Embed Size (px)
Citation preview
1
Estándares
Certificaciones
Formación
Publicaciones
Conferencias
Sintonía de Lazos PID:
Conceptos, Métodos
y Aspectos Prácticos
1
5. Metodos de sintonía: Sintonizar
Rafael González Martín
Ismael Pereda Alonso
Sintonía de Lazos PID (2013) 2
Plan de la sesión
• Repaso conceptos básicos
– Lazo de control
– Algoritmo PID
• Criterio de sintonía
– Respuesta del Controlador
– Rendimiento del Controlador
• Objetivos de la sintonía
• Métodos de sintonía a lazo abierto
• Métodos de sintonía a lazo cerrado
• Ruido y Filtro
• Lazos en cascada
• Controlabilidad
2
Sintonía de Lazos PID (2013) 3
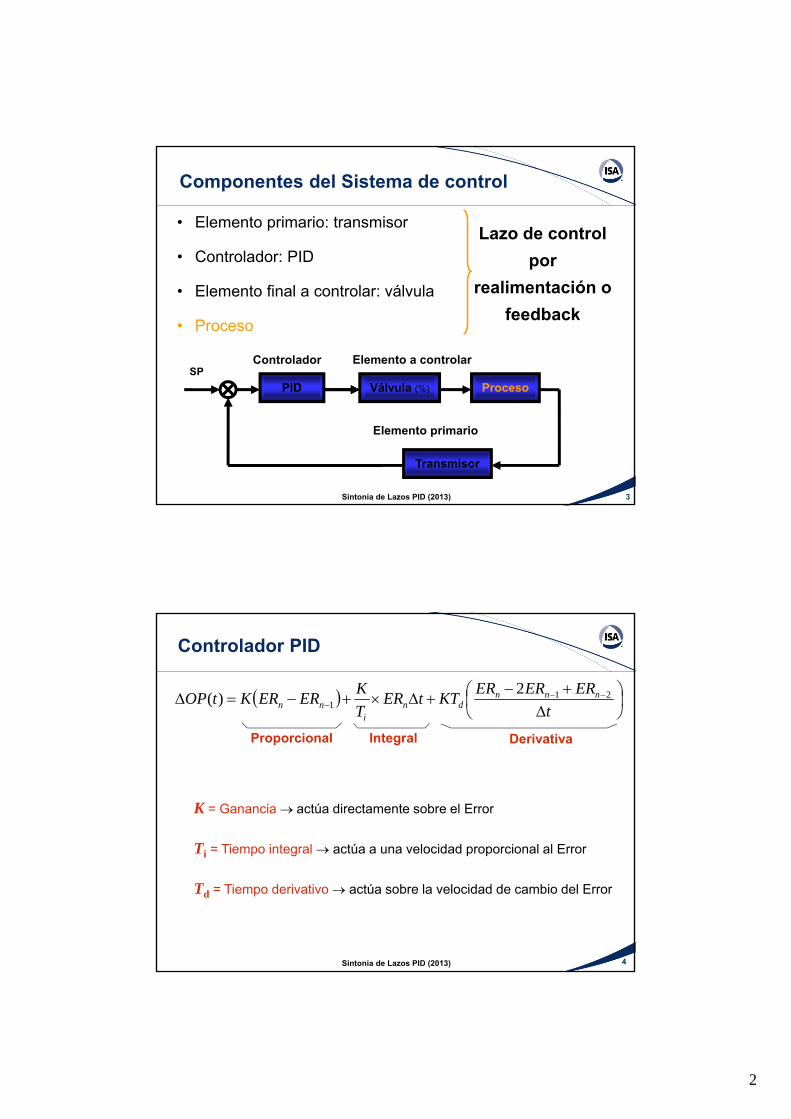
Componentes del Sistema de control
• Elemento primario: transmisor
• Controlador: PID
• Elemento final a controlar: válvula
• Proceso
Lazo de control
por
realimentación o
feedback
Controlador Elemento a controlarSP
ProcesoVálvula (%)PID
Elemento primario
Transmisor
Sintonía de Lazos PID (2013) 4
t
ERERERKTtER
T
KERERKtOP nnn
dni
nn21
1
2)(
Controlador PID
Proporcional Integral Derivativa
K = Ganancia actúa directamente sobre el Error
Ti = Tiempo integral actúa a una velocidad proporcional al Error
Td = Tiempo derivativo actúa sobre la velocidad de cambio del Error
3
Sintonía de Lazos PID (2013) 5
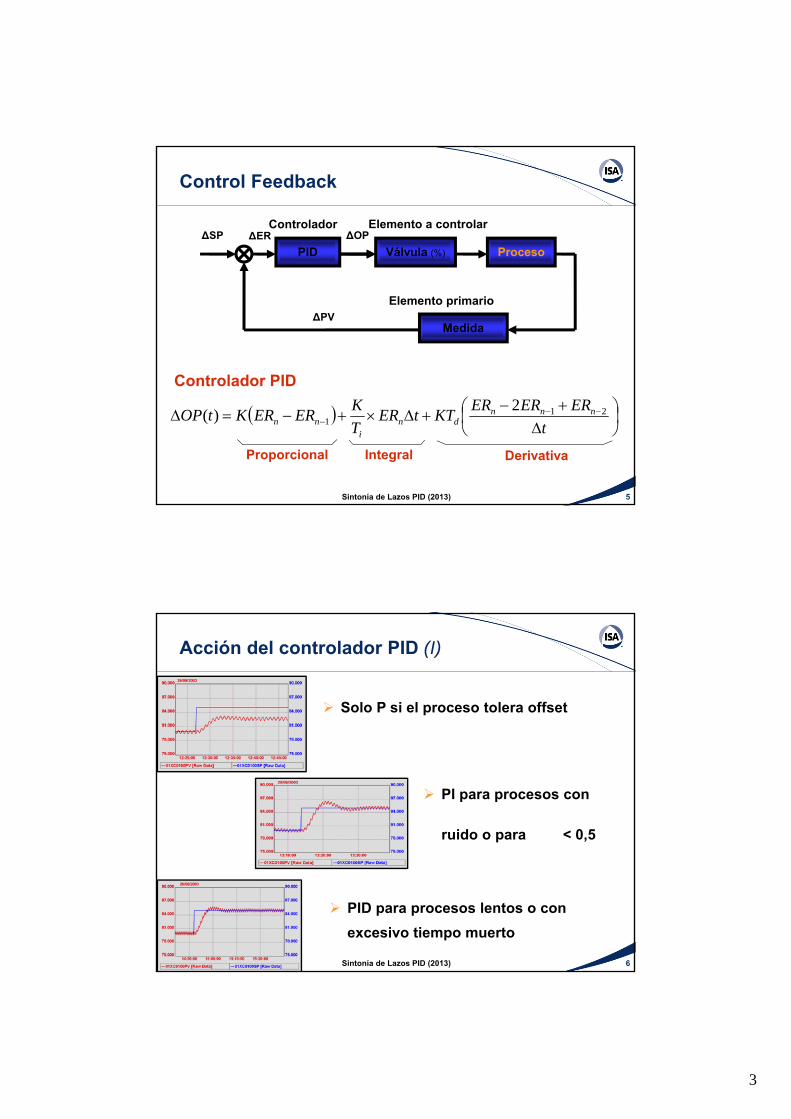
Control Feedback
Controlador Elemento a controlar
ProcesoVálvula (%)PID
Elemento primario
Medida
∆SP ∆OP
∆PV
∆ER
t
ERERERKTtER
T
KERERKtOP nnn
dni
nn21
1
2)(
Proporcional Integral Derivativa
Controlador PID
Sintonía de Lazos PID (2013) 6
Acción del controlador PID (I)
Solo P si el proceso tolera offset
PID para procesos lentos o con
excesivo tiempo muerto
PI para procesos con
ruido o para < 0,5
4
Sintonía de Lazos PID (2013) 7
Criterio de Sintonía (I)
Respuesta del controlador:
• Sobrepasamiento: máximo valor alcanzado sobre el valor en el
estado estacionario.
