Embed Size (px)
Citation preview
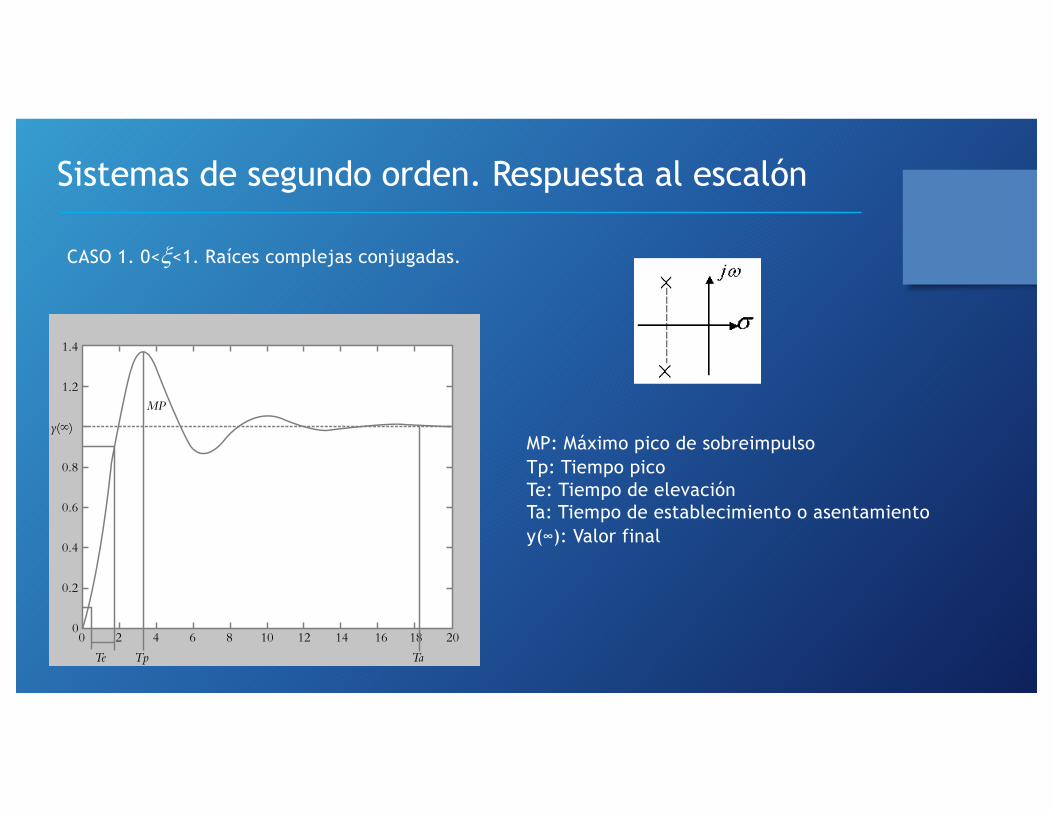
Sistemas de segundo orden. Respuesta al escalón
CASO 1. 0<x<1. Raíces complejas conjugadas.
MP: Máximo pico de sobreimpulsoTp: Tiempo picoTe: Tiempo de elevaciónTa: Tiempo de establecimiento o asentamientoy(∞): Valor final
Características de respuesta de los sistemas 205
0
0.2
0.4
0.6
0.8
1.2MP
1.4
y(@)
Te Tp Ta
0 2 4 6 8 10 12 14 16 18 20
Tiempo de asentamiento TaTiempo que necesita el sistema para que alcance su valor ! nal práctico; esto es, el tiempo para que transcurran cuatro constantes de tiempo.
Tiempo de elevación TeTiempo requerido por el sistema para que su respuesta pase del 10 al 90% de su valor ! nal
La tabla 5.1 incluye los diferentes parámetros asociados a los distintos tipos de sistemas amortiguados; los resultados presentados se asocian directamente con la ! gura 5.20.
Tabla 5.1 Características de respuesta al escalón de sistemas amortiguados.
Tipo de sistema
Tiempo de elevación
Máximo pico de
sobreimpulsoTiempo
picoTiempo de
asentamiento
Libre oscilatorio No existe No existe No existe No existe
Sobreamortiguado Existe No existe No existe Existe
Críticamente amortiguado Existe No existe No existe Existe
Subamortiguado Existe Existe Existe Existe
Figura 5.21Respuesta subamorti-
guada de un sistema de segundo orden para una entrada escalón unitario,
donde se indica el máximo pico de sobreimpulso
MP, el tiempo pico Tp, el tiempo de elevación Te y
el tiempo de asentamiento Ta. Se considera que la respuesta y(h) es igual
a la unidad.
C05_a SISTEMAS–Hdz.indd 205C05_a SISTEMAS–Hdz.indd 205 2/11/10 10:40:23 PM2/11/10 10:40:23 PM
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 143
Críticamente amortiguado
!=1
Sub amortiguado
0<!<1
Críticamente estable
!=0
Sistemas de segundo orden. Tiempo de establecimiento
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
146 Dpto. Electrónica, Automática e Informática Industrial
• Sobreoscilación, Mp: Valor de pico máximo de la salida ponderado con el valor final. Sólo sucede si 7.00 << ! .
• Tiempo de subida, tr: el tiempo transcurrido en alcanzar por primera vez el 100% del valor final de la señal de salida.
El objetivo que se pretende es obtener expresiones matemáticas que determinen los valores característicos temporales y de sobreoscilación, a través de los parámetros característicos de los sistemas de segundo orden ( )"#$!# ydn ,,, ,.
6.2.3.1 Tiempo de establecimiento, ts
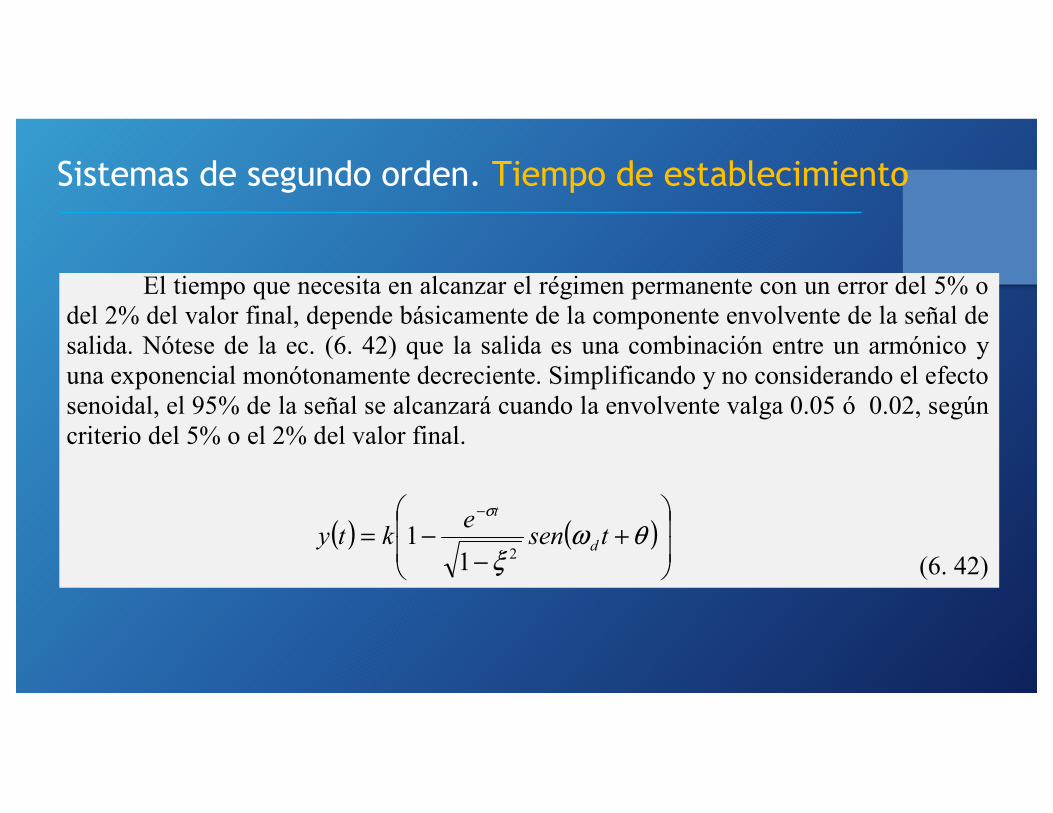
El tiempo que necesita en alcanzar el régimen permanente con un error del 5% o del 2% del valor final, depende básicamente de la componente envolvente de la señal de salida. Nótese de la ec. (6. 42) que la salida es una combinación entre un armónico y una exponencial monótonamente decreciente. Simplificando y no considerando el efecto senoidal, el 95% de la señal se alcanzará cuando la envolvente valga 0.05 ó 0.02, según criterio del 5% o el 2% del valor final.
( ) ( )
+
%%=
%
"#!
$
tsenekty d
t
211
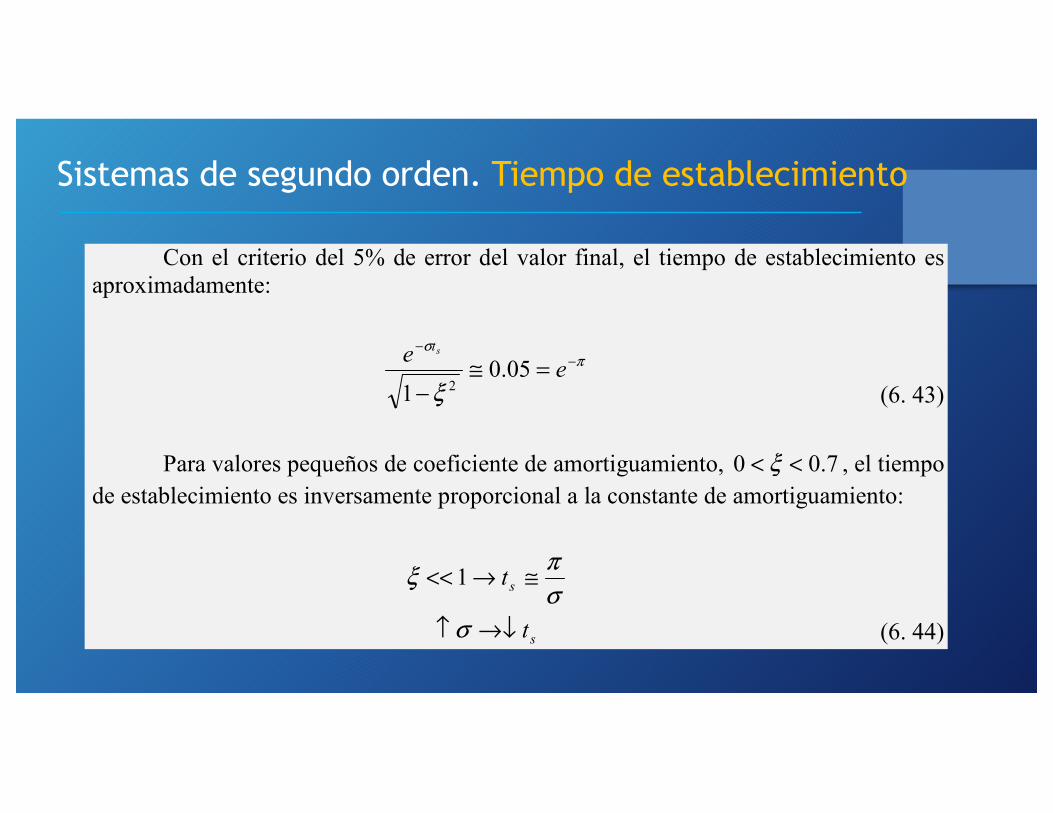
Con el criterio del 5% de error del valor final, el tiempo de establecimiento es aproximadamente:
&$
!%
%
='%
ee st
05.01 2
Para valores pequeños de coeficiente de amortiguamiento, 7.00 << ! , el tiempo de establecimiento es inversamente proporcional a la constante de amortiguamiento:
s
s
t
t
()*
'(<<
$$&! 1
6.2.3.2 Tiempo de pico, tp
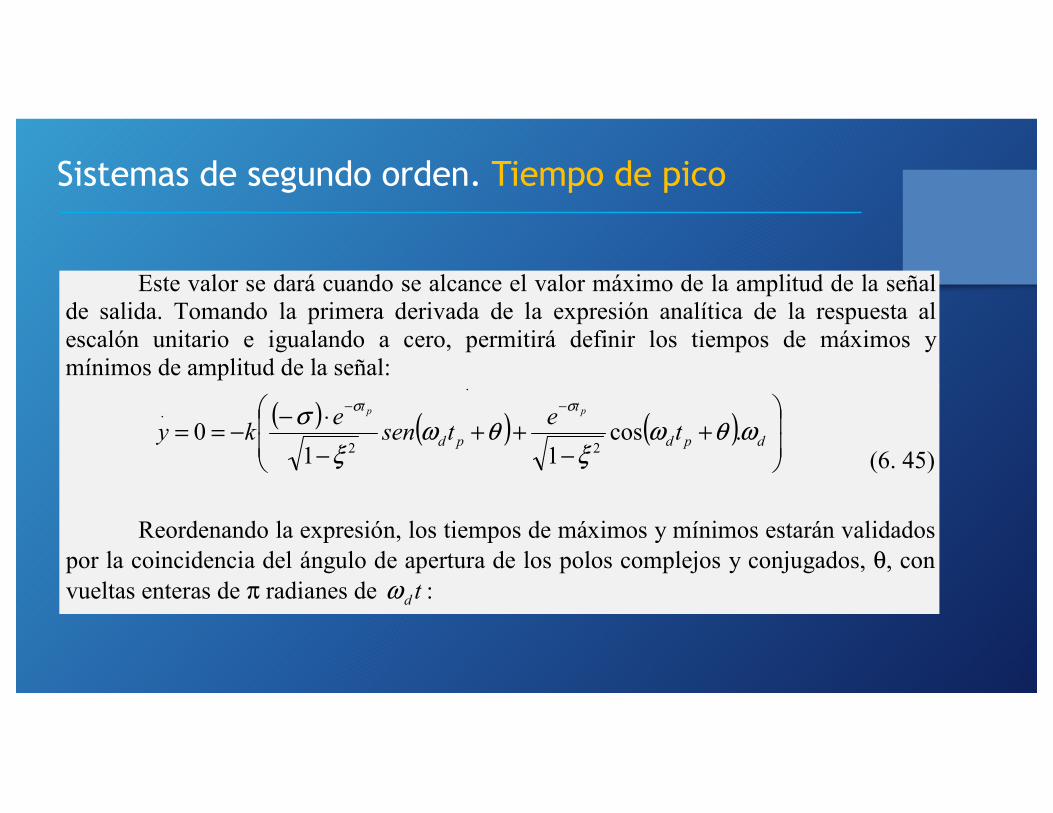
Este valor se dará cuando se alcance el valor máximo de la amplitud de la señal de salida. Tomando la primera derivada de la expresión analítica de la respuesta al escalón unitario e igualando a cero, permitirá definir los tiempos de máximos y mínimos de amplitud de la señal:
(6. 42)
(6. 43)
(6. 44)
Sistemas de segundo orden. Tiempo de establecimiento
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
146 Dpto. Electrónica, Automática e Informática Industrial
• Sobreoscilación, Mp: Valor de pico máximo de la salida ponderado con el valor final. Sólo sucede si 7.00 << ! .
• Tiempo de subida, tr: el tiempo transcurrido en alcanzar por primera vez el 100% del valor final de la señal de salida.
El objetivo que se pretende es obtener expresiones matemáticas que determinen los valores característicos temporales y de sobreoscilación, a través de los parámetros característicos de los sistemas de segundo orden ( )"#$!# ydn ,,, ,.
6.2.3.1 Tiempo de establecimiento, ts
El tiempo que necesita en alcanzar el régimen permanente con un error del 5% o del 2% del valor final, depende básicamente de la componente envolvente de la señal de salida. Nótese de la ec. (6. 42) que la salida es una combinación entre un armónico y una exponencial monótonamente decreciente. Simplificando y no considerando el efecto senoidal, el 95% de la señal se alcanzará cuando la envolvente valga 0.05 ó 0.02, según criterio del 5% o el 2% del valor final.
( ) ( )
+
%%=
%
"#!
$
tsenekty d
t
211
Con el criterio del 5% de error del valor final, el tiempo de establecimiento es aproximadamente:
&$
!%
%
='%
ee st
05.01 2
Para valores pequeños de coeficiente de amortiguamiento, 7.00 << ! , el tiempo de establecimiento es inversamente proporcional a la constante de amortiguamiento:
s
s
t
t
()*
'(<<
$$&! 1
6.2.3.2 Tiempo de pico, tp
Este valor se dará cuando se alcance el valor máximo de la amplitud de la señal de salida. Tomando la primera derivada de la expresión analítica de la respuesta al escalón unitario e igualando a cero, permitirá definir los tiempos de máximos y mínimos de amplitud de la señal:
(6. 42)
(6. 43)
(6. 44)
Sistemas de segundo orden. Tiempo de pico
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
146 Dpto. Electrónica, Automática e Informática Industrial
• Sobreoscilación, Mp: Valor de pico máximo de la salida ponderado con el valor final. Sólo sucede si 7.00 << ! .
• Tiempo de subida, tr: el tiempo transcurrido en alcanzar por primera vez el 100% del valor final de la señal de salida.
El objetivo que se pretende es obtener expresiones matemáticas que determinen los valores característicos temporales y de sobreoscilación, a través de los parámetros característicos de los sistemas de segundo orden ( )"#$!# ydn ,,, ,.
6.2.3.1 Tiempo de establecimiento, ts
El tiempo que necesita en alcanzar el régimen permanente con un error del 5% o del 2% del valor final, depende básicamente de la componente envolvente de la señal de salida. Nótese de la ec. (6. 42) que la salida es una combinación entre un armónico y una exponencial monótonamente decreciente. Simplificando y no considerando el efecto senoidal, el 95% de la señal se alcanzará cuando la envolvente valga 0.05 ó 0.02, según criterio del 5% o el 2% del valor final.
( ) ( )
+
%%=
%
"#!
$
tsenekty d
t
211
Con el criterio del 5% de error del valor final, el tiempo de establecimiento es aproximadamente:
&$
!%
%
='%
ee st
05.01 2
Para valores pequeños de coeficiente de amortiguamiento, 7.00 << ! , el tiempo de establecimiento es inversamente proporcional a la constante de amortiguamiento:
s
s
t
t
()*
'(<<
$$&! 1
6.2.3.2 Tiempo de pico, tp
Este valor se dará cuando se alcance el valor máximo de la amplitud de la señal de salida. Tomando la primera derivada de la expresión analítica de la respuesta al escalón unitario e igualando a cero, permitirá definir los tiempos de máximos y mínimos de amplitud de la señal:
(6. 42)
(6. 43)
(6. 44)
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 147
( ) ( ) ( ).
22
..cos
110
+
!++
!
"!!==
!!
dpd
t
pd
t
tetsenekypp
#$#%
$#%
& &&
Reordenando la expresión, los tiempos de máximos y mínimos estarán validados por la coincidencia del ángulo de apertura de los polos complejos y conjugados, $, con vueltas enteras de ' radianes de td# :
( ) $%#
%#&
#$# tgtt
n
ndpdg =
!==+
21
La primera vuelta de ' radianes de td# coincidirá con la amplitud máxima de la señal de salida. El tiempo de pico es inversamente proporcional a la frecuencia de amortiguamiento. Habrá tiempo de pico si hay sobreoscilación y ésta la habrá si el factor de amortiguamiento está entre 0.707 y 0.
pd
dppd
t
tt
()*
=(=
#
#''#
(6. 45)
(6. 46)
(6. 47)
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
d#'
d#'2
d#'3
d#'4
d#'5
d#'6
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
d#'
d#'2
d#'3
d#'4
d#'5
d#'6
Sistemas de segundo orden. Tiempo de pico
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 147
( ) ( ) ( ).
22
..cos
110
+
!++
!
"!!==
!!
dpd
t
pd
t
tetsenekypp
#$#%
$#%
& &&
Reordenando la expresión, los tiempos de máximos y mínimos estarán validados por la coincidencia del ángulo de apertura de los polos complejos y conjugados, $, con vueltas enteras de ' radianes de td# :
( ) $%#
%#&
#$# tgtt
n
ndpdg =
!==+
21
La primera vuelta de ' radianes de td# coincidirá con la amplitud máxima de la señal de salida. El tiempo de pico es inversamente proporcional a la frecuencia de amortiguamiento. Habrá tiempo de pico si hay sobreoscilación y ésta la habrá si el factor de amortiguamiento está entre 0.707 y 0.
pd
dppd
t
tt
()*
=(=
#
#''#
(6. 45)
(6. 46)
(6. 47)
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
d#'
d#'2
d#'3
d#'4
d#'5
d#'6
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
d#'
d#'2
d#'3
d#'4
d#'5
d#'6
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 147
( ) ( ) ( ).
22
..cos
110
+
!++
!
"!!==
!!
dpd
t
pd
t
tetsenekypp
#$#%
$#%
& &&
Reordenando la expresión, los tiempos de máximos y mínimos estarán validados por la coincidencia del ángulo de apertura de los polos complejos y conjugados, $, con vueltas enteras de ' radianes de td# :
( ) $%#
%#&
#$# tgtt
n
ndpdg =
!==+
21
La primera vuelta de ' radianes de td# coincidirá con la amplitud máxima de la señal de salida. El tiempo de pico es inversamente proporcional a la frecuencia de amortiguamiento. Habrá tiempo de pico si hay sobreoscilación y ésta la habrá si el factor de amortiguamiento está entre 0.707 y 0.
pd
dppd
t
tt
()*
=(=
#
#''#
(6. 45)
(6. 46)
(6. 47)
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
d#'
d#'2
d#'3
d#'4
d#'5
d#'6
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
d#'
d#'2
d#'3
d#'4
d#'5
d#'6
Sistemas de segundo orden. Máximo pico
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
148 Dpto. Electrónica, Automática e Informática Industrial
6.2.3.3 Sobreoscilación, Mp
Hay sobreoscilación si el factor de amortiguamiento está entre 0.707 y 0. La sobreoscilación se dará en el tiempo de tipo, tp, y corresponderá con el valor ponderado entre la máxima amplitud respecto al valor de salida en el régimen permanente. Al tener un sistema de ganancia estática k, la respuesta al escalón unitario, después de acabar el régimen transitorio, también será k veces de amplitud. Introduciendo el valor de tiempo de pico en la ec. (6. 42), para calcular el valor máximo y dando la definición de sobresocilación, MP, quedará como:
( ) ( )
1
11
11
12
/
2
/
max
!
!+
=
!
+
!!
=!
=
!!
"#
"$#
%&$%&$
sene
k
ksenek
yyy
M
dd
rp
rpp
El seno del ángulo de apertura y el radicando son ambas iguales expresiones. La sobreoscilación dependerá exclusivamente del ángulo de apertura de los polos complejos, ". Obviamente, para los sistemas subamortiguados, el factor de amortiguamiento está correlado con ", a través del coseno, luego a menor # implica una mayor sobreoscilación. Por tanto, la sobreoscilación está unida a la estabilidad. Se considera que un sistema es estable y con respuesta temporal aceptable (compromiso entre estabilidad y rapidez), si el factor de amortiguamiento está entre 0.4 y 0.7, lo cual significa una sobreoscilación entre el 12% y el 30% (ver capítulo 13):
[ ]p
tp
tp
M
eMeeM ggd
'()
*=== !!!
#
"$"$%$& %100%; ///
6.2.3.4 Tiempo de subida, tr
Muy empleado en los catálogos de componentes electrónicos en el apartado de las características dinámicas. El tiempo de subida es el intervalo de tiempo que tarda el sistema o el dispositivo en pasar del 10% al 90% en una de sus señales.
Para el tratamiento matemático y con el objeto de simplificar la expresión, se considerará el paso de tiempo entre el 0% al 100% del valor final, esto es, la primera vez que pasa la señal por el valor final.
En sistemas subamortiguados excitados con una entrada en escalón, sucederá cuando el segundo término de la ec.(6. 42) se haga nulo:
(6. 48)
(6. 49)
Sistemas de segundo orden. Máximo pico
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
148 Dpto. Electrónica, Automática e Informática Industrial
6.2.3.3 Sobreoscilación, Mp
Hay sobreoscilación si el factor de amortiguamiento está entre 0.707 y 0. La sobreoscilación se dará en el tiempo de tipo, tp, y corresponderá con el valor ponderado entre la máxima amplitud respecto al valor de salida en el régimen permanente. Al tener un sistema de ganancia estática k, la respuesta al escalón unitario, después de acabar el régimen transitorio, también será k veces de amplitud. Introduciendo el valor de tiempo de pico en la ec. (6. 42), para calcular el valor máximo y dando la definición de sobresocilación, MP, quedará como:
( ) ( )
1
11
11
12
/
2
/
max
!
!+
=
!
+
!!
=!
=
!!
"#
"$#
%&$%&$
sene
k
ksenek
yyy
M
dd
rp
rpp
El seno del ángulo de apertura y el radicando son ambas iguales expresiones. La sobreoscilación dependerá exclusivamente del ángulo de apertura de los polos complejos, ". Obviamente, para los sistemas subamortiguados, el factor de amortiguamiento está correlado con ", a través del coseno, luego a menor # implica una mayor sobreoscilación. Por tanto, la sobreoscilación está unida a la estabilidad. Se considera que un sistema es estable y con respuesta temporal aceptable (compromiso entre estabilidad y rapidez), si el factor de amortiguamiento está entre 0.4 y 0.7, lo cual significa una sobreoscilación entre el 12% y el 30% (ver capítulo 13):
[ ]p
tp
tp
M
eMeeM ggd
'()
*=== !!!
#
"$"$%$& %100%; ///
6.2.3.4 Tiempo de subida, tr
Muy empleado en los catálogos de componentes electrónicos en el apartado de las características dinámicas. El tiempo de subida es el intervalo de tiempo que tarda el sistema o el dispositivo en pasar del 10% al 90% en una de sus señales.
