Embed Size (px)
Citation preview
PDF generado usando el kit de herramientas de fuente abierta mwlib. Ver http://code.pediapress.com/ para mayor información.PDF generated at: Tue, 12 Aug 2014 18:25:01 UTC
CinematicaPrimera Version
ContenidosArtículos
Magnitud física 1Escalar (física) 4Vector 6Vector unitario 19Área 21Cinemática 26Sistema de referencia 36Vacío 38Punto material 43Centro de masas 43Equilibrio mecánico 45Cinemática del sólido rígido 48Cuerpo rígido 62Movimiento (física) 62Ecuación de movimiento 79Traslación (física) 81Resistencia aerodinámica 82Campo gravitatorio 89Intensidad del campo gravitatorio 92Desplazamiento (vector) 96Posición 98Velocidad 102Rapidez 107Aceleración 109Movimiento rectilíneo uniforme 115Movimiento rectilíneo uniformemente acelerado 117Caída libre 122Movimiento parabólico 129Movimiento circular uniforme 132Movimiento de rotación 136Efecto Coriolis 145Movimiento armónico simple 153Amplitud (física) 160Frecuencia 162
Vibración 165Precesión 167Nutación 172
ReferenciasFuentes y contribuyentes del artículo 174Fuentes de imagen, Licencias y contribuyentes 177
Licencias de artículosLicencia 180
Magnitud física 1
Magnitud físicaUna magnitud física es una propiedad o cualidad medible de un sistema físico, es decir, a la que se le puedenasignar distintos valores como resultado de una medición o una relación de medidas. Las magnitudes físicas semiden usando un patrón que tenga bien definida esa magnitud, y tomando como unidad la cantidad de esa propiedadque posea el objeto patrón. Por ejemplo, se considera que el patrón principal de longitud es el metro en el SistemaInternacional de Unidades.Las primeras magnitudes definidas estaban relacionadas con la medición de longitudes, áreas, volúmenes, masaspatrón, y la duración de periodos de tiempo.Existen magnitudes básicas y derivadas, y constituyen ejemplos de magnitudes físicas: la masa, la longitud, eltiempo, la carga eléctrica, la densidad, la temperatura, la velocidad, la aceleración y la energía. En términosgenerales, es toda propiedad de los cuerpos o sistemas que puede ser medida. De lo dicho se desprende laimportancia fundamental del instrumento de medición en la definición de la magnitud.La Oficina Internacional de Pesas y Medidas, por medio del Vocabulario Internacional de Metrología (InternationalVocabulary of Metrology, VIM), define a la magnitud como un atributo de un fenómeno, un cuerpo o sustancia quepuede ser distinguido cualitativamente y determinado cuantitativamente.A diferencia de las unidades empleadas para expresar su valor, las magnitudes físicas se expresan en cursiva: así, porejemplo, la "masa" se indica con "m", y "una masa de 3 kilogramos" la expresaremos como m = 3 kg.
Tipos de magnitudes físicasLas magnitudes físicas pueden ser clasificadas de acuerdo a varios criterios:•• Según su expresión matemática, las magnitudes se clasifican en escalares, vectoriales y tensoriales.•• Según su actividad, se clasifican en magnitudes extensivas e intensivas.
Magnitudes escalares, vectoriales y tensoriales• Las magnitudes escalares son aquellas que quedan completamente definidas por un número y las unidades
utilizadas para su medida. Esto es, las magnitudes escalares están representadas por el ente matemático mássimple, por un número. Podemos decir que poseen un módulo, pero que carecen de dirección. Su valor puede serindependiente del observador (v.g.: la masa, la temperatura, la densidad, etc.) o depender de la posición (v.g.: laenergía potencial), o estado de movimiento del observador (v.g.: la energía cinética).
• Las magnitudes vectoriales son aquellas que quedan caracterizadas por una cantidad (intensidad o módulo), unadirección y un sentido. En un espacio euclidiano, de no más de tres dimensiones, un vector se representa medianteun segmento orientado. Ejemplos de estas magnitudes son: la velocidad, la aceleración, la fuerza, el campoeléctrico, intensidad luminosa, etc.
Además, al considerar otro sistema de coordenadas asociado a un observador con diferente estado demovimiento o de orientación, las magnitudes vectoriales no presentan invariancia de cada uno de loscomponentes del vector y, por tanto, para relacionar las medidas de diferentes observadores se necesitanrelaciones de transformación vectorial. En mecánica clásica también el campo electrostático se considera unvector; sin embargo, de acuerdo con la teoría de la relatividad esta magnitud, al igual que el campo magnético,debe ser tratada como parte de una magnitud tensorial.
• Las magnitudes tensoriales son las que caracterizan propiedades o comportamientos físicos modelizablesmediante un conjunto de números que cambian tensorialmente al elegir otro sistema de coordenadas asociado a unobservador con diferente estado de movimiento (marco móvil) o de orientación.
Magnitud física 2
De acuerdo con el tipo de magnitud, debemos escoger leyes de transformación (por ej. la transformación de Lorentz)de las componentes físicas de las magnitudes medidas, para poder ver si diferentes observadores hicieron la mismamedida o para saber qué medidas obtendrá un observador, conocidas las de otro cuya orientación y estado demovimiento respecto al primero sean conocidos.
Magnitudes extensivas e intensivasUna magnitud extensiva es una magnitud que depende de la cantidad de sustancia que tiene el cuerpo o sistema.Las magnitudes extensivas son aditivas. Si consideramos un sistema físico formado por dos partes o subsistemas, elvalor total de una magnitud extensiva resulta ser la suma de sus valores en cada una de las dos partes. Ejemplos: lamasa y el volumen de un cuerpo o sistema, la energía de un sistema termodinámico, etc.Una magnitud intensiva es aquella cuyo valor no depende de la cantidad de materia del sistema. Las magnitudesintensivas tiene el mismo valor para un sistema que para cada una de sus partes consideradas como subsistemas.Ejemplos: la densidad, la temperatura y la presión de un sistema termodinámico en equilibrio.En general, el cociente entre dos magnitudes extensivas da como resultado una magnitud intensiva. Ejemplo: masadividida por volumen representa densidad.
Representación covariante y contravarianteLas magnitudes tensoriales de orden igual o superior a uno admiten varias formas de representación tensorial segúnel número de índices contravariantes y covariantes. Esto no es muy importante si el espacio es euclídeo y se empleancoordenadas cartesianas, aunque si el espacio no es euclídeo o se usan coordenadas no cartesianas es importantedistinguir entre diversas representaciones tensoriales que físicamente representan la misma magnitud. En relatividadgeneral dado que en general el espacio-tiempo es curvo el uso de representaciones convariantes y cotravariantes esinevitable.Así un vector puede ser representado mediante un tensor 1-covariante o mediante un tensor 1-contravariante. Másgeneralmente, una magnitud tensorial de orden k admite 2k representaciones tensoriales esencialmente equivalentes.Esto se debe a que en un espacio físico representable mediante una variedad riemanniana (o semiriemanninana comoen el caso relativista) existe un isomorfismo entre tensores de tipo y los de tipo siempre y cuando
. El paso de una representación a otra de otro tipo se lleva a cabo mediante la operación de "bajar ysubir índices".
Magnitudes objetivas y no objetivasUna magnitud se dice objetiva si las medidas de dicha magnitud por observadores diferentes pueden relacionarse demanera sistemática. En el contexto de la mecánica newtoniana se restringe el tipo de observador, y se considera queuna magnitud es objetiva si se pueden relacionar sistemáticamente las medidas de dos observadores cuyomovimiento relativo en un instante dado es un movimiento de sólido rígido. Existen buenos argumentos parasostener que una ley física adecuada debe estar formulada en términos de magnitudes físicas objetivas. En elcontexto de la teoría de la relatividad la objetividad física se amplia al concepto de covariancia de Lorentz (enrelatividad especial) y covariancia general (en relatividad especial).
Magnitud física 3
Sistema Internacional de UnidadesEl Sistema Internacional de Unidades se basa en dos tipos de magnitudes físicas:• Las siete que toma como unidades fundamentales, de las que derivan todas las demás. Son longitud, tiempo,
masa, intensidad de corriente eléctrica, temperatura, cantidad de sustancia e intensidad luminosa.• Las unidades derivadas, que son las restantes y que pueden ser expresadas con una combinación matemática de
las anteriores.
Unidades básicas o fundamentales del Sistema Internacional de UnidadesLas magnitudes básicas no derivadas del SI son las siguientes:• Longitud: metro (m). El metro es la distancia recorrida por la luz en el vacío en 1/299 792 458 segundos. Este
patrón fue establecido en el año 1983.• Tiempo: segundo (s). El segundo es la duración de 9 192 631 770 períodos de la radiación correspondiente a la
transición entre los dos niveles hiperfinos del estado fundamental del cesio-133. Este patrón fue establecido en elaño 1967.
• Masa: kilogramo (kg). El kilogramo es la masa de un cilindro de aleación de Platino-Iridio depositado en laOficina Internacional de Pesas y Medidas. Este patrón fue establecido en el año 1887.
• Intensidad de corriente eléctrica: amperio (A). El amperio o ampere es la intensidad de una corriente constanteque, manteniéndose en dos conductores paralelos, rectilíneos, de longitud infinita, de sección circulardespreciable y situados a una distancia de un metro uno de otro, en el vacío, produciría una fuerza igual a 2×10−7
newton por metro de longitud.• Temperatura: kelvin (K). El kelvin es la fracción 1/273,16 de la temperatura del punto triple del agua.• Cantidad de sustancia: mol (mol). El mol es la cantidad de sustancia de un sistema que contiene tantas entidades
elementales como átomos hay en 12 gramos de carbono-12.• Intensidad luminosa: candela (cd). La candela es la unidad luminosa, en una dirección dada, de una fuente que
emite una radiación monocromática de frecuencia 540×1012 Hz y cuya intensidad energética en dicha dirección es1/683 vatios por estereorradián.
Unidades Fundamentales en el Sistema Cegesimal C.G.S.• Longitud: centímetro (cm): 1/100 del metro (m) S.I.• Tiempo: segundo (s): La misma definición del S.I.• Masa: gramo (g): 1/1000 del kilogramo (kg) del S.I.
Unidades Fundamentales en el Sistema Gravitacional Métrico Técnico• Longitud: metro (m). La misma definición del Sistema Internacional.• Tiempo: segundo (s).La misma definición del Sistema Internacional.• Fuerza: kilogramo-fuerza (kgf). El peso de una masa de 1 kg (S.I.), en condiciones normales de gravedad
(g = 9,80665 m/s²).

Magnitud física 4
Magnitudes físicas derivadasUna vez definidas las magnitudes que se consideran básicas, las demás resultan derivadas y se pueden expresar comocombinación de las primeras.Las unidades derivadas se usan para las siguientes magnitudes: superficie, volumen, velocidad, aceleración,densidad, frecuencia, periodo, fuerza, presión, trabajo, calor, energía, potencia, carga eléctrica, diferencia depotencial, potencial eléctrico, resistencia eléctrica, etcétera.Algunas de las unidades usadas para esas magnitudes derivadas son:• Fuerza: newton (N) que es igual a kg·m/s²• Energía: julio (J) que es igual a kg·m²/s²
Referencias
Enlaces externos• Wikisource contiene obras originales de o sobre Patrones oficiales de las magnitudes (España).Wikisource• Wikimedia Commons alberga contenido multimedia sobre Magnitud física. Commons• Bureau International des Poids et Mesures (BIPM) - The International System of Mesures. (http:/ / www. bipm.
org/ utils/ common/ pdf/ si_brochure_8_en. pdf)
Escalar (física)Un escalar es un tipo de magnitud física que se expresa por un solo número y tiene el mismo valor para todos losobservadores. Una magnitud física se denomina escalar cuando se representa con un único número (únicacoordenada) invariable en cualquier sistema de referencia. Por ejemplo, la temperatura de un cuerpo se expresa conuna magnitud escalar. Así la masa de un cuerpo es un escalar, pues basta un número para representarla (por ejemplo:75 kg).[1]
Por el contrario, una magnitud es vectorial o, más generalmente tensorial, cuando se necesita algo más que unnúmero para representarla completamente. Por ejemplo, la velocidad del viento es una magnitud vectorial ya que,además de su módulo (que se mide como una magnitud escalar), debe indicarse también su dirección (norte, sur ,este, etc.), que se define por un vector unitario. En cambio, la distribución de tensiones internas de un cuerporequiere especificar en cada punto una matriz llamada tensor tensión y por tanto el estado de tensión de un cuerpoviene representado por una magnitud tensorial.[2]
Magnitud físicaUna magnitud física se expresa como el producto de un valor numérico y una unidad de medida, no únicamente unsolo número. La cantidad no depende de la unidad (por ejemplo, para la distancia, 1 km es lo mismo que 1000 m),aunque el número depende de la unidad. Por tanto, en el mismo ejemplo de la distancia, la cantidad no depende de lalongitud de los vectores base del sistema de coordenadas. Asimismo, otros cambios del sistema de coordenadaspueden afectar la fórmula para calcular el escalar (por ejemplo, la fórmula euclidiana para la distancia en términos delas coordenadas se basa en que la base sea ortonormal), pero no al escalar mismo.[3] En este sentido, la distanciafísica se desvía de la definición de métrica en el hecho de no ser solamente un número real; sin embargo, satisfacetodas las demás propiedades. Lo mismo ocurre con otras cantidades físicas que no son adimensionales. La direcciónno aplica para los escalares; estos están especificados por una sola magnitud o cantidad.

Escalar (física) 5
Ejemplos en física clásicaComo ejemplos de escalares tenemos la masa, la carga eléctrica, el volumen, el tiempo, la rapidez, la temperatura oel potencial eléctrico. La distancia entre dos puntos en un espacio tridimensional es un escalar. Sin embargo, ladirección desde uno de estos puntos al otro no lo es, puesto que para describir la dirección se requiere de dosmagnitudes: el ángulo medido sobre el plano horizontal y el ángulo medido desde dicho plano. La fuerza no puedeser descrita por un escalar, ya que esta propiedad está compuesta de una dirección y una magnitud. No obstante, lamagnitud de la fuerza por sí sola puede describirse como un escalar. Por ejemplo, la fuerza gravitacional que actúasobre una partícula no es un escalar, pero su magnitud sí lo es. La rapidez de un objeto (por ejemplo, 100 km/h) esun escalar, mientras que su velocidad (por ejemplo, 100 km/h en dirección norte) no lo es.Existen algunas cantidades llamadas pseudoescalares, que son el resultado de un triple producto escalar. Comoejemplo de esto, se encuentra la carga magnética.
Escalares en la teoría de la relatividadEn la teoría de la relatividad, se consideran cambios de coordenadas que cambian espacio por tiempo. Comoresultado de esto, muchas magnitudes físicas que son escalares en física clásica necesitan combinarse con otrasmagnitudes como vectores o tensores en cuatro dimensiones. Por ejemplo, la densidad de carga en un punto dentrode un medio, la cual en física clásica no es un escalar, debe combinarse con la densidad de corriente local (un vectorde tres dimensiones) para formar un vector relativista de cuatro dimensiones. De la misma manera, la densidad deenergía se debe combinar con la densidad de momento y la presión para formar el tensor de energía-momento.[4]
Como ejemplos de cantidades escalares en relatividad están la carga eléctrica,[5] intervalos de espacio-tiempo (comoel tiempo propio y la longitud propia)[6] y la masa invariante.
Referencias[1][1] Resnick (1993), p. 42.[2][2] Resnick (1993), p. 50[3][3] Arfken (1985), p. 131[4][4] Bergmann (1976), pp. 125-132.[5][5] Bergmann (1976), p. 282.[6][6] Bergmann (1976), p. 44.
Bibliografía• Arfken, George (1985). Mathematical Methods for Physicists (third edición). Academic press. ISBN 0-12-059820-5.• Bergmann, P. G. (1976). Introduction to the Theory of Relativity (http:/ / books. google. com. mx/
books?id=3cE9jXr_QhwC& printsec=frontcover& hl=es) (en inglés). Courier Dover Publications.ISBN 0486632822.
• Feynman, Richard P.; Leighton, Robert B.; Sands, Matthew (2006). The Feynman Lectures on Physics 1.ISBN 0-8053-9045-6.
• Resnick, R.; Halliday, D.; Krane, K. S (1993). Física vol. 1. Título original (en inglés): Physics, Vol. 1; traducidopor F. Andión Uz. Compañía Editorial Continental; publicado originalmente por John Wiley & Sons Inc. p. 42.ISBN 968-26-1230-6.
Vector 6
Vector
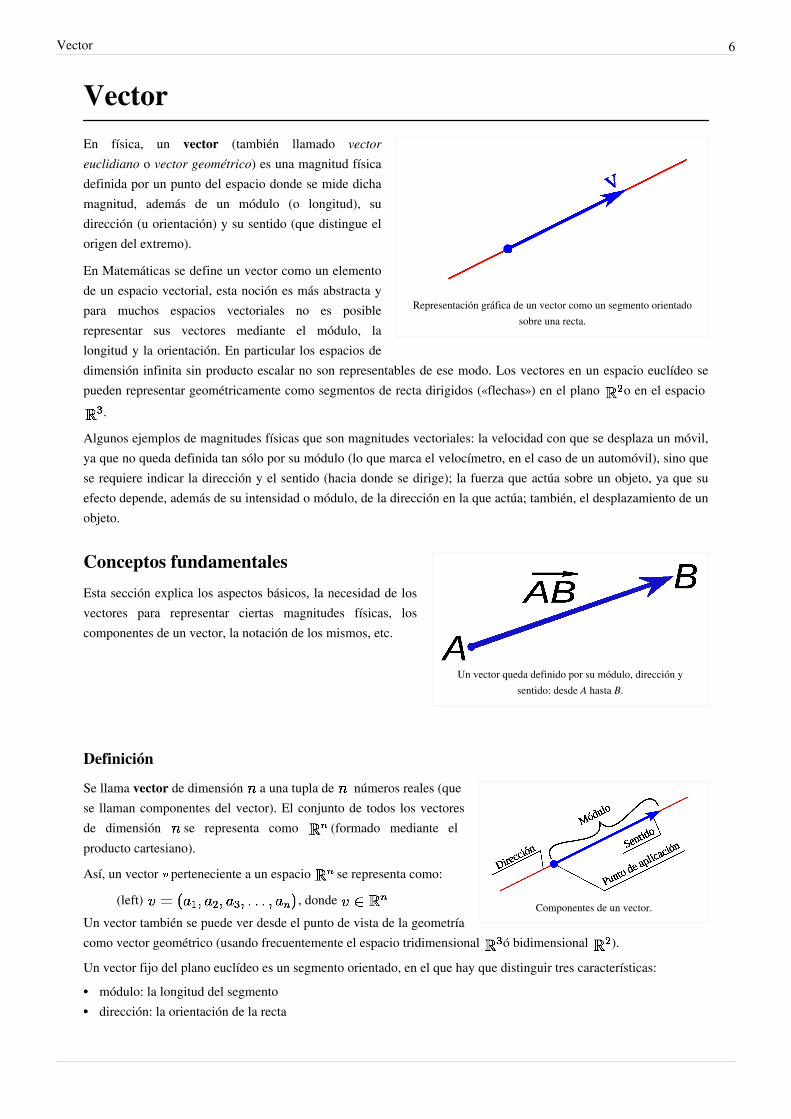
Representación gráfica de un vector como un segmento orientadosobre una recta.
En física, un vector (también llamado vectoreuclidiano o vector geométrico) es una magnitud físicadefinida por un punto del espacio donde se mide dichamagnitud, además de un módulo (o longitud), sudirección (u orientación) y su sentido (que distingue elorigen del extremo).
En Matemáticas se define un vector como un elementode un espacio vectorial, esta noción es más abstracta ypara muchos espacios vectoriales no es posiblerepresentar sus vectores mediante el módulo, lalongitud y la orientación. En particular los espacios dedimensión infinita sin producto escalar no son representables de ese modo. Los vectores en un espacio euclídeo sepueden representar geométricamente como segmentos de recta dirigidos («flechas») en el plano o en el espacio
.
Algunos ejemplos de magnitudes físicas que son magnitudes vectoriales: la velocidad con que se desplaza un móvil,ya que no queda definida tan sólo por su módulo (lo que marca el velocímetro, en el caso de un automóvil), sino quese requiere indicar la dirección y el sentido (hacia donde se dirige); la fuerza que actúa sobre un objeto, ya que suefecto depende, además de su intensidad o módulo, de la dirección en la que actúa; también, el desplazamiento de unobjeto.
Un vector queda definido por su módulo, dirección ysentido: desde A hasta B.
Conceptos fundamentales
Esta sección explica los aspectos básicos, la necesidad de losvectores para representar ciertas magnitudes físicas, loscomponentes de un vector, la notación de los mismos, etc.
Definición
Componentes de un vector.
Se llama vector de dimensión a una tupla de números reales (quese llaman componentes del vector). El conjunto de todos los vectoresde dimensión se representa como (formado mediante elproducto cartesiano).
Así, un vector perteneciente a un espacio se representa como:
(left) , donde Un vector también se puede ver desde el punto de vista de la geometríacomo vector geométrico (usando frecuentemente el espacio tridimensional ó bidimensional ).
Un vector fijo del plano euclídeo es un segmento orientado, en el que hay que distinguir tres características:•• módulo: la longitud del segmento•• dirección: la orientación de la recta
Vector 7
•• sentido: indica cual es el origen y cual es el extremo final de la rectaEn inglés, la palabra "direction" indica tanto la dirección como el sentido del vector, con lo que se define el vectorcon solo dos características: módulo y dirección.Los vectores fijos del plano se denotan con dos letras mayúsculas, por ejemplo , que indican su origen yextremo respectivamente.
Características de un vector
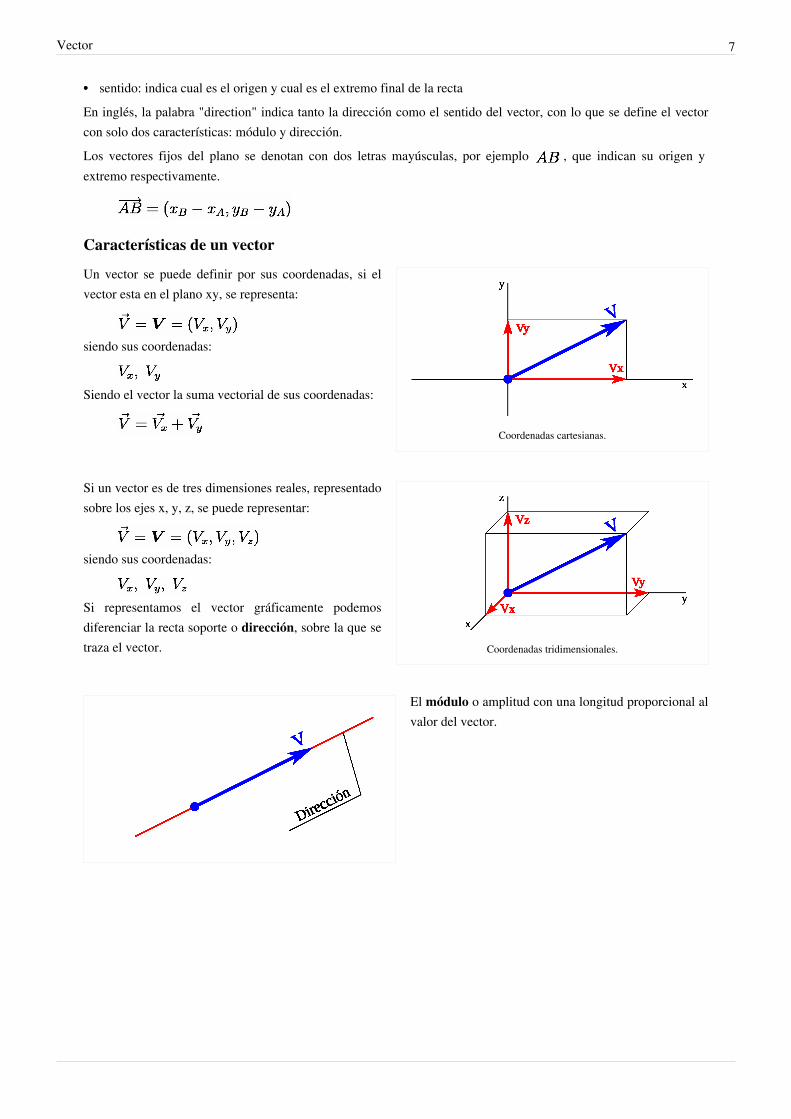
Coordenadas cartesianas.
Un vector se puede definir por sus coordenadas, si elvector esta en el plano xy, se representa:
siendo sus coordenadas:
Siendo el vector la suma vectorial de sus coordenadas:
Coordenadas tridimensionales.
Si un vector es de tres dimensiones reales, representadosobre los ejes x, y, z, se puede representar:
siendo sus coordenadas:
Si representamos el vector gráficamente podemosdiferenciar la recta soporte o dirección, sobre la que setraza el vector.
El módulo o amplitud con una longitud proporcional alvalor del vector.
Vector 8
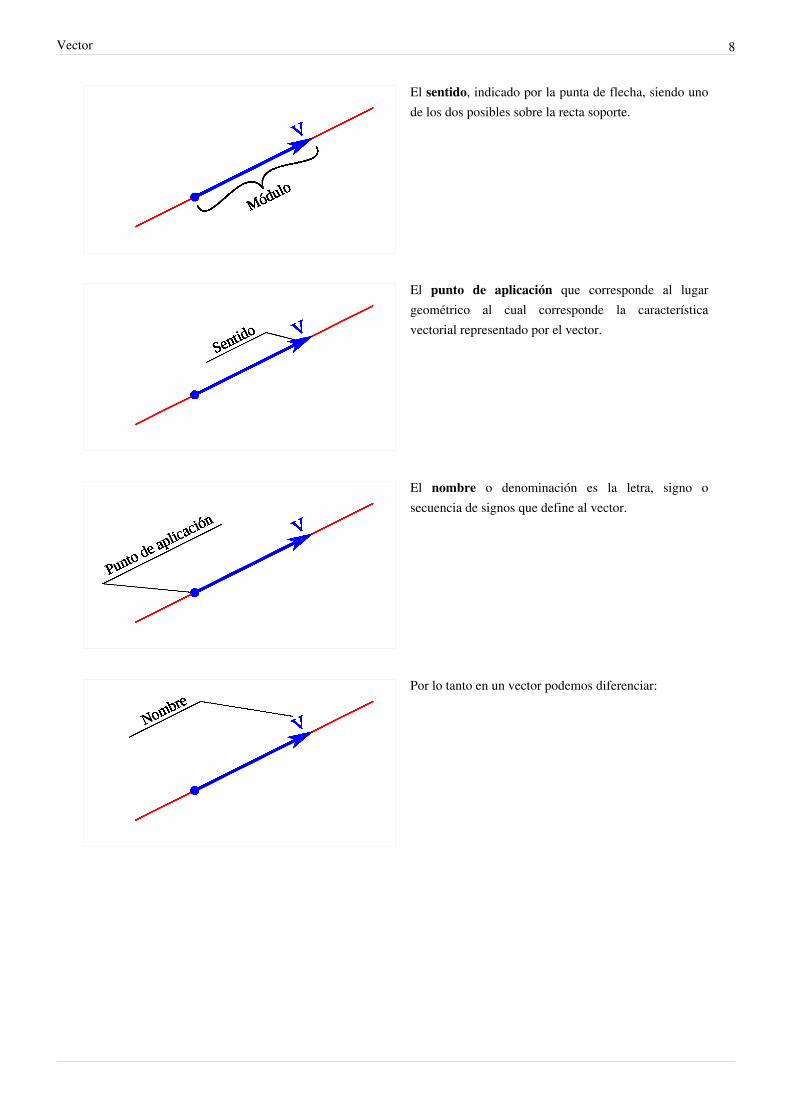
El sentido, indicado por la punta de flecha, siendo unode los dos posibles sobre la recta soporte.
El punto de aplicación que corresponde al lugargeométrico al cual corresponde la característicavectorial representado por el vector.
El nombre o denominación es la letra, signo osecuencia de signos que define al vector.
Por lo tanto en un vector podemos diferenciar:
Vector 9
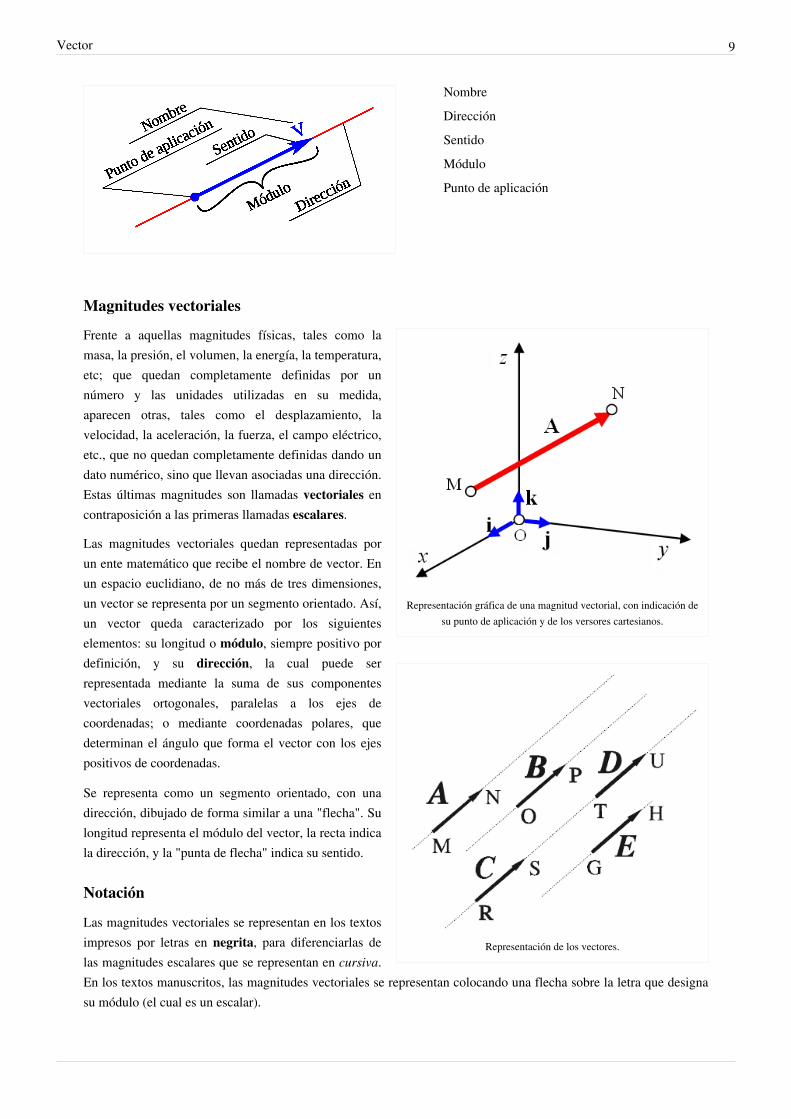
NombreDirecciónSentidoMóduloPunto de aplicación
Magnitudes vectoriales
Representación gráfica de una magnitud vectorial, con indicación desu punto de aplicación y de los versores cartesianos.
Representación de los vectores.
Frente a aquellas magnitudes físicas, tales como lamasa, la presión, el volumen, la energía, la temperatura,etc; que quedan completamente definidas por unnúmero y las unidades utilizadas en su medida,aparecen otras, tales como el desplazamiento, lavelocidad, la aceleración, la fuerza, el campo eléctrico,etc., que no quedan completamente definidas dando undato numérico, sino que llevan asociadas una dirección.Estas últimas magnitudes son llamadas vectoriales encontraposición a las primeras llamadas escalares.
Las magnitudes vectoriales quedan representadas porun ente matemático que recibe el nombre de vector. Enun espacio euclidiano, de no más de tres dimensiones,un vector se representa por un segmento orientado. Así,un vector queda caracterizado por los siguienteselementos: su longitud o módulo, siempre positivo pordefinición, y su dirección, la cual puede serrepresentada mediante la suma de sus componentesvectoriales ortogonales, paralelas a los ejes decoordenadas; o mediante coordenadas polares, quedeterminan el ángulo que forma el vector con los ejespositivos de coordenadas.
Se representa como un segmento orientado, con unadirección, dibujado de forma similar a una "flecha". Sulongitud representa el módulo del vector, la recta indicala dirección, y la "punta de flecha" indica su sentido.
Notación
Las magnitudes vectoriales se representan en los textosimpresos por letras en negrita, para diferenciarlas delas magnitudes escalares que se representan en cursiva.En los textos manuscritos, las magnitudes vectoriales se representan colocando una flecha sobre la letra que designasu módulo (el cual es un escalar).
Vector 10
Ejemplos
• ... representan, respectivamente, las magnitudes vectoriales de módulos A, a, ω, ... El módulo de unamagnitud vectorial también se representa encerrando entre barras la notación correspondiente al vector:
...• En los textos manuscritos se escribe: ... para los vectores y ... o ... para
los módulos.Cuando convenga, se representan la magnitud vectorial haciendo referencia al origen y al extremo del segmentoorientado que la representa geométricamente; así, se designan los vectores representados en la Figura 2 en la forma
, ... resultando muy útil esta notación para los vectores que representan el desplazamiento.
Además de estas convenciones los vectores unitarios o versores, cuyo módulo es la unidad, se representanfrecuentemente con un circunflejo encima, por ejemplo .
Clasificación de vectoresSegún los criterios que se utilicen para determinar la igualdad o equipolencia de dos vectores, pueden distinguirsedistintos tipos de los mismos:•• Vectores libres: no están aplicados en ningún punto en particular.•• Vectores deslizantes: su punto de aplicación puede deslizar a lo largo de su recta de acción.•• Vectores fijos o ligados: están aplicados en un punto en particular.Podemos referirnos también a:•• Vectores unitarios: vectores de módulo unidad.•• Vectores concurrentes o angulares: son aquellas cuyas direcciones o líneas de acción pasan por un mismo punto.
También se les suele llamar angulares por que forman un ángulo entre ellas.•• Vectores opuestos: vectores de igual magnitud y dirección, pero sentidos contrarios. En inglés se dice que son de
igual magnitud pero direcciones contrarias, ya que la dirección también indica el sentido.•• Vectores colineales: los vectores que comparten una misma recta de acción.•• Vectores paralelos: si sobre un cuerpo rígido actúan dos o más fuerzas cuyas líneas de acción son paralelas.•• Vectores coplanarios: los vectores cuyas rectas de acción son coplanarias (situadas en un mismo plano).
Componentes de un vector
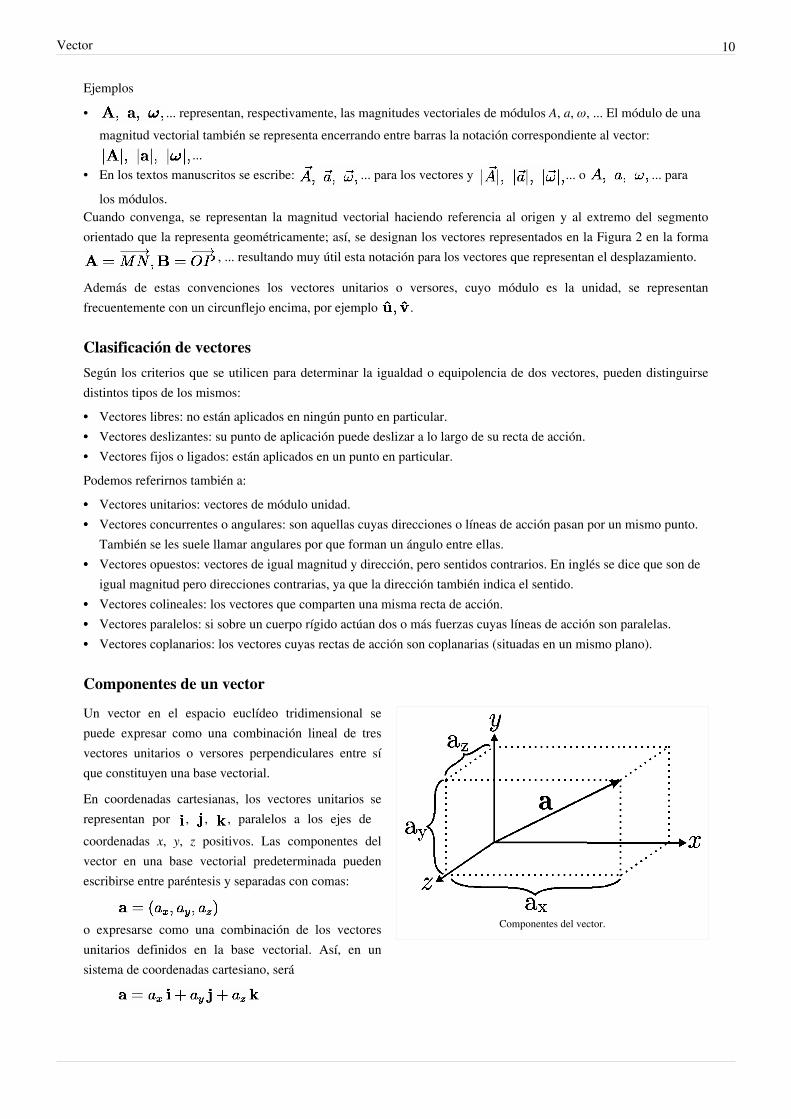
Componentes del vector.
Un vector en el espacio euclídeo tridimensional sepuede expresar como una combinación lineal de tresvectores unitarios o versores perpendiculares entre síque constituyen una base vectorial.
En coordenadas cartesianas, los vectores unitarios serepresentan por , , , paralelos a los ejes decoordenadas x, y, z positivos. Las componentes delvector en una base vectorial predeterminada puedenescribirse entre paréntesis y separadas con comas:
o expresarse como una combinación de los vectoresunitarios definidos en la base vectorial. Así, en unsistema de coordenadas cartesiano, será

Vector 11
Estas representaciones son equivalentes entre sí, y los valores ax, ay, az, son las componentes de un vector que, salvoque se indique lo contrario, son números reales.Una representación conveniente de las magnitudes vectoriales es mediante un vector columna o un vector fila,particularmente cuando están implicadas operaciones matrices (tales como el cambio de base), del modo siguiente:
Con esta notación, los vectores cartesianos quedan expresados en la forma:
El lema de Zorn, consecuencia del axioma de elección, permite establecer que todo espacio vectorial admite una basevectorial, por lo que todo vector es representable como el producto de unas componentes respecto a dicha base. Dadoun vector sólo existen un número finito de componentes diferentes de cero.
Representación gráfica de los vectoresAunque hay quien no recomienda el uso de gráficos para evitar la confusión de conceptos y la inducción al error, sininvestigación que lo corrobore, también es cierto que la memoria se estimula con mejores resultados. Para ello:• Se llama vector a la representación visual con el símbolo de flecha( un segmento y un triángulo en un extremo).•• La rectitud visual de una flecha o curvatura de la misma, no la hace diferente en símbolo si los dos extremos
permanecen en el mismo lugar y orden.• El que una flecha cierre en sí misma, indica la ausencia de efectos algebraicos.•• Para visualizar la suma de vectores se hará encadenándolos, es decir, uniendo el extremo que tiene un triángulo
(final) del primer vector con el extremo que no lo tiene (origen) del segundo vector manteniendo la dirección ydistancia, propias al espacio, de sus dos extremos, ya que estas dos cualidades los distingue visualmente de otrosvectores.
• Los escalares se representarán con una línea de trazos a modo, exclusivamente, de distinción ya que no siemprepertenecen al espacio de vectores.
Se examinan cada uno de los casos que aparecen en la definición de las operaciones suma de vectores y producto porun escalar:
Suma de vectores
La definición suma de vectores en el orden u+v produce otro vector, es como encadenar, siempre visualmente, unvector u y luego uno v. Diremos que u+v se simplifica como un vector w o que w descompone como suma devectores u y v.
1) Decir que u+v=v+u, es exigir que las dos sumas simplifiquen en el mismo vector, en negro. Véase que enfísica los vectores en rojo simulan la descomposición de fuerzas ejercidas por el vector negro en su origen, yse representa con un paralelogramo.
Vector 12
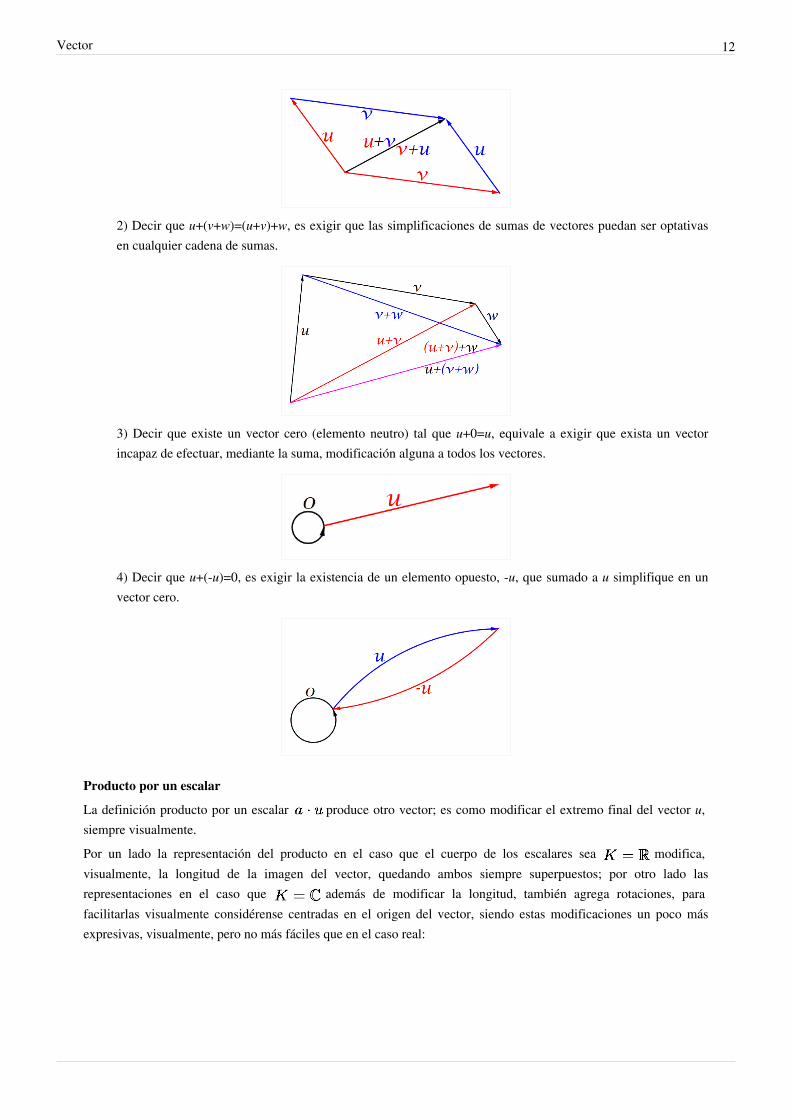
2) Decir que u+(v+w)=(u+v)+w, es exigir que las simplificaciones de sumas de vectores puedan ser optativasen cualquier cadena de sumas.
3) Decir que existe un vector cero (elemento neutro) tal que u+0=u, equivale a exigir que exista un vectorincapaz de efectuar, mediante la suma, modificación alguna a todos los vectores.
4) Decir que u+(-u)=0, es exigir la existencia de un elemento opuesto, -u, que sumado a u simplifique en unvector cero.
Producto por un escalar
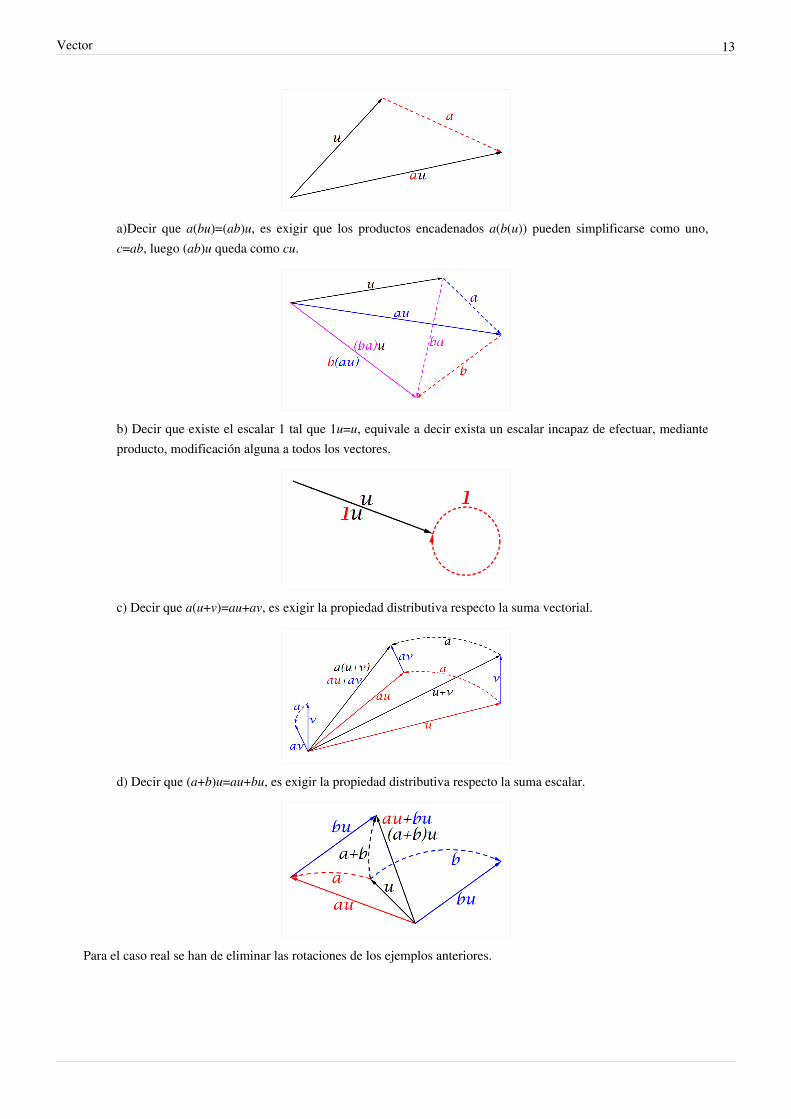
La definición producto por un escalar produce otro vector; es como modificar el extremo final del vector u,siempre visualmente.Por un lado la representación del producto en el caso que el cuerpo de los escalares sea modifica,visualmente, la longitud de la imagen del vector, quedando ambos siempre superpuestos; por otro lado lasrepresentaciones en el caso que además de modificar la longitud, también agrega rotaciones, parafacilitarlas visualmente considérense centradas en el origen del vector, siendo estas modificaciones un poco másexpresivas, visualmente, pero no más fáciles que en el caso real:
Vector 13
a)Decir que a(bu)=(ab)u, es exigir que los productos encadenados a(b(u)) pueden simplificarse como uno,c=ab, luego (ab)u queda como cu.
b) Decir que existe el escalar 1 tal que 1u=u, equivale a decir exista un escalar incapaz de efectuar, medianteproducto, modificación alguna a todos los vectores.
c) Decir que a(u+v)=au+av, es exigir la propiedad distributiva respecto la suma vectorial.
d) Decir que (a+b)u=au+bu, es exigir la propiedad distributiva respecto la suma escalar.
Para el caso real se han de eliminar las rotaciones de los ejemplos anteriores.
Vector 14
Operaciones con vectores
Suma de vectoresPara sumar dos vectores libres (vector y vector) se escogen como representantes dos vectores tales que el extremofinal de uno coincida con el extremo origen del otro vector.
Suma de vectores sobre un mismo punto
La suma de vectores está bien definida si ambos vectores pertenecen al mismo espacio vectorial, en física para quedos vectores puedan ser sumados deben estar aplicados en el mismo punto. La composición de fuerzas sobre unsólido rígido cuando los puntos de aplicación no coinciden lleva a la noción de momento de fuerza dados dos fuerzas
con puntos de aplicación se definen la fuerza resultante como el par:[cita requerida]
Donde es la suma generalizada a vectores aplicados en diferentes puntos. El punto de aplicación es el puntode intersección de las rectas de acción de las fuerzas. Las componentes del vector de fuerza resultante es de hecho lasuma de componentes ordinarias de vectores:
El momento resultante es el momento de fuerza del conjunto de fuerzas respecto al punto calculado para la fuerzaresultante.
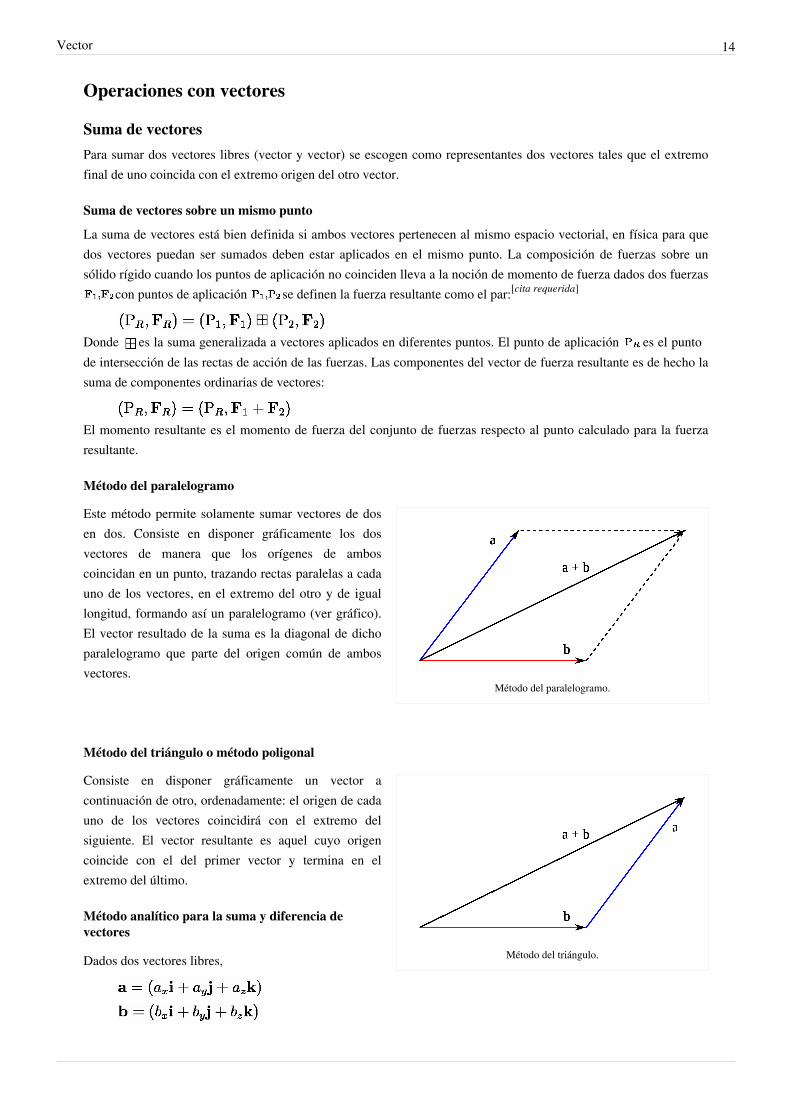
Método del paralelogramo
Método del paralelogramo.
Este método permite solamente sumar vectores de dosen dos. Consiste en disponer gráficamente los dosvectores de manera que los orígenes de amboscoincidan en un punto, trazando rectas paralelas a cadauno de los vectores, en el extremo del otro y de iguallongitud, formando así un paralelogramo (ver gráfico).El vector resultado de la suma es la diagonal de dichoparalelogramo que parte del origen común de ambosvectores.
Método del triángulo o método poligonal
Método del triángulo.
Consiste en disponer gráficamente un vector acontinuación de otro, ordenadamente: el origen de cadauno de los vectores coincidirá con el extremo delsiguiente. El vector resultante es aquel cuyo origencoincide con el del primer vector y termina en elextremo del último.
Método analítico para la suma y diferencia devectores
Dados dos vectores libres,

Vector 15
El resultado de su suma o de su diferencia se expresa en la forma
y ordenando las componentes,
Con la notación matricial sería
Conocidos los módulos de dos vectores dados, y , así como el ángulo que forman entre sí, el módulo dees:
La deducción de esta expresión puede consultarse en deducción del módulo de la suma.
Producto de un vector por un escalar
Producto por un escalar.
El producto de un vector por un escalar es otro vectorcuyo módulo es el producto del escalar por el módulodel vector, cuya dirección es igual a la del vector, ycuyo sentido es contrario a este si el escalar esnegativo.Partiendo de la representación gráfica del vector, sobrela misma línea de su dirección tomamos tantas veces elmódulo de vector como indica el escalar.Sean un escalar y un vector, el producto de por
se representa y se realiza multiplicando cadauna de las componentes del vector por el escalar; estoes,
Con la notación matricial sería
Derivada ordinaria de un vector
Dado un vector que es función de una variable independiente
Calculamos la derivada ordinaria del vector con respecto de la variable t, calculando la derivada de cada una de suscomponentes como si de escalares se tratara:
teniendo en cuenta que los vectores unitarios son constantes en módulo y dirección.Con notación matricial sería
Vector 16
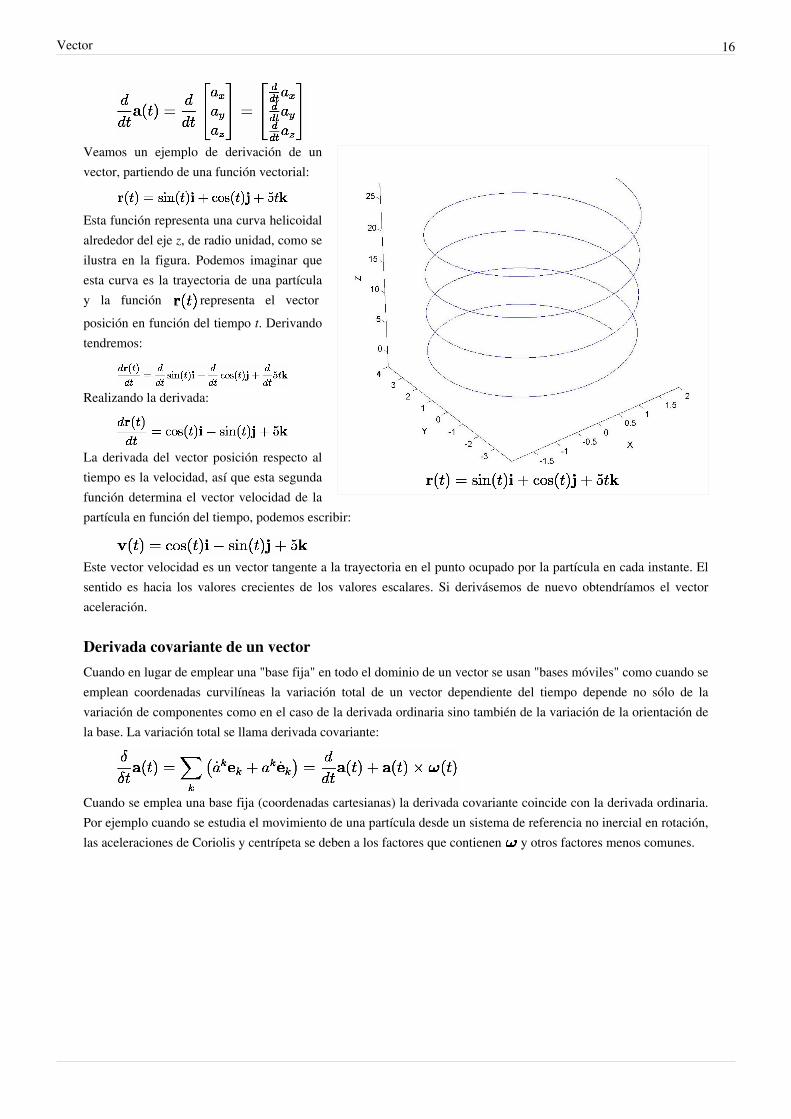
Veamos un ejemplo de derivación de unvector, partiendo de una función vectorial:
Esta función representa una curva helicoidalalrededor del eje z, de radio unidad, como seilustra en la figura. Podemos imaginar queesta curva es la trayectoria de una partículay la función representa el vectorposición en función del tiempo t. Derivandotendremos:
Realizando la derivada:
La derivada del vector posición respecto altiempo es la velocidad, así que esta segundafunción determina el vector velocidad de lapartícula en función del tiempo, podemos escribir:
Este vector velocidad es un vector tangente a la trayectoria en el punto ocupado por la partícula en cada instante. Elsentido es hacia los valores crecientes de los valores escalares. Si derivásemos de nuevo obtendríamos el vectoraceleración.
Derivada covariante de un vectorCuando en lugar de emplear una "base fija" en todo el dominio de un vector se usan "bases móviles" como cuando seemplean coordenadas curvilíneas la variación total de un vector dependiente del tiempo depende no sólo de lavariación de componentes como en el caso de la derivada ordinaria sino también de la variación de la orientación dela base. La variación total se llama derivada covariante:
Cuando se emplea una base fija (coordenadas cartesianas) la derivada covariante coincide con la derivada ordinaria.Por ejemplo cuando se estudia el movimiento de una partícula desde un sistema de referencia no inercial en rotación,las aceleraciones de Coriolis y centrípeta se deben a los factores que contienen y otros factores menos comunes.

Vector 17
Ángulo entre dos vectoresEl ángulo determinado por las direcciones de dos vectores y viene dado por:
Descomposiciones de un vectorDado un vector y una dirección de referencia dada por un vector unitario se puede descomponer el primervector en una componente paralela y otra componente perpendicular a la dirección de referencia:
En física esta descomposición se usa en diferentes contextos como descomponer la aceleración en una componenteparalela a la velocidad y otra componente perpendicular a la misma. También el tensión mecánica en un punto sobreun plano puede descomponerse en una componente normal al plano y otra paralela.
También dado un campo vectorial definido sobre un dominio de Lipschitz, acotado, simplemente conexo y decuadrado integrable admite la llamada descomposición de Helmholtz como suma de un campoconservativo y un campo solenoidal:
Cambio de base vectorial
Cambio de base vectorial.
En matemáticas las rotaciones sontransformaciones lineales que conservanlas normas en espacios vectoriales en losque se ha definido una operación deproducto interior. La matriz detransformación tiene la propiedad de ser unamatriz unitaria, es decir, es ortogonal y sudeterminante es 1. Sea un vector expresado en un sistema de coordenadascartesianas (x, y, z) con una base vectorial
asociada definida por los versores; esto es,
Ahora, supongamos que giramos el sistemade ejes coordenados, manteniendo fijo elorigen del mismo, de modo que obtengamosun nuevo triedro ortogonal de ejes (x′, y′,z′), con una base vectorial asociada definida por los versores . Las componentes del vector enesta nueva base vectorial serán:
La operación de rotación de la base vectorial siempre puede expresarse como la acción de un operador lineal(representado por una matriz) actuando sobre el vector (multiplicando al vector):

Vector 18
que es la matriz de transformación para el cambio de base vectorial.
Cambio de base vectorial.
EjemploEn el caso simple en el que el giro tenga magnitud alrededor del eje z, tendremos la transformación:
Al hacer la aplicación del operador, es decir, almultiplicar la matriz por el vector, obtendremos laexpresión del vector en la nueva base vectorial:
siendo
las componentes del vector en la nueva base vectorial.
Requerimientos físicos de las magnitudes vectorialesNo cualquier n-tupla de funciones o números reales constituye un vector físico. Para que una n-tupla represente unvector físico, los valores numéricos de las componentes del mismo medidos por diferentes observadores debentransformarse de acuerdo con ciertas relaciones fijas.En mecánica newtoniana generalmente se utilizan vectores genuinos, llamados a veces vectores polares, junto conpseudovectores, llamados vectores axiales que realmente representan el dual de Hodge de magnitudes tensorialesantisimétricas. El momento angular, el campo magnético y todas las magnitudes que en cuya definición interviene elproducto vectorial son en realidad pseudovectores o vectores axiales.En teoría especial de la relatividad, sólo los vectores tetradimensionales cuyas medidas tomadas por diferentesobservadores pueden ser relacionadas mediante alguna transformación de Lorentz constituyen magnitudesvectoriales. Así las componentes de dos magnitudes vectoriales medidas por dos observadores y debenrelacionarse de acuerdo con la siguiente relación:
Donde son las componentes de la matriz que da la transformación de Lorentz. Magnitudes como el momentoangular, el campo eléctrico o el campo magnético o el de hecho en teoría de la relatividad no son magnitudesvectoriales sino tensoriales.
Vector 19
Referencias
Bibliografía• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN
84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick, Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
ISBN 0-471-32057-9.• Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (en inglés) (6ª edición).
Brooks/Cole. ISBN 0-534-40842-7.• Tipler, Paul A. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.
Enlaces externos• Wikcionario tiene definiciones y otra información sobre vector.Wikcionario• Weisstein, Eric W. « Vector (http:/ / mathworld. wolfram. com/ Vector. html)» (en inglés). MathWorld. Wolfram
Research.
Vector unitarioEn álgebra lineal y física, un vector unitario o versor es un vector de módulo uno. En ocasiones se le llama tambiénvector normalizado.
NotaciónUn vector unitario se denota frecuentemente con un acento circunflejo sobre su nombre, como (se lee "r vector" o"vector r"). La notación mediante el uso de una breve ( ) también es común, especialmente en desarrollosmanuscritos. La tendencia actual es representar el vector en la dirección del vector en la forma .
DefiniciónHabiendo definido el concepto de vector unitario al comienzo de este artículo y habiendo presentado la notaciónusual en la sección anterior, presentamos en esta sección una definición simbólica de vector unitario.
Sea el vector v ∈ ℝn. Se dice que v es un vector unitario y se lo denota mediante si y solamente si elmódulo de v es igual a 1.
O en forma más compacta:

Vector unitario 20
Versor asociado a un vectorCon frecuencia resulta conveniente disponer de un vector unitario que tenga la misma dirección que un vector dado
. A tal vector se le llama versor asociado al vector y se puede representar bien sea por o por e indicauna dirección en el espacio.La operación que permite hallar es la división del vector entre su módulo.
Al proceso de obtener un versor asociado a un vector se le conoce como normalización del vector, razón por la cuales común referirse a un vector unitario como vector normalizado.El método para transformar una base ortogonal (obtenida, por ejemplo mediante el método de ortogonalización deGram-Schmidt) en una base ortonormal (es decir, una base en la que todos los vectores son versores) consistesimplemente en normalizar todos los vectores de la base utilitando la ecuación anterior.
Producto escalar de dos vectoresEn el espacio euclídeo, el producto escalar de dos vectores unitarios es simplemente el coseno del ángulo entre ellos.Esto es consecuencia de la definición de producto escalar y del hecho de que el módulo de ambos vectores es launidad:
Pero:
Por lo tanto:
donde θ es el ángulo entre ambos vectores.
Proyección escalarDe lo anterior, resulta que el producto de un vector por un vector (o vector unitario) es la proyección escalar delvector sobre la dirección determinada por el vector.
Como el módulo del vector es la unidad, la ecuación anterior se transforma en:
de donde es evidente lo afirmado al comienzo de este apartado. Este resultado es muy frecuente en física, donde ennecesario operar, por ejemplo, con las componentes ortogonales a una superficie.
Vectores cartesianosLos versores asociados con las direcciones de los ejes coordenados cartesianos se designan por ,respectivamente. Los versores cartesianos permiten expresar analíticamente los vectores por medio sus componentescartesianas. Ejemplo: la expresión analítica del vector es

Área 21
ÁreaEl área es una medida de extensión de una superficie, expresada en unidades de medida denominadas unidades desuperficie. Para superficies planas, el concepto es más intuitivo. Cualquier superficie plana de lados rectos, porejemplo un polígono, puede triangularse y se puede calcular su área como suma de las áreas de dichos triángulos.Ocasionalmente se usa el término "área" como sinónimo de superficie, cuando no existe confusión entre el conceptogeométrico en sí mismo (superficie) y la magnitud métrica asociada al concepto geométrico (área).Sin embargo, para calcular el área de superficies curvas se requiere introducir métodos de geometría diferencial.Para poder definir el área de una superficie en general –que es un concepto métrico–, se tiene que haber definido untensor métrico sobre la superficie en cuestión: cuando la superficie está dentro de un espacio euclídeo, la superficiehereda una estructura métrica natural inducida por la métrica euclidiana.
HistoriaLa idea de que el área es la medida que proporciona el tamaño de la región encerrada en una figura geométricaproviene de la antigüedad. En el Antiguo Egipto, tras la crecida anual de río Nilo inundando los campos, surgenecesidad de calcular el área de cada parcela agrícola para restablecer sus límites; para solventar eso, los egipciosinventaron la geometría, según Heródoto.[1]
El modo de calcular el área de un polígono como la suma de las áreas de los triángulos, es un método que fuepropuesto por primera vez por el sabio griego Antifón hacia el año 430 a. C. Hallar el área de una figura curvaentraña más dificultad. El método de agotamiento consiste en inscribir y circunscribir polígonos en la figurageométrica, aumentar el número de lados de dichos polígonos y hallar el área buscada. Con el sistema que se conocecomo método exhaustivo de Eudoxo, consiguió obtener una aproximación para calcular el área de un círculo. Dichosistema fue empleado tiempo después por Arquímedes para resolver otros problemas similares,[2] así como el cálculoaproximado del número π.
Área de figuras planas
Área de un triángulo
Áreas en un plano cuadriculado.
• El área de un triángulo es igual al semiproducto entre lalongitud de una base y la altura relativa a esta:[3]
donde b es la base del triángulo y h es la alturacorrespondiente a la base. (se puede considerar cualquierlado como base)
• Si el triángulo es rectángulo, la altura coincide con uno delos catetos, con lo cual el área es igual al semiproducto delos catetos:
donde a y b son los catetos.• Si se conoce la longitud de sus lados, se puede aplicar la
fórmula de Herón.
Área 22
donde a, b, c son los valores de las longitudes de sus lados, s = ½ (a + b + c) es el semiperimetro deltriángulo.
• Si el triángulo es equilátero, el área es igual a un cuarto del cuadrado de un lado por la raíz cuadrada de 3:
donde a es un lado del triángulo.
Área de un cuadrilátero
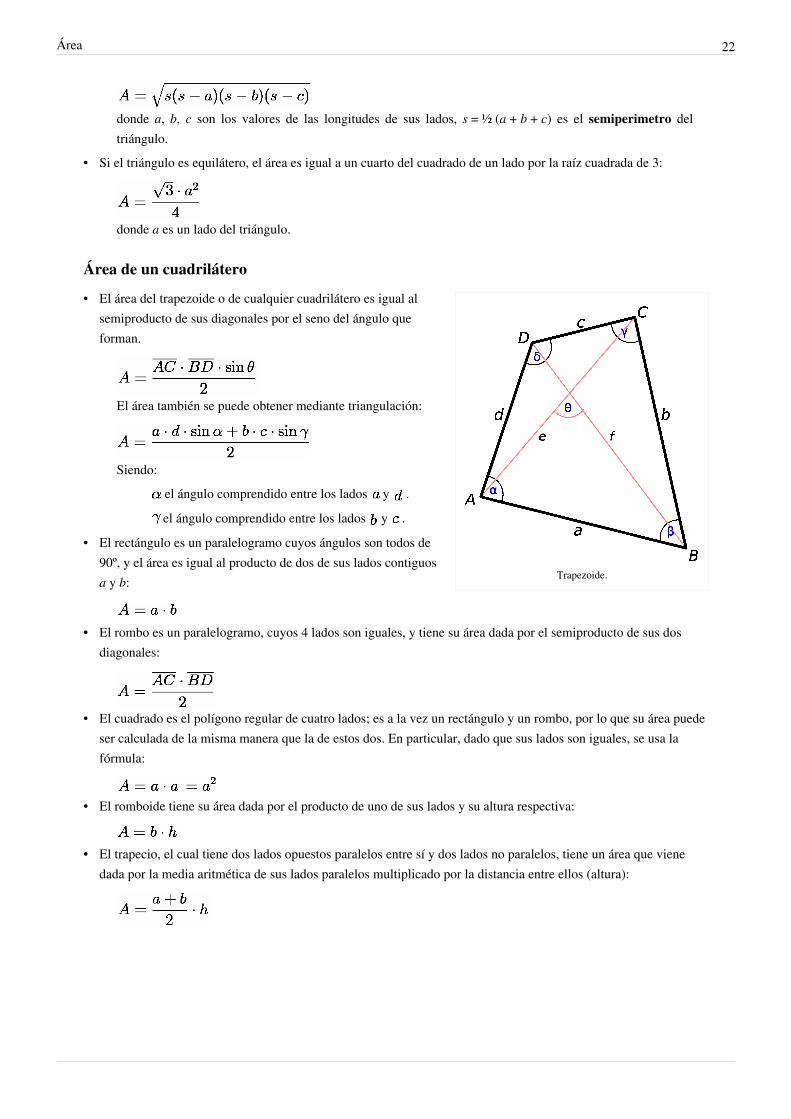
Trapezoide.
• El área del trapezoide o de cualquier cuadrilátero es igual alsemiproducto de sus diagonales por el seno del ángulo queforman.
El área también se puede obtener mediante triangulación:
Siendo:el ángulo comprendido entre los lados y .el ángulo comprendido entre los lados y .
• El rectángulo es un paralelogramo cuyos ángulos son todos de90º, y el área es igual al producto de dos de sus lados contiguosa y b:
• El rombo es un paralelogramo, cuyos 4 lados son iguales, y tiene su área dada por el semiproducto de sus dosdiagonales:
• El cuadrado es el polígono regular de cuatro lados; es a la vez un rectángulo y un rombo, por lo que su área puedeser calculada de la misma manera que la de estos dos. En particular, dado que sus lados son iguales, se usa lafórmula:
• El romboide tiene su área dada por el producto de uno de sus lados y su altura respectiva:
• El trapecio, el cual tiene dos lados opuestos paralelos entre sí y dos lados no paralelos, tiene un área que vienedada por la media aritmética de sus lados paralelos multiplicado por la distancia entre ellos (altura):
Área 23
Área del círculo y la elipseEl área de un círculo, o la delimitada por una circunferencia, se calcula mediante la siguiente expresiónmatemática:[4]
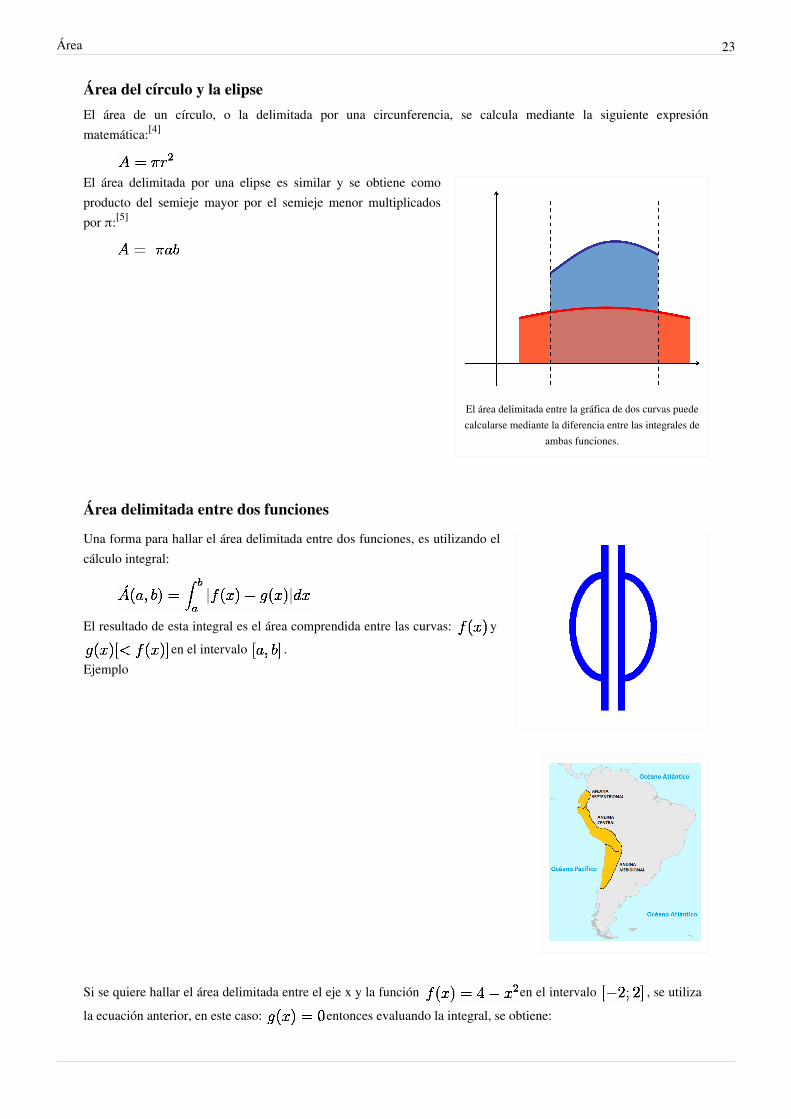
El área delimitada entre la gráfica de dos curvas puedecalcularse mediante la diferencia entre las integrales de
ambas funciones.
El área delimitada por una elipse es similar y se obtiene comoproducto del semieje mayor por el semieje menor multiplicadospor π:[5]
Área delimitada entre dos funciones
Una forma para hallar el área delimitada entre dos funciones, es utilizando elcálculo integral:
El resultado de esta integral es el área comprendida entre las curvas: yen el intervalo .
Ejemplo
Si se quiere hallar el área delimitada entre el eje x y la función en el intervalo , se utilizala ecuación anterior, en este caso: entonces evaluando la integral, se obtiene:
Área 24
Por lo que se concluye que el área delimitada es .El volumen encerrado entre dos funciones también puede ser reducido al cálculo de una integral, similar.
Relación área-perímetroDada una curva simple cerrada en el plano euclídeo puede probarse que su longitud o perímetro del área encerrada yla propia área encerrada satisfacen la relación:
(left)
La igualdad se alcanza sólo para un círculo el resto de figuras y formas posibles cumplen la desigualdad estricta.
Área de superficies curvasEl área de una superficie curva es más complejo y en general supone realizar algún tipo de idealización o límite paramedirlo.• Cuando la superficie es desarrollable, como sucede con el área lateral de un cilindro o de un cono el área de la
superficie puede calcularse a partir del área desarrollada que siempre es una figura plana. Una condiciónmatemática necesaria para que una superficie sea desarrollable es que su curvatura gaussiana sea nula.
• Cuando la superficie no es desarrollable, el cálculo de la superficie o la fórmula analítica para encontrar dichovalor es más trabajoso. Un ejemplo de superficie no desarrollable es la esfera ya que su curvatura gaussianacoincide con el inverso de su radio al cuadrado, y por tanto no es cero. Sin embargo la esfera es una superficie derevolución.
Superficie de revolución
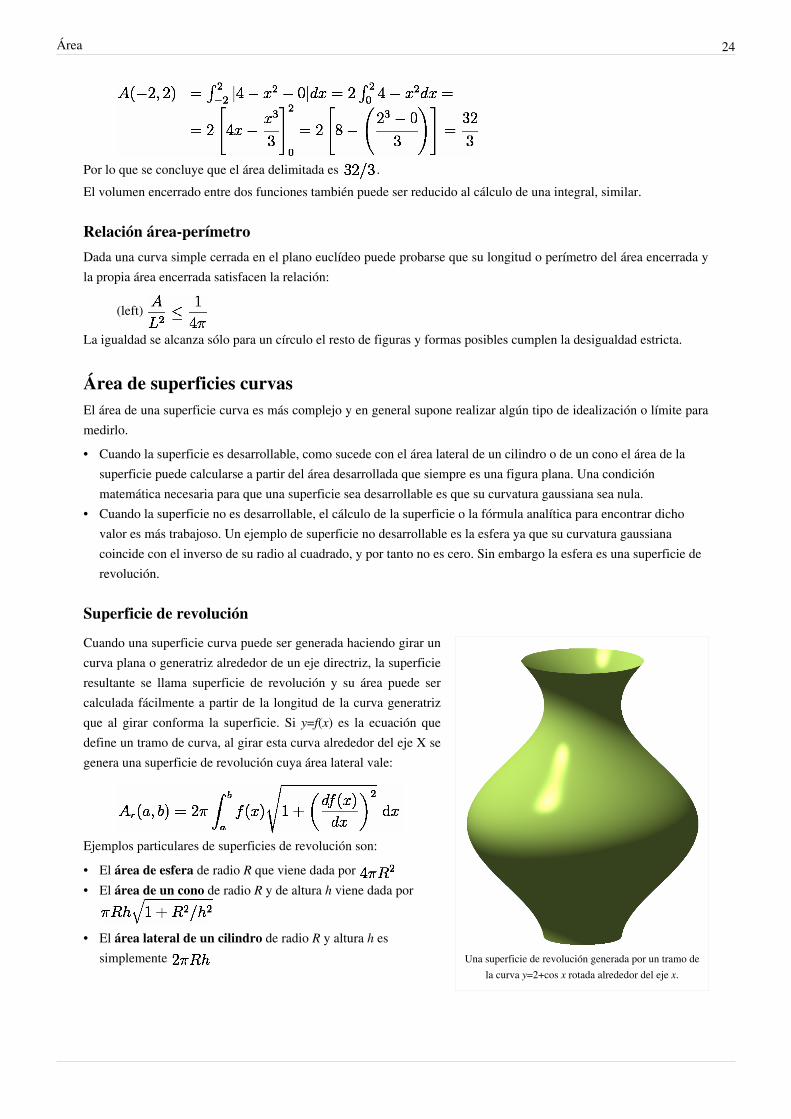
Una superficie de revolución generada por un tramo dela curva y=2+cos x rotada alrededor del eje x.
Cuando una superficie curva puede ser generada haciendo girar uncurva plana o generatriz alrededor de un eje directriz, la superficieresultante se llama superficie de revolución y su área puede sercalculada fácilmente a partir de la longitud de la curva generatrizque al girar conforma la superficie. Si y=f(x) es la ecuación quedefine un tramo de curva, al girar esta curva alrededor del eje X segenera una superficie de revolución cuya área lateral vale:
Ejemplos particulares de superficies de revolución son:• El área de esfera de radio R que viene dada por • El área de un cono de radio R y de altura h viene dada por
• El área lateral de un cilindro de radio R y altura h essimplemente

Área 25
Cálculo general de áreasMediante la geometría diferencial de superficies o más generalmente la geometría riemanniana puede calcularse elárea de cualquier superficie curva finita. Si la superficie viene dada por la función explícita z = f(x, y) entonces, dadauna región Ω contenida en una superficie su área resultar ser:
De manera un poco más general si conocemos la ecuación paramétrica de la superficie en función de doscoordenadas cualesquiera u y v entonces el área anterior puede escribirse como:
Donde E, F y G son las componentes del tensor métrico o primera forma fundamental de la superficie en lascoordenadas paramétricas u y v.
Unidades de medida de superficies
Sistema InternacionalSegún el sistema internacional, las unidades cuadradas son las que se listan a continuación:Múltiplos• Kilómetro cuadrado: 106 metros cuadrados• Hectómetro cuadrado o Hectárea: 104 metros cuadrados• Decámetro cuadrado o Área: 102 metros cuadradosUnidad básica• metro cuadrado: unidad derivada del SI•• Elenio: litro/centímetro•• Piornio: (candela·estereorradián)/luxSubmúltiplos• Decímetro cuadrado: 10−2 metros cuadrados• Centímetro cuadrado: 10−4 metros cuadrados• Milímetro cuadrado: 10−6 metros cuadrados• barn: 10−28 metros cuadrados
Sistema anglosajón de unidadesLas unidades más usadas del sistema anglosajón son:•• pulgada cuadrada•• pie cuadrado•• yarda cuadrada•• acre

