Embed Size (px)
Citation preview

CERTIFICADO
Certifico que el presente trabajo ha sido
realizado en su totalidad por
el Sr. Patricio Iván Vallejo Chagcha.
Atentamente,
Ing. Edwin Nieto Ríos.
DIRECTOR DE TESIS

AGRADECIMIENTO
Agradezco al Ing. Edwin Nieto por el
sacrificio, la dedicación y paciencia
con que ha dirigido este trabajo de Tesis.
Atentamente.,
Patricio Vallejo Chagcha

DEDICATORIA
El presente trabajo lo dedico con todo mi cariño y admiración
a mis padres, HUMBERTO e HILDA, por todo su sacrificio y
esfuerzo dedicados a velar por mi biniestar y poder culminar
esta etapa de mi vida.

ÍNDICE
pag.
CAPITULO I: GENERALIDADES
1.1 INTRODUCCIÓN........ 1
1.1.1 Nomenclatura..... 3
1.2 FUNDAMENTOS DE LOS MOTORES DE CORRIENTE
CONTINUA..... ....6
1.2.1 Introducción ....6
1.2.2 Punto de Operación del Motor..... 7
1.2.3 Motor D.C. con Excitación Independiente 10
1.2.4 Representación en diagrama de bloques con variables normalizadas.... 13
1.2.5 Control de la Máquina D.C. en Estado Permanente.... 18
1.2.5.1 Control por Armadura.......... 21
1.2.5.2 Control por Campo , 23
1.2.6 Comportamiento Dinámico de la Máquina D.C. a Campo Constante......26
1.3 FUNDAMENTOS DEL CONVERSOR A.C./D.C. A
UTILIZARSE ...34
1.3.1 Análisis en Conducción Discontinua 40
1.3.2 Análisis en Conducción Continua ....42
1.3.2.1 Determinación de la inductancia de Armadura LF ideal que permite
Conducción Continua. 46
1.3.2.2 Efectos de la Conmutación 48
1.3.2.3 Efectos de los Armónicos del Convertidor en la Red........ ..56
1.4 CARACTERÍSTICAS DE CONTROL PARA LOS
CONVERSORES ...........58

Pag.
CAPITULO II: ANÁLISIS Y DISEÑO
2.1 CARACTERÍSTICAS DEL MOTOR.... 63
2.2 ESPECIFICACIONES Y CONFIGURACIONES DEL CIRCUITO
DECONTHOL. ..63
2.2.1 Circuito de Potencia... ..63
2.2.2 Circuito de Control... 64
2.2.2.1 Circuito de Disparo...... 64
2.2.2.2 Circuito de Regulación , ...64
2.2.3 Protecciones .....64
2.2.4 Fuente ..65
2.3 DISEÑO DEL CIRCUITO DE POTENCIA.. 67
2.3.1 Diseño del circuito que alimenta ala Armadura 67
2.3.1.1 Diseño del Disipador de Calor......... 67
2.3.1.2 Diseño de la Red Snubber... -....71
2.3.2 Diseño del Circuito que alimenta al Campo. ..........75
2.4 DISEÑO DEL CIRCUITO DE CONTROL 76
2.4.1 Diseño del Circuito de Disparo...,. ..76
2.4.2 Diseño del Circuito de Regulación.. 82
2.5 PROTECCIONES ...93
2.5.1 Circuito Detector de Fallas 93
2.5.2 Circuito Protector de Fallas 96
2.5.3 Lógica de Encendido ...97
2.5.4 Fuente 98
2.6 CONSIDERACIONES PARA LA CONSTRUCCIÓN Y EL
MONTAJE 101

Pag-CAPITULO III: RESULTADOS EXPERIMENTALES
3.1 PRUEBAS EN ESTADO ESTABLE 125
3.2 PRUEBAS EN ESTADO DINÁMICO 130
CAPITULO IV: CONCLUSIONES Y RECOMENDACIONES
4.1 ANÁLISIS DE RESULTADOS 135
4.2 CONCLUSIONES 137
4.3 RECOMENDACIONES 140
BIBLIOGRAFÍA
ANEXO 1: Características del Tiristor SCR 2N 6174 o ECG 5547
ANEXO 2: Disipador de Calor
ANEXO3:RedSnubber
ANEXO 4: Diagramas Circuitales y Circuitos Impresos
ANEXO 5: Manual del Usuario
CAPITULO
I

1.1 INTRODUCCIÓN
Como tema de tesis vamos a controlar y regular la velocidad de un motor D.C. en un
cuadrante desde el punto de vista industrial, tomando en cuenta: su medio ambiente,
condiciones y requerimientos que se presenten. Esto nos sirvió para el diseño y
construcción de un módulo que realice esta función y emplearlo en ese sitio de
trabajo.
Para fundamentar el diseño y explicar la construcción del equipo, hemos elaborado
este libro, en el cual detallamos los aspectos mas importantes que involucran este
tema, partiendo desde los conceptos básicos del motor, del actuador a utilizarse y
como resultado de esto obtener nuestro propósito, aprovechando en todo este proceso
los elementos eléctricos y electrónicos requeridos de acuerdo a nuestro diseño.
Por tal motivo en el Capítulo I damos los fundamentos y comportamiento general
para un motor de D.C. con excitación independiente, alimentado por un convertidor
tipo puente monofásico totalmente controlado y como utilizarlo para controlar la
velocidad del motor D.C.
En el Capítulo II, partiendo de la base teórica del Capítulo I, diseñaremos en forma
detallada cada bloque principal que compone el módulo, estos son:
1.- Circuito de Potencia.
2.- Circuito de Control.
3.- Protecciones.
También explicamos y presentamos mediante fotografías cada parte del equipo, como
se interrelacionan físicamente cada bloque; al final se presenta por partes el costo
total del módulo.

En el Capítulo ffl presentamos los resultados obtenidos en el control y regulación del
motor D.C. tanto en Estado Estable como Dinámico de las variables de interés.
Y por último en el Capítulo IV daremos nuestras Conclusiones y Recomendaciones
obtenidas a lo largo de la realización de esta tesis tomando en cuenta cada etapa de
la misma.
Para ayuda del lector hemos incoiporado en los Anexos:
1.- Documentos utilizados.
2.- Esquemas.
3.- Manual de funcionamiento para el operador.
Todo esto con el afán de dar mayor comprensión de lo realizado en esta Tesis.
Esperamos haber tratado y realizado este tema de la mejor manera y sirva de ayuda
a las personas que necesiten conocer el manejo de la velocidad de un motor D.C. e
incluso hacerlo físicamente encontrando todos los elementos empleados en este
trabajo en el Mercado Local de la ciudad de Quito.
A continuación se dará una nomenclatura dando el significado de todos los términos
empleados a lo largo de este libro, esto será de mucha ayuda para el lector.

1.1.1 NOMENCLATURA
A = Armadura,
dv/dt = Razón de crecimiento del voltaje en el tiempo.
e0 = Fuerza contraelectromotriz nominal de la armadura.
infrecuencia.
F = Superficie total de un disipador.
Gdc = Ganancia del circuito de disparo.
ia = Comente instantánea de armadura.
ie = Corriente del campo.
iGN = Corriente instantánea de la compuerta del tiristor n.
Ifl = Comente de armadura DC.
loo ~ Corriente de armadura a rotor bloqueado.
Ieo = Comente de Campo nominal.
Is = Comente del secundario del transformador de comente.
J = Momento de inercia del motor.
KÍ = Ganancia del acondicionador de corriente.
Kffl = Ganancia del acondicionador de velocidad.
lk = Longitud crítica de un disipador plano rectangular.
La = Lnductancia de armadura.
LF = Inductancia de filtro de comente de Armadura.
LK = Inductancia de conmutación por fase.
LT — Inductancia total del circuito de armadura.
ma = Torque de aceleración.
md = Torque interno.
mL = Torque de carga.
m0 = Torque de arranque.
n = revoluciones del motor en el tiempo.

4
N = Numero del armónico de la corriente de la red.
PAV = Potencia media del tiristor.
Ra = Resistencia de armadura.
Rcs — Resistencia térmica carcaza-disipador.
Rg = Resistencia de Campo.
R:a = Resistencia térmica juntura-medio ambiente.
R:c = Resistencia térmica juntura-carcaza.
R^ - Resistencia térmica disipador-medio ambiente,i
S = Estator.
t = Tiempo.
tq = Tiempo mínimo de apagado del tiristor dado por el fabricante.
Ta = Temperatura ambiente.
Ta — Constante de tiempo de la armadura.
Tc = Temperatura de la carcaza del tiristor.
Tdc — Constante de tiempo de retardo del circuito de disparo con el convertidor.
T¿ = Constante de tiempo del acondicionador de corriente.
Tmn = Constante de tiempo Mecánica.
Tnl — Constante de tiempo del regulador PI de corriente.
Tn2 = Constante de tiempo del regulador PI de velocidad.
Tffl = Constante de tiempo del acondicionador de velocidad.
va = Voltaje instantáneo de armadura.
VAKN = Voltaje instantáneo ánodo cátodo del tiristor n.
VAN = Voltaje instantáneo A fase neutro de la red..
ve = Voltaje instantáneo de campo.
vs = Voltaje instantáneo de la red Snubber.
V = Voltaje RMS de la red.
Va = Voltaje de armadura DC.
V^Q = Voltaje de armadura nominal.

VAN = Voltaje DC fase neutro de la red.
Vc = Voltaje que controla el circuito de disparo.
Vcw = Voltaje de control al ángulo de activado ccw.
Vrl = Ganancia del regulador PI de comente.
Vr2 = Ganancia del regulador PI de velocidad.
Vx = Caída de voltaje medio producida por la conmutación.
w = Velocidad angular de la red de alimentación.
a = Ángulo de activado./
ac = Ángulo crítico entre conducción continua y discontinua.
amin = Ángulo de activado mínimo en conducción discontinua.
asb = Coeficiente de transferencia de calor.
c^v = Ángulo de activado máximo en conducción continua.
3 = Ángulo de extinción.
y = Ángulo de conducción.
& — Ángulo de rotación.
fya = Flujo de armadura.
<j)eo = Flujo de excitación nominal.
^F = Ángulo fasorial entre la inductancia y la resistencia de armadura.
9 = Ángulo mínimo de inicio de comente de armadura en conducción discontinua.
A, = Conductividad térmica.
r] = Rendimiento.
TI = Ángulo que indica la mitad del periodo de la red.
jj, = Ángulo de conmutación.
con = Frecuencia natural no amortiguada.
co0 = Velocidad angular en vacío del motor.
£ = Factor de amortiguamiento.

1.2 FUNDAMENTOS DE LOS MOTORES DE CORRIENTE
CONTINUA
1.2.1 INTRODUCCIÓN
La máquina de corriente continua, tema de estudio, es la de excitación independiente,
por ser la adecuada para el control y regulación de la velocidad en un amplio rango.
Para su estudio se ha tomado en cuenta un procedimiento natural o espontáneo de<
aprendizaje, como sería el de:
L- Conocerla físicamente.
2.- Saber las leyes que la rigen.
3.- Encenderla,
4.- Tener una operación permanente en estado estable; y,
5.- Conocer como reacciona ante variaciones del valor de referencia de la velocidad,
perturbaciones, e's decir su dinámica.
Cada uno de estos aspectos se los profundizará, mencionando sus características más
importantes, para tener una idea clara y precisa que nos permita maniobrarla.
Acogiéndonos a nuestro tema de tesis, la máquina D.C. con excitación independiente,
trabajará como motor, lo cual significa que:
L- El par electromagnético desarrollado produce (ayuda a la) rotación.
2.- La f.e.m. generada se opone a la comente del inducido (Ley de LENZ).
Estos dos aspectos son el significado del efecto motor, siendo básicamente lo que
ocurre entre los dos circuitos principales de la máquina, que son:
a) El de Excitación.
b) El de Inducido, los cuales físicamente se los verá más adelante.

Antes de entrar a conocer el motor D.C. con excitación independiente, tenemos que
analizar nuestro propósito de uso, el cnal es el control y regulación de la velocidad
con operación permanente en estado estable. El estado permanente se determina por
la intersección de las características velocidad angular vs. torque (del torque interno
del motor y de la carga mecánica acoplada al eje del motor) este punto de operación
debe ser estable. Al realizar un análisis sobre el estado permanente, podemos sacar
como conclusión, si el punto de operación es o no estable y así poder reconocerlo
fácilmente; lo cual es deterrniaante del rango de control para el motor; este estudio
se lo hará a continuación.
1.2.2 PUNTO DE OPERACIÓN DEL MOTOR
Del sistema físico que se parte para el análisis, consta como es lógico del eje de
rotación de la máquina, al cual se acopla cierta carga mecánica, cuyo torque de carga
(mjj se contrapone al torque interno (md) de la máquina, pues a cada acción se
contrapone una reacción; al existir un desequilibrio entre estas dos, por cambios no
uniformes de movimiento, aparece un torque de aceleración (itifl), esto nos indica las
leyes de Newton aplicadas a la rotación. Matemáticamente se lo expresa en la
ecuación (1.1), considerando el sistema físico, que para generalizarlo y dar mayor
simplicidad de apreciación se ha considerado una inercia acumulada del eje de
rotación para el motor, esto se ve en la figura (1.1) así:
Figura 1.1 Representación del eje del motoractuando cierto torque de carga

donde: ma = /w^e,<*>/) - 7w£(eso)/) (1.1)
siendo:
J - momento de inercia del eje md = torque interno.
mL = torque de carga. co = velocidad angular,
e = ángulo de rotación.
Para estado permanente, tanto al motor como en la carga, desaparece la relación del
ángulo de rotación en el torque. En estas condiciones, para saber si un punto de
operación (mls co^ (ver en la figura 1.2) es estable, podemos realizar un incremento
pequeño de velocidad angular (Acó), con lo cual si el sistema vuelve a funcionar a o>ls
podemos considerar que es estable. Para comprobar esta condición vamos ha analizar
la ecuación (1.1) para co = co1 + Acó y así obtener una condición nñnima que nos
permita reconocer si el punto de operación en estado permanente es o no estable, así:
J—(to + A to ) = mj(<¿1 + AGJ?¿) - mL(<¿ t + Aco^) (1.2)dt
Teniendo un Acó, como incremento infinitesimal, podemos utilizar las derivadas
parciales para co. En cuyo caso al multiplicarlo por Acó no alteramos la ecuación (1.2)
y quedaría un torque evaluado en coj con una variación infinitesimal de G), así:
¿ dm. dmT/—(Acó) = xAco ^ xAco
J , •* *"\J -i - ^ ( j J idt oco 1 eco :
Despejando Acó del segundo miembro de la ecuación queda :

dt do(1.3)
Definiendo :
k = (mT -
Siendo k-constante, queda la ecuación (1.3) así:
J d ,. . .(Acó) + A (o = O
kdt
Resolviendo, se obtiene:
Acó = Aco(0)e T» (1.4)
donde: y = _
Siendo Tm la constante de tiempo mecánica.
De la ecuación (1.4) se desprende que para k > O, o sea:
dm, dm.
El estado permanente en col es estable, siendo esta la condición que se debe cumplir,
ya que con un pequeño Acó causado por alguna perturbación temporal, este disminuye

10
exponencialmente según la ecuación (1.4). Para k < O el punto de operación es
inestable y si k = O tenemos sin definir la condición estable. En la figura (1.2) se
representan estos tres casos.
m
a) Estable b) Indiferente c) InestableFigura 1.2 Puntos de Operación del Motor.
Con esta información (previa), de como reconocer si el estado permanente escogido
(Punto de Operación) es estable, para así poder determinar de igual forma un rango
de estabilidad; vamos a empezar el estudio del motor D.C. con excitación
independiente, siguiendo el procedimiento indicado anteriormente. Es por esto que
primeramente la conoceremos físicamente con sus componentes eléctricos más
importante, con un breve detalle de la función de cada uno de ellos dentro del
esquema general del motor.
1.2.3 MOTOR D.C. CON EXCITACIÓN INDEPENDIENTE
Este tipo es el más usado, ya que opera sobre amplios rangos de velocidad, debido a
sus excelentes propiedades operacionales como a sus características de control, con
la única desventaja del conmutador mecánico que restringe la potencia y la velocidad

11
del motor; además que requiere mantenimiento periódico.
Realizaremos un breve repaso de los bobinados constitutivos de la máquina y serán
dibujados en la figura (1.3a), cuya forma de conectarse se verá mejor en la figura
(L3b)s en la que se destaca los bobinados propios del circuito.
La máquina D.C. consta de dos zonas:
a) La zona rígida llamada estator (S) en donde se encuentra generalmente el circuito
de excitación (o de Campo) constituida por electroimanes, llamados polos principales
(F1-F2).
b) La zona donde está la armadura (A) que consta del circuito de inducido (o de
Armadura) formado por varios bobinados interconectados de tal forma que al circular
corriente por los mismos, introducidos en el interior de un campo magnético
permanente, produzca el giro deseado.
De igual forma como se puede apreciar en la figura (1.3a) existe en el estator un
bobinado que se llama de compensación (C1-C2) el mismo que se encuentra en serie
con el bobinado de armadura, por el cual circula la corriente de armadura (ifl), cuyo
objetivo es producir una fuerza magneto-motriz (frnm) opuesta al flujo de armadura
(<|>a), con el fin de disminuir la reacción de armadura.
También existen los polos de conmutación (B1-B2) localizados entre los polos
principales del estator, cuyo bobinado se pone en serie con el bobinado de armadura,
y tiene la tarea de locarmente modificar el campo en la zona neutral para reducir los
chisporroteos existentes en la conmutación a través de las escobillas (B). Tanto el
flujo de excitación (<j>e) como el flujo de armadura (<|>a) se encuentran en cuadratura,
dando así una independencia entre estos dos flujos; es por esto que el control de esta
máquina es fácil.
12
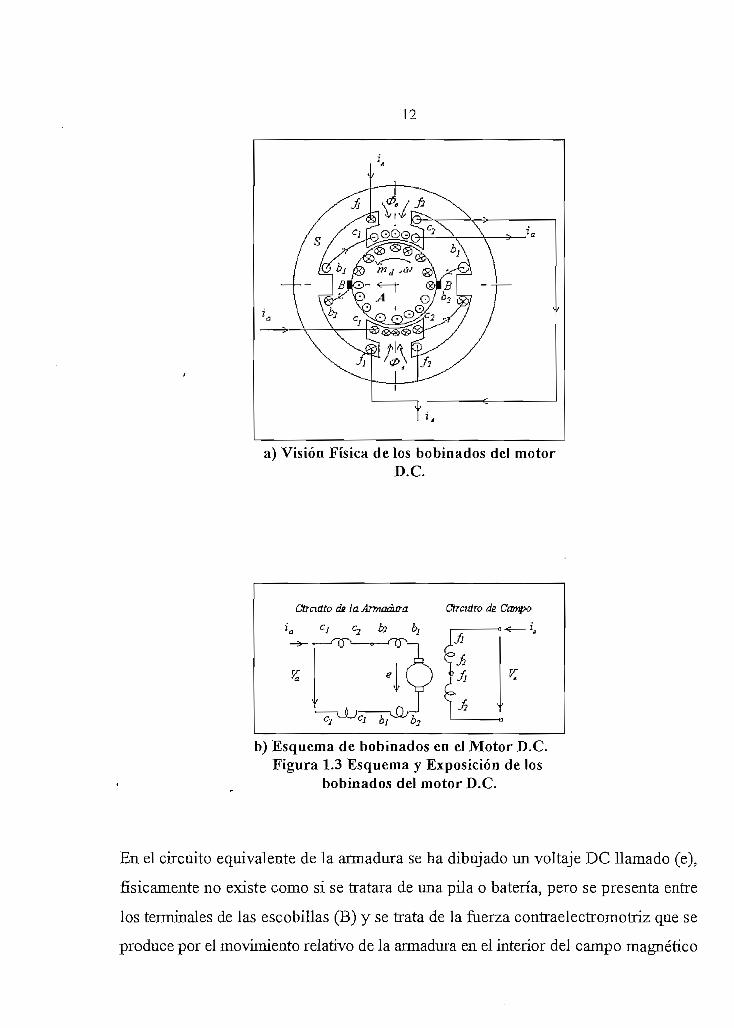
a) Visión Física de los bobinados del motorD.C.
Ctrciíito de la Armaáiíra. Circuito de CCDY%X>
j*i ¿j ¿j
&b) Esquema de bobinados en el Motor D.C.
Figura 1.3 Esquema y Exposición de losbobinados del motor D.C.
En el circuito equivalente de la armadura se ha dibujado un voltaje DC llamado (e),
físicamente no existe como si se tratara de una pila o batería, pero se presenta entre
los terminales de las escobillas (B) y se trata de la fuerza contraelectromotriz; que se
produce por el movimiento relativo de la armadura en el interior del campo magnético

13
del circuito de excitación, siendo un voltaje inducido.
De esta manera hemos mencionado los principales aspectos eléctricos que están
constituyendo la máquina D.C. con excitación independiente.
Enseguida se mencionará a esta máquina con las leyes que la rigen. En igual forma,
desarrollarlas hasta el punto de poder obtener un modelo matemático que nos permita
maniobrar todas las condiciones existentes tanto en su estado permanente como el
estudio con su comportamiento dinámico./
Para obtener un diagrama de flujo general, a este modelo matemático lo
normalizaremos;
L- Escogiendo adecuadamente las variables de referencia de normalización de tal
manera que la mayoría de las constantes se hagan UNO, lo cual nos permitirá una
fácil simulación.
2.- Cuidando que las variables físicas se puedan obtener con facilidad del diagrama
de bloques para facilitarnos su análisis.
1.2.4 REPRESENTACIÓN EN DIAGRAMA DE BLOQUES CON
VARIABLES NORMALIZADAS
En la figura (1.4) se representa el circuito eléctrico de la armadura como y el campo,
de los cuales se darán todas las relaciones existente entre comentes (i) , flujos
magnéticos (<j>),"inductancias (L), torques (m), resistencias (R) y voltajes (v).
Tanto las resistencias como las inductancias del circuito de excitación y armadura
serán puestas las equivalentes totales en cada caso, en la figura (1.4).

14
Figura 1.4 Circuito equivalente de la máquinadeD.C
Las ecuaciones diferenciales que rigen esta máquina son:
En el circuito de la armadura:
diR i + L —- + e = V (1.5)a a a -,, a ^- -*di
Para el voltaje inducido (fem):
e = (1.6)
La Ley de Newton asumiendo inercia acumulada:
a-7)
Para el torque eléctrico:
m , = c04> z (1.8)a 2T e a ^ J

15
En el circuito de campo:
Rie + Ne = Ve (1.9)dt
Donde la curva estática magnetizante (sin histéresis) es:
(1.10)e •* v ey
La velocidad angular es:
co . (1.11)dt
Los valores, de referencia para la normalización de las variables son
co0 = velocidad angular en vacío.
<j)eo = flujo nominal.
Asumo que cx = c2 = c (máquina ideal)
e0 = fuerza contraelectromotriz nominal.
Vfl0 = voltaje de armadura nominal.
V = e = c$ co (1.12)ao o ^ eo o ^- '
iao = comente de armadura a rotor bloqueado.

aoao
16
V00 (1.13)
El torque de arranque extrapolado es:
m = c<b i (1.14)o ^ e ao v y
El voltaje nominal de campo es:
V =Ri (1.15)en R (>n v -*
Con el propósito de realizar la normalización, hacemos lo siguiente:
Dividimos la ecuación (1,5) por V00, teniendo en cuenta las ecuaciones. (1.12) y
(1.13), tenemos:"
d ^ V i é M—(—) = — - — - -^— (1.16)j-i. • rr • AOÍ J V I (D COao ao ao T eo o
Ldonde: T =
R
Dividimos la ecuación (1.7) por m0 y considerando las ecuaciones. (1.8) y (1.14) y
tenemos:

17
d lü $ Z mrT — (—) - —— - — (1.17)
mn A •cp /o ' eo ao
codonde; T = /• — -
mo
DividimQS la ecuación (1.9) por Veoy considerando la ecuación (1.15) tenemos:
d * V iT — (—) - — - — (1.18)" t f * V ieo eo
4>donde: T = N eo
= TV —eo
Observando la ecuación (1.10) vemos que la curva de magnetización inversa
normalizada es:
4>
i cbeo ~ eo
Dividimos la ecuación (1.11) por ODO y tenemos:
-)-- (1-19)di e
o

18
donde: T = —-eO) o
En términos generales se tiene que el torque de carga también es función de la
velocidad y posición por lo que tenemos:
C—) (1-20)m m co eo o o
donde fL2 y ÍLS pueden o no ser cero.
Tomando en consideración las ecuaciones desde (1.16) a (1.19) podemos obtener el
diagrama de bloques deseado, dibujado en la figura (1.5).
De esta manera, ya podemos analizar:
1.- En base a que variables controlamos la velocidad y conseguimos nuestro punto
de operación permanente y estable deseado.
2.- Su comportamiento dinámico, al variar tal o cual variable.
Continuaremos el estudio de la máquina D.C. en su estado permanente para
conseguirlas variables y criterios con los cuales podemos controlar la velocidad.
1.2.5 CONTROL DE LA MAQUINA DC EN ESTADO
PERMANENTEi
Controlando los ckcuitos de Campo y de Armadura independientemente o ambos a
la vez, podemos llegar al estado permanente deseado. Cada uno de estos controles

19
Fig. 1.5 Diagrama de Bloques normalizado de la máquina D.C. deexcitación permanente.

20
tendrán sus características propias, así como también sus límites de operación, siendo
estas las causas para escoger tal o cual control para la máquina.
En el caso del tema de tesis el rango de variación de la velocidad será la nominal, esto
da para que se realice el Control por Armadura; sin embargo se ha estudiado el
Control por Campo y ambos a la vez, con el fin de dar mayores criterios de análisis
al momento de escoger el tipo de control.
En estado permanente las derivadas de las ecuaciones desde la (1.16) a la (1.19) son
cero, siendo el ángulo de rotación cambiante linealmente con el tiempo, por lo que no
tiene consecuencia alguna, estas ecuaciones quedan así:
V iao ao
= O (1.21)
m= O (1.22)
m
V 4>- / (— L) = O (1.23)e
eo T eoV 4>
Despejando de estas ecuaciones la velocidad angular y la corriente de armadura que
son las variables de interés, por medio de estas obtengo el punto de operación con su
correspondiente corriente a un torque de carga dado tenemos;

21
1 V i mT i i mT-i— - - -- i (1.24) -i- = I_* (1.25)
b mao
donde : b =
debido al la limitación de la saturación del hierro, por lo tanto:
V mr i mr_T /• O ¿\ _r / -í*\I (-—,—) ^ — = / 2(— )
o) K w / mo ao o ao o
Con V^ o Ve como señales de control de entrada aplicadas a la Armadura o al Campo
respectivamente podemos realizar el control en ambos circuitos independientemente
o ambos a la vez. Este estudio se lo realizará a continuación,
1.2.5.1 CONTROL POR ARMADURA
Independizando la Armadura del Campo, establecemos el valor nominal del flujo
como un factor constante, por lo tanto b — 1; resultando las ecuaciones (1.24) y (1.25)
como "Curvas de Control Lineal", siendo esto una condición favorable para su
control, así:
V mr i mr(1.27)
co V m i mo ao o ao o
Las características que resultan de las ecuaciones (1.26) y (1.27) se las dibuja en la
figura (1.6).

22
rango d&
-Q 5 -Of2
0,2
a) b)Figura 1.6 Curvas de estado permanente del motor D.C. con Control por
Armadura.
En la figura (1.6) vemos que la curva torque velocidad es válida en los cuatro
cuadrantes; dando un control continuo e inverso de torque y velocidad. Como Va está
referida a Vao, por lo tanto el rango de interés es -1 < V^ / VaQ < 1.
En la ecuación. (1.27) tenemos la proporcionalidad entre el torque y la corriente,
ambos referidos a sus valores en el encendido, los mismos que son 8 a 10 veces de los
nominales; tomándose como guía el valor más alto. Se considera como una condición
normal, generalmente, que el motor soporte una sobrecarga mecánica máxima de 2
veces el torque nominal, por lo tanto;

23
/ mr
-0,2 5 (— = —-) <. 0,2/ mao o
es el rango de operación. Debiendo aclarar que la relación lineal entre torque y
corriente de armadura, se cumple de una manera aproximada solamente para
máquinas compensadas, pues debido a la reacción de armadura esto no se cumple
para las máquinas no compensadas, especialmente para comentes altas.
1.2.5.2 CONTROL POR CAMPO
En este caso se maneja el flujo principal, teniendo cuidado con la saturación, entonces
su debilitamiento será el camino a seguir, o sea;
(b =
Además si el convertidor de alimentación a la armadura permite la operación en
cuatro cuadrantes del plano V^ - i entonces solo se considera los valores positivos/de b, así b^ < b < 1 y considerando el valor nominal y constante del voltaje de
armadura tenemos (Va i VaQ) ~ 1, por lo tanto las ecuaciones (1.24) y (1.25) quedan:
1 ^ 1 mr i 1 mr- -^ - —— (1.28) -^ „ 1- (1.29)
i o mao o
Las curvas que resultan de las ecuaciones (1.27) y (1.28) se las dibuja en la figura
(1.7).

24
envoltura de las curvasiorque velocidad
I 1
0,6
0,5
0,4
0,2
0,2m
Figura 1.7 Curvas de estado permanente del motor D.C. con Control de Campo.
Los puntos de corte en la figura (1.7a) son:
Para mL = O entonces:o) 1
o> bo
my si co = O entonces: —• = b
m
En la figura (1.7a) tenemos puntos de operación cuyas velocidades angulares pueden
ser menores o mayores a la velocidad angular en vacío (co0), para un mismo torque
de carga, dependiendo únicamente del factor de debilitamiento de campo (b) que
apliquemos. Esta reducción de velocidad es inevitable, mientras más alto sea el valor
del torque; lo cual es sumamente perjudicial ya que según la ecuación (1.29) el factor

25
1/b eleva la corriente para cualquier valor de torque. es por esto que en este rango de
velocidades no se aplica el control por debilitamiento de campo sino el control por
armadura, pues nos ofrece más ventajas. Así el control por debilitamiento de Campo
es utilizado para subir la velocidad a torques reducidos con la desventaja de
incrementar la corriente de armadura a un torque dado; como se puede apreciar en la
figura (1.7b).
El comportamiento de 1/b2 es indeseable al controlar la máquina a velocidad
constante, por su no linealidad. Como la corriente de Armadura en el encendido no es
afectada por el Campo, este debilitamiento no es solución en el arranque. Por tanto,
este control se lo utiliza como opción, cuando se ha agotado completamente el control
por Armadura.
Para obtener la condición de bmin para conseguir la velocidad máxima a un torque
dado, asumiendo Va = Va<y tenemos que sacar la derivada en el tiempo de la ecuación
(1.28) e igualar a cero, así:
b . = 2— (1.30)mm v *m o
Bajo este bmin empieza una reducción de velocidad; reemplazamos el valor de bmin
de la ecuación (1.30) en la ecuación (1.28) y obtenemos la velocidad máxima, así:
o) i m—2^ = -— (1.31)
o) 4 mro L
Donde la ecuación (1.31) es una función hiperbólica que es la envoltura de las curvas
torque-velocidad de la figura (1,7a). Obteniéndose la potencia máxima en el punto
tangente; por lo tanto la operación del motor no debe pasar a la derecha de esta curva.
Para obtener una expresión de la Potencia Mecánica, introducimos la ecuación (1.29)

26
en la ecuación (1.28) y obtenemos:
(—)(—) " —(1 - —) (1-32)o> m i io o ao ao
En esta ecuación se puede observar que la potencia depende únicamente de la
comente de Armadura.
Como podemos apreciar el control de la Máquina D.C. tiene dos rangos de control,
por Armadura y Campo. El primero actuando a Campo constante y nominal, con
variación del voltaje de armadura hasta conseguir la velocidad nominal en vacío; el
segundo es el de Campo, utilizado para control de velocidad más allá de la nominal
a torques de carga pequeños con voltaje de armadura constante y nominal.
Por todo esto, se escogió, en este tema de tesis, el control de velocidad variando el
voltaje de armadura del motor D.C.
Por último nos queda el estudio del comportamiento dinámico en la máquina.
1.2.6 COMPORTAMIENTO DINÁMICO DE LA MAQUINA DC A
CAMPO CONSTANTE
Por haber escogido el Control por Armadura para cambiar la velocidad del motor
D.C. estudiaremos el comportamiento dinámico del motor D.C. con excitación
independiente, constante e igual a la nominal (b = 1).
Primeramente sin considerar perturbaciones dependiendentes de la velocidad o
posición, en el torque de carga por lo que el diagrama de bloques de la figura (1.5) se
reduce al diagrama de bloques de la figura (1.8).