• Relación de amortiguamiento: relación de la altura de los primeros
picos. Se busca que sea ¼ (1/6 o 1/10 como más conservador).
• Tiempo de alcance: Tiempo en alcanzar el SP
• Tiempo de respuesta: Tiempo en alcanzar el SP ± 5%
Sintonía de Lazos PID (2013) 8
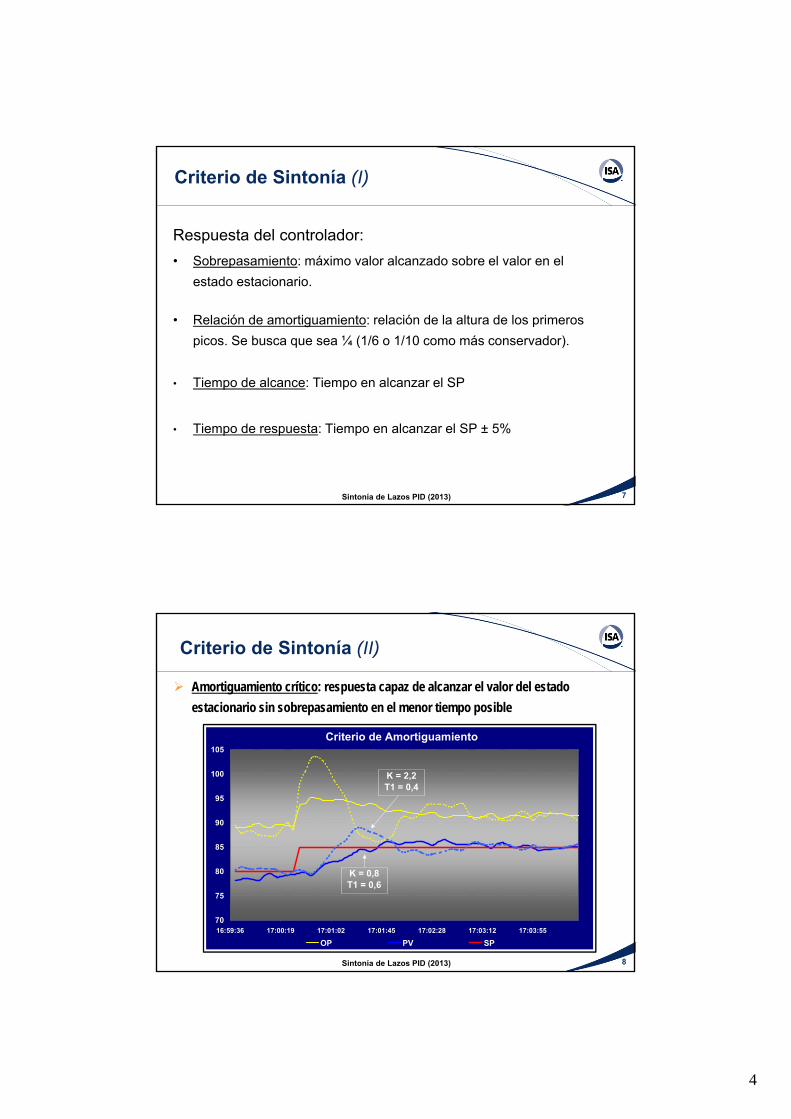
Criterio de Sintonía (II)
Amortiguamiento crítico: respuesta capaz de alcanzar el valor del estado
estacionario sin sobrepasamiento en el menor tiempo posible
Criterio de Amortiguamiento
70
75
80
85
90
95
100
105
16:59:36 17:00:19 17:01:02 17:01:45 17:02:28 17:03:12 17:03:55
OP PV SP
K = 2,2T1 = 0,4
K = 0,8T1 = 0,6
5
Sintonía de Lazos PID (2013) 9
Criterio de Sintonía (III)
Rendimiento del Controlador:
• IE: Integral del error
– No usar para respuestas oscilatorias
• IAE: Integral del valor absoluto del error
• ISE: Integral del cuadrado del error
– Criterio más conservador porque penaliza los errores altos
• ITAE: Integral del valor absoluto del error por el tiempo
Ninguno considera el comportamiento de OP !!!
0
dteIE
0
dteIAE
0
2 dteISE
0
dtetISE
Sintonía de Lazos PID (2013) 10
Criterio de Sintonía - Conclusiones
Ningún criterio es absoluto, se complementan
Cuidado con el ruido…
Generalmente se emplean los siguientes criterios:
~25% sobrepasamiento
Relación de amortiguamiento de 1/4
Mínimo Offset (solo control Proporcional)
Mínimo ISE (Integral del cuadrado del error)
Criterios
prácticos
6
Sintonía de Lazos PID (2013) 11
Sintonización: ¿qué es?
• Ajustar los parámetros del controlador “PID”
– K= Ganancia proporcional
– Ti = Tiempo integral (min)
– Td = Tiempo derivativo (min)
• Otros ajustes
– Filtros
– Ecuaciones : PID, PI-D, I-PD, I, etc.
Ajustar los parámetros del controlador “PID” para obtener la respuesta deseada del lazo ante cambios de SP o perturbaciones del proceso.
Medida
ProcesoValvula (%)PID
∆OP
∆PV
∆SP ∆ER-
+
Sintonía de Lazos PID (2013) 12
Sintonización: ¿por qué?
• Variaciones de carga: cambio inesperado de la PV
– Se busca que la variable controlada (PV) vuelva al valor del SP lo antes posible.
• Variación de SP: cambio intencional de SP
– Se busca que el proceso alcance el nuevo valor de SP lo antes posible.
