-
Levante Sistemas de Automatización y Control S.L.
Catálogos
www.lsa-control.com
Distribuidor oficial Bosch Rexroth, Indramat, Bosch y
Aventics.
LSA Control S.L. - Bosch Rexroth Sales PartnerRonda Narciso
Monturiol y Estarriol, 7-9Edificio TecnoParQ Planta 1ª Derecha,
Oficina 14(Parque Tecnológico de Paterna)46980 Paterna
(Valencia)Telf. (+34) 960 62 43 01 [email protected]
www.lsa-control.com www.boschrexroth.es
mailto:[email protected]://www.lsa-control.com/www.boschrexroth.eshttp://www.lsa-control.com/
-
LAF050 - 121Linear Motors
DOK-MOTOR*-LAF********-AWP1-EN-P
Selection and Project Planning
mannesmannRexroth
engineering
Indramat266416
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 2
About this documentation
LAF050 - 121Linear motors
Selection and project planning
DOK-MOTOR*-LAF********-AWP1-EN-E1,44
• Mappe 16• LAF-AP.pdf• 209-0069-4387-00
This electronic document is based on the hardcopy document with
documentdesig.: 209-0069-4387-00 EN/07.95
The purpose of this documentation is:
• Dimensioning of linear motors
• Selection of linear motors and related drive control units
• Clarification of technical data
• Mechanical integration of linear motor in machine
• Electrical integration of linear motor in machine
• Specification of ordering information for linear motor and its
electricalconnection accessories
Titel
Type of documentation:
Documenttype
Internal file reference
Reference
This documentationis used:
© INDRAMAT GmbH, 1995Copying of this document, and giving it to
others and the use or communicationof the contents thereof, are
forbidden without express authority. Offenders areliable to the
payment of damages.All rights are reserved in the event of the
grant of a patent or the registrationof a utility model or design.
(DIN 34-1)
The electronic documentation (E-doc) may be copied as often as
needed ifsuch are to be used by the consumer for the purpose
intended.
All rights reserved with respect to the content of this
documentation and theavailability of the products.
INDRAMAT GmbH • Bgm.-Dr.-Nebel-Straße 2 • D-97816 LohrTelefon 0
93 52 / 40-0 • Tx 689421 • Fax 0 93 52 / 40-48 85
Dept ENA (BS, UW, FS)
Copyright
Validity
Publisher
Designation of documentation Release- Comentsup to present
edition date
209-0069-4387-00 EN/07.95 Jul./95 First Edition
DOK-MOTOR*-LAF********-AWP1-EN-E1,44 Feb./97 First Edition
E-Doc
Change procedures
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 3
Table of Contents
PageTable of Contents
1. Applications 7
2. General information 8
2.1. Operating principle
...........................................................................8
2.2. Design of linear motors
....................................................................8
2.3. Installation in machine
.....................................................................9
2.4. Properties and
characteristics..........................................................9
3. Integration of linear direct drives in control systems 11
3.1. General servo applications
............................................................
113.1.1. ANALOG interface
.........................................................................
113.1.2. SERCOS interface
.........................................................................12
3.2. Servo application with electronic synchronization
.........................13
3.3. System configurations
....................................................................14
4. Dimensioning and selection of linear direct drives 15
4.1. Dimensioning
.................................................................................15
4.2. Triangular speed curve
..................................................................164.2.1.
Calculation equations for triangular speed curve
...........................174.2.2. Calculation example for
triangular speed curve .............................19
4.3. Trapezoidal speed curve
................................................................214.3.1.
Calculation equations for trapezoidal speed curve:
.......................214.3.2. Calculation example for trapezoidal
speed curve ..........................23
4.4. Sinusoidal speed curve
..................................................................254.4.1.
Calculation equations for sinusoidal speed curve
..........................254.4.2. Calculation example for
sinusoidal speed curve ............................27
4.5. Calculation during switch-on duration
............................................284.5.1. Calculation
equations for given switch-on durations......................28
5. Selection lists 30
5.1. Explanations for selection lists
.......................................................30
5.2. Selection lists
.................................................................................33
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 4
Table of Contents
6. Combination possibilities for linearmotor, drive control unit
and measuring system 37
7. Measuring systems 42
7.1. General information
........................................................................42
7.2. Selection
........................................................................................42
7.3. Transducer signal distribution for operation of several
driveson one linear scale
.........................................................................45
7.4. Transducer signal amplification for long cable lengths
..................46
8. Design information 47
8.1. Motor arrangement
.........................................................................47
8.2. Basic mechanical conditions
..........................................................508.2.1.
Machine kinematics
........................................................................508.2.2.
Mechanical
rigidity..........................................................................508.2.3.
Motors arranged in parallel
............................................................518.2.4.
Forces of attraction between primary and secondary part
............538.2.5. Seals
..............................................................................................54
8.3. Installation dimensions and production tolerances
........................55
8.4. Guides
............................................................................................56
8.5. Length measuring system
..............................................................568.5.1.
Attaching length measuring system
...............................................568.5.2. Reference
switch and reference cam
............................................588.5.3. Minimum
distance from end windings
............................................58
8.6. Vertical axes
...................................................................................59
8.7. Motor
cooling..................................................................................598.7.1.
General information
........................................................................598.7.2.
Cooling plates
................................................................................60
8.8. Behavior in case of EMERGENCY-STOP
......................................618.8.1. EMERGENCY-STOP due
to drive error .........................................618.8.2.
EMERGENCY-STOP due to machine-dependent error
.................63
8.9. Behavior in case of mains failure
...................................................64
8.10. Information on protection of personnel
..........................................65
8.11. Information on protection of machinery
.........................................65
8.12. Set-up altitude and environmental conditions
................................66
8.13. Behavior of linear motors during operation
....................................66
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 5
Table of Contents
9. Technical data 67
9.1. Motor data
......................................................................................67
9.2. Installation drawing
........................................................................69
9.3. Dimension sheets for linear motor LAF 050
..................................70
9.4. Dimension sheets for linear motor LAF 071
..................................72
9.5. Dimension sheets for linear motor LAF 121
..................................74
9.6. Electrical power connection
...........................................................79
9.7. Electrical connection of measuring system
....................................86
10. Product line 92
11. Assembly 96
11.1. Safety notes
...................................................................................96
11.2. Mounting of primary and secondary part on the
machine..............97
11.3. Connecting electrical lines of primary part
.....................................98
12. Storage, handling and transport 102
13. Shipped state 103
13.1. Shipping
.......................................................................................103
13.2. Scope of
delivery..........................................................................103
14. Product identification 105
15. Index 107
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 6
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 7
1. Applications
1. Applications
New technologies with high economic utility increasingly require
numericallycontrolled movements with extremely demanding
requirements for pathspeed and path precision.
These requirements can be met with linear direct drives.
Particularly onmachine tools with limited load forces, such as
laser machining, beam-cuttingand high-speed cutting machines,
textile, packaging and thermal moldingmachines, considerable
performance increases can be achieved compared tocommon NC drive
technology characterized by mechanical transmissionelements.
Linear direct drives offer new solutions and clearly improved
performancedata by combining asynchronous linear motors with
digital, intelligent drivecontrol units with the use of a SERCOS
interface as the interface to thecontroller.
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 8
2. General information
2. General information
Linear direct drives consist of:
• LAF asynchronous linear motors
• digital, intelligent drive control units
• measuring systems and
• guides
2.1. Operating principleLAF asynchronous linear motors are
created by unfolding a rotary asynchro-nous motor. The basic
characteristics of the LAF motor largely correspond tothose of a
rotary asynchronous motor. As a result, the drive control units,
whichhave been proven on rotary drives in numerous applications,
are used for theiractivation and control.
2.2. Design of linear motors
LAF asynchronous linear motors are modular motors. The motor
consists ofa primary part with a 3-phase a.c. winding and a
secondary part with a squirrel-cage winding. The primary and
secondary parts are supplied as separate partsand integrated in the
machine design by the machine manufacturer.
The primary part has fixed dimensions dependent on the size and
is usuallyintegrated in the moving part of the machine. The total
length of the secondarypart is dependent on the traverse distance.
It is put together from a freelyselectable number of separate
elements with a predefined length.
The optimal use of the LAF asynchronous linear motor requires
liquid coolingof the primary and secondary parts. Appropriate
cooling plates are availablefor this purpose. The cooling plates
can be supplied as part of the motor orseparately.
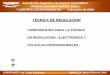
Fig. 2.1: Schematic design of an LAF asynchronous linear
motor
EXLAF01
Cooling platefor primary part
Cooling platefor secondary part
Machine carriage
Primary part
Secondary part
Linear positionmeasuring system
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 9
2. General information
2.3. Installation in machine
It is the task of the machine manufacturer to integrate the LAF
asynchronouslinear motors in the machine. In addition to the LAF
asynchronous linearmotors, measuring systems and guides must also
be mounted. The advan-tages of a linear direct drive can only be
ensured in operation with suitabledesign measures which take the
interaction of the various separate compo-nents into
consideration.
Fig. 2.2: Decisive influencing variables of a linear direct
drive
2.4. Properties and characteristics
When LAF asynchronous linear motors are used, the mechanical
transmis-sion elements used for common linear movements, such as
ball screw drives,rack-and-pinion units, transmissions or clutches,
are eliminated. This results,in conjunction with digital,
intelligent drive control units and controllerscompatible to the
SERCOS interface, in the following major advantages:
• high acceleration capacity with simultaneously high contour
and positioningexactness due to the lack of mechanical transmission
elements
• high control quality
• no transmission faults as the result of backlash on reversal
and play in thedrive train
• good synchronous operation properties
• high load stiffness
• high operating reliability due to the lack of wearing
components, i.e.,maintenance-free operation
• prevention of overload damage by monitoring the motor
temperature withthe temperature sensor in the drive control unit
integrated in the motorwinding
In contrast to conventional electro-mechanical drive systems, in
which aspatial separation between the electric motor and the
linearly moved part(support) is given, there is no spatial
separation of the motor from the movingpart of the mechanical
system in a linear direct drive.
