Embed Size (px)
Citation preview
ULA
“Diseño y Construcción de un Sistema de Seguimiento de un Objeto Luminoso”
Autor: Juan Carlos Badell Profesor Guía: Jean-Claude Dulhoste
Proyecto de Grado Presentado ante la ilustre Universidad de Los Andes como requisito final para optar al título de Ingeniero de
Sistemas.
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERIA
ESCUELA DE INGENIERIA DE SISTEMAS
JULIO, 2000
ULA
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERIA
ESCUELA DE INGENIERIA DE SISTEMAS
“Diseño y Construcción de un Sistema de Seguimiento de un Objeto Luminoso”
Autor: Juan Carlos Badell Profesor Guía: Jean-Claude Dulhoste
JULIO, 2000

ULA
AGRADECIMIENTO
Al Profesor Jean-Claude Dulhoste por su ayuda y orientación prestada a
la realización de este proyecto.
Al Laboratorio de Control y a su Técnico Alfredo por toda la
colaboración prestada.
A mi madre.

ULA
RESUMEN
En el proyecto que se presenta a continuación se describen algunos métodos para el seguimiento de fuente de luz, entre los métodos que más se destacan son aquellos que permiten el seguimiento solar aplicando para ello diferentes métodos y el seguimiento mediante radar. Se describe el diseño e implementación de un sistema de seguimiento mediante la utilización de fotosensores. El cual se mueve alrededor de un eje, utilizando para el arrastre, un motor de corriente continua. Este sistema nos va a permitir determinar la orientación de una fuente de luz con respecto a un eje de referencia. La orientación será dada en forma de tensión eléctrica suministrada por un potenciometro. El sistema desarrollado está controlado mediante un sistema de control de dos posiciones. Descriptores: Control de procesos-investigación. Sistema de control programado. * TS156.8
B3

ULA
TABLA DE CONTENIDO
Pág. AGRADECIMIENTO ii RESUMEN iii TABLA DE CONTENIDO iv INDICE DE FIGURAS vi INTRODUCCIÓN 1 CAPITULO I DESCRIPCIÓN DE SISTEMAS DE SEGUIMIENTO
DE FUENTES DE LUZ Y SEGUIMIENTO DE FUENTES DE LUZ Y SEGUIMIENTO MEDIANTE EL USO DEL RADAR. 5
1.1. Introducción. 5 1.2. Sistemas de Seguimiento Solar. 6 1.3. Sistema de Seguimiento mediante el Uso del Radar. 13 1.4. Sistema de Seguimiento de Líneas o Trazas. 17
CAPITULO II DESCRIPCIÓN Y ANÁLISIS DE SERVOSISTEMAS EXTREMALES 23
2.1 Introducción. 23 2.2 Definición de Servosistema Extremal. 29 2.3 Técnicas de Búsqueda de Optimo. 30 2.4 Estudio de la Influencia de las Dinámicas de
Medida y de Control en un Servosistema Extremal. 31

ULA
Pág.
2.5 Características generales de los servosistemas Extremales. 48
CAPITULO III DISEÑO Y CONSTRUCCIÓN DEL SISTEMA. 53
3.1. Introducción. 53 3.2. Sistema Fotosensor. 58 3.3. Circuito Amplificado. 61 3.4. Circuito de Control del Motor. 62 3.5. Sistema Diseñado. 63
ANÁLISIS EXPERIMENTAL 67 ANÁLISIS DE RESULTADOS. 69 CONCLUSIONES. 70 RECOMENDACIONES. 72 BIBLIOGRAFÍA. 73 ANEXOS. 74

ULA
INDICE DE FIGURAS
Pág.
1.1. Esquema utilizando un fotosensor. 9
1.2. Dispositivo del mecanismo fotosensor. 10
1.3. Caso de control típico de un sistema de seguimiento solar. 12
1.4. Esquema de un radar. 16
1.5. Estructura del seguidor de línea. 21
2.1. Quemador de Combustible 25
2.2. Diagrama de Bloques de un Sistema Extremal. 29
2.3. Diagrama de bloque de un servosistema con dinámicas. 34
2.4.Trayectorias (x,s) de un servosistema usando la derivada
ds/dt. 40
2.5. Trayectorias (x,u) de un servosistema usando la derivada
dy/dt. 46
2.6. Diagrama de bloque de un servosistema extremal usando
y/x. 50

ULA
Pág.
2.7.Diagrama de bloque asociado. 51
3.1. Servomecanismo de búsqueda extrema. 54
3.2. Celda fotoeléctrica. 55
3.3. Diagrama de bloques del sistema. 56
3.5. Diagrama de bloques de un sistema de control de dos
posiciones. 58
3.6. Relación entre el flujo luminoso, el ángulo de recepción
y la distancia de la fuente de luz. 60
3.7. Celda fotoeléctrica diseñada. 60
3.8. Circuito amplificador. 61
3.9. Sistema de control de dos posiciones. 62
3.10. Sistema Diseñado. 64
3.11. Funcionamiento del sistema. 65

ULA
INTRODUCCIÓN
Es muy frecuente tener que evaluar la orientación de una fuente
luminosa con respecto a un punto del plano, sin posibilidad de realizar
conexiones eléctricas entre la fuente (emisor de luz) y el sitio donde se va a
determinar la orientación.
En este trabajo se describen algunos sistemas de seguimiento entre los
que destacan, los sistemas de seguimiento solar y mediante el uso del radar,
estos sistemas son muy diferentes entre sí, pero parecidos en lo que a control
se refiere.
El presente trabajo contempla el diseño y construcción de un sistema de
seguimiento automático de objetos luminosos utilizando fotosensores. Para
su diseño se hace un análisis de los sistemas de seguimiento antes
mencionado.
El sistema a diseñar va a permitir determinar la orientación de una
fuente de luz en el plano respecto a un eje de referencia.

ULA
La orientación será dada en forma de tensión eléctrica suministrada por
un potenciometro.
El diseño del sistema se basa en la utilización de un sensor de luz que
orientará por medio de un motor, de tal forma que reciba la cantidad máxima
de luz de la fuente luminosa.
Este sistema debe tener una capacidad de respuesta instantánea, poseer
un grado de libertad y un soporte que facilite el control del mismo.
El control utilizado en este diseño es el control de dos posiciones.
Entre las aplicaciones del sistema a construir podemos citar el caso de la
ubicación de la extremidad de una barra flexible que puede girar alrededor de
un eje, en la extremidad de la barra podemos ubicar una fuente de luz o un
espejo y se podrá determinar la posición del extremo de la barra con respecto
al eje de rotación, por la orientación que tiene la fuente luminosa.

ULA
Otra aplicación es tratar de orientar celdas fotoeléctricas con respecto a
la posición del sol de tal forma que reciban la mayor cantidad posible de
energía solar.

ULA
CAPITULO I

ULA
CAPITULO I
DESCRIPCIÓN DE SISTEMAS DE
SEGUIMIENTO DE FUENTES DE LUZ
Y SEGUIMIENTO MEDIANTE EL USO
DEL RADAR.
1.1. INTRODUCCIÓN
Entre los sistemas de seguimiento de fuente de luz, los más conocidos
son los sistemas de seguimiento solar. En este capítulo haremos una revisión
de los mismos, estudiando su funcionamiento y características más relevantes.
Otro sistema de seguimiento conocido es el seguimiento mediante radar,
aunque la función que cumple este es muy diferente a la que cumplen los
sistemas de seguimiento solar, ambos son servomecanismos realimentados.
Con ambos casos el principio es el mismo, la diferencia está en la señal de
error a procesar.

