Upload
javi-rodriguez-hermida
View
267
Download
3
Embed Size (px)
DESCRIPTION
Buses de campo, buses usados en domótica. Diferentes protocolos, explicando sus características y funcionamiento
Citation preview
2.1 ASPECTOS GENERALES DE LOS BUSES DE CAMPO Un bus de campo es un sistema de trasmisin de informacin que simplifica la instalacin
y operacin de mquinas y equipamientos industriales. Generalmente son redes digitales, bidireccionales, multipunto, montadas sobre un bus
serie, que conectan dispositivos de campo como PLCs, transductores, actuadores y sensores. Los buses de campo deben ser capaces de hacer frente a los problemas que plantea la
industria: - Control integrado en diferentes niveles de informacin y diferentes procesos en
una misma planta. - Cantidad elevada de sensores y actuadores. - Distancia de control de mando superior a varias decenas de metros. Los buses de campo se estn reemplazando progresivamente los sistemas de control
aislados y centralizados por redes de control distribuido con las que mejorar la calidad del producto, reducir costes y mejorar la eficiencia[2]. La propia definicin de control distribuido exige que los dispositivos interconectados tengan cierta capacidad de proceso de modo que parte de las tareas queden delegadas en los diferentes nodos de la red, esto los convierte en dispositivos inteligentes.
Antes de la aparicin de los buses de campo la tcnica de comunicacin que dominaba en
la industria era el lazo de corriente de 4-20 mA, que aunque ofrece un medio con alto grado de inmunidad slo poda proporcionar un circuito conmutado de 20 mA full duplex con una velocidad de 9600 bps y alcanzando una distancia de 300 metros. A pesar de que se intent hacer del lazo de corriente un estndar, lo cierto es que cada fabricante introdujo diferentes niveles de seal.
Frente a las limitaciones del lazo de corriente, los buses de campo nos ofrecen mayores prestaciones. A continuacin se enumeran las ventajas que supone utilizar buses de campo:
- Reduccin del cableado. Habitualmente en la industria los autmatas se
conectan a varios sensores y actuadores. Si tenemos en cuenta que por cada actuador o sensor hay que instalar al menos dos cables podemos imaginarnos la maraa de cables que se forma a la entrada del controlador y si adems tenemos que llevar cada par de cables a un sitio distinto se puede observar que tanto el coste en cableado como el coste en la instalacin de los mismos es bastante elevado. Por si fuera poco, si ocurre algn fallo en los cables sera difcil detectar en cul ha ocurrido porque tendramos que comprobarlos uno por uno. Los buses de campo usan muy pocas lneas, algunos slo dos. Como se puede observar, la reduccin en costes de cableado e instalacin es evidente, adems en caso de rotura del cable sera ms fcil de detectar ya que slo tenemos que comprobar un cable, el del bus de campo.
- Informacin digital. El hecho de que la informacin que circula por el bus sea digital aporta ms precisin al sistema y una mayor inmunidad ante el ruido que un sistema analgico.
CAPTULO 2. BUSES DE CAMPO Y DOMTICA
Anlisis y aplicacin de los buses de campo a la domtica
4
- Proteccin contra ruido. Muchos de estos buses vienen preparados para funcionar en medio de fuertes campos electromagnticos mediante la utilizacin de cables apantallados. Adems algunos poseen medidas adicionales para poder operar en atmsferas potencialmente explosivas. Todo esto convierte a los buses de campo en sistemas idneos para trabajar en ambientes hostiles pudiendo extender de esta manera el abanico de aplicaciones donde pueden ser utilizados.
- Facilidad de mantenimiento y autodiagnstico. Al simplificar el cableado se pueden realizar funciones de mantenimiento preventivo y predictivo, de una forma ms fiable y actualizada. El hecho de que los elementos que se conectan al bus sean dispositivos inteligentes hace que podamos asignarles tareas de autodiagnstico que permitan ahorrarnos tiempo y dinero a la hora de detectar y reparar averas.
- Mayor velocidad. La velocidad de comunicacin puede ser un elemento crtico ya que tiene que dar tiempo a que el controlador pueda actualizar todas sus entradas sin que el programa en ejecucin pierda ninguna variacin por lo que el tiempo de comunicacin en todos los dispositivos no debera ser superior a 7ms. Como consecuencia habra que incrementar la velocidad de transmisin por encima de los 750 Kbps. Los buses de campo pueden ofrecer estas velocidades.
- Mayor longitud. Las tecnologas empleadas en los buses de campo permiten aumentar las distancias respecto al lazo de corriente, ms all de los 500m. Adems pueden integrarse en redes jerrquicas con pasarelas entre medios fsicos pudiendo cubrir un rea extensa.
- Ampliable. La inclusin de nuevos elementos en el sistema es mucho ms fcil ya que slo habr que hacer la conexin al bus mediante un conector en T o un conector-derivador en el punto del bus ms cercano al sensor/actuador en cuestin.
- Simplicidad. Para utilizar los buses de campo slo se hacen uso de las capas fsica, de enlace y aplicacin, lo cual simplifica el trabajo del diseador y del usuario, ya que este ltimo prcticamente slo debera ocuparse de la capa fsica y la capa de usuario.
2.2 COMPARATIVA
El bus de campo que fue finalmente escogido para elaborar el sistema domtico descrito
en el captulo 3 es CAN. De la especificacin de CAN se pueden extraer dos caractersticas fundamentales:
- Acceso por contienda con arbitraje de bits. Posee las ventajas de un bus de
acceso por contienda sin desperdiciar tiempo en caso de colisin de tramas, ya que el arbitraje de bits resuelve el conflicto a favor de un nico nodo sin destruir la informacin transmitida por ste.
- Comunicacin punto a multipunto. En CAN, los identificadores no son direcciones de nodos particulares, sino que expresan el tipo de contenido de la trama. Esto junto con las estructuras de buzones dentro de los nodos CAN hacen posible que un nico mensaje transmitido al bus pueda ser recogido por varios nodos simultneamente. Adems, los mensajes son filtrados por hardware, lo que evita tener que implementar algoritmos de seleccin.
Anlisis y aplicacin de los buses de campo a la domtica
5
De la primera caracterstica se deriva la posibilidad de establecer prioridades a los mensajes segn su identificador y la ventaja de tener un bus con un alto rendimiento pudiendo conseguir velocidades de transmisin altas (hasta 1Mbps).
De la segunda caracterstica se deriva la posibilidad de establecer una comunicacin mucho ms efectiva en entornos en los que varios elementos necesitan compartir cierta informacin entre s, como es el caso de la domtica. Esto ha propiciado el desarrollo de una arquitectura de protocolos sobre la cual se asienta el modelo de sistema domtico expuesto en el captulo 3, y que aprovecha precisamente esta caracterstica.
Dentro de los buses de campo industriales, CAN se muestra como el ms verstil, razn
que impuls a descartar otros buses como PROFIBUS o Ethernet. PROFIBUS est muy orientado a las aplicaciones industriales y aunque es bastante
robusto es tambin ms complejo, mientras que CAN a pesar de ser ms sencillo, es capaz de ofrecer el servicio de comunicacin que demandan las aplicaciones de domtica con una buena calidad y mucho ms flexible, ya que se adapta bien a casi cualquier aplicacin, no slo a las de carcter industrial.
Ethernet est ms orientado a la transmisin de datos en redes de rea local, y aunque
ofrece una comunicacin de banda ancha (del orden de 100Mbps), en aplicaciones de domtica no es necesario un ancho de banda tan grande. Por otra parte, Ethernet slo ofrece comunicacin punto a punto o por difusin a todos los nodos de la red, mientras que en este aspecto, CAN se muestra claramente superior.
En cuanto a los buses de campo utilizados en domtica hay que decir que existen buses
con prestaciones superiores a CAN en este mbito, pero tambin hay muchos con prestaciones inferiores. Habra sido ms sencillo escoger directamente un bus de campo de este tipo pero se ha credo ms conveniente utilizar CAN por la siguiente razn: El objetivo de este proyecto es el de dar a conocer las ventajas de la utilizacin de buses de campo y demostrar con un ejemplo prctico que estos buses se pueden aplicar como solucin de comunicacin a problemas reales. Por ste y otros motivos se ha preferido disear una solucin propia, que aunque implica un mayor esfuerzo, es mucho ms enriquecedora en cuanto a conocimientos adquiridos. A continuacin se detallan las razones adicionales que motivaron al descarte de otros buses:
X10 a pesar de su facilidad de instalacin (utiliza la red elctrica y no necesita cableado
adicional), est muy limitado en prestaciones y ofrece una velocidad de transmisin muy pobre. EHS mejora en cierto modo X10 pero sigue teniendo una velocidad de transmisin muy
baja y fue tambin descartado. Aunque es cierto que BatiBUS ofrece algunas de las ventajas ms importantes de CAN,
su velocidad tambin es muy baja y fue descartado. LONWorks s ofrece redes domticas ms robustas y estructuradas. El problema es que
no es un estndar abierto y sobre todo que las redes LONWorks son complejas y caras, razn por la cual este bus slo ha tenido xito en redes domticas para grandes edificios y hoteles. En el mbito del hogar CAN puede ofrecer una solucin ms barata y sencilla con unas prestaciones similares.
Anlisis y aplicacin de los buses de campo a la domtica
6
2.3 PROFIBUS
2.3.1 INTRODUCCIN Profibus es un bus industrial abierto independiente de fabricantes que sigue los
estndares europeos EN 50170 y EN 50254 que aseguran tal condicin. La organizacin que vela por este bus de campo es Profibus internacional (PI). Dentro de esta organizacin se encuentran inscritos ms de 800 participantes de todo el mundo. Este es un bus que define todas las caractersticas de una red de comunicacin serie industrial. Se utiliza como medio de intercambio de informacin entre dispositivos distribuidos en campo.
Actualmente, ms de 150 compaas de alta reputacin han reconocido las ventajas de
PROFIBUS y se han unido al PNO (PROFIBUS User Organization) o a alguna organizacin nacional afiliada. El PNO representa los intereses de fabricantes y usuarios, coordinando el mantenimiento y los desarrollos en el avance de la normativa PROFIBUS.
PROFIBUS se caracteriza por su funcionalidad y amplio campo de adaptacin dentro de la
industria. Este campo abarca desde el nivel de sensores y actuadores hasta el nivel de celdas. Usa la misma tcnica de transmisin y el mismo protocolo de acceso al bus con funciones de aplicacin diferenciadas. Esto permite una reduccin significativa de esfuerzo en la instalacin, mantenimiento y entrenamiento.
El rango de productos PROFIBUS se est extendiendo continuamente. Un sumario de los
productos y servicios disponibles en el mercado se puede localizar en la gua de productos electrnicos PROFIBUS, que puede ser obtenida del PNO.
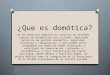
La comunicacin en un sistema industrial se puede dar a tres niveles, de forma separada
o conjunta: 1) Nivel de actuador/sensor. Las seales binarias de los sensores y actuadores son
transmitidas a travs del bus de estos dispositivos de manera cclica al maestro de la red. Para este nivel se suele utilizar ASInterface.