FSLAF01
Linear direct drive
Mechanicaldesign
CNC control
LAF asyn-chronous
linear motor
Drive control unit
Advantages
Disadvantages
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 10
2. General information
This results in the following disadvantages:
• The thermal losses occur directly in the motor, i.e., also
within the machine.As a result, suitable motor cooling must be
provided. To guarantee themaximum performance data, and thus
particularly the maximum availablepower of the drive, and to ensure
that no thermal energy is given off to theremaining machine
elements, cooling plates are required for the primaryand secondary
parts.
• The feed forces per motor are considerably lower than for
comparable,conventional electro-mechanical systems.
An increase in the permanent, maximum power within a linear
direct drive isachieved with
• a parallel arrangement or
• a series arrangement
of the individual motors. The dynamic characteristics (e.g., the
maximumacceleration capacity) result under consideration of the
total weight to beaccelerated in the drive train.
Power increase
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 11
3. Integration of linear direct drives in control systems
3. Integration of linear direct drives incontrol systems
Linear direct drives can be used for various applications. The
main uses aredivided into the areas:
• General servo applications with higher-level CNC control
and
• Servo applications with electronic drive synchronization
3.1. General servo applicationsFor the general servo application
range, servo applications can be furtherdistinguished in accordance
with the type of interface to the CNC control
• ANALOG interface or
• SERCOS interface
3.1.1. ANALOG interface
When the ANALOG interface is used, it is possible to use
conventionalcontrollers.
Main applications
Fig. 3.1: Linear direct drive with ANALOG interface
The position sensor signals detected by the measuring system are
madeavailable as an incremental sensor signal with a freely
programmable resolu-tion.
The programming and diagnosis of the drive are carried out with
a VT 100terminal.
Due to the insufficiently fast setpoint specification by the
controller, the contourexactness lies below the possibilities which
would apply if the SERCOSinterface were used.
D AA D
+W
-X
Primarypart 3 a.c.
Kv
Secondary part
Field-orientedstator currentcontrol
Speedcontrol
Speedsetpointanalog± 10 V
Actualposition value
CNC control(position control)
DDS digital control modulewith analog interface
Asynchronouslinear motor
Linear scale
Drive computer
FSANINT
VT 100
Parameterdiagnostics
Positioninterface
High-resolutionposition interface
Advantages
Disadvantages
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 12
3. Integration of linear direct drives in control systems
The speed range (range between the slowest and fastest speed) is
generallylimited to + 11 bits (vmin = vmax/2048).
The resolution of the sensor signals used for position control
is clearly lowerthan is possible with the SERCOS interface.
3.1.2. SERCOS interface
A full utilization of all possibilities and advantages of linear
direct drives ismade possible with the SERCOS interface.
The following operating modes can be used:
• Position control, either with or without lag distance
• Speed control
• Current control (force)
The following advantages result
• High contour exactness with high path speeds through fine
interpolation anddrive-internal, contouring-error-free position
control with a 250 µs cycle time
• High surface quality through low force ripple, high position
resolution andshort position-control cycle time
• Linear scale measuring steps are divided by 2048
• Simple realization of gantry axes, i.e., without compensation
control viacontroller
• Start-up and diagnosis directly via the NC terminal
• NC-independent start-up via PC with graphic support
• Fast initial start-up and easy duplication for a series of
machines by loadingcomplete parameter sets
Fig. 3.2: Linear direct drive with SERCOS interface
High-resolutionposition interface
Field-orientedstator currentcontrol
Speed control
CNC control DDS digital control module with SERCOS interface
Asynchronouslinear motor
SERCOSinterface
Drive computer
Position control
Fine interpolationSERCOSinterface
FSSERINT
ParametersDiagnosticsOperating data
Primarypart 3 a.c.
Secondary part
Linear scale
Advantages
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 13
3. Integration of linear direct drives in control systems
3.2. Servo application with electronic synchronization
Electronically synchronized drives contain the following system
components
• synchronized drives
• higher-level controllers (master computer, SPC)
• I/O modules
• local operating units
Here electronic synchronization is realized in the drive control
units by usingthe SERCOS-interface bus system between the drives. A
control card is usedto coordinate data exchange between the drives,
I/O modules, mastercomputer, SPC and local operating units. This
control card can be plugged intoeither the drive control units, the
PCs or the VME bus systems.
Therefore, the drives are divided into systems
• with an integrated control card
• without an integrated control card
The following operating modes are realized within the drive
control units:
• Position synchronization
• Speed synchronization
• Free synchronization (e.g., simulation of a cam disk)
When the control card is used, the
• parameterization
• referencing
• and set-up
of the axes is also supported.
In this case both a virtual and an actual guide axis are used as
a guide axis.
• Replacement of complex mechanical cam drives
• Increased exactness and speed
• Free change of the synchronization parameters, e.g., of the
speed ratios
• Guide axis transducer directly connectable
• Inputs/outputs can be directly connected
Operating modes
Advantages
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 14
3. Integration of linear direct drives in control systems
3.3. System configurations
The individual systems described in Section 3.1 and 3.2 are
designated assystem configurations and each marked with an
abbreviation. This abbrevia-tion must be indicated when ordering
drive control units, as they specify theplug-in modules for the
drive control units required for the special systemconfiguration.
Please see the documentation "Digital Intelligent
Drive-SystemConfigurations" for details.
Selection diagram
Fig. 3.3: Selection diagram for function-oriented selection of
linear direct drive
Applicationrange
Controller orinterfacefor controller
Extras Configurationcode
SERCOSinterface
DA 06
DS 13
General servoapplication
DS 08Separatecontrol
Connection ofguide axis
transducer GDS
I/O card with15 inputs/16 outputs
I/O card with15 inputs/16 outputs
+Connection of
guide axistransducer GDS
Servo applicationwith drive
synchronization
DS 15
DS 22
DS 07or
DS 28
DS 21
DS 06Integrated
CLCcontrol card
I/O card with15 inputs/16 outputs
DS 14
ANALOGinterface
FSAUSLINDIR
Connection ofguide axis
transducer GDS
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 15
4. Dimensioning and selection of linear direct drives
4. Dimensioning and selection of lineardirect drives
4.1. DimensioningApplications for which linear direct drives can
be used advantageously aredivided into the following characteristic
speed/time graphs:
• Triangular speed curve with idle time
• Operation with trapezoidal speed curve and idle time
• Sinusoidal speed curve
These characteristic speed/time graphs determine the design
criteria inconjunction with the forces resulting during these time
segments.
The basic procedure for dimensioning is as follows:
Fig. 4.1: Dimensioning procedure
FPdimLAF
1. Determination of mechanical conditions
• Moved weight• Friction, counter-force• Motor installation
position• Axis traverse path• Machining force
2. Specification of kinematic requirements
• Maximum speed• Acceleration
3. Determination of forces • Friction force• Force of weight•
Basic force• Load force• Acceleration force• Maximum force
4. Determination of effective force Feff
Define representative movement sequence
Movement sequence known?
Estimation of relative switch-on duration
Calculate Feff(4.10, 4.11, 4.12)
yes
no
Specify movement profile of a cycle (traverse path, speed,
acceleration) by individual time segments (speed/time graph)
Assign forces (determined from Step 3) to individual time
segments (force/time graph)
5. Selection of motor type and combination of LAF motor and
drive control unit from selection list under consideration of
design criteria
(4.1)(4.2)(4.3)
(4.4, 4.5)(4.6, 4.7)(4.8, 4.9)
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 16
4. Dimensioning and selection of linear direct drives
The linear direct drive must meet the following conditions:
• Adherence to the required speed,i.e., vmax > vmax,req
• Adherence to the required maximum force,i.e., Fmax >
Fmax,req
• Adherence to the required load force,i.e., FKB > FLoad
• Adherence to the required continuous nominal force,i.e., FpN
> Feff
If these conditions cannot be adhered to, an increase in the
forces of an axiscan be realized by mechanically connecting several
linear direct drives inparallel.
4.2. Triangular speed curve
This operating mode is characteristic of all highly dynamic
advance move-ments, such as those which can frequently be found in
the sheet-metal, paper,plastic or packaging industries.
Design criteria
Fig. 4.2: Speed/time curve for triangular operation
The design for this operating mode is mainly carried out in
accordance with therequired maximum force Fmax,req, composed of the
acceleration and brakingforce, and the effective force Feff.
DGverlLAF
Speed v
Time t
vmax
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 17
4. Dimensioning and selection of linear direct drives
4.2.1. Calculation equations for triangular speed curve
In the following the basic calculation equations are shown.
FR = (m • g + FAtt ) • µ + FAdd
FG = m • g • (1-fg ) • sin( α)
100
FO = FR + FG
FAtt
Force of attraction between primary and secondarypart of
asynchronous liner motor
FO
Basic force in NF
RFriction force in N
FG
Force of weight in Nm Moved weight in kg (under consideration of
moved
weight of motor)g Acceleration due to gravity in m/s2
µ Friction coefficientF
AddAdditional friction force (e.g., bellows) in N
fg
Counterbalance in %α Axis angle to horizontal plane in
degrees
FLoad = FMach + FO(upward motion with sloped axis)
FLoad = FMach + FO - 2 • FG(downward motion with sloped
axis)
FAcc
= m • a
(for uniform acceleration)
Fmax, req = FAcc + FLoad(for simultaneous acceleration and
machining)
Fmax, req = FAcc + FO(for acceleration)
FLoad Load force in NFMach Machining force in NFO Basic force in
NFG Force of weight in NFAcc Acceleration force in Nm Moved weight
in kga Acceleration in m/s2
Fmax, req Required maximum force of drive in N
Friction force
Force of weight
Basic force
Load force
Acceleration force
(4.1)
(4.2)
(4.3)
(4.4)
(4.5)
(4.6)
(4.8)
(4.9)
Maximum force
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 18
Effective force
4. Dimensioning and selection of linear direct drives
Feff =Σ ( Fi2 • ti )
(for uniform forces in knowΣ ti time segments)
Feff Effective force in NFi Force occurring within a time
segment in Nti Time segment in sec.