ULA
También haremos mención a otros sistemas de seguimiento.
1.2. SISTEMAS DE SEGUIMIENTO SOLAR
La necesidad de captar la mayor cantidad posible de energía incidente
en un determinado lugar es, evidentemente, una exigencia común a todos los
sistemas de aprovechamiento de la energía solar. La máxima captación se
obtiene si la superficie colectora se mantiene constantemente en posición
normal a los rayos del sol, lo que únicamente puede conseguirse si dicha
superficie está dotada de un movimiento de seguimiento del sol.
El seguimiento resulta imprescindible en los sistemas que se basan en la
concentración óptica de la radiación solar como en el caso del panel solar
fotovoltaico.
La radiación solar llega a la superficie de la tierra en dos formas:
Irradiación directa del sol e irradiancia difusa del cielo. Ambos componentes
se deben conocer para estimar la producción de energía de los diferentes
diseños de sistemas fotovoltaicos con orientación fija o con seguimiento solar.

ULA
El Piranómetro de Banda Rotatoria (PBR) es un instrumento confiable de
monitoreo solar que mide la irradiancia directa normal y la difusa horizontal.
El PBR y junto el equipo de adquisición de datos conforman un sistema
resistente e integrado que simplifica las mediciones de campo de la radiación
solar. El piranómetro de banda rotatoria desempeña funciones de un
piranómetro convencional (para medir irradiancia global) y de un
pirheliómetro con seguidor solar (para medir irradiancia directa).
El PBR usa un solo sensor (piranómetro) para determinar las
irradiancias global horizontal, directa normal y difusa horizontal, las cuales
están relacionadas con la ecuación:
Glo = Dif + Dirn * Cos (Z)
Glo es la irradiancia global medida en una superficie horizontal; Dif, la
irradiancia difusa en una superficie horizontal; Dirn, la irradiancia directa
normal (radiación solar incidente en una superficie viendo hacia el sol); y Cos
(Z), el ángulo zenital solar, el ángulo medido entre línea vertical y una línea
hacia el centro del sol. Una vez por minuto la banda de sombra gira sobre el

ULA
sensor de luz, tomando aproximadamente un segundo para ese movimiento.
Durante este período de un segundo la señal del piranómetro es leída unas 700
veces aproximadamente. La lectura mínima del piranómetro ocurre cuando el
disco solar está cubierto totalmente por la banda de sombra. El flujo de datos
de irradiancia con “alta frecuencia de lecturas” se procesan para calcular la
irradiancia difusa horizontal. Con Glo, Dif y CosZ conocidos, se calcula Dirn.
El piranómetro ve todo el hemisferio celeste mientras la banda de sombra
viaja desde su posición en la que está oculta bajo el sensor, hacia el horizonte
(A). A medida que la banda sigue su trayectoria pasando sobre el horizonte,
esta obstruye una pequeña banda del cielo, reduciendo la irradiancia que llega
al sensor (B). La medición de la irradiancia se reduce dramáticamente cuando
la banda de sombra obstruye al sensor de la radiación directa (C). Se presenta
un patrón simétrico a medida que la banda de sombra termina su giro,
terminando en su posición inicial bajo el piranómetro (D).
Este es un ejemplo de un sistema se seguimiento solar.

ULA
1.2.1. Sistema de Seguimiento Solar por medio de Fotosensores.
El sensor suele estar construido por pares de elementos fotosensibles
(fotorresistencia, fototransistores, etc.) montados de tal manera que
proporcionan una señal de salida nula cuando la orientación del panel es
perpendicular al haz solar y una señal positiva o negativa proporcional a la
desviación, en caso de que no sean paralelas la normal al colector y al haz de
luz. En estos casos el fotosensor va sólidamente unido al propio colector y de
nuevo con él de tal manera que su función sustituye a la de los captadores de
orientación y del controlador como se aprecia en la figura 1.1.
Figura 1.1. Esquema utilizando un fotosensor.

ULA
Como la corriente de salida depende de la intensidad de radiación solar
recibida, se hace un barrido de muestreo, alrededor de un eje paralelo al
conjunto reflector-receptor y otro perpendicular a este; podemos detectar la
posición del sol mediante el procesamiento de la información obtenida a
través del dispositivo fotosensor. Un dispositivo de este tipo se puede apreciar
en la figura 1.2.
Figura 1.2. Dispositivo del mecanismo fotosensor.

ULA
El problema de los sistemas de seguimiento por medio de fotosensor es
que la intensidad de radiación solar disminuye cuando hay nubosidad, por lo
que el sistema podría responder en forma errónea. Sin embargo, este problema
puede resolverse tomando en consideración diversos puntos de muestreo y la
comparación de las intensidades de radiaciones captadas; una homogeneidad
en las mismas indicaría la existencia de nubosidad y esto hace tomar las
previsiones del caso para garantizar el buen funcionamiento del sistema.
1.2.2. Sistema de seguimiento solar por coordenadas calculadas basado en
un microprocesador.
En el caso seguimiento por coordenadas calculadas, una forma de atacar
el problema puede ser con un computador que tenga en memoria o calcule la
posición instantánea del sol en la esfera celeste, a partir del día, del año, la
hora local y las coordenadas geográficas del lugar; por tanto no precisan, de la
presencia física de los rayos solares, obteniendo de los parámetros antes
indicados, los ángulos del azimut y elevación del sol en cada momento. A
partir de estos ángulos, el controlador obtiene el vector de orientación “s” que
debería poseer el colector para apuntar al sol y lo compara con el vector de

ULA
orientación red “c” del mismo, obteniendo a partir de la información recibida
del codificador angular. La diferencia entre ambos vectores permite conocer
los errores de orientación azimut y elevación y generar los valores oportunos
de control para los motores correspondientes. Este esquema se puede apreciar
en la figura 1.3.
Figura 1.3. Caso de control típico de un sistema de seguimiento solar.
El cálculo de la señal de error y de la señal de actuación se realiza a
intervalos regulares de tiempo t, que ha de ser mayor que el requerido por la
unidad de procesamiento para efectuar todos sus cálculos y operaciones I/O.
Estos sistemas se utilizan frecuentemente en los sistemas de
aprovechamiento de la energía solar que requieren un seguimiento indirecto

ULA
del sol, como ocurre en el caso de los campos de helióstatos de los controles
solares de tipo térmico.
Estos sistemas implican la utilización de elementos de cálculo y
procesamiento y por tanto resultan más ordenados cuanto mayor es el número
de paneles a controlar.
1.3. SISTEMA DE SEGUIMIENTO MEDIANTE EL USO DEL
RADAR.
El radar es un dispositivo electrónico que permite extender la capacidad
de sentidos del hombre en condiciones impenetrables para la visión humana
(tormentas, oscuridad, etc.) además es utilizado para la detección y
localización de objetos a grandes distancias.
El principal atributo del radar es su capacidad de medir la distancia a la
que se encuentra el blanco u objeto detectado.