2) Nivel de campo. Este nivel conecta a todos los perifricos tales como mdulos E/S, transductores de seal con el sistema de automatizacin por una comunicacin en tiempo real. En este nivel los datos son tambin enviados de forma sncrona mientras que las alarmas, los parmetros y los datos de diagnstico de la comunicacin son enviados de forma asncrona en momentos puntuales. Para este nivel PROFIBUS ofrece una solucin transparente y especialmente preparada para procesos de automatizacin.
3) Nivel de clula. Los controladores programables tales como los PLC y los IPC se comunican unos con otros en este nivel mediante grandes paquetes y potentes funciones de comunicacin, pudiendo estar esta capa integrada en el sistema de comunicaciones interno de una compaa mediante Internet, intranet, mediante los protocolos ms usuales TCP/IP y Ethernet.
Anlisis y aplicacin de los buses de campo a la domtica
7
Fig 2.1. Esquema de comunicacin industrial con Profibus
En resumen, el uso ms habitual de Profibus es la interconexin de diferentes dispositivos
de distintos fabricantes sin unas especiales exigencias, pudiendo ser utilizado para aplicaciones donde el tiempo del bus sea crtico y con los objetivos de comunicacin complejos.
2.3.2 CARACTERSTICAS GENERALES
Este bus se basa en la comunicacin controlada entre maestro-esclavo. Definimos de
manera particular estos dispositivos como: - Dispositivos maestros (Master Devices). Entre estas estaciones activas rota un
permiso de acceso y control que les permite enviar mensajes sin necesidad de peticin.
- Dispositivos secundarios (Slaves Devices). Perifricos asignados a los maestros. Consisten en una serie de dispositivos lo suficientemente inteligentes como para seguir las normas del protocolo. Entre ellos podemos encontrar: sensores, actuadores tipo rel, convertidores de frecuencia, electrovlvula, etc. Su papel es pasivo, pudiendo slo transmitir cuando se les ha realizado una peticin previa. Suelen ocupar poco tiempo de comunicacin pero son muy numerosos.
Los datos que se desplazan por el canal fsico son de 5 tipos diferentes: - Datos de entrada y de salida al proceso. - Funciones de diagnostico y verificacin. - Configuracin de dispositivos. - Programas entre los controladores. - Parmetros de control. Se podra decir que las principales caractersticas de Profibus son:
Anlisis y aplicacin de los buses de campo a la domtica
8
- Abierto. Profibus no pertenece a ninguna compaa, est controlado por un comit de estandarizacin. Por lo tanto, permite la comunicacin entre equipos de diferentes marcas sin la necesidad de una pasarela de protocolo.
- Exactitud, gracias al reconocimiento de comandos y mensajes, Profibus es un sistema de comunicacin altamente seguro puesto que los mensajes defectuosos son repetidos hasta que la confirmacin de recepcin es enviada.
- Multi-funcional, Profibus se adapta a todas las tareas de automatizacin, permitiendo el intercambio de datos entre controladores y entre elementos de campo.
- Capacidad de diagnstico. El estndar Profibus define mltiples formas de diagnsticos entre el sistema de control de procesos y los dispositivos de campo.
- Expansin del sistema. Un equipo adicional puede ser incorporado en cualquier momento al bus sin necesidad de reformar la estructura, incluso sin enturbiar la comunicacin existente.
2.3.3 PERFILES
Profibus ofrece protocolos de comunicaciones segn la aplicacin tanto para alta
velocidad como para gran cantidad de elementos direccionables, caso de los sensores y actuadores, tanto para buses con largos tiempos de respuesta como para aplicaciones de comunicacin compleja. Los tres perfiles compatibles que ofrece Profibus son:
- Profibus-DP (Descentralized Periphery), para el control distribuido. Diseado para
la comunicacin entre sistemas de control automtico y entradas y salidas distribuidas o remotas en campo. Ofrece la funcionalidad de intercambiar datos de forma rpida y cclica. Su principal ventaja es que es plug and play, en cuanto a que se permite la identificacin automtica de los dispositivos.
- Profibus-PA (Processs Automation), automatizacin de procesos. Permite que tanto sensores como actuadores sean conectados en una lnea de bus. Su aplicacin est definida en procesos situados en reas de seguridad intrnseca, denominadas Ex, y est regido segn el estndar internacional IEC 1158-2, especialmente indicado para las actividades petroleras y qumicas.
- Profibus-FMS (Field Message Specification), especificacin de los mensajes en el bus de campo. Se trata de una serie de tareas de comunicacin, de propsito general, en el nivel de comunicaciones de clula. Es el ms alto nivel de comunicaciones que aborda este bus, y permite la coordinacin de gran cantidad de aplicaciones de comunicacin: buses de ordenadores industriales, robots, En Profibus-FMS se realiza la comunicacin entre los dispositivos principales.
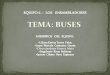
Desarrollo cronolgico de los diferentes perfiles:
Anlisis y aplicacin de los buses de campo a la domtica
9
FMS
DP
PA
PA plus DPV1
1990
1992
1994
1996
Fig. 2.2. Desarrollo cronolgico de los perfiles de Profibus
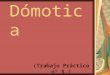
2.3.4 ARQUITECTURA DE PROTOCOLOS La arquitectura de protocolos de Profibus se basa en el modelo de referencia OSI, de
acuerdo con el estandar ISO 7498.
Fig. 2.3. Arquitectura de protocolos basada en el modelo OSI
Profibus-DP define las capas fsica y de enlace, as como el interfaz de usuario. Las capas
3 a 7 no estn definidas. El DDLM (Direct Data Link Mapper) proporciona un interfaz de usuario sencillo para el acceso a la capa 2. Como medio fsico se usa la tecnologa RS-485, fibra ptica o ambas.
En Profibus-FMS se definen las capas fsicas, de enlace y de aplicacin. La capa de
aplicacin consiste en el FMS (Fieldbus Message Specification) y el LLI (Lower Layer Interface). FMS contiene el protocolo de aplicacin y proporciona al usuario un amplio conjunto de servicios. LLI permite proporcionar a FMS una interfaz independiente del dispositivo con la capa de enlace.
Anlisis y aplicacin de los buses de campo a la domtica
10
Dicha capa implementa el protocolo de acceso al bus y la seguridad de datos. Como medio fsico se emplea RS-485, fibra ptica o ambas.
Profibus-PA utiliza el protocolo de Profibus-DP y le aade como caracterstica particular la
definicin de los perfiles de dispositivo. Como medio de transmisin utiliza el estndar IEC 1158-2, lo que le permite su utilizacin en zonas de seguridad intrnseca. Mediante un dispositivo puente es fcil acoplar redes Profibus-DP con redes Profibus-PA.
Por su parte, Profibus-DP y Profibus-FMS usan las mismas tecnologas de transmisin y
protocolo uniforme de acceso al medio, por ello, ambas pueden operar simultneamente sobre el mismo cableado.
2.3.5 MEDIOS FSICOS DE TRANSMISIN DE DATOS
El rea de aplicacin de los sistemas de bus de campo est determinada por la tecnologa
disponible para el nivel fsico. Igual que las demandas generales del sistema han llevado a ste a una arquitectura en bus, hacen falta satisfacer tambin caractersticas especficas a este nivel como son funcionamiento en ambientes agresivos, transmisin de datos y potencia en el mismo cable, etc. Actualmente existen tres mtodos de transmisin:
- RS-485: Medio de transmisin para aplicaciones generales de automatizacin en
cadenas de montaje y fabricacin. - IEC 1158-2: Medio de transmisin para uso en procesos de automatizacin. - Fibra ptica: Medio de transmisin caracterizado por presentar inmunidad a
interferencias y capacidad de salvar enlaces de largas distancias. Los desarrollos futuros intentarn usar Ethernet comercial como nivel fsico para Profibus. Es posible utilizar acopladores para enlaces entre los diferentes mtodos de transmisin. 2.3.5.1 RS-485 Es la tecnologa de transmisin ms usada por Profibus. Se utiliza en aplicaciones donde
se necesita alta velocidad de transmisin y simplicidad de instalacin. Utiliza un par trenzado de cobre apantallado.
Caractersticas principales:
- Topologas: Bus lineal, con distintos segmentos y terminadores activos en ambos
extremos. Tambin puede confeccionarse la red en rbol, generalizacin del bus. Por medio de repetidores se pueden conseguir diferentes segmentos del bus.
- Cable: Par trenzado apantallado, de cobre con diferentes recubrimientos segn el ambiente.
Anlisis y aplicacin de los buses de campo a la domtica
11
Fig. 2.4. Cable par trenzado apantallado para enlace Profibus
- Velocidad de transmisin: Entre 9.6K 12M, segn la distancia que haya que
cubrir. Dado que la velocidad es nica en el bus, un dispositivo principal suele marcarla y el resto se debe configurar a la misma.
Tasa de bit (kbit/sec) 9.6 19.2 93.75 187.5 500 1500 Enlace de 1200 m 1200 m 1200 m 1000 m 400 m 200 m
Tabla 2.1. Velocidades permitidas con RS-485 segn la longitud del enlace - Distancia de transmisin sin repetidor hasta 1200 metros. - El nmero de estaciones mximo sin repetidores es 32, con repetidores se puede
llegar hasta 127. La estructura del bus permite la expansin de la red. Slo hay que insertar un nuevo dispositivo, mediante un derivador de lnea, y, si est en el extremo, conectar el terminal o conmutador terminador de lnea.
- Conectores de diferentes tipos. El que recomienda la norma es el sub-D de 9 pines.
Todos los dispositivos irn conectados al bus mediante derivadores, que recibirn un
cable en la entrada (IN) y permitirn la continuidad de la lnea por la salida (OUT). Si el dispositivo es final de lnea, sta morir en l. Los derivadores tendrn integrada las resistencias adecuadas en caso de terminar o no la lnea. Una representacin del conexionado por RS-485 es:
R
T
T
EPT
EAT
EAT
R
EPT
EPT
EAT
EPT
Fig. 2.5. Esquema de un posible conexionado por RS-485
Anlisis y aplicacin de los buses de campo a la domtica
12
En el esquema, EA son las estaciones que hacen de maestros, mientras que las EP son
las estaciones que hacen de esclavos, T son los derivadores con y sin terminal de lnea, R es un repetidor de RS-485, y la lnea negra que conecta los diferentes equipos es par trenzado.
Al conectar una estacin al bus se debe asegurar el no conectar el cableado de datos al
revs. El uso de una lnea de datos apantallada es de absoluta necesidad para lograr un sistema inmune al ruido electromagntico. La pantalla debe estar conectada a la masa a ambos lados del cable, incluso se debe proteger las lneas de datos de los cables de alta tensin. El 90 % de los problemas ocurridos en una red Profibus son atribuidos a un incorrecto cableado e instalacin; estos problemas pueden ser solventados usando comprobadores de buses que pueden detectar la mayora de estos problemas.
