Embed Size (px)
Citation preview

110 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
4.3. Soluciones e indicaciones a los problemas delCapítulo III
4.3.1. Parte 1
1. B = {(1, 2, 1) , (0, 1, 1) , (1, 1, 1)} es una base pues está formado por tres vectoreslinealmente independientes. Los vectores de B escritos por columnas dan lugar a lamatriz de cambio de base, es
C =
⎛⎝ 1 0 1
2 1 1
1 1 1
⎞⎠ .
Así la fórmula de cambio de base es
X = CX 0
donde X son las coordenadas del vector con respecto a la base canónica Bc y X 0
con respecto a B. Entonces (1, 2,−4) en B tiene coordenadas (x0, y0, z0) donde⎛⎝ 1
2
−4
⎞⎠ =
⎛⎝ 1 0 1
2 1 1
1 1 1
⎞⎠⎛⎝ x0
y0
z0
⎞⎠
esto es v =
⎛⎝ 6
−5−5
⎞⎠ .
2. Respecto de la base canónica de R3 hallar las matrices de las siguientes aplicacioneslineales:
a) A =
⎛⎝ cosα − sinα 0
sinα cosα 0
0 0 1
⎞⎠b) La simetría con respecto a la recta x = 0, y = 0 hace que los vectores de la
base canónica e1, e2 y e3 se transformen en −e1,−e2 y e3 respectivamente. Portanto la matriz de la palicación lineal es
A =
⎛⎝ −1 0 0
0 −1 0
0 0 1
⎞⎠

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III111
c) Tomamos como base dos vectores que generen al plano x − y + z = 0, y unonormal al mismo, a saber
u1 = (1, 1, 0), u2 = (0, 1, 1), u3 = (1,−1, 1)
con respecto a esta base la matriz de la aplicación lineal es
A =
⎛⎝ 1 0 0
0 1 0
0 0 −1
⎞⎠Pasamos a la base canónica usando para ello la fórmula de cambio
X = CX 0
donde ahora C esta formada, por columnas, por los vectores de la base canónicaen coordenadas con respecta la baseB = {u1 = (1, 1, 0), u2 = (0, 1, 1), u3 = (1,−1, 1)} .Por ejemplo,
e1 = (1, 0, 0) = α(1, 1, 0) + β(0, 1, 1) + γ(1,−1, 1)
dará lugar a
1 = α+ γ
0 = α+ β − γ
0 = β + γ
y así γ = 13, α = 2
3y β = −1
3. Por tanto las coordenadas de e1 en B son
e1 =
µ2
3,−13,1
3
¶Para las de e2 y e3 se hace igual y se construye la matriz da cambio de base C.Sin embargo, la matriz de cambio de base de Bc a B es más fácil pues hemosdeescribir los vectores de B en coordenadas con respecto a los de Bc; tal matrizes
D =
⎛⎝ 1 0 1
1 1 −10 1 1
⎞⎠ ,
pero lo importante es que C−1 = D o que D−1 = C. Se comprueba que
C =
⎛⎝ 23
13−13
−13
13
23
13−13
13
⎞⎠
112 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
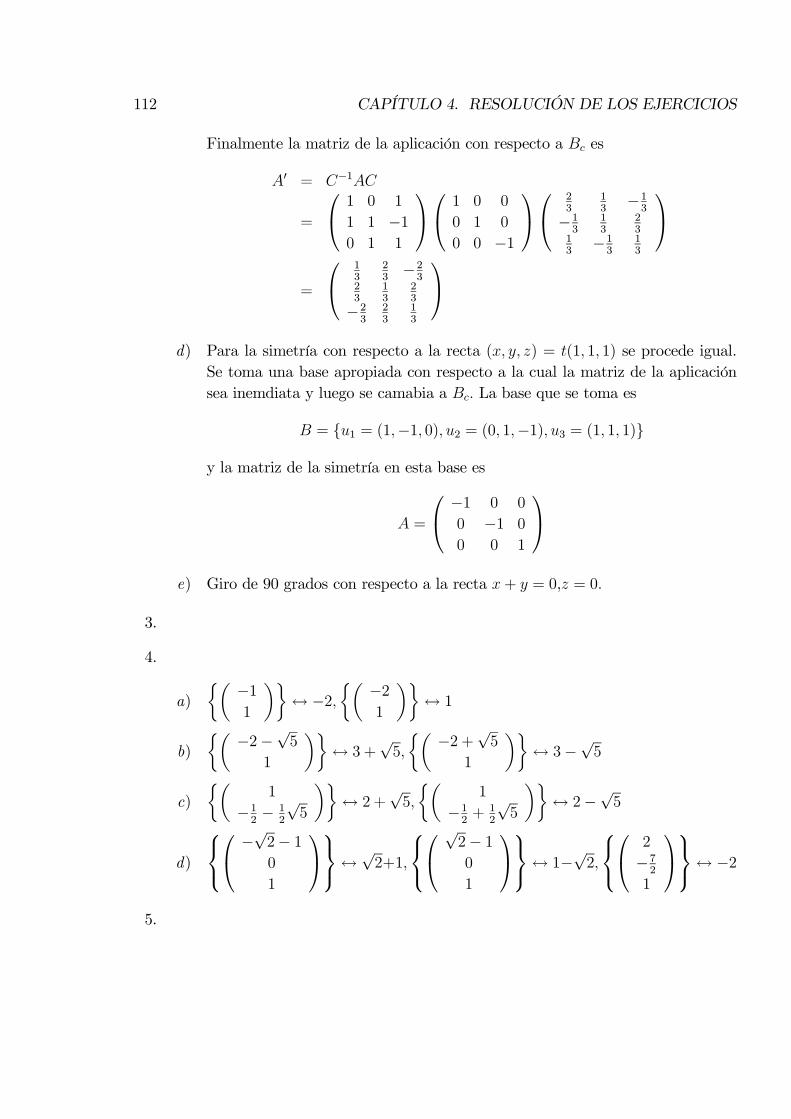
Finalmente la matriz de la aplicación con respecto a Bc es
A0 = C−1AC
=
⎛⎝ 1 0 1
1 1 −10 1 1
⎞⎠⎛⎝ 1 0 0
0 1 0
0 0 −1
⎞⎠⎛⎝ 23
13−13
−13
13
23
13−13
13
⎞⎠=
⎛⎝ 13
23−23
23
13
23
−23
23
13
⎞⎠d) Para la simetría con respecto a la recta (x, y, z) = t(1, 1, 1) se procede igual.
Se toma una base apropiada con respecto a la cual la matriz de la aplicaciónsea inemdiata y luego se camabia a Bc. La base que se toma es
B = {u1 = (1,−1, 0), u2 = (0, 1,−1), u3 = (1, 1, 1)}
y la matriz de la simetría en esta base es
A =
⎛⎝ −1 0 0
0 −1 0
0 0 1
⎞⎠e) Giro de 90 grados con respecto a la recta x+ y = 0,z = 0.
3.
4.
a)½µ−11
¶¾↔−2,
½µ−21
¶¾↔ 1
b)½µ−2−
√5
1
¶¾↔ 3 +
√5,
½µ−2 +
√5
1
¶¾↔ 3−
√5
c)½µ
1
−12− 1
2
√5
¶¾↔ 2 +
√5,
½µ1
−12+ 1
2
√5
¶¾↔ 2−
√5
d)
⎧⎨⎩⎛⎝ −
√2− 10
1
⎞⎠⎫⎬⎭↔√2+1,⎧⎨⎩⎛⎝√2− 10
1
⎞⎠⎫⎬⎭↔ 1−√2,
⎧⎨⎩⎛⎝ 2
−72
1
⎞⎠⎫⎬⎭↔ −25.

