Embed Size (px)
Citation preview
UNIVERSIDAD POLITECNICA DE MADRID
ESCUELA TECNICA SUPERIOR DE INGENIEROS AERONAUTICOS
Tesis Doctoral
Diseno de un Sistema Avanzado de
Guiado y Control para Misiles con
Doble Mando Aerodinamico
INVESTIGACION AEROESPACIAL UNIVERSITARIA
PREMIOS EJERCITO DEL AIRE 2016

Este trabajo es una version redactada de la tesis doctoral: Optimiza-
tion of the Integrated Guidance and Control for a Dual Aerodynamic
Control Missile, defendida ante tribunal academico en la ETS Inge-
nieros Aeronauticos de la Universidad Politecnica de Madrid en el ano
2015. El original de la tesis se presento en ingles obteniendo la califica-
cion Sobresaliente Cum Laude. La presente version es una traduccion
al castellano de dicho trabajo, adaptada ligeramente en su formato y
extension, para poder presentarla al premio del Ejercito del Aire 2016
en su modalidad de Investigacion Aeroespacial Universitaria. Es, en
todo lo demas, una reproduccion fiel del original. Se entrega junto a
este documento una version impresa del original de la tesis doctoral
tal y como fue presentada en ingles, como referencia.
i

Resumen
La presente investigacion pertenece al campo de la aeronautica y mas concretamente
al guiado y control aerodinamico de los misiles aire-aire con aplicacion militar.
La Tesis desarrolla un nuevo sistema de interaccion del guiado y control tal que
proporcione a un misil con doble mando aerodinamico (con aletas delanteras y en cola)
de una extraordinaria maniobrabilidad, que le permita la defensa o ataque contra blan-
cos aereos situados en todo el volumen esferico alrededor del avion lanzador, incluido
el hemisferio posterior.
Los misiles aire-aire, dadas las altas caracterısticas dinamicas del lanzador y del
blanco (dos vehıculos aereos de combate), requieren poseer una elevada maniobrabilidad
para efectuar su mision.
Dado el medio en que se desplazan, la atmosfera, la forma mas logica para efectuar
las maniobras es el generar y utilizar fuerzas y momentos de control aerodinamicos. Ası
se ha realizado desde la decada de los 50 hasta la del 2000, utilizando un unico conjunto
de aletas moviles situadas bien en la parte delantera (canards) o en la central o en la
cola. El movimiento de estas aletas producıa los pares aerodinamicos que hacıan girar el
vehıculo para dotarle de un angulo de ataque que, a su vez, generaba la fuerza normal
y la consiguiente aceleracion normal (maniobra) del misil. Pero ya en los anos 2000
las exigencias dinamicas del combate aereo aumentaron en grado extremo al aumentar
la maniobrabilidad de los aviones y, sobre todo, al aparecer los UAV (Unmaned Air
Vehicles) que, al no estar pilotados, podıan realizar maniobras muy altas no limitadas
por la supervivencia del hombre.
La respuesta en el diseno del misil para esas nuevas demandas ha sido de dos tipos.
Uno de ellos, al que se refiere esta Tesis, es dotar al misil de un doble mando aero-
dinamico, canards y cola. Otro es dotar al misil, ademas de un mando convencional
aerodinamico de aletas en cola, de un importante momento de control adicional conse-
guido a partir del chorro de gases del motor cohete, bien por movimientos de la tobera,
bien introduciendo aletas moviles en el chorro, o por otros metodos. El primer tipo de
misil, el de doble mando aerodinamico, esta aun en estado experimental y no ha sido
introducido en ningun misil aire-aire operativo. El estudio de su guiado y control no
es facil dado el complejo comportamiento de esa configuracion. Empleando los metodo
clasicos para ese estudio, como es el utilizar un lazo dinamico para el guiado y otro
ii

para el control , que se superaran drasticamente con esta invencion, la maniobrabilidad
que se alcanza con este misil, aunque es superior a la de sus predecesores con mando
aerodinamico simple (canard o aletas centrales o aletas de cola), no llega a satisfacer
las necesidades mencionadas para el moderno combate aire-aire, lo que si consiguen los
misiles con control hıbrido aerodinamico y chorro de gases.
Ahora bien, estos misiles hıbridos tienen dos desventajas principales frente al de
doble mando aerodinamico. La primera es su inherente complicacion de diseno y ma-
nufactura pues los mecanismos y materiales a utilizar para el control por chorro son de
complicada produccion, ya que deben trabajar con precision en un ambiente de muy
altas temperaturas y extremadamente erosivo, como es el chorro de un motor cohete.
La segunda, y operativamente muy importante, es que si en su trayectoria hacia el
blanco se termina la combustion del motor cohete, como no es anormal que ocurra, el
misil pierde toda la capacidad de control proveniente del chorro de gases, quedando
unicamente con el mando aerodinamico simple en cola que puede resultar insuficiente
para mantener el control con exito durante el resto de la trayectoria.
En esta Tesis se desarrolla un sistema de interaccion entre los subsistemas de guiado
y control de un misil con doble mando aerodinamico, que le permita alcanzar la ma-
niobrabilidad exigida en el combate aereo moderno, tal como lo consiguen los hıbridos
pero sin las desventajas descritas para estos.
iii

Indice general
1. Introduccion 1
1.1. Motivos para esta Tesis . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1. Misiles actuales con control aerodinamico . . . . . . . . . . . . . 1
1.1.2. Caracterısticas de la respuesta dinamica del misil . . . . . . . . 3
1.1.3. Propuesta de doble mando aerodinamico . . . . . . . . . . . . . 4
1.2. El bucle de guiado y control . . . . . . . . . . . . . . . . . . . . . . . . 8
1.3. Objetivos de la Tesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4. Revision de la Literatura . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.4.1. Aerodinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.4.2. Autopiloto y Guiado con control doble . . . . . . . . . . . . . . 16
1.4.3. Integracion del Autopiloto y Guiado . . . . . . . . . . . . . . . 18
1.5. Esquema de la Tesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2. Aerodinamica del Misil con Doble Control y su Maniobrabilidad 21
2.1. Configuracion y fenomenos aerodinamicos . . . . . . . . . . . . . . . . 21
2.1.1. Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.1.2. Acoplamiento Aerodinamico Canard-Cola . . . . . . . . . . . . 26
2.1.3. Incidencia de los Controles y Saturacion Supersonica . . . . . . 30
2.2. Modelo Aerodinamico . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.2.1. Fuerza Normal . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.2. Fuerza en Guinada . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.2.3. Momento de Cabeceo . . . . . . . . . . . . . . . . . . . . . . . . 35
2.2.4. Momento de Guinada . . . . . . . . . . . . . . . . . . . . . . . . 36
2.2.5. Momento de Balanceo . . . . . . . . . . . . . . . . . . . . . . . 39
2.2.6. Fuerza Axial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.2.7. Variaciones con el numero de Mach . . . . . . . . . . . . . . . . 46
2.3. Maniobrabilidad Estatica . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.3.1. Diagrama de maniobra . . . . . . . . . . . . . . . . . . . . . . . 46
2.3.2. Eficiencia Aerodinamica . . . . . . . . . . . . . . . . . . . . . . 47
2.4. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
iv
INDICE GENERAL
3. Guiado y Control en Doble-Lazo 52
3.1. Guiado Optimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.2. Dinamica de Corto Periodo . . . . . . . . . . . . . . . . . . . . . . . . 55
3.3. Formulacion en el Espacio de los Estados . . . . . . . . . . . . . . . . . 57
3.4. Solucion Optima del Autopiloto . . . . . . . . . . . . . . . . . . . . . . 59
3.4.1. Condiciones de Equilibrio . . . . . . . . . . . . . . . . . . . . . 59
3.4.2. Planteamiento del problema . . . . . . . . . . . . . . . . . . . . 60
3.4.3. Solucion Sub-optima . . . . . . . . . . . . . . . . . . . . . . . . 62
3.5. Ejemplos Guiado-Autopiloto en Doble-Lazo . . . . . . . . . . . . . . . 63
3.5.1. Lanzamiento con error de apuntamiento moderado . . . . . . . 64
3.5.2. Calculos de dominio de tiro en curso de colision . . . . . . . . . 68
3.6. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4. Guiado y Control Integrados 74
4.1. Planteamiento matematico . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.2. Resolucion del problema IGA-DAC . . . . . . . . . . . . . . . . . . . . 78
4.2.1. Ecuacion diferencial y condiciones de contorno . . . . . . . . . . 79
4.2.2. Resolucion mediante la ecuacion de Lyapunov . . . . . . . . . . 80
4.2.3. Controlador de pre-alimentacion . . . . . . . . . . . . . . . . . . 80
4.2.4. Procedimiento Practico de Resolucion . . . . . . . . . . . . . . . 81
4.3. Ejemplos numericos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.3.1. Errores de apuntamiento moderados . . . . . . . . . . . . . . . 84
4.3.2. Trayectorias alejadas del curso de colision . . . . . . . . . . . . 86
4.4. Efectos de Ruido, Estimacion y Radomo . . . . . . . . . . . . . . . . . 89
4.4.1. Errores de Radomo . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.4.2. Efecto de los ruidos radar y su frecuencia de muestreo . . . . . . 94
4.4.3. Filtro Variable tipo Kalman . . . . . . . . . . . . . . . . . . . . 95
4.4.4. Evaluacion de la distancia de paso con ruidos radar . . . . . . . 97
4.4.5. Experimentos con la frecuencia de muestreo de datos . . . . . . 98
4.5. Defensa contra ataque por la cola . . . . . . . . . . . . . . . . . . . . . 101
4.5.1. Soluciones previas y retos tecnologicos . . . . . . . . . . . . . . 101
4.5.2. Blanco de oportunidad en el hemisferio trasero . . . . . . . . . . 102
4.6. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5. Conclusiones 112
5.1. Resumen de resultados obtenidos . . . . . . . . . . . . . . . . . . . . . 112
5.1.1. Soluciones a las Preguntas de Investigacion . . . . . . . . . . . . 112
5.1.2. Implicaciones en el diseno del misil . . . . . . . . . . . . . . . . 115
5.1.3. Implicaciones teoricas . . . . . . . . . . . . . . . . . . . . . . . . 119
5.2. Limitaciones al Estudio y Areas de Desarrollo Futuras . . . . . . . . . . 119
v

INDICE GENERAL
5.2.1. Aerodinamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.2.2. Guiado y control . . . . . . . . . . . . . . . . . . . . . . . . . . 120
A. Derivacion de Matrices y Producto de Kronecker A1
A.1. Estructuras de Derivacion . . . . . . . . . . . . . . . . . . . . . . . . . A1
A.2. Producto de Kronecker y sus Propiedades . . . . . . . . . . . . . . . . A3
A.3. Algebra del Calculo de Matrices . . . . . . . . . . . . . . . . . . . . . . A4
A.3.1. Derivada de Matrices Compuestas . . . . . . . . . . . . . . . . . A5
A.3.2. Derivada de la Forma Escalar . . . . . . . . . . . . . . . . . . . A5
B. Teorıa de Control Optimo B1
B.1. Principio del Mınimo de Pontryagin para Misiles . . . . . . . . . . . . . B1
B.2. Ecuacion de Riccati Dependiente de los Estados . . . . . . . . . . . . . B3
C. Misil NASA NTCM Geometrıa y Modelo Aerodinamico C1
C.1. Geometrıa del misil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C1
C.2. Parametros basicos y definicion de la mision . . . . . . . . . . . . . . . C3
D. Datos Aerodinamicos D1
D.1. Tablas de Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . D2
E. Coeficientes Aerodinamicos E1
F. Dinamica del Misil y Cinematica Terminal F1
F.1. Velocidad en ejes cuerpo y viento . . . . . . . . . . . . . . . . . . . . . F1
F.2. Angulos de Euler y Cuaterniones . . . . . . . . . . . . . . . . . . . . . F1
F.3. Ecuaciones cinematicas y dinamicas con cuaterniones . . . . . . . . . . F2
G. Elementos de Matrices en el Espacio-Estado G1
G.1. Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . G1
G.2. Elementos de la Matriz de Estado Aerodinamica . . . . . . . . . . . . . G1
G.3. Elementos de la Matriz de Entrada del Control . . . . . . . . . . . . . G4
G.4. Elementos de la Matriz de Control Cruzado . . . . . . . . . . . . . . . G6
G.5. Elementos de la Matriz de Aceleraciones . . . . . . . . . . . . . . . . . G8
G.6. Elementos de la Matriz de Actuaciones . . . . . . . . . . . . . . . . . . G9
G.7. Elementos de la Matriz del Guiado-Autopiloto . . . . . . . . . . . . . . G12
H. Tratamiento Analıtico del Error de Radomo y Ruidos Radar. H1
H.1. Buscador radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . H1
H.2. Modelos Ruido Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . H3
H.2.1. Destello (Glint) . . . . . . . . . . . . . . . . . . . . . . . . . . . H3
H.2.2. Ruidos Independientes del Alcance . . . . . . . . . . . . . . . . H4
vi

INDICE GENERAL
H.2.3. Ruidos en Distancia y Velocidad de Colision . . . . . . . . . . . H5
Bibliograf
vii
ıa

Indice de figuras
1.1. INTA Misil Banderilla . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2. Cohete Guiado Superficie-Aire Stunner , con control doble aerodinamico 7
1.3. Diagrama de guiado y control del misil . . . . . . . . . . . . . . . . . . 9
1.4. Evolucion de los dominios de tiro del misil. . . . . . . . . . . . . . . . . 13
1.5. Lıneas principales de investigacion . . . . . . . . . . . . . . . . . . . . . 14
1.6. Interaccion entre control delantero y trasero . . . . . . . . . . . . . . . 15
1.7. Resultados experimentales para el misil NASA . . . . . . . . . . . . . . 15
1.8. Modos de operacion del misil . . . . . . . . . . . . . . . . . . . . . . . 17
2.1. Ejes y definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2. Contornos de presion total . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.3. Modelo de interferencia entre controles . . . . . . . . . . . . . . . . . . 28
2.4. Sustentacion del control aislado . . . . . . . . . . . . . . . . . . . . . . 28
2.5. Coeficiente de interferencia Kt−vc . . . . . . . . . . . . . . . . . . . . . 29
2.6. Perdida de fuerza normal en la cola debido a la interferencia aerodinami-
ca entre canard y cola . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.7. Saturacion supersonica . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.8. Coeficiente de fuerza normal, dos controles. . . . . . . . . . . . . . . . . 34
2.9. Momento de cabeceo, un control. . . . . . . . . . . . . . . . . . . . . . 37
2.10. Momento de cabeceo, dos controles . . . . . . . . . . . . . . . . . . . . 38
2.11. Balanceo inducido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.12. Balanceo inducido debido a α y δcr. . . . . . . . . . . . . . . . . . . . . 41
2.13. Momento de Control en Balanceo . . . . . . . . . . . . . . . . . . . . . 41
2.14. Contornos a Mach constante . . . . . . . . . . . . . . . . . . . . . . . . 42
2.15. Fuerza Axial, un control . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.16. Fuerza Axial, dos controles . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.17. Respuesta dinamica en lazo abierto . . . . . . . . . . . . . . . . . . . . 48
2.18. Eficiencia aerodinamica. . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.19. Diagrama de maniobra a 6,000m . . . . . . . . . . . . . . . . . . . . . 50
2.20. Diagrama de maniobra a 12,000m . . . . . . . . . . . . . . . . . . . . 51
viii

INDICE DE FIGURAS
3.1. Esquema del guiado y control en dos bucles . . . . . . . . . . . . . . . 53
3.2. Encuentro aire-aire. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3. Constante de navegacion optima . . . . . . . . . . . . . . . . . . . . . 55
3.4. Diagrama de fuerzas en el misil de doble mando . . . . . . . . . . . . . 64
3.5. Guiado y Control en doble bucle . . . . . . . . . . . . . . . . . . . . . . 65
3.6. Condiciones de lanzamiento . . . . . . . . . . . . . . . . . . . . . . . . 66
3.7. Trayectoria del misil DAC, canard, cola y del blanco . . . . . . . . . . . 69
3.8. Acceleracion del misil . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.9. Angulos de los controles . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.10. Mach Misil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.11. Angulo de preservacion del guiado θg . . . . . . . . . . . . . . . . . . . 71
3.12. Dominio tiro misil cola con navegacion proporcional . . . . . . . . . . . 71
3.13. Dominio tiro misil canard con navegacion proporcional . . . . . . . . . 72
3.14. Dominio tiro misil cola con guiado optimo . . . . . . . . . . . . . . . . 72
3.15. Dominio tiro misil canard con guiado optimo . . . . . . . . . . . . . . . 73
3.16. Dominio tiro misil control doble con guiado optimo . . . . . . . . . . . 73
4.1. Esquema del auto piloto y guiado integrados . . . . . . . . . . . . . . . 74
4.2. Escenario para el Guiado y control Integrado . . . . . . . . . . . . . . . 75
4.3. Algoritmo de calculo del sistema integrado . . . . . . . . . . . . . . . . 82
4.4. Trayectoria, error de apuntamiento moderado . . . . . . . . . . . . . . 85
4.5. Ratio de Aceleracion del misil vs Blanco , error de apuntamiento moderado 86
4.6. Parametros , error de apuntamiento moderado . . . . . . . . . . . . . . 87
4.7. Trayectorias alejadas del curso de colision. . . . . . . . . . . . . . . . . 88
4.8. Ratio de aceleraciones misil a blanco . . . . . . . . . . . . . . . . . . . 89
4.9. Parametros, trayectorias alejadas del curso de colision . . . . . . . . . . 90
4.10. Esquema del guiado y control integrado con efectos reales . . . . . . . . 91
4.11. Definicion de los angulos del buscador radar . . . . . . . . . . . . . . . 93
4.12. Sensibilidad a pendiente de radomo . . . . . . . . . . . . . . . . . . . . 94
4.13. Trayectoria del blanco medida por el radar. . . . . . . . . . . . . . . . 98
4.14. Aceleracion del misil en presencia de ruido radar. . . . . . . . . . . . . 99
4.15. Error con esquema integrado y ruido radar. . . . . . . . . . . . . . . . . 99
4.16. Error con esquema no-integrado y ruido radar. . . . . . . . . . . . . . . 100
4.17. Variacion de la distancia de paso con la frecuencia de muestreo . . . . . 100
4.18. Trayectoria contra un blanco el hemisferio trasero. . . . . . . . . . . . . 104
4.19. Maniobra del misil, blanco en el hemisferio trasero. . . . . . . . . . . . 105
4.20. Angulo de cabeceo, blanco en el hemisferio trasero. . . . . . . . . . . . 105
4.21. Parametros, blanco en el hemisferio trasero . . . . . . . . . . . . . . . . 106
4.22. Defensa contra un ataque por la cola. . . . . . . . . . . . . . . . . . . . 109
ix
INDICE DE FIGURAS
4.23. Defensa contra un ataque por la cola, maniobra del misil. . . . . . . . . 110
4.24. Defensa contra un ataque por la cola, angulo de cabeceo. . . . . . . . . 110
4.25. Defensa contra un ataque por la cola, otros parametros . . . . . . . . . 111
5.1. Subsistemas en un misil de control doble . . . . . . . . . . . . . . . . . 116
C.1. Geometrıa del misil base . . . . . . . . . . . . . . . . . . . . . . . . . . C1
C.2. Experimentos en Tunel Aerodinamico en NASA y Onera. . . . . . . . . C2
F.1. Definicion de angulos de Euler para misiles . . . . . . . . . . . . . . . . F2
H.1. Dinamica del Buscador . . . . . . . . . . . . . . . . . . . . . . . . . . . H4
x

Indice de cuadros
1.1. Comparacion de control canard y cola . . . . . . . . . . . . . . . . . . . 5
1.2. Referencias JCR para autopilotos de doble control . . . . . . . . . . . . 16
1.3. Referencias JCR para el guiado de misil DAC . . . . . . . . . . . . . . 17
2.1. Variables de movimiento . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2. Limites para la envolvente de vuelo del misil . . . . . . . . . . . . . . . 47
3.1. Lımites mecanicos y aerodinamicos del misil . . . . . . . . . . . . . . . 61
3.2. Parametros: Simulaciones de Guiado y Control Doble Bucle . . . . . . 66
3.3. Doble-Bucle G & C Resultados Simulacion . . . . . . . . . . . . . . . . 67
4.1. Resultados de la simulacion, G & C Integrado vs Doble Bucle para misil
doble mando aerodinamico . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.2. Parametros de ruido seleccionados para el radar activo . . . . . . . . . 97
4.3. Parametros de la simulacion. Blanco o de oportunidad en el hemisferio
trasero. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
4.4. Parametros de la simulacion defensa contra ataque desde cola . . . . . 107
C.1. Model Geometry Specifications . . . . . . . . . . . . . . . . . . . . . . C2
C.2. Guidance and Control Model Mission Specifications . . . . . . . . . . . C4
D.1. CN Wind Tunnel Results . . . . . . . . . . . . . . . . . . . . . . . . . . D2
D.2. DATCOM Semiexperimental Method Results for CN . . . . . . . . . . D2
D.3. Numerical CFD experiments results for CN . . . . . . . . . . . . . . . . D3
D.4. Cm Wind Tunnel Results . . . . . . . . . . . . . . . . . . . . . . . . . D3
D.5. Numerical CFD experiments results for Cm . . . . . . . . . . . . . . . . D4
D.6. CA Wind Tunnel Results . . . . . . . . . . . . . . . . . . . . . . . . . D4
D.7. Numerical CFD experiments results for CA . . . . . . . . . . . . . . . D4
D.8. Numerical CFD experiments results for δcr = 5 deg . . . . . . . . . . . . D5
D.9. Numerical CFD experiments results for δcr = 10 deg . . . . . . . . . . . D5
D.10.CFD Numerical Experiments, Induced Rolling Moment . . . . . . . . . D6
D.11.CFD Numerical Experiments, Sideslip . . . . . . . . . . . . . . . . . . D7
xi

INDICE DE CUADROS
D.12.CFD Numerical Experiments, Roll Driving Moment . . . . . . . . . . . D8
E.1. Fin Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . E1
E.2. Normal and Side Force Aero Coefficients . . . . . . . . . . . . . . . . . E1
E.3. NASA Missile Pitch and Yaw Moment Aero Coefficients . . . . . . . . E2
E.4. NASA Missile Aero Roll Moment Coefficients . . . . . . . . . . . . . . E4
E.5. NASA Missile Axial Force Coefficients . . . . . . . . . . . . . . . . . . E6
E.6. Mach Dependence Coefficients . . . . . . . . . . . . . . . . . . . . . . . E7
xii

Nomenclatura
En esta seccion se da una lista de la notacion empleada a lo largo del cuerpo
principal de la tesis ası como su definicion. Para otras definiciones por favor consultese
la seccion del apendice. El resumen se divide en nomenclatura matematica general,
su ındices y superındice es, letras griegas y latinas, coeficientes aerodinamicos y sus
derivadas, y abreviaciones y acronimos. A lo largo de la tesis las unidades estan en el
sistema internacional a no ser que especıficamente se indique lo contrario.
NOTACION MATEMATICA GENERAL
A⊗B Kronecker product
a ∧ b Vector cross product
A Matriz
AT Matriz transpuesta
‖A‖p Norma-P de una matriz
a Vector columna
aL Los componentes del vector se expresan en ejes L
a Escalar
a Variable adimensional
a Derivada en el tiempo
a Variable estimada
a∗ Variable medida, con ruido
aij Elemento de A, Fila i, Columna j
E Operador valor medio
c Coseno
In Madrid identidad de orden n
s Seno
sinc Funcion sinc
t Tangente
vect Vectorizacion de una matriz
[0] Matriz cero de dimension apropiada
xiii

NOMENCLATURA
SUBINDICE Y SUPERINDICE
a (Subındice) Referido a auto piloto misil
B (Sub/Super) Referido a cuerpo misil axes
c (Superındice) Referido a control delantero, canard
d (Subındice) Variable demandada
g (Subındice) Referido a guiado
L (Superındice) Ejes Inerciales
M (Subındice) Misil
OG (Superındice) Ley de guiado optimo
p (Subındice) Eje de balanceo del misil, (MXB)
q (Subındice) Plano de cabeceo del misil, (MXBZB)
r (Subındice) Plano de guinada del misil, (MXBY B)
s (Subındice) Servos
T (Subındice) Blanco
t (Superındice) Control trasero, cola
trim (Subındice) Condicion de equilibrio, trimado
W (Superındice) Referido a ejes viento
LETRAS LATINAS
Sımbolo Definicion
AR Alargamiento
A Matriz de los estados dinamicos
B Matriz de entradas de control
be Envergadura expuesta
cq Relacion de trimado en cabeceo
cr Relacion de trimado en guinada
d Diametro misil
dcm Posicion del centro de masas desde la ojiva
Eff Eficiencia aerodinamica
e Vector de error
∆eδ Esfuerzo de control
∆en Esfuerzo de maniobra
∆ek Perdida de energıa por unidad de masa
FA Fuerza axial aerodinamica
FN Fuerza normal aerodinamica
xiv

NOMENCLATURA
FS Fuerza lateral aerodinamica
fs Frecuencia de muestreo radar
G Matriz de entrada Kalman
H Hamiltoniano
H Matriz de actuaciones
h Altitud de vuelo del misil
I Momento de inercia
i Angulo de incidencia local
icq Angulo de incidencia en canard-cabeceo
icr Angulo de incidencia en canard-guinada
itq Angulo de incidencia en cola-cabeceo
itr Angulo de incidencia en cola-guinada
J Indice de control optimo
K Matriz de ganancias de control optimo
kg Vector de ganancias
L Momento aerodinamico de balanceo
M Riccati, matriz solucion de la ecuacion de
Ma Matriz de acoplamiento cruzado aerodinamico
M Momento aerodinamico de cabeceo
M∞ Numero de Mach
N Momento aerodinamico de guinada
Nt−vc Fuerza normal en la cola debido a los vortices del cuerpo misil
N ′ Constante de navegacion proporcional
m Masa del misil
n Aceleracion
p Vector de parametros
p Velocidad angular de balanceo, ejes cuerpo
Ph Perıodo del radomo
Q Matriz de peso de los estados
qM Vector de quaterniones
q Velocidad angular de cabeceo, ejes cuerpo
q∞ Presion dinamica
R Pendiente maxima de radomo
R Matriz de peso de los controles
r Vector de distancias
rTM Distancia misil-blanco
r Velocidad angular de guinada, ejes cuerpo
S Matriz de transformacion
Se Superficie alar expuesta
xv
NOMENCLATURA
Sref Superficie de referencia aerodinamica
s Distancia del centro de masas al de referencia
T Empuje del motor cohete
Ts Intervalo de muestreo de datos
Ts Matriz de servo frecuencias
tb Tiempo de combustion motor cohete
tf Tiempo de vuelo total, s
tgo Tiempo hasta impacto, s
u Vector de entradas de control
u Velocidad de misil en eje OXb
v Velocidad de misil en eje OYb
w Velocidad de misil en eje OZb
x Vector de estado
xa Vector de estados del auto piloto
xm Estados extendidos del auto piloto
xs Vector de posiciones de los servos
dcm Posicion de centro de masas, desde ojiva
VM Velocidad del misil
Vc Velocidad de colision
Vp Matriz de balanceo
Vq Matriz de cabeceo
Vr Matriz de guinada
V Matriz de ruidos de medida
W Matriz de ruidos de proceso
y Distancia perpendicular a la lınea de mira
z Vector de salida
za Vector de salida del auto piloto
LETRAS GRIEGAS
Sımbolo Definicion
α Angulo de ataque en cabeceo
αT Angulo de ataque total
β Angulo de guinada
δ Angulo del control aerodinamico
δ1c Canard Fin 1
δ2c Canard Fin 2
δ3c Canard Fin 3
xvi

NOMENCLATURA
δ4c Canard Fin 4
δ1t Cola Fin 1
δ2t Cola Fin 2
δ3t Cola Fin 3
δ4t Cola Fin 4
δd Demanda de posicion a los controles
δp Posicion del control en balanceo
δcq Canard Posicion del control en cabeceo
δtq Tail Posicion del control en cabeceo
δcr Canard Posicion del control en guinada
δtr Tail Posicion del control en guinada
εq Angulo de estela en la cola, cabeceo
εr Angulo de estela en la cola, guinada
εk Parametro auxiliar
εq Parametro auxiliar
Γb Intensidad del vortice del fuselaje
Γc Intensidad del vortice del canard
λ Vector de coestados
Λg Constante de navegacion efectiva
λ Parametro de retardo
φa Angulo de balanceo aerodinamico
φh Fase de radomo
Ψ Matriz de transicion
Ψ Coste terminal
Σ Desviacion estandar
σ Angulo de lınea de mira
θ Angulo de cabeceo
θg Angulo de guiado
θh Angulo del cardan
θr Angulo de refraccion
τc Retardo del servo-canard
τt Retardo del servo-cola
τu Retardo del servo-altas frecuencias
τg Retardo sistema guiado
Υ,Υ Parametros de reparto
$T Frecuencia del blanco en cabeceo, rad/s
ωLOS Velocidad angular de la lınea de mira
xvii

NOMENCLATURA
COEFICIENTES DE INTERFERENCIA AERODINAMICA
Sımbolo Definicion
CA Axial Force, entire missile
Cm Pitch Moment at moment reference center, entire missile
Cmα Pitch moment first derivative
Cmα Pitching-moment with rate of change in angle of attack
Cmα|α| Pitch moment second derivative
Cmα3 Pitch moment third derivative
Cmβ2αIncremental pitch moment due to sideslip
Cmβ2δcqVariation of canard pitch effectiveness with sideslip
Cmβ2δtq
Variation of tail pitch effectiveness with sideslip
Cmδcqδ
tq
Incremental pitch moment,canard and tail combined action
Cmq Rotary derivative
Cnδtr Tail effectiveness in yaw
Cnδcr Canard effectiveness in yaw
Cmδtq Tail effectiveness in pitch
Cmδcq Canard effectiveness in pitch
CN Normal Force coefficient, entire missile
CNα Normal-force first derivative
CNα Change of normal force with rate of change in angle of attack
CNα|α| Normal-force second derivative
CNαδcq Variation of canard lift effectiveness with angle of attack
CNαδtq
Variation of tail lift effectiveness with angle of attack
CNα3 Normal-force third derivative
CNβ2αIncremental normal force due to sideslip
CNβ2δcqVariation of canard lift effectiveness with sideslip
CNβ2δtq
Variation of tail lift effectiveness with sideslip
CNB Normal Force due to Missile Body only, Ojive and Afterbody sections
CNBc Incremental normal force at missile body due to presence of canard fins
CNBt Incremental normal force at missile body due to presence of tail fins
CNcB Incremental normal force at the canard fins due to missile body
∆CNc−vB Incremental normal force at the canard fins to body shed vortices
∆CNt−vB Incremental normal force at the tail fins to body shed vortices
∆CNt−vc Incremental normal force at the tail fins to canard shed vortices
CNδcq Canard lift effectiveness in pitch at constant angle of attack
CNδcqδ
tq
Loss of normal force due to canard and tail combined control action
CNδtq
Tail lift effectiveness in pitch at constant angle of attack
xviii

NOMENCLATURA
cN Normal force at control fin alone
cNi Change of control alone normal force with incidence angle
CNq Normal force pitching derivative
CNs Incremental normal force due to the sideslip angle
CNtB Incremental normal force at tail fins due to missile body
Cn Yaw Moment at moment reference center, entire missile
Cl Roll Moment, entire missile
CS Side Force, entire missile
CSα2βIncremental side force due to angle of attack
CSβ Side force first derivative
CSβ|β| Side force second derivative
CSβ3 Side force third derivative
CSδcr Canard effectiveness in side force
CT Thrust coefficient
KBc Ratio of body lift with canard to canard lift alone
KBt Ratio of body lift with tail to tail lift alone
KcB Ratio of canard lift with body to canard lift alone
KtB Ratio of tail lift with body to tail lift alone
Kc−vB Interference factor for effect of body vortex on canard
Kt−vB Interference factor for effect of body vortex on tail
Kt−vc Interference factor for effect of canard vortex on tail
Kφa Interference factor for sideslip
DERIVADAS PARCIALES
Symbol Definition∂εq∂α
Gradiente de estela por angulo de ataque actuando en la cola∂εr∂β
Gradiente de estela por angulo de guinada actuando en la cola∂εq∂δcq
Gradiente de estela por control de canard-cabeceo actuando en la cola
∂εr∂δcr
Gradiente de estela por control de canard-guinada actuando en la cola∂εq∂δcq
Valor medio del gradiente de estela por grado de control canard-cabeceo en la
seccion de cola∂εr∂δcr
Valor medio del gradiente de estela por grado de control canard-guinada en la
seccion de cola
xix

NOMENCLATURA
ABREVIATURAS Y ACRONIMOS
Symbol Definition
APN Augmented Proportional Navigation
cm center of mass
CAS Control Actuation System
CDLE Continuous-time Differential Lyapunov Equation
CDM Coefficient Diagram Method
CFD Computer Fluid Dynamics
DAC Dual Aerodynamic Control
DCM Direction Cosine Matrix
G&C Guidance and Control
GS Gain Schedulling
HJB Hamilton-Jacobi-Bellman
IGA Integrated Guidance and Autopilot
IGC Integrated Guidance and Control
IMU Inertial Measurement Unit
INTA Instituto Nacional de Tecnica Aeroespacial
IR Infrared
ISA International Standard Atmosphere
JCR Journal of Citation Reports
JNDA Japan National Defense Academy
LOS Line of Sight
LPV Linear Parameter Variation
LTI Linear Time Invariant
LQD Linear Quadratic Differential (game theory)
LQR Linear Quadratic Regulator
LQT Linear Quadratic Tracking
MIMO Multi Input Multi Output
MFSC Model Following Servo Controller
mrc Moment Reference Center
ND Non-dimensional
NTCM NASA Tandem Control Missile
OGL Optimal Guidance Law
PID Proportional-Integral-Derivative
PSD Power Spectral Density
PD Pulse Doppler
PN Proportional Navigation
RCS Radar Cross Section
xx

NOMENCLATURA
SBT Slender Body Theory
SDC State Dependent Coefficient
SDDRE State Dependent Differential Riccati Equation
SDRE State Dependent Riccati Equation
SMC Sliding Mode Control
SNR Signal to Noise Ratio
ST Side Thruster
STT Skit To Turn
TPBVP Two Point Boundary Value Problem
TVC Trust Vector Control
UCAV Unmanned Combat Air Vehicle
VCL Vector Control Law
xxi
Capıtulo 1
Introduccion
Tradicionalmente, el diseno del misil tactico se ha basado en una superior velocidad
y maniobrabilidad sobre el blanco para conseguir la intercepcion. Las nuevas misiones
para misiles aire-aire que operen dentro de la atmosfera incluyen la intercepcion de
blancos de combate no tripulados supersonicos y la defensa del avion lanzador frente a
ataques laterales o por su cola.Para conseguir pequenas distancias de paso, se requeriran
avances radicales en la aerodinamica del misil, las tecnologıas de guiado y control ası
como el aprovechamiento de la sinergias entre los distintos subsistemas. Esta tesis
esta dedicada al estudio del misil con doble mando aerodinamico, Dual Aerodynamic
Control (DAC), como una nueva configuracion para misiles de corto y medio alcance
aire-aire. Este primer capıtulo introductorio esta organizado como sigue. En primer
lugar se presentan los motivos para esta tesis, seguida por una descripcion general del
bucle de guiado y control. A continuacion se especifican los objetivos de la investigacion,
y se hace una revision del estado del arte en la literatura cientıfica a dıa de hoy.
Finalmente se presenta un esquema de desarrollo del trabajo.
1.1. Motivos para esta Tesis
1.1.1. Misiles actuales con control aerodinamico
Para un misil de alcance medio o corto en mision aire-aire , la configuracion mas
comun actualmente es axil-simetrica, con un motor cohete de combustible solido, y con
cuatro superficies fijas y cuatro superficies de control alineadas , que permiten la manio-
bra en cabeceo guinada y control en balanceo. Las arquitecturas modernas con control
aerodinamico son tipo canard o control en cola 1. Un misil con control canard maniobra
1A pesar de su popularidad inicial, el control por ala tipo Sparrow no se considera como unaopcion viable en el diseno moderno de misiles debido a sus desventajas. Otras aproximaciones menosconvencionales, como control por deflexion de la ojiva, aero frenos etc. no han entrado en servicio enmisiles debido a su perdida de actuaciones, pero actualmente estan en desarrollo para el control de
1
1.1. MOTIVOS
mediante la deflexion de sus superficies de control delanteras, mientras un misil con
control en cola deflecta sus superficies de control en la parte trasera. Tıpicamente la
superficies de control del misil son totalmente movibles y con bajo alargamiento. La
ojiva del misil es de baja resistencia aerodinamica o de tipo semiesferico y aloja el
buscador que es de tipo electromagnetico u electro optico, que va a dotar al misil de
su posicion relativa al blanco durante el vuelo.
Esta configuracion esta estabilizada en balanceo o tiene limitaciones en su velocidad
de giro en balanceo, y emplea maniobra con resbalamiento a lo largo de la lınea de
mira del buscador (Skid To Turn, STT) para interceptar al blanco. Las principales
ventajas de esta configuracion son su alta velocidad de respuesta sin alabeo previo y el
acoplamiento aerodinamico reducido entre los canales de cabeceo y guinada.
Esta disposicion clasica sufre de ciertos efectos aerodinamicos no lineales que com-
plican su control durante el vuelo. Estos efectos pueden ser divididos en dos categorıas:
1. Efectos en un plano, donde a bajos angulos de ataque, los torbellinos desprendidos
de las superficies delanteras cambian el angulo de incidencia local en la cola,
provocando que el momento aerodinamico del misil cambie abruptamente para
pequenas variaciones en el angulo de ataque. Al aumentar el angulo de ataque,
la ojiva del misil y el pequeno alargamiento de las aletas comienzan a crear no
linealidades en fuerza y momento de cabeceo. Este mismo efecto se repite en el
plano de guinada debido a la simetrıa del misil.
2. Los efectos fuera de plano son a su vez de dos tipos. El momento de balanceo in-
ducido aparece por ejemplo cuando el angulo de ataque y el angulo de guinada son
distintos durante una maniobra con resbalamiento. El segundo tipo es la guinada
fantasma, phantom yaw, donde a angulos de ataque moderados, los torbellinos
desprendidos del fuselaje del misil se vuelven asimetricos, creando de modo si-
multaneo perturbaciones en balanceo y en guinada. Estos efectos fuera de plano
son muy problematicos y causan dificultades para mantener un angulo de ba-
lanceo razonablemente estable o con una variacion suave. En el caso de un misil
canard las superficies de control delanteras tienen una capacidad de control muy
limitada en balanceo a traves de deflexiones diferenciales, debido al efecto opuesto
creado en la cola por la estela. Diversas soluciones se han ensayado en la practica
para el misil canard: rolerones como en el Sidewinder, como un mecanismo pa-
sivo que limita la velocidad de rotacion en balanceo; aletas fijas estabilizadoras
por delante del canard como en el Phyton-5; o desacoplar la cola dejandola que
gire libre, como en el cohete guiado MLRS, que permite a la seccion delantera
mantenerse estabilizada en balanceo, ya que el momento de reaccion creado en
la cola no se transmite al resto del fuselaje. El prototipo de misil Banderilla (ver
vuelo de municiones inteligentes y cohetes guiados.
2

1.1. MOTIVOS
Figura 1.1), incorporo de modo novedoso controles adicionales en la cola para
estabilizar el misil en balanceo, aunque estos servos adicionales no fueron usados
para el control en cabeceo o en guinada (Sanz-Aranguez and Simon, 2012).
Figura 1.1: INTA misil experimental Banderilla. Desarrollado en el Instituto como unproyecto de investigacion, era un misil con control delantero y controles adicionalesen la cola. Notese los flaps moviles en las superficies de cola, que se empleaban paramantener el balanceo estable durante el vuelo.
1.1.2. Caracterısticas de la respuesta dinamica del misil
El misil interceptor maniobra constantemente respondiendo a las sucesivas manio-
bras evasivas del blanco. Tıpicamente el motor de combustible solido no puede modifi-
car su ley de empuje una vez que comienza su mision. Aunque hay algunos misiles con
motores de empuje variable,la gran mayorıa de los misiles tacticos no lo tienen y son
capaces de maniobrar unicamente mediante la generacion de maniobra lateral, normal
a su eje de simetrıa. Al deflectar una de las superficies de control, se genera una fuerza
normal de pequena magnitud de modo casi instantaneo, que da lugar a un momento
aerodinamico alrededor del centro de gravedad del misil, que resulta en una rotacion
del mismo modificando su angulo de ataque. Es este angulo de ataque el responsable de
generar la aceleracion lateral del misil. Esta cadena de acontecimientos ocurre durante
cierto tiempo, y por lo tanto hay un retardo en la respuesta dinamica del misil desde
que se deflecta una superficie de control hasta que se alcanzan condiciones estacionarias
(trimado).
En condiciones estacionarias las superficies del canard generan una pequena fuerza
aerodinamica normal que estan, para un misil estaticamente estable, en la misma direc-
cion que la fuerza normal del misil. El misil canard en su respuesta dinamica tiende a
sobrepasar el nivel de aceleracion requerido por el sistema de guiado y el tiempo hasta
estabilizarse suele ser relativamente grande, siempre dependiendo de las condiciones de
vuelo. La respuesta en fase depende de la estabilidad del misil y de la influencia de
los efectos de estela en las superficies de control traseras. Por otro lado, para un misil
estaticamente estable con control en cola, la cola genera una fuerza normal inicial-
mente opuesta a la direccion principal de maniobra, creandose lo que se conoce como
3

1.1. MOTIVOS
respuesta inversa, que retrasa la respuesta total del misil. Debido a este efecto, la cola
se conoce como un control de fase no mınima, que se caracteriza por la presencia de un
cero a bajas frecuencias en la parte derecha del plano s si consideramos su funcion de
transferencia lineal. De modo opuesto, un misil con control delantero tiene un control
de fase mınimo.
Desde el punto de vista de control del misil, las caracterısticas de fase no mınima del
control en cola representan un reto muy significativo, ya que retarda la respuesta general
del misil. El autor en (Gutman, 2003) demostro la superioridad del misil canard sobre el
de control cola, siendo capaz de conseguir menores distancias de paso contra un blanco
maniobrero. Sin embargo Gutman considero un modelo simplificado, con un retardo
de primer orden del misil, en su demostracion. Como se ha discutido brevemente, la
aerodinamica del misil esta en realidad dominada por efectos altamente no lineales y
estos efectos no fueron considerados en el analisis citado.
1.1.3. Propuesta de doble mando aerodinamico
Ademas del efecto de fase considerado en la seccion anterior, hay otros elementos a
valorar en la arquitectura tradicional de misiles. Comparado con cola, el control canard
tiende a saturarse a angulos de ataque del misil mas bajos, ya que su incidencia local es
la suma del angulo de ataque del misil mas el angulo de deflexion del control delantero.
De este modo un control en cola suele ser preferido para realizar giros muy cerrados,
especialmente cuando la presion dinamica es baja. El control canard tambien requiere
mayores momentos de control en los servo mecanismos para mantener mayores pares
de charnela. A bajos angulos de ataque, y debido al efecto de estela en la cola, el
misil canard suele generar un mayor momento, ya que en este caso el brazo de palanca
correspondiente sera la distancia entre los centros de presiones del canard y de la cola.
A altos angulos de ataque, cuando la estela no afecta a la cola, el control trasero en cola
puede ofrecer un mayor brazo de palanca, una vez que el motor cohete se ha consumido
y por tanto el centro de gravedad esta en su posicion mas adelantada. En este ultimo
caso se requieren menores angulos de deflexion en el control de cola que en el caso
del canard para mantener mantener los mismos angulos de ataque del misil, con los
beneficios anadidos de una reduccion de la resistencia aerodinamica.
La tabla 1.1 resume las ventajas y desventajas relativas de cada tipo de control
aerodinamico para un mismo misil. La tabla sugiere que el control canard y cola son
complementarios y que la optima combinacion de un tipo y otro como funcion de las
condiciones de vuelo (angulo de ataque, aceleracion angulos del control, ley de guiado
etc.) podrıa resultar en mejores actuaciones del misil. Una combinacion de este tipo
deberıa incluir los efectos aerodinamicos de alto orden de ambos tipos de control, pero
podrıa resultar en un diseno mucho mas efectivo del misil sin modificar su estructura.
4
1.1. MOTIVOS
Ventajas Desventajas
Cola
· Bajo momento de charnela ybajo par de control debido a losangulos de incidencia reducidos.· Momento de balanceo inducidoreducido..· Para un misil estaticamente es-table, mayor efectividad del con-trol a altos angulos de ataque.· Baja resistencia aerodinamicainducida.· Control en balanceo sencillo me-diante de reflexiones diferenciales.
· Para un misil estaticamente es-table Menor maniobra en trima-do.· Efecto de fase no mınima, res-puesta inicial mas lenta.· El control se empaqueta alrede-dor del tubo de salida de gases delmotor.· Requiere un compromiso entreestabilidad y maniobrabilidad.
Canard
· Empaquetamiento efectivo delsistema de en control, guiado ybuscador en la ojiva del misil.· Fabricacion simplificada y faci-lidad para introducir cambios dediseno.· Alta maniobrabilidad a bajosangulos de ataque para un misilestable.· Mayor brazo de par de controlaerodinamico a bajos y modera-dos angulos de ataque.
· Altos angulos de incidencia en elcontrol, tendencia a saturarse.· Problemas con picos de manio-bra y tiempos de estabilizacion.· Alto balanceo inducido y perdi-da de control en cola debido a losvortices delanteros.· Control de balanceo complicado.· Momentos de flexion altos en laestructura.· Perdida de estabilidad altas ve-locidades.
Cuadro 1.1: Comparacion de control canard y cola
La idea para esta tesis surge entonces para investigar como integrar ambos tipos de
control en un misil aire-aire de control doble, donde tanto las superficies delanteras
como las superficies traseras sean moviles y que se actuen de modo simultaneo para
maniobra del misil en cabeceo y en guinada, y con la adecuada combinacion de estos
dos tipos de control dentro de un piloto automatico de tipo avanzado puede aumentar
significativamente las actuaciones de un misil ya existente.
Este control doble atmosferico (DAC) no debe confundirse con otros tipos de con-
trol avanzados ya existentes tipo hıbrido, en los que un misil con control en cola se
combina con control vectorial de empuje -Thrust Vector Control (TVC) - o empuje
lateral - Side Thrusters (ST)-, que puede generar momentos de control adicionales
independientemente de la presion dinamica exterior del misil:
La aplicacion de control hıbrido mas popular actualmente en servicio consiste en
control en cola combinado con control vectorial de empuje a traves de alabes de-
flectores (misiles IRIS y Sidewinder 9-X). Aqui el mismo actuador por se usa para
mover la cola y el alabe deflector dentro de la tobera, aumentando la velocidad
de respuesta del misil pero aumentando el efecto de fase no mınima. Como todos
5