2.3.5.2 FIBRA PTICA La red de fibra ptica en Profibus es la opcin para grandes distancias de transmisin o
para los ambientes industriales ms afectados por las interferencias electromagnticas. A menudo se utiliza una red mixta con elementos elctricos y pticos. La red de dispositivos pticos consiste en:
- Mdulos de enlace ptico. Estos mdulos configuran un enlace ptico, junto con
las fibras pticas. De estos mdulos se obtiene adems una salida elctrica para conectar a las estaciones participantes en la red.
- Elementos de conexin de los que cuelgan otras estaciones. Tienen entrada y salida ptica. Algunos fabricantes ofrecen conexin directa a la red ptica sin necesidad de pasar a red elctrica.
La topologa de una red ptica podra ser:
Fig. 2.6. Posible topologa de una red ptica.
En el esquema EO, es el enlace ptico, siendo de nuevo T el terminador de lnea, EA el
terminal maestro y EP el terminal esclavo, la lnea azul gruesa representa un canal de fibra doble, mientras que la lnea a trazos es un canal de fibra simple.
Las caractersticas generales de las redes pticas en Profibus son: - Topologa: permite crear una red en bus lineal, anillo y estrella. - Cable: fibra ptica de plstico para la longitud de onda de 660 nm. Si es vidrio
puede emplearse una longitud de onda de 800 a 1500 nm. Adems, se tendr en
Anlisis y aplicacin de los buses de campo a la domtica
13
cuenta si el cable deber ser instalado en el interior o exterior, al igual que el cable elctrico, para seleccionar la resistencia del cable.
- Las distancias de transmisin pueden llegar a ser hasta de 10 y 15 km. - El nmero mximo de estaciones es de 127. La expansin de la red se complica.
Deben coexistir sistemas elctricos y pticos. Aparecen conectores de fibra, adaptadores fibra-RS485, conectores de par de fibra (uno para transmitir y otro para recibir). Los dispositivos de enlace pticos disponen de conexiones pticas y tambin de cable de bus.
Por lo general, los dispositivos de enlace ptico incorporan funcionalidades como la
deteccin del estado de enlace, sincronizacin a la velocidad de transmisin del enlace, funciones de repetidor de seal ptica, etc.
2.3.5.3 IEC 1158-2 Este mtodo de transmisin, con una tasa de transferencia de 31.25 Kbit/s, es usada en
procesos de automatizacin en industrias qumicas y petroqumicas, en zonas potencialmente explosivas, debido a la seguridad intrnseca que ofrecen las dos lneas de alimentacin por las que se transmiten los datos y se suministra corriente. Los principios de este estndar son definidos como el modelo FISCO (Fieldbus Intrinsically Safe COncept). ste fue desarrollado en Alemania por el PTB (Instituto federal de fsica tcnica) y hoy es internacionalmente reconocido como el modelo bsico de cableado para buses de campo en zonas peligrosas. El FISCO est basado en:
- Cada segmento tiene slo una fuente de alimentacin. - Cuando alguna estacin est enviando tramas no hay alimentacin en el bus. - Cada dispositivo de campo consume un nivel de corriente constante mientras
funciona, no menos de 10 mA, actuando como un sumidero pasivo de corriente. - En los dos extremos del bus se colocan terminadores de lnea. - Slo estn permitidos topologas lineales, en rbol y en estrella. Para trabajar en zonas peligrosas es necesario que todos los componentes usados hayan
sido aprobados y certificados de acuerdo al modelo FISCO y al IEC 1158-2 por agencias autorizadas como PTB, BVS (Alemania), UL, FM (USA).
2.3.6 PROTOCOLO DE ACCESO AL MEDIO. NIVEL DE ENLACE Las tres variaciones de Profibus usan el mismo control de acceso al medio, incluyendo los
aspectos relacionados con la seguridad de los datos y el manejo de los protocolos de transmisin y los telegramas. En Profibus, la capa 2 se denomina FDL (Fieldbus Data Link). El MAC es determinista, de modo que slo una estacin tiene derecho a transmitir en cada momento. En particular ha sido diseado para cumplir:
- En las comunicaciones entre sistemas activos (maestros), encargados de tareas
de control complejas, debe asegurarse que cada estacin tenga suficiente tiempo para ejecutar sus tareas de comunicacin dentro de un intervalo de tiempo definido.
- Las tareas de comunicacin cclicas se implementarn de la forma ms sencilla posible para permitir la comunicacin entre un maestro y uno o varios esclavos.
Anlisis y aplicacin de los buses de campo a la domtica
14
Por tanto, el control de acceso al medio de Profibus incluye un sistema de paso de testigo
en bus (Token-bus) entre los maestros, junto con un sistema de consulta maestro-esclavo para la comunicacin entre cada maestro y su periferia.
Fig. 2.7. Nivel de enlace. Configuracin maestro/esclavo
El mecanismo de paso de testigo garantiza el derecho a acceder al bus de cada maestro
durante un determinado periodo de tiempo. El paso de testigo es un telegrama especial que permite la cesin al nodo que lo recibe, el derecho a acceder al bus. El testigo sigue una secuencia segn anillo lgico, con un tiempo mximo predeterminado para la rotacin completa del testigo.
La comunicacin maestro-esclavo permite que el maestro que posee el testigo en un
instante determinado se comunique con los esclavos que dependen de l. El maestro puede enviar mensajes a los esclavos y leer las contestaciones de stos. De esta forma, es posible tener un sistema con un nico maestro y mltiples esclavos, un sistema formado slo por estaciones activas o un sistema hbrido.
La capa de enlace tambin es la encargada de la seguridad de los datos. Todos los
telegramas tienen distancia de Hamming 4, debido al uso de delimitadores de comienzo y fin de trama especiales, as como un bit de paridad para cada byte segn se define en el estndar IEC 870-5-1.
El modo de funcionamiento es sin conexin. Permite tanto el direccionamiento unicast
como direcciones multicast y broadcast.
Bits de establecimiento
Delimitador de inicio
Profibus SDU (Unidad de datos de servicio)
Delimitador de terminacin
De 1 a 8 bytes 1 byte De 1 a 256 bytes 1 byte Tabla 2.2 Formato de la trama del nivel fsico de Profibus
2.3.7 PROFIBUS DP
PROFIBUS DP est diseado para alta velocidad de transferencia de datos en el nivel de
sensores y actuadores. En este nivel, los controladores tales como los PLC's intercambian datos
Anlisis y aplicacin de los buses de campo a la domtica
15
a travs de un enlace rpido serie con sus dispositivos perifricos. El intercambio de datos con estos perifricos es principalmente cclico. El controlador central (maestro) lee la informacin de entrada desde los esclavos y enva de retorno a los mismos la informacin de salida. Es importante que la duracin del ciclo del bus sea menor que la duracin del ciclo del programa del controlador, el cual es de aproximadamente de 10 ms en la mayora de las aplicaciones. Un sumario de las caractersticas tcnicas de PROFIBUS-DP queda reflejado en la siguiente tabla:
Tcnica de transmisin: PROFIBUS DIN 19 245 Parte 1. EIA RS485 par de cables trenzados o fibra ptica. 9600 bits/s hasta 12 Mbits/s. 100 mts a 12 Mbits/s, 900 mts a 1.5 Mbits/s expandible con
repetidores Medio de acceso: Protocolo de acceso al medio hbrido de acuerdo a DIN 19
245 Parte 2. Soporta sistemas mono-maestro o multi-maestro. Dispositivos maestros y esclavos. Comunicacin: Peer to peer (transferencia de data de usuario) o multicast
(sincronizacin). Transferencia de datos de usuario Maestro esclavo cclico
o transferencia de datos maestro maestro acclico. Modos de operacin: Operar (Operate): Transferencia cclica de datos de entrada
y salida. Borrar (Clear): Borrado de datos de entrada y salida. Detener (Stop): Solo es posible en funciones maestro-
maestro. Sincronizacin: Sincronizacin de las entradas y/o salidas de todos los
esclavos DP. Sync-mode: Las salidas son sincronizadas. Freeze-mode: Las entradas son sincronizadas. Funcionalidad: Transferencia cclica de datos entre maestros DP y
esclavos DP. Activacin o desactivacin individual de esclavos DP. Chequeo de la configuracin de los esclavos DP. Mecanismos de Autodiagnostico. Sincronizacin de entradas y salidas. Asignacin de direcciones a los esclavos a travs del bus. Configuracin del maestro DP a travs del bus. 246 bytes mximos de entrada / salida de datos por
Anlisis y aplicacin de los buses de campo a la domtica
16
esclavo DP (32 bytes tpicos). Mecanismos de seguridad y proteccin:
Todos los mensajes son enviados con distancia Hamming de HD=4.
Watchdog en los esclavos DP. Proteccin de acceso en las entradas / salidas de los
esclavos DP. Monitorizacin de la transferencia de datos con intervalo de
tiempo configurable en el DP-esclavo (DPM1). Tipos de dispositivos: Dispositivo maestro DP clase 2 (DPM2), por ejemplo
dispositivos de configuracin y programacin. Dispositivo maestro DP clase 1 (DPM1), por ejemplo
controladores centrales tales como PLC. Cableado e instalacin: Acoplamiento y desacople de estaciones sin afectar a las
otras estaciones. Tcnica de transmisin de dos conductores probados y de
fcil manejo. Tabla 2.3. Caractersticas principales de Profibus DP.
2.3.7.1 CARACTERSTICAS BSICAS Una gran terminacin no es suficiente para un uso exitoso de un sistema de bus. Mejor
dicho, una instalacin y servicio sencillo, buenas facilidades de diagnostico y una transmisin libre de errores son necesarias para cumplir con los requerimientos de los usuarios. PROFIBUS-DP combina estos requisitos de una manera ptima.
PROFIBUS-DP necesita, aproximadamente, 6 ms a 1.5 Mbits/s para la transmisin de 512
bits de datos de entrada-salida distribuida en 32 estaciones. Esto cumple el requerimiento para un corto tiempo de reaccin del sistema. La figura 2.8 muestra el tiempo de transmisin de PROFIBUS-DP, dependiendo del nmero de estaciones y la velocidad de transmisin. Este considerable incremento de la velocidad en comparacin con PROFIBUS-FMS, resulta principalmente del uso del servicio SRD (envo y recepcin de datos, send and receive data) de la capa 2. Este servicio permite la transmisin de datos de entrada y salida en un solo ciclo de mensaje. Adicionalmente, la mejora en el desempeo resulta del incremento de la velocidad de transmisin a 12 Mbits/s.
Anlisis y aplicacin de los buses de campo a la domtica
17
Fig. 2.8. Tiempo de ciclo de Bus dependiendo de la velocidad de transmisin y del n de dispositivos
esclavos en el sistema. 2.3.7.2 DIAGNSTICO Las extensas funciones de diagnstico de PROFIBUS-DP permiten una rpida localizacin
de fallos. Los mensajes de diagnstico son transmitidos al bus y recogidos por el maestro. Operan en tres niveles:
- Diagnstico relacionado a estaciones: Estos mensajes abarcan estados
operacionales generales de todos los dispositivos. Ejemplo: bajo voltaje en el dispositivo.
