Embed Size (px)
Citation preview
Andrés Zarabozo Martínez
Mecánica de Vuelo 2. Problemas
Ingeniería Aeronáutica
ETSEIAT
2012
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 2 -
Acerca de estos apuntes
Estos apuntes se han realizado para cubrir el temario de problemas de la segunda parte de la
asignatura “Mecánica de Vuelo 2”, que se imparte en el quinto curso de Ingeniería Aeronáutica, en
intensificación en Aeronaves, en la Escola Tècnica Superior d’Enginyeries Industrial i Aeronàutica de
Terrassa, de la Universitat Politècnica de Catalunya (ETSEIAT – UPC).
Una gran parte del material empleado para estos apuntes está basada de apuntes escritos por el
profesor Josep Oriol Lizandra Dalmases. Se agradece también la contribución de compañeros de
clase como Alejandro Roger Ull y Oriol Ferret Gasch.
Licencia
Esta obra está bajo una licencia Attribution-ShareAlike 3.0 Unported (CC BY-SA 3.0) de
Creative Commons. Para ver una copia de esta licencia, visite:
http://creativecommons.org/licenses/by-sa/3.0/deed.es_ES
En líneas generales:
Es libre de:
Compartir – Copiar, distribuir y comunicar públicamente la obra.
Transformar la obra y crear obras derivadas.
Hacer un uso comercial de esta obra.
Bajo las condiciones siguientes:
Reconocimiento — Debe reconocer al autor de la obra original (pero no de una manera que
sugiera que tiene su apoyo o apoya el uso que hace de su obra).
Compartir bajo la Misma Licencia — Si altera o transforma esta obra, o genera una obra
derivada, sólo puede distribuir la obra generada bajo una licencia idéntica a ésta.

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 3 -
0. Índice
0. Índice ............................................................................................................................................... 3
1. Recordatorio de mecánica de vuelo 1 ............................................................................................ 4
Problema 1. ......................................................................................................................................... 4
Problema 2. ......................................................................................................................................... 9
Problema 3. ....................................................................................................................................... 12
Problema 4. ....................................................................................................................................... 14
2. Vuelo de alta velocidad ................................................................................................................. 15
Problema 1. ....................................................................................................................................... 15
Problema 2. ....................................................................................................................................... 17
Problema 3. ....................................................................................................................................... 19
3. Estabilidad del movimiento no controlado ................................................................................... 21
Problema 1. ....................................................................................................................................... 21
Problema 2. ....................................................................................................................................... 24
Problema 3. ....................................................................................................................................... 28
Problema 4. ....................................................................................................................................... 33
Problema 5. ....................................................................................................................................... 40
Problema 6. ....................................................................................................................................... 43
4. Respuesta en lazo abierto y cerrado ............................................................................................. 55
Problema 1. ....................................................................................................................................... 55
Problema 2. ....................................................................................................................................... 58
Problema 3. ....................................................................................................................................... 60
Problema 4. ....................................................................................................................................... 65
Problema 5. ....................................................................................................................................... 69

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 4 -
1. Recordatorio de mecánica de vuelo 1
Problema 1.
Un avión con motor alternativo desarrolla un ascenso simétrico describiendo una espiral de radio .
Utilizando la hipótesis de eficiencia del motor constante ( ), y asumiendo que se conocen todos
los datos geométricos, de masa y aerodinámicos (en particular la polar parabólica) del avión
se pide:
a. Escribir las ecuaciones que definen completamente el movimiento de la aeronave, e indicar
el número de grados de libertad del sistema (para un radio de giro fijado).
b. Encontrar las velocidades que maximizan, respectivamente, el régimen de ascenso y el
ángulo de ascenso para una potencia máxima .
Figura 1.1. Trayectoria seguida por el avión en el problema

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 5 -
Resolución
a. Escribir ecuaciones y encontrar los grados de libertad
Al ser una trayectoria en espiral, se puede dividir la trayectoria en un movimiento circular en un
plano y un movimiento rectilíneo.
(
) (
)
Hay que buscar el movimiento particularizado en los ejes cuerpo, el movimiento encontrado arriba
están en ejes horizonte local, por lo que es necesario hacer el cambio de sistema de referencia
mediante la matriz de cambio.
Por lo que se obtienen las dos primeras ecuaciones
(1)
(2)
Según la ley de Newton
∑
Donde el vector de la velocidad se puede escribir como
La derivada en base móvil es
|
La primera derivada es cero por lo que la derivada queda
La velocidad angular es
Pero los dos últimos términos son nulos. Y la χ se puede renombrar como ω. Se hace la derivada
respecto al tiempo para encontrar la aceleración.

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 6 -
[ ]
[ ]
( )
Ahora lo que se buscan son las fuerzas. En los diferentes ejes se encuentran las siguientes fuerzas
{
{ {
La ecuación dinámica queda
(
) (
)
(3)
(4)
(5)
Aquí se obtienen tres ecuaciones más. Además si se le puede añadir la ecuación polar parabólica que
relaciona el coeficiente de resistencia y el de sustentación, por lo que se tienen seis ecuaciones. Las
variables del problema son: y . Son 8 variables.
Una sexta ecuación seria la relación entre la potencia y el empuje y la velocidad
(6)
El problema por lo tanto tiene dos grados de libertad.
b. Encontrar las velocidades que maximizan
La cuarta ecuación se puede simplificar a
De la quinta se obtiene
[
]
Juntando con lo obtenido justo antes queda
[
]

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 7 -
A parte de las seis ecuaciones obtenidas para el movimiento también se tienen estas tres
Asumiendo que la aeronave es una aeronave convencional (no es un avión acrobático), se puede
simplificar las ecuaciones con ya que este es un ángulo pequeño.
Se quiere aislar todas las variables y dejarlas en función de la velocidad.
√ √ (
)
[
( ) ]
( )
[
( ) ]
Donde
[
( ) ]
Para una potencia dada
[
]
Hay que maximizar ahora

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 8 -
Se debe resolver esta ecuación por métodos iterativos.
( ⁄ )
√

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 9 -
Problema 2.
Un avión de combate está dotado de toberas con geometría variable y empuje vectorial. Bajo las
hipótesis de que el empuje es independiente de la velocidad de vuelo y asumiendo que se conocen
todos los datos geométricos, de masa y aerodinámicos, y que además la polar
aerodinámica es independiente del número de Mach (pero no necesariamente parabólica)
se pide lo siguiente
a. Escribir las ecuaciones que describen un vuelo simétrico en un plano vertical e indicar los
grados de libertad del sistema
b. Encontrar el ángulo de deflexión del empuje ( ) relativo al plano de vuelo y la velocidad en
vuelo horizontal que minimice el empuje necesario en crucero.
c. Comparar los valores obtenidos en el apartado b con los correspondientes a un avión sin
empuje vectorial
Figura 2.1. Caza con empuje vectorial
Resolución
a. Ecuaciones y grados de libertad
Se pueden ver las fuerzas sobre la aeronave en la Figura 1.2.
Las variables del problema son: y . Se tienen dos ecuaciones, por lo que en total se tienen
dos grados de libertad.
b. Ángulo de empuje y velocidad de vuelo
Se quiere poner las variables ( ) y ( ). Se buscan los valores de y para que el empuje
sea mínimo. Para eso
Se deriva la primera ecuación y la segunda ecuación respecto a .

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 10 -
{
{
Combinándolas dividiendo ambas expresiones
Esto es la inversa de la condición de máxima eficiencia. Ahora se derivan respecto al coeficiente de
sustentación
{
{
Dividiéndolas otra vez se obtiene
Esto implica máxima fineza.
(
)
Partiendo de igualdades trigonométricas
√
⁄
√ ( ⁄ )
√
√ ( ⁄ )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 11 -
De la combinación de las ecuaciones
[ (
)
]
√
(
)
c. Comparación con empuje no vectorial
Partiendo de la ecuación
Se sustituye la velocidad
[
(
)
] √ (
)
√ (
)
En el caso de la tobera sin empuje vectorial
( ) (
)
La diferencia entre los dos empujes queda
( ) ( )
[
√ (
)
]
La ganancia se puede simplificar como
√
⁄
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 12 -
Problema 3.
El efecto de la elasticidad de la estructura del fuselaje en la estabilidad longitudinal puede estimarse
considerando una relación lineal entre la sustentación en el estabilizador horizontal y la variación de
su ángulo de incidencia
Donde (flexibilidad) es una constante conocida. Asumiendo también conocidos todos los datos del
avión, se pide lo siguiente
a. Encontrar una expresión para el coeficiente de sustentación del estabilizador horizontal
como una función del ángulo de ataque del estabilizador, la flexibilidad y otros parámetros
de vuelo del avión original (estructura infinitamente rígida)
b. Indicar como la estabilidad estática longitudinal con mandos fijos se ve afectada por la
elasticidad de la estructura del fuselaje
c. Como se ve modificada la efectividad del estabilizador debido a la elasticidad
Nota: La efectividad del estabilizador se define como un factor que, multiplicado por el ángulo de
deflexión , da un incremento del coeficiente de sustentación de cola ( ) .
( )
Figura 3.1.Diagrama del avión del problema
Δ𝛼𝑡
𝐿𝑡

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 13 -
Resolución
a. Expresión de
Por definición
El ángulo de ataque del estabilizador se ve modificado por la deformación del fuselaje en .
( ) ( )
b. Como afecta la elasticidad a la estabilidad
La derivada de estabilidad más importante para el caso de estabilidad estática longitudinal es .
(
)
La contribución del estabilizador a la derivada de estabilidad es
( )
(
)
(
)
( )
( )
Similarmente para el caso de que no haya flexibilidad ( )
( )
El efecto de la flexibilidad disminuye el módulo de ( ) por lo que hace el avión menos estable.
c. Variación de la efectividad
Por definición
( ) ( ) ( )
( ) ( )
Asumiendo que el es igual para ambos aviones, se puede ver que la efectividad aumenta.

