Embed Size (px)
Citation preview
cenidet
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Mecánica
TESIS DE MAESTRÍA EN CIENCIAS
Obtención de Arreglos Modales de Pesos para el Balanceo de Rotores, a Partir de Matrices de Coeficientes de Influencia.
presentada por
José Angel Ruiz Jiménez Ing. Electromecánico por el I. T. de Minatitlán
como requisito para la obtención del grado de: Maestría en Ciencias en Ingeniería Mecánica
Director de tesis: Dr. Jorge Enrique Aguirre Romano
Co-Director de tesis:
Dr. Enrique Simón Gutiérrez Wing Cuernavaca, Morelos, México. 06 de Noviembre de 2007

cenidet
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Mecánica
TESIS DE MAESTRÍA EN CIENCIAS
Obtención de Arreglos Modales de Pesos para el Balanceo de Rotores, a Partir de Matrices de Coeficientes de Influencia.
presentada por
José Angel Ruiz Jiménez Ing. Electromecánico por el I. T. de Minatitlán
como requisito para la obtención del grado de:
Maestría en Ciencias en Ingeniería Mecánica
Director de tesis: Dr. Jorge Enrique Aguirre Romano
Co-Director de tesis:
Dr. Enrique Simón Gutiérrez Wing
Jurado: Dr. José María Rodríguez Lelis – Presidente
M.C. Eladio Martínez Rayón – Secretario Dr. Jorge Colín Ocampo – Vocal
Dr. Jorge Enrique Aguirre Romano – Vocal Suplente
Cuernavaca, Morelos, México. 06 de Noviembre de 2007
DEDICATORIA
A mi madre
Con amor, respeto y admiración.
AGRADECIMIENTOS
A dios: por acompañarme y ayudarme siempre.
A mi madre: por el amor, la confianza y el apoyo que siempre me brinda. Eres la persona más
importante en mi vida y nunca podré pagar todo lo que haces por mí.
A Verona: por su amor, la paciencia, la confianza y por estar siempre conmigo. Tú me
impulsas a dar lo mejor de mí cada día.
A mis abuelos: Epifanio y Juanita (e. p. d.), por ser un padre y una madre para mi, siempre los
llevo en mi corazón.
A mis tíos: Juan, Marco, Maria del Rosario, Epifanio, Héctor, Leodegario y José, por el cariño
y la confianza que me tienen.
A Ernesto Cancino y Fabio Aguirre: por su amistad, por los momentos compartidos y las
tardes de sonrisas y pláticas interminables.
A Rubén Saldivar: por el apoyo y amistad que siempre me brinda.
A la familia Soto Manuet: por abrirme las puertas de su casa y por su amistad sincera.
Al Dr. Jorge Enrique Aguirre Romano por dirigir el presente trabajo y por contribuir a
desarrollarme profesionalmente. Me siento orgulloso de haber trabajado con usted, mis
respetos hoy y siempre.
Al Dr. Enrique Simón Gutiérrez Wing por el apoyo y comentarios brindados durante el
desarrollo de la tesis.
A los miembros del jurado revisor: Dr. José María Rodríguez, M.C. Eladio Martínez y Dr.
Jorge Colin, por los comentarios para mejorar el presente trabajo.
A los profesores del departamento de ingeniería mecánica: Dr. Baltazar, Dr. Wing, Dr. Colin,
Dr. Bedolla, M.C. Claudia y el M.C. Eladio, por los conocimientos y experiencias
compartidas. Una mención especial al Dr. Dariusz y al Dr. José María porque son un ejemplo
de lucha, entrega y dedicación.
A mis compañeros: Efraín, Jorge Daniel, Salvador, Daniel, Marco, José Manuel y Melvin, por
su apoyo a lo largo de toda la maestría.
Al Instituto de Investigaciones Eléctricas por permitirme desarrollar la presente tesis en sus
instalaciones. Gracias al personal de la gerencia de turbomaquinaria por el trato amable que
siempre me brindaron.
Al Consejo Nacional de Ciencia y Tecnología (CONACYT) por el apoyo económico brindado
durante la realización de mis estudios.
RESUMEN
En la práctica se conocen dos métodos para el balanceo de rotores: el método de coeficientes
de influencia que se basa en la respuesta del rotor para calcular los pesos de balanceo y el
método de balanceo modal que requiere del conocimiento de las formas modales del rotor para
obtener los arreglos modales de pesos. Los pesos que se obtienen por el método de
coeficientes de influencia sólo reducen la vibración en determinadas frecuencias; en contraste,
los arreglos modales de pesos tienen la ventaja de reducir la vibración de modos específicos en
todo el intervalo de frecuencias.
En el presente trabajo de investigación se tomaron conceptos de ambos métodos de balanceo
para calcular los arreglos modales de pesos. El método que se propone calcula arreglos
modales de pesos a partir de matrices completas e incompletas de coeficientes de influencia.
Como parte del procedimiento se toma la forma que adopta el rotor en la frecuencia
seleccionada para obtener un arreglo de pesos inicial, si dicho arreglo genera en todas las
frecuencias la misma curva de deflexión entonces se considera como un arreglo modal de
pesos y la curva de deflexión resultante como la forma modal, de lo contrario se recalcula la
forma inicial hasta que la condición anterior se cumpla.
Con base en el algoritmo propuesto para el método desarrollado en este trabajo, se realizó un
programa de cómputo con el cual se obtuvieron los arreglos modales de pesos para los
siguientes casos que son similares a condiciones prácticas: selección de frecuencias no
resonantes, máquinas con modos de vibración cercanos y máquinas con la influencia de un
modo superior.
ABSTRACT
Rotor balancing is conducted by one of two known methods: the influence coefficient method
that calculates the balancing weights on the basis of the rotor response and the modal
balancing method, which calculates modal weight sets on the basis of knowledge of the modal
shapes of the rotor. The weights obtained through the first method reduce vibration at the
specified frequencies; in contrast, the modal weights sets have the advantage of reducing the
vibration of specific modes in the whole speed range.
In the present research work concepts were taken from both balancing methods to calculate the
modal weight sets. The method proposed to do this, calculates modal weight sets from
complete and incomplete influence coefficients matrices. The procedure considers the
deflection curve adopted by the rotor at the selected frequency to obtain an initial weight set, if
this set generates for all the frequencies the same deflection curve, the weight set will be
considered modal and the resulting deflection curve as a modal shape, otherwise this
deflection curve is used to recalculate another weight set until the previous condition is
fulfilled.
The proposed method is presented as an algorithm and a computer program was elaborated
with which modal weight sets were obtained for the following cases which are similar to
practical conditions: selection of non resonant frequencies, machines with close natural
frequency and machines with the influence of a higher frequency mode.
CONTENIDO
LISTA DE FIGURAS.................................................................................................................i
LISTA DE TABLAS................................................................................................................ iii
LISTA DE SIMBOLOS ...........................................................................................................iv
Capítulo 1 Introducción.
1.1 Introducción.................................................................................................................1
1.2 Planteamiento del problema. .......................................................................................2
1.3 Objetivo. ......................................................................................................................4
1.4 Alcances. .....................................................................................................................4
1.5 Estado del arte. ............................................................................................................5
Capítulo 2 Conceptos básicos. 2.1 Introducción...............................................................................................................13
2.2 Matriz completa de coeficientes de influencia. .........................................................13
2.3 Matriz incompleta de coeficientes de influencia. ......................................................15
2.4 Balanceo por coeficientes de influencia. ...................................................................15
2.5 Balanceo por multiplicadores. ...................................................................................18
2.6 Modo de vibración.....................................................................................................19
2.7 Forma modal..............................................................................................................19
2.8 Arreglos modales de pesos. .......................................................................................21
2.9 Contribuciones modales. ...........................................................................................23
2.10 Criterio de confiabilidad modal.................................................................................25
2.11 Balanceo modal. ........................................................................................................25
Capítulo 3 Arreglos modales de pesos a partir de matrices completas de coeficientes de influencia.
3.1 Introducción...............................................................................................................28
3.2 Consideraciones hechas en el cálculo de los arreglos modales de pesos. .................28
3.3 Primer método para obtener los arreglos modales de pesos......................................29
3.4 Análisis para determinar el parámetro que afecta el cálculo de los arreglos modales de pesos. ....................................................................................................................33
3.5 Descripción del método de los AMP para matrices completas. ................................35
3.6 Discusión. ..................................................................................................................48
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
4.1 Introducción...............................................................................................................51
4.2 Secuencia de las pruebas. ..........................................................................................51
4.3 Caso 1: Condición ideal.............................................................................................55
4.4 Caso 2: Selección de frecuencias fuera de los picos de vibración.............................56
4.5 Caso 3: Modos cercanos. ...........................................................................................58
4.6 Caso 4: Modos superiores. ........................................................................................62
4.7 Discusión. ..................................................................................................................64
Capítulo 5 Arreglos modales de pesos a partir de matrices incompletas de coeficientes de influencia.
5.1 Introducción...............................................................................................................65
5.2 Descripción del método para matrices incompletas. .................................................65
5.3 Factores que afectan el cálculo de los AMP a partir de matrices incompletas..........69
5.4 Aplicación..................................................................................................................69
5.5 Discusión. ..................................................................................................................72
Capítulo 6 Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
6.1 Introducción...............................................................................................................73
6.2 Algoritmo general......................................................................................................73
6.3 Tamaño de las matrices. ............................................................................................80
6.4 Recomendaciones para la programación. ..................................................................82
Capítulo 7 Conclusiones y recomendaciones. 7.1 Conclusiones..............................................................................................................83
7.2 Recomendaciones. .....................................................................................................85
Referencias............................................................................................................................86
Apéndice A Modelo del Turbogenerador Mitsubishi de 350 MW............................................89
Apéndice B Ecuaciones para generar la respuesta del Turbogenerador Mitsubishi de 350 MW...................................................................................................................................................91
Apéndice C Aplicación de los AMP a un modelo con cuatro modos de vibración ..................93
Apéndice D Código de programación del algoritmo general para calcular los AMP ...............96
LISTA DE FIGURAS
Figura 2.1 Sistema rotor soporte a) en estado estacionario b) en su primera forma modal correspondiente a la primer frecuencia natural y c) segunda forma modal que corresponde a la segunda frecuencia natural. .........................................................20
Figura 2.2 Sistema rotor-soporte a) con siete sensores montados y b) factor de forma modal
del primer modo en la posición de los sensores.. ...................................................20 Figura 2.3 Forma modal del primer modo 1ψ , del sistema rotor soporte de la figura 2.2 a)...20 Figura 2.4 Forma de los diagramas de bode de los sensores S1 y S2 al excitar el rotor con un
arreglos modal de pesos..........................................................................................21 Figura 2.5 Diagrama polar de los sensores S1 y S2, que muestran la presencia de un modo de
vibración .................................................................................................................22 Figura 2.6 Diagramas de Bode que muestran a) Contribución de los modos 1 y 2 en el sensor
S1 y b) contribuciones del modo 1 y 2 en el sensor S2. .........................................24 Figura 3.1 Diferencia entre la vibración del modo uno y dos. .................................................30 Figura 3.2 Diagrama de flujo del método de los AMP para matrices completas. ....................37 Figura 3.3 Diagramas de bode de los sensores S1 y S2, que muestran las frecuencias a
seleccionar en el método de los AMP para matrices completas.............................38 Figura 3.4 Diagramas de Bode y polar de la vibración que se genera en el modelo de dos
modos y dos planos de balanceo, a causa del desbalance.......................................45 Figura 3.5 Respuesta de la máquina al colocar el AMP que se obtiene en la primera iteración.
................................................................................................................................46 Figura 3.6 Efectos del AMP de la segunda iteración sobre las vibraciones del segundo modo.
................................................................................................................................46 Figura 3.7 Efecto del AMP final sobre el modelo de dos modos de vibración. .......................47 Figura 4.1 Esquema del modelo del Turbogenerador marca Mitsubishi de 350 MW..............51 Figura 4.2 Carátula del modelo en donde se colocan los pesos para los diferentes rodados de
prueba. ....................................................................................................................52
i

Figura 4.3 Vibración en los sensores del modelo en forma de diagrama de Bode y diagrama
polar. .......................................................................................................................53 Figura 4.4 Diagrama de flujo de la secuencia de las pruebas...................................................54 Figura 4.5 Selección de frecuencias diferentes a los picos de vibración. ................................57 Figura 4.6 Diagramas de Bode de los sensores S1 y S2 con modos cercanos. ........................59 Figura 4.7 Diagrama de Bode de señales de vibración con influencias de un modo superior. 62 Figura 6.1 Diagrama de flujo del Algoritmo para programar el método de los AMP..............74 Figura 6.2 Diagrama de flujo de los datos de entrada. .............................................................75 Figura 6.3 Diagrama de flujo de las ecuaciones para matrices completas de coeficientes de
influencia. ...............................................................................................................75 Figura 6.4 Diagrama de flujo de las ecuaciones para matrices incompletas de coeficientes de
influencia. ...............................................................................................................75 Figura A1 Turbogenerador Mitsubishi de 350 MW.................................................................89 Figura C1 Modelo compuesto por una turbina y un generador eléctrico. ................................93 Figura C2 Diagrama de Bode que muestra el desbalance de la máquina. ...............................93 Figura C3 Eliminación del primer modo de vibración al colocar el AMP correspondiente. ...94 Figura C4 Diagrama de Bode que muestra la eliminación del segundo modo de vibración. ..94 Figura C5 Diagrama de Bode con un sólo pico de vibración que se genera por la eliminación
de tres modos. .........................................................................................................95
ii

LISTA DE TABLAS
Tabla 2.1 Ventajas y desventajas del método de balanceo por coeficientes de influencia........17 Tabla 2.2 Valores de vibración de los sensores S1 y S2 en las diferentes frecuencias………….
seleccionadas. ............................................................................................................22 Tabla 2.3 Factor de forma modal en las diferentes frecuencias seleccionadas. ........................23 Tabla 2.4 Ventajas y desventajas del balanceo modal...............................................................27 Tabla 3.1 Cambio en el factor de forma modal y en la proporción de los pesos de un arreglo
modal, en las iteraciones diferentes iteraciones. .......................................................45 Tabla 4.1 Resultados del caso ideal...........................................................................................55 Tabla 4.2 Resultados de la prueba con dos modos de vibración y diferente separación en las
frecuencias seleccionadas. .........................................................................................57 Tabla 4.3 Resultados para la prueba de dos modos cercanos con frecuencias naturales………..
separadas 10 rpm. ......................................................................................................60 Tabla 4.4 Resultados para la prueba de dos modos de vibración con frecuencias naturales……
separadas por 50 rpm.................................................................................................61 Tabla 4.5 Resultados para la prueba de siete modos y frecuencias naturales cercanas.............61 Tabla 4.6 Resultados para el caso de estudio con un modo superior. .......................................63 Tabla 5.1 Iteraciones del método de los AMP para matrices incompletas al colocar arreglos de
pesos en los rodados de prueba. ................................................................................70 Tabla 5.2 Iteraciones del método de los AMP a partir de matrices incompletas al colocar pesos
individuales en los rodados de prueba.......................................................................71 Tabla 6.1 Tabla de variables que intervienen en el cálculo de los AMP...................................80 Tabla A1 Parámetros modales del plano X en el modelo del Turbogenerador Mitsubishi de….
350 MW.....................................................................................................................90 Tabla A2 Parámetros modales del plano Y en el modelo del Turbogenerador Mitsubishi de…..
350 MW.....................................................................................................................90
iii
LISTA DE SIMBOLOS
Símbolo Descripción α Coeficiente de influencia. ψ Factor de forma modal o forma modal.
Aψ Factor de forma modal de referencia o forma modal de referencia.
Xψ Factor de forma modal a comparar o forma modal a comparar
ϕ Factor de forma modal recalculado.
φ Factor de forma modal de referencia.
δ Delta de Kronecker.
Vo Vibración de la corrida inicial.
V Vibración en la corrida de prueba.
PP Pesos de prueba.
M Multiplicador.
C Contribución modal.
Arn Escalar para el modo r a la frecuencia n.
AMP Arreglo modal de pesos.
VM Vibraciones modales.
VE Vibraciones efecto.
MAC Criterio de confiabilidad modal.
R Radio del plano de balanceo.
RR Relación entre los radios de los planos de balanceo.
rpm Revoluciones por minuto.
[ ]VΔ Matriz de incremento de vibración.
{ }P Vector de pesos de balanceo.
{ }V Vector de vibraciones a compensar.
{ }rU Vector de vibración del modo r.
iv
{ }DU Vector de diferencia de vibración
i Posición o sensor.
j Plano de balanceo.
n Velocidad de giro o frecuencia.
m Número de sensores i por número de velocidades n.
k Número de velocidades n por número de sensores i.
q Rodados de prueba
r Modo de vibración.
a Sensor de referencia del modo r.
b Plano de referencia.
z Modo de referencia
[ ] Matriz.
{ }T Transpuesta del vector columna.
Valor absoluto.
[ ]* Transpuesta conjugada.
[ ]+ Inversa de Moore – Penrose ó Pseudoinversa.
[ ] 1− Inversa de uma matriz cuadrada.
⊗ Producto Kronecker
v
Capítulo 1 Introducción Equation Chapter 1 Section 1 1 Capitulo 1.
1.1 Introducción.
El desbalance es una de las principales causas de vibración en máquinas rotatorias. Puede
generar niveles de vibración elevados que provocan daño en los componentes de la máquina y
desgaste excesivo en chumaceras, sellos y acoplamientos. Los métodos que se han
desarrollado a lo largo de los años para reducir las vibraciones causadas por el desbalance son:
el balanceo por coeficientes de influencia y el balanceo modal. En las últimas décadas, la
posibilidad de conjuntar los métodos para aprovechar sus ventajas se plantea en diferentes
trabajos, como se muestra en el presente capítulo.
1
Capítulo 1 Introducción
1.2 Planteamiento del problema.
En procesos industriales como el de generación de energía eléctrica, extracción del petróleo
entre otros, las máquinas rotativas tienen un desempeño fundamental; un ejemplo se encuentra
en las plantas termoeléctricas, donde los turbogeneradores se encargan de producir la energía
eléctrica que se comercializa. Por la importancia de las máquinas rotatorias es necesario tener
un control estricto sobre su desempeño, por lo cual se monitorean de manera continua ciertos
parámetros críticos como la vibración. El fenómeno de la vibración es provocado por diversos
problemas como: el desbalance del rotor, la falta de alineamiento entre las máquinas,
rodamientos en mal estado y aflojamientos mecánicos; considerándose como la principal
causa el desbalance.
El desbalance se genera por la distribución irregular de la masa del rotor alrededor del eje de
rotación, ocasionando que el centro de masa deje de coincidir con el centro de rotación de la
máquina. Por tanto, el balanceo consiste en adicionar masa en cantidades específicas y a una
distancia establecida, con el propósito de generar una distribución de masa uniforme cuyo
centro coincida con el de rotación.
El valor de la magnitud y posición de las masas de balanceo no se puede conocer de manera
directa, sobre todo en turbogeneradores o grupos de turbinas; por lo que el desarrollo de
técnicas de balanceo se enfoca en la obtención de dichos valores en el menor tiempo posible y
con la mayor reducción en los valores de vibración. En la práctica se conocen dos métodos de
balanceo: el método por coeficientes de influencia y el método modal.
El método por coeficientes de influencia se basa en la respuesta del rotor al colocar pesos de
prueba en los diferentes planos de balanceo. Como resultado de las pruebas se obtienen los
coeficientes de influencia del rotor, los cuales se ordenan en forma matricial para calcular los
pesos de corrección que reducen los valores de vibración en la velocidad seleccionada.
2
Capítulo 1 Introducción
A diferencia del método por coeficientes de influencia, el balanceo modal permite reducir la
vibración de un modo específico del rotor en todas las velocidades mediante la colocación de
arreglos modales de pesos. Para determinar dichos arreglos, se requiere calcular la forma
modal, lo cual implica la realización de pruebas modales experimentales en el rotor o la
elaboración de modelos detallados, proceso que puede durar días o semanas según el tipo de
rotor o máquina.
La principal ventaja del balanceo modal son los arreglos modales de pesos, los cuales
permiten el control sobre el balanceo al reducir la vibración en todo el intervalo de
velocidades para algún modo específico, sin afectar las vibraciones de los otros modos; lo cual
no ocurre con los pesos obtenidos con la matriz de coeficientes de influencia. Sin embargo, la
principal ventaja del balanceo por coeficientes de influencia es que la matriz se forma de la
respuesta de la máquina y que relaciona las vibraciones medidas en los sensores con los pesos
colocados en los planos de balanceo.
En el presente trabajo se desarrolla un método que aprovecha las ventajas de la matriz de
coeficientes de influencia para obtener arreglos modales de pesos, lo cual evita el cálculo de la
forma modal por alguna de las técnicas mencionadas. El utilizar arreglos modales de pesos
para el balanceo de rotores permite al personal encargado de la actividad tener un mejor
entendimiento del comportamiento vibratorio de la máquina, ya que sabrá qué pesos colocar
para afectar modos específicos de vibración. Con este conocimiento se puede reducir el tiempo
de la actividad de balanceo permitiendo que la máquina entre en operación, transformándose
en beneficios directos en la producción y en ganancias económicas a la empresa.
3
Capítulo 1 Introducción
1.3 Objetivo.
Obtener arreglos modales de pesos a partir de matrices completas o incompletas de
coeficientes de influencia, que permitan mejorar el balanceo de rotores.
1.4 Alcances.
Desarrollar un método para determinar los arreglos modales de pesos con base en
matrices completas de coeficientes de influencia.
Realizar una rutina de cómputo que permita obtener arreglos modales de pesos a partir
de matrices completas de coeficientes de influencia.
Desarrollar un método para determinar los arreglos modales de pesos con base en
matrices incompletas de coeficientes de influencia.
Realizar una rutina que permita automatizar el método para matrices incompletas.
Determinar, si es posible obtener las formas modales en los planos de balanceo y en los
puntos de medición por medio de los arreglos modales de pesos que se obtienen con la
matriz de coeficientes de influencias.
4
Capítulo 1 Introducción
1.5 Estado del arte.
Cuando en una máquina rotatoria se presentan vibraciones a causa del desbalance, el
funcionamiento se ve afectado negativamente; por eso es necesario corregir el problema
agregando masa en cantidades especificas y a una distancia establecida. La función de los
métodos de balanceo es calcular la magnitud y posición de las masas de balanceo con el fin de
disminuir o eliminar la vibración.
El estudio de las máquinas rotatorias comenzó con Rankine en 1869 [1], quien trató de
explicar el comportamiento en los sistemas rotor soporte. Para el estudio empleó un modelo
constituido por una masa rígida girando en una órbita circular, con un resorte elástico
actuando en la dirección radial [2]. Con este modelo Rankine estableció el término “velocidad
girante”, que es una cierta velocidad a la cual el eje se curva y gira alrededor de esta forma
curva. De hecho, se puede demostrar que más allá de la velocidad girante la deflexión radial
del modelo de Rankine crece sin límite [3]. Como resultado de la investigación Rankine
enunció que las máquinas rotatorias nunca serían capaces de rebasar la velocidad girante.
Años después, Carl Gustaf Patrick De Laval, desarrolló un modelo para explicar las
características dinámicas de las turbomáquinas [4]. El objetivo del modelo era tratar de
predecir el comportamiento dinámico de turbinas que fueron usadas inicialmente como parte
del proceso industrial de separadores de crema en productos lácteos. En 1889, con los
experimentos de De Laval, se logró incrementar la velocidad de operación de este tipo
turbinas a 40,000 rpm, con la velocidad alcanzada aparecieron efectos inerciales desconocidos
hasta entonces.
El trabajo de De Laval trató de describir el fenómeno de resonancia, empezó a formular los
primeros conceptos de desbalance rotatorio y explicó el fenómeno como producto de la
heterogeneidad en la distribución de la masa sobre el rotor [4].
5

Capítulo 1 Introducción
En 1894, Stanley Dunkerley publicó un estudio sobre las vibraciones de ejes cargados con
poleas [5], en el cual definió el término “velocidad crítica” como una velocidad particular en
donde el eje se curva, pero al exceder esta velocidad el eje se comporta normal. Dunkerley
demostró que la velocidad crítica depende de la manera en la que el eje está soportado, de su
tamaño y módulo de elasticidad, así como del peso, posición y tamaño de las poleas que lleve.
Por otra parte, August Föppl mostró un modelo alternativo al de Rankine, el cual tiene una
solución estable al sobrepasar la “velocidad girante” [6]. Föppl explicó como el rotor responde
al desbalance cerca y sobre la velocidad crítica
Los ingenieros de esta época trabajaron bajo el concepto de velocidad girante de Rankine, ya
que sus predicciones fueron aceptadas como verdaderas, y no sobre el concepto de velocidad
crítica de Dunkerley; lo cual frenó el desarrollo de rotores de alta velocidad por casi 50 años.
La evidencia experimental de que una segunda velocidad crítica existía fue publicada por W.
Kerr en 1916 [7]; al igual que De Laval y Föppl, Kerr se oponía a lo establecido por la teoría
de Rankine. En la 1919 Henrio H. Jeffcott confirmó la predicción de Föppl de que existía una
solución estable arriba de la velocidad crítica; además amplió el trabajo de Föppl al considerar
el amortiguamiento externo. Cinco años después, Aurel B. Stodola demostró que la solución
del modelo de Jeffcott era estable por los efectos de la aceleración de Coriolis [8], la cual no
fue considerada en el modelo de Rankine [9].
Jeffcott utilizó un modelo que consta de un disco desbalanceado colocado a la mitad de un eje
flexible de masa despreciable, y todo el sistema está montado en soportes rígidos. Este modelo
sirvió para analizar la respuesta de una máquina con el rotor desbalanceado [10]. El análisis
explicó como la amplitud de la vibración alcanza un valor máximo en la velocidad crítica y
disminuye a medida que se sobrepasa. Una revisión del rotor Jeffcott da tres posibilidades para
reducir la amplitud de la vibración [1]:
1. Balancear el rotor.
2. Cambiar la velocidad de operación, lejos de la velocidad crítica.
3. Agregar amortiguamiento al sistema.
6
Capítulo 1 Introducción
El balanceo es el método al que más se recurre por atacar directamente el origen de la
vibración. A partir de esta época se comenzaron a desarrollar técnicas para el balanceo de
rotores, pero se tenía el problema que al balancear un plano, la vibración en los demás planos
se afectaba, por lo que balancear una máquina requería mucho tiempo de trabajo y con poca
precisión en los resultados.
Thearle [11], publicó un método en donde se presenta la forma de conocer la influencia que
tiene el agregar peso en un plano sobre los demás. Aunque no se empleó terminología
matemática para describirlo, los conceptos se explicaron de manera teórica y son la base del
método de balanceo por coeficientes de influencia, el cual fue estudiado posteriormente por
Baker [12].
El método de balanceo por coeficientes de influencia usa pesos de prueba para determinar
experimentalmente la sensibilidad del sistema rotor soporte [13]. El método consiste en
colocar una masa de prueba en uno de los planos de balanceo y medir la respuesta del rotor,
este proceso se repite en cada plano de la máquina. Posteriormente se calculan los coeficientes
de influencia y se forma una matriz completa con la que se determinan los pesos de corrección
que reducen la vibración en una sola velocidad.
El balanceo por coeficientes de influencia presenta la limitante de necesitar tantos rodados de
prueba como planos de balanceo tenga la máquina más una corrida inicial; por lo que la
aplicación se limita a máquinas de dos y tres planos.
En 1964, Goodman extendió la técnica de coeficientes de influencia de Thearle, al incluir el
método de reducción por mínimos cuadrados para el cálculo de los pesos de balanceo [14]. El
método de Goodman permite adquirir datos de vibración a diferentes velocidades; y con esto
calcular los pesos de balanceo para esas velocidades.
Lund y Tonnesen [15], realizaron experimentos para validar y determinar la exactitud del
método presentado por Goodman, conjuntamente determinaron la influencia de la
7
Capítulo 1 Introducción
instrumentación en los cálculos. Las conclusiones obtenidas por estos autores fueron: a) Un
rotor puede considerarse como un sistema con un comportamiento lineal dentro de límites
cercanos, b) para un balanceo satisfactorio los errores causados por la instrumentación no
deben exceder de tres o cuatro por ciento y c) con suficientes mediciones, el método por
coeficientes de influencia se puede usar para balancear más de dos planos simultáneamente.
Tessarzik realizó dos experimentos para evaluar la precisión del método de balanceo por
coeficientes de influencia; el primero se realizó con la técnica de la velocidad exacta [16] y el
segundo con la técnica de mínimos cuadrados [17].
El método de coeficientes de influencia era el más conocido hasta la época de los 70’s [18];
pero en esta misma época una técnica de análisis de estructuras que se denomina análisis
modal comenzó a tener gran impacto gracias a los avances en los transductores electrónicos y
los analizadores digitales [19].
Los estudios en análisis modal comenzaron con Kennedy y Pancú en 1947, ellos introdujeron
conceptos modales al analizar estructuras de aviones, utilizaron el diagrama polar de respuesta
como herramienta para la identificación de modos de vibración en resonancia, de frecuencias
naturales y amortiguamiento. Posteriormente, Grobel empleó conceptos modales para el
balanceo de rotores [20]. El trabajo de Grobel consistió en analizar la configuración de pesos
para balancear cada modo en específico, el procedimiento requería una corrida de prueba para
balancear cada uno de los modos, por lo que el balanceo era un proceso largo.
Probablemente, las aportaciones más importantes en el campo de balaceo de rotores por
conceptos de análisis modal fueron realizadas por Bishop, Parkinson y Gladwell. En el trabajo
publicado por Bishop en 1959 [21], se describe que el modelo del rotor de Jeffcott no provee
la suficiente información para resolver los problemas del balanceo de rotores y plantea una
ecuación diferencial de movimiento, donde involucra la rigidez de los soportes, la velocidad
de giro del eje y la forma modal. Con este trabajo, Bishop y Gladwell [22], elaboraron un
8
Capítulo 1 Introducción
método general de balanceo modal de rotores, en el cual las masas de corrección se calculan
para cada modo de vibración de la máquina.
Al inicio de los años 80’s ya se contaba con dos métodos de balanceo y la aplicación de uno u
otro dependía del tipo de problema que se quería resolver, pero en general no se podían
conjuntar. Parkinson, Darlow y Smalley [23], publicaron un artículo donde aprovecharon las
ventajas tanto del balanceo modal como el de coeficientes de influencia. La técnica consiste en
balancear modo por modo, y se utilizan las características del método de coeficientes de
influencia para determinar arreglos modales de pesos. Los arreglos modales se construyen de
tal manera que afecten a un modo de vibración sin afectar a los otros modos.
Para la determinación de los arreglos modales de pesos se utiliza información experimental, la
cual se genera al colocar pesos de prueba individuales en los planos de balanceo del rotor. Se
menciona la posibilidad de generar arreglos de pesos que no afecten cualquier conjunto
general de modos de vibración, entre ellos los modos superiores a los que se está balanceando.
Para esto se requiere un número de planos de balanceo igual al número de modos que no se
desea afectar más uno, y debe contarse con información de rodados de pruebas realizadas con
anterioridad o con predicciones basadas en el análisis de modelos numéricos del rotor.
Los arreglos modales de pesos se determinan empíricamente mediante un procedimiento
similar al de los coeficientes de influencia; por eso este método requiere un conocimiento
mínimo de la respuesta dinámica de la máquina y, por lo tanto, reduce la profundidad del
análisis que se requiere en comparación con un balanceo modal tradicional.
Por otro lado, al igual que el método de los coeficientes de influencia, tiene la desventaja del
alto número de rodados para el balanceo, ya que la construcción de los arreglos modales de
pesos se basa en la colocación de pesos de prueba, con el fin de caracterizar su influencia
sobre los modos que no se desea afectar. La información necesaria para generar los arreglos
modales de pesos puede obtenerse mediante una simulación numérica del comportamiento del
9
Capítulo 1 Introducción
rotor; pero este procedimiento alternativo presenta la desventaja de tener que desarrollar un
modelo numérico del conjunto rotor soporte.
El uso de las computadoras en esta época permitió almacenar y analizar los datos de los
rodados de prueba, crear diagramas de Bode y diagramas polares de respuesta [24], también
fue posible calcular los coeficientes de influencia a diferentes velocidades, incluso a las
velocidades superiores a la de operación. Dichos coeficientes se podían aplicar a máquinas con
las mismas características geométricas o guardarse para futuros balanceos. Con los avances
tecnológicos y los estudios previos, se aumenta la posibilidad de unificar los métodos de
balanceo.
Otro método que mezcla las ventajas del balanceo por coeficiente de influencia y el balanceo
modal, se desarrolló en el Instituto de Investigaciones Eléctricas, el cual se denomina
“balanceo modal de rotores utilizando coeficientes de influencia” [25]. La ventaja de este
método respecto al de Parkinson, es que sólo requiere una corrida de prueba para determinar
los arreglos modales de pesos, además incluye un método generalizado para obtener la matriz
de coeficientes de influencia.
El procedimiento para calcular los arreglos modales de pesos con el método de balanceo
modal de rotores utilizando coeficientes de influencia, consiste en colocar pesos de prueba que
exciten todos los modos presentes en la máquina. Mediante el programa AMODAL
desarrollado también en el instituto, se extraen parámetros modales como: frecuencia natural,
factor de forma modal y amortiguamiento modal, de la respuesta del rotor. Al conocer el
factor de forma modal en los planos de balanceo se descompone el peso de prueba en arreglos
modales de pesos. El método se probó en un rotor de turbina de seis toneladas, reduciendo las
vibraciones a un ocho por ciento de la vibración máxima inicial [25].
La desventaja del método de “balanceo modal de rotores utilizando coeficientes de influencia”
es que requiere del conocimiento del factor de forma modal en los planos de balanceo, y para
10
Capítulo 1 Introducción
ello es necesario contar con programas de extracción de parámetros modales o la realización
de pruebas modales experimentales en el rotor.
En el presente trabajo el cálculo de la matriz completa de coeficientes de influencia se realiza
con el método generalizado de los coeficientes de influencia [25], el cual presenta la ventaja
de que aprovecha la experiencia del personal encargado del balanceo, porque en ocasiones se
colocan arreglos de pesos en el rotor en cada rodado de prueba, un par de pesos con la misma
magnitud y fase para el primer modo y dos pesos iguales pero separados 180° para el segundo
modo.
En el caso de algunos turbogeneradores el colocar dos pesos en fase u opuestos, no es
suficiente para afectar un modo de vibración sin afectar a los otros, a causa de la influencia de
los modos de un rotor sobre el conjunto, ya que el turbogenerador se comporta como un
mismo sistema. Por lo que el cálculo de un arreglo modal de pesos consiste en determinar el
peso a colocar en cada uno de los planos de balanceo de la máquina para no afectar a otros
modos de vibración. Los arreglos modales de pesos determinados se pueden utilizar para crear
una matriz de coeficientes de influencia, en la cual el cambio de vibración de un rodado a otro
significa la eliminación o reducción de la vibración de un modo especifico.
En 1996, Preciado, Aguirre y Bannister presentaron el método de los multiplicadores, el cual
se deriva del método generalizado de coeficientes de influencia. La ventaja del método de
multiplicadores es que calcula pesos de balanceo cuando no se tiene el mismo número de
rodados de prueba que planos de balanceo [26]. Para el cálculo de los pesos de balanceo se
utilizan multiplicadores, que se calculan al invertir la matriz de incremento de vibración. La
única condición para la aplicación de este método es que los pesos de prueba que se colocan
en diferentes rodados de prueba sean linealmente independientes.
La posibilidad de balancear un rotor sin rodados de prueba la presenta Preciado y Bannister
[27], quienes emplearon conceptos modales para balancear un rotor experimental, además
analizaron la influencia de la posición de los transductores en el cálculo de los pesos de
11
Capítulo 1 Introducción
12
balanceo. El procedimiento empleado por Preciado y Bannister consiste en la extracción de
parámetros modales en resonancia de la corrida inicial, con estos datos ajustan un modelo
numérico del rotor, del cual obtienen las formas modales. Al conocer la forma modal se
determina el factor de forma modal en los planos de balanceo, con el cual se calculan los
arreglos modales de pesos. Más tarde, la técnica de Preciado y Bannister fue empleada por El-
Shafei [28], para balancear un rotor considerando modos complejos.
Tanto el método de balanceo de Preciado y Bannister como el método de EL-Shafei, plantean
la posibilidad de obtener arreglos modales de pesos sin rodados de prueba, pero requieren
programas para extraer parámetros modales y de un modelo numérico del rotor con el que
determinan la forma modal. En este trabajo de investigación, se propone un método que
calcula los arreglos modales de pesos sin el uso de programas de extracción de parámetros
modales, en lugar de esto, emplea la matriz de coeficientes de influencia la cual relaciona las
vibraciones en los puntos de medición con los pesos colocados en los planos de balanceo.
En el presente trabajo el estudio de la matriz incompleta de coeficientes de influencia para
obtener los arreglos modales de pesos, es porque en la práctica no siempre es posible realizar
los rodados de prueba necesarios para el balanceo, sobre todo en máquinas con más de dos
planos de balanceo. Las ventajas que se esperan obtener con los arreglos modales de pesos
son: tener una idea clara del comportamiento vibratorio del rotor, que los arreglos sean más
estables que una matriz de coeficientes de influencia con el paso del tiempo, que sean
aplicables a máquinas con iguales características geométricas y de montaje, y que reduzcan la
vibración de un modo de la máquina en todo el intervalo de velocidades.