Para el tratamiento matemático y con el objeto de simplificar la expresión, se considerará el paso de tiempo entre el 0% al 100% del valor final, esto es, la primera vez que pasa la señal por el valor final.
En sistemas subamortiguados excitados con una entrada en escalón, sucederá cuando el segundo término de la ec.(6. 42) se haga nulo:
(6. 48)
(6. 49)
Sistemas de segundo orden. Tiempo de elevación
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
148 Dpto. Electrónica, Automática e Informática Industrial
6.2.3.3 Sobreoscilación, Mp
Hay sobreoscilación si el factor de amortiguamiento está entre 0.707 y 0. La sobreoscilación se dará en el tiempo de tipo, tp, y corresponderá con el valor ponderado entre la máxima amplitud respecto al valor de salida en el régimen permanente. Al tener un sistema de ganancia estática k, la respuesta al escalón unitario, después de acabar el régimen transitorio, también será k veces de amplitud. Introduciendo el valor de tiempo de pico en la ec. (6. 42), para calcular el valor máximo y dando la definición de sobresocilación, MP, quedará como:
( ) ( )
1
11
11
12
/
2
/
max
!
!+
=
!
+
!!
=!
=
!!
"#
"$#
%&$%&$
sene
k
ksenek
yyy
M
dd
rp
rpp
El seno del ángulo de apertura y el radicando son ambas iguales expresiones. La sobreoscilación dependerá exclusivamente del ángulo de apertura de los polos complejos, ". Obviamente, para los sistemas subamortiguados, el factor de amortiguamiento está correlado con ", a través del coseno, luego a menor # implica una mayor sobreoscilación. Por tanto, la sobreoscilación está unida a la estabilidad. Se considera que un sistema es estable y con respuesta temporal aceptable (compromiso entre estabilidad y rapidez), si el factor de amortiguamiento está entre 0.4 y 0.7, lo cual significa una sobreoscilación entre el 12% y el 30% (ver capítulo 13):
[ ]p
tp
tp
M
eMeeM ggd
'()
*=== !!!
#
"$"$%$& %100%; ///
6.2.3.4 Tiempo de subida, tr
Muy empleado en los catálogos de componentes electrónicos en el apartado de las características dinámicas. El tiempo de subida es el intervalo de tiempo que tarda el sistema o el dispositivo en pasar del 10% al 90% en una de sus señales.
Para el tratamiento matemático y con el objeto de simplificar la expresión, se considerará el paso de tiempo entre el 0% al 100% del valor final, esto es, la primera vez que pasa la señal por el valor final.
En sistemas subamortiguados excitados con una entrada en escalón, sucederá cuando el segundo término de la ec.(6. 42) se haga nulo:
(6. 48)
(6. 49)
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 149
( ) ( ) 001 2
=+!=+"
"
#$#$%
&
rdrd
t
tsentsene
La primera vez pasará cuando el arco seno pase por el valor de ':
drrd tt
$#'
'#$"
=!=+
6.2.4 Respuesta de un sistema de 2º orden al impulso y a la rampa
La repuesta al impulso de un sistema de segundo orden será la derivada de la ec.(6. 42), respecto al tiempo, cuya ecuación hace referencia a la salida de un sistema de segundo orden ante una entrada en escalón. Obviamente las conclusiones deberán de coincidir con las conseguidas por descomposición en fracciones simples de los polos y dada por la ec. (6. 35):
( ) ( ) ( )tytsenek
ty escalóndtn
impulso !="
= " $%
$ &
21
La salida del sistema ante una entrada en rampa unitaria será la integral respecto al tiempo de la respuesta al escalón unitario:
(6. 50)
(6. 51)
(6. 52)
0 5 10 150
0.5
1
0 5 10 150
0.5
1
1.5
0 5 10 150
0.1
0.2
0.3
0.4
0 5 10 15-0.5
0
0.5
1
Respuesta al escalón
Am
plitu
d
Respuesta al escalón
Am
plitu
d
Respuesta al impulso
Tiempo (s)
Am
plitu
d
Respuesta impulso
Tiempo (s)
Am
plitu
d
0 5 10 150
0.5
1
0 5 10 150
0.5
1
1.5
0 5 10 150
0.1
0.2
0.3
0.4
0 5 10 15-0.5
0
0.5
1
Respuesta al escalón
Am
plitu
d
Respuesta al escalón
Am
plitu
d
Respuesta al impulso
Tiempo (s)
Am
plitu
d
Respuesta impulso
Tiempo (s)
Am
plitu
d
Figura 6. 9 a) Sistema sobreamortiguado b) sistema subamortiguado
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 149
( ) ( ) 001 2
=+!=+"
"
#$#$%
&
rdrd
t
tsentsene
La primera vez pasará cuando el arco seno pase por el valor de ':
drrd tt
$#''#$ "
=!=+
6.2.4 Respuesta de un sistema de 2º orden al impulso y a la rampa
La repuesta al impulso de un sistema de segundo orden será la derivada de la ec.(6. 42), respecto al tiempo, cuya ecuación hace referencia a la salida de un sistema de segundo orden ante una entrada en escalón. Obviamente las conclusiones deberán de coincidir con las conseguidas por descomposición en fracciones simples de los polos y dada por la ec. (6. 35):
( ) ( ) ( )tytsenek
ty escalóndtn
impulso !="
= " $%
$ &
21
La salida del sistema ante una entrada en rampa unitaria será la integral respecto al tiempo de la respuesta al escalón unitario:
(6. 50)
(6. 51)
(6. 52)
0 5 10 150
0.5
1
0 5 10 150
0.5
1
1.5
0 5 10 150
0.1
0.2
0.3
0.4
0 5 10 15-0.5
0
0.5
1
Respuesta al escalón
Am
plitu
d
Respuesta al escalón
Am
plitu
d
Respuesta al impulso
Tiempo (s)
Am
plitu
d
Respuesta impulso
Tiempo (s)
Am
plitu
d
0 5 10 150
0.5
1
0 5 10 150
0.5
1
1.5
0 5 10 150
0.1
0.2
0.3
0.4
0 5 10 15-0.5
0
0.5
1
Respuesta al escalón
Am
plitu
d
Respuesta al escalón
Am
plitu
d
Respuesta al impulso
Tiempo (s)
Am
plitu
d
Respuesta impulso
Tiempo (s)
Am
plitu
d
Figura 6. 9 a) Sistema sobreamortiguado b) sistema subamortiguado
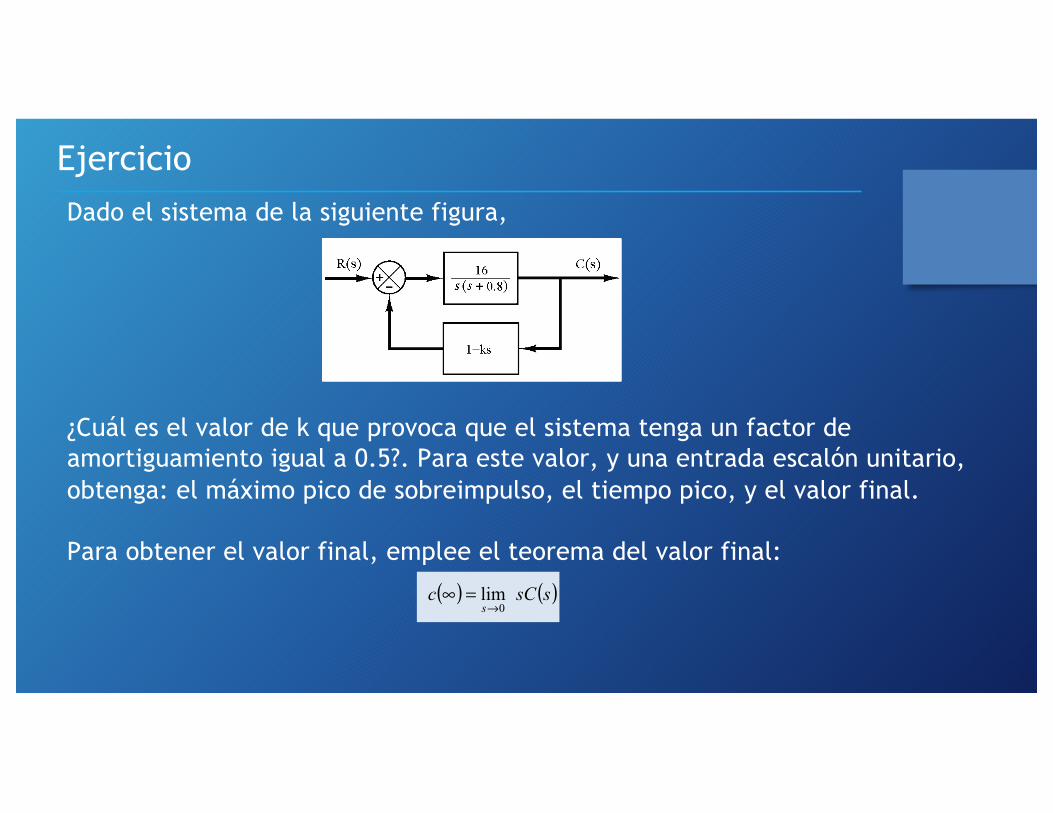
EjercicioDado el sistema de la siguiente figura,
¿Cuál es el valor de k que provoca que el sistema tenga un factor de amortiguamiento igual a 0.5?. Para este valor, y una entrada escalón unitario, obtenga: el máximo pico de sobreimpulso, el tiempo pico, y el valor final.
Para obtener el valor final, emplee el teorema del valor final:
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERÍA DE CONTROL 13 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HERNÁNDEZ
Ejemplo 2 Considere el sistema de la figura. Determine el valor de k de modo que la relación de amortiguamiento ! sea de 0.5. Luego obtenga el tiempo de crecimiento rt , el tiempo pico pt , el sobreimpulso máximo pM y el tiempo de establecimiento st , en la respuesta a un escalón unitario.
Solución. La función de transferencia de este sistema es:
( )( ) ( ) 16168.0
162 +++
=skssR
sC ( )( ) 22
2
2 nn
n
ssG
sRsC
"!""
++=
Comparándola con la función general de 2º orden
( ) 16168.02 222 +++=++ sksss nn "!"
lo que nos da que ( )kn 168.02 +=!" y 162 =n" la ganancia del sistema 1=G La frecuencia natural no amortiguada n" . segradn /4="
Despejando k ( )( ) 2.016
8.045.0216
8.02=
#=
#= nk !" 2.0=k
El máximo sobrepaso %pM
( )%3.16100100%
22 5.015.01===
##
## $!!$
eeM p Frecuencia natural amortiguada d"
segradnd /464.35.0141 22 =#=#= !"" El tiempo pico pt
segtd
p 907.0464.3
===$
"$
El tiempo de crecimiento (levantamiento) rt
( ) ( ) rad047.15.0coscos 11 === ## !% segtd
r 605.0464.3
047.1=
#=
#=
$"
%$
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERÍA DE CONTROL 14 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HERNÁNDEZ
Tiempo de estabilización (asentamiento) st
( )( ) segtn
s 245.0
44===
!"
Podemos calcular ( )#c para una entrada escalón unitario utilizando el teorema del valor final
( ) ( )( )
1116168.0
16limlim 200=
+++==#
$$ sskssssCc
ss
Gráfica de respuesta ( )tc para una entrada escalón unitario, utilizando la envolvente.
El número de picos sería 2.2907.02
cos ===p
spi t
tN ( ) 11 ==# GRc
Los valores de la respuesta ( )tc son
( )( ) ( )( )( )
( )( ) ( )( )( ) 973.011
1)814.1()2(
163.111
1)907.0()(
628.3
2
814.1
=%=
#%==
=+=
#+==
%
%
%
%
e
cectc
e
cectc
pn
pn
tp
tp
!"
!"
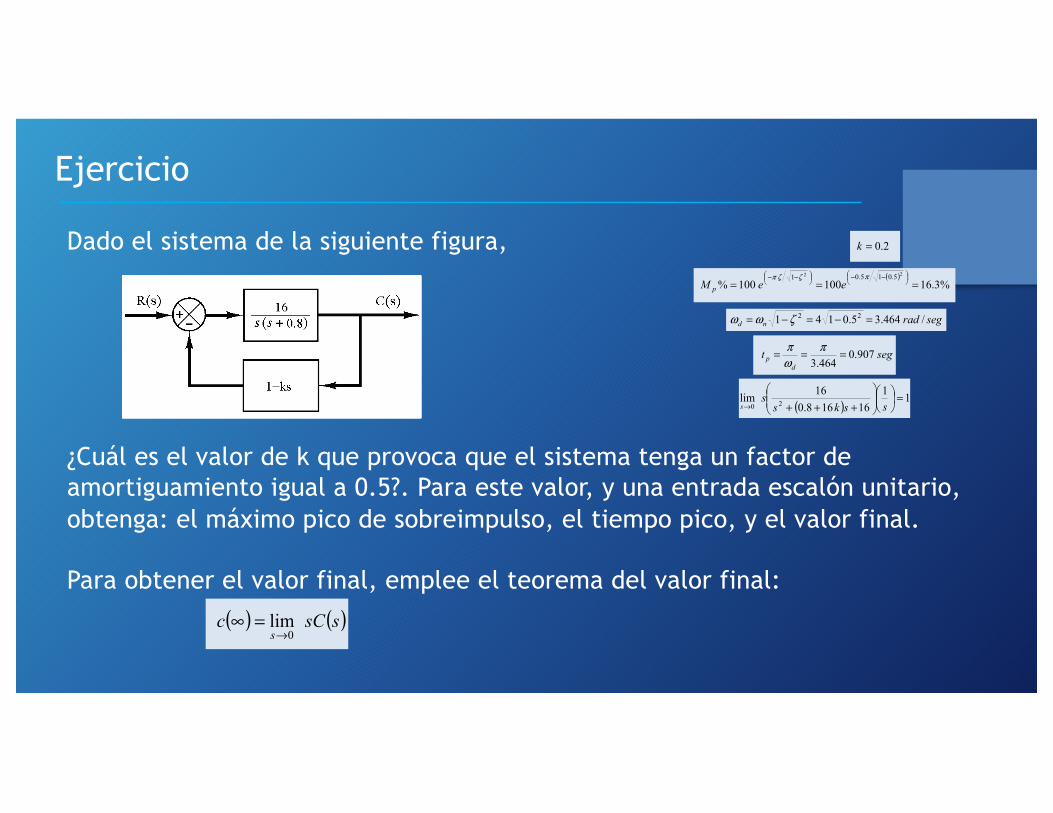
Ejercicio
Dado el sistema de la siguiente figura,
¿Cuál es el valor de k que provoca que el sistema tenga un factor de amortiguamiento igual a 0.5?. Para este valor, y una entrada escalón unitario, obtenga: el máximo pico de sobreimpulso, el tiempo pico, y el valor final.
Para obtener el valor final, emplee el teorema del valor final:
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERÍA DE CONTROL 13 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HERNÁNDEZ
Ejemplo 2 Considere el sistema de la figura. Determine el valor de k de modo que la relación de amortiguamiento ! sea de 0.5. Luego obtenga el tiempo de crecimiento rt , el tiempo pico pt , el sobreimpulso máximo pM y el tiempo de establecimiento st , en la respuesta a un escalón unitario.
Solución. La función de transferencia de este sistema es:
( )( ) ( ) 16168.0
162 +++
=skssR
sC ( )( ) 22
2
2 nn
n
ssG
sRsC
"!""
++=
Comparándola con la función general de 2º orden
( ) 16168.02 222 +++=++ sksss nn "!"
lo que nos da que ( )kn 168.02 +=!" y 162 =n" la ganancia del sistema 1=G La frecuencia natural no amortiguada n" . segradn /4="
Despejando k ( )( ) 2.016
8.045.0216
8.02=
#=
#= nk !" 2.0=k
El máximo sobrepaso %pM
( )%3.16100100%
22 5.015.01===
##
## $!!$
eeM p Frecuencia natural amortiguada d"
segradnd /464.35.0141 22 =#=#= !"" El tiempo pico pt
segtd
p 907.0464.3
===$
"$
El tiempo de crecimiento (levantamiento) rt
( ) ( ) rad047.15.0coscos 11 === ## !% segtd
r 605.0464.3
047.1=
#=
#=
$"
%$
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERÍA DE CONTROL 14 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HERNÁNDEZ
Tiempo de estabilización (asentamiento) st
( )( ) segtn
s 245.0
44===
!"
Podemos calcular ( )#c para una entrada escalón unitario utilizando el teorema del valor final
( ) ( )( )
1116168.0
16limlim 200=
+++==#
$$ sskssssCc
ss
Gráfica de respuesta ( )tc para una entrada escalón unitario, utilizando la envolvente.
El número de picos sería 2.2907.02
cos ===p
spi t
tN ( ) 11 ==# GRc
Los valores de la respuesta ( )tc son
( )( ) ( )( )( )
( )( ) ( )( )( ) 973.011
1)814.1()2(
163.111
1)907.0()(
628.3
2
814.1
=%=
#%==
=+=
#+==
%
%
%
%
e
cectc
e
cectc
pn
pn
tp
tp
!"
!"
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERÍA DE CONTROL 13 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HERNÁNDEZ
Ejemplo 2 Considere el sistema de la figura. Determine el valor de k de modo que la relación de amortiguamiento ! sea de 0.5. Luego obtenga el tiempo de crecimiento rt , el tiempo pico pt , el sobreimpulso máximo pM y el tiempo de establecimiento st , en la respuesta a un escalón unitario.
Solución. La función de transferencia de este sistema es:
( )( ) ( ) 16168.0
162 +++
=skssR
sC ( )( ) 22
2
2 nn
n
ssG
sRsC
"!""
++=
Comparándola con la función general de 2º orden
( ) 16168.02 222 +++=++ sksss nn "!"
lo que nos da que ( )kn 168.02 +=!" y 162 =n" la ganancia del sistema 1=G La frecuencia natural no amortiguada n" . segradn /4="
Despejando k ( )( ) 2.016
8.045.0216
8.02=
#=
#= nk !" 2.0=k
El máximo sobrepaso %pM
( )%3.16100100%
22 5.015.01===
##
## $!!$
eeM p Frecuencia natural amortiguada d"
segradnd /464.35.0141 22 =#=#= !"" El tiempo pico pt
segtd
p 907.0464.3
===$
"$
El tiempo de crecimiento (levantamiento) rt
( ) ( ) rad047.15.0coscos 11 === ## !% segtd
r 605.0464.3
047.1=
#=
#=
$"
%$
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERÍA DE CONTROL 13 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HERNÁNDEZ
Ejemplo 2 Considere el sistema de la figura. Determine el valor de k de modo que la relación de amortiguamiento ! sea de 0.5. Luego obtenga el tiempo de crecimiento rt , el tiempo pico pt , el sobreimpulso máximo pM y el tiempo de establecimiento st , en la respuesta a un escalón unitario.
Solución. La función de transferencia de este sistema es:
( )( ) ( ) 16168.0
162 +++
=skssR
sC ( )( ) 22
2
2 nn
n
ssG
sRsC
"!""
++=
Comparándola con la función general de 2º orden
( ) 16168.02 222 +++=++ sksss nn "!"
lo que nos da que ( )kn 168.02 +=!" y 162 =n" la ganancia del sistema 1=G La frecuencia natural no amortiguada n" . segradn /4="
Despejando k ( )( ) 2.016
8.045.0216
8.02=
#=
#= nk !" 2.0=k
El máximo sobrepaso %pM
( )%3.16100100%
22 5.015.01===
##
## $!!$
eeM p Frecuencia natural amortiguada d"
segradnd /464.35.0141 22 =#=#= !"" El tiempo pico pt
segtd
p 907.0464.3
===$
"$
El tiempo de crecimiento (levantamiento) rt
( ) ( ) rad047.15.0coscos 11 === ## !% segtd
r 605.0464.3
047.1=
#=
#=
$"
%$
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERÍA DE CONTROL 13 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HERNÁNDEZ
Ejemplo 2 Considere el sistema de la figura. Determine el valor de k de modo que la relación de amortiguamiento ! sea de 0.5. Luego obtenga el tiempo de crecimiento rt , el tiempo pico pt , el sobreimpulso máximo pM y el tiempo de establecimiento st , en la respuesta a un escalón unitario.
Solución. La función de transferencia de este sistema es:
( )( ) ( ) 16168.0
162 +++
=skssR
sC ( )( ) 22
2
2 nn
n
ssG
sRsC
"!""
++=
Comparándola con la función general de 2º orden
( ) 16168.02 222 +++=++ sksss nn "!"
lo que nos da que ( )kn 168.02 +=!" y 162 =n" la ganancia del sistema 1=G La frecuencia natural no amortiguada n" . segradn /4="
Despejando k ( )( ) 2.016
8.045.0216
8.02=
#=
#= nk !" 2.0=k
El máximo sobrepaso %pM
( )%3.16100100%
22 5.015.01===
##
## $!!$
eeM p Frecuencia natural amortiguada d"
segradnd /464.35.0141 22 =#=#= !"" El tiempo pico pt
segtd
p 907.0464.3
===$
"$
El tiempo de crecimiento (levantamiento) rt
( ) ( ) rad047.15.0coscos 11 === ## !% segtd
r 605.0464.3
047.1=
#=
#=
$"
%$
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERÍA DE CONTROL 13 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HERNÁNDEZ
Ejemplo 2 Considere el sistema de la figura. Determine el valor de k de modo que la relación de amortiguamiento ! sea de 0.5. Luego obtenga el tiempo de crecimiento rt , el tiempo pico pt , el sobreimpulso máximo pM y el tiempo de establecimiento st , en la respuesta a un escalón unitario.
Solución. La función de transferencia de este sistema es:
( )( ) ( ) 16168.0
162 +++
=skssR
sC ( )( ) 22
2
2 nn
n
ssG
sRsC
"!""
++=
Comparándola con la función general de 2º orden
( ) 16168.02 222 +++=++ sksss nn "!"
lo que nos da que ( )kn 168.02 +=!" y 162 =n" la ganancia del sistema 1=G La frecuencia natural no amortiguada n" . segradn /4="
Despejando k ( )( ) 2.016
8.045.0216
8.02=
#=
#= nk !" 2.0=k
El máximo sobrepaso %pM
( )%3.16100100%
22 5.015.01===
##
## $!!$
eeM p Frecuencia natural amortiguada d"
segradnd /464.35.0141 22 =#=#= !"" El tiempo pico pt
segtd
p 907.0464.3
===$
"$
El tiempo de crecimiento (levantamiento) rt
( ) ( ) rad047.15.0coscos 11 === ## !% segtd
r 605.0464.3
047.1=
#=
#=
$"
%$
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERÍA DE CONTROL 14 M.C. JOSÉ MANUEL ROCHA NÚÑEZ M.C. ELIZABETH GPE. LARA HERNÁNDEZ
Tiempo de estabilización (asentamiento) st
( )( ) segtn
s 245.0
44===
!"
Podemos calcular ( )#c para una entrada escalón unitario utilizando el teorema del valor final
( ) ( )( )
1116168.0
16limlim 200=
+++==#
$$ sskssssCc
ss
Gráfica de respuesta ( )tc para una entrada escalón unitario, utilizando la envolvente.
El número de picos sería 2.2907.02
cos ===p
spi t
tN ( ) 11 ==# GRc
Los valores de la respuesta ( )tc son
( )( ) ( )( )( )
( )( ) ( )( )( ) 973.011
1)814.1()2(
163.111
1)907.0()(
628.3
2
814.1
=%=
#%==
=+=
#+==
%
%
%
%
e
cectc
e
cectc
pn
pn
tp
tp
!"
!"
Ejercicio
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB220
Aproximación teórica de una curva de respuesta real de un sistema subamortiguado
Una forma de determinar una aproximación analítica de un sistema desconocido, en este caso de segundo orden, es a partir del análisis de su curva de respuesta, siempre y cuando esté disponible, por ejemplo, mediante una tarjeta de adquisición de datos.
� EJEMPLO 5.12
Determine la función de transferencia de lazo cerrado T(s) del sistema que se ilustra en la ! gura 5.32.
Step Response1
00 0.5 1 1.5 2 2.5
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
MP
Time (sec)
Am
plitu
de
Tp
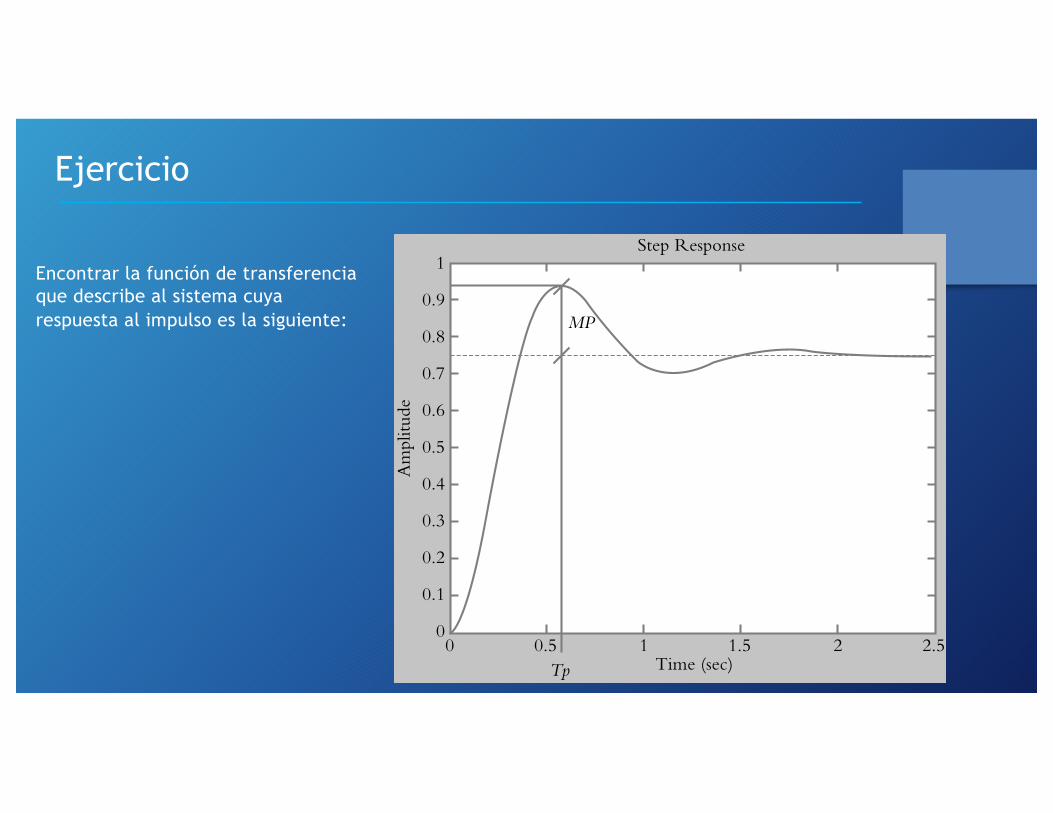
Solución: La respuesta de estado estable es y(") = 0.75 unidades, el máximo pico de sobre-impulso MP es del 25% y el tiempo pico Tp corresponde a 0.5684 seg. Si se toma en consideración que el amortiguamiento ! es función de MP : !(MP), es posible cuanti! car el amortiguamiento !, en tanto que a partir de "(Tp), se puede determinar ": De las ecuaciones 5.45 y 5.41, respectivamente:
!" "
=!" #$+ !" #$
=!" #$ln( )
ln( )
ln( . )MP
MP
2
2 2
2
2
0 75
++ !" #$=
ln( . ).
