Embed Size (px)
DESCRIPTION
Instituto Tecnológico de Mérida.Ingeniería Electrónica.TRABAJO FIN DE CARRERA Ingeniería Electrónica.Presentado por: Álvaro Cortes Mánica PARA OPTAR AL GRADO DE INGENIERO ELECTRÓNICO.Mérida, Yucatán, México 2008.• Desarrollar un software visual que puede ser usado como interfaz de usuario y descargar las terapias al dispositivo.• El proyecto estaría enfocado al uso de componentes electrónicos de bajo costo.• La creación de una interfaz sencilla que permita una interacción adecuada entre el usuario-equipo, y que sea de gran alto grado de confiabilidad.● Cumplir con las características eléctricas establecidas para poder competir con equipos del mercado.● Seguir las regulaciones y normas sobre equipos electrónicos de Electro- terapia por La Secretaría de Salud de México, International Electrotechnical Comission.• Aplicación del proyecto al campo de la fisioterapia por medio de la creación de terapias que puedan combatir problemas musculares y circulatorios.
Citation preview
Diseño de un dispositivo generador de corrientes interferenciales para el
tratamiento de patologías de origen muscular y
circulatorio Instituto Tecnológico de Mérida
Presentado por:
Álvaro Cortes Mánica
Tesis de Fin de Carrera Ingeniería Electrónica.
Mérida, Yucatán , México 2008
Contenido
Capítulo 1.- Introducción ................................................................................. 1
1.1 Antecedentes ...................................................................................... 1
1.2 Planteamiento del problema ................................................................. 1
1.3. Objetivos ............................................................................................... 2
1.3.1 Objetivo general .................................................................................. 2
1.3.2. Objetivos específicos .......................................................................... 2
1.4. Justificación ........................................................................................... 3
1.5. Delimitación .......................................................................................... 4
1.5.1. Alcances y Limitaciones ...................................................................... 4
1.6 Caracterización del área en que se participó .......................................... 4
Capítulo 2. Fundamento Teórico ..................................................................... 6
2.1 Concepto, historia y generalidades ........................................................ 6
2.2 Aspectos fisiológicos de la electro estimulación. ................................... 8
2.2.1. Fenómenos no nocivos causados por la electricidad en el ser humano
..................................................................................................................... 9
2.3 Clasificación de las corrientes ............................................................... 11
2.4 Origen de las corrientes interferenciales .............................................. 13
2.5 Características de las corrientes interferenciales. ................................ 15
2.6 Ventajas de las corrientes interferenciales ........................................... 17
2.7 Cualidades terapéuticas de las corrientes interferenciales ................... 18
2.8 Efectos fisiológicos de las corrientes interferenciales ........................... 19
2.9 Tipos de estimuladores musculares ...................................................... 20
2.10 Características de un electro estimulador .......................................... 22
2.11 Principios de operación ...................................................................... 24
2.12 Criterios de selección del método ...................................................... 28
3
2.13 Electrodos .......................................................................................... 29
2.14 Normas de seguridad ........................................................................ 29
2.15 Protecciones para el paciente............................................................ 32
Capítulo 3. Procedimiento y descripción de las actividades realizadas ..... 35
3.1 Descripción de actividades ................................................................... 35
3.2 Desarrollo ............................................................................................ 39
3.2.1 Funcionamiento del dispositivo ...................................................... 39
3.3 Arquitectura de hardware .................................................................... 40
3.3.1 Fuente de alimentación. .................................................................... 41
3.3.2 Oscilador sinusoidal fijo y variable..................................................... 44
3.3.3 Control digital .................................................................................... 48
3.3.4 Etapa de Amplificación ................................................................... 58
3.3.5 Etapa de salida .............................................................................. 62
3.4 Arquitectura de Software ..................................................................... 64
3.4.1 Programa visual .............................................................................. 64
3.4.2 Portal Web ..................................................................................... 66
Capítulo 4. Conclusiones y Recomendaciones ............................................... 68
Referencias ................................................................................................. 69
1
Capítulo 1.- Introducción
1.1 Antecedentes
La estimulación eléctrica con electrodos de superficie a través de la piel
mediante equipos portátiles viene aplicándose con éxito en la medicina tradicional
desde hace muchos años para el tratamiento del dolor y la recuperación muscular.
No obstante, ha sido recientemente que gracias a su sencillez de manejo y al
abaratamiento de los equipos, su utilización ha saltado del ámbito profesional al
privado.
1.2 Planteamiento del problema
Son muchas las personas que sufren dolores en las cervicales, en el ciático,
o que padecen reumatismos, jaquecas y otras muchas molestias pero son pocas
las personas que saben que, gracias al avance tecnológico de la electrónica, se
pueden eliminar todo tipo de patologías de origen muscular y circulatorio, sin
provocar otros daños en el organismo. La pregunta que nos hacemos es: ¿Por
que no tener dispositivo electrónico de bajo costo de elaboración, capaz de
eliminar dichos padecimientos omitiendo el uso de píldoras o comprimidos, es
decir, sin necesidad de hacer usos de fármacos, que tienen gran numero de
efectos secundarios?.
Este proyecto se enfoca en diseñar un dispositivo capaz de generar
corrientes interferenciales variando la frecuencia digitalmente con una interfaz de
fácil manejo, y que sea capaz de almacenar los datos de la terapia para después
ser procesados mediante un software visual por medio del puerto serial para su
posterior interpretación.
Por tal motivo en el presente reporte se exponen los trabajos realizados en
el proyecto “Diseño de un dispositivo generador de corrientes interferenciales
para el tratamiento de patologías de origen muscular y circulatorio.”
2
En este documento se presentan los diseños de las diferentes partes en
que se conforman el proyecto, se analiza a fondo el origen de la electro-
estimulación, el efecto fisiológico que ocurre al ser aplicado al cuerpo y otras
características importantes. Se menciona las actividades realizadas durante el
periodo de desarrollo del proyecto.
Podemos insistir en que este proyecto se enfoca al desarrollo de un
dispositivo electrónico para uso exclusivo en el campo de la rehabilitación,
tomando en cuenta las consideraciones mas importantes que existen en el
mercado , de igual manera a las normas dictadas por los organismos de carácter
nacional e internacional especialmente dedicados a la verificación y regularización
de dichos dispositivos; tales como La Secretaría de Salud de México, International
Electrotechnical Commision, American International Standards Insitute por
mencionar algunos.
Esta investigación se orientó hacia el desarrollo de un dispositivo que fuese
la primera aproximación a un equipo médico real , con un costo relativamente
bajo en comparación con los que existen en el mercado, siendo atractivo a
hospitales que tienen un presupuesto limitado.
1.3. Objetivos
1.3.1 Objetivo general
El objetivo de este proyecto es de crear un electro-estimulador de corrientes
interferenciales para el tratamiento de diversos padecimientos del cuerpo humano
con una interfaz sencilla y de bajo costo.
1.3.2. Objetivos específicos
Desarrollar un software visual que puede ser usado como interfaz de
usuario y descargar las terapias al dispositivo
El proyecto estaría enfocado al uso de componentes electrónicos de bajo
3
costo.
La creación de una interfaz sencilla que permita una interacción adecuada
entre el usuario-equipo, y que sea de gran alto grado de confiabilidad.
● Cumplir con las características eléctricas establecidas para poder competir
con equipos del mercado.
● Seguir las regulaciones y normas sobre equipos electrónicos de Electro-
terapia por La Secretaría de Salud de México, International Electrotechnical
Comission.
Aplicación del proyecto al campo de la fisioterapia por medio de la creación
de terapias que puedan combatir problemas musculares y circulatorios.
1.4. Justificación
Este dispositivo sería de importante relevancia dado que los equipos
dedicados a la electroterapia son diseñados en el extranjero y tienen un alto costo
excluyendo el de importación. Es por este motivo que muchos hospitales tienen
un presupuesto limitado que los hace prescindir de estos dispositivos.
No es del todo satisfactorio tener un conocimiento teórico, si no, que debe
ser la base que sustente un trabajo científico para lograr un beneficio que se de
impacto social y económico.
La aplicación del conocimiento que se adquiere en el aula, tiene que ser
puesto a prueba. Por ello, se ha decidido llevar a cabo la implementación de un
proyecto final de la materia y en este caso particular es de un electro-estimulador
muscular, en el cual, se apliquen todos estos conocimientos aprendidos que se
nos han enseñado en nuestra formación, como ingenieros, así como en nuestra
propia persona.
4
1.5. Delimitación
1.5.1. Alcances y Limitaciones
Debido a su sencilla interfaz cualquier tipo de terapia puede ser fácilmente
programable por el usuario.
Si los hospitales adquirieran este dispositivo podrán dar terapias menos
costosas y más accesibles a la población entera debido al bajo costo de
producción.
Las características actuales de los materiales actuales de fabricación y a las
técnicas usadas, no permiten que el prototipo sea portátil, además de que sea
únicamente de un solo canal.
1.6 Caracterización del área en que se participó
Este proyecto se realizó con la colaboración del Instituto Tecnológico de
Morelia y el Instituto Tecnológico de Mérida .Las actividades fueron realizadas en
el departamento de Ingeniería Electrónica del Instituto Tecnológico de Morelia, en
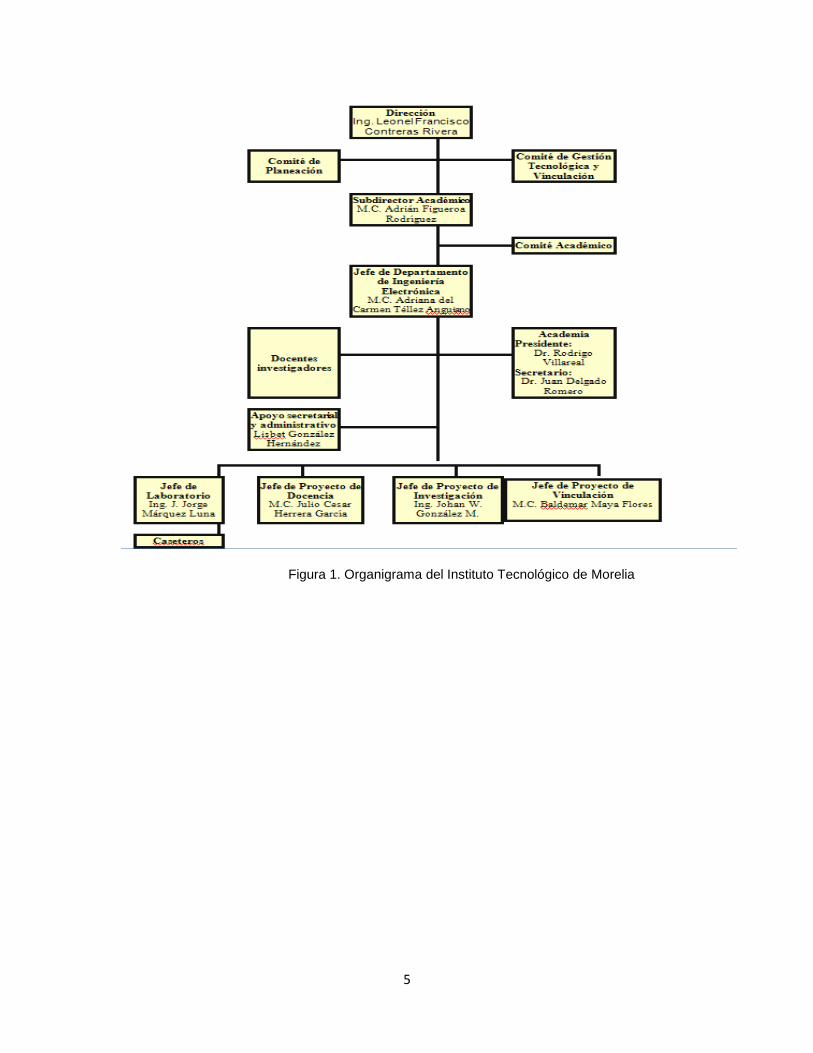
la figura 1 podemos observar el organigrama de dicha institución.
El instituto Tecnológico de Morelia es una institución pública de educación
superior y de postgrado responsable de la formación integral de profesionales en
las áreas de ingeniería y administración.
5
Figura 1. Organigrama del Instituto Tecnológico de Morelia
6
Capítulo 2. Fundamento Teórico
2.1 Concepto, historia y generalidades
La electroterapia es la disciplina médica que se ocupa del tratamiento de
ciertas patologías humanas aprovechando diversos fenómenos eléctricos
artificiales. Podemos definir a la electroterapia como el estudio de las aplicaciones
terapéuticas de la electricidad; o bien como el tratamiento de determinadas
enfermedades mediante la electricidad.
Proviene del griego electro (electricidad) y terapia (cura); y es la rama de la
medicina que utiliza el paso de la corriente eléctrica a través del organismo con
fines curativos.
La electricidad es una forma de energía, su denominación proviene del
griego electrón=ámbar y nace cuando Thales de Mileto (600 a.c.) descubre que al
frotar un trozo de ámbar, éste adquiere la propiedad de atraer pequeños objetos;
durante siglos se pensó que la electricidad era un fluido.
Si se coloca un cuerpo cargado positivamente en un lado y al otro un
cuerpo cargado negativamente y entre ambos se coloca un conductor (material
que permite el paso de los electrones) tendremos que entre uno y otro cuerpo
existe una diferencia de potencial. Los electrones sobrantes en el lado cargado
positivamente irán pasando, a través del conductor, al de carga negativa, hasta
que se equilibren las dos cargas y, por tanto, deje de existir esa diferencia de
potencial, con lo cual cesa la corriente.
Figura 2. Representación de cargas negativas y positivas
Fuente: Electroterapia en fisioterapia, Rodríguez Martín, 2ª edición
7
La historia de la electroterapia se remonta a los tiempos de los romanos, en
los cuales utilizaban la anguila eléctrica aplicada en la zona afectada, a veces era
decapitada para que la descarga fuera más intensa. En cuanto a investigadores de
la electricidad con fines curativos destacamos:
• Luigi Galvani: En 1876 realiza una serie de investigaciones sobre los efectos de
la corriente continua sobre el organismo humano y sobre el miembro en particular.
La corriente continua se denomina galvánica en su honor.
• Volta: Contemporáneo de Galvani, creó la pila eléctrica productora de la corriente
continua utilizada por Galvani para sus experimentos.
• D´Arsonval: Realizó estudios sobre la excitabilidad y, lo más importante, las
interrupciones de la corriente continua en un segundo, creando el sentido de los
Hertzios.
• Claude Bernard: Descubridor de las corrientes que llevan su nombre, también
denominadas diadinámicas.
• Rupert Traebert: Asimismo descubridor de unas corrientes de claro efecto
analgésico.
La corriente eléctrica es el conjunto de fenómenos que ocurren en un
conductor (cuerpo que permite el paso de los electrones) cuando entre sus
extremos se establece una diferencia de potencial.
Aunque la velocidad del desplazamiento de los electrones por el conductor
es de 0.5 mm/seg, el impulso y onda de choque, es decir, la corriente eléctrica, se
transmite a la velocidad de la luz, es decir 300,000 km/seg.
Los cuerpos cuyos electrones periféricos están rígidamente sujetos no
permiten el paso de la corriente eléctrica y se conocen con el nombre de
dieléctricos o aislantes, con esta división encontramos:
• Conductores: metales y soluciones salinas
• Semiconductores: papel, madera, carbón, agua y algunos metales como el
selenio y el silicio.
8
• Aislantes: aceite, porcelana, goma, cristal y ebonita.
2.2 Aspectos fisiológicos de la electro estimulación.
Cuando hacemos una contracción de forma voluntaria, el cerebro emite un
orden, que se llama potencia de acción. Éste se propaga a gran velocidad a lo
largo del nervio motor, invirtiendo la polaridad de las células que atraviesa. Al final
del recorrido, gracias al neurotransmisor (la acetilcolina), la información se
encamina al interior de la célula muscular y desencadena el acortamiento
muscular, la electro estimulación (EEM) consiste en estimular el músculo, a través
del nervio motor.
Primero, porque la estimulación eléctrica de una moto neurona necesita mucha
menos corriente que la estimulación eléctrica de la fibra muscular y segundo,
porque la distribución del nervio a todas las fibras musculares, permite, con su
excitación en la superficie transmitir el influjo hasta la profundidad.
La provocación artificial de contracciones musculares mediante una
corriente interrumpida o una corriente alterna, puede perseguir diferentes
objetivos; si estamos hablando de denervaciones completas o parciales de fibras
musculares, el interés se centrará en “normalizar” ese músculo; por el contrario
querremos hipertrofiarlo en el caso de que la inervación del músculo sea normal.
En cualquier caso los objetivos más importantes que buscamos son: tonificación
de la musculatura, mejora del riego sanguíneo, recuperación de la sensibilidad
muscular, obtención de información de la excitabilidad eléctrica de fibras nerviosas
y tejido muscular, retardo o impedimento de la atrofia muscular, prevención de la
fibrosis muscular, estiramiento muscular e incluso la relajación del músculo.
Es un hecho bien conocido que el paciente nota una disminución o incluso
la desaparición de la corriente conforme pasa el tiempo. Este proceso se conoce
como acomodación o adaptación y se debe a que los receptores estimulados
pasan información sobre los cambios externos en un grado menor. La
estimulación con un estímulo invariable conduce a una disminución del efecto
estimulante. Se puede evitar la acomodación de las siguientes maneras:
9
Aumentado la amplitud
Variando la frecuencia
Ajustando una modulación baja
2.2.1. Fenómenos no nocivos causados por la electricidad en el ser humano
Sensación eléctrica
Límite de tolerancia (implica sensaciones intensas incluyendo el dolor)
Dolor
Estimulación neuromuscular
Impotencia muscular
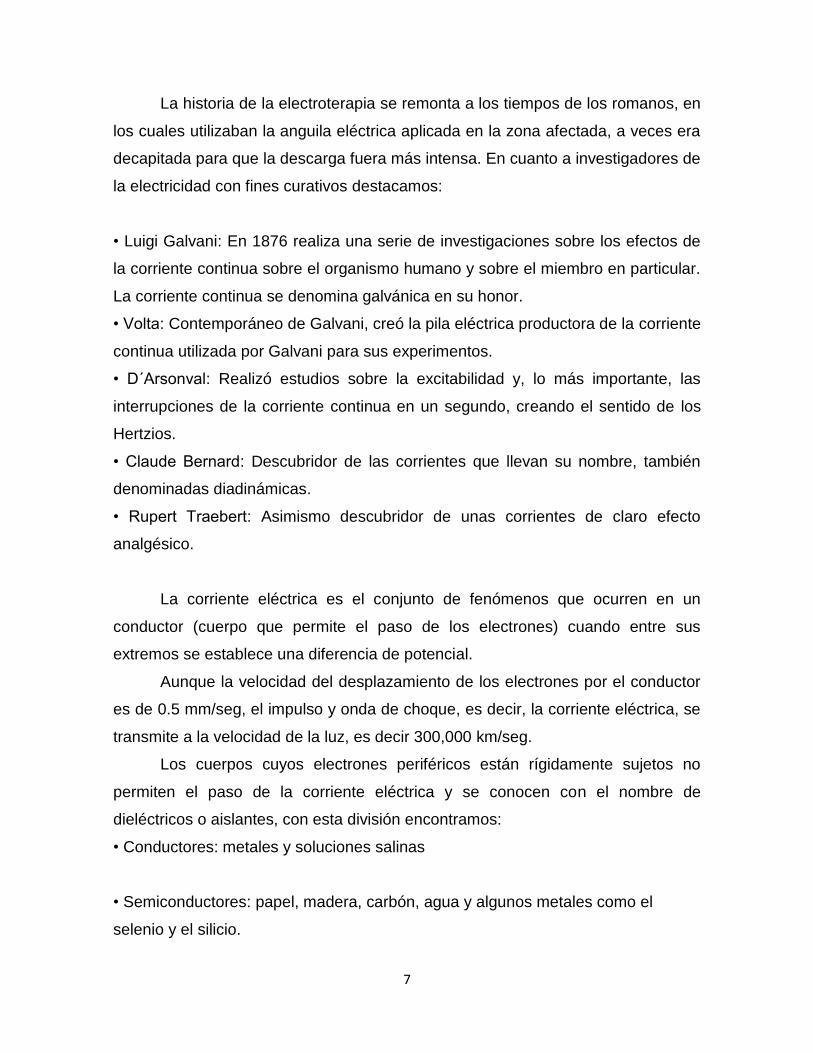
Umbral de Sensación Eléctrica
Valor mínimo de la corriente que causa alguna sensación en la persona por
la que fluye .El posicionamiento y tamaño de los electrodos, así como la
frecuencia utilizada en la estimulación son factores fundamentales.
10
30
10
3
1
0.3
0.1
100K30K10K3K1K30010030
100
300
Frecuencia Hz
Co
rrie
nte
mA
-R
MS
C-C
M-M
T-T
C-C: Cuello - Cintura
M-M:Mano der. - Mano Izq.
T-T:Torso - Torso
200cm2
60cm2
Figura 3. Representación grafica del umbral de
sensación eléctrica en diferentes partes del cuerpo
Fuente: Recopilación de Apuntes Biomédicos, Chávez Herrera
10
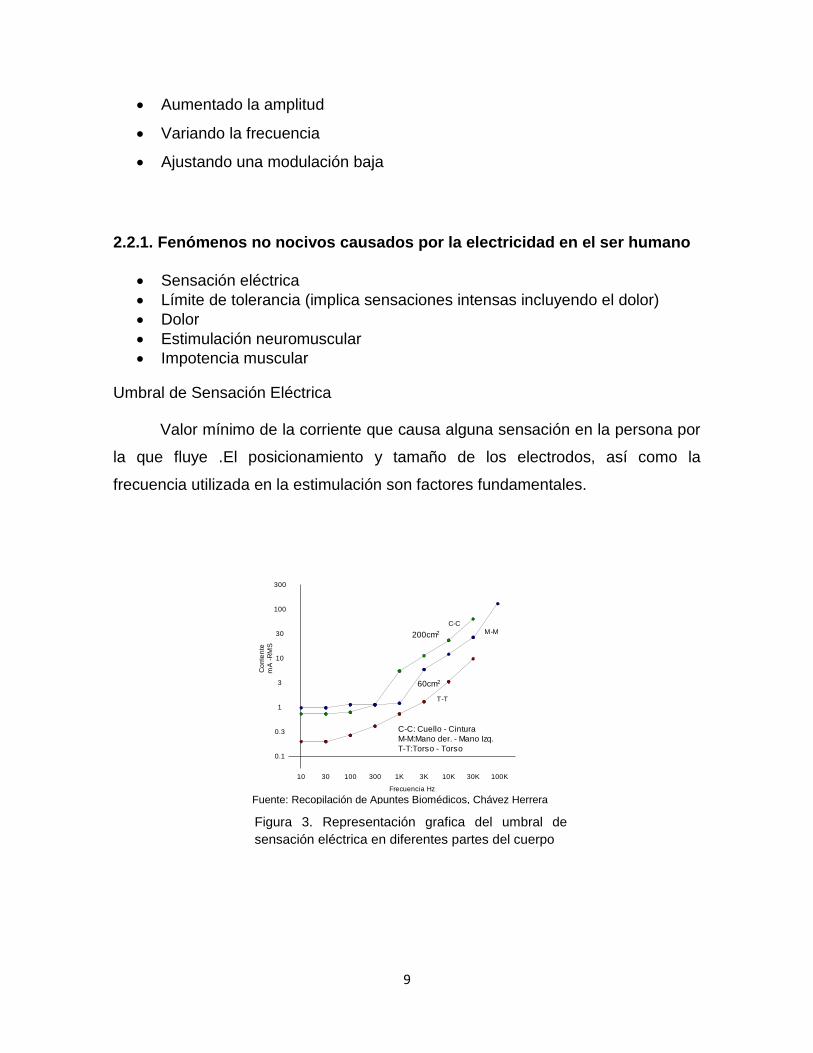
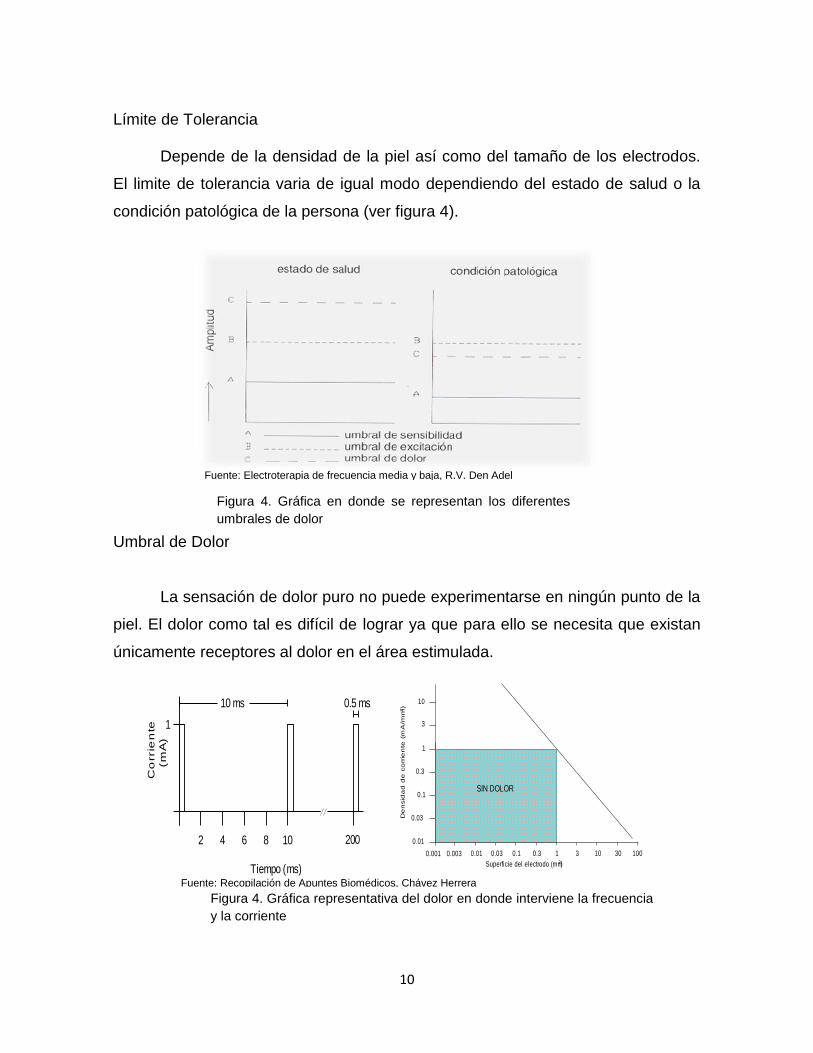
Límite de Tolerancia
Depende de la densidad de la piel así como del tamaño de los electrodos.
