-
8/12/2019 8861B - MIL
1/32
ML-A-M61B(AS)7 February 1986SUPERSEDI NG
.7-
*
ri g2.
ML-A-8861(ASG)18 May 1960(See secti on 6. 4)
MLI TARY SPECIFICATIONAI RPLANE STRENGTH AND RIGIDITYFLIGHT
LOADS
Thi s speci f i cat i on i s approved for use w thi n the Naval
Ai r SystemsCommand, Department of the Navy, and i s avai l abl e
for use by al lDepartments and Agenci es of the Department of
Defense.SCOPE1. 1 Scope. Thi s specl fi caton covers the requi
rements for strength anddi ty for f l i ght l oadi ng condi t i ons
appl i cabl e to ai rpl anes.APPLI CABLE DOCUMENTS2. 1 Government
documents.2. 1. 1 Speci fi cati ons. The fol l ow ng speci f i cat
ions form a part of thi sspeci f i cat i on to the extent spectf i
ed herei n, Unl ess otherw se speci f i ed, thei ssues of these
documents shal l be those l i sted i n the I ssue of the
Departmentof Defense Endex of Speci f i cati ons and Standards
(0001SS) and suppl ementthereto, ci ted i n the sol i ci tat i
on.
I IBenef i ci al comments (recommendati ons, addi ti ons, del
eti ons) and any pert i nentdata whi ch may be of use i n i mprovi
ng thi s document shoul d be addressed to:Naval Ai r Engi neeri ng
Center, Systems Engi neeri ng ard Standardi zati onDepartment,
(Code 93), Lakehurst, NJ 08733- 5100, by usi ng the sel f-
addressedStandardi zati on Document I mprovement Proposal (OD Form
1426) appeari ng at theend of thi s document or by l etter.
AMSC N A FSC 1510DI STRI BUTION STATEMEPJ TA. Approved for publ
i c rel ease; di stri buti on i s unl i mted.
*
-
8/12/2019 8861B - MIL
2/32
-
8/12/2019 8861B - MIL
3/32
ML-A- 8861B(AS)
3.1.1 Gross wei ght . The desi gn gross wei ghts for the f l i
ght l oads andl oadi ng condi ti ons speci f i ed herein shall be
all gross weights fromthe minimum fl yi ng gross wei ght to the
maxi mum desi gn gross wei ght. Forwei ghts up to the basic flight
design gross wei ght, strength shal l beprovi ded for al l condi t
i ons for the val ues of parameters speci fed for thebasi c fl i
ght desi gn gross wei ghts. At hi gher wei ght, strength shal l
beprovi ded for by mai ntai ni ng a constant mass ti mes l oad
factor (n. h ) product,except that the l oad factor shal l be not l
ess than that speci f i ed i n Tabl e Ifor the maxi mum desi gn
gross wei ght.
TABLE I . Symmetri cal f l i ght parameters.
Symmetr ical f l i ght l i mt l oad factorCl assDf Basi c f l i
ght Al 1 Maxi mum desi gn Lim t Time f or abruptl l i r - desi gn
gross gross gross wei ght speed control di s-pl ane wei ght wei
ghts v, pl acement t, ,secondMn. at Mn. at Mn. atMax. V v, Max.
v
i 2 3 4 5 6 7 8i F, VA 7. 50 -3. 00 - 1. 00 5. 50 -2. 00 a 0.
2sJ T 7. 50 - 3. 00 -1. 00 4. 00 -2. 00 0. 2sO 6. 00 - 3. 00 0 3.
00 - 1. 00 P 0. 3eI i . 1 4. 00 - 2. 00 0 2. 50 - 1. 00 c 0. 3.I s
3. 50 - 1. 00 0 2. 50 0 ; 0. 4i/ )4,vi i , e/ P 3s00 -1 . 00 0 2.
50 0 d 0. 4
MSSI ON SYMBOLS FOR CLASS OF AI RPLANEAttackFi ghterObservati
onPatrolReconnai ssanceAnti submari neTrainerUt i l i tyl
deather
-
8/12/2019 8861B - MIL
4/32
ML-A-8861B(AS)
3. 1. 1. 1 Wei ght di stri buti ons. The wei ght di stri buti
ons for the basi c,hi gh drag, di ve recovery, l andi ng approach,
and takeoff confi gurati on shal lbe al l those that are cr i t i
cal as a resul t of al l pract i cabl e symmetri cal andasymmetri
cal di stri buti ons and shal l be determned by consi derati on of
al lpossibl e, arrangements of vari abl e, di sposabl e, and
removabl e i tems, i ncl udi ngexternal stores, for whi ch provi si
on i s requi red (i ncl udi ng bal l ast requi redfor structural
demonstrati on tests) w thi n the ai rpl ane strength andaerodynamc
control l abi l i ty l i mts.
3.1.2 Center of gravi ty posi t i ons. The desi gn center of
gravi ty posi ti onsat each wei ght and each aerodynamc confi
gurati on (posi ti on of vari abl egeometry surfaces, si ze and l
ocat i on of external stores) shal l i ncl ude atol erance beyond
the actual maxi mumforward and actual maxi mumaft posi ti ons.I ncl
uded shal l be al l wei ghts and aerodynamc confi gurati ons whi ch
areattai nabl e as a resul t of al l practi cal symmetri cal and
asymmetri caldi stri buti ons of useful l oad up to the maxi mum
desi gn wei ght, ai rpl aneatt i tudes and accel erat i ons, fuel
sequenci ng, and ai rpl ane f l exi bi l i ty. Thi stol erance shal
l be ~1. 5 percent of mean aerodynamc chord (MAC) or 15 percentof
the di stance between the most forward and most aft actual val ues
from thecompl ete center of gravi ty (CG) envel ope, whi chever i s
greater. Thi stol erance shal l be appl i ed so as to move the desi
gn center of gravi t i esforward of the actual most forward posi t
i on and aft of the actualmost aft posi t i on. For ai rpl anes w
th vari abl e sweep w ngs, the reference MACshal l be that for the
w ngs l andi ng or take-of f posi t ion.
3. 1. 2. 1 Bal l ast support- structure. l dhensuff i ci ent bal
l ast supportstructure strength cannot be i denti fi ed and l
ocated for bal l ast wei ghtdi stri buti on necessary to meet the
speci fi ed CG requi rements w th thespeci f i ed tol erances, the
contractor may use a fi ni te el ement di stri buti on ofthe bal l
ast wei ght throughout the forward or aft port ions of the fusel
age, asappropri ate. When a fi ni te el ement di stri buti on i s
used, strength provi si onsshal l be made and appropri atel y defi
ned for the support-structure(s) for thebal l ast wei ght(s) to al
l ow for a 1. 0 percent MAC tol erance on the maxi mumforward and
aft desi gn CG. Thi s devi at ion shal l appl y for the desi gn
ofbal l ast wei ght support- structure onl y.3. 1. 3 Aerodynamc
conf i gurati ons. For the f l i ght l oad condi t ions of thi
sspeci f i cat i on, unl ess otherw se speci f i ed, al l devi ces
such as, but notl i mted to, f l aps, sl ats, sl ots, cockpi t encl
osures, l andi ng gear, speedl i mti ng devi ces, and bomb-bay
doors shal l be i n thei r cl osed or retractedposi ti ons. Al
ternatel y:
a. Speed l i mt ing devi ces ( incl udi ng l andi ng gear , i f
i t i sused as a speed l i mti ng devi ce) and bomb-bay doors shal
l bei n the ful l open or extended posi t ions as l i mted by avai
l -abl e actuati ng (operati ng or hol di ng) force or power,
and,al ternatel y, i n al l cr i t i cal i ntermedi ate posi t i
ons.
4
-
8/12/2019 8861B - MIL
5/32
-
8/12/2019 8861B - MIL
6/32
ML-A-8861B(AS)
b. At speeds up to l andi ng, approach, and take-off l i mtspeed
(V~F), w th devi ces extended or open i n thei rmaxi mum open or
extended posi ti on for take-off , w th al lval ues of vert ical l
oad factor between 1. 0 and 1.5.3.1.4 Ai r speeds. The ai rspeeds
shal l be those speci fi ed and anyattai nabl e l esser or i
ntermedi ate ai r speeds that resul t i n cr i t i cal l oads.3. 1.