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III113
a)
⎧⎨⎩⎛⎝ −1−2
1
⎞⎠⎫⎬⎭ ↔ −2,⎧⎨⎩⎛⎝√2− 1
3
−13+ 4
3
√2
1
⎞⎠⎫⎬⎭ ↔ √2 + 1,⎧⎨⎩⎛⎝ −1
3−√2
−13− 4
3
√2
1
⎞⎠⎫⎬⎭ ↔1−√2
b)
⎧⎨⎩⎛⎝ −1−32+ 1
2
√33
1
⎞⎠⎫⎬⎭↔ 12+12
√33,
⎧⎨⎩⎛⎝ −1−32− 1
2
√33
1
⎞⎠⎫⎬⎭↔ 12−12
√33,
⎧⎨⎩⎛⎝ −1381−98
⎞⎠⎫⎬⎭↔6
c)
⎧⎨⎩⎛⎝ 1
0
0
⎞⎠⎫⎬⎭↔ 1,
⎧⎨⎩⎛⎝ 0
−13+ 1
3
√10
1
⎞⎠⎫⎬⎭↔ 3 +√10,
⎧⎨⎩⎛⎝ 0
−13− 1
3
√10
1
⎞⎠⎫⎬⎭↔ 3−√10
6.
a) Hay dos autovalores pero uno de ellos tiene asociados dos autovectores l.i.:⎧⎨⎩⎛⎝ 1
1
1
⎞⎠⎫⎬⎭↔ 2,
⎧⎨⎩⎛⎝ 1
1
0
⎞⎠ ,
⎛⎝ 1
0
1
⎞⎠⎫⎬⎭↔ 3
b) Idem:
⎧⎨⎩⎛⎝ 1
0
1
⎞⎠ ,
⎛⎝ 0
1
0
⎞⎠⎫⎬⎭↔ 1,
⎧⎨⎩⎛⎝ −10
1
⎞⎠⎫⎬⎭↔−17. Los autovalores de la matriz
A =
⎛⎝ a b 0
0 −1 0
0 0 1
⎞⎠son a,−1, 1 y por ende es diagonalizable siempre que a sea distinto de −1 y de 1(ya que habría 3 autovalores diferentes). La forma diagonal sería
D =
⎛⎝ a 0 0
0 −1 0
0 0 1
⎞⎠ .
Faltaría ver qué ocurre si a coincide con alguno de estos dos valores.
114 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
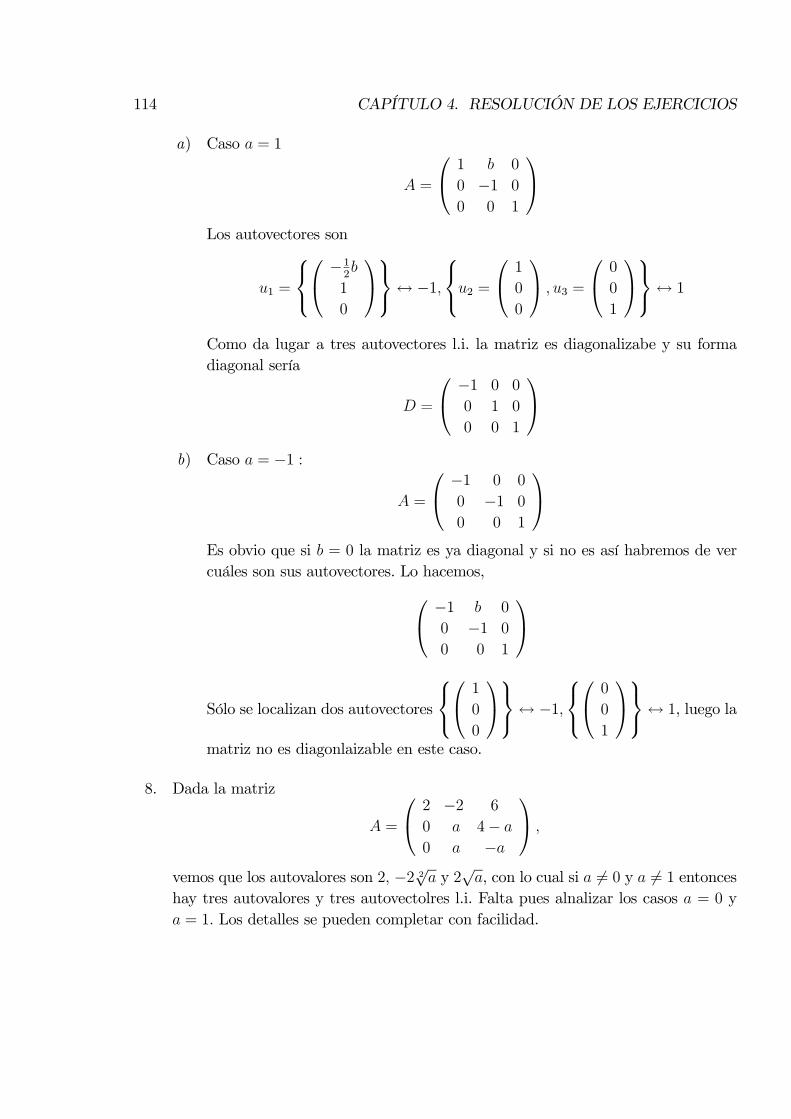
a) Caso a = 1
A =
⎛⎝ 1 b 0
0 −1 0
0 0 1
⎞⎠Los autovectores son
u1 =
⎧⎨⎩⎛⎝ −12b1
0
⎞⎠⎫⎬⎭↔−1,⎧⎨⎩u2 =
⎛⎝ 1
0
0
⎞⎠ , u3 =
⎛⎝ 0
0
1
⎞⎠⎫⎬⎭↔ 1
Como da lugar a tres autovectores l.i. la matriz es diagonalizabe y su formadiagonal sería
D =
⎛⎝ −1 0 0
0 1 0
0 0 1
⎞⎠b) Caso a = −1 :
A =
⎛⎝ −1 0 0
0 −1 0
0 0 1
⎞⎠Es obvio que si b = 0 la matriz es ya diagonal y si no es así habremos de vercuáles son sus autovectores. Lo hacemos,⎛⎝ −1 b 0
0 −1 0
0 0 1
⎞⎠
Sólo se localizan dos autovectores
⎧⎨⎩⎛⎝ 1
0
0
⎞⎠⎫⎬⎭↔ −1,⎧⎨⎩⎛⎝ 0
0
1
⎞⎠⎫⎬⎭↔ 1, luego la
matriz no es diagonlaizable en este caso.
8. Dada la matriz
A =
⎛⎝ 2 −2 6
0 a 4− a
0 a −a
⎞⎠ ,
vemos que los autovalores son 2, −2 2√a y 2
√a, con lo cual si a 6= 0 y a 6= 1 entonces
hay tres autovalores y tres autovectolres l.i. Falta pues alnalizar los casos a = 0 ya = 1. Los detalles se pueden completar con facilidad.