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 14 -
Problema 4.
Un fabricante da los ejes principales de inercia y la inercia en esos ejes. Se pide encontrar el valor de
los momentos de inercia respecto a otros ejes. Se hace la suposición que el momento de inercia en
se mantiene constante ya que los ejes coinciden (faltan saber tres momentos de inercia e ).
Resolución
Los ejes principales de inercia son
(
)
Se busca primero el sistema de cambio de base
{
Se calcula primero el momento en
∫( ) ∫(
)
Por definición la integral del producto de dos ejes principales es cero
∫
∫[ ( )
]
∫ (
) (
)
Para el momento en es prácticamente lo mismo. El momento es
∫ ∫( )( )
∫(
∫(
) ∫(
) ( )
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 15 -
2. Vuelo de alta velocidad
Problema 1.
Considerando un vuelo de planeo en una atmosfera isoterma. La relación de presión – altitud viene
dada por la siguiente expresión, donde es constante.
Demostrad que el alcance y la autonomía puede expresarse como
∫
( )
∫
( )
Resolución
a) Alcance
El alcance es función del ángulo de descenso .
∫
∫
∫
El ángulo de descenso es
Por lo tanto la función solo depende de y .
Utilizando la relación entre la presión y la altitud se tiene
(
)
(
) (
)
Por lo que el alcance queda
∫
( )
La carga alar adimensional es

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 16 -
Nota: la que aparece en la ecuación de no es la misma que se utiliza en la ecuación del alcance.
En la ecuación del alcance es el ángulo de descenso, mientras que la otra es el coeficiente de
dilatación adiabática del aire.
Finalmente el alcance queda
∫
( )
b) Autonomía
De forma similar el tiempo de vuelo se puede definir de la siguiente forma
∫
∫
Del apartado anterior
( )
∫
( )
La velocidad de descenso es
( ) ( )
∫
( )
∫
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 17 -
Problema 2.
Considerando el vuelo de ascenso exacto de un turbofán de polar parabólica, demostrad que el
coeficiente de sustentación de equilibrio asociado viene dado con la siguiente ecuación
Donde los coeficientes , y dependen de los valores del régimen de giro corregido del rotor, la
carga alar adimensional y el número de Mach:
(
) (
)
Resolución
Las ecuaciones de ascenso, de un vuelo rectilíneo y uniforme, son
{
Se puede aislar de la primera ecuación y de la segunda ecuación el ángulo de ascenso,
{
Se adimensionalizan las variables , y utilizando el peso .
La última adimensionalización se obtiene fácilmente ya que
Por lo tanto las ecuaciones de ascenso adimensionalizadas quedan
{
Se utiliza la siguiente igualdad trigonométrica y se le introduce la primera ecuación.

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 18 -
Además el cuadrado de la segunda ecuación también contiene .
(
)
(
)
(
)(
) (
)
(
)
(
)
(
)
(
)
(
)
(
)
Igualando las dos expresiones de y reordenando los términos se obtiene ya la demostración.
(
)
(
)
] [ (
)]
[(
)
]

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 19 -
Problema 3.
Un caza tiene la siguiente polar parabólica
( ) ( )
Donde las funciones ( ) y ( ) son conocidas. También se conoce el coeficiente de empuje
adimensional ( ). Se pide
a) Dada una altitud y un número de Mach , encontrad la carga alar que permita un giro
constante y horizontal con radio de curvatura y que tenga la mínima relación ( ⁄ ) .
b) Utilizando la carga alar altitud y factor de carga obtenidos en el apartado anterior, encontrad
una expresión con la que se pueda obtener el número de Mach teniendo la relación
( ⁄ )
Resolución
a) Carga alar que tenga mínima relación ( ⁄ )
Al tener un vuelo con un giro en un plano horizontal se sabe que: . Se debe buscar el
mínimo de la relación empuje peso.
(
)
(
)
(
)
Al tener los parámetros y constantes, el factor de carga, el coeficiente de resistencia parásita y
la constante también son constantes.
Para obtener el mínimo se deriva la expresión respecto al único parámetro variable que es la carga
alar adimensional.
(
)
√
√
b) Expresión para obtener el número de Mach que tenga mínima relación ( ⁄ )
Se fija la carga alar (que es la que se ha obtenido en el apartado anterior) pero en cambio el número
de Mach es variable. Hay que recordar que los parámetros y dependen del número de Mach
por lo que hay que tener cuidado al hacer la derivada respecto al coeficiente de Mach.
(
)
(
) (
)
(
)

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 20 -
(
)
(
)
( ) ( ) ]

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 21 -
3. Estabilidad del movimiento no controlado
Problema 1.
Considera un globo con masa y volumen , en equilibrio estático en una atmosfera en calma.
Asumiendo que se conocen todos los valores aerodinámicos del globo se pide lo siguiente
a. La altitud de equilibrio
b. La ecuación del movimiento vertical alrededor de la altitud de equilibrio para pequeñas
perturbaciones
c. El tiempo característico del movimiento (despreciando la resistencia aerodinámica)
d. Una expresión adimensional para la ecuación del movimiento vertical
e. Las condiciones que deben satisfacerse para que la resistencia aerodinámica tenga que
considerarse como un término de segundo orden
Resolución
a. Altitud de equilibrio
La fuerza recibida es igual al peso de aire desplazado.
( )
( )
De la ecuación de la isa
( ) (
)
De forma más genérica se puede escribir
( ) ( )
[ (
)
]
b. Ecuación del movimiento vertical
La resistencia generada por el globo depende de hacia donde se mueve el globo
|
|

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 22 -
|
|
Si no fuese por el término de la resistencia esta ecuación se podría linealizar. Se linealizará el resto
de la ecuación y además haciendo la hipótesis que la resistencia es un diferencial de segundo orden
por lo que es muy pequeño. Se empieza linealizando la densidad.
(
)
Donde
[ (
)
]
(
)
De la ecuación del equilibrio . Además se puede hacer un cambio de variable
.
(
)
(
)
Volviendo a la ecuación de ISA
[ (
)
] (
)
( ) |
Siempre tiene el mismo signo, positivo. Volviendo a la derivada
[ (
)
]
Esto es una EDO de segundo orden cuya solución es del tipo
( ) ( )
c. Tiempo característico
Es un movimiento harmónico sin amortiguamiento. En la práctica sí que se amortigua ya que está la
resistencia del aire que se ha despreciado en la linealización.
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 23 -
( )
El tiempo característico es ⁄
d. Expresión adimensional de la ecuación del movimiento
Adimensionalizando
Volviendo a considerar el término de la resistencia
|
|
e. Condiciones para la resistencia aerodinámica
Para despreciar el término de la resistencia se tiene que cumplir
Si el globo fuese muy ligero o bien la superficie fuese grande o una densidad de equilibrio grande, el
movimiento se amortiguaría muy rápidamente.
De la ley de Arquímedes la masa es igual a la densidad por el volumen de aire desplazado.
( )
( ⁄ )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 24 -
Problema 2.
Asumiendo como condiciones de referencia vuelo recto, simétrico y horizontal con velocidad
constate , el movimiento de largo que sigue una pequeña perturbación puede ser analizado a
través de un modelo matemático simplificado basado en las siguientes hipótesis
- Peso constante
- Régimen incompresible
- Ángulo de ataque constante
- Variaciones de velocidad pequeñas comparado con la velocidad de referencia: ⁄
- Resistencia aerodinámica se equilibra con el empuje en todo momento .
- Densidad del aire constante dentro del rango de altitudes a considerar
Se pide lo siguiente
a. Identificar las variables y las ecuaciones que se usaran, y los grados de libertad
b. Utilizando el teorema Buckingham, indicar las formas posibles de la expresión que dan la
altitud y velocidad en función del tiempo
c. Dar una hipótesis adicional que podría ser consistente con ⁄
d. Encontrar la altitud y velocidad como función del tiempo
e. Verificar si la hipótesis se satisface realmente
Resolución
a. Variables, ecuaciones y grados de libertad
Figura 2.1.Diagrama de fuerzas del problema
Se empieza buscando el equilibrio de fuerzas en coordenadas de ejes cuerpo, de la figura se obtiene
{
𝑊
𝑇
𝐿
𝐷 𝛾

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 25 -
Del enunciado se sabe que
Las ecuaciones aerodinámicas no se utilizan ya que ambas son función de y se conocen los
coeficientes.
{
( )
( )
Las variables del problema son y . Al haber cuatro ecuaciones, el problema no tiene ningún
grado de libertad.
b. Teorema de Buckingham
El teorema Π de Buckingham dice como agrupar en paquetes ecuaciones adimensionales para poder
ver como es una variable en función de las otras.
Se adimensionaliza utilizando las variables y .
(
)
(
)
c. Hipótesis adicional
De la segunda ecuación obtenida
Se ve que una hipótesis que sea consistente para ⁄ es .
d. Altitud y velocidad
La variación de la altitud es
Sabiendo que
( )
( )
Se tiene

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 26 -
( )
( )
[
]
La energía específica que tiene el avión es
De las condiciones de referencia: y
√
Del equilibrio de fuerzas de la Figura 3.1 y con la condición de .
Se consideran ángulos pequeños ( ).
(
)
(
)
El primer término es ⁄ .