5 Al ti tudes. The al t i tudes used for the determnati on of f l i
ghtl oadi ng condi ti ons, other than take-off and l andi ng
approach, shal l be al l theal t i tudes that resul t i n cr i t i
cal l oads f rom sea l evel to those al t i tudes atwhi ch the l i
mt equi val ent ai r speed (EAS) and Mach number are maxi mums
ormaxi mum performance (Crui se Al ti tude) requi rement. Sea l
evel shal l be usedfor l andi ng approach and take-off .3. 1. 6
Power setti ngs. The power or thrust for the condi t ions of thi
sspeci f i cati on, i ncl udi ng gusts combi ned w th manuevers,
shal l be al l val uesbetween zero and the maxi mum attai nabl e
usi ng thrust augmentati on or auxi l i ary
power devi ces, except that for consi derat i on of ai r speeds
appl i cabl e togusts, the power need not exceed normal rated for
reci procati ng engi nes andml i tary thrust (non-afterburni ng)
for al l gas turbi ne engi nes.3. 1. 7 Pressuri zati on. Thel i mt
pressure di ff erenti al between pressuri zedporti ons of the
structure and the ambi ent atmosphere shal l be:
a. 1. 33 ti mes the maxi mum attai nabl e pressure combi ned w
th1-G fl i ght l oads. The maxi mum attai nabl e pressure shal l
bedef i ned as l i mted by the pressur i zat i on safety val ve(s)
, pl usthe tol erance l i mt on the safety val ve(s) .b. Zero and
the maxi mum attai nabl e pressure combi ned w thfl i ght l oads.c.
1. 33 ti mes the maxi mum attai nabl e pressure combi ned w ththe l
oads due to ground test support equi pment forpressuri zati on
tests.
3. 1. 8 Ai rl oad di stri buti ons. The di str ibut i ons of ai
r l oads used i n thestructural desi gn shal l be those determned
by the use of acceptabl eanal yti cal methods and by the use of
aerodynamc data whi ch are demonstratedto be appl i cabl e as
approved by the acqui si t i on act i vi ty. These data shal li ncl
ude the effects of Mach number, deformati on of the surface due
toaeroel asti ci ty and thermopl asti c ef fects, and nonl i near
eff ects such as buf fet.3.1.9 Posi t ions of adj ustabl e f i xed
surfaces. For each ai rpl aneconfi gurati on associ ated w th the l
oadi ng condi ti ons of thi s speci fi cati on,the posi t i on of f
i xed surfac~s, whi ch are adj ustabl e i n f l i ght or on the
-
8/12/2019 8861B - MIL
7/32
ML-A-8861B(AS)
ground shal l be the extreme posi t i ons of the avai l abl e
range of setti ngs ofthe conf i gurat ion as l i mted by posi t i
ve stops and al so for al l cr i t i calposi ti ons w thi n that
range.3.1.10 Posi ti ons of cockpi t encl osures, bomb-bay doors, l
andi ng gear anddoors, di ve recovery devi ces, and cow fl aps.
Loads on cockpit encl osures,
bomb-bay doors, l andi ng gear and doors, di ve-r ecovery devi
ces, and cow fl apsshal l be those resul t i ng from the l oadi ng
condi ti ons of thi s speci f i cati on forthe ful l y opened, i
ntermedi ateposl ti ons~and fully cl osed posi t i ons up to thel i
mt speed for whi ch operat ion of these components i s requi red. I
f theai rpl ane s aerodynamc characteri sti cs are si gni fi cantl
y aff ected by theposi t i ons of these i tems, the l oads on the
ai rpl ane shal l be those resul t i ng~i th these i tems ful l y
opened as wel l as ful l y cl osed, consi der i ng each i tem. i
ndi vi dual l y.3. 1. 11 Torque on pri mary control surfaces. The
torque on pri mary control. surfaces resul t i ng from the l oads
and l oadi ng condi ti ons of thi s speci f i cati onshal l be modi
fi ed as fol l ows:
a. Negl ect the torque resul ti ng from ai rl oads forward of
thehi nge l i ne of the control surface when thi s resul ts i n
morecr i t i cal torque by assumng that these al r loads act at
thehi nge l i ne, andb. Assume tabs, other than those whi ch can
move rel ati ve to thei rassoci ated surfaces onl y by vi rtue of
the movement of theassoci ated surfaces, are i n those posi t i ons
w thi n thei rl i mts of t ravel whi ch resul t i n the most cr i t
i cal torqueon the control surface, except that,c. In those cases
where the requi rements of 3. 1. l l a and b,resul t i n hi nge
moments greater than those whi ch can besuppl i ed by the control
systems, the requi rements of 3. 1. l l aand b, shal l be modi f i
ed, as necessary, i n order that theresul tant hi nge movements are
equal to those that can besuppl i ed by the control systems, except
3.1. 13. For thepurpose of thi s requi rement, the hi nge moments
that can besuppl i ed by the control systems shal l be those that
resul tfrom appl i cat i on of the l l mt pi l ot -appl i ed cockpi
t controlforces i n the case of manual or boosted control s or
those thatresul t from maxi mum control power or surface authori ty
i n thecase of powered systems. The manner i n whi ch the requi
rementsof 3.1. l l a and b, are modi f i ed shal l be such that
thecri t i cal di stri buti ons of torque, consi stent w th the
maxi mum
speci fi ed val ue of resul tant torque, are obtai ned.
7
-
8/12/2019 8861B - MIL
8/32
ML-A-8861B(AS)
3. 1. 12 Tab l oads. Tabs shal l be i n al l posi t i ons w t hi
n thei r l i m t oft ravel at al l speeds up to the l imt speed.
The associ ated control surfacesshal l be i n thei r neutral posi t
i ons. The l ocal angl e of at tack of the tabsassoci ated fi xed
surface shal l be zero. Ai rl oads on porti ons of the ai rpl
aneother than tabs may be negl ected.3.1.13 Unsymmetr ical hor
izontal tai l l oads. The ai r l oads on thehori zontal tai l for
symmetri cal fl i ght condi ti ons and symmetri cal gusts shal lbe
di stri buted unsymmetri cal l y as wel l as symmetri cal l y. The
unsymmetri caldi stri buti ons shal l be obtai ned by mul ti pl yi
ng the ai rl oads on the hori zontalt ai l on one si de of the
plane of symmet ry by ( 1 + x) and the ai rl oads on theother si de
by (1 - x). The val ue of x f or al l cl asses shal l be 0. 5 f or
poi ntA of Fi gure 2 and for al l poi nts represent ing aerodynamc
stal l or buf fet .For al l other poi nts, the val ue of x shal l
be 0. 15. The ai r l oads on thehori zontal tai l resul ti ng from
unsymmetri cal fl i ght condi ti ons and si de gustsshal l be
determned from speci fi cal l y appl i cabl e aerodynamc data, oral
ternat i vel y shal l be di str ibuted i n a manner such that they
produce arol l i ng moment
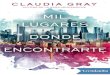
whereL =q .sH =b =B=Y =A=B=c=
def i ned by:
(q) SH) (b. ) 62400
T2Af313- 0. 4Y- 9r TL H
rol l i ng moment, ft . l bsd7namc pressure, l bs. per sq. f t
.area of hori zontal tai l , sq. f t.span of hor i zontal t ai l ,
f t.angl e of si desl i p, degreesdi hedral of hori zontal tai l ,
degreesSee f i gure 1, f t.See f i gure 1, f t.See f i gure 1, f
t.
For ai rcraft w th di fferenti al hori zontal stabi l i zers,
the unsymmetri calai r l oad di str ibut i on shal l be determned
by w nd tunnel test or speci f i cal l y-appl i cabl e fl i ght
test data, combi ned w th a buf feti ng dynamcs computer modeli n
whi ch al l ai r l oad and control system dynamc effects are i ncl
uded.Addi ti onal l y, the maxi mum programmed def l ecti ons of
the di f ferenti alstabi l i zers shal l be not l i mted by
actuator power.
