Embed Size (px)
Citation preview

1
la respuesta de un sistema es la suma de la respuesta forzada (también llamada respuesta estacionaria o solución particular) y la respuesta natural (solución homogénea)
Tema 2: Respuesta temporal de sistemas continuos (I)
Control y Automatización, IOI
Para encontrar la respuesta de un sistema de control podemos resolver la ecuación diferencial…… o podemos representar el sistema mediante su función de transferencia y calcular su transformada inversa de Laplace…pero también podemos evaluar cualitativamente cuál es la respuesta de un sistema simplemente analizando los polos y los ceros del sistema
los polos de la señal de entrada determinan la respuesta forzada los polos de la función de transferencia determinan la respuesta natural
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

2
¿qué significa lo anterior?
En la Sesión #1 de MATLAB resolviste la respuesta de un sistema a una entrada constante:
H2(s) =20
s2 + 6s+ 144
H2(s) : �3± 3p15i
C2(s) =20
s(s2 + 6s+ 144)=
A
s+
Bs+ C
s2 + 6s+ 144
c2(t) =5
36
� 5
36
e�3t[cos(3
p15t) +
p15 sin(3
p15t)
15
]
polos de
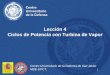
a partir de estos polos, del tema anterior ya sabemos que la respuesta natural del sistema será la convolución de una exponencial decreciente con una función oscilante
respuesta naturalrespuesta forzada
0 0.5 1 1.5 2t
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
536 −
√1527 e−3t[cos(3
!(15)t− 14.48)]
536 −
√1527 e−3t
536 +
√1527 e−3t
=
5
36
�p15
27
e�3tcos[(3
p15t� 14.48)]
explica la forma gráfica de la solución a partir de la expresión de c(t)
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

3
Tipos de formas de onda de entrada utilizados en sistemas de control:
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

G(s) =9
s2 + 9s+ 9
G(s) =9
s2 + 2s+ 9
Tipos de respuesta temporal de sistemas de segundo orden
consideramos respuesta a una función escalón: R(s) =1
s;C(s) = G(s) ·R(s)
4
C(s) =9
s(s2 + 9s+ 9)) c(t)
C(s) =9
s(s2 + 2s+ 9)) c(t)
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
t
c(t)
c (t ) = 1 + 0.171e−7 .854t − 1.17e−1 .145t
0 2 4 6 8 100
0.5
1
1.5
2
t
c(t)
c (t ) = 1 − 1.06e− t c os(√8t − 19.4)
1 − 1.06e− t
1 + 1.06e− t
¿polos de la función de transferencia en cada caso?
� =9/2
3> 1
� =2/2
3< 1
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

0 2 4 6 8 100
0.5
1
1.5
2
t
c(t)
c (t ) = 1 − cos 3t
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
t
c(t)
c (t ) = 1 − 3t e−3t − e−3t
G(s) =9
s2 + 9
5
G(s) =9
s2 + 6s+ 9
� = 0
� =6/2
3= 1
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

0 2 4 6 8 100
0.5
1
1.5
t
c(t)
c r it icamente amortiguado
sobreamortiguado
subamortiguado
6
¿qué relación existe entre la respuesta transitoria del sistema y los polos de su función de transferencia?
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

7
Definimos razón de amortiguamiento:
G(s) =b
s2 + as + b
¿sabes explicar por qué tiene esta expresión?
� =frecuencia de amortiguamiento
frecuencia natural de oscilacion=
a/2�b
� los casos anteriores se pueden caracterizar a partir de este coeficiente
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

8
tipos de respuesta de los sistemas de segundo orden a una función escalón en función de la razón de amortiguamiento:
raíz múltiple!
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

9
En la sesión #2 de MATLAB trabajarás con los siguientes parámetros que caracterizan la respuesta temporal:
Tr, Rise time
Tp, Peak time
%OS, Percent overshoot
Ts, Settling time
Steady state
Step Response
(seconds)0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
1.2
1.4
Tr
Tp
Tssteady state
representación de líneas de Tp, Ts y %OS constanteen el plano s
(Ts tiene esa representaciónen su forma aproximada!!)
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

10
G(s) =20
s2 + 8s + 20
¿qué tipo de sistema es?
¿cuál es el valor de su coeficiente de amortiguamiento?
Respuesta del sistema a una función escalón:
C(s) =20
s(s2 + 8s + 20)
c(t) = 1 � e�4t(cos(2t) + 2 sin(2t))
0 2 4 6 8 10t
0
0.2
0.4
0.6
0.8
1
1.2
c(t)
es la gráfica que esperabas??
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente

Step Response
(seconds)0 1 2 3 40
0.2
0.4
0.6
0.8
1
1.2
1.4
G1 G2 G3 G4
11
0 0.2 0.4 0.6 0.8 1ζ
0
20
40
60
80
100%OS
dependencia de %OS con ζ
⇣ = 0.340.50.67
0.90
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente
%OS = 100 · e� ���
1��2
G1 =20
s2 + 8s+ 20
G2 =20
s2 + 6s+ 20
G3 =20
s2 + 4.5s+ 20
G4 =20
s2 + 3s+ 20

12
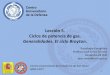
Respuesta de sistemas con polos adicionales (sin ceros)
consideramos respuesta a una función escalón: R(s) =1
s;C(s) = G(s) ·R(s)
Step Response
(seconds)0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
G1 G2 G3 G4
¿qué tendencia observas? ¿cómo describes el efecto de la adición de un tercer polo?Tema 2- Respuesta temporal de sistemas continuos-
Araceli G Llorente
G1 =22
s2 + 2s+ 22
G3 =110
(s+ 5)(s2 + 2s+ 22)
G4 =154
(s+ 7)(s2 + 2s+ 22)
G2 =44
(s+ 2)(s2 + 2s+ 22)

13
si calculamos mediante transformada inversa de Laplace las funciones respuesta, c(t), de la transparencia anterior
c2(t) = 1 � e�2t � 2
21
�21e�t sin(
�21t)
c1(t) = 1 � e�t[cos(�
21t) +
�21
21sin(
�21t)]
razona a partir de las expresiones analíticas lo que has visto gráficamente!!!
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente
c3(t) = 1� 22
37
e�5t � 15
37
e�t[cos(
p21t) +
25
p21
63
sin(
p21t)]
c4(t) = 1� 22
57
e�7t � 35
57
e�t[cos(
p21t) +
9
p21
35
sin(
p21t)]

14
Respuesta de un sistema con ceros
H1 =9
s2 + 2s+ 9
¿cómo describes el comportamiento de un sistema con ceros respecto al sistema sin ceros (H1)?
(s+ a)C(s) = sC(s) + aC(s)
derivada de la respuesta original respuesta original multiplicada por a
Step Response
(seconds)0 1 2 3 4 5 6 70
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8H1 H2 H3 H4
H2 =(9/2)(s+ 2)
s2 + 2s+ 9
H3 =3(s+ 3)
s2 + 2s+ 9
Tema 2- Respuesta temporal de sistemas continuos- Araceli G Llorente
H4 =(9/10)(s+ 10)
s2 + 2s+ 9