(4.10)
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 19
4.2.2. Calculation example for triangular speed curve
Cycle
4. Dimensioning and selection of linear direct drives
Given data
Fig. 4.3: Speed/time graph of calculation example
Moved weight m = 400 kg (incl. primary-part weight)
Friction coefficient µ = 0.05
Force of attraction betweenprimary and secondary partof linear
motor FAtt = 0 N
Additional friction force FAdd = 50 N
Vertical counterbalance fG = 90 %
Machining force FMach = 0 N
The following applies:
a =
a = = 10 m/s2
FR = (m • g + F
Att) • µ + F
Add
FR = (400 kg • 9.81 m/s2 + 0 N) • 0.05 + 50 N = 246 N
FG = m • g • ( 1 – ) • sin (α)
FG = (400 kg • 9.81 m/s2 • (1 – ) • sin (90°) = 392 N
FO = F
R + F
G
FO = 246 N + 392 N = 638 N
FAcc
= m • a
FAcc
= 400 kg • 10 m/s2 = 4000 N
Fmax, req
= FAcc
+ FO
Fmax, req
= 4000 N + 638 N = 4638 N
Calculation procedure
Acceleration
Friction force
Force of weight
Basic force
Acceleration force
Maximum force
vtAcc
1m/s0.1 s
fg100 90
100
DGGEZE1
v
t in ms
in m/s
100 200 300 400 500 600
-1
700 800
+1
Cycle time
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 20
Effective force Feff
=
The force/time graph is as follows:
Fig. 4.4: Force/time graph of calculation example
Selecting lineardirect drive
This results in:
Feff
=
Feff
= 2883 N
Asynchronous linear motor 2 x LAF 121 C-CDrive control unit 2 x
DDS 2.1-W100
with following data: vmax = 60 m/min.FpN = 4.000 NFmax = 5.260
N
4. Dimensioning and selection of linear direct drives
Σ (Fi2 • t
i)
Σ ti
100 200 300 400 500 600 700 800
DGKRZE1
t in ms
F in N
FAcc + FR + FG = 4638 N
– FAcc + FR + FG = – 3362 N
– FAcc – FR + FG = – 3854 N
FAcc - FR + FG = 4146 N
FO = 638 N FO = 638 N
(46382 N2 • 0.1 s + 33622 N2 • 0.1 s) + (6382 N2 • 0.2 s)+
(38542 N2 • 0.1 s + 41462 N2 • 0.1 s) + (6382 N2 • 0.2 s)
0.8 s
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 21
4. Dimensioning and selection of linear direct drives
4.3. Trapezoidal speed curveThis operating mode is
characteristic of most applications in machine toolengineering. It
can also be found frequently in handling systems.
DGtrapLAF
Speed v
Time t
Fig. 4.5: Speed/time curve for trapezoidal operation
The design for this operating mode is mainly based on the
required maximumforce Fmax,eff in the acceleration phases and the
effective force Feff during thetotal cycle time.
4.3.1. Calculation equations for trapezoidal speed curve:
FR = (m • g + FAtt) • µ + FAdd
FG = m • g • (1-fg ) • sin( α)
100
FO = FR + FG
FAtt
Force of attraction between primary and secondarypart of
asynchronous liner motor
FO
Basic force in NF
RFriction force in N
FG
Force of weight in Nm Moved weight in kg (under consideration of
moved
weight of motor)g Acceleration due to gravity in m/s2
µ Friction coefficientF
AddAdditional friction force (e.g., bellows) in N
fg
Counterbalance in %α Axis angle to horizontal plane in
degrees
Friction force
Force of weight
Basic force
(4.1)
(4.2)
(4.3)
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 22
Load force
Acceleration force
(4.4)
(4.5)
(4.6)
(4.8)
(4.9)
FLoad = FMach + FO(upward motion with sloped axis)
FLoad = FMach + FO - 2 • FG(downward motion with sloped
axis)
FAcc
= m • a
(for uniform acceleration)
Fmax, req = FAcc + FLoad(for simultaneous acceleration and
machining)
Fmax, req
= FAcc
+ FO
(for acceleration)
FLoad Load force in NFMach Machining force in NFO Basic force in
NFG Force of weight in NFAcc Acceleration force in Nm Moved weight
in kga Acceleration in m/s2
Fmax, req Required maximum force of drive in N
4. Dimensioning and selection of linear direct drives
Effective force
Feff =Σ ( Fi
2 • t i )(for uniform forces in know
Σ ti time segments)
Feff Effective force in NFi Force occurring within a time
segment in Nti Time segment in sec.
(4.10)
Maximum force
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 23
4.3.2. Calculation example for trapezoidal speed curve
Cycle:
4. Dimensioning and selection of linear direct drives
Given data
Calculation procedure
Friction force
Force of weight
Basic force
Acceleration force
Load force
Maximum force
Fig. 4.6: Speed/time graph of calculation example
Moved weight m = 400 kg(with primary-part weightestimated at 50
kg)
Friction coefficient µ = 0.02
Force of attraction between primaryand secondary part FAtt =
15.000 N (estimated)
Additional friction force FAdd = 50 N
Horizontal arrangement ofmachining force FMach = 1.500 N
Acceleration a = 6 m/s2
The following applies:
FR = (m • g + FAtt) • µ + FAddFR = (400 kg • 9.81 m/s2 + 15 000
N) • 0.02 + 50 N = 428 N
FG = 0 N, as horizontal axis
FO = FR + FGFO = 428 N
FAcc = m • a
FAcc = 400 kg • 6 m/s2 = 2400 N
FLoad = FMach + FOFLoad = 1500 N + 428 N = 1928 N
Fmax, req = FAcc + FLoadFmax, req = 2400 N + 1928 N = 4328 N
0.5 1.0 1.5 2.0 2.5 3.0
0.6
0.3
-0.6
DGGEZE2
t in s
v in m/s
Cycle time
MachiningF = 1500 N
Rapid-traversetool ap-proachmotion
Rapid-traversereturn motion
Idle
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 24
This results in:
Feff
=
Feff
= 1542 N
A.) Asynchronous linear motor LAF 121 C-CDrive control unit DDS
2.1-W200
with following data: vmax = 60 m/min.FpN = 2000 NFmax = 4800
N
or
B.) Asynchronous linear motor 2 x LAF 121 A-EDrive control unit
1 x DDS 2.1-W200
with following data: vmax = 60 m/min.FpN = 2000 NFmax = 4800
N
Fig. 4.7: Force/time graph of calculation example:
(28282 N2 • 0.1 s) + (4282 N2 • 0.3 s) + (19722 N2 • 0.1 s)+
(43282 N2 • 0.05 s)+ (19282 N2 • 0.95 s)+ (4722 N2 • 0.05 s) +
(28282 N2 • 0.1 s) + (4282 N2 • 0.65 s)+ (19722 N2 • 0.1 s) + (4282
N2 • 0.65 s)
3.0 s
Selecting lineardirect drive
Feff =
The force/time graph is as follows:
4. Dimensioning and selection of linear direct drives
Σ (Fi2 • t
i)
Σ ti
– FAcc – FO= – 2828 N
– FAcc + FLast= – 472 N– FAcc + FO
= – 1972 N
0.5 1.0 1.5 2.0 2.5 3.0
2000
4000
-2000
-4000DGKRZE2
t in s
F in N
FAcc + FO= 2828 N
FO = 428 N
Fmax, req = 4328 N
FLoad = 1928 N
– FO = – 428 N
FAcc – FO = 1972 N
Effective force
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 25
4.4. Sinusoidal speed curve
This operating mode can frequently be found in applications in
the textile andpackaging industry
4. Dimensioning and selection of linear direct drives
DGsinLAF
Speed v
Time t
Fig. 4.8: Speed/time curve for sinusoidal speed curve
The design for this operating mode is carried out primarily in
accordance withthe maximum force Fmax,req in the acceleration
phases and the force Feff over theperiod duration.
4.4.1. Calculation equations for sinusoidal speed curve
FR = (m • g + FAtt) • µ + FAdd
FG = m • g • (1-
fg ) • sin( α)100
FO = F
R + F
G
FAtt Force of attraction between primary and secondarypart of
asynchronous liner motor
FO Basic force in NFR Friction force in NFG Force of weight in
Nm Moved weight in kg (under consideration of moved
weight of motor)g Acceleration due to gravity in m/s2
µ Friction coefficientFAdd Additional friction force (e.g.,
bellows) in Nfg Counterbalance in %α Axis angle to horizontal plane
in degrees
Friction force
Force of weight
Basic force
(4.1)
(4.2)
(4.3)
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 26
4. Dimensioning and selection of linear direct drives
(4.7)
(4.9)
Acceleration force
Maximum force
FAcc =m • vmax • 2 • π
T(for sinusoidal speed/time graph)
Fmax, req = FAcc + FO (for acceleration)
FO Basic force in NFAcc Acceleration force in Nm Moved weight in
kgvmax Moved weight in kgT Period duration in sec.Fmax, req
Required maximum force of drive in N
Effective force
Feff
= FO
2 +F
Acc2
2
(for sinusoidal speed/time graph with constantbasic force)
Feff Effective force in NFO Basic force in NFAcc Acceleration
force in N
(4.11)
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 27
4. Dimensioning and selection of linear direct drives
4.4.2. Calculation example for sinusoidal speed curve
CycleGiven data
Calculation procedure
Friction force
Force of weight
Basic force
Acceleration force
Maximum force
Effective force
Selecting lineardirect drive
The following applies:
FR = (m • g + FAtt) • µ + FAddFR = (100 kg • 9.81 m/s2 + 10 000
N) • 0.02 + 50 N = 269 N
FG = 0 N, as horizontal axis
FO = FR + FGFO = 269 N + 0 N = 269 N
FAcc = m • vmax •
FAcc = 100 kg • 0.6 m/s2 • = 943 N
Fmax, req = FAcc + FOFmax, req = 943 N + 269 N = 1212 N
Feff = FO2 +
Feff = 2692 + = 898 N
Asynchronous linear motor LAF 121 A-FDrive control unit DDS
2.1-W050
with following data: vmax = 45 m/min
FpN = 1000 N
Fmax = 2140 N
2 • π T
2 • π 0.4 s
FAcc2
2
1212 2
2
Fig. 4.9: Speed/time chart of calculation example
Moved weight m = 100 kg (incl. primary part weight)
Friction coefficient µ = 0.02
Force of attraction betweenprimary and secondarypart of linear
motor FAtt = 10 000 N (estimated)
Additional friction force FAdd = 50 N
Machining force for FMach = 0 Nhorizontal arrangement
0.6
-0.6
0.2 0.4
DGGEZE3
t in s
v in m/s
Period duration T
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 28
4. Dimensioning and selection of linear direct drives
4.5. Calculation during switch-on durationIf the speed/time
curve is not exactly known, the calculation can take placeduring
the switch-on duration.