27
Figura 1.8 Diagrama de Bloques Lineal del Motor D.C. a FlujoConstante.
Obteniendo en las ecuaciones (1.16) y (1.17) la transformada de Laplace, tenemos:
S£(—i
co
m.
Siendo Ufl(s) y ML(s) las variables independientes y Q(s) e Ifl(s) las variables
dependientes, en donde:
(1.33)
-ML(s) (1.34)

28
Reemplazando la ecuación (1,33) en la ecuación (1.34) tenemos:
s) (1.35)
en donde: Fll = y -F22
s2T T + sT + 1m« a m« m/i a mn
Reemplazado la ecuación (1.35) en la ecuación (1.33) tenemos:
s) (1.36)
en donde: ./? = — y: F21 2 -^ • J 22 2
mn a mn mn a mn
En el sistema multivariable de las ecuaciones (1.35) y (1.36) tenemos un denominador
común, cuyos valores propios constituyen los polos del sistema, los cuales también
proporcionan los valores referenciales de análisis; así el factor de amortiguamiento
(Q que define la forma de respuesta del sistema por ejemplo, si el sistema es
subamortiguado (O < £ < 1), críticamente amortiguado (£ = 1) o sobreamortiguado (£
> 1) y la frecuencia natural de oscilación (con) que define la rapidez de respuesta del
sistema. Los valores propios de este denominador común son:

'1,2
29
entonces:_!
2\
m.
T(1.37) (1.38)
II Ta mn
El amortiguamiento y la rapidez de respuesta dependen del momento de inercia total
referido al eje del motor, de la resistencia e inductancia equivalente del circuito de
armadura. Por lo que manipulando estos elementos podemos variar el comportamiento
del motor.
Así para el caso sobreamortiguado tenemos:
Para: £, > 1 entonces: —T
T> 1 ;porloqueTmn>4T£3 (1.39)
Para el caso subamortiguado tenemos:
Tmn<4TÍJ (1.40)
Como podemos apreciar en la ecuación (1.35) la velocidad angular íl(s) en vacío,
para una entrada paso, dependerá de F1|(s), que es la función de transferencia básica
del sistema. La forma de onda de Q(s) depende del valor de £ y con y la amplitud del
valor del voltaje de armadura. En igual forma, según la ecuación (1.36), en estas
condiciones la corri
de Fu(s) multiplica
dado; vemos que Ifl(s) se incrementa de
30
iente de armadura Ia(s) tendrá el comportamiento de la derivadaa
de Fu(s) multiplicada por Tmn. Si a todo esto aplicamos un torque de carga ML(s)
acuerdo a la forma de Fu(s); mientras que la
velocidad angular D(s) disminuye con un factor derivativo de F11(s).
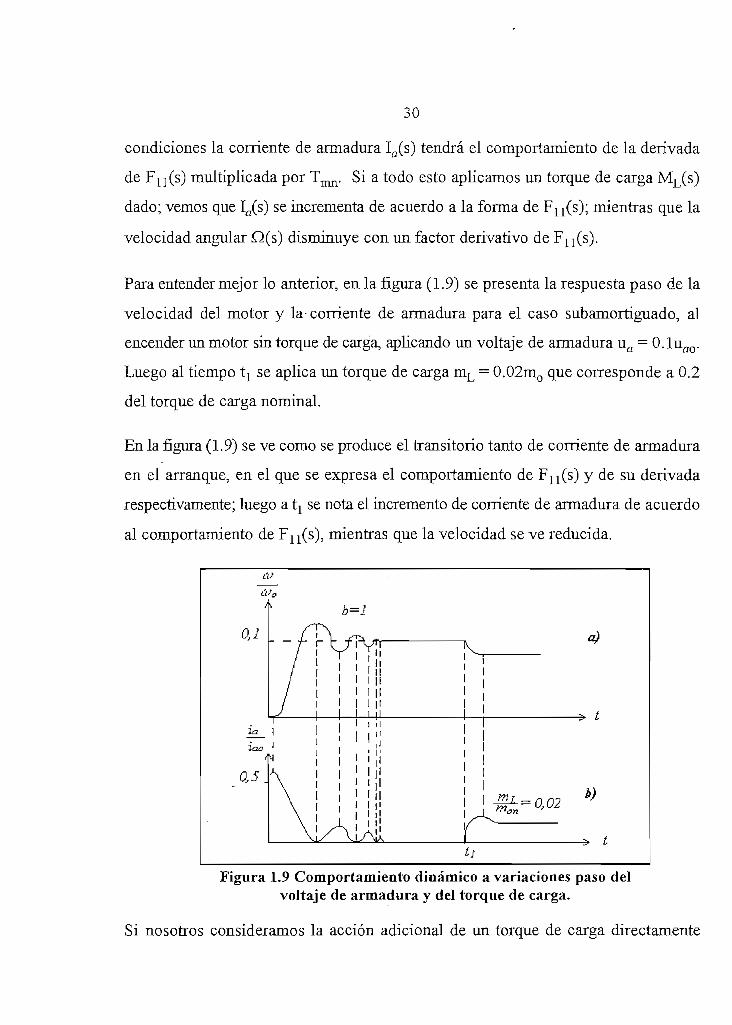
Para entender mejor lo anterior, en la figura (1.9) se presenta la respuesta paso de la
velocidad del motor y la -corriente de armadura para el caso subamortiguado, al
encender un motor sin torque de carga, aplicando un voltaje de armadura ua = 0. luao.
Luego al tiempo tj se aplica un torque de carga mL = 0.02m0 que corresponde a 0.2
del torque de carga nominal.
En la figura (1.9) se ve como se produce el transitorio tanto de corriente de armadura
en el arranque, en el que se expresa el comportamiento de Fu(s) y de su derivada
respectivamente; luego a t^ se nota el incremento de comente de armadura de acuerdo
al comportamiento de Fu(s), mientras que la velocidad se ve reducida.
Figura 1.9 Comportamiento dinámico a variaciones paso delvoltaje de armadura y del torque de carga.
Si nosotros consideramos la acción adicional de un torque de carga directamente

31
proporcional a la velocidad; llamado fricción viscosa, tenemos:
m) (1.41)
m mo o
Por lo tanto la representación de la máquina será la que se indica en la figura (1.10).
, -i ,tan k
Figura 1.10 Motor D.C. con torque de carga dependiente de la velocidad.
Analicemos su comportamiento dinámico, utilizando para ello las ecuaciones. (1.33)
y (1.35) y reemplazo la ecuación (1.41) en la ecuación (1.35) y tenemos:
UJjs) - MLl(S)(sTa * 1)
s2T T + (TkT * T > + 1mn a ^ a L m?r
(1.42)
Reemplazo la ecuación (1.42) en la ecuación (1.33) y obtengo la corriente de

armadura, así:
U (s)(T s + fc.) + Mr.(s)r / -_\v ys- mn Z.y ¿lv ^ (1.43)
Con los nuevos valores propios del sistema, tenemos los valores del factor de
amortiguamiento (Ci) y frecuencia natural de oscilación (conl)9 del nuevo
denominador común así:
TakL + Tmn T kr + T
ry mn a
i
£ 1
tí"-T + 1)4 r2
Manejando ^x tenemos: C, = — (1-46)
&
Por lo tanto: Ci <{í
Para obtener con reemplazo la ecuación (1.45) en la ecuación (1.44) y teniendo en
cuenta la ecuación (1.38) tenemos:
&

33
(1.47) entonces: co >
Siendo kL positiva, el sistema es estable. Comparando las ecuaciones (1.42) y (1.43)
con las ecuaciones (1.35) y (1.36), observamos como el comportamiento de la
velocidad no cambia, mientras que la comente presenta; a más de la parte derivativa
una proporcional; esto causa que en vacío, ya no sea cero la comente y con torque de
carga se tiene el mismo efecto que en la ecuación (1.36). Todo esto con menor
amortiguamiento a mayor rapidez de respuesta.
En resumen esta adición del torque de fricción proporciona las mismas respuestas
cuando el torque de carga es independiente de la velocidad; con la salvedad, de que,
la comente nunca se hace cero; produciéndose menor amortiguamiento a mayor
rapidez de respuesta, por lo tanto el caso mas critico será cuando el motor se lo
represente de acuerdo a la figura (1.8) o sea sin torque de carga dependiente de la
velocidad.
Además como se puede apreciar en las ecuaciones (1.36) y (1.43) un incremento del
torque de carga significa un aumento de la comente. Por tanto debemos controlar
adecuadamente la corriente de armadura, para que esta comente no sea tan elevada
en especial en el arranque. En la práctica la sobrecarga a un motor viene especificada
por el fabricante, siendo por lo general es dos veces la nominal durante un cierto
tiempo (10 s a 15 s). En base a ello se limita la comente de armadura a un valor
específico, determinado por la aplicación.

34
1.3 FUNDAMENTOS DEL CONVERSOR A.C./D.C. A
UTILIZARSE
Para alimentar a la armadura del motor D.C. con excitación independiente,
utilizaremos como actuador, un convertidor monofásico completamente controlado
tipo puente. Dado que es el convertidor aconsejable para el rango de potencia en el
que vamos a trabajar (3 KW). El esquema general que utilizaremos se indica en la
figura (1.11) donde:
LK = Inductancia de conmutación por fase,
LF = Inductancia adicional para mejorar el factor de rizado de la fuente.
Figura 1.11 Rectificador generalizado monofásicocontrolado tipo puente.
Q! y Q2 trabajan en el semiciclo positivo y Q3 y Q4 en el semiciclo negativo,
activados de acuerdo al ángulo de encendido a.
Para nuestro propósito de análisis, este sistema puede ser representado por el que se
indica en la figura (1.12), en donde LK = O (no se considera los efectos de la
conmutación); y QA y QB representan a los dos tiristores en serie activados

35
simultáneamente en cada semiciclo.
G5
Figura 1.12 Circuito equivalente del sistema.
Para este tipo de Rectificador se presentan dos situaciones. Una cuando la corriente
ia es siempre positiva (caso de conducción continua). Y otra cuando la corriente ia es
cero durante un intervalo periódico (caso de conducción discontinua).
Empezaremos el estudio para el caso de conducción discontinua; es decir la
inductancia Lj tiene un valor que no obliga a la corriente de armadura a permanecer
circulando en el motor, como se puede observar en la figura (1.13) donde a > 95
siendo 0 el ángulo de encendido y 6 = arcsen(/2V/e). Lo mismo en la figura (1.14)
para 9 > a > ((3 - K\e P es el ángulo de extinción, solo que aquí iA comienza
a fluir cuando wt = 0 a causa de que ia llega a cero antes que QA esté activado.
Una reducción adicional en a como en la figura (1.15) con 6 > a y ([3 - ir) > a, en
donde QA está activado antes que ia llegue a cero; QB es conmutado y QA empieza
a conducir a wt = a; sin embargo como LT no es suficientemente grande entonces iA
no se prolonga hasta V^ > es así que se hace cero a wt = P - n e inicia a wt = 9.

36
-jTV
32L371
Figura 1.13 Formas de Onda de las variables del circuito equivalente de la figura1.12 para conducción discontinua con a > 0.

37
3n f)
Figura 1.14 Formas de Onda de las variables del circuito de la figura 1.12 paraconducción discontinua con 0 > a > (p — TC).

38
'GB
¿Tí
G-i-271:
Figura 1.15 Formas de Onda de las variables del circuito equivalente de la figura1.12 para conducción discontinua con 6 > a y (J3 — TC) > a.

39
-GA q
a-i
a
1ÍTI
Figura 1.16 Formas de onda del circuito equivalente de la figura 1.12 paraconducción continua con 9 > a

40
En resumen, según las formas de onda en conducción discontinua de las variables del
circuito de la figura (1.12), tenemos que si la corriente en la carga no es cero, aun
cuando el voltaje en la fuente sea menor que el voltaje inducido (e), existe
conmutación instantánea en las líneas cuando wt= a, como en la figura (1.15); hecho
que no ocurre en las figuras (1.13) y (1.14).
Cuando wt = a y el voltaje de la fuente es mayor que el voltaje inducido (e), se inicia
la conducción en la carga; como se observa en la figura (1,13).
Mientras que en la figura (1.14), la conducción no se inicia en wt = a ya que la
corriente a cesado y además el voltaje de la fuente es menor que el voltaje inducido
(e). En todos estos casos el ángulo de conducción y = ( P - a) siempre es menor que
7C.
Con las condiciones necesarias, como una inductancia (Lj-) suficientemente grande
podemos tener operación de conducción continua, como en la figura (1.16), aun
cuando sea a < TJ .
Enseguida realizaremos un análisis matemático en cada condición de conducción,
determinándose las variables normalizadas más importante del motor, para ver como
se da el funcionamiento del mismo con este actuador y en base a que condiciones
poder manejar tanto su voltaje como su comente. Estos factores son importantes para
poder alcanzar los estados permanentes deseados.
Empezaremos el estudio con el análisis matemático con la conducción discontinua
en el motor.
1.3.1 ANÁLISIS EN CONDUCCIÓN DISCONTINUA
Las ecuaciones que nos servirán para obtener el control del motor D.C. con excitación

41
independiente, en un punto de operación deseado son:
En primer lugar la ecuación que describe la corriente de armadura, la obtenemos
resolviendo la ecuación (1.5) con la condición que en wt = a , ifl(t) = O como se ve en
la figura (1.13d); tenemos:
a - <P)]C - (1.48)' I a 1 I
donde: |Z| = R2 + (wLT)2 y: tanR
En el momento que wt = (3 ia(t) = O (ver la figura (1.13d)) y reemplazando esta
condición en la ecuación (1.48) obtenemos la ecuación (1.49) normalizada, la cual
nos permite evaluar el ángulo de extinción (3.
g-p2 1 O í —
^L^ r y» /" TLT\L^ n tanT /i /i o\1 03 COST 71 03 m
o o
A A < * T l T f ldonde: = = —senü y: COST = —

1\¡2-eos
44
Con la ayuda de la computadora, utilizando los programas SPREADSHEET y
PAINTBRUSH se pudo generar la figura (1.17) donde hemos aplicado el
procedimiento descrito para varios valores de a, teniendo como límite el ángulo de
activado mínimo ctmin; el cual se lo puede obtener al igualar el voltaje medio de
armadura en conducción continua, que es la ecuación (1.51) con el voltaje instantáneo
que alimenta al convertidor en el momento que corresponde al mismo ángulo de
activado amin3 es decir:
a . = JzVsenct . (1.53)min i mtn ^- J
Entonces anún = 32.48°, para este tipo de convertidor y así obtenemos una familia de
curvas normalizadas de velocidad angular vs. torque de carga para una máquina de
D.C. alimentada por un convertidor tipo puente monofásico con = 57.23°. La base
de datos de P necesitó de 207 puntos que van desde los 106° hasta los 360° para cada
curva. El valor de corresponde a la máquina que se escogió como modelo para
realizar el diseño de los reguladores de velocidad y corriente, detallado en el numeral
2.4.
En la figura (1.17) observamos los puntos en donde sucede la transición de
conducción discontinua a continua, notándose que a partir de estos puntos de
transición, sólo en conducción continua, la combinación motor-convertidor se puede
considerar como una función de transferencia lineal. Además estos puntos de
transición se pueden desplazar hacia la izquierda aumentando ^F, por ejemplo
incrementando la inductancia del circuito de Armadura. La marcada diferencia de
comportamiento en ambas conducciones, dificulta el diseño de un control que pueda
operar en ambas condiciones satisfactoriamente.

45
Figura 1.17 Características normalizadas de la velocidad angular vs. el torque decarga de un motor D.C. alimentado por un convertidor tipo puente monofásico.
Es evidente que una operación en conducción continua es deseable. Esto se puede
obtener incrementando el valor de LF en el circuito de armadura; aun así no podemos

46
ratificar que opere en conducción continua bajo todas las condiciones de carga y
velocidad. Para asegurar que para todo a exista conducción continua debería
aumentar Y hasta desplazar el punto de transición de la curva cuando a = 90° hacia
la izquierda del torque de carga deseado ya que es aquí donde se genera el punto de
transición máximo en cuanto al valor del torque de carga.
Vamos a ilustrar un método rápido y sencillo con el cual podemos calcular la
inductancia LF ideal que debemos añadir para que a partir de un determinado torque
m^ exista para todo a conducción continua; por lo general m^ menor o igual al torque
de carga nominal.
1.3.2.1 DETERMINACIÓN DE LA INDUCTANCIA DE ARMADURA LF
IDEAL QUE PERMITE CONDUCCIÓN CONTINUA
Empezaremos dando las base matemática en la que se fundamenta este método; para
lo cual en el punto de transición con a = 90° y con la ecuación (1.52) se tiene que
ODI/COO = -n^/m^ utilizando este valor de velocidad angular en la ecuación (1.49) con
el mismo a y con P = TI + a, tenemos:
+ p, ^^-cos2<E>— (1.54) ; a =
2 — ^_^L_ 2
(1 _ e !-•)
En la ecuación (1.54), no es tan fácil obtener Y con el dato del torque de carga
deseado m^ Sin embargo con el mismo torque de carga ml cuando CO/G>O = O, según
la ecuación (1.52) tenemos;

47
mi = cosa (1.55) ; — = O
m co
0.1 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 30 c¿
Figura 1.18 Gráfico de las ecuaciones (1.54) y (1.55)
Al dibujar las ecuaciones (1.54) y (1.55) en la figura (1.18) vemos que a = Y cuando
mj/tÜQ < 0.2, incluso para valores de torque cercanos a 0.3 prácticamente se mantiene
esta igualdad. Esta conclusión es muy importante, si consideramos que el torque de
arranque mo está en el orden de 8 a 10 veces el torque de carga nominal del motor,
entonces la igualdad anterior se cumple aun con motores trabajando de 2.4 a 3 veces
el torque de carga nominal; dependiendo del valor del torque de arranque.
Por lo tanto cuando necesitemos encontrar el valor ideal LF que debemos añadir para
tener conducción continua a un deterrninado torque de carga ml9 de hasta tres veces
el torque de carga nominal, procedemos de la siguiente manera. En la ecuación (1.55),

48
siendo a ~ T encuentro *F para el torque de carga m^
Con la ecuación (1.48) y la figura (1.12) y bajo la suposición que Ra y La son
conocidas (por medición o dato del fabricante del motor), me permite encontrar LF
ideal.
A continuación vamos a tratar el efecto que se produce al conmutar una fase a la otra
del circuito equivalente del puente monofásico totalmente controlado, visto en la
figura (1.12)
1.3.2.2 EFECTOS DE LA CONMUTACIÓN
Para tratar este tema vamos a determinar las ecuaciones necesarias con las cuales se
podrá medir los efectos de la conmutación (solapamiento) para el caso de
"conducción continua y corriente D.C. constante"; esta suposición nos permite:
1.- Un análisis matemático más simple, considerando que el error en la práctica es
despreciable.
2.- Calcular la caída de voltaje medio producida por este efecto. Esta caída de voltaje
resulta ser mayor que el caso real, en el que la comente posee un cierto rizado.
La conmutación es la transferencia de corriente de un ramal a otro; para nuestro caso
será entre las líneas A y B de la fig. (1.19). Debido a la impedancia propia de la
fuente, la cual normalmente tiene un dominio inductivo, la conmutación ocurre en un
tiempo imito llamado de conmutación. Al ángulo wt que corresponde a este tiempo
lo denominaremos el ángulo de conmutación ja, durante el cual mientras en el un
ramal se incrementa la comente, en el otro decae en la misma proporción. Esto
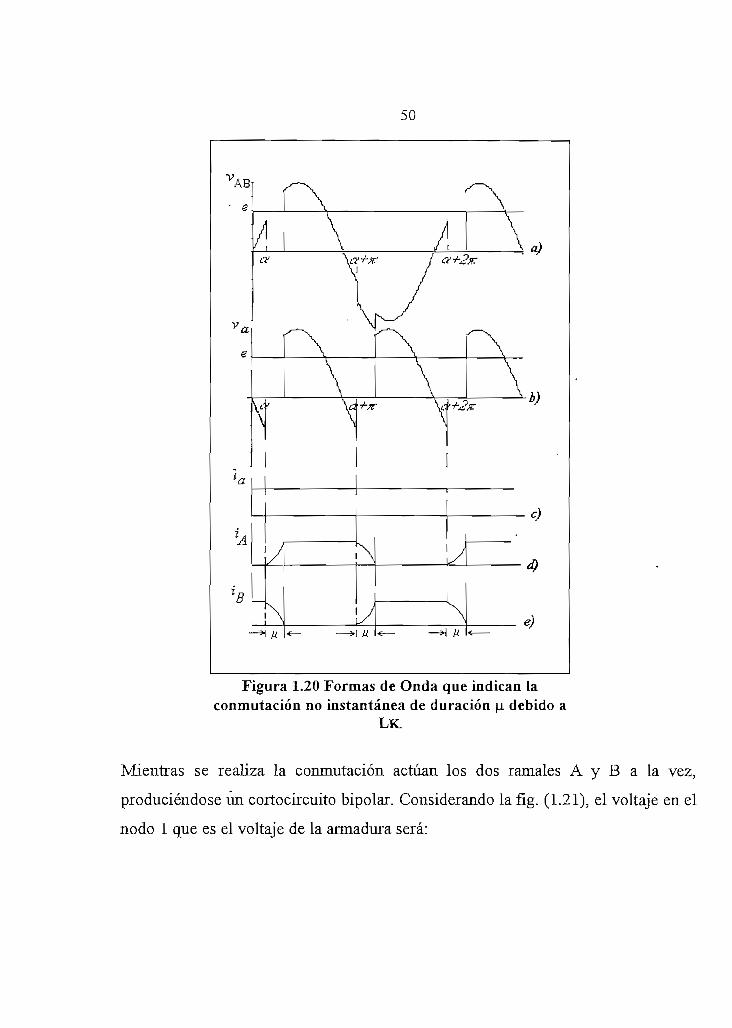
podemos apreciar en la fig. (1.20 d y e), además se observa que por efecto de la
conmutación el ángulo de conducción de cada tiristor, en conducción continua, ya no
es TT sino y = n + ¿i.

49
7" a
Figura 1.19 Circuito equivalente del sistema con LíC
Las ecuaciones normalizadas que nos ayudarán a cuantificar este efecto del retardo
en la conmutación las determinaremos a continuación, para lo cual:
Vaoa = Voltaje medio de la armadura sin considerar el retardo en la conmutación jo.
igual a 0.
Vaa = Voltaje medio de la armadura considerando el retardo en la conmutación jj,
diferente de 0.
Vx = Caída de voltaje medio producida por el efecto de la conmutación.
Vxo = Caída de voltaje medio producida por el efecto de la conmutación cuando a
igual a 0.
ja0 = Ángulo de conmutación cuando a igual a 0.
= 2-/~2V/7t = Voltaje medio sin considerar la conmutación para a igual a 0.
50
Figura 1.20 Formas de Onda que indican laconmutación no instantánea de duración |i debido a
LK
Mientras se realiza la conmutación actúan los dos ramales A y B a la vez,
produciéndose un cortocircuito bipolar. Considerando la fíg. (1.21), el voltaje en el
nodo 1 que es el voltaje de la armadura será:

AN dt
51
diB~-
dt
Figura 1.21 Circuito de análisis para el período deconmutación.
Dado que: iA + iB = Ia tenemos :dt dt
Sumando (2) + (1) tenemos: v =aVAN + VBN
Como i^ y VBN están desfazadas 180° entonces va — O en la conmutación.
Restando (2) - (1) tenemos:dt
Integro ambos miembros de la ecuación anterior considerando que VAN = -/~2Vsenwt
y que iA = O cuando wt = a. [Ver fig (1.20d)] obtenemos:
I2V,IÁ = (eos a - (1.56)

52
De acuerdo a la fig (1.20d) cuando wt = a + ja, iA = l¿ esto reemplazo en la ecuación
(1.56) y tenemos:
1= - [cosa - eos (a + u)] (1.57)
En la ecuación anterior • cuando a = 0 y j a = j i 0 y l a corriente sigue constante,
entonces:
Despejando la ecuación (1.58) tenemos:
cosuo = 1 - — (1.59)
\Í2VDonde: /„ = •+ = Corriente de Cortocircuito en la Conmutación.
La diferencia entre el voltaje de armadura sin considerar el efecto de la conmutación
[ecuación (1.51)] que de aquí en adelante lo denominaremos Vaoa, y el voltaje
considerando dicho efecto constituye la caída de voltaje medio denominada Vx:
V V V™ (1.60)
V V Vao ao ao
Igualando las ecuaciones (1.57) y (1.58) tenemos:

53
eos ce -f cosfi = 1 + eos (a + ji) (1.61)
La ecuación (1.61) nos da la familia de curvas ángulo de conmutación vs. ángulo de
activado como se ve en la figura (1.22). En la que se nota;
1.- Mientras el ángulo de activado crece entre O < a < Tr/2 (nuestro rango de interés
en este tema de tesis), el ángulo de conmutación decrece desde un máximo a un
mínimo.
2.- Por motivo del efecto de la conmutación, el ángulo de activado a, ya no podemos
variarlo entre O < a < TE, pues como se ve; ahora a + jj. = TI. Sin embargo esta igualdad
Figura 1.22 Familia de Curvas ángulo de conmutación ji vs ángulo de activadoa para diversos valores de p,o.

54
tampoco es tan cierta, ya que allí no está considerado el tiempo mínimo necesario
para poder apagar un tiristor (t ); pues conforme a aumenta y tiende a n (modo de
inversión), disminuye el tiempo en el cual el voltaje ánodo-cátodo del tiristor
apagado, es negativo y de una duración suficiente como para poder apagarlo, llamado
wtoff> Porl° tanto:
Caso contrario este tiristor no dispondrá del tiempo suficiente como para poder
apagarse y la corriente D.C. crecerá sin control, siendo las protecciones (fusible); el
único medio de detener este crecimiento. A este fenómeno se le conoce con el nombre
de, "Inestabilidad del convertidor en la región del inversor".
Entonces para evito este problema el ángulo de activado a tendrá un máximo que lo
denominaremos o , e igual a c^v = TC - wtq - jj. - wts; donde.wts es un ángulo pequeño
menor a 5°, según nuestro criterio de diseño, que nos asegure no llegar a esta zona de
inestabilidad.
Para poder calcular este o , de esta ecuación despejo ow + jj, = TI - wt - wts, esto
reemplazo en la ecuación (1.57) y con todos los datos conocidos despejo cos(c^v) y
encuentro el ángulo de activado máximo.
El voltaje medio de armadura considerando el efecto de la conmutación lo
obtendremos integrando la forma de onda de la figura (1.20b); así:
a •«- TIñv— fn J

55
• 0 1 * 4 . ^« cosa + eos (a + u)Por lo tanto: • - = - - - —(1.62)Vao
Reemplazo la ecuación (1.62) en la ecuación (1.60) tenemos:
^x _ cosa - eos (a * u)V 2
La ecuación (1.63) igualo con la ecuación (1.57) y tenemos:
V i /X. L a
V 2(1.64)
ao
Como la corriente de la armadura es constante, por lo tanto Vx también lo es; es decir
la caída de voltaje debida al efecto de la conmutación es independiente de a.
Reemplazando las ecuaciones (1.64) y (1.63) en la ecuación (1.61), obtenemos una
expresión que relaciona la corriente de armadura con el voltaje de armadura, así:
V i /aa *- a ,, ,_ N• = cosa - —— (1.65)
V 2 Ir
La conmutación distorsiona la forma de onda del voltaje en la barra de conexión del
convertidor, esto causa interferencia al circuito que controla el encendido de los
tiristores ya que dependen para su sincronía del cruce por cero del voltaje de la red.
La presencia de armónicos adicionales en la fundamental del voltaje de la red, causa
problemas de interferencia o ruido eléctrico por parte del convertidor a otros equipos,

56
todos estos conectados en la misma barra.
En general en las distintas aplicaciones j-i0 no pasa de 30° (a excepción de fundidoras
y soldadoras) siendo un límite recomendable de trabajo. Es aconsejable que, para
rninirnizar la influencia del convertidor en la red, sea el voltaje relativo inductivo de
cortocircuito de la inductancia de conmutación mayor o igual a 4%. Por último
daremos un breve repaso de los efectos de los armónicos del convertidor en la red.
1.3.2.3 EFECTOS DE LOS ARMÓNICOS DEL CONVERTIDOR EN LA RED
Es evidente que por la acción de interrupción alternada de los tiristores considerando
siempre conducción continua y constante, tenemos una comente no senoidal en la
fuente cuyos armónicos serán de orden impar N = 3,5,7 ... de magnitud 1/N veces la
fundamental, sin considerar conmutación.
La interferencia, de los armónicos de comente del convertidor, a la red dependerá de
como las inductancias, tanto del sistema de generación como del cableado del
convertidor, reaccionan a cada frecuencia armónica particular.
El convertidor es prácticamente una fuente de armónicos inyectados a la red, para
atenuar esta interferencia se colocan filtros, resonantes serie a la frecuencia de los
armónicos más bajos, en la barra común de conexión, como se puede apreciar en la
figura (1.23). Los cuales además de corregir el factor de potencia evita la resonancia
paralelo de la inductancia de la red con el condensador de compensación. Ya que al
resonar a una frecuencia armónica, produce sobrevoltajes que afectan tanto a las
protecciones de linea como a los equipos conectados en la barra del sistema, por lo
tanto se debe evitar este problema.

57
barra comúnde conexión
Ln ^ Lkliüüí—m—\smmfr
Fuentedel Sistema
Filtro para eltercer armónico .
Convertidor
®generador1 * ide comentearmónica
Figura 1.23 Efecto de los armónicos de corriente delconvertidor a la fuente/

58
1.4 CARACTERÍSTICAS DE CONTROL PARA LOS
CONVERSORES
Hasta el momento hemos analizado y establecido características que nuestro diseño
cumpla, para el control y regulación de la velocidad de un motor D.C. de hasta 3 KW;
estas son:
L- El motor D.C. es de excitación independiente y constante.
2.- Variando el voltaje de armadura controlamos la velocidad del motor.
3.- El actuador a utilizarse es un convertidor tipo puente monofásico.
4.- La corriente de armadura es D.C. pura.
5.- Todas las variables que se consideran son normalizadas.
Todo análisis por hacerse debe tener presente estas condiciones ya fijadas. La figura
(1.12) en diagramas de bloques puede ser representada dé la siguiente forma:
• actuador(convertidor) motor D. C.
Figura 1.24 Diagrama de Bloques delconvertidor de la figura 1.12.
La manera como el actuador controla el voltaje de armadura del motor D.C. es
mediante la variación del ángulo de activado a del convertidor totalmente controlado.
La variación del ángulo de activado a, se logra a través de un voltaje de control en un
circuito cuya salida es el ángulo de activado deseado [ver figura (1.25)].

59
VcVco
circuito de disparode los ¿instares del
convertidor
&
••
iy
/\
Va
Vao
Figura 1.25 Control de un convertidor.
La manera en que varía el voltaje medio para la armadura Va con relación al voltaje
de control Vc define la característica del control de un convertidor, siendo Vc la
variable independiente, donde:
Vco = Es el voltaje de control máximo.
Como es lógico es deseable una relación lineal entre estas dos variables desde el
punto de vista de regulación y control, sin embargo una característica senoidal es más
fácil de realizarla.
Estas dos características se las puede observar en la figura (1.26)
£! O
1
*cw
\ j£_Veo
Va_
Vao
I
a) Lineal b) SenoidalFigura 1.26 Características de control para el convertidor.

60
La manera de poder obtener la característica lineal es compensando la relación
cosenoidal entre el voltaje medio de la armadura y el ángulo de activado es decir:
Vce = arceos (1.66)
Por lo tanto de la ecuación (1.51) tenemos:
V
V Vao co
(1.67)
De igual forma la característica senoidal de la figura (1.26b), escogida para
implementarla en esta tesis, se la obtiene de una relación lineal entre el ángulo de
activado a y el voltaje de control como se observa en la figura (1.27).
Veo
Figura 1.27 Característica del Circuito de Disparo.
Donde: a =2 V
—2
(1.68)

61
La manera física puesta en diagrama de bloques de como poder obtener la
característica de la figura (1.26b) se la puede ver en la figura (1.28), en donde se
construyen los pulsos necesarios para controlar los tiristores; los pulsos deben estar
sincronizados a la red. Una vez escogido el ángulo de disparo, este no debería
cambiar, siendo fácil de realizar.
De igual forma si fuera el caso para obtener la figura (1.26a), en lugar de generar la
señal diente de sierra de la figura (1.28) que corresponde a la ecuación (1.68),
tenemos que generar la ecuación (1.66).