El limite de tolerancia varia de igual modo dependiendo del estado de salud o la
condición patológica de la persona (ver figura 4).
Umbral de Dolor
La sensación de dolor puro no puede experimentarse en ningún punto de la
piel. El dolor como tal es difícil de lograr ya que para ello se necesita que existan
únicamente receptores al dolor en el área estimulada.
2 4 6 8 10 200
1
10 ms 0.5 ms
Co
rrie
nte
(m
A)
Tiempo (ms)
0.01
0.03
0.1
0.3
1
3
10
0.001 0.003 0.01 0.03 0.1 0.3 1 3 10 30 100
Superficie del electrodo (mm2)
De
nsid
ad
de
co
rrie
nte
(m
A/m
m2)
SIN DOLOR
Figura 4. Gráfica en donde se representan los diferentes
umbrales de dolor
Figura 4. Gráfica representativa del dolor en donde interviene la frecuencia
y la corriente
Fuente: Recopilación de Apuntes Biomédicos, Chávez Herrera
Fuente: Electroterapia de frecuencia media y baja, R.V. Den Adel
11
2.3 Clasificación de las corrientes
En la actualidad existen diferentes tipos de corrientes que son usadas en el
campo de la electroterapia para curar diversas patologías ya sea de origen
muscular o circulatorio, es necesario saber el tipo de padecimiento para poder
hacer una buena elección sobre el tipo de corriente que se va a emplear.
La división que nos vamos a encontrar en la clasificación de las corrientes
es la que sigue (puede variar según autores):
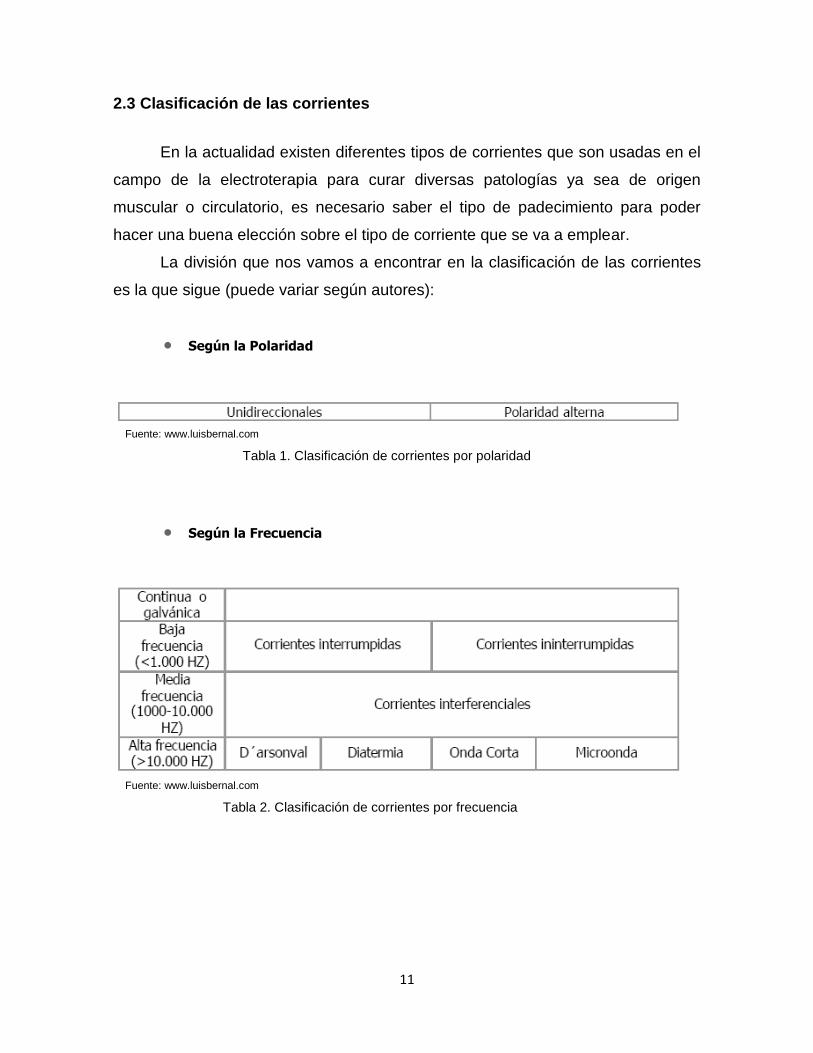
Según la Polaridad
Según la Frecuencia
Tabla 2. Clasificación de corrientes por frecuencia
Tabla 1. Clasificación de corrientes por polaridad
Fuente: www.luisbernal.com
Fuente: www.luisbernal.com
12
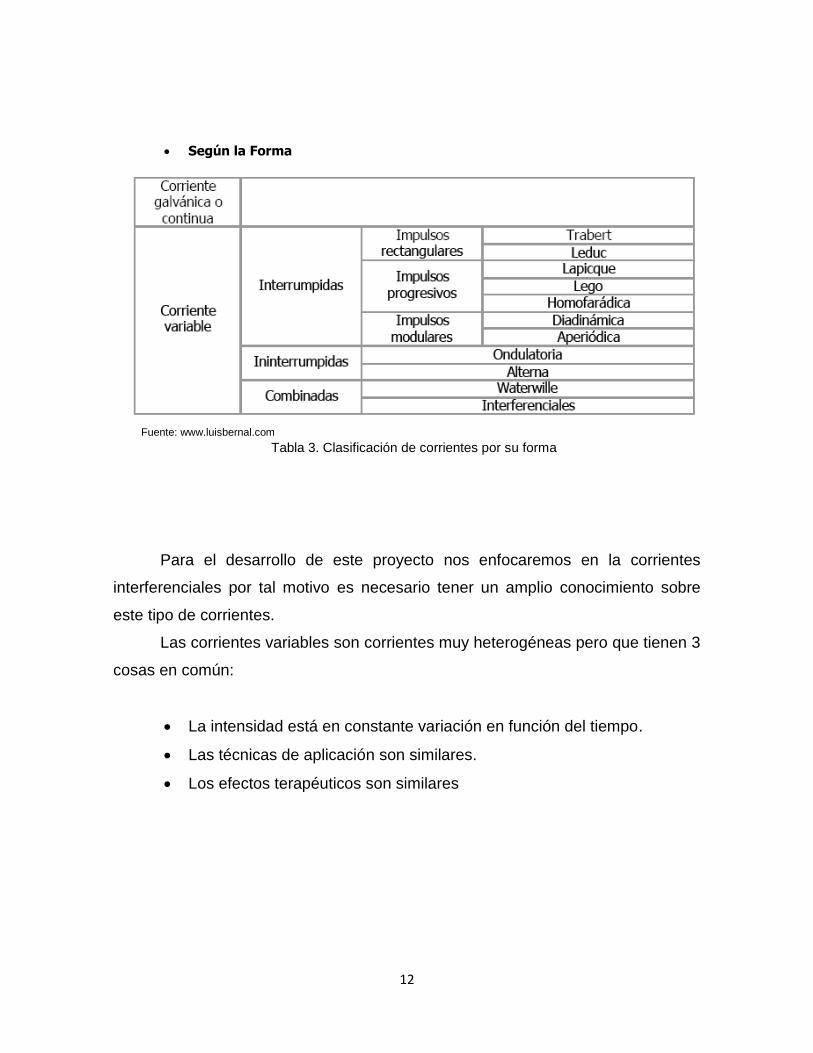
Según la Forma
Para el desarrollo de este proyecto nos enfocaremos en la corrientes
interferenciales por tal motivo es necesario tener un amplio conocimiento sobre
este tipo de corrientes.
Las corrientes variables son corrientes muy heterogéneas pero que tienen 3
cosas en común:
La intensidad está en constante variación en función del tiempo.
Las técnicas de aplicación son similares.
Los efectos terapéuticos son similares
Tabla 3. Clasificación de corrientes por su forma
Fuente: www.luisbernal.com
13
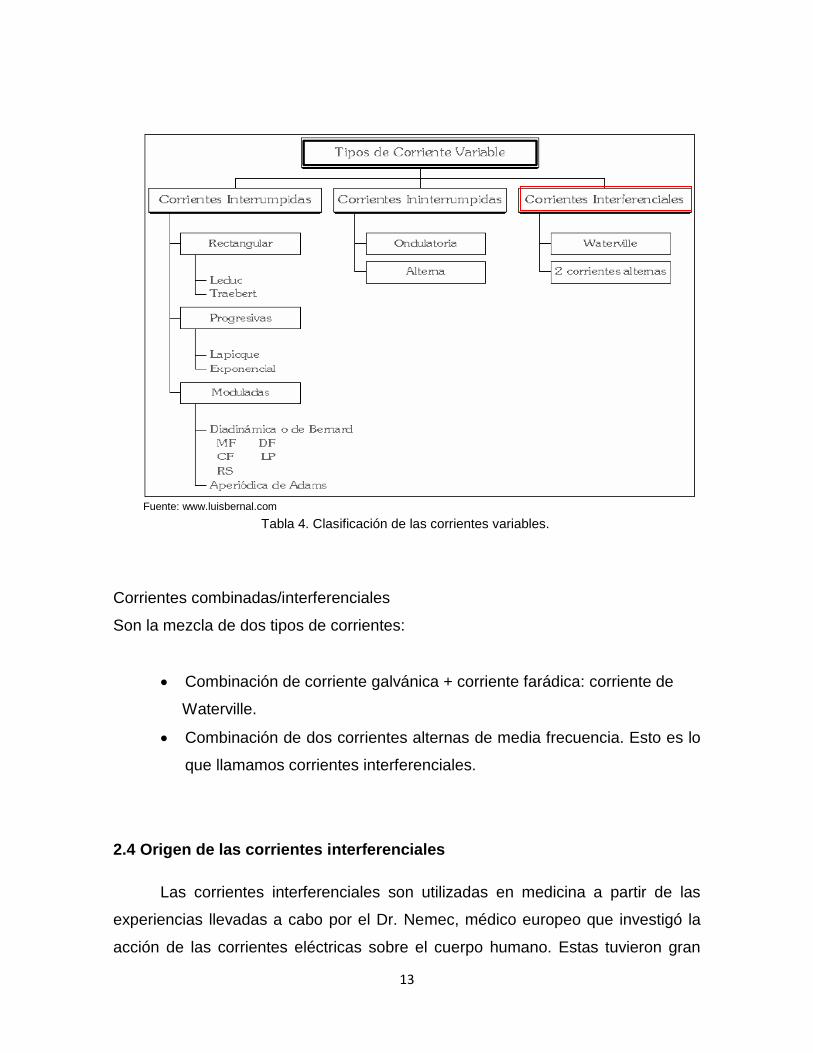
Corrientes combinadas/interferenciales
Son la mezcla de dos tipos de corrientes:
Combinación de corriente galvánica + corriente farádica: corriente de
Waterville.
Combinación de dos corrientes alternas de media frecuencia. Esto es lo
que llamamos corrientes interferenciales.
2.4 Origen de las corrientes interferenciales
Las corrientes interferenciales son utilizadas en medicina a partir de las
experiencias llevadas a cabo por el Dr. Nemec, médico europeo que investigó la
acción de las corrientes eléctricas sobre el cuerpo humano. Estas tuvieron gran
Tabla 4. Clasificación de las corrientes variables.
Fuente: www.luisbernal.com
14
aceptación en países como Francia y Alemania, pero fue en la década de los años
60’s y 70’s donde esta modalidad de electroterapia alcanzó un nivel de mucha
importancia, haciéndose conocer en casi todo el mundo. La experiencia del Dr.
Nemec sobrevino por necesidad de conseguir un tipo de onda eléctrica que
consiguiera acceder a profundidades mayores que con otros tipos de corrientes
estimulantes, así como permitir la aplicación de intensidades altas sin ocasionar
molestias excesivas.
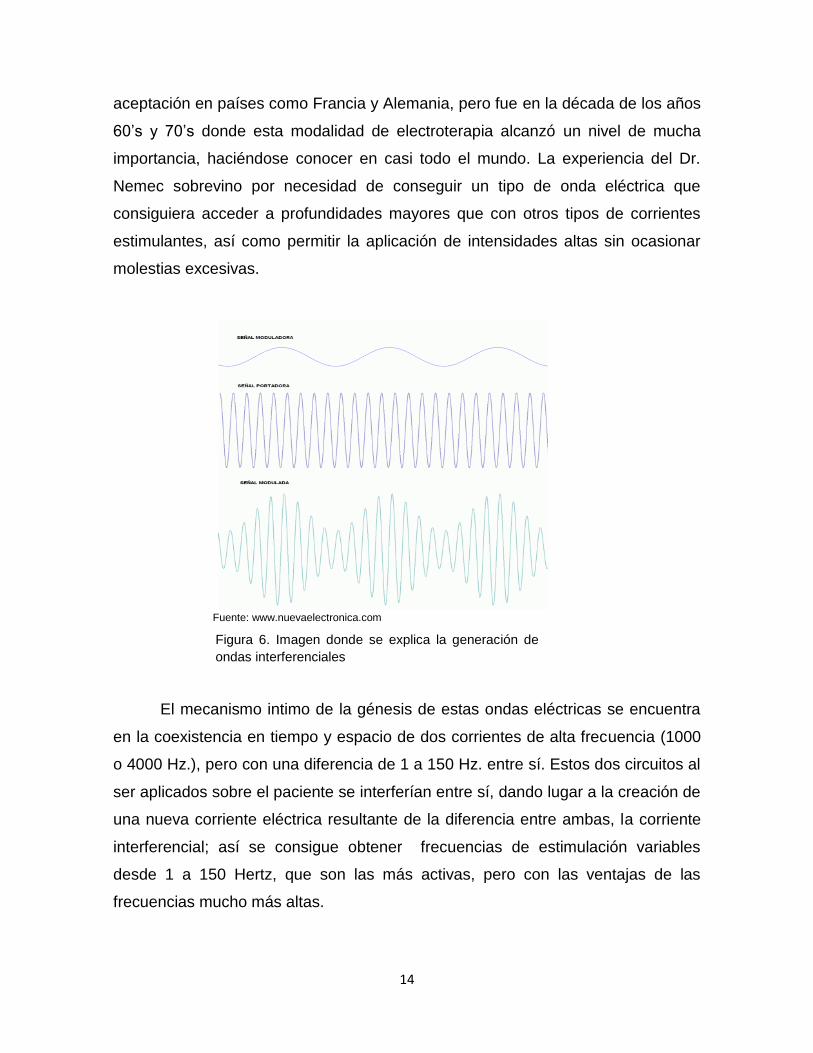
El mecanismo intimo de la génesis de estas ondas eléctricas se encuentra
en la coexistencia en tiempo y espacio de dos corrientes de alta frecuencia (1000
o 4000 Hz.), pero con una diferencia de 1 a 150 Hz. entre sí. Estos dos circuitos al
ser aplicados sobre el paciente se interferían entre sí, dando lugar a la creación de
una nueva corriente eléctrica resultante de la diferencia entre ambas, la corriente
interferencial; así se consigue obtener frecuencias de estimulación variables
desde 1 a 150 Hertz, que son las más activas, pero con las ventajas de las
frecuencias mucho más altas.
Figura 6. Imagen donde se explica la generación de
ondas interferenciales
Fuente: www.nuevaelectronica.com
15
Es sabido en fisioterapia que las frecuencias de mejor nivel de estimulación
son aquellas de hasta 100 Hertz. A medida que esta frecuencia aumenta (500,
1 000, 2 000, 4 000 Hz, etc.) la estimulación muscular disminuye, pero también lo
hace la sensación molesta que percibe el paciente.
2.5 Características de las corrientes interferenciales.
.• La ubicación de los electrodos se hace de preferencia sobre las zonas de
inervación o punto excito motor .
.• La estimulación del músculo deseado se produce cuando sobreviene la onda
eléctrica o el tren de ondas, pero cuando cesa el estimulo eléctrico, también
desaparece el estimulo muscular.
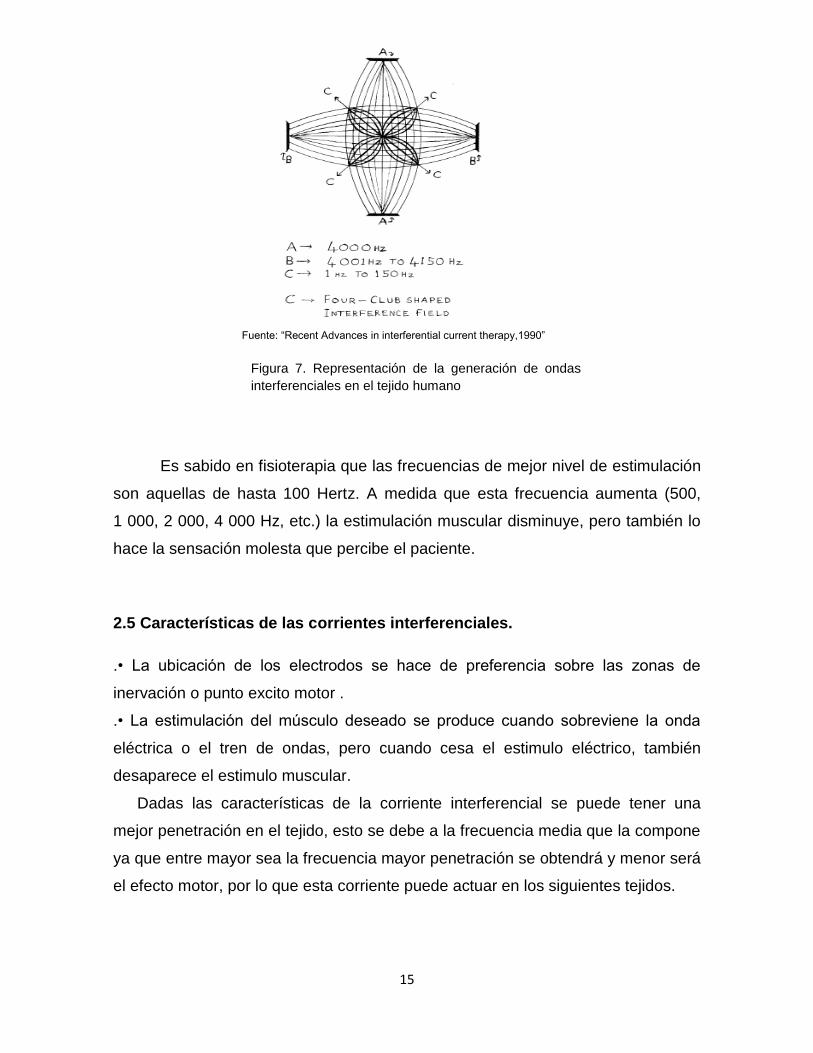
Dadas las características de la corriente interferencial se puede tener una
mejor penetración en el tejido, esto se debe a la frecuencia media que la compone
ya que entre mayor sea la frecuencia mayor penetración se obtendrá y menor será
el efecto motor, por lo que esta corriente puede actuar en los siguientes tejidos.
Figura 7. Representación de la generación de ondas
interferenciales en el tejido humano
Fuente: “Recent Advances in interferential current therapy,1990”
16
Piel
Fibra muscular estriada
Vasos sanguíneos y linfáticos
Intestinos
Otros conducto y esfínteres con capacidad contráctil
Tejido Conjuntivo
Articulaciones
Tejido nervioso
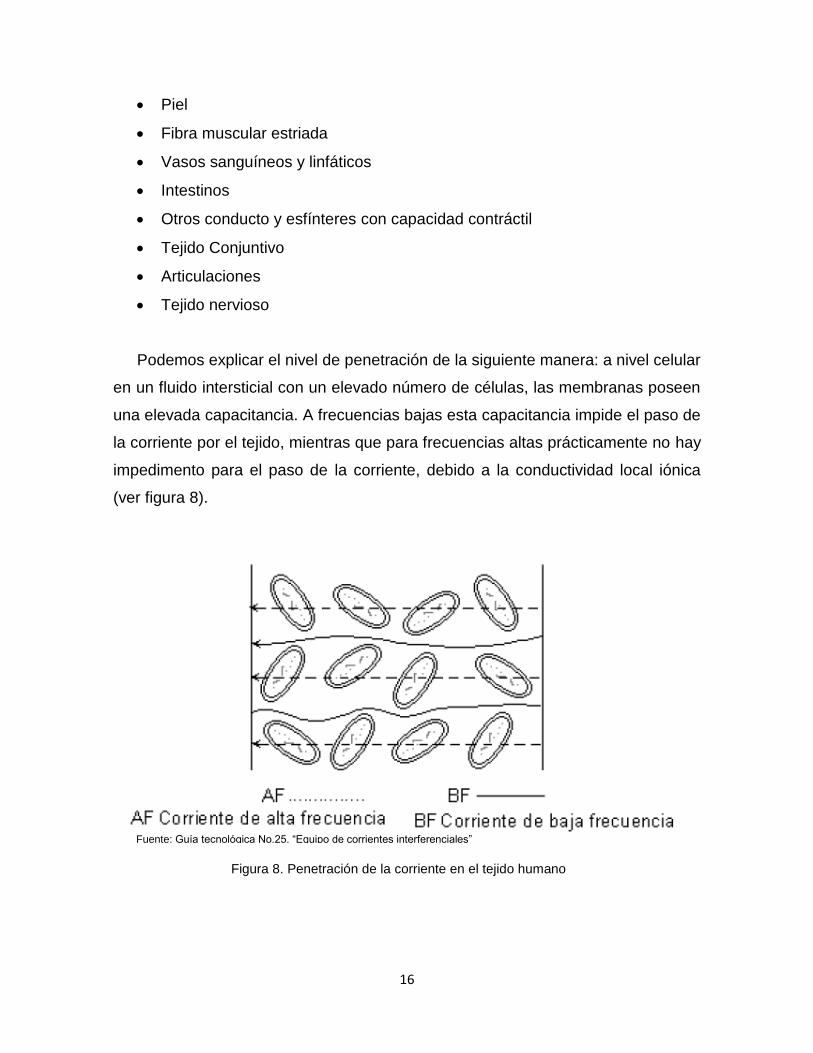
Podemos explicar el nivel de penetración de la siguiente manera: a nivel celular
en un fluido intersticial con un elevado número de células, las membranas poseen
una elevada capacitancia. A frecuencias bajas esta capacitancia impide el paso de
la corriente por el tejido, mientras que para frecuencias altas prácticamente no hay
impedimento para el paso de la corriente, debido a la conductividad local iónica
(ver figura 8).
