Embed Size (px)
DESCRIPTION
UNAL
Citation preview
Sistemas Dinamicos Difusos
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino
Proyecto Curricular de Matematicas
Universidad Distrital Francisco Jose de Caldas
Semillero LOTO
25 de enero de 2013
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 1 / 1
Parte I
Desde La Logica
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 2 / 1
Algo de Historia
Ano 1965, Lotfi A. Zadeh: Primeras ideas de teorıa de conjuntos difusos,
Objetivo: Encontrar en las matematicas modelos apropiados para el
estudio de problemas complejos de control que se presentan en la teorıa de
la informacion;
Resultado: Se supero la rigidez de la teorıa clasica de conjuntos y
clasificando objetos de un universo conocido que responden a una
determinada propiedad de manera que no solo la verifican o no, sino que la
pueden verificar parcialmente.
Consecuencias: Estrecha relacion entre la teorıa de los conjuntos difusos
y la logica multi-valuada.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 3 / 1
Algo de Historia
Ano 1965, Lotfi A. Zadeh: Primeras ideas de teorıa de conjuntos difusos,
Objetivo: Encontrar en las matematicas modelos apropiados para el
estudio de problemas complejos de control que se presentan en la teorıa de
la informacion;
Resultado: Se supero la rigidez de la teorıa clasica de conjuntos y
clasificando objetos de un universo conocido que responden a una
determinada propiedad de manera que no solo la verifican o no, sino que la
pueden verificar parcialmente.
Consecuencias: Estrecha relacion entre la teorıa de los conjuntos difusos
y la logica multi-valuada.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 3 / 1
Algo de Historia
Ano 1965, Lotfi A. Zadeh: Primeras ideas de teorıa de conjuntos difusos,
Objetivo: Encontrar en las matematicas modelos apropiados para el
estudio de problemas complejos de control que se presentan en la teorıa de
la informacion;
Resultado: Se supero la rigidez de la teorıa clasica de conjuntos y
clasificando objetos de un universo conocido que responden a una
determinada propiedad de manera que no solo la verifican o no, sino que la
pueden verificar parcialmente.
Consecuencias: Estrecha relacion entre la teorıa de los conjuntos difusos
y la logica multi-valuada.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 3 / 1
Algo de Historia
Ano 1965, Lotfi A. Zadeh: Primeras ideas de teorıa de conjuntos difusos,
Objetivo: Encontrar en las matematicas modelos apropiados para el
estudio de problemas complejos de control que se presentan en la teorıa de
la informacion;
Resultado: Se supero la rigidez de la teorıa clasica de conjuntos y
clasificando objetos de un universo conocido que responden a una
determinada propiedad de manera que no solo la verifican o no, sino que la
pueden verificar parcialmente.
Consecuencias: Estrecha relacion entre la teorıa de los conjuntos difusos
y la logica multi-valuada.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 3 / 1
Desde la logica clasica
Definicion
Principio de Bivalencia: Cada proposicion tiene exactamente uno de los
dos valores de verdad: ⊥ (falso) o > (verdadero) que usualmente se
codifican con 0 y 1 respectivamente.
Definicion
Principio de Composicion, el valor de verdad de cada formula bien formada
compuesta es funcion del valor de verdad de sus componentes.
Conjunto de valores de verdad: {0, 1}
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 4 / 1
Desde la logica clasica
Definicion
Principio de Bivalencia: Cada proposicion tiene exactamente uno de los
dos valores de verdad: ⊥ (falso) o > (verdadero) que usualmente se
codifican con 0 y 1 respectivamente.
Definicion
Principio de Composicion, el valor de verdad de cada formula bien formada
compuesta es funcion del valor de verdad de sus componentes.
Conjunto de valores de verdad: {0, 1}
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 4 / 1
Desde la logica clasica
Definicion
Principio de Bivalencia: Cada proposicion tiene exactamente uno de los
dos valores de verdad: ⊥ (falso) o > (verdadero) que usualmente se
codifican con 0 y 1 respectivamente.
Definicion
Principio de Composicion, el valor de verdad de cada formula bien formada
compuesta es funcion del valor de verdad de sus componentes.
Conjunto de valores de verdad: {0, 1}
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 4 / 1
Los conectivos clasicos son definidos a partir de la conjuncion, disyuncion
y negacion i. e. se considera el junto con las funciones
mın,max y 1− . . .
La estructura de valores de verdad puede ser un algebra Booleana
B = {B,∧,∨,c , 0, 1},
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 5 / 1

