Embed Size (px)
Citation preview
Análisis de Vibración para el
Mantenimiento Predictivo de
MaquinariaMaquinaria
Arturo Vargas MercadoGerente de Programa Academico
Agenda
• Introducción – ¿Porqué medir sonido y vibración?
• Parte 1: Sensores – Sonido y Vibración
• Parte 2: Acondicionamiento de Señales y A/Ds
• Parte 3: Análisis y Procesamiento de Señales• Parte 3: Análisis y Procesamiento de Señales
• Parte 4: Sistemas: Arquitectura y Casos de Estudio

¿Porqué Medir Sonido y Vibración?
• Investigación y Desarrollo – durante la
investigación y desarrollo , el ruido y vibración de
un dispositivo se estudian y se intentan reducir
permitiendo mayor vida de servicio al usuario final.
i.e. línea blanca, vehículos, herramientasi.e. línea blanca, vehículos, herramientas

¿Porqué Medir Sonido y Vibración?
• Desempeño de Audio – calidad de bocinas
(audio automotriz/doméstico, teléfonos celulares),
amplificadores, ecualizadores, etc. caracterizados
por mediciones de respuesta en frecuencia ,
análisis de distorsión y calidad de audioanálisis de distorsión y calidad de audio

¿Porqué Medir Sonido y Vibración?
• Pruebas Estructurales – medir la respuesta de
vibración permite determinar la integridad de la
estructura, propiedades de materiales, i.e. fatiga,
rigidez, fracturasrigidez, fracturas

¿Porqué Medir Sonido y Vibración?
• Control – detectar la presencia o cambio de
ruido o vibración e iniciar acciones apropiadas.
i.e. sistemas de suspensión activos, supresión
de ruido en cabina, o shakers

• Mantenimiento Predictivo – tendencias y
análisis del desempeño de maquinaria para
determinar cuándo será necesario el
mantenimiento para evitar fallas catastróficas
¿Porqué Medir Sonido y Vibración?

• Protección de Maquinaria- monitoreo de
vibración e iniciar alarmas o apagado cuando
los niveles excedan determinado límite.
¿Porqué Medir Sonido y Vibración?

Estrategias de Mantenimiento
REACTIVO ACTIVO
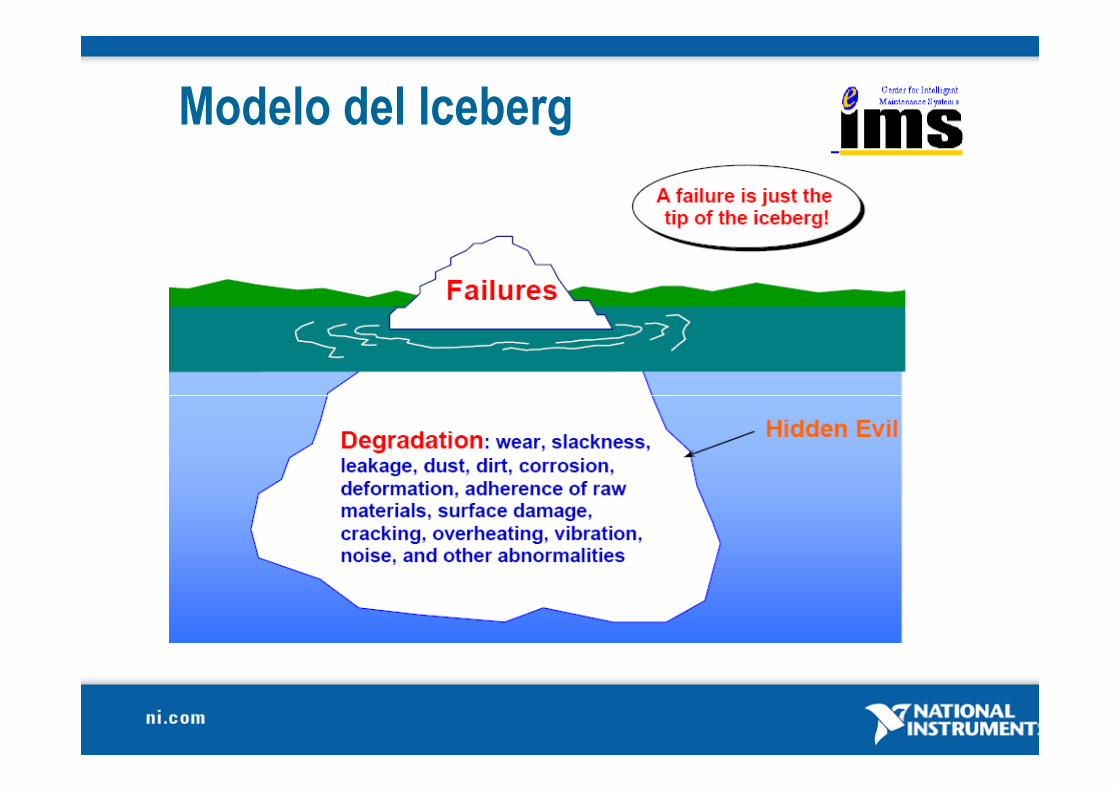
Modelo del Iceberg
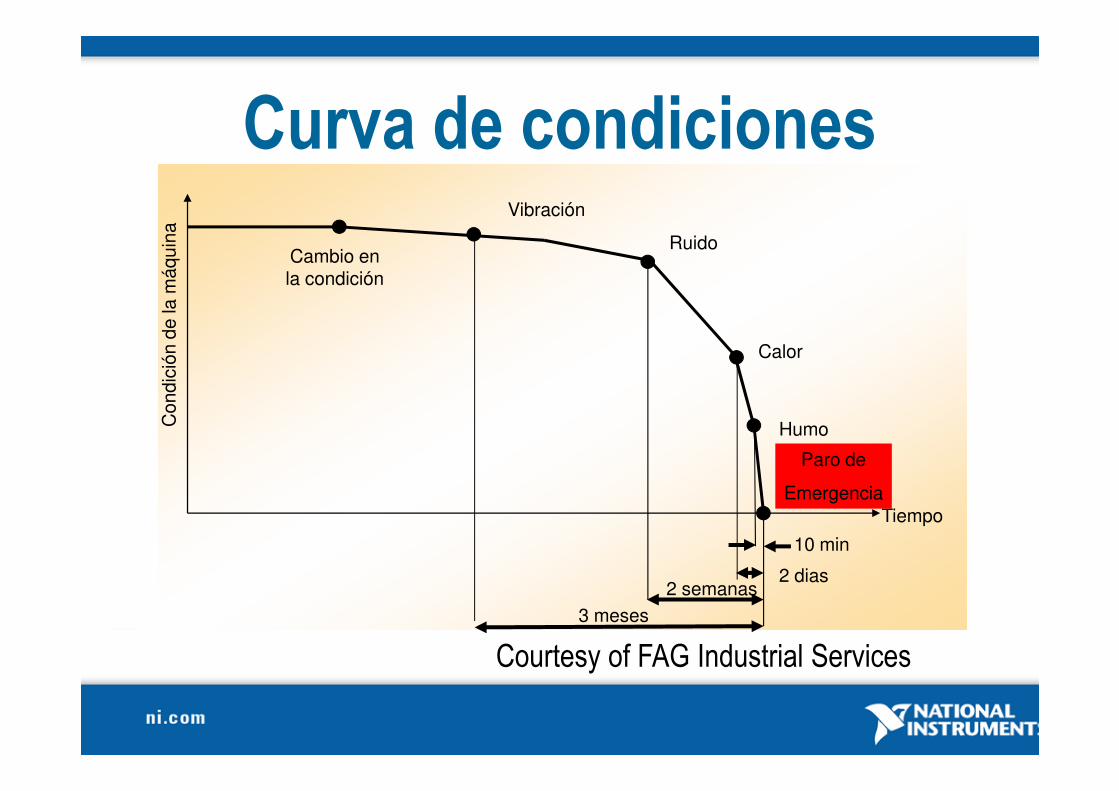
Curva de condiciones
Cambio en la condición
Vibración
Ruido
Calor
Condic
ión
de la m
áquin
a
Tiempo
Humo
Paro de
Emergencia
3 meses
2 semanas2 dias
10 min
Condic
ión
Courtesy of FAG Industrial Services
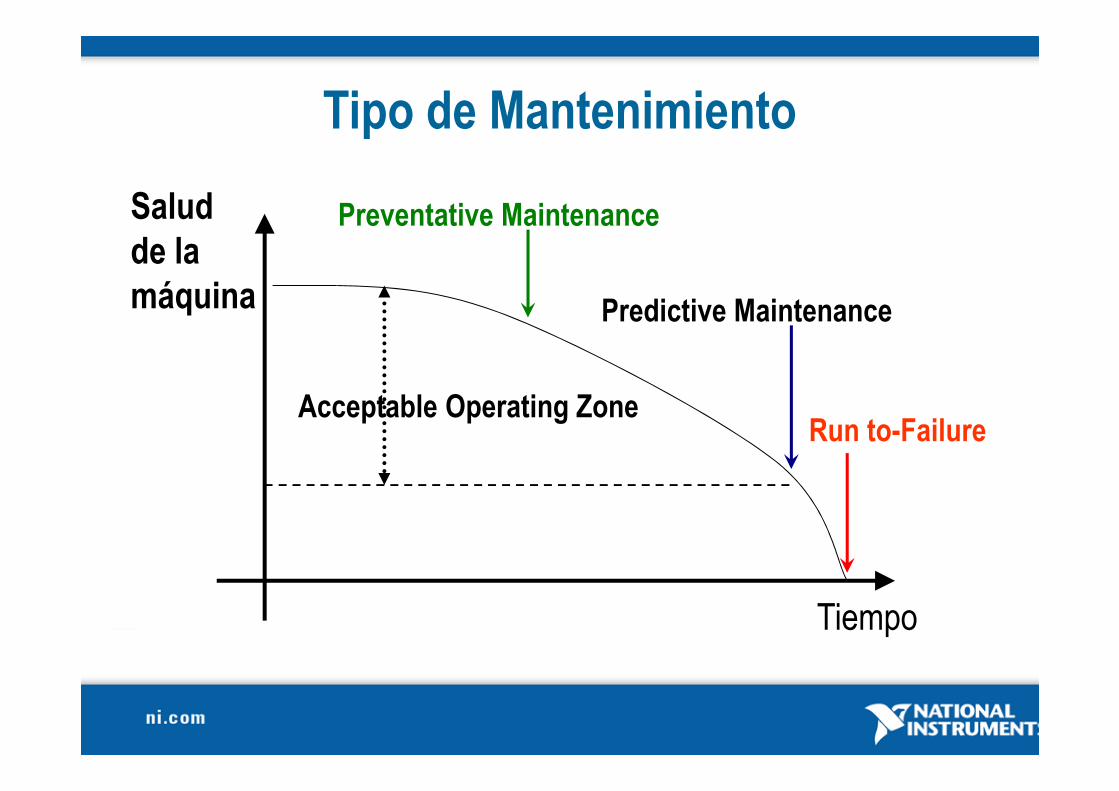
Tipo de Mantenimiento
Preventative Maintenance
Predictive Maintenance
Salud
de la
máquina
Acceptable Operating ZoneRun to-Failure
Tiempo
Acceptable Operating Zone
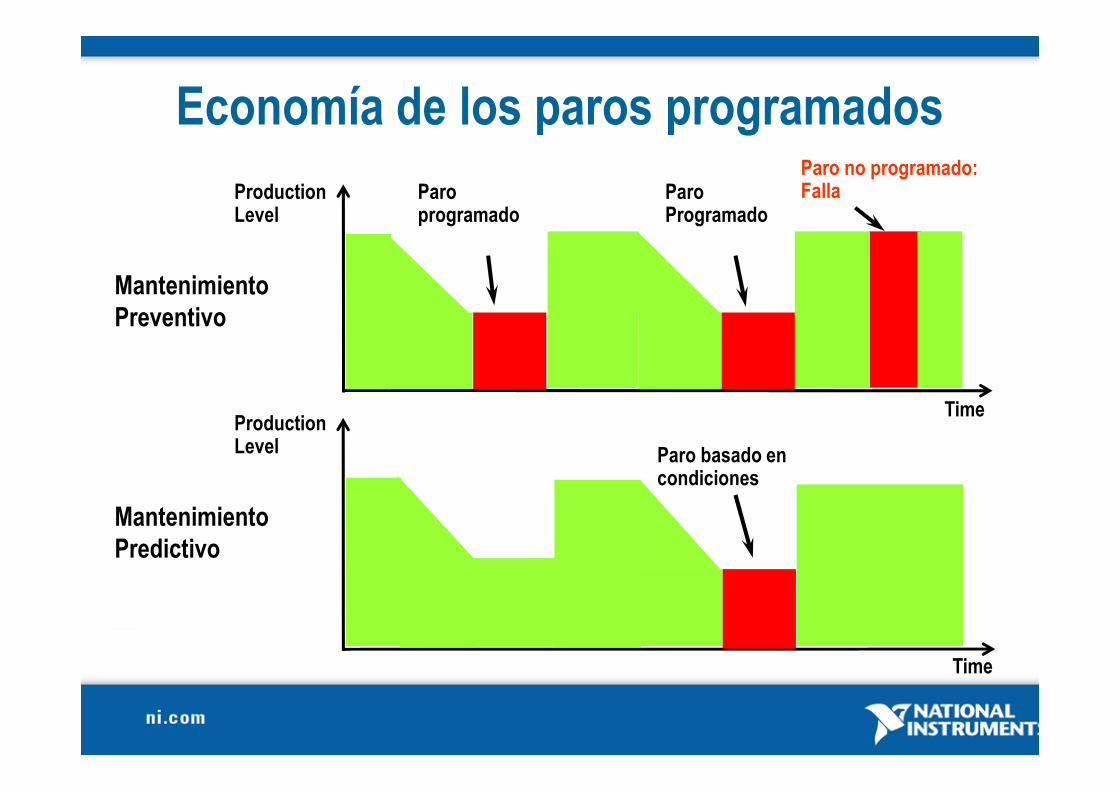
Mantenimiento
Preventivo
ProductionLevel
Paro no programado: FallaParo
programadoParoProgramado
Economía de los paros programados
Time
Time
Mantenimiento
Predictivo
ProductionLevel Paro basado en
condiciones
Siendo tan importante: ¿Por qué no lo
hacemos?