Figura 8. Penetración de la corriente en el tejido humano
Fuente: Guía tecnológica No.25. “Equipo de corrientes interferenciales”
17
Las células al ser de tamaño desigual y con funciones muy diferentes, hacen
que cada tejido tenga una constitución heterogénea con enormes diferencias en la
conductividad de los mismos por lo que la electroterapia no da el mismo efecto en
todos los tejidos dependiendo totalmente de la constitución de la zona donde se
aplique la terapia. El organismo como un conductor, dada su constitución, se
puede dividir de la siguiente manera:
●Tejidos poco conductores: huesos, grasa, piel callosa y gruesa, pelo y uñas.
● Tejidos medianamente conductores: piel, tendones, fascias gruesas y cartílagos.
●Tejidos relativamente buenos conductores: sangre, linfa, líquidos intra y
extracelulares, tejidos musculares, vísceras, hormonas, tejido conjuntivo, líquidos,
jugos orgánicos y tejido nervioso.
El efecto que se logra en un tejido al dar electroterapia está en función de la
intensidad de corriente, de la tensión, de la frecuencia, forma de onda y duración
del paso de la corriente.
Dependiendo de estas variables se pueden obtener resultados terapéuticos
muy buenos estimulando a nivel sensitivo, motor o dando un efecto térmico, pero
si no se manejan estas variables adecuadamente las consecuencias del paso de
la corriente por el cuerpo pueden ocasionar desde lesiones físicas secundarias,
tetanización, asfixia, quemaduras hasta llegar a la fibrilación ventricular. Es
importante resaltar que con una intensidad elevada se puede ocasionar fibrilación
ventricular sin ninguna alteración en la piel.
2.6 Ventajas de las corrientes interferenciales
1) La utilización de frecuencias altas posibilita una disminución de la resistencia
de la piel, mejorando la tolerancia sensitiva a las ondas eléctricas, lo que
determina el uso de intensidades eléctricas ciertamente elevadas que pasan muy
desapercibidas aún para pacientes sensibles.
18
2) Las ondas de estimulación alcanzan profundidades inaccesibles para las ondas
bipolares clásicas.
3) Brindan la posibilidad de actuar en áreas de mayor extensión.
4) Efecto residual, que favorece la perpetuación del tratamiento una vez finalizada
la sesión.
2.7 Cualidades terapéuticas de las corrientes interferenciales
Dichas corrientes se caracterizan por tener una marcada acción excito
motriz, ya que de acuerdo a su particular mecanismo de generación, el estímulo
despolarizante se produce en la intimidad del tejido muscular, ocasionando un
masivo reclutamiento de unidades motoras. Dada las características de
conformación de la interferencia eléctrica, se logra acceder a niveles de
profundidad normalmente no alcanzados con otros sistemas de electroterapia.
Esto da origen a una intensa acción muscular de característica singular, variando
constantemente la intensidad de trabajo en forma oscilatoria y desplazando la
movilidad alternativamente hacia los cuatro electrodos. En lo concerniente al
sistema circulatorio, todas estas características hacen que al trabajar la
musculatura estriada, se obtiene un efecto de bomba muscular, favoreciendo un
incremento de la circulación venosa de retorno.
Otro importante aporte de las corrientes interferenciales reside en la
inducción de un marcado efecto analgésico que persiste mucho más allá de
finalizada la sesión y que va potencializándose en sesiones sucesivas. Esta acción
que es rápidamente comprobable, es ocasionada por un importante aumento del
umbral doloroso y por la circulación constante de corrientes de alta frecuencia, que
provocan un exceso de estímulos en las terminaciones nerviosas sensitivas
Los aspectos anteriormente mencionados determinan que las corrientes
interferenciales estén particularmente indicadas en el tratamiento de situaciones
relacionadas con las patologías de origen muscular y circulatorio. Por tal motivo es
aconsejado para tratar con mucha eficacia gran cantidad de afecciones del
aparato locomotor, tanto post- traumática como degenerativa, y los trastornos
19
estéticos más comunes como los relacionados con déficit circulatorio, flaccidez
muscular, celulitis, y atrofia muscular, potenciación muscular, relajación muscular,
elongación muscular, bombeo circulatorio, analgesia en dolores de origen químico,
analgesia en dolores de origen mecánico, analgesia en dolores de origen
neurálgico, desbridamientos titulares, liberaciones articulares, eliminación de
derrames articulares, en distrofia simpático-refleja, movilización intrínseca e intima
de las articulaciones vertebrales.
2.8 Efectos fisiológicos de las corrientes interferenciales
El principal efecto es el excito motor, aunque también tiene un efecto
analgésico. La contracción muscular por efecto excito motor va a seguir la ley del
todo o nada, es decir una fibrilla muscular o se contrae completamente por la
acción de la corriente eléctrica, o no se contrae en absoluto. Esto va a depender
principalmente de los siguientes factores:
Temperatura: A menor temperatura, mayor intensidad necesaria para obtener
la respuesta muscular.
Ley de las acciones polares: La excitación nace en el cátodo durante el cierre de
la aplicación y muere en el ánodo durante la apertura
.
Frecuencia: las frecuencias inferiores a 10 hertz permiten contracciones
musculares sucesivas con períodos de descanso. Si aumentamos la frecuencia no
permitimos la relajación y se produce una contracción muscular sostenida o
tétanos. El mantenimiento de frecuencias elevadas constantes puede provocar
acostumbramiento (disminución de los efectos excito motores), para evitarlo se
realizan modulaciones en intensidad, frecuencia o ambos a la vez.
20
Pendiente: la corriente excitante disminuye su eficacia a medida que disminuye
su pendiente. Ante la repetición de los impulsos con baja pendiente, la fibra
muscular eleva su umbral de contracción y se produce acomodación.
Esta capacidad no es conservada por las fibras musculares alteradas, por lo
que la aplicación de este tipo de impulsos permitirá la estimulación selectiva de las
fibras alteradas.
Intensidad: la obtención de contracción muscular necesita alcanzar una
intensidad umbral por debajo de la cual no existe respuesta. Esta intensidad es
conocida como umbral. Tras la primera contracción, las siguientes son ligeramente
mayores para intensidades constantes, pero si se siguen aplicando impulsos
eléctricos, acabará por producirse el fenómeno de acomodación o disminución de
la contracción muscular para una misma intensidad.
Tiempo o duración de los impulsos: con tiempos largos no se influye en la
contracción muscular, pero al ir disminuyendo los tiempos de impulso, llega un
momento en que es necesario aumentar la intensidad para mantener el mismo
grado de contracción muscular.
2.9 Tipos de estimuladores musculares
Los equipos de electro estimulación se pueden clasificar en analógicos y
digitales. Existe una gran confusión para diferencial un sistema analógico de uno
digital, erróneamente se piensa que un sistema digital es aquel que se maneja por
medio de controles que se tiene que pulsar. La diferencia no está en la estética o
en el funcionamiento mecánico del equipo, está en la señal de estimulación que va
al paciente.
Entre un equipo analógico y uno digital terapéuticamente no hay
diferencias. En el mercado la mayoría de los equipos son digitales porque esta
21
tecnología ahorra espacios, los equipos son más ligeros y compactos, y el diseño
electrónico es mucho más sencillo.
Existe en el mercado una gran diversidad de estimuladores eléctricos,
capaces de aplicar al paciente impulsos eléctricos con parámetros controlados y
con niveles de seguridad adecuados. En esta gama de equipos se encuentran
desde estimuladores portátiles, con aplicaciones muy específicas, hasta equipos
estacionarios, con un radio de acción mucho más amplio y universal, que utilizan
diversos tipos de señales dependiendo de los resultados que se deseen obtener.
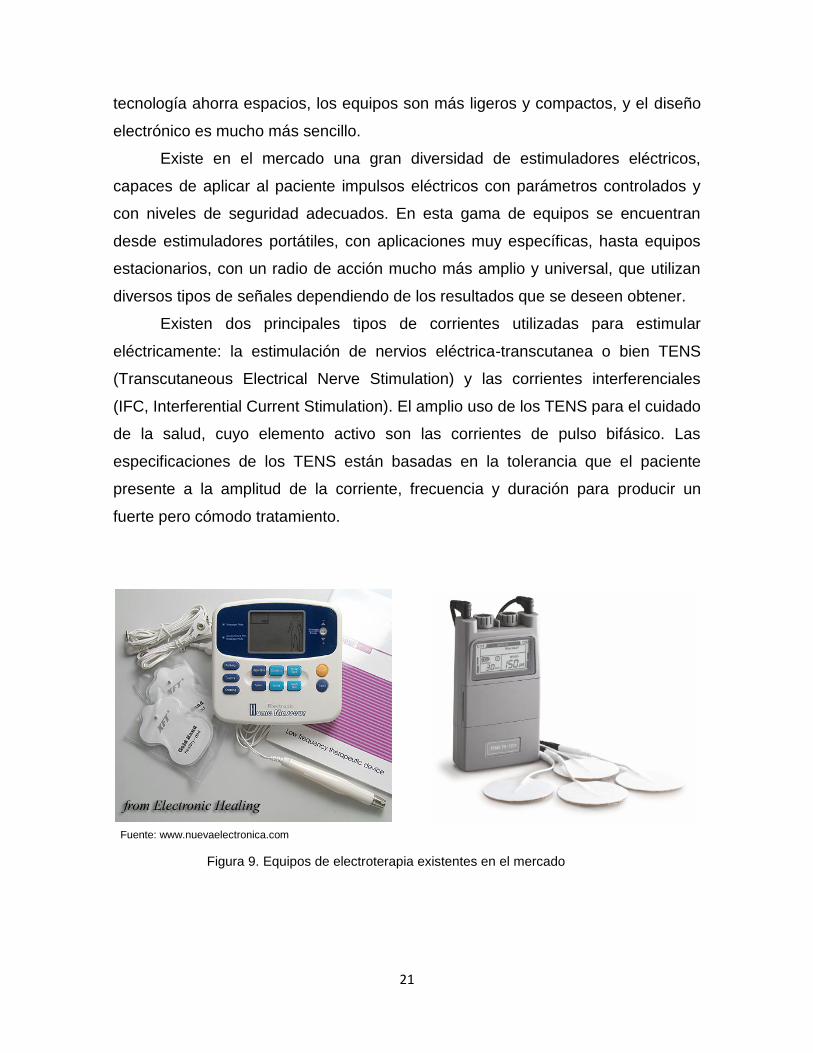
Existen dos principales tipos de corrientes utilizadas para estimular
eléctricamente: la estimulación de nervios eléctrica-transcutanea o bien TENS
(Transcutaneous Electrical Nerve Stimulation) y las corrientes interferenciales
(IFC, Interferential Current Stimulation). El amplio uso de los TENS para el cuidado
de la salud, cuyo elemento activo son las corrientes de pulso bifásico. Las
especificaciones de los TENS están basadas en la tolerancia que el paciente
presente a la amplitud de la corriente, frecuencia y duración para producir un
fuerte pero cómodo tratamiento.
Figura 9. Equipos de electroterapia existentes en el mercado
Fuente: www.nuevaelectronica.com
22
Las IFC se originan de la aplicación transcutánea de corriente eléctricas
alternas de medias frecuencias, moduladas en amplitud a una baja frecuencia
para propósitos terapéuticos, pueden y aplicación de las corrientes
interferenciales.
Entonces podemos resumir lo anterior diciendo que las corrientes
interferenciales son ondas sinusoidales portadoras de media frecuencia con
envolventes de baja frecuencia
2.10 Características de un electro estimulador
Un electro-estimulador debe de cumplir con ciertas características para que
pueda ser de gran utilidad. A continuación se describen las características más
importantes de los electros estimuladores que se pueden adquirir en el mercado
actual.
La forma del pulso
Se observa con la ayuda de un osciloscopio y depende exclusivamente del
diseño adoptado por fabricante al construir el circuito eléctrico del estimulador.
Aunque se ha especulado durante muchos años con las propiedades terapéuticas
de las diferentes formas de onda, en la actualidad, ya casi todo el mundo reconoce
que la forma de la onda influye poco o nada en el resultado del tratamiento.
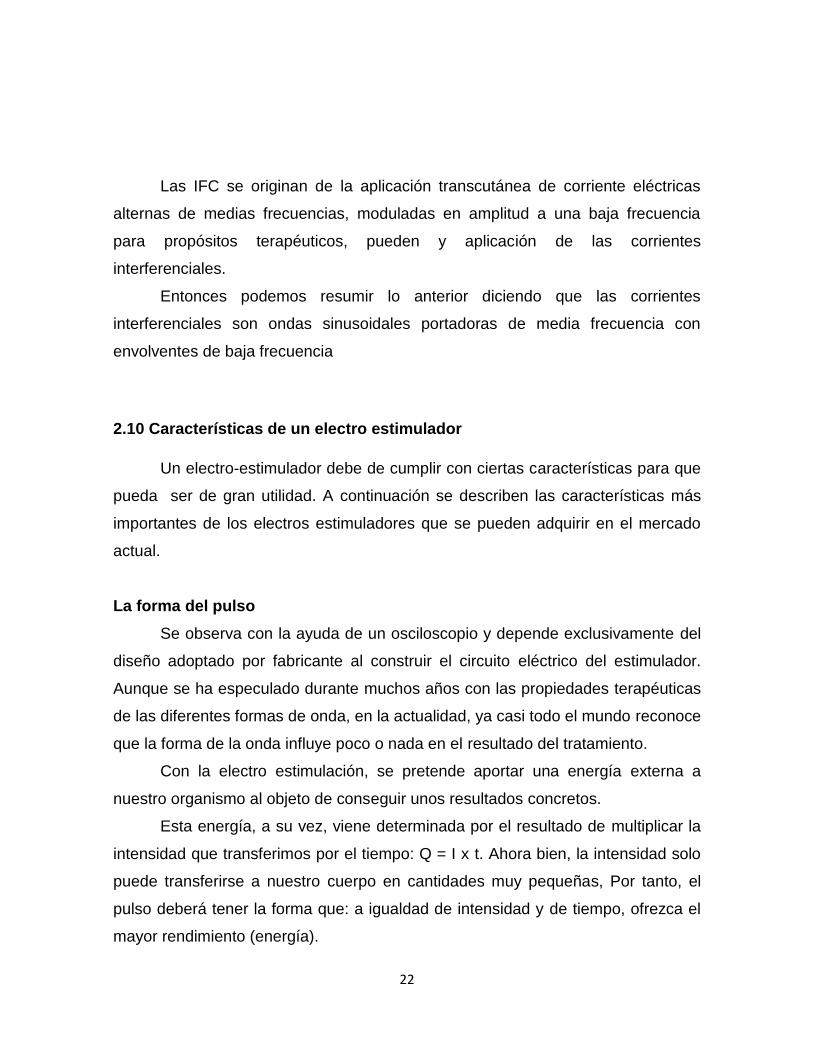
Con la electro estimulación, se pretende aportar una energía externa a
nuestro organismo al objeto de conseguir unos resultados concretos.
Esta energía, a su vez, viene determinada por el resultado de multiplicar la
intensidad que transferimos por el tiempo: Q = I x t. Ahora bien, la intensidad solo
puede transferirse a nuestro cuerpo en cantidades muy pequeñas, Por tanto, el
pulso deberá tener la forma que: a igualdad de intensidad y de tiempo, ofrezca el
mayor rendimiento (energía).
23
La frecuencia.
Se mide en hertz (Hz). 1 Hz, significa un pulso por segundo, 2 Hz. significa
dos pulsos por segundo y así sucesivamente. Conforme variamos el valor de la
frecuencia las reacciones de nuestro organismo serán diferentes, por tanto, resulta
fundamental conocerlas para poder combatir el padecimiento correctamente.
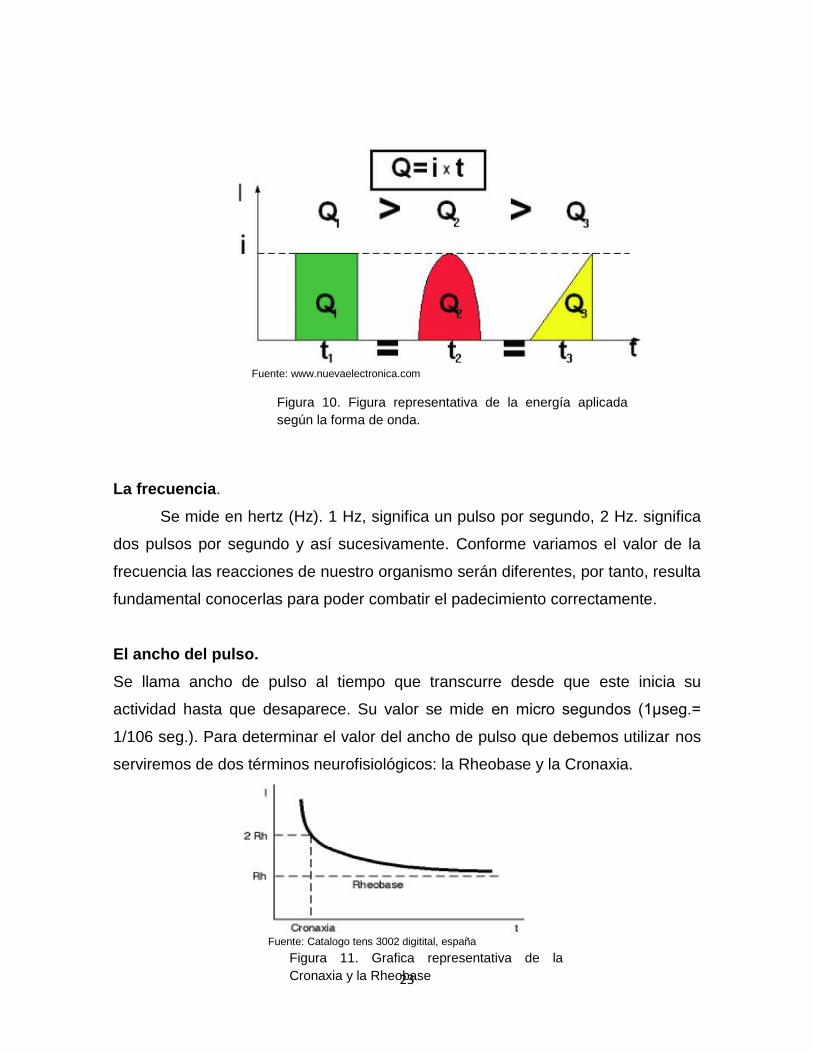
El ancho del pulso.
Se llama ancho de pulso al tiempo que transcurre desde que este inicia su
actividad hasta que desaparece. Su valor se mide en micro segundos (1μseg.=
1/106 seg.). Para determinar el valor del ancho de pulso que debemos utilizar nos
serviremos de dos términos neurofisiológicos: la Rheobase y la Cronaxia.
Figura 10. Figura representativa de la energía aplicada
según la forma de onda.
Figura 11. Grafica representativa de la
Cronaxia y la Rheobase
Fuente: www.nuevaelectronica.com
Fuente: Catalogo tens 3002 digitital, españa
24
La Rheobase (Rh), es la intensidad mínima de un impulso rectangular de 1
segundo de duración, necesaria para provocar una contracción umbral. Mientras
que la Cronaxia es la anchura que debe adquirir un impulso eléctrico de corriente
constante y establecimiento brusco para provocar una contracción muscular con
una intensidad doble de la Rheobase.
Estos conceptos, sirven para lograr un equilibrio entre los parámetros de
intensidad y tiempo (ancho de pulso) de modo que se pueda conseguir siempre
una estimulación lo más confortable posible.
Los valores de Rheobase y Cronaxia dependen básicamente del tipo y
proporción de las fibras musculares que componen cada músculo. Por tanto,
varían de una persona a otra y de un músculo a otro.