ULA
La Figura 1.4. Muestra una forma sencilla de explicar al funcionamiento
del radar.
La figura consiste de una antena transmisora que emite radiaciones
electromagnéticas generadas por un oscilador de alguna clase, una antena
recibidora y un detector de energía o recibidor.
Una parte de la señal trasmitida es interceptada por un objeto y vuelta a
irradiar en todas direcciones.
La antena recibidora recolecta la energía que retorna y entrega ésta a el
recibidor, donde es procesada para detectar el blanco y para extraer su
localización y velocidad relativa.
La distancia al blanco se determina midiendo el tiempo tomado por la
señal en viajar al blanco y regresar.
De esta señal que retoma se extrae toda la información posible tal como:
disección o posición angular del blanco, el movimiento relativo entre el blanco

ULA
y radar, lo que permite distinguir, objetos en movimientos de objetos
estacionarios.
El radar calcula las coordenadas de un objeto y suministra esta
información, ésta se usa para conocer la posición actual del objeto y predecir
su posición futura lo que resulta en un seguimiento del blanco.
En el seguimiento mediante el radar la antena está posicionada en un
ángulo determinado a cada momento mediante un servomecanismo que actúa
por una señal de error. Siendo la generación de esta señal de error la parte
esencial dentro del sistema de seguimiento.
Para seguir un blanco, es necesario conocer la magnitud y dirección de
la posición angular del blanco con respecto a alguna dirección de referencia,
usualmente el eje de la antena.
La diferencia entre la posición del blanco y la dirección de referencia es
el error angular.

ULA
El radar de seguimiento busca posicionar la antena para hacer el error
angular cero. Cuando esto ocurre, el blanco está localizado a lo largo del eje
de referencia.
Transmisor
Receptor
Figura 1.4. Esquema de un radar.
Objeto o Blanco

ULA
1.4 SISTEMA DE SEGUIMIENTO DE LINEAS O TRAZAS.
1.4.1. Principios de Operación
1.4.1.1. Descripción General
El Seguidor de Línea consiste de un cabezal óptico ensamblado a una
unidad de control que proporciona el poder y los controles de operación. En
este cabezal, el cual reemplaza la pluma de un registrador, se ubica una fuente
de luz que ilumina el papel en la vecindad de la traza a seguir. La luz reflejada
se dirige y es enfocada sobre dos foto–diodos mediante lentes semi–
cilíndricos. Los foto–diodos van a disminuir su resistencia cuando el rayo de
luz irradie sobre la línea. Los foto–diodos se colocan suficientemente cerca y
se conectan en un circuito equilibrador de voltaje. Cuando la iluminación de
cada foto-diodo es igual, existe una “condición de nulidad”.
Cuando la alineación con el trazo no es exacto, el par de foto–diodos
produce una señal de error. Esta señal es aplicada al servo-sistema del
registrador mediante un amplificador. La acción de balance del servo-sistema,

ULA
tiende al regreso del cabezal ensamblado a una posición que anula la señal de
error. Además de los foto–diodos, un foto rectificador controlado de silicio
(SCR) se incluye en el cabezal como un dispositivo que permite registrar el
error que se genera, con la finalidad de indicar el incremento en el error de la
trayectoria a seguir. Este opera similarmente al rectificador controlado de
silicio excepto que tiene dos disparadores recíprocos, uno óptico y otro
eléctrico. El disparador óptico es activado por el aumento en la intensidad de
la luz cuando la línea que se sigue, se pierde. La intensidad de luz necesaria
para la descarga es controlada por el disparador eléctrico. La descarga
ocasiona que la resistencia del SCR cambie desde algunos megaohms hasta
pocos ohms. Este dispositivo se emplea como un interruptor, para activar un
mecanismo de advertencia, encendiendo una luz de alarma.
Debido a la respuesta espectral hacia la infrarroja de los foto–diodos, las
líneas estándar de rejilla producidas por el tipo de la tinta utilizada en la
misma, se atenúan severamente y no ocasiona ambigüedades en la medición.

ULA
1.4.1.2. Descripción del Circuito
1.4.1.2.1. El Seguidor de Línea
El circuito del seguidor de línea, consiste de dos foto – diodos CR-201
y CR-202, una alimentación y circuito de amortiguación.
Los foto–diodos conforman un circuito simple de divisor de voltaje. Si
la alimentación negativo y positivo poseen el mismo valor, y si las fotoceldas
son idénticas, y están igualmente iluminadas, el voltaje en el amplificador D
P-201 es cero con respecto a tierra.
Esto corresponde a la condición de “no salida” para la posición nula. En
la condición nula, la línea a seguir no está en el campo de visión de ninguna
fotocelda. Si el cabezal se mueve de forma ascendente, la fotocelda inferior
recibe un monto decrementado de cantidad de luz. Esto se debe a que la línea
está compuesta parcialmente de tinta china la cual no refleja casi la longitud
de onda infrarroja de la luz para lo cual, los foto-diodos son principalmente
sensibles. Esta longitud de onda de luz es absorbida por el pigmento en la
ULA
tinta. El diodo inferior asume una gran impedancia lo que desequilibra el
divisor de voltaje. El Pin D presenta ahora, un voltaje negativo, que ha sido
enviado, cuando el servo sistema mueve el dorso del cabezal a su posición
original. Si el cabezal se desplaza descendente, habría una señal positiva y el
cabezal se moverá en la dirección opuesta hasta conseguir su condición nula.
La señal para el voltaje de control de la trayectoria hacia el servomotor del
registrador viene desde el amplificador D P-201 mediante R-301, el control de
ganancia R-1, y a través del valor de amortiguamiento producido en la red, R-
303, R-304 y C-301, a la entrada del servo amplificador.
Este voltaje se aplica entonces a los servo amplificadores para conducir
el cabezal de rastreo en forma similar a un grabador estándar con señal de
entrada.
1.4.1.2.2. La Alarma de Error
El circuito de alarma de error consiste de una foto SCR CR-203, y luz
de alarma.

ULA
La compensación de temperatura para el foto SCR de alarma de error es
efectuado por una resistencia R-201 y un termistor RT-201 en serie con el
disparador eléctrico de este elemento.
Figura 1.5. Estructura del seguidor de línea.
ULA
CAPITULO II

ULA
CAPITULO II
DESCRIPCIÓN Y ANÁLISIS DE SERVOSISTEMAS
EXTREMALES
2.1. INTRODUCCIÓN
En el estudio y discusión de los servosistemas extremales es importante
hacer resaltar la realimentación (feedback).
El concepto de realimentación es muy importante en la teoría de
control.
La realimentación es el factor fundamental en la búsqueda de un óptimo
(valor máximo o mínimo) en este sistema, ya que con la realimentación es
posible determinar la búsqueda de un óptimo estático (servosistemas
extremales).
23

ULA
Este tipo de sistema es sujeto a alteraciones del ambiente, lo que
modifica por un lado el óptimo buscado y por otro lado la dinámica del
sistema que se debe asignar. La utilización de una realimentación de este tipo
de sistema nos permite estas influencias de una forma automática.
Los servosistemas extremales son sistemas con cadenas de retorno, por
medio de las cuales se ajusta la señal de control del proceso de tal forma que
la salida del proceso sea máxima o mínima.
Para explicar lo que es un servosistema extremal vamos a considerar el
proceso de combustión en un quemador.
La combustión se puede esquematizar a partir de la figura 2.1.