0 750 4037
2
T p = "
#, por lo cual: #
"= =Tp
5 527. rad/seg.
Figura 5.32Respuesta al escalón de un
sistema desconocido.
5.3.4
C05_b SISTEMAS–Hdz.indd 220C05_b SISTEMAS–Hdz.indd 220 2/11/10 10:42:00 PM2/11/10 10:42:00 PM
Encontrar la función de transferencia que describe al sistema cuya respuesta al impulso es la siguiente:
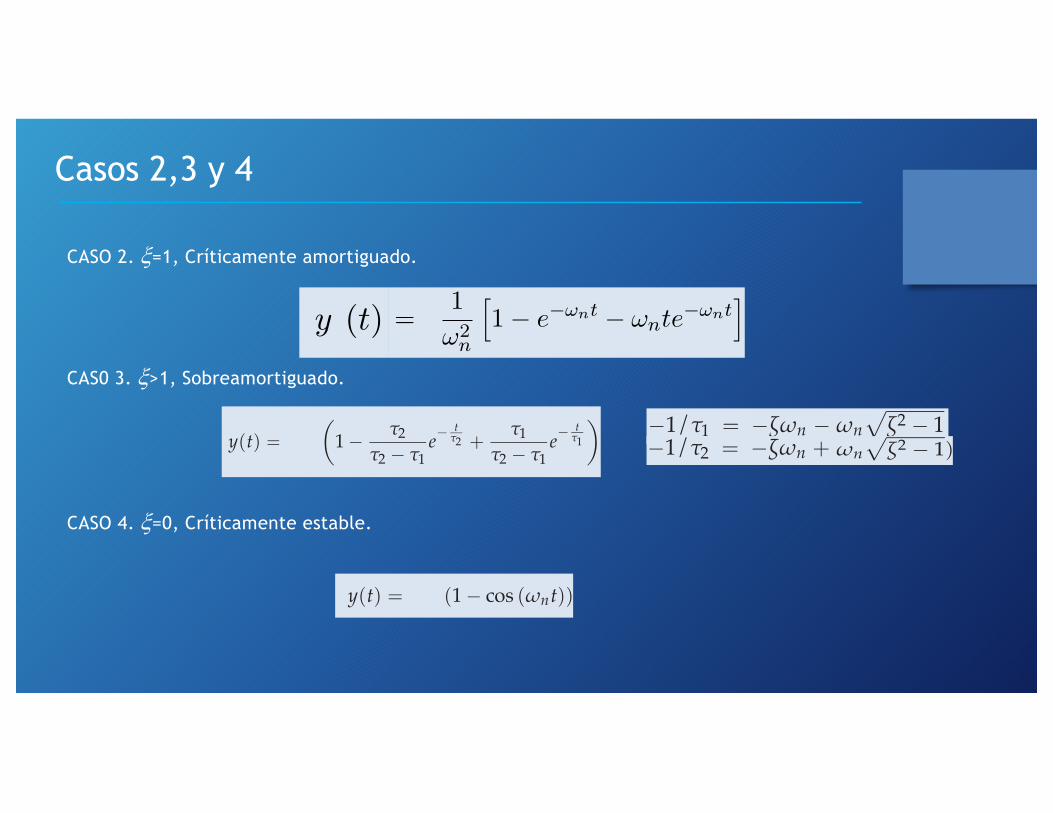
Casos 2,3 y 4
CASO 2. x=1, Críticamente amortiguado.
CAS0 3. x>1, Sobreamortiguado.
CASO 4. x=0, Críticamente estable.
The particular solution may be found using the method of undetermined coe±cients, we takeyp(t) = K and substitute into the diÆerential equation giving
!2nK = 1 (74)
orys(t) = C1e
∏1t + C2e∏2t +
1!2
n. (75)
The constants C1 and C2 are chosen to satisfy the two initial conditions:
ys(0) = C1 + C2 +1!2
n= 0 (76)
dys
dt
ØØØØt=0
= C1∏1 + C2∏2 = 0, (77)
which may be solved to give:
C1 =∏2
!2n (∏1 ° ∏2)
, C2 =∏1
!2n (∏2 ° ∏1)
. (78)
The solution for the unit step response when the roots are distinct is therefore:
ys(t) =1!2
n
∑1°
µ∏2
∏2 ° ∏1e∏1t +
∏1
∏1 ° ∏2e∏2t
∂∏(79)
=1!2
n
∑1° ∏2∏1
∏2 ° ∏1
µ 1∏1
e∏1t ° 1∏2
e∏2t∂∏
(80)
It can be seen that the second and third terms in Eq. (80) are identical to those in the homogeneousresponse, Eq. (55), so that the solution may be written for the overdamped case as:
ys(t) =1!2
n
∑1° 1
ø2 ° ø1
≥ø2e
°t/ø2 ° ø1e°t/ø1
¥∏for ≥ > 1, (81)
where ø1 = °1/∏1 and ø2 = °1/∏2 are time constants as previously defined.For the underdamped case, when ∏1 = °≥!n + j!n
p1° ≥2 and ∏1 = ≥!n ° j!n
p1° ≥2, from
Eq. (65) the solution is:
ys(t) =1!2
n
"
1° e°≥!nt
p1° ≥2
cos(!dt° √)#
for 0 < ≥ < 1. (82)
where as before the phase angle √ = tan°1≥≥/
p1° ≥2
¥.
When the roots of the characteristic equation are identical (≥ = 1) and ∏1 = ∏2 = °!n, thehomogeneous solution has a modified form, and the total solution is:
ys(t) = C1e∏t + C2te
∏t +1!2
n. (83)
The solution which satisfies the initial conditions is:
ys(t) =1!2
n
h1° e∏t + ∏te∏t
i
=1!2
n
h1° e°!nt ° !nte°!nt
ifor ≥ = 1. (84)
30
The particular solution may be found using the method of undetermined coe±cients, we takeyp(t) = K and substitute into the diÆerential equation giving
!2nK = 1 (74)
orys(t) = C1e
∏1t + C2e∏2t +
1!2
n. (75)
The constants C1 and C2 are chosen to satisfy the two initial conditions:
ys(0) = C1 + C2 +1!2
n= 0 (76)
dys
dt
ØØØØt=0
= C1∏1 + C2∏2 = 0, (77)
which may be solved to give:
C1 =∏2
!2n (∏1 ° ∏2)
, C2 =∏1
!2n (∏2 ° ∏1)
. (78)
The solution for the unit step response when the roots are distinct is therefore:
ys(t) =1!2
n
∑1°
µ∏2
∏2 ° ∏1e∏1t +
∏1
∏1 ° ∏2e∏2t
∂∏(79)
=1!2
n
∑1° ∏2∏1
∏2 ° ∏1
µ 1∏1
e∏1t ° 1∏2
e∏2t∂∏
(80)
It can be seen that the second and third terms in Eq. (80) are identical to those in the homogeneousresponse, Eq. (55), so that the solution may be written for the overdamped case as:
ys(t) =1!2
n
∑1° 1
ø2 ° ø1
≥ø2e
°t/ø2 ° ø1e°t/ø1
¥∏for ≥ > 1, (81)
where ø1 = °1/∏1 and ø2 = °1/∏2 are time constants as previously defined.For the underdamped case, when ∏1 = °≥!n + j!n
p1° ≥2 and ∏1 = ≥!n ° j!n
p1° ≥2, from
Eq. (65) the solution is:
ys(t) =1!2
n
"
1° e°≥!nt
p1° ≥2
cos(!dt° √)#
for 0 < ≥ < 1. (82)
where as before the phase angle √ = tan°1≥≥/
p1° ≥2
¥.
When the roots of the characteristic equation are identical (≥ = 1) and ∏1 = ∏2 = °!n, thehomogeneous solution has a modified form, and the total solution is:
ys(t) = C1e∏t + C2te
∏t +1!2
n. (83)
The solution which satisfies the initial conditions is:
ys(t) =1!2
n
h1° e∏t + ∏te∏t
i
=1!2
n
h1° e°!nt ° !nte°!nt
ifor ≥ = 1. (84)
30
The particular solution may be found using the method of undetermined coe±cients, we takeyp(t) = K and substitute into the diÆerential equation giving
!2nK = 1 (74)
orys(t) = C1e
∏1t + C2e∏2t +
1!2
n. (75)
The constants C1 and C2 are chosen to satisfy the two initial conditions:
ys(0) = C1 + C2 +1!2
n= 0 (76)
dys
dt
ØØØØt=0
= C1∏1 + C2∏2 = 0, (77)
which may be solved to give:
C1 =∏2
!2n (∏1 ° ∏2)
, C2 =∏1
!2n (∏2 ° ∏1)
. (78)
The solution for the unit step response when the roots are distinct is therefore:
ys(t) =1!2
n
∑1°
µ∏2
∏2 ° ∏1e∏1t +
∏1
∏1 ° ∏2e∏2t
∂∏(79)
=1!2
n
∑1° ∏2∏1
∏2 ° ∏1
µ 1∏1
e∏1t ° 1∏2
e∏2t∂∏
(80)
It can be seen that the second and third terms in Eq. (80) are identical to those in the homogeneousresponse, Eq. (55), so that the solution may be written for the overdamped case as:
ys(t) =1!2
n
∑1° 1
ø2 ° ø1
≥ø2e
°t/ø2 ° ø1e°t/ø1
¥∏for ≥ > 1, (81)
where ø1 = °1/∏1 and ø2 = °1/∏2 are time constants as previously defined.For the underdamped case, when ∏1 = °≥!n + j!n
p1° ≥2 and ∏1 = ≥!n ° j!n
p1° ≥2, from
Eq. (65) the solution is:
ys(t) =1!2
n
"
1° e°≥!nt
p1° ≥2
cos(!dt° √)#
for 0 < ≥ < 1. (82)
where as before the phase angle √ = tan°1≥≥/
p1° ≥2
¥.
When the roots of the characteristic equation are identical (≥ = 1) and ∏1 = ∏2 = °!n, thehomogeneous solution has a modified form, and the total solution is:
ys(t) = C1e∏t + C2te
∏t +1!2
n. (83)
The solution which satisfies the initial conditions is:
ys(t) =1!2
n
h1° e∏t + ∏te∏t
i
=1!2
n
h1° e°!nt ° !nte°!nt
ifor ≥ = 1. (84)
30
40 · Capítulo 3. Respuesta temporal
donde !2 es la constante de tiempo asociada al polo más cercano al eje imaginario, que provocala exponencial más lenta (!2 > !1) y la respuesta temporal se puede obtener por tanto como lacombinación de dos sistemas de primer orden:
y(t) = kUe!1! !2
!2 ! !1e!
t!2 +
!1!2 ! !1
e!t
!1
", t " 0 (3.14)
Cuando " = 1, las dos raíces son iguales s1 = s2 (!1 = !2) y al sistema se le denomina críticamenteamortiguado. Su función de transferencia viene dada por:
G(s) =k
(!s+ 1)2(3.15)
y la respuesta a escalón tiene la siguiente expresión analítica:
y(t) = kUe!1! e!
t! ! t
!e!
t!
", t " 0 (3.16)
Sistema críticamente estable: Como se puede observar en la ecuación (3.12), cuando " = 0 los dospolos complejos conjugados se encuentran sobre el eje imaginario (con parte real nula) y se obtieneuna respuesta con una oscilación mantenida dada por:
y(t) = kUe (1! cos (#nt)) , t " 0 (3.17)
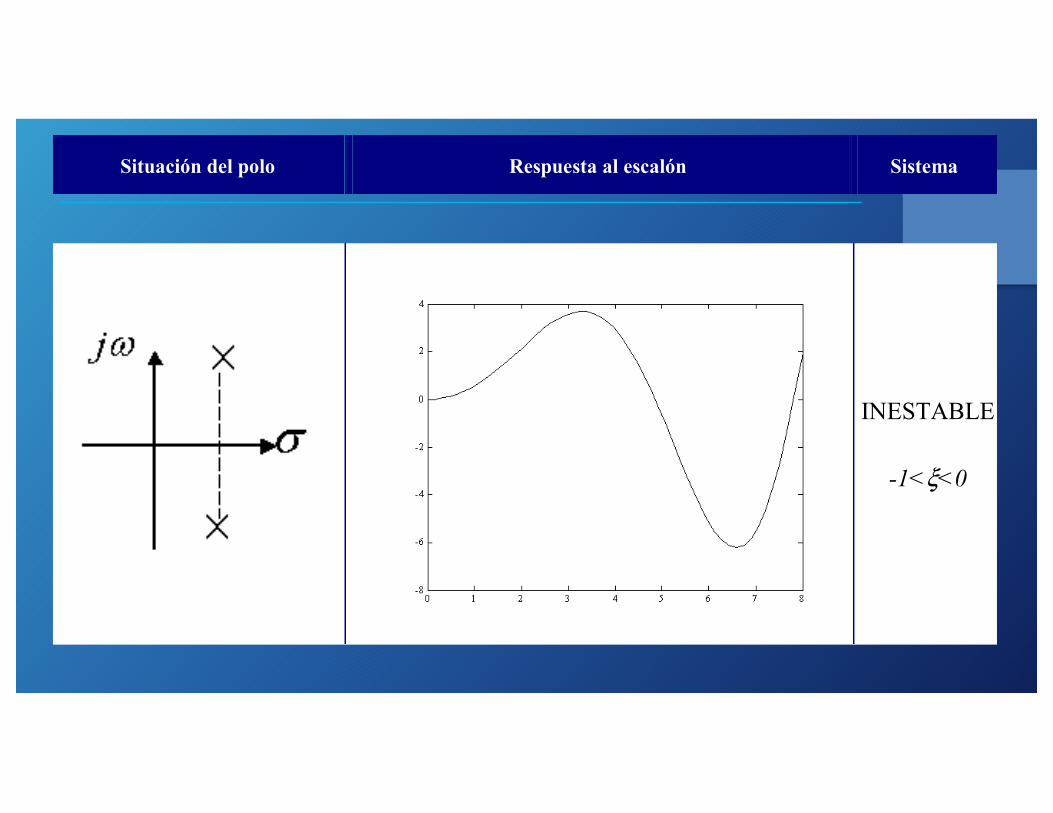
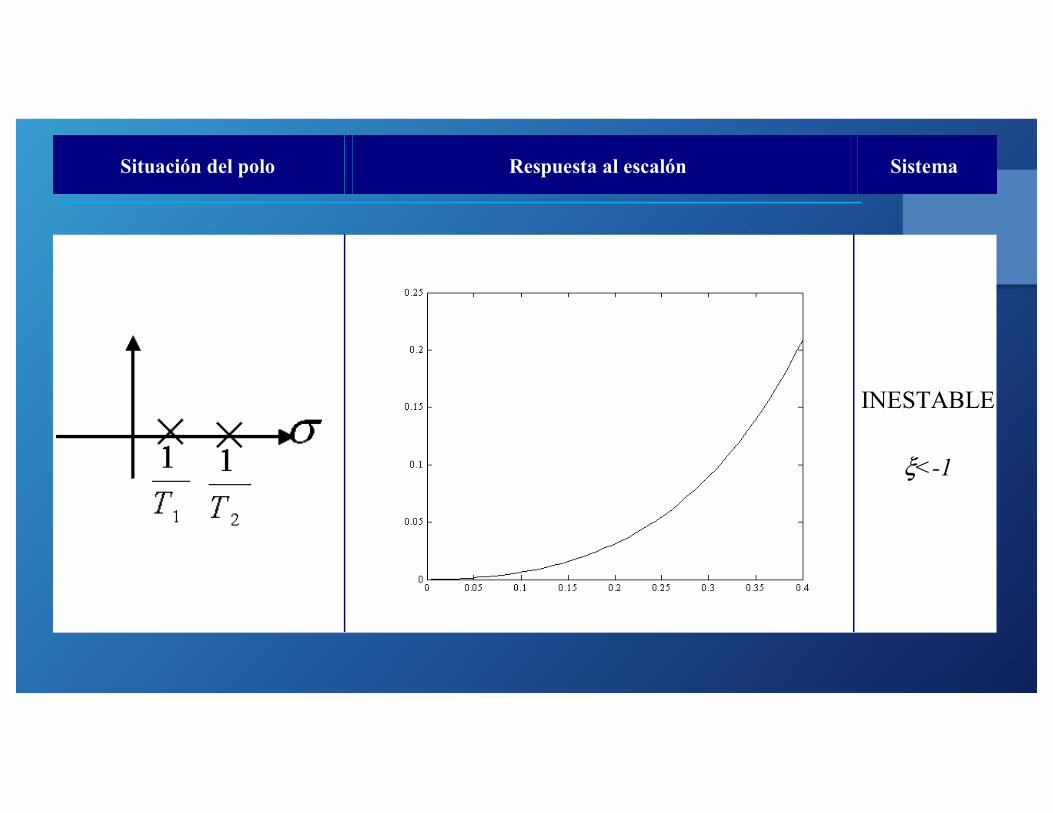
Sistema inestable: En el caso " < 0 el sistema será inestable. Tendrá dos polos complejos conjugadoscon parte real en el semiplano derecho si !1 < " < 0 (respuesta inestable oscilatoria) o bien dospolos reales en el semiplano derecho si " # !1 (respuesta inestable de tipo exponencial).
Tanto en el caso subamortiguado como en el sobreamortiguado, un análisis interesante consiste enestudiar la localización de los polos de un sistema de segundo orden en función de los parámetros carac-terísticos de la función de transferencia. A partir de dichos parámetros, se pueden encontrar relacionescon determinadas características puntuales de la respuesta temporal del sistema (que, como se analizaráen el Capítulo 7, además pueden ser utilizadas como especificaciones de funcionamiento en lazo cerra-do en el diseño de sistemas de control). Las características de la respuesta temporal más extendidas son(ver Figura 3.1):
Sobreoscilación (SO(%)): Representa el sobrepico o sobreelongación del sistema en%, que es la di-ferencia entre el máximo valor de pico de la respuesta y el valor de régimen estacionario, relativaa dicho valor de régimen estacionario (en%). Para el caso subamortiguado, derivando la ecuación(3.12) e igualando a cero se puede obtener el valor máximo de y(t) que define la sobreoscilación, asícomo el tiempo en el que se alcanza dicho máximo (tiempo de pico). El valor de la sobreoscilaciónviene dado por:
SO(%) = 100 exp
#!"$$1! "2
%(3.18)
Como es lógico, su definición tiene sentido únicamente en el caso subamortiguado.Tiempo de pico (tp (s)): Tiempo que tarda la respuesta del sistema en alcanzar su valor de picomedido desde el instante en que se introduce el escalón. Derivando la ecuación (3.12) e igualandoa cero para obtener el máximo se obtiene el valor del tiempo de pico:
tp =$
#d=
$
#n$1! "2
(3.19)
3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros · 39
! es el coeficiente, razón o factor de amortiguamiento relativo del sistema (adimensional), quedeterminará la forma de la respuesta transitoria. En función de su valor se puede deducir si elsistema es inestable (! < 0), críticamente estable o no amortiguado (! = 0), subamortiguado(0 < ! < 1), críticamente amortiguado (! = 1) o sobreamortiguado (! > 1).
"n es la frecuencia natural no amortiguada (rad/s), que corresponde a la frecuencia con la queoscilaría el sistema si no existiese amortiguamiento (! = 0, respuesta de tipo senoidal).
Evidentemente, para que se obtenga una respuesta limitada cuando la señal de entrada tiene formade escalón (señal acotada), los polos del sistema deben estar en la parte izquierda del plano s. Si algunade sus raíces está en el semiplano derecho s, el sistema será inestable. Si la ecuación característica delsistema (J(s) = s2 + 2!"ns+ "2
n = 0) tiene las raíces sobre el eje imaginario (eje j"), la salida en estadoestacionario cuando la entrada es una señal en escalón tendrá oscilaciones mantenidas, a menos que laentrada sea una sinusoide cuya frecuencia sea igual a la magnitud de las raíces del eje j". Para este caso,la salida está sin acotar. A tal sistema se le denomina marginalmente estable, debido a que únicamentealgunas entradas limitadas (sinusoides de la frecuencia de los polos) harán que la salida no esté acotada.La respuesta temporal cuando la entrada tiene forma de escalón de amplitud Ue (U(s) = Ue/s) se
puede obtener a partir de:
Y(s) = G(s)U(s) =k"2
ns2 + 2!"ns+ "2
n
Ues
(3.11)
aplicando la transformada inversa de Laplace, y(t) = L!1 {Y(s)}, o bien resolviendo la ecuación dife-rencial con:
u(t) =
!0, t < 0Ue, t " 0
,
siendo necesario diferenciar los casos: 0 # ! < 1, ! " 1 y ! < 0. En todos ellos, la respuesta temporal delos sistemas de segundo orden comienza en t = 0 con pendiente nula. Se puede comprobar fácilmentehaciendo dy(t)/dt|t=0.
Sistema subamortiguado: Para el caso 0 # ! < 1 se obtiene que los polos del sistema (raíces dela ecuación característica) son complejos conjugados, (s1 = !!"n + j"n
"1! !2 y s$1 = !!"n !
j"n"1! !2) y la respuesta temporal a entrada en escalón es:
y(t) = kUe
#1! e!!"nt
$cos"dt+
!"1! !2
sen"dt
%&, t " 0 (3.12)
donde "d = "n"1! !2 es la frecuencia natural amortiguada. Se puede observar cómo la compo-
nente compleja de los polos produce una respuesta temporal con presencia de senos y cosenos quedan lugar a oscilaciones que se amortiguan con la envolvente exponencial. Al producto # = !"nse le denomina factor de amortiguamiento, que es una constante que determina las propiedades deamortiguamiento de un sistema. Determina la velocidad de crecimiento o decaimiento de la res-puesta a escalón unitario de un sistema de segundo orden subamortiguado.
Sistema sobreamortiguado: Cuando el factor de amortiguamiento relativo ! " 1, los polos del sistemade segundo orden serán reales (s1 = !1/$1 = !!"n ! "n
"!2 ! 1 y s2 = !1/$2 = !!"n +
"n"
!2 ! 1) . La función de transferencia en este caso viene dada por:
G(s) =k
($1s+ 1)($2s+ 1)(3.13)
3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros · 39
! es el coeficiente, razón o factor de amortiguamiento relativo del sistema (adimensional), quedeterminará la forma de la respuesta transitoria. En función de su valor se puede deducir si elsistema es inestable (! < 0), críticamente estable o no amortiguado (! = 0), subamortiguado(0 < ! < 1), críticamente amortiguado (! = 1) o sobreamortiguado (! > 1).
"n es la frecuencia natural no amortiguada (rad/s), que corresponde a la frecuencia con la queoscilaría el sistema si no existiese amortiguamiento (! = 0, respuesta de tipo senoidal).
Evidentemente, para que se obtenga una respuesta limitada cuando la señal de entrada tiene formade escalón (señal acotada), los polos del sistema deben estar en la parte izquierda del plano s. Si algunade sus raíces está en el semiplano derecho s, el sistema será inestable. Si la ecuación característica delsistema (J(s) = s2 + 2!"ns+ "2
n = 0) tiene las raíces sobre el eje imaginario (eje j"), la salida en estadoestacionario cuando la entrada es una señal en escalón tendrá oscilaciones mantenidas, a menos que laentrada sea una sinusoide cuya frecuencia sea igual a la magnitud de las raíces del eje j". Para este caso,la salida está sin acotar. A tal sistema se le denomina marginalmente estable, debido a que únicamentealgunas entradas limitadas (sinusoides de la frecuencia de los polos) harán que la salida no esté acotada.La respuesta temporal cuando la entrada tiene forma de escalón de amplitud Ue (U(s) = Ue/s) se
puede obtener a partir de:
Y(s) = G(s)U(s) =k"2
ns2 + 2!"ns+ "2
n
Ues
(3.11)
aplicando la transformada inversa de Laplace, y(t) = L!1 {Y(s)}, o bien resolviendo la ecuación dife-rencial con:
u(t) =
!0, t < 0Ue, t " 0
,
siendo necesario diferenciar los casos: 0 # ! < 1, ! " 1 y ! < 0. En todos ellos, la respuesta temporal delos sistemas de segundo orden comienza en t = 0 con pendiente nula. Se puede comprobar fácilmentehaciendo dy(t)/dt|t=0.
Sistema subamortiguado: Para el caso 0 # ! < 1 se obtiene que los polos del sistema (raíces dela ecuación característica) son complejos conjugados, (s1 = !!"n + j"n
"1! !2 y s$1 = !!"n !
j"n"1! !2) y la respuesta temporal a entrada en escalón es:
y(t) = kUe
#1! e!!"nt
$cos"dt+
!"1! !2
sen"dt
%&, t " 0 (3.12)
donde "d = "n"1! !2 es la frecuencia natural amortiguada. Se puede observar cómo la compo-
nente compleja de los polos produce una respuesta temporal con presencia de senos y cosenos quedan lugar a oscilaciones que se amortiguan con la envolvente exponencial. Al producto # = !"nse le denomina factor de amortiguamiento, que es una constante que determina las propiedades deamortiguamiento de un sistema. Determina la velocidad de crecimiento o decaimiento de la res-puesta a escalón unitario de un sistema de segundo orden subamortiguado.
