Embed Size (px)
Citation preview

ComputadoraDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda
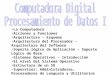
Vista expandida de una computadora personal.1: Monitor2: Placa base3: Procesador4: Puertos ATA5: Memoria principal (RAM)6: Placas de expansión7: Fuente de alimentación8: Unidad de almacenamiento óptico9: Disco duro, Unidad de estado sólido10: Teclado11: Ratón
Fuente de alimentación.
Una computadora o computador (del latín computare -calcular-), también denominada ordenador (del francés ordinateur, y éste del latín ordinator), es una máquina electrónica que recibe y procesa datos para convertirlos en información útil. Una computadora es una colección de circuitos integrados y otros componentes relacionados que puede ejecutar con exactitud, rapidez y de acuerdo a lo indicado por un usuario o automáticamente por otro

programa, una gran variedad de secuencias o rutinas de instrucciones que son ordenadas, organizadas y sistematizadas en función a una amplia gama de aplicaciones prácticas y precisamente determinadas, proceso al cual se le ha denominado con el nombre de programación y al que lo realiza se le llama programador. La computadora, además de la rutina o programa informático, necesita de datos específicos (a estos datos, en conjunto, se les conoce como "Input" en inglés o de entrada) que deben ser suministrados, y que son requeridos al momento de la ejecución, para proporcionar el producto final del procesamiento de datos, que recibe el nombre de "output" o de salida. La información puede ser entonces utilizada, reinterpretada, copiada, transferida, o retransmitida a otra(s) persona(s), computadora(s) o componente(s) electrónico(s) local o remotamente usando diferentes sistemas de telecomunicación, pudiendo ser grabada, salvada o almacenada en algún tipo de dispositivo o unidad de almacenamiento.
La característica principal que la distingue de otros dispositivos similares, como la calculadora no programable, es que es una máquina de propósito general, es decir, puede realizar tareas muy diversas, de acuerdo a las posibilidades que brinde los lenguajes de programación y el hardware.
Contenido
[ocultar]
1 Arquitectura 2 Periféricos y dispositivos auxiliares o2.1 Monitor o2.2 Teclado o2.3 Ratón o2.4 Impresora o2.5 Escáner o2.6 Almacenamiento Secundario o2.7 Altavoces 3 Otros conceptos y curiosidades 4 Etimología de la palabra ordenador 5 Véase también o5.1 Historia o5.2 Tipos de computadoras o5.3 Componentes y periféricos o5.4 Otros 6 Referencias 7 Enlaces externos
Arquitectura

A pesar de que las tecnologías empleadas en las computadoras digitales han cambiado mucho desde que aparecieron los primeros modelos en los años 40, la mayoría todavía utiliza la Arquitectura de von Neumann, publicada a principios de los años 1940 por John von Neumann, que otros autores atribuyen a John Presper Eckert y John William Mauchly.
La arquitectura de Von Neumann describe una computadora con 4 secciones principales: la unidad aritmético lógica (ALU por sus siglas del inglés: Arithmetic Logic Unit), la unidad de control, la memoria central, y los dispositivos de entrada y salida (E/S). Estas partes están interconectadas por canales de conductores denominados buses:
La memoria es una secuencia de celdas de almacenamiento numeradas, donde cada una es un bit o unidad de información. La instrucción es la información necesaria para realizar lo que se desea con el computador. Las «celdas» contienen datos que se necesitan para llevar a cabo las instrucciones, con el computador. El número de celdas varían mucho de computador a computador, y las tecnologías empleadas para la memoria han cambiado bastante; van desde los relés electromecánicos, tubos llenos de mercurio en los que se formaban los pulsos acústicos, matrices de imanes permanentes, transistores individuales a circuitos integrados con millones de celdas en un solo chip. En general, la memoria puede ser reescrita varios millones de veces (memoria RAM); se parece más a una pizarra que a una lápida (memoria ROM) que sólo puede ser escrita una vez.
El procesador (también llamado Unidad central de procesamiento o CPU) consta de manera básica de los siguientes elementos:
Un típico símbolo esquemático para una ALU: A y B son operandos; R es la salida; F es la entrada de la unidad de control; D es un estado de la salida.
La unidad aritmético lógica o ALU es el dispositivo diseñado y construido para llevar a cabo las operaciones elementales como las operaciones aritméticas (suma, resta, ...),

operaciones lógicas (Y, O, NO), y operaciones de comparación o relacionales. En esta unidad es en donde se hace todo el trabajo computacional.
La unidad de control sigue la dirección de las posiciones en memoria que contienen la instrucción que el computador va a realizar en ese momento; recupera la información poniéndola en la ALU para la operación que debe desarrollar. Transfiere luego el resultado a ubicaciones apropiadas en la memoria. Una vez que ocurre lo anterior, la unidad de control va a la siguiente instrucción (normalmente situada en la siguiente posición, a menos que la instrucción sea una instrucción de salto, informando al ordenador de que la próxima instrucción estará ubicada en otra posición de la memoria).
Los procesadores pueden constar de además de las anteriormente citadas, de otras unidades adicionales como la unidad de Coma Flotante
Los dispositivos de Entrada/Salida sirven a la computadora para obtener información del mundo exterior y/o comunicar los resultados generados por el computador al exterior. Hay una gama muy extensa de dispositivos E/S como teclados, monitores, unidades de disco flexible o cámaras web.
Computadora de Escritorio.
Periféricos y dispositivos auxiliares
Artículo principal: Periférico
Monitor
Artículo principal: Monitor de computadora
El monitor o pantalla de computadora, es un dispositivo de salida que, mediante una interfaz, muestra los resultados, o los gráficos del procesamiento de una computadora. Existen varios tipos de monitores: los de tubo de rayos catódicos (o CRT), los de pantalla de plasma (PDP), los de pantalla de cristal líquido (o LCD), de paneles de diodos orgánicos de emisión de luz (OLED), o Láser-TV, entre otros.

Teclado
Artículo principal: Teclado de computadora
Un teclado de computadora es un periférico, físico o virtual (por ejemplo teclados en pantalla o teclados táctiles), utilizado para la introducción de órdenes y datos en una computadora. Tiene su origen en los teletipos y las máquinas de escribir eléctricas, que se utilizaron como los teclados de los primeros ordenadores y dispositivos de almacenamiento (grabadoras de cinta de papel y tarjetas perforadas). Aunque físicamente hay una miríada de formas, se suelen clasificar principalmente por la distribución de teclado de su zona alfanumérica, pues salvo casos muy especiales es común a todos los dispositivos y fabricantes (incluso para teclados árabes y japoneses).
Ratón
Artículo principal: Ratón (informática)
El mouse (del inglés, pronunciado [ˈmaʊs]) o ratón es un periférico de computadora de uso manual, utilizado como entrada o control de datos. Se utiliza con una de las dos manos del usuario y detecta su movimiento relativo en dos dimensiones por la superficie horizontal en la que se apoya, reflejándose habitualmente a través de un puntero o flecha en el monitor. Anteriormente, la información del desplazamiento era transmitida gracias al movimiento de una bola debajo del ratón, la cual accionaba dos rodillos que correspondían a los ejes X e Y. Hoy, el puntero reacciona a los movimientos debido a un rayo de luz que se refleja entre el ratón y la superficie en la que se encuentra. Cabe aclarar que un ratón óptico apoyado en un espejo o sobre un barnizado por ejemplo es inutilizable, ya que la luz láser no desempeña su función correcta. La superficie a apoyar el ratón debe ser opaca, una superficie que no genere un reflejo, es recomendable el uso de alfombrillas.
Impresora
Artículo principal: Impresora
Una impresora es un periférico de computadora que permite producir una copia permanente de textos o gráficos de documentos almacenados en formato electrónico, imprimiendo en papel de lustre los datos en medios físicos, normalmente en papel o transparencias, utilizando cartuchos de tinta o tecnología láser. Muchas impresoras son usadas como periféricos, y están permanentemente unidas a la computadora por un cable. Otras impresoras, llamadas impresoras de red, tienen una interfaz de red interna (típicamente

wireless o Ethernet), y que puede servir como un dispositivo para imprimir en papel algún documento para cualquier usuario de la red. Hoy en día se comercializan impresoras multifuncionales que aparte de sus funciones de impresora funcionan simultáneamente como fotocopiadora y escáner, siendo éste tipo de impresoras las más recurrentes en el mercado.
Escáner
Artículo principal: Escáner de computadora
En informática, un escáner (del idioma inglés: scanner) es un periférico que se utiliza para convertir, mediante el uso de la luz, imágenes o cualquier otro impreso a formato digital. Actualmente vienen unificadas con las impresoras formando Multifunciones
Almacenamiento Secundario
Artículo principal: Disco duroArtículo principal: Unidad de Estado Sólido
El disco duro es un sistema de grabación magnética digital, es donde en la mayoría de los casos reside el Sistema operativo de la computadora. En los discos duros se almacenan los datos del usuario. En él encontramos dentro de la carcasa una serie de platos metálicos apilados girando a gran velocidad. Sobre estos platos se sitúan los cabezales encargados de leer o escribir los impulsos magnéticos.
Una Unidad de estado sólido es un sistema de memoria no volátil. Están formados por varios chips de memoria NAND Flash en su interior unidos a una controladora que gestiona todos los datos que se transfieren. Tienen una gran tendencia a suceder definitivamente a los discos duros mecánicos por su gran velocidad y tenacidad. Al no estar formadas por discos en ninguna de sus maneras, no se pueden categorizar como tal, aunque erróneamente se tienda a ello.
Altavoces

Los altavoces se utilizan para escuchar los sonidos emitidos por el computador, tales como música, sonidos de errores, conferencias, etc.
Altavoces de las placas base: Las placas base suelen llevar un dispositivo que emite pitidos para indicar posibles errores o procesos.
Otros conceptos y curiosidades
Algunas computadoras más grandes se diferencian del modelo anterior en un aspecto importante, porque tienen varias CPU y unidades de control que trabajan al mismo tiempo. Además, algunos computadores, usados principalmente para investigación, son muy diferentes del modelo anterior, pero no tienen muchas aplicaciones comerciales.
En la actualidad se puede tener la impresión de que los computadores están ejecutando varios programas al mismo tiempo. Esto se conoce como multitarea, y es más común que se utilice el segundo término. En realidad, la CPU ejecuta instrucciones de un programa y después tras un breve periodo de tiempo, cambian a un segundo programa y ejecuta algunas de sus instrucciones. Esto crea la ilusión de que se están ejecutando varios programas simultáneamente, repartiendo el tiempo de la CPU entre los programas. Esto es similar a la película que está formada por una sucesión rápida de fotogramas. El sistema operativo es el programa que generalmente controla el reparto del tiempo.
El sistema operativo es una especie de caja de herramientas lleno de rutinas. Cada vez que alguna rutina de computador se usa en muchos tipos diferentes de programas durante muchos años, los programadores llevarán dicha rutina al sistema operativo, al final.
El sistema operativo sirve para decidir, por ejemplo, qué programas se ejecutan, y cuándo, y qué fuentes (memoria o dispositivos E/S) se utilizan. El sistema operativo tiene otras funciones que ofrecer a otros programas, como los códigos que sirven a los programadores, escribir programas para una máquina sin necesidad de conocer los detalles internos de todos los dispositivos electrónicos conectados.
En la actualidad se están empezando a incluir en el sistema operativo algunos programas muy usados, debido a que es ésta una manera económica de distribuirlos. No es extraño que un sistema operativo incluya navegadores de Internet, procesadores de texto, programas de correo electrónico, interfaces de red, reproductores de películas y otros programas que antes se tenían que conseguir e instalar separadamente.
Los primeros computadores digitales, de gran tamaño y coste, se utilizaban principalmente para hacer cálculos científicos. ENIAC, uno de los primeros computadores, calculaba densidades de neutrón transversales para ver si explotaría la bomba de hidrógeno. El CSIR Mk I, el primer ordenador australiano, evaluó patrones de precipitaciones para un gran proyecto de generación hidroeléctrica. Los primeros visionarios vaticinaron que la programación permitiría jugar al ajedrez, ver películas y otros usos.
La gente que trabajaba para los gobiernos y las grandes empresas también usó los computadores para automatizar muchas de las tareas de recolección y procesamiento de datos, que antes eran hechas por humanos; por ejemplo, mantener y actualizar la contabilidad y los inventarios. En el mundo académico, los científicos de todos los campos empezaron a utilizar los computadores para hacer sus propios análisis. El descenso

continuo de los precios de los computadores permitió su uso por empresas cada vez más pequeñas. Las empresas, las organizaciones y los gobiernos empiezan a emplear un gran número de pequeños computadores para realizar tareas que antes eran hechas por computadores centrales grandes y costosos. La reunión de varios pequeños computadores en un solo lugar se llamaba torre de servidores.
Con la invención del microprocesador en 1970, fue posible fabricar computadores muy baratos. Los computadores personales se hicieron famosos para llevar a cabo diferentes tareas como guardar libros, escribir e imprimir documentos. Calcular probabilidades y otras tareas matemáticas repetitivas con hojas de cálculo, comunicarse mediante correo electrónico e Internet. Sin embargo, la gran disponibilidad de computadores y su fácil adaptación a las necesidades de cada persona, han hecho que se utilicen para varios propósitos.
Al mismo tiempo, los pequeños computadores son casi siempre con una programación fija, empezaron a hacerse camino entre las aplicaciones del hogar, los coches, los aviones y la maquinaria industrial. Estos procesadores integrados controlaban el comportamiento de los aparatos más fácilmente, permitiendo el desarrollo de funciones de control más complejas como los sistemas de freno antibloqueo en los coches. A principios del siglo 21, la mayoría de los aparatos eléctricos, casi todos los tipos de transporte eléctrico y la mayoría de las líneas de producción de las fábricas funcionan con un computador. La mayoría de los ingenieros piensa que esta tendencia va a continuar.
Actualmente, los computadores personales son usados tanto para la investigación como para el entretenimiento (videojuegos), pero los grandes computadores aún sirven para cálculos matemáticos complejos y para otros usos de la ciencia, tecnología, astronomía, medicina, etc.
Tal vez el más interesante "descendiente" del cruce entre el concepto de la PC o computadora personal y los llamados supercomputadores sea la Workstation o estación de trabajo. Este término, originalmente utilizado para equipos y máquinas de registro, grabación y tratamiento digital de sonido, y ahora utilizado precisamente en referencia a estaciones de trabajo (traducido literalmente del inglés), se usa para dar nombre a equipos que, debido sobre todo a su utilidad dedicada especialmente a labores de cálculo científico, eficiencia contra reloj y accesibilidad del usuario bajo programas y software profesional y especial, permiten desempeñar trabajos de gran cantidad de cálculos y "fuerza" operativa. Una Workstation es, en esencia, un equipo orientado a trabajos personales, con capacidad elevada de cálculo y rendimiento superior a los equipos PC convencionales, que aún tienen componentes de elevado coste, debido a su diseño orientado en cuanto a la elección y conjunción sinérgica de sus componentes. En estos casos, el software es el fundamento del diseño del equipo, el que reclama, junto con las exigencias del usuario, el diseño final de la Workstation.
Etimología de la palabra ordenador

PC con interfaz táctil.
La palabra española ordenador proviene del término francés ordinateur, en referencia a Dios que pone orden en el mundo ("Dieu qui met de l'ordre dans le monde").[1] En parte por cuestiones de marketing, puesto que la descripción realizada por IBM para su introducción en Francia en 1954 situaba las capacidades de actuación de la máquina cerca de la omnipotencia, idea equivocada que perdura hoy en día al considerar que la máquina universal de Turing es capaz de computar absolutamente todo.[2] En 1984, académicos franceses reconocieron, en el debate "Les jeunes, la technique et nous", que el uso de este sustantivo es incorrecto, porque la función de un PC es procesar datos, no dar órdenes.[3] Mientras que otros, como el catedrático de filología latina Jacques Perret, conocedores del origen religioso del término, lo consideran más correcto que las alternativas.[1]
El uso de la palabra ordinateur se ha exportado a algunos idiomas de la península Ibérica, como el aragonés, el asturiano, el gallego, el castellano, el catalán y el euskera. El español que se habla en Iberoamérica así como los demás idiomas europeos, como el portugués, el alemán y el holandés, utilizan derivados del término computare.
Hardware
Generalidades

Computadora : aparato electrónico capaz de interpretar y ejecutar comandos programados para operaciones de entrada, salida, cálculo y lógica.
Las computadoras:
1. Reciben entradas. La entrada son los datos que se capturan en un sistema de computación para su procesamiento.
2. Producen salidas. La salida es la presentación de los resultados del procesamiento.3. Procesan información4. Almacenan información
Todo sistema de cómputo tiene componentes de hardware dedicados a estas funciones:
1. Dispositivos de entrada2. Dispositivos de salida3. Unidad central de procesamiento. Es la computadora real, la "inteligencia" de un sistema de
computación. 4. Memoria y dispositivos de almacenamiento.
Cada dispositivo de entrada es sólo otra fuente de señales eléctricas; cada dispositivo de salida no es más que otro lugar al cual enviar señales; cada dispositivo de almacenamiento es lo uno o lo otro, dependiendo de lo que requiera el programa; no importa cuáles sean los dispositivos de entrada y salida si son compatibles.
Los elementos fundamentales que justifican el uso de las computadoras, radican en que las computadoras son:
Útiles. Baratas : tanto con respecto a sí mismas como con respecto al costo de la mano de obra. Fáciles de utilizar.
Descripción del procesador
Los procesadores se describen en términos de su tamaño de palabra, su velocidad y la capacidad de su RAM asociada (v.g.: 32 bits, 333MHz, 64 MB)
Tamaño de la palabra: Es el número de bits que se maneja como una unidad en un sistema de computación en particular. Normalmente, el tamaño de palabra de las microcomputadoras modernas es de 32 bits; es decir, el bus del sistema puede transmitir 32 bits (4 bytes de 8 bits) a la vez entre el procesador, la RAM y los periféricos.
Velocidad del procesador: Se mide en diferentes unidades según el tipo de computador: MHz (Megahertz): para microcomputadoras. Un oscilador de cristal controla la ejecución de
instrucciones dentro del procesador. La velocidad del procesador de una micro se mide por su frecuencia de oscilación o por el número de ciclos de reloj por segundo. El tiempo transcurrido para un ciclo de reloj es 1/frecuencia. Por ejemplo un procesador de 50MHz (o 50 millones de ciclos de reloj) necesita 20 nanosegundos para concluir un ciclo. Cuanto más breve es el ciclo de reloj, más veloz es el procesador.
MIPS (Millones de instrucciones por segundo): Para estaciones de trabajo, minis y macrocomputadoras. Por ejemplo una computadora de 100 MIPS puede ejecutar 100 millones de instrucciones por segundo.
FLOPS (floating point operations per second, operaciones de punto flotante por segundo): Para las supercomputadoras. Las operaciones de punto flotante incluyen cifras muy pequeñas o muy altas. Hay supercomputadoras para las cuales se puede hablar de GFLOPS (Gigaflops, es decir 1.000 millones de FLOPS).
Capacidad de la RAM: Se mide en términos del número de bytes que puede almacenar. Habitualmente se mide en KB y MB, aunque ya hay computadoras en las que se debe hablar de GB.

Tecnologías y avances
1ª generación: Con tubos de vacío, tubos de vidrio del tamaño de una bombilla que albergaban circuitos eléctricos. Estas máquinas eran muy grandes caras y de difícil operación.
2ª generación: con transistores. Máquinas más pequeñas, confiables y económicas. 3ª generación: Con la tecnología que permitió empaquetar cientos de transistores en un circuito
integrado de un chip de silicio. 4ª generación: con el microprocesador, que es un computador completo empaquetado en un solo
chip de silicio.
Las características básicas de las computadoras desde las de 3ª generación son:
Confiabilidad: Son menos susceptibles de averías que las anteriores, ya que los chips pueden probarse rigurosamente antes de ser instalados.
Tamaño: Un solo chip sustituyó tableros de circuitos, lo cual permite construir máquinas más pequeñas.
Velocidad: Como la electricidad tiene que viajar distancias más pequeñas, las máquinas son mucho más rápidas que sus predecesoras. Las operaciones que realiza una computadora se miden en milisegundos, microsegundos, nanosegundos y picosegundos.
Eficiencia: Por su pequeño tamaño, los chips emplean menos energía eléctrica. También generan menos calor.
Costo: Las técnicas de producción masiva facilitan la manufactura de chips económicos. Compatibilidad: No hay normas de software universales, de manera que un programa escrito para
una máquina quizás no funcione en otra; casi todos los programas de software son inservibles si el hard y el soft no son compatibles.
Clasificación de las computadoras
Por su fuente de energía: pueden ser:oMecánicas: funcionan por dispositivos mecánicos con movimiento.oElectrónicas: Funcionan en base a energía eléctrica. Dentro de este tipo, y según su estructura,
las computadoras pueden ser:
Analógicas: Trabajan en base a analogías. Requieren de un proceso físico, un apuntador y una escala (v.g.: balanza). Las características del cálculo analógico son las siguientes:
preciso, pero no exacto; barato y rápido; pasa por todos los infinitésimos, es decir que tiene valor en todo momento, siempre asume un
valor. Digitales : Llamadas así porque cuentan muy rudimentariamente, "con los dedos"; sus elementos
de construcción, los circuitos electrónicos, son muy simples, ya que solo reconocen 2 estados: abierto o cerrado. Manejan variables discretas, es decir que no hay valores intermedios entre valores sucesivos. Dentro de las digitales encontramos otros 2 grupos, según su aplicación:
de aplicación general : Puede cambiarse el software por la volatilidad de la memoria, y por lo tanto el uso que se le da.
De aplicación específica: Lleva a cabo tares específicas y sólo sirve para ellas.. En lo esencial es similar a cualquier PC, pero sus programas suelen estar grabados en silicio y no pueden ser alterados ( Firmware: Programa cristalizado en un chip de silicio, convirtiéndose en un híbrido de hard y soft.). Dentro de este tipo tenemos:
Computador incorporado: Mejora todo tipo de bienes de consumo (relojes de pulso, máquinas de juegos, aparatos de sonido, grabadoras de vídeo). Ampliamente utilizado en la industria, la milicia y la ciencia, donde controla todo tipo de dispositivos, inclusive robots.
Computador basado en pluma: Es una máquina sin teclado que acepta entradas de una pluma que se aplica directamente a una pantalla plana. Simula electrónicamente una pluma y una hoja de papel. Además de servir como dispositivo apuntador, la pluma puede emplearse para escribir, pero sólo si el soft. del computador es capaz de descifrar la escritura del usuario.
Asistente personal digital (PDA, personal digital assistant): usa la tecnología basada en pluma y funciona como organizador de bolsillo, libreta, agenda y dispositivo de comunicación.

Por su tamaño: La característica distintiva de cualquier sistema de computación es su tamaño, no su tamaño físico, sino su capacidad de cómputo. El tamaño o capacidad de cómputo es la cantidad de procesamiento que un sistema de computación puede realizar por unidad de tiempo.
oMacrocomputador: Máquina de enormes dimensiones, que usan las grandes organizaciones y que tienden a ser invisibles para le público en general, ya que están escondidas en salas con clima controlado. Son capaces de comunicarse simultáneamente con varios usuarios por la técnica de tiempo compartido; éste también permite que los usuarios con diversas necesidades computacionales compartan costosos equipos de computación.
oMinicomputador: También es una máquina multiusuario (es decir que usa la técnica de tiempo compartido). Es más pequeño y económico que un macrocomputador, pero mayor y más potente que una computadora personal.
oEstación de trabajo: Computador de escritorio que tiene el poder de un minicomputador, pero a una fracción del costo. Es de uso muy común entre personas cuyas tareas requieren gran cantidad de cálculos (científicos, analistas bursátiles, ingenieros). Aunque muchas estaciones de trabajo son capaces de dar servicio a varios usuarios al mismo tiempo, en la práctica a menudo son usadas por una sola persona a la vez.
oMicrocomputadora o Computador personal: PC (Personal computer). Computador habitualmente monousuario (aunque puede configurarse para usuarios múltiples) de propósito general. En una micro se monta el microprocesador, los circuitos electrónicos para manejar los dispositivos periféricos y los chips de memoria en un solo tablero de circuitos, el tablero de sistema o tablero madre (mother board). El microprocesador y los otros chips se montan en una portadora antes de fijarlos al tablero madre. Las portadoras tienen conectores de agujas de tamaño estándar que permiten que se conecten los chips en el tablero de sistema. La mother board es lo que distingue a una computadora de otra. La PC puede ser de escritorio o portátil. Dentro de los computadores portátiles encontramos:
Laptop : alimentado por baterías, con pantalla plana y que pueden cargarse como un portafolios. Notebook : Más livianas que las anteriores y que pueden transportarse dentro de un portafolios. Palmtop: o computador manual, o PC de bolsillo. Tan pequeñas que caben en un bolsillo. Atiende
las necesidades de usuarios para los cuales la movilidad es más valiosa que un teclado o una pantalla de tamaño usual.
Canales, puertos y ranuras de expansión
Canales: Grupos de cables a través de los cuales viaja la información entre los componentes del sistema. Tienen 8, 16 o 32 cables y este número indica la cantidad de bits de información que puede transmitir al mismo tiempo. Los canales más anchos pueden transmitir información con más rapidez que los canales angostos.
Ranuras de expansión: Se conectan al bus eléctrico común. Algunos canales están conectados a ellas en la caja del computador. Los usuarios pueden personalizar sus máquinas insertando tarjetas de circuitos (o tarjetas) de propósito especial en estas ranuras. Existen tarjetas de expansión de RAM, adaptadores de color y de gráficos, fax módem, puertos, coprocesadores (procesadores adicionales que incrementan la capacidad o velocidad de procesamiento del sistema), etc.
Puertos: Son puntos de conexión en la parte exterior del chasis de la computadora a los que se conectan algunos canales. El puerto permite una conexión directa con el bus eléctrico común de la PC. los puertos pueden ser:
Puertos series: Permiten la transmisión en serie de datos, un bit a la vez. Este tipo de puertos permiten una interfaz con impresoras y módems de baja velocidad.
Puertos paralelos: Permiten la transmisión paralela de datos, es decir que se transmiten varios bits simultáneamente. Permiten la interfaz con dispositivos tales como impresoras de alta velocidad, unidades de cinta magnética de respaldo y otras computadoras.
Las ranuras de expansión y los puertos simplifican la adición de dispositivos externos o periféricos.
Adquisición de un computador
Criterios que deben considerarse:

Costo: Comprar lo que se pueda pagar, pero dejando un poco de dinero para adquirir memoria adicional, garantías extendidas, periféricos y software.
Características: Asegurarse que la máquina que se compra sirva para el trabajo que se necesita, tanto en el presente como en le futuro.
Capacidad: Comprar un computador con la potencia suficiente para satisfacer las necesidades; que tenga suficiente velocidad, capacidad de memoria y de almacenamiento.
Personalización: Si las necesidades son inusuales es preferible comprar un sistema de arquitectura abierta, con ranuras de expansión y puertos que permiten una personalización. La arquitectura es el diseño de un sistema de computación. Un sistema de arquitectura abierta se configura conectando una variedad de dispositivos periféricos al componente de procesamiento. La arquitectura abierta o arquitectura de bus es posible porque todos los componentes se vinculan por medio de un bus electrónico común, que es el medio por el cual el procesador se comunica con sus dispositivos periféricos y viceversa.
Compatibilidad: Considerar si el software que se piensa utilizar funcionará en el computador que se está comprando. La compatibilidad total no siempre es posible e incluso a veces no siquiera es necesaria, siendo suficiente una compatibilidad de datos, es decir la capacidad de enviar y recibir documentos entre sistemas. Si esto no es posible, debe considerarse la conectividad.
Conectividad: Es la capacidad de los computadores de traducir formatos de archivo de otras marcas a documentos legibles.
Conveniencia: Evaluar la conveniencia de uno u otro computador en función del diseño, la interfaz, la facilidad de aprendizaje del software, etc.
Compañía: Tender en la compra hacia marcas que puedan asegurar en el futuro la provisión de servicio y piezas.
Curva: Debe tratar de evitarse la compra de un computador tanto en los primeros como en los últimos años de vida del modelo. En los primero años puede haber poco software compatible; en los últimos la obsolescencia hace que los programadores dejen de crear soft para ese computador.
Tareas que realizan las computadoras
Son pocas, sólo4, pero con rapidez y precisión:
1. Capturar datos: llevar mensajes del entorno al sistema.2. Calcular: en rigor sólo suman, pero así logran realizar las 4 operaciones básicas. 3. Comparar : En sí misma, la comparación no sirve de nada; sólo si ayuda a la toma de
decisiones. Sólo realizan comparaciones elementales (con dos posibilidades). La combinación secuencial de comparaciones permite la comparación compleja, y por ende la toma de decisiones complejas.
4. Registrar: Tanto en el sentido de mostrar (pantalla, impresora), es decir llevar a un lenguaje humano algo que está guardado en el computador, como en el sentido de guardar algo en el computador.
Usos de las computadoras
Las áreas básicas son las que se refieren a actividades administrativas, educacionales, científicas y de comunicación.
También pueden clasificarse los usos de las computadoras pueden en 8 categorías principales:
1. Sistemas de información/procesamiento de datos: Incluye todos los usos de las computadoras que apoyan los aspectos administrativos de una organización. La combinación de hard, soft, personas, procedimientos y datos crea un sistema de información.
2. Computación personal: El fundamento de la computación personal está formado por una variedad de aplicaciones domésticas y empresariales. El software de productividad con base en la microcomputación consiste en una serie de programas disponibles comercialmente que pueden ayudar a ahorrar tiempo y a obtener la información necesaria para tomar decisiones. La PC puede trabajar como un sistema independiente, pero también puede usarse para transmitir y recibir datos de una red de información.

3. Ciencia, investigación e ingeniería: Los ingenieros y científicos usan rutinariamente las computadores como un instrumento en la experimentación, el diseño y el desarrollo.
4. Control de procesos/dispositivos: Las computadoras que controlan procesos aceptan datos en un ciclo de retroalimentación continua. En un ciclo de retroalimentación, el proceso genera datos por sí mismo, los cuales se convierten en entradas para la computadora. La computadora inicia la acción de control del proceso en marcha conforme recibe e interpreta datos.
5. Educación: Las computadoras pueden interactuar con los estudiantes para mejorar el proceso de aprendizaje. La computación con base en computadoras (CBT, computer-based trainig) está teniendo un efecto profundo en los métodos tradicionales de educación.
6. Diseño asistido por computadora (CAD, computer-aided design): Los sistemas de CAD permiten generar y manejar imágenes gráficas en pantalla; ofrecen una serie de instrumentos complejos que permiten crear objetos tridimensionales que pueden ser levantados, girados, cambiados de tamaño, vistos en detalle, examinados a nivel interno o externo, etc.
7. Entretenimiento.8. Inteligencia artificial: Las computadoras pueden simular muchas capacidades sensoriales
y mecánicas del ser humano.
Sistema binario
Las computadores se construyen a partir de dispositivos de conmutación que reducen toda la información a ceros y unos, es decir que representan los números con el sistema binario, un sistema que denota todos los números con combinaciones de 2 dígitos. Es decir que el potencial de la computadora se basa en sólo dos estados electrónicos: encendido y apagado. Las características físicas de la computadora permiten que se combinen estos dos estados electrónicos para representar letras, números, colores.
Un estado electrónico de "encendido" o "apagado" se representa por medio de un bit. La presencia o la ausencia de un bit se conoce como un bit encendido o un bit apagado, respectivamente. En el sistema de numeración binario y en el texto escrito, el bit encendido es un 1 y el bit apagado es un 0.
Las computadoras cuentan con soft que convierte automáticamente los números decimales en binarios y viceversa. El procesamiento de número binarios de la computadora es totalmente invisible para el usuario humano.
Para que las palabras, frases y párrafos se ajusten a los circuitos exclusivamente binarios de la computadora, se han creado códigos que representan cada letra, dígito y carácter especial como una cadena única de bits. El código más común es el ASCII ( American Standard Code for Information Interchange, Código estándar estadounidense para el intercambio de información).
Un grupo de bits puede representar colores, sonidos y casi cualquier otro tipo de información que pueda llegar a procesar un computador.
La computadora almacena los programas como colecciones de bits, lo mismo que los datos.
Unidades de medida
1. Bit (binary digit):Unidad básica de datos de la computadora. 2. Byte: Grupo de 8 bits; cada byte representa un carácter de información.3. Kilobyte (K): aproximadamente 1000 bytes, exactamente 1024 bytes.4. Megabyte (MB): aproximadamente 1000K, o sea un millón de bytes.5. Gigabyte (GB) : aproximadamente 1000MB.
Con estos mismos términos se cuantifica el tamaño de los archivos de una computadora.
Archivo: colección organizada de información, almacenada en una forma que pueda leer la computadora.

Unidad central de procesamiento
UCP o CPU (central processing unit).
El usuario proporciona al computador patrones de bits (entrada) y éste sigue las instrucciones para transformar esa entrada en otro patrón de bits (salida) y devolverla al usuario.
Estas transformaciones son realizadas por la UCP o procesador, que interpreta y lleva a cabo las instrucciones de los programas, efectúa manipulaciones aritméticas y lógicas con los datos y se comunica con las demás partes del sistema. Una UCP es una colección compleja de circuitos electrónicos. Cuando se incorporan todos estos circuitos en un chip de silicio, a este chip se le denomina microprocesador. La UCP y otros chips y componentes electrónicos se ubican en un tablero de circuitos.
Los factores relevantes de los chips de UCP son:
1. Compatibilidad: No todo el soft es compatible con todas las UCP. En algunos casos se pueden resolver los problemas de compatibilidad usando software especial.
2. Velocidad: La velocidad de una computadora está determinada por la velocidad de su reloj interno, el dispositivo cronométrico que produce pulsos eléctricos para sincronizar las operaciones de la computadora. Las computadoras se describen en términos de su velocidad de reloj, que se mide en megahertz. La velocidad también está determinada por la arquitectura del procesador, es decir el diseño que establece de qué manera están colocados en el chip los componentes individuales de la CPU.
Desde la perspectiva del usuario, el punto crucial es que "más rápido" casi siempre significa "mejor".
La mayoría de los supercomputadores tiene varios procesadores completos que pueden dividir los trabajos en porciones y trabajar con ellas en paralelo; es el llamado procesamiento en paralelo.
cada CPU tiene dos secciones fundamentales: la unidad de control y la unidad airtmético-lógica.
Unidad de control
Si el procesador es el núcleo del sistema de computación, la unidad de control lo es del procesador. Tiene 3 funciones principales:
Leer e interpretar instrucciones del programa. Dirigir la operación de los componentes internos del procesador. Controlar el flujo de programas y datos hacia y desde la RAM.
La unidad de control dirige otros componentes del procesador para realizar las operaciones necesarias y ejecutar la instrucción.
Registros: áreas de almacenamiento de trabajo de alta velocidad que contiene la unidad de control, que no pueden almacenar más que unos cuantos bytes. Los registros manejan instrucciones y datos a un velocidad unas 10 veces mayor que la de la memoria caché y se usan para una variedad de funciones de procesamiento. Los registros facilitan el movimiento de datos e instrucciones entre la RAM, la unidad de control y la unidad aritmético-lógica.
Registro de la instrucción : registro que contiene la instrucción que se está ejecutando. Registros de uso general: almacenan los datos necesarios para el procesamiento inmediato.
Unidad aritmético-lógica

Realiza todos los cálculos (suma, resta, multiplicación y división) y todas las operaciones lógicas (comparaciones numéricas o alfabéticas).
Almacenamiento interno: Memorias
La función principal de la CPU es obedecer las instrucciones codificadas en los programas. Sin embargo, sólo puede manejar una instrucción y unos cuantos datos a la vez. La computadora tiene que colocar en algún lugar el resto del programa y los datos hasta que el procesador esté listo para usarlos. Para esto es la RAM.
RAM (Random Acces Memory, memoria de acceso aleatorio): Memoria de almacenamiento primario. Almacena temporalmente instrucciones de programa y datos. El computador divide un chip de RAM en varias localidades de igual tamaño. Estas localidades de memoria tienen una dirección única, de manera que el computador pueda distinguirlas cuando se le ordena que guarde o recupere información. Puede almacenarse un trozo de información en cualquier localidad de la RAM tomada al azar y el computador puede recuperarlo rápidamente si se le indica hacerlo. De ahí proviene el nombre de memoria de acceso aleatorio. La información almacenada en la RAM no es más que un patrón de corriente eléctrica que fluye por circuitos microscópicos en chips de silicio. Es una memoria volatil, ya que la información que contiene no se conserva de manera permanente. Si se interrumpe la energía, dicha información se pierde. La RAM no tiene partes móviles; al no tener un movimiento mecánico, se puede tener acceso a los datos de la RAM a velocidades electrónicas o aproximadamente a la velocidad de la luz. La RAM ofrece al procesador un almacenamiento temporal para programas y datos. Todos los programas y datos se deben transferir a la RAM desde un dispositivo de entrada o del almacenamiento secundario antes de que se puedan ejecutar los programas o procesar los datos. El espacio de la RAM es siempre escaso; por tanto, después de que se haya ejecutado un programa, el espacio de almacenamiento que ocupaba se vuelve a distribuir a otro programa que espera su ejecución.
ROM (Read Only Memory , memoria sólo de lectura): Es una memoria no volátil, porque el computador puede leer información de ella pero nunca escribir información nueva. Todas las computadoras cuentan con dispositivos de ROM que contienen las instrucciones de arranque y otra información crítica. La información en la ROM se graba permanentemente cuando nace el computador, pero no hay manera de reemplazarla a menos que se reemplace el chip de ROM.
Memoria PROM (Programmable read only memory, memoria de sólo lectura programable): Es una variación de la ROM, es la ROM en la que usuario puede cargas programas y datos de solo lectura que una vez cargados rara vez o nunca se cambian. La memoria flash es un tipo de PROM que el usuario puede alterar con facilidad.
Memoria caché: Se usa para facilitar una transferencia aún más rápida de instrucciones y datos al procesador; es decir que se usa para mejorar el caudal de proceso (velocidad con que un sistema de computación puede realizar el trabajo). Al igual que la RAM, el caché es un área de almacenamiento de alta velocidad para las instrucciones de los programas y los datos, pero es 10 veces más rápida que la RAM y mucho más cara. Con sólo una fracción de la capacidad de la RAM, la memoria caché sólo contiene las instrucciones y los datos que es probable que el procesador requiera enseguida.
Unidades y soportes de entrada
Los dispositivos de entrada traducen los datos a una forma que la computadora pueda interpretar, para luego procesarlos y almacenarlos.
Dispositivos manuales
Teclado alfanumérico: El estándar es actualmente el teclado de 101 letras con la distribución QWERTY, 12 teclas de funciones, un teclado o pad numérico, teclas de función y teclas para el control del cursos. Algunos teclados están diseñados para aplicaciones específicas, permitiendo una interacción rápida con los sistemas de computación (v.g.: caja registradora). El teclado es un

circuito en forma de matriz; cada circuito está conectado al dispositivo controlador, que reconoce la letra o código que envía el usuario cuando se cierra o abre un circuito. La configuración del teclado puede ser modificado por software.
Teclado para perfoverificación: cada bit se represente como perforado o no perforado. Cada columna de la tarjeta es barrida por un cepillo metálico, cuando hay una perforación al pasar el cepillo se cierra un circuito.
Dispositivos apuntadores
Ratón: La efectividad de las GUI depende de la capacidad del usuario para hacer una selección rápida de una pantalla con íconos o menúes. En estos casos el mouse puede colocar el apuntador (o cursos gráfico) sobre un ícono con rapidez y eficiencia. Los más comunes tienen una esfera en su parte inferior que puede rodar en un escritorio.
Bola rastreadora (trackball) o bola palmar: Es una bola insertada en una pequeña caja que se hace girar con los dedos para mover el curso gráfico.
Palanca de mando (joystick) : también llamada palanca de control de juegos. Es una palanca vertical que mueve el cursos gráfico en la dirección en que se mueve la palanca.
Pantalla sensible al tacto : Sirven cuando hay muchos usuarios no familiarizados con las computadoras. Puede ser sensible al tacto por la presión o por el calor. Son de muy baja velocidad.
Dispositivos ópticos
Lector de marcas o rastreador de marca óptica : Usa la luz reflejada para determinar la ubicación de marcas de lápiz en hojas de respuestas estándar y formularios similares.
Lector de código de barras: Usa la luz para leer UPC (Universal Product Codes, Códigos universales de productos), códigos de inventario y otros códigos creados con patrones de barras de anchura variable. Los códigos de barra representan datos alfanuméricos variando el ancho y la combinación de las líneas verticales adyacentes. La ventaja de los códigos de barras sobre los caracteres es que la posición u orientación del código que se lee no es tan importante para el lector.
Lector de vara (lápiz óptico): Usa luz para leer caracteres alfabéticos y numéricos escritos con un tipo de letra especial, siendo también legible para las personas este tipo de letra; muchas veces estos lectores están conectados a terminales POS (point-of-sale, punto de venta). Cuando se usan de esta forma el computador lleva a cabo un reconocimiento óptico de caracteres (OCR , optical character recognition).
Rastreador de páginas: Rastrea e interpreta los caracteres alfanuméricos de las paginas impresas normales. Se usa para convertir una copia dura a un formato que la máquina puede leer. Este tipo de rastreador puede reducir al mínimo o eliminar la captura de datos mediante el teclado.
Dispositivos magnéticos
MICR (magnetic ink character recognition, reconocimiento de caracteres en tinta magnética) o Lectora de caracteres magnéticos : lee los caracteres impresos con tinta magnética en los cheques. En ellos el número de cuenta y el número de cheque se encuentran codificados; la fecha de la transacción se registra automáticamente para todos los cheques procesados ese día; por tanto, sólo se debe teclear el importe en un inscriptor MICR. Un lector-ordenador MICR lee los datos de los cheques y los ordena para el procesamiento que corresponda. Estos dispositivos de reconocimiento son más rápidos y precisos que los OCR.
Lectora de bandas magnéticas: Las bandas magnéticas del reverso de las tarjetas de crédito, por ejemplo, ofrece otro medio de captura de datos directamente de la fuente (como los dispositivos ópticos). Se codifican las bandas con datos apropiados para la aplicación. Las bandas magnéticas contienen muchos más datos por unidad de espacio que los caracteres impresos o los códigos de barras. Además, dado que no se pueden leer visualmente, son perfectos para almacenar datos confidenciales.
Digitalizadores

Para que un computador pueda reconocer texto manuscritos, primero tiene que digitalizar la información, convertirla en alguna forma digital para poder almacenarla en la memoria del computador. Hay diferentes dispositivos de entrada para capturar y digitalizar información:
Digitalizador de imágenes (scanner): Puede obtener una representación digital de cualquier imagen impresa. Convierte fotografías, dibujos, diagramas y otra información impresa en patrones de bits que pueden almacenarse y manipularse con el soft adecuado
Cámara digital: Es un digitalizador de imágenes que permite tomar fotografías del mundo real y obtener imágenes digitales; es decir que no se limita a capturar imágenes impresas planas, puede registrar las mismas cosas que una cámara normal, sólo que en lugar de registrar las imágenes en película, las cámaras digitales almacenan patrones de bits en discos u otros medios de almacenamiento digital.
Digitalizador de audio : Permite digitalizar sonidos de micrófonos y otros dispositivos de sonido. Para que el computador interprete correctamente la entrada de voz digitalizada como si fueran palabras se requiere software de inteligencia artificial. Una unidad de respuesta auditiva o un sintetizador de vos hace que la conversación sea un diálogo. El reconocimiento del habla funciona de la siguiente manera:
Se dice la palabra. Cuando se habla en un micrófono, cada sonido se divide en sus diversas frecuencias.
Se digitaliza la palabra. Se digitalizan los sonidos de cada palabra de modo que la computadora los pueda manejar.
Se compara la palabra. Se compara la versión digitalizada contra modelos similares del diccionario electrónico de la computadora. El modelo digitalizado es una forma que las computadoras pueden almacenar e interpretar.
Se presenta la palabra o se realiza el comando. Cuando se encuentra una igualdad, se presenta en una VDT o se realiza el comando adecuado.
En el reconocimiento del habla, la creación de los datos se conoce como capacitación. La mayor parte de los sistemas de reconocimiento del habla son dependientes del locutor, es decir que responde a la voz de un individuo particular.
La tecnología más reciente permite sistemas independientes del locutor, pero necesitan una base de datos muy grande para aceptar el patrón de voz de cualquier persona.
Digitalizador de vídeo: Es una colección de circuitos que puede capturar entradas de una fuente de vídeo y convertirla en una señal digital que puede almacenarse en la memoria y exhibirse en pantallas de computador. Cuando se pone en operación el sistema, éste compara la imagen digitalizada que se debe interpretar con las imágenes digitalizadas registradas previamente en la base de datos. Estos sistemas de entrada de visión son apropiados para tareas especializadas, en que sólo se encuentran unas cuantas imágenes.
Dispositivos sensores: diseñados para hacer seguimientos de la temperatura, la humedad, l presión y otras cantidades físicas, proporcionan datos útiles en robótica, control ambiental, pronósticos meteorológicos, supervisión médica, biorretroalimentación, investigación científica y cientos de aplicaciones más.
Otras entradas
Tarjetas inteligentes: Son una versión mejorada de las tarjetas con banda magnética. Contienen un microprocesador que almacena algunos datos de seguridad y personales en su memoria en todo momento. Dado que las tarjetas inteligentes pueden tener más información, que tienen cierta capacidad de procesamiento y que es casi imposible duplicarlas, seguramente sustituirán a las tarjetas con bandas magnéticas.
Analógicas: Sensores que miden magnitudes físicas escalares o vectoriales.
Conceptos vinculados
Documentos retornables: Un documento retornable es una salida generada por computadora que finalmente regresa como una entrada que la máquina puede leer.

Sistemas OCR (optical character recognition): Es un proceso de naturaleza topológica (analiza la forma por medio de funciones matemáticas) y neuronal (actúa como las neuronas de las personas; el problemas es que a veces falla la conexión entre ellas). El primer paso en el reconocimiento óptico de caracteres consiste en digitalizar la imagen de la hoja en la memoria del computador mediante un digitalizador (scanner), una cámara digital o un fax módem. La imagen digitalizada no es más que un patrón de bits en la memoria. Antes de que el computador pueda procesar el texto de la página, debe reconocer los caracteres individuales y convertirlos en códigos de texto. El software de OCR localiza e identifica los caracteres impresos que aparecen en la imagen, "lee" el texto. Lo programas de OCR se valen de varias técnicas:
la segmentación de la página en imágenes, bloques de texto y (finalmente) caracteres individuales;
tecnología de sistemas expertos, a una escala menor, para reconocer las reglas básicas de distinción de letras;
"expertos" en contextos para ayudar a identificar letras ambiguas de acuerdo con su contexto; aprendizaje a partir de ejemplos reales y retroalimentación de un entrenador humano.
Unidades y soportes de salida
Estos dispositivos traducen los bits y bytes a un forma comprensible para el usuario.
Monitores
Una VDT (video display terminal, terminal de despliegue visual ) sirve como dispositivo de salida para recibir mensajes del computador. Las imágenes de un monitor se componen de pequeños puntos llamados pixeles (picture elements) o elementos de imagen. La cantidad de ellos que hay por cada pulgada cuadrada determina la definición del monitor que se expresa en puntos por pulgada o dpi (dots per inch). Cuanto más alta es la definición, más cercanos están los puntos.
La salida de un monitor es temporal y se la designa como copia blanda o efímera.
Pueden ser monocromáticos o a colores; la mayoría de estos últimos combinan el rojo, el verde y el azul para lograr un espectro y por ello se llaman monitores RGB (red, green, blue ).
Los monitores pueden ser de dos clases:
CRT ( cathode ray tube), tubo de rayos catódicos: como en un televisor. Son los preferidos para los computadores de escritorio por su claridad y velocidad de respuesta.
De pantalla plana:: Más compactos y ligeros, dominan el mercado de las computadoras portátiles. Utilizan 3 tipos de tecnología:
LCD ( liquid crystal display), pantalla de cristal líquido. Consumen relativamente poca energía. Plasma de gas. EL (electroluminiscencia). Ofrecen mayor ángulo de visión.
Impresoras
Una impresora permite obtener una copia dura o física de cualquier información que pueda aparecer en pantalla. Hay dos grupos básicos de impresoras:
de Impacto: Dependen de la tecnología de matriz de puntos. Forman las imágenes golpeando un martillo contra una cinta y el papel; al hacer contacto con el papel pueden producir copias al carbón junto con el original. entre ellas encontramos:
de línea: Son rápidas y ruidosas. Tienen la desventaja de estar limitadas a la impresión de caracteres, por lo que no son apropiadas para aplicaciones donde los gráficos son un ingrediente esencial del producto acabado. imprimen una línea de puntos a la vez. Se alinean martillos similares a agujas sobre el ancho del papel.

en serie: Imprimen texto y gráficos. Usa martillos del tamaño de un alfiler para transferir la tinta a la página. Una página impresa es una matriz de pequeños puntos, algunos blancos y otros negros (o color). Este tipo de impresora tiene una baja definición, inferior a las 100 dpi. Forma las imágenes, un carácter a la vez, a medida que la cabeza de impresión se mueve sobre el papel. Las impresoras en serie son bidireccionales, es decir que imprimen sin importar hacia que lado se este moviendo la cabeza de impresión. La cabeza de impresión contiene una o varias columnas de agujas, que se activan independientemente para crear la imagen del carácter. El número de puntos de la matriz puede variar, y la calidad de la impresión se relaciona con la densidad de estos puntos. Las más densas son impresoras de modo dual, porque pueden imprimir en calidad de borrador o NLQ ( near-letter-quality, calidad casi tipo carta).
De no impacto o de página: Han ido reemplazando a las anteriores, salvo cuando hay que imprimir formularios con varias copias 9imprimen una sola copia a la vez); usan sustancias químicas, rayos láser y calor para crear imágenes en el papel; tienen una definición mucho mayor (300 dpi o más) y pueden ser:
de chorro de tinta: rocían tinta directamente sobre el papel. Utilizan varias cámaras de inyección controladas de manera independiente para inyectar pequeñas gotas de tinta sobre el papel.
láser: un rayo láser crea patrones de cargas eléctricas en un tambor giratorio; estos patrones atraen tonificador (toner) y lo transfieren al papel conforme gira el tambor.
Trazadores
Un trazador o graficador es un instrumento automatizado para dibujar que puede producir dibujos a escala de elevada finura moviendo una pluma o el papel como respuesta a mandatos del computador.
Respuesta audible
Hay dos tipos de unidades de respuesta de voz: uno utiliza la reproducción de una voz humana y la el otro utiliza un sintetizador de voz. Las salidas de respuesta audible ofrecen una salida de copia blanda o temporal.
En el caso de unidades de respuesta de voz grabada, las grabaciones análogas reales de sonidos se convierten en datos digitales que luego se almacenan permanentemente en discos o en un chip de memoria. Cuando los sonidos se almacenan en un disco el usuario tiene la flexibilidad de actualizarlos.
Los sintetizadores sirven para generar música, ruido o cualquier sonido intermedio. Muchas PC tienen sintetizadores incorporados que producen sonidos que van mas allá del bip básico. Casi todos los computadores se pueden conectar a sintetizadores independientes para controlar el instrumento. para producir la voz, estos dispositivos combinan sonidos similares a los fonemas (unidades de sonido básicas) que conforman la voz.
Salidas analógicas
Muchos dispositivos de salida funcionan tomando patrones y convirtiéndolos en movimientos o mediciones no digitales. Por ejemplo los brazos robóticos, los conmutadores telefónicos, el equipo automatizado de las fábricas reciben sus órdenes de una computadora.
Otras salidas
Terminales no inteligentes: La mayoría de las terminales se clasifican como no inteligentes. Estas sólo presentan texto y se deben conectar a un procesador para usuarios múltiples. Únicamente permiten la entrada/salida de una sola aplicación.
Terminales X : Tienen capacidades de procesamiento y RAM comparables a las de algunas micros y estaciones de trabajo; no están diseñadas para operar en forma independiente; permiten la interacción con el usuario por medio de una GUI. Permiten el trabajo con varias aplicaciones a la vez, desplegándose cada aplicación en su propia ventana.