1.1. MOTIVOS
los sistemas de tipo hıbrido una vez que la combustion del motor se termina, el
misil tiene unicamente control en cola disponible para interceptar al blanco.
El control por empuje lateral es un metodo en el cual una masa de flujo pulsado se
expulsa durante un corto periodo de tiempo en direccion normal a la superficie del
cuerpo del misil, por delante del centro de gravedad. Este flujo cruzado causa una
separacion local del flujo aerodinamico sobre la superficie del misil, que cambia la
distribucion de presion sobre la misma y como resultado modifica su trayectoria.
Este tipo de control ocurre en impulsos, con un modo de operacion conocido como
bang-bang. El control por empuje lateral tiene un ancho de banda elevado pero
es extremadamente complejo de modelizar en detalle y tiene limitaciones, tanto
en magnitud como en tiempo de operacion, esto ultimo limitado por la cantidad
de gas a presion que el misil puede llevar a bordo.
Estos dos tipos de control hıbrido tienen tres misiones caracterısticas:
1. En misiles exo-atmosfericos, en aplicaciones superficie aire, operando en las capas
altas de la atmosfera para interceptar misiles de tipo balıstico en las cercanıas
del apogeo.
2. En aplicaciones aire-aire de misiles endo-atmosfericos, para la defensa del avion
lanzador contra ataques desde su cola. Aquı el mando simple aerodinamico no es
suficiente para girar el misil 180 grados inmediatamente despues del lanzamiento
con la suficiente rapidez.
3. En aplicaciones dentro de la atmosfera tipo SAM superficie-aire para la defensa
de area, donde el control vectorial del empuje provee al misil de capacidad de
maniobra ya desde el lanzamiento, cuando la presion dinamica es baja y el control
aerodinamico todavıa no es eficiente.
En esta tesis se demostrara mediante simulaciones que el misil con control doble
aerodinamico sera capaz de ejecutar la mision de defensa contra ataques desde cola
unicamente con control aerodinamico y sin modificar el empuje del misil, como sera
revisado en la seccion 4.5.
A dıa de hoy solamente hay una aplicacion desclasificada del control doble aero-
dinamico, y solo esta en fase de desarrollo. Se trata del cohete guiado superficie-aire
Stunner, que formara parte del sistema de defensa aerea de Israel David’s Sling, (ver
Figura 1.2). Se espera que entre en servicio en 2017. Esta aplicacion se ha concebido
contra blancos no maniobrables, cohetes no guiados o derivados del Scud descendiendo
contra zonas urbanas. Por su configuracion estructural, pensamos que este cohete guia-
do no es capaz de soportar grandes esfuerzos estructurales y que por tanto el angulo
de ataque en vuelo estara limitado a pequenos valores. El control doble se emplea para
6
1.1. MOTIVOS
pequenas correcciones de trayectorias en los ultimos segundos antes de la intercepta-
cion, y con ambos controles delanteros y traseros actuando en la misma direccion, en
lo que se conoce como modo de desviacion 2 -(Fleeman, 2012) y Figura 1.8-, pero no
para generar una aceleracion de decenas de veces la aceleracion de la gravedad como
se esperarıa en una aplicacion aire-aire.
Figura 1.2: Cohete Guiado Superficie-Aire Stunner , con control doble aerodinamico.Este cohete guiado se utiliza para defensa de area y se espera que entre en servicio en2017. Se disena para interceptar cohetes no guiados en su fase de descenso a tierra.Notese las pequenas superficies fijas situadas justo enfrente de las aletas moviles decola, que se emplean para estabilizar la celula y reducir el balanceo inducido creadopor la superficies moviles delanteras.
La configuracion DAC tiene la ventaja frente a la hıbrida de un menor coste y
mayor simplicidad, y no estar restringido por el tiempo de combustion del motor cohete
o por la cantidad de reservas de gas presurizado a bordo para generar maniobras
adicionales. Comparado con un misil con control en cola, el control doble solo requiere
dos servomecanismos adicionales para actuar las superficies delanteras en picado y
guinada, para lograr un incremento sustancial en las actuaciones del misil como sera
demostrado.
Con las mejoras en la fiabilidad tamano peso y par de salida de los servomecanismos,
junto a su coste cada vez mas reducido, la complicacion adicional de la instalacion de
los servomecanismos adicionales que se requieren para el control doble se compensa
mas que sobradamente con la mejora que se obtiene en las actuaciones. Sin embargo
los grados de control adicionales requieren de un tratamiento matematico complejo que
contemple todas las implicaciones resultantes en la aerodinamica del misil ası como en
el lazo de guiado y control.
2ambos controles deflectados en la misma direccion generando un incremento en sustentacion yprovocando la traslacion del misil pero con una pequena, si no nula, rotacion del misil
7

1.2. EL BUCLE DE GUIADO Y CONTROL
1.2. El bucle de guiado y control
La trayectoria del misil interceptor se divide tıpicamente en tres segmentos: lanza-
miento, curso medio y fase terminal. Durante la fase terminal los algoritmos de guiado
y control son responsables de corregir los errores de apuntamiento residuales de las
fases previas y considerar las maniobras del blanco para conseguir la mınima distancia
de paso final. La figura 1.3 representa el bucle de guıado y control (G&C) para un misil
interceptor tipo avanzado. Este bucle se usara a lo largo de la tesis como una referencia
en la investigacion, en la que progresivamente se ira definiendo la estructura y cada
uno de los componentes para un misil de control doble. A continuacion se realiza una
breve descripcion de cada uno de los bloques:
El Buscador de a bordo se encarga de detectar las variables necesarias del
blanco durante el vuelo para alimentar a la ley de guiado del misil. El buscador
esta enganchado al blanco durante esta fase terminal, permitiendo el guiado del
misil durante todo el vuelo. Sin embargo a traves del buscador se introduce ruido
no deseado dentro del bucle de guiado y control. El buscador es un sistema
electromecanico con su propio bucle de realimentacion que ademas introduce
retardos de tiempo en el bucle de guiado y control del misil. La gran mayorıa de
los misiles aire-aire en servicio hoy emplean un buscador tipo radar (activo, pasivo
o semiactivo) o un buscador de infrarrojos IIR de tipo pasivo. Una ventaja de
que el buscador este a bordo del propio misil, activo o pasivo, es que la precision
de sus medidas aumenta en general a medida que la distancia relativa entre el
blanco y el misil se reduce, aunque algunos tipos de ruidos como el destello (glint)
aumentan.
El Filtro de Navegacion es el responsable de separar el ruido de la senal de
entrada y de proveer estimaciones de las variables del blanco entre los instantes de
toma de datos del buscador, ası como calcular y estimar otras variables del blanco
no directamente medidas pero que son requeridas por la ley de guiado del misil.
Como ejemplo de estas ultimas tıpicamente se necesita la aceleracion vectorial del
blanco o su derivada con el tiempo. El filtro de navegacion contiene un modelo
dinamico del encuentro aire-aire, ası como de los ruidos de medida esperados. El
retardo de tiempo introducido por el filtro de navegacion es despreciable ya que
se trata de un subsistema puramente electronico.
El bloque de Guiado contiene la ley de guiado, que calcula, basado en la ci-
nematica relativa y la aceleracion del blanco, el vector de aceleracion demandada
nLd al misil, necesario para conseguir un curso de colision hacia el blanco. Esta
demanda se calcula en tiempo real a bordo del misil. La mayorıa de los misiles
8
1.2. BUCLE G&C
DinamicaBlanco
Radar Ruidos radar y radomo
Sistemade
Navegacion
ModeloAceleracion
Blanco
Guiadoxg = f(xg,n
Ld )
time-to-goEstimador
Autopilotoxa = f(xa,xsd)
Servosxs = f(xs,xsd)
dinamica alto orden τu
StrapdownIMU
SensoresNoise
ActitudFiltro/
Estimador
DinamicaRotacion
Misil
DinamicaTraslacion
Misil
xT , xT+
rTM , Vc
t∗s,ω∗LOS
nLT
tgo
rTM , Vc
nLd+
nB
−
xsd
xs
nB
nB
xM , xM
−
xa
p, q, r
u, v, w
Figura 1.3: Diagrama de guıa de control para un misil aire aire moderno. Se represen-tan unicamente las principales variables. El time-to-go y el modelo de aceleracion delblanco solo se emplean en un misil con guiado optimo, que la practica no esta todavıaampliamente extendido. Notese que hay cuatro entradas exogenas, la maniobra delblanco xT , xT , el sistema de deteccion (buscador y radomo), la IMU con sus ruidosasociados y la dinamica de alto orden de los servos.
actualmente en servicio emplean una de las variantes de la conocida ley de na-
vegacion proporcional, que requiere que el misil tenga una ventaja de velocidad
9
1.2. BUCLE G&C
significativa sobre el blanco y que sea capaz de maniobrar al menos tres veces
mas que el blanco. La ley de navegacion proporcional demanda una aceleracion
al misil sin considerar su capacidad remanente de maniobra, los lımites de su
envuelta de vuelo o el tiempo de respuesta del piloto automatico. Por otro lado
la ley de guiado optimo incorpora la aceleracion actual del misil nB en su calculo
de nLd (consultese la seccion 3.1).
El Piloto automatico, control de vuelo o autopiloto y el sistema de con-
trol de actuadores (CAS) son los responsables de transformar la demanda de
aceleracion de la ley de guiado nLd en la respuesta adecuada de la celula del misil.
El piloto automatico es el mismo un bucle de control con realimentacion den-
tro del bucle general de guiado y control del misil. Constantemente monitoriza
la aceleracion obtenida nB y genera ordenes al CAS, codificadas generalmente
como angulos de posicion demandados para cada uno de los controles xsd , ver
Figura 1.3 .
Una unidad de medida inercial (IMU ) mide en tiempo real las aceleraciones y
velocidades angulares del misil, y un filtro digital estima a partir de estas medidas
el angulo de ataque α y de guinada β con la suficiente precision. Se hace notar que
los angulos aerodinamicos no pueden medirse directamente sin cometer errores
importantes (Stevens and Lewis, 2003).
Las senales de salida de la IMU se combinan con las ordenes de guiado en el
piloto automatico para calcular la demanda a cada uno de los actuadores de las
superficies de control. Estos son de tipo electromecanico o neumatico y fuerzan
el angulo de las aletas xs a seguir a la demanda xsd . La respuesta dinamica de
la celula a la senal del control depende de las condiciones de vuelo del misil en
ese instante (altitud, numero de Mach, angulo de ataque, etcetera). El objetivo
basico del sistema de control es conseguir que la dinamica resultante siga los
comandos de guiado de una forma efectiva.
El piloto automatico debe incluir un modelo dinamico de rotacion y tras-
lacion , que lleva aparejado tener programada una representacion completa ae-
rodinamica del misil con sus correspondientes limitaciones. El piloto automatico
completo representa el mayor retardo de tiempo dentro del bucle de G&C loop.
Todo este bucle se cierra cuando el buscador vuelve a detectar la posicion relativa entre
el blanco y el misil, generandose nuevas ordenes de guiado, que a su vez inician una
nueva respuesta del auto piloto y movimiento de las superficies de control del misil. El
objetivo ultimo del bucle de guiado y control es obtener la mınima distancia de paso
al blanco dentro de las limitaciones y capacidades del misil interceptor aereo.
10

1.3. OBJETIVOS DE LA TESIS
En la Figura 1.3 notese que los calculos del guiado y del auto piloto se realizan en
bloques separados y consecutivos. Esta aproximacion corresponde al tradicional meto-
do de dos lazos, que considera que hay una separacion espectral entre el guiado y el
auto piloto (Yanushevsky, 2008). Esto se debe a que tıpicamente el tiempo caracterısti-
co del encuentro aire-aire contra blancos poco maniobreros ha sido siempre mayor que
el tiempo caracterıstico de respuesta del auto piloto del misil. Dentro de esta aproxi-
macion, el auto piloto siempre se ha disenado como un regulador que trabaja con un
horizonte de tiempo infinito. En esta tesis se modificara el esquema clasico descrito en
la Figura 1.3 al combinar el control de vuelo y el guiado en un unico bucle.
1.3. Objetivos de la Tesis
El objetivo esta tesis es investigar las actuaciones del misil de control doble aero-
dinamico como una nueva alternativa al control convencional, canard o cola, e hıbrido,
para misiles aire-aire en aplicaciones contra blancos modernos no pilotados y para la
defensa en cola. Este misil sera empleado contra blancos altamente maniobreros. En
este escenario la hipotesis de separacion espectral entre el control de vuelo y el guiado
puede que no sea valida. Se plantea entonces una solucion integrada, optimizando el
auto piloto y el guiado en un unico bucle de control aprovechando su sinergias.
Este objetivo general se transforma en tres lıneas de investigacion y para cada una
de ellas se plantean cuestiones especıficas a resolver, ninguna de las cuales ha sido
resuelta a dıa de hoy en la literatura cientıfica. Estas son:
1. Modelo aerodinamico avanzado para misil con control doble.
1.1. Analizar y caracterizar los fenomenos aerodinamicos esperados, en particular
el acoplamiento cruzado entre los controles. La influencia de los controles
delantero sobre los traseros a distintos angulos de ataque del misil, necesita
ser caracterizada en detalle.
1.2. Desarrollar una nomenclatura especıfica, no existente a dıa de hoy, para
tratar el problema matematico de este tipo de misil.
1.3. Desarrollar un modelo teorico aerodinamico con la suficiente precision para
estudios de guiado y control avanzados. El nivel de detalle requerido no ha
sido encontrado en ninguna publicacion existente. Este modelo necesita ser
definido con la ayuda de coeficientes invariantes que podran ser ajustados a
un misil particular mediante metodos de identificacion de parametros.
1.4. Obtener datos fiables experimentales para validar el modelo teorico aero-
dinamico, bien de ensayos en tunel de viento o bien calculandolos a traves
de metodos CFD.
11

1.3. OBJETIVOS DE LA TESIS
1.5. Investigar la estabilidad el control en balanceo del misil con control doble
aerodinamico.
2. Desarrollo de un auto piloto para el misil con control doble y el estudio de su
conexion con una ley de guiado optimo para formar un sistema de dos lazos para
el misil DAC.
2.1. Definir las limitaciones especıficas y los indicadores de actuaciones para el
auto piloto de control doble.
2.2. Optimizar y resolver el auto piloto del misil, con entradas de control multi-
ples, aerodinamica no lineal e incluyendo el acoplamiento cruzado entre con-
troles. Establecer la estrategia para la distribucion del esfuerzo del control
entre los canales delanteros y traseros.
2.3. Comparar los resultados obtenidos con el metodo estandar en la industria
moderna de ajuste de ganancias.
2.4. Evaluar el doble bucle de G&C de la figura 1.3, aplicado a un misil DAC
atacando a un blanco que maniobra y compararlo con las actuaciones de
misiles convencionales.
3. Investigar el guiado auto piloto integrado (IGA) y compararlo con la aproxima-
cion de dos bucles. Puede potencialmente optimizar el esfuerzo de control durante
el vuelo al considerar los estados de guiado como parte del algoritmo de control
de vuelo.
3.1. Definir el modelo matematico adecuado para el problema integrado.
3.2. Manejar adecuadamente las variables de guiado y del auto piloto ya que
trabajan en diferentes ordenes de magnitud y podrıan saturar el control del
misil.
3.3. Definir los objetivos de actuaciones para el sistema integrado.
3.4. Resolver el nuevo problema matematico de optimizacion de una planta no
lineal en un tiempo finito.
3.5. Comparar las actuaciones del misil con control integrado frente al mismo
misil empleando un esquema en doble lazo.
3.6. Evaluar como el ruido, la frecuencia discreta de datos del blanco y los errores
de radomo afectan a las actuaciones del misil DAC.
3.7. Evaluar las capacidades del misil con doble mando aerodinamico y control
integrado en la defensa contra ataque por la cola, como un requisito para
misiles modernos y sin emplear deflexion de empuje. (vease Figura 1.4).
12

1.4. REVISION DE LA LITERATURA
1960’s 1970’s 1980’s 1990’s 2000’s+
MT = 1,2, M = 1,5, nT = 3, h = 12, 000m
Figura 1.4: Evolucion de los dominios de tiro del misil (Sanz-Aranguez, 2000). El ejem-plo muestra un misil lanzado a M = 1,5, atacando un caza pilotado volando a MT = 1,2con maniobra nT = 3 g. En la decada de los anos 60 y 70, las limitaciones en el bus-cador de infrarrojos y de la capacidad de maniobra del misil restringıan el dominio detiro a la parte trasera del blanco. En los 80 y 90 del avion lanzador se equipa con unradar y es capaz de lanzar el misil cerca del curso de colision, extendiendo el dominiode tiro a casi todos los sectores alrededor de un blanco poco maniobreros. Estas figurasse reproduciran en la tesis para la intercepcion de blancos altamente maniobrables, enla seccion 3.5.2. Los ultimos desarrollos en la maniobrabilidad de los misiles desde losanos 2000 han extendido el dominio de tiro aun mas, pero no son aun suficientes parala defensa contra un ataque por la cola solo empleando control aerodinamico. En estatesis se desarrollaran de modo analıtico y se demostraran de modo numerico, que ladefensa contra un ataque por la cola es posible realizarla de modo optimo con un misilcon control doble aerodinamico e integracion de su guiado y control.
Estas tres lıneas de investigacion y las cuestiones principales asociadas se repre-
sentan de modo grafico en la figura 1.5. El tema de la tesis implica una variedad
de disciplinas como la aerodinamica, el control, la optimizacion matematica pura o
la mecanica de vuelo. En efecto la investigacion enfocada en el area de misiles tiene
siempre un caracter multi-disciplinar ya que todos sus subsistemas estan fuertemente
interconectados.
Debido a que esto es una tesis doctoral en ingenierıa aeroespacial, es apropiado com-
plementar los resultados teoricos con simulaciones numericas, para evaluar los logros
obtenidos y ponderar su dificultad de implantacion practica. No se trata sin embar-
go, de realizar un diseno de ingenierıa de detalle sino de ilustra los conceptos y los
resultados de investigacion obtenidos.
1.4. Revision de la Literatura
1.4.1. Aerodinamica
La referencia(Beresh et al., 2009) describe experimentos llevados a cabo en un tunel
de viento subsonico con dos controles, con la intencion de investigar la interaccion en-
13

1.4. REVISION DE LA LITERATURA
ObjetivosInvestigacion
Tesis
GuiadoDoble-Bucle
AutopilotoNolineal
Lımites
RepartoControl
Optimizacion
G y CIntegrado
OptimizacionSaturacion
Ruidos
DefensaCola
DisenoMisil
AcoplamientoControles
ModeloAerod.
DatosAerod.
ControlBalanceo
Figura 1.5: Lıneas principales de investigacion
tre ellos sin la presencia de un fuselaje (ver 1.6). La conclusion del estudio es que los
vortices generados por el control delantero cambian el angulo de incidencia efectivo del
control trasero. Debido a que la estructura de torbellinos se mantiene en supersonico,
(Spahr and Dickey, 1953), es de esperar que esta conclusion se mantenga en este regi-
men, aunque los valores de sustentacion varıen al depender del Mach. La presencia del
fuselaje del misil creara interacciones mas complejas que habra que tener en cuenta.
La literatura cientıfica publicada ha sido examinada buscando estudios sobre aero-
dinamica de misiles con dos controles. La unica referencia valida encontrada ha sido
acerca de una serie de experimentos en tunel llevados a cabo en el centro Langley
Unitary Plan Wind por A.B. Blair en 1993, como parte del NASA Langley Research
Center. Sin embargo, los datos aun estan sujetos a US Export Control Regulations, y
la NASA no ha podido desclasificarlos para este estudio. El prototipo ensayado NASA
Tandem Control Missile (NTCM) es un misil tıpico de configuracion cruciforme y ojiva
14

1.4. REVISION DE LA LITERATURA
(a) Diseno del experimento (b) Fuerza normal en control trasero. α1 = 10,M∞ = 0,8
Figura 1.6: Interaccion entre control delantero y trasero, tomado de la referencia (Be-resh et al., 2009).
tangente (vease Figure C.1 en los Apendices), y se ensayo en supersonico a distintos
angulos de ataque entre 0 y 28 deg, y a distintas combinaciones de posiciones de los
control delantero y trasero, limitadas a 20 como maximo.
Sin embargo, un extracto limitado de los datos experimentales se ha publicado
en tres artıculos distintos (Lesieutre et al., 2002a,b) y (Cross et al., 2010). Los datos
muestran grandes variaciones de la aerodinamica con el angulo de ataque a distintas
posiciones de los controles, y pueden encontrarse en los apendices (ver Figure 1.7). Las
no-linealidades son especialmente acusadas en las cercanıas de α = 0, debido al efecto
de la estela.
Figura 1.7: Resultados experimentales para el misil NASA. Reproducidos aquı de lareferencia (Lesieutre et al., 2002a)
Otros autores han llevado a cabo estudios numericos con el misil NTCM (Blair,
1978; Khalid et al., 2005b,a; Al-Garni et al., 2008; Akgul et al., 2012) 3. Sin embar-
3El informe del NATO Research and Technology Organization (RTO) - (Khalid et al., 2005b) - fue
15

1.4. REVISION DE LA LITERATURA
go estos estudios no incorporan deflexiones simultaneas de los controles delanteros y
traseros, pero pueden servir como referencia para separar los efectos aerodinamicos
generales del misil de las acciones del control doble.
En resumen se han encontrado algunos artıculos cientıficos indicando el potencial
de este tipo de misil, sin embargo debido a la escasez de datos disponibles, se hace
necesario extenderlos mediante un estudio aerodinamico adecuado.
1.4.2. Autopiloto y Guiado con control doble
Se han encontrado solo seis artıculos en la literatura cientıfica sobre este tema, vease
la tabla 1.2. Se han disenado auto pilotos para misiles con control doble empleando el
metodo no lineal de State Dependent Riccati Equation en (Mracek, 2007) y Apendice
B.2, ası como con tecnicas de control lineal: LQT linear quadratic tracking en (Mracek
and Ridgely, 2006), regulador optimo proporcional-integral en (Ochi, 2003; Ochi and
Kanai, 1997; Ochi et al., 1994) y control clasico general en (Manabe, 2001).
Los trabajos en (Mracek, 2007; Mracek and Ridgely, 2006) consideraban solo co-
rrecciones por desviacion positiva, donde ambos controles se deflectan en la misma
direccion, generando un incremento de sustentacion inmediata y la traslacion del misil.
Con este metodo los misiles de control doble pueden tener dificultades en conseguir
angulos de ataque grandes y por tanto altos niveles de aceleracion lateral. Los metodos
lineales en (Ochi, 2003; Ochi and Kanai, 1997) se combinaron con un generador de
ordenes de angulo de ataque que puede conseguir que el misil opere de modo opuesto,
que gira el misil aumentando el angulo de ataque final. En contraste la referencia (Ochi
et al., 1994) solo consideraba el modo opuesto pero no el de desviacion.
Cuadro 1.2: Referencias JCR para autopilotos de doble control
Referencia Modelo aerodinamico Control
Mracek (2007) Ajuste polinomio SDREMracek and Ridgely (2006) Coeficientes constantes LQTOchi (2003) Coeficientes constantes LQTManabe (2001) Coeficientes constantes PIDOchi and Kanai (1997) Coeficientes constantes PIDOchi et al. (1994) Coeficientes constantes PID
Ninguno de estos artıculos incorpora el efecto de acoplamiento cruzado entre los
controles ( terminos δcqδtq y de orden superior) en el diseno del auto piloto. Aunque
el efecto neto en fuerza puede ser pequeno, se dan fluctuaciones importantes en el
momento de cabeceo debido al efecto de la estela sobre la cola.
proporcionado amablemente por la oficina espanola Spanish NATO RTO Office
16
1.4. REVISION DE LA LITERATURA
δcq
−δtqVM
q
α
(a) Opuesto
δcqδtq
VM
α
n
(b) Desviacion
Figura 1.8: Modos de operacion del misil con control doble.
En la aproximacion de dos lazos el auto piloto se coloca en un bucle interior y
se disena separadamente del lazo exterior de guiado, asumiendo que existe separacion
espectral entre el auto piloto y el guiado. Cuando se asume que la dinamica del misil
es de primer orden, que el blanco esta efectuando una maniobra constante, se deriva la
ley de guiado optimo, (Sanz-Aranguez, 2011; Zarchan, 2012). Distintos investigadores
en la literatura cientıfica han estudiado la ley de guiado optima para el misil de control
doble, vease la tabla 1.3.
Cuadro 1.3: Referencias JCR para el guiado de misil DAC.
Referencia Modelo aerodinamico G& C Control
Levy et al. (2015) Coeficientes constantes IGA LQRYan and Ji (2012) Coeficientes constantes IGA Small-gainM. Idan and Golan (2007) Coeficientes constantes IGA SMCShima and Golan (2007) Transferencia lineal Two-Loop LQDShima and Golan (2006) Transferencia lineal Two-Loop LQDShima and Golan (2005) Transferencia lineal Two-Loop LQD
Estos autores del Israel Institute of Technology han conseguido soluciones al pro-
blema de la interceptacion final, lınearizada alrededor del curso de colision, empleando
un regulador lineal cuadratico diferencial LQG con y sin limitaciones en los angulos de
control del misil. El bloque de guiado imparte los comandos directamente a los canales
de control delantero y trasero, cada uno de los cuales se representan por funciones de
transferencia lineales, asumiendo que los angulos de actitud del misil son pequenos, la
velocidad es constante y no existe acoplamiento entre las acciones del canard y de la
cola. Con estas hipotesis, los autores sugieren que debe darse preponderancia al control
canard, ya que incrementando el esfuerzo de control en la cola tiene un efecto negativo
al aumentar el efecto de fase no mınima. Estos resultados son consistentes con el es-
tudio anteriormente citado de Gutman, acerca de la superioridad del misil con control
canard bajo hipotesis similares.
17

1.4. REVISION DE LA LITERATURA
1.4.3. Integracion del Autopiloto y Guiado
La integracion de guiado y del auto piloto es una de las areas de investigacion mas
activas a dıa de hoy en el area de misiles. En esta aproximacion de guiado y auto piloto
integrados (IGA), las instrucciones de control se generan directamente a los servos,
calculadas a partir de los estados de guiado y control de vuelo de modo conjunto,
sin un lazo separado de auto pilotado. En artıculos cientıficos sobre el esquema IGA
para misil con control doble aerodinamico, ver tabla 1.3 se han empleado control con
resbalamiento M. Idan and Golan (2007), el teorema de pequenas ganancias Yan and
Ji (2012) y reguladores lineales cuadraticos Levy et al. (2015). Todos estos autores
consideraron un misil de dinamica lineal operando en modo de desviacion. Levy Levy
et al. (2015) recientemente ha concluido que, asumiendo dinamica linearizada de la
trayectoria del misil en torno al curso de colision, la aproximacion integrada y la de
dos lazos dan resultados equivalentes, sin ninguna ventaja para la solucion integrada.
Como se ha visto, al resolver el problema integrado es tıpico recurrir a linealizar el
problema alrededor del curso de colision (Levy et al., 2013; Park et al., 2011; Zhurbal
and Idan, 2011a) o plantearlo en ejes cuerpo (Balakrishnan et al., 2013; Dancer et al.,
2008; Xin et al., 2006; Menon and Ohlmeyer, 2001). Esto se hace porque, debido a
que la aproximacion integrada combina los estados de guiado y del misil, que tienen
diferentes escalas, con cualquiera de estas dos aproximaciones mencionadas reduce la
magnitud de los estados de guiado al omitir la distancia entre el misil y el blanco a
lo largo de la lınea de mira, o a lo largo del eje de simetrıa del misil respectivamente.
El control proporcional tiende a compensar por errores en proporcion a su magnitud.
Si los errores de guiado dominan sobre los estados del misil, los comandos de control
resultar en una aceleracion del misil muy alta y causan la saturacion de los controles,
con la perdida de control del misil. Este es un factor que se eliminara en la tesis.
Como alternativa a las distancias al blanco, es conveniente hacer notar que otros
autores que han integrado guiado y auto piloto-aunque no para misil con control doble-
han empleado la velocidad angular de la lınea de mira (Vaddi et al., 2009; Menon et al.,
2002b), los errores de apuntamiento a un punto previsto de impacto (Harl et al., 2010)
o el angulo entre la lınea de mira y la velocidad del misil (Yamasaki et al., 2012), ya que
las escalas de cualquiera de estas magnitudes es comparable a la escala de los estados
del misil. Las estrategias de guiado que resultan en estos escenarios son similares a
seguir una ley de navegacion proporcional en los dos primeros y una ley de persecucion
pura en el ultimo. Sin embargo es bien conocido que una ley de navegacion proporcional
o una ley de desviacion pura resultan en demandas de aceleracion al misil superiores
que las que se obtienen con una ley de guiado optimo (Zarchan, 2012).
En esta tesis ademas se empleara el desarrollo matematico en ejes inerciales, ya que
la formulacion en ejes cuerpo tiene varios inconvenientes: la eliminacion de la distancia
18
1.5. ESQUEMA DE LA TESIS
a lo largo del eje de simetrıa puede resultar en que el misil se deslice alrededor del blanco
sin conseguir el impacto (Balakrishnan et al., 2013) y es muy sensible a la seleccion de
los factores de ponderacion (Xin et al., 2006), ası como un comportamiento oscilatorio
del misil debido al bajo amortiguamiento de la celula en cabeceo.
1.5. Esquema de la Tesis
Las conclusiones sobre la efectividad del concepto de misil DAC frente a arquitec-
turas mas tradicionales en servicio actualmente solo puede establecerse una vez que
todos los aspectos relevantes del problema se han investigado. El cuerpo de la tesis
refleja los principales resultados obtenidos, mientras que resultados secundarios se han
trasladado a los apendices para facilitar la exposicion. La estructura de capıtulos es
como sigue:
Capıtulo 2, se centra en el estudio del aerodinamica del misil con control doble
y en el desarrollo de un modelo aerodinamico analıtico completo. Se presentan
los diagramas de maniobra para este tipo de control.
Capıtulo 3, esta dedicado al guiado y control empleando una aproximacion
clasica en doble bucle, donde el auto piloto y el guiado son independientes. El
auto piloto aquı se ha desarrollado de modo que tenga en consideracion las ca-
racterısticas no lineales del control doble, y se desarrolla una solucion completa
tridimensional desarrollando la teorıa matematica del control optimo. En com-
binacion con la ley de guiado optimo, el esquema de doble bucle se compara fa-
vorablemente con las actuaciones de misiles con control clasico en cola o canard,
obteniendose menores distancias de paso y requiriendose menos maniobra en el
misil. Se obtienen los dominios de tiro desde distintas posiciones de lanzamiento.
Capıtulo 4 esta dedicado al desarrollo y a la solucion de la logica integrada IGA
para el misil de doble mando aerodinamico DAC. Este es el principal capıtulo de
la tesis e incorpora resultados obtenidos en los capıtulos anteriores. Para resol-
ver el problema matematico que resulta, se ha desarrollado dentro de la teorıa
de control optimo, una nueva solucion empleando la ecuacion de Lyapunov. Se
evalua los resultados de este tipo de control frente a la aproximacion desacopla-
da del capıtulo anterior, con resultados muy positivos, superiores para el control
integrado. Se incorporan ademas en este capıtulo efectos reales como ruidos en
el radar, efectos de radomo y el efecto de considerar datos del radar en forma
digital. Finalmente se demuestra que este misil IGA-DAC puede, realizar man-
teniendo siempre el control aerodinamico, una defensa contra un blanco que le
ataque por la cola.
19

1.5. ESQUEMA DE LA TESIS
Capıtulo 5, contiene las conclusiones de la Tesis, implicaciones para el diseno
del misil y las recomendaciones para futuros trabajo.
Apendice A trata el calculo diferencial de matrices y su relacion con el producto
de Kronecker.
Apendice B contiene los resultados principales de la teorıa de control optimo
que son necesarios para el desarrollo.
Apendice C contiene la geometrıa y los parametros de mision del misil base
NASA que se emplea para ilustrar los resultados teoricos de la tesis.
Apendice D Contiene los datos aerodinamicos en bruto para el misil de control
doble, obtenidos a traves de experimentos en tunel de viento de la literatura ası
como resultados numericos obtenidos con metodos de aerodinamica computacio-
nal (CFD) y metodos semi-experimentales (software US Air Foce DATCOM).
Appendix E contiene los coeficientes aerodinamicos para el misil base.
Appendix F ecuaciones cinematicas y dinamicas del movimiento del misil.
Appendix G ecuaciones analıticas obtenidas para cada componente de las ma-
trices en el espacio de los estados obtenidas en los capıtulos 3 y 4.
Appendix H aquı se describe el modelo de ruido para un radar aire-aire activo
ası como la dinamica del servomecanismo de la cabeza buscadora.
Se incluye una seccion con la Bibliografıa al final.
20

Capıtulo 2
Aerodinamica del Misil con Doble
Control y su Maniobrabilidad
Este capıtulo propone un modelo aerodinamico para estudiar los efectos no lineales
asociados con altos angulos de ataque y acoplamiento entre controles que se dan en
nuestro misil. La seccion 2.1 define la geometrıa y las caracterısticas operativas del
misil, introduce la nomenclatura especıfica para el control doble y estudia los fenome-
nos aerodinamicos que tienen que ser incluidos en el modelo analıtico con la ayuda de
la teorıa de cuerpos esbeltos. La seccion 2.2 desarrollar y presentar el modelo aero-
dinamico analıtico para todos los coeficientes CN , Cm, CA, Cl, CS and Cn. Los datos
aerodinamicos procedentes de experimentos en tunel y calculos numericos del aero-
dinamica se han empleado para validar el modelo. En la seccion 2.3 se describe la
respuesta en lazo abierto, sin control -para el misil de doble mando aerodinamico y el
diagrama de maniobra. Finalmente la seccion 2.4 contiene las conclusiones para este
capıtulo. Los resultados aquı obtenidos seran empleados en los estudios de guiado y
control del capıtulo siguiente.
2.1. Configuracion y fenomenos aerodinamicos
Se describe a continuacion la configuracion del misil seleccionada en este trabajo:
El misil de control doble aerodinamico es un misil de corto a medio alcance en
misiones aire-aire, con un motor cohete de propulsante solido, equipado con un
radar activo 1
Radomo de tipo ojiva tangente para reducir la resistencia aerodinamica (ver figura
1Los requisitos de informacion impuestos por la ley de guiado incluyen distancias y velocidadesrelativas al blanco, ası como una estimacion de la maniobra del blanco, que solo pueden ser obtenidosa traves de un radar. Un buscador de infrarrojos solo mide directamente la velocidad angular de lalınea de mira y ademas instala un irdome semiesferico con una alta resistencia aerodinamica.
21
2.1. CONFIGURACION Y FENOMENOS AERODINAMICOS
2.1), seguido por un cuerpo cilındrico de alta relacion de aspecto y dos sets de
aletas cruciformes colocados en la seccion delantera (canard) y trasera (cola).
Todas las aletas son de pequena envergadura y bajo alargamiento, con una rela-
cion entre la semienvergadura y el radio del misil proxima a, o menor que uno.
Esto ultimo se debe a los requisitos mas restrictivos que se imponen en los misi-
les modernos con respecto al tamano de las aletas para el transporte en el avion
lanzador.
Toda la aleta de control se mueve alrededor de un eje de charnela perpendicular
al cuerpo del misil.
Se asume que todas las aletas tienen la misma forma en planta.
Finalmente se asume que el misil es un cuerpo rıgido con tetra-simetrıa, tanto en
geometrıa como propiedades masicas.
Con respecto a la operacion del misil:
Se considera solo la fase de vuelo supersonico, de acuerdo con la mision de ataque
terminal aire-aire definida en el apendice C.2, o con la mision de defensa contra
ataque en cola definida en 4.5.
El misil emplea control cartesiano (skid-to-turn) y estara estabilizado en balanceo
en cruz +. Esta configuracion es inestable en balanceo, y por tanto requiere que el
auto piloto compense por cualquier perturbacion en balanceo para mantener esta
orientacion. Aunque la configuracion en ”x”puede resultar en una mayor capaci-
dad de maniobra, se selecciona la configuracion en cruz ya que reduce el numero
de torbellinos que se desprenden de las aletas delanteras y que interaccionan con
las superficies en cola, lo que se traduce en una mayor controlabiliad del misil
DAC.
El control en balanceo se consigue mediante deflexiones diferenciales de los con-
troles en la cola. En este misil solo seis servomecanismos son necesarios, ya que la
superficies 1c y 3c, ası como las 2c y 4c, estan ligadas mecanicamente (ver figura
2.1). Cada una de las aletas de cola 1t, 2t, 3t, 4t, esta accionada por su propio
servomecanismo.
2.1.1. Definiciones
Los ejes cuerpo (B) MXBY BZB (ver figura 2.1) estan centrados en el centro de
gravedad del misil, y alineados con las superficies de control y los ejes principales de
inercia del misil. El eje MXB apunta hacia la ojiva del misil, el eje MY B hacia la
22

2.1. CONFIGURACION Y FENOMENOS AERODINAMICOS
Figura 2.1: Ejes y definiciones
derecha visto desde atras y el eje MZB havia las aletas inferiores. El plano MXBY B
es el plano de guinada y el plano MXBZB es el plano de cabeceo.
La velocidad del misil con respecto a una referencia inercial LXLY LZL, expresada
en ejes cuerpo es:
V BM =
[u v w
]T(2.1)
y su velocidad angular:
ωBM =[p q r
]T(2.2)
Las velocidades angulares del misil en ejes cuerpo, cabeceo q, balanceo p y guinada
r, siguen la regla de la mano derecha, ver Figura 2.1. Los ejes viento se definen de
modo que OXW esta alineado con la velocidad del misil:
VWM =
[VM 0 0
]T(2.3)
con VM =√u2 + v2 + w2 .
Los angulos de ataque y de guinada se definen como:
α = t−1(wu
)(2.4)
23

2.1. CONFIGURACION Y FENOMENOS AERODINAMICOS
β = s−1
(v
VM
)(2.5)
El angulo de guinada es positivo cuando la velocidad aerodinamica esta en el lado
derecho del plano de simetrıa. Notese que con esta definicion de guinada no se mantiene
la simetrıa de los angulos de incidencia con respecto a los dos planos de control del
misil, pero se acepta ya que se restringe el analisis a valores moderados de β.
El angulo de ataque total y el angulo de balanceo aerodinamico se definen como:
αT = c−1
(u
VM
)= c−1 (cαcβ) (2.6)
φa = t−1( vw
)= t−1
(tβ
sα
)(2.7)
donde los coeficientes aerodinamicos son funciones periodicas de φa.
Con respecto al criterio de signos para los angulos del control, mirando desde la
trasera del misil, un angulo positivo para las superficies verticales mueve el borde de
ataque a la derecha, y para las superficies horizontales mueve el borde de ataque hacia
arriba. Notese que para aeronaves se suele adoptar un criterio distinto (Klein and
Morelli, 2010). Un balanceo positivo es en el sentido de las agujas del reloj visto desde
la trasera del misil.
Debido a que en misiles el centro de gravedad se desplaza con la combustion del
motor, se definen los coeficientes de momento aerodinamico alrededor de un punto fijo,
conocido como centro de referencia de momentos, o moment reference center (mrc): L
M
N
= q∞Srefd
Cl
Cm
Cn
(2.8)
Las fuerzas y momentos aerodinamicos en el centro de gravedad del misil se calculan
a traves de: FA
FS
FN
= q∞Sref
CA
CS
CN
(2.9)
Lcm
Mcm
Ncm
= q∞Srefd
Cl
Cm + s(t) · CNCn − s(t) · CS
(2.10)
con:
s(t) = dcm(t)− dmrc (2.11)
donde d es una distancia adimensional medida en calibres d. Notese que en la ecuacion
24

2.1. CONFIGURACION Y FENOMENOS AERODINAMICOS
2.10 cuando s(t) 6= 0 existe acoplamiento entre las fuerzas y momentos aerodinamicos..
Cuadro 2.1: Variables de movimiento
Ejes Cuerpo Balanceo XB Cabeceo Y B Guinada ZB
Velocidad angular p q rVelocidad u v wFuerzas aerodinamicas FA FS FNMomentos aerodinamicos Lcm Mcm Ncm
Momentos de Inercia IBx IBy IBzDeflexiones del Control δp δq δrAngulos de Euler φ θ ψEmpuje del Misil T
Se verifica que
β > 0⇒ FS > 0 (2.12a)
α > 0⇒ FN > 0 (2.12b)
angulo de control en cabeceo:
δcq =1
2(δ1c + δ3c) (2.13)
δtq =1
2(δ1t + δ3t) (2.14)
δcq > 0⇒ (FN > 0,M > 0) (2.15a)
δtq > 0⇒ (FN > 0,M < 0) (2.15b)
angulo de control en guinada:
δcr =1
2(δ2c + δ4c) (2.16)
δtr =1
2(δ2t + δ4t) (2.17)
δcr > 0⇒ (FS < 0, N > 0) (2.18a)
δtr > 0⇒ (FS < 0, N < 0) (2.18b)
25

2.1. ACOPLAMIENTO AERODINAMICO CANARD-COLA
angulo de control en balanceo:
δp =1
4(δ3t + δ4t − δ1t − δ2t) (2.19)
δp > 0⇒ L > 0 (2.20)
δ1c
δ2c
δ3c
δ4c
δ1t
δ2t
δ3t
δ4t
=
1 0 0 0 0
0 1 0 0 0
1 0 0 0 0
0 1 0 0 0
0 0 −1 1 0
0 0 −1 0 1
0 0 1 1 0
0 0 1 0 1
·
δcq
δcr
δp
δtq
δtr
(2.21)
2.1.2. Acoplamiento Aerodinamico Canard-Cola
La fuerza normal de la configuracion completa se define como:
CN = CNB + CNBc + CNcB + CNBt + CNtB
+ CNβ + CNβ + ∆CNt−vc + ∆CNt−vB + ∆CNc−vB(2.22)
La complejidad adicional en nuestro misil viene dada por la interferencia que resulta
cuando los vortices desprendidos por el canard cambian las caracterısticas de control
de la cola. Este efecto en la ecuacion 2.22 esta incluido en el termino ∆CNt−vc .
Las investigaciones de los autores (Spahr and Dickey, 1953; Wood et al., 2003) des-
criben las caracterısticas esperadas en la estela del canard. Para el misil con control
doble con angulo nulo de balanceo y sin guinada, las superficies delanteras superior
e inferior no producen ningun torbellino porque no tienen angulo de incidencia con
respecto al flujo incidente. Las superficies delanteras horizontales desprenden un tor-
bellino al aumentar el angulo de incidencia. Experimentos numericos llevados a cabo
en esta tesis, demuestran que para las aletas de pequeno alargamiento, este torbellino
esta completamente desarrollado antes de llegar a la cola (ver figura 2.2).
Esta situacion se puede aproximar por un modelo teorico representado en la figura
2.3.
Con la aplicacion de la teorıa de torbellinos bidimensional y la teorıa de cuerpos
esbeltos (Rogers, 1954; Pitts et al., 1957), se obtiene que:
26

2.1. ACOPLAMIENTO AERODINAMICO CANARD-COLA
Figura 2.2: Contornos de presion total. Para el misil a 2,5 Mach y angulos de ataquede α = 5 deg (superior) y α = 30 deg (inferior). El canard del misil esta deflectadoδqc = 20 grados.
Γc =2VMc
cNSrefπbe
(2.23)
Se ha definido:
cN = cNi (i) · i
=n∑k=0
c2k+1i2k+1
(2.24)
como la sustentacion del control aislado, que es una funcion de su incidencia local i.
27