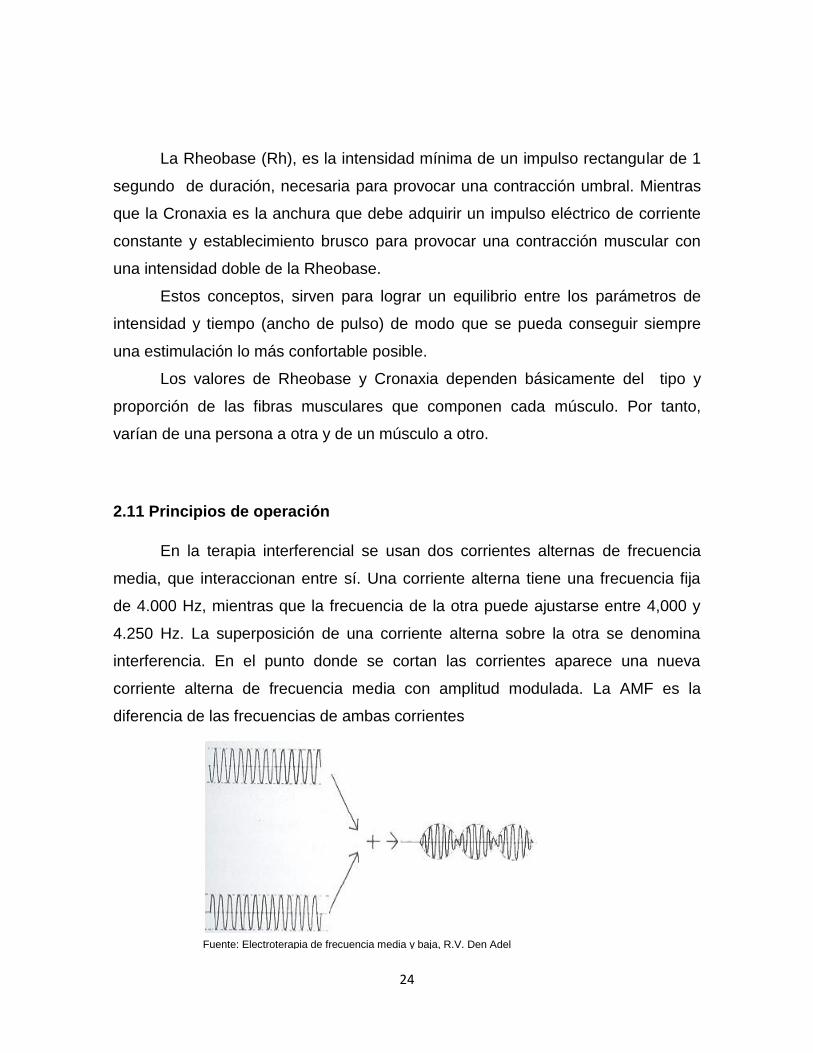
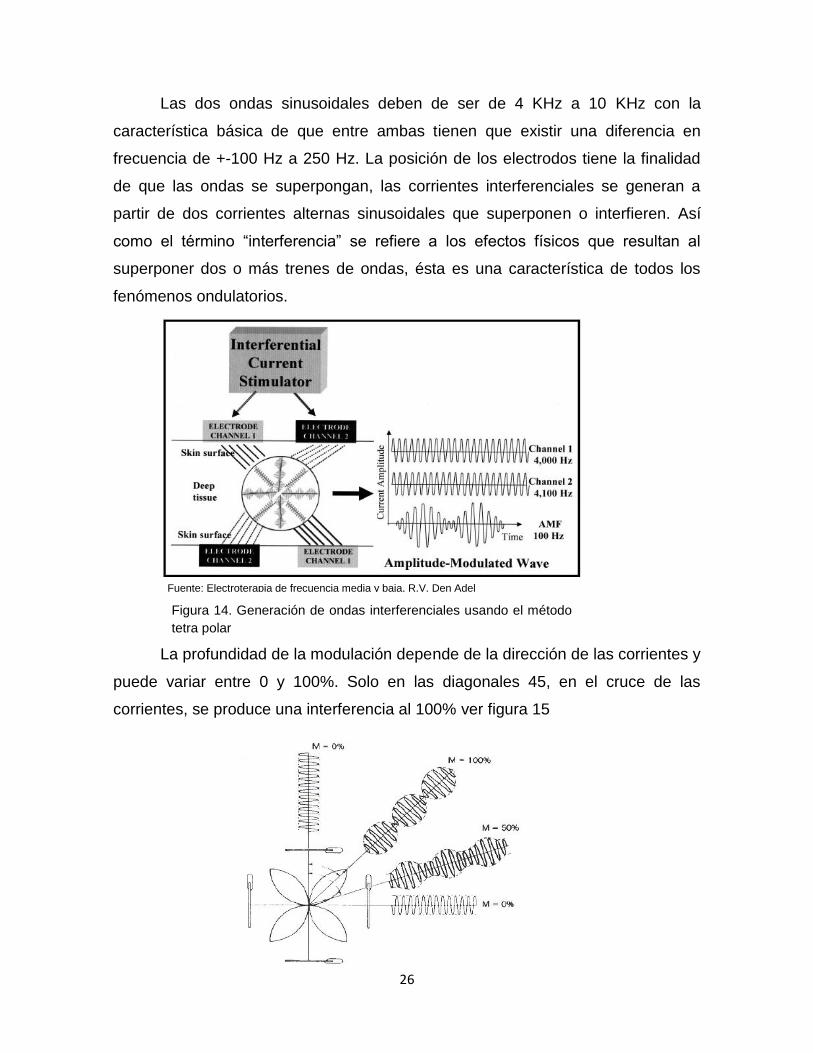
2.11 Principios de operación
En la terapia interferencial se usan dos corrientes alternas de frecuencia
media, que interaccionan entre sí. Una corriente alterna tiene una frecuencia fija
de 4.000 Hz, mientras que la frecuencia de la otra puede ajustarse entre 4,000 y
4.250 Hz. La superposición de una corriente alterna sobre la otra se denomina
interferencia. En el punto donde se cortan las corrientes aparece una nueva
corriente alterna de frecuencia media con amplitud modulada. La AMF es la
diferencia de las frecuencias de ambas corrientes
Fuente: Electroterapia de frecuencia media y baja, R.V. Den Adel
25
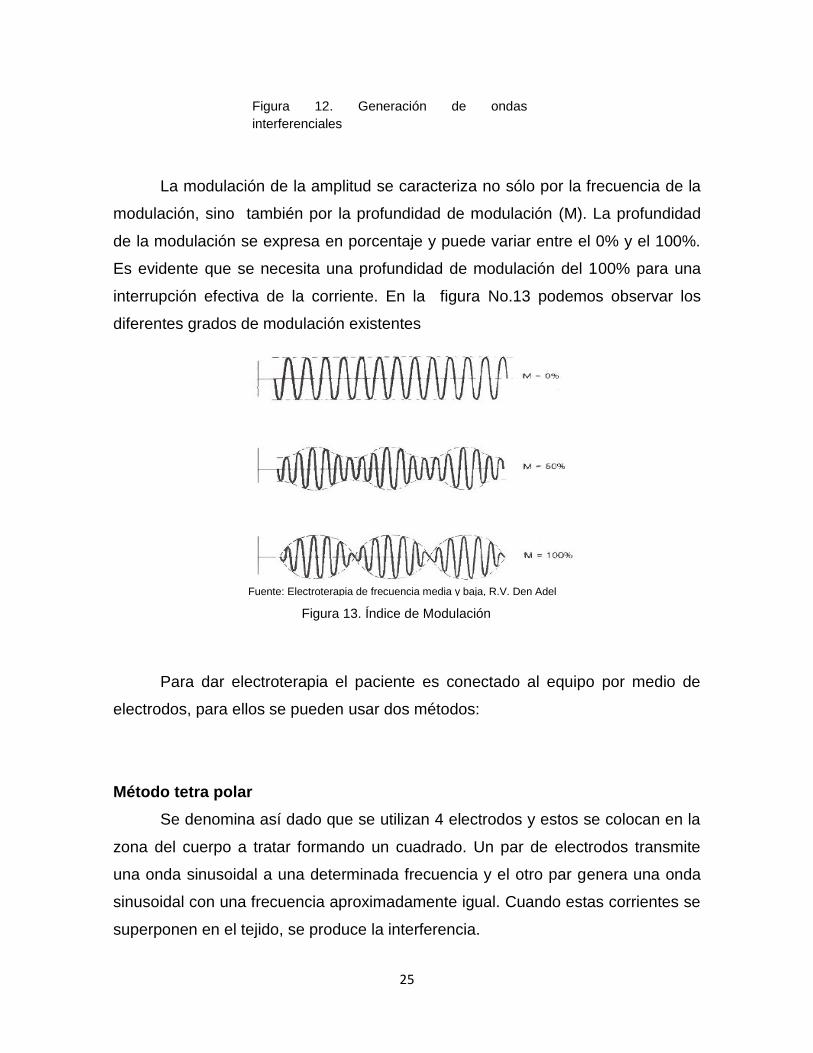
La modulación de la amplitud se caracteriza no sólo por la frecuencia de la
modulación, sino también por la profundidad de modulación (M). La profundidad
de la modulación se expresa en porcentaje y puede variar entre el 0% y el 100%.
Es evidente que se necesita una profundidad de modulación del 100% para una
interrupción efectiva de la corriente. En la figura No.13 podemos observar los
diferentes grados de modulación existentes
Para dar electroterapia el paciente es conectado al equipo por medio de
electrodos, para ellos se pueden usar dos métodos:
Método tetra polar
Se denomina así dado que se utilizan 4 electrodos y estos se colocan en la
zona del cuerpo a tratar formando un cuadrado. Un par de electrodos transmite
una onda sinusoidal a una determinada frecuencia y el otro par genera una onda
sinusoidal con una frecuencia aproximadamente igual. Cuando estas corrientes se
superponen en el tejido, se produce la interferencia.
Figura 12. Generación de ondas
interferenciales
Figura 13. Índice de Modulación
Fuente: Electroterapia de frecuencia media y baja, R.V. Den Adel
26
Las dos ondas sinusoidales deben de ser de 4 KHz a 10 KHz con la
característica básica de que entre ambas tienen que existir una diferencia en
frecuencia de +-100 Hz a 250 Hz. La posición de los electrodos tiene la finalidad
de que las ondas se superpongan, las corrientes interferenciales se generan a
partir de dos corrientes alternas sinusoidales que superponen o interfieren. Así
como el término “interferencia” se refiere a los efectos físicos que resultan al
superponer dos o más trenes de ondas, ésta es una característica de todos los
fenómenos ondulatorios.
La profundidad de la modulación depende de la dirección de las corrientes y
puede variar entre 0 y 100%. Solo en las diagonales 45, en el cruce de las
corrientes, se produce una interferencia al 100% ver figura 15
Figura 14. Generación de ondas interferenciales usando el método
tetra polar
Fuente: Electroterapia de frecuencia media y baja, R.V. Den Adel
27
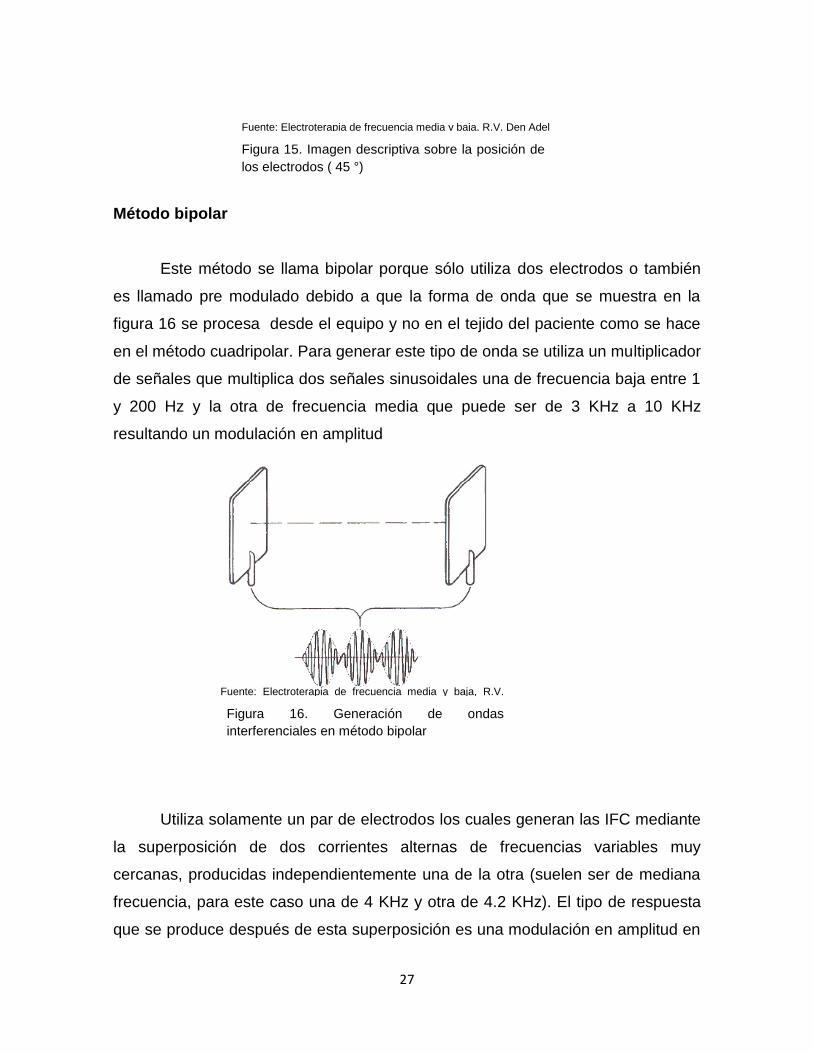
Método bipolar
Este método se llama bipolar porque sólo utiliza dos electrodos o también
es llamado pre modulado debido a que la forma de onda que se muestra en la
figura 16 se procesa desde el equipo y no en el tejido del paciente como se hace
en el método cuadripolar. Para generar este tipo de onda se utiliza un multiplicador
de señales que multiplica dos señales sinusoidales una de frecuencia baja entre 1
y 200 Hz y la otra de frecuencia media que puede ser de 3 KHz a 10 KHz
resultando un modulación en amplitud
Utiliza solamente un par de electrodos los cuales generan las IFC mediante
la superposición de dos corrientes alternas de frecuencias variables muy
cercanas, producidas independientemente una de la otra (suelen ser de mediana
frecuencia, para este caso una de 4 KHz y otra de 4.2 KHz). El tipo de respuesta
que se produce después de esta superposición es una modulación en amplitud en
Figura 15. Imagen descriptiva sobre la posición de
los electrodos ( 45 °)
Figura 16. Generación de ondas
interferenciales en método bipolar
Fuente: Electroterapia de frecuencia media y baja, R.V. Den Adel
Fuente: Electroterapia de frecuencia media y baja, R.V.
Den Adel
28
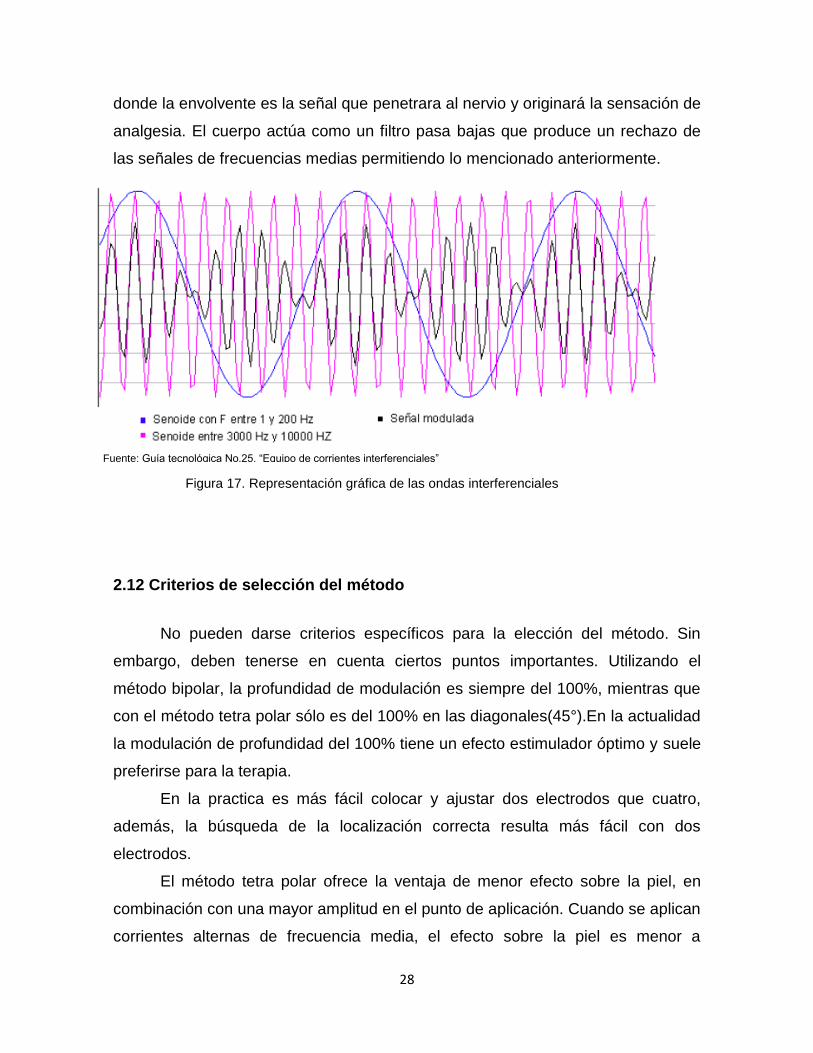
donde la envolvente es la señal que penetrara al nervio y originará la sensación de
analgesia. El cuerpo actúa como un filtro pasa bajas que produce un rechazo de
las señales de frecuencias medias permitiendo lo mencionado anteriormente.
2.12 Criterios de selección del método
No pueden darse criterios específicos para la elección del método. Sin
embargo, deben tenerse en cuenta ciertos puntos importantes. Utilizando el
método bipolar, la profundidad de modulación es siempre del 100%, mientras que
con el método tetra polar sólo es del 100% en las diagonales(45°).En la actualidad
la modulación de profundidad del 100% tiene un efecto estimulador óptimo y suele
preferirse para la terapia.
En la practica es más fácil colocar y ajustar dos electrodos que cuatro,
además, la búsqueda de la localización correcta resulta más fácil con dos
electrodos.
El método tetra polar ofrece la ventaja de menor efecto sobre la piel, en
combinación con una mayor amplitud en el punto de aplicación. Cuando se aplican
corrientes alternas de frecuencia media, el efecto sobre la piel es menor a
Figura 17. Representación gráfica de las ondas interferenciales
Fuente: Guía tecnológica No.25. “Equipo de corrientes interferenciales”
29
consecuencia de la penetración profunda, debida a la frecuencia media de la
corriente interferencial.
2.13 Electrodos
Posicionamiento de los electrodos debe ser tal que el paciente sienta la
estimulación en la zona afectada. Tanto en aplicaciones bipolares como en las
tetra polares, se debe de comprobar esto durante el tratamiento y si es necesario,
se deben volver a colocar los electrodos.
Para dar terapia se puede usar electrodos convencionales, desechables,
reusables, pregelados o los de fibra de carbono que requieren bandas elásticas
para sujetarlos. También hay electrodos para aplicaciones locales muy pequeñas,
estos no son mayores de 10 cm y contienen cuatro electrodos de 1 a 2 cm
cuadrados.
2.14 Normas de seguridad
Para la obtención de los mejores resultados en la aplicación de la terapia y
la prevención de accidentes eléctricos, el fisioterapeuta debe poseer los
conocimientos propios de su currículo y seguir un método en la aplicación de
aparatos eléctricos a un paciente.
Figura 18. Electrodos convencionales para la aplicación de
electroterapia
Fuente: Electroterapia de frecuencia media y baja, R.V. Den Adel
30
• La primera valoración que debe realizar el fisioterapeuta es la correcta indicación
de la técnica, así como la certeza de que no existe una contraindicación para la
terapia, ya sea una contraindicación absoluta o relativa.
• Debe comprobar antes de cada tratamiento el correcto funcionamiento del
aparato y periódicamente de la red eléctrica a la que está conectado, y también las
condiciones generales del local donde se va a administrar este tratamiento.
• Colocar al paciente en la posición correcta para recibir la terapia.
• Escoger correctamente los electrodos o medio de acoplamiento al paciente,
dejando al descubierto la zona a tratar y comprobando el estado de la piel de esa
zona, eliminando si fuese necesario sudor, grasa, etc.
• Escoger el tipo de corriente que se va a administrar, comprobando de nuevo los
parámetros de tratamiento.
• Comprobar con el aparato y de forma suave y lenta, elevar la intensidad hasta
llegar a la deseada.
• Si aparece algún tipo de problema, disminuir la intensidad o desconectar el
aparato.
• Al término de la sesión, disminuir (si fuese necesario, en función del tipo de
aparato) la intensidad de forma progresiva.
• Anotar todas las referencias o incidencias del tratamiento. Llevar el control del
número de sesiones, parámetros aplicados en el tratamiento e incidencias.
Los peligros de la electroterapia se pueden evitar en su mayor parte
mediante el conocimiento de los mismos y de sus medidas generales de
protección.
Los accidentes eléctricos se producen como un accidente de trabajo o
durante una sesión de tratamiento de forma ocasional .
En la producción del accidente eléctrico tiene especial importancia el tipo de
corriente, así tenemos que:
• La corriente continua solo provoca efectos excito motores en la apertura y cierre
del circuito, produciendo efectos polares e interpolares, generalmente quemaduras
en el trayecto de la corriente y en las zonas de entrada y salida de la misma.
31
• La corriente alterna de baja frecuencia produce sobre todo contracción muscular,
quedando minimizados los otros efectos. La máxima peligrosidad corresponde a
frecuencias de 50-60 Hz. A medida que la frecuencia aumenta, disminuye el
riesgo, hasta que en frecuencias superiores a 1 Mhz ya no hay choque eléctrico.
Otros aspectos que intervienen en la peligrosidad del accidente eléctrico son:
• El voltaje: normalmente el límite de tolerancia se ha establecido en 300 voltios
para la corriente alterna de baja frecuencia y en 500 voltios para la continua; a
pesar de ello hay que tener en cuenta que corrientes de bajo voltaje, pueden
producir accidentes si las intensidades son altas.
• La intensidad: con intensidades pequeñas, de pocos miliamperios se suele
producir homigueos. Con 10 mA ya se produce contracción muscular, pudiendo
producirse accidente si la contracción impide al accidentado “soltar” el medio que
le está transmitiendo la corriente, o si se produce contracción de la musculatura
respiratoria. Aparecen quemaduras polares en la corriente continua. Una
intensidad entre 80 y 100 mA puede producir fibrilación ventricular, pudiendo llegar
a ser mortal, según el trayecto y duración. Una intensidad por encima de los 100
mA produce depresión del sistema nervioso, con muerte aparente.
• Resistencia cutánea: hay que tener en cuenta que la piel húmeda ofrece una
resistencia 10 veces mayor, y ello puede provocar accidentes eléctricos.
• Densidad eléctrica: es la relación entre la intensidad de corriente y la superficie
que sirve de puerta de entrada de la corriente. Por ello es fundamental intentar
evitar quemaduras colocando unos electrodos con la superficie adecuada a la
corriente e intensidad que vamos a suministrar.
Los síntomas que provoca un accidente eléctrico pueden ser:
• Síntomas locales: afectan a la zona de contacto produciendo quemaduras
electrolíticas. También las masas musculares se sobrecalientas, con liberación de
pigmentos, que pueden llevar a una alteración renal. También fracturas óseas o de
vasos sanguíneos se pueden producir de manera local por exceso de corriente
eléctrica.
32
• Síntomas generales: afectación cardíaca, de la musculatura respiratoria,
neurológicas (desde visión borrosa hasta edema cerebral o coma), psíquicos
(aturdimiento, amnesia) e, incluso, la muerte.
El tratamiento de las afecciones puede ser médico o quirúrgico, dependiendo de la
importancia de los mismos. En algunos casos, el tratamiento inmediato requiere
lucha contra la apnea y el shock.
2.15 Protecciones para el paciente
Podemos establecer que cualquier tipo de aparatos de uso médico debe
cumplir con una premisa fundamental, aunque un tanto ideal: dentro del campo de
aplicación previsto, no se debe dañar eléctricamente al paciente aún cuando el
aparato se averíe. Los aparatos de electro diagnóstico y algunos de electroterapia
pueden emitir deliberadamente pulsos (por ejemplo, de 300 mseg) de hasta 200
mA , estos podrían producir una fibrilación ventricular con ciertos posicionamientos
electródicos por lo que debe evitarse a toda costa cualquier riesgo que pueda
poner en peligro, tanto al paciente como al operador.
A fin de prevenir un microshock se indica por norma que la corriente de fuga
máxima permitida en el instrumento es de 10A (según normas de seguridad de la
NFPA National Fire Protection Association).
El umbral de percepción de la corriente eléctrica en un ser humano
depende de la intensidad y la frecuencia de ésta así como del posicionamiento de
los electrodos en el cuerpo. El umbral de percepción más bajo corresponde a la
corriente continua, el cual es muy similar al de 50 Hz.
Cuando se aplica corriente eléctrica a un individuo, ésta, dependiendo de su
magnitud, es capaz de producirle un estado de impotencia muscular. Hay
ocasiones en que el individuo puede perder por completo el control de todos sus
músculos. Obviamente después de persistir el estímulo por más de tres minutos
puede sobrevenir la muerte por asfixia, por ejemplo:
.
33
Se puede decir que el límite de tolerancia sensitivo al nivel de la piel
depende de la densidad de la misma y del tamaño del electrodo (área que cubre).