Medida
ProcesoValvula (%)PID
∆OP
∆PV
∆SP ∆ER-
+
Reducir el coste (producto y tiempo de respuesta)
7
Sintonía de Lazos PID (2013) 13
Perturbación de carga
75
80
85
90
95
100
37918 37918 37918 37918 37918 37918 37918
OP PV
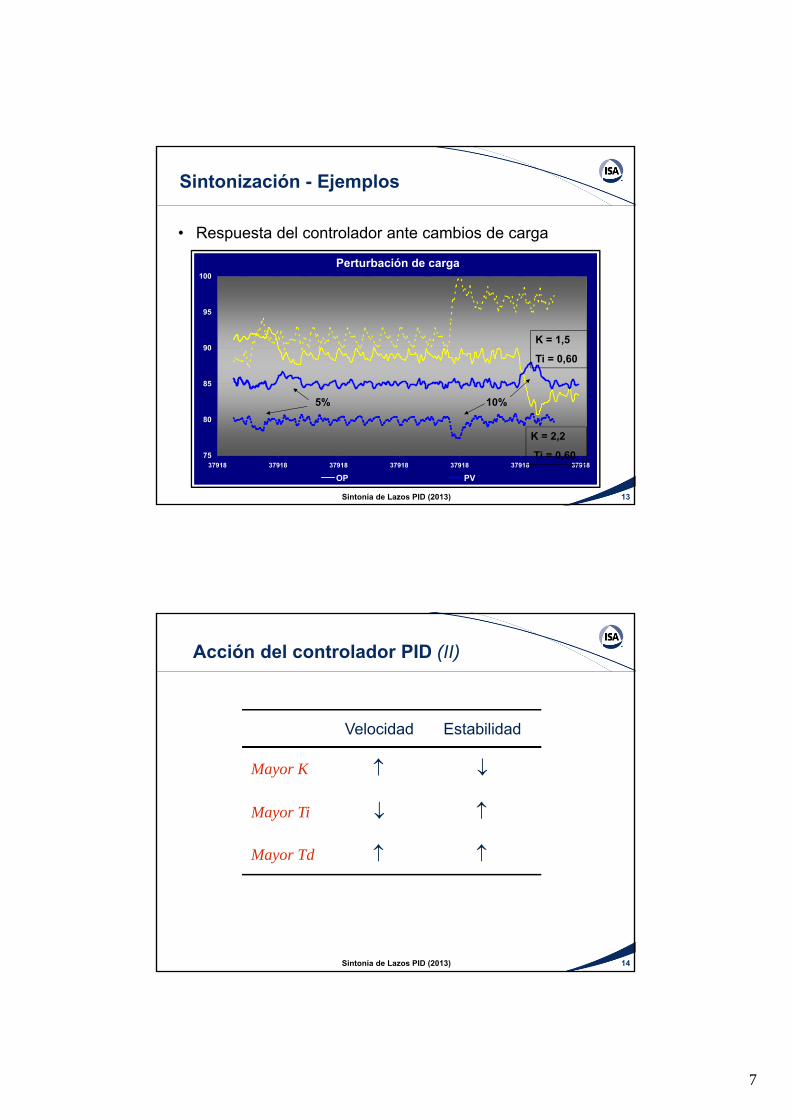
Sintonización - Ejemplos
• Respuesta del controlador ante cambios de carga
K = 1,5
Ti = 0,60
K = 2,2
Ti = 0,60
5% 10%
Sintonía de Lazos PID (2013) 14
Acción del controlador PID (II)
Velocidad Estabilidad
Mayor K
Mayor Ti
Mayor Td
8
Sintonía de Lazos PID (2013) 15
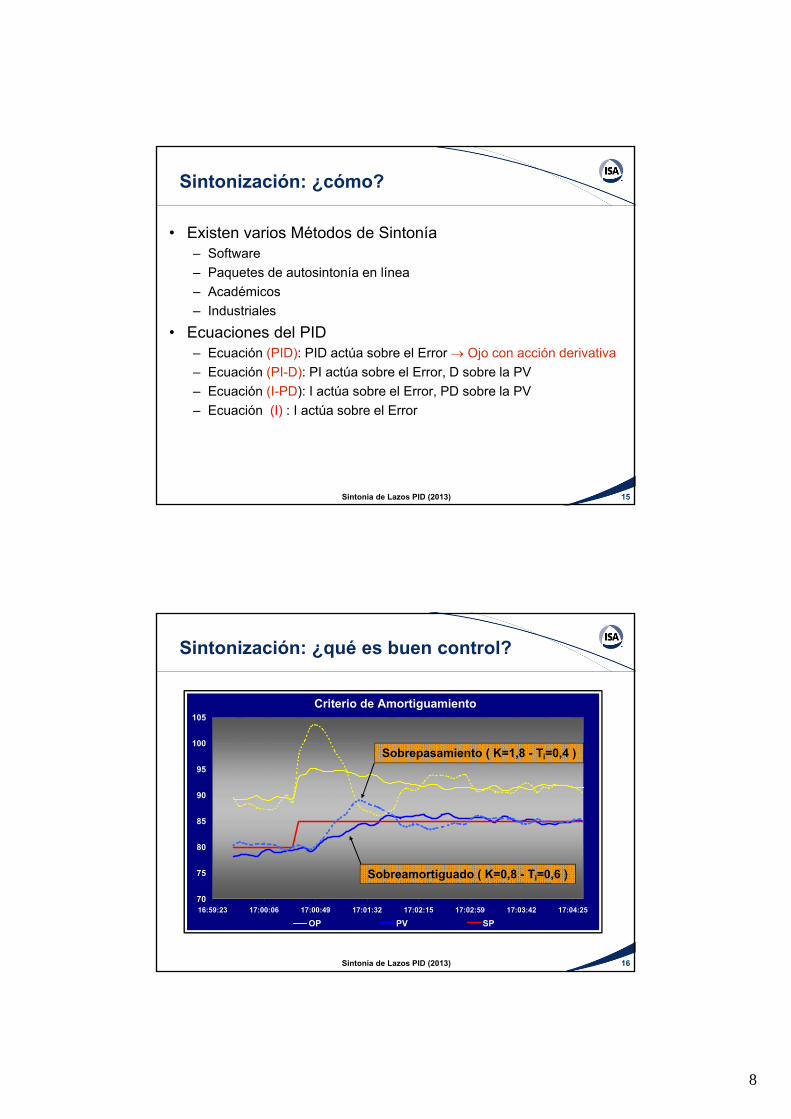
Sintonización: ¿cómo?
• Existen varios Métodos de Sintonía– Software
– Paquetes de autosintonía en línea
– Académicos
– Industriales
• Ecuaciones del PID– Ecuación (PID): PID actúa sobre el Error Ojo con acción derivativa
– Ecuación (PI-D): PI actúa sobre el Error, D sobre la PV
– Ecuación (I-PD): I actúa sobre el Error, PD sobre la PV
– Ecuación (I) : I actúa sobre el Error
Sintonía de Lazos PID (2013) 16
Criterio de Amortiguamiento
70
75
80
85
90
95
100
105
16:59:23 17:00:06 17:00:49 17:01:32 17:02:15 17:02:59 17:03:42 17:04:25
OP PV SP
Sintonización: ¿qué es buen control?
Sobreamortiguado ( K=0,8 - Ti=0,6 )
Sobrepasamiento ( K=1,8 - Ti=0,4 )
9
Sintonía de Lazos PID (2013) 17
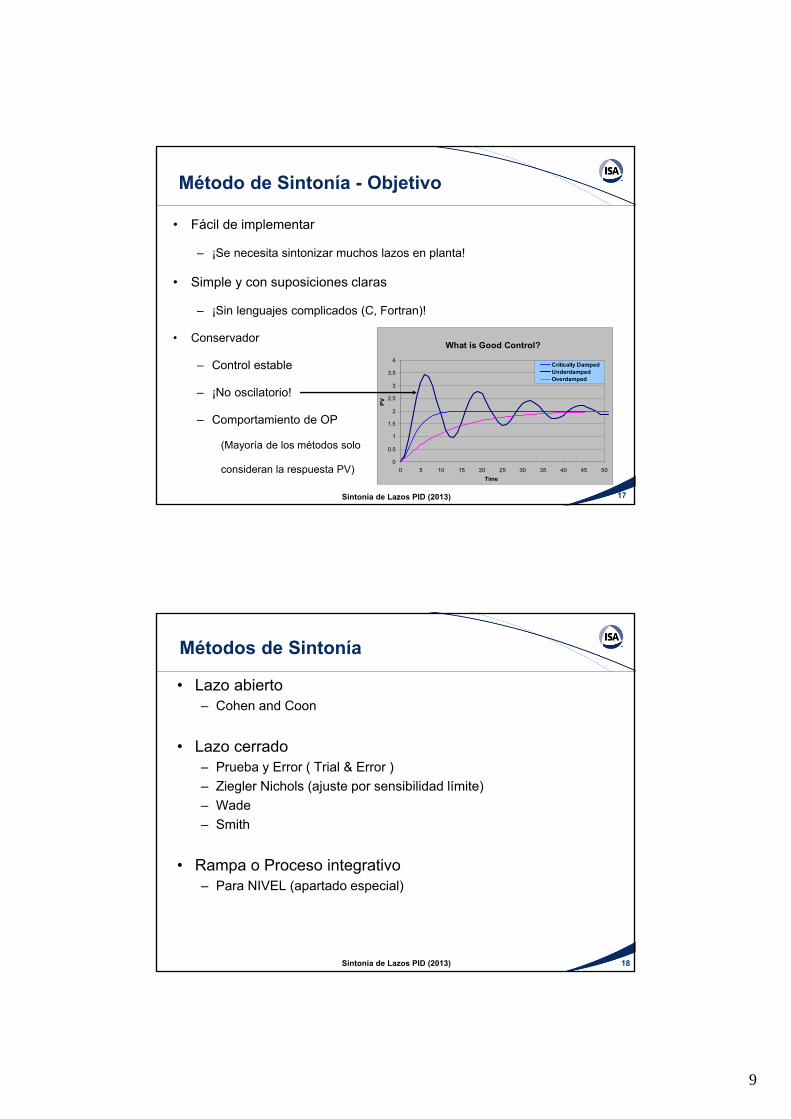
• Fácil de implementar
– ¡Se necesita sintonizar muchos lazos en planta!