- Diagnstico relacionado a los mdulos: Estos mensajes indican que un fallo se presenta en un rango de I/O especfico de una estacin. Ejemplo: mdulo de 8 bits de salida.
- Diagnstico relacionado a los canales: Estos mensajes muestran que hay un fallo en un bit de entrada o salida (canal). Ejemplo: cortocircuito en el canal de salida nmero 7.
2.3.7.3 INSTALACIN Y SERVICIO La tcnica de transmisin RS-485 es muy sencilla de utilizar. Esto permite una enorme
flexibilidad en la configuracin del sistema. La instalacin del par trenzado de cables no requiere destreza. La estructura del bus permite acoplar o desacoplar estaciones sin afectar a las dems estaciones. Adicionalmente, es posible configurar el sistema paso a paso.
2.3.7.4 CONFIGURACIN DEL SISTEMA Y TIPOS DE DISPOSITIVOS PROFIBUS-DP permite sistemas mono-maestro o multi-maestro. Es posible conectar
hasta 126 estaciones (maestros o esclavos) en el mismo bus. La descripcin de la configuracin del sistema consiste de: el nmero de estaciones, la asignacin entre direccin de estaciones y direcciones de entrada y salida, la consistencia de la trama de datos, formato del mensaje de diagnstico y los parmetros del bus.
Anlisis y aplicacin de los buses de campo a la domtica
18
Cada sistema PROFIBUS-DP contiene diferentes tipos de dispositivos. En una
clasificacin por aplicacin existen tres tipos principales: - DP-maestro clase 1 (DPM1). Este es el controlador central, el cual intercambia
informacin con las estaciones descentralizadas (esclavos DP) en un ciclo de mensaje definido. Los dispositivos tpicos son los PLC's, los controles numricos o los controladores de robots.
- DP-maestro clase 2 (DPM2). Este tipo de dispositivos son usados para programacin, configuracin y diagnstico. Son utilizados durante la instalacin para definir la configuracin del sistema.
- DP-esclavo A. Los esclavos DP son dispositivos perifricos (sensores, actuadores) que recogen informacin de entrada y emiten informacin de salida al perifrico. Tambin es posible fabricar dispositivos solamente para entrada o salida de datos. Los dispositivos DP tpicos son dispositivos con entradas o salidas binarias de 24 Vdc o 110/220 Vac, entradas o salidas analgicas, contadores, etc. El nmero de datos de entrada y salida depende del dispositivo y est limitado a un mximo de 246 bytes. Muchos de los esclavos DP disponibles actualmente tienen nicamente un mximo de 32 bytes de entradas y 32 bytes de salidas. En la mayora de los casos, este lmite se debe a razones de implementacin.
En sistemas mono-maestro, solo un maestro est activo en la fase operativa. La figura 2.9
muestra la estructura de un sistema PROFIBUS-DP mono-maestro. El PLC es el maestro del proceso. Los esclavos DP distribuidos estn conectados al PLC a travs del bus. Esta configuracin provoca la menor duracin del ciclo de bus.
Fig. 2.9. Sistema DP mono-maestro
En configuracin multi-maestro, varios maestros DP estn activos en el bus, funcionando
como subsistemas (cada uno formado por un maestro con sus esclavos asignados) u operando como dispositivos de configuracin o diagnstico. La imagen de entrada y salida puede ser leda por cada maestro. Slo a un maestro (el cual fue asignado por configuracin) se le permite escribir a la salida de un esclavo DP. Los sistemas multimaestro producen un ciclo de bus ms largo que los sistemas monomaestro.
Anlisis y aplicacin de los buses de campo a la domtica
19
2.3.7.5 COMPORTAMIENTO DEL SISTEMA Las especificaciones PROFIBUS-DP incluyen una descripcin detallada de
comportamiento del sistema. Esto facilita la interoperabilidad de los dispositivos. El comportamiento del sistema es afectado principalmente por el estado de DPM1. El estado puede ser controlado local o remotamente por los dispositivos de configuracin. Usualmente, se dan los siguientes estados:
- Detenido (Stop). En este estado no ocurre transferencia de datos entre el DPM1 y
los esclavos DP. - Limpiar (Clear). El DPM1 lee la informacin de entrada de los esclavos DP y
mantiene a las salidas en su estado de a prueba de fallos. - Operar (Operate). El DPM1 est en estado de transferencia de datos. En una
secuencia de mensajes cclicos, la trama de datos de entrada es leda del esclavo-DP y la trama de datos de salida es escrita en el esclavo-DP.
El DPM1 transmite su estado local en un intervalo de tiempo configurable, con un
comando multicast, a todos los esclavos DP asignados. La reaccin del sistema debido a fallos en la fase de transferencia de datos, por ejemplo,
la cada de un esclavo-DP, est determinada por el parmetro de configuracin "Autoclear" del DPM1. Si este parmetro es "cierto", el DPM1 lleva las salidas de todos los esclavos-DP asignados a su estatus de fail-safe (a prueba de fallos), lo que significa que no est habilitado para transmitir la trama de datos vlida. Despus, DPM1 cambia al estado Limpiar.
Si "Autoclear" es falso, el DPM1 se mantiene en su estado de Operacin incluso en el caso de que se produzca un fallo de esclavo-DP. El usuario puede determinar la reaccin del sistema.
2.3.7.6 TRANSFERENCIA CCLICA DE DATOS La transferencia de datos del usuario entre el DPM1 y sus esclavos DP asignados es
ejecutada automticamente por DPM1 mediante un orden recurrente definido. Durante la configuracin del bus del sistema, el usuario define la asignacin de esclavos DP a un DPM1 y cuales de estos esclavos DP estn incluidos o excluidos del ciclo de mensajes.
La interaccin entre el DPM1 y sus esclavos DP est estructurada en fases de
parametrizacin, configuracin y transferencia de trama de datos. En las fases de parametrizacin y configuracin, cada esclavo DP compara su configuracin real con la trama de datos de configuracin recibida desde su DPM1. Cuando verifica su configuracin, el tipo de dispositivo, formato y longitud de la informacin as como el nmero de entradas y salida tienen que ser idnticas. El usuario, en consecuencia tiene una extensa proteccin contra fallos de configuracin mediante estas pruebas. Slo si estas pruebas concluyen con xito, el esclavo DP est listo para pasar a la fase de transferencia de datos. La figura 2.10 muestra los principios de transferencia de data de usuario entre el DPM1 y los esclavos DP En adicin a la transferencia de tramas de datos de usuario ejecutada automticamente, es posible enviar datos de usuario de parametrizacin definidos por los esclavos DP.
Anlisis y aplicacin de los buses de campo a la domtica
20
POWER_ON
WAIT_PRM
WAIT_CFG
DATA_EXC
Set_Slave_Address
Slave_DiagnoseGet_Config
Slave_DiagnoseSet_Param, OKGet_Config
Check_Config, OK
Check_Config, OKSet_Param, OK
Data_Exchange, OK
Check_Config, NOT OKSet_Param, NOT OK
Fig. 2.10. Funcionamiento de un dispositivo esclavo DP 2.3.7.7 TRANSFERENCIA DE DATOS ENTRE DPM1 Y LOS DISPOSITIVOS DE CONFIGURACIN Como complemento a las funciones maestro-esclavo, PROFIBUS DP permite funciones
maestro-maestro. Son usadas entre DPM1 y los dispositivos de configuracin y programacin (DPM2). Principalmente, estas funciones permiten la configuracin del DPM1 a travs del bus.
Adems de las facilidades de Upload y Download, la funcin maestro-maestro permite
habilitar o deshabilitar dinmicamente la transferencia de tramas de datos entre DPM1 y los esclavos seleccionados, as como el cambio del modo de operacin del DPM1.
2.3.7.8 MODOS SYNC Y FREEZE En adicin a la transferencia cclica de datos de usuario, el cual es realizado en forma
automtica por DPM1, es posible enviar datos de comando de control desde un maestro DP a un nico esclavo DP, grupo de esclavos o a todas las dems estaciones. Estos comandos son transmitidos como comandos multicast. El uso de estas funciones permite el modo sync o freeze de los esclavos DP. Estos modos permiten la sincronizacin del manejo de evento de los esclavos DP.
Las estaciones seleccionadas entran en modo sync, despus de que el maestro enva un
comando sync. En este modo, la salida de los esclavos DP seleccionados se congela en su estado actual. Durante los siguientes ciclos de intercambio de datos, los datos de salida son almacenados en el esclavo DP, pero la salida fsica se mantiene sin cambios. Cuando el esclavo
Anlisis y aplicacin de los buses de campo a la domtica
21
DP recibe el siguiente comando sync del maestro, los datos de salida son emitidos al perifrico. El usuario puede detener el modo sync con el comando unsync.
De la misma manera, el comando freeze habilita el modo freeze de los esclavos DP. Este
comando permite congelar las entradas a su valor presente. Los datos de entrada se actualizan despus de recibir el siguiente comando freeze. El usuario puede detener el modo freeze con el comando unfreeze.
2.3.7.9 MECANISMOS DE PROTECCIN Debido al rango de aplicacin del PROFIBUS DP, es necesario equipar al sistema con una
proteccin efectiva contra fallos de parametrizacin o fallos en el bus. PROFIBUS DP utiliza mecanismos de control en el maestro DP y en los esclavos DP. Estos son implementados como temporizadores de perros guardianes o Watchdog timers.
- En el maestro DP: El DPM1 monitoriza la transferencia de datos de usuario de los
esclavos DP con el Data_Control_Timer (temporizado de control de trama de datos). Para cada esclavo DP se utiliza un temporizado de control individual. Este temporizador expira si dentro de un intervalo de control de datos, no ocurre una transferencia de datos de usuario con xito, en cuyo caso, el usuario sera informado del fallo. Si el error de reaccin automtica ha sido habilitado (Auto_clear = true), el DPM1 abandona el estado de operacin (operate), cambia las salidas de todos los esclavos DP asignados a su condicin de fail-safe y los cambia a su estado de Limpieza (Clear).
- En los esclavos DP: El esclavo DP usa el temporizador Watchdog para detectar fallos del DPM1 asignado o del bus. Si un esclavo DP reconoce que no ocurre una transferencia de datos de usuario con xito con DPM1 dentro del intervalo del temporizador Watchdog, cambia las salidas a su condicin de fail-safe.
Para garantizar la operacin segura en sistemas multimaestro, es necesario realizar una
proteccin de acceso para las entradas y las salidas de los esclavos DP. Esta proteccin asegura que solo ser posible el acceso directo de las entradas y salidas desde el DPM1 asignado. Para todos los otros mensajes maestros DP, los esclavos DP ofrecen una imagen de las entradas y salidas, la cual puede ser leda por cualquier otro maestro DP sin derecho de acceso.