Los conectivos clasicos son definidos a partir de la conjuncion, disyuncion
y negacion i. e. se considera el junto con las funciones
mın,max y 1− . . .
La estructura de valores de verdad puede ser un algebra Booleana
B = {B,∧,∨,c , 0, 1},
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 5 / 1
Las funciones de verdad para conjuncion, disjuncion y negacion son
escogidos de acuerdo a
∧,∨,c
respectivamente y
Validez de una formula bien formada H con respecto a una interpretacion
dada significa que H tiene el valor 1 de B en esa interpretacion.
Que Cambia. La logica multi-valuada solamente cambia el principio de
bivalencia;
Se asume que
{0, 1} ⊆ WS . (1)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 6 / 1
Las funciones de verdad para conjuncion, disjuncion y negacion son
escogidos de acuerdo a
∧,∨,c
respectivamente y
Validez de una formula bien formada H con respecto a una interpretacion
dada significa que H tiene el valor 1 de B en esa interpretacion.
Que Cambia. La logica multi-valuada solamente cambia el principio de
bivalencia;
Se asume que
{0, 1} ⊆ WS . (1)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 6 / 1
Las funciones de verdad para conjuncion, disjuncion y negacion son
escogidos de acuerdo a
∧,∨,c
respectivamente y
Validez de una formula bien formada H con respecto a una interpretacion
dada significa que H tiene el valor 1 de B en esa interpretacion.
Que Cambia. La logica multi-valuada solamente cambia el principio de
bivalencia;
Se asume que
{0, 1} ⊆ WS . (1)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 6 / 1
Ejemplo (1.2)
De los Grados de Verdad
No hay restricciones para el conjunto WS de grados de verdad de S ; es
usual tener ademas de (??) la estructura
WS ⊆ [0, 1] ⊆ R, (2)
en este ambiente, algunos ejemplos:
W0 =: { x ∈ Q | 0 ≤ x ≤ 1} o, (3)
W∞ =: { x ∈ R | 0 ≤ x ≤ 1}, (4)
Wn =: { k
n − 1| 0 ≤ k ≤ n − 1}, (5)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 7 / 1
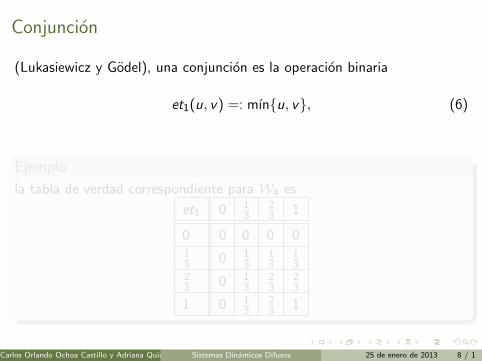
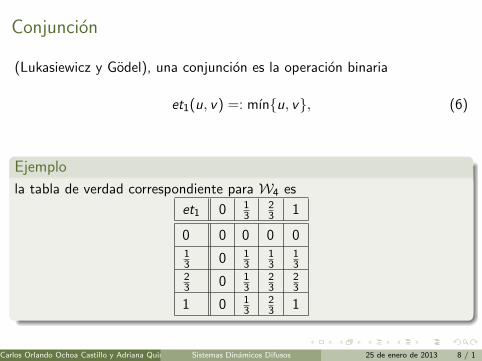
Conjuncion
(Lukasiewicz y Godel), una conjuncion es la operacion binaria
et1(u, v) =: mın{u, v}, (6)
Ejemplo
la tabla de verdad correspondiente para W4 es
et1 0 13
23 1
0 0 0 0 013 0 1
313
13
23 0 1
323
23
1 0 13
23 1
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 8 / 1
Conjuncion
(Lukasiewicz y Godel), una conjuncion es la operacion binaria
et1(u, v) =: mın{u, v}, (6)
Ejemplo
la tabla de verdad correspondiente para W4 es
et1 0 13
23 1
0 0 0 0 013 0 1
313
13
23 0 1
323
23
1 0 13
23 1
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 8 / 1
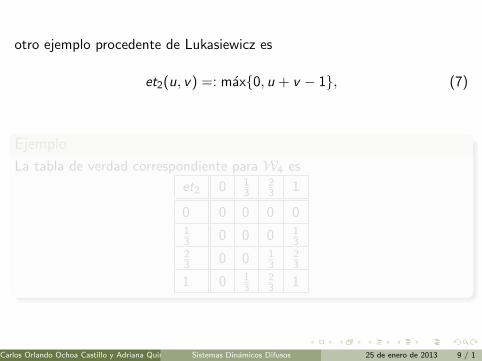
otro ejemplo procedente de Lukasiewicz es
et2(u, v) =: max{0, u + v − 1}, (7)
Ejemplo
La tabla de verdad correspondiente para W4 es
et2 0 13
23 1
0 0 0 0 013 0 0 0 1
323 0 0 1
323
1 0 13
23 1
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 9 / 1
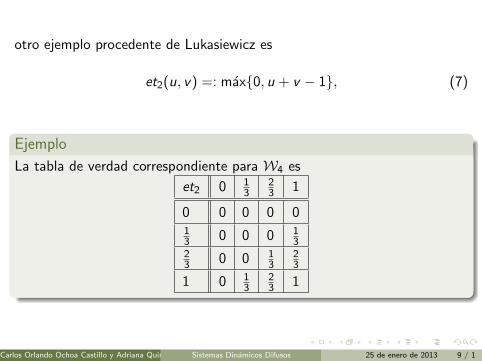
otro ejemplo procedente de Lukasiewicz es
et2(u, v) =: max{0, u + v − 1}, (7)
Ejemplo
La tabla de verdad correspondiente para W4 es
et2 0 13
23 1
0 0 0 0 013 0 0 0 1
323 0 0 1
323
1 0 13
23 1
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 9 / 1
Ejemplo
En tiempos recientes se ha considerado la conjuncion
et3(u, v) =: u · v , (8)
Definicion
Una Operacion binaria t en [0, 1] es una t-norma si
T1. t es asociativa y conmutativa,
T2. t es no creciente en cada argumento,
T3. 1 es elemento neutro para t.
Para todo x ∈ [0, 1], t(x , 0) = 0 pues t(x , 0) = t(0, x) ≤ t(0, 1) = 0.
([0, 1], t) es un monoide.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 10 / 1
Ejemplo
En tiempos recientes se ha considerado la conjuncion
et3(u, v) =: u · v , (8)
Definicion
Una Operacion binaria t en [0, 1] es una t-norma si
T1. t es asociativa y conmutativa,
T2. t es no creciente en cada argumento,
T3. 1 es elemento neutro para t.
Para todo x ∈ [0, 1], t(x , 0) = 0 pues t(x , 0) = t(0, x) ≤ t(0, 1) = 0.
([0, 1], t) es un monoide.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 10 / 1
Conectivos Negacion
Godel y Lukasiewicz proponen:
non0(x) =
1 si x = 0
0 si x 6= 0,y non1(x) = 1− x ; (9)
Post propone non2 para Wm:
non2(x) =
1 si x = 0
x − 1m−1 si x 6= 0
(10)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 11 / 1
Definicion
Una funcion n : [0, 1]→ [0, 1] es una negacion si es no creciente y
n(0) = 1 y n(1) = 0. Una negacion es etricta si es estrictamente
decreciente y continua, es fuerte si es estricta y es una involucion, es decir,
satisface n(n(x)) = x para todo x ∈ [0, 1].
Ası, non2 no es una negacion para m > 2, non0 es una negacion y non1 es
una negacion fuerte. Otro ejemplo de negacion no estricta es
non∗(x) =
1 si x < 1
0 si x = 1,(11)
toda funcion negacion n satisface
non0 ≤ n ≤ non∗
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 12 / 1
Definicion
Una funcion n : [0, 1]→ [0, 1] es una negacion si es no creciente y
n(0) = 1 y n(1) = 0. Una negacion es etricta si es estrictamente
decreciente y continua, es fuerte si es estricta y es una involucion, es decir,
satisface n(n(x)) = x para todo x ∈ [0, 1].
Ası, non2 no es una negacion para m > 2, non0 es una negacion y non1 es
una negacion fuerte. Otro ejemplo de negacion no estricta es
non∗(x) =
1 si x < 1
0 si x = 1,(11)
toda funcion negacion n satisface
non0 ≤ n ≤ non∗
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 12 / 1

Un ejemplo de una negacion estricta que no es fuerte es
non3(x) = 1− x2, (12)
un surtidor de negaciones fuertes lo constituye la familia de funciones
nλ(x) =1− x
1 + λx(13)
donde λ > −1.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 13 / 1

Un ejemplo de una negacion estricta que no es fuerte es
non3(x) = 1− x2, (12)
un surtidor de negaciones fuertes lo constituye la familia de funciones
nλ(x) =1− x
1 + λx(13)
donde λ > −1.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 13 / 1

Teorema
Sean t una t-norma continua y n una negacion estricta, para todo
x ∈ [0, 1] se tiene que t(x ,n(x)) = 0 si y solo si existe un automorfismo φ
del intervalo [0, 1] tal que para todo x , y ∈ [0, 1] es
t(x , y) = φ−1(et2(φ(x), φ(y))) y
n(x) ≤ φ−1(1− φ(x)). (14)
Una situacion tıpica la presentan et2 y non1.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 14 / 1

Teorema
Sean t una t-norma continua y n una negacion estricta, para todo
x ∈ [0, 1] se tiene que t(x ,n(x)) = 0 si y solo si existe un automorfismo φ
del intervalo [0, 1] tal que para todo x , y ∈ [0, 1] es
t(x , y) = φ−1(et2(φ(x), φ(y))) y
n(x) ≤ φ−1(1− φ(x)). (14)
Una situacion tıpica la presentan et2 y non1.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 14 / 1
Conectivos Disyuncion
Una operacion binaria s en el intervalo [0, 1] es una t-conorma si
S1 Es asociativa y conmutativa,
S2 Es no decreciente en cada argumento,
S3 0 es elememto neutro, es decir; s(x , 0) = x para todo x ∈ [0, 1].
Es claro que para todo x ∈ [0, 1], s(x , 1) = 1 pues
s(x , 1) = s(1, x) ≥ s(0, 1) = 1.
El intervalo [0, 1] con la operacion s es un monoide.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 15 / 1
Conectivos Disyuncion
Una operacion binaria s en el intervalo [0, 1] es una t-conorma si
S1 Es asociativa y conmutativa,
S2 Es no decreciente en cada argumento,
S3 0 es elememto neutro, es decir; s(x , 0) = x para todo x ∈ [0, 1].
Es claro que para todo x ∈ [0, 1], s(x , 1) = 1 pues
s(x , 1) = s(1, x) ≥ s(0, 1) = 1.
El intervalo [0, 1] con la operacion s es un monoide.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 15 / 1