ULA
Combustible
Calorías
Aire
Fig. 2.1. Quemador de Combustible.
Para ser quemado el combustible necesita ser agregado con oxígeno,
generalmente éste es tomado del aire; puede ocurrir que la mezcla no se
realiza en forma adecuada; por ejemplo hay demasiado aire para la cantidad de
combustión disponible y el residuo del aire se va por la chimenea ocasionando
pérdida de calor, puede ocurrir también que la cantidad de aire sea inferior a la
cantidad requerida para quemar todo el combustible, en este caso el
Agua

ULA
combustible se quema mal, lo cual produce humo, es incompleta, hay pérdida
de combustible.
Se entiende por consiguiente que existe una mezcla completa, de tal
forma que no hay pérdida de calorías por los gases que se escapan y la
combustión se realiza en las mejores condiciones ¿Cómo realizarse esta
mezcla completa?. Una manera sería controlar el flujo de combustible que
llega al quemador manteniendo un flujo de aire constante.
Por estos métodos tendremos los problemas siguientes; si cambia la
naturaleza del combustible se necesita otro ajuste del flujo de combustible, o
puede modificarse también la naturaleza del airea, su cantidad de oxígeno
puede fluctuar, puede ser más o menos cargado en agua, un nuevo ajuste de
flujo de combustible sería necesario, por consiguiente para que la combustión
sea completa y no haya pérdidas de calorías; se necesita tener en cuenta en el
control de flujo del combustible, las condiciones ambientales (calidad del aire
y del combustible) y es un problema técnico complejo.
ULA
Otra manera de resolver nuestro problema es tratar de medir
directamente el rendimiento de la combustión (esta medida se puede realizar
con bastante exactitud a partir de la medida de la cantidad de oxígeno que se
mantiene en los gases de combustión y la cantidad de CO2).
Ajustamos entonces el flujo del combustible de tal forma que la
cantidad de oxígeno sea mínimo en todo momento. Se dice que en esas
condiciones se tiene un servosistema extremal. Se nota que en éste caso no
hay que tener en cuenta las condiciones ambientales.
Este problema se parece mucho a la búsqueda de un óptimo (valor
máximo o mínimo) de una función, este óptimo se puede desplazar en el
tiempo, la posición del óptimo es una función del tiempo o puede ser función
de otra variable y se desplazará en sincronismo con esta variable.
En estas condiciones la búsqueda de un óptimo es bastante difícil en el
caso general. Se gana en tener una búsqueda en lazo cerrado.

ULA
La búsqueda en lazo cerrado del mínimo de oxígeno permitido es hacer
que el efecto de las perturbaciones se minimice.
Otro ejemplo de un servosistema extremal es la búsqueda de un óptimo
de luz. Para ello sería necesario tener un sistema en lazo cerrado sin señal de
referencia en el cual se pueda calcular la búsqueda del valor máximo deseado
por medio de cálculos entre el valor anterior de la posición del haz de luz y el
valor actual de este. Este procedimiento se puede llevar a cabo siguiendo las
reglas para búsqueda de máximos, según el dispositivo con el que se este
midiendo dicha posición.
El estudio de estos servosistemas extremales es complejo sobre todo si
se tiene en cuenta la dinámica del proceso de medida de la señal de salida y a
la dinámica del proceso de elaboración de la señal de control. Trataremos de
hacer el análisis de estos servosistemas en casos sencillos.
ULA
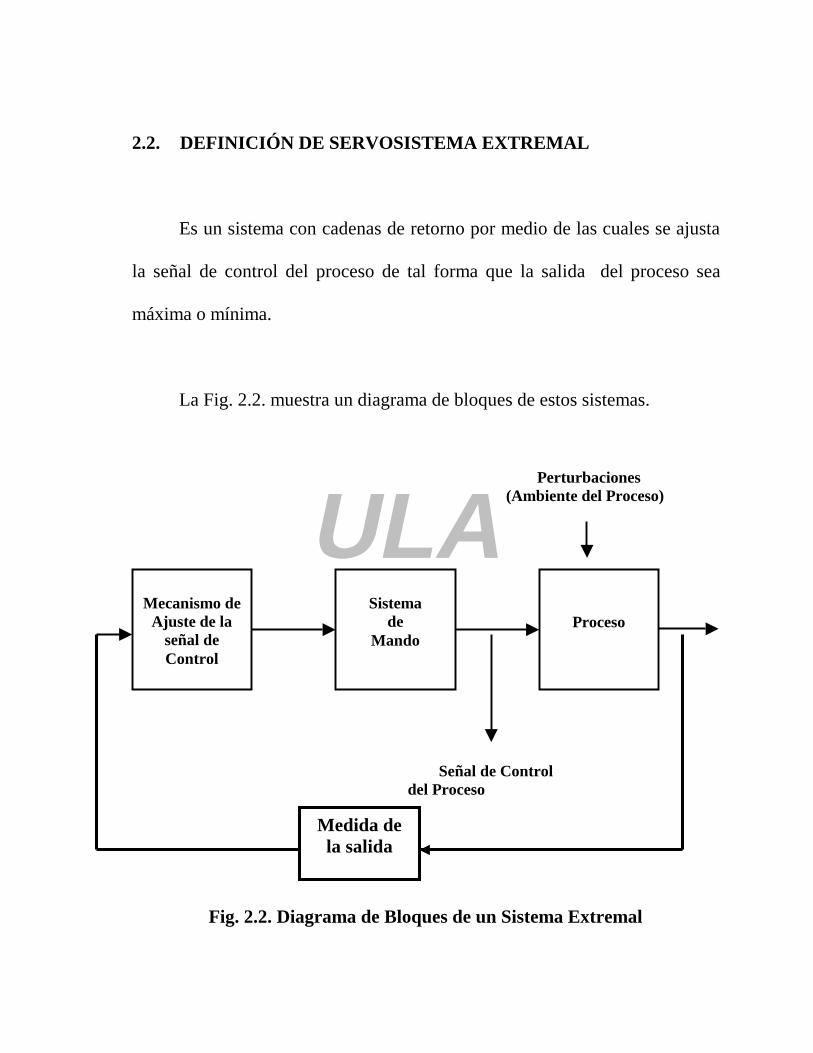
2.2. DEFINICIÓN DE SERVOSISTEMA EXTREMAL
Es un sistema con cadenas de retorno por medio de las cuales se ajusta
la señal de control del proceso de tal forma que la salida del proceso sea
máxima o mínima.
La Fig. 2.2. muestra un diagrama de bloques de estos sistemas.
Perturbaciones (Ambiente del Proceso) Señal de Control
del Proceso
Fig. 2.2. Dia
Sistema
de Mando
Proceso
Mecanismo de Ajuste de la
señal de Control
Medida dela salidagrama de Bloques de un Sistema Extremal