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III115
9. Para probar que los autovalores de una matriz real y simétrica de orden dos sonsiempre reales bastará con ver que posee dos autovalores distintos y para ello espreciso que el sicriminante del polinomio característico sea distinto de cero
10. Encontrar la forma diagonal y la matriz de cambio de base correspondiente de lasmatrices
a) los autovectores y autovlores son:⎧⎨⎩⎛⎝ 1
1
0
⎞⎠⎫⎬⎭↔ 3,
⎧⎪⎨⎪⎩⎛⎜⎝ −
√17−3√17+5
− 1√17+5
¡−√17− 9
¢1
⎞⎟⎠↔ 3
2− 12
√17
⎫⎪⎬⎪⎭y ⎧⎪⎨⎪⎩
⎛⎜⎝ −√17+3√17−5
− 1√17−5
¡−√17 + 9
¢1
⎞⎟⎠⎫⎪⎬⎪⎭↔ 1
2
√17 +
3
2
b)
c) Para este caso el único autovalor es 2 y la solución de (A− 2Id)−→x = −→0 es⎛⎝ x
y
z
⎞⎠ = λ
⎛⎝ −210
⎞⎠+ μ
⎛⎝ 3
0
1
⎞⎠Por tanto la matriz no es diagonalizable.
11. Para
A =
⎛⎝ 4 −2 2
2 0 2
−1 1 1
⎞⎠
se tiene
⎧⎨⎩⎛⎝ −2−2
1
⎞⎠⎫⎬⎭↔ 1,
⎧⎨⎩⎛⎝ −10
1
⎞⎠ ,
⎛⎝ 1
1
0
⎞⎠⎫⎬⎭↔ 2, con lo cual podemos respon-
der directamente a cualquier pregunta relacionada con A
12. Para hallar la potencia n−ésima de la matriz
A =
⎛⎝ a b b
b a b
b b a
⎞⎠ .