62
GENERADOR DIE^JTEDE SIERRA
Voltaje de .sincronización
permite al ángulo de disparoser proporcional con si
voltaje de control
(Voltaje de control)
Iymin
limitación de
MONOESTABLE
Amplificador a lostransmisores de los
impulsos
Figura 1.28 Circuito de Disparo.

CAPITULO
II
CAPITULO II
2.1 CARACTERÍSTICAS DEL MOTOR
El módulo industrial está diseñado para un motor D.C. con excitación independiente
que trabajando en conducción continua y constante cumpla con las siguientes
características como sus límites máximos:
1.- Potencia Nominal.- 3 KW.
2.- Voltaje de la Red .- 220 V A.C. +/- 20% monofásica
3.- Corriente de Armadura - 20 A D.C.
4.- Velocidad.- 2000 rpm.
5.- Corriente de Campo .- 2 A D.C.
2.2 ESPECIFICACIONES Y CONFIGURACIONES DEL
CIRCUITO DE CONTROL
El equipo diseñado lo conforman cuatro bloques:
2.2.1 CIRCUITO DE POTENCIA
Consta de:
1.- Un puente monofásico totalmente controlado diseñado a base de SCR's, que
alimenta la armadura del motor D.C.
2.- Un puente monofásico no controlado constituido por diodos, para el Campo
cuando este no es de imanes permanentes.
3.- Un transformador de Corriente de 20 A / 0.5 A que realimenta la corriente A.C.
del puente monofásico controlado al circuito de control para la detección de
sobrecorrientes como también para la regulación de comente de armadura.

64
4.- Un transformador de Voltaje de 220 V7 36 V con tap central para la alimentación
de la fuente que alimenta a las tarjetas del módulo.
2.2.2 CIRCUITO DE CONTROL
Se divide en dos bloques:
2.2.2.1 CIRCUITO DE DISPARO
Realiza lo señalado en la fig. (1.28) y discrimina a que par de tiristores le corresponde
encenderse. Por medio de opto-triacs controlo las compuertas de los SCR's.
2.2.2.2 CIRCUITO DE REGULACIÓN
Consta de:
1.- Un lazo interno de regulación de comente hecho con un controlador PI.
2.- Un lazo externo de regulación de velocidad también diseñado con un PI, cuya
salida constituye el valor referencial de la corriente de armadura.
3.- Un ckcuito de aceleración y desaceleración de la referencia de velocidad con la
opción de conectarse directamente esta referencia a la regulación de velocidad.
2.2.3 PROTECCIONES
Se consideraron para:
1.- La Sobreconiente.
2.- La Sobre velocidad.
3.- Fallas del Taco de la realimentación de velocidad.
También se consideró un circuito que nos permite disponer de un tiempo de espera
a nuestra conveniencia para realizar todas las conecciones necesarias o imprevistos
65
que se presentan para luego habilitar la operación del equipo, además nos sirve para
la deshabilitación del circuito de fallas cuando se haya solucionado el problema.
2.2.4 FUENTE
Alimenta a todos los circuitos electrónicos que dispone el equipo con H-/-15 V.
Todo esto podemos ver en la configuración global de la figura (2.1) en la que se da
la interrelación de cada bloque mencionado.

66
Figura 2.1 Diagrama de Bloques de la Configuración del Equipo

67
2.3 DISEÑO DEL CIRCUITO DE POTENCIA
Vamos a diseñar primeramente el convertidor tipo puente monofásico totalmente
controlado que alimenta a la armadura del motor.
2.3.1 DISEÑO DEL CIRCUITO QUE ALIMENTA A LA
ARMADURA
Los SCR's del circuito de potencia de la figura (1.11), se los diseñó considerando el
voltaje pico inverso máximo repetitivo que van ha soportar, el cual es el voltaje pico
de la red considerando un 20% de variación máxima, dando un 50% de seguridad, lo
que nos da 560 V pico. La corriente media que circula por cada SCR es la mitad de
la carga total, teniendo conducción continua con el mismo factor de seguridad y
variación anterior nos da 18 A DC y 25 A RMS. Con estos dos datos en el mercado
local se encontró el ECG 5547 que tiene: VDRM = 600 V; IXRMS = A; ITAV = 22
A, cumpliendo con lo requerido. Las características dadas por el fabricante las
adjuntamos en el Anexo Al. Este elemento al trabajar a potencias que produce un
calor interno alto que lo puede destruir, necesita ser ubicado en un disipador de calor
para ayudar a disminuir la resistencia térmica, entre la juntura y el medio ambiente;
razón por la cual vamos a proceder a su diseño.
2.3.1.1 DISEÑO DEL DISIPADOR DE CALOR
Como en el mercado local no encontramos el disipador exacto requerido, vamos a dar
criterios para su selección, entonces calculo el volumen mínimo e ideal cuyo valor es
inversamente proporcional a su resistencia térmica, disipador-medio ambiente,
Vamos a calcular la resistencia térmica juntura medio ambiente, Rja, máxima para
prevenir que se dañe el tiristor con el fin de tener una referencia del mínimo volumen
del disipador permisible para lo cual utilizo una fórmula de la Referencia BC6 en

68
donde:
R. , < (2.1)jamáx . — v '
siendo:
A = 0.08/°C V = VDRM i = IDRM del tiristor.
De acuerdo a las características del ECG 5547, a la temperatura máxima de la carcaza
Tc = 100 °C entonces tiene un loRMmáx ~ 4 mA; este valor junto con el VDRM del
elemento reemplazados en la ecuación anterior nos da que R^j^ < 5.21 °C/W.
Teniendo en cuenta que la resistencia térmica entre la juntura y la carcaza R:c =
1°C/W así mismo considerando que la resistencia térmica entre la carcaza y el
disipador R^ = 0.1R-C; entonces la resistencia térmica máxima entre el disipador y el
medio ambiente será Rg^n^ < 4.11 °CAV. Con este valor observamos el manual ECG
de elementos electrónicos y vemos que disipador correspondería al volumen mínimo
permisible, sin ser este el requerido.
Para obtener el disipador ideal vamos a calcular la resistencia térmica nominal del
disipador con el medio ambiente R^; según las características del ECG 5547 del
Anexo Al en la página 3.15 del manual de la Ref. BC6, se encuentra dibujado en la
figura 1 Tc vs IATvY en a figura 2 tenemos PAV vs IATV5 en las cuales con IATy = 18
A D.C. considerando como período de conducción 180° obtenemos Tc = 74 °C, PAV
= 30 W teniendo en cuenta la nota de la fig. 15 tenemos:
rr - o,i(r A - T)] - TR - -^ - crnáx - c— - a- - R (2.2)s es ^ Jsa
* AV
donde: según la figura 1 Tcmáx = 100 °C a una temperatura ambiente Ta = 40 °C por

69
ser un módulo industrial; tenemos que R^ = 0.95 °CAV.
Con este valor de acuerdo a la Referencia BLl, adjunta en el Anexo A2, para calcular
el volumen del disipador se procede así:
Obtengo el gradiente de temperatura efectivo entre la juntura y el medio ambiente
ATeffque determina el valor del coeficiente de transferencia de calor asb en la figura
17.5 de la referencia, en el cual se encuentra el gráfico del coeficiente de transferencia
de calor en función de la temperatura y la altura h de la aleta del disipador para
altitudes menores a 1000 m y desde 20 °C a 40 °C. Según esta referencia ATeff =
O-^Tjmáx - Ta esto es igual a 50 °C ya que Tjmáx = 100 °C (es la temperatura máxima
de la carcaza) con una temperatura ambiente Ta = 40 °C. Tomando como referencia
h = 20 cm por tratarse de la altura máxima que correspondería a un disipador con R^
baja, entonces a 50 °C en la figura 17.5 tenemos un asb = 12E 4W/(°Kcm2).
Con este valor calculo la superficie total F, de las dos caras de la aleta del disipador,
que es:
F = - (2.3)r\*R xa .
1 sa sb
Considerando la figura 17.3 en la que se dibuja el rendimiento de una aleta en función
de su longitud 1, normalizada con respecto a su longitud crítica lk, donde con un
rendimiento r\ 0.9 del disipador, sería un valor práctico para la altura de Quito para
proporcionar un valor mínimo a la longitud de la aleta, dando así en esta figura l/lk
= 0.6; más allá del valor de lk el rendimiento sigue disminuyendo su valor, mientras
que el tamaño del disipador aumenta, desperdiciándose así material, con todo esto F
= 975 cm2. La forma más simple del disipador sería la rectangular plana, donde la
Referencia BLl establece como restricción que la altura h, en nuestro caso también
corresponde a 13 debe ser igual o mayor que el doble de la base b, tomando h = b y

70
como F = 2hb, por tratarse de doble lado, tenemos h = 31 cm y b = 16 cm. De la
ecuación (2,4) calculo el espesor (d) del disipador tomando en cuenta la longitud
crítica 1K en la que se da el rendimiento TI = 0.9.
(2.4),so
Como la longitud del disipador ya está dada entonces lk = h/0.6, la conductividad
térmica del aluminio es A = 1.8 W/(cm*°K); entonces d = 3.6 cm. Por lo tanto el
disipador plano rectangular tendría 31 cm*16 cm*3.6 cm de volumen. Considerando
la figura 17.10 vemos que dibujando este volumen en una forma conocida de
disipador que de una distribución de flujo calórico simétrico obtenemos una
simplificación del circuito resistivo térmico que se da yse aconseja obtener en la
figura 17.11; entonces la figura plana del disipador puede ser modelada a otra forma
simétrica de igual volumen y cuyo centro calórico tenga el mismo ancho que el
inicial. Como ejemplo en la figura (2.2) podemos ver que al disipador plano, lo hemos
recortado en su altura h = 31 cm a 16 cm y los 15 cm restantes se dividió en 32
volúmenes iguales, repartidos equidistantemente uno de otro, dispuestos de una
manera simétrica del centro calórico, al cual se le ha dado un ancho que permita
ubicar un SCR de la potencia que estamos manejando, ya que este es la fuente térmica
a disipar.

36 mm
36 mm
71
160mrn
4,7 mm—^ •— 2,5mm
Figura 2.2 Disipador
Teniendo la idea del disipador que cumple con la resistencia térmica disipador-medio
ambiente ideal R^ y conociendo el límite del mismo, se encontró en el mercado local
tres disipadores de la forma de una estrella conocidos como tipo comando y uno de
la forma dibujada, que cumplirían cercanamente con el valor de R^ pedido. Para
servir como soporte de los SCR's que constituyen el puente monofásico controlado
diseñado. A continuación diseñaremos la red Snubber de cada tiristor.
2.3.1.2 DISEÑO DE LA RED SNUBBER
Como parte del circuito de potencia una red Snubber en paralelo a cada tiristor, que
no es más que una capacitancia y una resistencia en serie, tiene por objeto:
L- Limitar la razón de crecimiento del dv/dt que puede presentar la red, tomando
como valor máximo el dado por el fabricante.
2.- Absorber la energía asociada con la comente de recuperación reversa del tiristor.
3.- Limitar el voltaje pico cátodo-ánodo del SCR en el apagado del mismo.

72
En conducción continua, el circuito equivalente del puente controlado, se muestra en
la figura (2.3), en donde la inductancia L1 = 2LK como se puede apreciar en la figura
(1.11), R1 y C son las equivalentes del convertidor tipo puente monofásico controlado
desde el punto de vista de la red Snubber, para nuestro caso son R' = R/2 y C1 = 2C,
siendo R y C son las resistencias y capacitancias que físicamente se pondrán en
paralelo a cada SCR como se ve en el Circuito de Potencia del Anexo A4; Vp es un
voltaje paso aplicado el cual será el voltaje pico de la red considerando un 20% de
seguridad entonces Vp = 1.2*-/2V y vs es la respuesta de voltaje a limitar.
U
y,
Figura 2.3 Circuito para el diseño de la redSnubber.
Debemos resolver este circuito para encontrar los valores de R1 y C1, analizando que
forma de respuesta nos sirve. Este trabajo ya está hecho en la Referencia BR2 adjunta
al final, en la cual se diseña una red Snubber tomando en cuenta cual de los tres
objetivos es más preponderante. Enseguida vamos a determinar cual de estos tres
factores es el más crítico para nuestro caso.
1.- Como el tiristor ECG 5547 tiene un buen dv/dt = 50 V/fis, por lo tanto este
parámetro no es el más importante.
2.- La comente de recuperación reversa pico I que circula por la inductancia L1, en
el momento en que el SCR se apaga, es transferida a la red R'C la misma que absorbe
la energía asociada a I y viene aproximadamente dada por:

73
j = ^JL^L (2.5)L!
donde:
-1 es el tiempo que se demora el tiristor en apagarse, para nuestro caso es de 25 ¡is.
- L' es el doble de la inductancia de conmutación por fase LK. LK se la obtiene al
despejar en la ecuación (1.55) el cosfio y reemplazarlo en la ecuación (1.60) con a
= O y despejar en la misma X^, obteniendo:
IV V
I Va ao
siendo:
V Iao a
(2.7)
Para nuestro caso:
- kT = V~2/2 para un puente monofásico,
- u^ — 0.04, como condición impuesta del voltaje relativo inductivo de cortocircuito
de la inductancia de conmutación.
/Ia = 1.8 como máxima carga impuesta al motor en un momento dado.
Por lo tanto la inductancia LK = 5.04 mH a 60 Hz y considerando una variación del
voltaje de la red de un 20 % y a 20 A D.C. Entonces de la ecuación (2.5) I = 0.93 A

74
y la energía que genera es 4.36 mJ, esta al ser pequeña no es un factor prioritario que
determine el diseño. Por lo tanto el voltaje pico de vs, Vb al ser el último factor a
considerar, este sirve de criterio para el diseño de la red Snubber. Considerando la
Referencia BR1 en la página 49 nos indica que un factor de amortiguamiento mayor
que 0.5 es recomendado escoger para prevenir voltajes excesivos a través del tiristor.
De acuerdo a esto según la Referencia BR2 adjunta este diseño se basa en la figura
4, en donde se encuentran dibujados:
1.- El factor de amortiguamiento C0>
2.- El voltaje pico de vs que es Vls normalizado con respecto a Vp.
3.- La razón de crecimiento dv/dt inicial normalizada con respecto al producto de la
frecuencia natural no amortiguada wn' con el voltaje paso Vp.
Considerando Vj/Vp = 1.15 según esta figura 4 tenemos que: £0 = 0.9,
(dv/dt)y(Vpcon') = 1.7 y X0 = 0.6, con estos valores de acuerdo a las ecuaciones (57)
y (58) del Anexo A3 tenemos que:
C' = L'(—-—Y (2.8)Vp
1 = 2C J¿_°* C'
(2.9)
Por lo tanto C = 0.1 ¡iF y R= 808 Q. La potencia de disipación en la resistencia R es:
= -(-L'I2 + -C'Ox/+ ( p )2*— (2.10)2 2 2 /?'2 + y 2 2JK. + J ( - f

75
Donde f = 60 Hz, entonces PR= 0.72W y el voltaje de la capacitancia debe ser mayor
al voltaje pico de la red considerando un 20% de variación. En el mercado Local se
encontró R - 820 Q/l W y C = 0. 1
Como:
ü> / = — - — (2.11)n i - v '
\JL!C'
Entonces el (dv/dt)o = 14 V/|is, siendo un valor de crecimiento:
1.- Aceptable de respuesta de la red Snubber, ya que un valor muy bajo de dv/dt
implica que el tiempo de estabilización de la respuesta de voltaje en la red sea muy
elevado, por lo tanto no deseable; y,
2.- Menor al dado por el fabricante del tiristor usado -en el puente controlado.
Entonces esta red Snubber cumple con su objetivo. Con esto acabamos el diseño del
circuito potencia que alimenta a la armadura del motor, enseguida diseñaremos el
circuito que sirve al Campo del motor, si este no es de imanes permanentes.
2.3.2 DISEÑO DEL CIRCUITO QUE ALIMENTA AL CAMPO
Para energizar al Campo se utiliza un puente monofásico no controlado que se lo
diseña considerando el voltaje pico inverso máximo repetitivo que van ha soportar,
siendo el voltaje pico de la red con un 20 % de variación máxima y dando un 50 %
de seguridad, lo que nos da 560 V pico; como un motor de 3 KW tiene generalmente
una corriente de Campo que está en el orden de 1 A D.C., por lo tanto se escogió el
puente de diodos ECG 169 cuyo VPRV = 600 V e IQAV~ 2 A D.C; se puso un fusible
(Fl) a la entrada de este circuito de 2 A RMS(ver Anexo A4). Con esto terminamos
el diseño del circuito de potencia y pasamos al diseño del circuito de control.

76
2.4 DISEÑO DEL CIRCUITO DE CONTROL
Para empezar con el diseño del circuito de control debemos tomar en cuenta quef
primero hay que controlar y luego regular la velocidad de un motor, es así como se
procedió en el diseño total, por lo tanto vamos a diseñar el circuito que controla la
velocidad del motor, siendo este el Circuito de Disparo.
2.4.1 DISEÑO DEL CIRCUITO DE DISPARO
Como la característica de control para el convertidor es la senoidal, la misma que fue
escogida en el numeral 1.4 y la podemos ver en la figura (1.26 b); entonces la
característica del circuito de disparo debe ser lineal, vista en la figura (1.27), esta nos
sirvió para el diseño del Circuito de Disparo cuya configuración en diagramas de
bloques la tenemos en la figura (1.28), y paso a paso concuerda con el esquema
circuital del Anexo A4, que lo explicaremos a continuación en tres etapas.
Como necesitamos la generación de pulsos que activen a los tiristores a través de sus
compuertas, estos pulsos deben aparecer en cada período del voltaje de alimentación
al motor, a un detenninado ángulo a cuya selección se lo hace variando el voltaje de
control Vc ( 10 V = 0° < a < aw = 164° = -8,2 V, definido a continuación de la figura
(1.22) de acuerdo a la característica del circuito de disparo (figura 1.27), esta diente
de sierra ( figura 2.43c) debe ser generada sincronizadamente con cada cruce por cero
del voltaje de alimentación al motor o de la red (ver figura 2.4 c). Por medio del
circuito de la figúra(2.4 b) detecto el instante en que se producen los cruces por cero
del voltaje de la red y cuya salida los indica en forma de pulsos (ver figura 2.4 2(b)).

77
a) Red b) Detector de Cruce por Cero y Limitador c) Generador Diente de SierraFigura 2.4 Primera Etapa del Circuito de Disparo con las formas de Onda de
Voltaje de salida de cada Bloque.
En el circuito de la figura (2.4b) para detectar los cruce por cero utilizamos un
Optoacoplador (ISO5) NPN - Transistor (ECG 3041) cuyo transistor trabaja en corte
cuando el voltaje rectificado de la red es menor al voltaje de polarización directa del
diodo y el resto del período saturamos al transistor con el propósito de obtener en el
emisor pulsos negativos entre 15 V y O V con el menor ancho de tiempo posible, ya
que una vez detectado los cruce por cero empezamos a generar en el resto del período
la característica del circuito de disparo (figura 2.4c). Como el optoacoplador ECG
3041 tiene:
1.- Una comente de colector máxima 1 ^ =100 mA
2.- Una corriente nominal por el diodo IF = 60 mA
3.- Tiene una razón de transferencia de corriente D.C. hef = IJÍF ~ 100 %.
Teniendo Rl = R2 = 10 KH entonces PR1 = 4.84 WIR1 = 22 mA RMS e IR2 = 1,5

78
mA D.C. con VCC = 15 V con esto consigo saturar al transistor y tener el menor
ancho de pulso posible. Si subimos la corriente por el diodo saturo más al transistor
pero no se consigue disminuir de manera apreciable el ancho del pulso; aumentando
las pérdidas en la resistencia de potencia escogida Rl = 10KQ/10W como un factor
de seguridad. Tomando en cuenta el voltaje pico de la red, una variación del 20 % y
un factor de seguridad del 50 % se escogió como puente rectificador DI el ECG 5305
que tiene VPRV = 600 V e IQAV = 1-^ A.
Ahora se genera una onda cuadrada entre Vc = +/-10 V, sincronizada con la red para
integrarla y obtener la diente de sierra deseada; esto se consigue comparando en el
operacional U1A el voltaje emisor del transistor (IS05 ) con un voltaje intermedio
de VCC obteniendo pulsos negativos de 22.5 jas entre +/- 15V que luego con los
diodos zener D2 Y D3 ( ECG 5018A Vz = 9,1 V) limito el voltaje de salida de U1A
a niveles de Vc, figura (2.4 2b). La resistencia R21 = 0.47 KQ sirve para limitar la
corriente que sale IOOT = 10 mA o entra 1 = 0.3 mA a U1A (LF 347N) y permitir
que los zener regulen al ser conectados a la siguiente etapa (figura 2.4c).
La figura (2.4c) es un integrador-inversor de comente constante donde:
/ = C,— (2.12)A f
siendo:
AV = 20 V ; Cl = 0,01 jaF (valor escogido).
At = intervalo de carga Atc = 22,5 (is o descarga Atd = 8,311 ms del condensador Cl.
En el intervalo de descarga D4 esta en polarización inversa, D5 conduce y el zener
D6 marca el límite de inicio de la descarga entonces de la ecuación Id = 2451 jiA,
como VCC = 15 V entonces R^ = R6 + R7 + R8 = 608 KD; debido a que se pierde

79
un poco del período del voltaje del motor en la detección del cruce por cero, para
ajustar la diente de sierra a O V cuando Vc = O V hacemos la descarga más rápida e
inicie un poco más alto que 10 V, obteniendo en la práctica R . = 532 Q. y el zener D6
sea el ECG 5019A (Vz = 10 V)..
En el intervalo de carga D4 conduce, D5 en polarización inversa entonces de la
ecuación (2.12) Ic - 8,9 mA, debido a que la corriente que circula por R^ es pequeña
comparada con la Ic de carga entonces:
VR5 = -^ (2.13)
Vc = 10 V por lo tanto R5 = 1100 Q/80 mW; escogimos R5 - 1 Kfl
En la segunda etapa del encuito de disparo dibujada en la figura (2.5), con un nivel
alto a la salida del operacional U1B se indica el momento en que se genera los pulsos
de disparo, esto ocurre cuando el Vc es mayor que el voltaje de la diente de sierra
(figura 2.5a). Los pulsos los obtenemos por medio del monoestable U2A (ECG 4098)
se activa por transición negativa entre 15 V y O V por lo que se utilizo el transistor Q1
como inversor y el diodo D7 como su protección. El U2A da un solo pulso sin
importar el tiempo de permanencia en O V, esto evitaría que se produzcan disparos
inesperados cuando el Vc en el comparador U1B salga de los parámetros de +/-10 V;
puesto que si se sale por el lado positivo, el U2A recibe una señal siempre negativa
en su entrada dando un solo pulso en cada cruce por cero obteniéndose el voltaje
máximo de armadura y por el lado negativo al tener el monoestable siempre una
entrada en alto no se producen pulsos con lo que cesa la carga.
El pulso obtenido con RIO = 100 KÍ2 y C2 = 0.01 pp es de 15 V y 0.4 ms, suficiente
como para poder encender a los tiristores.

80
vcc
VC-
-MOVVC
-10V60Hz
Ot Cí+TT
— 60Hz ~
a) Voltajes que se comparan en U1B b) Pulsos que salen de U2AFigura 2.5 Segunda Etapa del Circuito de Disparo con formas de
Onda de Voltaje
La tercera etapa es la figura (2.6) donde se distribuye un pulso a un par de tiristores
alternadamente, para mantener el circuito de potencia encendido por lo menos a
media carga en caso de falla de un optoacoplador o dos en serie, distinguiéndose a
que semiperíodo positivo de la red corresponden. Esto se consigue con dos inversores
alternados sincronizados con la red en el caso del Q2 y Q3 figura (2.6 a y c), con sus
salidas conectadas a una entrada de una compuerta AND del U3 (ECG 4081) y a la
otra entrada va el pulso; por lo tanto pasará el pulso a los optoacopladores 1801,2,3,4
(ECG 3048) sólo cuando la salida de Q2 o Q3 esté en un nivel alto disrcrimando así
el encendido de cada par de SCR's.; necesitamos que este cambio de nivel sea
generado cada cruce por cero para poder variar el pulso incluso con a - 0° entonces
hacemos que el transistor de ISO6 apenas salga de corte, del cruce por cero con
flancos verticales pase a saturación, por lo tanto con R19 = 2,7Kn/10W y R17 = 10
KQ entonces IFRMS = 57 mA siendo un valor cercano a su comente nominal
permitida con PR19 = 8.9W e IRI? = 1.5 mA.

81
Entonces el transistor de ISO6 permite que Q2 y Q3 corten y saturen en cada cruce
por cero; como Q3 satura cuando Q2 corta entonces R20 debe ser menor que R15 y
permitir que el voltaje colector de Q2 sea semejante a VCC y al contrario cuando Q3
corta Q2 satura entonces R18 debe ser un valor intermedio que sature a Q2, por lo
tanto escogimos R18 = 1.1 Kíí R20 = 0.47 RQ y R15 = 3.3 KQ, R16 « 15 Kfí para
limitar la comente de colector cuando Q3 satura.
Como IGTmin = 4 mA D.C. cuando Tc = 25°C del SCR ECG 5547 y siendo en aw -
164° el VGT = 4. IV D.C. considerando que el pulso dura 0.4 ms, entonces con una
resistencia R = 2.2 KQ/0.5W que limite la corriente a 1.9 mA de la red a la
compuerta del tiristor, permite el encendido del tiristor, donde los 2. ImA restantes los
proporciona los optoacopladores de cada SCR. La I^m^ - 9 mA considerando un 20
% de variación de la red como iQXmáx ~ ^0 mA entonces no hay problema de
sobrecorriente que pueda dañar la compuerta de cada tiristor.

82
a) ON 2-4 b) Pulso SCR 2-4 c) ON 1-3 d) Pulso SCR 1-3Figura 2.6 Tercera Etapa del Circuito de Disparo con Formas de
Onda de Voltaje
A la entrada del Circuito de Disparo (ver figura 2.4) se puso un fusible (F2) de 1 A
ya que la carga máxima es IR19 + IR1 = 79 roA. Una vez realizado el diseño del
circuito de disparo procedo al diseño del circuito de regulación.
2.4.2 DISEÑO DEL CIRCUITO DE REGULACIÓN
En la figura (2.7) se representa el diagrama de bloques con valores normalizados los
lazos de control con los reguladores de velocidad y de corriente a diseñarse, se tomó
para la máquina D.C. el caso más crítico que es de la figura (1.8) como se dedujo en
las ecuaciones (1.46) y (1.47). El circuito de regulación consta en el Anexo A4.

83
Figura 2.7 Diagrama de Bloques del Circuito deRegulación de Velocidad y de Corriente

84
Para iniciar con el diseño de los reguladores tenemos que conocer todos los retardos
y ganancias de cada bloque del la figura (2.7). Empezaremos con el lazo del regulador
de corriente calculando en primer lugar el bloque que representa al Circuito de
Disparo.
En este bloque se ve inmerso el convertidor que alimenta a la armadura del motor, se
nota un tiempo muerto que representa el tiempo de espera hasta que se activen los
SCR's. Esta característica se la aproxima a un retardo efectivo (Tdc) de primer orden
semejante a cualquier acondicionador de los lazos de realimentación y con una
ganancia Kdc es decir;
(2-14)
donde: Tdc = T/2p siendo p = 2 y T = (1/60) s, entonces Tdc = 4.17 ms.
G . ^Lx-^x^C^ - —*—) (2.15)* 2 V 2 V 2ar co
Esta expresión se la obtiene al derivar la ecuación (1.51) con respecto a Vc, ya que
según la ecuación (1.68) a está en función VC5 y luego normalizarla con respecto a
Var donde:
^ar = Voltaje de armadura de referencia.
Vco = Voltaje de control máximo.
Cuando a — 90° o sea Vc = O, como el diseñó lo hacemos para condiciones extremas
entonces según la ecuación (2.13) Kdcmáx = Tc/2, siendo el valor a utilizarse como

85
ganancia del bloque del circuito de disparo.
Para el siguiente bloque, avanzando en la figura (2.7) de izquierda a derecha,
necesitamos el valor de la constante de tiempo del circuito de armadura (Tfl); por lo
que necesitamos conocer la inductancia de filtrado LF y La así como la resistencia
total del circuito de armadura.
Con el afán de generalizar nuestro diseño hemos recurrido a la Referencia BC2 , en
el que se da a conocer todos los datos técnicos de una gran cantidad de motores
diseñados para diferentes aplicaciones, así como para varias potencias, etc. y se
encontró más de 100 motores que cumplen con las características pedidas,
encontrándose en muchos de ellos como su valor típico a La = 2.6 mH y Rfl = 0.631
Q que corresponde a motores del tipo 1GL5106 de la pág 2/59 cuyos datos técnicos
constan en la Tabla 2.1, los cuales nos servirán como referencia para el diseño de los
reguladores; estos son:
" '' '" TABLA 2,1 ', ,
Voltaje de Armadura ,Va = 150V
Velocidad, n = 1720 rpm
Momento de Inercia, J =
Potencia del Campo Ppyp
0.0180 Kg*m2
Ln = 280 W
Comente de Armadura, Ia = 24 A
Potencia,? =2. 95 KW
Rendimiento, rj - 76%
Torque nominal mT = 16.4 N*m
De acuerdo a esto Tfl = 4.12 ms sin LF. Vamos a ver ubicando el punto de operación
normalizado en estado permanente y estable en la figura (1.17) (que fue dibujada para
este motor) si con este 1a trabaja en conducción CONTINUA por lo menos a torque
de carga nominal, de lo contrario encuentro LF de acuerdo al numeral 1.3.2.1, según
la Tabla 2.2 tenemos:

86
Tabla 2.2
Con la Ecuación
(1.5)
(1,12)
(1.13) y (1.14)
Calculo
c4>e = 0.75Vs/rad
w0 = 200 rad/s
mn = 178.3 N*m
por lo tanto mL/m0 = 0.092 y co/coo = 0.9, este punto en la figura (1.17) vemos que
el motor no trabaja en conducción continua, entonces de acuerdo a la ecuación (1.55)
con Y = 84.8° logramos operar en conducción continua, necesitando una LF = 15.8
mH de acuerdo a la ecuación (1.48) y a la figura (1.12) produciéndose un nuevo Ta
= 29.14ms.
Ahora vamos a limitar el rizado de la corriente de armadura a +/- 5% del valor
nominal de la carga añadiendo más inductancia ,como en o)/co0 = O, a = 84.8° según
la ecuación (1.55), en este ángulo a calculo el voltaje A.C. = 219.3 V, con el rizado
de +/- 5% la corriente A.C. = 0.85 A calculo la impedancia que debería presentar el
circuito de armadura y con este valor puesto que Ra sube a 6.25 Q entonces con LF
= 324.3 mH logro un rizado de +/- 5%, siendo el valor final de Ta = 66 ms.
El siguiente bloque a calcularse será el del Acondicionador de Corriente, (ver figuras
2.7 y 2.8), siendo:
V(2.16)
donde:
Vco = Voltaje de control de normalización = 10 V
K = amplificación del circuito de realimentación — R6/R5 = 8.33

87
Is = corriente nominal del secundario del transformador de corriente = 0.5 A
R4 = 2.2 fl; por lo tanto ki = 0.92.
T¡ es la constante de tiempo del filtro de este acondicionador, que básicamente
corresponde a R3*C2, la misma que debe ser lo suficientemente pequeña como para
no afectar la respuesta del regulador y a la vez proporcionar el suficiente filtrado de
la corriente de realimentación como para tener un nivel fijo de la corriente medida
(CORMED), por todo esto TÍ = 5,6 ms.
Ró100KQ
TI CORMEÍ)
20A/D.5A
Figura 2.8 Acondicionador de Corriente
El siguiente bloque de la figura (2.7) corresponde a constante de tiempo mecánica del
motor T^ = 20.2 ms según la ecuación (1.17).
Ahora diseño la ganancia y el retardo del acondicionador de velocidad (ver figura 2.7
y 2.9) cuya salida corresponderá a la velocidad medida (VELMED). Como en
aplicaciones industriales vamos ha utilizar tacos del orden de 60 V D.C. a 1000 rpm
entonces ubicando tres resistencias de potencia en serie R33 = R34 = R35 = 2,2Kíl
y 1,64W (en la práctica de 5W por seguridad) se da la posibilidad de conectar a este
equipo máquinas que funcionen en rangos de velocidades nominales desde:

166,67 rpm a 1000 rpm conectando la polaridad negativa del taco en VMEN,
1000 rpm a 2000 rpm conectando con igual polaridad en VMED; y,
2000 rpm a 3000 rpm conectando con igual polaridad en VMAX.
Vamos hacer k^ = 1 entonces utilizo un potenciómetro que limita el máximo voltaje
de la realimentación de velocidad a 10V para todos lo rangos, por lo que lo conecto
en VMIN; su valor debe ser tal que no afecte a R35 para no alterar los rangos,
entonces Rll = 50 KQ/72 mW. Escojo Tco = 6 ms = R12*C4 , por las mismas
razones de T¡.
jVELMEp-
Figura 2.9 Acondicionador de Velocidad para Taco DC.
La técnica de compensación a utilizarse como una guía para obtener las ganancias,
los retardos de los reguladores de velocidad y de corriente, en el caso del lazo de
corriente por tener retardos de primer orden será la del Óptimo de Magnitud, en el
caso del lazo de velocidad por tener un bloque integrador será la del Óptimo de
Simetría, no siendo factibles a ser utilizadas en vista de que Ta > T^, sin embargo
vamos a usarlas como método de diseño para obtener valores referenciales de las
ganancias y retardos de los reguladores, ya que de todas maneras por cualquier otro
método al final se debe proceder a una calibración experimental de estos valores.
Estas dos maneras de diseño se las explica mejor en la Referencia BC43 nosotros la
aplicaremos.
Con todos estos datos y según la Referencia BC4 la amplificación Vrl y el tiempo de

89
integración Tnl del regulador PI de corriente(ver figuras 2.7 y 2.10) será:
T(2.17)
Entonces: Vrl = 2.75 y Tnl = 66 ms. Físicamente de acuerdo a la figura (2.10) será:
D19 D20ÍOV 8.2V
fr
ve >
|PRQFAI>
Figura 2.10 Regulador PI de Corriente.
Tnl = C3*R7 de donde C3 = 0.22 uF, R7 = 330 Kfí.
Vrl= R7/R8 = R7/R9 por tanto R8 = R9 =120KQ.
Según la figura (2.7) los voltajes que entran al PI de corriente (ver figura 2.10) vienen
del bloque limitador de comente que establece la referencia de comente máxima
(REFCOR) del acondicionador de corriente (CORMED); también llega un voltaje
proveniente del circuito protector de fallas (PROFAL) y la salida del P.L de comente
será el voltaje de control (VC) que va hacia el terminal positivo del operacional de la
segunda etapa del encuito de disparo (ver figura 2,5).
Bajo este procedimiento debo esperar un máximo sobreimpulso de 4.3 % con un
tiempo de establecimiento Ts = 8.4*(4.17 ms + 4.17 ms) = 69 ms. Cabe anotar que se

90
a puesto dos diodos zener de 10 V y 8.2 V en paralelo a R7 y C3 con el propósito de
limitar el voltaje de salida del regulador de corriente, para que en ningún caso se salga
de los límites de control, es decir 0° < a < 164°, como se señaló en el diseño del
circuito de disparo.
Para el regulador PI de velocidad de acuerdo a la Referencia BC4 la amplificación
Vr2 y el tiempo de integración T^ de la figura (2. 1 1) será:
TV, = - — - (2.19)
r2 x(r/ + Tdc + TJ
+ Tdc * TJ (2.20)
Entonces Vr2 = 0.5 y T^ = 58 ms.
Sin embargo bajo este procedimiento en la respuesta velocidad existirá un sobrepico
porcentual de 43 %; para atenuarlo ubicamos un nuevo bloque en el canal del
regulador de velocidad de la forma de un acondicionador con ganancia igual a 1 y de
tiempo de retardo igual T^. Con esto el sobreimpulso esperado es de 8 % con un
tiempo de establecimiento Ts= 13.6*(4.17ms + 4.17ms + 6ms) = 195 ms.
Este circuito se puede observar en la figura (2.12) donde R26, R27, CIO constituyen
el filtro del canal de la realimentación (VELMED) y R28, R29, CU corresponden
al canal de referencia de velocidad (REFVEL).
Como; Vr2 = R30/(R26 + R27) - R30/(R28 + R29) y T^ = R30*C12 - C10*R26/2
Siendo: R26 = R27 - R28 = R29 y CIO - CU
entonces: C12 = 0.22 uF, CIO = 0.47 uF, R30 = 270 KH y R26 = 270 KQ.