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 27 -
(√
)
Esta ecuación muestra un movimiento harmónico. Donde la frecuencia natural es
√
La solución general del problema es
[√
]
Dependiendo de las condiciones iniciales se obtiene el desfase .
[√
]
De la constante solo se puede decir que tiene que ser pequeña. La velocidad finalmente queda
√ [√
]
√
[√
]

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 28 -
Problema 3.
El modo fugoide de un avión puede ser analizado, según el mismo modelo simplificado del ejercicio
6, pero sin la hipótesis de que el empuje es igual a la resistencia ( ) sino que se utiliza un
sistema de dos ecuaciones linealizadas en las variables dependiente y . Se pide lo siguiente
a. Escribir el sistema de ecuaciones dinámicas de forma no dimensional
b. La frecuencia del movimiento, y compararlas con las obtenidas en el ejercicio 6
c. El coeficiente de amortiguación
Nota: a diferencia del ejercicio 6 en el equilibrio de fuerzas utilizar la ecuación vertical de ejes tierra,
y la ecuación en en ejes viento.
Resolución
a. Sistema de ecuaciones dinámicas adimensionales
Figura 3.1.Diagrama de fuerzas del problema
Aunque no lo diga el enunciado se hace la suposición de que el empuje es constate y no cambia de
dirección. También se considera que el ángulo de ataque es constante.
Del equilibrio de fuerzas (siguiendo el consejo del enunciado) es
{
Se simplifica considerando ángulos pequeños ( ) y se linealizan las dos ecuaciones. Se recuerda
que si una variable es nula en las condiciones estacionarias se omite el prefijo de la perturbación.
( ) ( )
𝑊
𝑇
𝐿
𝐷 𝛾

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 29 -
En el momento de referencia .
( )
La segunda ecuación queda
( ) ( ) ( )
En el momento de referencia y .
( )
El termino ya que se considera un infinitesimal de segundo orden.
Las dos ecuaciones quedan
{
( )
( )
Como se conocen los coeficientes aerodinámicos y además se hizo la suposición de que es
constante los coeficientes también lo son
| ( )
| ( )
La variación de la altitud es , por lo tanto el ángulo de cabeceo de la velocidad
(
)
Pero se puede despreciar el término ya que es un infinitesimal de segundo orden.
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 30 -
Aplicando las expresiones obtenidas para el ángulo de cabeceo de la velocidad y las cargas
aerodinámicas en las ecuaciones linealizadas, se obtiene
{
( )
( )
Debido a que el peso se puede escribir como
{
( )
( )
Se define ⁄ y se puede definir un tiempo característico como
A partir de la velocidad y tiempo adimensional se pueden crear nuevos números adimensionales
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
Las ecuaciones adimensionales quedan
{
{
En forma matricial queda

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 31 -
[
]
{
} {
}
b. Frecuencia de movimiento
La solución a ensayar es una función compleja exponencial que se puede relacionar con funciones
trigonométricas.
Se hace el cambio de variable siguiente
{
} {
}
Se sabe que las derivadas de la exponencial son
La ecuación matricial queda
[
] {
} {
}
La exponencial es una función que nunca se anula por lo que para que se cumpla la ecuación se tiene
que cumplir que el producto de matriz y vector sea cero. Para que eso se cumpla se tiene que
cumplir que el determinante de la función sea cero.
]{ } { } ]
El determinante de la función es
[
]
Las soluciones posibles son
{
El polinomio de segundo orden se puede resolver para conseguir dos soluciones más.
√ (
)
√ (
)

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 32 -
Se omite la primera solución trivial ( ), la solución queda pues
{
(
) ( √ (
)
)
(
) ( √ (
)
)
La solución final de las perturbaciones es igual a la suma de las soluciones de todos los autovalores
{
(
) ( √ (
)
) (
) ( √ (
)
)
(
) ( √ (
)
) (
) ( √ (
)
)
{
(
){[ (√ (
)
) (√ (
)
)] [ (√ (
)
) (√ (
)
)]}
(
){[ (√ (
)
) (√ (
)
)] [ (√ (
)
) (√ (
)
)]}
{
(
) (√ (
)
)
(
) (√ (
)
)
El movimiento definido por estas ecuaciones se denomina fugoide. Volviendo a la ecuación
, se puede rescribir la ecuación dejarla de la siguiente forma
La frecuencia natural es √ , que también es el módulo de para el caso en que ⁄ .
En el ejercicio 6 se obtiene una frecuencia natura √ ⁄ , que es la misma si se
adimensionaliza de la misma forma que se hizo al adimensionalizar las ecuaciones del movimiento
en este ejercicio.
c. Coeficiente de amortiguación
La relación de amortiguamiento es
√
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 33 -
Problema 4.
Se pretende estudiar el movimiento no controlado que experimenta un avión caza bombardero
después de soltar una bomba, partiendo de una condición de vuelo horizontal, rectilíneo y con
velocidad constante. Considerando conocidas todas las características aerodinámicas geométricas y
másicas del avión se hacen las siguientes hipótesis
- La masa del avión es mucho más grande que la de la bomba
- El centro de gravedad del avión no cambia después de soltar la bomba
- El empuje del motor no varía con la velocidad de vuelo
Se pide
a. Describir cualitativamente el movimiento del avión posterior a soltar la bomba, e indicar si
hay alguna aproximación adecuada para resolver el movimiento
b. Razonar que condición de referencia conviene tomar para estudiar el movimiento y las
condiciones iniciales
c. Plantear las ecuaciones del movimiento y las condiciones iniciales
d. Resolver el sistema anterior y determina el movimiento y el tiempo que transcurre para
tener un ángulo de asiento ⁄
Para la aplicación numérica del último apartado se toma:
⁄ ⁄
Resolución
a. Descripción cualitativa
Al soltar la bomba, el avión tendrá una sustentación ligeramente superior al peso, por lo tanto
ascenderá. Debido a que el movimiento no será suficientemente rápido como para ser modo de
corto periodo, el movimiento puede aproximarse por un modo fugoide.
Se recuerda que en el modo fugoide se impone que y son nulos.
b. Condición de referencia
La condición de referencia corresponde al estado final, una vez el movimiento transitorio se haya
amortiguado y esté en régimen estacionario. En esta condición se tiene velocidad uniforme con
un ángulo de ascenso .
Se consideran ángulos pequeños.
Antes de lanzar la bomba se tiene (del equilibrio de fuerzas)
{ ( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 34 -
Se puede ver que en el movimiento de referencia se tendrá
Sabiendo que
Dado que los coeficientes aerodinámicos estacionarios no varían si el centro de gravedad no varía se
puede considerar
( )
√
Para calcular la inclinación de la trayectoria
(
) (
) (
)
Del equilibrio de fuerzas horizontales se tiene
(
)
(
)
(
)
(
)(
)
c. Ecuaciones del movimiento y condiciones iniciales
Al tener modo fugoide el sistema reducido de ecuaciones del movimiento (ya incluyendo las
hipótesis de que el empuje no varía con la velocidad y despreciando efectos de compresibilidad) se
tiene como

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 35 -
[
( ) ] {
} {
}
Debido a que el empuje no varía con la velocidad y se desprecian los efectos de compresibilidad se
tiene que . Además se puede despreciar la componente de respecto a es decir
Se calcula la derivada de estabilidad
|
( )|
|
Sabiendo que
( )
( )
Del apartado b. se tiene
Obteniendo
Finalmente el sistema reducido de ecuaciones del movimiento queda
[
] {
} {
}
Se estudian soluciones exponenciales
{
} {
}
Por lo que el sistema queda
[
] {
} {
}
Los autovalores se obtienen resolviendo el sistema que queda al igualar el determinante a .
(
) (
)

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 36 -
(
)
(
)
Se aplica ahora la aproximación ⁄ . Se puede hacer una aproximación más al considerar
que
⁄ . El polinomio simplificado queda
Esta es la expresión simple del modo fugoide cuando el movimiento de referencia es horizontal y
rectilíneo. Por lo tanto el factor de amortiguamiento y la frecuencia natural son
√
√
Las dos raíces del polinomio característico son
√
√(
)
√
√
(
)
√
El módulo de este fasor es
| | √ √
√
√
√
Se ha despreciado la contribución de respecto a
ya que suele ser de unos cuatro órdenes
de magnitud.
La solución general para las variables dependientes es
( )
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 37 -
Las amplitudes y son los módulos de los fasores complejos de y que deben satisfacer
por ejemplo la segunda ecuación del sistema (pero despreciando el termino ⁄ respecto a
.
( )
( )
Como se ha dicho que y son los módulos de los fasores complejos de y , se debe
obtener el módulo de la parte fasorial ( ).
| |
√
√
El desfase entre los ángulos de fase, definidos como es
(
) ( √
)
Resulta que ⁄ . De hecho en casos típicos de aviones con fineza de , se ve que el desfase
es de un ángulo ⁄ .
En las condiciones iniciales se tiene
{ ( )
( )
√ ( )
( ) ( )
Este sistema sirve para resolver las únicas variables incógnitas y . Se debe de resolver de
forma iterativa.
Con las expresiones analíticas de y obtenidas se podrían integrar fácilmente las ecuaciones de
la trayectoria, que, para el caso particular de son
( ) ( ) ( )
( ) ( )
(
)
Se recuerda que al ser el ángulo de ataque constante se tiene .
a. Tiempo para ⁄
(
)