• Simple y con suposiciones claras
– ¡Sin lenguajes complicados (C, Fortran)!
• Conservador
– Control estable
– ¡No oscilatorio!
– Comportamiento de OP
(Mayoría de los métodos solo
consideran la respuesta PV)
What is Good Control?
0
0.5
1
1.5
2
2.5
3
3.5
4
0 5 10 15 20 25 30 35 40 45 50
Time
PV
Critically DampedUnderdampedOverdamped
Método de Sintonía - Objetivo
Sintonía de Lazos PID (2013) 18
• Lazo abierto– Cohen and Coon
• Lazo cerrado– Prueba y Error ( Trial & Error )
– Ziegler Nichols (ajuste por sensibilidad límite)
– Wade
– Smith
• Rampa o Proceso integrativo– Para NIVEL (apartado especial)
Métodos de Sintonía
10
Sintonía de Lazos PID (2013) 19
Curva de Proceso lazo abierto
60
65
70
75
80
85
90
95
12:38:10 12:39:36 12:41:02 12:42:29 12:43:55 12:45:22
01xc0200.op 01xc0200.pv
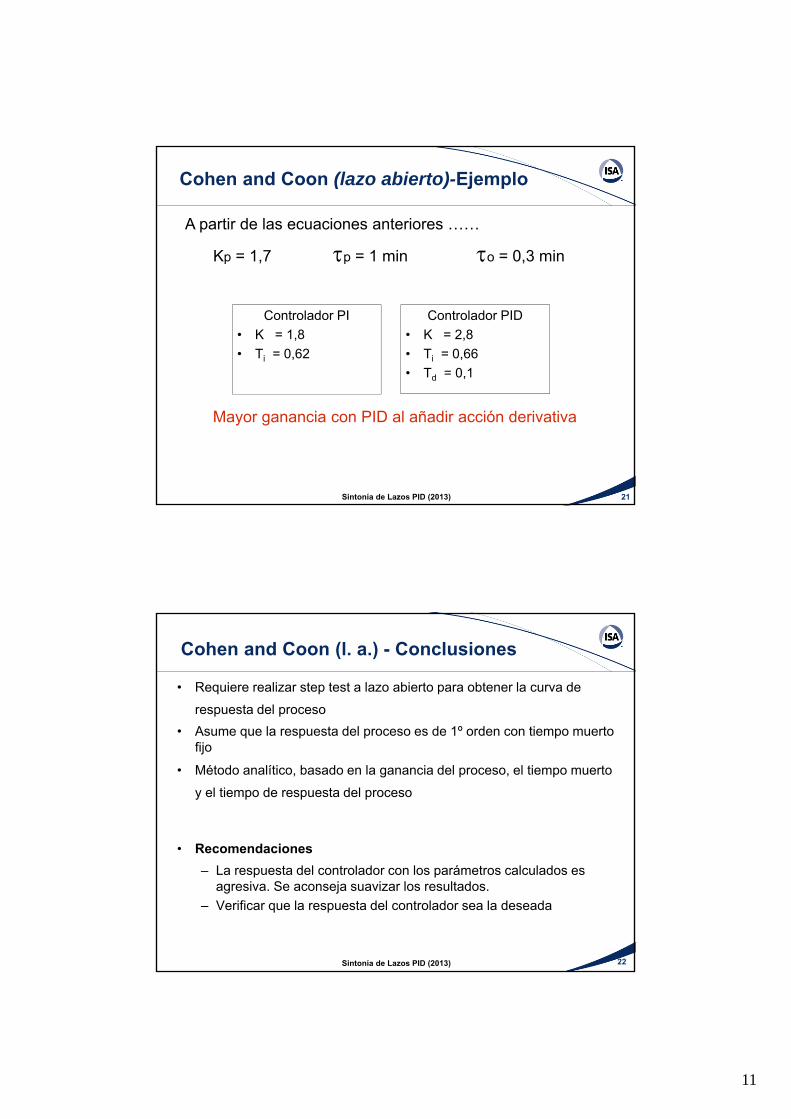
Cohen and Coon (lazo abierto)
• Supone que la respuesta del lazo abierto es de 1º orden con tiempo muerto
• A partir de la curva de respuesta del proceso en lazo abierto,
se calcula Kp, o y p.
∆PV
p
63%
o ss
o = 0,3 min
p = 1 min
Kp = ∆PV/∆OP = 1,7
Sintonía de Lazos PID (2013) 20
Cohen and Coon (lazo abierto)
• Parámetros PI • Parámetros PID
p
o
p
o
oi
p
o
o
p
p
T
KK
209
330
129,01
p
ood
p
o
p
o
oi
p
o
o
p
p
T
T
KK
211
4
813
632
433,11
Parámetros de sintonía del Método Cohen Coon
11
Sintonía de Lazos PID (2013) 21
Cohen and Coon (lazo abierto)-Ejemplo
Controlador PI
• K = 1,8
• Ti = 0,62
Controlador PID
• K = 2,8
• Ti = 0,66
• Td = 0,1
A partir de las ecuaciones anteriores ……
Kp = 1,7 p = 1 min o = 0,3 min
Mayor ganancia con PID al añadir acción derivativa
Sintonía de Lazos PID (2013) 22
Cohen and Coon (l. a.) - Conclusiones
• Requiere realizar step test a lazo abierto para obtener la curva de
respuesta del proceso
• Asume que la respuesta del proceso es de 1º orden con tiempo muerto fijo
• Método analítico, basado en la ganancia del proceso, el tiempo muerto
y el tiempo de respuesta del proceso
• Recomendaciones
– La respuesta del controlador con los parámetros calculados es agresiva. Se aconseja suavizar los resultados.
– Verificar que la respuesta del controlador sea la deseada
12
Sintonía de Lazos PID (2013) 23
Prueba y error (lazo cerrado)
• Se ajustan los parámetros del controlador en forma empírica y a lazo cerrado.
• Sugerencias generales para métodos Trial & Error:
– La acción proporcional es el control principal.
– La acción integral y derivativa se emplean para mejorar la respuesta.
– Realizar incrementos del parámetro de ajuste del 30-50% en cada paso.
– Relación de amortiguamiento de 1/4 como criterio más habitual de respuesta del sistema ante perturbaciones.