Capítulo 2 Conceptos básicos
Equation Chapter (Next) Section 2 2 Capitulo 2
2.1 Introducción.
El conjuntar el método de balanceo modal y el de coeficientes de influencia para calcular
arreglos modales de pesos requiere entender los conceptos en los que se basa cada uno. Dentro
de los conceptos principales se encuentran: coeficiente de influencia, modo de vibración,
forma modal y contribución modal; los cuales se definen en este capítulo sin usar un gran
número de ecuaciones o deducciones matemáticas.
2.2 Matriz completa de coeficientes de influencia.
Un coeficiente de influencia es un vector que define el cambio resultante en la vibración en
algún punto específico de un rotor, por unidad de masa de balanceo agregada en un plano
definido, a una cierta velocidad de giro de la máquina. La ecuación fundamental para el
cálculo es:
n n
n ii j
j
V VoPP
α −= i
13
(2.1)
Donde: njiα = Coeficiente de influencia en la posición i a causa de la masa de prueba colocada en el
plano j. niVo = Vibración en la posición i a la velocidad n del rodado inicial.
niV = Vibración en la posición i a la velocidad n del rodado de prueba.
jPP = Peso de prueba en el plano j.
n = Velocidad de giro o frecuencia.
Capítulo 2 Conceptos básicos.
i = Posición o sensor.
j = Plano de balanceo.
El cálculo de los coeficientes de influencia con la ecuación 2.1 requiere la colocación de pesos
individuales en cada rodado de prueba, con el fin de caracterizar los efectos vibratorios que
causan dichos pesos en los planos de balanceo. Cuando se tienen tantos rodados de prueba
como planos de balanceo más una corrida inicial se forma una matriz completa de coeficientes
de influencia. Otra manera de construir la matriz completa es mediante la ecuación 2.2
propuesta en el método generalizado de coeficientes de influencia [25], la cual permite colocar
tanto arreglos de pesos como pesos individuales en los rodados de prueba.
[ ] [ ][ ] 1V PPα −= Δ (2.2)
( )( )mxj = mxj jxj
Donde:
[ ]α = Matriz completa con los coeficientes de influencia a las velocidades n.
[ VΔ ]
]
j
= Matriz de incremento de vibración. Cada columna de la matriz contiene los cambios
de vibración en los diferentes sensores.
[PP = Matriz de pesos de prueba. Cada columna corresponde a un rodado de prueba, y los
elementos de la columna representan los pesos colocados en cada uno de los planos de
balanceo.
m = Número de sensores i, por número de velocidades n.
En las ecuaciones 2.1 y 2.2 los coeficientes de influencia de la matriz tienen el mismo
significado y para el caso de una velocidad la matriz de influencia se puede escribir:
1 111 1
1 11
j
i i
α α
α α
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
(2.3)
14

Capítulo 2 Conceptos básicos.
Un requisito importante para formar la matriz completa es que el cambio de vibración de una
rodado a otro sea significativo, con el fin de reducir el efecto del ruido en las señales de
vibración [29]. En el método desarrollado en esta investigación, la importancia de la matriz
completa de coeficientes de influencia consiste en que se emplea para calcular los arreglos
modales de pesos, AMP, y evita el cálculo del factor de forma modal en los planos de
balanceo.
2.3 Matriz incompleta de coeficientes de influencia.
Si el número de rodados de prueba es menor al número de planos de balanceo, entonces se
tiene una matriz incompleta de coeficientes de influencia. La matriz incompleta no tiene
caracterizados todos los planos de balanceo y no es posible conocer la influencia de dichos
planos en la vibración de la máquina. En este caso, la ecuación 2.2 no se puede aplicar para
calcular los coeficientes de influencia, por lo que el cálculo de los arreglos modales de pesos
se realiza con el método de los multiplicadores [26].
La influencia de los modos superiores sobre la matriz completa de coeficientes de influencia
se puede considerar como un caso especial de la matriz incompleta, ya que para balancear los
modos superiores se necesitan tantos planos de balanceo extras en la máquina como modos
superiores se tengan, planos que no es posible caracterizar porque no existen. Por tanto, el
número de rodados de prueba es menor al número de planos de balanceo que se requieren en
la máquina
2.4 Balanceo por coeficientes de influencia.
El método de coeficientes de influencia se basa completamente en datos experimentales y
asume una relación lineal entre la vibración del rotor y el desbalance [26]. Originalmente al
15

Capítulo 2 Conceptos básicos.
tener la matriz completa de coeficientes de influencia los pesos de balanceo se calculaban para
una velocidad con la ecuación 2.4.
{ } [ ] { }1P α −= − V (2.4)
( )( )jx1= jxi ix1
En forma desarrollada la ecuación 2.4:
11 11 11 1 1
1 11
nj
nj i i j
P V
P V
α α
α α
−⎡ ⎤ 1
1i
⎧ ⎫⎧ ⎫⎢ ⎥ ⎪ ⎪⎪ ⎪ = −⎨ ⎬ ⎨ ⎬⎢ ⎥
⎪ ⎪ ⎪ ⎪⎢ ⎥⎩ ⎭ ⎩ ⎭⎣ ⎦
(2.5)
La ecuación 2.4 es válida cuando se tiene una matriz cuadrada de coeficientes de influencia
como en el caso de igual número de sensores que planos de balanceo y a una velocidad. Por
esta limitante, Goodman presentó una ecuación general que admite varias velocidades para el
cálculo de los pesos de balanceo [14]. Al seleccionar varias velocidades la matriz se vuelve
rectangular y no se puede invertir por métodos convencionales como el método de la adjunta o
el de Gauss [30]. Para invertir la matriz rectangular se ocupa el método de Moore – Penrose, el
cual se basa en la reducción del error por mínimos cuadrados. Las ecuaciones propuestas por
Goodman son:
{ } [ ] [ ]( ) [ ] { }1* *P α α α−⎛= −⎜
⎝ ⎠V⎞
⎟ (2.6)
[ ] [ ] [ ]( ) [ ]1* *α α α α−+ = (2.7)
{ } [ ] { }P α += − V (2.8)
( )( )jx1= jxm mx1
Donde:
{ }P = Vector de pesos de balanceo.
{ }V = Vector de vibraciones a compensar.
= Inversa de Moore – Penrose ó Pseudoinversa.
[ ]* = Transpuesta conjugada.
En forma expandida la ecuación 2.8 se puede escribir como muestra la ecuación 2.9.
16

Capítulo 2 Conceptos básicos.
1 111 1 1
1 112 211 1 1
1
2 21
11 1 1
1
j
i i j
j
i i jj
n nj
n ni i j
V
VV
P
VP
V
V
α α
α αα α
α α
α α
α α
+ 1
1
2
2
i
i
n
ni
⎡ ⎤ ⎧ ⎫⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎧ ⎫ ⎢ ⎥ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎢ ⎥= −⎨ ⎬ ⎨ ⎬⎢ ⎥⎪ ⎪ ⎪ ⎪⎢ ⎥⎩ ⎭ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎢ ⎥ ⎪ ⎪⎣ ⎦ ⎩ ⎭
(2.9)
Las ventajas y desventajas del método de coeficientes de influencia se presentan en la tabla
2.1.
Tabla 2.1 Ventajas y desventajas del método de balanceo por coeficientes de influencia.
METODO DE BALANCEO POR COEFICIENTES DE INFLUENCIA
Ventajas Desventajas
Requiere conocimiento mínimo en dinámica de rotores.
Supone linealidad en la respuesta del
rotor.
Balancea a varias velocidades simultáneamente.
Requiere tantos rodados de prueba como planos de balanceo, más una inicial.
Las mediciones de vibración pueden llevarse a cabo en velocidades cercanas a las críticas, con lo cual, puede reducirse considerablemente el desbalance.
El balanceo en una velocidad no garantiza una reducción en todas las demás.
La técnica de mínimos cuadrados se emplea para la optimización de resultados cuando se usan varias velocidades.
Los coeficientes de influencia pueden variar con el tiempo de acuerdo a las condiciones de la máquina.
17
Capítulo 2 Conceptos básicos.
2.5 Balanceo por multiplicadores.
El cálculo de los arreglos modales de pesos para matrices incompletas se realiza combinando
conceptos modales como: factor de forma modal y contribución modal con el método de los
multiplicadores, este método se deriva del método generalizado de los coeficientes de
influencia [25]. Si de la ecuación 2.4 se despejan las vibraciones a compensar { se puede
escribir:
}V
{ } [ ]{ }V α− = P (2.10)
( )( )mx1= mxq qx1
Sustituyendo la ecuación 2.2 en 2.10,
{ } [ ][ ] { }1V V PP −− = Δ P (2.11) ordenando los términos,
[ ] { } [ ] { }1V V PP P− −− Δ = 1 (2.12) El multiplicador para calcular los pesos de balanceo se obtiene con:
{ } [ ] { }1M V V−= − Δ (2.13)
Para generalizar la inversa de y seleccionar varias velocidades, se emplea el método de
Moore – Penrose, como se muestra en la ecuación 2.15.
[ VΔ ]
{ } [ ] { }M V V+= − Δ (2.14)
{ } [ ] [ ]( ) [ ] { }1* *M V V V V−⎛= − Δ Δ Δ⎜
⎝ ⎠⎞⎟ (2.15)
( )( )( )( )( )qx1= qxm mxq qxm mx1
Por lo que los pesos de balanceo para las velocidades seleccionadas son:
{ } [ ]{ }P PP M= (2.16)
( )( )jx1= jxq qx1
18

Capítulo 2 Conceptos básicos.
La ecuación 2.16 no requiere el cálculo de los coeficientes de influencia para la determinación
de los pesos de balanceo, sino del multiplicador M. El tamaño del multiplicador depende del
número de rodados de prueba q y no del número de planos de balanceo j [25]; por eso se
puede aplicar al caso de las matrices incompletas, donde el número de rodados de prueba es
menor al número de planos de balanceo. Los pesos de balanceo que se calculan con la
ecuación 2.16 para una matriz completa son iguales a los que se obtienen de la ecuación 2.8
del método de los coeficientes de influencia. La única limitante del método de balanceo por
multiplicadores es que requiere que las columnas de la matriz de pesos de prueba sean
linealmente independientes [25].
2.6 Modo de vibración.
Un modo de vibración es una propiedad inherente de una estructura; depende de la
distribución de la masa y rigidez, así como de la relación entre sus magnitudes. Cada modo se
define por una frecuencia natural, amortiguamiento modal y forma modal [31]. Por tanto, un
modo es un patrón o manera característica en el que vibra un sistema mecánico en su
frecuencia natural [32].
La mayoría de los sistemas mecánicos tienen varios modos y la vibración es normalmente una
combinación o una mezcla de todos ellos aunque no todos están excitados de la misma manera
y su contribución a la vibración es diferente.
2.7 Forma modal.
Un factor o elemento de forma modal se puede definir como la relación del desplazamiento de
un punto respecto a otro tomado como referencia cuando el sistema vibra en algún modo
específico. Una forma modal se puede considerar como una serie de factores de forma modal,
ver figura 2.1.
19

Capítulo 2 Conceptos básicos.
a) b) c) Figura 2.1 Sistema rotor soporte a) en estado estacionario b) en su primera forma modal correspondiente a la primer frecuencia natural y c) segunda forma modal que corresponde a la segunda frecuencia natural.
La figura 2.2 a) muestra un sistema rotor-soporte con siete sensores montados a los largo de su
longitud, para medir la vibración total en cada punto; si la vibración del sistema se
descompone por modos, entonces el factor de forma modal para el primer modo en los puntos
de medición se vería como en la figura 2.2 b).
a) b)
Figura 2.2 Sistema rotor-soporte a) con siete sensores montados y b) factor de forma modal del primer modo en la posición de los sensores. i rψ = Factor de forma modal en la posición i del modo r.
Para observar la forma modal del primer modo de manera continua, es necesario tener los
factores de forma modal en varios puntos del rotor y ajustar una curva a esos puntos, como se
observa en la figura 2.3.
Figura 2.3 Forma modal del primer modo 1ψ , del sistema rotor soporte de la figura 2.2 a).
S4 A
mpl
itud
(Adi
men
sion
al)
S1 S2 S3 S5 S6 S7
Longitud (m) S1 S2 S3 S5 S6 S7
21ψ
S4
11ψ 31ψ 41ψ 51ψ 61ψ 71ψ
Longitud (m)
Am
plitu
d (A
dim
ensi
onal
)
S1 S2 S3 S5 S6 S7
1ψ
S4
20
Capítulo 2 Conceptos básicos.
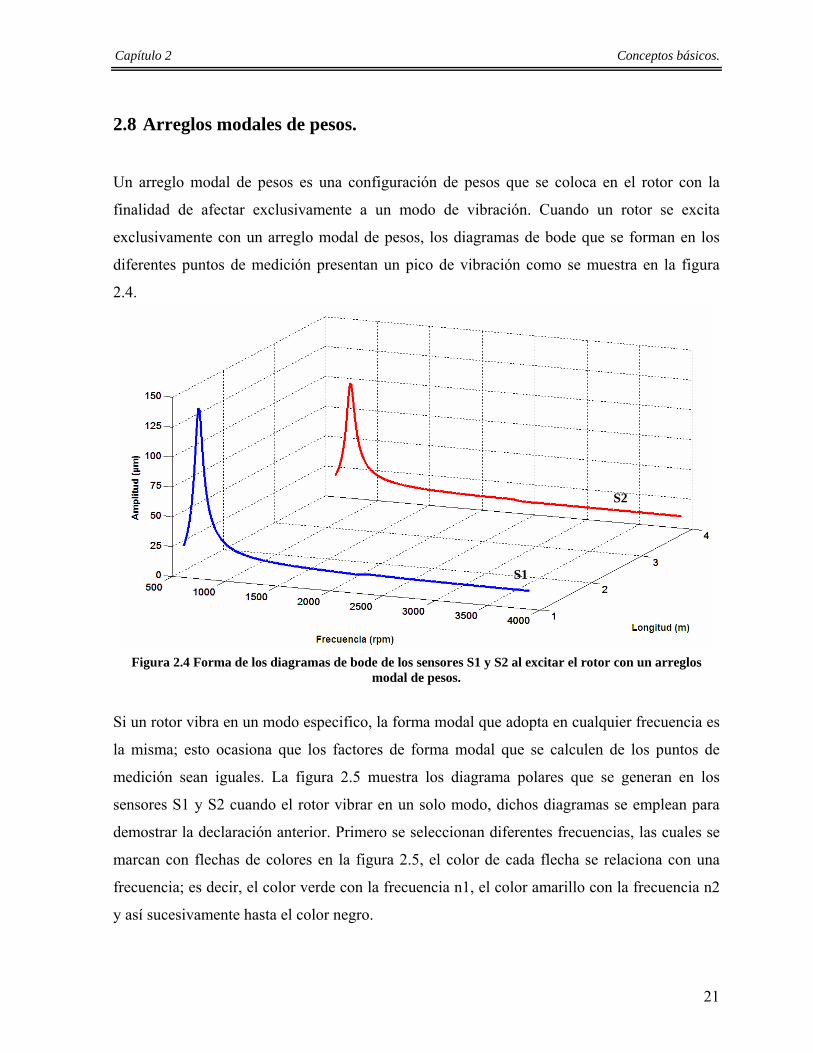
2.8 Arreglos modales de pesos.
Un arreglo modal de pesos es una configuración de pesos que se coloca en el rotor con la
finalidad de afectar exclusivamente a un modo de vibración. Cuando un rotor se excita
exclusivamente con un arreglo modal de pesos, los diagramas de bode que se forman en los
diferentes puntos de medición presentan un pico de vibración como se muestra en la figura
2.4.
S1
S2
Figura 2.4 Forma de los diagramas de bode de los sensores S1 y S2 al excitar el rotor con un arreglos modal de pesos.
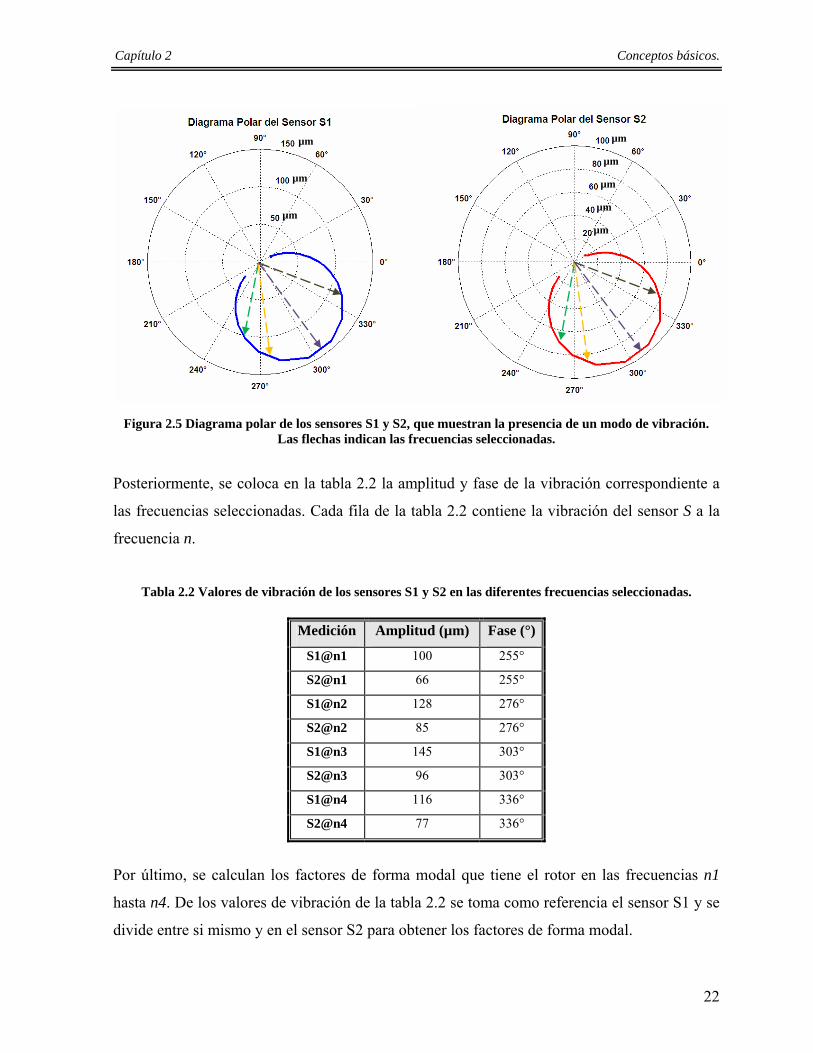
Si un rotor vibra en un modo especifico, la forma modal que adopta en cualquier frecuencia es
la misma; esto ocasiona que los factores de forma modal que se calculen de los puntos de
medición sean iguales. La figura 2.5 muestra los diagrama polares que se generan en los
sensores S1 y S2 cuando el rotor vibrar en un solo modo, dichos diagramas se emplean para
demostrar la declaración anterior. Primero se seleccionan diferentes frecuencias, las cuales se
marcan con flechas de colores en la figura 2.5, el color de cada flecha se relaciona con una
frecuencia; es decir, el color verde con la frecuencia n1, el color amarillo con la frecuencia n2
y así sucesivamente hasta el color negro.
21
Capítulo 2 Conceptos básicos.
µm
µm
µm
µm
µm
µm
µm
µm
Figura 2.5 Diagrama polar de los sensores S1 y S2, que muestran la presencia de un modo de vibración. Las flechas indican las frecuencias seleccionadas.
Posteriormente, se coloca en la tabla 2.2 la amplitud y fase de la vibración correspondiente a
las frecuencias seleccionadas. Cada fila de la tabla 2.2 contiene la vibración del sensor S a la
frecuencia n.
Tabla 2.2 Valores de vibración de los sensores S1 y S2 en las diferentes frecuencias seleccionadas.
Medición Amplitud (µm) Fase (°)
S1@n1 100 255°
S2@n1 66 255°
S1@n2 128 276°
S2@n2 85 276°
S1@n3 145 303°
S2@n3 96 303°
S1@n4 116 336°
S2@n4 77 336°
Por último, se calculan los factores de forma modal que tiene el rotor en las frecuencias n1
hasta n4. De los valores de vibración de la tabla 2.2 se toma como referencia el sensor S1 y se
divide entre si mismo y en el sensor S2 para obtener los factores de forma modal.
22
Capítulo 2 Conceptos básicos.
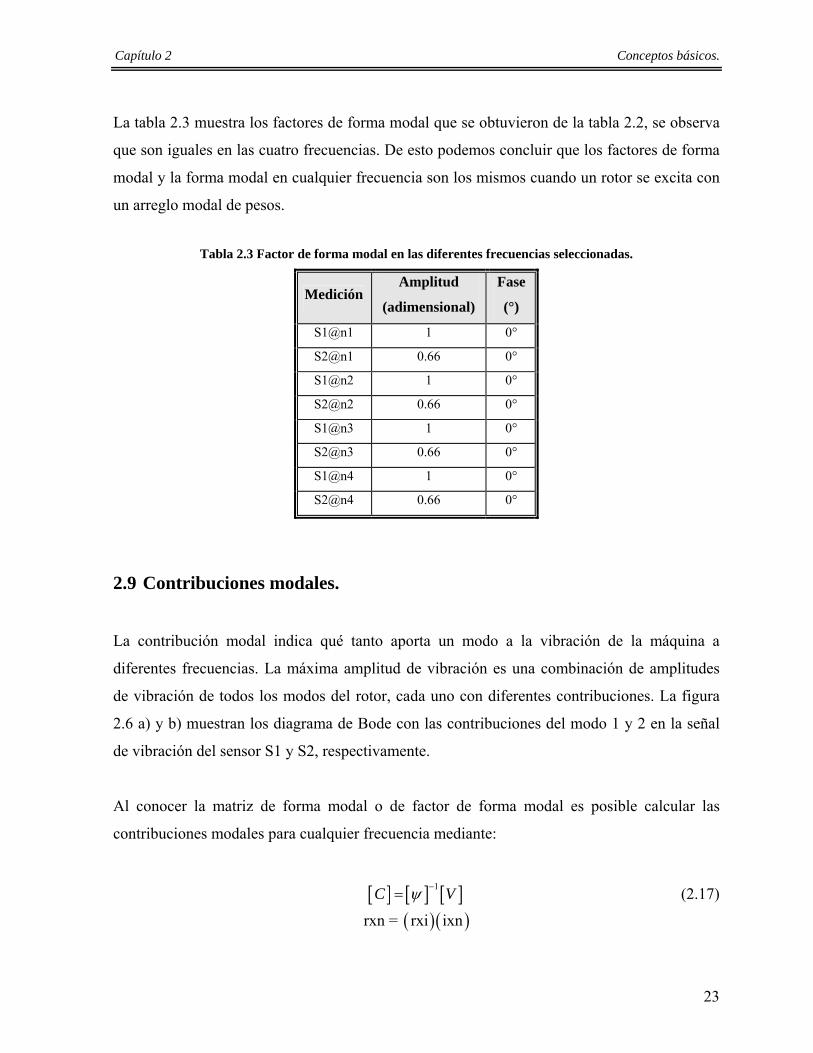
La tabla 2.3 muestra los factores de forma modal que se obtuvieron de la tabla 2.2, se observa
que son iguales en las cuatro frecuencias. De esto podemos concluir que los factores de forma
modal y la forma modal en cualquier frecuencia son los mismos cuando un rotor se excita con
un arreglo modal de pesos.
Tabla 2.3 Factor de forma modal en las diferentes frecuencias seleccionadas.
Medición
Amplitud
(adimensional)
Fase
(°)
S1@n1 1 0°
S2@n1 0.66 0°
S1@n2 1 0°
S2@n2 0.66 0°
S1@n3 1 0°
S2@n3 0.66 0°
S1@n4 1 0°
S2@n4 0.66 0°
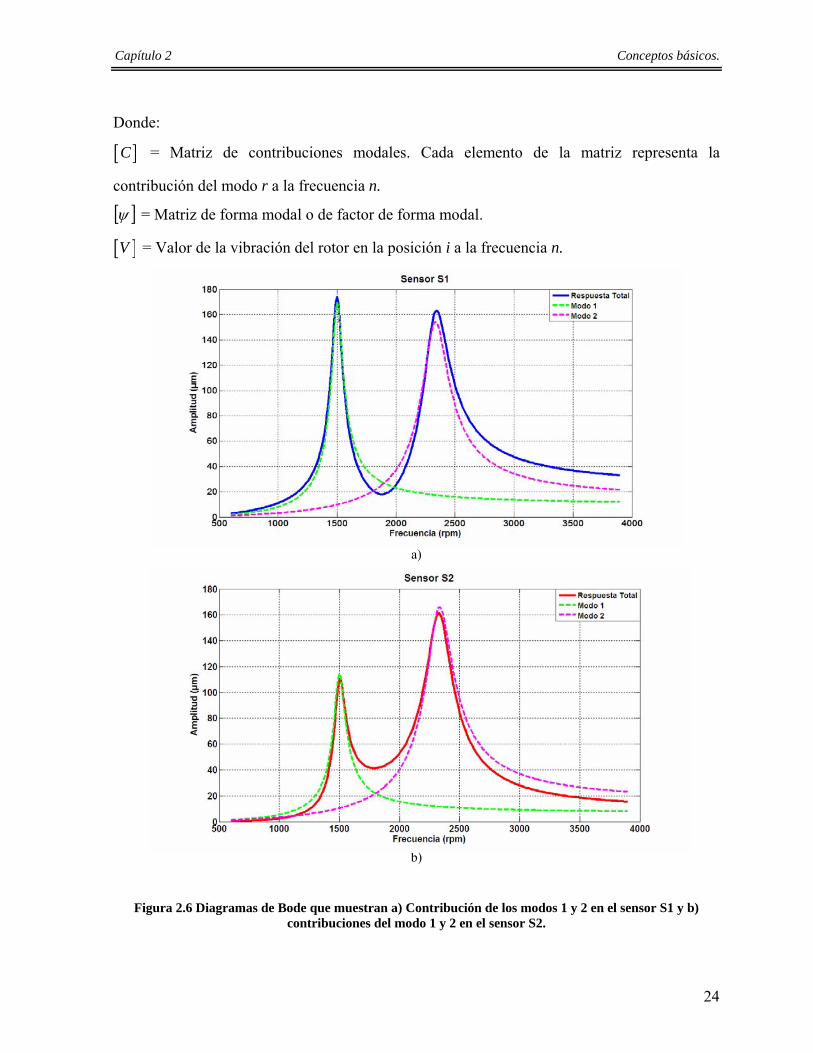
2.9 Contribuciones modales.
La contribución modal indica qué tanto aporta un modo a la vibración de la máquina a
diferentes frecuencias. La máxima amplitud de vibración es una combinación de amplitudes
de vibración de todos los modos del rotor, cada uno con diferentes contribuciones. La figura
2.6 a) y b) muestran los diagrama de Bode con las contribuciones del modo 1 y 2 en la señal
de vibración del sensor S1 y S2, respectivamente.
Al conocer la matriz de forma modal o de factor de forma modal es posible calcular las
contribuciones modales para cualquier frecuencia mediante:
[ ] [ ] [ ]1C ψ −= V (2.17)
( )( )rxn = rxi ixn
23
Capítulo 2 Conceptos básicos.
Donde:
[ ]C = Matriz de contribuciones modales. Cada elemento de la matriz representa la
contribución del modo r a la frecuencia n.
[ ]ψ = Matriz de forma modal o de factor de forma modal.
[ ]V = Valor de la vibración del rotor en la posición i a la frecuencia n.
a)
b)
Figura 2.6 Diagramas de Bode que muestran a) Contribución de los modos 1 y 2 en el sensor S1 y b)
contribuciones del modo 1 y 2 en el sensor S2.
24

Capítulo 2 Conceptos básicos.
En la figura 2.6 se observa que la vibración en cualquier frecuencia es una combinación de
ambos modos y en los picos de vibración la mayor contribución la tiene el modo
correspondiente a esa frecuencia natural.
2.10 Criterio de confiabilidad modal.
El criterio de confiabilidad modal (MAC por sus siglas en ingles) se utiliza para comparar dos
formas modales y determinar la coincidencia entre ellas. El resultado del MAC es un escalar
cuyo valor se encuentra entre 0 y 1, si tiene valor de uno indica que las formas son
coincidentes en todos los puntos y si el valor es cero indica que las formas son diferentes [19].
Para calcular el MAC se emplea la ecuación:
( ){ } { }
{ } { }( ) { } { }( )
2
,T
X A
T TX X A A
MAC A Xψ ψ
ψ ψ ψ ψ= (2.18)
Donde:
{ AA }ψ= = Forma de referencia.
{ XX }ψ= = Forma a comparar.
{ }T = Transpuesta del vector columna.
= Valor absoluto.
2.11 Balanceo modal.
La consideración básica del método de balanceo modal es que la respuesta al desbalance del
rotor se puede expresar como una serie de componentes modales, cada uno correspondiente a
un grado de libertad. De manera similar, las fuerzas de desbalance se pueden expresar como
una serie de desbalances modales [27]. El balanceo modal plantea la posibilidad de balancear
25