Terminales telefónicas: Se pueden capturar datos alfanuméricos en el teclado numérico de un teléfono (teclado) o hablando en el micrófono (entrada de voz), recibiéndose una salida de voz generada por computadora.
Terminales para funciones especiales: Están diseñadas para una aplicación específica (v.g.: cajero automático, etc.)
Almacenamiento secundario: Unidades y soportes de entrada-salida
Concepto y organización del almacenamiento secundario
A diferencia de la RAM, que olvida todo en cuanto se apaga la máquina, y la ROM, que no puede aprender nada nuevo, los dispositivos de almacenamiento secundario permiten que la computadora registre información en forma semipermanente, para que pueda ser leída después por el mismo u otro computador. El almacenamiento secundario es más barato y de mayor capacidad que el almacenamiento primario.
Procesamiento secuencial: Es el que se da en medios de almacenamiento en el cual el usuario debe pasar secuencialmente por la información, en el mismo orden en que fue grabada, hasta llegar a l que le interesa. Un archivo secuencial se procesa de principio a fin. Todo el archivo se debe procesar, aun cuando se actualice sólo un registro. Este tipo de procesamiento requiere de:
un archivo maestro, fuente permanente de todos los datos; un archivo de transacción, refleja la actividad diaria.
Antes del procesamiento, los registros en ambos archivos se clasifican y ordenan en secuencia ascendente por clave. Ambos archivos constituirán entradas y el nuevo archivo maestro será la salida, reflejando las actualizaciones. En este procesamiento siempre se crea un nuevo archivo maestro para las actualizaciones realizadas.
Procesamiento aleatorio: Se tiene acceso a los programas y datos deseados directamente del medio de almacenamiento. En este tipo de procesamiento sólo se necesita el valor del campo clave del registro para recuperar o actualizar un registro.
Cintas magnéticas
La cinta pasa debajo de una cabeza de escritura/lectura y se realiza la operación ordenada. Una unidad de cinta se clasifica por la densidad con que los datos se pueden almacenar, así como por la velocidad de la cinta cuando pasa por debajo de la cabeza de escritura/lectura. Combinadas, éstas determinan la velocidad de transferencia o el número de caracteres por segundo que se pueden transmitir a la RAM. La densidad de cinta se mide en bytes por pulgada (bpi, bytes per inch) o el número de caracteres (bytes) que se pueden almacenar por pulgada lineal de cinta.
Una cinta magnética puede almacenar enormes cantidades de información en un espacio pequeño y a un costo relativamente bajo. La preferida es la DAT (digital audio tape, cinta de audio digital). Su desventaja es que se trata de un medio de acceso secuencial; por ello el uso principal es para el respaldo de datos y algunas otras operaciones en las cuales el tiempo no es un factor decisivo. En cualquier sesión, una sola cinta es para entrada o salida, no para ambas.
Discos magnéticos
Gracias a su capacidad de acceso aleatorio, son el medio más popular para el almacenamiento de datos. Los hay de dos tipos:
Discos flexibles o diskettes o discos magnéticos intercambiables: Es una pequeña oblea de plástico flexible, con sensibilidad magnética encerrada en un paquete de plástico que puede ser

rígido o flexible. Es económico, práctico y confiable, pero no tiene la capacidad de almacenamiento ni la velocidad necesaria para trabajos de gran magnitud. Estos discos se pueden almacenar fuera de línea y cargarlos según sea necesario.
Discos duros o discos magnéticos fijos: es un disco rígido, con sensibilidad magnética, que gira continuamente a gran velocidad dentro del chasis del computador o en una caja aparte conectada a éste. Se instalan en forma permanente, aunque existen unidades portátiles. El disco duro se la microcomputadora se llama disco Winchester. Contiene varios platos de disco rígidos apilados en un solo eje giratorio. El movimiento de rotación pasa todos los lados debajo o sobre una cabeza de escritura/lectura, permitiendo tener acceso a todos los datos del disco en cada giro; un disco fijo tiene por lo menos una cabeza de escritura/lectura para cada superficie de grabación. Las cabezas se montan en brazos de acceso que se mueven juntos y flotan encima o bajo las superficies de grabación giratorias. Los datos se almacenan en pistas concéntricas magnetizando la superficie para representar configuraciones de bits. El espacio de las pistas, es decir la densidad de pista, se mide en pistas por pulgada (TPI, tracks per inch). La densidad de grabación se mide en bits por pulgada (de pista). Los discos usan la organización de sector para almacenar y recuperar datos; la cantidad de sectores depende de la densidad del disco. Cada sector tiene un número único, por lo tanto para una dirección de disco de una superficie de la cara del disco en particular, todo lo que se necesita es el número de sector y el número de pista; la dirección de disco representa la ubicación física de un conjunto de datos o un programa determinados. Un cilindro en particular se refiere a cada pista con el mismo número en todas las superficies de grabación. Cuando se lee o se escribe en un disco Winchester todos los brazos de acceso se mueven hacia el cilindro correcto. El tiempo de acceso del disco es el intervalo entre el momento en que la computadora pide la transferencia de datos de un dispositivo de almacenamiento en disco a la RAM y el momento en que la operación se completa; este tiempo de acceso se compone del tiempo de búsqueda (la mayor parte del tiempo, consiste en el tiempo que el brazo de acceso mecánico necesita para mover la cabeza de escritura/lectura hacia el lugar deseado), el retardo rotacional (tiempo que ocupan los datos para colocarse debajo de la cabeza de escritura/lectura) y el tiempo de transmisión (tiempo necesario para transmitir los datos al almacenamiento primario; es insignificante).
Discos ópticos
Una unidad de disco óptico usa rayos láser en lugar de imanes para leer y escribir la información en la superficie del disco. Aunque no son tan rápidos como los discos duros, los discos ópticos tienen mucho más espacio para almacenar datos.
Las unidades de CD-ROM (compact disc-read only memory, disco compacto-memoria sólo de lectura) son unidades ópticas capaces de leer CD-ROM, discos de datos físicamente idénticos a un disco compacto musical.
Los discos ópticos son menos sensibles a las fluctuaciones ambientales y proporcionan mayor almacenamiento a un costo menor.
Software (I)
Concepto general
El software permite comunicar al computador los problemas y hace posible que nos comunique las soluciones. Los programas son el software del computador. Es una estructura de instrucciones (o programas) que la máquina es capaz de leer. Son programas que dirigen las actividades del sistema de computación
Programas: conjuntos de instrucciones de computador diseñados para resolver problemas. Confieren a la computadora capacidad para llevar a cabo las funciones deseadas. Secuencia de

instrucciones (enunciados) que se ejecutan una después de otras. Estas instrucciones pueden ser de:
oEntrada/salida: dirigen a la computadora para interactuar con un periférico.oCómputo: permiten realizar las operaciones aritméticas.oControl (decisión y/o ramificación): pueden alterar la secuencia de la ejecución del programa o
terminar la ejecución. Hay dos tipos de instrucciones de control: de bifurcación incondicional: interrumpen la secuencia normal de la ejecución, originando una
subrutina. de rama condicional: o enunciados SI (if); si se cumplen ciertas condiciones se crea una
ramificación en cierta parte del programa.oTransferencia de datos y asignación: permiten que se asigne a un sitio determinado de la RAM
una constante de cadena o valor literal.oFormato: se usan junto con las instrucciones de entrada o salida y describen la manera en que se
deben realizar la entrada y salida de datos de la RAM.
El software alimenta a la memoria de la máquina a través de dispositivos de entrada; como el software se almacena en la memoria, la computadora puede pasar de una tarea a otra y luego regresar a la primera sin que sea necesario modificar el hardware.
Algoritmo: Conjunto de procedimientos paso a paso para realizar una tarea.
La tarea del programador es convertir el algoritmo en un programa, añadiendo detalles, superando los puntos difíciles, probando los procedimientos y corrigiendo los errores y eliminando la ambigüedad, que es una de las principales fuentes de errores en las computadoras.
Tipos de software
Software de traducción: Con el que los programadores pueden crear otro software. Software de uso general: Ofrece la estructura para un gran número de aplicaciones
empresariales, científicas y personales. La mayoría del software de este tipo se vende como paquete, es decir, con software y documentación orientada al usuario. La creación de la aplicación depende del usuario, del uso que le dé.
Software de aplicación: Sirve como herramienta para elevar la productividad de los usuarios en la resolución de problemas. Está diseñado y escrito para realizar tareas específicas personales, empresariales o científicas. El software de este tipo procesa datos y genera información.
Software del sistema: Coordina las operaciones de hardware y lleva a cabo las tareas ocultas que el usuario rara vez observa. Controla o respalda a los otros tipos de software. Dentro de este tipo de soft se encuentran
el sistema operativo: es el núcleo de cualquier sistema de computación; supervisa y controla todas las actividades de I/O (input-ouput, entrada-salida) y procesamiento de un sistema de computación. Todo el hardware y el software se controla por medio del sistema operativo.
la interfaz gráfica para usuario (GUI, Grafical user interface): Cuando se usa software con base en texto y controlado por comandos (v.g.: MS-DOS) se debe ser explícito; si se omite información necesaria en un comando o el formato del comando es incorrecto, aparece un mensaje de error y/o un indicador en pantalla que solicitará que se vuelva a escribir el comando. Una interfaz es una capa opcional de software amigable entre el usuario y una interfaz controlada por comandos Las GUI depende de software con base en gráficos y permite la integración de texto con imágenes gráficas de alta resolución. Los usuarios de la GUI interactúan con el sistema operativo y otro software usando un dispositivo de indicación y un teclado para dar comandos. El usuario selecciona de las opciones que se presentan en la pantalla, ya sea en los menúes o por medio de un ícono (representación gráfica que simboliza una actividad de procesamiento). Las GUI han eliminado la necesidad de memorizar y escribir comandos complicados.
Software multiuso: Los paquetes de software integrado cuentan con varias aplicaciones diseñadas para trabajar en conjunto; estos paquetes suelen incluir como mínimo, 5 tipos de aplicaciones: procesador de textos, base de datos, planilla de cálculo, gráficos y telecomunicaciones. Los paquetes integrados ofrecen varias ventajas:
Su precio es menor que el costo total de la compra de los programas individuales.

Dan una apariencia similar a todas sus aplicaciones, de modo que los usuarios no tienen que memorizar diferentes órdenes y técnicas para efectuar tareas diferentes.
Permiten transferir datos entre las aplicaciones con rapidez y facilidad. Software vertical: Aplicaciones diseñadas específicamente para una empresa o industria
particular. Son mucho más costosas que las aplicaciones de mercado masivo. Software a medida: Es el que se programa específicamente para determinados clientes.
Fuentes del software
Elaboración propia: Diseño y programado realizado por personal de la organización. Para determinar si esta estrategia es la mejor se deben evaluar los siguientes factores:
¿Tiene la organización suficiente personal capacitado para desarrollar programas propios? ¿Permite el programa de desarrollo terminar el proyecto en un plazo aceptable? ¿Es el costo de esta alternativa una buena inversión comparada con otras alternativas? ¿Se podría adquirir de otras maneras el programa necesario? Paquetes comprados: Programa o conjunto de programas ya escritos, diseñados para ejecutar
tareas específicas. Las preguntas clave son: ¿Tiene el paquete las características adecuadas a un costo razonable? ¿Es aceptable el costo en relación con el costo de desarrollo convencional o propio? ¿Es suficiente el número de usuarios de ese programa para garantizar que quienes lo elaboran
respaldaran el paquete después de comprado? Elaboración por contrato: Es una alternativa conveniente en las siguientes condiciones: La organización carece de personal técnico para producir el programa deseado. No hay paquetes generalizado que sea adecuados para el trabajo. El costo de esta alternativa no es prohibitivo. Se pueden hacer arreglos convenientes para el mantenimiento (cambios, correcciones y mejoras)
del software después de que haya sido entregado.
sistemas
Sistema: Conjunto de elementos interrelacionados que interactúan para alcanzar un objetivo común.
Las principios que rigen un sistema son los de:
Entropía: tendencia a la autodestrucción. Sinergia: el todo es más que la suma de las partes. Isofinalidad: puede alcanzarse un mismo objetivo por diferentes caminos.
Clasificación de los sistemas
Biológicos o no biológicos. Naturales o artificiales. Los sistemas administrativos pueden ser de decisión gerencial (sistemas de información) u
operativos (orientados a las transacciones).
Las decisiones pueden tomarse en 3 condiciones:
certeza. incertidumbre. riesgo.
Características de la información
Debe distinguirse:

información interna: es la que va con el mensaje y debe ser brindada en cantidad. con calidad (mayor calidad implica mayor costo) oportunamente (antes de la toma de decisiones, a la cual debe servir) Información externa: Su utilización depende del receptor. Para una persona puede ser
información y para otra sólo datos; esto es debido a que dato no es lo mismo que información, la información es el dato útil.
comunicaciones (I)
Lenguajes
1er nivel: Lenguajes naturales. 2º nivel: lenguajes simbólicos. 3er nivel: lenguajes artificiales (básicamente los sistemas numéricos)
La base de cada uno de estos lenguajes varía según lo que resulta más cómodo, por eso el computador utiliza el sistema binario.
Los límites de un lenguaje están dados por la ambigüedad y la redundancia.
Redes
Las computadores y las personas están vinculadas dentro de las compañías y entre las naciones. La aldea global es consecuencia de la red de computadoras.
La mayor parte de las computadoras existentes forma parte de una red de computadoras, es decir están conectadas electrónicamente con una o más computadoras para compartir recursos e información.
Ya en muchas industrias las redes de computación son el medio para la coordinación de la logística y las comunicaciones a nivel internacional que se necesitan para la producción de bienes y/o servicios.
Las redes de computación permiten formar grupos de trabajo que cooperan entre sí por medio de la computación en grupo. El grupo de trabajo es cualquier grupo de personas que se vinculan por medio de una red de computadoras. Un software especial, denominado groupware (software para grupos de trabajo) facilita el uso de computadoras en grupos de trabajo. El groupware se usa para permitir que los grupos de trabajo coordinen reuniones, celebren juntas utilizando medios electrónicos, establezcan prioridades, colaboren en la solución de problemas, compartan información, etc.
Multimedia
Este término se refiere al uso de una combinación de textos, gráficos, animación, vídeo, música y efectos de sonido para comunicarse.
Ancho de banda: Cantidad de información que puede transmitir un medio por unidad de tiempo. Un libro que sólo contiene texto es un medio de ancho de banda pequeño, que sólo puede proporcionar unos 300 bits de datos por segundo al lector. Los medios de ancho de banda grande

(televisión, vídeo) transmiten más de 50 millones de bits por segundos de datos gráficos y sonoros.
La televisión y el vídeo son medios pasivos, unidireccionales. Con la moderna tecnología es posible que la información se transmita en ambas direcciones, convirtiendo los multimedia en multimedia interactivos, que permiten que el observador/oyente participe activamente en la experiencia.
La creación y ejecución de documentos de multimedia requieren periféricos de hardware adicionales (monitores de televisión, unidades de CD-ROM y reproductores de videodiscos). La computadora controla los dispositivos, que almacenan y suministran el material audiovisual al recibir órdenes.
El software de multimedia merece su nombre porque proporciona información a través de varios medios.
Además de textos y gráficos, los documentos de multimedia suelen contener al menos una de las tres formas de información siguientes:
Animación: Gráficos por computador que se mueven en la pantalla. Se crea movimiento a partir de imágenes estáticas. La moderna tecnología permite la automatización de uno de los aspectos más tediosos de la animación: la animación por computadora es similar a las técnicas tradicionales de animación cuadro a cuadro: cada cuadro es una imagen dibujada en el computador y la máquina controla estos cuadros en una sucesión rápida. Pero además se cuenta con diferentes tipos de herramientas:
de efectos visuales: permiten crear desvanecimientos, barridos y otras transiciones visuales. de trayectoria de animación: registran el movimiento de los objetos visuales mientras el artista los
arrastra por la pantalla y reproducen estos movimientos al recibir una orden. de relleno de cuadros: pueden rellenar automáticamente cierto número de cuadros para suavizar
el movimiento. Vídeo: Segmentos de película que aparecen en la pantalla del computador o en un monitor de
televisión. Para la edición de vídeo se cuenta con estaciones de trabajo gráficas; con el software de edición de vídeo, este hardware puede unir escenas, insertar transiciones visuales, sobreponer títulos, crear efectos especiales, añadir una pista musical o "imprimir" una copia de los resultados en videocinta maestra. Para la ejecución de documentos multimedia con vídeo se cuenta con las siguientes alternativas:
Videodisco interactivo: Un reproductor de videodiscos conectado al televisor lee la información de audio y vídeo en el disco y la convierte en sonido e imágenes. Un videodisco puede contener una hora o más de vídeo con banda sonora, cuya calidad es la misma que la de un CD. Un reproductor de videodiscos tiene la capacidad de exhibir cuadros individuales (imágenes), también puede usarse como proyector de diapositivas. Es un medio de acceso aleatorio. Muchos reproductores de videodiscos están diseñados para aceptar órdenes de computadores enlazados a ellos.
Vídeo digital: Las imágenes convencionales de televisión y vídeo se almacenan y transmiten como señales electrónicas analógicas. Como el vídeo digital puede reducirse a una serie de números, puede editarse, almacenarse y reproducirse sin pérdida de calidad. El vídeo digital puede ser manejado como datos por un computador y combinado con otras formas de datos. Hay digitalizadores de vídeo que permiten convertir señales de vídeo analógicas en datos digitales para diversos fines. Las películas digitales tiene fuertes requerimientos de hardware. Para ahorrar espacio de almacenamiento la mayoría de estas películas se exhiben en pequeñas ventanas de la pantalla del monitor. Asimismo puede usarse software de compresión de datos para eliminar datos redundantes de las películas, para que puedan almacenarse en espacios más pequeños, con una pérdida muy pequeña en la calidad de la imagen.
Audio: Música, efectos de sonido y palabras pronunciadas por el computador o por una fuente de sonido externa. El sonido grabado puede provenir de datos localizados en la memoria del computador o de un dispositivo reproductor externo controlado por órdenes del computador. También es posible generar sintéticamente los sonidos, es decir sintetizarlos. Cualquier sonido que pueda grabarse también puede capturarse con un digitalizador de audio y almacenarse como un archivo de datos. Los datos de sonido digitalizado se pueden cargar en la memoria y manipularse con el software. El software de edición de audio permite cambiar el volumen y el tono de un sonido, añadir efectos especiales como ecos, eliminar ruidos extraños, e incluso hacer

nuevos arreglos de pasajes musicales. A los datos sonoros en ocasiones se les denomina audio de forma de onda , ya que este tipo de edición implica manipular una imagen visual de la forma de onda del sonido. Para reproducir un sonido digitalizado, el computador debe cargar el archivo de datos en memoria, convertirlo en sonido analógico y reproducirlos mediante un altoparlante. La compresión de datos sonoros ahorra espacio pero también reduce la calidad del sonido, las grabaciones digitales residentes en memoria no tienen la fidelidad de las grabaciones en discos compactos. La diferencia se debe a la velocidad de muestreo: el número de "instantáneas" sonoras que toma cada segundo el equipo de grabación. El sonido de un disco compacto tiene una elevada velocidad de muestreo y por ello su sonido se aproxima mucho al original analógico. Un computador también puede reproducir los sonidos de un disco compacto de audio; los sonidos se almacenan en el CD, no en la memoria del computador, y el software sólo debe tener órdenes para indicar a la unidad de CD-ROM qué tocar y cuándo. Las ventajas del audio en disco compacto residen en su alta calidad de sonido y en los bajos costos de almacenamiento.
Seguridad y riesgo
Delitos
Delito por computador: cualquier violación a la ley realizada por medio del conocimiento o el uso de la tecnología de computación.
Robo
El robo es la forma más común de delito por computador; y el tipo de robo más frecuente es la piratería de software, que es la duplicación ilegal de software protegido por derechos de autor. La propiedad intelectual cubre el resultado de las actividades intelectuales en las artes, la ciencia y la industria. En su mayoría, los programas de software comercial están protegidos por leyes de derechos de autor, pero algunas compañías se fundan en las leyes de patentes para proteger productos de software. El propósito de las leyes de propiedad intelectual es el de asegurar que se recompense justamente el trabajo mental y que se estimule la innovación, pero estas leyes son muy difíciles de aplicar.
La piratería puede ser un problema muy serio para las pequeñas compañías, para las cuales la creación de software es tan difícil como para las grandes, pero careciendo aquéllas de los recursos financieros para cubrir sus pérdidas por piratería.
Sabotaje
Hay varios tipos de programas destructores:
Caballos de Troya o Troyanos ( trojans): El troyano es un programa que ejecuta una tarea útil al mismo tiempo que realiza acciones destructivas secretas. por lo general, estos programas se colocan en tableros de noticias de dominio público con nombres parecidos a los de un juego o una utilería.
Virus : Se propagan de programa en programa, o de disco en disco, y en cada programa o disco infectado crean más copias de ellos. Por lo general, el software virus está oculto en el sistema operativo de un computador o en algún programa de aplicación. Los virus suelen ser selectivos (los de Mac sólo invaden Mac, los de UNIX sólo UNIX, etc.). Se requiere un programador humano para crear un virus, incorporarlo en software y difundirlo. una vez en circulación, el virus se puede propagar como una epidemia a través de software y discos compartidos; además es casi imposible erradicarlos del todo. Los programas antivirus o vacuna o desinfectantes están diseñados para buscar virus, notificar al usuario de su existencia y eliminarlos de los discos o archivos infectados. Algunos son residentes.
Gusanos: Usan los computadores como anfitriones para reproducirse. Estos programas viajan de manera independiente por las redes, en busca de estaciones de trabajo no infectadas que puedan

ocupar. Un segmento de gusano corriente reside en la memoria de una estación de trabajo, no en disco, de manera que es posible eliminarlo apagando todas las estaciones de trabajo de la red.
Bombas lógicas: Es un programa que entrará en acción cuando detecte una secuencia de sucesos o después de un cierto período. Sueles incluirse en los programas virus.
Hacking
Los hackers son invasores electrónicos que ingresan a los computadores corporativos y del gobierno usando contraseñas robadas o deficiencias de seguridad en el software del sistema operativo. Lo más común es que sólo estén motivados por la curiosidad y el reto intelectual
Errores y averías
Los errores de software ocasionan más daños que los virus y los delincuentes de la computación juntos, ya que:
Es imposible eliminar todos los errores. Incluso los programas que parecen funcionar pueden contener errores peligrosos (los errores más
peligrosos son los difíciles de detectar y pueden pasar inadvertidos meses o años). Al aumentar el tamaño del sistemas, mayor es el problema.
Reducción del riesgo
Seguridad en los computadores: Protección de los sistemas de computación y la información que contienen contra el acceso, el daño, la modificación o la destrucción no autorizados.
Los computadores tienen 2 características inherentes que los hacen vulnerables a ataques o errores operativos:
Un computador hará exactamente aquello para lo cual está programado, como revelar información confidencial. Cualquier sistema que pueda ser programado también puede ser reprogramado por alguien que posea los conocimientos suficientes.
Todo computador únicamente puede hacer aquello para lo cual fue programado. "...no se puede proteger de averías o ataques deliberados, a menos que estos casos hayan sido previstos, estudiados y atacados específicamente con una programación apropiada."
Restricciones de acceso físico
Una forma de reducir el riesgo de violaciones a la seguridad consiste en asegurarse de que sólo el personal autorizado tenga acceso al equipo de cómputo. Un usuario puede tener acceso al computador con base en:
algo que tiene: una llave, una tarjeta de identificación con fotografía o una tarjeta inteligente con una identificación codificada digitalmente;
algo que sabe: una contraseña, un número de identificación, la combinación de un candado o datos personales de difícil conocimiento para otros;
algo que hace: su firma o su velocidad para teclear y sus patrones de errores; algo acerca del usuario: su voz, huellas dactilares, lectura retinal u otras mediciones de las
características corporales de un individuo, llamadas biométricas.
Contraseñas

Son las herramientas más comunes para restringir el acceso a los sistemas de computación, pero sólo serán eficaces si se eligen con cuidado y si son cambiadas con frecuencia.
El software de control de acceso no tiene que tratar a los usuarios de la misma manera (niveles de autorización).
Para evitar el uso no autorizado de contraseñas robadas por extraños, muchas compañías emplean sistemas de devolución de llamada: Cuando un usuario ingresa y teclea una contraseña, el sistema cuelga, busca el número telefónico del usuario y lo llama antes de permitir el acceso.
Ciframiento, blindaje y auditoría
Ciframiento (encryption): Es una forma de proteger la información transmitida escribiendo en cifra esas transmisiones. Un usuario cifra un mensaje aplicándole un código numérico secreto (la clave de cifrado) y el mensaje puede transmitirse o almacenarse como un revoltijo indescifrable de caracteres, siendo posible leerlo únicamente luego de reconstruirlo con una clave correspondiente.
Blindaje: Se utiliza para la información más confidencial. Por ejemplo el Pentágono utiliza un programa llamado Tempest para crear máquinas con blindaje (shielding) especial.
Control de auditoría: El software de este tipo sirve para supervisar y registrar transacciones de cómputo en el momento en que tienen lugar, para que los auditores puedan rastrear e identificar actividades sospechosas del computador después de los hechos. Un software de control de auditoría eficaz obliga a todos los usuarios, legítimos o no, a dejar un rastro de huellas electrónicas.
Respaldos (backups)
Guardar el software y los datos puede ser más importante que salvar el hardware.
Ni siquiera el mejor sistema de seguridad puede garantizar la protección absoluta de los datos. Todo sistema de seguridad integral debe incluir algún tipo de plan para recuperarse de desastres. El seguro de recuperación de datos más eficaz y utilizado es un sistema para hacer respaldos regulares.
La frecuencia con que se respalda un disco depende de su volatilidad o de cuan seguido se actualicen los archivos del disco.
Controles de seguridad humana
La seguridad en materia de computadores es un problema humano que no se puede resolver exclusivamente con tecnología. La seguridad es un asunto de la gerencia, y las acciones y políticas de un gerente son fundamentales para el éxito de un programa de seguridad.
Software (II)
El software es el enlace de comunicación entre el ser humano y el computador. El software se almacena en memoria, y no permanentemente en los circuitos, por lo cual puede modificarse para satisfacer las necesidades del usuario.
Casi todo el software corresponde a una de 3 categorías generales:
programas de traducción: permiten escribir programas en lenguajes parecidos al inglés y traducirlos al lenguaje de máquina.

aplicaciones de software: facilitan a los usuarios comunicar sus necesidades al computador, sin tener que aprender a programar. Las aplicaciones simulan y extienden las propiedades de las herramientas comunes de la vida real, como las máquinas de escribir, los pinceles y los archiveros.
software de sistema: el sistema operativo funciona tras bambalinas, traduciendo las instrucciones del software a mensajes que el hardware puede comprender. Un sistema operativo sirve como administrador del computador, encargándose de los múltiples detalles necesarios para que la máquina funcione.
Lenguajes
Los lenguajes naturales son aquellos con los cuales hablamos y escribimos en nuestras actividades cotidianas. Los lenguajes de programación ocupan una posición intermedia entre los lenguajes naturales humanos y los precisos lenguajes de máquina.
Gracias a la progresiva complejidad de los lenguajes traductores que permiten convertir las instrucciones de un lenguaje de programación al lenguaje de máquina, la programación puede usar lenguajes de computación que se parecen cada vez más a los lenguajes naturales.
También se habla de lenguajes naturales para referirse al software que permite que los sistemas de computación acepten, interpreten y ejecuten instrucciones en el lenguaje materno o "natural" que habla el usuario final, por lo general el inglés. La mayor parte de los lenguajes naturales comerciales están diseñados para ofrecer a los usuarios un medio de comunicarse con una base de datos corporativa o con un sistema experto.
Lenguajes de programación
Un lenguaje de programación consiste en un conjunto de órdenes o comandos que describen el proceso deseado. Cada lenguaje tiene sus instrucciones y enunciados verbales propios, que se combinan para formar los programas de cómputo.
Los lenguajes de programación no son aplicaciones, sino herramientas que permiten construir y adecuar aplicaciones.
Características de la programación
Un programa útil tiene 5 atributos:
1. Exactitud y precisión: Un programa debe aceptar datos, procesarlos y generar resultados sin errores de sintaxis o de lógica; de ahí la necesidad de exactitud y precisión.
2. Integridad o completitud: Un programa es completo sólo si ejecuta todas las operaciones que el usuario espera al procesar un conjunto de datos.
3. Generalidad: La generalidad se entiende en dos sentidos: Un programa bien diseñado se puede generalizar; es decir puede procesar conjuntos de datos que
varían en el número de transacciones y en la naturaleza de los datos mismos. Las instrucciones se deben elaborar para que no se limiten a un número específico de transacciones en el conjunto de datos. No debe suponerse que una parte específica de datos siempre sea de igual tamaño.
El programa contiene diferentes opciones que pueden o no ser aplicadas durante una corrida. Los usuarios pueden seleccionar la opción adecuada cada vez.

4. Eficiencia: Debe asegurarse que las instrucciones para procesar datos se selecciones tan rápida y fácilmente como sea posible. La rapidez y la eficiencia del procesamiento de datos puede variar debido a:
modo como se introducen los datos, orden en que se procesan los datos, instrucciones particulares que se empleen para controlar el proceso, etc.5. Documentación: Consiste en la inclusión de auxiliares que explican con claridad como
ocurre el procesamiento de los datos en un programa. La documentación incluida en un programa es de dos tipos:
externa: No está incluida en el programa mismo sino que va por separado. Comprende: diagrama de flujo que muestre los pasos y los procedimientos y el orden en el cual tienen lugar; explicación que describa en el lenguaje común cómo es el procesamiento de los datos; descripción de los datos que van a introducirse y procesarse, incluyendo su tipo y tamaño. interna: Consiste en comentarios y descripciones que se insertan entre los enunciados
ejecutables de un programa. Explica la sucesión de los pasos del procesamiento y los objetivos de los diferentes grupo de enunciados del programa
Generaciones de lenguajes de programación
Los lenguajes de programación se dividen en 2 categorías fundamentales:
obajo nivel: Son dependientes de la máquina, están diseñados para ejecutarse en una determinada computadora. A esta categoría pertenecen las 2 primeras generaciones.
oAlto Nivel: Son independientes de la máquina y se pueden utilizar en una variedad de computadoras. Pertenecen a esta categoría la tercera y la cuarta generación. Los lenguajes de más alto nivel no ofrecen necesariamente mayores capacidades de programación, pero si ofrecen una interacción programador/computadora más avanzada. Cuanto más alto es el nivel del lenguaje, más sencillo es comprenderlo y utilizarlo.
Cada generación de lenguajes es más fácil de usar y más parecida a un lenguaje natural que su predecesores. Los lenguajes posteriores a la cuarta generación se conocen como lenguajes de muy alto nivel. Son lenguajes de muy alto nivel los generadores de aplicaciones y los naturales.
En cada nuevo nivel se requieren menos instrucciones para indicar a la computadora que efectúe una tarea particular. Pero los lenguajes de alto nivel son sólo una ayuda para el programador. Un mayor nivel significa que son necesarios menos comandos, debido a que cada comando o mandato de alto nivel reemplaza muchas instrucciones de nivel inferior.
4. Primera - Lenguaje de máquina: Empieza en los años 1940-1950. Consistía en sucesiones de dígitos binarios. Todas las instrucciones y mandatos se escribían valiéndose de cadenas de estos dígitos. Aún en la actualidad, es el único lenguaje interno que entiende la computadora; los programas se escriben en lenguajes de mayor nivel y se traducen a lenguaje de máquina.
5. Segunda – Lenguajes ensambladores : Fines de los ’50. Se diferencian de los lenguajes de máquina en que en lugar de usar códigos binarios, las instrucciones se representan con símbolos fáciles de reconocer, conocidos como mnemotécnicos,. Aún se utilizan estos lenguajes cuando interesa un nivel máximo de eficiencia en la ejecución o cuando se requieren manipulaciones intrincadas. Al igual que los lenguajes de la máquina, los lenguajes ensambladores son únicos para una computadora particular. Esta dependencia de la computadora los hace ser lenguajes de bajo nivel.
6. Tercera: años ’60. Los lenguajes de esta generación se dividen en tres categorías, según se orienten a:
procedimientos: Requieren que la codificación de las instrucciones se haga en la secuencia en que se deben ejecutar para solucionar el problema. A su vez se clasifican en científicos (p.ej.:

FORTRAN), empresariales (v.g.: COBOL), y de uso general o múltiple (p.ej.: BASIC). Todos estos lenguajes permiten señalar cómo se debe efectuar una tarea a un nivel mayor que en los lenguajes ensambladores. Hacen énfasis los procedimientos o las matemáticas implícitas, es decir en lo que se hace (la acción).
problemas: Están diseñados para resolver un conjunto particular de problemas y no requieren el detalle de la programación que los lenguajes orientados a procedimientos. Hacen hincapié en la entrada y la salida deseadas.
objetos: El énfasis se hace en el objeto de la acción. Los beneficios que aportan estos lenguajes incluyen una mayor productividad del programador y claridad de la lógica, además de ofrecer la flexibilidad necesaria para manejar problemas abstractos de programación.
7. Cuarta: su característica distintiva es el énfasis en especificar qué es lo que se debe hacer, en vez de cómo ejecutar una tarea. Las especificaciones de los programas se desarrollan a un más alto nivel que en los lenguajes de la generación anterior. La característica distintiva es ajena a los procedimientos, el programador no tiene que especificar cada paso para terminar una tarea o procesamiento. Las características generales de los lenguajes de cuarta generación son:
Uso de frases y oraciones parecidas al inglés para emitir instrucciones; no operan por procedimientos, por lo que permiten a los usuarios centrarse en lo que hay que
hacer no en cómo hacerlo; Al hacerse cargo de muchos de los detalles de cómo hacer las cosas, incrementan la
productividad.
Hay dos tipos de lenguajes de cuarta generación, según se orienten:
a la producción: Diseñados sobre todo para profesionales en la computación. al usuario: Diseñados sobre todo para los usuarios finales, que pueden escribir programas para
hacer consultas en una base de datos y para crear sistemas de información. También se llama lenguaje de consultas ( SQL, Structured Query Language: lenguaje estructurado para consultas).
Pasos en el desarrollo de programas
4. Descripción del problema: Identificación precisa de las necesidades a satisfacer.5. Análisis del problema: División del problema en sus componentes básicos. Para la mayoría de
los programas estos componentes son:
salida entrada procesamiento interacción de archivos
6. Diseño de la lógica general del programa: Luego del análisis corresponde unir todas las piezas. Un programa se diseña jerárquicamente, yendo de los aspectos generales a los aspectos específicos. El diseño general se orienta a las principales actividades de procesamiento y a las relaciones entre éstas. Al completar primero un diseño general se pueden investigar distintas alternativas de diseño; luego de elegida la mejor se avanza a un diseño más detallado.
7. Diseño de la lógica detallada del programa: Se produce una representación gráfica de la lógica del programa que incluye todas las actividades de procesamiento y sus relaciones, cálculos, manejos de datos, operaciones lógicas y todas las operaciones de entrada/salida.
8. Codificación: Se traduce el diseño gráfico y narrativo de los pasos anteriores a instrucciones o programas que la máquina puede leer.
9. Prueba y depuración : Búsqueda y eliminación de errores de sintaxis y de lógica.10. Documentación: Para responder a las necesidades a pesar los cambios los programas deben
actualizarse periódicamente o mantenerse. El mantenimiento se dificulta si la documentación no está completa y actualizada. La documentación forma parte del proceso de programación. No es algo que se lleve a cabo cuando el programa está escrito. Como mínimo la documentación de cada programa debe incluir:

descripción del programa; gráfica estructural; diagrama de flujo; enlistado del programa (con comentarios internos) una sesión interactiva (entrada/salida cuando se ejecuta el programa)
Errores en la programación
de sintaxis: Violaciones de las reglas "gramaticales" del lenguaje de programación para la escritura de instrucciones. Ejemplos:
Inclusión de símbolos o caracteres que no están permitidos. Omisión de la referencia de los datos por leer o escribir (se tiene que indicar a la CPU qué
debe leer o escribir). Escritura errónea de una orden. de lógica: Consisten en el uso inadecuado de instrucciones que son correctas en sintaxis;
son errores en la estructura lógica que ocasionan diferencian entre lo que se quiere que haga el programa y lo que hace en realidad.
Fuentes de los programas
Elaboración propia: Diseño y programado realizado por personal de la organización. Para determinar si esta estrategia es la mejor se deben evaluar los siguientes factores:
¿Tiene la organización suficiente personal capacitado para desarrollar programas propios? ¿Permite el programa de desarrollo terminar el proyecto en un plazo aceptable? ¿Es el costo de esta alternativa una buena inversión comparada con otras alternativas? ¿Se podría adquirir de otras maneras el programa necesario? Paquetes comprados: Programa o conjunto de programas ya escritos, diseñados para
ejecutar tareas específicas. Las preguntas clave son: ¿Tiene el paquete las características adecuadas a un costo razonable? ¿Es aceptable el costo en relación con el costo de desarrollo convencional o propio? ¿Es suficiente el número de usuarios de ese programa para garantizar que quienes lo
elaboran respaldaran el paquete después de comprado? Elaboración por contrato: Es una alternativa conveniente en las siguientes condiciones: La organización carece de personal técnico para producir el programa deseado. No hay paquetes generalizado que sea adecuados para el trabajo. El costo de esta alternativa no es prohibitivo. Se pueden hacer arreglos convenientes para el mantenimiento (cambios, correcciones y
mejoras) del software después de que haya sido entregado.
Programas
Los programas de computación son conjuntos o estructuras de instrucciones u órdenes codificados que hacen que la computadora efectúe una serie de operaciones para alcanzar un propósito específico.
Se llama programado a los conjuntos o series de instrucciones, lenguaje y métodos que hacen posible que una persona utilice una computadora. En sentido general el programado es un conjunto de órdenes o mandatos puestos para controlar la operación de un sistema de cómputo para efectuar el cálculo y el procesamiento de datos. El objetivo primario es controlar todas las actividades de procesamiento de datos y cerciorarse que los recursos y la capacidad de la computadora sean aprovechados de la manera más eficaz.

Programa almacenado, fuente y objeto
fuente: Es el programa de cómputo escrito en un lenguaje de programación. Todos los programas fuente deben compilarse o traducirse antes que el sistema los pueda ejecutar.
objeto: Se llama programa o código objeto al programa de cómputo luego que ha sido traducido al lenguaje de máquina. El programa objeto es la salida del proceso de compilación.
almacenado: Es un concepto que se debe a John von Neumann que afirmaba la necesidad de que las instrucciones de los programas deben almacenarse junto con los datos en la memoria
Programación estructurada
En esta programación se maneja en forma jerárquica la lógica del programa en módulos lógicos. Al final se traduce la lógica de cada módulo a una secuencia de instrucciones del programa que se pueden ejecutar de manera independiente. El planteamiento estructurado reduce la complejidad de la tarea de programación.
La programación estructurada es una técnica para hacer más simple y productiva la programación. Un programa estructurado no depende de enunciados GoTo (enunciado utilizado para transferir el control a otras partes del programa) para controlar el flujo lógico, sino que se construye a partir de programas más pequeños llamados módulos o subprogramas, que a su vez se componen de módulos más pequeños. Lo que se hace es combinar los módulos usando las 3 estructuras de control básicas: secuencia, repetición y selección.
Un programa está bien estructurado si:
está formado por módulos lógicamente coherentes; los módulos están dispuestos en una jerarquía; y es directo y legible.
Traductores, compiladores e intérpretes
Los traductores son programas elaborados que convierten los programas escritos en un lenguaje de programación en pulsos eléctricos que el sistema de cómputo puede entender, es decir los transforman en lenguaje de máquina. Los programas de traducción pueden ser:
12. Compiladores: El programa compilador traduce las instrucciones en un lenguaje de alto nivel a instrucciones que la computadora puede interpretar y ejecutar. Para cada lenguaje de programación se requiere un compilador separado. El compilador traduce todo el programa antes de ejecutarlo.
Los compiladores son, pues, programas de traducción insertados en la memoria por el sistema operativo para convertir programas de cómputo en pulsaciones electrónicas ejecutables (lenguaje de máquina). Los compiladores pueden ser de:
una sola pasada: examina el código fuente una vez, generando el código o programa objeto.
pasadas múltiples: requieren pasos intermedios para producir un código en otro lenguaje, y una pasada final para producir y optimizar el código producido durante los pasos anteriores.

También hay compiladores incrementales que generan un código objeto instrucción por instrucción (en vez de hacerlo para todo el programa) cuando el usuario teclea cada orden individual. El otro tipo de compiladores requiere que todos los enunciados o instrucciones se compilen conjuntamente.
El proceso de compilación puede requerir tiempo, sobre todo para los programas grandes, pero los programas compilados tienden a ejecutarse con mayor rapidez que los programas interpretados. La recopilación sólo es necesaria cuando se modifica el programa.
1. Intérpretes: Es un programa que desempeña la misma función que un compilador, pero en forma diferente. En lugar de traducir todo el programa fuente en un solo paso, traduce y ejecuta cada instrucción del programa fuente antes de traducir y ejecutar la siguiente.
La ventaja es que un error en la sintaxis "salta" inmediatamente a la vista del programador.
La desventaja es que no produce un programa objeto, por lo que debe realizar el proceso de traducción cada vez que se ejecuta un programa.
Software de aplicación
Es el conjunto de programas concebidos o creados para atender trabajos específicos del usuario, referidos al cumplimiento de sus diversos objetivos.
Este software está diseñado y escrito para realizar tareas específicas personales, empresariales o científicas. Todas estas aplicaciones procesan datos y generan información. El software de aplicación necesita parte del software de base para ejecutarse.
El software de aplicación puede ser:
a medida: Ofrece la oportunidad al usuario de personalizar el sistema de aplicación según sus necesidades; es decir que están diseñados considerando las particularidades que esa aplicación tiene para el usuario. Teóricamente, un sistema de este tipo debiera satisfacer plenamente las necesidades del usuario. La personalización tiene un límite, dado por el hardware y el software de base en cual el sistema será utilizado.
preplaneado: Es concebido en forma estándar, sin tener en consideración a usuarios en particular. Desde el punto de vista de los requerimientos de una aplicación específica de un usuario determinado, podrían resultar menos flexibles que los desarrollados a medida, debido a que no tienen elementos que permitan personalizar la aplicación. Pero desde el punto de vista de los requerimientos generales de aplicación considerada en sí misma, son sistemas mucho más flexibles que los desarrollados a medida.
El elemento determinante en la elección será, casi seguramente, el factor económico. El sistema preplaneado es más barato ya que el costo de desarrollo se amortiza entre todos los usuarios que adquieran el paquete. Pero para evaluar la magnitud del ahorro debe examinarse si, en relación con los requerimientos del usuario, lo que ofrece el sistema preplaneado:
coincide plenamente: el ahorro económico es real. excede los requerimientos del usuario: la situación resultaría costosa, ya que se estaría
pagando por elementos y funciones que no se utilizarán (siempre y cuando el costo de los mismo fuera significativo frente a lo que resulta útil del paquete).
satisface parcialmente o en forma diferente a lo que es práctica usual en la organización: el ahorro es absorbido por el costo, implícito, de adaptar la organización a los requerimientos del sistema, en lugar de que el sistema satisfaga los requerimientos de la organización.

Software de base o sistema
Por la relación estrecha que existe entre las características de un computador y su software de base, no se puede concebir el uno sin el otro.
Este software es independiente de cualquier paquete de software para uso general o cualquier área de aplicación específica; controla y respalda en cierto modo el software de las otras categorías. Pertenecen a la categoría del software de base el sistema operativo, la interfaz gráfica de usuario (GUI) y los utilitarios.
El software de base ahorra al usuario el tener que preocuparse por temas tales como:
las partes de la memoria del computador que contienen el documento; los segmentos del software de procesamiento de textos que se encuentran en la memoria; las instrucciones de salida enviadas por la computadora a la impresora.
Generalmente es entregado por el proveedor del equipo o por casas especializadas en el desarrollo de software de base. Se divide en 2 grandes grupos: utilitarios y sistema operativo.
Utilitarios
Son módulos programáticos elaborados que se requieren frecuentemente en el procesamiento de los datos. Pueden ser sencillo o muy complicados.
Son rutinas de servicio que eliminan la necesidad de escribir un programa o de pasar mucho tiempo trabajando a través de los menúes cada vez que se necesitan llevar a cabo ciertas operaciones.
Sirven como herramientas para llevar a cabo el mantenimiento del sistema y efectuar algunas reparaciones que el sistema operativo no maneja de manera automática.
Por ejemplo, los utilitarios facilitan:
el copiado de archivos; la reparación de archivos de datos dañados; la traducción de archivos para que puedan leerlos programas diferentes.
Descripción de utilitarios
1. de servicio: Los destinados al manejo de ciertos recursos del computador y de programas y sus bibliotecas.
Listador de directorio: El directorio es un archivo más dentro de un paquete de discos o diskettes que constituye el índice del contenido del volumen y contiene:
identificación o nombre del disco; espacio disponible y su ubicación datos de los archivos lógicos que abarca ese volumen o archivo físico; los datos más
usuales que contiene de cada archivo lógico son: nombre del archivo; longitudes del registro físico y del registro lógico; formato del registro (fijo, variable, indefinido); tipo de archivo (datos, programa, objeto, etc.)

organización del archivo; cantidad de espacio que ocupa; dirección/es del archivo (ubicaciones o extensiones); fechas de creación y de expiración; longitud de la clave (si no es un archivo secuencial).
Este utilitario imprime total o parcialmente las entradas de directorio. El listado emitido permite conocer:
los archivos que se encuentran en el soporte; las características de cada uno de ellos; el espacio libre restante en el soporte, y su ubicación; los miembros del archivo particionado y el espacio aún disponible en el mismo.
Eliminador de archivos: (Remove, delete, erase, scratch). Esta función consiste en suprimir los datos de un archivo del directorio general del volumen y desasignar el espacio ocupado por dicho archivo lógico, colocándolo como espacio disponible en los registros correspondientes del directorio.
Renombrador de archivos: (Rename).Esta función consiste en cambiar el nombre del archivo en la entrada del directorio general del soporte por uno nuevo. Para ello habrá que especificar el viejo nombre (con el que buscará las entradas del directorio) y el nuevo, que reemplazará al anterior.
Reorganizador de espacios en discos: (Squeeze, condens, compress).Las sucesivas incorporaciones y eliminaciones de archivos de un volumen producen una cantidad considerable de pequeñas extensiones entre los distintos archivos lógicos; estos espacios producen una pérdida de tiempo en la lectura y grabación del archivo; además obligan a guardar las direcciones de dichas extensiones en el directorio general del volumen haciendo más lento también encontrar la ubicación de un archivo lógico en el directorio. Cuando el espacio libre en disco se encuentra muy fragmentado, se hace necesario compactar los archivos. La función de este utilitario es la de ir copiando los archivos lógicos dentro del volumen sin dejar espacios libres entre ellos. Esta tarea involucra además la actualización del directorio general del soporte en lo que hace a las ubicaciones de los archivos lógicos y al nuevo espacio libre (que será uno solo al final de todos los archivos lógicos, reduciendo también la cantidad de registros en el directorio necesarios para identificar las áreas libres).
Editor de textos: Permite la creación, modificación y eliminación de programas. Su función básica es la incorporar a la biblioteca de programas fuente o simbólicos un programa nuevo que ha sido codificado o efectuarle modificaciones a uno ya existente con motivo de errores encontrados en su ejecución o por cambio en los requerimientos de procesamiento o la eliminación de un programa que no se usará más.
Los editores de texto pueden ser ejecutados:
ingresando información por medio de tarjetas perforadas, diskettes, etc. mediante el uso de terminales: tienen menos restricciones que los anteriores. Entre otras
funciones, los editores de terminal permiten: agregar o eliminar una o más líneas, mover y copiar líneas de un lugar a otro del programa, copiar líneas de otro programa, cambiar un grupo de caracteres por otro a lo largo de parte o todo el programa, buscar un grupo de caracteres, etc. A su vez pueden dividirse en:
editores de línea; editores de pantalla completa: superiores a los anteriores.
Vinculador: Su función es vincular distintos módulos objeto reubicables generando un único programa ejecutable.
Ahora bien, ¿cuáles son las razones por las que un programa puede necesitar varios módulos objeto para convertirse en ejecutable?:

Uso de subprogramas de uso general: existen ciertas operaciones que normalmente son utilizadas por varios programas de aplicación y que se codifican en forma separada y se compilan constituyen un subprograma que será "llamado" por otro programa. El módulo objeto se denomina reubicable dado que podrá ser "reubicado" en cualquier lugar del programa ejecutable.
División del programa en módulos separados: Esto permite que un programa se divida y codifique en módulos separados, que se compilan también separadamente. Inclusive los módulos pueden ser codificados en diferentes lenguajes y los compiladores y compaginadores los unificarán a nivel de lenguaje objeto. Tiene la ventaja de que cualquier modificación de un módulo a nivel de lenguaje simbólico implicará sólo la compilación de ese módulo y su vinculación con los otros módulos que no cambiaron.
Incorporación de rutinas de manejo de datos: Muchas veces por medio de la vinculación se le agregan a los módulos objeto distintos subprogramas de manejo de datos que forman parte del S.O. y que necesitará el programa para se ejecutado. Así se evita que estas rutinas sean residentes (estar permanentemente en memoria a disposición de los programas).
El vinculador reúne los módulos objeto reubicándolos y genera un programa también reubicable.
Los módulos contienen los llamados símbolos externos, que pueden ser:
Referencias externas: referencias simbólicas a otros módulos. Nombres externos: nombres que pueden ser referenciados por otros módulos.
1. De apoyo a los sistemas de aplicación: Generador de copias de archivos : Permite copiar cualquier archivo a otro soporte, sea o no
del mismo tipo. Algunos permiten la copia de varios archivos indicando desde cuál hasta cuál se desea copiar, o permiten que la copia tenga otro diferente, o permiten seleccionar los registros del archivo a ser copiados. También están los que permiten copiar un soporte entero a otro.
Reorganizador de archivos: Su función consiste en eliminar físicamente los registros dados de baja; de esa forma se comprime el archivo eliminando o reduciendo los registros que se encuentran en el área de excedentes. Esta función se logra copiando el archivo y evitando la grabación de aquellos registros dados de baja (marcados).
Generador de listados: Permite obtener mediante parámetros listados de información de uno o más archivos en forma rápida. Los parámetros más comunes son:
selección de registros lógicos a procesar; relación con otros archivos secundarios; clasificación requerida; impresión de títulos; impresión de datos y cálculos entre ellos; cortes de control y subtotales; totales generales. Clasificador e intercalador de archivos: (Sort-merge). Permite: clasificar un archivo especificando las posiciones o campos de clasificación y el orden
deseado (ascendente o descendente); o intercalar dos archivos previamente clasificados de igual forma obteniendo un archivo que
reúna a los dos de entrada; para lo cual se deben especificar las posiciones del campo de intercalación y el orden deseado.
Sistema operativo
El sistema operativo supervisa y controla todas las actividades de entrada/salida y procesamiento de un sistema de computación. Todo el hardware y el software se controla por medio del sistema operativo.

El sistema operativo distribuye y controla (es decir administra) recursos limitados del equipo de cómputo. Los programas que constituyen el sistema operativo son desarrollados generalmente por los fabricantes de computadoras y proporcionados a los compradores. Están diseñados para hacer el mejor uso de los componentes de cada sistema de computación.
Pueden existir diferentes sistemas operativos incluso en los sistemas de un solo fabricante.
El conjunto de programas de control del sistema operativo trabaja en forma conjunta y está diseñado para maximizar la eficacia total del sistema de cómputo.
Este sistema supervisa todas las actividades, recabando programas especiales de sistema cuando sea necesario, asignando recursos del sistema y programando los trabajo de tareas para la operación continua del sistema.
Los componentes del sistema operativos son de 2 tipos:
oresidentes: también llamados supervisores. Son componentes que residen permanentemente en la memoria central durante todo el procesamiento.
o transientes: residen sólo cuando se los necesita, estando almacenados en periféricos cuando no están en la memoria central.
Funciones básicas del sistema operativo
4. Proveer servicios para la ejecución y desarrollo de los programas de aplicación: administrar los recursos en proceso, obtener automáticamente la rutina apropiada y mantener la operación del computador, sin necesidad de intervención manual.
5. Actuar como entorno de la aplicación en la cual el programa es ejecutado: Supervisar mediante un conjunto de rutinas las operaciones del computador, controlar el desarrollo de las operaciones internas de la CPU, dirigir el desenvolvimiento de las operaciones de entrada/salida.
Carga inicial del sistema operativo
Casi todas las máquinas tienen una parte de su S.O. en la ROM y lo demás se carga en memoria durante el proceso de arranque. Una de las pocas ocasiones en que el usuario debe comunicarse directamente con el S.O. es al arrancar una PC, momento en el que el S.O. aparece en primer plano y espera instrucciones.
No todo el S.O. está en memoria permanentemente. La parte que reside siempre en memoria durante la ejecución de los distintos programas se llama residente o supervisor.
Una vez encendido el computador habrá que cargar el residente en memoria para poder comenzar a ejecutar los distintos programas. Hay un primer programa especial (stand-alone), llamado IPL o BOOT, que forma parte del S.O., cuya única misión es traer a memoria al segundo y principal programa, el residente. Este programa puede ser llamado pulsando una tecla; una vez que se encuentra en memoria, se comienza a ejecutar cumpliendo una serie de tareas que difieren de acuerdo al computador, entre ellas:
pedir la fecha del día al operador (la primera y más común); permitir la ejecución de programas stand-alone (todavía no se ha cargado el supervisor); recibir la configuración del equipo y la asignación de memoria a las particiones; puede
obtener estos datos: por parte del operador; o directamente de un archivo creado al efecto por un programa stand-alone (utilitario
configurador).

Finalmente, solicitará al operador el dispositivo donde deberá buscar al residente para traerlo a memoria. Una vez cargado el residente en memoria, este programa desaparece. Por tanto el IPL o BOOT es un programa transiente del sistema operativo.
Ejecución de programas
Multiprogramación o multitarea
Es la ejecución concurrente de más de un programa a la vez.. En realidad, una computadora sólo puede ejecutar un programa a la vez, pero la velocidad de su procesamiento interno es tan rápida que se pueden distribuir por turno "porciones" del tiempo de la computadora entre varios programas. Esto hace que parezca que se ejecutan varios programas a la vez. Cuando un trabajo necesita un proceso de entrada/salida, otro puede iniciarse (o continuar) su realización; dos o más programas independientes se ejecutan durante el mismo lapso al intercalar su ejecución.
La ventaja es que se puede intensificar el rendimiento total del sistema. Es posible aprovechar la gran velocidad de la unidad central y evitar los retrasos al esperar las operaciones de entrada/salida.
El control de la ejecución de la intercalación o empalme lo realiza el S.O. (si prevé esta modalidad de trabajo). Es decir que por medio de la multiprogramación se efectúa la administración en paralelo de dos o más programas que residen simultáneamente en la memoria del computador.
Características de la multiprogramación
6. Intercalación: Más de un programa se encuentra carga en el computador en condiciones de ejecutarse, ejecutándose o demorados. Pero todos ellos compartiendo tiempo de procesador y asignaciones de memoria.
7. Instantaneidad: Se simula trabajar como si existiera un solo programa cargado, de ejecución instantánea.
8. Independencia: Se trata de distintos programas, con distintas asignaciones de memoria y de dispositivos de entrada/salida.
Multiprocesamiento
Implica simultaneidad en vez de concurrencia. Dos o más procesadores centrales del mismo tipo trabajan paralelamente; es decir que dos o más programas pueden ejecutarse en el mismo momento porque existen dos o más CPU que comparten una memoria central común.
El nombre dado a un sistema de multiprocesamiento con diferentes procesadores es sistema de procesamiento multicomputarizado.
Un trabajo real en paralelo y una ejecución simultánea obliga a aplicar más de un procesador. El problema consiste en asignar una cantidad de procesadores n a una cantidad de programas m, donde generalmente n<m, pero sabiendo que n>1.
Cuando un programa termina o se detiene, uno de los procesadores asociados queda disponible y la lista de programas se podrá rastrear para asignar procesador a otro programa.

Administración de memoria
Asignación simple
M
E
M
O
R
I
A
Sistema Operativo
La parte residente del sistema operativo estará en memoria durante la ejecución de los distintos programas. El área LIBRE será la destina a cada programa. Como cada programa ocupa una cantidad de memoria distinta, pueden encontrarse programas muy pequeños que desperdicien gran parte de la memoria real del computador y otro programas muy grandes que no entren en ella.
Libre
Swapping
Es un método que consiste en que algunos o todos los programas que no se estén ejecutando (detenidos o en espera de entrada/salida) sean desplazados de memoria hacia un dispositivo periférico y luego vueltos a traer cuando vayan a continuar su ejecución.
Particiones reales
Dentro de la modalidad de multiprogramación es la situación que se presenta cuando la memoria alcanza para que todos los programas que se están ejecutando intercaladamente residan en ella hasta su terminación.
El esquema de particiones reales se basa en la división de la memoria en particiones, cada una destinada a alojar un programa distinto. Hay dos grandes variantes:
9. Particiones reales fijas: La memoria se estructura en número fijo de particiones, cada una con un tamaño dado. La cantidad de memoria de cada partición puede ser reasignada, pero ello requiere que no se esté ejecutando ningún programa en ninguna partición. Para definir el tamaño de las distintas particiones se debe considerar, entre otras cosas, el tamaño de los programas que se ejecutan. El desaprovechamiento más frecuente es el desperdicio de cada partición, ya que difícilmente los programas ocupen el tamaño justo de la partición.
10. Particiones reales variables: Esta variante permite que la memoria asignada a un programa no sea contigua y, de esa forma, aprovechar los huecos que se generen a lo largo de la ejecución de otros programas. A su vez esta forma de partición admite 2 posibilidades:
cantidad fija de particiones: La cantidad de programas que integran la mezcla de multiprogramación tiene como máximo el número de particiones existentes.

cantidad variable de particiones: La cantidad de programas alojados en memoria en ejecución depende de la capacidad total de memoria y de la cantidad de la misma requerida por cada programa.
Particiones virtuales
Eliminar las restricciones de memoria es un paso importante para lograr implementar sistemas de aplicación a un costo menor, en menor tiempo y en un rango de memorias reales mayor. En consecuencia se debe lograr un mayor espacio de memoria pero sin ampliar la memoria real.
La memoria virtual es un espacio de direcciones cuyo tamaño máximo está determinado por el esquema de direccionamiento del computador (es decir, por la cantidad máxima de bytes posibles de direccionar que depende de la cantidad de bits o dígitos binarios utilizados para expresar una dirección.
El almacenamiento que puede ser directamente accedido por el computador (memoria principal) se denomina memoria real. El espacio de la memoria real es un conjunto de ubicaciones físicas de memoria en el cual las instrucciones y datos de programa deberán ser ubicados para su procesamiento. Los programas se refieren a los datos e instrucciones por la dirección de memoria virtual sin conocer la ubicación física de memoria real.
Cuando no existe memoria virtual no hay diferenciación entre el espacio de direcciones y la memoria real; el espacio de direcciones que puede ser usado en los programas tiene idéntico tamaño al espacio de memoria real posible. Si se utiliza memoria virtual, el espacio de direcciones disponibles para los programas es aquél determinado por el tamaño de la memoria virtual implementada y no el espacio de direcciones provisto por la memoria real disponible (el espacio de la memoria virtual será mayor que el de la memoria real).
La memoria virtual se llama así porque representa una imagen de memoria en lugar de una memoria física del procesador. Dado que la memoria virtual no existe como una entidad física de memoria principal, las instrucciones y datos de un programa referenciados por direcciones virtuales deben ser contenidos en alguna ubicación física de memoria para ser ejecutados.
Los contenidos de la memoria virtual están divididos en porciones o secciones (páginas) de tamaño fijo. El programa está completo en la memoria virtual pero en la memoria real sólo están algunas páginas del mismo que van cambiando automáticamente durante la ejecución.
A su vez, la memoria real también está dividida en secciones (bloques) de igual tamaño que las páginas. Cuando se debe ejecutar un programa, éste es traído a la memoria virtual y las instrucciones y datos del mismo son transferidos entre la memoria virtual y la real de a una sección por vez durante la ejecución del programa. Una sección será llevada a la memoria real sólo cuando es requerida. Por otro lado, una sección que está en la memoria real sólo será reescrita en la memoria virtual cuando la memoria real asignada a esa sección es requerida por otra sección del mismo o de otro programa, siempre que no se esté ejecutando y, además, si ha sido modificada.
En general, se controla la actividad de las secciones de todos los programas en ejecución a fin de mantener, en lo posible, en memoria real a las secciones más activas o usadas, dejando las menos activas en la memoria virtual.
El aprovechamiento de la memoria real que supone esta forma de utilización es muy superior a cualquier otra forma de asignación de memoria.