Fig. 4.10: Time shares/switch on duration for various operating
phases
The design is carried out in accordance with the required forces
in theindividual operating phases and the effective force Feff
during the switch-ondurations.
4.5.1. Calculation equations for given switch-on durations
FSedantLAF
Rapidtraverse
Machining
Break/acceleration
Standstill
FR = (m • g + F
Att) • µ + F
Add
FG = m • g • (1-fg ) • sin( α)
100
FO = FR + FG
FAtt
Force of attraction between primary and secondarypart of
asynchronous linear motor
FO
Basic force in NF
RFriction force in N
FG
Force of weight in Nm Moved weight in kg (under consideration of
moved
weight of motor)g Acceleration due to gravity in m/s2
µ Friction coefficientF
AddAdditional friction force (e.g., bellows) in N
fg
in %α Axis angle to horizontal plane in degrees
Friction force
Force of weight
Basic force
(4.1)
(4.2)
(4.3)
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 29
4. Dimensioning and selection of linear direct drives
Load force
Acceleration force
(4.4)
(4.5)
(4.6)
(4.8)
(4.9)
FLoad = FMach + FO(upward motion with sloped axis)
FLoad = FMach + FO - 2 • FG(downward motion with sloped
axis)
FAcc
= m • a(for uniform acceleration)
Fmax, req = FAcc + FLoad(for simultaneous acceleration and
machining)
Fmax, req
= FAcc
+ FO
(for acceleration)
FLoad Load force in NFMach Machining force in NFO Basic force in
NFG Force of weight in NFAcc Acceleration force in Nm Moved weight
in kga Acceleration in m/s2
Fmax, req Required maximum force of drive in N
Effective force(approx. calculation) Feff = Σ (Fi
2 • EDi) (for uniform forces with known switch-on duration)
Feff Effective force in NEDi Switch-on duration within an
operating phase in %Fi Force within an operating phase in N
100
(4.12)
Maximum force
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 30
5. Selection lists
5. Selection lists
5.1. Explanations for selection listsThe performance data of the
motor/drive control unit combinations are listedin the selection
lists per drive control unit. Up to a maximum of two LAF motorscan
be connected. These combinations were included in the selection
lists. Inaddition, linear motors can be arranged mechanically in
series or parallel. Thecorresponding combination possibilities are
contained in Section 6. The forcescan then be added together
accordingly.
The variables listed in the selection lists have the following
meaning:
Usable maximum speed vmax for standard applications in a closed
positioncontrol circuit with an NC control.The speed at which the
linear motor can be operated with the nominal forceover the entire
speed range is used as a basis.
This force can be output by the linear motor for an unlimited
time.
The maximum force can be output by the motor briefly for a
maximum switch-on duration of 400 ms. Then this force is reduced to
the short-term operatingforce FKB in dependency on the current
limitation in the drive control unit. Themaximum force is available
for acceleration up to the critical speed vFmax.
This force is available at maximum speed.
This force can be used in the intermittent mode for the
specified switch-onduration percentage (operating mode S6 as per
DIN 57530/VDE 0530). Themaximum play duration corresponds to the
thermal time constant of the motor.For lower short-term operating
force the switch-on duration is determinedapproximately as
follows:
(1) vmaxMaximum speed
(2) FpNContinuous nominal
force
(3) Fmax – vFmaxMaximum force-
Critical speed
(4) FvmaxMaximum force at vmax
(5) FSO – EDShort-term operating
force switch-onduration
ED Switch-on duration in %FpN Continuous nominal force in NFSO
Short-term operating force in N
ED = ( )2 • 100 %F
dN
FKB
(5.1)
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 31
(6) tAAcceleration/braking
time
(7) mMMotor weight of
primary part
(8) PDCIntermediate-circuit
continuous output
(9) LAF motor
(10) DDS drivecontrol unit
5. Selection lists
Acceleration time of motor from standstill to maximum speed or
braking timefrom maximum speed to standstill.
• without load weights
• without load forces
under consideration of the characteristic F = f(v).
Weight of the linear-motor primary part
Continuous output which must be constantly made available by the
supplysystem if the motor is operating in the continuous nominal
mode.
The indicated motor code specifies the motor-related drive data.
To determinethe ordering data, proceed as described in Section
10.
The model designations of the drive control unit are indicated
to the degreethat they help determine the data in the selection
list.
Fig. 5.1: Part of drive control unit model decisive for drive
data
Please specify the remaining ordering information in accordance
with theproject planning documentation. Here the configuration
designation as perSection 3.3 will also be required.
This factor is to be entered during the programming of the
drives to achievethe desired drive data.
When other values are entered, the selection data are
changed.
The overload factor indicates the ratio of the continuous
amplifier current to thecontinuous motor current. The operating
range within the amplifier character-istic is defined with this
factor. Several operating ranges are possible for somemotor/drive
control-unit combinations.
These are distinguished as follows:
• Operating range with high maximum force and low short-term
operatingforce
• Operating range with high short-term operating force and low
maximumforce
Example: DDS 2.1 – W 015
Code for:Drive control unitSeriesDesignCooling typeModel
current
(11) OF:Overload factor
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 32
Fig. 5.2: Schematic representation of the characteristic data
from the selection lists
The length of the secondary part is dependent on the required
total traversepath and the length of the secondary part.
The following standard lengths are available
• LAF050, 070, 1,000 mm parts
• LAF 121, 500 mm and 200 mm parts
Any desired traverse length can be achieved by connecting
several secondaryparts in series. The length of the secondary part
is calculated as follows:
Characteristic data
5. Selection lists
DGKENNDA
F
v
Fmax
FSO
FdN
vFmax
Fvmax
vmax
Secondary part
Example
Selection
Lpath = 1300 mm, Lprimary = 650 mm
Lsecondary = 1300 mm + 650 mm = 1950 mm
4 secondary parts of the type LFS 121 with a length of 500 mm
each
When specifying the secondary part length, the following points
must beobserved:
• When using a secondary-side cooling plate, the maximum length
is limitedby the pressure drop within the cooling plate (see
Section 8.7).
• For long traverse paths, corresponding measuring systems with
at least thelength of the available traverse path (see Section 7)
are required.
• The specified production tolerances of the machine elements
must beadhered to over the entire traverse path to ensure a defined
air gap height.