Entonces está determinado que para electrodos mayores de 100 cm2 se tiene que:
Frecuencia Límite de tolerancia
50 Hz 4-90 mA
10KHz 20-50 mA
100KHz 450-800mA
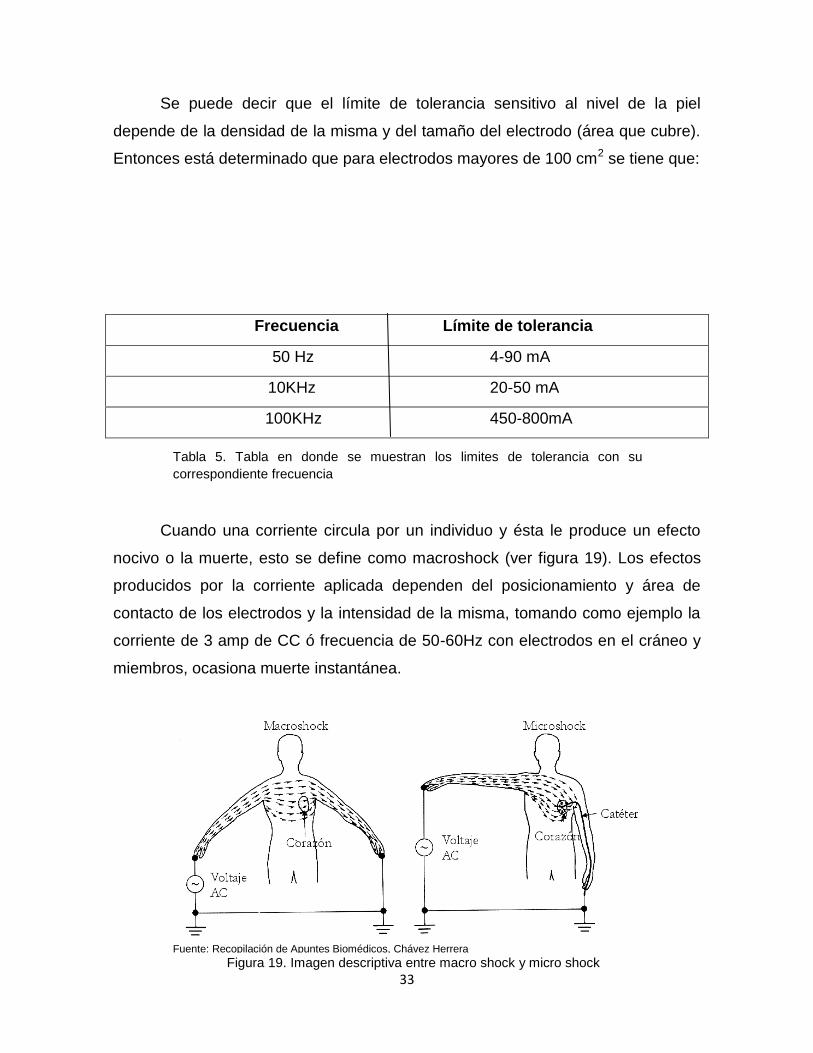
Cuando una corriente circula por un individuo y ésta le produce un efecto
nocivo o la muerte, esto se define como macroshock (ver figura 19). Los efectos
producidos por la corriente aplicada dependen del posicionamiento y área de
contacto de los electrodos y la intensidad de la misma, tomando como ejemplo la
corriente de 3 amp de CC ó frecuencia de 50-60Hz con electrodos en el cráneo y
miembros, ocasiona muerte instantánea.
Tabla 5. Tabla en donde se muestran los limites de tolerancia con su
correspondiente frecuencia
Figura 19. Imagen descriptiva entre macro shock y micro shock Fuente: Recopilación de Apuntes Biomédicos, Chávez Herrera
34
En condiciones ordinarias de vida y en procedimientos biomédicos, la causa
más común de muerte por fallas o accidentes de instrumentos es la afectación del
sistema de marcapasos del corazón con producción de fibrilación ventricular del
ciclo eléctrico cardiaco.
La causa más frecuente de shock eléctrico en instituciones médicas es la
derivación de corriente hacia un sujeto puesto a tierra que entra en contacto
directa o indirectamente con el polo vivo de la línea de alimentación. Un paciente
siempre está expuesto al riesgo del shock debido que al estar conectado a un
instrumento puede derivarse una corriente por él hacia tierra y además es muy
común que el paciente cierre un circuito eléctrico entre el instrumento y él mismo,
por lo que se hace necesario observar dos parámetros de seguridad en el diseño:
aislamiento entre la línea de alimentación y tierra física y una corriente de fuga
menor de 10A. Para poder cumplir con estos parámetros de seguridad es
necesario diseñar una fuente de alimentación capaz de proporcionar todos los
voltajes requeridos por los circuitos así como tener la suficiente potencia para ellos
sin dejar de observar la corriente de fuga y la tierra aislada.
35
Capítulo 3. Procedimiento y descripción de las actividades realizadas
Como se mencionó el parte de la introducción el objetivo de este proyecto
fue de diseñar un dispositivo capaz de generar corrientes Interferenciales
variando la frecuencia digitalmente con una interfaz de fácil manejo, y que sea
capaz de almacenar los datos de la terapia para después ser procesados
mediante un software visual por medio del puerto serial para su posterior
interpretación. La investigación se dividió en 6 etapas las cuales se explicarán más
adelante; esto con la finalidad de poder tener una mejor organización al momento
de efectuar el proyecto.
3.1 Descripción de actividades
Este proyecto se desarrollo en la ciudad de Morelia, Michoacán, México
con cooperación de los Institutos Tecnológicos de Mérida y Morelia.Las
actividades realizadas estuvieron supervisadas por el M.C Julio Cesar Herrera
García docente del Instituto Tecnológico de Morelia que fungió como asesor
externo de igual modo el M.C Johan Estrada López docente del Instituto
Tecnológico de Mérida tuvo participación en el proyecto como asesor interno
aportando valiosa información.
Se me asignó un cubículo con todo el material electrónico (osciloscopio,
fuentes, multímetro, generadores) necesario para poder llevar a cabo el proyecto,
el cual se encontraba en el segundo piso del laboratorio de la carrera de Ingeniería
Electrónica del Instituto Tecnológico de Morelia.
Los horarios de trabajo fueron de 8 am a 1 pm de lunes a viernes durante
un periodo de 5 meses (Febrero -Junio) de 2008.
Todas las actividades que conformaron el proyecto se mencionan a
continuación con una breve explicación sobre las tareas realizadas hechas en
cada actividad.
36
Actividad 1: Entrevistas con Fisioterapeutas, y Especialista en el área para un
mejor conocimiento sobre el tema.
En esta etapa se tuvieron entrevistas con doctores especialistas en el área
para poder tener un mejor conocimiento del tema y así poder realizar una
mejor investigación
La entrevista tuvo lugar en el hospital regional de la ciudad de Morelia
Michoacán el cual es un dependencia gubernamental y entre sus servicios
que ofrece a la sociedad cuenta con un área totalmente equipada para la
aplicación de la electroterapia
Actividad 2: Documentación y adquisición de información para reforzar los
conocimientos del proyecto.
Esta actividad se enfocó a la búsqueda de información en libros, internet,
revistas u algún otro tipo de documentación que pudiera aportar información
útil para la elaboración del proyecto. El centro de información del Tecnológico
de Morelia fue el lugar en donde se pudo obtener la información mencionada
anteriormente; de igual manera cierta información fue proporcionada por
docentes del instituto Tecnológico de Mérida y Morelia.
Actividad 3: Evaluación, selección y compra de los diferentes dispositivos
electrónicos que se emplearán en la elaboración del prototipo.
Una vez hecho el análisis y establecido los parámetros que conformarían el
diseño del proyecto se optó por la evaluación y selección de los dispositivos
que intervendrían para su desarrollo.
Se evaluaron y probaron una gran cantidad de dispositivos seleccionando
solo aquellos que pudieran ser útiles. Podemos citar que se escogieron
dispositivos de muy bajo costo, fácil existencia, y de fácil operación.
37
Actividad 4: Diseño y esquematización
En el diseño del proyecto se realizaron seis etapas que posteriormente
serán explicadas detalladamente.
Para el diseño de las partes que conforman el proyecto se uso el programa
Lime Wire que es un simulador electrónico que a su vez tiene la opción de
convertir los circuitos eléctricos a circuitos impresos (PCB).
Actividad 5: Integración y desarrollo del prototipo final
Se usaron placas fenólicas de doble cara debido a la complejidad del
diseño, el resultado fueron seis placas correspondientes a cada etapa, se
emplearon electrodos electrolíticos con la finalidad de lograr una buena
conducción al momento de ser aplicado al cuerpo.
Se desarrollo el software visual para la administración del dispositivo este fue
hecho en Visual Basic.
Actividad 6: Realización de Pruebas
Las Pruebas fueron realizadas en el instituto Tecnológico de Morelia con
estudiantes y profesores siguiendo las terapias establecidas y tomando en
cuenta toda la seguridad necesaria para evitar cualquier tipo de accidentes.
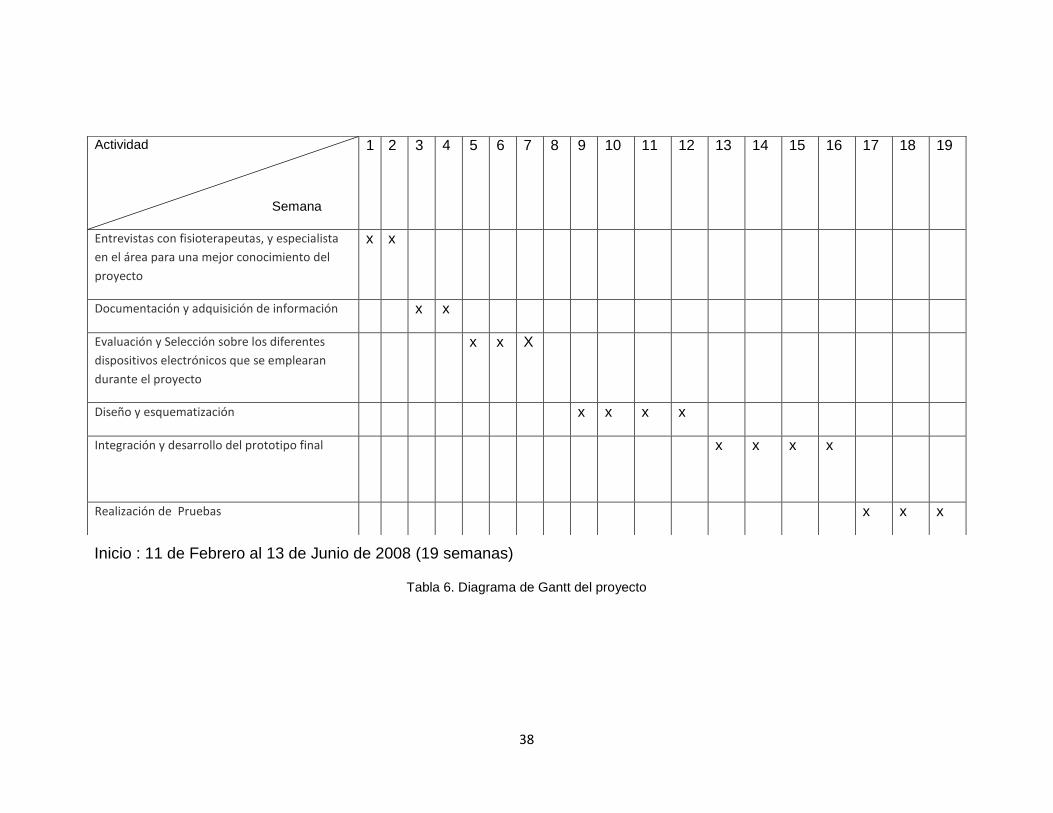
A continuación se muestra en la tabla 6 el tiempo que se requirió para poder llevar
a cabo la investigación
38
Inicio : 11 de Febrero al 13 de Junio de 2008 (19 semanas)
Tabla 6. Diagrama de Gantt del proyecto
Actividad
Semana
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
Entrevistas con fisioterapeutas, y especialista
en el área para una mejor conocimiento del
proyecto
x x
Documentación y adquisición de información x x
Evaluación y Selección sobre los diferentes
dispositivos electrónicos que se emplearan
durante el proyecto
x x X
Diseño y esquematización x x x x
Integración y desarrollo del prototipo final x
x x x
Realización de Pruebas x x x
39
3.2 Desarrollo
3.2.1 Funcionamiento del dispositivo
Es necesario controlar la frecuencia, el tiempo y la corriente para que la
terapia que se esté aplicando pueda resultar de manera exitosa; debido a eso
el funcionamiento del equipo se orientó hacia el control digital del tiempo y la
frecuencia; como sabemos que la impedancia del cuerpo varia
considerablemente en cada paciente dependiendo de varios factores ; la
corriente es controlada manualmente por el usuario, evitando así de igual
modo “el efecto de acomodamiento” .
Fue necesaria la generación de dos ondas sinusoidales de igual
magnitud pero de frecuencia diferente, la primera onda fue creada de manera
fija a 4 Khz mientras que la segunda se uso un rango de 0 a 250 hz controlada
digitalmente, para lograr este objetivo se empleo un potenciómetro digital que
nos permitiera que por medio de una serie de pulsos digitales en sus pines de
configuración nos pudiera variar a una frecuencia deseada ; esta etapa fue
controlada por un micro controlador que efectúa la función de administrador
del dispositivo desplegando en un pantalla LCD los resultados. Cabe
mencionar que los datos en este caso el tiempo de terapia y la frecuencia son
guardados en una memoria de comunicación I2C para después ser
descargados a la PC mediante comunicación serial; de igual manera la
memoria es controlada por el micro controlador. Una vez generada las
frecuencias variable y fija respectivamente fue necesaria la utilización de un
circuito que nos pudiera modular la señal; y así obtener una solo señal de
salida para después ser enviada a un circuito de amplificación. Se diseño una
etapa de amplificación para poder mantener una tensión considerable
independiente de la impedancia de la piel, se uso de un transformador de 120
V a 12 V pico conectado de manera invertida para elevar el voltaje del
amplificador y pudiera ser aplicado al paciente sin ningún problema; el uso de
electrodos y gel electrolítico salida fue de suma importancia en la etapa de para
la aplicación final de la corriente al cuerpo.
El control del tiempo se diseño un temporizador con el circuito Ne555 el
cual envía un pulso a un pin del micro controlador cada segundo transcurrido.
40
El rango de frecuencias de los generadores variables y fijo; el tiempo de
funcionamiento se basaron en las terapias existentes en el campo de la
electroterapia.
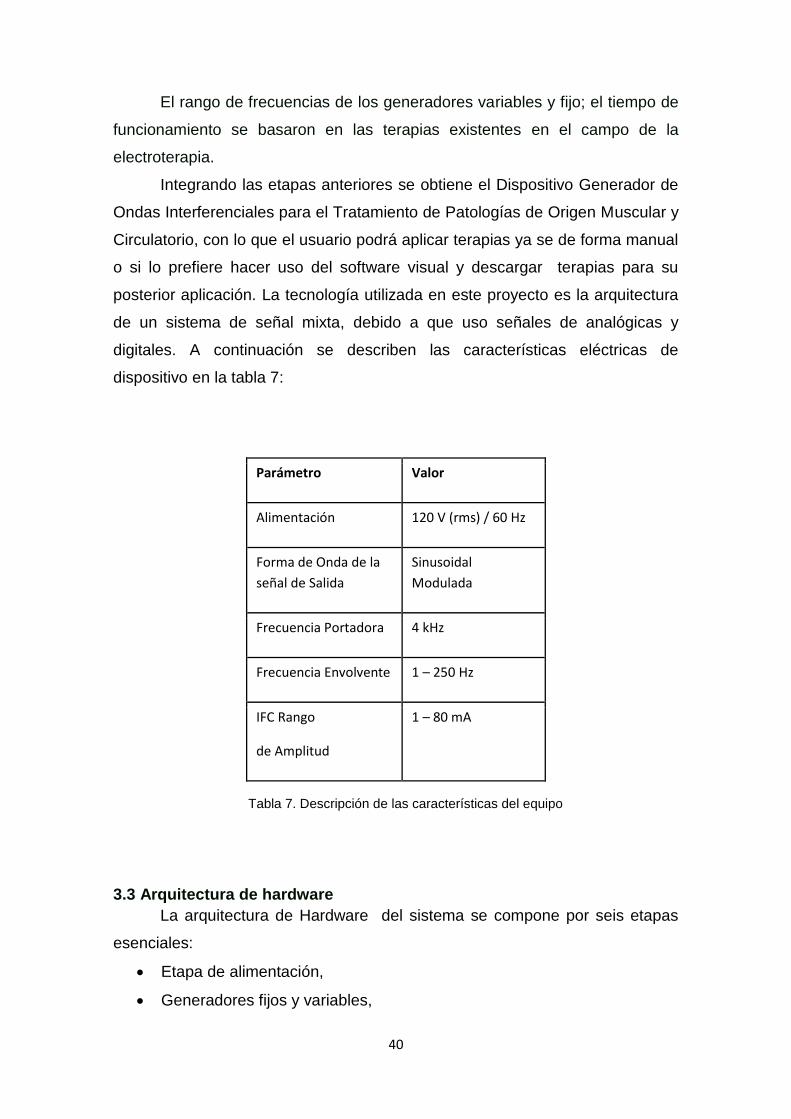
Integrando las etapas anteriores se obtiene el Dispositivo Generador de
Ondas Interferenciales para el Tratamiento de Patologías de Origen Muscular y
Circulatorio, con lo que el usuario podrá aplicar terapias ya se de forma manual
o si lo prefiere hacer uso del software visual y descargar terapias para su
posterior aplicación. La tecnología utilizada en este proyecto es la arquitectura
de un sistema de señal mixta, debido a que uso señales de analógicas y
digitales. A continuación se describen las características eléctricas de
dispositivo en la tabla 7:
Parámetro Valor
Alimentación 120 V (rms) / 60 Hz
Forma de Onda de la
señal de Salida
Sinusoidal
Modulada
Frecuencia Portadora 4 kHz
Frecuencia Envolvente 1 – 250 Hz
IFC Rango
de Amplitud
1 – 80 mA
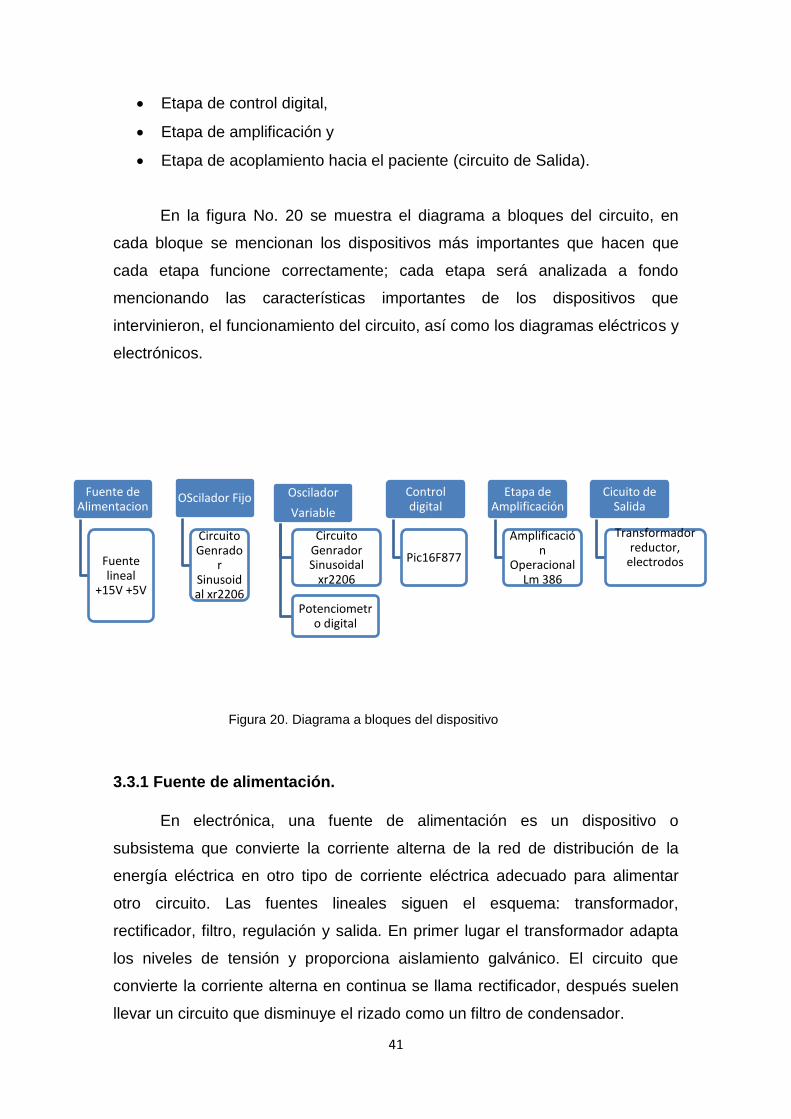
3.3 Arquitectura de hardware
La arquitectura de Hardware del sistema se compone por seis etapas
esenciales:
Etapa de alimentación,
Generadores fijos y variables,
Tabla 7. Descripción de las características del equipo
41
Fuente de Alimentacion
Fuente lineal
+15V +5V
OScilador Fijo
Circuito Genrado
r Sinusoidal xr2206
Oscilador
Variable
Circuito Genrador Sinusoidal
xr2206
Potenciometro digital
Control digital
Pic16F877
Etapa de Amplificación
Amplificación
Operacional Lm 386
Cicuito de Salida
Transformador reductor,
electrodos
Etapa de control digital,
Etapa de amplificación y
Etapa de acoplamiento hacia el paciente (circuito de Salida).
En la figura No. 20 se muestra el diagrama a bloques del circuito, en
cada bloque se mencionan los dispositivos más importantes que hacen que
cada etapa funcione correctamente; cada etapa será analizada a fondo
mencionando las características importantes de los dispositivos que
intervinieron, el funcionamiento del circuito, así como los diagramas eléctricos y
electrónicos.
3.3.1 Fuente de alimentación.
En electrónica, una fuente de alimentación es un dispositivo o
subsistema que convierte la corriente alterna de la red de distribución de la
energía eléctrica en otro tipo de corriente eléctrica adecuado para alimentar
otro circuito. Las fuentes lineales siguen el esquema: transformador,
rectificador, filtro, regulación y salida. En primer lugar el transformador adapta
los niveles de tensión y proporciona aislamiento galvánico. El circuito que
convierte la corriente alterna en continua se llama rectificador, después suelen
llevar un circuito que disminuye el rizado como un filtro de condensador.
Figura 20. Diagrama a bloques del dispositivo
42
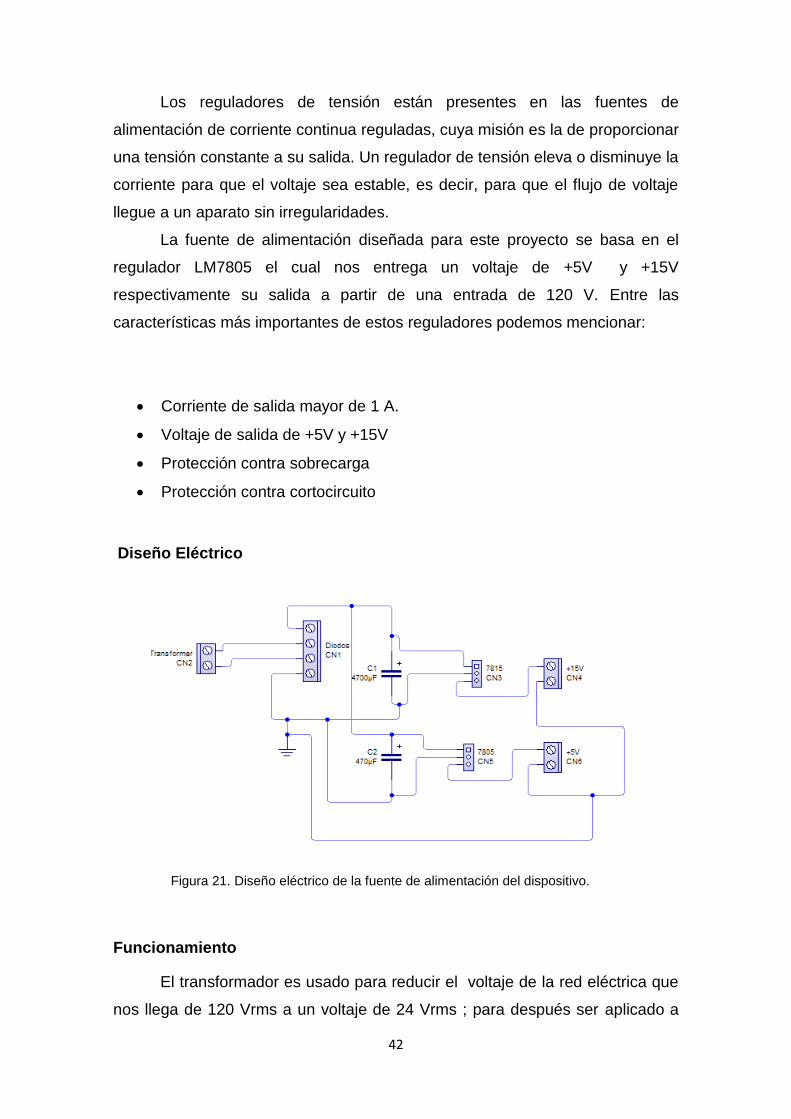
Los reguladores de tensión están presentes en las fuentes de
alimentación de corriente continua reguladas, cuya misión es la de proporcionar
una tensión constante a su salida. Un regulador de tensión eleva o disminuye la
corriente para que el voltaje sea estable, es decir, para que el flujo de voltaje
llegue a un aparato sin irregularidades.