ULA
Como se puede observar una diferencia entre un servosistema extremal
con uno clásico es que en dicho sistema no existe señal de referencia.
2.3. TÉCNICAS DE BÚSQUEDA DE OPTIMO
2.3.1. Método de la Derivada dy/dt.
Este método realiza la medida de dy/dt (derivada respecto al tiempo de
la función Y(t) para el momento como se de la entrada dx, si dy/dt es negativo
y se busca un máximo, estamos en buena dirección para x y se requiere un
incremento de x hasta alcanzar dy/dt = 0, tenemos en este caso un máximo.
Ahora si dy/dt es positivo y se busca un máximo, estamos en mala dirección
para x lo cual requiere una disminución de x hasta alcanzar dy/dt = 0 y
tenemos un máximo.
2.3.2. Método del Gradiente
En este caso se toma la derivada dy/dx y obtendremos un máximo o
mínimo cuando dy/dt = 0.
ULA
El signo del gradiente nos indica en que sentido tiene que modificarse x;
si el gradiente es positivo y buscamos un máximo se requiere aumentar x hasta
alcanzar dy/dx = 0, y si el gradiente es negativo y buscamos un máximo se
requiere disminuir x hasta alcanzar dy/dx = 0.
2.4. ESTUDIO DE LA INFLUENCIA DE LAS DINÁMICAS DE
MEDIDA Y DE CONTROL EN UN SERVOSISTEMA
EXTREMAL.
El estudio de estas dinámicas se enfocará como lo indicado por la figura
2.3.
En algunos servosistemas puede ocurrir que “y” no sea accesible
directamente, del todo; por lo tanto hay que utilizar un aparato de medida que
tiene una cierta dinámica. Una dinámica característica a estos elementos de
medida es dada por la función de transferencia siguiente:
S
SsF
1
11 1
)exp()(
�
�
�
�� (2.1)

ULA
También la acción x no se toma instantáneamente, el elemento de
acción puede tener dinámica; para muchos elementos una buena aproximación
a esta dinámica puede ser dada por la función de transferencia:
En estas expresiones �1 y �2 son retardos debido generalmente al
traslado de la señal.
�1 y �2 son constantes de tiempo debido a las inercias de los elementos
de medida y de acción.
En la figura 2.3 la característica estática presentará un máximo, que
puede ser alterado por las condiciones ambientales.
Si la alteración de la característica se presenta en el servosistema de la
figura 2.3 su entrada viene dada por:
S
SsF
2
22 1
)exp()(
�
�
�
��
dxtVtx �� )()(
(2.2)
(2.3)

ULA
y su salida por:
Para menos complejidad del problema de la figura 2.3 se harán las
simplificaciones siguientes sobre las dinámicas:
Hechas estas suposiciones se hará a continuación un estudio del
comportamiento del servosistema extremal de la figura 2.3.
dytytw �� )()(
SSF
11 1
1)(
���
SSF
22 1
1)(
���
0�� dd yx
(2.4)
(2.6)
(2.5)
(2.7)

ULA
2.4.1. Estudio con Dinámica de Medida de un Servosistema Extremal
2.4.1.1. Determinación de las Trayectorias
La Ley de Control viene dada por:
donde:
Esta ley de control permite agregar o disminuir el valor de k a x para
buscar un máximo o mínimo de una característica estática que suponemos que
es una parábola dada por la función:
Presentando un valor máximo para a < 0.
kx
ysign
dt
dx).(
�
��
1���
2axy �
(2.8)
(2.9)
(2.10)

ULA
Se supone además que la dinámica del proceso de la señal de control es:
Y la dinámica de medida:
El comportamiento del sistema es determinado para k > 0 y se
reemplaza la ecuación:
por:
y llegando a la ecuación:
1)(1 �SF
SSF
22 1
1)(
���
²1 axsdt
ds���
²1 axsdt
dx
dx
ds���
²1 axsdx
dsk ���
(2.11)
(2.12)
(2.13)
(2.14)
(2.15)

ULA
con condiciones iniciales:
Tomando la transformada de Laplace:
despejando p(S) se llega:
Tomando la transformada inversa:
donde:
01
1
�
�
x
Ss
311
2)(})({
s
aSpSSSpk ����
1
2)(
1
311
�
��
skt
aSsktSp
²²22²)exp()( 111
��
akxaktaxk
xCxp ���
��
�� ��� ²²2 11 akSC
(2.18)
(2.16)
(2.17)
(2.19)
(2.20)

ULA
Las formas de las trayectorias se dan en la figura 2.4. para k > 0 y son
asintóticas al arco parabólico.
Se nota en la figura 2.4 que las tangentes horizontales a las trayectorias
se encuentran sobre la parábola s= a x2. Esto nos permite definir dos regiones
en el plano (x,s), una región (I) dentro de la concavidad de la parábola y otra
región (II) fuera de la concavidad de la parábola.
Las trayectorias simétricas de p(x) corresponden cuando se reemplaza x
por –x y k por –k.
2.4.1.2. Ley de Control por Gradiente.
El signo de k viene definido por:
²²)²( 11 takktxas ���
0�dx
dsak
(2.21)
(2.22)

ULA
Para alcanzar el máximo, esta ley permite dar la dirección de
desplazamiento, la cual verifica si se va por buen sentido y por consiguiente la
modificación de x (bien sea agregándole o disminuyéndole el valor de k a x).
Los resultados se dan en el plano (x, s), donde se tiene que las trayectorias
admisibles se sitúan en la concavidad de la parábola y= ax2 (región I de la
figura 2.4).
Por la relación:
se verifica el proceso de desplazamiento al valor máximo como se ve en la
figura 2.5.
Este proceso se puede iniciar con condiciones iniciales M0 (región I de
la figura 2.5), en cuyo caso el desplazamiento es hacia el arco parabólico de
conmutación y el valor de x pasando de un valor menor a otro hasta que ds/dx
se iguale a cero, si se inicia el proceso con condiciones iniciales M0 (región II
de la figura 2.5); el desplazamiento se realiza sobre una vertical, cambiando k
de signo constantemente hasta encontrar el arco parabólico para luego seguir
el mismo proceso de la región I (cambiando el valor de x) y así encontrar el
valor máximo cuando ds/dx = 0.
)²(1
1
saxdx
dsk ��
�
(2.23)
ULA
2.4.1.3. Ley de Control por Derivada (ds/dt).
En esta ley se cumple para alcanzar el valor máximo de la parábola
s= ax2 las reglas siguientes:
Si ds/dt > 0, no hay conmutación;
Si ds/dt pasa de negativo a positivo, se produce no conmutación;
Si ds/dt pasa de positivo a negativo, hay conmutación.
La relación:
Verifica las reglas de conmutación de k nombradas anteriormente.
)²(1
1
saxdt
ds��
�(2.24)

ULA
2.4.2. Estudio con Dinámica de Control sobre un Servosistema Extremal.
Se supone que la dinámica de medida es ausente (en la figura 2.3, se
tiene F2(S) = 1) y que la dinámica del proceso viene dada por la función de
transferencia:
También se supone que la característica estática es una parábola y = ax2,
que presenta un máximo (a < 0) y sin alteraciones en las condiciones
ambientales (Xd = yd = 0).
La ley de control explicada (sección 2.3.1.1) viene dada por:
donde k > 0 (para un valor máximo)
ssU
sVF
11 1
1
)(
)(
����
kx
ysign
dt
dx)(
�
��
(2.25)
(2.26)

ULA
2.4.2.1. Ley de control por derivada dy/dt. El estudio de este proceso se hace en el plano (x,u), donde se tiene que
la función de transferencia:
(ya que V=x);
sustituyendo dx/dt = k se llega:
donde se tiene la ecuación diferencial:
Su
xSF
11 1
1)(
����
)(1
1
xudt
dx��
�
kxu 1���
1
)(2
�
xuax
dt
dx
dx
dy
dt
dy ���
(2.27)
(2.28)
(2.29)
(2.30)