Sintonía de Lazos PID (2013) 24
Ziegler-Nichols lazo cerrado
60
70
80
90
100
110
9:36:43 9:38:10 9:39:36 9:41:02 9:42:29 9:43:55 9:45:22
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
01xc0200.op 01xc0200.pv 01xc0200.sp 01xc0200.k
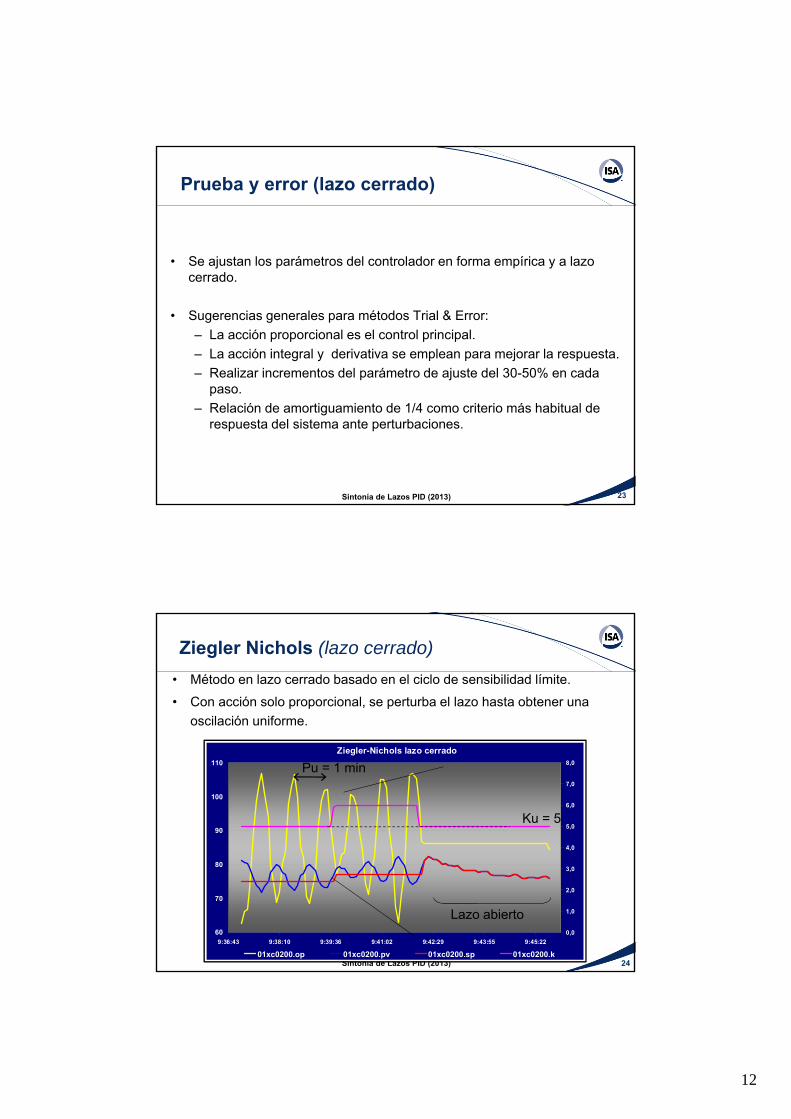
Ziegler Nichols (lazo cerrado)
• Método en lazo cerrado basado en el ciclo de sensibilidad límite.
• Con acción solo proporcional, se perturba el lazo hasta obtener una
oscilación uniforme.
Pu = 1 min
Ku = 5
Lazo abierto
13
Sintonía de Lazos PID (2013) 25
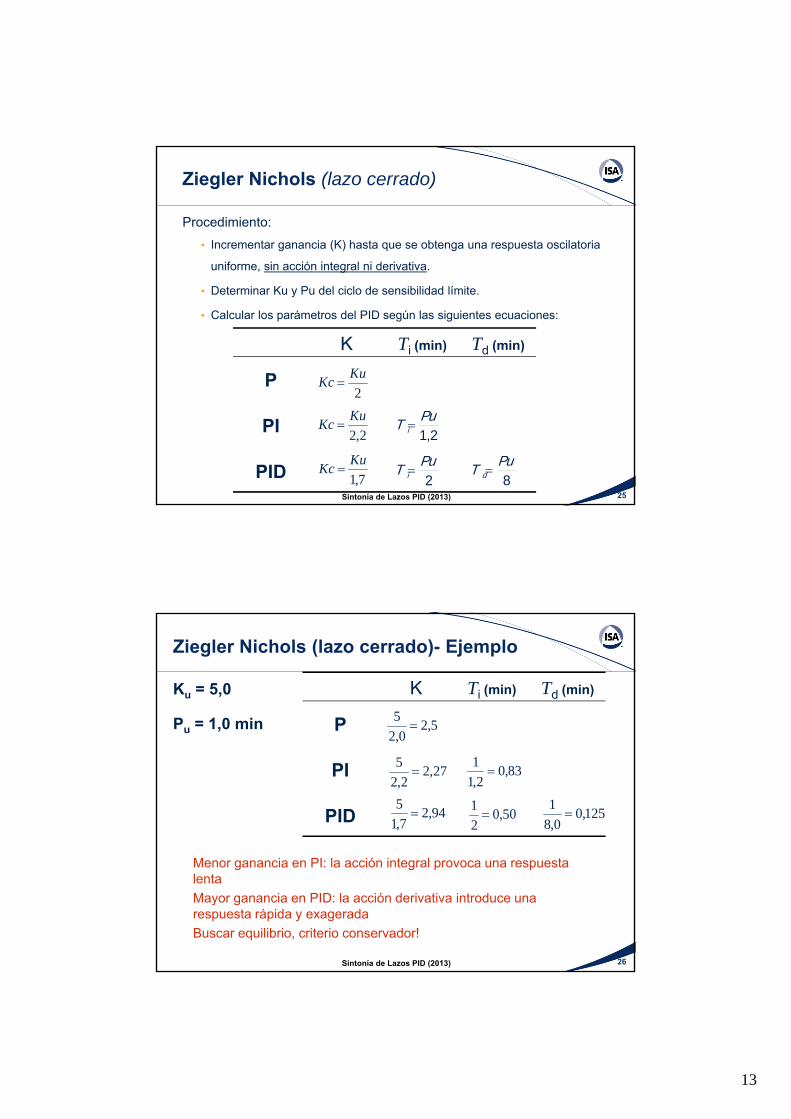
Procedimiento:
• Incrementar ganancia (K) hasta que se obtenga una respuesta oscilatoria
uniforme, sin acción integral ni derivativa.
• Determinar Ku y Pu del ciclo de sensibilidad límite.
• Calcular los parámetros del PID según las siguientes ecuaciones:
Ziegler Nichols (lazo cerrado)
2,2
KuKc
7,1
KuKc
2,1PuT i
2PuT iPID
PI
P
Td (min)Ti (min)K
2
KuKc
8PuT d
Sintonía de Lazos PID (2013) 26
Ku = 5,0
Pu = 1,0 min
Ziegler Nichols (lazo cerrado)- Ejemplo
Menor ganancia en PI: la acción integral provoca una respuesta lenta
Mayor ganancia en PID: la acción derivativa introduce una respuesta rápida y exagerada
Buscar equilibrio, criterio conservador!