8
-
8/12/2019 8861B - MIL
9/32
ML-A-8861B(AS)
A
section Orherlzental ta l alplane or symmetry.
FI GURE 1. Perti nent di mensi ons for cal cul ati ons of hori
zontal tai l l oads.3. 1. 14 Fal l -safe and damage tol erance. So
f ar as i s pract i cabl e, t hestructure of uti l i ty (VU),
reconnai ssance (VR), trai ner (VT), observati on(VO), anti submari
ne (VS), weather (VW, and patrol (VP) ai rpl anes shal l bedesi
gned to fai l -safe. Fol l ow ng a fat igue fai l ure or obvi ous
parti al faiof a si ngl e pr inci pal st ructural el ement . at l
east l i mt strenath reaui red ureforf l i ght l oads- shal l remai
n. The damage requi rements shal l be s~eci f i ~d by-
-
8/12/2019 8861B - MIL
10/32
ML-A-8861B(AS)
3. 1. 16 Deformati on of i nternal and external access cl
osures. Loadcarryi ng and nonl oad carryi ng i nternal and external
access covers (i ncl udi ngdoors, panel s, hatches, cow i ngs and
other coveri ngs), l ocki ngmechani sms,such as l andi ng gear up l
ocks and down l ocks, access cl osure l atches andaccess cl osure
fasteners shal l not defl ect adversel y from thei r i ntendedposi
t ions at l oads up to the desi gn l i mt l oad for each l oadi ng
condi t ion forwhi ch l i mt l oads are speci f i ed. Unl ocki ng,
unl atchi ng, or rel ease of accesscl osures, and unl ocki ng or
unfasteni ng of mechani sms shal l not occur at l oadsup to and i
ncl udi ng desi gn ul t imate for l oadi ng condi t i ons for whi
ch l i mt orul ti mate l oads are speci fi ed, and at l oads up to
and i ncl udi ng maxi mum desi gnl oads for l andi ng. Access cl
osures shal l remai n i n pl ace under ul t i matef l i ght l oads
i f 10 percent of the fasteners are unfastened or i f one l atch
orqui ck rel ease fasteners sel ected at randomon each edge of an
access cl osuresecured by these fasteners or l atches i s
unfastened, such that no deflectionw l l occur by whi ch Ram ai r
effects woul d cause i ncreased l oads.
3.2 Symmetrical flight conditions.3. 2. 1 Bal anced maneuver.
The ai rpl ane shal l be i n the basi c, hi gh-drag,and di
ve-recovery confi gurati ons at al l poi nts on and w thi n the
maneuveri ngenvel ope bounded by O, A, B, C, D, E, and O of Fi gure
2 and fur ther def i ned i nTabl e I . The pi t chi ng vel oci ty
shal l be the f i ni te pi t chi ng vel oci tyassoci ated w th the
l oad factor devel oped. I t shal l be assumed that theel evator i
s def l ected at a very sl ow rate so that the pi t chi ng accel
erat ion i szero.3.2.2 Accel erated pi tch maneuver and recovery.
The ai rpl ane shal l be i nthe basi c hi gh-drag, and di
ve-recovery confi gurati ons. The ai rpl ane i ni t i al l yshal l
be i n steady unaccel erated f l i ght at the ai rspeed speci f i
ed for themanuever and tri mmed for zero control forces at that ai
rspeed. The ai rspeedshal l be constant unti l the speci f i ed l
oad factor has been attai ned. The l oad
factors to be attai ned shal l be al l val ues on and w thi n
the envel ope boundedbyO, A, B, C, D, andEof Fi gure 2. Except as
noted i n 3.2. 2d the l oadfactor at each ai rspeed shal l be attai
ned as speci f i ed i n 3.2.2a and b, or3.2.2e, bel ow for al l
center of gravi ty posi t ions, and also shall be attainedas speci
f i ed i n 3. 2. 2c, bel ow for the maxi mumaft center of gravi ty
posi t i on:
a. By a cockpi t l ongi tudi nal control movement resul ti ng i
n atri angul ar di spl acement- ti me curve as i l l ustrated by
thesol i d st rai ght l i nes of Fi gure 3a provi ded that thespeci
f i ed l oad factor can be attai ned by such a controlmovement;
otherw se by the ramp- styl e control movementi l l ustrated by the
dashed strai ght l i nes of Fi gure 3a.The t ime t , i s speci f i
ed in Tabl e I . For the ramp-5tYl econtrol movement, the ti me tz
shal l be the mni mumt ime that the cont rol i s held at the stops
to at tain thespeci fi ed l oad factor.
-
8/12/2019 8861B - MIL
11/32
.
.
LADFAcTOoRf?.
FI I L-A- 8861B(AS)
2.
B
-J
.
.
L flz = f siC. a2 kl/s nlnNOTES
1. JA=GB= value speci f i ed i n col umns 2 and 5, tab2. GC= val
ue speci fi ed i n col umn 4, tabl e I .3. HO= KE val ue speci f i
ed i n col umns 3 and 6, tabl e4. OH=. as speci f i ed i n M L- A-
8860 .M5. OG= v,as speci f i ed i n i %L-A-88606. K = 1. 25 for
MZO. 6=l .Of or MSl . O= [1. 625 - (0.625 M ] f or 0. 6
-
8/12/2019 8861B - MIL
12/32
ML-A- 8861B(AS)
Mximum available 6as limited by stopst
i-, + 4a
Load factor
F-,-+- w--+- 1 -ib
I I
cTime ~ t
FI GURE 3. Cockpi t l ongi tudi nal control di spl acement vs ti
me di agram
12
-
8/12/2019 8861B - MIL
13/32
ML-A- 8861B(AS)
b. By a cockpi t l ongi tudi nal control movement resul t i ng i
na ramp-styl e di spl acement ti me curve as i l l ustrated bythe
sol i d st rai ght l i nes of Fi gure 3b. The time t ,i s speci f i
ed i n Tabl e I . The ti me ts and the controldi spl acement 6 shal
l be j ust suf f i ci ent to attai n thespeci f i ed l oad factor i
n t ime 2t l pl us t a.
c. By a cockpi t l ongi tudi nal control movement resul t i ng i
n aramp-styl e di spl acement- ti me curve as i l l ustrated by
thesol i d st rai ght l i nes of Fi gure 3c. The ti me t, i sspeci
f i ed i n Tabl e I . The ti me tq and the controldi spl acement 6
and mnus 6 /2 shal l be j ust suf f i ci entto attai n the speci f
i ed l oad factor coi nci dental l y w ththe attai nment of mnus 6
/2.d. For al l maneuvers of accel erated pi tch, strength shal l
beprovi ded so that a recovery can be made by the appl i cati
on
of an abrupt maxi mum l ongi tudi nal - control force or maxi
mumcontrol surface authori ty (when appl i cabl e) i n the opposi
tedi recti on unti l maxi mum up-stabi l i zer or w ng l oad has
beenattai ned consi stent w th safe recovery procedures.e. For ai
rcraft equi pped w th computer- control l ed, fl y-by-w re,act i ve
control , stabi l i ty augmentat i on, di rect l i f t control ,
orother types of control systemwhere pi l ot control i nputs donot
di rectl y establ i sh control surface posi t i on, strengthshal l
be provi ded i n the ai rpl ane and control surfaces foral l
changes to the shapes and rates of the di spl acement-ti merequi
rements of 3. 2. 2a, b, or c i mposed by the controlsurface authori
ty as speci f i ed i n 3. 1. 15.
3. 2. 2. 1 Low speed symmetri cal maneuver w th pi tch. The ai
rpl ane shal l bei n the basi c, hi gh-drag, and di ve-recovery
conf i gurat i ons at al l poi nts on themaneuveri ng envel ope
bounded by O and A of Fi gure 2 and further defi ned i nTabl e I .