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 38 -
b. Ejemplo numérico
Se utilizan los siguientes valores numéricos
Primero se obtienen los valores de referencias para el ángulo de cabeceo y la velocidad
√
√
√
√
El sistema queda
[
] {
} {
}
[
] {
} {
}
El polinomio característico queda
√
El módulo de este fasor es
| | √ √
En el tercer apartado se obtuvo la siguiente relación
√
El desfase es
( √
)
Donde puede ser ó , dependiendo de las soluciones, ya que las amplitudes deben ser positivas.
De las ecuaciones de las condiciones iniciales. .
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 39 -
{
√ ( )
( )
{
( )
( )
Este sistema se resuelve de forma numérica resultando
Las otras dos variables quedan
√
√
Por lo tanto la solución del sistema es
( ) ( )
( ) ( )
El tiempo hasta conseguir la mitad de la amplitud ⁄ es
(
)
(
)
Para una cuerda y una velocidad ⁄ , se obtiene un tiempo en de

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 40 -
Problema 5.
Un avión de transporte tiene las siguientes características:
- Masa
- Envergadura
- Superficie alar
- Momentos de inercia
Se pretende estudiar el modo oscilatorio lateral a una velocidad de ⁄ y a ISA, partir
de un modelo simple, considerando movimiento horizontal y rectilíneo ( ), y únicamente el
movimiento de guiñada con único grado de libertad, forzando que sea nulo el ángulo .
Las derivadas de estabilidad lateral son
Tabla 3.1. Derivadas de estabilidad lateral
De acuerdo con las hipótesis indicadas, se pide:
a. Razonar que ecuaciones se deben eliminar
b. Encontrar la ecuación característica
c. Determinar la frecuencia y amortiguamiento
Las ecuaciones generales del movimiento lateral son
[
]
{
}
{
( )
(
) ( ) ( )
( ) (
) ( )
}

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 41 -
Resolución
a. Ecuaciones para eliminar
Para empezar los parámetros de control son todos cero.
Las ecuaciones de la fuerza lateral (primera ecuación) y del momento (segunda ecuación) se
descartan debido a que se especifica que únicamente se debe de considerar el grado de libertad de
guiñada. Estas ecuaciones vienen impuestas.
Dado que se considera el balance es nulo ( ) además el ángulo de inicial se obtiene que
. La cuarta ecuación se descarta.
Queda entonces únicamente la tercera ecuación
( )
b. Ecuación característica
Como el movimiento es rectilíneo se puede igualar el ángulo de guiñada ( ) con el ángulo de
resbalamiento ( ).
Se recuerda que son derivadas respecto al tiempo.
Obteniendo
Se estudian las soluciones exponenciales
Se recuerda que el tiempo está adimensionalizado con la envergadura debido a que es un modo
lateral – direccional.
La ecuación característica queda
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 42 -
La solución de los autovalores es
√
c. Frecuencia y amortiguamiento
La ecuación característica se puede escribir de la forma
Por lo tanto
√
√
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 43 -
Problema 6.
Se pretende estudiar el comportamiento dinámico longitudinal de un avión de transporte para la
condición de referencia de vuelo horizontal, simétrica y rectilínea a y . El
avión tiene las siguientes características másicas y geométricas:
- Masa
- Superficie alar
- Cuerda media aerodinámica
- Momentos de inercia
Para esta condición, las derivadas de estabilidad son las siguientes
Tabla 3.2. Derivadas de estabilidad
Se pide
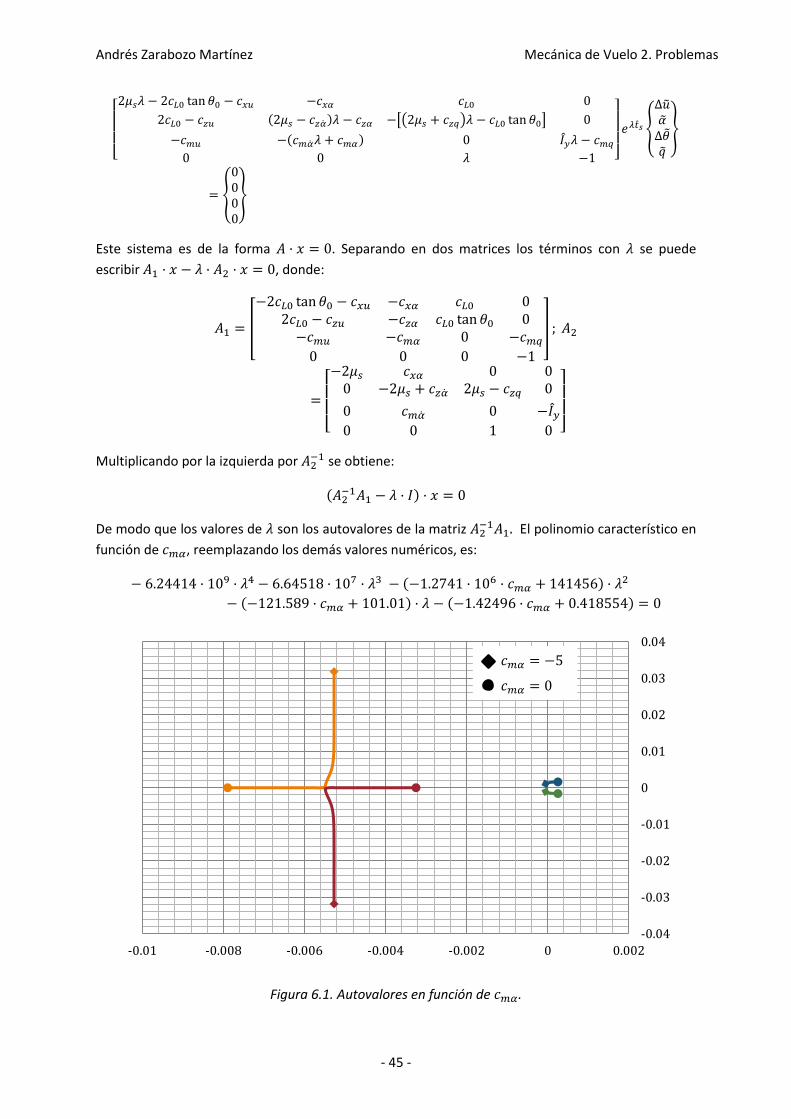
a. Representar gráficamente en el plano complejo (parte real y parte imaginaria) el lugar
geométrico de las raíces del polinomio característico, cuando el parámetro varía entre
y (con el resto de parámetros iguales a las de la tabla) y cuando el parámetro varía
entre y (con el resto de parámetros iguales a los de la tabla).
b. Comparar las gráficas anteriores con los que se obtienen haciendo uso de las expresiones
aproximadas de los modos fugoides y de corto periodo
c. Para los valores indicados en la tabla, encontrar las raíces y los autovalores asociados, y
determinar y representar gráficamente la respuesta en función del tiempo cuando
inicialmente ( ) la velocidad es un 10% inferior a la de referencia y el resto de variables
y son nulas.