Capítulo 2 Conceptos básicos.
un rotor con una sola corrida, aunque para esto es necesario contar con un modelo espacial,
modal o de respuesta del rotor.
Este método de balanceo se basa en el principio de ortogonalidad modal, el cual establece que
la energía cinética y potencial total de un sistema mecánico corresponde a la suma de la
energía cinética y potencial asociada con cada modo de vibración [33]. Este principio sugiere
la posibilidad de aplicar un conjunto de fuerzas seleccionadas de tal manera que solo afecte la
energía de un modo, para el caso del balanceo este conjunto es lo que se conoce como un
arreglo modal de pesos.
La aplicación del método de balanceo modal requiere conocer el factor de forma modal en los
planos de balanceo de todos los modos presentes. Los pesos que constituyen un arreglo modal
se calculan a partir de la siguiente ecuación:
( )*r j t j r t rPψ = − Vδ∑ (2.19) Donde:
rjψ = Factor de forma modal en el plano de balanceo j para el modo r.
jtP = Peso de balanceo para el modo t en el plano j.
rV = Vibración del modo r en resonancia.
rtδ = Delta de Kronecker; 1 para r = t y 0 para r ≠ t.
* = Multiplicación
De la ecuación 2.19 se puede decir que al multiplicar un arreglo modal de pesos de un modo t
por una forma modal de un modo r, este no causara ningún efecto, como se puede ver:
( )* 0rj t jP Paraψ r t= ≠∑ (2.20)
Las ventajas y desventajas del método de balanceo modal se presentan en la tabla 2.4:
26
Capítulo 2 Conceptos básicos.
27
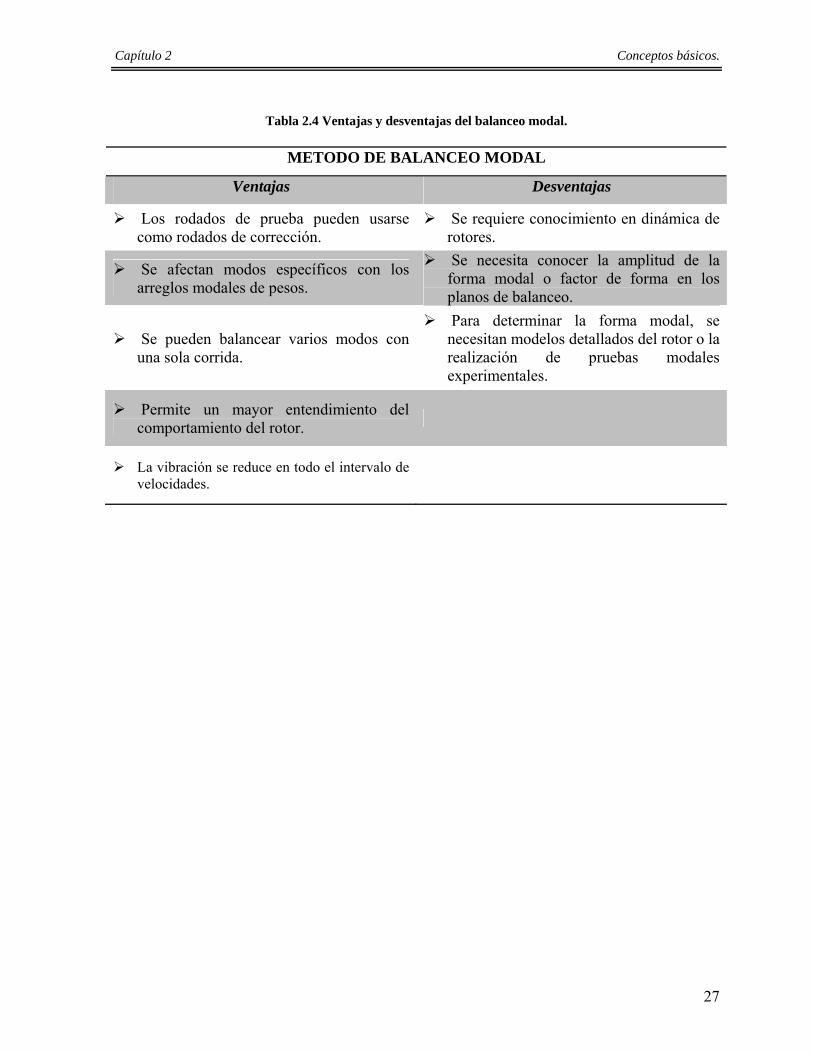
Tabla 2.4 Ventajas y desventajas del balanceo modal.
METODO DE BALANCEO MODAL
Ventajas Desventajas
Los rodados de prueba pueden usarse como rodados de corrección.
Se requiere conocimiento en dinámica de rotores.
Se afectan modos específicos con los arreglos modales de pesos.
Se necesita conocer la amplitud de la forma modal o factor de forma en los planos de balanceo.
Se pueden balancear varios modos con una sola corrida.
Para determinar la forma modal, se necesitan modelos detallados del rotor o la realización de pruebas modales experimentales.
Permite un mayor entendimiento del comportamiento del rotor.
La vibración se reduce en todo el intervalo de velocidades.
Capítulo 3 Arreglos modales de pesos a partir de matrices completas de coeficientes de influencia. Equation Chapter (Next) Section 3 3 Capitulo 3.
3.1 Introducción.
El parámetro de una máquina que más influye en el cálculo de los arreglos modales de pesos
es la forma modal. La técnica convencional para conocer la forma modal se basa en pruebas
modales experimentales o en el uso de modelos numéricos que describan el comportamiento
del rotor, pero esto en ocasiones es imposible realizarlo o requiere semanas de trabajo. El
método para obtener arreglos modales de pesos a partir de matrices completas de coeficientes
de influencia que se describe en este capítulo, calcula el factor de forma modal en los puntos
de medición por medio de iteraciones, lo que elimina la determinación de la forma modal.
Con los factores de forma modal se logra descomponer una vibración total en sus
componentes modales, las cuales se combinan con la matriz completa de coeficientes de
influencia para obtener los arreglos modales de peso. Antes de la creación del método de los
AMP para matrices completas, se desarrolló el método de las diferencias, que se describe en la
sección 3.3, del cual se tomaron algunas ideas. El método de las diferencias tiene la desventaja
de que sólo se aplica al caso de un rotor con dos modos de vibración.
3.2 Consideraciones hechas en el cálculo de los arreglos modales de pesos.
De los métodos que se presentan en este capítulo, el primero, llamado método de las
diferencias, sólo es aplicable a sistemas con dos modos de vibración, mientras que el segundo,
28
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
llamado método de los AMP para matrices completas, es un método general para calcular los
arreglos modales de pesos de una máquina que presentan varios modos de vibración. Las
consideraciones hechas en ambos casos fueron:
Considerar que el rotor o grupo de rotores presenta modos reales y planos.
Considerar que la frecuencia natural coincide con la vibración máxima aunque en la
práctica esto no siempre se cumple, ya que: a) con el aumento en la relación de
amortiguamiento la frecuencia natural deja de coincidir con la amplitud máxima en el
caso de un modo único [34] y b) la combinación de varios modos también genera el
mismo efecto.
Se considera que se cuenta con la matriz completa de coeficientes de influencia, la cual
se puede obtener por el método de coeficientes de influencias [11-12], o por el método
generalizado de los coeficientes de influencia [25].
3.3 Primer método para obtener los arreglos modales de pesos.
El método de las diferencias fue el primer método desarrollado en este trabajo para calcular
los arreglos modales de pesos a partir de matrices completas de coeficientes de influencia, se
aplicó principalmente a un modelo con dos modos de vibración y dos planos de balanceo. La
idea de este método es forzar al rotor a vibrar en una sola forma modal mediante un arreglo
modal de pesos, para calcular el arreglo modal se determina la diferencia entre la vibración
seleccionada para el modo que no se desea afectar y la vibración del modo que se quiere
eliminar, dicha diferencia de vibración se combinada con la matriz completas de coeficientes
de influencias y se obtiene como resultado un AMP.
Las frecuencias a seleccionar para calcular los AMP serán las que coincidan con los picos de
vibración, ya que el modo de vibración asociado con dicha frecuencia tiene una mayor
contribución a la vibración total que cualquiera de los otros modos, por lo que cada frecuencia
seleccionada representará un modo de vibración. Los valores de vibración a las frecuencias
29

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
seleccionadas se emplean para crear vectores de vibración de cada modo, estos vectores tiene
una forma modal similares a la de la máquina pero amplificada un escalar A, lo cual se puede
escribir como indica la ecuación 3.1.
{ } { }r r rU A ψ= (3.1) Donde:
{ }rU = Vector de vibración del modo r.
rA = Escalar para el modo r.
Si se colocan los vectores de vibración U del primer modo y los del segundo modo en una
misma gráfica, se observa que existe una diferencia de vibración DU entre ellos, líneas negras
en la figura 3.1. Es necesario eliminar la diferencia de vibración entre los modos para que el
rotor vibre con una sola forma modal.
Longitud (m)
Am
plitu
d (µ
m)
0
1U
2U
12−ΔU
Figura 3.1 Diferencia entre la vibración del modo uno y dos.
La secuencia del método consiste en: primero seleccionar las frecuencias que coincidan con
los picos de vibración, las vibraciones en cada una de estas frecuencias se consideran como la
vibración de un modo, para calcular el arreglo modal de pesos es necesario crear un vector de
diferencia de vibración, para esto se selecciona la vibración de un modo como referencia y se
30
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
resta a la vibración de ambos modo; en la figura 3.1 las vibraciones del primer modo son
las de referencia. Como en un rotor los valores de vibración sólo se tienen en los puntos de
medición, el vector de diferencia de vibración se forma con la siguiente ecuación:
1U
DU
{ } { } { }i r z ir i zDU U U− = − (3.2)
Donde:
{ }ir zDU − = Vector de diferencia de vibración entre los puntos de medición i de los modos r y
el modo z de referencia.
z = Modo de referencia.
i = Posición o sensor.
La forma del vector DU al aplicarse en el caso de un rotor con dos sensores, dos planos de
lanceo, dos modos de vibración y como referencia el primer modo, se muestra en la ecuación
3.3. Al crear el vector DU es necesario restar las vibraciones del modo de referencia a ambos
modos, para que al calcular el arreglo modal de pesos para el segundo modo, este no afecte las
vibraciones del modo de referencia.
11 11
12 1 12 11
21 21
22 1 22 21
0
0
U UDU U U
U UDU U U
−
−
⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪= −⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭
(3.3)
Al tener el vector de diferencia de vibración DU de la ecuación 3.3 y la matriz con los
coeficientes de influencia a las frecuencias seleccionadas, el arreglo modal de pesos del
segundo modo se calcula con la ecuación:
1 12 1
22 1
0
0ni j
j
P DUP
DU
α+ −
−
⎧ ⎫⎪ ⎪⎧ ⎫ ⎪ ⎪⎡ ⎤= −⎨ ⎬ ⎨⎣ ⎦
⎩ ⎭⎬
⎪ ⎪⎪ ⎪⎩ ⎭
(3.4)
Donde:
{ }jP = Arreglo modal de pesos para el modo diferente al de referencia. Cada elemento del
vector representa el peso a colocar en el plano de balanceo j
31
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
[ ]α = Matriz completa de coeficientes de influencia.
El arreglo modal de pesos que se calcula en con la ecuación 3.4 genera una vibración igual al
negativo de que al sumarse a la vibración total elimina la vibración del segundo modo,
quedando el primero sin cambio. Por tanto el arreglo modal de pesos que se obtiene
corresponde al segundo modo.
DU
Para calcular el arreglo modal del primer modo el procedimiento es igual al anterior, pero las
vibraciones de referencia serian las del segundo modo y el vector de diferencia de vibraciones
se puede escribir:
11 1211 2
12 12
21 2221 2
22 22
0
0
U UDUU UU UDUU U
−
−
⎧ ⎫ ⎧ ⎫⎧ ⎫⎪ ⎪ ⎪ ⎪⎪ ⎪
⎪ ⎪ ⎪ ⎪ ⎪ ⎪= −⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭
(3.5)
En resumen, las vibraciones del modo que se escoja de referencia no serán afectadas por el
arreglo modal de pesos que se calcula. Es decir, si la referencia son las vibraciones del primer
modo, sólo se afectarán las vibraciones del segundo modo, por lo que será un arreglo para el
segundo modo.
El método de las diferencias también se aplicó al modelo de tres modos, pero el arreglo
resultante afectaba a todos los modos excepto al de referencia, lo que no cumple la condición
para ser un arreglo modal de pesos; por lo que este método no fue viable en casos de más de
dos modos y dos planos de balanceo.
La contribución del método de las diferencias a el método final para determinar los AMP fue
el hecho de sustituir el valor de la vibración en las frecuencias que no corresponden al modo
seleccionado por cero, esto con el fin de calcular pesos que sólo afecten las vibraciones del
modo y no a las de otras frecuencias. En la ecuaciones 3.3 y 3.5 la función de los ceros es
evitar que las vibraciones de esas frecuencias se afecten por los pesos que se calculan.
32

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
3.4 Análisis para determinar el parámetro que afecta el cálculo de los
arreglos modales de pesos.
En esta investigación se busca determinar los arreglos modales de pesos a partir de matrices de
coeficientes de influencia. Para esto se realizó un análisis con el fin de identificar qué
parámetro influye en el cálculo de los AMP. La siguiente ecuación fue la base para el estudio.
{ } [ ]{ }V α= P (3.6) Lo primero que se encontró fue que si el vector de vibración { }V que se coloca en la ecuación
3.6 corresponde a un modo de vibración, entonces dicho vector se puede escribir como el
producto de la contribución modal correspondiente a esa frecuencia por la forma modal:
{ }{ } { }r n r ij jC ψ α⎡ ⎤= ⎣ ⎦ P (3.7)
Donde, { }{ }rnrC ψ es la vibración del modo r en la frecuencia n del sistema. Al despejar { }jP
de la ecuación 3.7 se tiene:
{ } { }{ }1
j ij r n rP Cα−
⎡ ⎤= ⎣ ⎦ ψ (3.8)
Los pesos resultantes son un arreglo modal, ya que el vector de vibración que se introdujo en
la ecuación 3.8 corresponde a un modo de vibración. En este caso se utilizó una matriz de
coeficientes de influencia cuadrada, es decir con tantos planos de balanceo como sensores, y
mediciones a una sola frecuencia.
Se realizó otro análisis utilizando la ecuación 3.6, pero esta vez se seleccionaron varias
velocidades, por lo que se calcularon las contribuciones modales para cada velocidad con la
ecuación 2.18. En este caso, la matriz de influencia era rectangular y para la inversa se aplicó
el método de Moore – Penrose. La ecuación 3.8 también se puede escribir:
{ } { }{ }
111 1
212 1
ni j
j ni j
CP
C
α ψ
ψα
+⎡ ⎤ ⎧ ⎫⎪ ⎪= ⎢ ⎥ ⎨ ⎬⎢ ⎥ ⎪ ⎪⎩ ⎭⎣ ⎦
(3.9)
33

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
Al resolver esta ecuación se obtuvo un arreglo modal de pesos aun cuando se utilizó un
método aproximado para invertir la matriz de coeficientes de influencia; esto es porque los
AMP se basan en el principio de ortogonalidad al igual que las fuerzas modales, por tanto sólo
existe un arreglo de pesos capaz de excitar sólo un modo de vibración.
Para demostrar que el arreglo modal { }jP es único, se despeja { }{ }111 ψC y { }{ }112 ψC de la
ecuación 3.9:
{ }{ } { }
111 1
212 1
ni j
jni j
CP
C
ψ α
ψ α
⎡ ⎤⎧ ⎫⎪ ⎪ = ⎢ ⎥⎨ ⎬⎢ ⎥⎪ ⎪⎩ ⎭ ⎣ ⎦
(3.10)
Se separa la ecuación 3.10 en sistemas de ecuaciones independientes:
{ }{ } { }111 1
ni j jC ψ α⎡ ⎤= ⎣ ⎦ P (3.11)
{ }{ } { }212 1
ni j jC ψ α⎡ ⎤= ⎣ ⎦ P (3.12)
Como { }1ψ debe ser igual en ambas ecuaciones ya que el arreglo solo excita un modo, se
tiene:
{ } { }11
11
1 ni j jP
Cψ α⎡ ⎤= ⎣ ⎦ (3.13)
{ } { }21
12
1 nij jP
Cψ α⎡ ⎤= ⎣ ⎦ (3.14)
Igualando { }1ψ de las ecuaciones 3.13 y 3.14
{ } { }1
11 12
1 1n nij j ij jP
C Cα α⎡ ⎤ ⎡ ⎤=⎣ ⎦ ⎣ ⎦
2 P (3.15)
Ordenando los términos:
{ }1 2
11 12
1 1 0n nij ij jP
C Cα α
⎡ ⎤⎡ ⎤ ⎡ ⎤− =⎢ ⎣ ⎦ ⎣ ⎦
⎢ ⎥⎣ ⎦⎥ (3.16)
Para que la ecuación 3.16 se cumpla, el resultado de la operación entre corchetes debe ser una
matriz singular, de manera que sólo existe un conjunto de vectores { }jP que al multiplicarlo
por esta matriz singular de como resultado cero. Los vectores { }jP que satisfacen la ecuación
34
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
3.16 son los vectores propios de la matriz que aparece delimitada por corchetes en dicha
ecuación; estos vectores indican las proporciones que deben guardar los pesos de un arreglo
modal.
Si el vector de vibración { que se introduce en la ecuación 3.9 no representa una
componente modal de vibración entonces no se cumplirá la igualdad de la ecuación 3.15, y por
lo tanto el arreglo de pesos representado por el vector
}V
{ }jP resultante podrá excitar a varios
modos de vibración.
De los casos analizados se concluyó que para obtener un arreglo modal de pesos es necesario
colocar un vector de vibración modal en la ecuación 3.9. Para obtener un vector de vibración
modal se requiere calcular las contribuciones modales, que dependen de las formas modales.
Por esta razón, el parámetro necesario para obtener los AMP son las formas modales.
3.5 Descripción del método de los AMP para matrices completas.
El objetivo del método es determinar los arreglos modales de pesos a partir de una matriz
completa de coeficientes de influencia; para ello es necesario calcular los factores de forma
modal en los puntos de medición del rotor o grupo de rotores mediante iteraciones.
El método de los AMP para matrices completas consiste en proponer factores de forma modal
iniciales para cada modo y calcular las contribuciones modales, con las contribuciones se
genera un vector de vibración modal el cual contiene las vibraciones del modo en las
diferentes frecuencias seleccionadas. Posteriormente con la ecuación 2.8 se calcula el arreglo
modal de pesos, AMP, correspondiente. Como se emplea el método de Moore – Penrose para
invertir la matriz de coeficientes de influencia es necesario calcular las vibraciones efecto para
conocer las vibraciones que realmente genera el arreglo modal de pesos calculado
inicialmente.
35
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
Si el arreglo de pesos obtenido en la primera aproximación es modal, los factores de forma
modal que se obtienen al adimensionar las vibraciones efecto de cada modo en las diferentes
frecuencias seleccionadas es el mismo, es decir, el rotor vibrará en una forma modal. En caso
que el arreglo calculado no genere los mismos factores de forma modal, entonces se toman
nuevos factores de forma modal y se calculan nuevamente las contribuciones modales y los
AMP, el cálculo termina hasta que el AMP genere los mismos factores de forma modal en
cualquier frecuencia.
Como resultado del método de los AMP para matrices completas se obtienen: los arreglos
modales de pesos, los factores de forma modal en los puntos de medición y la suma de los
arreglos modales de pesos balanceará la máquina en todo el intervalo de frecuencias. Para
aplicar el método de los AMP para matrices completas se requiere lo siguiente:
El número de planos de balanceo debe ser igual al número de sensores.
Seleccionar tantas velocidades como modos de vibración se desee afectar, con el fin de
obtener un factor de forma modal inicial con cada frecuencia seleccionada.
Tener una matriz completa de coeficientes de influencia, con la característica mencionada
en la sección 2.2.
Tener un rodado inicial para balancear, con los valores de vibración de todos los sensores.
Los pasos que constituyen el método de los AMP para matrices completas son:
1. Seleccionar frecuencias que coincidan con los picos de vibración.
2. Calcular factores de forma modal iniciales en los sensores.
3. Calcular las contribuciones modales iniciales.
4. Crear matriz de vibración modal inicial.
5. Cálculo del AMP inicial.
6. Vibraciones efecto causadas por el AMP inicial.
7. Calcular los factores de forma modal del rotor causados por los AMP iniciales.
8. Tomar el factor de forma modal de referencia.
9. Calcular el número MAC para los AMP iniciales.
36

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
10. Aplicación del criterio de convergencia para determinar si el arreglo es o no modal. Si el
MAC es mayor a la referencia entonces el arreglo de pesos inicial es modal, sino se toma
el factor de forma modal de referencia como factores de forma inicial y se inician los
cálculos en el punto tres.
En forma de diagrama de flujo el método de los AMP para matrices completas se encentra en
la figura 3.2.
Frecuencias que coinciden con los picos de vibración.
Factores de forma modal
iniciales.
Contribuciones modales.
Figura 3.2 Diagrama de flujo del método de los AMP para matrices completas.
Matriz de vibración modal inicial.
Calcular los AMP iniciales con la matriz completa de coeficientes de influencia.
Vibraciones efecto causadas por los AMP
iniciales.
Factores de forma modal del rotor causados por los
AMP iniciales.
Factores de forma modal de referencia.
Número MAC MAC > 0.99999
Utilizar los factores de forma modal de referencia
como iniciales.
No
Si AMP y factor de forma modal en los sensores
37
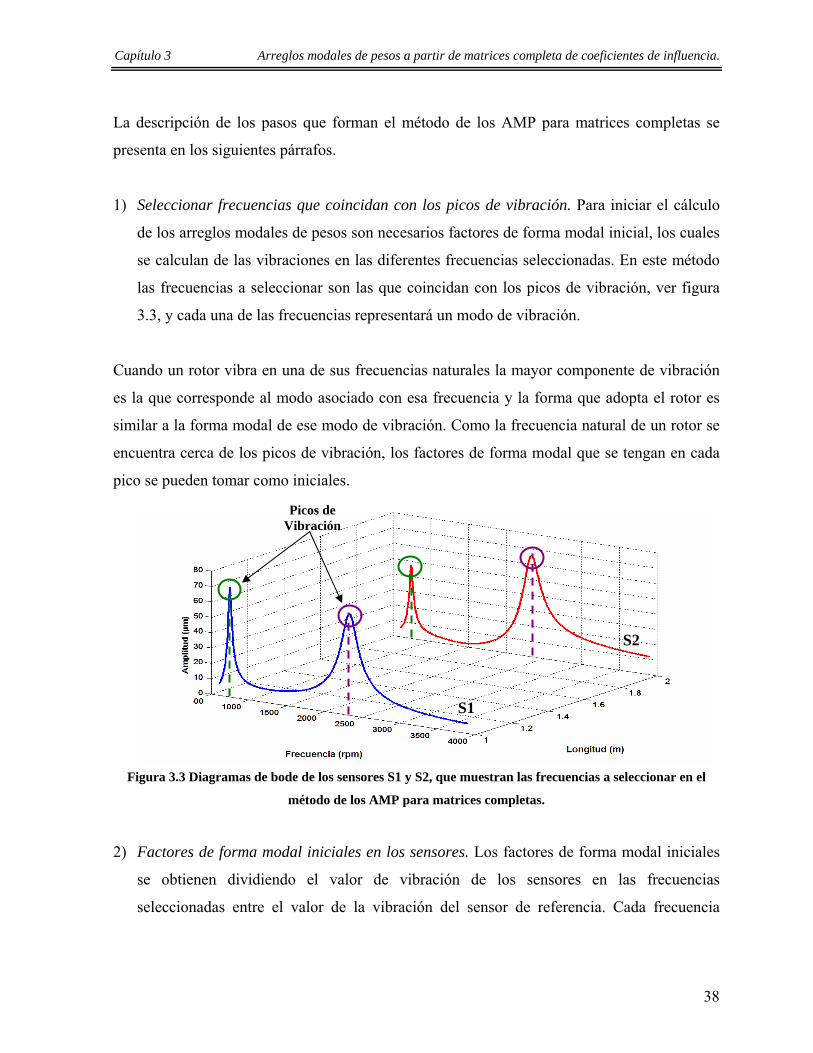
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
La descripción de los pasos que forman el método de los AMP para matrices completas se
presenta en los siguientes párrafos.
1) Seleccionar frecuencias que coincidan con los picos de vibración. Para iniciar el cálculo
de los arreglos modales de pesos son necesarios factores de forma modal inicial, los cuales
se calculan de las vibraciones en las diferentes frecuencias seleccionadas. En este método
las frecuencias a seleccionar son las que coincidan con los picos de vibración, ver figura
3.3, y cada una de las frecuencias representará un modo de vibración.
Cuando un rotor vibra en una de sus frecuencias naturales la mayor componente de vibración
es la que corresponde al modo asociado con esa frecuencia y la forma que adopta el rotor es
similar a la forma modal de ese modo de vibración. Como la frecuencia natural de un rotor se
encuentra cerca de los picos de vibración, los factores de forma modal que se tengan en cada
pico se pueden tomar como iniciales.
Picos de Vibración
S2
S1
Figura 3.3 Diagramas de bode de los sensores S1 y S2, que muestran las frecuencias a seleccionar en el
método de los AMP para matrices completas.
2) Factores de forma modal iniciales en los sensores. Los factores de forma modal iniciales
se obtienen dividiendo el valor de vibración de los sensores en las frecuencias
seleccionadas entre el valor de la vibración del sensor de referencia. Cada frecuencia
38

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
seleccionada del paso anterior se asocia con un modo de vibración y el cálculo de los
factores de forma modal inicial en los sensores se realiza con la siguiente ecuación
{ } i ri r
a r
VV
ψ⎧ ⎫⎪ ⎪= ⎨ ⎬⎪ ⎪⎩ ⎭
(3.17)
Donde:
{ ir }ψ = Factor de forma modal en la posición i del modo r.
irV = Vibración en la posición i del modo r.
arV = Vibración en la posición de referencia a del modo r.
Cabe mencionar que los factores de forma modal iniciales tienen una forma parecida a los
factores de forma reales del rotor, se toman dichos factores como iniciales ya que no se cuenta
con programas de extracción de parámetros modales para determinar los factores de forma
modal reales del rotor.
Cuando se tienen los factores de forma modal iniciales en los puntos de medición para cada
modo, estos se concentran en una matriz que se construye con la siguiente ecuación:
[ ] { } { } { }1 2i i i rψ ψ ψ ψ⎡ ⎤= ⎣ ⎦ (3.18)
ix = ix1 ix1 ix1 r
Donde [ ]ψ es la matriz que contiene los factores de forma modal de todos los modos.
3) Contribuciones modales. Con la ecuación 2.17 se calcula la contribución de cada modo a
la vibración total en las diferentes frecuencias. Cada fila de la matriz de contribución
modal indica el modo y las columnas la contribución de ese modo en las diferentes
frecuencias. El número de contribuciones modales C de cada modo es igual al número de
frecuencias seleccionadas.
4) Matriz de vibración modal inicial. En el tema 3.4 se explicó que para obtener un AMP era
necesario un vector de vibración modal; es decir, un vector que contenga los valores de
39

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
vibración de cada modo en las diferentes frecuencias. Como en este método se calculan
todos los AMP al mismo tiempo, se utiliza una matriz de vibración modal en donde las
columnas representan los vectores de vibración modal inicial. Para calcular dicha matriz se
emplea la siguiente ecuación:
[ ] { } { } { }1 2 rVM VM VM VM= ⎡ ⎤⎣ ⎦ (3.19) kx = kx1 kx1 kx1 r
Donde:
[ ]VM = Matriz de vibración modal inicial.
{ }rVM = Vector de vibración modal inicial del modo r.
k = Número de velocidades n por número de sensores i.
Para calcular el vector de vibración modal inicial se necesita transponer la matriz de
contribuciones modales la cual se denota por [ ]TC y posteriormente aplicar la ecuación:
{ } { } { } 1y y yVM TC y rψ= ⊗ ≤ ≤
]
(3.20)
kx1 nx1 ix1
Donde:
y = La columna de la matriz.
⊗ = Producto Kronecker
La matriz [ contiene los vectores de vibración de cada modo acomodado en columnas y el
tamaño depende por un lado del número de frecuencias n seleccionadas multiplicado por el
número de sensores i y por el otro del número de modos que se tengan en el rotor o conjunto
de rotores.
VM
En la primera aproximación, los renglones de la matriz de vibración modal tienen la
característica de sólo tener valores de vibración en la frecuencia asociada con cada modo
mientras que en las demás frecuencias el valor de vibración es cero. El valor de vibración cero
es una consideración inicial que indica que la vibración de un modo es nula en las frecuencias
diferentes a la asociada con dicho modo. Conforme se acercan los cálculos a los factores de
40
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
forma modal reales se conocen las contribuciones modales reales y con esto la matriz de
vibraciones modales va cambiando los valores de cero iniciales por la vibración que genera el
modo en las frecuencias seleccionadas.
Para utilizar la matriz en el cálculo de los arreglos modales se cambia la distribución de
los valores de vibración de k x r a m x r para tener la misma distribución que la matriz de
coeficientes de influencias, donde m es el número de sensores i por el número de velocidades
n. La nueva distribución de matriz de vibración modal inicial
[VM ]
[ ]VM se presenta en la ecuación
3.21.
m xrVM⎡ ⎤⎣ ⎦ (3.21)
5) Cálculo de los AMP iniciales. En esta etapa cobra importancia la matriz completa de
coeficientes de influencia para calcular los arreglos modales de peso, cabe mencionar que
dicha matriz se forma en balanceos anteriores y no durante la aplicación del presente
método.
La ecuación 3.22 se emplea para calcular los arreglos modales de pesos iniciales. Dicha
ecuación representa una modificación a la ecuación 2.8 del balanceo por coeficientes de
influencia con el fin de utilizar la matriz de vibración modal inicial modificada en el cálculo
de los arreglos modales de pesos.
[ ] [ ] [ ]AMP VMα += − (3.22)
( )( )jxr = jxm mxr
Donde:
[AMP]
En caso de aplicación del método a un caso real, cuando no se cuenta con suficientes rodados
de prueba para formar la matriz completa de coeficientes de influencia se sugiere unir los
= Esta matriz contiene todos los arreglos modales de pesos iniciales de la máquina.
Las columnas son los arreglos para cada modo de vibración y la fila es el plano de balanceo j
en donde se debe colocar el peso.
41