91
El bloque de limitación de comente coiresponde al potenciómetro R40 = 50KQ, con
el cual fijamos el límite máximo de voltaje de salida del regulador de velocidad, de
acuerdo al valor de carga nominal que corresponda este valor ( REFCOR).Esto lo
realizamos saturando el regulador de velocidad y a carga nominal, variando el valor
del potenciómetro, establecemos el valor del voltaje que es la corriente de referencia
máxima peimitida
Figura 2.11 Regulador PI de Velocidad.
Por medio del potenciómetro R32 puedo compensar el offset del operacional del
regulador de velocidad para que de OV la salida del regulador cuando la velocidad de
referencia sea cero.
De esta forma hemos diseñado en forma detallada el circuito de control, con el
propósito de dar los criterios necesarios con los cuales poder alterar algún elemento
del circuito, puesto que al tratarse de un módulo industrial su aplicación no
necesariamente vaha ser bajo las condiciones establecidas ni con la carga impuesta,
Para generalizar más nuestro diseño, hemos puesto dos potenciómetros a cada salida
de los reguladores como son R38 y R39 los mismos que están en el Anexo A4, con
los cuales subiendo el valor de la resistencia (tomando como referencia la salida de
cada regulador), aumentamos hasta once veces la amplificación y el tiempo de retardo
de cada regulador, puesto que la relación:
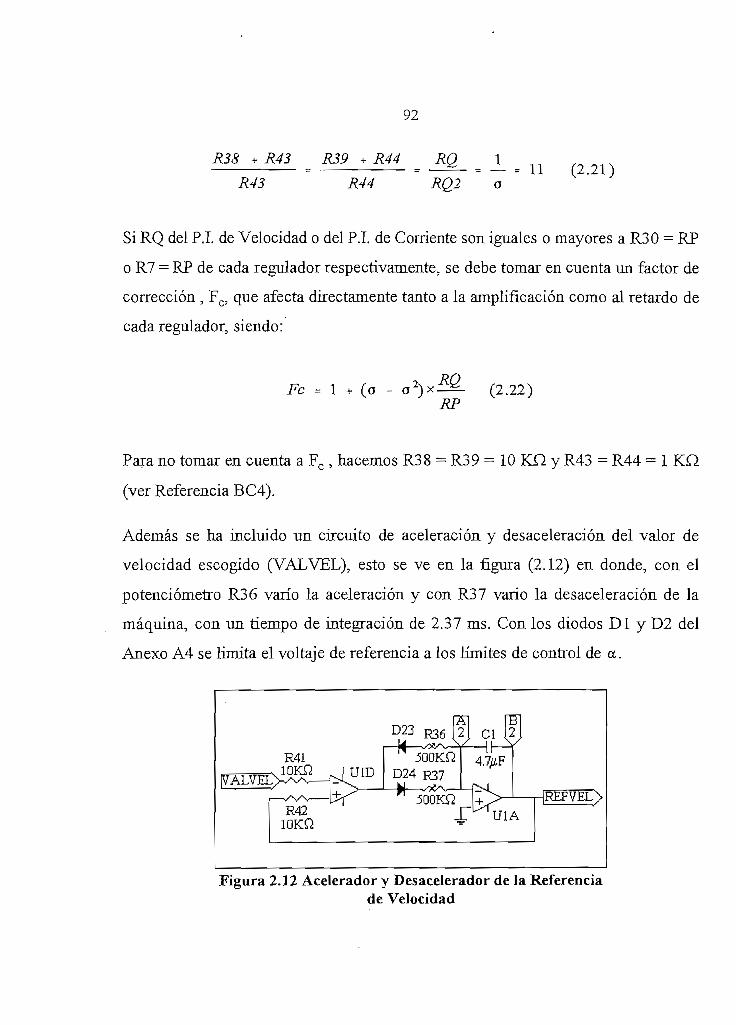
92
R38 + R43 R39 + R44
R43 R44 RQ2-11
o(2.21)
Si RQ del P.L de Velocidad o del P.I. de Corriente son iguales o mayores a R30 = RP
o R7 = RP de cada regulador respectivamente, se debe tomar en cuenta un factor de
corrección , Fc, que afecta directamente tanto a la amplificación como al retardo de
cada regulador, siendo:
Fc = (a - a:
RP(2.22)
Para no tomar en cuenta a Fc , hacemos R38 = R39 = 10 Kfl y R43 = R44 = 1 KQ
(ver Referencia BC4).
Además se ha incluido un circuito de aceleración y desaceleración del valor de
velocidad escogido (VALVEL), esto se ve en la figura (2.12) en donde, con el
potenciómetro R36 varío la aceleración y con R37 vario la desaceleración de la
máquina, con un tiempo de integración de 2.37 ms. Con los diodos DI y D2 del
Anexo A4 se limita el voltaje de referencia a los límites de control de a.
D23
:R£FVEL>
Figura 2.12 Acelerador y Desacelerador de la Referenciade Velocidad

93
2.5 PROTECCIONES
Vamos a proteger al sistema contra: sobrevelocidades, sobrecorrientes y fallas del
taco, indeseables en operación normal de la carga, para Jo cual en base a un solo
diseño se realizó los circuitos que protegen a la carga de estas fallas, el mismo que
consta de dos circuitos:
L- Un detector de fallas
2.- Un protector de fallas
2.5.1 CIRCUITO DETECTOR DE FALLAS
Todos los circuitos detectores de fallas constan en el Anexo A4; como medio de
explicación utilizaremos el circuito detector de sobrevelocidad (ver en la figura 2.13).
Este circuito primero compara la variable de realimentación respectiva, de acuerdo
a su polaridad, con el valor límite referencial de la misma traducidas a voltaje,
producto de un divisor (Rl y R2) que se encuentra a la entrada de cada circuito
(U2D), produciendo un nivel alto de voltaje como señal lógica de indicación de que
se ha detectado el límite de funcionamiento no permisible en la carga. Esta señal se
la lleva a la compuerta de un SCR Ql (ECG 5401) dando como respuesta la
conducción de Ql cuando el nivel de la entrada a la compuerta es alto,
permaneciendo en ese estado indefinidamente y activando al circuito protector de
fallas (ACFAL). PULPAL es la salida a un pulsador para despejar la falla. Como
elemento indicador de la detección de la falla se ha puesto un led (D12), ubicado en
la parte frontal del módulo, con el respectivo nombre de la falla.

-vcc
94
Figura 2.13 Detector de Fallas (Caso de Sobrevelocidad)
Sin embargo en el circuito que detecta fallas en el taco hemos añadido un circuito
adicional, el de la figura (2.14) y cuyo conjunto se lo ve en el Anexo A4.
Se considera como falla del taco, cuando la señal de velocidad medida no le sigue a
una variación de la señal de referencia de velocidad en un tiempo máximo adecuado.
Esto perjudica la operación del motor, puesto que afecta al regulador de velocidad,
ya que no permite compensar el error lo suficientemente rápido, lo que puede
producir sobrecomentes o sobrevelocidades no deseables.
El circuito detector de fallas del taco también funciona como los anteriores, como se
puede apreciar en el Anexo A4, con la salvedad de que a la entrada positiva del
comparador de su detector de falla (diferencia de voltaje entre el taco y la referencia
de velocidad TACME) hemos puesto un circuito sumador y da siempre el valor
absoluto de esta suma que es el circuito de la figura (2.14) ya que el error entre la
referencia de velocidad y la velocidad medida no siempre tiene un solo signo.
El circuito de la figura (2.14) se lo diseñó así:
Al nodo (1) llega la suma ( positiva o negativa ) del voltaje positivo de la referencia
de velocidad (REFVEL ver figura 2.12) con el voltaje negativo de la velocidad
medida (VELMED ver figura 2.9). Con REFVEL negativo en conducción continua,

95
el motor no gira y no tiene sentido esta protección; por esto se puso el diodo D28.
Cuando la suma en el nodo (1) es positiva, entonces es invertida en el operacional
U5C ya que D30 está en polarización directa y D29 en polarización inversa, por lo
tanto al terminal negativo del operacional U5B no solo llega la corriente positiva IR50
sino también la 1^5354 = -21-R5Q (porque las resistencias son del mismo valor y R53
está en paralelo a R54); entonces a la salida de U5C (TACME) obtengo el mismo
voltaje positivo de la suma en el nodo (1).
Cuando en el nodo (1) la suma (que es el error) es negativa, solo alcanza la entrada
de U5B a través de R50 ya que por R51 no circula comente, entonces (TACME) es
el mismo valor de voltaje del error con signo positivo.
El límite máximo de error es, R46*VCC/(R45 + R46) (ver Anexo A4) escogido en
la práctica e igual a 1.5 V, entonces R46 = 1KQ y R45 = 10 KQ.
Como medida de protección se decidió ubicar en todos los detectores de fallas
resistencias de valores fijos en cada divisor de voltaje que da el límite máximo de
falla para que solo personal especializado realice los ajustes convenientes.
HTACME>
Figura 2.14 Circuito que da el Valor Absoluto de la Entrada.

97
2.5.3 LÓGICA DE ENCENDIDO
El equipo al momento de energizarlo simula que se ha producido una falla,
indicándola por medio de un led D21 llamado ESPERA (en la parte frontal del
equipo). Esto lo hacemos por medio del circuito de la figura (2.16) que inhibe los
pulsos a las compuertas de los tiristores del circuito de potencia y activa el circuito
protector de fallas (ACFAL); sólo en el momento de energizarlo por primera vez, ya
que al unir el RESET del monoestable U2A de la figura (2.5) del circuito de disparo
al ánodo del SCR Q6 de la figura (2.16) y al trabajar este circuito de la misma forma
en que lo hacen los detectores de falla, una vez apagado el SCR Q6, en operación
normal, por factores eléctricos no lo encendemos nuevamente ya que lo impide el
valor elevado de la capacitancia C8 = 22 pp, con esto tengo el control de encendido
de la carga. El circuito se lo apaga por medio de la salida (PULPAL), que corresponde
al pulsador de los circuitos detectores de fallas.
KACFAL]D4RESET >
HPULFAL>
Figura 2.16 Inhibidor de Pulsos.
Para habilitar la operación del equipo se ha dispuesto de un salida a un SW (-
VCC/SW) que debidamente polarizado a -VCC corte la saturación de Q3 y Q4 de la
figura (2.17)3 los cuales son de fuente - drenaje intercambiable; que mantienen a las
salidas del regulador de velocidad y al acelerador de la referencia de velocidad en O
V como medida de seguridad, que permita el inicio de funcionamiento del motor
desde el estado de reposo.

96
2.5.2 CIRCUITO PROTECTOR DE FALLAS
Procedemos a proteger al equipo y a la carga, de la siguiente manera (ver figura 2.15).
Uniendo todas las salidas (ACFAL) de los detectores de fallas vistos en la figura
(2.13) a la base del transistor Q5 de la figura (2.15), cuyo colector lo conectamos al
regulador de corriente, a través de la resistencia R22; una vez que se detecte la falla,
el SCR Ql de la figura (2.13) conduce y satura a Q5, como R22 es demasiado baja
en relación a R8 y R9 del regulador de corriente de la figura (2.9), entonces la salida
del protector de fallas (PROFAL) satura al PI de corriente al instante dando a la salida
el voltaje mínimo que corresponde al awmáx = 164° con lo cual forzamos a trabajar
al convertidor como inversor.
VCCo05 K22
]PRQFAJ>
Figura 2.15 Circuito Protector de Fallas.
Una vez protegido al equipo y considerando que el factor que produjo la falla ya no
existe podemos rerniciar nuestro trabajo; para lo cual necesito de un pulsador
(PULFAL) que en paralelo a los SCR's, de los detectores de fallas (ver figuras 2.13
y 2.16), los apague. Con el propósito de aislar el funcionamiento de cada circuito
detector y a la vez para que con un solo pulsador se apaguen todos los SCR se dispuso
de diodos a las salidas de cada circuito detector de fallas. A la vez con este pulsador,
compruebo todos los leds de indicación de falla.

vccR21S R31
1.2MQ
-VCC/SW
Figura 2.17 Habilitador.
De esta manera para encender el equipo primero debo desactivar el circuito inhibidor
de pulsos mediante el pulsador de fallas en la figura (2.16) y luego cerrar el SW en
la figura (2.17) en el bloque -VCC/SW para habilitarlo; siendo esta la lógica de
encendido del módulo industrial. Por último diseñaremos la fuente que nos
proporcione la potencia necesaria para que trabajen los circuitos electrónicos.
2.5.4 FUENTE
La Fuente que alimenta a todos los circuitos diseñados (ver figura 2.18) necesitó que
proporcione +/- 15 V D.C, como el consumo de corriente en las tarjetas es máximo
de 500 mA D.C. entonces para su elaboración escogimos los reguladores de voltaje
U4 (LM7815) y el U5 (LM7915), que soportan hasta 2.2 A pico a la salida.
Como garantizan +/-15V cuando se los alimente con un voltaje que esté comprendido
entre los 18 V y 33 V A.C.. Para saber cual es el voltaje mínimo de la mitad del
secundario del transformador, debemos calcular el voltaje de rizado pico-pico que
se tiene a la entrada de cada regulador (se consideró forma de onda triangular) y
sumarle al mínimo de A.C. que necesita para operar, con este valor A.C. sacar su
valor eficaz, así:(Referencia BL7 )

99
Vr. . . 2^- (2.23)lc°-lc° V ^ ^
Donde:
Icc: Es la comente D.C. de salida de cada regulador, igual a 500 mA.
C3 : Es el condensador de entrada a cada regulador, igual a 2200 jjp
Por lo tanto:
Vrpico-pico: Voltaje de rizado pico-pico es igual a 1.9 V
V + Vry _ min ptco-ptco s,- 24 \ min .—. \ s
Donde:
S e* Y°ltaJe mínimo A.C. que se necesita para regular, igual a 18 V
Por lo tanto:
"Vnns: Es el valor eficaz mínimo de la mitad del secundario del transformador, igual.
a 14.06 V.
Como necesitamos garantizar +/- 15 V D.C. a la salida de la Fuente incluso ante
variaciones de +/- 20 % del voltaje de la red, entonces el voltaje eficaz de la mitad del
secundario del transformador será de Vrms rea| = 18 V A.C.
La comente eficaz que circula por el secundario del transformador, se la obtiene del
análisis de pulsos de comente (considerados como parte de sinusoides) que se forman
en el tiempo de conducción de los diodos del puente rectificador D13. En este
intervalo corto, por el diodo tendrá que pasar la misma cantidad de comente
promedio; como esta comente promedio que sale del regulador es la misma que la del
diodo, de estos pulsos se deduce que:

T O O
Donde:
Ipico: Es el valor pico del pulso de comente
T: Es el período de la onda rectificada, igual 8.33 ms
T I . Es el intervalo de tiempo que dura el pulso de comente
Para calcular 1 debemos considerar que este inicia en el mínimo voltaje instantáneo
a la entrada del regulador y termina en el máximo voltaje del secundario del
transformador, por lo tanto:
n , v/2 V ,-Vr . .'L _ \ * rms-reaí ptco-pico-,—• - sen ( —-—)2 J2V
• ^^ xr (2.26)Tí
De las ecuaciones (2.25) y (2.26) tenemos que Ipico = 4.065 A. Entonces la corriente
eficaz Inusj que circula por el secundario del transformador obtenida de los pulsos de
corriente será:
wr ¡ 2— f ( - - ) sen (o> /)<*(<•> ¿) (2-27)ir J , r.
^-ir
Entonces la comente eficaz del transformador considerando una variación de voltaje
de la red de un 20 % será de 1 ^ = 1.03 A.
Por lo tanto se escogió proveer a esta fuente de un transformador de 220 V / 36 V

101
A.C. con tap central (T2) y soporte 1 A de corriente. El fusible F3 de la figura (2.18)
se escogió de 1.5A; el resto de condensadores puestos en la fuente son
recomendaciones propias del fabricante para cada elemento, con el propósito de
disminuir el ruido eléctrico y mejorar el rizado del voltaje de salida.
U4
3,
^
-2200/¿F CJ57ko.l,FVI VU
GND
4Pp220D/¿F Có^U.l¿¿F
1CO.FP
VI VO
,C7 0, -C9
1 1 II 1 u w 1 Sí I I 1 1 1 L' _ / *• 1 1 !iuuítp ^r-.^-'o u.ip.r -^rNOiij1 1
Figura 2.18 Fuente.
2.6 CONSIDERACIONES PARA LA CONSTRUCCIÓN Y
EL MONTAJE
A continuación vamos a dar los criterios con los cuales se procedió a construir el
equipo, ilustrando los aspectos físicos que lo componen para conocerlo, identificar
sus partes y manejarlo; por último daremos una análisis económico del equipo.
Primero debemos tomar en cuenta que el módulo se aplicará en el Campo Industrial,
debido a este medio ambiente de trabajo, todos los circuitos vamos ha ubicarlos en
una caja de acero de doble fondo, similar a una caja para interruptores térmicos marca
SQUAEE D, de color beige duna y con las siguientes dimensiones:
- 50 cm. de Alto.
- 40 cm. de Ancho
- 20 cm de profundidad.
Además se consideró que el equipo puede ser operado a distancia por lo tanto:

102
- El pulsador N.A. (normalmente abierto) que desactiva la detección de cualquier falla
y al modo de ESPERA
- El Interruptor N.A. que habilita el funcionamiento del módulo
- El Potenciómetro (Lineal o Logarítmico) que constituye la referencia de velocidad
del Motor, no forman parte del equipo y serán adquiridos por el usuario de acuerdo
a sus necesidades.
La posición de uso y su aspecto frontal lo podemos ver en la fotografía 2.1, en la que
se ve la puerta con ceixadura triangular, que da acceso al interior del equipo, y
montada en la misma están:
1.-" Los tres leds de indicación de falla de SOBRECORRJENTE,
SOBREVELOCIDAD y FALLA del TACO.
2.- El led de ESPERA que indica que el equipo está energizado y listo para funcionar
3.- El título del equipo que es " MODULO PARA REGULAR LA VELOCIDAD DE
UN MOTOR MONOFÁSICO (para señalar que su alimentación se lo hace a través
de un convertidor tipo puente monofásico) D.C. DE 3 KW".
Además se puede observar, en la parte superior de la puerta, dos soportes perforados
y soldados a la parte posterior de la caja (ver fotografías 2.1 y 2.2) que sirven para
sostener verticalmente al equipo.
Para permitir ventilación al interior del módulo; principalmente al circuito de
potencia, disponemos de dos rejillas laterales y uno en la base (ver fotografías. 2.2 y
2.4). Permitiendo de esta manera que el flujo calórico se disipe por medio de una
corriente de aire que va desde el inferior del equipo hacia arriba y salga por los lados.
Por lo tanto para aprovechar la ventilación, las aletas de los disipadores del circuito
de potencia se colocaron en dirección vertical al piso (ver fotografía. 2.7).

103
Como el tornillo de ajuste del SCR ECG 5547 es el ánodo del tiristor por lo tanto los
disipadores están aislados del fondo del equipo con celerón (aislante) de un
centímetro de alto a través de los cuales pasan los tornillos de ajuste del disipador,
que también tienen aislada su cabeza para que en ningún momento los disipadores
hagan contacto con al acero de la caja.
Para permitir que la rejilla inferior provea de ventilación al equipo (ver fotografía 2.4)
cuando este se asiente sobre uñábase horizontal, se colocó dos soportes desmontables
en U, de la misma profundidad que el equipo (20 cm); unidos con tuercas a la base
del módulo ( ver fotografía 2.1 y 2.2).
En la vista lateral (ver fotografía 2.2) se puede observar los tres portafusibles que
alojan a los fusibles , tipo cristal, que protegen al CIRCUITO de DISPARO, de
CAMPO y a la FUENTE.
Al abrir el equipo (ver fotografía 2.3) podemos ver en la parte superior la tarjeta
número dos (ver fotografía 2.5), montada en bisagras, en la que está impreso:
1- El Circuito de Control (numeral 2.2.2),
2- El Circuito de Protecciones (numeral 2.2.3)
3- El Circuito de Campo (numeral 2.3.2).
En el inferior de esta tarjeta ( ver fotografía 2.8) está:
- A la izquierda la bornera de Control, de color blanco y de veinte terminales
- A la derecha la bornera de Potencia y de cinco terminales.
Todos los cables que salen de las horneras hacia el exterior del módulo lo hacen por
medio de un orificio ubicado en la base al lado de los fusibles (ver fotografías 2.1,
2.3, 2.8).
Por último en la parte inferior del equipo (ver fotografía 2.3), se encuentran dos

104
transformadores que corresponden al Circuito de Potencia (numeral 2.2.1) (ver
fotografía 2.8) que son:
1.- El Negro es el Transformador de Voltaje con tap Central de 220V/36V que
alimenta al Circuito de Fuente para las Tarjetas (numeral 2.5.4); tiene dos conectores:
el de cuatro terminales (Negro) va a la Fuente y el de dos terminales (Blanco) va a
la bornera de Potencia. Facilitando su desmontaje.
2.- El Blanco es el transformador de comente de 22A/0.5A (ver figura 2.8)
Se dejó un espacio entre ambos transformadores para permitir la ventilación por la
rejilla inferior y en caso de ser necesario podamos poner un ventilador que
proporcione ventilación forzada desde el inferior y salga por las rejillas laterales. No
se puso una rejilla en la parte superior para impedir que el polvo se introduzca en el
equipo.
En la fotografía 2.4 se ve la tarjeta número dos y la uno que está abajo, se abren en
dirección contraria. En el fondo de ambas tarjetas están los cuatro disipadores, en los
que están los SCR's del puente monofásico de la Armadura (ver fotografía 2.8),
dispuestos así:
SCR1
SCR4
SCR2
SCR3
Fig. 2.19 Disposición Física de los Tiristores.

105
En la fotografía 2.5 se ve la tarjeta número dos cuyo diagrama circuital y encuito
impreso está en el ANEXO A4 . En la parte superior izquierda de esta tarjeta se puede
ver una parte de los conectores de 9 pines los que conectan a los leds de indicación
de la puerta frontal con esta tarjeta.
Para evitar que el ruido eléctrico afecte al voltaje de referencia de velocidad, hemos
puesto cable blindado # 24 AWG flexible STP BEL1419A 4 HILOS + TERRA, entre
los terminales del conector CON3 (ver circuito impreso Anexo A4) descritos como
(-, VAR, +) (que corresponden a la polarización y variación del potenciómetro que
fijará la referencia de velocidad del módulo) hacia la bornera de control del equipo.
En la fotografía 2.6 está la tarjeta número uno cuyos diagramas circuitales y su
circuito impreso están en el ANEXO A4 y se divide en tres partes:
1.- Superior está la Fuente
2.- Central está el Circuito de Disparo
3.- Inferior está la Red Snubber de cada tiristor.
Todos ios tornillos del equipo son cadmiados para evitar oxidación y del mismo
grosor M8 y los agujeros en los que se colocan son pasados machuelos para asegurar
mejor al elemento a fijar y permitir facilidad de desmontaje de las partes.

106
Fotografía 2.1 Vista Frontal
Fotografía 2.2 Vista Lateral

107
Fotografía 2.3 Vista Frontal abierto el Módulo
Fotografía 2.4 Vista Frontal con las tarjetas desplegadas

108
- - Af i
-
Fotografía 2.5 Tarjeta 2
Fotografía 2.6 Tarjeta 1

109
Fotografía 2.7 Circuito de Potencia
Fotografía 2.8 Parte Inferior del Equipo

no
2.6.1 DESCRIPCIÓN DE LOS TERMINALES DE LAS BORNERAS
A contijauación vamos a identificar cada terminal de todas las horneras que existen
en el módulo, dibujadas en la forma física en la que constan en el módulo y en las
tarjetas, con el propósito de dar a conocer:
1.- El destino que lleva cada terminal
2.- Que información tiene consigo.
Empezaremos con la tarjeta I(figura2.20), considerando:
1.- Los terminales con igual símbolo (X*>S>B) van unidos entre si y conectados a la
Bornera de Potencia (figura 2.21).
2.- Se tomo como simbología:
R = Resistencia ; C = Capacitancia de la Red Snubber
G = Compuerta ; A = Ánodo de los Tiristores del Circuito de Potencia,
En la figura (2.21) consta la bornera de Potencia en la que se indica la posición
frontal que están ubicados los transformadores en el módulo y como se conectan a
esta bornera, tanto el de voltaje que alimenta a la Fuente como el de comente que
sirve para medir la Corriente de Armadura.
En la figura (2.22) se indica la bornera de Control y en la figura (2.23) están la
descripción de las borneras de la tarjeta 2.