Área 26
Referencias[1] Heródoto Historias, Libro II.[2][2] El problema del área: fca.unl.edu.ar[3][3] Spiegel y Abellanas, 1992, p.9[4][4] Spiegel y Abellanas, 1992, p. 10[5][5] Spiegel y Abellanas, 1992, p. 11
Bibliografía• Spiegel, Murray R.; Abellanas, Lorenzo (1992). McGraw-Hill, ed. Fórmulas y tablas de matemática aplicada.
Aravaca (Madrid). ISBN 84-7615-197-7.
Enlaces externos• Wikimedia Commons alberga contenido multimedia sobre Área. Commons• Wikcionario tiene definiciones y otra información sobre área.Wikcionario• Weisstein, Eric W. « Área (http:/ / mathworld. wolfram. com/ Area. html)» (en inglés). MathWorld. Wolfram
Research.• El problema del área, en fca.unl.edu.ar (http:/ / www. fca. unl. edu. ar/ Intdef/ Probarea. htm)• El valor del área representada gráficamente, en fca.unl.edu.ar (http:/ / www. fca. unl. edu. ar/ Intdef/
problemadelarea. htm)
CinemáticaLa cinemática (del griego κινεω, kineo, movimiento) es la rama de la física que estudia las leyes del movimiento delos cuerpos sin considerar las causas que lo originan (las fuerzas) y se limita, esencialmente, al estudio de latrayectoria en función del tiempo. La aceleración es el ritmo con el que cambia la velocidad. La velocidad y laaceleración son las dos principales magnitudes que describen cómo cambia la posición en función del tiempo.
HistoriaLos primeros en intentar describir el movimiento fueron los astrónomos y los filósofos griegos. Hacia 1605, GalileoGalilei hizo sus famosos estudios del movimiento de caída libre y de esferas en planos inclinados a fin decomprender aspectos del movimiento relevantes en su tiempo, como el movimiento de los planetas y de las balas decañón. Posteriormente, el estudio de la cicloide realizado por Evangelista Torricelli (1608-1647) fue configurando loque se conocería como geometría del movimiento.Luego las aportaciones de Nicolás Copérnico, Tycho Brahe y Johannes Kepler expandieron los horizontes en ladescripción del movimiento durante el siglo XVI. En el 1687, con la publicación de la obra tituladaPrincipia, IsaacNewton hizo la mayor aportación conocida al estudio sistemático del movimiento. Isaac Newton (1642 - 1727) fueun físico y matemático inglés, considerado una de las mentes más brillantes en la historia de la ciencia. Entre otrosnumerosos aportes, estableció las tres leyes del movimiento que llevan su nombre, contribuyendo así al campo de ladinámica, y también postuló la Ley de gravitación universal.El nacimiento de la cinemática moderna tiene lugar con la alocución de Pierre Varignon el 20 de enero de 1700 antela Academia Real de las Ciencias de París. Fue allí cuando definió la noción de aceleración y mostró cómo es posiblededucirla de la velocidad instantánea utilizando un simple procedimiento de cálculo diferencial.En la segunda mitad del siglo XVIII se produjeron más contribuciones por Jean Le Rond d'Alembert, LeonhardEuler y André-Marie Ampère y continuaron con el enunciado de la ley fundamental del centro instantáneo derotación en el movimiento plano, de Daniel Bernoulli (1700-1782).
Cinemática 27
El vocablo cinemática fue creado por André-Marie Ampère (1775-1836), quien delimitó el contenido de estadisciplina y aclaró su posición dentro del campo de la mecánica. Desde entonces y hasta la actualidad la cinemáticaha continuado su desarrollo hasta adquirir una estructura propia.Con la teoría de la relatividad especial de Albert Einstein en 1905 se inició una nueva etapa, la cinemática relativista,donde el tiempo y el espacio no son absolutos, y sí lo es la velocidad de la luz.
Elementos básicos de la cinemáticaLos elementos básicos de la cinemática son el espacio, el tiempo y un móvil.En la mecánica clásica se admite la existencia de un espacio absoluto, es decir, un espacio anterior a todos losobjetos materiales e independiente de la existencia de estos. Este espacio es el escenario donde ocurren todos losfenómenos físicos, y se supone que todas las leyes de la física se cumplen rigurosamente en todas las regiones delmismo. El espacio físico se representa en la mecánica clásica mediante un espacio euclidiano.Análogamente, la mecánica clásica admite la existencia de un tiempo absoluto que transcurre del mismo modo entodas las regiones del Universo y que es independiente de la existencia de los objetos materiales y de la ocurrenciade los fenómenos físicos.El móvil más simple que se puede considerar es el punto material o partícula; cuando en la cinemática se estudia estecaso particular de móvil, se denomina cinemática de la partícula, y cuando el móvil bajo estudio es un cuerpo rígidose lo puede considerar un sistema de partículas y hacer extensivos análogos conceptos; en este caso se le denominacinemática del sólido rígido o del cuerpo rígido.
Fundamento de la cinemática clásicaLa cinemática trata del estudio del movimiento de los cuerpos en general y, en particular, el caso simplificado delmovimiento de un punto material, mas no estudia por qué se mueven los cuerpos. Para sistemas de muchaspartículas, por ejemplo los fluidos, las leyes de movimiento se estudian en la mecánica de fluidos.El movimiento trazado por una partícula lo mide un observador respecto a un sistema de referencia. Desde el puntode vista matemático, la cinemática expresa cómo varían las coordenadas de posición de la partícula (o partículas) enfunción del tiempo. La función matemática que describe la trayectoria recorrida por el cuerpo (o partícula) dependede la velocidad (la rapidez con la que cambia de posición un móvil) y de la aceleración (variación de la velocidadrespecto del tiempo).El movimiento de una partícula (o cuerpo rígido) se puede describir según los valores de velocidad y aceleración,que son magnitudes vectoriales:• Si la aceleración es nula, da lugar a un movimiento rectilíneo uniforme y la velocidad permanece constante a lo
largo del tiempo.• Si la aceleración es constante con igual dirección que la velocidad, da lugar al movimiento rectilíneo
uniformemente acelerado y la velocidad variará a lo largo del tiempo.• Si la aceleración es constante con dirección perpendicular a la velocidad, da lugar al movimiento circular
uniforme, donde el módulo de la velocidad es constante, cambiando su dirección con el tiempo.• Cuando la aceleración es constante y está en el mismo plano que la velocidad y la trayectoria, tiene lugar el
movimiento parabólico, donde la componente de la velocidad en la dirección de la aceleración se comporta comoun movimiento rectilíneo uniformemente acelerado, y la componente perpendicular se comporta como unmovimiento rectilíneo uniforme, y se genera una trayectoria parabólica al componer ambas.
• Cuando la aceleración es constante pero no está en el mismo plano que la velocidad y la trayectoria, se observa elefecto de Coriolis.[cita requerida]
• En el movimiento armónico simple se tiene un movimiento periódico de vaivén, como el del péndulo, en el cual un cuerpo oscila a un lado y a otro desde la posición de equilibrio en una dirección determinada y en intervalos
Cinemática 28
iguales de tiempo. La aceleración y la velocidad son funciones, en este caso, sinusoidales del tiempo.Al considerar el movimiento de traslación de un cuerpo extenso, en el caso de ser rígido, conociendo como se mueveuna de las partículas, se deduce como se mueven las demás. Así, basta describir el movimiento de una partículapuntual, como por ejemplo el centro de masa del cuerpo, para especificar el movimiento de todo el cuerpo. En ladescripción del movimiento de rotación hay que considerar el eje de rotación respecto del cual rota el cuerpo y ladistribución de partículas respecto al eje de giro. El estudio del movimiento de rotación de un sólido rígido sueleincluirse en la temática de la mecánica del sólido rígido, por ser más complicado. Un movimiento interesante es el deuna peonza, que al girar puede tener un movimiento de precesión y de nutación.Cuando un cuerpo posee varios movimientos simultáneamente, como por ejemplo uno de traslación y otro derotación, se puede estudiar cada uno por separado en el sistema de referencia que sea apropiado para cada uno, yluego, superponer los movimientos.
Sistemas de coordenadasEn el estudio del movimiento, los sistemas de coordenadas más útiles se encuentran viendo los límites de latrayectoria a recorrer o analizando el efecto geométrico de la aceleración que afecta al movimiento. Así, paradescribir el movimiento de un talón obligado a desplazarse a lo largo de un aro circular, la coordenada más útil seríael ángulo trazado sobre el aro. Del mismo modo, para describir el movimiento de una partícula sometida a la acciónde una fuerza central, las coordenadas polares serían las más útiles.En la gran mayoría de los casos, el estudio cinemático se hace sobre un sistema de coordenadas cartesianas, usandouna, dos o tres dimensiones, según la trayectoria seguida por el cuerpo.
Registro del movimientoLa tecnología hoy en día nos ofrece muchas formas de registrar el movimiento efectuado por un cuerpo. Así, paramedir la velocidad de los vehículos se dispone del radar de tráfico cuyo funcionamiento se basa en el efecto Doppler.El tacómetro es un indicador de la velocidad de un vehículo basado en la frecuencia de rotación de las ruedas. Loscaminantes disponen de podómetros que detectan las vibraciones características del paso y, suponiendo una distanciamedia característica para cada paso, permiten calcular la distancia recorrida. El vídeo, unido al análisis informáticode las imágenes, permite igualmente determinar la posición y la velocidad de los vehículos.
Cinemática 29
Movimiento rectilíneoEs aquél en el que el móvil describe una trayectoria en línea recta.
Movimiento rectilíneo uniforme
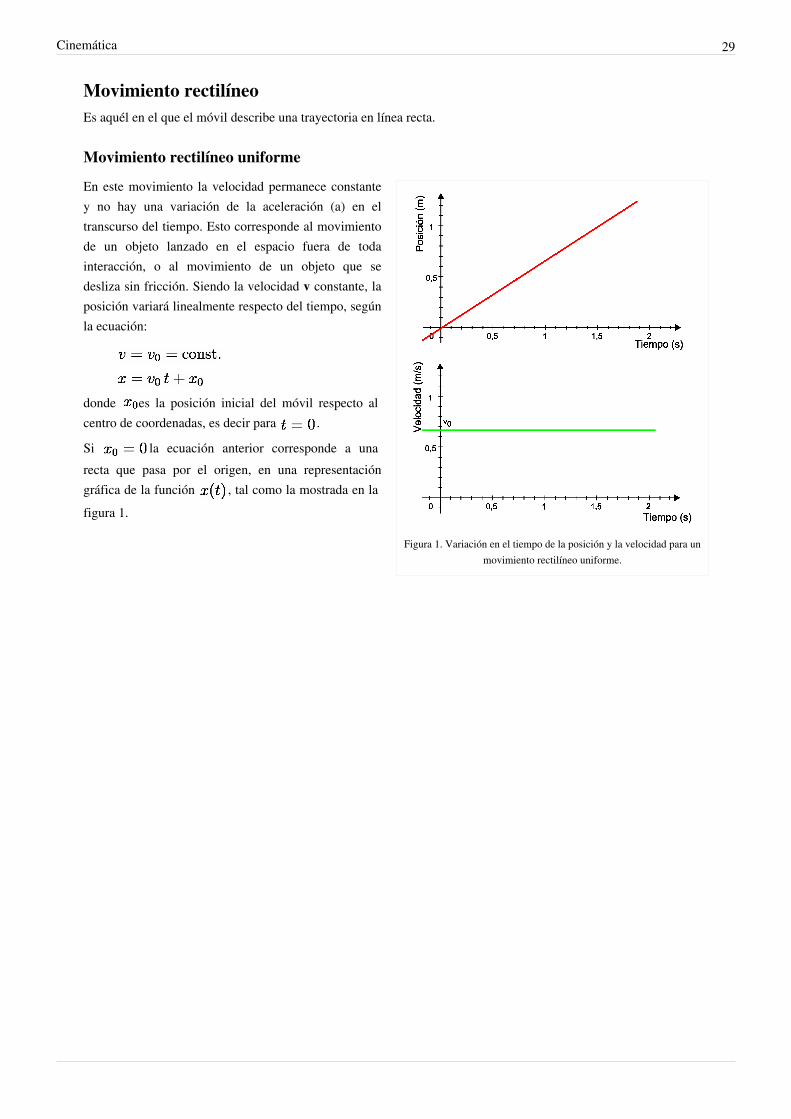
Figura 1. Variación en el tiempo de la posición y la velocidad para unmovimiento rectilíneo uniforme.
En este movimiento la velocidad permanece constantey no hay una variación de la aceleración (a) en eltranscurso del tiempo. Esto corresponde al movimientode un objeto lanzado en el espacio fuera de todainteracción, o al movimiento de un objeto que sedesliza sin fricción. Siendo la velocidad v constante, laposición variará linealmente respecto del tiempo, segúnla ecuación:
donde es la posición inicial del móvil respecto alcentro de coordenadas, es decir para .
Si la ecuación anterior corresponde a unarecta que pasa por el origen, en una representacióngráfica de la función , tal como la mostrada en lafigura 1.
Cinemática 30
Movimiento rectilíneo uniformemente acelerado
Figura 2. Variación en el tiempo de la posición, lavelocidad y la aceleración en un movimiento rectilíneo
uniformemente acelerado.
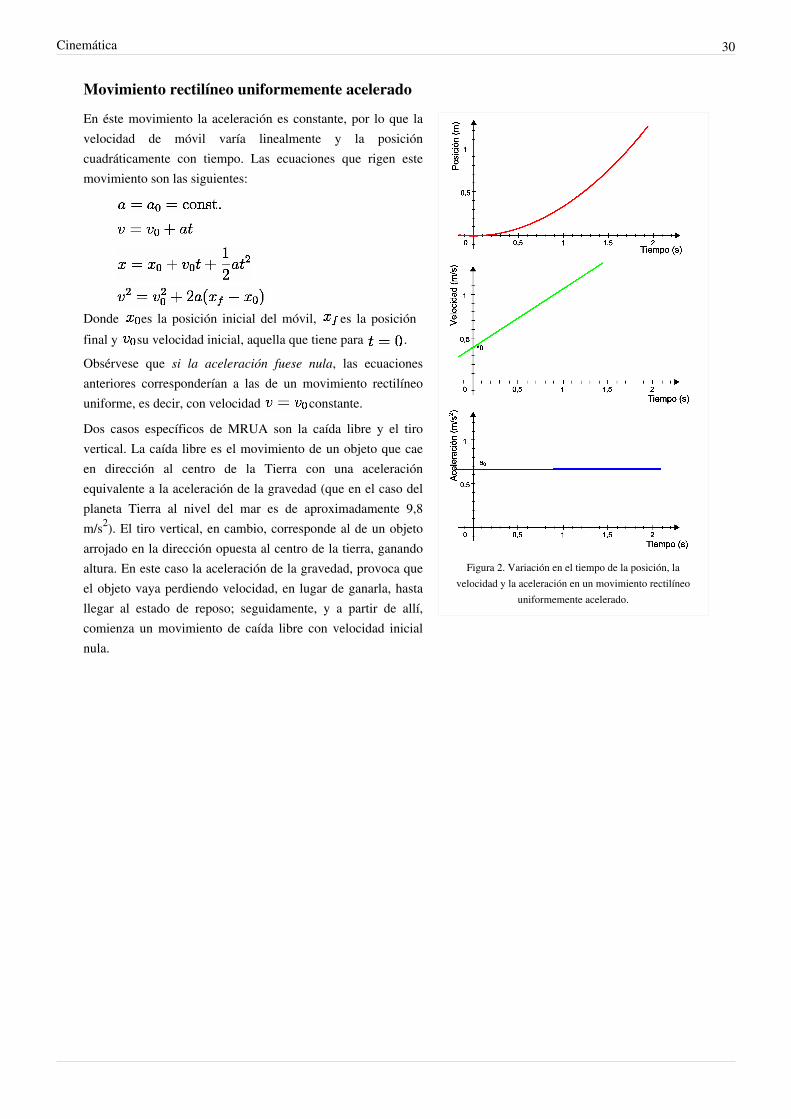
En éste movimiento la aceleración es constante, por lo que lavelocidad de móvil varía linealmente y la posicióncuadráticamente con tiempo. Las ecuaciones que rigen estemovimiento son las siguientes:
Donde es la posición inicial del móvil, es la posiciónfinal y su velocidad inicial, aquella que tiene para .Obsérvese que si la aceleración fuese nula, las ecuacionesanteriores corresponderían a las de un movimiento rectilíneouniforme, es decir, con velocidad constante.
Dos casos específicos de MRUA son la caída libre y el tirovertical. La caída libre es el movimiento de un objeto que caeen dirección al centro de la Tierra con una aceleraciónequivalente a la aceleración de la gravedad (que en el caso delplaneta Tierra al nivel del mar es de aproximadamente 9,8m/s2). El tiro vertical, en cambio, corresponde al de un objetoarrojado en la dirección opuesta al centro de la tierra, ganandoaltura. En este caso la aceleración de la gravedad, provoca queel objeto vaya perdiendo velocidad, en lugar de ganarla, hastallegar al estado de reposo; seguidamente, y a partir de allí,comienza un movimiento de caída libre con velocidad inicialnula.
Cinemática 31
Movimiento armónico simple
Una masa colgada de un muellese mueve con un movimiento
armónico simple.
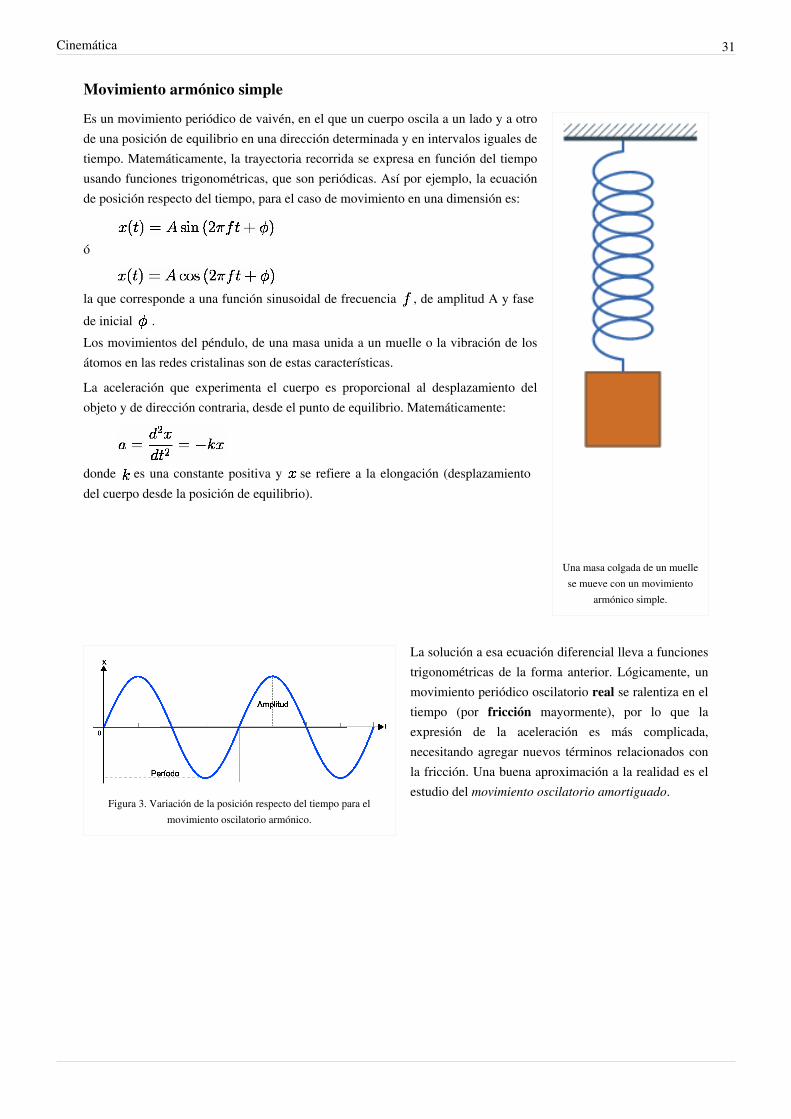
Es un movimiento periódico de vaivén, en el que un cuerpo oscila a un lado y a otrode una posición de equilibrio en una dirección determinada y en intervalos iguales detiempo. Matemáticamente, la trayectoria recorrida se expresa en función del tiempousando funciones trigonométricas, que son periódicas. Así por ejemplo, la ecuaciónde posición respecto del tiempo, para el caso de movimiento en una dimensión es:
ó
la que corresponde a una función sinusoidal de frecuencia , de amplitud A y fasede inicial .Los movimientos del péndulo, de una masa unida a un muelle o la vibración de losátomos en las redes cristalinas son de estas características.
La aceleración que experimenta el cuerpo es proporcional al desplazamiento delobjeto y de dirección contraria, desde el punto de equilibrio. Matemáticamente:
donde es una constante positiva y se refiere a la elongación (desplazamientodel cuerpo desde la posición de equilibrio).
Figura 3. Variación de la posición respecto del tiempo para elmovimiento oscilatorio armónico.
La solución a esa ecuación diferencial lleva a funcionestrigonométricas de la forma anterior. Lógicamente, unmovimiento periódico oscilatorio real se ralentiza en eltiempo (por fricción mayormente), por lo que laexpresión de la aceleración es más complicada,necesitando agregar nuevos términos relacionados conla fricción. Una buena aproximación a la realidad es elestudio del movimiento oscilatorio amortiguado.

Cinemática 32
Movimiento parabólico
Figura 4. Esquema de la trayectoria del movimiento balístico.
Objeto disparado con un ángulo inicial desde un punto que
sigue una trayectoria parabólica.
El movimiento parabólico se puede analizarcomo la composición de dos movimientosrectilíneos distintos: uno horizontal (según el ejex) de velocidad constante y otro vertical (segúneje y) uniformemente acelerado, con laaceleración gravitatoria; la composición deambos da como resultado una trayectoriaparabólica.
Claramente, la componente horizontal de lavelocidad permanece invariable, pero lacomponente vertical y el ángulo θ cambian en eltranscurso del movimiento.
En la figura 4 se observa que el vector velocidadinicial forma un ángulo inicial respecto aleje x; y, como se dijo, para el análisis sedescompone en los dos tipos de movimientomencionados; bajo este análisis, las componentessegún x e y de la velocidad inicial serán:
El desplazamiento horizontal está dado por la leydel movimiento uniforme, por tanto susecuaciones serán (si se considera ):
En tanto que el movimiento según el eje serárectilíneo uniformemente acelerado, siendo susecuaciones:
Si se reemplaza y opera para eliminar el tiempo, con las ecuaciones que dan las posiciones e , se obtiene laecuación de la trayectoria en el plano xy:
que tiene la forma general
y representa una parábola en el plano y(x). En la figura 4 se muestra esta representación, pero en ella se ha considerado (no así en la animación respectiva). En esa figura también se observa que la altura máxima en la trayectoria parabólica se producirá en H, cuando la componente vertical de la velocidad sea nula (máximo de

Cinemática 33
la parábola); y que el alcance horizontal ocurrirá cuando el cuerpo retorne al suelo, en (donde la parábola corta al eje ).
Movimiento circularEl movimiento circular en la práctica es un tipo muy común de movimiento: Lo experimentan, por ejemplo, laspartículas de un disco que gira sobre su eje, las de una noria, las de las agujas de un reloj, las de las paletas de unventilador, etc. Para el caso de un disco en rotación alrededor de un eje fijo, cualquiera de sus puntos describetrayectorias circulares, realizando un cierto número de vueltas durante determinado intervalo de tiempo. Para ladescripción de este movimiento resulta conveniente referirse ángulos recorridos; ya que estos últimos son idénticospara todos los puntos del disco (referido a un mismo centro). La longitud del arco recorrido por un punto del discodepende de su posición y es igual al producto del ángulo recorrido por su distancia al eje o centro de giro. Lavelocidad angular (ω) se define como el desplazamiento angular respecto del tiempo, y se representa mediante unvector perpendicular al plano de rotación; su dirección se determina aplicando la "regla de la mano derecha" o delsacacorchos. La aceleración angular (α) resulta ser variación de velocidad angular respecto del tiempo, y serepresenta por un vector análogo al de la velocidad angular, pero puede o no tener la misma dirección (según acelereo retarde).La velocidad (v) de una partícula es una magnitud vectorial cuyo módulo expresa la longitud del arco recorrido(espacio) por unidad de tiempo tiempo; dicho módulo también se denomina rapidez o celeridad. Se representamediante un vector cuya dirección es tangente a la trayectoria circular y coincide con el del movimiento.La aceleración (a) de una partícula es una magnitud vectorial que indica la rapidez con que cambia la velocidadrespecto del tiempo; esto es, el cambio del vector velocidad por unidad de tiempo. La aceleración tiene generalmentedos componentes: la aceleración tangencial a la trayectoria y la aceleración normal a ésta. La aceleración tangenciales la que causa la variación del módulo de la velocidad (celeridad) respecto del tiempo, mientras que la aceleraciónnormal es la responsable del cambio de dirección de la velocidad. Los módulos de ambas componentes de laaceleración dependen de la distancia a la que se encuentre la partícula respecto del eje de giro.
Movimiento circular uniforme
Figura 5. Dirección de magnitudes físicas en unatrayectoria circular de radio 1.
Se caracteriza por tener una velocidad variable o estructuralconstante por lo que la aceleración angular es nula. La velocidadlineal de la partícula no varía en módulo, pero sí en dirección. Laaceleración tangencial es nula; pero existe aceleración centrípeta(la aceleración normal), que es causante del cambio de dirección.
Matemáticamente, la velocidad angular se expresa como:
donde es la velocidad angular (constante), es la variacióndel ángulo barrido por la partícula y es la variación deltiempo.El ángulo recorrido en un intervalo de tiempo es:

Cinemática 34
Movimiento circular uniformemente aceleradoEn este movimiento, la velocidad angular varía linealmente respecto del tiempo, por estar sometido el móvil a unaaceleración angular constante. Las ecuaciones de movimiento son análogas a las del rectilíneo uniformementeacelerado, pero usando ángulos en vez de distancias:
siendo la aceleración angular constante.
Formulación matemática con el cálculo diferencialLa velocidad es la derivada temporal del vector de posición y la aceleración es la derivada temporal de la velocidad:
o bien sus expresiones integrales:
Movimiento sobre la TierraAl observar el movimiento sobre la Tierra de cuerpos tales como masas de aire en meteorología o de proyectiles, seencuentran unas desviaciones provocadas por el llamado Efecto Coriolis. Ellas son usadas para probar que la Tierraestá rotando sobre su eje. Desde el punto de vista cinemático es interesante explicar lo que ocurre al considerar latrayectoria observada desde un sistema de referencia que está en rotación, la Tierra.Supongamos que un cañón situado en el ecuador lanza un proyectil hacia el norte a lo largo de un meridiano. Unobservador situado al norte sobre el meridiano observa que el proyectil cae al este de lo predicho, desviándose a laderecha de la trayectoria. De forma análoga, si el proyectil se hubiera disparado a lo largo del meridiano hacia el sur,el proyectil también se habría desviado hacia el este, en este caso hacia la izquierda de la trayectoria seguida. Laexplicación de esta "desviación", provocada por el Efecto Coriolis, es debida a la rotación de la Tierra. El proyectiltiene una velocidad con tres componentes: las dos que afectan al tiro parabólico, hacia el norte (o el sur) y haciaarriba, respectivamente, más una tercera componente perpendicular a las anteriores debida a que el proyectil, antesde salir del cañón, tiene una velocidad igual a la velocidad de rotación de la Tierra en el ecuador. Esta últimacomponente de velocidad es la causante de la desviación observada pues si bien la velocidad angular de rotación dela Tierra es constante sobre toda su superficie, no lo es la velocidad lineal de rotación, la cual es máxima en elecuador y nula en el centro de los polos. Así, el proyectil conforme avanza hacia el norte (o el sur), se mueve másrápido hacia el este que la superficie de la Tierra, por lo que se observa la desviación mencionada. Lógicamente, si laTierra no estuviese rotando sobre sí misma, no se daría esta desviación.Otro caso interesante de movimiento sobre la Tierra es el del péndulo de Foucault. El plano de oscilación del péndulo no permanece fijo, sino que lo observamos girar, girando en sentido horario en el hemisferio norte y en sentido antihorario en el hemisferio sur. Si el péndulo se pone a oscilar en el ecuador, el plano de oscilación no cambia. En cambio, en los polos, el giro del plano de oscilación toma un día. Para latitudes intermedias toma valores mayores, dependiendo de la latitud. La explicación de tal giro se basa en los mismos principios hechos anteriormente
Cinemática 35
para el proyectil de artillería.
Cinemática relativista
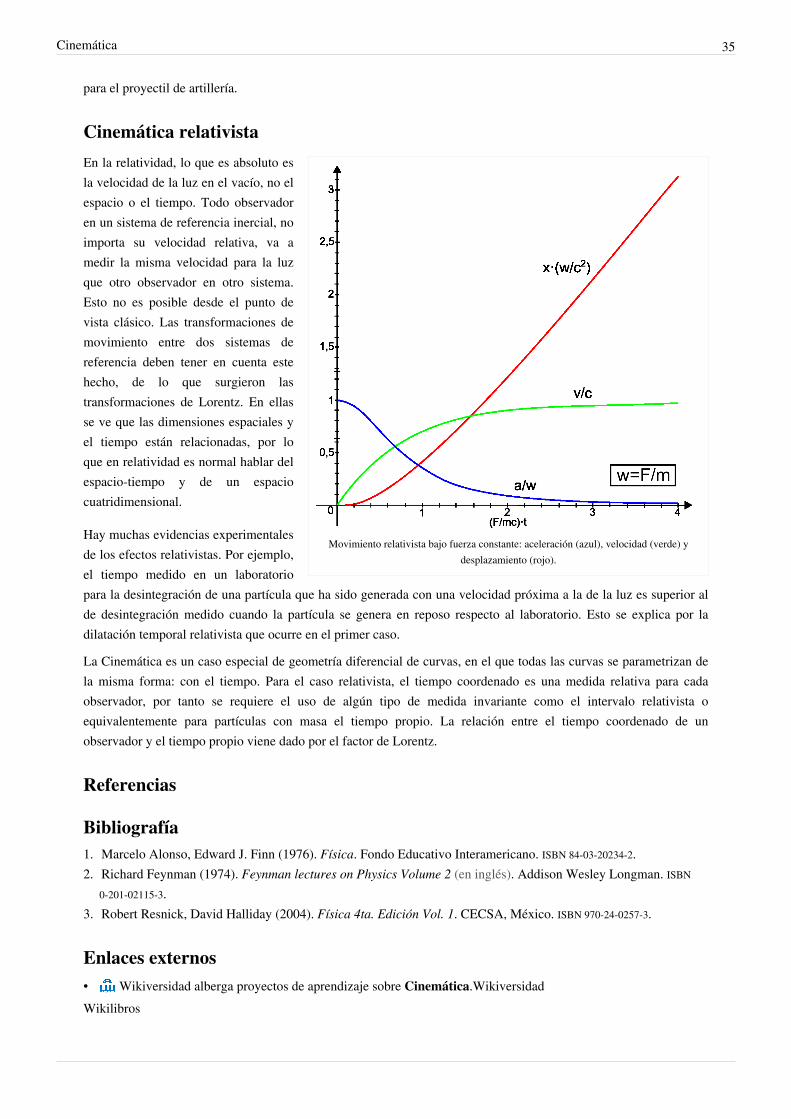
Movimiento relativista bajo fuerza constante: aceleración (azul), velocidad (verde) ydesplazamiento (rojo).
En la relatividad, lo que es absoluto esla velocidad de la luz en el vacío, no elespacio o el tiempo. Todo observadoren un sistema de referencia inercial, noimporta su velocidad relativa, va amedir la misma velocidad para la luzque otro observador en otro sistema.Esto no es posible desde el punto devista clásico. Las transformaciones demovimiento entre dos sistemas dereferencia deben tener en cuenta estehecho, de lo que surgieron lastransformaciones de Lorentz. En ellasse ve que las dimensiones espaciales yel tiempo están relacionadas, por loque en relatividad es normal hablar delespacio-tiempo y de un espaciocuatridimensional.
Hay muchas evidencias experimentalesde los efectos relativistas. Por ejemplo,el tiempo medido en un laboratoriopara la desintegración de una partícula que ha sido generada con una velocidad próxima a la de la luz es superior alde desintegración medido cuando la partícula se genera en reposo respecto al laboratorio. Esto se explica por ladilatación temporal relativista que ocurre en el primer caso.
La Cinemática es un caso especial de geometría diferencial de curvas, en el que todas las curvas se parametrizan dela misma forma: con el tiempo. Para el caso relativista, el tiempo coordenado es una medida relativa para cadaobservador, por tanto se requiere el uso de algún tipo de medida invariante como el intervalo relativista oequivalentemente para partículas con masa el tiempo propio. La relación entre el tiempo coordenado de unobservador y el tiempo propio viene dado por el factor de Lorentz.
Referencias
Bibliografía1. Marcelo Alonso, Edward J. Finn (1976). Física. Fondo Educativo Interamericano. ISBN 84-03-20234-2.2. Richard Feynman (1974). Feynman lectures on Physics Volume 2 (en inglés). Addison Wesley Longman. ISBN
0-201-02115-3.3. Robert Resnick, David Halliday (2004). Física 4ta. Edición Vol. 1. CECSA, México. ISBN 970-24-0257-3.
Enlaces externos• Wikiversidad alberga proyectos de aprendizaje sobre Cinemática.WikiversidadWikilibros
Cinemática 36
• Wikilibros alberga un libro o manual sobre Cinemática.• Wikimedia Commons alberga contenido multimedia sobre Cinemática. Commons• Wikcionario tiene definiciones y otra información sobre Cinemática.Wikcionario• Física por ordenador (http:/ / www. sc. ehu. es/ sbweb/ fisica/ cinematica/ cinematica. htm)
Sistema de referencia
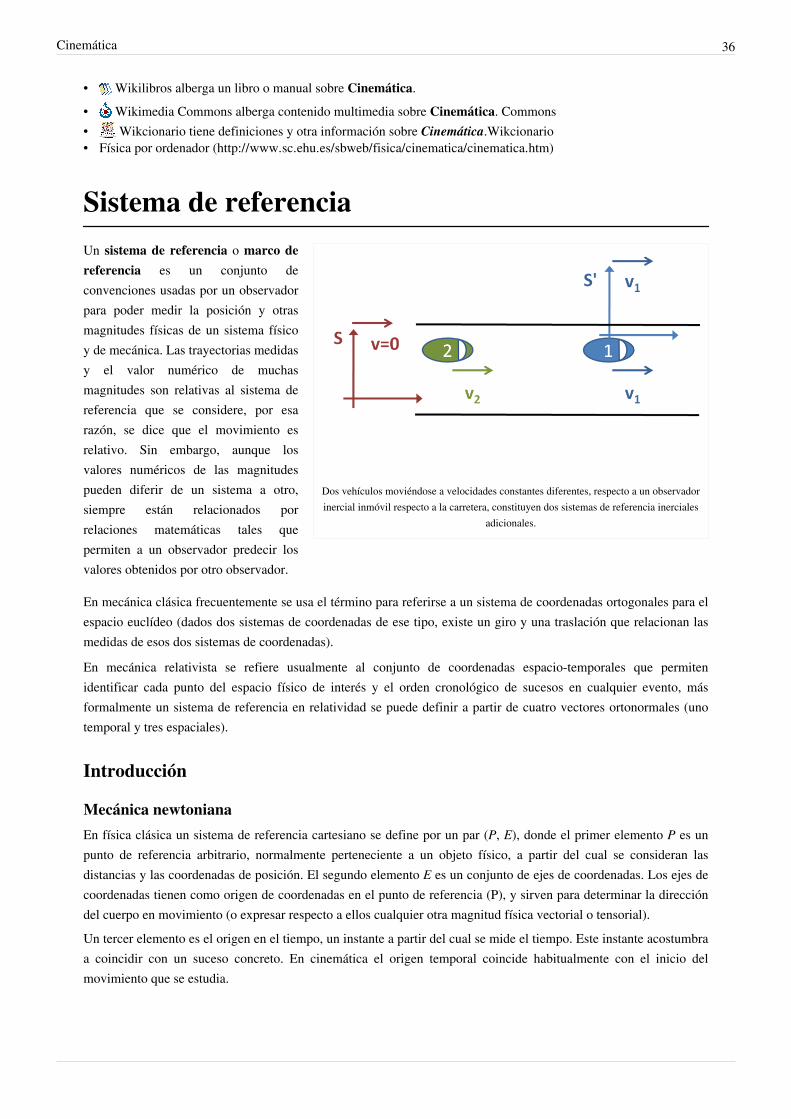
Dos vehículos moviéndose a velocidades constantes diferentes, respecto a un observadorinercial inmóvil respecto a la carretera, constituyen dos sistemas de referencia inerciales
adicionales.
Un sistema de referencia o marco dereferencia es un conjunto deconvenciones usadas por un observadorpara poder medir la posición y otrasmagnitudes físicas de un sistema físicoy de mecánica. Las trayectorias medidasy el valor numérico de muchasmagnitudes son relativas al sistema dereferencia que se considere, por esarazón, se dice que el movimiento esrelativo. Sin embargo, aunque losvalores numéricos de las magnitudespueden diferir de un sistema a otro,siempre están relacionados porrelaciones matemáticas tales quepermiten a un observador predecir losvalores obtenidos por otro observador.
En mecánica clásica frecuentemente se usa el término para referirse a un sistema de coordenadas ortogonales para elespacio euclídeo (dados dos sistemas de coordenadas de ese tipo, existe un giro y una traslación que relacionan lasmedidas de esos dos sistemas de coordenadas).
En mecánica relativista se refiere usualmente al conjunto de coordenadas espacio-temporales que permitenidentificar cada punto del espacio físico de interés y el orden cronológico de sucesos en cualquier evento, másformalmente un sistema de referencia en relatividad se puede definir a partir de cuatro vectores ortonormales (unotemporal y tres espaciales).
Introducción
Mecánica newtonianaEn física clásica un sistema de referencia cartesiano se define por un par (P, E), donde el primer elemento P es unpunto de referencia arbitrario, normalmente perteneciente a un objeto físico, a partir del cual se consideran lasdistancias y las coordenadas de posición. El segundo elemento E es un conjunto de ejes de coordenadas. Los ejes decoordenadas tienen como origen de coordenadas en el punto de referencia (P), y sirven para determinar la direccióndel cuerpo en movimiento (o expresar respecto a ellos cualquier otra magnitud física vectorial o tensorial).Un tercer elemento es el origen en el tiempo, un instante a partir del cual se mide el tiempo. Este instante acostumbraa coincidir con un suceso concreto. En cinemática el origen temporal coincide habitualmente con el inicio delmovimiento que se estudia.

Sistema de referencia 37
Estos tres elementos: punto de referencia, ejes de coordenadas cartesianos y origen temporal, forman el sistema dereferencia. Para poder utilizar un sistema de referencia, sin embargo, se necesitan unas unidades de medida que nossirvan para medir. Las unidades son convencionales y se definen tomando como referencia elementos físicamenteconstantes. A un conjunto de unidades y sus relaciones se le llama sistema de unidades. En el Sistema Internacionalde Unidades o SI, se utiliza el metro como unidad del espacio y el segundo como unidad del tiempo.Si un objeto se mueve en línea recta, solamente es necesario un eje para describir su movimiento. Cuando se muevepor un plano hacen falta al menos dos ejes. Para movimientos en el espacio se utilizan tres ejes. Las coordenadasmás utilizadas son las coordenadas cartesianas, designadas (x,y,z), donde x es la proyección sobre el "eje horizontal"(x es positivo hacia la derecha y negativo hacia la izquierda); y es la coordenada vertical, positivo hacia arriba ynegativo hacia abajo; y z mide la profundidad, positivo cuando se acerca y negativo cuando se aleja. Cuando seestudian movimientos respecto a la superficie de la Tierra, se acostumbra a hacer pasar el eje y o el eje z por elcentro de la Tierra, con el origen de coordenadas situado en la superficie.Dados dos sistemas de referencia R1 y R2, con un origen de tiempos y que se mueven con una velocidad constanteuno respecto al otro, las coordenadas de ambos sistemas de coordenadas están relacionadados mediante:
Donde:, son las componentes de una matriz ortogonal que representa la rotación necesaria para dar a los dos
sistemas la misma orientación., son las componentes de la velocidad del sistema 1 respecto al 2.
, es la posición del origen de coordenadas 2 respecto al origen de coordenadas de 1 en el instantet = 0.
Mecánica clásica lagrangianaEn mecánica clásica lagrangiana también es interesante usar sistemas de referencia más complicados, definidos porun conjunto de coordenadas curvilíneas en el espacio. Las coordenadas de las magnitudes vectoriales o tensoriales enestos sistemas de referencia no cartesianos se definen respecto a los vectores tangentes a las líneas coordenadas encada punto. Dado un conjunto de coordenadas curvilíneas en cada el sistema de "ejes" viene dado por:
Un sistema de cartesiano de referencia es uno en que y el origen de referencia viene dado por .
Mecánica relativistaLa definición de sistema de referencia en relatividad es más compleja, ya que en general no puede establecerse unorigen de tiempos válido para cualquier observador con independencia del punto del espacio en que se encuentre. Enprincipio un sistema de referencia queda definido en relatividad especificando un conjunto de observadoresrepartidos inicialmente por una hipersuperficie del espacio tiempo. Hay sistemas que llamados sincronizables que sipermiten establecer un origen de tiempos común, pero esos sistemas sólo pueden existir en un espacio-tiempoestacionario. Los problemas asociados a la "relatividad del tiempo" obligan a que la definición de sistema dereferencia en teoría de la relatividad general sea notoriamente más complicada que en mecánica clásica.En relatividad general se define un sistema de referencia como un conjunto de observadores locales, es decir, unsistema de referencia es un campo vectorial cuyas curvas integrales son observadores locales, es decir, curvastemporales.
Sistema de referencia 38
Sistema inercialA grandes rasgos, es un sistema de referencia en el que las leyes físicas adoptan una forma simplificada, equivalentea las leyes de Newton para pequeñas velocidades. Dado un sistema inercial, cualquier otro sistema de referencia queesté parado o bien que se desplace en línea recta a velocidad constante respecto al primero, es también un sistemainercial.Formalmente, en mecánica clásica y teoría de la relatividad especial, un sistema inercial es aquel en el que lossímbolos de Christoffel obtenidos a partir de la función lagrangiana se anulan. En un sistema inercial no sonnecesarias fuerzas ficticias para describir el movimiento de las partículas observadas mediante el conjunto deconvenciones que describen el sistema de referencia.
VacíoEl vacío (del latín vacīvus) es la ausencia total de material en los elementos (materia) en un determinado espacio olugar, o la falta de contenido en el interior de un recipiente. Por extensión, se denomina también vacío a la condiciónde una región donde la densidad de partículas es muy baja, como por ejemplo el espacio interestelar; o la de unacavidad cerrada donde la presión del aire u otros gases es menor que la atmosférica.Puede existir naturalmente o ser provocado en forma artificial, ya sea para usos tecnológicos o científicos, o en lavida diaria. Se aprovecha en diversas industrias, como la alimentaria, la automovilística o la farmacéutica.
DefiniciónDe acuerdo con la definición de la Sociedad Estadounidense del Vacío o AVS (1958), el término se refiere a ciertoespacio lleno con gases a una presión total menor que la presión atmosférica, por lo que el grado de vacío seincrementa en relación directa con la disminución de presión del gas residual. Esto significa que cuanto másdisminuyamos la presión, mayor vacío obtendremos, lo que nos permite clasificar el grado de vacío encorrespondencia con intervalos de presiones cada vez menores. Cada intervalo tiene características propias
Medición del vacíoLa presión atmosférica es la que ejerce la atmósfera o aire sobre la Tierra. A temperatura ambiente y presiónatmosférica normal, un metro cúbico de aire contiene aproximadamente 2 × 1025 moléculas en movimiento a unavelocidad promedio de 1600 kilómetros por hora. Una manera de medir la presión atmosférica es con un barómetrode mercurio; su valor se expresa en términos de la altura de la columna de mercurio de sección transversal unitaria y760 mm de alto. Con base en esto, decimos que una atmósfera estándar es igual a 760 mmHg. Utilizaremos porconveniencia la unidad torricelli (símbolo, Torr) como medida de presión; 1 Torr = 1 mmHg, por lo que 1 atm =760 Torr; por lo tanto 1 Torr = 1/760 de una atmósfera estándar, o sea 1 Torr = 1,136 × 10–3 atm.
Medición de bajas presionesPirani construyó el primer aparato capaz de medir presiones muy pequeñas, menores de 10–5 Torr. Para entendercomo funciona debemos pensar que en la zona donde se ha producido el vacío tenemos un filamento metálico por elque pasa una corriente. La resistencia eléctrica de ese filamento depende de la temperatura. La temperatura quealcanza el filamento para un voltaje dado depende de la cantidad de moléculas de gas que hay a su alrededor. Esasmoléculas actúan como «abrigo» del metal. Por lo tanto, la temperatura del filamento depende del abrigo: másmoléculas ―> más abrigo ―> más temperatura. Menos moléculas ―> mayor vacío ―> menor temperatura. Comola resistencia depende de la temperatura nos basta medirla para saber el nivel de vacío que hay. Para medir laresistencia basta medir el voltaje aplicado y la intensidad resultante.
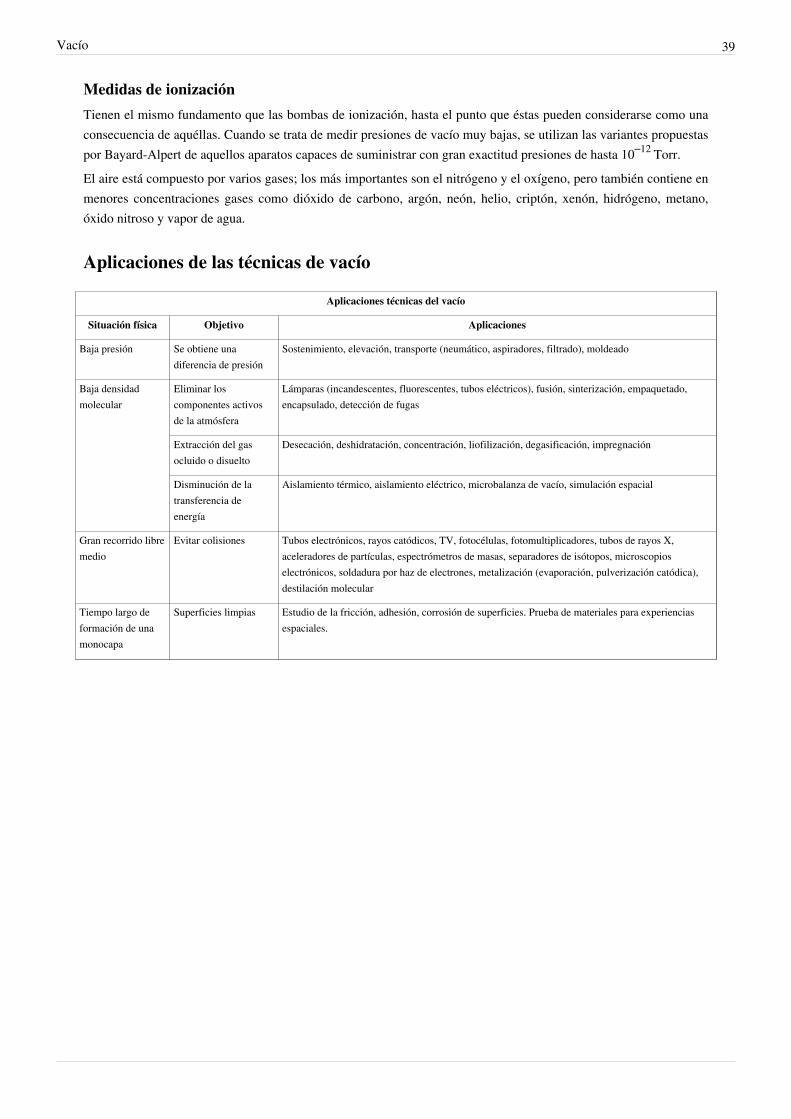
Vacío 39
Medidas de ionizaciónTienen el mismo fundamento que las bombas de ionización, hasta el punto que éstas pueden considerarse como unaconsecuencia de aquéllas. Cuando se trata de medir presiones de vacío muy bajas, se utilizan las variantes propuestaspor Bayard-Alpert de aquellos aparatos capaces de suministrar con gran exactitud presiones de hasta 10–12 Torr.El aire está compuesto por varios gases; los más importantes son el nitrógeno y el oxígeno, pero también contiene enmenores concentraciones gases como dióxido de carbono, argón, neón, helio, criptón, xenón, hidrógeno, metano,óxido nitroso y vapor de agua.
Aplicaciones de las técnicas de vacío
Aplicaciones técnicas del vacío
Situación física Objetivo Aplicaciones
Baja presión Se obtiene unadiferencia de presión
Sostenimiento, elevación, transporte (neumático, aspiradores, filtrado), moldeado
Baja densidadmolecular
Eliminar loscomponentes activosde la atmósfera
Lámparas (incandescentes, fluorescentes, tubos eléctricos), fusión, sinterización, empaquetado,encapsulado, detección de fugas
Extracción del gasocluido o disuelto
Desecación, deshidratación, concentración, liofilización, degasificación, impregnación
Disminución de latransferencia deenergía
Aislamiento térmico, aislamiento eléctrico, microbalanza de vacío, simulación espacial
Gran recorrido libremedio
Evitar colisiones Tubos electrónicos, rayos catódicos, TV, fotocélulas, fotomultiplicadores, tubos de rayos X,aceleradores de partículas, espectrómetros de masas, separadores de isótopos, microscopioselectrónicos, soldadura por haz de electrones, metalización (evaporación, pulverización catódica),destilación molecular
Tiempo largo deformación de unamonocapa
Superficies limpias Estudio de la fricción, adhesión, corrosión de superficies. Prueba de materiales para experienciasespaciales.
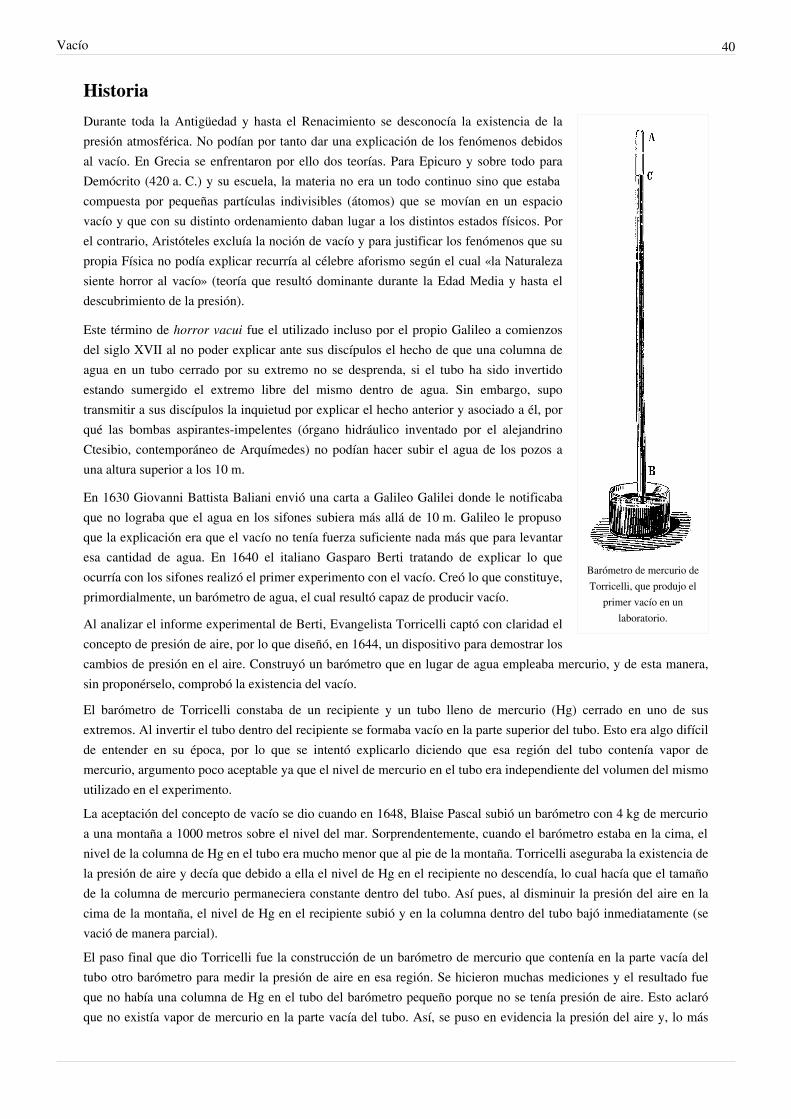
Vacío 40
Historia
Barómetro de mercurio deTorricelli, que produjo el
primer vacío en unlaboratorio.
Durante toda la Antigüedad y hasta el Renacimiento se desconocía la existencia de lapresión atmosférica. No podían por tanto dar una explicación de los fenómenos debidosal vacío. En Grecia se enfrentaron por ello dos teorías. Para Epicuro y sobre todo paraDemócrito (420 a. C.) y su escuela, la materia no era un todo continuo sino que estabacompuesta por pequeñas partículas indivisibles (átomos) que se movían en un espaciovacío y que con su distinto ordenamiento daban lugar a los distintos estados físicos. Porel contrario, Aristóteles excluía la noción de vacío y para justificar los fenómenos que supropia Física no podía explicar recurría al célebre aforismo según el cual «la Naturalezasiente horror al vacío» (teoría que resultó dominante durante la Edad Media y hasta eldescubrimiento de la presión).
Este término de horror vacui fue el utilizado incluso por el propio Galileo a comienzosdel siglo XVII al no poder explicar ante sus discípulos el hecho de que una columna deagua en un tubo cerrado por su extremo no se desprenda, si el tubo ha sido invertidoestando sumergido el extremo libre del mismo dentro de agua. Sin embargo, supotransmitir a sus discípulos la inquietud por explicar el hecho anterior y asociado a él, porqué las bombas aspirantes-impelentes (órgano hidráulico inventado por el alejandrinoCtesibio, contemporáneo de Arquímedes) no podían hacer subir el agua de los pozos auna altura superior a los 10 m.
En 1630 Giovanni Battista Baliani envió una carta a Galileo Galilei donde le notificabaque no lograba que el agua en los sifones subiera más allá de 10 m. Galileo le propusoque la explicación era que el vacío no tenía fuerza suficiente nada más que para levantaresa cantidad de agua. En 1640 el italiano Gasparo Berti tratando de explicar lo queocurría con los sifones realizó el primer experimento con el vacío. Creó lo que constituye,primordialmente, un barómetro de agua, el cual resultó capaz de producir vacío.
Al analizar el informe experimental de Berti, Evangelista Torricelli captó con claridad elconcepto de presión de aire, por lo que diseñó, en 1644, un dispositivo para demostrar loscambios de presión en el aire. Construyó un barómetro que en lugar de agua empleaba mercurio, y de esta manera,sin proponérselo, comprobó la existencia del vacío.
El barómetro de Torricelli constaba de un recipiente y un tubo lleno de mercurio (Hg) cerrado en uno de susextremos. Al invertir el tubo dentro del recipiente se formaba vacío en la parte superior del tubo. Esto era algo difícilde entender en su época, por lo que se intentó explicarlo diciendo que esa región del tubo contenía vapor demercurio, argumento poco aceptable ya que el nivel de mercurio en el tubo era independiente del volumen del mismoutilizado en el experimento.La aceptación del concepto de vacío se dio cuando en 1648, Blaise Pascal subió un barómetro con 4 kg de mercurioa una montaña a 1000 metros sobre el nivel del mar. Sorprendentemente, cuando el barómetro estaba en la cima, elnivel de la columna de Hg en el tubo era mucho menor que al pie de la montaña. Torricelli aseguraba la existencia dela presión de aire y decía que debido a ella el nivel de Hg en el recipiente no descendía, lo cual hacía que el tamañode la columna de mercurio permaneciera constante dentro del tubo. Así pues, al disminuir la presión del aire en lacima de la montaña, el nivel de Hg en el recipiente subió y en la columna dentro del tubo bajó inmediatamente (sevació de manera parcial).El paso final que dio Torricelli fue la construcción de un barómetro de mercurio que contenía en la parte vacía deltubo otro barómetro para medir la presión de aire en esa región. Se hicieron muchas mediciones y el resultado fueque no había una columna de Hg en el tubo del barómetro pequeño porque no se tenía presión de aire. Esto aclaróque no existía vapor de mercurio en la parte vacía del tubo. Así, se puso en evidencia la presión del aire y, lo más
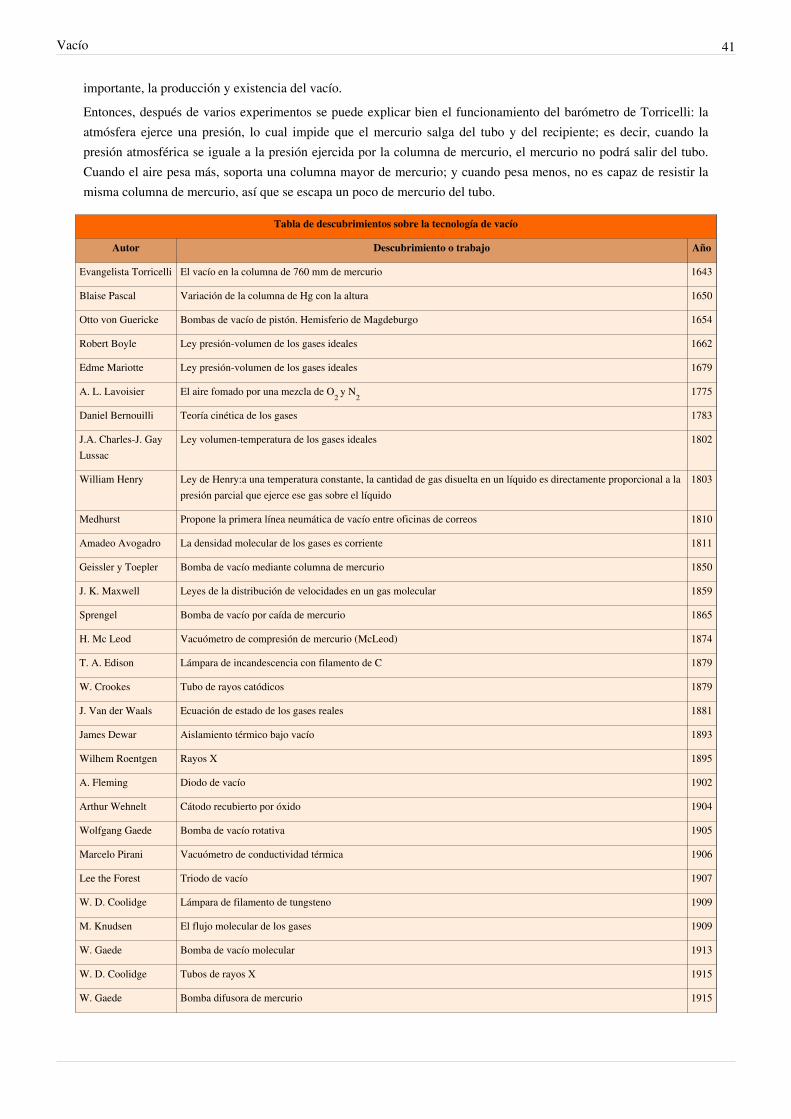
Vacío 41
importante, la producción y existencia del vacío.Entonces, después de varios experimentos se puede explicar bien el funcionamiento del barómetro de Torricelli: laatmósfera ejerce una presión, lo cual impide que el mercurio salga del tubo y del recipiente; es decir, cuando lapresión atmosférica se iguale a la presión ejercida por la columna de mercurio, el mercurio no podrá salir del tubo.Cuando el aire pesa más, soporta una columna mayor de mercurio; y cuando pesa menos, no es capaz de resistir lamisma columna de mercurio, así que se escapa un poco de mercurio del tubo.
Tabla de descubrimientos sobre la tecnología de vacío
Autor Descubrimiento o trabajo Año
Evangelista Torricelli El vacío en la columna de 760 mm de mercurio 1643
Blaise Pascal Variación de la columna de Hg con la altura 1650
Otto von Guericke Bombas de vacío de pistón. Hemisferio de Magdeburgo 1654
Robert Boyle Ley presión-volumen de los gases ideales 1662
Edme Mariotte Ley presión-volumen de los gases ideales 1679
A. L. Lavoisier El aire fomado por una mezcla de O2 y N2 1775
Daniel Bernouilli Teoría cinética de los gases 1783
J.A. Charles-J. GayLussac
Ley volumen-temperatura de los gases ideales 1802
William Henry Ley de Henry:a una temperatura constante, la cantidad de gas disuelta en un líquido es directamente proporcional a lapresión parcial que ejerce ese gas sobre el líquido
1803
Medhurst Propone la primera línea neumática de vacío entre oficinas de correos 1810
Amadeo Avogadro La densidad molecular de los gases es corriente 1811
Geissler y Toepler Bomba de vacío mediante columna de mercurio 1850
J. K. Maxwell Leyes de la distribución de velocidades en un gas molecular 1859
Sprengel Bomba de vacío por caída de mercurio 1865
H. Mc Leod Vacuómetro de compresión de mercurio (McLeod) 1874
T. A. Edison Lámpara de incandescencia con filamento de C 1879
W. Crookes Tubo de rayos catódicos 1879
J. Van der Waals Ecuación de estado de los gases reales 1881
James Dewar Aislamiento térmico bajo vacío 1893
Wilhem Roentgen Rayos X 1895
A. Fleming Diodo de vacío 1902
Arthur Wehnelt Cátodo recubierto por óxido 1904
Wolfgang Gaede Bomba de vacío rotativa 1905
Marcelo Pirani Vacuómetro de conductividad térmica 1906
Lee the Forest Triodo de vacío 1907
W. D. Coolidge Lámpara de filamento de tungsteno 1909
M. Knudsen El flujo molecular de los gases 1909
W. Gaede Bomba de vacío molecular 1913
W. D. Coolidge Tubos de rayos X 1915
W. Gaede Bomba difusora de mercurio 1915
Vacío 42
Irving Langmuir Lámpara incandescente llena de gas inerte 1915
Irving Langmuir Bomba difusora de condensación de mercurio 1916
O. E. Buckley Galga de ionización de cátodo caliente 1916
F. Holweck Bomba molecular 1923
W. Gaede El gas-ballast en las bombas rotativas 1935
Kenneth Hickman Bomba difusora de aceite 1936
F. M. Penning Vacuómetro de ionización de cátodo frío 1937
R. T. Bayard y D.Alpert
Galga de ionización para ultra alto vacío 1950
H. J. Schwarz, R. G.Herb
Bombas iónicas 1953
Bibliografía• Talavera, Laura; Mario Farías (1990). El vacío y sus aplicaciones. México: La Ciencia para Todos.
ISBN 978-968-16-7032-0.• Ribas, Albert (2008). Biografía del vacío. Su historia filosófica y científica desde la Antigüedad a la Edad
Moderna (4.ª ed. edición). Barcelona: Sunya. ISBN 978-846-1239-252.
Enlaces externos• Wikcionario tiene definiciones y otra información sobre vacío.Wikcionario• EditorialSunya.com [1] (la web del vacío)
Referencias[1] http:/ / www. editorialsunya. com/ vacio. html
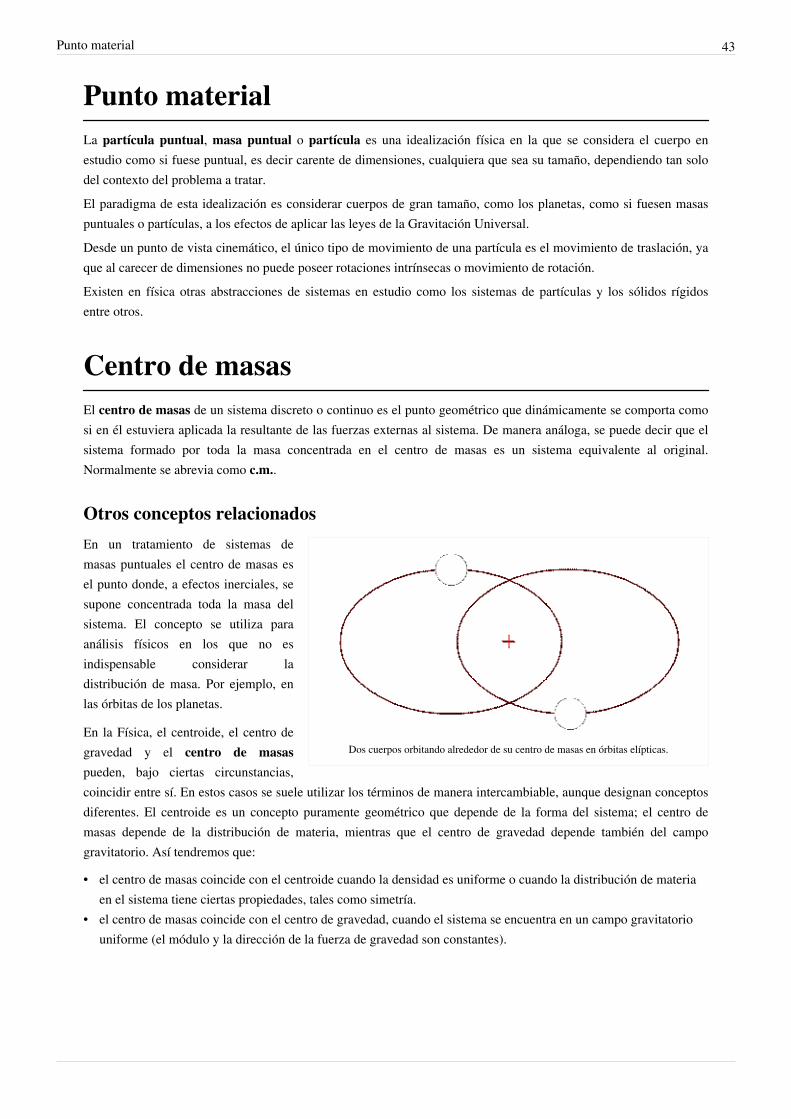
Punto material 43
Punto materialLa partícula puntual, masa puntual o partícula es una idealización física en la que se considera el cuerpo enestudio como si fuese puntual, es decir carente de dimensiones, cualquiera que sea su tamaño, dependiendo tan solodel contexto del problema a tratar.El paradigma de esta idealización es considerar cuerpos de gran tamaño, como los planetas, como si fuesen masaspuntuales o partículas, a los efectos de aplicar las leyes de la Gravitación Universal.Desde un punto de vista cinemático, el único tipo de movimiento de una partícula es el movimiento de traslación, yaque al carecer de dimensiones no puede poseer rotaciones intrínsecas o movimiento de rotación.Existen en física otras abstracciones de sistemas en estudio como los sistemas de partículas y los sólidos rígidosentre otros.
Centro de masasEl centro de masas de un sistema discreto o continuo es el punto geométrico que dinámicamente se comporta comosi en él estuviera aplicada la resultante de las fuerzas externas al sistema. De manera análoga, se puede decir que elsistema formado por toda la masa concentrada en el centro de masas es un sistema equivalente al original.Normalmente se abrevia como c.m..
Otros conceptos relacionados
Dos cuerpos orbitando alrededor de su centro de masas en órbitas elípticas.
En un tratamiento de sistemas demasas puntuales el centro de masas esel punto donde, a efectos inerciales, sesupone concentrada toda la masa delsistema. El concepto se utiliza paraanálisis físicos en los que no esindispensable considerar ladistribución de masa. Por ejemplo, enlas órbitas de los planetas.
En la Física, el centroide, el centro degravedad y el centro de masaspueden, bajo ciertas circunstancias,coincidir entre sí. En estos casos se suele utilizar los términos de manera intercambiable, aunque designan conceptosdiferentes. El centroide es un concepto puramente geométrico que depende de la forma del sistema; el centro demasas depende de la distribución de materia, mientras que el centro de gravedad depende también del campogravitatorio. Así tendremos que:
• el centro de masas coincide con el centroide cuando la densidad es uniforme o cuando la distribución de materiaen el sistema tiene ciertas propiedades, tales como simetría.
• el centro de masas coincide con el centro de gravedad, cuando el sistema se encuentra en un campo gravitatoriouniforme (el módulo y la dirección de la fuerza de gravedad son constantes).

Centro de masas 44
Cálculo del c.m. de un sistema
Distribución discreta de materiaPara un sistema de masas discreto, formado por un conjunto de masas puntuales, el centro de masas se puedecalcular como:
, masa de la partícula i-ésima., vector de posición de la masa i-ésima respecto al sistema de referencia supuesto.
Distribución cuasidiscreta de materiaEn el caso de un sistema de cuerpos cuasipuntuales, o cuerpos que distan entre sí mucho más que las dimensiones decada uno de los cuerpos, el cálculo anterior resulta bastante aproximado.
Distribución continua de materiaPara sistemas de masas continuos o distribuciones continuas de materia debemos recurrir al Cálculo Infinitesimal eIntegral, de modo que la expresión anterior se escribe en la forma:
• Distribución de masa homogénea: Si la masa está distribuida homogéneamente, la densidad será constante porlo que se puede sacar fuera de la integral haciendo uso de la relación siguiente:
siendo V el volumen total.Para cuerpos bidimensionales (superficies) o monodimensionales (líneas) se trabajará con densidades superficiales ylongitudinales respectivamente.Para el caso de cuerpos con densidad uniforme, el c.m. coincidirá con el centroide del cuerpo.• Distribución de masa no homogénea: Los centros de masas en cuerpos de densidad variable pueden calcularse
si se conoce la función de densidad . En este caso se calcula el centro de masas de la siguiente forma.
Para calcular la integral hay que conocer la función de densidad.
Centro de masas 45
Cálculo de centro de masasPara el cálculo de sólidos de revolución resulta muy útil el Teorema de Pappus-Guldin.
Referencias
Bibliografía• Marion, Jerry B. (1996). Dinámica clásica de las partículas y sistemas. Barcelona: Ed. Reverté. ISBN 84-291-4094-8.• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN
84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
ISBN 0-471-32057-9.• Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (en inglés) (6ª edición).
Brooks/Cole. ISBN 0-534-40842-7.• Tipler, Paul A. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.
Enlaces externos• Centro de masas en heurema.com (http:/ / www. heurema. com/ TestF19. htm)
Equilibrio mecánicoEl equilibrio mecánico es un estado estacionario en el que se cumple alguna de estas dos condiciones:• Un sistema está en equilibrio mecánico cuando la suma de fuerzas y momentos sobre cada partícula del sistema es
cero.• Un sistema está en equilibrio mecánico si su posición en el espacio de configuración es un punto en el que el
gradiente de energía potencial es cero.La segunda definición es más general y útil, especialmente en mecánica de medios continuos.
Definición basada en equilibrio de fuerzasComo consecuencia de las leyes de la mecánica, una partícula en equilibrio no sufre aceleración lineal ni de rotación,pero puede estar moviéndose a velocidad uniforme o rotar a velocidad angular uniforme. Esto es ampliable a unsólido rígido.
Condición necesaria de equilibrioLas ecuaciones necesarias de equilibrio mecánico son:• Una partícula o un sólido rígido está en equilibrio de traslación cuando: la suma de todas las fuerzas que actúan
sobre el cuerpo es cero.
En el espacio se tienen tres ecuaciones de fuerzas, una por dimensión; descomponiendo cada fuerza en suscoordenadas resulta:
Y como un vector, es cero, cuando cada una de sus componentes es cero, se tiene:

Equilibrio mecánico 46
1.
2.
3.
Un sólido rígido está en equilibrio de traslación cuando la suma de las componentes de las fuerzas que actúansobre él es cero.
• Un sólido rígido está en equilibrio de rotación, si la suma de momentos sobre el cuerpo es cero.
En el espacio tiene las tres ecuaciones una por dimensión; por un razonamiento similar al de las fuerzas:
Resultando:
1.
2.
3.
Un sólido rígido está en equilibrio de rotación cuando la suma de las componentes de los momentos queactúan sobre él es cero.
Un sólido rígido está en equilibrio si está en equilibrio de traslación y de rotación.Se distingue un tipo particular de equilibrio mecánico llamado equilibrio estático que correspondería a una situaciónen que el cuerpo está en reposo, con velocidad cero: una hoja de papel sobre un escritorio estará en equilibriomecánico y estático, un paracaidista cayendo a velocidad constante, dada por la velocidad límite estaría en equilibriomecánico pero no estático.
Condiciones suficientesTal como se ha expuesto en la sección anterior, dado un sólido una condición necesaria para que este sólido esté enequilibrio mecánico es que la suma de reacciones y el momento resultante de estas reacciones sea cero. Si el sólidoes indeformable la condición además de necesaria es suficiente, sin embargo, para ciertos sólidos deformables lacondición de que la suma de fuerzas y momentos se anule puede no ser suficiente. En ese último caso además debensatisfacerse locamente las ecuaciones diferenciales de equilibrio:
Donde:denotan las componentes del tensor de tensiones.
es la fuerza por unidad de volumen actuante en cada punto del sólido.
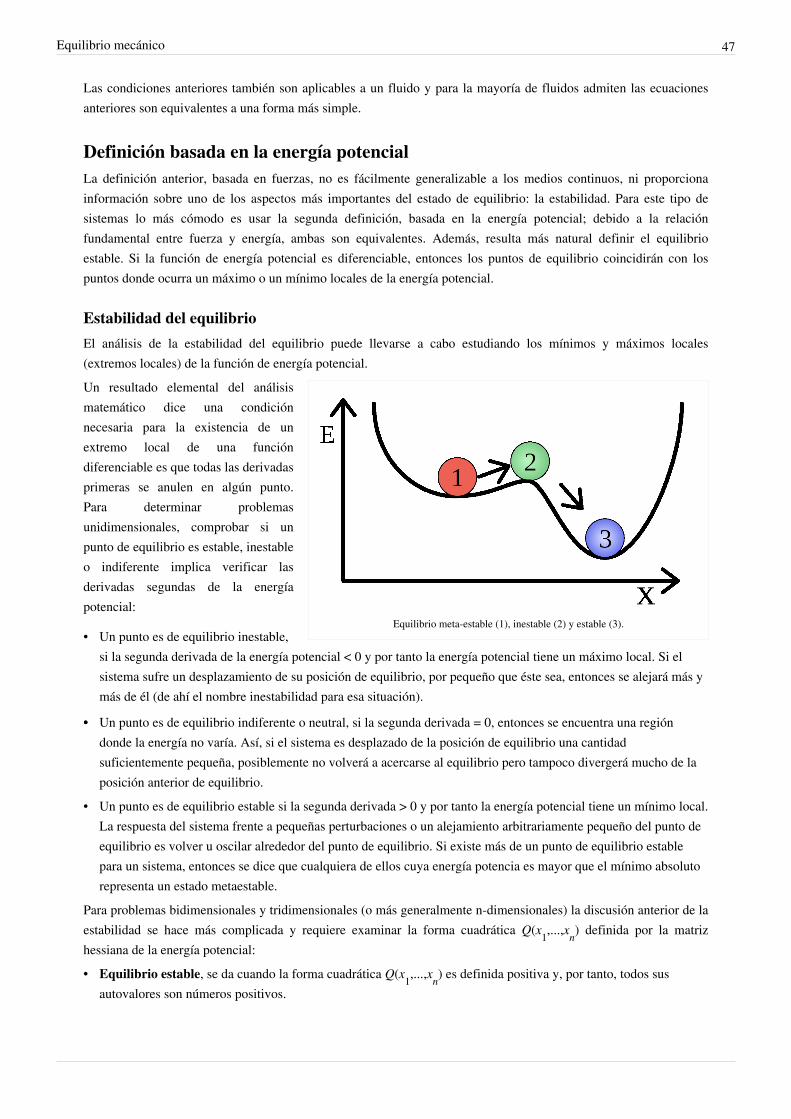
Equilibrio mecánico 47
Las condiciones anteriores también son aplicables a un fluido y para la mayoría de fluidos admiten las ecuacionesanteriores son equivalentes a una forma más simple.
Definición basada en la energía potencialLa definición anterior, basada en fuerzas, no es fácilmente generalizable a los medios continuos, ni proporcionainformación sobre uno de los aspectos más importantes del estado de equilibrio: la estabilidad. Para este tipo desistemas lo más cómodo es usar la segunda definición, basada en la energía potencial; debido a la relaciónfundamental entre fuerza y energía, ambas son equivalentes. Además, resulta más natural definir el equilibrioestable. Si la función de energía potencial es diferenciable, entonces los puntos de equilibrio coincidirán con lospuntos donde ocurra un máximo o un mínimo locales de la energía potencial.
Estabilidad del equilibrioEl análisis de la estabilidad del equilibrio puede llevarse a cabo estudiando los mínimos y máximos locales(extremos locales) de la función de energía potencial.
Equilibrio meta-estable (1), inestable (2) y estable (3).
Un resultado elemental del análisismatemático dice una condiciónnecesaria para la existencia de unextremo local de una funcióndiferenciable es que todas las derivadasprimeras se anulen en algún punto.Para determinar problemasunidimensionales, comprobar si unpunto de equilibrio es estable, inestableo indiferente implica verificar lasderivadas segundas de la energíapotencial:
• Un punto es de equilibrio inestable,si la segunda derivada de la energía potencial < 0 y por tanto la energía potencial tiene un máximo local. Si elsistema sufre un desplazamiento de su posición de equilibrio, por pequeño que éste sea, entonces se alejará más ymás de él (de ahí el nombre inestabilidad para esa situación).
•• Un punto es de equilibrio indiferente o neutral, si la segunda derivada = 0, entonces se encuentra una regióndonde la energía no varía. Así, si el sistema es desplazado de la posición de equilibrio una cantidadsuficientemente pequeña, posiblemente no volverá a acercarse al equilibrio pero tampoco divergerá mucho de laposición anterior de equilibrio.
• Un punto es de equilibrio estable si la segunda derivada > 0 y por tanto la energía potencial tiene un mínimo local.La respuesta del sistema frente a pequeñas perturbaciones o un alejamiento arbitrariamente pequeño del punto deequilibrio es volver u oscilar alrededor del punto de equilibrio. Si existe más de un punto de equilibrio establepara un sistema, entonces se dice que cualquiera de ellos cuya energía potencia es mayor que el mínimo absolutorepresenta un estado metaestable.
Para problemas bidimensionales y tridimensionales (o más generalmente n-dimensionales) la discusión anterior de laestabilidad se hace más complicada y requiere examinar la forma cuadrática Q(x1,...,xn) definida por la matrizhessiana de la energía potencial:• Equilibrio estable, se da cuando la forma cuadrática Q(x1,...,xn) es definida positiva y, por tanto, todos sus
autovalores son números positivos.