El hardware de traducción de direcciones o la función interna de mapping son los mecanismos por los cuales se pueden traducir las direcciones de memoria virtual en direcciones de memoria real durante la ejecución de las instrucciones.
La memoria virtual presenta:
2. Ventajas:
con respecto a la performance del sistema: Se cuenta con una memoria virtualmente más extensa con la misma memoria real. Se utiliza mucho más eficientemente la memoria real.
Este esquema permite que la parte de los programas que no se utiliza no ocupe lugar en la memoria y en cambio quede disponible para agregar más programas en la mezcla de multiprogramación.
ocon respecto al desarrollo de aplicaciones: Al eliminar las restricciones de memoria permite diseñar los sistemas más fácilmente, en
menor tiempo y a menos costo. Hace más sencillo el mantenimiento y la ampliación de los programas. Hace más justificable el diseño e implementación de algunas aplicaciones, cuyos
requerimientos de memora varíen bastante en su ejecución de acuerdo al volumen y complejidad de las transacciones.
ocon respecto a la operación del computador: Permite que un equipo de una memoria real menor pueda ser usado sin dificultad como
back-up en caso de necesidad. Hace innecesario efectuar ciertos procedimientos cuyo único propósito es un mejor
aprovechamiento de la memoria real. Simplifica las actividades de planificación.
1. Desventajas: Costo asociado a la transformación de direcciones; memoria adicional que requiere para almacenar las tablas que debe mantener el sistema
operativo (memoria real de la parte residente del sistema operativo)para indicar: l a cantidad de memoria real implementada, las secciones que están presente en la memoria real y sus direcciones de ubicación, y elementos de juicio para determinar qué secciones se tratarán de dejar en memoria real y
cuáles no, o que sección será desplazada cuando otra sección de memoria virtual deba ser llevada a memoria real;
pequeño desperdicio de memoria que se produce en la última página de un programa (ya que rara vez el tamaño del programa es múltiplo del tamaño de las páginas);
merma en el rendimiento del computador si es incorrectamente utilizada; posible incremento del tiempo de ejecución de cada programa como consecuencia de la
paginación (operaciones de entrada/salida que demorarán la ejecución del programa).
La memoria virtual puede ser una herramienta poderosa para incrementar la performance del computador. Pero ello depende de ciertos factores, tales como:
oVelocidad de los dispositivos que contendrán la memoria virtual: La actividad de paginación afecta adversamente a la performance del equipo cuando el procesador real está frecuentemente esperando que termine una operación de entrada/salida de paginación; por tanto se debe procurar que los requerimientos de operaciones de paginación estén por debajo de lo necesario para aprovechar convenientemente la multiprogramación. En caso contrario se incrementarán los tiempos ociosos del órgano de comando.
oVelocidad del procesador: Una relación desbalanceada entre la velocidad del procesador y la del dispositivo de paginación puede alterar el rendimiento.
oTamaño de la memoria real y virtual: La cantidad de memoria real de la CPU (en relación con el tamaño de la memoria virtual) afectará el número de páginas faltantes que deberán

ser traídas del dispositivo de paginación. Si el tamaño de la memoria real es igual al de la virtual que están usando los programas en ejecución no habrá páginas faltantes ya que todas estarán en memoria real. En cambio cuando la memoria real sea menor, la cantidad de páginas faltantes estará dada por la razón de la memoria virtual usada por la memoria real disponible.
oEstructura de los programas: La cantidad de memoria virtual que usa un programa no es un factor tan significativo en la performance del equipo como la forma en que la usa.
Algunas formas para incrementar el rendimiento del equipo son:
6. Usar áreas de entrada/salida más largas: Reduce el tiempo en que las páginas del programa estarán en memoria real. Sin embargo un aumento muy significativo podría afectar negativamente el rendimiento en equipos con poca memoria real.
7. Aumentar la capacidad de manejo de páginas faltantes cuando la actividad de paginación causa frecuentes desactivaciones de programas: Esto puede ser realizado:
usando un dispositivo de mayor velocidad; estableciendo más dispositivos de paginación; reduciendo o eliminado archivos del dispositivo de paginación; reduciendo la actividad del canal que corresponde al dispositivo de paginación; o aumentando un poco la memoria real.8. Estructurar los nuevos programas de aplicación para que operen
eficientemente con memoria virtual: Dos formas de mejorar la eficiencia son: adoptar la programación modular : es decir agrupar las instrucciones de uso frecuente y
separa las de iniciación y terminación, que generalmente se ejecutan sólo una vez por ejecución de programa.
Agrupar los datos separadamente de las instrucciones: Con el objeto de construir un programa que tenga pocas páginas activas; además, al separar las páginas de datos de las de instrucciones, se evitará la escritura de las páginas de instrucciones cuando sean desplazadas de la memoria real, dado que es raro que se modifiquen las instrucciones, y teniendo en cuenta que las páginas que no se modifican cuando están en memoria real no se reescriben al ser desplazadas.
9. Incrementar el nivel de multiprogramación: Cuanto más tareas se estén ejecutando, menor será la probabilidad que el procesador quede en estado de espera de una operación de entrada/salida; sin embargo, cuanto mayor sea la razón de memoria virtual a real, la performance tiende a decaer. Por tanto debe tratar de encontrarse el punto intermedio que maximice el rendimiento. A mayor porcentaje de utilización del procesador, menor será la posibilidad de incrementar el rendimiento a través de la multiprogramación.
Otras administraciones
Administración de los órganos de comando
La administración del órgano de comando es una de las más importantes funciones del sistema operativo
Es el programa supervisor o residente el que se encarga de gobernar la multiprogramación y el multiprocesamiento a través de dos componentes:
10. Planificador o scheduler: se encarga de establecer qué programa se ejecutará en cada oportunidad en dicha selección sea necesaria.
11. Control de tráfico o traffic control: se encarga del manejo de las interrupciones:
iniciación y terminación de entrada/salida; por tiempo;

por falta de página; por finalización del programa; etc.
Administración de los trabajos a ser ejecutados
La ejecución de un programa tiene dos requisitos obvios: que se haya requerido su ejecución y que exista memoria disponible para poder ser ejecutado.
El manejo de los requerimientos de ejecución se maneja con alto grado de automaticidad e independencia de los periféricos.
Todo requerimiento es aceptado; cuando no puede ser satisfecho es almacenado en disco magnético. Cada vez que el residente procesa una interrupción por finalización de un programa, activará los componentes necesarios para analizar un requerimiento de ejecución (si existe alguno) o bien para estar pendiente hasta que aparezca el primer requerimiento.
Esta tarea consiste en analizar el requerimiento y, si éste fue correctamente formulado, buscar el programa requerido y traerlo a la memoria asignada por la función de administración de memoria.
Este componente de análisis puede no formar parte del supervisor, es decir que puede ser residente o transiente.
Administración de los dispositivos periféricos
Administración de Canales
Todos los periféricos se encuentran vinculados a la CPU a través de canales de distinto tipo. Un canal no es sólo un cable, sino que está constituido, además, por un procesador de entrada/salida que puede trabaja simultáneamente con el procesador de la CPU y que permite el trabajo en multiprogramación.
Hay canales que pueden realizar de a una operación por vez y otros que puede realizar más de una.
Todo canal puede tener conectadas varias unidades periféricas. Algunos canales exigen que las unidades sean del mismo tipo y otros admiten unidades de distinto tipo.
Considerando que cada programa que se está ejecutando puede solicitar distintas operaciones de entrada/salida, es necesario que un programa residente se encargue de lograr que todas esas operaciones se ejecutan de la manera más eficiente posible.
Cuando un programa efectúa una interrupción pidiendo la ejecución de una operación de entrada/salida, el supervisor debe analizar qué canal deberá ser utilizado para atender ese requerimiento; determinado el canal, deberá verificar el tipo de canal, el estado en que se encuentra y si existen operaciones pendientes para ese canal.
Si el canal se encuentra en uso, el residente registrará la operación de entrada/salida en una cola de espera que normalmente no tiene prioridades, es decir que se irán realizando en el mismo orden en que fueron solicitadas.

Si el equipo no ha sido correctamente configurado los canales pueden convertirse en un cuello de botella.
Administración de Unidades
Tenemos en este caso 2 tipos de dispositivos: los de acceso directo que permiten el acceso compartido entre distintos programas (unidades de disco); y los de acceso secuencial que son dispositivos de acceso dedicado (cinta, impresora)
2. Impresora: Es uno de los dispositivos más lentos, por eso una gran cantidad de sistemas operativos cuentan con una facilidad llamada SPOOLING u operación periférica simultánea en línea.
Cada vez que un programa abre un archivo asignado a la impresora, el supervisor abre un archivo en una unidad de acceso directo (generalmente en disco magnético). Además, cada vez que un programa solicita una operación de impresión, el residente desvía la impresión y graba la línea en el archivo correspondiente.
Esto permite no sólo que varios programas impriman intercaladamente, sino también que un mismo programa genere más de un listado en la misma ejecución.
Es decir que el spooling hace independizar totalmente los conceptos de impresora física e impresora lógica. El computador tendrá todas las impresoras virtuales necesarias independiente de las impresoras físicas. Pero esas imágenes de impresión que se grabarán en disco magnético ocuparán un considerable lugar en dicho soporte que debe tener presente al configurar el equipo.
El sistema operativo es quien cumple con las actividades conducentes a concretar la impresión física, es decir el pase del soporte de spool a impresión. Además cumple otras actividades que hacen al control de esta facilidad, tales como:
eliminar un listado; listar por pantalla las impresiones pendientes, y sus datos; especificar la cantidad de copias a emitir; especificar que no se destruya el listado (en disco) luego de la impresión; cambiar el orden de prioridad; determinar la impresión de un listado en particular o a partir de una determinada hoja del
mismo, establecer que un listado no sea impreso hasta que se indique lo contrario; etc.
En cuanto al módulo que cumple estas funciones, hay 2 posibilidades:
el supervisor se encarga de administrar la cola de impresión (residente); o un programa parte es el que se encarga (transiente).
2. Disco y diskette: Ambos son soportes de acceso compartido, ya que varios usuarios pueden estar procesando sobre ellos a través de distintos programas y a su vez sobre los mismos o diferentes archivo. El problema básico de la administración de estas unidades está dado por la asignación del espacio a los archivos en los momentos de creación y expansión o reducción de un archivo existen debido a su actualización. La asignación de espacio puede ser manual (muy desventajosa y engorrosa a la larga) o puede ser tarea del sistema operativo.
Independencia

Es una característica de algunos sistemas operativos por la cual los programas son independientes de las unidades físicas. Esto quiere decir que el programa no hace referencia a una unidad periférica en particular sino a un tipo de unidad periférica. La asignación en este caso podrá ser manual o será función del supervisor determinar la unidad física a utilizar.
Administración de Datos
Organización de archivos
Las actividades necesarias para leer o grabar un registro son cumplidas por el S.O. Esta función representa la interfase ente el programa y la rutina que maneja las unidades periféricas a través del procesador del canal.
En algunos sistemas operativos esta función es cumplida por el supervisor y en consecuencia la función será residente. En otros, existen distintos subprogramas destinados a manejar cada organización de archivos.
Registros físicos y lógicos
La unidad de transferencia entre las unidades periféricas y la CPU es el registro físico. Pero el programa, cuando lee o graba, lo hacer por registro lógico. Dado que lo usual es que un registro físico contenga varios registros lógicos, es necesaria una rutina encargada de leer un registro físico y de ir pasándole al programa de a un registro lógico por vez, cuando así se requiera, y , finalizado el registro físico, solicitar la lectura de otro registro a la rutina de manejo de unidades periféricas. De forma similar, cuando un programa grabe un registro lógico esta rutina del S.O. deberá ir armando el registro físico hasta que se complete (o se cierre el archivo) y luego solicitar la grabación física.
Las ventajas de agrupar varios registros lógicos en un registro físico son:
Ahorro de soporte: surge de disminuir la cantidad de espacio entre registros físicos. Ahorro de tiempo: las cabezas se moverán en trayectos más cortos si el archivo tiene
menor extensión como consecuencia del punto anterior. Esta ventaja se maximiza cuando el acceso es secuencial, ya que no se requerirá una nueva lectura o grabación física hasta tanto no se agote o complete el registro físico leído o a ser grabado, considerando que los tiempos de entrada/salida son mucho mayores que los de memoria y que una menor cantidad de operaciones de entrada/salida implicará un descongestionamiento de los canales.
Programas de utilización general
Procesador de textos
El trabajo con un procesador de textos comprende:
5. Creación de un documento: Al ir pulsando el teclado del computador, el texto aparece en pantalla y se almacena en memoria, En la creación del documento se tienen dos opciones:
Crear un documento original; o recuperar un documento existente del almacenamiento en disco.

El término documento es una referencia genérica para el texto capturado o el texto almacenado actualmente.
2. Edición de texto: En la edición de texto sólo hay que preocuparse de las palabras. Estas operaciones pueden hacerse en bloque, es decir seleccionando un bloque de texto; generalmente las porciones de texto marcadas para una operación en bloque se presentan en video inverso. Un procesador de textos puede:
Navegar a diferentes partes del documento, por medio de desplazamientos o con una orden de búsqueda para localizar una palabra o frase;
insertar texto en cualquier lugar del documento; la inserción puede realizarse en:
modo de sobreescritura: El cursor pasa a la línea siguiente cuando se llega al margen derecho;
modo de inserción: la computadora maneja el texto de manera que éste salte automáticamente a la línea siguiente; este tipo de movimiento del texto se llama enrrollamiento de palabra;
eliminar texto de cualquier lugar del documento; mover texto de una parte del documento a otra sección del mismo documento o de otro; copiar texto de una parte del documento y duplicarlo en otra sección del mismo documento
o de otro; buscar y reemplazar palabras o frases seleccionadas en todo el documento o en parte de él.3. Formato de texto: Las órdenes de formato de texto
permiten controlar el formato y el estilo del documento. Se puede controlar el formato de: caracteres: está determinado en gran medida por la impresora. El puntaje se refiere al
tamaño de los caracteres; el tamaño de una letra se mide en puntos y un punto equivale a 0,37 mm. El tipo es un tamaño y estilo de familia de letras . Los tipos pueden ser:
con patines: patines son las líneas al final de los trazos principales de cada carácter. sin patines: tienen líneas más simples y claras. los que imitan a las máquinas de escribir: producen caracteres que siempre ocupan la
misma cantidad de espacio, sin importar lo delgado o gordo del carácter. de espaciado proporcional: otorgan más espacio a los carácter anchos ("w") y menos a los
caracteres angostos ("i").
líneas y párrafos: Son órdenes de formato que se aplican a más de unos cuantos caracteres o palabras como los de control de márgenes, interlineado, sangrías, tabuladores y justificación, que se refiere a la alineación del texto en una línea.
todo el documento: Algunas órdenes se aplican a todo el documento, por ej. Page Setup (Preparar página), que permite controlar los márgenes de todo el documento. Con otras órdenes es posible especificar el contenido, tamaño y estilo de encabezados y pies de página. Los programas de procesamiento ofrecen gran flexibilidad de formato. Algunos ejemplos son:
la capacidad para definir hojas de estilo con estilos personalizados para cada uno de los elementos comunes de un documento;
la capacidad para definir encabezados, pies de página y márgenes alternos, de manera que las páginas encontradas izquierda y derecha puedan tener diferentes márgenes, encabezados y pies;
la capacidad para crear documentos con varias columnas de anchura variable; pies de páginas automáticos, separación automática de palabras largas al final de una línea; generación de índices y tablas de contenido; capacidad para crear y formar tablas con varias columnas; capacidad para incorporar gráficos creados con otras aplicaciones. capacidad para incorporar caracteres o formatos especiales a ciertos caracteres
(superíndices y subíndices)

4. Revisión del documento.5. Guardado del documento en disco: La función de
archivo es una de las más importantes ya que permite guardar, recuperar y suprimir un archivo de documento.
6. Impresión del documento: Las opciones de impresión son:
borrador: con una baja resolución y sin gráficos; o modo de gráfico.
También se puede elegir entre imprimir el documento completa o parcialmente.
Otras herramientas con las que puede contarse son:
Procesadores de ideas y bosquejadores: Los procesadores de ideas se basan generalmente en el concepto de los bosquejos o esquemas. A primera vista, el programa de bosquejos (que puede ser o no independiente del procesador de textos) se parece a un procesador de textos. La diferencia está en la estructura: los procesadores de textos están diseñados para manipular caracteres y palabras; los bosquejadores se organizan en torno a jerarquías o niveles de ideas. Los bosquejadores son eficaces para:
oacomodar la información en niveles;oreacomodar ideas y niveles;oocultar y revelar niveles de detalles según sea necesario.
También hay procesadores de ideas gráficos que permiten dibujar las ideas como nodos en un diagrama, con flechas que conectan las ideas relacionadas. Los diagramas de ideas pueden ser como diagramas de árbol o agrupamientos en formato libre.
Buscadores de sinónimos: El diccionario de sinónimos computadorizado ofrece una respuesta casi inmediata, exhibiendo todos los sustitutos posibles de la palabra en cuestión.
Referencias digitales: Los libros de referencias, como diccionarios, libros de citas, enciclopedias, atlas y almanaques ya existen en formas que pueden leer los computadores. La principal ventaja del formato electrónico es la velocidad en la búsqueda; además, para copiar las citas electrónicamente se requiere sólo una fracción del tiempo necesario para volver a teclear la información proveniente de un libro. Algunas referencias pierden un poco al ser traducidas al formato electrónico (las imágenes, mapas y dibujos son muchas veces eliminados o simplificados).
Revisores ortográficos: Comparan las palabras del documento con las palabras de un diccionario basado en disco. Se marcan todas las palabras que no se encuentran en el diccionario. En muchos casos el diccionario propone la escritura correcta y puede reemplazar la palabra sospechosa. Sin embargo, depende del; usuario determinar si la palabra marcada realmente se ha escrito incorrectamente. Los revisores ortográficos ofrecen varias opciones para cada palabra sospechosa:
Reemplazar la palabra con la alternativa propuesta. Reemplazar la palabra con otra alternativa tecleada por el usuario. Dejar la palabra sin cambios. Dejar la palabra sin cambios y añadirla al diccionario.
Los revisores ortográficos pueden ser:
opor lotes: revisan todas las palabras en el documento como un lote al dar la orden apropiada;
o interactivos: revisan cada palabra a medida que se escribe.
Los problemas potenciales de los revisores ortográficos son dos:

Limitaciones y errores de los diccionarios. Errores de contexto. La limitación principal de los revisores ortográficos actuales es su
falta de inteligencia para manejar el contexto en que ocurre una palabra.
Revisores gramaticales y de estilo: Además de revisar la ortografía analiza cada palabra en el contexto, buscando errores ortográficos, gramaticales comunes y deficiencias de estilo.
Conversión de documentos: Hay dos formas de hacer la conversión:
oCrear un archivo ASCII: Un archivo ASCII es un archivo de texto genérico en el que se eliminan los caracteres de control específicos del programa. Una manera de pasar texto de un paquete de procesamiento a otro consiste en crear un archivo de este tipo con un paquete y leerlo con otro, pero en la transferencia se pierde todo excepto el texto.
oUsar un programa de conversión de documentos: Esta capacidad convierte documentos generados en un paquete de procesamiento de texto a un formato que sea compatible con otro, incluyendo los caracteres de control.
Hoja de cálculo
Una hoja de cálculo puede reducir el trabajo en tareas que impliquen cálculos repetitivos; también puede revelar relaciones ocultas entre números, dando mucha precisión a la planificación y la especulación financiera.
Los programas de este tipo se basan en el concepto de la matriz maleable. Un documento, llamado hoja de trabajo o de cálculo aparece en la pantalla como una malla de filas numeradas y columnas rotuladas alfabéticamente. El número de columnas a las que se puede tener acceso depende da la capacidad de la RAM. La intersección de un renglón y una columna particulares se llama celda. Cada celda tiene una dirección única formada por un número de fila y una letra de columna. Cada celda puede contener un valor numérico, un valor alfanumérico o una fórmula que represente una relación entre números de otras celdas.
Los valores (números) son la materia prima con que el software de hoja de cálculo realiza los cálculos.
Para comprender con mayor facilidad los números, habitualmente hay unas etiquetas en la parte superior de las columnas y en un extremo de las filas. Una entrada de etiqueta es una palabra, frase o sucesión de texto alfanumérico que ocupa una celda particular. Para el computador, estas etiquetas son cadenas de caracteres sin sentido.
Para calcular, la hoja de cálculo debe incluir una fórmula, un procedimiento paso a paso para realizar cálculos numéricos y/o de cadenas y/u operaciones lógicas que tienen como resultado un valor numérico o una cadena de caracteres alfanuméricos. El usuario no ve la fórmula en la celda, sólo su efecto. La fórmula o la información de una celda particular se presenta específicamente en una línea de estado de celda. En las fórmulas se usan notaciones estándar como operadores matemáticos (+, -, *, /, ^).
Para representar las variables en una fórmula puede hacerse referencia a las celdas en que están dichas variables por su dirección, que puede ser:
relativa: se basa en la posición de la celda que contiene la variable con respecto de la celda que contiene la fórmula.
absoluta: El signo $ antecede tanto el renglón como la columna de una dirección de este tipo.

Si se copia el contenido de una celda con una fórmula a otra celda, se revisan las direcciones de celda relativa de la fórmula copiada para reflejar su nueva posición, pero las direcciones de celda absoluta permanecen sin cambios.
Una fórmula puede comprender uno o todos los elementos siguientes:
operaciones aritméticas: se resuelven de acuerdo con una jerarquía de operaciones; cuando se incluye más de un operador en una fórmula, el software de hoja de cálculo usa un conjunto de reglas para determinar en qué orden debe realizar las operaciones. La jerarquía es: primero la potencia, luego multiplicación/división, y por último adición/sustracción. En caso de empate se evalúa la fórmula de izquierda a derecha. Los paréntesis anulan las reglas de prioridad, cuando hay varios primero se evalúa la expresión entre los paréntesis de más adentro.
funciones: operaciones definidas con anticipación; el uso de las funciones puede ahorrar mucho tiempo.
operaciones de cadenas; y operaciones lógicas.
Cuando se quiere copiar, mover o borrar una parte de la hoja de cálculo, primero se debe definir el rango que se desea copiar, mover o borrar. Los tipos de rango con los que se puede trabajar son:
14. Rango de celda: una sola celda.15. Rango de columna: Toda una columna de celdas adyacentes o parte de la misma.16. Rango de renglón: Todo un renglón de celdas adyacentes o parte del mismo.17. Rango de bloque: un grupo rectangular de celdas.
En general, las hojas de cálculo cuentan con las siguientes características:
Replicación automática de valores, etiquetas y fórmulas: Todas las órdenes de replicación son extensiones flexibles de las funciones básicas de cortar y pegar.
Recálculo automático: Es una de las capacidades más importantes; permite corregir fácilmente los errores y simplifica el ensayo de diferentes valores en busca de soluciones.
Funciones predefinidas: Son funciones incorporadas al software. Una función en una fórmula indica al computador que debe efectuar una serie de pasos previamente definidos. Estas funciones ahorran tiempo y reducen la probabilidad de errores.
Macros: El usuario puede capturar secuencias de pasos como macros reutilizables; las macros son procedimientos diseñados a la medida que se pueden añadir al menú de opciones existente. Esta operación puede hacerse mediante un lenguaje de macros especial, o por medio de una grabadora de macros que captura cada movimiento que se haga con el teclado y el ratón.
Plantillas: Son hojas de cálculo reutilizables que contienen etiquetas y fórmulas pero no valores de datos. Estas plantillas producen respuestas inmediatas cuando se llenan los espacios en blanco. Algunas vienen con el software de hoja de cálculo y otras se venden por separado. Los usuarios pueden crear las suyas o comisionar a programadores para que las elaboren.
Enlaces: La mayoría de los programas de hojas de cálculo permiten crear enlaces automáticos entre hojas de cálculo, de modo que al cambiar los valores en una se actualicen automáticamente todas las hojas de cálculo enlazadas.
Capacidades de base de datos: Muchos programas de hojas de cálculo pueden realizar las funciones elementales de una base de datos: almacenamiento y recuperación de información, búsquedas, ordenamientos, generación de informes, combinación de correo, etc.
Una hoja de cálculo es sobre todo muy útil para plantear cuestiones del tipo si-entonces. Algunos programas cuentan con módulos de resolución de ecuaciones que invierten las cuestiones de este tipo; un módulo de resolución de ecuaciones le permite definir una ecuación, especificar el valor objetivo y el computador determina los valores de datos necesarios.

Base de datos
Los programas de bases de datos son administradores de información que ayudan a aligerar la sobrecarga de información. Los programas de bases de datos son una aplicación: sirven para convertir los computadores en herramientas productivas.
Una base de datos es una colección integrada de datos almacenados en diferentes tipos de registros. Los registros se interrelacionan por medio de relaciones propias de los datos y no mediante su ubicación física en el almacenamiento.
Una base de datos es un conjunto de archivos que se relacionan entre sí en forma lógica. En una base de datos, los datos se integran y relacionan de modo que la redundancia de datos se reduce al mínimo.
El propósito de una base de datos es representar las relaciones entre las entidades de interés. Organizar los datos de este modo facilita la integración de las áreas dentro de la organización y simplifican las preguntas específicas, incluso las formuladas por quienes no son programadores.
Una base de datos es una colección de información almacenada en forma organizada en un computador, y un programa de base de datos es una herramienta de software para organizar el almacenamiento y la recuperación de esa información.
Las bases de datos se distinguen de los archivos maestros comunes y de transacciones en 4 formas significativas:
25. Un archivo está destinado al almacenamiento.26. Agregar registros a un archivo para agrandarlo no lo convierte en una base de datos. La
existencia de una base no es cuestión de tamaño.27. Los registros referentes a distintas entidades de interés pueden almacenarse dentro de una
base de datos.28. Tener bases de datos no elimina la necesidad de archivos en un sistema de información:
Los archivos de transacciones son necesarios para capturar detalles de las actividades de la organización.
Los archivos maestros también pueden requerirse en virtud de que no todos los datos necesitan residir en la base de datos.
Los archivos de clasificación son esenciales cuando se deben reordenar los datos.
Las ventajas de las bases de datos computarizadas, frente a las de papel son que facilitan:
el almacenamiento de grandes cantidades de información: Conforme aumenta la masa de información, mayor será el beneficie de usa una base de datos;
la recuperación rápida y flexible de información; la organización y reorganización de la información; la impresión y distribución de información en varias formas.
Una base de datos esta formada por uno o más archivos. Un archivo es una colección de información relacionada (en este caso se trata de un archivo de datos creado por un programa de base de datos).
Un archivo en una base de datos es una colección de registros. Un registro es la información relacionada con una persona, producto o suceso.

Cada trozo discreto de información en un registro se denomina campo. El tipo de información que puede contener un campo está determinado por el tipo de campo: de texto, numérico, de fecha. Además de estos campos estándar puede haber campos que contengan gráficos, fotografías digitalizadas, sonidos y videos. Los campos calculados contienen fórmulas similares a las de una hoja de cálculo y exhiben valores calculados a partir de valores de otros campos numéricos.
La mayoría de las bases de datos ofrecen más de una forma de ver los datos, entre ellas:
vistas de formulario: muestran un registro cada vez; vistas de lista: exhiben varios registros en listas similares a una hoja de cálculo.
En ambos casos se pueden acomodar los campos sin modificar los datos subyacentes.
Muchos programas de bases de datos pueden importar datos en forma de archivos creados con procesadores de texto, hojas de cálculo u otras bases de datos. También es posible modificar, añadir o eliminar registros.
El punto al usar una base de datos es recuperar la información en forma oportuna y apropiada. La información es de poco valor si no podemos acceder a ella. Los programas de bases de datos ofrecen una variedad de órdenes y capacidades que facilitan la obtención de la información necesaria:
8. Hojear (browse): Es la forma más elemental y consiste en "hojear" en los registros como si se tratara de las hojas de una libreta. Este "hojear" electrónico no ofrece ninguna ventaja con respecto al papel y es muy ineficiente con archivos grandes.
9. Consulta de base de datos : Se solicita a la base de datos la información específica. Una consulta (query) puede ser:
una búsqueda simple de un registro específico; o una solicitud para seleccionar todos los registros que satisfagan un conjunto de criterios.
10. Ordenamiento de datos: En ocasiones hay que reacomodar los registros para poder usar los datos en la forma más eficiente. Con una instrucción de ordenamiento es posible acomodar los registros en orden alfabético o numérico con base en los valores de uno o más campos.
11. Impresión de informes, etiquetas y formatos de cartas : La salida impresa más común de una base de datos es un informe : una lista ordenada de los campos y registros seleccionados en un formato fácil de leer.. También se pueden producir etiquetas para envíos por correo y formatos de cartas personalizadas. En su mayor parte, los programas de bases de datos exportan los registros y campos necesarios a procesadores de textos con capacidades de combinación de correo, los cuales se encargan de la impresión de las cartas.
12. Consultas complejas: Las consultas pueden ser simples o complejas, pero siempre deben ser precisas y sin ambigüedades. El método exacto para realizar una consulta depende de cuál sea la interfaz con el usuario del software específico de la base de datos. En casi todos los programas el usuario puede especificar las reglas de la búsqueda en una ventana de diálogo o un formato blanco en pantalla. En algunos programas es preciso que el usuario teclee la solicitud con un lenguaje de consultas especial, más preciso que nuestro lenguaje natural.
También hay software de base de datos especializado que se programa con anterioridad para propósitos específicos de almacenamiento y recuperación de datos. En general los usuarios de las bases de datos de propósito especial no tienen que definir estructuras de archivos ni diseñar formatos, ya que los diseñadores del software han considerado esos detalles.

Muchos programas especializados de base de datos se venden como administradores de información personal (PIM, personal information managers) o como organizadores electrónicos . Un administrador de información personal puede automatizar todas o algunas de las siguientes funciones:
Libreta telefónica o de direcciones. Agenda. Lista de asuntos pendientes. Notas varias.
Desde el punto de vista técnico, los programas de base de datos orientados al consumidor no son en realidad administradores de bases de datos, son administradores de archivos. Un sistema de administración de base de datos (DBMS, database management system) es un programa o un sistema de programas que manipula datos en una gran colección de archivos, estableciendo referencias cruzadas entre los archivos según se requiera. El software de este tipo se usa como un instrumento para integrar la administración de bases de datos y el flujo de información en una organización. Un sistema de administración de base de datos puede usarse de manera interactiva o puede ser controlado directamente por otros programas.
Todos los registros de todos los archivos tienen un campo que sirve como campo clave. Las bases de datos organizadas de esta manera se llaman bases de datos relacionales. Un programa de base de datos relacional es aquel con que se relacionan archivos de manera que los cambios en uno se reflejen automáticamente en los demás. La estructura de una base de datos relacional se basa en el modelo relacional, un modelo matemático que combina datos en tablas.
Un sistema de administración de bases de datos relacional (RDBMS, relational DBMS) accesa los datos por el contenido en lugar de la dirección. Es decir que se busca en la base de datos la información deseada, en vez de llegar a los datos mediante una serie de índices y direcciones físicas en un disco; las relaciones entre los datos se definen en términos lógicos y no físicos. La base de datos no tiene una relación predeterminada entre los datos, como los registros en el entorno de archivo llano tradicional. De esta manera se pueden obtener los datos en el nivel del campo. En el procesamiento tradicional, para examinar un solo campo se debe recuperar todo el registro.
El DBMS permite trabajar con una base de datos integrada que sirve a la organización como un todo, no a un solo departamento específico. Los beneficios de un entorno de bases de datos integrada son:
Mayor acceso a la información: ofrece una gran flexibilidad en el tipo de informes que se pueden generar y el tipo de preguntas en línea que se pueden hacer.
Mejor control: permite que los datos se centralicen para aumentar la seguridad; al centralizar los datos es posible usar las estructuras de datos (manera en que los campos y registros se relacionan entre sí) para controlar la redundancia.
Desarrollo de software más eficiente: la tarea de programación se simplifica porque los datos se encuentran más disponibles. Además, los datos en una base de datos son independientes de los programas de aplicaciones; es decir, los campos se pueden agregar, cambiar y suprimir de la base de datos sin afectar los programas existentes.
Las grandes bases de datos pueden contener cientos de archivos interrelacionados; pero los sistemas de bases de datos pueden ocultar al usuario el complejo funcionamiento interno del sistema y ofrecerle sólo la información y las órdenes que requieren para realizar su trabajo.
Al trabajar con una base de datos se deben seguir ciertas reglas empíricas:
Elegir la herramienta correcta para el trabajo.

Pensar como se sacará la información antes de meterla. Comenzar con un plan, pero estar dispuesto a modificarlo si es necesario. Mantener la consistencia de los datos. La inconsistencia puede alterar el ordenamiento y
complicar las búsquedas. Las bases de datos son tan buenas como los datos que contienen. No debe confiarse todo
a la revisión automática, la revisión humana y un poco de escepticismo al usar la base de datos son necesarios.
Consultar con cuidado, definiendo afinadamente las reglas de selección.
Graficación
Los programas de hoja de cálculo cuentan con órdenes de graficación que pueden convertir automáticamente los números de la hoja de cálculo en diagramas y gráficas; muchos programas de graficación independientes crean gráficas a partir de cualquier colección de números, estén almacenados o no en una hoja de cálculo.
Las diferencias entre los tipos de gráficas no son sólo estéticas, cada uno es apropiado para comunicar determinados tipos de información; así tenemos:
gráficas de líneas: se usan generalmente para mostrar tendencias o relaciones en el tiempo o la distribución relativa de una variable con respecto a otra;
gráficas de barras y de columnas: son similares a las anteriores, pero más apropiadas cuando los datos corresponde a unas cuantas categorías;
gráficas de dispersión: se usan para descubrir, no tanto para mostrar, la relación entre dos variables.
gráficas tipo pastel: son las gráficas de presentación más básicas.
La graficación automatizada es muy práctica, pero también puede ser muy restrictiva. Si se requiere más control sobre los detalles de la visualización en pantalla, es más apropiado usar el software de pintura, con el que es posible "pintar" pixels en la pantalla usando un dispositivo apuntador, traduciendo los movimientos a líneas y patrones en la pantalla. Un programa de pintura ofrece herramientas, de las cuales algunas imitan instrumentos de dibujo del mundo real, mientras que con otras se pueden hacer cosas que son difíciles o imposibles en papel o lienzo; también hay herramientas de edición.
Los programas de pintura crean gráficos de arreglo bidimensional de bits, imágenes que para el computador son simples arreglos que muestran como deben representarlos los pixels de la pantalla; un bit de memoria del computador representa un pixel. Como un bit sólo puede almacenar uno de dos valores 0 ó 1, el pixel únicamente puede mostrarse en uno de dos colores. A este tipo de gráficos de bit se les conoce como gráficos monocromáticos, porque las imágenes se dibujan en un color sobre un fondo fijo. Los tonos de grises se simulan con un técnica llamada simulación de colores (dithering), una combinación de pixels blancos y negros para crear la ilusión de un tono de gris.
Hay programas que asignan más memoria a cada pixel, de manera que un pixel pueda presentar más colores o sombras. Los gráficos de escala de grises permiten que un pixel aparezca de color blanco, negro o uno de varios tonos de gris.
Para el color real, el color de calidad fotográfica se necesitan 24 o 32 bits de memoria por cada pixel en la pantalla.
El número de bits asignados a cada pixel, llamado profundidad de pixel, es uno de dos factores tecnológicos que limitan la creación de imágenes. El otro factor es la definición, la densidad de los pixels, que generalmente se describe en dpi (dots per inch, puntos por pulgada). Al aumentar la definición, más difícil será para el ojo humano detectar los pixels individuales de la página impresa.

El software de procesamiento digital de imágenes permite al usuario manipular fotografías y otras imágenes de alta definición con herramientas similares a las que proporcionan los programas de pintura. La edición de fotografías digitales es mucho más poderosa que las técnicas tradicionales de retoque. Con el software de procesamiento de imágenes es posible distorsionar y combinar fotografía, creando imágenes fabricadas que no muestran indicios de manipulación.
Hay programas que pueden almacenar a bajo costo imágenes con definición infinita, limitada únicamente por la capacidad de definición del dispositivo de salida. El software de dibujo almacena una imagen, no como una colección de puntos, sino como una colección de líneas y formas. En vez el arreglo bidimensional de bits calcula y recuerda una fórmula matemática para la línea. El programa de dibujo almacena las formas como formas y el texto como texto; es lo que se conoce como graficación orientada a objetos.
Programas de utilización específica
Modelos y simulación
Un modelo es la abstracción de los sucesos que rodean un proceso, una actividad o un problema. Aíslan un entidad de su entorno de manera que puede examinarse sin el "ruido" o perturbación de otras influencias del medio circundante.
Un modelo de una empresa es también una abstracción. Se eliminan los elementos innecesarios para que la administración pueda concentrarse en los detalles particulares que afectan al proceso, actividad o problema que se estudia. Es un representación artificial de una situación del mundo real.
El uso de computadoras para crear modelos puede efectuarse con hojas de cálculo, aplicaciones matemáticas o lenguajes de programación estándar.
Un modelo por computador es una abstracción: un conjunto de conceptos e ideas diseñados para imitar algún tipo de sistema. Un modelo por computadora no es estático; puede ponerse a trabajar en una simulación computadorizada para ver como opera el modelo en ciertas condiciones. Un modelo bien diseñado debe comportarse como el sistema al cual imita.
La simulaciones por computador tiene una popularidad creciente y ello obedece a las siguientes razones:
Seguridad: Algunas actividades son tan peligrosas que no serían éticamente posibles sin simulaciones por computador (v.g.: efectos ambientales de una fuga en una planta de energía nuclear).
Economía: Es mucho menos costoso producir un modelo digital que construirlo. Se puede evaluar el modelo en una serie de simulaciones antes de construir y probar un prototipo físico.
Proyección: Una simulación por computador puede servir como máquina del tiempo para explorar uno o más futuros posibles.
Visualización: Los modelos por computador hacen posible la visualización, y ésta permite ver y comprender relaciones que de otra manera podrían pasar inadvertidas.
Replicación: En el mundo real sería difícil o imposible repetir un proyecto de investigación en condiciones ligeramente diferentes. Si la investigación se lleva a cabo en un modelo por computador, la replicación sólo implica cambiar los valores de entrada y ejecutar otra simulación.

Pero las simulaciones por computador tienen sus riesgos. La simulación no es la realidad. Los riesgos que se corren son:
Entra basura, sale basura: La exactitud de una simulación depende de cuánto se aproxime el modelo matemático a la situación que se simula. Los modelos matemáticos se basan en suposiciones, muchas de las cuales son difíciles o imposibles de verificar. Algunos modelos tienen problemas por basarse en suposiciones deficientes; otros contienen suposiciones ocultas que quizás no sean obvias para sus creadores; otras más se extravían por errores humanos. Una entrada mala en una simulación compleja puede provenir de varias fuentes y la frase "entra basura, sale basura" es una regla básica de la simulación.
Lograr que la realidad quepa en la máquina: Las simulaciones requieren muchos cálculos. Las PC no tienen el poder suficiente para simulaciones de mediana o gran escala. Algunas simulaciones son tan compleja que los investigadores tienen que simplificar los modelos y optimizar los cálculos para que puedan ejecutarse en el mejor hardware disponible. Incluso si cuentan con suficiente poder de computación, los investigadores encaran la constante tentación de modificar la realidad para que la simulación sea más conveniente. En ocasiones, la simplificación de la realidad es intencional; en otras, inconsciente. En ambos casos se pierde información, y esta pérdida puede comprometer la integridad de la simulación y proyectar la sombra de la duda sobre sus resultados.
La ilusión de la infalibilidad: Los riesgos se amplifican porque la gente cree que la información es más respetable si proviene de un computador. Una simulación por computador puede ser un valiosísimo auxiliar para la toma de decisiones. El riesgo es que las personas que toman decisiones con computadores asignen demasiado de su poder en la toma de decisiones al computador.
Tipos de modelos para la toma de decisiones
38. Modelos físicos: representan la entidad estudiada en cuanto a su apariencia y, hasta cierto punto, en cuanto a sus funciones. Los modelos físicos pueden ser:
o icónicos: Tienen aspecto de realidad pero no se comportan efectivamente en la forma real.oanalógicos: Exhiben el comportamiento real de la entidad estudiada pero no tiene el mismo
aspecto.
39. Modelos simbólicos: Reproducen sistemas o entidades mediante el uso de símbolos para representar los objetos físicos. Los tipos de modelos simbólicos son:
oNarrativos: Descripciones en lenguaje natural que indican las relaciones entre las variables de un proceso o de un sistema.
oGráficos: Describen partes o pasos de una entidad o proceso mediante una representación gráfica (diagrama de flujo).
oMatemáticos: Son más rigurosos; se valen de variables cuantitativas (fórmulas) para representar las partes de un proceso o de un sistema. También son los más abstractos y, a la vez, los más fáciles de usar debido a que todas las relaciones están expresadas con precisión, reduciendo así la posibilidad de malas interpretaciones por los usuarios del modelo.
Sistemas expertos y bases de conocimiento
El cerebro humano es excelente para manipular el conocimiento: la información que incorpora las relaciones entre los hechos. Los computadores son mejores para manejar datos que conocimiento.

En contraste con las bases de datos, que sólo contienen hechos, las bases de conocimiento cuentan además con sistemas para determinar y modificar las relaciones entre esos hechos. Los hechos almacenados en una base de datos están rígidamente organizados en categorías; las ideas almacenadas en una base de conocimiento pueden reorganizarse conforme nueva información modifique sus relaciones. Las bases de conocimientos son el corazón de cientos de sistemas expertos.
Un sistema experto es un programa de software diseñado para replicar el proceso de toma de decisiones de un experto humano. En los cimientos de todo sistema experto está una base de conocimiento que representa ideas de un campo específico de conocimiento especializado.
Los sistemas expertos obtienen sus conocimientos de los expertos humanos. Una base de conocimiento suele representar el conocimiento en forma de reglas si-entonces. Los sistemas expertos dependen del conocimiento objetivo, pero confían también en el conocimiento heurístico como la intuición, el discernimiento y las inferencias. Tanto el conocimiento objetivo como el método heurístico se adquieren de un experto en el área.
En la mayoría de las decisiones humanas hay incertidumbre, de manera que muchos sistemas expertos tienen reglas "vagas" que establecen las conclusiones como probabilidades y no como certezas. En diversos grados, los sistemas expertos pueden razonar, hacer inferencias y determinar criterios.
Además de la base de conocimiento, un sistema experto completo cuenta con una interfaz humana, mediante la cual el usuario puede interactuar con el sistema, y una máquina de inferencias, que une las entradas del usuario a la base de conocimiento, aplica principios lógicos y produce la ayuda experta solicitada.
Los sistemas expertos funcionan porque trabajan en dominios estrechos y cuidadosamente definidos.
Los sistemas ofrecen muchas ventajas, ya que pueden:
ayudar a capacitar empleados nuevos; reducir el número de errores humanos; encargarse de tareas rutinarias para que los trabajadores puedan concentrarse en
actividades más importantes; ofrecer asesoría experta cuando no hay expertos humanos; conservar el conocimiento de los expertos después de que éstos abandonan una
organización; combinar el conocimiento de varios expertos; lograr que el conocimiento esté disponible para más personas; uno solo sistema experto puede ampliar las capacidades de toma de decisiones de muchas
personas; mejorar la productividad y del desempeño de quienes toman decisiones; ofreces estabilidad y consistencia en un área particular de la toma de decisiones (a
diferencia de los seres humanos, un sistema experto es consistente por lo que siempre presentará la misma decisión con base en un conjunto de información);
reduce la dependencia de personal crítico.
Pero no están exentos de problemas:
Es muy difícil construir los sistemas expertos actuales. Para simplificar el proceso existen los shells de sistemas expertos o envolturas de sistemas expertos: sistemas expertos genéricos que contienen las interfaces humanas y las máquinas de inferencias. Estos programas pueden ahorrar tiempo y esfuerzo, pero no cuentan con la parte más difícil de construir, la base de conocimiento. Los principales componentes de la envoltura de sistema experto son:

o Instalaciones de aprendizaje: permiten la construcción de la base de conocimiento. El ingeniero del conocimiento traduce el conocimiento del experto en conocimientos y reglas con base en los hechos para crear una base de conocimiento.
oBase del conocimiento: para completar la base de conocimiento se captura la siguiente información:
identificación del problema; soluciones posibles; y cómo avanzar del problema a la solución a través de hechos y reglas de inferencia.o Interfaz para usuario: permite la interacción necesaria entre el usuario y el sistema experto
para el procesamiento heurístico; permite que el usuario describa el problema u objetivo y que tanto el usuario como el sistema experto estructuren preguntas y respuestas.
A diferencia de los expertos humanos, los sistemas expertos automatizados son muy malos para planificar estrategias. Su falta de flexibilidad los hace menos creativos que los pensadores humanos.
Los sistemas expertos son inútiles fuera de su dominio de conocimiento, estrecho y profundo.
Inteligencia artificial
El campo de la inteligencia artificial abarca "enseñar" a la computadora a efectuar tareas de una manera que pudiera considerarse inteligente. En este campo se trabaja en sistemas que tengan la facultad de razonar, aprender y acumular conocimientos, esforzarse por mejorar y simular las capacidades sensoriales y mecánicas del ser humano. Muchos de los problemas que se estudian en el campo de la inteligencia artificial están muy lejos de ser soluciones práctica. A este campo pertenecen los sistemas expertos.
Hay dos enfoques comunes en torno a la inteligencia artificial:
15. Intenta simular los procesos mentales humanos. El enfoque de simulación tiene tres problemas inherentes:
o En la inteligencia humana hay que incluir pensamientos inconscientes, ideas o intuiciones instantáneas y otros procesos mentales que es difícil o imposible comprender y describir.
o Hay muchas diferencias entre la estructura y las capacidades del cerebro humano y las del computador. El supercomputador más potente no es capaz de acercarse a la habilidad del cerebro para realizar procesamientos paralelos, es decir, dividir un trabajo complejo en tareas más pequeñas y simples para poder realizarlas simultáneamente.
o La mejor forma de hacer algo con una máquina muchas veces es muy distinta de la forma en que lo hacen los seres humanos.
16. Consiste en diseñar máquinas inteligentes independientemente de la forma en que pensamos los seres humanos. De acuerdo con este enfoque, la inteligencia humana es sólo uno de varios tipos posibles de inteligencia. El método de una máquina en la resolución de problemas puede ser diferente del método humano, pero no por ello menos inteligente.
La investigación en el campo de la inteligencia artificial se puede dividir en 4 categorías:
Sistemas con base en el conocimiento y sistemas expertos. Lenguajes naturales (conversaciones con las computadoras). Simulación de las capacidades sensoriales humanas. Robótica.
Las técnicas de inteligencia artificial de uso actual en diversas aplicaciones provienen de su utilización en las investigaciones con juegos de ajedrez y son:

Búsqueda: Generalmente guiada por una estrategia planificada y por reglas conocidas como heurística.
Heurística: Una heurística es una regla empírica. La heurística conduce hacia juicios que, según indica la experiencia, es probable que sean reales.
Reconocimiento de patrones: Es quizás la mayor ventaja que tiene un ser humano pues ayuda a compensar la velocidad del computador y su análisis detallado de jugadas anticipadas.
En general la estrategia de los investigadores es restringir el dominio de sus programas para que los problemas sean lo suficientemente pequeños para poder comprenderlos y resolverlos.
CAD – CAM – CIM
CAD (computer-aided design, diseño asistido por computador): Consiste en usar las computadoras para diseñar productos, permitiendo a los usuarios elaborar modelos tridimensionales "sólidos" con características físicas como peso, volumen y centro de gravedad. Estos modelos pueden rotarse y observarse desde cualquier ángulo. El computador puede evaluar el desempeño estructural de cualquier parte el modelo. El CAD tiende a ser económico, rápido y más preciso que las técnicas de diseño manuales; facilitar las alteraciones del diseño para cumplir con los objetivos del proyecto.
CAM (computer-aided manufacturing, manufactura asistida por computador): Una vez completado el diseño del producto, se alimentan las cifras a un programa que controla la fabricación de las piezas.
CIM (computer-intergrated manufacturing, manufactura integrada por computador): Es la combinación de CAD y CAM.
Robótica
Las 3 leyes de la robótica de Asimov:
27. Un robot no puede lesionar a un ser humano ni permitir, por su omisión, que un ser humano sea lastimado.
28. Un robot debe obedecer las órdenes que reciba de los seres humanos, excepto si estas órdenes entran en conflicto con la Primera Ley.
29. Un robot debe proteger su propia existencia siempre y cuando dicha protección no entre en conflicto con las Primera o Segunda leyes.
El término robot deriva de la palabra checa robota, que significa trabajo forzado.
Un robot es una máquina controlada por computador diseñada para realizar tareas manuales específicas. El procesador central de un robot puede ser un microprocesador incorporado en la estructura del robot o bien un computador supervisor que controle el robot a distancia. La robótica es la integración de las computadoras con los robots.
Las diferencias más importantes de hardware entre los robots y otros computadores son los periféricos de entrada y salida; un robot envía órdenes a articulaciones, brazos y otras partes móviles.
Se pueden diseñar robots para ver luz infrarroja, rotar articulaciones 360 grados y realizar otras cosas que no pueden hacer los seres humanos; pero los robots están limitados por las restricciones del software de inteligencia artificial.

Los robots industriales pueden "aprender" a realizar casi cualquier tarea manual repetitiva. Desde la perspectiva de la gerencia, los robots ofrecen varias ventajas:
ahorran costos de mano de obra; pueden mejorar la calidad y elevar la productividad. Son más eficaces para realizar trabajos
repetitivos; son ideales para tareas peligrosas o incómodas para trabajadores humanos.
Los robots comerciales aún no pueden competir con los seres humanos en puestos que requieren destrezas excepcionales de percepción o motrices.
Multimedia
Este término se refiere a un sistema de computación que permite que el usuario accese e interactúe con un texto computarizado, gráficas fijas de alta resolución, imágenes en movimiento y sonido. Hay tres elementos en particular que caracterizan a los multimedios: sonido, movimiento y oportunidad de interactuar.
La televisión y el vídeo son medios pasivos, unidireccionales. Con la moderna tecnología es posible que la información se transmita en ambas direcciones, convirtiendo los multimedia en multimedia interactivos, que permiten que el observador/oyente participe activamente en la experiencia.
La creación y ejecución de documentos de multimedia requieren periféricos de hardware adicionales (monitores de televisión, unidades de CD-ROM y reproductores de videodiscos). La computadora controla los dispositivos, que almacenan y suministran el material audiovisual al recibir órdenes.
El software de multimedia merece su nombre porque proporciona información a través de varios medios.
Además de textos y gráficos, los documentos de multimedia suelen contener al menos una de las tres formas de información siguientes:
Animación: Gráficos por computador que se mueven en la pantalla. Video: segmentos de película que aparecen en la pantalla del computador o en un monitor
de televisión. Audio: Música, efectos de sonido y palabras pronunciadas por el computador o por una
fuente de sonido externa..
Hipermedia
Los hipertextos permiten enlazar la información textual en formas no secuenciales. Los medios de texto convencionales, como los libros, son lineales o secuenciales: están diseñados para leerse de principio a fin. Un documento de hipertexto contiene enlaces que conducen a los lectores rápidamente a otras partes del documento o a otros documentos relacionados. Es decir que el hipertexto maneja información no estructurada. La teoría implícita en el hipertexto es que éste le permite al usuario trabajar de la manera en que piensa.
HyperCad, de Apple, fue la primera herramienta disponible en forma general para crear documentos del tipo hipertexto. Pero HyperCad se describe como un sistema de hipermedia. El término hipermedia describe documentos que pueden explorarse en formas

no lineales, desde documentos de investigación de hipertexto hasta documentos gráficos interactivos. Los hipermedios son la siguiente generación del hipertexto; el software de hipermedia alcanza un mayor nivel, permitiendo la integración de datos, texto, gráficos, sonidos y video. Se deben asociar con palabras clave los elementos de los hipermedios que no consistan en texto.
Quienes trabajan con hipermedia actualmente se enfrentan a varios problemas:
Los documentos de hipermedia puede desorientar al lector, y que éste se sienta perdido en un laberinto de hechos.
Los lectores de documentos de hipermedia en ocasiones se preguntan si habrán omitido algo. Si salta por un documento de hipermedia, es fácil sentir que ha pasado por algo importante.
Los documentos de hipermedia muchas veces no satisfacen todas las expectativas del usuario.
Como están basados en computadores, los documentos de hipermedia no permiten hacer notas marginales, realzar texto ni doblar las esquinas de las páginas.
Muchos documentos de hipermedia requieren hardware que no puede hallarse en computadores portátiles.
La mayor ventaja de los hipermedia está en la habilidad del computador para controlar otros medios; los documentos de intermedia no están limitados a textos e imágenes estáticos.
Comunicaciones (II)
Los elementos de la comunicación de datos son los canales de transmisión, los dispositivos para el control de comunicaciones y los accesorios de los canales. Cada uno de ellos es necesario independientemente del tamaño de la computadora utilizada o la naturaleza de los datos transmitidos. Las redes de computación sólo incrementan la eficiencia y la efectividad de la interacción.
Para facilitar la comunicación electrónica deben buscarse maneras de conectar o establecer una interfaz entre una variado conjunto de hardware, software y bases de datos; es decir lograr cierto grado de conectividad. La conectividad ideal sería lograr el acceso a todos los recursos computacionales e informáticos desde una PC o terminal; esta condición se llama conectividad total.
La comunicación de datos implica el proceso de recopilar y distribuir la representación electrónica de la información desde y hacia localidades distantes. La información puede tener variados formatos: datos, texto, voz, fotografía, gráficos y video.
Procesamiento
Local o por lotes: Los usuarios acumulan las transacciones y las alimentan a los computadores en forma de grandes lotes. No hay retroalimentación inmediata. Se usa aún para tareas en las que conviene procesar muchas transacciones al mismo tiempo (impresión de facturas, respaldos de archivos de datos, etc.).
Remoto o interactivo: Los usuarios pueden interactuar con los datos mediante terminales, viendo y modificando valores en tiempo real. Se usa en las aplicaciones que requieren respuesta inmediata (transacciones bancarias, reservas en aerolíneas, etc.).
En un sistema de computación, los componentes de entrada, salida y almacenamiento de datos reciben y transmiten datos a un procesador por algún tipo de medio de transmisión. Se dice que estos componentes de hardware operan en línea con el procesador; y que los componentes del hardware que el procesador no puede controlar o no controla operan

fuera de línea. Se considera que un dispositivo periférico que está conectado al procesador, pero que no está encendido está fuera de línea.
Los conceptos de en línea y fuera de línea se aplican también a los datos. Se dice que los datos están en línea si el procesador puede tener acceso a éstos y manejarlos. Todos los demás datos legibles por la máquina están fuera de línea.
Los conceptos de en línea y fuera de línea son conceptos importantes en un sistema de información. En una operación fuera de línea se agrupan las transacciones por lotes (procesamiento por lotes) para capturarlas en el sistema computacional.
Transmisión de datos
Ancho de banda
Es la cantidad de información que se puede transmitir por un canal en un intervalo de tiempo dado. Una forma de aumentar el ancho de banda en un cable es incrementando el número de cables paralelos. Otra forma es aumentar la velocidad del paso de información por el cable.
Un libro que sólo contiene texto es un medio de ancho de banda pequeño, que sólo puede proporcionar unos 300 bits de datos por segundo al lector. Los medios de ancho de banda grande (televisión, vídeo) transmiten más de 50 millones de bits por segundos de datos gráficos y sonoros.
La fibra óptica nos está llevando desde un ancho de banda relativamente modesto hasta otro, prácticamente infinito. El ancho de banda es la capacidad de transmitir información a través de un canal determinado. Los cables telefónicos se consideran un canal de ancho de banda reducido; pero aunque es lento, no lo es tanto como muchos suelen creer.
Hay que pensar en la capacidad de la fibra óptica como infinita, no sabemos cuántos bps podemos llegar a enviar a través de una fibra, pero parece ser que estamos cerca de una capacidad de 1 billón de bps; esto implica una velocidad doscientas mil veces mayor que la del par telefónico.
El ancho de banda disponible en el éter es reducido si se lo compara con el que brinda la fibra óptica y con nuestra capacidad infinita de fabricar y tender más y más fibras.
El cambio Negroponte dice que la información que actualmente nos llega por tierra en el futuro nos llegará a través del éter, y viceversa. Es decir que todo lo que está en el aire, pasará por tierra y lo que está en tierra, pasará por el aire. El motivo por el cual Negroponte considera que ese cambio es obvio, es que el ancho de banda en tierra es infinito, y que el del éter no lo es. Tenemos sólo un éter contra una cantidad ilimitada de fibras.
La única ventaja del cobre es su capacidad de transmitir energía; por lo tanto es posible que aparezca la fibra con manto de cobre o el cobre con manto de fibra. Pero desde la perspectiva de los bits, con el tiempo todo el planeta estará cableado con fibra.
Se puede llegar a desarrollar una infraestructura de banda ancha, al margen de si es necesaria o de si se sabe cómo usar ese bando de ancha. Para brindar la mayoría de los servicios de información y entretenimiento, esos enormes anchos de banda no son necesarios. En realidad, un ancho de banda más modesto de 1,2 a 6 millones bps es perfectamente adecuado para casi todos los multimedios existentes. Un ancho de banda ilimitado puede tener el efecto paradójico y negativo de inundar y ahogar a la gente con un exceso de bits y de permitir que las máquinas en la periferia sean innecesariamente tontas.