111
TARJETAS 1
FUENTE
-VCC * D DEL TRANSFORMADOR DE FUENTE AL íGND í Q CIRCUITO DEFUENTE(VERFIG.2.18) )
r n ^VCC í n
1 — ' CIRCUITO DE DISPARO
RESETrál DELATARJETAS2ALRESTETDELECG4092VCC DMOD n ES VC DÉLA TARJETAS 2 rVERFIG. 2.5;-vcc aGND [£_
( *.*»ó-« " J-03 TERMINALES CON IGUAL SÍMBOLO VAN UNIDOS^ ;**.*_P» ) EN-TRE SI Y CONECTADOS A LA BORNERA DE POTENCIA
R: RESISTENCIAC: CONDENSADORA: ÁNODO f
G: COMPUERTA AL CIRCUITO DE JDISPARO ( VER FIG. 2.4)1
REDSNUBBER
i _—
G(SCR1)A(SCR1)
A(BCR3)A(SCR2)G(SCR2)
G(^CR4)
NEUTRO
FASE
R(SCR1)C(SCR1)R(SCR3)C(SCR3)C(SCR2)R(SCR2)C(SCR4)
DDDD
DaaDDDDD
DIDn(3
aaDDanaa
~ACGND~AC
* *£P
***
X
m
X©*,•O•* **
X1
Figura 2.20 Descripción de las Borneras de la Tarjeta # 1
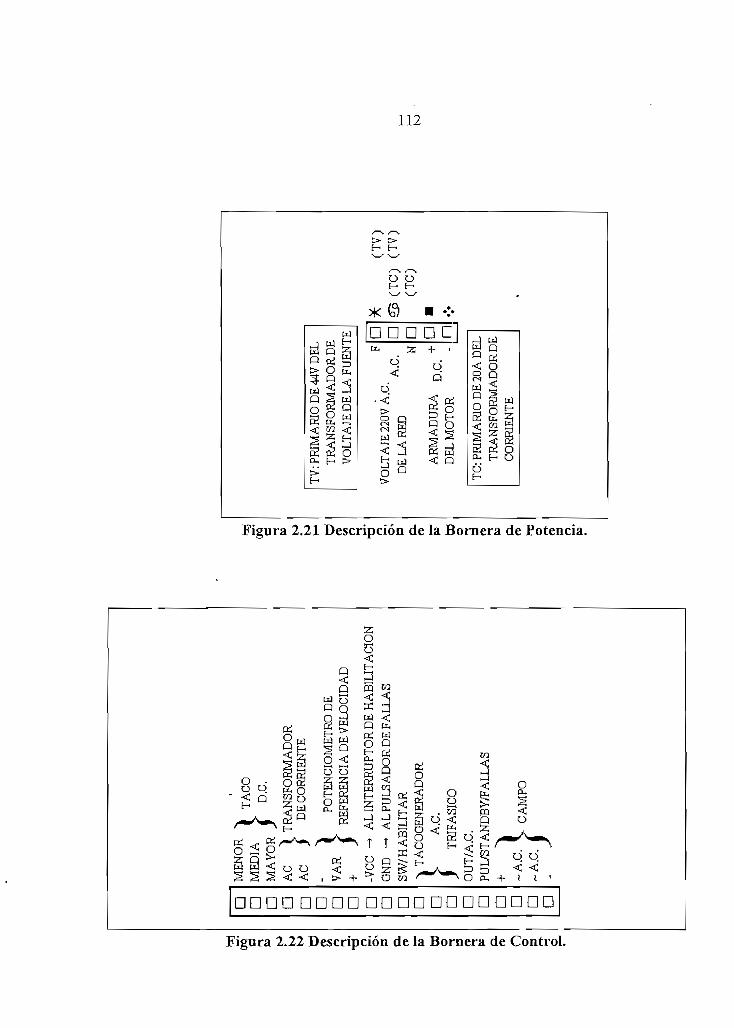
cfq' C P kí
ws ft *5'
r> S> a 5T W o -i B "1 P
de Contro
l.
D D D a p D D a D D D D D D a D a D a a
ME
NO
R
"\A
>
D c
MA
YO
R
}
' '
ÁC
\R
AC
/
DE
CO
RR
IEN
TE
" \O
DE
i R
EFER
ENC
IA D
E V
ELO
CID
AD
+
)-V
CC
-»
A
L I
NT
ER
RU
PTO
R D
E H
AB
ILIT
AC
IÓN
GN
D
-* A
L P
UL
SAD
OR
DE
FA
LLA
SS
W/H
AB
IUT
AR
-\R i
A
.C.
)
TR
IFÁ
SIC
OO
UT
/Á.C
.PU
UST
AN
DB
Y/F
AL
LA
S
-A.C
. V
C
AM
PO-A
.C. 1
ero o 2. B a. W o 3 O r*
S P*
TV: P
RIM
AR
IO D
E 4
4V D
ELT
RA
NSF
OR
MA
DO
R D
EV
OLT
AJE
DE
LA
FU
EN
TE
VO
LT
AJE
22
0V
.C.
DE
LA R
EDA'C
-
AR
MA
DU
RA
D
tC_
+D
EL
MO
TO
R
' '
-D
X(T
V)
(TC
) (T
V)
(TC
)
TC
: PR
IMA
RIO
DE
20A
DE
LT
RA
NSF
OR
MA
DO
R D
EC
OR
RIE
NTE

113
:jt Q
tú QQ <00 Q
9 a<¡ w
ümosP-,
odoH
<cu
p3"0
OO
Q
Q
>»
CQ
Q
« O
nDnnnnnD
g
Ono <vi £3« Q
Q
0 3 o
o
Q r;°° -o "
=(tQ 0
w S
^
< E < S< pí < £2> g s- Q
<0
¡a «dfe Q
oo<C
|DQpn|
Figura 2.23 Descripción de las Horneras de la Tarjeta # 2.
Una vez terminada la construcción vamos a detallar por último el costo del equipo en
la Tabla 2.3

114
TABLA 2,3
CANT.
16
50
4
2
2
1
2m.
0,5m
1
48
18
1
12
4
4
1
1
1
2
2
INSCRIPCIÓN
Aislante de Celeron
Amarras
Amplificador Operacional LF 347N
Amplificador Operacional LM 741
Bornera de 12 terminales # 14 AWG
Bornera de 12 terminales # 8 AWG
Cable TW# 8 AWG
Cable STP 4H + Tierra Blindado
BEL1419A
Caja Metálica Completa
Clavijas pequeñas
Clavijas grandes
Compuerta AND CMOS CD 4081
Condensadores de 0.01pF/0.22jjF
Condensador de O.lpF
Condensador de O.l^iF/ÓOOV D.C.
Condensador de 4,7 joF
Condensador de 1 joF/50V
Condensador de 22 jjF/50V
Condensador de 100^F/25V
Condensador de 2200^iF/25V
PRECIO
WITASIO
500,00
100,00
4.600,00
2.500,00
1.500,00
2.000,00
1.000,00
2.543,00
240.000,00
500,00
350,00
2.300,00
750,00
400,00
1.400,00
800,00
350,00
400,00
450,00
2.500,00
SUBTOTAL
8.000,00
5.000,00
18.400,00
5.000,00
3.000,00
2.000,00
2.000,00
.1.272,00
240.000,00
24.000,00
6.300,00
2.300,00
9.000,00
1.600,00
5.600,00
800,00
350,00
400,00
900,00
5.000,00

115
1
3
8
2
25
7
4
4
1
2
4
1
3
7
2
2
2
64
1
4
oJ
1- 1
Conector macho/hembra 2 pines # 14
AWG
Conector 6 pines
Conectóles 8 y 4 pines completos
Conector 9 pines
Diodo ECG 116
Diodo Zener
Disipador de Calor de Aluminio.
Led Luz Roja
Monoestable CMOS ECG 4098B
Optoacoplador ECG 3041
Optoacoplador ECG 3048
Plaquetas de Títulos
Portafusible tipo botella con fusibles
Potenciómetros de Precisión
10Kn/50Kn/500KQ
Puente de Diodos ECG 169
Puente de Diodos WO4M
Reguladores de Voltaje
LM7815/LM7915
Resistencia de 1/2 W
Resistencia de 2.2Q/2W
Resistencia de 820Q/1W
Resistencia de 2.2KH/5W
Resistencia de 2.7KO/10W
Resistencia de 10KQ/10W
5.000300
1.300,00
1.600,00
2,000,00
300,00
2.000,00
12.000,00
5.400,00
7.500,00
5.000,00
5.500,00
4.000,00
1.600,00
4.500,00
2.200,00
1.500,00
2.500,00
150,00
330,00
330,00
1.200,00
1.500,00
1.750,00
5.000,00
3.900,00
12.800,00
4.000,00
7.500,00
14.000,00
48.000,00
21.600,00
7.500,00
10.000,00
22.000,00
4.000,00
4.800,00
31.500,00
4.400,00
3.000,00
5.000,00
9.600,00
330,00
1.320,00
3.600,00
1.500,00
1.750,00

116
11
12
4
4
50
1
1
4
- 2
14
Tarjeta impresa grande
Tarjeta impresa mediana
Terminal tipo ojo # 8 AWG de cobre.
TiristorECG5401
TiristorECG5547.
Tornillo cadmiado M8
Transformador de Corriente
20A/0.5A
Transformador de Voltaje 220V/44V
Transistores 2N2222/2N3906
Transistor FET ECG 3 12
Zócalos 8/14/16/18 pines
VARIOS
120.000,00
67.000,00
500,00
1.500,00
56.000,00
200,00
30.000,00
30.000,00
1.000,00
3.500,00
500,00
10.000,00
TOTAL
120.000,00
67.000,00
6.000,00
6.000,00
224.000,00
10.000,00
30.000,00
30.000,00
4.000,00
7.000,00
7.000,00
10.000,00
1-089,022,00

CAPITULO
III

CAPITULO m
El módulo está diseñado para trabajar con un motor que cumpla con las características
del numeral 2.1. Al no disponer, se trabajó con un grupo Motor - Generador de menor
potencia a plena de carga y cuyas características constan en las Tablas 3.1 y 3.2.
TABLA 3.1
MOTO»
MOTOR INDUSTRIES
DIRECT CURRENT
CAT No.
SPEC
FRAME
HP
SERIE. F.
VOLTS
AMP
RPM
WOUND
ENCL
CLASS
AMB
DUTY
SERIE
CDP 3440
34 - 4401 - 3662
56C 428P
3/4
1.00
90
7
1750
PM
TEFC
B
40°C
CONT
W386
BALDOR ELECTRIC. C.O.
FTSMITHARK.U.S.A.

118
TABIA#3,2
GENEftADOK
MOTOR INDUSTRIES
DIRECT CURRENT
CATNo.
SPEC
FRAME
HP
SERIE. F.
VOLTS
AMP
RPM
WOUND
ENCL
CLASS
AMB
DUTY
SERTE
CDP 3455
34-4401-3865
56C 435P
1
1.00
180
5
1750
PM
TEFC
F
40°C
CONT
W186
BALDOR ELECTRIC. C.O.
FT SMITH ARK U.S.A.
Para llegar a condiciones nominales , esto es a plena carga del MOTOR (7 A D.C.
en conducción continua) se ubicó dos resistencia en paralelo, de 100H 250W+/-
3% cada una, conectadas a la Armadura del GENERADOR.
Para filtrar la carga a la Armadura del MOTOR se colocó una inductancia de

119
filtrado LF = 219,8 mH con RF = 3.6 £1
Para mejorar el filtrado de la corriente de armadura realimentada a través del
transformador de corriente, se puso R3 — 15 KQ (ver figura 2.8) en el
acondicionador de corriente.
De igual forma luego de probar al sistema con todos los valores de resistencia y
capacitancias calculadas en el diseño de los reguladores de corriente como de
velocidad, se ajustó en ese orden las resistencias R8 = R9 a 43 KD (ver figura
2.10) y luego R26 = R27 = R28 = R29 a 48 KQ (ver figura 2.11) para obtener
mayor rapidez de respuesta a cambios de la referencia de velocidad y menor
inestabilidad de velocidad debido a perturbaciones en el torque de carga.
Antes de activar al motor y trabajando el módulo en el modo de ESPERA,
tomamos formas de onda (dibujadas a través de un grafizador) en diferentes
puntos del Circuito de Disparo, para describir gráficamente los pasos que se siguen
para obtener los Pulsos de Disparo de los tiristores, así:
Una vez alimentada la Primera Etapa del Circuito de Disparo (ver figura 2.4) en el
emisor del Optoacoplador ISO5 obtenemos una onda cuadrada (figura 3.1) de
período T — 8.33 ms, la misma que luego de ser comparada en U1A y limitada por
los zener DI y D23 obtenemos la forma de la figura (3.2) de T = 8.33 ms y un
tiempo de permanencia en -8 V de 22.5 jus. Esta Onda es alimentada al circuito
integrador (ver figura 2.4c) y cuya salida es la diente de sierra de la figura (3.3).

120
T E K T R O N I X 2 2 2 0
Figura 3.1 Voltaje Emisor del Optoacoplador ECG 3041ISO5 de la figura (2.4)
X = 2ms/div. Y = 5V/div.
T E K T R D W 1 X 2 2 2
Figura 3.2 Voltaje en el Cátodo del zener D2 de la fig. (2.4)X = 2ms/d iv . Y = 5 V/div.

121
Esta al ser comparada con el Voltaje de Control mínimo Vc = -8.2V (aw = 164° )
en U1B (ver figura 2.5) obtenemos la figura (3.4), la misma que luego de ser
invertida y modificada su amplitud (entre 15V y O V) como se ve en la figura
(3.5); su flanco negativo alimentado al monoestable U2A de la figura (2.5),
generará en ese instante un pulso de 15 V cada 8.33 ms, visto en la figura (3.6) y
de ancho de 0.4 ms.
stf
T E K T R D N 1 X 2220
Figura 3.3 Característica del Circuito de Disparo.X - 2 ms / div. Y = 5 VI div.

122
T E K T R O N I X 2220
T
Figura. 3.4 Voltaje a la salida del comparador UIB de lafigura. (2.4)
X = 2 ms / div. Y= 5 V / div.
T E K T R O N I X 2220
Figura 3.5 Voltaje en el colector de Ql de la figura (2.5)X = 2ms/div . Y-5V/div .
122
T E K T R O N I X 2228
Figura 3.6 Pulso de Disparo de f = 120 Hz.X = 5ms/div. Y = 5V/div.
Para distinguir a que par de SCR's va cada pulso, mediante el circuito de la figura
(2.6) en dos compuertas AND de U3 (ECG 4081) ingreso por un lado el pulso y
por el otro una señal cuadrada sincronizada con la red de 15 V de 60 Hz, (ver
figura (3.7), al otro par de compuertas ingreso el mismo pulso pero con la onda
cuadrada invertida para obtener a la salida de las compuertas AND un pulso(en el
ánodo del diodo del optoacoplador) alternado cada 60 Hz. Estas ondas cuadradas
se las obtuvieron en el Colector de Q2 y Q3 de la figura (2.6) (Q3 está en alto en
el primer período de alimentación al motor; activando SCR1-SCR3). Estos pulsos
alimentados a los optoacopladores del circuito de la figura (2.6) activan las
compuertas del los SCR's. Los pulsos que van a los SCR1-SCR3 se ve en la figura
(3.8) y para los SCR2-SCR4 están atrasados 8.33 ms con respecto a los primeros..

124
TEKTRDH1X 2220
Figura 3.7 Voltaje del colector de Q3 de la fíg. (2.6)X = 2ms/div. Y = 5V/div.
TEKTRONIX E22
-e-
Figura 3.8 Pulso de Disparo en el Ánodo del diodo deloptoacoplador ISO3 de la figura (2.6)
X = 5 ms / div. Y - 0.5 V / div.

125
3.1 PRUEBAS EN ESTADO ESTABLE
De esta manera gráfica hemos explicado la generación de los pulsos en el Circuito
de Disparo. Una vez salido del modo de ESPERA al presionar un pulsador
normalmente abierto y habilitando la operación del equipo cerrando un interruptor,
observamos el comportamiento del motor en estado estable trabajando a plena
carga y en conducción continua; estos resultados son;
En la figura (3.9) observamos el voltaje a la salida del Acondicionador de
Velocidad (ver figura 2.9) y muestra la velocidad del motor en el tiempo girando a
1750 r.p.m. y a plena carga. Este voltaje es realimentado al circuito regulador de
velocidad (ver figura 2.7).
T E K T R O N I X 2220
Figura 3.9 Velocidad VELMED de la figura (2.9)X = 2 s / div. Y = 850 rpm / div.
126
En la figura (3.10) muestra el voltaje del tacogenerador de D.C. que fue usado,
antes de ser filtrado en el Acondicionador de Velocidad.
T E K T R O N I X SS20
Figura 3.10 Voltaje a la salida del Tacogenerador.X = 2 ms / div. Y = 2 VI div.
En la figura (3,11) está la comente de armadura en la cual se ve que el motor está
trabajando a 6.5 A D.C. y con un rizado de 2,41 A RMS (estos datos fueron
obtenidos con una punta amperimétrica y conectado a un multímetro digital); el
voltaje de armadura es de 80 V D.C. y se lo puede observar en la figura (3.12).

127
T E K T R O M I X
„
Figura 3.11 Corriente de Armadura Nominal.X = 2 ms 1 div. Y = 4 A / div.
TEKTÍ?
Figura 3.12 Voltaje de Armadura a plena carga.X = 2ms/d iv . Y = 77V/div.
128
En la figura (3.13) consta la corriente de armadura (de la figura 3.11) filtrada en el
acondicionador de corriente de la figura (2.8) y que se realimenta al circuito del
regulador de corriente (ver figura 2.7) (CORMED).
T E K T R O f f l X
Figura 3.13 Corriente de Armadura filtrada, CORMED dela figura (2.8)
X = 2 s / div. Y = 3 A / div.
Cuando el voltaje en la armadura del motor es de 25 V D.C. y su forma de onda es
la de la figura. (3.14) el motor empieza a trabajar en conducción continua a partir
de los 2 A D.C. como se ve en la forma de onda de comente de la figura (3.15).

129
T E K T R O M J X 2H20
-E-
Figura 3.14 Mínimo Voltaje de Armadura en conduccióncontinua.
X = 2 ms / div. Y - 100 V / div.
T E K T R O N I X
Figura 3.15 Corriente de Armadura Límite para conduccióncontinua.
X = 2 ras / div. Y = 5 A / div.

130
Además se tomó una muestra de la variación del voltaje de control Ve (ver figura
2.10) en el tiempoI para obtener un voltaje de Armadura de 53.2 V D.C.; esto se ve
en la figura (3.16).
T E K T R G M J X
-3-
Figura3.16 Voltaje de Control.X = 2 ms / div. Y = 1 V / div.
3.2 PRUEBAS EN ESTADO DINÁMICO
A continuación vamos a ver el comportamiento dinámico del motor. Se puso una
entrada paso de O a 4 V D.C. del voltaje de referencia.de velocidad sin pasar por el
circuito acelerador de la referencia (ver figura 2.12) para observar como responde
el motor tanto en velocidad angular como en corriente, luego se puso un voltaje
negativo en la referencia de velocidad para frenar al motor y apagarlo, esto se ve
en la figuras (3.17) y (3.18).

131
m
^\
Fig. 3.17 Comportamiento de la Velocidad Angular ante unavariación paso de 4 V D.C. de la Referencia de Velocidad.
9
C l
Figura 3.18 Comportamiento de la Corriente de Armaduraante una variación paso de 4 V D.C. de la Referencia de
Velocidad.X = 0.1s/div. Y = 2.5A/div.

132
Además variando el voltaje de control por medio del potenciómetro que da la
referencia de velocidad medimos el voltaje en la armadura del motor y la velocidad
a la que gira. Los resultados están en la Tabla 3.3 y en las figuras (3.19), (3.20) y
(3.21).
TABLA 3,3
VOLTAJE!®
REFERENCIA
VRC.
1,28
1,50
1,75
2,00
2,25
2,50
2,75
3,00
3,25
3,50
3,75
4,00
4,25
VOLTAJE DE
ARMABÍIRA
V1XC.
24,50
28,10
34,00
37,50
41,50
45,60
53,30
56,50
61,50
67,20
72,30
78,60
90,00
VELOCIDAD
r,j>.jn.
520
600
720
780
880
970
1150
1225
1350
1450
1600
1750
2000
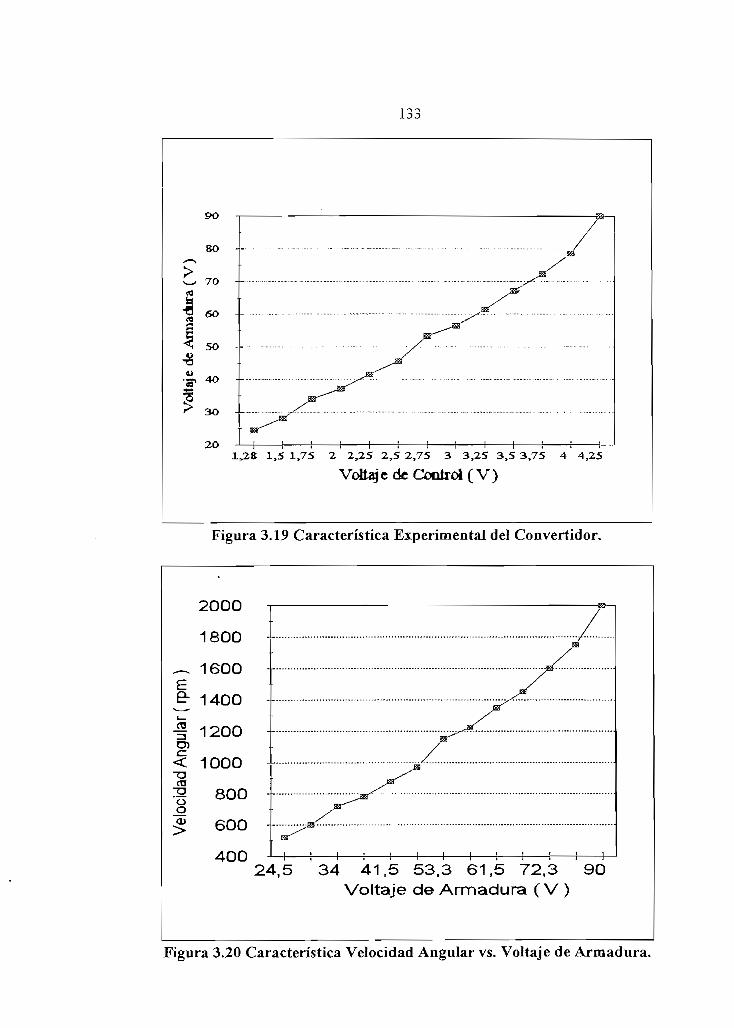
133
Voí
taj e
de
Arm
adur
a ( V
)
so - - • •
4O
/a
^^. /
^^^mr
1,28 1,5 1,75 2 2,25 2,5 2,75 3 3,25 3,5 3,75 4 4,25
Voltee de Control (V)
Figura 3.19 Característica Experimental del Convertidor.
fr
íü13Oí
<-a«iT3"ooa>
200O
180O
160O
1400
1200
1000
8OO
600
400
y*,/s^•^
j^^^^24,5 34 41,5 53,3 61,5 72,3 90
Voltaje de Armadura ( V )
Figura 3.20 Característica Velocidad Angular vs. Voltaje de Armadura.

134
2000
— 16OOE£ 1400J5coc:< 10OOosS 800_OOí
1,28 1,75 2,25 2,75 3,25 3,75 4,25Voltaje de Control (V )
Figura 3.21 Característica Velocidad Angular vs Voltaje de Control.
De esta manera hemos terminado de realizar diferentes pruebas con el módulo con
el propósito de observar el funcionamiento en todas las condiciones posibles de
funcionamiento y depurar el diseño.

CAPITULO
IV

CAPITULO IV
4.1 ANÁLISIS DE RESULLADOS
1.- De acuerdo a la figuras (3.15) y (3.17) el voltaje pico de la Red Snubber V± con
respecto al voltaje pico de la red de alimentación experimentalmente es V|/Vp = 1.2;
este valor comparado con el escogido en el diseño (numeral 2.3.1.2) que fue Vj/Vp =
1.15, nos proporciona un error del 4.2 %. Esto nos da una idea que el factor de
amortiguamiento real es un poco menor al 0.9 tomado para el diseño. Entonces la
inductancia de conmutación según la ecuación (2.9) tiene un valor similar pero mayor
al calculado. Por todo esto podemos decir que son aceptables las consideraciones
hechas para el diseño de la Red Snubber así como el procedimiento, valores calculados
y escogidos, debido a que el orden de error obtenido no afecta al voltaje pico de 600
V que pueden soportar los tiristores, ni tampoco excederá el dv/dt del elemento,
cumpliendo satisfactoriamente el objetivo para el cual fue diseñado.
2.- En la figura (3.20) se nota que su tiempo de establecimiento experimental es tse =
0.2 s. Considerando el cambio en T¡ = 15 ms (ver al inicio del capítulo III) el tiempo
de establecimiento diseñado será de t^ = 13.3*(4.17 ms + 6 ms + 15 ms) = 0.334 s
entonces el error entre el experimental y el diseñado será de e^ = -67 %. En igual
forma observarnos que el Máximo sobreimpulso porcentual experimental es cero
mientras que el esperado, de acuerdo al Óptimo de Simetría con alisamiento de la
consigna en el canal de referencia como de medición de la velocidad, es Mpd = 8 %,
entonces el error.entre el experimental y el diseñado es de eMp = - 8 %. Como se ve en
este caso ambos errores al ser negativos muestra que los resultados experimentales son
más que satisfactorios a los esperados.
3.- De acuerdo a la figura (3.21) el tiempo de establecimiento experimental t^ de la
corriente de carga en el encendido del motor es t^ = 0.2 s. Mientras que el tiempo de
establecimiento diseñado t^, considerando que el tiempo de retardo Tf del

136
Acondicionador de Corriente se cambió a 15 ms (como se indicó en el Capítulo III),
es tsd= 8.4*(4.17 ms + 15 ms) = 0.16 s entonces el error entre tse y tsd es de e^ = 24.2
%. Mientras que el Máximo sobreimpulso porcentual experimental Mpe = 7.7 %; como
el esperado según el Óptimo de Magnitud es de 4.3 %, entonces el error entre el
experimental y el diseñado es de e^ =3.3 %.
Estos dos errores son considerados como aceptables ya que:
- Con ets = 24.2 % en ningún caso pierde estabilidad el sistema y mantiene su
regulación de velocidad corrigiendo los efectos que producen las modificaciones del
torque de carga (perturbaciones) con rapidez, exactitud y con un mínimo de
oscilaciones y
- Con eM =3.3 % en ningún caso llega al límite de comente (8 A) establecido con
R40JJv;er Anexo A4) fijado para protección del motor con el que se trabajó.
4.- El rango de control de la velocidad para este motor utilizando el módulo es de 520
rpm a 2000 rpm es decir una relación de 1/4 siendo aceptable para el control y
regulación de la velocidad a torque de carga variable, como se puede comprobar al
compararlos con otros modelos de motores, por ejemplo según el Catalogo DA12 DC
Motors for Variable Speed Drives de 1992 de la SIEMENS en la página 1/10
observamos varios rangos nominales de control de velocidad aceptados por SIEMENS
en los cuales este rango 1/4 es mejor que los expuestos en el mencionado catálogo.
5.- La Característica de Control experimental dibujada en la figura (3.22) hace notar
una linealidad entre el voltaje de control con el voltaje de armadura del motor, lo cual
coincide con la característica de control que tomamos como base (ver figura 1.26b),
tomando en cuenta los mismos rangos de voltajes. Por tanto podemos decir que es
buena la exactitud de la velocidad que se consigue al variar el voltaje de control, como
se puede comprobar en las figuras (3.23) y (3.24).

137
4.2 CONCLUSIONES
1.- El amortiguamiento £ y la rapidez de respuesta con dependen:
- Del momento de inercia total referido al eje del motor.
- De la inductancia y resistencia equivalente del circuito de Armadura.
Por lo que manipulando estos elementos podemos variar el comportamiento del motor,
esto se puede deducir de las ecuaciones (1.39) y (1.40).
2.- Un motor D.C. a flujo nominal y constante que trabaja con un torque de carga neto
que depende tanto de la velocidad de giro (ver figura 1.10) llega a su estado
permanente y estable ante una variación del voltaje de armadura o torque de carga
mucho más rápido que un motor D.C. a flujo constante y nominal cuyo torque de carga
es independiente de la velocidad (ver figura 1.8). Sin embargo su respuesta tanto de
velocidad como de torque de carga presenta un sobrepico mayor al del motor
representado en la figura (1.8). Esto se demostró en las ecuaciones (1.46) y (1.47) en
el numeral 1.2.6 al estudiar el comportamiento dinámico de la máquina de D.C. a
Campo constante y nominal.
3.- Se demostró en el numeral 1.3.2.1 que el ángulo crítico de activado ac a partir del
cual inicia la conducción continua del motor, es igual al ángulo fasorial T" = o>La/R<7
que existe en el circuito de armadura del motor, siempre que se trabajen con torques
de carga menores o iguales a 0.3 veces el torque de arranque m0 del motor. Es decir si
m0 = 8 mL (torque de carga nominal) entonces que ac = Y incluso trabajando con un
torque menor o igual a 2.4 veces el nominal mL. Esta conclusión, ac = T, también se
cumple para cuando la carga es inductiva resistiva (R - L).
4.- Debido a la escasez en el Mercado Nacional para conseguir un disipador de calor
y peor aún pedirlo por su resistencia térmica, necesitamos utilizar el método descrito

138
en el numeral 2.3.1.1 para su diseño; el cual nos dio excelentes resultados ya que nos
permite escogerlo por; el tamaño, forma física, dimensiones y de acuerdo a esto
conocer su resistencia térmica para tomar una decisión. Como ejemplo de esto los
disipadores escogidos en esta tesis no cumplen con las dimensiones y forma del
dibujado en la figura (2.2); sin embargo se lo escogió por dos razones:
4.1.- En el supuesto caso de haber encontrado el disipador ideal; el tamaño físico que
ocuparía el puente controlado que alimenta a la armadura del motor es demasiado
grande con respecto a otros modelos de convertidores de 3 KW disponibles en el
mercado como el expuesto en la conclusión 8, con lo cual no estaríamos optimizando:
- El costo de construcción del equipo.
- El espacio físico que necesita.
- Peso.
- Facilidad para su transporte.
4.2.- El diseño del disipador ideal fue calculado considerando una temperatura
ambiente en el módulo de Ta = 40 °C5 sin embargo si hacemos que el equipo tenga
adecuada ventilación e incluso si ponemos ventilación forzada podemos hacer Ta = 25
°C con lo cual el disipador que necesitamos (manteniendo la forma de la figura 2.2) es
uno de Aluminio y cuyas dimensiones son 12cm*12cm*2.3cm con 16 aletas a ambos
lados de 3.7mm*2.3cm espaciadas a 2mm y un centro de 3 cm para poner elSCR, todo
esto se calculó utilizando el mismo procedimiento para obtener la figura (2.2). Estas
dimensiones sí.corresponden a los disipadores conseguidos en el Mercado Local;
además en el equipo se dispuso de rejillas y un espacio para ubicar un ventilador en el
caso de ser necesario, esto se menciona en el numeral 2.6.
5.- Al disponer en el módulo industrial de un convertidor tipo puente totalmente
controlado como actuador para el control de la velocidad de la máquina de D.C.,
brindamos al usuario mayor diversidad de aplicaciones para trabajar con la carga ya

139
que el convertidor puede trabajar tanto en el modo de Rectificación como en el de
Inversión, no así como sucede con el convertidor controlado con diodo de conmutación
y el semicontrolado, que pueden trabajar sólo como rectificadores, brindándonos
únicamente acción motriz a la máquina de D.C. En cambio en esta tesis se utilizó el
modo de Rectificación para regular la velocidad del motor D.C. y el modo de Inversión
para utilizarla como freno regenerativo y así disminuir lo más rápido posible la
velocidad del motor (ver figura 3.20) debido a que se hace cero casi al instante su
corriente, como se ve en la figura (3,21).
6.- De acuerdo a los análisis de resultados 2 y 3 podemos decir que los métodos del
Óptimo de Magnitud y Óptimo de Simetría con alisamiento de la consigna, empleados
para el diseño de los reguladores PI de Comente y de Velocidad respectivamente dan
buenos frutos no necesitando en este caso de otro tipo de controlador para mejorar la
respuesta de velocidad y carga del motor.
7.- Las protecciones de Sobrecogiente, Sobrevelocidad y Fallas del Taco a pesar de no
ser dibujadas en el Capítulo HI, sin embargo se puede anotar que en la práctica
detectaron eficazmente la falla y la despejaron de manera rápida ya que también
aprovechan el modo de Inversión en el que se hace trabajar al convertidor tipo puente
controlado para frenar al motor.
8.- Tomando en cuenta el Modulo para controlar la velocidad de SIEMENS con
tecnología análoga Tipo 6RA21 13-OBD20-0 semicontrolado que esta en la página 3/6,
3/14 y 3/17 de la Referencia BC3 y comparándolas con el módulo diseñado, como se
ve en la Tabla 4.1.

140
TABLA 4.1
Construido por
Voltaje de la red
Comente de Armadura
Voltaje de Armadura
Potencia
Peso
Dimensiones
SIEMENS
220 V A.C. monofásicos
15AD.C.
170VD.C
2.6 K.W.
1.9Kg
24 cm * 21 cm * 15 cm
TESIS
220 V A.C. monofásicos
20AD.C.
150VD.C.
3 K.W.
5Kg.
50 cm * 40 cm * 20 cm
Vemos que el nuestro en tamaño es el doble que el de SIEMENS, esto es debido a:
- Las limitaciones tecnológicas del medio
- Esta incluido el transformador de comente que realimenta la Corriente de
Armadura al circuito de control del módulo.
- Disponibilidad económica.
Sin embargo esto se ve compensado con:
- Las mayores bondades con las que se puede operar a la carga,
- Mayor Potencia.
- Podemos trabajar con el mismo módulo hasta 5 KW sólo aumentado la capacidad
de carga que puede manejar el Transformador de Comente.
4.3 RECOMENDACIONES
1.- Se recomienda ubicar el equipo en un lugar de fácil acceso, ventilado y alejado
de vibraciones fuertes con el propósito de no afectar su funcionamiento y evitar
daños tanto mecánicos como eléctricos.
2.- En vista del alto costo que involucra la elaboración de la tesis se recomienda

141
realizar proyectos que sean diseñados para menor potencia de trabajo y disminuir el
alcance ha ser desarrollado en la misma.
3.- Debido a que en la elaboración de la tesis se necesita utilizar equipo caros,
además de un espacio físico donde poder desarrollar el proyecto; se recomienda
implementar algún reglamento interno; por medio del cual el estudiante que realiza
la tesis, identificado ya sea por medio de un carnet, esté en capacidad bajo su
responsabilidad, de poder trabajar y acceder a los laboratorios y su equipo, previa
coordinación con el mismo; y si el caso lo requiere poder desplazar algún
instrumento a otro departamento de la Facultad de Ingeniería Eléctrica.

BIBLIOGRAFÍA
Revistas Especializadas
BRL- IEEE Standard Practicas and Requirements for General Purpose Thyristor
D.C.Drives. IEEE, New York, 1983.
BR2.- Qptimum Snubbers for Power Semiconductora, William McMurray, IEEE
Transactions on Industry Applications, Vol IA-8, No. 5, September-October,
(1972)
Libros Especializados
BLL- Arnulf Hof&nann und Karl Stocker; Thyristor - Himdbuch- Siemens
Aktiengesellschaft, (1976).
BL2 .- BryanNorris; Electronic Power Control and Digital Techniques. MacGraw -
Hill Book Company, 1976.
BL3.- Ciril W. Lander; Power Electronics. MacGraw - Hill Book Company, 1987.
BL4.- Friedrich Fróhr y Fritz Orttenburger; Introducción al Control Electrónico.
Siemens Aktiengesellschaft, Berlín, (1986).
BL5.- Irving L. Kosow; Máquinas Eléctricas y Transformadores. Prentice - Hall Inc.
BL6.- Katsuhiko Ogata; Ingeniería de Control Moderna. Prentice - Hall Inc., 1987.
BL7.- Robert Boylestad y Louis Nashelsky; Electrónica Teoría de Circuitos, Prentice
- Hall Internacional, 1982.
BL8.- Werner Leonhard; Control of Electrical Prives. Springer-Verlag Berlín
Heidelberg, New York Tokyo, (1985).