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
rodados disponibles con los rodados de balanceos anteriores con el fin de completar dicha
matriz; aunque se crea la posibilidad de que el arreglo que se obtenga afecte a otros modos de
vibración, ya que el cálculo de un AMP depende de la matriz de coeficientes de influencia.
6) Vibraciones efecto causadas por los AMP iniciales. El método de Moore - Penrose es una
aproximación de la inversa de una matriz, por tanto la ecuación 3.22 tiene una solución
aproximada y es necesario conocer las vibraciones que realmente ocasionan los AMP
iniciales. Las vibraciones efecto se determinan con la siguiente ecuación:
[ ] [ ][ ]VE AMPα= (3.23)
( )( )m x r = m x j jx r
[ ]VESe cambia el orden de las vibraciones en la matriz de vibraciones efecto de m x r a k x r,
ara tener una matriz ordenada por velocidades y no por sensores, la nueva matriz se presenta p
en la ecuación 3.24.
k xrVE⎡ ⎤⎣ ⎦ (3.24)
7 or causados por los AMP iniciales. Si el ) Calcular los factores de forma modal del rot
arreglo de pesos que se calcula es modal el rotor tendrá el mismo factor de forma modal en
etapa se denominan recalculados y se obtienen al
dimensionar la matriz de vibraciones efecto. La secuencia para adimensionar dicha matriz es:
todas las frecuencias seleccionadas.
Los factores de forma modal en esta
a
seleccionar una columna de la matriz k xrVE⎡ ⎤⎣ ⎦ y escoger un sensor de referencia, como las
vibraciones en la columna están ordenadas por frecuencias se emplea la ecuación 3.17 para
calcular los factores de forma modal en cada frecuencia, la secuencia se repite para todas las
columna que componen la matriz de vibraciones efecto k xrVE⎡ ⎤⎣ ⎦ . Al adimensionar todas las
columnas, se forma una matriz que se denomina de factores de forma modal recalculados
ϕ⎡ ⎤ que tiene el mismo tamaño que la matriz VEk xr⎣ ⎦ k xr⎡ ⎤⎣ ⎦ , pero es adimensional.
42
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
8) Tomar el factor de forma modal de referencia. Para calcular el número MAC y determinar
el rotor tiene los mismos factores de formsi a modal en las frecuencias seleccionadas, es
referencia para el
odo relacionado con la columna; los factores de forma modal a seleccionar son los que
asocia
s de forma modal de referencia para cada modo, estos
colocan en una ma res de forma modal de referencia
necesario tener un factor de forma modal de referencia para cada modo.
En cada columna de la matriz k xrϕ⎡ ⎤⎣ ⎦ se escoge un factor de forma modal de
m
correspondan a la frecuencia da con el modo de vibración, es decir, los factores de
forma modal de referencia para el segundo modo son los factores de forma que se encuentre
en la segunda frecuencia seleccionada.
Al obtener de la matriz k x rϕ⎡ ⎤⎣ ⎦ los factore
triz de facto [ ]φse , que tiene el mismo
tamaño y distribución que la matriz [ ]ψ de la ecuación 3.18.
9) Calcular el número MAC para los AMP iniciales. El significado del MAC se presentó en
la sección 2.10. Para determinar el número AC se emplea la ecuación 2.18; se toma una M
columna de la matriz de factores de forma modal de referencia [ ]φ y se compara con los
factores de forma modal de cada una de las frecuencias que componen la columna
correspondiente en la matriz de factores de forma modal recalculados, como resultado se
obtiene el número MAC que provoca un arreglo modal de pesos inicial en cada frecuencia.
Los números MAC que se obtienen para cada arreglo se colocan en una matriz de números
MAC, la cual se puede escribir:
nr
[ ]11 12 1
21 22 2
1 2
r
r
n n
MAC MAC MACMAC MAC MAC
MAC
MAC MAC MAC
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
(3.25)
= nxr nx1 nx1 nx1
43
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
Donde:
[ ]MAC = Matriz de números MAC. Los elementos de esta matr
MAC resultante al comparar los factores de forma modal recalculados en la frecuencia n con
de cia od mn se relaciona con el arreglo
pesos y las filas con las frecuencias.
Una característica de la matriz de números MAC es que tiene sólo unos en la diagonal
atriz de números MAC se le calcula el valor rms por columna, el cual representa el
iz representan el número
los factores de forma modal referen del m o r. La colu a
modal de
principal, porque el factor de forma modal de referencia coincide con el factor de forma modal
recalculado del cual se tomó.
A la m
valor MAC rms para cada arreglo modal inicial y se obtiene con la ecuación 3.26.
( )2
1
1 nrrms xr
x
MAC MACn =
= ∑ (3.26)
Donde: rrmsMAC = Número MAC rms generado por el arreglo modal de pesos inicial del modo r.
0) Criterio de convergencia. De los números MAC rms que se calculan para los arreglos
les de pesos iniciales, se toma el mínimo, ya que representa el arreglo modal de pesos
inicial que tiene m a
modal en todas las frecuencias y que afecta a otros modos de vibración.
1
moda
ayor desviación, es decir, que no genera los mismos factores de form
El criterio de convergencia consiste en que el número MAC rms mínimo sea mayor a 0.99999,
ya que asegura un arreglo modal que provoca la misma forma modal en todas las frecuencias.
Si la condición del MAC no se cumple, se toman los factores de forma modal de referencia
[ ]φ como una nueva matriz de factores de forma modal inicial [ ]ψ y se comienzan las
operaciones desde el punto tres. Lo que ocurre en cada iteración es que los factores de forma
modal se recalculan al igual que los arreglos modales de pesos.
44
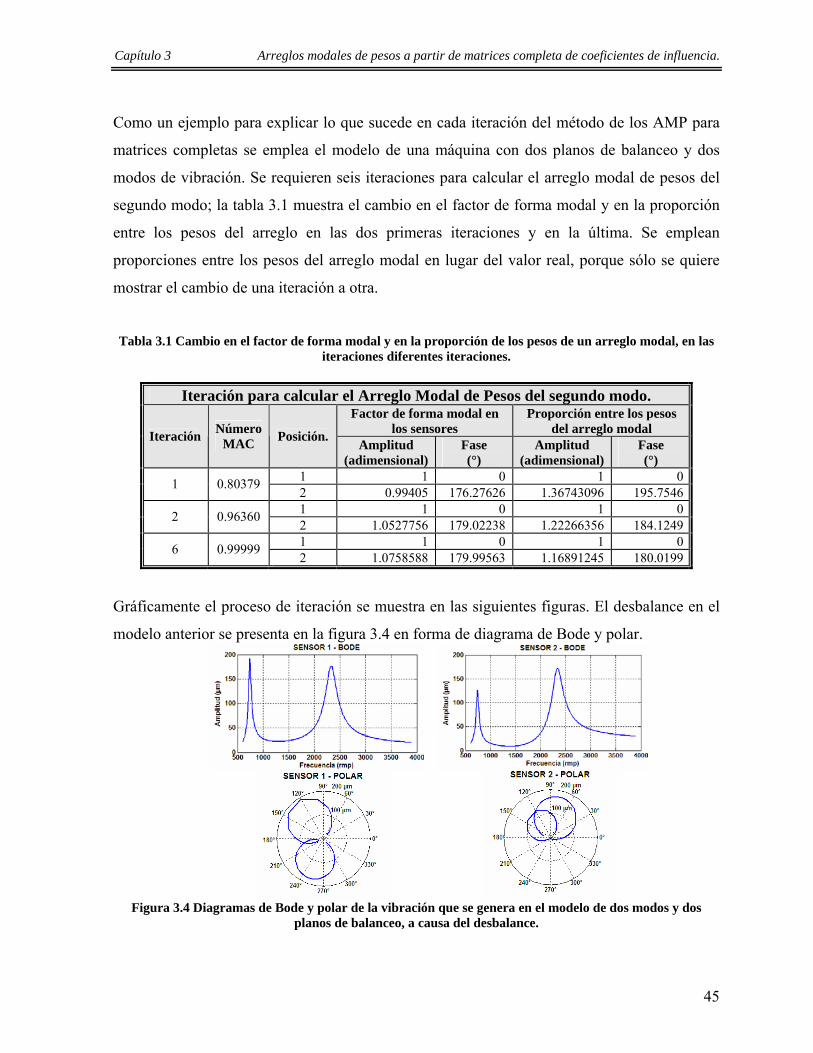
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
Como un ejemplo para explicar lo que sucede en cada iteración del método de los AMP para
rices completas se emplea el modelo de una máquina con dos planos de balanceo y dos
modos de vibración. Se requieren seis iteraciones para calcular el arreglo modal de pesos del
segundo modo; la tabla 3.1 muestra el cambio en el factor de fo
mat
rma modal y en la proporción
entre los pesos del arreglo en las dos primeras iteraciones y en la última. Se emplean
proporciones entre los pesos del arreglo modal en lugar del valor real, porque sólo se quiere
mostrar el cambio de una iteración a otra.
Tabla 3.1 Cambio en el factor de forma modal y en la proporción de los pesos de un arreglo modal, en las
iteraciones diferentes iteraciones.
Iteración para calcular el Arreglo Modal de Pesos del segundo modo. Factor de forma modal en
los sensores Proporción entre los pesos
del arreglo modal Número Iteración Posición. MAC Amplitud (adimensional)
Fase (°)
Amplitud Fase (adimensional) (°)
1 1 1 00 1 0.80379 2 0.99405 176.27626 1.36743096 195.75461 1 0 1 02 0.96360 2 1.0527756 179.02238 1.22266356 184.12491 1 0 1 06 0.99999 2 1.0758588 179.99563 991.16891245 180.01
Gráficam te el de iteración se m n tes des en el
modelo anterior se presenta en la figura a de diagrama de Bode y polar.
en proceso uestra e las siguien figuras. El balance
3.4 en form
Figura 3.4 Diagramas de Bode y polar de la vibración que se genera en el modelo de dos modos y dos planos de balanceo, a causa del desbalance.
45

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
En la figura 3.5 se observa la respuesta del modelo al colocar el AMP que se obtiene en la
rimera iteración del método para matrices completas. En dicha figura se observa que las
vibraciones del segundo modo se reducen, pero el arreglo no la elimina completamente, por lo
qu
p
e se calcula un nuevo arreglo modal de pesos en la siguiente iteración.
Figura 3.5 Respuesta de la máquina al colocar el AMP que se obtiene
ma modal y las propor
.1, y los efectos que
en la primera iteración.
ciones del AMP en la segunda iteración se
se producen sobre las vibraciones del modelo se
Los factores de for
encuentran en la tabla 3
muestran en la figura 3.6.
Figura 3.6 Efectos del AMP de la segunda iteración sobre las vibraciones del segundo modo.
46

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
Al utilizar un modelo teórico para generar los datos de vibración, es posible calcular un
rreglo modal de pesos que tengan un MAC rms de 0.99999, en el ejemplo se logra un arreglo
con esa precisión después de 6 iteraciones. Los efectos de dicho arreglo sobre el modelo se
resentan en la figura 3.7.
a
p
Figura 3.7 Efecto del AMP final sobre el modelo de dos modos de vibración.
as gráficas de la figura 3.6 y 3.7 son similares, aunque la figura 3.7 es un arreglo con un
MAC de 0.99999. El valor de convergencia en el método de los AMP para matrices completas
varía de acuerdo al caso de estudio, como se muestra en los capítulos cuatro y cinco. El valor
e referencia de 0.999999 que se presenta en esta sección es con el que plantea el método
influencia para
calcular los arreglos modales de pesos.
factores
de forma modal en los puntos de medición.
res de forma modal en los planos de balanceo.
L
d
inicialmente. Se consideran cinco decimales en la referencia porque con un número mayor, la
variación en la magnitud y fase de los pesos en cada iteración es despreciable.
Las principales características del método de los AMP para matrices completas son:
Utiliza sólo un rodado inicial y una matriz completa de coeficientes de
No necesita programas de extracción de parámetros modales para determinar los
Al utilizar la matriz de coeficientes de influencia para calcular los arreglos modales de
pesos, no es necesario calcular los facto
47
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
3.6 Discusión. El método de los AMP para matrices completas de coeficientes de influencia reúne
características tanto del balanceo por coeficientes de influencia como del balanceo modal.
Tiene la ventaja de no necesitar rodados de prueba para caracterizar los modos de vibración,
a que utiliza la matriz completa de coeficientes de influencia la cual contiene esa
argadas de la actividad, sólo
bservan una reducción en la vibración sin saber cuáles modos se eliminaron o afectaron. La
de pesos pueden proporcionar esa guía ya que cada modo de
bración está ligado a diferentes ubicaciones o partes de la máquina, velocidades y maneras
ia que dependen de una combinación aleatoria
e las formas modales con las condiciones de la máquina, las frecuencias seleccionadas, los
y
información. Además, el método de los AMP no requiere modelos numéricos para conocer los
factores de forma modal en los planos de balanceo, lo que reduce el tiempo de cálculo de los
arreglos modales de pesos y por tanto la actividad de balanceo.
Con el método de los coeficientes de influencia al tener una matriz completa se pueden
calcular los pesos para balancear el rotor en diferentes frecuencias; pero estos pesos no indican
cómo se afecta cada modo de vibración y las personas enc
o
ventaja de contar con arreglos modales de pesos es que se pueden reducir o eliminar la
vibración correspondiente a algún modo específico, lo que permite controlar la reducción de
las vibraciones en la máquina.
Cuando una máquina no responde como se esperaba a los pesos de balanceo colocados, es
indispensable contar con alguna orientación para que el especialita pueda proceder con el
balanceo. Los arreglos modales
vi
de vibrar, mientras que los cambios en el comportamiento de una máquina producidos por los
pesos obtenidos de una matriz de coeficientes de influencia podrían parecer aleatorios y no
indicar al especialista ningún curso de acción.
Otra ventaja que se espera de los arreglos modales de pesos es que la proporción entre los
pesos de un arreglo se mantenga con el paso del tiempo, al ser dependiente de la forma modal;
esto contraste con los coeficientes de influenc
d
48

Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
errores de medición, etc. Por la estabilidad que se espera de los AMP se abre la posibilidad de
aplicarlos a máquinas con iguales características de diseño y montaje.
Al tener los AMP de la máquina se pueden utilizar para balancear modo por modo en
diferentes rodados de prueba o colocar en el rotor la suma de los AMP para balancear sólo con
la corrida inicial. Otra ventaja de los arreglos modales de pesos es que con ellos se pueden
onocer los factores de forma modal en los planos de balanceo, aunque con una referencia c
distinta a los factores de forma modal en los sensores. Los factores de forma en los planos de
balanceo se calculan con la siguiente secuencia:
Primero se forma la matriz de fuerzas [ ]F que tiene la siguiente forma:
[ ] { } { } { }1 2 jF F F F⎡ ⎤= ⎣ ⎦ (3.27)
[ ]FEl cálculo de las columnas de se realiza con:
{ } { } 1x x xF RR TAMP x j= ≤ ≤ (3.28)
onde
{ }xTAMPD es una columna de la transpuesta de la matriz de AMP.
[ ] [ ]TTAMP AMP= (3.29) y
jR j
b
RRR
= (3.30)
Donde:
= Relación entre el radio del plano j y el de referencia b. RRj
jR = Radio del plano de balanceo j.
bR = Radio del plano de balanceo de referencia.
Cuando se calcula la matriz [ ]F se emplea la siguiente ecuación para determinar los factores
de forma modal en los planos de balanceo:
49
Capítulo 3 Arreglos modales de pesos a partir de matrices completa de coeficientes de influencia.
50
[ ] [ ] [ ]1F Iψ −= (3.31)
Donde:
[ ]ψ = Matriz de factores de forma modal en los planos de
odo r y la fila el plano de balanceo j.
balanceo. La columna representa el
m
[ ]F = Matriz de fuerzas.
[ ]I = Matriz identidad.
[ ] 1− = Inversa de la matriz cuadrada.
La ecuación 3.31 se aplica si el número de modos es igual al número de planos de balanceo, ya
que i adrada para determinar los factores de forma modal. Al
ner los factores de forma modal tanto en los planos de balanceo como en los puntos de
mplica la inversa de una matriz cu
te
medición se puede tener una idea de la forma que adopta el rotor en cada modo de vibración.
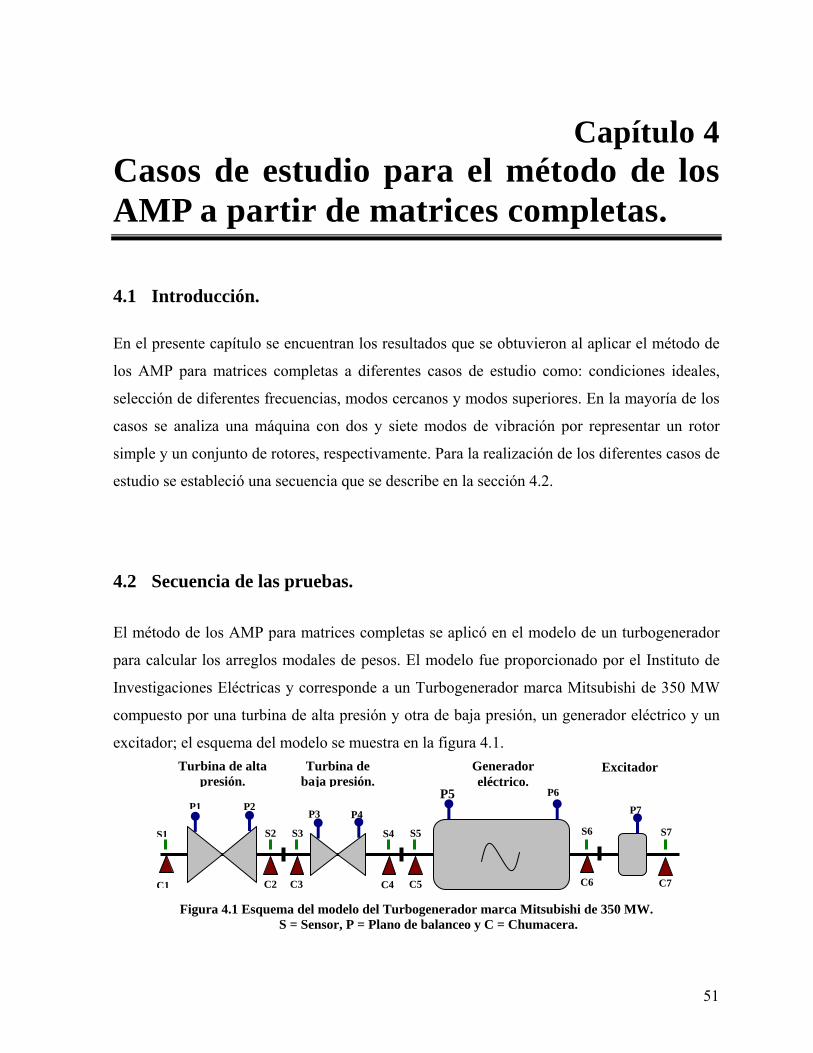
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas. Equation Chapter (Next) Section 4 4 Capitulo 4.
4.1 Introducción.
En el presente capítulo se encuentran los resultados que se obtuvieron al aplicar el método de
los AMP para matrices completas a diferentes casos de estudio como: condiciones ideales,
selección de diferentes frecuencias, modos cercanos y modos superiores. En la mayoría de los
casos se analiza una máquina con dos y siete modos de vibración por representar un rotor
simple y un conjunto de rotores, respectivamente. Para la realización de los diferentes casos de
estudio se estableció una secuencia que se describe en la sección 4.2.
4.2 Secuencia de las pruebas.
El método de los AMP para matrices completas se aplicó en el modelo de un turbogenerador
para calcular los arreglos modales de pesos. El modelo fue proporcionado por el Instituto de
Investigaciones Eléctricas y corresponde a un Turbogenerador marca Mitsubishi de 350 MW
compuesto por una turbina de alta presión y otra de baja presión, un generador eléctrico y un
excitador; el esquema del modelo se muestra en la figura 4.1.
C7C6 C5C4C3 C2 C1
Turbina de alta presión.
Turbina de baja presión.
Generador eléctrico.
S1 S2 S3 S4 S5 S6 S7
P7
P6 P5P3 P4
P2 P1
Excitador
Figura 4.1 Esquema del modelo del Turbogenerador marca Mitsubishi de 350 MW. S = Sensor, P = Plano de balanceo y C = Chumacera.
51
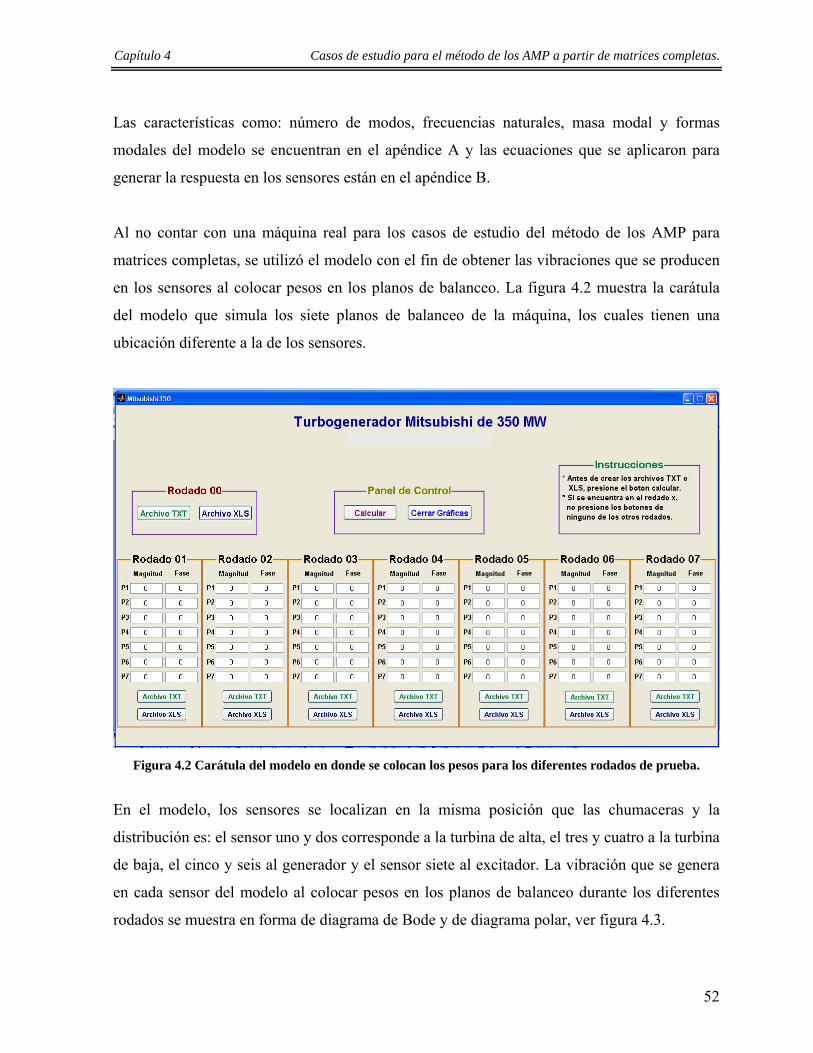
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
Las características como: número de modos, frecuencias naturales, masa modal y formas
modales del modelo se encuentran en el apéndice A y las ecuaciones que se aplicaron para
generar la respuesta en los sensores están en el apéndice B.
Al no contar con una máquina real para los casos de estudio del método de los AMP para
matrices completas, se utilizó el modelo con el fin de obtener las vibraciones que se producen
en los sensores al colocar pesos en los planos de balanceo. La figura 4.2 muestra la carátula
del modelo que simula los siete planos de balanceo de la máquina, los cuales tienen una
ubicación diferente a la de los sensores.
Figura 4.2 Carátula del modelo en donde se colocan los pesos para los diferentes rodados de prueba.
En el modelo, los sensores se localizan en la misma posición que las chumaceras y la
distribución es: el sensor uno y dos corresponde a la turbina de alta, el tres y cuatro a la turbina
de baja, el cinco y seis al generador y el sensor siete al excitador. La vibración que se genera
en cada sensor del modelo al colocar pesos en los planos de balanceo durante los diferentes
rodados se muestra en forma de diagrama de Bode y de diagrama polar, ver figura 4.3.
52
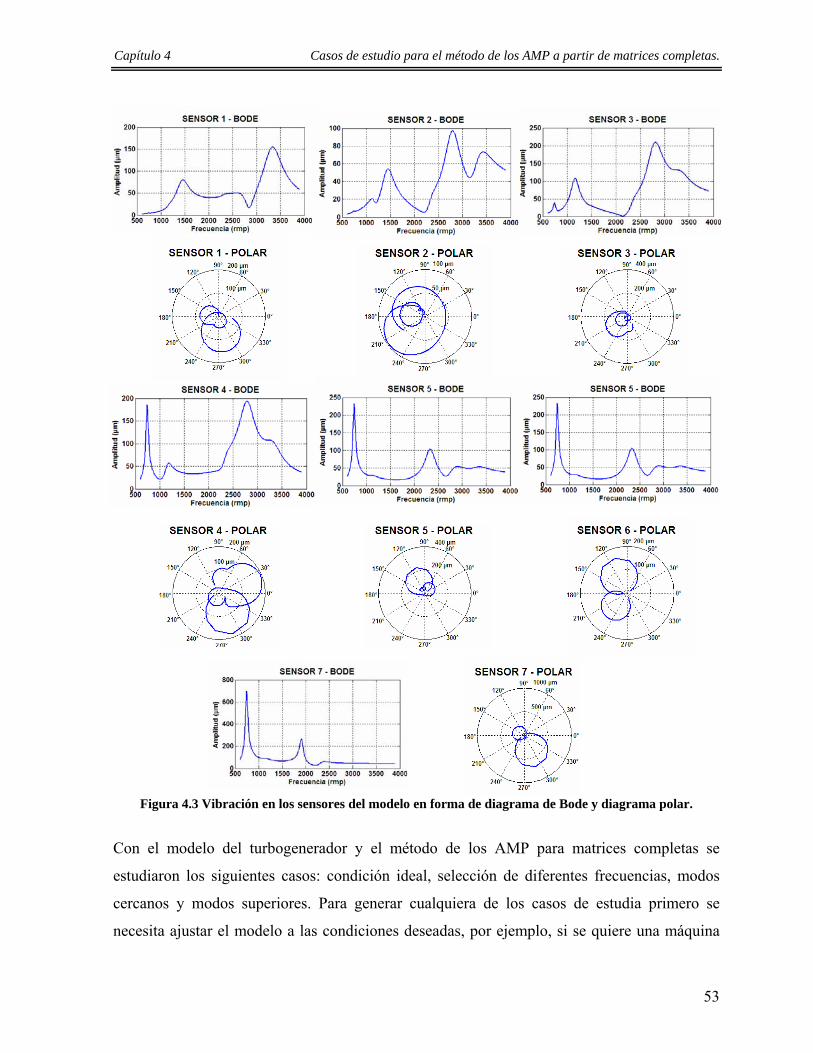
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
Figura 4.3 Vibración en los sensores del modelo en forma de diagrama de Bode y diagrama polar.
Con el modelo del turbogenerador y el método de los AMP para matrices completas se
estudiaron los siguientes casos: condición ideal, selección de diferentes frecuencias, modos
cercanos y modos superiores. Para generar cualquiera de los casos de estudia primero se
necesita ajustar el modelo a las condiciones deseadas, por ejemplo, si se quiere una máquina
53
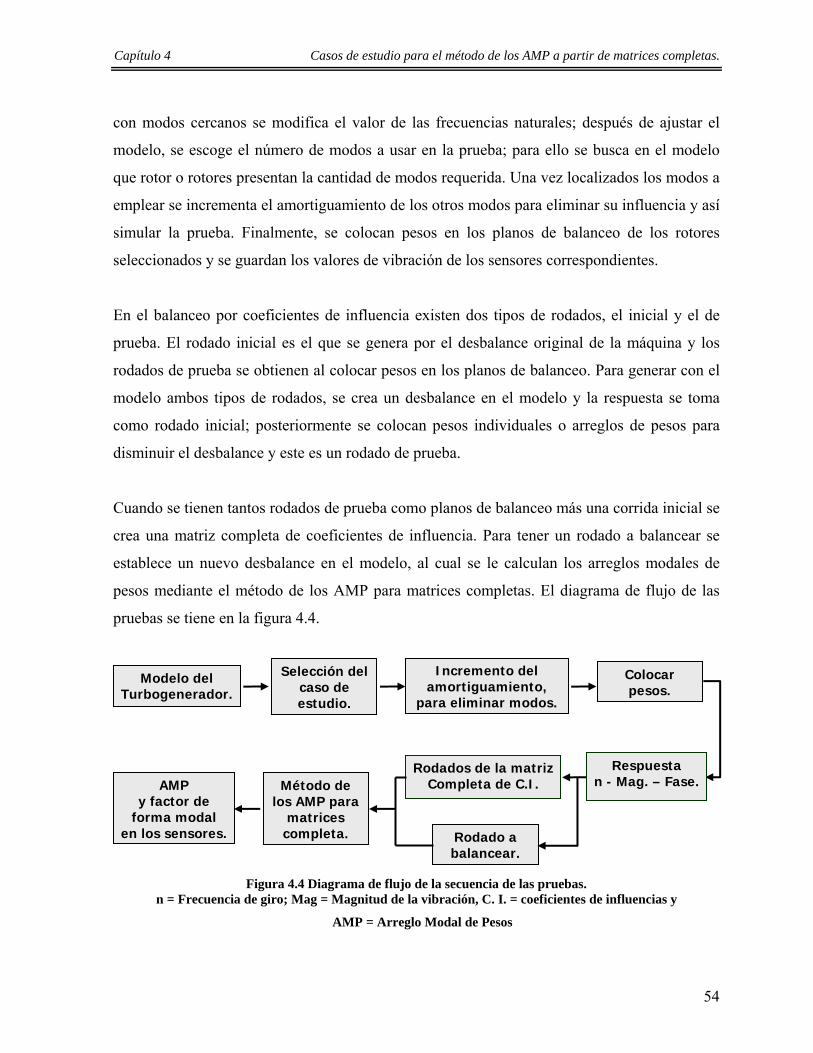
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
con modos cercanos se modifica el valor de las frecuencias naturales; después de ajustar el
modelo, se escoge el número de modos a usar en la prueba; para ello se busca en el modelo
que rotor o rotores presentan la cantidad de modos requerida. Una vez localizados los modos a
emplear se incrementa el amortiguamiento de los otros modos para eliminar su influencia y así
simular la prueba. Finalmente, se colocan pesos en los planos de balanceo de los rotores
seleccionados y se guardan los valores de vibración de los sensores correspondientes.
En el balanceo por coeficientes de influencia existen dos tipos de rodados, el inicial y el de
prueba. El rodado inicial es el que se genera por el desbalance original de la máquina y los
rodados de prueba se obtienen al colocar pesos en los planos de balanceo. Para generar con el
modelo ambos tipos de rodados, se crea un desbalance en el modelo y la respuesta se toma
como rodado inicial; posteriormente se colocan pesos individuales o arreglos de pesos para
disminuir el desbalance y este es un rodado de prueba.
Cuando se tienen tantos rodados de prueba como planos de balanceo más una corrida inicial se
crea una matriz completa de coeficientes de influencia. Para tener un rodado a balancear se
establece un nuevo desbalance en el modelo, al cual se le calculan los arreglos modales de
pesos mediante el método de los AMP para matrices completas. El diagrama de flujo de las
pruebas se tiene en la figura 4.4.
Modelo del Turbogenerador.
Rodados de la matriz Completa de C.I.
Selección del caso de estudio.
Incremento del amortiguamiento,
para eliminar modos.
Colocar pesos.
Rodado a balancear.
Método de los AMP para
matrices completa.
Respuesta n - Mag. – Fase.
AMP
y factor de forma modal
en los sensores.
Figura 4.4 Diagrama de flujo de la secuencia de las pruebas. n = Frecuencia de giro; Mag = Magnitud de la vibración, C. I. = coeficientes de influencias y
AMP = Arreglo Modal de Pesos
54
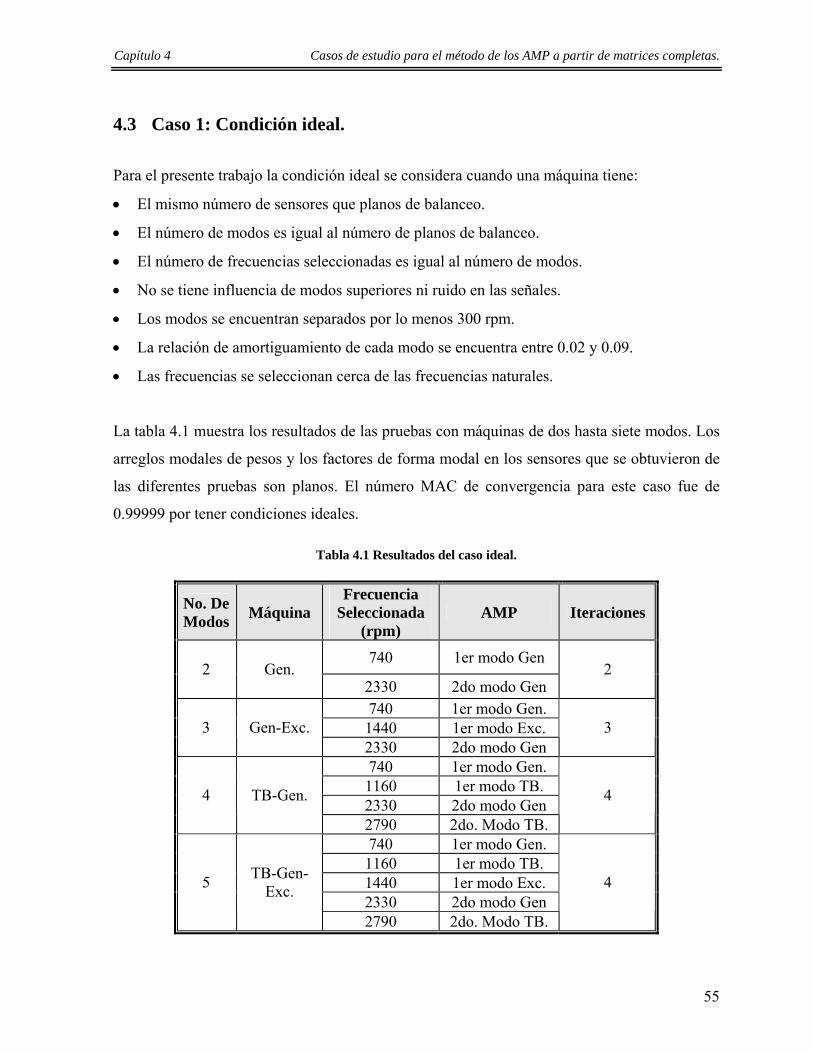
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
4.3 Caso 1: Condición ideal.
Para el presente trabajo la condición ideal se considera cuando una máquina tiene:
• El mismo número de sensores que planos de balanceo.
• El número de modos es igual al número de planos de balanceo.
• El número de frecuencias seleccionadas es igual al número de modos.
• No se tiene influencia de modos superiores ni ruido en las señales.
• Los modos se encuentran separados por lo menos 300 rpm.
• La relación de amortiguamiento de cada modo se encuentra entre 0.02 y 0.09.
• Las frecuencias se seleccionan cerca de las frecuencias naturales.
La tabla 4.1 muestra los resultados de las pruebas con máquinas de dos hasta siete modos. Los
arreglos modales de pesos y los factores de forma modal en los sensores que se obtuvieron de
las diferentes pruebas son planos. El número MAC de convergencia para este caso fue de
0.99999 por tener condiciones ideales.
Tabla 4.1 Resultados del caso ideal.
No. De Modos Máquina
Frecuencia Seleccionada
(rpm) AMP Iteraciones
740 1er modo Gen 2
Gen. 2330 2do modo Gen
2
740 1er modo Gen. 1440 1er modo Exc. 3 Gen-Exc. 2330 2do modo Gen
3
740 1er modo Gen. 1160 1er modo TB. 2330 2do modo Gen 4 TB-Gen.
2790 2do. Modo TB.
4
740 1er modo Gen. 1160 1er modo TB. 1440 1er modo Exc. 2330 2do modo Gen
5 TB-Gen-Exc.
2790 2do. Modo TB.
4
55
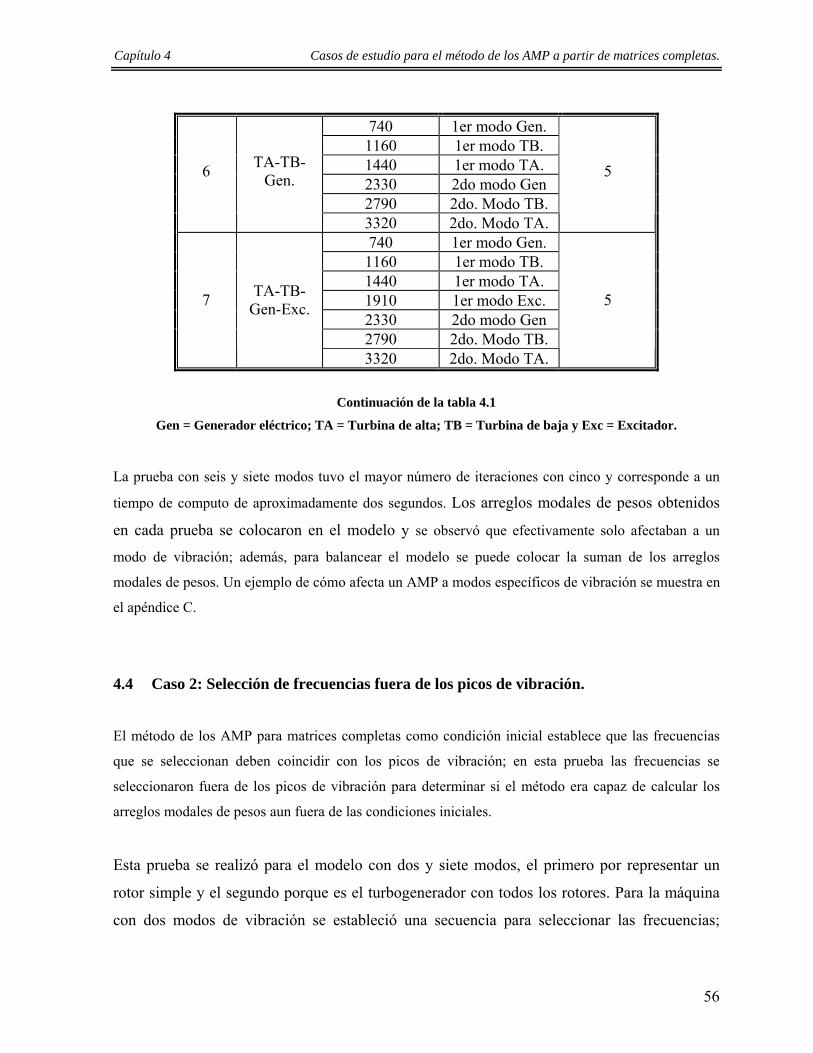
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
740 1er modo Gen. 1160 1er modo TB. 1440 1er modo TA. 2330 2do modo Gen 2790 2do. Modo TB.
6 TA-TB-Gen.
3320 2do. Modo TA.
5
740 1er modo Gen. 1160 1er modo TB. 1440 1er modo TA. 1910 1er modo Exc. 2330 2do modo Gen 2790 2do. Modo TB.
7 TA-TB-Gen-Exc.
3320 2do. Modo TA.
5
Continuación de la tabla 4.1
Gen = Generador eléctrico; TA = Turbina de alta; TB = Turbina de baja y Exc = Excitador.
La prueba con seis y siete modos tuvo el mayor número de iteraciones con cinco y corresponde a un
tiempo de computo de aproximadamente dos segundos. Los arreglos modales de pesos obtenidos
en cada prueba se colocaron en el modelo y se observó que efectivamente solo afectaban a un
modo de vibración; además, para balancear el modelo se puede colocar la suman de los arreglos
modales de pesos. Un ejemplo de cómo afecta un AMP a modos específicos de vibración se muestra en
el apéndice C.
4.4 Caso 2: Selección de frecuencias fuera de los picos de vibración.
El método de los AMP para matrices completas como condición inicial establece que las frecuencias
que se seleccionan deben coincidir con los picos de vibración; en esta prueba las frecuencias se
seleccionaron fuera de los picos de vibración para determinar si el método era capaz de calcular los
arreglos modales de pesos aun fuera de las condiciones iniciales.
Esta prueba se realizó para el modelo con dos y siete modos, el primero por representar un
rotor simple y el segundo porque es el turbogenerador con todos los rotores. Para la máquina
con dos modos de vibración se estableció una secuencia para seleccionar las frecuencias;
56
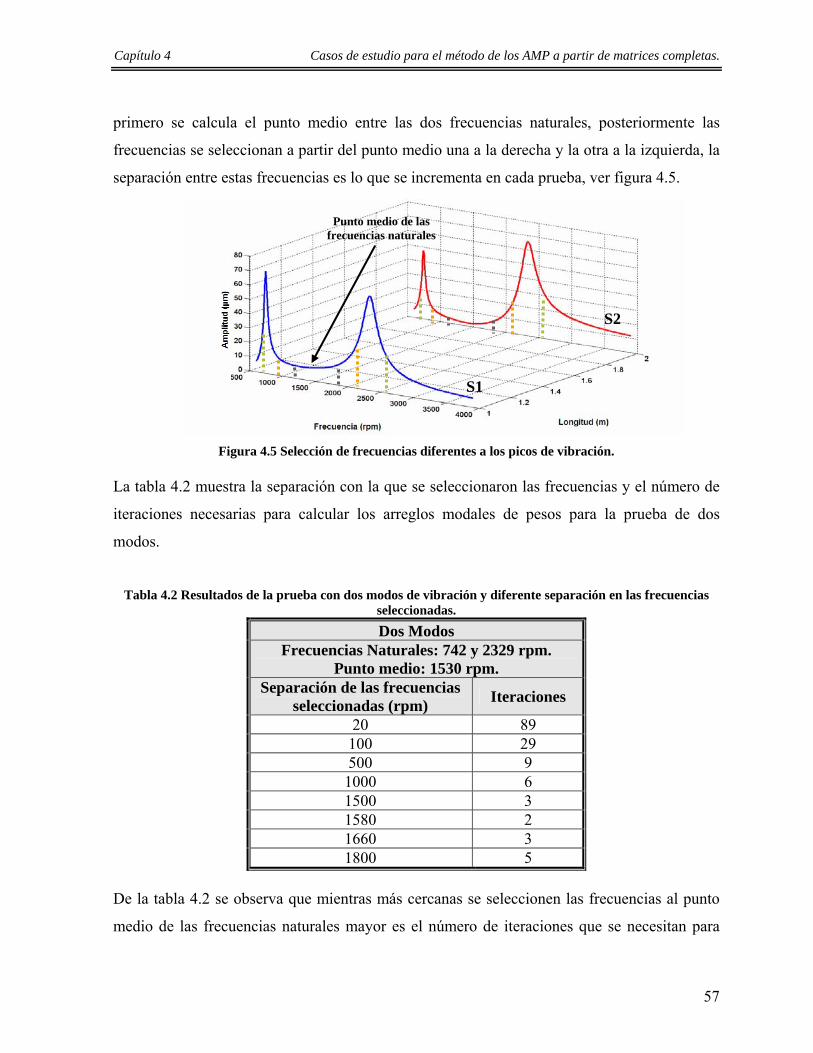
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
primero se calcula el punto medio entre las dos frecuencias naturales, posteriormente las
frecuencias se seleccionan a partir del punto medio una a la derecha y la otra a la izquierda, la
separación entre estas frecuencias es lo que se incrementa en cada prueba, ver figura 4.5.
S1
S2
Punto medio de las frecuencias naturales
Figura 4.5 Selección de frecuencias diferentes a los picos de vibración. La tabla 4.2 muestra la separación con la que se seleccionaron las frecuencias y el número de
iteraciones necesarias para calcular los arreglos modales de pesos para la prueba de dos
modos.
Tabla 4.2 Resultados de la prueba con dos modos de vibración y diferente separación en las frecuencias
seleccionadas. Dos Modos
Frecuencias Naturales: 742 y 2329 rpm. Punto medio: 1530 rpm.
Separación de las frecuencias seleccionadas (rpm) Iteraciones
20 89 100 29 500 9 1000 6 1500 3 1580 2 1660 3 1800 5
De la tabla 4.2 se observa que mientras más cercanas se seleccionen las frecuencias al punto
medio de las frecuencias naturales mayor es el número de iteraciones que se necesitan para
57

Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
calcular los AMP; esto es porque las contribuciones de cada modo a la vibración en esas
frecuencias son similares y el método requiere mayor número de iteraciones para calcular el
factor de forma modal en los sensores. También se concluye que mientras más separadas se
seleccionen las frecuencias del punto medio de las frecuencias naturales el método de los
AMP para matrices completas requiere menos iteraciones para converger, ya que la influencia
de un modo sobre el otro se reduce conforme se separan las frecuencias.
En la separación de frecuencias correspondiente a 1580 rpm el número de iteraciones que se
requiere es menor que en cualquiera de los otros casos, ya que las frecuencias seleccionadas se
encuentran cerca de las frecuencias naturales, en donde la mayor aportación a la vibración la
tiene el modo correspondiente y la forma que adopta el rotor es similar a la forma modal real.
También se realizaron pruebas en el modelo con siete modos de vibración; para ello la
selección de frecuencias no se estableció como en la prueba de dos modos, sino que se
seleccionaban frecuencias antes ó después de las frecuencias naturales. Se determino que
mientras las frecuencias seleccionadas se distribuyan a los largo del intervalo en donde se
encuentran todos los modos de la máquina el método de los AMP para matrices completas de
coeficientes de influencia calculara los arreglos modales de pesos; pero si las frecuencias
seleccionadas se encuentran en un intervalo que abarque solo una cierta cantidad de modos no
será posible calcular los arreglos modales de pesos. Por ser esta la prueba con mayor número
de modos, la declaración anterior se puede aplicar a máquinas de tres hasta seis modos de
vibración.
4.5 Caso 3: Modos cercanos. En ocasiones las máquinas presentan modos cuyas frecuencias naturales se encuentran cerca,
cuando esto sucede los diagramas de Bode presentan picos de vibración cercanos como en la
figura 4.6. Si las frecuencias naturales llegan a estar separadas por algunas rpm los diagramas
de Bode sólo muestran un pico de vibración y no es posible distinguir que parte corresponde a
58
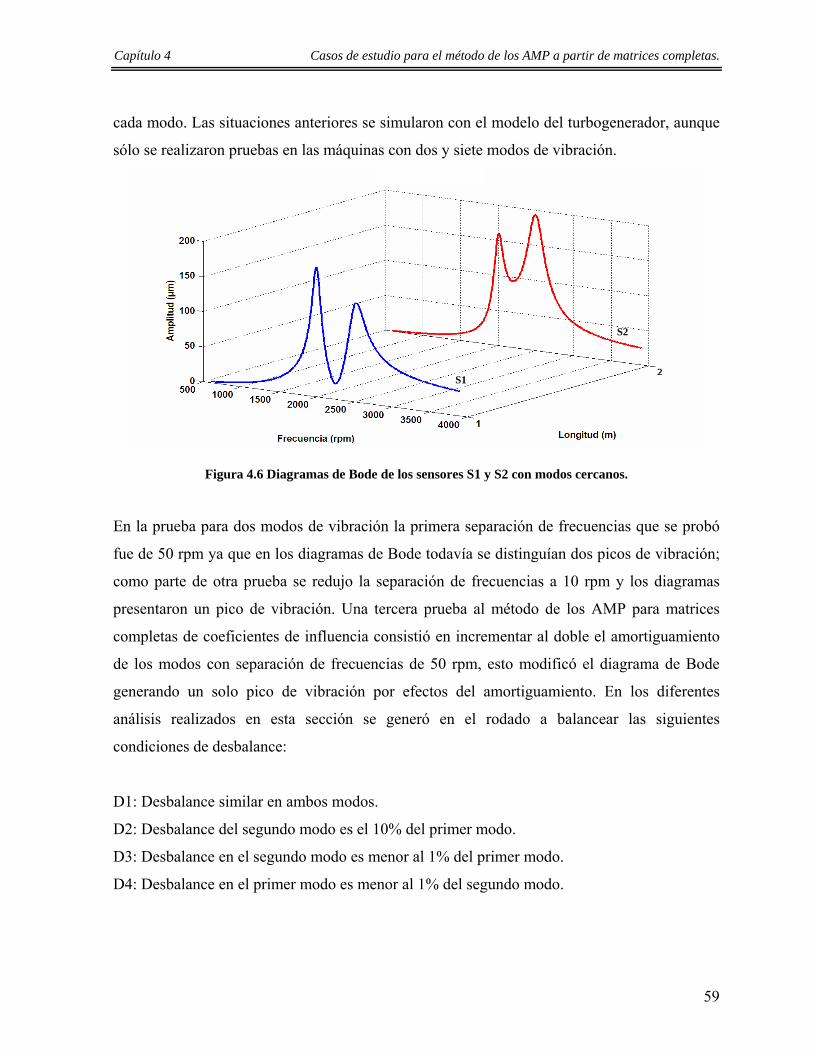
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
cada modo. Las situaciones anteriores se simularon con el modelo del turbogenerador, aunque
sólo se realizaron pruebas en las máquinas con dos y siete modos de vibración.
S1
S2
Figura 4.6 Diagramas de Bode de los sensores S1 y S2 con modos cercanos.
En la prueba para dos modos de vibración la primera separación de frecuencias que se probó
fue de 50 rpm ya que en los diagramas de Bode todavía se distinguían dos picos de vibración;
como parte de otra prueba se redujo la separación de frecuencias a 10 rpm y los diagramas
presentaron un pico de vibración. Una tercera prueba al método de los AMP para matrices
completas de coeficientes de influencia consistió en incrementar al doble el amortiguamiento
de los modos con separación de frecuencias de 50 rpm, esto modificó el diagrama de Bode
generando un solo pico de vibración por efectos del amortiguamiento. En los diferentes
análisis realizados en esta sección se generó en el rodado a balancear las siguientes
condiciones de desbalance:
D1: Desbalance similar en ambos modos.
D2: Desbalance del segundo modo es el 10% del primer modo.
D3: Desbalance en el segundo modo es menor al 1% del primer modo.
D4: Desbalance en el primer modo es menor al 1% del segundo modo.
59
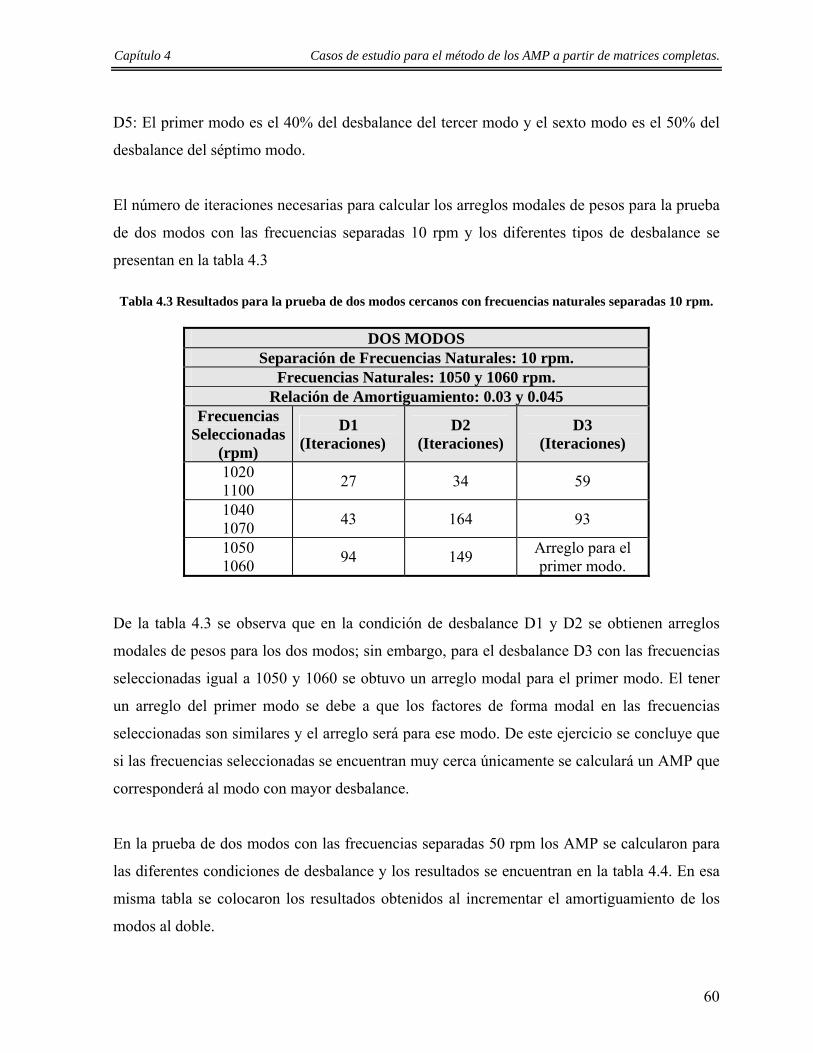
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
D5: El primer modo es el 40% del desbalance del tercer modo y el sexto modo es el 50% del
desbalance del séptimo modo.
El número de iteraciones necesarias para calcular los arreglos modales de pesos para la prueba
de dos modos con las frecuencias separadas 10 rpm y los diferentes tipos de desbalance se
presentan en la tabla 4.3
Tabla 4.3 Resultados para la prueba de dos modos cercanos con frecuencias naturales separadas 10 rpm.
DOS MODOS Separación de Frecuencias Naturales: 10 rpm.
Frecuencias Naturales: 1050 y 1060 rpm. Relación de Amortiguamiento: 0.03 y 0.045
Frecuencias Seleccionadas
(rpm)
D1 (Iteraciones)
D2 (Iteraciones)
D3 (Iteraciones)
1020 1100 27 34 59
1040 1070 43 164 93
1050 1060 94 149 Arreglo para el
primer modo.
De la tabla 4.3 se observa que en la condición de desbalance D1 y D2 se obtienen arreglos
modales de pesos para los dos modos; sin embargo, para el desbalance D3 con las frecuencias
seleccionadas igual a 1050 y 1060 se obtuvo un arreglo modal para el primer modo. El tener
un arreglo del primer modo se debe a que los factores de forma modal en las frecuencias
seleccionadas son similares y el arreglo será para ese modo. De este ejercicio se concluye que
si las frecuencias seleccionadas se encuentran muy cerca únicamente se calculará un AMP que
corresponderá al modo con mayor desbalance.
En la prueba de dos modos con las frecuencias separadas 50 rpm los AMP se calcularon para
las diferentes condiciones de desbalance y los resultados se encuentran en la tabla 4.4. En esa
misma tabla se colocaron los resultados obtenidos al incrementar el amortiguamiento de los
modos al doble.
60

Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
Tabla 4.4 Resultados para la prueba de dos modos de vibración con frecuencias naturales separadas por 50 rpm.
DOS MODOS
Separación de Frecuencias Naturales: 50 rpm. Frecuencias Naturales: 1000 y 1050 rpm.
Relación de amortiguamiento: 0.035 y 0.045
Relación de Amortiguamiento: 0.06 y 0.09
Frecuencias Seleccionadas
(rpm) D1 (Iteraciones)
D2 (Iteraciones)
D4 (Iteraciones)
D1 (Iteraciones)
D2 (Iteraciones)
D4 (Iteraciones)
960 1100 8 10 21 12 16 32
990 1060 8 9 19 16 22 41
1000 1050 9 11 22 21 27 39
De la prueba con los modos a 50 rpm se concluye que con el doble de amortiguamiento el
número iteraciones que se requieren para calcular los AMP se incrementa casi al doble de lo
que se necesita en comparación con el primer caso de amortiguamiento. Para el desbalance D4
al igual que en la prueba con frecuencias separadas 10 rpm al seleccionar frecuencias con una
separación de 20 rpm, sólo se calcula el AMP para el modo con el mayor desbalance.
En el modelo con siete modos de vibración y frecuencias separadas 50 rpm la prueba se
realizó con la condición de desbalance D1. También se calcularon arreglos modales de pesos
para frecuencias naturales separadas por 100 rpm con la condición de desbalance D1 y D5.
Los resultados de la prueba al modelo con siete modos se presentan en la tabla 4.5.
Tabla 4.5 Resultados para la prueba de siete modos y frecuencias naturales cercanas.
SIETE MODOS Frecuencias naturales
separadas: 50 rpm. Frecuencias naturales separadas: 100 rpm.
D1 D1 D5 Iteración máxima. 167. Con
frecuencias seleccionadas igual a las frecuencias naturales.
Iteración máxima. 23. Con frecuencias seleccionadas
igual a las frecuencias naturales.
Iteración máxima. 63. Con 5 frecuencias
seleccionadas igual a las frecuencias naturales.
61
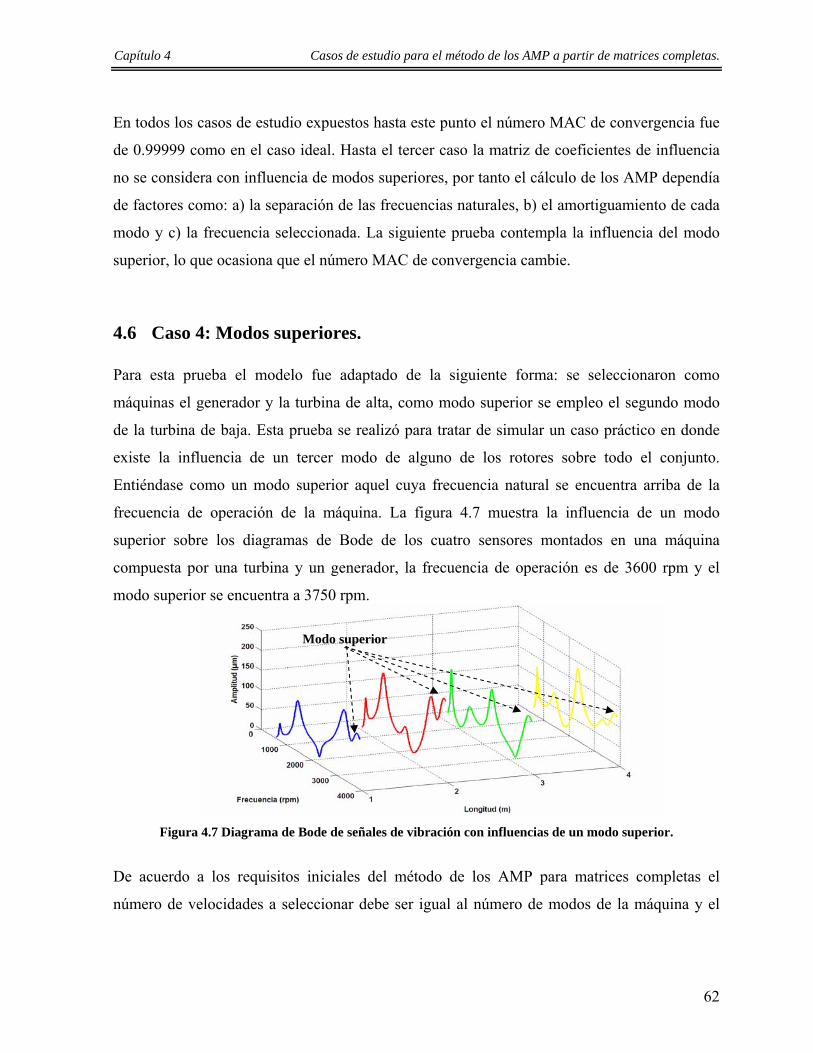
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
En todos los casos de estudio expuestos hasta este punto el número MAC de convergencia fue
de 0.99999 como en el caso ideal. Hasta el tercer caso la matriz de coeficientes de influencia
no se considera con influencia de modos superiores, por tanto el cálculo de los AMP dependía
de factores como: a) la separación de las frecuencias naturales, b) el amortiguamiento de cada
modo y c) la frecuencia seleccionada. La siguiente prueba contempla la influencia del modo
superior, lo que ocasiona que el número MAC de convergencia cambie.
4.6 Caso 4: Modos superiores. Para esta prueba el modelo fue adaptado de la siguiente forma: se seleccionaron como
máquinas el generador y la turbina de alta, como modo superior se empleo el segundo modo
de la turbina de baja. Esta prueba se realizó para tratar de simular un caso práctico en donde
existe la influencia de un tercer modo de alguno de los rotores sobre todo el conjunto.
Entiéndase como un modo superior aquel cuya frecuencia natural se encuentra arriba de la
frecuencia de operación de la máquina. La figura 4.7 muestra la influencia de un modo
superior sobre los diagramas de Bode de los cuatro sensores montados en una máquina
compuesta por una turbina y un generador, la frecuencia de operación es de 3600 rpm y el
modo superior se encuentra a 3750 rpm.
S1S2
S3 S4Modo superior
Figura 4.7 Diagrama de Bode de señales de vibración con influencias de un modo superior.
De acuerdo a los requisitos iniciales del método de los AMP para matrices completas el
número de velocidades a seleccionar debe ser igual al número de modos de la máquina y el
62
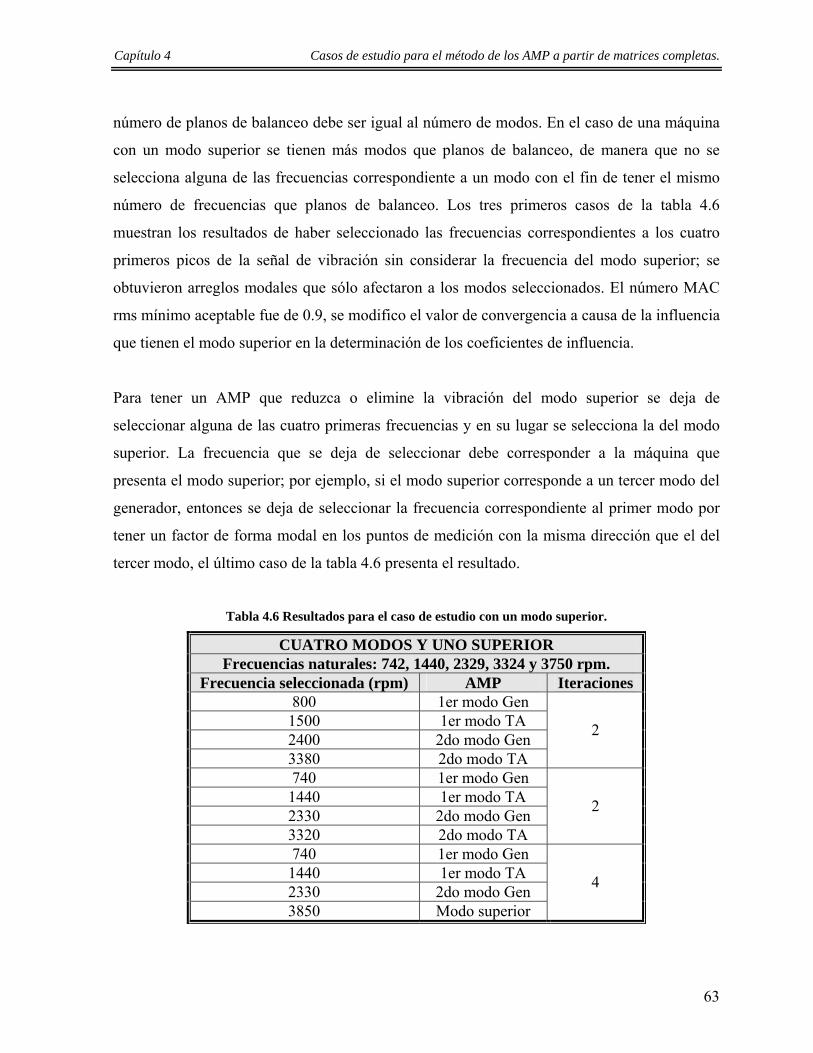
Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
número de planos de balanceo debe ser igual al número de modos. En el caso de una máquina
con un modo superior se tienen más modos que planos de balanceo, de manera que no se
selecciona alguna de las frecuencias correspondiente a un modo con el fin de tener el mismo
número de frecuencias que planos de balanceo. Los tres primeros casos de la tabla 4.6
muestran los resultados de haber seleccionado las frecuencias correspondientes a los cuatro
primeros picos de la señal de vibración sin considerar la frecuencia del modo superior; se
obtuvieron arreglos modales que sólo afectaron a los modos seleccionados. El número MAC
rms mínimo aceptable fue de 0.9, se modifico el valor de convergencia a causa de la influencia
que tienen el modo superior en la determinación de los coeficientes de influencia.
Para tener un AMP que reduzca o elimine la vibración del modo superior se deja de
seleccionar alguna de las cuatro primeras frecuencias y en su lugar se selecciona la del modo
superior. La frecuencia que se deja de seleccionar debe corresponder a la máquina que
presenta el modo superior; por ejemplo, si el modo superior corresponde a un tercer modo del
generador, entonces se deja de seleccionar la frecuencia correspondiente al primer modo por
tener un factor de forma modal en los puntos de medición con la misma dirección que el del
tercer modo, el último caso de la tabla 4.6 presenta el resultado.
Tabla 4.6 Resultados para el caso de estudio con un modo superior.
CUATRO MODOS Y UNO SUPERIOR Frecuencias naturales: 742, 1440, 2329, 3324 y 3750 rpm.
Frecuencia seleccionada (rpm) AMP Iteraciones 800 1er modo Gen 1500 1er modo TA 2400 2do modo Gen 3380 2do modo TA
2
740 1er modo Gen 1440 1er modo TA 2330 2do modo Gen 3320 2do modo TA
2
740 1er modo Gen 1440 1er modo TA 2330 2do modo Gen 3850 Modo superior
4
63

Capítulo 4 Casos de estudio para el método de los AMP a partir de matrices completas.
64
4.7 Discusión.
De acuerdo a los resultados de los casos de estudio, se abre la posibilidad de que el método de
los AMP para matrices completas de coeficientes de influencia se aplique a máquinas reales
que presenten modos cercanos o que tengan influencia de un modo superior. De acuerdo a las
pruebas se logran calcular arreglos modales de pesos para máquinas con dos y hasta siete
modos de vibración, como en el caso de los turbogeneradores
El número MAC de convergencia varía según las condiciones en la máquina. En los casos de
estudio como: condición ideal, selección de diferentes frecuencias y modos cercanos, el
método de los AMP para matrices completas alcanzaba valores de convergencia de 0.99999,
porque no se tiene la influencia del modo superior y los valores de vibración en los diferentes
rodados corresponden a una mezcla de los modos que se encuentran por debajo de la
frecuencia de operación. En el último caso de estudio, por la influencia del modo superior
tanto en la matriz de coeficientes de influencia como en el rodado a balancear, el número
MAC de convergencia es de 0.9; aunque con este valor las formas modales presentan una
buena coincidencia [19].
En el método de los AMP para matrices completas de coeficientes de influencia la única
condición para la selección de frecuencias es que se distribuyan en todo el intervalo en donde
se encuentren los modos de la máquina; lo anterior permite seleccionar la frecuencia de
operación y relacionarla con un modo de vibración al cual se le puede calcular el AMP
correspondiente.
El número de iteraciones que requiere el método para calcular los AMP depende de: las
frecuencias seleccionadas, la separación entre los modos, el amortiguamiento y de la
influencia del modo superior.
Capítulo 5 Arreglos modales de pesos a partir de matrices incompletas de coeficientes de influencia. Equation Chapter (Next) Section 5 5 Capitulo 5.
5.1 Introducción.
Uno de los objetivos de este trabajo es desarrollar un método para matrices incompletas de
coeficientes de influencia, con el fin de aprovechar toda la información disponible de la
máquina. Se tiene una matriz incompleta cuando el número de rodados de prueba es menor al
número de planos de balanceo. El método para matrices incompletas es una modificación al
método de AMP a partir de matrices completas, la diferencia radica en que se emplea el
método de los multiplicadores para calcular los AMP [26], en lugar del método generalizado
de coeficientes de influencia [25].
5.2 Descripción del método para matrices incompletas.
El método de los AMP a partir de matrices completas como datos de entrada sólo necesita:
número de planos de balanceo, número de modos, número de sensores y las frecuencias a
seleccionar; en el caso de una matriz incompleta se requieren datos específicos como: número
de rodados de prueba, número y posición de planos caracterizados, número y posición de los
sensores de la prueba y el número de velocidades a escoger depende del número de sensores
de la prueba; a este tipo de datos se le llama datos de la prueba.
65
Capítulo 5 Arreglos modales de pesos a partir de matrices incompletas de coeficientes de influencia.
La primer diferencia entre el método de los AMP a partir de matrices completas y el de
matrices incompletas se encuentra en los datos de entrada, a causa de las ecuaciones que se
emplean para calcular los AMP en cada caso.
En el método de los AMP a partir de matrices incompletas el dato que más influye en el
cálculo de los AMP es el número de sensores. Al escoger los sensores para la prueba se tienen
las siguientes posibilidades:
Seleccionar el mismo número de sensores para la prueba que número de sensores de la
máquina.
Seleccionar los sensores adyacentes a los planos caracterizados.
Seleccionar los sensores adyacentes a los planos caracterizados y los sensores de
rotores cercanos.
El resultado de los AMP varía de acuerdo al número de sensores que se escojan ya que el
cálculo de los multiplicadores depende tanto del número de rodados de prueba como del
número de sensores por el número de velocidades, ver ecuación 2.15. En el método para
matrices incompletas el número de velocidades a seleccionar está limitado al número de
sensores que se escojan para la prueba, esta dependencia no se puede ver de manera directa
como en el caso de los multiplicadores, pero se puede explicar de la siguiente forma: para
calcular las contribuciones modales con la ecuación 2.17 es necesario invertir la matriz de
factores de forma modal por alguno de los métodos convencionales, esto requiere que dicha
matriz sea cuadrada; en la ecuación 2.17 para que la matriz sea cuadrada el número de modos
r debe ser igual al número de sensores i y como el número de modos r depende de las
frecuencias seleccionadas, se concluye que la matriz cuadrada de factores de forma modal
requiere igual número de sensores que frecuencias.
Para aplicar el método de los AMP para matrices incompletas se requiere:
Definir el número y posición de los sensores a utilizar en la prueba.
Seleccionar el mismo número de velocidades que sensores para la prueba.
Tener rodados de prueba con los pesos agregados en cada uno de ellos.
66