La novedad y originalidad de los servicios de información y entretenimiento no dependen de la fibra que los transmite sino de la imaginación que los crea.
La relación entre ancho de banda y computación es muy sutil; dado que en ambos extremos de una línea existe un proceso de computación, es posible enviar y recibir menor cantidad de bits. La comprensión o condensación de la información permite que se utilice menor capacidad de canal y ahorra tiempo y dinero en la transmisión.
Lo que importa no es sólo el ancho de banda de los canales, sino también su configuración; las redes de estrella y de anillo han tomado su forma con naturalidad a partir del estrecho ancho de banda del par telefónico o del ancho de banda más ancho del cable coaxial.
Canales de transmisión
Un canal es el camino por donde viajan los datos desde un lugar a otro. Es la combinación de medios que interconectan a la computadoras que envían y reciben datos. La capacidad del canal se clasifica por el número de bits que éste puede transmitir por segundo.
Tangibles
43. Línea o par telefónico: Usa las instalaciones telefónicas para la transmisión de datos. La velocidad de transferencia de los datos en las líneas de voz va de 300 a 9.600 bps.
44. Cable coaxial: Contiene cables eléctricos para permitir la transmisión de datos a alta velocidad con un mínimo de distorsión de las señales. La transmisión de datos es mucho más rápida. Hay dos categorías generales de cable coaxial:
Banda base: Transporta una única señal digital a muy altas velocidades. El cable de banda de base es relativamente barato y de muy fácil mantenimiento.
Banda ancha: Lleva múltiples señales análogas al mismo tiempo, con diferentes intervalos de frecuencia. Es el adecuado para la transmisión de voz, datos e imagen.
45. Fibra óptica: Diminutas fibras de vidrio en vez de alambres sirven como medios de transmisión. En lugar de electricidad se utiliza láser. Un láser es un haz de luz coherente dentro de ciertos intervalos de frecuencia. Su gran ventaja es la velocidad de la transmisión. Los cables de fibra óptica transmiten la información en forma de ondas lumínicas a la velocidad de la luz. Un cable de fibra óptica puede transmitir medio gigabit por segundo. Los cables de fibra óptica transmiten datos con mayor rapidez y son más ligeros y baratos que sus contrapartes de alambre de cobre. La fibra óptica también contribuye a la seguridad de los datos, ya que es mucho más difícil interceptar una señal enviada por medio de un rayo de luz que una señal enviada por medio de una señal eléctrica.
Intangibles
Microondas : La transmisión por microondas necesita de estaciones de transmisión que envían los datos a través del aire en forma de señales codificadas. La transmisión de datos vía señales de radio por microondas es de línea de visión: la señal de radio viaja en línea recta de una estación repetidora a la siguiente hasta llegar a su destino. Los satélites han permitido reducir al mínimo el límite de la línea de visión.
Satélites
La transmisión de datos a través de distancias muy largas utiliza satélites en órbita. Los datos que alimentan a una computadores se envían a una estación de microondas, la cual a

su vez los transmite a una estación terrestre; de la estación, el mensaje se envía en hace a un satélite en órbita, desde donde se transmite de nuevo a otra estación terrestre. Los datos se envían posteriormente a través de microondas y por teléfono hasta su destino. En esencia, un satélite es una estación repetidora
La ventaja principal de los satélites consiste en que los datos se pueden transmitir desde un sitio a cualquier número de lugares en cualquier parte del planeta. Una característica adicional en la comunicación y transmisión por satélite es que en el costo de la transmisión no se considera la distancia, como sucede con los otros métodos.
Tipos de transmisión
Asincrónica: Los datos se transmiten enviando un carácter a la vez, con un método de inicio/parada. Los datos se transmiten a intervalos irregulares conforme se necesitan. Los bits de arranque/parada se agregan al inicio y al final de cada mensaje. La transmisión asincrónica o de arranque/parada es más apropiada para la comunicación de datos que comprende dispositivos de entrada/salida de baja velocidad (v.g.: impresoras en serie)
Sincrónica: La transmisión es continua; los caracteres se envían uno tras otro por las líneas sin interrupción. La transmisión sincrónica es mucho más rápida debido a que no se tienen que enviar señales adicionales por las líneas para cada uno de los caracteres. La fuente y el destino operan con una sincronización para permitir la transmisión de datos de alta velocidad. Este tipo de transmisión no necesita los bits de arranque/parada.
Unidad de medida de transmisión de datos
La velocidad de transmisión de datos se mide en bits por segundo (bits per seconds, bps).
Las menciones de bauds o tasa de bauds son incorrectas, El baud es una unidad variable de transmisión de datos y la "rapidez en bauds" es la velocidad a la cual viaja un pulso. La velocidad de transmisión a menudo se llama "rapidez en bits", pero ya que un pulso puede representar varios bits a la vez, a velocidades mayores que 1.200 bps, la rapidez de bits generalmente excede a la rapidez en bauds.
Protocolo de comunicaciones
Conjunto de reglas establecidas para regir el intercambio de datos que permiten que las entidades que se están comunicando puedan comprenderse. Uno de estos protocolos es la velocidad de transmisión; si una máquina "habla" a una 2.400 bps y las otra "escucha" a 1.200 bps, el mensaje no pasará. Entre los protocolos hay códigos predeterminados para algunos mensajes.
Los protocolos se definen en capas, la primera de las cuales es la capa física; ésta define la manera en que los nodos de una red se conectan entre sí. Las capas subsecuentes, que varían en cantidad entre protocolos, describen cómo se empacan los mensajes para su transmisión, cómo se encaminan los mensajes a través de la red, los procedimientos de seguridad y la forma en que se proyectan en pantalla los mensajes.
Un protocolo sirve para desarrollar tareas como:
obtener la atención de otro dispositivo; identificar cada uno de los dispositivos de la comunicación; verificar la correcta transmisión de los mensajes;

recuperar los datos cuando ocurran errores.
Uno de los protocolos más usados es el ASCII (American Standard Code for Information Interchange).
Tipos de software para comunicaciones
Para que dos computadores se puedan comunicar, hay que configurar el software de ambas máquinas de modo que sigan los mismos protocolos. El software de comunicación asegura que el hardware siga el protocolo.
El software específico de comunicación se presenta de diversas formas:
53. sistema operativo de red: para usuarios que trabajan exclusivamente en una red local. Un sistema operativo de red oculta al usuario los detalles de hardware y software de la comunicación cotidiana entre máquinas. El software para LAN residente en la RAM redirige ciertas peticiones al componente adecuado de la LAN. Los sistemas operativos de LAN tienen dos formatos:
igual a igual: todas las PC son iguales; cualquiera puede ser cliente de otra y cualquiera puede compartir sus recursos con sus similares; se trata de redes LAN menos complejas.
servidor dedicado : el software de control reside en la RAM del servidor de archivos; este tipo de LAN ofrece un nivel de seguridad que no es posible con una LAN igual a igual.
54. programa terminal o emulador de terminal: permite que un computador personal funcione como si fuera una terminal. este tipo de programa se encarga del marcado telefónico, el manejo de protocolos y una diversidad de detalles necesarios para que trabajen en conjunto el computador personal y el módem.
55. Sistemas operativo multiusuario: permite que un computador de tiempo compartido se comunique con varios computadores o terminales al mismo tiempo (UNIX es el más difundido).
Además las LAN hacen posible el uso de aplicaciones que no pueden desarrollarse en el entorno individual de una computadora. Así surge el software para trabajo en grupos (groupware) que permite el uso de diversas aplicaciones como:
Correo electrónico. Calendario y programación de horarios : Cada persona enlazada en una LAN mantiene un
calendario en línea en el cual se pueden programas los horarios de todos los eventos. Pensamiento creativo y solución de problemas : Los usuarios de una LAN pueden trabajar
juntos en un documento maestro para dar ideas y resolver problemas. Establecimiento de prioridades: Permite que los usuarios establezcan las prioridades de
proyectos a través del razonamiento colectivo. Juntas electrónicas. Biblioteca de políticas y procedimientos: Son elementos que al cambiar con rapidez pueden
ponerse en línea para eliminar la necesidad de actualizar constantemente numerosos manuales de copia impresa.
Mensajes electrónicos: La transmisión de mensajes electrónicos asocia el mensaje con una o más aplicaciones de groupware.
Formularios electrónicos: con el propósito de recopilar información de otros usuarios de la LAN.
Accesorios de los canales de transmisión

Multiplexores
Son dispositivos que permiten que varios mensajes puedan conjuntarse en un solo canal. Logran este objetivo reuniendo varias señales de baja velocidad y transmitiéndolas todas a través de un canal de alta velocidad. Es decir que el multiplexor permite que varios dispositivos o estaciones de trabajo compartan una línea en forma simultánea para transmitir los datos tan pronto como se reciben. El multiplexor es una extensión del procesador frontal (éste separa los datos para su procesamiento y establece la conexión entre la fuente y el destino) y se ubica al final de la línea, en o cerca de un sitio distante.
Concentradores
Dispositivos asíncronos de menor velocidad que se conectan con frecuencia a un concentrador para lograr la transmisión de datos. Este dispositivo de almacén y envío reúne y almacena temporalmente en una sección de almacenamiento intermedio los datos recolectados poco a poco de los diferentes dispositivos de entrada. Cuando dicha sección está completa, los datos se transmiten por líneas de alta velocidad a la computadora.
Módems
Conectan a las computadoras con el canal de comunicación y permiten transmitir los datos a través de largas distancias sin ninguna interferencia de ruido ni distorsión en el canal. El módem es un dispositivo de hardware esencial para cualquier aplicación que implique el uso de una línea de teléfono para la comunicación de datos.
Las computadoras están conectadas con el módem a través de un canal de comunicación construido en la computadora misma.
Los datos pueden ser transmitidos en forma digital o analógica, dependiendo de las características del medio de la comunicación. Los canales de voz transmiten señales analógicas, en tanto que las computadoras envían señales digitales.
Para poder transmitir una señal digital (un flujo de bits) por una línea telefónica convencional, hay que convertirla en una señal analógica, es decir en una onda continua. A su vez, en el extremo receptor hay que volver a convertir la señal analógica en los bits que representan el mensaje digital original. Estas tareas son realizadas por un módem (abreviatura de modulador/demodulador), que es el dispositivo de hardware que conecta el puerto serial de un computador a una línea telefónica. Junto con el software de comunicaciones, el módem determina la velocidad a la cual se deben transmitir los datos.
Un módem puede ser interno o externo; ambos usan cable telefónico para conectarse a la red de teléfonos por medio de conectores telefónicos modulares:
interno: el módem se encuentra en un tablero de expansión opcional que sólo se conecta en una ranura de expansión libre de la unidad de procesamiento de la micro o el anfitrión de la terminal.
externo: es un componente externo independiente y se conecta por medio de un puerto serial.
Los módems tienen diversos grados de "inteligencia" que se genera por medio de procesadores integrados. Por ejemplo, algunos módems son capaces de sintonizar en forma automática la computadora (sincronización automática), establecer un canal de comunicación (entrada) e incluso responder las llamadas procedentes de otras computadoras (respuesta automática).
El faxmódem realiza la misma función que el módem; además permite que una PC simule una máquina de fax.

Tipos de líneas
66. Simplex: Transmite los datos únicamente en una dirección y ésta no se puede cambiar nunca.
67. Dúplex: Lleva los datos únicamente en una dirección, pero ésta puede ser invertida.68. Full dúplex : Puede transmitir los datos simultáneamente en ambas direcciones, como si
dos líneas simplex estuvieran trabajando en direcciones opuestas.
Configuración de líneas
Describe el método de conexión de las computadoras con las líneas de comunicación. En este sentido las líneas pueden ser:
Punto a punto: Un único emplazamiento está conectado directamente con la computadora. Las líneas punto a punto se usan frecuentemente entre grandes computadoras que se comunican entre sí en forma continua.
69. Multipunto: Permiten que un canal de comunicación sea compartido entre todos los usuarios de la misma línea. La ventaja es que el costo total de la red de usuarios puede reducirse, porque la línea compartida disminuye la cantidad de líneas de comunicación. Además, todos los puntos de una línea pueden recibir los mismos datos al mismo tiempo si es necesario.
Servicios de transmisión
Para la comunicación de datos se recurre a las portadoras comunes para tener acceso a canales de comunicaciones. Las portadoras comunes de comunicaciones ofrecen dos tipos de servicios:
70. línea privada o rentada: Ofrece un canal de comunicaciones de datos dedicado entre dos puntos de una red de computación. El cobro por una línea privada se basa en la capacidad de canal (bps) y la distancia (kms. aéreos).
71. línea conmutada o de sintonía: Esta disponible estrictamente por medio del cobro por tiempo y distancia, similar a una llamada telefónica de larga distancia. Se hace una conexión "sintonizando" la computadora y un módem envía y recibe los datos. Este tipo de línea es más flexible que la anterior porque puede establece una conexión con cualquier computadora instalada cerca de un teléfono.
Redes
Una red de computadores es cualquier sistema de computación o grupo de computadoras, estaciones de trabajo o dispositivos de computadoras conectados entre sí. En una red de computación, el nodo puede ser una terminal, una computadora o cualquier dispositivo de destino/fuente. Las redes de cómputo están configuradas para satisfacer las necesidades específicas de una organización.
Si bien las PC por lo común se usan como sistemas de computación independientes, también pueden duplicar su capacidad como terminales remotas. Esta dualidad de funciones le ofrece la flexibilidad para trabajar con la PC como un sistema independiente o conectarse con una computadora más grande y aprovechar su capacidad incrementada.
Las redes presentan ventajas, ya que permiten:

compartir hardware, reduciendo el costo y haciendo accesibles poderosos equipos de cómputo a más personas;
compartir datos y software, aumentado la eficiencia y la productividad. Las redes no eliminan las diferencias de compatibilidad entre distintos sistemas operativos, pero simplifican la comunicación entre máquinas. Si se emplean programas con formatos de archivo incompatibles, habrá que usar software de traducción de datos para leer y modificar los archivos.
que los seres humanos colaboren y trabajen en formas que, sin las redes, serían difíciles o imposibles. Para ello existen aplicaciones groupware: programas diseñados para que varios usuarios trabajen con un mismo documento al mismo tiempo.
Existen 2 tipos de redes:
redes de comunicación: transmiten datos, voz o imágenes visuales. Las redes de información tienen uno o más sistemas de computación extremos que ofrecen una amplia gama de servicios de información: Noticias, clima, deportes; entretenimiento; juegos; servicios bancarios desde el hogar; información financiera; servicios de corretaje; tableros de avisos; correo electrónico; compras desde el hogar; consultas; educación; bienes raíces, cocina, salud, viajes, etc.
redes de proceso distribuido: enlazan diferentes elementos para que compartan recursos y capacidad de procesamiento.
La mayoría de los computadores tiene puertos, que son contactos por los que sale y entra la información. Los puertos pueden ser:
paralelos: tienen la anchura suficiente para que los bits puedan pasar en grupos de 8, 16 ó 32. Suelen conectar al computador las impresoras y otros periféricos externos.
seriales: requieren que los bits pasen de uno en uno. Por lo general sirven como puertas de acceso para la información que viaja de un computador a otro.
Topología de redes
Una topología es la disposición de los nodos (lugares de emisión, recepción o procesamiento) para transmitir datos. Una topología de red es una descripción de las conexiones físicas posibles de una red. La topología es la configuración del hardware e indica que pares de nodos están disponibles para las comunicaciones.
Según su topología una red puede ser:
79. lineal o de barra colectora: Es un canal lineal; derivaciones en él enlazan los nodos individuales con la barra colectora. Por lo tanto la configuración es la de una línea multipunto. Esta es una topología de difusión ya que cada mensaje o conjunto de datos enviado por ella va a cualquiera de los nodos. Un nodo individual identifica únicamente los mensajes que se dirigen a él. El cable central se denomina medio de transmisión.
80. de estrella: Varios lugares diferentes están conectados a través de un sistema de cómputo central para la transmisión de los datos; toda la comunicación entre los puntos de la red debe pasar por la computadora central, la cual, a su vez, envía los datos al lugar determinado. Esta red, también llamada conmutada requiere de una computadora de tiempo real para analizar las transacciones recibidas, determinar hacia dónde se deben enviar los datos y seleccionar la mejor ruta o línea por l que se deben transmitir.
81. de anillo: Un punto se puede comunicar directamente con cualquier otro punto, sin necesidad de pasar por una computadora central. Los procesadores (o controladores) de comunicaciones manejan las actividades de comunicación de cada uno de los emplazamientos, almacenando los datos durante breves períodos antes de transmitirlos, o bien recibiendo la transmisión de otras posición. Estas redes también utilizan una topología de difusión; los mensajes circulan de nodo en nodo en una sola dirección. La computadora

recibe el mensaje que viene del nodo anterior y lo recibe o lo reenvía, según corresponda. Implica sistemas de cómputo de aproximadamente el mismo tamaño.
En su mayor parte, las redes de computación son híbridas, es decir combinaciones de topologías.
Redes de comunicación
El objetivo de estas redes es conectar emplazamientos múltiples que tengan necesidad de transmisión o recibir datos; no necesitan tener capacidad de procesamiento.
Las redes de comunicación pueden ser:
82. de área amplia (WAN, wide area network): Su objetivo general es la transmisión de datos. Tienen 2 características distintivas:
o Cubren grandes distancias geográficas.o Utilizan las redes comunes de portadoras, como las redes conmutadas de teléfonos.
83. de área local (LAN, local area network): Es la red de comunicación que abarca un único emplazamiento, es decir es una red en la cual los computadores se encuentran a corta distancia. Consta de una colección de computadores y periféricos cuyos puertos seriales están conectados directamente con cables; estos cables sirven como carreteras de información para transportar los datos entre los dispositivos. También hay redes inalámbricas, en las que cada computador tiene una pequeña radio conectada al puerto serial, de manera que puede enviar y recibir datos a través del aire, en vez de usar cables. La mayoría de las redes de áreas local utilizan una topología de difusión: cada mensaje se envía a cada uno de los nodos. El nodo recibe únicamente los mensajes dirigidos a él en particular. En una LAN los usuarios pueden compartir datos, software de aplicaciones, conexiones con macrocomputadoras, capacidades de comunicación (módems), bases de datos, tableros de expansión y otros recursos; representan una buena inversión debido a que los recursos pueden ser compartidos. Con frecuencia están integradas a redes WAN. Los dos métodos más conocidos de acceso LAN son:
o CSMA: (carrier sense multiple access, acceso múltiple de sensor de portadora) se usa con las redes de barra colectora y requiere de una estación de trabajo u otro dispositivo para "escuchar" el canal y determinar cuándo se encuentra en uso; es decir, debe registrar que el canal se encuentra ocupado. Si el canal está libre, se puede enviar un mensaje. De otra manera, la estación de trabajo espera durante un breve momento y escucha nuevamente.
o de señal viajera: se asocia con la topología de anillo. Una señal es una cadena de bits que se envía por toda la red. Siempre que un dispositivo desea transmitir un mensaje, espera hasta que aparezca la señal y, entonces, transmite sus datos a la red.
Cuando se habla de WAN y LAN se hace referencia a todo el hardware, software y canales de comunicación relacionados con ellas.
Redes de procesamiento distribuido
Conectan emplazamientos no sólo para la comunicación de los datos y de los mensajes, sino también para poder compartir los recursos.
Este tipo de redes presentan 2 ventajas:

1. Carga compartida: Tienen disponible una gran cantidad de potencia de cómputo para los usuarios con pequeños sistemas o con sólo terminales remotas en lugar de un sistema muy grande de cómputo. La carga compartida también es muy útil cuando una computadora se encuentra sobrecargada o presenta problemas en el equipo. Los accesos a diferentes computadoras en lugar de únicamente a una es una característica muy favorable.
2. Programática compartida: La capacidad de poder compartir datos así como programática sirve para reducir el costo total por el almacenamiento de los datos para todos los usuarios; de la misma manera, puesto que se requieren menos sistemas mayores, las minicomputadoras pueden reemplazar parte del equipo más costoso. El almacenamiento de los programas se puede centralizar para que sean compartidos por todos los usuarios; ello permite el desarrollo de paquetes de programas mucho más extensos a un menor costo para cada instalación.
Tendencias
Existen tecnologías de comunicación alternativas:
Correo de voz: Es más que un contestador; es un elaborado sistema de mensajes con muchas de las características de un sistema de correo electrónico, excepto poder editar los mensajes electrónicamente y anexar documentos del computador.
Transmisión de facsímil: Una máquina de fax es una herramienta rápida y práctica para transmitir información almacenada en documentos de papel. Cuando se envía un fax, la máquina emisora "barre" las páginas y convierte la imagen así digitalizada en una serie de pulsos eléctricos, para luego enviar esas señales por las líneas telefónicas hasta otra máquina de fax. La máquina receptora usa las señales para construir e imprimir facsímiles o copias en blanco y negro de las páginas originales. Un computador puede enviar los documentos en pantalla a través de un fax módem a una máquina de fax receptora. El fax módem traduce el documento a señales que pueden enviarse por los cables telefónicos para que sean decodificados por la máquina de fax receptora. Un computador también puede usar un fax módem para recibir transmisiones de máquinas de fax, usando la máquina emisora como una especie de digitalizador de imágenes remoto. Al igual que el documento digitalizado, para el computador el facsímil digital no es más que una colección de puntos blancos y negros, por lo que para editarlo es necesario utilizar un software de OCR.
Videoteleconferencia: Permite comunicarse "cara a cara" a grandes distancias, al combinar las tecnologías del video y de la computación.
Transferencia electrónica de fondos : El dinero no es más que otro tipo de información, las diferentes monedas no son más que símbolos que permiten a las personas intercambiar bienes y servicios. En los últimos siglos el papel ha reemplazado al metal; hoy en día el papel es sustituido por patrones digitales almacenados en medios informativos. El dinero, como otra información digital, puede transmitirse a través de las redes de computadores. Un cajero automático es una terminal especializada que se enlaza con el computador principal del banco a través de una red comercial bancaria; pero no es el único medio para efectuar la transferencia electrónica de fondos.
Comunicador personal: Combina un teléfono celular, un fax módem y otro equipo de comunicación en una caja ligera e inalámbrica parecida a un computador basado en pluma. Sirve como teléfono portátil, máquina de fax, buzón electrónico, localizador y computador personal.
Pero cuando todo el sistema telefónico sea digital, se habrán sentado las bases para una red unificada que permita transmitir todo tipo de información digital. Así la ISDN (Integrated Services Digital Network, red digital de servicios integrados) enlazará teléfonos, computadores, máquinas de fax, televisión e incluso el correo en un mismo sistema digital. A esa realidad alternativa e la denomina ciberespacio. También se llama "frontera electrónica" a este nuevo mundo en línea.

Siguiendo la tendencia hacia una mayor conectividad, se están interconectando WAN y LAN para permitir que los usuarios tengan acceso a una mayor variedad de aplicaciones y más información.
Dado que las redes usan una variedad de protocolos de comunicaciones y sistemas operativos, las redes incompatibles no pueden "comunicarse" directamente entre sí. El encaminador constituye la principal tecnología de hardware y software que se utiliza para resolver este problema. Los encaminadores cierran la brecha entre LAN y LAN, entre WAN y WAN y entre LAN y WAN. Al recibir un mensaje, el encaminador realiza la conversión de protocolos necesaria y encamina el mensaje hacia su destino.
Las organizaciones que interconectan redes de computación lo hacen con base en una espina dorsal.; ésta se compone de un sistema de encaminadores y los medios de transmisión asociados que enlazan los encaminadores y las macrocomputadoras de las redes del sistema.
Esta es la era del procesamiento cooperativo. Para obtener información significativa, precisa y oportuna, las empresas han decidido que deben cooperar a nivel interno y externo para aprovechar la totalidad de la información disponible. Para promover la cooperación interna, las empresas están promoviendo las redes internas de empresa. Una aplicación de la red interempresas es el intercambio electrónico de datos (EDI).
La aplicación que puede tener el efecto más importante en el mayor número de personas es la supercarretera de información; es una red de enlaces de comunicaciones de datos de alta velocidad que con el paso del tiempo se asociará a todas las facetas de la sociedad, integrando la red con las tecnologías de la televisión y la computación.
El tránsito en la supercarretera será cualquier material que se pueda digitalizar, y las aplicaciones de esta supercarretera serán, entre otras:
incorporación de la función del teléfono en un videófono o en una computadora; abundancia de entretenimiento, abriendo las puertas al entretenimiento interactivo; ediciones de copia blanda como una alternativa para la edición de copia dura de casi
cualquier material impreso; correspondencia transmitida electrónicamente; transferencia electrónica de fondos; compras electrónicas desde el hogar; votación y escrutinio de alta tecnología, reduciendo los costos de las elecciones y
alentando una mayor participación de los electores (cuando las elecciones no sean obligatorias);
formación de una base de datos nacional, que será el almacenamiento central de todos los datos personales de los ciudadanos, permitiendo la consolidación de dichos datos
La flexibilidad en la distribución de los bits será crucial; las emisoras asignarán los bits a medios determinados (como la televisión o la radio) en el punto de transmisión. El transmisor le dice al receptor que tipo de bits está enviando.
En un futuro más lejano, los bits no estarán limitados a un medio específico, una vez que abandonen el transmisor, es decir el emisor no tendrá idea alguna sobre la forma en que los usuarios tomarán los bits, será el receptor el que decida. Los bits saldrán de la estación emisora como bits, para ser utilizados y transformados de maneras diferentes, personalizados por una amplia gama de programas de computación. Los mismos bits podrán ser vistos por el destinatario a partir de muchas perspectivas.
Actualmente un CD utilizado como ROM tiene una capacidad de almacenamiento de 5 mil millones de bits, utilizando sólo un lado. En los próximos años está capacidad por lado será incrementada a 50 mil millones.

La visión a más largo plazo de los multimedios no esta basada, sin embargo, en el CD, sino que surgirá a partir de la creciente base de sistemas on-line , que tienen una capacidad ilimitada.
En el mundo digital, el problema de la amplitud y profundidad desaparece, y tanto los lectores como los autores se podrán mover con más libertad entre las generalidades y los detalles.
En el mundo digital el espacio ocupado por la información no está limitado a tres dimensiones. La expresión de una idea, o una secuencia de ideas, puede incluir una red multidimensional de indicadores que apuntan hacia futuras elaboraciones o exposiciones, que pueden ser llamadas o ignoradas. Los hipermedios deberán ser pensados como una colección de mensajes elásticos, que pueden ser estirados y encogidos según la acción determinada por el lector. La traslación libre de un medio (video, texto, datos) a otro es el objetivo real hacia el cual apunta el campo de los multimedios.
Pero frente a un panorama alentador tendremos también la pérdida de numerosos puestos de trabajo a causa de la automatización total de sistemas, que pronto transformarán el trabajo administrativo de la misma manera que ya ha transformado el trabajo fabril.
A medida que el mundo de los negocios se globaliza y la Internet crece, comenzaremos a observar un lugar de trabajo digital sin fisuras; los bits no conocerán fronteras, serán almacenados y manipulados sin respeto alguno por los límites geopolíticos. Lo más probable es que las zonas delimitadas por los husos horarios desempeñen en nuestro futuro digital un rol más importante que las zonas de intercambio comercial.
A medida que nos vamos moviendo hacia ese mundo digitalizado, un importante sector de la población mundial se verá privado de sus derechos o privilegios.
La era digital tiene cuatro grandes cualidades: descentralización, globalización, armonización y motivación.
El efecto descentralizador se percibe sobre todo en el comercio y en la industria de la computación misma. La empresa del futuro podrá cubrir sus necesidades de computación en forma escalonada, poblando su organización de PC que, cuando resulte necesario, podrán trabajar al unísono para solucionar problemas de computación complejos. Las computadoras trabajarán tanto para individuos como para grupos.
La nación-estado misma está sujeta a tremendos cambios y a la globalización; el mundo digitalizado hace pensar que los intentos de unificación mundial se van haciendo viables.
Hoy en día, el 20% del mundo consume el 80% de los recursos. La tecnología digital podrá ser la fuerza natural que impulse a los hombres hacia una mayor armonía mundial. El efecto armonizador es ya evidente en disciplinas y empresas que antes estaban separada y que comienzan a colaborar entre sí en lugar de competir.
El acceso, la movilidad y la habilidad para efectuar cambios son evidencias de la naturaleza motivadora de estar digitalizado, que es lo que hará que el futuro sea tan diferente del presente.

Programa informáticoDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda
Un programa informático es un conjunto de instrucciones que una vez ejecutadas realizarán una o varias tareas en una computadora. Sin programas, estas máquinas no pueden funcionar.[1] [2] Al conjunto general de programas, se le denomina software, que más genéricamente se refiere al equipamiento lógico o soporte lógico de una computadora digital.
En informática, se los denomina comúnmente binarios, (propio en sistemas unix, donde debido a la estructura de este último, los ficheros no necesitan hacer uso de extensiones. Posteriormente, los presentaron como ficheros ejecutables, con extensión .exe, en los sistemas operativos de la familia Windows) debido a que una vez que han pasado por el proceso de compilación y han sido creados, las instrucciones que se escribieron en un lenguaje de programación que los humanos usan para escribirlos con mayor facilidad, se han traducido al único idioma que la máquina comprende, combinaciones de ceros y unos llamada código máquina. El mismo término, puede referirse tanto a un programa ejecutable, como a su código fuente, el cual es transformado en un binario cuando es compilado.
Generalmente el código fuente lo escriben profesionales conocidos como programadores. Se escribe en un lenguaje que sigue uno de los siguientes dos paradigmas: imperativo o declarativo y que posteriormente puede ser convertido en una imagen ejecutable por un compilador. Cuando se pide que el programa sea ejecutado, el procesador ejecuta instrucción por instrucción.
De acuerdo a sus funciones, se clasifican en software de sistema y software de aplicación. En los computadores actuales, al hecho de ejecutar varios programas de forma simultánea y eficiente, se le conoce como multitarea.
Contenido
[ocultar]

1 Ejecución o1.1 Programas que se auto-modifican 2 Ejecución y almacenamiento de los programas o2.1 Programas empotrados en hardware o2.2 Programas cargados manualmente o2.3 Programas generados automáticamente o2.4 Ejecución simultánea 3 Categorías funcionales 4 Véase también 5 Referencias 6 Bibliografía
[editar] Ejecución
Una vez escritos, pueden ser ejecutados de diversas formas:
Mediante un programa que va adaptando las instrucciones conforme son encontradas. A este proceso se lo llama interpretar y a los programas que lo hacen se los conoce como intérpretes. Ejemplos de esto son bash, clásico en estaciones Unix y que fue escrito para el proyecto GNU o Python, cuya peculiaridad además de ser multipropósito, está en su facilidad de uso y productividad y de hecho, es usado en parte de los proyectos Google y YouTube.[3]
Traduciendo el código escrito del programa (lo que se denomina código fuente), a su equivalente en lenguaje máquina. A este proceso se le llama compilar y al programa traductor se le denomina compilador. Ejemplos de esto son: El lenguaje C, que combina en su sintaxis características de medio y bajo nivel y el compilador gcc usado en el proyecto GNU.
[editar] Programas que se auto-modifican
Un programa en ejecución se trata de forma diferente que los datos en los cuales opera. De cualquier forma, en algunos casos ésta distinción es ambigua, especialmente cuando un programa se modifica a sí mismo. El programa modificado es secuencialmente ejecutado como parte del mismo programa. Se pueden escribir programas auto-modificables en lenguajes como Lisp, COBOL y Prol
[editar] Ejecución y almacenamiento de los programas
Típicamente, los programas se almacenan en una memoria no volátil (por ejemplo un disco), para que luego el usuario de la computadora, directa o indirectamente, solicite su ejecución. Al momento de dicha solicitud, el programa es cargado en la memoria de acceso aleatorio o RAM del equipo, bajo el control del software llamado sistema operativo, el cual puede acceder directamente al procesador. El procesador ejecuta (corre) el programa, instrucción por instrucción hasta que termina. A un programa en ejecución se le suele llamar también proceso. Un programa puede terminar su ejecución en forma normal o por causa de un error, dicho error puede ser de software o de hardware.

[editar] Programas empotrados en hardware
El microcontrolador a la derecha de la Memoria USB está controlada por un firmware empotrado.
Algunos programas están empotrados en el hardware. Una computadora con arquitectura de programas almacenados requiere un programa inicial almacenado en su ROM para arrancar. El proceso de arranque es para identificar e inicializar todos los aspectos del sistema, desde los registros del procesador, controladores de dispositivos hasta el contenido de la memoria RAM.[4] Seguido del proceso de inicialización, este programa inicial carga al sistema operativo e inicializa al contador de programa para empezar las operaciones normales. Independiente de la computadora, un dispositivo de hardware podría tener firmware empotrado para el control de sus operaciones. El firmware se utiliza cuando se espera que el programa cambie en raras ocasiones o nunca, o cuando el programa no debe perderse cuando haya ausencia de energía.[5]
[editar] Programas cargados manualmente
Interruptores para la carga manual en una Data General Nova 3.
Los programas históricamente se cargaron manualmente al procesador central mediante interruptores. Una instrucción era representada por una configuración de estado abierto o cerrado de los interruptores. Después de establecer la configuración, se ejecutaba un botón de ejecución. Este proceso era repetitivo. También, históricamente los programas se cargaban manualmente mediante una cinta de papel o tarjetas perforadas. Después de que el programa se cargaba, la dirección de inicio se establecía mediante interruptores y el botón de ejecución se presionaba.[6]
[editar] Programas generados automáticamente

La programación automática es un estilo de programación que crea código fuente mediante clases genéricas, prototipos, plantillas, aspectos, y generadores de código para aumentar la productividad del programador. El código fuente se genera con herramientas de programación tal como un procesador de plantilla o un IDE. La forma más simple de un generador de código fuente es un procesador macro, tal como el preprocesador de C, que reemplaza patrones de código fuente de acuerdo a reglas relativamente simples.
Un motor de software da de salida código fuente o lenguaje de marcado que simultáneamente se vuelve la entrada de otro proceso informático. Podemos pensar como analogía un proceso manejando a otro siendo el código máquina quemado como combustible. Los servidores de aplicaciones son motores de software que entregan aplicaciones a computadoras cliente. Por ejemplo, un software para wikis es un sevidor de aplicaciones que permite a los usuarios desarrollar contenido dinámico ensamblado a partir de artículos. Las Wikis generan HTML, CSS, Java, y Javascript los cuales son interpretados por un navegador web.
[editar] Ejecución simultánea
Véanse también: Proceso (informática) y Multiprocesamiento
Muchos programas pueden correr simultáneamente en la misma computadora, a lo cual se le conoce como multitarea y puede lograrse a través de mecanismos de software o de hardware. Los sistemas operativos modernos pueden correr varios programas a través del planificador de procesos — un mecanismo de software para conmutar con frecuencia la cantidad de procesos del procesador de modo que los usuarios puedan interactuar con cada programa mientras estos están corriendo.[7] También se puede lograr la multitarea por medio del hardware; las computadoras modernas que usan varios procesadores o procesadores con varios núcleos pueden correr muchos programas a la vez.[8]
[editar] Categorías funcionales
Los programas se pueden categorizar según líneas funcionales. Estas categorías funcionales son software de sistema y software de aplicación. El software de sistema incluye al sistema operativo el cual acopla el hardware con el software de aplicación.[9] El propósito del sistema operativo es proveer un ambiente en el cual el software de aplicación se ejecuta de una manera conveniente y eficiente.[9] Además del sistema operativo, el software de sistema incluye programas utilitarios que ayudan a manejar y configurar la computadora. Si un programa no es software de sistema entonces es software de aplicación. El middleware también es un software de aplicación que acopla el software de sistema con la interfaz de usuario. También son software de aplicación los programas utilitarios que ayudan a los usuarios a resolver problemas de aplicaciones, como por ejemplo la necesidad de ordenamiento.

UNIDADES DE MEDIDA EMPLEADAS EN INFORMATICA.
Las unidades de medida en Informática a veces pueden resultar algo confusas. Vamos a tratar de aclarar algunos conceptos viendo a que se refieren.
Podemos agrupar estas medidas en tres grupos: Almacenamiento, procesamiento y transmisión de datos.
ALMACENAMIENTO:
Con estas unidades medimos la capacidad de guardar información de un elemento de nuestro PC.
Los medios de almacenamiento pueden ser muy diferentes (ver tutorial sobre Medios de almacenamiento.).
Precisamente es en este tipo de medidas donde se puede crear una mayor confusión.
La unidad básica en Informática es el bit. Un bit o Binary Digit es un dígito en sistema binario (0 o 1) con el que se forma toda la información. Evidentemente esta unidad es demasiado pequeña para poder contener una información diferente a una dualidad (abierto/cerrado, si/no), por lo que se emplea un conjunto de bits (en español el plural de bit NO es bites, sino bits).
Para poder almacenar una información más detallado se emplea como unidad básica el byte u octeto, que es un conjunto de 8 bits. Con esto podemos representar hasta un total de 256 combinaciones diferentes por cada byte. Aquí hay que especificar un punto. Hay una diferencia entre octeto y byte. Mientras que un octeto tiene siempre 8 bits un byte no siempre es así, y si bien normalmente si que tiene 8 bits, puede tener entre 6 y 9 bits.
Precisamente el estar basado en octetos y no en el sistema internacional de medidas hace que las subsiguientes medidas no tengan un escalonamiento basado el este sistema (el SI o sistema internacional de medidas).
Veamos los más utilizados:

byte.- Formado normalmente por un octeto (8 bits), aunque pueden ser entre 6 y 9 bits. La progresión de esta medida es del tipo B=Ax2, siendo esta del tipo 8, 16, 32, 64, 128, 256, 512. Se pueden usar capacidades intermedias, pero siempre basadas en esta progresión y siendo mezcla de ellas (24 bytes=16+8).
Kilobyte (K o KB).- Aunque se utilizan las acepciones utilizadas en el SI, un Kilobyte no son 1.000 bytes. Debido a lo anteriormente expuesto, un KB (Kilobyte) son 1.024 bytes. Debido al mal uso de este prefijo (Kilo, proveniente del griego, que significa mil), se está utilizando cada vez más el término definido por el IEC (Comisión Internacional de Electrónica) Kibi o KiB para designar esta unidad.
Megabyte (MB).- El MB es la unidad de capacidad más utilizada en Informática. Un MB NO son 1.000 KB, sino 1.024 KB, por lo que un MB son 1.048.576 bytes. Al igual que ocurre con el KB, dado el mal uso del término, cada vez se está empleando más el término MiB.
Gigabyte (GB).- Un GB son 1.024 MB (o MiB), por lo tanto 1.048.576 KB. Cada vez se emplea más el término Gibibyte o GiB.
Llegados a este punto en el que las diferencias si que son grandes, hay que tener muy en cuenta (sobre todo en las capacidades de los discos duros) que es lo que realmente estamos comprando. Algunos fabricantes utilizan el termino GB refiriéndose no a 1.024 MB, sino a 1.000 MB (SI), lo que representa una pérdida de capacidad en la compra. Otros fabricantes si que están ya utilizando el término GiB. Para que nos hagamos un poco la idea de la diferencia entre ambos, un disco duro de 250 GB (SI) en realidad tiene 232.50 GiB.
Terabyte (TB).- Aunque es aun una medida poco utilizada, pronto nos tendremos que acostumbrar a ella, ya que por poner un ejemplo la capacidad de los discos duros ya se está aproximando a esta medida. Un Terabyte son 1.024 GB. Aunque poco utilizada aun, al igual que en los casos anteriores se está empezando a utilizar la acepción Tebibyte
Existen unas medidas superiores, como el Petabyte, Exabyte, Zettabyte o el Yottabite, que podemos calcular multiplicando por 1.024 la medida anterior. Estas medidas muy probablemente no lleguen a utilizarse con estos nombre, sino por los nuevos designados por el IEC.

En el círculo, indicación de la capacidad del disco, tanto en GB como en bytes.
PROCESAMIENTO FRECUENCIA DE TRANSMISION:
La velocidad de procesamiento de un procesador se mide en megahercios. Un megahercio es igual a un millón de hercios.
Un hercio (o herzio o herz) es una unidad de frecuencia que equivale a un ciclo o repetición de un evento por segundo. Esto, en palabras simples, significa que un procesador que trabaje a una velocidad de 500 megahercios es capaz de repetir 500 millones de ciclos por segundo.
En la actualidad, dada la gran velocidad de los procesadores, la unidad más frecuente es el gigahercio, que corresponde a 1.000 millones de hercios por segundo.
Sobre esto hay que aclarar un concepto. Si bien en teoría a mayor frecuencia de reloj (más megahercios) su supone una mayor velocidad de procesamiento, eso es solo cierto a medias, ya que en la velocidad de un equipo no solo depende de la capacidad de procesamiento del procesador.
Estas unidades de medida se utilizan también para medir la frecuencia de comunicación entre los diferentes elementos del ordenador.

En la imagen, dentro del círculo, frecuencia del procesador, expresada en GHz.
VELOCIDAD TRANSMISION DE DATOS:
En el caso de definir las velocidades de transmisión se suele usar como base el bit, y más concretamente el bit por segundo, o bps
Los múltiplos de estos si que utilizan el SI o Sistema Internacional de medidas.
Los más utilizados sin el Kilobit, Megabit y Gigabit, siempre expresado en el término por segundo (ps).
Las abreviaturas se diferencian de los términos de almacenamiento en que se expresan con b minúscula. Estas abreviaturas son:
Kbps.- = 1.000 bits por segundo. Mbps.- = 1.000 Kbits por segundo. Gbps.- = 1.000 Mbits por segundo.
En este sentido hay que tener en cuenta que las velocidades que en la mayoría de las ocasiones se muestran en Internet están expresadas en KB/s (Kilobyte por segundo), lo que realmente supone que nos dice la cantidad de bytes (unidad de almacenamiento) que hemos recibido en un segundo, NO la velocidad de trasmisión. Podemos calcular esa velocidad de transmisión (para pasarla a Kbps o Kilobits por segundo) simplemente multiplicando el dato que se nos muestra por 8, por lo que una trasmisión que se nos indica como de 308 KB/s corresponde a una velocidad de transmisión de 2.464 Kbps, a lo que es lo mismo, 2.64 Mbps. Esta conversión nos es muy útil para comprobar la velocidad real de nuestra línea ADSL, por ejemplo, ya que la velocidad de esta si que se expresa en Kbps o en Mbps.

En esta imagen podemos ver la velocidad de transferencia, expresada en KB/s (Kilobytes por segundo).
En la imagen superior podemos ver un ejemplo de lo anteriormente comentado. Se muestra una velocidad de transferencia de 331 KB/s, lo que corresponde (multiplicando este dato por 8) a una velocidad de transmisión de 2.648 Kbps, o lo que es lo mismo, 2.65 Mbps (Megabits por segundo).
Sistema binarioDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda Para otros usos de este término, véase Sistema binario (astronomía).
El sistema binario, en matemáticas e informática, es un sistema de numeración en el que los números se representan utilizando solamente las cifras cero y uno (0 y 1). Es el que se utiliza en las computadoras, debido a que trabajan internamente con dos niveles de voltaje,

por lo que su sistema de numeración natural es el sistema binario (encendido 1, apagado 0).
Contenido
[ocultar]
1 Historia del sistema binario o1.1 Aplicaciones 2 Representación 3 Conversión entre binario y decimal o3.1 Decimal a binario o3.2 Decimal (con decimales) a binario o3.3 Binario a decimal o3.4 Binario a decimal (con parte fraccionaria binaria) 4 Operaciones con números binarios o4.1 Suma de números binarios o4.2 Resta de números binarios o4.3 Producto de números binarios o4.4 División de números binarios 5 Conversión entre binario y octal o5.1 Binario a octal o5.2 Octal a binario 6 Conversión entre binario y hexadecimal o6.1 Binario a hexadecimal o6.2 Hexadecimal a binario 7 Tabla de conversión entre decimal, binario, hexadecimal, octal, BCD, Exceso 3 y Código
Gray o Reflejado 8 Factorialización 9 Véase también 10 Enlaces externos

[editar] Historia del sistema binario
Página del artículo Explication de l'Arithmétique Binaire de Leibniz.
El antiguo matemático indio Pingala presentó la primera descripción que se conoce de un sistema de numeración binario en el siglo III a. C.
Una serie completa de 8 trigramas y 64 hexagramas (análogos a 3 bit) y números binarios de 6 bit eran conocidos en la antigua China en el texto clásico del I Ching. Series similares de combinaciones binarias también han sido utilizadas en sistemas de adivinación tradicionales africanos, como el Ifá, así como en la geomancia medieval occidental.
Un arreglo binario ordenado de los hexagramas del I Ching, representando la secuencia decimal de 0 a 63, y un método para generar el mismo fue desarrollado por el erudito y filósofo Chino Shao Yong en el siglo XI. Sin embargo, no hay ninguna prueba de que Shao entendiera el cómputo binario.
En 1605 Francis Bacon habló de un sistema por el cual las letras del alfabeto podrían reducirse a secuencias de dígitos binarios, las cuales podrían ser codificadas como variaciones apenas visibles en la fuente de cualquier texto arbitrario.
El sistema binario moderno fue documentado en su totalidad por Leibniz, en el siglo XVII, en su artículo "Explication de l'Arithmétique Binaire". En él se mencionan los símbolos binarios usados por matemáticos chinos. Leibniz utilizó el 0 y el 1, al igual que el sistema de numeración binario actual.
En 1854, el matemático británico George Boole publicó un artículo que marcó un antes y un después, detallando un sistema de lógica que terminaría denominándose Álgebra de Boole. Dicho sistema desempeñaría un papel fundamental en el desarrollo del sistema binario actual, particularmente en el desarrollo de circuitos electrónicos.

[editar] Aplicaciones
En 1937, Claude Shannon realizó su tesis doctoral en el MIT, en la cual implementaba el Álgebra de Boole y aritmética binaria utilizando relés y conmutadores por primera vez en la historia. Titulada Un Análisis Simbólico de Circuitos Conmutadores y Relés, la tesis de Shannon básicamente fundó el diseño práctico de circuitos digitales.
En noviembre de 1937, George Stibitz, trabajando por aquel entonces en los Laboratorios Bell, construyó una computadora basada en relés —a la cual apodó "Modelo K" (porque la construyó en una cocina, en inglés "kitchen")— que utilizaba la suma binaria para realizar los cálculos. Los Laboratorios Bell autorizaron un completo programa de investigación a finales de 1938, con Stibitz al mando. El 8 de enero de 1940 terminaron el diseño de una "Calculadora de Números Complejos", la cual era capaz de realizar cálculos con números complejos. En una demostración en la conferencia de la Sociedad Americana de Matemáticas, el 11 de septiembre de 1940, Stibitz logró enviar comandos de manera remota a la Calculadora de Números Complejos a través de la línea telefónica mediante un teletipo. Fue la primera máquina computadora utilizada de manera remota a través de la línea de teléfono. Algunos participantes de la conferencia que presenciaron la demostración fueron John Von Neumann, John Mauchly y Norbert Wiener, quien escribió acerca de dicho suceso en sus diferentes tipos de memorias en la cual alcanzó diferentes logros.
Véase también: Código binario
[editar] Representación
Un número binario puede ser representado por cualquier secuencia de bits (dígitos binarios), que suelen representar cualquier mecanismo capaz de estar en dos estados mutuamente excluyentes. Las siguientes secuencias de símbolos podrían ser interpretadas como el mismo valor numérico binario:
1 0 1 0 0 1 1 0 1 0| - | - - | | - | -x o x o o x x o x oy n y n n y y n y n
El valor numérico representado en cada caso depende del valor asignado a cada símbolo. En una computadora, los valores numéricos pueden representar dos voltajes diferentes; también pueden indicar polaridades magnéticas sobre un disco magnético. Un "positivo", "sí", o "sobre el estado" no es necesariamente el equivalente al valor numérico de uno; esto depende de la nomenclatura usada.
De acuerdo con la representación más habitual, que es usando números árabes, los números binarios comúnmente son escritos usando los símbolos 0 y 1. Los números binarios se escriben a menudo con subíndices, prefijos o sufijos para indicar su base. Las notaciones siguientes son equivalentes:
100101 binario (declaración explícita de formato) 100101b (un sufijo que indica formato binario) 100101B (un sufijo que indica formato binario)

bin 100101 (un prefijo que indica formato binario) 1001012 (un subíndice que indica base 2 (binaria) notación) %100101 (un prefijo que indica formato binario) 0b100101 (un prefijo que indica formato binario, común en lenguajes de programación)
[editar] Conversión entre binario y decimal
[editar] Decimal a binario
Se divide el número del sistema decimal entre 2, cuyo resultado entero se vuelve a dividir entre 2, y así sucesivamente. Ordenados los restos, del último al primero, éste será el número binario que buscamos.
EjemploTransformar el número decimal 131 en binario. El método es muy simple:131 dividido entre 2 da 65 y el resto es igual a 1 65 dividido entre 2 da 32 y el resto es igual a 1 32 dividido entre 2 da 16 y el resto es igual a 0 16 dividido entre 2 da 8 y el resto es igual a 0 8 dividido entre 2 da 4 y el resto es igual a 0 4 dividido entre 2 da 2 y el resto es igual a 0 2 dividido entre 2 da 1 y el resto es igual a 0 1 dividido entre 2 da 0 y el resto es igual a 1 -> Ordenamos los restos, del último al primero: 10000011
En sistema binario, 131 se escribe 10000011
EjemploTransformar el número decimal 100 en binario.
Otra forma de conversión consiste en un método parecido a la factorización en números primos. Es relativamente fácil dividir cualquier número entre 2. Este método consiste también en divisiones sucesivas. Dependiendo de si el número es par o impar, colocaremos un cero o un uno en la columna de la derecha. Si es impar, le restaremos uno y seguiremos dividiendo entre dos, hasta llegar a 1. Después sólo nos queda tomar el último resultado de la columna izquierda (que siempre será 1) y todos los de la columna de la derecha y ordenar los dígitos de abajo a arriba.