Desi gn l imt l oad factor shal l be at tai ned by poi nt A, at a
speedV. equal to e~ther of the fol l ow ng speeds:
13
-
8/12/2019 8861B - MIL
14/32
a.
v=e
where
ML-A-8861B(AS)
/2N Wz
PO KcNa smax
N Desi gn l i mt l oad factorzw = Desi gn wei ght of the ai rpl
ane, poundss = Surf ace area, sq. f t.PO = Ai r densi ty, slugs/cu.
f t.c = Maxi mum
Na max
K for M< 0. 6 = 1. 25 or1. 25 atKfor MS1. O = 1. 0Kfor 0.
6
-
8/12/2019 8861B - MIL
15/32
ML-A- 88613(AS)
a. Take-off . The ci esi anwei aht for take-off shal l be the
maxl murn
b. Land
desi gn w~i ght ~nd al ternatel y the basi c f l i ght ti eswei
ght.nq approach. The desi gn wei ght for l andi ng approach
sha.
be the maxi mum l andi ng-desi gn wei ght.3.2.4 Mng sweepi ng.
For vari abl e- sweep w ng atrpl anes, strength shanrovi ded for
sweet) i rwthe w nqs at al ? speeds, al t i tudes, wei ghts up to
the
gn
1
1 bemaxi mum desi gn gross-wei ght, ; i ng posi ti ons, and l
oad factor between -2. 0 and5. 5.
3. 3 Unsymmetri cal fl i ght condi ti ons.3. 3. 1 Rol l i ng
maneuvers. The ai rpl ane shal l be i n the basi c: hi gh-dragand
speci f i ed store conf i gurati ons. The ai rspeeds shal l be al l
ai rspeeds upto l i mt speed (V,) . Duri ng the maneuver, the di
recti onal control shal lbe:
a. Held f i xed in i t s posi t i on for t ri mw th zero
rudder-control force i n w ngs- l evel f l i ght at the speed requi
red, andb. Di spl aced as necessary to mai ntai n zero si desl i p
up to l i mtsof the rudder authori ty.
The cockpi t l ateral control shal l be di spl aced to al l the
di spl acements to themaxi mum avai l abl e di spl acement attai
nabl e by a pi l ot l ateral control force of60 pounds (two equal
and opposi te 48- pound forces appl i ed at the ci rcumerenceof the
cont rol wheel ) by appl i cat ion of the cont rol force i n not
more tha 0.1second for ai rpl anes w th st i ck control s and not
more than 0.3 second forai rpl anes w th wheel control s; for
automated fl i ght control type systems (see3. ?. 15), appl i cati
on of the maxi mum control surface(s) authori ty i s requi red.The
control force(s) or authori ty shal l be mai ntai ned unti l the
requi redchange i n angl e of bank i s at tai ned, except that , i
f a rol l rate greater than270 degrees per second woul d resul t,
the control posi ti on may be l essened orauthori ty modi f i ed,
subsequent to attai nment of the maxi mum rol l i ngaccel erat ion,
to that posi t ion resul t ing i n a rol l rate of 270 degrees
persecond. The maneuver shal l be checked by appl i cati on of the
maxi mum avai l abl edi spl acement attai nabl e w th a 60-pound l
ateral control force (two equal andopposi te 48-pound forces appl i
ed at the ci rcumerence of the control wheel )appl i ed i n not
more than 0.1 second for st ick control s and i n not more than0. 3
second for wheel control s. For automated fl i ght control type
systems,maxi mum l ateral control surface(s) authori ty shal l be
used.3.3.1.1 Rol l i ng pul l - out. For al l ai rpl anes, the i ni
t i al l oad factorshal l be al l val ues between 1.0 and 0.8 desi
gn l oad factor. The ai rpl aneshal l be i ni t i al l y i n a
steady constant -al t i tude turn at an angl e of bank to
-
8/12/2019 8861B - MIL
16/32
attai n theof t he t urnmai ntai n th
ML-A-8861B(AS)
oad factor at the speci f i ed ai rspeed. The ai rpl ane shal l
roll outthrough an angle of bank equal to twice the initial angle
ands opposite bank. Constant air speed and constant cockpi t ol
ongi tudi nal control surf ace authori ty shal l be mai ntai ned.
For VF, VA and VTcl asses, t he l oad f act or shal l al so i ncl
ude al l val ues f rom-1. 0 t o 1. 0 w ththe maneuver start ing
from l ateral l y l evel f l i ght and the ai rpl ane rol l i
ngthrough 180 degrees.
3. 3. 1. 2 Level f l i ght rol l ( VA, VF, and VT ai r pl anes
onl y) . The i ni t i all oad factor shal l be 1.0. The ai rpl ane
shal l execute a 360-degree rol lstarti ng from w ngs-l ateral l
y-l evel fl i ght. The l ongi tudi nal control - surf aceauthor i
ty shal l be hel d constant at the tr im posi t i on requi red for
l evelf l i ght pri or to commenci ng the rol l .3. 3. 1. 3
Unsymmetri cal maneuvers for automated fl i ght control -
augmentedai rcraf t. For ai rcraft equi pped w th fl i ght control
systems where pi l oti nouts do not di rectl v establ i sh control
surface ~osi ti on (such as comDuter-control l ed, fl y-byw ~e,
acti ve control , or stabi j i ty augmentati on systems),the ai rpl
ane shal l addi ti onal l y be desi gned for maxi mum abrupt pi l
ot i nput ofal l l ongi tudi nal , l ateral and di rect i onal
control s (st i ck, wheel , si de-armcontrol l er and rudder pedal
).
These pi l ot i nput rates shal l be such that the speci f i ed
control di spl acementrates, rol l rates, and l oad factors of
3.3.1 and 3.3.2 shal l not be exceeded,and shal l be used to establ
i sh cr i t i cal control surface author i ty forcondi t ions of
steady rol l w th abrupt pi t ch, steady pi tch w th abrupt rol l
,and those combi nati ons of abrupt pi tch and abrupt rol l
representi ng controlcol umn posi ti ons i ntermedi ate between onl
y pi tch or. onl y rol l .3. 3. 1. 4 Demonstrati on maneuvers.
Structural desi gn shal l i ncl udemaneuvers requi red to sati sfy
the structural demonstrati on requi rements ofML-D-8708.3.3. 2 Rol
l i n take-off or l andi ng approach confi gurat i on. The ai r
speedshal l be V~F i n the l andi nq approach confi gurati on. The
l oad factor- shal lbe 1. 0. The l ateral contr~l shal l be di spl
aced i n accordance w th 3.3.1.The rol l need not be carr ied
beyond 90 degrees angl e of bank.3. 3. 3 Si desl i ps and yaw nq
maneuver. The condi t i ons of thi s paragraph areessenti al l y fl
at maneuvers w thout substanti al degree of coupl ed rol l .Lateral
-control di spl acement or authori ty shal l be i ncl uded to mai
ntai n thew ngs i n a l evel at ti t ude, except that for the hi
gh-speed rudder-ki ck andreversed-rudder condi ti ons of 3. 3. 3. 5
and 3. 3. 3. 6, an angl e of bank not morethan 5 degrees shal l be
mai ntai ned. The mni mum speeds for thi s paragraphshal l be i n
the mni mum speeds at whi ch the angl es of bank can be mai ntai
ned.
For al l condi t ions, the normal l oad factor shal l be
1.0.
16
-
8/12/2019 8861B - MIL
17/32
ML-A-8861B(AS)
3. 3. 3. 1 Steady si desl l p. The ai rpl ane shal l be i n the
basi c and hi gh-dragconf i gurati ons. The ai rspeed shal l be al
l speeds up to V, . A 300-poundrudder-control force shal l be sl ow
y appl i ed. For ai rcraf t havi ng di rect si deforce control , pi
l ot I nput suf f i ci ent to provi de the speci f i ed si dew
seaccel erati on and di spl acement shal l be appl i ed to the
surface(s) capabl e ofappl yi ng the di rect si de force, and
compensati ng forces appl i ed to otherdi rect ional , rol l , or
pi t ch cont rol sur faces such that no change i n rol l orpi tch
atti tude occurs duri ng si dew se transl ati on.
