-
8/2/2019 06 IV Fsuard Presentation
1/32
Pedestrian Detection using Infrared Imagesand Histograms of
Oriented Gradients
F. Suard1, A. Rakotomamonjy1, A. Bensrhair1, A. Broggi2
[email protected]
1
Laboratoire dInformatique, Traitement de lInformation,
Systemes.INSA de Rouen, Rouen, France
2 Dipartimento di Ingegneria dellInformazione,Universita di
Parma, Parma, Italy
Intelligent Vehicle Symposium 2006
Tokyo, 14th June 2006
-
8/2/2019 06 IV Fsuard Presentation
2/32
Introduction HOG Method Application Conclusion
Introduction
Machine learning and vision system.Histogram of Oriented
Gradient [DT05],
Classifier : Support Vector Machines [Vap98].
Application : pedestrian detection with infrared images.
Objectives
using HOG method for pedestrian detection,
extracting windows from infrared images.F. Suard 2
-
8/2/2019 06 IV Fsuard Presentation
3/32
Introduction HOG Method Application Conclusion
Histogram of Oriented Gradient
Introduced by N. Dalal and B. Triggs [DT05] representing an
image (128 64 pixels) with a vector.
Computation of local gradient histograms.
F. Suard 3
-
8/2/2019 06 IV Fsuard Presentation
4/32
Introduction HOG Method Application Conclusion
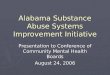
HOG computation steps
Original Image :
F. Suard 4
-
8/2/2019 06 IV Fsuard Presentation
5/32
Introduction HOG Method Application Conclusion
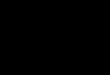
HOG computation steps
Gradient Orientation and Norm:
F. Suard 4
-
8/2/2019 06 IV Fsuard Presentation
6/32
Introduction HOG Method Application Conclusion
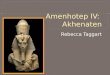
HOG computation steps
Cell Splitting:
F. Suard 4
-
8/2/2019 06 IV Fsuard Presentation
7/32
Introduction HOG Method Application Conclusion
HOG computation steps
Histogramm normalization, block 1:
Final descriptor: [0.01 0.5 0 0.8]
F. Suard 4
-
8/2/2019 06 IV Fsuard Presentation
8/32
Introduction HOG Method Application Conclusion
HOG computation steps
Histogramm normalization, block 2:
Final descriptor: [0.01 0.5 0 0.8 0.2 0 0.9 0]
F. Suard 4
-
8/2/2019 06 IV Fsuard Presentation
9/32
Introduction HOG Method Application Conclusion
HOG computation steps
Histogramm normalization, block n:
Final descriptor: [0.01 0.5 0 0.8 0.2 0 0.9 0 ... 0.6 0.7 0.1
0]
F. Suard 4
-
8/2/2019 06 IV Fsuard Presentation
10/32
Introduction HOG Method Application Conclusion
HOG parameters
Parameterscell: number of pixels,
block: number of cells, overlap, normalization factor (no, L1,
L2),
histogram: number of bins, weighted vote(gradient magnitude,
vote).
Exhaustive test for parameters tuning,
Dataset : pedestrians and non-pedestrians manually
extracted.
F. Suard 5
-
8/2/2019 06 IV Fsuard Presentation
11/32
Introduction HOG Method Application Conclusion
HOG parameters
Optimal set of parameters
size of cell : 8 8 pixels,
size of block : 2 2 cells,
overlap between blocks : 1 cell,normalization factor for block :
L2,
number of bins per histogram : 8
weigthed vote for histogram : gradient magnitude.