Equilibrio mecánico 48
• Equilibrio totalmente inestable, se da cuando la forma cuadrática Q(x1,...,xn) es definida negativa, por tanto,todos sus autovalores son negativos.
• Equilibrio mixto inestable, se da cuando la forma cuadrática Q(x1,...,xn) es no es definida positiva y alguno desus autovalores es negativo. Esto implica que según ciertas direcciones puede haber estabilidad unidimensionalpero según otras habrá inestabilidad unidimensional
Referencias• Marion & Thornton, Classical Dynamics of Particles and Systems. Fourth Edition, Harcourt Brace & Company
(1995). (en inglés)• Resnick, R. and D. Halliday (1966) Physics, Part 1, John Wiley & Sons, New York, 646 pp + Appendices. (en
inglés)
Cinemática del sólido rígidoLa cinemática del sólido rígido es una aplicación de la cinemática al movimiento de un objeto tridimensional rígidoen el espacio. El movimiento más general del sólido rígido puede considerarse como la superposición de dos tipos demovimiento básicos: de traslación y de rotación.
Concepto de sólido rígido
Figura 1. Concepto de sólido rígido.
Entendemos por sólido rígido un sistema físico en elque la distancia entre dos puntos materialescualesquiera de ellas permanece invariable en eltranscurso del tiempo. Los cuerpos sólidos quemanejamos se deforman siempre, en mayor o menorgrado, cuando están sometidos a las acciones de lasfuerzas; sin embargo, si éstas son suficientementepequeñas, las deformaciones producidas sondespreciables y, entonces, hablaremos de cuerposrígidos o indeformables. La definición de sólido rígidoes sólo conceptual, por cuanto que el sólido rígido, entodo rigor, no existe. En este sentido, el sólido rígido essólo una idealización y extrapolación del sólido real, aligual que lo es la partícula o punto material.
Consideremos un sólido rígido y un sistema decoordenadas, xyz, como se muestra en la Figura 1. Indicaremos por ri y rj los vectores de posición de dos puntos, Pi yPj, del sólido; la condición geométrica de rigidez se expresa por
(1)
que es equivalente a , ya que la raíz cuadrada de una constante es otra constante.La posición del sólido con respecto al sistema de ejes coordenados queda perfectamente determinada si conocemosla posición de tres cualesquiera de sus puntos, no alineados, como los puntos 1, 2 y 3 que se indican en la Figura 1.Para especificar la posición de cada uno de ellos se necesitan tres parámetros o coordenadas; de modo que en totalnecesitamos, aparentemente, nueve parámetros o coordenadas para especificar la posición del sólido en el espacio.Los tres puntos que hemos tomado como referencia están ligados por las condiciones de rigidez expresadas por [1];esto es, tres ecuaciones
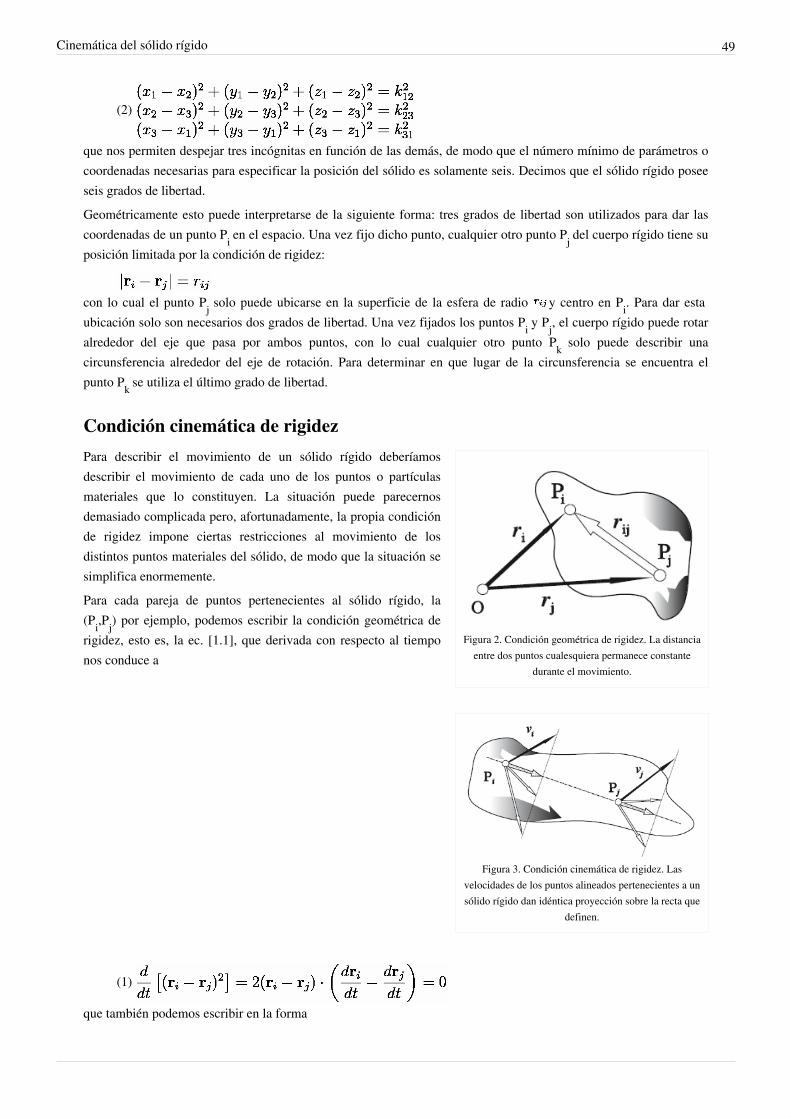
Cinemática del sólido rígido 49
(2)
que nos permiten despejar tres incógnitas en función de las demás, de modo que el número mínimo de parámetros ocoordenadas necesarias para especificar la posición del sólido es solamente seis. Decimos que el sólido rígido poseeseis grados de libertad.Geométricamente esto puede interpretarse de la siguiente forma: tres grados de libertad son utilizados para dar lascoordenadas de un punto Pi en el espacio. Una vez fijo dicho punto, cualquier otro punto Pj del cuerpo rígido tiene suposición limitada por la condición de rigidez:
con lo cual el punto Pj solo puede ubicarse en la superficie de la esfera de radio y centro en Pi. Para dar estaubicación solo son necesarios dos grados de libertad. Una vez fijados los puntos Pi y Pj, el cuerpo rígido puede rotaralrededor del eje que pasa por ambos puntos, con lo cual cualquier otro punto Pk solo puede describir unacircunsferencia alrededor del eje de rotación. Para determinar en que lugar de la circunsferencia se encuentra elpunto Pk se utiliza el último grado de libertad.
Condición cinemática de rigidez
Figura 2. Condición geométrica de rigidez. La distanciaentre dos puntos cualesquiera permanece constante
durante el movimiento.
Figura 3. Condición cinemática de rigidez. Lasvelocidades de los puntos alineados pertenecientes a unsólido rígido dan idéntica proyección sobre la recta que
definen.
Para describir el movimiento de un sólido rígido deberíamosdescribir el movimiento de cada uno de los puntos o partículasmateriales que lo constituyen. La situación puede parecernosdemasiado complicada pero, afortunadamente, la propia condiciónde rigidez impone ciertas restricciones al movimiento de losdistintos puntos materiales del sólido, de modo que la situación sesimplifica enormemente.Para cada pareja de puntos pertenecientes al sólido rígido, la(Pi,Pj) por ejemplo, podemos escribir la condición geométrica derigidez, esto es, la ec. [1.1], que derivada con respecto al tiemponos conduce a
(1)
que también podemos escribir en la forma

Cinemática del sólido rígido 50
(2) donde rij y vij representan, respectivamente, el vector de posición y la velocidad de la partícula Pi con respecto a laPj. La ec. [2] expresa un resultado importante: al no ser nulos ninguno de los vectores que intervienen en el productoescalar, han de ser perpendiculares entre sí. Dicho de otro modo: todo vector con sus extremos fijos en el sólidorígido (ya que el rij es válido para cualquier par de puntos constituyentes del sólido) es perpendicular a su derivadacon respecto al tiempo (i.e., a vij).La ec. [2] puede escribirse en la forma
(3) o también
(4)
ecuación que expresa la igualdad entre las proyecciones de las velocidades de los puntos Pi y Pj sobre la recta que losune. Este resultado constituye la condición cinemática de rigidez que se enuncia así:
Las velocidades de los puntos alineados pertenecientes al sólido rígido dan la misma proyección sobrela recta que los une.
Manifiestamente, la condición cinemática de rigidez expresa la imposibilidad de que se modifique la distancia entredos puntos cualesquiera del sólido en el transcurso del movimiento de éste, ya que al ser siempre sus velocidadesiguales en la recta que los une, es imposible que alguno se acerque al otro.El movimiento más general del sólido rígido puede considerarse como la superposición de dos tipos de movimientobásicos: de traslación y de rotación.
Movimiento de traslación
Figura 4. Movimiento de traslación.
El movimiento de traslación es el más sencillo quepuede realizar el sólido rígido. Desde un punto de vistageométrico, lo podemos definir del modo siguiente:
Se dice que un sólido rígido se encuentraanimado de un movimiento de traslacióncuando todo segmento rectilíneo definidopor dos puntos de aquél permaneceparalelo a si mismo en el transcurso delmovimiento.
Consideremos un sólido rígido animado de unmovimiento de traslación, como se muestra en laFigura 4. En virtud de la condición geométrica de rigidez, el vector rij = ri-rj debe mantener constante su módulo enel transcurso de cualquier movimiento y, además, en virtud de la definición geométrica del movimiento de traslación,también ha de mantener constante su dirección; entonces, siendo c un vector constante, se puede escribir:
(1) y derivando con respecto al tiempo
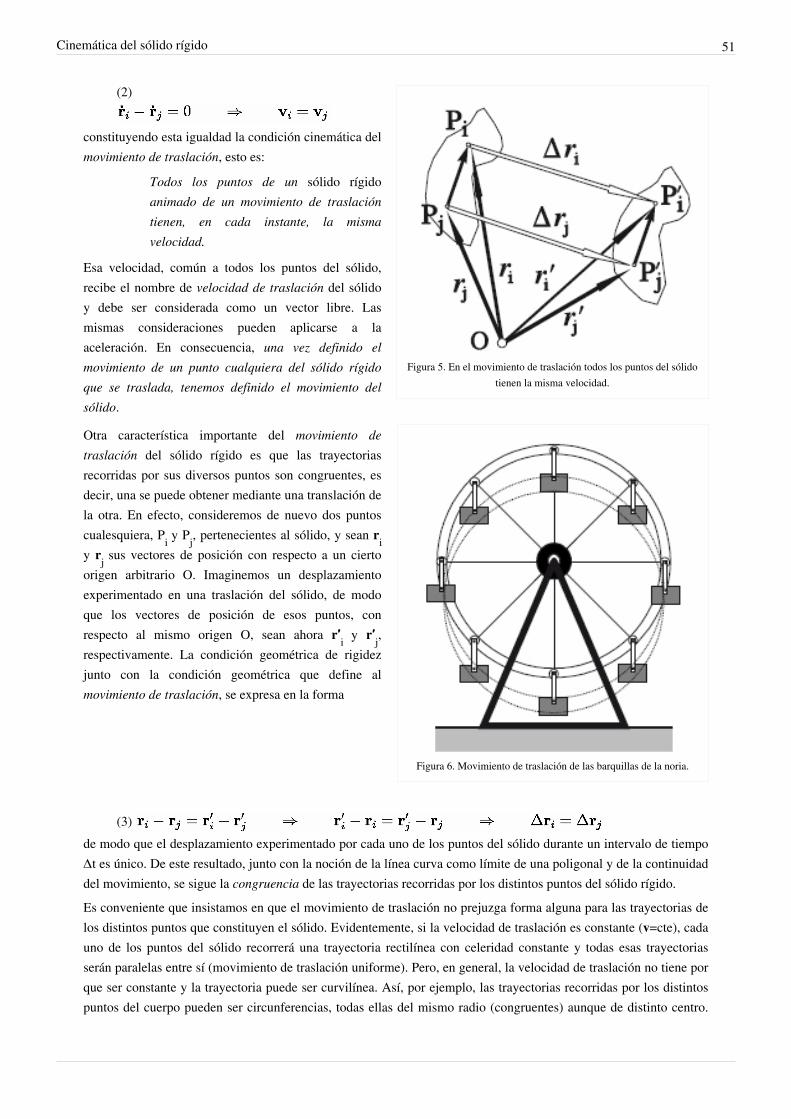
Cinemática del sólido rígido 51
Figura 5. En el movimiento de traslación todos los puntos del sólidotienen la misma velocidad.
Figura 6. Movimiento de traslación de las barquillas de la noria.
(2)
constituyendo esta igualdad la condición cinemática delmovimiento de traslación, esto es:
Todos los puntos de un sólido rígidoanimado de un movimiento de traslacióntienen, en cada instante, la mismavelocidad.
Esa velocidad, común a todos los puntos del sólido,recibe el nombre de velocidad de traslación del sólidoy debe ser considerada como un vector libre. Lasmismas consideraciones pueden aplicarse a laaceleración. En consecuencia, una vez definido elmovimiento de un punto cualquiera del sólido rígidoque se traslada, tenemos definido el movimiento delsólido.
Otra característica importante del movimiento detraslación del sólido rígido es que las trayectoriasrecorridas por sus diversos puntos son congruentes, esdecir, una se puede obtener mediante una translación dela otra. En efecto, consideremos de nuevo dos puntoscualesquiera, Pi y Pj, pertenecientes al sólido, y sean riy rj sus vectores de posición con respecto a un ciertoorigen arbitrario O. Imaginemos un desplazamientoexperimentado en una traslación del sólido, de modoque los vectores de posición de esos puntos, conrespecto al mismo origen O, sean ahora r′i y r′j,respectivamente. La condición geométrica de rigidezjunto con la condición geométrica que define almovimiento de traslación, se expresa en la forma
(3) de modo que el desplazamiento experimentado por cada uno de los puntos del sólido durante un intervalo de tiempoΔt es único. De este resultado, junto con la noción de la línea curva como límite de una poligonal y de la continuidaddel movimiento, se sigue la congruencia de las trayectorias recorridas por los distintos puntos del sólido rígido.Es conveniente que insistamos en que el movimiento de traslación no prejuzga forma alguna para las trayectorias de los distintos puntos que constituyen el sólido. Evidentemente, si la velocidad de traslación es constante (v=cte), cada uno de los puntos del sólido recorrerá una trayectoria rectilínea con celeridad constante y todas esas trayectorias serán paralelas entre sí (movimiento de traslación uniforme). Pero, en general, la velocidad de traslación no tiene por que ser constante y la trayectoria puede ser curvilínea. Así, por ejemplo, las trayectorias recorridas por los distintos puntos del cuerpo pueden ser circunferencias, todas ellas del mismo radio (congruentes) aunque de distinto centro.
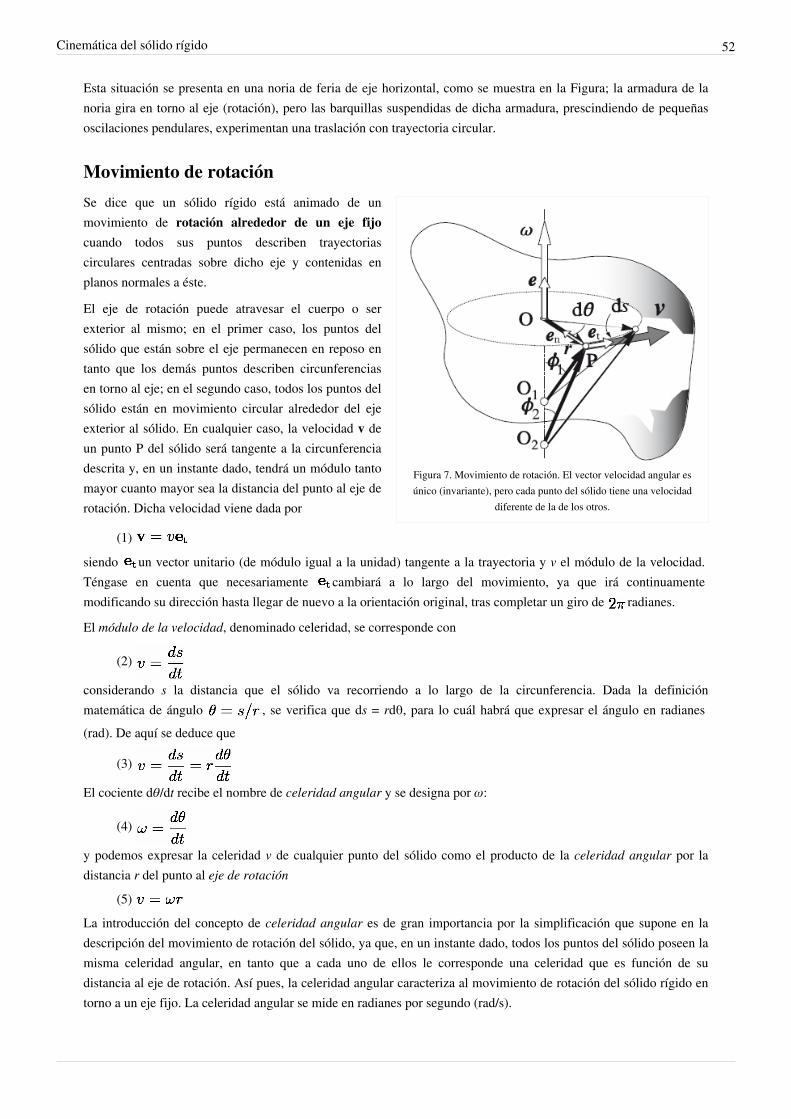
Cinemática del sólido rígido 52
Esta situación se presenta en una noria de feria de eje horizontal, como se muestra en la Figura; la armadura de lanoria gira en torno al eje (rotación), pero las barquillas suspendidas de dicha armadura, prescindiendo de pequeñasoscilaciones pendulares, experimentan una traslación con trayectoria circular.
Movimiento de rotación
Figura 7. Movimiento de rotación. El vector velocidad angular esúnico (invariante), pero cada punto del sólido tiene una velocidad
diferente de la de los otros.
Se dice que un sólido rígido está animado de unmovimiento de rotación alrededor de un eje fijocuando todos sus puntos describen trayectoriascirculares centradas sobre dicho eje y contenidas enplanos normales a éste.
El eje de rotación puede atravesar el cuerpo o serexterior al mismo; en el primer caso, los puntos delsólido que están sobre el eje permanecen en reposo entanto que los demás puntos describen circunferenciasen torno al eje; en el segundo caso, todos los puntos delsólido están en movimiento circular alrededor del ejeexterior al sólido. En cualquier caso, la velocidad v deun punto P del sólido será tangente a la circunferenciadescrita y, en un instante dado, tendrá un módulo tantomayor cuanto mayor sea la distancia del punto al eje derotación. Dicha velocidad viene dada por
(1) siendo un vector unitario (de módulo igual a la unidad) tangente a la trayectoria y v el módulo de la velocidad.Téngase en cuenta que necesariamente cambiará a lo largo del movimiento, ya que irá continuamentemodificando su dirección hasta llegar de nuevo a la orientación original, tras completar un giro de radianes.
El módulo de la velocidad, denominado celeridad, se corresponde con
(2)
considerando s la distancia que el sólido va recorriendo a lo largo de la circunferencia. Dada la definiciónmatemática de ángulo , se verifica que ds = rdθ, para lo cuál habrá que expresar el ángulo en radianes(rad). De aquí se deduce que
(3)
El cociente dθ/dt recibe el nombre de celeridad angular y se designa por ω:
(4)
y podemos expresar la celeridad v de cualquier punto del sólido como el producto de la celeridad angular por ladistancia r del punto al eje de rotación
(5) La introducción del concepto de celeridad angular es de gran importancia por la simplificación que supone en ladescripción del movimiento de rotación del sólido, ya que, en un instante dado, todos los puntos del sólido poseen lamisma celeridad angular, en tanto que a cada uno de ellos le corresponde una celeridad que es función de sudistancia al eje de rotación. Así pues, la celeridad angular caracteriza al movimiento de rotación del sólido rígido entorno a un eje fijo. La celeridad angular se mide en radianes por segundo (rad/s).
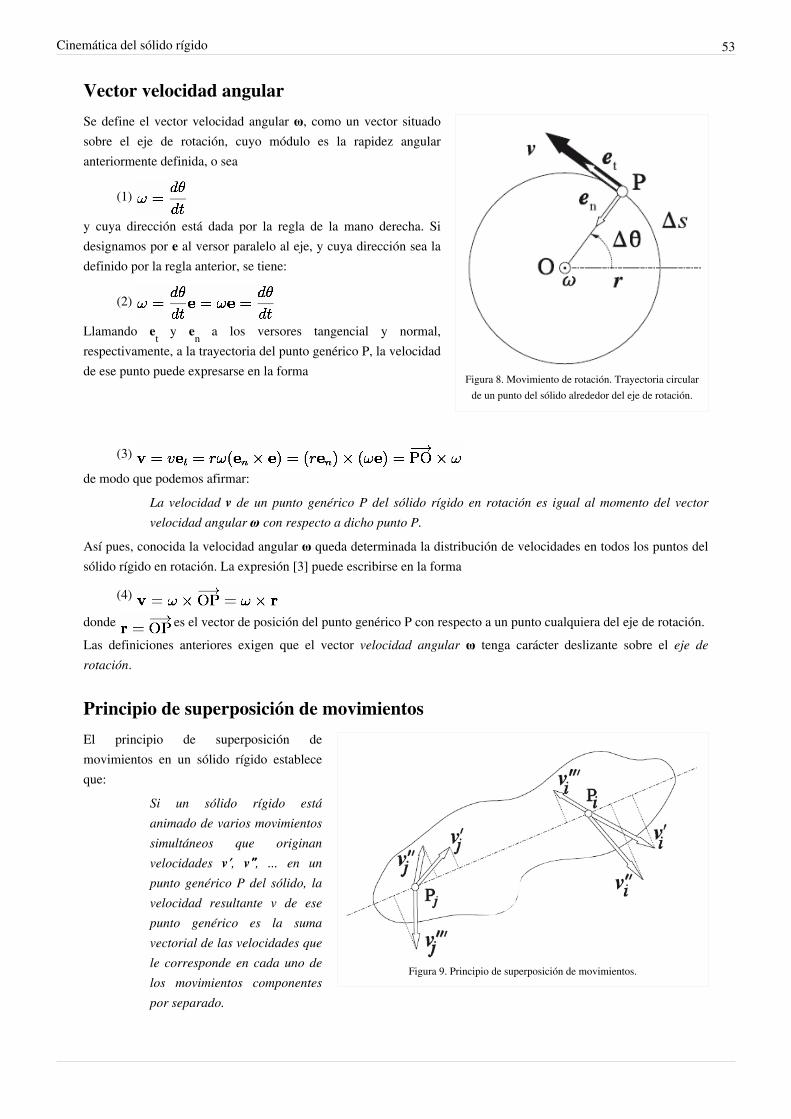
Cinemática del sólido rígido 53
Vector velocidad angular
Figura 8. Movimiento de rotación. Trayectoria circularde un punto del sólido alrededor del eje de rotación.
Se define el vector velocidad angular ω, como un vector situadosobre el eje de rotación, cuyo módulo es la rapidez angularanteriormente definida, o sea
(1)
y cuya dirección está dada por la regla de la mano derecha. Sidesignamos por e al versor paralelo al eje, y cuya dirección sea ladefinido por la regla anterior, se tiene:
(2)
Llamando et y en a los versores tangencial y normal,respectivamente, a la trayectoria del punto genérico P, la velocidadde ese punto puede expresarse en la forma
(3)
de modo que podemos afirmar:La velocidad v de un punto genérico P del sólido rígido en rotación es igual al momento del vectorvelocidad angular ω con respecto a dicho punto P.
Así pues, conocida la velocidad angular ω queda determinada la distribución de velocidades en todos los puntos delsólido rígido en rotación. La expresión [3] puede escribirse en la forma
(4)
donde es el vector de posición del punto genérico P con respecto a un punto cualquiera del eje de rotación.Las definiciones anteriores exigen que el vector velocidad angular ω tenga carácter deslizante sobre el eje derotación.
Principio de superposición de movimientos
Figura 9. Principio de superposición de movimientos.
El principio de superposición demovimientos en un sólido rígido estableceque:
Si un sólido rígido estáanimado de varios movimientossimultáneos que originanvelocidades v′, v″, ... en unpunto genérico P del sólido, lavelocidad resultante v de esepunto genérico es la sumavectorial de las velocidades quele corresponde en cada uno delos movimientos componentespor separado.

Cinemática del sólido rígido 54
Otra forma de enunciar el principio de superposición es la siguiente:Si un sólido rígido está animado de varios movimientos simultáneos, para cada uno de los cuales secumple la condición cinemática de rigidez, el movimiento resultante también cumple esa condición.
Composición de rotacionesA partir de la definición del vector velocidad angular, y al quedar completamente representado por dicho vector elmovimiento de rotación del sólido, es fácil comprender que componer dos o más rotaciones se reducirá a sumar losvectores de velocidad angular que las representan. Consideraremos dos casos sencillos.
Rotaciones cuyos ejes concurren en un punto
Figura 10. Podemos imaginar las dos rotaciones simultáneas delmodo que se ilustra en esta figura. Esto es, el sólido está en rotación
con una velocidad angular ω2 alrededor de un cierto eje; a su vez,este eje está rotando con una velocidad angular ω1 alrededor de uneje fijo en el espacio. La rotación ω2 suele denominarse rotación
intrínseca; la rotación ω1 recibe el nombre de precesión.
Consideremos un sólido rígido animado de dosrotaciones simultáneas, ω1 y ω2, cuyos ejes concurrenen el punto O (Figura 10). La velocidad de un puntogenérico P del sólido será la suma de las velocidades,v1 y v2, que le corresponderían a ese punto en cadarotación por separado; i.e.,
(1) de modo que
(2)
o sea queEl resultado de la superposición de dos omás rotaciones simultáneas cuyos ejesconcurren en un punto es igual a otrarotación cuyo eje pasa por dicho punto ycuya velocidad angular es la suma(vectorial) de las velocidades angularescorrespondientes a las rotacionescomponentes.
Par de rotaciones
Figura 11. Un par de rotaciones equivale a una traslación.
Consideremos un sólido rígido que esté animadosimultáneamente de dos movimientos de rotación, entorno a ejes paralelos entre sí y de modo que lasvelocidades angulares correspondientes, localizadassobre dichos ejes, tengan el mismo módulo ydirecciones contrarias (Figura 11); esto es, ω1=ω yω2=-ω. Los vectores ω y -ω constituyen un par derotaciones (cita requerida de bibliografía donde sedefina el término). La velocidad de un punto genérico Pdel sólido será
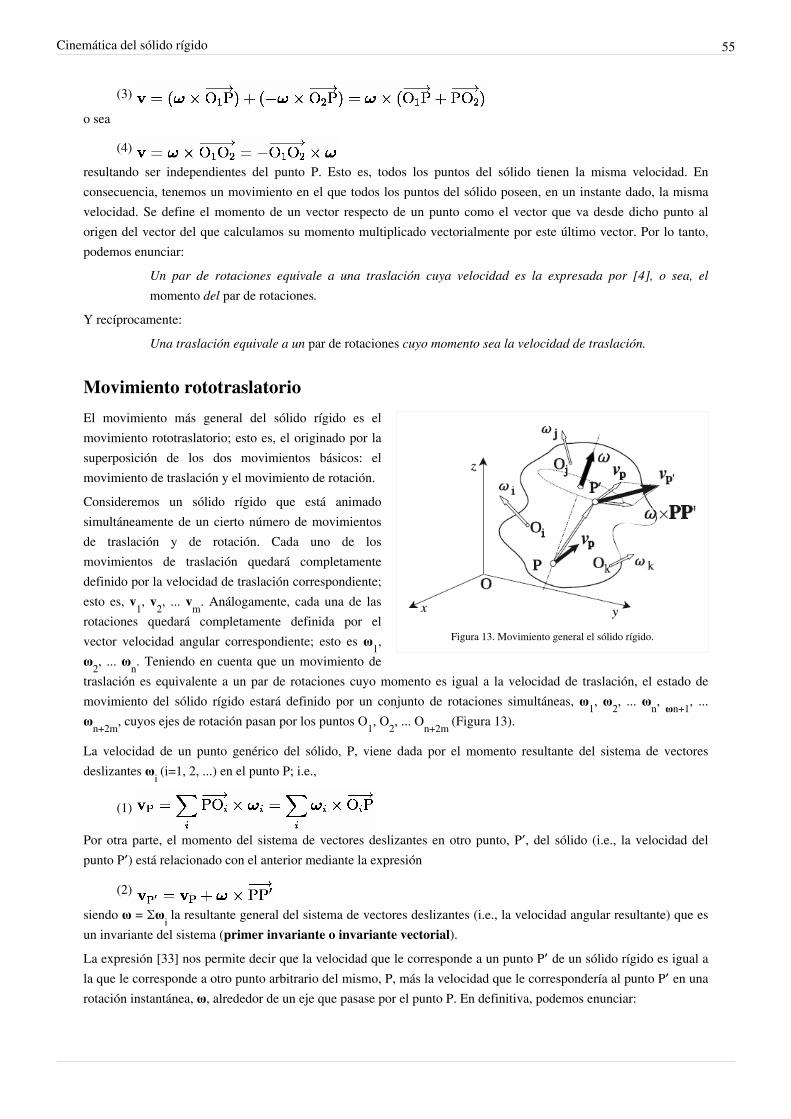
Cinemática del sólido rígido 55
(3)
o sea
(4) resultando ser independientes del punto P. Esto es, todos los puntos del sólido tienen la misma velocidad. Enconsecuencia, tenemos un movimiento en el que todos los puntos del sólido poseen, en un instante dado, la mismavelocidad. Se define el momento de un vector respecto de un punto como el vector que va desde dicho punto alorigen del vector del que calculamos su momento multiplicado vectorialmente por este último vector. Por lo tanto,podemos enunciar:
Un par de rotaciones equivale a una traslación cuya velocidad es la expresada por [4], o sea, elmomento del par de rotaciones.
Y recíprocamente:Una traslación equivale a un par de rotaciones cuyo momento sea la velocidad de traslación.
Movimiento rototraslatorio
Figura 13. Movimiento general el sólido rígido.
El movimiento más general del sólido rígido es elmovimiento rototraslatorio; esto es, el originado por lasuperposición de los dos movimientos básicos: elmovimiento de traslación y el movimiento de rotación.Consideremos un sólido rígido que está animadosimultáneamente de un cierto número de movimientosde traslación y de rotación. Cada uno de losmovimientos de traslación quedará completamentedefinido por la velocidad de traslación correspondiente;esto es, v1, v2, ... vm. Análogamente, cada una de lasrotaciones quedará completamente definida por elvector velocidad angular correspondiente; esto es ω1,ω2, ... ωn. Teniendo en cuenta que un movimiento detraslación es equivalente a un par de rotaciones cuyo momento es igual a la velocidad de traslación, el estado demovimiento del sólido rígido estará definido por un conjunto de rotaciones simultáneas, ω1, ω2, ... ωn,
ωn+1, ...ωn+2m, cuyos ejes de rotación pasan por los puntos O1, O2, ... On+2m (Figura 13).
La velocidad de un punto genérico del sólido, P, viene dada por el momento resultante del sistema de vectoresdeslizantes ωi (i=1, 2, ...) en el punto P; i.e.,
(1)
Por otra parte, el momento del sistema de vectores deslizantes en otro punto, P′, del sólido (i.e., la velocidad delpunto P′) está relacionado con el anterior mediante la expresión
(2)
siendo ω = Σωi la resultante general del sistema de vectores deslizantes (i.e., la velocidad angular resultante) que esun invariante del sistema (primer invariante o invariante vectorial).La expresión [33] nos permite decir que la velocidad que le corresponde a un punto P′ de un sólido rígido es igual ala que le corresponde a otro punto arbitrario del mismo, P, más la velocidad que le correspondería al punto P′ en unarotación instantánea, ω, alrededor de un eje que pasase por el punto P. En definitiva, podemos enunciar:
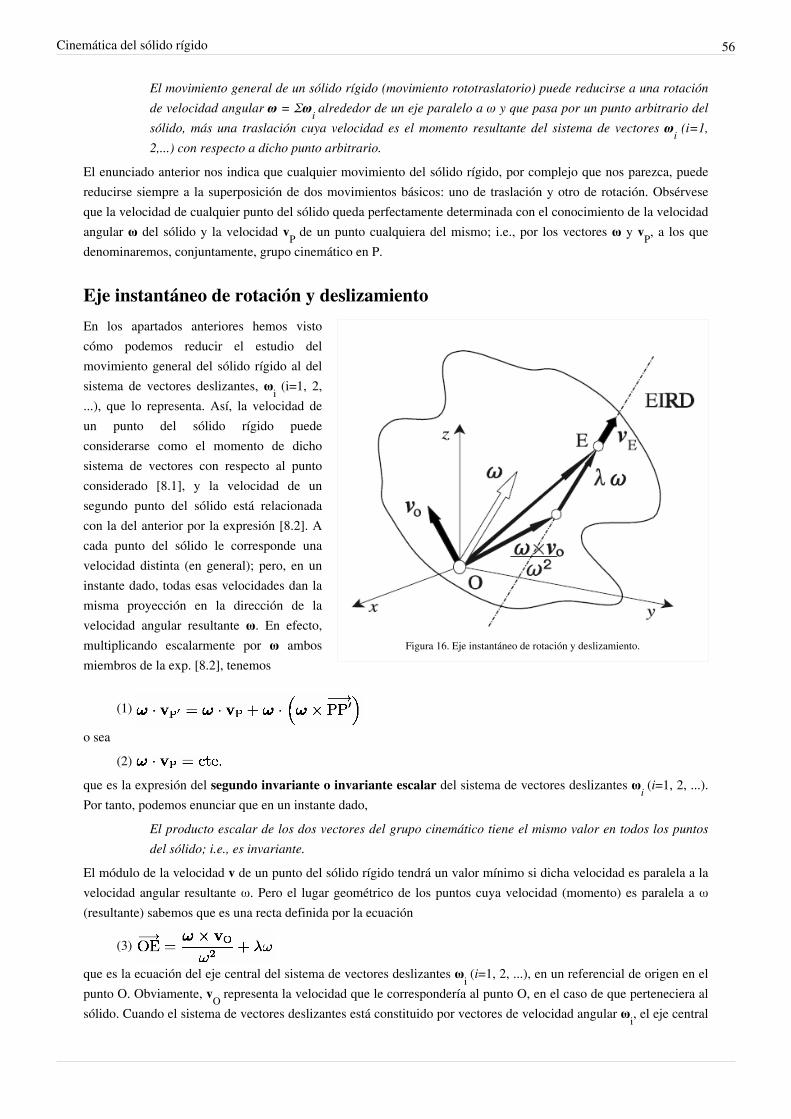
Cinemática del sólido rígido 56
El movimiento general de un sólido rígido (movimiento rototraslatorio) puede reducirse a una rotaciónde velocidad angular ω = Σωi alrededor de un eje paralelo a ω y que pasa por un punto arbitrario delsólido, más una traslación cuya velocidad es el momento resultante del sistema de vectores ωi (i=1,2,...) con respecto a dicho punto arbitrario.
El enunciado anterior nos indica que cualquier movimiento del sólido rígido, por complejo que nos parezca, puedereducirse siempre a la superposición de dos movimientos básicos: uno de traslación y otro de rotación. Obsérveseque la velocidad de cualquier punto del sólido queda perfectamente determinada con el conocimiento de la velocidadangular ω del sólido y la velocidad vP de un punto cualquiera del mismo; i.e., por los vectores ω y vP, a los quedenominaremos, conjuntamente, grupo cinemático en P.
Eje instantáneo de rotación y deslizamiento
Figura 16. Eje instantáneo de rotación y deslizamiento.
En los apartados anteriores hemos vistocómo podemos reducir el estudio delmovimiento general del sólido rígido al delsistema de vectores deslizantes, ωi (i=1, 2,...), que lo representa. Así, la velocidad deun punto del sólido rígido puedeconsiderarse como el momento de dichosistema de vectores con respecto al puntoconsiderado [8.1], y la velocidad de unsegundo punto del sólido está relacionadacon la del anterior por la expresión [8.2]. Acada punto del sólido le corresponde unavelocidad distinta (en general); pero, en uninstante dado, todas esas velocidades dan lamisma proyección en la dirección de lavelocidad angular resultante ω. En efecto,multiplicando escalarmente por ω ambosmiembros de la exp. [8.2], tenemos
(1)
o sea(2)
que es la expresión del segundo invariante o invariante escalar del sistema de vectores deslizantes ωi (i=1, 2, ...).Por tanto, podemos enunciar que en un instante dado,
El producto escalar de los dos vectores del grupo cinemático tiene el mismo valor en todos los puntosdel sólido; i.e., es invariante.
El módulo de la velocidad v de un punto del sólido rígido tendrá un valor mínimo si dicha velocidad es paralela a lavelocidad angular resultante ω. Pero el lugar geométrico de los puntos cuya velocidad (momento) es paralela a ω(resultante) sabemos que es una recta definida por la ecuación
(3)
que es la ecuación del eje central del sistema de vectores deslizantes ωi (i=1, 2, ...), en un referencial de origen en el punto O. Obviamente, vO representa la velocidad que le correspondería al punto O, en el caso de que perteneciera al sólido. Cuando el sistema de vectores deslizantes está constituido por vectores de velocidad angular ωi, el eje central

Cinemática del sólido rígido 57
del sistema de vectores recibe el nombre de eje instantáneo de rotación y deslizamiento (EIRD). Así pues, el EIRDqueda definido como el lugar geométrico de los puntos del sólido de velocidad mínima o bien el lugar geométrico delos puntos del sólido cuya velocidad es paralela a la dirección de la velocidad angular del mismo.Obviamente, el módulo de la velocidad mínima puede determinarse proyectando la velocidad v de un puntocualquiera del sólido sobre la velocidad angular ω del mismo; esto es,
(4)
y su dirección es la del vector ω (i.e., la del EIRD).
Teorema de Chasles
Figura 17.
Cuando el invariante escalar del sistema derotaciones es distinto de cero (i.e., ω•v≠0)es posible reducir canónicamente elmovimiento rototraslatorio a los dosmovimientos básicos: rotación y traslación.Tomando un punto E del eje central comocentro de reducción, el sistema de rotacionesresulta ser equivalente a una rotación única,ω = Σωi, localizada sobre el eje central delsistema de rotaciones, más una traslación odeslizamiento a lo largo de dicho eje, conuna velocidad vd, llamada velocidadmínima o de deslizamiento, dada por
(1)
que constituye la expresión del Teorema deChasles:
El movimiento general de un sólido rígido resulta equivalente a una rotación pura alrededor del ejecentral del sistema de
rotaciones ωi (i=1, 2, ...) más una traslación a lo largo de dicho eje.Por esa razón el eje central de un sistema de rotaciones recibe el nombre de eje instantáneo de rotación ydeslizamiento y el movimiento resultante se denomina movimiento helicoidal tangente.Cuando el invariante escalar es nulo, o sea ω•v = 0, siendo v la velocidad de un punto genérico del sólido, se nospueden presentar los siguientes casos:(1) Que sea ω = 0 y v = 0. Esta condición prevalecerá para cualquier punto del sólido. En ese instante, el sólido seencuentra en reposo.(2) Que sea ω = 0 y v ≠ 0. Todos los puntos del sólido tienen la misma velocidad. En ese instante, el movimiento delsólido es una traslación pura.(3) Que sea ω ≠ 0 y v = 0. El sistema de rotaciones está definido por un sistema de vectores deslizantes concurrenteso paralelos. Se trata de una rotación pura alrededor de un eje que pasa por el punto de concurrencia (propio oimpropio). En los demás puntos del sólido, fuera de la recta de acción de ω, aparecerá una velocidad que serásiempre perpendicular a ω, por ser ω•v = 0.

Cinemática del sólido rígido 58
(4) Que sea ω ≠ 0 y v ≠ 0. En este caso deberá ser v⊥ω, de modo que cada punto del sólido se moverá en un planoperpendicular al eje instantáneo de rotación (o sea, al vector ω). Como para los puntos de dicho eje deberá ser,además, v||ω, la velocidad de dichos puntos será nula. Por consiguiente, el sólido pasará en cada instante por unestado de rotación pura, con velocidad angular ω, alrededor del eje instantáneo de rotación, pero sin que existadeslizamiento alguno a lo largo de dicho eje. Este movimiento recibe el nombre de movimiento de rodadura y en éllos puntos del eje instantáneo de rotación se encuentran instantáneamente en reposo.
Axoides. Representación de Poncelet
Figura 18.
Figura 19.
Todo nuestro análisis anterior se refiere a uninstante determinado y, así, la ecuación quedefine al eje instantáneo de rotación ydeslizamiento, depende de los valoresinstantáneos de ω y de vO, de modo querepresenta una recta móvil en el espacio. Enefecto, los vectores ω y vO pueden variar deun instante a otro de modo que el ejeinstantáneo, en general, cambiaráconstantemente de posición, en el transcursodel tiempo, tanto con respecto a un sistemade ejes fijos en el espacio, como conrespecto a otro sistema de ejes ligados alsólido rígido y que se muevansolidariamente con él. El eje instantáneosólo estará indefinido en aquellos instantesen los que el movimiento del sólido sea unatraslación pura.
En el transcurso del movimiento del sólido,el eje instantáneo modifica su posición conrespecto a un referencial de ejes fijos en elespacio (xyz), generando una superficiereglada que recibe el nombre de axoide fijo.Por otra parte, el eje instantáneo, en sumovimiento con respecto al referencial deejes ligados al sólido (x′y′z′), genera otrasuperficie reglada que recibe el nombre deaxoide móvil. Se comprende que, en cadainstante, ambos axoides deben tener unarecta común, que es el eje instantáneocorrespondiente a dicho instante, de modoque ambos axoides son tangentes a lo largode la recta mencionada. Además, en cadainstante, el sólido rígido realiza una traslación o deslizamiento a lo largo de dicho eje o recta común a ambosaxoides, con una velocidad vd que es la velocidad de traslación del movimiento helicoidal tangente, y que essimplemente la proyección del vector velocidad v de cualquier punto del sólido sobre el eje instantáneo de rotación ydeslizamiento.

Cinemática del sólido rígido 59
En definitiva, el movimiento general del sólido rígido (rototraslatorio) se puede representar de forma continuasuponiendo que el sólido está ligado y se mueve solidariamente con una superficie móvil (axoide móvil) que ruedasobre una superficie fija (axoide fijo) al mismo tiempo que experimenta un deslizamiento a lo largo de la generatrizcomún instantánea. Tal representación del movimiento del sólido se debe al matemático y general francésJean-Victor Poncelet (1788-1867).En el caso de que uno de los puntos del sólido permanezca fijo durante el movimiento, ambos axoides degeneran enconos tangentes entre sí a lo largo de una generatriz y el movimiento continuo de Poncelet se reduce a una rodaduradel cono móvil sobre el cono fijo, ya que no habrá deslizamiento por ser nula la velocidad de uno de los puntos delsólido. En la Figura 19 ilustramos este tipo de movimiento.El sólido rígido (y el cono móvil al cual es solidario) gira con velocidad angular ω1 al mismo tiempo que el eje deω1 gira con una velocidad angular ω2 alrededor de un eje fijo en el espacio. El resultado de estos dos movimientoscombinados es una rodadura del cono móvil sobre el cono fijo, siendo el eje instantáneo de rotación (puntos develocidad instantánea nula con respecto al sistema de ejes fijos) la generatriz común instantáneamente a ambosconos. Obviamente, será ω = ω1 + ω2, como se ilustra en la Figura 19, siendo ω la velocidad angular instantánea delsólido.
AceleraciónConsideremos un punto genérico P de un sólido rígido en movimiento y sea vP su velocidad. Si consideramos unsegundo punto, O, perteneciente al sólido, cuya velocidad sea vO, la relación existente entre ambas velocidades es dela forma
(1) donde ω es la velocidad angular resultante, que la podemos considerar localizada sobre un eje que pase por el puntoO. Derivando la expresión anterior con respecto al tiempo, obtenemos la aceleración aP del punto P; esto es,
(2)
o sea
(3)
donde• es la aceleración del punto O;
• es la aceleración tangencial del punto P en su rotación alrededor de un eje en la dirección de ω y que
pasa por el punto O;• es la aceleración normal del punto P respecto al eje anteriormente citado.
Obviamente, la suma de las aceleraciones tangencial y normal del punto P en su rotación en torno al eje definido porω y que pasa por el punto O es igual a , o sea la aceleración relativa del punto P respecto al punto O.

Cinemática del sólido rígido 60
Vector aceleración angular
Aceleración angular. En el caso general, cuando el eje de rotación nomanteniene una dirección constante en el espació, la aceleración
angular no tiene la dirección del eje de rotación.
Definimos la aceleración angular como el cambio queexperimenta la velocidad angular por unidad de tiempo.Se denota por la letra griega y, al igual que lavelocidad angular, tiene carácter vectorial. Pordefinición,
(1)
siendo el vector velocidad angular del sólido rígidoalrededor del eje de rotación. La aceleración angular seexpresa en radianes por segundo al cuadrado, o s-2, yaque el radián es adimensional.
Si denominamos por el versor asociado al eje derotación, de modo que sea , podemos escribir
(2)
resultando que, en general, el vector no está localizado sobre el eje de rotación.En el caso particular de que el eje de rotación mantenga una orientación fija en el espacio (movimiento plano),entonces será y el vector aceleración angular estará localizado sobre el eje de rotación. Esto es,
(3)
de modo que el módulo de la aceleración angular, , es la derivada de la rapidez angular con respecto altiempo (o la derivada segunda del ángulo de rotación con respecto al tiempo), su dirección es la de cuando larapidez angular aumenta con el tiempo, pero es de dirección opuesta si disminuye.En el caso general, cuando el eje de rotación no mantiene una dirección fija en el espacio, será , aunque
, ya que el versor del eje cambia de dirección en el transcurso del movimiento. Puesto que es un versor,su derivada será un vector perpendicular a , esto es, al eje instantáneo de rotación.Así pues, en el caso más general, la aceleración angular se expresará en la forma
(4)
siendo la velocidad angular asociada a la rotación del eje o precesión del eje de rotación (definido por ) en elespacio.En la expresión anterior observaremos que el vector aceleración angular tiene dos componentes: una componentelongitudinal (i.e., en la dirección del eje de rotación) cuyo módulo es y una componente transversal (i.e.,perpendicular al eje de rotación) cuyo módulo es .Así pues, en general,• el vector no tendrá la misma dirección que el vector .• el vector aceleración angular no tendrá la dirección del eje de rotación.

Cinemática del sólido rígido 61
La dirección de la aceleración angular sólo coincide con la del vector velocidad angular, o sea, con el eje de rotación,en el caso de que dicho eje mantenga su orientación fija en el espacio, esto es, en el movimiento plano.
Movimiento planoEn el movimiento plano del sólido rígido, la aceleración angular, al igual que la velocidad angular, tiene la direccióndel eje de rotación y viene dada por:
(1)
donde representa el ángulo girado en función de y la velocidad angular.
(2)
En el movimiento plano tanto la velocidad angular como la aceleración angular son vectores perpendiculares alplano en el que se produce el movimiento.
Referencias
Bibliografía• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex (http:/ / www. uco. es/ users/
fa1orgim/ monytexco). ISBN 84-404-4290-4, ISBN 84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Marion, Jerry B. (1996). Dinámica clásica de las partículas y sistemas. Barcelona: Ed. Reverté. ISBN 84-291-4094-8.• Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
ISBN 0-471-32057-9.• Curso Interactivo de Física en Internet. (http:/ / www. sc. ehu. es/ sbweb/ fisica_/ ) Ángel Franco García.
Enlaces externos• Script de Física de Ingeniería Mecánica, desde la página 72, 6º Tema Cinemática del sólido rígido. (http:/ / www.
docstoc. com/ docs/ 99827248/ Fisica-de-primero-de-ingenieria-mecanica)
Cuerpo rígido 62
Cuerpo rígidoUn cuerpo rígido se define como aquel que no sufre deformaciones por efecto de fuerzas externas, es decir, unsistema de partículas cuyas posiciones relativas no cambian. Sin embargo, las estructuras y máquinas reales nuncason absolutamente rígidas y se deforman bajo la acción de cargas que actúan sobre ellas. Un cuerpo rígido es unaidealización, que se emplea para efectos de estudios de Cinemática, ya que esta rama de la Mecánica, únicamenteestudia los objetos y no las fuerzas exteriores que actúan sobre ellos.
Movimiento (física)
El movimiento es un cambio de posición respecto del tiempo medido por un ciertoobservador.
En mecánica, el movimiento es un cambiode la posición de un cuerpo a lo largo deltiempo respecto de un sistema de referencia.
El estudio del movimiento se puede realizara través de la cinemática o a través de ladinámica. En función de la elección delsistema de referencia quedaran definidas lasecuaciones del movimiento, ecuaciones quedeterminarán la posición, la velocidad y laaceleración del cuerpo en cada instante detiempo. Todo movimiento puederepresentarse y estudiarse mediante gráficas.Las más habituales son las que representanel espacio, la velocidad o la aceleración enfunción del tiempo.
Movimiento (física) 63
Introducción
La Mecánica comprende el estudio de las máquinas (Polea simplefija).
Un sistema físico real se caracteriza por al menos trespropiedades importantes:1. Tener una ubicación en el espacio-tiempo.2. Tener un estado físico definido sujeto a evolución
temporal.3. Poderle asociar una magnitud física llamada
energía.
El movimiento se refiere al cambio de ubicación en elespacio a lo largo del tiempo, tal como es medido porun observador físico. Un poco más generalmente elcambio de ubicación puede verse influido por laspropiedades internas de un cuerpo o sistema físico, oincluso el estudio del movimiento en toda sugeneralidad lleva a considerar el cambio de dichoestado físico.
La descripción del movimiento de los cuerpos físicos sedenomina cinemática (que sólo se ocuparía de laspropiedades 1 y 2 anteriores). Esta disciplina pretendedescribir el modo en que un determinado cuerpo se mueve y qué propiedades tiene dicho movimiento. La físicaclásica nació estudiando la cinemática de cuerpos rígidos.
Posteriormente el estudio de las causas que producen el movimiento y las relaciones cuantitativas entre los agentesque causan el movimiento y el movimiento observado llevó al desarrollo de la mecánica (Griego Μηχανική y delatín mechanica o 'arte de construir máquinas') que es la rama de la física que estudia y analiza el movimiento yreposo de los cuerpos, y su evolución en el tiempo, bajo la acción de fuerzas y agentes que pueden alterar el estadode movimiento. La mecánica teórica fue durante los siglos XVII, XVIII y principios del siglo XIX, la disciplina de lafísica que alcanzó mayor abstracción matemática y fue una fuente de mejora del conocimiento científico del mundo.La mecánica aplicada está usualmente relacionada con la ingeniería. Ambos puntos de vista se justificanparcialmente ya que, si bien la mecánica es la base para la mayoría de las ciencias de la ingeniería clásica, no tieneun carácter tan empírico como éstas y, en cambio, por su rigor y razonamiento deductivo, se parece más a lamatemática.
Durante el siglo XX la aparición de nuevos hechos físicos, tanto la consideración de cuerpos físicos moviéndose avelocidades cercanas a la velocidad de la luz como el movimiento de las partículas subatómicas, llevaron a laformulación de teorías más abstractas como la mecánica relativista y la mecánica cuántica que seguían interesándosepor la evolución en el tiempo de los sistemas físicos, aunque de una manera más abstracta y general de lo habíahecho la mecánica clásica, cuyo objetivo era básicamente cuantificar el cambio de posición en el espacio de laspartículas a lo largo del tiempo y los agentes responsables de dichos cambios.

Movimiento (física) 64
Mecánica clásicaLa mecánica clásica es una formulación de la mecánica para describir mediante leyes el comportamiento de cuerposfísicos macroscópicos en reposo y a velocidades pequeñas comparadas con la velocidad de la luz.Existen varias formulaciones diferentes, de la mecánica clásica para describir un mismo fenómeno natural, queindependientemente de los aspectos formales y metodológicos que utilizan llegan a la misma conclusión.• La mecánica vectorial, deviene directamente de las leyes de Newton, por eso también se le conoce con el
gentilicio de newtoniana. Es aplicable a cuerpos que se mueven en relación a un observador a velocidadespequeñas comparadas con la de la luz. Fue construida en un principio para una sola partícula moviéndose en uncampo gravitatorio. Se basa en el tratamiento de dos magnitudes vectoriales bajo una relación causal: la fuerza yla acción de la fuerza, medida por la variación del momentum (cantidad de movimiento). El análisis y síntesis defuerzas y momentos constituye el método básico de la mecánica vectorial. Requiere del uso privilegiado desistemas de referencia inercial.
• La mecánica analítica (analítica en el sentido matemático de la palabra y no filosófico). Sus métodos sonpoderosos y trascienden de la Mecánica a otros campos de la física. Se puede encontrar el germen de la mecánicaanalítica en la obra de Leibniz que propone para solucionar los problemas mecánicos otras magnitudes básicas(menos oscuras según Leibniz que la fuerza y el momento de Newton), pero ahora escalares, que son: la energíacinética y el trabajo. Estas magnitudes están relacionadas de forma diferencial. La característica esencial es que,en la formulación, se toman como fundamentos primeros principios generales (diferenciales e integrales), y que apartir de estos principios se obtengan analíticamente las ecuaciones de movimiento.
En mecánica newtoniana el movimiento de una partícula en el espacio tridimensional se representa por una funciónvectorial:
El conjunto imagen se denomina trayectoria y se obtiene integrando la ecuación diferencial anteriorcon las condiciones de contorno adecuadas. Dado que la ecuación diferencial puede ser complicada a veces sebuscan integrales de movimiento que permitan encontrar la trayectoria más fácilmente. Para un sistema de npartículas libres que ejercen acciones a distancia instáneas la idea anterior se generaliza:
Si existen ligaduras en el movimiento puede resultar más sencillo y económico pasar a un sistema de coordenadasgeneralizadas y trabajar con una formulación abstracta típica de la mecánica analítica.
Mecánica relativistaPara describir la posición de una partícula material, la mecánica relativista hace uso de un sistema de cuatrocoordenadas definidas sobre un espacio-tiempo de cuatro dimensiones. El movimiento de una partícula materialviene dado por una curva en una 4-variedad lorentziana, cuyo vector tangente es de tipo temporal. Además, lasacciones a distancia instantáneas están excluidas ya que al propagarse más rápido que la velocidad de la luz danlugar a contracciones en el principio de causalidad. Por lo que un sistema de partículas puntuales en interacción debeser descrito con la ayuda de "campos retardados", es decir, que no actúan de manera instatánea, cuya variación debedeterminarse como propagación a partir de la posición de la partícula. Esto complica razonablemente el número deecuaciones necesarias para describir un conjunto de partículas en interacción.Otra dificultad añadida es que no existe un tiempo universal para todos los observadores, por lo que relacionar lasmedidas de diferentes observadores en movimiento relativo es ligeramente más complejo que en la mecánica clásica.Una manera conveniente es definir el intervalo invariante relativista y parametrizar las trayectorias en elespacio-tiempo en función de dicho parámetro. La descripción campos de fuerzas o fluidos requiere definir ciertas
Movimiento (física) 65
magnitudes tensoriales sobre el espacio vectorial tangente al espacio-tiempo.
Mecánica cuánticaLa mecánica cuántica[1][2] es una de las ramas principales de la física, y uno de los más grandes avances del sigloXX para el conocimiento humano, que explica el comportamiento de la materia y de la energía. Su aplicación hahecho posible el descubrimiento y desarrollo de muchas tecnologías, como por ejemplo los transistores que se usanmás que nada en la computación. Igualmente la mecánica cuántica daba cuenta de las propiedades de la estructuraatómica y de muchos otros problemas para los cuales la mecánica clásica da predicciones totalmente incorrectas. Ladescripción que hace la mecánica cuántica de las partículas abandona por el completo la noción de trayectoria, yaque debido al principio de incertidumbre no puede existir un estado cuántico convencional donde posición y elmomento tengan valores perfectamente definidos. En su lugar, el objeto fundamental en la descripción cuántica delas partículas no son estados definidos por posición y momentum, es decir punto de un espacio de fases, sinodistribuciones sobre un espacio fásico. Estas distribuciones pueden ser dotadas de estructura de espacio de Hilbert.La mecánica cuántica tal como fue originalmente formulada no incorporaba la teoría de la relatividad en suformalismo, que inicialmente sólo podía ser tenida en cuenta mediante teoría de perturbaciones. La parte de lamecánica cuántica que sí incorpora elementos relativistas de manera formal y con diversos problemas, es lamecánica cuántica relativista o ya, de forma más exacta y potente, la teoría cuántica de campos (que incluye a su veza la electrodinámica cuántica, cromodinámica cuántica y teoría electrodébil dentro del modelo estándar) y másgeneralmente, la teoría cuántica de campos en espacio-tiempo curvo. La única interacción que no se ha podidocuantificar ha sido la interacción gravitatoria.La mecánica cuántica es la base de los estudios del átomo, los núcleos y las partículas elementales (siendo yanecesario el tratamiento relativista), pero también en teoría de la información, criptografía y química.
Historia del concepto físicoLas cuestiones acerca de las causas del movimiento surgieron en la mente del hombre hace más de 25 siglos, pero lasrespuestas que hoy conocemos no se desarrollaron hasta los tiempos de Galileo Galilei (1564–1642) y Sir. IssacNewton (1642–1727).• Anaximandro pensaba que la naturaleza procedía de la separación, por medio de un eterno movimiento, de los
elementos opuestos (por ejemplo, (frío-calor), que estaban encerrados en algo llamado materia primordial.• Demócrito decía que la naturaleza está formada por piezas indivisibles de materia llamadas átomos, y que el
movimiento era la principal característica de éstos, siendo el movimiento un cambio de lugar en el espacio.• Las paradojas de Zenón son una serie de paradojas o aporías ideadas por Zenón de Elea. Dedicado principalmente
al problema del continuo y a las relaciones entre espacio, tiempo y movimiento, Zenón habría planteado — segúnseñala Proclo — un total de 40 paradojas, de las cuales se han conservado nueve o diez descripciones completas(en la Física[3][4] de Aristóteles y el comentario de Simplicio a esta obra).
• Aristóteles rechaza la tarea de retomar el concepto de átomo, de Democrito, y de la energía, de Aristóteles,definiendo a la energía como indeterminación absoluta de la materia, lo que comprendemos como materia nomásica y a los cuerpos como determinación absoluta de la materia, lo que comprendemos como materia másica.Recordemos que Epícuro es el primer físico absoluto, de ahí se dan dos importantes rasgos, que los cuerpospercibidos son materiales y que la energía, que provoca el movimiento en estos, también es material.
La importancia de esta tesis, epicúrea, es inconmensurable en la historia de la física, debido a que resuelve las problemáticas de las tesis expuestas antes de esta, y posteriormente tiene influencia en la física, sobre todo a partir de los s.XVI y s.XVII, gracias al redescubrimiento de Poggio Bracciolini y de Pierre Gassendi de las obras de Epícuro. Un ejemplo claro de influencia esta en Isaac Newton, que de hecho desvirtuó la teoría, llegando así a errores en su Ley de gravitación universal, un error claro es el fundamento que da al movimiento en la gravedad, analógicamente comparado con el determinismo mecanicista de Demócrito. Quienes que confirmaron definitivamente, con sus
Movimiento (física) 66
trabajos, la tesis de Epícuro fueron Max Planck y Albert Einstein, después de veintiún siglos de duda sobre la tesisde Epícuro.• Lucrecio, para evitar el determinismo mecanicista, ya criticado por Aristóteles, toma el pensamiento de Epicuro e
introduce la tesis de que los átomos caen en el vacío y experimentan por sí mismos una declinación que lespermite encontrarse. De esta forma se trata de imponer un cierto orden a la idea original que suponía que las cosasse formaban con un movimiento caótico de átomos.
• A partir de Galileo, los hombres de ciencia comenzaron a desarrollar técnicas de análisis que permitían unadescripción cuantificable del fenómeno.
Estudios del movimientoEl gran filósofo griego Aristóteles (384 a. C. – 322 a. C.) propuso explicaciones sobre lo que ocurría en lanaturaleza, considerando las observaciones que hacía de las experiencias cotidianas y su razonamiento, aunque no sepreocupaba por comprobar sus afirmaciones. Aristóteles formuló su teoría sobre la caída de los cuerpos afirmandoque los más pesados caían más rápido que los más ligeros, es decir entre más peso tengan los cuerpos más rápidocaen. Esta teoría fue aceptada por casi dos mil años hasta que en el siglo XVII Galileo realiza un estudio máscuidadoso sobre el movimiento de los cuerpos y su caída, sobre la cual afirmaba: "cualquier velocidad, una vezimpartida a un cuerpo se mantendrá constantemente, en tanto no existan causas de aceleración o retardamiento,fenómeno que se observará en planos horizontales donde la fricción se haya reducido al mínimo" Esta afirmaciónlleva consigo el principio de la inercia de Galileo la cuál brevemente dice: "Si no se ejerce ninguna fuerza sobre uncuerpo, éste permanecerá en reposo o se moverá en línea recta con velocidad constante" . Él fue estudiando losmovimientos de diversos objetos en un plano inclinado y observó que en el caso de planos con pendientedescendente a una causa de aceleración, mientras que en los planos con pendiente ascendente hay una causa deretardamiento. De esta experiencia razonó que cuando las pendientes de los planos no son descendentes niascendentes no debe haber aceleración ni retardamiento por lo que llegó a la conclusión de que cuando elmovimiento es a lo largo de un plano horizontal debe ser permanente. Galileo hizo un estudio para comprobar lo quehabía dicho Aristóteles acerca de la caída de los cuerpos, para hacerlo se subió a lo más alto de la torre de Pisa ysoltó dos objetos de distinto peso; y observó que los cuerpos caen a la misma velocidad sin importar su peso,quedando así descartada la teoría de la caída de los cuerpos de Aristóteles.
Movimiento (física) 67
Cinemática
Una masa colgada de un muellese mueve con un movimiento
armónico simple.
La Cinemática (del griego κινεω, kineo, movimiento) es la rama de la mecánicaclásica que estudia las leyes del movimiento de los cuerpos sin tener en cuenta lascausas que lo producen, limitándose, esencialmente, al estudio de la trayectoria enfunción del tiempo.
En la Cinemática se utiliza un sistema de coordenadas para describir las trayectorias,denominado sistema de referencia. La velocidad es el ritmo con que cambia laposición un cuerpo. La aceleración es el ritmo con que cambia su velocidad. Lavelocidad y la aceleración son las dos principales cantidades que describen cómocambia su posición en función del tiempo.
El estudio de la cinemática usualmente empieza con la consideración de casosparticulares de movimiento con características particulares. Usualmente se empiezael estudio cinemático considerando el movimiento de una partícula o cuerpo cuyaestructura y propiedades internas pueden ignorarse para explicar su movimientoglobal. Entre los movimientos que puede ejecutar una partícula material libre sonparticularmente interesantes los siguientes:• Movimiento rectilíneo uniforme. Un movimiento es rectilíneo cuando describe
una trayectoria recta.• Movimiento circular. El movimiento circular es el que se basa en un eje de giro
y radio constante: la trayectoria será una circunferencia. Si, además, la velocidadde giro es constante, se produce el movimiento circular uniforme, que es un casoparticular de movimiento circular, con radio fijo y velocidad angular referente. Eneste caso la velocidad vectorial no es constante, aunque sí puede ser constante laceleridad (o módulo de la velocidad).
• Movimiento armónico simple, que es un tipo de movimiento oscilatorioejecutado por una partícula a partir de un centro o punto de equilibrio.
• Movimiento parabólico. Se denomina movimiento parabólico al realizado por un objeto cuya trayectoriadescribe una parábola. En mecánica clásica se corresponde con la trayectoria ideal de un proyectil que se mueveen un medio que no ofrece resistencia al avance y que está sujeto a un campo gravitatorio uniforme. También esposible demostrar que puede ser analizado como la composición de dos movimientos rectilíneos, un movimientorectilíneo uniforme horizontal y movimiento rectilíneo uniformemente acelerado vertical.
• Movimiento pendular. El movimiento pendular es una forma de desplazamiento que presentan algunos sistemasfísicos como aplicación práctica de movimiento cuasi-armónico. Existen diversas variantes de movimientopendular: péndulo simple, péndulo de torsión y péndulo físico.
Los tres primeros son de interés tanto en mecánica clásica, como en mecánica relativista y mecánica cuántica.Mientras que el movimiento parabólico y el movimiento pendular son de interés casi exclusivamente en la mecánicaclásica. El movimiento armónico simple también es interesante en mecánica cuántica para aproximar ciertaspropiedades de los sólidos a nivel atómico.Cuando se consideran medios continuos o medios materiales exendidos el movimiento de los cuerpos es máscomplejo ya que se requiere describir como se mueve cada punto material que forma parte del cuerpo. Algunos delos más simples de este tipo de movimiento son:• Movimiento de sólido rígido, es el que se da en un sólido cuyas partículas se mueven conjuntamente de tal
manera que las distancias relativas entre ellas permanecen constantes a lo largo del tiempo.
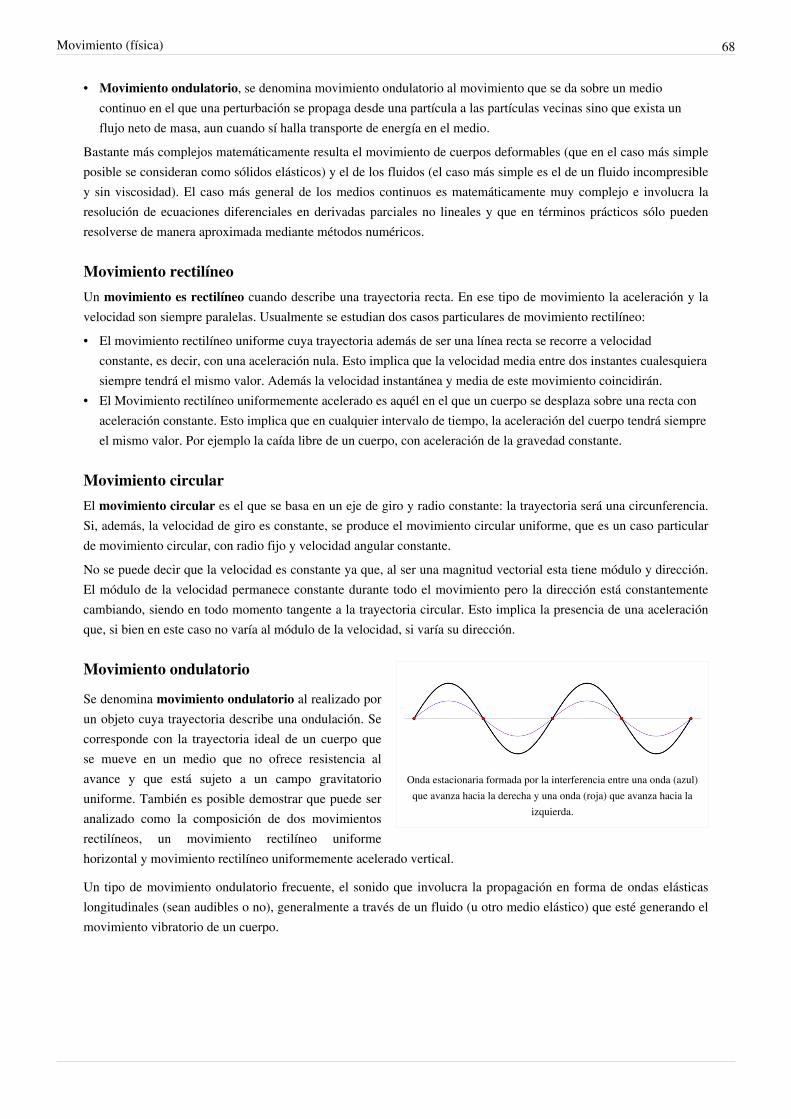
Movimiento (física) 68
• Movimiento ondulatorio, se denomina movimiento ondulatorio al movimiento que se da sobre un mediocontinuo en el que una perturbación se propaga desde una partícula a las partículas vecinas sino que exista unflujo neto de masa, aun cuando sí halla transporte de energía en el medio.
Bastante más complejos matemáticamente resulta el movimiento de cuerpos deformables (que en el caso más simpleposible se consideran como sólidos elásticos) y el de los fluidos (el caso más simple es el de un fluido incompresibley sin viscosidad). El caso más general de los medios continuos es matemáticamente muy complejo e involucra laresolución de ecuaciones diferenciales en derivadas parciales no lineales y que en términos prácticos sólo puedenresolverse de manera aproximada mediante métodos numéricos.
Movimiento rectilíneoUn movimiento es rectilíneo cuando describe una trayectoria recta. En ese tipo de movimiento la aceleración y lavelocidad son siempre paralelas. Usualmente se estudian dos casos particulares de movimiento rectilíneo:• El movimiento rectilíneo uniforme cuya trayectoria además de ser una línea recta se recorre a velocidad
constante, es decir, con una aceleración nula. Esto implica que la velocidad media entre dos instantes cualesquierasiempre tendrá el mismo valor. Además la velocidad instantánea y media de este movimiento coincidirán.
• El Movimiento rectilíneo uniformemente acelerado es aquél en el que un cuerpo se desplaza sobre una recta conaceleración constante. Esto implica que en cualquier intervalo de tiempo, la aceleración del cuerpo tendrá siempreel mismo valor. Por ejemplo la caída libre de un cuerpo, con aceleración de la gravedad constante.
Movimiento circularEl movimiento circular es el que se basa en un eje de giro y radio constante: la trayectoria será una circunferencia.Si, además, la velocidad de giro es constante, se produce el movimiento circular uniforme, que es un caso particularde movimiento circular, con radio fijo y velocidad angular constante.No se puede decir que la velocidad es constante ya que, al ser una magnitud vectorial esta tiene módulo y dirección.El módulo de la velocidad permanece constante durante todo el movimiento pero la dirección está constantementecambiando, siendo en todo momento tangente a la trayectoria circular. Esto implica la presencia de una aceleraciónque, si bien en este caso no varía al módulo de la velocidad, si varía su dirección.
Onda estacionaria formada por la interferencia entre una onda (azul)que avanza hacia la derecha y una onda (roja) que avanza hacia la
izquierda.
Movimiento ondulatorio
Se denomina movimiento ondulatorio al realizado porun objeto cuya trayectoria describe una ondulación. Secorresponde con la trayectoria ideal de un cuerpo quese mueve en un medio que no ofrece resistencia alavance y que está sujeto a un campo gravitatoriouniforme. También es posible demostrar que puede seranalizado como la composición de dos movimientosrectilíneos, un movimiento rectilíneo uniformehorizontal y movimiento rectilíneo uniformemente acelerado vertical.
Un tipo de movimiento ondulatorio frecuente, el sonido que involucra la propagación en forma de ondas elásticaslongitudinales (sean audibles o no), generalmente a través de un fluido (u otro medio elástico) que esté generando elmovimiento vibratorio de un cuerpo.