Capítulo 5 Arreglos modales de pesos a partir de matrices incompletas de coeficientes de influencia.
La secuencia para determinar los arreglos modales de pesos a partir de matrices incompletas es
similar al de las matrices completas y las diferencias se presentan a continuación.
1. Introducir los datos para la prueba. Introducir el número y posición de los planos
caracterizados, número de rodados de prueba y por último el número y posición de los
sensores para la prueba. Al introducir el número de sensores es necesario recordar que de
ese valor depende el número de velocidades a seleccionar.
2. Selección de frecuencias. Se recomienda seleccionar las frecuencias que corresponden a
los modos de la máquina cuyos planos se han caracterizado.
3. Seguir los pasos del 2 al 4 del método de los AMP a partir de matrices completas.
4. Calculo de los AMP iniciales. En esta etapa se aplica el método de los multiplicadores para
calcular los arreglos modales de pesos iniciales con una modificación a la ecuación 2.15.
[ ] [ ] [ ]( ) [ ] [1* * ]M V V V VM−⎛= − Δ Δ Δ⎜
⎝ ⎠⎞⎟ (5.1)
( )( )( )( )( )qxr = qxm mxq qxm mxr
En la ecuación 5.1 se nota la dependencia del multiplicador M del número de rodados q y del
número de velocidades por el número sensores seleccionados. El cálculo de los arreglos
modales de pesos es mediante:
[ ] [ ][ ]AMP PP M= (5.2)
( )( )jxr = jxq qxr
El número de arreglos modales de pesos que se obtienen dependen del número de modos, que
es igual al número de frecuencias seleccionadas.
5. Calculo de las vibraciones efecto. Para calcular las vibraciones efecto que generan los
AMP se emplea:
[ ] [ ][ ]VE V M= Δ (5.3) mxr = (mxq)(qxr)
67
Capítulo 5 Arreglos modales de pesos a partir de matrices incompletas de coeficientes de influencia.
6. Continuar con los pasos del 7 al 9 del método de matrices completas.
7. Criterio de convergencia. A diferencia del método para matrices completas en donde el
número MAC rms mínimo aceptable era de 0.99999 o 0.9 según el caso; en el método para
matrices incompletas el valor de convergencia es de 0.8.
El valor de convergencia de 0.8 se tomó de [19]. De acuerdo a la referencia, un número MAC
con ese valor indica que las formas modales coinciden en la mayoría de los puntos, y se
pueden considerar similares. Además el 0.8 es el valor mínimo aceptable cuando se comparan
formas modales obtenidas de modelos con los derivados de pruebas modales experimentales
[19].
Al igual que el método de matrices completas, si el MAC rms mínimo es menor que el valor
de referencia, se toma la matriz de factores de forma modal de referencia y se inician los
cálculos en el punto tres. Si el número MAC rms mínimo es mayor que la referencia, se
obtiene los AMP para las frecuencias seleccionadas y los factores de forma modal en los
sensores.
En ocasiones el MAC rms mínimo no alcanza un valor mayor a 0.8, sino que se mantiene en
un valor constante. Cuando el valor constante se repite durante 10 iteraciones se detienen los
cálculos y se extraen de la matriz de AMP los arreglos cuyo MAC rms sea mayor a la
referencia. En algunos casos los pesos de los arreglos que se extraen de la matriz de AMP
tienen valores superiores a los que se necesitan para balancear el modo correspondiente, en
este caso lo que se aprovecha es la proporción entre los pesos de un mismo arreglo, ya que
garantizan que sólo se afecta un modo de vibración. Las proporciones entre los AMP se
pueden multiplicar por un valor de peso y se obtendrá el peso a colocar en los demás planos de
balanceo para afectar exclusivamente un modo.
68

Capítulo 5 Arreglos modales de pesos a partir de matrices incompletas de coeficientes de influencia.
5.3 Factores que afectan el cálculo de los AMP a partir de matrices incompletas.
Al ser un método para matrices incompletas significa que no se tienen caracterizados todos los
planos de balanceo y no siempre se podrán obtener arreglos modales de pesos para todas las
velocidades seleccionadas. El obtener los AMP a partir de matrices incompletas depende de
diversos factores como: el número de rodados de prueba, la manera en que se colocan los
pesos de prueba, del número de sensores que se escogen para la prueba y las frecuencias
seleccionadas.
Mientras más cercano sea el número de rodados de prueba al número de planos de la máquina
mayor será el número de arreglos modales de pesos que se puedan calcular. De acuerdo al
número de planos caracterizados es el tamaño del AMP; por ejemplo, para afectar el primer
modo de una máquina con siete modos, se requiere conocer la cantidad de peso a colocar en
los diferentes planos de balanceo; si se han caracterizado sólo dos planos de balanceo el AMP
estará constituido sólo por dos pesos.
5.4 Aplicación.
Se calcularon arreglos modales de pesos para el modelo del turbogenerador Mitsubishi de 350
MW siguiendo la secuencia establecida en la sección 4.2. Para las pruebas no se formó una
matriz completa de coeficientes de influencia, sino se generaron rodados de prueba a los
cuales se les aplicó el método de los AMP a partir de matrices incompletas para obtener los
AMP. Se estudiaron dos casos, el primero colocando arreglos de pesos en los rodados de
prueba y el segundo con pesos individuales, ambos sin considerar modos cercanos o modos
superiores.
69

Capítulo 5 Arreglos modales de pesos a partir de matrices incompletas de coeficientes de influencia.
El objetivo de los casos de estudio es mostrar que el número de AMP que se pueden obtener
con matrices incompletas depende del: número de rodados de prueba, posición de los pesos, el
número de sensores y las velocidades seleccionadas.
En el primer caso de estudio, los arreglos de pesos que se colocaron en el modelo estaban
constituidos por dos pesos de igual magnitud y fase para el primer modo (AP1) y con la fase
opuesta para el segundo modo (AP2). Conforme se colocaba un arreglo de pesos en el modelo
se obtenía un rodado de prueba, al cual se le calculaban los AMP con el método propuesto en
el presente capítulo. Los resultados de las pruebas se muestran en la tabla 5.1. Las velocidades
seleccionadas corresponden a los modos de la máquina con los planos caracterizados.
Tabla 5.1 Iteraciones del método de los AMP para matrices incompletas al colocar arreglos de pesos en los
rodados de prueba.
Número de
rodados de prueba
Máquina donde se colocaron los
arreglos de pesos
Número de sensores
seleccionados
Número de velocidades
seleccionadas AMP Iter.
1 AP1 en Gen. 2 2 1er modo Gen. 1
2 AP2 en Gen. 2 2 1er modo Gen. 2do modo Gen. 1
3 AP1 en TB. 4 4 1er modo Gen. 1er modo TB. 17
4 AP2 en TB. 4 4
1er modo Gen. 1er modo TB.
2do modo Gen. 2do modo TB.
1
5 AP1 en TA. 6 6
1er modo Gen. 1er modo TB. 1er modo TA.
2do modo Gen.
18
6 AP2 en TA. 6 6
1er modo Gen. 1er modo TB. 1er modo TA.
2do modo Gen. 2do modo TB. 2do modo TA.
2
Iter = Iteraciones; Gen = Generador eléctrico; TA = Turbina de alta y TB = Turbina de baja.
70

Capítulo 5 Arreglos modales de pesos a partir de matrices incompletas de coeficientes de influencia.
De la tabla 5.1 se concluye que mientras mayor sea el número de rodados de prueba mayor es
el número de AMP que se pueden obtener. Al colocar arreglos de pesos en los rodados de
prueba se tiene la ventaja de calcular AMP desde el primer rodado.
Otro caso de estudio consistió en generar rodados de prueba colocando pesos individuales en
los planos de balanceo. A diferencia del caso anterior el número de AMP que se pueden
calcular es igual al número de planos caracterizados; el número de iteraciones necesarias para
obtener los AMP se encuentran en la tabla 5.2.
Tabla 5.2 Iteraciones del método de los AMP a partir de matrices incompletas al colocar pesos individuales
en los rodados de prueba.
Número de
rodados de prueba
Plano del Turbogenerador donde se coloco
el peso de prueba.
Número de sensores
seleccionados
Número de velocidades
seleccionadas AMP Iter.
1 5 - - - -
2 6 2 2 1er modo Gen. 2do modo Gen. 1
3 4 3 3 1er modo Gen. 1er modo TB.
2do modo Gen. 2
4 3 4 4
1er modo Gen. 1er modo TB.
2do modo Gen. 2do modo TB.
1
5 2 5 5
1er modo Gen. 1er modo TB. 1er modo TA.
2do modo Gen. 2do modo TB.
9
6 1 6 6
1er modo Gen. 1er modo TB. 1er modo TA.
2do modo Gen. 2do modo TB. 2do modo TA.
2
71
Capítulo 5 Arreglos modales de pesos a partir de matrices incompletas de coeficientes de influencia.
72
5.5 Discusión.
A diferencia del método de los AMP para matrices completas, el método para matrices
incompletas calcula arreglos modales de pesos de acuerdo al número de rodados disponibles y
planos caracterizados, lo que permite calcular arreglos modales de pesos para una máquina
con un número de rodados menor al número de planos de balanceo.
Para balancear se pueden calcular los AMP de una corrida inicial a partir de rodados de
pruebas anteriores. Los arreglos de modales de pesos se colocan en la máquina para crear
rodados de prueba nuevos en donde el cambio de vibración significa la reducción o
eliminación de las vibraciones generadas por un modo.
En el método para matrices completas de coeficientes de influencia el número de pesos que
constituye un AMP es igual al número de planos de balanceo, en el caso de matrices
incompletas el tamaño del arreglo depende del número de planos caracterizados, aunque es un
AMP parcial proporciona una idea al especialista en balanceo de cómo afectar parcialmente a
un modo de vibración.
La limitante del método de los AMP a partir de matrices incompletas es que el número de
arreglos modales de pesos que se pueden calcular depende del número de rodados de prueba,
la posición de los planos caracterizados, la manera en como se colocan los pesos, los sensores
seleccionados para la prueba y las frecuencias seleccionadas.
Capítulo 6 Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia. Equation Chapter (Next) Section 6 6 Capitulo 6.
6.1 Introducción.
En el capítulo tres y cinco se describieron los métodos para calcular los arreglos modales de
pesos a partir de matrices de coeficientes de influencia. Como se menciona en el capítulo 5 el
método para matrices incompletas es una modificación al de matrices completas por lo que se
abre la posibilidad de realizar un programa que sea capaz de calcular los AMP para cualquier
tipo de matriz de coeficientes de influencia.
6.2 Algoritmo general.
Como parte de los resultados de esta investigación se presenta un algoritmo general que
permite calcular los arreglos modales de pesos a partir de matrices completas e incompletas de
coeficientes de influencia. Para diferenciar entre un tipo de matriz y otra se piden dos tipos de
datos de entrada: datos de la máquina y datos para la prueba. Al determinar el tipo de matriz se
establecen las operaciones que se realizarán para calcular los arreglos modales de pesos. La
programación del algoritmo se realizó en Matlab v6.5 y el código de programación se presenta
en el apéndice D.
El diagrama de flujo del algoritmo general se encuentra en la figura 6.1 y tiene una secuencia
similar a los métodos descritos anteriormente, pero se encuentra dividido por bloques los
cuales se describen después de las figura 6.4.
73
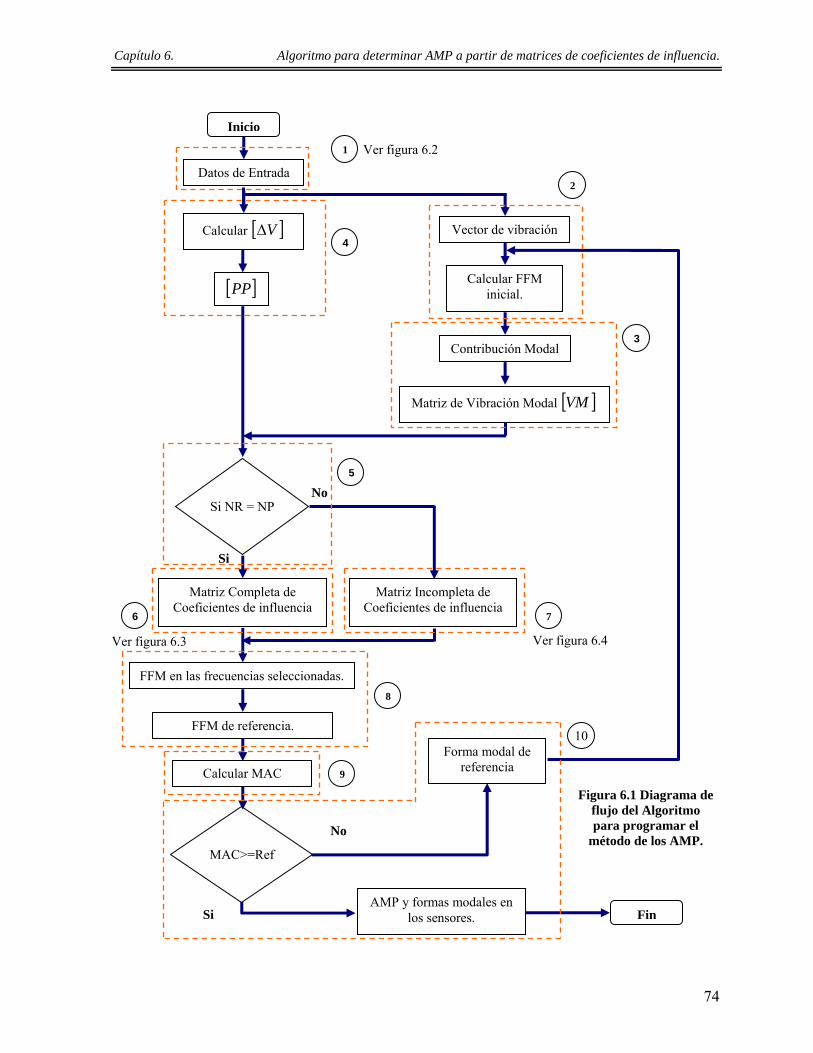
Capítulo 6. Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
Inicio
Figura 6.2 Diagrama de flujo del Algoritmo para programar el método de los AMP.
Matriz Completa de Coeficientes de influencia
Matriz Incompleta de Coeficientes de influencia
Datos de Entrada
Vector de vibración
Calcular FFM inicial.
Contribución Modal
Calcular [ ]VΔ
[ ]PP
Matriz de Vibración Modal [ ]VM
Si NR = NP
Si
No
FFM en las frecuencias seleccionadas.
FFM de referencia.
Calcular MAC
MAC>=Ref
No
Si
Forma modal de referencia
AMP y formas modales en los sensores. Fin
Figura 6.1 Diagrama de flujo del Algoritmo para programar el
método de los AMP.
1
2
Ver figura 6.2
4
3
5
6 7
Ver figura 6.4 Ver figura 6.3
8
9
10
74
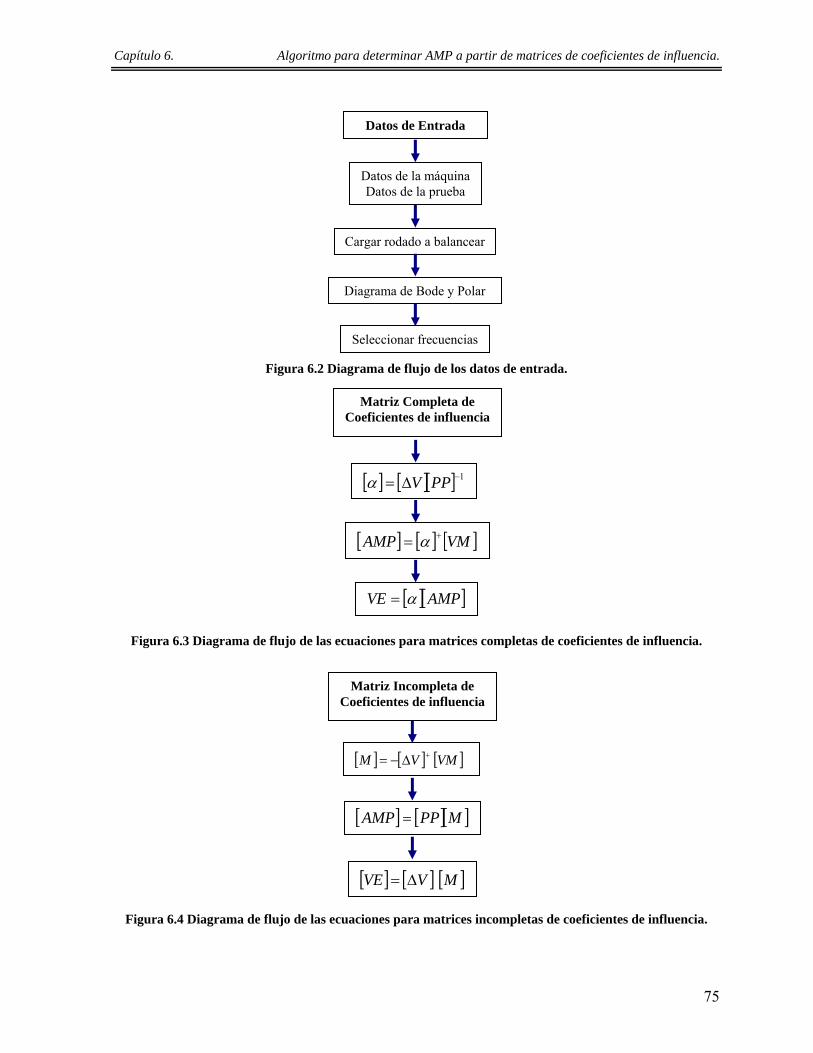
Capítulo 6. Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
Datos de Entrada
Datos de la máquina Datos de la prueba
Cargar rodado a balancear
Diagrama de Bode y Polar
Seleccionar frecuencias
Figura 6.2 Diagrama de flujo de los datos de entrada.
Matriz Completa de
Coeficientes de influencia
[ ] [ ][ ] 1−Δ= PPVα
[ ] [ ] [ ]VMAMP += α
[ ][ ]AMPVE α=
Figura 6.3 Diagrama de flujo de las ecuaciones para matrices completas de coeficientes de influencia.
Matriz Incompleta de
Coeficientes de influencia
Figura 6.4 Diagrama de flujo de las ecuaciones para matrices incompletas de coeficientes de influencia.
[ ] [ ] [ ]VMVM +Δ−=
[ ] [ ][ ]MPPAMP =
[ ] [ ] [ ]MVVE Δ=
75