• Falta de recursos humanos
� Especialistas en vibraciones
� Consultores externos� Consultores externos
• Presupuestos
� Equipo costoso
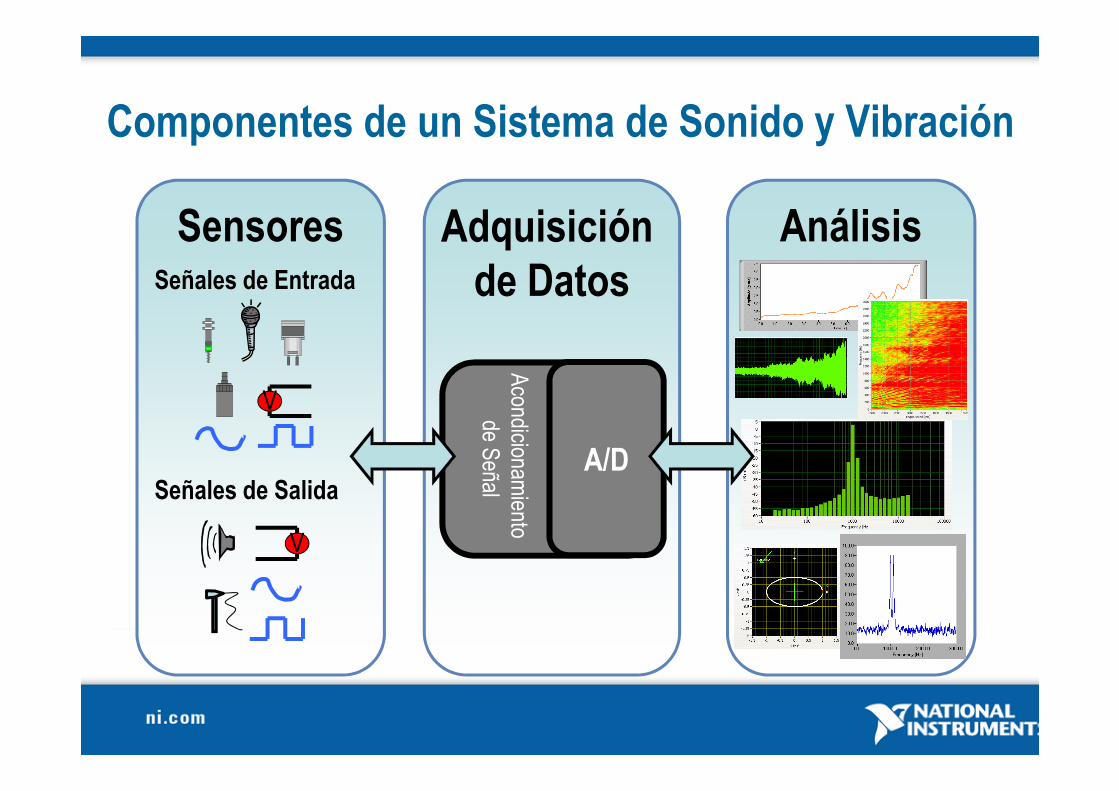
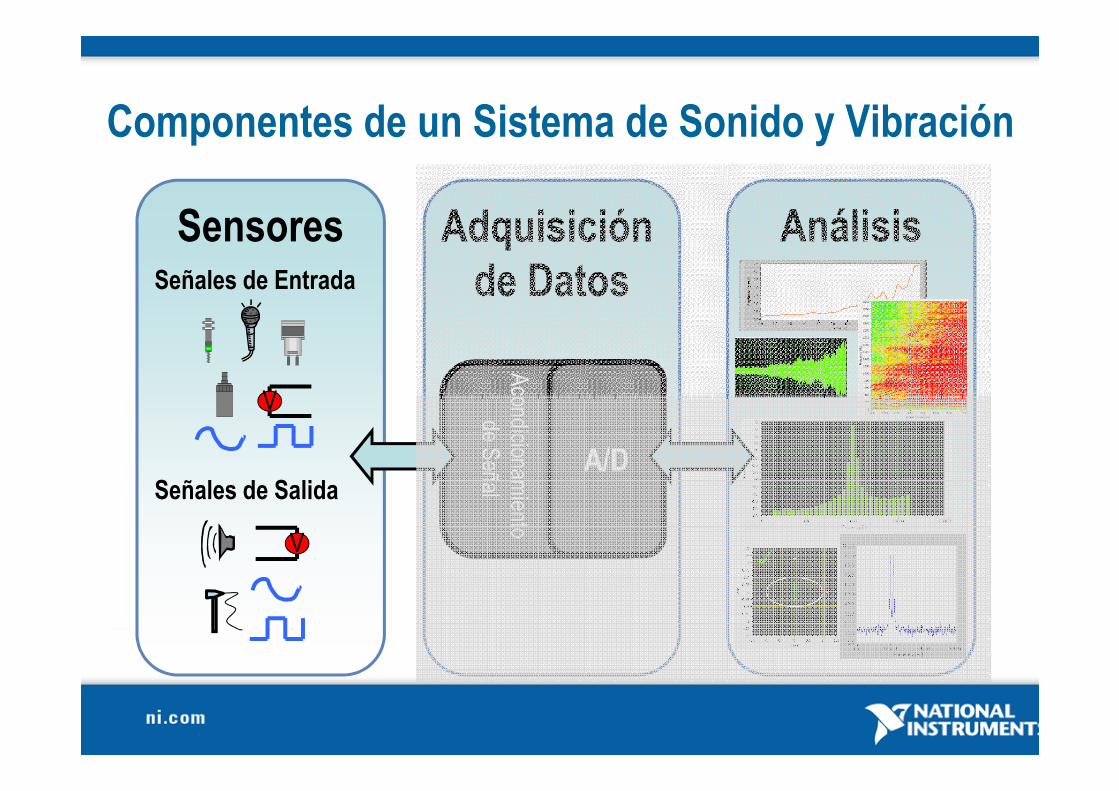
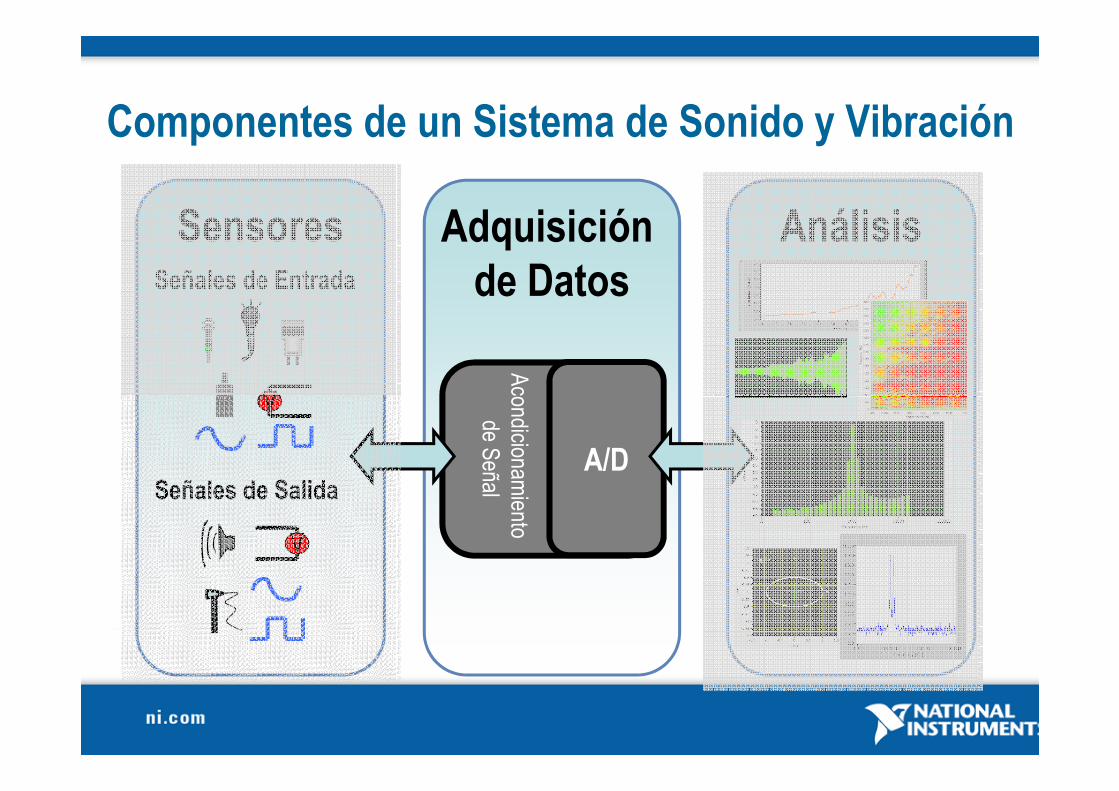
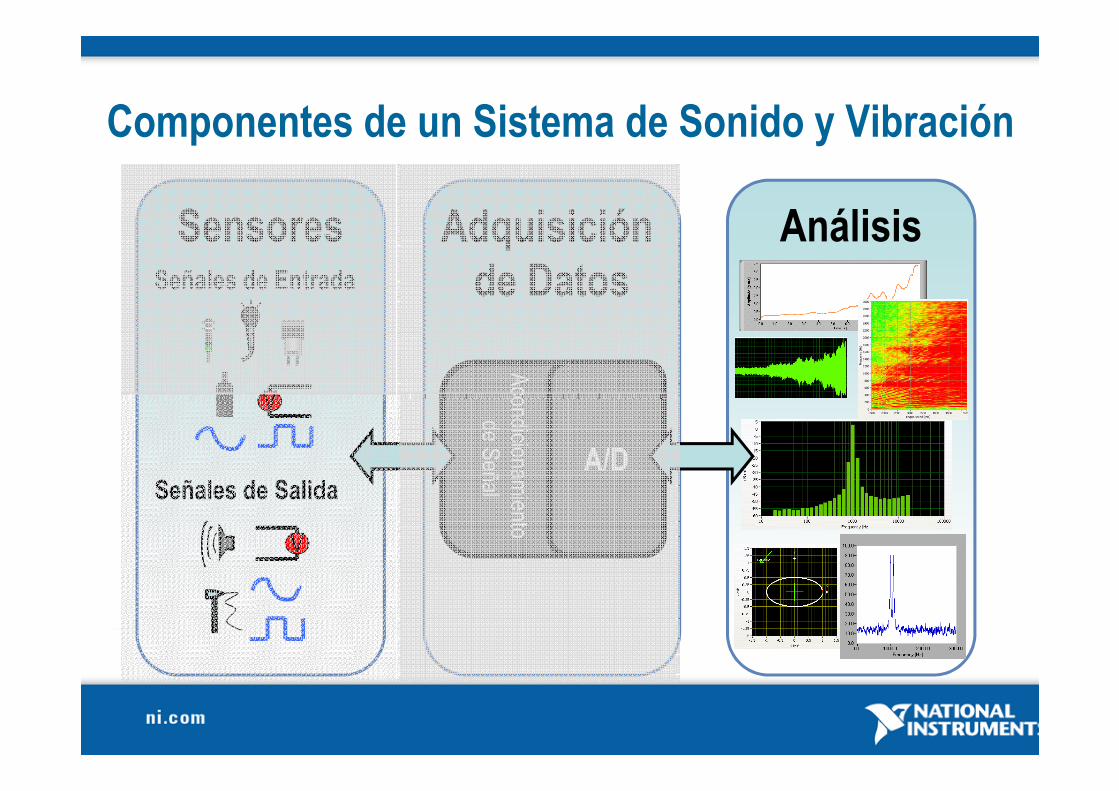
Componentes de un Sistema de Sonido y Vibración
Adquisición
de Datos
Acondicionam
iento
Sensores
V
Señales de Entrada
Análisis
Acondicionam
iento
de Señal
A/D
V
Señales de Salida
V
Componentes de un Sistema de Sonido y Vibración
Adquisición
de Datos
Acondicionam
iento
Sensores
V
Señales de Entrada
Análisis
Acondicionam
iento
de Señal
A/D
V
Señales de Salida
V

Acelerómetros
• Medir� Aceleración
� Velocidad y desplazamiento
(vía integración contra tiempo)
• El resultado se expresa en g o m/s2• El resultado se expresa en g o m/s2
� 1 g = aceleración en la superficie de la Tierra
� 1 g = 9.81 m/s2
• Configuraciones de un eje y tres ejes
• Se calibra por medio de un agitador de vibración
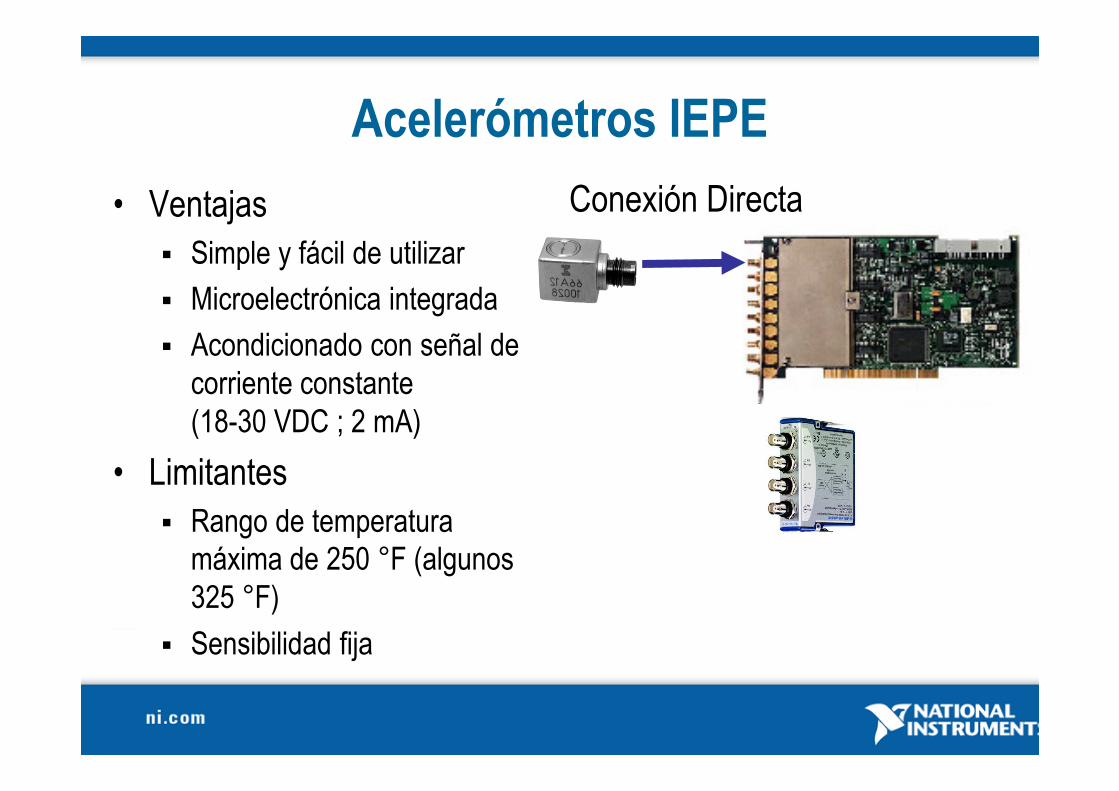
Acelerómetros IEPE
• Ventajas
� Simple y fácil de utilizar
� Microelectrónica integrada
� Acondicionado con señal de
corriente constante
Conexión Directa
corriente constante
(18-30 VDC ; 2 mA)
• Limitantes
� Rango de temperatura