Lsecondary > Lpath + Lprimary
Lsecondary Length of secondary part in mmLpath Traverse path in
mmLprimary Length of primary part in mm
(5.2)
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 33
5. Selection lists
5.2. Selection lists
Vmax
FdN
Fmax
vFmax
Fvmax
FSO
ED tA m
M P
DC Motor type Controller OF
m/min N N m/min N N % ms kg kW LAF type DDS %
150 170 340 96 170 300 32 35/24 3.2 1.7 050A-H 2.1-W050-D 267150
170 460 56 170 330 27 30/17 3.2 1.6 050A-H 2.1-W100-D 317150 170
450 59 170 340 25 30/18 3.2 1.6 050A-H 2.1-W100-D 333150 170 460 56
170 340 25 30/17 3.2 1.6 050A-H 2.1-W150-D 333
150 340 440 136 340 380 80 48/36 6.4 3.6 2 x050A-H 2.1-W050-D
133150 340 690 94 340 380 80 35/23 6.4 3.3 2 x050A-H 2.1-W100-D
133150 340 500 126 340 500 46 43/32 6.4 3.5 2 x050A-H 2.1-W100-D
200150 340 870 64 340 520 43 31/18 6.4 3.2 2 x050A-H 2.1-W150-D
217150 340 600 109 340 600 32 38/27 6.4 3.4 2 x050A-H 2.1-W150-D
267150 340 920 55 340 560 37 30/17 6.4 3.1 2 x050A-H 2.1-W200-D
240150 340 650 101 340 650 27 36/25 6.4 3.4 2 x050A-H 2.1-W200-D
300150 340 690 94 340 600 32 35/23 6.4 3.3 2 x050A-H 2.1-A100-D
267150 340 650 101 340 650 27 36/25 6.4 3.4 2 x050A-H 2.1-A100-D
300150 340 870 64 340 690 24 31/18 6.4 3.2 2 x050A-H 2.1-A150-D
333150 340 920 55 340 690 24 30/17 6.4 3.1 2 x050A-H 2.1-A200-D
333150 340 690 94 340 690 24 35/23 6.4 3.3 2 x050A-H 2.1-F100-D
333150 340 870 64 340 690 24 31/18 6.4 3.2 2 x050A-H 2.1-F150-D
333150 340 920 55 340 690 24 30/17 6.4 3.1 2 x050A-H 2.1-F200-D
333
150 340 440 136 340 380 80 49/37 6.5 3.6 050C-H 2.1-W050-D
133150 340 690 94 340 380 80 35/24 6.5 3.3 050C-H 2.1-W100-D 133150
340 500 126 340 500 46 44/33 6.5 3.5 050C-H 2.1-W100-D 200150 340
870 64 340 520 43 31/19 6.5 3.2 050C-H 2.1-W150-D 217150 340 600
109 340 600 32 39/27 6.5 3.4 050C-H 2.1-W150-D 267150 340 920 55
340 560 37 31/18 6.5 3.1 050C-H 2.1-W200-D 240150 340 650 101 340
650 27 37/25 6.5 3.4 050C-H 2.1-W200-D 300150 340 690 94 340 600 32
35/24 6.5 3.3 050C-H 2.1-A100-D 267150 340 650 101 340 650 27 37/25
6.5 3.4 050C-H 2.1-A100-D 300150 340 870 64 340 690 24 31/19 6.5
3.2 050C-H 2.1-A150-D 333150 340 920 55 340 690 24 31/18 6.5 3.1
050C-H 2.1-A200-D 333150 340 690 94 340 690 24 35/24 6.5 3.3 050C-H
2.1-F100-D 333150 340 870 64 340 690 24 31/19 6.5 3.2 050C-H
2.1-F150-D 333150 340 920 55 340 690 24 31/18 6.5 3.1 050C-H
2.1-F200-D 333
150 680 1030 123 680 690 97 43/32 13.0 7.0 2 x050C-H 2.1-W150-D
117150 680 760 146 680 760 80 56/43 13.0 7.3 2 x050C-H 2.1-W150-D
133150 680 1270 103 680 690 97 37/26 13.0 6.8 2 x050C-H 2.1-W200-D
117150 680 820 141 680 820 69 52/40 13.0 7.2 2 x050C-H 2.1-W200-D
150150 680 890 135 680 760 80 49/37 13.0 7.1 2 x050C-H 2.1-A100-D
133150 680 820 141 680 820 69 52/40 13.0 7.2 2 x050C-H 2.1-A100-D
150150 680 1160 113 680 910 56 39/28 13.0 6.9 2 x050C-H 2.1-A150-D
175150 680 1380 94 680 790 74 35/24 13.0 6.7 2 x050C-H 2.1-A200-D
142150 680 1200 109 680 910 56 39/27 13.0 6.8 2 x050C-H 2.1-A200-D
175150 680 890 135 680 890 58 49/37 13.0 7.1 2 x050C-H 2.1-F100-D
167150 680 1160 113 680 910 56 39/28 13.0 6.9 2 x050C-H 2.1-F150-D
175150 680 1380 94 680 910 56 35/24 13.0 6.7 2 x050C-H 2.1-F200-D
175
Fig. 5.3: Selection list with LAF050
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 34
5. Selection lists
Vmax
FdN
Fmax
vFmax
Fvmax
FSO
ED tA m
M P
peak P
DC Motor type Controller OF
m/min N N m/min N N % ms kg KW kW LAF type DDS %
120 350 610 83 350 520 45 26/18 5,6 3,0 2,7 070A-P 2.1-W050-D
235120 350 790 58 350 520 45 23/14 5,6 3,0 2,5 070A-P 2.1-W100-D
235120 350 680 73 350 680 26 24/16 5,6 3,0 2,6 070A-P 2.1-W100-D
353120 350 790 58 350 700 25 23/14 5,6 3,0 2,5 070A-P 2.1-W150-D
371120 350 610 83 350 610 33 26/18 5,6 3,0 2,7 070A-P 2.1-A050-D
294120 350 790 58 350 700 25 23/14 5,6 3,0 2,5 070A-P 2.1-A100-D
371120 350 610 83 350 610 33 26/18 5,6 3,0 2,7 070A-P 2.1-F050-D
294120 350 790 58 350 700 25 23/14 5,6 3,0 2,5 070A-P 2.1-F100-D
371
120 700 860 109 700 860 66 34/26 11,2 6,0 5,7 2 x070A-P
2.1-W100-D 176120 700 1540 60 700 910 59 23/15 11,2 6,0 5,1 2
x070A-P 2.1-W150-D 191120 700 1050 95 700 1050 44 29/21 11,2 6,1
5,5 2 x070A-P 2.1-W150-D 235120 700 1590 57 700 1010 48 22/14 11,2
5,9 5,1 2 x070A-P 2.1-W200-D 221120 700 1140 89 700 1140 38 27/20
11,2 6,1 5,4 2 x070A-P 2.1-W200-D 265120 700 1220 83 700 1050 44
26/18 11,2 6,1 5,4 2 x070A-P 2.1-A100-D 235120 700 1140 89 700 1140
38 27/20 11,2 6,1 5,4 2 x070A-P 2.1-A100-D 265120 700 1540 60 700
1250 31 23/15 11,2 6,0 5,1 2 x070A-P 2.1-A150-D 309120 700 1590 57
700 1250 31 22/14 11,2 5,9 5,1 2 x070A-P 2.1-A200-D 309120 700 1220
83 700 1220 33 26/18 11,2 6,1 5,4 2 x070A-P 2.1-F100-D 294120 700
1540 60 700 1250 31 23/15 11,2 6,0 5,1 2 x070A-P 2.1-F150-D 309120
700 1590 57 700 1250 31 22/14 11,2 5,9 5,1 2 x070A-P 2.1-F200-D
309
120 700 860 109 700 860 66 35/27 11,5 6,0 5,7 070C-P 2.1-W100-D
176120 700 1540 60 700 910 59 23/15 11,5 6,0 5,1 070C-P 2.1-W150-D
191120 700 1050 95 700 1050 44 30/22 11,5 6,1 5,5 070C-P 2.1-W150-D
235120 700 1590 57 700 1010 48 23/14 11,5 5,9 5,1 070C-P 2.1-W200-D
221120 700 1140 89 700 1140 38 28/20 11,5 6,1 5,4 070C-P 2.1-W200-D
265120 700 1220 83 700 1050 44 27/19 11,5 6,1 5,4 070C-P 2.1-A100-D
235120 700 1140 89 700 1140 38 28/20 11,5 6,1 5,4 070C-P 2.1-A100-D
265120 700 1540 60 700 1250 31 23/15 11,5 6,0 5,1 070C-P 2.1-A150-D
309120 700 1590 57 700 1250 31 23/14 11,5 5,9 5,1 070C-P 2.1-A200-D
309120 700 1220 83 700 1220 33 27/19 11,5 6,1 5,4 070C-P 2.1-F100-D
294120 700 1540 60 700 1250 31 23/15 11,5 6,0 5,1 070C-P 2.1-F150-D
309120 700 1590 57 700 1250 31 23/14 11,5 5,9 5,1 070C-P 2.1-F200-D
309
120 1380 1380 120 1380 1380 100 43/33 23,0 11,6 11,6 2 x070C-P
2.1-W200-D 132120 1380 1380 120 1380 1380 100 43/33 23,0 11,6 11,6
2 x070C-P 2.1-A100-D 132120 1400 2020 98 1400 1570 80 31/23 23,0
12,1 11,1 2 x070C-P 2.1-A150-D 154120 1380 2360 86 1380 1380 100
28/19 23,0 12,2 10,8 2 x070C-P 2.1-A200-D 132120 1400 2110 95 1400
1570 80 30/22 23,0 12,1 11,0 2 x070C-P 2.1-A200-D 154120 1400 1510
116 1400 1510 86 40/30 23,0 11,7 11,5 2 x070C-P 2.1-F100-D 147120
1400 2020 98 1400 1570 80 31/23 23,0 12,1 11,1 2 x070C-P 2.1-F150-D
154120 1400 2440 83 1400 1570 80 27/19 23,0 12,2 10,7 2 x070C-P
2.1-F200-D 154
Fig. 5.4: Selection list with LAF071
in preparation
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 35
5. Selection lists
Vmax FdN Fmax vFmax Fvmax FSO ED tA mM PDC Motor type Controller
OFm/min N N m/min N N % ms kg kW LAF type DDS %
45 1000 2140 31 1000 1780 32 9/7 19.0 3.1 121A-F 2.1-W050-D
16945 1000 2200 30 1000 2000 25 9/6 19.0 3.1 121A-F 2.1-W100-D
19445 1000 2140 31 1000 2000 25 9/7 19.0 3.1 121A-F 2.1-A050-D
19445 1000 2200 30 1000 2000 25 9/6 19.0 3.1 121A-F 2.1-A100-D
19445 1000 2140 31 1000 2000 25 9/7 19.0 3.1 121A-F 2.1-F050-D
19445 1000 2200 30 1000 2000 25 9/6 19.0 3.1 121A-F 2.1-F100-D
194
45 2000 3570 35 2000 2240 80 10/8 38.0 6.4 2 x121A-F 2.1-W100-D
10645 2000 2950 39 2000 2950 46 12/10 38.0 6.5 2 x121A-F 2.1-W100-D
13845 2000 4400 30 2000 3370 35 9/6 38.0 6.2 2 x121A-F 2.1-W150-D
15945 2000 3570 35 2000 3570 31 10/8 38.0 6.4 2 x121A-F 2.1-W150-D
16945 2000 4400 30 2000 3830 27 9/6 38.0 6.2 2 x121A-F 2.1-W200-D
18445 2000 3940 33 2000 3940 26 10/7 38.0 6.3 2 x121A-F 2.1-W200-D
19145 2000 4280 31 2000 3570 31 9/7 38.0 6.2 2 x121A-F 2.1-A100-D
16945 2000 3940 33 2000 3940 26 10/7 38.0 6.3 2 x121A-F 2.1-A100-D
19145 2000 4400 30 2000 4000 25 9/6 38.0 6.2 2 x121A-F 2.1-A150-D
19445 2000 4400 30 2000 4000 25 9/6 38.0 6.2 2 x121A-F 2.1-A200-D