2.1. ACOPLAMIENTO AERODINAMICO CANARD-COLA
δcq
Zb
Xb
be2
d
VM
hφ=0Trayect
oriaVortic
e
α
δtq
δtr
Yb
Zb
−ΓcΓc
fc
Figura 2.3: Modelo de interferencia entre controles
La pendiente de esta curva es cNi(i) =∑n
k=0 c2k+1i2k.
0 2 4 6 8 10 12 14 16 18 20 22 240
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
2,2
2,4
Angulo de incidencia, i, deg
c N
Ajuste polinomico, ec.( 2.24)Missile Datcom
Figura 2.4: Sustentacion del control aislado, 2.5 Mach. Calculado con el programaMissile DATCOM de la US Air Force (Auman et al., 2011).
Definiendo el centro de vorticidad como (Moore, 2000) fc:
fc =d
2+π
4
be2
(2.25)
La perdida de sustentacion en la cola puede expresarse como:
∆Nt−vc = q∞Sref∆CNt−vc (2.26)
28
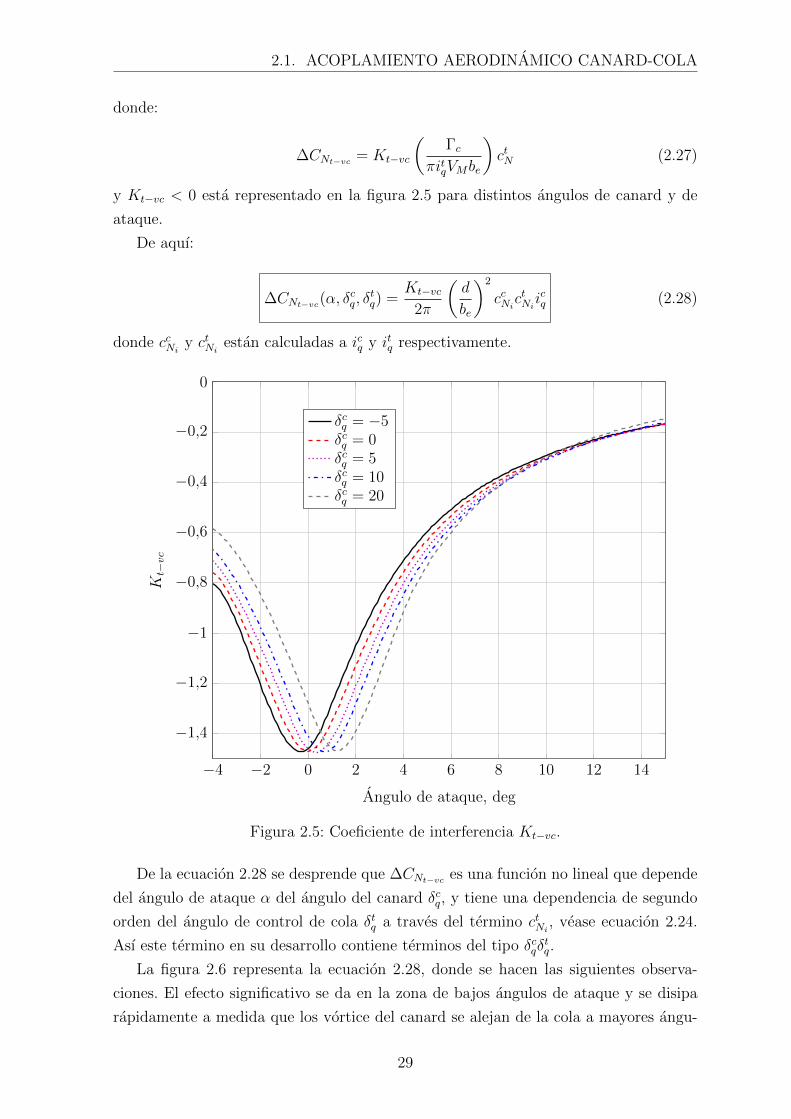
2.1. ACOPLAMIENTO AERODINAMICO CANARD-COLA
donde:
∆CNt−vc = Kt−vc
(Γc
πitqVMbe
)ctN (2.27)
y Kt−vc < 0 esta representado en la figura 2.5 para distintos angulos de canard y de
ataque.
De aquı:
∆CNt−vc(α, δcq, δ
tq) =
Kt−vc
2π
(d
be
)2
ccNictNiicq (2.28)
donde ccNi y ctNi estan calculadas a icq y itq respectivamente.
−4 −2 0 2 4 6 8 10 12 14
−1,4
−1,2
−1
−0,8
−0,6
−0,4
−0,2
0
Angulo de ataque, deg
Kt−vc
δcq = −5δcq = 0δcq = 5δcq = 10δcq = 20
Figura 2.5: Coeficiente de interferencia Kt−vc.
De la ecuacion 2.28 se desprende que ∆CNt−vc es una funcion no lineal que depende
del angulo de ataque α del angulo del canard δcq, y tiene una dependencia de segundo
orden del angulo de control de cola δtq a traves del termino ctNi , vease ecuacion 2.24.
Ası este termino en su desarrollo contiene terminos del tipo δcqδtq.
La figura 2.6 representa la ecuacion 2.28, donde se hacen las siguientes observa-
ciones. El efecto significativo se da en la zona de bajos angulos de ataque y se disipa
rapidamente a medida que los vortice del canard se alejan de la cola a mayores angu-
29

2.1. ACOPLAMIENTO AERODINAMICO CANARD-COLA
los de ataque. El efecto del angulo de control en la cola es de importancia secundaria
comparado con el angulo de control del canard y el angulo de ataque, aunque aumenta
con el primero.
De aquı se obtiene que:
∆CtNt−vc(α, 0, δ
tq) =
Ktt−vc
2π
(d
be
)2
cNi (KcBα) ctNiKcBα (2.29)
∆CcNt−vc(α, δ
cq, 0) =
Kt−vc
2π
(d
be
)2
ccNicNi (KtBα) icq (2.30)
2.1.3. Incidencia de los Controles y Saturacion Supersonica
Puede definirse un angulo de estela medio en la seccion de cola como:
εq(α, δcq) =
∂εq∂α· α +
∂εq∂δcq· δcq (2.31)
siendo
∂εq∂α
=∆CNt−vc(α, 0, 0)
α · cNi (KcBα)(2.32)
∂εq∂δcq
=∆CNt−vc(0, δ
cq, 0)
δcqcNi(kcBδcq
) (2.33)
Los angulos de incidencia se definen como:
icq = KcB · α + kcB · δcq (2.34)
itq = KcB · α ·(
1 +∂εq∂α
)+ ktB ·
(δtq +
∂εq∂δcq· δcq)
+ δp (2.35)
icr = KcB · β − kcB · δcr (2.36)
itr = KcB · β ·(
1 +∂εr∂β
)− ktB ·
(δtr +
∂εr∂δcr· δcr)− δp (2.37)
donde de la simetrıa del misil se desprende que:
∂εr∂β
=∂εq∂α
(2.38)
∂εr∂δcr
=∂εq∂δcq
(2.39)
30

2.1. ACOPLAMIENTO AERODINAMICO CANARD-COLA
−4 −2 0 2 4 6 8 10 12 14−0,6
−0,55
−0,5
−0,45
−0,4
−0,35
−0,3
−0,25
−0,2
−0,15
−0,1
−5 · 10−2
0
5 · 10−2
0,1
Angulo de ataque, deg
∆CNt−vc
δtq = −10o
δtq = 0o
δtq = 10oδcq = 20
δcq = 10
δcq = 0∆CNt−vc
Figura 2.6: Perdida de fuerza normal en la cola debido a la interferencia aerodinamicaentre canard y cola.El efecto es mas significativo a bajos angulos de ataque cuando losvortices impactan directamente en la cola.
31

2.2. MODELO AERODINAMICO
Como consecuencia, la incidencia en cada uno de los ocho controles del misil sera
distinta. La saturacion supersonica ocurre cuando el coeficiente de fuerza normal del
control cN no sigue aumentando con incrementos en el angulo de incidencia local. El
dominio controlable para nuestro misil se define como el conjunto de angulos de inci-
dencia 2.34, 2.35, 2.36 y 2.37, que estan por debajo del angulo de saturacion supersonica
iss. El valor de iss se obtiene de una funcion experimental del tipo:
cNss = f (AR,M∞) (2.40)
cNss = cNi (iss) · iss (2.41)
1,6 1,8 2 2,2 2,4 2,6 2,8 32,3
2,35
2,4
2,45
2,5
2,55
2,6
2,65
2,7
M∞
c Nss
AR = 2,0AR = 1,8AR = 1,6AR = 1,4AR = 1,2
Figura 2.7: Saturacion supersonica
Cuando el control se satura
∂Cm∂δ
= 0 parai > iss
2.2. Modelo Aerodinamico
Para un cierto numero de Mach M∞ se ha desarrollado un modelo matematico
original para la aerodinamica de un misil generico de control doble, incorporando este
modelo el efecto visto de acoplamiento cruzado entre controles. Este modelo se define
32

2.2. MODELO AERODINAMICO
en terminos de coeficientes invariantes que pueden ser ajustados mediante metodos de
identificacion de parametros.
2.2.1. Fuerza Normal
Static Control Fixed Terms
CN = CNαα + CNα|α|α|α|+ CNα3α3 + CNβ2α
β2α
Canard Control Effects
+(CNδcq + CNαδcqα + CNβ2δcq
β2)δcq
Tail Control Effects
+(CN
δtq+ CN
αδtqα + CN
β2δtqβ2)δtq
Dual Control Interference Effects
+(CN
δcqδtq
+ CNαδcqδ
tqα)δcqδ
tq
Dynamic Terms
+(CNqq + CNαα)d
2VM
(2.42)
El coeficiente de fuerza normal se presenta en la ecuacion 2.42 y contiene terminos
estaticos y dinamicos. Los terminos estaticos se deben al angulo de ataque, angulo
de guinada, deflexiones de los controles y acoplamiento cruzado entre los mismos.La
respuesta del misil DAC al angulo de ataque cuando no hay control se aproxima por
un modelo de orden tres, CNαα + CNα|α|α|α| + CNα3α3. El efecto de β por el termino
CNβ2αβ2α.
La respuesta en los controles individuales, canard o cola, es lineal mas un termino
que considera la variacion de la efectividad del control con el angulo de ataque. La
efectividad del control en cola o canard es distinta con el angulo de ataque.
33

2.2. MODELO AERODINAMICO
−5 0 5 10 15 20 25 30−3
−2
−1
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
Angle of attack, deg
CN
Aero Model (all lines)
EXP δcq = 10 δtq = 10
EXP δcq = 0 δtq = 0
CFD δcq = 10 δtq = −10
EXP δcq = 20 δtq = −20
CFD δcq = −10 δtq = −10
Figura 2.8: Coeficiente de fuerza normal, dos controles. EXP indica datos experimen-tales de tunel de viento, CFD datos calculados numericamente, mientra que las lıneascontınuas representan el modelo aerodinamico analıtico.
34

2.2. MODELO AERODINAMICO
2.2.2. Fuerza en Guinada
Sin control
CS = CSββ + CSβ|β|β|β|+ CSβ3β3 + CSα2β
α2β
Control Canard
+(CSδcr + CSβδcrβ + CSα2δcr
α2)δcr
Control Cola
+(CS
δtr+ CS
βδtrβ + CS
α2δtrα2)δtr
Control Doble
+(CS
δcrδtr
+ CSβδcrδ
trβ)δcrδ
tr
Amortiguamiento
+(CSrr + CSβ β)d
2VM
(2.43)
2.2.3. Momento de Cabeceo
Sin Control
Cm = Cmαα + Cmα|α|α|α|+ Cmα3α3 + Cmβ2α
β2α
Control Canard
+(Cmδcq(α) + Cmβ2δcq
β2)δcq
Control Cola
+(Cmδtq(α) + Cm
β2δtqβ2)δtq
Control Doble
+(Cm
δcqδtq
+ Cmαδcqδ
tqα)δcqδ
tq
Amortiguamiento
+(Cmqq + Cmαα)d
2VM
(2.44)
Donde las efectividades de los controles vienen definidas por:
35
2.2. MODELO AERODINAMICO
Cmδcq(α) =
n1∑k=1
Ckmαδcq
e−
α−αkδcq
∆αkδcq
2
α ≥ 0
n1∑k=1
2Ckmαδcq
e−
α−αkδcq
∆αkδcq
2
− Ckmαδcq
e−
|α|−αkδcq∆αk
δcq
2
α < 0
(2.45)
Cmδtq(α) =
C0mαδtq
+n2∑k=1
Ckmαδtq
(α)k α ≥ 0
2C0mαδtq
−n2∑k=1
Ckmαδtq
(|α|)k α < 0(2.46)
2.2.4. Momento de Guinada
Sin control
Cn = Cnββ + Cnβ|β|β|β|+ Cnβ3β3 + Cnα2β
α2β
Control Canard
+(Cnδcr(β) + Cnα2δcr
α2)δcr
Control Cola
+(Cnδtr(β) + Cn
α2δtrα2)δtr
Control Doble
+(Cn
δcrδtr
+ Cnβδcrδ
trβ)δcrδ
tr
Amortiguamiento
+(Cnrr + Cnβ β)d
2VM
(2.47)
Cnδcr(β) =
n1∑k=1
2Cknβδcr
e−(β−βk
δcr∆βk
δcr
)2
− Cknβδcr
e−
β−βkδcr
∆αkδcq
2
β ≥ 0
n1∑k=1
Cknβδcr
e−(|β|−βk
δcr∆βk
δcr
)2
β < 0
(2.48)
Cnδtr(β) =
2C0
nβδtr
−n2∑k=1
Cknβδtr
(β)k β ≥ 0
C0nβδtr
+n2∑k=1
Cknβδtr
(|β|)k β < 0(2.49)
36
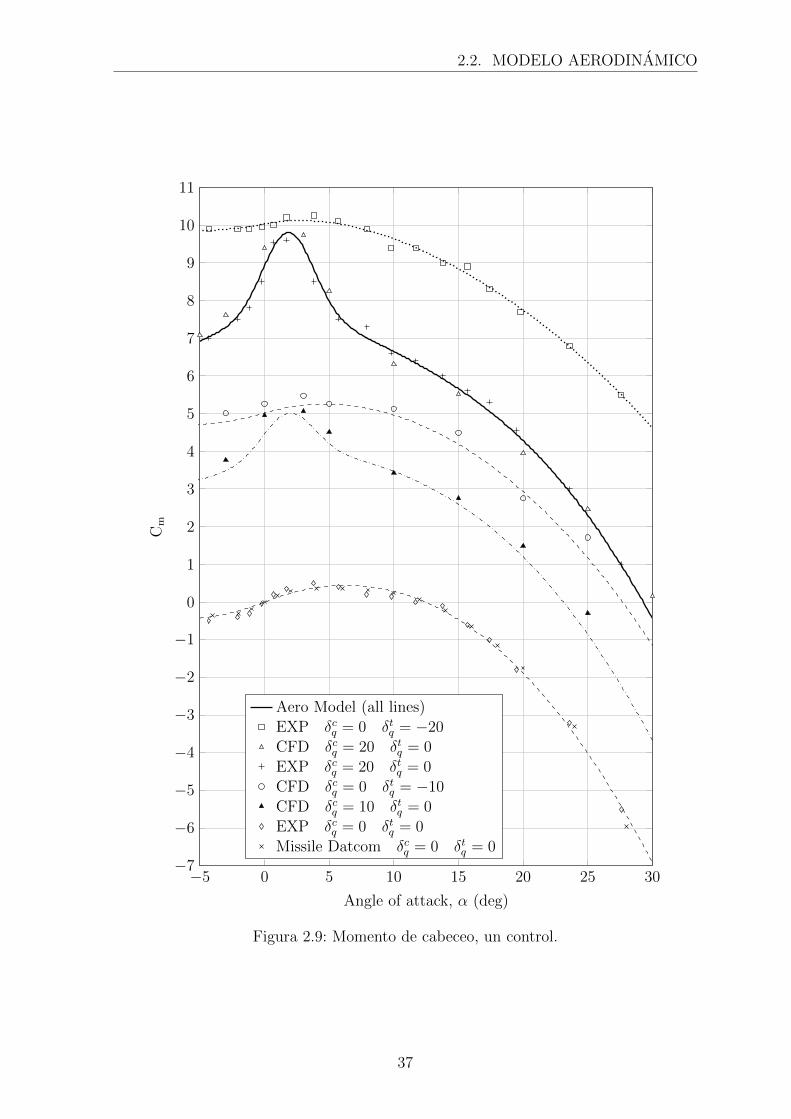
2.2. MODELO AERODINAMICO
−5 0 5 10 15 20 25 30−7
−6
−5
−4
−3
−2
−1
0
1
2
3
4
5
6
7
8
9
10
11
Angle of attack, α (deg)
Cm
Aero Model (all lines)
EXP δcq = 0 δtq = −20
CFD δcq = 20 δtq = 0
EXP δcq = 20 δtq = 0
CFD δcq = 0 δtq = −10
CFD δcq = 10 δtq = 0
EXP δcq = 0 δtq = 0
Missile Datcom δcq = 0 δtq = 0
Figura 2.9: Momento de cabeceo, un control.
37
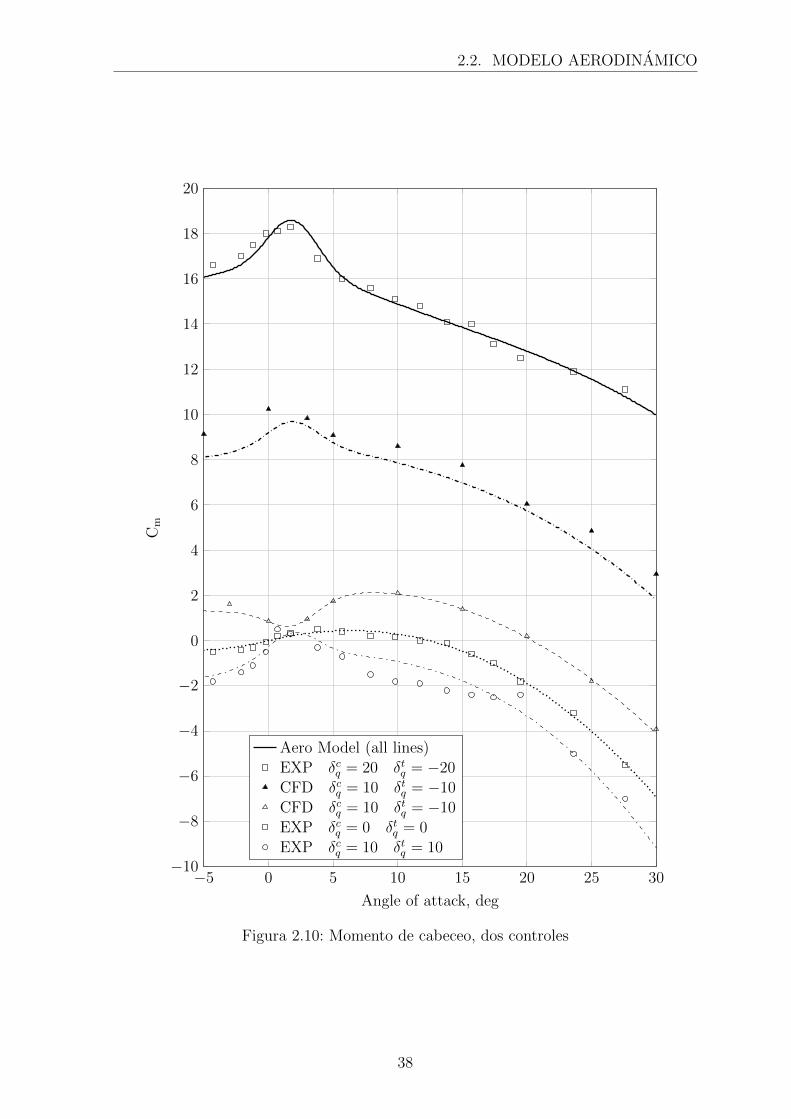
2.2. MODELO AERODINAMICO
−5 0 5 10 15 20 25 30−10
−8
−6
−4
−2
0
2
4
6
8
10
12
14
16
18
20
Angle of attack, deg
Cm
Aero Model (all lines)
EXP δcq = 20 δtq = −20
CFD δcq = 10 δtq = −10
CFD δcq = 10 δtq = −10
EXP δcq = 0 δtq = 0
EXP δcq = 10 δtq = 10
Figura 2.10: Momento de cabeceo, dos controles
38

2.2. MODELO AERODINAMICO
2.2.5. Momento de Balanceo
Balanceo Inducido
Cl = Cli(α, β) + Clαδcr (α)δcr + Clβδcq (β)δcq
Control de Balanceo
+Clδp(α, β)δp
Amortiguamiento
+Clpg6(α, β)pd
2VM
(2.50)
Cada uno de los distintos terminos se detalla en los siguientes parrafos.
Momento de Balanceo Inducido
Se distinguen dos casos, balanceo inducido debido a una combinacion de α y β, Cli ,
y debido a deflexiones del control. En el primer caso:
Cli(α, β) = s (4φa)(Cli01
β2 + Cli21α2 + Cli41
α4 + Cli61α6)
+s (8φa)(Cli02
β2 + Cli22α2 + Cli42
α4 + Cli62α6) (2.51)
Debido a la simetrıa, este momento inducido es nulo cuando:
β = t−1(s(α)) (2.52)
El balanceo inducido asociado con una deflexion del control se define con una serie
truncada de Fourier (ver Figura 2.12):
Clαδcr (α) =
n4∑k=1
Cklαδcr
s(ωkαδcrα + φkαδcr) (2.53a)
Clβδcq (β) =
n5∑k=1
Cklβδcq
s(ωkβδcqβ + φkβδcq) (2.53b)
39

2.2. MODELO AERODINAMICO
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
−0,14
−0,12
−0,1
−8 · 10−2
−6 · 10−2
−4 · 10−2
−2 · 10−2
0
2 · 10−2
4 · 10−2
6 · 10−2
8 · 10−2
0,1
0,12
0,14
Angle of attack, deg
Cl i(α,β
)
aero model β = 5 degCFD, β = 5 degaero model β = 10 degCFD, β = 10 degaero model β = 15 degCFD, β = 15 deg
Figura 2.11: Balanceo inducido
Momento de Control en Balanceo
Clδp(αT ) =
n6∑k=1
CklαT δp
e
(αT−α
kTδp
∆αkTδp
)2
(2.54)
40
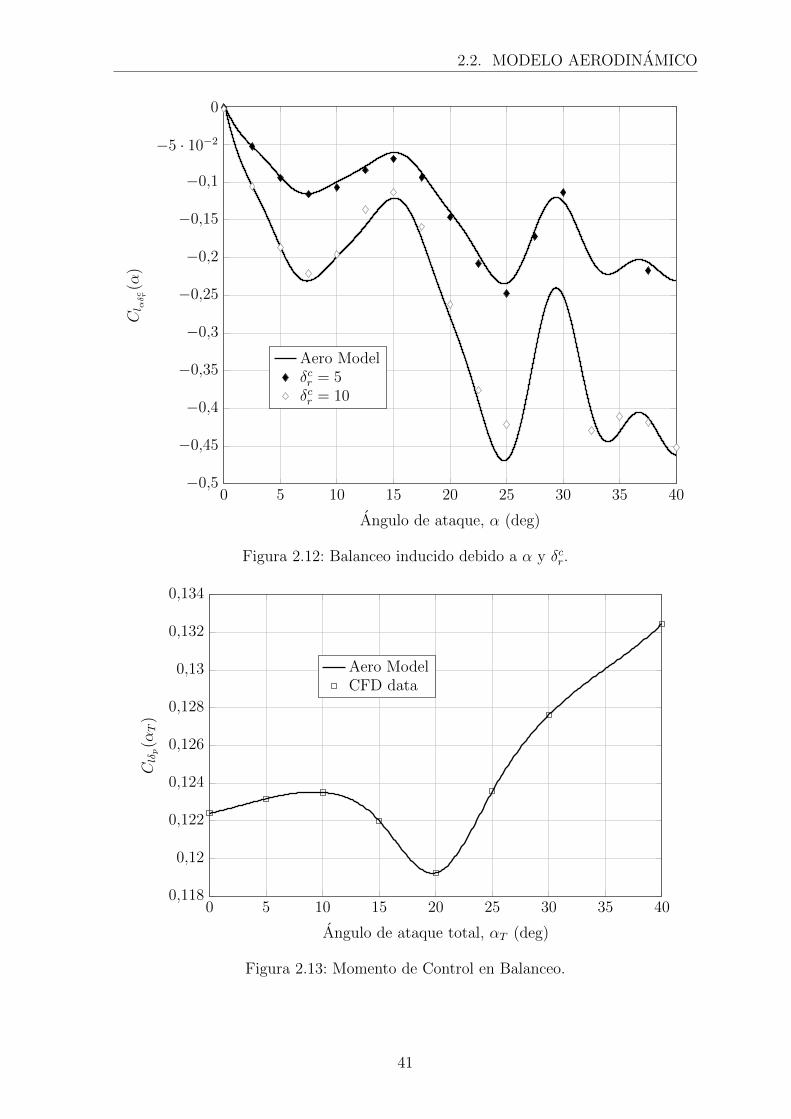
2.2. MODELO AERODINAMICO
0 5 10 15 20 25 30 35 40−0,5
−0,45
−0,4
−0,35
−0,3
−0,25
−0,2
−0,15
−0,1
−5 · 10−2
0
Angulo de ataque, α (deg)
Cl αδc r(α
)
Aero Modelδcr = 5δcr = 10
Figura 2.12: Balanceo inducido debido a α y δcr.
0 5 10 15 20 25 30 35 400,118
0,12
0,122
0,124
0,126
0,128
0,13
0,132
0,134
Angulo de ataque total, αT (deg)
Clδp(α
T)
Aero ModelCFD data
Figura 2.13: Momento de Control en Balanceo.
41

2.2. MODELO AERODINAMICO
2.2.6. Fuerza Axial
Figura 2.14: Contornos a Mach constante. α = 15, δcq = 10 , δtq = −10. La figura ilustrala complejidad de la interaccion axial.
El modelo para la fuerza axial, ecuacion 2.55, contiene numerosos factores de in-
terferencia, debido a la fısica tan compleja que aparece con el doble mando en esta
direccion. Cuando no actua ningun control la respuesta en fuerza axial se representa
por un modelo de tercer orden en angulo de ataque. En este modelo la respuesta axial
con la guinada es lineal debido a las restricciones en guinada que se mencionaron al
discutir las hipotesis del modelo. Notese que la fuerza axial es lineal con el angulo de
ataque en el caso del canard, pero cuadratica en angulo de ataque con la deflexion de
la cola, para considerar el hecho de que la cola opera dentro de la estela del fuselaje y
el canard. Cuando ambos controles estan deflectados, la ecuacion introduce terminos
de mayor orden, para considerar la mayor complejidad de la interaccion en direccion
axial.
42

2.2. MODELO AERODINAMICO
Sin control
CA = CA0 + CAα |α|+ CAβ |β|+ CAα2α2 + CAα3 |α|
3
Resistencia de base
+∆CAb
Control canard cabeceo
+(CAδcq sgn δcq + CAαδcqα + CAβδcqβ
)δcq
Control canard guinada
+(CAδcr sgn δcr + CAαδcrα + CAβδcrβ
)δcr
Control balanceo
+CAδp |δp|
Control cola cabeceo
+(CA
δtqsgn δtq + CA
αδtqα + CA
α2δtqα2 + CA
βδtqβ)δtq
Control cola guinada
+(CA
δtrsgn δtr + CA
αδtrα + CA
α2δtrα2 + CA
βδtrβ)δtr
Control doble en cabeceo
+
(CA
δcqδtq
+ CAαδcqδ
tqα + CA
δcq2δtqδcq + CA
δcqδtq2δtq
)δcqδ
tq
Control doble en guinada
+(CA
δcrδtr
+ CAβδcrδ
trβ + CA
δcr2δtrδcr + CA
δcrδtr2δtr
)δcrδ
tr
(2.55)
con:
sgn δ =
|δ|δ
δ 6= 0
0 δ = 0(2.56)
La resistencia de base es:
∆CAb (t) =
−CAb AeSref
t ≤ tb
0 t > tb(2.57)
donde Ae es el area de salida de la tobera.
43

2.2. MODELO AERODINAMICO
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 300,3
0,4
0,5
0,6
0,7
0,8
0,9
1
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
Angle of attack, α deg
CA
Aero model
EXP δcq = 20 δtq = 0
CFD δcq = 10 δtq = 0
EXP δcq = 0 δtq = 0
CFD δcq = 0 δtq = −10
EXP δcq = 0 δtq = −20
Figura 2.15: Fuerza Axial, un control.
44
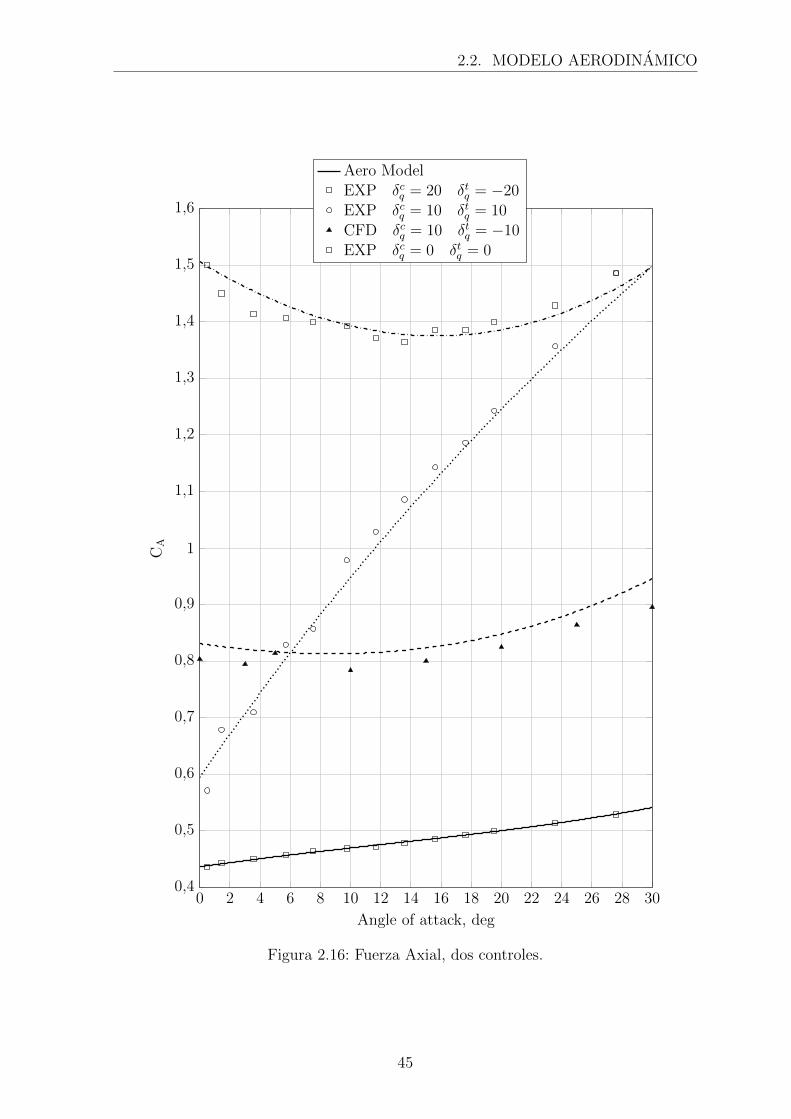
2.2. MODELO AERODINAMICO
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 300,4
0,5
0,6
0,7
0,8
0,9
1
1,1
1,2
1,3
1,4
1,5
1,6
Angle of attack, deg
CA
Aero Model
EXP δcq = 20 δtq = −20
EXP δcq = 10 δtq = 10
CFD δcq = 10 δtq = −10
EXP δcq = 0 δtq = 0
Figura 2.16: Fuerza Axial, dos controles.
45

2.3. MANIOBRABILIDAD ESTATICA
2.2.7. Variaciones con el numero de Mach
Se asume que en la fase terminal de la maniobra las variaciones 4M∞ alrededor de
M∞, siendo M∞ > 2,0, son pequenas, y por tanto se tiene que:
CA (M∞ +4M∞) = CA(M∞) +∂CA∂M∞
∣∣∣∣M∞
4M∞M∞
(2.58a)
CN (M∞ +4M∞) = CN(M∞) +∂CN∂M∞
∣∣∣∣M∞
4M∞M∞
(2.58b)
CS (M∞ +4M∞) = CS(M∞) +∂CS∂M∞
∣∣∣∣M∞
4M∞M∞
(2.58c)
Cm (M∞ +4M∞) = Cm(M∞) +∂Cm∂M∞
∣∣∣∣M∞
4M∞M∞
(2.58d)
Cn (M∞ +4M∞) = Cn(M∞) +∂Cn∂M∞
∣∣∣∣M∞
4M∞M∞
(2.58e)
2.3. Maniobrabilidad Estatica
2.3.1. Diagrama de maniobra
Esta seccion evalua la maniobra lateral que puede dar el misil con control doble en
condiciones de equilibrio, empleando las ecuaciones 2.42 y 2.44. La maniobra se define
como:
ntrim =q∞Srefmg
CNtrim (2.59)
donde CNtrim se define en condiciones de equilibrio:
Cm(α, δcq, δ
tq
)= 0
αtrim,δcqtrim
,δtqtrim===========⇒ CNtrim = CN
(αtrim, δ
cqtrim
, δtqtrim
)(2.60)
Se buscan soluciones a la ecuacion Cm(α, δcq, δ
tq
)= 0 que sean compatibles con las
limitaciones aerodinamicas del misil, definidas en la tabla 2.2.
Los diagramas de maniobra del misil en equilibrio y compatibles con los lımites ası
definidos para αtrim > 0 y φa = 0, se representan el las figuras 2.19 y 2.20, para dos
altitudes distintas. Se obtienen los valores de la maniobra estatica en condiciones de
equilibrio ntrim vs. δcqtrim con αtrim y δtqtrim como parametros. Los resultados se dan
para Mach constante y cierta posicion del centro de gravedad.
46

2.3. MANIOBRABILIDAD ESTATICA
Cuadro 2.2: Limites para la envolvente de vuelo del misil
Parametro Sımbolo Valor Unidades
Maximo angulo de ataque αmax 30 degSaturacion supersonica iss 25,2 degLımite mecanico del control δmech ±30 degLımite estructural nstruc 40 g
Los resultados de las figuras 2.19 y 2.20 permiten ilustrar la comparacion entre el
control canard y el control en cola para un mismo misil, como se vio en la seccion 1.1.1.
Debido a que la cola produce un incremento de momento de cabeceo mucho mayor,
que ademas es constante en un rango amplio de angulo de ataque, da lugar a angulos
de ataque de equilibrio mayores. Sin embargo el control en cola produce un incremento
negativo de fuerza normal, con lo que el control en cola necesita un angulo de ataque
mayor para producir la misma fuerza normal CN que el misil canard para el mismo
angulo de control. Tambien se aprecia como el control delantero se satura mucho antes,
con lo que el misil con control en cola es capaz de generar una maniobra maxima mayor.
Cuando se accionan los dos controles, delantero y trasero de modo simultaneo, se
observan tres regiones diferenciadas:
1. Desviacion positiva , δcqtrim > 0 y δtqtrim > 0. La maniobra maxima es menor
que la del misil canard.
2. Control opuesto,δcqtrim > 0 y δtqtrim < 0, localizado entre el misil canard δtq = 0
y el cola δcq = 0.
3. Desviacion negativa, δcqtrim < 0 y δtqtrim < 0. Corresponde a la region a la
izquierda del misil cola, y limitado por el angulo mecanico maximo del control.
Potencialmente obtiene la maniobra mas elevada.
Sin embargo es interesante observar las caracterısticas de respuesta dinamica para
cada uno de estos modos. La figura 2.17 representa la respuesta no lineal en lazo abierto
para la misma maniobra final nBtrim = 10 g. Observese como la respuesta en lazo abierto
esta muy poco amortiguada y tendra que ser corregidas por el auto piloto. En el caso
de la desviacion negativa se observa como la respuesta dinamica comienza con valores
de maniobra negativos muy importantes y que su tiempo de estabilizacion es elevado,
lo que previene su utilizacion practica.
2.3.2. Eficiencia Aerodinamica
La eficiencia aerodinamica del misil es:
47
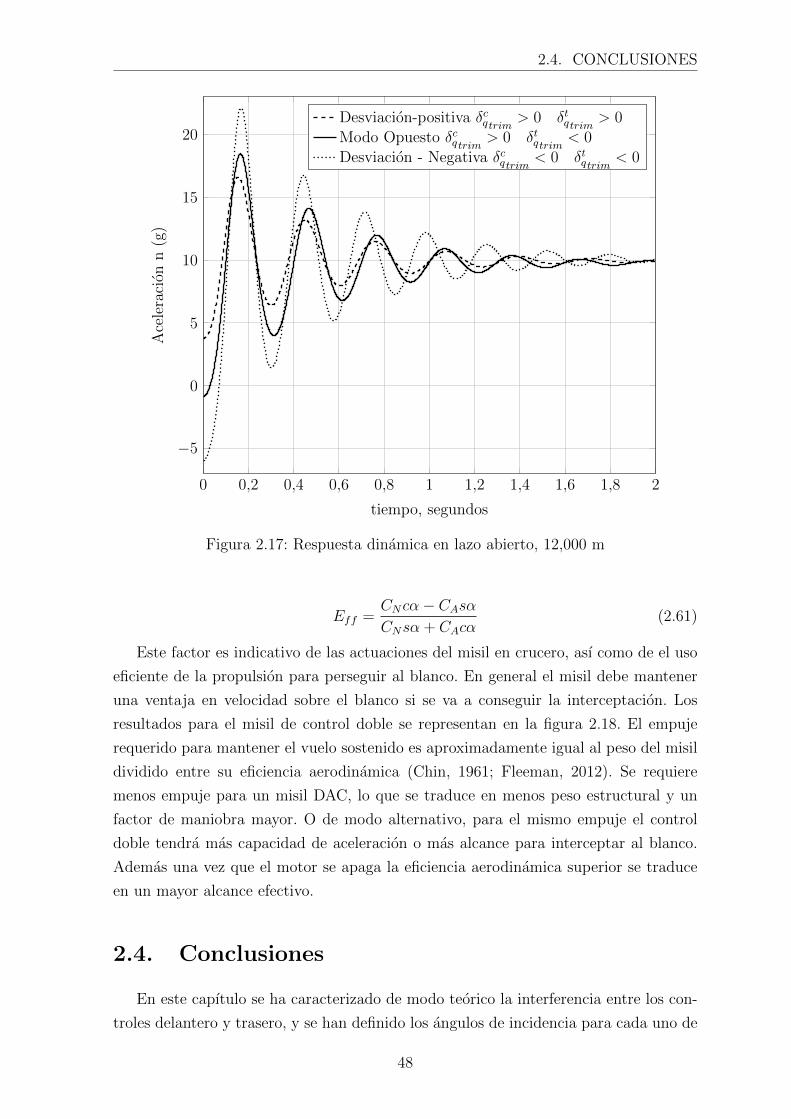
2.4. CONCLUSIONES
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
−5
0
5
10
15
20
tiempo, segundos
Ace
lera
cion
n(g
)
Desviacion-positiva δcqtrim > 0 δtqtrim > 0
Modo Opuesto δcqtrim > 0 δtqtrim < 0
Desviacion - Negativa δcqtrim < 0 δtqtrim < 0
Figura 2.17: Respuesta dinamica en lazo abierto, 12,000 m
Eff =CNcα− CAsαCNsα + CAcα
(2.61)
Este factor es indicativo de las actuaciones del misil en crucero, ası como de el uso
eficiente de la propulsion para perseguir al blanco. En general el misil debe mantener
una ventaja en velocidad sobre el blanco si se va a conseguir la interceptacion. Los
resultados para el misil de control doble se representan en la figura 2.18. El empuje
requerido para mantener el vuelo sostenido es aproximadamente igual al peso del misil
dividido entre su eficiencia aerodinamica (Chin, 1961; Fleeman, 2012). Se requiere
menos empuje para un misil DAC, lo que se traduce en menos peso estructural y un
factor de maniobra mayor. O de modo alternativo, para el mismo empuje el control
doble tendra mas capacidad de aceleracion o mas alcance para interceptar al blanco.
Ademas una vez que el motor se apaga la eficiencia aerodinamica superior se traduce
en un mayor alcance efectivo.
2.4. Conclusiones
En este capıtulo se ha caracterizado de modo teorico la interferencia entre los con-
troles delantero y trasero, y se han definido los angulos de incidencia para cada uno de
48
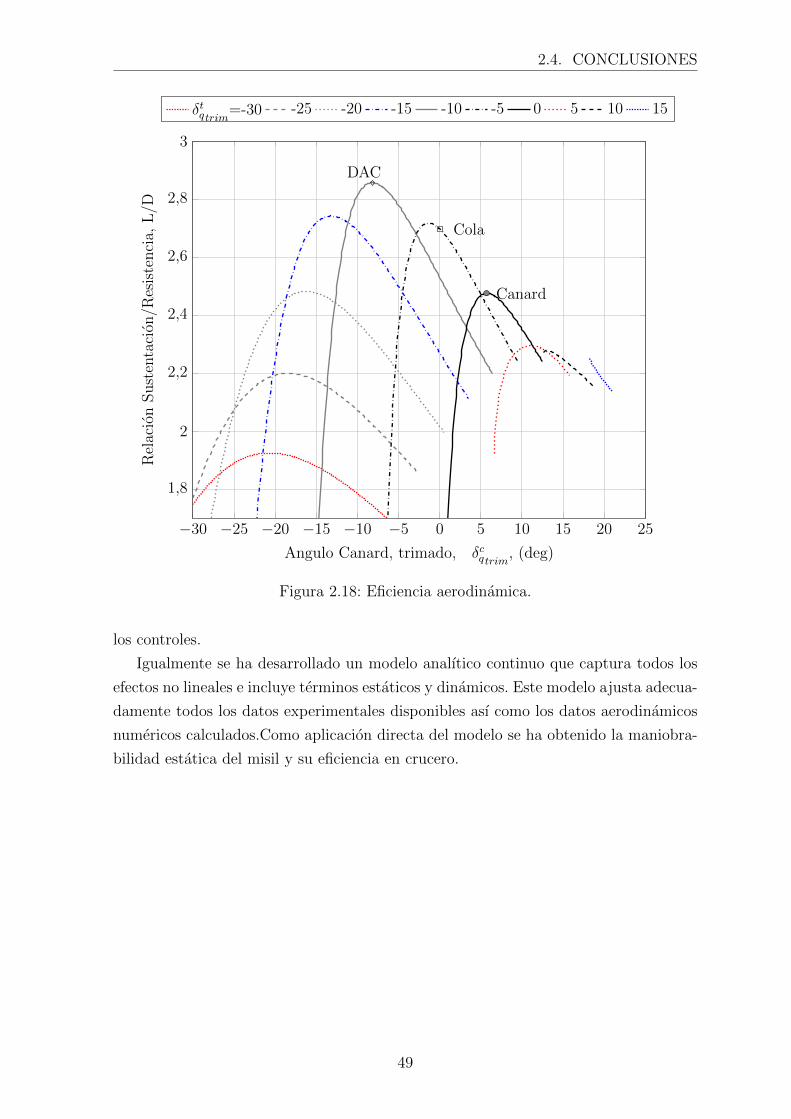
2.4. CONCLUSIONES
−30 −25 −20 −15 −10 −5 0 5 10 15 20 25
1,8
2
2,2
2,4
2,6
2,8
3
Canard
Cola
DAC
Angulo Canard, trimado, δcqtrim, (deg)
Rel
acio
nSust
enta
cion
/Res
iste
nci
a,L
/D
δtqtrim=-30 -25 -20 -15 -10 -5 0 5 10 15
Figura 2.18: Eficiencia aerodinamica.
los controles.
Igualmente se ha desarrollado un modelo analıtico continuo que captura todos los
efectos no lineales e incluye terminos estaticos y dinamicos. Este modelo ajusta adecua-
damente todos los datos experimentales disponibles ası como los datos aerodinamicos
numericos calculados.Como aplicacion directa del modelo se ha obtenido la maniobra-
bilidad estatica del misil y su eficiencia en crucero.
49

2.4. CONCLUSIONES
−30−
28−
26−
24−
22−
20−
18−
16−
14−
12−
10−
8−
6−
4−
20
24
68
1012
1416
1820
2224
051015202530354045
δt q=
-25
-20
-15
-10
-5
Misi
lCan
ard
5
10
15
αtrim
=5
αtrim
=10
αtrim
=15
αtrim
=20
Mis
ilC
ola
δc q
ntrim(g)
Fig
ura
2.19
:D
iagr
ama
de
man
iobra
a6,
000m
.
50

2.4. CONCLUSIONES
−30−
28−
26−
24−
22−
20−
18−
16−
14−
12−
10−
8−
6−
4−
20
24
68
1012
1416
1820
2224
05101520253035
δt q=
-30 -2
5
-15
-10
-5
Misil
Can
ard
5
10
15
αtrim
=5
αtrim
=10
αtrim
=15
αtrim
=20
αtrim
=25
Mis
ilC
ola
δc q
ntrim(g)δc q
−δt q
VM
αtrim
nB trim
=−nB ztrim
Fig
ura
2.20
:D
iagr
ama
de
man
iobra
a12
,000
m
51