27,22,2
5
94,27,1
5
83,02,1
1
50,02
1PID
PI
P
Td (min)Ti (min)K
5,20,2
5
125,00,8
1
14
Sintonía de Lazos PID (2013) 27
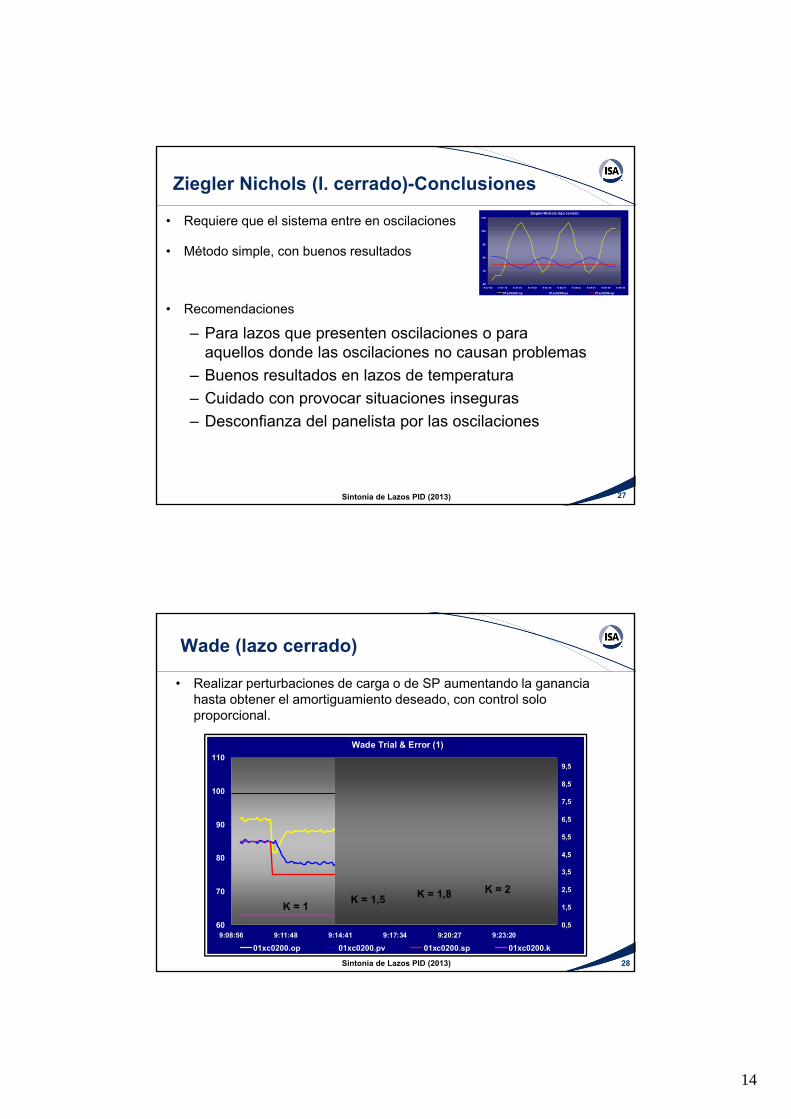
Ziegler Nichols (l. cerrado)-Conclusiones
• Requiere que el sistema entre en oscilaciones
• Método simple, con buenos resultados
• Recomendaciones
– Para lazos que presenten oscilaciones o para aquellos donde las oscilaciones no causan problemas
– Buenos resultados en lazos de temperatura
– Cuidado con provocar situaciones inseguras
– Desconfianza del panelista por las oscilaciones
Ziegler-Nichols lazo cerrado
60
70
80
90
100
110
9:37:00 9:37:18 9:37:35 9:37:52 9:38:10 9:38:27 9:38:44 9:39:01 9:39:19 9:39:36
01xc0200.op 01xc0200.pv 01xc0200.sp
Sintonía de Lazos PID (2013) 28
Wade Trial & Error (1)
60
70
80
90
100
110
9:08:56 9:11:48 9:14:41 9:17:34 9:20:27 9:23:20
0,5
1,5
2,5
3,5
4,5
5,5
6,5
7,5
8,5
9,5
01xc0200.op 01xc0200.pv 01xc0200.sp 01xc0200.k
Wade (lazo cerrado)
• Realizar perturbaciones de carga o de SP aumentando la ganancia hasta obtener el amortiguamiento deseado, con control solo proporcional.
K = 1K = 1,5 K = 1,8 K = 2
15
Sintonía de Lazos PID (2013) 29
Wade Trial & Error (2)
60
70
80
90
100
110
9:48:58 9:50:24 9:51:50 9:53:17 9:54:43 9:56:10 9:57:36 9:59:02
0,5
1,5
2,5
3,5
4,5
5,5
6,5
7,5
8,5
9,5
01xc0200.op 01xc0200.pv 01xc0200.sp 01xc0200.k
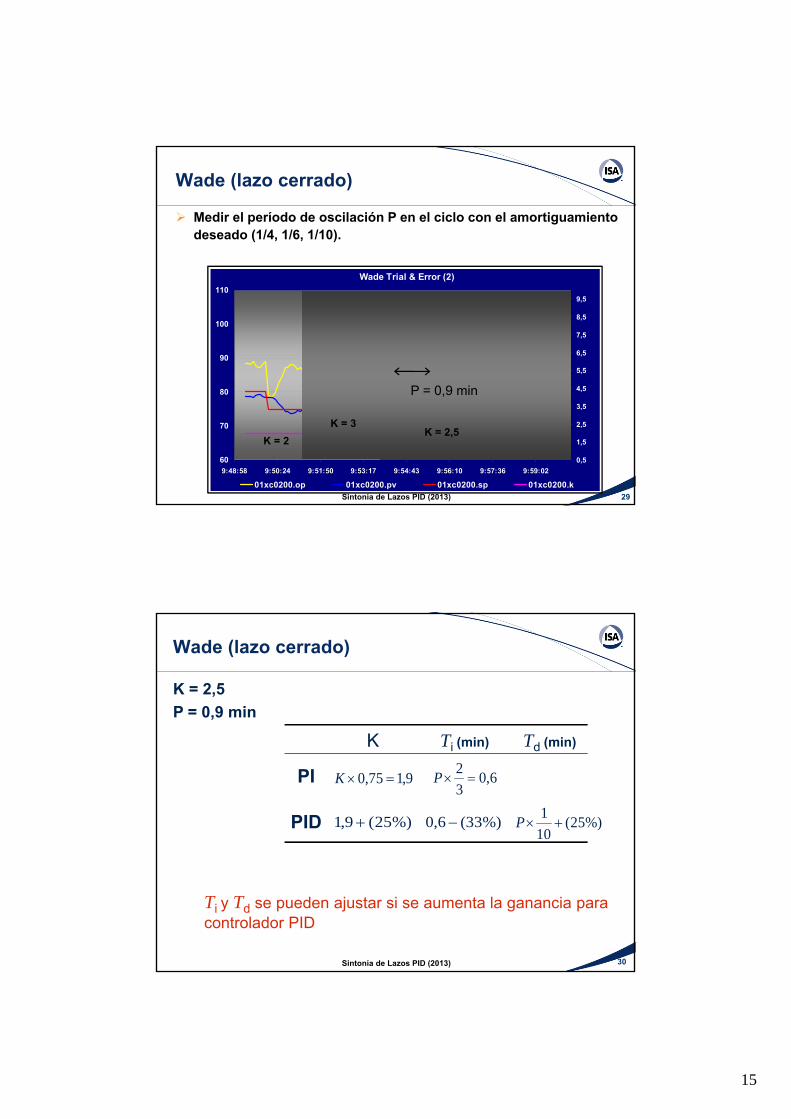
Wade (lazo cerrado)
Medir el período de oscilación P en el ciclo con el amortiguamiento deseado (1/4, 1/6, 1/10).