Capítulo 6. Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
Bloque 1: Datos de entrada. Se introducen los datos necesarios para calcular los AMP como
son: número de sensores, modos y planos de la máquina, así como las frecuencias a
seleccionar.
Los datos de entrada se dividen en dos: datos de la máquina y datos de la prueba. En los datos
de la máquina se introduce el número de sensores, planos de balanceo y modos de la máquina.
Posteriormente se piden los datos de la prueba, que son: el número de rodados de prueba, el
número de planos de balanceo caracterizados y el número de sensores a utilizar en el cálculo,
así como la posición de cada uno de ellos. Los datos de la prueba se ocupan para calcular los
AMP.
En el caso de una matriz completa el número de sensores es igual al de planos de balanceo
tanto en los datos de la máquina como en los datos de la prueba; asimismo el número de
planos de balanceo es igual al número de rodados de prueba. Para el caso de las matrices
incompletas esto no se cumple, ya el número de rodados de prueba es diferente al número de
planos de balanceo; por tanto, para calcular los AMP a partir de matrices incompletas se
seleccionan los planos caracterizados y los sensores a utilizar durante la prueba.
Después de tener los datos de la máquina y de la prueba, se carga al programa el rodado a
balancear o el rodado al que se le calculará los AMP; también se generan los diagramas
polares y de Bode de dicho rodado. Los diagramas deben mostrar las vibraciones en cada uno
de los sensores seleccionados para la prueba. Como último dato de entrada se seleccionan las
frecuencias para las cuales se calcularán los AMP. El número de frecuencias seleccionadas
será igual al número de sensores de la prueba.
Bloque 2: Factores de forma modal inicial. Se calculan los factores de forma modal inicial,
FFM, para cada modo de acuerdo a las frecuencias seleccionadas. Antes de calcular los
factores de forma modal inicial es necesario crear una matriz de vibración que contenga las
vibraciones de los sensores en las diferentes frecuencias seleccionadas. Cada columna de esta
76
Capítulo 6. Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
matriz corresponde a las vibraciones en una frecuencia y las filas son los diferentes sensores
de la prueba.
A la matriz de vibración se le aplica la ecuación 3.17 para calcular los factores de forma
modal inicial en las diferentes velocidades, cada factor de forma modal está asociado a un
modo de vibración.
Bloque 3: Matriz de vibración modal. La matriz de vibración modal contiene las vibraciones
de cada modo en las diferentes frecuencias seleccionadas. Para el cálculo de la matriz de
vibración modal es necesario conocer las contribuciones modales y los factores de forma
modal en lo sensores.
La contribución modal indica la aportación de un modo a la vibración total en las diferentes
frecuencias; para el cálculo de las contribuciones se emplea la ecuación 2.17. Con las
contribuciones modales y los factores de forma modal se aplica la ecuación 3.19 para obtener
la matriz de vibración modal.
Bloque 4: Matrices delta V y PP. Estas matrices son la base para calcular la matriz de
coeficientes de influencias completa y para determinar los multiplicadores en el caso de una
matriz incompleta.
Cada columna de la matriz contiene los cambios de vibración en los sensores de un
rodado a otro y la matriz [ contiene los pesos individuales o arreglos de pesos colocados
en los planos de balanceo en cada rodado de prueba.
[ VΔ
]PP
]
Bloque 5: Tipo de matriz de coeficientes de influencia. En este bloque se determina el tipo
de matriz que se tiene de acuerdo con los datos de entrada. Si el número de rodados de prueba,
q, es igual al número de planos de balanceo caracterizados, j, se tiene una matriz completa, y
si es menor entonces es una matriz incompleta.
77
Capítulo 6. Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
Bloque 6: AMP con matrices completas. El cálculo de los AMP se realiza con la ecuación
2.8, la cual requiere una matriz completa de coeficientes de influencia y de la matriz de
vibraciones modales. Para calcular la matriz completa se emplea la ecuación 2.2 del método
generalizado de coeficientes de influencia [25].
Al utilizar el método de Moore – Penrose para invertir la matriz de coeficientes de influencia y
calcular los AMP la solución que se obtiene es aproximada, por lo que es necesario calcular
las vibraciones efecto, que son las vibraciones que realmente genera el arreglo de pesos
calculado, para esto se ocupa la ecuación 3.23.
Bloque 7: AMP con matrices incompletas. Si el número de rodados de prueba es menor al
número de planos de balanceo, entonces se tiene una matriz incompleta, por lo que la ecuación
2.8 no se puede aplicar para calcular los AMP. En este caso se sustituye el cálculo de la matriz
de coeficientes de influencias por un multiplicador que permite calcular los AMP sin
necesidad de tener tantos rodados de prueba como planos de balanceo. El multiplicador se
determina con la ecuación 2.15 y los AMP con la ecuación 2.16.
En la ecuación 2.15, el cálculo del multiplicador implica invertir la matriz por el método
de Moore – Penrose o de la Pseudoinversa, como en el caso anterior es necesario calcular las
vibraciones efecto para determinar las vibraciones reales, para esto se emplea la ecuación 5.3
[ VΔ ]
Bloque 8: Factores de forma modal de referencia. Los factores de forma modal de
referencia se emplean para calcular los números MAC y con ello determinar si el arreglo de
pesos es o no modal.
Antes de determinar los factores de forma modal de referencia se calculan los factores de
forma modal recalculados que corresponden a las frecuencias seleccionadas, para ello emplea
la ecuación 3.17. De la matriz de factores de forma modal se toma como FFM de referencia el
que corresponde a la frecuencia asociada con cada modo.
78
Capítulo 6. Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
Bloque 9: Cálculo del número MAC. El número MAC se calcula con la ecuación 2.18 y
sirve para comparar los factores de forma modal de referencia con los factores de forma que se
obtienen de las diferentes frecuencias seleccionadas. Del grupo de números MAC que se
obtiene para cada arreglo modal se calcula un valor rms para dicha serie de números y el
resultado se convierte en el MAC rms correspondiente al arreglo modal de pesos.
Bloque 10: Criterio de convergencia. Como el método para calcular los arreglos modales de
pesos es un ciclo se necesita un criterio de convergencia para detener los cálculos. En este
caso el cálculo de los AMP se detiene hasta que el MAC mínimo rms es mayor a un valor de
referencia. Los valores de referencia varían según el caso de estudio:
Matriz completa sin modo superior: 0.99999
Matriz completa y modo superior: 0.9
Matriz incompleta: 0.8 o que el número MAC no cambie en 10 iteraciones.
Estos valores de referencia indican que el arreglo modal de pesos calculado genera la misma
forma modal en todas las frecuencias seleccionadas, si el MAC en la primera iteración no es
mayor o igual al valor de referencia, entonces se toma el factor de forma modal de referencia y
se inicia el ciclo en el bloque tres. Cuando la condición se cumple se obtienen los arreglos
modales de pesos para los modos seleccionados y el factor de forma modal en los puntos de
medición.
79
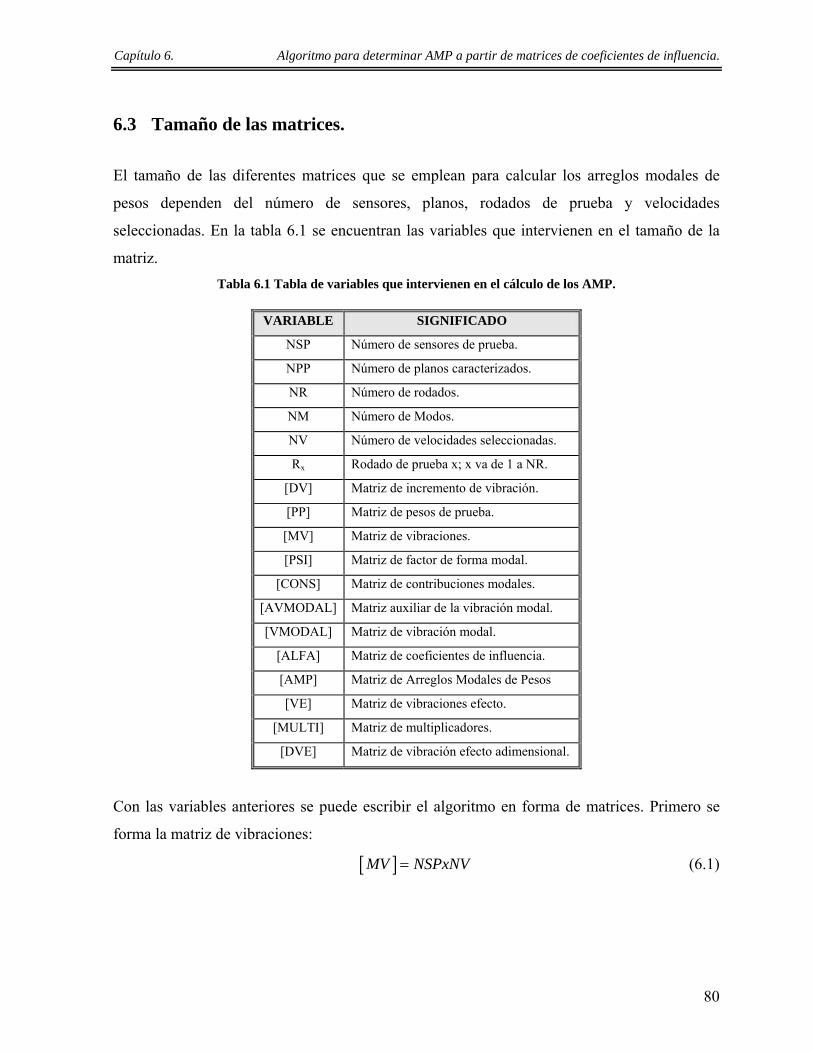
Capítulo 6. Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
6.3 Tamaño de las matrices.
El tamaño de las diferentes matrices que se emplean para calcular los arreglos modales de
pesos dependen del número de sensores, planos, rodados de prueba y velocidades
seleccionadas. En la tabla 6.1 se encuentran las variables que intervienen en el tamaño de la
matriz. Tabla 6.1 Tabla de variables que intervienen en el cálculo de los AMP.
VARIABLE SIGNIFICADO
NSP Número de sensores de prueba.
NPP Número de planos caracterizados.
NR Número de rodados.
NM Número de Modos.
NV Número de velocidades seleccionadas.
Rx Rodado de prueba x; x va de 1 a NR.
[DV] Matriz de incremento de vibración.
[PP] Matriz de pesos de prueba.
[MV] Matriz de vibraciones.
[PSI] Matriz de factor de forma modal.
[CONS] Matriz de contribuciones modales.
[AVMODAL] Matriz auxiliar de la vibración modal.
[VMODAL] Matriz de vibración modal.
[ALFA] Matriz de coeficientes de influencia.
[AMP] Matriz de Arreglos Modales de Pesos
[VE] Matriz de vibraciones efecto.
[MULTI] Matriz de multiplicadores.
[DVE] Matriz de vibración efecto adimensional.
Con las variables anteriores se puede escribir el algoritmo en forma de matrices. Primero se
forma la matriz de vibraciones:
[ ]MV NSPxNV= (6.1)
80
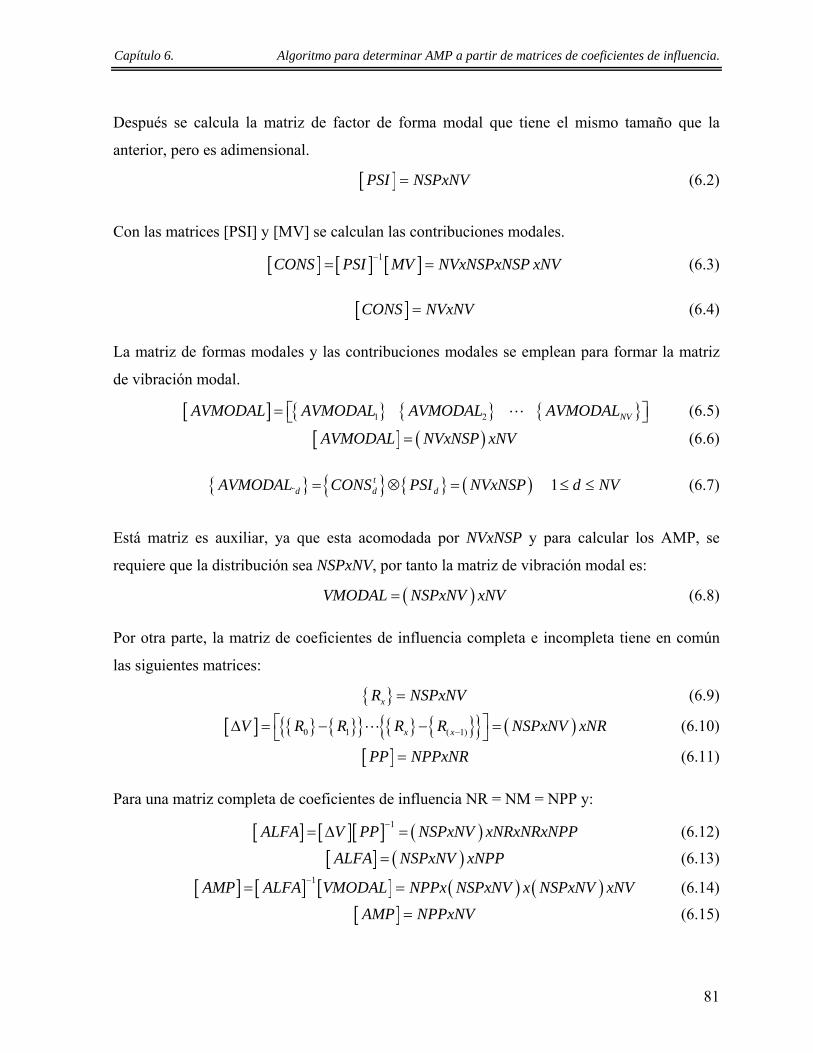
Capítulo 6. Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
Después se calcula la matriz de factor de forma modal que tiene el mismo tamaño que la
anterior, pero es adimensional.
[ ]PSI NSPxNV= (6.2)
Con las matrices [PSI] y [MV] se calculan las contribuciones modales.
[ ] [ ] [ ]1CONS PSI MV NVxNSPxNSP xNV−= = (6.3) [ ]CONS NVxNV= (6.4) La matriz de formas modales y las contribuciones modales se emplean para formar la matriz
de vibración modal.
[ ] { } { } { }1 2 NVAVMODAL AVMODAL AVMODAL AVMODAL= ⎡ ⎤⎣ ⎦ (6.5)
[ ] ( )AVMODAL NVxNSP xNV= (6.6) { } { } { } ( )¨ 1t
d d dAVMODAL CONS PSI NVxNSP d NV= ⊗ = ≤ ≤ (6.7)
Está matriz es auxiliar, ya que esta acomodada por NVxNSP y para calcular los AMP, se
requiere que la distribución sea NSPxNV, por tanto la matriz de vibración modal es:
( )VMODAL NSPxNV xNV= (6.8) Por otra parte, la matriz de coeficientes de influencia completa e incompleta tiene en común
las siguientes matrices:
{ }xR NSPxNV= (6.9)
[ ] { } { }{ } { } { }{ } ( )0 1 ( 1)x xV R R R R NSPxNV xN−⎡ ⎤Δ = − − =⎣ ⎦ R (6.10)
[ ]PP NPPxNR= (6.11) Para una matriz completa de coeficientes de influencia NR = NM = NPP y:
[ ] [ ][ ] ( )1ALFA V PP NSPxNV xNRxNRxNPP−= Δ = (6.12)
[ ] ( )ALFA NSPxNV xNPP= (6.13)
[ ] [ ] [ ] ( ) ( )1AMP ALFA VMODAL NPPx NSPxNV x NSPxNV xNV−= = (6.14)
[ ]AMP NPPxNV= (6.15)
81
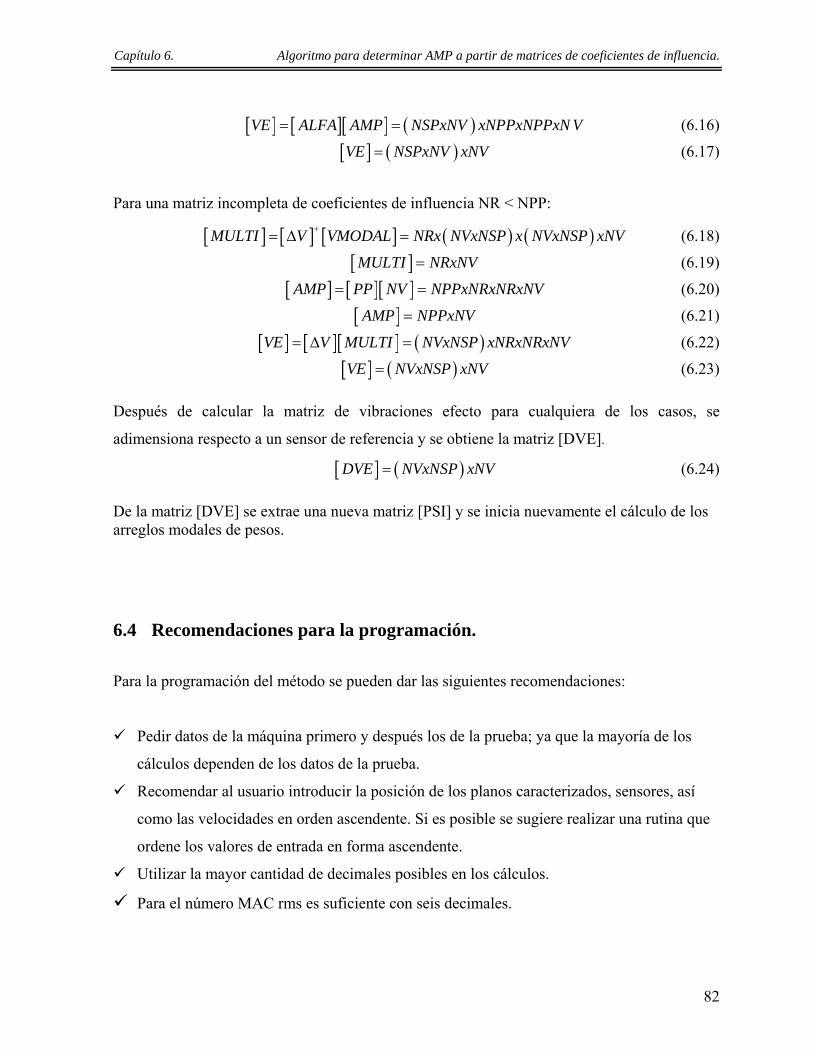
Capítulo 6. Algoritmo para determinar AMP a partir de matrices de coeficientes de influencia.
82
[ ] [ ][ ] ( )VE ALFA AMP NSPxNV xNPPxNPPxN V= = (6.16)
[ ] ( )VE NSPxNV xNV= (6.17)
Para una matriz incompleta de coeficientes de influencia NR < NPP:
[ ] [ ] [ ] ( ) ( )MULTI V VMODAL NRx NVxNSP x NVxNSP xNV+= Δ = (6.18)
[ ]MULTI NRxNV= (6.19)
[ ] [ ][ ]AMP PP NV NPPxNRxNRxNV= = (6.20)
[ ]AMP NPPxNV= (6.21)
[ ] [ ][ ] ( )VE V MULTI NVxNSP xNRxNRxNV= Δ = (6.22)
[ ] ( )VE NVxNSP xNV= (6.23) Después de calcular la matriz de vibraciones efecto para cualquiera de los casos, se
adimensiona respecto a un sensor de referencia y se obtiene la matriz [DVE].
[ ] ( )DVE NVxNSP xNV= (6.24) De la matriz [DVE] se extrae una nueva matriz [PSI] y se inicia nuevamente el cálculo de los arreglos modales de pesos.
6.4 Recomendaciones para la programación.
Para la programación del método se pueden dar las siguientes recomendaciones:
Pedir datos de la máquina primero y después los de la prueba; ya que la mayoría de los
cálculos dependen de los datos de la prueba.
Recomendar al usuario introducir la posición de los planos caracterizados, sensores, así
como las velocidades en orden ascendente. Si es posible se sugiere realizar una rutina que
ordene los valores de entrada en forma ascendente.
Utilizar la mayor cantidad de decimales posibles en los cálculos.
Para el número MAC rms es suficiente con seis decimales.
Capítulo 7 Conclusiones y recomendaciones. Equation Chapter (Next) Section 7 7 Capitulo 7.
7.1 Conclusiones.
La investigación que se realizó en el presente trabajo se divide en dos etapas: en la primera se
considera la existencia de una matriz completa de coeficientes de influencia para obtener los
arreglos modales de pesos. En la segunda etapa dichos arreglos se obtienen de una matriz de
coeficientes de influencia incompleta, es decir, que a la máquina no se le caracterizaron todos
los planos de balanceo por falta de rodados de prueba. Respecto a la matriz completa las
conclusiones son las siguientes:
Se desarrolló un método para calcular los arreglos modales de pesos a partir de matrices
completas de coeficientes de influencia, el cual combina conceptos modales como: factor de
forma modal y contribución modal con la matriz de coeficientes de influencia. El método
propuesto determina los arreglos modales de pesos mediante iteraciones, las cuales se emplean
para calcular los factores de forma modal en los puntos de medición.
De acuerdo a los resultados que se obtuvieron en los diferentes casos de estudio, se espera que
la proporción entre los pesos de un arreglo modal se conserve con el paso del tiempo, al ser
dependientes de la forma modal y que dichos arreglos se puedan emplear en balanceos
posteriores; además al contar con los arreglos modales de pesos es posible calcular los factores
de forma modal en los planos de balanceo, aunque con una referencia diferente a los factores
de forma modal en los sensores.
Si la máquina a balancear tiene la influencia de un modo superior es posible calcular un
arreglo modal de pesos que reduzca la vibración de dicho modo. Para obtener el arreglo modal
que afecta al modo superior se selecciona una frecuencia que se encuentre por arriba de la
83
Capítulo 7 Conclusiones y recomendaciones.
velocidad de operación y se omite la selección de uno de los modos de la máquina. El modo
que se deja de seleccionar es el que tiene la misma dirección de los factores de forma modal en
los puntos de medición que el modo superior.
El número de iteraciones que requiere el método para calcular los arreglos modales de pesos
depende de los siguientes casos: la frecuencia que se selecciona para cada modo, la separación
entre las frecuencias naturales, el amortiguamiento y de la influencia del modo superior.
En el método de los AMP para matrices completas es necesario distribuir las frecuencias a
seleccionar dentro del intervalo de frecuencias limitado por los modos de la máquina, de lo
contrario no será posible calcular los arreglos modales de pesos.
Las conclusiones del método de los AMP para matrices incompletas de coeficientes de
influencia son:
Se desarrolló un método para calcular arreglos modales de pesos a partir de matrices
incompletas de coeficientes de influencia, que combina conceptos modales como: factor de
forma modal y contribución modal con el método de balanceo por multiplicadores. Se pueden
obtener arreglos modales de pesos desde la primera corrida de prueba, siempre que se coloque
un arreglo de pesos como peso de prueba.
La posibilidad de obtener los arreglos modales de pesos depende en gran medida del número
de sensores que se seleccionen para la prueba y el número de pesos que forman dicho arreglo
depende del número de planos de balanceo caracterizados en los rodados de prueba.
En los artículos consultados para este trabajo, no se encontró ningún método que calcule AMP
a partir de matrices incompletas de coeficientes de influencia; por lo que el método que se
plantea en el capítulo cinco se considera una contribución en el área de balanceo al igual que
el método para matrices completas.
84
Capítulo 7 Conclusiones y recomendaciones.
85
7.2 Recomendaciones.
Como una posible mejora al método de los AMP para matrices completas e incompletas se
propone utilizar ponderaciones para incrementar los valores de vibración en una frecuencia
específica, lo cual permitirá aproximar los factores de forma modal iniciales al real. El método
de las ponderaciones se puede tomar de [26].
Se recomienda seguir explorando el caso de modos superiores con el método de los AMP para
matrices completas, pero con un modelo que tengas tres modos de vibración por cada rotor
que lo integre. Esto permitirá determinar la cantidad de modos superiores que tiene como
límite el método de los AMP para matrices completas. Cabe mencionar que los modos del
modelo deben ser planos, porque fue para la condición que se desarrolló el método propuesto
en este trabajo.
Simular el ruido en las señales de vibración con el fin de determinar los efectos en el método
de los AMP para matrices completas y como se afecta la convergencia del método.
En algunos casos se encontró que los factores de forma modal en los sensores no eran planos,
ya que presentaban desviación entre 5° y 10°; como resultado el AMP que se calcula no es
plano. Se recomienda realizar una rutina de cómputo que permita al usuario modificar los
ángulos de los factores de forma de manera que sean planos y después iniciar nuevamente el
cálculo de los AMP pero con los factores de forma modificados.
Realizar pruebas del método de lo AMP a partir de matrices incompletas para los casos de:
modos cercanos, modos superiores, ruido en la señal de vibración y combinaciones de ellos.
Realizar pruebas del método de los AMP a partir de matrices completas e incompletas de
coeficientes de influencia en un rotor experimental y posteriormente en una máquina real.
Referencias
1. John M. Vance, 1988, Rotodynamics of Turbomachinery, Wiley, primera edición.
2. Rankine, W. A., 1869, “On the Centrifugal Force of Rotaring Shafts”, Engineer, Vol. 27,
pp. 249.
3. Loewy, R. G. and Piarulli, V. J., 1969, “Dynamics of Rotating Shafts,” Shock and
Vibration Information Center, SVM – 4.
4. Cervantes, C. J., 2005, “Utilización de Modelos Espaciales Simplificados para Apoyar el
Balanceo Modal,” Tesis de maestría en ciencias, CENIDET, Cuernavaca, Mor.
5. Durkeley, S., 1894, “On the Whirling and Vibration of Shafts,” Phil. Trans. R. Soc.,
London, Ser. A, Vol 185, pp. 279 – 360.
6. Föppl, A., 1895, “Das Problem der Lavalschen Turbinenwelle,” Der Civilingenieur, Vol
41, pp 335 -342.
7. Kerr, W., 1916, “On the Whirling Speeds of Loaded Shafts,” Engineering, pp. 150.
8. Yamamoto, T., Ishida, Y., 2001, Linear and Nonlinear Rotodynamics, Wiley & Sons, pp.
295 – 297.
9. Neslson, Frederick C., 2003, “A Brief History of Early Rotor Dynamics,” Sound and
Vibration, June, pp. 8 – 11.
10. Jeffcott, H. H., 1919, “The Lateral Vibration of Loaded Shafts in the Neighborhood of a
Whirling Speed: The Effect of Want of Balance”, Philosophical Magazine, Vol. 6, No. 37,
pp. 304 – 314.
11. Thearle, E. L., 1934, “Dynamics Balancing of Rotating Machinery in the Field,” Journal of
Applied Mechanics (Transactions of the ASME), Vol. 56, pp. 745 – 753.
12. Baker J. G., 1939, “Methods of Rotor-Unbalance Determination,” ASME Journal of
Applied Mechanics, Vol. 61, pp. A1-A6.
13. Kang Y., Chang Y. P., Tseng M. H., Tang P.H. and Chang Y. F., 2000, “A Modified
Approach Based on Influence Coefficient Method for Balancing Crank – Shaft,” Journal
of Sound and vibration, Vol. 234, N. 2, pp. 277 – 296.
86
Referencias
14. Goodman, T. P., 1964, “A Least-Squares Method for Computing Balance Corrections,“
ASME Journal of engineering for industry, Series B, Vol. 86, No. 3, 1964, pp. 273-279.
15. Lund, J. W., y Tonnesen, J., 1972, “Analysis and Experiments on Multi-Plane Balancing
of a Flexible Rotor,” ASME, Journal of engineering for industry, Vol. 94, pp. 233 – 242.
16. Tessarzik J. M., Badgley R. H. and Anderson W. J., 1972, “Flexible rotor balancing by the
exact point-speed influence coefficient method,” ASME Journal of Engineering for
Industry, pp. 148 – 158.
17. Tessarzik J. M., Badgley R. H. and Fleming D. P., 1976, “Experimental evaluation of
multiplane - multispeed rotor balancing through multiple critical speeds,” ASME Journal
of Engineering for Industry, pp. 988 - 998.
18. Muñoz, V. J. M., G. Guerrero y E. Murphy, 1984, “Procedimiento de Balanceo por
Coeficientes de Influencia para Uno y Dos Planos,” Gerencia de generación
termoeléctrica, CFE, México.
19. Ewins, D. J., 200, “Modal Testing: Theory and Practice,” Research study press LTD,
Inglaterra, segunda edición.
20. Grobel, L. P., 1953, “Balancing Turbine Generator Rotors,” General electric Review, Vol.
65, No. 4, pp 22 - 25.
21. Bishop, R. E. D., 1959, “The Vibration of Rotating Shafts,” Journal of Mechanical
Engineering Science, Vol. 1, No. 1, pp. 50 -65.
22. Bishop, R. E. D. and Gladwell, G. M. L., 1959, “The Vibration and Balancing of an
Unbalanced Flexible Rotor,” Journal of Mechanical Engineering Science, Vol. 1, No. 1,
pp. 66 -67.
23. Parkinson A. G., Darlow M. S. y Smalley A. J., 1980, “A Theoretical Introduction to the
Development of a Unified Approach to Flexible Rotor Balancing,” ASME, Journal of
sound and vibration, Vol. 68, No. 4, pp. 489 – 506.
24. Holdt, H.H., 1988,”Computer-Aided High-Speed Balancing of Flexible Turbine Rotors,”
Turbomachinery International, January/February, pp. 29-31.
25. Preciado, D. E. y Aguirre, R. J., 1993, “Balanceo Modal de Rotores Utilizando
Coeficientes de Influencia,” Boletín IIE, Vol 17, Num 1, pp. 21 -32.
87
Referencias
88
26. Preciado, D. E., Aguirre, R. J. y Bannister, R. H., 1996, “Influence Coefficients Method
for Rotor Balancing Using Multiple Trial Mass Sets,” Procc. 6° Conf. on Vibration in
Rotating Machinery; Oxford, England; September, pp. 491 – 506.
27. Preciado, D. E. y Bannister, R. H., 2002, “Balancing of an Experimental Rotor Without
Trial Runs”, International Journal of Rotating Machinery; Vol. 8; No. 2; pp. 499-108.
28. El-Shafei, A., El-Kabbany, A. S., Younan, A. A., 2004, “Rotor Balancing Without Trail
Weights,” Transaction of ASME: Journal of Engineering for Gas Turbines and Power,
Vol. 126, July, pp. 604 – 609.
29. Aguirre R. J. E., Rothhirsch L. A., 1987, “Limitations and Recommendations for
Multiplane Influence Coefficient Balancing,” Vibration Institute, 11th Annual Meeting,
June 9-13.
30. Howard Anton, 1999, “Introducción al algebra lineal,” Limusa, segunda edición.
31. Schwarz, B. J. y Richardson M. H., 1999, “Experimental Modal Análisis,” CSI Reliability
Week, Orlando, Fl, Octubre.
32. http://www.dliengineering.com/vibman-spanish/mododevibracin1.htm. Marzo 2007
33. Preciado, D. E.; 1998, “Mixed Modal Balancing of Flexible Rotors without Trial Runs,”
PhD. Thesis; Cranfield University, U. K.
34. Aguirre R. J., Preciado D. E., 1991, “Análisis modal aplicado al balanceo de rotores: dos
aspectos técnicos relevantes,” Boletín IIE, Vol. 15, Núm 4.
35. Singiresu S. Rao, 1995, “Mechanical Vibrations,” Addison-Wesley, Tercera Edición,
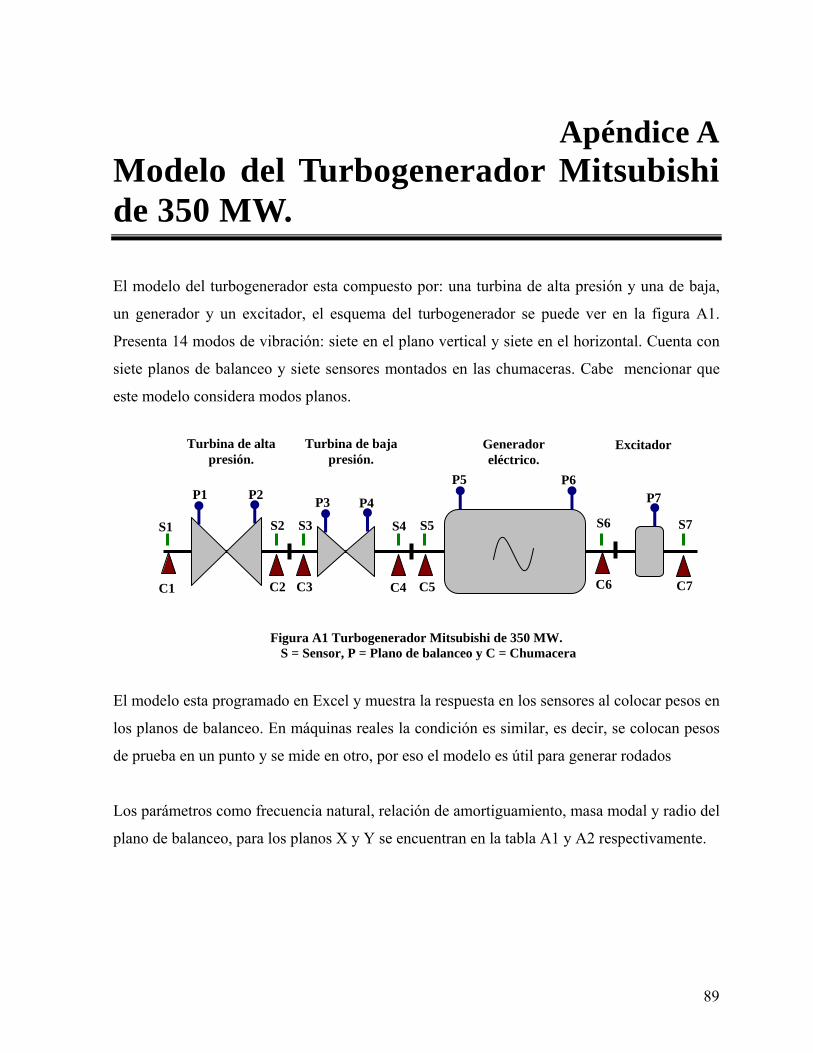
Apéndice A Modelo del Turbogenerador Mitsubishi de 350 MW. 8 Apéndice A
El modelo del turbogenerador esta compuesto por: una turbina de alta presión y una de baja,
un generador y un excitador, el esquema del turbogenerador se puede ver en la figura A1.
Presenta 14 modos de vibración: siete en el plano vertical y siete en el horizontal. Cuenta con
siete planos de balanceo y siete sensores montados en las chumaceras. Cabe mencionar que
este modelo considera modos planos.
Turbina de alta presión.
Turbina de baja presión.
Generador eléctrico.
Excitador
C1 C2 C3 C4 C5 C6 C7
P1 P2 P3 P4
P5 P6 P7
S1 S2 S3 S4 S5 S6 S7
Figura A1 Turbogenerador Mitsubishi de 350 MW.
S = Sensor, P = Plano de balanceo y C = Chumacera
El modelo esta programado en Excel y muestra la respuesta en los sensores al colocar pesos en
los planos de balanceo. En máquinas reales la condición es similar, es decir, se colocan pesos
de prueba en un punto y se mide en otro, por eso el modelo es útil para generar rodados
Los parámetros como frecuencia natural, relación de amortiguamiento, masa modal y radio del
plano de balanceo, para los planos X y Y se encuentran en la tabla A1 y A2 respectivamente.
89
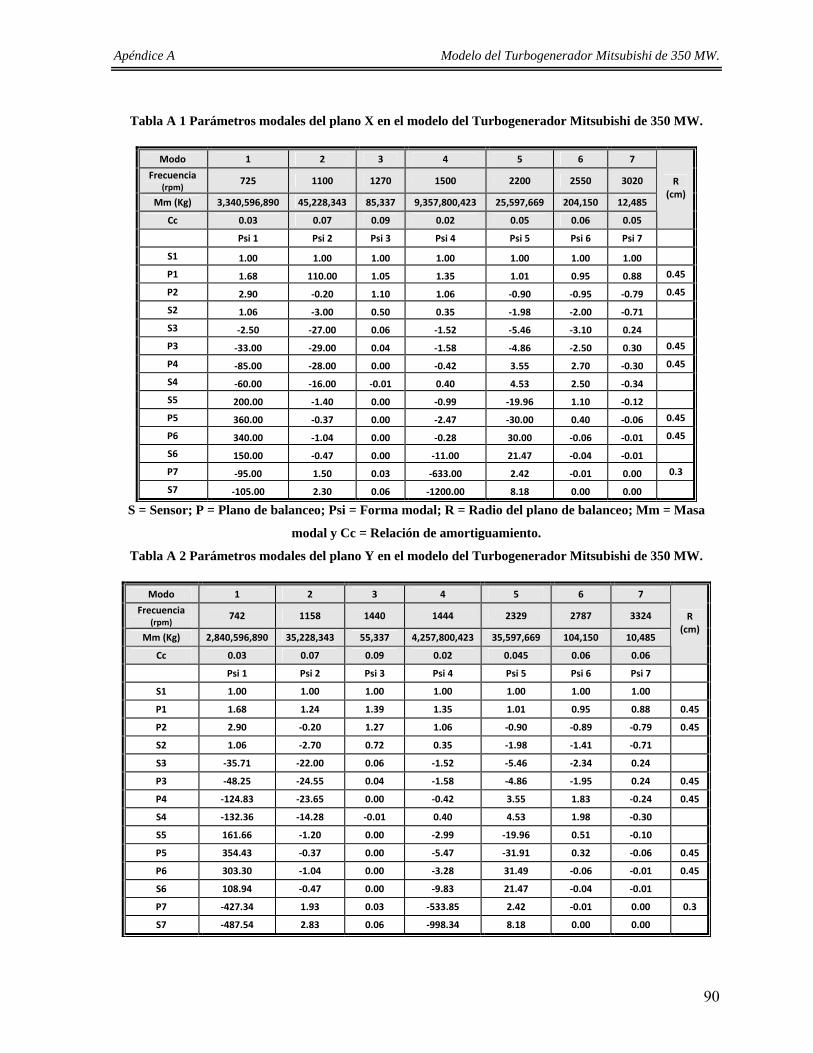
Apéndice A Modelo del Turbogenerador Mitsubishi de 350 MW.
90
Tabla A 1 Parámetros modales del plano X en el modelo del Turbogenerador Mitsubishi de 350 MW.
Modo 1 2 3 4 5 6 7
Frecuencia (rpm) 725 1100 1270 1500 2200 2550 3020
Mm (Kg) 3,340,596,890 45,228,343 85,337 9,357,800,423 25,597,669 204,150 12,485
Cc 0.03 0.07 0.09 0.02 0.05 0.06 0.05
R (cm)
Psi 1 Psi 2 Psi 3 Psi 4 Psi 5 Psi 6 Psi 7
S1 1.00 1.00 1.00 1.00 1.00 1.00 1.00
P1 1.68 110.00 1.05 1.35 1.01 0.95 0.88 0.45
P2 2.90 ‐0.20 1.10 1.06 ‐0.90 ‐0.95 ‐0.79 0.45
S2 1.06 ‐3.00 0.50 0.35 ‐1.98 ‐2.00 ‐0.71
S3 ‐2.50 ‐27.00 0.06 ‐1.52 ‐5.46 ‐3.10 0.24
P3 ‐33.00 ‐29.00 0.04 ‐1.58 ‐4.86 ‐2.50 0.30 0.45
P4 ‐85.00 ‐28.00 0.00 ‐0.42 3.55 2.70 ‐0.30 0.45
S4 ‐60.00 ‐16.00 ‐0.01 0.40 4.53 2.50 ‐0.34
S5 200.00 ‐1.40 0.00 ‐0.99 ‐19.96 1.10 ‐0.12
P5 360.00 ‐0.37 0.00 ‐2.47 ‐30.00 0.40 ‐0.06 0.45
P6 340.00 ‐1.04 0.00 ‐0.28 30.00 ‐0.06 ‐0.01 0.45
S6 150.00 ‐0.47 0.00 ‐11.00 21.47 ‐0.04 ‐0.01
P7 ‐95.00 1.50 0.03 ‐633.00 2.42 ‐0.01 0.00 0.3
S7 ‐105.00 2.30 0.06 ‐1200.00 8.18 0.00 0.00
S = Sensor; P = Plano de balanceo; Psi = Forma modal; R = Radio del plano de balanceo; Mm = Masa
modal y Cc = Relación de amortiguamiento.
Tabla A 2 Parámetros modales del plano Y en el modelo del Turbogenerador Mitsubishi de 350 MW.
Modo 1 2 3 4 5 6 7
Frecuencia (rpm)
742 1158 1440 1444 2329 2787 3324
Mm (Kg) 2,840,596,890 35,228,343 55,337 4,257,800,423 35,597,669 104,150 10,485
Cc 0.03 0.07 0.09 0.02 0.045 0.06 0.06
R (cm)
Psi 1 Psi 2 Psi 3 Psi 4 Psi 5 Psi 6 Psi 7
S1 1.00 1.00 1.00 1.00 1.00 1.00 1.00
P1 1.68 1.24 1.39 1.35 1.01 0.95 0.88 0.45
P2 2.90 ‐0.20 1.27 1.06 ‐0.90 ‐0.89 ‐0.79 0.45
S2 1.06 ‐2.70 0.72 0.35 ‐1.98 ‐1.41 ‐0.71
S3 ‐35.71 ‐22.00 0.06 ‐1.52 ‐5.46 ‐2.34 0.24
P3 ‐48.25 ‐24.55 0.04 ‐1.58 ‐4.86 ‐1.95 0.24 0.45
P4 ‐124.83 ‐23.65 0.00 ‐0.42 3.55 1.83 ‐0.24 0.45
S4 ‐132.36 ‐14.28 ‐0.01 0.40 4.53 1.98 ‐0.30
S5 161.66 ‐1.20 0.00 ‐2.99 ‐19.96 0.51 ‐0.10
P5 354.43 ‐0.37 0.00 ‐5.47 ‐31.91 0.32 ‐0.06 0.45
P6 303.30 ‐1.04 0.00 ‐3.28 31.49 ‐0.06 ‐0.01 0.45
S6 108.94 ‐0.47 0.00 ‐9.83 21.47 ‐0.04 ‐0.01
P7 ‐427.34 1.93 0.03 ‐533.85 2.42 ‐0.01 0.00 0.3
S7 ‐487.54 2.83 0.06 ‐998.34 8.18 0.00 0.00
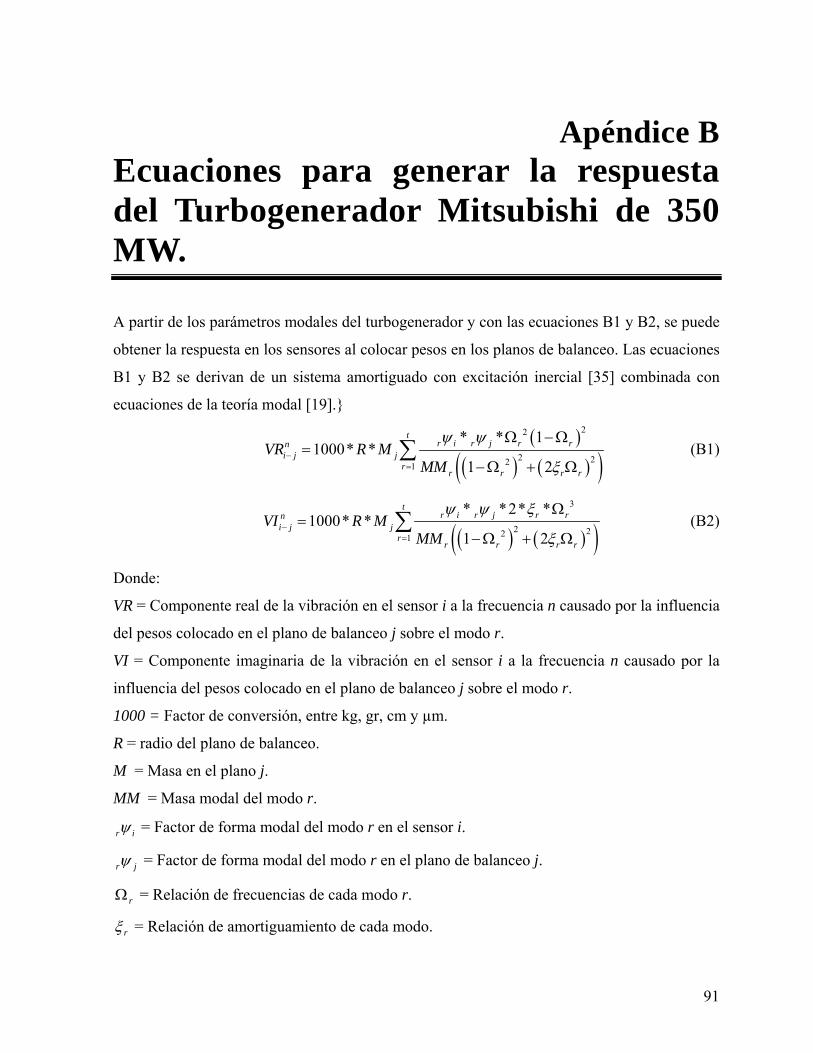
Apéndice B Ecuaciones para generar la respuesta del Turbogenerador Mitsubishi de 350 MW. 9 Apéndice B A partir de los parámetros modales del turbogenerador y con las ecuaciones B1 y B2, se puede
obtener la respuesta en los sensores al colocar pesos en los planos de balanceo. Las ecuaciones
B1 y B2 se derivan de un sistema amortiguado con excitación inercial [35] combinada con
ecuaciones de la teoría modal [19].}
( )( ) ( )( )
22
2 221
* * 11000* *
1 2
tr i r j r rn
i j jr
r r r r
VR R MMM
ψ ψ
ξ−
=
Ω −Ω=
−Ω + Ω∑ (B1)
( ) ( )( )3
2 221
* *2* *1000* *
1 2
tr i r j r rn
i j jr
r r r r
VI R MMM
ψ ψ ξ
ξ−
=
Ω=
−Ω + Ω∑ (B2)
Donde:
VR = Componente real de la vibración en el sensor i a la frecuencia n causado por la influencia
del pesos colocado en el plano de balanceo j sobre el modo r.
VI = Componente imaginaria de la vibración en el sensor i a la frecuencia n causado por la
influencia del pesos colocado en el plano de balanceo j sobre el modo r.
1000 = Factor de conversión, entre kg, gr, cm y µm.
R = radio del plano de balanceo.
M = Masa en el plano j.
MM = Masa modal del modo r.
r iψ = Factor de forma modal del modo r en el sensor i.
r jψ = Factor de forma modal del modo r en el plano de balanceo j.
rΩ = Relación de frecuencias de cada modo r.
rξ = Relación de amortiguamiento de cada modo.
91
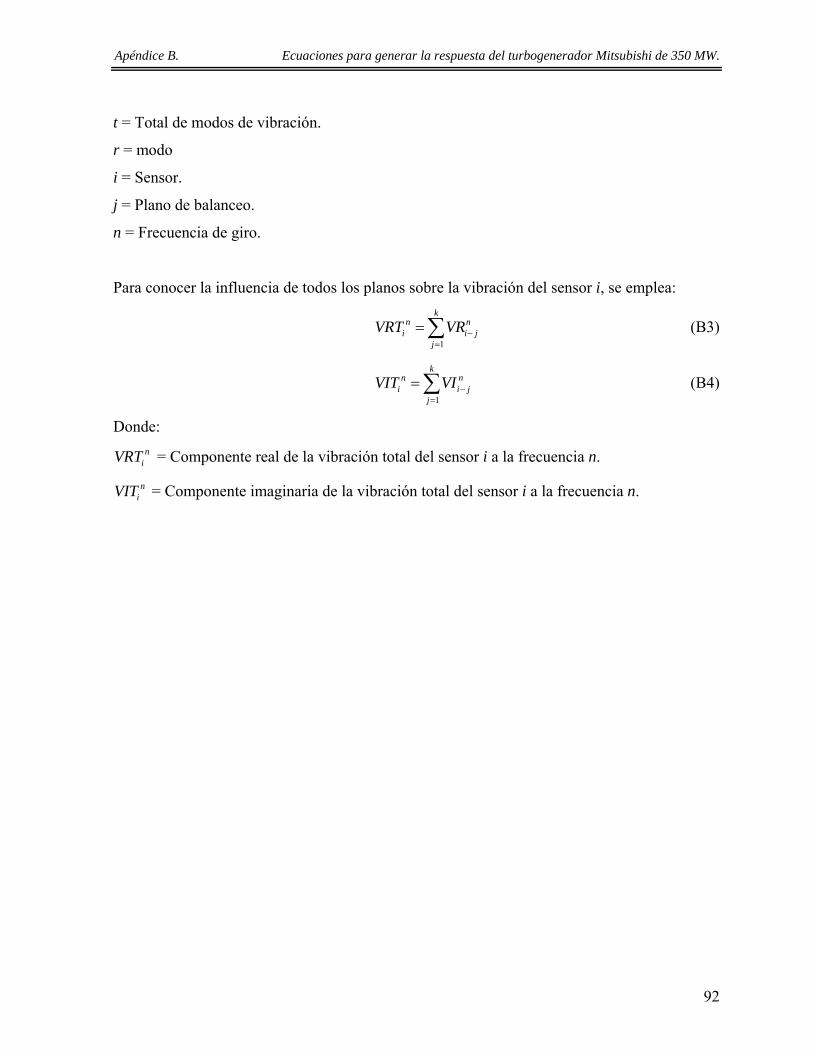
Apéndice B. Ecuaciones para generar la respuesta del turbogenerador Mitsubishi de 350 MW.
92
t = Total de modos de vibración.
r = modo
i = Sensor.
j = Plano de balanceo.
n = Frecuencia de giro.
Para conocer la influencia de todos los planos sobre la vibración del sensor i, se emplea:
1
kn
ij
VRT VRni j−
=
=∑ (B3)
1
kn
ij
VIT VI ni j−
=
= ∑ (B4)
Donde: n
iVRT = Componente real de la vibración total del sensor i a la frecuencia n.
niVIT = Componente imaginaria de la vibración total del sensor i a la frecuencia n.
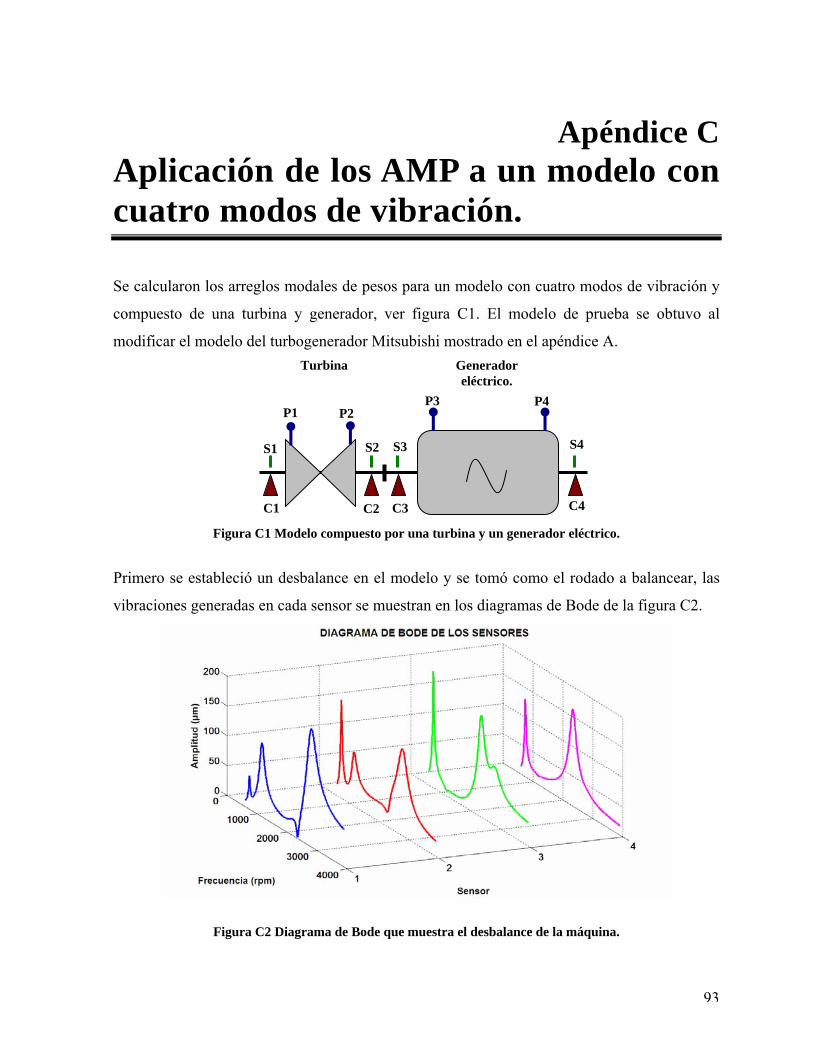
Apéndice C Aplicación de los AMP a un modelo con cuatro modos de vibración. 10 Apéndice C.
Se calcularon los arreglos modales de pesos para un modelo con cuatro modos de vibración y
compuesto de una turbina y generador, ver figura C1. El modelo de prueba se obtuvo al
modificar el modelo del turbogenerador Mitsubishi mostrado en el apéndice A.
Turbina Generador eléctrico.
C1 C2 C3 C4
P1 P2P3 P4
S1 S2 S3 S4
Figura C1 Modelo compuesto por una turbina y un generador eléctrico.
Primero se estableció un desbalance en el modelo y se tomó como el rodado a balancear, las
vibraciones generadas en cada sensor se muestran en los diagramas de Bode de la figura C2.
Figura C2 Diagrama de Bode que muestra el desbalance de la máquina.
93
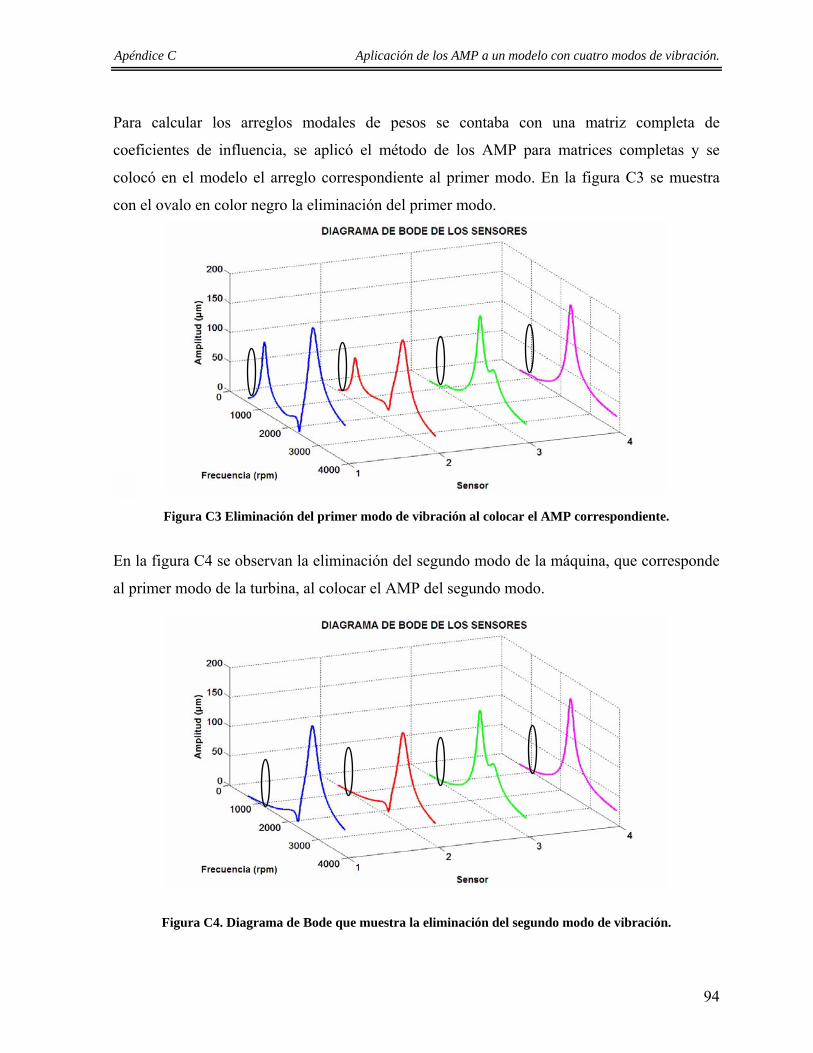
Apéndice C Aplicación de los AMP a un modelo con cuatro modos de vibración.
Para calcular los arreglos modales de pesos se contaba con una matriz completa de
coeficientes de influencia, se aplicó el método de los AMP para matrices completas y se
colocó en el modelo el arreglo correspondiente al primer modo. En la figura C3 se muestra
con el ovalo en color negro la eliminación del primer modo.
Figura C3 Eliminación del primer modo de vibración al colocar el AMP correspondiente.
En la figura C4 se observan la eliminación del segundo modo de la máquina, que corresponde
al primer modo de la turbina, al colocar el AMP del segundo modo.
Figura C4. Diagrama de Bode que muestra la eliminación del segundo modo de vibración.
94
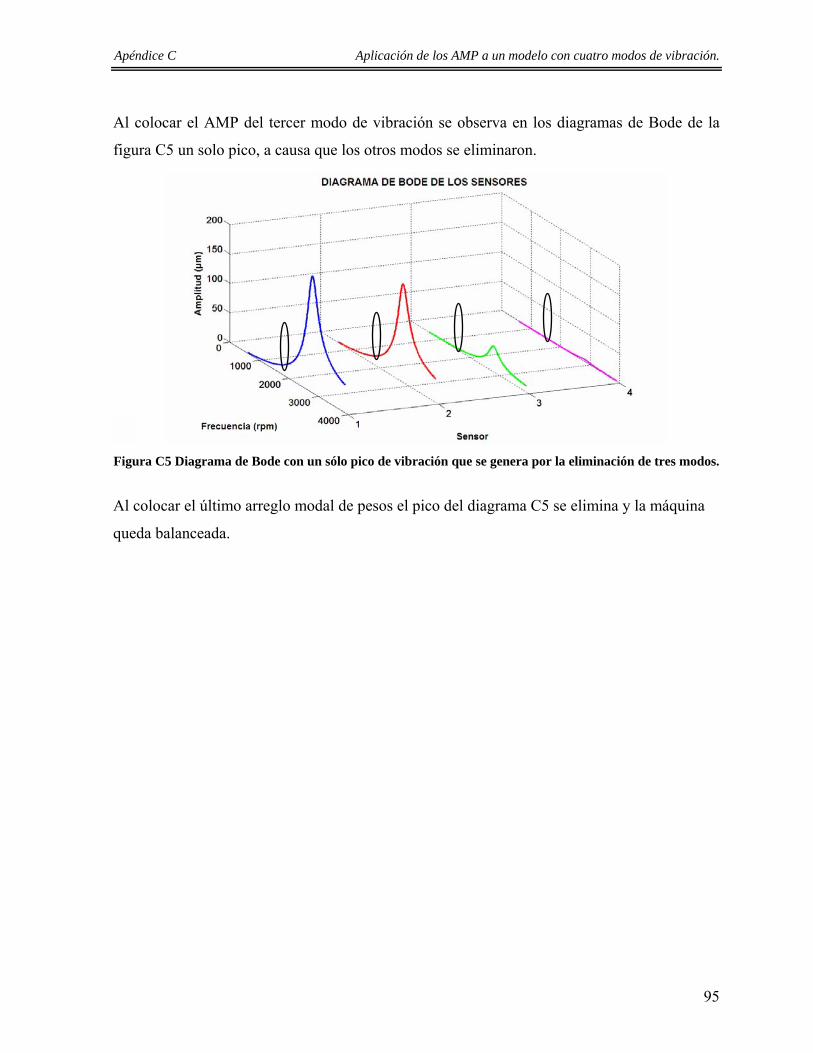
Apéndice C Aplicación de los AMP a un modelo con cuatro modos de vibración.
95
Al colocar el AMP del tercer modo de vibración se observa en los diagramas de Bode de la
figura C5 un solo pico, a causa que los otros modos se eliminaron.
Figura C5 Diagrama de Bode con un sólo pico de vibración que se genera por la eliminación de tres modos.
Al colocar el último arreglo modal de pesos el pico del diagrama C5 se elimina y la máquina
queda balanceada.
Apéndice D Código de programación del algoritmo general para calcular los AMP. 11 Apéndice D.
El programa se realizó en Matlab v6.5, para ello fue necesaria agregar dos funciones extras. La primera es la función cis que permite introducir un vector con amplitud y fase, la segunda fue la función nround que redondea los resultados a un cierto número de decimales. El programa sigue la secuencia del algoritmo presentado en el capítulo 6. Tiene como limite el cálculo de los arreglos modales de pesos para una máquina con siete planos de balanceo y siete sensores. %···························DATOS DE ENTRADA························· %-------------------------------------------------------------------- %CARGADO DEL RODADO A BALANCEAR Y CARACTERISTICAS DE LA MÁQUINA. clc clear all fprintf ('-.-.-.-.-.-.-.--.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-\n') fprintf('PROGRAMA PARA CALCULAR ARREGLOS MODALES DE PESOS MEDIANTE UNA') fprintf('\n MATRIZ COMPLETA O INCOMPLETA DE COEFICIENTES DE INFLUENCIA.') fprintf ('\n-.-.-.-.-.-.-.--.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-\n') fprintf('\nCARACTERISTICAS DE LA MAQUINA:') NS = input ('\n\nNúmero de Sensores ==> '); NP = input ('Número de Planos ==> '); NM = input ('Número Modos ==> '); fprintf('\nCARACTERÍSTICAS DE LA PRUEBA:') NR = input ('\n\nNúmero de Rodados de Prueba ==> '); NPP = input ('Número de Planos Caracterizados ==> '); for cn = 1:NPP PP(cn) = input ('Posición del Plano ==> '); end NSP = input ('\nNúmero de Sensores ==> '); for cm = 1:NSP PS(cm) = input ('Posición del Sensor ==> '); end NV = NSP; %Número de velocidades = numero de sensores de prueba %Para tener una matriz PSI cuadrada. RB = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\RB'); a = size(RB); %Calcula el tamaño de la matriz RB. b = a(1); %Determina el numero de RPM de la matriz RB. VMIN = RB(1); VMAX = RB(b); MAC = 0.1; %Referencia al iniciar el ciclo del cálculo de los AMP.
96
Apéndice D Código de programación del algoritmo general para calcular los AMP.
am = 0.1; %Sirve para detener el ciclo. bm = 0; %Contador de MAC repetidos. %·············DIAGRAMAS POLARES Y DE BODE DEL RODADO RB·············· %-------------------------------------------------------------------- fprintf ('\n················································································\n') fprintf(' === OBSERVE LOS DIAGRAMAS === ') fprintf('\nEL NUMERO DE VELOCIDADES A SELECCIONAR ES: %d, QUE ES IGUAL AL NUMERO DE SENSORES', NSP) fprintf('\nEL RANGO DE VELOCIDADES ES: %d - %d RPM',VMIN,VMAX) fprintf('\nPRESI0NE ENTER PARA CONTINUAR Y PARA CERRAR LAS GRAFICAS.') fprintf ('\n················································································') input(''); %Detiene el programa hasta presionar cualquier tecla. c = 1; %Contador Auxiliar para almacenar por columnas, según el número de sensores. for cs = 1:1:NSP %Permite recorrer todos los sensores. d=PS(cs); MAG(:,c) = RB(:,(d*2)); %Vector de magnitud de vibración de todos los sensores. FAS(:,c) = RB(:,((d*2)+1)); %Vector de fase de todos los sensores. c = c + 1; end f = 1; %Contador Auxiliar para seleccionar la columna de cada sensor. for g = 1:2:NSP*2 if (f < 5) & (f >0) %Condición para solo graficar hasta cuatro sensores por ventana. figure(1) %Despliega una ventana con los sensores 1 - 4. g =NSP; %Variable auxiliar para almacenar el numero de planos. if NSP > 4 g = 4; %Para que solo se realicen cuatro graficas en la primer ventana. end subplot (2,g,f) plot (RB(1:b,1)', MAG(1:b,f)) %Diagrama de Bode. title ('Sensor') xlabel('Frecuencia (rpm)') ylabel('Magnitud (Micras)') grid on subplot (2,g,f+g) polar ((FAS(:,f)+360)*pi/180,MAG(:,f)) %Diagrama Polar. grid on end if (f < 8) & (f >4) %Condición para solo graficar hasta tres sensores por ventana. figure(2) %Despliega una ventana con los sensores 5 - 7. subplot (2,(NSP-4),(f-4)) plot (RB(1:b,1)', MAG(1:b,f)) %Diagrama de Bode. title ('Sensor') xlabel('Frecuencia (rpm)') ylabel('Magnitud (Micras)') grid on subplot (2,(NSP-4),(f-4)+(NSP-4)) polar ((FAS(:,f)+360)*pi/180,MAG(:,f)) %Diagrama Polar. end f = f + 1; end input(''); %Detiene el programa hasta presionar cualquier tecla. close all %Cierra todas las graficas.
97