Teorema
Si n es una negacion fuerte y s y t son dos operaciones binarias
relacionadas por
s(x , y) = n(t(n(x),n(y))), ∀x , y ∈ [0, 1],
entonces t es una t-norma y s es una t-conorma.
Es usual que se considere la negacion fuerte non1; ası, para una t-norma t
se tiene la t-conorma:
st(x , y) = 1− t(1− x , 1− y), ∀x , y ∈ [0, 1], (15)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 16 / 1

Teorema
Si n es una negacion fuerte y s y t son dos operaciones binarias
relacionadas por
s(x , y) = n(t(n(x),n(y))), ∀x , y ∈ [0, 1],
entonces t es una t-norma y s es una t-conorma.
Es usual que se considere la negacion fuerte non1; ası, para una t-norma t
se tiene la t-conorma:
st(x , y) = 1− t(1− x , 1− y), ∀x , y ∈ [0, 1], (15)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 16 / 1

Se obtener las t-conormas mas populares
vel1(x , y) = max{x , y}, (16)
vel2(x , y) = mın{1, x + y} y (17)
vel3(x , y) = x + y − x · y (18)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 17 / 1

Se obtener las t-conormas mas populares
vel1(x , y) = max{x , y}, (16)
vel2(x , y) = mın{1, x + y} y (17)
vel3(x , y) = x + y − x · y (18)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 17 / 1

Se obtener las t-conormas mas populares
vel1(x , y) = max{x , y}, (16)
vel2(x , y) = mın{1, x + y} y (17)
vel3(x , y) = x + y − x · y (18)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 17 / 1

Se obtener las t-conormas mas populares
vel1(x , y) = max{x , y}, (16)
vel2(x , y) = mın{1, x + y} y (17)
vel3(x , y) = x + y − x · y (18)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 17 / 1
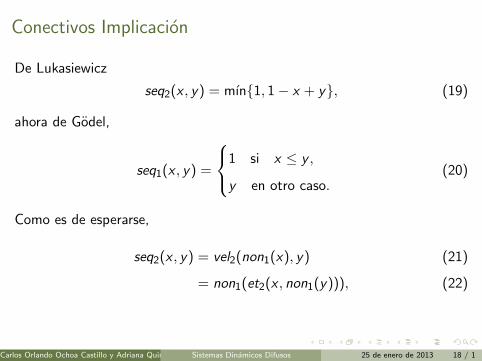
Conectivos Implicacion
De Lukasiewicz
seq2(x , y) = mın{1, 1− x + y}, (19)
ahora de Godel,
seq1(x , y) =
1 si x ≤ y ,
y en otro caso.(20)
Como es de esperarse,
seq2(x , y) = vel2(non1(x), y) (21)
= non1(et2(x , non1(y))), (22)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 18 / 1
Conectivos Implicacion
De Lukasiewicz
seq2(x , y) = mın{1, 1− x + y}, (19)
ahora de Godel,
seq1(x , y) =
1 si x ≤ y ,
y en otro caso.(20)
Como es de esperarse,
seq2(x , y) = vel2(non1(x), y) (21)
= non1(et2(x , non1(y))), (22)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 18 / 1
Conectivos Implicacion
De Lukasiewicz
seq2(x , y) = mın{1, 1− x + y}, (19)
ahora de Godel,
seq1(x , y) =
1 si x ≤ y ,
y en otro caso.(20)
Como es de esperarse,
seq2(x , y) = vel2(non1(x), y) (21)
= non1(et2(x , non1(y))), (22)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 18 / 1
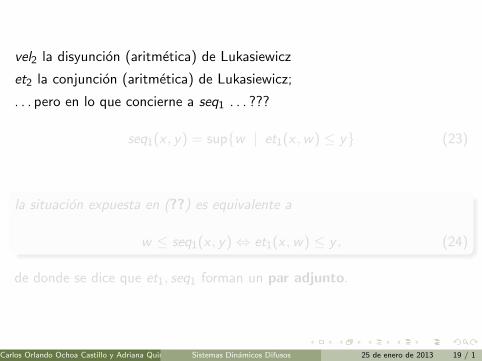
vel2 la disyuncion (aritmetica) de Lukasiewicz
et2 la conjuncion (aritmetica) de Lukasiewicz;
. . . pero en lo que concierne a seq1 . . . ???
seq1(x , y) = sup{w | et1(x ,w) ≤ y} (23)
la situacion expuesta en (??) es equivalente a
w ≤ seq1(x , y)⇔ et1(x ,w) ≤ y , (24)
de donde se dice que et1, seq1 forman un par adjunto.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 19 / 1
vel2 la disyuncion (aritmetica) de Lukasiewicz
et2 la conjuncion (aritmetica) de Lukasiewicz;
. . . pero en lo que concierne a seq1 . . . ???
seq1(x , y) = sup{w | et1(x ,w) ≤ y} (23)
la situacion expuesta en (??) es equivalente a
w ≤ seq1(x , y)⇔ et1(x ,w) ≤ y , (24)
de donde se dice que et1, seq1 forman un par adjunto.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 19 / 1
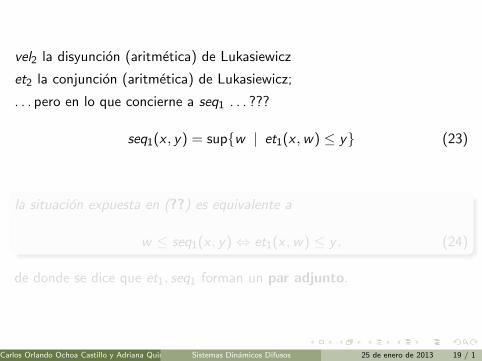
vel2 la disyuncion (aritmetica) de Lukasiewicz
et2 la conjuncion (aritmetica) de Lukasiewicz;
. . . pero en lo que concierne a seq1 . . . ???
seq1(x , y) = sup{w | et1(x ,w) ≤ y} (23)
la situacion expuesta en (??) es equivalente a
w ≤ seq1(x , y)⇔ et1(x ,w) ≤ y , (24)
de donde se dice que et1, seq1 forman un par adjunto.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 19 / 1