Capıtulo 3
Guiado y Control en Doble-Lazo
Este capıtulo trata sobre el guiado y control en dos bucles para el misil de do-
ble mando aerodinamico y el metodo propuesto de resolucion. Asumiendo que existe
separacion espectral entre el auto piloto y el guiado, ambos bucles son disenados inde-
pendientemente en una arquitectura de G&C desacoplada. El bucle de guiado externo
puede ser tratado como solucion de un problema de control optimo lineal en horizonte
temporal finito. El modelo completo de auto piloto se plantea como una solucion no li-
neal de un problema de control en tiempo infinito, que sigue la demanda de aceleracion
del guiado. El modelo aerodinamico desarrollado en el capıtulo anterior se empleara en
la formulacion del problema en tres dimensiones.
3.1. Guiado Optimo
En el esquema de doble lazo se asume que el misil tiene una respuesta de primer
orden en la forma:
τgnL + nL = nLd (3.1)
donde nLd es la maniobra optima que tiene que calcularse y τg es el retardo de guiado.
La cinematica en su formulacion en el espacio de los estados y para una maniobra
constante del blanco resulta ser:
xg = Agxg +Bgug (3.2)
xg =[rLTM
TV LTM
TnLT
TnL
T]T
(3.3)
ug = nLd (3.4)
52
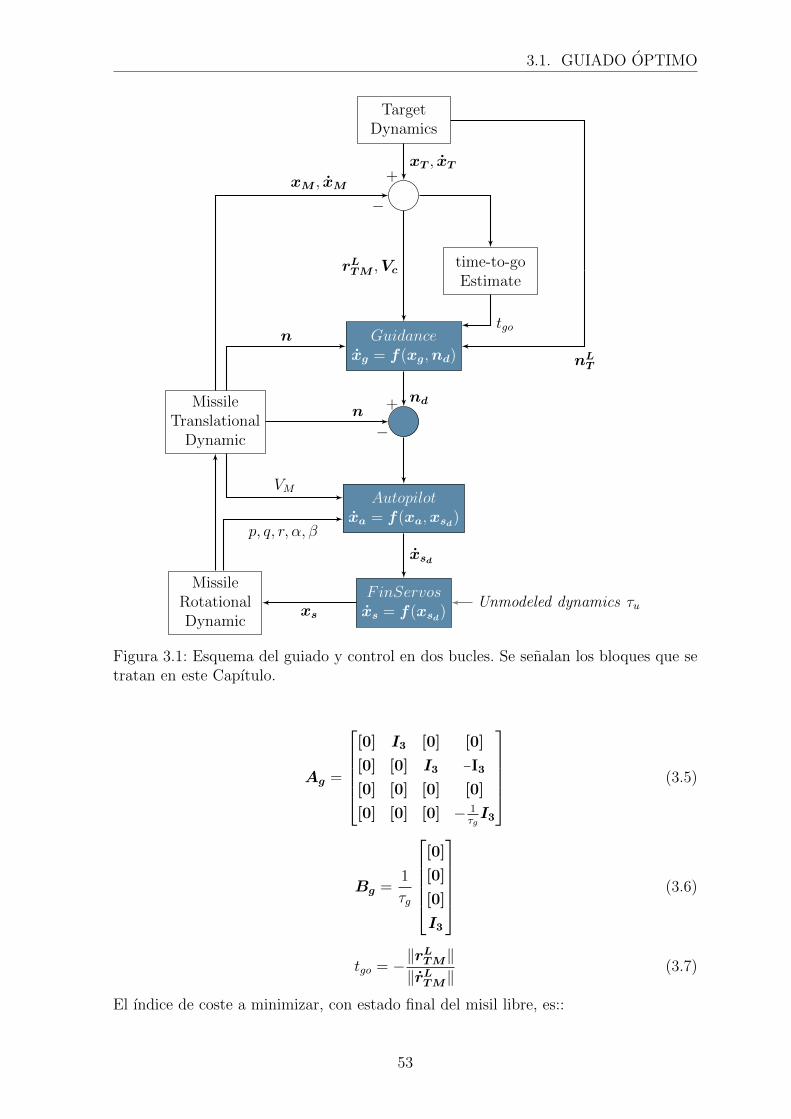
3.1. GUIADO OPTIMO
TargetDynamics
Guidancexg = f(xg,nd)
time-to-goEstimate
Autopilotxa = f(xa,xsd)
FinServosxs = f(xsd)
Unmodeled dynamics τu
MissileRotationalDynamic
MissileTranslational
Dynamic
xT , xT+
rLTM ,Vc
tgo
nLT
nd+
xsd
xs
n
xM , xM
−
p, q, r, α, β
VM
n
−
Figura 3.1: Esquema del guiado y control en dos bucles. Se senalan los bloques que setratan en este Capıtulo.
Ag =
[0] I3 [0] [0]
[0] [0] I3 −I3[0] [0] [0] [0]
[0] [0] [0] − 1τgI3
(3.5)
Bg =1
τg
[0]
[0]
[0]
I3
(3.6)
tgo = −‖rLTM‖
‖rLTM‖(3.7)
El ındice de coste a minimizar, con estado final del misil libre, es::
53

3.1. GUIADO OPTIMO
XL
YLZL
M
L ≡M0
T
T0
PIC
V LT
nB
nLT
rLTM
ωLOS
ts
XB
Y B
ZB
Figura 3.2: Encuentro aire-aire. Se senalan las posiciones del Misil M , del blanco, T , yel punto previsto de Impacto (PIP). Los puntos M0 y T0 senalan las posiciones inicialesde misil y blanco respectivamente.
mınnL
d
Jg =1
2rLTM
T(tf )Sgr
LTM (tf ) +
∫ tf
0
(nLd
TRgn
Ld
)dt
s.t. xg= Agxg +Bgug
(3.8)
donde tf se calcula por el valor de la ecuacion 3.7 en t = 0, y Sg = cI3 , R = bI3 con
b yd c constantes.
El problema definido por el sistema de ecuaciones 3.2 y 3.8 tiene solucion analıtica,
(Ben-Asher and Yaesh, 1998; Zarchan, 2012; Lin, 1991; Sanz-Aranguez, 2011) que puede
representarse por:
nLd =(kTg ⊗ I3
)· xg (3.9)
donde ⊗ representa el producto de Kronecker (ver Apendice A) y kg es:
kg =Λg
t2go
[1 tgo
t2go2−τ 2
g
(e−ξg + ξg − 1
)]T(3.10)
Λg =6ξ2g
(e−ξg + ξg − 1
)2ξ3g + 3 + 6ξg − 6ξ2
g − 12ξge−ξg − 3e−2ξg + 6bcτ3g
ξg =tgoτg
(3.11)
54
V LM

3.2. DINAMICA DE CORTO PERIODO
1 2 3 4 5 6 7 8 9 10−2
−1
0
1
2
3
tgo
Λg
τg = 2, c = 1, b = 1τg = 0,1, c = 1, b = 1τg = 0,5, c = 1, b = 1
Figura 3.3: Constante de navegacion optima
Esta ley de guiado genera un vector de demanda de aceleracion en ejes inerciales nLd ,
sin considerar como el misil va a efectuar la maniobra (Palumbo et al., 2010). El misil
no tiene control directo sobre su aceleracion longitudinal y va a intentar maniobrar
produciendo aceleracion normal al eje de simetrıa del misil en el plano MY BZB, nBd .
La relacion entre ambos vectores viene dada por:
nBd = CBg SBLn
Ld (3.12)
CBg =
0 0 0
0 1 0
0 0 1
3.2. Dinamica de Corto Periodo
El control de vuelo del misil durante la fase terminal es un auto piloto que controla
su aceleracion. En el desarrollo del modelo de auto piloto, es costumbre considerar solo
la dinamica de corto perıodo del misil asumiendo que su velocidad es constante.
Las ecuaciones de traslacion del misil se obtienen al transformar la velocidad de
ejes viento a ejes cuerpo:
55

3.2. DINAMICA DE CORTO PERIODO
u =VMcαcβ (3.13a)
v =VMsβ (3.13b)
w =VMsαcβ (3.13c)
Diferenciando la ecuacion 3.13 e invirtiendo la matriz resultante se obtiene: VM
VM α
VM β
=−1
cβ
−cαc2β −sβcβ −sαc2β
sα 0 −cαsβcβcα −c2β sαsβcβ
u
v
w
(3.14)
Sustituyendo las ecuaciones F.14:
VM = −cαcβ(FA − Tm(t)
− 2g (q1q3 − q0q2)
)− sβ
(FSm(t)
− 2g (q2q3 + q0q1)
)− sαcβ
(FNm(t)
− g(q2
0 − q21 − q2
2 + q23
))(3.15)
α =1
VMcβ
[sα
(FA − Tm(t)
− 2g (q1q3 − q0q2)
)− cα
(FNm(t)
− g(q2
0 − q21 − q2
2 + q23
))]+ q − tβ (pcα + rsα) (3.16)
β =1
VM
[cαsβ
(FA − Tm(t)
− 2g (q1q3 − q0q2)
)− cβ
(FSm(t)
− 2g (q2q3 + q0q1)
)]+
1
VM
[sαcβ
(FNm(t)
− g(q2
0 − q21 − q2
2 + q23
))]+ psα− rcα (3.17)
Estas ecuaciones se simplifican con las siguientes hipotesis
Se desprecian la variaciones de VM y por tanto la ecuacion 3.15 no se considera,
aunque los coeficientes aerodinamicos se actualizaran con la velocidad real de
vuelo en cada punto. En la aproximacion integrada del siguiente Capıtulo no
hara falta considerar esta hipotesis.
Se desprecia las fuerzas de Coriolis debidas al chorro de gases.
Para los estudios preliminares de guiado y control se desprecia los terminos gra-
vitatorios.
56

3.3. FORMULACION EN EL ESPACIO DE LOS ESTADOS
Con estas simplificaciones e introduciendo las ecuaciones 2.9:
α =q∞SrefmVM
(sα
cβCA −
cα
cβCN
)+ q − pcαtβ − rsαtβ − sα
cβ
q∞SrefCTmVM
(3.18)
β =q∞SrefmVM
(cαsβCA − cβCS + sαsβCN) + psα− rcα− cαsβ q∞SrefCTmVM
(3.19)
donde CT se define como el coeficiente de empuje (ver ecuacion G.1).
La dinamica rotatoria del misil se obtiene de las ecuaciones F.18 y 2.10:
p =q∞Srefd
IbxCl (3.20)
q =Iby − IbxIby
pr +q∞Srefd
Iby(Cm + s · CN) (3.21)
r =Ibx − IbyIby
pq +q∞Srefd
Iby(Cn − s · CS) (3.22)
3.3. Formulacion en el Espacio de los Estados
A partir de los resultados de la seccion anterior, la formulacion en el espacio de los
estados es:
xm = Am (xm,Υ)xm +Bmu (3.23)
xm =[xTa xTs xTs xTsd
∫p]T
u = xsd (3.24)
Am (xm,Υ) =
Aa (Ba +Ma) [0] [0] [0]
[0] [0] I5 [0] [0]
[0] − 1τuTs −
(1τuI5 + Ts
)1τuTs [0]
[0] [0] [0] [0] [0]
uTp [0] [0] [0] [0]
(3.25)
57

3.3. FORMULACION EN EL ESPACIO DE LOS ESTADOS
Bm =
[0]
[0]
[0]
I5
[0]
(3.26)
uTp =[0 0 1 0 0
](3.27)
xa =[α β p q r
]T(3.28)
xs =[δcq δcr δp δtq δtr
]T(3.29)
donde las matrices son funcion de los vectores xa y xs. La matriz de estados aero-
dinamicos Aa contiene la aerodinamica no lineal del misil cuando no hay accion de
control, mientras que la matriz Ba expresa la variacion en efectividad del control aero-
dinamico con el angulo de ataque, e incluye el efecto de estela del canard sobre la cola
sin deflectar. Finalmente cuando ambos controles delantero y trasero estan de fletados,
las matrices Mqa y M r
a tienen en cuenta los efectos de interferencia aerodinamica o
acoplamiento cruzado descritos en la seccion 2.1.2. Los coeficientes de estas matrices
se encuentran en los Apendices, secciones G.2, G.3 y G.4.
El modelo de servo considerado es un sistema de segundo orden de la forma:
xs = −(
1
τuI5 + Ts
)xs +
1
τuTs (xsd − xs) (3.30)
xsd =[δcqd δcrd δpd δtqd δtrd
]T(3.31)
Ts =
1τc
0 0 0 0
0 1τc
0 0 0
0 0 1τt
0 0
0 0 0 1τt
0
0 0 0 0 1τt
(3.32)
El objetivo para el misil es conseguir las aceleraciones demandadas en ejes cuerpo
nBy d y nBz d, que resultan de la ecuacion de guiado 3.12:
nBd =[nBy d nBz d
]T(3.33)
58

3.4. SOLUCION OPTIMA DEL AUTOPILOTO
nBy = − 1
mq∞SrefCS (3.34a)
nBz = − 1
mq∞SrefCN (3.34b)
que en forma matricial se expresa como:
nB = Ha (xa)xa +La (xa,xs,Υn)xs (3.35)
Los coeficientes de las matrices Ha y La se encuentran en la seccion G.5.
3.4. Solucion Optima del Autopiloto
3.4.1. Condiciones de Equilibrio
Las condiciones de equilibrio en las que xatrim y xstrim van a generar la aceleracion
demandada nB se obtienen de las ecuaciones 3.35 y 3.23:
nBd = Ha (xatrim)xatrim +La (xatrim,xstrim)xstrim (3.36a)
[0] = Aa (xatrim)xatrim + [Ba (xatrim,xstrim) +Ma (xatrim,xstrim)]xstrim (3.36b)
El sistema 3.36 tiene 7 ecuaciones con 10 variables. Para resolverlo de modo unıvoco
se definen las condiciones:
1. Se definen los factores de reparto del esfuerzo de control en equilibrio como:
cq =δtqtrimδcqtrim
cr =δtrtrimδcrtrim
(3.37)
2. ptrim = 0.
Los dos parametros cq y cr definen el peso relativo para el uso de los controles
delanteros y traseros en estado estacionario. Su signo define la eleccion del modo de
control para el misil DAC, modo desviacion o opuesto en estado estacionario, pero no
previene utilizar cualquiera de estos modos en la transicion para alcanzar las condicio-
nes estacionarias. Estos parametros pueden seleccionarse para minimizar el esfuerzo de
control, definido como
59

3.4. SOLUCION OPTIMA DEL AUTOPILOTO
∆eδ =
√1
tf
∫ tf
0
[δcq(t)
2 + δcr(t)2 + δp(t)
2 + δtq(t)2 + δcr(t)
2] dt (3.38)
para obtener la aceleracion maxima esperada. Vease los Apendices para un ejemplo de
seleccion de estos parametros.
Notese que cq, cr → 0 corresponde a un misil con control cola y cq, cr → ∞ a un
canard.
A partir de aquı pueden obtenerse las condiciones de equilibrio:
1. Se resuleven con el metodo de Newton (Kelley, 2003) las ecuaciones:
βrδcr
−Vr 0
0
nBy d
=
0
0
0
, con Vr =
aa22 aa25 ba22 +ma
22 + cr (ba25 +ma25)
aa52 aa55 ba52 +ma52 + cr (ba55 +ma
55)
ha12 ha15 la12 + crla15
−1
(3.39)
αqδcq
−Vq 0
0
nBz d
=
0
0
0
, con Vq =
aa11 aa14 ba11 +ma
11 + cq (ba14 +ma14)
aa41 aa44 ba41 +ma41 + cq (ba44 +ma
44)
ha21 ha24 la21 + cqla24
−1
(3.40)
2. A partir de aquı el control necesario para balanceo nulo es:
δptrim = Vp
αtrim
βtrim
δcqtrimδcrtrim
, with Vp = − 1
(ba33 +ma33)
[aa31 aa32 ba31 +ma
31 ba32 +ma33
]
(3.41)
Obteniendose los vectores xatrimand xstrim que generan la aceleracion requerida
nBy d y nBz d en ejes cuerpo.
3.4.2. Planteamiento del problema
Como se vio en el Capıtulo anterior, el modelo aerodinamico en el que se basa este
autopiloto es valido dentro de ciertos lımites, ver tabla 3.1 :
60

3.4. SOLUCION OPTIMA DEL AUTOPILOTO
Angulos de incidencia icq, icr, i
tq, i
tr dados por las ecuaciones 2.34, 2.35, 2.36 y 2.37,
han de mantenerse por debajo del valor correspondiente a la saturacion supersoni-
ca.
Al aumentar el angulo de ataque, el flujo alrededor del fuselaje del misil se tor-
na progresivamente asimetrico, causando el fenomeno no estacionario conocido
como phantom yaw (Balakrishnan et al., 2013), fenomeno que puede provocar
que el misil no sea controlable en balanceo. El angulo de ataque debe entonces
mantenerse por debajo de un valor maximo αpy.
Lımite en angulo de guinada, β, para minimizar el balanceo inducido.
Limitaciones estructurales, nmax, en δmec, δ, y en los giroscopos e instrumentos,
qmax y rmax.
Estabilidad en balanceo requiere p and∫p proximos a cero.
Todas estas restricciones se combinan en un vector de actuaciones, zm que se empleara
en el ındice de coste a optimizar.
zm =[icq itq icr itr p q r α β nBy nBz
∫p]T
(3.42)
Cuadro 3.1: Lımites mecanicos y aerodinamicos del misil
Parametro (sımbolo) Valor (unidades)
Incidencia para saturacion del control, imax (for M∞ = 2,5) 25.2 deg
Angulo de ataque maximo, αpy 35 degMaximo angulo de guinada, βmax 15 degDeflexion mecanica del control, δmax 30 deg
Velocidad de giro del control, δmax 600 deg/sLımite estructural del misil, nmax 40 g
La relacion entre zm y xm viene dada por:
zm = Hm (xm,Υn)xm (3.43)
donde los coeficientes de Hm se encuentran en la seccion G.6 de los Apendices.
Como resultado el problema de optimizacion del auto piloto se plantea como un
regulador en horizote infinito:
mınu=xsd
J=
∫ ∞0
(zTQz + uTRu
)Ts.t. e=Am (xm) e−Bmu
z=Hmxm −Hmtrimxmtrim
(3.44)
61

3.4. SOLUCION OPTIMA DEL AUTOPILOTO
con
lımt→∞
e = [0] (3.45)
y
e = xmtrim− xm (3.46)
3.4.3. Solucion Sub-optima
El Hamiltoniano de 3.44 viene dado por:
H =1
2
(zTQz + uTRu
)+ λT (Ame−Bmu) (3.47)
de donde las condiciones necesarias para el optimo, de la discusion en B.5, son:
e = Ame−Bmu (3.48a)
λ = −1
2
∂(zTQz
)∂e
−∂(λTAme
)∂e
(3.48b)
[0] = Ru−Bmλ (3.48c)
Para el vector de control y de co-estados:
u = R−1Bmλ (3.49)
λ = M (e) e (3.50)
el problema resulta en la ecuacion matricial
(MAmA
TmM −MBmR
−1BmM +HTmQHm
)e
+∂M
∂eT(e⊗ In)− (eM ⊗ In)T
∂Am
∂xme
−HTmQ (Hm −Hmtrim
)xmtrim−(In ⊗ xTm
) ∂HTm
∂xmQz = [0]
(3.51)
donde para resolver esta ecuacion se desprecian los dos terminos finales, que tienden
a cero al hacerlo el vector de error e , resultando una solucion sub-optima con la
resolucion unicamente del primer termino:
MAm +ATmM −MBmR
−1BmM +HTmQHm = [0] (3.52)
que es una ecuacion algebraica de Riccati dependiente de los estados (SDRE), con
62

3.5. EJEMPLOS GUIADO-AUTOPILOTO EN DOBLE-LAZO
M (xm) como variable y que hay que resolver para xm en cada punto de la trayectoria
del misil . La ley de control resultante es:
u = Km (xm) · e (3.53)
Km (xm) = R−1BTmM (xm) (3.54)
Es conveniente introducir en la solucion un mecanismo para acelerar la respuesta
del autopiloto. Esto puede hacerse a traves de un λ-shift, (para un sistema lineal ver
(Anderson and Moore, 2007), que modifica los polos del sistema y su estabilidad, sin
cambiar su dinamica. El problema se replantea como:
mınu=xsd
J =
∫ ∞0
e2λt(zTQz + uTRu
)Ts.t. xm=Amxm +Bmu
z =Hmxm −Hmtrimxmtrim
(3.55)
cuya solucion es:
Mλ (Am + λIn) + (Am + λIn)T Mλ −MλBmR−1BmMλ +HT
mQHm = [0]
(3.56)
u = eλtR−1BTmMλe (3.57)
3.5. Ejemplos Guiado-Autopiloto en Doble-Lazo
En esta seccion se investigan numericamente las actuaciones del guiado y control
en dos bucles para un misil de doble mando aerodinamico contra un blanco de alta
velocidad y capacidad de maniobra, y se comparan con los resultados obtenidos para
el mismo misil con unicamente mando canard o cola. El diagrama de fuerzas en el misil
se ilustra en la figura 3.4 y el bucle completo de guiado y control en la figura 3.5.
El paso de integracion para el guiado es de 0.001 s, y el auto piloto se calcula
a una frecuencia 25 veces superior. La altitud del escenario es de 12.000 m, que es
mas restrictiva en terminos de maniobra del misil, ver figura 2.20. El blanco vuela con
MT = 1,5, y el Mach inicial del misil es M = 2,5.
Otros parametros de la simulacion son:
c = 108 b = 1 τg = 0,1 s
63

3.5. EJEMPLOS GUIADO-AUTOPILOTO EN DOBLE-LAZO
δc
Mc.m., qδt
XB
ZB
FN
FA
nLd
nB = −nBz
T
θg
VM
XL
θ γM
α
Figura 3.4: Diagrama de fuerzas en el misil de doble mando.
Q = diag[100 100 100 100 1000 1000 1000 1000 1000 1 1 100
]Para el misil DAC:
R = diag[1 1 1 1 1
]Para cola:
R = diag[1010 1010 1 11 1
]Para canard:
R = diag[1 1 1010 1010 1010
]y los parametros del misil se muestran en la tabla 3.2 ası como las limitaciones operati-
vas en la tabla 3.1. En este caso los parametros masicos del misil varıan con el tiempo
durante la combustion del motor cohete.
3.5.1. Lanzamiento con error de apuntamiento moderado
El misil se lanza con un error de apuntamiento HE = 20 con respecto al curso de
colision, tal y como se muestra en la figura 3.6. La distancia inicial entre misil y blanco
64

3.5. EJEMPLOS GUIADO-AUTOPILOTO EN DOBLE-LAZO
MovimientoBlanco
xg
tgo
Λg
(kTg ⊗ I3
)xg
nBd = CBg SBLn
Ld
VpVq(cq) Vr(cr)
Am = Am + λIn
MλAm + ATmMλ −MλBmR−1BmMλ +HT
mQHm = [0]
u = eλtR−1BTmMλe
xm = Am (xm)xm +Bmu
∫
rT ,VT ,nT
ξg
kgnLd
xmtrim
e = xm − xmtrim
xm
SBL
Figura 3.5: Guiado y Control en doble bucle.
65

3.5. EJEMPLOS GUIADO-AUTOPILOTO EN DOBLE-LAZO
Cuadro 3.2: Parametros: Simulaciones de Guiado y Control Doble Bucle
Parametro (Sımbolo) Valor (unid.)
Masa misil inicial/fin combustion, (m) 101.3/87.3 KgTiempo de combustion motor, (tb) 8 sPosicion centro masas (desde ojiva) 143.6/128.8 cmMomento de Inercia Cabeceo IBx 34.7/32 Kg m2
Mach inicial misil M∞ 2.5Coeficiente de empuje inicial, CT 1.2Retardos de los servos, τc, τt, τu 0.1, sParametro reparto control, cq -1.5
rTM(0) es de is 6,000 metros y el angulo inicial de la lınea de mira es σ = 0 grados. El
blanco ejecuta una maniobra evasiva con nT = 15 g, con un angulo inicial γT (0) = 90,
siendo:
γT =nTVT
ZL
XL
M
T
PIC
VM
VT(nLd
)nT
σ
γc
HE
γM
γT
Figura 3.6: Condiciones de lanzamiento
Las trayectorias obtenidas para el misil con doble control, canard y cola, se muestran
en la figura 3.7 y en la tabla 3.3 se resumen los principales parametros de actuaciones,
definiendose los parametros de calidad como:
∆en =1
nT tf
∫ tf
0
nLdt (3.58)
∆ek =2
V 2M (0)
∫ tf
0
VM VMdt (3.59)
66

3.5. EJEMPLOS GUIADO-AUTOPILOTO EN DOBLE-LAZO
VM = −cα(FA − Tm
)− sα
(FNm
)(3.60)
∆eδ =
√1
tf
∫ tf
0
[δcq(t)
2 + δtq(t)2] dt (3.61)
Cuadro 3.3: Doble-Bucle G & C Resultados Simulacion
Control tf ,(s) distancia paso,(metros) ∆en ∆eδ, deg ∆ek
DAC 6,8 0,14 1,00 10,27 0,50Cola 6,4 0,28 0,96 14,20 0,84Canard 7,8 245 1,02 21,78 0,06
El misil con control en cola y con control doble consiguen distancias finales de paso
de 0,28 y 0,14 m respectivamente, mientras que el canard no consigue impactar al
blanco.
En la figura 3.9 se observa como el misil DAC emplea el modo de control opuesto
de manera predominante, mientras que desviacion positva se emplea para correcciones
finales antes del impacto. El canard llega al lımite maximo de su control en un intento de
maniobrar para alcanzar al blanco, resultando en un incremento brusco de su resistencia
aerodinamica y perdida de velocidad y actitud de vuelo.
Notese que el control doble aerodinamico requiere el menor esfuerzo de control,
calculado mediante ∆eδ en la ecuacion 3.38, para conseguir la menor distancia de paso
final.
El tiempo hasta impacto es de 6,4 segundos para el misil con control en cola y 6,8
para misil con control doble. El misil con control en cola tiene la mejor eficiencia en
el uso de la propulsion, con un valor de energıa cinetica especıfica ∆ek ligeramente
superior al control doble con guiado y control desacoplados.
Esto se explica debido a que el angulo θg, ver figura 3.4, que forma la aceleracion
demandada nLd con la aceleracion lateral generada por el misil nB, es siempre superior
en el caso del misil con control doble, como se ilustra en la figura 3.11. Este angulo se
define como:
θg = c−1‖nB‖‖nLd‖
(3.62)
y es un indicador de la preservacion de las instrucciones de guiado definidas por (Pa-
lumbo et al., 2010). A menor valor del angulo θg el misil ejecuta mas fielmente las
instrucciones de guiado, o en otras palabras, menos aceleracion se desperdicia en una
direccion no deseada. Como se vera en el capıtulo siguiente, el control integrado au-
menta en gran medida la preservacion de las instrucciones de guiado para el misil con
67

3.6. CONCLUSIONES
control doble, reduciendo sus tiempos de vuelo.
3.5.2. Calculos de dominio de tiro en curso de colision
El dominio de tiro se define como el conjunto de todos los puntos de lanzamiento
del misil en curso de colision hacia el blanco desde donde se alcanza una distancia final
de paso menor o igual a 1 m. En este caso HE = 0, nT = 12 g y γT (0) = 90, MT = 1,5.
Se han obtenido cinco mapas distintos, donde las zonas grises indican los puntos
de lanzamiento del misil que pertenecen a su dominio de tiro. Los mapas 3.12 y 3.13
corresponden respectivamente a un misil con control cola y canard, en ambos casos
guiados por navegacion proporcional. Es equivalente al resultado que puede esperarse
de un misil en servicio a dıa de hoy actuando contra un blanco tipo UCAV. Se observa
que solo los lanzamientos desde posiciones laterales al blanco consiguen impacto directo.
Sustituyendo la navegacion proporcional por la ley de guiado optima se obtienen
dominios de tiro mucho mas amplios, correspondientes a las figuras 3.12 y 3.13 para
cola y canard. En cualquier caso el misil en cola tiene un dominio de tiro mas extenso
debido a la tendencia adversa del canard a saturarse.
En contraste, la combinacion de misil con un doble control aerodinamico y ley de
guiado optimo consigue un dominio de tiro completo, como se ve en la figura 3.16 ,
lograndose la intercepcion en toda la region alrededor del blanco.
3.6. Conclusiones
En este capıtulo se ha desarrollado un modelo teorico y practico para el calculo de
un auto piloto general que incluye la aerodinamica no lineal y las limitaciones mecanicas
y aerodinamicas de la operacion del misil. El auto piloto es capaz de gestionar un misil
con doble control aerodinamico pero tambien un control simple delantero o trasero.
Una vez combinado el auto piloto con la ley de guiado optima para un misil de
control doble se obtiene un dominio de tiro superior a los misiles convencionales.
68
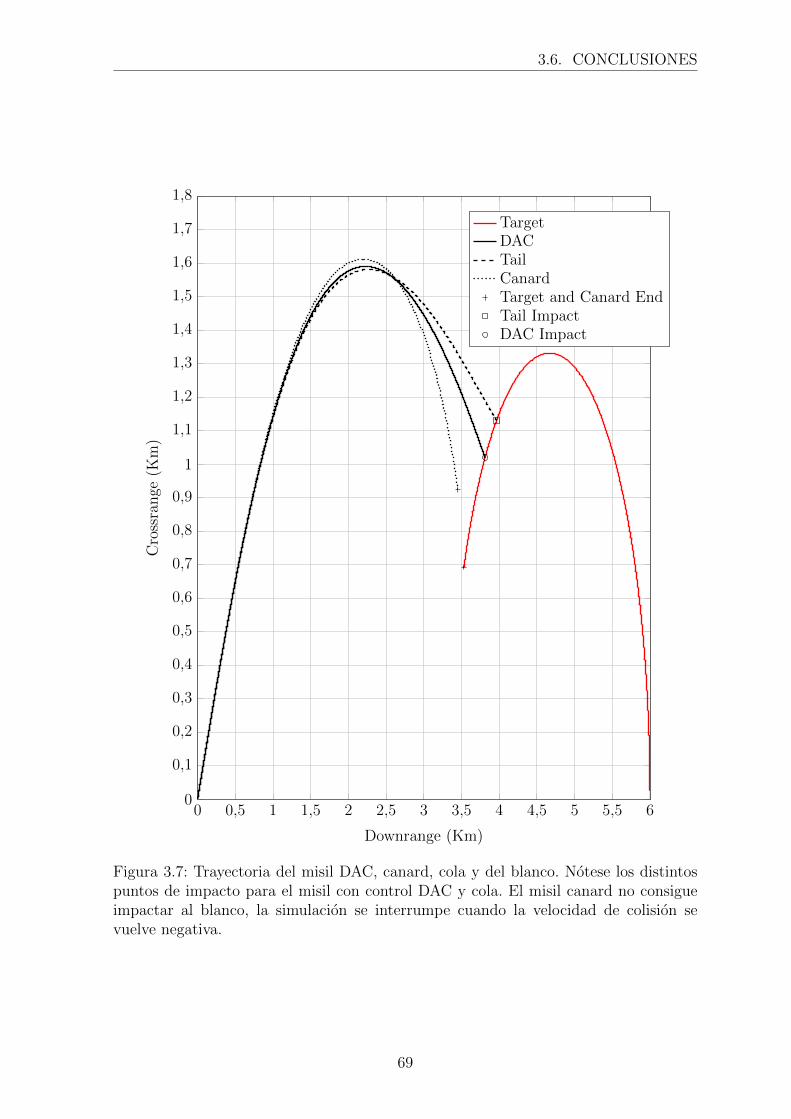
3.6. CONCLUSIONES
0 0,5 1 1,5 2 2,5 3 3,5 4 4,5 5 5,5 60
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
Downrange (Km)
Cro
ssra
nge
(Km
)
TargetDACTailCanardTarget and Canard EndTail ImpactDAC Impact
Figura 3.7: Trayectoria del misil DAC, canard, cola y del blanco. Notese los distintospuntos de impacto para el misil con control DAC y cola. El misil canard no consigueimpactar al blanco, la simulacion se interrumpe cuando la velocidad de colision sevuelve negativa.
69
3.6. CONCLUSIONES
0 1 2 3 4 5 6 7 8−20
−10
0
10
20
30
Time (sec)
nB z
,(g
)
DACTailCanard
Figura 3.8: Acceleracion del misil
0 1 2 3 4 5 6 7 8
−20
0
20
Time (s)
δ(d
eg)
DAC δcq
DAC δtq
Tail δtq
Canard δcq
Figura 3.9: Angulos de los controles
0 1 2 3 4 5 6 7 8
1
1,5
2
2,5
time, (s)
M∞
DACTailCanardTarget
Figura 3.10: Mach Misil
70

3.6. CONCLUSIONES
0 1 2 3 4 5 6 70
20
40
60
time (s)
Guid
ance
pre
serv
atio
nan
gle,θ g
,deg
DACSDRE-Tail
Figura 3.11: Angulo de preservacion del guiado θg.
-180
-160
-140
-120 -60
-40
-20
0
20
40
6080100
120
140
160
crossrange, meters-2500-2000-1500-1000 -500 0 500 1000 1500 2000 2500
-1500
-1000
-500
0
500
1000
1500
Figura 3.12: Dominio tiro misil cola con navegacion proporcional. La flecha indica ladireccion inicial de la velocidad del blanco. El blanco maniobra con nT = 12g, girandosesu trayectoria hacia la izquierda en la figura.
71

3.6. CONCLUSIONES
-180
-160
-140
-120 -60
-40
-20
0
20
40
6080100
120
140
160
crossrange, meters-3000 -2000 -1000 0 1000 2000 3000
-3000
-2000
-1000
0
1000
2000
3000
Figura 3.13: Dominio tiro misil cola con navegacion proporcional
-180
-160
-140
-120 -60
-40
-20
0
20
40
6080100
120
140
160
crossrange, meters-3000 -2000 -1000 0 1000 2000 3000
-3000
-2000
-1000
0
1000
2000
3000
Figura 3.14: Dominio tiro misil cola con guiado optimo
72
3.6. CONCLUSIONES
-180
-160
-140
-120 -60
-40
-20
0
20
40
6080100
120
140
160
crossrange, meters-3000 -2000 -1000 0 1000 2000 3000
-3000
-2000
-1000
0
1000
2000
3000
Figura 3.15: Dominio tiro misil canard con guiado optimo
-180
-160
-140
-120 -60
-40
-20
0
20
40
6080100
120
140
160
crossrange, meters-3000 -2000 -1000 0 1000 2000 3000
-3000
-2000
-1000
0
1000
2000
3000
Figura 3.16: Dominio tiro misil control doble con guiado optimo
73
Capıtulo 4
Guiado y Control Integrados
En este capıtulo se desarrolla el guiado y auto pilotado del misil en la logica integra-
da (IGA), y se aplica al misil con control doble aerodinamico. La logica integrada es un
controlador no lineal que simplifica enormemente la cantidad de calculos que hay que
llevar a cabo en tiempo real frente al algoritmo desarrollado en el capıtulo 3 y como se
demostrara a traves de simulaciones, es capaz de conseguir menores distancias de paso
con menores requisitos de maniobra para el misil. La figura 4.1 presenta un esquema
general de la aproximacion integrado, donde la salida del controlador xsd guıa al mi-
sil hasta interceptar al blanco a la vez que de modo simultaneo controla la respuesta
transitoria del misil estabilizando todos sus estados. Esto resulta en un conjunto de
trayectorias para el misil distintas a las obtenidas con la aproximacion en dos bucles.
TargetDynamics
IntegratedxI = f(xI ,xsd)
time-to-goEstimate
FinServosxs = f(xsd)
Unmodeled dynamics, τu
MissileDynamic
xT , xT+
rTM , Vc
tgo
nT
xsd
xs
xM , xM
−
Figura 4.1: Esquema del auto piloto y guiado integrados.
74

4.1. PLANTEAMIENTO MATEMATICO
4.1. Planteamiento matematico
En toda la discusion del capıtulo anterior, el auto piloto se definio en ejes cuerpo
mientras que el guiado lo era en ejes inerciales. Esta disfuncion causa una perdida de la
informacion de guiado. El sistema integrado, que resuelve simultaneamente el guiado
y el auto piloto, sera definido en ejes inerciales.
Las variables del problema se ilustran en la figura 4.2. La ligadura entre los estados
de guiado y las variables de vuelo del misil viene dada por la ecuacion vectorial:
XL
ZL
XB
ZB
−nBz = nB
rBTM
VM
θ γM
α
−zBr
xBr
M
T
VT
xLT
zLT
xLM
zLM
nT
γT
Figura 4.2: Escenario para el Guiado y control Integrado. La aceleracion del misil nB
es normal al eje de simetrıa del misil xB. El blanco efectua una maniobra de modulonT constante, normal a su velocidad.
(drMT
dt
)L=
xLr
yLr
zLr
= V LT − V L
M (4.1)
donde V LM es:
V LM = SLB · SBW ·
VM00
(4.2)
La matriz de transformacion de ejes cuerpo inerciales SBLse representa con ayuda
de los cuaterniones (ver apendice, ecuacion F.4):
75

4.1. IGA MODEL
SLB =
q20 + q2
1−q22 − q2
3 2(q1q2 + q0q3) 2(q1q3−q0q2)
2(q1q2 − q0q3) q20 − q2
1 + q22 − q2
3 2(q2q3 + q0q1)
2(q1q3 + q0q2) 2(q2q3 − q0q1) (q20 − q2
1 − q22 + q2
3)
T
(4.3)
y SBW es:
SBW =
cαcβ sβ sαcβ
−cαsβ cβ −sαsβ−sα 0 cα
T
(4.4)
Sustituyendo las ecuaciones 4.2, 4.3 y 4.4 en4.1 se obtiene:
xLr = −(q2
0 + q21−q2
2 − q23
)VMcαcβ − 2(q1q2 + q0q3)VMsβ
− 2(q1q3−q0q2)VMsαcβ + VTx (4.5)
yLr = − (q1q2 − q0q3)VMcαcβ −(q2
0 − q21 + q2
2 − q23
)VMsβ
− 2(q2q3 + q0q1)VMsαcβ + VTy (4.6)
zLr = −2 (q1q3 + q0q2)VMcαcβ − 2 (q2q3 − q0q1)VMsβ
−(q2
0 − q21 − q2
2 + q23
)VMsαcβ + VTz (4.7)
Combinando esta ecuacion con 3.16, 3.17, 3.20, 3.21 , 3.22, F.8 y considerando que:
VM = −cαcβ(FA − Tm
)− sβFS
m− sαcβFN
m(4.8)
se llega a un sistema en el espacio de los estados en la forma:
xI = AIxI +BIuI +EI (4.9)
xI =[qTM rLMT
TxTVM ωBM
TxTs xTs xTsd
∫p]T
(4.10)
xVM =[VM α β
]T(4.11)
76
4.1. IGA MODEL
AI =
12Θq [0] [0] 1
2Θω [0] [0] [0] [0]
[0] [0] Ak [0] [0] [0] [0] [0]
[0] [0] Aw11 Aw12 Bw21 +Mw21 [0] [0] [0]
[0] [0] Aw21 Aw22 Bw21 +Mw21 [0] [0] [0]
[0] [0] [0] [0] [0] I5 [0] [0]
[0] [0] [0] [0] − 1τuTs −
(1τuI5 + Ts
)1τuTs [0]
[0] [0] [0] [0] [0] [0] [0] [0]
[0] [0] [0] [1, 0, 0] [0] [0] [0] [0]
(4.12)
BI =
[0]
[0]
[0]
[0]
[0]
[0]
I2
[0]
EI =
[0]
V LT
[0]
[0]
[0]
[0]
[0]
[0]
(4.13)
qM =[q0 q1 q2 q3
]T(4.14)
qM =1
2ΘqqM +
1
2Θωω
BM (4.15)
Θq =
εk (1− εq) −Υεp −Υεq −Υεr
Υεp εk (1− εq) Υεr −Υεq
Υεq −Υεr εk (1− εq) Υεp
Υεr Υεq −Υεp εk (1− εq)
(4.16)
Θω =
− (1−Υε) q1 − (1−Υε) q2 − (1−Υε) q3
(1−Υε) q0 − (1−Υε) q3 + (1−Υε) q2
(1−Υε) q3 (1−Υε) q0 − (1−Υε) q1
− (1−Υε) q2 (1−Υε) q1 (1−Υε) q0
(4.17)
εq = q20 + q2
1 + q22 + q2
3 (4.18)
donde el vector de control es el mismo que el capıtulo anterior uI = xsd .
El vector EI contiene la velocidad del blanco, que no es controlable por el sistema
y por tanto se trata como una perturbacion exterior, dejandose fuera del proceso de
optimizacion. Los coeficientes de las matrices Ak, Aw , Bw and Mw, se encuentran
de los apendices, seccion G.7.
77

4.2. RESOLUCION DEL PROBLEMA IGA-DAC
Se define un vector de actuaciones zI para el problema integrado como sigue:
zI =[rTTM zTm
]T(4.19)
o de forma explıcita:
zI =[xLr yLr zLr icq icr itq itr p q r α β nby nbz
∫p]T
(4.20)
con zI = HI (xI)xI , y
HI =
[I3 [0]
[0] Hm
](4.21)
El objetivo del sistema integrado es minimizar la distancia de paso final y estabilizar
la respuesta transitoria del misil de modo simultaneo, lo que se traduce en el siguiente
problema de optimizacion:
mınu=xsd
JI =1
2xI
T (tf )SIxI(tf ) +1
2
∫ tf
0
(zTIQIzI + uTIRuI
)dt
s.t. xI=AIxI +BIuI
zI=HIxI
(4.22)
Cuando la separacion entre el misil y el blanco es lo suficientemente grande, el
problema anterior puede ser aproximado por un problema de Lagrange en tiempo
infinito:
mınuI=xsd
JI =1
2
∫ ∞0
(zTIQIzI + uTIRuI
)dt
s.t. xI=AIxI +BIuI
zI=HIxI
(4.23)
4.2. Resolucion del problema IGA-DAC
De modo analogo a la solucion obtenida para el autopiloto en el capıtulo anterior,
la solucion del problema en horizonte temporal infinito (4.23) es uoI :
uoI = −R−1BTIMo(xI , t)xI (4.24)
siendo Mo la solucion de:
78

4.2. SOLUTION VIA LYAPUNOV EQUATION
MoAI +MToAI +HT
I QIHI −MoBIR−1BT
IMo = 0 (4.25)
4.2.1. Ecuacion diferencial y condiciones de contorno
El planteamiento de la ecuacion B.10 de Hamilton-Jacobi-Bellman para el problema
4.22 resulta en
− ∂J∗ (xI , t)
∂t=
[∂J∗ (xI , t)
∂xI
]TAIxI +
1
2xTIH
TI QIHIxI
− 1
2
[∂J∗ (xI , t)
∂xI
]TBIR
−1BTI
∂J∗ (xI , t)
∂xI(4.26)
donde J∗ (xI , t) es el ındice de coste optimo. Las condiciones finales y la ley de control
son:
J∗ (xI , tf ) =1
2xTI (tf )SIxI(tf ) (4.27)
u∗ = −R−1BTI
∂J∗ (xI , t)
∂xI(4.28)
Operando y despreciando los terminos que convergen a cero, se llega una ecuacion
diferencial de Riccati dependiente de los estados del problema (SDDRE):
−DMDt
= MAI +MTAI +HTI QIHI −MBIR
−1BTIM (4.29)
siendo la derivada matricial total igual a:
D
Dt=
∂
∂t+
(∂
∂xI
)T(xI ⊗ In) (4.30)
con condiciones terminales:
M (xI , tf ) = SI (4.31)
y, dado que se han despreciado terminos, el vector de control no sera optimo sino
sub-optimo, de la forma:
uI = −R−1BTIM(xI , t)xI (4.32)
79

4.2. SOLUTION VIA LYAPUNOV EQUATION
4.2.2. Resolucion mediante la ecuacion de Lyapunov
Para resolver la ecuacion 4.29 con condiciones terminales 4.31 en el instante final,
tf , necesitarıamos conocer los valores futuros de las matrices, que a su vez dependen
del vector de estado xI , para poder integrar hacia atras desde tf . Esto es posible solo
si el sistema fuese lineal y las matrices fueran constantes, pero no en nuestro problema
no lineal.
En su lugar se asume que la matriz M puede descomponerse en la suma de una
matriz de transicion invertible Ψ y una matriz de estado estacionario Mo:
M (xI , t) = Ψ−1 (xI , t) +Mo (xI) (4.33)
donde en cada paso de integracion Mo (xI) es la solucion de la ecuacion de Riccati que
resuleve el problema 4.25 :
MoAI +MToAI +HT
I QIHI −MoBIR−1BT
IMo = 0 (4.34)
Sustrayendo 4.29 de 4.34, se obtiene una ecuacion diferencial de Lyapunov:
DΨ
Dt= A0Ψ + ΨAT
0 −BIR−1BT
I (4.35)
A0 (xI) = AI (xI)−BIR−1BT
IMo (4.36)
Ψ (xI , tf ) = (SI −Mo (xI))−1 (4.37)
La solucion de la ecuacion 4.35 mediante el procedimiento descrito en (Gajic and
Qureshi, 2008) es:
Ψ (xI , t) = eA0(t−tf) (Ψ (xI , tf )−D) eAT0 (t−tf) +D (4.38)
donde D es la solucion de la ecuacion algebraica de Lyapunov (ALE):
A0D +DAT0 −BIR
−1BTI = 0 (4.39)
4.2.3. Controlador de pre-alimentacion
Para prevenir los errores de escalado, se recurre a un controlador de prealimentacion,
que calcula un punto de equilibrio cercano en cada instante, xId . Este estado intermedio
contiene el angulo de ataque, el angulo de guinada, y las velocidades angulares de
cabeceo, guinada y balanceo que generarıan las aceleraciones demandadas por la ley
80