Sistema sobreamortiguado: Cuando el factor de amortiguamiento relativo ! " 1, los polos del sistemade segundo orden serán reales (s1 = !1/$1 = !!"n ! "n
"!2 ! 1 y s2 = !1/$2 = !!"n +
"n"
!2 ! 1) . La función de transferencia en este caso viene dada por:
G(s) =k
($1s+ 1)($2s+ 1)(3.13)
3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros · 39
! es el coeficiente, razón o factor de amortiguamiento relativo del sistema (adimensional), quedeterminará la forma de la respuesta transitoria. En función de su valor se puede deducir si elsistema es inestable (! < 0), críticamente estable o no amortiguado (! = 0), subamortiguado(0 < ! < 1), críticamente amortiguado (! = 1) o sobreamortiguado (! > 1).
"n es la frecuencia natural no amortiguada (rad/s), que corresponde a la frecuencia con la queoscilaría el sistema si no existiese amortiguamiento (! = 0, respuesta de tipo senoidal).
Evidentemente, para que se obtenga una respuesta limitada cuando la señal de entrada tiene formade escalón (señal acotada), los polos del sistema deben estar en la parte izquierda del plano s. Si algunade sus raíces está en el semiplano derecho s, el sistema será inestable. Si la ecuación característica delsistema (J(s) = s2 + 2!"ns+ "2
n = 0) tiene las raíces sobre el eje imaginario (eje j"), la salida en estadoestacionario cuando la entrada es una señal en escalón tendrá oscilaciones mantenidas, a menos que laentrada sea una sinusoide cuya frecuencia sea igual a la magnitud de las raíces del eje j". Para este caso,la salida está sin acotar. A tal sistema se le denomina marginalmente estable, debido a que únicamentealgunas entradas limitadas (sinusoides de la frecuencia de los polos) harán que la salida no esté acotada.La respuesta temporal cuando la entrada tiene forma de escalón de amplitud Ue (U(s) = Ue/s) se
puede obtener a partir de:
Y(s) = G(s)U(s) =k"2
ns2 + 2!"ns+ "2
n
Ues
(3.11)
aplicando la transformada inversa de Laplace, y(t) = L!1 {Y(s)}, o bien resolviendo la ecuación dife-rencial con:
u(t) =
!0, t < 0Ue, t " 0
,
siendo necesario diferenciar los casos: 0 # ! < 1, ! " 1 y ! < 0. En todos ellos, la respuesta temporal delos sistemas de segundo orden comienza en t = 0 con pendiente nula. Se puede comprobar fácilmentehaciendo dy(t)/dt|t=0.
Sistema subamortiguado: Para el caso 0 # ! < 1 se obtiene que los polos del sistema (raíces dela ecuación característica) son complejos conjugados, (s1 = !!"n + j"n
"1! !2 y s$1 = !!"n !
j"n"1! !2) y la respuesta temporal a entrada en escalón es:
y(t) = kUe
#1! e!!"nt
$cos"dt+
!"1! !2
sen"dt
%&, t " 0 (3.12)
donde "d = "n"1! !2 es la frecuencia natural amortiguada. Se puede observar cómo la compo-
nente compleja de los polos produce una respuesta temporal con presencia de senos y cosenos quedan lugar a oscilaciones que se amortiguan con la envolvente exponencial. Al producto # = !"nse le denomina factor de amortiguamiento, que es una constante que determina las propiedades deamortiguamiento de un sistema. Determina la velocidad de crecimiento o decaimiento de la res-puesta a escalón unitario de un sistema de segundo orden subamortiguado.
Sistema sobreamortiguado: Cuando el factor de amortiguamiento relativo ! " 1, los polos del sistemade segundo orden serán reales (s1 = !1/$1 = !!"n ! "n
"!2 ! 1 y s2 = !1/$2 = !!"n +
"n"
!2 ! 1) . La función de transferencia en este caso viene dada por:
G(s) =k
($1s+ 1)($2s+ 1)(3.13)
3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros · 39
! es el coeficiente, razón o factor de amortiguamiento relativo del sistema (adimensional), quedeterminará la forma de la respuesta transitoria. En función de su valor se puede deducir si elsistema es inestable (! < 0), críticamente estable o no amortiguado (! = 0), subamortiguado(0 < ! < 1), críticamente amortiguado (! = 1) o sobreamortiguado (! > 1).
"n es la frecuencia natural no amortiguada (rad/s), que corresponde a la frecuencia con la queoscilaría el sistema si no existiese amortiguamiento (! = 0, respuesta de tipo senoidal).
Evidentemente, para que se obtenga una respuesta limitada cuando la señal de entrada tiene formade escalón (señal acotada), los polos del sistema deben estar en la parte izquierda del plano s. Si algunade sus raíces está en el semiplano derecho s, el sistema será inestable. Si la ecuación característica delsistema (J(s) = s2 + 2!"ns+ "2
n = 0) tiene las raíces sobre el eje imaginario (eje j"), la salida en estadoestacionario cuando la entrada es una señal en escalón tendrá oscilaciones mantenidas, a menos que laentrada sea una sinusoide cuya frecuencia sea igual a la magnitud de las raíces del eje j". Para este caso,la salida está sin acotar. A tal sistema se le denomina marginalmente estable, debido a que únicamentealgunas entradas limitadas (sinusoides de la frecuencia de los polos) harán que la salida no esté acotada.La respuesta temporal cuando la entrada tiene forma de escalón de amplitud Ue (U(s) = Ue/s) se
puede obtener a partir de:
Y(s) = G(s)U(s) =k"2
ns2 + 2!"ns+ "2
n
Ues
(3.11)
aplicando la transformada inversa de Laplace, y(t) = L!1 {Y(s)}, o bien resolviendo la ecuación dife-rencial con:
u(t) =
!0, t < 0Ue, t " 0
,
siendo necesario diferenciar los casos: 0 # ! < 1, ! " 1 y ! < 0. En todos ellos, la respuesta temporal delos sistemas de segundo orden comienza en t = 0 con pendiente nula. Se puede comprobar fácilmentehaciendo dy(t)/dt|t=0.
Sistema subamortiguado: Para el caso 0 # ! < 1 se obtiene que los polos del sistema (raíces dela ecuación característica) son complejos conjugados, (s1 = !!"n + j"n
"1! !2 y s$1 = !!"n !
j"n"1! !2) y la respuesta temporal a entrada en escalón es:
y(t) = kUe
#1! e!!"nt
$cos"dt+
!"1! !2
sen"dt
%&, t " 0 (3.12)
donde "d = "n"1! !2 es la frecuencia natural amortiguada. Se puede observar cómo la compo-
nente compleja de los polos produce una respuesta temporal con presencia de senos y cosenos quedan lugar a oscilaciones que se amortiguan con la envolvente exponencial. Al producto # = !"nse le denomina factor de amortiguamiento, que es una constante que determina las propiedades deamortiguamiento de un sistema. Determina la velocidad de crecimiento o decaimiento de la res-puesta a escalón unitario de un sistema de segundo orden subamortiguado.
Sistema sobreamortiguado: Cuando el factor de amortiguamiento relativo ! " 1, los polos del sistemade segundo orden serán reales (s1 = !1/$1 = !!"n ! "n
"!2 ! 1 y s2 = !1/$2 = !!"n +
"n"
!2 ! 1) . La función de transferencia en este caso viene dada por:
G(s) =k
($1s+ 1)($2s+ 1)(3.13)
40 · Capítulo 3. Respuesta temporal
donde !2 es la constante de tiempo asociada al polo más cercano al eje imaginario, que provocala exponencial más lenta (!2 > !1) y la respuesta temporal se puede obtener por tanto como lacombinación de dos sistemas de primer orden:
y(t) = kUe!1! !2
!2 ! !1e!
t!2 +
!1!2 ! !1
e!t
!1
", t " 0 (3.14)
Cuando " = 1, las dos raíces son iguales s1 = s2 (!1 = !2) y al sistema se le denomina críticamenteamortiguado. Su función de transferencia viene dada por:
G(s) =k
(!s+ 1)2(3.15)
y la respuesta a escalón tiene la siguiente expresión analítica:
y(t) = kUe!1! e!
t! ! t
!e!
t!
", t " 0 (3.16)
Sistema críticamente estable: Como se puede observar en la ecuación (3.12), cuando " = 0 los dospolos complejos conjugados se encuentran sobre el eje imaginario (con parte real nula) y se obtieneuna respuesta con una oscilación mantenida dada por:
y(t) = kUe (1! cos (#nt)) , t " 0 (3.17)
Sistema inestable: En el caso " < 0 el sistema será inestable. Tendrá dos polos complejos conjugadoscon parte real en el semiplano derecho si !1 < " < 0 (respuesta inestable oscilatoria) o bien dospolos reales en el semiplano derecho si " # !1 (respuesta inestable de tipo exponencial).
Tanto en el caso subamortiguado como en el sobreamortiguado, un análisis interesante consiste enestudiar la localización de los polos de un sistema de segundo orden en función de los parámetros carac-terísticos de la función de transferencia. A partir de dichos parámetros, se pueden encontrar relacionescon determinadas características puntuales de la respuesta temporal del sistema (que, como se analizaráen el Capítulo 7, además pueden ser utilizadas como especificaciones de funcionamiento en lazo cerra-do en el diseño de sistemas de control). Las características de la respuesta temporal más extendidas son(ver Figura 3.1):
Sobreoscilación (SO(%)): Representa el sobrepico o sobreelongación del sistema en%, que es la di-ferencia entre el máximo valor de pico de la respuesta y el valor de régimen estacionario, relativaa dicho valor de régimen estacionario (en%). Para el caso subamortiguado, derivando la ecuación(3.12) e igualando a cero se puede obtener el valor máximo de y(t) que define la sobreoscilación, asícomo el tiempo en el que se alcanza dicho máximo (tiempo de pico). El valor de la sobreoscilaciónviene dado por:
SO(%) = 100 exp
#!"$$1! "2
%(3.18)
Como es lógico, su definición tiene sentido únicamente en el caso subamortiguado.Tiempo de pico (tp (s)): Tiempo que tarda la respuesta del sistema en alcanzar su valor de picomedido desde el instante en que se introduce el escalón. Derivando la ecuación (3.12) e igualandoa cero para obtener el máximo se obtiene el valor del tiempo de pico:
tp =$
#d=
$
#n$1! "2
(3.19)
40 · Capítulo 3. Respuesta temporal
donde !2 es la constante de tiempo asociada al polo más cercano al eje imaginario, que provocala exponencial más lenta (!2 > !1) y la respuesta temporal se puede obtener por tanto como lacombinación de dos sistemas de primer orden:
y(t) = kUe!1! !2
!2 ! !1e!
t!2 +
!1!2 ! !1
e!t
!1
", t " 0 (3.14)
Cuando " = 1, las dos raíces son iguales s1 = s2 (!1 = !2) y al sistema se le denomina críticamenteamortiguado. Su función de transferencia viene dada por:
G(s) =k
(!s+ 1)2(3.15)
y la respuesta a escalón tiene la siguiente expresión analítica:
y(t) = kUe!1! e!
t! ! t
!e!
t!
", t " 0 (3.16)
Sistema críticamente estable: Como se puede observar en la ecuación (3.12), cuando " = 0 los dospolos complejos conjugados se encuentran sobre el eje imaginario (con parte real nula) y se obtieneuna respuesta con una oscilación mantenida dada por:
y(t) = kUe (1! cos (#nt)) , t " 0 (3.17)
Sistema inestable: En el caso " < 0 el sistema será inestable. Tendrá dos polos complejos conjugadoscon parte real en el semiplano derecho si !1 < " < 0 (respuesta inestable oscilatoria) o bien dospolos reales en el semiplano derecho si " # !1 (respuesta inestable de tipo exponencial).
Tanto en el caso subamortiguado como en el sobreamortiguado, un análisis interesante consiste enestudiar la localización de los polos de un sistema de segundo orden en función de los parámetros carac-terísticos de la función de transferencia. A partir de dichos parámetros, se pueden encontrar relacionescon determinadas características puntuales de la respuesta temporal del sistema (que, como se analizaráen el Capítulo 7, además pueden ser utilizadas como especificaciones de funcionamiento en lazo cerra-do en el diseño de sistemas de control). Las características de la respuesta temporal más extendidas son(ver Figura 3.1):
Sobreoscilación (SO(%)): Representa el sobrepico o sobreelongación del sistema en%, que es la di-ferencia entre el máximo valor de pico de la respuesta y el valor de régimen estacionario, relativaa dicho valor de régimen estacionario (en%). Para el caso subamortiguado, derivando la ecuación(3.12) e igualando a cero se puede obtener el valor máximo de y(t) que define la sobreoscilación, asícomo el tiempo en el que se alcanza dicho máximo (tiempo de pico). El valor de la sobreoscilaciónviene dado por:
SO(%) = 100 exp
#!"$$1! "2
%(3.18)
Como es lógico, su definición tiene sentido únicamente en el caso subamortiguado.Tiempo de pico (tp (s)): Tiempo que tarda la respuesta del sistema en alcanzar su valor de picomedido desde el instante en que se introduce el escalón. Derivando la ecuación (3.12) e igualandoa cero para obtener el máximo se obtiene el valor del tiempo de pico:
tp =$
#d=
$
#n$1! "2
(3.19)
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
142 Dpto. Electrónica, Automática e Informática Industrial
( )12
2
+
+
=
nn
ss
ksG
!"
!
es igual a:
( ) ( )
+
##=
#
$!"
%
tsenekty d
t
211
De dos maneras distintas pueden ser abordadas la problemática. Una a través de la descomposición en fracciones simples de la transformada de Laplace de la salida. La otra posibilidad es la integración en el tiempo de la respuesta al impulso (ver ec. (6. 35)).
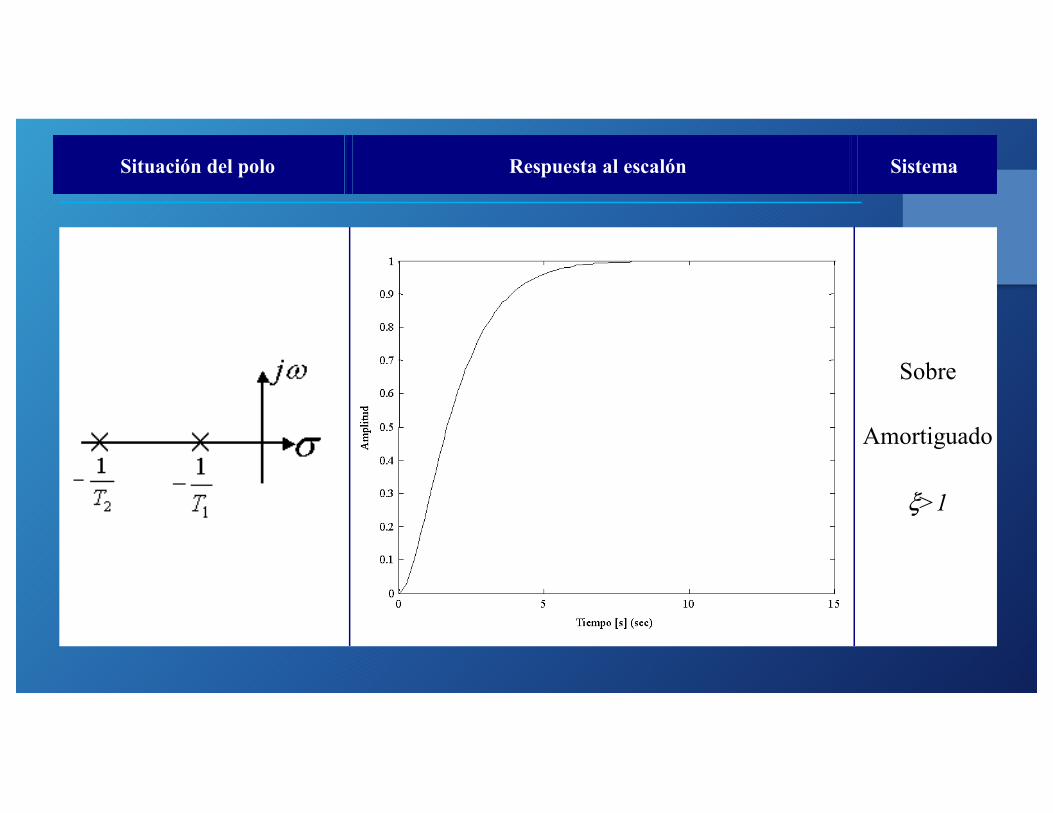
Al igual que en el anterior capítulo, se sintetiza el comportamiento de los sistemas de segundo orden ante una entrada en escalón unitario a través de un cuadro resumen. Aparecerán los polos según el coeficiente de amortiguamiento y cuál es la evolución temporal de su salida:
Situación del polo Respuesta al escalón Sistema
Sobre
Amortiguado
">1
(6. 40)
(6. 41)
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
142 Dpto. Electrónica, Automática e Informática Industrial
( )12
2
+
+
=
nn
ss
ksG
!"
!
es igual a:
( ) ( )
+
##=
#
$!"
%
tsenekty d
t
211
De dos maneras distintas pueden ser abordadas la problemática. Una a través de la descomposición en fracciones simples de la transformada de Laplace de la salida. La otra posibilidad es la integración en el tiempo de la respuesta al impulso (ver ec. (6. 35)).
Al igual que en el anterior capítulo, se sintetiza el comportamiento de los sistemas de segundo orden ante una entrada en escalón unitario a través de un cuadro resumen. Aparecerán los polos según el coeficiente de amortiguamiento y cuál es la evolución temporal de su salida:
Situación del polo Respuesta al escalón Sistema
Sobre
Amortiguado
">1
(6. 40)
(6. 41)
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
142 Dpto. Electrónica, Automática e Informática Industrial
( )12
2
+
+
=
nn
ss
ksG
!"!
es igual a:
( ) ( )
+
##=
#
$!"
%tsenekty d
t
211
De dos maneras distintas pueden ser abordadas la problemática. Una a través de la descomposición en fracciones simples de la transformada de Laplace de la salida. La otra posibilidad es la integración en el tiempo de la respuesta al impulso (ver ec. (6. 35)).
Al igual que en el anterior capítulo, se sintetiza el comportamiento de los sistemas de segundo orden ante una entrada en escalón unitario a través de un cuadro resumen. Aparecerán los polos según el coeficiente de amortiguamiento y cuál es la evolución temporal de su salida:
Situación del polo Respuesta al escalón Sistema
Sobre
Amortiguado
">1
(6. 40)
(6. 41)
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
142 Dpto. Electrónica, Automática e Informática Industrial
( )12
2
+
+
=
nn
ss
ksG
!"
!
es igual a:
( ) ( )
+
##=
#
$!"
%
tsenekty d
t
211
De dos maneras distintas pueden ser abordadas la problemática. Una a través de la descomposición en fracciones simples de la transformada de Laplace de la salida. La otra posibilidad es la integración en el tiempo de la respuesta al impulso (ver ec. (6. 35)).
Al igual que en el anterior capítulo, se sintetiza el comportamiento de los sistemas de segundo orden ante una entrada en escalón unitario a través de un cuadro resumen. Aparecerán los polos según el coeficiente de amortiguamiento y cuál es la evolución temporal de su salida:
Situación del polo Respuesta al escalón Sistema
Sobre
Amortiguado
">1
(6. 40)
(6. 41)
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 143
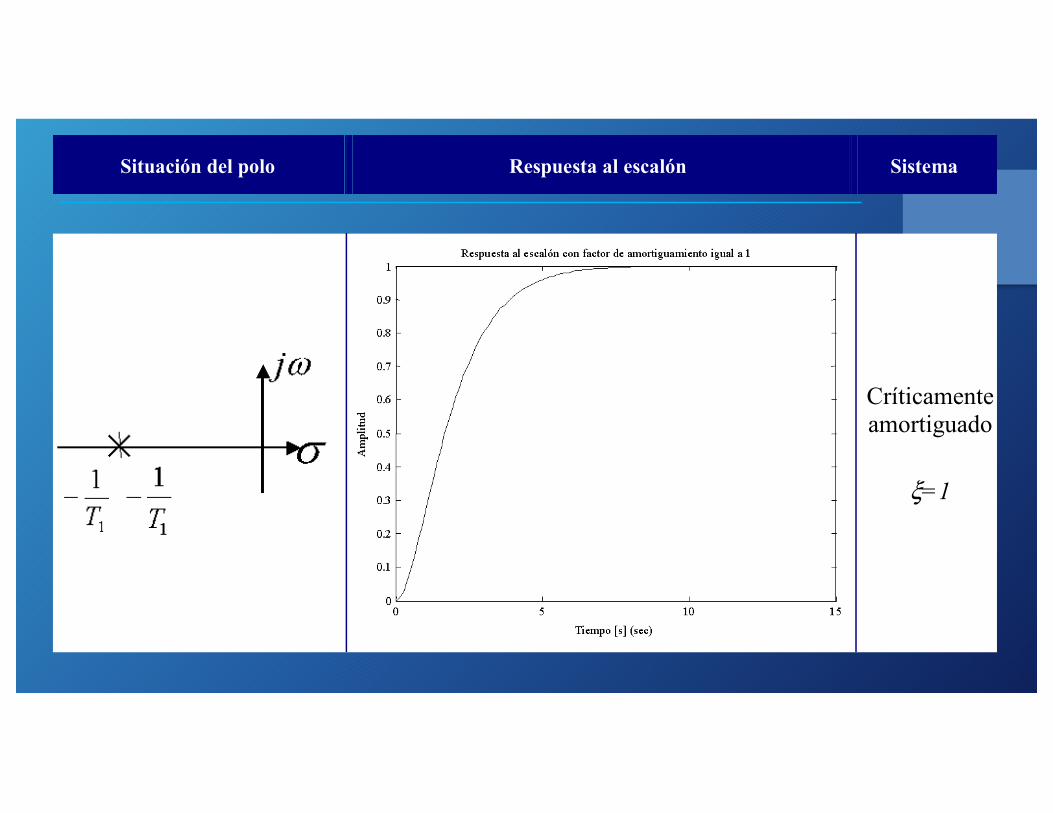
Críticamente amortiguado
!=1
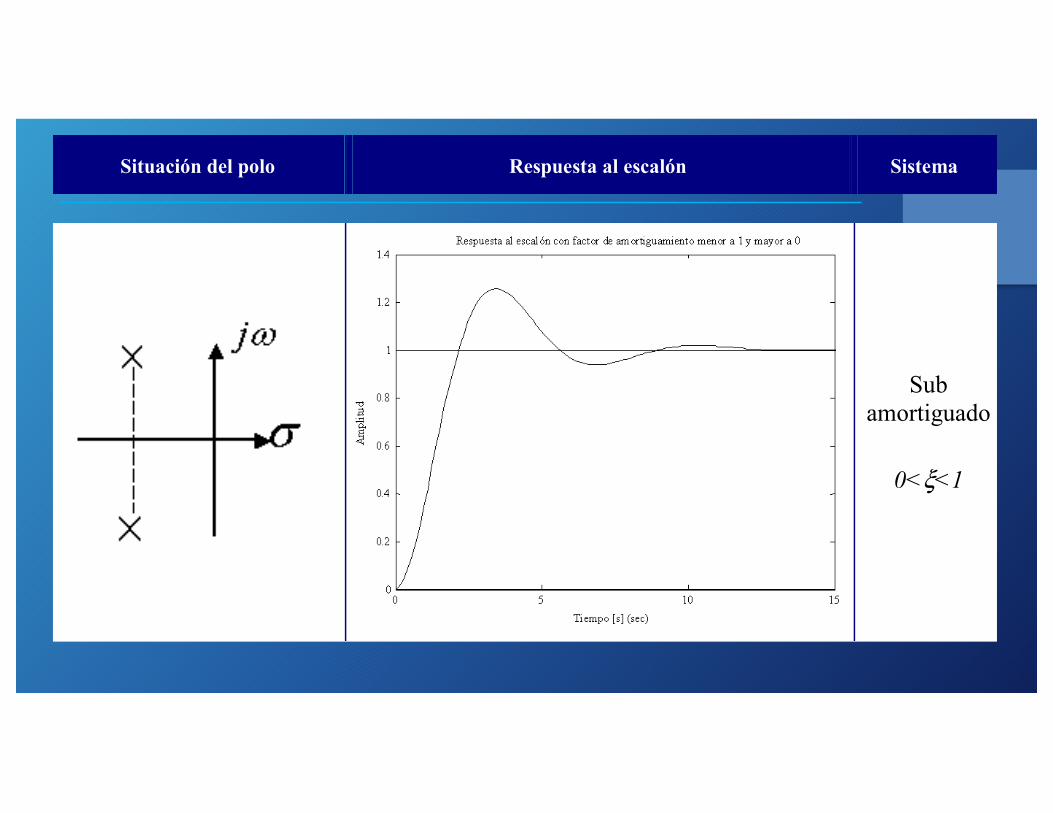
Sub amortiguado
0<!<1
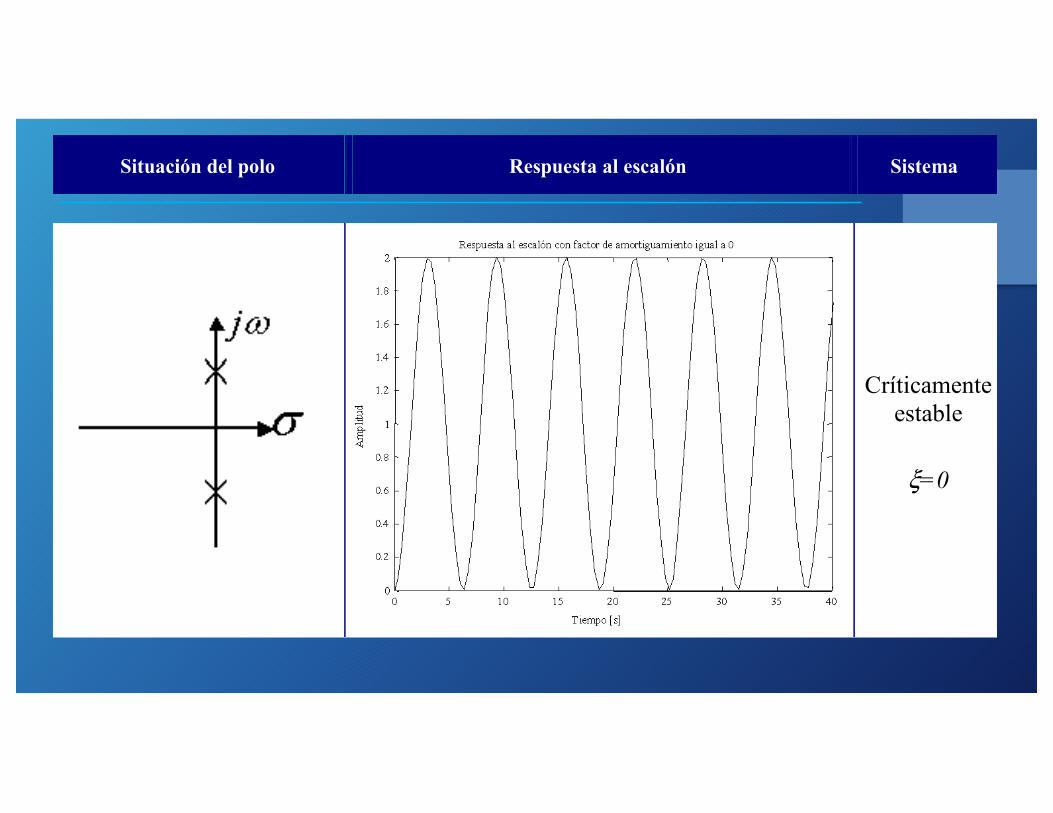
Críticamente estable
!=0
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
142 Dpto. Electrónica, Automática e Informática Industrial
( )12
2
+
+
=
nn
ss
ksG
!"