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 44 -
Resolución
Cálculo de parámetros numéricos:
Para en atmósfera ISA se tiene:
( ) ( ) ( )
( ) ( )
⁄
La velocidad y la presión dinámica de referencia son:
√ √ ⁄
La masa adimensional es:
El momento de inercia adimensional es:
Finalmente, en las condiciones de referencia, el coeficiente de sustentación es:
Obtención de los autovalores para el sistema completo:
El sistema de ecuaciones del movimiento longitudinal es:
[
( ) [( ) ]
( )
]
{
}
{
}
Se ensayan soluciones de tipo exponencial:
Aplicando los operadores de derivación se obtiene:
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 45 -
[
( ) [( ) ]
( )
]
{
}
{
}
Este sistema es de la forma . Separando en dos matrices los términos con se puede
escribir , donde:
[
]
[
]
Multiplicando por la izquierda por se obtiene:
( )
De modo que los valores de son los autovalores de la matriz El polinomio característico en
función de , reemplazando los demás valores numéricos, es:
( )
( ) ( )
Figura 6.1. Autovalores en función de .
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
-0.01 -0.008 -0.006 -0.004 -0.002 0 0.002
𝑐𝑚𝛼
𝑐𝑚𝛼
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 46 -
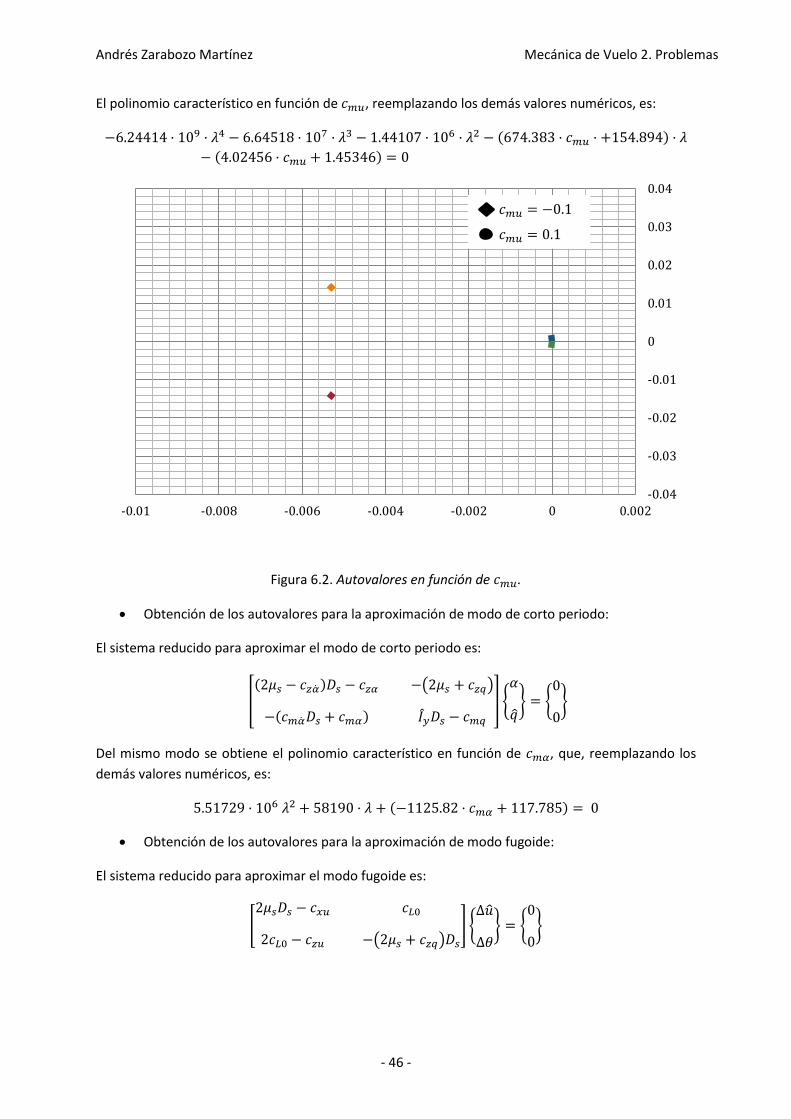
El polinomio característico en función de , reemplazando los demás valores numéricos, es:
( )
( )
Figura 6.2. Autovalores en función de .
Obtención de los autovalores para la aproximación de modo de corto periodo:
El sistema reducido para aproximar el modo de corto periodo es:
[( ) ( )
( )
] {
} {
}
Del mismo modo se obtiene el polinomio característico en función de , que, reemplazando los
demás valores numéricos, es:
( )
Obtención de los autovalores para la aproximación de modo fugoide:
El sistema reducido para aproximar el modo fugoide es:
[
( )
] {
} {
}
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
-0.01 -0.008 -0.006 -0.004 -0.002 0 0.002
𝑐𝑚𝑢
𝑐𝑚𝑢

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 47 -
Este modo no incluye la ecuación del momento de cabeceo , por lo que los autovalores son
constantes respecto a y . Reemplazando los valores numéricos el polinomio característico
es:
Y por lo tanto las raíces son:
Figura 6.3. Autovalores de la aproximación de corto periodo (rojo y naranja)
y del modo fugoide (azul y verde) en función de .
Comparación de los resultados:
Comparando las gráficas se ve que para el sistema completo, si , el modo se hace
dinámicamente inestable, mientras que en la aproximación no depende de , y siempre es
estable.
Para el caso de corto periodo, cuando , la frecuencia disminuye tanto en el sistema
completo como en el aproximado, pero la parte real de la aproximación (tiempo característico)
difiere ligeramente.
-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
-0.01 -0.008 -0.006 -0.004 -0.002 0 0.002
𝑐𝑚𝛼
𝑐𝑚𝛼

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 48 -
Condiciones iniciales:
La perturbación inicial de la velocidad es de un 10% de la velocidad de referencia, ( )
. Para el resto de variables las condiciones iniciales son iguales a las de referencia.
Obtención de los autovalores:
Los autovalores para el caso de la tabla 1 son:
Obtención de los autovectores:
Los autovectores se obtienen a partir del sistema ( ) . Los autovectores
normalizados a partir del módulo son
{
} {
} {
} {
}
{
} {
} {
} {
}
Obtención de las amplitudes:
La solución de cada variable será una combinación lineal de cada una de las soluciones obtenidas:
∑
Donde la amplitud representa el peso del autovalor en la solución. Si se considera el instante
inicial las exponenciales son , por lo tanto:
( ) ∑

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 49 -
Entonces se puede escribir el sistema:
] {
} {
}
Donde ] es la matriz formada por los autovectores en columna. Este sistema se puede resolver
invirtiendo la matriz ]:
{
} {
} {
}
Cada coeficiente de la solución de vale entonces, escrito en coordenadas polares:
Módulo Fase Módulo Fase Módulo Fase Módulo Fase
0.0002330 –0.3414072 0.0002330 0.3414072 0.0502658 –3.0986775 0.0502658 3.0986775
0.0072235 –1.1402435 0.0072235 1.1402435 0.0030427 3.0063370 0.0030427 –3.0063370
0.0067890 –1.4389558 0.0067890 1.4389558 0.0799590 1.5819582 0.0799590 –1.5819582
0.0001040 0.4924158 0.0001040 –0.4924158 0.0000918 –3.0872913 0.0000918 3.0872913
Tanto los autovalores como los coeficientes correspondientes forman pares de
números complejos conjugados. Por ello se puede escribir:
∑
∑| | ( )
∑| | ( )
∑| | ( ( ) ( ))
Al ser complejos conjugados se duplican los términos con ( ) y se eliminan los términos
con ( ):
| | ( ) | | ( )
Las ecuaciones quedan entonces:

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 50 -
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
En forma dimensional:
( ) ( ) ⁄ ]
( ) ( )
( ) ( ) ]
( ) ( )
( ) ( ) ]
( ) ( )
( ) ( ) ⁄ ]
( ) ( )
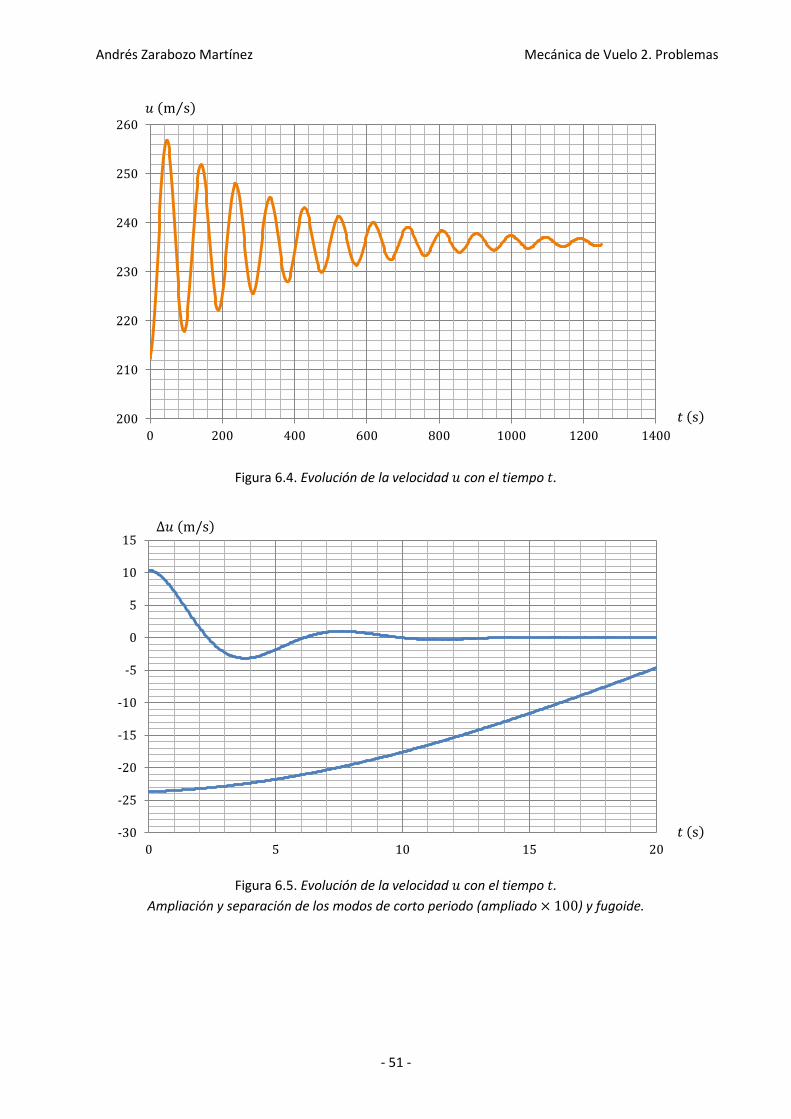
Se muestra a continuación la variación de las condiciones de vuelo a lo largo del tiempo, y también
se separan los modos de corto periodo y fugoide.
Comentarios.
Se puede ver en las gráficas que el tiempo característico de corto periodo es mucho menor que el
modo fugoide. Las frecuencias de ambos también difieren en un orden de magnitud.
Además se puede comprobar que la velocidad casi no se ve afectada en el modo de corto periodo
(se ha tenido que ampliar veces para poder observar el modo) y por tanto la aproximación de
que para el modo de corto periodo es aceptable.
Comparando los coeficientes de las ecuaciones adimensionales para el modo fugoide se ve
claramente que la magnitud de y son mucho mayores que las de y . Por lo tanto la
simplificación del modo fugoide puede considerarse válida.
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 51 -
Figura 6.4. Evolución de la velocidad con el tiempo .
Figura 6.5. Evolución de la velocidad con el tiempo .
Ampliación y separación de los modos de corto periodo (ampliado ) y fugoide.
200
210
220
230
240
250
260
0 200 400 600 800 1000 1200 1400
⁄
-30
-25
-20
-15
-10
-5
0
5
10
15
0 5 10 15 20
( )
( )
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 52 -
Figura 6.6. Evolución del ángulo de ataque con el tiempo .
Figura 6.7. Evolución del ángulo de ataque con el tiempo .
Ampliación y separación de los modos de corto periodo y fugoide.
-1.E-02
-8.E-03
-6.E-03
-4.E-03
-2.E-03
0.E+00
2.E-03
4.E-03
6.E-03
8.E-03
0 200 400 600 800 1000 1200 1400
-8.E-03
-6.E-03
-4.E-03
-2.E-03
0.E+00
2.E-03
4.E-03
6.E-03
8.E-03
1.E-02
1.E-02
0 5 10 15 20
( )
( )
( )
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 53 -
Figura 6.8. Evolución del ángulo de cabeceo con el tiempo .
Figura 6.9. Evolución del ángulo de cabeceo con el tiempo .
Ampliación y separación de los modos de corto periodo y fugoide.
-2.E-01
-2.E-01
-1.E-01
-5.E-02
0.E+00
5.E-02
1.E-01
2.E-01
0 200 400 600 800 1000 1200 1400
-2.E-01
-1.E-01
-1.E-01
-1.E-01
-8.E-02
-6.E-02
-4.E-02
-2.E-02
0.E+00
2.E-02
0 5 10 15 20
( )
( )
( )
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 54 -
Figura 6.10. Evolución de la velocidad angular de cabeceo con el tiempo .
Figura 6.11. Evolución de la velocidad angular de cabeceo con el tiempo .
Ampliación y separación de los modos de corto periodo y fugoide.
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0 200 400 600 800 1000 1200 1400
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0 5 10 15 20
( )
( )
( )
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 55 -
4. Respuesta en lazo abierto y cerrado
Problema 1.
Se pretende analizar la respuesta longitudinal de un avión cuando, partiendo de una condición de
vuelo horizontal, simétrica, rectilínea y velocidad constante, el piloto acciona rápidamente el mando
longitudinal, manteniéndolo durante un tiempo breve, y devolviéndolo acto seguido a la posición
original. Se pide:
a) Indicar si hay alguna simplificación adecuada para estudiar el movimiento
b) Determinar las variables para
c) Discutir si el resultado obtenido tiene sentido
Nota: se puede modelar la acción como una función impulso
Resolución
Se analiza la formulación matricial para el movimiento longitudinal.
[
( ) [( ) ]
( )
]
{
}
[
]
{ ( )
( )}
Solo se acciona el mando longitudinal por lo que ( ) . Al ser vuelo horizontal .
[
( ) ( )
( )
]
{
} [
] ( )
De la cuarta ecuación se obtiene
Sustituyendo esto en la segunda ecuación y haciendo la simplificación de que la velocidad no se ve
afectada inmediatamente por la variación del timón de profundidad se obtiene la aproximación de
corto periodo.
[( ) ( )
( )
] {
} {
} ( )
Se hace la transformada de Laplace
[( ) ( )
( )
] { ( )
( )} {
} ( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 56 -
Se hace la inversa de la matriz del sistema
[( ) ( )
( )
]
( ) ]( ) ( )( )[
( )
]
El denominador definido como la función ( ) se puede simplificar de la siguiente manera
( ) ( ) ]( ) ( )( )
( ) [ ( ) ( ) ] ( )
Este polinomio se puede escribir de la siguiente forma
( ) ( )( )
Donde
√
( )
( ) ( )
√ ( )( )
El polinomio tiene dos soluciones y su conjugado.
( √ )
( ) ( )( )( )
Obteniendo el sistema siguiente
{ ( )
( )}
( )( )( )[
( )
] {
} ( )
La respuesta en el espacio de Laplace es
( ) ( )
( )(
)
( )( )( ) ( )
( )
[ ( )
] [ ( )
]
( )( ) ( )
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 57 -
( ) ( )
( ) ](
)
( )( )( ) ( )
[( )
] [ ( )
] [
]
( ) ( )( ) ( )
Se desprecia el término . Para la entrada impulso la transformada de Laplace
( ( )) ( )
Se tiene
( )
( )
[
( ) ]
( )
( )
( )
[ ( )
] [
]
( )
Se aplica el teorema del valor inicial.
( )
( ) ]
[
( )
[
( ) ]
( )
]
Utilizando dos veces el teorema de l’Hôpital el límite queda
( )
( )
Se resuelve el limite para ( ) de forma similar
( )
( )
( )
La respuesta final en forma vectorial es
{ ( )
( )}
( ){
( )
}

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 58 -
Problema 2.
Se pretende analizar la respuesta longitudinal de un avión propulsado por motor a reacción cuando,
partiendo de una condición de vuelo horizontal, simétrica, rectilínea y velocidad constante, el piloto
avanza rápidamente la palanca de gases, manteniéndola en la nueva posición. Considerando
negligible el tiempo de retraso en la respuesta del motor (aunque en la realidad pueda tener un
retraso), se pide:
d) Indicar si hay alguna simplificación adecuada para estudiar el movimiento
e) Determinar las variables para
f) Discutir si el resultado obtenido tiene sentido
Nota: se puede modelar la acción como una función escalón
Resolución
Se analiza la formulación matricial para el movimiento longitudinal.
[
( ) [( ) ]
( )
]
{
}
[
]
{ ( )
( )}
Solo se acciona la palanca de gases por lo que ( ) , además al ser vuelo horizontal .
[
( ) ( )
( )
]
{
} {
} ( )
Considerando que el ángulo de ataque no se ve modificado inmediatamente por la variación del
empuje ( ), utilizando las dos primeras ecuaciones se obtiene la aproximación fugoide.
[
( )
] {
} {
} ( )
Se hace la transformada de Laplace.
[
( ) ] {
} {
} ( )
Se hace la inversa de la matriz del sistema
[
( ) ]
( )[ ( )
( )
]
Donde ( ) es
( ) ( )( ) ( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 59 -
( ) ( )
El sistema queda
{
}
( )[ ( )
( )
] {
} ( )
{
}
( ){ ( )
( )
} ( )
Para la entrada escalón la transformada de Laplace es
( ( )) ( )
El sistema queda
{
}
( ){ ( )
( )
}
Se aplica el teorema del valor final.
{ ( )
( )}
{ ( )
( ) }
{
( )
} {
}
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 60 -
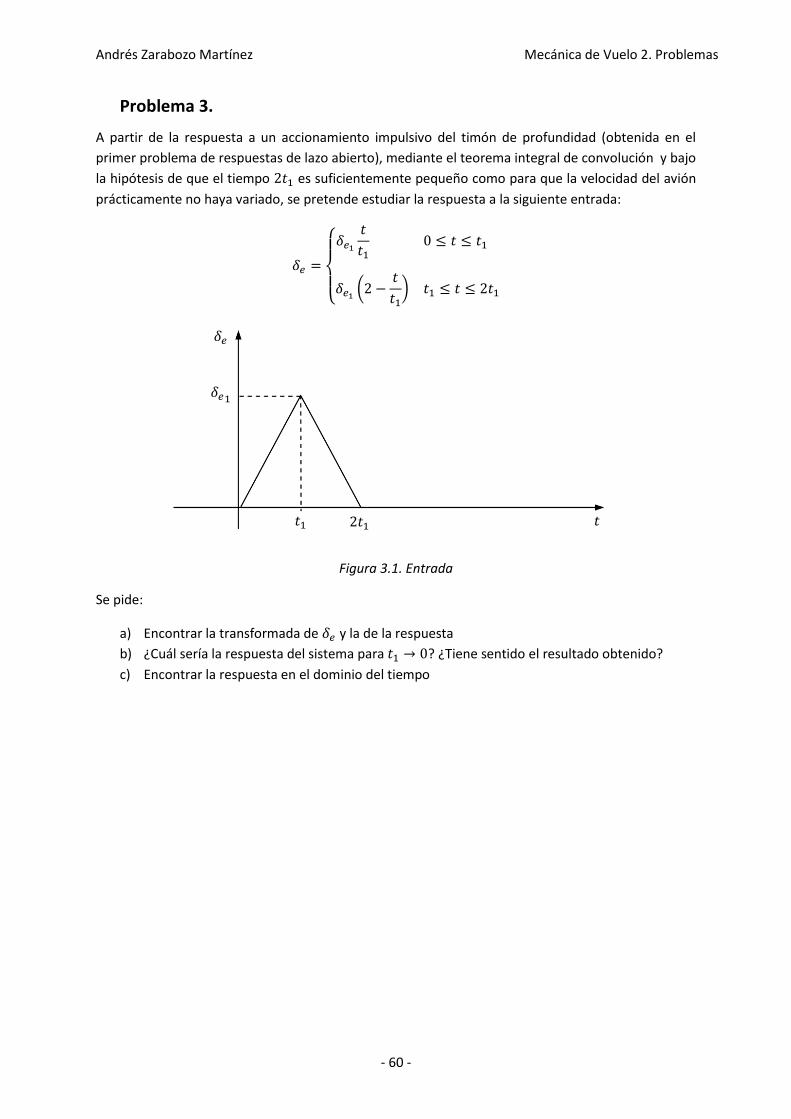
Problema 3.
A partir de la respuesta a un accionamiento impulsivo del timón de profundidad (obtenida en el
primer problema de respuestas de lazo abierto), mediante el teorema integral de convolución y bajo
la hipótesis de que el tiempo es suficientemente pequeño como para que la velocidad del avión
prácticamente no haya variado, se pretende estudiar la respuesta a la siguiente entrada:
{
(
)
Figura 3.1. Entrada
Se pide:
a) Encontrar la transformada de y la de la respuesta
b) ¿Cuál sería la respuesta del sistema para ? ¿Tiene sentido el resultado obtenido?
c) Encontrar la respuesta en el dominio del tiempo
𝛿𝑒
𝑡 𝑡 𝑡
𝛿𝑒