Movimiento (física) 69
Movimiento parabólico
Péndulo simple en movimientoarmónico con oscilaciones
pequeñas.
Se denomina movimiento parabólico al realizado por un objeto cuya trayectoriadescribe una parábola. Se corresponde con la trayectoria ideal de un cuerpo que semueve en un medio, que no ofrece resistencia al avance y que está sujeto a un campogravitatorio uniforme. También es posible demostrar que puede ser analizado comola composición de dos movimientos rectilíneos, un movimiento rectilíneo uniformehorizontal y movimiento rectilíneo uniformemente acelerado vertical.
Movimiento pendular
El movimiento pendular es una forma de desplazamiento que presentan algunossistemas físicos como aplicación práctica al movimiento armónico simple. Acontinuación hay tres características del movimiento pendular que son: péndulosimple, péndulo de torsión y péndulo físico.
Se llama movimiento - a la trayectoria que un objeto describe después de haber sidolanzado desde un punto cualquiera del espacio. Si el objeto tiene una densidad demasa suficientemente grande, los experimentos muestran que, a menudo, se puededespreciar la resistencia del aire y suponer que la aceleración del mismo es debidasólo a la gravedad.
Movimiento armónico simple
Las ondas pueden ser representadas por unmovimiento armónico simple.
El movimiento armónico simple (se abrevia m.a.s.), tambiéndenominado movimiento vibratorio armónico simple (abreviadom.v.a.s.), es un movimiento periódico que queda descrito en funcióndel tiempo por una función armónica (seno o coseno). Si la descripciónde un movimiento requiriese más de una función armónica, en generalsería un movimiento armónico, pero no un m.a.s..
En el caso de que la trayectoria sea rectilínea, la partícula que realizaun m.a.s. oscila alejándose y acercándose de un punto, situado en elcentro de su trayectoria, de tal manera que su posición en función del tiempo con respecto a ese punto es unasinusoide. En este movimiento, la fuerza que actúa sobre la partícula es proporcional a su desplazamiento respecto adicho punto y dirigida hacia éste.
Movimiento (física) 70
Movimiento giroscópicoDe acuerdo con la mecánica del sólido rígido, además de la rotación alrededor de su eje de simetría, un giróscopopresenta en general dos movimientos principales: la precesión y la nutación.En un giroscopio debemos tener en cuenta que el cambio en el momento angular de la rueda debe darse en ladirección del momento de la fuerza que actúa sobre la rueda.
Características del movimientoLa descripción del movimiento de partículas puntuales o corpúsculos (cuya estructura interna no se requiere paradescribir la posición general de la partícula) es similar en mecánica clásica y mecánica relativista. En ambas elmovimiento es una curva parametrizada por un parámetro escalar. En la descripción de la mecánica clásica elparámetro es el tiempo universal, mientras que en relatividad se usa el intervalo relativista ya que el tiempo propiopercibido por la partícula y el tiempo medido por diferentes observadores no coincide.La descripción cuántica del movimiento es más compleja ya que realmente la descripción cuántica del movimientono asume necesariamente que las partículas sigan una trayectoria de tipo clásico (algunas interpretaciones de lamecánica cuántica sí asumen que exista una trayectoria única, pero otras formulaciones prescinden por completo delconcepto de trayectoria), por lo que en esas formulaciones no tiene sentido hablar ni de posición, ni de velocidad.Sin embargo, todas las teorías físicas del movimiento atribuyen al movimiento una serie de características o atributosfísicos como:• Posición (general en mecánica clásica y relativista, con restricciones en mecánica cuántica).•• La cantidad de movimiento lineal•• La cantidad de movimiento angular•• La fuerza existente sobre la partículaEn mecánica clásica y mecánica relativista todos ellos son valores numéricos medibles, mientras que en mecánicacuántica esas magnitudes son en general variables aleatorias para las que es posible predecir sus valores medios, perono el valor exacto en todo momento.
Trayectoria
Un relámpago es el destello emitido por unacorriente eléctrica, la trayectoria de los electronesde dicha corriente es una trayectoria [aproximable
por un] fractal.
En mecánica clásica y mecánica relativista, la trayectoria es el lugargeométrico de las posiciones sucesivas por las que pasa un cuerpo ensu movimiento. La trayectoria depende del sistema de referencia en elque se describa el movimiento; es decir el punto de vista delobservador.
Posición y desplazamiento
En mecánica clásica es perfectamente posible definir unívocamente lalongitud Lc de la trayectoria o camino recorrido por un cuerpo humano.También puede definirse sin ambigüedad la distancia d que hay entreun punto inicial y el final de su trayectoria; está representado por lalongitud de la línea recta que une el punto inicial con el punto final.Ambas magnitudes están relacionadas por la desigualdad siguiente:
En relatividad especial sin embargo el concepto de desplazamiento de un móvil o longitud recorrida depende delobservador y aunque para cada observador la longitud recorrida es mayor o igual que el desplazamiento alcanzado
Movimiento (física) 71
no puede definirse de manera objetiva una "longitud recorrida" por el móvil en la que puedan coincidir todos losobservadores.
Velocidad y rapidez
Vuelo del F-22 Raptor a velocidad supersónica.
La velocidad es una magnitud física de carácter vectorialque expresa el desplazamiento de un objeto por unidad detiempo. En el lenguaje cotidiano se emplea las palabrasrapidez y velocidad de manera indistinta. En física se haceuna distinción entre ellas. De manera muy sencilla, ladiferencia es que la velocidad es la rapidez en una direccióndeterminada. Cuando se dice que un auto viaja a 60km/hora se está indicando su rapidez. Pero al decir que unauto se desplaza a 60 km/h hacia el norte se estáespecificando su velocidad. La rapidez describe qué tanaprisa se desplaza un objeto; la velocidad describe que tanaprisa lo hace y en que dirección.
La velocidad de movimiento en un instante dado dependedel observador tanto en mecánica clásica como en teoría dela relatividad. En mecánica cuántica la velocidad de unmóvil al igual que su trayectoria no tiene porqué estardefinida en un instante dado, de acuerdo con algunasinterpretaciones de la teoría. El fenómenos delZitterbewegung sugiere que un electrón podría tener unmovimiento oscilatorio transversal alrededor de lo que su"trayectoria" clásica (es decir, el camino que debería seguirsi la descripción clásica fuera correcta).
La rapidez o también llamada celeridad es la relación entre la distancia recorrida y el tiempo empleado en recorrerla.Un auto, por ejemplo, recorre un cierto número de kilómetros en una hora que puede ser de 110km/h. La rapidez esuna medida de que tan veloz se mueve un objeto. Es la razón de cambio a la que se recorre la distancia, ya que laexpresión razón de cambio indica que estamos dividiendo alguna cantidad entre el tiempo, por lo tanto, la rapidez semide siempre en términos de una unidad de distancia dividida entre una unidad de tiempo.
AceleraciónEn física el término aceleración es una magnitud vectorial que se aplica tanto a los aumentos como a lasdisminuciones de rapidez en una unidad de tiempo, por ejemplo, los frenos de un auto pueden producir grandesaceleraciones retardantes, es decir, pueden producir un gran decremento por segundo de su rapidez. A esto se le suelellamar desaceleración o aceleración negativa. El término aceleración se aplica tanto a cambios de rapidez como acambios de dirección. Si recorres una curva con una rapidez constante de 50 km/h, sientes los efectos de laaceleración como una tendencia a inclinarte hacia el exterior de la curva (inercia). Se puede recorrer la curva conrapidez constante, pero la velocidad no es constante ya que la dirección cambia a cada instante, por lo tanto, el estadode movimiento cambia, es decir, se está acelerando.La aceleración normal es una medida de la curvatura de la trayectoria, diferentes observadores en movimiento nouniforme respecto a ellos observarán fuerzas y aceleraciones diferentes y por tanto trayectorias diferentes. Si unobservador inercial examina la trayectoria de una partícula que se mueve en línea recta y con velocidad uniforme(trayectoria de curvatura cero), cualquier otro observador inercial verá la partícula moverse en línea recta y con
Movimiento (física) 72
velocidad uniforme (aunque no la misma recta), en el caso de observadores arbitrarios en movimiento aceleradoentre ellos las formas de las trayectorias pueden diferir notablemente, ya que al medir los dos observadoresaceleraciones completamente diferentes, la trayectoria de la partícula se curvará de maneras muy diferentes para unoy otro observador.
FuerzaEn física, la fuerza es una magnitud física que mide la intensidad del intercambio de momento lineal entre dospartículas o sistemas de partículas (en lenguaje de la física de partículas se habla de interacción). Según unadefinición clásica, fuerza es todo agente capaz de modificar la cantidad de movimiento o la forma de los cuerposmateriales.En el Sistema Internacional de Unidades, la fuerza se mide en "Newtons (N)".
EnergíaEn física, la energía se define como la capacidad para realizar un trabajo, se manifiesta en los cambios físicos, porejemplo, al elevar un objeto, transportarlo (movimiento), deformarlo o calentarlo. La energía no es un estado físicoreal, ni una "sustancia intangible" sino una magnitud escalar que se le asigna al estado del sistema físico, es decir, laenergía es una herramienta o abstracción matemática de una propiedad de los sistemas físicos. Por ejemplo, se puededecir que un sistema con energía cinética nula está en reposo. La energía se mide con la unidad "joule (J)".
Movimiento en mecánica clásica
La primera y segunda ley de Newton, en latín, en la ediciónoriginal de su obra Principia Mathematica.
Una ley de movimiento es una relación cuantitiva entrevariables necesarias para describir el movimiento de loscuerpos. Históricamente la mecánica clásica surgió tras laformulación por parte de Isaac Newton de tres "leyes"cuantitativas que describían el movimiento de unapartícula material.
Leyes de Newton
Las Leyes de Newton, también conocidas como Leyes delmovimiento de Newton, son tres principios a partir de loscuales se explican la mayor parte de los problemasplanteados por la dinámica, en particular aquellos relativosal movimiento de los cuerpos. Revolucionaron losconceptos básicos de la física y el movimiento de loscuerpos en el universo.
En tanto que constituyen los cimientos no sólo de ladinámica clásica sino también de la física clásica engeneral. Aunque incluyen ciertas definiciones y en ciertosentido pueden verse como axiomas, Newton afirmó queestaban basadas en observaciones y experimentoscuantitativos; ciertamente no pueden derivarse a partir deotras relaciones más básicas. La demostración de suvalidez radica en sus predicciones y la validez de esaspredicciones fue verificada en todos y cada uno de loscasos durante más de dos siglos.
Movimiento (física) 73
Los estudios que el realizó se pueden definir con las siguientes tres leyes que postuló:• La primera ley del movimiento rebate la idea aristotélica de que un cuerpo sólo puede mantenerse en movimiento
si se le aplica una fuerza. Newton expone que:Todo cuerpo permanece en su estado inicial de reposo o movimiento uniforme rectilíneo a menos quesobre él se ejerza una fuerza exterior no equilibrada.
El ser la primera de las tres leyes de Newton suele inducir a un error muy común atribuyendo eldescubrimiento de esta propiedad al propio Newton cuando, en realidad, fue Galileo Galilei en el siglo XVI elprimero en observar, estudiar y formalizar dicha propiedad y posteriormente, ya en el siglo XVII, fue tomadapor Newton. Esta ley postula, por tanto, que un cuerpo no puede cambiar por sí solo su estado inicial, ya sea enreposo o en movimiento rectilíneo uniforme, a menos que se aplique una fuerza o una serie de fuerzas cuyoresultante no sea nulo sobre él. Newton toma en cuenta, así, el que los cuerpos en movimiento están sometidosconstantemente a fuerzas de roce o fricción, que los frena de forma progresiva, algo novedoso respecto deconcepciones anteriores que entendían que el movimiento o la detención de un cuerpo se debía exclusivamentea si se ejercía sobre ellos una fuerza, pero nunca entendiendo como esta a la fricción.
•• La segunda ley del movimiento de Newton afirma que:El cambio de movimiento es proporcional a la fuerza motriz impresa y ocurre según la línea recta a lolargo de la cual aquella fuerza se imprime.
Esta ley explica qué ocurre si sobre un cuerpo en movimiento (cuya masa no tiene por qué ser constante) actúauna fuerza neta: la fuerza modificará el estado de movimiento, cambiando la velocidad en módulo o dirección.En concreto, los cambios experimentados en la cantidad de movimiento de un cuerpo son proporcionales a lafuerza motriz y se desarrollan en la dirección de esta; esto es, las fuerzas son causas que producenaceleraciones en los cuerpos. A diferencia de la primera ley de Newton que es descriptiva, la segunda leytambién conocida como ley del movimiento permite calcular cuantitativamente las fuerzas, las masas yaceleraciones de los cuerpos.
Donde:F, fuerza que se mide en Newton (N)m, masa que se mide en kilogramos o gramos (Kg, g)a, aceleración que se mide en metros sobre segundos al cuadrado (m/s2)
Nota: hay que tomar en cuenta que 1 N= kg m/s2
•• La Tercera ley de Newton afirma que:Con toda acción ocurre siempre una reacción igual y contraria: o sea, las acciones mutuas de doscuerpos siempre son iguales y de dirección contraria.
La tercera ley es completamente original de Newton (pues las dos primeras ya habían sido propuestas de otrasmaneras por Galileo, Hooke y Huygens) y hace de las leyes de la mecánica un conjunto lógico y completo.Expone que por cada fuerza que actúa sobre un cuerpo, este realiza una fuerza de igual intensidad, pero dedirección contraria sobre el cuerpo que la produjo. Dicho de otra forma, las fuerzas, situadas sobre la mismarecta, siempre se presentan en pares de igual magnitud y opuestas en dirección. Es importante observar queeste principio de acción y reacción relaciona dos fuerzas que no están aplicadas al mismo cuerpo, produciendoen ellos aceleraciones diferentes, según sean sus masas.
Por lo demás, cada una de esas fuerzas obedece por separado a la segunda ley. Junto con las anteriores leyes, éstapermite enunciar los principios de conservación del momento lineal y del momento angular.
Movimiento (física) 74
Cinemática clásica y sus fundamentosLa cinemática trata del estudio del movimiento de los cuerpos en general, y, en particular, el caso simplificado delmovimiento de un punto material. Para sistemas de muchas partículas, tales como los fluidos, las leyes demovimiento se estudian en la mecánica de fluidos. El movimiento trazado por una partícula lo mide un observadorrespecto a un sistema de referencia. Desde el punto de vista matemático, la Cinemática expresa cómo varían lascoordenadas de posición de la partícula (o partículas) en función del tiempo. La función que describe la trayectoriarecorrida por el cuerpo (o partícula) depende de la velocidad (la rapidez con la que cambia de posición un móvil) yde la aceleración (variación de la velocidad respecto del tiempo).El movimiento de una partícula (o cuerpo rígido) se puede describir según los valores de velocidad y aceleración,que son magnitudes vectoriales.• Si la aceleración es nula, da lugar a un movimiento rectilíneo uniforme y la velocidad permanece constante a lo
largo del tiempo.• Si la aceleración es constante con igual dirección que la velocidad, da lugar al movimiento rectilíneo
uniformemente acelerado y la velocidad variará a lo largo del tiempo.• Si la aceleración es constante con dirección perpendicular a la velocidad, da lugar al movimiento circular
uniforme, donde el módulo de la velocidad es constante, cambiando su dirección con el tiempo.• Cuando la aceleración es constante y está en el mismo plano que la velocidad y la trayectoria, tenemos el caso del
movimiento parabólico, donde la componente de la velocidad en la dirección de la aceleración se comporta comoun movimiento rectilíneo uniformemente acelerado, y la componente perpendicular se comporta como unmovimiento rectilíneo uniforme, generándose una trayectoria parabólica al componer ambas.
• Cuando la aceleración es constante pero no está en el mismo plano que la velocidad y la trayectoria, se observa elefecto de Coriolis.
• En el movimiento armónico simple se tiene un movimiento periódico de vaivén, como el del péndulo, en el cualun cuerpo oscila a un lado y a otro desde la posición de equilibrio en una dirección determinada y en intervalosiguales de tiempo. La aceleración y la velocidad son funciones, en este caso, sinusoidales del tiempo.
Al considerar el movimiento de traslación de un cuerpo extenso, en el caso de ser rígido, conociendo como se mueveuna de las partículas, se deduce como se mueven las demás. Así basta describir el movimiento de una partículapuntual tal como el centro de masa del cuerpo para especificar el movimiento de todo el cuerpo. En la descripcióndel movimiento de rotación hay que considerar el eje de rotación respecto del cual rota el cuerpo y la distribución departículas respecto al eje de giro. El estudio del movimiento de rotación de un sólido rígido suele incluirse en latemática de la mecánica del sólido rígido por ser más complicado. Un movimiento interesante es el de una peonza,que al girar puede tener un movimiento de precesión y de nutaciónCuando un cuerpo posee varios movimientos simultáneamente, tal como uno de traslación y otro de rotación, sepuede estudiar cada uno por separado en el sistema de referencia que sea apropiado para cada uno, y luego,superponer los movimientos.
Ecuaciones de movimiento en mecánica clásicaHistóricamente el primer ejemplo de ecuación del movimiento que se introdujo en física fue la segunda ley deNewton para sistemas físicos compuestos de agregados partículas materiales puntuales. En estos sistemas el estadodinámico de un sistema quedaba fijado por la posición y velocidad de todas las partículas en un instante dado. Haciafinales del siglo XVIII se introdujo la mecánica analítica o racional, como generalización de las leyes de Newtonaplicables a sistemas de referencia inerciales. Se concibieron dos enfoques básicamente equivalentes conocidoscomo mecánica lagrangiana y mecánica hamiltoniana, que pueden llegar a un elevado grado de abstracción yformalización. Los ejemplos clásicos de ecuación del movimiento más conocidos son:
1. La segunda ley de Newton que se usa en mecánica newtoniana:
Movimiento (física) 75
2. Las ecuaciones de Euler-Lagrange que aparecen en mecánica lagrangiana:
3. Las ecuaciones de Hamilton que aparecen en mecánica hamiltoniana:
Mecánica newtonianaHistóricamente el concepto de cantidad de movimiento surgió en el contexto de la mecánica newtoniana en estrecharelación con el concepto de velocidad y el de masa. En mecánica newtoniana se define la cantidad de movimientolineal como el producto de la masa por la velocidad:
La idea intuitiva tras esta definición está en que la "cantidad de movimiento" dependía tanto de la masa como de lavelocidad: si se imagina una mosca y un camión, ambos moviéndose a 40 km/h, la experiencia cotidiana dice que lamosca es fácil de detener con la mano mientras que el camión no, aunque los dos vayan a la misma velocidad. Estaintuición llevó a definir una magnitud que fuera proporcional tanto a la masa del objeto móvil como a su velocidad.
Mecánica lagrangiana y hamiltonianaEn las formulaciones más abstractas de la mecánica clásica, como la mecánica lagrangiana y la mecánicahamiltoniana, además del momento lineal y del momento angular se pueden definir otros momentos, llamadosmomentos generalizados o momentos conjugados, asociados a cualquier tipo de coordenada generalizada. Segeneraliza así la noción de momento.Si se tiene un sistema mecánico definido por su lagrangiano L definido en términos de las coordenadas generalizadas(q1,q2,...,qN) y las velocidades generalizadas, entonces el momento conjugado de la coordenada qi viene dado por:
Cuando la coordenada qi es una de las coordenadas de un sistema de coordenadas cartesianas, el momento conjugadocoincide con una de las componentes del momento lineal, y, cuando la coordenada generalizada representa unacoordenada angular o la medida de un ángulo, el momento conjugado correspondiente resulta ser una de lascomponentes del momento angular.
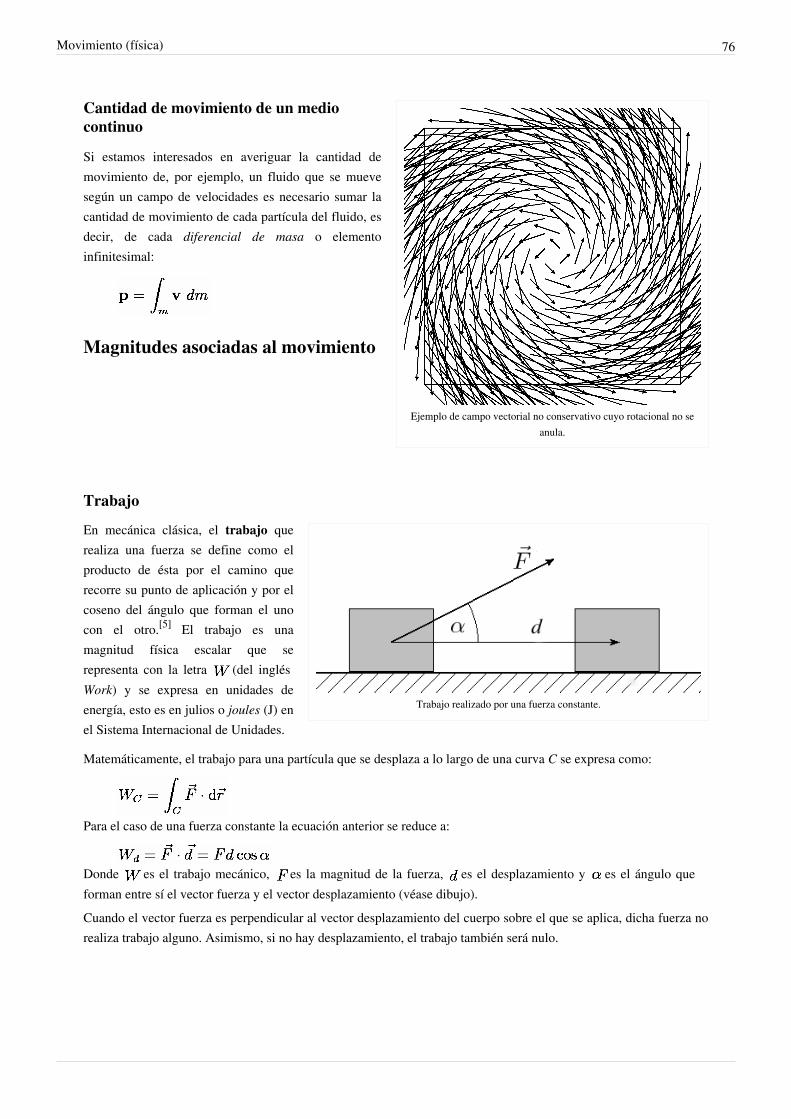
Movimiento (física) 76
Ejemplo de campo vectorial no conservativo cuyo rotacional no seanula.
Cantidad de movimiento de un mediocontinuo
Si estamos interesados en averiguar la cantidad demovimiento de, por ejemplo, un fluido que se muevesegún un campo de velocidades es necesario sumar lacantidad de movimiento de cada partícula del fluido, esdecir, de cada diferencial de masa o elementoinfinitesimal:
Magnitudes asociadas al movimiento
Trabajo
Trabajo realizado por una fuerza constante.
En mecánica clásica, el trabajo querealiza una fuerza se define como elproducto de ésta por el camino querecorre su punto de aplicación y por elcoseno del ángulo que forman el unocon el otro.[5] El trabajo es unamagnitud física escalar que serepresenta con la letra (del inglésWork) y se expresa en unidades deenergía, esto es en julios o joules (J) enel Sistema Internacional de Unidades.
Matemáticamente, el trabajo para una partícula que se desplaza a lo largo de una curva C se expresa como:
Para el caso de una fuerza constante la ecuación anterior se reduce a:
Donde es el trabajo mecánico, es la magnitud de la fuerza, es el desplazamiento y es el ángulo queforman entre sí el vector fuerza y el vector desplazamiento (véase dibujo).Cuando el vector fuerza es perpendicular al vector desplazamiento del cuerpo sobre el que se aplica, dicha fuerza norealiza trabajo alguno. Asimismo, si no hay desplazamiento, el trabajo también será nulo.
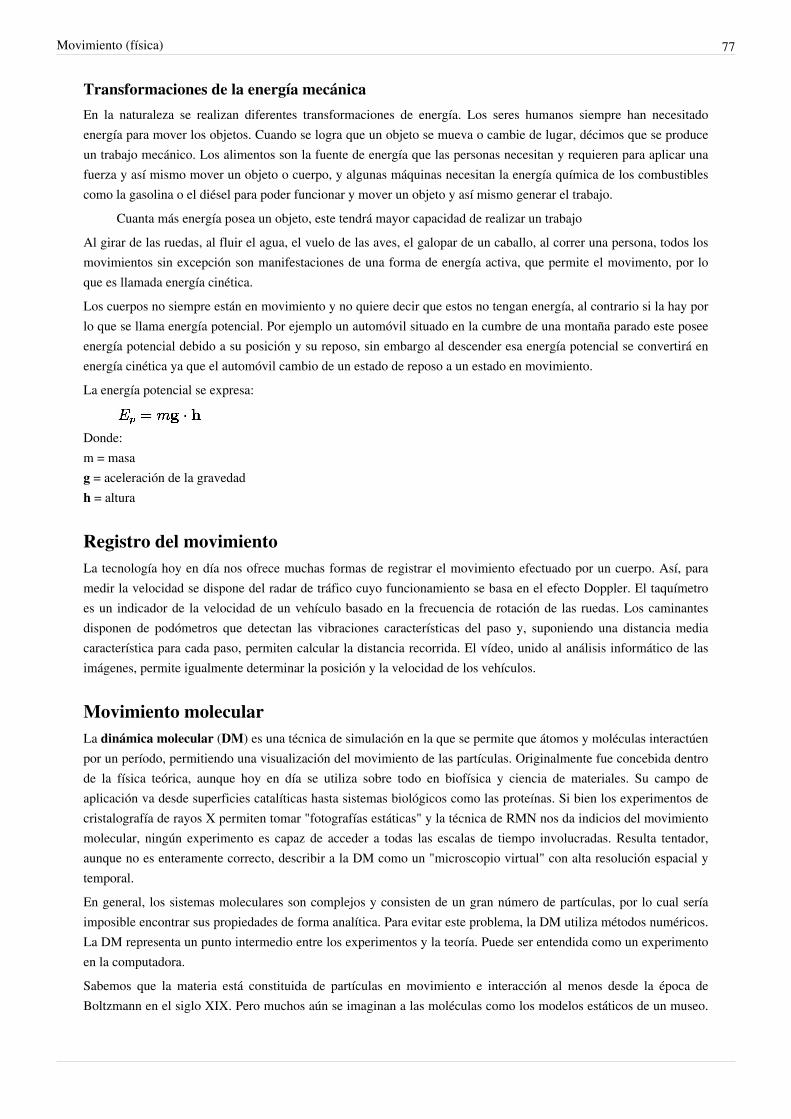
Movimiento (física) 77
Transformaciones de la energía mecánicaEn la naturaleza se realizan diferentes transformaciones de energía. Los seres humanos siempre han necesitadoenergía para mover los objetos. Cuando se logra que un objeto se mueva o cambie de lugar, décimos que se produceun trabajo mecánico. Los alimentos son la fuente de energía que las personas necesitan y requieren para aplicar unafuerza y así mismo mover un objeto o cuerpo, y algunas máquinas necesitan la energía química de los combustiblescomo la gasolina o el diésel para poder funcionar y mover un objeto y así mismo generar el trabajo.
Cuanta más energía posea un objeto, este tendrá mayor capacidad de realizar un trabajoAl girar de las ruedas, al fluir el agua, el vuelo de las aves, el galopar de un caballo, al correr una persona, todos losmovimientos sin excepción son manifestaciones de una forma de energía activa, que permite el movimento, por loque es llamada energía cinética.Los cuerpos no siempre están en movimiento y no quiere decir que estos no tengan energía, al contrario si la hay porlo que se llama energía potencial. Por ejemplo un automóvil situado en la cumbre de una montaña parado este poseeenergía potencial debido a su posición y su reposo, sin embargo al descender esa energía potencial se convertirá enenergía cinética ya que el automóvil cambio de un estado de reposo a un estado en movimiento.La energía potencial se expresa:
Donde:m = masag = aceleración de la gravedadh = altura
Registro del movimientoLa tecnología hoy en día nos ofrece muchas formas de registrar el movimiento efectuado por un cuerpo. Así, paramedir la velocidad se dispone del radar de tráfico cuyo funcionamiento se basa en el efecto Doppler. El taquímetroes un indicador de la velocidad de un vehículo basado en la frecuencia de rotación de las ruedas. Los caminantesdisponen de podómetros que detectan las vibraciones características del paso y, suponiendo una distancia mediacaracterística para cada paso, permiten calcular la distancia recorrida. El vídeo, unido al análisis informático de lasimágenes, permite igualmente determinar la posición y la velocidad de los vehículos.
Movimiento molecularLa dinámica molecular (DM) es una técnica de simulación en la que se permite que átomos y moléculas interactúenpor un período, permitiendo una visualización del movimiento de las partículas. Originalmente fue concebida dentrode la física teórica, aunque hoy en día se utiliza sobre todo en biofísica y ciencia de materiales. Su campo deaplicación va desde superficies catalíticas hasta sistemas biológicos como las proteínas. Si bien los experimentos decristalografía de rayos X permiten tomar "fotografías estáticas" y la técnica de RMN nos da indicios del movimientomolecular, ningún experimento es capaz de acceder a todas las escalas de tiempo involucradas. Resulta tentador,aunque no es enteramente correcto, describir a la DM como un "microscopio virtual" con alta resolución espacial ytemporal.En general, los sistemas moleculares son complejos y consisten de un gran número de partículas, por lo cual seríaimposible encontrar sus propiedades de forma analítica. Para evitar este problema, la DM utiliza métodos numéricos.La DM representa un punto intermedio entre los experimentos y la teoría. Puede ser entendida como un experimentoen la computadora.Sabemos que la materia está constituida de partículas en movimiento e interacción al menos desde la época de Boltzmann en el siglo XIX. Pero muchos aún se imaginan a las moléculas como los modelos estáticos de un museo.
Movimiento (física) 78
Richard Feynman dijo en 1963 que "todo lo que hacen los seres vivos puede ser entendido a través de los saltos ycontorsiones de los átomos.Una de las contribuciones más importantes de la dinámica molecular es crear conciencia de que el DNA y lasproteínas son máquinas en movimiento. Se le utiliza para explorar la relación entre estructura, movimiento y función.La dinámica molecular es un campo multidisciplinario. Sus leyes y teorías provienen de las Matemáticas, Física yQuímica. Emplea algoritmos de las Ciencias de la Computación y Teoría de la información. Permite entender a losmateriales y las moléculas no cómo entidades rígidas, sino como cuerpos animados. También se le ha llamado"estadística mecánica numérica" o "la visión de Laplace de la mecánica Newtoniana", en el sentido de predecir elfuturo al animar las fuerzas de la naturaleza.Para utilizar esta técnica de forma correcta, es importante entender las aproximaciones utilizadas y evitar caer en elerror conceptual de que estamos simulando el comportamiento real y exacto de un sistema molecular. La integraciónde las ecuaciones de movimiento están mal condicionadas, lo cual genera errores numéricos acumulativos, quepueden ser minimizados seleccionando apropiadamente los algoritmos, pero no eliminados del todo. Por otro lado,las interacciones entre las partículas se modelan con un campo de fuerza aproximado, que puede o no ser adecuadodependiendo del problema que queremos resolver. De cualquier forma, la dinámica molecular nos permite explorarsu comportamiento representativo en el espacio fásico.En la DM, hay que balancear el costo computacional y la fiabilidad en los resultados. En la DM clásica se utilizan lasEcuaciones de Newton, cuyo costo computacional es mucho menor que el de las de la mecánica cuántica. Es por elloque muchas propiedades que pueden resultar de interés, como la formación o ruptura de enlaces no puedan serestudiadas mediante este método ya que no contempla estados excitados o reactividad.Existen métodos híbridos denominados QM/MM (Quantum Mechanics/Molecular Mechanics) en los que un centroreactivo es tratado de modo cuántico mientras que el ambiente que lo rodea se trata de modo clásico. El desafío eneste tipo de métodos resulta en la definición de manera precisa de la interacción entre los dos formas de describir elsistema...El resultado de una simulación de dinámica molecular son las posiciones y velocidades de cada átomo de lamolécula, para cada instante en el tiempo discretizado. A esto se le llama trayectoria.
Referencias[1] De Broglie (1926): Ondes et mouvements, París, Gauthier-Villars[2] Schrödinger, [Quantisierung als Eigenwertproblem (Erste Mitteilung.)], Ann. Phys., 79, p. 361-376, (1926)1924 & 1926[3] Aristotle's Physics (http:/ / classics. mit. edu/ Aristotle/ physics. html) "Física" de Aristóteles traducida al inglés por R. P. Hardie de R. K.
Gaye[4] Física - Aristóteles (http:/ / books. google. de/ books?id=JEwp0ttrx3IC& lpg=PP1& hl=de& pg=PP1#v=onepage& q& f=false) "Física",
Bibliotheca Scriptorum Graecorum et Romanorum Mexicana Obras (Aristóteles (Universidad Nacional Autónoma de México))), traducciónde Ute Schmidt Osmanczik, UNAM 2001, ISBN 968-36-8136-0, ISBN 978-968-36-8136-2
[5] (http:/ / lema. rae. es/ drae/ ?val=trabajo) Definición de la RAE
Bibliografía•• Una pequeña parte de este artículo corresponde a la información adquirida por el libro enciclopédico Estudios
de la naturaleza, Yaditzha Irausquin (2008).• Physics – Physical Science Study Committee (1966). ISBN 978-0-669-97451-5•• Physics (second edition 1996)

Ecuación de movimiento 79
Ecuación de movimientoEn física, una ecuación de movimiento es la formulación matemática que define la evolución temporal de unsistema físico en el espacio. Esta ecuación relaciona la derivada temporal de una o varias variables que caracterizanel estado físico del sistema, con otras magnitudes físicas que provocan el cambio en el sistema.En la dinámica del punto material, la ecuación de movimiento determina la posición futura de un objeto o partículamóvil en función de otras variables como, su velocidad, su aceleración, su masa y cuantas variables le puedan afectaren su movimiento junto con las condiciones iniciales. En otras áreas de la física como la mecánica de los medioscontinuos o la teoría de campos se habla de ecuación de movimiento en general para describir las ecuaciones deevolución o variación temporal del sistema.
Ecuaciones de movimiento en mecánica clásicaHistóricamente el primer ejemplo de ecuación del movimiento que se introdujo en física fue la segunda ley deNewton para sistemas físicos compuestos de agregados partículas materiales puntuales. En estos sistemas el estadodinámico de un sistema quedaba fijado por la posición y velocidad de todas las partículas en un instante dado. Haciafinales del siglo XVIII se introdujo la mecánica analítica o racional, como generalización de las leyes de Newtonaplicables a sistemas de referencia inerciales. Se concibieron dos enfoques básicamente equivalentes conocidoscomo mecánica lagrangiana y mecánica hamiltoniana, que pueden llegar a un elevado grado de abstracción yformalización en ecuaciones diferenciales.
Sistemas discretosUn sistema discreto de partículas o de sólidos rígidos tiene un número finito de grados de libertad. Los ejemplosclásicos de ecuación del movimiento más conocidos son:
1. La segunda ley de Newton que se usa en mecánica newtoniana:
2. Las ecuaciones de Euler-Lagrange que aparecen en mecánica lagrangiana:
3. Las ecuaciones de Hamilton que aparecen en mecánica hamiltoniana:
Sistemas continuosMuchos sistemas de la mecánica clásica se modelizan como un medio continuo entre ellos los sólidos deformables yla mecánica de fluidos. Estos sistemas requieren ecuaciones de evolución temporal que involucran ecuacionesdiferenciales en derivadas parciales.
Ecuaciones de movimiento en teoría de la relatividadEn la teoría de la relatividad existen dos tipos de entidades físicas, las partículas y los campos. Aunque en últimainstancia, tal como establece la teoría cuántica de campos, las partículas son campos materiales altamentelocalizados, en teoría de la relatividad se pueden tratar las partículas como entes físicos localizados en elespacio-tiempo. La distinción entre estos tipos de entidades físicas hace que en teoría de la relatividad existan dostipos de ecuaciones de movimiento:1.1. Las ecuaciones de movimiento de las partículas materiales, que son la generalización relativista de las ecuaciones
de la mecánica clásica.
Ecuación de movimiento 80
2.2. Las ecuaciones de "movimiento" o evolución temporal de los campos físicos.
Ecuaciones de movimiento de partículasEl análogo de la primera ley de Newton en teoría de la teoría de la relatividad postula que cuando sobre las partículasno actúa ninguna fuerza estas se mueven a lo largo de las geodésicas del espacio-tiempo, es decir, sobre las líneasmás "rectas" posibles o de curvatura mínima. Cuando sobre las partículas actúa alguna fuerza, la ecuación delmovimiento en términos de tiempo propio de la partícula, los símbolos de Christoffel dependientes de la curvaturadel espacio tiempo, y la fuerza total sobre la partícula viene dada por:
Para una partícula moviéndose a través de un espacio-tiempo plano ( ), con velocidad pequeña respecto a
la de la luz ( ) la anterior ecuación se reduce a la segunda ley de Newton.
Ecuaciones de movimiento en teoría clásica de camposLos sistemas físicos formados por un conjunto de partículas interactuantes de la mecánica clásica y los sistemasfísicos de partículas relativistas sin interacción, son sistemas con un número finito de grados de libertad, cuyasecuaciones de movimiento vienen dadas por ecuaciones diferenciales ordinarias como todos los ejemplos anteriores.Sin embargo, los campos físicos además de evolución temporal o variación en el tiempo, presentan variación en elespacio. Esa característica hace que los campos físicos se consideren informalmente como sistemas con un númeroinfinito de grados de libertad. Las peculiaridades de los campos hacen que sus ecuaciones de "movimiento" oevolución temporal vengan dadas por ecuaciones en derivadas parciales en lugar de ecuaciones diferencialesordinarias.El campo físico más importante en el contexto de la teoría de la Relatividad Especial es el campo electromagnético,cuyas ecuaciones de evolución temporal vienen dadas por las ecuaciones de Maxwell. Estas ecuaciones puedenescribirse de diversas maneras y de diversas notaciones, aunque en el contexto de la teoría de la relatividad convieneescribirlas en forma explícitamente covariante en términos del tensor campo electromagnético . En esa forma,las ecuaciones se reducen a dos ecuaciones de la forma (unidades cgs):
Donde se ha usado el convenio de sumación de Einstein, son las componentes del cuadrivector densidad decorriente. En esas ecuaciones aparecen las coordenadas (donde c es la velocidadde la luz, t el tiempo, y (x,y,z) son las coordenadas cartesianas convencionales del espacio tridimensional. Así laevolución en el tiempo del campo electromagnético, si nos fijamos en un punto concreto del espacio viene medidapor las derivadas respecto a la coordenada x<su>0</supo> = ct.En el contexto de la teoría general de la relatividad aparece un problema adicional. La propia geometría delespacio-tiempo viene representada por un campo tensorial llamado tensor métrico. El propio campo gravitatorio esuna manifestación de que la geometría del espacio-tiempo no es plana o euclídea. El campo gravitatorio de hecho esproporcional a la curvatura del espacio-tiempo. Las ecuaciones de evolución vuelven a ser ecuaciones diferencialesen derivadas parciales:

Ecuación de movimiento 81
donde reaparecen los símbolos de Christoffel que aparecían en la ecuación del movimiento de las partículas. Adiferencia de las ecuaciones del campo electromagnético, estas ecuaciones del campo gravitatorio o geometría delespacio-tiempo son ecuaciones no lineales debido a la presencia de términos que son el producto de dos Γ. Esto haceque las ecuaciones de Einstein del campo gravitatorio sean de difícil solución.
Ecuaciones de movimiento en mecánica cuánticaEn mecánica cuántica existen diversos tipos de ecuación de movimiento para la función de onda según el tipo deproblema o sistema cuántico estudiado. Los ejemplos más conocidos de ecuación del movimiento son:
1. La ecuación de Schrödinger:
2. La ecuación de Klein-Gordon:
3. La ecuación de Dirac:
Referencias
Bibliografía• Landau & Lifshitz: Mecánica, Ed. Reverté, Barcelona, 1991. ISBN 84-291-4081-6.• Landau & Lifshitz, Teoría clásica de los campos, Ed. Reverté, ISBN 84-291-4082-4.
Traslación (física)En física, la traslación es un movimiento en el cual se modifica la posición de un objeto, en contraposición a unarotación.
Mecánica clásicaPara un cuerpo clásico (y, por tanto, moviéndose en un espacio euclídeo), una traslación es la operación quemodifica las posiciones de todos los cuerpos según la fórmula:
donde es un vector constante. Dicha operación puede ser generalizada a otras coordenadas, porejemplo la coordenada temporal. Obviamente una traslación matemática es una isometría del espacio euclídeo.Para un objeto que no posee estructura, como por ejemplo un subconjunto del espacio, se considera el rango delsubconjunto afectado por la transformación. En forma alternativa, es posible definir una traslación como unaoperación sobre los objetos, tal que todas sus propiedades como color, composición, etc. se corresponden. Pero nodeben confundirse las dos: una traslación del espacio no posee puntos fijos, los puntos fijos de una traslación en elotro sentido son los objetos con sus correspondientes simetrías de traslación. De acuerdo con el teorema de Noether,la simetría de traslación es equivalente a la conservación del momento de fuerza.
Traslación (física) 82
Mecánica relativistaEn teoría de la relatividad especial sigue siendo posible considerar la traslación de un cuerpo, debido a que elespacio-tiempo tiene curvatura constante (e igual a cero). Sin embargo, en esa teoría aparecen diversos problemasrelacionados con la simultaneidad, y un observador en movimiento arbitrario podría inferir que incluso un sólido queno cambia su forma no tiene una forma constante.En teoría de la relatividad general la situación es más complicada aún, ya que al ser la curvatura local delespacio-tiempo variable de un punto a otro estrictamente no puede existir un movimiento de traslación o movimientode sólido rígido, debido a que no exista ninguna transformación isométrica que relacione la forma del cuerpo en dospuntos difernentes del espacio-tiempo. Para cuerpos de pequeñas dimensiones, puede definirse de maneraaproximada que constituye un movimiento de traslación pero no para objetos grandes, cuyas dimensiones no seandespreciables frente al inverso de algún escalar relacionado con la curvatura seccional del espacio-tiempo.
Referencia
Bibliografía• Robert M. Wald, General Relativity, Chicago University Press, ISBN 0-226-87033-2.• Steven Weinberg, Gravitation and Cosmology: principles and applications of the general theory of relativity,
Wiley (1972), ISBN 0-471-92567-5.
Resistencia aerodinámicaSe denomina resistencia aerodinámica, o simplemente resistencia, a la fuerza que sufre un cuerpo al moverse através del aire, y en particular a la componente de esa fuerza en la dirección de la velocidad relativa del cuerporespecto del medio. La resistencia es siempre de sentido opuesto al de dicha velocidad, por lo que habitualmente sedice de ella que, de forma análoga a la de fricción, es la fuerza que se opone al avance de un cuerpo a través del aire.De manera más general, para un cuerpo en movimiento en el seno de un fluido cualquiera, tal componente recibe elnombre de resistencia fluidodinámica. En el caso del agua, por ejemplo, se denomina resistencia hidrodinámica.
IntroducciónAl igual que con otras fuerzas aerodinámicas, se utilizan coeficientes aerodinámicos que representan la efectividadde la forma de un cuerpo para el desplazamiento a través del aire. Su coeficiente asociado es conocido popularmentecomo coeficiente de penetración, coeficiente de resistencia o coeficiente aerodinámico, siendo esta últimadenominación especialmente incorrecta ya que existen varias fuerzas aerodinámicas, con sus respectivos coeficientesaerodinámicos, y cada uno de ellos tiene un significadoLa forma en que se estudia la resistencia aerodinámica presenta algunas particularidades según el campo deaplicación.
Resistencia aerodinámica 83
En aeronáuticaLa resistencia total de un avión en vuelo se puede descomponer en las siguientes:
Resistencia parásitaSe denomina así toda resistencia que no es función de la sustentación. Es la resistencia que se genera por todas laspequeñas partes no aerodinámicas de un objeto. Está compuesta por:• Resistencia de perfil: La resistencia de un perfil alar se puede descomponer a su vez en otras dos:1.1. Resistencia de presión: Debida a la forma de la estela.2.2. Resistencia de fricción: Debida a la viscosidad del fluido.•• Resistencia adicional: Es la resistencia provocada por los componentes de un avión que no producen sustentación,
por ejemplo el fuselaje o las góndolas de los motores.• Resistencia de interferencia: Cada elemento exterior de un avión en vuelo posee su capa límite, pero por su
proximidad éstas pueden llegar a interferir entre sí, lo que conduce a la aparición de esta resistencia.
Resistencia inducidaSi se considera un ala de envergadura finita, debido a unos torbellinos que aparecen en los extremos del ala por a ladiferencia de presiones entre el extradós y el intradós, surge la llamada resistencia inducida. Esta resistencia esfunción de la sustentación y de ahí que sea directamente proporcional al ángulo de ataque, mayor sustentaciónimplica mayor resistencia inducida. Es la resistencia producida como resultado de la producción de sustentación.Altos ángulos de ataque, que producen más sustentación, producen alta resistencia inducida. Es en otras palabras laresistencia por el peso se puede decir en cierto modo que romper la inercia es parte de esto.La resistencia inducida esuna de las fuerzas aerodinámicas opuestas a la sustentación.Fórmula de la resistencia inducida:
Donde (descripción de la variable y unidades en el Sistema Internacional de Unidades):- Resistencia inducida (newtons).
- Sustentación (newtons).- Densidad del fluido (kg m−3).- Envergadura (m).- Velocidad (ms−1).- Factor de eficiencia que depende de la forma en planta del ala (adimensional).
Coeficiente de la resistencia inducida:
Donde (además de las variables descritas en la fórmula anterior):- Coeficiente de sustentación.
- Alargamiento del ala.

Resistencia aerodinámica 84
Coeficiente de resistencia del perfil para pequeños números de Mach
Simulación que muestra la distribución de las presiones en un perfilsometido a flujo laminar. Se puede observar la resistencia del perfil
por el aumento de las presiones en su borde de ataque.
La resistencia al avance del área de superficie delala de envergadura infinita suele llamarse resistenciadel perfil. Como resistencia al avance de cualquiercuerpo la resistencia del perfil puede dividirse en laresistencia pura del perfil y la resistencia inducida:
Donde:
: Resistencia pura del perfil.: Resistencia inducida la cual depende del
coeficiente de sustentación.El coeficiente de resistencia inducida es proporcional alcoeficiente de sustentación, para engendrar una gran sustentación, el ala ha de hacer desviar más intensamente elflujo de aire hacia abajo. Al mismo tiempo el ala cumple un gran trabajo y por consiguiente, sufre gran resistencia,su forma más simple de cálculo es:
Donde:: Es el alargamiento del ala.: Es coeficiente geométrico del ala
Por todo lo antes dicho el coeficiente de resistencia inducida quedaría expresado de la siguiente forma:
La resistencia pura del perfil está compuesta por diferentes tipos de resistencias entre las que se encuentran la depresión ( ) y la de fricción ( ):
También existe la resistencia de onda la cual en este caso no existe debido a que ya que el fenómeno ocurre apequeños números de Mach, la resistencia de presión tiene solo la naturaleza turbulenta.Ahora bien se necesita calcular el valor de los dos coeficientes de resistencia, el correspondiente a la presión y elcorrespondiente a la fricción con la superficie del perfil. Para determinar el coeficiente de resistencia debido a ladistribución de presiones por la superficie es necesario restablecer la forma constructiva del modelo que se va afabricar para tener una derivada (ds) determinada, pues hay que separar a lo largo del eje x del cuerpo una secciónelemental normal al eje x. La fuerza de resistencia en esta será igual a:
Donde:: Presión en la parte delantera del elemento.: Presión en la parte trasera del elemento.
De la ecuación anterior se puede deducir que la fuerza de resistencia a causa de la distribución de presiones por elperfil será la integral tomada por el área de la sección máxima en la superficie Y o Z.
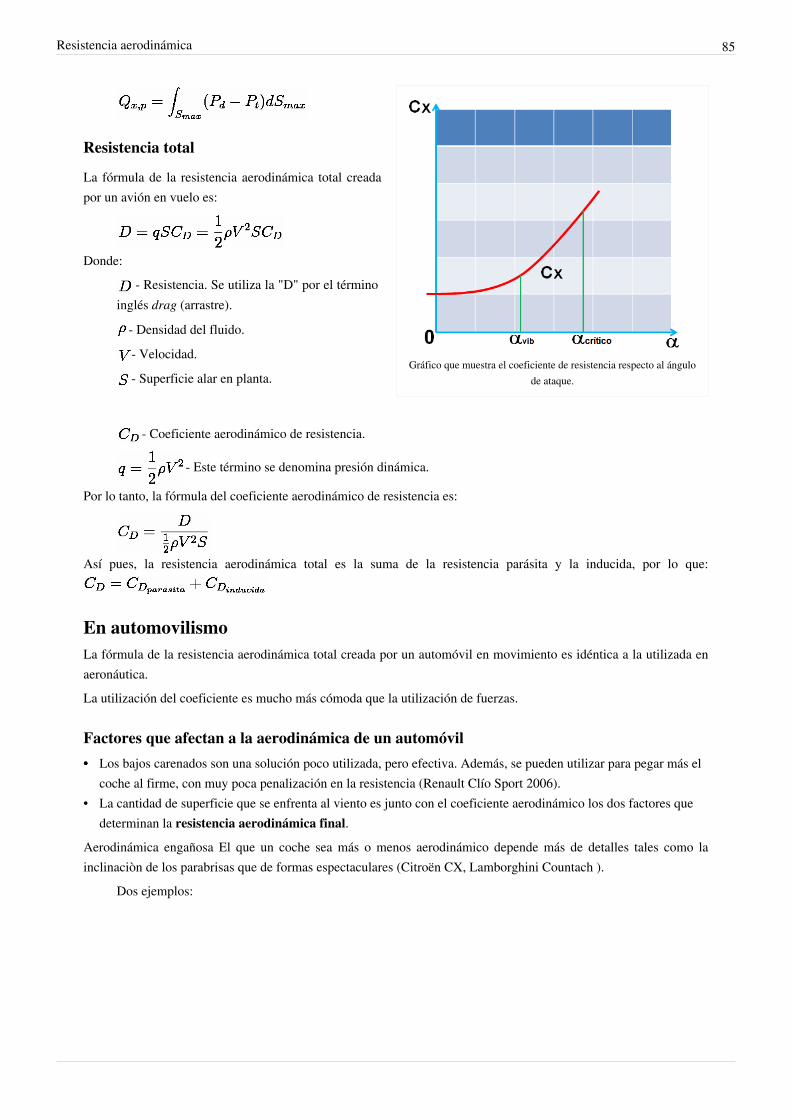
Resistencia aerodinámica 85
Gráfico que muestra el coeficiente de resistencia respecto al ángulode ataque.
Resistencia total
La fórmula de la resistencia aerodinámica total creadapor un avión en vuelo es:
Donde:- Resistencia. Se utiliza la "D" por el término
inglés drag (arrastre).
- Densidad del fluido.- Velocidad.- Superficie alar en planta.
- Coeficiente aerodinámico de resistencia.
- Este término se denomina presión dinámica.
Por lo tanto, la fórmula del coeficiente aerodinámico de resistencia es:
Así pues, la resistencia aerodinámica total es la suma de la resistencia parásita y la inducida, por lo que:
En automovilismoLa fórmula de la resistencia aerodinámica total creada por un automóvil en movimiento es idéntica a la utilizada enaeronáutica.La utilización del coeficiente es mucho más cómoda que la utilización de fuerzas.
Factores que afectan a la aerodinámica de un automóvil•• Los bajos carenados son una solución poco utilizada, pero efectiva. Además, se pueden utilizar para pegar más el
coche al firme, con muy poca penalización en la resistencia (Renault Clío Sport 2006).• La cantidad de superficie que se enfrenta al viento es junto con el coeficiente aerodinámico los dos factores que
determinan la resistencia aerodinámica final.Aerodinámica engañosa El que un coche sea más o menos aerodinámico depende más de detalles tales como lainclinaciòn de los parabrisas que de formas espectaculares (Citroën CX, Lamborghini Countach ).
Dos ejemplos:
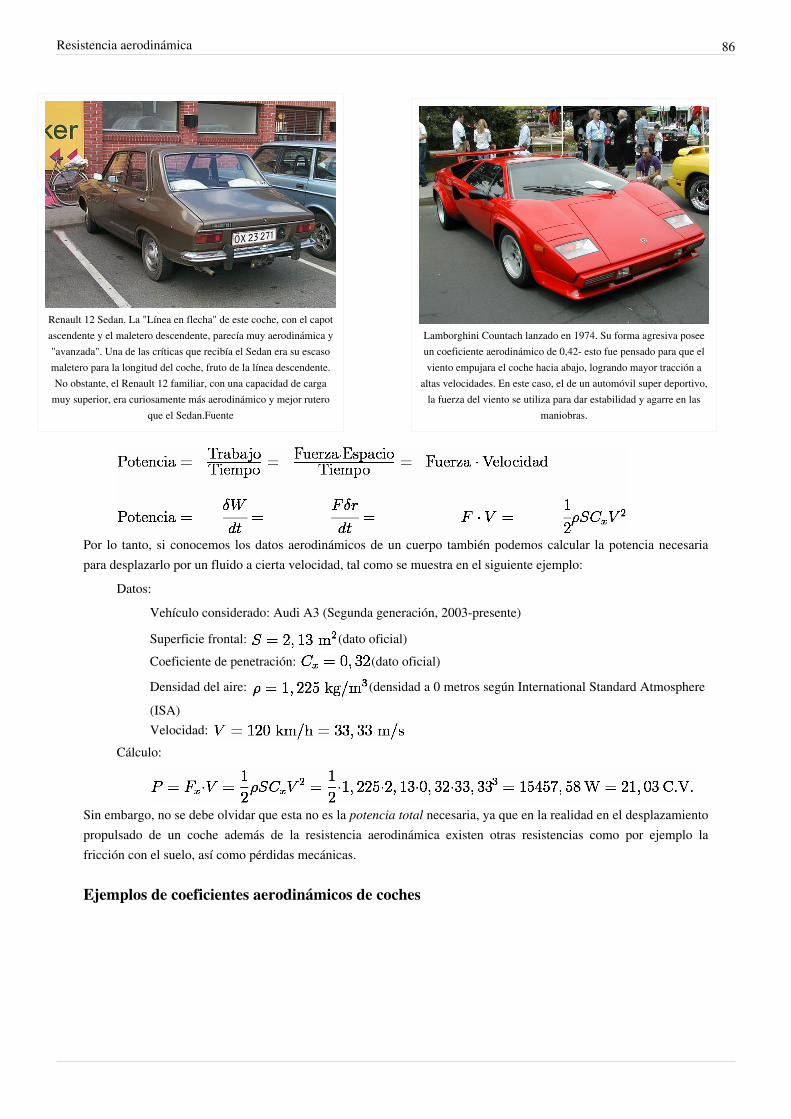
Resistencia aerodinámica 86
Renault 12 Sedan. La "Línea en flecha" de este coche, con el capotascendente y el maletero descendente, parecía muy aerodinámica y"avanzada". Una de las críticas que recibía el Sedan era su escasomaletero para la longitud del coche, fruto de la línea descendente.No obstante, el Renault 12 familiar, con una capacidad de carga
muy superior, era curiosamente más aerodinámico y mejor ruteroque el Sedan.Fuente
Lamborghini Countach lanzado en 1974. Su forma agresiva poseeun coeficiente aerodinámico de 0,42- esto fue pensado para que elviento empujara el coche hacia abajo, logrando mayor tracción a
altas velocidades. En este caso, el de un automóvil super deportivo,la fuerza del viento se utiliza para dar estabilidad y agarre en las
maniobras.
Por lo tanto, si conocemos los datos aerodinámicos de un cuerpo también podemos calcular la potencia necesariapara desplazarlo por un fluido a cierta velocidad, tal como se muestra en el siguiente ejemplo:
Datos:Vehículo considerado: Audi A3 (Segunda generación, 2003-presente)
Superficie frontal: (dato oficial)Coeficiente de penetración: (dato oficial)
Densidad del aire: (densidad a 0 metros según International Standard Atmosphere(ISA)Velocidad:
Cálculo:
Sin embargo, no se debe olvidar que esta no es la potencia total necesaria, ya que en la realidad en el desplazamientopropulsado de un coche además de la resistencia aerodinámica existen otras resistencias como por ejemplo lafricción con el suelo, así como pérdidas mecánicas.
Ejemplos de coeficientes aerodinámicos de coches
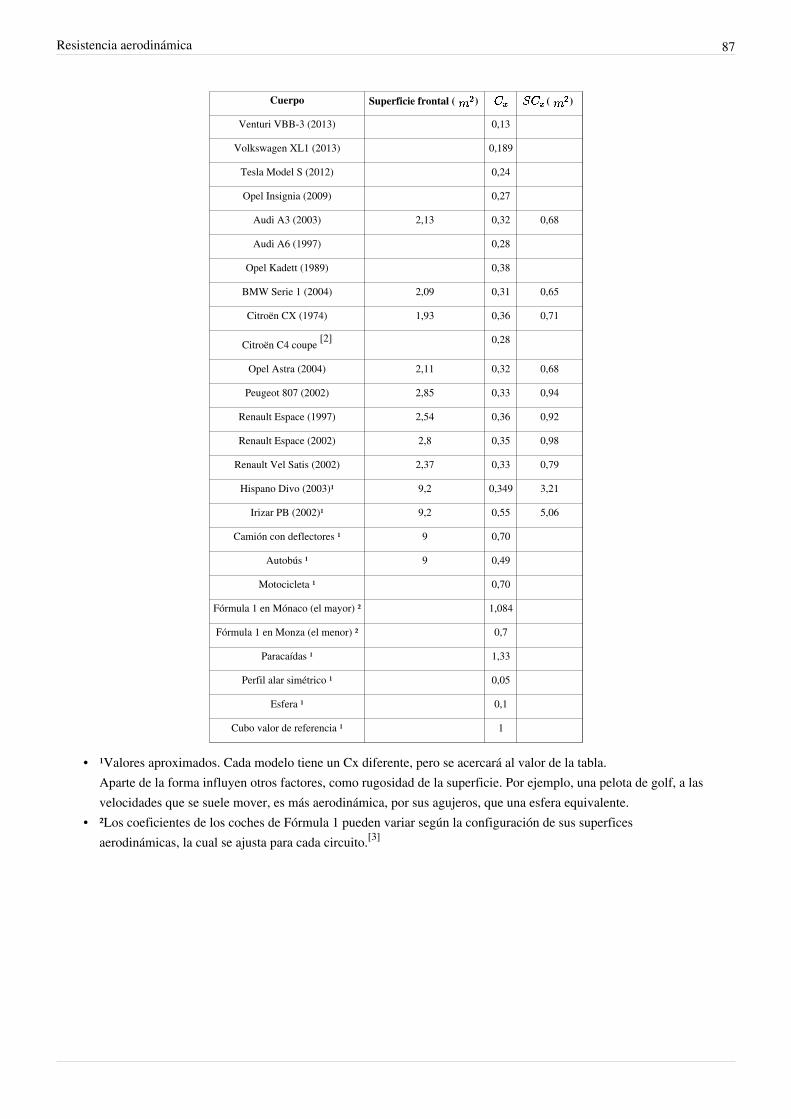
Resistencia aerodinámica 87
Cuerpo Superficie frontal ( ) ( )
Venturi VBB-3 (2013) 0,13
Volkswagen XL1 (2013) 0,189
Tesla Model S (2012) 0,24
Opel Insignia (2009) 0,27
Audi A3 (2003) 2,13 0,32 0,68
Audi A6 (1997) 0,28
Opel Kadett (1989) 0,38
BMW Serie 1 (2004) 2,09 0,31 0,65
Citroën CX (1974) 1,93 0,36 0,71
Citroën C4 coupe [2] 0,28
Opel Astra (2004) 2,11 0,32 0,68
Peugeot 807 (2002) 2,85 0,33 0,94
Renault Espace (1997) 2,54 0,36 0,92
Renault Espace (2002) 2,8 0,35 0,98
Renault Vel Satis (2002) 2,37 0,33 0,79
Hispano Divo (2003)¹ 9,2 0,349 3,21
Irizar PB (2002)¹ 9,2 0,55 5,06
Camión con deflectores ¹ 9 0,70
Autobús ¹ 9 0,49
Motocicleta ¹ 0,70
Fórmula 1 en Mónaco (el mayor) ² 1,084
Fórmula 1 en Monza (el menor) ² 0,7
Paracaídas ¹ 1,33
Perfil alar simétrico ¹ 0,05
Esfera ¹ 0,1
Cubo valor de referencia ¹ 1
• ¹Valores aproximados. Cada modelo tiene un Cx diferente, pero se acercará al valor de la tabla.Aparte de la forma influyen otros factores, como rugosidad de la superficie. Por ejemplo, una pelota de golf, a lasvelocidades que se suele mover, es más aerodinámica, por sus agujeros, que una esfera equivalente.
• ²Los coeficientes de los coches de Fórmula 1 pueden variar según la configuración de sus superficesaerodinámicas, la cual se ajusta para cada circuito.[3]
Resistencia aerodinámica 88
Referencias[1] Fuente (http:/ / www. foro. pieldetoro. net/ web/ pruebas/ ver. php?ID=868)[2] http:/ / www. ondaregionalmurcia. es/ programas/ revista_motor/ motor265. htm[3] Fernando Alonso Fan Site - Portal con noticias, fotos, foros, chat y juegos acerca del piloto español de Fórmula 1 (http:/ / www.
fernando-alonso. net/ foro/ viewtopic. php?t=230& sid=21208e2bec758bcdf99dcb9e6e1b4506)
Bibliografía•• G.M. TSEITLIN , M.I. SOLTS , V.M. POPOV. Aerodinámica y Dinámica del vuelo de las aeronaves.•• BARLOW B. J.; RAE W. H.; POPE A. (1999). Low Speed Wind Tunnel Testing.•• HINZE J.O. Turbulence.•• BLESSMANN J., O Vento na Engenharia Estrutural, Editora da Universidades, UFGRS, Porto Alegre, Brasil,
1995.•• BENDAT J.S., PIERSOL A.G. Random Data-Analysis and Measurements Procedures, Wiley, New York, 1986.COOK N. J., Determination of the Model Scale Factor in Wind-Tunnel Simulations of the Adiabatic Atmospheric.•• ADRIÁN R. WITTWER, MARIO E. DE BORTOLI, M. B. NATALINI. Variación de los parámetros
característicos de una simulación de la capa límite atmosférica en un túnel de viento.• DELNERO, J. S*. ; MARAÑON DI LEO, J. ; BACCHI, F. A.; COLMAN, J. & COLOSQUI, C. E.
Determinación experimental en túnel de capa límite de los coeficientes aerodinámicos de perfiles de bajosReynolds.
•• J. COLMAN, J. MARAÑÓN DI LEO, J. S. DELNERO, M. MARTÍNEZ, U. BOLDES, F. BACCHI. Lift anddrag coefficients behavior at low Reynolds number in an airfoil with miniflap Gurney submitted to a turbulentflow.
•• J.S. DELNERO, J. COLMAN, U. BOLDES, M. MARTINEZ, J. MARAÑÓN DI LEO and F.A. BACCHI. Aboutthe turbulent scale dependent response of reflexed airfoils.
Enlaces externos• Página web de la NASA (http:/ / translate. google. com/ translate?hl=es& sl=en& u=http:/ / www. nasa. gov/ &
sa=X& oi=translate& resnum=1& ct=result& prev=/ search?q=nasa,+ national+ aeronautics+ and+ space+administration& hl=es& rlz=1T4SUNA_es___ES212)
• Estudios avanzados de aerodinámica (Inglés) (http:/ / aerodyn. org/ )• En el túnel del viento. Revista cesvimap. Marzo de 2007 (http:/ / www3. mapfre. com/ cesvimaprevista/ revista59/
pdfs/ carroceria. pdf)
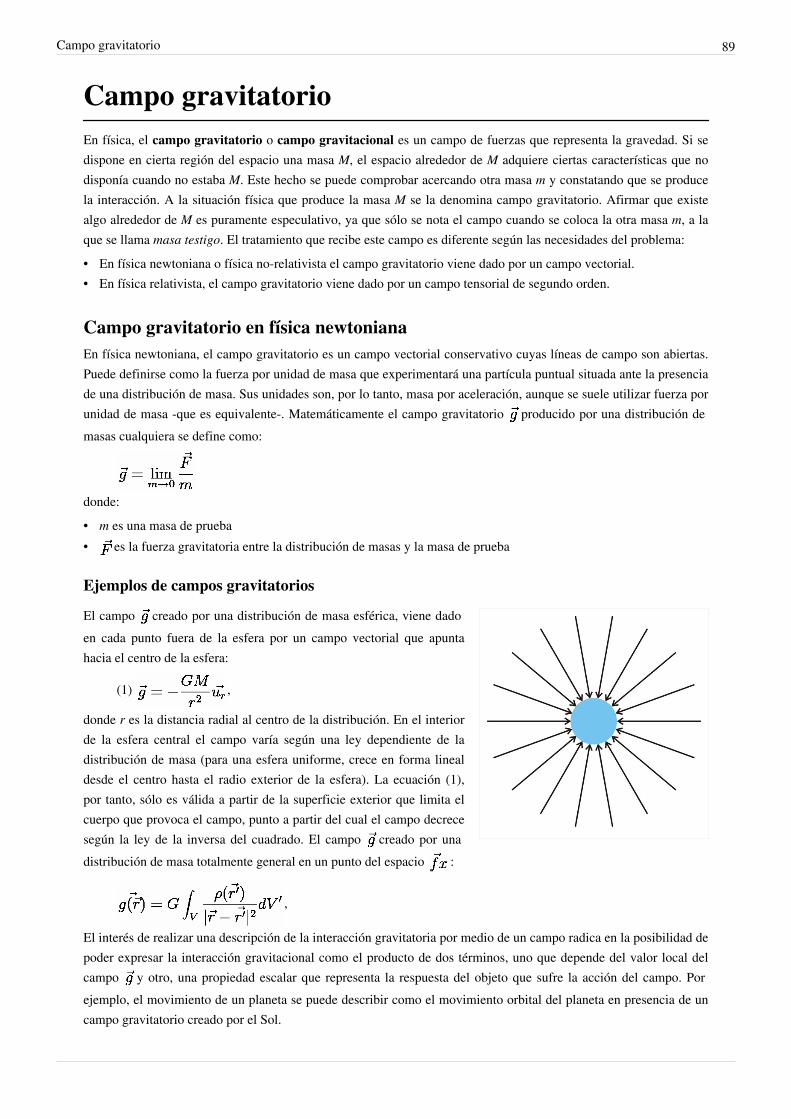
Campo gravitatorio 89
Campo gravitatorioEn física, el campo gravitatorio o campo gravitacional es un campo de fuerzas que representa la gravedad. Si sedispone en cierta región del espacio una masa M, el espacio alrededor de M adquiere ciertas características que nodisponía cuando no estaba M. Este hecho se puede comprobar acercando otra masa m y constatando que se producela interacción. A la situación física que produce la masa M se la denomina campo gravitatorio. Afirmar que existealgo alrededor de M es puramente especulativo, ya que sólo se nota el campo cuando se coloca la otra masa m, a laque se llama masa testigo. El tratamiento que recibe este campo es diferente según las necesidades del problema:• En física newtoniana o física no-relativista el campo gravitatorio viene dado por un campo vectorial.• En física relativista, el campo gravitatorio viene dado por un campo tensorial de segundo orden.
Campo gravitatorio en física newtonianaEn física newtoniana, el campo gravitatorio es un campo vectorial conservativo cuyas líneas de campo son abiertas.Puede definirse como la fuerza por unidad de masa que experimentará una partícula puntual situada ante la presenciade una distribución de masa. Sus unidades son, por lo tanto, masa por aceleración, aunque se suele utilizar fuerza porunidad de masa -que es equivalente-. Matemáticamente el campo gravitatorio producido por una distribución demasas cualquiera se define como:
donde:• m es una masa de prueba• es la fuerza gravitatoria entre la distribución de masas y la masa de prueba
Ejemplos de campos gravitatorios
El campo creado por una distribución de masa esférica, viene dadoen cada punto fuera de la esfera por un campo vectorial que apuntahacia el centro de la esfera:
(1) ,
donde r es la distancia radial al centro de la distribución. En el interiorde la esfera central el campo varía según una ley dependiente de ladistribución de masa (para una esfera uniforme, crece en forma linealdesde el centro hasta el radio exterior de la esfera). La ecuación (1),por tanto, sólo es válida a partir de la superficie exterior que limita elcuerpo que provoca el campo, punto a partir del cual el campo decrecesegún la ley de la inversa del cuadrado. El campo creado por unadistribución de masa totalmente general en un punto del espacio :
,
El interés de realizar una descripción de la interacción gravitatoria por medio de un campo radica en la posibilidad depoder expresar la interacción gravitacional como el producto de dos términos, uno que depende del valor local delcampo y otro, una propiedad escalar que representa la respuesta del objeto que sufre la acción del campo. Porejemplo, el movimiento de un planeta se puede describir como el movimiento orbital del planeta en presencia de uncampo gravitatorio creado por el Sol.

Campo gravitatorio 90
Los campos gravitatorios son aditivos; el campo gravitatorio creado por una distribución de masa es igual a la sumade los campos creados por sus diferentes elementos. El campo gravitatorio del Sistema Solar es el creado por el Sol,Júpiter y los demás planetas.
Líneas de fuerzaUna línea de fuerza o línea de flujo, normalmente en el contexto del electromagnetismo, es la curva cuya tangenteproporciona la dirección del campo en ese punto. Como resultado, también es perpendicular a las líneasequipotenciales en la dirección convencional de mayor a menor potencial. Suponen una forma útil de esquematizargráficamente un campo, aunque son imaginarias y no tienen presencia física.
Potencial gravitatorioLa naturaleza conservativa del campo permite definir una magnitud, que se podría llamar energía mecánica, tal quela suma de la energía potencial y energía cinética del sistema es una cantidad constante. Esto implica que el trabajorealizado en el seno de un campo gravitatorio dependerá sólo de las posiciones final e inicial, y no de la trayectoriaseguida (así,el trabajo realizado a lo largo de una superficie cerrada será nulo). Así a cada punto del espacio se lepuede asignar un potencial Φ gravitatorio relacionado con la densidad de la distribución de masa y con el vector decampo gravitatorio por:
Podemos demostrar matemáticamente de forma sencilla (y esto es extensible al campo eléctrico), que efectivamenteel campo gravitatorio de la mecánica newtoniana es conservativo: Primero deberíamos notar un hecho matemáticoimportante, y es que si un campo vectorial se puede expresar como gradiente de algún campo escalar ,es decir, si entonces el trabajo realizado a lo largo de cualquier trayectoria depende sólo delestado final y el inicial. La función escalar se llama función potencial del campo vectorial . Para probar estohay que integrar la fuerza a lo largo de una determinada curva , es decir, debe calcularse la integral de línea:
(*)
que, si y son los puntos en el espacio tridimensional con que empieza y acaba C respectivamente, y sedesignamos la función nos quedará
Llamando y . Ahora, partiendo de (*) ahora tenemos que
que con una simple inspección concluimos que es:
Ahora obtenemos pues . El escalar se llama energía potencial en x, y vemos quesu suma con el escalar k(x) tiene que mantenerse constante, ha de ser la misma. En el caso del campogravitatorio,tenemos que
con . El vector unitario de dirección puede ser puesto , así que:
Campo gravitatorio 91
Y este campo de fuerza es obviamente un gradiente de ,que es la función potencial. Con
esto queda pues demostrado que el campo gravitatorio es conservativo (la energía mecánica, en ausencia de otrasfuerzas externas, ha de conservarse). La demostración para el caso del campo eléctrico es análoga con pocos matices(la fuerza puede ser atractiva o repulsiva, y cargas iguales se repelen, mientras que en el campo gravitatorio sólo hayatracción).
Campo gravitatorio en física relativistaEn la teoría de la relatividad general el campo gravitatorio no se describe como un campo de fuerzas, sino que lastrayectorias curvas que los cuerpos siguen en el espacio tridimensional, son sólo un reflejo de que el espacio-tiempoes curvo. De acuerdo con la teoría de la relatividad general, una partícula puntual en caída libre en un campogravitatorio está siguiendo una línea de mínima curvatura, llamada geodésica, sobre un espacio-tiempo curvo. Portanto, la curvatura de las trayectorias tridimensionales se debe a que la línea más recta posible en el espacio-tiempode cuatro dimensiones no se proyecta como una recta, vista desde el espacio tridimensional.El campo gravitatorio se interpreta en relatividad como la curvatura del espacio-tiempo que, en presencia de materia,deja de ser plano. Allí donde el espacio-tiempo no es plano, se percibe ese hecho como campo gravitatorio local, yviceversa, allí donde se percibe campo gravitatorio se tiene una geometría curva del espacio-tiempo. Así, la teoríarelativista de Einstein del campo gravitatorio es una teoría de la estructura geométrica local del espacio-tiempo. Enesta teoría el tensor de curvatura de Ricci está asociado al tensor de energía-momento de la materia:
Donde:son las componentes del tensor de curvatura de Ricci.son las componentes del tensor métrico que permite medir distancias en el espacio-tiempo curvo.
es el escalar de curvatura de Ricci.son las componentes del Tensor de energía-impulso de la materia que crea el campo.
son la constante de la gravitación universal y la velocidad de la luz.

Intensidad del campo gravitatorio 92
Intensidad del campo gravitatorio
Variación de la aceleración de la gravedad en función de la distancia a la superficiede la Tierra.
La intensidad del campo gravitatorio,aceleración de la gravedad o,simplemente, gravedad, es la fuerzagravitatoria específica que actúa sobre uncuerpo en el campo gravitatorio de otro; estoes, como la fuerza gravitatoria por unidad demasa del cuerpo que la experimenta. Se larepresenta como y se expresa ennewtons/kilogramo (N/kg) en el SistemaInternacional de Unidades.
También podría interpretarse como laaceleración que sufriría un cuerpo en caídalibre sobre otro. Esta interpretación parecemás intuitiva y accesible en los cursosintroductorios de Física; sin embargo no escorrecta, a menos que consideremos uncampo gravitatorio en abstracto (con lo quedesaparece la intuición) o que el cuerpotenga una masa despreciable en relación conla masa del que lo atrae, para poderdespreciar la aceleración que adquiere estesegundo cuerpo.
IntroducciónLa gravedad sobre la superficie de un planeta típicamente esférico viene dada por:
donde G es la constante de gravitación universal, M es la masa del planeta, R es el radio del planeta y es unvector unitario (es decir, de módulo 1) dirigido hacia el centro del planeta.Equivalentemente, puede definirse como el peso por unidad de masa de un objeto que se encuentra sobre lasuperficie del planeta:
En el caso de la Tierra, a nivel de la superficie del mar su módulo vale:
valor que se ha definido como el correspondiente a la gravedad estándar.El valor de la aceleración de la gravedad tiene su valor máximo en la superficie del planeta, disminuyendo de formaaproximadamente parabólica con la altura y de forma lineal con la profundidad:

Intensidad del campo gravitatorio 93
La aceleración de la gravedad en la Tierra varía según la altura. En la superficie está definida por 9,80665 m/s2.
Tabla comparativa de la aceleración de la gravedad
Astro g m/s2
Sol 27,90 273,70
Mercurio 0,37 3,70
Venus 0,88 8,85
Tierra 1,00 9,81
Luna 0,16 1,62
Marte 0,38 3,72
Júpiter 2,64 26,39
Saturno 1,15 11,67
Urano 1,05 11,43
Neptuno 1,22 11,07
La lista adjunta muestra los valores relativos de la aceleración de la gravedad en el Sol, en la superficie de cadaplaneta del Sistema Solar y en la superficie de la Luna, tomando como unidad el valor de la gravedad estándar ensuperficie de la Tierra y en valor absoluto, expresada en m/s2, con dos dígitos decimales de aproximación. Así, parala Tierra la aceleración de la gravedad es 9,81 metros sobre segundo al cuadrado
Campo gravitatorio terrestreLa fuerza de gravedad en la superficie de la Tierra no es exactamente igual en todos los sitios. Existen pequeñasvariaciones de un lugar a otro. Hay varios factores que intervienen para que así ocurra:
LatitudDebido a la rotación de la Tierra, los cuerpos experimentan una fuerza centrífuga que varía según la latitud: es nulaen los polos y máxima en el ecuador. Esta fuerza centrífuga hace disminuir el efecto de la atracción gravitatoria, y ladesvía de su dirección original hacia el centro de la Tierra. A nivel del mar, la siguiente fórmula nos da el valor de ga una latitud :
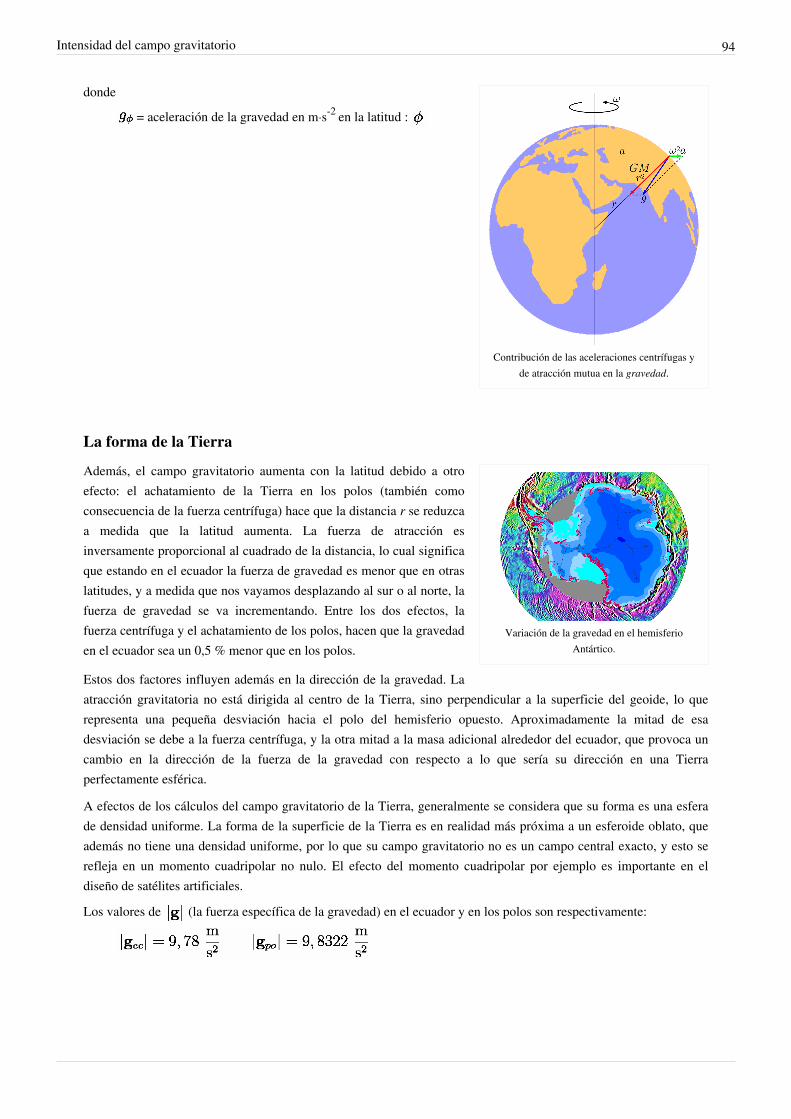
Intensidad del campo gravitatorio 94
Contribución de las aceleraciones centrífugas yde atracción mutua en la gravedad.
donde
= aceleración de la gravedad en m·s-2 en la latitud :
La forma de la Tierra
Variación de la gravedad en el hemisferioAntártico.
Además, el campo gravitatorio aumenta con la latitud debido a otroefecto: el achatamiento de la Tierra en los polos (también comoconsecuencia de la fuerza centrífuga) hace que la distancia r se reduzcaa medida que la latitud aumenta. La fuerza de atracción esinversamente proporcional al cuadrado de la distancia, lo cual significaque estando en el ecuador la fuerza de gravedad es menor que en otraslatitudes, y a medida que nos vayamos desplazando al sur o al norte, lafuerza de gravedad se va incrementando. Entre los dos efectos, lafuerza centrífuga y el achatamiento de los polos, hacen que la gravedaden el ecuador sea un 0,5 % menor que en los polos.
Estos dos factores influyen además en la dirección de la gravedad. Laatracción gravitatoria no está dirigida al centro de la Tierra, sino perpendicular a la superficie del geoide, lo querepresenta una pequeña desviación hacia el polo del hemisferio opuesto. Aproximadamente la mitad de esadesviación se debe a la fuerza centrífuga, y la otra mitad a la masa adicional alrededor del ecuador, que provoca uncambio en la dirección de la fuerza de la gravedad con respecto a lo que sería su dirección en una Tierraperfectamente esférica.
A efectos de los cálculos del campo gravitatorio de la Tierra, generalmente se considera que su forma es una esferade densidad uniforme. La forma de la superficie de la Tierra es en realidad más próxima a un esferoide oblato, queademás no tiene una densidad uniforme, por lo que su campo gravitatorio no es un campo central exacto, y esto serefleja en un momento cuadripolar no nulo. El efecto del momento cuadripolar por ejemplo es importante en eldiseño de satélites artificiales.
Los valores de (la fuerza específica de la gravedad) en el ecuador y en los polos son respectivamente:

Intensidad del campo gravitatorio 95
Altura
intensidad del campo gravitatorio de la Tierra
La aceleración de la gravedad disminuye con la altura, ya que amayor altura, es mayor la distancia al centro de la Tierra. Lavariación de la gravedad con respecto a la altura está expresada enla siguiente fórmula:
dondees la aceleración de la gravedad a la altura con
respecto al nivel del mar.
es el radio medio de la Tierra (6.371.000 m).es la aceleración de la gravedad al nivel del mar.
Profundidad
La fuerza de la gravedad en el centro de una esfera homogénea es nula, ya que es suma de fuerzas que, por simetría,se cancelan las unas a las otras. Además, del teorema de Gauss se deduce que la fuerza de la gravedad en el interiorde una esfera homogénea es proporcional a la distancia al centro. Por tanto si la Tierra fuese homogénea laaceleración de la gravedad a una distancia de su centro sería .
Pero como la densidad de la Tierra no es constante, la aceleración de la gravedad toma su valor máximo, 10,7 m/s²,en la superficie del núcleo de la Tierra, debido a la gran densidad del mismo.
Topografía local y geología
Anomalías del campo gravitacional terrestre(expresado en miligal[1]) respecto del valor
estimado, considerando la variación del radioterrestre.
Las variaciones locales en topografía (como la presencia de montañas)y geología (como la densidad de las rocas en las inmediaciones) son lasresponsables de que existan pequeñas variaciones en un lugar sin quetenga que ver la latitud. A veces hay una pequeña variación en unazona que dista pocos kilómetros de otra. Estas variaciones se deben aque cerca de la superficie pueden existir rocas de densidad mayor a lanormal (llamadas mascon), lo que produce que sea mayor la gravedadsobre esos lugares. Esas irregularidades fueron causantes desorpresivos cambios de dirección en satélites artificiales, motivo por elcual se empezó a estudiar el fenómeno. Las variaciones mencionadasson tan pequeñas que sólo se las puede detectar con instrumentos degran precisión.
•• Además, las irregularidades de la superficie y ciertas homogeneidades continentales provocan pequeñasperturbaciones del campo a lo largo de la superficie.
Esas pequeñas irregularidades respecto de los valores medios pueden utilizarse para estudiar la distribución dedensidad en la corteza terrestre empleando técnicas de gravimetría). La gravedad ejercida sobre los objetos que estánsobre la superficie tiende a disminuir al alejarse del planeta, por aumentar la distancia r entre las masas implicadas.Sin embargo, también disminuye al adentrarse en el interior de la Tierra, ya que cada vez una porción mayor de masadel planeta la rodea, contrarrestándose las fuerzas ejercidas en direcciones opuestas. En el centro de la Tierra lagravedad es nula porque se contrarrestan todas las fuerzas de atracción, aunque está sometido a una enorme presiónpor el peso de las capas superiores del planeta.
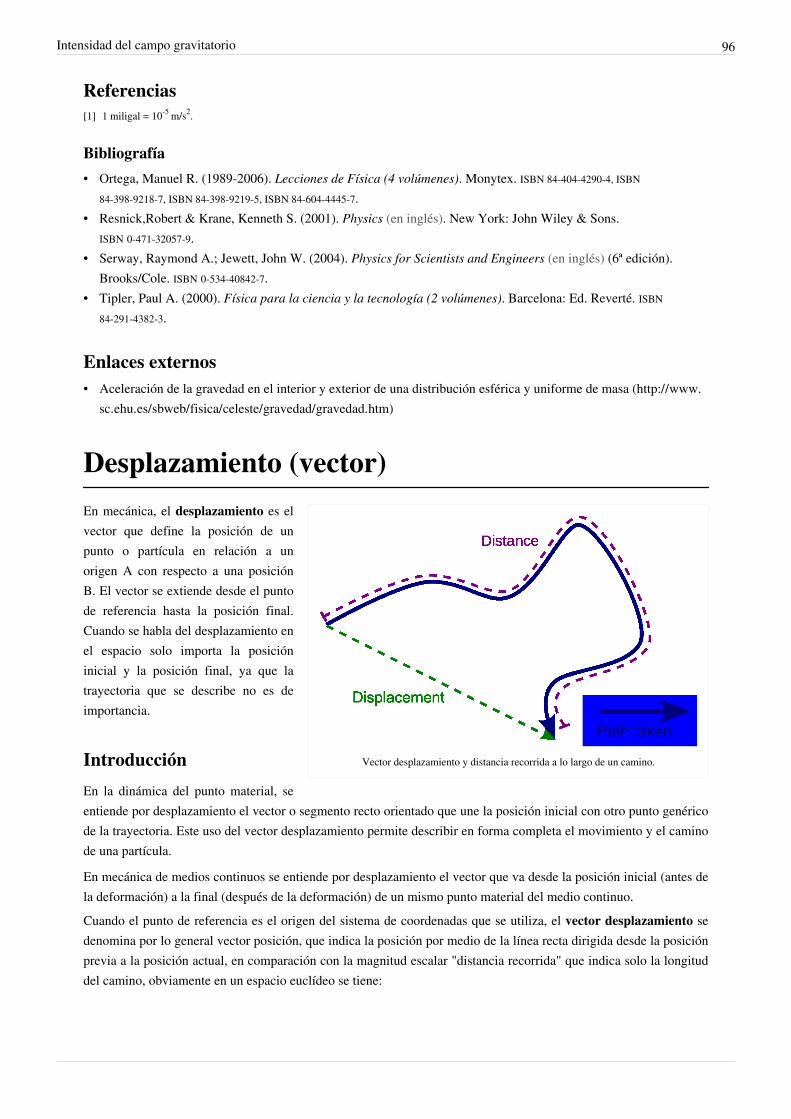
Intensidad del campo gravitatorio 96
Referencias[1] 1 miligal = 10-5 m/s2.
Bibliografía• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN
84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
ISBN 0-471-32057-9.• Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (en inglés) (6ª edición).
Brooks/Cole. ISBN 0-534-40842-7.• Tipler, Paul A. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.
Enlaces externos• Aceleración de la gravedad en el interior y exterior de una distribución esférica y uniforme de masa (http:/ / www.
sc. ehu. es/ sbweb/ fisica/ celeste/ gravedad/ gravedad. htm)
Desplazamiento (vector)
Vector desplazamiento y distancia recorrida a lo largo de un camino.
En mecánica, el desplazamiento es elvector que define la posición de unpunto o partícula en relación a unorigen A con respecto a una posiciónB. El vector se extiende desde el puntode referencia hasta la posición final.Cuando se habla del desplazamiento enel espacio solo importa la posicióninicial y la posición final, ya que latrayectoria que se describe no es deimportancia.
Introducción
En la dinámica del punto material, seentiende por desplazamiento el vector o segmento recto orientado que une la posición inicial con otro punto genéricode la trayectoria. Este uso del vector desplazamiento permite describir en forma completa el movimiento y el caminode una partícula.
En mecánica de medios continuos se entiende por desplazamiento el vector que va desde la posición inicial (antes dela deformación) a la final (después de la deformación) de un mismo punto material del medio continuo.Cuando el punto de referencia es el origen del sistema de coordenadas que se utiliza, el vector desplazamiento sedenomina por lo general vector posición, que indica la posición por medio de la línea recta dirigida desde la posiciónprevia a la posición actual, en comparación con la magnitud escalar "distancia recorrida" que indica solo la longituddel camino, obviamente en un espacio euclídeo se tiene:

Desplazamiento (vector) 97
La igualdad anterior sólo se cumpliría para un movimiento rectilíneo.Cuando el punto de referencia es la posición previa de la partícula, el vector desplazamiento indica la dirección delmovimiento por medio de un vector que va desde la posición previa a la posición actual. Este uso del vectordesplazamiento es útil para definir a los vectores velocidad y aceleración de una partícula definida.
Desplazamientos de puntos materiales aisladosEn ciertos contextos se representa por Δ
x y viene dado por:
Desplazamientos en un sólido deformableSi llamamos K a la región del espacio ocupada por un sólido deformable podemos representar el proceso dedeformación entre dos posiciones como un difeomorfismo . Si consideramos un sistema decoordenadas cartesianas (x, y, z) sobre K se define el vector desplazamiento u para cada punto sencillamente como:
A partir de este vector de desplazamientos es trivial calcular las componentes de la deformación y si se conoce la leyconstitutiva del sólido deformable pueden determinarse las tensiones mecánicas a que se halla sometido. En concretoel tensor deformación de Green-Lagrange:
Donde:
Bibliografía• Landau & Lifshitz: Mecánica (vol. 1), Ed. Reverté, Barcelona, 1991. ISBN 84-291-4081-6.• Landau & Lifshitz: Teoría de la elasticidad (vol. 7), Ed. Reverté, Barcelona, 1991.
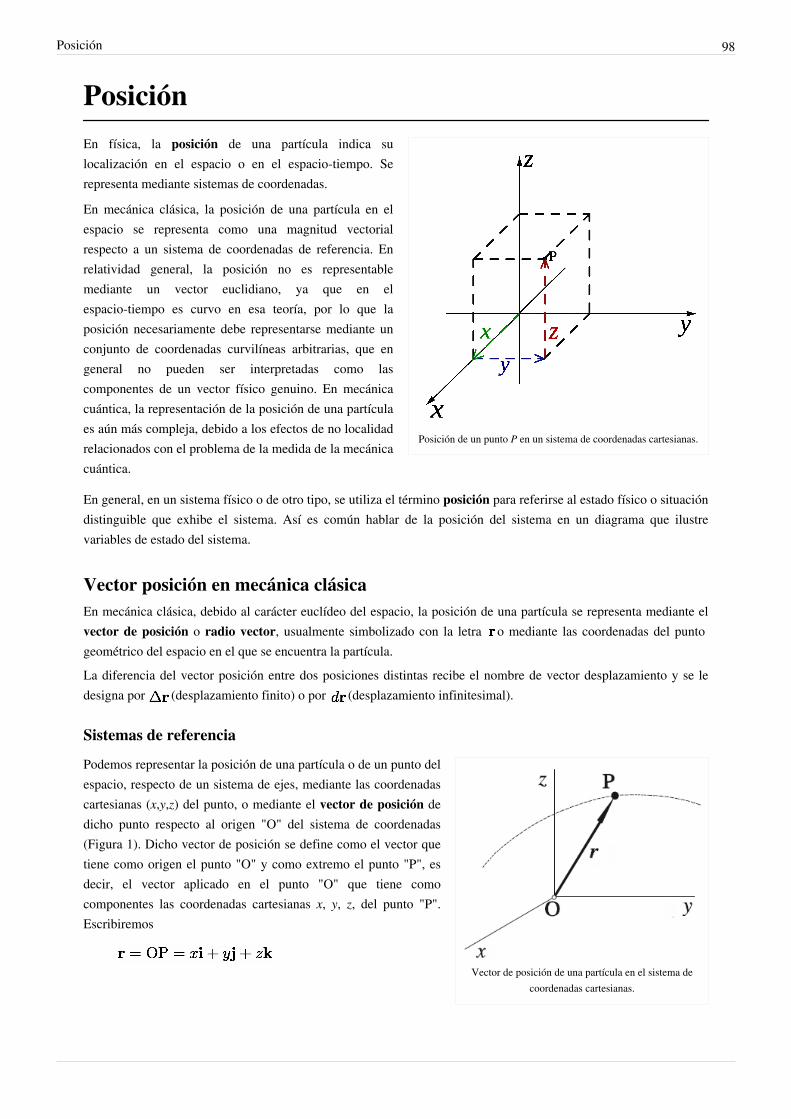
Posición 98
Posición
Posición de un punto P en un sistema de coordenadas cartesianas.
En física, la posición de una partícula indica sulocalización en el espacio o en el espacio-tiempo. Serepresenta mediante sistemas de coordenadas.
En mecánica clásica, la posición de una partícula en elespacio se representa como una magnitud vectorialrespecto a un sistema de coordenadas de referencia. Enrelatividad general, la posición no es representablemediante un vector euclidiano, ya que en elespacio-tiempo es curvo en esa teoría, por lo que laposición necesariamente debe representarse mediante unconjunto de coordenadas curvilíneas arbitrarias, que engeneral no pueden ser interpretadas como lascomponentes de un vector físico genuino. En mecánicacuántica, la representación de la posición de una partículaes aún más compleja, debido a los efectos de no localidadrelacionados con el problema de la medida de la mecánicacuántica.
En general, en un sistema físico o de otro tipo, se utiliza el término posición para referirse al estado físico o situacióndistinguible que exhibe el sistema. Así es común hablar de la posición del sistema en un diagrama que ilustrevariables de estado del sistema.
Vector posición en mecánica clásicaEn mecánica clásica, debido al carácter euclídeo del espacio, la posición de una partícula se representa mediante elvector de posición o radio vector, usualmente simbolizado con la letra o mediante las coordenadas del puntogeométrico del espacio en el que se encuentra la partícula.La diferencia del vector posición entre dos posiciones distintas recibe el nombre de vector desplazamiento y se ledesigna por (desplazamiento finito) o por (desplazamiento infinitesimal).
Sistemas de referencia
Vector de posición de una partícula en el sistema decoordenadas cartesianas.
Podemos representar la posición de una partícula o de un punto delespacio, respecto de un sistema de ejes, mediante las coordenadascartesianas (x,y,z) del punto, o mediante el vector de posición dedicho punto respecto al origen "O" del sistema de coordenadas(Figura 1). Dicho vector de posición se define como el vector quetiene como origen el punto "O" y como extremo el punto "P", esdecir, el vector aplicado en el punto "O" que tiene comocomponentes las coordenadas cartesianas x, y, z, del punto "P".Escribiremos
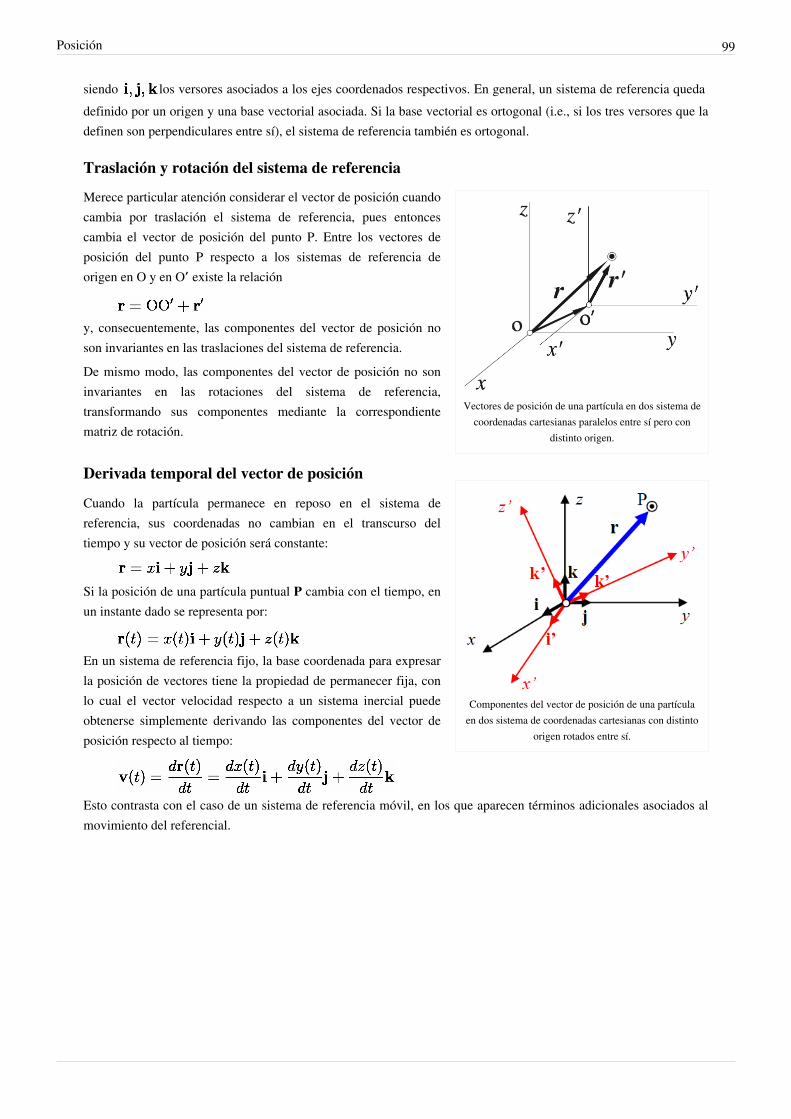
Posición 99
siendo los versores asociados a los ejes coordenados respectivos. En general, un sistema de referencia quedadefinido por un origen y una base vectorial asociada. Si la base vectorial es ortogonal (i.e., si los tres versores que ladefinen son perpendiculares entre sí), el sistema de referencia también es ortogonal.
Traslación y rotación del sistema de referencia
Vectores de posición de una partícula en dos sistema decoordenadas cartesianas paralelos entre sí pero con
distinto origen.
Componentes del vector de posición de una partículaen dos sistema de coordenadas cartesianas con distinto
origen rotados entre sí.
Merece particular atención considerar el vector de posición cuandocambia por traslación el sistema de referencia, pues entoncescambia el vector de posición del punto P. Entre los vectores deposición del punto P respecto a los sistemas de referencia deorigen en O y en O′ existe la relación
y, consecuentemente, las componentes del vector de posición noson invariantes en las traslaciones del sistema de referencia.De mismo modo, las componentes del vector de posición no soninvariantes en las rotaciones del sistema de referencia,transformando sus componentes mediante la correspondientematriz de rotación.
Derivada temporal del vector de posición
Cuando la partícula permanece en reposo en el sistema dereferencia, sus coordenadas no cambian en el transcurso deltiempo y su vector de posición será constante:
Si la posición de una partícula puntual P cambia con el tiempo, enun instante dado se representa por:
En un sistema de referencia fijo, la base coordenada para expresarla posición de vectores tiene la propiedad de permanecer fija, conlo cual el vector velocidad respecto a un sistema inercial puedeobtenerse simplemente derivando las componentes del vector deposición respecto al tiempo:
Esto contrasta con el caso de un sistema de referencia móvil, en los que aparecen términos adicionales asociados almovimiento del referencial.

Posición 100
Derivada del vector de posición en referenciales en rotación
Velocidad absoluta y velocidad relativa de una partícula enmovimiento con respecto a dos referenciales.
Cuando el movimiento de la partícula se describe a un sistema de referencia móvil (x,y,z) en rotación con respecto deun referencial fijo (X,Y,Z) con el que comparte el mismo origen, el vector de posición será el mismo en ambosreferenciales y vendrá expresado por:
en el referencial móvil (x,y,z). Puesto que los versores cartesianos (i,j,k)son función del tiempo, al derivar el vectorposición con respecto al tiempo aparecerán términos relacionados se obtiene:
siendo la velocidad angular asociada a la rotación del referencial móvil con respecto al referencial fijo.En términos de la geometría diferencial los términos adicionales tienen que ver con la conexión asociada al sistemade coordenadas o referencia escogido:
Donde:
son los símbolos de Christoffel que caracterizan la conexión.son las componentes de la velocidad.

Posición 101
Posición en mecánica relativistaEn la teoría especial de la relatividad el espacio-tiempo de Minkowski tiene geometría pseudoeuclídea pero en loesencial existe una biyección entre ese espacio y por lo que puede definirse un cuadrivector posición análogo enmuchos aspectos al vector posición de la mecánica clásica:
La derivada de este vector respecto al tiempo propio resulta ser la cuadrivelocidad que es el análogo relativista de lavelocidad de la mecánica clásica:
Sin embargo en la teoría general de la relatividad las cosas se complican debido a que en ese contexto elespacio-tiempo generalmente es curvo. En ese caso no existe una biyección directa entre el espacio-tiempo y elespacio euclídeo tridimensional y por tanto no resulta posible describir la posición de un punto del espacio-tiempomediante un vector euclídeo. Aunque como el espacio-tiempo cuatridimensional es localmente difeomórfico con elespacio eclídeo tridimensional, pueden emplearse coordenadas curvilíneas que tienen leyes de transformacióntensorial similares a un cuadrivector, aunque las cuatro coordenadas de un punto no pueden ser identificadas con uncuadrivector.
Posición en mecánica cuánticaEn mecánica cuántica no-relativista para la mayoría de los sistemas no puede hablarse de la posición de unadeterminada partícula o incluso de su trayectoria. Esto es una consecuencia del principio de incertidumbre deHeisenberg. En esta teoría las coordenadas intervienen sólo como argumento de la función de onda que describe unsistema, pero en general esas coordenadas no designan la posición de ninguna partícula.
Referencia
Bibliografía• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN
84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
ISBN 0-471-32057-9.• Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (en inglés) (6ª edición).
Brooks/Cole. ISBN 0-534-40842-7.• Tipler, Paul A. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.• Tipler, Paul Alel. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.

Velocidad 102
Velocidad
Definición de los vectores velocidad media e instantánea.
La velocidad es una magnitud física decarácter vectorial que expresa eldesplazamiento de un objeto por unidad detiempo. Se representa por o . Susdimensiones son [L]/[T].[1][2] Su unidad enel Sistema Internacional es el metro porsegundo (símbolo m/s).
En virtud de su carácter vectorial, paradefinir la velocidad deben considerarse ladirección del desplazamiento y el módulo, elcual se denomina celeridad o rapidez.[3]
De igual forma que la velocidad es el ritmoo tasa de cambio de la posición por unidadde tiempo, la aceleración es la tasa decambio de la velocidad por unidad detiempo.
HistoriaAristóteles estudió los fenómenos físicos sin llegar a conceptualizar una noción de velocidad. En efecto, susexplicaciones (que posteriormente se demostrarían incorrectas) solo describían los fenómenos en palabras, sin usarlas matemáticas como herramienta.Fue Galileo Galilei quien, estudiando el movimiento de los cuerpos en un plano inclinado, llegó a un concepto develocidad. Lo que hizo fue dividir la distancia recorrida en unidades de tiempo. Esto es, fijó un patrón de una unidadde tiempo, como por ejemplo 1 segundo, y a partir de esto relacionó la distancia recorrida por un cuerpo en cadasegundo. De esta manera, Galileo desarrolló el concepto de la velocidad como una variación de la distancia recorridapor unidad de tiempo.A pesar del gran avance de la introducción de esta nueva noción, sus alcances se restringían a los alcances mismosde las matemáticas. Por ejemplo, era relativamente sencillo calcular la velocidad de un móvil que se desplaza avelocidad constante, puesto que en cada segundo recorre distancias iguales. A su vez, también lo era calcular lavelocidad de un móvil en aceleración constante, como en un cuerpo en caída libre. Sin embargo, cuando la velocidaddel objeto variaba, no había herramienta, en épocas de Galileo, que ayudase a determinar la velocidad instantánea deun objeto.Fue recién en el siglo XVI cuando, con el desarrollo del cálculo por parte de Isaac Newton y Gottfried Leibniz, sepudo solucionar la cuestión de obtener la velocidad instantánea de un objeto. Ésta está determinada por la derivadade la posición del objeto respecto del tiempo. En el lenguaje cotidiano empleamos las palabras rapidez y velocidadde manera indistinta. En física hacemos una distinción entre ellas. De manera muy sencilla, la diferencia es que lavelocidad es una rapidez en una dirección determinada. Cuando se dice que un auto viaja a 60 km/hora estamosindicando su rapidez. Pero si se dice que un auto se desplaza a 60 km/h hacia el norte estamos especificando suvelocidad y la velocidad nos dice que tan aprisa lo hace y en que dirección.Las aplicaciones de la velocidad, con el uso de Cálculo, es una herramienta fundamental en Física e Ingeniería,extendiéndose en prácticamente todo estudio donde haya una variación de la posición respecto del tiempo.

Velocidad 103
Velocidad en mecánica clásica
Velocidad mediaLa 'velocidad media' o velocidad promedio es la velocidad en un intervalo de tiempo dado. Se calcula dividiendo eldesplazamiento (Δr) entre el tiempo (Δt) empleado en efectuarlo:
(1)
Esta es la definición de la velocidad media entendida como vector (ya que es el resultado de dividir un vector entreun escalar).Por otra parte, si se considera la distancia recorrida sobre la trayectoria en un intervalo de tiempo dado, tenemos lavelocidad media sobre la trayectoria o rapidez media, la cual es una cantidad escalar. La expresión anterior seescribe en la forma:
(2)
La velocidad media sobre la trayectoria también se suele denominar «velocidad media numérica» aunque esta últimaforma de llamarla no está exenta de ambigüedades.El módulo de la velocidad media (entendida como vector), en general, es diferente al valor de la velocidad mediasobre la trayectoria. Solo serán iguales si la trayectoria es rectilínea y si el móvil solo avanza (en uno u otro sentido)sin retroceder. Por ejemplo, si un objeto recorre una distancia de 10 metros en un lapso de 3 segundos, el módulo desu velocidad media sobre la trayectoria es:
Velocidad instantáneaLa velocidad instantánea es un vector tangente a la trayectoria, corresponde a la derivada del vector posición (R)respecto al tiempo.
Permite conocer la velocidad de un móvil que se desplaza sobre una trayectoria cuando el intervalo de tiempo esinfinitamente pequeño, siendo entonces el espacio recorrido también muy pequeño, representando un punto de latrayectoria. La velocidad instantánea es siempre tangente a la trayectoria.
En forma vectorial, la velocidad es la derivada del vector posición respecto al tiempo:
donde es un vector (vector de módulo unidad) de dirección tangente a la trayectoria del cuerpo en cuestión y es el vector posición, ya que en el límite los diferenciales de espacio recorrido y posición coinciden.
Celeridad o rapidezLa celeridad o rapidez es la magnitud o el valor de la velocidad, ya sea velocidad vectorial media, velocidad mediasobre la trayectoria, o velocidad instantánea (velocidad en un punto). El módulo del vector velocidad instantánea y elvalor numérico de la velocidad instantánea sobre la trayectoria son iguales, mientras que la rapidez promedio nonecesariamente es igual a la magnitud de la velocidad promedio. La rapidez promedio (o velocidad media sobre latrayectoria) y la velocidad media tienen la misma magnitud cuando todo el movimiento se da en una dirección. Enotros casos, pueden diferir.
Velocidad 104
Velocidad relativaEl cálculo de velocidades relativas en mecánica clásica es aditivo y encaja con la intuición común sobre velocidades;de esta propiedad de la aditividad surge el método de la velocidad relativa. La velocidad relativa entre dosobservadores A y B es el valor de la velocidad de un observador medida por el otro. Las velocidades relativas mediaspor A y B serán iguales en valor absoluto pero de signo contrario. Denotaremos al valor la velocidad relativa de unobservador B respecto a otro observador A como .Dadas dos partículas A y B, cuyas velocidades medidas por un cierto observador son y , la velocidadrelativa de B con respecto a A se denota como y viene dada por:
Naturalmente, la velocidad relativa de A con respecto a B se denota como y viene dada por:
de modo que las velocidades relativas y tienen el mismo módulo pero dirección contraria.
Velocidad angularLa velocidad angular no es propiamente una velocidad en el sentido anteriormente definido sino una medida de larapidez con la que ocurre un movimiento de rotación. Aunque no es propiamente una velocidad una vez conocida lavelocidad de un punto de un sólido y la velocidad angular del sólido se puede determinar la velocidad instantánea delresto de puntos del sólido.
Velocidad en mecánica relativistaEn mecánica relativista puede definirse la velocidad de manera análoga a como se hace en mecánica clásica sinembargo la velocidad así definida no tiene las mismas propiedades que su análogo clásico:• En primer lugar la velocidad convencional medida por diferentes observadores, aún inerciales, no tiene una ley de
transformación sencilla (de hecho la velocidad no es ampliable a un cuadrivector de manera trivial).• En segundo lugar, el momento lineal y la velocidad en mecánica relativista no son proporcionales, por esa razón
se considera conveniente en los cálculos substituir la velocidad convencional por la cuadrivelocidad, cuyascomponentes espaciales coinciden con la velocidad para velocidades pequeñas comparadas con la luz, siendo suscomponentes en el caso general:
Además esta cuadrivelocidad tiene propiedades de transformación adecuadamente covariantes y es proporcional alcuadrimomento lineal.En mecánica relativista la velocidad relativa no es aditiva. Eso significa que si consideramos dos observadores, A yB, moviéndose sobre una misma recta a velocidades diferentes , respecto de un tercer observador O,sucede que:
Siendo la velocidad de B medida por A y la velocidad de A medida por B. Esto sucede porque tanto la medida de velocidades, como el transcurso del tiempo para los observadores A y B no es el mismo debido a que tienen diferentes velocidades, y como es sabido el paso del tiempo depende de la velocidad de un sistema en relación a la velocidad de la luz. Cuando se tiene en cuenta esto, resulta que el cálculo de velocidades relativas no es aditiva. A diferencia de lo que sucede en la mecánica clásica, donde el paso del tiempo es idéntico para todos los observadores con independencia de su estado de movimiento. Otra forma de verlo es la siguiente: si las velocidades relativas fuera simplemente aditiva en relatividad llegaríamos a contradicciones. Para verlo, consideremos un objeto pequeño que se mueve respecto a otro mayor a una velocidad superior a la mitad de la luz. Y consideremos que ese
Velocidad 105
otro objeto mayor se moviera a más de la velocidad de la luz respecto a un observador fijo. La aditividad implicaríaque el objeto pequeño se movería a una velocidad superior a la de la luz respecto al observador fijo, pero eso no esposible porque todos los objetos materiales convencionales tienen velocidades inferiores a la de luz. Sin embargo,aunque las velocidades no son aditivas en relatividad, para velocidades pequeñas comparadas con la velocidad de laluz, las desigualdades se cumplen de modo aproximado, es decir:
Siendo inadecuada esta aproximación para valores de las velocidades no despreciables frente a la velocidad de la luz.
Velocidad en mecánica cuánticaEn mecánica cuántica no relativista el estado de una partícula se describe mediante una función de onda quesatisface la ecuación de Schrödinger. La velocidad de propagación media de la partícula viene dado por la expresión:
Obviamente la velocidad sólo será diferente de cero cuando la función de onda es compleja, siendo idénticamentenula la velocidad de los estados ligados estacionarios, cuya función de onda es real. Esto último se debe a que losestados estacionarios representan estados que no varían con el tiempo y por tanto no se propagan.En mecánica cuántica relativista se postula que por ejemplo un electrón podría tener junto con una velocidad mediamacroscópica (medida entre dos instantes diferentes) un movimiento de agitación u oscilación muy rápida adicionalconocido como Zitterbewegung, de acuerdo con esa interpretación adicional no existe una relación entre el momentode la partícula y la velocidad asignable a dicho movimiento.
Unidades de velocidad
Sistema Internacional de Unidades (SI)• Metro por segundo (m/s), unidad de velocidad del SI (1 m/s = 3,6 km/h).Sistema Métrico antiguo:• Kilómetro por hora (km/h) (muy habitual en los medios de transporte)[4]
• Kilómetro por segundo (km/s)
Sistema Cegesimal de Unidades• Centímetro por segundo (cm/s) unidad de velocidad del sistema cegesimal
Sistema Anglosajón de Unidades• Pie por segundo (ft/s), unidad de velocidad del sistema inglés• Milla por hora (mph) (uso habitual)• Milla por segundo (mps) (uso coloquial)
Navegación marítima y Navegación aérea• El nudo es una unidad de medida de velocidad, utilizada en navegación marítima y aérea, equivalente a la milla
náutica por hora (la longitud de la milla naútica es de 1.852 metros; la longitud de la milla terrestre -statute mille-es de 1.609,344 metros).
Velocidad 106
Aeronáutica• El Número Mach es una medida de velocidad relativa que se define como el cociente entre la velocidad de un
objeto y la velocidad del sonido en el medio en que se mueve dicho objeto. Es un número adimensionaltípicamente usado para describir la velocidad de los aviones. Mach 1 equivale a la velocidad del sonido, Mach 2es dos veces la velocidad del sonido,y así sucesivamente. La velocidad del sonido en el aire es de 340 m/s (1224km/h).
Unidades de Planck (Unidades naturales)• El valor de la velocidad de la luz en el vacío = 299 792 458 m/s (aproximadamente 300 000 km/s).
Referencias[1][1] Resnick, 1996, pp. 10 y 11.[2][2] Resnick, 1996, pp. 17-23.[3] http:/ / es. wikibooks. org/ wiki/ Física/ Cinemática/ Velocidad[4][4] Utilizada, por ejemplo, en las señales de tráfico.
Bibliografía• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN
84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick, Robert & Halliday, David (2004). Física 4ª. CECSA, México. ISBN 970-24-0257-3.• Tipler, Paul A. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.• Giancoli. Física = 2006. Pearson Educación, México. ISBN 970-26-0776-0.
Enlaces externos• Wikiquote alberga frases célebres de o sobre Velocidad. Wikiquote• Wikcionario tiene definiciones y otra información sobre velocidad.Wikcionario• Conversión online de unidades de velocidad (http:/ / www. unitsconversion. com. ar/ esp/
conversiondeunidadesvelocidad/ )• Conversión de unidades (http:/ / unit-converter. org/ )• Curso Interactivo de Física en Internet. (http:/ / www. sc. ehu. es/ sbweb/ fisica_/ ) Ángel Franco García.• Bureau International des Poids et Mesures - The International System of Mesures (http:/ / www. bipm. org/ utils/
common/ pdf/ si_brochure_8_en. pdf)• Definición de velocidad en el DRAE (http:/ / lema. rae. es/ drae/ ?val=velocidad)

Rapidez 107
RapidezLa rapidez o celeridad promedio es la relación entre la distancia recorrida y el tiempo empleado en completarla. Sumagnitud se designa como v. La celeridad es una magnitud escalar de dimensión[1][2] [L]/[T]. La rapidez tien lamisma dimensión que la velocidad, pero no tiene el carácter vectorial de ésta. La celeridad instantánea representajustamente el módulo de la velocidad instantánea. La diferencia entre velocidad y rapidez es que la velocidad tieneun carácter vectorial y la rapidez es una magnitud de carácter escalar.Aunque los términos de celeridad o rapidez son apropiados cuando deseamos referirnos inequívocamente al módulode la velocidad, es correcto y de uso corriente (no sólo en el uso popular, sino también en el científico y técnico)utilizar los términos "velocidad", "celeridad" y "rapidez" como sinónimos. Esto es así para la totalidad de lasmagnitudes vectoriales (aceleración, fuerza, momento, cantidad de movimiento, etc.) a cuyos módulos no se lesasigna nombres especiales.
Ejemplo:Si un móvil recorre una distancia de 20 cm en 4 s, su rapidez es:
Celeridad y velocidadLa rapidez es una magnitud escalar que solo indica la magnitud de la velocidad. Por ejemplo, supongamos que unfelino puede desarrollar una velocidad de 90 km/h, mientras que un atleta de alto rendimiento puede desarrollar unavelocidad de 30 km/h, podemos decir, tomando como referencia las velocidades, que el felino es 3 veces más rápidoque el atleta.
Definición de los vectores velocidad media e instantánea.
Definición de celeridad media:
donde Δs es la distancia recorrida (longitudde arco, en la figura).
Definición de velocidad instantánea y deceleridad instantánea:
donde dr es el vector desplazamiento y ds esla distancia medida sobre la trayectoria,asociada al desplazamiento.
Podemos expresar el vector velocidad en laforma
donde et es el vector unitario en la dirección de la velocidad, tangente a la trayectoria, por lo que recibe el nombre de
versor tangente.Los velocímetros de que disponen los vehículos miden el módulo de la velocidad instantánea, esto es, la celeridad.Un objeto en movimiento recorre una cierta distancia en un tiempo determinado. Un auto, por ejemplo, recorre uncierto número de kilómetros en una hora. La rapidez es una medida de que tán aprisa se mueve un objeto . Es la
Rapidez 108
razón de cambio a la que se recorre la distancia. Recuerda que la expresión razón de cambio indica que estamosdividiendo alguna cantidad entre el tiempo. La rapidez se mide siempre en términos de una unidad de distanciadividida entre una unidad de tiempo. La rapidez se define como la distancia recorrida por unidad de tiempo. Aquí lapalabra "por" significa "dividido entre" y la rapidez describe cuán rápido se desplaza un objeto.
Unidades de rapidezLas unidades de celeridad:• Metros por segundo: (símbolo, m/s, ms-1) medida del SI• Centímetros por segundo: (símbolo, cm/s, cm s-1)• Kilómetros por hora: (símbolo, km/h)• Millas por hora: (abreviatura, m.p.h.)• Milla náutica por hora (knot): (símbolo kt)• Mach: 1 mach es la velocidad del sonido, n-machs es n veces la velocidad del sonido.
1 mach ≈ 340 m/s ≈ 1224 km/h• Velocidad de la luz en el vacío: (símbolo c) es una unidad natural
c = 299 792 458 m/s
Rapidez mediaLa rapidez media o rapidez promedio es el término que se suele usar para referirnos a la celeridad media. La rapidezen sí, es una magnitud escalar que relaciona la distancia recorrida con el tiempo. La rapidez media de un cuerpo es larelación entre la distancia que recorre y el tiempo que tarda en recorrerla. Si la rapidez media de un coche es 80km/h, esto quiere decir que el coche recorre una distancia de 80 km en cada hora.
La rapidez media o promedio de una partícula es una cantidad escalar, y se calcula dividiendo la distancia totalrecorrida entre el intervalo total de tiempo necesario para recorrer esa distancia.No confundir con velocidadpromedio:La velocidad media o promedio se calcula de la siguiente manera:v = (x2 - x1) / (t2 - t1)donde: x2 = posición final x1 = posición inicial t2 = tiempo final t1 = tiempo inicial.Si partes de tiempo cero y posición cero la ecuación de arriba se reduce a:v = d / t.
Conversiones1 m/s = 3,6 km/h1 mph = 1,609 km/h1 knot = 1,852 km/h = 0,514 m/s
Curiosidades•• La rapidez de un caracol común es 0,001 m/s; 0,0036 km/h; 0,0023 mph.•• Una caminata rápida: 1,667 m/s; 6 km/h; 3,75 mph.• Velocistas olímpicos (100 metros lisos): 10 m/s; 36 km/h; 22,5 mph.• Rapidez límite en una autopista de Francia es 36,111 m/s; 130 km/h; 80 mph.• Rapidez de crucero de un Boeing 747-8 = 290,947 m/s; 1047,41 km/h; 650,83 mph; (oficialmente 0,85 Machs)•• Récord oficial de rapidez en el aire es 980,278 m/s; 3529 km/h; 2188 mph.
Rapidez 109
•• Reentrada de un trasbordador espacial es 7777,778 m/s; 28 000 km/h; 17 500 mph.• Velocidad del sonido: en el aire = 340 m/s; en agua = 1500 m/s• Elevador del observatorio de Taipéi: 16,667 m/s; 60,6 km/h; 37,6 mph
Referencias[1][1] Resnick, 1996, pp. 10 y 11.[2][2] Resnick, 1996, pp. 17-23.
Bibliografía• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN
84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick,R. and Halliday, D. (1996). Physics. John Wiley & Sons. ISBN 0-471-83202-2.• Tipler, Paul A. (2000). Física para{ la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.
Enlaces externos• Wikiquote alberga frases célebres de o sobre prisa o rapidez. Wikiquote• Rapidez vs. Velocidad, en profisica.cl (http:/ / www. profisica. cl/ conceptos/ 5-rapidez. html)• Bureau International des Poids et Mesures - The International System of Mesures (http:/ / www. bipm. org/ utils/
common/ pdf/ si_brochure_8_en. pdf)• National Institute of Standards & Technology - Guide for the Use of the International System of Units (SI) (http:/
/ physics. nist. gov/ cuu/ pdf/ sp811. pdf)
AceleraciónEn física, la aceleración es una magnitud vectorial que nos indica el cambio de velocidad por unidad de tiempo. Enel contexto de la mecánica vectorial newtoniana se representa normalmente por o y su módulo por . Susdimensiones son . Su unidad en el Sistema Internacional es el m/s2.En la mecánica newtoniana, para un cuerpo con masa constante, la aceleración del cuerpo es proporcional a la fuerzaque actúa sobre él mismo (segunda ley de Newton):
donde F es la fuerza resultante que actúa sobre el cuerpo, m es la masa del cuerpo, y a es la aceleración. La relaciónanterior es válida en cualquier sistema de referencia inercial.
IntroducciónDe conformidad con la mecánica newtoniana, una partícula no puede seguir una trayectoria curva a menos que sobreella actúe una cierta aceleración como consecuencia de la acción de una fuerza, ya que si ésta no existiese, sumovimiento sería rectilíneo. Asimismo, una partícula en movimiento rectilíneo solo puede cambiar su velocidad bajola acción de una aceleración en la misma dirección de su velocidad (dirigida en el mismo sentido si acelera; o ensentido contrario si desacelera).Algunos ejemplos del concepto de aceleración serían:• La llamada aceleración de la gravedad en la Tierra es la aceleración que produce la fuerza gravitatoria terrestre; su
valor en la superficie de la Tierra es, aproximadamente, de 9,8 m/s2. Esto quiere decir que si se dejara caer

Aceleración 110
libremente un objeto, aumentaría su velocidad de caída a razón de 9,8 m/s por cada segundo (siempre queomitamos la resistencia aerodinámica del aire). El objeto caería, por tanto, cada vez más rápido, respondiendodicha velocidad a la ecuación:
•• Una maniobra de frenada de un vehículo, que se correspondería con una aceleración de signo negativo, odesaceleración, al oponerse a la velocidad que ya tenía el vehículo. Si el vehículo adquiriese más velocidad, adicho efecto se le llamaría aceleración y, en este caso, sería de signo positivo.
Aceleración media e instantánea
Definición de la aceleración de una partícula en un movimiento cualquiera. Obsérveseque la aceleración no es tangente a la trayectoria.
Cada instante, o sea en cada punto dela trayectoria, queda definido un vectorvelocidad que, en general, cambiatanto en módulo como en dirección alpasar de un punto a otro de latrayectoria. La dirección de lavelocidad cambiará debido a que lavelocidad es tangente a la trayectoria yésta, por lo general, no es rectilínea. Enla Figura se representan los vectoresvelocidad correspondientes a losinstantes t y t+Δt, cuando la partículapasa por los puntos P y Q,respectivamente. El cambio vectorialen la velocidad de la partícula duranteese intervalo de tiempo está indicadopor Δv, en el triángulo vectorial al pie de la figura. Se define la aceleración media de la partícula, en el intervalo detiempo Δt, como el cociente:
Que es un vector paralelo a Δv y dependerá de la duración del intervalo de tiempo Δt considerado. La aceleracióninstantánea se la define como el límite al que tiende el cociente incremental Δv/Δt cuando Δt→0; esto es la derivadadel vector velocidad con respecto al tiempo:
Puesto que la velocidad instantánea v a su vez es la derivada del vector posición r respecto al tiempo, la aceleraciónes la derivada segunda de la posición con respecto del tiempo:
De igual forma se puede definir la velocidad instantánea a partir de la aceleración como:
Se puede obtener la velocidad a partir de la aceleración mediante integración:

Aceleración 111
Medición de la aceleraciónLa medida de la aceleración puede hacerse con un sistema de adquisición de datos y un simple acelerómetro. Losacelerómetros electrónicos son fabricados para medir la aceleración en una, dos o tres direcciones. Cuentan con doselementos conductivos, separados por un material que varia su conductividad en función de las medidas, que a suvez serán relativas a la aceleración del conjunto.
UnidadesLas unidades de la aceleración son:•• Sistema Internacional
1 m/s2
•• Sistema Cegesimal1 cm/s2 = 1 Gal
Componentes intrínsecas de la aceleración: aceleraciones tangencial y normal
Componentes intrínsecas de la aceleración.
En tanto que el vector velocidad v es tangente a latrayectoria, el vector aceleración a puededescomponerse en dos componentes (llamadascomponentes intrínsecas) mutuamente perpendiculares:una componente tangencial at (en la dirección de latangente a la trayectoria), llamada aceleracióntangencial, y una componente normal an (en ladirección de la normal principal a la trayectoria),llamada aceleración normal o centrípeta (este últimonombre en razón a que siempre está dirigida hacia elcentro de curvatura).
Derivando la velocidad con respecto al tiempo, teniendo en cuenta que el vector tangente cambia de dirección alpasar de un punto a otro de la trayectoria (esto significa que no es constante) obtenemos
siendo el vector unitario tangente a la trayectoria en la misma dirección que la velocidad y la velocidadangular. Resulta conveniente escribir la expresión anterior en la forma
siendoel vector unitario normal a la trayectoria, esto es dirigido hacia el centro de curvatura de la misma,
el radio de curvatura de la trayectoria, esto es el radio de la circunferencia osculatriz a la trayectoria.Las magnitudes de estas dos componentes de la aceleración son:
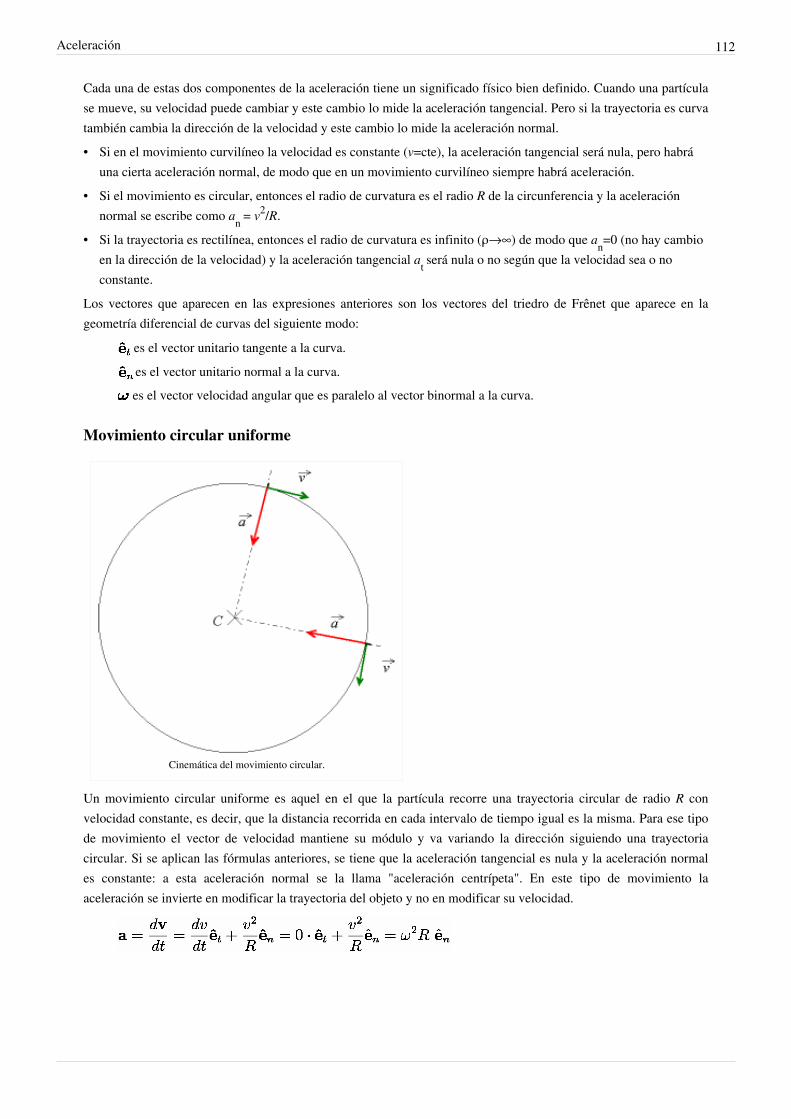
Aceleración 112
Cada una de estas dos componentes de la aceleración tiene un significado físico bien definido. Cuando una partículase mueve, su velocidad puede cambiar y este cambio lo mide la aceleración tangencial. Pero si la trayectoria es curvatambién cambia la dirección de la velocidad y este cambio lo mide la aceleración normal.• Si en el movimiento curvilíneo la velocidad es constante (v=cte), la aceleración tangencial será nula, pero habrá
una cierta aceleración normal, de modo que en un movimiento curvilíneo siempre habrá aceleración.• Si el movimiento es circular, entonces el radio de curvatura es el radio R de la circunferencia y la aceleración
normal se escribe como an = v2/R.• Si la trayectoria es rectilínea, entonces el radio de curvatura es infinito (ρ→∞) de modo que an=0 (no hay cambio
en la dirección de la velocidad) y la aceleración tangencial at será nula o no según que la velocidad sea o noconstante.
Los vectores que aparecen en las expresiones anteriores son los vectores del triedro de Frênet que aparece en lageometría diferencial de curvas del siguiente modo:
es el vector unitario tangente a la curva.es el vector unitario normal a la curva.es el vector velocidad angular que es paralelo al vector binormal a la curva.
Movimiento circular uniforme
Cinemática del movimiento circular.
Un movimiento circular uniforme es aquel en el que la partícula recorre una trayectoria circular de radio R convelocidad constante, es decir, que la distancia recorrida en cada intervalo de tiempo igual es la misma. Para ese tipode movimiento el vector de velocidad mantiene su módulo y va variando la dirección siguiendo una trayectoriacircular. Si se aplican las fórmulas anteriores, se tiene que la aceleración tangencial es nula y la aceleración normales constante: a esta aceleración normal se la llama "aceleración centrípeta". En este tipo de movimiento laaceleración se invierte en modificar la trayectoria del objeto y no en modificar su velocidad.
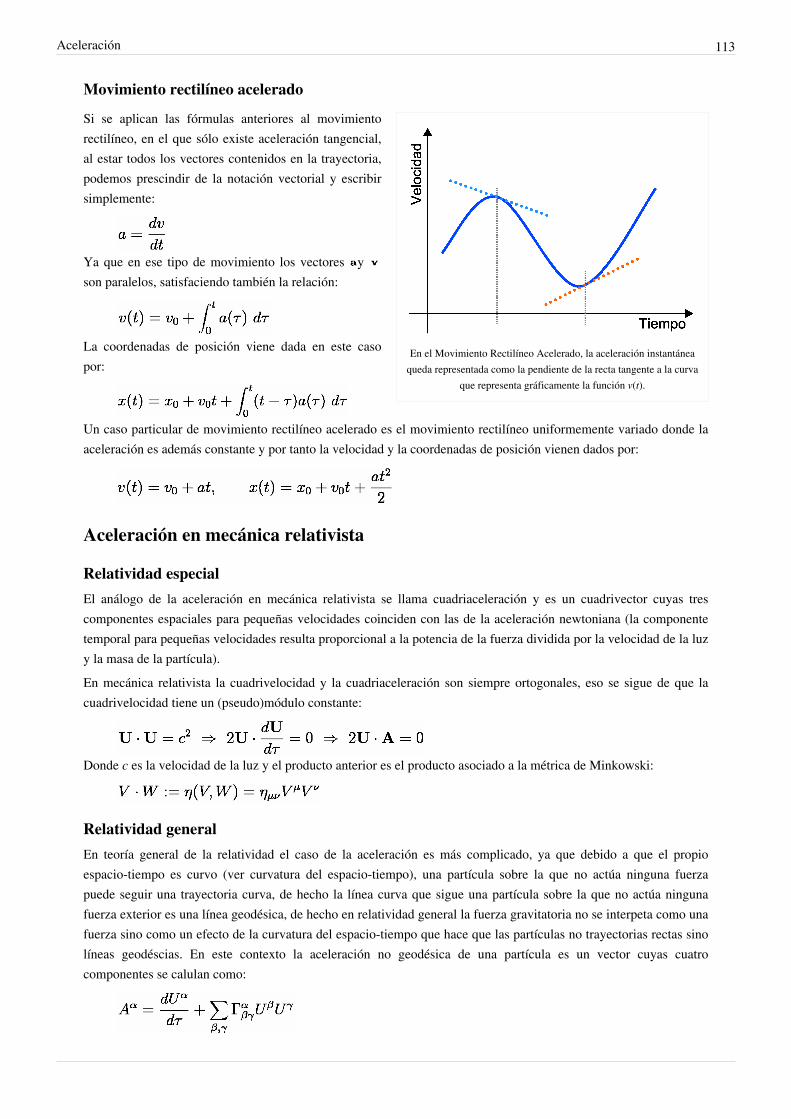
Aceleración 113
Movimiento rectilíneo acelerado
En el Movimiento Rectilíneo Acelerado, la aceleración instantáneaqueda representada como la pendiente de la recta tangente a la curva
que representa gráficamente la función v(t).
Si se aplican las fórmulas anteriores al movimientorectilíneo, en el que sólo existe aceleración tangencial,al estar todos los vectores contenidos en la trayectoria,podemos prescindir de la notación vectorial y escribirsimplemente:
Ya que en ese tipo de movimiento los vectores y son paralelos, satisfaciendo también la relación:
La coordenadas de posición viene dada en este casopor:
Un caso particular de movimiento rectilíneo acelerado es el movimiento rectilíneo uniformemente variado donde laaceleración es además constante y por tanto la velocidad y la coordenadas de posición vienen dados por:
Aceleración en mecánica relativista
Relatividad especialEl análogo de la aceleración en mecánica relativista se llama cuadriaceleración y es un cuadrivector cuyas trescomponentes espaciales para pequeñas velocidades coinciden con las de la aceleración newtoniana (la componentetemporal para pequeñas velocidades resulta proporcional a la potencia de la fuerza dividida por la velocidad de la luzy la masa de la partícula).En mecánica relativista la cuadrivelocidad y la cuadriaceleración son siempre ortogonales, eso se sigue de que lacuadrivelocidad tiene un (pseudo)módulo constante:
Donde c es la velocidad de la luz y el producto anterior es el producto asociado a la métrica de Minkowski:
Relatividad generalEn teoría general de la relatividad el caso de la aceleración es más complicado, ya que debido a que el propioespacio-tiempo es curvo (ver curvatura del espacio-tiempo), una partícula sobre la que no actúa ninguna fuerzapuede seguir una trayectoria curva, de hecho la línea curva que sigue una partícula sobre la que no actúa ningunafuerza exterior es una línea geodésica, de hecho en relatividad general la fuerza gravitatoria no se interpeta como unafuerza sino como un efecto de la curvatura del espacio-tiempo que hace que las partículas no trayectorias rectas sinolíneas geodéscias. En este contexto la aceleración no geodésica de una partícula es un vector cuyas cuatrocomponentes se calulan como:
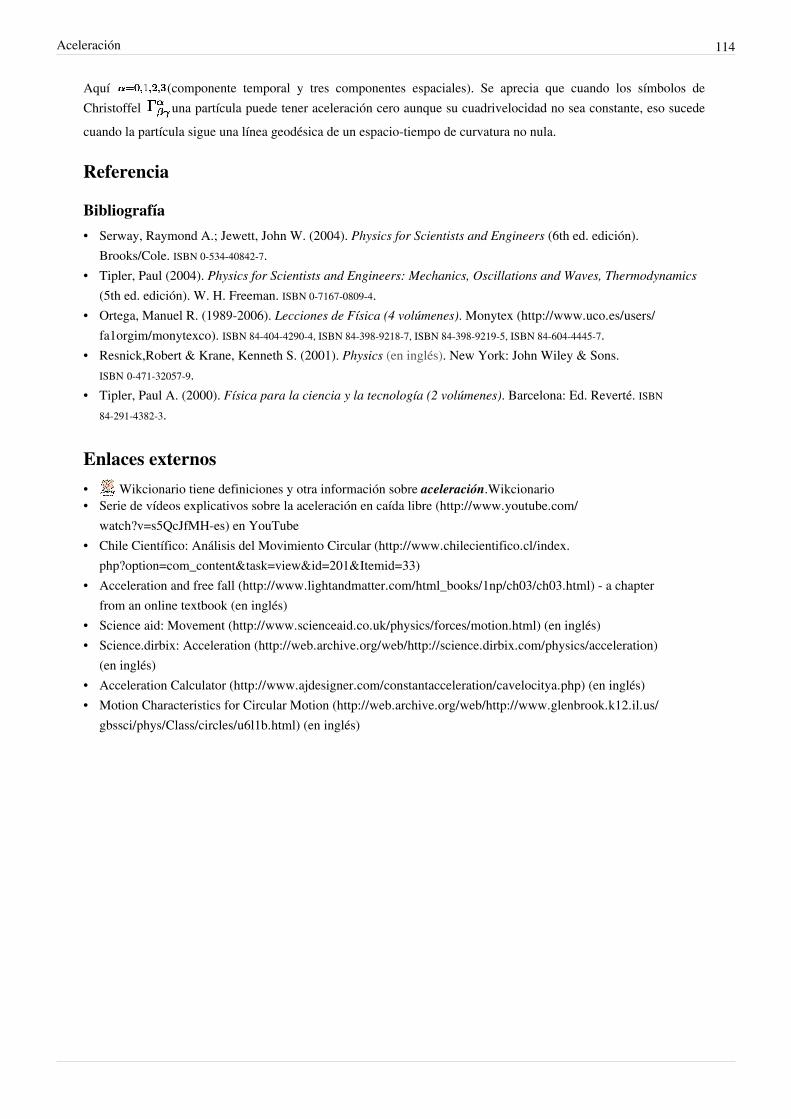
Aceleración 114
Aquí (componente temporal y tres componentes espaciales). Se aprecia que cuando los símbolos deChristoffel una partícula puede tener aceleración cero aunque su cuadrivelocidad no sea constante, eso sucedecuando la partícula sigue una línea geodésica de un espacio-tiempo de curvatura no nula.
Referencia
Bibliografía• Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (6th ed. edición).
Brooks/Cole. ISBN 0-534-40842-7.• Tipler, Paul (2004). Physics for Scientists and Engineers: Mechanics, Oscillations and Waves, Thermodynamics
(5th ed. edición). W. H. Freeman. ISBN 0-7167-0809-4.• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex (http:/ / www. uco. es/ users/
fa1orgim/ monytexco). ISBN 84-404-4290-4, ISBN 84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
ISBN 0-471-32057-9.• Tipler, Paul A. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.
Enlaces externos• Wikcionario tiene definiciones y otra información sobre aceleración.Wikcionario• Serie de vídeos explicativos sobre la aceleración en caída libre (http:/ / www. youtube. com/
watch?v=s5QcJfMH-es) en YouTube• Chile Científico: Análisis del Movimiento Circular (http:/ / www. chilecientifico. cl/ index.
php?option=com_content& task=view& id=201& Itemid=33)• Acceleration and free fall (http:/ / www. lightandmatter. com/ html_books/ 1np/ ch03/ ch03. html) - a chapter
from an online textbook (en inglés)• Science aid: Movement (http:/ / www. scienceaid. co. uk/ physics/ forces/ motion. html) (en inglés)• Science.dirbix: Acceleration (http:/ / web. archive. org/ web/ http:/ / science. dirbix. com/ physics/ acceleration)
(en inglés)• Acceleration Calculator (http:/ / www. ajdesigner. com/ constantacceleration/ cavelocitya. php) (en inglés)• Motion Characteristics for Circular Motion (http:/ / web. archive. org/ web/ http:/ / www. glenbrook. k12. il. us/
gbssci/ phys/ Class/ circles/ u6l1b. html) (en inglés)
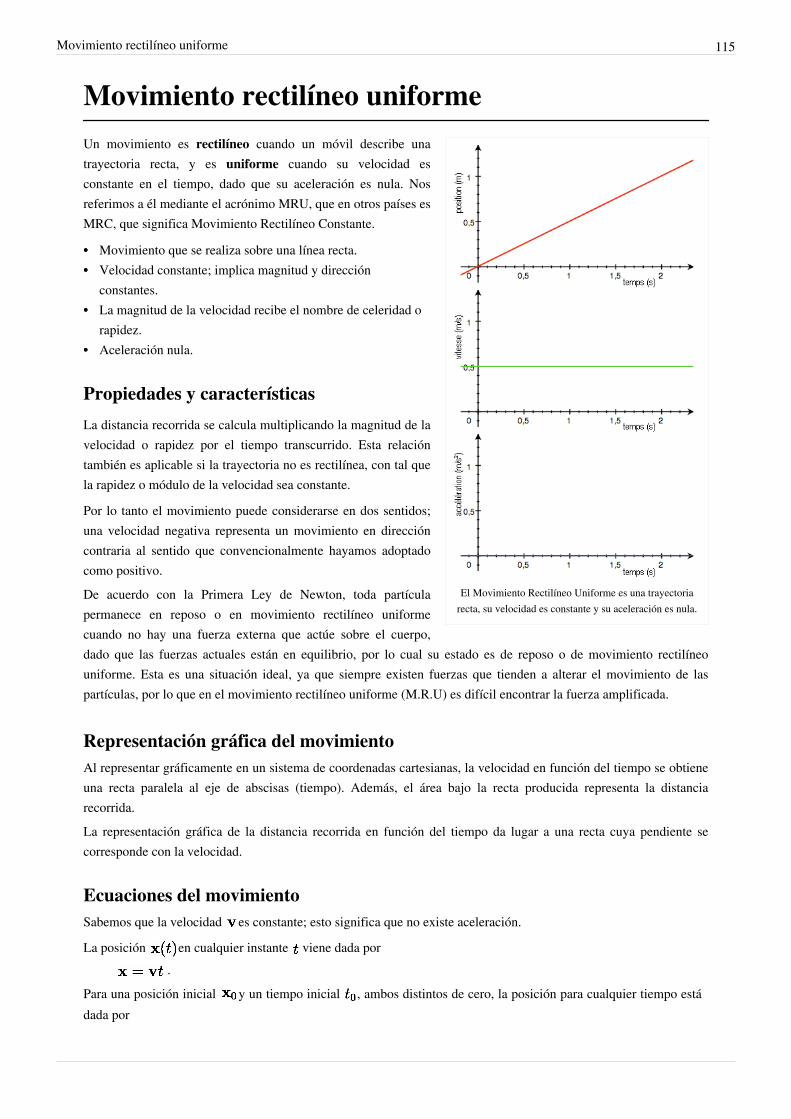
Movimiento rectilíneo uniforme 115
Movimiento rectilíneo uniforme
El Movimiento Rectilíneo Uniforme es una trayectoriarecta, su velocidad es constante y su aceleración es nula.
Un movimiento es rectilíneo cuando un móvil describe unatrayectoria recta, y es uniforme cuando su velocidad esconstante en el tiempo, dado que su aceleración es nula. Nosreferimos a él mediante el acrónimo MRU, que en otros países esMRC, que significa Movimiento Rectilíneo Constante.
•• Movimiento que se realiza sobre una línea recta.•• Velocidad constante; implica magnitud y dirección
constantes.•• La magnitud de la velocidad recibe el nombre de celeridad o
rapidez.•• Aceleración nula.
Propiedades y características
La distancia recorrida se calcula multiplicando la magnitud de lavelocidad o rapidez por el tiempo transcurrido. Esta relacióntambién es aplicable si la trayectoria no es rectilínea, con tal quela rapidez o módulo de la velocidad sea constante.
Por lo tanto el movimiento puede considerarse en dos sentidos;una velocidad negativa representa un movimiento en direccióncontraria al sentido que convencionalmente hayamos adoptadocomo positivo.De acuerdo con la Primera Ley de Newton, toda partículapermanece en reposo o en movimiento rectilíneo uniformecuando no hay una fuerza externa que actúe sobre el cuerpo,dado que las fuerzas actuales están en equilibrio, por lo cual su estado es de reposo o de movimiento rectilíneouniforme. Esta es una situación ideal, ya que siempre existen fuerzas que tienden a alterar el movimiento de laspartículas, por lo que en el movimiento rectilíneo uniforme (M.R.U) es difícil encontrar la fuerza amplificada.
Representación gráfica del movimientoAl representar gráficamente en un sistema de coordenadas cartesianas, la velocidad en función del tiempo se obtieneuna recta paralela al eje de abscisas (tiempo). Además, el área bajo la recta producida representa la distanciarecorrida.La representación gráfica de la distancia recorrida en función del tiempo da lugar a una recta cuya pendiente secorresponde con la velocidad.
Ecuaciones del movimientoSabemos que la velocidad es constante; esto significa que no existe aceleración.
La posición en cualquier instante viene dada por.
Para una posición inicial y un tiempo inicial , ambos distintos de cero, la posición para cualquier tiempo estádada por

Movimiento rectilíneo uniforme 116
Esta ecuación se obtiene de:
AplicacionesEn astronomía, el MRU es muy utilizado. Los planetas y las estrellas no se mueven en línea recta, pero la que sí semueve en línea recta es la luz, y siempre a la misma velocidad.Entonces, sabiendo la distancia a la que se encuentra un objeto, se puede saber el tiempo que tarda la luz en recorreresa distancia. Por ejemplo, el sol se encuentra a 150.000.000 km. La luz, por lo tanto, tarda 500 segundos (8 minutos20 segundos) en llegar hasta la tierra. La realidad es un poco más compleja, con la relatividad de por medio, pero agrandes rasgos podemos decir que la luz sigue un movimiento rectilíneo uniforme.
Bibliografía• Antonio Máximo, Beatriz Alvarenga (2005). Física General. México D.F.: Oxford University Press. ISBN
970-613-147-7.
Enlaces externosEcuaciones de un MRU, E-Ducativa Catedu, Gobierno de Aragón. [1]
Referencias[1] http:/ / e-ducativa. catedu. es/ 44700165/ aula/ archivos/ repositorio/ / 1000/ 1147/ html/ 11_ecuaciones_de_un_mru. html
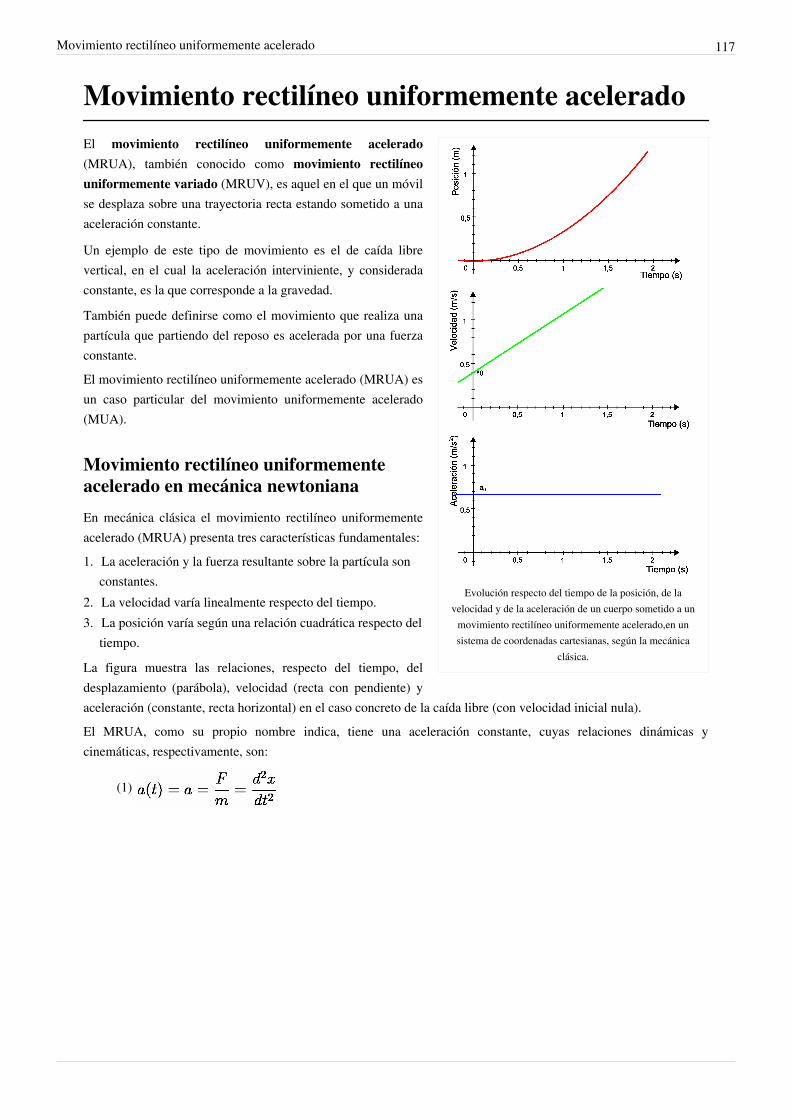
Movimiento rectilíneo uniformemente acelerado 117
Movimiento rectilíneo uniformemente acelerado
Evolución respecto del tiempo de la posición, de lavelocidad y de la aceleración de un cuerpo sometido a un
movimiento rectilíneo uniformemente acelerado,en unsistema de coordenadas cartesianas, según la mecánica
clásica.
El movimiento rectilíneo uniformemente acelerado(MRUA), también conocido como movimiento rectilíneouniformemente variado (MRUV), es aquel en el que un móvilse desplaza sobre una trayectoria recta estando sometido a unaaceleración constante.
Un ejemplo de este tipo de movimiento es el de caída librevertical, en el cual la aceleración interviniente, y consideradaconstante, es la que corresponde a la gravedad.
También puede definirse como el movimiento que realiza unapartícula que partiendo del reposo es acelerada por una fuerzaconstante.El movimiento rectilíneo uniformemente acelerado (MRUA) esun caso particular del movimiento uniformemente acelerado(MUA).
Movimiento rectilíneo uniformementeacelerado en mecánica newtoniana
En mecánica clásica el movimiento rectilíneo uniformementeacelerado (MRUA) presenta tres características fundamentales:1. La aceleración y la fuerza resultante sobre la partícula son
constantes.2. La velocidad varía linealmente respecto del tiempo.3. La posición varía según una relación cuadrática respecto del
tiempo.
La figura muestra las relaciones, respecto del tiempo, deldesplazamiento (parábola), velocidad (recta con pendiente) yaceleración (constante, recta horizontal) en el caso concreto de la caída libre (con velocidad inicial nula).El MRUA, como su propio nombre indica, tiene una aceleración constante, cuyas relaciones dinámicas ycinemáticas, respectivamente, son:
(1)
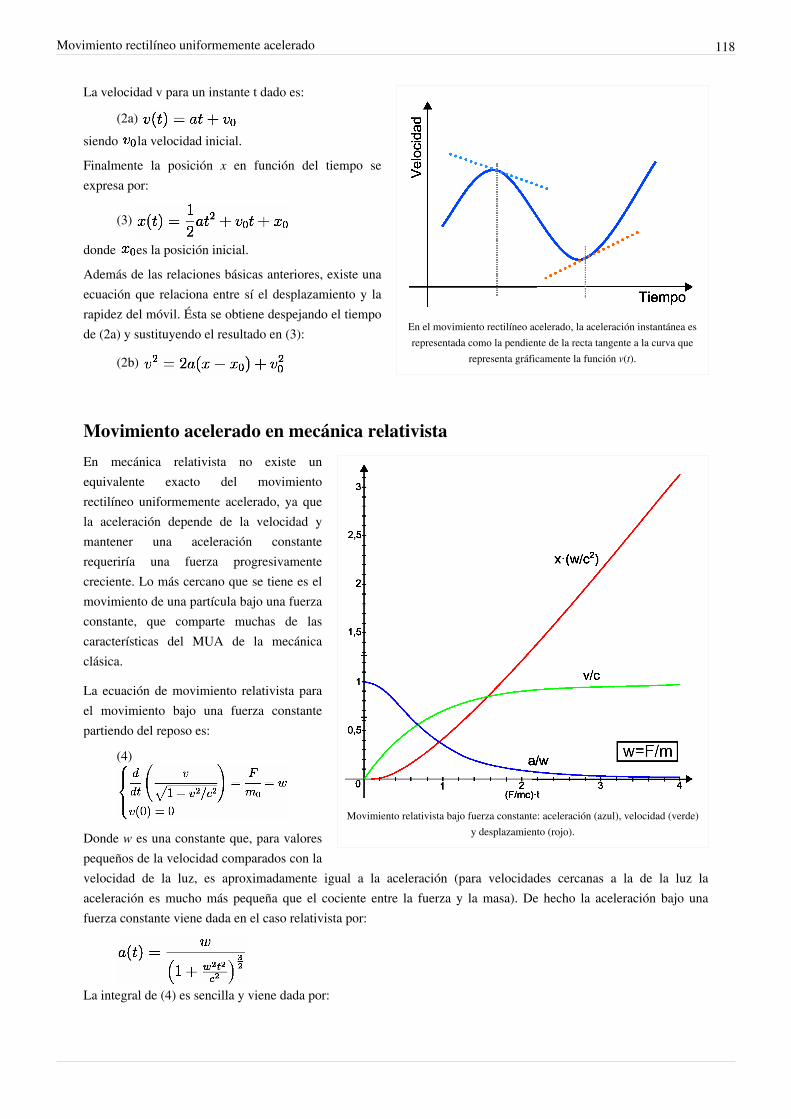
Movimiento rectilíneo uniformemente acelerado 118
En el movimiento rectilíneo acelerado, la aceleración instantánea esrepresentada como la pendiente de la recta tangente a la curva que
representa gráficamente la función v(t).
La velocidad v para un instante t dado es:
(2a) siendo la velocidad inicial.Finalmente la posición x en función del tiempo seexpresa por:
(3)
donde es la posición inicial.Además de las relaciones básicas anteriores, existe unaecuación que relaciona entre sí el desplazamiento y larapidez del móvil. Ésta se obtiene despejando el tiempode (2a) y sustituyendo el resultado en (3):
(2b)
Movimiento acelerado en mecánica relativista
Movimiento relativista bajo fuerza constante: aceleración (azul), velocidad (verde)y desplazamiento (rojo).
En mecánica relativista no existe unequivalente exacto del movimientorectilíneo uniformemente acelerado, ya quela aceleración depende de la velocidad ymantener una aceleración constanterequeriría una fuerza progresivamentecreciente. Lo más cercano que se tiene es elmovimiento de una partícula bajo una fuerzaconstante, que comparte muchas de lascaracterísticas del MUA de la mecánicaclásica.
La ecuación de movimiento relativista parael movimiento bajo una fuerza constantepartiendo del reposo es:
(4)
Donde w es una constante que, para valorespequeños de la velocidad comparados con lavelocidad de la luz, es aproximadamente igual a la aceleración (para velocidades cercanas a la de la luz laaceleración es mucho más pequeña que el cociente entre la fuerza y la masa). De hecho la aceleración bajo unafuerza constante viene dada en el caso relativista por:
La integral de (4) es sencilla y viene dada por:

Movimiento rectilíneo uniformemente acelerado 119
(5)
E integrando esta última ecuación, suponiendo que inicialmente la partícula ocupaba la posición x = 0, se llega a:
(6)
En este caso el tiempo propio de la partícula acelerada se puede calcular en función del tiempo coordenado tmediante la expresión:
(7)
Todas estas expresiones pueden generalizarse fácilmente al caso de un movimiento uniformemente acelerado, cuyatrayectoria es más complicada que la parábola, tal como sucede en el caso clásico cuando el movimiento se da sobreun plano.
Observadores de RindlerEl tratamiento de los observadores uniformemente acelerados en el espacio-tiempo de Minkowski se realizahabitualmente usando las llamadas coordenadas de Rindler para dicho espacio, un observador acelerado quedarepresentado por un sistema de referencia asociado a unas coordenadas de Rindler. Partiendo de las coordenadascartesianas la métrica de dicho espacio-tiempo:
Considérese ahora la región conocida como "cuña de Rindler", dada por el conjunto de puntos que verifican:
Y defínase sobre ella un cambio de coordenadas dado por las transformaciones siguientes:
Donde:, es un parámetro relacionado con la aceleración del observador.[1]
, son las coordenadas temporal y espaciales medidas por dicho observador.Usando estas coordenadas, la cuña de Rindler del espacio de Minkowski tiene una métrica, expresada en las nuevascoordenadas, dada por la expresión:
Puede que estas coordenadas representen a un observador acelerado según el eje X, cuya cuadriaceleración obtenidacomo derivada covariante de la cuadrivelocidad está relacionada con el valor de la coordenada x:

Movimiento rectilíneo uniformemente acelerado 120
Horizonte de RindlerEs interesante notar que un observador uniformemente acelerado tiene horizonte de eventos, es decir existe unasuperficie espacial (que coincide con la frontera de la cuña de Rindler):
tal que la luz del otro lado jamás alcanzaría al observador acelerado. Este horizonte de sucesos es del mismo tipo queel horizonte de sucesos que ve un obsevador situado fuera de un agujero negro. Es decir, los eventos al otro lado delhorizonte de eventos no pueden ser vistos por estos observadores.El ejemplo de las coordenadas de Rindler muestra que la ocurrencia de un horizonte de eventos no está asociada alpropio espacio-tiempo sino a ciertos observadores. Las coordenadas de Rindler constituyen una cartografía delespacio-tiempo plano de Minkowski. En dicho espacio un observador inercial no ve ningún horizonte de eventospero sí lo ve un observador acelerado.
Movimiento acelerado en mecánica cuántica
Movimiento bajo fuerza constante en mecánica cuánticaEn mecánica cuántica no se puede hablar de trayectorias ya que la posición de la partícula no puede determinarse conprecisión arbitraria, por lo que sólo existen análogos cuánticos imperfectos del movimiento rectilíneo clásico. Elequivalente cuántico más simple de movimiento uniformemente acelerado es el de una partícula cuántica (norelativista y sin espín) en un campo de fuerzas conservativo en el que la energía potencial es una función lineal de lacoordenada.
La solución general de esta ecuación puede escribirse como transformada de Fourier del conjunto de soluciones de laecuación estacionaria:
Donde la amplitud es una función de la energía que debe escogerse para satisfacer las condiciones iniciales y lafunción en el integrando debe ser solución de la ecuación de Schrödinger estacionaria:
Donde:es la constante de Planck racionalizada.es la masa de la partícula.
es la fuerza que se ejerce sobre la partícula.es la energía de un estado estacionario del hamiltoniano cuántico.
Haciendo el cambio de variable:
Entonces la ecuación (*) equivale a la ecuación:
Que es la ecuación de Airy, por lo que la solución general de la ecuación de Schrödinger queda en términos defunciones Airy:
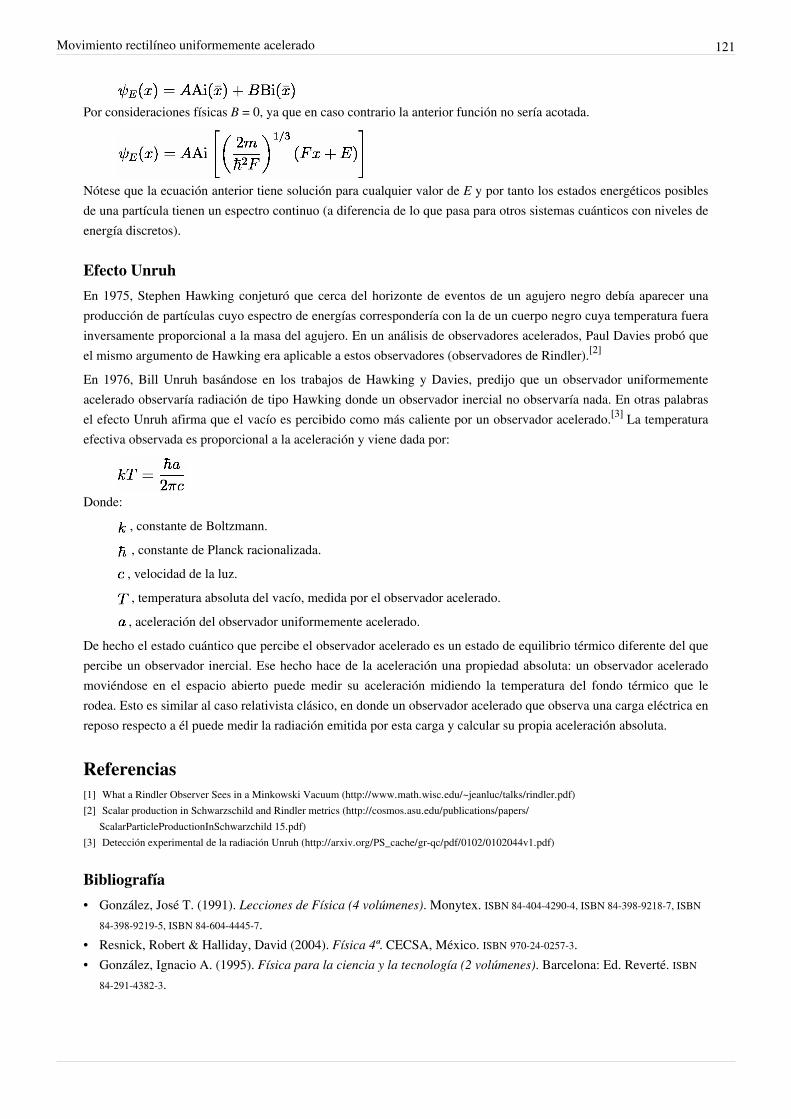
Movimiento rectilíneo uniformemente acelerado 121
Por consideraciones físicas B = 0, ya que en caso contrario la anterior función no sería acotada.
Nótese que la ecuación anterior tiene solución para cualquier valor de E y por tanto los estados energéticos posiblesde una partícula tienen un espectro continuo (a diferencia de lo que pasa para otros sistemas cuánticos con niveles deenergía discretos).
Efecto UnruhEn 1975, Stephen Hawking conjeturó que cerca del horizonte de eventos de un agujero negro debía aparecer unaproducción de partículas cuyo espectro de energías correspondería con la de un cuerpo negro cuya temperatura fuerainversamente proporcional a la masa del agujero. En un análisis de observadores acelerados, Paul Davies probó queel mismo argumento de Hawking era aplicable a estos observadores (observadores de Rindler).[2]
En 1976, Bill Unruh basándose en los trabajos de Hawking y Davies, predijo que un observador uniformementeacelerado observaría radiación de tipo Hawking donde un observador inercial no observaría nada. En otras palabrasel efecto Unruh afirma que el vacío es percibido como más caliente por un observador acelerado.[3] La temperaturaefectiva observada es proporcional a la aceleración y viene dada por:
Donde:, constante de Boltzmann., constante de Planck racionalizada.
, velocidad de la luz., temperatura absoluta del vacío, medida por el observador acelerado., aceleración del observador uniformemente acelerado.
De hecho el estado cuántico que percibe el observador acelerado es un estado de equilibrio térmico diferente del quepercibe un observador inercial. Ese hecho hace de la aceleración una propiedad absoluta: un observador aceleradomoviéndose en el espacio abierto puede medir su aceleración midiendo la temperatura del fondo térmico que lerodea. Esto es similar al caso relativista clásico, en donde un observador acelerado que observa una carga eléctrica enreposo respecto a él puede medir la radiación emitida por esta carga y calcular su propia aceleración absoluta.
Referencias[1] What a Rindler Observer Sees in a Minkowski Vacuum (http:/ / www. math. wisc. edu/ ~jeanluc/ talks/ rindler. pdf)[2] Scalar production in Schwarzschild and Rindler metrics (http:/ / cosmos. asu. edu/ publications/ papers/
ScalarParticleProductionInSchwarzchild 15. pdf)[3] Detección experimental de la radiación Unruh (http:/ / arxiv. org/ PS_cache/ gr-qc/ pdf/ 0102/ 0102044v1. pdf)
Bibliografía• González, José T. (1991). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN 84-398-9218-7, ISBN
84-398-9219-5, ISBN 84-604-4445-7.• Resnick, Robert & Halliday, David (2004). Física 4ª. CECSA, México. ISBN 970-24-0257-3.• González, Ignacio A. (1995). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.
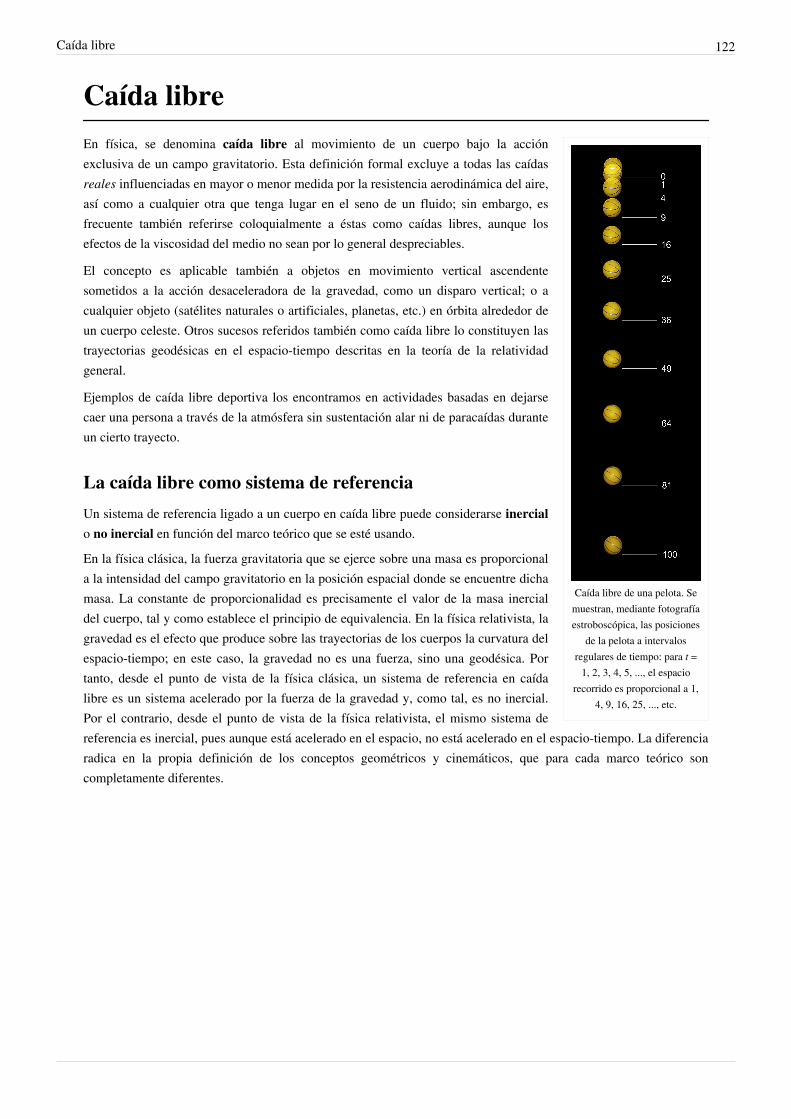
Caída libre 122
Caída libre
Caída libre de una pelota. Semuestran, mediante fotografíaestroboscópica, las posiciones
de la pelota a intervalosregulares de tiempo: para t =
1, 2, 3, 4, 5, ..., el espaciorecorrido es proporcional a 1,
4, 9, 16, 25, ..., etc.
En física, se denomina caída libre al movimiento de un cuerpo bajo la acciónexclusiva de un campo gravitatorio. Esta definición formal excluye a todas las caídasreales influenciadas en mayor o menor medida por la resistencia aerodinámica del aire,así como a cualquier otra que tenga lugar en el seno de un fluido; sin embargo, esfrecuente también referirse coloquialmente a éstas como caídas libres, aunque losefectos de la viscosidad del medio no sean por lo general despreciables.
El concepto es aplicable también a objetos en movimiento vertical ascendentesometidos a la acción desaceleradora de la gravedad, como un disparo vertical; o acualquier objeto (satélites naturales o artificiales, planetas, etc.) en órbita alrededor deun cuerpo celeste. Otros sucesos referidos también como caída libre lo constituyen lastrayectorias geodésicas en el espacio-tiempo descritas en la teoría de la relatividadgeneral.
Ejemplos de caída libre deportiva los encontramos en actividades basadas en dejarsecaer una persona a través de la atmósfera sin sustentación alar ni de paracaídas duranteun cierto trayecto.
La caída libre como sistema de referencia
Un sistema de referencia ligado a un cuerpo en caída libre puede considerarse inercialo no inercial en función del marco teórico que se esté usando.
En la física clásica, la fuerza gravitatoria que se ejerce sobre una masa es proporcionala la intensidad del campo gravitatorio en la posición espacial donde se encuentre dichamasa. La constante de proporcionalidad es precisamente el valor de la masa inercialdel cuerpo, tal y como establece el principio de equivalencia. En la física relativista, lagravedad es el efecto que produce sobre las trayectorias de los cuerpos la curvatura delespacio-tiempo; en este caso, la gravedad no es una fuerza, sino una geodésica. Portanto, desde el punto de vista de la física clásica, un sistema de referencia en caídalibre es un sistema acelerado por la fuerza de la gravedad y, como tal, es no inercial.Por el contrario, desde el punto de vista de la física relativista, el mismo sistema dereferencia es inercial, pues aunque está acelerado en el espacio, no está acelerado en el espacio-tiempo. La diferenciaradica en la propia definición de los conceptos geométricos y cinemáticos, que para cada marco teórico soncompletamente diferentes.