19445 2000 4280 31 2000 4000 25 9/7 38.0 6.2 2 x121A-F 2.1-F100-D
19445 2000 4400 30 2000 4000 25 9/6 38.0 6.2 2 x121A-F 2.1-F150-D
194
60 1000 1770 48 1000 1460 47 14/11 19.0 3.4 121A-E 2.1-W050-D
14960 1000 2400 39 1000 1820 30 11/8 19.0 3.2 121A-E 2.1-W100-D
19360 1000 2110 43 1000 2000 25 12/9 19.0 3.3 121A-E 2.1-W100-D
21760 1000 2400 39 1000 2000 25 11/8 19.0 3.2 121A-E 2.1-W150-D
21760 1000 1770 48 1000 1770 32 14/11 19.0 3.4 121A-E 2.1-A050-D
18660 1000 2400 39 1000 2000 25 11/8 19.0 3.2 121A-E 2.1-A100-D
21760 1000 1770 48 1000 1770 32 14/11 19.0 3.4 121A-E 2.1-F050-D
18660 1000 2400 39 1000 2000 25 11/8 19.0 3.2 121A-E 2.1-F100-D
217
60 2000 4770 39 2000 2410 69 11/8 38.0 6.5 2 x121A-E 2.1-W150-D
12160 2000 2920 53 2000 2920 47 16/13 38.0 7.0 2 x121A-E 2.1-W150-D
14960 2000 4800 39 2000 2760 53 11/8 38.0 6.5 2 x121A-E 2.1-W200-D
13960 2000 3240 51 2000 3240 38 14/12 38.0 6.9 2 x121A-E 2.1-W200-D
16760 2000 3540 48 2000 2920 47 14/11 38.0 6.8 2 x121A-E 2.1-A100-D
14960 2000 3240 51 2000 3240 38 14/12 38.0 6.9 2 x121A-E 2.1-A100-D
16760 2000 4770 39 2000 3680 30 11/8 38.0 6.5 2 x121A-E 2.1-A150-D
19560 2000 4800 39 2000 3680 30 11/8 38.0 6.5 2 x121A-E 2.1-A200-D
19560 2000 3540 48 2000 3540 32 14/11 38.0 6.8 2 x121A-E 2.1-F100-D
18660 2000 4770 39 2000 3680 30 11/8 38.0 6.5 2 x121A-E 2.1-F150-D
19560 2000 4800 39 2000 3680 30 11/8 38.0 6.5 2 x121A-E 2.1-F200-D
195
100 1000 2440 57 1000 1170 73 19/13 19.0 3.5 121A-D 2.1-W100-D
122100 1000 1690 79 1000 1690 35 24/19 19.0 3.9 121A-D 2.1-W100-D
183100 1000 2700 49 1000 1910 27 18/12 19.0 3.4 121A-D 2.1-W150-D
214100 1000 2440 57 1000 2000 25 19/13 19.0 3.5 121A-D 2.1-W150-D
228100 1000 2700 49 1000 2000 25 18/12 19.0 3.4 121A-D 2.1-W200-D
228100 1000 2440 57 1000 2000 25 19/13 19.0 3.5 121A-D 2.1-A100-D
228100 1000 2700 49 1000 2000 25 18/12 19.0 3.4 121A-D 2.1-A150-D
228100 1000 2440 57 1000 2000 25 19/13 19.0 3.5 121A-D 2.1-F100-D
228100 1000 2700 49 1000 2000 25 18/12 19.0 3.4 121A-D 2.1-F150-D
228
100 2000 4570 61 2000 2060 94 20/14 38.0 7.2 2 x121A-D
2.1-W200-D 107100 2000 2630 91 2000 2630 58 30/24 38.0 8.2 2
x121A-D 2.1-W200-D 138100 2000 2900 86 2000 2350 72 27/22 38.0 8.1
2 x121A-D 2.1-A100-D 122100 2000 2630 91 2000 2630 58 30/24 38.0
8.2 2 x121A-D 2.1-A100-D 138100 2000 4030 70 2000 3020 44 21/16
38.0 7.5 2 x121A-D 2.1-A150-D 161100 2000 4880 57 2000 2490 65
19/13 38.0 7.1 2 x121A-D 2.1-A200-D 130100 2000 4220 67 2000 3020
44 21/15 38.0 7.4 2 x121A-D 2.1-A200-D 161100 2000 2900 86 2000
2900 48 27/22 38.0 8.1 2 x121A-D 2.1-F100-D 153100 2000 4030 70
2000 3020 44 21/16 38.0 7.5 2 x121A-D 2.1-F150-D 161100 2000 4880
57 2000 3020 44 19/13 38.0 7.1 2 x121A-D 2.1-F200-D 161
Fig. 5.5: Selection list with LAF121A
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 36
5. Selection lists
Vmax
FdN
Fmax
vFmax
Fvmax
FSO
ED tA m
M P
DC Motor type Controller OF
m/min N N m/min N N % ms kg kW LAF type DDS %
45 2000 2780 37 2000 2230 80 13/9 35.0 5.1 121C-B 2.1-W050-D
11045 2000 4830 17 2000 2230 80 9/5 35.0 4.5 121C-B 2.1-W100-D
11045 2000 3270 32 2000 3270 37 11/8 35.0 5.0 121C-B 2.1-W100-D
16545 2000 4830 17 2000 3930 26 9/5 35.0 4.5 121C-B 2.1-W150-D
20745 2000 4130 24 2000 4130 23 10/6 35.0 4.7 121C-B 2.1-W150-D
22045 2000 5000 6 2000 4000 25 9/4 35.0 4.1 121C-B 2.1-W200-D 21245
2000 4500 20 2000 4500 20 9/6 35.0 4.6 121C-B 2.1-W200-D 24845 2000
2780 37 2000 2780 52 13/9 35.0 5.1 121C-B 2.1-A050-D 13845 2000
4830 17 2000 4000 25 9/5 35.0 4.5 121C-B 2.1-A100-D 21245 2000 5000
15 2000 4000 25 9/5 35.0 4.4 121C-B 2.1-A150-D 21245 2000 2780 37
2000 2780 52 13/9 35.0 5.1 121C-B 2.1-F050-D 13845 2000 4830 17
2000 4000 25 9/5 35.0 4.5 121C-B 2.1-F100-D 21245 2000 5000 15 2000
4000 25 9/5 35.0 4.4 121C-B 2.1-F150-D 212
45 4000 5560 37 4000 4170 92 13/9 70.0 10.3 2 x121C-B 2.1-W150-D
10345 4000 4460 43 4000 4460 80 16/12 70.0 10.6 2 x121C-B
2.1-W150-D 11045 4000 8070 25 4000 4170 92 10/7 70.0 9.4 2 x121C-B
2.1-W200-D 10345 4000 5020 40 4000 5020 63 14/10 70.0 10.5 2
x121C-B 2.1-W200-D 12445 4000 5560 37 4000 4460 80 13/9 70.0 10.3 2
x121C-B 2.1-A100-D 11045 4000 5020 40 4000 5020 63 14/10 70.0 10.5
2 x121C-B 2.1-A100-D 12445 4000 7860 26 4000 5810 47 10/7 70.0 9.5
2 x121C-B 2.1-A150-D 14545 4000 9660 17 4000 4750 71 9/5 70.0 8.9 2
x121C-B 2.1-A200-D 11745 4000 8260 24 4000 5810 47 10/6 70.0 9.4 2
x121C-B 2.1-A200-D 14545 4000 5560 37 4000 5560 52 13/9 70.0 10.3 2
x121C-B 2.1-F100-D 13845 4000 7860 26 4000 5810 47 10/7 70.0 9.5 2
x121C-B 2.1-F150-D 14545 4000 9660 17 4000 5810 47 9/5 70.0 8.9 2
x121C-B 2.1-F200-D 145
60 2000 3550 41 2000 2100 91 14/10 35.0 5.3 121C-C 2.1-W100-D
10460 2000 2630 52 2000 2630 58 18/13 35.0 5.6 121C-C 2.1-W100-D
13260 2000 5000 23 2000 2940 46 12/7 35.0 4.7 121C-C 2.1-W150-D
14960 2000 3380 43 2000 3380 35 15/10 35.0 5.3 121C-C 2.1-W150-D
17660 2000 5000 23 2000 3350 36 12/7 35.0 4.7 121C-C 2.1-W200-D
17460 2000 3720 39 2000 3720 29 14/9 35.0 5.2 121C-C 2.1-W200-D
19860 2000 4040 35 2000 3380 35 13/9 35.0 5.1 121C-C 2.1-A100-D
17660 2000 3720 39 2000 3720 29 14/9 35.0 5.2 121C-C 2.1-A100-D
19860 2000 5000 23 2000 4000 25 12/7 35.0 4.7 121C-C 2.1-A150-D
21760 2000 4040 35 2000 4000 25 13/9 35.0 5.1 121C-C 2.1-F100-D
21760 2000 5000 23 2000 4000 25 12/7 35.0 4.7 121C-C 2.1-F150-D
217
60 3990 3990 60 3990 3990 100 22/18 70.0 11.8 2 x121C-C
2.1-W200-D 9960 3990 3990 60 3990 3990 100 22/18 70.0 11.8 2
x121C-C 2.1-A100-D 9960 4000 6410 45 4000 4640 74 15/11 70.0 10.8 2
x121C-C 2.1-A150-D 11560 3990 7770 37 3990 3990 100 13/9 70.0 10.3
2 x121C-C 2.1-A200-D 9960 4000 6770 43 4000 4640 74 14/10 70.0 10.7
2 x121C-C 2.1-A200-D 11560 4000 4430 57 4000 4430 82 20/16 70.0
11.6 2 x121C-C 2.1-F100-D 11060 4000 6410 45 4000 4640 74 15/11
70.0 10.8 2 x121C-C 2.1-F150-D 11560 4000 8080 35 4000 4640 74 13/9
70.0 10.1 2 x121C-C 2.1-F200-D 115
100 2000 4350 44 2000 2080 92 22/13 35.0 5.4 121C-A 2.1-W150-D
104100 2000 2570 86 2000 2570 61 31/23 35.0 6.8 121C-A 2.1-W150-D
128100 2000 5000 29 2000 2180 84 21/12 35.0 4.9 121C-A 2.1-W200-D
109100 2000 2870 79 2000 2870 49 28/20 35.0 6.5 121C-A 2.1-W200-D
144100 2000 3150 73 2000 2570 61 27/19 35.0 6.3 121C-A 2.1-A100-D
128100 2000 2870 79 2000 2870 49 28/20 35.0 6.5 121C-A 2.1-A100-D
144100 2000 4350 44 2000 3280 37 22/13 35.0 5.4 121C-A 2.1-A150-D
168100 2000 5000 29 2000 2920 47 21/12 35.0 4.9 121C-A 2.1-A200-D
147100 2000 4550 39 2000 3280 37 21/13 35.0 5.2 121C-A 2.1-A200-D
168100 2000 3150 73 2000 3150 40 27/19 35.0 6.3 121C-A 2.1-F100-D
160100 2000 4350 44 2000 3280 37 22/13 35.0 5.4 121C-A 2.1-F150-D
168100 2000 5000 29 2000 3280 37 21/12 35.0 4.9 121C-A 2.1-F200-D
168
100 3290 5140 86 3290 3290 100 34/23 70.0 12.5 2 x121C-A
2.1-A200-D 84100 3290 4830 90 3290 3290 100 35/24 70.0 12.7 2
x121C-A 2.1-F150-D 84100 3290 6300 73 3290 3290 100 29/19 70.0 11.8
2 x121C-A 2.1-F200-D 84
Fig. 5.6: Selection list with LAF121C
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 37
Basic combination A)
6. Combination possibilities
Fig. 6.1: Combination with one LAF motor, one drive control unit
and one measuring system
One LAF motor, one drive control unit, one measuring
systemCombination A) is characterized by the following:
• Number of linear motors: 1
• Number of drive control units: 1
• Number of measuring systems: 1 scale / 1 scanning head
• Transducer signal distribution: no
The following basic combinations apply to control with a
SERCOSinterface. For control with an ANALOG interface, only the
basiccombinations A or B are possible.