Manuales y Catálogos
BCl.-Catálogo de Accionamientos a Velocidad Variable. Siemens Aktiengesellschaft,
(1991).
BC2.- Catalog DA12 D.C. for Variable Speed Prives. Siemens Aktiengesellschaft,
(1992).
BC3.- Catalog DA21 Chasis Converters Simoreg for Variable Speed D.C. Prives.
Siemens Aktiengesellschaft, (1991-1992).
BC4.- The World of Variable Speed Prives. Siemens Aktiengesellschaft, (1991-
1992).
B C5. - 6RA22 Simoreg K Converters in Hybrid Technology, Siemens
Aktiengesellschaft, (1991-1992).
BC6.- Motorola Thyristor Pevice Pata, Motorola, 1992.

ANEXO
1

Silicon ConírolSed RectifiersReverse Blocking Triode Thyristors
.. . designed fur industrial and consumar dpplicaiions such as power suppHes;batiery chargürs; temperatura, mutor, liyhl and w«lder controla.
» Económica! for a WicJa Rancjfa of Usas» Hiyh Suigo Curreiit — IjSM " 3bQ Amp• Praclical Ltivwl TrifjgerinQ and Hnldincj Cliaracteribltuíi —
•1 and 5.2 inA { fyp) ui TC •- 25 C* Ruyyed Conslruction in Enliur Pretibíii ur bolalud Stud Packinju
MÁXIMUM RAT1NGS (Tj -- V5 C unloss oihfiiwise notod )
Rnting
'Pejfc Buputiiivtí Forwiml Of llevtjrsu BlacttinjjVoltdye, Noto 1
(Tj • 40 lo i 100'C, 1 2 Sino Wavu,50 Iü 400 MÍ. CjHttJ Op«n)
2N3U71, 2N61722N3B72. 2N61732NUH/3, -'Nal/4
•P«aV. Nnn-nutJUiitivti Forward or fievüisu Ult)ck¡ii(|VuHauíj (i •- 6 nib)
2N3870. 2N61712N3871. 2N61722M3B/2, 2N61732N3Ü/3. ?N6174
•AvBfdiji) On Slale Current, Nulo ?(TC - ''-0 io » fciS'o(TC - « ab o
'Peale Non Hi-¡jeiitiv(i Sutijt: Cunuril(One cyclti. fiO Mi] (Te - ' 6 ti C)
Cifcuil Fusinrj([ - 8.3 nía)
Symbol
orvüfíM
VHSMor
VDSM
'l(AV)
TSM
,2,
Valué
100
400tiOO
160330
700
2211
a'J°
510
Uiilt
Volts
Volts
Anips
Arnps
A2s
2IV3870thru
2M3873
thru2ÍNJ6174
SCRs35 AMPERES RMS
100 thru 600 VOLTS
i tum aiWll t l MU[]ullV
CASE 174-04(TO.2Q3AA)
STYLE 12N3870 tliru 2N3373
-Í CASE 311-021 STYLE 1
(Stud Isolotod)2N6171 thru 2NS174
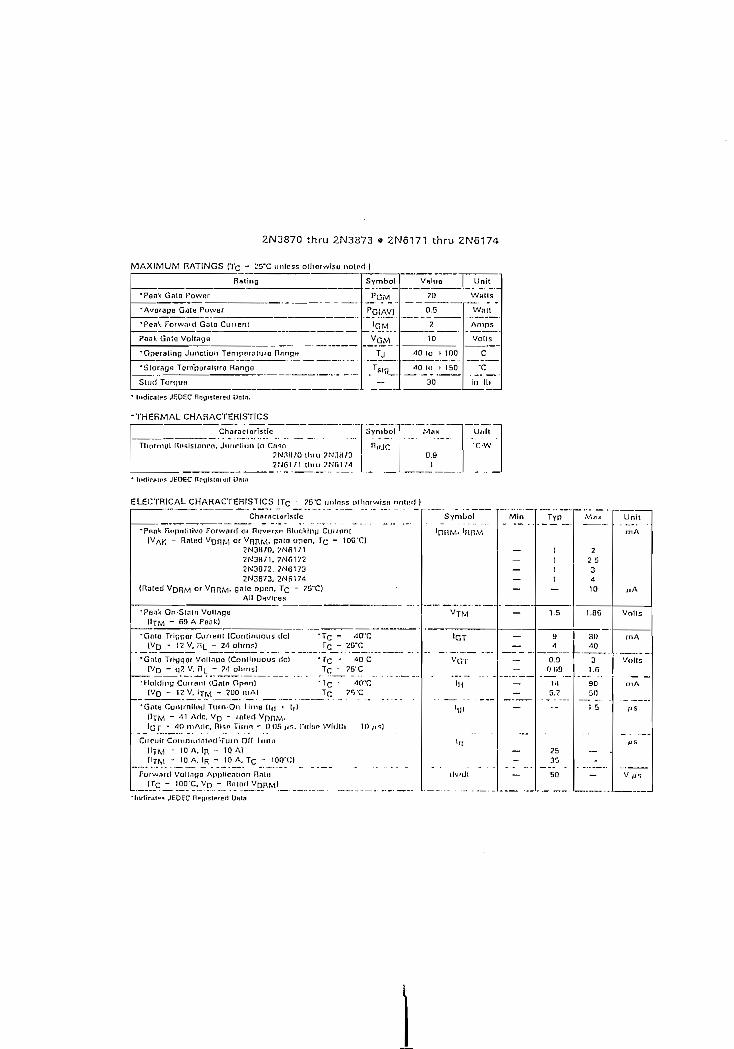
2N3870 thru 2N3873 * 2N6171 thru 2N6174
MÁXIMUM HATINGS (Tc - 25-C unloss otherwiso notpcl ]
Ratíng
*Pea*i Gata PoWBr
•Avofags díte Powar
•Peak ForwimJ Gale Curren!
PcaK Gala Voltage
'Operating Junclion Tempnralufe flfinge
'Gloraga Ternprjr ature Ranga
Slud Torqua
fiyoibol
PGM
PG(AV)
'GM
VGMTJ
rslf)
-
Valué
70
0.5
7
10
•10 lo » 100
AQ lo i 150
30
Unít
WHllS
Wau
Anips
Volls
C
•cin Ib
• ludientes JEDEC RnflislerstJ O.ila.
•THERMAL CHARACTERISTICS
Cnnraclorístic
TI mt nuil nnsisiiinro. Jimrliun m CninPN.1H/0 lliru 7N.1H/32.NG1/1 tliiu '.'Nfil/J
Symbol
n/'JC
Ma«
0.91
Unit
"C'W
' l»rt¡rfltp* .jeOEC Ftp,jístsí.íil Dnln
ELECTRtCAL CHARACTEHISTICS (Tc ?5'C unlrtr-s tiiliniwiRR nnlml )
Chora claris tic
"PñiiK Rfipolitivo Forwnrd oí Rijvprsn HlorAinu CimontIVAK ~ Raled VDnM or VRRM, ¡jnts open, Trj - 100'CÍ
2N3H/0, 7NG1712N3B/1, 7N61722N3872. 2N01732N3873. 2NR174
(Raletl VDRM 0[ VRRM- 9al° open. TQ - ?5"C)All DHVICÜ5
•Pa.ik On-Sialri Voliage
HTM - 69 A Peafc)
•Galo rriníier Currenl (Contintious de) 'T^ - 40"C(VD - 12V, RL - 24 olirnsí I"C - 25'C
'Gnle Triyqet Volt.iflo (Coniiiuious (Je) *TQ - -10 C(Vp - q2 V, RI_ - 7-1 ohtnsj TC • ?r>"C
'Holiliny Cuiiant (Galo Opnn) MC - 40"C(VD - 1Z V. ITM - 200 mAl TC 7 ^ - C
'Gíiia Contrnlliul Tiim-On urna (l,j < lr)
HTM ~ *11 Mr- VD * '"'ffi VDH.M-IGF ' W niAcir. niqn Timo - () OH ;ts. Fiilsn WtiJlti 10 /<•:)
Ctrcuit Cnmniut.ilcíl •Tilín OÍI lunn(I7M - 10 A. IR -- 10 A)
(ITM - 10 A. IR - io A. TC - locraFurwaiil Volt.idB Applicntlon HÍIIH
(TC - 100-C.Vp - n.-iiaíl VDnMl
Symbol
'ntiM. IFIFIM
VTM
IGT
vt-T
'H
'ui
i(,
(IV'lJl
M¡n
——_
—
—
—
—
—
—
-
——
—
_
-
—
TYP
iiii
—
1.5
94
0.0Ofi!)
14
5.2
--
2535
50
Max
22 53&10
l.BG
3040
3l.fi
SO50
1 5
—
- -_
Unit
mA
;iA
Volts
rnA
Volls
niA
PS
í<5
V,JS
* JEDEC nRS!.sii>'ed Dala

2N3870 thru 2N3873 • ?N6171 thru 2N6174
FIGURE 5 - TYPICAL T
DOS O í 0 2 OS l l ) 20 SU 10
FIGURE 0 - PULSE TRIGGER CURRENT
FIGURE a - CATE THICCER VOLTACE
-urr si AI E voi 'MÍE • i; v —
-60 *0 ÍO O 70 10 fill fl(l "XI 170 1*0
ERMAL RESPONSE
70 50 IM 700 SOO 1 DV J Q I S O V
FIGURE 7 - CATE TRIGGER CURRENT
10 ;o o 70 *n FÍO BO 100 norj JUfJCriON [£MPEKAIUREI0C1
FIGURE 9 - HOLDING CUHRENT
O JO <0 Gil 8U 100 UO
11 JU'ICIlllN TEMPERA rUflE I"CI

2N3870 thru 2N3873 • 2N6T71 thru 2N6T74
FIGURE 1 - AVERAGE CUHRENT D6RATING FIGURE 2 - ON STATE POWER QISSIPAT1ON
in is ;n /í. 111
iAV). AVLHACt UN SI Al E CUHKtNl (AMPl
U S O ID Ib ?U ?S 30 Jí. 40
IIIAV). AVIHAGt ON STAI t CUHflEíJI (AMPJ
FIGURE 3 - ON STATECHARACTEHlímCS
II8 IU U 1 fl 7 ¡ ? ti .1 n 34 3 ti 4 I i ü
vi M. MÁXIMUM I f l^rANIAHEUUS Olí i IA I £ VOL I Alit IVItLlM
FIGURE 4 - MÁXIMUM NON RECE TI TI VE
SURGE CURRENT
- I C f ü L t -
!il)f((,t ISHHLI-LOIU AHnFOt lÜWtO- HV HAItn CUIíniM AND VCli
Ij- -íUiu tlÜü"C
'!» 311 bll ¡(1 lü 70 lt) Si) /ü IUONUMBLH Ut CYClES

I
OX3NV

Optimum Snubbers for Power SemiconductorsWILLIAM McMUttRAY, SÉNIOR M E M B E R , IEEE
Abstrae!—It ¡s generally necessary to connect an RO snubheracross a power rectífier or thyristor to absorb the eoergy associatedwith the recovery current of the device and limít the resul t ing voltagespike'and rate of rise tlv/ilt, For a given soubber capacítance, U isshown that ihere is ao optimum damping resistance which minimireathe peak voltage, bur a lower resistance is required to minímize theaverage dv/tlt to the peak. Design procedures are derived for select-ing the capacitance and optimum resistance to limit the peak voltageor do/di to speciñed valúes. The device recovery current is trapped incircuir inducíante, and its energy must be dissipated, while thesnubber produces addít ional losses as the price of performing itslimíting function.
GENERAL EQUATIONS OK R E C O V E K Y VOLTAGETKANÜIEN*T
FOR ANALYSíS of íhc recovery voltage tranüíentappearing across a semiconductor-recüh'er diode or
thyristor device, a power convcrter can usual ly be re-duced to un cquivalunt rircuit of thu fonn áhown ¡n l'ig.1. A voltage ¿', which can be assumtíd stcady throughoutthu transicnt, iri upplied tu u sirrifá IK'L eimiit. Tlu; volt-age e acroSíj thu simbbor ru.-jiátanct: and tru|)acitancu inauríüti appuurs ad n:f:ovi?ry vcjltage un tlu: üL'inicondin.-tordevice. The init ia! capacitor voltuge \¿ zero, but an i n i t i u lcurrent / \s proacnt iu i ho circuit . This iá tho poak rcvüfáerecovery currcat in llm duvict-, which bucumcs catiiblishedin llio inductancc L and \¿ furccd tu tnmafiír to thu RCpalh whcii t l i u d(!vic:ií blucliá. i i l u fk in j í \á n^umt'tl to umtrin u ühort intr-rva!, \\hirli is ccrtainly l!tt¡ rusu i'ur snap-urTdiodeá anií a ruasonablc upproxii i ia t iui i fui* tnosL uLherdevices. Time zero of thu traiwicnt \á the ins tan t \vhcii thedevícc bludíti. The i n i t i a l valué of e \¿ IR. An idual i'G-covury t ransie t iL iá ü l iuwn in l'ig. '2.
Fig. 1. Equivalen!, circnii uf aiiubber.
OEVICECüRÍE)Cll/{ "v-S*"n ~ i :
DEVICE VOLI1CE t
Fig. '2. Idealuei! recovery traiisient.
The peak rccovery current / for a given device is a func-tion of temperaturu, tho pruvioiiá i'urnard currenc beforeapplication of the coinnwtat ing vultagc ¿', and the ratedi/di which is equal tú EIL. Typical or máximum valúesof recovery current (or thu rccovurud chargü, from whichthe current can easily be ealcitlated) aro includud in inanydevice ápecií icutiuiiá as funiHioná uf Ihcse para motera [1 ].
The genera! I.aplace transforins fur the current í andthe voltage e are
U)
Pnper TOD-7'2-í I , approvcil liy ( l ie Puwcr riuiiiicuiiilinitur Cuai-ilee of the I K K I Í Imí i ia l ry ApplifaUuii.i SIR-JL-IJ- for prcauí i tui ionttie 1Q71 Il'ip;!^ Inili i . i try ¡uní < ¡eiiiírul Applical ini in ( í n m p Anima!
Pnmiileeal tlie .Meeting, C'Ievelaml, tUiio, Oi-lubcr 1H-'2I. Tilia \vurk \va= 3iip[)nrtedin parí I)}' i!ie U.¿. Army Mtibility Kíiiiipjnent tieacnrch ¡uiü Oe-velripmeiit Center (MI-^iDC), Fi. Uelvoir. V^., iimler d/niractOAAK 02-B7C-UI60 l l i ru t i ^ l i [lio (¡uneral Klet-iric ricniicdiuliictorProducía Uepi í r in iu i i t , Ai ibum, X.V. .Muauátript rele¡iatíil íur pul)-lirntiiia Fcbniarv '2il, 11)72.
The uuilior is" witlt Cmponiie Hc.-cürcli ¡uní Devulnpiiienl, llen-era! Kliíi'tnc Cornpnny, tíi-Iicnci-iiidj-, N.V. t'JJ-ió.
s+
Thu general ¿olutions ufpresentad. The p;irameterá
ia t iuns wi l lare dufiíiL'd
nuw beas ful-

51)4 TRANSACTIONS QN INDUSTRV APPLICATIONS, SKPTEM BER/OCTOBER 1972
lows. Undamprd na tu ra l f rpqupnry (rad/s):
1
DccroniPiit farlor:
ZL.27,'
(3)
(4)
r < I + +(16)
thR slopp is positivp, and thp ropovory voltíige rises to apeak at a t ime t\h can bo. obtíiinpd by sotting (10)equa! to zoro, yioldíng
For dosignin.K ího snubbor cirouit. it is cnnvnninnt tooxprc-ps thp rqüalions in terms of tho ío||o\vinp normaüzpdparameters. Initial currpnt factor:
I II= - -*/-.E TC
Damping factor:
f =2V7,/C
Note that
(5)
CG)
f ina l pnprgy in capacitor
Case I: Undcrdainpcil Cniícifífnn f < /
Tliis is thc caso of most practica I importanro, sincp if.inc'lndos tho n p f i m u m do^ign of f h o snubbpr r ircuit . Thoangular frequmry of tho diimprd oscillation? is givon by
_ \LV- _ in i t i a l pnprgy in inductanro
-f — sin tít exp (—ai). (9)
The inverse transform of (2) yiplds
e = E - (E - 727)(eos u/ - - sin u í ) exp (-ai)
DiíTcrentiating (9)
= (E -ai
•pxp (-ai) + 7,C
- --sin wM oxp (-ai)- 00)
Thp initial voltagp and slopp cnn bp (Ipclucocl by insppp-t ion of thc oíreuit Fip. 1, or ohtainpcl by .settiug i = O in(0) and (10). Note fhat thp rpsult- is thp. same for critica Ior ovordamping:
(12)
(13)
lf f h i s i n i l i a l slopr is no( positivo, thon f hn i n i t i a l rocovoryvoltago givcn by (1 1) is thp máximum. Ho\vevpr, if
2Í- - 4r:x + X > O (15)
tan wíj = —-
(K - 7?7)2« + -
i-vT
= /Cí"jX)(definÍt-Íon of functton)
« -tan-'/Cr.x)Ci)
(17)
(18)
(19)
(20)
(21)
whoro thp anglo is in thp first or second quadrant, dppnnd-ing lipón \vhothor tho function/(í',x) is positivo or negative,rpsppctivply.
Substituíing fhe valué of ii from (21) into (9), the valuéEI of thp poak rocovory voltago is obtaincd
(R) ^i = E -\- PXp ( — í
. (22)ü)0- wo-C/1
The normalizad peak voltage can bp rpduced to a functionof f and x> dofined as p(f ,x)
• V 1 - 2fx 4- X2. (23)
Tho average rate of Hse of voltage to t-his peak valué is
>'
U tan-'/(f,x)
Case I-A: No Dampíng f = O
Thp pqimtions fnr filis sppcinl rasp rnn be obfaínpdfrom fhe gpneral pquations for undprdamping by setting/?, a, and f erjual to ?,pro, \vhilo u bocomps tu0:
e = 7T(1 - POS woO + ~ sin a-
ríe
ru
(26)
(27)
(28)

MCUDRRAY: OPTIMÜM SNUBBERS FOR POWER SEM:CQNDUCTORS 595
and
tan iJ =
— tan"1
CT&l —
3,x) = ~ = 1 + Vi 4- X'
Ei
ti — tan '
(29)
(30)
(31)
(32)
(33)
The average rate of rise of voltago to thiá peak valué is
— ' = ¿Ciin - f44-^^ U *„.*!,-! .,ft- ,.\V
U tanh-1 £;(f,x)
Case III: Criiically Daniped Condition f = J
For this condition, a = u0, and
''e \/ .
x(l + Vi 4- xj)
(35)
LI TT — tan™1 x
Case //: Overdamped Condition J" > /
For this condition, the paramcter a ís defined as
w = v a 5 — cjo1 == WQ v |" — 1.
Equations (9) and (10) become, respectively,
/ a \ = E — (E — RI) ( cosh at sinh cj¿) exp ( — at)
\ /
+ — sinh wí-exp (—ai) (36)
de / o)2 -I- a27- = (E -RI) 2a cosh ai sinh taidi ^ ' \
(45)
(46)
X- (47)
The inverse transform of (2) yiulds
& = E - (E - RI)(l - at) exp (-ai)
4- {RIat exp (-al). (48)
Dífferentíating (48)
~ = \E(1 - al) + l- Rl(at - 3)1-a exp (-ai). (49)
If condition (15) is satisfied (x < 2/3), the peak voltageis attained at a time íi which CQU be found by setting (49)equal to zero, yielding
1 —
•exp (—ai) + - ( cosh wi sính wí exp ( — ai). (37)C \ /
IF condition (16) holds, the peak voltage occurs at a time¿i obtained by setting (37) equal to zero and solving
(50)
(SO
Substituting froni (ñO) into (4S), the nonnalizcd peak re-covery voltage is
tanh(E - RI)2a + -
ii . . /- - 1 + (1 - x) exp I - (52)
(38)The average ratc of riso of vultage to tliis peak is
f/iA = Ei =
dl)ív /i ~o
of function)-x)-oxp -
tanh"1 1 -x2 -3x
+
- 1 l. (42)
-x
1 - x
(53)
(54)
Substituting íi ínto (36), the samn üxprossion as (22)for the peak recovery voltage EI is ubtained. The normal-ized peak voltage as a function of f and x becomes
ffíf,x) = - = 1 4- exp 'J -
2- (43)
SNUBBER CIRCUIT DESIGN FOH - \ i i N i M U M VOÍ.TAGE SPIKK
The normalizad pcnk vollagc A'i/'/i c t imput t 'd from (23),(43), or (52) is plottod in l-'ig. ¡i :iá u l 'uncliiui uf the dump-ing factor f, with the initi i t l cunxMít fuctüi- x »s n puram-eter. These curves uro similiir to ihosc obtiiined by YonZtistrow and Gallowny f rum nunu-rical «ulution of thedifferentml cquatiui iá of the cia-nit by eomputer methods[1]. For a givcn valué xo of the punimetcr Xi there ia a

59 G I K K B Tn.\NP \CTIONS ON INDUSTRY APPLICATIONS, SEPTEMnER/OCTOUErt 1972
Fip. 3. Pchk vnl tnRp n* funrtíni i nf dumping a mi ín í l in l curren!.
- 0.1,o.i 0.2 4 g 8 10
to a spoeiíied vahío. Thus, if C/?i/7?)0 is ího allowablevoltago ratio, the opt imum snubbor design may be ob-taíned from Fig. 4:
0.4 0.6 0.8 I 2
IK1TUU C U R R E N T FACTOR X 0
Fíg. 4. Optimum pnidiber desipii paramo! ors fnr mínimum vnltage
j i a r l i t ' i i l a r valué f n nf Iho pimmiPler f \vhidi \ v i l l minimizr1
the poak voll;ige n i t io (/-.',. 'A')o- Bolccting J" = ¡-n re¡>resfntsan opt imum Finibher design for minimizing (lio voltagespike \v¡th a givon enpaei tance (assuming tho i m l u c f n n r eL and peak rot'ovor\ eurrení / are ¡)rodetorminod) or forminimizintí (l io ( i í i]i: idtanro roquireil ío I S m i í t!io P|iikc
Xa — funct ion of (55)
/£A
= function of ( — ) (56)\E /a
C = L
(5S)
Tho avoragc f/r/rfí, normalizad \vith respcct to -£u0l isalso pho\vn on Fíg. 4.
N o t o l h a t tho paramólas obfa inc-d frnm Fig. 4 aro opti-rmim only if ilr/tll is of no oonsoquoneo, such as may betho case for diodos and reverse vollagrs 011 thyristors.Hou-evor, reverse ror-overy rli'/dt l imitat icms are now ap-pearing in somo povver dórico spedfioations.
SNUBBEU CUICUIT DEPIGN FOH MÍNIMUM dv/dl
I f tho rorovoring dovíec has a l l iyr is tor on t ine f l ed in-vorsoly aeross i t , Ihen its reverse reoovory dv/dl appoarsín the fonvard din-el iun \v i lh rospect to thnt thyristor,and becomes criticnlly important. For examplc, mnnyoyclooonvertcrs and reversing de motor drives use inverse-parnüel pairs of thyristors. In some inveríers fecdbnckreetifiors are connecícd dirodly ixcross the thyristors.Here ího reverse rorovery of Iho rortif ior oecurs just aftereommutation of the Ihyrisíor, a t imo \vhen dv/út is mostcritical. If the devico itsolf is a bidiroctional thyristor (ofthe triode or diodo typo), its recovery tlv/dt must againbe limitcd,
In diseussing dv/dl, the problom of dcfinition aríses forall rases oxcept a linear riso af ronstant slope. For cxample,1 he iniíial slopo or Míe máximum instantaneous slopo maybe used. Sometimos an exponontini risc is assumod fordeíiniíif; or tosting purposcs. In the ideal case analyzed intlio provious soctinns, \vhero the recovery current is as-snmod (o "snap" off, tho initial dv/dl is theorcticaiíy in-finite. Thorefore, ího dv/dt is lloro defincd as tho averngcplope to the voltagc- ponk. The circuít de.signer and deviceraiing engineer shoulcl eooporaíe in determíning that theactual shapo of the transient is consistent with provontingthe thyristor from solf-triRgoring, \vhich is the mam pur-pose of l imit ing dv/di.
The narmalixod avornge dv/dt oomputod from (24),(44), or (olí) is plot ted in Fig. 5 as a fune t íon of tho clamp-inp fac to r f, \v i l l i the i n i t i a l cnrrent factor x »R " parnm-otor. K ispeen th:il for a (íivt'ii valnc xn of l l i o paramcfor x,tliore ¡s ü pa r t i cu la r dioico of dumping (fn) vvíiieh \vi l lminimizo tho avorage dr/fll at some valuó (tlv/tll)a. Theseop t imum closign parametors nre shmvn in Fig. (í. togetherwi th tho forrospondiiiíi poak vollaf ie ratio (7íi/A")n. from\vhich a smibher may be tiosiíinod lo givo a spocifiod di<t<ll

UCUUMUY: SÍÍUBBERS FOR POWER SEMICONDUCTORS 5D7
I H I I I 4 L E U H H E N T fiCTOH X
10 E 4 I 1 06 04
5. Average dv/dl as funclion üf damping and iniLml current.
O.G o.a i z 4 6 s IQINITWL CURRENT FACTOR XQ
Fig. 6. Optimum snubber parameters for mínimum dv/dl.
recovery current / are predeterminad by other considera-tions) are presentad in Fig. 7. Thu produi-t íSi(do/dí) \vaschosen as a convenient function for ¡i compuior irnnimiza-tion program. Thu design proceduru id as fullows.
1) Select a tolerable peuk voltage l'.'¡ muí calcúlate(Bi/£)o.
2) From Fig. 7, read the correspouding valúes of xojfo( and (dv/dt}ü/-Euo-
3) Calcúlate C, /£, «o, and (du/r/Oo using (57), (58), and(3).
If the resulting valúe of í/y/cíí íá Inrgcr íhan pcrmissible,a larger capacitance is required, and t h u purameter xoshould be selected 011 the basjs of dv/tll Umitation. Toaid this selection, the optimum dv/dl nonnalized \vithrespect to the predetcrmmed factor E-/LI is plotted inFig. S. The procedure íá as follows.
1) For the allowublc (dv/dt)0l calculaLi; (dv/dlh-U/E*.t2) l'Vom Fig. ti, ruad llu¡ uort'íisponding valuó uf xo,
using the "compromisu" curve.3) Knter Fig. 7 \vith this valué xo uncí rcad To und
(fíi/^Jo.4) Calcúlate C and 7? using (f)7) and (ñS), and use the
nearest standard valucü.This compromise dusign is rccomniuiidud for most
practical applicaüons. In rare casca wliLTii tlit¡ limitatíonson peak voltage or dv/dl are abnormally üir ingunt , such asto acccntuate the importance of one o ver thu othur, thenFigs. 4 or 6 and the correspouding curvos on Fig. S may.be used. Howover, note that there iá littlu ímprovcment inthe critica! parameter over,that given by the compromisedesígn for the samo valuu of xo-
A. plot of a typical recovery tranaicnt with a snubberdesigncd for "compromise" damping is ¿liown in Kig. 9,for x = 0.6, f = 0.475. The íhyristor and capacitorvoltagcs aro ahown; the voltage across tlu; resistor (propor-tional to cui'rcnt) is thu dift'orencc betwL'un the t\vo curves.Tho slope of thu dualusd une in Fig. ü \¿ tliü nonnalizedaverage dv/dl.
For the ideal c-asu whuro llio ntíiovi-ry uurrunt is neg-ligible, x -^ O and thu nsymptotea of the "compromise"curves yield
r = 0.9G4
using mínimum capacitance. Note that minimum dv/dl isobtained with less damping than requircd to minimizo thevoltage spike.
COMPROMISE DEÜIGN UF SKUIÍUEU CIRCUIT
In most applications, the peale recovery voltage anddo/dt at-ross a thyrísíor are both important, and a damp-ing factor selected to compromise butween minimumvolíage spike and minimum dv/dt is rccommended. Theset of píiminutL-ra for that amount uf damping wliicli wi l lnmiinmi' tlu: prodnct of A'i and (i/í"'(//)uv fur a givuncapairitancí: (aLil l ussuining l l ia l Llic; indutrtauco L and pirak
C5Ü)
SNUBBER LOSÜES AT TIME UF UECOVERV
First, a gañera] exivááion for l lu t lu¿ai:rf ín :i seríes LCR.circuit fed from a de ¡smirce will bu obtninod in Uinns of theinitial and final sttitu variabk-á. Thwi thi: snubber lossduring the recovery transient is ubtaiiu-il as u spccial case.
Supposc, in the circuit of Fig. 1, lluit tlie capacitorvoltage chuiigfd f rum l'i to 1', muí iho L-urrent changesfrom /i to I-i in a üt iu: inlcrval í'rmn /i tu í«. f f c ¡s the in-atmituiKJOUa c¡i|mcilor vuluigu muí / l l i c iiiálantmicuus

IBEE TIUNHACT1ONS ON INni'STRY APPMC.VTIONS, SBPTE.MOKn/OCTOBKn 1972
0.10.1
Fig. 7.
0.2 0.4 0.6 0.8 I ZINIT1AL CURflENT FACTOR X0
Opliimun smihlier pnrnmelers fnr romprnmipe
G 8 |0
"Fig. s.
0.1 I 10
I N 1 I I A I C U R R E N ! F A C T O R X0
Optimiiiu rff'til furlor." ruid .iddiMnnnl lo?»? tortor.
THTHtSTOHVOLUGE
\
'CÍFÍCIIORVOLTAGE
ti)0t, RAOUHS
Fig, 9. . Tvpical rerovery voIltiRe transient. % — 0.6, f = Ü.475.
rurrent, t-hey arp rplntrd by
/ di — C //i'. (00)
Tiie IOPS ir in rpsistor 72 muy be dpterminpd frorn thepuargy balance rcquiromont:
— incrrase in onergy storedin p.ipncitor
iiicrpfiKp ín cnorgy storedin ¡miiu'lor
loss = cnergy from sourco
rti rii pl'i rl*Í-R di = E \ rll - C v dv - L \ di (0
J ii J tt J 1*1 J i,
= C(r2-
(01)
- /i3) C62)
-A8). (63)
This ís t l ip (losirod gciipni! pxprpssion for loss. For theRiuibbor circuit, l"i = O, 1% = /í, I\ I, /2 — O
ir =
(60)
Noto fha l all »f íhp pnorgy írappr-d in HIP induotancent UIP timo of rpí-ovnry is ínpvitably dissipated. Thefactor 1/x2, plotfpd in Kig. R. rpprt'SPnls thp por unit addi-tioníil ioss, which is thp penalty paid for l imi t inR dv/dt andthn voltngo spikn. Rnsidps thp UIPS ¡xt thf; l imo of rorovery,tho snubbpr \vil l d iwipüíp cnprtiy nrpml to \/'2C (A/O2 ¡Wtinip a stpp volNiííc chaiiRc (A/O ncciir.s in tlin voll.igewnvpform aerosK thp dcvicn. Tiu* IOPKPS dnp lo tho sinoothlyvarying portions of the wnvcform, suoli as a sinusoidalsupply vollngp, arp gonorally ncgiigiblp in comparisonwitli the stpp IOFFPS.