Caída libre 123
Caída libre ideal
Animación de la caída libre.
En la caída libre ideal, se desprecia la resistencia aerodinámica que presenta el aire almovimiento del cuerpo, analizando lo que pasaría en el vacío. En esas condiciones, laaceleración que adquiriría el cuerpo sería debida exclusivamente a la gravedad, siendoindependiente de su masa; por ejemplo, si dejáramos caer una bala de cañón y unapluma en el vacío, ambos adquirirían la misma aceleración, , que es la aceleraciónde la gravedad
Ecuación del movimiento
De acuerdo a la segunda ley de Newton, la fuerza que actúa sobre un cuerpo esigual al producto de su masa por la aceleración que adquiere. En caída libre sólointervienen el peso (vertical, hacia abajo) y el rozamiento aerodinámico en lamisma dirección, y sentido opuesto a la velocidad. Dentro de un campo gravitatorioaproximadamente constante, la ecuación del movimiento de caída libre es:
La aceleración de la gravedad lleva signo negativo porque se toma el eje verticalcomo positivo hacia arriba.
Trayectoria en caída libre
Caída libre totalmente vertical
El movimiento del cuerpo en caída libre es vertical con velocidad creciente(aproximadamente movimiento uniformemente acelerado con aceleración g) (aproximadamente porque la velocidadaumenta cuando el objeto disminuye en altura, en la mayoría de los casos la variación es despreciable). La ecuaciónde movimiento se puede escribir en términos la altura y:
(1) donde:
, son la aceleración y la velocidad verticales.
, es la fuerza de rozamiento fluidodinámico (que aumenta con la velocidad).• Si, en primera aproximación, se desprecia la fuerza de rozamiento, cosa que puede hacerse para caídas desde
pequeñas alturas de cuerpos relativamente compactos, en las que se alcanzan velocidades moderadas, la soluciónde la ecuación diferencial (1) para las velocidades y la altura vienen dada por:
donde v0 es la velocidad inicial, para una caída desde el reposo v0 = 0 y h0 es la altura inicial de caída.• Para grandes alturas u objetos de gran superficie (una pluma, un paracaídas) es necesario tener en cuenta la
resistencia fluidodinámica que suele ser modelizada como una fuerza proporcional a la velocidad, siendo laconstante de proporcionalidad el llamado rozamiento aerodinámico kw:
(2) En este caso la variación con el tiempo de la velocidad y el espacio recorrido vienen dados por la solución de laecuación diferencial (2):

Caída libre 124
Nótese que en este caso existe una velocidad límite dada por el rozamiento aerodinámico y la masa del cuerpo quecae:
• Un análisis más cuidadoso de la fricción de un fluido revelaría que a grandes velocidades el flujo alrededor de unobjeto no puede considerarse laminar, sino turbulento y se producen remolinos alrededor del objeto que cae de talmanera que la fuerza de fricción se vuelve proporcional al cuadrado de la velocidad:
(3)
Donde:, es el coeficiente aerodinámico de resistencia al avance, que sólo depende de la forma del cuerpo., es el área transversal a la dirección del movimiento.
, es la densidad del fluido.
, es el signo de la velocidad.La velocidad límite puede calcularse fácilmente poniendo igual a cero la aceleración en la ecuación (3):
La solución analítica de la ecuación diferencial (3) depende del signo relativo de la fuerza de rozamiento y el pesopor lo que la solución analítica es diferente para un cuerpo que sube o para uno que cae. La solución de velocidadespara ambos casos es:
Donde: .Si se integran las ecuaciones anteriores para el caso de caída libre desde una altura y velocidad inicial nula y parael caso de lanzamiento vertical desde una altura nula con una velocidad inicial se obtienen los siguientesresultados para la altura del cuerpo:Caída libre ( y ):
El tiempo transcurrido en la caída desde la altura hasta la altura puede obtenerse al reordenar laecuación anterior:
Lanzamiento vertical ( y ):

Caída libre 125
Si la altura es aquella en que la velocidad vertical se hace cero, entonces el tiempo transcurrido desde ellanzamiento hasta el instante en que se alcanza la altura puede calcularse como:
Se puede demostrar que el tiempo que tarda un cuerpo en caer desde una altura hasta el suelo a través del aire esmayor que el que tarda el mismo cuerpo en alcanzar la alura máxima de si es lanzado desde el suelo. Para ellobasta con probar la desigualdad siguiente:
sabiendo que y que
Intuitivamente la diferencia de tiempos es clara, en el tiro hacia arriba la velocidad inicial es mayor por lo que lafuerza de rozamiento promedio a lo largo de la trayectoria también es mayor que la que se alcanza en tiro haciaabajo.
Caída libre parabólica y casi-parabólicaCuando un cuerpo cae en caída libre pero no parte del reposo porque tiene una velocidad no nula, entonces latrayectoria de caída no es una recta sino una curva aproximadamente parabólica. La ecuación de la trayectoria encoordenadas cartesianas viene dada por:
(4)

Caída libre 126
Rozamiento -kw
v. Trayectorias casi parabólicas con rozamientoproporcional a la velocidad, para cinco valores diferentes de lavelocidad horizontal β = 1,5 - 2,5 - 3,5 - 4,5, desde una altura h
= 7δ.
donde x es la coordenada horizontal (eje de abcisas) e y lacoordenada vertical (eje de ordenadas).
La expresión de la velocidad vertical debe reescribirse enfunción de la coordenada x teniendo en cuenta que t = x/vx.Pueden distinguirse los siguientes casos:
•• Para un cuerpo en caída libre sin rozamiento, latrayectoria es exactamente una parábola dada por:
•• Cuando se incluye el rozamiento aerodinámico, latrayectoria no es exactamente una parábola. Por ejemplopara una fuerza de rozamiento proporcional a lavelocidad como en la (2) la trayectoria resulta ser:
donde:
Para una fuerza de rozamiento proporcional al cuadrado dela velocidad, la integración de las ecuaciones delmovimiento es más compleja, presuponiendo fuerzas derozamiento independientes en dirección horizontal yvertical proporcionales al cuadrado del valor de lacomponente:
La trayectoria viene dada por:
donde:
Las figuras adjuntas muestran la forma de las trayectorias para cinco valores diferentes del parámetro β para unamisma altura de caída (medida en unidades de longitud δ).
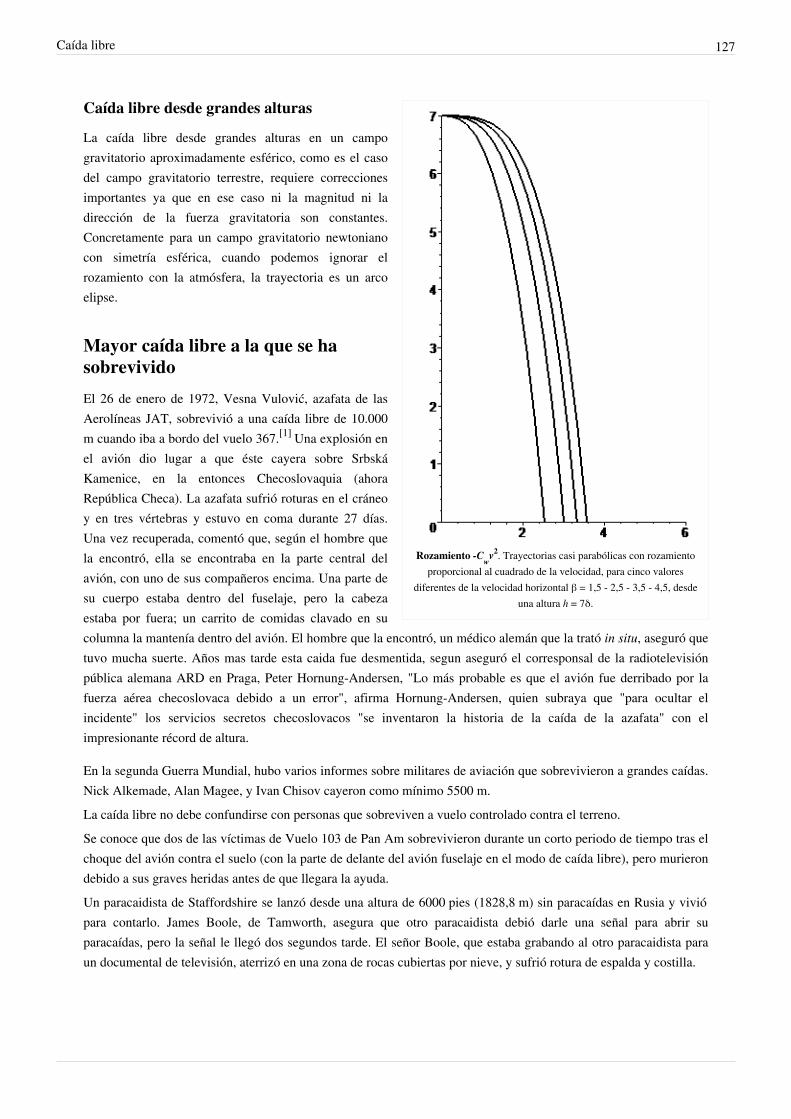
Caída libre 127
Rozamiento -Cw
v2. Trayectorias casi parabólicas con rozamientoproporcional al cuadrado de la velocidad, para cinco valores
diferentes de la velocidad horizontal β = 1,5 - 2,5 - 3,5 - 4,5, desdeuna altura h = 7δ.
Caída libre desde grandes alturas
La caída libre desde grandes alturas en un campogravitatorio aproximadamente esférico, como es el casodel campo gravitatorio terrestre, requiere correccionesimportantes ya que en ese caso ni la magnitud ni ladirección de la fuerza gravitatoria son constantes.Concretamente para un campo gravitatorio newtonianocon simetría esférica, cuando podemos ignorar elrozamiento con la atmósfera, la trayectoria es un arcoelipse.
Mayor caída libre a la que se hasobrevivido
El 26 de enero de 1972, Vesna Vulović, azafata de lasAerolíneas JAT, sobrevivió a una caída libre de 10.000m cuando iba a bordo del vuelo 367.[1] Una explosión enel avión dio lugar a que éste cayera sobre SrbskáKamenice, en la entonces Checoslovaquia (ahoraRepública Checa). La azafata sufrió roturas en el cráneoy en tres vértebras y estuvo en coma durante 27 días.Una vez recuperada, comentó que, según el hombre quela encontró, ella se encontraba en la parte central delavión, con uno de sus compañeros encima. Una parte desu cuerpo estaba dentro del fuselaje, pero la cabezaestaba por fuera; un carrito de comidas clavado en sucolumna la mantenía dentro del avión. El hombre que la encontró, un médico alemán que la trató in situ, aseguró quetuvo mucha suerte. Años mas tarde esta caida fue desmentida, segun aseguró el corresponsal de la radiotelevisiónpública alemana ARD en Praga, Peter Hornung-Andersen, "Lo más probable es que el avión fue derribado por lafuerza aérea checoslovaca debido a un error", afirma Hornung-Andersen, quien subraya que "para ocultar elincidente" los servicios secretos checoslovacos "se inventaron la historia de la caída de la azafata" con elimpresionante récord de altura.
En la segunda Guerra Mundial, hubo varios informes sobre militares de aviación que sobrevivieron a grandes caídas.Nick Alkemade, Alan Magee, y Ivan Chisov cayeron como mínimo 5500 m.La caída libre no debe confundirse con personas que sobreviven a vuelo controlado contra el terreno.Se conoce que dos de las víctimas de Vuelo 103 de Pan Am sobrevivieron durante un corto periodo de tiempo tras elchoque del avión contra el suelo (con la parte de delante del avión fuselaje en el modo de caída libre), pero murierondebido a sus graves heridas antes de que llegara la ayuda.Un paracaidista de Staffordshire se lanzó desde una altura de 6000 pies (1828,8 m) sin paracaídas en Rusia y viviópara contarlo. James Boole, de Tamworth, asegura que otro paracaidista debió darle una señal para abrir suparacaídas, pero la señal le llegó dos segundos tarde. El señor Boole, que estaba grabando al otro paracaidista paraun documental de televisión, aterrizó en una zona de rocas cubiertas por nieve, y sufrió rotura de espalda y costilla.
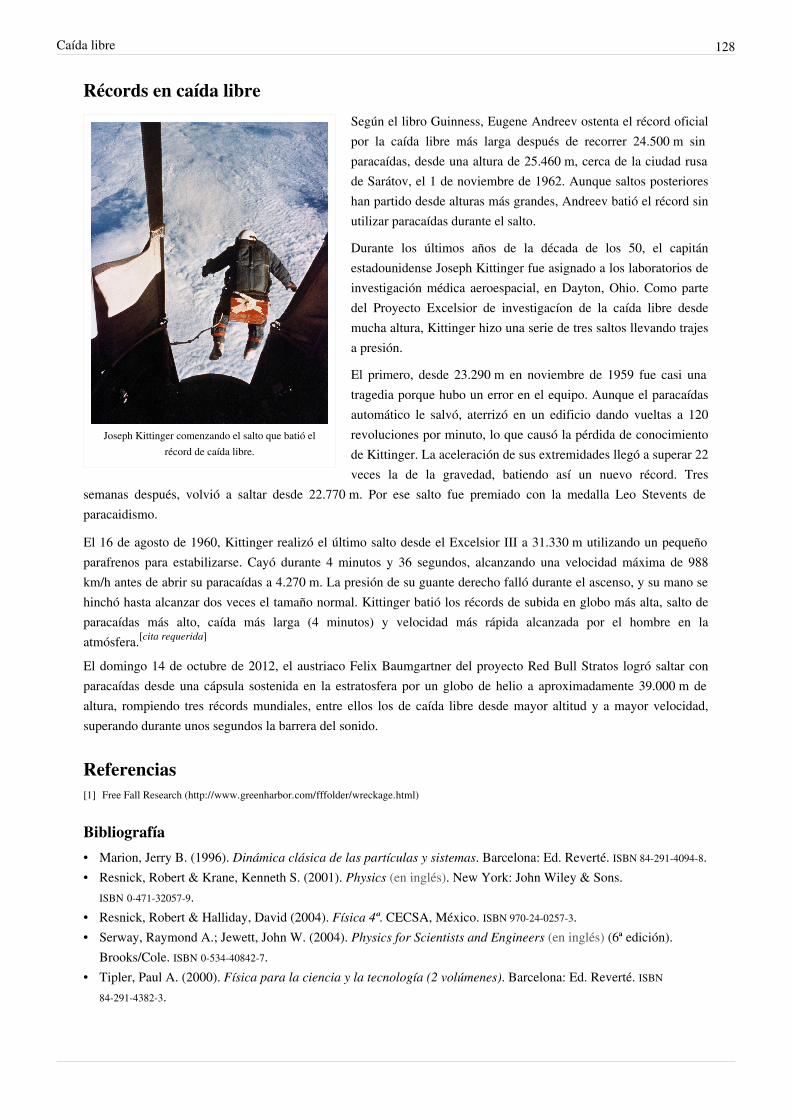
Caída libre 128
Récords en caída libre
Joseph Kittinger comenzando el salto que batió elrécord de caída libre.
Según el libro Guinness, Eugene Andreev ostenta el récord oficialpor la caída libre más larga después de recorrer 24.500 m sinparacaídas, desde una altura de 25.460 m, cerca de la ciudad rusade Sarátov, el 1 de noviembre de 1962. Aunque saltos posterioreshan partido desde alturas más grandes, Andreev batió el récord sinutilizar paracaídas durante el salto.
Durante los últimos años de la década de los 50, el capitánestadounidense Joseph Kittinger fue asignado a los laboratorios deinvestigación médica aeroespacial, en Dayton, Ohio. Como partedel Proyecto Excelsior de investigacíon de la caída libre desdemucha altura, Kittinger hizo una serie de tres saltos llevando trajesa presión.
El primero, desde 23.290 m en noviembre de 1959 fue casi unatragedia porque hubo un error en el equipo. Aunque el paracaídasautomático le salvó, aterrizó en un edificio dando vueltas a 120revoluciones por minuto, lo que causó la pérdida de conocimientode Kittinger. La aceleración de sus extremidades llegó a superar 22veces la de la gravedad, batiendo así un nuevo récord. Tres
semanas después, volvió a saltar desde 22.770 m. Por ese salto fue premiado con la medalla Leo Stevents deparacaidismo.
El 16 de agosto de 1960, Kittinger realizó el último salto desde el Excelsior III a 31.330 m utilizando un pequeñoparafrenos para estabilizarse. Cayó durante 4 minutos y 36 segundos, alcanzando una velocidad máxima de 988km/h antes de abrir su paracaídas a 4.270 m. La presión de su guante derecho falló durante el ascenso, y su mano sehinchó hasta alcanzar dos veces el tamaño normal. Kittinger batió los récords de subida en globo más alta, salto deparacaídas más alto, caída más larga (4 minutos) y velocidad más rápida alcanzada por el hombre en laatmósfera.[cita requerida]
El domingo 14 de octubre de 2012, el austriaco Felix Baumgartner del proyecto Red Bull Stratos logró saltar conparacaídas desde una cápsula sostenida en la estratosfera por un globo de helio a aproximadamente 39.000 m dealtura, rompiendo tres récords mundiales, entre ellos los de caída libre desde mayor altitud y a mayor velocidad,superando durante unos segundos la barrera del sonido.
Referencias[1] Free Fall Research (http:/ / www. greenharbor. com/ fffolder/ wreckage. html)
Bibliografía• Marion, Jerry B. (1996). Dinámica clásica de las partículas y sistemas. Barcelona: Ed. Reverté. ISBN 84-291-4094-8.• Resnick, Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
ISBN 0-471-32057-9.• Resnick, Robert & Halliday, David (2004). Física 4ª. CECSA, México. ISBN 970-24-0257-3.• Serway, Raymond A.; Jewett, John W. (2004). Physics for Scientists and Engineers (en inglés) (6ª edición).
Brooks/Cole. ISBN 0-534-40842-7.• Tipler, Paul A. (2000). Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.
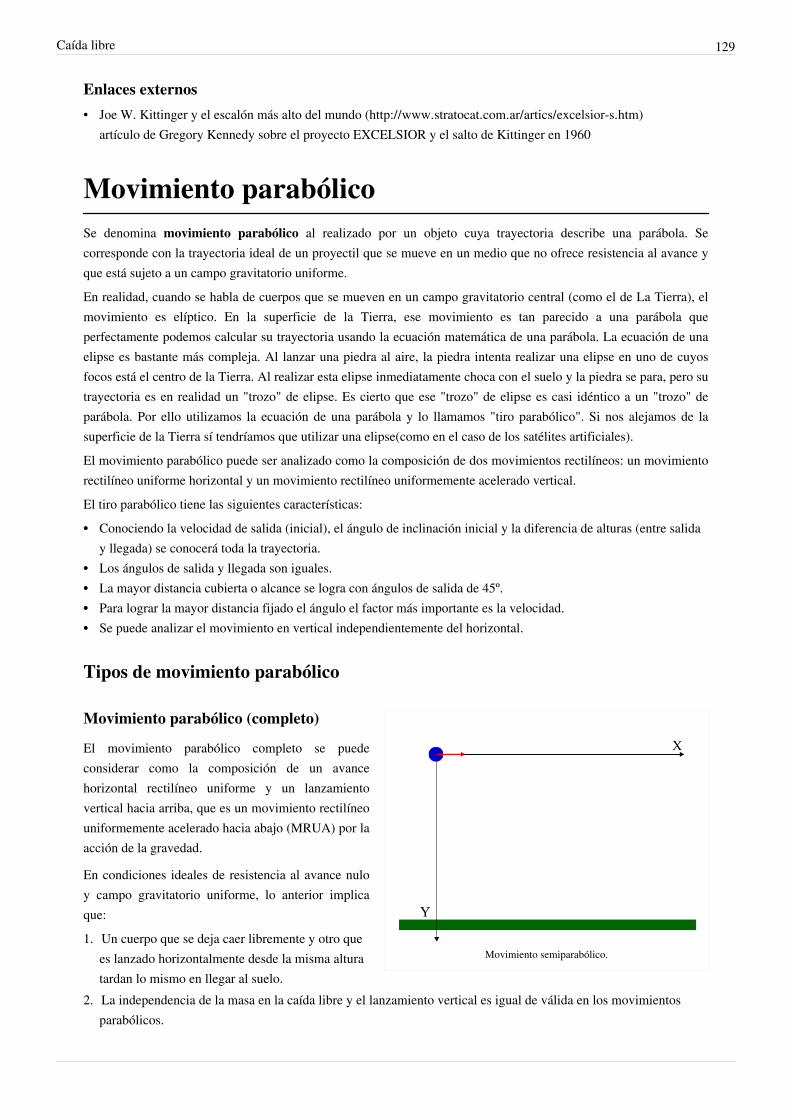
Caída libre 129
Enlaces externos• Joe W. Kittinger y el escalón más alto del mundo (http:/ / www. stratocat. com. ar/ artics/ excelsior-s. htm)
artículo de Gregory Kennedy sobre el proyecto EXCELSIOR y el salto de Kittinger en 1960
Movimiento parabólicoSe denomina movimiento parabólico al realizado por un objeto cuya trayectoria describe una parábola. Secorresponde con la trayectoria ideal de un proyectil que se mueve en un medio que no ofrece resistencia al avance yque está sujeto a un campo gravitatorio uniforme.En realidad, cuando se habla de cuerpos que se mueven en un campo gravitatorio central (como el de La Tierra), elmovimiento es elíptico. En la superficie de la Tierra, ese movimiento es tan parecido a una parábola queperfectamente podemos calcular su trayectoria usando la ecuación matemática de una parábola. La ecuación de unaelipse es bastante más compleja. Al lanzar una piedra al aire, la piedra intenta realizar una elipse en uno de cuyosfocos está el centro de la Tierra. Al realizar esta elipse inmediatamente choca con el suelo y la piedra se para, pero sutrayectoria es en realidad un "trozo" de elipse. Es cierto que ese "trozo" de elipse es casi idéntico a un "trozo" deparábola. Por ello utilizamos la ecuación de una parábola y lo llamamos "tiro parabólico". Si nos alejamos de lasuperficie de la Tierra sí tendríamos que utilizar una elipse(como en el caso de los satélites artificiales).El movimiento parabólico puede ser analizado como la composición de dos movimientos rectilíneos: un movimientorectilíneo uniforme horizontal y un movimiento rectilíneo uniformemente acelerado vertical.El tiro parabólico tiene las siguientes características:•• Conociendo la velocidad de salida (inicial), el ángulo de inclinación inicial y la diferencia de alturas (entre salida
y llegada) se conocerá toda la trayectoria.•• Los ángulos de salida y llegada son iguales.•• La mayor distancia cubierta o alcance se logra con ángulos de salida de 45º.•• Para lograr la mayor distancia fijado el ángulo el factor más importante es la velocidad.•• Se puede analizar el movimiento en vertical independientemente del horizontal.
Tipos de movimiento parabólico
Movimiento semiparabólico.
Movimiento parabólico (completo)
El movimiento parabólico completo se puedeconsiderar como la composición de un avancehorizontal rectilíneo uniforme y un lanzamientovertical hacia arriba, que es un movimiento rectilíneouniformemente acelerado hacia abajo (MRUA) por laacción de la gravedad.
En condiciones ideales de resistencia al avance nuloy campo gravitatorio uniforme, lo anterior implicaque:1. Un cuerpo que se deja caer libremente y otro que
es lanzado horizontalmente desde la misma alturatardan lo mismo en llegar al suelo.
2. La independencia de la masa en la caída libre y el lanzamiento vertical es igual de válida en los movimientosparabólicos.
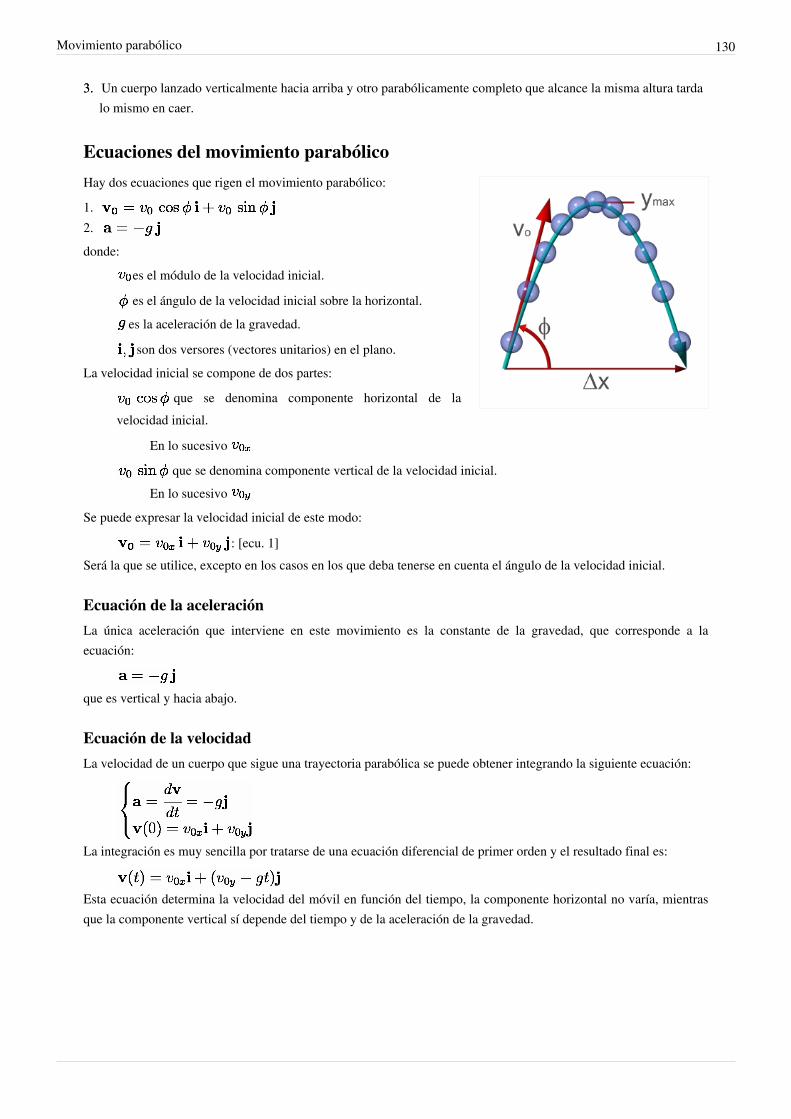
Movimiento parabólico 130
3.3. Un cuerpo lanzado verticalmente hacia arriba y otro parabólicamente completo que alcance la misma altura tardalo mismo en caer.
Ecuaciones del movimiento parabólico
Hay dos ecuaciones que rigen el movimiento parabólico:
1.2.donde:
es el módulo de la velocidad inicial.
es el ángulo de la velocidad inicial sobre la horizontal.es la aceleración de la gravedad.
son dos versores (vectores unitarios) en el plano.La velocidad inicial se compone de dos partes:
que se denomina componente horizontal de lavelocidad inicial.
En lo sucesivo
que se denomina componente vertical de la velocidad inicial.En lo sucesivo
Se puede expresar la velocidad inicial de este modo:
: [ecu. 1]Será la que se utilice, excepto en los casos en los que deba tenerse en cuenta el ángulo de la velocidad inicial.
Ecuación de la aceleraciónLa única aceleración que interviene en este movimiento es la constante de la gravedad, que corresponde a laecuación:
que es vertical y hacia abajo.
Ecuación de la velocidadLa velocidad de un cuerpo que sigue una trayectoria parabólica se puede obtener integrando la siguiente ecuación:
La integración es muy sencilla por tratarse de una ecuación diferencial de primer orden y el resultado final es:
Esta ecuación determina la velocidad del móvil en función del tiempo, la componente horizontal no varía, mientrasque la componente vertical sí depende del tiempo y de la aceleración de la gravedad.

Movimiento parabólico 131
Ecuación de la posición
Partiendo de la ecuación que establece la velocidad del móvil con la relación al tiempo y de la definición develocidad, la posición puede ser encontrada integrando de la siguiente ecuación diferencial:
La integración es muy sencilla por tratarse de una ecuación diferencial de primer orden y el resultado final es:
La trayectoria del movimiento parabólico está formada por la combinación de dos movimientos, uno horizontal develocidad constante, y otro vertical uniformemente acelerado; la conjugación de los dos da como resultado unaparábola.
Movimiento parabólico con rozamientoCuando consideramos el rozamiento la trayectoria es casi una parábola pero no exactamente. El estudio de latrayectoria en ese caso es considerado por la balística.
Generalizaciones relativistasEn teoría de la relatividad para un que un móvil ejecute una trayectoria parabólica se requiere un campo de fuerzasno uniforme o una fuerza dependiente del tiempo. Sin embargo, es interesante estudiar un análogo aproximado quesería el de un móvil sometido a una fuerza constante que no sea paralela a la velocidad, esto ocasiona un movimientocuasiparabólico. Este es, por ejemplo, con gran aproximación el movimiento que ejecuta un electrón u otra partículacargada frente a una placa plana cargada uniformemente (condensador plano). La ecuación de movimiento relativistapara el movimiento bajo una fuerza constante, alineada con la dirección X es:

Movimiento parabólico 132
Donde w es una constante que, para valores pequeños de la velocidad comparados con la velocidad de la luz, esaproximadamente igual a la aceleración (para velocidades cercanas a la de la luz la aceleración es mucho máspequeña que el cociente entre la fuerza y la masa).
Movimiento circular uniformeEn física, el movimiento circular uniforme (también denominado movimiento uniformemente circular) describeel movimiento de un cuerpo atravesando, con rapidez constante, una trayectoria circular.Aunque la rapidez del objeto es constante, su velocidad no lo es: La velocidad, una magnitud vectorial, tangente a latrayectoria, en cada instante cambia de dirección. Esta circunstancia implica la existencia de una aceleración que, sibien en este caso no varía al módulo de la velocidad, sí varía su dirección.
Cinemática del MCU en mecánica clásica
Ángulo y velocidad angularEl ángulo abarcado en un movimiento circular es igual al cociente entre la longitud del arco de circunferenciarecorrida y el radio.La longitud del arco y el radio de la circunferencia son magnitudes de longitud, por lo que el desplazamiento angulares una magnitud adimensional, llamada radián. Un radián es un arco de circunferencia de longitud igual al radio de lacircunferencia, y la circunferencia completa tiene radianes.La velocidad angular es la variación del desplazamiento angular por unidad de tiempo:
Partiendo de estos conceptos se estudian las condiciones del movimiento circular uniforme, en cuanto a sutrayectoria y espacio recorrido, velocidad y aceleración, según el modelo físico cinemático.
Posición
Se considera un sistema de referencia en el plano xy, con vectoresunitarios en la dirección de estos ejes . La posición de lapartícula en función del ángulo de giro y del radio r es en unsistema de referencia cartesiano xy:
De modo que el vector de posición de la partícula en función deltiempo es:
siendo:: es el vector de posición de la partícula.: es el radio de la trayectoria.
Al ser un movimiento uniforme, a iguales incrementos de tiempo le corresponden iguales desplazamientos angulares,lo que se define como velocidad angular (ω):

Movimiento circular uniforme 133
El ángulo (φ), debe medirse en radianes:
donde s es la serpiente longitudinal del arco de circunferenciaSegún esta definición:1 vuelta = 360° = 2 π radianes½ vuelta = 180° = π radianes¼ de vuelta = 90° = π /2 radianes
Velocidad tangencialLa velocidad se obtiene a partir del vector de posición mediante derivación tangencial:
La relación entre la velocidad angular y la velocidad tangencial es:
El vector velocidad es tangente a la trayectoria, lo que puede comprobarse fácilmente efectuando el producto escalary comprobando que es nulo.
AceleraciónLa aceleración se obtiene a partir del vector velocidad con la derivación:
de modo que
Así pues, el vector aceleración tiene dirección opuesta al vector de posición, normal a la trayectoria y apuntandosiempre hacia el centro de la trayectoria circular. por lo que acostumbramos a referirnos a ella como aceleraciónnormal o centrípeta.El módulo de la aceleración es el cuadrado de la velocidad angular por el radio de giro, aunque lo podemos expresartambién en función de la celeridad de la partícula, ya que, en virtud de la relación , resulta
Esta aceleración es la única que experimenta la partícula cuando se mueve con rapidez constante en una trayectoriacircular, por lo que la partícula deberá ser atraída hacia el centro mediante una fuerza centrípeta que la aparte de unatrayectoria rectilínea, como correspondería por la ley de inercia.

Movimiento circular uniforme 134
Movimiento circular y movimiento armónicoEn dos dimensiones la composición de dos movimientos armónicos de la misma frecuencia y amplitud,convenientemente desfasados, dan lugar a un movimiento circular uniforme. Por ejemplo un movimientobidimensional dado por las ecuaciones:
El momento angular puede calcularse como:
De hecho las órbitas planetarias circulares pueden entenderse como la composición de dos movimientos armónicossegún dos direcciones mutuamente perpendiculares.
Período y frecuenciaEl periodo representa el tiempo necesario para que el móvil complete una vuelta y viene dado por:
La frecuencia mide el número de revoluciones o vueltas completadas por el móvil en la unidad de tiempo y vienedada por:
Por consiguiente, la frecuencia es la inversa del período:
Movimiento circular en mecánica relativistaSi bien la teoría especial de la relatividad permite que una partícula no cargada esté en movimiento circularuniforme, esto en general no resulta posible para una partícula cargada a la que no se le suministra energía adicional.Esto se debe a que una partícula cargada acelerada emite radicación electromagnética perdiendo energía en eseproceso. Eso es precisamente lo que sucede en un sincrotrón que es un tipo de acelerador de partículas (de hecho laradicación de sincrotón emitida por partículas aceleradas en un anillo puede usarse con fines médicos).Además, en la mecánica relativista el cociente entre la fuerza centrípeta y la aceleración centrípeta, es diferente delcociente entre la fuerza tangencial y la aceleración tangencial. Esto introduce una diferencia fundamental con el casonewtoniano: la aceleración y la fuerza relativistas no son vectores necesariamente paralelos:
De la relación anterior, se deduce que la fuerza y la aceleración sólo son paralelas en dos casos:
El primer caso se da cuando la aceleración y la velocidad son perpendiculares, cosa que sucede en el movimientocircular uniforme (o helicoidal uniforme). El segundo caso se da en un movimiento rectilíneo. En cualquier otro tipode movimiento en general la fuerza y la aceleración no serán permanentemente paralelas.

Movimiento circular uniforme 135
Movimiento circular en mecánica cuánticaEn mecánica cuántica si bien no puede hablarse de trayectoria con precisión pueden ser analizados los estadoscuánticos estacionarios de unas partículas que deben moverse a lo largo de un anillo. Los estados estacionarios deuna partícula en un anillo son el análogo cuántico del movimiento circular uniforme. Para una partícula moviéndosesobre un anillo con momento angular bien definido la función de onda viene dada por:
Puede observarse que la denisdad de probabilidad es uniforme, al igual que sucede en el caso clásico.Un hecho interesante es que las predicciones para una partícula cargada, es que esta no tiene porqué emitir fotones,de la misma manera que el electrón orbitante alrededor del núcleo no emite energía, por ser el valor resultante de laaceleración vectorial nula, al ser la distribución simétrica respecto al núcleo atómico.
Referencia
Bibliografía• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN
84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick, Robert & Halliday, David (2004). Física 4ª. CECSA, México. ISBN 970-24-0257-3.• Tipler, Paul A. (2000). .223 Física para la ciencia y la tecnología (2 volúmenes). Barcelona: Ed. Reverté. ISBN
84-291-4382-3.
Enlaces externos• Curso Interactivo de Física en Internet. (http:/ / www. sc. ehu. es/ sbweb/ fisica_/ ) Ángel Franco García.
Movimiento de rotación 136
Movimiento de rotación
Rotación de la Tierra.
Rotación es el movimiento de cambio de orientación de un cuerpoo un sistema de referencia de forma que una línea (llamada eje derotación) o un punto permanece fijo.
La rotación de un cuerpo se representa mediante un operador queafecta a un conjunto de puntos o vectores. El movimiento rotatoriose representa mediante el vector velocidad angular , que es unvector de carácter deslizante y situado sobre el eje de rotación.Cuando el eje pasa por el centro de masa o de gravedad se diceque el cuerpo «gira sobre sí mismo».
La rotación también puede ser oscilatoria, como en el péndulo (izquierda). Los giros son completos sólo cuando laenergía es lo suficientemente alta (derecha). El gráfico superior muestra la trayectoria en el espacio fásico.En ingeniería mecánica, se llama revolución a una rotación completa de una pieza sobre su eje (como en la unidadde revoluciones por minuto), mientras que en astronomía se usa esta misma palabra para referirse al movimientoorbital de traslación de un cuerpo alrededor de otro (como los planetas alrededor del Sol).
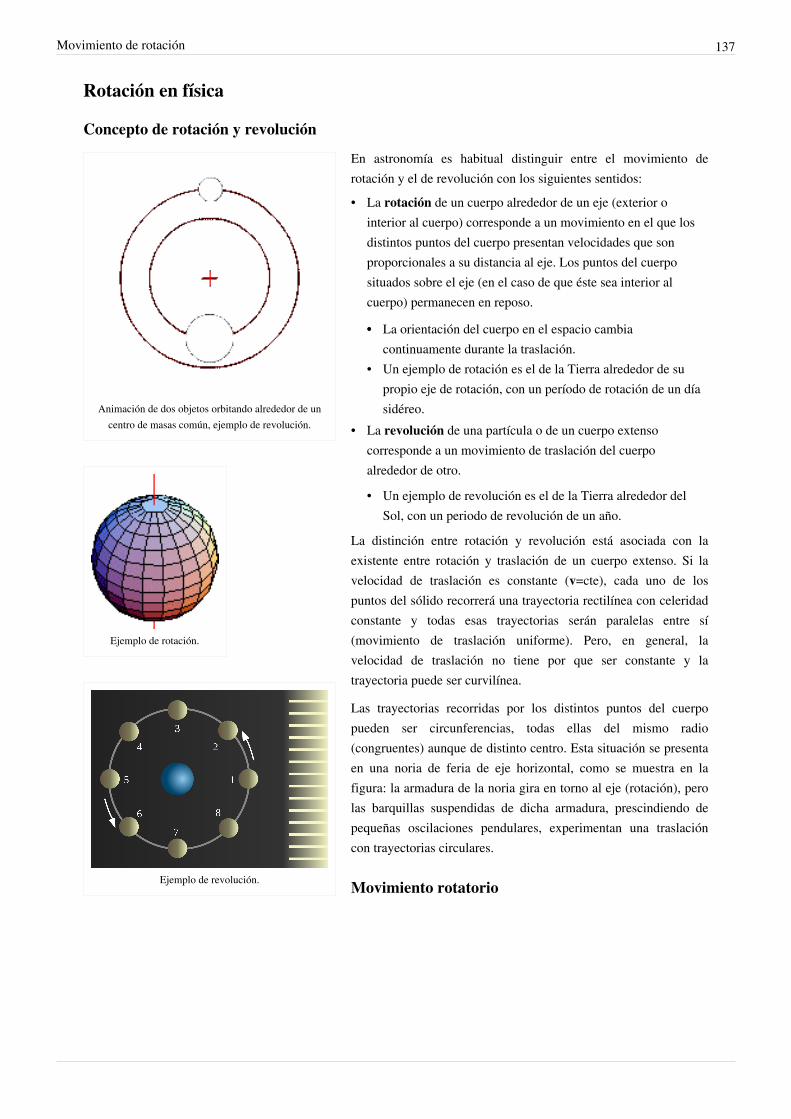
Movimiento de rotación 137
Rotación en física
Concepto de rotación y revolución
Animación de dos objetos orbitando alrededor de uncentro de masas común, ejemplo de revolución.
Ejemplo de rotación.
Ejemplo de revolución.
En astronomía es habitual distinguir entre el movimiento derotación y el de revolución con los siguientes sentidos:• La rotación de un cuerpo alrededor de un eje (exterior o
interior al cuerpo) corresponde a un movimiento en el que losdistintos puntos del cuerpo presentan velocidades que sonproporcionales a su distancia al eje. Los puntos del cuerposituados sobre el eje (en el caso de que éste sea interior alcuerpo) permanecen en reposo.
•• La orientación del cuerpo en el espacio cambiacontinuamente durante la traslación.
• Un ejemplo de rotación es el de la Tierra alrededor de supropio eje de rotación, con un período de rotación de un díasidéreo.
• La revolución de una partícula o de un cuerpo extensocorresponde a un movimiento de traslación del cuerpoalrededor de otro.
• Un ejemplo de revolución es el de la Tierra alrededor delSol, con un periodo de revolución de un año.
La distinción entre rotación y revolución está asociada con laexistente entre rotación y traslación de un cuerpo extenso. Si lavelocidad de traslación es constante (v=cte), cada uno de lospuntos del sólido recorrerá una trayectoria rectilínea con celeridadconstante y todas esas trayectorias serán paralelas entre sí(movimiento de traslación uniforme). Pero, en general, lavelocidad de traslación no tiene por que ser constante y latrayectoria puede ser curvilínea.
Las trayectorias recorridas por los distintos puntos del cuerpopueden ser circunferencias, todas ellas del mismo radio(congruentes) aunque de distinto centro. Esta situación se presentaen una noria de feria de eje horizontal, como se muestra en lafigura: la armadura de la noria gira en torno al eje (rotación), perolas barquillas suspendidas de dicha armadura, prescindiendo depequeñas oscilaciones pendulares, experimentan una traslacióncon trayectorias circulares.
Movimiento rotatorio

Movimiento de rotación 138
El movimiento de la estructura de una noríacorresponde a un movimiento de rotación. Por elcontrario, las barquillas de la noria realizan un
movimiento de traslación o revolución con trayectoriacircular.
Rotación infinitesimal
En una rotación en un ángulo infinitesimal δθ, se puede tomar cosδθ ≈ 1 y sen δθ ≈ δθ, de modo que la expresión de la rotaciónplana pasa a ser:
Si se componen dos rotaciones infinitesimales y, por ello, sedescartan los términos de orden superior al primero, se compruebaque poseen la propiedad conmutativa, que no tienen las rotacionestridimensionales finitas.Matemáticamente el conjunto de las rotaciones infinitesimales enel espacio euclideo forman el álgebra de Lie , asociada algrupo de Lie SO(3)
Velocidad angular
Dado un sólido rígido que rota alrededor de un eje, la velocidad lineal v de una partícula se puede expresar a partirde la velocidad angular ω:
Mientras que la aceleración a es:
Si el sólido rígido además de rotar alrededor de un eje tiene un movimiento adicional de traslación con velocidadinstantánea V entonces las fórmulas anteriores deben substituirse por:
Dinámica de rotaciónLa velocidad angular de rotación está relacionada con el momento angular. Para producir una variación en elmomento angular es necesario actuar sobre el sistema con fuerzas que ejerzan un momento de fuerza. La relaciónentre el momento de las fuerzas que actúan sobre el sólido y la aceleración angular se conoce como momento deinercia (I) y representa la inercia o resistencia del sólido a alterar su movimiento de rotación.La energía cinética de rotación se escribe:
siendo el tensor momento de inercia. La expresión del teorema del trabajo en movimientos de rotación se puedeexpresar así:
Movimiento de rotación 139
de modo que, la variación de la energía cinética del sólido rígido es igual al producto escalar del momento de lasfuerzas por el vector representativo del ángulo girado ( ).
Eje de rotaciónSi bien se define la rotación como un movimiento de rotación alrededor de un eje, debe tenerse presente que dichoeje de rotación puede ir cambiando su inclinación a lo largo del tiempo. Así sucede con eje de rotación terrestre y engeneral el eje de rotación de cualquier sólido en rotación que no presente simetría esférica. Para un planeta, o engeneral cualquier sólido en rotación, sobre el que no actúa un par de fuerza el momento angular se mantieneconstante, aunque eso no implica que su eje de rotación sea fijo. Para una peonza simétrica, es decir, un sólido talque dos de sus momentos de inercia principales sean iguales y el tercero diferente, el eje de rotación gira alrededorde la dirección del momento angular. Los planetas con muy buena aproximación son esferoides achatados en lospolos, lo cual los convierte en una peonza simétrica, por esa razón su eje de giro experimenta una rotación conocidacomo precesión. La velocidad angular de precesión viene dada por el cociente entre el momento angular de rotacióny el menor de los momentos de inercia del planeta:
El el caso de existencia de asimetría axial el planeta es una peonza asimétrica y además el eje de giro puede realizarun movimiento de nutación.
Rotación en matemáticas
Introducción matemáticaEl tratamiento detallado de las rotaciones ha sido objeto de numerosos trabajos matemáticos, que abordan elproblema desde diversos puntos de vista y grados de sofisticación: cuaterniones, matrices, operadores vectoriales,teoría de grupos... Todos estos enfoques son matemáticamente equivalentes y se pueden derivar unos de otros, salvoen algunos aspectos concretos y posibles resultados redundantes, y la elección de uno u otro depende del problemaconcreto. Con la llegada de la robótica y los gráficos informáticos, la matemática de las rotaciones ha cobrado unnuevo impulso y ha pasado a ser una materia de estudio muy activo, con particular énfasis en el enfoque basado encuaterniones.En matemáticas las rotaciones son transformaciones lineales que conservan las normas (es decir, son isométricas) enespacios vectoriales en los que se ha definido una operación de producto interior y cuya matriz tiene la propiedad deser ortogonal y de determinante igual a ±1. Si el determinante es +1 se llama rotación propia y si es −1, además deuna rotación propia hay una inversión o reflexión y se habla de rotación impropia.[1]
La conservación de la norma es equivalente a la conservación del producto interior, que se puede expresar como:
Consecuencia de ella es que las distancias y las formas también se conservan.Como parámetro que determina la rotación se puede usar un vector (que tiene carácter deslizante) del eje de rotacióny de longitud proporcional al ángulo de rotación. Sin embargo, lo normal es separar este vector en el ángulo y unvector unitario, lo que en el espacio da cuatro parámetros.[2] Como consecuencia hay dos formas de representar unaúnica rotación, pues
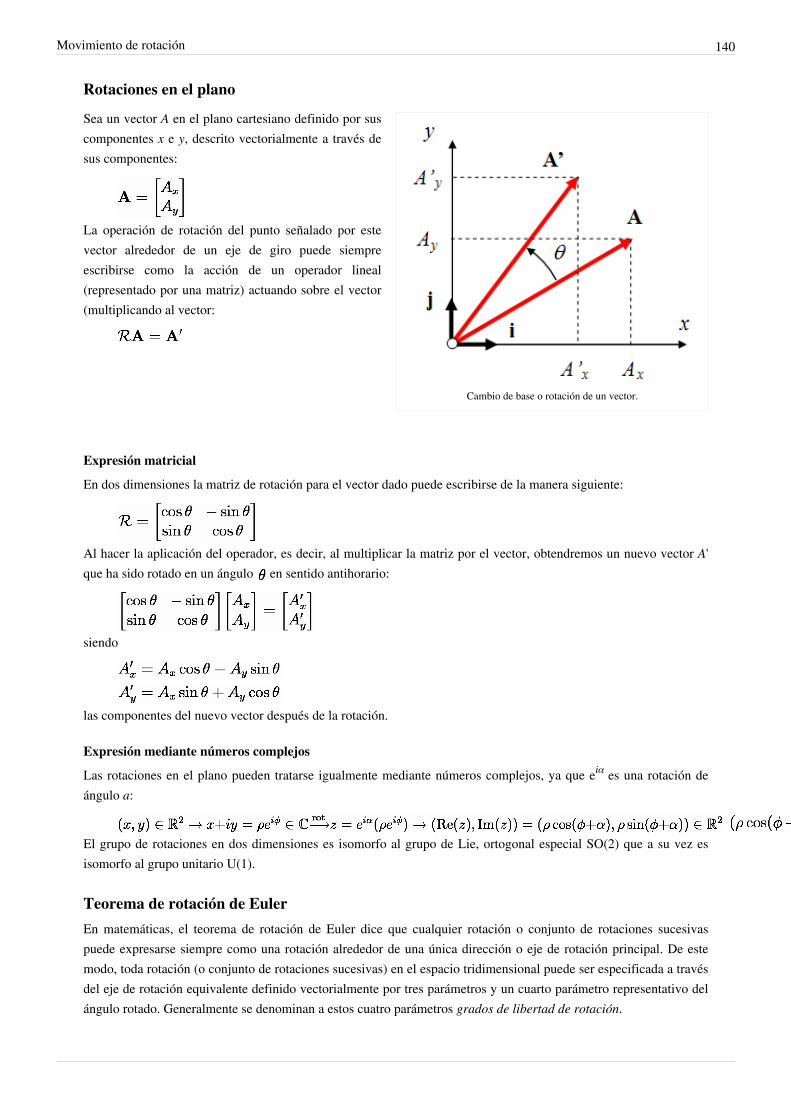
Movimiento de rotación 140
Rotaciones en el plano
Cambio de base o rotación de un vector.
Sea un vector A en el plano cartesiano definido por suscomponentes x e y, descrito vectorialmente a través desus componentes:
La operación de rotación del punto señalado por estevector alrededor de un eje de giro puede siempreescribirse como la acción de un operador lineal(representado por una matriz) actuando sobre el vector(multiplicando al vector:
Expresión matricial
En dos dimensiones la matriz de rotación para el vector dado puede escribirse de la manera siguiente:
Al hacer la aplicación del operador, es decir, al multiplicar la matriz por el vector, obtendremos un nuevo vector A'que ha sido rotado en un ángulo en sentido antihorario:
siendo
las componentes del nuevo vector después de la rotación.
Expresión mediante números complejos
Las rotaciones en el plano pueden tratarse igualmente mediante números complejos, ya que eiα es una rotación deángulo a:
El grupo de rotaciones en dos dimensiones es isomorfo al grupo de Lie, ortogonal especial SO(2) que a su vez esisomorfo al grupo unitario U(1).
Teorema de rotación de EulerEn matemáticas, el teorema de rotación de Euler dice que cualquier rotación o conjunto de rotaciones sucesivaspuede expresarse siempre como una rotación alrededor de una única dirección o eje de rotación principal. De estemodo, toda rotación (o conjunto de rotaciones sucesivas) en el espacio tridimensional puede ser especificada a travésdel eje de rotación equivalente definido vectorialmente por tres parámetros y un cuarto parámetro representativo delángulo rotado. Generalmente se denominan a estos cuatro parámetros grados de libertad de rotación.
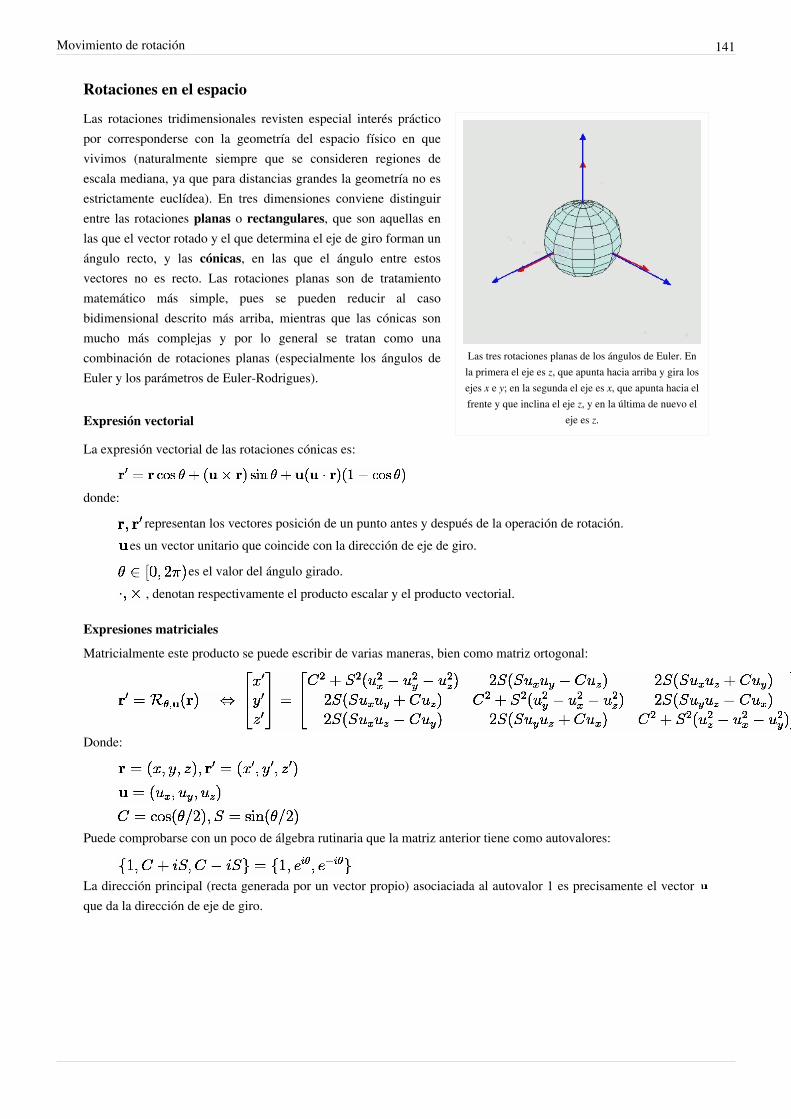
Movimiento de rotación 141
Rotaciones en el espacio
Las tres rotaciones planas de los ángulos de Euler. Enla primera el eje es z, que apunta hacia arriba y gira losejes x e y; en la segunda el eje es x, que apunta hacia elfrente y que inclina el eje z, y en la última de nuevo el
eje es z.
Las rotaciones tridimensionales revisten especial interés prácticopor corresponderse con la geometría del espacio físico en quevivimos (naturalmente siempre que se consideren regiones deescala mediana, ya que para distancias grandes la geometría no esestrictamente euclídea). En tres dimensiones conviene distinguirentre las rotaciones planas o rectangulares, que son aquellas enlas que el vector rotado y el que determina el eje de giro forman unángulo recto, y las cónicas, en las que el ángulo entre estosvectores no es recto. Las rotaciones planas son de tratamientomatemático más simple, pues se pueden reducir al casobidimensional descrito más arriba, mientras que las cónicas sonmucho más complejas y por lo general se tratan como unacombinación de rotaciones planas (especialmente los ángulos deEuler y los parámetros de Euler-Rodrigues).
Expresión vectorial
La expresión vectorial de las rotaciones cónicas es:
donde:
representan los vectores posición de un punto antes y después de la operación de rotación.es un vector unitario que coincide con la dirección de eje de giro.
es el valor del ángulo girado., denotan respectivamente el producto escalar y el producto vectorial.
Expresiones matriciales
Matricialmente este producto se puede escribir de varias maneras, bien como matriz ortogonal:
Donde:
Puede comprobarse con un poco de álgebra rutinaria que la matriz anterior tiene como autovalores:
La dirección principal (recta generada por un vector propio) asociaciada al autovalor 1 es precisamente el vector que da la dirección de eje de giro.

Movimiento de rotación 142
Expresiones vectoriales
Se puede describir el movimiento de rotación cónica con operadores vectoriales que, al contrario que las expresionesmatriciales, son independientes de las coordenadas. Así,[3]
donde la expresión entre paréntesis funciona como operador y , de modo que .[4] Hayciertos casos especiales de este operador:• es una rotación plana de (1/2)π rad. La aplicación sucesiva de este operador da , ,
, , etc., con un comportamiento parecido a la unidad imaginaria (i).[5] Es un operadorhemisimétrico y en coordenadas castesianas su matriz es:
• es una rotación plana de ángulo θ. Una notación alternativa es (por similitud con losnúmeros complejos). La forma matricial de este operador en los ejes cartesianos principales es particularmentesencilla; por ejemplo, para i es:
• es una rotación cónica binaria (de π rad). Una rotación cónica arbitraria de ángulo θ se puederepresentar con dos rotaciones binarias, perpendiculares a y que forman un ángulo (1/2)θ;[6] la manipulaciónde este par de rotaciones binarias (o, de modo equivalente, de dos reflexiones) se puede tomar como la base parala descripción mediante los parámetros de Euler-Rodrigues. Así, el segundo de estos ejes se obtiene mediante unarotación plana del primero con , que da los cuatro parámetros:
Ángulos de Euler
Mediante los ángulos de Euler se puede representar una rotación cualquiera con una sucesión de tres rotacionesplanas alrededor de tres ejes ortogonales. No hay acuerdo sobre los tres ejes concretos y en la literatura científicaaparecen diversos convenios; hay, en concreto, 12 posibilidades, pero lo más habitual es que se tomen zyz y zxz. Aestos 12 convenios hay que añadir posibles variaciones en el signo, orientación relativa de ejes (horario oantihorario) y punto de vista (operación en vectores o transformación de coordenadas).[7]
Los ángulos de Euler fueron el sistema más popular en los siglos XIX y XX para representar las rotaciones, puespermiten modelizar fácilmente varios sistemas mecánicos, como los trompos, los giroscopios, los barcos y losaviones. En el caso del trompo, los ejes se corresponden con la precesión, la nutación y la rotación. En los aviones setoman como ejes xyz, de modo que se correspondan con el alabeo (o balanceo en barcos), el cabeceo y la guiñada;este convenio específico de ejes se llama también ángulos de navegación o de Tait-Bryan.Los ángulos de Euler presentan una singularidad cuando el ángulo del segundo giro es 0 o π, pues en tal caso elprimer ángulo y el segundo pasan a quedar indefinidos, y solo está definida su suma, si el ángulo es 0. Con ello sepierde un grado de libertad, lo que en los dispositivos mecánicos que combinan varios ejes, como los giroscopios,puede conducir a un bloqueo del sistema, conocido como bloqueo de cardán (en inglés, gimbal lock).Matemáticamente, es posible evitar estas singularidades con sistemas de cuatro parámetros, como los parámetros deEuler-Rodrigues (o cuaterniones).

Movimiento de rotación 143
Parámetros de Euler-Rodrigues y cuaterniones
Los cuaterniones proporcionan un método para representar rotaciones que no presentan singularidades a costa de serredundantes. Pueden introducirse axiomáticamente o derivarse a partir de rotaciones vectoriales, en especialmediante la construcción de Euler-Rodrigues.[8]
Históricamente, los cuatro parámetros que forman los cuaterniones fueron introducidos de modo independiente y condiferentes tratamientos matemáticos y geométricos por Gauss, Rodrigues y Hamilton, entre otros, aunqueaparentemente Euler, a pesar del nombre, los desconocía. Rodrigues llegó a ellos mediante trigonometría esféricacomo una combinación de reflexiones; Hamilton, poco después, lo formuló de modo axiomático como una extensiónde los números complejos. En mecánica cuántica también se llegó a ellos con las matrices de Pauli.En tres dimensiones existe una construcción similar a la de los números complejos de módulo unidad pararepresentar las rotaciones en el plano. La construcción clave reside en identificar los vectores tridimensionales connúmeros cuaterniónicos con parte real nula, y usar las tres componentes como coeficientes de la parte no real. Larotación se puede representar como un producto conjugado por un cuaternión unitario obtenido por exponenciaciónde un cuaternión igual al producto del ángulo girado por el cuaternión que representa al eje de giro.Dado un vector tridimensional rerepsentable como un número cuaterniónico con parte real nula, y una rotacióntridimensional dada por un giro en torno al eje se puede representar el vector girado resultante como:
Este enfoque está relacionado con el álgebra geométrica y los vectores i, j y k siguen las reglas algebraicas de loscuaterniones (i2 = −1, etc.). El producto de dos rotaciones viene dado, en términos de vectores ordinarios, por:[9]
donde [a, b] representa un cuaternión con parte real a y parte no real b.
Teoría de grupos
Una rotación de un sexto de vuelta completa(2π/6) alrededor de un eje que atraviesa la
pantalla deja igual la molécula de benceno, por loque hay una simetría rotacional (entre otras).
En teoría de grupos, la rotación es una de las posibles transformacionesque se pueden aplicar a un sistema o una figura geométrica, quepermiten determinar la simetría de redes cristalográficas, orbitalesatómicos y moléculas, y por tanto parte de sus propiedadesfísico-químicas. Otras tranformaciones son la traslación, la reflexión yla inversión.
Rotaciones frente a traslaciones
En mecánica se demuestra que el movimiento del sólido rígido sepuede descomponer en una rotación y una traslación. Ambastrasformaciones son isométricas, como corresponde al hecho de que elsólido es rígido, pero en la rotación, al contrario que en la traslación,hay al menos un punto fijo. El conjunto de estas transformacionesforma un grupo llamado grupo euclidiano que es el grupo de isometríadel espacio euclidiano tridimensional. Cada elemento g de este grupoeuclidiano se puede representar de manera única como:[10]
donde R es una matriz de 3x3 que representa una rotación y d las componentes del vector de tres componentes que representa el desplazamiento. Por tanto esta manera de representar el grupo es una representación lineal sobre un
Movimiento de rotación 144
espacio vectorial de dimensión cuatro.
Rotaciones frente a reflexiones e inversiones
Estas tres transformaciones se llaman tranformaciones puntales pues dejan un punto fijo, y están estrechamenterelacionadas. Así, dos reflexiones según dos planos equivalen a una rotación.La composición de dos rotaciones tridimensionales es otra rotación, por lo que estas forman un grupo, llamado O(3)y que incluye las reflexiones. Las rotaciones propias son un subgrupo, llamado SO(3), pero no las rotacionesimpropias, pues dos de ellas equivalen a una rotación propia.
Percepción de las rotaciones
Resultado.
Imagen original de la composición.
La imagen muestra un artificio paracrear la ilusión de una rotación en 3D apartir de una imagen en 2D. Estáformada por partes restringidas unadetrás de otra, de modo que nuestrocerebro interpreta como una rotaciónde acuerdo a los datos que sobre elobjeto (la cabeza) retiene nuestramemoria.
Referencias[1] Simon L. Altmann, Rotations, quaternions,
and double groups, New York, Dover, 2005,p. 52
[2][2] Altmann, p 65[3] Donald H. Menzel, Mathematical Physics,
New York, Dover, 1961, p. 90 (la notaciónes algo distinta)
[4] Jerrold E. Marsden, Tudor S. Ratiu,Introduction to Mechanics and Symmetry,Springer, 2010, p. 289 (la notación es algodistinta).
[5] J. Willard Gibbs, Edwin Bidwell Wilson,Vector Analysis, New Haven, Yale Univ.Press, 1947, p. 299
[6][6] Gibbs, Wilson, p. 343-344[7] Granino A. Korn, Theresa M. Korn, Mathematical handbook for scientists and engineers, New York, Dover, 2000, p. 476-478[8] Simon L. Altmann, Rotations, quaternions, and double groups, New York, Dover, 2005, p. 155-159[9][9] Altamann, p. 203[10][10] Marsden, Ratio, p.649
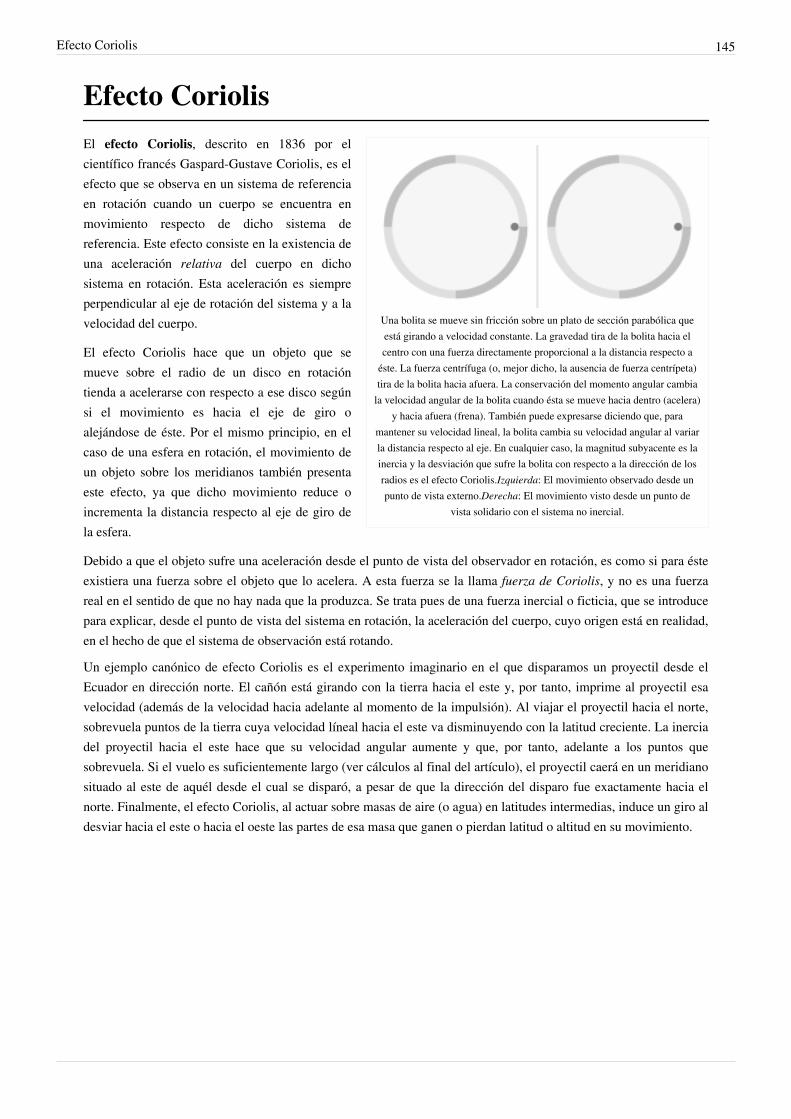
Efecto Coriolis 145
Efecto Coriolis
Una bolita se mueve sin fricción sobre un plato de sección parabólica queestá girando a velocidad constante. La gravedad tira de la bolita hacia elcentro con una fuerza directamente proporcional a la distancia respecto a
éste. La fuerza centrífuga (o, mejor dicho, la ausencia de fuerza centrípeta)tira de la bolita hacia afuera. La conservación del momento angular cambia
la velocidad angular de la bolita cuando ésta se mueve hacia dentro (acelera)y hacia afuera (frena). También puede expresarse diciendo que, para
mantener su velocidad lineal, la bolita cambia su velocidad angular al variarla distancia respecto al eje. En cualquier caso, la magnitud subyacente es lainercia y la desviación que sufre la bolita con respecto a la dirección de losradios es el efecto Coriolis.Izquierda: El movimiento observado desde unpunto de vista externo.Derecha: El movimiento visto desde un punto de
vista solidario con el sistema no inercial.
El efecto Coriolis, descrito en 1836 por elcientífico francés Gaspard-Gustave Coriolis, es elefecto que se observa en un sistema de referenciaen rotación cuando un cuerpo se encuentra enmovimiento respecto de dicho sistema dereferencia. Este efecto consiste en la existencia deuna aceleración relativa del cuerpo en dichosistema en rotación. Esta aceleración es siempreperpendicular al eje de rotación del sistema y a lavelocidad del cuerpo.
El efecto Coriolis hace que un objeto que semueve sobre el radio de un disco en rotacióntienda a acelerarse con respecto a ese disco segúnsi el movimiento es hacia el eje de giro oalejándose de éste. Por el mismo principio, en elcaso de una esfera en rotación, el movimiento deun objeto sobre los meridianos también presentaeste efecto, ya que dicho movimiento reduce oincrementa la distancia respecto al eje de giro dela esfera.
Debido a que el objeto sufre una aceleración desde el punto de vista del observador en rotación, es como si para ésteexistiera una fuerza sobre el objeto que lo acelera. A esta fuerza se la llama fuerza de Coriolis, y no es una fuerzareal en el sentido de que no hay nada que la produzca. Se trata pues de una fuerza inercial o ficticia, que se introducepara explicar, desde el punto de vista del sistema en rotación, la aceleración del cuerpo, cuyo origen está en realidad,en el hecho de que el sistema de observación está rotando.
Un ejemplo canónico de efecto Coriolis es el experimento imaginario en el que disparamos un proyectil desde elEcuador en dirección norte. El cañón está girando con la tierra hacia el este y, por tanto, imprime al proyectil esavelocidad (además de la velocidad hacia adelante al momento de la impulsión). Al viajar el proyectil hacia el norte,sobrevuela puntos de la tierra cuya velocidad líneal hacia el este va disminuyendo con la latitud creciente. La inerciadel proyectil hacia el este hace que su velocidad angular aumente y que, por tanto, adelante a los puntos quesobrevuela. Si el vuelo es suficientemente largo (ver cálculos al final del artículo), el proyectil caerá en un meridianosituado al este de aquél desde el cual se disparó, a pesar de que la dirección del disparo fue exactamente hacia elnorte. Finalmente, el efecto Coriolis, al actuar sobre masas de aire (o agua) en latitudes intermedias, induce un giro aldesviar hacia el este o hacia el oeste las partes de esa masa que ganen o pierdan latitud o altitud en su movimiento.
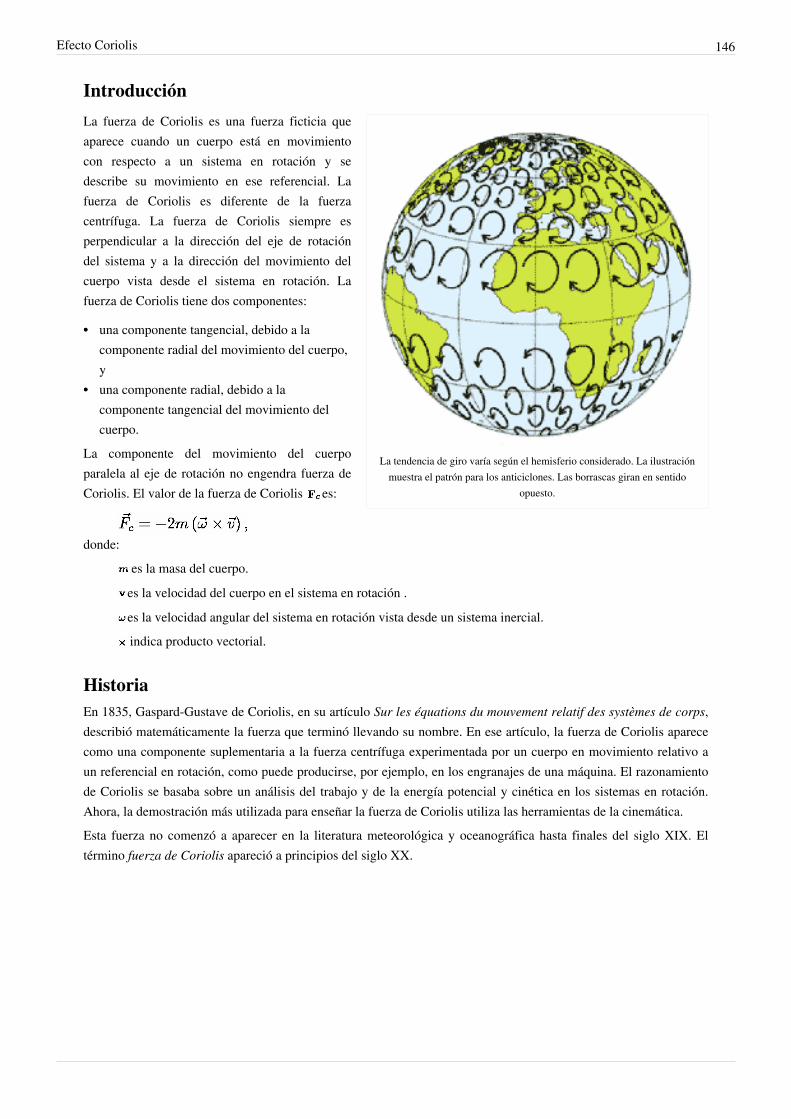
Efecto Coriolis 146
Introducción
La tendencia de giro varía según el hemisferio considerado. La ilustraciónmuestra el patrón para los anticiclones. Las borrascas giran en sentido
opuesto.
La fuerza de Coriolis es una fuerza ficticia queaparece cuando un cuerpo está en movimientocon respecto a un sistema en rotación y sedescribe su movimiento en ese referencial. Lafuerza de Coriolis es diferente de la fuerzacentrífuga. La fuerza de Coriolis siempre esperpendicular a la dirección del eje de rotacióndel sistema y a la dirección del movimiento delcuerpo vista desde el sistema en rotación. Lafuerza de Coriolis tiene dos componentes:
•• una componente tangencial, debido a lacomponente radial del movimiento del cuerpo,y
•• una componente radial, debido a lacomponente tangencial del movimiento delcuerpo.
La componente del movimiento del cuerpoparalela al eje de rotación no engendra fuerza deCoriolis. El valor de la fuerza de Coriolis es:
donde:es la masa del cuerpo.
es la velocidad del cuerpo en el sistema en rotación .es la velocidad angular del sistema en rotación vista desde un sistema inercial.indica producto vectorial.
HistoriaEn 1835, Gaspard-Gustave de Coriolis, en su artículo Sur les équations du mouvement relatif des systèmes de corps,describió matemáticamente la fuerza que terminó llevando su nombre. En ese artículo, la fuerza de Coriolis aparececomo una componente suplementaria a la fuerza centrífuga experimentada por un cuerpo en movimiento relativo aun referencial en rotación, como puede producirse, por ejemplo, en los engranajes de una máquina. El razonamientode Coriolis se basaba sobre un análisis del trabajo y de la energía potencial y cinética en los sistemas en rotación.Ahora, la demostración más utilizada para enseñar la fuerza de Coriolis utiliza las herramientas de la cinemática.Esta fuerza no comenzó a aparecer en la literatura meteorológica y oceanográfica hasta finales del siglo XIX. Eltérmino fuerza de Coriolis apareció a principios del siglo XX.