Apéndice D Código de programación del algoritmo general para calcular los AMP.
%··················CALCULO DE FFM INICIALES ························ %-------------------------------------------------------------------- %CÁLCULO DEL FFM DE CADA VELOCIDAD. for h = 1:1:NV %Permite capturar las velocidades. fprintf ('Introducir Velocidad %d de %d ', h, NSP) VV(h,1) = input ('==> '); %Guarda el valor de las velocidades en un vector. for k = 1:1:b %Permite recorrer todas las velocidades. if RB(k) == VV(h) %Vibraciones del rodado RB. n = 1; for m = 1:1:NSP VVV(n,h) = RB(k,(PS(m)*2))*cis(RB(k,(PS(m)*2+1))); %La columna es la velocidad. n = n + 1; %Esta matriz es para determinar los FFM end end end end [VibMax PVM] = max(VVV); %Determina el valor máximo por renglón y guarda la posición. for in = 1:1:NV PSI(:,in)=VVV(:,in)/VVV(PVM(in),in); %Factor de forma modal inicial. end %Toma de referencia el sensor con la vibración mayor en cada frecuencia. n1 = 1; for h1 = 1:1:NSP for m1 = 1:1:NV VREAL(n1,1)= VVV(h1,m1); %Vector de vibraciones reales, para calcular las vibraciones residuales. n1 = n1 + 1; %Contador para acomodar las vibraciones por sensor y velocidad. end end %·············CÁLCULO DE LAS CONTRIBUCIONES MODALES·················· %-------------------------------------------------------------------- co = 1; if (NSP == NS)&&(NPP == NP)&&(NP == NR) %Matriz completa. if NP==NM ref = 0.99999; %Valor del MAC de referencia para matrices completas. end if NP<NM ref = 0.9; %Valor del MAC de referencia para matrices completas y modo superior. end end if (NR < NP) %Matriz incompleta. ref = 0.8; %Valor del MAC de referencia para matrices incompletas. end while MAC < ref CONST = pinv(PSI)*VVV; %Calculo de las contribuciones modales. %La Fila es el modo y la columna es la contribución del modo en cada velocidad. for p=1:1:NV r =1; s=NSP;
98
Apéndice D Código de programación del algoritmo general para calcular los AMP.
for q = 1:1:NV AVMODAL(r:s,p) = PSI(:,p)*CONST(p,q); %Matriz de vibraciones acomodado por modos en columna. r=r+NSP; %Este vector indica la vibración de cada modo en las diferentes frecuencias. s=s+NSP; %Las filas acomodadas por grupo de velocidades. end end p1 = 1; for r1 = 1:1:NSP*NV VMODAL(r1,:) = AVMODAL(p1,:); %Matriz de vibración modal para determinar los AMP's. p1 = p1 + NSP; %Este vector se debe multiplicar por ALFA o la pseudo inversa de delta V. if p1 > NSP*NV %Cada columna corresponde a un modo. p1 = p1 -NSP*NV + 1; %Las filas están ordenadas por grupo de sensores. end end %·······················CÁLCULO DE DELTA V, P ······················· %-------------------------------------------------------------------- %CARGADO DE LOS RODADOS DE PRUEBA MAS EL INICIAL. for y = 1:1:(NR) if y == 1 %PARA UN RODADO DE PRUEBA. R00 = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\R00'); R01 = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\R01'); end if y == 2 %PARA DOS RODADOS DE PRUEBA R02 = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\R02'); end if y == 3 %PARA TRES RODADOS DE PRUEBA R03 = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\R03'); end if y == 4 %PARA CUATRO RODADOS DE PRUEBA R04 = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\R04'); end if y == 5 %PARA CINCO RODADOS DE PRUEBA R05 = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\R05'); end if y == 6 %PARA SEIS RODADOS DE PRUEBA R06 = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\R06'); end if y == 7 %PARA SIETE RODADOS DE PRUEBA R07 = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\R07'); end end %==================================================================== %DETERMINACION DE LOS VALORES DE VIBRACION EN CADA UNO DE LOS RODADOS, %SEGUN LAS VELOCIDADES SELECCIONADAS. for t = 1:1:NV %Permite seleccionar las vibraciones en cada velocidad. for x = 1:1:NR %Permite entrar en cada uno de los rodados que se cargaron. for u = 1:1:b %Permite recorrer todo el rango de velocidades.
99
Apéndice D Código de programación del algoritmo general para calcular los AMP.
%.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.- if (x < 2)&(x > 0) if R00(u) == VV(t) %Vibraciones del rodado R00 correspondiente a la velocidad x. v=t; for va = 1:1:NSP VR00(v,1)= R00(u,(PS(va)*2))*cis(R00(u,(PS(va)*2+1))); v=v+NV; end end if R01(u) == VV(t) %Vibraciones del rodado R01 correspondiente a la velocidad x. v=t; for va = 1:1:NSP VR01(v,1)=R01(u,(PS(va)*2))*cis(R01(u,(PS(va)*2+1))); v=v+NV; end end end %.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.- if (x < 3)&(x > 1) if R02(u) == VV(t) %Vibraciones del rodado R02 correspondiente a la velocidad x. v=t; for va = 1:1:NSP VR02(v,1)=R02(u,(PS(va)*2))*cis(R02(u,(PS(va)*2+1))); v=v+NV; end end end %.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.- if (x < 4)&(x > 2) if R03(u) == VV(t) %Vibraciones del rodado R03 correspondiente a la velocidad x. v=t; for va = 1:1:NSP VR03(v,1)=R03(u,(PS(va)*2))*cis(R03(u,(PS(va)*2+1))); v=v+NV; end end end %.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.- if (x < 5)&(x > 3) if R04(u) == VV(t) %Vibraciones del rodado R04 correspondiente a la velocidad x. v=t; for va = 1:1:NSP VR04(v,1)=R04(u,(PS(va)*2))*cis(R04(u,(PS(va)*2+1))); v=v+NV; end end end %.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.- if (x < 6)&(x > 4) if R05(u) == VV(t) %Vibraciones del rodado R05 correspondiente a la velocidad x. v=t; for va = 1:1:NSP VR05(v,1)=R05(u,(PS(va)*2))*cis(R05(u,(PS(va)*2+1)));
100

Apéndice D Código de programación del algoritmo general para calcular los AMP.
v=v+NV; end end end %.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.- if (x < 7)&(x > 5) if R06(u) == VV(t) %Vibraciones del rodado R06 correspondiente a la velocidad x. v=t; for va = 1:1:NSP VR06(v,1)=R06(u,(PS(va)*2))*cis(R06(u,(PS(va)*2+1))); v=v+NV; end end end %.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.- if (x < 8)&(x > 6) if R07(u) == VV(t) %Vibraciones del rodado R06 correspondiente a la velocidad x. v=t; for va = 1:1:NSP VR07(v,1)=R07(u,(PS(va)*2))*cis(R07(u,(PS(va)*2+1))); v=v+NV; end end end %.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.- end end end %==================================================================== %Calculo de la matriz delta V y la matriz de pesos. if NR == 1 %Delta V para Un rodado de prueba. DV = [VR01-VR00]; end if NR == 2 %Delta V para Dos rodados de prueba. DV = [VR01-VR00 VR02-VR01]; end if NR == 3 %Delta V para Tres rodados de prueba. DV = [VR01-VR00 VR02-VR01 VR03-VR02]; end if NR == 4 %Delta V para Cuatro rodados de prueba. DV = [VR01-VR00 VR02-VR01 VR03-VR02 VR04-VR03]; end if NR == 5 %Delta V para Cinco rodados de prueba. DV = [VR01-VR00 VR02-VR01 VR03-VR02 VR04-VR03 VR05-VR04]; end if NR == 6 %Delta V para Seis rodados de prueba. DV = [VR01-VR00 VR02-VR01 VR03-VR02 VR04-VR03 VR05-VR04 VR06-VR05]; end if NR == 7 %Delta V para Siete rodados de prueba. DV = [VR01-VR00 VR02-VR01 VR03-VR02 VR04-VR03 VR05-VR04 VR06-VR05 VR07-VR06]; end
101
Apéndice D Código de programación del algoritmo general para calcular los AMP.
PESOS = xlsread ('C:\MATLAB6p5\work\Angel Balanceo\Final\PESOS'); %Se carga la matriz de pesos. cs =1; if NP<7 for cf = 2:2:NR*2 for ck = 1:1:NPP DP(ck,cs) = PESOS(2+PP(ck),cf)*cis(PESOS(2+PP(ck),cf+1)); %Matriz de Pesos. end cs = cs + 1; end end if NP==7 for cf = 2:2:NR*2 for ck = 1:1:NPP DP(ck,cs) = PESOS(PP(ck),cf)*cis(PESOS(PP(ck),cf+1)); %Matriz de Pesos. end cs = cs + 1; end end %·····CALCULO AMP POR MATRIZ DE INFLUENCIA O MULTIPLICADORES········. if NR<NP PDV = pinv(DV); %Cálculo de la Pseudoinversa con el método de Moore - Penroses. MULTI = PDV*(-1*VMODAL); %Cálculo del multiplicador para el rodado a balancear RB. AMP = DP*MULTI; %Cálculo de los AMP en base a multiplicadores. end if (NSP == NS)&&(NPP == NP)&&(NP == NR) ALFA = DV*inv(DP); %Matriz de coeficientes de influencia AMP = pinv(ALFA)*(-1*VMODAL); %Cálculo de los AMP con la matriz completa ALFA. end [MXAMP PPAMP] = max(AMP); %Posición del plano con el mayor peso en cada AMP, plano de referencia. for ra=1:1:NV PAMP(:, ra) = AMP(:,ra)/MXAMP(ra); %Función para adimensionalizar los AMP, respecto a un plano de referencia. end %················CÁLCULO DE LAS VIBRACIONES EFECTO ·················· %-------------------------------------------------------------------- if NR < NP VE = DV*MULTI; %Vibración efecto por multiplicadores. end if (NSP == NS)&&(NPP == NP)&&(NP == NR) VE = ALFA*AMP; %Vibración efecto por matriz de coeficientes de influencia. end %················CÁLCULO DE LOS FFM NUEVOS Y MAC ·············· %-------------------------------------------------------------------- fa = 1; for fb = 1:1:NSP*NV VEV(fb,:)=VE(fa,:); %Ordena la matriz de vibraciones efecto por velocidades.
102

Apéndice D Código de programación del algoritmo general para calcular los AMP.
fa = fa + NSP; if fa>(NSP*NV) fa = fa - NSP*NV + 1; end end aga = 1; agb = NSP; for agc = 1:1:NV AVEV(1:NSP,agc) = VEV(aga:agb,agc); aga = aga + NSP; %Matriz que guarda las vibraciones efecto de referencia. agb = agb + NSP; %Esta es una submatriz que se forma de acuerdo al modo y la frecuencia. end %Es decir el modo uno con la frecuencia uno. [VEM PVEM] = max(AVEV); %Determina el valor máximo por renglón y guarda la posicion. for gc = 1:1:NV PSI(1:NSP,gc) = AVEV(:,gc)/VEM(gc); %Forma modal en los sensores recalculada. end %Cada columna representa un modo de vibración. for fc = 1:1:NV fg = PVEM(fc); %La posición del sensor de referencia. fh = 1; for fe = 1:1:NSP*NV VEVD(fe,fc) = VEV(fe,fc)/VEV(fg,fc); %Matriz de vibración efecto desdimensionalizado, psi de todas las velocidades. fh = fh + 1; if fh > NSP fg = fg + NSP; fh = 1; end end end %························ CALCULO DEL MAC ··························· %-------------------------------------------------------------------- for h1 = 1:1:NV h3 = 1; for h2 = 1:NSP:NSP*NV MOASCR(h3,h1) = ((abs(VEVD(h2:(h2+NSP-1),h1)'*PSI(1:NSP,h1)))^2)/((VEVD(h2:(h2+NSP-1),h1)'*VEVD(h2:(h2+NSP-1),h1))*(PSI(1:NSP,h1)'*PSI(1:NSP,h1))); h3 = h3 + 1; %Calculo de todos los MAC, tomando como referencia la forma modal psi end %De la velocidad correspondiente. end for h4 = 1:1:NV PRMAC(h4) = roundn((sum((MOASCR(:,h4)).^2)/NSP)^(1/2),-6); %MAC RMS por velocidad. end MAC = min (PRMAC); %Valor del MAC minimo. fprintf ('\n\nEL NUMERO MAC MINIMO DE ESTE CALCULO TIENE UN VALOR DE %2.6f EN LA APROXIMACION %d.',MAC, co); co = co + 1;
103
Apéndice D Código de programación del algoritmo general para calcular los AMP.
if am ~= MAC bm = 0; end if am==MAC bm = bm + 1; %Almacena el numero de veces que se repite el MAC mínimo. end if bm == 10 ref = 0.1; %Detiene el ciclo porque cambia la referencia. end am = MAC; end %clc %·······························RESULTADOS··························· %-------------------------------------------------------------------- %==================================================================== %ARREGLOS MODALES DE PESOS, PROPORCIONES Y FORMA MODAL EN SENSORES. for da = 1:1:NV VR(:,da) = VREAL + VE(:,da); %Vibracion residual. MVR = abs(VR); FVR = angle(VR)*180/pi; end MAMP = abs(AMP); FAMP = angle(AMP)*180/pi; %Magnitud y fase de los AMP. MPAMP = abs(PAMP); FPAMP = angle(PAMP)*180/pi; %Magnitud y fase de las proporciones de los AMP. MPSI = abs(PSI); FPSI = angle(PSI)*180/pi; %Magnitud y fase de las formas modales en los sensores. if (NSP == NS)&&(NPP == NP)&&(NP == NR) %Matriz completa. if NP==NM PMAC = find(PRMAC>=0.99999); %Encuentra AMP con el MAC mayor al valor de referencia. end if NP<NM %Matriz completa y modo superior. PMAC = find(PRMAC>=0.9); %Encuentra AMP con el MAC mayor al valor de referencia. end end if (NR < NP) %Matriz incompleta. PMAC = find(PRMAC>=0.8); %Encuentra AMP con el MAC mayor al valor de referencia. end for ca1 = 1:1:length(PMAC) fprintf ('\n\n--.-.-.-.-.-.-.--.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-\n') fprintf(' RESULTADOS. ') fprintf ('\n PARA LA VELOCIDAD DE %d RPM ',VV(PMAC(ca1))); fprintf ('\n-.-.-.-.-.-.-.--.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-.-\n') fprintf ('\n============== ARREGLO MODAL DE PESOS ==============\n') for ca2 = 1:NPP
104

Apéndice D Código de programación del algoritmo general para calcular los AMP.
105
fprintf ('\nPLANO %d\n',PP(ca2)); fprintf ('MAGNITUD %5.4f GRAMOS; FASE %5.4fº\n',MAMP(ca2,ca1),FAMP(ca2,ca1)); end fprintf ('\n============== PROPORCIONES DE ARREGLO MODAL DE PESOS ==============\n') for cc2 = 1:NPP fprintf ('\nPLANO %d\n',PP(cc2)); fprintf ('MAGNITUD %5.4f GRAMOS; FASE %5.4fº\n',MPAMP(cc2,ca1),FPAMP(cc2,ca1)); end fprintf ('\n============== FORMA MODAL EN LOS SENSORES ==============\n') for rb = 1:1:NSP fprintf ('\nSENSOR %d ',PS(rb)) ; fprintf ('\nAMPLITUD %5.5f FASE %5.5f\n', MPSI(rb,ca1),FPSI(rb,ca1) ) ; end fprintf ('\nEL NUMERO MAC RMS DE ESTE ARREGLO ES: %2.6f\n',PRMAC(PMAC(ca1))); end fprintf ('\n\nEL NUMERO MAC RMS MINIMO DE ESTE CALCULO TIENE UN VALOR DE %2.6f EN LA APROXIMACION %d.',MAC, (co-1)); if (NSP == NS)&&(NPP == NP)&&(NP == NR) %Matriz completa. if NP==NM fprintf ('\nEL NUMERO MAC RMS MINIMO ACEPTABLE PARA MATRIZ COMPLETA ES DE 0.99999'); end if NP<NM %Matriz completa y modo superior. fprintf ('\nEL NUMERO MAC RMS MINIMO ACEPTABLE PARA MATRIZ COMPLETA CON MODO SUPERIOR ES DE 0.9'); end end if (NR < NP) %Matriz incompleta. fprintf ('\nEL NUMERO MAC RMS MINIMO ACEPTABLE PARA MATRIZ INCOMPLETA ES DE 0.8'); end %====================================================================









![Diseos de Investigacin-prof Mercado[1]](https://img.pdfslide.es/doc/110x75/55cf8e45550346703b9064a3/diseos-de-investigacin-prof-mercado1.jpg)