máxima de 250 °F (algunos
325 °F)
� Sensibilidad fija
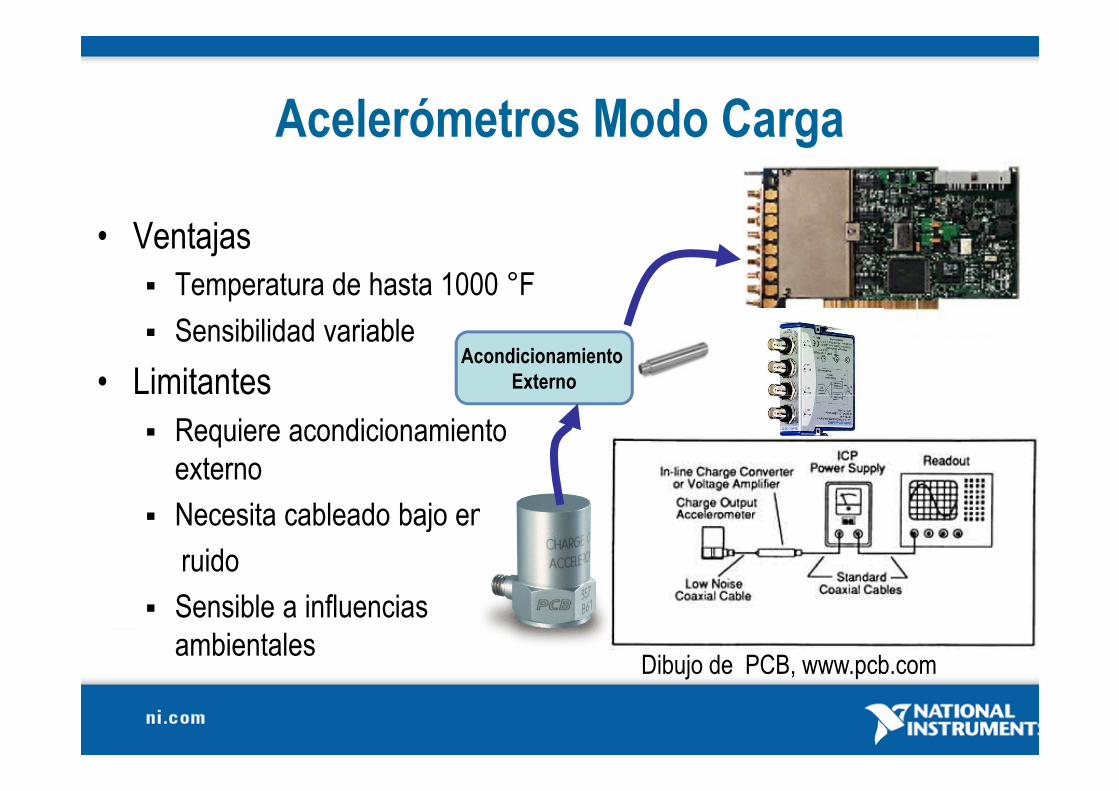
Acelerómetros Modo Carga
• Ventajas
� Temperatura de hasta 1000 °F� Sensibilidad variable
• LimitantesAcondicionamiento
Externo• Limitantes
� Requiere acondicionamiento
externo
� Necesita cableado bajo en
ruido
� Sensible a influencias
ambientalesDibujo de PCB, www.pcb.com
Demo: Medición de Acelerómetro
Demo 2
Micrófonos
• Miden
� Presión del sonido (una variación sobre la presión
atmosférica)
� Convertido a nivel de presión del sonido (SPL en dB)� Convertido a nivel de presión del sonido (SPL en dB)
(una referencia de dB a 20 uPa)
• El resultado se expresa en Pascales (Pa)
• Calibración con una fuente de referencia de ruido
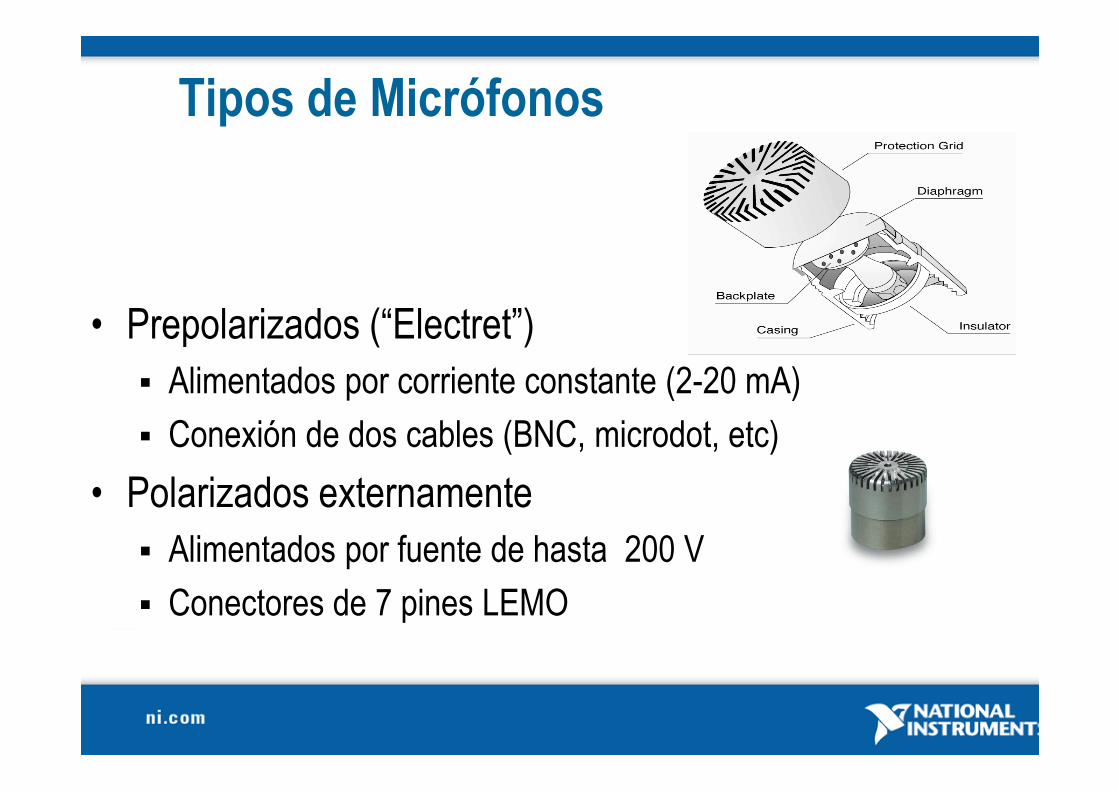
Tipos de Micrófonos
• Prepolarizados (“Electret”)
� Alimentados por corriente constante (2-20 mA)� Alimentados por corriente constante (2-20 mA)
� Conexión de dos cables (BNC, microdot, etc)
• Polarizados externamente
� Alimentados por fuente de hasta 200 V
� Conectores de 7 pines LEMO
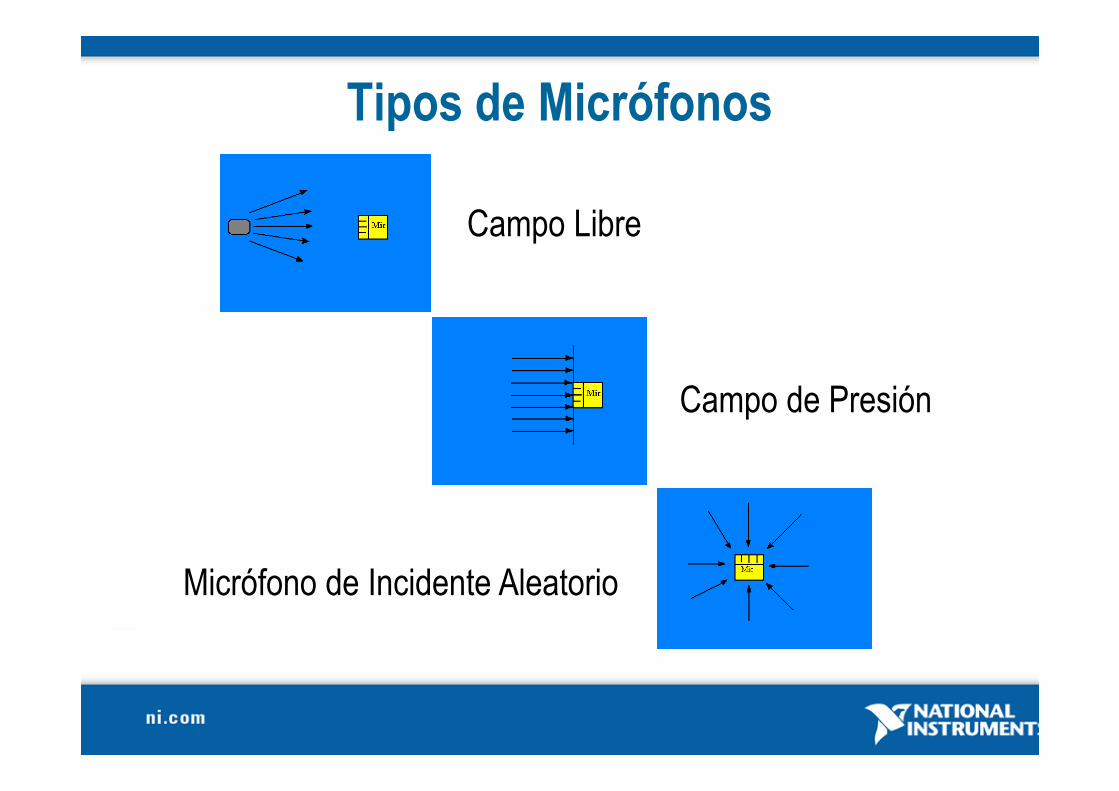
Tipos de Micrófonos
Campo Libre
Campo de PresiónCampo de Presión
Micrófono de Incidente Aleatorio

Consideraciones de Selección de Transductores
� ¿Cuál es el nivel de vibración o sonido?