2.3.7.10 LA BASE DE DATOS DE DISPOSITIVOS Las caractersticas principales de cada esclavo DP y cada DPM1 tienen que ser
documentada por el fabricante y ser entregada al usuario del dispositivo en forma de una hoja de datos del dispositivo y un archivo de base de datos. La estructura, contenido y codificacin de esta informacin est estandarizada. Lo que permite una configuracin conveniente de cualquier esclavo DP con dispositivos de configuracin de cualquier fabricante. El PNO administra esta informacin, independientemente del fabricante, y ofrece la misma a requerimiento.
Anlisis y aplicacin de los buses de campo a la domtica
22
Fig. 2.11. Archivo GSD. Base de datos de dispositivos Profibus DP
2.3.7.11 NMERO DE IDENTIFICACIN Cada tipo de esclavo DP tiene que tener un nmero de identificacin individual. Este
nmero es necesario para permitir al DPM1 identificar el tipo de esclavo DP conectado sin un significativo gasto en protocolo. El DPM1 compara el nmero de identificacin de cada esclavo DP conectado con el nmero de identificacin de los datos de configuracin determinado por la configuracin del dispositivo. La transferencia de datos de usuario en la fase de operacin del sistema solamente empezar cuando el esclavo DP correcto est conectado en el bus con la direccin de estacin adecuada. Esto asegura una alta proteccin contra fallos de parametrizacin. El fabricante es requerido por el PNO para aplicar un nmero de identificacin individual para cada tipo de esclavo DP. El PNO administra los nmeros de identificacin junto a la informacin de la base de datos del dispositivo.
Anlisis y aplicacin de los buses de campo a la domtica
23
2.4 CAN (CONTROLLER AREA NETWORK)
2.4.1 INTRODUCCIN
Controller Area Network (CAN) es un protocolo de comunicacin serie que soporta
eficientemente el control distribuido en tiempo real con un alto nivel de seguridad. El aumento de la complejidad de los sistemas electrnicos para automocin y la exigencia de mayor seguridad y confort por parte de los usuarios motivaron a Bosch a disear un bus de campo que diera solucin a estas necesidades. CAN ha sido estandarizado internacionalmente de manera que numerosos fabricantes de semiconductores han desarrollado circuitos integrados basados en este estndar.
El ejemplo ms habitual de aplicacin del bus CAN es el ABS, que requiere la actuacin
conjunta de las revoluciones del motor y del carburador para reducir el par cuando una rueda motriz patina. Pero aunque inicialmente fue utilizado para la automocin, sus caractersticas le permiten adaptarse a un amplio rango de aplicaciones, desde redes de alta velocidad hasta cableado de bajo coste para mltiples elementos, pudiendo controlar mquinas, sensores, etc. con velocidades de hasta 1 Mbit/s.
De acuerdo con el modelo OSI, CAN se subdivide en capas, de las cuales el estndar
define las dos primeras, capa fsica y capa de enlace. No existen los niveles del 3 al 6 puesto que se pasa directamente a la capa de aplicacin desde la de enlace. Una peculiaridad de CAN es que las capas de enlace y aplicacin no estn totalmente separadas sino que guardan un cierto vnculo que quedar patente cuando se muestre la estructura de tramas del nivel de enlace. Existen dos partes dentro de la especificacin CAN 2.0[3], la A y la B, y aunque utilicen diferentes nombres para las subcapas del nivel de enlace, su misin es la misma. Bsicamente la nica diferencia que existe entre CAN 2.0 A y CAN 2.0 B es que la parte A utiliza identificadores de 11 bits, compatible con anteriores versiones de CAN, mientras que B utiliza identificadores de 29 bits. Por lo dems, el funcionamiento es el mismo.
NIVEL CAN 2.0 A CAN 2.0 B Aplicacin (Protocolo especfico) (Protocolo especfico) Presentacin Sesin Transporte Red
CAN Object layer LLC Enlace
CAN Transfer layer MAC
Fsico ISO 11898 ISO 11898 Fig. 2.12 Torre de protocolos en aplicaciones CAN
Antes de entrar en detalle es conveniente citar las dos caractersticas ms importantes de
CAN, clave esencial para comprender las enormes ventajas que trae consigo utilizar este bus: - Los identificadores no son direcciones de nodos concretos, sino que expresan el
contenido del mensaje. Por ejemplo: podramos asignar un identificador para los datos de temperatura, otro para los de velocidad, etc. De esta manera se pueden
Anlisis y aplicacin de los buses de campo a la domtica
24
establecer comunicaciones punto a multipunto ya que slo los nodos a los que interese el mensaje lo recibirn.
- El tipo de acceso al medio es basado en contienda pero con la particularidad de que no se desperdicia tiempo, debido a que las colisiones se resuelven mediante un arbitraje de bits en el que gana el nodo con ms prioridad sin que esto suponga la modificacin de ninguno de los bits que este nodo ha transmitido. Esto es algo parecido a lo que ocurre en un canal D de un acceso RDSI.
2.4.2 NIVEL FSICO El nivel fsico de CAN est estandarizado por el ISO (International Organization for
Standardization) en la norma ISO 11898[4]. La transmisin puede efectuarse de dos formas, la primera es a travs de una sola lnea, siempre que todos los nodos tengan una referencia de tierra comn y los niveles de tensin estaran referidos a tierra. La segunda es a travs de dos hilos en modo diferencial. Nos centraremos en esta ltima forma puesto que es la que regula el estndar ISO 11898.
En la figura 2.13 se muestra la disposicin tpica del bus CAN. En ella podemos observar
que el bus est formado por dos lneas, CANH Y CANL, dentro de un cable, que puede estar apantallado o no, por tanto pueden ser utilizados cables UTP (Unshielded twisted pair) y STP (Shielded twisted pair).
Es importante resear que el bus debe estar terminado en los extremos con resistencias
de terminacin de 120 Ohmios. Adems no es conveniente incluir las resistencias de terminacin en los nodos que estn colocados en los extremos puesto que si estos nodos son retirados, el bus se quedar sin terminacin y se pueden dar reflexiones que imposibiliten una correcta comunicacin.
Fig. 2.13 Esquema de conexin de los nodos al bus CAN El bus est en estado recesivo cuando todos los transmisores estn desactivados. La
tensin de las lneas del bus en este caso es generado por las resistencias de terminacin y los circuitos de recepcin de los nodos, que muestran una impedancia alta entre las lneas del bus.
Un bit dominante es enviado al bus cuando al menos uno de los nodos tiene habilitado su
transmisor y quiere escribir un bit dominante. Esto provoca un flujo de corriente a travs de las
Terminador Terminador
CANH
CANL
Transceiver
Controlador (digital)
TX RX
Nodo 1
Transceiver
Controlador (digital)
TX RX
Nodo n
Anlisis y aplicacin de los buses de campo a la domtica
25
resistencias de terminacin y consecuentemente una tensin diferencial entre ambas lneas del bus. El bus puede estar en uno de los dos estados: recesivo o dominante.
En el estado recesivo, las tensiones en CANH y CANL son fijadas al nivel de tensin de
modo comn, y se considerarn como un 1 lgico siempre que la tensin diferencial no supere un cierto umbral mximo. El bus est en estado recesivo cuando se quiere transmitir un 1 o cuando el bus est en reposo.
En el estado dominante la tensin diferencial es mayor que un umbral mnimo. Un bit
dominante sobreescribe a un bit dominante y ocurre cuando uno o ms nodos quieren transmitir un 0 lgico.
Fig. 2.14 Niveles de tensin en el bus CAN
A continuacin se muestran los umbrales de tensin que se definen en la especificacin: Recesivo Parmetro Notacin Unidad
Mnimo Tpico
Mximo
VCANH
V
2,5
7,0
Tensin del bus en modo comn
VCANL
V
-2,0
2,5
Tensin diferencial
Vdiff
mV
-120
0
12
Tabla 2.4 Niveles de tensin para el estado recesivo Dominante Parmetro Notacin Unidad
Mnimo Tpico
Mximo
VCANH
V
3,5
7,0
Tensin del bus en modo comn
VCANL
V
-2,0
1,5
Tensin diferencial
Vdiff
mV
1,2
2,0
3,0
Tabla 2.5 Niveles de tensin para el estado dominante
V
t
CANH
CANL
Recesivo Dominante Recesivo
Anlisis y aplicacin de los buses de campo a la domtica
26
La especificacin ISO 11898 no define el tipo de conectores y cables a usar pero s define
los parmetros elctricos mnimos que deben cumplir los materiales. En el caso del cable se recomienda que tengan una impedancia caracterstica en torno a los 120 , una resistencia de menos de 70m/m y un retraso de lnea especfico de menos de 5ns/m En cuanto a la topologa hay que procurar que se parezca lo ms posible a una lnea recta para evitar reflexiones. Los parmetros que debe cumplir la topologa son:
Parmetro Notacin Unidad Mnimo Mximo Longitud del bus L m 0 40 Longitud del stub o latiguillo l m 0 0,3 Distancia entre nodos D m 0,1 40 Nota: especificaciones para 1Mbit/s
Tabla 2.6 Distancias a tener en cuenta en el cableado del bus CAN Las limitaciones del bus dependen de varios factores como por ejemplo la velocidad de
transmisin. En la siguiente tabla se muestra una comparativa entre la longitud mxima del bus y la velocidad:
Velocidad Tiempo de Bit Longitud Mxima 1 Mbps 1 S 40 m 800 Kbps 1,25 S 50 m 500 Kbps 2 S 100 m 250 Kbps 4 S 250 m 125 Kbps 8 S 500 m 50 Kbps 20 S 1000 m 20 Kbps 50 S 2500 m 10 Kbps 100 S 5000 m
Tabla 2.7 Relacin entre velocidad de transmisin y longitud del bus Otra de las limitaciones que hay que tener en cuenta es el nmero de nodos que se
pueden insertar en la red. Aunque la norma no especifica ningn lmite, lo cierto es que el bus est limitado por carga y dependiendo del tipo de transceiver que usemos podremos poner ms o menos nodos. Como valor de referencia se puede establecer un mximo de 64 nodos.
La capa fsica se encarga tambin de otros aspectos tales como la codificacin de bits, los
tiempos de bit y la sincronizacin, que sern vistos en detalle ms adelante.
2.4.3 NIVEL DE ENLACE En este nivel est la clave fundamental para entender el funcionamiento de CAN. Gracias
a esta capa, CAN ofrece una comunicacin con las siguientes caractersticas: - Establece prioridades para los mensajes. - Garantiza los tiempos de latencia. - Permite una configuracin flexible. - La comunicacin es punto a multipunto sincronizada. - Permite sistemas multimaestro.