116 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
calculamos sus autovalores y autovectores⎧⎨⎩⎛⎝ −10
1
⎞⎠ ,
⎛⎝ −110
⎞⎠⎫⎬⎭↔ a− b,
⎧⎨⎩⎛⎝ 1
1
1
⎞⎠⎫⎬⎭↔ a+ 2b
Por ello
An = C (A0)nC−1
con
A0 = diag(a− b, a− b, a+ 2b)
y
C =
⎛⎝ −101
−11
0
1
1
1
⎞⎠13. El sitema lineal
un = 3un−1 + 3vn−1
vn = 5un−1 + vn−1,
tiene como matriz a
A =
µ3 3
5 1
¶=
µ−35
1
1
1
¶µ−2 0
0 6
¶µ−35
1
1
1
¶−1Si u0 = 1 y v0 = 1 se deduce (hacerlo!) queµ
unvn
¶=
µ−35
1
1
1
¶µ(−2)n 0
0 6n
¶µ−35
1
1
1
¶−1µu0v0
¶
14. Sabemos que
⎧⎨⎩⎛⎝ −121
4
1
⎞⎠⎫⎬⎭↔ 1,
⎧⎨⎩⎛⎝ 0
0
1
⎞⎠ ,
⎛⎝ −110
⎞⎠⎫⎬⎭↔−12 y entonces⎛⎝ xn
ynzn
⎞⎠ =
⎛⎝ −1214
1
0
0
1
−11
0
⎞⎠⎛⎝ 1 0 0
0 −1/2 0
0 0 −1/2
⎞⎠n⎛⎝ −1214
1
0
0
1
−11
0
⎞⎠−1⎛⎝ x0y0z0
⎞⎠
4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III117
15. Si A =µ0,8 0,3
0,2 0,7
¶sus autovalores son 1 y 0.5. Además, la matriz de paso es
C =
µ3 1
2 −1
¶Por tanto µ
xkyk
¶=
µ0,8 0,3
0,2 0,7
¶k µ1
α
¶= C (A0)
kC−1
µ1
α
¶=
µ3 1
2 −1
¶Ã1 0
0 (1/2)k
!µ3 1
2 −1
¶−1µ1
α
¶=
µ35+ 1
521−n 3
5− 3
52−n
25− 1
521−n 2
5+ 3
52−n
¶µ1
α
¶=
µ35+ 1
521−n + 3
5α− 3
5α2−n
25− 1
521−n + 2
5α+ 3
5α2−n
¶→
µ35+ 3
5α
25+ 2
5α
¶cuando k → ∞, Para que el estado límite obtendio sea proporcional a −→v = (1, α)
ha existir k tal que µ35+ 3
5α
25+ 2
5α
¶=
µk
kα
¶i.e.
α = k5
3− 1
α = kα5
2− 1
de donde
k1
3= kα
1
2
Esto implica que α = −1 y k = 0, ó α = 23y k 6= 0.
16.

118 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
a) Un cálculo sencillo permite decir que
det (A− λI) = det
⎛⎝ −λ x 2
−2 −λ −22 −2 −λ
⎞⎠ = 0
sii λ = −2 ó λ = 1±√5− 2x. Así, para que A sea diagonalizable como matriz
deM3×3 (R) es preciso que los autovalores sean reales con lo que 5−2x ≥ 0, i.e.x ≤ 5
2. Para todo x así resulta que existiran 3 autovalores distintos siempre que
5− 2x 6= 0 y 1±√5− 2x 6= −2. La igualdades 5− 2x = 0 y 1±
√5− 2x = −2
si, y sólo si x = −2 y x = 5/2. En el primer caso, con x = −2, la matriz Aes simétrica (y por supuesto real), y se puede probar que en tal situación esdiagonalizable; y para el segundo caso hemos de ver la dimensión deKer(A−I) :como
r(A− I) = r
⎛⎝ −1 5/2 2
−2 −1 −22 −2 −1
⎞⎠ = 2
entonces dim (Ker(A− I)) = 1, lo que asegura que sólo habrá un autovectorpara el autovalor doble λ = 1. Por ende, para x = 5/2 la matriz no es diago-nalizable.De resultas podemos decir que A es diagonlizable, con autovalores −2 y 1 ±√5− 2x sii x < 5
2.
b) El sistema dinámico tiene como matriz a B = 1rA por lo que se tiene que los
autovalores de B son −2ry 1±
√5−2xr
. Se demuestra (se omite este detalle) queen cierta base
−→y (t) =
⎛⎜⎝ −2r
0 0
0 1+√5−2xr
0
0 0 1−√5−2xr
⎞⎟⎠t
−→y 0
por lo que lımt→∞−→y (t) = −→0 sii lımt→∞
¡−2r
¢t= 0, y lımt→∞
³1±√5−2xr
´t= 0.
Esto a su vez equivale a ¯−2r
¯< 1
y ¯1±√5− 2xr
¯< 1.
Como r es positivo las desigualdades anteriores se dan sii
r > max©2, 1 + 2
√5− 2x
ª.