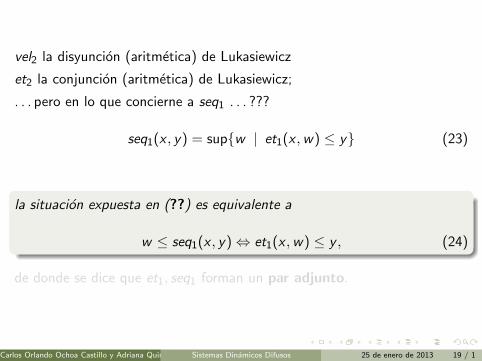
vel2 la disyuncion (aritmetica) de Lukasiewicz
et2 la conjuncion (aritmetica) de Lukasiewicz;
. . . pero en lo que concierne a seq1 . . . ???
seq1(x , y) = sup{w | et1(x ,w) ≤ y} (23)
la situacion expuesta en (??) es equivalente a
w ≤ seq1(x , y)⇔ et1(x ,w) ≤ y , (24)
de donde se dice que et1, seq1 forman un par adjunto.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 19 / 1
GL-monoides
Generalizando
([0, 1], et1, vel1), enriquecido con (et1, seq1) . . . ;
(L,6) un retıculo infinitamente distributivo y completo, i. e. (L,6) es
parcialmente ordenado,
Para todo A ⊂ L,∨
A y∧
A estan definidos y para todo α ∈ L es(∨A)∧ α =
∨{a ∧ α | a ∈ A} y (25)(∧
A)∨ α =
∧{a ∨ α | a ∈ A}. (26)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 20 / 1
GL-monoides
Generalizando
([0, 1], et1, vel1), enriquecido con (et1, seq1) . . . ;
(L,6) un retıculo infinitamente distributivo y completo, i. e. (L,6) es
parcialmente ordenado,
Para todo A ⊂ L,∨
A y∧
A estan definidos y para todo α ∈ L es(∨A)∧ α =
∨{a ∧ α | a ∈ A} y (25)(∧
A)∨ α =
∧{a ∨ α | a ∈ A}. (26)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 20 / 1
GL-monoides
Generalizando
([0, 1], et1, vel1), enriquecido con (et1, seq1) . . . ;
(L,6) un retıculo infinitamente distributivo y completo, i. e. (L,6) es
parcialmente ordenado,
Para todo A ⊂ L,∨
A y∧
A estan definidos y para todo α ∈ L es(∨A)∧ α =
∨{a ∧ α | a ∈ A} y (25)(∧
A)∨ α =
∧{a ∨ α | a ∈ A}. (26)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 20 / 1
GL-monoides
Generalizando
([0, 1], et1, vel1), enriquecido con (et1, seq1) . . . ;
(L,6) un retıculo infinitamente distributivo y completo, i. e. (L,6) es
parcialmente ordenado,
Para todo A ⊂ L,∨
A y∧
A estan definidos y para todo α ∈ L es(∨A)∧ α =
∨{a ∧ α | a ∈ A} y (25)(∧
A)∨ α =
∧{a ∨ α | a ∈ A}. (26)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 20 / 1
GL-monoides
Generalizando
([0, 1], et1, vel1), enriquecido con (et1, seq1) . . . ;
(L,6) un retıculo infinitamente distributivo y completo, i. e. (L,6) es
parcialmente ordenado,
Para todo A ⊂ L,∨
A y∧
A estan definidos y para todo α ∈ L es(∨A)∧ α =
∨{a ∧ α | a ∈ A} y (25)(∧
A)∨ α =
∧{a ∨ α | a ∈ A}. (26)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 20 / 1
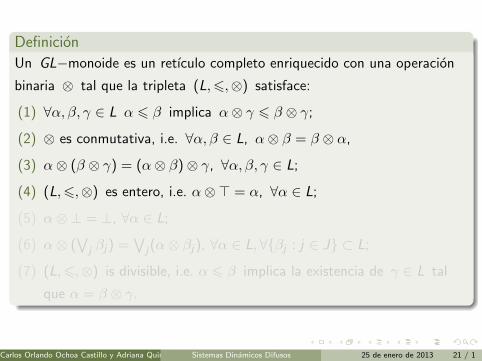
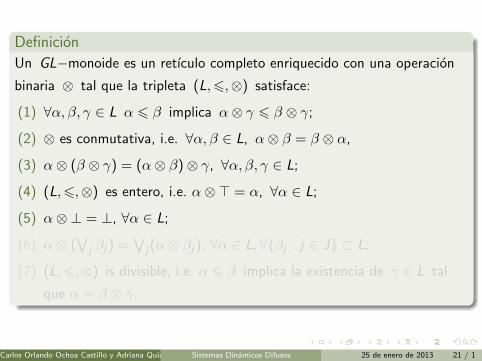
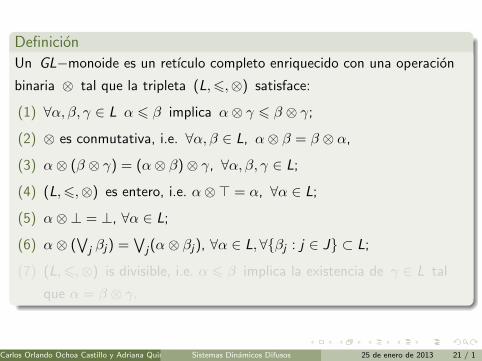
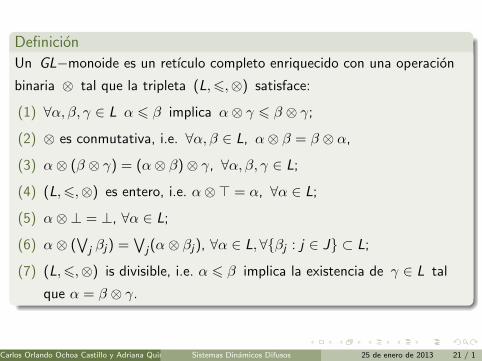
Definicion
Un GL−monoide es un retıculo completo enriquecido con una operacion
binaria ⊗ tal que la tripleta (L,6,⊗) satisface:
(1) ∀α, β, γ ∈ L α 6 β implica α⊗ γ 6 β ⊗ γ;
(2) ⊗ es conmutativa, i.e. ∀α, β ∈ L, α⊗ β = β ⊗ α,
(3) α⊗ (β ⊗ γ) = (α⊗ β)⊗ γ, ∀α, β, γ ∈ L;
(4) (L,6,⊗) es entero, i.e. α⊗> = α, ∀α ∈ L;
(5) α⊗⊥ = ⊥, ∀α ∈ L;
(6) α⊗ (∨
j βj) =∨
j(α⊗ βj), ∀α ∈ L, ∀{βj : j ∈ J} ⊂ L;
(7) (L,6,⊗) is divisible, i.e. α 6 β implica la existencia de γ ∈ L tal
que α = β ⊗ γ.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 21 / 1
Definicion
Un GL−monoide es un retıculo completo enriquecido con una operacion
binaria ⊗ tal que la tripleta (L,6,⊗) satisface:
(1) ∀α, β, γ ∈ L α 6 β implica α⊗ γ 6 β ⊗ γ;
(2) ⊗ es conmutativa, i.e. ∀α, β ∈ L, α⊗ β = β ⊗ α,
(3) α⊗ (β ⊗ γ) = (α⊗ β)⊗ γ, ∀α, β, γ ∈ L;
(4) (L,6,⊗) es entero, i.e. α⊗> = α, ∀α ∈ L;
(5) α⊗⊥ = ⊥, ∀α ∈ L;
(6) α⊗ (∨
j βj) =∨
j(α⊗ βj), ∀α ∈ L, ∀{βj : j ∈ J} ⊂ L;
(7) (L,6,⊗) is divisible, i.e. α 6 β implica la existencia de γ ∈ L tal
que α = β ⊗ γ.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 21 / 1
Definicion
Un GL−monoide es un retıculo completo enriquecido con una operacion
binaria ⊗ tal que la tripleta (L,6,⊗) satisface:
(1) ∀α, β, γ ∈ L α 6 β implica α⊗ γ 6 β ⊗ γ;
(2) ⊗ es conmutativa, i.e. ∀α, β ∈ L, α⊗ β = β ⊗ α,
(3) α⊗ (β ⊗ γ) = (α⊗ β)⊗ γ, ∀α, β, γ ∈ L;
(4) (L,6,⊗) es entero, i.e. α⊗> = α, ∀α ∈ L;
(5) α⊗⊥ = ⊥, ∀α ∈ L;
(6) α⊗ (∨
j βj) =∨
j(α⊗ βj), ∀α ∈ L,∀{βj : j ∈ J} ⊂ L;
(7) (L,6,⊗) is divisible, i.e. α 6 β implica la existencia de γ ∈ L tal
que α = β ⊗ γ.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 21 / 1
Definicion
Un GL−monoide es un retıculo completo enriquecido con una operacion
binaria ⊗ tal que la tripleta (L,6,⊗) satisface:
(1) ∀α, β, γ ∈ L α 6 β implica α⊗ γ 6 β ⊗ γ;
(2) ⊗ es conmutativa, i.e. ∀α, β ∈ L, α⊗ β = β ⊗ α,
(3) α⊗ (β ⊗ γ) = (α⊗ β)⊗ γ, ∀α, β, γ ∈ L;
(4) (L,6,⊗) es entero, i.e. α⊗> = α, ∀α ∈ L;
(5) α⊗⊥ = ⊥, ∀α ∈ L;
(6) α⊗ (∨
j βj) =∨
j(α⊗ βj), ∀α ∈ L, ∀{βj : j ∈ J} ⊂ L;
(7) (L,6,⊗) is divisible, i.e. α 6 β implica la existencia de γ ∈ L tal
que α = β ⊗ γ.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 21 / 1
Definicion
Un GL−monoide es un retıculo completo enriquecido con una operacion
binaria ⊗ tal que la tripleta (L,6,⊗) satisface:
(1) ∀α, β, γ ∈ L α 6 β implica α⊗ γ 6 β ⊗ γ;
(2) ⊗ es conmutativa, i.e. ∀α, β ∈ L, α⊗ β = β ⊗ α,
(3) α⊗ (β ⊗ γ) = (α⊗ β)⊗ γ, ∀α, β, γ ∈ L;
(4) (L,6,⊗) es entero, i.e. α⊗> = α, ∀α ∈ L;
(5) α⊗⊥ = ⊥, ∀α ∈ L;
(6) α⊗ (∨
j βj) =∨
j(α⊗ βj), ∀α ∈ L,∀{βj : j ∈ J} ⊂ L;
(7) (L,6,⊗) is divisible, i.e. α 6 β implica la existencia de γ ∈ L tal
que α = β ⊗ γ.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 21 / 1
Definicion
Un GL−monoide es un retıculo completo enriquecido con una operacion
binaria ⊗ tal que la tripleta (L,6,⊗) satisface:
(1) ∀α, β, γ ∈ L α 6 β implica α⊗ γ 6 β ⊗ γ;
(2) ⊗ es conmutativa, i.e. ∀α, β ∈ L, α⊗ β = β ⊗ α,
(3) α⊗ (β ⊗ γ) = (α⊗ β)⊗ γ, ∀α, β, γ ∈ L;
(4) (L,6,⊗) es entero, i.e. α⊗> = α, ∀α ∈ L;
(5) α⊗⊥ = ⊥, ∀α ∈ L;
(6) α⊗ (∨
j βj) =∨
j(α⊗ βj), ∀α ∈ L,∀{βj : j ∈ J} ⊂ L;
(7) (L,6,⊗) is divisible, i.e. α 6 β implica la existencia de γ ∈ L tal
que α = β ⊗ γ.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 21 / 1
Definicion
Un GL−monoide es un retıculo completo enriquecido con una operacion
binaria ⊗ tal que la tripleta (L,6,⊗) satisface:
(1) ∀α, β, γ ∈ L α 6 β implica α⊗ γ 6 β ⊗ γ;
(2) ⊗ es conmutativa, i.e. ∀α, β ∈ L, α⊗ β = β ⊗ α,
(3) α⊗ (β ⊗ γ) = (α⊗ β)⊗ γ, ∀α, β, γ ∈ L;
(4) (L,6,⊗) es entero, i.e. α⊗> = α, ∀α ∈ L;
(5) α⊗⊥ = ⊥, ∀α ∈ L;
(6) α⊗ (∨
j βj) =∨
j(α⊗ βj), ∀α ∈ L,∀{βj : j ∈ J} ⊂ L;
(7) (L,6,⊗) is divisible, i.e. α 6 β implica la existencia de γ ∈ L tal
que α = β ⊗ γ.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 21 / 1