6. Combination possibilities for linearmotor, drive control unit
and measuringsystem
Based on the required performance data, a suitable number of
linear motorsand drive control units can be combined as specified
in Sections 4 and 5.
Several motors can be arranged mechanically in parallel or in
series per axis.With a mechanically rigid coupling of the
individual motors, only one measur-ing system is required per axis.
If several drive control units are used with onlyone measuring
system, the output signal of the measuring system is distrib-uted
to the individual drive control units. A transducer signal
distribution of thetype DGA 1.2 (voltage output signals) is used
for this purpose.
The maximum number of motors and drive control units per axis is
limited asfollows:
• max. number of LAF motors per drive control unit: 2
• max. number of drive control units per measuring system: 4
Various combination possibilities result in interdependence on
measuringsystems depending on the number of linear motors and drive
control units peraxis. The optimal combination results in close
coordination with the overallmechanical design. The possible basic
combinations are described in thefollowing. The individual basic
combinations can be varied accordingly.
FSLAF1A1M1
Primary part
Linear scale
Secondary part
DDS 2 configured drive control unit
LAFlinear motor
CNC control
SERCOS interface
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 38
6. Combination possibilities
Basic combination B) Two LAF motors, one drive control unit, one
measuring systemCombination B) is characterized by the
following:
• Number of linear motors: 2
• Number of drive control units: 1
• Number of measuring systems: 1 scale / 1 scanning head
• Mechanical motor connection: rigidly coupled
• Transducer signal distribution: no
Fig. 6.2: Combination with two LAF motors, one drive control
unit and one measuringsystem
The following advantages result:
• Good power input with larger guide width
• Power increase compared to basic combination A) possible
The following disadvantages result:
• Different asymmetrical loads cannot be specifically fully
stabilized
• Rigid mechanics required
• Only limited spacing between motors possible
FSLAF2A1M1
Primary part
Linear scale
Secondary part
DDS 2 configured drive contr ol units
Mechanically rigid coupling of LAF
linear motor sCNC contr ol
SERCOS interface
Advantages
Disadvantages
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 39
Basic combination C)
6. Combination possibilities
Two LAF motors, two drive control units, one measuring
systemCombination C) is characterized by the following:
• Number of linear motors: 2
• Number of drive control units: 2
• Number of measuring systems: 1 scale / 1 scanning head
• Mechanical motor connection: rigidly coupled
• Transducer signal distribution: yes
Fig. 6.3: Combination with two LAF motors, two drive control
units and one measuringsystem
The following advantages result:
• Good power input with larger guide width
• Power increase compared to basic combination B)
• Only one measuring system required
The following disadvantages result:
• Different asymmetrical loads cannot be specifically fully
stabilized
• Rigid mechanics required
• Only limited spacing between motors possible
FSLAF2A2M1DGA transducersignal distribution
Primary part
Linear scale
Secondary part
DDS 2 configured drive control units
Mechanically rigid coupling of LAF
linear motor sCNC contr ol
SERCOS interface
Advantages
Disadvantages
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 40
Basic combination D)
6. Combination possibilities
Two LAF motors, two drive control units, two measuring systems
(gantry axis)
Combination D) is characterized by the following:
• Number of linear motors: 2
• Number of drive control units: 2
• Number of measuring systems: 2 scales / 2 scanning heads
• Mechanical motor connection: non-rigidly coupled
• Transducer signal distribution: no
FSLAF2A2M2
Primarypart
Linear scale
Secondarypart
DDS 2 configured drive control units
Mechanically non-rigidcoupling of LAF
linear motor sCNC contr ol
SERCOS interface
Linear scale
Fig. 6.4: Combination with two LAF motors, two drive control
units and two measuringsystems
The following advantages result:
• Asymmetrical loads are fully stabilized independently of each
other
• Larger spacing between motors possible
• Good power input with larger guide width
• Power increase compared to basic combination B)
• No rigid mechanics required
The following disadvantages result:
• High precision of measuring systems themselves and to each
other re-quired (max. 5 µm/m)
• Two measuring systems required
• Increased costs for wiring
Advantages
Disadvantages
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 41
Basic combination E)
6. Combination possibilities
Combination E) is characterized by the following:
• Number of linear motors: >2
• Number of drive control units: >2
• Number of measuring systems: 1 scale / 1 scanning head
• Mechanical motor connection: rigidly coupled
• Transducer signal distribution: yes
FSLAFxAxM1
Max. 4amplifier
Addl. digital drivers
Max. 4 x 2LAF Linear
motors
DGAtransducer
signal distribution
Primary part
Linear scale
Secondarypart
DDS 2 configured drive control unitsMechanically rigidcoupling
of LAF
linear motorsCNC control
SERCOS interface
Fig. 6.5: Combination with several LAF motors, several drive
control units and onemeasuring system
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 42
7. Measuring systems
7. Measuring systems
7.1. General informationA measuring system is required for
position and speed detection. Linear scaleson the basis of
photo-electric scanning are available from various manufactur-ers
for this purpose.
These incrementally operating systems provide two signals
shifted by 90° withthe corresponding signal period. These are read
into the evaluation electronicsin the drive control unit and
intermediately interpolated to achieve a higheraccuracy and
resolution.
An absolute dimensional reference is produced for an incremental
measuringsystem by evaluating a reference mark on the scale.
Therefore, the referencemark must be approached first after
switching on the machine.
To avoid long approach paths with only one reference mark on the
scale, linearscales are offered with distance-coded reference
marks.
INDRAMAT drive control units are currently unable to
evaluatedistance-coded reference marks when operated with linear
motors.
Absolute measuring linear scales are currently being tested and
will begenerally available from 1/96.
The measuring system is not available from INDRAMAT. It must be
providedand installed by the machine manufacturer itself.
7.2. Selection
Depending on the respective application, linear scales are
offered
• in encapsulated and open designs, and
• in various precision classes and
• with different signal periods.
Open measuring systems are recommended for applications
requiring maxi-mum precision and control quality. In contrast to
encapsulated systems, openlinear scales are characterized by
contactless operation.
This results in the following advantages:
• no additional guidance by the measuring system is present in
the axis
• no friction in the measuring system seals
These are opposed by the following disadvantages:
• sealing may need to be carried out by the machine
manufacturer
• adjustment of the scanning device must be carried out by the
machinemanufacturer during mounting on the machine.
For applications in the field of machine tools (MT), e.g.,
high-speed machining(HSC) and grinding machining, encapsulated
measuring systems with thecorresponding rigid coupling are
completely adequate.
Evaluation
Reference mark
Distance-codedreference marks
Open measuringsystems
Encapsulatedmeasuring systems
Absolute measuringsystems
Delivery status
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 43
7. Measuring systems
The condition for the compatibility of the linear scale with the
INDRAMAT drivecontrol units is an interface with a sinusoidal
output signal with 11 µAss or 1 Vss.
Compatibility
Designation Unit min. typ. max.
Supply voltage V 4.75 5.0 5.25
Supply current mA 150
Ie1 ; Ie2 µAss 7 16
Ie0 µA 2 8
Ie1 ° el. 0
Ie2 ° el. 90
Signal shape Approx. sinusoidal
Max. input frequency kHz 150
Interpolation of signal periods 2048 fold
Mea
surin
gsy
stem
sup
ply
Incr
emen
tal o
utpu
t sig
nals
Phase angle
Signal current
Fig. 7.1: Specification of the interface for linear scales with
sinusoidal current outputsignals 11 µAss
Designation Unit min. typ. max.