.
3. 3. 3. 2 Low speed rudder ki ck. The ai rpl ane shal l be i n
the takeof f andl andi ng conf i gurat i ons at speeds up toV, ,
and addi t i onal l y shal l be i nthe basi c and hi gh-drag confi
gurati ons at speeds up to 0. 6V. The cockpi tdi rect i onal
control shal l be di spl aced i n not more than 0.2 second to
themaxi mum di spl acement attai nabl e as l i mted by stops, or
maxi mum output of thepower-control system or a 300-pound di recti
onal -control force. The controldi spl acement or force shal l be
mai ntai ned unti l the maxi mum over-sw ng angl eof si desl i p i
s at tai ned and the ai rpl ane attai ns a steady si desl i p.
Recoveryshal l be made by reduci ng the di recti onal control di
spl acement to zero i n notmore than 0. 2 second.3. 3. 3. 3 Hi gh
speed rudder ki ck. The ai rpl ane shal l be i n the basi c andhi
gh-drag confi gurati on at speeds up to V, for VA, VF, and VT ai
rpl anes,and up to VH for other type ai rcraf t . The cockpi t di
recti onal controlshal l be di spl aced to the maxi mum di spl
acement attai nabl e w th a 180-pounddi recti onal -control force
appl i ed i n not more than 0. 2 second. The controlforce shai l be
mai ntai ned unti l the maxi mum over-sw ng angl e of sl i desl i p
i sattai ned and the ai rpl ane attai ns a steady si desl i p.
Recovery shal l be madeby reducing the di recti onal -control di
spl acement to zero i n not more than 0. 2second.3.3.3.4 Reversed
rudder ( for VF, VA and VT onl y) . At speeds up to V, ,recovery f
rom the steady si desl i p of 3.3.3 shal l be made by appl i cat
ion of a
180-pound rudder-control force i n the opposi te di recti on i n
not more than 0. 2second. Mai ntai n opposi te rudder force unti l
maxi mum over- sw ng angl e occurs.3. 3. 3. 5 One- engi ne- out
operati on. For mul ti -engi ne ai rcraft , suddenstoppi ng of an
engi ne at al l speeds above the approved one-engi ne-out mni
mumtakeof f speed up to V~ for VF, VA and VT ai rpl anes, and up to
V foral l other cl asses shal l oot resul t i n unacceptabl e ai
rcraft moti ons orvi brat i ons w thi n these speci f i ed speed
ranges. The ai rpl ane at V, , shal lbe I n the takeoff and l andi
ng approach confi gurati ons and at al l other speeds,the conf i
gurat ion shal l be the basi c and hi ~h-draa. The l i mt strenqth
of theai rpl ane ~hal l not be exceeded I n a symme2. 250r 0. 5nZ,
whi chever i s greater, w thi noperati ve and al l other engi nes
del i verThese requi rements shal l not be construedf l yi ng-qual
i ti es or power- pl ant- i nstal l atoperati on.
r{cal pul l - out t o a l oad f~ctor ofeach engi ne, one at a ti
me,ng normal - rated power or thrust.to supersede or obvi ate appl
i cabl eon requi rements for one-engi ne-out
-
8/12/2019 8861B - MIL
18/32
ML-A-8861B(AS)
3.3.3.6 Engi ne fai l ure. The ai rpl ane shal l be i n the basi
c confi gurati on.The ai rspeeds shal l be al l speeds from the
approved one- engi ne- out mni mumtakeoff speed to V, . The cr i t
i cal engi ne shal l suddenl y fai l . I f reversethrust i s possi
bl e because of automati c features, the fai l ed engi ne shal ldel
i ver reverse thrust. Al l other engi nes shal l del i ver normal
-rated power orthrust , except that takeoff power or thrust i s
appl i cabl e at speeds up toVs . Automati c featheri ng, decoupl i
ng, or thrust- control l i ng devi cesLshal l be operati ng and al
ternatel y not operati ng. Wth these devi cesoperati ng, l i mt
strength i s requi red. Wth automati c devi ces not operati ng,ul
ti mate strength i s requi red. The di recti onal control shal l
be:
a. Hel d i n the neutral posi t i on unt i l maxi mum si desl i
p i sattai ned.b. Moved by a 300-pound force appl i ed i n 0. 2
second so asto restore the or igi nal headi ng, the i ni t iat ion
of therestorat ive mot ion to occur at al l cr i t i cal t imes
from thei nstant of fai l ure to the i nstant of maxi mum si desl i
p.
3. 3. 3. 7 Unsymmetri cal thrust. Wth ai rcraft ut i l i zi ng
thrust vector ingdevi ces, strenqth shal l be provi ded i n the ai
rpl ane to recover safel y from anymaneuver requi ~i ng unsymmetri
cal thrust that i s speci fi ed w thi n theaerodynamc fl yi ng qual
i ti es and stabi l i ty requi rements.3.3.3.8 Di rect si de force
control . Nhen appl i cabl e, strength shal l beprovi ded for
abrupt appl i cati on of the maxi mum di rect si de force
controlauthori ty i n such a manner so that a maxi mum si de force
l oad factor (NY)of 3.0 i s not exceeded. Strength shal l be provi
ded for thi s maneuver at al lspeeds from mni mum speed to maxi mum
l evel fl i ght speed (VM .3. 3. 3. 9 Evasi ve maneuvers. Consi
derati on shal l be gi ven to anal yzeai rcraft strength for evasi
ve maneuvers such as; j i nki ng, mssi l e break, etc.3.4 Spi ns.
These condi t i ons are appl i cabl e to Cl asses VA, VF, VO, VT,
VUai rpl anes. Rel easabl e external stores may be j etti soned
after the fi rst turn.The ent ry speed shal l be that of poi nt A
of Fi gure 2. Al l cri t i calcombi nat i ons of the spi n
parameters of Tabl e 11 shal l be used i n thedetermnat ion of l i
mt l oads or , al ternat ivel y, the l i mt l oads may bedetermned
from appl i cabl e spi n- parameter data that have been approved
forthi s purpose by the acqui ri ng acti vi ty. Net l oads shal l i
ncl ude both ai rl oadsand i nerti a val ues.3.5 Gust l oads. The
ai rpl ane shal l encounter l oads caused by verti cal and
l ateral gusts. These l oads shal l be determned by the di
screte gust andconti nuous turbul ence approach. The approach to be
used shal l be establ i shedby the acquri ng acti vi ty for i ndi
vi dual ai rpl anes.
18
-
8/12/2019 8861B - MIL
19/32
.
M L-A-$861B(AS)
TABLE 11. Spi n parameters.
a
Yaw ng Rol 1i ng Pi tchi ngvel ocl ty, vel oci ty vel oci t y
LoadNo. Tyoe Spi n radi sec. rad/ sec. radl sec. factor1 To ri ght
Erect (1) 5. 0 for +3. 5 ~1.s nz/ 22 Steep I nverted fusel age-
-3.5 ~1. o - 2. 53 To l ef t Erect mounted en- -3.5 ~1.s n=/ 24 I
nverted gi nes on VA, +3.5 +1. 0 -2.5VF and VTai rpl anes
( 2) 3. 5 f or5 To ri ght Erect w ng-mounted +1. 5 o +1.06 Fl at
I nverted engi nes on VA, - ?. 5 - 1. 07 To l ef t Erect VF and VT
ai r- - 1. 5 ; +1.0B I nverted pl anes +1. 5 o -1.0( 3) 2. 0 f or
VUand VO ai r-pl anes
i
3. 5. 1 Di screte gust anal ysi s. The ai rpl ane shal l be
consi dered i nstrai ght and l evel , unyawed fl i ght w th the
appropri ate bal anci ng hori zontalt ai l l oad and t rim vert i
cal t ai l l oad. I t shal l encounter di screte verti caland l
ateral gust of desi gn vel oci ty at the speci f i ed speeds and cr
i t i calwei ghts. Desi gn gust vel oci t i es shal l be:
i . 66- FPS-EAS at VGb. 50-FPS-EAS at V.c. 25-FPS-EAS at V,d.