Todo GL−monoide es residuado, i.e. existe 7−→ en L que satisface:
α⊗ β 6 γ ⇐⇒ α 6 (β 7−→ γ) ∀α, β, γ ∈ L. (27)
La implicacion esta dada por:
α 7−→ β =∨{λ ∈ L | α⊗ λ 6 β}, (28)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 22 / 1

Todo GL−monoide es residuado, i.e. existe 7−→ en L que satisface:
α⊗ β 6 γ ⇐⇒ α 6 (β 7−→ γ) ∀α, β, γ ∈ L. (27)
La implicacion esta dada por:
α 7−→ β =∨{λ ∈ L | α⊗ λ 6 β}, (28)
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 22 / 1
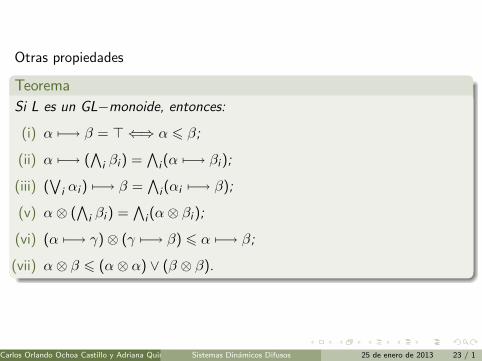
Otras propiedades
Teorema
Si L es un GL−monoide, entonces:
(i) α 7−→ β = > ⇐⇒ α 6 β;
(ii) α 7−→ (∧
i βi ) =∧
i (α 7−→ βi );
(iii) (∨
i αi ) 7−→ β =∧
i (αi 7−→ β);
(v) α⊗ (∧
i βi ) =∧
i (α⊗ βi );
(vi) (α 7−→ γ)⊗ (γ 7−→ β) 6 α 7−→ β;
(vii) α⊗ β 6 (α⊗ α) ∨ (β ⊗ β).
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 23 / 1