ULA
La ecuación diferencial anterior constituye las trayectorias (figura 2.6)
de conmutación de este método, el proceso de encontrar el valor máximo de la
parábola se inicia con condiciones iniciales (X 0).
Como:
Dadas las condiciones iniciales X= x1, u1=0, se llega a la solución;
tomando la transformada de Laplace respecto a la variable u:
Ahora tomando la transformada inversa:
donde:
uxdu
dxk ��1�
1
1²
²
1)(
1
11
�
��
kSt
Sxkt
SSx
11
)exp()( ��
kuk
uXux ��
��
)( 111 �� kxkC ��
(2.31)
(2.32)
(2.33)
(2.34)

ULA
Como la representación gráfica es el plano (x,u) se realiza el siguiente
cambio de variable:
donde:
Siendo esta familia de trayectorias asintóticas a la recta u = x + k�1
como se nota en la figura 2.6.
11
)exp()( ��
kxk
xCxu ��
��
)( 111 �� kUkC ��
(2.35)
(2.36)
ULA
El proceso de este método puede ser estable o inestable, según las
condiciones iniciales de x,u como se ve en la figura 2.7 y por lo general la ley
de comando es satisfecha.
En este método se hace el uso de derivadas dy/dt y dx/dt, las cuales en
virtud se obtiene el gradiente:
La obtención del gradiente es mostrado en el diagrama de bloque de la
figura 2.8., al cual se le anexa un diagrama de bloque asociado (figura 2.9) que
permite realizar el cálculo completo.
La ley de comando del diagrama de bloque asociado es un integrador
(R(S) = K/S), que permite calcular la derivada dx/dt, para aumentar o
disminuir el valor de x y su desplazamiento en el arco parabólico, además se
tiene una función de transferencia (F1(S) = 1/1 + �1S), la cual realiza la
función de una constante que facilitan la medida de u.
dt
dxdt
dy
dx
dy� (2.37)

ULA
La ley de comando de este método (el gradiente ) viene dada por:
Esta ley permite desplazarse al valor máximo del arco parabólico,
agregando o disminuyendo k al valor x; su sentido es realizado en el plano
(x,u), el proceso puede concluir o converger a un ciclo límite si las
conmutaciones son imperfectas (estas imperfecciones son debidas a diferentes
fenómenos) y concluyen cuando:
2.5. CARACTERÍSTICAS GENERALES DE LOS SERVOSISTEMAS
EXTREMALES.
Siempre se persigue como objetivo determinar un punto extremal.
Cada uno de estos servosistemas usa ciertos criterios o técnicas para
llegar a encontrar este punto extremal.
kx
ysign
dt
du)(
�
��
0��
�
x
y
(2.38)
(2.39)

ULA
Siempre es conveniente el uso de una dinámica en el proceso que
permita darle tiempo de responder al servosistema. De otra forma el sistema
sería inestable y una dinámica en la medida para realizar la medición de la
salida del servosistema cada cierto período.

ULA
CAPITULO III

ULA
CAPITULO III
DISEÑO Y CONSTRUCCIÓN DEL SISTEMA
3.1. INTRODUCCIÓN
El sistema aquí especificado hace uso de un dispositivo fotosensor
(celda fotoeléctrica), el cual permite seguir en forma instantánea a cualquier
objeto emisor de luz que capte. El sistema responde instantánea y
automáticamente, manejando el motor que permite al dispositivo ubicar la
posición del objeto emisor de luz.
Nuestro sistema tiene un grado de libertad, con un mecanismo de
arrastre conformado por un motor de corriente continua y ruedas dentadas
como reductor unidas a un potenciómetro que sirve como sensor de posición.
La gráfica 3.1. muestra un diagrama esquemático de un
������������� ��� � ������ ��� ��������� ����� ����� ��� �� � �ón que
ULA
dependen de la posición del eje del motor y corresponden a la salida de la
celda fotoeléctrica.
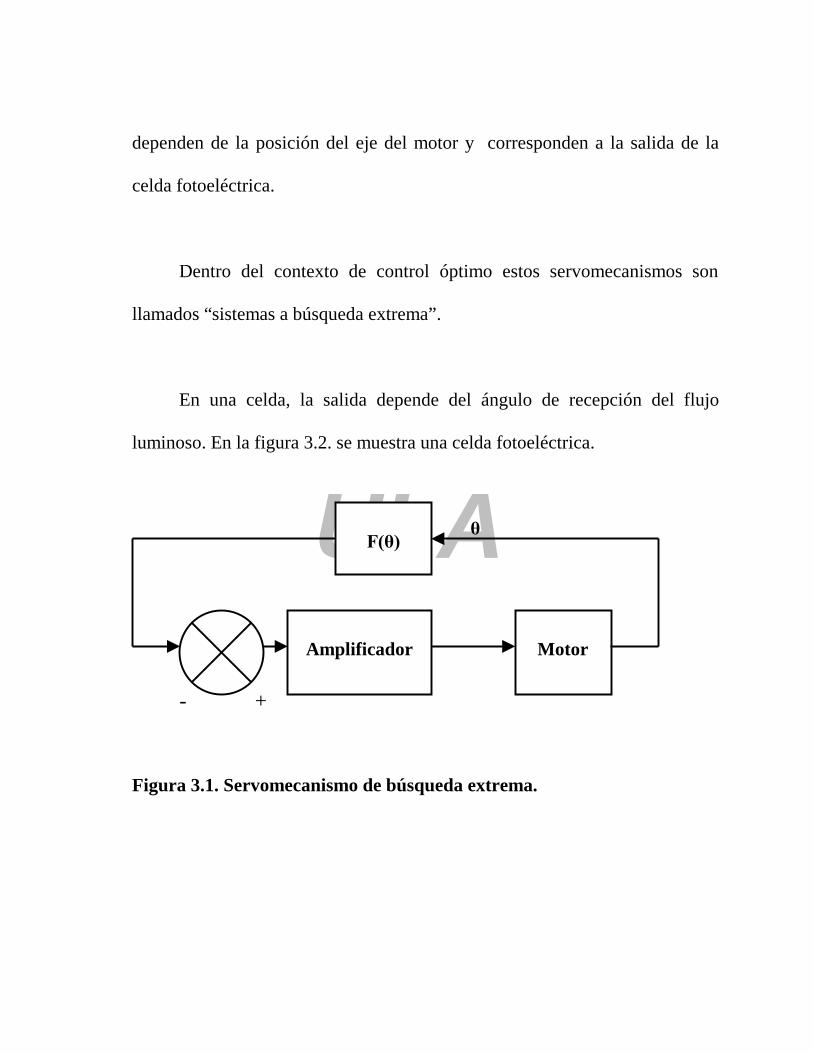
Dentro del contexto de control óptimo estos servomecanismos son
llamados “sistemas a búsqueda extrema”.
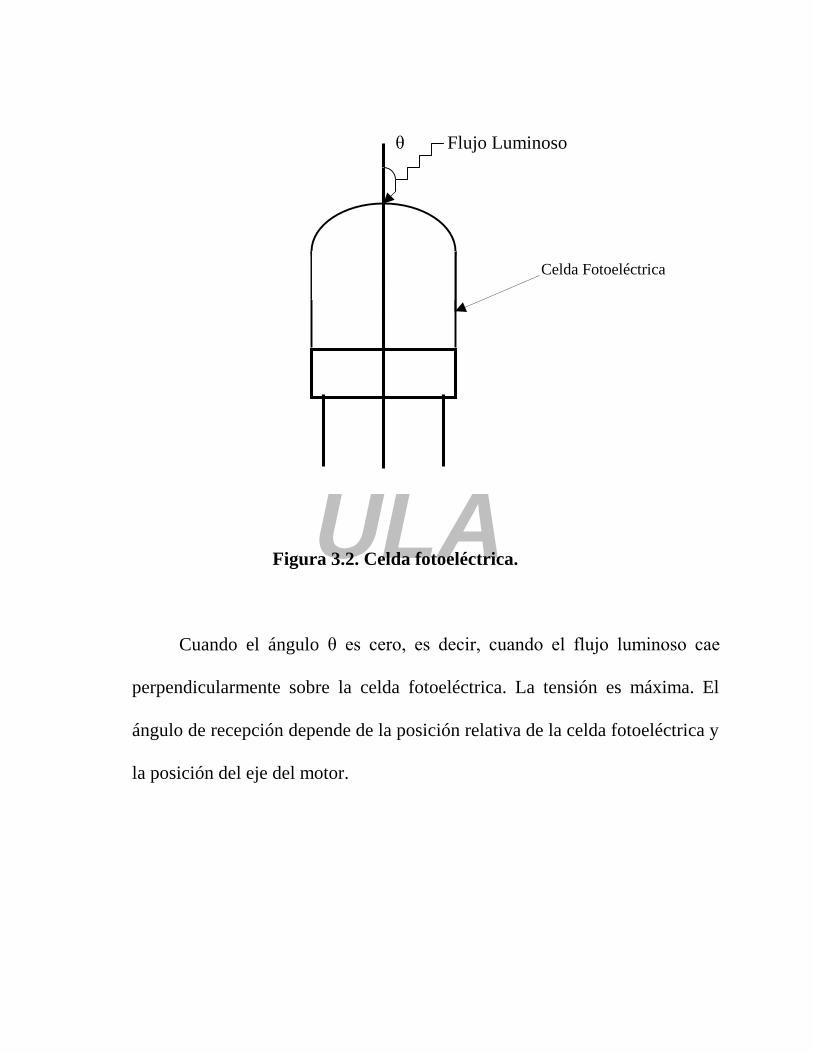
En una celda, la salida depende del ángulo de recepción del flujo
luminoso. En la figura 3.2. se muestra una celda fotoeléctrica.
�������������
- +
Figura 3.1. Servomecanismo de búsqueda extrema.
����
Amplificador
Motor
ULA
� Flujo Luminoso
Celda Fotoeléctrica
Figura 3.2. Celda fotoeléctrica.
Cuando el ángulo �� ��� ������ ��� ������ � ���� ��� �� ��� � ����� ����
perpendicularmente sobre la celda fotoeléctrica. La tensión es máxima. El
ángulo de recepción depende de la posición relativa de la celda fotoeléctrica y
la posición del eje del motor.