� ¿Cuáles son las frecuencias de interés (máximo y mínimo)?
� ¿Cuál es el rango de temperatura requerida?
� ¿Cuál es la longitud del cable que se requiere?
Componentes de un Sistema de Sonido y Vibración
Adquisición
de Datos
Acondicionam
iento
Sensores
V
Señales de Entrada
Análisis
Acondicionam
iento
de Señal
A/D
V
Señales de Salida
V
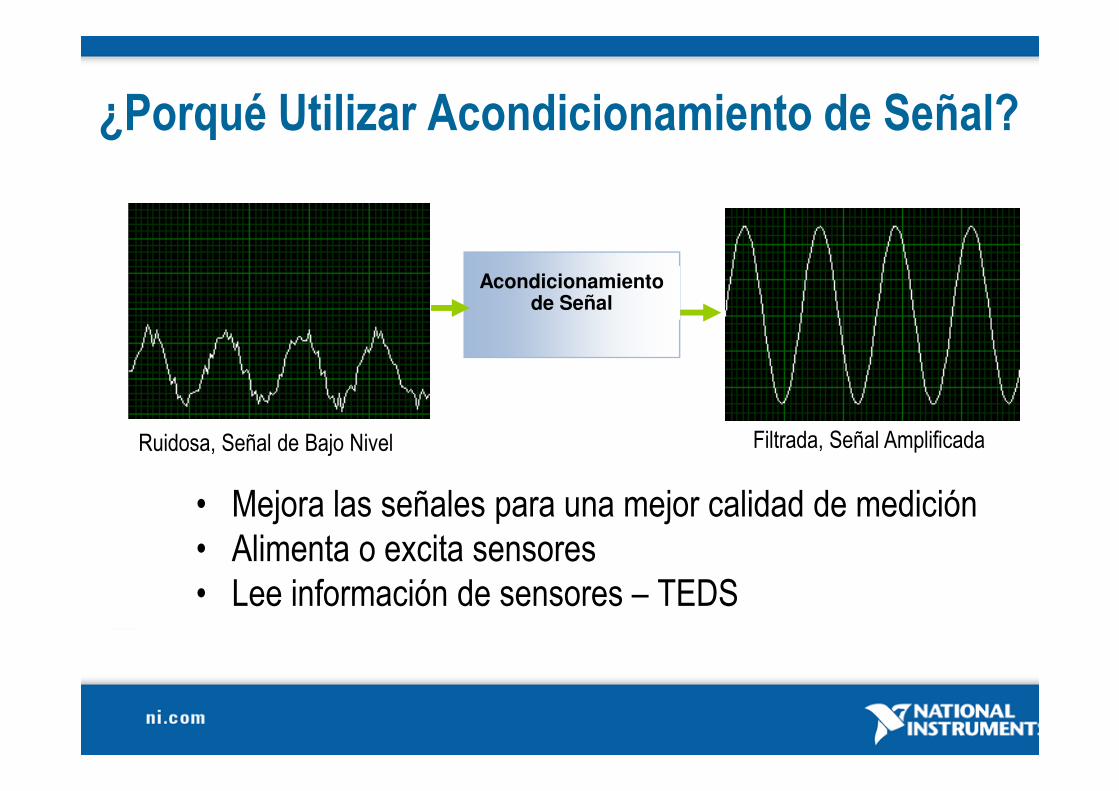
¿Porqué Utilizar Acondicionamiento de Señal?
Acondicionamiento de Señal
• Mejora las señales para una mejor calidad de medición
• Alimenta o excita sensores
• Lee información de sensores – TEDS
Ruidosa, Señal de Bajo Nivel Filtrada, Señal Amplificada
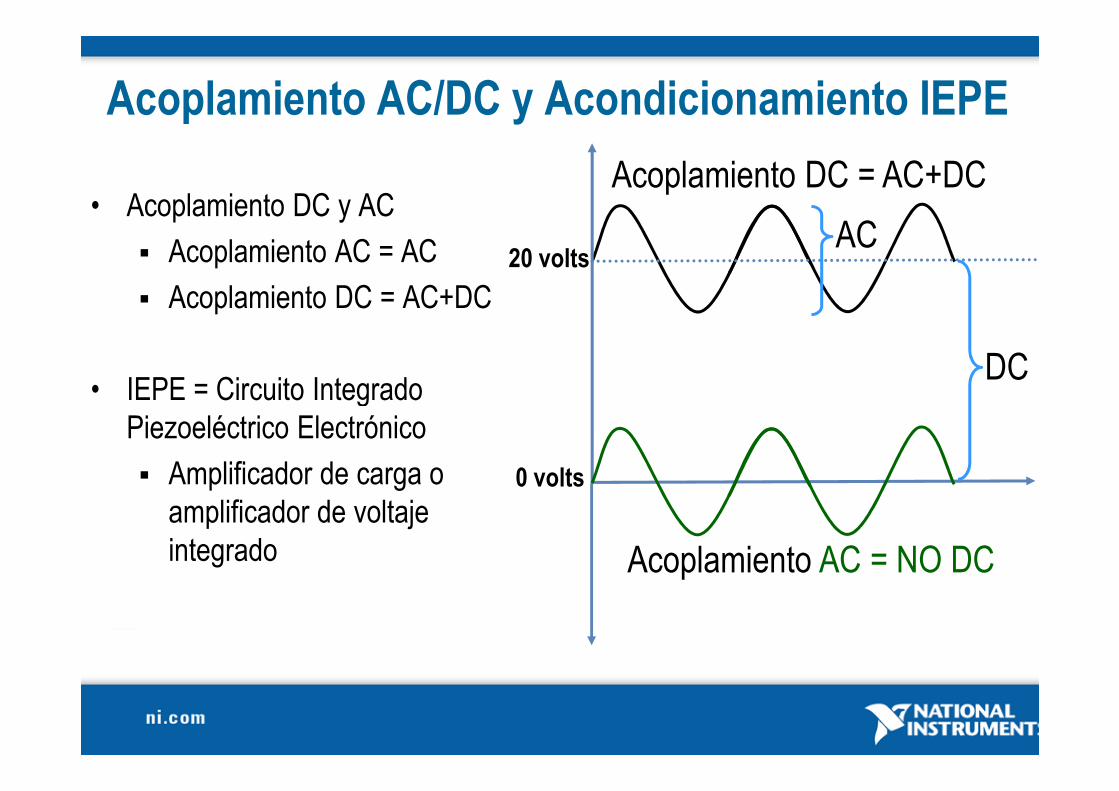
Acoplamiento AC/DC y Acondicionamiento IEPE
• Acoplamiento DC y AC
� Acoplamiento AC = AC
� Acoplamiento DC = AC+DC
• IEPE = Circuito Integrado
20 volts
Acoplamiento DC = AC+DC
DC
AC
• IEPE = Circuito Integrado
Piezoeléctrico Electrónico
� Amplificador de carga o
amplificador de voltaje
integrado
0 volts
Acoplamiento AC = NO DC
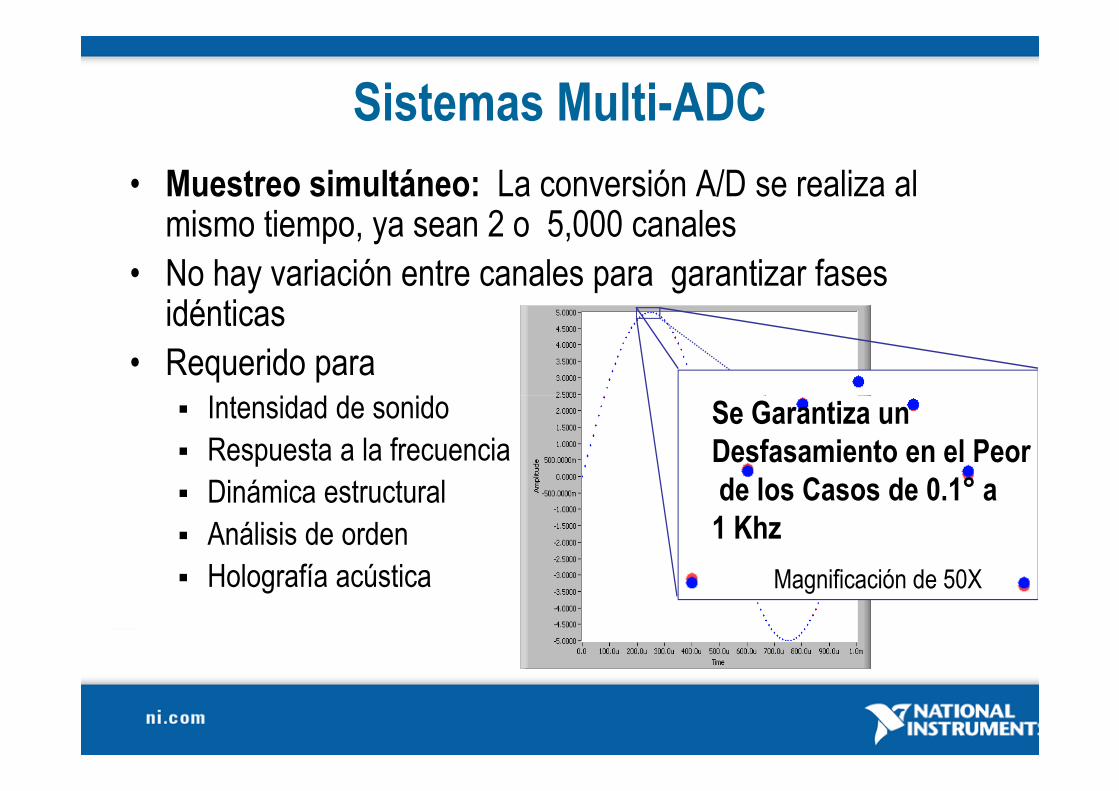
Sistemas Multi-ADC
• Muestreo simultáneo: La conversión A/D se realiza al mismo tiempo, ya sean 2 o 5,000 canales
• No hay variación entre canales para garantizar fases idénticas
• Requerido para � Intensidad de sonido Se Garantiza un � Intensidad de sonido
� Respuesta a la frecuencia
� Dinámica estructural
� Análisis de orden
� Holografía acústica
Se Garantiza un
Desfasamiento en el Peor
de los Casos de 0.1° a
1 Khz
Magnificación de 50X
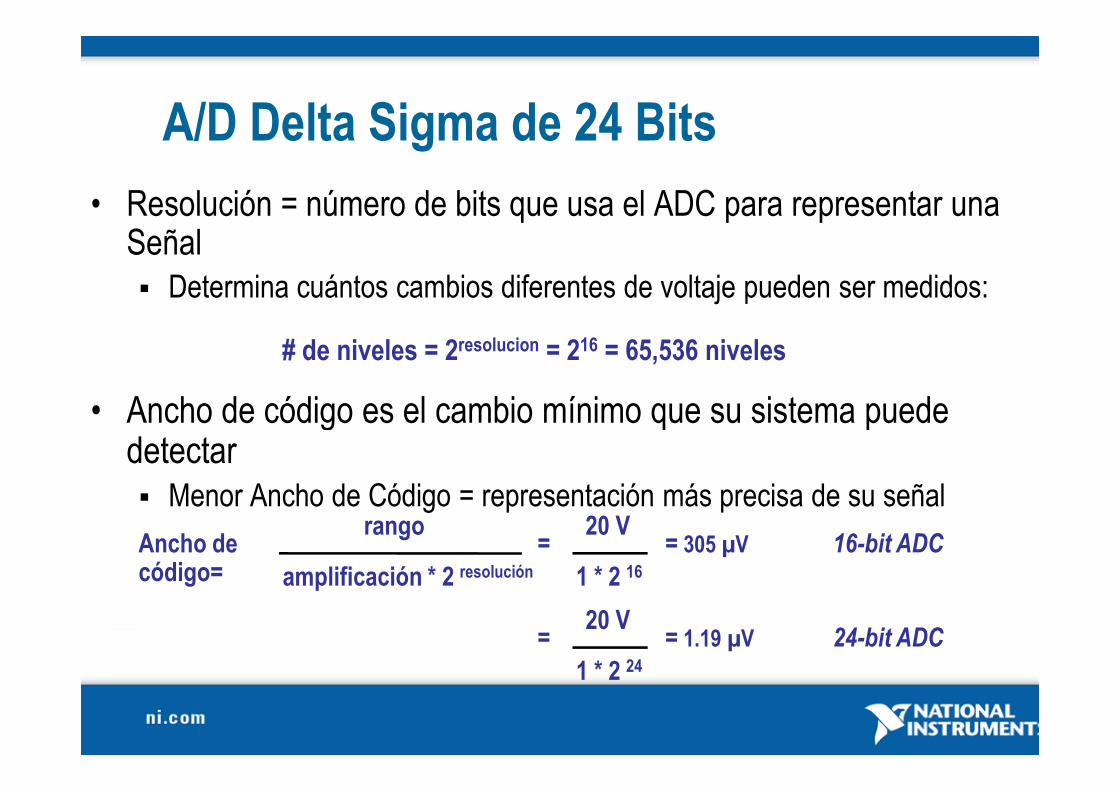
A/D Delta Sigma de 24 Bits
• Resolución = número de bits que usa el ADC para representar una Señal
� Determina cuántos cambios diferentes de voltaje pueden ser medidos:
• Ancho de código es el cambio mínimo que su sistema puede
# de niveles = 2resolucion = 216 = 65,536 niveles
• Ancho de código es el cambio mínimo que su sistema puede detectar� Menor Ancho de Código = representación más precisa de su señal
Ancho de código=
rango
amplificación * 2 resolución
=20 V
1 * 2 16
=
1 * 2 24
20 V
= 305 µV
= 1.19 µV
16-bit ADC
24-bit ADC
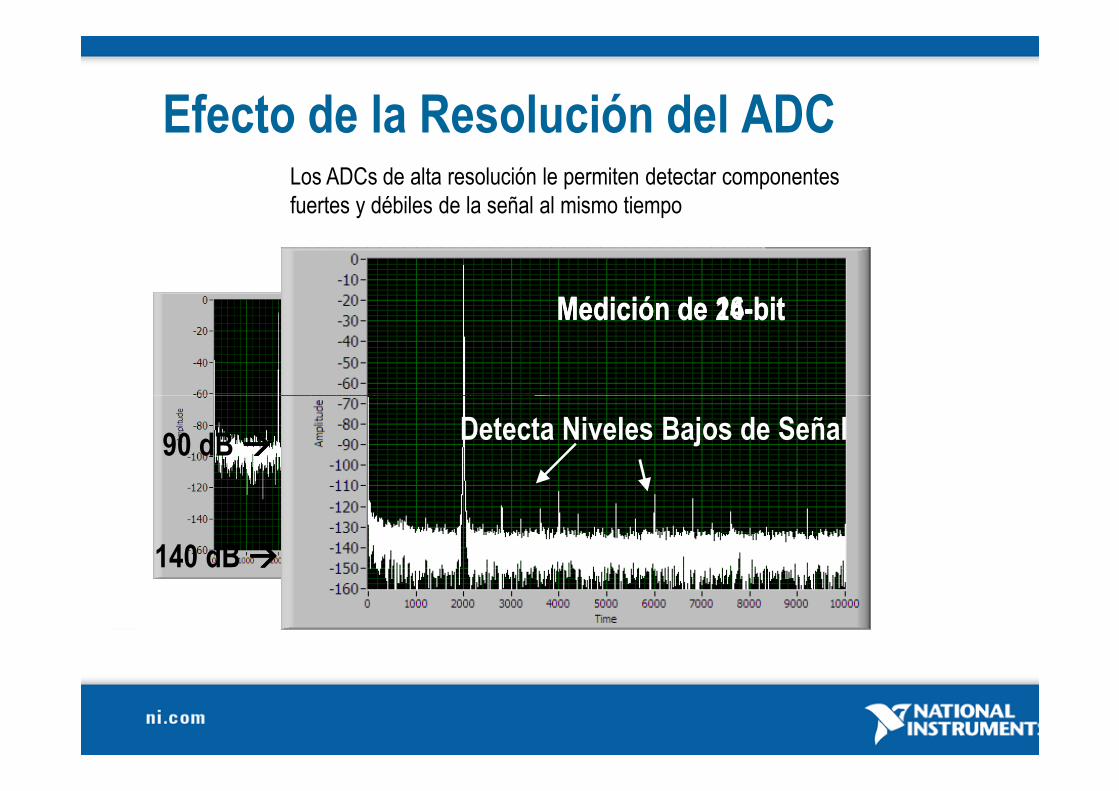