4.2. SOLUTION VIA LYAPUNOV EQUATION
de guiado optima xmtrimen cada punto de la trayectoria del misil.
Este vector de trimado xId para el problema integrado se define como:
xId =
qM
rLMT + V LMT · M t
VM
xmtrim
(4.40)
Con la introduccion de este vector, el problema integrado se transforma en un
regulador a tiempo finito tf que trata de eliminar el error eI entre el vector de estado
en cada instante xI y el vector xId, en la forma:
mınu=xsd
JI=1
2eI
T (tf )SIeI(tf ) +1
2
∫ tf
0
(zTIQI zI + uTIRuI
)dt
s.t. eI=AIxI −BIuI
eI=xId − xIzI=HIxI −HIxId
(4.41)
con el objetivo de llevar el vector de error del problema integrado eI a cero en t = tf .
La introduccion de este pre-alimentador fuerza al sistema integrado a buscar con-
diciones de equilibrio local es a lo largo de toda su trayectoria. Esta manipulacion de
la dinamica del sistema integrado preserva la separacion de escalas temporales entre
el guiado y el auto piloto, y al mismo tiempo retiene la filosofıa de la aproximacion
integrada.
La ley de control sub-optima resultante es:
uI = R−1BTIMeI (4.42)
La siguiente seccion resume el procedimiento de calculo de la matriz M con los desa-
rrollos de las secciones 4.2.1, 4.2.2 y 4.2.3
4.2.4. Procedimiento Practico de Resolucion
El procedimiento se ilustra en la figura 4.3. Los pasos a seguir son:
1. El controlador de pre-alimentacion calcula en cada instantet el vector xId.
2. eI = xId − xI
3. Se resuelve la ecuacion 4.34, obteniendose Mo. Esta ecuacion puede resolverse
de manera de efectiva a traves de cualquiera de las tecnicas descritas en (Menon
et al., 2002a).
81
4.2. SOLUTION VIA LYAPUNOV EQUATION
xI(t)
xId(t)
AI = AI (xI) + λIn
MoAI +MTo AI +HT
I QIHI −MoBIR−1BT
IMo = 0
tgo
A0 = AI −BIR−1BT
IMo
Ψ (tf ) = (SI −Mo)−1 A0D +DA0 −BIR
−1BTI = 0
Ψ (t) = e−A0tgo (Ψ (tf )−D) e−AT0 tgo +D
M = Ψ−1 (t) +Mo
uI = eλtR−1BTIMeI
uoI = eλtR−1BTIMoeI
eI = xId − xI
Mo
tgo < tc
D
tgo > tc
Figura 4.3: Algoritmo de calculo del sistema integrado. Existen dos posibles soluciones,uoI en el incio de l amaniobra terminal y uI en la cercanıa inmediata del blanco. Eneste diagrama se incluye un acelerador de la respuesta λ-shift.
82

4.3. EJEMPLOS NUMERICOS
4. A0 = AI −BIR−1BT
IMo.
5. Se invierte la matriz (SI −Mo (xI)) , para obtener Ψ (xI , tf ).
6. Se resuelve la ecuacion A0D + DAT0 − BIR
−1BTI = 0 a traves del proceso
descrito en la referencia (Gajic and Qureshi, 2008), obteniendose D.
7. Se obtiene
Ψ = eA0(t−tf) (Ψ (xI , tf )−D) eAT0 (t−tf) +D
La resolucion de la matriz exponencial eA0(t−tf) en 4.38 requiere una alta precision
y se empleara el metodo numerico de la referencia (Caliari et al., 2014). El calculo
de la exponencial eA0(t−tf) tiene que ser preciso o de otro modo la matriz M
tendera a infinito y saturara la entrada de control uI .
8. M = Ψ−1 +Mo.
9. Se obtiene la ley de control uI = R−1BTIMeI .
Sin embargo, debido a la presencia de tgo en la exponencial, cuando este valor es
relativamente grande la matriz Ψno sera invertirle y no se puede encontrar una solucion
para M .
En estas circunstancias, cuando la distancia entre el misil y el blanco es aun relativa-
mente grande, se empleara la solucion proporcionada por la matriz Mo para controlar
el misil, en la forma:
uoI = R−1BTIMoeI (4.43)
Se define un tiempo tc a partir del cual la matriz Ψ es invertirle, y por tanto se
pasarıa de utilizar la ley de control con horizonte infinito, ecuacion 4.43, a la ley de
control de horizonte finito, representada por 4.42:
uI = R−1BTIMeI
Este valor de tc se calcula en tiempo real como el instante en el que el valor de la
norma ‖M −Mo‖p excede cierto valor numerico y como consecuencia la matriz Ψ es
invertirle.
4.3. Ejemplos numericos
En esta seccion el esquema en dos bucles del capıtulo anterior se compara contra el
esquema integrado en escenarios sin ruidos. Los parametros de la simulacion correspon-
den a los mismos de la seccion 3.5. En el caso del doble bucle la frecuencia de guiado
83
4.3. EJEMPLOS NUMERICOS
es de 1000 Hz y del auto piloto de 25.000 Hz. Para el sistema integrado todo el bucle
se resuelve a 1000 Hz.
4.3.1. Errores de apuntamiento moderados
Este primer escenario considerar una intercepcion aire-aire donde el misil con control
doble persigue un UCAV supersonico con MT = 1,5, repitiendose las condiciones del
ejemplo planteado en 3.5.1, con una maniobra del blanco de nT = 15 g 1.
La figura 4.4 muestra las trayectorias del misil empleando el doble bucle y la logica
integrada. Se observa que el vuelo del misil en cada caso sigue cursos distintos. El tiempo
de vuelo hasta el impacto con la logica integrada es de 5,7 segundos mientras que para
el sistema de doble bucle se obtienen 6,8 segundos, y las distancias de paso finales son
0,08 y 0,14 m respectivamente. Los resultados principales obtenidos se resumen en la
tabla 4.1. En la aproximacion integrada el control terminal de Lyapunov de la ecuacion
4.42 se emplea durante los ultimos 0,4 segundos de vuelo, mientras que para la mayorıa
del tiempo de vuelo la logica integrada emplea la ley dada por uoI , ecuacion 4.43.
Cuadro 4.1: Resultados de la simulacion, G & C Integrado vs Doble Bucle para misildoble mando aerodinamico
Control tf ,(s) distancia paso,(m) ∆en ∆eδ, (deg) ∆ek
Doble Bucle 6,8 0,14 1,00 10,27 0,50Integrado 5,7 0,08 0,18 1,25 0,49
Aunque en los dos casos las distancias finales obtenidas representan impacto directo,
el esquema integrado tiene mejores actuaciones que el doble bucle:
Como se ve en la figura 4.5 el misil guiado con el esquema integrado requiere
menos aceleracion para interceptar al blanco que si el guiado por un doble bucle.
E incluso requiere menos aceleracion que la realizada por el blanco. El esquema
integrado es mas eficiente ya que considera no solo la posicion del blanco sino
ademas la actitud del misil al generar las instrucciones a los servos, y por tanto
preserva mejor las instrucciones de guiado.
La figura 4.6 representa otros parametros importantes de vuelo. La logica in-
tegrada requiere menos angulo de ataque y menos angulos de control, lo que
se traduce en menor resistencia aerodinamica, permitiendo al misil mantener su
vuelo acelerado hacia el blanco durante todo el vuelo.
1Un blanco pilotado no podrıa exceder 9g en una maniobra evasiva. Aquı los 15g representan ellımite estructural del UCAV.
84

4.3. EJEMPLOS NUMERICOS
0 500 1,000 1,500 2,000 2,500 3,000 3,500 4,000 4,500 5,000 5,500 6,0000
100
200
300
400
500
600
700
800
900
1,000
1,100
1,200
1,300
1,400
1,500
1,600
Downrange (m)
Cro
ssra
nge
(m)
BlancoMisil Guiado IntegradoMisil Doble Bucle
Figura 4.4: Trayectoria, error de apuntamiento moderado. Se lanzan dos misiles si-multaneamente, desde el mismo punto, contra un blanco que maniobra a 15 g. Lastrayectorias obtenidas difieren notablemente en funcion de la ley de guiado empleada.
85
4.3. EJEMPLOS NUMERICOS
0 1 2 3 4 5 6 7−0,5
0
0,5
1
1,5
2
Time (sec)
nBznT
Doble BucleIntegrado
Figura 4.5: Ratio de Aceleracion del misil vs Blanco , error de apuntamiento moderado.
Ambas logicas de control utilizan los dos modos disponibles para misiles de doble
mando aerodinamico, tanto desviacion como modo opuesto, a lo largo de las
distintas etapas del vuelo.
Finalmente es importante destacar que la carga computacional a bordo es significa-
tivamente menor en el caso de la aproximacion integrada. Esto se debe a dos motivos,
el tiempo de vuelo es menor y ademas no hay un bucle de auto pilotado independiente
operando a alta frecuencia. En este ejemplo en concreto la aproximacion integrada ha
requerido de 5697 pasos de integracion, mientras que la no integrada o de doble bucle
a requerido 170.650, casi 30 veces mas.
4.3.2. Trayectorias alejadas del curso de colision
Las caracterısticas de la logica integrada que incluyen menores angulos de los con-
troles y menores angulos de ataque, se aprovechan mejor en trayectorias que estan muy
lejos del curso de colision. Esto ocurre por ejemplo cuando el avion lanzador se ve for-
zado a realizar un disparo de emergencia contra un blanco que le atacaba lateralmente.
La figura 4.7 representa las trayectorias obtenidas para el misil siguiendo logica inte-
grada y logica de doble bucle, tratando de interceptar un blanco maniobrero, cuando
el angulo inicial de apuntamiento es muy importante, HE = 60 grados, en el lımite del
angulo de deteccion del buscador radar del misil. Otros parametros de este ejemplo son
γT = 180 y nT = 9 g, mientras que todos los demas permanecen iguales a los descritos
en la seccion 4.3.1. Bajo estas premisas, la distancia obtenida con la logica integrada
es 0,14 m, consiguiendose la intercepcion del blanco a los 6,1 segundos habiendo estado
el controlador terminal de Lyapunov activo en los ultimos 0.35 segundos.
86
4.3. EJEMPLOS NUMERICOS
0 1 2 3 4 5 6 7
−20
0
20
δc qδt q
(deg
)
δcq - Two-Loopδcq -IGA
δtq-nonIGA
δtq -IGA
0 1 2 3 4 5 6 7
−20
0
20
40
α(d
eg)
non-IGAIGA
0 1 2 3 4 5 6 7
2
2,5
3
Time (sec)
M∞
Two-LoopIGA
Figura 4.6: Parametros , error de apuntamiento moderado.
Sin embargo el mismo misil de doble mando pero con un guiado de doble bucle,
superior como hemos visto en el Capıtulo 3 a los misiles convencionales, no es capaz de
conseguir interceptar al blanco antes de que su motor cohete se consuma y su velocidad
de vuelo haya caıdo de manera significativa. La simulacion se detiene a los 10,2 segundos
87

4.3. EJEMPLOS NUMERICOS
de vuelo, cuando la velocidad de colision se vuelve positiva lo que significa que el blanco
ha conseguido evadirse. Este instante se representa en la figura 4.7 mediante los puntos
Mf y Tf , que son respectivamente el misil y el blanco cuando se detiene la simulacion,
a una distancia relativa entre ellos de 1384 m.
0 500 1,000 1,500 2,000 2,500 3,000 3,500 4,000 4,500 5,000 5,500 6,000
−3,400
−3,200
−3,000
−2,800
−2,600
−2,400
−2,200
−2,000
−1,800
−1,600
−1,400
−1,200
−1,000
−800
−600
−400
−200
0
200
400
600
800
1,000
Tf
Mf
Downrange (m)
Cro
ssra
nge
(m)
targetIGAtwo-loop
Figura 4.7: Trayectorias alejadas del curso de colision. El misil guiado por doble-bucleno consigue interceptar al blanco, mientras que el de guiado integrado consigue elimpacto directo. Los puntos Mf y Tf indican la posicion del misil y blanco cuando lavelocidad de colision Vc cambia de signo .
Otros parametros de la simulacion se representan en las figuras 4.8 y 4.9. Notese
como el giro cerrado del misil a casi su lımite estructural causa una caıda muy impor-
88
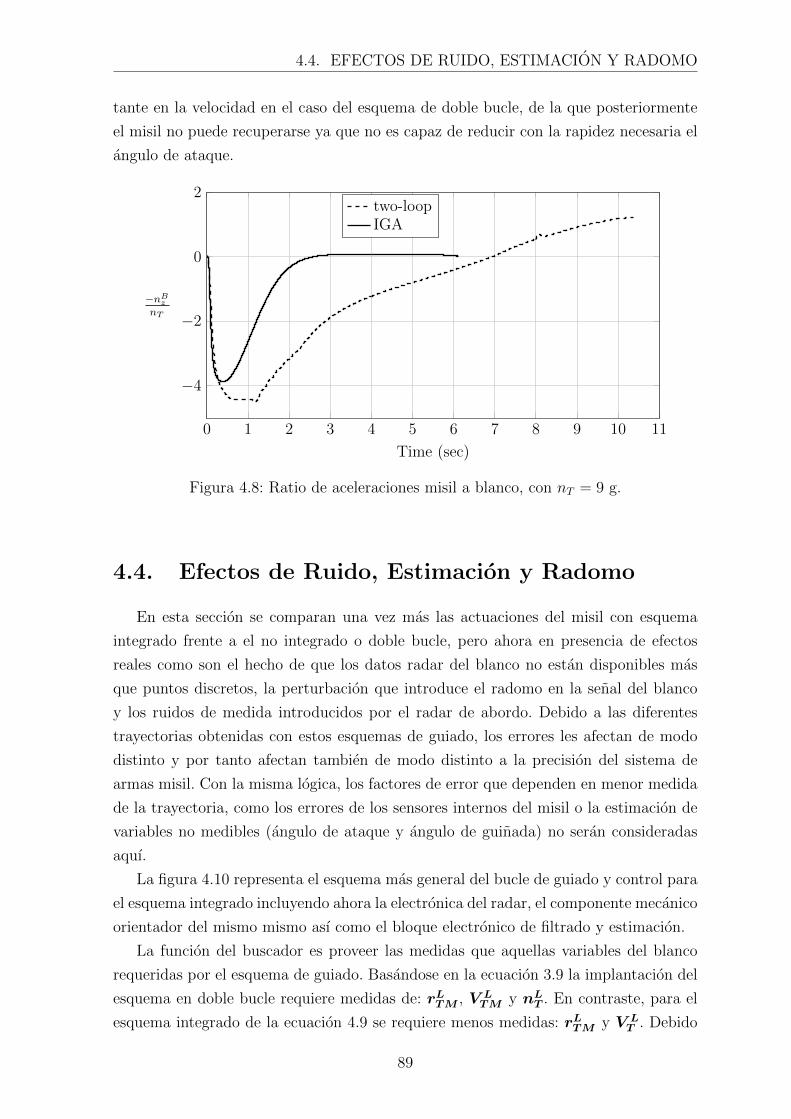
4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
tante en la velocidad en el caso del esquema de doble bucle, de la que posteriormente
el misil no puede recuperarse ya que no es capaz de reducir con la rapidez necesaria el
angulo de ataque.
0 1 2 3 4 5 6 7 8 9 10 11
−4
−2
0
2
Time (sec)
−nBznT
two-loopIGA
Figura 4.8: Ratio de aceleraciones misil a blanco, con nT = 9 g.
4.4. Efectos de Ruido, Estimacion y Radomo
En esta seccion se comparan una vez mas las actuaciones del misil con esquema
integrado frente a el no integrado o doble bucle, pero ahora en presencia de efectos
reales como son el hecho de que los datos radar del blanco no estan disponibles mas
que puntos discretos, la perturbacion que introduce el radomo en la senal del blanco
y los ruidos de medida introducidos por el radar de abordo. Debido a las diferentes
trayectorias obtenidas con estos esquemas de guiado, los errores les afectan de modo
distinto y por tanto afectan tambien de modo distinto a la precision del sistema de
armas misil. Con la misma logica, los factores de error que dependen en menor medida
de la trayectoria, como los errores de los sensores internos del misil o la estimacion de
variables no medibles (angulo de ataque y angulo de guinada) no seran consideradas
aquı.
La figura 4.10 representa el esquema mas general del bucle de guiado y control para
el esquema integrado incluyendo ahora la electronica del radar, el componente mecanico
orientador del mismo mismo ası como el bloque electronico de filtrado y estimacion.
La funcion del buscador es proveer las medidas que aquellas variables del blanco
requeridas por el esquema de guiado. Basandose en la ecuacion 3.9 la implantacion del
esquema en doble bucle requiere medidas de: rLTM , V LTM y nLT . En contraste, para el
esquema integrado de la ecuacion 4.9 se requiere menos medidas: rLTM y V LT . Debido
89
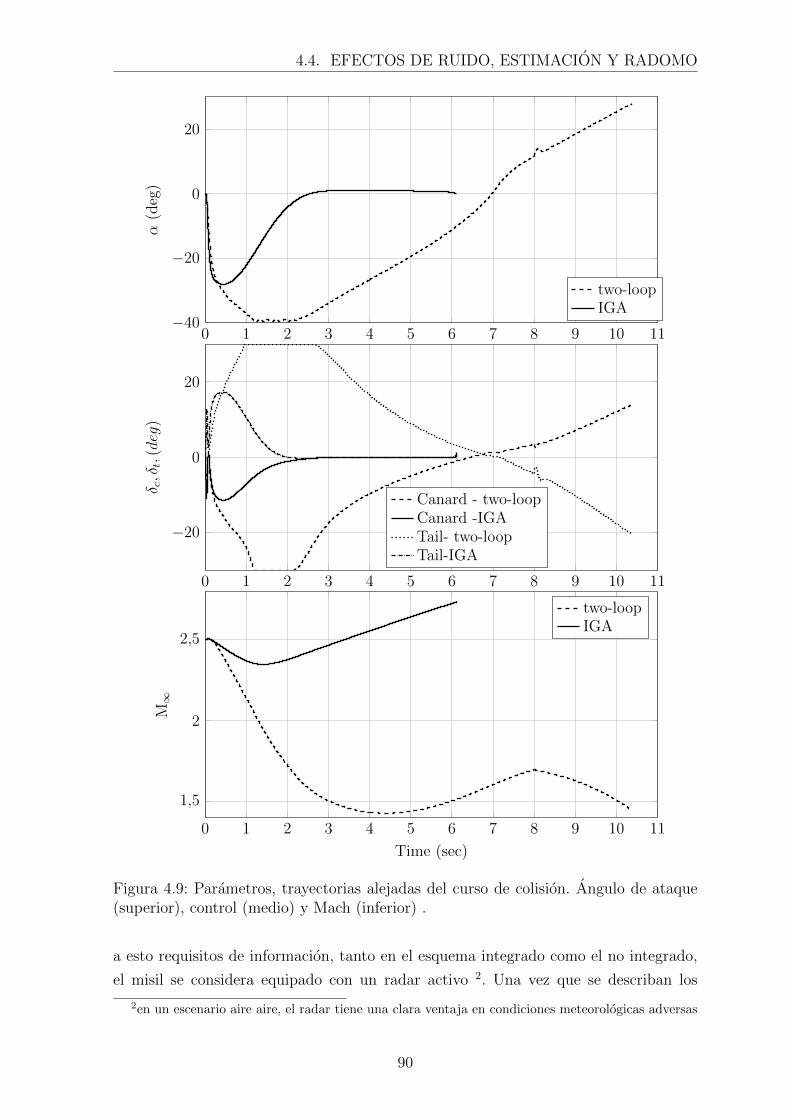
4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
0 1 2 3 4 5 6 7 8 9 10 11
−20
0
20
δ c,δt,
(deg
)
Canard - two-loopCanard -IGATail- two-loopTail-IGA
0 1 2 3 4 5 6 7 8 9 10 11−40
−20
0
20
α(d
eg)
two-loopIGA
0 1 2 3 4 5 6 7 8 9 10 11
1,5
2
2,5
Time (sec)
M∞
two-loopIGA
Figura 4.9: Parametros, trayectorias alejadas del curso de colision. Angulo de ataque(superior), control (medio) y Mach (inferior) .
a esto requisitos de informacion, tanto en el esquema integrado como el no integrado,
el misil se considera equipado con un radar activo 2. Una vez que se describan los
2en un escenario aire aire, el radar tiene una clara ventaja en condiciones meteorologicas adversas
90

4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
efectos reales, sus efectos pueden ser evaluados a traves de simulaciones no lineales
de encuentros tıpicos aire-aire. Una aproximacion similar se ha llevado a cabo en la
referencia (Zhurbal and Idan, 2011a).
NavigationFilter
Radar‖rTM‖ Vc
Radar Noises
Seekerxsk = f(xsk,xskd) Radome Error
TargetDynamics
IntegratedxI = f(xI ,xsd)
time-to-goEstimate
FinServosxs = f(xsd)
Unmodeled dynamics
MissileDynamic
xT , xT
σ∗, σ∗e
Ts, r∗TMk
, V ∗ck
rTM , ˙rTM+
xI
tgo
nT
xsd
xs
xM , xM
−
xM , xM ,n
Figura 4.10: Esquema del guiado y control integrado con efectos reales. Errores deradomo -seccion 4.4.1- ruidos radar y efectos de muestreo y estimacion - seccion 4.4.2-filtro Kalman - seccion 4.4.3- y finalmente la dinamica de alto orden de los servos -ecuacion 3.30
Ademas de la lınea de mira al blanco y de su velocidad angular, el radar activo de
la mayorıa de los misiles modernos es capaz de medir la distancia al blanco y en ciertas
y en presencia de nubes frente a un sensor de infrarrojos u u optico
91
4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
circunstancias la velocidad de colision. Estas medidas adicionales pueden ser utilizadas
con ventaja por el sistema de navegacion y guiado:
La velocidad de colision Vc - ecuacion F.22 - es necesaria para estimar el tiempo
hasta el impacto en la ley de guiado optimo, tgo ecuacion F.26, y es un com-
ponente fundamental de la ley de navegacion proporcional. Si no se mide puede
ser estimada, pero esto ultimo puede causar errores importantes. La medida por
parte del radar de la velocidad de colision mejora la efectividad del arma.
Tanto el esquema integrado como el de doble bucle requieren una cantidad sig-
nificativa de informacion del blanco, en particular su velocidad relativa y su
aceleracion. Estimar esta ultima unicamente a traves de medidas angulares es
matematicamente imposible. La medida de la distancia relativa del misil al blan-
co, y de su velocidad de colision, combinada con los angulos de la lınea de mira
en un filtro de navegacion adecuado, permite una estimacion de la maniobra del
blanco y su empleo en leyes de guiado mas avanzadas.
4.4.1. Errores de Radomo
Debido a la presencia de errores parasitos de radomo, la cabeza del buscador ra-
ramente esta apuntada directamente al blanco y existe cierta de diferencia entre la
posicion real σ y la medida σm para el blanco. La cabeza del buscador tiene su propia
dinamica de apuntamiento, lo que causa cierto retardos en el angulo del seguimiento
del buscador, ver figura H.1 y 4.11.
.
Los errores por tanto vienen de dos contribuciones, por un lado la dinamica del
buscador, que causa un error de apuntamiento ε y el error de refraccion de radomo.
Un modelo dinamico para la cabeza del buscador sera empleado en las simulaciones
numericas y esta descrito en el apendice, adaptado de la referencia (Nesline and Zar-
chan, 1985).
Para un analisis preliminar puede suponerse que el angulo de difraccion θr es una
funcion seno periodica del angulo cardan del buscador θh, definido por el eje de la
antena:
θr = R · s(2π
Phθh + φh) (4.44)
donde R es la pendiente maxima de radomo, que depende de: el angulo con el que la
energıa del blanco incide en el radomo, el material, la fase de la senal, la temperatura
del radomo, etc, siendo en general muy difıcil de calcular o medir con precision, ver
referencia (Lin, 1991). Los requisitos de tolerancias para la pendiente de radomo son
92

4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
XB
ZB
Blanco aparente
Blanco
Eje antena
XLθ
θd
ε′
θh
σσm
εθr
Figura 4.11: Definicion de los angulos del buscador radar. Con respecto a la referenciainercial fija en el espacio, el eje del misil forma el angulo θ. El eje de la antena, que nocoincide con el eje misil, forma un angulo θd con respecto a la referencia. El eje de laantena tiene un error de orientacion ε con respecto al blanco. La distorsion de radomocrea una posicion aparente del blanco dada por ε′
siempre parte de los requisitos de diseno de un misil tactico. Los radomos de formas
aerodinamicas introducen errores que pueden modelarse como re - alimentaciones no
deseadas en el bucle de guiado y control. Afectan tanto a la estabilidad del misil como
a la distancia de paso final, (Zarchan, 2012), y reducen el tiempo de respuesta del misil.
Un valor positivo de la pendiente de radomo R reduce la medida de la velocidad angular
de la lınea de mira, causando grandes oscilaciones al misil en vuelo. Una pendiente
negativa por otro lado provoca inestabilidades del sistema.
En cualquier caso, y para pequenos angulos de cardan θh, la influencia de los errores
de radomo en el bucle de guiado y control tiende a disminuir. Aunque un misil con
control aerodinamico tiene que mantener cierto angulo de ataque para poder maniobrar,
los misiles con control doble aerodinamico requieren menos angulo de ataque en vuelo,
se reduce el angulo de cardan al blanco y por tanto el error de radomo. Ademas el
misil con control doble aerodinamico combinado con el esquema integrado de guiado
y control resulta en una aproximacion mas directa al blanco, ver figuras 4.4 y 4.7, lo
que permite reducir aun mas el angulo cardan al blanco. Esta relacion entre la ley de
guiado y el error de radomo se analiza en la seccion siguiente mediante simulaciones
numericas.
93
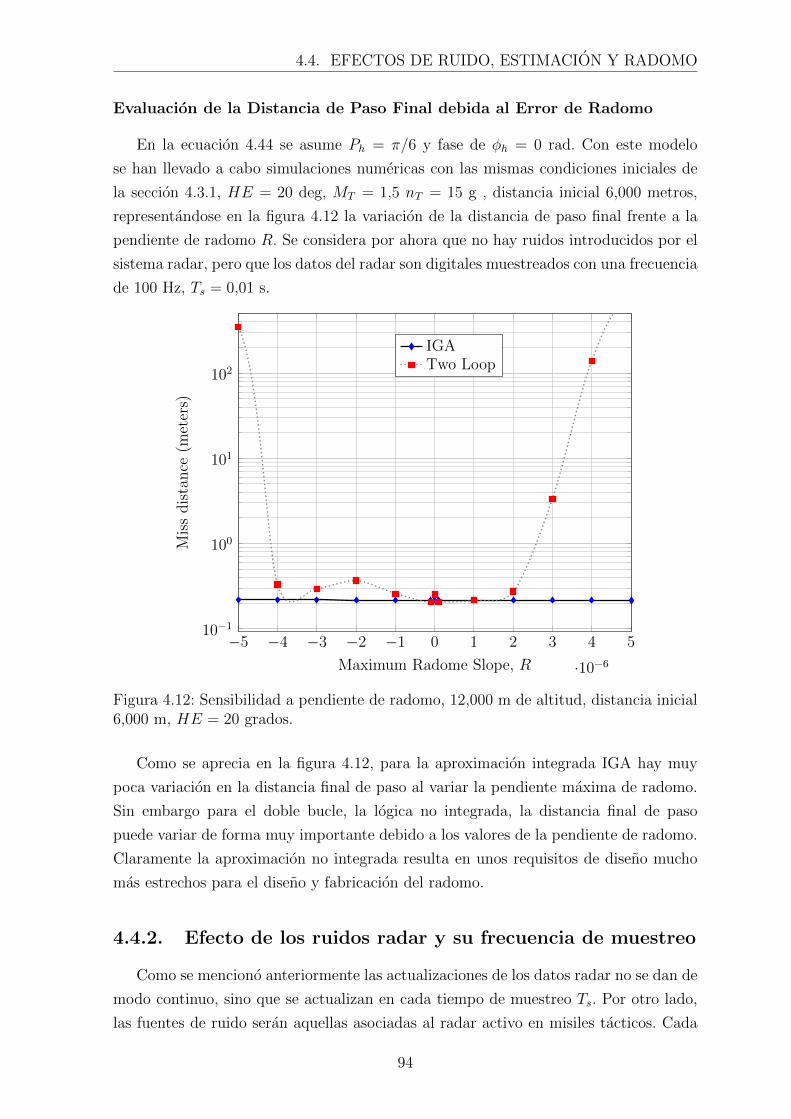
4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
Evaluacion de la Distancia de Paso Final debida al Error de Radomo
En la ecuacion 4.44 se asume Ph = π/6 y fase de φh = 0 rad. Con este modelo
se han llevado a cabo simulaciones numericas con las mismas condiciones iniciales de
la seccion 4.3.1, HE = 20 deg, MT = 1,5 nT = 15 g , distancia inicial 6,000 metros,
representandose en la figura 4.12 la variacion de la distancia de paso final frente a la
pendiente de radomo R. Se considera por ahora que no hay ruidos introducidos por el
sistema radar, pero que los datos del radar son digitales muestreados con una frecuencia
de 100 Hz, Ts = 0,01 s.
−5 −4 −3 −2 −1 0 1 2 3 4 5
·10−6
10−1
100
101
102
Maximum Radome Slope, R
Mis
sdis
tance
(met
ers)
IGATwo Loop
Figura 4.12: Sensibilidad a pendiente de radomo, 12,000 m de altitud, distancia inicial6,000 m, HE = 20 grados.
Como se aprecia en la figura 4.12, para la aproximacion integrada IGA hay muy
poca variacion en la distancia final de paso al variar la pendiente maxima de radomo.
Sin embargo para el doble bucle, la logica no integrada, la distancia final de paso
puede variar de forma muy importante debido a los valores de la pendiente de radomo.
Claramente la aproximacion no integrada resulta en unos requisitos de diseno mucho
mas estrechos para el diseno y fabricacion del radomo.
4.4.2. Efecto de los ruidos radar y su frecuencia de muestreo
Como se menciono anteriormente las actualizaciones de los datos radar no se dan de
modo continuo, sino que se actualizan en cada tiempo de muestreo Ts. Por otro lado,
las fuentes de ruido seran aquellas asociadas al radar activo en misiles tacticos. Cada
94
4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
uno de estos ruidos puede caracterizarse por una desviacion estandar Σ, y asumirse
que entra en el bucle de guiado y control del misil en cada intervalo de muestreo Ts.
Para simplificar la exposicion, los detalles de como se calcula la desviacion estandar
para cada tipo de ruido se ha movido a los apendices, en la seccion H.2. Se asumira
que la relacion entre la densidad espectral del ruido (PSD) a su desviacion estandar se
relaciona con la frecuencia de muestreo a traves de PSD = Σ2Ts.
Los ruidos que se consideran relevantes para el radar activo son:
El destello (glint), que es un tipo de ruido angular, causado por perturbaciones
aleatorias en el retorno blanco del radar, y que no depende de las caracterısticas
del buscador. Es un ruido altamente no correlado, pero puede ser modelado (ver
seccion H.2.1) como la combinacion de dos distribuciones Gausianas con desvia-
ciones estandares distintas que denominaremos Σg1 y Σg2. Este tipo de ruido se
incrementa al disminuir la distancia al blanco.
El ruido angular del radar activo, que se detalla en la seccion H.2.2. Es un
ruido de tipo termico, que aparece ya que es el mismo radar el que emite y recibe
la senal. Es proporcional al cuadrado de la distancia entre el misil y el blanco.
Desvanecimiento y ruidos atmosfericos, que pueden considerarse indepen-
dientes del alcance esto se revisan en la seccion H.2.2.
Ruidos en la medida de range and collision velocity, se detallan en la subsec-
cion H.2.3.
La mejora del sensor radar disminuira los ruidos angulares dependientes e inde-
pendientes del alcance, a la vez que aquellos asociados a la medida del alcance y la
velocidad de colision. No disminuira sin embargo los ruidos de destello.
4.4.3. Filtro Variable tipo Kalman
El bloque de filtrado en la figura 4.10 es responsable de filtrar aquellas variables que
estan corrompidas por el ruido, ası como de estimar los valores de las variables entre
intervalos de medida y calcular aquellas variables que no pueden medirse directamente,
como por ejemplo nT .
Para poder estimar las variables de guiado se recurrira a un filtro de Kalman discre-
to. Aunque existen filtros no lineales mas complejos, como se describen en la referencia
(Kim et al., 2012), por ejemplo un Extended Kalman Filter o filtro de partıculas, (Gus-
tafsson et al., 2002), el proposito de esta seccion es estudiar el impacto de la estimacion
en el bucle de guiado y control. Este objetivo se consigue al emplear el mismo esquema
de estimacion para la logica integrada y la de doble bucle. Ademas el filtro lineal de
95

4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
Kalman es capaz de conseguir resultados suficientemente buenos cuando la aceleracion
del blanco es constante o es senoidal, como se describe en (Zarchan, 2012).
En misiles interceptores la varianza del ruido radar no es estacionaria ya que varıa
con la distancia al blanco. Como consecuencia las ganancias del filtro Kalman seran
dependientes del tiempo. El filtro desarrollara estimaciones de los estados del blanco
que necesite la ley de guiado y control a partir del conjunto de medidas con ruido que
contienen informacion sobre el blanco. En el desarrollo del filtro se necesita considerar
la dinamica del blanco, que se asume como:VLTM
V LTM
nLT
=
[0] I3 [0]
[0] [0] I3
[0] [0] [0]
r
LTM
V LTM
nLT
−[0]
nL
[0]
+
[0]
[0]
w
(4.45)
[rL∗TMV L∗TM
]=
[I3 [0] [0]
[0] I3 [0]
]rLTM
V LTM
nLT
+
[υ(r,θ)
υV
](4.46)
en el espacio-estado
xF = AFxF +GFuF +W (4.47)
z∗F = HFxF + V (4.48)
con xF =[rLTM V L
TM nLT
]T, z∗F =
[rL∗TM V L∗
TM
]Tand uF = nL,V =
[υ(r,θ) υV
]T,
QF = E[WWT
].
La ecuacion del filtro discreto, de la referencia (Zarchan and Musoff, 2000), es:
xFk = ΦkxFk−1 +GFkuFk−1 +KFk (z∗Fk −HFΦkxFk−1 −HFGFkxFk−1) (4.49)
con
Φk =
1 Ts 0,5T 2s
0 1 Ts
0 0 1
⊗ I3 (4.50)
GFk =
∫ τ=Ts
τ=0
Φ (τ )GF · dτ = −
0,5T 2s
Ts
0
⊗ I3 (4.51)
De modo estricto, la ultima ecuacion es solo valida si uFk es constante entre puntos
de muestreo, lo cual no es cierto ya que se espera que la aceleracion del misil varıe de
96

4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
modo continuo. Las ecuaciones recursivas para el calculo de las ganancias son:
MFk = ΦkPFk−1ΦTk +QFk (4.52a)
K = MFkHTF
(HMFkH
T +RFk
)−1(4.52b)
PFk = (I −KkHF )MFk (4.52c)
QFk =nTtgo
T 5s
20T 4s
8T 3s
6T 4s
8T 3s
3T 2s
2T 3s
6T 2s
2Ts
⊗ I3 (4.53)
y RFk = E[VVT
]. Para iniciar las ecuaciones 4.52 se necesita una matriz de cova-
rianza inicial PFk (0).
4.4.4. Evaluacion de la distancia de paso con ruidos radar
El caso de la seccion 4.3.1 ha sido calculado numericamente con los siguientes
parametros:
Cuadro 4.2: Parametros de ruido seleccionados para el radar activo
Fuente Parametros
Glint Σg1 = 10−3 rad , Σg2 = 10−1 rad proporcional a ( 1‖rTM‖
Independiente Σf = 10−3 radDependiente alcance Σt = 3,33 · 10−6‖rTM‖2
Velocidad colision ΣV = 5 · 10−6‖rTM‖2
Atmosferico Σan = 0Alcance Σρ = 0
Inicialmente se considera una simulacion en la que, R = 0 y Ts = 0,01.El filtro se
inicializa a los Tkalman = 0,5 segundos. La figura 4.13 muestra la trayectoria obtenida
relativa al misil. En el caso del doble bucle, el ruido radar afecta a la estimacion de
la aceleracion del blanco, que no se estima particularmente bien por un filtro lineal de
Kalman. Esto a su vez genera una demanda de aceleracion al misil esta muy afectada
por el ruido, como puede verse en la figura 4.14 . En contraste, con el esquema integrado
se obtiene una trayectoria mucho mas controlada. La distancia final de paso en este
ejemplo ha sido de 0.72m para el IGA y 3.14m para el doble bucle.
Se llevan a cabo ahora variaciones de R en simulaciones de Montecarlo, ya que
en presencia de ruidos estocasticos, los resultados de la simulacion variaran en cada
ejemplo. Como es sabido, este metodo es el mas ampliamente utilizado para analisis
97

4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
two-loopIGA
2000 metros
4000 metros
6000 metros
Figura 4.13: Trayectoria del blanco medida por el radar tal y como se ve desde el misil.
estadıstico. Aquı se realizan 50 simulaciones para cada caso, obteniendose la media y
la desviacion estadıstica en cada escenario.
Los resultados se aprecian en en las figuras 4.15 y 4.16. El ruido de destello tiene una
importancia muy significativa en el caso del doble bucle, incrementando la distancia
de paso en un orden de magnitud, mientras que el esquema integrado es mucho menos
sensible a la maxima pendiente de radomo.
4.4.5. Experimentos con la frecuencia de muestreo de datos
En esta seccion se estudian las implicaciones de la frecuencia de muestreo de datos
del buscador en las actuaciones del sistema, para un misil operando con logica integrada
o en doble bucle. Los experimentos se llevan a cabo sin ruido.
El escenario es el de la seccion anterior, con HE = 20 deg, Mach incial de M = 2,5
y nT = 15 g, MT = 1,5 . Para cada valor de fs = 1Ts
, se varıa a distancia inicial entre
misil y blanco entre 2,000 y 8,000 metros. Los resultados se muestran en la figura 4.17
para frecuencias de muestreo entre 50-1000 Hz.
Los resultados de 4.17 muestran que el filtro de Kalman y las actuaciones del misil
sin ruido son independientes de la frecuencia de muestreo excepto para el caso de muy
bajas frecuencias para la logica integrada. Este resultado ilustra que la logica integrada
98
4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
0 1 2 3 4 5 6 7−2
−1,8
−1,6
−1,4
−1,2
−1
−0,8
−0,6
−0,4
−0,2
0
0,2
0,4
Time (s)
−nBznT
two-loopIGA
Figura 4.14: Aceleracion del misil en presencia de ruido radar.
−5 −4 −3 −2 −1 0 1 2 3 4 5
·10−6
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
Maximum Radome Slope, R
RM
SM
iss
dis
tance
(met
ers)
IGA - Range Independent NoiseIGA - Radar Active NoiseIGA - Glint
Figura 4.15: Error con esquema integrado y ruido radar.
99

4.4. EFECTOS DE RUIDO, ESTIMACION Y RADOMO
−5 −4 −3 −2 −1 0 1 2 3 4 5
·10−6
0
2
4
6
8
10
Maximum Radome Slope, R
RM
SM
iss
dis
tance
(met
ers)
Two-Loop - Glint NoiseTwo-Loop - Radar Active NoiseTwo-Loop Range Independent Noise
Figura 4.16: Error con esquema no-integrado y ruido radar.
100 200 300 400 500 600 700 800 900 1,0000
1
2
3
4
5
6
7
8
9
Sampling rate, fs = 1Ts, Hz
Ave
rage
mis
s(m
),fo
r‖rTM
(0)‖∈
[200
0,80
00](m
) IGATwoLoop
Figura 4.17: Variacion de la distancia de paso con la frecuencia de muestreo.
100

4.5. DEFENSA CONTRA ATAQUE POR LA COLA
requiere un mınimo de frecuencia de muestreo para ser capaz de guiar el misil hasta
el blanco. Dado que el coste del hardware del radar es proporcional al valor de la
frecuencia de muestreo, se demuestra que el caso integrado se requiere un radar de
mayor calidad que para el caso del doble bucle.
En el caso del doble bucle el auto piloto trabaja a una frecuencia superior al bucle
externo de guiado, mientras que en el caso integrado se trabaja a una unica frecuen-
cia. La mayor frecuencia de trabajo del auto piloto del doble bucle puede por tanto
contribuir a mejorar los resultados cuando la frecuencia de trabajo del radar es baja.
4.5. Defensa contra ataque por la cola
4.5.1. Soluciones previas y retos tecnologicos
Esta seccion investiga un control puramente aerodinamico para obtener un giro de
180 grados del misil, empleando el misil de control doble aerodinamico y un esquema
integrado para el guiado y control. Este tipo de maniobra es muy importante para
misiles modernos, como se detalla en la figura 1.4 y referencia (Kim et al., 2013),
ya que da la capacidad al avion lanzador para atacar blancos de oportunidad en su
hemisferio trasero o auto defensa contra un blanco atacante que se aproxime por la cola.
Como consecuencia un misil capaz de realizar esta maniobra dota al avion portador de
una gran ventaja en supervivencia y flexibilidad operativa.
Para misiles convencionales modernos con control canard o cola, propulsados por
un motor cohete solido, los intentos para obtener las altas velocidades de giro reque-
ridas requieren altos angulos de ataque por encima de 50 grados. En este dominio de
altos angulos de ataque, el misil experimenta muchas dificultades para mantener un
vuelo controlado: se produce perdida o saturacion aerodinamica del control, el efecto
de guinada fantasma debido a los torbellinos asimetricos del fuselaje, alta resistencia
aerodinamica y perdida de velocidad, variaciones de estabilidad, perdida de control de
balanceo, etc. Cualquiera de estos efectos puede por sı solo causar perdida de control
de vuelo y unas actuaciones del misil muy pobres.
La habilidad para conseguir realizar este tipo de maniobra ha sido una de las princi-
pales razones detras de la introduccion reciente del esquema de misil hıbrido en misiones
aire-aire, (Wise and B Roy, 1998). En este tipo de misiles el control aerodinamico se
combina con un actuador no-aerodinamico que deflecta el chorro y permite mantener
al misil controlado en la region de altos angulos de ataque, como se describe en la
seccion 1.1.3. Este tipo de elementos incrementa significativamente el coste, la com-
plejidad y el riesgo tecnico del misil, ası como los riesgos de seguridad para el avion
lanzador (Ratliff et al., 2009), (McFarland and Calise, 2000) , (Innocenti and Thukral,
101

4.5. DEFENSA CONTRA ATAQUE POR LA COLA
1993). Como consecuencia, ser capaces de realizar esta maniobra con un misil muy agil
unicamente con control aerodinamico es un beneficio operativo muy significativo.
Como se demostrara en esta seccion el misil con control doble aerodinamico y guiado
integrado es capaz de realizar esta maniobra y conseguir interceptar a un blanco que
se aproxima por el hemisferio trasero, manteniendo angulos de ataque por debajo de
35 grados durante toda la maniobra.
Se considerara que el misil se lanza desde un avion en regimen supersonico e in-
mediatamente enciende su motor cohete para realizar el giro de 180 grados. En la fase
inicial el misil se aleja del blanco, por lo que el buscador radar no ha capturado aun
al blanco y la velocidad de colision es negativa. En esta fase inicial se pide al misil un
giro a factor de carga constante en una fase de trayectoria pre-programada. Una vez
que el misil ha girado de modo que el angulo de cardan del buscador θh es menor que
60 grados, se asume que el radar fija al blanco y a partir de aquı sigue el esquema
integrado hasta la interceptacion.
Se consideran dos escenarios distintos. En el primero el misil se lanza desde un
avion atacando a un blanco no programado, un blanco de oportunidad, que acaba de
ser detectado y localizado en la cola del avion lanzador. En un segundo escenario el misil
se emplea como defensa contra un avion caza enemigo que se aproxima rapidamente al
avion lanzador desde su cola.
4.5.2. Blanco de oportunidad en el hemisferio trasero
Se asume que el Mach del avion lanzador es M = 2,5. El blanco es un caza moderno
pilotado volando a MT = 1,2, y que inmediatamente comienza una maniobra evasiva
a su maxima capacidad de 9 g una vez que detecta el lanzamiento del misil. Otros
parametros de la simulacion se definen en la tabla 4.3.
Cuadro 4.3: Parametros de la simulacion. Blanco o de oportunidad en el hemisferiotrasero.
Parametro Valor (unid.)
Mach lanzamiento misil, M∞ 2.5 ( ND)Mach Blanco, MT 1.2 (ND)Maniobra del blanco, nT 9 (g)Factor de carga en el giro 30 (g)Altitud vuelo, h 12,000 metersDistancia inicial, rTM(0) 5,000 (m)Tiempo combustion motor, tb 8 (s)Empuje, T 3400 (N)
Inmediatamente despues de ser lanzado y alejarse del avion lanzador, el misil inicia
un giro a factor de carga constante de 30 g. La trayectoria resultante se muestra en la
102
4.5. DEFENSA CONTRA ATAQUE POR LA COLA
figura 4.18. Una vez que se completa este giro cerrado y se fija el blanco en el radar,
se inicia la trayectoria guiada hacia el blanco. La distancia final de paso es de 0.42
metros, lo que equivale a impacto directo, tiempo total de vuelo de 8.5 segundos, con
tc = 8,1 s.
La figura 4.19 representa la maniobra del misil durante el encuentro aire-aire.La
demanda de maniobra durante la fase inicial de vuelo (entre los puntos M0 y M1)
se fija a 30g, que se administra por parte del autopiloto para no exceder los lımites
mecanicos y aerodinamicos de la envolvente de vuelo del misil, como en la seccion 3.4.
Una vez que el misil ha girado lo suficiente, de modo que su radar es capaz de detectar
al blanco, la logica de guiado cambia desde una maniobra constante al esquema IGA
integrado, que se traduce en una reduccion inmediata de la demanda de maniobra. La
maxima maniobra necesaria ha sido de 31.2 g, en el inicio del giro a g-constante. Notese
que la transicion al esquema integrado es abrupta pero no se producen oscilaciones,
como se aprecia en la figura 4.20. El cambio de rumbo de 0 a 180 grados ha llevado
solo 2.2 segundos a una altitud de 12,000 metros, lo que por si solo indica la agilidad
del misil DAC. En esta simulacion se han incluido los ruidos, errores de radomo y
frecuencia de muestreo de datos del apartado anterior, siendo por tanto totalmente
realista.
La figura 4.21 ilustra el comportamiento de otros parametros importantes en el
vuelo del misil. El angulo de ataque permanece siempre por debajo del nivel de 35
grados a partir del cual se considera que aparece el efecto de guinada fantasma.
Los angulos de los controles de vuelo, 4.21, permanecen siempre por debajo del lımi-
te mecanico de 30 grados. El canard se encuentra saturado debido a su alta incidencia
en la fase final del giro a G constante, y no contribuira mas a incrementar el momen-
to de cabeceo del misil, siendo ∂Cm∂δcq
= 0. Cuando el control delantero se encuentra
saturado, el misil sigue estando controlado por la cola.
Finalmente en la figura 4.21 en su parte inferior ilustra el comportamiento de la ve-
locidad del misil. La propulsion permanece activa durante los primeros ocho segundos.
Se nota como la velocidad del misil cae de modo significativo durante la fase inicial
de giro cerrado, incluso a pesar de que la propulsion esta activa. Una vez que el giro
termina la alta eficiencia cinematica del esquema integrado de guiado permite al misil y
recuperar rapidamente su velocidad. En los ultimos instantes antes del impacto el mo-
tor cohete se ha consumido por completo pero el misil tiene suficiente presion dinamica
para la maniobra de correccion final y conseguir interceptar al blanco actuando en los
controles canard y cola.
103