!
es igual a:
( ) ( )
+
##=
#
$!"
%
tsenekty d
t
211
De dos maneras distintas pueden ser abordadas la problemática. Una a través de la descomposición en fracciones simples de la transformada de Laplace de la salida. La otra posibilidad es la integración en el tiempo de la respuesta al impulso (ver ec. (6. 35)).
Al igual que en el anterior capítulo, se sintetiza el comportamiento de los sistemas de segundo orden ante una entrada en escalón unitario a través de un cuadro resumen. Aparecerán los polos según el coeficiente de amortiguamiento y cuál es la evolución temporal de su salida:
Situación del polo Respuesta al escalón Sistema
Sobre
Amortiguado
">1
(6. 40)
(6. 41)
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 143
Críticamente amortiguado
!=1
Sub amortiguado
0<!<1
Críticamente estable
!=0
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
142 Dpto. Electrónica, Automática e Informática Industrial
( )12
2
+
+
=
nn
ss
ksG
!"
!
es igual a:
( ) ( )
+
##=
#
$!"
%
tsenekty d
t
211
De dos maneras distintas pueden ser abordadas la problemática. Una a través de la descomposición en fracciones simples de la transformada de Laplace de la salida. La otra posibilidad es la integración en el tiempo de la respuesta al impulso (ver ec. (6. 35)).
Al igual que en el anterior capítulo, se sintetiza el comportamiento de los sistemas de segundo orden ante una entrada en escalón unitario a través de un cuadro resumen. Aparecerán los polos según el coeficiente de amortiguamiento y cuál es la evolución temporal de su salida:
Situación del polo Respuesta al escalón Sistema
Sobre
Amortiguado
">1
(6. 40)
(6. 41)
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 143
Críticamente amortiguado
!=1
Sub amortiguado
0<!<1
Críticamente estable
!=0
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
142 Dpto. Electrónica, Automática e Informática Industrial
( )12
2
+
+
=
nn
ss
ksG
!"
!
es igual a:
( ) ( )
+
##=
#
$!"
%
tsenekty d
t
211
De dos maneras distintas pueden ser abordadas la problemática. Una a través de la descomposición en fracciones simples de la transformada de Laplace de la salida. La otra posibilidad es la integración en el tiempo de la respuesta al impulso (ver ec. (6. 35)).
Al igual que en el anterior capítulo, se sintetiza el comportamiento de los sistemas de segundo orden ante una entrada en escalón unitario a través de un cuadro resumen. Aparecerán los polos según el coeficiente de amortiguamiento y cuál es la evolución temporal de su salida:
Situación del polo Respuesta al escalón Sistema
Sobre
Amortiguado
">1
(6. 40)
(6. 41)
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
144 Dpto. Electrónica, Automática e Informática Industrial
INESTABLE
-1<!<0
INESTABLE
!<-1
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
142 Dpto. Electrónica, Automática e Informática Industrial
( )12
2
+
+
=
nn
ss
ksG
!"
!
es igual a:
( ) ( )
+
##=
#
$!"
%
tsenekty d
t
211
De dos maneras distintas pueden ser abordadas la problemática. Una a través de la descomposición en fracciones simples de la transformada de Laplace de la salida. La otra posibilidad es la integración en el tiempo de la respuesta al impulso (ver ec. (6. 35)).
Al igual que en el anterior capítulo, se sintetiza el comportamiento de los sistemas de segundo orden ante una entrada en escalón unitario a través de un cuadro resumen. Aparecerán los polos según el coeficiente de amortiguamiento y cuál es la evolución temporal de su salida:
Situación del polo Respuesta al escalón Sistema
Sobre
Amortiguado
">1
(6. 40)
(6. 41)
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
144 Dpto. Electrónica, Automática e Informática Industrial
INESTABLE
-1<!<0
INESTABLE
!<-1
Apuntes de Regulación Capítulo 6: Análisis temporal de sistemas de 1er y 2º
Dpto. Electrónica, Automática e Informática Industrial 141
!
!
! ! !!
!
!
!! ! "
#j0=$
01 <<% $10 << $
1=$
1>$
1%<$
!
!
! ! !!
!
!
!! ! "
#j0=$
01 <<% $10 << $
1=$
1>$
1%<$
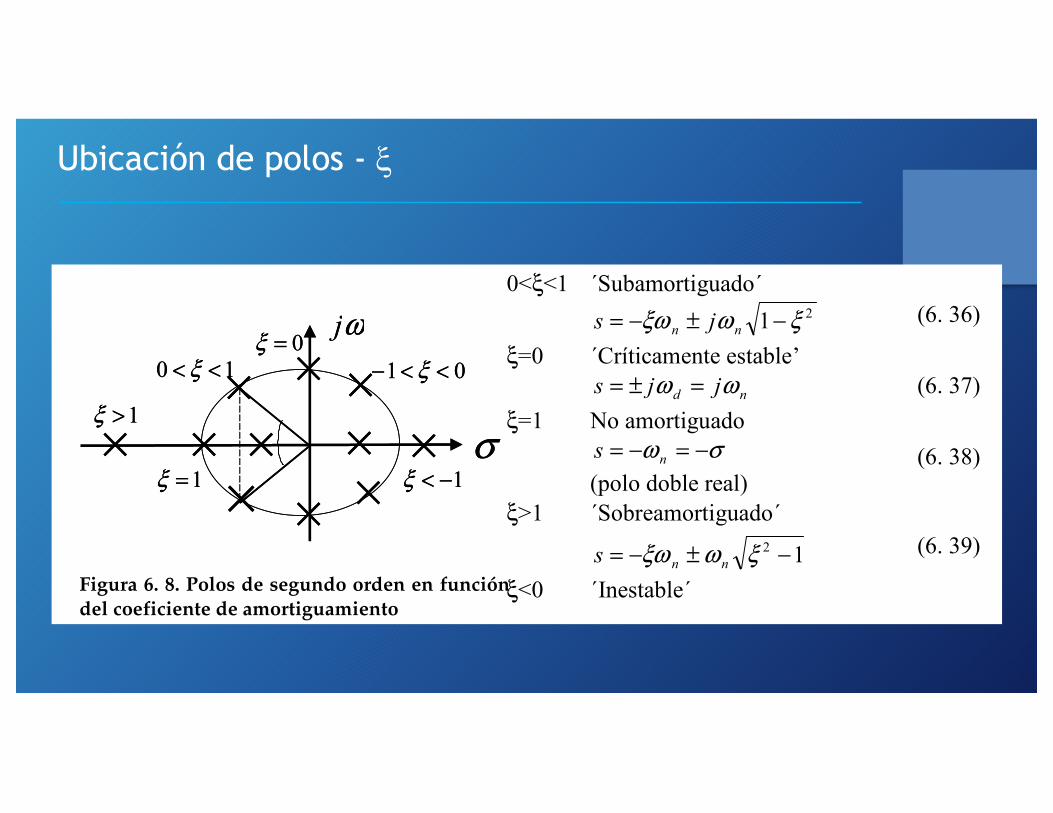
Figura 6. 8. Polos de segundo orden en función del coeficiente de amortiguamiento
Las naturalezas de los polos de los sistemas de segundo orden están determinadas por el factor de amortiguamiento. Si el $ es menor a cero el sistema es inestable. Cuando está entre 0 y 1 las raíces son complejas y conjugadas, situadas en el semiplano negativo. Un valor del $ igual a la unidad, indica que los polos son dobles y reales, con valor negativo. Por último, valores del coeficiente de amortiguamiento mayor a 1, indica dos raíces negativas y reales:
0<$<1 ´Subamortiguado´
21 $#$# %±%= nn js
$=0 ´Críticamente estable’ nd jjs ## =±=
$=1 No amortiguado "# %=%= ns
(polo doble real) $>1 ´Sobreamortiguado´
12 %±%= $#$# nns
$<0 ´Inestable´
6.2.2 Respuesta en escalón
Se propone al lector que demuestre que la respuesta al escalón unitario de un sistema de segundo orden simple:
(6. 36)
(6. 37)
(6. 38)
(6. 39)
"
!!
!!
#j
"
!!
!!
#j
0 1 2 3 4 5 6-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
plitu
d
3,1 == d#"
5,1 == d#"
0 1 2 3 4 5 6-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25Respuesta impulsional con igual constante de amortiguamiento
Tiempo [s]
Am
plitu
d
3,1 == d#"
5,1 == d#"
Figura 6. 7. a) Lugar geométrico de la frecuencia de amortiguamiento, b) Respuesta impulsional de dos sistemas con igual constante de amortiguamiento y diferente frecuencia de amortiguamiento
Ubicación de polos - x
Capítulo 6: Análisis temporal de sistemas de 1er y 2º Apuntes de Regulación
156 Dpto. Electrónica, Automática e Informática Industrial
0 10 20 30 40 50 60 70 800
1
2
3
4
5
6
7
La dinámica de la Peltier es aproximado por:
)()()( tTCRtTtP TH
THe
•
!+!
"
[ ] )()( 0 tiTtP pce #$ (linealización)
donde
ucp(t): tensión de control peltier
ip(t): corriente que circula por la Peltier
!T(t)= Tc-Tf , Tc%temperatura cara caliente
Tf%temperatura cara fría
uACOND(t): tensión de salida proporcional a !T(t)
Pe(t): potencia eléctrica dada a la peltier
#: coeficiente de Seebeck 0.003 V/K
Ante una entrada en escalón de 5V, la respuesta es la dada por la figura. Considere que la temperatura ambiente es de 20ºC. Determinar:
a) FDT equivalente
b) Diagrama de bloques
c) Cálculo de RTH y CTH
Ejercicio 6.7
Dibujar la señal de salida ante una entrada en escalón unitario, para los siguientes valores de k: a) 0.02; b) 0.125; c) 2.5, comparándolos en cuanto a tp, ts, Mp y tr.
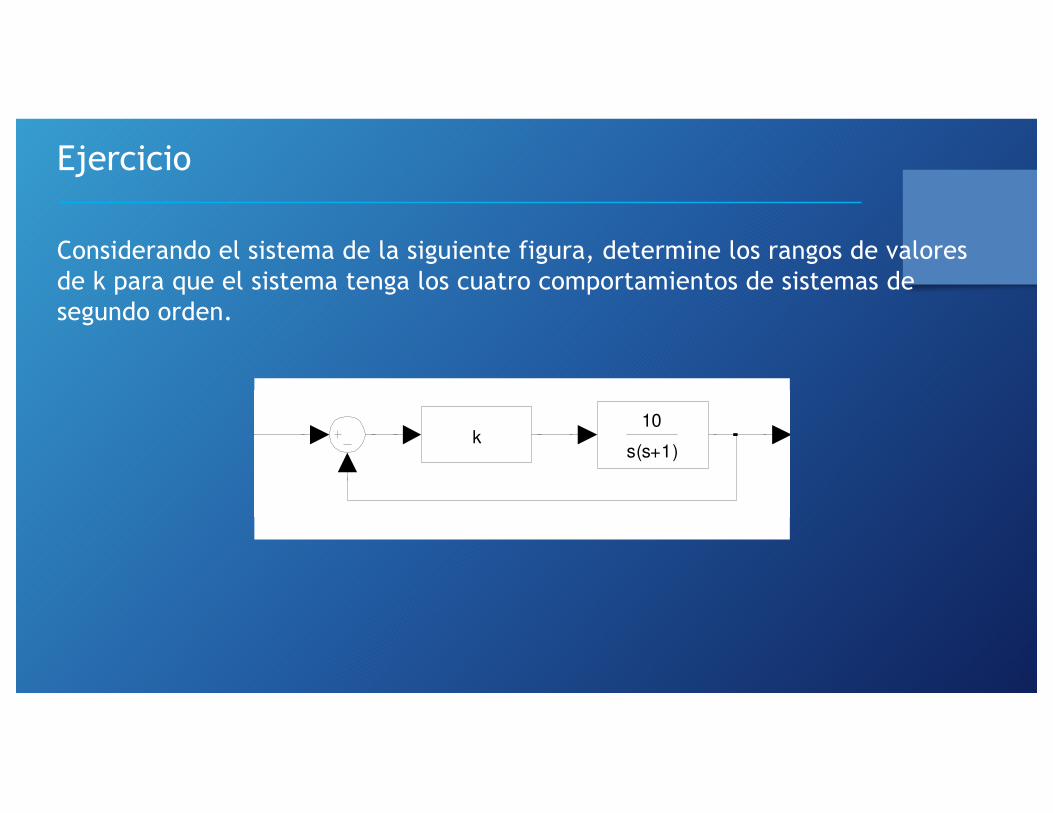
10
s(s+1)k
Ejercicio
Considerando el sistema de la siguiente figura, determine los rangos de valores de k para que el sistema tenga los cuatro comportamientos de sistemas de segundo orden.
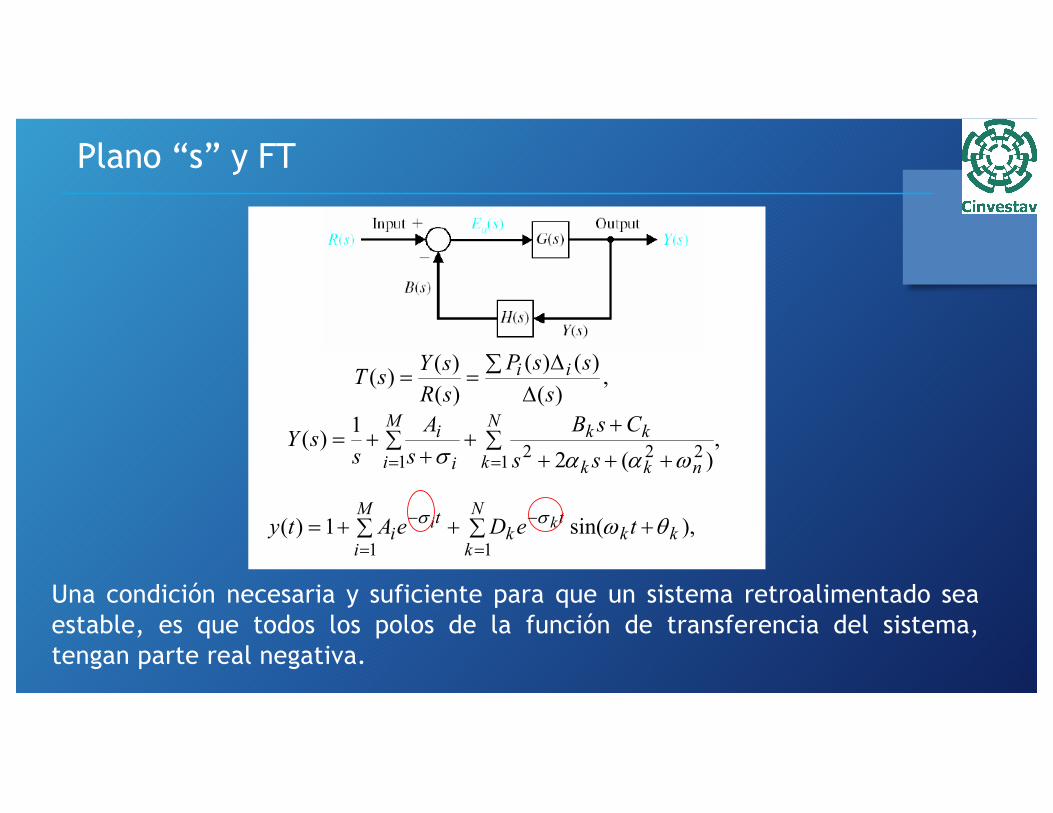
Plano “s” y FTS-Plane and Transient Response
,)(
)()()()()(
sssP
sRsYsT ii
''¦
,)(2
1)(1 1 222¦ ¦
���
��
��
M
i
N
k nkk
kk
i
i
ssCsB
sA
ssY
ZDDV
¦ ��¦�
�
� N
kkk
tk
M
i
ti teDeAty ki
11),sin(1)( TZVV
A necessary and sufficient condition for a feedback system to be stable is that all the poles of the system transfer function have negative real parts.
5
Una condición necesaria y suficiente para que un sistema retroalimentado seaestable, es que todos los polos de la función de transferencia del sistema,tengan parte real negativa.
Criterio de estabilidad de Routh-Hurwitz
Criterio de estabilidad de Routh-Hurwitz
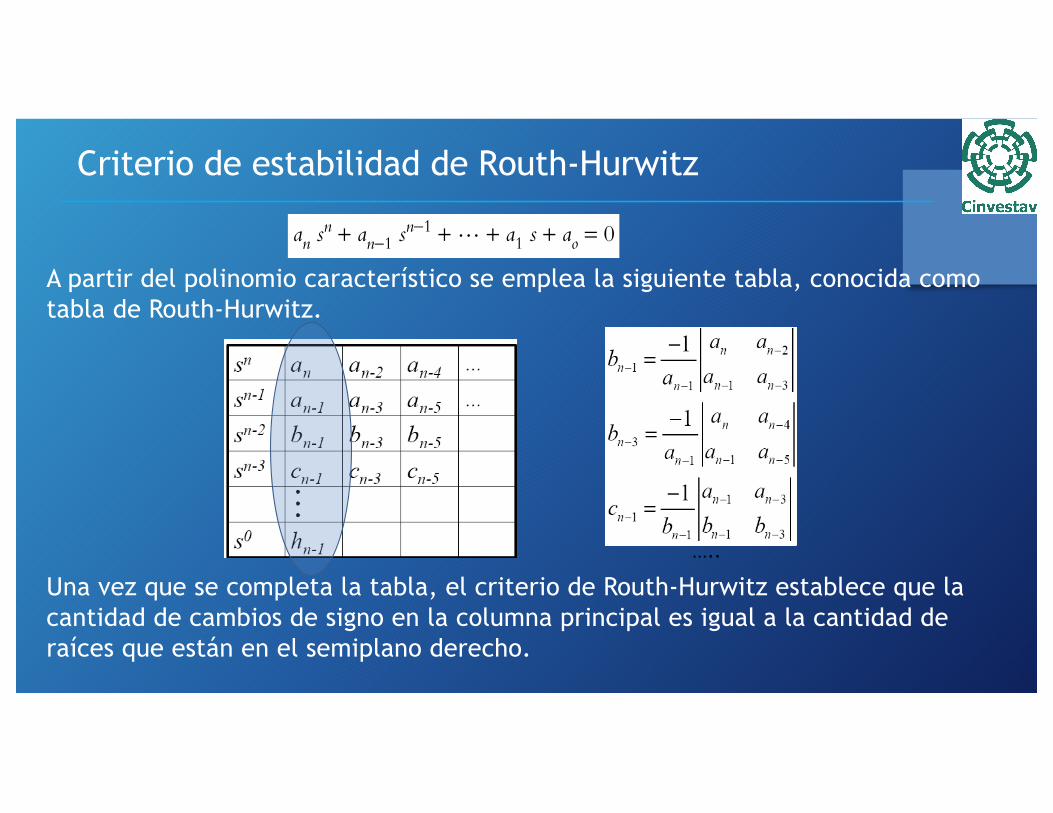
Criterio de estabilidad de Routh-Hurwitz
A partir del polinomio característico se emplea la siguiente tabla, conocida como tabla de Routh-Hurwitz.
Una vez que se completa la tabla, el criterio de Routh-Hurwitz establece que la cantidad de cambios de signo en la columna principal es igual a la cantidad de raíces que están en el semiplano derecho.
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB244
6.1 INTRODUCCIÓN
Para sistemas retroalimentados, que se representan por sus respectivas funciones de trans-ferencia de lazo cerrado T(s), el hecho más importante se relaciona con las ecuaciones características asociadas a T(s) y consiste en determinar si el sistema bajo consideración es estable, esto es, si sus polos de lazo cerrado están localizados en el semiplano izquierdo del plano s. En cuanto a los polinomios característicos, se puede establecer que los sistemas de prime-ro y segundo grados siempre serán estables en lazo cerrado; sin embargo, a partir de ecua-ciones características de tercer grado, los sistemas pueden ser o no estables, lo cual depende de la ubicación en el plano s de los respectivos polos de lazo cerrado de cada con! guración en particular. Una primera alternativa para establecer la estabilidad de un sistema consiste en aplicar el método de Newton-Raphson1 al polinomio característico bajo consideración, con lo que se determinaría la posición de los polos de lazo cerrado. Como segunda opción, con Matlab es posible obtener las raíces de cualquier poli-nomio de grado n (véase capítulo 2, sección 2.8.1. Evaluación de raíces con el comando roots). Existe una tercera opción, la cual, aunque no señala la posición de los polos de la ecuación característica bajo consideración, indica el número de raíces características que se localizan a la derecha del plano s. Esto se conoce como método de Routh-Hurwitz.
MÉTODO DE ROUTH-HURWITZ
En la década de 1890, A. Hurwitz y E. J. Routh publicaron, en forma separada, un pro-cedimiento numérico para determinar la estabilidad de un sistema a partir de su ecua-ción característica 1 + G(s)H(s) = 0. Este método es un arreglo numérico que tiene como objetivo determinar el número de raíces de un polinomio característico que estén en el semiplano derecho del plano s. Por eso, al procedimiento de Routh-Hurwitz se le denomina método de estabilidad absoluta, ya que el resultado no indica la posición especí! ca de los polos, como en el caso de los distintos métodos de evaluación de raíces de polinomios; sin embargo, aún en la actualidad es una herramienta de suma importancia, pues es posible establecer el rango de valores de ganancia ajustable K para los cuales los sistemas de lazo cerrado son estables. El primer paso para determinar la estabilidad absoluta de un polinomio característico 1 + G(s)H(s) = 0 es representarlo en su respectivo arreglo de Routh-Hurwitz. Sea el polinomio característico de grado n:
an sn + an�1 s
n�1 + … + a1 s + ao = 0 (6.1)
Para comenzar el arreglo, se procede a escribir una columna de términos en s, ini-ciando con la potencia de mayor grado sn y de ahí en orden descendente hasta llegar al término independiente s0; a continuación se distribuyen en el arreglo los coe! cientes an, an�1, … a1 y ao en pares de dos en dos, según se muestra en la ! gura 6.1.
1 Nakamura S., Análisis numérico y visualización gráfica con MATLAB, Pearson Educación, 1997.
6.2
C06_a SISTEMAS–Hdz.indd 244C06_a SISTEMAS–Hdz.indd 244 2/11/10 10:43:26 PM2/11/10 10:43:26 PM
Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
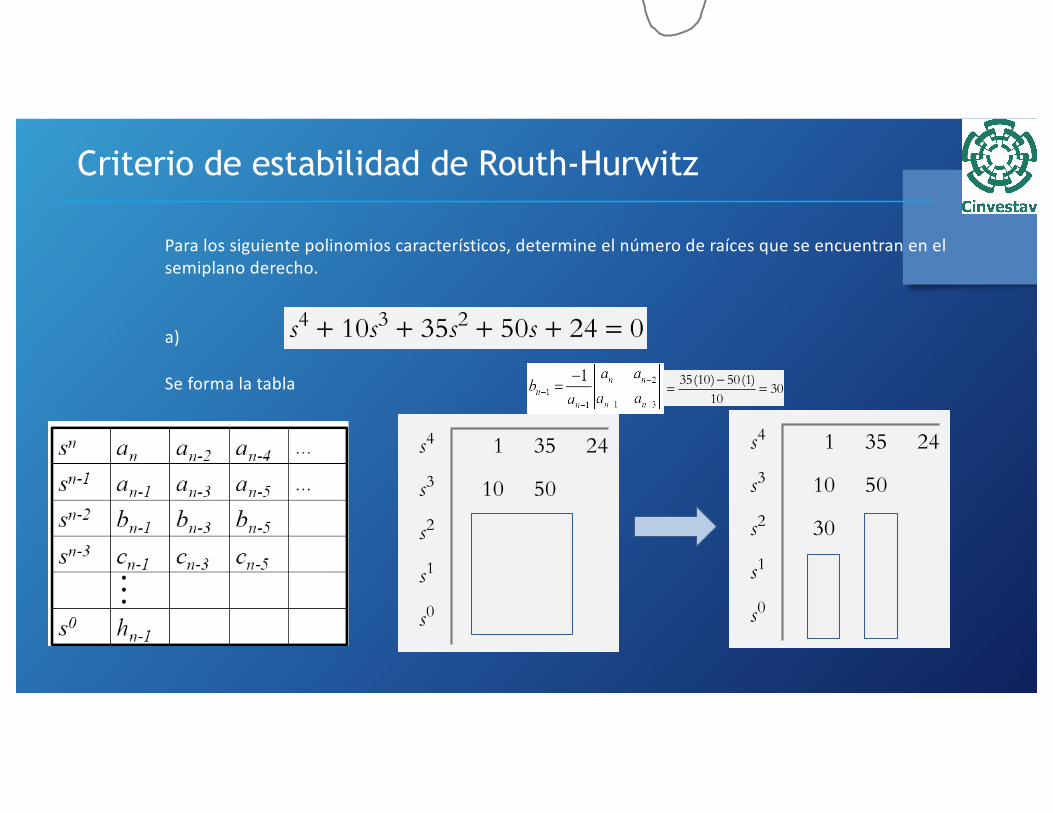
Criterio de estabilidad de Routh-Hurwitz
Para los siguiente polinomios característicos, determine el número de raíces que se encuentran en el semiplano derecho.
a)
Se forma la tabla
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 245
sn an an�2 an�4 …
sn�1 an�1 an�3 an�5 � � �
sn�2
…
s0
Después se procede a completar el arreglo, agregando los elementos b1, b2, … c1, c2, …, que corresponden a las ! las de los elementos bi , ci , etcétera y se calculan de la siguiente manera:
ba a a a
an n n n
n1
1 2 3
1=
!! ! !