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III119
17. Se pueden calcular los autovectores con sus autovalres correspondientes, son½µ−81
¶¾↔ 3
4,
½µ1
0
¶¾↔ 1
Por tanto
C =
µ−8 1
1 0
¶y µ
xtyt
¶= An
µx0y0
¶= C (A0)
tC−1
=
µ−8 1
1 0
¶µ(3/4)t 0
0 1
¶µ−8 1
1 0
¶µx0y0
¶=
µ64x0 (3/4)
t + x0 − 8 (3/4)t y0−8x0 (3/4)t + (3/4)t y0
¶→
µx00
¶si n→∞.
18. El modelo se rige por la edov = k(t− t0)
con v = dTdty t0 = 20, esto es
dT
dt= k(T − 20)
Resolvemos la EDOdTdt= k(T − 20). Se trata de una ecuación lineal por lo que
buscamos soluciones del tipo T (t) = u (t) v (t) . Llevando esta T a la EDO obtenemos
u0v + v0u = kuv − 20k
i.e.u0v + u (v0 − kv) = −20k
Hacemos v0 − kv = 0 y con la v resultante resolvemos u0v = −20k. La primeraecuación tiene como solución v = exp(kv) y la segunda es por tanto u0 exp(kv) =
−20k, i.e.u0 = −20k exp(−kv)

120 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
que tiene como solución general a
u = 20 exp(−kv) + C
con C una constante cualquiera.Entonces la solución general de la EDO lineal inicial es
T = uv = (20 exp(−kv) + C) exp(kv)
= C exp(kv) + 20.
Si en t = 0 la temperatura es T = 100, y en t = 20 es T = 60 se deben cumplir lasecuaciones
C = 80, 40 = C exp(20k)
Así 40 = 80 exp(20k), y por ende exp k =¡12
¢ 120 y T = 20 + 80
¡12
¢ t20 .
Para calcular el tiempo que tiene que transcurrir hasta conseguir 30o hacemos
30 = 20 + 80
µ1
2
¶ t20
de donde se sigue t = 20 ln 8ln 2= 60.
19. Que y = C1x+ C2 es solución de la EDO y00 +
¡2x
¢y0 = 0 es inmediato pues con una
tal y tenemos que sus derivadas son
y0 =−C1x2
, y00 =2C1x3
.
Sustituimos esto en la ecuación y verificamos la identidad
y00 +
µ2
x
¶y0 =
2C1x3
+
µ2
x
¶−C1x2
= 0.
20. Básicamente, la estrategia consiste en dejar de un lado toda expresión que dependade x junto con dx y lo mismo con y y dy.
a) ydx− xdy = 0 es lo mismo que escribir
dx
x=
dy
y
Integrando a ambos lados tenemos
logCx = logDy
i.e. Cx = exp (logDy) = Dy, y por tanto y = C1x es la solución buscada (C1es una constante arbitraria)

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III121
b) dx− (1− x) dy = 0 equivale a
dx
1− x= dy
y por consiguiente− log(1− x) + C = y
c) (1 + y2)dx−√xdy = 0 se puede escribir como
x−1/2dx =dy
(1 + y2)
Integramos y quedax−3/2
−3/2 + C = arctan y
i.e.
y = tan
µx−3/2
−3/2 + C
¶21. Para encontrar las soluciones de ecuaciones lineales de primer orden se propone el
método propuestoen el problema 1: consiste en buscar soluciones con el formatoy (x) = u (x) v (x) .
a) Si y0 − 2yx+1
= (x+ 1)2 el método nos lleva a la identidad
u0v + u
µv0 − 2v
x+ 1
¶= (x+ 1)2
Vemos que entonces basta con resolver
v0 − 2v
x+ 1= 0
yu0v = (x+ 1)2 .
Para resolver v0− 2vx+1
= 0 reescribimos la ecuación como una EDO de variablesseparadas: hacemos
dv
dx=
2v
x+ 1
ódv
2v=
dx
x+ 1

122 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
y así log v = 2 log (C (x+ 1)). Por tanto
v = C (x+ 1)2
Basta con tomar v = (x+ 1)2 . Resolvemos ahora u0v = (x+ 1)2 con la u
encontrada:u0 (x+ 1)2 = (x+ 1)2
lo que da u0 = 1, por ende u = x+ C. La solución general es
y = (x+ C) (x+ 1)2
b) En el caso ¡x− x2
¢ dydx+¡2x2 − 1
¢y = 2x2
la identidad que resulta después del cambio y = uv es¡x− x2
¢(u0v + uv0) + (2x− 1)uv = 2x3
i.e. ¡x− x2
¢u0v +
¡(2x− 1) v +
¡x− x2
¢v0¢u = 2x3
La primera EDO a resolver será
dv
v=1− 2x2x− x2
dx1 (4.1)
Una solución de esta ecuación es
v = e2x(x− x2)
Resta por integrar la EDO¡x− x2
¢e2x(x− x2)u0 = 2x3
1R
dvv =
R1−2x2x−x2 dx da
log v =
Z1− 2x+ 2x− 2x2
x− x2dx
=
Z1− 2xx− x2
dx+
Z2x− 2x2x− x2
dx
= log(x− x2) + 2x