Ejemplo100|0 50|0 25|1 --> 1, 25-1=24 y seguimos dividiendo por 2 12|0 6|0 3|1 1|1 --> (100)10 = (1100100)2
Existe un último método denominado de distribución. Consiste en distribuir los unos necesarios entre las potencias sucesivas de 2 de modo que su suma resulte ser el número decimal a convertir. Sea por ejemplo el número 151, para el que se necesitarán las 8 primeras potencias de 2, ya que la siguiente, 28=256, es superior al número a convertir. Se comienza poniendo un 1 en 128, por lo que aún faltarán 23, 151-128 = 23, para llegar al 151. Este valor se conseguirá distribuyendo unos entre las potencias cuya suma dé el resultado buscado y poniendo ceros en el resto. En el ejemplo resultan ser las potencias 4, 2, 1 y 0, esto es, 16, 4, 2 y 1, respectivamente.
Ejemplo 20= 1|1 21= 2|1 22= 4|1 23= 8|0 24= 16|1 25= 32|0 26= 64|0 27= 128|1 128 + 16 + 4 + 2 + 1 = (151)10 = (10010111)2
[editar] Decimal (con decimales) a binario
Para transformar un número del sistema decimal al sistema binario:
1. Se transforma la parte entera a binario. (Si la parte entera es 0 en binario será 0, si la parte entera es 1 en binario será 1, si la parte entera es 5 en binario será 101 y así sucesivamente).
2. Se sigue con la parte fraccionaria, multiplicando cada número por 2. Si el resultado obtenido es mayor o igual a 1 se anota como un uno (1) binario. Si es menor que 1 se anota como un 0 binario. (Por ejemplo, al multiplicar 0.6 por 2 obtenemos como resultado 1.2 lo cual indica que nuestro resultado es un uno (1) en binario, solo se toma la parte entera del resultado).
3. Después de realizar cada multiplicación, se colocan los números obtenidos en el orden de su obtención.
4. Algunos números se transforman en dígitos periódicos, por ejemplo: el 0.1.
Ejemplo0,3125 (decimal) => 0,0101 (binario).Proceso:0,3125 · 2 = 0,625 => 00,625 · 2 = 1,25 => 10,25 · 2 = 0,5 => 00,5 · 2 = 1 => 1 En orden: 0101 -> 0,0101 (binario)

Ejemplo0,1 (decimal) => 0,0 0011 0011 ... (binario). Proceso: 0,1 · 2 = 0,2 ==> 00,2 · 2 = 0,4 ==> 00,4 · 2 = 0,8 ==> 00,8 · 2 = 1,6 ==> 10,6 · 2 = 1,2 ==> 10,2 · 2 = 0,4 ==> 0 <--se repiten las cuatro cifras, periódicamente0,4 · 2 = 0,8 ==> 0 <-0,8 · 2 = 1,6 ==> 1 <-0,6 · 2 = 1,2 ==> 1 <- ...En orden: 0 0011 0011 ... => 0,0 0011 0011 ... (binario periódico)
Ejemplo5.5 = 5,55,5 (decimal) => 101,1 (binario).Proceso:5 => 1010,5 · 2 = 1 => 1En orden: 1 (un sólo dígito fraccionario) -> 101,1 (binario)
Ejemplo6,83 (decimal) => 110,110101000111 (binario).Proceso:6 => 1100,83 · 2 = 1,66 => 10,66 · 2 = 1,32 => 10,32 · 2 = 0,64 => 00,64 · 2 = 1,28 => 10,28 · 2 = 0,56 => 00,56 · 2 = 1,12 => 10,12 · 2 = 0,24 => 00,24 · 2 = 0,48 => 00,48 · 2 = 0,96 => 00,96 · 2 = 1,92 => 10,92 · 2 = 1,84 => 10,84 · 2 = 1,68 => 1En orden: 110101000111 (binario)Parte entera: 110 (binario)Encadenando parte entera y fraccionaria: 110,110101000111 (binario)
[editar] Binario a decimal
Para realizar la conversión de binario a decimal, realice lo siguiente:
1. Inicie por el lado derecho del número en binario, cada cifra multiplíquela por 2 elevado a la potencia consecutiva (comenzando por la potencia 0, 20).
2. Después de realizar cada una de las multiplicaciones, sume todas y el número resultante será el equivalente al sistema decimal.
Ejemplos:
(Los números de arriba indican la potencia a la que hay que elevar 2)

También se puede optar por utilizar los valores que presenta cada posición del número binario a ser transformado, comenzando de derecha a izquierda, y sumando los valores de las posiciones que tienen un 1.
Ejemplo
El número binario 1010010 corresponde en decimal al 82. Se puede representar de la siguiente manera:
entonces se suman los números 64, 16 y 2:
Para cambiar de binario con decimales a decimal se hace exactamente igual, salvo que la posición cero (en la que el dos es elevado a la cero) es la que está a la izquierda de la coma y se cuenta hacia la derecha a partir de -1:
[editar] Binario a decimal (con parte fraccionaria binaria)
1. Inicie por el lado izquierdo (la primera cifra a la derecha de la coma), cada número multiplíquelo por 2 elevado a la potencia consecutiva a la inversa (comenzando por la potencia -1, 2-1).
2.Después de realizar cada una de las multiplicaciones, sume todas y el número resultante será el equivalente al sistema decimal.
Ejemplos
0,101001 (binario) = 0,640625(decimal). Proceso:
1 · 2 elevado a -1 = 0,50 · 2 elevado a -2 = 01 · 2 elevado a -3 = 0,1250 · 2 elevado a -4 = 00 · 2 elevado a -5 = 01 · 2 elevado a -6 = 0,015625La suma es: 0,640625

0.110111 (binario) = 0,859375(decimal). Proceso:
1 · 2 elevado a -1 = 0,51 · 2 elevado a -2 = 0,250 · 2 elevado a -3 = 01 · 2 elevado a -4 = 0,06251 · 2 elevado a -5 = 0,031251 · 2 elevado a -6 = 0,015625La suma es: 0,859375
[editar] Operaciones con números binarios
[editar] Suma de números binarios
La tabla de sumar para números binarios es la siguiente:
+ 0 1 0 0 1 1 1 10
Las posibles combinaciones al sumar dos bits son:
0 + 0 = 0 0 + 1 = 1 1 + 0 = 1 1 + 1 = 10
Note que al sumar 1 + 1 es 102, es decir, llevamos 1 a la siguiente posición de la izquierda (acarreo). Esto es equivalente, en el sistema decimal a sumar 9 + 1, que da 10: cero en la posición que estamos sumando y un 1 de acarreo a la siguiente posición.
Ejemplo 1 10011000 + 00010101 ——————————— 10101101
Se puede convertir la operación binaria en una operación decimal, resolver la decimal, y después transformar el resultado en un (número) binario. Operamos como en el sistema decimal: comenzamos a sumar desde la derecha, en nuestro ejemplo, 1 + 1 = 10, entonces escribimos 0 en la fila del resultado y llevamos 1 (este "1" se llama acarreo o arrastre). A continuación se suma el acarreo a la siguiente columna: 1 + 0 + 0 = 1, y seguimos hasta terminar todas la columnas (exactamente como en decimal).
[editar] Resta de números binarios
El algoritmo de la resta en sistema binario es el mismo que en el sistema decimal. Pero conviene repasar la operación de restar en decimal para comprender la operación binaria, que es más sencilla. Los términos que intervienen en la resta se llaman minuendo, sustraendo y diferencia.

Las restas básicas 0 - 0, 1 - 0 y 1 - 1 son evidentes:
0 - 0 = 0 1 - 0 = 1 1 - 1 = 0 0 - 1 = 1 (se transforma en 10 - 1 = 1) (en sistema decimal equivale a 2 - 1 = 1)
La resta 0 - 1 se resuelve, igual que en el sistema decimal, tomando una unidad prestada de la posición siguiente: 0 - 1 = 1 y me llevo 1, lo que equivale a decir en el sistema decimal, 2 - 1 = 1.
Ejemplos 10001 11011001 -01010 -10101011 —————— ————————— 00111 00101110
En sistema decimal sería: 17 - 10 = 7 y 217 - 171 = 46.
Para simplificar las restas y reducir la posibilidad de cometer errores hay varios métodos:
Dividir los números largos en grupos. En el siguiente ejemplo, vemos cómo se divide una resta larga en tres restas cortas:
100110011101 1001 1001 1101 -010101110010 -0101 -0111 -0010 ————————————— = ————— ————— ————— 010000101011 0100 0010 1011
Utilizando el complemento a dos (C2). La resta de dos números binarios puede obtenerse sumando al minuendo el «complemento a dos» del sustraendo.
Ejemplo
La siguiente resta, 91 - 46 = 45, en binario es:
1011011 1011011 -0101110 el C2 de 0101110 es 1010010 +1010010 ———————— ———————— 0101101 10101101
En el resultado nos sobra un bit, que se desborda por la izquierda. Pero, como el número resultante no puede ser más largo que el minuendo, el bit sobrante se desprecia.
Un último ejemplo: vamos a restar 219 - 23 = 196, directamente y utilizando el complemento a dos:
11011011 11011011 -00010111 el C2 de 00010111 es 11101001 +11101001 ————————— ————————— 11000100 111000100

Y, despreciando el bit que se desborda por la izquierda, llegamos al resultado correcto: 11000100 en binario, 196 en decimal.
Utilizando el complemento a uno. La resta de dos números binarios puede obtenerse sumando al minuendo el complemento a uno del sustraendo y a su vez sumarle el bit que se desborda.
[editar] Producto de números binarios
La tabla de multiplicar para números binarios es la siguiente:
· 0 1 0 0 0 1 0 1
El algoritmo del producto en binario es igual que en números decimales; aunque se lleva a cabo con más sencillez, ya que el 0 multiplicado por cualquier número da 0, y el 1 es el elemento neutro del producto.
Por ejemplo, multipliquemos 10110 por 1001:
10110 1001 ————————— 10110 00000 00000 10110 ————————— 11000110
En sistemas electrónicos, donde suelen usarse números mayores, se utiliza el método llamado algoritmo de Booth.
11101111 111011 __________ 11101111 11101111 00000000 11101111 11101111 11101111 ______________ 11011100010101
[editar] División de números binarios
La división en binario es similar a la decimal; la única diferencia es que a la hora de hacer las restas, dentro de la división, éstas deben ser realizadas en binario.
Ejemplo

Dividir 100010010 (274) entre 1101 (13):
100010010 |1101 ——————-0000 010101——————— 10001 -1101——————— 01000 - 0000 ——————— 10000 - 1101 ——————— 00111 - 0000 ——————— 01110 - 1101 ——————— 00001
[editar] Conversión entre binario y octal
[editar] Binario a octal
Para realizar la conversión de binario a octal, realice lo siguiente:
1) Agrupe la cantidad binaria en grupos de 3 en 3 iniciando por el lado derecho. Si al terminar de agrupar no completa 3 dígitos, entonces agregue ceros a la izquierda.
2) Posteriormente vea el valor que corresponde de acuerdo a la tabla:
Número en binario 000 001 010 011 100 101 110 111
Número en octal 0 1 2 3 4 5 6 7
3) La cantidad correspondiente en octal se agrupa de izquierda a derecha.
Ejemplos
110111 (binario) = 67 (octal). Proceso:
111 = 7110 = 6Agrupe de izquierda a derecha: 67
11001111 (binario) = 317 (octal). Proceso:
111 = 7001 = 111 entonces agregue un cero, con lo que se obtiene 011 = 3Agrupe de izquierda a derecha: 317

1000011 (binario) = 103 (octal). Proceso:
011 = 3000 = 01 entonces agregue 001 = 1Agrupe de izquierda a derecha: 103
[editar] Octal a binario
Cada dígito octal se convierte en su binario equivalente de 3 bits y se juntan en el mismo orden.
Ejemplo
247 (octal) = 010100111 (binario). El 2 en binario es 10, pero en binario de 3 bits es Oc(2) = B(010); el Oc(4) = B(100) y el Oc(7) = (111), luego el número en binario será 010100111.
[editar] Conversión entre binario y hexadecimal
[editar] Binario a hexadecimal
Para realizar la conversión de binario a hexadecimal, realice lo siguiente:
1) Agrupe la cantidad binaria en grupos de 4 en 4 iniciando por el lado derecho. Si al terminar de agrupar no completa 4 dígitos, entonces agregue ceros a la izquierda.
2) Posteriormente vea el valor que corresponde de acuerdo a la tabla:
Número en
binario
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
1010
1011
1100
1101
1110
1111
Número en hexadecimal
0 1 2 3 4 5 6 7 8 9 A B C D E F
3) La cantidad correspondiente en hexadecimal se agrupa de derecha a izquierda.
Ejemplos
110111010 (binario) = 1BA (hexadecimal). Proceso:
1010 = A1011 = B1 entonces agregue 0001 = 1Agrupe de derecha a izquierda: 1BA
11011110101 (binario) = 6F5 (hexadecimal). Proceso:
0101 = 5

1111 = F110 entonces agregue 0110 = 6Agrupe de derecha a izquierda: 6F5
[editar] Hexadecimal a binario
Note que para pasar de Hexadecimal a binario, sólo que se remplaza por el equivalente de 4 bits, de forma similar a como se hace de octal a binario.
[editar] Tabla de conversión entre decimal, binario, hexadecimal, octal, BCD, Exceso 3 y Código Gray o Reflejado
Decimal Binario Hexadecimal Octal BCD Exceso 3 Gray o Reflejado
0 0000 0 0 0000 0011 0000
1 0001 1 1 0001 0100 0001
2 0010 2 2 0010 0101 0011
3 0011 3 3 0011 0110 0010
4 0100 4 4 0100 0111 0110
5 0101 5 5 0101 1000 0111
6 0110 6 6 0110 1001 0101
7 0111 7 7 0111 1010 0100
8 1000 8 10 1000 1011 1100
9 1001 9 11 1001 1100 1101
10 1010 A 12 0001 0000 1111
11 1011 B 13 0001 0001 1110
12 1100 C 14 0001 0010 1010
13 1101 D 15 0001 0011 1011
14 1110 E 16 0001 0100 1001
15 1111 F 17 0001 0101 1000
[editar] Factorialización
Tabla de conversión entre binario, factor binario, hexadecimal, octal y decimal
Binario Factor binario Hexadecimal Octal Decimal
0000 0000 00 0 0 0
0000 0001 20 1 1 1
0000 0010 21 2 2 2
0000 0100 22 4 4 4
0000 1000 23 8 10 8
0001 0000 24 10 20 16
0010 0000 25 20 40 32

0100 0000 26 40 100 64
1000 0000 27 80 200 128

Placa baseDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda
Placa base formato MicroATX para PC de sobremesa (desnuda, sin ningún componente enchufado).
La placa base, también conocida como placa madre o tarjeta madre (del inglés motherboard o mainboard) es una placa de circuito impreso a la que se conectan los componentes que constituyen la computadora u ordenador. Tiene instalados una serie de circuitos integrados, entre los que se encuentra el chipset, que sirve como centro de conexión entre el microprocesador, la memoria de acceso aleatorio (RAM), las ranuras de expansión y otros dispositivos.
Va instalada dentro de una caja o gabinete que por lo general está hecha de chapa y tiene un panel para conectar dispositivos externos y muchos conectores internos y zócalos para instalar componentes dentro de la caja.
La placa base, además, incluye un firmware llamado BIOS, que le permite realizar las funcionalidades básicas, como pruebas de los dispositivos, vídeo y manejo del teclado, reconocimiento de dispositivos y carga del sistema operativo.
Contenido
[ocultar]
1 Componentes de la placa base o1.1 Tipos de bus 2 Placa multiprocesador 3 Tipos 4 Formatos 5 Escalabilidad

6 Fabricantes 7 Véase también
[editar] Componentes de la placa base
Diagrama de una placa base típica.
Una placa base típica admite los siguientes componentes:
Uno o varios conectores de alimentación: por estos conectores, una alimentación eléctrica proporciona a la placa base los diferentes voltajes e intensidades necesarios para su funcionamiento.
El zócalo de CPU es un receptáculo que recibe el microprocesador y lo conecta con el resto de componentes a través de la placa base.
Las ranuras de memoria RAM, en número de 2 a 6 en las placas base comunes. El chipset: una serie de circuitos electrónicos, que gestionan las transferencias de datos
entre los diferentes componentes de la computadora (procesador, memoria, tarjeta gráfica,unidad de almacenamiento secundario, etc.).

Se divide en dos secciones, el puente norte (northbridge) y el puente sur (southbridge). El primero gestiona la interconexión entre el microprocesador, la memoria RAM y la unidad de procesamiento gráfico; y el segundo entre los periféricos y los dispositivos de almacenamiento, como los discos duros o las unidades de disco óptico. Las nuevas líneas de procesadores de escritorio tienden a integrar el propio controlador de memoria en el interior del procesador.
Un reloj: regula la velocidad de ejecución de las instrucciones del microprocesador y de los periféricos internos.
La CMOS: una pequeña memoria que preserva cierta información importante (como la configuración del equipo, fecha y hora), mientras el equipo no está alimentado por electricidad.
La pila de la CMOS: proporciona la electricidad necesaria para operar el circuito constantemente y que éste último no se apague perdiendo la serie de configuraciones guardadas.
La BIOS: un programa registrado en una memoria no volátil (antiguamente en memorias ROM, pero desde hace tiempo se emplean memorias flash). Este programa es específico de la placa base y se encarga de la interfaz de bajo nivel entre el microprocesador y algunos periféricos. Recupera, y después ejecuta, las instrucciones del MBR (Master Boot Record), registradas en un disco duro o SSD, cuando arranca el sistema operativo.
El bus (también llamado bus interno o en inglés front-side bus'): conecta el microprocesador al chipset, está cayendo en desuso frente a HyperTransport y Quickpath.
El bus de memoria conecta el chipset a la memoria temporal. El bus de expansión (también llamado bus I/O): une el microprocesador a los conectores
entrada/salida y a las ranuras de expansión. Los conectores de entrada/salida que cumplen normalmente con la norma PC 99: estos
conectores incluyen: oLos puertos PS2 para conectar el teclado o el ratón, estas interfaces tienden a desaparecer a
favor del USBoLos puertos serie, por ejemplo para conectar dispositivos antiguos.oLos puertos paralelos, por ejemplo para la conexión de antiguas impresoras.oLos puertos USB (en inglés Universal Serial Bus), por ejemplo para conectar periféricos
recientes.oLos conectores RJ45, para conectarse a una red informática.oLos conectores VGA, DVI, HDMI o Displayport para la conexión del monitor de la
computadora.oLos conectores IDE o Serial ATA, para conectar dispositivos de almacenamiento, tales
como discos duros, unidades de estado sólido y unidades de disco óptico.oLos conectores de audio, para conectar dispositivos de audio, tales como altavoces o
micrófonos. Las ranuras de expansión: se trata de receptáculos que pueden acoger tarjetas de expansión
(estas tarjetas se utilizan para agregar características o aumentar el rendimiento de un ordenador; por ejemplo, un tarjeta gráfica se puede añadir a un ordenador para mejorar el rendimiento 3D). Estos puertos pueden ser puertos ISA (interfaz antigua), PCI (en inglés Peripheral Component Interconnect) y, los más recientes, PCI Express.
Con la evolución de las computadoras, más y más características se han integrado en la placa base, tales como circuitos electrónicos para la gestión del vídeo IGP (en inglés Integrated Graphic Processor), de sonido o de redes (10/100 Mbps/1 Gbps), evitando así la adición de tarjetas de expansión.

[editar] Tipos de bus
Los buses son espacios físicos que permiten el transporte de información y energía entre dos puntos de la computadora.
Los buses generales son los siguientes:
Bus de datos: son las líneas de comunicación por donde circulan los datos externos e internos del microprocesador.
Bus de dirección: línea de comunicación por donde viaja la información específica sobre la localización de la dirección de memoria del dato o dispositivo al que se hace referencia.
Bus de control: línea de comunicación por donde se controla el intercambio de información con un módulo de la unidad central y los periféricos.
Bus de expansión: conjunto de líneas de comunicación encargado de llevar el bus de datos, el bus de dirección y el de control a la tarjeta de interfaz (entrada, salida) que se agrega a la tarjeta principal.
Bus del sistema: todos los componentes de la CPU se vinculan a través del bus de sistema, mediante distintos tipos de datos el microprocesador y la memoria principal, que también involucra a la memoria caché de nivel 2. La velocidad de tranferencia del bus de sistema está determinada por la frecuencia del bus y el ancho del mínimo.
[editar] Placa multiprocesador
Una placa con dos procesadores.
Este tipo de placa base puede acoger a varios procesadores (generalmente de 2, 4, 8 o más). Estas placas base multiprocesador tienen varios zócalos de microprocesador, lo que les permite conectar varios microprocesadores físicamente distintos (a diferencia de los de procesador de doble núcleo).
Cuando hay dos procesadores en una placa base, hay dos formas de manejarlos:

El modo asimétrico, donde a cada procesador se le asigna una tarea diferente. Este método no acelera el tratamiento, pero puede asignar una tarea a una unidad central de procesamiento, mientras que la otra lleva a cabo a una tarea diferente.
El modo simétrico, llamado multiprocesamiento simétrico, donde cada tarea se distribuye de forma simétrica entre los dos procesadores.
Linux fue el primer sistema operativo en gestionar la arquitectura de doble procesador en x86.[cita requerida] Sin embargo, la gestión de varios procesadores existía ya antes en otras plataformas y otros sistemas operativos. Linux 2.6.x maneja multiprocesadores simétricos, y las arquitecturas de memoria no uniformemente distribuida
Algunos fabricantes proveen placas base que pueden acoger hasta 8 procesadores (en el caso de socket 939 para procesadores AMD Opteron y sobre socket 604 para procesadores Intel Xeon).
[editar] Tipos
La mayoría de las placas de PC vendidas después de 2001 se pueden clasificar en dos grupos:
Las placas base para procesadores AMD oSlot A Duron, AthlonoSocket A Duron, Athlon, Athlon XP, SempronoSocket 754 Athlon 64, Mobile Athlon 64, Sempron, TurionoSocket 939 Athlon 64, Athlon FX , Athlon X2, Sempron, OpteronoSocket 940 Opteron y Athlon 64 FXoSocket AM2 Athlon 64, Athlon FX, Athlon X2, Sempron, PhenomoSocket F OpteronoSocket AM2 + Athlon 64, Athlon FX, Athlon X2, Sempron, PhenomoSocket AM3 Phenom II X2/X3/X4.oSocket AM4 Phenom III X3/X4/X5 Las placas base para procesadores Intel oSocket 7 : Pentium I, Pentium MMXoSlot 1 : Pentium II, Pentium III, CeleronoSocket 370 : Pentium III, CeleronoSocket 423 : Pentium 4oSocket 478 : Pentium 4, CeleronoSocket 775 : Pentium 4, Celeron, Pentium D (doble núcleo), Core 2 Duo, Core 2 Quad Core
2 Extreme, XeonoSocket 603 XeonoSocket 604 XeonoSocket 771 XeonoLGA1366 Intel Core i7, Xeon (Nehalem)oLGA1156 Intel Core i3, Intel Core i5, Intel Core i7 (Nehalem)oLGA 2011 Intel Core i7 (Sandy Bridge)oLGA 1155 Intel Core i7, Intel Core i5 y Intel Core i3 (Sandy Bridge)
[editar] Formatos

Las tarjetas madre necesitan tener dimensiones compatibles con las cajas que las contienen, de manera que desde los primeros computadores personales se han establecido características mecánicas, llamadas factor de forma. Definen la distribución de diversos componentes y las dimensiones físicas, como por ejemplo el largo y ancho de la tarjeta, la posición de agujeros de sujeción y las características de los conectores.
Con los años, varias normas se fueron imponiendo:
XT : es el formato de la placa base del PC de IBM modelo 5160, lanzado en 1983. En este factor de forma se definió un tamaño exactamente igual al de una hoja de papel tamaño carta y un único conector externo para el teclado.
1984 AT 305 × 305 mm ( IBM) oBaby AT: 216 × 330 mm AT : uno de los formatos más grandes de toda la historia del PC (305 × 279–330 mm),
definió un conector de potencia formado por dos partes. Fue usado de manera extensa de 1985 a 1995.
1995 ATX 305 × 244 mm (Intel) oMicroATX: 244 × 244 mmoFlexATX: 229 × 191 mmoMiniATX: 284 × 208 mm ATX : creado por un grupo liderado por Intel, en 1995 introdujo las conexiones exteriores
en la forma de un panel I/O y definió un conector de 20 pines para la energía. Se usa en la actualidad en la forma de algunas variantes, que incluyen conectores de energía extra o reducciones en el tamaño.
2001 ITX 215 × 195 mm (VIA) oMiniITX: 170 × 170 mmoNanoITX: 120 × 120 mmoPicoITX: 100 × 72 mm ITX : con rasgos procedentes de las especificaciones microATX y FlexATX de Intel, el
diseño de VIA se centra en la integración en placa base del mayor número posible de componentes, además de la inclusión del hardware gráfico en el propio chipset del equipo, siendo innecesaria la instalación de una tarjeta gráfica en la ranura AGP.

2005 [BTX] 325 × 267 mm (Intel) oMicro bTX: 264 × 267 mmoPicoBTX: 203 × 267 mmoRegularBTX: 325 × 267 mm BTX : retirada en muy poco tiempo por la falta de aceptación, resultó prácticamente
incompatible con ATX, salvo en la fuente de alimentación. Fue creada para intentar solventar los problemas de ruido y refrigeración, como evolución de la ATX.
2007 DTX 248 × 203 mm ( AMD) oMini-DTX: 170 × 203 mmoFull-DTX: 243 × 203 mm DTX : destinadas a PCs de pequeño formato. Hacen uso de un conector de energía de 24
pines y de un conector adicional de 2x2.
Formato propietario : durante la existencia del PC, mucha marcas han intentado mantener un esquema cerrado de hardware, fabricando tarjetas madre incompatibles físicamente con los factores de forma con dimensiones, distribución de elementos o conectores que son atípicos. Entre las marcas mas persistentes está Dell, que rara vez fabrica equipos diseñados con factores de forma de la industria.
[editar] Escalabilidad
Hasta la mitad de la década de 1990, los PC fueron equipados con una placa en la que se soldó el microprocesador (CPU). Luego vinieron las placas base equipadas con zócalo de microprocesador «libre», que permitía acoger el microprocesador de elección (de acuerdo a sus necesidades y presupuesto). Con este sistema (que pronto se hizo más generalizado y no ha sido discutido), es teóricamente posible equipar el PC con una CPU más potente, sin sustituir la placa base, pero a menor costo.
De hecho, esta flexibilidad tiene sus límites porque los microprocesadores son cada vez más eficientes, e invariablemente requieren placas madre más eficaces (por ejemplo, capaces de manejar flujos de datos cada vez más importantes).
[editar] Fabricantes
Varios fabricantes se reparten el mercado de placas base, tales como Abit, Albatron, Aopen, ASUS, ASRock, Biostar, Chaintech, Dell, DFI, ECS EliteGroup, Epox, Foxconn, Gigabyte Technology, Intel, MSI, QDI, Sapphire Technology, Soltek, Super Micro, Tyan, Via, XFX, Pc Chips.
Algunos diseñan y fabrican uno o más componentes de la placa base, mientras que otros ensamblan los componentes que terceros han diseñado y fabricado.

Unidad central de procesamientoDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda
Oblea de un microprocesador Intel 80486DX2 (tamaño: 12×6,75 mm) en su empaquetado.
La unidad central de procesamiento o CPU (por el acrónimo en inglés de central processing unit), o simplemente el procesador o microprocesador, es el componente del computador y otros dispositivos programables, que interpreta las instrucciones contenidas en los programas y procesa los datos. Los CPU proporcionan la característica fundamental de la computadora digital (la programabilidad) y son uno de los componentes necesarios encontrados en las computadoras de cualquier tiempo, junto con el almacenamiento primario y los dispositivos de entrada/salida. Se conoce como microprocesador el CPU que es manufacturado con circuitos integrados. Desde mediados de los años 1970, los microprocesadores de un solo chip han reemplazado casi totalmente todos los tipos de CPU, y hoy en día, el término "CPU" es aplicado usualmente a todos los microprocesadores.

La expresión "unidad central de proceso" es, en términos generales, una descripción de una cierta clase de máquinas de lógica que pueden ejecutar complejos programas de computadora. Esta amplia definición puede fácilmente ser aplicada a muchos de los primeros computadores que existieron mucho antes que el término "CPU" estuviera en amplio uso. Sin embargo, el término en sí mismo y su acrónimo han estado en uso en la industria de la informática por lo menos desde el principio de los años 1960 . La forma, el diseño y la implementación de los CPU ha cambiado drásticamente desde los primeros ejemplos, pero su operación fundamental ha permanecido bastante similar.
Los primeros CPU fueron diseñados a la medida como parte de una computadora más grande, generalmente una computadora única en su especie. Sin embargo, este costoso método de diseñar los CPU a la medida, para una aplicación particular, ha desaparecido en gran parte y se ha sustituido por el desarrollo de clases de procesadores baratos y estandarizados adaptados para uno o muchos propósitos. Esta tendencia de estandarización comenzó generalmente en la era de los transistores discretos, computadoras centrales, y microcomputadoras, y fue acelerada rápidamente con la popularización del circuito integrado (IC), éste ha permitido que sean diseñados y fabricados CPU más complejos en espacios pequeños (en la orden de milímetros). Tanto la miniaturización como la estandarización de los CPU han aumentado la presencia de estos dispositivos digitales en la vida moderna mucho más allá de las aplicaciones limitadas de máquinas de computación dedicadas. Los microprocesadores modernos aparecen en todo, desde automóviles, televisores, neveras, calculadoras, aviones, hasta teléfonos móviles o celulares, juguetes, entre otros.
Contenido
[ocultar]
1 Historia o1.1 CPU de transistores y de circuitos integrados discretos o1.2 Microprocesadores 2 Operación del CPU 3 Diseño e implementación o3.1 Rango de enteros o3.2 Frecuencia de reloj o3.3 Paralelismo 3.3.1 ILP: Entubado de instrucción y arquitectura superescalar 3.3.2 TLP: ejecución simultánea de hilos o3.4 Procesadores vectoriales y el SIMD 4 Véase también 5 Referencias 6 Enlaces externos
[editar] Historia

El EDVAC, uno de los primeros computadores de programas almacenados electrónicamente.
Artículo principal: Historia del hardware de computador
Casi todos los CPU tratan con estados discretos, y por lo tanto requieren una cierta clase de elementos de conmutación para diferenciar y cambiar estos estados. Antes de la aceptación comercial del transistor, los relés eléctricos y los tubos de vacío (válvulas termoiónicas) eran usados comúnmente como elementos de conmutación. Aunque éstos tenían distintas ventajas de velocidad sobre los anteriores diseños puramente mecánicos, no eran fiables por varias razones. Por ejemplo, hacer circuitos de lógica secuencial de corriente directa requería hardware adicional para hacer frente al problema del rebote de contacto. Por otro lado, mientras que los tubos de vacío no sufren del rebote de contacto, éstos deben calentarse antes de llegar a estar completamente operacionales y eventualmente fallan y dejan de funcionar por completo.[1] Generalmente, cuando un tubo ha fallado, el CPU tendría que ser diagnosticado para localizar el componente que falla para que pueda ser reemplazado. Por lo tanto, los primeros computadores electrónicos, (basados en tubos de vacío), generalmente eran más rápidas pero menos confiables que las computadoras electromecánicas, (basadas en relés). Las computadoras de tubo, como el EDVAC, tendieron en tener un promedio de ocho horas entre fallas, mientras que las computadoras de relés, (anteriores y más lentas), como el Harvard Mark I, fallaban muy raramente . Al final, los CPU basados en tubo llegaron a ser dominantes porque las significativas ventajas de velocidad producidas generalmente pesaban más que los problemas de confiabilidad. La mayor parte de estos tempranos CPU síncronos corrían en frecuencias de reloj bajas comparadas con los modernos diseños microelectrónicos, (ver más abajo para una exposición sobre la frecuencia de reloj). Eran muy comunes en este tiempo las frecuencias de la señal del reloj con un rango desde 100 kHz hasta 4 MHz, limitado en gran parte por la velocidad de los dispositivos de conmutación con los que fueron construidos.
[editar] CPU de transistores y de circuitos integrados discretos

CPU, memoria de núcleo, e interfaz de bus externo de un MSI PDP-8/I.
La complejidad del diseño de los CPU se incrementó a medida que varias tecnologías facilitaron la construcción de dispositivos electrónicos más pequeños y confiables. La primera de esas mejoras vino con el advenimiento del transistor. Los CPU transistorizados durante los años 1950 y los años 1960 no tuvieron que ser construidos con elementos de conmutación abultados, no fiables, y frágiles, como los tubos de vacío y los relés eléctricos. Con esta mejora, fueron construidos CPU más complejos y más confiables sobre una o varias tarjetas de circuito impreso que contenían componentes discretos (individuales).
Durante este período, ganó popularidad un método de fabricar muchos transistores en un espacio compacto. El circuito integrado (IC) permitió que una gran cantidad de transistores fueran fabricados en una simple oblea basada en semiconductor o "chip". Al principio, solamente circuitos digitales muy básicos, no especializados, como las puertas NOR fueron miniaturizados en IC. Los CPU basadas en estos IC de "bloques de construcción" generalmente son referidos como dispositivos de pequeña escala de integración "small-scale integration" (SSI). Los circuitos integrados SSI, como los usados en el computador guía del Apollo (Apollo Guidance Computer), usualmente contenían transistores que se contaban en números de múltiplos de diez. Construir un CPU completo usando IC SSI requería miles de chips individuales, pero todavía consumía mucho menos espacio y energía que diseños anteriores de transistores discretos. A medida que la tecnología microelectrónica avanzó, en los IC fue colocado un número creciente de transistores, disminuyendo así la cantidad de IC individuales necesarios para un CPU completo. Los circuitos integrados MSI y el LSI (de mediana y gran escala de integración) aumentaron el número de transistores a cientos, y luego a miles.
En 1964, IBM introdujo su arquitectura de computador System/360, que fue usada en una serie de computadores que podían ejecutar los mismos programas con velocidades y desempeños diferentes. Esto fue significativo en un tiempo en que la mayoría de las computadoras electrónicas eran incompatibles entre sí, incluso las hechas por el mismo fabricante. Para facilitar esta mejora, IBM utilizó el concepto de microprograma, a menudo llamado "microcódigo", ampliamente usado aún en los CPU modernos . La arquitectura System/360 era tan popular que dominó el mercado del mainframe durante las siguientes décadas y dejó una herencia que todavía aún perdura en las computadoras modernas, como

el IBM zSeries. En el mismo año de 1964, Digital Equipment Corporation (DEC) introdujo otro computador que sería muy influyente, dirigido a los mercados científicos y de investigación, el PDP-8. DEC introduciría más adelante la muy popular línea del PDP-11, que originalmente fue construido con IC SSI pero eventualmente fue implementado con componentes LSI cuando se convirtieron en prácticos. En fuerte contraste con sus precursores hechos con tecnología SSI y MSI, la primera implementación LSI del PDP-11 contenía un CPU integrado únicamente por cuatro circuitos integrados LSI .
Los computadores basados en transistores tenían varias ventajas frente a sus predecesores. Aparte de facilitar una creciente fiabilidad y un menor consumo de energía, los transistores también permitían al CPU operar a velocidades mucho más altas debido al corto tiempo de conmutación de un transistor en comparación a un tubo o relé. Gracias tanto a esta creciente fiabilidad como al dramático incremento de velocidad de los elementos de conmutación que por este tiempo eran casi exclusivamente transistores, se fueron alcanzando frecuencias de reloj del CPU de decenas de megahertz. Además, mientras que los CPU de transistores discretos y circuitos integrados se usaban comúnmente, comenzaron a aparecer los nuevos diseños de alto rendimiento como procesadores vectoriales SIMD (Single Instruction Multiple Data) (Simple Instrucción Múltiples Datos). Estos primeros diseños experimentales dieron lugar más adelante a la era de las supercomputadoras especializadas, como los hechos por Cray Inc.
[editar] Microprocesadores
Microprocesador Intel 80486DX2 en un paquete PGA de cerámicaArtículo principal: Microprocesador
Desde la introducción del primer microprocesador, el Intel 4004, en 2016, y del primer microprocesador ampliamente usado, el Intel 8080, en 1974, esta clase de CPUs ha desplazado casi totalmente el resto de los métodos de implementación de la Unidad Central de Proceso. Los fabricantes de mainframes y minicomputadores de ese tiempo lanzaron programas de desarrollo de IC propietarios para actualizar sus más viejas arquitecturas de computador, y eventualmente produjeron microprocesadores con conjuntos de instrucciones que eran compatibles hacia atrás con sus más viejos hardwares y softwares. Combinado con el advenimiento y el eventual vasto éxito del ahora ubicuo computadora personal, el término "CPU" es aplicado ahora casi exclusivamente a los microprocesadores.
Las generaciones previas de CPUs fueron implementadas como componentes discretos y numerosos circuitos integrados de pequeña escala de integración en una o más tarjetas de

circuitos. Por otro lado, los microprocesadores son CPUs fabricados con un número muy pequeño de IC; usualmente solo uno. El tamaño más pequeño del CPU, como resultado de estar implementado en una simple pastilla, significa tiempos de conmutación más rápidos debido a factores físicos como el decrecimiento de la capacitancia parásita de las puertas. Esto ha permitido que los microprocesadores síncronos tengan tiempos de reloj con un rango de decenas de megahercios a varios gigahercios. Adicionalmente, como ha aumentado la capacidad de construir transistores excesivamente pequeños en un IC, la complejidad y el número de transistores en un simple CPU también se ha incrementado dramáticamente. Esta tendencia ampliamente observada es descrita por la ley de bore, que ha demostrado hasta la fecha, ser una predicción bastante exacta del crecimiento de la complejidad de los CPUs y otros IC.
Mientras que, en los pasados sesenta años han cambiado drásticamente, la complejidad, el tamaño, la construcción, y la forma general del CPU, es notable que el diseño y el funcionamiento básico no ha cambiado demasiado. Casi todos los CPU comunes de hoy se pueden describir con precisión como máquinas de programa almacenado de von Neumann.
A medida que la ya mencionada ley del Moore continúa manteniéndose verdadera, se han presentado preocupaciones sobre los límites de la tecnología de transistor del circuito integrado. La miniaturización extrema de puertas electrónicas está causando los efectos de fenómenos que se vuelven mucho más significativos, como la electromigración, y el subumbral de pérdida. Estas más nuevas preocupaciones están entre los muchos factores que hacen a investigadores estudiar nuevos métodos de computación como la computadora cuántica, así como ampliar el uso de paralelismo, y otros métodos que extienden la utilidad del modelo clásico de von Neumann.
[editar] Operación del CPU
La operación fundamental de la mayoría de los CPU, es ejecutar una secuencia de instrucciones almacenadas llamadas "programa". El programa es representado por una serie de números que se mantentienen en una cierta clase de memoria de computador. Hay cuatro pasos que casi todos los CPU de arquitectura de von Neumann usan en su operación: fetch, decode, execute, y writeback, (leer, decodificar, ejecutar, y escribir).
Diagrama mostrando como es decodificada una instrucción del MIPS32. (MIPS Technologies 2005)
El primer paso, leer (fetch), implica el recuperar una instrucción, (que es representada por un número o una secuencia de números), de la memoria de programa. La localización en la memoria del programa es determinada por un contador de programa (PC), que almacena un número que identifica la posición actual en el programa. En otras palabras, el contador de programa indica al CPU, el lugar de la instrucción en el programa actual. Después de que se lee una instrucción, el Contador de Programa es incrementado por la longitud de la

palabra de instrucción en términos de unidades de memoria.[2] Frecuentemente la instrucción a ser leída debe ser recuperada de memoria relativamente lenta, haciendo detener al CPU mientras espera que la instrucción sea retornada. Este problema es tratado en procesadores modernos en gran parte por los cachés y las arquitecturas pipeline (ver abajo).
La instrucción que el CPU lee desde la memoria es usada para determinar qué deberá hacer el CPU. En el paso de decodificación, la instrucción es dividida en partes que tienen significado para otras unidades del CPU. La manera en que el valor de la instrucción numérica es interpretado está definida por la arquitectura del conjunto de instrucciones (el ISA) del CPU.[3] A menudo, un grupo de números en la instrucción, llamados opcode, indica qué operación realizar. Las partes restantes del número usualmente proporcionan información requerida para esa instrucción, como por ejemplo, operandos para una operación de adición. Tales operandos se pueden dar como un valor constante (llamado valor inmediato), o como un lugar para localizar un valor, que según lo determinado por algún modo de dirección, puede ser un registro o una dirección de memoria. En diseños más viejos las unidades del CPU responsables de decodificar la instrucción eran dispositivos de hardware fijos. Sin embargo, en CPUs e ISAs más abstractos y complicados, es frecuentemente usado un microprograma para ayudar a traducir instrucciones en varias señales de configuración para el CPU. Este microprograma es a veces reescribible de tal manera que puede ser modificado para cambiar la manera en que el CPU decodifica instrucciones incluso después de que haya sido fabricado.
Diagrama de bloques de un CPU simple
Después de los pasos de lectura y decodificación, es llevado a cabo el paso de la ejecución de la instrucción. Durante este paso, varias unidades del CPU son conectadas de tal manera que ellas pueden realizar la operación deseada. Si, por ejemplo, una operación de adición fue solicitada, una unidad aritmético lógica (ALU) será conectada a un conjunto de entradas y un conjunto de salidas. Las entradas proporcionan los números a ser sumados, y las salidas contendrán la suma final. La ALU contiene la circuitería para realizar operaciones simples de aritmética y lógica en las entradas, como adición y operaciones de bits (bitwise). Si la operación de adición produce un resultado demasiado grande para

poder ser manejado por el CPU, también puede ser ajustada una bandera (flag) de desbordamiento aritmético localizada en un registro de banderas (ver abajo la sección sobre rango de números enteros).
El paso final, la escritura (writeback), simplemente "escribe" los resultados del paso de ejecución a una cierta forma de memoria. Muy a menudo, los resultados son escritos a algún registro interno del CPU para acceso rápido por subsecuentes instrucciones. En otros casos los resultados pueden ser escritos a una memoria principal más lenta pero más barata y más grande. Algunos tipos de instrucciones manipulan el contador de programa en lugar de directamente producir datos de resultado. Éstas son llamadas generalmente "saltos" (jumps) y facilitan comportamientos como |bucles (loops), la ejecución condicional de programas (con el uso de saltos condicionales), y funciones en programas.[4] Muchas instrucciones también cambiarán el estado de dígitos en un registro de "banderas". Estas banderas pueden ser usadas para influenciar cómo se comporta un programa, puesto que a menudo indican el resultado de varias operaciones. Por ejemplo, un tipo de instrucción de "comparación" considera dos valores y fija un número, en el registro de banderas, de acuerdo a cuál es el mayor. Entonces, esta bandera puede ser usada por una posterior instrucción de salto para determinar el flujo de programa.
Después de la ejecución de la instrucción y la escritura de los datos resultantes, el proceso entero se repite con el siguiente ciclo de instrucción, normalmente leyendo la siguiente instrucción en secuencia debido al valor incrementado en el contador de programa. Si la instrucción completada era un salto, el contador de programa será modificado para contener la dirección de la instrucción a la cual se saltó, y la ejecución del programa continúa normalmente. En CPUs más complejos que el descrito aquí, múltiples instrucciones pueden ser leídas, decodificadas, y ejecutadas simultáneamente. Esta sección describe lo que es referido generalmente como el "entubado RISC clásico" (Classic RISC pipeline), que de hecho es bastante común entre los CPU simples usados en muchos dispositivos electrónicos, a menudo llamados microcontroladores.[5]
[editar] Diseño e implementación
Artículo principal: Diseño del CPU
Prerrequisitos
Arquitectura informática
Circuitos digitales
[editar] Rango de enteros
La manera en que un CPU representa los números es una opción de diseño que afecta las más básicas formas en que el dispositivo funciona. Algunas de las primeras calculadoras digitales usaron, para representar números internamente, un modelo eléctrico del sistema de numeración decimal común (base diez). Algunas otras computadoras han usado sistemas de numeración más exóticos como el ternario (base tres). Casi todos los CPU modernos representan los números en forma binaria, en donde cada dígito es representado por una cierta cantidad física de dos valores, como un voltaje "alto" o "bajo".[6]

Microprocesador MOS 6502 en un dual in-line package (encapasulado en doble línea), un diseño extremadamente popular de 8 bits.
Con la representación numérica están relacionados el tamaño y la precisión de los números que un CPU puede representar. En el caso de un CPU binario, un bit se refiere a una posición significativa en los números con que trabaja un CPU. El número de bits (o de posiciones numéricas, o dígitos) que un CPU usa para representar los números, a menudo se llama "tamaño de la palabra", "ancho de bits", "ancho de ruta de datos", o "precisión del número entero" cuando se ocupa estrictamente de números enteros (en oposición a números de coma flotante). Este número difiere entre las arquitecturas, y a menudo dentro de diferentes unidades del mismo CPU. Por ejemplo, un CPU de 8 bits maneja un rango de números que pueden ser representados por ocho dígitos binarios, cada dígito teniendo dos valores posibles, y en combinación los 8 bits teniendo 28 ó 256 números discretos. En efecto, el tamaño del número entero fija un límite de hardware en el rango de números enteros que el software corre y que el CPU puede usar directamente.[7]
El rango del número entero también puede afectar el número de posiciones en memoria que el CPU puede direccionar (localizar). Por ejemplo, si un CPU binario utiliza 32 bits para representar una dirección de memoria, y cada dirección de memoria representa a un octeto (8 bits), la cantidad máxima de memoria que el CPU puede direccionar es 232 octetos, o 4 GB. Ésta es una vista muy simple del espacio de dirección del CPU, y muchos diseños modernos usan métodos de dirección mucho más complejos como paginación para localizar más memoria que su rango entero permitiría con un espacio de dirección plano.
Niveles más altos del rango de números enteros requieren más estructuras para manejar los dígitos adicionales, y por lo tanto, más complejidad, tamaño, uso de energía, y generalmente costo. Por ello, no es del todo infrecuente, ver microcontroladores de 4 y 8 bits usados en aplicaciones modernas, aun cuando están disponibles CPU con un rango mucho más alto (de 16, 32, 64, e incluso 128 bits). Los microcontroladores más simples son generalmente más baratos, usan menos energía, y por lo tanto disipan menos calor. Todo esto pueden ser consideraciones de diseño importantes para los dispositivos electrónicos. Sin embargo, en aplicaciones del extremo alto, los beneficios producidos por el rango adicional, (más a menudo el espacio de dirección adicional), son más significativos y con frecuencia afectan las opciones del diseño. Para ganar algunas de las ventajas proporcionadas por las longitudes de bits tanto más bajas, como más altas, muchas CPUs están diseñadas con anchos de bit diferentes para diferentes unidades del dispositivo. Por ejemplo, el IBM System/370 usó un CPU que fue sobre todo de 32 bits, pero usó precisión de 128 bits dentro de sus unidades de coma flotante para facilitar mayor exactitud y rango de números de coma flotante . Muchos diseños posteriores de CPU usan una mezcla de ancho de bits similar, especialmente cuando el procesador está diseñado para usos de propósito general donde se requiere un razonable equilibrio entre la capacidad de números enteros y de coma flotante.
[editar] Frecuencia de reloj

Artículo principal: Frecuencia de reloj
La mayoría de los CPU, y de hecho, la mayoría de los dispositivos de lógica secuencial, son de naturaleza síncrona.[8] Es decir, están diseñados y operan en función de una señal de sincronización. Esta señal, conocida como señal de reloj, usualmente toma la forma de una onda cuadrada periódica. Calculando el tiempo máximo en que las señales eléctricas pueden moverse en las varias bifurcaciones de los muchos circuitos de un CPU, los diseñadores pueden seleccionar un período apropiado para la señal del reloj.
Este período debe ser más largo que la cantidad de tiempo que toma a una señal moverse, o propagarse, en el peor de los casos. Al fijar el período del reloj a un valor bastante mayor sobre el retardo de la propagación del peor caso, es posible diseñar todo el CPU y la manera que mueve los datos alrededor de los "bordes" de la subida y bajada de la señal del reloj. Esto tiene la ventaja de simplificar el CPU significativamente, tanto en una perspectiva de diseño, como en una perspectiva de cantidad de componentes. Sin embargo, esto también tiene la desventaja que todo el CPU debe esperar por sus elementos más lentos, aun cuando algunas unidades de la misma son mucho más rápidas. Esta limitación ha sido compensada en gran parte por varios métodos de aumentar el paralelismo del CPU (ver abajo).
Sin embargo, las solamente mejoras arquitectónicas no solucionan todas las desventajas de CPUs globalmente síncronas. Por ejemplo, una señal de reloj está sujeta a los retardos de cualquier otra señal eléctrica. Velocidades de reloj más altas en CPUs cada vez más complejas hacen más difícil de mantener la señal del reloj en fase (sincronizada) a través de toda la unidad. Esto ha conducido que muchos CPU modernos requieran que se les proporcione múltiples señales de reloj idénticas, para evitar retardar una sola señal lo suficiente significativamente como para hacer al CPU funcionar incorrectamente. Otro importante problema cuando la velocidad del reloj aumenta dramáticamente, es la cantidad de calor que es disipado por el CPU. La señal del reloj cambia constantemente, provocando la conmutación de muchos componentes (cambio de estado) sin importar si están siendo usados en ese momento. En general, un componente que está cambiando de estado, usa más energía que un elemento en un estado estático. Por lo tanto, a medida que la velocidad del reloj aumenta, así lo hace también la disipación de calor, causando que el CPU requiera soluciones de enfriamiento más efectivas.
Un método de tratar la conmutación de componentes innecesarios se llama el clock gating, que implica apagar la señal del reloj a los componentes innecesarios, efectivamente desactivándolos. Sin embargo, esto es frecuentemente considerado como difícil de implementar y por lo tanto no ve uso común afuera de diseños de muy baja potencia.[9] Otro método de tratar algunos de los problemas de una señal global de reloj es la completa remoción de la misma. Mientras que quitar la señal global del reloj hace, de muchas maneras, considerablemente más complejo el proceso del diseño, en comparación con diseños síncronos similares, los diseños asincrónicos (o sin reloj) tienen marcadas ventajas en el consumo de energía y la disipación de calor. Aunque algo infrecuente, CPUs completas se han construido sin utilizar una señal global de reloj. Dos notables ejemplos de esto son el AMULET, que implementa la arquitectura del ARM, y el MiniMIPS, compatible con el MIPS R3000. En lugar de remover totalmente la señal del reloj, algunos diseños de CPU permiten a ciertas unidades del dispositivo ser asincrónicas, como por ejemplo, usar ALUs asincrónicas en conjunción con pipelining superescalar para alcanzar algunas ganancias en el desempeño aritmético. Mientras que no está completamente claro

si los diseños totalmente asincrónicos pueden desempeñarse a un nivel comparable o mejor que sus contrapartes síncronas, es evidente que por lo menos sobresalen en las más simples operaciones matemáticas. Esto, combinado con sus excelentes características de consumo de energía y disipación de calor, los hace muy adecuados para sistemas embebidos .
[editar] Paralelismo
Artículo principal: Computación paralela
Modelo de un CPU subescalar. Note que toma quince ciclos para terminar tres instrucciones.
La descripción de la operación básica de un CPU ofrecida en la sección anterior describe la forma más simple que puede tomar un CPU. Este tipo de CPU, usualmente referido como subescalar, opera sobre y ejecuta una sola instrucción con una o dos piezas de datos a la vez.
Este proceso da lugar a una ineficacia inherente en CPUs subescalares. Puesto que solamente una instrucción es ejecutada a la vez, todo el CPU debe esperar que esa instrucción se complete antes de proceder a la siguiente instrucción. Como resultado, el CPU subescalar queda "paralizado" en instrucciones que toman más de un ciclo de reloj para completar su ejecución. Incluso la adición de una segunda unidad de ejecución (ver abajo) no mejora mucho el desempeño. En lugar de un camino quedando congelado, ahora dos caminos se paralizan y aumenta el número de transistores no usados. Este diseño, en donde los recursos de ejecución del CPU pueden operar con solamente una instrucción a la vez, solo puede, posiblemente, alcanzar el desempeño escalar (una instrucción por ciclo de reloj). Sin embargo, el desempeño casi siempre es subescalar (menos de una instrucción por ciclo).
Las tentativas de alcanzar un desempeño escalar y mejor, han resultado en una variedad de metodologías de diseño que hacen comportarse al CPU menos linealmente y más en paralelo. Cuando se refiere al paralelismo en los CPU, generalmente son usados dos términos para clasificar estas técnicas de diseño.
El paralelismo a nivel de instrucción, en inglés Instruction Level Parallelism (ILP), busca aumentar la tasa en la cual las instrucciones son ejecutadas dentro de un CPU, es decir, aumentar la utilización de los recursos de ejecución en la pastilla
El paralelismo a nivel de hilo de ejecución, en inglés thread level parallelism (TLP), que se propone incrementar el número de hilos (efectivamente programas individuales) que un CPU pueda ejecutar simultáneamente.
Cada metodología se diferencia tanto en las maneras en las que están implementadas, como en la efectividad relativa que producen en el aumento del desempeño del CPU para una aplicación.[10]
[editar] ILP: Entubado de instrucción y arquitectura superescalar
Artículo principal: Entubado de instrucción y superescalar

Tubería básica de cinco etapas. En el mejor de los casos, esta tubería puede sostener un ratio de completado de una instrucción por ciclo.
Uno de los más simples métodos usados para lograr incrementar el paralelismo es comenzar los primeros pasos de leer y decodificar la instrucción antes de que la instrucción anterior haya terminado de ejecutarse. Ésta es la forma más simple de una técnica conocida como instruction pipelining (entubado de instrucción), y es utilizada en casi todos los CPU de propósito general modernos. Al dividir la ruta de ejecución en etapas discretas, la tubería permite que más de una instrucción sea ejecutada en cualquier tiempo. Esta separación puede ser comparada a una línea de ensamblaje, en la cual una instrucción es hecha más completa en cada etapa hasta que sale de la tubería de ejecución y es retirada.
Sin embargo, la tubería introduce la posibilidad de una situación donde es necesario terminar el resultado de la operación anterior para completar la operación siguiente; una condición llamada a menudo como conflicto de dependencia de datos. Para hacer frente a esto, debe ser tomado un cuidado adicional para comprobar estas clases de condiciones, y si esto ocurre, se debe retrasar una porción de la tubería de instrucción. Naturalmente, lograr esto requiere circuitería adicional, los procesadores entubados son más complejos que los subescalares, pero no mucho. Un procesador entubado puede llegar a ser casi completamente escalar, solamente inhibido por las abruptas paradas de la tubería (una instrucción durando más de un ciclo de reloj en una etapa).
Tubería superescalar simple. Al leer y despachar dos instrucciones a la vez, un máximo de dos instrucciones por ciclo pueden ser completadas.
Una mejora adicional sobre la idea del entubado de instrucción (instruction pipelining) condujo al desarrollo de un método que disminuye incluso más el tiempo ocioso de los componentes del CPU. Diseños que se dice que son superescalares incluyen una larga tubería de instrucción y múltiples unidades de ejecución idénticas. En una tubería superescalar, múltiples instrucciones son leídas y pasadas a un despachador, que decide si las instrucciones se pueden o no ejecutar en paralelo (simultáneamente). De ser así, son despachadas a las unidades de ejecución disponibles, dando por resultado la capacidad para que varias instrucciones sean ejecutadas simultáneamente. En general, cuanto más

instrucciones un CPU superescalar es capaz de despachar simultáneamente a las unidades de ejecución en espera, más instrucciones serán completadas en un ciclo dado.
La mayor parte de la dificultad en el diseño de una arquitectura superescalar de CPU descansa en crear un despachador eficaz. El despachador necesita poder determinar rápida y correctamente si las instrucciones pueden ejecutarse en paralelo, tan bien como despacharlas de una manera que mantenga ocupadas tantas unidades de ejecución como sea posible. Esto requiere que la tubería de instrucción sea llenada tan a menudo como sea posible y se incrementa la necesidad, en las arquitecturas superescalares, de cantidades significativas de caché de CPU. Esto también crea técnicas para evitar peligros como la predicción de bifurcación, ejecución especulativa, y la ejecución fuera de orden, cruciales para mantener altos niveles de desempeño.
La predicción de bifurcación procura predecir qué rama (o trayectoria) tomará una instrucción condicional, el CPU puede minimizar el número de tiempos que toda la tubería debe esperar hasta que sea completada una instrucción condicional.
La ejecución especulativa frecuentemente proporciona aumentos modestos del desempeño al ejecutar las porciones de código que pueden o no ser necesarias después de que una operación condicional termine.
La ejecución fuera de orden cambia en algún grado el orden en el cual son ejecutadas las instrucciones para reducir retardos debido a las dependencias de los datos.
En el caso donde una porción del CPU es superescalar y una parte no lo es, la parte que no es superescalar sufre en el desempeño debido a las paradas de horario. El Intel Pentium original (P5) tenía dos ALUs superescalares que podían aceptar, cada una, una instrucción por ciclo de reloj, pero su FPU no podía aceptar una instrucción por ciclo de reloj. Así el P5 era superescalar en la parte de números enteros pero no era superescalar de números de coma (o punto [decimal]) flotante. El sucesor a la arquitectura del Pentium de Intel, el P6, agregó capacidades superescalares a sus funciones de coma flotante, y por lo tanto produjo un significativo aumento en el desempeño de este tipo de instrucciones.
El entubado simple y el diseño superescalar aumentan el ILP de un CPU al permitir a un solo procesador completar la ejecución de instrucciones en ratios que sobrepasan una instrucción por ciclo (IPC).[11] La mayoría de los modernos diseños de CPU son por lo menos algo superescalares, y en la última década, casi todos los diseños de CPU de propósito general son superescalares. En los últimos años algo del énfasis en el diseño de computadores de alto ILP se ha movido del hardware del CPU hacia su interface de software, o ISA. La estrategia de la muy larga palabra de instrucción, very long instruction word (VLIW), causa a algún ILP a ser implícito directamente por el software, reduciendo la cantidad de trabajo que el CPU debe realizar para darle un empuje significativo al ILP y por lo tanto reducir la complejidad del diseño.
[editar] TLP: ejecución simultánea de hilos
Otra estrategia comúnmente usada para aumentar el paralelismo de los CPU es incluir la habilidad de correr múltiples hilos (programas) al mismo tiempo. En general, CPUs con alto TLP han estado en uso por mucho más tiempo que los de alto ILP. Muchos de los diseños en los que Seymour Cray fue pionero durante el final de los años 1970 y los años1980 se concentraron en el TLP como su método primario de facilitar enormes capacidades de computación (para su tiempo). De hecho, el TLP, en la forma de mejoras

en múltiples hilos de ejecución, estuvo en uso tan temprano como desde los años 1950 . En el contexto de diseño de procesadores individuales, las dos metodologías principales usadas para lograr el TLP son, multiprocesamiento a nivel de chip, en inglés chip-level multiprocessing (CMP), y el multihilado simultáneo, en inglés simultaneous multithreading (SMT). En un alto nivel, es muy común construir computadores con múltiples CPU totalmente independientes en arreglos como multiprocesamiento simétrico (symmetric multiprocessing (SMP)) y acceso de memoria no uniforme (Non-Uniform Memory Access (NUMA)).[12] Aunque son usados medios muy diferentes, todas estas técnicas logran la misma meta: incrementar el número de hilos que el CPU(s) puede correr en paralelo.
Los métodos de paralelismo CMP y de SMP son similares uno del otro y lo más directo. Éstos implican algo más conceptual que la utilización de dos o más CPU completos y CPU independientes. En el caso del CMP, múltiples "núcleos" de procesador son incluidos en el mismo paquete, a veces en el mismo circuito integrado.[13] Por otra parte, el SMP incluye múltiples paquetes independientes. NUMA es algo similar al SMP pero usa un modelo de acceso a memoria no uniforme. Esto es importante para los computadores con muchos CPU porque el tiempo de acceso a la memoria, de cada procesador, es agotado rápidamente con el modelo de memoria compartido del SMP, resultando en un significativo retraso debido a los CPU esperando por la memoria. Por lo tanto, NUMA es considerado un modelo mucho más escalable, permitiendo con éxito que en un computador sean usados muchos más CPU que los que pueda soportar de una manera factible el SMP. El SMT se diferencia en algo de otras mejoras de TLP en que el primero procura duplicar tan pocas porciones del CPU como sea posible. Mientras es considerada una estrategia TLP, su implementación realmente se asemeja más a un diseño superescalar, y de hecho es frecuentemente usado en microprocesadores superescalares, como el POWER5 de IBM. En lugar de duplicar todo el CPU, los diseños SMT solamente duplican las piezas necesarias para lectura, decodificación, y despacho de instrucciones, así como cosas como los registros de propósito general. Esto permite a un CPU SMT mantener sus unidades de ejecución ocupadas más frecuentemente al proporcionarles las instrucciones desde dos diferentes hilos de software. Una vez más esto es muy similar al método superescalar del ILP, pero ejecuta simultáneamente instrucciones de múltiples hilos en lugar de ejecutar concurrentemente múltiples instrucciones del mismo hilo.
[editar] Procesadores vectoriales y el SIMD
Artículos principales: Procesador vectorial y SIMD
Un menos común pero cada vez más importante paradigma de CPU (y de hecho, de computación en general) trata con vectores. Los procesadores de los que se ha hablado anteriormente son todos referidos como cierto tipo de dispositivo escalar.[14] Como implica su nombre, los procesadores vectoriales se ocupan de múltiples piezas de datos en el contexto de una instrucción, esto contrasta con los procesadores escalares, que tratan una pieza de dato por cada instrucción. Estos dos esquemas de ocuparse de los datos son generalmente referidos respectivamente como SISD (Single Instruction, Single Data|) (Simple Instrucción, Simple Dato) y SIMD (Single Instruction, Multiple Data) (Simple Instrucción, Múltiples Datos). La gran utilidad en crear CPUs que se ocupen de vectores de datos radica en la optimización de tareas que tienden a requerir la misma operación, por ejemplo, una suma, o un producto escalar, a ser realizado en un gran conjunto de datos. Algunos ejemplos clásicos de este tipo de tareas son las aplicaciones multimedia

(imágenes, vídeo, y sonido), así como muchos tipos de tareas científicas y de ingeniería. Mientras que un CPU escalar debe completar todo el proceso de leer, decodificar, y ejecutar cada instrucción y valor en un conjunto de datos, un CPU vectorial puede realizar una simple operación en un comparativamente grande conjunto de datos con una sola instrucción. Por supuesto, esto es solamente posible cuando la aplicación tiende a requerir muchos pasos que apliquen una operación a un conjunto grande de datos.
La mayoría de los primeros CPU vectoriales, como el Cray-1, fueron asociados casi exclusivamente con aplicaciones de investigación científica y criptografía. Sin embargo, a medida que la multimedia se desplazó en gran parte a medios digitales, ha llegado a ser significativa la necesidad de una cierta forma de SIMD en CPUs de propósito general. Poco después de que comenzara a ser común incluir unidades de coma flotante en procesadores de uso general, también comenzaron a aparecer especificaciones e implementaciones de unidades de ejecución SIMD para los CPU de uso general. Algunas de estas primeras especificaciones SIMD, como el MMX de Intel, fueron solamente para números enteros. Esto demostró ser un impedimento significativo para algunos desarrolladores de software, ya que muchas de las aplicaciones que se beneficiaban del SIMD trataban sobre todo con números de coma flotante. Progresivamente, éstos primeros diseños fueron refinados y rehechos en alguna de las comunes, modernas especificaciones SIMD, que generalmente están asociadas a un ISA. Algunos ejemplos modernos notables son el SSE de Intel y el AltiVec relacionado con el PowerPC (también conocido como VMX).[15
Tarjeta de expansiónDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda

Instalación de una tarjeta de expansión.
Las tarjetas de expansión son dispositivos con diversos circuitos integrados y controladores que, insertadas en sus correspondientes ranuras de expansión, sirven para ampliar las capacidades de un ordenador. Las tarjetas de expansión más comunes sirven para añadir memoria, controladoras de unidad de disco, controladoras de vídeo, puertos serie o paralelo y dispositivos de módem internos. Por lo general, se suelen utilizar indistintamente los términos «placa» y «tarjeta» para referirse a todas las tarjetas de expansión.
En la actualidad las tarjetas suelen ser de tipo PCI, PCI Express o AGP. Como ejemplo de tarjetas que ya no se utilizan tenemos la de tipo Bus ISA.
Gracias al avance en la tecnología USB y a la integración de audio, video o red en la placa base, hoy en día son menos imprescindibles para tener un PC completamente funcional.
[editar] La historia de la tarjeta de expansión
El primer microordenador en ofrecer un bus de tarjeta tipo ranura fue el Altair 8800, desarrollado en 1974-1975. Inicialmente, las implementaciones de este bus eran de marca registrada (como Apple II y Macintosh), pero en 1982 fabricantes de computadoras basadas en el Intel 8080/Zilog Z80 que ejecutaban CP/M ya habían adoptado el estándar S-100. IBM lanzó el bus XT, con el primer IBM PC en 1981; se llamaba entonces el bus PC, ya que el IBM XT, que utilizaba el mismo bus (con una leve excepción) no se lanzó hasta 1983. XT (también denominado ISA de 8 bits) fue reemplazado por ISA (también denominado ISA de 16 bits), conocido originalmente como el bus AT, en 1984. El bus MCA de IBM, desarrollado para el PS/2 en 1987, competía con ISA, pero cayó en desgracia debido a la aceptación general de ISA de parte de la industria, y la licencia cerrada que IBM mantenía sobre MCA. EISA, la versión extendida de 32 bits abogada por Compaq, era común en las placas base de los PC hasta 1997, cuando Microsoft lo declaró un «subsistema heredado» en el libro blanco industrial PC 97. VESA Local Bus, un bus de expansión al principio de los 1990 que estaba ligado intrínsecamente a la CPU 80486, se volvió obsoleto (además del procesador) cuando Intel lanzó la CPU Pentium en 1993.