La fuente de alimentación diseñada para este proyecto se basa en el
regulador LM7805 el cual nos entrega un voltaje de +5V y +15V
respectivamente su salida a partir de una entrada de 120 V. Entre las
características más importantes de estos reguladores podemos mencionar:
Corriente de salida mayor de 1 A.
Voltaje de salida de +5V y +15V
Protección contra sobrecarga
Protección contra cortocircuito
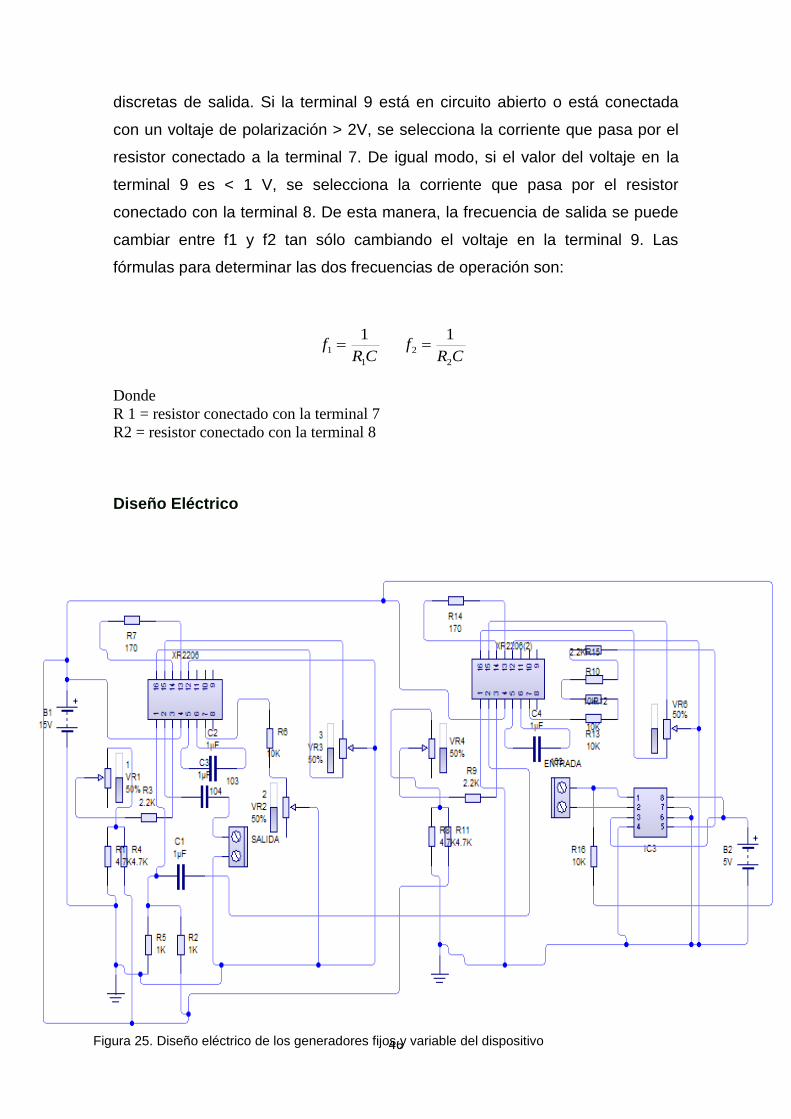
Diseño Eléctrico
Funcionamiento
El transformador es usado para reducir el voltaje de la red eléctrica que
nos llega de 120 Vrms a un voltaje de 24 Vrms ; para después ser aplicado a
Figura 21. Diseño eléctrico de la fuente de alimentación del dispositivo.
43
un puente de diodos que hace la función de rectificador onda completa para
después ser filtrada mediante el capacitor de 4700uf y poder así entregar un
voltaje continuo aproximadamente 30 Vrms a los reguladores LM7805 y
LM7815 y estos son los encargados de regular el voltaje de salida a +5 V y +15
V.
Es importante en esta etapa que la fuente de poder pueda producir las
tensiones requeridas por los dispositivos ya que de otro modo se podría ver
afectado el funcionamiento de los mismos dispositivos causando un mal
funcionamiento en todo el sistema o en el peor de los casos producir en la
salida corrientes no deseadas que puedan influir en la seguridad del paciente.
A partir de estas tensiones alimentamos las partes que esta compuesto
nuestro circuito.
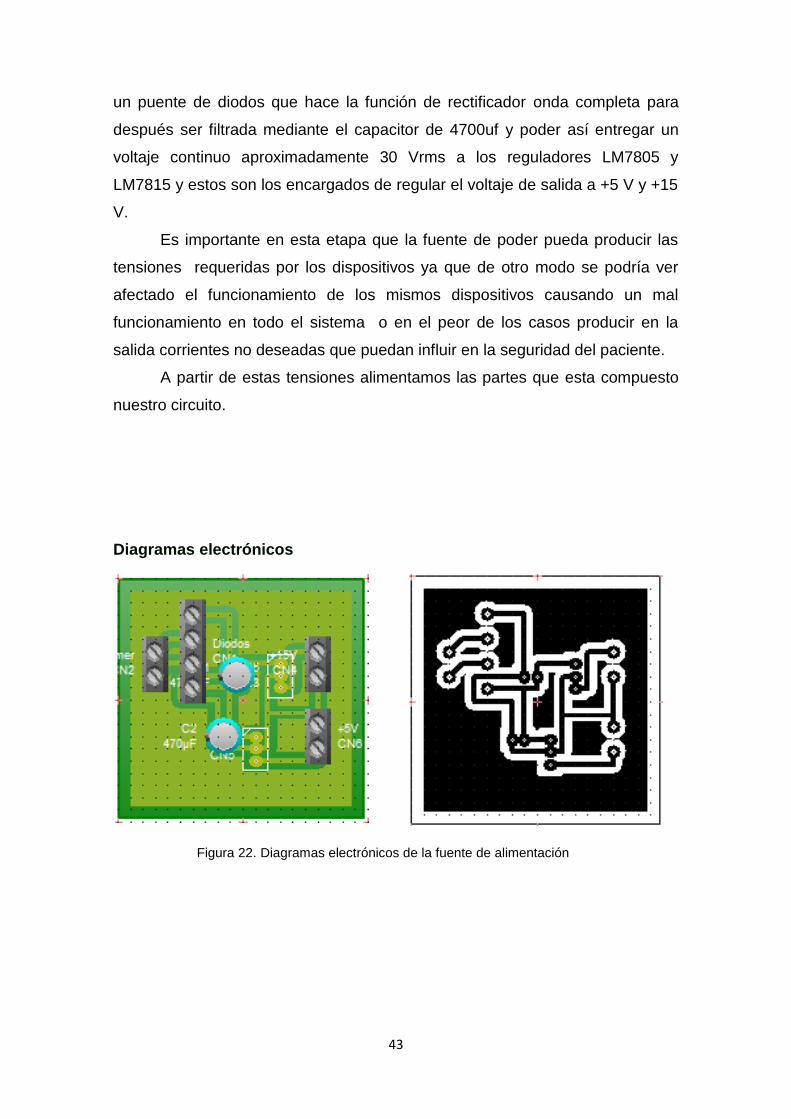
Diagramas electrónicos
Figura 22. Diagramas electrónicos de la fuente de alimentación
44
3.3.2 Oscilador sinusoidal fijo y variable
Los osciladores constan de un amplificador y de algún tipo de
retroalimentación: la señal de salida se reconduce a la entrada del amplificador.
Los elementos determinantes de la frecuencia pueden ser un circuito de
inductancia-capacitancia sintonizado o un cristal vibrador. Los osciladores
controlados por cristal ofrecen mayor precisión y estabilidad. Para poder
generar las ondas sinusoidales fue necesario la utilización del dispositivo XR-
2206 cuyo funcionamiento se explicará detalladamente posteriormente (ver
figura 23).
Dispositivo XR-2206
El XR-2206 es un generador de funciones en circuito integrado
monolítico, fabricado por EXAR Corporation, que puede producir formas de
onda de alta calidad tipo senoidal, cuadradas, triangular, en rampa y de pulso,
con un alto grado de estabilidad y exactitud (ver figura 24).
Las formas de onda de salida del XR-2206 se pueden modular tanto en
amplitud como en frecuencia, con una señal moduladora externa; la frecuencia
Figura 23. Onda sinusoidal
Figura 24. Imagen del dispositivo XR-2206
Fuente: Electroterapia de frecuencia media y baja, R.V. Den Adel
Fuente: XR2206 Datasheet
45
de operación se puede seleccionar externamente dentro de un intervalo de
0.01 Hz hasta más de 1 MHz. El XR-2206 se adapta en forma ideal a las
comunicaciones, instrumentación y a las aplicaciones.
Características.
Baja distorsión en la onda senoidal: 0.5%.
Excelente estabilidad de temperatura: 20ppm/ºC.
Rango de barrido amplio: 2000:1.
Baja sensibilidad de fuente: 0.01%V.
Modulación de amplitud linear.
Controles de FSK compatibles con tecnología TTL.
Rango amplio de alimentación: 10v a 26v.
Ciclo de operación ajustable: 1% a 99%.
Aplicaciones.
Generación de formas de onda.
Generación de barrido.
Generación AM/FM.
Conversión voltaje a frecuencia.
Generador FSK.
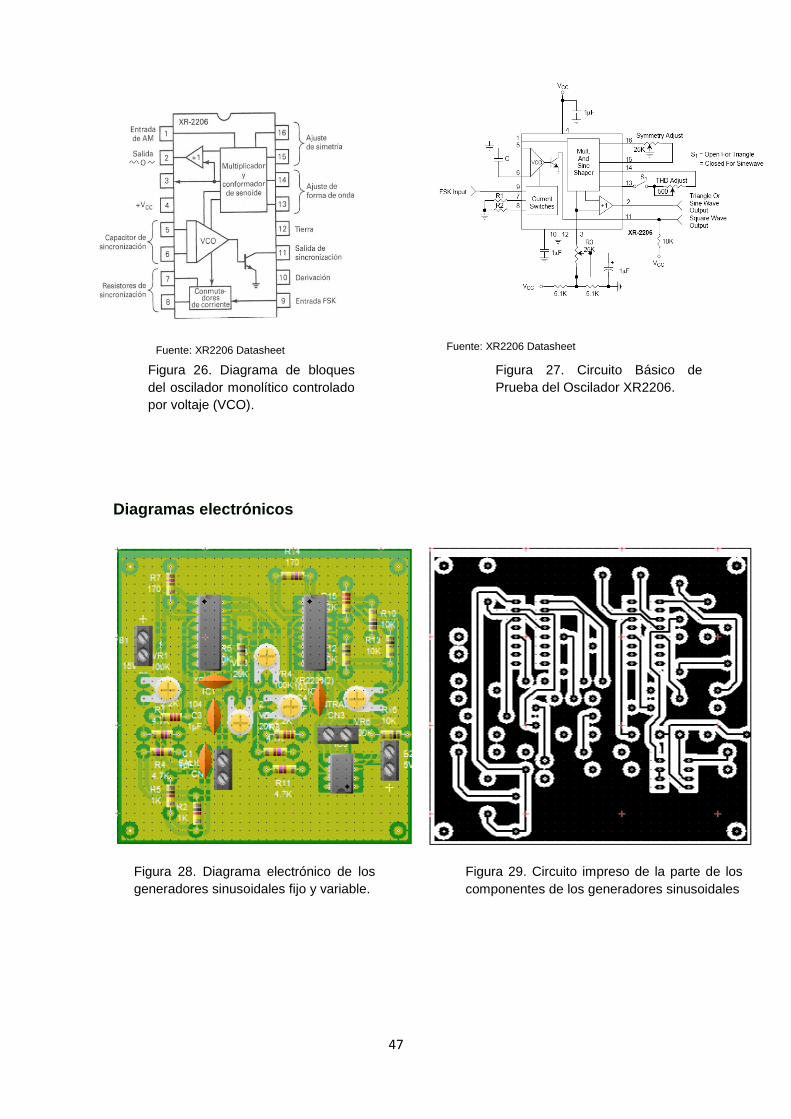
Funcionamiento
El diagrama de bloques del XR-2206 se ve en la figura 26. El generador
de funciones está formado por cuatro bloques funcionales: un oscilador
controlado por voltaje (VCO), un multiplicador y conformador sinusoidal
analógico, un amplificador separador de ganancia unitaria y un conjunto de
interruptores de corriente de entrada. Un oscilador controlado por voltaje es un
oscilador de funcionamiento autónomo con una frecuencia estable de
operación que depende de una capacitancia externa de temporización,
resistencia de temporización y un voltaje de control. La salida de un VCO es
una frecuencia, y su entrada es una señal de polarización o de control que
puede ser un voltaje de cd o de ca. El VCO produce en realidad una frecuencia
de salida que es proporcional a una corriente de entrada producida por un
resistor desde las terminales de temporización (la 7 o la 8) a tierra. Los
interruptores de corriente conducen a ésta de una de las terminales de
temporización al VCO. La corriente seleccionada depende del valor del voltaje
en la terminal (la 9) de entrada de modulación por conmutación de frecuencia.
Por consiguiente, se pueden producir en forma independiente dos frecuencias
46
discretas de salida. Si la terminal 9 está en circuito abierto o está conectada
con un voltaje de polarización > 2V, se selecciona la corriente que pasa por el
resistor conectado a la terminal 7. De igual modo, si el valor del voltaje en la
terminal 9 es < 1 V, se selecciona la corriente que pasa por el resistor
conectado con la terminal 8. De esta manera, la frecuencia de salida se puede
cambiar entre f1 y f2 tan sólo cambiando el voltaje en la terminal 9. Las
fórmulas para determinar las dos frecuencias de operación son:
Donde
R 1 = resistor conectado con la terminal 7
R2 = resistor conectado con la terminal 8
Diseño Eléctrico
CRf
1
1
1
CRf
2
2
1
Figura 25. Diseño eléctrico de los generadores fijos y variable del dispositivo
47
Diagramas electrónicos
Figura 26. Diagrama de bloques
del oscilador monolítico controlado
por voltaje (VCO).
Figura 27. Circuito Básico de
Prueba del Oscilador XR2206.
Figura 28. Diagrama electrónico de los
generadores sinusoidales fijo y variable.
Figura 29. Circuito impreso de la parte de los
componentes de los generadores sinusoidales
Fuente: XR2206 Datasheet Fuente: XR2206 Datasheet
48
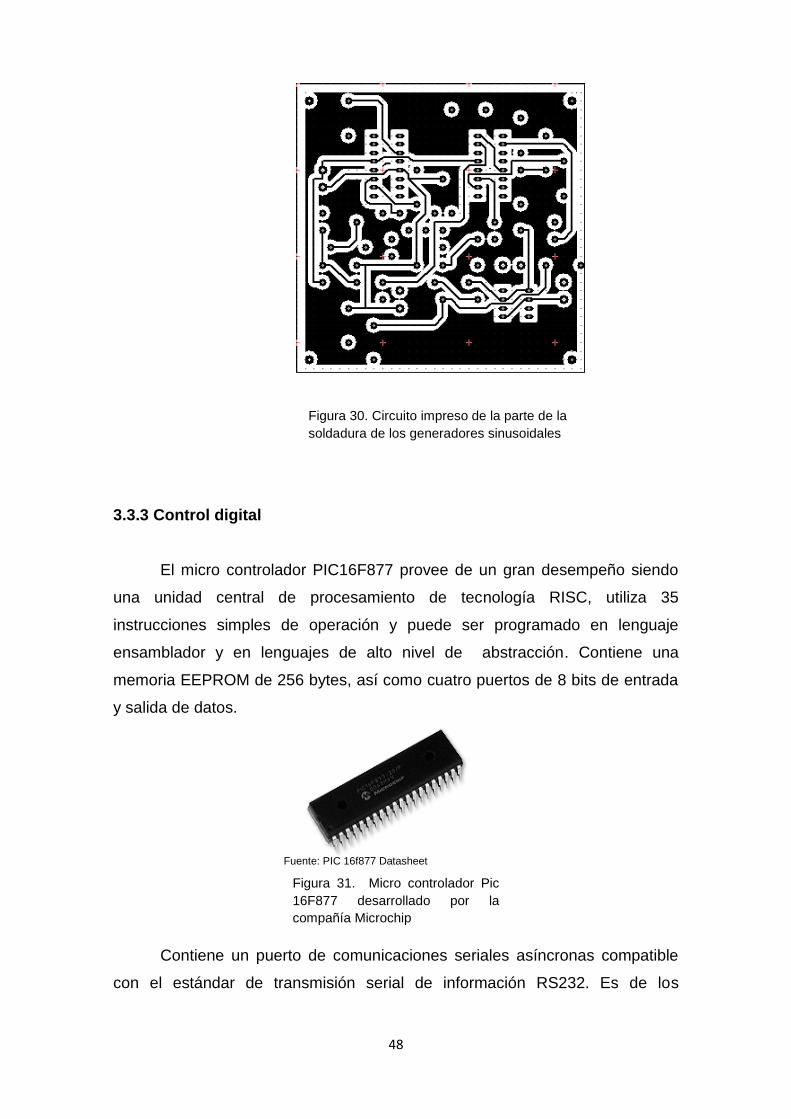
3.3.3 Control digital
El micro controlador PIC16F877 provee de un gran desempeño siendo
una unidad central de procesamiento de tecnología RISC, utiliza 35
instrucciones simples de operación y puede ser programado en lenguaje
ensamblador y en lenguajes de alto nivel de abstracción. Contiene una
memoria EEPROM de 256 bytes, así como cuatro puertos de 8 bits de entrada
y salida de datos.
Contiene un puerto de comunicaciones seriales asíncronas compatible
con el estándar de transmisión serial de información RS232. Es de los
Figura 31. Micro controlador Pic
16F877 desarrollado por la
compañía Microchip
Figura 30. Circuito impreso de la parte de la
soldadura de los generadores sinusoidales
Fuente: PIC 16f877 Datasheet
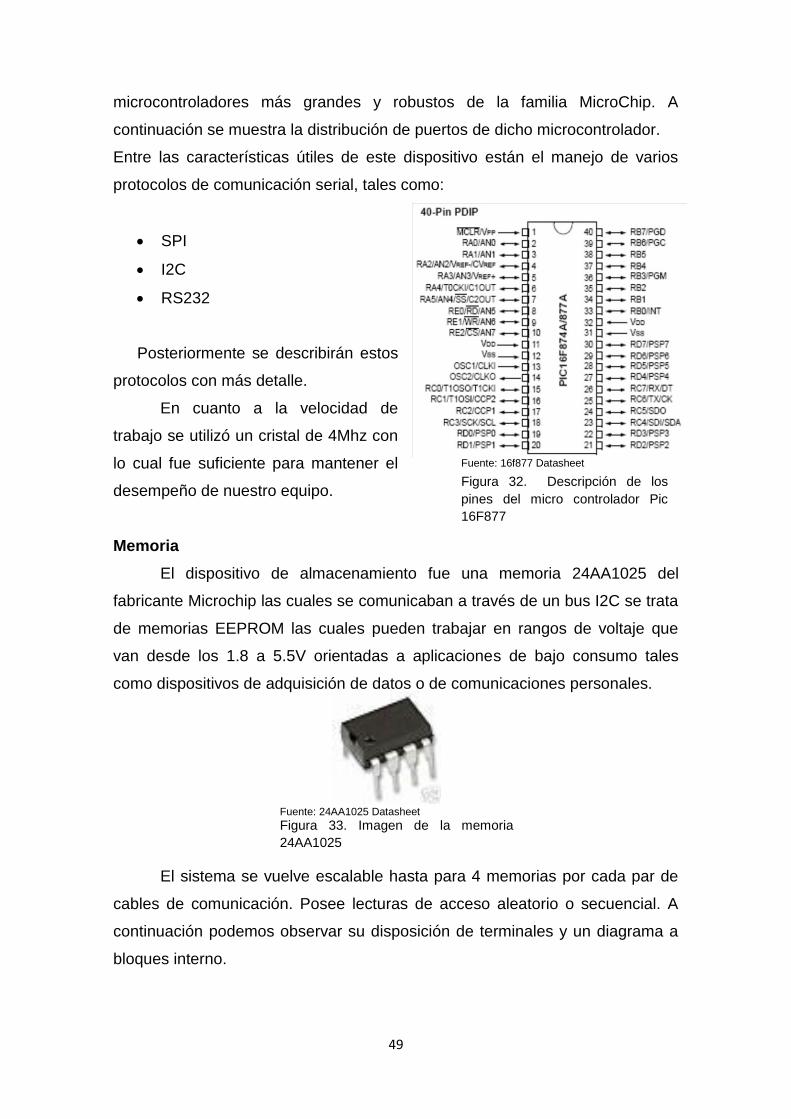
49
microcontroladores más grandes y robustos de la familia MicroChip. A
continuación se muestra la distribución de puertos de dicho microcontrolador.
Entre las características útiles de este dispositivo están el manejo de varios
protocolos de comunicación serial, tales como:
SPI
I2C
RS232
Posteriormente se describirán estos
protocolos con más detalle.
En cuanto a la velocidad de
trabajo se utilizó un cristal de 4Mhz con
lo cual fue suficiente para mantener el
desempeño de nuestro equipo.
Memoria
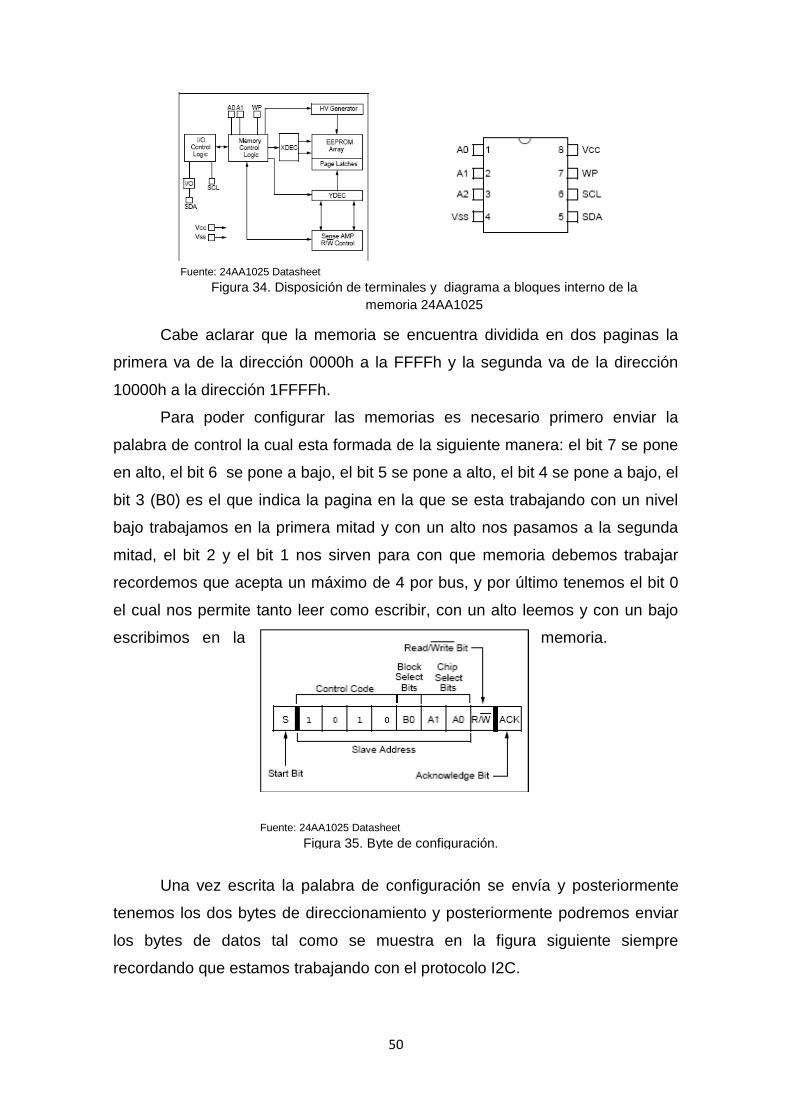
El dispositivo de almacenamiento fue una memoria 24AA1025 del
fabricante Microchip las cuales se comunicaban a través de un bus I2C se trata
de memorias EEPROM las cuales pueden trabajar en rangos de voltaje que
van desde los 1.8 a 5.5V orientadas a aplicaciones de bajo consumo tales
como dispositivos de adquisición de datos o de comunicaciones personales.