ULA
El servomecanismo diseñado es mostrado en la figura 3.3.
Figura 3.3. Diagrama de bloques del sistema.
El sistema fotosensor proporciona una información analógica de la
intensidad de luz, la cual es transmitida al amplificador donde se tomará una
decisión sobre el movimiento del motor el cual permitirá el seguimiento.
El sistema de control es de dos posiciones.
Es decir el actuador tiene solamente dos posiciones fijas.
Sensores
Amplificador
Circuito de
Control
Motor
ULA
El controlador de dos posiciones es relativamente simple y por esta
razón se usa ampliamente en sistemas de control.
Sea y(t) la señal de salida del controlador y e(t) la señal de error. En un
controlador de dos posiciones, la señal U(t) permanece en un valor máximo o
mínimo; según sea la señal de error positiva o negativa, de manera que
U(t) = U1 para e(t) > 0
= U2 para e(t) < 0
Donde U1 y U2 son constantes. Generalmente el valor mínimo de U2,
puede ser, o bien cero; o – U1. En general estos controladores son dispositivos
eléctricos.
La figura 3.5 muestra el diagrama de bloques de un sistema de control
de dos posiciones.

ULA
+ U1 e U U2
-
Figura 3.5 Diagrama de bloques de un sistema de control de dos
posiciones.
3.2. SISTEMA FOTOSENSOR
Consiste en dos celdas fotoeléctricas, este dispositivo da una
información analógica de la energía incidente.
La tensión de estas celdas depende del ángulo de recepción del flujo
luminoso y de la distancia a la cual se encuentra la fuente de luz. La relación
que da el alumbramiento es:
A = �/S
Proceso
ULA
����� �� ���������� ��� �� ��������� ��� ��� ������� �� ��� ��� �� ���
luminoso en mw y S representa la superficie de la celda.
El flujo luminoso que recibe las celdas es dada por la relación:
� = S * Cos � /r2 * I
I = Intensidad de la fuente de luz en mw/steradian.
Quedando entonces determinado el alumbramiento de la celda por la
siguiente ecuación:
A = Cos � / r2 * I
En este diseño, la celda fotoeléctrica es un fototransistor, el cual posee
una sensibilidad bastante alta y además posee la mejor respuesta a la
frecuencia de la señal a percibir dentro de los dispositivos sensores de luz. La
figura 3.7 muestra un diagrama esquemático de este diseño.

ULA
La sensibilidad de la celda en este diseño, puede ser controlado modifi-
cando el valor de la resistencia de salida en el emisor. En este caso se tomó el
valor de 2.5 KOHM, este valor de resistencia depende de la fuente de luz que
se vaya a seguir. En este trabajo las pruebas se hicieron con un rayo (láser).
Fuente de Luz
�
Proyección del Flujo Luminoso
Figura 3.6. Relación entre el flujo luminoso, el ángulo de recepción y la
distancia de la fuente de luz.
5 volt.
2.5 Kohm
Figura 3.7. Celda fotoeléctrica diseñada.

ULA
3.3. CIRCUITO AMPLIFICADOR
Este circuito está basado en el uso de comparadores, amplificador
inversor y un sumador inversor de dos entradas, como lo muestra la figura 3.8.
1K Sensor(1) V
Vrf Sensor (2) 2.5K 10K
1K - V1 - - Salida + + + Vo V V2 1K 10K - +
Figura 3.8. Circuito Amplificador.
Este circuito permite manejar las señales que vienen de los sensores y
genera una señal positiva o negativa dependiendo del sentido de giro
requerido por el motor. Esta salida hace las veces de señal de error a la entrada
del circuito de control del motor. La salida de este circuito es

ULA
Vo= -G*(V1+V2), donde G es la ganancia, en este diseño el valor de la
ganancia fue 2.5 K.
3.4. CIRCUITO DE CONTROL DEL MOTOR
Este circuito está conformado por un controlador de dos posiciones.
La salida del circuito amplificador es transmitida hacia el circuito de
control de dos posiciones. Este circuito es el que actúa directamente sobre el
motor y consiste de un par de transistores conectados como muestra la figura
3.9.
+12 volt.
U = Vo
-12 volt.
Figura 3.9. Sistema de control de dos posiciones.
M

ULA
La lógica de este circuito es la siguiente: a la base del par llega la señal
proveniente del circuito amplificador, si esta señal resulta ser una señal
negativa, el transistor polarizado con –12 volt., se satura y obtiene en el
emisor común una tensión de –12 volt., que irá directamente hacia el motor.
En caso contrario, será el transistor polarizado positivo el que se sature y el
que presentará en el emisor común una tensión positiva de magnitud +12 volt.
En el anexo 1 se encuentran las características del amplificador 741, y
del comparador 338 y de los transistores utilizados.
3.5. SISTEMA DISEÑADO
Este sistema está basado en el uso de dos fotosensores, un rayo (láser),
un potenciometro, un sistema reductor (ruedas dentadas) y un motor de
corriente continua.
La figura 3.10 muestra el sistema utilizado.