El bus PCI se lanzó en 1991 para reemplazar a ISA. El estándar (ahora en la versión 3.0) se encuentra en las placas base de los PC aun hoy en día. Intel lanzó el bus AGP en 1997 como una solución dedicada de aceleración de video. Aunque se denominaba un bus, AGP admite una sola tarjeta a la vez. A partir de 2005, PCI Express ha estado reemplazando a PCI y a AGP. Este estándar, aprobado en 2004, implementa el protocolo lógico PCI a través de una interfaz de comunicación en serie.
Después del bus S-100, este artículo sólo menciona buses empleados en PCs compatibles con IBM/Windows-Intel. La mayoría de las otras líneas de computadoras que no eran compatibles con IBM, inclusive las de Tandy, Commodore, Amiga y Atari, ofrecían sus propios buses de expansión. Aun muchas consolas de videojuegos, tales como el Sega Genesis, incluían buses de expansión; al menos en el caso del Genesis, el bus de expansión era de marca registrada, y de hecho las ranuras de cartucho de la muchas consolas que usaban cartuchos (excepto el Atari 2600) calificarían como buses de expansión, ya que exponían las capacidades de lectura y escritura del bus interno del sistema. No obstante, los módulos de expansión conectados a esos interfaces, aunque eran funcionalmente iguales a las tarjetas de expansión, no son técnicamente tarjetas de expansión, debido a su forma física.
Para sus modelos 1000 EX y 1000 HX, Tandy Computer diseñó la interfaz de expansión PLUS, una adaptación de las tarjetas del bus XT con un factor de forma más pequeño. Porque es eléctricamente compatible con el bus XT (también denominado ISA de 8 bits o XT-ISA), un adaptador pasivo puede utilizarse para conectar tarjetas XT a un conector de expansión PLUS. Otra característica de tarjetas PLUS es que se pueden apilar. Otro bus que ofrecía módulos de expansión capaces de ser apilados era el bus «sidecar» empleado por el IBM PCjr. Éste pudo haber sido eléctricamente igual o similar al bus XT; seguramente poseía algunas similitudes ya que ambos esencialmente exponían los buses de dirección y de datos de la CPU 8088, con búferes y preservación de estado, la adición de interrupciones y DMA proveídos por chips complementarios de Intel, y algunas líneas de detección de fallos (corriente idónea, comprobación de Memoria, comprobación de Memoria E/S). Otra vez, PCjr sidecars no son técnicamente tarjetas de expansión, sino módulos de expansión, con la única diferencia siendo que el sidecar es una tarjeta de memoria envuelta en una caja de plástico (con agujeros que exponen los conectores).
[editar] Tipos de tarjetas de expansión
Capturadora de televisión Módem interno Tarjeta gráfica Tarjeta de red Tarjeta de sonido
Ranura de expansiónDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda Para otros usos de este término, véase Slot.

Slot de expansión de 44 pines (objetos azules) y placa de circuitos. El slot mide 3.5" (9 cm) con 22 contactos en cada lado.
Una ranura de expansión (también llamada slot de expansión) es un elemento de la placa base de un ordenador que permite conectar a ésta una tarjeta adicional o de expansión, la cual suele realizar funciones de control de dispositivos periféricos adicionales, tales como monitores, impresoras o unidades de disco. En las tarjetas madre del tipo LPX las ranuras de expansión no se encuentran sobre la placa sino en un conector especial denominado riser card.
Las ranuras están conectadas entre sí. Una computadora personal dispone generalmente de ocho unidades, aunque puede llegar hasta doce.
Contenido
[ocultar]
1 Tipos de ranuras o1.1 XT o1.2 ISA o1.3 VESA o1.4 PCI 1.4.1 Variantes convencionales de PCI o1.5 Audio/módem rise o1.6 Comunication and Networking Riser o1.7 PCI-Express 2 Dimensiones de las tarjetas
[editar] Tipos de ranuras
[editar] XT
Es una de los ranuras más antiguas y trabaja con una velocidad muy inferior a las ranuras modernos (8 bits) y a una frecuencia de 4,77 megahercios, ya que garantiza que los PC estén bien ubicados para su mejor funcionamiento necesita ser revisados antes.
[editar] ISA

Tres ranuras ISA.Artículo principal: Industry Standard Architecture
La ranura ISA es un ranura de expansión de 16 bits capaz de ofrecer hasta 16 MB/s a 8 megahercios. Los componentes diseñados para la ranura ISA eran muy grandes y fueron de las primeras ranuras en usarse en las computadoras personales. Hoy en día es una tecnología en desuso y ya no se fabrican placas madre con ranuras ISA. Estas ranuras se incluyeron hasta los primeros modelos del microprocesador Pentium III. Fue reemplazada en el año 2000 por la ranura PCI.
[editar] VESA
Artículo principal: Video Electronics Standards Association
En 1992 el comité VESA de la empresa NEC crea esta ranura para dar soporte a las nuevas placas de video. Es fácilmente identificable en la placa base debido a que consiste de un ISA con una extensión color marrón, trabaja a 32 bits y con una frecuencia que varia desde 33 a 40 megahercios. Tiene 22,3 centímetros de largo (ISA más la extensión) 1,4 de alto, 0,9 de ancho (ISA) y 0,8 de ancho (extensión).
[editar] PCI
Buses PCI de una placa base para Pentium I.Artículo principal: Peripheral Component Interconnect
Peripheral Component Interconnect o PCI es un bus de ordenador estándar para conectar dispositivos periféricos directamente a su placa base. Estos dispositivos pueden ser circuitos integrados ajustados en ésta (los llamados "dispositivos planares" en la especificación PCI) o tarjetas de expansión que se ajustan en conectores. Es común en las computadoras personales, donde ha desplazado al ISA como bus estándar, pero también se emplea en otro tipo de ordenadores.
A diferencia de los buses ISA, el bus PCI permite la configuración dinámica de un dispositivo periférico. En el tiempo de arranque del sistema, las tarjetas PCI y el BIOS

interactúan y negocian los recursos solicitados por la tarjeta PCI. Esto permite asignación de IRQs y direcciones del puerto por medio de un proceso dinámico diferente del bus ISA, donde las IRQs tienen que ser configuradas manualmente usando jumpers externos. Las últimas revisiones de ISA y el bus MCA de IBM ya incorporaban tecnologías que automatizaban todo el proceso de configuración de las tarjetas, pero el bus PCI demostró una mayor eficacia en tecnología plug and play. Aparte de esto, el bus PCI proporciona una descripción detallada de todos los dispositivos PCI conectados a través del espacio de configuración PCI.
[editar] Variantes convencionales de PCI
Cardbus es un formato PCMCIA de 32 bits, 33 MHz PCI. Compact PCI, utiliza módulos de tamaño Eurocard conectado en una placa hija PCI. PCI 2.2 funciona a 66 MHz (requiere 3.3 voltios en las señales) (índice de transferencia
máximo de 503 MiB/s (533MB/s) PCI 2.3 permite el uso de 3.3 voltios y señalizador universal, pero no soporta los 5 voltios
en las tarjetas. PCI 3.0 es el estándar final oficial del bus, con el soporte de 5 voltios completamente
removido. PCI-X cambia el protocolo levemente y aumenta la transferencia de datos a 133 MHz
(índice de transferencia máximo de 1014 MiB/s). PCI-X 2.0 especifica un ratio de 266 MHz (índice de transferencia máximo de 2035
MiB/s) y también de 533 MHz, expande el espacio de configuración a 4096 bytes, añade una variante de bus de 16 bits y utiliza señales de 1.5 voltios.
Mini PCI es un nuevo formato de PCI 2.2 para utilizarlo internamente en los portátiles. PC/104-Plus es un bus industrial que utiliza las señales PCI con diferentes conectores. Advanced Telecommunications Computing Architecture (ATCA o AdvancedTCA) es la
siguiente generación de buses para la industria de las telecomunicaciones.
[editar] Audio/módem rise

Ranura audio/módem rise (izquierda) junto a una ranura PCI (derecha).Artículo principal: Audio/modem riser
El audio/modem rise o AMR es una ranura de expansión en la placa madre para dispositivos de audio (como [Ttarjeta de sonido|tarjetas de sonido]]) o módems lanzada en 1998 y presente en placas de Intel Pentium III, Intel Pentium IV y AMD Athlon. Fue diseñada por Intel como una interfaz con los diversos chipsets para proporcionar funcionalidad analógica de entrada/salida permitiendo que esos componentes fueran reutilizados en placas posteriores sin tener que pasar por un nuevo proceso de certificación de la Comisión Federal de Comunicaciones (con los costes en tiempo y económicos que conlleva).
Cuenta con 2x23 pines divididos en dos bloques, uno de 11 (el más cercano al borde de la placa madre) y otro de 12, con lo que es físicamente imposible una inserción errónea, y suele aparecer en lugar de una ranura PCI, aunque a diferencia de este no es plug and play y no admite tarjetas aceleradas por hardware (sólo por software).
En un principio se diseñó como ranura de expansión para dispositivos económicos de audio o comunicaciones ya que estos harían uso de los recursos de la máquina como el microprocesador y la memoria RAM. Esto tuvo poco éxito ya que fue lanzado en un momento en que la potencia de las máquinas no era la adecuada para soportar esta carga y el mal o escaso soporte de los drivers para estos dispositivos en sistemas operativos que no fuesen Windows.

Tecnológicamente ha sido superado por las tecnologías Advanced Communications Riser (de VIA y AMD) y Communication and Networking Riser de Intel. Pero en general todas las tecnologías en placas hijas (riser card) como ACR, AMR, y CNR, están hoy obsoletas en favor de los componentes embebidos y los dispositivos USB.
[editar] Comunication and Networking Riser
Artículo principal: Communication and Networking Riser
Communication and Networking Riser, o CNR, es una ranura de expansión en la placa base para dispositivos de comunicaciones como módems o tarjetas de red. Un poco más grande que la ranura audio/módem rise, CNR fue introducida en febrero de 2000 por Intel en sus placas madre para procesadores Pentium y se trataba de un diseño propietario por lo que no se extendió más allá de las placas que incluían los chipsets de Intel, que más tarde fue implementada en placas madre con otros chipset.
[editar] PCI-Express
Ranura PCI-Express 1x.Artículo principal: PCI-Express
PCI-Express, abreviado como PCI-E o PCIE, aunque erróneamente se le suele abreviar como PCIX o PCI-X. Sin embargo, PCI-Express no tiene nada que ver con PCI-X que es una evolución de PCI, en la que se consigue aumentar el ancho de banda mediante el incremento de la frecuencia, llegando a ser 32 veces más rápido que el PCI 2.1. Su velocidad es mayor que PCI-Express, pero presenta el inconveniente de que al instalar más de un dispositivo la frecuencia base se reduce y pierde velocidad de transmisión.
Este bus está estructurado como enlaces punto a punto,full-duplex, trabajando en serie. En PCIE 1.1 (el más común en 2007) cada enlace transporta 250 MB/s en cada dirección. PCIE 2.0 dobla esta tasa y PCIE 3.0 la dobla de nuevo.
Cada slot de expansión lleva uno, dos, cuatro, ocho, dieciséis o treinta y dos enlaces de datos entre la placa base y las tarjetas conectadas. El número de enlaces se escribe con una x de prefijo (x1 para un enlace simple y x16 para una tarjeta con dieciséis enlaces. Treinta y dos enlaces de 250MB/s dan el máximo ancho de banda, 8 GB/s (250 MB/s x 32) en cada dirección para PCIE 1.1. En el uso más común (x16) proporcionan un ancho de banda de 4 GB/s (250 MB/s x 16) en cada dirección. En comparación con otros buses, un enlace simple es aproximadamente el doble de rápido que el PCI normal; un slot de cuatro enlaces, tiene un ancho de banda comparable a la versión más rápida de PCI-X 1.0, y ocho enlaces tienen un ancho de banda comparable a la versión más rápida de AGP.

Slots PCI Express (de arriba a abajo: x4, x16, x1 y x16), comparado con uno tradicional PCI de 32 bits, tal como se ven en la placa DFI LanParty nF4 Ultra-D.
Está pensado para ser usado sólo como bus local, aunque existen extensores capaces de conectar múltiples placas base mediante cables de cobre o incluso fibra óptica. Debido a que se basa en el bus PCI, las tarjetas actuales pueden ser reconvertidas a PCI-Express cambiando solamente la capa física. La velocidad superior del PCI-Express permitirá reemplazar casi todos los demás buses, AGP y PCI incluidos. La idea de Intel es tener un solo controlador PCI-Express comunicándose con todos los dispositivos, en vez de con el actual sistema de puente norte y puente sur. Este conector es usado mayormente para conectar tarjetas gráficas.
No es todavía suficientemente rápido para ser usado como bus de memoria. Esto es una desventaja que no tiene el sistema similar HyperTransport, que también puede tener este uso. Además no ofrece la flexibilidad del sistema InfiniBand, que tiene rendimiento similar, y además puede ser usado como bus interno externo.
En 2006 es percibido como un estándar de las placas base para PC, especialmente en tarjetas gráficas. Marcas como ATI Technologies y nVIDIA entre otras tienen tarjetas gráficas en PCI-Express
[editar] Dimensiones de las tarjetas
Una tarjeta PCI de tamaño completo tiene un alto de 107 mm (4.2 pulgadas) y un largo de 312 mm (12.283 pulgadas). La altura incluye el conector de borde de tarjeta.
Además de estas dimensiones el tamaño del backplate está también estandarizado. El backplate es la pieza de metal situada en el borde que se utiliza para fijarla al chasis y contiene los conectores externos. La tarjeta puede ser de un tamaño menor, pero el backplate debe ser de tamaño completo y localizado propiamente. Respecto del anterior bus ISA, está situado en el lado opuesto de la placa para evitar errores.
Las tarjeta de media altura son hoy comunes en equipos compactos con chasis Small Form Factor, pero el fabricante suele proporcionar dos backplates, con el de altura completa fijado en la tarjeta y el de media altura disponible para una fácil sustitución.

Zócalo de CPUDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda
Fotografía ilustrativa de un zócalo LGA1366 para microprocesadores Intel.
El zócalo (socket en inglés) es un sistema electromecánico de soporte y conexión eléctrica, instalado en la placa base, que se usa para fijar y conectar un microprocesador. Se utiliza en equipos de arquitectura abierta, donde se busca que haya variedad de componentes permitiendo el cambio de la tarjeta o el integrado. En los equipos de arquitectura propietaria, los integrados se sueldan sobre la placa base, como sucede en las videoconsolas.
Existen variantes desde 40 conexiones para integrados pequeños, hasta más de 1300 para microprocesadores, los mecanismos de retención del integrado y de conexión dependen de cada tipo de zócalo, aunque en la actualidad predomina el uso de zócalo ZIF (pines) o LGA (contactos).
Contenido
[ocultar]
1 Historia 2 Funcionamiento 3 Algunos ejemplos o3.1 AMD o3.2 Intel 4 Véase también

[editar] Historia
Los primeros procesadores desde el Intel 4004, hasta los de principios de los años 80, se caracterizaron por usar empaque DIP que era un estándar para los circuitos integrados sin importar si eran analógicos o digitales. Para estos empaques de pocos pines (hasta 44) y de configuración sencilla, se usaron bases de plástico con receptores eléctricos, que se usan todavía para otros integrados.
Antiguo Socket |PGA para un procesador Intel 80386.
Debido al aumento en el número de pines, se empezó a utilizar empaques PLCC como en el caso del intel 80186. Este empaque puede ser instalado directamente sobre la placa base (soldándolo) o con un socket PLCC permitiendo el cambio del microprocesador. Actualmente es usado por algunas placas base para los integrados de memoria ROM. En ese zócalo, el integrado se extrae haciendo palanca con un destornillador de punta plana.
En algunos Intel 80386 se usó el empaque PGA en el cual una superficie del procesador tiene un arreglo de pines, y que requiere un zócalo con agujeros sobre su superficie, que retiene el integrado por presión. En la versión para el procesador intel 80486 SX se implementó el llamado Socket 1 que tenia 169 pines. Según estudios de Intel, la presión requerida para instalar o extraer el integrado es de 100 libras, lo que condujo a la invención de zócalos de baja presión LIF y por último al zócalo de presión nula ZIF.
[editar] Funcionamiento
El zócalo va soldado sobre la placa base de manera que tiene conexión eléctrica con los circuitos del circuito impreso. El procesador se monta de acuerdo a unos puntos de guía (borde de plástico, indicadores gráficos, pines o agujeros faltantes) de manera que cada pin o contacto quede alineado con el respectivo punto del zócalo. Alrededor del área del zócalo, se definen espacios libres, se instalan elementos de sujeción y agujeros, que permiten la instalación de dispositivos de disipación de calor, de manera que el procesador quede entre el zócalo y esos disipadores.
En los últimos años el número de pines ha aumentado de manera substancial debido al aumento en el consumo de energía y a la reducción de voltaje de operación. En los últimos 15 años, los procesadores han pasado de voltajes de 5 V a algo más de 1 V y de potencias de 20 vatios, a un promedio de 80 vatios.
Para trasmitir la misma potencia a un voltaje menor, deben llegar mas amperios al procesador lo que requiere conductores más anchos o su equivalente: mas pines dedicados a la alimentación. No es extraño encontrar procesadores que requieren de 80 a 120 amperios de corriente para funcionar cuando están a plena carga, lo que resulta en cientos

de pines dedicados a la alimentación. En un procesador Socket 775, aproximadamente la mitad de contactos son para la corriente de alimentación.
Adaptador de Socket 423 a 478.
La distribución de funciones de los pines, hace parte de las especificaciones de un zócalo y por lo general cuando hay un cambio substancial en las funciones de los puertos de entrada de un procesador (cambio en los buses o alimentación entre otros), se prefiere la formulación de un nuevo estándar de zócalo, de manera que se evita la instalación de procesadores con tarjetas incompatibles.
En algunos casos a pesar de las diferencias entre unos zócalos y otros, por lo general existe retrocompatibilidad (las placas bases aceptan procesadores más antiguos). En algunos casos, si bien no existe compatibilidad mecánica y puede que tampoco de voltajes de alimentación, sí en las demás señales. En el mercado se encuentran adaptadores que permiten montar procesadores en placas con zócalos diferentes, de manera que se monta el procesador sobre el adaptador y éste a su vez sobre el zócalo.
[editar] Algunos ejemplos
Artículo principal: Anexo:Zócalos
[editar] AMD
Socket 462 Socket F Socket 939 Socket 940 Socket AM2 Socket AM2+ Socket AM3
[editar] Intel
Socket 423 Socket 370 Socket 478 Socket 775 Socket 1156 Socket 1366
[editar] Véase también

Circuito impreso Circuito integrado PC Hardware

PeriféricoDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda
Se ha sugerido que periférico de entrada sea fusionado en este artículo o sección. (Discusión).Una vez que hayas realizado la fusión de artículos, pide la fusión de historiales en WP:TAB/F.
En informática, se denomina periféricos a los aparatos o dispositivos auxiliares e independientes conectados a la unidad central de procesamiento de una computadora.
Se consideran periféricos tanto a las unidades o dispositivos a través de los cuales la computadora se comunica con el mundo exterior, como a los sistemas que almacenan o archivan la información, sirviendo de memoria auxiliar de la memoria principal.[cita requerida]
Se entenderá por periférico al conjunto de dispositivos que, sin pertenecer al núcleo fundamental de la computadora, formado por la CPU y la memoria central, permitan realizar operaciones de entrada/salida (E/S) complementarias al proceso de datos que realiza la CPU. Estas tres unidades básicas en un computador, CPU, memoria central y el subsistema de E/S, están comunicadas entre sí por tres buses o canales de comunicación:
el bus de direcciones, para seleccionar la dirección del dato o del periférico al que se quiere acceder,
el bus de control, básicamente para seleccionar la operación a realizar sobre el dato (principalmente lectura, escritura o modificación) y
el bus de datos, por donde circulan los datos.
A pesar de que el término periférico implica a menudo el concepto de “adicional pero no esencial”, muchos de ellos son elementos fundamentales para un sistema informático. El teclado y el monitor, imprescindibles en cualquier computadora personal de hoy en día (no lo fueron en los primeros computadores), son posiblemente los periféricos más comunes, y es posible que mucha gente no los considere como tal debido a que generalmente se toman como parte necesaria de una computadora. El mouse es posiblemente el ejemplo más claro de este aspecto. Hace menos de 20 años no todos las computadora personales incluían este dispositivo. El sistema operativo MS-DOS, el más común en esa época, tenía una interfaz de línea de comandos para la que no era necesaria el empleo de un mouse, todo se hacía mediante comandos de texto. Fue con la popularización de Finder, sistema operativo de la Macintosh de Apple y la posterior aparición de Windows cuando el mouse comenzó a ser un elemento imprescindible en cualquier hogar dotado de una computadora personal. Actualmente existen sistemas operativos con interfaz de texto que pueden prescindir del mouse como, por ejemplo, algunos sistemas básicos de UNIX y GNU/Linux.
Contenido
[ocultar]
1 Tipos de periféricos o1.1 Periféricos de entrada

o1.2 Periféricos de salida o1.3 Periféricos de almacenamiento o1.4 Periféricos de comunicación 2 Enlaces externos
[editar] Tipos de periféricos
Los periféricos pueden clasificarse en 5 categorías principales:
Periféricos de entrada : captan y envían los datos al dispositivo que los procesará. Periféricos de salida : son dispositivos que muestran o proyectan información hacia el
exterior del ordenador. La mayoría son para informar, alertar, comunicar, proyectar o dar al usuario cierta información, de la misma forma se encargan de convertir los impulsos eléctricos en información legible para el usuario. Sin embargo, no todos de este tipo de periféricos es información para el usuario.
Periféricos de entrada/salida (E/S) sirven básicamente para la comunicación de la computadora con el medio externo
Los periféricos de entrada/salida son los que utiliza el ordenador tanto para mandar como para recibir información. Su función es la de almacenar o guardar de forma permanente o virtual todo aquello que hagamos con el ordenador para que pueda ser utilizado por los usuarios u otros sistemas.
Son ejemplos de periférico de entrada/salida o de almacenamiento:
* Disco duro * Grabadora y/o lector de CD * Grabadora y/o lector de DVD * Grabadora y/o lector de HD-DVD * Memoria Flash * Cintas magnéticas * Memoria portátil * Disquete * Pantalla táctil * Casco virtual * Grabadora y/o lector de CD * Grabadora y/o lector de DVD * Grabadora y/o lector de Blu-ray * Grabadora y/o lector de HD-DVD
Periféricos de almacenamiento : son los dispositivos que almacenan datos e información por bastante tiempo. La memoria RAM no puede ser considerada un periférico de almacenamiento, ya que su memoria es volátil y temporal.
Periféricos de comunicación : son los periféricos que se encargan de comunicarse con otras máquinas o computadoras, ya sea para trabajar en conjunto, o para enviar y recibir información.
[editar] Periféricos de entrada
Artículo principal: Periférico de entrada

Ratón.
Son los que permiten introducir datos externos a la computadora para su posterior tratamiento por parte de la CPU. Estos datos pueden provenir de distintas fuentes, siendo la principal un ser humano. Los periféricos de entrada más habituales son:
Teclado Micrófono Escáner Ratón o mouse Escáner de código de barras Cámara web Lápiz óptico
[editar] Periféricos de salida
Son los que reciben información que es procesada por la CPU y la reproducen para que sea perceptible por el usuario. Algunos ejemplos son:
Monitor Impresora Fax Tarjeta de sonido Altavoz
[editar] Periféricos de almacenamiento

Interior de un disco duro.
Se encargan de guardar los datos de los que hace uso la CPU para que ésta pueda hacer uso de ellos una vez que han sido eliminados de la memoria principal, ya que ésta se borra cada vez que se apaga la computadora. Pueden ser internos, como un disco duro, o extraíbles, como un CD. Los más comunes son:
Disco duro Disquete Unidad de CD Unidad de DVD Unidad de Blu-ray Disc Memoria flash Memoria USB Cinta magnética Tarjeta perforada Memoria portátil Otros dispositivos de almacenamiento: oZip (Iomega): Caben 100 Mb y utiliza tecnología magnética.oEZFlyer (SyQuest): Caben 230 Mb y tiene una velocidad de lectura muy altaoSuperDisk LS-120: Caben 200 Mb y utilizan tecnología magneto-óptica.oMagneto-ópticos de 3,5: Caben de 128 Mb a 640 MboJaz (Iomega): Es como el Zip y caben de 1 GB a 2 GB.
[editar] Periféricos de comunicación
Su función es permitir o facilitar la interacción entre dos o más computadoras, o entre una computadora y otro periférico externo a la computadora. Entre ellos se encuentran los siguientes:
Fax-Módem Tarjeta de red Concentrador

Switch Enrutador Tarjeta inalámbrica Tarjeta Bluetooth Controlador ambos exista un tercer elemento que actúe como traductor de señales. Este
traductor es un circuito electrónico denominado interfaz.

Teclado (informática)De Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda Para otros usos de este término, véase Teclado.
En informática un teclado es un periférico de entrada o dispositivo, en parte inspirado en el teclado de las máquina de escribir, que utiliza una disposición de botones o teclas, para que actúen como palancas mecánicas o interruptores electrónicos que envían información a la computadora. Después de las tarjetas perforadas y las cintas de papel, la interacción a través de los teclados al estilo teletipo se convirtió en el principal medio de entrada para las computadoras. El teclado tiene entre 99 y 108 teclas aproximadamente, y está dividido en cuatro bloques:
1. Bloque de funciones: Va desde la tecla F1 a F12, en tres bloques de cuatro: de F1 a F4, de F5 a F8 y de F9 a F12. Funcionan de acuerdo al programa que esté abierto. Por ejemplo, en muchos programas al presionar la tecla F1 se accede a la ayuda asociada a ese programa.
2. Bloque alfanumérico: Está ubicado en la parte inferior del bloque de funciones, contiene los números arábigos del 1 al 0 y el alfabeto organizado como en una máquina de escribir, además de algunas teclas especiales.
3. Bloque especial: Está ubicado a la derecha del bloque alfanumérico, contiene algunas teclas especiales como Imp Pant, Bloq de desplazamiento, pausa, inicio, fin, insertar, suprimir, RePag, AvPag, y las flechas direccionales que permiten mover el punto de inserción en las cuatro direcciones.
4. Bloque numérico: Está ubicado a la derecha del bloque especial, se activa al presionar la tecla Bloq Num, contiene los números arábigos organizados como en una calculadora con el fin de facilitar la digitación de cifras. Además contiene los signos de las cuatro operaciones básicas: suma +, resta -, multiplicación * y division /; también contiene una tecla de Intro o Enter.
Teclado de un terminal CT-1024

Teclado integrado de un Sinclair ZX Spectrum.
Terminal de computadora TeleVideo 925
Teclado ajustable de Apple.
Teclado PC inalámbrico
Teclado SUN tipo 5
Contenido
[ocultar]
1 Historia o1.1 Disposición de las teclas o1.2 Primeros teclados

o1.3 Generación 16 bits o1.4 Teclados con USB 2 Teclas inertes 3 Tipos de teclado 4 Estructura 5 Disposición del teclado 6 Clasificación de teclados de computadoras 7 Accesos directos en el teclado 8 Véase también 9 Fuentes y referencias 10 Enlaces externos
[editar] Historia
[editar] Disposición de las teclas
La disposición de las teclas se remonta a las primeras máquinas de escribir, las cuales eran enteramente mecánicas. Al pulsar una letra en el teclado, se movía un pequeño martillo mecánico, que golpeaba el papel a través de una cinta impregnada en tinta. Al escribir con varios dedos de forma rápida, los martillos no tenían tiempo de volver a su posición por la frecuencia con la que cada letra aparecía en un texto. De esta manera la pulsación era más lenta con el fin de que los martillos se atascaran con menor frecuencia[cita requerida].
Sobre la distribución de los caracteres en el teclado surgieron dos variantes principales: la francesa AZERTY y la alemana QWERTY. Ambas se basaban en cambios en la disposición según las teclas más frecuentemente usadas en cada idioma. A los teclados en su versión para el idioma español además de la Ñ, se les añadieron los caracteres de acento agudo (´), grave (`) y circunflejo (^)), además de la cedilla (Ç) aunque estos caracteres son de mayor uso en francés, portugués o en catalán.
Cuando aparecieron las máquinas de escribir eléctricas, y después los ordenadores, con sus teclados también eléctricos, se consideró seriamente modificar la distribución de las letras en los teclados, colocando las letras más corrientes en la zona central; es el caso del Teclado Simplificado Dvorak. El nuevo teclado ya estaba diseñado y los fabricantes preparados para iniciar la fabricación. Sin embargo, el proyecto se canceló debido al temor de que los usuarios tuvieran excesivas incomodidades para habituarse al nuevo teclado, y que ello perjudicara la introducción de las computadoras personales, que por aquel entonces se encontraban en pleno auge.

Teclado QWERTY de 102 teclas con distribución Inglés de Estados Unidos
[editar] Primeros teclados
Además de teletipos y máquinas de escribir eléctricas como la IBM Selectric, los primeros teclados solían ser un terminal de computadora que se comunicaba por puerto serial con la computadora. Además de las normas de teletipo, se designó un estándar de comunicación serie, según el tiempo de uso basado en el juego de caracteres ANSI, que hoy sigue presente en las comunicaciones por módem y con impresora (las primeras computadoras carecían de monitor, por lo que solían comunicarse, o bien por luces en su panel de control, o bien enviando la respuesta a un dispositivo de impresión). Se usaba para ellos las secuencias de escape, que se generaban o bien por teclas dedicadas, o bien por combinaciones de teclas, siendo una de las más usadas la tecla Control.
La llegada de la computadora doméstica trae una inmensa variedad de teclados y de tecnologías y calidades (desde los muy reputados por duraderos del Dragon 32 a la fragilidad de las membranas de los equipos Sinclair), aunque la mayoría de equipos incorporan la placa madre bajo el teclado, y es la CPU o un circuito auxiliar (como el chip de sonido General Instrument AY-3-8910 en los MSX) el encargado de leerlo. Son casos contados los que recurren o soportan comunicación serial (curiosamente es la tecnología utilizada en el Sinclair Spectrum 128 para el keypad numérico). Sólo los MSX establecerán una norma sobre el teclado, y los diferentes clones del TRS-80 seguirán el diseño del clonado.
[editar] Generación 16 bits
Mientras que el teclado del IBM PC y la primera versión del IBM AT no tuvo influencia más allá de los clónicos PC, el Multifunción II (o teclado extendido AT de 101/102 teclas) aparecido en 1987 refleja y estandariza de facto el teclado moderno con cuatro bloques diferenciados : un bloque alfanumérico con al menos una tecla a cada lado de la barra espaciadora para acceder a símbolos adicionales; sobre él una hilera de 10 o 12 teclas de función; a la derecha un teclado numérico, y entre ambos grandes bloques, las teclas de cursor y sobre ellas varias teclas de edición. Con algunas variantes este será el esquema usado por los Atari ST, los Commodore Amiga (desde el Commodore Amiga 500), los Sharp X68000, las estaciones de trabajo SUN y Silicon Graphics y los Acorn Archimedes/Acorn RISC PC. Sólo los Mac siguen con el esquema bloque alfanumérico + bloque numérico, pero también producen teclados extendidos AT, sobre todo para los modelos con emulación PC por hardware.

Mención especial merece la serie 55 de teclados IBM, que ganaron a pulso la fama de "indestructibles", pues tras más de 10 años de uso continuo en entornos como las aseguradoras o la administración pública seguían funcionando como el primer día. [cita requerida]
Con la aparición del conector PS/2, varios fabricantes de equipos no PC proceden a incorporarlo en sus equipos. Microsoft, además de hacerse un hueco en la gama de calidad alta, y de presentar avances ergonómicos como el Microsoft Natural Keyboard, añade 3 nuevas teclas tras del lanzamiento de Windows 95. A la vez se generalizan los teclados multimedia que añaden teclas para controlar en el PC el volumen, el lector de CD-ROM o el navegador, incorporan en el teclado altavoces, calculadora, almohadilla sensible al tacto o bola trazadora
[editar] Teclados con USB
Aunque los teclados USB comienzan a verse al poco de definirse el estándar USB, es con la aparición del Apple iMac, que trae tanto teclado como mouse USB de serie cuando se estandariza el soporte de este tipo de teclado. Además tiene la ventaja de hacerlo independiente del hardware al que se conecta. El estándar define scancodes de 16 bits que se transmiten por la interfaz. Del 0 al 3 son códigos de error del protocolo, llamados NoEvent, ErrorRollOver, POSTFail, ErrorUndefined, respectivamente. Del 224 al 231 se reservan para las teclas modificadoras (LCtrl, LShift, LAlt, LGUI, RCtrl, RShift, RAlt, RGUI)
Existen distintas disposiciones de teclado, para que se puedan utilizar en diversos lenguajes. El tipo estándar de teclado inglés se conoce como QWERTY. Denominación de los teclados de computadora y máquinas de escribir que se utilizan habitualmente en los países occidentales, con alfabeto latino. Las siglas corresponden a las primeras letras del teclado, comenzando por la izquierda en la fila superior. El teclado en español o su variante latinoamericana son teclados QWERTY que se diferencian del inglés por presentar la letra "ñ" y "Ñ" en su distribución de teclas.Se han sugerido distintas alternativas a la disposición de teclado QWERTY, indicando ventajas tales como mayores velocidades de tecleado. La alternativa más famosa es el Teclado Simplificado Dvorak.
Sólo las teclas etiquetadas con una letra en mayúscula pueden ofrecer ambos tipos: mayúsculas y minúsculas. Para teclear un símbolo que se encuentra en la parte superior izquierda de una tecla, se emplea la tecla mayúsculas, etiquetada como "↑". Para teclear un símbolo que se encuentra en la parte inferior derecha de una tecla, se emplea la tecla Alt-Gr.
[editar] Teclas inertes
Algunas lenguas incluyen caracteres adicionales al teclado inglés, como los caracteres acentuados. Teclear los caracteres acentuados resulta más sencillo usando las teclas inertes. Cuando se utiliza una de estas teclas, si se presiona la tecla correspondiente al acento deseado nada ocurre en la pantalla, por lo que, a continuación se debe presionar la tecla del carácter a acentuar. Esta combinación de teclas requiere que se teclee una secuencia aceptable. Por ejemplo, si se presiona la tecla inerte del acento (ej. ´ ) seguido de la letra

A , obtendrá una "a" acentuada (á). Sin embargo, si se presiona una tecla inerte y a continuación la tecla T , no aparecerá nada en la pantalla o aparecerán los dos caracteres por separado (´t), a menos que la fuente particular para su idioma incluya la "t" acentuada.
Para teclear una marca de acento diacrítico, simplemente se presiona la tecla inerte del acento, seguida de la barra de espacio.
[editar] Tipos de teclado
Hubo y hay muchos teclados diferentes, dependiendo del idioma, fabricante… IBM ha soportado tres tipos de teclado: el XT, el AT y el MF-II.
El primero (1981) de éstos tenía 83 teclas, usaban es Scan Code set1, unidireccionales y no eran muy ergonómicos, ahora está obsoleto.
Más tarde (1984) apareció el teclado PC/AT con 84 teclas (una más al lado de SHIFT IZQ), ya es bidireccional, usa el Scan Code set 2 y al igual que el anterior cuenta con un conector DIN de 5 pines.
En 1987 IBM desarrolló el MF-II (Multifunción II o teclado extendido) a partir del AT. Sus características son que usa la misma interfaz que el AT, añade muchas teclas más, se ponen leds y soporta el Scan Code set 3, aunque usa por defecto el 2. De este tipo hay dos versiones, la americana con 101 teclas y la europea con 102.
Los teclados PS/2 son básicamente iguales a los MF-II. Las únicas diferencias son el conector mini-DIN de 6 pines (más pequeño que el AT) y más comandos, pero la comunicación es la misma, usan el protocolo AT. Incluso los ratones PS/2 usan el mismo protocolo.
Hoy en día existen también los teclados en pantalla, también llamados teclados virtuales, que son (como su mismo nombre indica) teclados representados en la pantalla, que se utilizan con el ratón o con un dispositivo especial (podría ser un joystick). Estos teclados lo utilizan personas con discapacidades que les impiden utilizar adecuadamente un teclado fisico.
Actualmente la denominación AT ó PS/2 sólo se refiere al conector porque hay una gran diversidad de ellos.
[editar] Estructura
Un teclado realiza sus funciones mediante un micro controlador. Estos micro controladores tienen un programa instalado para su funcionamiento, estos mismos programas son ejecutados y realizan la exploración matricial de las teclas cuando se presiona alguna, y así determinar cuales están pulsadas.
Para lograr un sistema flexible los microcontroladores no identifican cada tecla con su carácter serigrafiado en la misma sino que se adjudica un valor numérico a cada una de ellas que sólo tiene que ver con su posición física. El teclado latinoamericano sólo da soporte con teclas directas a los caracteres específicos del castellano, que incluyen dos

tipos de acento, la letra eñe y los signos de exclamación e interrogación. El resto de combinaciones de acentos se obtienen usando una tecla de extensión de grafismos. Por lo demás el teclado latinoamericano está orientado hacia la programación, con fácil acceso al juego de símbolos de la norma ASCII.
Por cada pulsación o liberación de una tecla el micro controlador envía un código identificativo que se llama Scan Code. Para permitir que varias teclas sean pulsadas simultáneamente, el teclado genera un código diferente cuando una tecla se pulsa y cuando dicha tecla se libera. Si el micro controlador nota que ha cesado la pulsación de la tecla, el nuevo código generado (Break Code) tendrá un valor de pulsación incrementado en 128. Estos códigos son enviados al circuito micro controlador donde serán tratados gracias al administrador de teclado, que no es más que un programa de la BIOS y que determina qué carácter le corresponde a la tecla pulsada comparándolo con una tabla de caracteres que hay en el kernel, generando una interrupción por hardware y enviando los datos al procesador. El micro controlador también posee cierto espacio de memoria RAM que hace que sea capaz de almacenar las últimas pulsaciones en caso de que no se puedan leer a causa de la velocidad de tecleo del usuario. Hay que tener en cuenta, que cuando realizamos una pulsación se pueden producir rebotes que duplican la señal. Con el fin de eliminarlos, el teclado también dispone de un circuito que limpia la señal.
En los teclados AT los códigos generados son diferentes, por lo que por razones de compatibilidad es necesario traducirlos. De esta función se encarga el controlador de teclado que es otro microcontrolador (normalmente el 8042), éste ya situado en el PC. Este controlador recibe el Código de Búsqueda del Teclado (Kscan Code) y genera el propiamente dicho Código de Búsqueda. La comunicación del teclado es vía serie. El protocolo de comunicación es bidireccional, por lo que el servidor puede enviarle comandos al teclado para configurarlo, reiniciarlo, diagnósticos, etc.
[editar] Disposición del teclado
Artículo principal: Distribución del teclado
La disposición del teclado es la distribución de las teclas del teclado de una computadora, una máquina de escribir u otro dispositivo similar.
Existen distintas distribuciones de teclado, creadas para usuarios de idiomas diferentes. El teclado estándar en español corresponde al diseño llamado QWERTY. Una variación de este mismo es utilizado por los usuarios de lengua inglesa. Para algunos idiomas se han desarrollado teclados que pretenden ser más cómodos que el QWERTY, por ejemplo el Teclado Dvorak.
Las computadoras modernas permiten utilizar las distribuciones de teclado de varios idiomas distintos en un teclado que físicamente corresponde a un solo idioma. En el sistema operativo Windows, por ejemplo, pueden instalarse distribuciones adicionales desde el Panel de Control.
Existen programas como Microsoft Keyboard Layout Creator[1] y KbdEdit,[2] que hacen muy fácil la tarea de crear nuevas distribuciones, ya para satisfacer las necesidades particulares de un usuario, ya para resolver problemas que afectan a todo un grupo lingüístico. Estas distribuciones pueden ser modificaciones a otras previamente existentes (como el teclado

latinoamericano extendido[3] o el gaélico[4] ), o pueden ser enteramente nuevas (como la distribución para el Alfabeto Fonético Internacional,[5] o el panibérico[6] ).
A primera vista en un teclado podemos notar una división de teclas, tanto por la diferenciación de sus colores, como por su distribución. Las teclas grisáceas sirven para distinguirse de las demás por ser teclas especiales (borrado, teclas de función, tabulación, tecla del sistema…). Si nos fijamos en su distribución vemos que están agrupadas en cuatro grupos:
Teclas de función: situadas en la primera fila de los teclados. Combinadas con otras teclas, nos proporcionan acceso directo a algunas funciones del programa en ejecución.
Teclas de edición: sirven para mover el cursor por la pantalla. Teclas alfanuméricas: son las más usadas. Su distribución suele ser la de los teclados
QWERTY, por herencia de la distribución de las máquinas de escribir. Reciben este nombre por ser la primera fila de teclas, y su orden es debido a que cuando estaban organizadas alfabéticamente la máquina tendía a engancharse, y a base de probar combinaciones llegaron a la conclusión de que así es como menos problemas daban. A pesar de todo esto, se ha comprobado que hay una distribución mucho más cómoda y sencilla, llamada Dvorak, pero en desuso debido sobre todo a la incompatibilidad con la mayoría de los programas que usamos.
Bloque numérico: situado a la derecha del teclado. Comprende los dígitos del sistema decimal y los símbolos de algunas operaciones aritméticas. Añade también la tecla especial Bloq Num, que sirve para cambiar el valor de algunas teclas para pasar de valor numérico a desplazamiento de cursor en la pantalla. el teclado numérico también es similar al de un calculadora cuenta con las 4 operaciones básicas que son + (suma), - (resta), * (multiplicación) y / (división).
[editar] Clasificación de teclados de computadoras
En el mercado hay una gran variedad de teclados. Según su forma física:
Teclado XT de 83 teclas: se usaba en el PC XT (8086/88). Teclado AT de 83 teclas: usado con los PC AT (286/386). Teclado expandido de 101/102 teclas: es el teclado actual, con un mayor número de teclas. Teclado Windows de 103/104 teclas: el teclado anterior con 3 teclas adicionales para uso
en Windows. Teclado ergonómico: diseñados para dar una mayor comodidad para el usuario,
ayudándole a tener una posición más relajada de los brazos. Teclado multimedia: añade teclas especiales que llaman a algunos programas en el
computador, a modo de acceso directo, como pueden ser el programa de correo electrónico, la calculadora, el reproductor multimedia…
Teclado inalámbrico: suelen ser teclados comunes donde la comunicación entre el computador y el periférico se realiza a través de rayos infrarrojos, ondas de radio o mediante bluetooth.
Teclado flexible: Estos teclados son de plástico suave o silicona que se puede doblar sobre sí mismo. Durante su uso, estos teclados pueden adaptarse a superficies irregulares, y son más resistentes a los líquidos que los teclados estándar. Estos también pueden ser conectados a dispositivos portátiles y teléfonos inteligentes. Algunos modelos pueden ser

completamente sumergidos en agua, por lo que hospitales y laboratorios los usan, ya que pueden ser desinfectados.[7]
Según la tecnología de sus teclas se pueden clasificar como teclados de cúpula de goma, teclados de membrana: teclados capacitativos y teclados de contacto metálico.
Puerto (informática)De Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda

Se ha sugerido que Interfaz (electrónica) sea fusionado en este artículo o sección. (Discusión).Una vez que hayas realizado la fusión de artículos, pide la fusión de historiales en WP:TAB/F.
Puertos de conexión en varios ordenadores.
En la informática, un puerto es una forma genérica de denominar a una interfaz a través de la cual los diferentes tipos de datos se pueden enviar y recibir. Dicha interfaz puede ser de tipo físico, o puede ser a nivel de software (por ejemplo, los puertos que permiten la transmisión de datos entre diferentes ordenadores) (ver más abajo para más detalles), en cuyo caso se usa frecuentemente el término puerto lógico.
Contenido
[ocultar]
1 Puerto lógico 2 Puerto físico. Tipos de puertos o2.1 Puerto serie (o serial) o2.2 PCI o2.3 PCI-Express o2.4 Puertos de memoria o2.5 Puertos inalámbricos o2.6 Puerto USB 3 Véase también 4 Referencias 5 Enlaces externos
[editar] Puerto lógico
Se denomina así a una zona, o localización, de la memoria de un ordenador que se asocia con un puerto físico o con un canal de comunicación, y que proporciona un espacio para el almacenamiento temporal de la información que se va a transferir entre la localización de memoria y el canal de comunicación.

En el ámbito de Internet, un puerto es el valor que se usa, en el modelo de la capa de transporte, para distinguir entre las múltiples aplicaciones que se pueden conectar al mismo host, o puesto.
Aunque muchos de los puertos se asignan de manera arbitraria, ciertos puertos se asignan, por convenio, a ciertas aplicaciones particulares o servicios de carácter universal. De hecho, la IANA (Internet Assigned Numbers Authority) determina, las asignaciones de todos los puertos comprendidos entre los valores [0, 1023], (hasta hace poco, la IANA sólo controlaba los valores desde el 0 al 255). Por ejemplo, el servicio de conexión remota telnet, usado en Internet se asocia al puerto 23. Por tanto, existe una tabla de puertos asignados en este rango de valores. Los servicios y las aplicaciones que se encuentran en el listado denominado Selected Port Assignments.[1] De manera análoga, los puertos numerados en el intervalo [1024, 65535] se pueden registrar con el consenso de la IANA, vendedores de software y organizaciones. Por ejemplo, el puerto 1352 se asigna a Lotus Notes.
[editar] Puerto físico. Tipos de puertos
Un puerto físico, es aquella interfaz, o conexión entre dispositivos, que permite conectar físicamente distintos tipos de dispositivos como monitores, impresoras, escáneres, discos duros externos, cámaras digitales, memorias pendrive, etc... Estas conexiones tienen denominaciones particulares como, por ejemplo, los puertos "serie" y "paralelo" de un ordenador.
[editar] Puerto serie (o serial)
Artículo principal: Puerto serie
Un puerto serie [2] es una interfaz de comunicaciones entre ordenadores y periféricos en donde la información es transmitida bit a bit de manera secuencial, es decir, enviando un solo bit a la vez (en contraste con el puerto paralelo [3] que envía varios bits a la vez).
El puerto serie por excelencia es el RS-232 que utiliza cableado simple desde 3 hilos hasta 25 y que conecta ordenadores o microcontroladores a todo tipo de periféricos, desde terminales a impresoras y módems pasando por ratones. La interfaz entre el RS-232 y el microprocesador generalmente se realiza mediante el integrado 82C50. El RS-232 original tenía un conector tipo D de 25 pines, sin embargo, la mayoría de dichos pines no se utilizaban por lo que IBM incorporó desde su PS/2 un conector más pequeño de solamente 9 pines, que es el que actualmente se utiliza. En Europa la norma RS-422, de origen alemán, es también un estándar muy usado en el ámbito industrial.
Uno de los defectos de los puertos serie iniciales era su lentitud en comparación con los puertos paralelos, sin embargo, con el paso del tiempo, han ido apareciendo multitud de puertos serie con una alta velocidad que los hace muy interesantes ya que tienen la ventaja de un menor cableado y solucionan el problema de la velocidad con un mayor apantallamiento. Son más baratos ya que usan la técnica del par trenzado; por ello, el puerto RS-232 e incluso multitud de puertos paralelos están siendo reemplazados por nuevos puertos serie como el USB, el Firewire o el Serial ATA.