Efecto de la Resolución del ADC
Medición de 24-bitMedición de 16-bit
Los ADCs de alta resolución le permiten detectar componentes
fuertes y débiles de la señal al mismo tiempo
140 dB ����
90 dB ����Detecta Niveles Bajos de Señal
fN = fs/2 fs: frecuencia de muestreo
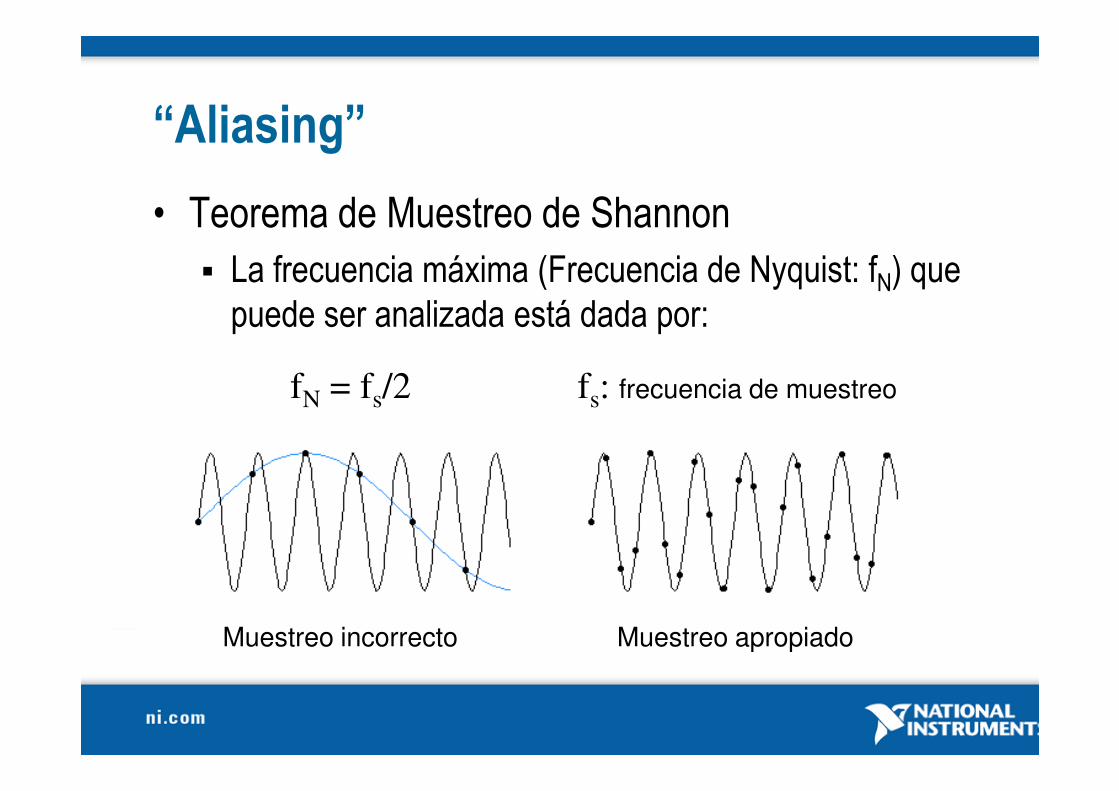
“Aliasing”
• Teorema de Muestreo de Shannon
� La frecuencia máxima (Frecuencia de Nyquist: fN) que
puede ser analizada está dada por:
Muestreo incorrecto Muestreo apropiado
fN = fs/2 fs: frecuencia de muestreo
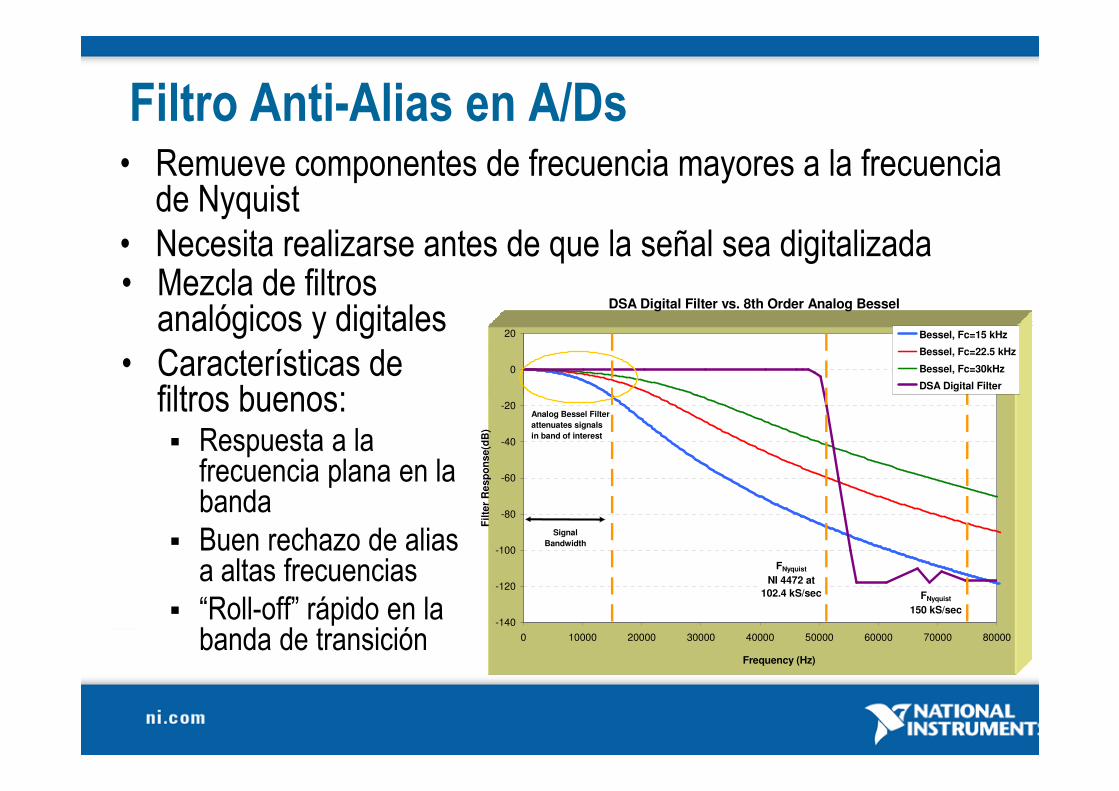
Filtro Anti-Alias en A/Ds
• Mezcla de filtros analógicos y digitales
• Características de filtros buenos:
DSA Digital Filter vs. 8th Order Analog Bessel
0
20 Bessel, Fc=15 kHz
Bessel, Fc=22.5 kHz
Bessel, Fc=30kHz
DSA Digital Filter
• Remueve componentes de frecuencia mayores a la frecuencia de Nyquist
• Necesita realizarse antes de que la señal sea digitalizada
filtros buenos:� Respuesta a la
frecuencia plana en la banda
� Buen rechazo de alias a altas frecuencias
� “Roll-off” rápido en la banda de transición
-140
-120
-100
-80
-60
-40
-20
0 10000 20000 30000 40000 50000 60000 70000 80000
Frequency (Hz)
Fil
ter
Re
sp
on
se
(dB
)
Signal
Bandwidth
FNyquist
NI 4472 at
102.4 kS/sec FNyquist
150 kS/sec
Analog Bessel Filter
attenuates signals
in band of interest
Componentes de un Sistema de Sonido y Vibración
Adquisición
de Datos
Acondicionam
iento
Sensores
V
Señales de Entrada
Análisis
Acondicionam
iento
de Señal
A/D
V
Señales de Salida
V
Análisis de Sonido y Vibración
• Mediciones en el Dominio del Tiempo
� Nivel de sonido y vibración
• Mediciones del Dominio de la Frecuencia
� Potencia del espectro
Análisis de armónicas y octavas� Análisis de armónicas y octavas
� Respuesta a la frecuencia / barrido de seno
� Análisis de audio - distorsión
• Análisis en el Dominio del Orden
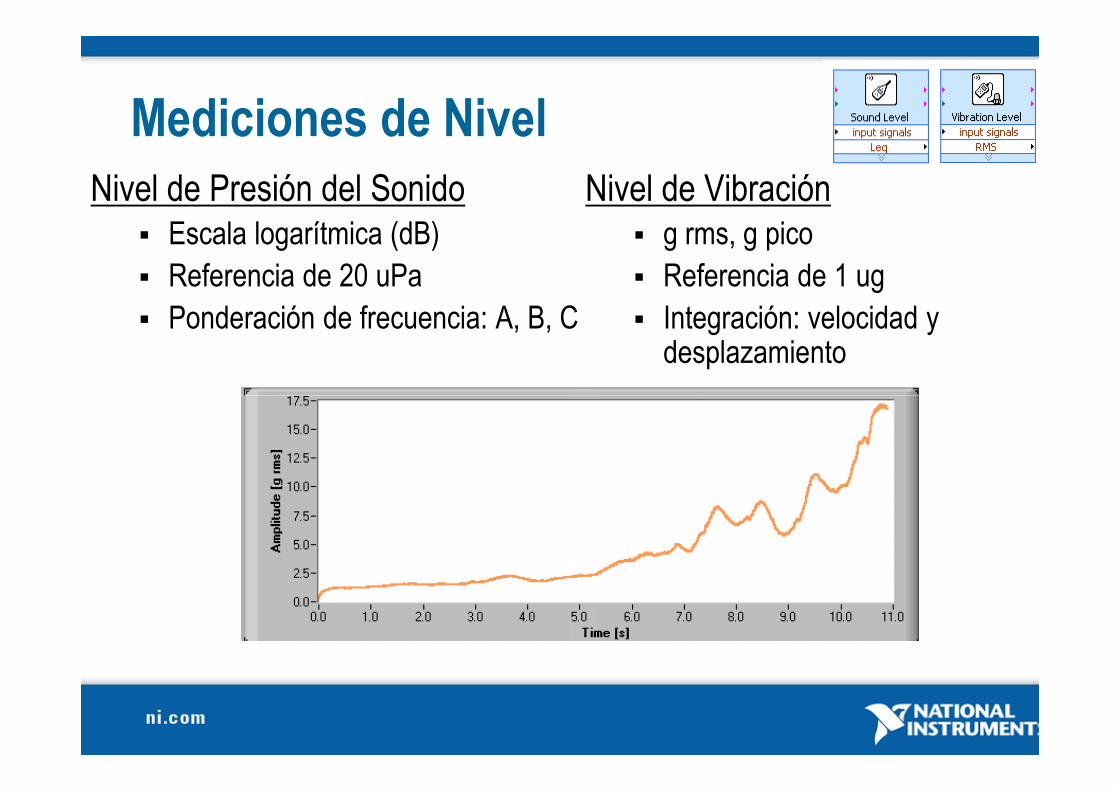
Mediciones de Nivel
Nivel de Presión del Sonido� Escala logarítmica (dB)
� Referencia de 20 uPa
� Ponderación de frecuencia: A, B, C
Nivel de Vibración � g rms, g pico
� Referencia de 1 ug