4.5. DEFENSA CONTRA ATAQUE POR LA COLA
−3,000−2,500−2,000−1,500−1,000 −500 0 500 1,000−6,000
−5,500
−5,000
−4,500
−4,000
−3,500
−3,000
−2,500
−2,000
−1,500
−1,000
−500
0
500
1,000
VM
VT
M1
M0
I
T0
M2M3
Downrange (m)
Cro
ssra
nge
(m)
targetDAC Missile w/IGA
Figura 4.18: Trayectoria contra un blanco el hemisferio trasero. La figura demuestra laagilidad conseguida con una logica integrada y misil de doble mando aerodinamico con-tra un blanco maniobrero, inicialmente localizado en la trasera del avion lanzador.M0
es el punto de lanzamiento, M1 final de la maniobra de giro cerrado a 30 g y el comienzodel guiado IGA. M2 apagado del motor cohete a los t = 8 segundos, M3 comienzo delcontrolador final de Lyapunov, I impacto contra el blanco.
Maniobra de defensa contra un ataque por la cola
Aquı se considera el escenario de un avion caza enemigo localizado en nuestra
cola, volando a la misma velocidad y altitud que nuestro avion, con M = 2,5 y apro-
ximandose al avion amigo rapidamente. La separacion inicial entre nuestra avion y el
avion blanco es la misma que en el escenario anterior, 5000 m. Los otros parametros
para la simulacion se define en la tabla 4.4. El misil se lanza a M = 2,5 e inmediata-
104

4.5. DEFENSA CONTRA ATAQUE POR LA COLA
0 1 2 3 4 5 6 7 8−10
0
10
20
30
Time (sec)
Mis
sile
late
ral
acce
lera
tion
,−nB z
(g)
Figura 4.19: Maniobra del misil, blanco en el hemisferio trasero.La curva en color rojocorresponden a los resultados de la simulacion con ruido y efectos reales.
0 1 2 3 4 5 6 7 880
100
120
140
160
180
200
220
240
260
280
Time (sec)
Mis
sile
pit
chan
gle,θ,
(deg
)
Figura 4.20: Angulo de cabeceo, θ, blanco en el hemisferio trasero. La curva en colorrojo corresponden a los resultados de la simulacion con ruido y efectos reales.
105

4.5. DEFENSA CONTRA ATAQUE POR LA COLA
0 1 2 3 4 5 6 7 8
−20
0
20
δq c,δt q
(deg
)
Canard -IGATail-IGACanard -IGATail-IGA
0 1 2 3 4 5 6 7 8 9−10
0
10
20
30
40
α(d
eg)
0 1 2 3 4 5 6 7 8 92
2,2
2,4
2,6
Time (sec)
M∞
Figura 4.21: Parametros, blanco en el hemisferio trasero: angulo de ataque (top), angu-los de control (middle), Mach (bottom). La curva en color rojo corresponden a losresultados de la simulacion con ruido y efectos reales.
mente inicia una maniobra de giro cerrado a nBd = 30 g de modo sostenido. Durante
este giro el angulo de ataque del misil aumenta de modo progresivo, y una vez que
106

4.5. DEFENSA CONTRA ATAQUE POR LA COLA
alcanza el lımite maximo admisible α = 35, la demanda de maniobra se reduce en
escalon nBd = 24 g, para preservar la controlabilidad del misil. A partir de este punto
el misil continua el giro a nBd = 24 g sostenidos, mientras completa su giro y θh < 60
grados. Una vez que el angulo de cardan del buscador llega a los 60 grados, el radar
del misil engancha al blanco y comienza el guiado y control integrados. La logica de
guiado integrada guıa al misil hacia el blanco a la vez que recupera la velocidad del
misil tras el giro manteniendo angulos de ataque bajos.
Cuadro 4.4: Parametros de la simulacion defensa contra ataque desde cola
Parametro Valor (unid.)
Mach lanzamiento misil, M 2.5 ( ND)Mach blanco, MT 2.5 (ND)Maniobra blanco, nT 6 (g)Factor de carga giro misil 30 / 24 (g)Altitud, h 12,000 metersDistancia misil a blanco inicial, rTM(0) 5,000 (m)Tiempo de combsution, tb 8 (s)Empuje, T 3400 (N)
La distancia final de paso obtenida es de 0.57 metros con impacto a los 6.7 segundos
desde lanzamiento. El controlador terminal esta activo desde el segundo tc = 6,2.
La figura 4.22 muestra las trayectorias del misil y del blanco. La maniobra realizada
por el avion blanco tratando de escapar corresponde a una maniobra realista, en la que
el avion trata de que el misil con control aerodinamico convencional sature su control
y pierda actuaciones, o en el caso de un misil hıbrido que consuma su propulsion antes
de acercarse al blanco.
Las figuras 4.23 y 4.24 ilustran la aceleracion lateral del misil y su angulo de cabeceo.
En rojo se muestra las curvas correspondientes a la trayectoria afectada por ruido radar
y otros efectos reales comentados. Notese como el efecto del destelleo (glint) se percibe
fundamentalmente al final del vuelo, cerca del impacto, causando algunas fluctuaciones
en el movimiento de los controles.
En la maniobra, figura 4.23, se aprecia los dos niveles de aceleracion demandado
durante el giro cerrado, y la transicion suave entre los mismos perfectamente controlada
por el auto piloto. Se nota tambien el bajo nivel de aceleracion lateral requerido por el
control integrado una vez que concluya el giro, y la correccion final en desviacion antes
del impacto. La maxima maniobra durante la intercepcion aire-aire es de 31.2 g, por
debajo del lımite estructural.
En la grafica correspondiente al angulo de cabeceo, figura 4.24, se observa una
velocidad de giro θ muy elevada inicialmente , inmediatamente despues del lanzamiento.
Esto se debe al efecto de la estela del canard en el control de cola, que genera un valor del
107

4.6. CONCLUSIONES
momento de picado Cm muy importante cuando el angulo de ataque es todavıa pequeno.
Notese que el cambio de nivel de maniobra se da a los t=2.2 segundos, mientras que
θ no cambia apreciablemente debido a la gestion del auto piloto. Una vez completado
el giro, sigue una region de θ casi constante, en la que el control IGA dirige al misil
contra el blanco aumentando progresivamente su velocidad.
La figura 4.25 muestra otros parametros de actuaciones importantes: angulo de
ataque, la posicion de las aletas de control y el numero de Mach durante el vuelo.
Notese como el angulo de ataque no excede el lımite de 35 grados, y los controles
permanecen siempre por debajo de su lımite mecanico de 30 grados. El numero de
Mach del misil se reduce durante la fase de giro a un mınimo de 1.88, pero se recupera
rapidamente despues.
4.6. Conclusiones
En este capıtulo se ha desarrollado un algoritmo completo para implementar el
guiado y control en un solo bucle, incluyendo efectos reales y aerodinamica no lineal.
Se ha hecho especıficamente para misiles con control doble aerodinamico, y es aplicable
a misiles con control en cola o canard.
La logica integrada no necesita considerar ningun modelo particular de maniobra
del blanco, e incluye unicamente la velocidad del blanco como una perturbacion al
sistema.
Las simulaciones con y sin efectos reales demuestran la superioridad neta de la
aproximacion integrada con respecto al doble bucle tradicional. Con la aproximacion
integrada se incluye la velocidad del misil en el bucle de optimizacion general con lo
que se gestiona mejor la energıa cinetica del misil, y ademas se consigue una mejor
preservacion de las ordenes de guiado, al no existir transferencia entre bucles de guiado
y de auto piloto separados. El guiado IGA no necesita calcular la aceleracion del blanco,
y ademas tiene un aproximacion mas directa hacia el blanco, siendo una ley mucho mas
robusta en presencia de ruidos radar y otros efectos reales.
El misil con control doble aerodinamico y guiado y control integrados es capaz de
interceptar blancos en la cola manteniendo siempre control aerodinamico, sin recurrir a
los desarrollos modernos actuales hıbridos, aumentando la capacidad de supervivencia
y flexibilidad operativa del avion de combate portador de este tipo de misil.
108
4.6. CONCLUSIONES
−2,000 −1,500 −1,000 −500 0 500 1,000 1,500 2,000−6,000
−5,500
−5,000
−4,500
−4,000
−3,500
−3,000
−2,500
−2,000
−1,500
−1,000
−500
0
500
1,000
VM
VT
M∗1
M0
M1 I
T0
M3
Downrange (m)
Cro
ssra
nge
(m)
Engagement Geometry
targetIGA
Figura 4.22: Defensa contra un ataque por la cola, con un misil con control doble yguiado y control integrados. M0 posicion inicial, M∗
1 fin de la primera fase de giro a 30 g,M1 fin de la segunda fase de giro a 24 g. En M1 comienza el guiado IGA, M3 comienzodel guiado terminal de Lyapunov. Finalmente I es el punto de impacto directo contrael caza enemigo.
109

4.6. CONCLUSIONES
0 1 2 3 4 5 6−10
0
10
20
30
Time (sec)
Mis
sile
late
ral
acce
lera
tion
,−nB z
(g)
Figura 4.23: Defensa contra un ataque por la cola, maniobra del misil
0 1 2 3 4 5 6
100
150
200
250
300
350
Time (sec)
Mis
sile
pit
chan
gle,θ,
(deg
)
Figura 4.24: Defensa contra un ataque por la cola, angulo de cabeceo.
110
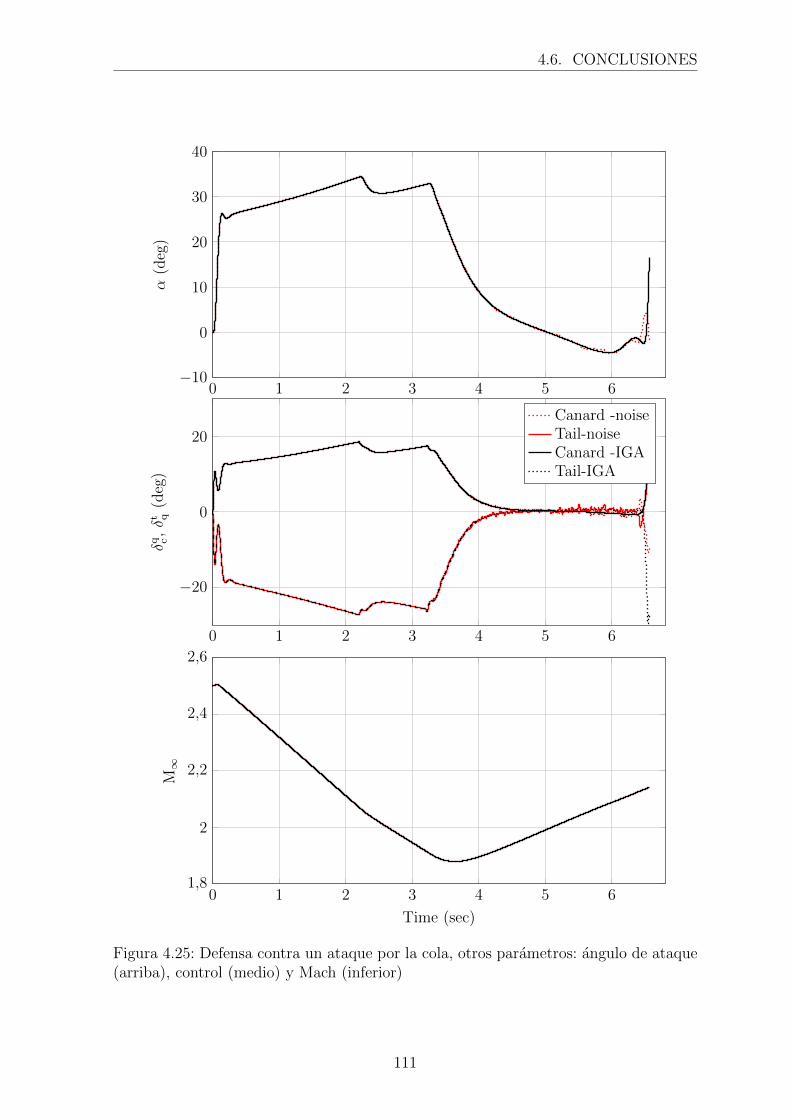
4.6. CONCLUSIONES
0 1 2 3 4 5 6
−20
0
20
δq c,δt q
(deg
)
Canard -noiseTail-noiseCanard -IGATail-IGA
0 1 2 3 4 5 6−10
0
10
20
30
40α
(deg
)
0 1 2 3 4 5 61,8
2
2,2
2,4
2,6
Time (sec)
M∞
Figura 4.25: Defensa contra un ataque por la cola, otros parametros: angulo de ataque(arriba), control (medio) y Mach (inferior)
111
Capıtulo 5
Conclusiones
En este ultimo capıtulo se integran y sintetizan las conclusiones obtenidas en los
capıtulos anteriores. Tambien se destacan aquı las limitaciones del estudio y se indican
distintas direcciones y areas para continuar la investigacion.
Este capıtulo se estructura del siguiente modo: la seccion 6.1 contiene las respuestas
a las preguntas de investigacion planteadas en la seccion 1.3, revisa las consecuencias
practicas para la arquitectura del misil e identifica las implicaciones teoricas de es-
tos resultados; la seccion 6.2 clasifica las distintas limitaciones que se han encontrado
durante las etapas de la investigacion y finalmente identifica areas para continuar y
avanzar sobre este estudio.
5.1. Resumen de resultados obtenidos
Los principales resultados obtenidos se han recogido dentro de sus capıtulos respec-
tivos. Esta seccion sintetiza estos resultados para responder a las cuestiones de inves-
tigacion planteadas en la seccion 1.3 y desglosa sus implicaciones practicas y teoricas.
5.1.1. Soluciones a las Preguntas de Investigacion
1. Modelo aerodinamico avanzado para el misil de control doble.
1.1. Los fenomenos aerodinamicos caracterısticos del control doble y en particu-
lar el acoplamiento cruzado entre controles han sido estudiados en la seccion
2.1.2 con la ayuda de la teorıa de cuerpos esbeltos y simulaciones numericas.
1.2. Se ha desarrollado una nomenclatura especıfica para el tratamiento tridi-
mensional del misil de control doble, tal y como se contempla en la seccion
2.1.1.
112
5.1. RESUMEN DE RESULTADOS OBTENIDOS
1.3. Se ha desarrollado un modelo teorico, a traves de funciones continuas, con
una alta precision suficiente para estudios avanzados de guiado y control.
Estos resultados se recogen en la seccion 2.2, con el nivel de detalle requerido.
1.4. Se han obtenido datos aerodinamicos experimentales fiables a traves del es-
tudio de la literatura cientıfica (Lesieutre et al., 2002a,b; Cross et al., 2010;
Blair, 1978; Khalid et al., 2005a,b; Akgul et al., 2012; Al-Garni et al., 2008).
Estos datos han permitido comprobar la validez del modelo teorico. Se han
extendido en este estudio a traves de experimentos de aerodinamica compu-
tacional y metodos aerodinamicos de ingenierıa (DATCOM)- ver Apendice
D - con el nivel de precision requerido. Los coeficientes del modelo teorico
ajustados para el misil NASA pueden encontrarse en el Apendice E.
1.5. En este diseno la autoridad para control en balanceo se ha asignado a la
seccion de cola. Se han desarrollado expresiones analıticas para el balanceo
inducido, el amortiguamiento y el momento de control aerodinamico en ba-
lanceo. El auto piloto para balanceo esta acoplado con los canales de los auto
pilotos de picado y guinada. Las capacidades del control de balanceo en cola
para mantener estable el misil se han demostrado a traves de simulaciones
numericas.
2. Desarrollo de la estructura en dos bucles del guiado y el auto piloto para misil
de control doble.
2.1. Las limitaciones especıficas y los requisitos operacionales para el auto piloto
del misil de control doble se han desarrollado en la seccion 3.4.2, con enfasis
en mantener el misil dentro de sus capacidades aerodinamicas. El angulo de
incidencia en cada uno de los controles tiene que ser monitorizado en tiempo
real para prevenir la saturacion aerodinamica del control o su entrada en
perdida.
2.2. Se ha resuelto el bucle general de guiado y control, representado en la Figura
1.3 para el misil de control doble.
2.2.1. Como variable de control se ha utilizado la derivada en el tiempo de los
angulos de posicion de los controles δ.
2.2.2. Se ha introducido un bloque de pre-alimentacion, detallado en la sec-
cion, 3.4.1, para resolver el problema de reparto cuando hay entradas de
control multiples. Este bloque de pre alimentacion define un punto de
equilibrio local en cada instante del vuelo para el sistema no lineal. El
control actua de modo que lleva a la planta a este punto de equilibrio.
2.2.3. El Apendice G lista todos los coeficientes en el espacio de los estados
que forman el sistema del autopiloto.
113
5.1. RESUMEN DE RESULTADOS OBTENIDOS
2.3. El auto piloto no lineal se compara favorablemente contra sistemas de con-
trol tradicionales de ajuste de ganancias para el misil de control doble. La
solucion propuesta requiere menos esfuerzo de control, tiene un tiempo de
estabilizacion mas corto y menor tiempo de respuesta que el esquema de
ajuste de ganancias.
2.4. El esquema de dos bucles G&C aplicado al misil de control doble aero-
dinamico, obtiene mejores resultados con menores distancias de paso, que
un misil equivalente con control cola or canard, tanto guiado por navegacion
proporcional o por la ley de guiado optimo, contra un blanco que maniobra,
demostrado en 3.5.2.
3. Investigacion sobre la aproximacion integrada y comparacion frente al doble bucle
para el guiado y control de misiles
3.1. Se ha desarrollado un modelo matematico en ejes inerciales para el guiado
y control de vuelo integrado, detallado en la seccion 4.1 y en el Apendice
G. Debido al bajo amortiguamiento de la celula del misil, el tratamiento
en ejes inerciales es mas adecuado que en ejes cuerpo. Ademas este modelo
incorpora explıcitamente la velocidad del blanco.
3.2. Un controlador de pre-alimentacion, basado en una proyeccion en el tiempo
de las condiciones de vuelo en equilibrio el misil, es capaz de prevenir el
problema de las distintas escalas en las variables de guiado y control. Sin
este pre alimentador el sistema de control integrado se saturarıa rapidamente
tal y como se describe en 4.2.3.
3.3. Un ındice del coste para la la optimizacion del sistema integrado se ha
definido en la seccion 4.2.3. Este ındice de coste es una combinacion del
ındice de coste para el guiado optimo, detallado en la seccion 3.1 , con el
ındice de coste para el misil definido en la seccion 3.4.2.
3.4. Se ha desarrollado una solucion su optima para el problema integrado no
lineal, que minimiza el ındice de coste en un tiempo finito. Esto se hace a
traves de un procedimiento matematico relativamente complejo que incluye
una transformacion matricial y la solucion de una ecuacion de Lyapunov,
tal y como se detalla en la seccion 4.2.3.
3.5. El misil con el control integrado se compara favorablemente contra el mismo
misil empleando un esquema no integrado de dos bucles, como se demuestra
en la seccion 4.3. La superioridad del controlador integrado se hace aun mas
evidente en condiciones de lanzamiento desfavorables, alejadas del curso de
colision.
114

5.1. RESUMEN DE RESULTADOS OBTENIDOS
3.6. Las simulaciones con radomo, ruidos de radar y variaciones en la frecuencia
de muestreo del radar, descritas en la seccion 4.4 , se han llevado a cabo en la
seccion 4.4.4, donde el bucle integrado demuestra tener menos sensibilidad
a perturbaciones externas
3.7. Seccion 4.5 Describe como la logica integrada puede ser usada con efectivi-
dad para la defensa contra un ataque desde la cola. El sistema integrado es
capaz de gestionar esta maniobra defensiva interceptar al blanco atacante
solo con control aerodinamico.
5.1.2. Implicaciones en el diseno del misil
Aquı se tratan dos elementos que son especialmente relevantes, por un lado el peso y
el coste del misil de doble mando, y por otro que capacidades han de tener los sistemas
de a bordo para implementar esta solucion en tiempo real.
Consideraciones sobre peso y coste
La figura 5.1 ilustra los subsistemas del misil. El peso de cada subsistema se ve
afectado por cambios en las actuaciones de vuelo del misil que a su vez dependen del
esquema de guiado. Por ejemplo el peso estructural el tamano de la carga de guerra de
diseno, el tipo y cantidad de propulsante, el peso de los actuado redes para el control
de vuelo etc. son sensibles a los cambios de las actuaciones del misil. Por otro lado hay
algunos subsistemas que son relativamente insensibles a cambios en las actuaciones
de vuelo como por ejemplo el grado modo, el buscador, el tamano de las baterıas el
dimensionado de la electronica para guiado y auto piloto. El peso total es un factor
muy significativo para un arma aerotransportada, viene limitado por la capacidad de
transporte de la plataforma y que afecta potencialmente a sus costes de produccion y de
logıstica, a los danos colaterales que puede infringir, a su potencia de fuego y a la firma
radar del avion lanzador durante el transporte entre otros factores. Esta seccion revisa
de modo conceptual los cambios que pueden esperarse en cada uno de los subsistemas
sensibles como consecuencia de la mejora en las actuaciones encontradas para el misil
de doble mando.
El peso estructural del misil es un factor significativo ya que representa aproxima-
damente el 22 % del peso del misil al lanzamiento (Berglund et al., 2001). Las conside-
raciones de diseno mas importantes con respecto al peso estructural son normalmente
la presion interna del motor cohete y las cargas aerodinamicas durante la maniobra
final.
Se ha demostrado que el misil con control doble aerodinamico con logica integrada
soporta 1/4 del esfuerzo de maniobra ∆en . Y se requiere menos maniobra maxima. Esto
115

5.1. RESUMEN DE RESULTADOS OBTENIDOS
Buscador Radar
Servomecanismos Canard Cabeceo / Guinada (x2)
Electronica de Guiado
Bateria
Espoleta
Autopiloto
Cabeza de Guerra
Motor Cohete Combustible Solido
Servos Cola Cabeceo/Guinada/Balanceo (x4)
Blast Pipe
Figura 5.1: Subsistemas en un misil de control doble
se traduce en menores momentos de flexion en la estructura que pueden representar un
menor espesor de material, con la subsiguiente reduccion de peso estructural.
Por otro lado, la maxima presion dentro de la camara de combustion de un motor
cohete de combustible solido es una funcion del pro pulsante seleccionado. Sin embar-
go la logica integrada ha demostrado un mejor uso de la propulsion con una superior
energıa cinetica especıfica durante el vuelo ∆ek, y menos tiempo de vuelo hasta el im-
pacto. A su vez estos resultados podrıan permitir al disenador reducir el peso necesario
de propulsante por debajo del 65 % del peso al lanzamiento que es tıpico en misiles
tacticos, (Fleeman, 2012).
Para un misil interceptor aereo, las mejoras en las actuaciones de vuelo tienen un
impacto muy significativo en el peso requerido para la cabeza de guerra y un impacto
secundario en las caracterısticas de la espoleta.
De la referencia (Carleone, 1993), puede establecerse que la sobrepresion generada
por la onda expansiva creada por la carga de guerra es directamente proporcional a la
cantidad de masa de explosivo y su energıa, e inversamente proporcional al cubo de
la distancia de paso. Asumiendo aquı que el tipo de explosivo no cambia, las menores
distancias de paso obtenidas para nuestro misil reducen grandemente los requisitos de
peso para la cabeza de guerra obteniendo la misma letalidad. Ademas la aproximacion
directa al blanco y la mayor precision obtenida permite al disenador cambiar el tipo de
cabeza de guerra a una de tipo dirigido. En este modelo la energıa cinetica de la carga
116

5.1. RESUMEN DE RESULTADOS OBTENIDOS
se libera a lo largo de una lınea, por ejemplo el eje axial frontal del misil, permitiendo
descargar toda la energıa explosiva directamente sobre el blanco. Este tipo de cabeza
de guerra dirigida tiene la mayor densidad de energıa cinetica de todas y permite una
reduccion incluso mayor en el tamano de la cabeza de guerra, minimizando ademas la
probabilidad de causar un dano colateral. En contraste un misil aire aire tıpico tiene
una cabeza de guerra de fragmentacion de forma cilındrica, que debido a la distribucion
radial de los fragmentos, requiere una cabeza de guerra de mayor tamano y mas pesada.
La aproximacion directa al blanco y su mayor velocidad de colision permite al misil
con guiado integrado montar una espoleta con un angulo fijo de activacion, que simplifi-
ca los requerimientos de la espoleta de proximidad, minimizando su coste. Dependiendo
de la mision la espoleta de proximidad podrıa incluso ser eliminada y reemplazarse por
una espoleta de contacto ya que este tipo de guiado aumenta la probabilidad de impacto
directo, siendo este tipo de espoleta mucho mas sencilla, fiable y segura.
Finalmente merece la pena comentar el hecho de que el misil de doble mando
aerodinamico necesita dos servo mecanismos adicionales de control, vease la figura
5.1. Los servos son dos en la seccion delantera y cuatro en la seccion de cola, estos
ultimos situados alrededor del tubo de salida del chorro del motor. Se hace notar que
el aumento en numero de actuadores no implica necesariamente un aumento de peso ya
que depende del diseno aerodinamico de la aleta y de la posicion de la lınea de charnela
del actuador con respecto al centro de presiones .
En efecto, el momento de charnela es:
Mh = Nc · yh (5.1)
donde Nc es la fuerza normal local en la aleta y yh es la distancia entre el centro de
presion y la posicion de la lınea de charnela. Nc es proporcional al angulo de ataque
y a la deflexion del control. Ambas variables son menores en el caso de un misil de
doble mando, comparadas con las necesarias para operar un misil con control canard
o cola, e incluso menores si la logica integrada se aplica. El factor yh depende de la
localizacion de la lınea de charnela y del desplazamiento relativo del centro de presion
con el numero de Mach. Este ultimo puede ser ajustado mediante el diseno adecuado
de la aleta de control (en doble delta por ejemplo).
En resumen, los potenciales incrementos en peso y coste debido a los dos servos
adicionales, pueden ser compensados a traves de otros mecanismos ya considerados
(estructura, propulsante, cabeza de guerra) para reducir de modo general el presupuesto
de coste y de pesos. En cualquier caso estos dos servos adicionales para el control
aerodinamico se comparan favorablemente con las complicaciones y los actuado por el
que se requieren en el caso de un misil hıbrido.
117

5.1. RESUMEN DE RESULTADOS OBTENIDOS
Calculo en tiempo real de la ley de guiado
Los dos metodos descritos en esta tesis, el metodo integrado en un unico lazo y el
metodo de doble lazo requieren de capacidades de procesado a bordo significativas. Las
mayores cargas computacionales son:
1. Para el esquema un doble lazo:
a) El auto piloto se calcula y se resuelve a una frecuencia muy superior (x10 o
mayor) que el bucle de guiado.
b) Requiere una solucion en tiempo real de una ecuacion matricial algebraica
de Riccati de 21x21 en cada paso de integracion del auto piloto.
2. Para el diseno integrado:
a) Todo el calculo se realiza a la frecuencia que marca el reloj de guiado.
b) Requiere la solucion en tiempo real de una ecuacion matricial diferencial de
29x 9 en cada paso de integracion 4.34.
c) Requiere el calculo de la inversa de dos matrices de 29 x 29, ecuaciones 4.33
y 4.37.
d) Requiere el calculo de una matriz exponencial de 29 x 29 eA0(t−tf) .
e) Requiere la solucion de una ecuacion matricial de 29 x 29 de Lyapunov 4.39.
Por cada paso de integracion el sistema integrado requiere un mayor numero de
operaciones que el de doble lazo, pero corre a una frecuencia superior ya que lo hace a
la frecuencia del bucle de guiado externo en la aproximacion de doble lazo. El resultado
en un vuelo de unos 10 segundos de duracion es que el sistema integrado requiere 30
veces menos calculos que el sistema de doble lazo.
La mayor carga computacional en cualquiera de estos esquemas proviene de la solu-
cion de las ecuaciones matriciales en tiempo real. La velocidad de solucion de cada una
de las ecuaciones mencionadas arriba de 21 x 21 y 29 x 29, han sido evaluadas con ayu-
da del paquete MATLAB real time environment, obteniendose un tiempo de ejecucion
de 0.5ms de resolucion con un nucleo Corei7 operando a 2.5GHz y 16GB RAM. Las
capacidades de los sistemas de control de vuelo para altas actuaciones disponibles co-
mercialmente son superiores, y en cualquier caso los codigos utilizados son susceptibles
de mejora lo que dara lugar a incrementos adicionales en velocidad de proceso.
118
5.2. LIMITACIONES AL ESTUDIO Y AREAS DE DESARROLLO FUTURAS
5.1.3. Implicaciones teoricas
Se ha desarrollado un procedimiento generico para crear un auto piloto no lineal
capaz de controlar un misil en picado, guinada y balanceo simultaneamente. Ademas
el auto piloto desarrollado gestionar multiples entradas y salidas.
Se ha introducido el producto de Kronecker para simplificar el tratamiento del
problema optimo con matrices dependientes de los estados.
Se ha encontrado una solucion en tiempo finito para un problema optimo no lineal
mediante la ecuacion de Lyapunov, y se ha aplicado a la resolucion del problema inte-
grado. El problema de optimizacion es especialmente adecuado a misiles, ya que tienen
un claro objetivo en minimizar la distancia de paso. Pero esta aproximacion puede
extenderse a cualquier otro problema altamente no lineal que necesite optimizar cierta
funcion compleja dentro de un intervalo de tiempo finito. Posibles aplicaciones son la
trayectoria de ascenso de un vehıculo lanzador, optimizar al crucero en un avion o caza
de combate, maniobras de satelites en el espacio etc.
5.2. Limitaciones al Estudio y Areas de Desarrollo
Futuras
En esta seccion se repasan las limitaciones a este estudio y se identifican las areas
en las que la investigacion puede avanzar en aras de adquirir nuevos conocimientos. Se
tratan tres secciones aerodinamica, control y guiado.
5.2.1. Aerodinamica
El modelo aerodinamico en este estudio se ha planteado con limitaciones en β
y Mach. Un modelo ingenieril para aplicaciones practicas tendra que eliminar estas
restricciones y considerar los valores de α y β iguales en magnitud ası como todo el
regimen de vuelo del misil, desde supersonico subsonico.
No se ha dispuesto en este estudio de datos aerodinamicos en guinada o en balanceo.
En esta investigacion se han utilizado datos procedentes de aerodinamica computacio-
nal CFD y metodos semi empıricos para validar el modelo teorico en estos dos aspectos.
Aunque se ha encontrado una correlacion muy buena entre los datos calculados y medi-
dos para la aerodinamica en cabeceo, lo que permite tener gran confianza en los datos
calculados en guinada y balanceo, la ultima prueba de verosimilitud siempre vendra
dada por los datos en tunel.
No se han considerado en este estudio los efectos aeroelasticos, y como las defor-
maciones de la estructura debido a las cargas en vuelo afectan a la aerodinamica del
119

5.2. LIMITACIONES AL ESTUDIO Y AREAS DE DESARROLLO FUTURAS
misil.
5.2.2. Guiado y control
Se ha considerado que todas las variables del misil estaban disponibles para ser
realimentadas al sistema de control y carentes de ruido. Esto se ha hecho ası ya que
no es un hecho diferencial entre el guiado integrado y el no integrado. Sin embargo
un estudio posterior podrıa considerar que en la medida de los quaterniones y las
velocidades angulares del misil que da la IMU estan tıpicamente contaminadas por
ruido. Otro factor a considerar es que los angulos aerodinamicos α y β no suele medirse
directamente en misiles en servicio y se estiman como parte del filtro de Kalman.
Solo se ha considerado el guiado radar, debido a la gran cantidad de datos que
requiere el guiado optimo. Sin embargo esta metodologıa podrıa aplicarse tambien a
un misil guiado por infrarrojos, donde se mide menos variables pero se estiman las
necesarias. El buscador de infrarrojos va montado dentro de un irdome semiesferico
que aumenta la resistencia aerodinamica, factor que tendrıamos que considerar.
El modelo de los servo sea considerado como un modelo de segundo orden con un
factor adicional que incluye dinamicas de orden superior. Este modelo puede refinarse
en posteriores estudios. Tambien se ha considerado que los servo mecanismos son capa-
ces de generar todo el par necesario para mantener la aleta aerodinamica en la posicion
demandada. Se han incluido no obstante limitaciones en la velocidad maxima de giro
que el servo puede dar. Un modelo mas detallado mecanico que incluya las ecuaciones
dinamicas del servomecanismo y sus limitaciones en par.
120

Apendice A
Derivacion de Matrices y Producto
de Kronecker
Este apendice actualiza las convenciones originalmente definidas en (Vetter, 1970) y
posteriormente expandidas por (Brewer, 1978) para aquellos elementos que se emplean
dentro del cuerpo principal de la tesis. La aplicacion de estas formulas, con la inclusion
del producto de Kronecker, preserva la notacion matricial a traves de la operacion de
derivacion. Estas operaciones se emplean de modo extensivo en la tesis al aplicar los
metodos de optimizacion.
En lo que sigue x : R → Rn,1, es un vector columna, y y (x) : R → Rp,1, z (x) :
R→ Rq,1son vectores columna cuyos elementos son funciones de los elementos de x.
A.1. Estructuras de Derivacion
Si la matriz A : R→ Rp,q, depende funcionalmente del vector x,
A (x) =
a11 · · · a1p
.... . .
...
aq1 · · · aqp
(A.1)
sus elementos akj son funciones de xi. Se tiene que:
∂A
∂xi=
∂a11
∂xi· · · ∂a1p
∂xi...
. . ....
∂aq1∂xi
· · · ∂aqp∂xi
(A.2)
∂A
∂x=
∂A∂x1...∂A∂xn
(A.3)
A1

A.1. ESTRUCTURAS DE DERIVACION
y en forma expandida:
∂A
∂x=
∂a11
∂x1· · · ∂a1p
∂x1...
. . ....
∂aq1∂x1
· · · ∂aqp∂x1
.... . .
...
∂a11
∂xn· · · ∂a1p
∂xn...
. . ....
∂aq1∂xn
· · · ∂aqp∂xn
(A.4)
de modo similar, la derivada con respecto a un vector columna xT es:
∂A
∂xT=
∂a11
∂x1· · · ∂a1p
∂x1· · · ∂a11
∂xn· · · ∂a1p
∂xn
· · · . . .... · · · · · · . . .
...∂aq1∂x1
· · · ∂aqp∂x1
· · · ∂aq1∂xn
· · · ∂aqp∂xn
(A.5)
Se define:
∂kA
∂xk=
∂
∂x
(∂
∂x
(· · · ∂A
∂x
))(A.6)
Para la derivada de un vector funcion de un vector, existen tres casos distintos.
Vector fila derivado con respecto a un vector columna resulta en una matriz:
[∂yT
∂x
]=
∂y1
∂x1
∂y2
∂x1· · · ∂yp
∂x1∂y1
∂x2
∂y2
∂x2· · · ∂yp
∂x2...
.... . .
...∂y1
∂xn
∂y2
∂xn· · · ∂yp
∂xn
(A.7)
La derivada de un vector columna con respecto a un vector fila es una matriz:
[∂y
∂xT
]=
∂y1
∂x1
∂y1
∂x2· · · ∂y1
∂xn∂y2
∂x1
∂y2
∂x2· · · ∂y2
∂xn...
.... . .
...∂yp∂x1
∂yp∂x2
· · · ∂yp∂xn
(A.8)
donde (A.8) se conoce como el jacobiano. De aquı:[∂yT
∂x
]T=
[∂y
∂xT
](A.9)
Y finalmente la derivada de un vector columna con respecto a un vector columna es
un vector en la forma:
A2

A.2. PRODUCTO DE KRONECKER Y SUS PROPIEDADES
[∂y
∂x
]=
∂y1
∂x1∂y2
∂x1...∂yp∂x1
...∂y1
∂xn∂y2
∂xn...∂yp∂xn
(A.10)
donde[∂y∂x
]es la vectorizacion de (A.8). Se introduce la siguiente notacion:[
∂y
∂x
]= vec
[∂y
∂xT
](A.11)
∂y
∂y= vec Ip (A.12)
∂yT
∂y= Ip (A.13)
(In ⊗
(xTA
))· vec In = vec
(xTA
)= ATx (A.14)
A.2. Producto de Kronecker y sus Propiedades
El producto de Kronecker, tambien conocido como producto tensorial, de las ma-
trices A y B , se obtiene multiplicando los elementos de la matriz A por la matriz B.
Por ejemplo:
I2 ⊗ xT ≡
[x1 · · · xn 0 · · · 0
0 · · · 0 x1 · · · xn
](A.15)
De aquı: aA = a⊗A.
Productos de Kronecker sucesivos se definen como:
⊗kx ≡ x⊗ x⊗ · · · ⊗ x (A.16)
y de aquı:
(I ⊗A)k = I ⊗Ak (A.17)
A3

A.3. ALGEBRA DEL CALCULO DE MATRICES
Propiedades que se emplean en la tesis:
(A⊗B)T = AT ⊗BT (A.18)
(A⊗B)⊗C = A⊗ (B ⊗C) (A.19)
(A⊗B) (C ⊗D) = AB ⊗CD (A.20)
(Im ⊗N ) (M ⊗ In) = (M ⊗ In) (Im ⊗N ) (A.21)
(CT ⊗A
)vecB = vecABC (A.22)
vec(xyT
)= y ⊗ x (A.23)
(Ip ⊗ y) A = A⊗ y (A.24)
A(Iq ⊗ zT
)= A⊗ zT (A.25)
La demostracion puede encontrarse por ejemplo en (Laub, 2004).
La ecuacion de Lyapunov:
AX +XAT = C (A.26)
que se utiliza en el Capıtulo 4, puede expresarse:
[(I ⊗A) + (A⊗ I)] vecX = vecC (A.27)
A.3. Algebra del Calculo de Matrices
Las definiciones y resultados de las ultimas dos secciones se aplican aquı para pre-
sentar la estructura de matrices compuestas y formas escalares:
Si A : R → Rp,q es funcionalmente dependiente de otras matrices, A (B, · · · ), su
derivada es:
∂A
∂B=∑i,k
E(s,t)ik ⊗ ∂A
∂bik(A.28)
A4

A.3. ALGEBRA DEL CALCULO DE MATRICES
donde E(s,t)ik tiene dimensiones de (s, t), y cuyo elemento ik es 1 y 0 en todas las otras
posiciones.
De aquı: (∂A
∂B
)T=∂AT
∂BT(A.29)
∂aA
∂B=
∂a
∂B⊗A+ a
∂A
∂B(A.30)
A.3.1. Derivada de Matrices Compuestas
Regla de la cadena
Si A (C (B)) donde A : R → Rp,q, C : R → Rr,l, su derivada con respecto a
B : R→ Rs,t:
∂A (C (B))
∂B=
(∂[vecC]T
∂B⊗ Ip
)(It ⊗
∂A
∂[vecC]
)=
(Is ⊗
∂A
∂[vecC]
)(∂[vecCT ]T
∂B⊗ Iq
) (A.31)
Regla del Producto
La derivada de A (B) = C (B)F (B) :
∂CF
∂B=∂C
∂B(It ⊗ F ) + (Is ⊗C)
∂F
∂B(A.32)
Derivada del Producto de Kronecker
∂A⊗C∂B
=∂A
∂B⊗C + (Is ⊗Upr)
(∂C
∂B⊗A
)(It ⊗Ulq) (A.33)
donde Upq es la matriz de permutacion, una matriz cuadrada de orden (pq, pq) que
tiene un unico 1 en cada fila y columna .
A.3.2. Derivada de la Forma Escalar
Se consideran derivadas de la forma escalar yTAz, donde A (x) : R → Rp,q, x :
R→ Rn,1, y (x) : R→ Rp,1 y z (x) : R→ Rq,1.
A5

A.3. ALGEBRA DEL CALCULO DE MATRICES
∂yTAz
∂y= Az (A.34)
∂yTAz
∂z= ATy (A.35)
∂yTAz
∂x=∂yT
∂xAz +
(In ⊗ yT
) ∂A
∂xz +
(In ⊗
(yTA
)) [ ∂z
∂x
](A.36)
obteniendose:
∂xTAx
∂x=(A + AT
)x+
(In ⊗ xT
) ∂A
∂xx (A.37)
∂xTAx
∂xT= xT
(A + AT
)+(In ⊗ xT
) ∂A
∂xx (A.38)
La ecuacion A.37, para una matriz tal que Q = QT :
∂yTQy
∂y= 2Qy (A.39)
A6

Apendice B
Teorıa de Control Optimo
Se realiza una revision rapida del Estado del arte en la resolucion del problema
del regulador optimo para sistemas no lineales, en la que ademas se han adaptado
con la introduccion original del producto de Kronecker revisado en el apendice A, que
simplifica en gran medida la notacion.
B.1. Principio del Mınimo de Pontryagin para Mi-
siles
Se considera que el control del misil o su guiado es un sistema dinamico de la forma:
x(t) = f(x(t),u(t), t), x(0) = x0 (B.1)
donde t ∈ [0, tf ]. Como es normal en vehıculos aerodinamicos se considera que el vector
de estado inicial x ∈ Ω ⊆ Rn, con 0 ∈ Ω y u ∈ U ⊆ Rm, estan acotados en Ω y U
con 1 ≤ m ≤ n. Se asume que el par (x,u) es continuo y f tiene derivadas primera y
segunda continuas con respecto todos sus argumentos.
Para el caso del auto piloto, se pretende minimizar el problema de Lagrange
J(x0,u, 0) =
∫ ∞0
L(x(t),u(t), t) dt (B.2)
Mientras que en el problema de guiado se pretende minimizar un ındice de coste mas
general, en lo que se conoce como el problema deBolza:
J(x0,u, 0) = Ψ(tf ,xf ) +
∫ tf
0
L(x(t),u(t), t) dt (B.3)
En el guiado el Estado final no esta fijado debido a la presencia de Ψ(tf ,xf ) como
un funcional de la distancia de paso. En lo que sigue se considera el problema mas
general de Bolza ya que incluye la formulacion de Lagrange. Se busca u∗ ∈ U que
B1

B.1. PRINCIPIO DEL MINIMO DE PONTRYAGIN PARA MISILES
cause (B.1) a seguir una trayectoria admisible x∗ ∈ Ω que minimice el ındice de coste.
El Hamiltoniano del sistema es:
H(x,u,λ, t) , L(x(t),u(t), t) + λTf(x(t),u(t), t) (B.4)
El vector columna de adjuntos λ es el vector de multiplicadores de Lagrange aso-
ciado con las limitaciones dinamicas en (B.1).
Las condiciones necesarias para que u∗ sea la ley de control optima para x∗ son:
H(x∗(t),u∗(t),λ(t), t) ≤ H(x∗(t),u(t),λ(t), t) (B.5a)
x(t) =∂H∂λ
(B.5b)
−λ =∂H∂x
(B.5c)
para todo t ∈ [0, tf ], y todos los controles admisibles. La ecuacion (B.5a) es propiamente
el principio del mınimo de Pontryagin.
Las condiciones de contorno vienen dadas por:
[∂Ψ
∂x(tf ,x
∗(tf )− λ(tf )
]T· δxf+[
H(x∗(tf ),u∗(tf ),λ
∗(tf ), tf ) +∂Ψ
∂x(tf ,x
∗(tf )
]δtf = 0
(B.6)
Este principio transforma el problema de control optimo en un problema con valo-
res en los extremos, e introduce el Hamiltoniano en el campo de la optimizacion. La
combinacion de condiciones iniciales y finales con ecuaciones diferenciales no lineales
constituye un problema que es muy difıcil de resolver en la practica.
Si los controles no tiene limitaciones, entonces para que u∗(t) minimice el Hamilto-
niano es necesario pero no suficiente que:
∂H∂u
(x∗(t),u∗(t),λ(t), t) = 0 (B.7)
Si se satisface (B.7) y el Hessiano es positivo definido (condicion de suficiencia debil
de Legendre-Clebsh):
∂2H∂u2
(x∗(t),u∗(t),λ(t), t) > 0 (B.8)
entonces se garantiza que u∗(t) causa un mınimo local.
Podemos establecer una conexion con la programacion Dinamica, asumiendo que
J∗ (x0, 0) , mınu∈U
J(x0,u) (B.9)
B2

B.2. ECUACION DE RICCATI DEPENDIENTE DE LOS ESTADOS
es suave, con derivadas primera y segunda acotadas, se llega a la ecuacion de Hamilton-
Jacobi-Bellman (HJB):
0 =∂J∗
∂t(x, t) +H
(x∗(t),u∗(t),
∂J∗
∂x, t
)(B.10)
con condiciones de contorno:
J∗ (tf ,xt) = Ψ (tf ,x∗f ) (B.11)
and
∂J∗
∂x= λ (B.12)
Esto es, el vector de coestados representa la funcion de sensibilidad del ındice de
coste optimo con respecto al vector de estado. Se puede tambien considerar como un
vector que apunta alejandose del gradiente del ındice de coste optimo.
B.2. Ecuacion de Riccati Dependiente de los Esta-
dos
Se considera aquı una simplificacion del problema general presentado en la seccion
anterior. El sistema dinamico B.1 se asume que puede ser escrito como:
x(t) = f(x(t)) + g(x(t))u(t) (B.13)
con f and g funciones continuas.El sistema (B.13) es invariante en el tiempo, no
lineal en el estado y afin en el control. Donde x ∈ Ω ⊆ Rn, con 0 ∈ Ω, asumiendo que
u no esta acotado. Se verifica tambien que f(0) = 0 y g((x)) 6= 0 ∀x ∈ Ω.
El problema minimiza el ındice de coste de Langrange
J(x0,u, 0) =1
2
∫ ∞0
(xTQ(x)x+ uTR(x)u
)dt (B.14)
a la vez que regula el vector de estado 0 al origen, de modo que:
lımt→∞
x = 0 (B.15)
donde Q(x) = QT (x) ≥ 0 y R(x) = RT (x) > 0.
Para esta formulacion en horizonte de tiempo infinito, J∗ se asume como estaciona-
rio ∂J∗
∂t= 0, y verifica J∗(0) = 0. Sustituyendo en (B.10)y particularizando para x = 0,
se obtiene:∂J∗(0)
∂x= 0 (B.16)
B3