P = 0,9 min
K = 2
K = 3K = 2,5
Sintonía de Lazos PID (2013) 30
K = 2,5
P = 0,9 min
Wade (lazo cerrado)
Ti y Td se pueden ajustar si se aumenta la ganancia para controlador PID
9,175,0 K
%)25(9,1
6,03
2P
%)33(6,0 PID
PI
Td (min)Ti (min)K
%)25(10
1P
16
Sintonía de Lazos PID (2013) 31
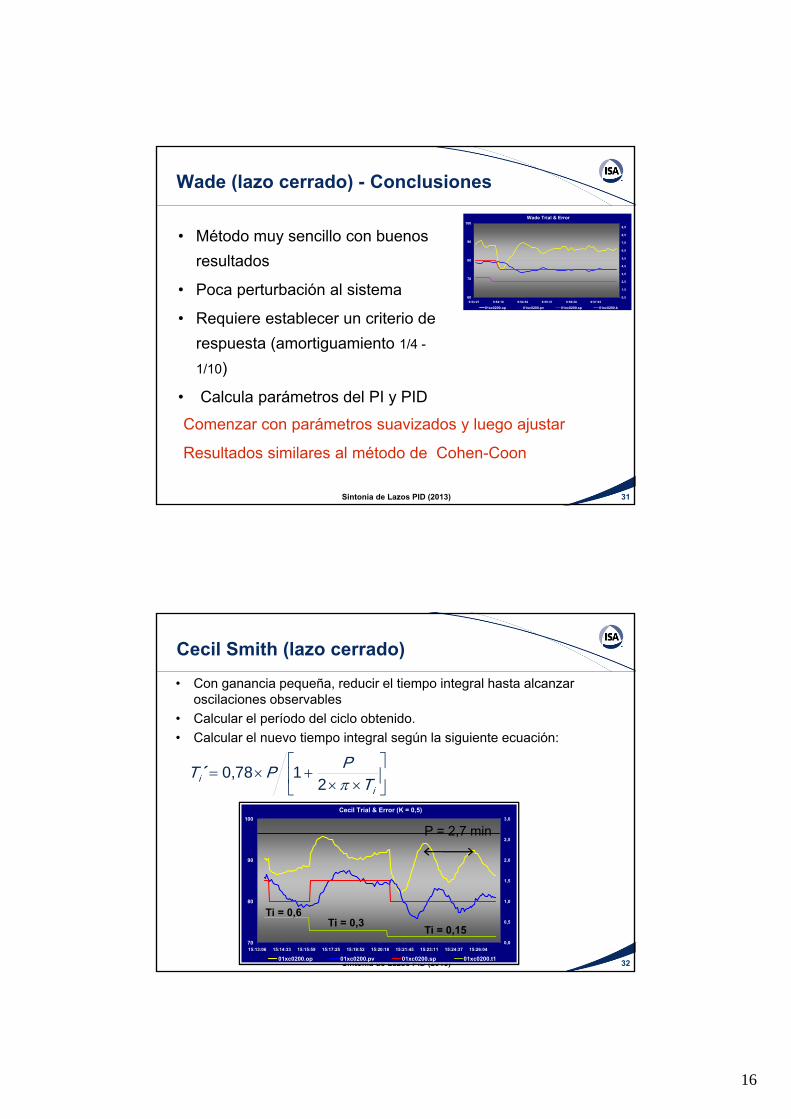
Wade (lazo cerrado) - Conclusiones
• Método muy sencillo con buenos
resultados
• Poca perturbación al sistema
• Requiere establecer un criterio de
respuesta (amortiguamiento 1/4 -
1/10)
• Calcula parámetros del PI y PID
Comenzar con parámetros suavizados y luego ajustar
Resultados similares al método de Cohen-Coon
Wade Trial & Error
60
70
80
90
100
9:53:27 9:54:10 9:54:54 9:55:37 9:56:20 9:57:03
0,5
1,5
2,5
3,5
4,5
5,5
6,5
7,5
8,5
9,5
01xc0200.op 01xc0200.pv 01xc0200.sp 01xc0200.k
Sintonía de Lazos PID (2013) 32
Cecil Smith (lazo cerrado)
• Con ganancia pequeña, reducir el tiempo integral hasta alcanzar oscilaciones observables
• Calcular el período del ciclo obtenido.
• Calcular el nuevo tiempo integral según la siguiente ecuación:
Cecil Trial & Error (K = 0,5)
70
80
90
100
15:13:06 15:14:33 15:15:59 15:17:25 15:18:52 15:20:18 15:21:45 15:23:11 15:24:37 15:26:04
0,0
0,5
1,0
1,5
2,0
2,5
3,0
01xc0200.op 01xc0200.pv 01xc0200.sp 01xc0200.t1
i
i TPPT2
178,0´
P = 2,7 min
Ti = 0,15Ti = 0,3
Ti = 0,6
17
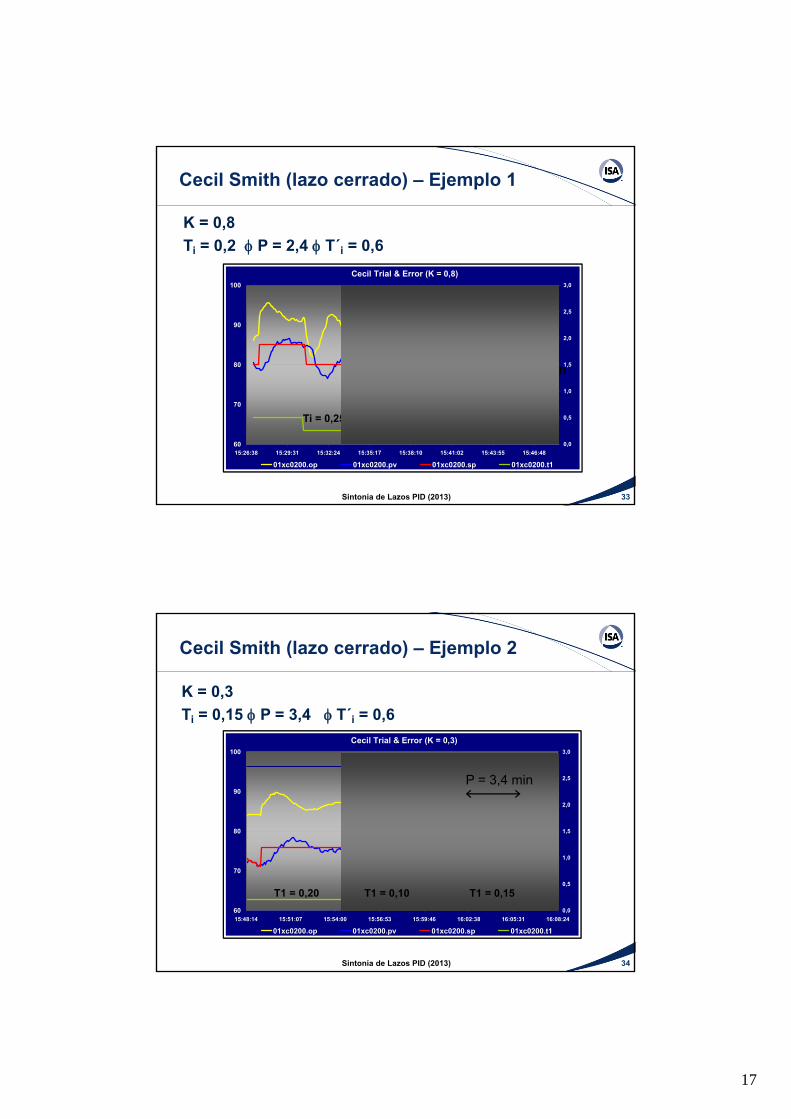
Sintonía de Lazos PID (2013) 33
Cecil Trial & Error (K = 0,8)
60
70
80
90
100
15:26:38 15:29:31 15:32:24 15:35:17 15:38:10 15:41:02 15:43:55 15:46:48
0,0
0,5
1,0
1,5
2,0
2,5
3,0
01xc0200.op 01xc0200.pv 01xc0200.sp 01xc0200.t1
Cecil Smith (lazo cerrado) – Ejemplo 1
P = 2,4 min
T1 = 0,2T1 = 0,15Ti = 0,25
K = 0,8
Ti = 0,2 P = 2,4 T´i = 0,6
Sintonía de Lazos PID (2013) 34
Cecil Trial & Error (K = 0,3)
60
70
80
90
100
15:48:14 15:51:07 15:54:00 15:56:53 15:59:46 16:02:38 16:05:31 16:08:24
0,0
0,5
1,0
1,5
2,0
2,5
3,0
01xc0200.op 01xc0200.pv 01xc0200.sp 01xc0200.t1
Cecil Smith (lazo cerrado) – Ejemplo 2
P = 3,4 min
T1 = 0,15T1 = 0,10T1 = 0,20
K = 0,3
Ti = 0,15 P = 3,4 T´i = 0,6
18
Sintonía de Lazos PID (2013) 35
Método sencillo que calcula Ti
Poca perturbación al sistema
No especifica el grado de oscilación que se debe alcanzar
Ambigüedad en el criterio de oscilación
Cecil Smith (l. cerrado) - Conclusiones
No conviene superar ¼ de amortiguamiento
No calcula ganancia, se ajusta según amortiguamiento deseado.