Otras propiedades
Teorema
Si L es un GL−monoide, entonces:
(i) α 7−→ β = > ⇐⇒ α 6 β;
(ii) α 7−→ (∧
i βi ) =∧
i (α 7−→ βi );
(iii) (∨
i αi ) 7−→ β =∧
i (αi 7−→ β);
(v) α⊗ (∧
i βi ) =∧
i (α⊗ βi );
(vi) (α 7−→ γ)⊗ (γ 7−→ β) 6 α 7−→ β;
(vii) α⊗ β 6 (α⊗ α) ∨ (β ⊗ β).
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 23 / 1
Otras propiedades
Teorema
Si L es un GL−monoide, entonces:
(i) α 7−→ β = > ⇐⇒ α 6 β;
(ii) α 7−→ (∧
i βi ) =∧
i (α 7−→ βi );
(iii) (∨
i αi ) 7−→ β =∧
i (αi 7−→ β);
(v) α⊗ (∧
i βi ) =∧
i (α⊗ βi );
(vi) (α 7−→ γ)⊗ (γ 7−→ β) 6 α 7−→ β;
(vii) α⊗ β 6 (α⊗ α) ∨ (β ⊗ β).
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 23 / 1
Otras propiedades
Teorema
Si L es un GL−monoide, entonces:
(i) α 7−→ β = > ⇐⇒ α 6 β;
(ii) α 7−→ (∧
i βi ) =∧
i (α 7−→ βi );
(iii) (∨
i αi ) 7−→ β =∧
i (αi 7−→ β);
(v) α⊗ (∧
i βi ) =∧
i (α⊗ βi );
(vi) (α 7−→ γ)⊗ (γ 7−→ β) 6 α 7−→ β;
(vii) α⊗ β 6 (α⊗ α) ∨ (β ⊗ β).
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 23 / 1
Otras propiedades
Teorema
Si L es un GL−monoide, entonces:
(i) α 7−→ β = > ⇐⇒ α 6 β;
(ii) α 7−→ (∧
i βi ) =∧
i (α 7−→ βi );
(iii) (∨
i αi ) 7−→ β =∧
i (αi 7−→ β);
(v) α⊗ (∧
i βi ) =∧
i (α⊗ βi );
(vi) (α 7−→ γ)⊗ (γ 7−→ β) 6 α 7−→ β;
(vii) α⊗ β 6 (α⊗ α) ∨ (β ⊗ β).
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 23 / 1
Otras propiedades
Teorema
Si L es un GL−monoide, entonces:
(i) α 7−→ β = > ⇐⇒ α 6 β;
(ii) α 7−→ (∧
i βi ) =∧
i (α 7−→ βi );
(iii) (∨
i αi ) 7−→ β =∧
i (αi 7−→ β);
(v) α⊗ (∧
i βi ) =∧
i (α⊗ βi );
(vi) (α 7−→ γ)⊗ (γ 7−→ β) 6 α 7−→ β;
(vii) α⊗ β 6 (α⊗ α) ∨ (β ⊗ β).
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 23 / 1
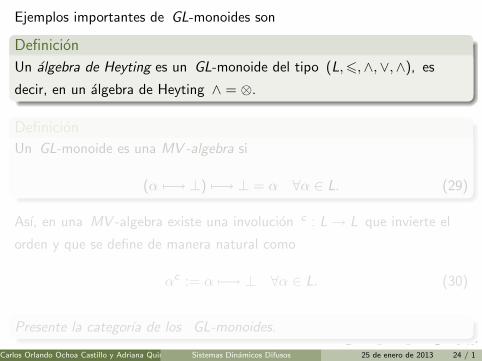
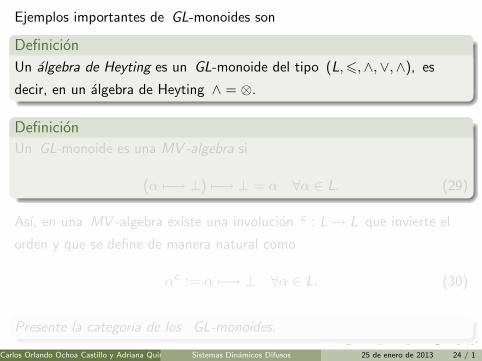
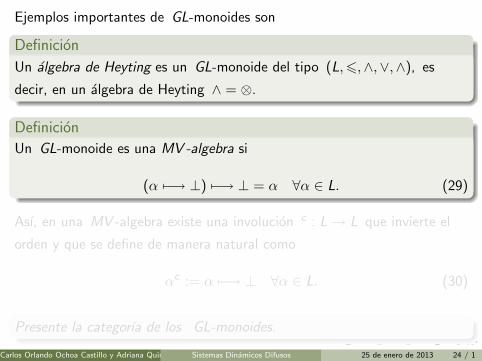
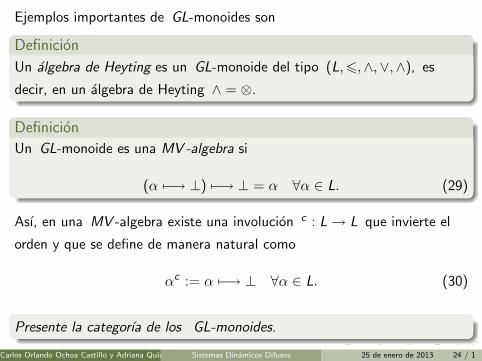
Ejemplos importantes de GL-monoides son
Definicion
Un algebra de Heyting es un GL-monoide del tipo (L,6,∧,∨,∧), es
decir, en un algebra de Heyting ∧ = ⊗.
Definicion
Un GL-monoide es una MV -algebra si
(α 7−→ ⊥) 7−→ ⊥ = α ∀α ∈ L. (29)
Ası, en una MV -algebra existe una involucion c : L→ L que invierte el
orden y que se define de manera natural como
αc := α 7−→ ⊥ ∀α ∈ L. (30)
Presente la categorıa de los GL-monoides.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 24 / 1
Ejemplos importantes de GL-monoides son
Definicion
Un algebra de Heyting es un GL-monoide del tipo (L,6,∧,∨,∧), es
decir, en un algebra de Heyting ∧ = ⊗.
Definicion
Un GL-monoide es una MV -algebra si
(α 7−→ ⊥) 7−→ ⊥ = α ∀α ∈ L. (29)
Ası, en una MV -algebra existe una involucion c : L→ L que invierte el
orden y que se define de manera natural como
αc := α 7−→ ⊥ ∀α ∈ L. (30)
Presente la categorıa de los GL-monoides.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 24 / 1
Ejemplos importantes de GL-monoides son
Definicion
Un algebra de Heyting es un GL-monoide del tipo (L,6,∧,∨,∧), es
decir, en un algebra de Heyting ∧ = ⊗.
Definicion
Un GL-monoide es una MV -algebra si
(α 7−→ ⊥) 7−→ ⊥ = α ∀α ∈ L. (29)
Ası, en una MV -algebra existe una involucion c : L→ L que invierte el
orden y que se define de manera natural como
αc := α 7−→ ⊥ ∀α ∈ L. (30)
Presente la categorıa de los GL-monoides.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 24 / 1
Ejemplos importantes de GL-monoides son
Definicion
Un algebra de Heyting es un GL-monoide del tipo (L,6,∧,∨,∧), es
decir, en un algebra de Heyting ∧ = ⊗.
Definicion
Un GL-monoide es una MV -algebra si
(α 7−→ ⊥) 7−→ ⊥ = α ∀α ∈ L. (29)
Ası, en una MV -algebra existe una involucion c : L→ L que invierte el
orden y que se define de manera natural como
αc := α 7−→ ⊥ ∀α ∈ L. (30)
Presente la categorıa de los GL-monoides.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 24 / 1
Parte II
Conjuntos Difusos
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 25 / 1

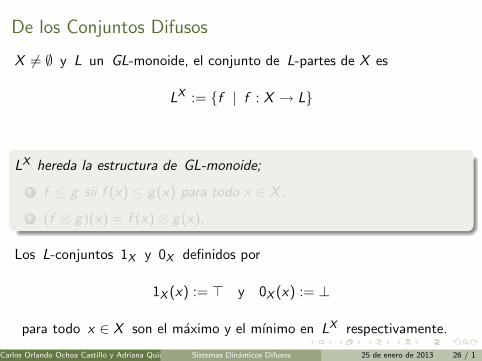
De los Conjuntos Difusos
X 6= ∅ y L un GL-monoide, el conjunto de L-partes de X es
LX := {f | f : X → L}
LX hereda la estructura de GL-monoide;
1 f ≤ g sii f (x) ≤ g(x) para todo x ∈ X ,
2 (f ⊗ g)(x) = f (x)⊗ g(x),
Los L-conjuntos 1X y 0X definidos por
1X (x) := > y 0X (x) := ⊥
para todo x ∈ X son el maximo y el mınimo en LX respectivamente.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 26 / 1