El sistema se vuelve escalable hasta para 4 memorias por cada par de
cables de comunicación. Posee lecturas de acceso aleatorio o secuencial. A
continuación podemos observar su disposición de terminales y un diagrama a
bloques interno.
Figura 33. Imagen de la memoria
24AA1025
Figura 32. Descripción de los
pines del micro controlador Pic
16F877
Fuente: 16f877 Datasheet
Fuente: 24AA1025 Datasheet
50
Cabe aclarar que la memoria se encuentra dividida en dos paginas la
primera va de la dirección 0000h a la FFFFh y la segunda va de la dirección
10000h a la dirección 1FFFFh.
Para poder configurar las memorias es necesario primero enviar la
palabra de control la cual esta formada de la siguiente manera: el bit 7 se pone
en alto, el bit 6 se pone a bajo, el bit 5 se pone a alto, el bit 4 se pone a bajo, el
bit 3 (B0) es el que indica la pagina en la que se esta trabajando con un nivel
bajo trabajamos en la primera mitad y con un alto nos pasamos a la segunda
mitad, el bit 2 y el bit 1 nos sirven para con que memoria debemos trabajar
recordemos que acepta un máximo de 4 por bus, y por último tenemos el bit 0
el cual nos permite tanto leer como escribir, con un alto leemos y con un bajo
escribimos en la memoria.
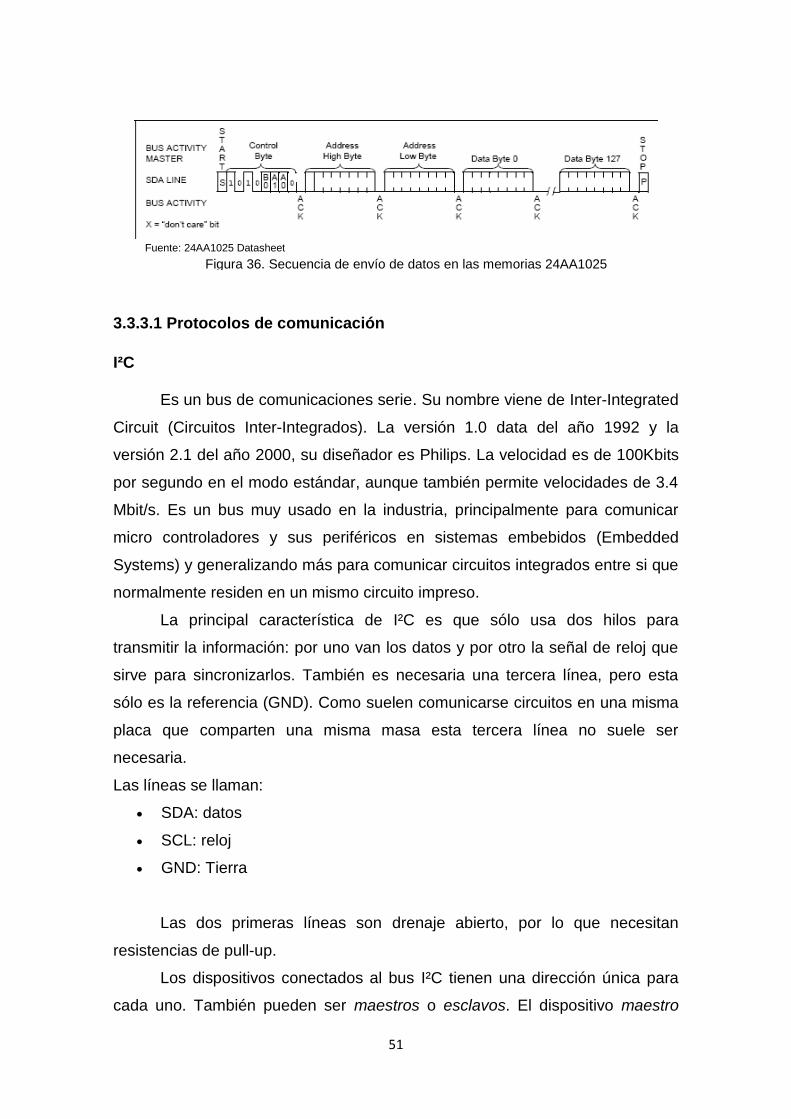
Una vez escrita la palabra de configuración se envía y posteriormente
tenemos los dos bytes de direccionamiento y posteriormente podremos enviar
los bytes de datos tal como se muestra en la figura siguiente siempre
recordando que estamos trabajando con el protocolo I2C.
Figura 34. Disposición de terminales y diagrama a bloques interno de la
memoria 24AA1025
Figura 35. Byte de configuración.
Fuente: 24AA1025 Datasheet
Fuente: 24AA1025 Datasheet
51
3.3.3.1 Protocolos de comunicación
I²C
Es un bus de comunicaciones serie. Su nombre viene de Inter-Integrated
Circuit (Circuitos Inter-Integrados). La versión 1.0 data del año 1992 y la
versión 2.1 del año 2000, su diseñador es Philips. La velocidad es de 100Kbits
por segundo en el modo estándar, aunque también permite velocidades de 3.4
Mbit/s. Es un bus muy usado en la industria, principalmente para comunicar
micro controladores y sus periféricos en sistemas embebidos (Embedded
Systems) y generalizando más para comunicar circuitos integrados entre si que
normalmente residen en un mismo circuito impreso.
La principal característica de I²C es que sólo usa dos hilos para
transmitir la información: por uno van los datos y por otro la señal de reloj que
sirve para sincronizarlos. También es necesaria una tercera línea, pero esta
sólo es la referencia (GND). Como suelen comunicarse circuitos en una misma
placa que comparten una misma masa esta tercera línea no suele ser
necesaria.
Las líneas se llaman:
SDA: datos
SCL: reloj
GND: Tierra
Las dos primeras líneas son drenaje abierto, por lo que necesitan
resistencias de pull-up.
Los dispositivos conectados al bus I²C tienen una dirección única para
cada uno. También pueden ser maestros o esclavos. El dispositivo maestro
Figura 36. Secuencia de envío de datos en las memorias 24AA1025
Fuente: 24AA1025 Datasheet
52
inicia la transferencia de datos y además genera la señal de reloj, pero no es
necesario que el maestro sea siempre el mismo dispositivo, esta característica
se la pueden ir pasando los dispositivos que tengan esa capacidad. Esta
característica hace que al bus I²C se le denomine bus multimaestro.
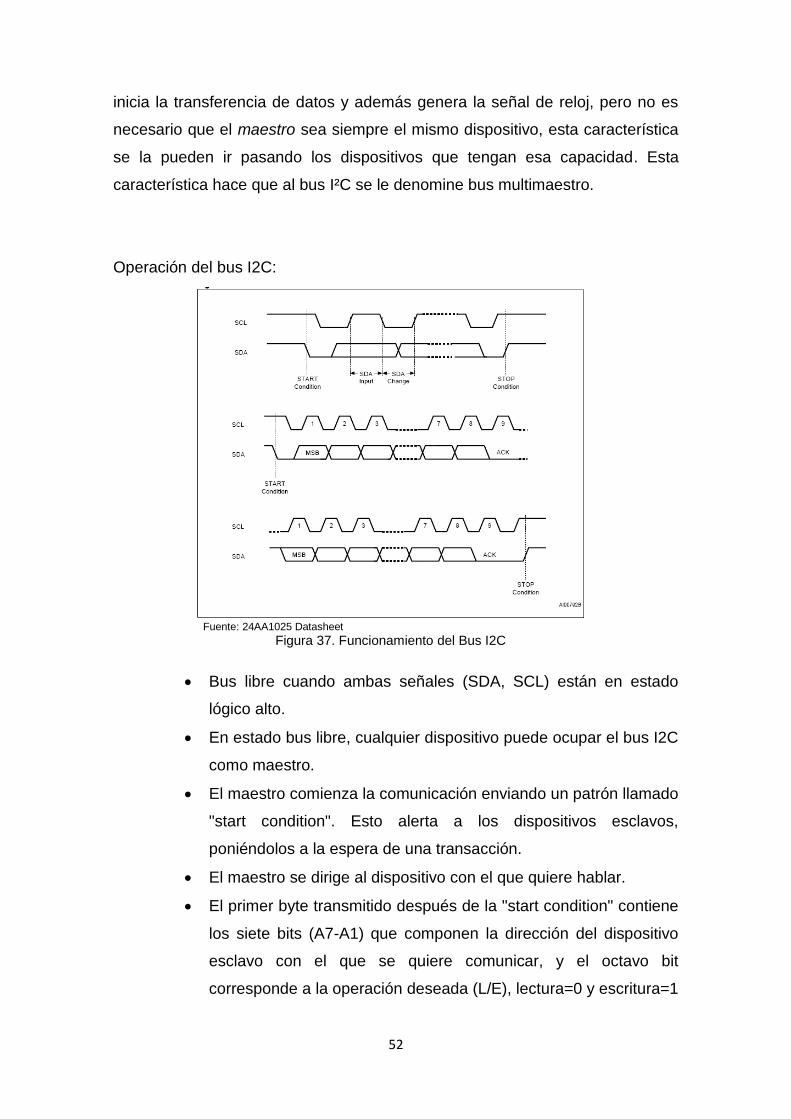
Operación del bus I2C:
Bus libre cuando ambas señales (SDA, SCL) están en estado
lógico alto.
En estado bus libre, cualquier dispositivo puede ocupar el bus I2C
como maestro.
El maestro comienza la comunicación enviando un patrón llamado
"start condition". Esto alerta a los dispositivos esclavos,
poniéndolos a la espera de una transacción.
El maestro se dirige al dispositivo con el que quiere hablar.
El primer byte transmitido después de la "start condition" contiene
los siete bits (A7-A1) que componen la dirección del dispositivo
esclavo con el que se quiere comunicar, y el octavo bit
corresponde a la operación deseada (L/E), lectura=0 y escritura=1
Figura 37. Funcionamiento del Bus I2C Fuente: 24AA1025 Datasheet
53
(escritura significa enviar algo al dispositivo esclavo, lectura
significa enviar algo al dispositivo maestro).
La dirección enviada es comparada por cada esclavo del bus con
su propia dirección, si ambas coinciden, el esclavo se considera
diseccionado como esclavo-transmisor o esclavo-receptor
dependiendo del bit R/W.
El esclavo responde enviando un bit de ACK que le indica al
dispositivo maestro que el esclavo reconoce la solicitud y está en
condiciones de comunicarse.
Seguidamente puede comenzar el intercambio de información
entre los dispositivos.
Habiendo direccionado ya el dispositivo esclavo, lo que debe
hacer ahora el maestro es enviar el número de registro interno
desde el que desea leer o al que va a escribir.
Ahora el maestro puede empezar a recibir o transmitir datos.
Todos los bytes de información colocados sobre la línea SDA
deben constar de 8 bits, el número máximo de bytes que pueden
ser enviados en una transmisión no está restringido, siendo el
esclavo quien fija esta cantidad de acuerdo a sus características.
Luego de transmitirse cada byte, es obligatoria la generación de
un bit adicional de reconocimiento (ACK) que indica al dispositivo
maestro que el esclavo ha recibido el byte.
Aun cuando el maestro siempre controla el estado de la línea del
reloj, un esclavo de baja velocidad o que deba detener la
transferencia de datos mientras efectúa otra función, puede forzar
la línea SCL a nivel bajo. Esto hace que el maestro entre en un
estado de espera, durante el cual, no transmite información
esperando a que el esclavo esté listo para continuar la
transferencia en el punto donde había sido detenida.
Cuando la comunicación ha finalizado, el maestro debe dejar libre
el bus y para ello transmite una "stop condition".
54
Después de la "stop condition", es obligatorio para el bus estar
libre durante unos microsegundos.
RS-232
También conocido como Electronic Industries Alliance RS-232C, es una
interfaz que designa una norma para el intercambio serie de datos binarios
entre un DTE (Equipo terminal de datos) y un DCE (Data Communication
Equipment, Equipo de terminación del circuito de datos), aunque existen otras
situaciones en las que también se utiliza la interfaz RS-232.
En particular, existen ocasiones en que interesa conectar otro tipo de
equipamientos, como pueden ser computadores. Evidentemente, en el caso de
interconexión entre los mismos, se requerirá la conexión de un DTE (Data
Terminal Equipment) con otro DTE.
El RS-232 consiste en un conector tipo DB-25 (de 25 pines), aunque es
normal encontrar la versión de 9 pines (DB-9), más barato e incluso más
extendido para cierto tipo de periféricos (como el ratón serie del PC).
La interfaz RS-232 está diseñada para distancias cortas, de unos 15 m o
menos, y para una velocidades de comunicación bajas, de no más de 20 KB. A
pesar de ello, muchas veces se utiliza a mayores velocidades con un resultado
aceptable. La interfaz puede trabajar en comunicación asíncrona o síncrona y
tipos de canal simplex, half duplex o full duplex.
En un canal simplex los datos siempre viajarán en una dirección, por
ejemplo desde DCE a DTE. En un canal half duplex, los datos pueden viajar en
una u otra dirección, pero sólo durante un determinado periodo de tiempo;
Figura 38. Cable usado para la
comunicación serial
Fuente: www.unicrom.com
55
luego la línea debe ser conmutada antes que los datos puedan viajar en la otra
dirección. En un canal full duplex, los datos pueden viajar en ambos sentidos
simultáneamente. Las líneas de handshaking de la RS-232 se usan para
resolver los problemas asociados con este modo de operación, tal como en qué
dirección los datos deben viajar en un instante determinado.
Si un dispositivo de los que están conectados a una interfaz RS-232 procesa
los datos a una velocidad menor de la que los recibe deben de conectarse las
líneas handshaking que permiten realizar un control de flujo tal que al
dispositivo más lento le de tiempo de procesar la información.
Las líneas de "hand shaking" que permiten hacer este control de flujo
son las líneas RTS y CTS. Los diseñadores del estándar no concibieron estas
líneas para que funcionen de este modo, pero dada su utilidad en cada interfaz
posterior se incluye este modo de uso.
A continuación se describen las terminales utilizadas:
1 CG, Chassis Ground, Tierra del chasis (pin 5). Este circuito
(también llamado Frame Ground masa del cuadro) es un mecanismo
para asegurar que los chasis de los dos de dispositivos estén al
mismo potencial, y para impedir una descarga eléctrica al operador.
Este circuito no es usado como referencia por ningún otro voltaje y es
optativo. Si se usa, debería tomarse alguna precaución para no crear
bucles de tierra. Es la tierra de seguridad del sistema.
2 TX, Transmit Data, Datos de transmisión (pin 2). Este circuito es
la trayectoria por medio del cual los datos se envían desde el DTE al
DCE. Este circuito debe estar presente si los datos deben viajar en
esa dirección en cualquier momento.
3 RX, Receive Data, Datos de recepción (pin 3). Esta línea es el
recorrido por medio del cual los datos se envían desde el DCE al
DTE. Esta línea debe estar presente si los datos deben viajar en esa
dirección en un momento dado.
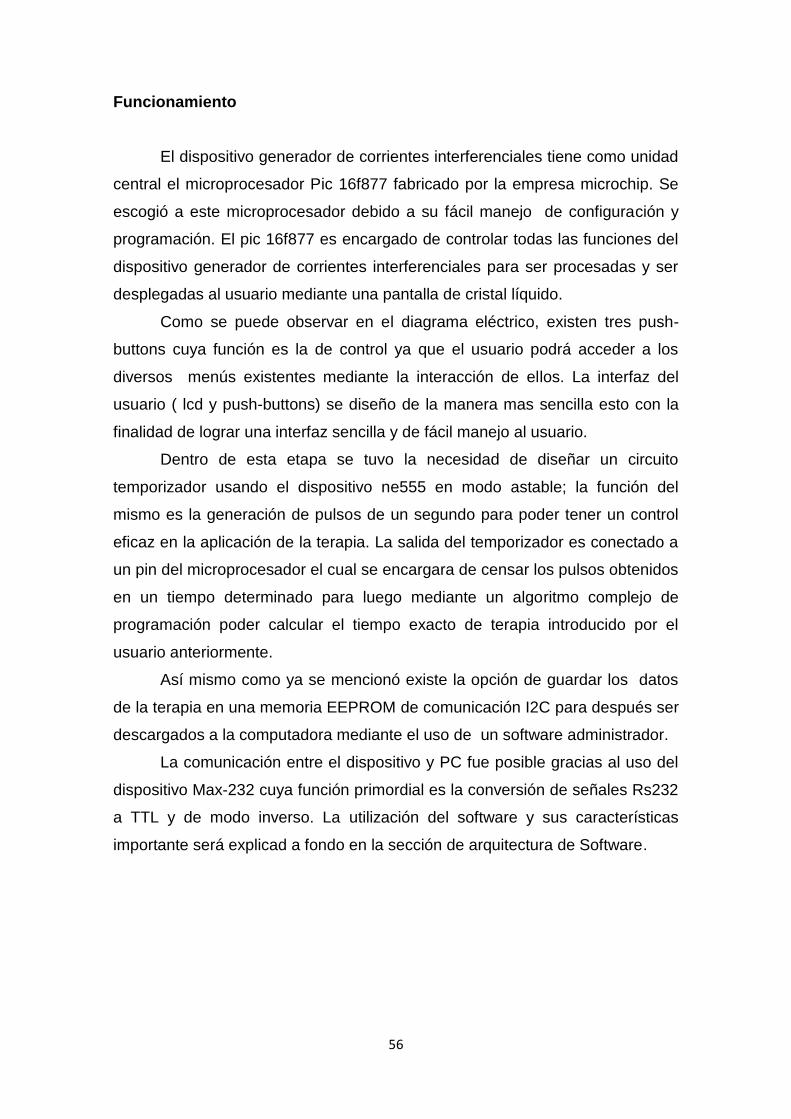
56
Funcionamiento
El dispositivo generador de corrientes interferenciales tiene como unidad
central el microprocesador Pic 16f877 fabricado por la empresa microchip. Se
escogió a este microprocesador debido a su fácil manejo de configuración y
programación. El pic 16f877 es encargado de controlar todas las funciones del
dispositivo generador de corrientes interferenciales para ser procesadas y ser
desplegadas al usuario mediante una pantalla de cristal líquido.
Como se puede observar en el diagrama eléctrico, existen tres push-
buttons cuya función es la de control ya que el usuario podrá acceder a los
diversos menús existentes mediante la interacción de ellos. La interfaz del
usuario ( lcd y push-buttons) se diseño de la manera mas sencilla esto con la
finalidad de lograr una interfaz sencilla y de fácil manejo al usuario.
Dentro de esta etapa se tuvo la necesidad de diseñar un circuito
temporizador usando el dispositivo ne555 en modo astable; la función del
mismo es la generación de pulsos de un segundo para poder tener un control
eficaz en la aplicación de la terapia. La salida del temporizador es conectado a
un pin del microprocesador el cual se encargara de censar los pulsos obtenidos
en un tiempo determinado para luego mediante un algoritmo complejo de
programación poder calcular el tiempo exacto de terapia introducido por el
usuario anteriormente.
Así mismo como ya se mencionó existe la opción de guardar los datos
de la terapia en una memoria EEPROM de comunicación I2C para después ser
descargados a la computadora mediante el uso de un software administrador.
La comunicación entre el dispositivo y PC fue posible gracias al uso del
dispositivo Max-232 cuya función primordial es la conversión de señales Rs232
a TTL y de modo inverso. La utilización del software y sus características
importante será explicad a fondo en la sección de arquitectura de Software.
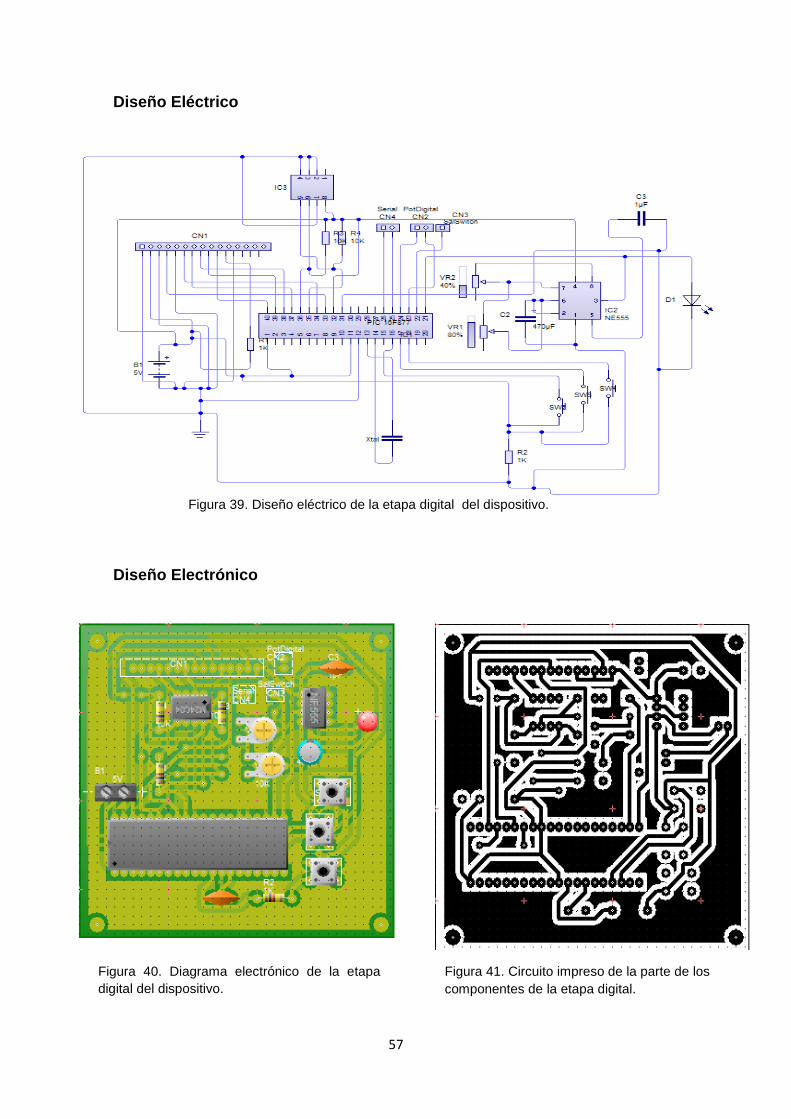
57
Diseño Eléctrico
Diseño Electrónico
Figura 39. Diseño eléctrico de la etapa digital del dispositivo.
Figura 40. Diagrama electrónico de la etapa
digital del dispositivo.
Figura 41. Circuito impreso de la parte de los
componentes de la etapa digital.
58
3.3.4 Etapa de Amplificación
El amplificador operacional es un dispositivo lineal de propósito general el
cual tiene capacidad de manejo de señal desde f=0 Hz hasta una frecuencia
definida por el fabricante; tiene además límites de señal que van desde el
orden de los nV, hasta unas docenas de voltio (especificación también definida
por el fabricante). Los amplificadores operacionales se caracterizan por su
entrada diferencial y una ganancia muy alta, generalmente mayor que 105
equivalentes a 100dB. El A.O es un amplificador de alta ganancia directamente
acoplado, que en general se alimenta con fuentes positivas y negativas, lo cual
permite que tenga excursiones tanto por arriba como por debajo de tierra (o el
punto de referencia que se considere). El nombre de Amplificador Operacional
proviene de una de las utilidades básicas de este, como lo son realizar
operaciones matemáticas en computadores analógicos (características
operativas). El Amplificador Operacional ideal se caracteriza por:
1. Resistencia de entrada,(Ren), tiende a infinito.
2. Resistencia de salida, (Ro), tiende a cero.
3. Ganancia de tensión de lazo abierto, (A), tiende a infinito
Figura 42. Circuito impreso de la parte de la
soldadura de la etapa digital.