Alta acción integral limita el ajuste de la ganancia
Sintonía de Lazos PID (2013) 36
Métodos lazo cerrado - Conclusiones
• Métodos simples, buen punto de partida para sintonizar
• Relación de amortiguamiento de 1/4 como respuesta óptima
• Recomendaciones
– Para cualquier lazo, porque no se introducen muchas oscilaciones
– Incrementos del 30-50% en el parámetro de ajuste (ganancia o T1)
– Los periodos de oscilación se pueden medir en la PV o en la OP
– Dificultad en la medida de procesos con ruido
– Comenzar con parámetros suavizados y luego ajustar
– Comprobar la respuesta del lazo ante perturbaciones de carga
19
Sintonía de Lazos PID (2013) 37
• Controlador PI
• K = 1,8 x 0,75 = 1,4
• Ti = 0,6 x 1,25 = 0,75
• Controlador PID
• K = 2,8 x 0,75 = 2,1
• Ti = 0,66 x 1,25 = 0,83
• Td = 0,01 = 0,01
Métodos suavizados
Los métodos estudiados proporcionan constantes del PID muy agresivas (alta ganacia y bajo tiempo integral) para la mayoría de las aplicaciones en la industria química.
Comenzar con las constantes suavizadas y luego ajustar para obtener la respuesta deseada
Ejemplo Método Cohen Coon
Sintonía de Lazos PID (2013) 38
Ruido y Filtros
• Tipos de ruido
– Aleatorio
– Periódico
– Picos de ruido
• Origen del ruido
– Proceso intrínseco
– Mediciones / toma muestras
Colocar el lazo en manual para distinguir si el ruido proviene del propio lazo
20
Sintonía de Lazos PID (2013) 39
Ruido y Filtros
• Criterio de selección de Filtros– Selectividad
– Reducción del ruido
– Distorsión de la señal
• Tipo de Filtros
– Exponencial lineal
– Exponencial no lineal
Sintonía de Lazos PID (2013) 40
Ruido y Filtros - Conclusiones
• Solo usar filtro cuando el ruido es un problema (S/R>2)
• Filtros suavizan señal y retardan respuesta
• Incrementar frecuencia de medición para minimizar
distorsiones de señal
21
Sintonía de Lazos PID (2013) 41
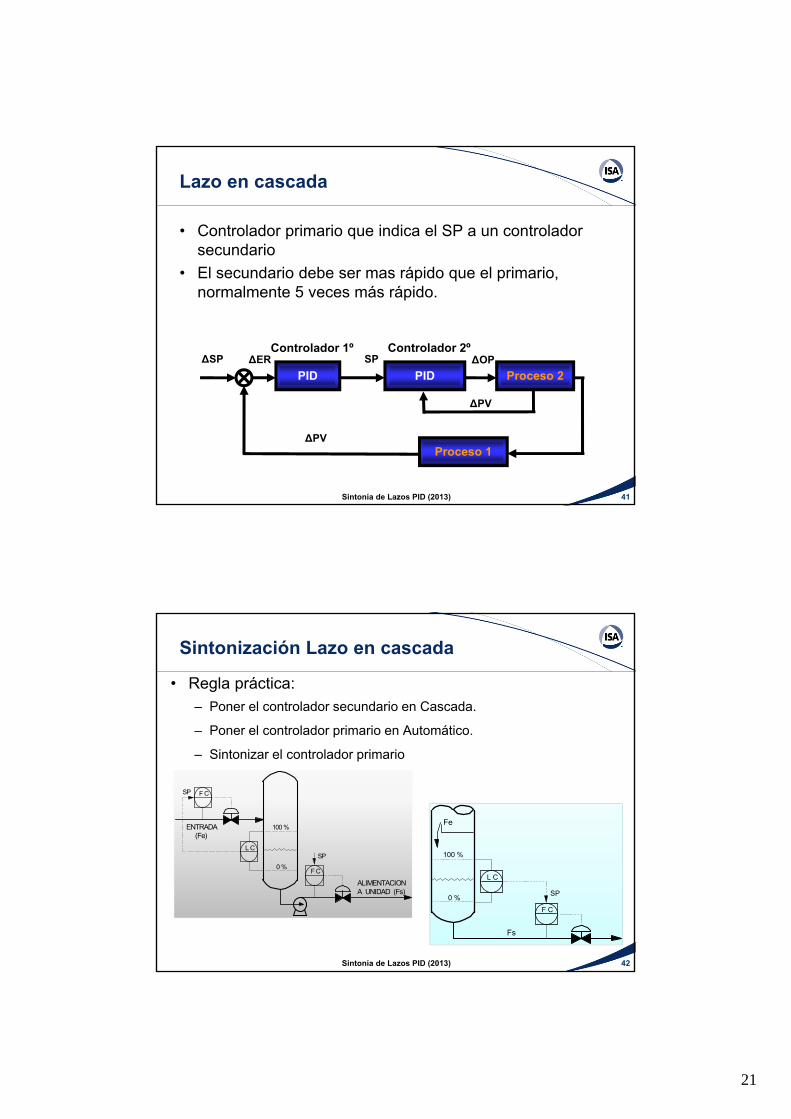
Lazo en cascada
• Controlador primario que indica el SP a un controlador secundario
• El secundario debe ser mas rápido que el primario, normalmente 5 veces más rápido.
Controlador 1º Controlador 2º
Proceso 2PIDPID
Proceso 1
∆SP SP
∆PV
∆ER
∆PV
∆OP
Sintonía de Lazos PID (2013) 42
Sintonización Lazo en cascada
• Regla práctica:
– Poner el controlador secundario en Cascada.
– Poner el controlador primario en Automático.
– Sintonizar el controlador primario
L C
F C
SP
100 %
0 %
Fe
Fs
L C
F C
SP
100 %
0 %
Fe
Fs
ENTRADA (Fe)
ALIMENTACIONA UNIDAD (Fs)
L C
SP F C
F C
SP
100 %
0 %
ENTRADA (Fe)
ALIMENTACIONA UNIDAD (Fs)
L C
SP F C
F C
SP
100 %
0 %
22
Sintonía de Lazos PID (2013) 43
Controlabilidad: ¿de qué depende?
• Características del proceso:
– No linealidad
– Interacción entre variables: variable controlada influencia a dos
variables manipuladas y viceversa.
– Tiempo muerto: la respuesta del PID es pobre para procesos con
tiempo muerto grande.
• Otros parámetros:
– No linealidad de válvulas de control (histéresis)
Comprender el proceso y cuantificar interacciones
Sintonía de Lazos PID (2013) 44
Controlabilidad: ¿cómo se mejora?
• Instrumentación: los valores medidos reflejan el estado del proceso?
– Calibración periódica
– Filtros
• Elemento a controlar: válvula de control
– Posición vs señal de posición del SCD
– No linealidad
• Hardware
• Proceso: es capaz de hacer lo que el control busca?
• Estrategia de control en etapa de diseño
• Sintonización según criterio de sintonía
– Ajustar parámetros hasta alcanzar la respuesta deseada





