50-FPS-EAS at speeds up to V, , for the l andi ng approachw th the
l andi ng gear and other devi ces whi ch are open or
extended i n thei r maxi mum open or maxi mum extended pos ti
ons.
19
-
8/12/2019 8861B - MIL
20/32
ML-A-8861B(AS)
e. For al ti tudes above 20, 000 feet the speci fi ed equi val
ent gustvel oci ty shal l be mul t i pl i ed by the factor :
u at al t i t udeu at 20,000
where: o = f) / po
3. 5. 1. 1 Di screte gust formul as. Ai rpl ane l oads deri ved
from the di scretegust approach shal l not i ncl ude possi bl e
benefi ts that may be deri ved from astabi l i ty augmentati on
system Loads on ai rpl ane components shal l be deri vedusi ng the
gust l oads formul as speci f i ed i n 3.5. l . l a, 3.5. l . l b
and 3.5.1. l cbel ow These l oads shal l be bal anced throughout
the ai rpl ane by l i near androtati onal i nerti a forces.a.
n
where: n.VeUde
141s
a
KW
b.
Ver ti cal gusts on the w ng and fusel age. Loads on thew nq and
fusel aae shal l be der ived from the l oad factorest~bl i shed
fro; the fol l ow ng formul a:
= n ~ KWV, Ude a498 (WS)= 1. 0 - .= Equi val ent ai rspeeds i n
knots= Maxi mum equi val ent gust vel oci ty i n feet per second of
asi ngl e (l -cosi ne) gust of 25 w ng mean aerodynamc chordl
engths.= Mng l oadi ng i n pounds per square foot= Rate of change
C. w th angl e of at tack (per radi an)A
corrected for Mach number and aeroel asti c eff ects.= Di mensi
onl ess gust factor whi ch i s shown i n Fi gure 4.
Ver ti cal gust on the fusel age and hor izontal tai l . Thehor
izontal tai l shal l be attacked by gust of desi gn vel oci ty.The
l oad on the tai l shal l be cal cul ated as fol l ows:
20
-
8/12/2019 8861B - MIL
21/32
.
ML-A- 8861B(AS)
1. 0
0.8
0.6KW. 0.4
.0.2
0
m r 1
I I I 1 1 I I I Jo 10 20 30 40 50 60 70 80 90 100
Pmass rati o (p) = 2WpgcaSGust f actor ( KW = A di mensi onl ess
termwhi ch accounts for the al l evi atedmot ion of the ai rpl ane
and the t ime l ag of the
bui l d-upof aerodynamc l l ft . Thi s parameter s basedon mass
rat io as shown i n Fi gure 4 and i s expressed i nterms of p. The
curve marked subsoni c shal l be usedonl y for speeds bel ow the
cri ti cal Mach number. Thecurve marked supersoni c shal l be used
for speeds abovethe cri ti cal Mach number.Where:
w= wei ght, l bsP = densi ty9 = gravi ty, assume 32.2 ft / sec.
2c = average chord, ft . (span area)a = rate of change w th angl e
of at tacks = w ng area: f tz$4/ s = w ng loadlng, lbs/ftz
FI GURE 4. Gust factor (Kw) mass rat i o (v~.
21
-
8/12/2019 8861B - MIL
22/32
ML-A- 8861B(AS)
KW Ud V. S. ah ( l - d&)Fh. T. = _ t. e. t* t. iii498
where a i s the rate of change of the hor i zontal tai l normal
forcehtcoef f i ci ent. The gust factor KW shal l be equal t o 1. 1
KWfor thetsuper- cri ti cal regi me. No transi ent l i ft devel
opment shal l beconsi dered. No reduct i on in dynamc pressure at
the tai l i s t o beconsi dered. The term (1 - de/ da) represent
the steady downwashef f ect at t he tai l .
c. Lateral qusts on the fusel age and vert ical tai l . Fusel
ageand verti cal tai l gust l oads shal l be cal cul ated usi ngthe
perti nent gust- vel oci ti es of 3. 5. 1 assumed acti ng-hor i
zontal l y. The tai l pl ane i s consi dered to have ani ni t ial
si de sl i p of zero degrees. The l oad shal l becal cul ated w
thout consi derati on of unsteady l i ftphenomena i n accordance w
th the formul a:
KWVt Udve svtkztFVt = ~8 e
where KW shal l be taken equal t o 1. 0 and a. t i s t he rate
of changeVt
of the verti cal tai l normal force coef f i ci ent .3.5.1.2 Low
al t i tude attack mssi on. For al l ai rpl anes for whi ch l owal
t i tude Capabi l i ty i s reaui red. the ai r~l ane shal l
encounter a vert ical 25-FPS-EAS gust whi l e-perf ormng api l ot-
appl i ed or programmed symmetr i cal pul l -out . The ai r speeds
shal l be al l speeds up to V, . The pi l ot - appl i ed
orprogrammed-pul l -out l oad factor shal l be the greatest of:
a. The l oad factor for l ow- al ti tude bombi ng systems(LABS)
, toss, or other programmed bombi ng systems.b. 0. 6 ti mes the
desi gn maxi mum symmetri cal f l i ght l i mtl oad factor.c.
2.25.
. 22+
-
8/12/2019 8861B - MIL
23/32
.
.
WL-A- 886 B(AS)
3. 5. 1. 3 Gust cr i ter ia for aer ial del i very. The ai r
speed shal l be aer ialdel i very speed (V, , ) w th the wei ght
from the mni mum fl yi ng wei ght to themaxi mum desi gn wei ght at
al t i tudes from sea l evel to 20. 000 feet. The caraodoors and
cargo ramp shal l be open and the fl aps extended. The a~rpl ane
ski l lencounter a gust of 50- FPS- EAS before and aft er cargo
extracti on and 25-FPS-EAS duri ng cargo extracti on.3. 5. 2 Gust
response parameters. The gust response parameters, A andN shal l be
based on a dynamc anal ysi s that i ncl udes al l r igi d ands;~ni
fl cant fl exi bl e degrees of freedom The quanti t y, A, i s t he
rat i o of theroot mean val ue of the response to the root mean
square val ue of theturbul ence i nput and i s expressed:
[/
; 2
1
mT (fN] 2 n (f I )df l unitsA= ftlseco
The quanti ty N. i s the character i st i c frequency of the
response and i sexpressed:
where: T(o) 2 = the squared modul us of the frequency response
functi on.$. (Q) = the normal i zed power spectrum of atmospheri
ctubul ence.(Q) = reduced frequency expressed i n radi ansl ft.
The eff ects of stabi l i ty augmentati on systems shal l be i
ncl uded, and possi bl esaturat ion or non- l i near i t i es i n
such a systemat hi gh l evel s of gust vel oci tyshal l be taken i
nto account. The dynamc anal ysi s shal l be conducted for al lmaj
or components of the ai rpl ane at suspected cri t i cal poi nts
for thesecomponents. The power spectrum of atmospheri c turbul ence
to be used andappropri ate val ues of scal e of turbul ence are
shown i n 3.5.2. 3 and Tabl e I I I .Desi gn l oads shal l be the
greater l oads of the anal yses i n 3.5. 2. 1 and3. 5. 2. 2.
23
-
8/12/2019 8861B - MIL
24/32
TA
Tube
fedpames
4tuF
MsoSm
Dreo
P
b
P
b
LF
010
LwL
Co
Vc
10
27
05
16
5
010
LwL
Co
Lea
10
31
,0s10
5
010
CmCusD
VcLea10
2500
50
5
1025
CmCusD
VcLea04
3000
59
1
2550
CmCusD
VcLea03
3400
81
2
5010
CmCusD
VcLea01
3500
92
2
1020
CmCusD
VcLea00
3200
15
2
2030
CmCusD
VcLea00
3100
18
2
3040
CmCusD
VcLea00
2900
98
2
4050
CmCusD
VcLea00
3200
88
2
5060
CmCusD
VcLea00
3800
70
2
6070
CmCusD
VcLea00
2900
43
2
7080
CmCusD
VcLea00
2800
182
a
80
cmCusD
VcLea00
2500
00
2
-
8/12/2019 8861B - MIL
25/32
ML-I - 88613(AS)
3.5.2. 1 Rat i onal -probabi l i ty anal ysi s. A rat i onal
.(RPA) shal l be conducted usi ng the general procedure of67-28.