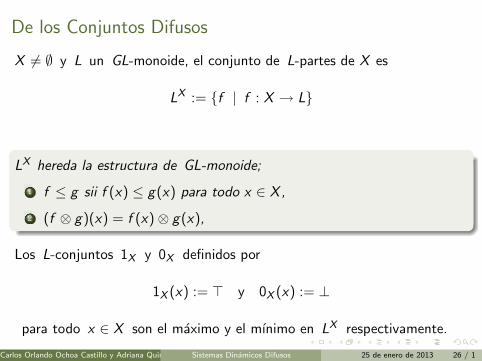
De los Conjuntos Difusos
X 6= ∅ y L un GL-monoide, el conjunto de L-partes de X es
LX := {f | f : X → L}
LX hereda la estructura de GL-monoide;
1 f ≤ g sii f (x) ≤ g(x) para todo x ∈ X ,
2 (f ⊗ g)(x) = f (x)⊗ g(x),
Los L-conjuntos 1X y 0X definidos por
1X (x) := > y 0X (x) := ⊥
para todo x ∈ X son el maximo y el mınimo en LX respectivamente.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 26 / 1
De los Conjuntos Difusos
X 6= ∅ y L un GL-monoide, el conjunto de L-partes de X es
LX := {f | f : X → L}
LX hereda la estructura de GL-monoide;
1 f ≤ g sii f (x) ≤ g(x) para todo x ∈ X ,
2 (f ⊗ g)(x) = f (x)⊗ g(x),
Los L-conjuntos 1X y 0X definidos por
1X (x) := > y 0X (x) := ⊥
para todo x ∈ X son el maximo y el mınimo en LX respectivamente.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 26 / 1
De los Conjuntos Difusos
X 6= ∅ y L un GL-monoide, el conjunto de L-partes de X es
LX := {f | f : X → L}
LX hereda la estructura de GL-monoide;
1 f ≤ g sii f (x) ≤ g(x) para todo x ∈ X ,
2 (f ⊗ g)(x) = f (x)⊗ g(x),
Los L-conjuntos 1X y 0X definidos por
1X (x) := > y 0X (x) := ⊥
para todo x ∈ X son el maximo y el mınimo en LX respectivamente.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 26 / 1

ademas, si X es finito, el cardinal de f es
|f | =∑x∈X
f (x) (31)
y el grado de contenencia de f en g es
S(f , g) =1
|f |(|f | −
∑x∈X
max{0, f (x)− g(x))
(32)
notese que la suma da una medida de aquellos elementos x en donde la
relacion f (x) ≤ g(x) no se satisface; tambien se tiene S(g , f ), se puede
pensar en el grado de coincidencia en [0, 1]-partes, tiene el problema de
evocar la estructura (R,+, ·), esto es, [0, 1] es visto como subconjunto de
los numeros reales.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 27 / 1

Parte III
Sistemas Dinamicos Difusos
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 28 / 1
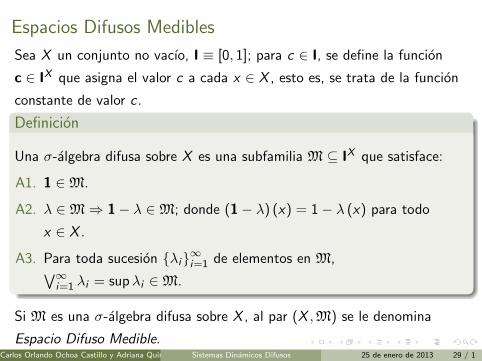
Espacios Difusos Medibles
Sea X un conjunto no vacıo, I ≡ [0, 1]; para c ∈ I, se define la funcion
c ∈ IX que asigna el valor c a cada x ∈ X , esto es, se trata de la funcion
constante de valor c .
Definicion
Una σ-algebra difusa sobre X es una subfamilia M ⊆ IX que satisface:
A1. 1 ∈M.
A2. λ ∈M⇒ 1− λ ∈M; donde (1− λ) (x) = 1− λ (x) para todo
x ∈ X .
A3. Para toda sucesion {λi}∞i=1 de elementos en M,∨∞i=1 λi = supλi ∈M.
Si M es una σ-algebra difusa sobre X , al par (X ,M) se le denomina
Espacio Difuso Medible.Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 29 / 1

Los espacios difusos medibles se relacionan entre si tal como lo hacen
varias estructuras, esta manera de relacionarse es como sigue:
Definicion
Una transformacion T : (X ,M)→ (Y ,N) se dice Difusa Medible si, para
µ ∈ N,←T (µ) ≡ µ ◦ T ∈M, es decir
←T (N) ⊆M.
En otras palabras, T es difusa medible si el diagrama
X Y
I
-T
@@
@@Rµ◦T
?
µ
conmuta.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 30 / 1
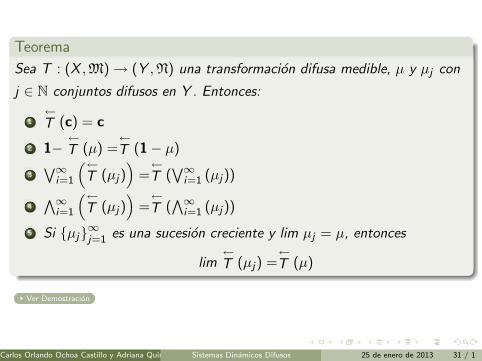
Teorema
Sea T : (X ,M)→ (Y ,N) una transformacion difusa medible, µ y µj con
j ∈ N conjuntos difusos en Y . Entonces:
1←T (c) = c
2 1−←T (µ) =
←T (1− µ)
3∨∞
i=1
(←T (µj)
)=←T (∨∞
i=1 (µj))
4∧∞
i=1
(←T (µj)
)=←T (∧∞
i=1 (µj))
5 Si {µj}∞j=1 es una sucesion creciente y lim µj = µ, entonces
lim←T (µj) =
←T (µ)
Ver Demostracion
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 31 / 1
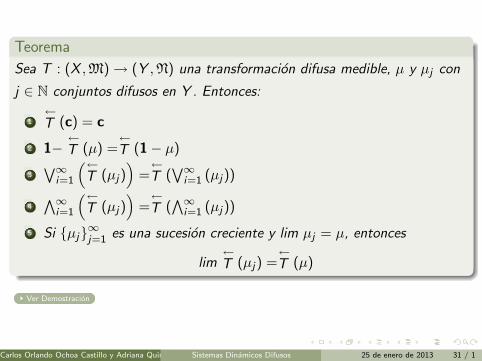
Teorema
Sea T : (X ,M)→ (Y ,N) una transformacion difusa medible, µ y µj con
j ∈ N conjuntos difusos en Y . Entonces:
1←T (c) = c
2 1−←T (µ) =
←T (1− µ)
3∨∞
i=1
(←T (µj)
)=←T (∨∞
i=1 (µj))
4∧∞
i=1
(←T (µj)
)=←T (∧∞
i=1 (µj))
5 Si {µj}∞j=1 es una sucesion creciente y lim µj = µ, entonces
lim←T (µj) =
←T (µ)
Ver Demostracion
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 31 / 1

