-
DEPARTAMENTO DE ENERGA Y MECNICA
INGENIERA ELECTROMECNICA
CONSULTA DE ROBTICA INDUSTRIAL
Nombre
Iguago Fernando
Responsable de la Materia
Ing. Patricia Constante
-
Pg. | 1
TEMA: OBTENCIN DE PARMETROS DENAVIT-HARTENBERG POR EL
MTODO MODIFICADO.
1.- OBJETIVO GENERAL
Consultar la obtencin de parmetros Denavit-Hartenberg modificado
y la
obtencin de la matriz homognea modificada para diferenciar con
el
mtodo estndar y las ventajas de este mtodo.
2.- OBJETIVOS ESPECFICOS
Observar la diferencia entre el mtodo estndar de los parmetros
DH y
el modificado.
Conocer la aplicabilidad del mtodo DH modificado.
Realizar un ejemplo de la obtencin de los parmetros DH del
mtodo
modificado.
3.- FUNDAMENTACIN TERICA
MTODO DENAVIT-HARTENBERG MODIFICADO.
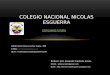
Utilizando el mtodo de Denavit-Hartenberg modificado, DHm
conjuntamente
con la figura 1, donde se asigna los sistemas de coordenadas
antes y despus
de una articulacin, se toma en cuenta para formar los grupos de
movimientos
que se realiz al sistema de coordenadas mviles sobre una
articulacin esto
se resume en cada fila de la tabla de parmetros, segn este
convenio la
secuencia es primero sobre el eje x (rosca en x) y luego sobre
el eje z (rosca en
z), la notacin es: giro alrededor de x, , traslacin a lo largo
de x, , giro
alrededor de z, , traslacin a lo largo de z se denota con d; los
movimientos en
grupos de cuatro se presentan en cada fila en la tabla 1.
-
Pg. | 2
Fig. 1. Sistemas de coordenadas sobre cada articulacin del
mecanismo.
Tabla 1. Tabla de parmetros Denavit-Hartenberg modificado
La frmula Denavit-Hartenberg modificado, para cada fila de la
tabla DH, o
grupos de movimientos y la secuencia indicada de acuerdo a la
ecuacin.
-
Pg. | 3
La matriz del brazo es:
Las ecuaciones del movimiento en notacin matricial:
-
Pg. | 4
Ejemplo:
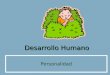
En este mtodo de Denavit-Hartenberg modificado la secuencia de
los
movimientos se agrupan en grupos de cuatro, aqu la diferencia
est al formar
grupos de cuatro movimientos para pasar la articulacin desde el
sistema de
coordenadas = { 1} hasta el sistema = {}, ver figura 2.
Todos los movimientos realizados al sistema de coordenadas mvil
son
presentados de una manera formal en grupos de cuatro, dos
movimientos
rotacin y traslacin en 1 antes de pasar la articulacin y otros
dos
movimientos en despus de pasar la articulacin i, estos se
indican en cada
fila de la tabla de parmetros de Denavit-Hartenberg modificada
en la tabla 2.
Fig. 2. Asignacin sistemas de coordenadas Denavit-Hartenberg
modificado.
Los parmetros de cada fila de la tabla corresponden a la
secuencia de
movimientos que se realizaron al sistema de coordenadas para
pasar la
articulacin i, note la diferencia con el estndar, la secuencia
de movimientos
primero en el eje x luego en el eje z, estos parmetros y
variables sealadas
con asterisco de cada fila se remplazan en la frmula de la
matriz de
transformacin de coordenadas Ai, tambin conocida como frmula de
Denavit-
Hartenberg modificada.
-
Pg. | 5
Tabla 2. Tabla de parmetros de Denavit-Hartenberg modificada
La matriz de transformacin homognea H se obtiene multiplicando
las matrices
de transformacin de coordenadas Ai, a este resultado se le
conoce como matriz
del brazo y se denota con 30 o con H. Obsrvese que la matriz Ai
se le puede
denotar tambin como 1 , es la matriz de transformacin de
coordenadas
entre el sistema = { 1} y el sistema = {}, y se indica a
continuacin.
-
Pg. | 6
4.- COMENTARIOS Y CONCLUSIONES
En el mtodo de Denavit-Hartenberg estndar se asigna el sistema
de
coordenadas i sobre la lnea de eje de la articulacin i+1, en
este caso se
toma en cuenta los movimientos realizados al sistema de
coordenadas
mviles y se forma grupos de cuatro movimientos, estos
movimientos se
resume en cada fila de la tabla de parmetros, segn este convenio
es
importante la secuencia, primero sobre el eje z (rosca en z) y
luego sobre
el eje x (rosca en x), la notacin es: rotacin alrededor de z, ,
traslacin a
lo largo de z, d; traslacin a lo largo de x, a, rotacin
alrededor de x, ; con
estos cuatro movimientos se forman las filas que indica de la
tabla de
parmetros, si uno de estos movimientos no es necesario realizar
se llena
con cero.
En el mtodo de Denavit-Hartenberg modificado, se asigna al
sistema de
coordenadas i sobre la lnea de eje de la articulacin i, se toma
en cuenta
para formar los grupos de movimientos que se realiz al sistema
de
coordenadas mviles sobre el eslabn i-1, segn este convenio
la
secuencia es primero sobre el eje x (rosca en x) y luego sobre
el eje z
-
Pg. | 7
(rosca en z), la notacin es: giro alrededor de x, , traslacin a
lo largo de
x, a, giro alrededor de z, , traslacin a lo largo de z, d.
5.- RECOMENDACIONES
En robtica se debe reconocer la importancia que tiene el modelo
matricial
planteado por Denavit-Hartenberg para encontrar las ecuaciones
del
movimiento en cadenas cinemticas abiertas que son tpicas en los
robot
articulados, esta es la base de la cinemtica directa e
indirecta, as como
tambin para la dinmica de los mismos.
Denavit-Hartenberg estndar. La secuencia de movimientos para
pasar
sobre un eslabn es,
Denavit-Hartenberg modificada. La secuencia de movimientos para
pasar
sobre una articulacin es, y el
resultado del producto de estas cuatro matrices en esta misma
secuencia
nos da la matriz.
6.- BIBLIOGRAFA
DENAVIT-HARTENBERG, C. D. (2014). COMPARACIN DEL
MTODO DE DENAVIT-HARTENBERG ESTNDAR CON EL
MODIFICADO EN LA MODELACIN DE LA ROBTICA. En M. M.
RAMREZ. Quito.