Efecto Coriolis 147
Formulación y demostraciónPara demostrar la expresión analítica expresada en la introducción, pueden usarse dos aproximaciones diferentes: porconservación del momento angular o por derivación en base móvil. A continuación se explican ambas.
Demostración por conservación del momento angular
En un sistema de coordenadas cilíndricas, lavelocidad (en negro) de un punto puede
descomponerse en una velocidad radial (enmagenta), una velocidad axial (en azul) y una
velocidad tangencial (en verde).
Es preciso recordar que cuando un observador en un sistema noinercial (como lo es un sistema en rotación) trata de comprender elcomportamiento de su sistema como si fuese un sistema inercial veaparecer fuerzas ficticias. En el caso de un sistema en rotación, elobservador ve que todos los objetos que no están sujetos se alejan demanera radial como si actuase sobre ellos una fuerza proporcional a susmasas y a la distancia a una cierta recta (el eje de rotación). Esa es lafuerza centrífuga que hay que compensar con la fuerza centrípeta parasujetar los objetos. Por supuesto, para un observador externo, situadoen un sistema inercial (sistema fijo), la única fuerza que existe es lafuerza centrípeta, cuando los objetos están sujetos. Si no lo están, losobjetos tomarán la tangente y se alejarán del eje de rotación.
Si los objetos no están inmóviles con respecto al observador delsistema en rotación, otra fuerza ficticia aparece: la fuerza de Coriolis. Visto desde el sistema en rotación, elmovimiento de un objeto se puede descomponer en una componente paralela al eje de rotación, otra componenteradial (situada sobre una línea que pasa por el eje de rotación y perpendicular a éste), y una tercera componentetangencial (tangente a un círculo centrado en el eje y perpendicular a éste) (ver gráfica).Un objeto que se desplaza paralelamente al eje de rotación, visto de un sistema fijo, gira con el sistema en rotación ala misma velocidad angular y con radio constante. La única fuerza que actúa sobre el objeto es la fuerza centrípeta.El observador del sistema en rotación sólo nota la fuerza centrífuga contra la cual hay que oponerse para que sequede a la misma distancia del eje.
Cuando se reduce el radio de rotación de uncuerpo sin aplicar un torque, el momento angularse conserva y la velocidad tangencial aumenta.En cambio, si se obliga al cuerpo a conservar la
misma velocidad angular, la velocidad tangencialdisminuye. El esquema está visto desde un
sistema fijo (inercial).
Supóngase que un observador en el sistema en rotación mantiene unamasa a una distancia del eje de rotación mediante un hilo demasa despreciable. El observador tira del hilo y modifica ligeramenteel radio de rotación de la masa de . Eso le ha tomado un tiempo
. Como el momento dinámico es nulo, el momento angular de lamasa se conserva. Si es la velocidad de la masa, la conservación delmomento angular expresa:
El signo menos indica que cuando el radio aumenta la velocidadtangencial disminuye.Si la masa se moviese siguiendo una trayectoria radial, fija conrespecto al sistema en rotación, conservando en consecuencia la misma velocidad angular del sistema en rotación,su velocidad lineal habría aumentado de (o disminuido, si es negativo). Para un observador fijo,entre la velocidad de la masa que se ve obligada a seguir una trayectoria radial y la velocidad de la masa queconserva su momento angular hay una diferencia de:

Efecto Coriolis 148
Como el objeto no está sujeto al sistema en rotación, el observador en ese sistema ve la masa tomar una velocidadlateral . Eso se interpreta como la aplicación de una fuerza lateral (de Coriolis). Si el cambio de velocidad tomó
segundos, la aceleración de Coriolis será (en valor absoluto):
,donde es la velocidad radial. Esa aceleración corresponde a una fuerza (de Coriolis) de:
Considerando un objeto con velocidad tangencial vista por el observador en el sistema en rotación. Esta vez, lamisma masa tenida por un hilo tiene una velocidad angular diferente del sistema en rotación. Para el observador en elsistema en rotación, las fuerzas que nota aplicadas a la masa para que siga una trayectoria circular son: la fuerzacentrífuga que ve aplicada en todos los objetos, más la fuerza centrífuga debido a la rotación aparente de lamasa . Pero eso no basta. Hay aún otra fuerza aparente, y es precisamente la fuerza de Coriolis. Se calculaahora la fuerza centrípeta que ve un observador fijo: la velocidad tangencial es . Para este observador, lafuerza centrípeta que mantiene la masa a distancia constante será:
El primer término es la fuerza centrífuga común a todos los objetos que giran con el sistema en rotación. El terceroes la fuerza centrífuga debida a la rotación de la masa con respecto al sistema en rotación. Y el segundo término es lafuerza de Coriolis. Es un término suplementario debido al hecho de que la fuerza centrífuga depende del cuadrado dela velocidad tangencial y no puede obtenerse sumando las fuerzas centrífugas debido a velocidades parciales. Lafuerza de Coriolis es:
Como se ha dicho , esa fuerza es radial.
Demostración por la derivación en base móvilPara esta demostración se utilizará el subíndice abs para indicar magnitudes vistas desde el sistema de referenciainercial, es decir, uno donde el espacio sea homogéneo e isótropo y donde el tiempo sea constante. El subíndice rel(relativa) se refiere a magnitudes vistas desde una referencia no galileana o no inercial. El subíndice ar (arrastre)hace referencia al movimiento de la base móvil respecto a la base fija.También es necesario conocer cómo se deriva en una base móvil:
Una aceleración es un cambio en la magnitud o en la orientación de la velocidad respecto del tiempo. Para esademostración se considera un movimiento que no varía la magnitud de su velocidad, es decir, que no está sometido afuerzas que tengan alguna componente en la dirección del movimiento.Entonces:
Por una parte:
Por otra:
donde:
Como no se considera el movimiento alrededor del Sol, sino sólo el giro de la tierra en torno a si misma:

Efecto Coriolis 149
Además, como se está imaginando un movimiento sin aceleración relativa (como el de un proyectil):
quedando así:
Pero:
Entonces:
Volviendo al principio:
La aceleración de Coriolis es el primer sumando:
La aceleración centrípeta es el segundo:
Meteorología, oceanografía y fuerza de Coriolis
El ejemplo más notorio de manifestación del efecto Coriolis se dacuando masas de aire o de agua se desplazan siguiendo meridianosterrestres, y su trayectoria y velocidad se ven modificadas por él. Enefecto, los vientos o corrientes oceánicas que se desplazan siguiendoun meridiano se desvían acelerando en la dirección de giro (este) si vanhacia los polos o al contrario (oeste) si van hacia el ecuador. Lamanifestación de estas desviaciones produce, de manera análoga algiro de la bolita mostrado al principio, que las borrascas tiendan a giraren el hemisferio sur en el sentido de las agujas del reloj y, en elhemisferio norte, en sentido contrario.
El efecto de la fuerza de Coriolis deberá considerarse siempre que seestudie el movimiento de fluidos y también el de cualquier objetomóvil sobre esferas o superficies planas en rotación. Esto incluye a los
planetas gaseosos del sistema solar, el Sol y todas las estrellas y, en el planeta Tierra, el movimiento de las aguas delos ríos, los lagos, los océanos y, por supuesto, de la atmósfera. El efecto de Coriolis predice que siempre que seobserven los movimientos giratorios de esos cuerpos, los vórtices seguirán la norma descrita para las borrascas yanticiclones terrestres.
Además de su influencia sobre la atmósfera, es muy notoria la que tiene también sobre la circulación oceánica. Enlas cuencas que tienen la forma apropiada (como, por ejemplo, la cuenca del Atlántico norte y la del Atlántico sur),el efecto Coriolis desvía a las corrientes marinas hacia la derecha en el hemisferio norte y hacia la izquierda en elhemisferio sur, de la misma manera que sucede con la circulación general de los vientos.Las excepciones o modificaciones de este patrón general de la circulación general de los océanos tienen que ver con la disposición de las costas y la compensación introducida por las corrientes cálidas que van, en los océanos, de las
Efecto Coriolis 150
costas orientales de la zona intertropical hacia las occidentales de las zonas templadas de los continentes (Corrientedel Golfo y de Kuro Shivo, especialmente). Además, en los océanos, lo mismo que sucede en la atmósfera, seproduce una especie de convergencia en las latitudes ecuatoriales por la fuerza centrífuga del movimiento derotación: tanto el océano como la atmósfera tienen un abombamiento ecuatorial por la rotación terrestre, de variosmetros de altura en el caso de los océanos y de varios kilómetros en la atmósfera. A su vez, este "abombamiento"ocasiona una especie de obstáculo a la libre circulación y al libre intercambio de energía (oceánica y atmosférica)entre los dos hemisferios. La circulación en la zona ecuatorial es, por lo tanto, de este a oeste, tanto en lo querespecta a las corrientes ecuatoriales del norte y del sur como con respecto a los alisios del noreste en el hemisferionorte y del sureste en el hemisferio sur. Por último, lo que se ha denominado abombamiento ecuatorial de losocéanos tiene varias consecuencias: entre ellas, la formación de lo que se ha denominado contracorrientesecuatoriales también del norte y del sur, definidas e identificadas en muchos atlas y libros de geografía y de cienciasde la Tierra, y la desviación hacia las zonas subtropicales y templadas: de nuevo, hacia la derecha en el hemisferionorte y hacia la izquierda en el hemisferio sur.
Efectos de la fuerza de CoriolisUna de las raras ocasiones en la cual una persona puede sentir la fuerza de Coriolis es cuando trata de caminarsiguiendo una trayectoria radial en un tiovivo (o carrusel). Cuando la persona se aleja del eje de rotación, sentirá unafuerza que la empuja en el sentido contrario a la rotación: es la fuerza de Coriolis.Cuando una persona se aleja o se acerca del eje de rotación a una velocidad de 1 m/s en un tiovivo que gira a 10vueltas por minuto, la aceleración de Coriolis es:
Se trata, por consiguiente, de una aceleración lateral 46 veces más pequeña que la gravedad. Para una persona de70 kg, eso corresponde a una fuerza lateral igual al peso de 1,5 kg. No es mucho pero, poniendo atención, puedesentirse.
Objetos que se desplazan sobre la TierraLa Tierra gira mucho más lentamente que un carrusel. Su velocidad angular es de radianes por día sideral (23 h,56 m, 4,1 s) es decir . La aceleración de Coriolis debido a la rotación de la Tierra es mucho menor.Cuando un cuerpo sigue una trayectoria norte-sur sobre la Tierra (siguiendo un meridiano), la componente radial desu velocidad (la velocidad a la cual el cuerpo se acerca o se aleja del eje de rotación terrestre) depende de la latituddel cuerpo. Es fácil ver que la componente radial es . Cuando el cuerpo está cerca del ecuador, sudistancia respecto al eje de la Tierra no cambia. Si la trayectoria del cuerpo es este-oeste y sigue un paralelo, sudistancia respecto al eje terrestre no varía, pero ya hemos visto que sentirá una aceleración de Coriolis dirigida haciael eje de la Tierra que vale . La componente paralela a la superficie de la Tierra depende de la latitud yes: .Vemos que en los dos casos, visto desde la Tierra, un cuerpo que se desplaza sobre la superficie de la Tierra sienteuna aceleración lateral de valor dirigida hacia la derecha de la velocidad.Un cuerpo que se desplaza con una velocidad de 1 m/s, sin interacción con el suelo, a una latitud de 45° encuentrauna aceleración lateral de Coriolis igual a:
,lo cual corresponde a una fuerza lateral aproximadamente 100 000 veces menor que su propio peso. Dicho de otramanera, la trayectoria se desvía hacia la derecha como si el terreno estuviese inclinado hacia la derecha 1 milímetrocada 100 metros.Si se trata de un avión cuya velocidad es 900 km/h (250 m/s), la aceleración será 250 veces mayor. El efecto serádarle al avión una trayectoria circular de 4850 km de diámetro (a una latitud de 45°):

Efecto Coriolis 151
Por supuesto, el piloto corregirá esta desviación, pero no parece posible que pueda distinguirla de los efectos delviento o de los errores de reglaje de la posición neutra de los alerones de dirección y de profundidad.
BalísticaTomemos el caso de un obús, situado a una latitud de 45° y que tira un proyectil a 110 km de distancia. El ángulo detiro para esa distancia es de 45°. Si se desprecia el efecto de los rozamientos con el aire, la velocidad horizontal delproyectil es de 734 m/s, y el tiempo de vuelo es de 150 segundos. La aceleración de Coriolis será:
La distancia lateral de desvío provocada por la aceleración de Coriolis es:
Esa distancia corresponde a un error en el ángulo de tiro de 0,44°. Las opiniones divergen sobre la importancia deeste error, comparado con la influencia de otras fuerzas y, sobre todo, con la fuerza provocada por el efecto Magnussobre proyectiles que giran axialmente.Para cañones de menor alcance, el error en el ángulo de tiro es aún menor. Por ejemplo, para un proyectil cuyoalcance es de 20 km y cuya velocidad media es la misma, el error del ángulo es 25 veces menor.En el Film "The Avengers" Clint Barton dispara una flecha al helicarrier haciendo uso del efecto Coriolis.
Diferencia entre los tiempos de vuelo en la ida y vuelta de un mismo trayectoTomaremos como ejemplo el Trayecto Frankfurt - Bogotá. Intuitivamente se podría afirmar que el tiempo de vuelode Frankfurt a Bogotá es más corto porque la tierra gira hacia el este y el avión se dirige hacia el oeste. Es decir,Bogotá se le "acerca" al avión. En el regreso debería ser más largo el vuelo porque Frankfurt se le "aleja" al avión.Sin embargo, el hecho es que el tiempo de vuelo FRA - BOG es de ~12h y el de BOG - FRA ~10h. Esto se debe a losiguiente: El avión no vuela lo suficientemente alto para escapar el campo gravitacional de la tierra. Es decir, elavión permanece en el marco de referencia del planeta. Hablar de que Frankfurt se está alejando es erróneo.Consideremos un helicóptero que asciende en Bogotá y se mantiene en el mismo punto en el aire por unas horas. ¿Seencuentra dicho helicóptero después de ese tiempo en el Pacífico? Efectivamente no. Hipotéticamente podríamosconsiderar la rotación de la tierra y concluir lo mismo al pensar de la siguiente manera: Asumamos comosimplificación que la rotación de la tierra es de 1600 km/h independiente de la latitud (lo cual es físicamenteincorrecto, como veremos luego). Para nosotros en El Dorado antes de despegar estamos en estado de reposo, peropara el astronauta en la Estación Espacial Internacional nos estamos moviendo a 1600 km/h. Aunque Frankfurt seeste alejando a esta velocidad, nosotros ni habiendo despegado, la estamos persiguiendo a 1600 km/h. De la mismamanera, si estuviésemos en el Flughafen Frankfurt, Bogotá se nos estaría acercando a 1600 km/h y nosotros alejandode ella a 1600 km/h. Por ende, para nosotros en la Tierra es como si ambas ciudades estuviesen en reposo. Larotación de la Tierra no puede jugar entonces un rol en la diferencia de los tiempos de vuelo. En este punto debemoscorregir la suposición que habíamos formulado anteriormente: la rotación de la tierra no es igual en todas suslatitudes (máxima en el ecuador, mínima/nula en los polos). Para entender que efecto tiene está diferencia develocidades, recordemos nuestras experiencias infantiles sobre una rueda giratoria en un parque. Después de habersido puestos en rotación, sentíamos un "empujón" en dirección de la rotación al intentar ir de afuera hacia el centrode la rueda. Lo mismo le ocurre al aire al ir del ecuador a los polos, dado que existe una diferencia de temperaturaconsiderable entre estos. Este "empujón" que sufrimos nosotros en el parque y el viento en su viaje es la famosafuerza de Coriolis. El aire se mueve hacia el este y se presenta como una resistencia para el avión viajando hacia eloeste como es el caso del trayecto Frankfurt-Bogotá. En el trayecto Bogotá-Frankfurt viajamos "viento en popa".

Efecto Coriolis 152
Aplicación prácticaUna aplicación práctica de la fuerza de Coriolis es el caudalímetro másico, un instrumento que mide el caudalmásico de un fluido que circula a través de una tubería. Este instrumento fue comercializado en 1977 por MicroMotion Inc.Los caudalímetros normales miden el caudal volumétrico, el cual es proporcional al caudal másico sólo cuando ladensidad del fluido es constante. Si el fluido tiene una variación de densidad o contiene burbujas, entonces el caudalvolumétrico, multiplicado por la densidad, no será exactamente igual al caudal másico. El caudalímetro másico deCoriolis funciona aplicando una fuerza de vibración a un tubo curvado a través del cual pasa el fluido. El efectoCoriolis crea una fuerza en el tubo perpendicular a ambas direcciones: la de vibración y la dirección de la corriente.Esta fuerza se mide para obtener el caudal másico. Los caudalímetros de Coriolis pueden usarse además con fluidosno newtonianos, en los cuales los caudalímetros normales tienden a dar resultados erróneos. El mismo instrumentopuede usarse para medir la densidad del fluido. Este instrumento tiene una novedad adicional, que consiste en que elfluido está en un tubo liso, sin partes móviles, que no necesita limpieza ni mantenimiento y presenta una caída depresión muy baja.
Referencias
Bibliografía• Arthur N. Strahler. Physical Geography. New York, John Wiley & Sons, 1960, 2nd edition. La traducción
española es de 1974.• Joseph E. Williams, editor. World Atlas. Englewood Cliffs, New Jersey, Estados Unidos: Prentice - Hall Inc.,
1963.
Enlaces externos
• Wikimedia Commons alberga contenido multimedia sobre Fuerza de CoriolisCommons.• Animaciones interesantes sobre el efecto Coriolis. (http:/ / www. classzone. com/ books/ earth_science/ terc/
content/ visualizations/ es1904/ es1904page01. cfm?chapter_no=19)
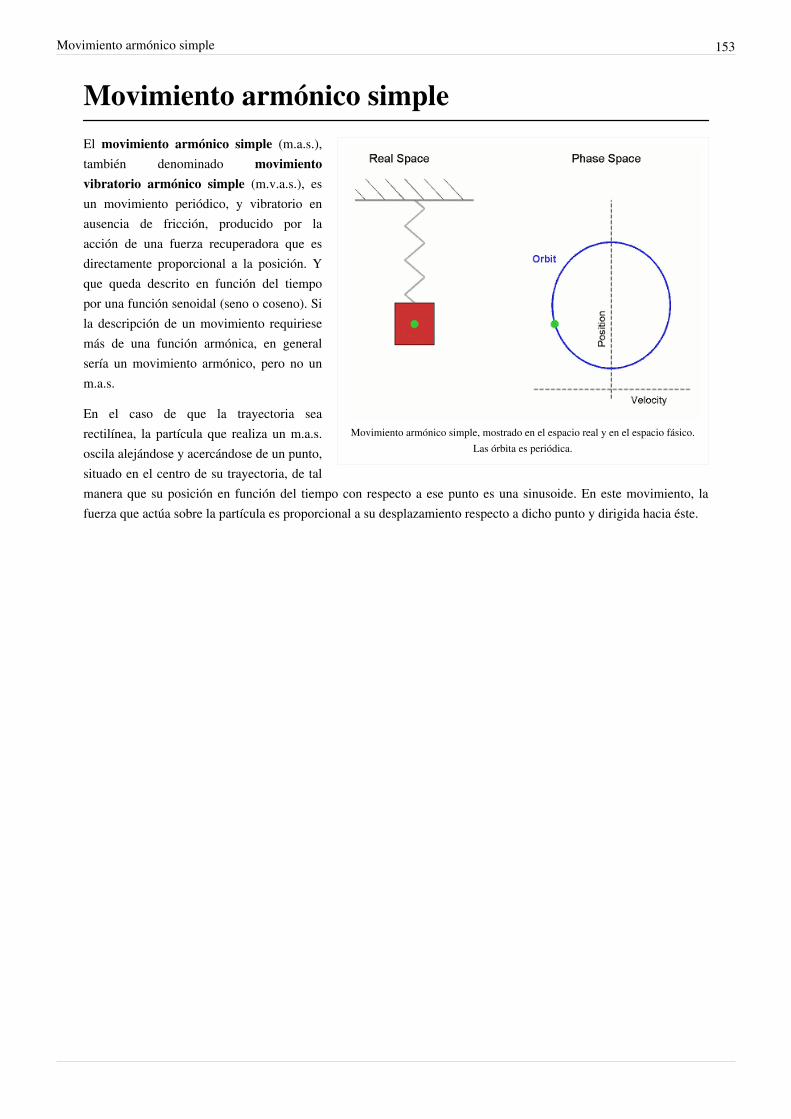
Movimiento armónico simple 153
Movimiento armónico simple
Movimiento armónico simple, mostrado en el espacio real y en el espacio fásico.Las órbita es periódica.
El movimiento armónico simple (m.a.s.),también denominado movimientovibratorio armónico simple (m.v.a.s.), esun movimiento periódico, y vibratorio enausencia de fricción, producido por laacción de una fuerza recuperadora que esdirectamente proporcional a la posición. Yque queda descrito en función del tiempopor una función senoidal (seno o coseno). Sila descripción de un movimiento requiriesemás de una función armónica, en generalsería un movimiento armónico, pero no unm.a.s.
En el caso de que la trayectoria searectilínea, la partícula que realiza un m.a.s.oscila alejándose y acercándose de un punto,situado en el centro de su trayectoria, de talmanera que su posición en función del tiempo con respecto a ese punto es una sinusoide. En este movimiento, lafuerza que actúa sobre la partícula es proporcional a su desplazamiento respecto a dicho punto y dirigida hacia éste.
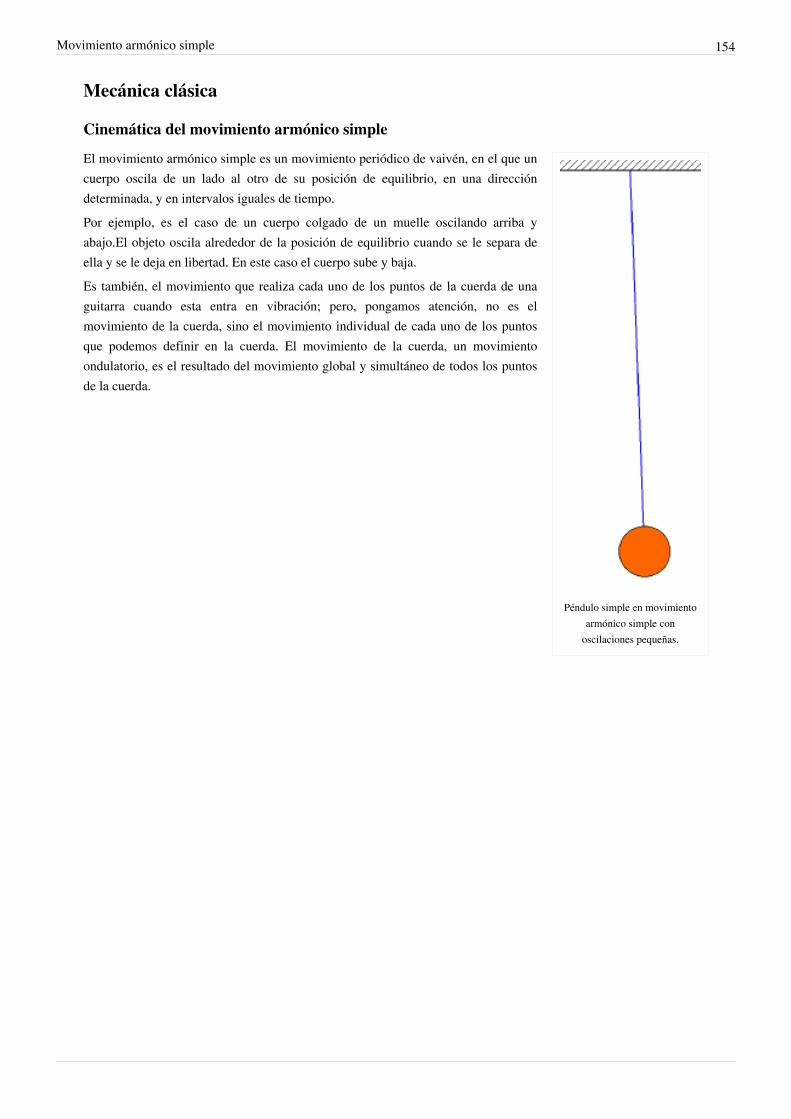
Movimiento armónico simple 154
Mecánica clásica
Cinemática del movimiento armónico simple
Péndulo simple en movimientoarmónico simple con
oscilaciones pequeñas.
El movimiento armónico simple es un movimiento periódico de vaivén, en el que uncuerpo oscila de un lado al otro de su posición de equilibrio, en una direccióndeterminada, y en intervalos iguales de tiempo.Por ejemplo, es el caso de un cuerpo colgado de un muelle oscilando arriba yabajo.El objeto oscila alrededor de la posición de equilibrio cuando se le separa deella y se le deja en libertad. En este caso el cuerpo sube y baja.Es también, el movimiento que realiza cada uno de los puntos de la cuerda de unaguitarra cuando esta entra en vibración; pero, pongamos atención, no es elmovimiento de la cuerda, sino el movimiento individual de cada uno de los puntosque podemos definir en la cuerda. El movimiento de la cuerda, un movimientoondulatorio, es el resultado del movimiento global y simultáneo de todos los puntosde la cuerda.
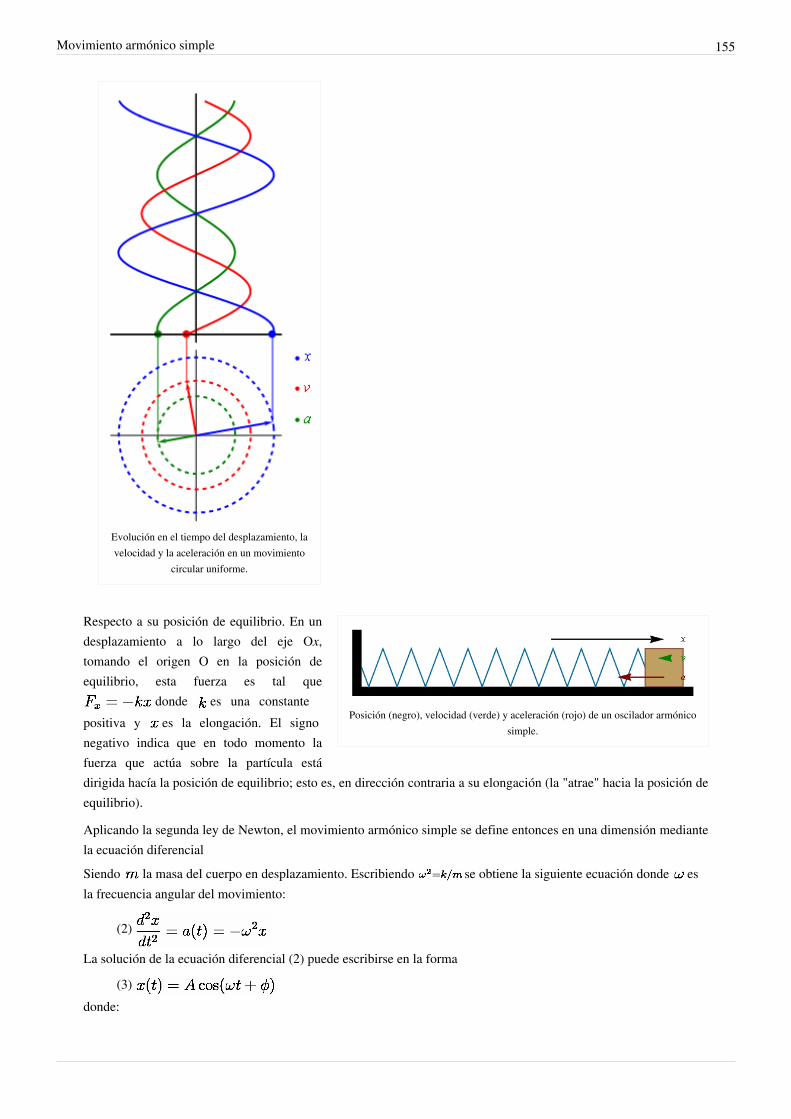
Movimiento armónico simple 155
Evolución en el tiempo del desplazamiento, lavelocidad y la aceleración en un movimiento
circular uniforme.
Posición (negro), velocidad (verde) y aceleración (rojo) de un oscilador armónicosimple.
Respecto a su posición de equilibrio. En undesplazamiento a lo largo del eje Ox,tomando el origen O en la posición deequilibrio, esta fuerza es tal que
donde es una constantepositiva y es la elongación. El signonegativo indica que en todo momento lafuerza que actúa sobre la partícula estádirigida hacía la posición de equilibrio; esto es, en dirección contraria a su elongación (la "atrae" hacia la posición deequilibrio).
Aplicando la segunda ley de Newton, el movimiento armónico simple se define entonces en una dimensión mediantela ecuación diferencialSiendo la masa del cuerpo en desplazamiento. Escribiendo se obtiene la siguiente ecuación donde esla frecuencia angular del movimiento:
(2)
La solución de la ecuación diferencial (2) puede escribirse en la forma
(3) donde:

Movimiento armónico simple 156
es la elongación o desplazamiento respecto al punto de equilibrio.es la amplitud del movimiento (elongación máxima).es la frecuencia angular
es el tiempo.
es la fase inicial e indica el estado de oscilación o vibración (o fase) en el instante t = 0 de la partícula queoscila.
Además, la frecuencia de oscilación puede escribirse como esto:
(4) , y por lo tanto el periodo como
La velocidad y aceleración de la partícula pueden obtenerse derivando respecto del tiempo la expresión.
VelocidadLa velocidad instantánea de un punto material que ejecuta un movimiento armónico simple se obtiene por lo tantoderivando la posición respecto al tiempo:
(5)
AceleraciónLa aceleración es la variación de la velocidad del movimiento respecto al tiempo de espera y se obtiene por lo tantoderivado la ecuación de la velocidad respecto al tiempo de encuentro:
(6)
Amplitud y fase inicial
La amplitud y la fase inicial se pueden calcular a partir de las condiciones iniciales del movimiento, esto esde los valores de la elongación y de la velocidad iniciales.
(7)
(8)
Sumando miembro a miembro las dos ecuaciones (7) y (8) obtenemos
(9)
Dividiendo miembro a miembro las dos ecuaciones (7) y (8) obtenemos
(10)

Movimiento armónico simple 157
Dinámica del movimiento armónico simpleEn el movimiento armónico simple la fuerza que actúa sobre el móvil es directamente proporcional:
(11) Un ejemplo sería el que realiza un objeto unido al extremo un muelle, en ese caso k sería la constante de elasticidaddel muelle. Aplicando la segunda ley de newton tendríamos:
(12)
Comparando esta ecuación y la que teníamos para la aceleración (6) se deduce:
(13)
Esta ecuación nos permite expresar el periodo (T) del movimiento armónico simple en función de la masa de lapartícula y de la constante elástica de la fuerza que actúa sobre ella:
(14)
Energía del movimiento armónico simple
Energías cinética (Ec), potencial (Ep) y mecánica (Em) en el movimiento armónicoen función de la la elongación.
Las fuerzas involucradas en un movimientoarmónico simple son centrales y, por tanto,conservativas. En consecuencia, se puededefinir un campo escalar llamado energíapotencial (Ep) asociado a la fuerza. Parahallar la expresión de la energía potencial,basta con integrar la expresión de la fuerza(esto es extensible a todas las fuerzasconservativas) y cambiarla de signo,obteniéndose:
(15)
La energía potencial alcanza su máximo en los extremos de la trayectoria y tiene valor nulo (cero) en el punto x = 0,es decir el punto de equilibrio.
La energía cinética cambiará a lo largo de las oscilaciones pues lo hace la velocidad:
(16)
La energía cinética es nula en -A o +A (v=0) y el valor máximo se alcanza en el punto de equilibrio (máximavelocidad Aω).
(17)
Como sólo actúan fuerzas conservativas, la energía mecánica (suma de la energía cinética y potencial) permanececonstante.
(18) Finalmente, al ser la energía mecánica constante, puede calcularse fácilmente considerando los casos en los que lavelocidad de la partícula es nula y por lo tanto la energía potencial es máxima, es decir, en los puntos y
. Se obtiene entonces que,

Movimiento armónico simple 158
(19)
O también cuando la velocidad de la partícula es máxima y la energía potencial nula, en el punto de equilibrio
(20)
Ejemplos
Medición de masa en ingravidezEn condiciones de ingravidez no es posible medir la masa de un cuerpo a partir de su peso. Sin embargo, se puederecurrir al principio del movimiento armónico simple para realizar tal medición.Para ello se instaló en la estación espacial Skylab un dispositivo (experimento M172) destinado a medir la masa delos tripulantes consistente en una silla oscilante capaz de medir su periodo de oscilación electrónicamente. Apartir de este dato, y conociendo la constante de fuerza del resorte unido a la silla, es posible entonces calcular lamasa del individuo:
(21)
Mecánica relativista y mecánica cuánticaEn mecánica relativista el análogo del movimiento armónico simple, es un movimiento en el que la fuerza esproporcional a la elongación pero debido a las peculiaridades de la teoría de la relatividad el movimiento resultantees sólo cuasiarmónico, y no exactamente armónico. En mecánica cuántica no puede hablarse propiamente detrayectorias, pero existe también un análogo cuántico de dicho movimiento.
Mecánica relativistaEl problema del oscilador en mecánica relativista no admite una solución analítica simple debido a que la ecuacióndel movimiento implica integrar la siguiente ecuación:[1]
Sin embargo, puede una solución aproximada con las condiciones de contorno dada por:
donde:
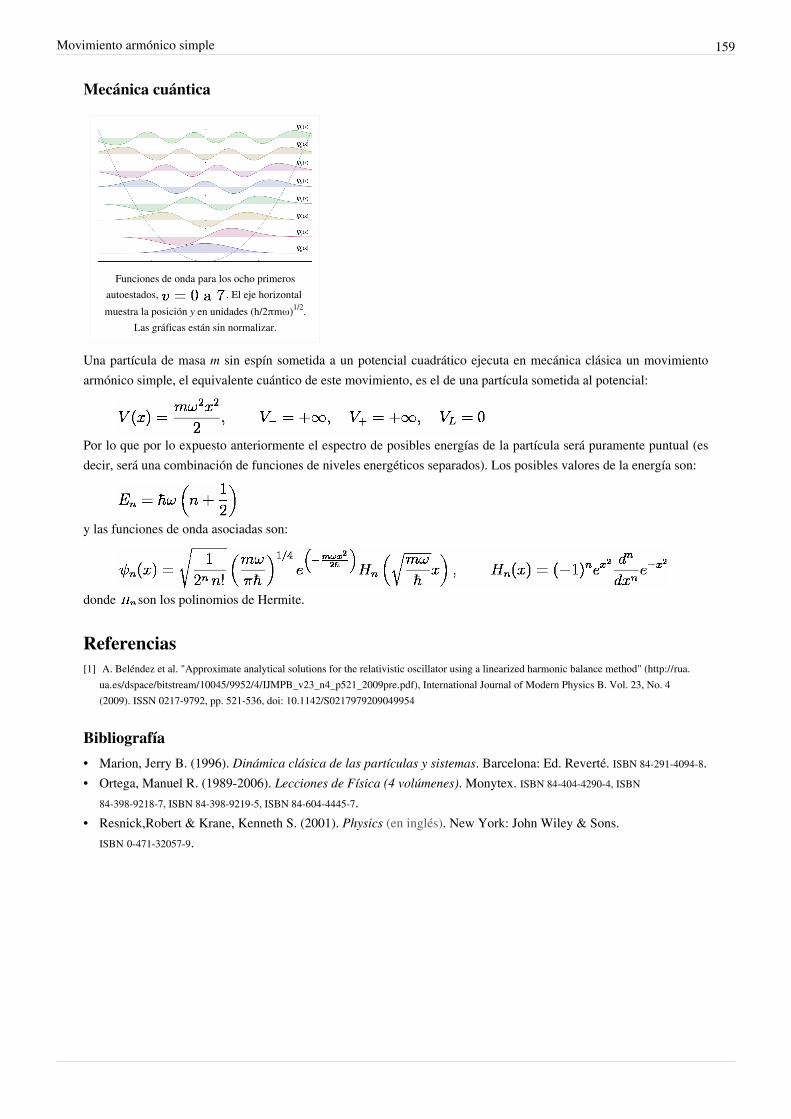
Movimiento armónico simple 159
Mecánica cuántica
Funciones de onda para los ocho primerosautoestados, . El eje horizontalmuestra la posición y en unidades (h/2πmω)1/2.
Las gráficas están sin normalizar.
Una partícula de masa m sin espín sometida a un potencial cuadrático ejecuta en mecánica clásica un movimientoarmónico simple, el equivalente cuántico de este movimiento, es el de una partícula sometida al potencial:
Por lo que por lo expuesto anteriormente el espectro de posibles energías de la partícula será puramente puntual (esdecir, será una combinación de funciones de niveles energéticos separados). Los posibles valores de la energía son:
y las funciones de onda asociadas son:
donde son los polinomios de Hermite.
Referencias[1] A. Beléndez et al. "Approximate analytical solutions for the relativistic oscillator using a linearized harmonic balance method" (http:/ / rua.
ua. es/ dspace/ bitstream/ 10045/ 9952/ 4/ IJMPB_v23_n4_p521_2009pre. pdf), International Journal of Modern Physics B. Vol. 23, No. 4(2009). ISSN 0217-9792, pp. 521-536, doi: 10.1142/S0217979209049954
Bibliografía• Marion, Jerry B. (1996). Dinámica clásica de las partículas y sistemas. Barcelona: Ed. Reverté. ISBN 84-291-4094-8.• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN
84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
ISBN 0-471-32057-9.

Movimiento armónico simple 160
Enlaces externos• Física Universitaria (http:/ / www. uco. es/ ~fa1orgim/ fisica/ docencia/ index. html) – Abundante información
para el nivel de la Física Universitaria. Incluye textos y animaciones.• Curso Interactivo de Física en Internet (http:/ / www. sc. ehu. es/ sbweb/ fisica_/ ) – Ángel Franco García.• Fórmulas del movimiento armónico simple (http:/ / www. vaxasoftware. com/ doc_edu/ fis. html) – Cinemática,
Dinámica y Energía del M.A.S.• Script de Física de Ingeniería Mecánica, desde la página 50, movimiento armónico simple. (http:/ / www. docstoc.
com/ docs/ 99827248/ Fisica-de-primero-de-ingenieria-mecanica)• Simple Harmonic Motion (http:/ / www. splung. com/ content/ sid/ 2/ page/ shm) – Splung (en inglés)cucursal
Amplitud (física)
Onda sinusoide:1 = Amplitud,
2 = Amplitud de pico a pico,3 = Media cuadrática,
4 = Periodo.
En física la amplitud de un movimiento oscilatorio,ondulatorio o señal electromagnética es una medida dela variación máxima del desplazamiento u otramagnitud física que varía periódica ocuasiperiódicamente en el tiempo. Es la distancia entreel punto más alejado de una onda y el punto deequilibrio o medio.
Amplitud de onda
Es una perturbación física que se propaga en el espaciocomo una onda armónica puede modelizarsematemáticamente como una magnitud física cuyovalor varía con el tiempo y de un punto a otro delespacio según una ecuación como:
Donde es la velocidad de propagación de la perturbación. Para una onda plana que se propaga en dirección x lasolución de la ecuación anterior es:
Y en ese caso la amplitud se define como:
Usualmente la intensidad de una onda es una magnitud proporcional al promedio del cuadrado de la amplitud:
Para una onda periódica de período T:
Amplitud (física) 161
Amplitud en acústicaEn acústica la amplitud normalmente se mide en decibelios SPL ( ):• Los decibelios representan la relación entre dos señales y se basa en un logaritmo de base 10 del cociente entre
dos amplitudes sonoras o presiones.• Las siglas SPL hacen referencia a la presión sonora (Sound Pressure Level).
Si una onda sonora que ocasiona una sobrepresión máxima a su paso por un punto del espacio, su amplitudmedida en decibelios SPL es:
Donde es la presión sonora de referencia.
Atenuación del sonidoLas ondas van "debilitándose en amplitud" conforme van alejándose de su punto de origen: es lo que se conoce comoatenuación de la onda. Aunque la amplitud de las ondas decrece, su longitud de onda y su frecuencia permaneceninvariables, ya que éstas dependen sólo del foco emisor.La disminución de amplitud de una onda sonora se debe a dos razones:• La ampliación del frente de onda, que da lugar a una disminución de la amplitud viene cuantificada por la Ley
cuadrática inversa.• La absorción de la vibración, que es un proceso disipativo por el cual parte de la potencia sonora es absorbida por
algún material que sea un aislante acústico.
Unidades de la amplitudLas unidades de la amplitud dependen del fenómeno:• En corriente alterna es usual usar la amplitud cuadrática media medida en voltios o amperios, según el aspecto de
dicha corriente que se esté estudiando.• En una onda electromagnética la amplitud está relacionada con la raíz cuadrada de la intensidad radiante y resulta
estar relacionada con el campo eléctrico de dicha onda. En una onda luminosa importa además de la intensidadradiante la intensidad luminosa que usualmente se mide en candelas.
• En una onda sonora la amplitud es la sobrepresión atmosférica y por tanto las unidades para la amplitud de unaonda sonora pueden ser el pascal, el milibar o cualquier otra unidad de presión.
• Para una onda mecánica o una vibración la amplitud es un desplazamiento y tiene unidades de longitud.
Semi-amplitudSemi-amplitud significa la mitad de la amplitud del pico a pico.[1] Es la medida más ampliamente utilizada deamplitud orbital en astronomía y la medición de pequeñas semi-amplitudes en las estrellas cercanas es importante enla búsqueda de exoplanetas.[2] Para una onda sinusoidal, la amplitud de pico y semi-amplitud son los mismos.Algunos científicos[3] usan la "amplitud" o "pico de amplitud" para significar semi-amplitud, es decir, la mitad de laamplitud pico a pico es una referencia que es representada así .
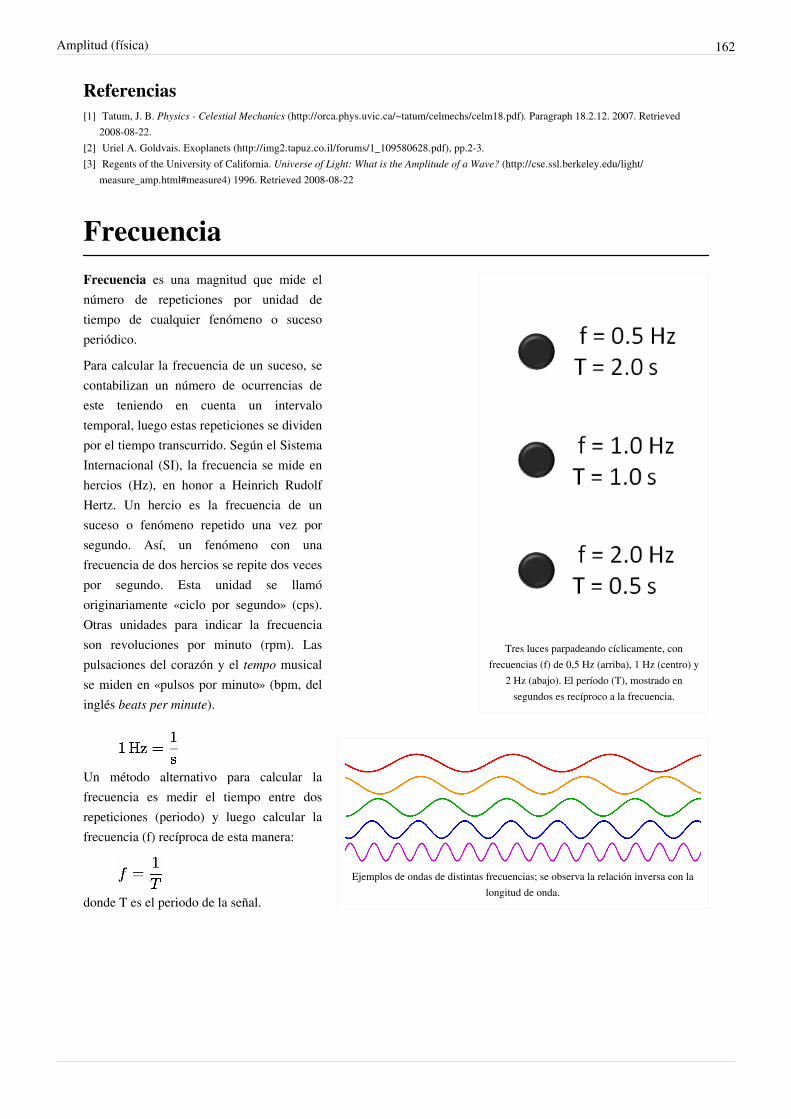
Amplitud (física) 162
Referencias[1] Tatum, J. B. Physics - Celestial Mechanics (http:/ / orca. phys. uvic. ca/ ~tatum/ celmechs/ celm18. pdf). Paragraph 18.2.12. 2007. Retrieved
2008-08-22.[2] Uriel A. Goldvais. Exoplanets (http:/ / img2. tapuz. co. il/ forums/ 1_109580628. pdf), pp.2-3.[3] Regents of the University of California. Universe of Light: What is the Amplitude of a Wave? (http:/ / cse. ssl. berkeley. edu/ light/
measure_amp. html#measure4) 1996. Retrieved 2008-08-22
Frecuencia
Tres luces parpadeando cíclicamente, confrecuencias (f) de 0,5 Hz (arriba), 1 Hz (centro) y
2 Hz (abajo). El período (T), mostrado ensegundos es recíproco a la frecuencia.
Ejemplos de ondas de distintas frecuencias; se observa la relación inversa con lalongitud de onda.
Frecuencia es una magnitud que mide elnúmero de repeticiones por unidad detiempo de cualquier fenómeno o sucesoperiódico.
Para calcular la frecuencia de un suceso, secontabilizan un número de ocurrencias deeste teniendo en cuenta un intervalotemporal, luego estas repeticiones se dividenpor el tiempo transcurrido. Según el SistemaInternacional (SI), la frecuencia se mide enhercios (Hz), en honor a Heinrich RudolfHertz. Un hercio es la frecuencia de unsuceso o fenómeno repetido una vez porsegundo. Así, un fenómeno con unafrecuencia de dos hercios se repite dos vecespor segundo. Esta unidad se llamóoriginariamente «ciclo por segundo» (cps).Otras unidades para indicar la frecuenciason revoluciones por minuto (rpm). Laspulsaciones del corazón y el tempo musicalse miden en «pulsos por minuto» (bpm, delinglés beats per minute).
Un método alternativo para calcular lafrecuencia es medir el tiempo entre dosrepeticiones (periodo) y luego calcular lafrecuencia (f) recíproca de esta manera:
donde T es el periodo de la señal.
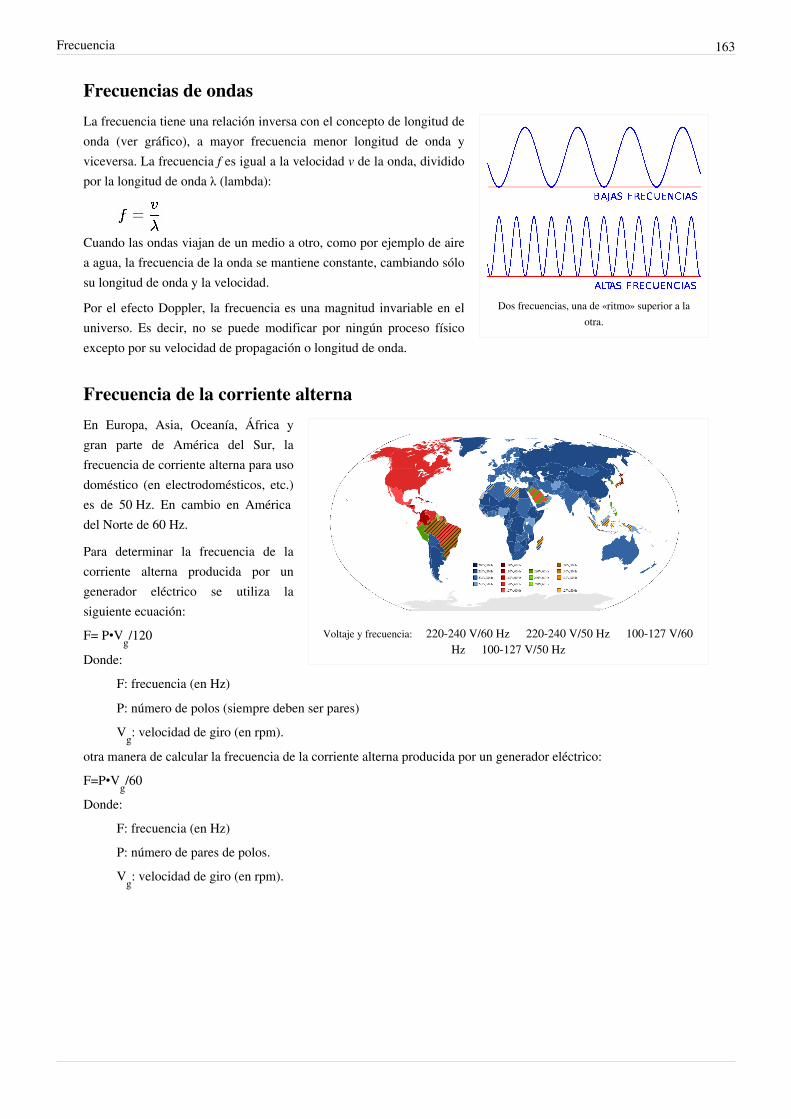
Frecuencia 163
Frecuencias de ondas
Dos frecuencias, una de «ritmo» superior a laotra.
La frecuencia tiene una relación inversa con el concepto de longitud deonda (ver gráfico), a mayor frecuencia menor longitud de onda yviceversa. La frecuencia f es igual a la velocidad v de la onda, divididopor la longitud de onda λ (lambda):
Cuando las ondas viajan de un medio a otro, como por ejemplo de airea agua, la frecuencia de la onda se mantiene constante, cambiando sólosu longitud de onda y la velocidad.
Por el efecto Doppler, la frecuencia es una magnitud invariable en eluniverso. Es decir, no se puede modificar por ningún proceso físicoexcepto por su velocidad de propagación o longitud de onda.
Frecuencia de la corriente alterna
Voltaje y frecuencia: 220-240 V/60 Hz 220-240 V/50 Hz 100-127 V/60Hz 100-127 V/50 Hz
En Europa, Asia, Oceanía, África ygran parte de América del Sur, lafrecuencia de corriente alterna para usodoméstico (en electrodomésticos, etc.)es de 50 Hz. En cambio en Américadel Norte de 60 Hz.
Para determinar la frecuencia de lacorriente alterna producida por ungenerador eléctrico se utiliza lasiguiente ecuación:F= P•Vg/120Donde:
F: frecuencia (en Hz)P: número de polos (siempre deben ser pares)Vg: velocidad de giro (en rpm).
otra manera de calcular la frecuencia de la corriente alterna producida por un generador eléctrico:F=P•Vg/60Donde:
F: frecuencia (en Hz)P: número de pares de polos.Vg: velocidad de giro (en rpm).
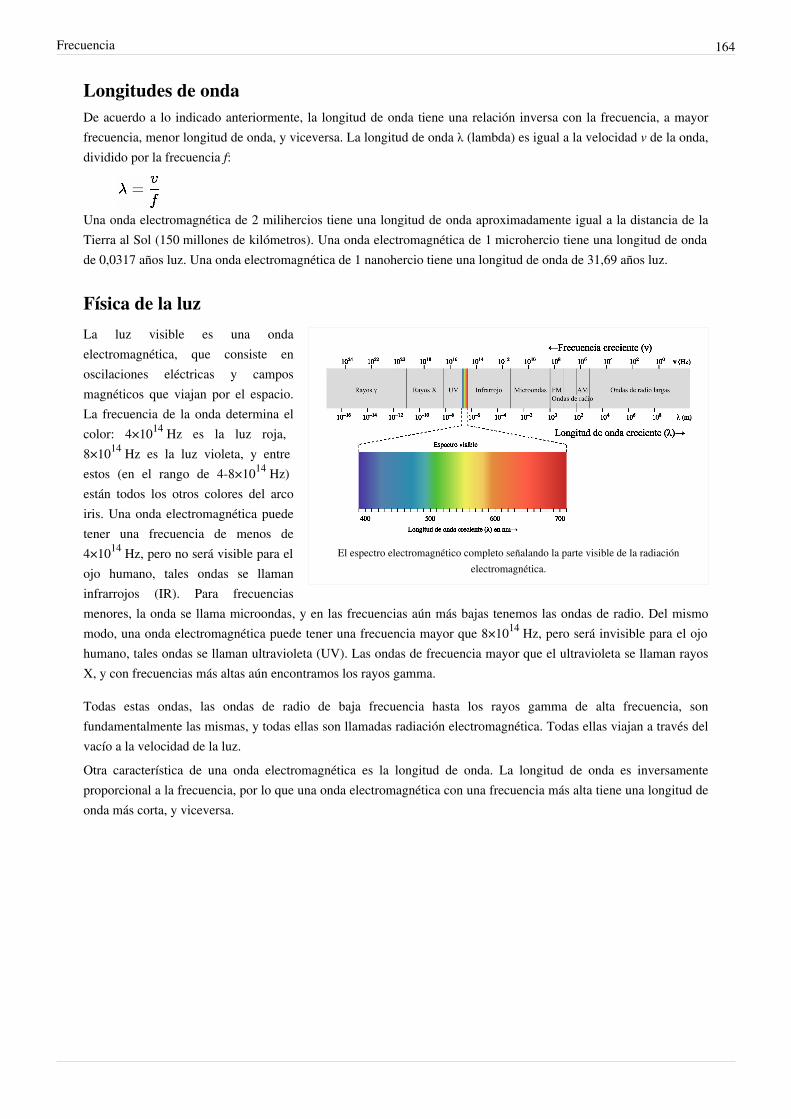
Frecuencia 164
Longitudes de ondaDe acuerdo a lo indicado anteriormente, la longitud de onda tiene una relación inversa con la frecuencia, a mayorfrecuencia, menor longitud de onda, y viceversa. La longitud de onda λ (lambda) es igual a la velocidad v de la onda,dividido por la frecuencia f:
Una onda electromagnética de 2 milihercios tiene una longitud de onda aproximadamente igual a la distancia de laTierra al Sol (150 millones de kilómetros). Una onda electromagnética de 1 microhercio tiene una longitud de ondade 0,0317 años luz. Una onda electromagnética de 1 nanohercio tiene una longitud de onda de 31,69 años luz.
Física de la luz
El espectro electromagnético completo señalando la parte visible de la radiaciónelectromagnética.
La luz visible es una ondaelectromagnética, que consiste enoscilaciones eléctricas y camposmagnéticos que viajan por el espacio.La frecuencia de la onda determina elcolor: 4×1014 Hz es la luz roja,8×1014 Hz es la luz violeta, y entreestos (en el rango de 4-8×1014 Hz)están todos los otros colores del arcoiris. Una onda electromagnética puedetener una frecuencia de menos de4×1014 Hz, pero no será visible para elojo humano, tales ondas se llamaninfrarrojos (IR). Para frecuenciasmenores, la onda se llama microondas, y en las frecuencias aún más bajas tenemos las ondas de radio. Del mismomodo, una onda electromagnética puede tener una frecuencia mayor que 8×1014 Hz, pero será invisible para el ojohumano, tales ondas se llaman ultravioleta (UV). Las ondas de frecuencia mayor que el ultravioleta se llaman rayosX, y con frecuencias más altas aún encontramos los rayos gamma.
Todas estas ondas, las ondas de radio de baja frecuencia hasta los rayos gamma de alta frecuencia, sonfundamentalmente las mismas, y todas ellas son llamadas radiación electromagnética. Todas ellas viajan a través delvacío a la velocidad de la luz.Otra característica de una onda electromagnética es la longitud de onda. La longitud de onda es inversamenteproporcional a la frecuencia, por lo que una onda electromagnética con una frecuencia más alta tiene una longitud deonda más corta, y viceversa.
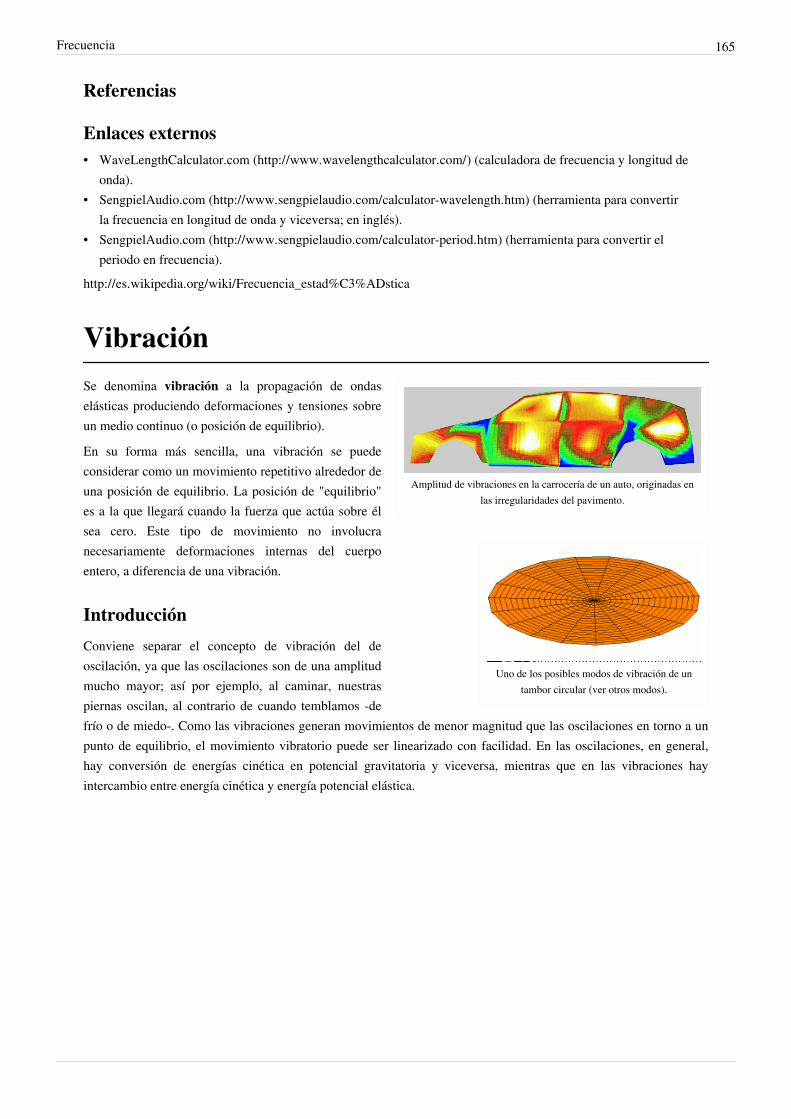
Frecuencia 165
Referencias
Enlaces externos• WaveLengthCalculator.com (http:/ / www. wavelengthcalculator. com/ ) (calculadora de frecuencia y longitud de
onda).• SengpielAudio.com (http:/ / www. sengpielaudio. com/ calculator-wavelength. htm) (herramienta para convertir
la frecuencia en longitud de onda y viceversa; en inglés).• SengpielAudio.com (http:/ / www. sengpielaudio. com/ calculator-period. htm) (herramienta para convertir el
periodo en frecuencia).http:/ / es. wikipedia. org/ wiki/ Frecuencia_estad%C3%ADstica
Vibración
Amplitud de vibraciones en la carrocería de un auto, originadas enlas irregularidades del pavimento.
Uno de los posibles modos de vibración de untambor circular (ver otros modos).
Se denomina vibración a la propagación de ondaselásticas produciendo deformaciones y tensiones sobreun medio continuo (o posición de equilibrio).
En su forma más sencilla, una vibración se puedeconsiderar como un movimiento repetitivo alrededor deuna posición de equilibrio. La posición de "equilibrio"es a la que llegará cuando la fuerza que actúa sobre élsea cero. Este tipo de movimiento no involucranecesariamente deformaciones internas del cuerpoentero, a diferencia de una vibración.
Introducción
Conviene separar el concepto de vibración del deoscilación, ya que las oscilaciones son de una amplitudmucho mayor; así por ejemplo, al caminar, nuestraspiernas oscilan, al contrario de cuando temblamos -defrío o de miedo-. Como las vibraciones generan movimientos de menor magnitud que las oscilaciones en torno a unpunto de equilibrio, el movimiento vibratorio puede ser linearizado con facilidad. En las oscilaciones, en general,hay conversión de energías cinética en potencial gravitatoria y viceversa, mientras que en las vibraciones hayintercambio entre energía cinética y energía potencial elástica.
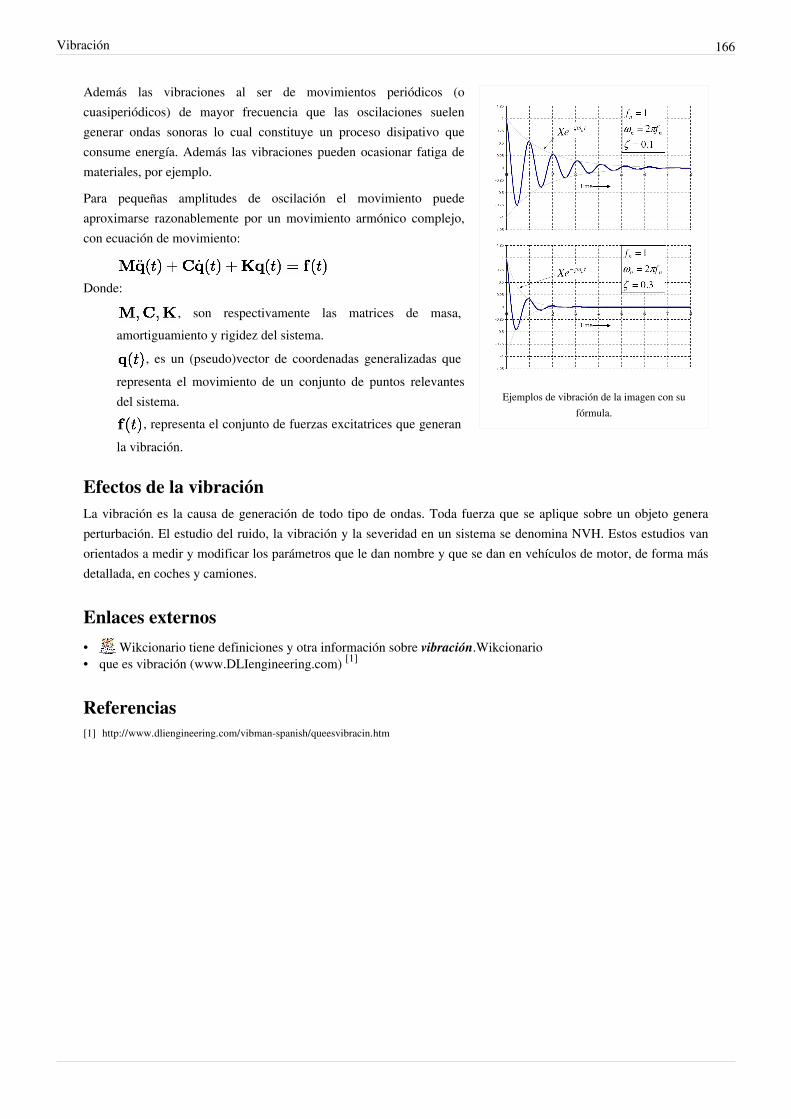
Vibración 166
Ejemplos de vibración de la imagen con sufórmula.
Además las vibraciones al ser de movimientos periódicos (ocuasiperiódicos) de mayor frecuencia que las oscilaciones suelengenerar ondas sonoras lo cual constituye un proceso disipativo queconsume energía. Además las vibraciones pueden ocasionar fatiga demateriales, por ejemplo.
Para pequeñas amplitudes de oscilación el movimiento puedeaproximarse razonablemente por un movimiento armónico complejo,con ecuación de movimiento:
Donde:
, son respectivamente las matrices de masa,amortiguamiento y rigidez del sistema.
, es un (pseudo)vector de coordenadas generalizadas querepresenta el movimiento de un conjunto de puntos relevantesdel sistema.
, representa el conjunto de fuerzas excitatrices que generanla vibración.
Efectos de la vibraciónLa vibración es la causa de generación de todo tipo de ondas. Toda fuerza que se aplique sobre un objeto generaperturbación. El estudio del ruido, la vibración y la severidad en un sistema se denomina NVH. Estos estudios vanorientados a medir y modificar los parámetros que le dan nombre y que se dan en vehículos de motor, de forma másdetallada, en coches y camiones.
Enlaces externos• Wikcionario tiene definiciones y otra información sobre vibración.Wikcionario• que es vibración (www.DLIengineering.com) [1]
Referencias[1] http:/ / www. dliengineering. com/ vibman-spanish/ queesvibracin. htm

Precesión 167
Precesión
Movimiento de precesión de un trompo o peonza.
La precesión o movimiento de precesión nutación, es el movimientoasociado con el cambio de dirección en el espacio, que experimenta eleje instantáneo de rotación de un cuerpo.
Un ejemplo de precesión lo tenemos en el movimiento que realiza unapeonza o trompo en rotación. Cuando su eje de rotación no es vertical,la peonza posee un movimiento de «cabeceo» similar al de precesión.
Más exactamente una precesión pura es aquel movimiento del eje derotación que mantiene su segundo ángulo de Euler (nutación)constante. Este movimiento de nutación también se da en el eje de laTierra.
Hay dos tipos de precesión: la precesión debida a los momentos externos, y la precesión sin momentos de fuerzasexternos.
Precesión sin momentos externosEste movimiento ocurre cuando un cuerpo está en movimiento alrededor de un eje que no es ni el de máximomomento de inercia ni el de menor momento de inercia. La precesión puede estar acompañada de otros movimientospropios de los cuerpos en rotación como la nutación. Hay un tipo especial de curvas sobre la superficie del objeto,llamadas polodia[1][2] y herpolodia, las cuales describen el movimiento del mismo.
Precesión debida a momentos externos
Ángulos usados para describir la orientación de lapeonza.
Precesión un sólido de revolución
Se llama peonza simétrica en movimiento libre a un sólido rígido derevolución, con dos de sus momentos de inercia principales iguales
. Como en una peonza simétrica se pueden escogerarbitrariamente los ejes 1 y 2, conviene aprovechar ese hecho parasimplificar las expresiones tomando el eje 1 paralelo a la línea nodal delos ángulos de Euler lo cual equivale a que ψ = 0.
Lo cual lleva a que las velocidades angulares en el sistema dereferencia no inercial vengan dadas por:
La energía cinética de rotación una peonza simétrica ( ) puede expresarse en términos de los ángulos deEuler sencillamente:

Precesión 168
Por otro lado si se toma el eje Z del sistema de referencia alineado con el momento angular del sólido rígido se tieneque las componentes del momento angular y la relación con la velocidad angular son:
Escribiendo componente a componente estas ecuaciones se tiene que:
La primera ecuación nos dice que en el movimiento libre de una peonza simétrica ésta no cabecea; es decir, no haymovimiento de nutación ya que el ángulo formado por eje de rotación y el momento angular se mantiene constanteen el movimiento. La segunda describe el movimiento de precesión de acuerdo con el cual el eje de rotación (quecoincide con la dirección de la velocidad angular) gira alrededor de la dirección del momento angular (eje Z). Latercera ecuación da la velocidad de rotación del sólido alrededor de su tercer eje de inercia.
Giroscopio
Todos los vectores del dibujo están en un planohorizontal. Como el momento dinámico
aplicado al cuerpo es perpendicular al momentoangular , únicamente este último cambia de
dirección. Ese cambio es la precesión.
Recordemos que el momento angular es un vector que tiene comomódulo, el producto del momento de inercia del cuerpo alrededor deleje de rotación, multiplicado por la velocidad angular. La dirección delvector es la misma que la del vector asociado a la velocidad angular yestá dada por la regla de la mano derecha. La ecuación de base delmomento angular de un cuerpo es:
donde es el momento angular del cuerpo y es el momento defuerza aplicado al cuerpo. Esta ecuación corresponde, en elmovimiento lineal, a la ecuación donde es la fuerza aplicada aun cuerpo y es el momento lineal del cuerpo.Cuando el momento de fuerza es paralelo al momento angular, o sea,paralelo al eje de rotación, nada cambia en la rotación. En cambio, una componente del momento, perpendicular aleje de rotación, no cambia el módulo de la velocidad angular sino su dirección, es decir la dirección del eje derotación del cuerpo.Consideremos el cuerpo en rotación de la imagen de derecha. Cuando se le aplica un momento dinámico como elindicado por las fuerzas dibujadas, la dirección de la variación del momento angular es la indicada en el dibujo. Estavariación es perpendicular al momento angular y paralela al momento. La variación de durante un intervalo detiempo es:
Nótese que tiene la misma dirección que . El ángulo que el nuevo momento angular hace con elprecedente cumple que:
Si el cociente es pequeño (e. g. menor a 5 ° en magnitud, típicamente causado por un intervalo de tiempo pequeño), el ángulo se puede obtener de la aproximación de la ecuación anterior mostrada a continuación:
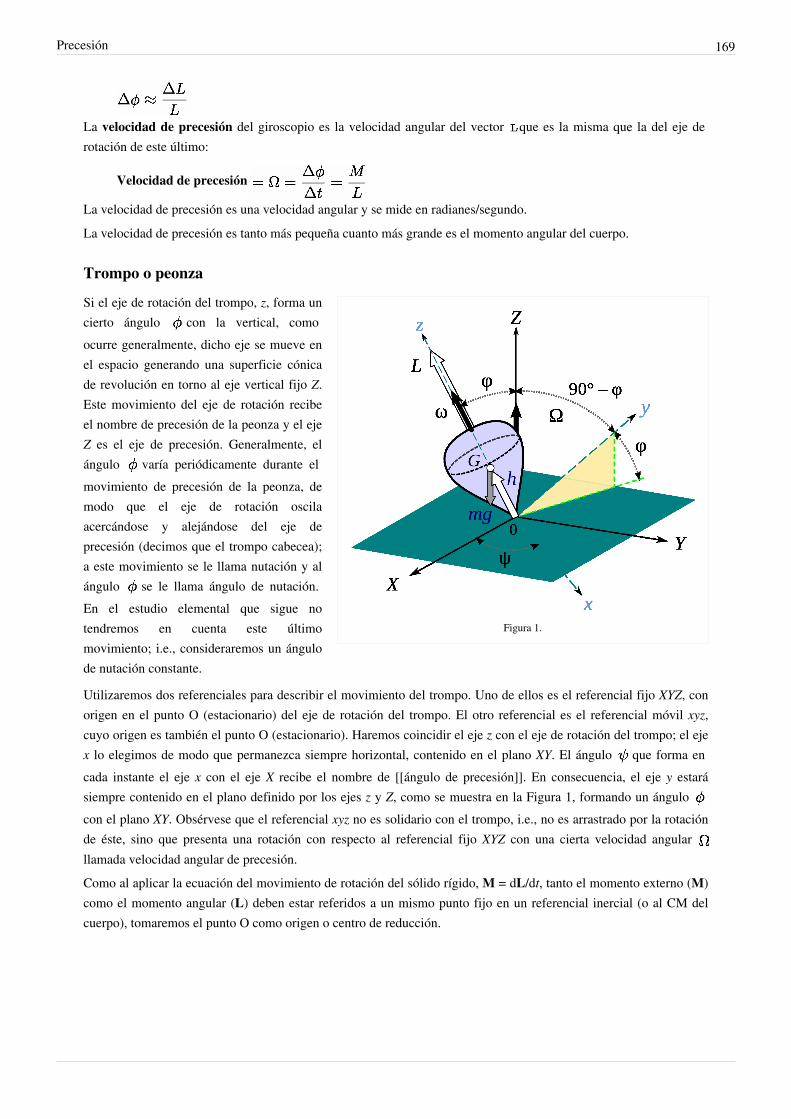
Precesión 169
La velocidad de precesión del giroscopio es la velocidad angular del vector que es la misma que la del eje derotación de este último:
Velocidad de precesión
La velocidad de precesión es una velocidad angular y se mide en radianes/segundo.La velocidad de precesión es tanto más pequeña cuanto más grande es el momento angular del cuerpo.
Trompo o peonza
Figura 1.
Si el eje de rotación del trompo, z, forma uncierto ángulo con la vertical, comoocurre generalmente, dicho eje se mueve enel espacio generando una superficie cónicade revolución en torno al eje vertical fijo Z.Este movimiento del eje de rotación recibeel nombre de precesión de la peonza y el ejeZ es el eje de precesión. Generalmente, elángulo varía periódicamente durante elmovimiento de precesión de la peonza, demodo que el eje de rotación oscilaacercándose y alejándose del eje deprecesión (decimos que el trompo cabecea);a este movimiento se le llama nutación y alángulo se le llama ángulo de nutación.En el estudio elemental que sigue notendremos en cuenta este últimomovimiento; i.e., consideraremos un ángulode nutación constante.
Utilizaremos dos referenciales para describir el movimiento del trompo. Uno de ellos es el referencial fijo XYZ, conorigen en el punto O (estacionario) del eje de rotación del trompo. El otro referencial es el referencial móvil xyz,cuyo origen es también el punto O (estacionario). Haremos coincidir el eje z con el eje de rotación del trompo; el ejex lo elegimos de modo que permanezca siempre horizontal, contenido en el plano XY. El ángulo que forma encada instante el eje x con el eje X recibe el nombre de [[ángulo de precesión]]. En consecuencia, el eje y estarásiempre contenido en el plano definido por los ejes z y Z, como se muestra en la Figura 1, formando un ángulo con el plano XY. Obsérvese que el referencial xyz no es solidario con el trompo, i.e., no es arrastrado por la rotaciónde éste, sino que presenta una rotación con respecto al referencial fijo XYZ con una cierta velocidad angular llamada velocidad angular de precesión.Como al aplicar la ecuación del movimiento de rotación del sólido rígido, M = dL/dt, tanto el momento externo (M)como el momento angular (L) deben estar referidos a un mismo punto fijo en un referencial inercial (o al CM delcuerpo), tomaremos el punto O como origen o centro de reducción.