Supply voltage V 4.75 5.0 5.25
Supply current mA 150
A, B Vss
1
R V 0,4
A °el. 0
B °el. 90
Signal shape Approx. sinusoidal
Max. input frequency kHz 400
Interpolation of signal periods 2048 fold
Mea
surin
gsy
stem
sup
ply
Incr
emen
tal o
utpu
t sig
nals
Fig. 7.2: Specification of the interface for linear scales with
sinusoidal voltage outputsignals 1 Vss
Phase angle
Signal current
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 44
To achieve a high linear scale resolution, an interpolation of
the sinusoidalinput signal is carried out in the drive control unit
with a factor of 2.048. In thisway, a resolution (measuring step)
of up to approximately 2 nm can be realizeddepending on the signal
period of the linear scale. However, this resolutiondoes not match
the positioning exactness achievable with the measuringsystem!
The measuring system resolution does not match the
positioningexactness achievable with the measuring system.
Measuring systems are selected under observance of the following
criteria:
• Maximum traverse range (this determines the required measuring
length)
• Maximum installation length
• Positioning exactness
• Maximum traversing speed (limited by the mechanically
permissible speedor permissible input frequency of the evaluation
electronics in the drivecontrol unit)
• Required protection type
• Observance of external influences, such as vibration or shock
loading
Please use the special documentation of the linear scale
supplier to make aselection.
The positioning exactness can be approximately determined from
the scaleincrement or signal period of the linear scale as
follows:
7. Measuring systems
Max. speed(maximum input
frequency ofevaluation electronics)
vmax ≤ fin • tp • 0.06
vmax Maximum traversing speed in m/minfin Maximum input
frequency of the evaluation
electronics in kHzfor linear scales with– current output
signals: 150 kHz– voltage output signals: 400 kHz
tp Signal period in µm
Appropriate cables are available from INDRAMAT for the
electrical connectionbetween the scale output and the evaluation
electronics input. See Section 9.6for information.
tp
Signal period in µm∆s Positioning exactness in µm
(7.1)
(7.2)
∆s ≤ tp 20
Positioning exactness(absolute exactness)
Selection information
Measuring systemresolution
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 45
7. Measuring systems
The following measuring systems from the firm Heidenhain are
recom-mended:
Model designation for linear scale with
Designation: Current output signals Voltage output signals
11 µASS 1VSS
Open measuring system LIF 101 LIF 181(Tp=4 µm, vmax=36 m/min)
(Tp=4 µm, vmax=96 m/min)
Encapsulated measuring LS 406 LS 486system (Tp=20 µm, vmax=120
m/min) (Tp=20 µm, vmax=120 m/min)
Recommendations
Linear scale with Transducer signal distribution
Voltage output signals 1 VSS DGA 1.2
7.3. Transducer signal distribution for operation ofseveral
drives on one linear scale
For axes with several linear motors, several drive control units
and only onecommon length measuring system, the output signals of
the measuringsystem are distributed. Transducer signal distribution
cards are available forthis purpose.
Up to 4 drive control units can be connected per transducer
signal distribution.
APVERLINSPAN
~ Output signals to drive control unit
~ Output signals to drive control unit
Voltage input signals from linear scalePower supply DGA
(in a transducer cable)
~ Output signals todrive control unit + DGA 1.2
X4 X3
X2
X5 X6
X1
Output signals for monitoring purposes
Fig. 7.3: Transducer signal distribution for linear scales with
voltage output signals (1 Vss)
Pre-fabricated INDRAMAT cables are available for the
connections
• from the measuring system to the transducer signal
distribution and
• from the transducer signal distribution to the drive control
unit.
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 46
7. Measuring systems
7.4. Transducer signal amplification for long cablelengths
When using linear scales with current output signals, a
transducer signalamplification box DVG 1.1 must be used for cable
lengths greater than 30 m.With this transducer signal amplification
a maximum total cable length of 80m can be realized.
When using linear scales with voltage output signals, a maximum
cable lengthof 50 m can be realized without transducer signal
amplification. A transducersignal amplification to increase the
cable length is currently only available inthe form of the
transducer signal distribution box DGA 1.2. The maximumcable length
is then 150 m.
Linear scales withcurrent output signals
Linear scales withvoltage output signals
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 47
8. Design information
LAF asynchronous linear motors are modular motors. They consist
of aprimary and secondary part, which are to be integrated in the
machine by themachine manufacturer (OEM).
Due to the fact that the motors must be an integral part of the
entire machine,a few important points must be observed with regard
to the design incomparison to conventional electromechanical linear
axes (e.g., ball screwdrives). The following section provides
information on:
• Possibilities of mechanical motor integration
• Installation dimensions and production tolerances
• Guides
• Mounting measuring system
• Sealing off against dirt
• Operation of vertical axes
• Motor cooling
• Braking of an axis in case of EMERGENCY STOP
• Set-up height and environmental conditions
8.1. Motor arrangementAfter specifying
• the type and number of the primary parts
• the type and length of the secondary parts
• the type and number of drive control units and
• the suitable system configuration
as described in Chapters 3, 4, 5 and 6, different possibilities
for motorarrangement within the machine design result, particularly
for axes withseveral motors mechanically connected in parallel.
Possible arrangementsare shown in the following.
8. Design information
Possible motorarrangement on an
axis of motion
Fig. 8.1: One motor per axis
MZM1H
Measur-ingsystem
Carriage Cooling plate for primary part
Primary part
Machine bedSecondary partCooling plate for secondary part
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 48
Fig. 8.2: Two motors per axis
8. Design information
Fig. 8.3: Two motors per axis, vertical arrangement
MZM2V1
Carriage
Cooling plate for primary part
Primary partSecondary part
Cooling plate for secondary part
Machine bed
Measuring system
Advantage:
Disadvantage:
• Low deflection
• High installation height
MZM2H
Advantage:
Disadvantage:
Measuringsystem
Carriage Cooling plate for primary part
Primary part
Machine bed Secondary partCooling plate for secondary part
• Low installation height
• Rigid design required• Measuring system arrangement closest to
center as possible difficult• Deflection due to force of
attraction
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 49
8. Design information
Fig. 8.4: Two motors per axis, vertical arrangement
Fig. 8.5: Two motors per axis, vertical arrangement
MZM2V2
Carriage
Machine bedCooling platefor secondary part
Secondary part
Cooling platefor primary part Primary part
Measuringsystem
Advantage:
Disadvantages:
• High rigidity• No tipping torque on guide
• High installation space• Measuring system arrangement among
motors difficult
MZM2V3
Carriage Cooling platefor primary part
Primary part
Measuringsystem
Machine bedCooling platefor secondary part Secondary part
Advantage:
Disadvantage:
• High rigidity
• High installation space• Tipping torque on guide• Mounting of
primary part difficult
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 50
8.2. Basic mechanical conditions
8.2.1. Machine kinematics
To ensure a high acceleration capacity, the weight of the moved
machineelements must be reduced to a minimum. This can be achieved
by usingmaterials with a low specific weight (e.g., aluminum or
compound materials)and through design measures (e.g., framework
design).
If it is necessary to double several axes kinematically to
produce pathmovements (e.g., compound table), then the reactions of
the individual axesto each other must be minimized. Therefore,
kinematic chains are to beavoided on machines with several axes.
Here axis configurations with longprojection lengths that change
during operation are particularly critical.
8.2.2. Mechanical rigidity
The rigidity of the individual mechanical components within a
machine largelydetermines, in conjunction with the weight and the
resulting resonancefrequency, the achievable quality of the
machine. Here a differentiation ismade between the rigidity
• of the machine baseframe
• of axes located mechanically downstream in the case of
kinematic couplingof axes
• of the axis of motion.
Due to reaction forces, consisting of acceleration, braking and
process forces,from moving axes, the machine baseframe is
stimulated to oscillate and issubjected to a deformation.
8. Design information
Machine baseframer
m • a cbaseframe
Example
a
∆s m
FBVERFOR
Fig. 8.6: Deformation of machine baseframe as a result of the
reaction force duringacceleration
cbaseframe = 1000 N/µmm = 500 kga = 10 m/s2
Deformation of the machine frame:
∆s =
∆s = 5 µm
LSA Control S.L. www.lsa-control.com [email protected]
(+34) 960 62 43 01
-
• DOK-MOTOR*-LAF********-AWP1-EN-E1,44 • 02.97 51
8. Design information
Rigidity ofkinematicallycoupled axes
Rigidity of theaxis of motion
With regard to the rigidity of kinematically coupled axes, it
must be noted thatthe flexibility of the axes (both the mechanical
flexibility and the componentresulting from the control technique)
are added together.
The rigidity of an axis of motion is determined by the overall
mechanicaldesign. The goal during the design process must be to
design of axis ascompactly as possible. To ensure sufficient
control quality, the lowest naturalfrequency occurring within the
axis should not exceed approx. 200 Hz. Foraxes with non-constant
forces of weight (e.g., workpieces to be machineddifferently), the
natural frequencies also change so that a reduction in thefrequency
f ~ 1/m occurs as the force of weight increases.
8.2.3. Motors arranged in parallel
If motors arranged in parallel are used with an axis of motion,
then this can beoperated with
• a common measuring system (Fig. 8.7) or
• with two separate measuring systems (Fig. 8.8: gantry
axis).
Which of the arrangements represents a reasonable technical and
economi-cal solution is largely dependent on the rigidity of the
connecting elementsbetween the individual motors and their
installation symmetry with the axis.
Fig. 8.7: Axis with one measuring system
Axis with onemeasuring system
FSLAF2A2M1
DGA trans-ducer signaldistribution
Primary part
Linear scale
Secondarypart
DDS 2 configured drive control units
CNC contr ol
SERCOS interface
Mechanicall y rigidcoupling of LAF
linear motors
Effect of non-symmetrical loads
If the control of both motors is supplied with the same actual
position value (i.e.,only one common measuring system) and the
control and axis parameters inthe drive control units are
identical, then both motors are subjected to the sameforce. In the
case of a non-symmetrical load (e.g., non-symmetrical
weightdistribution