� Integración: velocidad y desplazamiento
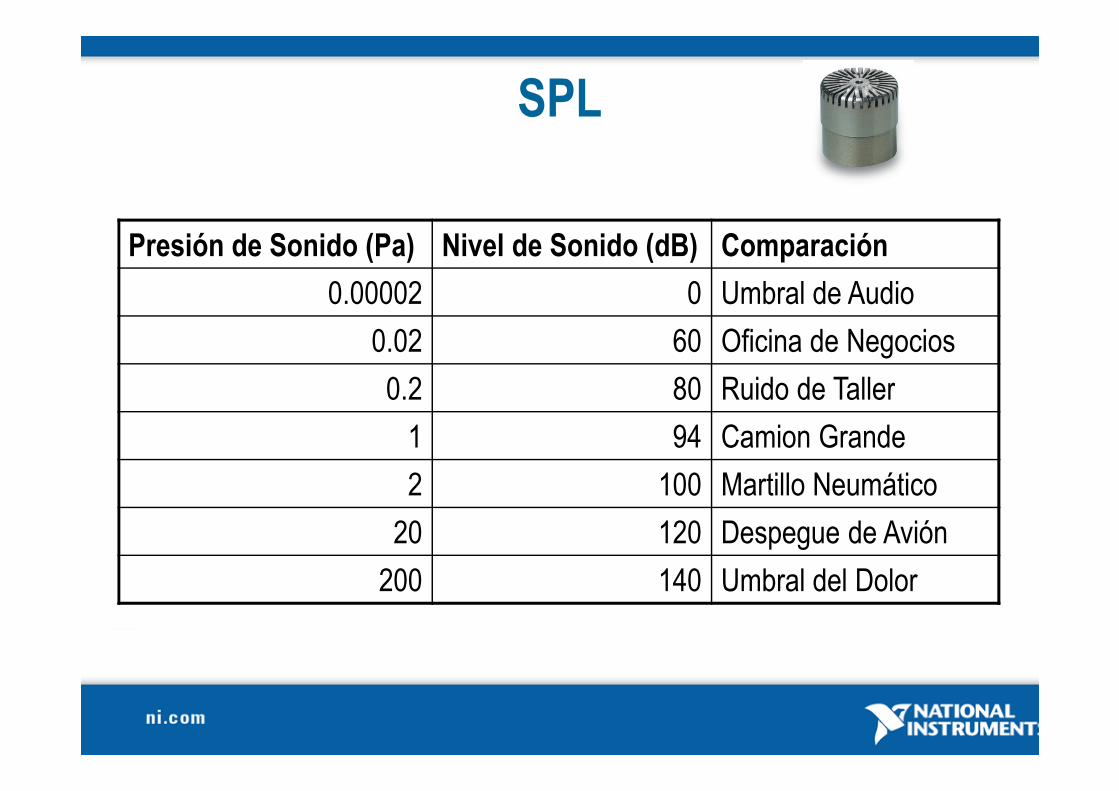
SPL
Presión de Sonido (Pa) Nivel de Sonido (dB) Comparación
0.00002 0 Umbral de Audio
0.02 60 Oficina de Negocios
0.2 80 Ruido de Taller0.2 80 Ruido de Taller
1 94 Camion Grande
2 100 Martillo Neumático
20 120 Despegue de Avión
200 140 Umbral del Dolor
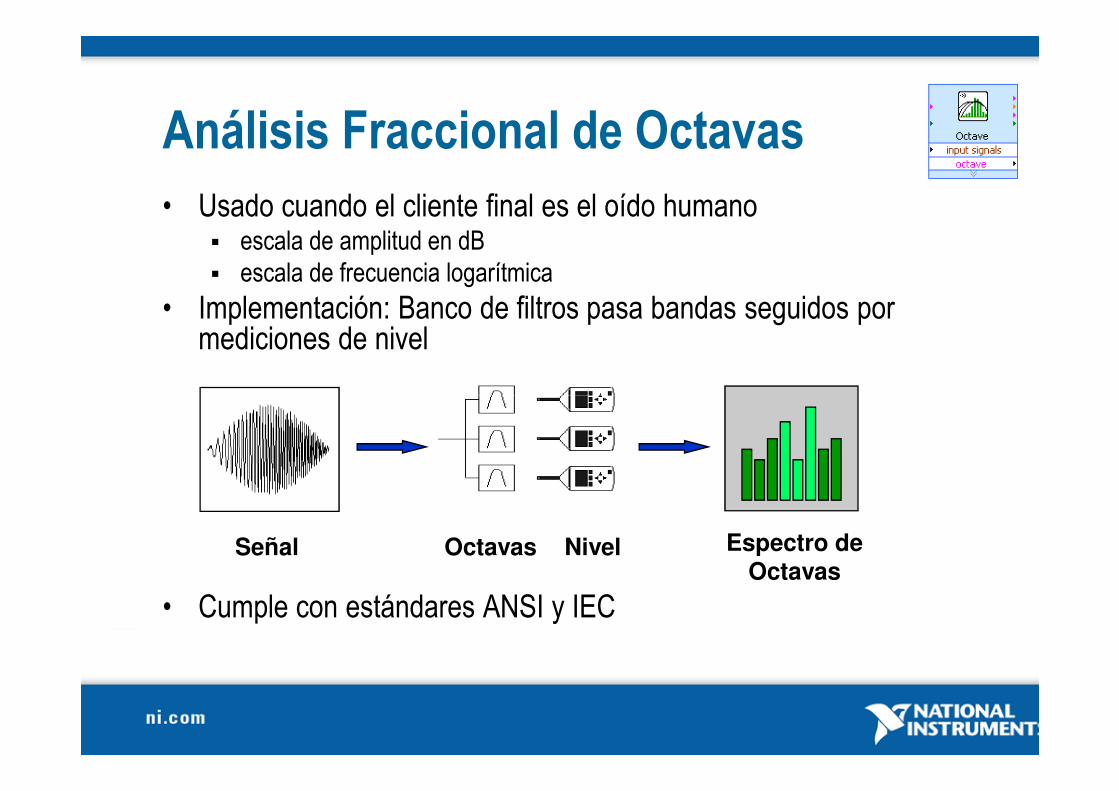
Análisis Fraccional de Octavas
• Usado cuando el cliente final es el oído humano� escala de amplitud en dB
� escala de frecuencia logarítmica
• Implementación: Banco de filtros pasa bandas seguidos por mediciones de nivel
Señal Octavas Nivel Espectro de Octavas
• Cumple con estándares ANSI y IEC
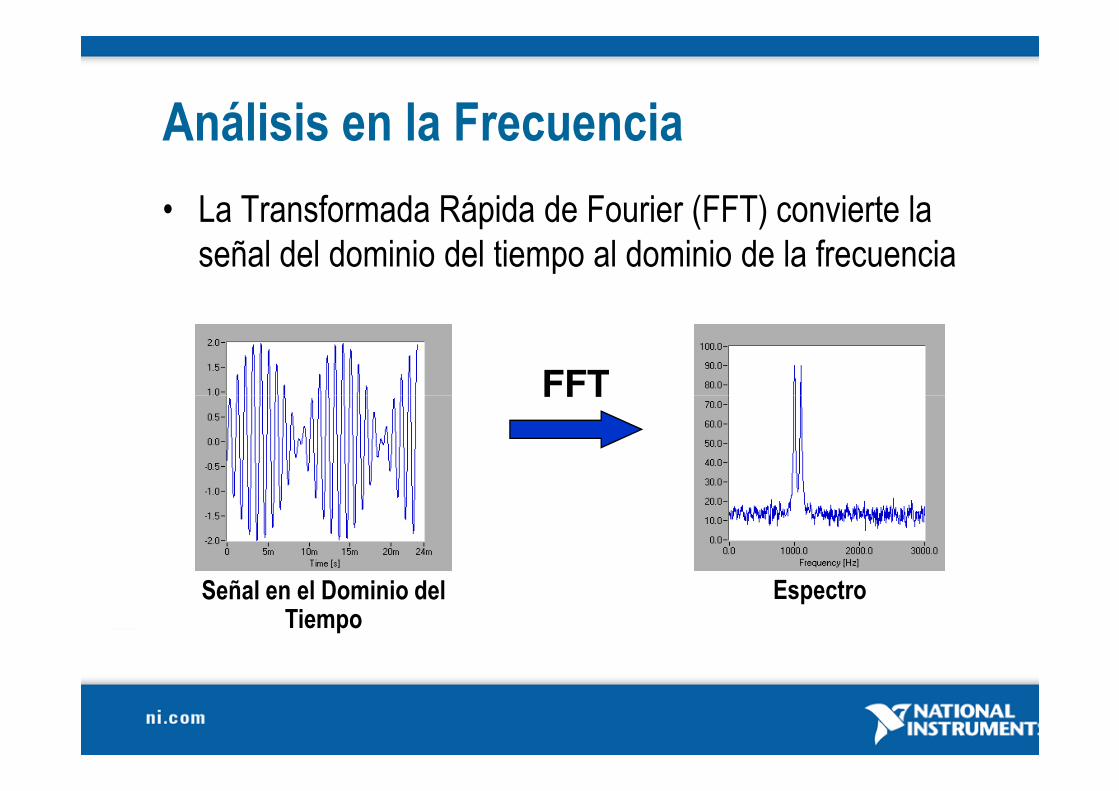
Análisis en la Frecuencia
• La Transformada Rápida de Fourier (FFT) convierte la
señal del dominio del tiempo al dominio de la frecuencia
FFT
Señal en el Dominio del Tiempo
FFT
Espectro
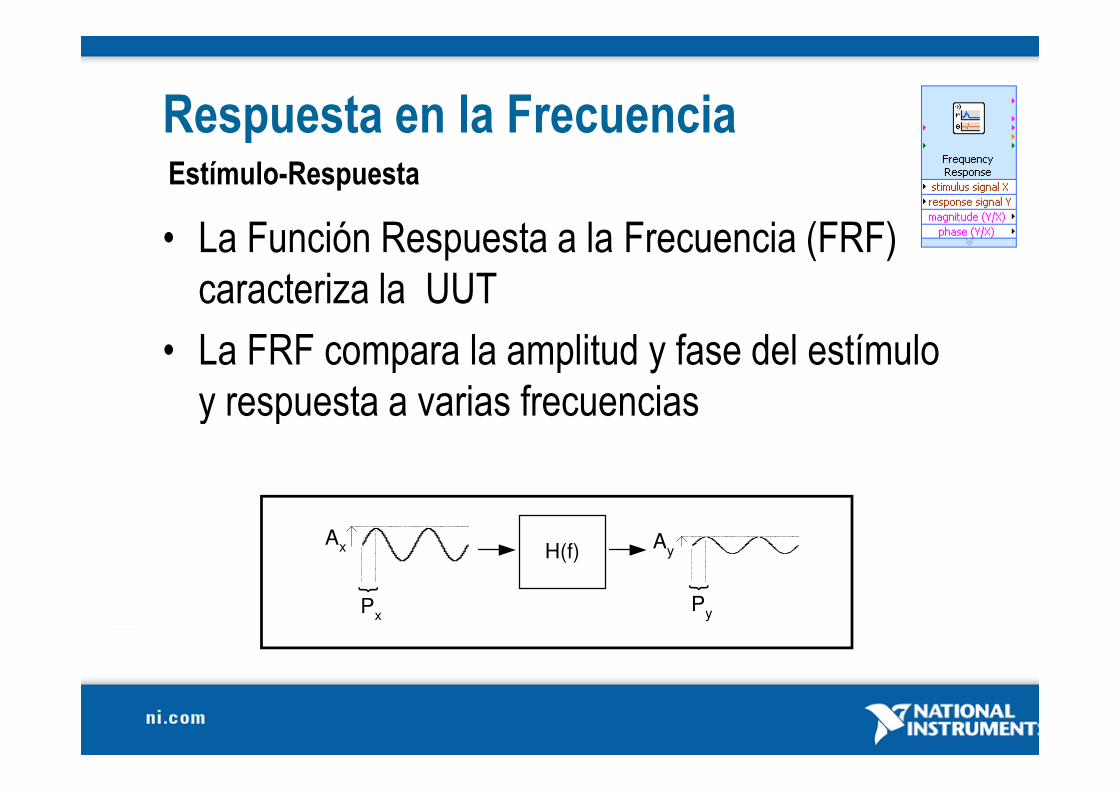
Respuesta en la Frecuencia
• La Función Respuesta a la Frecuencia (FRF)
caracteriza la UUT
• La FRF compara la amplitud y fase del estímulo
y respuesta a varias frecuencias
Estímulo-Respuesta
y respuesta a varias frecuencias
Ax
{
Px
H(f) Ay
{
Py
Tipos de Estímulos
Banda Ancha (Basado en FFT)
� La excitación incluye todas
las frecuencias a la vez
� Menor tiempo de prueba
� Ejemplos:
Discretos
� La excitación consiste de sólo una frecuencia a la vez
� Tiempos de prueba mayores generalmente (permite asentarse y promediados)� Ejemplos:
• Ruido blanco
• “Chirp”
• Ruido rosa
• Impacto martillo
promediados)
� Puede usarse para medir distorsión dependiente de frecuencia
� Ejemplos:• Un sólo tono
• Seno multi tono
• Barrido de seno o seno con pasos en frecuencia
Análisis de Audio
• Distorsión (no linealidad)
� THD, THD+Ruido, SINAD: Medidos con un tono puro (fundamental)
• Distorsión harmónica total = Distorsión/fundamental
• SINAD = señal/(ruido + distorsión)• SINAD = señal/(ruido + distorsión)Señal = fundamental + ruido + distorsión
� IMD (distorsión de intermodulación): excitación de dos tonos
• “Crosstalk”
• Ganancia/fase
¿Qué es Análisis de Orden?