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III123
i.e.
u =
Z2x3
(x− x2) e2x(x− x2)dx
Así la solución es
y =
µZ2x3
(x− x2) e2x(x− x2)dx+ C
¶e2x(x− x2)
c) Como la solución general de y0 + 1−2xx2
y − 1 = 0, es
y = x2¡(1 + Ce1/x
¢y la condición inicial es y(1/2) = 1,i.e
(1/2)2¡(1 + Ce2
¢= 1
entonces C = 3e2y la sol. particular pedida es
y = x2µ(1 +
3
e2e1/x
¶d) La solución general de y0 + 2
xy = a
x2(a es una constante), y (1) = 2 es
y = x−2 (ax+ C)
En efecto, si y = uv entonces
(u0v + uv0) +2
xuv = ax−2
y las EDO’s son
2
xv + v0 = 0
u0v = ax−2
La primera,dv
v=−2xdx
i.e. log v = −2 log x, o lo que es lo mismo, v = x−2.Luego de conseguir vresolvemos la 2a EDO para localizar u :
u0x−2 = ax−2
lo que da u = ax+ C. Como y (1) = 2 entonces
2 = (a+ C)
y C = 2− a.La solución particular es
y = x−2 (ax+ 2− a)

124 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
22. Resuelve los siguientes problemas:
a) Para el sistema2½
x0 = −x+ y
y0 = −x− 3y hacemos la suma de las dos ecuaciones resul-
tandox0 + y0 = −2(x+ y),
por lo que si definimos z = x+ y entonces la EDO previa se lee
z0 = −2z
y por consiguiente z = C1 exp(−2x).Usamos una de los dos ecuaciones, digamosque la segunda y0 = −x− 3y. Ésta se reescribe como
y0 = −x− y − 2y= −z − 2y= −C1 exp(−2x)− 2y
en definitiva, tenemos
dy
dx= −C1 exp(−2x)− 2y
una EDO lineal que se resuelve buscando y de la forma y = uv. La solucióngeneral es
y = (C2 − xC1) e−2x
Finalmente queda por resolver z = x+y = C1 exp(−2x), pero esto es inmediato:
x = (C1 − C2 + xC1) e−2x
b) La matriz del sistema es
A =
µ−7 1
−2 −5
¶cuyos autovalores y autovectores son½µ
12+ 1
2i
1
¶¾↔ −6− i,½µ
12− 1
2i
1
¶¾↔ −6 + i
2Este ejemplo no se recoge dentro de las situaciones explicadas en clases teóricas ya que la matriz
A =
µ−1 1
−1 −3
¶asociada al sistema no es diagonalizable. Explicamos un método alternativo.

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III125
Si diagonalizamos el sistema con la matriz de cambio
C =
µ12+ 1
2i 1
2− 1
2i
1 1
¶resulta que la forma diagonal es
D =
µ−6− i 0
0 −6 + i
¶= C−1AC
En la base formada por los autovectores el sistema½
x0 = −7x+ y
y0 = −2x− 5y ,i.e.
X 0 = AX
(ahora X 0 es la derivada del vectorµ
x
y
¶) se escribe
Z 0 = DZ
que es lo mismo queµz01z02
¶=
µ−6− i 0
0 −6 + i
¶µz1z2
¶3Esto da como solución general
Z =
µz1z2
¶=
µC1 exp (−6− i)
C2 exp (−6 + i)
¶Por tanto la sol. general compleja es
X =
µx
y
¶= CZ =
µ12+ 1
2i 1
2− 1
2i
1 1
¶µC1 exp (−6− i) t
C2 exp (−6 + i) t
¶=
µ ¡12+ 1
2i¢C1e
(−6−i)t +¡12− 1
2i¢C2e
(−6+i)t
C1e(−6−i)t + C2e
(−6+i)t
¶3Tengamos en cuenta que las coordenadas de Z y las d X se relacionana mediante la ecuación de
cambio de base
X = CZ

126 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
Para buscar las soluciones reales calculamos dos soluciones particulares en laexpresión anterior y operamos con ellas: una haciendo C1 = 1 y C2 = 0, y otracon C1 = 0 y C2 = 1. Estas soluciones son
X1 =
µ ¡12+ 1
2i¢e(−6−i)t
e(−6−i)t
¶X2 =
µ ¡12− 1
2i¢e(−6+i)t
e(−6+i)t
¶Operamos con éstas para definir otras que ya son reales:
Y1 =X1 +X2
2=1
2
µ ¡12+ 1
2i¢e(−6−i)t
e(−6−i)t
¶+1
2
µ ¡12− 1
2i¢e(−6+i)t
e(−6+i)t
¶= e−6t
µ12(cos t+ sin t)
cos t
¶e
Y2 =X1 −X2
2i=
e−6t
2i
µ ¡12+ 1
2i¢exp (−it)
e−it
¶− e−6t
2i
µ ¡12− 1
2i¢exp (it)
eit
¶= e−6t
µ12(cos t− sin t)− sin t
¶La sol. general esµ
x
y
¶= C1Y1 + C2Y2
= Ce−6tµ
12(cos t+ sin t)
cos t
¶+De−6t
µ12(cos t− sin t)− sin t
¶= e−6t
µ ¡12C + 1
2D¢cos t+
¡12C − 1
2D¢sin t
C cos t−D sin t
¶c) Resolvemos el sitema½
x0 = 2x+ 2y
y0 = x+ 3y, (x(0), y (0)) = (2, 3)
que escrito en forma compacta es
X 0 = AX