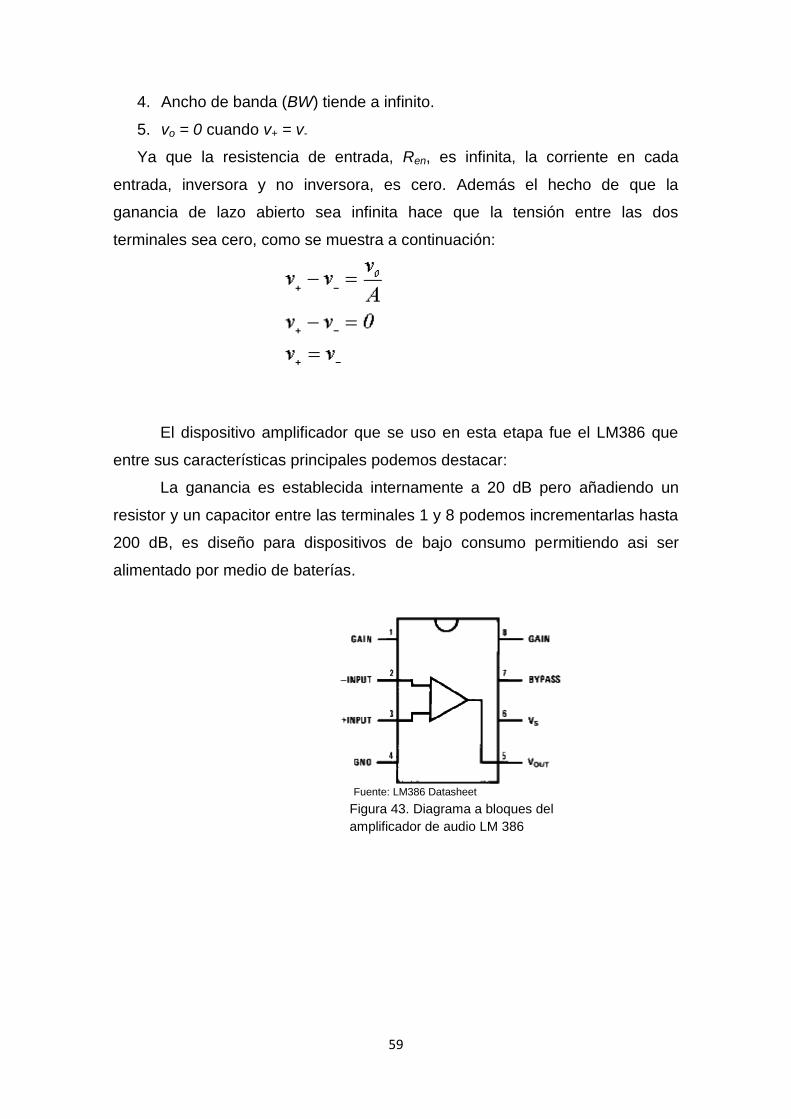
59
4. Ancho de banda (BW) tiende a infinito.
5. vo = 0 cuando v+ = v-
Ya que la resistencia de entrada, Ren, es infinita, la corriente en cada
entrada, inversora y no inversora, es cero. Además el hecho de que la
ganancia de lazo abierto sea infinita hace que la tensión entre las dos
terminales sea cero, como se muestra a continuación:
El dispositivo amplificador que se uso en esta etapa fue el LM386 que
entre sus características principales podemos destacar:
La ganancia es establecida internamente a 20 dB pero añadiendo un
resistor y un capacitor entre las terminales 1 y 8 podemos incrementarlas hasta
200 dB, es diseño para dispositivos de bajo consumo permitiendo asi ser
alimentado por medio de baterías.
Figura 43. Diagrama a bloques del
amplificador de audio LM 386
Fuente: LM386 Datasheet
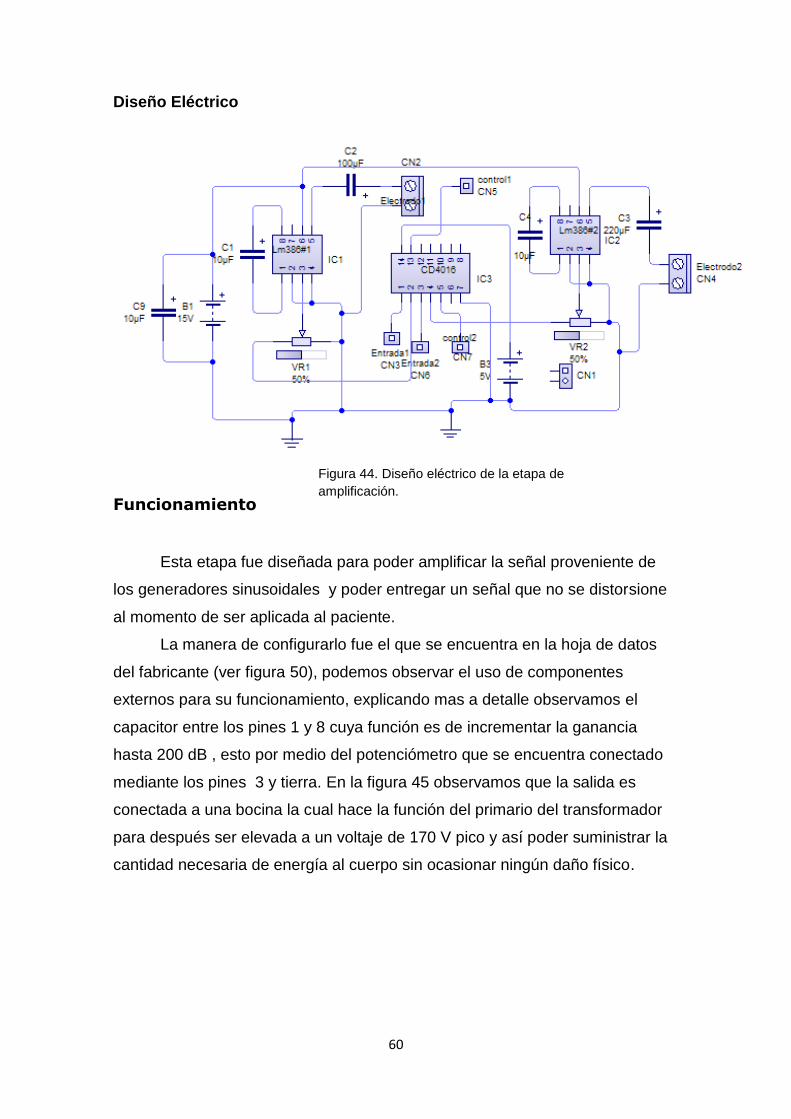
60
Diseño Eléctrico
Funcionamiento
Esta etapa fue diseñada para poder amplificar la señal proveniente de
los generadores sinusoidales y poder entregar un señal que no se distorsione
al momento de ser aplicada al paciente.
La manera de configurarlo fue el que se encuentra en la hoja de datos
del fabricante (ver figura 50), podemos observar el uso de componentes
externos para su funcionamiento, explicando mas a detalle observamos el
capacitor entre los pines 1 y 8 cuya función es de incrementar la ganancia
hasta 200 dB , esto por medio del potenciómetro que se encuentra conectado
mediante los pines 3 y tierra. En la figura 45 observamos que la salida es
conectada a una bocina la cual hace la función del primario del transformador
para después ser elevada a un voltaje de 170 V pico y así poder suministrar la
cantidad necesaria de energía al cuerpo sin ocasionar ningún daño físico.
Figura 44. Diseño eléctrico de la etapa de
amplificación.
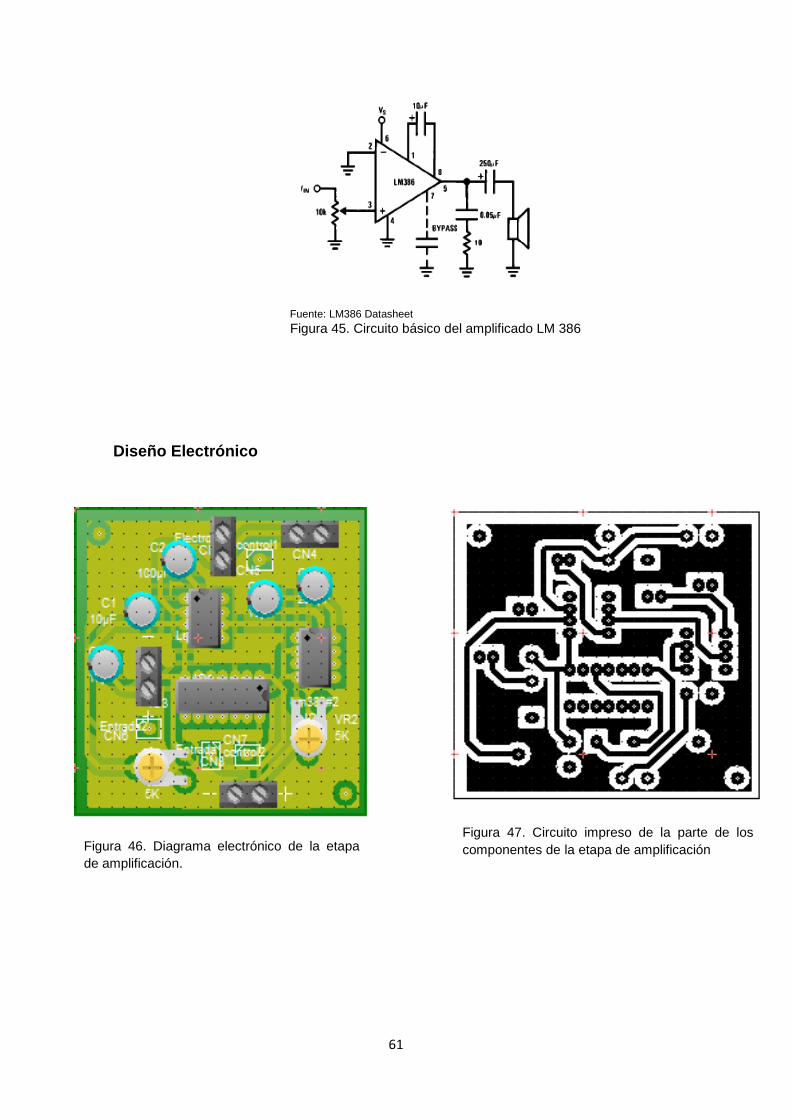
61
Diseño Electrónico
Figura 45. Circuito básico del amplificado LM 386
Figura 46. Diagrama electrónico de la etapa
de amplificación.
Figura 47. Circuito impreso de la parte de los
componentes de la etapa de amplificación
Fuente: LM386 Datasheet
62
3.3.5 Etapa de salida
El transformador es un dispositivo que se encarga de "transformar" el
voltaje de corriente alterna que tiene a su entrada en otro diferente amplitud,
que entrega a su salida.
Se compone de un núcleo de hierro sobre el cual se han arrollado
varias espiras (vueltas) de alambre conductor.
Este conjunto de vueltas se llaman bobinas y se denominan:
Bobina primaria o "primario" a aquella que recibe el voltaje de entrada y
Bobina secundaria o "secundario" a aquella que entrega el voltaje
transformado.
La Bobina primaria recibe un voltaje alterno que hará circular, por ella,
una corriente.
Esta corriente inducirá un flujo magnético en el núcleo de hierro
Como el bobinado secundario está arrollado sobre el mismo núcleo de
hierro, el flujo magnético circulará a través de las espiras de éste.
Al haber un flujo magnético que atraviesa las espiras del "Secundario",
se generará por el alambre del secundario un voltaje. En este
bobinado secundario habría una corriente si hay una carga conectada
(el secundario conectado por ejemplo a una resistencia)
La razón de transformación del voltaje entre el bobinado "Primario" y el
"Secundario" depende del número de vueltas que tenga cada uno. Si el
número de vueltas del secundario es el triple del primario. En el secundario
habrá el triple de voltaje.
Figura 48. Circuito impreso de la parte de la
soldadura de la etapa de amplificación
63
Entonces: Vs = Ns x Vp / Np Donde:
Np= Número de vueltas del primario
Ns=Número de vueltas secundario
Vp=Tensión del primario
Vs=tensión del secundario
Funcionamiento
Esta etapa tiene dos funciones principales: la primera sirvió para poder
elevar la salida proveniente del amplificador un voltaje de 170 V pico esto con
la finalidad de poder ser aplicado al cuerpo sin ninguna perdida de energía .
La segunda función es la de asilamiento del paciente con el circuito para
evitar descargas eléctricas no deseadas y hacer prevenir accidentes.
Fue necesario el uso de electrodos especiales y gel electrolítico para
poder hacer un buen contacto con la piel esto con la finalidad de toda la
corriente proveniente del equipo sea aplicada al cuerpo.
Figura 49. Electrodos usados para la aplicación
de electro terapia
Fuente: www.luisbernal.com
64
3.4 Arquitectura de Software
Funcionamiento
El software administrador fue desarrollado para la administración del
dispositivo generador de ondas interferenciales. El software esta divido en dos
etapas, las cuales se mencionan continuación del mismo modo se describen
las características importantes de cada una de ellas.
3.4.1 Programa visual
Descarga de rutinas al electro-estimulador ya pre-establecidas
Descarga de rutinas al electro-estimulador creadas por el usuario
Descarga de rutinas del electro-Estimulador a la Pc
El programa visual fue desarrollado en visual basic debido a que es un
lenguaje orientado a objetos y no se necesito conocimientos avanzados. Fue
necesaria una comunicación serial entre la PC y el dispositivo generador de
corrientes interferenciales
El programa visual tiene una pantalla en el que el usuario puede crear o
descargar cualquier tipo de terapia al dispositivo para su después aplicación;
una característica importante que contiene el software fue la creación de un
algoritmo sumamente complejo que nos permitiera conectarnos de una
manera exitosa al dispositivo y poder descargar todos los datos de la terapia
establecidos por el usuario hacia el mismo dispositivo; al mismo tiempo
aprovechando la compatibilidad con las diferentes bases de datos que nos
ofrece visual basic se implemento una rutina que se capaz de crear un base de
datos estructurada la cual nos permitiera tener un mejor manejo de
información, dicha base de datos es consultada vía web por medio del un portal
web creado especialmente para la visualización de los datos.
65
Figura 50. Pantalla de bienvenida del software visual
Figura 51. Pantalla de inicio del software visual
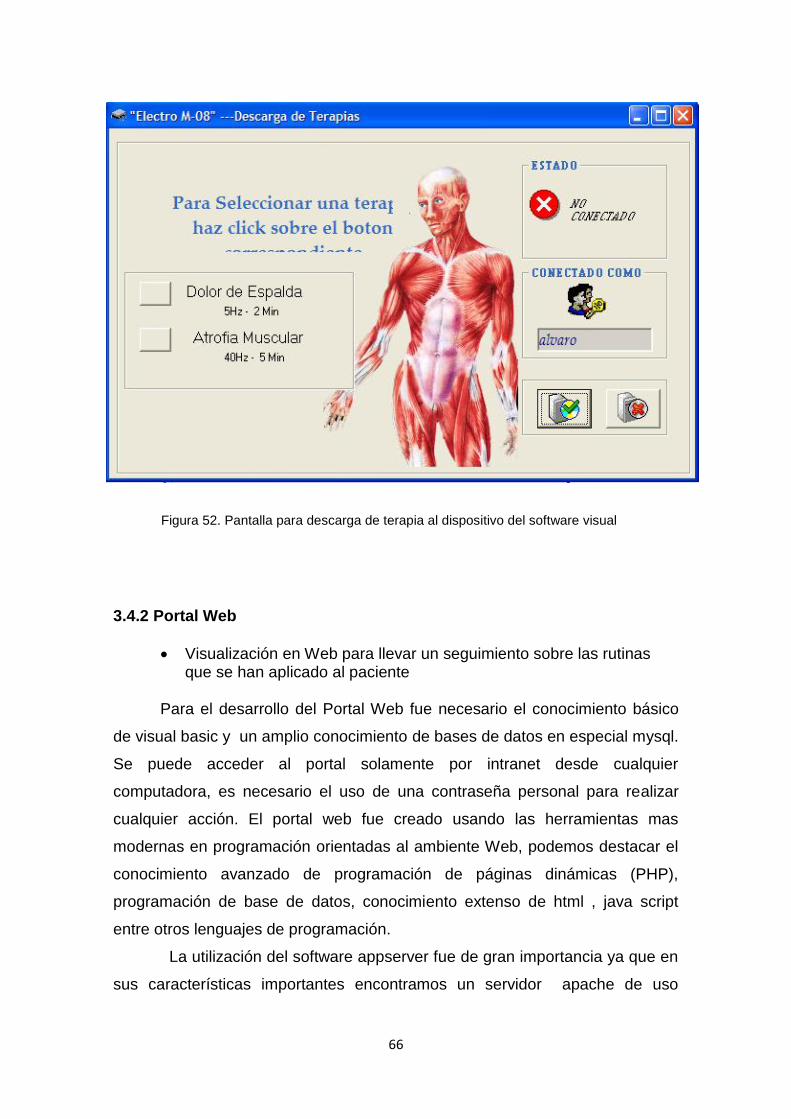
66
3.4.2 Portal Web
Visualización en Web para llevar un seguimiento sobre las rutinas que se han aplicado al paciente
Para el desarrollo del Portal Web fue necesario el conocimiento básico
de visual basic y un amplio conocimiento de bases de datos en especial mysql.
Se puede acceder al portal solamente por intranet desde cualquier
computadora, es necesario el uso de una contraseña personal para realizar
cualquier acción. El portal web fue creado usando las herramientas mas
modernas en programación orientadas al ambiente Web, podemos destacar el
conocimiento avanzado de programación de páginas dinámicas (PHP),
programación de base de datos, conocimiento extenso de html , java script
entre otros lenguajes de programación.
La utilización del software appserver fue de gran importancia ya que en
sus características importantes encontramos un servidor apache de uso
Figura 52. Pantalla para descarga de terapia al dispositivo del software visual
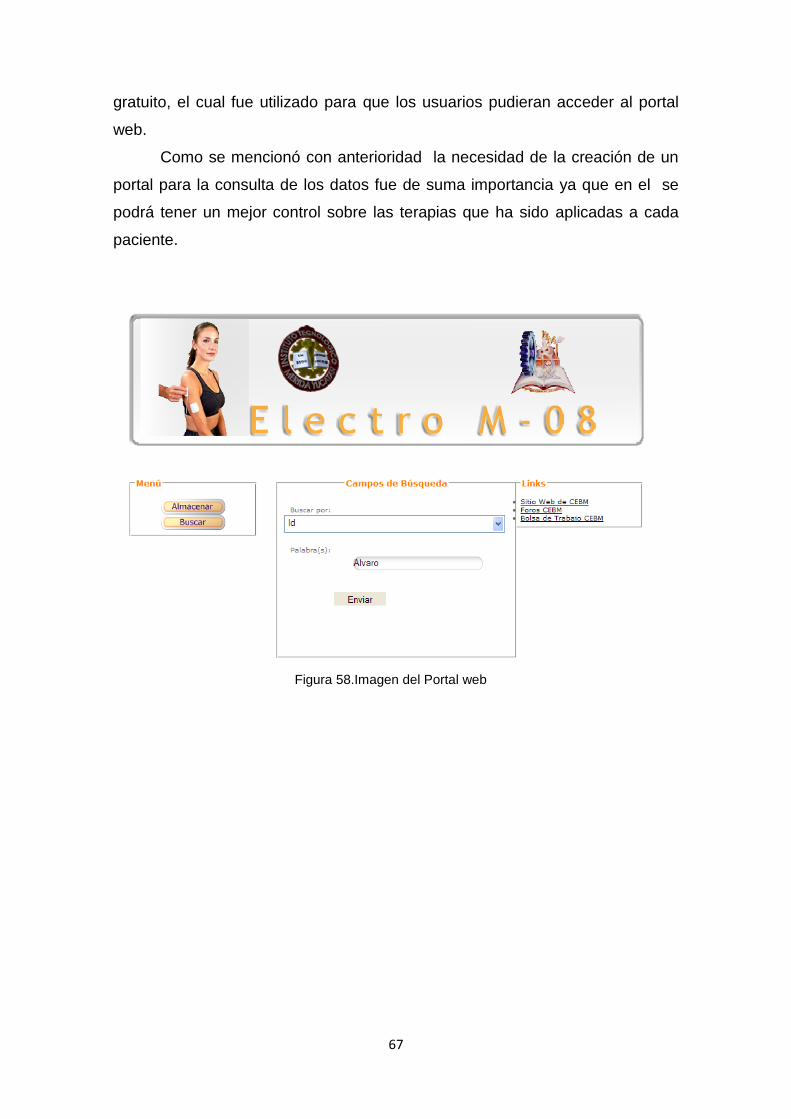
67
gratuito, el cual fue utilizado para que los usuarios pudieran acceder al portal
web.
Como se mencionó con anterioridad la necesidad de la creación de un
portal para la consulta de los datos fue de suma importancia ya que en el se
podrá tener un mejor control sobre las terapias que ha sido aplicadas a cada
paciente.
Figura 58.Imagen del Portal web
68
Capítulo 4. Conclusiones y Recomendaciones
La realización de este proyecto arrojó mucho conocimiento y satisfacción
profesional, ya que se logró aplicar todos y cada uno de los temas y aspectos
vistos en clase. La implementación de cada una de las etapas, respondieron de
manera muy satisfactoria. En los generadores se logró un funcionamiento de
manera exitosa, además de no permitir la intrusión de ruidos de manera
considerable. La amplificación final resulto buena, ya que no se saturaban los
amplificadores a variaciones fuertes de red eléctrica. La fuente de alimentación
logró proporcionar la corriente suficiente a todos los dispositivos empleados en
el funcionamiento del dispositivo.
El dispositivo solamente fue diseñado para un canal esto debido a la
falta de tiempo, pero si se requiere puede ser añadido cualquier cantidad de
canales realizando pequeñas modificaciones de hardware y software en el
diseño.
El uso de la PC para la administración del dispositivo ofrece una ventaja
sobre los demás dispositivos existentes en el mercado además de que puede
ser mejorado y adaptado según las necesidades de cada usuario.
En general el comportamiento del dispositivito generador de corrientes
interferenciales para el tratamiento de origen muscular y circulatorio fue bueno
debido a su comportamiento en general.
Figura 53. Pantalla del portal web
69
Referencias
Electroterapia en fisioterapia, Rodriguez Martin, 2da edición ,editorial Panamericana,2004
Recent Advances in interferential current therapy,1990”
Guía de corrientes interferenciales No 25, Equipo de Corrientes Interferenciales, 2005
Electrotherapy on the Web, Tim Whatson, http://www.electrotherapy.com. Guía Tecnológica 25 Equipos de Corrientes Interferenciales, 2004. Secretaria de Salud.
Li, Huang, Jen, Chen, (2005 ) “The Implementation of a Multi-Channel Interferential Current Electrical Stimulation System”, Proc. of the IEEE Engineering in Medicine and Biology 27th Annual Conference.
Minder et al. (2003) “Interferential Current (IFC)”.
Sedra, A., Smith, K. C. (2004). Microelectronic Circuits (4thEdition). USA: Oxford University Press.
S. Ravichandran, (1990). “Recent Advances in Interferential Current Therapy”, Proc. of the 12th Annual Int. Conf. on Engineering in Medicine and Biology Society, Vol. 12, No. 5, T. P. Nolan. “Electrotherapeutic Modalities: Electrotherapy and Iontophoresis”, in Modalities for Therapeutic Intervention, F. A. Davis Company, Philadelphia, 2005.
Franco Sergio, “Design with operational amplifiers and analog integrated circuits”, Edición Internacional, 1988, Págs.
Recopilación de Apuntes Biomédicos, Chávez Herrera, Morelia Michoacán ,
2008
Electroterapia de frecuencia media y baja, R.V. Den Adel
www.luisbernal.com

70