: OPTIMUM S N Ü H U E R S FOH PO1VER SEMICONDUCTORS 590
SNUBBER Loss AND THYRISTOR DISSIPATIONAT TIME OF Timtf ON
In particular, whcn u thyristor turna un from a vultageE, an cnurgy loas \/'l CR~ wi l l oceur. Because uf thu íiiiilcvoltage falf t ime of the thyriülor, sume of this encrgy willbe dissipated in the thyristor instead of the dumping re-sistor, and the capacitor discharge increases the initialdi/di in the thyristor. An estímate of the fraction of thesnubber discharge loss that is absorbed by the thyristorcan be derivcd if some simplifying nssumption is made rc-garding thc thyristor voltage full characteristic. Ifor ex-ample, suppose that the thyristor voltage falls exponen-tialry with a time constant T and is independent of thecurrent, then
(66)e = E exp I — -
Note that this exercise is not intended to imply thatany actual thyristor has such a characteristic, but only topróvida a simple order of magnítude loss estímate if theobservad fall intcrval can be approxímately fit to such acurve.
The dischargc current i of a snubber havíng a time con-stant T, = RC is given by
JBR r. -
A / texp i exp - - (07)
The energy W, absorbed by the thyristor is then
W = | eí di = •— —I'r , fgs)' J o 2 R T , + T
which is, as a fraction of the total loss
(00)r. -r- r
This result simply statcs that the loss \¿ divided behveenthe thyristor and its snubber in proportion to their re-spective time constants.
If the rise of load current iL in a parallel path throughthe same thyristor is Ümited by an inductance L and drívenby the voltage (E — e], where the thyristor voltage e ís thesame asstimed oxponuntial fal l (lili), then
diL
('0)
(71)
The thyristor dissipation produced by this load current
= rJo
(72)
In practico, th« rise of load fiirroní will not continué in-(lefinitcly, but w i l l í c rminat i : at üoint! ]cvt;l IL. Ifuwcvcr,(72) fur í l i t : riwitcli ing losa w i l l iu¡ appntxi inatcly Lriu- if t h utime tu ruach the currunt IL '^ üuvcjml Linius gruatur tlmn
Flg. 10. Forwurd poturized siiubber.
Fig. 11. Reverse püliiiúzed ¡simbber.
Fíg. 1'2. Unpolarized siiubber.
the time constunt r. If the snubber time; constunt is muchgreater than the thyristor fall timo (r, » r), Lhe ratio ofthe twp coutributions to tho thyris tur switching losssimplifies to
(73)
When thc snubber dischargc results in cxccssive thy-ristor swítching loss ]!'„ a polarizcd snubber urrangünientshouíd be considerad. Where thu priniary function of thesnubber is to limit thu fonvard dv/ilt ajjplicsd to a thyristorat the tirne of recovery of an inversu fuudback rcctih'er,the schcme showii ín Kig. 10 is of tun iiái-d. The resistor R\s the dampíng resistance efTective during furward dv/iít,
while R-i is a much largor rcsistaiiue to l inut tho snubberdischarge current when the t l iyriálor \s fircd.
When forward voltagü is rcapplicd lo a tliy"stor ns II
rariip of relatívely low dv/dt, the prime purpose of thesnubber is to limit thc reverse voltage spiku. Here, íhearrangomont of Fig. 11 can be uscd lo advantage. Damp-ing resistance R\s efTcctivo iluring rtivtrrát! ivcovcry, whilercsistance R-i of liiglicr v u l u u tlischargcd t l i u snubber ua-pacilur C during I h ü puriud of f u rwan l vol t i ígu bcifoi'Q thethyrísLor is [irud ugtiin.

600 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, SBPTEMBER/OCTOBER 1972
Note that polarizod smibbers do not rpdupo thn pircuitlossos, but only prorent tlio IOSPOR from boing dissipatodin thc íhvrislor. For exampie, a reverse polarized snubberprevente positivo charge from bcing put on the snubbercapacitor durinR thp to\v-loss ramp riv/dl, but the biockedrcvprsp chargo is dissipaíod ¡n thp disphargo resistor,
Wl i tMi a pair of fhyristors arp connoctod in invorseparaliol, as in a cyHocnnvprtor, thp snubbpr must bp cf-fcetivp during rpcovery of pithpr pnlarity. Thprpforp, apolarÍ7,ing arrangornent does not apponr to bp practica!,as indicatpd in Fig. 12. Howevor, it may bo possiblp to ro-duop thp smibbpr ."iüo by pmploying nonlinoíir rc.ictorswhich areunsaturafpd and liave a high valué of induptanceat thc t ime of rpcovery \vhen tho ourrpnt is cióse to zo.ro.Such reactor?, shown in Figs. 11 nnd 12, also reduce theinitial di/fH n f t c r tu rn on [2]. Kxperionce. has shown thatnonlinenr roactors caminí be advnntagoously employpcí incircuit arrnngomonts of thp typp shown in Fig. 10.
CONCMJSIONS
A procedure for pelect ing tho op t imum rnpnc i t anpp anddamping rpp'iRtancp for a pimplo pniibbor uscd to l imit therccovery transiení of po\ver rectifiers or thyristors hasbecn presented. In ?ome circuits, the rccovery of one deviceproduces stops of voltnpe not only across itself but acrossother deviees in i l i n pircuit as \vpll . These other dovicesoften have snubbei'p whicli contribute to siipprppsion of(lie transient, and t l io $Í7,p of thp snubber provided for pachdovipp inn.v bp rcduccd. The eimiit nctiou during t l ip re-covery trnusíent c:m ofíen, but not ahvnys, be reprcsfiitedby nn pquivalent circuil of thp simple form in Fig. 1 [3],[4]. Sometimos n snubbor dosigncd to snppress ono tran-
sient will not be optimum for suppressing nnother transicn.occurring at a different time in the cycle and a com-promiso must be madc. More complex snubber arrange-ments may nlso be used, such as the bridge circuit [4].
The energy of the device recovery current trapped inthc commutating ínductance must be dissipated in thesnubber, and the charging of the snubber capacitor by avottago stop causes addit ional losaos as the price of HaHmiting function. In the typicai transient shown in Fig. 9,thc additional loss at the time of rpcovery amounts to2.7S times the energy 1/2 Z//2. When the thyristor is sub-seciuentl}' firecl, the capacitor pnprgy is dissipated, and aconsiderable fractíon of it may bp absorbed by the thy-ristor if the snubbor is not polnrized. If the turn-on voltageis the same as thc commutat ing voltage, the dischargeloss is also 2.7S timos the trapped recovery energy. Thusthe nood to dissipate recoven' energy rpqutros a total addi-tional dissipation of about six times that recovory energy.For high frequeney oporation, thc need for devicos havinga small recovery curront and high dv/dt capability as wellas high di/dt capability becomes apparont.
REFERENCBS[1] F., K, Von Zastrow and J. It. G.allownv, "Commutfttiuii be-
havior of díITused high ciirrent rectifier diodes," in Con/, ¡ice.,!Pfí4 ÍBEE Int. Conv. lícc., pt. 4, p. 100-113. (Also nvnHnbleGR-SPU Appl i rnf ion Note 200.42, June IflG/í .)
[2] U. A. Pnice and P. Wood, "Ñnnlineftr i-e.ictors as protcctiveeienienls ínr l l ivr is lnr circuid," 7EEE Trans. Aíagn., vnl. MAG-.3, pp. 2a8-l>32,'Srpt. I«G7.
[,'1| J. U. Hice íind \j. F.. Ni(;kpls, "CommuUiUon du/ilL fífTects iatliyristor tíiree-phnse liridge ronvertcrs," ¡ERE 7'rans, Ind.Grn. Á-ppL, vol. KlA-4, pp. R65-672; Nov./Uec 1908.
[41 (1. Tíñele, " l í ic l iHinien für die Benies.sung der Tragerspeicheref-fekt-Besrh.irtiing von TliyrÍRtoren," ("Uuidíng principies for thede^ign of carricr-storage effect ronnectiuns for thyristors"]EbklTQtfch. Z, Ausg. A, vol. flü, no. 14, pp. 347-352, 1909.

ANEXO
3

01 02 03
— S
_j —5Z.-
H
£T2
1"
Aus
gang
Büd
16
.12
Scha
llun
g.
mil
der
dic
Sle
ueri
mpu
lse
wah
rend
de
r nc
gali
vcn
Spc
rrph
asc
untc
rdrü
ckl
wcr
den
(T T
hyri
sior
en,
ü Im
puls
íibc
rlra
gcr,
W S
pann
ungs
wan
dlcr
)
slor
cn o
der
der
Thy
risl
orke
tle,
z.B
, üb
er S
pann
ungs
wán
dler
, er
faB
t un
d ¡n
ein
erU
mse
izsc
halt
ung
ausg
ewer
tel
wer
den.
Der
Im
puls
am
A
usga
ng d
es S
teue
rsat
zes
wir
d da
nn i
n de
m A
ugcn
blic
k un
tcrb
roch
en,
in d
em S
perr
span
nung
am
zug
ehor
i-ge
n T
hyri
slor
ers
ch'e
int
Eín
e en
lspr
cche
nde
Pri
nzip
scha
ltun
g is
t im
B
ild 1
6.12
darg
csie
lH.
17.
Kül
iluu
g vo
n H
albl
eUer
bauc
leni
cntc
n
Die
bei
Bel
astu
ng c
ntst
ehen
de V
crlu
slw
iirm
c hc
izt
den
Thy
ríst
or a
uf.
Dur
ch a
us-
reic
hend
e K
ühlu
ng k
ann
dieT
able
tten
tem
penU
ur jc
doch
inn
erha
lb d
er z
ulas
sigc
n
Gre
nzen
geh
alle
n w
erde
n.
Je s
tark
er m
an e
inen
Thy
riao
r kü
hlt,
dest
o ho
hcr
kann
man
ihn
str
omm
iiD
ig a
us-
nutz
en.
Vor
auss
etzu
ng d
abci
íst
, da
D s
eine
m
axim
ale
Stro
mlr
agrá
higk
eit,
die
ímG
renz
cfíc
ktiv
slro
m z
um A
usdr
uck
kom
mt,
nich
t üb
crsc
hrit
ten
wir
d. D
as M
alí
Tur
das
tCüh
lver
mog
en c
ines
ÍC
ühlk
orpe
rs i
st s
ein
Wii
rmew
idcr
stan
d fi
lhic
. D
K v
orn
K.ü
hlko
rper
ohn
e Ü
bcrs
chrc
itun
g de
r ho
chst
zula
ssig
cn T
abtc
tlen
lem
pera
iur
íí,m
abfi
ihrb
aren
V
crlu
ste
crre
chne
n si
ch n
ach
der
:iuf
Sei
tc 8
7 ab
gele
ílei
en B
üZie
hung
,
GIe
ichu
ng(1
2.4)
,
mil
R.h
ju^^
ihG
+ ^
ih
Der
in
ncre
Wii
rmcw
ider
stan
d R
thG
des
Thy
risi
ors
ist
ein
den
Dai
enbl
iill
em z
uen
lneh
men
dcr
Fest
wer
t. D
er i
hcrm
isch
c Ü
bers
ungs
wid
ersi
ajK
l R
IK;K
hii
ngt
von
der
Gro
tk u
nd Q
uali
íat
der
Kon
íakt
niic
he x
wis
chen
Thy
rist
or
und
Kii
hlko
rper
sow
ie v
om A
nprc
lklr
uck
ab.
Bci
ordn
ungs
gcm
aüer
Mon
tagc
kan
o au
ch h
icrR
ir
cin
bcst
imm
ler
Fest
wcr
t ci
nges
ctzi
wer
den.
Bei
m O
hlko
rper
wid
cist
and
R,,K
hat
man
es
hing
egen
mil
rine
r va
riab
len
Gro
tíe
zu t
un.
Die
wes
entl
ichc
n, d
co W
crt
Klh
t bcs
tim
mcn
den
Fai
torc
o si
nd d
abei
For
m,
Gro
Qe
und
Mat
eria
J de
s K
Uhl
korp
ers
sow
ie d
¡c I
nten
sita
l de
r K
ülih
ing,
dic
in
der
Wh'
rmeÜ
berg
angs
zahl
a z
ura
Aus
druc
k ko
mm
t.
Zun
iich
st s
elle
n ei
nige
gru
ndle
gcnd
e B
cgrir
Te d
er L
uftk
ühlu
ng c
rlau
tcrt
und
dan
nní
ihcr
auf
die
Bcr
cchn
ung
voo
Küh
lble
chen
und
Küh
lkor
pera
ein
gega
ugcn
wcr
den.
17.1
. E
krec
hnun
E TO
« íü
hlbl
ecfc
oi u
nd K
ühlk
ürpe
m
L,u
ftkü
hluo
gt g
rund
lege
odc
Bui
eáun
ge*
und
Beg
rífTe
Strc
icht
LuH
an
eina
-ebc
naiv
aufg
chei
zlcn
Wan
d (T
empc
ratu
r 3J
vorb
ci, s
o íib
cr-
nim
mt se
je S
ckun
de c
inc
bali
mm
te W
arm
emcn
gc.
Die
dad
urch
em
stch
ende

¡^ i
n W
ist
prop
orli
onal
de
r O
berO
achc
F
dies
er
Wan
d un
d dc
r T
cmpe
ratu
rdil
Tcr
enz
(ÍÍK
—fl
yj z
wis
diai
Wan
d un
d U
mge
bung
(ííu
):
pK^'F
(&K-o
u).
(i?-')
Die
..P
ropo
rtio
nali
tats
kons
tant
e" d
iesc
r B
ezie
hung
wir
d ai
s
\\urm
eübe
rf>
fingS
íahl
a.
in W
/(cm
J K
)
bezc
ichn
et.
Die
Gro
De
der
Zah
l a
wir
d in
ers
ter
Lim
e da
von
besi
imm
t, ob
dí
eL
uíl
info
lge
rein
er Í
Con
vekt
ion
vorb
eist
rom
t (.
.Sel
bstb
elüT
lung
") o
dcro
bsie
an
der
Wan
d en
tlan
g ge
blas
cn
wir
d (.
.Fre
mdb
elüí
lung
").
Im I
clzt
cren
Fal
le g
ewin
nt m
anw
esen
tlic
h ho
herc
a-W
erte
und
díe
Küh
lung
wir
d w
irks
amer
.
Das
Sil
iziu
mel
emcn
t, in
dem
die
War
me
enls
tehL
hat
sel
bsl
nur
eine
rel
ativ
klc
ine
Obe
rflá
'che
Fsí.
Auf
grun
d de
r G
leÍc
hung
()7.
l) k
ann.
man
bei
die
ser
Flac
heng
roQ
eka
um e
ine
brau
chba
rc K
ühlu
ng e
rwar
len.
Dur
ch
ciñe
n gc
eígn
etcn
K
ühlk
orpe
rka
nn a
ber
die
lats
achl
ích
wir
ksam
e O
berf
lach
e F
um e
úi
Vie
lfac
hes
verg
roÜ
ert
wcr
den.
Wic
htig
ist
nur
, daG
die
War
me
gut
zu d
en K
Ühi
nüch
en h
ingc
leit
el w
ird.
Wat
mel
lua
Enl
lem
ung
X
Tcm
pcra
lurg
dalk
im
Thy
ríit
or u
nd K
Uhl
korp
cr b
cí A
bfuh
r vo
n V
crlu
slw
arm
c. D
crR
íppc
nwir
kung
sgra
d r/
isl
em M
iQ T
ur d
en T
cmpc
ralu
rabf
all
innc
rbul
b dc
r R
ippc
n
190
líild
17.
1 zc
igt
den
War
mcf
lufl
vo
m T
hyri
slor
zum
Kil
hlko
rper
. D
anin
ler
ist
das
Tem
pera
turg
efii
lle
aufg
etra
gen,
das
der
Wii
rmen
uD a
n de
n M
aler
ialw
idcr
stii
ndcn
von
Thy
rist
or u
nd
K.ü
hlko
rper
erz
eugl
. Je
wei
ler
cine
Küh
lnpp
e vo
m
Wii
rme-
¿tnt
rum
enl
fcrn
t ¡s
t, de
slo
nied
rige
r is
t ih
rc T
empc
ralu
r 3R
(0)
am R
ippü
iifu
Ü u
ndil
amil
ihrc
KÜ
Iill
eíst
ung
PKR.
Die
se w
ird
aber
nic
ht a
lleí
n du
rch
die
Tem
pcra
lur
artí
War
mec
intr
itt
best
imm
t, so
nder
n ga
nz w
esen
tlic
h au
ch d
urch
den
Tem
pera
tur-
uhra
ll in
der
Rip
pe x
lbsl
. B
ei d
er
Ber
echn
ung
der
Kül
ille
istu
ng ¡
st d
csha
lb n
ichi
ilií
í'Übe
rtem
pera
lur
A3R
(0)
am
Ein
trit
l ei
nzus
cl7.
en, s
onde
rn d
ie e
llck
live
, m
ulle
reÜ
bert
cmpc
ratu
r ¿ü
,,,,
. E
in M
aC T
ur d
as T
empe
ratu
rger
állc
in
der
Rip
pe
ist
dcr
soge
nann
te
(17.
2)
(17.
3)
Mod
ifiz
iert
m
an d
ie G
le¡c
hung
(l7.
I)
so g
ewin
nt m
an d
en R
ippe
nwir
kung
sgra
d
Ans
chau
lích
kan
n m
an a
uch
sagc
n: D
er
Rip
penw
irku
ngsg
rad
gibt
an,
wcl
chcr
Bru
chlc
il dc
r R
ippc
nnüc
he
F m
íl de
r vo
llen
Ü
bcrt
empe
ratu
r A
.9R(0
) aj
ii Fu
üw
irks
am i
st D
a de
r R
ippe
nwir
kung
sgra
d fi
írdi
e B
erec
hnun
g vo
n K
ühlr
ippe
n vo
nzc
nlra
ler
Bed
eutu
ng i
sl,
beda
rfer
noc
h ei
ner
gcna
uere
n B
elra
chiu
ng.
Ikm
essu
ng r
on K
ühlr
ippt
n
Je n
ach
Auf
bau
cine
s K
ühlk
orpe
rs
hat
man
es
mil
stir
nbch
eizt
cn
Lan
gsri
ppen
(lin
eare
W
arni
eaus
brei
tung
) od
er
mit
zcnl
ralb
ehei
zten
R
adia
lrip
pen
[rad
íale
War
mea
usbr
eilu
ng)
zu t
un.
Die
Ber
echn
ung
des
Tem
pera
turv
erla
ufes
in
eine
r un
endi
ich
ausg
edch
nlen
Liin
gs-
ripp
e (ü
hrt
zu d
er E
ipon
enti
alfu
nkti
on
mil
der
sogc
nann
tcn
JCri
tisc
hen
Liin
ge"
/K im
E.x
ponc
nien
. d¡e
ein
e F
unkl
ion
der
War
mel
eilz
ahl
i, d
er R
ippe
ndic
kc í
/ un
d dc
r W
arm
eiib
erga
ugsz
ahl
a is
t:
(17.
5)
Die
GIe
ichu
ngen
(l7.
4) u
nd (
17.5
) lie
fern
wcs
enlli
che
Inro
rmai
ione
n fi
ir d
ie z
wec
k-m
aflig
e D
imen
sion
icru
ng,
Ein
mal
sol
len
Küh
lrip
pen
¡n i
hrer
IJi
ngc
den
Wcr
t !K
nich
t w
eit
über
schr
eiie
n, d
a so
nst
die
Tem
pera
lur
ín d
en e
nire
rntc
ren
Rip
pcn-
bere
ichc
n zu
jla
rk a
bain
kt u
nd d
iese
zur
Küh
lung
Icau
m m
erkl
ich
bcit
rage
n. D
as
191

bcde
utcl
. diil
i es
sic
h bc
zogc
n au
fdcn
M
alcr
iala
ufw
nrtd
. ni
el"
!¿il"
it di
c R
ippc
?u
lang
zu
mac
hen.
Man
wir
d si
ch d
esha
lb
im a
llge
mei
nen
an d
ic F
ausl
rege
l ha
llen
:
'£/*
.A
nder
crsc
its
sagt
G
leíc
hung
(17.
5) a
us,
daB
ncb
en
eine
r gu
ien
Leit
ráhi
gkci
l de
sM
ater
ials
(K
upfe
r, A
lum
iniu
m)
auch
d¡c
Inl
ensi
tal
der
Kuh
lung
sta
rk e
inge
ht. B
eiFr
emdb
clii
riun
g ni
mm
t di
c kr
itis
chc
Lan
ge
ents
prec
hend
de
m
Anw
nchs
en
der
War
rncü
berg
angs
zahl
ot a
b. M
an k
ann
dies
jedo
ch d
urch
ein
e en
lspr
eche
nd g
rb'B
ere
Rip
pend
icke
kom
pcns
icre
n. D
iese
rSac
hvcr
halt
laE
it au
ch v
erst
ehen
. war
um I
Ciih
l-kí
irpe
r Tu
r E
igen
konv
ekti
on u
nd F
rcm
dbel
urtu
ng u
nter
schi
cdli
ch o
ptim
iert
wer
den
míis
sen.
Bei
der
R
adia
lrip
pe
ist
dic
Gle
íchu
ng d
es T
empe
ratu
rver
lauf
cs e
rheb
lich
ko
m-
pltz
ierl
er, d
a es
sic
h hi
cr u
m e
'm Z
ylin
derp
robl
em h
ande
jt, b
ei d
em a
uüer
dem
no
chdc
r E
inst
rom
radí
us d
er W
arm
e (I
nnen
radi
us d
er R
adia
lrip
pe)
zu b
crüc
ksic
htig
enist
. A
nalo
g de
r ,,K
.ritÍ
sche
n L
ange
" de
r L
angs
ripp
e er
sche
int
in d
er T
empe
ralu
r-gl
eich
ung
der
Rad
ialr
ippe
ais
Pa
ram
etcr
grbB
e de
r ..K
riti
sche
R
adiu
s"
r^J
]
—
117.
61
Die
für
die
Lii
ngsr
ippe
ang
esle
lllc
n Ü
bcrl
egun
gcn
gclle
ti du
mil
in g
lcic
her
VVci
sefi
ir d
ie R
adia
lrip
pe.
In d
er
Prax
is b
edeu
let
dies
, daD
es
unw
irts
chaf
llic
h w
iire.
den
Aul
ienr
adiu
s r.
eine
r R
adia
lrip
pe
grb'
Der
ais
den
kri
lisc
hen
Rud
ius
zu w
Ühl
en:
Aus
B
ild 1
7.2
kb'n
nen
die
Gro
Ben
/K o
der
r^ T
ur d
ie ü
blic
hen
Rip
penm
aler
iali
en
Kup
fer
und
Alu
min
ium
abg
eles
en
wer
den.
6 B
10 -K
)'1W
/(cm
rK)
Bil
d 17
.2
Kri
lisc
he L
ange
1K
und
Icri
tisc
hcr
Rad
ius
rK v
on K
upfe
r- u
nd A
lum
iniu
mri
pp
en a
is
Fun
lcli
on d
er W
arm
eiib
crg
ang
szah
l a
und
dcr
Rip
pcnd
iclc
e ti
Die
T
abel
le 1
7.1
gíbt
au
Ger
dem
ein
en
Ülie
rblic
k üb
er
die
War
mel
eiiz
^hl
Á de
rge
brii
uchl
iche
n K
ühlk
orpc
rmal
eria
lien
, wob
ei R
emei
sen
nur
verg
leic
hsha
ltxr
r au
f-ge
führ
l is
t. D
ie
Leg
íeru
ng A
1SÍ1
3 w
ird
beis
piel
swei
se
für
díc
Siem
ens-
Slan
dard
-kü
hlko
rper
ver
wen
del.
Hib
ulli
: 17
.1
VV
ünnc
Icil
zahí
A f
ür g
chrü
uchl
ichc
Rip
pcnm
alcr
iali
cn
Mal
cría
!
Elc
lctr
olyt
kupf
cr (
Wal
zku
pfe
r. K
up
ferb
kcíi)
Kup
ferg
uÜR
cin
alu
min
ium
Alu
-Sili
ziu
mIt
giü
run
g A
lSi
13A
ISil
Rci
neis
en
Á W/t
cm K
)
3.80
3.20
ÍIO
1.60
1.80
0.65
Niic
ít di
esen
A
usfü
hrun
gen
über
die
kr
itis
ehen
A
bine
ssun
gen
eine
r K
ühlr
ippc
erke
nnt
man
. da
tl d
cr ..
Rip
penw
irku
ngsg
rnd"
- n
amli
ch d
ie s
umm
uris
che
Aus
sage
über
den
Ein
íluD
der
Rip
pcna
usde
hmm
g in
ers
ier
Lin
ic e
ine
Funk
iion
des
Vcr
-lii
ülni
sses
//ÍK
bzw
. rj
rK
ist.
In D
ild 1
7.3
¡si d
er R
ippe
nwir
kung
sgni
d //
von
Liin
gs-
ripp
en a
is F
uiík
lion
des
Ver
halt
niss
es /
./K j
urge
trag
en.
Der
R
ippe
nwir
kung
sgra
dvo
n R
adia
lrip
pen
¡st d
em B
ild 1
7.4
zu e
ninc
haie
n. D
abei
ist
zus
atzi
ich
das
Vcr
háit
-ni
s vo
n W
ürm
eein
slro
mra
dius
r¡
zuñí
kii
tísc
hen
Rad
íus
rK z
u be
rück
sicb
lige
n.
n
0
/= 0
— w
^r
2
— ~.
. — •—
^^ 0.
"-
.
— - —
'
4
. 0.
-,
6 0.
^-s.
8 1.0
1.
1 L
^s--
_^^^1
I 1.
•^^
\•
^^^
3 10
Bild
17.3
Rip
pen
wii
tun
gsg
rad
(/ vo
n ü
ing
srip
pcn
in
Abh
angi
gkci
l vo
m V
crha
llni
s R
ipp
oil
ang
c /
zu k
rili
scbe
r L
ang
e /fc
. D
ie L
cisl
u/ig
P b
czei
dbnc
l di
e ir
a F
uD d
cr
R-i
ppc
cins
UcM
iicn
deW
arro
e in
Wal
l
193

Bild
17.4
Wir
kung
sgra
d r\n
Rad
ialn
ppen
in
Abhü
ngig
keil
vom
Vcrh
ííltn
is A
uÜen
radi
us r
. zu
krili
sche
in R
aiiiu
s /v
.Par
amct
er i
st d
as V
erha
ltnis
Inn
onra
díus
r¡z
u kr
ilisc
hein
Rad
ius r
K
Erg
anze
nd s
ei n
och
bem
erkt
, da
B R
adia
lrip
pen
in d
cr R
egcl
kei
ncn
rund
en,
son-
dem
ein
en
rech
teck
igen
Zus
chni
tl ha
ben.
In
dies
em F
alle
err
echn
el m
an,
sofe
rnda
s Se
iten
verh
altn
is
h:b
nich
t gr
oBer
ai
s 1:
2 is
i. de
n ef
fcki
ivcn
A
uBen
radi
us
genü
gend
gen
au a
us d
er P
iach
e
(17.
7)
Wam
ieüb
erga
ngsz
flhl
bei
Luf
tküh
l'ing
Dic
War
mea
bfuh
r cr
folg
t st
ets
durc
h S
trah
lung
(aj
und
Kon
vekt
ion
(o^J
. B
ei d
erK
onve
ktio
n is
t zw
isch
cn
Eig
cnko
nvck
tion
(S
elbs
tbel
üftu
ng)
und
crzw
ungc
ner
Kon
vekt
ion
(Fre
mdb
eiüf
tung
) zu
unt
ersc
heid
en.
Die
War
meü
berg
angs
zahl
bei
Sel
bsib
elüf
tung
aS
B
setz
t si
ch i
m w
escn
llic
hen
aus
zwei
Kom
pone
nlen
zus
amm
en
(Büd
17.
5),
ná'm
lích
aus
dem
A
ntei
i de
r S
trah
lung
und
dcm
der
K
onve
ktio
n- D
er S
lrah
lung
sant
eii
wir
d du
rch
das
Em
issi
onsv
erha
ltni
s un
d ci
ñen
sogc
nann
tcn
Abd
cckf
aito
r/A
bc-
einf
luB
t:
°SB=
£(I
-/A
)^+
C(C
. (1
7.8)
Dcr
Kon
vekt
ions
ante
il aK
nim
ml
weg
en d
er a
bnch
mcn
den
Luf
tdic
hte
in g
roB
ercn
Hoh
cn a
b. D
iesc
r Ei
nflu
D b
rauc
ht a
ber
erst
bei
Hoh
cn ü
bcr
lÜO
Om
NN
ber
üclc
-
íiild
17.
5W
arm
cilh
crga
nesa
ihl 2
^, b
ei .S
clbs
ibdi
iriw
iy i
n A
blia
ngig
kcit
von
der
mul
lere
nR
ippe
niib
cric
mpc
riuu
r A
3,(U
und
dcr
Elip
penl
iulic
h.
Die
Ken
nlin
icn
gelle
n fi
ir A
ufsl
cllu
ngsh
ohcn
< K
KKÍ i
n un
d U
mgc
bung
slcm
panl
urcn
von
-Ü b
is J
O °C
. Tem
er fi
ir ei
nzel
ne. f
rcis
tehc
nde.
lac
kicr
lc i
llccl
ie (
—);
fúr
mch
rcre
. im
Abs
tand
02
h ne
bene
inan
ders
lche
ndc,
lac
kier
le u
nd a
nnal
iern
dre
chic
ckig
e B
lcch
e (-
-I
sich
ligt
zu
wer
den;
bei
500
0 m
üb
er N
N
muB
man
mil
eíne
m A
bsin
ken
von
aK a
uf0.
75 s
eine
s no
rmal
en W
crte
s re
chne
n. E
inze
lhei
len
hier
zu f
indc
t m
an i
n de
r L
iter
a-lu
r [3
]. D
ie W
arm
cübe
rgai
igsz
ahl
asn
wei
sl c
ine
geri
ngc
Tem
pera
liir
abhi
ingi
gkei
lau
f. w
ic d
em B
ild 1
7.5
zu e
ntnc
hmcn
isl
; da
nebe
n la
Üt
die
Dar
slcl
lung
uuch
Ein
-ni
isse
dcr
rau
mli
chen
Geo
mel
ric
der
Kii
hini
ichc
-
Ble
chho
he k
, A
bsta
nd
nebe
n-
eina
ndcr
steh
ende
r B
lcch
e -
erkc
nnen
.
Die
\V
arm
eübe
rgan
&za
kl b
ei F
rcm
lbcl
üfiu
iiR
xffí
hang
t in
ers
ter
Lin
ie T
OO
folg
ende
n, f
orm
clm
aüig
nic
ht e
rfaB
barc
n E
infi
uügr
olkn
ab
:
von
der
efltí
cliv
en
Win
dgcs
chw
indi
gkci
t zw
isch
ai d
en
Küh
lrip
pen;
von
dcr
Tur
bulc
nz d
cr S
lrom
ung,
die
dur
ch
Wir
bels
legc
odc
r A
nlau
f-
kanl
en n
och
mer
klic
h er
hoht
wer
den
kann
;
vom
Ver
halln
ís L
ufls
palt
brei
tc z
u D
urch
stro
mti
erc.
Der
Slr
ahlu
ngsa
ntei
i in
der
\V
arm
eabf
uhr
ist
aufg
rund
dc
r bd
Fr
emdb
cHif
tung
übli
chen
eng
en P
acku
ngdc
r K
.üh!
blec
he b
zw.
Küh
lrip
pen
vem
achl
assi
gbar
.
195
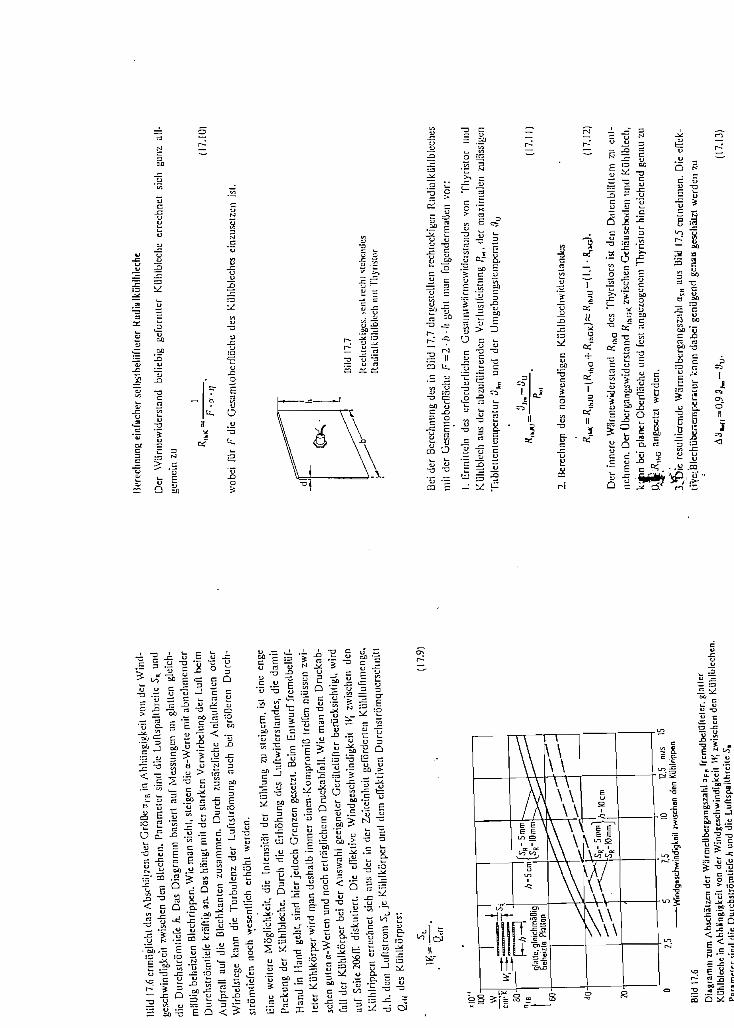
Bil
d 17
.6 e
rmüg
lich
t da
s A
bsch
:íj?
cn d
erG
roO
ea,-
H i
n A
bhii
ngig
keit
von
dcr
Wín
d-
gcsc
hwin
digk
cil
zwís
chen
den
Ble
chcn
. P
aram
cler
sin
d di
c L
ufls
pall
brci
lc 5
R u
nd
dic
Dur
cnst
rom
licl
e h.
Das
Dia
gram
m
basi
ert
auf
Mes
sung
en a
n gl
atlc
n gl
eich
-
rnat
íig
bchc
ízte
n B
lcch
rípp
cn. W
ic m
an s
ichl
, stc
igen
die
ct-
Wer
te m
il ab
neh
men
der
Dur
chst
rom
tier
e kr
afti
g an
. D
as h
iíng
l m
il dc
r st
arke
n V
crw
irbc
lung
der
Luf
t bc
im
Auf
pral
l au
f di
c B
lcch
kant
cn
zusa
mm
en.
Dur
ch z
usat
zlic
hc
Anl
aufk
anle
n o
der
Wir
bcls
tcgc
kan
n di
c T
urbu
lcnz
dc
r L
uTls
lrom
ung
auch
be
i gr
oBcr
cn
Dur
ch-
stro
mti
cfen
no
ch
wes
cntl
ich
erho
hl
wcr
den.
Ein
c w
eite
rc M
bgli
chke
it,
dic
Inte
nsit
at
dcr
Kü
hlu
ng
zu s
teig
em,
isl
cine
en
ge
Pac
kung
dcr
Küh
lbld
chc.
Dur
ch
dic
Erh
ohun
g de
s L
uftw
idcr
slan
dcs,
dic
dam
it
Han
d in
Han
d ge
ht,
sind
hie
rjed
och
Gre
nzen
ge
setz
l. B
cim
Enl
wur
f fr
emdb
elüT
-
ictc
r K
ühlk
orpc
r w
ird
man
dcs
halb
im
mer
cin
en-K
ompr
omiB
Ire
íTen
müs
sen
zwi-
schc
n gu
ten
a-W
ertc
n un
d no
ch c
rlrü
glic
hcm
Dru
ckab
fall
. W
ic m
an d
en
Dru
ckab
-
Tall
der
Küh
lkor
pcr
bei
der
Aus
wah
l ge
eign
eler
Ger
alel
üfte
r be
rück
sich
ligl
, w
írd
auf
SeÍl
e206
IT.
disk
utie
rt.
Dic
eí
Tek
tive
Win
dges
chw
indi
gkci
l 1^
zw
ísch
en
den
Küh
lrip
pcn
erre
chnc
t si
ch a
us d
cr í
n de
r Z
eítc
inhc
it g
crór
dcrt
en
Küh
lluf
tmcn
gc,
d.h.
dcm
Luf
lstr
om S
L je
Küh
lkbr
per
und
dem
eíí
eküv
en D
urcl
islr
tim
quer
schn
ílt
Qtí
t de
s K
iihl
kürp
ers:
'••
SL
(1
7.9)
O5
7.5
10
12.5
m/s
15
"Wio
dg
asch
win
dig
Vei
l íw
isch
an d
en K
ühlri
ppcn
Bild
17.
6D
iagr
amm
zum
Abs
cha.
zro
dcr
War
mcü
bcrg
angs
zahl
OF
Kíih
lblc
chc
in A
bhün
gigk
cil
von
dcr
Wm
dgcs
chw
ind.
gkcu
»',
zw.
Para
mct
cr ii
nd d
ic D
urch
stro
mli
cfc
h un
d di
e Lu
flsp
allb
rcU
c ¿
,ech
cn
lech
cn.
einf
uche
r sc
llw
tbel
iifl
eter
Rud
inlk
iihl
hlec
he
Dcr
W
ürm
cwid
erst
and
beli
ebíg
ge
form
lcr
Küh
lble
che
erre
chne
t si
ch
ganz
al
l-
gem
ein
zu
(17.
10)
"UK
r*
'r
• a •
/;
wob
ei
Tur
F di
e G
esam
lobe
rflü
che
des
Kül
ilbl
eche
s ci
nzus
etze
n is
t.
Dild
17.7
Rcc
htcc
kigc
s, >
unlt
t:ch
t si
clic
ntl
Rad
ialk
ülil
blcc
h m
u T
hyri
stor
Bei
der
B
erec
hnun
g de
s in
Bil
d 17
.7 d
argc
stdl
len
rech
teck
igen
R
üdia
lkii
hlbl
eche
s
mil
der
ües
amio
berf
lach
c /r
= 2
-/j-
/i g
ehl
man
fol
gcnd
crm
aüen
v
or:
I. E
rmii
ttíl
n de
s cr
ford
erli
chcn
G
csni
niw
iinn
cwid
erst
andc
s vo
n T
hyri
stor
un
d
Küh
lblü
ch a
us d
er a
bzur
ührc
ndcn
V
crlu
sllt
isiu
ng ^
, d
er m
axim
alen
zul
assi
gen
Tab
iett
cnle
inpe
ratu
r íí
^
und
der
Uin
gcbu
ngst
cínD
crat
ur 3
y
«ik
«i —
(17.
11)
2. B
erec
hnqi
des
nol
wen
dige
n fC
ühlb
lcch
wid
crst
andc
s
(17.
12)
Dcr
in
nere
War
mew
ider
slan
d R
íha
des
Thy
risl
ors
¡sí d
en D
alcn
blat
tem
zu
enl-
neli
men
. D
er Ü
berg
angs
wid
erst
and
K1h
UK z
wís
chen
Geh
ausc
bode
n un
d K
ühlb
lech
,
ktfi
n be
i pl
aner
Obe
ríla
chc
und
Test
ange
zoge
nem
Thy
risl
or h
inrc
iche
nd g
enau
zu
(iJÉ
^h
o a
ngcs
ctzt
wcr
den.
J^pie
rcs
ulli
aend
e W
ünne
über
gang
szah
l aS
B a
us B
ild 1
7.5
entn
ehm
en.
Die
efT
ek-
tiV
c-:B
!cch
übcn
cmpc
rstu
r ka
nn d
abei
gen
ügcn
d gc
naa
gesc
hálz
t w
crde
n zu
(17.
13)