Anlisis y aplicacin de los buses de campo a la domtica
27
- Detecta y sealiza errores. - Retransmite automticamente mensajes en caso de colisin tan pronto como el
bus est libre. - Distingue entre errores temporales y permanentes pudiendo desconectar nodos
defectuosos. 2.4.3.1 LAS SUBCAPAS DEL NIVEL DE ENLACE: LLC Y MAC La subcapa MAC representa el ncleo del protocolo de CAN. Presenta los mensajes
recibidos desde la subcapa LLC y acepta los mensajes para ser pasados a la subcapa LLC. La subcapa MAC es responsable de las siguientes tareas: - Encapsulado / desencapsulado de datos. - Codificacin de la trama (Insertando/extrayendo bits de relleno). - Gestin del acceso al medio. - Deteccin de errores. - Sealizacin de errores. - Generacin de asentimientos. - Serializacin / deserializacin de los datos. Esta subcapa est supervisada por una entidad de gestin denominada Fault
Confinement, que es un mecanismo de autocomprobacin para distinguir entre leves perturbaciones y fallos permanentes.
La subcapa LLC se encarga de las siguientes tareas: - Filtrado de mensajes. - Notificacin de sobrecarga. - Autorrecuperacin. Las diferentes caractersticas de la subcapa LLC y del protocolo CAN tienen una serie
consecuencias: Mensajes. Los mensajes son enviados al bus con un formato fijo de longitud variable pero
limitada. Cuando el bus est libre cualquier unidad puede empezar a transmitir un mensaje. Encaminamiento de la informacin. En un sistema CAN, los nodos no necesitan
conocer la configuracin de la red y no necesitan por tanto direcciones. Esto tiene importantes consecuencias:
- Flexibilidad. Se pueden aadir nuevos nodos sin que suponga una modificacin del hardware o software de ningn otro nodo.
- Encaminamiento de mensajes. El identificador no indica el destinatario del mensaje, sino el significado de los datos, por eso todos los nodos pueden decidir mediante filtrado si deben recibir ese mensaje o no.
- Multicast. Como consecuencia del filtrado de mensajes, varios nodos pueden recibir el mismo mensaje simultneamente.
Velocidad de transmisin. Es posible elegir la velocidad para cada sistema, sin
embargo, dentro de un sistema, todos los nodos transmiten a la misma velocidad.
Anlisis y aplicacin de los buses de campo a la domtica
28
Prioridades. El identificador determina la prioridad del mensaje en los accesos al bus. Peticin de datos remotos. Enviando una trama remota (Remote Frame) se puede
requerir a otro nodo que mande la correspondiente trama de datos. Ambas tramas tienen el mismo identificador.
Arbitraje. Siempre que el bus est libre, cualquier nodo puede empezar a transmitir un
mensaje. Si dos o ms nodos empiezan a transmitir mensajes al mismo tiempo, el conflicto de acceso al bus es resuelto por arbitraje de bits usando el identificador. Este mecanismo garantiza que no se pierde ni la informacin ni el tiempo.
Seguridad. Para lograr un alto nivel de seguridad en la transferencia de datos, se han
implementado medidas de deteccin de errores y autocorreccin en cada nodo CAN. Las medidas de deteccin de errores son: - Monitorizacin de la informacin escrita al bus. - Cdigo de redundancia cclico. - Bits de relleno. - Comprobacin de la estructura de la trama. Con este tipo de medidas se logra una probabilidad residual de errores no detectados
menor que: [tasa de errores en el mensaje] 4.7E-11
Confinamiento de fallos (Fault confinement). Como ya se ha mencionado, los nodos
CAN distinguen entre errores temporales y permanentes, siendo capaces de desactivar los nodos defectuosos para que no perturben el funcionamiento de la red.
Asentimientos. Todos los receptores comprueban la consistencia de un mensaje que
est siendo recibido y lo asentirn si el mensaje es consistente. En caso contrario lo sealarn con la pertinente trama de error.
Sleep mode. Para reducir el consumo los nodos CAN pueden entrar en este modo si no
van a ser utilizados. El nodo saldr de este modo bien porque detecte actividad en el bus o bien porque el sistema requiera que el nodo CAN vuelva a estar operativo.
2.4.3.2 DATA FRAME (TRAMA DE DATOS) Una trama de datos est compuesta de siete campos de bits: COMIENZO DE TRAMA,
CAMPO DE ARBITRAJE, CAMPO DE CONTROL, CAMPO DE DATOS, CRC, ASENTIMIENTO y FINAL DE TRAMA. El campo de datos puede tener longitud cero.
COMIENZO DE TRAMA
CAMPO DE ARBITRAJE
CAMPO DE CONTROL
CAMPO DE DATOS
CRC ASENTI- MIENTO
FINAL DE TRAMA
1 bit
12 bits/ 31 bits
6 bits
8 x n bits n= 0,1,,7,8
17 bits
2 bits
7 bits
Fig. 2.15 Estructura de una trama de datos
Anlisis y aplicacin de los buses de campo a la domtica
29
Comienzo de trama. Consiste en un nico bit dominante. Su misin es delimitar el
comienzo de una trama y servir de referencia para que el resto de nodos se sincronicen con el flanco de subida de este bit.
Campo de arbitraje. El formato es distinto segn si nos encontramos ante una trama
estndar o una trama extendida. Las tramas estndar utilizan identificadores de 11 bits mientras que las extendidas utilizan identificadores de 29 bits.
IDENTIFICADOR RTR IDE R0 DLC
11 bits 1 bit 1 bit 1 bit 4 bits
Fig. 2.16 Campos de arbitraje y control en una trama estndar IDENTIFICADOR (ID28 ID18)
SRR IDE
IDENTIFICADOR (ID17 ID0)
RTR
R1 R0
DLC
11 bits 1 bit 1 bit 18 bits 1 bit 1 bit 1 bit 4 bits Fig. 2.17 Campos de arbitraje y control en una trama extendida
Como ya se dijo, el identificador indica el contenido del mensaje y a su vez define la
prioridad del mensaje. El bit RTR (Remote Transmission Request) indica si se trata de una trama de datos (0) o
si se trata de una trama remota (1). El bit SRR (Substitute Remote Request) sustituye al bit RTR de las tramas estndar y
siempre est a 1 de modo que en una colisin entre una trama estndar y una extendida en las que coincidan los 11 primeros bits del identificador, siempre prevalezca la trama estndar.
El bit IDE (Identifier Extensin) determina si el identificador es de 11 29 bits, por tanto
este bit tiene el valor 0 en las tramas estndar y el valor 1 en las tramas extendidas. Campo de control. Este campo tiene una longitud de 6 bits como se aprecia en las
figuras 2.16 y 2.17. Los bits R0 y R1 estn reservados mientras que los 4 bits del DLC (Data lenght code) indican la longitud en bytes del campo de datos. De la figura 2.15 se desprende que el campo de datos tiene una longitud mxima de 8 bytes, por tanto, el valor mximo que puede codificarse en el DLC es 8. Aunque con 4 bits podramos codificar valores desde el 0 al 15, los valores mayores que 8 no estn permitidos.
Campo de datos. Puede contener desde 0 a 8 bytes de informacin. Dentro de cada byte,
los bits estn ordenados de manera que el bit ms significativo es el primero que se transmite. CRC (Cdigo de redundancia cclico). Este campo se divide en dos partes, por un lado
un cdigo de redundancia para poder detectar errores y por otro un delimitador del CRC. El cdigo de redundancia es del tipo BCH, tiene una longitud de 16 bits y responde al siguiente polinomio generador: X15 + X14 + X10 + X8 + X7 + X4 + X3 + 1.
Anlisis y aplicacin de los buses de campo a la domtica
30
CRC Delimitador 15 bits 1 bit
Fig. 2.18 Campo CRC El CRC se calcula sobre los siguientes campos sin contar los bits de relleno: Comienzo de
trama, Campo de arbitraje, Campo de control y Campo de datos. El delimitador consiste en un bit con valor 1.
Campo de asentimiento. Este campo se compone de dos bits: la ranura y el delimitador
de asentimiento. El nodo que transmite la trama pone ambos bits a 1 (nivel recesivo). Todos los nodos que hayan recibido correctamente la trama, incluyendo una comprobacin del CRC con resultado satisfactorio, sobrescribirn la ranura de asentimiento con un bit dominante (0) indicando al nodo transmisor que la trama ha sido recibida correctamente.
Ranura de ACK Delimitador ACK
1 bit 1 bit Fig. 2.19 Campo de asentimiento
Final de trama. Este campo consiste simplemente en 7 bits recesivos. 2.4.3.3 REMOTE FRAME (TRAMA REMOTA) La estructura de una trama remota es exactamente igual que la de una trama de datos con
la excepcin de que el bit RTR va a 1 y que el campo de datos est vaco independientemente del valor del DLC. Este tipo de tramas se utilizan cuando se quiere solicitar determinada informacin a un nodo. El nodo solicitante enva una trama remota, sin datos y con un determinado identificador. El nodo receptor reacciona enviando inmediatamente una trama de datos con el mismo identificador y la informacin correspondiente. Por supuesto el nodo receptor debe tener preparada previamente la informacin actualizada en el buzn correspondiente para que cuando llegue una trama remota la informacin que se enve automticamente sea la adecuada.
2.4.3.4 ERROR FRAME (TRAMA DE ERROR) La trama de error consta de dos campos. El primero viene dado por la superposicin de
seales de error procedentes de diferentes nodos. El segundo es un delimitador de error.
SEAL DE ERROR DELIMITADOR DE ERROR
De 6 a 12 bits 8 bits Fig. 2.20 Estructura de una trama de error
Hay dos tipos de seales de error:
Anlisis y aplicacin de los buses de campo a la domtica
31
- Seal de error activo: Consiste en seis bits dominantes consecutivos. - Seal de error pasivo: Consiste en seis bits recesivos consecutivos a menos que
otros nodos los sobrescriban con sus seales de error activo. Un nodo en estado de error activo que detecta una condicin de error lo indica
transmitiendo una seal de error activo. Esta seal viola la ley de bits de relleno aplicados a todos los campos desde el comienzo de trama hasta el CRC o destruye el formato de los campos de asentimiento y final de trama. Como consecuencia, todos los dems nodos detectan una condicin de error e inician la transmisin de sus propias seales de error. Por eso, la secuencia de bits dominantes que realmente se ven en el bus resulta de la superposicin de diferentes seales de error y la longitud de esta secuencia puede variar entre 6 y 12 bits.
Un nodo en estado de error pasivo que detecta una condicin de error intenta indicarla transmitiendo una seal de error pasivo. Este nodo espera a que aparezcan 6 bits de la misma polaridad, empezando a contar desde el principio de la seal de error pasivo.
Una vez que se han terminado de transmitir todas las seales de error tanto pasivas como
activas, los nodos transmiten 8 bits recesivos al bus. Estos 8 bits forman el delimitador de error. 2.4.3.5 OVERLOAD FRAME (TRAMA DE SOBRECARGA) La trama de sobrecarga contiene dos campos de dos bits cada uno: la seal de
sobrecarga y el delimitador de sobrecarga. Hay tres tipos de condiciones de sobrecarga, que conducen ambas a la transmisin de
este tipo de tramas: - Las condiciones internas de un receptor pueden hacer que ste necesite introducir
un retraso en la recepcin de la prxima trama de datos o trama remota para que pueda procesar la tarea que tenga pendiente.