Precesión 170
Figura 2.
Puesto que el trompo está girando, con una velocidadangular intrínseca ω, alrededor del eje principal deinercia z, su momento angular será paralelo a lavelocidad angular (o sea, será paralelo al eje z), y vienedado por
(1) Por otra parte, el momento externo que actúa sobre eltrompo se debe al peso mg que actúa en el centro degravedad G y es igual al producto vectorial
(2) de modo que el momento externo M resulta serperpendicular al eje de rotación, o sea que . Elmódulo del momento aplicado es
(3) siendo h=OG la distancia entre el punto estacionariodel trompo (el extremo de su púa) y el centro de gravedad del mismo. La dirección de M es la del eje x.
Como el momento externo aplicado al trompo no es nulo, el momento angular no permanecerá constante. Durante unintervalo de tiempo infinitesimal dt el cambio infinitesimal experimentado por el momento angular vale
(4) de modo que el cambio dL en el momento angular tiene siempre la misma dirección que el momento aplicado M(del mismo modo que el cambio en la cantidad de movimiento tiene siempre la misma dirección que la fuerza).Como el momento M es perpendicular al momento angular L, el cambio dL en el momento angular también esperpendicular a L. Por consiguiente, el vector momento angular cambia de dirección, pero su módulo permanececonstante (Figura 2). Naturalmente, puesto que el momento angular tiene siempre la dirección del eje de rotaciónéste cambiará también su orientación en el espacio en el transcurso del tiempo.
El extremo del momento angular L describe una circunferencia, de radio , alrededor del eje fijo Z y en untiempo dt dicho radio experimenta un desplazamiento angular dψ. La velocidad angular de precesión Ω se definecomo la velocidad angular con la que gira el eje z en torno al eje fijo Z. Esto es
(5)
y está representado por un vector situado sobre eje Z.Puesto que L es un vector de módulo constante que precesa alrededor del eje Z con una velocidad angular Ω,podemos escribir la ec. dif. del movimiento de rotación en la forma
(6)
obteniéndose para el módulo del momento
(7) expresión de la que despejaremos Ω para tener
(8)
donde hemos sustituido las expresiones (1) y (2) para el momento angular y el momento, respectivamente. Lavelocidad angular de precesión, Ω, resulta ser inversamente proporcional al momento angular (L) o a la velocidadangular intrínseca (ω), de modo que si éste o ésta es grande, aquélla será pequeña.
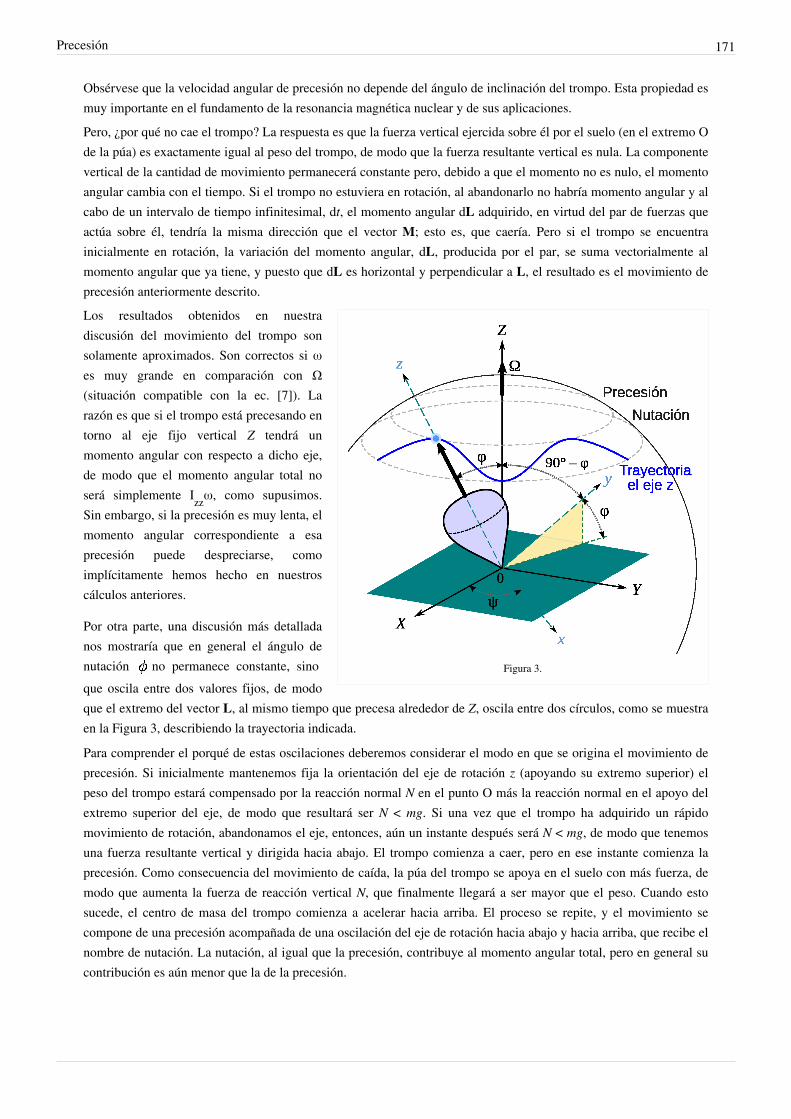
Precesión 171
Obsérvese que la velocidad angular de precesión no depende del ángulo de inclinación del trompo. Esta propiedad esmuy importante en el fundamento de la resonancia magnética nuclear y de sus aplicaciones.Pero, ¿por qué no cae el trompo? La respuesta es que la fuerza vertical ejercida sobre él por el suelo (en el extremo Ode la púa) es exactamente igual al peso del trompo, de modo que la fuerza resultante vertical es nula. La componentevertical de la cantidad de movimiento permanecerá constante pero, debido a que el momento no es nulo, el momentoangular cambia con el tiempo. Si el trompo no estuviera en rotación, al abandonarlo no habría momento angular y alcabo de un intervalo de tiempo infinitesimal, dt, el momento angular dL adquirido, en virtud del par de fuerzas queactúa sobre él, tendría la misma dirección que el vector M; esto es, que caería. Pero si el trompo se encuentrainicialmente en rotación, la variación del momento angular, dL, producida por el par, se suma vectorialmente almomento angular que ya tiene, y puesto que dL es horizontal y perpendicular a L, el resultado es el movimiento deprecesión anteriormente descrito.
Figura 3.
Los resultados obtenidos en nuestradiscusión del movimiento del trompo sonsolamente aproximados. Son correctos si ωes muy grande en comparación con Ω(situación compatible con la ec. [7]). Larazón es que si el trompo está precesando entorno al eje fijo vertical Z tendrá unmomento angular con respecto a dicho eje,de modo que el momento angular total noserá simplemente Izzω, como supusimos.Sin embargo, si la precesión es muy lenta, elmomento angular correspondiente a esaprecesión puede despreciarse, comoimplícitamente hemos hecho en nuestroscálculos anteriores.
Por otra parte, una discusión más detalladanos mostraría que en general el ángulo denutación no permanece constante, sinoque oscila entre dos valores fijos, de modoque el extremo del vector L, al mismo tiempo que precesa alrededor de Z, oscila entre dos círculos, como se muestraen la Figura 3, describiendo la trayectoria indicada.
Para comprender el porqué de estas oscilaciones deberemos considerar el modo en que se origina el movimiento deprecesión. Si inicialmente mantenemos fija la orientación del eje de rotación z (apoyando su extremo superior) elpeso del trompo estará compensado por la reacción normal N en el punto O más la reacción normal en el apoyo delextremo superior del eje, de modo que resultará ser N < mg. Si una vez que el trompo ha adquirido un rápidomovimiento de rotación, abandonamos el eje, entonces, aún un instante después será N < mg, de modo que tenemosuna fuerza resultante vertical y dirigida hacia abajo. El trompo comienza a caer, pero en ese instante comienza laprecesión. Como consecuencia del movimiento de caída, la púa del trompo se apoya en el suelo con más fuerza, demodo que aumenta la fuerza de reacción vertical N, que finalmente llegará a ser mayor que el peso. Cuando estosucede, el centro de masa del trompo comienza a acelerar hacia arriba. El proceso se repite, y el movimiento secompone de una precesión acompañada de una oscilación del eje de rotación hacia abajo y hacia arriba, que recibe elnombre de nutación. La nutación, al igual que la precesión, contribuye al momento angular total, pero en general sucontribución es aún menor que la de la precesión.
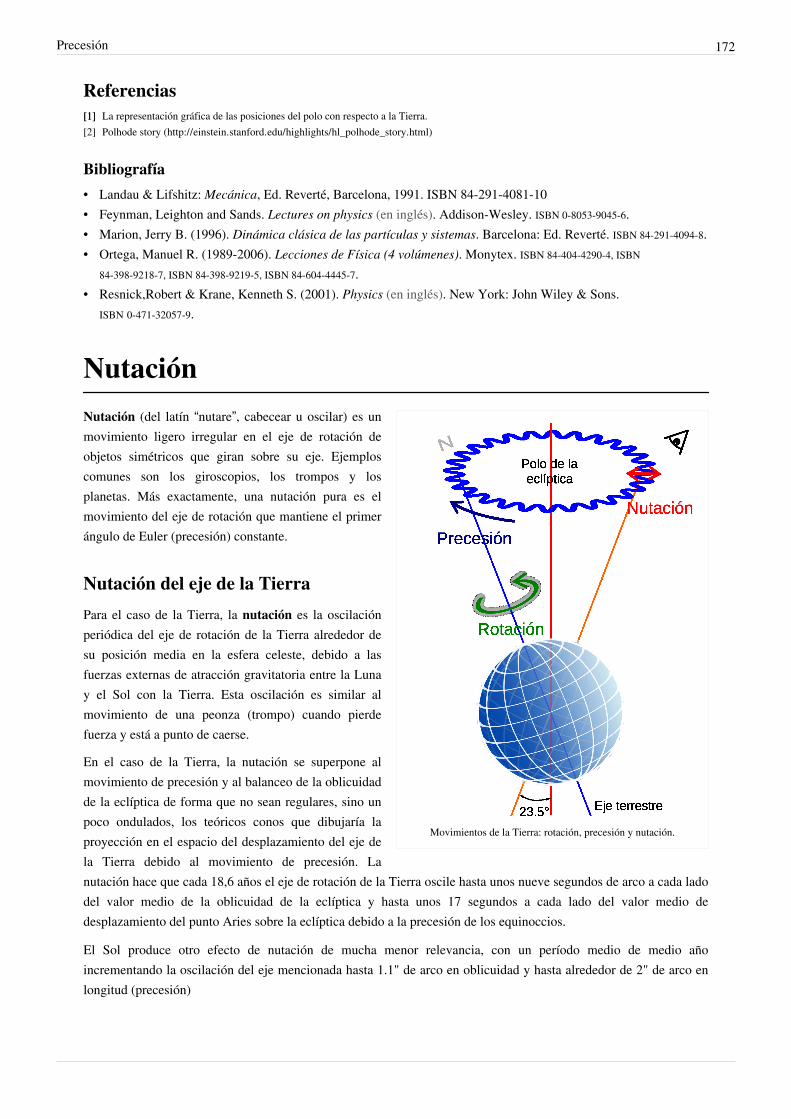
Precesión 172
Referencias[1][1] La representación gráfica de las posiciones del polo con respecto a la Tierra.[2] Polhode story (http:/ / einstein. stanford. edu/ highlights/ hl_polhode_story. html)
Bibliografía• Landau & Lifshitz: Mecánica, Ed. Reverté, Barcelona, 1991. ISBN 84-291-4081-10• Feynman, Leighton and Sands. Lectures on physics (en inglés). Addison-Wesley. ISBN 0-8053-9045-6.• Marion, Jerry B. (1996). Dinámica clásica de las partículas y sistemas. Barcelona: Ed. Reverté. ISBN 84-291-4094-8.• Ortega, Manuel R. (1989-2006). Lecciones de Física (4 volúmenes). Monytex. ISBN 84-404-4290-4, ISBN
84-398-9218-7, ISBN 84-398-9219-5, ISBN 84-604-4445-7.• Resnick,Robert & Krane, Kenneth S. (2001). Physics (en inglés). New York: John Wiley & Sons.
ISBN 0-471-32057-9.
Nutación
Movimientos de la Tierra: rotación, precesión y nutación.
Nutación (del latín “nutare”, cabecear u oscilar) es unmovimiento ligero irregular en el eje de rotación deobjetos simétricos que giran sobre su eje. Ejemploscomunes son los giroscopios, los trompos y losplanetas. Más exactamente, una nutación pura es elmovimiento del eje de rotación que mantiene el primerángulo de Euler (precesión) constante.
Nutación del eje de la Tierra
Para el caso de la Tierra, la nutación es la oscilaciónperiódica del eje de rotación de la Tierra alrededor desu posición media en la esfera celeste, debido a lasfuerzas externas de atracción gravitatoria entre la Lunay el Sol con la Tierra. Esta oscilación es similar almovimiento de una peonza (trompo) cuando pierdefuerza y está a punto de caerse.
En el caso de la Tierra, la nutación se superpone almovimiento de precesión y al balanceo de la oblicuidadde la eclíptica de forma que no sean regulares, sino unpoco ondulados, los teóricos conos que dibujaría laproyección en el espacio del desplazamiento del eje dela Tierra debido al movimiento de precesión. Lanutación hace que cada 18,6 años el eje de rotación de la Tierra oscile hasta unos nueve segundos de arco a cada ladodel valor medio de la oblicuidad de la eclíptica y hasta unos 17 segundos a cada lado del valor medio dedesplazamiento del punto Aries sobre la eclíptica debido a la precesión de los equinoccios.
El Sol produce otro efecto de nutación de mucha menor relevancia, con un período medio de medio añoincrementando la oscilación del eje mencionada hasta 1.1" de arco en oblicuidad y hasta alrededor de 2" de arco enlongitud (precesión)
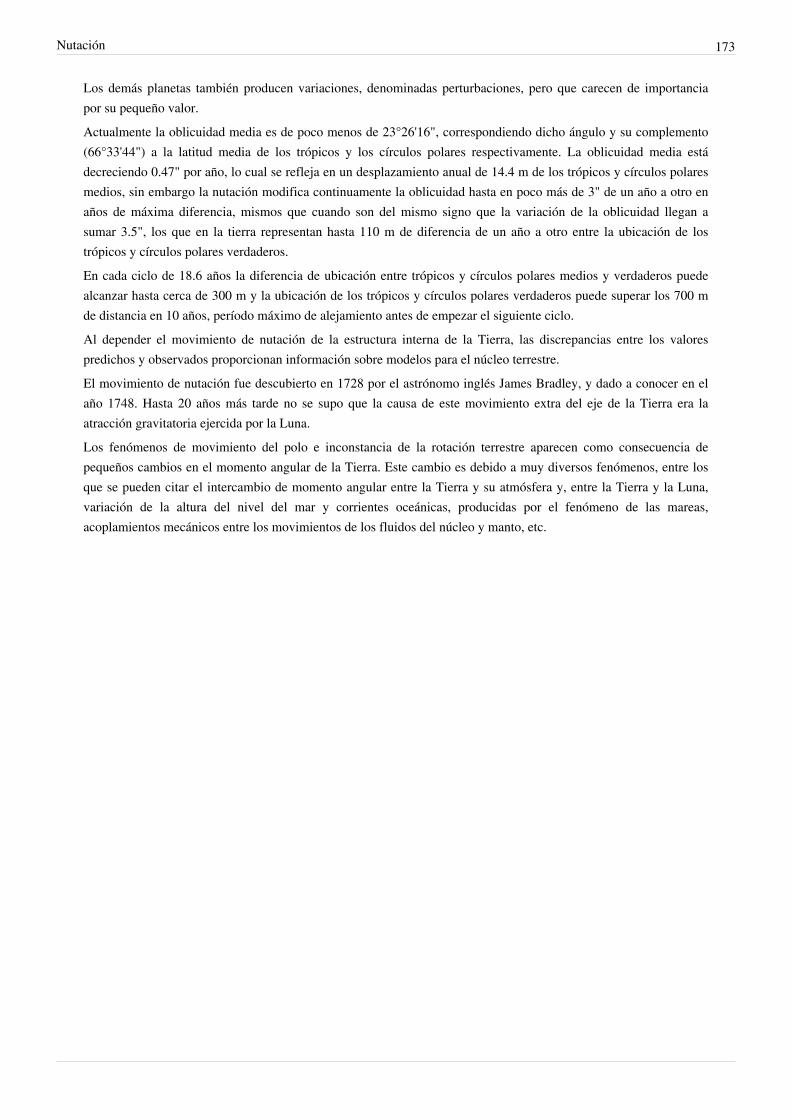
Nutación 173
Los demás planetas también producen variaciones, denominadas perturbaciones, pero que carecen de importanciapor su pequeño valor.Actualmente la oblicuidad media es de poco menos de 23°26'16", correspondiendo dicho ángulo y su complemento(66°33'44") a la latitud media de los trópicos y los círculos polares respectivamente. La oblicuidad media estádecreciendo 0.47" por año, lo cual se refleja en un desplazamiento anual de 14.4 m de los trópicos y círculos polaresmedios, sin embargo la nutación modifica continuamente la oblicuidad hasta en poco más de 3" de un año a otro enaños de máxima diferencia, mismos que cuando son del mismo signo que la variación de la oblicuidad llegan asumar 3.5", los que en la tierra representan hasta 110 m de diferencia de un año a otro entre la ubicación de lostrópicos y círculos polares verdaderos.En cada ciclo de 18.6 años la diferencia de ubicación entre trópicos y círculos polares medios y verdaderos puedealcanzar hasta cerca de 300 m y la ubicación de los trópicos y círculos polares verdaderos puede superar los 700 mde distancia en 10 años, período máximo de alejamiento antes de empezar el siguiente ciclo.Al depender el movimiento de nutación de la estructura interna de la Tierra, las discrepancias entre los valorespredichos y observados proporcionan información sobre modelos para el núcleo terrestre.El movimiento de nutación fue descubierto en 1728 por el astrónomo inglés James Bradley, y dado a conocer en elaño 1748. Hasta 20 años más tarde no se supo que la causa de este movimiento extra del eje de la Tierra era laatracción gravitatoria ejercida por la Luna.Los fenómenos de movimiento del polo e inconstancia de la rotación terrestre aparecen como consecuencia depequeños cambios en el momento angular de la Tierra. Este cambio es debido a muy diversos fenómenos, entre losque se pueden citar el intercambio de momento angular entre la Tierra y su atmósfera y, entre la Tierra y la Luna,variación de la altura del nivel del mar y corrientes oceánicas, producidas por el fenómeno de las mareas,acoplamientos mecánicos entre los movimientos de los fluidos del núcleo y manto, etc.
Fuentes y contribuyentes del artículo 174
Fuentes y contribuyentes del artículoMagnitud física Fuente: http://es.wikipedia.org/w/index.php?oldid=76274051 Contribuyentes: -Erick-, AVIADOR, Abgenis, Acratta, Alarmero, Aleator, Alefisico, Algarabia, Allforrous,Andreasmperu, Angel GN, Antonorsi, Antón Francho, Arjuno3, Axvolution, Baiji, Balles2601, Banfield, Barteik, Belb, Beto29, Billyrobshaw, BlackBeast, BuenaGente, Camilo, Carmin,Dangelin5, Darwino, Davius, Diegusjaimes, Docfredderick, Drude, Eamezaga, Edslov, Eduardosalg, Edupedro, Ejmeza, FAR, Farisori, Fernando javier perez, Fonadier, Foundling, FrancoGG,Furti, Ganímedes, GermanX, Gsrdzl, Götz, HUB, Helmy oved, Hidoy kukyo, House, Humbefa, Humberto, Ignacio Icke, Ignaciojimenez89, Isha, IvanStepaniuk, JABO, JMCC1, JMPerez,JacobRodrigues, Javitorvic, Jcaraballo, Jelf45, Jkbw, Johch1, Jose98natareno, Joseaperez, Juanjuanjuanjuanjuanjuan, Kansai, Kraenar, Kved, LUXO1995, Laberinto16, Laura Fiorucci, Lauraparton, Leonpolanco, Leugim1972, Lourdes Cardenal, Macarrones, MadriCR, Makete, Maldoror, Manuelt15, Mar del Sur, Marcelo, MarcoAurelio, Marianov, Matdrodes, Mcapdevila, Mel 23,Mnts, Muro de Aguas, Nachosan, Netito777, NicolasAlejandro, Nicop, OLM, Pacovila, Paomari17, Petruss, Platonides, Pólux, Queninosta, Quijav, Racso, Rafaelangel1997, Raulshc, Renly,Ricardogpn, Rodriajdre, Rosarino, Rrmsjp, Rubpe19, Ruy Pugliesi, Rαge, Saloca, Santga, Savh, Seraphimon216, Sergio Andres Segovia, SuperBraulio13, Superzerocool, Tano4595, Technopat,Thunderbird2, Tirithel, TonyCba, Travelour, Tuertooriginal, UA31, Unificacion, VanKleinen, Veon, Waka Waka, XalD, Xosema, Xuankar, 638 ediciones anónimas
Escalar (física) Fuente: http://es.wikipedia.org/w/index.php?oldid=74755125 Contribuyentes: Acratta, Armonizador, Banfield, Behemot leviatan, Biasoli, Camilo, Cocolacoste, Davius, Dierato,Efegé, Fixertool, GermanX, Gsrdzl, HUB, Helmy oved, Humbefa, JMCC1, Jkbw, Juanmontero.333, Mansoncc, Matdrodes, Matteocordoba, Ortisa, Rastrojo, Ricardogpn, SuperBraulio13,Technopat, Teckizt, Travelour, UA31, UAwiki, Zalovitch, 71 ediciones anónimas
Vector Fuente: http://es.wikipedia.org/w/index.php?oldid=76186183 Contribuyentes: Abgenis, Acratta, Aika, Airunp, Alberto Leguiza, Alberto Salguero, Ale flashero, Alexav8, Alfredobi,Algarabia, Alhen, Aliman5040, Alvaro qc, Andreaherrera17, Andreasmperu, Angel GN, Angel.F, AngelCaído, Antonorsi, Antur, Antón Francho, Arjuno3, Asqueladd, Axvolution, Axxgreazz,Aybar lautaro pizarro, Açipni-Lovrij, Baiji, Belb, Belgrano, BetoCG, Betoloco55, BlackBeast, BraisGabin, Bucephala, BuenaGente, C'est moi, CaStarCo, Camilo, Carmin, Carrasco carlos,Cguzmanceti, Chris pinto, Claudio Elias, Cobalttempest, Coins, CommonsDelinker, DJ Nietzsche, Damisoft, Daniel ASA, DasAuge, David0811, Davius, Denisdelcarmen, Der Künstler,DerHexer, Dianai, Diegusjaimes, Diosa, Dnu72, Dodo, Dossier2, DrVino, Echani, Edgarjdq, Edmenb, Eduardosalg, Elliniká, Elsenyor, Emijrp, Enric Naval, Eperez766, Erik Mora, Fanikiss,Farisori, Felipe frih, Ferbr1, Fidelmoquegua, Filipo, Finwe, Fmariluis, Foundling, Foxware, Fran Ara, Fran89, FrancoGG, Fsd141, Galandil, Gbsuar, GermanX, Gharadeldesierto, Greek, Gsrdzl,Gustronico, Götz, HUB, Helmy oved, HiTe, Homero Simpson, House, Hprmedina, Humberto, Ialad, Igna, Isha, J. A. Gélvez, J.M.Domingo, J3D3, JAQG, JMCC1, JQv4, JacobRodrigues,Jarisleif, Jarke, Jerowiki, JeysonxD, Jhonatan-peña, Jimbo20, Jkbw, Jorge c2010, Jorgelrm, Jose98natareno, Joshimath, Juan Marquez, Juan Mayordomo, Juanje 2712, Karshan, Kekkyojin,Kenoguzman, Kismalac, Kved, LMLM, LP, LUISQM, Laura Fiorucci, Laxmen, Leonpolanco, Linkedark, Linux65, Locos epraix, MEUDIT MONENEGRO, Macy, Mafores, MagisterMathematicae, Maldoror, Malguzt, Mansoncc, MarcoAurelio, Marianov, Mario modesto, Matdrodes, Matiasasb, Mel 23, Mercenario97, MercurioMT, Mettallzoar, Miancta, Miguel,Mike.lifeguard, Milestones, Miss Manzana, Mjacome0172, Muro de Aguas, Mushii, Natrix, Neodop, Netito777, Nixón, Numbo3, OboeCrack, Omegakent, Oscar ., Osos4, Pablo323, Pabloallo,Paintman, Pakitou, Pan con queso, Pello, Petruss, Pieter, Pino, Ppja, Pólux, Queninosta, Racso, Rainiero.garcia, Ramjar, Rastrojo, Raulshc, Rigenea, Riohachero, Rojasyesid, Roman.astaroth,Rondador, Roprgm, RoyFocker, RubiksMaster110, Rubpe19, Rv53705, Rαge, Sanchez1103, Sandra Leyva, Santiperez, Sapientisimo, Savh, Shalbat, Skr515, Soulreaper, SuperBraulio13,Superzerocool, Susanbea, TMU, Taichi, Tano4595, Tarkus, Technopat, Teijus, Tirithel, Toad32767, Tomatejc, Tostadora, Troodon, UA31, Usuwiki, VanKleinen, Veon, Vetranio, Vic Fede,Victormoz, Vitamine, Vivaelcelta, Waka Waka, Windrade, Wricardoh, XProlok, XalD, Xuankar, Yeison1997r, Yeza, 1248 ediciones anónimas
Vector unitario Fuente: http://es.wikipedia.org/w/index.php?oldid=75744130 Contribuyentes: Acratta, Algarabia, Aliman5040, Alvaro qc, Calq, Cinabrium, Cobalttempest, Davius, Dhidalgo,Diegusjaimes, El Moska, Fargue, Farisori, Fran89, GermanX, Götz, HUB, Hapussai, Hprmedina, Ignacioerrico, J.R.Menzinger, Jkbw, Kordas, LP, Leonpolanco, Locos epraix, Matdrodes,Mpeinadopa, PhoneixS, Ricardogpn, Spirit-Black-Wikipedista, Vitamine, XanaG, 98 ediciones anónimas
Área Fuente: http://es.wikipedia.org/w/index.php?oldid=76300233 Contribuyentes: 2rombos, Acratta, Adis, Adorian, Adrilv, Alejandrocaro35, AlemanI2.0, Alexav8, Allforrous, Amanuense,Andreasmperu, Angel GN, Antón Francho, Arjuno3, Ayax alexander rodriguez reyes, Açipni-Lovrij, Baiji, Banfield, Benjaminm31, Bernard, BetoCG, BlackBeast, Boen, Bucho, BuenaGente,Camilo, Canopus49, Cobalttempest, Cratón, Ctrl Z, Dangelin5, Daniel ASA, DanielithoMoya, Davius, Delphidius, Diegusjaimes, Digigalos, Dodo, Dorieo, Dupergabriel, Edmenb, Edslov,Eduardosalg, Elboy99, Emiduronte, EnGarde69, Er Komandante, Erfil, Esceptic0, Felipealvarez, Figempa 2a, Fiquei, Fixertool, Flakinho, Fonadier, Foundling, Fran89, GM83, Gaeddal, Gafotas,GermanX, Greek, Gusgus, Góngora, Götz, Halfdrag, Helmy oved, Higoki, Humbefa, Humberto, Igna, Isha, JMCC1, JacobRodrigues, Javicivil, Javierito92, Jcaraballo, Jjafjjaf, Jkbw,Jmvkrecords, Jurock, Kismalac, Kved, Kyze, LP, Leonpolanco, LlamaAl, Lobo, Loco085, Lucien leGrey, Luis80214, MaKiNeoH, MadriCR, Mafores, Magister Mathematicae, Mariaacosta2014,Marsal20, Matdrodes, Mdiagom, Mel 23, Milsepul, Miss Manzana, Mpeinadopa, Nahuelm85, Netito777, Ninrouter, Oblongo, Ortisa, PR1iNzIpEh, Pacoperez6, Pan con queso, Petruss, Pino,Platonides, Pólux, Queninosta, Qwertymith, Racso, Rondador, Rosarino, Roxihermosa, Rubpe19, Santga, Santiperez, Savh, Silvia Andino, Simelemontolomeo, Singolox, Snakeeater, Soulreaper,SuperBraulio13, Superzerocool, Tano4595, Technopat, TeleMania, Tirithel, Tord765, Travelour, UA31, Valpala2, VanKleinen, Vic Fede, Vitamine, Vivero, Waka Waka, Wewe, White MasterKing, XalD, Yeza, 667 ediciones anónimas
Cinemática Fuente: http://es.wikipedia.org/w/index.php?oldid=75877718 Contribuyentes: Abajo estaba el pez, Acratta, Alefisico, Aleo2sabe, Alexav8, Algarabia, Amanuense, Andreasmperu,Angel GN, Angelito7, Antur, Antón Francho, Arturo Reina, Açipni-Lovrij, Balderai, Balles2601, Belgrano, C h a n-Wiki, CASF, CEGH, Camilo, Carlosexplorer, Chico512, Cinevoro,Cobalttempest, Corrector1, Correogsk, Cvalda, DJ Nietzsche, Dangelin5, Daniela fereira, Dankonal, DavidPazos, Davius, DerKrieger, Diego15032000, Diegusjaimes, Dnu72, Dodo, DrCapi,Echani, Eddvilla, EduLeo, Eloycotallo, Emijrp, Envite, Estudiante077, Fany bonita, Foundling, FriedrickMILBarbarossa, Fsd141, Futbolero, Gabriel Solo, Gilmjc, Gsrdzl, Gtr. Errol, Götz, HUB,Halfdrag, Helmy oved, HiTe, Holiday, Humberto, Icvav, Igna, Ileana n, Isha, JacobRodrigues, Jarisleif, Javierito92, Jkbw, Jmvgpartner, Jmvkrecords, Jorge 2701, Jorge c2010, JorgeGG, Josemiguel marquina gomez, Joseaperez, Juanaperra, Jygrower, Kastellanos, Kenxen777, LPFR, Laura Fiorucci, Leonpolanco, Leoslax, Lourdes Cardenal, Lucien leGrey, Luqquino, Macarron,MadriCR, Magister Mathematicae, Manuelferreria, Manuelt15, Manueltato11, Marcelo, MarcoAurelio, Mario890, MarioCGR, Matdrodes, Miss Manzana, Mr.Ajedrez, Nacho18, Nicop, Nioger,Nmsf07, Omar san15, Omarsanchezorta, P.o.l.o., Pleira, Prietoquilmes, Pólux, Quijav, Raulshc, Relleu, Ricardogpn, Rjgalindo, Robalgri, Roberrpm, Rosarino, RoyFocker, Rsg, Samuray, Sandrodel valle, SergioN, Sfs90, SuperBraulio13, Superzerocool, Taichi, Tano4595, Taty2007, Technopat, Tirithel, Tomatejc, Veon, Wikimich, Xuankar, 488 ediciones anónimas
Sistema de referencia Fuente: http://es.wikipedia.org/w/index.php?oldid=75605700 Contribuyentes: .Sergio, Acratta, Aleator, Allforrous, Antur, Apo007, Arturo Reina, Baiji, Balles2601,Biasoli, Davius, Diegusjaimes, Fsd141, GMoyano, Gaijin, GermanX, Gragry, Götz, Halfdrag, Jkbw, Jorge c2010, Joseaperez, MaUrIcIo96, MadriCR, Magister Mathematicae, Maldoror,Marianov, Matdrodes, Montgomery, Motion, Mparri, Netito777, P3p3012345543210, Pello, Proximo.xv, Roy mdza, RoyFocker, SuperBraulio13, Tano4595, Tarawa1943, Technopat, WakaWaka, Xuankar, Y0rx, 170 ediciones anónimas
Vacío Fuente: http://es.wikipedia.org/w/index.php?oldid=74091434 Contribuyentes: 3coma14, Acratta, Airunp, Algarabia, Andreoliva, Angus, Armando-Martin, Bannedalex, Bcartolo, Berfito,Biasoli, Carlopos, Chichornio, Davius, DerkeNuke, Derrick77, Dhidalgo, Dodo, EBRO30, Ecemaml, Edupedro, Eloy, Farisori, Feministo, Ferherre, Flexar, Gaijin, Gallowolf, Gonis, Gustronico,HUB, Halfdrag, Hmchmchmc, Imnaoj, JABO, JCCO, Jakeukalane, Javierito92, Jkbw, Jorge c2010, JorgeGG, Jsanchezes, Juan Carlos Sánchez Rivero, Jusore, Krous, Laura Fiorucci, Lpagola,Marcelodealsina, Matdrodes, Moebiusuibeom-es, Mrexcel, Muro de Aguas, Opinador, Ortisa, Pedro Felipe, PhJ, Pólux, Ratchet, Rosarino, SPQRes, Technopat, Urdangaray, conversion script,119 ediciones anónimas
Punto material Fuente: http://es.wikipedia.org/w/index.php?oldid=72527774 Contribuyentes: Acratta, Algarabia, Davius, Grillitus, Oblongo, Ricardogpn, 5 ediciones anónimas
Centro de masas Fuente: http://es.wikipedia.org/w/index.php?oldid=74144475 Contribuyentes: Abián, Acratta, Alexanderps, Algarabia, Belb, Chewie, Cobalttempest, Davius, Echani, Ejmeza,El Moska, Fran Ara, Helmy oved, Hgnava, Humberto, JMCC1, Jkbw, Laura Fiorucci, Loqu, Manuelt15, Matdrodes, Migp, Phileros74, Pretor, Quantanew, Reanduro, Rodrigouf, Romanovich,Rαge, TArea, Tano4595, Tesi1700, Waka Waka, Xenoforme, 96 ediciones anónimas
Equilibrio mecánico Fuente: http://es.wikipedia.org/w/index.php?oldid=74872978 Contribuyentes: 3coma14, Davius, Dodo, Fsd141, Ggenellina, Jkbw, Jorge c2010, Julian leonardo paez,Laura Fiorucci, Leitoxx, Nemo, Poco a poco, Soulreaper, Tano4595, 36 ediciones anónimas
Cinemática del sólido rígido Fuente: http://es.wikipedia.org/w/index.php?oldid=73642733 Contribuyentes: Algarabia, Davius, Dnu72, Emiduronte, Gaijin, Guapitomaster, Götz, Jkbw, Quijav,SuperBraulio13, UA31, 27 ediciones anónimas
Cuerpo rígido Fuente: http://es.wikipedia.org/w/index.php?oldid=74581371 Contribuyentes: 4lex, Akhran, Açipni-Lovrij, Cookie, Grillitus, NahuelMS, Swordfish2007, Taichi, 22 edicionesanónimas
Movimiento (física) Fuente: http://es.wikipedia.org/w/index.php?oldid=76264167 Contribuyentes: Acratta, Adan iorny, Airunp, AlEEjANDRAAH, Aleestra, Algarabia, Andre Engels, Andreasmperu, Aneury0770, Angel GN, Antonorsi, Aqui c, Arley niño, Arturo Reina, Axvolution, Axxgreazz, Açipni-Lovrij, Balles2601, Banfield, Baute2010, BlackBeast, Cgb, Cinevoro, Cookie, Copydays, Daniel bellorin, Danielgmcbq, David0811, Davius, Diegusjaimes, Digigalos, Dodo, Draxtreme, Edjoerv, Eduardosalg, El Moska, Er Komandante, Flextron, Fsd141, Gafotas, Gaijin, Galandil, Ganímedes, Gengiskanhg, Gsrdzl, Götz, HUB, Helmy oved, Huhsunqu, Igna, Ihazevich, Isha, Ivanovick solano, JABO, JMPerez, Jafeluv, JakobVoss, Jkbw, Jmvgpartner, Jorge c2010, Joseaperez, Jrosillo3, Latiniensis, Laura Fiorucci, Lauranrg, Leitoxx, Leonpolanco, LlamaAl, Lofre, Lsttterquioa, MadriCR, Maldoror, ManuelMore, Matdrodes, Miss Manzana, Mnp53, Muro de Aguas, Mutari, Nachosan, Netito777, Nico9julio, Oblongo, Oswaldo00, Pabloes, PeiT, PhJ, Poco a poco, Pólux, Ricardogpn, Richard Lyon, Rigenea, Roberrpm, Rubpe19, SABASA1012, SAVE THE World, Santga, Savh, Seanver, Sergio Andres Segovia, Sotito Metalero, Soulreaper, Sparedcoast, Sunny.Moya, SuperBraulio13, Superzerocool, Syum90, Taichi,
Fuentes y contribuyentes del artículo 175
Tamorlan, Tano4595, Technopat, Tirithel, Tomatejc, Tostadora, UA31, Urdangaray, WEITER, Waka Waka, Wesisnay, Wikiléptico, Xuankar, Ángel Luis Alfaro, 569 ediciones anónimas
Ecuación de movimiento Fuente: http://es.wikipedia.org/w/index.php?oldid=74280048 Contribuyentes: 3coma14, Acratta, Alefisico, Andres Rojas, Arjuno3, Balles2601, CATUNILLO, DJNietzsche, Davius, Dreitmen, Grico, Helmy oved, Humbefa, Jkbw, Juan Mayordomo, Matdrodes, Pólux, Tano4595, Vic Fede, Yeza, 29 ediciones anónimas
Traslación (física) Fuente: http://es.wikipedia.org/w/index.php?oldid=74107862 Contribuyentes: Acratta, Andreasmperu, Davius, Diegusjaimes, Helmy oved, JMCC1, Jkbw, Petronas, Petruss,Technopat, Uruk, 21 ediciones anónimas
Resistencia aerodinámica Fuente: http://es.wikipedia.org/w/index.php?oldid=76260549 Contribuyentes: 142857, A ver, Amadís, Antur, Basquetteur, Beethoven, Bucyrus, Davius, Deleatur,Eloy, Feliciano, Guatonchico, Gustronico, JMPerez, Jasón, Javierito92, Jkbw, Jorge C.Al, Kristobal, Leonpolanco, Lustorgan, Mel 23, Odvn, Outisnn, OverG, PJRM 1, Pacostein, Paul 14,Rafa606, Randroide, Rondador, Syum90, Tano4595, Tortillovsky, Triku, Troodon, 74 ediciones anónimas
Campo gravitatorio Fuente: http://es.wikipedia.org/w/index.php?oldid=75220173 Contribuyentes: Acratta, Alhen, Amadís, BuenaGente, Cinevoro, Comae, Crist510, D.H, Davius,Eduardosalg, GermanX, Gsrdzl, Hafernandez, Hortografia, JMCC1, Jerowiki, Jkbw, Jonathan Saviñon de los Santos, Juan Marquez, Juancitox, Lg719, ManuelGR, Mortadelo2005, Morytelov,Muro de Aguas, Opinador, Perky Pat, Pólux, RoyFocker, Sanbec, Slipk555, Srbanana, Takashi kurita, Tano4595, Template namespace initialisation script, Vitamine, Wricardoh, XxisaixX123,Zulucho, 54 ediciones anónimas
Intensidad del campo gravitatorio Fuente: http://es.wikipedia.org/w/index.php?oldid=72829244 Contribuyentes: 4lex, Abelacoa, Acratta, Algarabia, Blaken, Boen, Davius, Diegusjaimes,Edmenb, Especiales, GermanX, GomoX, Gustronico, Götz, Humberto, Jerowiki, Jesusosm, Jkbw, Jmcalderon, Julian leonardo paez, Jynus, Lasai, Lauranrg, Lourdes Cardenal, Maldoror,Matdrodes, Montgomery, Muro de Aguas, NeVic, Quijav, Raulshc, Roberto Fiadone, RubiksMaster110, Siquisai, Srbanana, Taichi, Tano4595, Uruk, VanKleinen, Walmarc, Xsm34, 67 edicionesanónimas
Desplazamiento (vector) Fuente: http://es.wikipedia.org/w/index.php?oldid=76208322 Contribuyentes: AVIADOR, Acratta, Alefisico, Balles2601, Biasoli, Davius, Estudiante077, FAL56,GermanX, Greek, Götz, Halfdrag, Helmy oved, Jkbw, Jmvgpartner, Leonpolanco, MadriCR, Matdrodes, Nicop, Petruss, Roberrpm, Snakeyes, Technopat, Thebatzuk, Travelour, Uruk, Veon,Wacruz9, 95 ediciones anónimas
Posición Fuente: http://es.wikipedia.org/w/index.php?oldid=74511214 Contribuyentes: Acratta, Alefisico, Algarabia, Angel GN, Davius, Dianai, Dnu72, Edslov, Eduardosalg, FAL56, Fsd141,GermanX, Gonis, Greek, HUB, Humberto, JMCC1, Jkbw, Kikeyalexrulean, Kved, Leitoxx, Lucien leGrey, Matdrodes, Pello, Raulshc, Ricardogpn, SuperBraulio13, Wafry, Xuankar, conversionscript, Ángel Luis Alfaro, 66 ediciones anónimas
Velocidad Fuente: http://es.wikipedia.org/w/index.php?oldid=75977842 Contribuyentes: .Sergio, 2rombos, 3coma14, AVIADOR, Acratta, Agguizar, Airunp, Aitorponce, Alan, Ale flashero,Alefisico, Algarabia, Andreasmperu, Andreoliva, Angel GN, Antepiero, Antonorsi, Antur, Arjuno3, Armando-Martin, Arteminis, Atila rey, Axvolution, Açipni-Lovrij, Baiji, Balderai,Balles2601, Banfield, Barcex, Belchi, Benedicto, BetoCG, Biasoli, BlackBeast, Brianna59rios, Camilo, Carmin, Carrousel, Carutsu, ClubDeFansAgustinFUruguay, Constanzaserra, Creosota, DJNietzsche, Daddyh, Daniel De Leon Martinez, David0811, Davius, Deborathcasanova, DerKrieger, Dermot, Diana.luceroc, Diegusjaimes, Dnu72, Dondervogel 2, Edslov, Eduardosalg, Elliniká,Emiduronte, Epatrono 33, Er Komandante, Erickithop, Felviper, Ferrersaurio, Flakinho, Fonadier, Foundling, Fsd141, Gallowolf, Gato ocioso, GermanX, Giacomopc, Gilmjc, Ginés90, Gizmo II,Grimaldydj14, Gsrdzl, Gusama Romero, Gusgus, Götz, HUB, Halfdrag, Hannatt, Hans Topo1993, Harpagornis, Helmy oved, Holalopen, Humberto, Ignacio Icke, Ilario, Isha, J.R.Menzinger,JMCC1, JacobRodrigues, Jarisleif, Jcaraballo, Jkbw, Jorge 2701, Joseaperez, Jsanchezes, Kismalac, Kordas, Laura Fiorucci, Leonpolanco, Libertines, LlamaAl, Lopez sopez, Lucien leGrey,MaKiNeoH, MadriCR, Magister Mathematicae, Maldoror, Maleiva, Mamoncitos, Mansoncc, ManuelMore, Manuelt15, Marianov, Marsal20, Matdrodes, Mel 23, Montgomery, Mortadelo2005,Mosca, Multicmms, Muro de Aguas, NaBUru38, Netito777, Nicop, Nihilo, Ninovolador, Ortisa, Oscar ., Pan con queso, Pascow, PeiT, Pello, PhJ, Platonides, Poco a poco, Pólux, Racso, Raulshc,Reignerok, Ricardogpn, Rigenea, Robalgri, Rodelar, Rodrigouf, Roinpa, Rosarino, RoyFocker, SABASA1012, Saloca, Samuel Maca Garcia, Savh, Sebrev, Sehou, Sergio Andres Segovia,Soulreaper, SuperBraulio13, Tano4595, Tarawa1943, Tarkus, Technopat, Tirithel, Travelour, Triku, Troodon, Tyk, UA31, Ucevista, Varano, Vic Fede, Vicente huichito, Vitamine, Waka Waka,Wilfredor, XalD, Xuankar, Yeison1997r, Yeza, Érico Júnior Wouters, 780 ediciones anónimas
Rapidez Fuente: http://es.wikipedia.org/w/index.php?oldid=76157296 Contribuyentes: ASpibz, Acratta, Alefisico, Algarabia, Andreasmperu, Andrey diaz, Arjuno3, Armando-Martin, Atila rey,Banfield, Belascoaran mx, Biasoli, Bislaw, Brianna59rios, Bucho, C766la, Carmin, Chico512, Cipión, Cl6rk, Comae, Cristianrock2, DJ Nietzsche, Dangelin5, Darkmaster12, Davius,Diegusjaimes, Dondervogel 2, Draxtreme, Eduardosalg, Ener6, Fonadier, Gaijin, Ginés90, Grillitus, Gsrdzl, Gusama Romero, Götz, Harturo123, Helmy oved, Hidoy kukyo, Ileana n, Isha,JMCC1, Jkbw, Jurgens, Kenedys, Kronoss, Leonpolanco, LieutenantLatvia, Magister Mathematicae, Manwë, Marianov, Memovch1, Miss Manzana, Netito777, Oscarkyuubi, Osiel Melo Guerra,Platonides, Pólux, Racso, Ricardogpn, Robalgri, Roberto Fiadone, Roimergarcia, Rosarinagazo, Rosarino, Rαge, Santhy, SuperBraulio13, Tarkus, Technopat, The14Jabc20, Tirithel, Tux, UA31,Vandal Crusher, Vicente huichito, Waka Waka, Webnaster, Xuankar, 360 ediciones anónimas
Aceleración Fuente: http://es.wikipedia.org/w/index.php?oldid=75906708 Contribuyentes: 4lex, 80-25-166-133.uc.nombres.ttd.es, Abián, Acratta, Algarabia, Allforrous, Andreasmperu,Asqueladd, Atila rey, Axvolution, Açipni-Lovrij, Balderai, Banfield, Benedicto, BlackBeast, BuenaGente, Calvary chords, Carlos Zeas, Cinevoro, Cl6rk, Cobalttempest, David0811, Davius,Derek blaz, Diegusjaimes, Dnu72, Dodo, Dorieo, Dreitmen, Durero, Edmenb, El BAD, Elcaballodeatila, Eli22, Emijrp, Ener6, Ermitaño9, Ezarate, Fabiano Pyrex, Foundling, Fran89, FrancoGG,Fsd141, Gsrdzl, Götz, Halfdrag, Harpagornis, Helmy oved, Homo logos, House, Humberto, In.muzak, IrwinSantos, Isha, JMCC1, JRM spain, JacobRodrigues, Jarisleif, Javi pk, Javierito92,Jkbw, JordiGimenez, Jorge c2010, JoseA, Joseaperez, Juanda1234567, KarLiithaa, Karshan, Kved, Laura Fiorucci, Leonpolanco, LlamaAl, Lnnz, Mafores, Maleiva, Manwë, MaoGo, Marcelo,Marieta perez, Matdrodes, Metronomo, Miss Manzana, Moriel, Muro de Aguas, NACLE, NICOLAS HERRERA, Nadhubabdad, Netito777, NicolasAlejandro, Olivares86, Ortisa, Osado,Pabloab, Pello, Petronas, Petruss, PhJ, Puigspita, Pólux, Quijav, Retama, Robalgri, Roberrpm, Robert965, RoyFocker, SABASA1012, Sauron, Savh, Sbelza, Soulreaper, SuperBraulio13,Tamorlan, Tano4595, Technopat, Tirithel, TomasG, Tomatejc, Travelour, Triku, UA31, VanKleinen, Waka Waka, XavierGallart, Xavigivax, Yeison1997r, conversion script, 399 edicionesanónimas
Movimiento rectilíneo uniforme Fuente: http://es.wikipedia.org/w/index.php?oldid=75806613 Contribuyentes: Acratta, Airunp, Aledesanfer95, Alexav8, Algarabia, Alma máter, Amanuense,Antur, Açipni-Lovrij, Baiji, Balles2601, Banfield, Biasoli, Cambioinfomacion, Canopus49, Cristophersebastian, DJ Nietzsche, Dangelin5, Darwino, David0811, Davius, Dianai, Diegusjaimes,Dodo, Dreitmen, Durero, Earrnz, Edslov, Eduardosalg, Elsenyor, Er Komandante, Felipealvarez, Ferferfer gomez, Foundling, FrancoGG, Frei sein, Fsd141, Gafotas, Galandil, GermanX,Ggenellina, Gragry, Grillitus, Gsrdzl, HUB, Hahc21, Helmy oved, Hprmedina, Humberto, Hvizcarra, Isha, JABO, JMPerez, JacobRodrigues, Jaffi, Jaontiveros, Javierito92, Jcaraballo, Jkbw,Joinmetal, Jorgemgby, Joseaperez, Juan1493, Juangui Juan Araya, Juanjo ripoll97, Julie, Kismalac, LPFR, Lari Black Dog, Laura Fiorucci, Leonpolanco, Locos epraix, Macarron, Maes13xd,Mansoncc, ManuelMore, Manuelt15, Matdrodes, Miss Manzana, Mora belieber, Mortadelo2005, Mpeinadopa, Muro de Aguas, Mushii, Netito777, NicolasAlejandro, Nicooo21122012, Nioger,Oblongo, Ortisa, Oscar Antonio Romero, Ouhuiohurishfuis, Pacificemotion, Pacovila, Palacio300, Peruchevere, Petruss, Picograjo, Pino, Pleira, Pólux, Ramon00, Raulshc, Raystorm, Ricardogpn,Rosarino, Rubpe19, Savh, SchönePuppe, Sebrev, SergioN, Shalbat, Shinnee, StephanoMaster, SuperBraulio13, Taichi, Tano4595, Technopat, Thanos, Tirithel, UA31, Ucevista, Un Tal Alex..,Vatelys, Waka Waka, Wiferrove, Wikichasqui, Wilfredor, Xuankar, Yacero, Yoooooooooooooooooooooooooooooooooooooooooo, Érico Júnior Wouters, 631 ediciones anónimas
Movimiento rectilíneo uniformemente acelerado Fuente: http://es.wikipedia.org/w/index.php?oldid=76087875 Contribuyentes: Abián, Acratta, Algarabia, Algébrico, Arjuno3, Banfield,Berkhan, Beto29, BlackBeast, Bucephala, CASF, Cinabrium, Cobalttempest, Cookie, DanyAlejandro, David0811, Davius, Diegusjaimes, Dnu72, Dodo, Dreitmen, Edc.Edc, Escarlati, Esceptic0,Felper, Fonti10, Fsd141, Gsrdzl, Helmy oved, HiTe, Hispa, Humberto, Igna, JMPerez, Jaffi, Javierito92, Jkbw, JorgeGG, Joseaperez, Kismalac, Kved, LAURIjaz96, Laura Fiorucci, Maldoror,MarcoAurelio, Matdrodes, Mendizi, Mercenario97, Mortadelo2005, Mpeinadopa, Omarandresgomez, Pe7er, Petronas, PhatomLord, Pino, Pleira, Pólux, Ramon00, Raulshc, Savh, Sebrev,SergioN, SuperBraulio13, Tano4595, Tarawa1943, Technopat, Tirithel, Torbellino, Travelour, UA31, Varano, Victorino mm, Wikielwikingo, Yamaneko, Zorrillo-Estepa, 278 ediciones anónimas
Caída libre Fuente: http://es.wikipedia.org/w/index.php?oldid=76274324 Contribuyentes: AVIADOR, Aleposta, Algarabia, Alhen, Amanuense, Analopez.UEM, Andreasmperu, Angus, Antur,Arjuno3, Arochdaniel, Axvolution, Balderai, Banfield, Branco8, BuenaGente, C'est moi, Camilo, Chico512, Cinevoro, Claudia kura, ConnieGB, Creosota, Daniel ASA, DanielithoMoya, Davius,Dbuezas, Diegusjaimes, Diogeneselcinico42, Edmont, Edslov, Especiales, Fadelgadillor, Feer aa. d' Herreraa, Fonty27, FrancoGG, Fsd141, Gaijin, Galandil, GermanX, GiantSlayer007, Grillitus,Grizzly Sigma, Groovenstein, Gsrdzl, Gustronico, Hafernandez, Halfdrag, HeMaCh, Helmy oved, Hoo man, Hprmedina, Humberto, Irbian, IrwinSantos, Isha, Iulius1973, JABO, JacobRodrigues,Jarisleif, Javierito92, Jkbw, Jmvgpartner, Jonadragon007, Jurock, Karshan, Kismalac, Kokoo, Krustiman, Ktitimbo, La Pluma Retorcida, Leonpolanco, Lucien leGrey, LyingB, MagisterMathematicae, Magotsuku, Mahadeva, Marianov, Mario modesto, Matdrodes, Matius007, Mel 23, MercurioMT, Miguel.baillon, Mpeinadopa, Mushii, Mutari, NicolasAlejandro, Nicop,OboeCrack, Olivares86, Pablompa, Petronas, Petruss, PhJ, Platonides, Poco a poco, Popoxd, Pólux, Queninosta, Ramon00, Razzo, Ricardogpn, Rojasyesid, Sarge quake, Savh, Shakira 92,Soulreaper, SuperBraulio13, Tano4595, Technopat, Th3j0ker, Tirithel, Travelour, UA31, VARGUX, Vandal Crusher, Varano, Vic Fede, Vitamine, Waka Waka, Wilfredor, 576 edicionesanónimas
Movimiento parabólico Fuente: http://es.wikipedia.org/w/index.php?oldid=76072031 Contribuyentes: AVIADOR, Airunp, Aleator, Algarabia, Alvaro qc, Andreasmperu, Angel AndreRuiz123, Angel GN, Antur, AqueronteBlog, Arkimedes, Asqueladd, Axxgreazz, Açipni-Lovrij, Balles2601, Banfield, BlackBeast, Bucephala, Camilo, Centroamericano, Cinevoro, Cnciller12, DJNietzsche, DLeandroc, David0811, Davius, Diegusjaimes, Digigalos, Dnu72, Dodo, Eduardosalg, Edub, Emiduronte, Er Komandante, Especiales, Ezarate, Fixertool, Forgotten736, Foundling,Fsd141, Furti, Habancho, Helmy oved, Hemingway10, HiTe, Hprmedina, Humberto, Igna, Iradigalesc, Isha, JABO, Jkbw, Josell2, Juanfer4444, Kordas, Kved, Leonpolanco, Link477,Luciaalcala, MadriCR, Mafores, Maldoror, Markoszarrate, Marquitos4554, Matdrodes, Maxdudekiller, Mecamático, Mishuevos123, Mortadelo2005, Morza, Neodop, OLM, Pacovila, Parthyrock, Pececito, Platonides, Pólux, Queninosta, Ricardogpn, Roberpl, Rojasyesid, Savh, Soulreaper, Srengel, SuperBraulio13, Tano4595, Technopat, Tirithel, Tomatejc, UA31, VanKleinen,Varano, Vic Fede, Xqno, 457 ediciones anónimas
Fuentes y contribuyentes del artículo 176
Movimiento circular uniforme Fuente: http://es.wikipedia.org/w/index.php?oldid=76281273 Contribuyentes: AVIADOR, Adriansm, Aida Ivars, Algarabia, Andreasmperu, Arjuno3,Aserranoco, Beto29, BlackBeast, Bucho, Cerebru, Cookie, DJ Nietzsche, DRincon, David0811, Davius, Dhidalgo, Diegusjaimes, Dnu72, Dodo, Dorieo, Dr.Sebas, Edslov, Edub, EnGarde69,Esceptic0, FAR, Foundling, Fsd141, Furti, Greek, Guanxito, Götz, Helmy oved, HiTe, Humberto, Ialad, Isha, Jarisleif, Jcaraballo, Jkbw, Kzman, LMLM, Laura Fiorucci, Linkedark, MadriCR,Matdrodes, Mel 23, NeoAdonis, Netito777, Oscaresantosg, Petronas, Petruss, Platonides, Pólux, Queninosta, Rafa3040, Raystorm, Ricaldex, Rojasyesid, Rosarino, SuperBraulio13, Tano4595,Technopat, TeleMania, The Bear That Wasn't, Tirithel, Tomatejc, Travelour, UA31, Urdangaray, Usuwiki, Valentin estevanez navarro, Vandal Crusher, Waka Waka, Zenbaku, ZorgNBA, 301ediciones anónimas
Movimiento de rotación Fuente: http://es.wikipedia.org/w/index.php?oldid=75972879 Contribuyentes: Acratta, Algarabia, Aloriel, Antón Francho, Arkady, Arturito marques, Atila rey,Augusto Pinochet, Balles2601, Banfield, Barcex, BrossFarid, Carmin, Caskete, Crescent Moon, Davius, Delmondo, Delphidius, Diegusjaimes, Dreitmen, Edmenb, EduLeo, Eduardosalg, Elferdo,Emijrp, Ferchoos98, Fetfabanba, Fsd141, Gaijin, Gallowolf, Ggenellina, Grillitus, Gusama Romero, Gusbelluwiki, Halfdrag, Hemingway10, Host123, Hprmedina, Humberto, IrwinSantos,JacobRodrigues, Javierito92, Jerowiki, Jesus0809, Jkbw, Jmvkrecords, Jorge c2010, Juan Manuel, Juan Mayordomo, Julian leonardo paez, Kismalac, KyleReese, LPFR, Leonpolanco, LlamaAl,MILO, Magister Mathematicae, Maquedasahag, Matdrodes, Mel 23, Montgomery, Neodimio, Netito777, Ortisa, Osado, Pablo323, Pati, Pino, Proferichardperez, Pólux, Quijav, Raulshc,Raystorm, Reknor, Ricardo Chavez, RoyFocker, Savh, Sennheiser, Sms, Srengel, SuperBraulio13, Tano4595, Technopat, UA31, Vitamine, Vivero, Wricardoh, Xenoforme, Xuankar, Ángel LuisAlfaro, 317 ediciones anónimas
Efecto Coriolis Fuente: http://es.wikipedia.org/w/index.php?oldid=74739280 Contribuyentes: .Sergio, AVIADOR, Af3, AldanaN, Algarabia, Alhen, Alpertron, Alvaro qc, Amadís, Amanuense,Antonorsi, Antur, Antón Francho, Axvolution, Banfield, Cad, Cheveri, Ciberprofe, Cleptuno, Cobalttempest, ConnieGB, Coren, Correogsk, Daniel De Leon Martinez, Davius, Diegusjaimes,Dodo, Edc.Edc, Egaida, Emijrp, Ensada, Er Cicero, Fev, Foundling, GermanX, Grillitus, Humberto, Ignacio Icke, Igor21, Isha, JMCC1, Javierito92, Jesusosm, Jkbw, Joseaperez, Jtico, Kismalac,KitiaraDeSolace, KnightRider, Lluis, Lucien leGrey, Maleonm01, Matdrodes, McLaud, Metrónomo, Moriel, Mparri, Mutari, Nicofeltes, Nihilo, Nilfanion, Nioger, Noshua, Omnipunctum,Oxilium, POTOMOLO2, Pacomeco, Pati, Pello, Petruss, Pitxulin, Pleira, Por la verdad, Proximo.xv, Pólux, Rodrigouf, Ronaldo16, Rosarinagazo, SDJuanma, Sanbec, Schummy, SergioN,Sergiovh, Simeón el Loco, SpiceMan, Szvalb, Taichi, Tano4595, Template namespace initialisation script, Tirithel, Troodon, Txo, Urdangaray, Vitamine, Wasabo, Wricardoh, Xosema, Xuankar,Yeza, ZrzlKing, Érico Júnior Wouters, 166 ediciones anónimas
Movimiento armónico simple Fuente: http://es.wikipedia.org/w/index.php?oldid=75906202 Contribuyentes: 2rombos, Acratta, Aida Ivars, Airunp, Alexquendi, Algarabia, Alvaro qc,Andreasmperu, Arjuno3, Asqueladd, Axvolution, Balles2601, Belb, Cheveri, Dario.rguez, David0811, Davius, Diegopopo, Diegusjaimes, Dodo, Dorieo, Dreitmen, Eduardosalg, Entalpia2,Fsd141, Furti, Futbolero, GM83, GermanX, Godinator, Gusgus, Götz, Hahc21, Halfdrag, Helmy oved, HiTe, Humberto, Isha, JCFC, JacobRodrigues, Jarisleif, Javier Carmona del Rio, Jfmelero,Jkbw, JohanSebastian1997, Joseaperez, Josher8a, Juan Mayordomo, Keko11, Kved, LeCire, Lenercito2013, Leonpolanco, Maernus, Magister Mathematicae, Maldoror, Manuelt15, Manueltato11,Matdrodes, Mcapdevila, Mdiagom, Netito777, Nixón, Paulienator, Pólux, Queninosta, Raulshc, Ricardogpn, Robalgri, Robertec, Rocafort8, Rrmsjp, Sopayaso, Stardust, SuperBraulio13,Superzerocool, Tano4595, Technopat, Vani1989, Volans83, Xuankar, Yotas1313, 色 情 色 情 色 情 色 情, 417 ediciones anónimas
Amplitud (física) Fuente: http://es.wikipedia.org/w/index.php?oldid=75269840 Contribuyentes: Alexis Advance, Ascánder, Cansado, Davius, Diegusjaimes, Dinopmi, Foundling, Götz,Halfdrag, Hprmedina, Humberto, Ingolll, Israel.cma, JaviMad, Jerowiki, Jkbw, Laura Fiorucci, Leonpolanco, Maldoror, Maleiva, Marb, MarcoAurelio, Matdrodes, Millars, Nolaiz, Oscar .,Pascow, Pavka, Peatone81, Pólux, Quantanew, Ricardogpn, Roinpa, Rubpe19, Savh, SuperBraulio13, UA31, Wlpowta, Yago AB, Zam, 93 ediciones anónimas
Frecuencia Fuente: http://es.wikipedia.org/w/index.php?oldid=76194818 Contribuyentes: 67wkii, Acratta, Alavisan, AlbertoDV, Albertogmdp, Alfredobi, Angel GN, Arctosouros, Area580,Ascánder, AstroMen, Baiji, Banfield, Beatriz.Velayos.UEM, Bernard, BetoCG, Boja, Carmin, Cdani, Cibergili, Cobalttempest, Ctrl Z, DISK548, Daguero, Daniela devla, Davius, Demondary,Diego 5397, Diegusjaimes, Digigalos, Dodo, Draxtreme, Edslov, Eduardosalg, Eli22, Eloy, Emiduronte, Emijrp, Ener6, Ferbr1, Foundling, Fran89, Franco68, FrancoGG, Frutoseco, Fushigi-kun,GermanX, Gfrubi, Gonis, Grillitus, Gusgus, Götz, HUB, Helmy oved, Humberto, Ivan.Romero, Jarisleif, Jkbw, Joseaperez, Kabalod, Kekkyojin, Laura Fiorucci, Leonpolanco, Linx esp, LuckasBlade, Mafores, Manuelt15, Marb, Matdrodes, Mescalier, Millars, Moriel, Mutari, Numbo3, Oblongo, Paconi, Pacovila, Paintman, Patricio.lorente, PhJ, Pólux, Rodriguillo, Rojasyesid, Rosarino,RoyFocker, Sabbut, Sanbec, Savh, Schmolling UEM, Snakeeater, SuperBraulio13, Taichi, Tano4595, Technopat, Texai, UA31, ULISESMCR, Unificacion, VanKleinen, Vapara, Xuankar,Yrithinnd, conversion script, Каррильо, 288 ediciones anónimas
Vibración Fuente: http://es.wikipedia.org/w/index.php?oldid=74879602 Contribuyentes: Acratta, Alvaro qc, Angel GN, Atherak, Açipni-Lovrij, BuenaGente, Camilo, Ceancata, Davius,Diegusjaimes, Diosa, Edmenb, Edmont, Eduardosalg, Emijrp, GermanX, Gsrdzl, Gusama Romero, Ingolll, JOe-LoFish, JacobRodrigues, Jkbw, Jsanchezes, Kokoo, Kulturalmente, Kved,Loco085, Luckas Blade, MadriCR, Marb, Marhaiden, Mcanet, Oscar ., Rafa606, Ricardogpn, Shalbat, Sosolid, SpeedyGonzalez, Srengel, SuperBraulio13, Tano4595, Technopat, Tuc negre,UA31, Varano, Xasel, Zeoroth, 91 ediciones anónimas
Precesión Fuente: http://es.wikipedia.org/w/index.php?oldid=74951062 Contribuyentes: Af3, Airunp, Aleator, Algarabia, Alsuara, Amadís, Banfield, Benedicto, Caliver, David0811, Davius,Diegusjaimes, Ejmeza, Emijrp, Gaeddal, Gafotas, GermanX, Gononogon, Götz, Igna, JMCC1, Jakeukalane, Jkbw, Joseaperez, Jstitch, Juansempere, LPFR, Lsg, Muro de Aguas, Pabloallo,Pacostein, Sigmanexus6, Tano4595, Valentinita the best, Xgarciaf, 62 ediciones anónimas
Nutación Fuente: http://es.wikipedia.org/w/index.php?oldid=74606002 Contribuyentes: Airunp, Algarabia, BetoCG, Caliver, Crysys, Cícero, Delphidius, Diegusjaimes, Emijrp, Ereenegee,FedericoMP, Gengiskanhg, GermanX, Gsrdzl, Hprmedina, Iulius1973, Jkbw, Jlbezares, Joseaperez, Jugones55, Krysthyan, LMLM, Luiscon, Luismandel, Matdrodes, Quijav, Rubysi, Sabbut,Tano4595, Urdangaray, Xgarciaf, Zentauro, 51 ediciones anónimas
Fuentes de imagen, Licencias y contribuyentes 177
Fuentes de imagen, Licencias y contribuyentesArchivo:Wikisource-logo.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Wikisource-logo.svg Licencia: logo Contribuyentes: ChrisiPK, Guillom, INeverCry, Jarekt, Leyo,MichaelMaggs, NielsF, Rei-artur, Rocket000, SteinsplitterArchivo:Commons-logo.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Commons-logo.svg Licencia: Public Domain Contribuyentes: SVG version was created by User:Gruntand cleaned up by 3247, based on the earlier PNG version, created by Reidab.Archivo:Vector 01.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_01.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:Dnu72Archivo:Vector AB from A to B.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_AB_from_A_to_B.svg Licencia: GNU Free Documentation License Contribuyentes:Original uploader was Silly rabbit at en.wikipediaArchivo:Vector_00.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_00.svg Licencia: Creative Commons Attribution-Share Alike Contribuyentes: Dnu72Archivo:Vector 09.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_09.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:Dnu72Archivo:Vector 08.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_08.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:Dnu72Archivo:vector 02.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_02.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:Dnu72Archivo:vector 03.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_03.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:Dnu72Archivo:vector 04.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_04.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:Dnu72Archivo:vector 05.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_05.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:Dnu72Archivo:vector 06.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_06.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:Dnu72Archivo:vector 07.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_07.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: User:Dnu72Archivo:Moglfm01sn vector.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm01sn_vector.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglfm0101 equipolencia.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0101_equipolencia.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Vector1.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector1.png Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: KoantumArchivo:Vetorial_space_P.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vetorial_space_P.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectorial space P 1.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectorial_space_P_1.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectorial_space_P_2.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectorial_space_P_2.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectorial space P_3.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectorial_space_P_3.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectorial space P_4.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectorial_space_P_4.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectorial space P_e.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectorial_space_P_e.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectorial space P_a.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectorial_space_P_a.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectorial space P_b.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectorial_space_P_b.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectorial space P_c.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectorial_space_P_c.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectorial space P_d.GIF Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectorial_space_P_d.GIF Licencia: Public Domain Contribuyentes: MarianovArchivo:Vectoren optellen.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectoren_optellen.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: ErikBaasArchivo:Vectoren optellen 2.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vectoren_optellen_2.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:Erik BaasArchivo:Scalar multiplication of vectors.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Scalar_multiplication_of_vectors.svg Licencia: Public Domain Contribuyentes:User:BdeshamArchivo:Vector-valued function.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector-valued_function.jpg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: en:User:BrokenSegue at en.wikipedia.orgArchivo:Moglfm0120 rotacion.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0120_rotacion.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglfm0121 rotacion.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0121_rotacion.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Wiktionary-logo-es.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Wiktionary-logo-es.png Licencia: logo Contribuyentes: es:Usuario:PybaloArchivo:Area.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Area.svg Licencia: GNU Free Documentation License Contribuyentes: WrtlprnftArchivo:Tetragon measures.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Tetragon_measures.svg Licencia: Public Domain Contribuyentes: Lars H. Rohwedder(User:RokerHRO)Archivo:Areabetweentwographs.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Areabetweentwographs.svg Licencia: Public Domain Contribuyentes: user:Petr DlouhýFile:Área de Servicio.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Área_de_Servicio.png Licencia: Creative Commons Attribution-Sharealike 3.0,2.5,2.0,1.0 Contribuyentes: KalhFile:Área Cultural Andina - División.PNG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Área_Cultural_Andina_-_División.PNG Licencia: Creative CommonsAttribution-Sharealike 3.0 Contribuyentes: User:EniolArchivo:Surface of revolution illustration.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Surface_of_revolution_illustration.png Licencia: Public Domain Contribuyentes:Oleg AlexandrovArchivo:Grafico pv del MRU.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Grafico_pv_del_MRU.svg Licencia: Creative Commons Attribution 3.0 Contribuyentes:Grafico_pv_del_MRU.jpg: SergioN derivative work: Robot8A (talk)Archivo:Grafico pva del MRUA.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Grafico_pva_del_MRUA.svg Licencia: Creative Commons Attribution 3.0 Contribuyentes:Grafico_pva_del_MRUA.jpg: SergioN derivative work: Robot8A (talk)Archivo:Simple harmonic oscillator.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Simple_harmonic_oscillator.gif Licencia: Public Domain Contribuyentes: Oleg AlexandrovArchivo:Posición Mov periodico.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Posición_Mov_periodico.svg Licencia: Creative Commons Attribution 3.0 Contribuyentes:Posición_Mov_periodico.jpg: SergioN derivative work: Robot8A (talk)Archivo:Moglfm0415 balística.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0415_balística.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Casting obliquely.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Casting_obliquely.gif Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Kri, Pieter Kuiper, Tano4595, Yuta Aoki, 3 ediciones anónimasArchivo:Moviment circular.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moviment_circular.jpg Licencia: GNU Free Documentation License Contribuyentes: Arturo Reina,Camilo Motato, Pieter Kuiper, 3 ediciones anónimasArchivo:Relativistic-UAM.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Relativistic-UAM.svg Licencia: Public Domain Contribuyentes: Relativistic-UAM.png: Daviusderivative work: Robot8A (talk)Archivo:Wikiversity-logo-Snorky.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Wikiversity-logo-Snorky.svg Licencia: desconocido Contribuyentes: -Archivo:Wikibooks-logo.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Wikibooks-logo.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:User:Bastique, User:Ramac et al.Archivo:Two reference frames.PNG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Two_reference_frames.PNG Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: Brews ohareArchivo:Baro 0.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Baro_0.png Licencia: Public Domain Contribuyentes: Ruben Castelnuovo (Ub)Archivo:orbit5.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Orbit5.gif Licencia: Public Domain Contribuyentes: User:Zhatt
Fuentes de imagen, Licencias y contribuyentes 178
Archivo:Meta-stability.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Meta-stability.svg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes:Georg Wiora (Dr. Schorsch)Archivo:Moglf0501 Cinemática Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf0501_Cinemática_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglf0502 Cinemática Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf0502_Cinemática_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglf0503 Cinemática Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf0503_Cinemática_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglfm0504 movimiento traslacion.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0504_movimiento_traslacion.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglfm0505 movimiento traslacion.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0505_movimiento_traslacion.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglfm0506 movimiento traslacion.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0506_movimiento_traslacion.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglfm0507 movimiento rotacion.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0507_movimiento_rotacion.jpg Licencia: Public Domain Contribuyentes:AlgarabiaArchivo:Moglfm0508 movimiento rotacion.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0508_movimiento_rotacion.jpg Licencia: Public Domain Contribuyentes:AlgarabiaArchivo:Moglf0509 Cinemática Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf0509_Cinemática_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglf0510 Cinemática del Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf0510_Cinemática_del_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglf0511 Cinemática del Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf0511_Cinemática_del_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglg0513 Cinemática del Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglg0513_Cinemática_del_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglf0516 Cinemática del Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf0516_Cinemática_del_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglf0517 Cinemática del Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf0517_Cinemática_del_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglg0518 Cinemática del Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglg0518_Cinemática_del_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglg0519 Cinemática del Sólido Rígido.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglg0519_Cinemática_del_Sólido_Rígido.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglf0521 Aceleración angular.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf0521_Aceleración_angular.jpg Licencia: Public Domain Contribuyentes:AlgarabiaArchivo:Leaving Yongsan Station.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Leaving_Yongsan_Station.jpg Licencia: Creative Commons Attribution-ShareAlike 3.0Unported Contribuyentes: Danleo, FREEZA, Hyolee2, J o, LERK, 아흔, 2 ediciones anónimasArchivo:Polea-simple-fija.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Polea-simple-fija.jpg Licencia: GNU Free Documentation License Contribuyentes: César RincónArchivo:Standing wave 2.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Standing_wave_2.gif Licencia: Public Domain Contribuyentes: BrokenSegue, Cdang, Fractaler, KerstiNebelsiek, LucasVB, Nixón, Pieter Kuiper, 11 ediciones anónimasArchivo:Simple Pendulum Oscillator.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Simple_Pendulum_Oscillator.gif Licencia: Creative Commons Attribution-ShareAlike 3.0Unported Contribuyentes: burroArchivo:Simple harmonic motion animation.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Simple_harmonic_motion_animation.gif Licencia: Public Domain Contribuyentes:User:Evil_saltineArchivo:Lightnings sequence 2 animation.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Lightnings_sequence_2_animation.gif Licencia: Creative CommonsAttribution-Sharealike 2.5 Contribuyentes: original data: Sebastien D'ARCO, animate: Koba-chanArchivo:F-22 supersonic 090622-N-7780S-014.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:F-22_supersonic_090622-N-7780S-014.jpg Licencia: Public Domain Contribuyentes: Mass Communication Specialist 2nd Class Kyle Steckler, U.S. NavyArchivo:Newtons laws in latin.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Newtons_laws_in_latin.jpg Licencia: Public Domain Contribuyentes: Bestiasonica, JdH, Manvyi, Tttrung, Wst, 4 ediciones anónimasArchivo:Vector field.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Vector_field.svg Licencia: Public Domain Contribuyentes: Fibonacci.Archivo:Trabajo.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Trabajo.png Licencia: Creative Commons Attribution-Share Alike Contribuyentes: Ignacio MarcouxArchivo: VarPresA0L.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:VarPresA0L.png Licencia: Creative Commons Attribution 3.0 Contribuyentes: OverGArchivo:CxvsAlpha.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:CxvsAlpha.png Licencia: Creative Commons Attribution 3.0 Contribuyentes: OverGArchivo:R12bronze.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:R12bronze.jpg Licencia: GNU Free Documentation License Contribuyentes: Frank C. Müller, JamieliImage:Lamborghini Countach LP500S.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Lamborghini_Countach_LP500S.jpg Licencia: GNU Free Documentation License Contribuyentes: M-J, MB-one, Mr.choppers, Sfoskett, ŠJůArchivo:Pushing1.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Pushing1.png Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: D.HArchivo:Gravitation acceleration.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Gravitation_acceleration.png Licencia: GNU Free Documentation License Contribuyentes:Jochen Burghardt, Perhelion, Superborsuk, Werckmeister, WikipediaMasterArchivo:Acceleration-due-to-Gravity-on-Earth.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Acceleration-due-to-Gravity-on-Earth.png Licencia: Public Domain Contribuyentes: HighTemplarArchivo:Southern ocean gravity hg.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Southern_ocean_gravity_hg.png Licencia: Public Domain Contribuyentes: Hannes Grobe,AWIArchivo:Earth-G-force.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Earth-G-force.png Licencia: Creative Commons Attribution-Sharealike 2.5 Contribuyentes:Earth-G-force.png: derivative work: KronicTOOL (talk)Archivo:Geoids sm.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Geoids_sm.jpg Licencia: Public Domain Contribuyentes: Angrense, B jonas, Denniss, Look2See1,LudwigSebastianMicheler, Maddox2, Mapmarks, Mario1952, Minor edit, Rainald62, RedAndr, 1 ediciones anónimasArchivo:Distancedisplacement.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Distancedisplacement.svg Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: User:Mr.SwarajArchivo:Rectangular coordinates.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Rectangular_coordinates.svg Licencia: Public Domain Contribuyentes: Cronholm144Archivo:Moglfm0123 vecto de posición.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0123_vecto_de_posición.jpg Licencia: Public Domain Contribuyentes:AlgarabiaArchivo:Moglfm0124 vecto de posición.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0124_vecto_de_posición.jpg Licencia: Public Domain Contribuyentes:AlgarabiaArchivo:Mog vector de posición (rotación).jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Mog_vector_de_posición_(rotación).jpg Licencia: Public Domain Contribuyentes:Algarabia
Fuentes de imagen, Licencias y contribuyentes 179
Archivo:Moglfm0902 movimiento relativo.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0902_movimiento_relativo.jpg Licencia: Public Domain Contribuyentes:AlgarabiaArchivo:Moglfm0405 velocidad.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0405_velocidad.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Spanish Wikiquote.SVG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Spanish_Wikiquote.SVG Licencia: logo Contribuyentes: James.mcd.nzArchivo:Moglfm0407 aceleración.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0407_aceleración.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Moglfm0410 componentes aceleración.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglfm0410_componentes_aceleración.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Cinematique mouvement circulaire uniforme.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Cinematique_mouvement_circulaire_uniforme.png Licencia: GNU FreeDocumentation License Contribuyentes: Christophe Dang Ngoc Chan Cdang at fr.wikipediaArchivo:Aceleracion.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Aceleracion.svg Licencia: Public Domain Contribuyentes: Aceleracion.GIF: JoseA derivative work:Robot8A (talk)Archivo:GraphesMRU.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:GraphesMRU.png Licencia: Creative Commons Attribution-Share Alike Contribuyentes: No-w-ayArchivo:Falling ball.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Falling_ball.jpg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: MichaelMaggsArchivo:Free-fall with initial velocity and air drag.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Free-fall_with_initial_velocity_and_air_drag.gif Licencia: CreativeCommons Attribution-ShareAlike 3.0 Unported Contribuyentes: Abdullah Köroğlu, Tano4595, Yellowcard, Yuta AokiArchivo:Quasi-parab-freefall.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Quasi-parab-freefall.png Licencia: Public Domain Contribuyentes: MyName (Davius)Archivo:Quasi-parab-freefall2.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Quasi-parab-freefall2.png Licencia: Public Domain Contribuyentes: MyName (Davius)Archivo:Kittinger-jump.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Kittinger-jump.jpg Licencia: Public Domain Contribuyentes: US Air ForceArchivo:Rzutp.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Rzutp.gif Licencia: Public Domain Contribuyentes: MpfizArchivo:Tir parabòlic.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Tir_parabòlic.png Licencia: GNU Free Documentation License Contribuyentes: Abdullah Köroğlu,Benlisquare, Iradigalesc, Joey-das-WBF, Petri Krohn, Pieter Kuiper, 3 ediciones anónimasArchivo:Rotating earth (large).gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Rotating_earth_(large).gif Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: MarvelArchivo:Pendulum 30deg.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Pendulum_30deg.gif Licencia: Public Domain Contribuyentes: Lucas V. Barbosa (Kieff)Archivo:Pendulum 220deg.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Pendulum_220deg.gif Licencia: Public Domain Contribuyentes: Lucas V. Barbosa (Kieff)Archivo:Orbit2.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Orbit2.gif Licencia: Public Domain Contribuyentes: User:ZhattArchivo:Rotating Sphere.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Rotating_Sphere.gif Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: JV001 Atif Nur Cahyani, Maksim, Oleg Alexandrov, W!B:, WikipediaMaster, 4 ediciones anónimasArchivo:Mond Grafik.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Mond_Grafik.svg Licencia: GNU Free Documentation License Contribuyentes: Horst Frank (JPG),Nethac DIU (SVG)Archivo:Mog rotacion vector.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Mog_rotacion_vector.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Euler2.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Euler2.gif Licencia: Creative Commons Attribution-Share Alike Contribuyentes: JuansempereArchivo:Benzene-aromatic-3D-balls.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Benzene-aromatic-3D-balls.png Licencia: Public Domain Contribuyentes: Benjah-bmm27Archivo:ArtMechanic Rotation.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:ArtMechanic_Rotation.gif Licencia: GNU Free Documentation License Contribuyentes:User:ArtMechanicArchivo:ArtMechanic.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:ArtMechanic.jpg Licencia: GNU Free Documentation License Contribuyentes: User:ArtMechanicArchivo:Parabolic dish ellipse oscill.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Parabolic_dish_ellipse_oscill.gif Licencia: Creative Commons Attribution-Sharealike 2.5 Contribuyentes: Hahc21, IngerAlHaosului, Tomatejc, 3 ediciones anónimasArchivo:Coriolis effect14.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Coriolis_effect14.png Licencia: GNU Free Documentation License Contribuyentes: Cleontuni,SaperaudArchivo:Coriolis uno.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Coriolis_uno.png Licencia: GNU Free Documentation License Contribuyentes: Karelj, LPArchivo:Coriolis-dos.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Coriolis-dos.png Licencia: GNU Free Documentation License Contribuyentes: Karelj, LPArchivo:Coriolis.JPG Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Coriolis.JPG Licencia: Creative Commons Attribution-ShareAlike 3.0 Unported Contribuyentes: Tano4595,Wizard2007File:Simple Harmonic Motion Orbit.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Simple_Harmonic_Motion_Orbit.gif Licencia: Public Domain Contribuyentes: MazemasterArchivo:Fasorxva.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Fasorxva.gif Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: Gonfer at en.wikipediaArchivo:Muelle.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Muelle.gif Licencia: Creative Commons Attribution-ShareAlike 1.0 Generic Contribuyentes: GonferArchivo:Energia MAS.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Energia_MAS.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: JfmeleroArchivo:HarmOsziFunktionen.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:HarmOsziFunktionen.png Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: AllenMcC.Archivo:Sine voltage.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Sine_voltage.svg Licencia: Public Domain Contribuyentes: Matthias KrügerArchivo:FrequencyAnimation.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:FrequencyAnimation.gif Licencia: Public Domain Contribuyentes: Sbyrnes321Archivo:Sine waves different frequencies.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Sine_waves_different_frequencies.svg Licencia: Public Domain Contribuyentes:CeeKay, Chenspec, Darapti, Editor at Large, JenVan, Juiced lemon, LucasVB, Wutsje, Yonatanh, Ö, 16 ediciones anónimasArchivo:Frecuencia.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Frecuencia.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes: Original:Usuario:Mar. Imagen vectorial: Usuario:67wkiiArchivo:Weltkarte der Netzspannungen und Netzfrequenzen.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Weltkarte_der_Netzspannungen_und_Netzfrequenzen.svg Licencia: Public Domain Contribuyentes: SomnusDeArchivo:EM_spectrum_es.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:EM_spectrum_es.svg Licencia: Creative Commons Attribution-Sharealike 3.0 Contribuyentes:Crates; the author of the original in english is Philip RonanArchivo:Body vibration due to road excitation.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Body_vibration_due_to_road_excitation.jpg Licencia: Public Domain Contribuyentes: Martinhelfer, Oleg AlexandrovArchivo:Drum vibration mode21.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Drum_vibration_mode21.gif Licencia: Public Domain Contribuyentes: Oleg AlexandrovImagen:Damped Free Vibration.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Damped_Free_Vibration.png Licencia: Public Domain Contribuyentes: Original uploader wasLzyvzl at en.wikipediaArchivo:Precessing-top.gif Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Precessing-top.gif Licencia: GNU Free Documentation License Contribuyentes: LP, Newone, Tano4595,WikipediaMasterArchivo:Wiki euler trompo.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Wiki_euler_trompo.jpg Licencia: Public Domain Contribuyentes: AlsuaraArchivo:precession-expl.png Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Precession-expl.png Licencia: GNU Free Documentation License Contribuyentes: Abdullah Köroğlu,LP, Newone, Tano4595Archivo:Precession-nutation-vec-ES.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Precession-nutation-vec-ES.svg Licencia: Public Domain Contribuyentes: CaliverArchivo:Moglf2119 Peonza simétrica.jpg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Moglf2119_Peonza_simétrica.jpg Licencia: Public Domain Contribuyentes: AlgarabiaArchivo:Precession-nutation-xyz-ES.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Precession-nutation-xyz-ES.svg Licencia: Public Domain Contribuyentes: CaliverImage:Precession-nutation-ES.svg Fuente: http://es.wikipedia.org/w/index.php?title=Archivo:Precession-nutation-ES.svg Licencia: Public Domain Contribuyentes: Caliver

Licencia 180
LicenciaCreative Commons Attribution-Share Alike 3.0//creativecommons.org/licenses/by-sa/3.0/



