ULA
Láser Fotosensor
Potenciometro
Sistema Reductor
Motor CC
Figura 3.10. Sistema Diseñado
El sistema funciona de la siguiente manera: como lo muestra la Figura
3.11, el láser es disparado sobre la superficie del objeto a seguir, en nuestro
caso la superficie a seguir es un espejo, este refleja la luz proveniente del láser
hacia el fotosensores que corresponde al movimiento del espejo. La señal

ULA
recibida por el fotosensor es transmitida hacia el circuito amplificador, este
transmite una señal negativa o positiva dependiendo del fotosensor excitado,
luego la salida de este va hacia el circuito de control del motor, el cual
indicará el sentido de giro del motor dependiendo de la señal proveniente del
circuito amplificado, es decir, si la señal es negativa quiere decir que el objeto
se está moviendo hacia la izquierda del punto de referencia, en caso contrario
el objeto se está movimiento hacia la derecha del punto de referencia, como se
explica en los puntos anteriores.
Fotosensor Fotosensor
Láser
Objeto a seguir
Figura 3.11. Funcionamiento del sistema.
Como se puede ver en la figura 3.11. la resolución del sensor es
proporcional a la distancia que hay entre el sensor y el objeto a seguir, esta
condición cumple con el principio triangular.
Espejo
ULA
La posición final del objeto está dada en forma de tensión suministrada
por el potenciometro, esta tensión es dada en grados por medio del
computador utilizando la tarjeta de adquisición de datos, la cual toma como
señal de entrada la tensión suministrada por el potenciometro.
La tensión suministrada por el potenciometro va a ser negativa o
positiva dependiendo del giro hecho por el motor, es decir, si el motor gira a la
izquierda la tensión suministrada por el potenciometro es positiva en caso
contrario la tensión es negativa, esto se debe a que el potenciometro está
polarizado con ± 5 voltios, tomando como punto de referencia el cero.

ULA
RESULTADO EXPERIMENTAL
Si el objeto a seguir (espejo) se mueve muy rápidamente el ángulo de
percepción del flujo luminoso por parte de la celda fotoeléctrica no va a
permitir que la tensión de salida de la misma sea máxima, esto va impedir que
el sistema responda de manera instantánea.
El objeto a seguir se debe mover a una velocidad que permita que el
ángulo de percepción del flujo luminoso sea perpendicular a la celda
fotoeléctrica de tal manera que la tensión de salida de la celda sea máxima,
permitiendo de esta forma que el sistema responda de manera instantánea.
Como en nuestro caso el sistema a seguir es un espejo, el haz de luz reflejado
por el mismo nunca va hacer transmitido sobre las dos celdas al mismo
tiempo.
En el caso que el sistema a seguir sea directamente una fuente luminosa
esta se puede reflejar sobre las dos celdas al mismo tiempo, si se refleja la
misma cantidad de luz sobre las celdas, la señal producida por ambas se van
anular ya que una va ser negativa , la otra positiva y van a tener el mismo
ULA
valor, por lo tanto el sistema no va a responder ,es decir el sistema se va a
mantener inmóvil. En el caso de que una celda perciba mayor intensidad de
flujo luminoso ,esta va a producir una tensión de salida mayor,lo que va a
permitir que el giro realizado por el motor corresponda a la posición de esta
celda..
Si la precisión del potenciometro.utilizado es mayor, la posición del
objeto a seguir será dada con mayor exactitud.

ULA
ANÁLISIS DE RESULTADOS
El sistema de control implementado cumple con las especificaciones
establecidas.
La respuesta instantánea del sistema va a depender de la sensibilidad del
sistema fotosensor diseñado, a la distancia que hay entre el objeto y el sistema
diseñado, es decir, entra al rayo (láser) y el espejo y al ángulo de recepción de
la luz por parte del fotosensor diseñado.
De acuerdo a lo antes mencionado el sistema va a responder de manera
satisfactoria.
ULA
CONCLUSIONES
El sistema responde casi de manera instantánea, aún cuando la
sensibilidad del sistema fotosensor diseñado no es muy grande.
Sin embargo, el sistema diseñado, se puede adaptar a diferentes niveles
de luz, modificando la resistencia de salida del emisor.
La implementación del sistema de control por medio de circuitos
eléctricos conocida como lógica alambrada es muy práctica, lo que permite
implementar otros controles mediante el uso de microprocesadores, solamente
haciendo algunos cambios a nivel circuital.
Este tipo de sistemas son muy útiles cuando se desea evaluar la
orientación de un objeto luminoso con respecto a un punto del plano, sin
utilizar ningún tipo de conexiones entre ambos.

ULA
Las aplicaciones de un sistema de este tipo son diversas, ya que el
principio utilizado es muy simple. Entre las áreas donde se podría aplicar
están por ejemplo: la Robótica, en Astronomía, etc.
Incluso este sistema se podría aplicar en nuestro laboratorio. En el caso
de la ubicación de la extremidad de una barra flexible que puede girar
alrededor de un eje. En la extremidad de la barra flexible se puede ubicar una
fuente de luz o un espejo y se podrá determinar la posición del extremo de la
barra con respecto al eje de rotación por la orientación que tiene la fuente
luminosa.

ULA
RECOMENDACIONES
El sistema se puede mejorar colocando otro tipo de sensores de luz que
permitan mejorar la sensibilidad del mismo.
Por otra parte para mejorar la movilidad del motor utilizar un mejor
sistema reductor, para una mayor precisión cambiar el motor de CC por un
motor paso a paso.
Para mejorar la respuesta, dada por el pontenciometro, este se puede
cambiar por uno de mayor precisión.

ULA
BIBLIOGRAFÍA
PHILLIPPE COIFFET, Michel, “Introduction To Robot Technology,
McGraw-Hill, Primera Edición.1982.
KUO, Benjamin, “Sistemas Automático de Control, Compañía Editorial
Continental S.A., México, Segunda Edición. 1985
TOCCI, Ronald, “Circuitos y Dispositivos Electrónicos, MCGraw-Hill,
Primera Edición. 1986.
DIAZ S., Oswaldo, “Sistema de Seguimiento del Sol por Coordenadas
Calculadas”. ULA, Mérida. 1986
USECHE D., Leandro, “Sistema de Seguimiento de Objetos a Movimiento
Errático mediante Celda Fotoeléctrica”, ULA, Mérida. 1988
MARTINEZ B., Ana Isabel, “Implementación de un Sistema de Control
Extremal para Seguimiento de una Fuente de Luz”. Ts. 156.8 M378. 1992
HERNÁNDEZ D., Francisco, “Proposición de un Control Extremal para un
Biomotor en Funcionamiento Continuo”. TS156.8 Ha. 1984.

ULA





















![Ind 12 - OSHA 3146 Proteccion Contra Caidas en La Construcci[1]](https://img.pdfslide.es/doc/110x75/5571fbc1497959916995b8ef/ind-12-osha-3146-proteccion-contra-caidas-en-la-construcci1.jpg)