- La deteccin de un bit dominante en el ltimo bit de un delimitador de error o de un delimitador de sobrecarga. En este caso el nodo transmitir una trama de sobrecarga, no una trama de error y los contadores de errores no sern incrementados.
- Deteccin de un bit dominante en el primer y segundo bit de INTERMISSION.
SEAL DE SOBRECARGA
DELIMITADOR DE SOBRECARGA
de 6 a 12 bits 8 bits
Fig. 2.21 Estructura de una trama de sobrecarga La seal de sobrecarga consiste en seis bits dominantes consecutivos y la forma
resultante de este campo es anloga a la de la seal de error. Lo mismo ocurre con el delimitador de sobrecarga, que se corresponde con una secuencia
de 8 bits recesivos al igual que el delimitador de error.
Anlisis y aplicacin de los buses de campo a la domtica
32
2.4.3.6 ESPACIO ENTRE TRAMAS Tanto las tramas de datos como las tramas remotas estn separadas de la trama
precedente, sea del tipo que sea, por un conjunto de bits denominados INTERFRAME SPACE (Espacio entre tramas). En contraste, las tramas de error y sobrecarga no van precedidas por este espacio entre tramas, ni siquiera varias tramas de sobrecarga seguidas.
El espacio entre tramas contiene los campos de bits INTERMISSION, Bus libre, y para nodos en estado de error pasivo que han transmitido el ltimo mensaje, Suspensin de transmisin.
INTERMISSION BUS LIBRE
3 bits indefinido
a) Espacio entre tramas para nodos en estado error activo
INTERMISSION SUSPENSIN DE TRANSMISIN
BUS LIBRE
3 bits 8 bits indefinido b) Espacio entre tramas para nodos en estado error pasivo
Fig. 2.22 Estructura del espacio entre tramas El campo INTERMISSION consiste en una secuencia de 3 bits recesivos consecutivos y el
campo Suspensin de transmisin consiste en una secuencia de 8 bits recesivos consecutivos. La duracin del espacio denominado Bus libre es indefinida y termina cuando algn nodo
empieza a transmitir una trama.
2.4.4 ARBITRAJE EN EL BUS El arbitraje de bits es el mecanismo que utiliza CAN para decidir en caso de colisin cul
es el nodo que puede seguir transmitiendo. Esta decisin se toma teniendo en cuenta el campo de arbitraje, que contiene el identificador.
Como ya se ha dicho, un bit dominante prevalece sobre uno recesivo. Esto es posible gracias a los circuitos de los transmisores que se comportan de forma similar a una puerta a drenador abierto, que es capaz de fijar un cero lgico pero que al transmitir un uno lgico ponen su salida en alta impedancia.
Si un solo nodo empieza a transmitir una trama, automticamente el resto de nodos se ponen a recibir el mensaje y se abstienen de transmitir al bus hast que el bus vuelva a quedar libre y necesiten transmitir algo o hasta que se den condiciones de error o sobrecarga.
El problema surge cuando dos o ms estaciones intentan transmitir al mismo tiempo. En este caso cuando cualquiera de los nodos que intentan transmitir detecten diferencia entre el bit que ellos estn transmitiendo y el bit que se observa en el bus, y siempre que se encuentren transmitiendo el campo de arbitraje, entendern que han perdido la contienda y por tanto deben dejar de transmitir inmediatamente. Estos nodos volvern a intentar la transmisin cuando el bus est libre de nuevo.
El siguiente ejemplo ilustra el funcionamiento del mecanismo de arbitraje:
Anlisis y aplicacin de los buses de campo a la domtica
33
Fig. 2.23 Ejemplo de arbitraje en el bus CAN En la figura se aprecia cmo el nodo 1 deja de transmitir en cuanto se percata de que en
el bus hay un nivel dominante (0) cuando l haba transmitido un nivel recesivo (1). Lo mismo le ocurre al nodo 3 unos bits despus. Al final slo queda el nodo 2 que es el que finalmente transmite su trama sin haber desperdiciado tiempo y sin haber destruido la informacin del nodo ganador.
Tambin se puede apreciar que el valor del identificador del nodo 2 es el ms bajo (00011000011b = 195d), frente al nodo 1 (001XXXXXXXXb > 256d) y al nodo 3 (0001101XXXXb > 208d). Por tanto los mensajes con identificadores ms bajos tendrn ms preferencia.
Si dos o ms nodos transmiten tramas con el mismo identificador y bit RTR, en el
momento en que hubiera alguna discrepancia, por ejemplo, en el campo de datos, los nodos lo que detectaran sera un error de bit, emitiran las correspondientes tramas de error y destruiran la trama que estaban transmitiendo. En ese caso s se habra desperdiciado tiempo y los nodos tendran que reintentar la transmisin de nuevo.
2.4.5 FILTRADO DE MENSAJES
Aunque la especificacin CAN no regula del todo la forma de intercambiar informacin
entre el sistema microprocesador y el controlador CAN, lo cierto es que la mayora de dispositivos establecen para ello una serie de buzones (mailboxes). En el caso de los buzones de transmisin, cada uno de ellos lleva un campo con el identificador que incluirn en sus mensajes y en el caso de los buzones de recepcin, cada uno puede llevar uno o ms filtros. Los filtros se componen de un identificador y una mscara. De esta manera en un buzn de recepcin pueden entrar un grupo de mensajes siempre que el identificador del mensaje entrante coincida con el identificador del filtro en los bits especificados en la mscara.
Anlisis y aplicacin de los buses de campo a la domtica
34
1 1 0 0 1 1 0 0 0 0 0 ID del mensaje 1
1 1 0 0 1 1 0 0 0 1 1
ID del mensaje 2
1 1 0 1 0 1 0 0 0 0 0 ID del mensaje 3
1 1 0 0 1 1 0 0 0 0 0
ID del filtro 0 0 0 0 0 0 1 1 1 1 1
Mscara del filtro
Fig. 2.24 Ejemplo de filtrado con buzones En el caso de los buzones configurados para recibir tramas remotas, el controlador no
guarda los datos de stas puesto que no contienen datos, y en su lugar inicia automticamente una transmisin de una trama de datos con la informacin que estuviera guardada en dicho buzn por el sistema microprocesador.
2.4.6 CODIFICACIN Los campos Comienzo de trama, Campo de arbitraje, Campo de control, Campo de datos
y CRC de las tramas de datos y tramas remotas son codificados con el mtodo de bits de relleno. Siempre que el transmisor detecta cinco bits consecutivos de idntico valor en el flujo de bits que va a ser transmitido, inserta automticamente un bit complementario en el flujo que realmente se transmite. Los restantes campos de dichas tramas tienen un formato fijo y no estn afectados.
El flujo de bits en un mensaje es codificado de acuerdo con el mtodo de No-Retorno-a-cero (NRZ). Esto significa que durante todo el tiempo de bit, el nivel generado se mantiene.
2.4.7 MECANISMOS CONTRA ERRORES
2.4.7.1 TIPOS DE ERRORES Hay cinco tipos de errores que se pueden dar en un bus CAN: - Error de bit. Al tiempo que un nodo transmite un bit al bus, tambin monitoriza el
nivel real en el bus, y cuando el valor detectado es diferente del valor enviado se genera un error de bit excepto cuando se est transmitiendo un bit que pertenece al campo de arbitraje o a la ranura de asentimiento y siempre que detectemos un nivel dominante cuando hayamos transmitido un nivel recesivo. Tampoco se interpreta como un error de bit cuando un nodo enva una seal de error pasivo mientras otros nodos ponen en el bus un nivel dominante debido a sus seales de error activo.
El mensaje 1 entrara en el buzn porque su identificador coincide con el identificador del filtro en los bits que especifica la mscara (los que estn a 0). El mensaje 2 entrara en el buzn por la misma razn aunque los dos ltimos bits no coincidan ya que por la configuracin de la mscara esos bits no deben ser comprobados. El mensaje 3 no entrara en el buzn puesto que tiene 2 bits diferentes dentro de la zona del identificador que s es comprobada.
Anlisis y aplicacin de los buses de campo a la domtica
35
- Error en bits de relleno. Cuando se detectan 6 bits consecutivos con el mismo valor en alguno de los campos codificados con el mtodo de bits de relleno, se genera este tipo de error.
- Error en CRC. Los receptores recalculan el CRC de los mensajes que le estn llegando y si detectan discrepancia entre el CRC que han obtenido y el que reciben en la trama, lo sealan como error en el CRC.
- Error de formato. Este tipo de error ocurre cuando se detectan bits ilegales en campos con un formato fijo. Si se detecta un bit dominante durante el ltimo bit del campo Final de trama, no se considera como error de formato.
- Error de asentimiento. Si un nodo transmisor no detecta un nivel dominante durante la ranura de asentimiento de la trama que est transmitiendo, genera este error.
En cuanto se detecta alguno de estos errores se transmite inmediatamente a partir del
siguiente bit una trama de error utilizando una seal de error activo o pasivo segn el estado del nodo, a excepcin de los errores en CRC. Ante errores en el CRC, la trama de error se transmite justo despus del delimitador de asentimiento siempre que no se haya producido alguna de las otras condiciones de error antes.
2.4.7.2 CONFINAMIENTO DE NODOS DEFECTUOSOS (FAULT CONFINEMENT) Los nodos pueden estar en tres estados: - error activo. - error pasivo. - bus off (desactivado). Un nodo en error activo puede tomar parte en las comunicaciones del bus con normalidad
y enviar seales de error activo cuando detecte un error. Un nodo en error pasivo tambin puede tomar parte en las comunicaciones pero a la hora
de sealar un error debe hacerlo con la seal de error pasivo, y adems, despus de una transmisin, los nodos en error pasivo deben esperar un tiempo antes de iniciar una nueva transmisin.
Un nodo en bus off est desactivado y no puede ejercer influencia alguna sobre el bus.
Para hacer efectivo el mecanismo de confinamiento de nodos defectuosos, se implementan dos contadores en cada nodo:
- Contador de errores de transmisin - Contador de errores de recepcin Los contadores son modificados de acuerdo a las siguientes reglas: 1) Cuando un receptor detecta un error, el contador de errores de recepcin es
incrementado en 1 excepto cuando se trata de un error de bit durante el envo de una seal de error o de sobrecarga.
2) Cuando un receptor detecta un bit dominante como primer bit tras enviar una seal de error, el contador de errores de recepcin ser incrementado en 8
Anlisis y aplicacin de los buses de campo a la domtica
36
3) Cuando el transmisor enva una seal de error el contador de errores de transmisin es incrementado en 8. Para esta regla hay dos excepciones, la primera se aplica al caso en que el transmisor est en error pasivo y detecte un error de asentimiento por no recibir un asentimiento con bit dominante y no detectar bits dominantes mientras enva su seal de error pasivo, ya que esto significara que el nodo es el nico activo en el bus. La segunda excepcin se aplica al caso en que el transmisor enva una seal de error por un error de bits de relleno ocurrido durante el arbitraje al haber enviado un bit recesivo pero haber monitorizado un bit dominante. El contador de errores de transmisin no se modifica si se dan los casos de cualquiera de estas dos excepciones.