Descriptor dimension: 3360
F. Suard 6
-
8/2/2019 06 IV Fsuard Presentation
12/32
Introduction HOG Method Application Conclusion
Linear SVM Classifier
Data X Rn
Label y {1, 1}
Decision function f(x) =m
k=1 k yk xk, x + b
Class ofX = sign of f(x)
F. Suard 7
-
8/2/2019 06 IV Fsuard Presentation
13/32
Introduction HOG Method Application Conclusion
Single Frame Classification
ROC Curve for single frame classifi-cation (test dataset: 4400
examples)when size of learning dataset varies :
Confusion matrix (1000)
TrueP N
PredictionP 2096 54
N 71 2079
detection 0.9749
accuracy 0.9709
precision 0.9672
F. Suard 8
-
8/2/2019 06 IV Fsuard Presentation
14/32
Introduction HOG Method Application Conclusion
Single Frame Classification
ROC Curve for single frame classifi-cation (test dataset: 4400
examples)when size of learning dataset varies :
Confusion matrix (1000)
True
P N
PredictionP 2096 54
N 71 2079
detection 0.9749
accuracy 0.9709
precision 0.9672
For 90 % of good recognition : 1 false-positive for330 windows
examined
F. Suard 8
-
8/2/2019 06 IV Fsuard Presentation
15/32
Introduction HOG Method Application Conclusion
Misclassification
Examples of bad classification :
mis-classification
mis-classification
false-positive false-positive
F. Suard 9
-
8/2/2019 06 IV Fsuard Presentation
16/32
Introduction HOG Method Application Conclusion
HOG applied to infrared images
Application
infrared images,
pedestrian detection.
Windows extraction function
Particularity of infrared images
Warm area (pedestrian head) appears lighter
F. Suard 10
-
8/2/2019 06 IV Fsuard Presentation
17/32
Introduction HOG Method Application Conclusion
Windows extraction
Original Image:
F. Suard 11
-
8/2/2019 06 IV Fsuard Presentation
18/32
Introduction HOG Method Application Conclusion
Windows extraction
Warm areas:
F. Suard 11
-
8/2/2019 06 IV Fsuard Presentation
19/32
Introduction HOG Method Application Conclusion
Windows extraction
Warm area of the second pedestrian:
F. Suard 11
I d i HOG M h d A li i C l i
-
8/2/2019 06 IV Fsuard Presentation
20/32
Introduction HOG Method Application Conclusion
Windows extraction
Gradient :
F. Suard 11
I t d ti HOG M th d A li ti C l i
-
8/2/2019 06 IV Fsuard Presentation
21/32
Introduction HOG Method Application Conclusion
Windows extraction
left and right bounds:
F. Suard 11
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
22/32
Introduction HOG Method Application Conclusion
Windows extraction
upper bound:
F. Suard 11
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
23/32
Introduction HOG Method Application Conclusion
Windows extraction
lower bounds:
F. Suard 11
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
24/32
Introduction HOG Method Application Conclusion
Windows extraction
combination and windows extraction (> 1000):
F. Suard 11
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
25/32
Introduction HOG Method Application Conclusion
Windows extraction
Classification:
F. Suard 11
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
26/32
pp
Results
Windows which prediction are over threshold :
f(x) > 0 f(x) > 0.5
F. Suard 12
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
27/32
pp
Results
f(x) > 0 f(x) > 0.5
F. Suard 13
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
28/32
Results
f(x) > 0 f(x) > 0.5
F. Suard 14
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
29/32
Results
f(x) > 0 f(x) > 0.5
F. Suard 15
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
30/32
Results
f(x) > 0 f(x) > 0.5
F. Suard 16
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
31/32
Conclusion and perspectives
+Good results for single frame classification,
Answer for pedestrian size variability,
Good generalization for pedestrian pose variability.
-
Parameters,
Windows extraction.
PerspectivesImprove performance,
reduce computation time,
work with sequences.
F. Suard 17
Introduction HOG Method Application Conclusion
-
8/2/2019 06 IV Fsuard Presentation
32/32
References
Navneet Dalal and Bill Triggs.
Histograms of oriented gradients for human detection.In Cordelia
Schmid, Stefano Soatto, and Carlo Tomasi, editors, International
Conference on ComputerVision and Pattern Recognition, volume 2,
pages 886893, INRIA Rhone-Alpes, ZIRST-655, av. delEurope,
Montbonnot-38334, June 2005.
A. Broggi A. Fascioli P. Grisleri T. Graf M. Meinecke.
Model-based validation approaches and matching techniques for
automotive vision based pedestriandetection.In Intl. IEEE Wks. on
Object Tracking and Classification in and Beyond the Visible
Spectrum, San Diego,USA, page in press, June 2005.
V. Vapnik.
Statistical Learning Theory.
Wiley, 1998.
F. Suard 18