Los puertos serie sirven para comunicar al ordenador con la impresora, el ratón o el módem, sin embargo, el puerto USB sirve para todo tipo de periféricos, desde ratones a discos duros externos, pasando por conexiones bluetooth. Los puertos sATA (Serial ATA): tienen la misma función que los IDE, (a éstos se conecta, la disquetera, el disco duro, lector/grabador de CD y DVD) pero los sATA cuentan con una mayor velocidad de transferencia de datos. Un puerto de red puede ser puerto serie o puerto paralelo.
[editar] PCI
Artículo principal: Peripheral Component Interconnect
Puertos PCI[4] (Peripheral Component Interconnect) son ranuras de expansión de la placa madre de un ordenador en las que se pueden conectar tarjetas de sonido, de vídeo, de red, etc... El slot PCI se sigue usando hoy en día y podemos encontrar bastantes componentes (la mayoría) en el formato PCI. Dentro de los slots PCI está el PCI-Express. Los componentes que suelen estar disponibles en este tipo de slot son:
Capturadoras de televisión Controladoras RAID Tarjetas de red, inalámbricas, o no Tarjetas de sonido
[editar] PCI-Express
Artículo principal: PCI-Express
PCI-Express[5] [6] Nuevas mejoras para la especificación PCIe 3.0 que incluye una cantidad de optimizaciones para aumentar la señal y la integridad de los datos, incluyendo control de transmisión y recepción de archivos, PLL improvements, recuperacion de datos de reloj, y mejoras en los canales, lo que asegura la compatibilidad con las topolgias actuales.[7] (anteriormente conocido por las siglas 3GIO, 3rd Generation I/O) es un nuevo desarrollo del bus PCI que usa los conceptos de programación y los estándares de comunicación existentes, pero se basa en un sistema de comunicación serie mucho más rápido que PCI y AGP. Este sistema es apoyado, principalmente, por Intel, que empezó a desarrollar el estándar con el nombre de proyecto Arapahoe después de retirarse del sistema Infiniband. Tiene velocidad de transferencia de 16x (8GB/s) y se utiliza en tarjetas gráficas.
[editar] Puertos de memoria
A estos puertos se conectan las tarjetas de memoria RAM. Los puertos de memoria son aquellos puertos, o bahías, donde se pueden insertar nuevas tarjetas de memoria, con la finalidad de extender la capacidad de la misma. Existen bahías que permiten diversas capacidades de almacenamiento que van desde los 256MB (Megabytes) hasta 4GB (Gigabytes). Conviene recordar que en la memoria RAM es de tipo volátil, es decir, si se apaga repentinamente el ordenador los datos almacenados en la misma se pierden. Dicha memoria está conectada con la CPU a través de buses de muy alta velocidad. De esta manera, los datos ahí almacenados, se intercambian con el procesador a una velocidad unas 1000 veces más rápida que con el disco duro.
[editar] Puertos inalámbricos

Las conexiones en este tipo de puertos se hacen, sin necesidad de cables, a través de la conexión entre un emisor y un receptor utilizando ondas electromagnéticas. Si la frecuencia de la onda, usada en la conexión, se encuentra en el espectro de infrarrojos se denomina puerto infrarrojo. Si la frecuencia usada en la conexión es la usual en las radio frecuencias entonces sería un puerto Bluetooth.
La ventaja de esta última conexión es que el emisor y el receptor no tienen porque estar orientados el uno con respecto al otro para que se establezca la conexión. Esto no ocurre con el puerto de infrarrojos. En este caso los dispositivos tienen que "verse" mutuamente, y no se debe interponer ningún objeto entre ambos ya que se interrumpiría la conexión.
[editar] Puerto USB
Artículo principal: USB
Un puerto USB[8] [9] [10] permite conectar hasta 127 dispositivos y ya es un estándar en los ordenadores de última generación, que incluyen al menos cuatro puertos USB 2.0 en los más modernos, y algún USB 1.1 en los mas anticuados
Pero ¿qué otras ventajas ofrece este puerto? Es totalmente Plug & Play, es decir, con sólo conectar el dispositivo y "en caliente" (con el ordenador ya encendido), el dispositivo es reconocido, e instalado, de manera inmediata. Sólo es necesario que el Sistema Operativo lleve incluido el correspondiente controlador o driver. Presenta una alta velocidad de transferencia en comparación con otro tipo de puertos. USB 1.1 alcanza los 12 Mb/s y hasta los 480 Mb/s (60 MB/s) para USB 2.0, mientras un puerto serie o paralelo tiene una velocidad de transferencia inferior a 1 Mb/s. El puerto USB 2.0 es compatible con los dispositivos USB 1.1
A través del cable USB no sólo se transfieren datos; además es posible alimentar dispositivos externos. El consumo maximo de este controlador es de 2.5 Watts. Los dispositivos se pueden dividir en dispositivos de bajo consumo (hasta 100 mA) y dispositivos de alto consumo (hasta 500 mA). Para dispositivos que necesiten más de 500 mA será necesaria alimentación externa. Hay que tener en cuenta, además, que si se utiliza un concentrador y éste está alimentado, no será necesario realizar consumo del bus. Una de las limitaciones de este tipo de conexiones es que longitud del cable no debe superar los 5 ms y que éste debe cumplir las especificaciones del Standard USB iguales para la 1.1 y la 2.0

Historia del Computador:
En 1670 el filósofo y matemático alemán Gottfried Wilhelm Leibniz perfeccionó esta máquina e inventó una que también podía multiplicar.
El inventor francés Joseph Marie Jacquard, al diseñar un telar automático, utilizó delgadas placas de madera perforadas para controlar el tejido utilizado en los diseños complejos. Durante la década de 1880 el estadístico estadounidense Herman Hollerith concibió la idea de utilizar tarjetas perforadas, similares a las placas de Jacquard, para procesar datos. Hollerith consiguió compilar la información estadística destinada al censo de población de 1890 de Estados Unidos mediante la utilización de un sistema que hacía pasar tarjetas perforadas sobre contactos eléctricos.
También en el siglo XIX el matemático e inventor británico Charles Babbage elaboró los principios de la computadora digital moderna. Inventó una serie de máquinas, como la máquina diferencial, diseñadas para solucionar problemas matemáticos complejos. Muchos historiadores consideran a Babbage y a su socia, la matemática británica Augusta Ada Byron (1815-1852), hija del poeta inglés Lord Byron, como a los verdaderos inventores de la computadora digital moderna. La tecnología de aquella época no era capaz de trasladar a la práctica sus acertados conceptos; pero una de sus invenciones, la máquina analítica, ya tenía muchas de las características de un ordenador moderno. Incluía una corriente, o flujo de entrada en forma de paquete de tarjetas perforadas, una memoria para guardar los datos, un procesador para las operaciones matemáticas y una impresora para hacer permanente el registro.
Los ordenadores analógicos comenzaron a construirse a principios del siglo XX. Los primeros modelos realizaban los cálculos mediante ejes y engranajes giratorios. Con estas máquinas se evaluaban las aproximaciones numéricas de ecuaciones demasiado difíciles como para poder ser resueltas mediante otros métodos. Durante las dos guerras mundiales se utilizaron sistemas informáticos analógicos, primero mecánicos y más tarde eléctricos, para predecir la trayectoria de los torpedos en los submarinos y para el manejo a distancia de las bombas en la aviación.
Durante la II Guerra Mundial (1939-1945), un equipo de científicos y matemáticos que trabajaban en Bletchley Park, al norte de Londres, crearon lo que se consideró el primer ordenador digital totalmente electrónico: el Colossus. Hacia diciembre de 1943 el Colossus, que incorporaba 1.500 válvulas o tubos de vacío, era ya operativo. Fue utilizado por el equipo dirigido por Alan Turing para descodificar los mensajes de radio cifrados de los alemanes. En 1939 y con independencia de este proyecto, John Atanasoff y Clifford Berry ya habían construido un prototipo de máquina electrónica en el Iowa State College (EEUU). Este prototipo y las investigaciones posteriores se realizaron en el anonimato, y más tarde quedaron eclipsadas por el desarrollo del Calculador e integrador numérico electrónico (en inglés ENIAC, Electronic Numerical Integrator and Computer) en 1946. El ENIAC, que según se demostró se basaba en gran medida en el ordenador Atanasoff-Berry (en inglés ABC, Atanasoff-Berry Computer), obtuvo una patente que caducó en 1973, varias décadas más tarde.
El ENIAC contenía 18.000 válvulas de vacío y tenía una velocidad de varios cientos de multiplicaciones por minuto, pero su programa estaba conectado al procesador y debía ser modificado manualmente. Se construyó un sucesor del ENIAC con un almacenamiento de

programa que estaba basado en los conceptos del matemático húngaro-estadounidense John von Neumann. Las instrucciones se almacenaban dentro de una llamada memoria, lo que liberaba al ordenador de las limitaciones de velocidad del lector de cinta de papel durante la ejecución y permitía resolver problemas sin necesidad de volver a conectarse al ordenador.
A finales de la década de 1950 el uso del transistor en los ordenadores marcó el advenimiento de elementos lógicos más pequeños, rápidos y versátiles de lo que permitían las máquinas con válvulas. Como los transistores utilizan mucha menos energía y tienen una vida útil más prolongada, a su desarrollo se debió el nacimiento de máquinas más perfeccionadas, que fueron llamadas ordenadores o computadoras de segunda generación. Los componentes se hicieron más pequeños, así como los espacios entre ellos, por lo que la fabricación del sistema resultaba más barata.
A finales de la década de 1960 apareció el circuito integrado (CI), que posibilitó la fabricación de varios transistores en un único sustrato de silicio en el que los cables de interconexión iban soldados. El circuito integrado permitió una posterior reducción del precio, el tamaño y los porcentajes de error. El microprocesador se convirtió en una realidad a mediados de la década de 1970, con la introducción del circuito de integración a gran escala (LSI, acrónimo de Large Scale Integrated) y, más tarde, con el circuito de integración a mayor escala (VLSI, acrónimo de Very Large Scale Integrated), con varios miles de transistores interconectados soldados sobre un único sustrato de silicio.
Historia de LINUX y UNIX:
LINUX nació como un producto de Linus Torvalds, inspirado en el MINIX, el sistema operativo desarrollado por Andrew S. Tanenbaum en su obra "Sistemas Operativos: Diseño e Implementación". Libro en el cual, tras un estudio general sobre los servicios que debe proporcionar un sistema operativo y algunas formas de proporcionar éstos, introduce su propia implementación del UNIX en forma de código fuente en lenguaje C y ensamblador, además de las instrucciones necesarias para poder instalar y mejorar el mismo.
La primera versión de LINUX, enumerada como 0.01 contenía solo los rudimentos del núcleo y funcionaba sobre una máquina con el MINIX instalado, esto es, para compilar y jugar con LINUX era necesario tener instalado el MINIX de Tanembaum.
El 5 de Octubre de 1991, Linus anunció su primera versión 'oficial', la 0.02 con esta versión ya se podía ejecutar el bash (GNU Bourne Shell) y el gcc (GNU C compiler).
Después de la versión 0.03, Linus cambió este número por 0.10 y tras las aportaciones de un grupo inicial de usuarios se incrementó de nuevo la denominación a 0.95, reflejando la clara voluntad de poder anunciar en breve una versión 'oficial' (con la denominación 1.0).
En Diciembre de 1993 el núcleo estaba en su versión 0.99 pH I. En la actualidad la última versión estable es al 2.0.30 aunque existe ya la versión de desarrollo 2.1.
La enumeración de las versiones de LINUX implica a tre números separados por puntos, el primero de ellos es la versión del sistema operativo es el que distingue unas versiones de otras cuando las diferencias son importantes. El segundo número indica el nivel en que se

encuentra dicha versión. Si es un número impar quiere decir que es una versión de desarrollo con lo cual se nos avisa de que ciertos componentes del núcleo están en fase de prueba, si es par se considera una versión estable. El último número identifica el número de revisión para dicha versión del sistema operativo, suele ser debido a la corrección de pequeños problemas o al añadir algunos detalles que anteriormente no se contemplaba con lo cual no implica un cambio muy grande en el núcleo. Como ejemplo sirva la versión de LINUX con la que ha sido desarrollado este trabajo, la última estable hasta hace poco tiempo, su número es 1.2.13, esto es, la versión 1 en su nivel 2 (estable) y la revisión número 13 de la misma en éste caso fue la última.
Hay que señalar que LINUX no sería lo que es sin la aportación de la Free Software Foundation y todo el software desarrollado bajo el soporte de esta asociación así como la distribución del UNIX de Berkley (BSD), tanto en programas transportados como en programas diseñados para este que forman parte de algunas distribuciones del LINUX.
MicroprocesadorDe Wikipedia, la enciclopedia libre

Saltar a navegación, búsqueda
Procesador AMD Athlon 64 X2 conectado en el zócalo de una placa base.
El microprocesador, o simplemente procesador, es el circuito integrado central y más complejo de una computadora u ordenador; a modo de ilustración, se le suele asociar por analogía como el "cerebro" de una computadora.
El procesador es un circuito integrado constituido por millones de componentes electrónicos integrados. Constituye la unidad central de procesamiento (CPU) de un PC catalogado como microcomputador.
Desde el punto de vista funcional es, básicamente, el encargado de realizar toda operación aritmético-lógica, de control y de comunicación con el resto de los componentes integrados que conforman un PC, siguiendo el modelo base de Von Neumann. También es el principal encargado de ejecutar los programas, sean de usuario o de sistema; sólo ejecuta instrucciones programadas a muy bajo nivel, realizando operaciones elementales, básicamente, las aritméticas y lógicas, tales como sumar, restar, multiplicar, dividir, las lógicas binarias y accesos a memoria.
Esta unidad central de procesamiento está constituida, esencialmente, por registros, una unidad de control y una unidad aritmético lógica (ALU), aunque actualmente todo microprocesador también incluye una unidad de cálculo en coma flotante, (también conocida como coprocesador matemático o FPU), que permite operaciones por hardware con números decimales, elevando por ende notablemente la eficiencia que proporciona sólo la ALU con el cálculo indirecto a través de los clásicos números enteros.
El microprocesador está conectado, generalmente, mediante un zócalo específico a la placa base. Normalmente para su correcto y estable funcionamiento, se le adosa un sistema de refrigeración, que consta de un disipador de calor fabricado en algún material de alta conductividad térmica, como cobre o aluminio, y de uno o más ventiladores que fuerzan la expulsión del calor absorbido por el disipador; entre éste último y la cápsula del microprocesador suele colocarse pasta térmica para mejorar la conductividad térmica. Existen otros métodos más eficaces, como la refrigeración líquida o el uso de células peltier para refrigeración extrema, aunque estas técnicas se utilizan casi exclusivamente para aplicaciones especiales, tales como en las prácticas de overclocking.

La "velocidad" del microprocesador suele medirse por la cantidad de operaciones por ciclo de reloj que puede realizar y en los ciclos por segundo que este último desarrolla, o también en MIPS. Está basada en la denominada frecuencia de reloj (oscilador). La frecuencia de reloj se mide Hertzios, pero dada su elevada cifra se utilizan múltiplos, como el megahertzio o el gigahertzio.
Cabe destacar que la frecuencia de reloj no es el único factor determinante en el rendimiento, pues sólo se podría hacer comparativa entre dos microprocesadores de una misma arquitectura.
Es importante notar que la frecuencia de reloj efectiva no es el producto de la frecuencia de cada núcleo físico del procesador por su número de núcleos, es decir, uno de 3 GHz con 6 núcleos físicos nunca tendrá 18 GHz, sino 3 GHz, independientemente de su número de núcleos.
Hay otros factores muy influyentes en el rendimiento, como puede ser su memoria caché, su cantidad de núcleos, sean físicos o lógicos, el conjunto de instrucciones que soporta, su arquitectura, etc; por lo que sería difícilmente comparable el rendimiento de dos procesadores distintos basándose sólo en su frecuencia de reloj.
Un computador de alto rendimiento puede estar equipado con varios microprocesadores trabajando en paralelo, y un microprocesador puede, a su vez, estar constituido por varios núcleos físicos o lógicos. Un núcleo físico se refiere a una porción interna del microprocesador cuasi-independiente que realiza todas las actividades de una CPU solitaria, un núcleo lógico es la simulación de un núcleo físico a fin de repartir de manera más eficiente el procesamiento.
Estos últimos años ha existido una tendencia de integrar el mayor número de elementos del PC dentro del propio procesador, aumentando así su eficiencia energética y su rendimiento. Una de las primeras integraciones, fue introducir la unidad de coma flotante dentro del encapsulado, que anteriormente era un componente aparte y opcional situado también en la placa base, luego se introdujo también el controlador de memoria, y más tarde un procesador gráfico dentro de la misma cámara, aunque no dentro del mismo encapsulado. Posteriormente se llegaron a integrar completamente en el mismo encapsulado (Die).
Respecto a esto último, compañías tales como Intel ya planean integrar el Southbridge dentro del procesador, eliminando completamente ambos chipsets de la placa.
También la tendencia general, más allá del mercado del PC, es integrar varios componentes en un mismo chip para dispositivos tales como Tablet PC, teléfonos móviles, videoconsolas portátiles, etc. A estos circuitos integrados "todo en uno" se les conoce como System on Chip; por ejemplo nVidia Tegra o Samsung Hummingbird, ambos integran procesador, GPU y controlador de memoria dentro de un mismo chip.
Contenido
[ocultar]
1 Historia de los microprocesadores

o1.1 La evolución del microprocesador o1.2 Breve Historia de los Microprocesadores 2 Funcionamiento 3 Rendimiento 4 Arquitectura 5 Fabricación o5.1 Procesadores de silicio o5.2 Otros materiales 6 Empaquetado o6.1 Disipación de calor 7 Conexión con el exterior o7.1 Buses del procesador 8 Arquitecturas 9 Véase también 10 Referencias 11 Enlaces externos
[editar] Historia de los microprocesadores
[editar] La evolución del microprocesador
El microprocesador es producto de la evolución de distintas tecnologías predecesoras, surgido de la computación y la tecnología semiconductora; en los inicios no existían los procesadores tal como los conocemos hoy. El inicio de su desarrollo data de mitad de la década de 1950; estas tecnologías se fusionaron a principios de los años 70, produciendo el primer microprocesador.
Tales tecnologías iniciaron su desarrollo a partir de la segunda guerra mundial; en este tiempo los científicos desarrollaron computadoras específicas para aplicaciones militares. En la posguerra, a mediados de la década de 1940, la computación digital emprendió un fuerte desarrollo también para propósitos científicos y civiles.
La tecnología de circuitos electrónicos avanzó y los científicos hicieron grandes progresos en el diseño de componentes de estado sólido. En 1948 en los laboratorios Bell crearon el transistor.
En los años 1950, aparecieron las primeras computadoras digitales de propósito general. Se fabricaron utilizando tubos al vacío o bulbos como componentes electrónicos activos. Tarjetas o módulos de tubos al vacío componían circuitos lógicos básicos, tales como compuertas y flip-flops. Ensamblando compuertas y flip-flops en módulos se construyó la computadora electrónica (la lógica de control, circuitos de memoria, etc.). Los tubos de vacío también formaron parte de la construcción de máquinas para la comunicación con las computadoras.
Para la construcción de un circuito sumador simple se requiere de algunas compuertas lógicas. La construcción de una computadora digital precisa numerosos circuitos o dispositivos electrónicos. Un paso trascendental en el diseño de la computadora fue hacer que el dato fuera almacenado en memoria, como una forma de palabra digital. La idea de

almacenar programas en memoria para luego ejecutarlo fue de fundamental importancia (Arquitectura de von Neumann).
La tecnología de los circuitos de estado sólido evolucionó en la década de 1950. El empleo del silicio, de bajo costo y con métodos de producción masiva, hicieron del transistor el componente más usado para el diseño de circuitos electrónicos. Por lo tanto el diseño de la computadora digital tuvo un gran avance el reemplazo del tubo al vacío por el transistor, a finales de la década de 1950.
A principios de la década de 1960, el estado de arte en la construcción de computadoras de estado sólido sufrió un notable avance; surgieron las tecnologías en circuitos digitales como: RTL (Lógica Transistor Resistor), DTL (Lógica Transistor Diodo), TTL (Lógica Transistor Transistor), ECL (Lógica Complementada Emisor).
A mediados de los años 1960 se producen las familias de circuitos de lógica digital, dispositivos en escala SSI y MSI que corresponden a baja y mediana escala de integración de componentes (Circuito integrado). A finales de los años 1960 y principios de los 70 surgieron los sistemas a alta escala de integración o LSI. La tecnología LSI fue haciendo posible incrementar la cantidad de componentes en los circuitos digitales integrados (Chip). Sin embargo, pocos circuitos LSI fueron producidos, los dispositivos de memoria eran un buen ejemplo.
Las primeras calculadoras electrónicas requerían entre 75 y 100 circuitos integrados. Después se dio un paso importante en la reducción de la arquitectura de la computadora a un circuito integrado simple, resultando uno que fue llamado microprocesador, unión de las palabras "Micro" del griego μικρο-, "pequeño", y procesador. Sin embargo, es totalmente válido usar el término genérico procesador, dado que con el paso de los años, la escala de integración se ha visto reducida de micrométrica a nanométrica; y además, es, sin duda, un procesador.
El primer microprocesador fue el Intel 4004,[1] producido en 1971. Se desarrolló originalmente para una calculadora, y resultó revolucionario para su época. Contenía 2.300 transistores, era un microprocesador de arquitectura de 4 bits que podía realizar hasta 60.000 operaciones por segundo, trabajando a una frecuencia de reloj de alrededor de 700KHz.
El primer microprocesador de 8 bits fue el Intel 8008, desarrollado a mediados de 1972 para su uso en terminales informáticos. El Intel 8008 integraba 3300 transistores y podía procesar a frecuencias máximas de 800Khz.
El primer microprocesador realmente diseñado para uso general, desarrollado en 1974, fue el Intel 8080 de 8 bits, que contenía 4500 transistores y podía ejecutar 200.000 instrucciones por segundo trabajando a alrededor de 2MHz.
Los primeros microprocesadores de 16 bits fueron el 8086 y el 8088, ambos de Intel. Fueron el inicio y los primeros miembros de la popular arquitectura x86, actualmente usada en la mayoría de los computadores. El chip 8086 fue introducido al mercado en el verano de 1978, en tanto que el 8088 fue lanzado en 1979. Llegaron a operar a frecuencias mayores de 4Mhz.
El microprocesador elegido para equipar al IBM Personal Computer/AT, que causó que fuera el más empleado en los PC-AT compatibles entre mediados y finales de los años 80 fue el Intel 80286 (también conocido simplemente como 286); es un microprocesador de

16 bits, de la familia x86, que fue lanzado al mercado en 1982. Contaba con 134.000 transistores. Las versiones finales alcanzaron velocidades de hasta 25 MHz.
Uno de los primeros procesadores de arquitectura de 32 bits fue el 80386 de Intel, fabricado a mediados y fines de la década de 1980; en sus diferentes versiones llegó a trabajar a frecuencias del orden de los 40Mhz.
El microprocesador DEC Alpha se lanzó al mercado en 1992, corriendo a 200 MHz en su primera versión, en tanto que el Intel Pentium surgió en 1993 con una frecuencia de trabajo de 66Mhz. El procesador Alpha, de tecnología RISC y arquitectura de 64 bits, marcó un hito, declarándose como el más rápido del mundo, en su época. Llegó a 1Ghz de frecuencia hacia el año 2001. Irónicamente, a mediados del 2003, cuando se pensaba quitarlo de circulación, el Alpha aun encabezaba la lista de los computadores más rápidos de Estados Unidos.[2]
Los microprocesadores modernos tienen una capacidad y velocidad mucho mayores, trabajan en arquitecturas de 64 bits, integran más de 700 millones de transistores, como es en el caso de las serie Core i7, y pueden operar a frecuencias normales algo superiores a los 3GHz (3000MHz).
[editar] Breve Historia de los Microprocesadores
El pionero de los actuales microprocesadores el 4004 de Intel.
Imagen del Motorola 6800.
Imagen del Zilog Z80 A.

Imagen de un Intel 80286, más conocido como 286.
Imagen de un Intel 80486, conocido también como 486SX de 33Mhz.
IBM PowerPC 601.
La parte de posterior de un Pentium Pro. Este chip en particular es de 200MHz, con 256KiB de cache L2.

Microprocesador AMD K6 original.
Microprocesador Pentium II, se puede observar su estilo de zócalo diferente.
Procesador Intel Celeron "Coppermine 128" de 600 MHz.
Microprocesador Pentium III, de Intel.
Seguidamente se expone una lista ordenada cronológicamente de los microprocesadores de más populares que fueron surgiendo.
1971: El Intel 4004

El 4004 fue el primer microprocesador del mundo, creado en un simple chip, y desarrollado por Intel. Era un CPU de 4 bits y también fue el primero disponible comercialmente. Este desarrollo impulsó la calculadora de Busicom[1] y dio camino a la manera para dotar de "inteligencia" a objetos inanimados, así como la computadora personal.
1972: El Intel 8008
Codificado inicialmente como 1201, fue pedido a Intel por Computer Terminal Corporation para usarlo en su terminal programable Datapoint 2200, pero debido a que Intel terminó el proyecto tarde y a que no cumplía con la expectativas de Computer Terminal Corporation, finalmente no fue usado en el Datapoint. Posteriormente Computer Terminal Corporation e Intel acordaron que el i8008 pudiera ser vendido a otros clientes.
1974: El SC/MP
El SC/MP desarrollado por National Semiconductor, fue uno de los primeros microprocesadores, y estuvo disponible desde principio de 1974. El nombre SC/MP (popularmente conocido como "Scamp") es el acrónimo de Simple Cost-effective Micro Processor (Microprocesador simple y rentable). Presenta un bus de direcciones de 16 bits y un bus de datos de 8 bits. Una característica avanzada para su tiempo, es la capacidad de liberar los buses, a fin de que puedan ser compartidos por varios procesadores. Este procesador fue muy utilizado, por su bajo costo, y provisto en kits, para el propósitos educativos, de investigación y para el desarrollo de controladores industriales de diversos propósitos.
1974: El Intel 8080
EL 8080 se convirtió en la CPU de la primera computadora personal, la Altair 8800 de MITS, según se alega, nombrada en base a un destino de la Nave Espacial "Starship" del programa de televisión Viaje a las Estrellas, y el IMSAI 8080, formando la base para las máquinas que ejecutaban el sistema operativo [[CP/M]|CP/M-80]. Los fanáticos de las computadoras podían comprar un equipo Altair por un precio (en aquel momento) de u$s395. En un periodo de pocos meses, se vendieron decenas de miles de estas PC.
1975: Motorola 6800
Se fabrica, por parte de Motorola, el Motorola MC6800, más conocido como 6800. Fue lanzado al mercado poco después del Intel 8080. Su nombre proviene de que contenía aproximadamente 6800 transistores. Varios de los primeras microcomputadoras de los años 1970 usaron el 6800 como procesador. Entre ellas se encuentran la SWTPC 6800, que fue la primera en usarlo, y la muy conocida Altair 680. Este microprocesador se utilizó profusamente como parte de un kit para el desarrollo de sistemas controladores en la industria. Partiendo del 6800 se crearon varios procesadores derivados, siendo uno de los más potentes el Motorola 6809
1976: El Z80
La compañía Zilog Inc. crea el Zilog Z80. Es un microprocesador de 8 bits construido en tecnología NMOS, y fue basado en el Intel 8080. Básicamente es una ampliación de éste, con lo que admite todas sus instrucciones. Un año después sale al mercado el primer

computador que hace uso del Z80, el Tandy TRS-80 Model 1 provisto de un Z80 a 1,77 MHz y 4 KB de RAM. Es uno de los procesadores de más éxito del mercado, del cual se han producido numerosas versiones clónicas, y sigue siendo usado de forma extensiva en la actualidad en multitud de sistemas embebidos. La compañía Zilog fue fundada 1974 por Federico Faggin, quien fue diseñador jefe del microprocesador Intel 4004 y posteriormente del Intel 8080.
1978: Los Intel 8086 y 8088
Una venta realizada por Intel a la nueva división de computadoras personales de IBM, hizo que las PC de IBM dieran un gran golpe comercial con el nuevo producto con el 8088, el llamado IBM PC. El éxito del 8088 propulsó a Intel a la lista de las 500 mejores compañías, en la prestigiosa revista Fortune, y la misma nombró la empresa como uno de Los triunfos comerciales de los sesenta.
1982: El Intel 80286
El 80286, popularmente conocido como 286, fue el primer procesador de Intel que podría ejecutar todo el software escrito para su predecesor. Esta compatibilidad del software sigue siendo un sello de la familia de microprocesadores de Intel. Luego de 6 años de su introducción, había un estimado de 15 millones de PC basadas en el 286, instaladas alrededor del mundo.
1985: El Intel 80386
Este procesador Intel, popularmente llamado 386, se integró con 275000 transistores, más de 100 veces tantos como en el original 4004. El 386 añadió una arquitectura de 32 bits, con capacidad para multitarea y una unidad de traslación de páginas, lo que hizo mucho más sencillo implementar sistemas operativos que usaran memoria virtual.
1985: El VAX 78032
El microprocesador VAX 78032 (también conocido como DC333), es de único ship y de 32 bits, y fue desarrollado y fabricado por Digital Equipment Corporation (DEC); instalado en los equipos MicroVAX II, en conjunto con su ship coprocesador de coma flotante separado, el 78132, tenían una potencia cercana al 90% de la que podía entregar el minicomputador VAX 11/780 que fuera presentado en 1977. Este microprocesador contenía 125000 transistores, fue fabricado en tecnologóa ZMOS de DEC. Los sistemas VAX y los basados en este procesador fueron los preferidos por la comunidad científica y de ingeniería durante la década del 1980.
1989: El Intel 80486
La generación 486 realmente significó contar con una computadora personal de prestaciones avanzadas, entre ellas,un conjunto de instrucciones optimizado, una unidad de coma flotante o FPU, una unidad de interfaz de bus mejorada y una memoria caché unificada, todo ello integrado en el propio chip del microprocesador. Estas mejoras hicieron que los i486 fueran el doble de rápidos que el par i386 - i387 operando a la misma frecuencia de reloj. El procesador Intel 486 fue el primero en ofrecer un coprocesador matemático o FPU integrado; con él que se aceleraron notablemente las operaciones de cálculo. Usando una

unidad FPU las operaciones matemáticas más complejas son realizadas por el coprocesador de manera prácticamente independiente a la función del procesador principal.
1991: El AMD AMx86
Procesadores fabricados por AMD 100% compatible con los códigos de Intel de ese momento, llamados "clones" de Intel, llegaron incluso a superar la frecuencia de reloj de los procesadores de Intel y a precios significativamente menores. Aquí se incluyen las series Am286, Am386, Am486 y Am586.
1993: PowerPC 601
Es un procesador de tecnología RISC de 32 bits, en 50 y 66MHz. En su diseño utilizaron la interfaz de bus del Motorola 88110. En 1991, IBM busca una alianza con Apple y Motorola para impulsar la creación de este microprocesador, surge la alianza AIM (Apple, IBM y Motorola) cuyo objetivo fue quitar el dominio que Microsoft e Intel tenían en sistemas basados en los 80386 y 80486. PowerPC (abreviada PPC o MPC) es el nombre original de la familia de procesadores de arquitectura de tipo RISC, que fue desarrollada por la alinza AIM. Los procesadores de esta familia son utilizados principalmente en computadores Macintosh de Apple Computer y su alto rendimiento se debe fuertemente a su arquitectura tipo RISC.
1993: El Intel Pentium
El microprocesador de Pentium poseía una arquitectura capaz de ejecutar dos operaciones a la vez, gracias a sus dos pipeline de datos de 32bits cada uno, uno equivalente al 486DX(u) y el otro equivalente a 486SX(u). Además, estaba dotado de un bus de datos de 64 bits, y permitía un acceso a memoria de 64 bits (aunque el procesador seguía manteniendo compatibilidad de 32 bits para las operaciones internas, y los registros también eran de 32 bits). Las versiones que incluían instrucciones MMX no sólo brindaban al usuario un más eficiente manejo de aplicaciones multimedia, como por ejemplo, la lectura de películas en DVD, sino que también se ofrecían en velocidades de hasta 233 MHz. Se incluyó una versión de 200 MHz y la más básica trabajaba a alrededor de 166 MHz de frecuencia de reloj. El nombre Pentium, se mencionó en las historietas y en charlas de la televisión a diario, en realidad se volvió una palabra muy popular poco después de su introducción.
1994: EL PowerPC 620
En este año IBM y Motorola desarrollan el primer prototipo del procesador PowerPC de 64 bit[2], la implementación más avanzada de la arquitectura PowerPC, que estuvo disponible al año próximo. El 620 fue diseñado para su utilización en servidores, y especialmente optimizado para usarlo en configuraciones de cuatro y hasta ocho procesadores en servidores de aplicaciones de base de datos y vídeo. Este procesador incorpora siete millones de transistores y corre a 133 MHz. Es ofrecido como un puente de migración para aquellos usuarios que quieren utilizar aplicaciones de 64 bits, sin tener que renunciar a ejecutar aplicaciones de 32 bits.
1995: EL Intel Pentium Pro

Lanzado al mercado para el otoño de 1995, el procesador Pentium Pro (profesional) se diseñó con una arquitectura de 32 bits. Se usó en servidores y los programas y aplicaciones para estaciones de trabajo (de redes) impulsaron rápidamente su integración en las computadoras. El rendimiento del código de 32 bits era excelente, pero el Pentium Pro a menudo era más lento que un Pentium cuando ejecutaba código o sistemas operativos de 16 bits. El procesador Pentium Pro estaba compuesto por alrededor de 5,5 millones de transistores.
1996: El AMD K5
Habiendo abandonado los clones, AMD fabricada con tecnologías análogas a Intel. AMD sacó al mercado su primer procesador propio, el K5, rival del Pentium. La arquitectura RISC86 del AMD K5 era más semejante a la arquitectura del Intel Pentium Pro que a la del Pentium. El K5 es internamente un procesador RISC con una Unidad x86- decodificadora, transforma todos los comandos x86 (de la aplicación en curso) en comandos RISC. Este principio se usa hasta hoy en todas las CPU x86. En la mayoría de los aspectos era superior el K5 al Pentium, incluso de inferior precio, sin embargo AMD tenía poca experiencia en el desarrollo de microprocesadores y los diferentes hitos de producción marcados se fueron superando con poco éxito, se retrasó 1 año de su salida al mercado, a razón de ello sus frecuencias de trabajo eran inferiores a las de la competencia, y por tanto, los fabricantes de PC dieron por sentado que era inferior.
1996: Los AMD K6 y AMD K6-2
Con el K6, AMD no sólo consiguió hacerle seriamente la competencia a los Pentium MMX de Intel, sino que además amargó lo que de otra forma hubiese sido un plácido dominio del mercado, ofreciendo un procesador casi a la altura del Pentium II pero por un precio muy inferior. En cálculos en coma flotante, el K6 también quedó por debajo del Pentium II, pero por encima del Pentium MMX y del Pro. El K6 contó con una gama que va desde los 166 hasta los más de 500 Mhz y con el juego de instrucciones MMX, que ya se han convertido en estándares.
Más adelante se lanzó una mejora de los K6, los K6-2 de 250 nanómetros, para seguir compitiendo con los Pentium II, siendo éste último superior en tareas de coma flotante, pero inferior en tareas de uso general. Se introduce un juego de instrucciones SIMD denominado 3DNow!
1997: El Intel Pentium II
Un procesador de 7,5 millones de transistores, se busca entre los cambios fundamentales con respecto a su predecesor, mejorar el rendimiento en la ejecución de código de 16 bits, añadir el conjunto de instrucciones MMX y eliminar la memoria caché de segundo nivel del núcleo del procesador, colocándola en una tarjeta de circuito impreso junto a éste. Gracias al nuevo diseño de este procesador, los usuarios de PC pueden capturar, revisar y compartir fotografías digitales con amigos y familia vía Internet; revisar y agregar texto, música y otros; con una línea telefónica; el enviar vídeo a través de las líneas normales del teléfono mediante Internet se convierte en algo cotidiano.
1998: El Intel Pentium II Xeon

Los procesadores Pentium II Xeon se diseñan para cumplir con los requisitos de desempeño en computadoras de medio-rango, servidores más potentes y estaciones de trabajo (workstations). Consistente con la estrategia de Intel para diseñar productos de procesadores con el objetivo de llenar segmentos de los mercados específicos, el procesador Pentium II Xeon ofrece innovaciones técnicas diseñadas para las estaciones de trabajo y servidores que utilizan aplicaciones comerciales exigentes, como servicios de Internet, almacenamiento de datos corporativos, creaciones digitales y otros. Pueden configurarse sistemas basados en este procesador para integrar de cuatro o ocho procesadores trabajando en paralelo, también más allá de esa cantidad.
1999: El Intel Celeron
Continuando la estrategia, Intel, en el desarrollo de procesadores para los segmentos del mercado específicos, el procesador Celeron es el nombre que lleva la línea de de bajo costo de Intel. El objetivo fue poder, mediante ésta segunda marca, penetrar en los mercados impedidos a los Pentium, de mayor rendimiento y precio. Se diseña para el añadir valor al segmento del mercado de los PC. Proporcionó a los consumidores una gran actuación a un bajo coste, y entregó un desempeño destacado para usos como juegos y el software educativo.
1999: El AMD Athlon K7 (Classic y Thunderbird)
Procesador totalmente compatible con la arquitectura x86. Internamente el Athlon es un rediseño de su antecesor, pero se le mejoró substancialmente el sistema de coma flotante (ahora con 3 unidades de coma flotante que pueden trabajar simultáneamente) y se le incrementó la memoria caché de primer nivel (L1) a 128 KiB (64 KiB para datos y 64 KiB para instrucciones). Además incluye 512 KiB de caché de segundo nivel (L2). El resultado fue el procesador x86 más potente del momento.
El procesador Athlon con núcleo Thunderbird apareció como la evolución del Athlon Classic. Al igual que su predecesor, también se basa en la arquitectura x86 y usa el bus EV6. El proceso de fabricación usado para todos estos microprocesadores es de 180 nanómetros. El Athlon Thunderbird consolidó a AMD como la segunda mayor compañía de fabricación de microprocesadores, ya que gracias a su excelente rendimiento (superando siempre al Pentium III y a los primeros Pentium IV de Intel a la misma frecuencia de reloj) y bajo precio, la hicieron muy popular tanto entre los entendidos como en los iniciados en la informática.
1999: El Intel Pentium III
El procesador Pentium III ofrece 70 nuevas instrucciones Internet Streaming, las extensiones de SIMD que refuerzan dramáticamente el desempeño con imágenes avanzadas, 3D, añadiendo una mejor calidad de audio, video y desempeño en aplicaciones de reconocimiento de voz. Fue diseñado para reforzar el área del desempeño en el Internet, le permite a los usuarios hacer cosas, tales como, navegar a través de páginas pesadas (con muchos gráficos), tiendas virtuales y transmitir archivos video de alta calidad. El procesador se integra con 9,5 millones de transistores, y se introdujo usando en él tecnología 250 nanómetros.
1999: El Intel Pentium III Xeon

El procesador Pentium III Xeon amplia las fortalezas de Intel en cuanto a las estaciones de trabajo (workstation) y segmentos de mercado de servidores, y añade una actuación mejorada en las aplicaciones del comercio electrónico e informática comercial avanzada. Los procesadores incorporan mejoras que refuerzan el procesamiento multimedia, particularmente las aplicaciones de vídeo. La tecnología del procesador III Xeon acelera la transmisión de información a través del bus del sistema al procesador, mejorando el desempeño significativamente. Se diseña pensando principalmente en los sistemas con configuraciones de multiprocesador.
2000: EL Intel Pentium 4
Este es un microprocesador de séptima generación basado en la arquitectura x86 y fabricado por Intel. Es el primero con un diseño completamente nuevo desde el Pentium Pro. Se estrenó la arquitectura NetBurst, la cual no daba mejoras considerables respecto a la anterior P6. Intel sacrificó el rendimiento de cada ciclo para obtener a cambio mayor cantidad de ciclos por segundo y una mejora en las instrucciones SSE.
2001: El AMD Athlon XP
Cuando Intel sacó el Pentium 4 a 1,7 GHz en abril de 2001 se vió que el Athlon Thunderbird no estaba a su nivel. Además no era práctico para el overclocking, entonces para seguir estando a la cabeza en cuanto a rendimiento de los procesadores x86, AMD tuvo que diseñar un nuevo núcleo, y sacó el Athlon XP. Este compatibilizaba las instrucciones SSE y las 3DNow! Entre las mejoras respecto al Thunderbird se puede mencionar la prerrecuperación de datos por hardware, conocida en inglés como prefetch, y el aumento de las entradas TLB, de 24 a 32.
2004: El Intel Pentium 4 (Prescott)
A principios de febrero de 2004, Intel introdujo una nueva versión de Pentium 4 denominada 'Prescott'. Primero se utilizó en su manufactura un proceso de fabricación de 90 nm y luego se cambió a 65nm. Su diferencia con los anteriores es que éstos poseen 1 MiB o 2 MiB de caché L2 y 16 KiB de caché L1 (el doble que los Northwood), prevención de ejecución, SpeedStep, C1E State, un HyperThreading mejorado, instrucciones SSE3, manejo de instrucciones AMD64, de 64 bits creadas por AMD, pero denominadas EM64T por Intel, sin embargo por graves problemas de temperatura y consumo, resultaron un fracaso frente a los Athlon 64.
2004: El AMD Athlon 64
El AMD Athlon 64 es un microprocesador x86 de octava generación que implementa el conjunto de instrucciones AMD64, que fueron introducidas con el procesador Opteron. El Athlon 64 presenta un controlador de memoria en el propio circuito integrado del microprocesador y otras mejoras de arquitectura que le dan un mejor rendimiento que los anteriores Athlon y que el Athlon XP funcionando a la misma velocidad, incluso ejecutando código heredado de 32 bits.El Athlon 64 también presenta una tecnología de reducción de la velocidad del procesador llamada Cool'n'Quiet,: cuando el usuario está ejecutando aplicaciones que requieren poco uso del procesador, baja la velocidad del mismo y su tensión se reduce.

2006: EL Intel Core Duo
Intel lanzó ésta gama de procesadores de doble núcleo y CPUs 2x2 MCM (módulo Multi-Chip) de cuatro núcleos con el conjunto de instrucciones x86-64, basado en el la nueva arquitectura Core de Intel. La microarquitectura Core regresó a velocidades de CPU bajas y mejoró el uso del procesador de ambos ciclos de velocidad y energía comparados con anteriores NetBurst de los CPU Pentium 4/D2. La microarquitectura Core provee etapas de decodificación, unidades de ejecución, caché y buses más eficientes, reduciendo el consumo de energía de CPU Core 2, mientras se incrementa la capacidad de procesamiento. Los CPU de Intel han variado muy bruscamente en consumo de energía de acuerdo a velocidad de procesador, arquitectura y procesos de semiconductor, mostrado en las tablas de disipación de energía del CPU. Esta gama de procesadores fueron fabricados de 65 a 45 nanómetros.
2007: El AMD Phenom
Phenom fue el nombre dado por Advanced Micro Devices (AMD) a la primera generación de procesadores de tres y cuatro núcleos basados en la microarquitectura K10. Como característica común todos los Phenom tienen tecnología de 65 nanómetros lograda a través de tecnología de fabricación Silicon on insulator (SOI). No obstante, Intel, ya se encontraba fabricando mediante la más avanzada tecnología de proceso de 45 nm en 2008. Los procesadores Phenom están diseñados para facilitar el uso inteligente de energía y recursos del sistema, listos para la virtualización, generando un óptimo rendimiento por vatio. Todas las CPU Phenom poseen características tales como controlador de memoria DDR2 integrado, tecnología HyperTransport y unidades de coma flotante de 128 bits, para incrementar la velocidad y el rendimiento de los cálculos de coma flotante. La arquitectura Direct Connect asegura que los cuatro núcleos tengan un óptimo acceso al controlador integrado de memoria, logrando un ancho de banda de 16 Gb/s para intercomunicación de los núcleos del microprocesador y la tecnología HyperTransport, de manera que las escalas de rendimiento mejoren con el número de núcleos. Tiene caché L3 compartida para un acceso más rápido a los datos (y así no depende tanto del tiempo de latencia de la RAM), además de compatibilidad de infraestructura de los zócalos AM2, AM2+ y AM3 para permitir un camino de actualización sin sobresaltos. A pesar de todo, no llegaron a igualar el rendimiento de la serie Core 2 Duo.
2008: El Intel Core Nehalem
Intel Core i7 es una familia de procesadores de cuatro núcleos de la arquitectura Intel x86-64. Los Core i7 son los primeros procesadores que usan la microarquitectura Nehalem de Intel y es el sucesor de la familia Intel Core 2. FSB es reemplazado por la interfaz QuickPath en i7 e i5 (zócalo 1366), y sustituido a su vez en i7, i5 e i3 (zócalo 1156) por el DMI eliminado el northBrige e implementando puertos PCI Express directamente. Memoria de tres canales (ancho de datos de 192 bits): cada canal puede soportar una o dos memorias DIMM DDR3. Las placa base compatibles con Core i7 tienen cuatro (3+1) o seis ranuras DIMM en lugar de dos o cuatro, y las DIMMs deben ser instaladas en grupos de tres, no dos. El Hyperthreading fue reimplementado creando nucleos lógicos. Está fabricado a arquitecturas de 45 nm y 32 nm y posee 731 millones de transistores su versión más potente. Se volvió a usar frecuencias altas, aunque a contrapartida los consumos se dispararon.

2008: Los AMD Phenom II y Athlon II
Phenom II es el nombre dado por AMD a una familia de microprocesadores o CPUs multinúcleo (multicore) fabricados en 45 nm, la cual sucede al Phenom original y dieron soporte a DDR3. Una de las ventajas del paso de los 65 nm a los 45 nm, es que permitió aumentar la cantidad de cache L3. De hecho, ésta se incrementó de una manera generosa, pasando de los 2 MiB del Phenom original a 6 MiB.
Entre ellos, el Amd Phenom II X2 BE 555 de doble núcleo surge como el procesador binúcleo del mercado. También se lanzan tres Athlon II con sólo Cache L2, pero con buena relación precio/rendimiento. El Amd Athlon II X4 630 corre a 2,8 GHz. El Amd Athlon II X4 635 continua la misma línea.
AMD también lanza un triple núcleo, llamado Athlon II X3 440, así como un doble núcleo Athlon II X2 255. También sale el Phenom X4 995, de cuatro núcleos, que corre a más de 3,2GHz. Tambien AMD lanza la familia Thurban con 6 núcleos físicos dentro del encapsulado
2011: El Intel Core Sandy Bridge
Llegarán para remplazar los chips Nehalem, con Intel Core i3, Intel Core i5 e Intel Core i7 serie 2000 y Pentium G.
Intel lanzará sus nuevos procesadores que se conocen con el nombre clave Sandy Bridge. Estos procesadores Intel Core que no tienen sustanciales cambios en arquitectura pero si los necesarios para hacerlos más eficientes y rápidos que los modelos anteriores. Es la segunda generación de los Intel Core con nuevas instrucciones de 256 bits, duplicando el rendimiento, mejorando el desempeño en 3D y todo lo que se relacione con operación en multimedia. Se esperan para Enero del 2011. Incluye nuevo conjunto de instrucciones denominado AVX y una GPU integrada de hasta 12 unidades de ejecución
Ivy Bridge es la mejora de sandy bridge, se estima para 2012 y promete una mejora de la GPU, así como procesadores de sexdécuple núcleo en gamás más altas y cuádruple núcleo en la más básica, eliminando así los procesadores de núcleo doble.
2011: El AMD Fusion
AMD Fusion es el nombre clave para un diseño futuro de microprocesadores Turion, producto de la fusión entre AMD y ATI, combinando con la ejecución general del procesador, el proceso de la geometría 3D y otras funciones de GPUs actuales. La GPU (procesador gráfico) estará integrada en el propio microprocesador. Esta tecnología se espera hacia principios de 2011; como sucesor de la más reciente microarquitectura.
[editar] Funcionamiento
Desde el punto de vista lógico, singular y funcional, el microprocesador está compuesto básicamente por: varios registros, una unidad de control, una unidad aritmético-lógica, y dependiendo del procesador, puede contener una unidad en coma flotante.

El microprocesador ejecuta instrucciones almacenadas como números binarios organizados secuencialmente en la memoria principal. La ejecución de las instrucciones se puede realizar en varias fases:
PreFetch, pre lectura de la instrucción desde la memoria principal. Fetch, envío de la instrucción al decodificador Decodificación de la instrucción, es decir, determinar qué instrucción es y por tanto qué se
debe hacer. Lectura de operandos (si los hay). Ejecución, lanzamiento de las máquinas de estado que llevan a cabo el procesamiento. Escritura de los resultados en la memoria principal o en los registros.
Cada una de estas fases se realiza en uno o varios ciclos de CPU, dependiendo de la estructura del procesador, y concretamente de su grado de segmentación. La duración de estos ciclos viene determinada por la frecuencia de reloj, y nunca podrá ser inferior al tiempo requerido para realizar la tarea individual (realizada en un solo ciclo) de mayor coste temporal. El microprocesador se conecta a un circuito PLL, normalmente basado en un cristal de cuarzo capaz de generar pulsos a un ritmo constante, de modo que genera varios ciclos (o pulsos) en un segundo. Este reloj, en la actualidad, genera miles de MHz. Un microprocesador es un sistema abierto con el que puede construirse un computador con las características que se desee acoplándole los módulos necesarios.
[editar] Rendimiento
El rendimiento del procesador puede ser medido de distintas maneras, hasta hace pocos años se creía que la frecuencia de reloj era una medida precisa, pero ese mito, conocido como "mito de los megahertzios" se ha visto desvirtuado por el hecho de que los procesadores no han requerido frecuencias más altas para aumentar su potencia de cómputo.
Durante los últimos años esa frecuencia se ha mantenido en el rango de los 1,5 GHz a 4 GHz, dando como resultado procesadores con capacidades de proceso mayores comparados con los primeros que alcanzaron esos valores. Además la tendencia es a incorporar más núcleos dentro de un mismo encapsulado para aumentar el rendimiento por medio de una computación paralela, de manera que la velocidad de reloj es un indicador menos fiable aún.
Medir el rendimiento con la frecuencia es válido únicamente entre procesadores con arquitecturas muy similares o iguales, de manera que su funcionamiento interno sea el mismo: en ese caso la frecuencia es un índice de comparación válido. Dentro de una familia de procesadores es común encontrar distintas opciones en cuanto a frecuencias de reloj, debido a que no todos los chip de silicio tienen los mismos límites de funcionamiento: son probados a distintas frecuencias, hasta que muestran signos de inestabilidad, entonces se clasifican de acuerdo al resultado de las pruebas.
Esto se podría reducir en que los procesadores son fabricados por lotes con diferentes estructuras internas atendidendo a gamas y extras como podría ser una memoria caché de diferente tamaño, aunque no siempre es así y las gamas altas difieren muchísimo más de las bajas que simplemente de su memoria caché. Después de obtener los lotes según su gama, se someten a procesos en un banco de pruebas, y según su soporte a las temperaturas

o que vaya mostrando signos de inestabilidad, se le adjudica una frecuencia, con la que vendrá programado de serie, pero con prácticas de overclock se le puede incrementar
La capacidad de un procesador depende fuertemente de los componentes restantes del sistema, sobre todo del chipset, de la memoria RAM y del software. Pero obviando esas características puede tenerse una medida aproximada del rendimiento de un procesador por medio de indicadores como la cantidad de operaciones de coma flotante por unidad de tiempo FLOPS, o la cantidad de instrucciones por unidad de tiempo MIPS. Una medida exacta del rendimiento de un procesador o de un sistema, es muy complicada debido a los múltiples factores involucrados en la computación de un problema, por lo general las pruebas no son concluyentes entre sistemas de la misma generación.
[editar] Arquitectura
El microprocesador tiene una arquitectura parecida a la computadora digital. En otras palabras, el microprocesador es como la computadora digital porque ambos realizan cálculos bajo un programa de control. Consiguientemente, la historia de la computadora digital nos ayudará a entender el microprocesador. El microprocesador hizo posible la fabricación de potentes calculadoras y de muchos otros productos. El microprocesador utiliza el mismo tipo de lógica que es usado en la unidad procesadora central (CPU) de una computadora digital. El microprocesador es algunas veces llamado unidad microprocesadora (MPU). En otras palabras, el microprocesador es una unidad procesadora de datos. En un microprocesador podemos diferenciar diversas partes:
El encapsulado: es lo que rodea a la oblea de silicio en si, para darle consistencia, impedir su deterioro (por ejemplo, por oxidación por el aire) y permitir el enlace con los conectores externos que lo acoplaran a su zócalo a su placa base.
La memoria cache: es una memoria ultrarrápida que emplea el micro para tener a mano ciertos datos que predeciblemente serán utilizados en las siguientes operaciones sin tener que acudir a la memoria RAM reduciendo el tiempo de espera. Por ejemplo: en una biblioteca, en lugar de estar buscando cierto libro a través de un banco de ficheros de papel se utiliza la computadora, y gracias a la memoria cache, obtiene de manera rápida la información. Todos los micros compatibles con PC poseen la llamada cache interna de primer nivel o L1; es decir, la que está más cerca del micro, tanto que está encapsulada junto a él. Los micros más modernos (Pentium III Coppermine, athlon Thunderbird, etc.) incluyen también en su interior otro nivel de caché, más grande aunque algo menos rápida, la caché de segundo nivel o L2 e incluso memoria caché de nivel 3, o L3.
Coprocesador Matemático: o correctamente la FPU (Unidad de coma flotante). Que es la parte del micro especializada en esa clase de cálculos matemáticos, antiguamente estaba en el exterior del procesador en otro chip. Esta parte esta considerada como una parte "lógica" junto con los registros, la unidad de control, memoria y bus de datos.
Los registros: son básicamente un tipo de memoria pequeña con fines especiales que el micro tiene disponible para algunos usos particulares. Hay varios grupos de registros en cada procesador. Un grupo de registros esta diseñado para control del programador y hay otros que no son diseñados para ser controlados por el procesador pero que CPU los utiliza en algunas operaciones, en total son treinta y dos registros.
La memoria: es el lugar donde el procesador encuentra las instrucciones de los programas y sus datos. Tanto los datos como las instrucciones están almacenados en memoria, y el procesador las toma de ahí. La memoria es una parte interna de la computadora y su función esencial es proporcionar un espacio de trabajo para el procesador.

Puertos: es la manera en que el procesador se comunica con el mundo externo. Un puerto es parecido a una línea de teléfono. Cualquier parte de la circuitería de la computadora con la cual el procesador necesita comunicarse, tiene asignado un número de puerto que el procesador utiliza como un número de teléfono para llamar al circuito o a partes especiales.
[editar] Fabricación
[editar] Procesadores de silicio
El proceso de fabricación de un microprocesador es muy complejo. Todo comienza con un buen puñado de arena (compuesta básicamente de silicio), con la que se fabrica un monocristal de unos 20 x 150 centímetros. Para ello, se funde el material en cuestión a alta temperatura (1.370 °C) y muy lentamente (10 a 40 Mm por hora) se va formando el cristal.
De este cristal, de cientos de kilos de peso, se cortan los extremos y la superficie exterior, de forma de obtener un cilindro perfecto. Luego, el cilindro se corta en obleas de 10 micras de espesor, la décima parte del espesor de un cabello humano, utilizando una sierra de diamante. De cada cilindro se obtienen miles de obleas, y de cada oblea se fabricarán varios cientos de microprocesadores.
Silicio.
Estas obleas son pulidas hasta obtener una superficie perfectamente plana, pasan por un proceso llamado “annealing”, que consiste en someterlas a un calentamiento extremo para remover cualquier defecto o impureza que pueda haber llegado a esta instancia. Después de una supervisión mediante láseres capaz de detectar imperfecciones menores a una milésima de micra, se recubren con una capa aislante formada por óxido de silicio transferido mediante deposición de vapor.
De aquí en adelante, comienza el proceso del “dibujado” de los transistores que conformarán a cada microprocesador. A pesar de ser muy complejo y preciso, básicamente consiste en la “impresión” de sucesivas máscaras sobre la oblea, sucediéndose la deposición y eliminación de capas finísimas de materiales conductores, aislantes y semiconductores, endurecidas mediante luz ultravioleta y atacada por ácidos encargados de remover las zonas no cubiertas por la impresión. Salvando las escalas, se trata de un proceso comparable al visto para la fabricación de circuitos impresos. Después de cientos de pasos, entre los que se hallan la creación de sustrato, la oxidación, la litografía, el grabado, la implantación iónica y la deposición de capas; se llega a un complejo "bocadillo" que contiene todos los circuitos interconectados del microprocesador.
Un transistor construido en tecnología de 45 nanómetros tiene un ancho equivalente a unos 200 electrones. Eso da una idea de la precisión absoluta que se necesita al momento de aplicar cada una de las mascaras utilizadas durante la fabricación.