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 61 -
Resolución
La respuesta a un accionamiento impulsivo del timón de profundidad de forma general (habiendo ya
impuesto la suposición de modo de corto periodo y ) es
{
( )
( )
}
( )
{
[
( ) ]
( )
[ ( )
] [
]
( ) }
( )
Se debe buscar la transformada de Laplace de la entrada ( ( )) ( ).
∫ ( )
∫
∫ (
)
Esta integral se puede dividir en tres más sencillas
∫
(
∫
)
( )
∫
( )
∫ (
)
[ (
)
( )]
( )
( )
Sumando las tres integrales queda
( ) ( )]
Por lo tanto la respuesta es
( )
( )
[
( ) ]
( )
( )
( )
[ ( )
] [
]
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 62 -
Los exponenciales del numerador solo generan un desplazamiento en la respuesta ya que
( ( )) ( ) ( )
Donde ( ) es una función escalón.
Por lo tanto solo hace falta determinar la forma general sin tener en cuenta las exponenciales y
después hacer las correcciones por desfase. Se define con asterisco las soluciones simplificadas.
( )
( )
[
( ) ]
( )
( )
( )
[ ( )
] [
]
( )
Para hacer la transformada inversa conviene descomponer el polinomio del denominador. Se
recuerda que las raíces del polinomio de segundo grado son conjugados y son
( √ ) ( √ )
Se descompone el denominador.
( )
( )( ) ( )( ) ( ) ( )
Obteniendo el siguiente sistema
( )
( )
Obteniendo
( )
| |
( )
| |
( )
Para simplificar la expresión de la respuesta se van a utilizar las constantes , , y . Para
conseguir
( )
( )
( )
( )

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 63 -
Donde
( )
( )
( )
( )
( )
Haciendo la simplificación del polinomio se tiene
( ) ( )(
) ( ) ( ) (
)
Expandiendo las dos respuestas
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
Con estos factores elementales ya es trivial obtener la transformada inversa de Laplace.
( ) ( ) ( ) ( ) ( )
( ) ( ) [ ( ) ]
( ) ( ) ( ) ( )
Donde
( )]
Similarmente para la otra respuesta se obtiene
( ) ( ) ( ) ( ) ( )
A partir de la solución elemental, ya se puede escribir la respuesta total, teniendo en cuenta el
desfase que introducen las exponenciales en ( ).
( )
( ) ( ) ( )]
( )
( ) ( ) ( )]
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 64 -
Como estudio a parte se presenta una simplificación del estudio a partir del momento en que se
tienen las respuestas antes de hacer la transformada inversa de Laplace.
Para , se ve que ( ) presenta una indeterminación del tipo ⁄ . No obstante desarrollando
las exponenciales en serie de Mclaurin hasta orden dos se obtiene
(
) (
)
Utilizando esta simplificación se obtiene una solución parecida a un impulso, aunque en la práctica la
aplicación de una deflexión infinitesimal no pueda existir esta simplificación da resultados bastante
parecidos a los obtenidos antes.

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 65 -
Problema 4.
Se pretende diseñar un piloto automático para un avión comercial con un modo supresor de
fugoide, de acuerdo con la teoría de pequeñas perturbaciones, con una entrada de velocidad
controlada por (en lugar del ángulo ), y actuando únicamente sobre el timón de profundidad.
Con el fin de tener en cuenta las variaciones del ángulo de ataque , se considerará una
aproximación fugoide modificada, respecto a la simplificación habitual. La velocidad angular és
pequeña, con una variación temporal negligible, es decir, despreciando el momento total . Y
también se desprecian las contribuciones de y en y , pero manteniendo la dependencia de
en y .
Partiendo de la condición de vuelo simétrico horizontal y rectilíneo con velocidad constante, y con
las derivadas de estabilidad de la Tabla 4.1, y suponiendo que el controlador es del tipo proporcional
(con una constante ), se pide:
a) Representar el diagrama de bloques correspondiente a este modo
b) Escribir el sistema de ecuaciones simplificado y obtener la ecuación característica
c) Obtener la solución estacionaria ( ) correspondiente a una entrada .
Discutir el resultado obtenido
Tabla 4.1. Derivadas de estabilidad longitudinal
Se tienen además los siguientes parámetros
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 66 -
Resolución
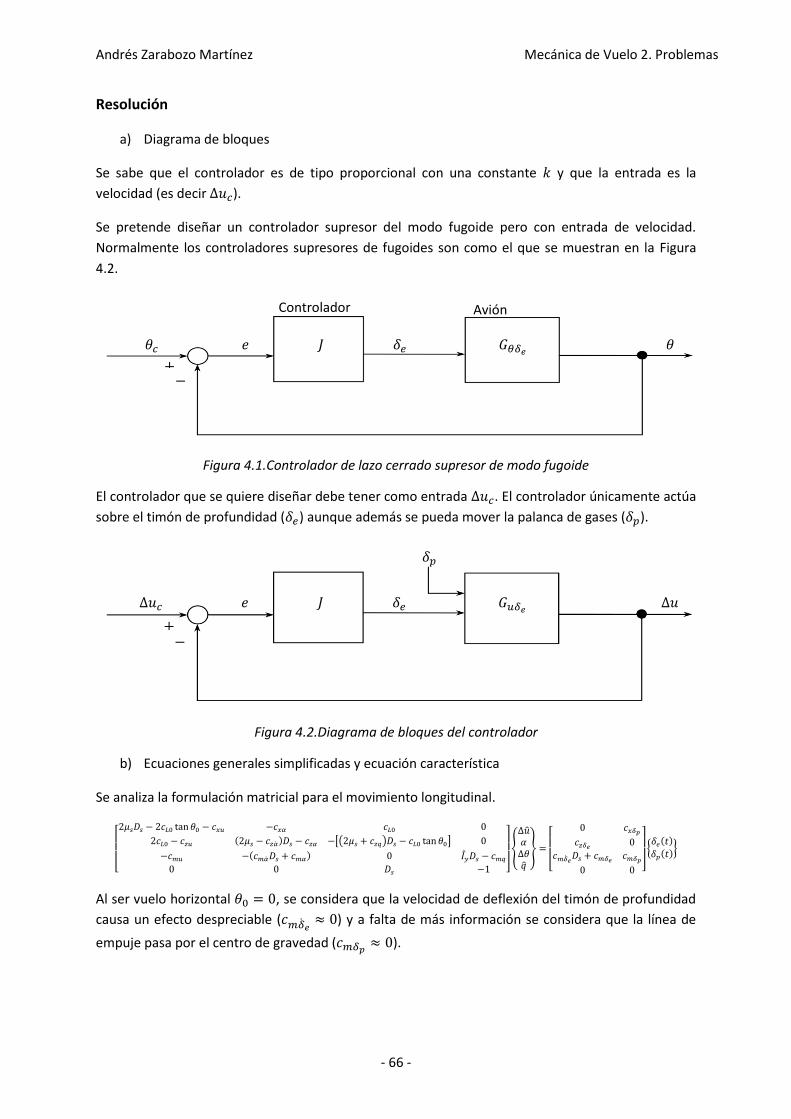
a) Diagrama de bloques
Se sabe que el controlador es de tipo proporcional con una constante y que la entrada es la
velocidad (es decir ).
Se pretende diseñar un controlador supresor del modo fugoide pero con entrada de velocidad.
Normalmente los controladores supresores de fugoides son como el que se muestran en la Figura
4.2.
Figura 4.1.Controlador de lazo cerrado supresor de modo fugoide
El controlador que se quiere diseñar debe tener como entrada . El controlador únicamente actúa
sobre el timón de profundidad ( ) aunque además se pueda mover la palanca de gases ( ).
Figura 4.2.Diagrama de bloques del controlador
b) Ecuaciones generales simplificadas y ecuación característica
Se analiza la formulación matricial para el movimiento longitudinal.
[
( ) [( ) ]
( )
]
{
}
[
]
{ ( )
( )}
Al ser vuelo horizontal , se considera que la velocidad de deflexión del timón de profundidad
causa un efecto despreciable ( ) y a falta de más información se considera que la línea de
empuje pasa por el centro de gravedad ( ).
𝜃𝑐 𝑒 𝐽 𝛿𝑒 𝐺𝜃𝛿𝑒 𝜃
Controlador Avión
Δ𝑢𝑐 𝑒 𝐽 𝛿𝑒 𝐺𝑢𝛿𝑒 Δ𝑢
𝛿𝑝