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III127
con
A =
µ2 2
1 3
¶Diagonalizamos A : D = C−1AC ó A = CDC−1 donde
C =
µ−2 1
1 1
¶, D =
µ1 0
0 4
¶Así X 0 = AX se transforma en
X 0 = CDC−1X
que equivale aC−1X 0 = DC−1X
esto esZ 0 = DZ
siendo Z 0 = C−1X 0 y Z = C−1X. Si Z =
µz1 (t)
z2 (t)
¶entonces el sistema
precedente es µz01 (t)
z02 (t)
¶=
µ1 0
0 4
¶µz1 (t)
z2 (t)
¶Sabemos que la solución general de éste esµ
z1 (t)
z2 (t)
¶=
µC1 exp t
C2 exp 4t
¶De Z = C−1X se sigue que la solución general es
X = CZ =
µ−2 1
1 1
¶µC1 exp (t)
C2 exp (4t)
¶=
µ−2C1et + C2e
4t
C1et + C2e
4t
¶Como además debe cumplirse la condición inical (x(0), y (0)) = (2, 3) entonces
2 = −2C1 + C2
3 = C1 + C2
Se tiene que C2 = 83, C1 =
13, y la solución particular pedida esµx (t)
y (t)
¶=
µ−23et + 8
3e4t
13et + 8
3e4t
¶

128 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
23. El método para las EDO’s lineales homogéneas de orden dos consiste en convertirlasen sistemas de dos EDO’s de orden 1.
a) Si y00 − 7y0 + 12y = 0 hacemosy0 =
dy
dxy entonces
y00 =dy0
dx= −12y + 7y0
Juntamos las dos ecuaciones:
dy
dx= y0
dy0
dx= −12y + 7y0
ó Ãdydxdy0
dx
!=
µ0 1
−12 7
¶µy
y0
¶.
Este sistema tiene como matriz a
A =
µ0 1
−12 7
¶
Los autovalores son 3 y 4, y los autovectores asociados sonµ1
3
¶yµ1
4
¶respectivamente. La solución esµ
y (t)
y0 (t)
¶=
µ1 1
3 4
¶µC1 exp (3t)
C2 exp (4t)
¶La única coordenada que nos interesa es la primera,
y (t) = C1 exp (3t) + C2 exp (4t)
b) Si y00 + 6y0 + 5y = 0 el sistema asociado tiene como matriz a
A =
µ0 1
−5 −6
¶La matriz de paso es
C =
µ1 1
−1 −5
¶

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III129
y los autovalores son 1 y −5. La solución general esµy (t)
y0 (t)
¶=
µ1 1
−1 −5
¶µC1 exp (t)
C2 exp (−5t)
¶La solución del problema es
y (t) = C1 exp (t) + C2 exp (−5t)
c) y00 + 4y = 0, y(1) = 1, y0(1) = 0 se transforma en un sistema de matriz
A =
µ0 1
−4 0
¶la cual tiene como matriz de paso a
C =
µ−12i 1
2i
1 1
¶y autovalores a 2i,−2i. Esto nos lleva a considerar soluciones complejas quemás tarde manipularemos para obtener reales. La solución general compleja esµ
y (t)
y0 (t)
¶=
µ−12i 1
2i
1 1
¶µC1 exp (2it)
C2 exp (−2it)
¶=
µ−12i (C1e
2it − C2e−2it)
C1e2it + C2e
−2it
¶Nos fijamos sólo en y, en
y = −12i¡C1e
2it − C2e−2it¢
de la que sacamos dos particulares
x1 = −12ie2it
x2 =1
2ie−2it
y con éstas fabricamos las reales
y1 =x1 + x22
=−12ie2it + 1
2ie−2it
2=1
2sin 2t
y2 =x1 − x22i
=−12ie2it − 1
2ie−2it
2i= −1
2cos 2t

130 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
La solución general es
y = C11
2sin 2t− C2
2cos 2t.
Resta por ajustar y(1) = 1, y0(1) = 0: la primera da C1 12 sin 2−C22cos 2 = 1 y la
segunda C1 cos 2+C2 sin 2 = 0. Resolvemos el sistema de ecuaciones resultantey obtenemos C1 = 2 sin 2, C2 = −2 cos 2 e
y = sin 2 sin 2t+ cos 2 cos 2t = sin (2 + 2t)
24. Al ser no homogéneas la situación es un poco más complicada. La solución generalde una EDO no homogénea se escribe como suma de la solución general de lahomogénea más una solución particular de la no homogénea. Para encontrar unasolución particular de la no homogénea se procede po el método de variación deconstantes.
a) Para resolver y00 − y = 5x + 2 primero solventamos la homogénea asociada:y00−y = 0 se resuelve mediante el método explicado en la pregunta precedente.La solución general de y00 − y = 0 es
y (x) = C exp(x) +D exp(−x)
Para encontrar la particular de y00 − y = 5x+ 2 buscamos una con el formato
y (x) = C (x) exp(x) +D (x) exp(−x)
y para ello hacemos las derivadas: en la primera derivada
y0 = Cex + C 0ex −De−x +D0e−x
= Cex −De−x + C 0ex +D0e−x
suponemos que C 0ex +D0e−x = 0, por tanto
y00 =¡Cex −De−x
¢0= Cex +De−x + C 0ex −D0e−x
Llevamos las expresiones a la EDO
Cex +De−x + C 0ex −D0e−x − Cex −De−x = 5x+ 2
lo que daC 0ex −D0e−x = 5x+ 2