!
( ) ( ), b
a a a aa
n n n n
n2
1 4 5
1=
!! ! !
!
( ) ( ) (6.2a)
cb a a b
bn n
11 3 1 2
1=
!! !( ) ( ), c
b a a bb
n n2
1 5 1 3
1=
!! !( ) ( ) (6.2b)
La tabla continúa verticalmente hasta terminar el arreglo, pero una vez que éste ha sido completado se aplica el criterio de Routh-Hurwitz, el cual establece que el número de cambios de signos en la columna principal corresponde al número de raíces que se encuentren a la derecha del eje j! (semiplano derecho SPD). Lo anterior se muestra en la ! gura 6.2.
Columna principal
sn an an�2 an�4 …
sn�1 an�1 an�3 an�5 � � �
sn�2 b1 b2 b3 …
… c1 c2 c3 …
… … … … .
� EJEMPLO 6.1
Para los siguientes polinomios característicos, aplique el criterio de Routh-Hurwitz con la ! nalidad de determinar el número de polos que se encuentren en el semi-plano derecho del plano s.
a) s4 + 10s3 + 35s2 + 50s + 24 = 0
b) s3 + 5s2 + 10 = 0
c ) s4 + 5s3 � 40s � 96 = 0
Figura 6.1Estructura del arreglo
de Routh-Hurwitz.
Figura 6.2El número de cambios de signo en los coefi cientes
de los elementos de la columna principal del
arreglo indica la cantidad de polos a la derecha del
eje j!.
C06_a SISTEMAS–Hdz.indd 245C06_a SISTEMAS–Hdz.indd 245 2/11/10 10:43:26 PM2/11/10 10:43:26 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
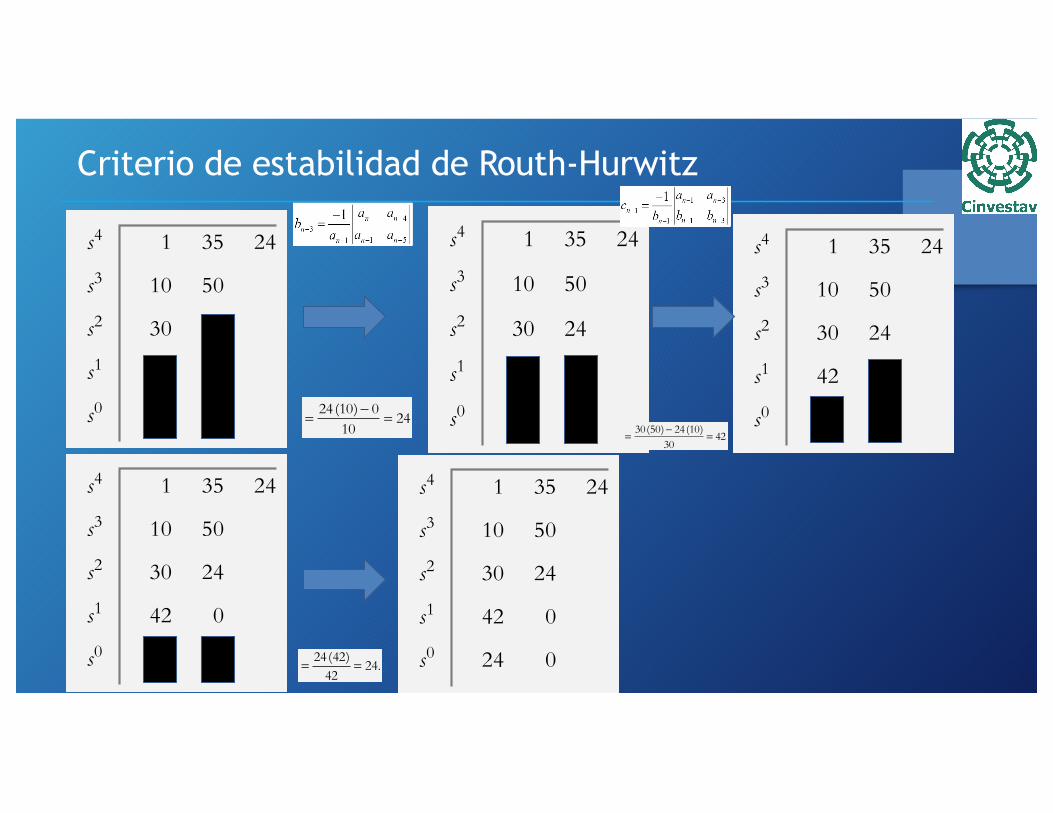
Criterio de estabilidad de Routh-Hurwitz
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
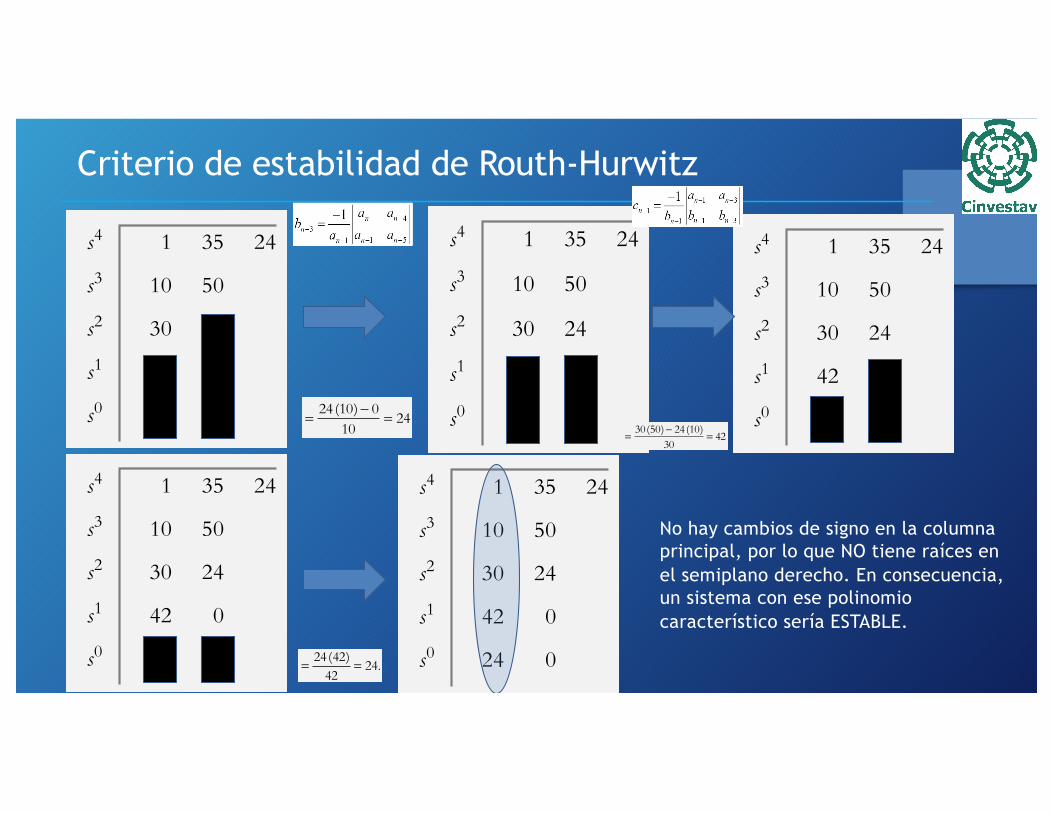
Criterio de estabilidad de Routh-Hurwitz
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
No hay cambios de signo en la columna principal, por lo que NO tiene raíces en el semiplano derecho. En consecuencia, un sistema con ese polinomio característico sería ESTABLE.
Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
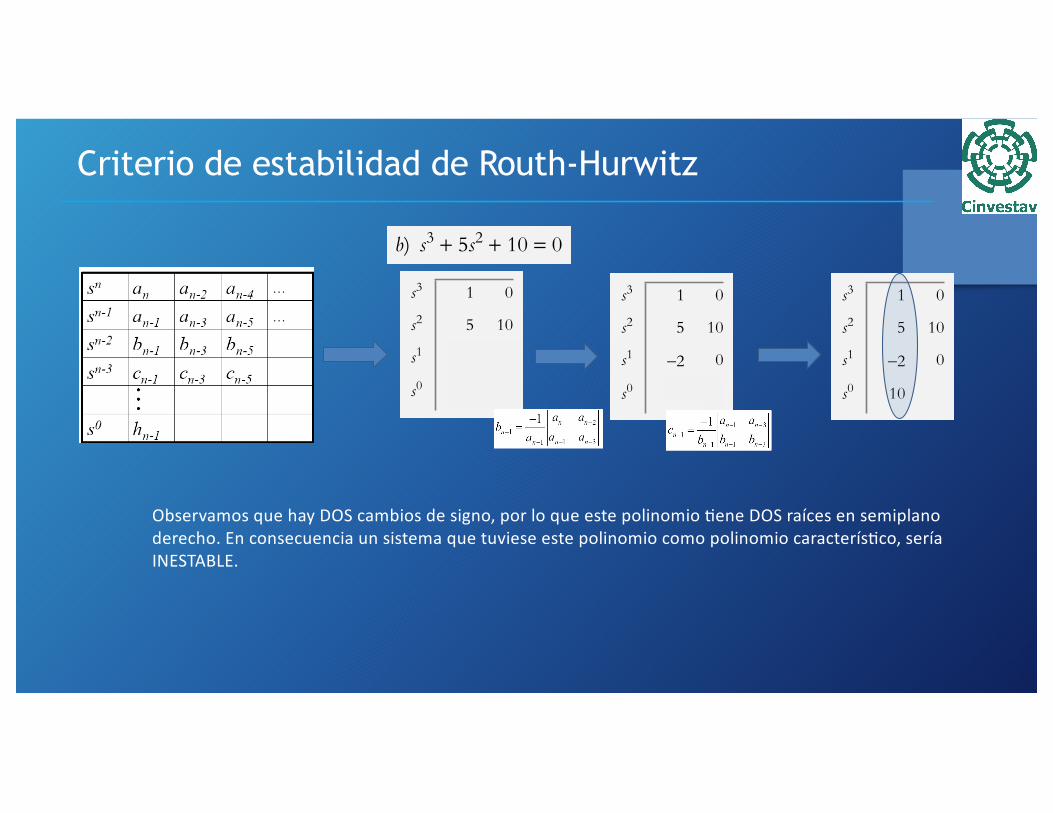
Criterio de estabilidad de Routh-Hurwitz
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 245
sn an an�2 an�4 …
sn�1 an�1 an�3 an�5 � � �
sn�2
…
s0
Después se procede a completar el arreglo, agregando los elementos b1, b2, … c1, c2, …, que corresponden a las ! las de los elementos bi , ci , etcétera y se calculan de la siguiente manera:
ba a a a
an n n n
n1
1 2 3
1=
!! ! !
!
( ) ( ), b
a a a aa
n n n n
n2
1 4 5
1=
!! ! !
!
( ) ( ) (6.2a)
cb a a b
bn n
11 3 1 2
1=
!! !( ) ( ), c
b a a bb
n n2
1 5 1 3
1=
!! !( ) ( ) (6.2b)
La tabla continúa verticalmente hasta terminar el arreglo, pero una vez que éste ha sido completado se aplica el criterio de Routh-Hurwitz, el cual establece que el número de cambios de signos en la columna principal corresponde al número de raíces que se encuentren a la derecha del eje j! (semiplano derecho SPD). Lo anterior se muestra en la ! gura 6.2.
Columna principal
sn an an�2 an�4 …
sn�1 an�1 an�3 an�5 � � �
sn�2 b1 b2 b3 …
… c1 c2 c3 …
… … … … .
� EJEMPLO 6.1
Para los siguientes polinomios característicos, aplique el criterio de Routh-Hurwitz con la ! nalidad de determinar el número de polos que se encuentren en el semi-plano derecho del plano s.
a) s4 + 10s3 + 35s2 + 50s + 24 = 0
b) s3 + 5s2 + 10 = 0
c ) s4 + 5s3 � 40s � 96 = 0
Figura 6.1Estructura del arreglo
de Routh-Hurwitz.
Figura 6.2El número de cambios de signo en los coefi cientes
de los elementos de la columna principal del
arreglo indica la cantidad de polos a la derecha del
eje j!.
C06_a SISTEMAS–Hdz.indd 245C06_a SISTEMAS–Hdz.indd 245 2/11/10 10:43:26 PM2/11/10 10:43:26 PM
Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Routh-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB246
Solución:a) La representación en el arreglo de Routh-Hurwitz del polinomio característico:
s4 + 10s3 + 35s2 + 50s + 24 = 0
junto con los coe! cientes b1, b2, c1 y d1 se muestra a continuación:
s4 1 35 24
s3 10 50
s2 30 24
s1 42 0
s0 24 0
Los coe! cientes b1 y b2 fueron evaluados, según indica la ecuación (6.2a), empleando las dos primeras ! las del arreglo:
b135 10 50 1
1030= ! =( ) ( )
, b224 10 0
1024= ! =( )
Una vez que se conocen los elementos que forman la ! la bi , para determinar los coe! cientes que darán lugar a la ! la ci , se utiliza la segunda ! la del arreglo, junto con la ahora conocida ! la bi ; luego se procede según lo muestra la ecua-ción (6.2b):
c130 50 24 10
3042= ! =( ) ( )
Para ! nalizar el arreglo con los elementos di , se manejan las dos ! las inme-diatas superiores a la ! la por evaluar:
d124 42
4224= =( )
.
Una vez que se completa el arreglo, se observa que en la columna principal no hay cambios de signo; por lo tanto, el sistema es estable, ya que tiene todos sus polos en el semiplano izquierdo (SPI).
b) El arreglo de Routh-Hurwitz correspondiente es:
s3 1 0
s2 5 10
s1 �2 0
s0 10
C06_a SISTEMAS–Hdz.indd 246C06_a SISTEMAS–Hdz.indd 246 2/11/10 10:43:27 PM2/11/10 10:43:27 PM
Observamos que hay DOS cambios de signo, por lo que este polinomio @ene DOS raíces en semiplano derecho. En consecuencia un sistema que tuviese este polinomio como polinomio caracterís@co, sería INESTABLE.

Criterio de estabilidad de Routh-HurwitzRouth-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 245
sn an an�2 an�4 …
sn�1 an�1 an�3 an�5 � � �
sn�2
…
s0
Después se procede a completar el arreglo, agregando los elementos b1, b2, … c1, c2, …, que corresponden a las ! las de los elementos bi , ci , etcétera y se calculan de la siguiente manera:
ba a a a
an n n n
n1
1 2 3
1=
!! ! !
!
( ) ( ), b
a a a aa
n n n n
n2
1 4 5
1=
!! ! !
!
( ) ( ) (6.2a)
cb a a b
bn n
11 3 1 2
1=
!! !( ) ( ), c
b a a bb
n n2
1 5 1 3
1=
!! !( ) ( ) (6.2b)
La tabla continúa verticalmente hasta terminar el arreglo, pero una vez que éste ha sido completado se aplica el criterio de Routh-Hurwitz, el cual establece que el número de cambios de signos en la columna principal corresponde al número de raíces que se encuentren a la derecha del eje j! (semiplano derecho SPD). Lo anterior se muestra en la ! gura 6.2.
Columna principal
sn an an�2 an�4 …
sn�1 an�1 an�3 an�5 � � �
sn�2 b1 b2 b3 …
… c1 c2 c3 …
… … … … .
� EJEMPLO 6.1
Para los siguientes polinomios característicos, aplique el criterio de Routh-Hurwitz con la ! nalidad de determinar el número de polos que se encuentren en el semi-plano derecho del plano s.
a) s4 + 10s3 + 35s2 + 50s + 24 = 0
b) s3 + 5s2 + 10 = 0
c ) s4 + 5s3 � 40s � 96 = 0
Figura 6.1Estructura del arreglo
de Routh-Hurwitz.
Figura 6.2El número de cambios de signo en los coefi cientes
de los elementos de la columna principal del
arreglo indica la cantidad de polos a la derecha del
eje j!.
C06_a SISTEMAS–Hdz.indd 245C06_a SISTEMAS–Hdz.indd 245 2/11/10 10:43:26 PM2/11/10 10:43:26 PM
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 247
donde hay dos cambios de signo en la columna principal (de 5 a �2 y de �2 a 10), que hace inestable el sistema con dos polos en el SPD.
c ) Para s4 + 5s3 � 40s � 96 = 0, se obtiene arreglo:
s4 1 0 �96
s3 5 �40
s2 8 �96
s1 20
s0 �96
por lo que es inestable el sistema, pues un cambio de signo en la columna prin-cipal indica un polo en el SPD. Con Matlab puede comprobarse lo anterior de una manera muy simple:
>> p = [1 5 0 �40 �96];>> roots(p)ans = 3.0000 �4.0000 �2.0000 + 2.0000i �2.0000 � 2.0000i
Casos especiales en el análisis de Routh-Hurwitz
a) Ceros en la columna principalSea el polinomio característico:
s s s s4 3 23 3 10 0+ + + + =
el cual es representado en su correspondiente arreglo de Routh-Hurwitz:
s4 1 3 10
s3 1 3
s2 0 10
s1
s0
6.2.1
C06_a SISTEMAS–Hdz.indd 247C06_a SISTEMAS–Hdz.indd 247 2/11/10 10:43:28 PM2/11/10 10:43:28 PM
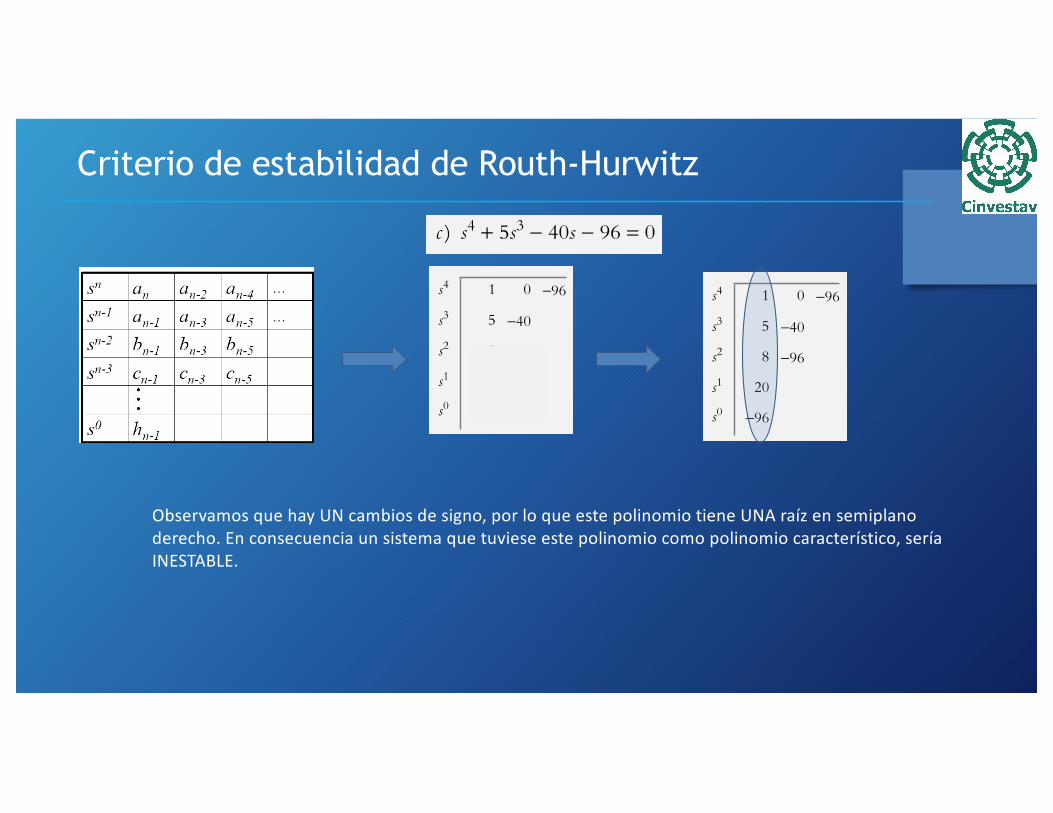
Criterio de estabilidad de Routh-HurwitzRouth-Hurwitz Table
The number of roots of Q(s) with positive real parts is equal to the number of sign changes in the first column
.0...)()( 011
1 ���� ' �� asasasasqs nn
nn
…..
16
Observamos que hay UN cambios de signo, por lo que este polinomio tiene UNA raíz en semiplano derecho. En consecuencia un sistema que tuviese este polinomio como polinomio característico, sería INESTABLE.
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 245
sn an an�2 an�4 …
sn�1 an�1 an�3 an�5 � � �
sn�2
…
s0
Después se procede a completar el arreglo, agregando los elementos b1, b2, … c1, c2, …, que corresponden a las ! las de los elementos bi , ci , etcétera y se calculan de la siguiente manera:
ba a a a
an n n n
n1
1 2 3
1=
!! ! !
!
( ) ( ), b
a a a aa
n n n n
n2
1 4 5
1=
!! ! !
!
( ) ( ) (6.2a)
cb a a b
bn n
11 3 1 2
1=
!! !( ) ( ), c
b a a bb
n n2
1 5 1 3
1=
!! !( ) ( ) (6.2b)
La tabla continúa verticalmente hasta terminar el arreglo, pero una vez que éste ha sido completado se aplica el criterio de Routh-Hurwitz, el cual establece que el número de cambios de signos en la columna principal corresponde al número de raíces que se encuentren a la derecha del eje j! (semiplano derecho SPD). Lo anterior se muestra en la ! gura 6.2.
Columna principal
sn an an�2 an�4 …
sn�1 an�1 an�3 an�5 � � �
sn�2 b1 b2 b3 …
… c1 c2 c3 …
… … … … .
� EJEMPLO 6.1
Para los siguientes polinomios característicos, aplique el criterio de Routh-Hurwitz con la ! nalidad de determinar el número de polos que se encuentren en el semi-plano derecho del plano s.
a) s4 + 10s3 + 35s2 + 50s + 24 = 0
b) s3 + 5s2 + 10 = 0
c ) s4 + 5s3 � 40s � 96 = 0
Figura 6.1Estructura del arreglo
de Routh-Hurwitz.
Figura 6.2El número de cambios de signo en los coefi cientes
de los elementos de la columna principal del
arreglo indica la cantidad de polos a la derecha del
eje j!.
C06_a SISTEMAS–Hdz.indd 245C06_a SISTEMAS–Hdz.indd 245 2/11/10 10:43:26 PM2/11/10 10:43:26 PM
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 247
donde hay dos cambios de signo en la columna principal (de 5 a �2 y de �2 a 10), que hace inestable el sistema con dos polos en el SPD.
c ) Para s4 + 5s3 � 40s � 96 = 0, se obtiene arreglo:
s4 1 0 �96
s3 5 �40
s2 8 �96
s1 20
s0 �96
por lo que es inestable el sistema, pues un cambio de signo en la columna prin-cipal indica un polo en el SPD. Con Matlab puede comprobarse lo anterior de una manera muy simple:
>> p = [1 5 0 �40 �96];>> roots(p)ans = 3.0000 �4.0000 �2.0000 + 2.0000i �2.0000 � 2.0000i
Casos especiales en el análisis de Routh-Hurwitz
a) Ceros en la columna principalSea el polinomio característico:
s s s s4 3 23 3 10 0+ + + + =
el cual es representado en su correspondiente arreglo de Routh-Hurwitz:
s4 1 3 10
s3 1 3
s2 0 10
s1
s0
6.2.1
C06_a SISTEMAS–Hdz.indd 247C06_a SISTEMAS–Hdz.indd 247 2/11/10 10:43:28 PM2/11/10 10:43:28 PM
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 247
donde hay dos cambios de signo en la columna principal (de 5 a �2 y de �2 a 10), que hace inestable el sistema con dos polos en el SPD.
c ) Para s4 + 5s3 � 40s � 96 = 0, se obtiene arreglo:
s4 1 0 �96
s3 5 �40
s2 8 �96
s1 20
s0 �96
por lo que es inestable el sistema, pues un cambio de signo en la columna prin-cipal indica un polo en el SPD. Con Matlab puede comprobarse lo anterior de una manera muy simple:
>> p = [1 5 0 �40 �96];>> roots(p)ans = 3.0000 �4.0000 �2.0000 + 2.0000i �2.0000 � 2.0000i
Casos especiales en el análisis de Routh-Hurwitz
a) Ceros en la columna principalSea el polinomio característico:
s s s s4 3 23 3 10 0+ + + + =
el cual es representado en su correspondiente arreglo de Routh-Hurwitz:
s4 1 3 10
s3 1 3
s2 0 10
s1
s0
6.2.1
C06_a SISTEMAS–Hdz.indd 247C06_a SISTEMAS–Hdz.indd 247 2/11/10 10:43:28 PM2/11/10 10:43:28 PM
Criterio de estabilidad de Routh-Hurwitz
Existen DOS casos que cuando se presentan, requieren un tratamiento diferente al caso general de los ejercicios anteriores:
a) Ceros en la columna principal.Recordemos que para calcular los elementos de la tabla de Routh-Hurwitz, se emplea un determinante, divido entre algún elemento de la columna principal, por lo que de presentarse este caso, se tendrían indeterminaciones.
b) Terminación anticipada de la tabla.Existen ocasiones en que al evaluar los elementos de la tabla de Routh-Hurwitz, se obtiene que todos los elementos de una fila son igual a cero.