• Muchos componentes de señal del ruido y vibración
están relacionados directamente a la velocidad:
� Desbalanceo, desalineación, defectos de rodamientos,
falta de acoplamientofalta de acoplamiento
• El análisis de orden normaliza las mediciones a una
velocidad rotacional para obtener mejores
componentes de esta señal
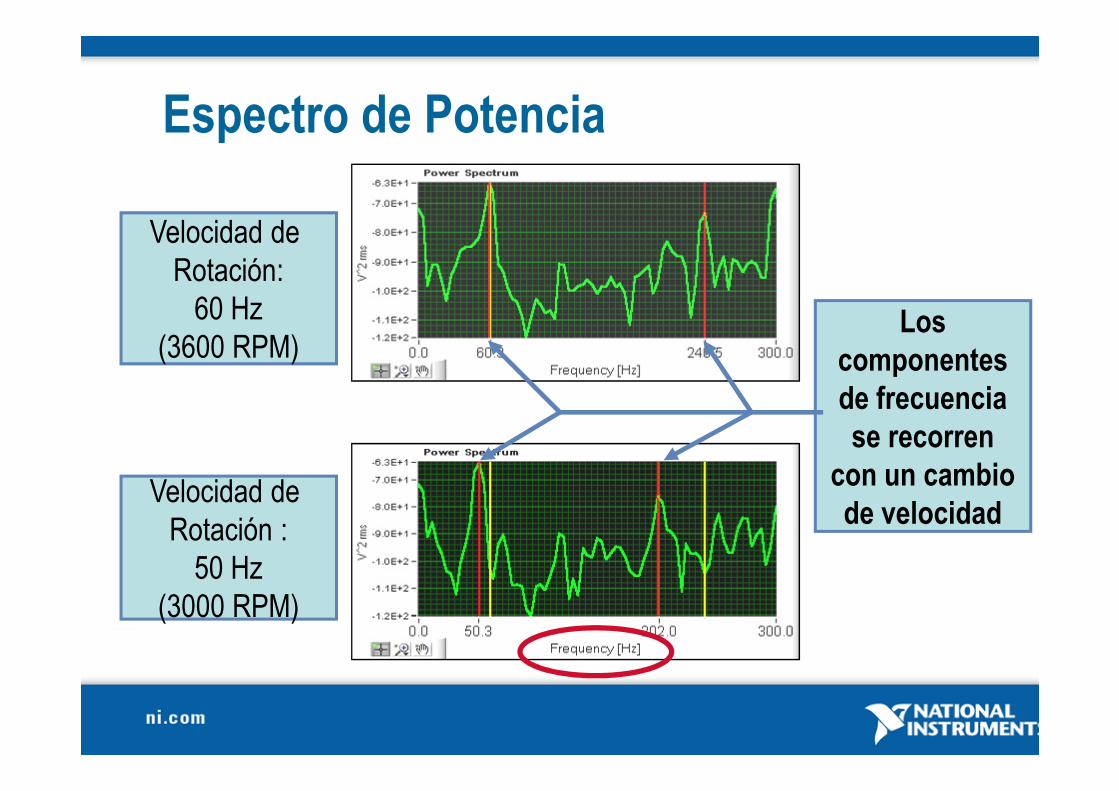
Espectro de Potencia
Velocidad de
Rotación:
60 Hz
(3600 RPM)Los
componentes
de frecuencia
Velocidad de
Rotación :
50 Hz
(3000 RPM)
de frecuencia
se recorren
con un cambio
de velocidad
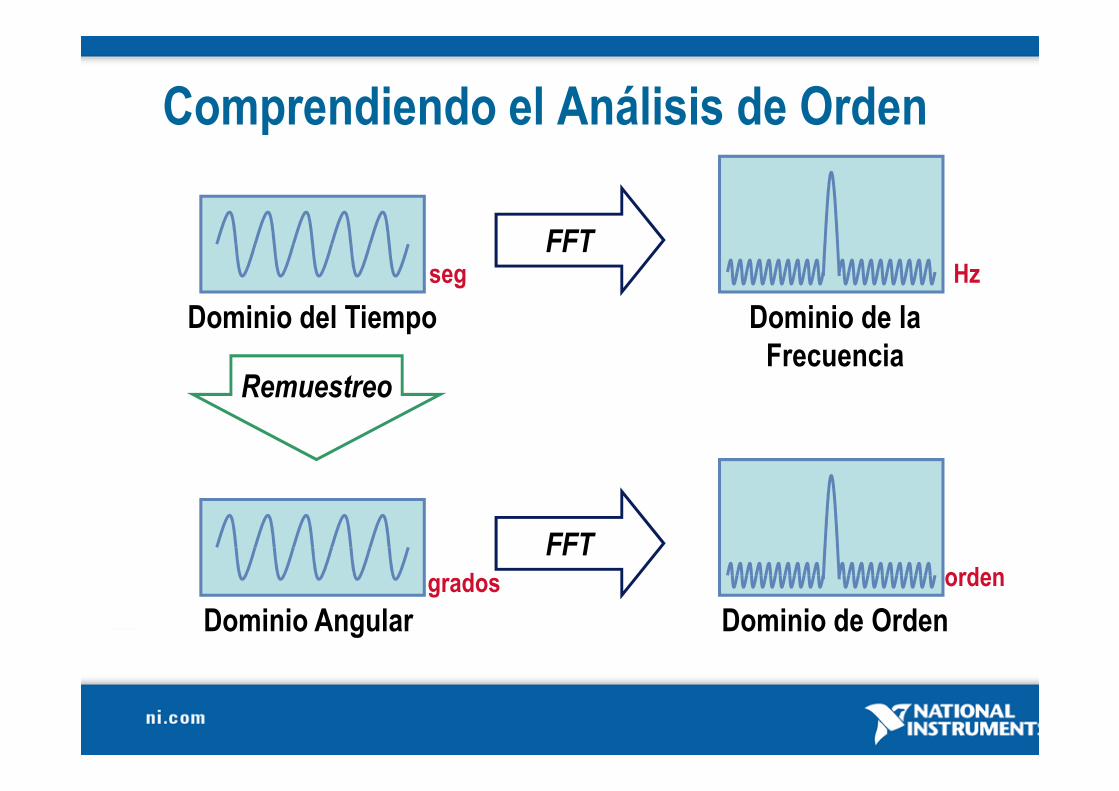
Comprendiendo el Análisis de Orden
Dominio del Tiempo
FFT
Dominio de la
FrecuenciaRemuestreo
seg Hz
Remuestreo
FFT
Dominio Angular
grados
Dominio de Orden
orden
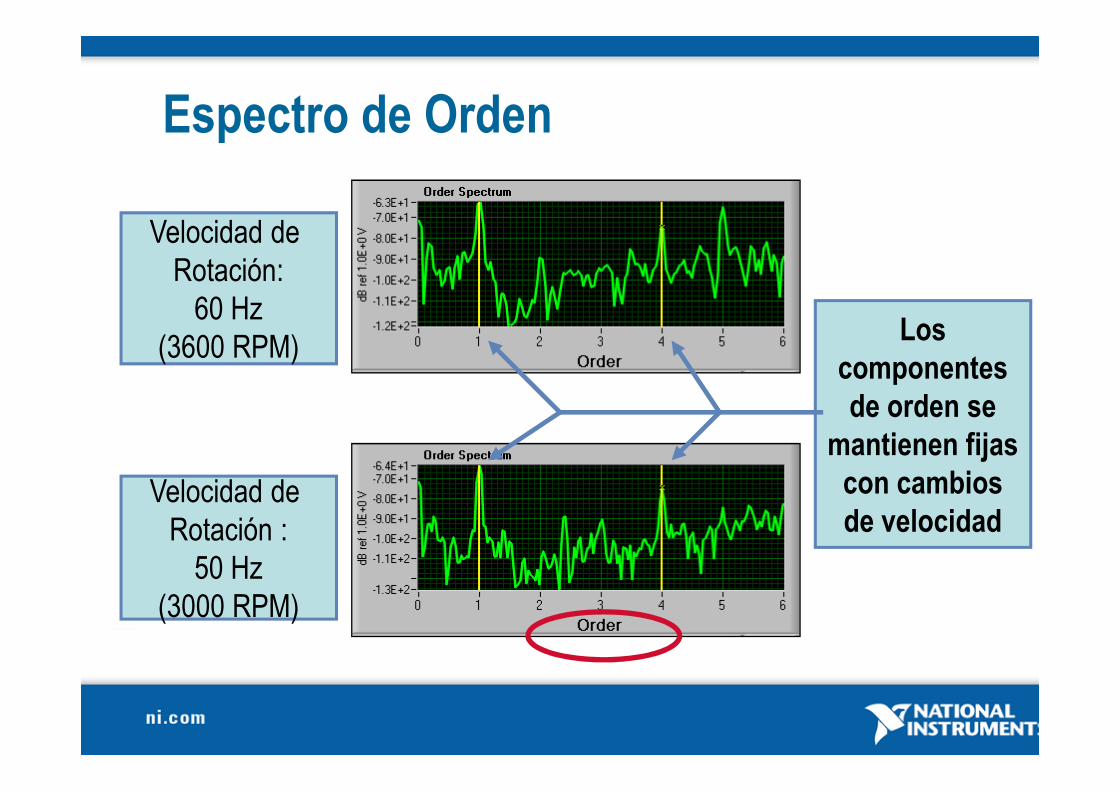
Espectro de Orden
Los
componentes
de orden se
Velocidad de
Rotación:
60 Hz
(3600 RPM)
de orden se
mantienen fijas
con cambios
de velocidadVelocidad de
Rotación :
50 Hz
(3000 RPM)
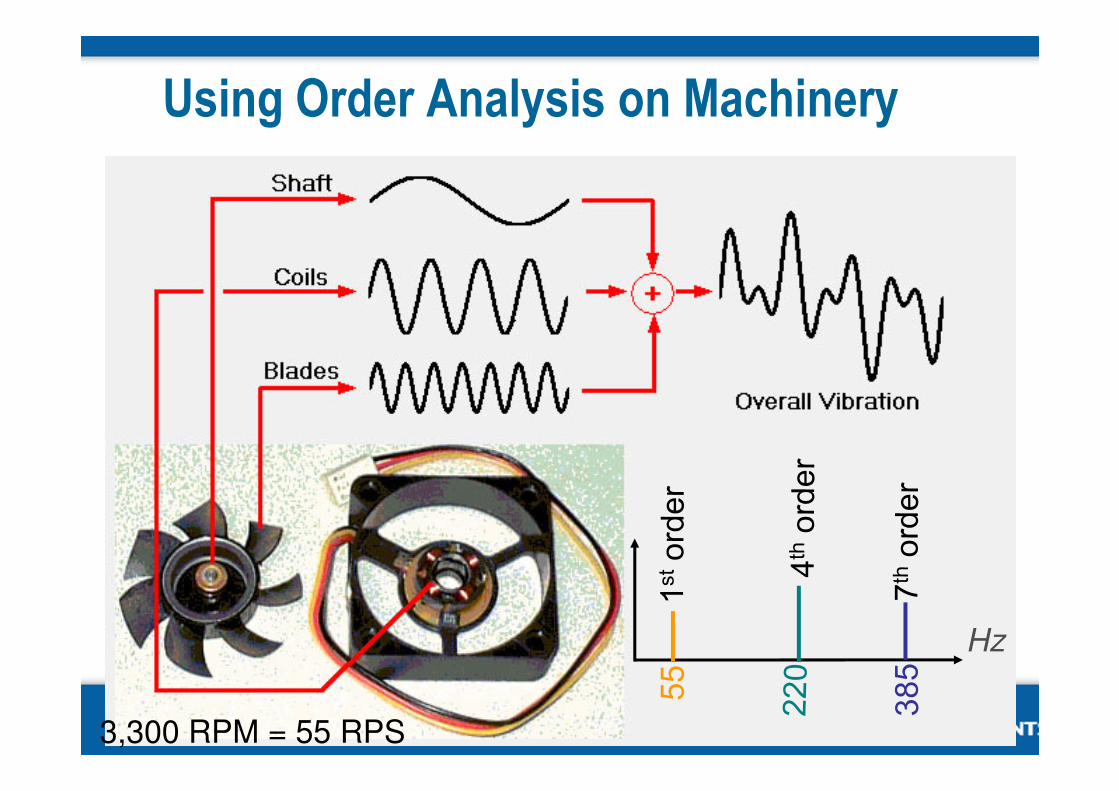
Using Order Analysis on Machinery
Hz
55
3,300 RPM = 55 RPS
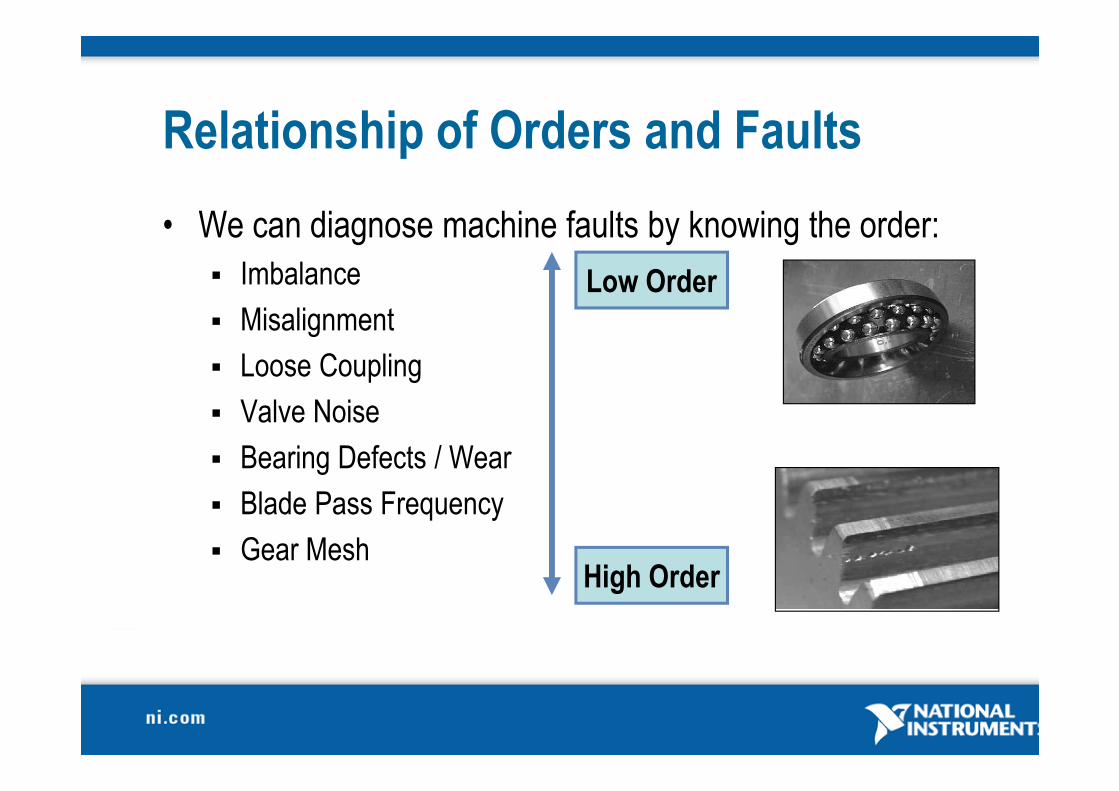
Relationship of Orders and Faults
• We can diagnose machine faults by knowing the order:
� Imbalance
� Misalignment