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III131
Por tanto nos quedan dos expresiones:
C 0ex +D0e−x = 0
C 0ex −D0e−x = 5x+ 2
Resolvemos despejando C 0 y D0 : C 0 = 125x+2ex, D0 = −1
2(5x+ 2) ex.
Entonces
C =
ZC 0dx =
1
2
Z5x+ 2
exdx = −5
2e−xx− 7
2e−x
y
D =
ZD0dx = −1
2
Z(5x+ 2) exdx = −5
2exx+
3
2ex
Entonces la solución paticular es
y0 = y0 (x) =
µ−52e−xx− 7
2e−x¶exp(x) +
µ−52exx+
3
2ex¶exp(−x)
y la general
y (x) = C exp(x) +D exp(−x)
+
µ−52e−xx− 7
2e−x¶exp(x) +
µ−52exx+
3
2ex¶exp(−x)
b) La solución general de y00 − 3y0 = 0 es
y = C exp (3x) +D
y la pariculary0 = C (x) exp (3x) +D (x)
Siguiendo los pasos del ejercicio anterior llegaremos al sistema
C 0e3x +D0 = 0
3C 0e3x = 2− 6x
Se obtieneC 0 = −2
3
−1 + 3xe3x
y
D0 = −23+ 2x

132 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
Por consiguiente
C =
ZC 0dx = −2
3
Z −1 + 3xe3x
dx =2
3e−3xx
D =
ZD0dx =
Z µ−23+ 2x
¶dx = −2
3x+ x2
ey0 (x) = x2
que es una solución particular. La general es
y = y0 (x) + C exp (3x) +D
c) Nos ocupamos de y00 − 7y0 + 6y = sinx, y(0) = 1, y0(0) = 0. Resolvemosy00 − 7y0 + 6y = 0 y para ello hacemos
y0 =dy
dx
y00 =dy0
dx= −6y + 7y0
que en forma vectorial esÃdydxdy0
dx
!=
µ0 1
−6 7
¶µy
y0
¶Como los autovectores y autovalores son½µ
1
1
¶¾↔ 1,
½µ1
6
¶¾↔ 6
Entonces el problema diagonal tiene como soluciónµz1z2
¶=
µC1 exp (6t)
C2 exp (t)
¶y el no diagonal µ
y
y0
¶= C
µz1z2
¶=
µ1 1
6 1
¶µC1 exp (6t)
C2 exp (t)
¶=
µC1e
6t + C2et
6C1e6t + C2e
t
¶

4.3. SOLUCIONES E INDICACIONES A LOS PROBLEMAS DEL CAPÍTULO III133
La solución general de la EDO homogénea es
y (t) = Ce6t +Det
Buscamos la sol gen no homo. con el formato y = C (x) e6x +D (x) ex hacenossu primera derivada
y0 = 6Ce6x +Dex +D0ex + C 0e6x
imponemosC 0e6x +D0ex = 0
y hacemos la segunda:
y00 = 36Ce6x + 6C 0e6x +Dex +D0ex
Lo ponemos en la edo y00 − 7y0 + 6y = sinx y queda
36Ce6t + 6C 0e6t +Det +D0et − 7¡6Ce6t +Det
¢+ 6
¡Ce6t +Det
¢= sinx
36Ce6t +Det − 7¡6Ce6t +Det
¢+ 6
¡Ce6t +Det
¢+ 6C 0e6t +D0et = sinx
6C 0e6t +D0et = sinx
De resultas tenemos
C 0e6x +D0ex = 0
6C 0e6x +D0ex = sinx
que da C 0 = 15sinxe6x
,D0 = −15sinxex; entonces
C =
Z1
5
sinx
e6xdx = − 1
185e−6x cosx− 6
185e−6x sinx
D =
Z−15
sinx
exdx =
1
10e−x cosx+
1
10e−x sinx
y la sol general del probelma no homogeno es
y = Ce6x +Dex +
+
µZ1
5
sinx
e6xdx
¶e6x +
µZ−15
sinx
exdx
¶ex
= Ce6x +Dex +µ1
10− 1
185
¶cosx+
µ1
10− 6
185
¶sinx

134 CAPÍTULO 4. RESOLUCIÓN DE LOS EJERCICIOS
Si y (0) = 1 entonces
C +D +
µ1
10− 1
185
¶= 1
y si y0 (0) = 0
6C +D +
µ1
10− 6
185
¶= 0
Así D = 1110, C = − 36
185y por tanto
y = − 36185
e6x +11
10ex +
µ1
10− 1
185
¶cosx+
µ1
10− 6
185
¶sinx.