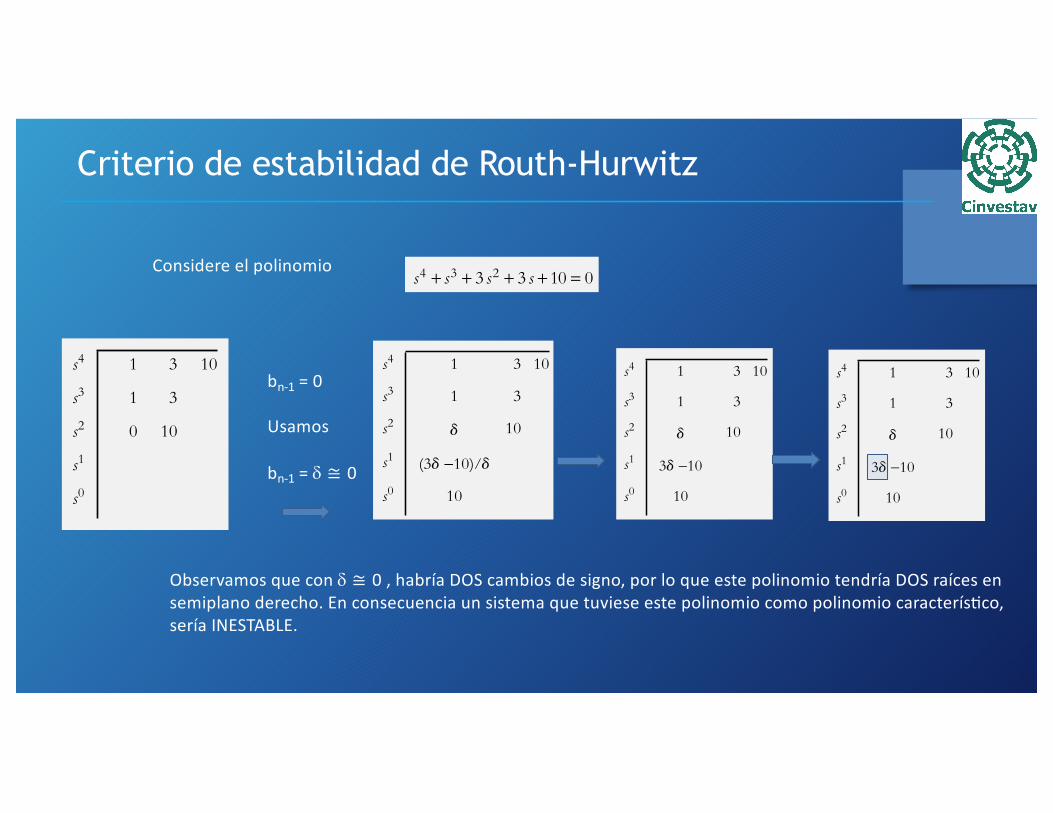
Criterio de estabilidad de Routh-Hurwitz
Considere el polinomio
bn-1 = 0
Usamos
bn-1 = d ≅ 0
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 247
donde hay dos cambios de signo en la columna principal (de 5 a �2 y de �2 a 10), que hace inestable el sistema con dos polos en el SPD.
c ) Para s4 + 5s3 � 40s � 96 = 0, se obtiene arreglo:
s4 1 0 �96
s3 5 �40
s2 8 �96
s1 20
s0 �96
por lo que es inestable el sistema, pues un cambio de signo en la columna prin-cipal indica un polo en el SPD. Con Matlab puede comprobarse lo anterior de una manera muy simple:
>> p = [1 5 0 �40 �96];>> roots(p)ans = 3.0000 �4.0000 �2.0000 + 2.0000i �2.0000 � 2.0000i
Casos especiales en el análisis de Routh-Hurwitz
a) Ceros en la columna principalSea el polinomio característico:
s s s s4 3 23 3 10 0+ + + + =
el cual es representado en su correspondiente arreglo de Routh-Hurwitz:
s4 1 3 10
s3 1 3
s2 0 10
s1
s0
6.2.1
C06_a SISTEMAS–Hdz.indd 247C06_a SISTEMAS–Hdz.indd 247 2/11/10 10:43:28 PM2/11/10 10:43:28 PM
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 247
donde hay dos cambios de signo en la columna principal (de 5 a �2 y de �2 a 10), que hace inestable el sistema con dos polos en el SPD.
c ) Para s4 + 5s3 � 40s � 96 = 0, se obtiene arreglo:
s4 1 0 �96
s3 5 �40
s2 8 �96
s1 20
s0 �96
por lo que es inestable el sistema, pues un cambio de signo en la columna prin-cipal indica un polo en el SPD. Con Matlab puede comprobarse lo anterior de una manera muy simple:
>> p = [1 5 0 �40 �96];>> roots(p)ans = 3.0000 �4.0000 �2.0000 + 2.0000i �2.0000 � 2.0000i
Casos especiales en el análisis de Routh-Hurwitz
a) Ceros en la columna principalSea el polinomio característico:
s s s s4 3 23 3 10 0+ + + + =
el cual es representado en su correspondiente arreglo de Routh-Hurwitz:
s4 1 3 10
s3 1 3
s2 0 10
s1
s0
6.2.1
C06_a SISTEMAS–Hdz.indd 247C06_a SISTEMAS–Hdz.indd 247 2/11/10 10:43:28 PM2/11/10 10:43:28 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB248
Se observa que la combinación de coe! cientes para cuanti! car el elemento b1 da por resultado un cero:
b13 3
10= ! = b2 10=
Aunque b2 es distinto de cero, los elementos de las siguientes ! las no pueden evaluar-se, ya que todos ellos quedarían divididos entre cero, lo que daría lugar a indetermina-ciones. Si los coe! cientes que componen el numerador de b1 fueran levemente diferentes, el resultado sería distinto de cero, con lo que el arreglo podría ser completado; para con-cluir éste, se de! ne el número !, que es casi cero, pero positivo, el cual se sustituye por el cero de la columna principal, con lo que el coe! ciente b1 puede ser evaluado:
b1 = !, donde ! % 0, pero positivo.
De esta manera, el arreglo resultante es:
s4 1 3 10 s4 1 3 10
s3 1 3 s3 1 3
s2 ! 10 s2 ! 10
s1 (3! �10)/! s1 3! �10
s0 10 s0 10
Cuando todos los elementos de una determinada ! la han sido evaluados, para facilitar los cálculos, el renglón bajo consideración puede multiplicarse por cualquier número diferente de cero (en este caso, la cuarta ! la se multiplicó por !) sin alterar el resultado del arreglo. Con respecto a la columna principal, ésta presenta dos cambios de signo, pues ! es casi cero, pero positivo, 3! " 10 < 0; por lo tanto, el sistema es inestable con dos polos en el SPD. A manera de comprobación, la ubicación de los polos obtenida con Matlab corres-ponden a:
�1.1954 + 1.3329i �1.1954 � 1.3329i 0.6954 + 1.6236i 0.6954 � 1.6236i
b) Terminación anticipada del arreglo En ocasiones, ocurre que para ciertos polinomios característicos su arreglo correspon-diente ! naliza en forma anticipada; esto es, antes de terminar el arreglo éste contiene una ! la formada exclusivamente por ceros en alguno de sus renglones intermedios; por ejemplo, el caso del polinomio característico:
s4 + 2s3 + 7s2 + 4s + 10 = 0
C06_a SISTEMAS–Hdz.indd 248C06_a SISTEMAS–Hdz.indd 248 2/11/10 10:43:29 PM2/11/10 10:43:29 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB248
Se observa que la combinación de coe! cientes para cuanti! car el elemento b1 da por resultado un cero:
b13 3
10= ! = b2 10=
Aunque b2 es distinto de cero, los elementos de las siguientes ! las no pueden evaluar-se, ya que todos ellos quedarían divididos entre cero, lo que daría lugar a indetermina-ciones. Si los coe! cientes que componen el numerador de b1 fueran levemente diferentes, el resultado sería distinto de cero, con lo que el arreglo podría ser completado; para con-cluir éste, se de! ne el número !, que es casi cero, pero positivo, el cual se sustituye por el cero de la columna principal, con lo que el coe! ciente b1 puede ser evaluado:
b1 = !, donde ! % 0, pero positivo.
De esta manera, el arreglo resultante es:
s4 1 3 10 s4 1 3 10
s3 1 3 s3 1 3
s2 ! 10 s2 ! 10
s1 (3! �10)/! s1 3! �10
s0 10 s0 10
Cuando todos los elementos de una determinada ! la han sido evaluados, para facilitar los cálculos, el renglón bajo consideración puede multiplicarse por cualquier número diferente de cero (en este caso, la cuarta ! la se multiplicó por !) sin alterar el resultado del arreglo. Con respecto a la columna principal, ésta presenta dos cambios de signo, pues ! es casi cero, pero positivo, 3! " 10 < 0; por lo tanto, el sistema es inestable con dos polos en el SPD. A manera de comprobación, la ubicación de los polos obtenida con Matlab corres-ponden a:
�1.1954 + 1.3329i �1.1954 � 1.3329i 0.6954 + 1.6236i 0.6954 � 1.6236i
b) Terminación anticipada del arreglo En ocasiones, ocurre que para ciertos polinomios característicos su arreglo correspon-diente ! naliza en forma anticipada; esto es, antes de terminar el arreglo éste contiene una ! la formada exclusivamente por ceros en alguno de sus renglones intermedios; por ejemplo, el caso del polinomio característico:
s4 + 2s3 + 7s2 + 4s + 10 = 0
C06_a SISTEMAS–Hdz.indd 248C06_a SISTEMAS–Hdz.indd 248 2/11/10 10:43:29 PM2/11/10 10:43:29 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB248
Se observa que la combinación de coe! cientes para cuanti! car el elemento b1 da por resultado un cero:
b13 3
10= ! = b2 10=
Aunque b2 es distinto de cero, los elementos de las siguientes ! las no pueden evaluar-se, ya que todos ellos quedarían divididos entre cero, lo que daría lugar a indetermina-ciones. Si los coe! cientes que componen el numerador de b1 fueran levemente diferentes, el resultado sería distinto de cero, con lo que el arreglo podría ser completado; para con-cluir éste, se de! ne el número !, que es casi cero, pero positivo, el cual se sustituye por el cero de la columna principal, con lo que el coe! ciente b1 puede ser evaluado:
b1 = !, donde ! % 0, pero positivo.
De esta manera, el arreglo resultante es:
s4 1 3 10 s4 1 3 10
s3 1 3 s3 1 3
s2 ! 10 s2 ! 10
s1 (3! �10)/! s1 3! �10
s0 10 s0 10
Cuando todos los elementos de una determinada ! la han sido evaluados, para facilitar los cálculos, el renglón bajo consideración puede multiplicarse por cualquier número diferente de cero (en este caso, la cuarta ! la se multiplicó por !) sin alterar el resultado del arreglo. Con respecto a la columna principal, ésta presenta dos cambios de signo, pues ! es casi cero, pero positivo, 3! " 10 < 0; por lo tanto, el sistema es inestable con dos polos en el SPD. A manera de comprobación, la ubicación de los polos obtenida con Matlab corres-ponden a:
�1.1954 + 1.3329i �1.1954 � 1.3329i 0.6954 + 1.6236i 0.6954 � 1.6236i
b) Terminación anticipada del arreglo En ocasiones, ocurre que para ciertos polinomios característicos su arreglo correspon-diente ! naliza en forma anticipada; esto es, antes de terminar el arreglo éste contiene una ! la formada exclusivamente por ceros en alguno de sus renglones intermedios; por ejemplo, el caso del polinomio característico:
s4 + 2s3 + 7s2 + 4s + 10 = 0
C06_a SISTEMAS–Hdz.indd 248C06_a SISTEMAS–Hdz.indd 248 2/11/10 10:43:29 PM2/11/10 10:43:29 PM
Observamos que con d ≅ 0 , habría DOS cambios de signo, por lo que este polinomio tendría DOS raíces en semiplano derecho. En consecuencia un sistema que tuviese este polinomio como polinomio caracterís@co, sería INESTABLE.
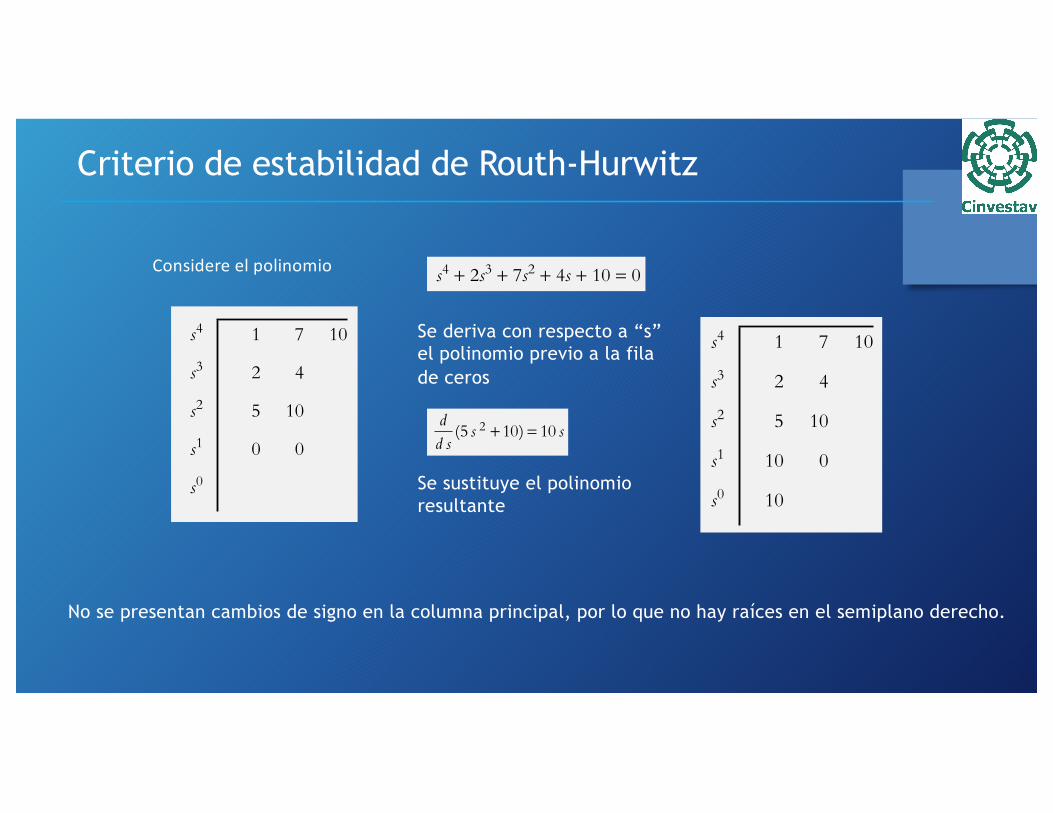
Criterio de estabilidad de Routh-Hurwitz
Considere el polinomio
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB248
Se observa que la combinación de coe! cientes para cuanti! car el elemento b1 da por resultado un cero:
b13 3
10= ! = b2 10=
Aunque b2 es distinto de cero, los elementos de las siguientes ! las no pueden evaluar-se, ya que todos ellos quedarían divididos entre cero, lo que daría lugar a indetermina-ciones. Si los coe! cientes que componen el numerador de b1 fueran levemente diferentes, el resultado sería distinto de cero, con lo que el arreglo podría ser completado; para con-cluir éste, se de! ne el número !, que es casi cero, pero positivo, el cual se sustituye por el cero de la columna principal, con lo que el coe! ciente b1 puede ser evaluado:
b1 = !, donde ! % 0, pero positivo.
De esta manera, el arreglo resultante es:
s4 1 3 10 s4 1 3 10
s3 1 3 s3 1 3
s2 ! 10 s2 ! 10
s1 (3! �10)/! s1 3! �10
s0 10 s0 10
Cuando todos los elementos de una determinada ! la han sido evaluados, para facilitar los cálculos, el renglón bajo consideración puede multiplicarse por cualquier número diferente de cero (en este caso, la cuarta ! la se multiplicó por !) sin alterar el resultado del arreglo. Con respecto a la columna principal, ésta presenta dos cambios de signo, pues ! es casi cero, pero positivo, 3! " 10 < 0; por lo tanto, el sistema es inestable con dos polos en el SPD. A manera de comprobación, la ubicación de los polos obtenida con Matlab corres-ponden a:
�1.1954 + 1.3329i �1.1954 � 1.3329i 0.6954 + 1.6236i 0.6954 � 1.6236i
b) Terminación anticipada del arreglo En ocasiones, ocurre que para ciertos polinomios característicos su arreglo correspon-diente ! naliza en forma anticipada; esto es, antes de terminar el arreglo éste contiene una ! la formada exclusivamente por ceros en alguno de sus renglones intermedios; por ejemplo, el caso del polinomio característico:
s4 + 2s3 + 7s2 + 4s + 10 = 0
C06_a SISTEMAS–Hdz.indd 248C06_a SISTEMAS–Hdz.indd 248 2/11/10 10:43:29 PM2/11/10 10:43:29 PM
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 249
el cual es representado en su respectivo arreglo de Routh-Hurwitz:
s4 1 7 10
s3 2 4
s2 5 10
s1 0 0
s0
La explicación de la terminación prematura del arreglo (alguna ! la intermedia com-puesta totalmente por ceros) indica que existe un polinomio divisor cuyas raíces son imaginarias, 0 ± j b, además de dividir exactamente al polinomio característico original. Para completar el arreglo, se procede a sustituir la ! la de ceros por la derivada en s del polinomio divisor, el cual se identi! ca a partir del renglón inmediato anterior no nulo del arreglo; en este caso, 5s2 + 10 (raíces complejas conjugadas en el eje imaginario: ± 1.4142 j ):
dd s
s s( )5 10 102 + =
s4 1 7 10
s3 2 4
s2 5 10
s1 10 0
s0 10
Una vez terminado el arreglo, se observa que el sistema es estable, ya que la columna principal no presenta cambios de signo.
� EJEMPLO 6.2
Para las siguientes funciones de transferencia T(s), aplique el criterio de Routh-Hurwitz a los respectivos polinomios característicos y determine la estabilidad de cada sistema, según el número de polos existentes en el semiplano derecho del plano s.
a) T ss s s s
( ) =+ + + +
55 5 104 3 2
b) T ss s s s s
( ) =+ + ! + !
407 12 205 4 3 2
C06_a SISTEMAS–Hdz.indd 249C06_a SISTEMAS–Hdz.indd 249 2/11/10 10:43:29 PM2/11/10 10:43:29 PM
Se deriva con respecto a “s”el polinomio previo a la fila de ceros
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 249
el cual es representado en su respectivo arreglo de Routh-Hurwitz:
s4 1 7 10
s3 2 4
s2 5 10
s1 0 0
s0
La explicación de la terminación prematura del arreglo (alguna ! la intermedia com-puesta totalmente por ceros) indica que existe un polinomio divisor cuyas raíces son imaginarias, 0 ± j b, además de dividir exactamente al polinomio característico original. Para completar el arreglo, se procede a sustituir la ! la de ceros por la derivada en s del polinomio divisor, el cual se identi! ca a partir del renglón inmediato anterior no nulo del arreglo; en este caso, 5s2 + 10 (raíces complejas conjugadas en el eje imaginario: ± 1.4142 j ):
dd s
s s( )5 10 102 + =
s4 1 7 10
s3 2 4
s2 5 10
s1 10 0
s0 10
Una vez terminado el arreglo, se observa que el sistema es estable, ya que la columna principal no presenta cambios de signo.
� EJEMPLO 6.2
Para las siguientes funciones de transferencia T(s), aplique el criterio de Routh-Hurwitz a los respectivos polinomios característicos y determine la estabilidad de cada sistema, según el número de polos existentes en el semiplano derecho del plano s.
a) T ss s s s
( ) =+ + + +
55 5 104 3 2
b) T ss s s s s
( ) =+ + ! + !
407 12 205 4 3 2
C06_a SISTEMAS–Hdz.indd 249C06_a SISTEMAS–Hdz.indd 249 2/11/10 10:43:29 PM2/11/10 10:43:29 PM
Se sustituye el polinomio resultante
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 249
el cual es representado en su respectivo arreglo de Routh-Hurwitz:
s4 1 7 10
s3 2 4
s2 5 10
s1 0 0
s0
La explicación de la terminación prematura del arreglo (alguna ! la intermedia com-puesta totalmente por ceros) indica que existe un polinomio divisor cuyas raíces son imaginarias, 0 ± j b, además de dividir exactamente al polinomio característico original. Para completar el arreglo, se procede a sustituir la ! la de ceros por la derivada en s del polinomio divisor, el cual se identi! ca a partir del renglón inmediato anterior no nulo del arreglo; en este caso, 5s2 + 10 (raíces complejas conjugadas en el eje imaginario: ± 1.4142 j ):
dd s
s s( )5 10 102 + =
s4 1 7 10
s3 2 4
s2 5 10
s1 10 0
s0 10
Una vez terminado el arreglo, se observa que el sistema es estable, ya que la columna principal no presenta cambios de signo.
� EJEMPLO 6.2
Para las siguientes funciones de transferencia T(s), aplique el criterio de Routh-Hurwitz a los respectivos polinomios característicos y determine la estabilidad de cada sistema, según el número de polos existentes en el semiplano derecho del plano s.
a) T ss s s s
( ) =+ + + +
55 5 104 3 2
b) T ss s s s s
( ) =+ + ! + !
407 12 205 4 3 2
C06_a SISTEMAS–Hdz.indd 249C06_a SISTEMAS–Hdz.indd 249 2/11/10 10:43:29 PM2/11/10 10:43:29 PM
No se presentan cambios de signo en la columna principal, por lo que no hay raíces en el semiplano derecho.
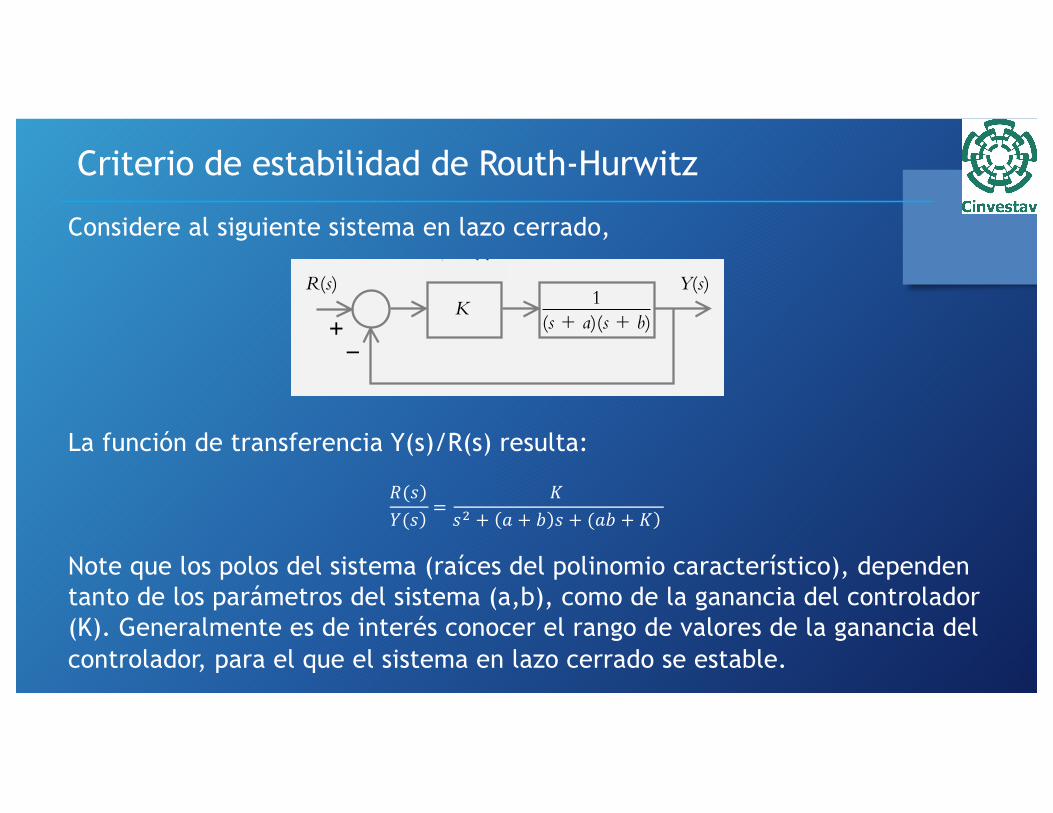
Criterio de estabilidad de Routh-Hurwitz
Considere al siguiente sistema en lazo cerrado,
La función de transferencia Y(s)/R(s) resulta:
Note que los polos del sistema (raíces del polinomio característico), dependen tanto de los parámetros del sistema (a,b), como de la ganancia del controlador (K). Generalmente es de interés conocer el rango de valores de la ganancia del controlador, para el que el sistema en lazo cerrado se estable.