Appl i cat ion of the RPA resul ts i n ul t imate (notanal ysi s
shal l be conducted usi ng an acceptabl e fai l urefor one ai rpl
ane, typi cal mssi on orof i l es for the ai r r)
probabi l i ty anal ysi sPubl i cati on SEG TDJ ?l i m t) l
oads. Theprobabi l i ty of 0, 0005ane underconsi derati on, the
desi gn fati gue i i fe, and spectral response parameters, Aand NO,
computed as speci fi ed i n 3. 5. 2. The spectral exceedance
curves:power spectral shape and scal es of turbul ence to be used i
n thi s anal ysl sshal l be as speci f i ed i n 3.5,2.3 and Tabl e
111.3-5. 2. 2 Desi qn envel ope anal ysi s. The desi gn envel ope
anal ysi s i s basedon a l i mt l oad concept , and no par t of the
ai rpl ane s st ructure shal l have al i mt strength l evel l ess
than that determned from thi s anal ysi s. Scal es ofturbul ence
used to compute the response parameter, A, shal l be as speci fi ed
i n. the turbul ence model gi ven i n 3. 5. 2. 3. Li mt gust l oads
thus der ived shal l beadded to the mean l oad and mul t i pl i ed
by 1,5 to establ i sh ul t i mate l oads forcompari son w th RPA l
oads. The desi gn l i mt gust vel oci ty, Yd/A, shal l beconsi
dered to stri ke the ai rpl ane at ai l cri t i cal wei ght-al t i
tude combi nati onsw th ai rpl ane speed at VH. Ydl A i s a true
gust vel oci ty where yd
i s the i ncremental val ue of the response parameter (l oad,
accel erati on, orst ress) of i nt erest and A i s def i ned i n 3.
5. 2. The values of Yd/A foreach al t i tude shal l be:a. 40 feet
per second from O to 1000 feet , thenb. Varyi ng l i nearl y t o 58
f eet perc. Varyi ng l i near ly to 62 feet perd. Varyi ng l i near
ly to 55 feet pere Varyi ng l i near ly to 14 feet per
3. 5. 2. 3 Normal i zed power spectrum Theto compute gust
response factors i n both theare al so shown i n Tabl e 111. The
normal i zedturbul ence shal l be:
second at 2500 feet, thensecond at 7000 feet, thensecond at 27,
000 feet, thensecond at 80, 000 feet.scal e of turbul ence L, to be
usedRPA and desi gn envel ope anal ysi spower spectrumof atmospheri
c
f n(f) )= ~ 1 + 8/ 3 (1.339Ln)2m (1 + (1. 339 LQ)2]1G
3. 5, 2. 4 Combi ned gust and maneuver l oads jUring low level
contouroperati ons. Combi ned gust and maneuver l oads duri ng l ow
l evel contouroperat i on shal l be determned i n a rat i onal
manner bv the contractor, and, i fmore cri t i cal than gust al
one, shal l be used for-des~g~. - A ratl onal -probabi l i ty anal
ysi s shal l be conducted usi ng the general procedure of
SEG-TR-65- 04.
25
-
8/12/2019 8861B - MIL
26/32
ML-A-8861B(AS)
3. 6 Workmanshi p. The engi neeri ng desi gn, and reprofessi
onal qual i ty prepared by qual i f i ed personnel .submtted shal l
be easi l y readabl e, correctl y i denti fval i dated.4. QUALI TY
ASSURANCE PROVI SI ONS
ated anal yses shal l be ofAny document(s)ed, and properl y
4. 1 Responsi bi l i ty for i nspecti on. Unl ess otherw se
speci f i ed i n thecontract or purchase order, the contractor i s
responsi bl e for the performanceof al l i nspecti on requi rements
as speci fi ed herei n. Except as otherw sespeci f i ed i n the
contract or purchase order, the contractor may use hi s own orany
other faci l i t i es sui tabl e for the performance of the i
nspect i onrequi rements speci f i ed herei n, unl ess di sapproved
by the Government. TheGovernment reserves the ri ght to perform any
of the i nspecti ons set forth i nthe speci fi cati on where such i
nspecti ons are deemed necessary to assuresuppl i es and servi ces
conform to prescri bed requi rements.4. 1. 1 Responsi bi l i ty for
compl i ance. Al l i tems must meet al l requi rementsof Sect i on
3. The i nspect ion set forth i n thi s speci f i cat ion shal l
become a
part of the contractors overal l i nspect i on systemor qual i
ty program Theabsence of any i nspecti on requi rements i n the
speci f i cati on shal l not rel i evethe contractor of the
responsi bi l i ty of assur i ng that al l products or suppl i
essubmttedto the Government for acceptance compl y w th al l requi
rements of thecontract. Sampl i ng i n qual i ty conformance does
notknown defecti ve materi al , ei ther i ndi cated or
actuaGovernment to acceptance of defecti ve materi al .4. 2 Methods
of i nspecti on.4. 2. 1accordance
1423.4. 2. 2ML-D-87064. 2. 3accordance
authori ze submssi on of, nor does i t commt the
si s data shal l be i nesi gn data. Structural desi gn and anal
:w th speci fi cati ons ML-D-8706 and ML-A-8868 and the appl i cabl
e 00
Laboratory tests. Laboratory tests shal l be i n accordance w
thand ML-A- 8867.Fl i qht tests. Navy demonst rat ion f l i ght
tests shal l be i nw th ML-D- 8708.
4. 3 Documentati on. Thi s speci f i cati on establ i shes the
basi c i nputs andrequi rements for some of the documentati on and
cal cul ati ons for the ai rcraft .The cri teri a to establ i sh
the desi gn and to si ze certai n equi pments shal l meetthe
preformance obj ecti ves as mandated by the mssi on(s). Hence, the
vi suali nspecti on of these documents shal l be as fol l ows:
26
-
8/12/2019 8861B - MIL
27/32
-
8/12/2019 8861B - MIL
28/32
ML-A-8861B(AS)
Control surf ace(s) authori ty. Control surface(s) authori ty i
s thatcombi nati on of acti ve feedback control s whi ch i nvol ves
a pi l otforce or programmed di spl acement i nput and rate of pi l
ot forceor programmed di spl acement i nput to the control surf
ace(s) whi chresul ts i n the appropri ate ai rpl ane response to
perform i tsi ntended maneuver.Maxi mum control surface(s) authori
ty. That combi nati on of pi l otforce or programmed di spl acement
i nput and rate of pi l ot forceor programmed di spl acement i nput
to the control surface(s) thatresul ts i n maxi mum l oads bei ng
generated on ai rf rame componentsduri ng the maneuver for whi ch i
t i s speci f i ed.
6. 4 Supersedi ng data. See supersedi ng data i n Secti on 6 of
ML-A-8860.Thi s speci fi cati on, ML-A-8861B(AS) supersedes
ML-A-008861A(USAF) i n part andhl I L-A- 8861. However
ML-A-008861A(USAF) w l l remai n i n force unti l cancel l edby the
Ai r Force and superseded by speci fi cati on ML-A-87221(USAF).6. 5
Subj ect term keyword l i st i ng.
Ai rpl ane Strength and Ri gi di ty Fl i ght Loads.Fl i ght
Loads, Ai rpl ane Strength and Ri gi di ty.Loads, Fl i ght, Ai rpl
ane Strength and Ri gi di ty.Ri gi di ty, Strength and; Ai rpl ane
Fl i ght Loads.Strength and Ri gi di ty; Ai rpl ane Fl i ght
Loads.6. 6 Changes from previ ous i ssue. Aster isks (or ver ti cal
l i nes) are notused i n thi s revi si on to i dent i fv chanqes w
th res~ect to the Drevi ous i ssuedue to the extensi veness of the
~hange~.