Generacion de σ-algebras difusas mediante la imagen reciproca de las
transformaciones difusas medibles,
Corolario
Sean (X ,M), (Y ,N) espacios difuso medibles, T : X → Y una
transformacion difusa medible, entonces
←T (N) =
{←T (µ) : µ ∈ N
}es una σ-algebra difusa sobre X .
Ver demostracion
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 32 / 1

Generacion de σ-algebras difusas mediante la imagen reciproca de las
transformaciones difusas medibles,
Corolario
Sean (X ,M), (Y ,N) espacios difuso medibles, T : X → Y una
transformacion difusa medible, entonces
←T (N) =
{←T (µ) : µ ∈ N
}es una σ-algebra difusa sobre X .
Ver demostracion
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 32 / 1
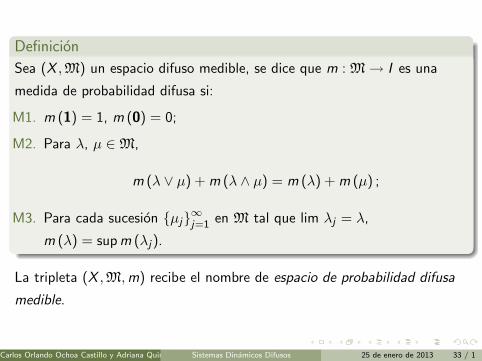
Definicion
Sea (X ,M) un espacio difuso medible, se dice que m : M→ I es una
medida de probabilidad difusa si:
M1. m (1) = 1, m (0) = 0;
M2. Para λ, µ ∈M,
m (λ ∨ µ) + m (λ ∧ µ) = m (λ) + m (µ) ;
M3. Para cada sucesion {µj}∞j=1 en M tal que lim λj = λ,
m (λ) = sup m (λj).
La tripleta (X ,M,m) recibe el nombre de espacio de probabilidad difusa
medible.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 33 / 1
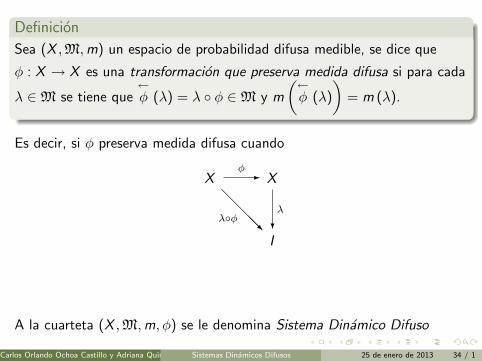
Definicion
Sea (X ,M,m) un espacio de probabilidad difusa medible, se dice que
φ : X → X es una transformacion que preserva medida difusa si para cada
λ ∈M se tiene que←φ (λ) = λ ◦ φ ∈M y m
(←φ (λ)
)= m (λ).
Es decir, si φ preserva medida difusa cuando
X X
I
-φ
@@
@@Rλ◦φ
?λ
A la cuarteta (X ,M,m, φ) se le denomina Sistema Dinamico Difuso
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 34 / 1

Teorema
Sean (X ,M,m) un espacio de probabilidad difusa medible y φ : X → X
una transformacion difusa medible; si n : M→ I esta definida por
n (µ) = m
(←φ (µ)
), µ ∈M,
entonces n es una medida de probabilidad difusa sobre M,
Ver Demostracion
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 35 / 1
Teorema
Sean (X ,M,m) un espacio de probabilidad difusa medible y φ : X → X
una transformacion difusa medible; si n : M→ I esta definida por
n (µ) = m
(←φ (µ)
), µ ∈M,
entonces n es una medida de probabilidad difusa sobre M,
Ver Demostracion
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 35 / 1
Definicion
Sean Φ1 = (X ,M,m, φ), Φ2 = (Y ,N, n, ϕ) Sistemas Dinamicos Difusos.
Si existe ψ∗ : N→M una funcion biyectiva tal que, para µ ∈ N, se
satisface que:
m (ψ∗ (µ)) = n (µ)
m
(←φ (ψ∗ (µ))
)= m
(ψ∗(←ψ (µ)
))Se dice que Φ1 es equivalente a Φ2.
Teorema
La equivalencia entre Sistemas Dinamicos Difusos es una relacion de
equivalencia.
Ver demostracion
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 36 / 1
Definicion
Sean Φ1 = (X ,M,m, φ), Φ2 = (Y ,N, n, ϕ) Sistemas Dinamicos Difusos.
Si existe ψ∗ : N→M una funcion biyectiva tal que, para µ ∈ N, se
satisface que:
m (ψ∗ (µ)) = n (µ)
m
(←φ (ψ∗ (µ))
)= m
(ψ∗(←ψ (µ)
))Se dice que Φ1 es equivalente a Φ2.
Teorema
La equivalencia entre Sistemas Dinamicos Difusos es una relacion de
equivalencia.
Ver demostracion
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 36 / 1
Parte IV
Bibliografıa
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 37 / 1
Jiri Adamek, Horst Herrlich, George Strecker , Abstract
and Concrete Categories, John Wiley & Sons, New York, 1990.
N. Bourbaki, General Topology, Addison-Wesley Publishing,
Massachusetts, 1966
U. Hohle, A. Sostak, Fixed-Basis Fuzzy Topologies In:
Mathematics of Fuzzy Sets: Logic, Topology and Measure Theory,
Kluwer Academic Publisher, Boston, 1999.
Peter T. Johnstone, Stone spaces, Cambridge University Press,
Cambridge, 1982.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 38 / 1
W. Kotze, Uniform Spaces In: Mathematics of Fuzzy Sets: Logic,
Topology and Measure Theory, Kluwer Academic Publisher, Boston,
1999.
Liu Ying-Ming, Luo Mao-Kang, Fuzzy Topology, World
Scientific, Singapore ,1997.
S. E. Rodabaugh, Powerset Operator Foundations For Poslat Fuzzy
Set Theories and Topologies, In: Mathematics of Fuzzy Sets: Logic,
Topology and Measure Theory, Kluwer Academic Publisher, Boston,
1999.
Saunders Mac Lane, Ieke Moerdijk, Sheaves in Geometry and
Logic, Springer-Verlag, New York, 1992.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 39 / 1
Alexander P. Sostak, Fuzzy functions and an extension of the
category L-Top of Chang-Goguen L-topological spaces, Proceedings
of the Ninth Prague Topological Symposium, Prague, Czech Republic,
2001.
Manuel Suarez M., Topologıa Conjuntista - Una Presentacion
Buleana-Adjunta, Universidad Pedagogica y Tecnologica de Colombia,
Tunja, 1992
Garcıa Marrero y Otros, Topologıa, Alhambra, Madrid, 1975
Adriana Quintero Palomino, Espectros Inverso y Directo en
Sistemas Dinamicos Difusos, Trabajo de Grado, Universidad Distrital
Francisco Jose de Caldas, Bogota, 2012
PRAMILA Srivastava, Mona Khare, Y.K. Srivastava. Fuzzy Dynamical
Systems. Inverse and Direct Spectra. Elsevier Science, Fuzzy Sets and
Systems. 2000.
Carlos Orlando Ochoa Castillo y Adriana Quintero Palomino (Proyecto Curricular de Matematicas Universidad Distrital Francisco Jose de Caldas Semillero LOTO )Sistemas Dinamicos Difusos 25 de enero de 2013 40 / 1