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB252
Al aplicar el método de Routh-Hurwitz se determina que el sistema es ines-table por tener dos polos en el SPD.
b) La función de transferencia de lazo cerrado T(s) del diagrama de ! ujo de señales de la " gura 6.3b corresponde a:
T ss
s s s( )
.= ++ + +
2 0 8
4 2 20
2
3 2
El resultado de aplicar el método de Routh-Hurwitz es que el sistema es inestable por tener dos polos en el SPD.
Figura 6.4La ecuación característica
del sistema de lazo cerrado depende de los coefi cientes
a y b, así como de la ganancia ajustable K:
1 + G(s)H(s) = s2 + (a + b) s + (a*b + K) = 0.
Aplicación del método de Routh-Hurwitz (ajuste de ganancia)
Para sistemas retroalimentados (como el de la " gura 6.4), los polos del polinomio carac-terístico dependerán tanto de los coe" cientes del polinomio original como del valor de la ganancia K, de tal manera que si la ganancia es ajustable para cada valor de K, los polos de lazo cerrado tendrán ubicaciones diferentes en el plano s.
R(s) Y(s)K
Controladorde ganancia
ajustableProceso
1(s � a)(s � b)�
�
En la introducción a este capítulo se comentó que los sistemas de primero y segundo grados siempre serán estables en lazo cerrado para toda ganancia K v 0; sin embargo, para polinomios característicos de grado superior, los sistemas pueden serlo o no. El hecho de que los signos de los coe" cientes de polinomios característicos de gra-do uno y dos sean iguales (todos positivos o todos negativos) garantiza que el sistema respectivo sea estable; sin embargo, por desgracia, dicha regla no es aplicable para po-linomios de grado tres en adelante. Es aquí precisamente donde el método de Routh-Hurwitz adquiere gran importancia, ya que de una manera sencilla es posible determinar todos los valores de ganancia K para los que los sistemas serán estables.
� EJEMPLO 6.4
Determine el rango de valores de ganancia K para los cuales los siguientes sistemas sean estables.
a) T sK
s s K( ) =
+ +2 5 b) T s
Ks K s
( )( ) .
=+ + +2 5 0 5
6.2.2
C06_a SISTEMAS–Hdz.indd 252C06_a SISTEMAS–Hdz.indd 252 2/11/10 10:43:31 PM2/11/10 10:43:31 PM
)𝑅(𝑠)𝑌(𝑠=
𝐾)𝑠! + 𝑎 + 𝑏 𝑠 + (𝑎𝑏 + 𝐾
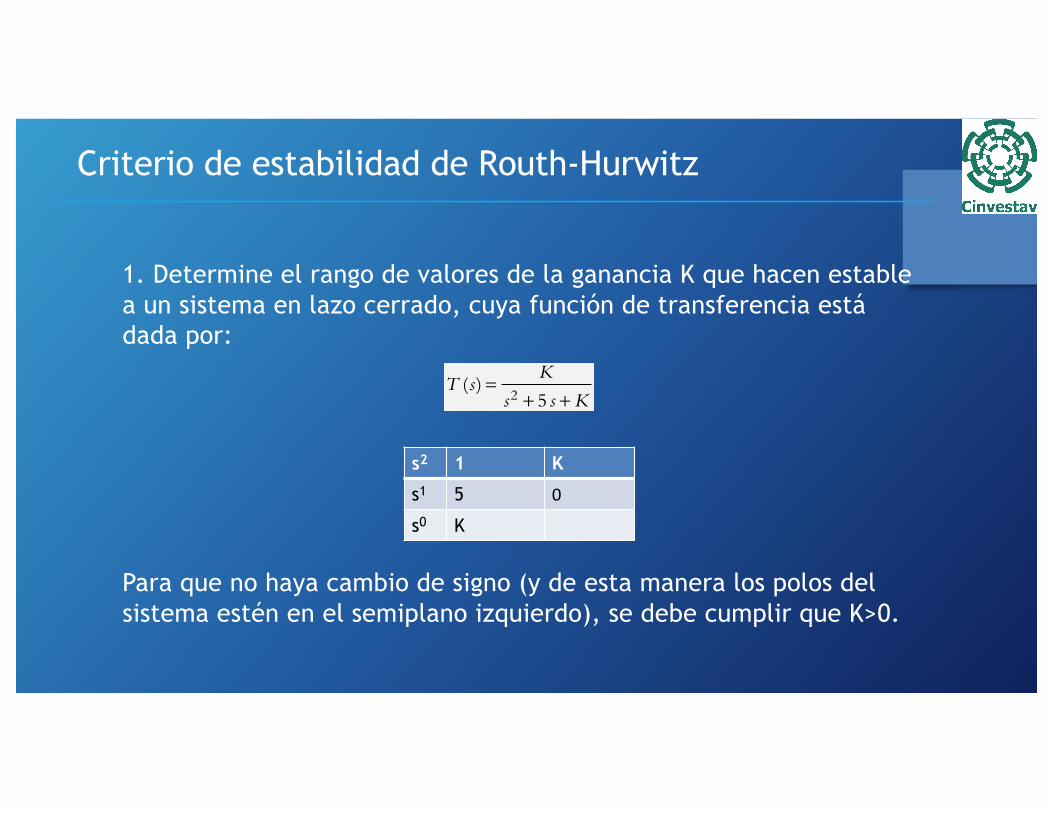
Criterio de estabilidad de Routh-Hurwitz
1. Determine el rango de valores de la ganancia K que hacen estable a un sistema en lazo cerrado, cuya función de transferencia está dada por:
Para que no haya cambio de signo (y de esta manera los polos del sistema estén en el semiplano izquierdo), se debe cumplir que K>0.
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB252
Al aplicar el método de Routh-Hurwitz se determina que el sistema es ines-table por tener dos polos en el SPD.
b) La función de transferencia de lazo cerrado T(s) del diagrama de ! ujo de señales de la " gura 6.3b corresponde a:
T ss
s s s( )
.= ++ + +
2 0 8
4 2 20
2
3 2
El resultado de aplicar el método de Routh-Hurwitz es que el sistema es inestable por tener dos polos en el SPD.
Figura 6.4La ecuación característica
del sistema de lazo cerrado depende de los coefi cientes
a y b, así como de la ganancia ajustable K:
1 + G(s)H(s) = s2 + (a + b) s + (a*b + K) = 0.
Aplicación del método de Routh-Hurwitz (ajuste de ganancia)
Para sistemas retroalimentados (como el de la " gura 6.4), los polos del polinomio carac-terístico dependerán tanto de los coe" cientes del polinomio original como del valor de la ganancia K, de tal manera que si la ganancia es ajustable para cada valor de K, los polos de lazo cerrado tendrán ubicaciones diferentes en el plano s.
R(s) Y(s)K
Controladorde ganancia
ajustableProceso
1(s � a)(s � b)�
�
En la introducción a este capítulo se comentó que los sistemas de primero y segundo grados siempre serán estables en lazo cerrado para toda ganancia K v 0; sin embargo, para polinomios característicos de grado superior, los sistemas pueden serlo o no. El hecho de que los signos de los coe" cientes de polinomios característicos de gra-do uno y dos sean iguales (todos positivos o todos negativos) garantiza que el sistema respectivo sea estable; sin embargo, por desgracia, dicha regla no es aplicable para po-linomios de grado tres en adelante. Es aquí precisamente donde el método de Routh-Hurwitz adquiere gran importancia, ya que de una manera sencilla es posible determinar todos los valores de ganancia K para los que los sistemas serán estables.
� EJEMPLO 6.4
Determine el rango de valores de ganancia K para los cuales los siguientes sistemas sean estables.
a) T sK
s s K( ) =
+ +2 5 b) T s
Ks K s
( )( ) .
=+ + +2 5 0 5
6.2.2
C06_a SISTEMAS–Hdz.indd 252C06_a SISTEMAS–Hdz.indd 252 2/11/10 10:43:31 PM2/11/10 10:43:31 PM
s2 1 K
s1 5 0
s0 K
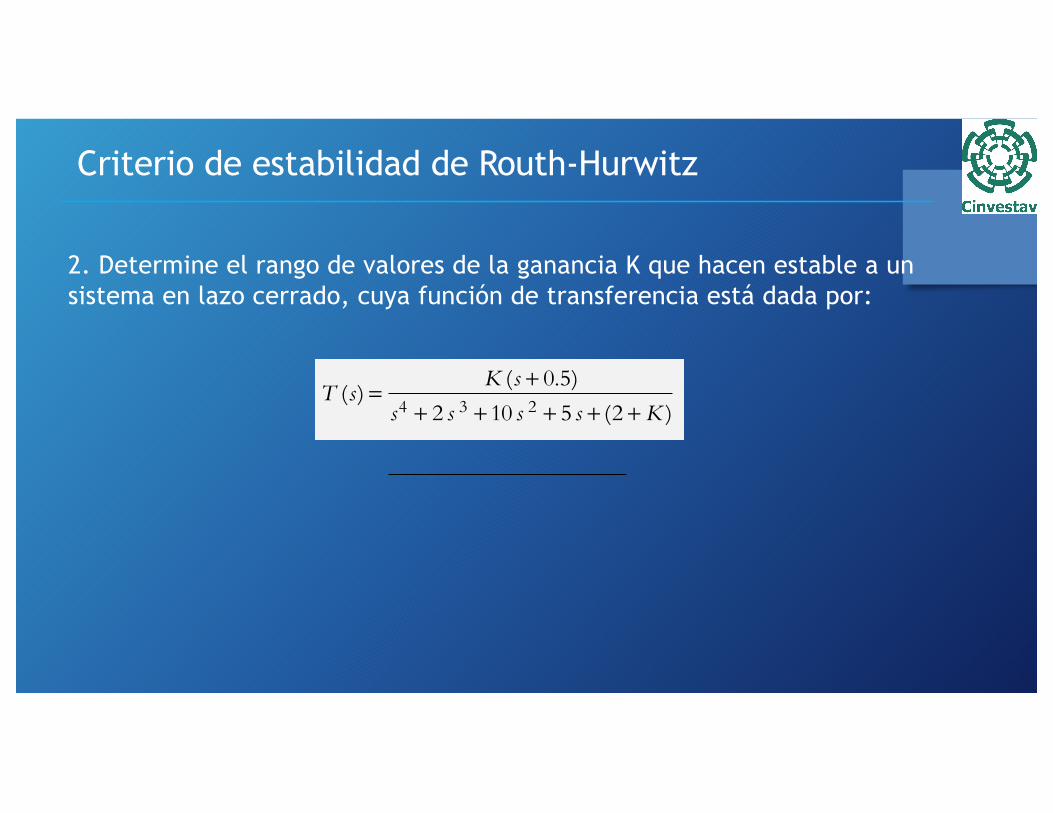
Criterio de estabilidad de Routh-Hurwitz
2. Determine el rango de valores de la ganancia K que hacen estable a un sistema en lazo cerrado, cuya función de transferencia está dada por:
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 253
c ) T sK
s s s s K( ) =
+ + + +2
5 10 204 3 2
d ) T sK s
s s K s( )
( . )= ++ + +
2 53 103 2
e) T sK s
s s s s K( )
( . )
( )= +
+ + + + +0 5
2 10 5 24 3 2
f ) T sK
s s s K s( ) =
+ + + +4 3 210 3 3
Solución:a) Para la ecuación característica perteneciente a T(s):
s s K2 5 0+ + =
es condición su! ciente que no haya cambios de signo en el polinomio, por lo que el sistema será estable para K > 0.
b) Con respecto al polinomio característico correspondiente:
s K s2 5 0 5 0+ + + =( ) .
si K > �5, los signos del polinomio serán todos iguales (en este caso positivos), razón su! ciente para asegurar la estabilidad del sistema.
c ) La representación en el arreglo de Routh-Hurwitz de la ecuación característica:
s s s s K4 3 25 10 20 0+ + + + =
se presenta a continuación. En este caso, la regla de los signos no es aplicable por el grado del polinomio.
s4 1 10 K
s3 5 20
s2 6 K
s1 120 � 5K
s0 K
Para que el sistema sea estable, todos los elementos de la columna principal deberán ser positivos, incluidos:
K > 0 y 120 5 0! >K
C06_a SISTEMAS–Hdz.indd 253C06_a SISTEMAS–Hdz.indd 253 2/11/10 10:43:32 PM2/11/10 10:43:32 PM
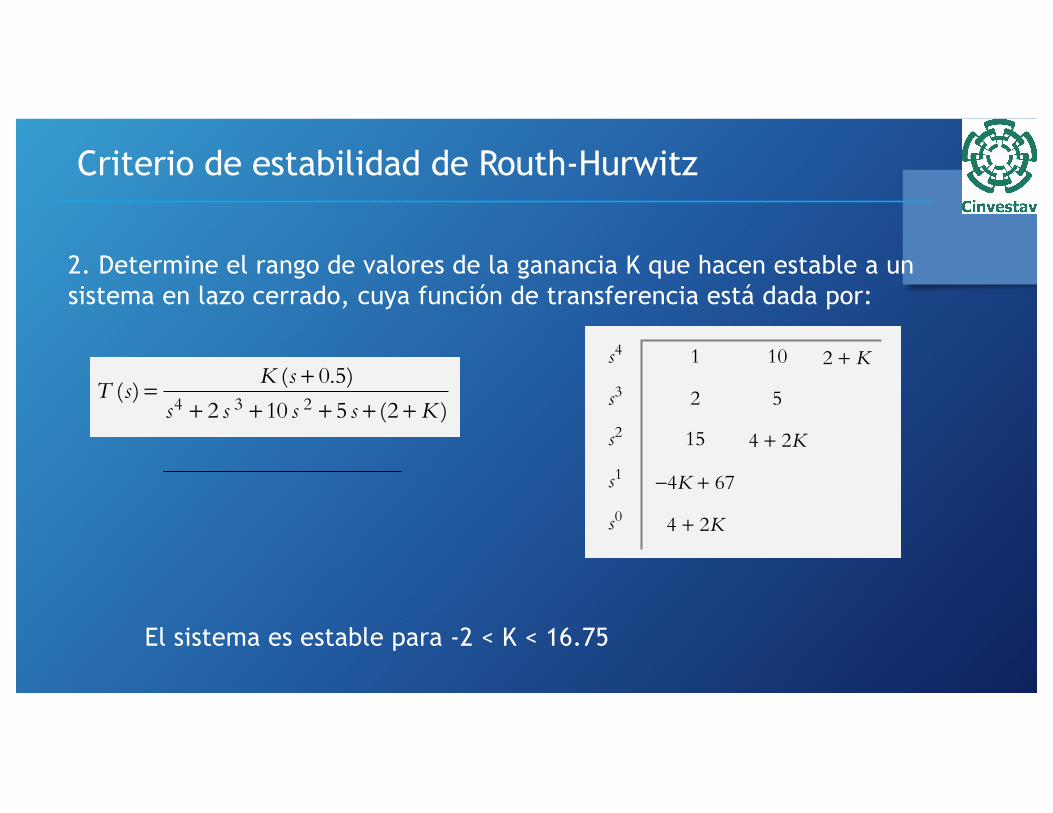
Criterio de estabilidad de Routh-Hurwitz
2. Determine el rango de valores de la ganancia K que hacen estable a un sistema en lazo cerrado, cuya función de transferencia está dada por:
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 253
c ) T sK
s s s s K( ) =
+ + + +2
5 10 204 3 2
d ) T sK s
s s K s( )
( . )= ++ + +
2 53 103 2
e) T sK s
s s s s K( )
( . )
( )= +
+ + + + +0 5
2 10 5 24 3 2
f ) T sK
s s s K s( ) =
+ + + +4 3 210 3 3
Solución:a) Para la ecuación característica perteneciente a T(s):
s s K2 5 0+ + =
es condición su! ciente que no haya cambios de signo en el polinomio, por lo que el sistema será estable para K > 0.
b) Con respecto al polinomio característico correspondiente:
s K s2 5 0 5 0+ + + =( ) .
si K > �5, los signos del polinomio serán todos iguales (en este caso positivos), razón su! ciente para asegurar la estabilidad del sistema.
c ) La representación en el arreglo de Routh-Hurwitz de la ecuación característica:
s s s s K4 3 25 10 20 0+ + + + =
se presenta a continuación. En este caso, la regla de los signos no es aplicable por el grado del polinomio.
s4 1 10 K
s3 5 20
s2 6 K
s1 120 � 5K
s0 K
Para que el sistema sea estable, todos los elementos de la columna principal deberán ser positivos, incluidos:
K > 0 y 120 5 0! >K
C06_a SISTEMAS–Hdz.indd 253C06_a SISTEMAS–Hdz.indd 253 2/11/10 10:43:32 PM2/11/10 10:43:32 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB254
De las desigualdades anteriores, se obtiene que el sistema será estable si: 0 < K < 24. En caso de que K = 0 o K = 24, el sistema se comporta como marginalmente estable.
d ) Para la ecuación característica s3 + 3s2 + Ks + 10 = 0, después de completar el arreglo de Routh-Hurwitz respectivo, se obtiene que el sistema es estable para K > 3.3333.
e) La representación del arreglo del polinomio en turno corresponde a:
s4 1 10 2 + K
s3 2 5
s2 15 4 + 2K
s1 �4K + 67
s0 4 + 2K
De las desigualdades 4 + 2K > 0 y �4K + 67 > 0, se obtiene que el rango de ganancias para que el sistema sea estable es de:
�2 < K < 16.75.
f ) El arreglo del polinomio s4 + 10s3 + 3s2 + Ks + 3 = 0 es:
s4 1 3 3
s3 10 K
s2 30 � K 30
s1 K 2 � 30K + 300
s0 30
De la primer desigualdad 30 ! K > 0, se obtiene que K < 30. La segunda desigualdad supone resolver la ecuación cuadrática K 2 � 30K + 300
= 0, lo que hace complejas las raíces encontradas:
Kj= ±30 17 305
2.
, K j1 2 15 8 6603, .= ±
Como no existe ningún valor real de K que satisfaga la desigualdad, el siste-ma es inestable para cualquier valor de ganancia.
C06_a SISTEMAS–Hdz.indd 254C06_a SISTEMAS–Hdz.indd 254 2/11/10 10:43:33 PM2/11/10 10:43:33 PM
El sistema es estable para -2 < K < 16.75
Criterio de estabilidad de Routh-Hurwitz
3. Determine el rango de valores de la ganancia K que hacen estable a un sistema en lazo cerrado, cuya función de transferencia está dada por:
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 253
c ) T sK
s s s s K( ) =
+ + + +2
5 10 204 3 2
d ) T sK s
s s K s( )
( . )= ++ + +
2 53 103 2
e) T sK s
s s s s K( )
( . )
( )= +
+ + + + +0 5
2 10 5 24 3 2
f ) T sK
s s s K s( ) =
+ + + +4 3 210 3 3
Solución:a) Para la ecuación característica perteneciente a T(s):
s s K2 5 0+ + =
es condición su! ciente que no haya cambios de signo en el polinomio, por lo que el sistema será estable para K > 0.
b) Con respecto al polinomio característico correspondiente:
s K s2 5 0 5 0+ + + =( ) .
si K > �5, los signos del polinomio serán todos iguales (en este caso positivos), razón su! ciente para asegurar la estabilidad del sistema.
c ) La representación en el arreglo de Routh-Hurwitz de la ecuación característica:
s s s s K4 3 25 10 20 0+ + + + =
se presenta a continuación. En este caso, la regla de los signos no es aplicable por el grado del polinomio.
s4 1 10 K
s3 5 20
s2 6 K
s1 120 � 5K
s0 K
Para que el sistema sea estable, todos los elementos de la columna principal deberán ser positivos, incluidos:
K > 0 y 120 5 0! >K
C06_a SISTEMAS–Hdz.indd 253C06_a SISTEMAS–Hdz.indd 253 2/11/10 10:43:32 PM2/11/10 10:43:32 PM
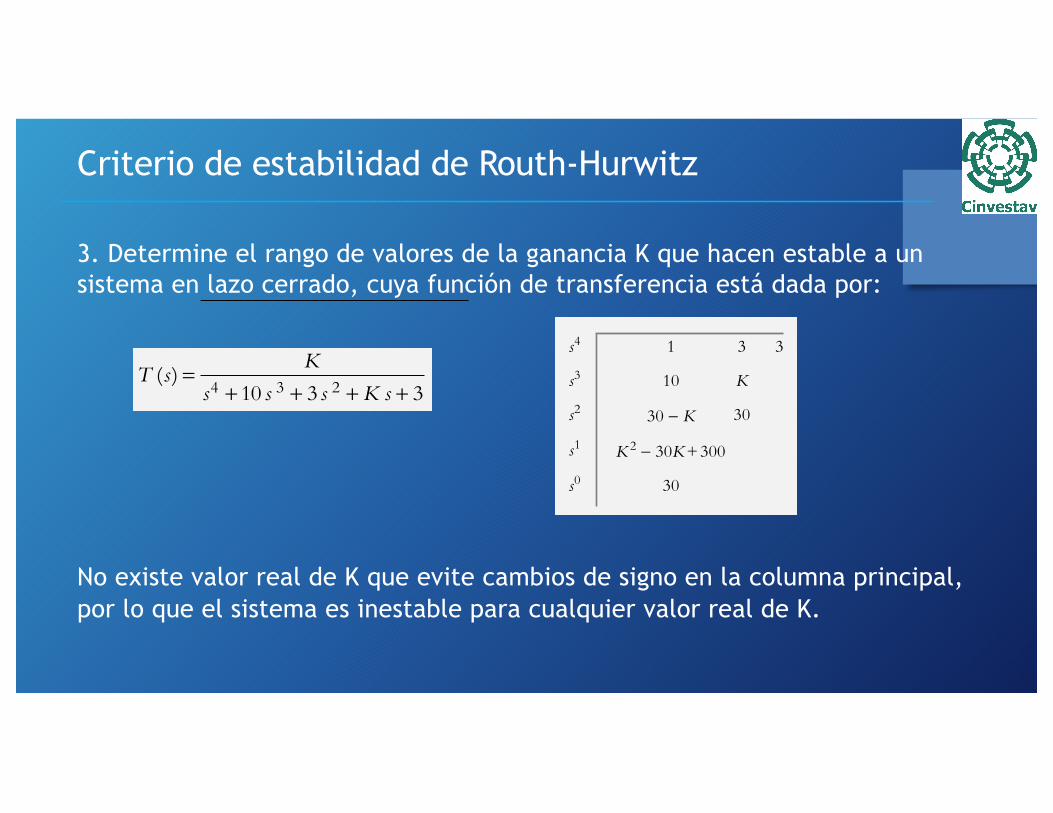
Criterio de estabilidad de Routh-Hurwitz
3. Determine el rango de valores de la ganancia K que hacen estable a un sistema en lazo cerrado, cuya función de transferencia está dada por:
No existe valor real de K que evite cambios de signo en la columna principal, por lo que el sistema es inestable para cualquier valor real de K.
Criterio de estabilidad de Routh-Hurwitz y lugar geométrico de raíces 253
c ) T sK
s s s s K( ) =
+ + + +2
5 10 204 3 2
d ) T sK s
s s K s( )
( . )= ++ + +
2 53 103 2
e) T sK s
s s s s K( )
( . )
( )= +
+ + + + +0 5
2 10 5 24 3 2
f ) T sK
s s s K s( ) =
+ + + +4 3 210 3 3
Solución:a) Para la ecuación característica perteneciente a T(s):
s s K2 5 0+ + =
es condición su! ciente que no haya cambios de signo en el polinomio, por lo que el sistema será estable para K > 0.
b) Con respecto al polinomio característico correspondiente:
s K s2 5 0 5 0+ + + =( ) .
si K > �5, los signos del polinomio serán todos iguales (en este caso positivos), razón su! ciente para asegurar la estabilidad del sistema.
c ) La representación en el arreglo de Routh-Hurwitz de la ecuación característica:
s s s s K4 3 25 10 20 0+ + + + =
se presenta a continuación. En este caso, la regla de los signos no es aplicable por el grado del polinomio.
s4 1 10 K
s3 5 20
s2 6 K
s1 120 � 5K
s0 K
Para que el sistema sea estable, todos los elementos de la columna principal deberán ser positivos, incluidos:
K > 0 y 120 5 0! >K
C06_a SISTEMAS–Hdz.indd 253C06_a SISTEMAS–Hdz.indd 253 2/11/10 10:43:32 PM2/11/10 10:43:32 PM
Introducción a los sistemas de control: conceptos, aplicaciones y simulación con MATLAB254
De las desigualdades anteriores, se obtiene que el sistema será estable si: 0 < K < 24. En caso de que K = 0 o K = 24, el sistema se comporta como marginalmente estable.
d ) Para la ecuación característica s3 + 3s2 + Ks + 10 = 0, después de completar el arreglo de Routh-Hurwitz respectivo, se obtiene que el sistema es estable para K > 3.3333.
e) La representación del arreglo del polinomio en turno corresponde a:
s4 1 10 2 + K
s3 2 5
s2 15 4 + 2K
s1 �4K + 67
s0 4 + 2K
De las desigualdades 4 + 2K > 0 y �4K + 67 > 0, se obtiene que el rango de ganancias para que el sistema sea estable es de:
�2 < K < 16.75.
f ) El arreglo del polinomio s4 + 10s3 + 3s2 + Ks + 3 = 0 es:
s4 1 3 3
s3 10 K
s2 30 � K 30
s1 K 2 � 30K + 300
s0 30
De la primer desigualdad 30 ! K > 0, se obtiene que K < 30. La segunda desigualdad supone resolver la ecuación cuadrática K 2 � 30K + 300
= 0, lo que hace complejas las raíces encontradas:
Kj= ±30 17 305
2.
, K j1 2 15 8 6603, .= ±
Como no existe ningún valor real de K que satisfaga la desigualdad, el siste-ma es inestable para cualquier valor de ganancia.
C06_a SISTEMAS–Hdz.indd 254C06_a SISTEMAS–Hdz.indd 254 2/11/10 10:43:33 PM2/11/10 10:43:33 PM



















![Comentarios Del CINVESTAV Al PTEO[1]](https://img.pdfslide.es/doc/110x75/553c4b20550346e2498b4924/comentarios-del-cinvestav-al-pteo1.jpg)