A B
crcc
hncr V
^o
rdcr
lích
«i
Ges
am.k
uhin
achc
F a
us G
,cic
hunB
(17.
10),
wob
ei
man
den
R
ippe
nwi^
kung
sgra
d i,
norm
alcr
wei
sc z
u 0.
9 an
scL
zt:
\)
5. F
esilc
gen
dcr
Rip
pcna
bmes
sung
cTi.
Hoh
e /i
und
Dre
ite
b er
gebe
n si
ch a
us
dcr
K/ú
hlfl
ache
zu
h-b
=~
. .
(17.
15)
wob
ci d
as S
cíte
nvcr
halt
nis
h:b
jcdo
ch n
icht
gro
Ber
ais
1:2
gew
ahll
wer
den
darf
, da
andc
rnfa
lls
nich
t m
chr
von
radi
aler
War
mea
usbr
cilu
ng
gcsp
roch
en w
erde
n ka
nn.
Dic
erf
orde
rlic
hc B
lech
dick
e Tu
r ci
ñen
Rip
penw
irku
ngsg
rad
von
íj =
0,9
ist
dem
BUd
i7.8
zu c
ntnc
hmcn
.
Blec
hdick
e d
500
400
;cm
'—
Ges
amlo
beill
aóhe
F
Bild
17.
8D
ic T
ur c
iñen
Rip
pcnw
ítlc
ungs
grad
von
T =
0,9
crf
oivo
n d
cr G
csar
ato
ber
flac
he
(F~
2-k
-b).
Dai
Dia
gra
mm
gil
í u
nle
r fo
lgen
deo
Vo
rau
ssct
zun
gcn
:
a)
Sci
lcnv
crha
ltnu
h:b
nk
hl
gioD
cr a
is 1
:2b)
B
oden
durc
hrae
sser
del
Th
yn
slo
rs g
roO
cr 8
mm
«cch
-Wc
<
0,-2
-G,
-Gew
ichl
ñopo
rtion
al w
achs
ende
Abm
assu
ngen
bei
Vons
tant
er W
irwJg
esch
win
digV
eil
iwis
chen
dan
Rip
pan.
Uil
d 17
.9
Sii
ttig
ungs
vcrh
alte
n ci
nes
siet
ig w
achs
endc
n R
ipp
cnk
iíh
lko
rpcr
s
Op
lim
ale
Gro
Qe
von
Rip
penk
ühlk
íirpe
rn
Die
Küh
llei
siun
g /fe
cin
es K
ülil
korp
ers
wiic
hsl -
gle
ichh
leib
ende
KQ
hlbe
dmgu
ngen
rilé
is v
orii
usge
selz
t -
nur
bis
7.11
eine
r be
slim
rnte
n G
roli
e un
iüih
ernd
pro
pori
ioni
tlm
il sc
inen
A
bmcs
sung
cn.
Vcr
grof
krt
man
ih
n da
riib
er
hina
us,
so
sicl
lt si
ch.
wie
Bi
ld 1
7.9
zeig
l, ei
ne A
rt S
aüig
ungs
verh
nlle
n ei
n, u
nd
der
Gew
inn
un (
Cüh
l-
icis
lung
sle
hl
in
kcin
em
Ver
hiil
tnis
zi
ir
Zun
ahm
c an
V
olum
en
und
Gew
icht
.D
ie
Urs
nche
hic
rfür
is
l in
den
T
empe
ralu
rabn
illü
n zu
suc
hcn,
di
e dc
r W
arm
c-st
rom
in
der
Gru
ndpl
atlc
und
in
den
Rip
|>en
des
Küh
lkor
pers
her
vorr
ufl
(sie
he..
Rip
penw
irku
ngsg
rad"
).
Der
Übe
rgan
g ín
die
Sat
tigu
ng e
rfol
gl s
teli
g. W
elch
cs V
erha
llni
s vo
n K
ühll
elst
ung
zu G
cwie
ht a
is o
plim
al u
nzus
ehcn
Ut,
blei
bl d
esw
egcn
inn
erha
lb c
ines
bes
lim
rnle
nSp
iclr
aum
es
Erm
csse
nssn
che.
Si
nnvo
ll er
sche
int
es,
den
Gcw
icht
spun
kl
ais
Opl
imum
zu
denn
ierc
n, b
eí d
esse
n V
crdo
ppcl
ung
die
Küh
llei
stun
g nu
r m
chr
um
10 b
is 2
0% s
tcig
l.
von
Rjp
|H!n
líÍili
lk(>
rpen
i
Ein
R
íppc
nküh
lkor
pcr
slcl
ll Ih
erm
tsch
gcs
chcn
ein
rcl
aliv
kom
p4iz
ierl
es G
ebil
de
dar.
dess
en
resu
ltie
rend
cr W
arm
ewid
crst
and
sich
nic
ht d
urch
ein
e G
lobn
lfor
nicl
crra
ssra
laO
t. Se
ine
K.ü
hlle
islu
ng P
K cr
gibt
sic
h ¡m
wcs
cnlí
iche
n au
a de
rSur
nmc
der
Kai
hllo
stun
gen
PKR
der
einz
clne
n R
ippc
n:
/t-Z
/i..
f'7-16
'Se
lbsl
wcn
n m
an
untc
rste
llt,
daD
alie
Rip
pco
glci
cfic
Abm
essu
ngcn
ha
ben
und
glei
chm
aQig
gck
ühlt
wer
den,
al
so g
kkhe
n W
arm
cwid
erst
and
aufw
cise
n, s
o sí
ndih
re
Küh
llci
stun
gen
doch
un
lcrs
chic
dlic
h,
wci
l -
wie
aus
G
lcic
hung
(17.
2) c
r-
199

-rnn
-
díe
über
tem
pera
tur
A3R
(0)
am
Wii
rmee
inlr
ilt
prop
orri
onal
mil
cín-
geht
. D
a dí
e T
cmpc
ratu
r ín
der
Gru
ndpl
alte
abe
r vo
n in
nen
nach
avi
Ben
abrá
llt,
ande
rt si
ch
die
Ein
triU
sübc
rtem
pcra
iur
¿3^(
0) n
icht
nur
von
K
íppe
zu
Rip
pe,
sond
crn
gL-g
cbcn
enfa
lls a
uch
noch
cni
lang
des
Ríp
pcnf
uücs
.
Eine
Ber
echn
ung
des
K.ü
hlkí
5rpe
rs i
st d
esha
lb n
ur m
bglic
h. w
enn
man
ihn
in
ein
mog
lichs
t w
irkl
ichk
eits
getr
eues
Ers
atzb
ild
von
Gru
ndpl
atte
n- u
nd
Rip
penw
ider
-st
andc
n au
flos
t, de
ssen
re
sult
icre
nder
W
arm
ewid
erst
nnd
sich
da
nn
in g
leic
hcr
Wci
se e
rrcc
hnen
la'B
t, w
ic d
cr c
ines
ele
klri
sche
n W
ider
stan
dsne
lzw
crke
s.
Um
die
Din
ge n
icht
unn
otig
zu
kom
pliz
iere
n, v
ersu
chl
man
dab
ei, a
lie T
eílw
arm
e-w
ider
slan
de a
uf c
ine
der
Túnf
, in
Tab
elle
17.
2 da
rges
telH
en
Gru
ndfo
rmen
zur
ück-
zufü
hrcn
;
Das
Rec
henv
erfa
hren
¿ol
í an
hand
cin
es B
eisp
icle
s er
liiu
ícrt
und
der
War
mew
ider
-st
and
des
Ín
Bild
17.
10 d
arge
stel
Hen
Küh
lkor
pcrs
ber
echn
et
wer
den.
Aus
Sym
-
Bild
17.
10R
ippc
nkÜ
hlko
rper
, au
fgeg
lied
crt
Ín G
nind
plal
lcnw
ider
slan
dc R
G u
nd R
ippe
nwid
cr-
íütn
dc R
.. D
ie W
arm
o.bg
ubc
dcr
Gru
ndpl
atle
ist
der
Ein
fach
heh
halb
cr v
crru
chla
ss.g
t
200
Tüb
cllc
17.
2 D
crcc
hnun
g de
r T
cilw
annc
wid
crsi
andc
cin
es R
ippc
ntüh
lkor
pcrr
An
dcr
War
mea
bfuh
rK
orpe
rW
arm
cwid
er-
slan
d R
lh
Gru
ndpl
alte
n w
idcr
st a
nd
e
Lin
eare
War
me-
able
iiun
g vc
mW
arm
ezcn
trum
Rad
íale
Wií
rme-
ablc
itun
g vo
mW
aim
czen
irum
Sph
ánsc
heW
iitm
cüb
kim
ng
vnm
Wiir
me
-ze
niru
m
Rip
pcnw
ider
sian
de
Küh
lung
dur
chL
angs
ripp
cn
Lang
srip
pc
'r
• a-t
j
F=
2-l-b
<jau
s ü
ifd I
7J
Külil
ung
du
rch
Ra
día
lrip
pe
n
Rad
ialr
ippc
D!ld
17
.4
201

Cft
Wir
ma
qual
le(í
hyns
ior)
Bild
17.
11T
herm
iseh
es E
rsai
zbild
cin
cr H
alfi
e de
s Ín
Bild
17.
10 l
iarg
estc
llle
n R
ippe
nküh
lkor
pers
KM
= R
n =
Rio
-;
Ali
e sc
chs
Rip
pcn
habc
n de
n gl
eich
en W
ídcr
sLan
d
mct
ricg
riín
den
genü
gt e
s, d
abei
nu
r ei
ne B
alit
e zu
be
lrac
hten
. D
ie G
run
dp
lalt
e
wir
d in
dre
¡ qu
ader
íorm
ige
Seg
men
te m
il d
en W
ídcr
stan
den
Rn
i, R
Cll
l R
G3
unte
r-
teil
t, di
e je
der
Tur
sich
vo
n ei
nem
W
arm
estr
om
anna
hern
d ko
nsta
nlcr
D
ichl
e
durc
hflo
ssen
w
erde
n. D
ie W
arm
eabf
uhr
an d
ic K
.uhl
luft
erfb
lgí
über
rec
htec
kige
Lan
gsri
ppen
, di
c al
ie d
en g
leic
hen
War
mew
ider
stan
d ha
bcn.
Man
gel
angt
mit
die
ser
Unt
erle
ilun
gdes
K.ü
hlko
rpcr
$zud
em i
m B
ild
17.1
1 w
iede
r-
gege
bene
n E
rsat
zbil
d. D
urch
sch
ritt
wei
ses
Vor
gehe
n la
'Bt
sich
dar
aus
der
resu
l-
tier
ende
War
mew
ider
stan
d au
srec
hnen
.
Auf
bau
uod
Eig
ensc
haft
en d
er S
tand
ardk
ühlk
orpe
r
Sofc
m
nich
t ge
wic
htig
c G
ründ
e da
gegc
n sp
rech
en,
wir
d m
an d
ie v
om T
hy
nsl
or-
Hcr
stcl
ler
ange
bote
nen
Sla
ndar
dküh
lkor
per
verw
eñde
n, d
enn
sie
sind
in
ih
rcr
Gro
Bc
dem
jcw
cíli
gen
Thy
rist
or a
ngcp
aDt
und
zudc
m a
ufgr
und
der
groO
en H
er-
stel
lzah
l ve
rgle
iths
wei
se b
illi
g. F
ür d
en E
insa
tz v
on S
land
ardk
ühlk
brpe
rn
spri
chl
Tem
er d
ic T
atsa
che,
daü
ihr
the
rmis
ches
Ver
halt
en b
ckan
nt
ist
und
der
proj
ek-
tier
cnde
Ing
enie
ur s
omit
zuv
erli
issi
ge U
nter
lagc
n Tu
r di
e L
osun
g se
iner
spe
ziel
len
Bcl
astu
ngsp
robl
emc
in d
er
Han
d h
at.
Im
folg
ende
n so
llcn
di
e w
csen
tlic
hcn
Eig
ensc
hafl
cn
der
Sie
mcn
s-K
.ühl
korp
er
umri
ssen
wer
den:
Mm
en'fl
lF
ür
klei
ne
und
mit
tlcr
e T
hyri
stor
en
wer
den
auss
chli
elll
ich
Alu
min
ium
-Küh
l-
korp
cr a
us c
íner
seh
r w
idcr
stan
dsrá
higc
n A
lSÍ-
Lcg
ieru
ng v
enve
ndet
, die
sic
h in
der
Pra
xis
bcst
cns
bew
ahrt
hat.
Für
gr
oBc
Thy
rist
oren
wer
den
dage
gcn
hauf
ig
Kup
ferk
ühlk
orpc
r ei
ngcs
ctzt
. da
dies
e w
cgen
¡h
rer
be!
glci
chcm
D
auvo
lum
cn h
ohcr
cn
Küh
llei
stun
g eí
nc g
ró'B
ere
Aus
nulz
ung
der
Thy
rist
oren
erl
aubc
n ai
s A
Iu-K
ühlk
orpe
r. E
s sl
ehen
jed
och
auch
Alu
-Küh
lkór
per
zur
Ver
fúgu
ng,
die
man
bcv
orzu
gt b
ei r
eine
n ÍC
urzz
eitb
eias
tung
en
eins
etze
n w
ird.
Kon
takt
iem
ng
Díe
K
pnta
ktie
rung
m
il
dem
K
ühlk
orpc
r er
folg
l be
ím
Sch
raub
thyr
islo
r ii
ber
Gew
indc
bolz
en
und
beím
Sch
eibe
nlhy
risl
or ü
ber
Kon
taki
nüch
en,
dic
mil
Hil
fe
cine
s F
eder
slah
ls a
urei
nand
ergc
preü
t w
erde
n.
Um
ein
en
gute
n W
á'rm
ekon
iakt
zu
cr
ziel
en,
müs
sen
hier
be!
dic
Aun
iigc
llit
chcn
abso
lut
saub
er u
nd p
lanp
aral
lel
sein
. U
ní a
uDer
dcm
be!
don
hoh
en A
iipr
cBdr
uck
cine
r K
nliv
ersc
hwei
Bun
g de
s M
ater
ials
vo
rzub
cuge
n un
d da
s A
usw
cchs
cln
auch
nach
lan
ger
Bet
rieb
szei
t zu
err
nogl
iche
n, e
mpf
ichl
l es
sic
h, a
ufd
ie (
Con
la!c
lHac
hen
vor
dem
Zus
amm
enba
u ei
ne d
íinn
e Sc
liic
hl S
llic
onpa
ste
aufz
ubri
ngen
. D
adur
ch
wir
d gl
cich
zcil
ig d
er W
arm
eko
nta
kt
noch
wei
tcr
verb
essc
rl.
Tía
'nni
sche
E
igen
schu
fien
In d
en D
aien
blüt
tcrn
sin
d no
rnui
lerw
dse
liir
jede
n T
hyri
stor
fol
gcnd
e K
ennl
mie
n
und
Dal
en c
ntha
llen
. die
das
Ihi
rrm
isch
e V
erha
ltcn
in
umía
sscn
der
Wci
sc b
csci
uci-
ben
:
Sfat
isch
er
\Var
meY
fider
sían
il be
i Se
lfas
lbel
üTlu
ng i
n A
bhan
gigk
cit
von
der
abge
führ
-
ten
Ver
lust
leis
tung
«,«
+«
,hO
K«
/t'i
-J
Uie
hc B
ild
17.1
2).
Die
Ver
ring
erun
gdes
Wii
rnie
wid
ersl
andc
s m
it z
uneh
mcn
der
Ver
lusl
leis
tung
hán
gí
mil
der
Ver
star
kung
der
nat
ürli
chen
K
onve
kiio
n du
rch
die
crh
oh
lc
Küh
lrip
pen-
lem
pcra
tur
zusa
mm
cn.
Stal
isch
er
War
mew
ider
suuu
l be
i F
rein
dbeU
iftu
ng
ín A
bhan
gígk
eit
von
der
Küh
l-
luft
incn
ge }
e ÍC
ühlk
orpc
r
^iw
c+^i
bG
K^/
ÍKJ
(sie
he r
echl
es
Bíld
, Sei
lc 3
79)
Dnt
ck-L
ufis
trom
-Ken
niin
ie
des
Kü
hlk
orp
ers
p=
/(S
L)
(sie
he B
ild
17.1
4}
TJ-a
nsie
nler
\V
arm
ew¡¿
erst
imd
Tur
Sel
bst-
und
Fr
enH
lbcl
ürtu
ng
ais
Fun
ktio
n de
r
Pul
sdau
cr
Zu
=/(
')
(sie
he B
ikl
auf
Sei
ic 3
80)
2,^
=/(
'l
(sie
he B
ild
IZI
I, S
eile
96)
Ana
lyti
sche
Erw
arm
ungs
funk
tion
des
Küh
ikor
p<:r
s (s
iehe
Sci
tc I
06 u
nd
I09I
T.).
203

ANEXO
4
9

CIRCUITO DE POTENCIA
NC
RR
GR
FU
EN
TE
CONVERTIDOR TIPO PUENTE MONOFftSICO
CIRCUITO DE POTEMCIfi
Y FUENTE

DETECTOR DE SQBREVELOCIDRD
DETECTOR DE SOBRECORRIENTE
LF
34
7N
0'"
™R
13
0.4
7K
D2
9
R57
¿-^
-WC
U2
ÍOK
^v-s
/-
J.O
K
R51
10K
9 1-1. ^n
se •v 8
D30
£_U_i
R53
10K
RS4
t 5
1QK
i U
SB, 3 _2
__ ^ I
r-li-jn
°-''7
KR
46
l11l-r3
47N
ÍK
í R
19
D-V
CC
0
.47
K
INHIBIDOR DE PULSOS
DETECTOR DEL TñCO GENERADOR
CO
NV
ER
TID
OR
T
IPO
P
UE
NT
E
MO
NO
FÁ
SIC
O
Sil»
Do
cu
me
nt
Nurr
fe*r
B
CIR
C.
DE
TE
CT
. D
E F
AL
LA
S
E
INH
IBID
OR

TRRNSDUCTOR DE VELOCIDRD RC
D5 3 oe3
1D
6r i
2
D9
t 3
2
*D7
r ^
2 DIO
t 3
2
i r a i r= s
U2B
6 -k
_i, >
-|i
C13
U
F347N
20
.22
uF
-vcc
o] O
O E
?7ñ
BIL
IT«R
TR
fiNS
DU
CT
OR
D
E
VE
LD
CID
RD
D
C
27
0K
Q
.22
uF
vcc
D1
9
D2
0k|
^? 1J
^
10V
8
.2V
CIR
CU
ITO
DE
DIS
Pft
RO
REGULRDOR PI DE CORRIENTE
RE
FE
RE
NC
IA
DE
Vft
R
VE
LO
CID
ftD
REGULADOR PI DE VELOCIDRD
TRRNSDUCTOR DE CORRIENTE
RCELERRDOR/DESRCELERRDOR
CO
NV
ER
TID
OR
T
IPO
P
UE
NT
E
MO
NO
FÁ
SIC
O
[Síz
e p
oc
ürñ
en
t N
um
b»r
CIR
CU
ITO
D
E
CO
NT
RO
L

EC
C
SD
19ñ

1
Mi 1 0 0 1 (• 1,R
24
¿ 1
1 C
11
•)
,R2
5 ¿ I
i C
12
m\
C13
•)
R26
I "
, D
1 -T•U
i c
u
mj
HJE D
§R
27
¿
«D
1"»
" r
M
RED
SN
UB
BE
R
• ,
— .•
tu
H
a n i*
y (•
3 )•
g EZ>
DI 2
X
-~
\ '
R1
1 1
i 2
C°N
6\
•/
' °
^ r
5 S
N^_x
/ o
o
8
o q
V
CC
GN
D
-VC
C
IS05
C
ON
2
£D
•[
R2
Q_
ta
•
•
•{
HJB
•ÍR
lSp
i (
«B
•
•
. .
V
->
,
, "R
? "
^
«_
010^
•|R
T7
p
iiN
'
^
BJR
21
i •]
Oi
\B9
1
n¿
C
7 ca
•ri*
° c^^
r
i 4^
6 h
(••)
(••
)•
• •
• .
. v_
y v_
y•
•
MK
2.
M•
| •
^R
B
|i
— —
. .
, .
o«
o2,
, B
|R22
p
pR
7
p
• í
•
¡q
•
*
•rw1* "
^
°7
C
1 D
5•
•
U3
•
•
wf]\ !•
(!"•)
rtl
•
es
ce
IS02 •
•
•! —
!• •!
I1
J"
^ —
,*
*
on
p
•LU
__J*
x
^
s" — \4
•!—
!• •c
ziD"
, .
rl
~^
^
010
•LR_1
£___
F
oi3
™"
, * 9 *
• ••••••
•[
^¿j
p
•KM
m~ni
CIR
CU
ITO
DE
DIS
PAR
O
FUEN
TE

PA
TRIC
IO V
ALL
EJO
TIT FUE
NTE
i rr
CIR
CU
ITO
DE
DIS
PAR
O
••••
•••••••i
RED
SN
UB
BE
R

ANEXO
5
•j

MANUAL DEL USUARIO
Antes de proceder a trabajar con el equipo es importante leer este Manual, con el fin
de conocer:
1.- Las Conexiones eléctricas que se necesitan hacer.
2.- El Modo de Funcionamiento del equipo.
3.- Calibración y Ajustes que se pueden hacer al equipo de acuerdo a sus necesidades.
CONEXIONES.-
Debemos conectar los siguientes terminales:
1.- EN LA HORNERA DE CONTROL (Figura 2.22).-
- GND y PUL/STANDB Y/FALLAS a un pulsador N.A.( normalmente abierto)
- SW/HABILITAR Y -VCC a un interruptor N.A.
- (+,VAR,-) a un potenciómetro considerando que su resistencia variable inicia en el
terminal (-).
- Conectar el terminal positivo del Taco D.C. al terminal GND y el negativo al
terminal MENOR, MEDIA, o MAYOR dependiendo de la relación V/r.p.m, del taco
y de la velocidad que va a regular el módulo (ver figura 2.9)
En caso de tener un taco trifásico A.C., se lo debe conectar a los terminales
respectivos del taco trifásico A.C. y utilizar el terminal OUT/AC como salida negativa
rectificada D.C. y seguir el procedimiento anterior de conexión del Taco D.C.
- En caso de que el motor no sea de imanes permanentes, utilizamos los terminales
de Campo (+,-) para alimentar al Campo del Motor y los terminales (AC, AC) hacia
la red de alimentación. El íusible de protección del Campo está incluido en el equipo.

2
2.- EN LA BORNERA DE POTENCIA (Figura 2.21).-
- Conectar los terminales F.N. a la red de alimentación y (+,-) al circuito de Armadura
del Motor. No se incluye los fusibles de protección de la Armadura.
FUNCIONAMIENTO.-
Al momento de conectar el equipo a la red de alimentación, el MODO DE ESPERA
se activa; indicado a través de un led en la parte frontal del módulo (ver fotografía
2.1) en el cual a pesar de que la Fuente y el Circuito de Disparo están funcionando,
sin embargo no llegan pulsos que activen a los tiristores del circuito de potencia, por
lo tanto podemos comprobar las conexiones de las horneras, a la inductancia de
filtrado y ubicar la referencia de velocidad ya sea al mínimo valor o a otro.
Para habilitar al funcionamiento del equipo debemos oprimir el pulsador que
desactiva el Modo de Espera y luego cerrar el Interruptor. En ese momento el motor
girará si la referencia de velocidad es positiva, caso contrario no.
Antes de apagar el funcionamiento del Motor, al abrir el Interruptor de habilitación,
podemos aprovechar el Modo de Inversión con el que permite trabajar el puente
monofásico totalmente controlado que alimenta a la Armadura del motor, para
frenarlo al instante; simplemente girando el potenciómetro a la referencia de
velocidad mínima (negativo).
CALIBRACIÓN Y AJUSTES.-
El módulo está diseñado para trabajar con motores de 20 A D.C.; sin embargo, si
nuestro requerimiento es manejar corrientes mucho menores a este valor, lo más
probable es que no podamos tener un óptimo control en la precisión y sensibilidad a
cambios de velocidad, entonces debemos calibrar la corriente de trabajo del módulo,
así:
De acuerdo a la comente a manejarse podemos cambiar R4 (ver figura 2.8) a un valor
mayor, con el propósito de aumentar el voltaje de salida del acondicionador de
comente (CORMED) hasta un valor inferior al limite R16/(R16+R17)*VCC del
detector de sobrecorriente (ver Anexo A4) que está fijado a 9 V. En caso de ser
necesario podemos cambiar la relación de amplificación del operacional U IB del
acondicionador (ver figura 2.8).
Para comprobar el voltaje CORMED, como mecanismos de calibración momentánea,
procedemos a sacar la clavija del terminal MOD de la bornera en la tarjeta No 2 (ver
figura 2.23) y conectar al tenninal VAR de la bornera de control, con el propósito de
controlar la velocidad del motor en lazo abierto, sólo a través del Circuito de
Disparo.. Con esto opero el motor hasta alcanzar la carga nominal y poder calibrar
CORMED e igualarla a la limitación de corriente, variando el potenciómetro R40 (ver
Anexo A4 ) de la tarjeta No 2.
A la vez podemos calibrar el voltaje de salida del acondicionador de velocidad
(VELMED) (ver figura 2.9) variando Rll y conseguir un voltaje menor al límite
R2/(R1+R2)*(-VCC) del detector de sobrevelocidad (ver anexo A4).
Terminados estos ajustes, desconectamos la clavija MOD del terminal VAR de la
bornera de control y la ubicamos en su propio lugar, de esta manera vuelvo a operar
en lazo cerrado, por medio del potenciómetro de la referencia de velocidad.
Para manejar en forma permanente la carga en lazo abierto (ver figura 1.24), para el
caso de no disponer de un taco para la realimentación de la velocidad o al manejar
cargas resistivas, sacamos el puente VC1-VC2 de la tarjeta No 2 (ver Anexo A4) y
conectamos VC2 a VAR de la bornera de control de la tarjeta No 2 a través de REF2.
En caso de ser necesario podemos aumentar hasta once veces la ganancia y el tiempo
de integración de ios reguladores de velocidad y de comente, girando los





