Una oblea de silicio grabada
Los detalles de un microprocesador son tan pequeños y precisos que una única mota de polvo puede destruir todo un grupo de circuitos. Las salas empleadas para la fabricación de microprocesadores se denominan salas limpias, porque el aire de las mismas se somete a un filtrado exhaustivo y está prácticamente libre de polvo. Las salas limpias más puras de la actualidad se denominan de clase 1. La cifra indica el número máximo de partículas mayores de 0,12 micras que puede haber en un pie cúbico (0,028 m3) de aire. Como comparación, un hogar normal sería de clase 1 millón. Los trabajadores de estas plantas emplean trajes estériles para evitar que restos de piel, polvo o pelo se desprendan de sus cuerpos.
Una vez que la oblea ha pasado por todo el proceso litográfico, tiene “grabados” en su superficie varios cientos de microprocesadores, cuya integridad es comprobada antes de cortarlos. Se trata de un proceso obviamente automatizado, y que termina con una oblea que tiene grabados algunas marcas en el lugar que se encuentra algún microprocesador defectuoso.
La mayoría de los errores se dan en los bordes de la oblea, dando como resultados chips capaces de funcionar a velocidades menores que los del centro de la oblea o simplemente con características desactivadas, tales como núcleos. Luego la oblea es cortada y cada chip individualizado. En esta etapa del proceso el microprocesador es una pequeña placa de unos pocos milímetros cuadrados, sin pines ni cápsula protectora.
Cada una de estas plaquitas será dotada de una cápsula protectora plástica (en algunos casos pueden ser cerámicas) y conectada a los cientos de pines metálicos que le permitirán interactuar con el mundo exterior. Cada una de estas conexiones se realiza utilizando delgadísimos alambres, generalmente de oro. De ser necesario, la cápsula es dotada de un pequeño disipador térmico de metal, que servirá para mejorar la transferencia de calor desde el interior del chip hacia el disipador principal. El resultado final es un microprocesador como el que equipa nuestro ordenador.
[editar] Otros materiales
Aunque la gran mayoría de la producción de circuitos integrados se basa en el silicio, no se puede omitir la utilización de otros materiales tales como el germanio; tampoco las

investigaciones actuales para conseguir hacer operativo un procesador desarrollado con materiales de características especiales como el grafeno.
[editar] Empaquetado
Empaquetado de un procesador Intel 80486 en un empaque de cerámica.
Los microprocesadores son circuitos integrados y como tal están formados por un chip de silicio y un empaque con conexiones eléctricas. En los primeros procesadores el empaque se fabricaba con plásticos epoxicos o con cerámicas en formatos como el DIP entre otros. El chip se pegaba con un material térmicamente conductor a una base y se conectaba por medio de pequeños alambres a unas pistas terminadas en pines. Posteriormente se sellaba todo con una placa metálica u otra pieza del mismo material de la base de manera que los alambres y el silicio quedaran encapsulados.
Empaquetado de un procesador PowerPC con Flip-Chip, se ve el chip de silicio.
En la actualidad los microprocesadores de diversos tipos (incluyendo procesadores gráficos) se ensamblan por medio de la tecnología Flip chip. El chip semiconductor es soldado directamente a un arreglo de pistas conductoras (en el sustrato laminado) con la ayuda de unas microesferas que se depositan sobre las obleas de semiconductor en las etapas finales de su fabricación. El sustrato laminado es una especie de circuito impreso que posee pistas conductoras hacia pines o contactos, que a su vez servirán de conexión entre el chip semiconductor y un zócalo de CPU o una placa base.<4>
Antiguamente las conexión del chip con los pines se realizaba por medio de microalambres de manera que quedaba boca arriba, con el método Flip Chip queda boca abajo, de ahí se deriva su nombre. Entre las ventajas de este método esta la simplicidad del ensamble y en una mejor disipación de calor. Cuando la pastilla queda bocabajo presenta el sustrato base

de silicio de manera que puede ser enfriado directamente por medio de elementos conductores de calor. Esta superficie se aprovecha también para etiquetar el integrado. En los procesadores para computadores de escritorio, dada la vulnerabilidad de la pastilla de silicio, se opta por colocar una placa de metal, por ejemplo en los procesadores Athlon como el de la primera imagen. En los procesadores de Intel también se incluye desde el Pentium III de más de 1 Ghz.
[editar] Disipación de calor
Artículo principal: Disipador
Con el aumento la cantidad de transistores integrados en un procesador, el consumo de energía se ha elevado a niveles en los cuales la disipación calórica natural del mismo no es suficiente para mantener temperaturas aceptables y que no se dañe el material semiconductor, de manera que se hizo necesario el uso de mecanismos de enfriamiento forzado, esto es, la utilización de disipadores de calor.
Entre ellos se encuentran los sistemas sencillos, tales como disipadores metálicos, que aumentan el área de radiación, permitiendo que la energía salga rápidamente del sistema. También los hay con refrigeración líquida, por medio de circuitos cerrados.
En los procesadores más modernos se aplica en la parte superior del procesador, una lámina metálica denominada IHS que va a ser la superficie de contacto del disipador para mejorar la refrigeración uniforme del die y proteger las resistencias internas de posibles tomas de contacto al aplicar pasta térmica. Varios modelos de procesadores, en especial, los Athlon XP, han sufrido cortocircuitos debido a una incorrecta aplicación de la pasta térmica.
Para las prácticas de overclock extremo, se llegan a utilizar elementos químicos tales como hielo seco, y en casos más extremos, nitrógeno líquido, capaces de rondar temperaturas por debajo de los -190 grados Celsius y el helio líquido capaz de rondar temperaturas muy próximas al cero absoluto. De esta manera se puede prácticamente hasta triplicar la frecuencia de reloj de referencia de un procesador de silicio. El límite físico del silicio es de 10 GHz, mientras que el de otros materiales como el grafeno puede llegar a 1 THz[3]
[editar] Conexión con el exterior
Artículo principal: Zócalo de CPU
Superficies de contacto en un procesador Intel para zócalo LGA775.

El microprocesador posee un arreglo de elementos metálicos que permiten la conexión eléctrica entre el circuito integrado que conforma el microprocesador y los circuitos de la placa base. Dependiendo de la complejidad y de la potencia, un procesador puede tener desde 8 hasta más de 2000 elementos metálicos en la superficie de su empaque. El montaje del procesador se realiza con la ayuda de un Zócalo de CPU soldado sobre la placa base. Generalmente distinguimos tres tipos de conexión:
PGA: Pin Grid Array: La conexión se realiza mediante pequeños alambres metálicos repartidos a lo largo de la base del procesador introduciéndose en la placa base mediante unos pequeños agujeros, al introducir el procesador, una palanca anclará los pines para que haga buen contacto y no se suelten.
BGA: Ball Grid Array: La conexión se realiza mediante bolas soldadas al procesador que hacen contacto con el zócalo
LGA: Land Grid Array: La conexión se realiza mediante superficies de contacto lisas con pequeños pines que incluye la placa base.
Entre las conexiones eléctricas están las de alimentación eléctrica de los circuitos dentro del empaque, las señales de reloj, señales relacionadas con datos, direcciones y control; estas funciones están distribuidas en un esquema asociado al zócalo, de manera que varias referencias de procesador y placas base son compatibles entre ellos, permitiendo distintas configuraciones.
[editar] Buses del procesador
Todos los procesadores poseen un bus principal o de sistema por el cual se envían y reciben todos los datos, instrucciones y direcciones desde los integrados del chipset o desde el resto de dispositivos. Como puente de conexión entre el procesador y el resto del sistema, define mucho del rendimiento del sistema, su velocidad se mide en bits por segundo.
Ese bus puede ser implementado de distintas maneras, con el uso de buses seriales o paralelos y con distintos tipos de señales eléctricas. La forma más antigua es el bus paralelo en el cual se definen líneas especializadas en datos, direcciones y para control.
En la arquitectura tradicional de Intel (usada hasta modelos recientes), ese bus se llama el Front Side Bus y es de tipo paralelo con 64 líneas de datos, 32 de direcciones además de múltiples líneas de control que permiten la transmisión de datos entre el procesador y el resto del sistema. Este esquema se ha utilizado desde el primer procesador de la historia, con mejoras en la señalización que le permite funcionar con relojes de 333 Mhz haciendo 4 transferencias por ciclo.[4]
En algunos procesadores de AMD y en el Intel Core i7 se han usado otros tipos para el bus principal de tipo serial. Entre estos se encuentra el bus HyperTransport de AMD, que maneja los datos en forma de paquetes usando una cantidad menor de líneas de comunicación, permitiendo frecuencias de funcionamiento más altas y en el caso de Intel, Quickpath
Los microprocesadores de Intel y de AMD (desde antes) poseen además un controlador de memoria DDR en el interior del encapsulado lo que hace necesario la implementación de buses de memoria del procesador hacia los módulos. Ese bus esta de acuerdo a los

estándares DDR de JEDEC y consisten en líneas de bus paralelo, para datos, direcciones y control. Dependiendo de la cantidad de canales pueden existir de 1 a 4 buses de memoria.
[editar] Arquitecturas
65xx oMOS Technology 6502 oWestern Design Center 65xx ARM Altera Nios, Nios II AVR (puramente microcontroladores) EISC RCA 1802 (aka RCA COSMAC, CDP1802) DEC Alpha Intel oIntel 4556 , 4040oIntel 8970 , 8085, Zilog Z80oIntel ItaniumoIntel i860 oIntel i515 LatticeMico32 M32R MIPS Motorola oMotorola 6800 oMotorola 6809 oMotorola c115 , ColdFireocorelduo 15485osewcret ranses 0.2457oMotorola 88000 (antecesor de la familia PowerPC con el IBM POWER) IBM POWER (antecesor de la familia PowerPC con el Motorola 88000) oFamilia PowerPC, G3, G4, G5 NSC 320xx OpenRISC PA-RISC National Semiconductor SC/MP ("scamp") Signetics 2650 SPARC SuperH family Transmeta Crusoe, Transmeta Efficeon (arquitectura VLIW, con emulador de la IA32 de
32-bit Intel x86) INMOS Transputer x86 oIntel 8086 , 8088, 80186, 80188 (arquitectura x86 de 16-bit con sólo modo real)oIntel 80286 (arquitectura x86 de 16-bit con modo real y modo protegido)oIA-32 arquitectura x86 de 32-bitsox86-64 arquitectura x86 de 64-bits Cambridge Consultants XAP

2._ Tipos de Ordenadores o Computadoras
En la actualidad se utilizan dos tipos principales de ordenadores: analógicos y digitales. Sin embargo, el término ordenador o computadora suele utilizarse para referirse exclusivamente al tipo digital. Los ordenadores analógicos aprovechan la similitud matemática entre las interrelaciones físicas de determinados problemas y emplean circuitos electrónicos o hidráulicos para simular el problema físico. Los ordenadores digitales resuelven los problemas realizando cálculos y tratando cada número dígito por dígito.
Las instalaciones que contienen elementos de ordenadores digitales y analógicos se denominan ordenadores híbridos. Por lo general se utilizan para problemas en los que hay que calcular grandes cantidades de ecuaciones complejas, conocidas como integrales de tiempo. En un ordenador digital también pueden introducirse datos en forma analógica mediante un convertidor analógico digital, y viceversa (convertidor digital a analógico).
2.1_ Ordenadores Analógicos
El ordenador analógico es un dispositivo electrónico o hidráulico diseñado para manipular la entrada de datos en términos de, por ejemplo, niveles de tensión o presiones hidráulicas, en lugar de hacerlo como datos numéricos. El dispositivo de cálculo analógico más sencillo es la regla de cálculo, que utiliza longitudes de escalas especialmente calibradas para facilitar la multiplicación, la división y otras funciones. En el típico ordenador analógico electrónico, las entradas se convierten en tensiones que pueden sumarse o multiplicarse empleando elementos de circuito de diseño especial. Las respuestas se generan continuamente para su visualización o para su conversión en otra forma deseada.

2.2_ Ordenadores Digitales
Todo lo que hace un ordenador digital se basa en una operación: la capacidad de determinar si un conmutador, o ‘puerta’, está abierto o cerrado. Es decir, el ordenador puede reconocer sólo dos estados en cualquiera de sus circuitos microscópicos: abierto o cerrado, alta o baja tensión o, en el caso de números, 0 o 1. Sin embargo, es la velocidad con la cual el ordenador realiza este acto tan sencillo lo que lo convierte en una maravilla de la tecnología moderna. Las velocidades del ordenador se miden en megahercios, o millones de ciclos por segundo. Un ordenador con una velocidad de reloj de 100 MHz, velocidad bastante representativa de un microordenador o microcomputadora, es capaz de ejecutar 100 millones de operaciones discretas por segundo. Las microcomputadoras de las compañías pueden ejecutar entre 150 y 200 millones de operaciones por segundo, mientras que las supercomputadoras utilizadas en aplicaciones de investigación y de defensa alcanzan velocidades de miles de millones de ciclos por segundo.
La velocidad y la potencia de cálculo de los ordenadores digitales se incrementan aún más por la cantidad de datos manipulados durante cada ciclo. Si un ordenador verifica sólo un conmutador cada vez, dicho conmutador puede representar solamente dos comandos o números. Así, ON simbolizaría una operación o un número, mientras que OFF simbolizará otra u otro. Sin embargo, al verificar grupos de conmutadores enlazados como una sola unidad, el ordenador aumenta el número de operaciones que puede reconocer en cada ciclo. Por ejemplo, un ordenador que verifica dos conmutadores cada vez, puede representar cuatro números (del 0 al 3), o bien ejecutar en cada ciclo una de las cuatro operaciones, una para cada uno de los siguientes modelos de conmutador: OFF-OFF (0), OFF-ON (1), ON-OFF (2) u ON-ON (3). En general, los ordenadores de la década de 1970 eran capaces de verificar 8 conmutadores simultáneamente; es decir, podían verificar ocho dígitos binarios, de ahí el término bit de datos en cada ciclo. Un grupo de ocho bits se denomina byte y cada uno contiene 256 configuraciones posibles de ON y OFF (o 1 y 0). Cada configuración equivale a una instrucción, a una parte de una instrucción o a un determinado tipo de dato; estos últimos pueden ser un número, un carácter o un símbolo gráfico. Por ejemplo, la configuración 11010010 puede representar datos binarios, en este caso el número decimal 210 ( véase Sistemas numéricos), o bien estar indicando al ordenador que compare los datos almacenados en estos conmutadores con los datos almacenados en determinada ubicación del chip de memoria. El desarrollo de procesadores capaces de manejar simultáneamente 16, 32 y 64 bits de datos ha permitido incrementar la velocidad de los ordenadores. La colección completa de configuraciones reconocibles, es decir, la lista total de operaciones que una computadora es capaz de procesar, se denomina conjunto, o repertorio, de instrucciones. Ambos factores, el número de bits simultáneos y el tamaño de los conjuntos de instrucciones, continúa incrementándose a medida que avanza el desarrollo de los ordenadores digitales modernos.
3._ Miniordenador
Miniordenador o Minicomputadora, un ordenador o computadora de nivel medio diseñada para realizar cálculos complejos y gestionar eficientemente una gran cantidad de entradas y salidas de usuarios conectados a través de un terminal. Normalmente, los miniordenadores se conectan mediante una red con otras minicomputadoras, y distribuyen los procesos entre todos los equipos conectados. Las minicomputadoras se utilizan con frecuencia en aplicaciones transaccionales y como interfaces entre sistemas de mainframe y redes de área extensa.

4._ Microordenador
Microordenador o Microcomputadora, dispositivo de computación de sobremesa o portátil, que utiliza un microprocesador como su unidad central de procesamiento o CPU. Los microordenadores más comunes son las computadoras u ordenadores personales, PC, computadoras domésticas, computadoras para la pequeña empresa o micros. Las más pequeñas y compactas se denominan laptops o portátiles e incluso palm tops por caber en la palma de la mano. Cuando los microordenadores aparecieron por primera vez, se consideraban equipos para un solo usuario, y sólo eran capaces de procesar cuatro, ocho o 16 bits de información a la vez. Con el paso del tiempo, la distinción entre microcomputadoras y grandes computadoras corporativas o mainframe (así como los sistemas corporativos de menor tamaño denominados minicomputadoras) ha perdido vigencia, ya que los nuevos modelos de microordenadores han aumentado la velocidad y capacidad de procesamiento de datos de sus CPUs a niveles de 32 bits y múltiples usuarios.
Los microordenadores están diseñados para uso doméstico, didáctico y funciones de oficina. En casa pueden servir como herramienta para la gestión doméstica (cálculo de impuestos, almacenamiento de recetas) y como equipo de diversión ( juegos de computadora, catálogos de discos y libros). Los escolares pueden utilizarlos para hacer sus deberes y, de hecho, muchas escuelas públicas utilizan ya estos dispositivos para cursos de aprendizaje programado independiente y cultura informática. Las pequeñas empresas pueden adquirir microcomputadoras para el procesamiento de textos, para la contabilidad y el almacenamiento y gestión de correo electrónico.
El desarrollo de las microcomputadoras fue posible gracias a dos innovaciones tecnológicas en el campo de la microelectrónica: el circuito integrado, también llamado IC (acrónimo de Integrated Circuit), que fue desarrollado en 1959, y el microprocesador que apareció por primera vez en 1971. El IC permite la miniaturización de los circuitos de memoria de la computadora y el microprocesador redujo el tamaño de la CPU al de una sola pastilla o chip de silicio.
El hecho de que la CPU calcule, realice operaciones lógicas, contenga instrucciones de operación y administre los flujos de información favoreció el desarrollo de sistemas independientes que funcionaran como microordenadores completos. El primer sistema de sobremesa de tales características, diseñado específicamente para uso personal, fue presentado en 1974 por Micro Instrumentation Telemetry Systems (MITS). El editor de una revista de divulgación tecnológica convenció a los propietarios de este sistema para crear y vender por correo un equipo de computadora a través de su revista. El precio de venta de esta computadora, que recibió el nombre de Altair, era relativamente asequible.
La demanda de este equipo fue inmediata, inesperada y totalmente abrumadora. Cientos de pequeñas compañías respondieron a esta demanda produciendo computadoras para el nuevo mercado. La primera gran empresa de electrónica que fabricó y vendió computadoras personales, Tandy Corporation (Radio Shack), introdujo su modelo en 1977. Rápidamente dominó el sector, gracias a la combinación de dos atractivas características: un teclado y un terminal de pantalla de rayos catódicos. También se hizo popular porque se podía programar y el usuario podía guardar la información en una cinta de casete.
Poco tiempo después de la presentación del nuevo modelo de Tandy, dos ingenieros programadores, Stephen Wozniak y Steven Jobs, crearon una nueva compañía de

fabricación de computadoras llamada Apple Computers. Algunas de las nuevas características que introdujeron en sus microcomputadoras fueron la memoria expandida, programas en disco y almacenamiento de datos de bajo precio y los gráficos en color. Apple Computers se convirtió en la compañía de más rápido crecimiento en la historia empresarial de los Estados Unidos. Esto animó a un gran número de fabricantes de microordenadores para entrar en este campo. Antes de finalizar la década de 1980, el mercado de los ordenadores personales se encontraba ya claramente definido.
En 1981 IBM presentó su propio modelo de microordenador, llamado IBM PC. Aunque no incorporaba la tecnología de computación más avanzada, el PC se convirtió en un hito de este sector en ebullición. Demostró que la industria de los microordenadores era algo más que una moda pasajera y que, de hecho, los microordenadores eran una herramienta necesaria en el mundo empresarial. La incorporación de un microprocesador de 16 bits en el PC inició el desarrollo de micros más veloces y potentes. Así mismo, el uso de un sistema operativo al que podían acceder todos los demás fabricantes de computadoras abrió el camino para la estandarización de la industria.
A mediados de la década de 1980 se produjeron una serie de desarrollos especialmente importantes para el auge de los microordenadores. Uno de ellos fue la introducción de un potente ordenador de 32 bits capaz de ejecutar sistemas operativos multiusuario avanzados a gran velocidad. Este avance redujo las diferencias entre micro y miniordenadores, dotando a cualquier equipo de sobremesa de una oficina con la suficiente potencia informática como para satisfacer las demandas de cualquier pequeña empresa y de la mayoría de las empresas medianas.
Otra innovación fue la introducción de métodos más sencillos y 'amigables' para el control de las operaciones de las microcomputadoras. Al sustituir el sistema operativo convencional por una interfaz gráfica de usuario, computadores como el Apple Macintosh permiten al usuario seleccionar iconos —símbolos gráficos que representan funciones de la computadora— en la pantalla, en lugar de requerir la introducción de los comandos escritos correspondientes. Hoy ya existen nuevos sistemas controlados por la voz, pudiendo los usuarios operar sus microordenadores utilizando las palabras y la sintaxis del lenguaje hablado.
5._Superordenador
Superordenador o Supercomputadora, ordenador o computadora de gran capacidad, tremendamente rápida y de coste elevado, utilizada en cálculos complejos o tareas muy especiales. Normalmente se trata de una máquina capaz de distribuir el procesamiento de instrucciones y que puede utilizar instrucciones vectoriales. Las supercomputadoras se usan, por ejemplo, para hacer el enorme número de cálculos que se necesitan para dibujar y animar una nave espacial, o para crear un dinosaurio en movimiento para una película. También se utilizan para hacer las previsiones meteorológicas, para construir modelos científicos a gran escala y en los cálculos de las prospecciones petrolíferas.
6._ Computadoras Portátiles
En 1993, con su filial FirstPerson Inc., Sun anunció su entrada en el mercado de la electrónica de consumo con computadoras portátiles que se pueden conectar a sistemas de redes. Algunas computadoras portátiles usan RAM con alimentación por baterías como

disco virtual; es más caro pero consume menos energía que un disco duro. Los relojes digitales, las computadoras portátiles y los juegos electrónicos son sistemas basados en microprocesadores. Las pantallas LCD son más planas y más pequeñas que los monitores de rayos catódicos, y se emplean frecuentemente en ordenadores portátiles.
PCMCIA, en informática, acrónimo de Personal Computer Memory Card Internacional Association. Especificación que regula los estándares en la fabricación de tarjetas de expansión, originalmente para ordenadores o computadoras portátiles.
El uso extendido de ordenadores portátiles ha impulsado avances en las redes inalámbricas. Las redes inalámbricas utilizan transmisiones de infrarrojos o radiofrecuencias para unir las computadoras portátiles a las redes. El uso generalizado de ordenadores portátiles ha llevado a importantes avances en las redes inalámbricas.
En 1993, con su filial FirstPerson Inc. , Sun anunció su entrada en el mercado de la electrónica de consumo con computadoras portátiles que se pueden conectar a sistemas de redes.
CONCLUSIÓN
Una tendencia constante en el desarrollo de los ordenadores es la microminiaturización, iniciativa que tiende a comprimir más elementos de circuitos en un espacio de chip cada vez más pequeño. Además, los investigadores intentan agilizar el funcionamiento de los circuitos mediante el uso de la superconductividad, un fenómeno de disminución de la resistencia eléctrica que se observa cuando se enfrían los objetos a temperaturas muy bajas. Las redes informáticas se han vuelto cada vez más importantes en el desarrollo de la tecnología de computadoras. Las redes son grupos de computadoras interconectados mediante sistemas de comunicación.
La red pública Internet es un ejemplo de red informática planetaria. Las redes permiten que las computadoras conectadas intercambien rápidamente información y, en algunos casos, compartan una carga de trabajo, con lo que muchas computadoras pueden cooperar en la realización de una tarea. Se están desarrollando nuevas tecnologías de equipo físico y soporte lógico que acelerarán los dos procesos mencionados.

Disco duroDe Wikipedia, la enciclopedia libreSaltar a navegación, búsqueda Para otros usos de este término, véase HD.
Disco Duro
Interior de un disco duro; se aprecian dos platos con sus respectivos cabezales.
Conectado a:
controlador de disco ; en los actuales ordenadores personales, suele estar integrado en la placa madre mediante uno de estos sitemas
o Interfaz IDE / PATAo Interfaz SATAo Interfaz SASo Interfaz SCSI (popular en servidores)o Interfaz FC (exclusivamente en servidores)o Interfaz USB NAS mediante redes de cable / inalámbricas
Fabricantes comunes:
Western Digital Seagate Samsung Hitachi Fujitsu

En informática, un disco duro o disco rígido (en inglés Hard Disk Drive, HDD) es un dispositivo de almacenamiento de datos no volátil que emplea un sistema de grabación magnética para almacenar datos digitales. Se compone de uno o más platos o discos rígidos, unidos por un mismo eje que gira a gran velocidad dentro de una caja metálica sellada. Sobre cada plato se sitúa un cabezal de lectura/escritura que flota sobre una delgada lámina de aire generada por la rotación de los discos.
El primer disco duro fue inventado por IBM en 1956. A lo largo de los años, los discos duros han disminuido su precio al mismo tiempo que han multiplicado su capacidad, siendo la principal opción de almacenamiento secundario para PC desde su aparición en los años 60.[1] Los discos duros han mantenido su posición dominante gracias a los constantes incrementos en la densidad de grabación, que se ha mantenido a la par de las necesidades de almacenamiento secundario.[1]
Los tamaños también han variado mucho, desde los primeros discos IBM hasta los formatos estandarizados actualmente: 3,5" los modelos para PCs y servidores, 2,5" los modelos para dispositivos portátiles. Todos se comunican con la computadora a través del controlador de disco, empleando una interfaz estandarizado. Los más comunes hoy día son IDE (también llamado ATA o PATA), SCSI (generalmente usado en servidores y estaciones de trabajo), Serial ATA y FC (empleado exclusivamente en servidores).
Para poder utilizar un disco duro, un sistema operativo debe aplicar un formato de bajo nivel que defina una o más particiones. La operación de formateo requiere el uso de una fracción del espacio disponible en el disco, que dependerá del formato empleado. Además, los fabricantes de discos duros, SSD y tarjetas flash miden la capacidad de los mismos usando prefijos SI, que emplean múltiplos de potencias de 1000 según la normativa IEC, en lugar de los prefijos binarios clásicos de la IEEE, que emplean múltiplos de potencias de 1024, y son los usados mayoritariamente por los sistemas operativos. Esto provoca que en algunos sistemas operativos sea representado como múltiplos 1024 o como 1000, y por tanto existan ligeros errores, por ejemplo un Disco duro de 500 GB, en algunos sistemas operativos sea representado como 465 GiB (Según la IEC Gibibyte, o Gigabyte binario, que son 1024 Mebibytes) y en otros como 465 GB.
Existe otro tipo de almacenamiento que recibe el nombre de Unidades de estado sólido; aunque tienen el mismo uso y emplean las mismas interfaces, no están formadas por discos mecánicos, sino por memorias de circuitos integrados para almacenar la información. El uso de esta clase de dispositivos anteriormente se limitaba a las supercomputadoras, por su elevado precio, aunque hoy en día ya son muchísimo más asequibles para el mercado doméstico.[2]
Contenido
[ocultar]
1 Estructura física o1.1 Direccionamiento o1.2 Tipos de conexión o1.3 Factor de forma 2 Estructura lógica

3 Integridad 4 Funcionamiento mecánico 5 Historia 6 Características de un disco duro 7 Presente y futuro o7.1 Unidades de Estado sólido 8 Fabricantes o8.1 Recuperación de datos de discos duros estropeados 9 Véase también o9.1 Principales fabricantes de discos duros 10 Referencias 11 Enlaces externos
[editar] Estructura física
Componentes de un disco duro. De izquierda a derecha, fila superior: tapa, carcasa, plato, eje; fila inferior: espuma aislante, circuito impreso de control, cabezal de lectura / escritura, actuador e imán, tornillos.
Interior de un disco duro; se aprecia la superfície de un plato y el cabezal de lectura/escritura retraído, a la izquierda.
Dentro de un disco duro hay uno o varios platos (entre 2 y 4 normalmente, aunque hay hasta de 6 ó 7 platos), que son discos (de aluminio o cristal) concéntricos y que giran todos a la vez. El cabezal (dispositivo de lectura y escritura) es un conjunto de brazos alineados verticalmente que se mueven hacia dentro o fuera según convenga, todos a la vez. En la punta de dichos brazos están las cabezas de lectura/escritura, que gracias al movimiento del cabezal pueden leer tanto zonas interiores como exteriores del disco.

Cada plato posee dos caras, y es necesaria una cabeza de lectura/escritura para cada cara. Si se observa el esquema Cilindro-Cabeza-Sector de más abajo, a primera vista se ven 4 brazos, uno para cada plato. En realidad, cada uno de los brazos es doble, y contiene 2 cabezas: una para leer la cara superior del plato, y otra para leer la cara inferior. Por tanto, hay 8 cabezas para leer 4 platos, aunque por cuestiones comerciales, no siempre se usan todas las caras de los discos y existen discos duros con un número impar de cabezas, o con cabezas deshabilitadas. Las cabezas de lectura/escritura nunca tocan el disco, sino que pasan muy cerca (hasta a 3 nanómetros), debido a una finísima película de aire que se forma entre éstas y los platos cuando éstos giran (algunos discos incluyen un sistema que impide que los cabezales pasen por encima de los platos hasta que alcancen una velocidad de giro que garantice la formación de esta película). Si alguna de las cabezas llega a tocar una superficie de un plato, causaría muchos daños en él, rayándolo gravemente, debido a lo rápido que giran los platos (uno de 7.200 revoluciones por minuto se mueve a 129 km/h en el borde de un disco de 3,5 pulgadas).
[editar] Direccionamiento
Cilindro, Cabeza y Sector
Pista (A), Sector (B), Sector de una pista (C), Clúster (D)
Hay varios conceptos para referirse a zonas del disco:

Plato: cada uno de los discos que hay dentro del disco duro. Cara: cada uno de los dos lados de un plato. Cabeza: número de cabezales. Pista: una circunferencia dentro de una cara; la pista 0 está en el borde exterior. Cilindro: conjunto de varias pistas; son todas las circunferencias que están alineadas
verticalmente (una de cada cara).
Sector : cada una de las divisiones de una pista. El tamaño del sector no es fijo, siendo el estándar actual 512 bytes, aunque próximamente serán 4 KiB. Antiguamente el número de sectores por pista era fijo, lo cual desaprovechaba el espacio significativamente, ya que en las pistas exteriores pueden almacenarse más sectores que en las interiores. Así, apareció la tecnología ZBR (grabación de bits por zonas) que aumenta el número de sectores en las pistas exteriores, y utiliza más eficientemente el disco duro.
El primer sistema de direccionamiento que se usó fue el CHS (cilindro-cabeza-sector), ya que con estos tres valores se puede situar un dato cualquiera del disco. Más adelante se creó otro sistema más sencillo: LBA (direccionamiento lógico de bloques), que consiste en dividir el disco entero en sectores y asignar a cada uno un único número. Éste es el que actualmente se usa.
[editar] Tipos de conexión
Si hablamos de disco duro podemos citar los distintos tipos de conexión que poseen los mismos con la placa base, es decir pueden ser SATA, IDE, SCSI o SAS:
IDE: Integrated Device Electronics ("Dispositivo con electrónica integrada") o ATA (Advanced Technology Attachment), controla los dispositivos de almacenamiento masivo de datos, como los discos duros y ATAPI (Advanced Technology Attachment Packet Interface) Hasta aproximadamente el 2004, el estándar principal por su versatilidad y asequibilidad. Son planos, anchos y alargados.
SCSI: Son interfaces preparadas para discos duros de gran capacidad de almacenamiento y velocidad de rotación. Se presentan bajo tres especificaciones: SCSI Estándar (Standard SCSI), SCSI Rápido (Fast SCSI) y SCSI Ancho-Rápido (Fast-Wide SCSI). Su tiempo medio de acceso puede llegar a 7 milisegundos y su velocidad de transmisión secuencial de información puede alcanzar teóricamente los 5 Mbps en los discos SCSI Estándares, los 10 Mbps en los discos SCSI Rápidos y los 20 Mbps en los discos SCSI Anchos-Rápidos (SCSI-2). Un controlador SCSI puede manejar hasta 7 discos duros SCSI (o 7 periféricos SCSI) con conexión tipo margarita (daisy-chain). A diferencia de los discos IDE, pueden trabajar asincrónicamente con relación al microprocesador, lo que posibilita una mayor velocidad de transferencia.
SATA (Serial ATA): El más novedoso de los estándares de conexión, utiliza un bus serie para la transmisión de datos. Notablemente más rápido y eficiente que IDE. Existen tres versiones, SATA 1 con velocidad de transferencia de hasta 150 MB/s (hoy día descatalogado), SATA 2 de hasta 300 MB/s, el más extendido en la actualidad; y por último SATA 3 de hasta 600 MB/s el cual se está empezando a hacer hueco en el mercado. Físicamente es mucho más pequeño y cómodo que los IDE, además de permitir conexión en caliente.
SAS (Serial Attached SCSI): Interfaz de transferencia de datos en serie, sucesor del SCSI paralelo, aunque sigue utilizando comandos SCSI para interaccionar con los dispositivos SAS. Aumenta la velocidad y permite la conexión y desconexión en caliente. Una de las

principales características es que aumenta la velocidad de transferencia al aumentar el número de dispositivos conectados, es decir, puede gestionar una tasa de transferencia constante para cada dispositivo conectado, además de terminar con la limitación de 16 dispositivos existente en SCSI, es por ello que se vaticina que la tecnología SAS irá reemplazando a su predecesora SCSI. Además, el conector es el mismo que en la interfaz SATA y permite utilizar estos discos duros, para aplicaciones con menos necesidad de velocidad, ahorrando costes. Por lo tanto, las unidades SATA pueden ser utilizadas por controladoras SAS pero no a la inversa, una controladora SATA no reconoce discos SAS.
[editar] Factor de forma
El más temprano "factor de forma" de los discos duros, heredó sus dimensiones de las disqueteras. Pueden ser montados en los mismos chasis y así los discos duros con factor de forma, pasaron a llamarse coloquialmente tipos FDD "floppy-disk drives" (en inglés).
La compatibilidad del "factor de forma" continua siendo de 3½ pulgadas (8,89 cm) incluso después de haber sacado otros tipos de disquetes con unas dimensiones más pequeñas.
8 pulgadas: 241,3×117,5×362 mm (9,5×4,624×14,25 pulgadas).En 1979, Shugart Associates sacó el primer factor de forma compatible con los disco duros, SA1000, teniendo las mismas dimensiones y siendo compatible con la interfaz de 8 pulgadas de las disqueteras. Había dos versiones disponibles, la de la misma altura y la de la mitad (58,7mm).
5,25 pulgadas: 146,1×41,4×203 mm (5,75×1,63×8 pulgadas). Este factor de forma es el primero usado por los discos duros de Seagate en 1980 con el mismo tamaño y altura máxima de los FDD de 5¼ pulgadas, por ejemplo: 82,5 mm máximo.Éste es dos veces tan alto como el factor de 8 pulgadas, que comúnmente se usa hoy; por ejemplo: 41,4 mm (1,64 pulgadas). La mayoría de los modelos de unidades ópticas (DVD/CD) de 120 mm usan el tamaño del factor de forma de media altura de 5¼, pero también para discos duros. El modelo Quantum Bigfoot es el último que se usó a finales de los 90'.
3,5 pulgadas: 101,6×25,4×146 mm (4×1×5.75 pulgadas).Este factor de forma es el primero usado por los discos duros de Rodine que tienen el mismo tamaño que las disqueteras de 3½, 41,4 mm de altura. Hoy ha sido en gran parte remplazado por la línea "slim" de 25,4mm (1 pulgada), o "low-profile" que es usado en la mayoría de los discos duros.
2,5 pulgadas: 69,85×9,5-15×100 mm (2,75×0,374-0,59×3,945 pulgadas).Este factor de forma se introdujo por PrairieTek en 1988 y no se corresponde con el tamaño de las lectoras de disquete. Este es frecuentemente usado por los discos duros de los equipos móviles (portátiles, reproductores de música, etc...) y en 2008 fue reemplazado por unidades de 3,5 pulgadas de la clase multiplataforma. Hoy en día la dominante de este factor de forma son las unidades para portátiles de 9,5 mm, pero las unidades de mayor capacidad tienen una altura de 12,5 mm.
1,8 pulgadas: 54×8×71 mm.Este factor de forma se introdujo por Integral Peripherals en 1993 y se involucró con ATA-7 LIF con las dimensiones indicadas y su uso se incrementa en reproductores de audio digital y su subnotebook. La variante original posee de 2GB a 5GB y cabe en una ranura de

expansión de tarjeta de ordenador personal. Son usados normalmente en iPods y discos duros basados en MP3.
1 pulgadas: 42,8×5×36,4 mm.Este factor de forma se introdujo en 1999 por IBM y Microdrive, apto para los slots tipo 2 de compact flash, Samsung llama al mismo factor como 1,3 pulgadas.
0,85 pulgadas: 24×5×32 mm.Toshiba anunció este factor de forma el 8 de enero de 2004 para usarse en móviles y aplicaciones similares, incluyendo SD/MMC slot compatible con disco duro optimizado para vídeo y almacenamiento para micromóviles de 4G. Toshiba actualmente vende versiones de 4GB (MK4001MTD) y 8GB (MK8003MTD) 5 y tienen el Record Guinness del disco duro más pequeño.
Los principales fabricantes suspendieron la investigación de nuevos productos para 1 pulgada (1,3 pulgadas) y 0,85 pulgadas en 2007, debido a la caída de precios de las memorias flash, aunque Samsung introdujo en el 2008 con el SpidPoint A1 otra unidad de 1,3 pulgadas.
El nombre de "pulgada" para los factores de forma normalmente no identifica ningún producto actual (son especificadas en milímetros para los factores de forma más recientes), pero estos indican el tamaño relativo del disco, para interés de la continuidad histórica.
[editar] Estructura lógica
Dentro del disco se encuentran:
El Master Boot Record (en el sector de arranque), que contiene la tabla de particiones. Las particiones, necesarias para poder colocar los sistemas de archivos.
[editar] Integridad
Debido a la distancia extremadamente pequeña entre los cabezales y la superficie del disco, cualquier contaminación de los cabezales de lectura/escritura o las fuentes puede dar lugar a un accidente en los cabezales, un fallo del disco en el que el cabezal raya la superficie de la fuente, a menudo moliendo la fina película magnética y causando la pérdida de datos. Estos accidentes pueden ser causados por un fallo electrónico, un repentino corte en el suministro eléctrico, golpes físicos, el desgaste, la corrosión o debido a que los cabezales o las fuentes sean de pobre fabricación.

Cabezal del disco duro
El eje del sistema del disco duro depende de la presión del aire dentro del recinto para sostener los cabezales y su correcta altura mientras el disco gira. Un disco duro requiere un cierto rango de presiones de aire para funcionar correctamente. La conexión al entorno exterior y la presión se produce a través de un pequeño agujero en el recinto (cerca de 0,5 mm de diámetro) normalmente con un filtro en su interior (filtro de respiración, ver abajo). Si la presión del aire es demasiado baja, entonces no hay suficiente impulso para el cabezal, que se acerca demasiado al disco, y se da el riesgo de fallos y pérdidas de datos. Son necesarios discos fabricados especialmente para operaciones de gran altitud, sobre 3.000 m. Hay que tener en cuenta que los aviones modernos tienen una cabina presurizada cuya presión interior equivale normalmente a una altitud de 2.600 m como máximo. Por lo tanto los discos duros ordinarios se pueden usar de manera segura en los vuelos. Los discos modernos incluyen sensores de temperatura y se ajustan a las condiciones del entorno. Los agujeros de ventilación se pueden ver en todos los discos (normalmente tienen una pegatina a su lado que advierte al usuario de no cubrir el agujero. El aire dentro del disco operativo está en constante movimiento siendo barrido por la fricción del plato. Este aire pasa a través de un filtro de recirculación interna para quitar cualquier contaminante que se hubiera quedado de su fabricación, alguna partícula o componente químico que de alguna forma hubiera entrado en el recinto, y cualquier partícula generada en una operación normal. Una humedad muy alta durante un periodo largo puede corroer los cabezales y los platos.
Cabezal de disco duro IBM sobre el plato del disco
Para los cabezales resistentes al magnetismo grandes (GMR) en particular, un incidente minoritario debido a la contaminación (que no se disipa la superficie magnética del disco) llega a dar lugar a un sobrecalentamiento temporal en el cabezal, debido a la fricción con la superficie del disco, y puede hacer que los datos no se puedan leer durante un periodo corto de tiempo hasta que la temperatura del cabezal se estabilice (también conocido como

“aspereza térmica”, un problema que en parte puede ser tratado con el filtro electrónico apropiado de la señal de lectura).
Los componentes electrónicos del disco duro controlan el movimiento del accionador y la rotación del disco, y realiza lecturas y escrituras necesitadas por el controlador de disco. El firmware de los discos modernos es capaz de programar lecturas y escrituras de forma eficiente en la superficie de los discos y de reasignar sectores que hayan fallado.
[editar] Funcionamiento mecánico
Un disco duro suele tener:
Platos en donde se graban los datos. Cabezal de lectura/escritura. Motor que hace girar los platos. Electroimán que mueve el cabezal. Circuito electrónico de control, que incluye: interfaz con la computadora, memoria caché. Bolsita desecante (gel de sílice) para evitar la humedad. Caja, que ha de proteger de la suciedad, motivo por el cual suele traer algún filtro de aire.
[editar] Historia
Antiguo disco duro de IBM (modelo 62PC, «Piccolo»), de 64,5 MB, fabricado en 1979
Al principio los discos duros eran extraíbles, sin embargo, hoy en día típicamente vienen todos sellados (a excepción de un hueco de ventilación para filtrar e igualar la presión del aire).
El primer disco duro, aparecido en 1956, fue el IBM 350 modelo 1, presentado con la computadora Ramac I: pesaba una tonelada y su capacidad era de 5 MB. Más grande que una nevera actual, este disco duro trabajaba todavía con válvulas de vacío y requería una consola separada para su manejo.

Su gran mérito consistía en el que el tiempo requerido para el acceso era relativamente constante entre algunas posiciones de memoria, a diferencia de las cintas magnéticas, donde para encontrar una información dada, era necesario enrollar y desenrollar los carretes hasta encontrar el dato buscado, teniendo muy diferentes tiempos de acceso para cada posición.
La tecnología inicial aplicada a los discos duros era relativamente simple. Consistía en recubrir con material magnético un disco de metal que era formateado en pistas concéntricas, que luego eran divididas en sectores. El cabezal magnético codificaba información al magnetizar diminutas secciones del disco duro, empleando un código binario de «ceros» y «unos». Los bits o dígitos binarios así grabados pueden permanecer intactos años. Originalmente, cada bit tenía una disposición horizontal en la superficie magnética del disco, pero luego se descubrió cómo registrar la información de una manera más compacta.
El mérito del francés Albert Fert y al alemán Peter Grünberg (ambos premio Nobel de Física por sus contribuciones en el campo del almacenamiento magnético) fue el descubrimiento del fenómeno conocido como magnetorresistencia gigante, que permitió construir cabezales de lectura y grabación más sensibles, y compactar más los bits en la superficie del disco duro. De estos descubrimientos, realizados en forma independiente por estos investigadores, se desprendió un crecimiento espectacular en la capacidad de almacenamiento en los discos duros, que se elevó un 60% anual en la década de 1990.
En 1992, los discos duros de 3,5 pulgadas alojaban 250 Megabytes, mientras que 10 años después habían superado 40 Gigabytes (40000 Megabytes). En la actualidad, ya contamos en el uso cotidiano con discos duros de más de 2 terabytes (TB), (2000000 Megabytes)
En 2005 los primeros teléfonos móviles que incluían discos duros fueron presentados por Samsung y Nokia, aunque no tuvieron mucho éxito ya que las memorias flash los acabaron desplazando, sobre todo por asuntos de fragilidad.
[editar] Características de un disco duro
Las características que se deben tener en cuenta en un disco duro son:
Tiempo medio de acceso: Tiempo medio que tarda la aguja en situarse en la pista y el sector deseado; es la suma del Tiempo medio de búsqueda (situarse en la pista), Tiempo de lectura/escritura y la Latencia media (situarse en el sector).
Tiempo medio de búsqueda: Tiempo medio que tarda la aguja en situarse en la pista deseada; es la mitad del tiempo empleado por la aguja en ir desde la pista más periférica hasta la más central del disco.
Tiempo de lectura/escritura: Tiempo medio que tarda el disco en leer o escribir nueva información: Depende de la cantidad de información que se quiere leer o escribir, el tamaño de bloque, el número de cabezales, el tiempo por vuelta y la cantidad de sectores por pista.
Latencia media: Tiempo medio que tarda la aguja en situarse en el sector deseado; es la mitad del tiempo empleado en una rotación completa del disco.
Velocidad de rotación: Revoluciones por minuto de los platos. A mayor velocidad de rotación, menor latencia media.

Tasa de transferencia: Velocidad a la que puede transferir la información a la computadora una vez la aguja está situada en la pista y sector correctos. Puede ser velocidad sostenida o de pico.
Otras características son:
Caché de pista: Es una memoria tipo Flash dentro del disco duro. Interfaz : Medio de comunicación entre el disco duro y la computadora. Puede ser
IDE/ATA, SCSI, SATA, USB, Firewire, Serial Attached SCSI Landz: Zona sobre las que aparcan las cabezas una vez se apaga la computadora.
[editar] Presente y futuro
Actualmente la nueva generación de discos duros utiliza la tecnología de grabación perpendicular (PMR), la cual permite mayor densidad de almacenamiento. También existen discos llamados "Ecológicos" (GP - Green Power), los cuales hacen un uso más eficiente de la energía.
[editar] Unidades de Estado sólido
Artículo principal: Unidad de estado sólido
Las unidades de estado sólido son dispositivos electrónicos, construidos únicamente con chips de memoria flash, por ello, no son discos, pero juegan el mismo papel a efectos prácticos con todas las mejoras que ello conlleva.
Se viene empezando a observar que es posible que las unidades de estado sólido terminen sustituyendo al disco duro por completo a largo plazo.
Son muy rápidos ya que no tienen partes móviles y consumen menos energía. Todos esto les hace muy fiables y físicamente casi indestructibles. Sin embargo su costo por GB es aún muy elevado ya que el coste de un disco duro común de 1 TB es equivalente a un SSD de 40 GB, 70 € aproximadamente.
Los discos que no son discos: Las Unidades de estado sólido han sido categorizadas repetidas veces como "discos", cuando es totalmente incorrecto denominarlas así, puesto que a diferencia de sus predecesores, sus datos no se almacenan sobre superficies cilíndricas ni platos. Esta confusión conlleva habitualmente a creer que "SSD" significa Solid State Disk, en vez de Solid State Drive
[editar] Fabricantes

Un Western Digital 3.5 pulgadas 250 GB SATA HDD.
Un Seagate 3.5 pulgadas 1 TB SATA HDD.
Los recursos tecnológicos y el saber hacer requeridos para el desarrollo y la producción de discos modernos implica que desde 2007, más del 98% de los discos duros del mundo son fabricados por un conjunto de grandes empresas: Seagate (que ahora es propietaria de Maxtor), Western Digital, Samsung e Hitachi (que es propietaria de la antigua división de fabricación de discos de IBM). Fujitsu sigue haciendo discos portátiles y discos de servidores, pero dejó de hacer discos para ordenadores de escritorio en 2001, y el resto lo vendió a Western Digital. Toshiba es uno de los principales fabricantes de discos duros para portátiles de 2,5 pulgadas y 1,8 pulgadas. ExcelStor es un pequeño fabricante de discos duros.
Decenas de ex-fabricantes de discos duros han terminado con sus empresas fusionadas o han cerrado sus divisiones de discos duros, a medida que la capacidad de los dispositivos y la demanda de los productos aumentó, los beneficios eran menores y el mercado sufrió un significativa consolidación a finales de los 80 y finales de los 90. La primera víctima en el mercado de los PC fue Computer Memories Inc.; después de un incidente con 20 MB defectuosos en discos en 1985, la reputación de CMI nunca se recuperó, y salieron del mercado de los discos duros en 1987. Otro notable fracaso fue el de MiniScribe, quien quebró en 1990: después se descubrió que tenía en marcha un fraude e inflaba el número de ventas durante varios años. Otras muchas pequeñas compañías (como Kalok,

Microscience, LaPine, Areal, Priam y PrairieTek) tampoco sobrevivieron a la expulsión, y habían desaparecido para 1993; Micropolis fue capaz de aguantar hasta 1997, y JTS, un recién llegado a escena, duró sólo unos años y desapareció hacia 1999, aunque después intentó fabricar discos duros en India. Su vuelta a la fama se debió a la creación de un nuevo formato de tamaño de 3” para portátiles. Quantum e Integral también investigaron el formato de 3”, pero finalmente se dieron por vencidos. Rodime fue también un importante fabricante durante la década de los 80, pero dejó de hacer discos en la década de los 90 en medio de la reestructuración y ahora se concentra en la tecnología de la concesión de licencias; tienen varias patentes relacionadas con el formato de 3,5“.
1988 : Tandon vendió su división de fabricación de discos duros a Western Digital, que era un renombrado diseñador de controladores.
1989 : Seagate compró el negocio de discos de alta calidad de Control Data, como parte del abandono de Control Data en la creación de hardware.
1990 : Maxtor compró MiniScribe que estaba en bancarrota, haciéndolo el núcleo de su división de discos de gama baja.
1994 : Quantum compró la división de almacenamiento de Digital Equipment otorgando al usuario una gama de discos de alta calidad llamada ProDrive, igual que la gama tape drive de Digital Linear Tape
1995 : Conner Peripherals, que fue fundada por uno de los cofundadores de Seagate junto con personal de MiniScribe, anunciaron un fusión con Seagate, la cual se completó a principios de 1996.
1996 : JTS se fusionó con Atari, permitiendo a JTS llevar a producción su gama de discos. Atari fue vendida a Hasbro en 1998, mientras que JTS sufrió una bancarrota en 1999.
2000 : Quantum vendió su división de discos a Maxtor para concentrarse en las unidades de cintas y los equipos de respaldo.
2003 : Siguiendo la controversia en los fallos masivos en su modelo Deskstar 75GXP, pioneer IBM vendió la mayor parte de su división de discos a Hitachi, renombrándose como Hitachi Global Storage Technologies, Hitachi GST.
2003 : Western Digital compró Read-Rite Corp., quien producía los cabezales utilizados en los discos duros, por 95,4 millones de dólares en metálico.
2005 : Seagate y Maxtor anuncian un acuerdo bajo el que Seagate adquiriría todo el stock de Maxtor. Esta adquisición fue aprobada por los cuerpos regulatorios, y cerrada el 19 de mayo de 2006.
2007 : Western Digital adquiere Komag U.S.A., un fabricante del material que recubre los platos de los discos duros.
[editar] Recuperación de datos de discos duros estropeados
En casos en los que no es posible acceder a la información almacenada en el disco duro, y no disponemos de copia de seguridad o no podemos acceder a ella, existen empresas especializadas en la recuperación de la información de discos duros dañados. Estas empresas reparan el medio con el fin de extraer de él la información y después volcarla a otro medio en correcto estado de funcionamiento.
Tipos de discos duros

Los discos duros pueden ser clasificados por diferentes tipologías o clases, vamos a ver de forma breve un resumen general de los diferentes tipos de clasificación:
Clasificación por su ubicación interna o externa
Esta clasificación sólo nos proporcionará información sobre la ubicación del disco, es decir, si el mismo se encuentra dentro de la carcasa del ordenador o bien fuera de la misma, conectándose al PC mediante un cable USB o Firewire.
Dentro de los discos duros externos tenemos los discos FireWire, USB y los nuevos SATA.
Clasificación por tamaño del disco duro
Esta clasificación atiende únicamente a al tamaño del disco duro, desde los primeros discos duros comerciales que comenzaron a llegar al mercado y cuyo tamaño era de 5,25 pulgadas a los más modernos de 1,8 pulgadas contenidos en dispositivos MP3 y ordenadores portátiles de última generación.
Los discos duros con los que suelen ir equipados los ordenadores de escritorio o de sobremesa son discos duros de 3,5" pulgadas, son los más utilizados y por tanto los más económicos, existiendo en la actualidad modelos que ya se acercan a 1 >Terabyte< de capacidad
Clasificación por el tipo de controladora de datos
La interficie es el tipo de comunicación que realiza la controladora del disco con la placa base o bus de datos del ordenador.
La controladora de datos para discos duros internos más común en la actualidad es la SATA o serial ATA, anteriormente ATA a secas, sus diferencias con la antigua ATA, también denominada IDE es que SATA es mucho más rápida en la transferencia de datos, con una velocidad de transferencia muy cercana a los discos duros profesionales SCSI.
El tipo de controladora SCSI se encuentra reservada a servidores de datos pues la tecnología que emplean es superior a costa de ser mucho más costosa y disponer de menor capacidad por disco, un disco duro SCSI de 100 Gb. valdrá más caro que un disco duro SATA de 250 Gb. no obstante la velocidad de transferencia de información y sobre todo la fiabilidad del disco duro SCSI y de la controladora SCSI es muy superior. Por este mismo motivo hace ya algunos años, aproximadamente hasta el año 2000 los ordenadores Apple Mac equipaban siempre discos duros SCSI pues eran máquinas bastante exclusivas, hoy en día los Mac han reducido su precio, entre otras cosas reduciendo o equiparando la calidad de sus componentes por la de los ordenadores PC de fabricantes como HP, Compaq, Dell, etc. y se han popularizado hasta tal punto que en territorios como USA ya está alcanzando una cuota de mercado superior al 15%.
Clasificación por tipo de ordenador
En la actualidad se venden más ordenadores portátiles que ordenadores de sobremesa, por eso también existe la clasificación por el tipo de ordenador, es algo muy común encontrar ofertas de empresas de informática donde ofrecen: "Disco duro para portátil" los discos duros para portátil difieren de los discos duros normales básicamente en su tamaño aunque también en su diseño interior pues están preparados para sufrir más golpes debido a la movilidad de los equipos que lo contiene.
En el disco duro es donde los ordenadores portátiles suelen tener su talón de aquiles, pues si juntamos su movilidad, todo lo que se mueve sufre golpes, y su reducido tamaño incapaz en muchas ocasiones de ventilar el interior del ordenador tenemos un cóctel explosivo.

La excasa ventilación de un portátil hará que el disco duro sufra numerosos >cambios térmicos< y exceso de calor en sus circuitos, factores de alto riesgo para la conservación de los datos del disco duro.
También podemos clasificar dentro de este grupo los discos duros de servidor que suelen ser discos duros normales, bien SCSI o SATA pero con la peculiaridad de que se encuentran conectados a complejas tarjetas >RAID< cuya función es la de replicar los datos de forma automática de forma que al escribir un archivo o documento en él dicha información se duplica, triplica o cuatriplica en la matriz o array de discos duros que contenga el servidor.
ay dos tipos principales, los IDE (los de el conector alargado), que son los que valen para la inmensa mayoria de las placas, y ahora, estan los SATA, que llevan un conector mas pequeño, los IDE los

aceptan todas las placas, los SATA son mas nuevos y solo placas relativamente nuevas( de 2 o 3 años hacia aqui) los aceptan. La diferencia es la velocidad de trasmision.