B.2. ECUACION DE RICCATI DEPENDIENTE DE LOS ESTADOS
de modo que
λ = M (x)x (B.17)
La condicion necesaria para el optimo es:
∂H∂u
= R(x)u + gT (x)M(x)x = 0 (B.18)
or
u = −R−1(x)gT (x)M(x)x (B.19)
y dado que el Hessiano es positivo definido la condicion es tambien suficiente para ser
un mınimo global:
∂2H∂u2
= R(x) (B.20)
Para obtener la ley de control es necesario encontrar la matriz M . Derivando en
(B.17) y sustituyendo en (B.5a) y (B.5c):
Mx+M[f − gR−1gTMx
]=
−Qx− 1
2xT
∂Q
∂xx− ∂fT
∂xMx− xTMgR−1∂g
T
∂xMx
− 1
2xTMgR−1∂R
∂xR−1BTMx
(B.21)
aplicando la regla de la cadena (ver A.3.1 ):
M =∂M
∂xT(x⊗ In) (B.22)
En el caso de un problema lineal, con f = Ax, yA, g,Q ,R constantes, la ecuacion
(B.21) colapsa a la ecuacion algebraica de Riccati , solucion del problema LQR (Linear
Quadratic Regulator) :
MA+ATM −MgR−1gTM +Q = 0 (B.23)
El metodo la Ecuacion de Riccati Dependiente de los Estados replica la solucion
del metodo lineal, asumiendo que f = A(x)x y resolviendo (B.23) para cada valor de
x. Para conseguir una solucion optima ha de verificarse la condicion necesaria:
Mx+1
2xT
∂Q
∂xx+
1
2xTMgR−1∂R
∂xR−1BTMx+ xT
∂AT
∂xMx =
− xTMgR−1∂gT
∂xMx = 0
(B.24)
B4

Apendice C
Misil NASA NTCM Geometrıa y
Modelo Aerodinamico
Aquı se describe el misil utilizado en las simulaciones. Esta basado en el misil de la
NASA NASA Tandem Control Missile mencionado en la referencia (Blair, 1978) y en
la seccion 1.4.1. Este misil ha sido escalado tres veces (x3) para los estudios de guiado
y control, y se han tomado ciertas hipotesis con respecto a sus parametros basicos,
basandose en misiles semejantes en servicio, adaptado de la referencia (Fleeman, 2006).
par
297.2
61.027.4
19.8
55.4
hinge linehinge line
XB
ZB
145.6moment reference center
Figura C.1: Geometrıa del misil base. Dimensiones en centımetros.
C.1. Geometrıa del misil
El modelo se representa en la figura C.1, Compuesto por un cuerpo axil simetrico,
una ojiva tangente, relacion de longitud a diametro de 3 y dos conjuntos de 4 aletas
C1

C.1. GEOMETRIA DEL MISIL
alineadas, donde todas las aletas son moviles.
(a) Missile Model (b) Shadowgraph at M∞ = 2,5
Figura C.2: Experimentos en Tunel Aerodinamico en NASA y Onera.
La tabla C.1 contiene las caracterısticas principales del misil base.
Cuadro C.1: Model Geometry Specifications
Parameter Symbol Value Units
Missile Length L 2.972 mMissile diameter, (caliber) 1 d 0.1981 mBody Frontal Area Sref 3.0828 dm2
Ojive length 3 dCylinder after-body length 12 dTotal missile body length 15 dTangent ojive radius 0.95 dFin tip chord ct 0.87 dFin exposed maximum chord (cr)e 1.38 dFin theoretical root chord cr 1.67 dFin sweep angle 30 degFin exposed semi span be
20.9 d
Fin installed span 2.8 dPanel exposed surface Se 7.947 dm2
Fin exposed aspect ratio AR 1.6 NDTheoretical taper ratio λc 0.571 NDFin exposed taper ratio λe 0.625 NDFin exposed mean aerodynamic chord MAC 1.15 dTheoretical canard apex (from nose) 2.8 dCanard hinge line position (from nose) 3.78 dTheoretical tail apex (from nose) 13.3 dTail hinge line 14.3 dSeparation between hinge lines 7.6 (cr)e
donde:
Sref =πd2
4(C.1)
1Missile caliber, note it is used as a reference to define other model lengths
C2

C.2. PARAMETROS BASICOS Y DEFINICION DE LA MISION
Se =(cr)e + ct
2be (C.2)
AR =b2e
Se(C.3)
λc =ctcr
(C.4)
λe =ct
(cr)e(C.5)
MAC =2
3· 1 + λe + λ2
e
1 + λe(cr)e (C.6)
De acuerdo a la convencion de misiles, el calibre del misil d se emplea como longitud
de referencia para los momentos aerodinamicos, y el area frontal del cuerpo del misil se
emplea como area de referencia para las fuerzas y momentos aerodinamicos. El centro
de referencia de momentos es un punto fijo que se situa a 1.4562 m desde la punta de
la ojiva como se puede ver en la figura C.1.
C.2. Parametros basicos y definicion de la mision
Basado en misiles aire aire comparables y en servicio la actualidad (Fleeman, 2012),
se define una mision estandar para poder dimensionar de manera adecuada el misil. La
tabla C.2 contiene los parametros basicos del misil y las especıficaciones de propulsion
definidas.
C3
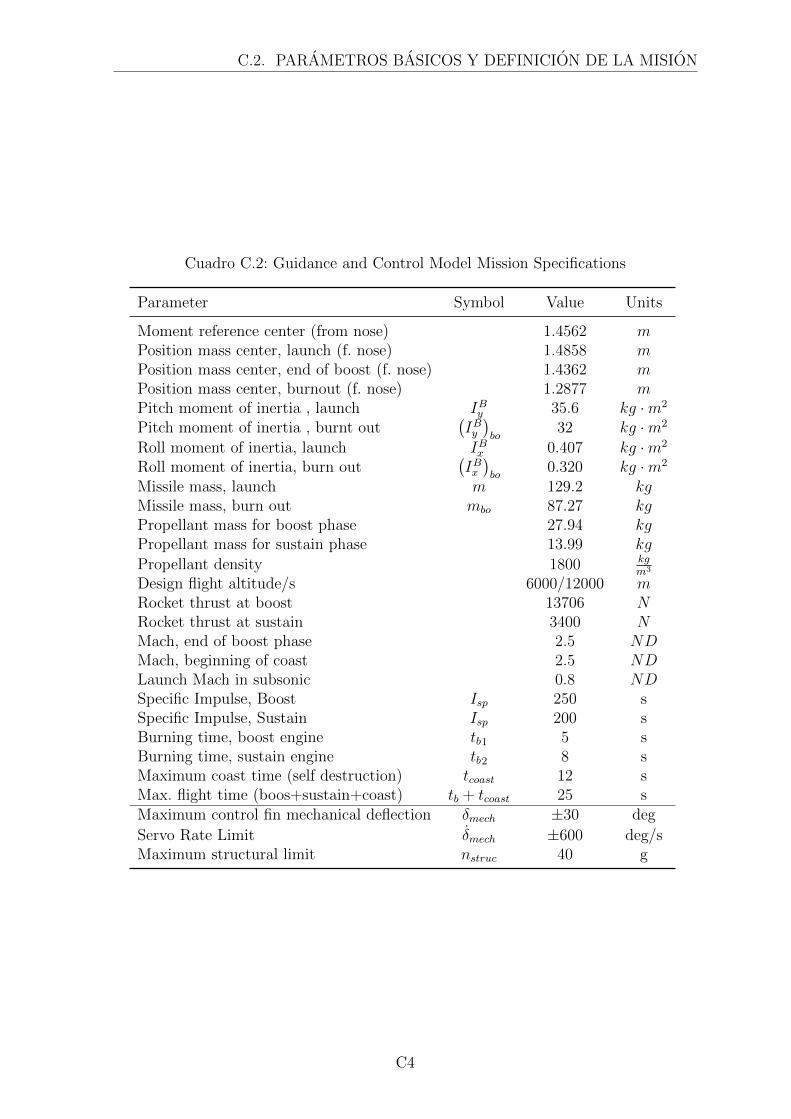
C.2. PARAMETROS BASICOS Y DEFINICION DE LA MISION
Cuadro C.2: Guidance and Control Model Mission Specifications
Parameter Symbol Value Units
Moment reference center (from nose) 1.4562 mPosition mass center, launch (f. nose) 1.4858 mPosition mass center, end of boost (f. nose) 1.4362 mPosition mass center, burnout (f. nose) 1.2877 mPitch moment of inertia , launch IBy 35.6 kg ·m2
Pitch moment of inertia , burnt out(IBy)bo
32 kg ·m2
Roll moment of inertia, launch IBx 0.407 kg ·m2
Roll moment of inertia, burn out(IBx)bo
0.320 kg ·m2
Missile mass, launch m 129.2 kgMissile mass, burn out mbo 87.27 kgPropellant mass for boost phase 27.94 kgPropellant mass for sustain phase 13.99 kg
Propellant density 1800 kgm3
Design flight altitude/s 6000/12000 mRocket thrust at boost 13706 NRocket thrust at sustain 3400 NMach, end of boost phase 2.5 NDMach, beginning of coast 2.5 NDLaunch Mach in subsonic 0.8 NDSpecific Impulse, Boost Isp 250 sSpecific Impulse, Sustain Isp 200 sBurning time, boost engine tb1 5 sBurning time, sustain engine tb2 8 sMaximum coast time (self destruction) tcoast 12 sMax. flight time (boos+sustain+coast) tb + tcoast 25 sMaximum control fin mechanical deflection δmech ±30 deg
Servo Rate Limit δmech ±600 deg/sMaximum structural limit nstruc 40 g
C4

Apendice D
Datos Aerodinamicos
El misil NASA fue probado en ensayos en tunel aerodinamico en regimen supersoni-
co con 1,75 < M∞ < 2,86 y a angulos de ataque −4 < α < 28 grados, en configuracion
en +. El numero de Reynolds fue 6,6x104 por cm ((Blair, 1978; Khalid et al., 2005a).
Los datos experimentales de tunel han sido extraıdos de las referencias (Khalid et al.,
2005b; Lesieutre et al., 2002b; Blair, 1978; Khalid et al., 2005a; Lesieutre et al., 2002a;
Cross et al., 2010; Akgul et al., 2012; Al-Garni et al., 2008). Las fuerzas y momentos
aerodinamicos fueron medidos con una sonda de esfuerzos y el angulo de ataque me-
diante un acelerometro introducido en la ojiva del modelo. Para inducir la transicion
a la turbulencia se colocaron bandas en la ojiva y en los bordes de ataque de las aletas
del misil, (Khalid et al., 2005b) los coeficientes medidos fueron CN , Cm y CA, todos en
ejes cuerpo.
Por otro lado, para expandir esta base de datos experimentales se realizaron calculos
de aerodinamica computacional, CFD, empleando el programa comercial Fluent. Los
datos experimentales de tunel aerodinamico fueron utilizados para ajustar los parame-
tros del CFD, aumentando su precision. Debido a la simetrıa, se realizo el calculo para
medio misil, en el que se utilizo una red de 2,2 millones de bloques estructurados la
altura de la primera celda por encima de la superficie del misil se situo en 10[−5 cali-
bres, y este fue el mismo parametro que se utilizo para capturar la capa lımite en las
aletas del misil. El modelo de turbulencia empleado fue el Spalart-Allmaras para todos
los angulos de incidencia. La solucion requirio de tres horas de calculo por cada angulo
de ataque en un procesador Intel Core i5-4570 3.2 GHz(cache) 4 GB RAM. Para cada
posicion de los controles se requieren 48 horas de calculo, haciendo un barrido para
todos los angulos de ataque de interes.
D1

D.1. TABLAS DE RESULTADOS
D.1. Tablas de Resultados
Cuadro D.1: CN Wind Tunnel Results extracted from graphs in (Lesieutre et al., 2002a)as a function of δcq/δ
tq parameter for NASA Model Missile
α 0/− 20 20/0 20/− 20 10/10 0/0
-4.3 -2.42 0.25 -1.12 0.28 -1.05-2.1 -1.95 0.80 -0.60 0.84 -0.56-1.2 -1.68 1.05 -0.30 0.98 -0.28-0.2 -1.52 1.15 -0.21 1.26 -0.140.7 -1.30 1.41 0.05 1.40 0.101.7 -1.10 1.60 0.28 1.82 0.303.8 -0.42 2.30 0.98 2.38 0.985.7 0.15 2.80 1.52 2.94 1.547.9 0.85 3.50 2.24 3.64 2.249.8 1.45 4.10 2.80 4.34 2.8711.7 2.30 4.90 3.50 5.04 3.7113.8 3.10 5.70 4.33 5.74 4.5515.7 3.95 6.50 5.15 6.86 5.4017.4 4.95 7.45 6.05 7.84 6.4019.8 5.90 8.26 7.00 8.82 7.2823.6 7.90 10.40 8.82 10.78 9.5227.6 9.80 12.30 10.60 13.16 11.62
Cuadro D.2: DATCOM Semiexperimental method results for CN as a function of δcq/δtq
parameter for NASA Model Missile
α 0/− 20 20/0 20/− 20 10/10 0/0
-4.0 -3.328 0.777 -1.282 0.687 -1.139-2.0 -2.586 1.430 -0.531 1.309 -0.528-1.0 -2.227 1.739 -0.190 1.599 -0.2520.0 -1.951 2.034 0.128 1.873 0.0001.0 -1.701 2.329 0.438 2.146 0.2522.0 -1.425 2.647 0.767 2.444 0.5284.0 -0.797 3.387 1.498 3.080 1.1496.0 -0.008 4.248 2.479 3.847 1.8088.0 0.777 5.319 3.545 4.666 2.54510.0 1.634 6.722 4.981 5.590 3.36412.0 2.579 7.798 6.071 6.655 4.28914.0 3.649 8.951 7.219 7.907 5.359
D2

D.1. TABLAS DE RESULTADOS
Cuadro D.3: Data from Numerical Experiments with CFD (Fluent). Results of CN asa function of δcq/δ
tq parameter for NASA Model Missile
α 0/− 10 10/0 20/0 10/− 10 −10/− 10
-3 -1.535 0.065 0.649 -1.415 -2.1090 -0.748 0.619 1.318 -0.140 -1.3923 0.044 1.443 2.067 0.755 -0.6755 0.643 2.089 2.803 1.431 -0.09510 2.214 3.717 4.397 3.000 1.67315 4.329 5.638 6.171 4.911 3.82620 6.825 8.133 8.505 7.418 6.28925 9.306 10.659 11.064 9.922 8.97230 13.484 13.769 12.589 11.748
Cuadro D.4: Experimental wind tunnel data of Cm as a function of δcq/δtq parameter
for NASA Model Missile from graphs in (Lesieutre et al., 2002a)
α 0/− 20 20/0 20/− 20 10/10 0/0
-4.3 9.40 6.50 16.60 -1.80 -0.50-2.1 9.40 7.00 17.00 -1.40 -0.40-1.2 9.40 7.30 17.50 -1.10 -0.30-0.2 9.45 8.00 18.00 -0.50 -0.050.7 9.50 9.05 18.10 0.50 0.201.7 9.70 9.10 18.30 0.30 0.353.8 9.75 8.00 16.90 -0.30 0.505.7 9.60 7.00 16.00 -0.70 0.407.9 9.40 6.80 15.60 -1.50 0.209.8 8.90 6.10 15.10 -1.80 0.1511.7 8.90 5.90 14.80 -1.90 0.0013.8 8.50 5.50 14.10 -2.20 -0.1015.7 8.40 5.10 14.00 -2.40 -0.6017.4 7.80 4.80 13.10 -2.50 -1.0019.5 7.20 4.05 12.50 -2.40 -1.8023.6 6.30 2.50 11.90 -5.00 -3.2027.6 5.00 0.50 11.10 -7.00 -5.50
D3
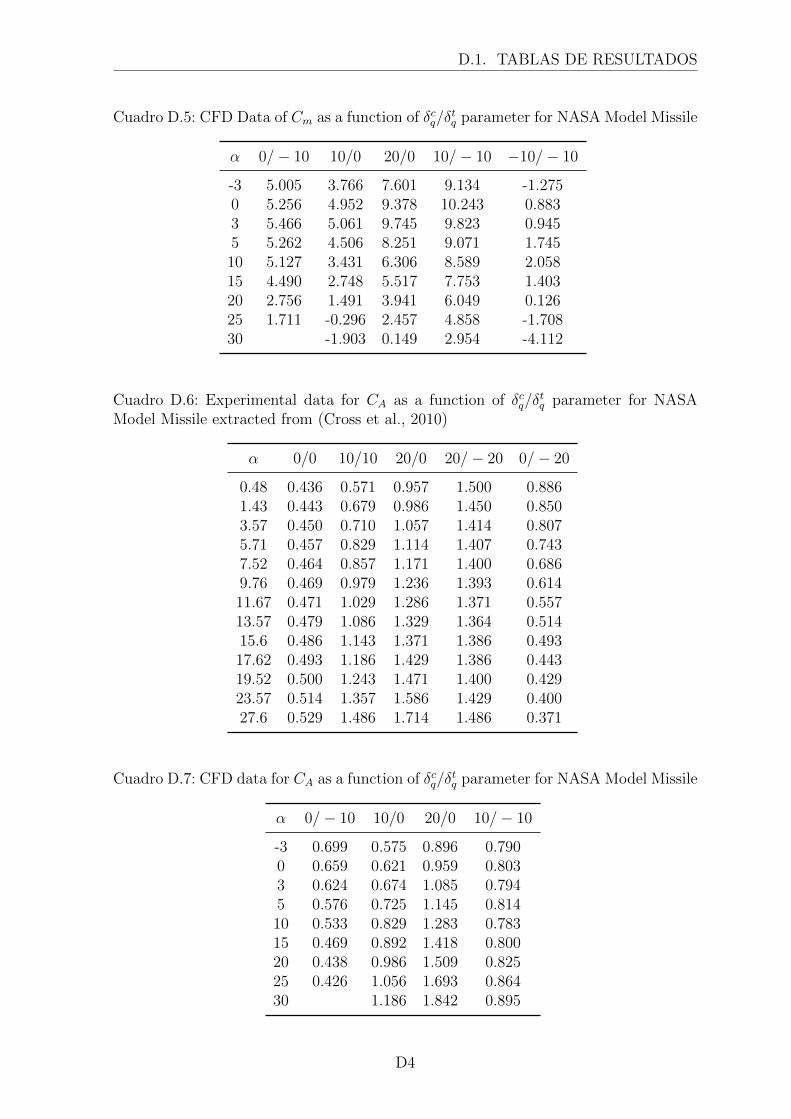
D.1. TABLAS DE RESULTADOS
Cuadro D.5: CFD Data of Cm as a function of δcq/δtq parameter for NASA Model Missile
α 0/− 10 10/0 20/0 10/− 10 −10/− 10
-3 5.005 3.766 7.601 9.134 -1.2750 5.256 4.952 9.378 10.243 0.8833 5.466 5.061 9.745 9.823 0.9455 5.262 4.506 8.251 9.071 1.74510 5.127 3.431 6.306 8.589 2.05815 4.490 2.748 5.517 7.753 1.40320 2.756 1.491 3.941 6.049 0.12625 1.711 -0.296 2.457 4.858 -1.70830 -1.903 0.149 2.954 -4.112
Cuadro D.6: Experimental data for CA as a function of δcq/δtq parameter for NASA
Model Missile extracted from (Cross et al., 2010)
α 0/0 10/10 20/0 20/− 20 0/− 20
0.48 0.436 0.571 0.957 1.500 0.8861.43 0.443 0.679 0.986 1.450 0.8503.57 0.450 0.710 1.057 1.414 0.8075.71 0.457 0.829 1.114 1.407 0.7437.52 0.464 0.857 1.171 1.400 0.6869.76 0.469 0.979 1.236 1.393 0.61411.67 0.471 1.029 1.286 1.371 0.55713.57 0.479 1.086 1.329 1.364 0.51415.6 0.486 1.143 1.371 1.386 0.49317.62 0.493 1.186 1.429 1.386 0.44319.52 0.500 1.243 1.471 1.400 0.42923.57 0.514 1.357 1.586 1.429 0.40027.6 0.529 1.486 1.714 1.486 0.371
Cuadro D.7: CFD data for CA as a function of δcq/δtq parameter for NASA Model Missile
α 0/− 10 10/0 20/0 10/− 10
-3 0.699 0.575 0.896 0.7900 0.659 0.621 0.959 0.8033 0.624 0.674 1.085 0.7945 0.576 0.725 1.145 0.81410 0.533 0.829 1.283 0.78315 0.469 0.892 1.418 0.80020 0.438 0.986 1.509 0.82525 0.426 1.056 1.693 0.86430 1.186 1.842 0.895
D4
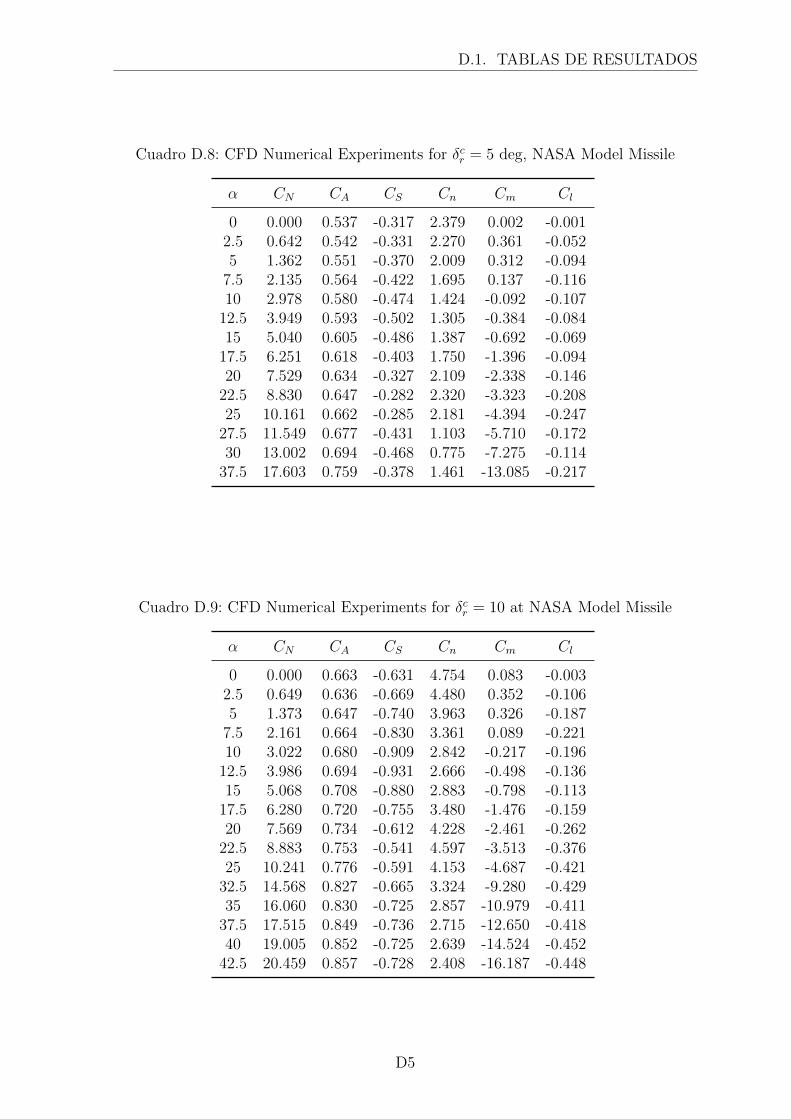
D.1. TABLAS DE RESULTADOS
Cuadro D.8: CFD Numerical Experiments for δcr = 5 deg, NASA Model Missile
α CN CA CS Cn Cm Cl
0 0.000 0.537 -0.317 2.379 0.002 -0.0012.5 0.642 0.542 -0.331 2.270 0.361 -0.0525 1.362 0.551 -0.370 2.009 0.312 -0.094
7.5 2.135 0.564 -0.422 1.695 0.137 -0.11610 2.978 0.580 -0.474 1.424 -0.092 -0.107
12.5 3.949 0.593 -0.502 1.305 -0.384 -0.08415 5.040 0.605 -0.486 1.387 -0.692 -0.069
17.5 6.251 0.618 -0.403 1.750 -1.396 -0.09420 7.529 0.634 -0.327 2.109 -2.338 -0.146
22.5 8.830 0.647 -0.282 2.320 -3.323 -0.20825 10.161 0.662 -0.285 2.181 -4.394 -0.247
27.5 11.549 0.677 -0.431 1.103 -5.710 -0.17230 13.002 0.694 -0.468 0.775 -7.275 -0.114
37.5 17.603 0.759 -0.378 1.461 -13.085 -0.217
Cuadro D.9: CFD Numerical Experiments for δcr = 10 at NASA Model Missile
α CN CA CS Cn Cm Cl
0 0.000 0.663 -0.631 4.754 0.083 -0.0032.5 0.649 0.636 -0.669 4.480 0.352 -0.1065 1.373 0.647 -0.740 3.963 0.326 -0.187
7.5 2.161 0.664 -0.830 3.361 0.089 -0.22110 3.022 0.680 -0.909 2.842 -0.217 -0.196
12.5 3.986 0.694 -0.931 2.666 -0.498 -0.13615 5.068 0.708 -0.880 2.883 -0.798 -0.113
17.5 6.280 0.720 -0.755 3.480 -1.476 -0.15920 7.569 0.734 -0.612 4.228 -2.461 -0.262
22.5 8.883 0.753 -0.541 4.597 -3.513 -0.37625 10.241 0.776 -0.591 4.153 -4.687 -0.421
32.5 14.568 0.827 -0.665 3.324 -9.280 -0.42935 16.060 0.830 -0.725 2.857 -10.979 -0.411
37.5 17.515 0.849 -0.736 2.715 -12.650 -0.41840 19.005 0.852 -0.725 2.639 -14.524 -0.452
42.5 20.459 0.857 -0.728 2.408 -16.187 -0.448
D5
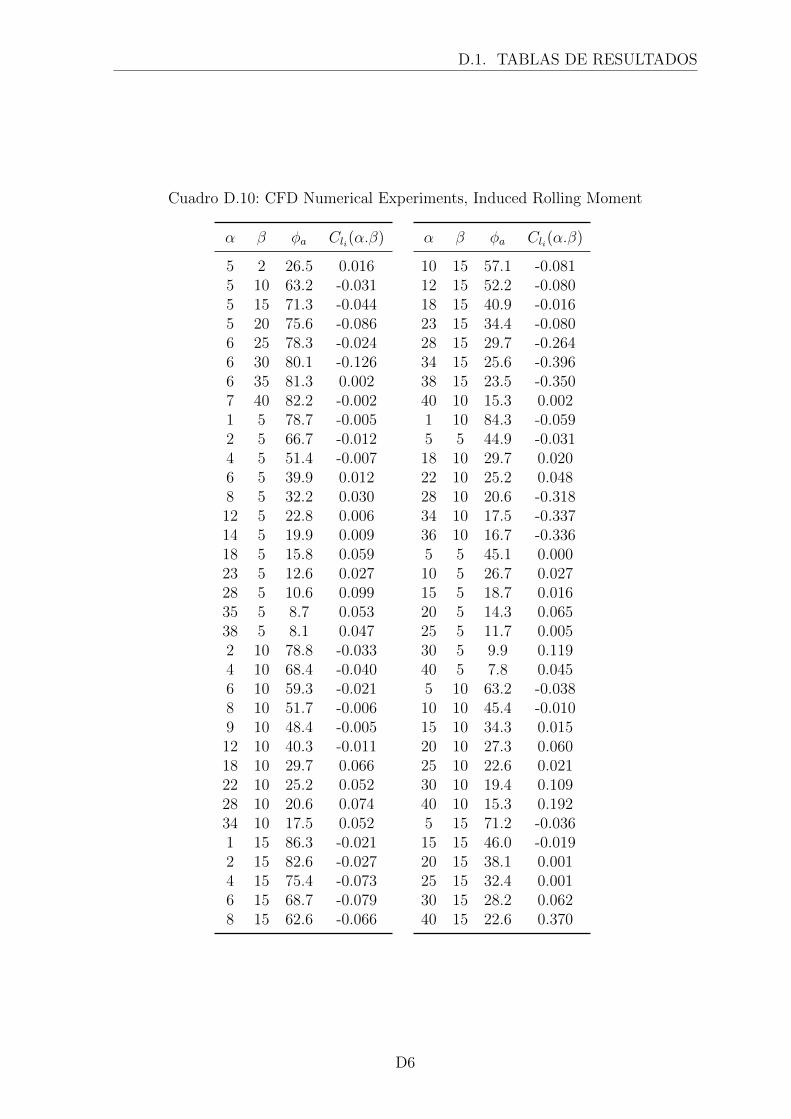
D.1. TABLAS DE RESULTADOS
Cuadro D.10: CFD Numerical Experiments, Induced Rolling Moment
α β φa Cli(α.β)
5 2 26.5 0.0165 10 63.2 -0.0315 15 71.3 -0.0445 20 75.6 -0.0866 25 78.3 -0.0246 30 80.1 -0.1266 35 81.3 0.0027 40 82.2 -0.0021 5 78.7 -0.0052 5 66.7 -0.0124 5 51.4 -0.0076 5 39.9 0.0128 5 32.2 0.03012 5 22.8 0.00614 5 19.9 0.00918 5 15.8 0.05923 5 12.6 0.02728 5 10.6 0.09935 5 8.7 0.05338 5 8.1 0.0472 10 78.8 -0.0334 10 68.4 -0.0406 10 59.3 -0.0218 10 51.7 -0.0069 10 48.4 -0.00512 10 40.3 -0.01118 10 29.7 0.06622 10 25.2 0.05228 10 20.6 0.07434 10 17.5 0.0521 15 86.3 -0.0212 15 82.6 -0.0274 15 75.4 -0.0736 15 68.7 -0.0798 15 62.6 -0.066
α β φa Cli(α.β)
10 15 57.1 -0.08112 15 52.2 -0.08018 15 40.9 -0.01623 15 34.4 -0.08028 15 29.7 -0.26434 15 25.6 -0.39638 15 23.5 -0.35040 10 15.3 0.0021 10 84.3 -0.0595 5 44.9 -0.03118 10 29.7 0.02022 10 25.2 0.04828 10 20.6 -0.31834 10 17.5 -0.33736 10 16.7 -0.3365 5 45.1 0.00010 5 26.7 0.02715 5 18.7 0.01620 5 14.3 0.06525 5 11.7 0.00530 5 9.9 0.11940 5 7.8 0.0455 10 63.2 -0.03810 10 45.4 -0.01015 10 34.3 0.01520 10 27.3 0.06025 10 22.6 0.02130 10 19.4 0.10940 10 15.3 0.1925 15 71.2 -0.03615 15 46.0 -0.01920 15 38.1 0.00125 15 32.4 0.00130 15 28.2 0.06240 15 22.6 0.370
D6
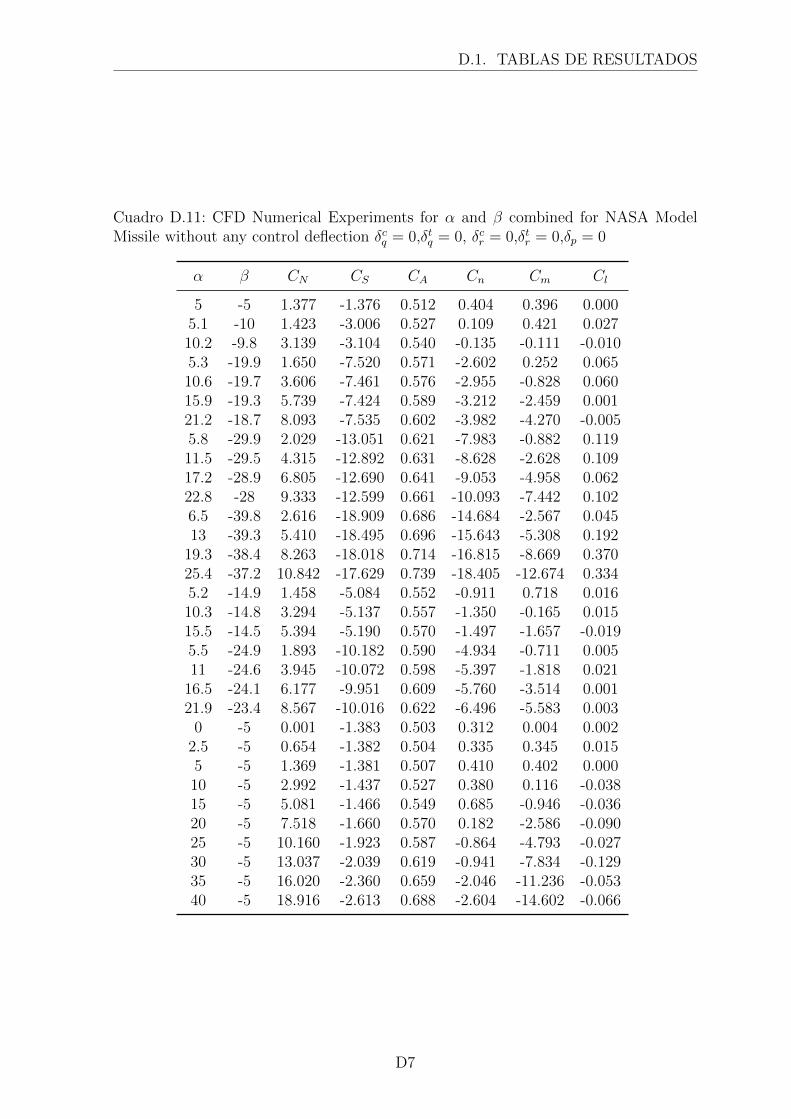
D.1. TABLAS DE RESULTADOS
Cuadro D.11: CFD Numerical Experiments for α and β combined for NASA ModelMissile without any control deflection δcq = 0,δtq = 0, δcr = 0,δtr = 0,δp = 0
α β CN CS CA Cn Cm Cl
5 -5 1.377 -1.376 0.512 0.404 0.396 0.0005.1 -10 1.423 -3.006 0.527 0.109 0.421 0.02710.2 -9.8 3.139 -3.104 0.540 -0.135 -0.111 -0.0105.3 -19.9 1.650 -7.520 0.571 -2.602 0.252 0.06510.6 -19.7 3.606 -7.461 0.576 -2.955 -0.828 0.06015.9 -19.3 5.739 -7.424 0.589 -3.212 -2.459 0.00121.2 -18.7 8.093 -7.535 0.602 -3.982 -4.270 -0.0055.8 -29.9 2.029 -13.051 0.621 -7.983 -0.882 0.11911.5 -29.5 4.315 -12.892 0.631 -8.628 -2.628 0.10917.2 -28.9 6.805 -12.690 0.641 -9.053 -4.958 0.06222.8 -28 9.333 -12.599 0.661 -10.093 -7.442 0.1026.5 -39.8 2.616 -18.909 0.686 -14.684 -2.567 0.04513 -39.3 5.410 -18.495 0.696 -15.643 -5.308 0.192
19.3 -38.4 8.263 -18.018 0.714 -16.815 -8.669 0.37025.4 -37.2 10.842 -17.629 0.739 -18.405 -12.674 0.3345.2 -14.9 1.458 -5.084 0.552 -0.911 0.718 0.01610.3 -14.8 3.294 -5.137 0.557 -1.350 -0.165 0.01515.5 -14.5 5.394 -5.190 0.570 -1.497 -1.657 -0.0195.5 -24.9 1.893 -10.182 0.590 -4.934 -0.711 0.00511 -24.6 3.945 -10.072 0.598 -5.397 -1.818 0.021
16.5 -24.1 6.177 -9.951 0.609 -5.760 -3.514 0.00121.9 -23.4 8.567 -10.016 0.622 -6.496 -5.583 0.003
0 -5 0.001 -1.383 0.503 0.312 0.004 0.0022.5 -5 0.654 -1.382 0.504 0.335 0.345 0.0155 -5 1.369 -1.381 0.507 0.410 0.402 0.00010 -5 2.992 -1.437 0.527 0.380 0.116 -0.03815 -5 5.081 -1.466 0.549 0.685 -0.946 -0.03620 -5 7.518 -1.660 0.570 0.182 -2.586 -0.09025 -5 10.160 -1.923 0.587 -0.864 -4.793 -0.02730 -5 13.037 -2.039 0.619 -0.941 -7.834 -0.12935 -5 16.020 -2.360 0.659 -2.046 -11.236 -0.05340 -5 18.916 -2.613 0.688 -2.604 -14.602 -0.066
D7