Custodi an: Prepari ng actNavy - AS Navy - AS(Proj ect 1510.
28
vi ty:
NO11)
-
8/12/2019 8861B - MIL
29/32
ML-A-8861B(AS)
CONTENTS
.
.
Paragraph 1.1. 12.2. 12. 1. 12. 1. 22. 23.3. 13. 1. 13. 1. 1.
13. 1. 23. 1. 2. 13. 1. 33. 1. 3. 13. 1. 3. 1. 13. 1. 3. 1. 23. 1.
3. 1. 33. 1. 43. 1. 53. 1. 63. 1. 73. 1. 83. 1. 93. 1. 103. 1. 113.
1. 123. 1. 133. 1. 143. 1. 153. 1.
163.23.2.13.2.23.2.2.13.2.2.23.2.33. 2. 4
SCOPE . . . . . . . . . . . . . . . . . . .ScopeAPPLI CABi ED6Ci
MN+S. : : : : : : : : : : :Government documents . . . . . . . . . .
.Speci f i cati ons . . . . . . . . . . . . . .Other Government
documents (publ i cati ons).Order of precedence . . . . . . . . . .
.REQUI REMENTS . . . . . . . . . . . . . . .Appl i cabi l i ty . .
. . . . . . . . . . . .Gross wei ght. . . . . . . . . . . . . .
.Wei ght di stri buti ons . . . . . . . . . . .Center of gravi ty
posi ti ons . . . . . . .Sal l ast support- structure . . . . . . .
.Aerodynamc conf i gurati ons . . . . . . . .Stores conf i gurati
ons . . . . . . . . . .Carri age. . . . . . . . . . . . . . . .
.Programmed rel ease of stores . . . . . . .Emergency stores rel
ease . . . . . . . . .Ai rspeeds . . . . . . . . . . . . . . . .Al
t i tudes . . . . . . . . . . . . . . . .Power setti ngs . . . . .
. . . . . . . . .Pressuri zati on . . . . . , . . . . . . . .Ai rl
oad di stri buti on . . . . , . . . . . .Posi t ions of adj ustabl
e f i xed surfaces . .Posi ti ons of cockpi t encl osures,
bomb-baydoors, l andi nggear and doors, di ve re-covery devi ces
and cow f~aps . . . . . .Torque on pr imary cont rol surf aces . .
. .Tab l oads . . . . . . . . . . . . . . . .Unsymmetr i cal hori
zontal tai l loads . . .Fai l - saf e and damage tol erance . . . .
. .Automated f l i ght cont rol systems . . . . .Deformati on of i
nternal and externalaccess cl osures . . . . . . . . . . . .
.Symmetri cal f l i ght condi t i ons . . . . . .Bal anced maneuver
. . , . . . . . . . . .Accel erated pi tch maneuver and recovery
.Low speed symmetr i cal maneuver w th pi tch.Verti cal transl ati
on maneuver . . . . . .Landi ng and take-of f approach conf i
gur-ati onpul l outs . . . . . . . . . . . . . .Wng sweepi ng . . .
. . . . . . . . . . .
PAGE111112222344445555666666
7;899
10101010?3141415
29
-
8/12/2019 8861B - MIL
30/32
ML-A- 8861B(AS)
CONTENTS
Paragraph 3. 33. 3. 13. 3. 1. 13. 3. 1. 23. 3. 1. 33. 3. 1. 43.
3. 23. 3. 33. 3. 3. 13. 3. 3. 23. 3. 3. 33. 3. 3. 43. 3. 3. 53. 3.
3. 63. 3. 3. 73. 3. 3. 8 ~3. 3. 3. 93. 43. 53. 5. 13. 5. 1. 13. .
5. 1. 23. 5. 1. 33. 5. 23. 5. 2. 13. 5. 2. 23. 5. 2. 33. 5. 2. 43.
64.4. 14. 1. 14. 24. 2. 14. 2. 24. 2. 34. 35.
Unsymmetri cal f l i ght condi t i ons . . . . .Rol l i ng
maneuvers . . . . . . . . . . . .Rol l i ng pul l - out . . . . . .
. . . . . . .Level f l i ght rol l ( VA, VF, and VT ai r -pl anes
onl y). . . . . . . . . . . . . . .Unsymmetri cal maneuvers for
automatedf l i ght control - augmented ai r craf t . . .Demonstrati
on maneuvers . . . . . . . . .Rol l i n take-off or l andi ng
approach con-f i gurati on. . . . . . . . . . . . . . . .Sl i desl
i ps and yawng maneuver . . . . . .Steadysi desl i p . . . . . . .
. . . . . .Low speed rudder ki ck . . . . . . . . . .Hi gh speed
rudder ki ck . . . . . . . . . .Reversed rudder ( for VF, VA and VT
onl y) .One-engi ne-out operati on . . . . . . . . .Engi ne fai l
ure . . . . . . . . . . . . . .Unsymmetri cal thrust . . . . . . .
. . . .Di rect si de force control . . . . . . . .Evasi ve
maneuvers . . . . . . . . . . . .Spi ns. . . . . . . . . . . . . .
. . . .Gust l oads. . . . . . . . . . . . . . . .Di screte gust
anal ysi s . . . . . . . . . .Di screte gust formul as . . . . . .
. . . .Low al ti tude attack mssi on . . . . . . .Gust cri teri a
for aeri al del i very . . . .Gust response parameters . . . . . .
. . .Rati onal - probabi l i ty anal ysi s. . . . . . .Desi gn
envel ope anal ysi s . . . . . . . . .Normal i zed power spectrum .
. . . . . . .Combi ned gust and maneuver l oads duri ngl ow l evel
contour operati ons . . . . . . .Workmanshi p . . . . . . . . . . .
. . . .QUALITY ASSURANCE PROVISIONS . . . . . . .Responsi bi l i ty
for i nspecti on . . . . . .Responsi bi l i t y for compl i ance .
. . . . .Methods of i nspecti on . . . . . . . . , .Desi gn data .
. . . . . . . . . . . . . .Laboratory tests . . . . . . . . . . . .
.Fl i ght tests. . . . . . . . . . . . . . .Documentati on . . . .
. . . . . . . . . .PACKAGI NG. . . . . . . . . . . . . . . . .
PAGE
1515151616161616171717171718181818181819202223232525252526262626262626262627
30
-
8/12/2019 8861B - MIL
31/32
Paragraph 6.: : ;6. 2. 16. 2. 2: : :6. 56. 6
M1-A-8861B(AS)
CONTENTS
NOTES. . . . . . . . . . . . . . . . . . .I ntended use, . . . .
. . . . . . . . . .Orderi ng data . . . . . . . . . . . . . .Acqui
si ti on requi rements . . . . . . . . .Data requi rements . . . .
. . . . . . . .Oef i ni ttons . . . . . . . . . . . . . .
.Supersessi on data . . . . . . . . . . . .Subj ect termkeyword l i
sti ng . . . . . . .Changes f rom previ ous I ssue . . . . . .
.
TABLES
Tabl e I Symmetri cal f l i ght parameters . . . . , . . . . . .
.11 Spi n parameters . . . . . .111 Turbul ence f i el d
parametersI v Vi sual i nspecti on cri teri aFI GURES
. . . . . . . . . . . . ,
. . . . . . . . . . . . .
. . . . . . . . . . . . .
Fi gure 1 Perti nent di mensi ons for cal cul ati ons of hori
zontaltai l l oads2 V-n di agram fo~ ~yket~i ~a~ f l i ght. ; ; ; ;
~ ; ; ; ;3 Cockpi t l ongi tudi nal control di spl acement vs
timediagram. . . . . . . . . . . . . . . . . . . . . . .
4 Gust factor Kw vs mass ratio p . . . , . . . . .
PAGE272727272727282828
3192427
9111221
-
8/12/2019 8861B - MIL
32/32