4) Si el transmisor detecta un error de bit mientras manda una seal de error activo o de sobrecarga, el contador de errores de transmisin es incrementado en 8.
5) Si un receptor detecta un error de bit mientras manda una seal de error activo o de sobrecarga, el contador de errores de recepcin es incrementado en 8.
6) Cualquier nodo tolera hasta 7 bits dominantes consecutivos tras mandar una seal de error activo, de error pasivo o de sobrecarga. Si se detectan ms bits dominantes consecutivos de los especificados por ese lmite, el transmisor incrementar en 8 su contador por cada grupo de 8 bits dominantes consecutivos que est de ms. Los receptores incrementarn su contador de errores de la misma manera.
7) Tras una transmisin con xito, el contador de errores de transmisin es decrementado en 1 a menos que el contador ya valga cero.
8) Tras la recepcin de un mensaje con xito, el contador de errores de recepcin es decrementado en 1 si tiene un valor entre 1 y 127. Si tena un valor de 0, no se decrementa. Si tena un valor mayor de 127, se le asigna un valor entre 119 y 127
9) Un nodo est en error pasivo cuando el contador de errores de transmisin o el de recepcin iguala o excede de 128.
10) Un nodo est en bus off cuando el contador de errores de transmisin es mayor o igual a 256
11) Un nodo en error pasivo pasa a error activo de nuevo cuando tanto el contador de errores de transmisin como el de recepcin son menores o iguales a 127.
12) Un nodo que est en bus off puede pasar a error activo con sus contadores a cero tras ocurrir 128 veces la deteccin de 11 bits recesivos consecutivos.
2.4.8 SINCRONIZACIN
Para conseguir la sincronizacin, la especificacin CAN divide el tiempo de bit en los
siguientes segmentos: - Segmento de sincronizacin (SYNC_SEG). - Segmento de propagacin (PROP_SEG). - Segmento de fase 1 (PHASE_SEG1). - Segmento de fase 2 (PHASE_SEG2).
SYNC_SEG PROP_SEG PHASE_SEG1 PHASE_SEG2
Fig. 2.25 Segmentos del tiempo de bit
Tiempo de bit
Punto de muestreo
Anlisis y aplicacin de los buses de campo a la domtica
37
El segmento de sincronizacin es el periodo de tiempo dentro del cual se produce el flanco
y sirve para sincronizar al nodo. El segmento de propagacin es un tiempo de espera para compensar los retrasos en la lnea. Los segmentos de fase son empleados para compensar los errores de fase del flanco y pueden ser alargados o acortados por el mecanismo de resincronizacin. El punto en el que realmente se muestrea el bit ocurre justo al finalizar el segmento de fase 1.
Estos segmentos estn formados a su vez de unidades menores llamadas Time
Quantum que se derivan de un oscilador tras pasar un prescaler. Dependiendo del valor de estos Time quantum y de cuntos de ellos formen cada segmento, as ser el tiempo de bit. El segmento de sincronizacin tiene una longitud de 1 Time quantum. Tanto el segmento de propagacin como el segmento de fase 1 pueden variar entre 1 y 8 Time quantum. Por su parte, el segmento de fase 2 est formado por un nmero de Time quantum de manera que sumen un tiempo equivalente al mximo entre el segmento de fase 1 y el tiempo de procesamiento de la informacin. Existen dos tipos de sincronizacin que se detallan a continuacin:
- Sincronizacin dura: Tras detectar un flanco se fuerza a comenzar un nuevo tiempo
de bit, de este modo el flanco cae necesariamente en el segmento de sincronizacin. - Resincronizacin: Se utiliza para corregir pequeos errores de fase. Para ello se
alarga el segmento de fase 1 o se acorta el segmento de fase 2 en un nmero de Time quantum no superior al lmite establecido por el ancho de salto de resincronizacin, que es un parmetro configurable.
La sincronizacin obedece a las siguientes reglas: 1) Slo un tipo de sincronizacin es posible dentro de un tiempo de bit 2) Un flanco ser usado para sincronizacin slo si el valor detectado en el punto de
muestreo anterior difiere del valor en el bus inmediatamente despus del flanco 3) La sincronizacin dura se lleva a cabo siempre que hay una transicin de recesivo a
dominante durante el estado de reposo del bus. 4) Todas las dems transiciones de recesivo a dominante que cumplan las reglas 1 y 2
sern usadas para resincronizacin.
2.5 ETHERNET
La topologa de red tipo Bus es una arquitectura abierta, flexible y robusta. Una o ms secciones acopladas en paralelo, y los nodos, forman un nico segmento de red. El bus es la parte bsica para la construccin de redes Ethernet. Como la topologa de bus es un diseo en paralelo, nuevos nodos pueden ser instalados en alguna parte sin afectar a la comunicacin. El Bus principal tambin puede ser expandido en sus puntos finales con una mnima afeccin y nuevas secciones pueden ser insertadas en la parte media de algn segmento.
En trminos generales, Ethernet es un sistema para el transporte digital de datos a travs
de sistemas de cmputo local. Ethernet es una tecnologa de transmisin de datos de alta velocidad que fue lanzada en 1973 por Xerox Corporation y registrada, posteriormente, junto con Digital e Intel. Es compatible con el modelo OSI en los niveles 1, 2 y 3 (el ltimo a travs de
Anlisis y aplicacin de los buses de campo a la domtica
38
puentes). Permite topologa en Bus o rbol con comunicacin semidplex. Las velocidades van desde los 10 Mbits/s a los 100 Mbits/s de FAST-Ethernet.
Es uno de los estndares de red que ms rpidamente evolucionan, debido a su uso
masivo en redes ofimticas. Ethernet permite a los Pcs y estaciones de trabajo de distintos fabricantes comunicarse usando estndares acordados para el envo de paquetes de informacin. Soporta una topologa de Bus y usa un canal compartido de comunicaciones, manejado por acceso mltiple de medicin de portadora con deteccin de colisin (CSMA/CD)[5].
Ethernet est bien adaptada a las aplicaciones en que el soporte de comunicaciones local
tiene que procesar a menudo un elevado trfico con puntas elevadas de intercambio de datos.
2.5.1 NIVEL FSICO
La Capa Fsica describe las caractersticas fsicas de la red y el hardware usado. Es la responsable del transporte de los datos hacia y fuera del dispositivo conectado. Su trabajo incluye el codificado y descodificado de los datos, la deteccin de portadora y colisiones, as como la interfaz elctrica y mecnica con el medio conectado. Esta capa incluye: Topologa, estaciones de trabajo, hardware de transmisin, equipo usado, etc.
La estacin de trabajo simplemente se refiere a una computadora o terminal que es capaz
de desplegar informacin del sistema Ethernet y al mismo tiempo transmitir hacia el sistema Ethernet. Aunque todas las computadoras personales actualmente pueden trabajar como una estacin en una LAN Ethernet, deben estar provistas de una tarjeta y software para configurarla. Cada una de estas estaciones debe tener una direccin nica para que el sistema sepa donde dejar la informacin.
Dentro de la Capa Fsica se pueden distinguir varios tipos de Redes Ethernet:
- Capa Fsica 10 Base 2: Especificacin Ethernet (IEEE 802.3) que utiliza tipo de cable
coaxial RG-58 muy econmico y probado. Topologa de Bus. - Capa Fsica 10 Base 5: Especificacin Ethernet (IEEE 802.3) que utiliza cable coaxial
RG-8 o RG-11, utilizado originalmente en las primeras etapas de desarrollo. Topologa de Bus.
- Capa Fsica 10 Base T: Especificacin Ethernet (IEEE 802.3) que utiliza cable multipar trenzado en topologa Estrella.
- Capa Fsica 10 Base FL: Especificacin Ethernet (IEEE 802.3) que utiliza Fibra ptica en topologa en Estrella.
- Capa Fsica 10 Base TX: Especificacin Fast-Ethernet (IEEE 802.3) para cable multipar trenzado en topologa Estrella.
- Capa Fsica 10 Base FX: Especificacin Fast-Ethernet (IEEE 802.3) para Fibra ptica en topologa Estrella.
2.5.2 NIVEL DE ENLACE
El nivel de enlace en las redes Ethernet se divide en dos subcapas denominadas MAC y
LLC. La primera de ellas es la especfica del estndar IEEE 802.3 y se ocupa del control de acceso al medio compartido. La segunda es comn a otros tipos de redes de rea local como Token Ring, FDDI, etc., y se ocupa del control lgico del enlace de datos.
Anlisis y aplicacin de los buses de campo a la domtica
39
2.5.2.1 MAC La tcnica de acceso al medio que usa la capa MAC de Ethernet es CSMA/CD, es decir,
Acceso Mltiple con Escucha y Deteccin de Colisiones. Cuando una estacin quiere transmitir, primero debe escuchar el canal por si estuviera
ocupado por otra estacin. En el caso de que se encuentre el canal libre, se empieza a emitir. Si el canal est ocupado, la estacin espera insistentemente a que ste se libere, y cuando esto ocurra, se transmite de inmediato (esto se conoce como funcionamiento 1-persistente).
El hecho de que se produzcan colisiones a pesar de enviar las tramas cuando se ha
interpretado que el canal est vaco se debe a los retardos de propagacin de la seal por el medio fsico: una estacin tarda algn tiempo en detectar el comienzo de la transmisin de otra estacin alejada.
Adems puede darse el caso de que varias estaciones que deseen trasmitir, encuentren el
canal ocupado y decidan esperar a que acabe la transmisin en curso. La caracterstica 1-persistente har que despus de la espera se produzca una colisin.
Para minimizar el impacto de las colisiones se obliga a las estaciones a auscultar el canal
mientras transmiten: si lo que envan no coincide con lo que reciben, se debe a que hay ms estaciones transmitiendo. Una vez detectada de esta forma la colisin, se transmite una seal de corta duracin y mayor potencia para asegurar que todos detecten la colisin. Acto seguido, se interrumpe la transmisin.
Despus de producirse la colisin, las estaciones implicadas en la misma retransmitirn
sus tramas pasado un cierto tiempo. Si este tiempo fuera fijo se producira una nueva colisin, de forma que se introduce una componente de aleatoriedad en la espera. Si el nmero de intentos rebasa cierta cantidad se abandona el intento de transmisin.
Obsrvese que este mecanismo no permite asignar prioridades de trfico o estaciones, y
tampoco garantiza determinsticamente un determinado tiempo mximo de acceso al enlace: puede darse el caso de que una trama colisione hasta su abandono, incluso a bajo nivel de carga (esto puede ser improbable, pero no imposible).
2.5.2.2 LLC El LLC no es ms que una capa de adaptacin que, basndose en el servicio
proporcionado por el MAC, da a la capa de red lo que esta espera: un enlace entre dos equipos que pueda multiplexarse. El LLC especifica, por tanto, cmo se lleva a cabo el control lgico del enclace de datos, definie