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 67 -
[
( ) ( )
( )
]
{
}
[
]
{ ( )
( )}
Según el enunciado, la velocidad angular de cabeceo es pequeña por lo que se pueden despreciar
y la variación del ángulo de ataque ( ). Por lo tanto de la tercera ecuación se obtiene
( )
Sustituyendo este resultado en las dos primeras ecuaciones se obtiene un sistema reducido de dos
ecuaciones. Se desprecian además las contribuciones de y .
[
( )
] {
} [
( )
]{
}
Como se tiene un controlador proporcional, donde es la velocidad deseada, es
( )
Por lo tanto el sistema de ecuaciones queda
[
( )
[
( )
]
]{
} {
[ ( )
]
}
c) Respuesta a una entrada escalón
Al tener solo como entrada la otra entrada ( ) es nula.
[
( )
[
( )
]
]{
} {
[ ( )
]
}
Se hace la transformada de Laplace.
[
( )
[
( )
]
] [
]
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 68 -
{
[ ( )
]
}
Se resuelve el sistema , multiplicando por la inversa de la matriz .
{
}
( ) ( )[
]
{
[ ( )
]
}
[
]
{
}
{
}
De acuerdo con el teorema del valor final, el límite para corresponde al límite para .
{
}
{
}
[
{
}] {
}
Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 69 -
Problema 5.
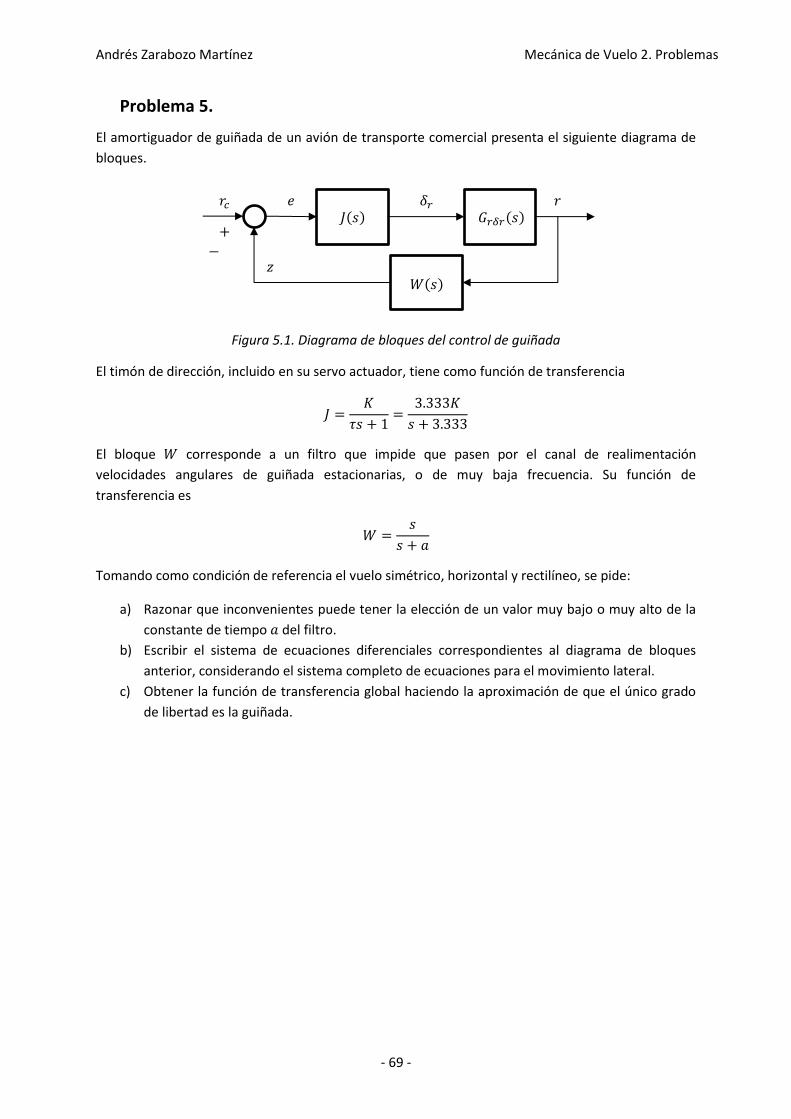
El amortiguador de guiñada de un avión de transporte comercial presenta el siguiente diagrama de
bloques.
Figura 5.1. Diagrama de bloques del control de guiñada
El timón de dirección, incluido en su servo actuador, tiene como función de transferencia
El bloque corresponde a un filtro que impide que pasen por el canal de realimentación
velocidades angulares de guiñada estacionarias, o de muy baja frecuencia. Su función de
transferencia es
Tomando como condición de referencia el vuelo simétrico, horizontal y rectilíneo, se pide:
a) Razonar que inconvenientes puede tener la elección de un valor muy bajo o muy alto de la
constante de tiempo del filtro.
b) Escribir el sistema de ecuaciones diferenciales correspondientes al diagrama de bloques
anterior, considerando el sistema completo de ecuaciones para el movimiento lateral.
c) Obtener la función de transferencia global haciendo la aproximación de que el único grado
de libertad es la guiñada.
𝑟 𝐺𝑟𝛿𝑟(𝑠)
𝑊(𝑠) 𝑧
𝑒
𝑟𝑐 𝐽(𝑠)
𝛿𝑟

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 70 -
Resolución
a) Razonar inconvenientes de bajo
El bloque es un filtro pasa altos, donde es la frecuencia de corte. Cuanto menor sea menor
será el rango de frecuencias filtradas, pero si es muy grande se puede estar filtrando información
importante. Como casos extremos si no se filtra ninguna frecuencia y si se filtran todas
las frecuencias por lo que no hay realimentación.
b) Sistema de ecuaciones diferenciales
Se desarrolla el diagrama de bloques desde la salida hacia atrás.
( )
( )
Despejando la
( )
La función de transferencia obtenida a partir de se denomina ganancia en lazo abierto. Esta
función depende de la frecuencia de corte ( ) que se haya seleccionado y que determina la
estabilidad del sistema, que se puede analizar por ejemplo mediante el diagrama de Nyquist o el
diagrama Nichols.
El sistema de ecuaciones diferencial para el movimiento lateral direccional es
[
( )
( )
]
{
} [
] {
}
En un caso general se aplicaría la transformada de Laplace:
[
( )
( )
]
{
} [
]{
}
Invirtiendo la matriz :
{
}
[
( )
( )
]
[
]{
}

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 71 -
El resultado es de la forma:
{
}
[
]
{
}
Finalmente se obtendría la función de transferencia .
c) Función de transferencia
Se realizan las siguientes simplificaciones:
No se tiene en cuenta la deflexión de los alerones
Se desprecia el efecto de la velocidad de deflexión
Se considera despreciable la fuerza lateral generada por el timón de dirección ( )
Se considera despreciable el momento de balance generado por el timón de dirección
( )
Se considera que el único grado de libertad es la guiñada ( )
Al tener vuelo horizontal rectilíneo y uniforme, se tiene
Al hacer estas simplificaciones se puede dejar directamente la tercera ecuación (guiñada) en función
de una sola variable. Se deja la ecuación en función de antes de hacerle la transformada de
Laplace para luego hacer el cambio de variable ( ) ( ).
(
)
La transformada de Laplace es
(
)
(
)
(
)
Por lo tanto es

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 72 -
En el apartado b, se dedujo que
( )
Por lo tanto la función de transferencia global es
Simplificando esta expresión se obtiene
( )
[ ( )( ) (
)]

Andrés Zarabozo Martínez Mecánica de Vuelo 2. Problemas
- 73 -



![Carles Dalmases (Diputación de Barcelona) Xavier Font ... · Guía turística 2002 Base de datos principal C] Fronteras y etiquetas Lugares C] Fotografías Carreteras Edificios 3D](https://img.pdfslide.es/doc/110x75/5f55e4f4671e155e836b4dc6/carles-dalmases-diputacin-de-barcelona-xavier-font-gua-turstica-2002.jpg)















![Dalmases-055-18juny2013 [Modo de compatibilidad]...Nou model farmàcia comunitària Creixement professional Marc : ElPladeGovern2011-2014,defineix10àmbitsenmatèriade salutondestaquenlasostenibilitatdelmodelsanitari](https://img.pdfslide.es/doc/110x75/5e5b721c220d394ef304e8e1/dalmases-055-18juny2013-modo-de-compatibilidad-nou-model-farmcia-comunitria.jpg)