� Loose Coupling
Valve Noise
Low Order
� Valve Noise
� Bearing Defects / Wear
� Blade Pass Frequency
� Gear MeshHigh Order
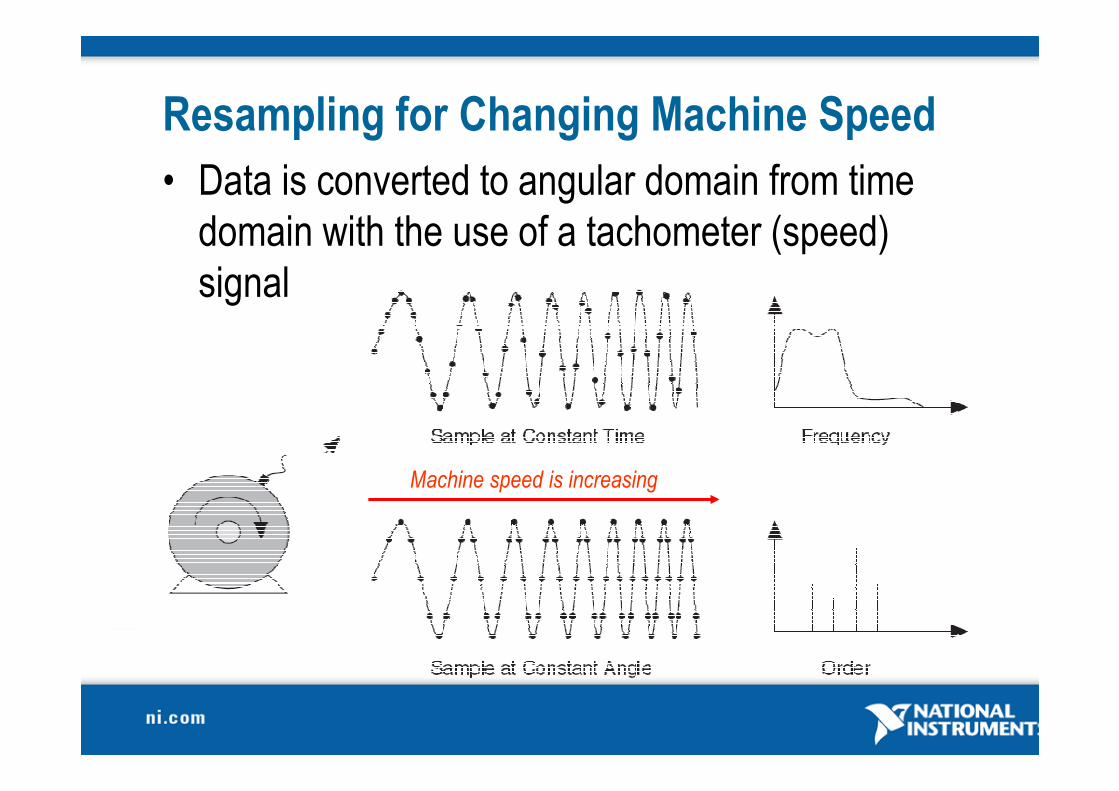
Resampling for Changing Machine Speed
• Data is converted to angular domain from time
domain with the use of a tachometer (speed)
signal
Machine speed is increasing

Poniendo todo junto…
Adquisición
de Datos
Acondicionam
iento
A/D
Sensores
V
Señales Entrada
Señales Salida
V
Análisis
Acondicionam
ientoV
Arquitecturas Casos de Estudio

Rango de Aplicaciones en Maquinaria
I&D, Celdas
de Prueba
Pruebas de
Fábrica
Servicio en
Campo,
Almacenamiento
Monitoreo
En LíneaProtección

Casos de Estudio de Gran Cantidad de Canales Boeing: Arreglo de 448 canales de Micrófono
200 Hz
Ruido en Fuselaje
400 Hz
Ruido de Entrada
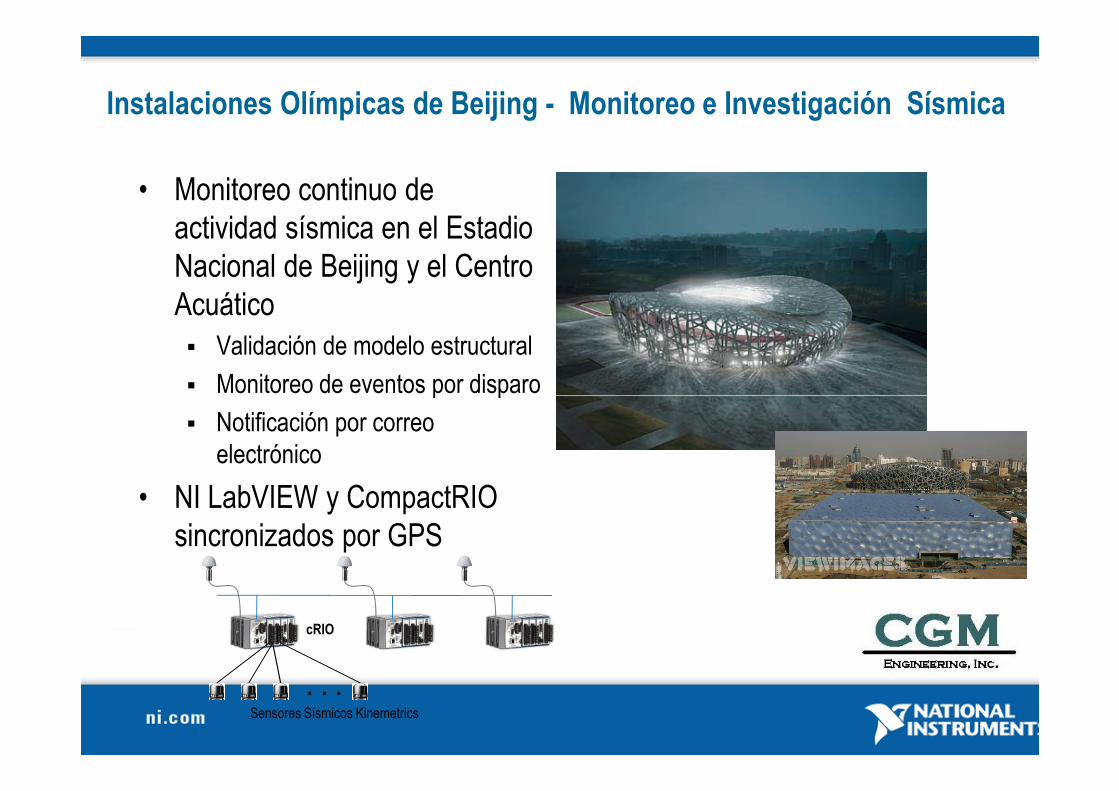
Instalaciones Olímpicas de Beijing - Monitoreo e Investigación Sísmica
• Monitoreo continuo de
actividad sísmica en el Estadio
Nacional de Beijing y el Centro
Acuático
� Validación de modelo estructural
� Monitoreo de eventos por disparo� Monitoreo de eventos por disparo
� Notificación por correo
electrónico
• NI LabVIEW y CompactRIO
sincronizados por GPS
. . .Sensores Sísmicos Kinemetrics
cRIO
¿Preguntas?