D.1. TABLAS DE RESULTADOS
Cuadro D.12: CFD Numerical Experiments. Calculation of roll control moment atNASA Model Missile with δp = 5 deg
α CN CA CS Cl Cn Cm
0 0.001 0.572 0.000 0.612 0.014 -0.0025 1.376 0.580 0.005 0.616 0.032 0.25810 2.978 0.606 0.010 0.618 0.083 -0.06915 5.041 0.633 0.042 0.610 0.314 -0.66820 7.528 0.656 0.134 0.596 0.801 -2.37125 10.135 0.681 0.177 0.618 1.247 -4.39930 12.887 0.705 0.244 0.638 1.803 -6.89540 18.929 0.774 0.342 0.662 2.205 -14.287
D8
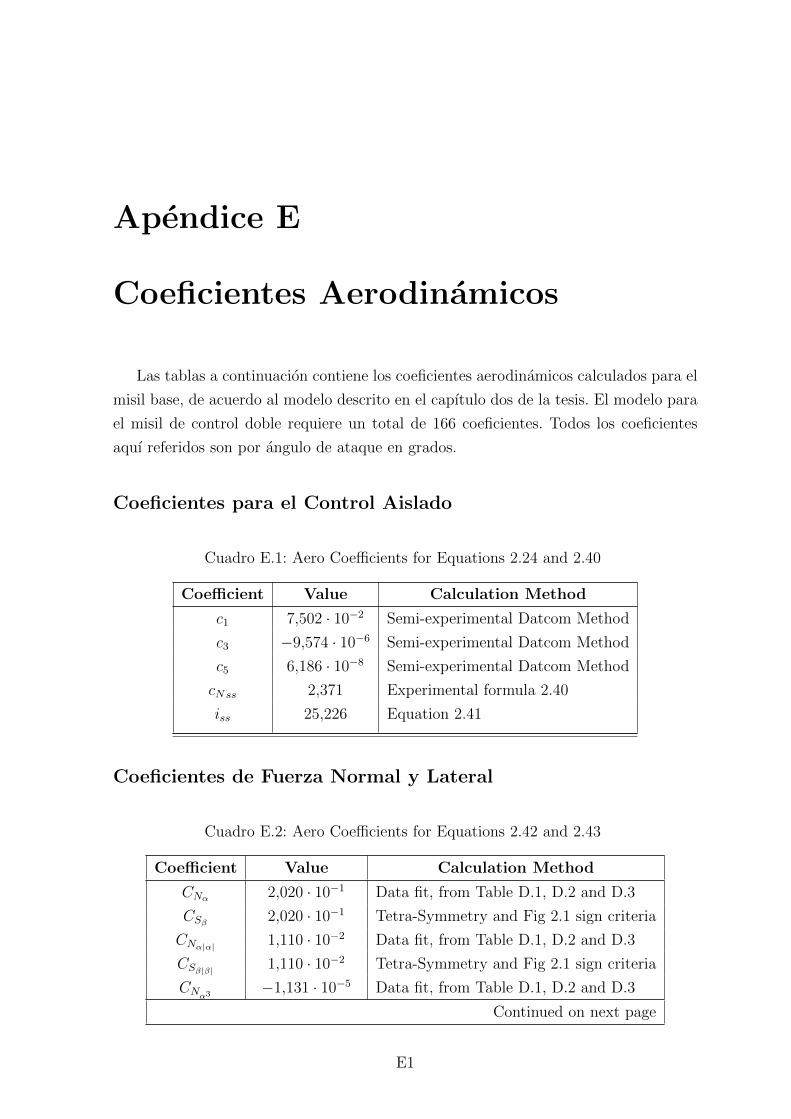
Apendice E
Coeficientes Aerodinamicos
Las tablas a continuacion contiene los coeficientes aerodinamicos calculados para el
misil base, de acuerdo al modelo descrito en el capıtulo dos de la tesis. El modelo para
el misil de control doble requiere un total de 166 coeficientes. Todos los coeficientes
aquı referidos son por angulo de ataque en grados.
Coeficientes para el Control Aislado
Cuadro E.1: Aero Coefficients for Equations 2.24 and 2.40
Coefficient Value Calculation Method
c1 7,502 · 10−2 Semi-experimental Datcom Method
c3 −9,574 · 10−6 Semi-experimental Datcom Method
c5 6,186 · 10−8 Semi-experimental Datcom Method
cNss 2,371 Experimental formula 2.40
iss 25,226 Equation 2.41
Coeficientes de Fuerza Normal y Lateral
Cuadro E.2: Aero Coefficients for Equations 2.42 and 2.43
Coefficient Value Calculation Method
CNα 2,020 · 10−1 Data fit, from Table D.1, D.2 and D.3
CSβ 2,020 · 10−1 Tetra-Symmetry and Fig 2.1 sign criteria
CNα|α| 1,110 · 10−2 Data fit, from Table D.1, D.2 and D.3
CSβ|β| 1,110 · 10−2 Tetra-Symmetry and Fig 2.1 sign criteria
CNα3 −1,131 · 10−5 Data fit, from Table D.1, D.2 and D.3
Continued on next page
E1
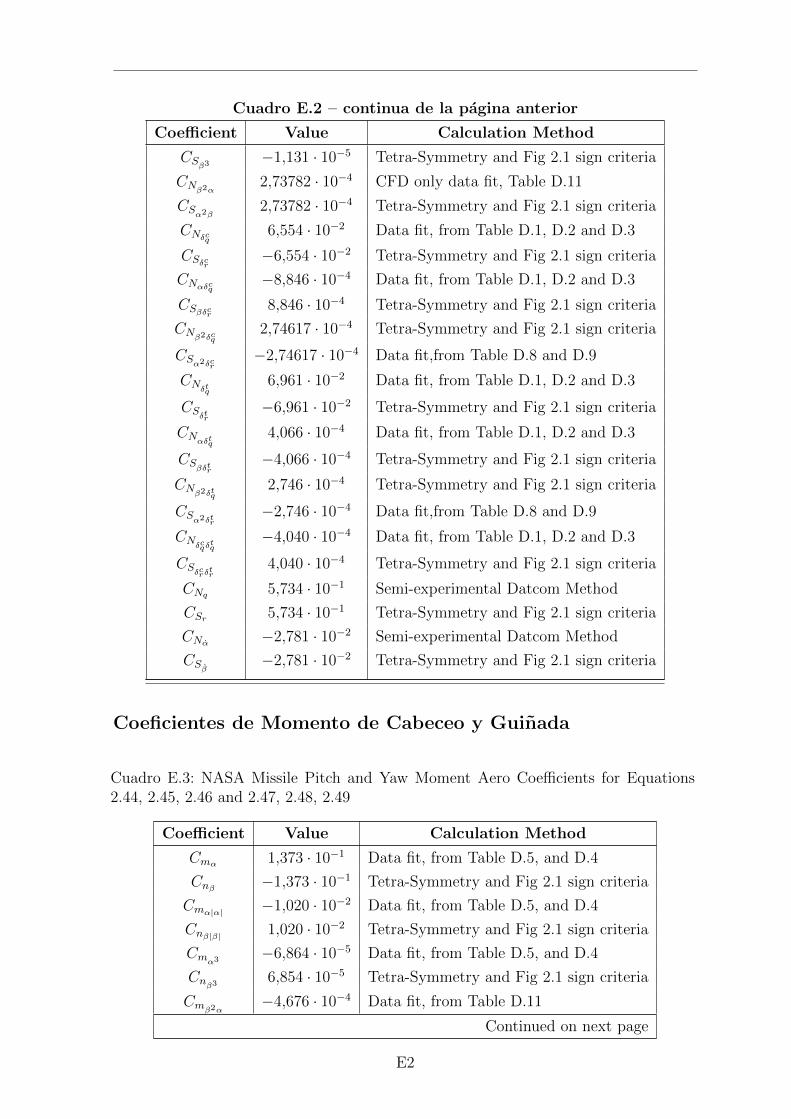
Cuadro E.2 – continua de la pagina anterior
Coefficient Value Calculation Method
CSβ3 −1,131 · 10−5 Tetra-Symmetry and Fig 2.1 sign criteria
CNβ2α2,73782 · 10−4 CFD only data fit, Table D.11
CSα2β2,73782 · 10−4 Tetra-Symmetry and Fig 2.1 sign criteria
CNδcq 6,554 · 10−2 Data fit, from Table D.1, D.2 and D.3
CSδcr −6,554 · 10−2 Tetra-Symmetry and Fig 2.1 sign criteria
CNαδcq −8,846 · 10−4 Data fit, from Table D.1, D.2 and D.3
CSβδcr 8,846 · 10−4 Tetra-Symmetry and Fig 2.1 sign criteria
CNβ2δcq2,74617 · 10−4 Tetra-Symmetry and Fig 2.1 sign criteria
CSα2δcr−2,74617 · 10−4 Data fit,from Table D.8 and D.9
CNδtq
6,961 · 10−2 Data fit, from Table D.1, D.2 and D.3
CSδtr
−6,961 · 10−2 Tetra-Symmetry and Fig 2.1 sign criteria
CNαδtq
4,066 · 10−4 Data fit, from Table D.1, D.2 and D.3
CSβδtr
−4,066 · 10−4 Tetra-Symmetry and Fig 2.1 sign criteria
CNβ2δtq
2,746 · 10−4 Tetra-Symmetry and Fig 2.1 sign criteria
CSα2δtr
−2,746 · 10−4 Data fit,from Table D.8 and D.9
CNδcqδ
tq
−4,040 · 10−4 Data fit, from Table D.1, D.2 and D.3
CSδcrδ
tr
4,040 · 10−4 Tetra-Symmetry and Fig 2.1 sign criteria
CNq 5,734 · 10−1 Semi-experimental Datcom Method
CSr 5,734 · 10−1 Tetra-Symmetry and Fig 2.1 sign criteria
CNα −2,781 · 10−2 Semi-experimental Datcom Method
CSβ −2,781 · 10−2 Tetra-Symmetry and Fig 2.1 sign criteria
Coeficientes de Momento de Cabeceo y Guinada
Cuadro E.3: NASA Missile Pitch and Yaw Moment Aero Coefficients for Equations2.44, 2.45, 2.46 and 2.47, 2.48, 2.49
Coefficient Value Calculation Method
Cmα 1,373 · 10−1 Data fit, from Table D.5, and D.4
Cnβ −1,373 · 10−1 Tetra-Symmetry and Fig 2.1 sign criteria
Cmα|α| −1,020 · 10−2 Data fit, from Table D.5, and D.4
Cnβ|β| 1,020 · 10−2 Tetra-Symmetry and Fig 2.1 sign criteria
Cmα3 −6,864 · 10−5 Data fit, from Table D.5, and D.4
Cnβ3 6,854 · 10−5 Tetra-Symmetry and Fig 2.1 sign criteria
Cmβ2α−4,676 · 10−4 Data fit, from Table D.11
Continued on next page
E2
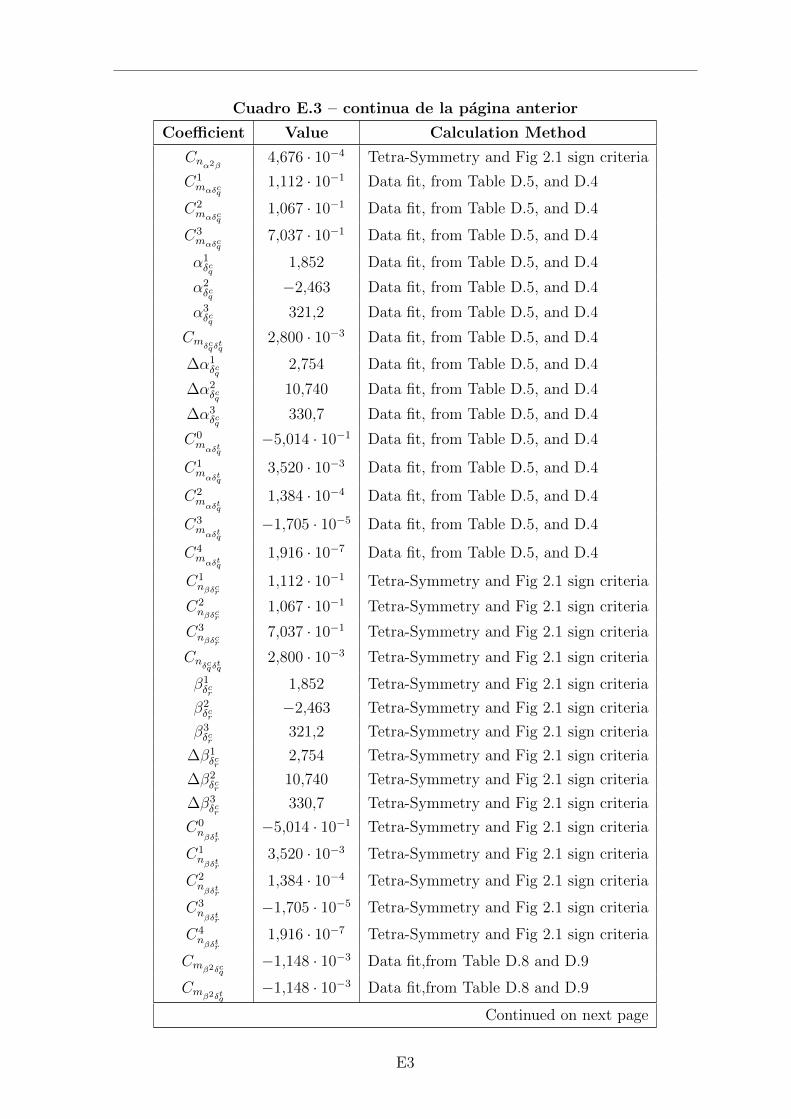
Cuadro E.3 – continua de la pagina anterior
Coefficient Value Calculation Method
Cnα2β4,676 · 10−4 Tetra-Symmetry and Fig 2.1 sign criteria
C1mαδcq
1,112 · 10−1 Data fit, from Table D.5, and D.4
C2mαδcq
1,067 · 10−1 Data fit, from Table D.5, and D.4
C3mαδcq
7,037 · 10−1 Data fit, from Table D.5, and D.4
α1δcq
1,852 Data fit, from Table D.5, and D.4
α2δcq
−2,463 Data fit, from Table D.5, and D.4
α3δcq
321,2 Data fit, from Table D.5, and D.4
Cmδcqδ
tq
2,800 · 10−3 Data fit, from Table D.5, and D.4
∆α1δcq
2,754 Data fit, from Table D.5, and D.4
∆α2δcq
10,740 Data fit, from Table D.5, and D.4
∆α3δcq
330,7 Data fit, from Table D.5, and D.4
C0mαδtq
−5,014 · 10−1 Data fit, from Table D.5, and D.4
C1mαδtq
3,520 · 10−3 Data fit, from Table D.5, and D.4
C2mαδtq
1,384 · 10−4 Data fit, from Table D.5, and D.4
C3mαδtq
−1,705 · 10−5 Data fit, from Table D.5, and D.4
C4mαδtq
1,916 · 10−7 Data fit, from Table D.5, and D.4
C1nβδcr
1,112 · 10−1 Tetra-Symmetry and Fig 2.1 sign criteria
C2nβδcr
1,067 · 10−1 Tetra-Symmetry and Fig 2.1 sign criteria
C3nβδcr
7,037 · 10−1 Tetra-Symmetry and Fig 2.1 sign criteria
Cnδcqδ
tq
2,800 · 10−3 Tetra-Symmetry and Fig 2.1 sign criteria
β1δcr
1,852 Tetra-Symmetry and Fig 2.1 sign criteria
β2δcr
−2,463 Tetra-Symmetry and Fig 2.1 sign criteria
β3δcr
321,2 Tetra-Symmetry and Fig 2.1 sign criteria
∆β1δcr
2,754 Tetra-Symmetry and Fig 2.1 sign criteria
∆β2δcr
10,740 Tetra-Symmetry and Fig 2.1 sign criteria
∆β3δcr
330,7 Tetra-Symmetry and Fig 2.1 sign criteria
C0nβδtr
−5,014 · 10−1 Tetra-Symmetry and Fig 2.1 sign criteria
C1nβδtr
3,520 · 10−3 Tetra-Symmetry and Fig 2.1 sign criteria
C2nβδtr
1,384 · 10−4 Tetra-Symmetry and Fig 2.1 sign criteria
C3nβδtr
−1,705 · 10−5 Tetra-Symmetry and Fig 2.1 sign criteria
C4nβδtr
1,916 · 10−7 Tetra-Symmetry and Fig 2.1 sign criteria
Cmβ2δcq−1,148 · 10−3 Data fit,from Table D.8 and D.9
Cmβ2δtq
−1,148 · 10−3 Data fit,from Table D.8 and D.9
Continued on next page
E3
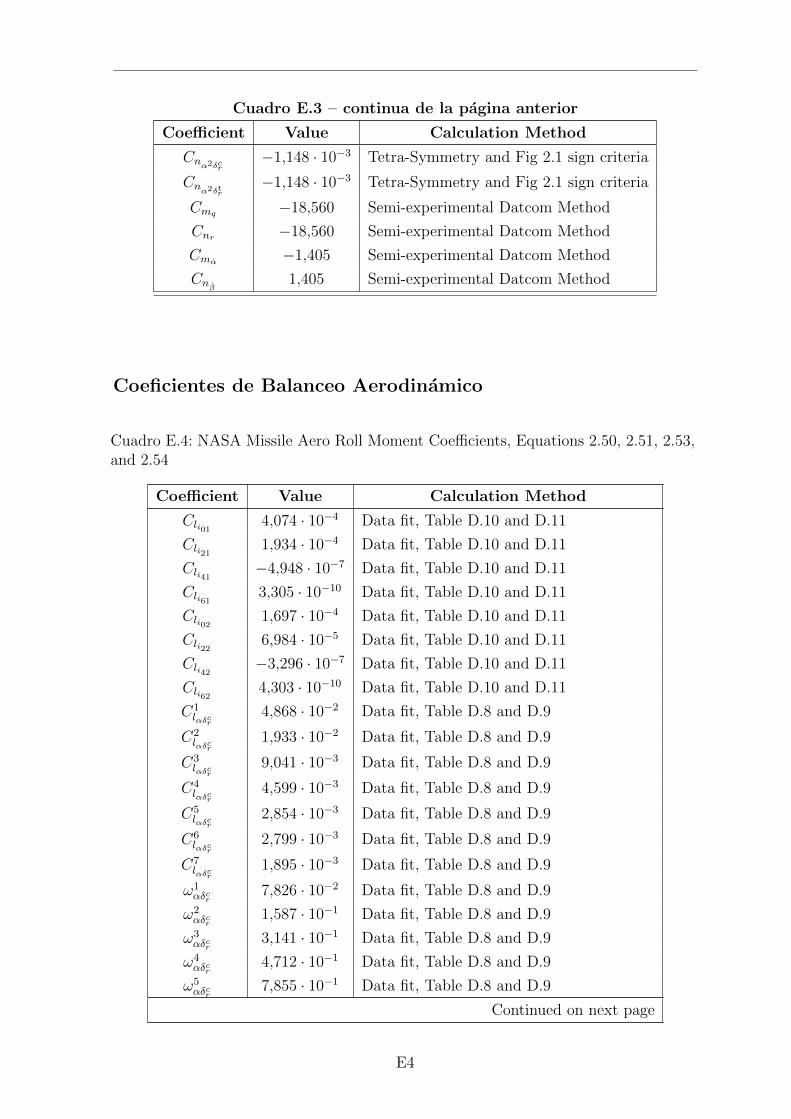
Cuadro E.3 – continua de la pagina anterior
Coefficient Value Calculation Method
Cnα2δcr−1,148 · 10−3 Tetra-Symmetry and Fig 2.1 sign criteria
Cnα2δtr
−1,148 · 10−3 Tetra-Symmetry and Fig 2.1 sign criteria
Cmq −18,560 Semi-experimental Datcom Method
Cnr −18,560 Semi-experimental Datcom Method
Cmα −1,405 Semi-experimental Datcom Method
Cnβ 1,405 Semi-experimental Datcom Method
Coeficientes de Balanceo Aerodinamico
Cuadro E.4: NASA Missile Aero Roll Moment Coefficients, Equations 2.50, 2.51, 2.53,and 2.54
Coefficient Value Calculation Method
Cli014,074 · 10−4 Data fit, Table D.10 and D.11
Cli211,934 · 10−4 Data fit, Table D.10 and D.11
Cli41−4,948 · 10−7 Data fit, Table D.10 and D.11
Cli613,305 · 10−10 Data fit, Table D.10 and D.11
Cli021,697 · 10−4 Data fit, Table D.10 and D.11
Cli226,984 · 10−5 Data fit, Table D.10 and D.11
Cli42−3,296 · 10−7 Data fit, Table D.10 and D.11
Cli624,303 · 10−10 Data fit, Table D.10 and D.11
C1lαδcr
4,868 · 10−2 Data fit, Table D.8 and D.9
C2lαδcr
1,933 · 10−2 Data fit, Table D.8 and D.9
C3lαδcr
9,041 · 10−3 Data fit, Table D.8 and D.9
C4lαδcr
4,599 · 10−3 Data fit, Table D.8 and D.9
C5lαδcr
2,854 · 10−3 Data fit, Table D.8 and D.9
C6lαδcr
2,799 · 10−3 Data fit, Table D.8 and D.9
C7lαδcr
1,895 · 10−3 Data fit, Table D.8 and D.9
ω1αδcr
7,826 · 10−2 Data fit, Table D.8 and D.9
ω2αδcr
1,587 · 10−1 Data fit, Table D.8 and D.9
ω3αδcr
3,141 · 10−1 Data fit, Table D.8 and D.9
ω4αδcr
4,712 · 10−1 Data fit, Table D.8 and D.9
ω5αδcr
7,855 · 10−1 Data fit, Table D.8 and D.9
Continued on next page
E4

Cuadro E.4 – continua de la pagina anterior
Coefficient Value Calculation Method
ω6αδcr
6,283 · 10−1 Data fit, Table D.8 and D.9
ω7αδcr
9,425 · 10−1 Data fit, Table D.8 and D.9
φ1αδcr
2,647 Data fit, Table D.8 and D.9
φ2αδcr
−1,970 Data fit, Table D.8 and D.9
φ3αδcr
−2,654 Data fit, Table D.8 and D.9
φ4αδcr
2,436 · 10−1 Data fit, Table D.8 and D.9
φ5αδcr
−2,433 Data fit, Table D.8 and D.9
φ6αδcr
2,315 Data fit, Table D.8 and D.9
φ7αδcr
−1,071 Data fit, Table D.8 and D.9
C1lβδcq
4,868 · 10−2 Equation 2.53
C2lβδcq
1,933 · 10−2 Equation 2.53
C3lβδcq
9,041 · 10−3 Equation 2.53
C4lβδcq
4,599 · 10−3 Equation 2.53
C5lβδcq
2,854 · 10−3 Equation 2.53
C6lβδcq
2,799 · 10−3 Equation 2.53
C7lβδcq
1,895 · 10−3 Equation 2.53
ω1βδcq
7,826 · 10−2 Equation 2.53
ω2βδcq
1,587 · 10−1 Equation 2.53
ω3βδcq
3,141 · 10−1 Equation 2.53
ω4βδcq
4,712 · 10−1 Equation 2.53
ω5βδcq
7,855 · 10−1 Equation 2.53
ω6βδcq
6,283 · 10−1 Equation 2.53
ω7βδcq
9,425 · 10−1 Equation 2.53
φ1βδcq
2,647 Equation 2.53
φ2βδcq
−1,970 Equation 2.53
φ3βδcq
−2,654 Equation 2.53
φ4βδcq
2,436 · 10−1 Equation 2.53
φ5βδcq
−2,433 Equation 2.53
φ6βδcq
2,315 Equation 2.53
φ7βδcq
−1,071 Equation 2.53
C1lαT δp
5,441 · 10−2 Data fit, Table D.12
C2lαT δp
1,215 · 10−1 Data fit, Table D.12
C3lαT δp
−5,458 · 10−3 Data fit, Table D.12
α1Tδp
56,8 Data fit, Table D.12
Continued on next page
E5

Cuadro E.4 – continua de la pagina anterior
Coefficient Value Calculation Method
α2Tδp
2,317 Data fit, Table D.12
α3Tδp
20,18 Data fit, Table D.12
∆α1Tδp
29,08 Data fit, Table D.12
∆α2Tδp
77,93 Data fit, Table D.12
∆α3Tδp
5,328 Data fit, Table D.12
Clp −1,935 Eastman Correlation, from (Mikhail, 1995)
Coeficientes de Fuerza Axial
Cuadro E.5: NASA Missile Axial Force Aero-model Coefficients, Equation 2.55
Coefficient Value Calculation Method
CA0 4,362 · 10−1 Data fit, Table D.6 and D.7
CAα 3,886 · 10−3 Data fit, Table D.6 and D.7
CAβ 3,886 · 10−3 Data fit, Table D.11 and Tetra-Symmetry
CAα2 −7,642 · 10−5 Data fit, Table D.6 and D.7
CAα3 2,111 · 10−6 Data fit, Table D.6 and D.7
∆CAb 1,062 · 10−1 Semi-experimental Datcom Method
CAδcq 2,266 · 10−2 Data fit, Table D.6 and D.7
CAαδcq 1,348 · 10−3 Data fit, Table D.6 and D.7
CAβδcq 1,001 · 10−5 Data fit, Table D.8 and D.9
CAδcr 2,266 · 10−2 Tetra-Symmetry
CAαδcr 1,001 · 10−5 Tetra-Symmetry
CAβδcr 1,348 · 10−3 Tetra-Symmetry
CAδp 2,720 · 10−2 Data fit, Table D.12
CAδtq
−2,282 · 10−2 Data fit, Table D.6 and D.7
CAαδtq
1,904 · 10−3 Data fit, Table D.6 and D.7
CAα2δtq
−2,708 · 10−5 Data fit, Table D.6 and D.7
CAβδtq
1,011 · 10−5 Data fit, Table D.8 and D.9
CAδtr
−2,282 · 10−2 Tetra-Symmetry
CAαδtr
1,011 · 10−5 Tetra-Symmetry
CAα2δtr
−1,001 · 10−6 Data fit, Table D.8 and D.9
CAβδtr
1,904 · 10−3 Tetra-Symmetry
Continued on next page
E6
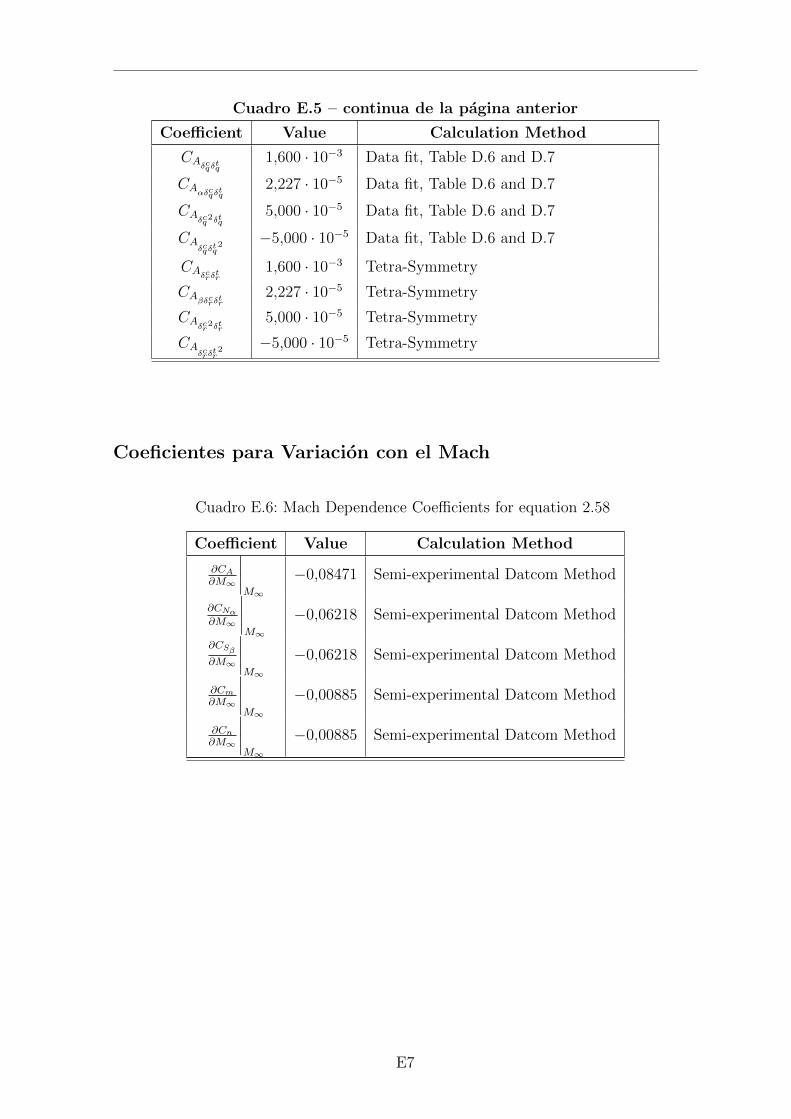
Cuadro E.5 – continua de la pagina anterior
Coefficient Value Calculation Method
CAδcqδ
tq
1,600 · 10−3 Data fit, Table D.6 and D.7
CAαδcqδ
tq
2,227 · 10−5 Data fit, Table D.6 and D.7
CAδcq
2δtq5,000 · 10−5 Data fit, Table D.6 and D.7
CAδcqδ
tq2 −5,000 · 10−5 Data fit, Table D.6 and D.7
CAδcrδ
tr
1,600 · 10−3 Tetra-Symmetry
CAβδcrδ
tr
2,227 · 10−5 Tetra-Symmetry
CAδcr
2δtr5,000 · 10−5 Tetra-Symmetry
CAδcrδ
tr2 −5,000 · 10−5 Tetra-Symmetry
Coeficientes para Variacion con el Mach
Cuadro E.6: Mach Dependence Coefficients for equation 2.58
Coefficient Value Calculation Method
∂CA∂M∞
∣∣∣∣M∞
−0,08471 Semi-experimental Datcom Method
∂CNα∂M∞
∣∣∣∣M∞
−0,06218 Semi-experimental Datcom Method
∂CSβ∂M∞
∣∣∣∣M∞
−0,06218 Semi-experimental Datcom Method
∂Cm∂M∞
∣∣∣∣M∞
−0,00885 Semi-experimental Datcom Method
∂Cn∂M∞
∣∣∣∣M∞
−0,00885 Semi-experimental Datcom Method
E7

Apendice F
Dinamica del Misil y Cinematica
Terminal
F.1. Velocidad en ejes cuerpo y viento
vWM = SWB ·Vb
M (F.1)
SWB =
cαcβ sβ sαcβ
−cαsβ cβ −sαsβ−sα 0 cα
(F.2)
F.2. Angulos de Euler y Cuaterniones
Los angulos de Euler del misil (θ, ψ, φ) definen la matriz de transformacion a ejes
cuerpo MXBY BZB de la referencia inercial MXLY LZL. La secuencia de la rotacion
se define como guinada, ψ, cabeceo θ y balanceo φ (ver figura F.1):
SBL =
cθcψ cθsψ −sθsφsθcψ−cφsψ sφsθsψ + cφcψ sφcθ
cφsθcψ + sφsψ cφsθsψ − sφcψ cφcθ
(F.3)
Sin embargo los angulos de Euler causan singularidades cuando el valor de θ es
grande, (Tewari, 2007). Se prefiere la aproximacion de los cuaterniones para misiles:
SBL =
q20 + q2
1−q22 − q2
3 2(q1q2 + q0q3) 2(q1q3−q0q2)
2(q1q2 − q0q3) q20 − q2
1 + q22 − q2
3 2(q2q3 + q0q1)
2(q1q3 + q0q2) 2(q2q3 − q0q1) (q20 − q2
1 − q22 + q2
3)
(F.4)
La ecuacion F.4 solo contiene expresiones algebraicas. De F.3 y F.4:
F1

F.3. ECUACIONES CINEMATICAS Y DINAMICAS CON CUATERNIONES
XB = x′′
XL
YL
ZL = z′
x′
YB
z′′ZB
y′ = y′′
ψ
θ
ψ
θ
φ
Figura F.1: Definicion de angulos de Euler para misiles
tψ =2(q1q2 + q0q3)
(q20 + q2
1 − q22 − q2
3)(F.5)
tφ =2(q2q3 + q0q1)
(q20 − q2
1 − q22 + q2
3)(F.6)
sθ = −2(q1q3−q0q2) (F.7)
F.3. Ecuaciones cinematicas y dinamicas con cua-
terniones
La cinematica de la rotacion se obtiene a traves de la derivada en el tiempo de los
cuaterniones: q0
q1
q2
q3
=1
2
0 −p −q −rp 0 r −qq −r 0 p
r q −p 0
q0
q1
q2
q3
(F.8)
La ecuacion de la dinamica de la traslacion, con aproximacion de tierra plana, se
F2

F.3. ECUACIONES DINAMICAS
define a traves de la ecuacion de Newton:
mdV B
M
dt+m ·ΩB
MVBM = FB +mSBL · gL (F.9)
donde m es la masa instantanea del misil incluido el propulsante no consumido:
ΩBM =
0 −r q
r 0 −p−q p 0
(F.10)
es el tensor oblicuo-simetrico de ωBM . Las fuerzas actuando en el misil son aerodinami-
cas, ecuacion (2.9)- y la propulsion del motor cohete:
FB = −
FA
FS
FN
+
T
0
0
(F.11)
y la referencia inercial MXLY LZL se orienta de modo que:
gL =
0
0
g
(F.12)
La aceleracion del misil, excluida la gravedad, se representa por el vector:
nB =1
mFB (F.13)
En forma escalar F.9 es:
u = rv − qw − 1
m(FA − T ) + 2g(q1q3 − q0q2) (F.14a)
v = pw − ru− 1
mFS + 2g(q2q3 + q0q1) (F.14b)
w = qu− pv − 1
mFN + g(q2
0 − q21 − q2
2 + q23) (F.14c)
La dinamica de la rotacion esta gobernada por la ecuacion de Euler:
dΩBM
dt= IB
−1 ·[−ΩB
M · IB · ωBM]
+MB (F.15)
donde se desprecia la variacion del momento de inercia con el tiempo. El momento de
inercia del misil es:
F3

F.3. ECUACIONES DINAMICAS
IB =
IBx 0 0
0 IBy 0
0 0 IBz
(F.16)
donde IBy = IBz asumiendo tetra-simetrıa perfecta. Los unicos momentos actuando
sobre el misil son los momentos aerodinamicos, donde no se consideran los momentos
de amortiguamiento causados por el chorro.
MB =
Lcm
Mcm
Ncm
(F.17)
En forma escalar, F.15 es:
p = Ibx−1Lcm (F.18a)
q = Iby−1 [(
Iby − Ibx)pr +Mcm
](F.18b)
r = Iby−1 [(
Ibx − Iby)pq +Ncm
](F.18c)
El momento de cabeceo esta acoplado con el de guinada si el balanceo no es nulo,
un efecto que se agrava cuando los valores de incidencia son altos (los valores de v y w
son proporcionales a la incidencia a traves de las ecuaciones 2.4 y 2.5).
Algunas definiciones utiles son:
ts =rLTM‖rLTM‖
(F.19)
V LTM =
[xL yL zL
]T(F.20)
V LTM = rLTM = V L
T − V LM (F.21)
V Lc = −r
LTM · V L
TM
‖rLTM‖(F.22)
−V LTM = −ts
(nLT − nL
)(F.23)
En general la velocidad de colision debe ser positiva durante la mayor parte del
encuentro aire-aire, el misil debe tener una ventaja de velocidad sobre el blanco (Sh-
neydor, 1998). La condicion es igual a:
F4

F.3. ECUACIONES DINAMICAS
rLTM · V LTM < 0 (F.24)
esta condicion tambien se expresa como:
ts · V LM > ts · V L
T (F.25)
El time-to-go hasta la interceptacion se define como:
tgo = − rLTM · V L
TM
V LTM · V L
TM
(F.26)
Time-to-go es un componente fundamental de la ley de guiado optimo (Zarchan,
2012, 2007) Aunque algunos modelos mas elaborados incluyen por ejemplo las instruc-
ciones de guiado anteriores o la resistencia aerodinamica (Tsourdos et al., 2011) en esta
tesis se empleara la estimacion definida por la ecuacion F.26. La velocidad angular de
la lınea de mira es:
ωLLOS =rLTM ∧ V L
TM
‖rLTM‖2(F.27)
y en ejes cuerpo:
ωBLOS =rBTM ∧ V B
TM
‖rBTM‖2(F.28)
en algebra tensorial se define como:
ωBLOS =1
‖rBTM‖2
0 −zBr yBr
zBr 0 −xBr−yBr xBr 0
·x
Br
yBr
zBr
(F.29)
siendo
ωBLOSx =yBr z
Br − zBr yBr
(xBr )2 + (yBr )2 + (zBr )2 (F.30a)
ωBLOSy =zBr x
Br − xBr zBr
(xBr )2 + (yBr )2 + (zBr )2 (F.30b)
ωBLOSz =xBr y
Br − yBr xBr
(xBr )2 + (yBr )2 + (zBr )2 (F.30c)
Si el misil y el blanco estan en curso de colision, entonces se verifica que ωLOS = 0,
rLTM , V LM y V L
T son vectores coplanarios y se verifica que:
ts ∧ V LM = ts ∧ V L
T (F.31)
F5
F.3. ECUACIONES DINAMICAS
Las razones para que ωLOS 6= 0 son cambios en la velocidad del misil y del blanco,
o que las velocidades de misil y blanco no estan alineadas con el triangulo de colision.
F6
Apendice G
Elementos de Matrices en el
Espacio-Estado
G.1. Definiciones
Coeficiente de empuje
CT =T
q∞Sref(G.1)
Factor de amortiguamiento en α
Dα = 1 +q∞SrefmVM
cα
cβ
d
2VMCNα (G.2)
Factor de amortiguamiento en β
Dβ = 1 +q∞SrefmVM
cβd
2VMCSβ (G.3)
G.2. Elementos de la Matriz de Estado Aerodinami-
ca
Se consideran los coeficientes de la matriz:
Aa =
aa11 aa12 aa13 aa14 aa15
aa21 aa22 aa23 aa24 aa25
aa31 aa32 aa33 0 0
aa41 aa42 aa43 aa44 aa45
aa51 aa52 aa53 aa54 aa55
G1

G.2. MATRIZ DE ESTADO
aa11 =q∞SrefmVMDα
[sα
cβ
(CAα + CAα2 |α|+ CAα3α
2)
sgnα
+sincα
cβ(CA0 + ∆CAb − CT )
− cα
cβ
(CNα + CNα|α| |α|+ CNα3α
2 + CNβ2αβ2Υα
)] (G.4)
aa12 =q∞SrefmVM
[sα
cβCAβ sgn β − cα
cβCNβ2α
(1−Υα)αβ
](G.5)
aa13 = − 1
Dα
cαtβ (G.6)
aa14 =1
Dα
[1− q∞Srefd
2mV 2M
cα
cβCNq
](G.7)
aa15 = − 1
Dα
sαtβ (G.8)
aa21 =q∞SrefmVMDβ
[cαsβ
(CAα + CAα2 |α|+ CAα3α
2)
sgnα
− cβCSα2β(1−Υβ) βα
+sαsβ(CNα + CNα|α| |α|+ CNα3α
2 + CNβ2αβ2Υα
)](G.9)
aa22 =q∞SrefmVMDβ
[cαsβCAβ sgn β
−cβ(CSβ + CSβ|β||β|+ CSβ3β
2 + CSα2βα2Υβ
)+
+ CNβ2αβα (1−Υα) + cα sinc β (CA0 + ∆CAb − CT )
](G.10)
aa23 =1
Dβ
sα (G.11)
aa24 =q∞Srefd
2mV 2M
sαsβCNq (G.12)
aa25 = − 1
Dβ
[q∞Srefd
2mV 2M
cβCSr + cα
](G.13)
G2
G.2. MATRIZ DE ESTADO
aa31 =q∞Srefd
IBxαs (4φa)
[Cli21
+ 2Cli22c (4φa) +
(Cli41
+ 2Cli42c (4φa)
)α2
+(Cli61
+ 2Cli62c (4φa)
)α4]
(G.14)
aa32 =q∞Srefd
IBxβs (4φa)
(Cli01
+ 2Cli02c (4φa)
)(G.15)
aa33 =q∞Srefd
IBx
d
2VMClp
n6∑k=1
CklαT δp
e
(αT−α
kTδp
∆αkTδp
)2 (G.16)
aa41 =q∞Srefd
IBy
[Cmα + Cmα|α| |α|+ Cmα3α
2 + Cmβ2αβ2Υα+
s(CNα + CNα|α||α|+ CNα3α
2 + CNβ2αβ2αΥα
)](G.17)
aa42 =q∞Srefd
IBy(1−Υα)αβ
(Cmβ2α
+ sCNβ2α
)(G.18)
aa43 = r (G.19)
aa44 =q∞Srefd
2
2VMIBy
(Cmq + sCNq
)(G.20)
aa45 = −IBx
IByp (G.21)
aa51 =q∞Srefd
2
2VMIBy(1−Υβ)αβ
(Cnα2β
− sCSα2β
)(G.22)
aa52 =q∞Srefd
Iby
[Cnβ + Cnβ|β||β|+ Cnβ3β
2 + Cnα2βα2Υβ
−s(CSβ + CSβ|β| |β|+ CSβ3β
2 + CSα2βα2Υβ
)](G.23)
aa53 = −q (G.24)
aa54 = pIbxIBy
(G.25)
G3

G.3. ELEMENTOS DE LA MATRIZ DE ENTRADA DEL CONTROL
aa55 =q∞Srefd
2
2VMIBy(Cnr − sCSr) (G.26)
G.3. Elementos de la Matriz de Entrada del Con-
trol
Se consideran los coeficientes de la matriz:
Ba =
ba11 ba12 ba13 ba14 ba15
ba21 ba22 ba23 ba24 ba25
ba31 ba32 ba33 0 0
ba41 0 0 ba44 0
0 ba52 0 0 ba55
ba11 =q∞SrefmVMDα
[(sα
cβCAδcq sgn δcq −
cα
cβCNδcq
)+ α
(sα
cβCAαδcq −
cα
cβCNαδcq
)+ β
sα
cβCAβδcq −
cα
cβCNβ2δcq
β2
](G.27)
ba12 =q∞SrefmVMDα
sα
cβ
(CAδcr sgn δcr + CAαδcrα + CAβδcrβ
)(G.28)
ba13 =q∞SrefmVMDα
sα
cβCAδp sgn δp (G.29)
ba14 =q∞SrefmVMDα
[(sα
cβCA
δtqsgn δtq −
cα
cβCN
δtq
)+ α
(sα
cβCA
αδtq− cα
cβCN
αδtq
)+sα
cβCA
α2δtqα2 + β
sα
cβCA
βδtq− cα
cβCN
β2δtqβ2
](G.30)
ba15 =q∞SrefmVMDα
sα
cβ
(CA
δtrsgn δtr + αCA
αδtr+ CA
α2δtrα2 + βCA
βδtr
)(G.31)
ba21 =q∞SrefmVMDβ
[cαsβ
(CAδcq sgn δcq + CAαδcqα + CAβδcqβ
)+ sαsβ
(CNδcq + CNβ2δcq
β2 + CNαδcqα)]
(G.32)
G4

G.3. MATRIZ ENTRADA CONTROL
ba22 =q∞SrefmVMDβ
[cαsβ
(CAδcr sgn δcr + CAαδcrα + CAβδcrβ
)− cβ
(CSδcr + CSβδcrβ + CSα2δcr
α2)]
(G.33)
ba23 =q∞SrefmVM
cαsβCAδp sgn δp (G.34)
ba24 =q∞SrefmVMDβ
[cαsβ
(CA
δtqsgn δtq + CA
αδtqα + CA
βδtqβ + CA
α2δtqα2)
+ sαsβ(CN
δtq+ CN
αδtqα + CN
β2δtqβ2)]
(G.35)
ba25 =q∞SrefmVMDβ
[cαsβ
(sgn δtrCAδtr
+ CAαδtrα + CA
βδtrβ + CA
α2δtrα2)
− cβ(CS
δtr+ CS
βδtrβ + CS
α2δtrα2)]
(G.36)
ba31 =q∞Srefd
IBx
(n5∑k=1
Cklβδcq
s(ωkβδcqβ + φkβδcqβ
))(G.37)
ba32 =q∞Srefd
IBx
(n4∑k=1
Cklαδcr
s(ωkαδcrα + φkαδcrα
))(G.38)
ba33 =q∞Srefd
IBx
n6∑k=1
CklαT δp
e
(αT−α
kTδp
∆αkTδp
)2 (G.39)
ba41 =q∞Srefd
IBy
[Cmδcq(α) + Cmβ2δcq
β2 + s(CNδcq + αCNαδcq + CNβ2δcq
β2)]
(G.40)
ba44 =q∞Srefd
IBy
[Cmδtq(α) + Cm
β2δtqβ2 + s
(CN
δtq+ αCN
αδtq+ CN
β2δtqβ2)]
(G.41)
ba52 =q∞Srefd
IBy
[Cnδcr(β) + Cnα2δcr
α2 − s(CSδcr + βCSβδcr + CSα2δcr
α2)]
(G.42)
G5

G.4. ELEMENTOS DE LA MATRIZ DE CONTROL CRUZADO
ba55 =q∞Srefd
IBy
[Cnδtr(β) + Cn
α2δtrα2 − s
(CS
δtr+ βCS
βδtr+ CS
α2δtrα2)]
(G.43)
G.4. Elementos de la Matriz de Control Cruzado
Consideramos los coeficientes de la matriz:
Mqa =
maq11
0 0 maq14
0
maq21
0 0 maq24
0
0 0 0 0 0
0 0 0 maq44
0
0 0 0 0 0
maq11
=q∞SrefmVMDα
sα
cβCA
δcq2δtq
(1−Υq) δtq (G.44)
maq14
=q∞SrefmVMDα
[sα
cβ
(CA
δcqδtq
+ CAδcqδ
tq2δtq + CA
δcq2δtq
Υqδcq + CA
αδcqδtqα
)−cαcβ
(CN
δcqδtq
+ CNαδcqδ
tqα)]
(G.45)
maq21
=q∞SrefmVMDβ
cαsβCAδcq
2δtqδtq (1−Υq) (G.46)
maq24
=q∞SrefmVMDβ
[cαsβ
(CA
δcqδtq
+ CAαδcqδ
tqα + CA
δcqδtq2δtq + CA
δcq2δtqδcqΥq
)+sαsβ
(CN
δcqδtq
+ CNαδcqδ
tqα)]
(G.47)
maq44
=q∞Srefd
Iby
[Cm
δcqδtq
+ Cmαδcqδ
tqα + s
(CN
δcqδtq
+ CNαδcqδ
tqα)]
(G.48)
y para la matriz:
M ra =
0 ma
r12 0 0 mar15
0 mar22 0 0 ma
r25
0 0 0 0 0
0 0 0 0 0
0 0 0 0 mar55
G6

G.4. MATRIZ DE CONTROL CRUZADO
mar12 =
q∞SrefmVMDα
sα
cβCA
δcr2δtr
(1−Υr) δtr (G.49)
mar15 =
q∞SrefmVMDα
sα
cβ
(CA
δcrδtr
+ CAδcrδ
tr2δtr + CA
δcr2δtr
Υrδcr + CA
βδcrδtrβ)
(G.50)
mar22 =
q∞SrefmVMDβ
cαsβCAδcr
2δtrδtr (1−Υr) (G.51)
mar25 =
q∞SrefmVMDβ
[cαsβ
(CA
δcrδtr
+ CAβδcrδ
trβ + CA
δcr2δtrδcrΥr + CA
δcrδtr2δtr
)−cβ
(CS
δcrδtr
+ CSβδcrδ
trβ)]
(G.52)
mar55 =
q∞SrefmVM
[Cn
δcrδtr
+ Cnβδcrδ
trβ − s
(CS
δcrδtr
+ CSβδcrδ
trβ)]
(G.53)
Finalmente la matriz combinada es:
Ma =
ma
11 ma21 0 ma
41 ma51
ma21 ma
22 0 ma42 ma
52
0 0 0 0 0
ma41 0 0 ma
44 0
0 ma52 0 0 ma
55
ma
11 = δcqmaq11
+ δtqmaq14
(1−Υq) (G.54)
ma12 = δcrm
ar12 + δtrm
ar15(1−Υr) (G.55)
ma14 = δcqm
aq14
Υq (G.56)
ma15 = δcrm
ar15Υr (G.57)
ma21 = δcqm
aq21
+ δtqmaq24
(1−Υq) (G.58)
ma22 = δcrm
ar22 + δtrm
ar25(1−Υr) (G.59)
G7

G.5. ELEMENTOS DE LA MATRIZ DE ACELERACIONES
ma24 = δcqm
aq24
Υq (G.60)
ma25 = δcrm
ar25Υr (G.61)
ma41 = δtqm
aq44
(1−Υq) (G.62)
ma44 = δcqm
aq44
Υq (G.63)
ma52 = δtrm
ar55(1−Υr) (G.64)
ma55 = δcrm
ar55Υr (G.65)
G.5. Elementos de la Matriz de Aceleraciones
Se consideran los coeficientes de la matriz:
Ha =
[ha11 ha12 0 0 ha15
ha21 ha22 0 ha24 0
]
ha11 = −q∞Srefm
CSα2βαβΥn (G.66)
ha12 = −q∞Srefm
(CSβ + CSβ|β||β|+ CSβ3β
2 + CSα2βα2 (1−Υn)
)(G.67)
ha15 = −q∞Srefm
d
2VMCSr (G.68)
ha21 = −q∞Srefm
(CNα + CNα|α||α|+ CNα3α
2 + CNβ2αβ2 (1−Υn)
)(G.69)
ha22 = −q∞Srefm
CNβ2ααβΥn (G.70)
ha24 = −q∞Srefm
d
2VMCNq (G.71)
y para la matriz:
G8

G.6. ELEMENTOS DE LA MATRIZ DE ACTUACIONES
La =
[0 la12 0 0 la15
la21 0 0 la24 0
]
la12 = −q∞Srefm
[CSδcr + CSβδcrβ + CSα2δcr
α2 + Υn
(CS
δcrδtr
+ CSβδcrδ
trβ)δtr
](G.72)
la15 = −q∞Srefm
[CS
δtr+ CS
βδtrβ + CS
α2δtrα2 + (1−Υn)
(CS
δcrδtr
+ CSβδcrδ
trβ)δcr
](G.73)
la21 = −q∞Srefm
[CNδcq + CNαδcqα + CNβ2δcq
β2 + Υn
(CN
δcqδtq
+ CNαδcqδ
tqα)δtq
](G.74)
la24 = −q∞Srefm
[CN
δtq+ CN
αδtqα + CN
β2δtqβ2 + (1−Υn)
(CN
δcqδtq
+ CNαδcqδ
tqα)δcq
](G.75)
G.6. Elementos de la Matriz de Actuaciones
Hm =
hm11 0 0 0 0 hm16 0 0 0 0 · · · 0
hm21 0 0 0 0 hm26 0 hm28 hm29 0 · · · 0
0 hm32 0 0 0 0 hm37 0 0 0 · · · 0
0 hm42 0 0 0 0 hm47 hm48 0 hm4,10 · · · 0
0 0 hm53 0 0 0 0 0 0 0 · · · 0
0 0 0 hm64 0 0 0 0 0 0 · · · 0
0 0 0 0 hm75 0 0 0 0 0 · · · 0
hm81 0 0 0 0 0 0 0 0 0 · · · 0
0 hm92 0 0 0 0 0 0 0 0 · · · 0
hm10,1 hm10,2 0 0 hm10,5 0 hm10,7 0 0 hm10,10 · · · 0
hm11,1 hm11,2 0 hm11,4 0 hm11,6 0 0 hm11,9 0 · · · 0
0 0 0 0 0 0 0 0 0 0 · · · hm12,21
hm11 = KcB (G.76)
hm16 = kcB (G.77)
hm21 = KtB
(1 +
∂εq∂α
)(G.78)
G9
G.6. MATRIZ DE ACTUACIONES
hm26 = ktB∂εq∂δcq
(G.79)
hm28 = 1 (G.80)
hm29 = ktB (G.81)
hm32 = KcB (G.82)
hm32 = −kcB (G.83)
hm42 = KtB
(1 +
∂εr∂β
)(G.84)
hm47 = −ktB∂εr∂δcr
(G.85)
hm47 = −1 (G.86)
hm4,10 = −ktb (G.87)
hm53 = 1 (G.88)
hm64 = 1 (G.89)
hm75 = 1 (G.90)
hm81 = 1 (G.91)
hm92 = 1 (G.92)
hm10,1 = −q∞Srefm
CSα2βαβΥn (G.93)
G10

G.6. MATRIZ DE ACTUACIONES
hm10,2 = −q∞Srefm
(CSβ + CSβ|β||β|+ CSβ3β
2 + CSα2βα2 (1−Υn)
)(G.94)
hm10,5 = −q∞Srefm
d
2VMCSr (G.95)
hm10,7 = −q∞Srefm
[CSδcr + CSβδcrβ + CSα2δcr
α2 + Υn
(CS
δcrδtr
+ CSβδcrδ
trβ)δtr
](G.96)
hm10,10 = −q∞Srefm
[CS
δtr+ CS
βδtrβ + CS
α2δtrα2 + (1−Υn)
(CS
δcrδtr
+ CSβδcrδ
trβ)δcr
](G.97)
hm11,1 = −q∞Srefm
(CNα + CNα|α| |α|+ CNα3α
2 + CNβ2αβ2 (1−Υn)
)(G.98)
hm11,2 = −q∞Srefm
CNβ2ααβΥn (G.99)
hm11,4 = −q∞Srefm
d
2VMCNq (G.100)
hm11,6 = −q∞Srefm
[CNδcq + CNαδcqα + CNβ2δcq
β2 + Υn
(CN
δcqδtq
+ CNαδcqδ
tqα)δtq
](G.101)
hm11,9 = −q∞Srefm
[CN
δtq+ CN
αδtqα
+CNβ2δtq
β2 + (1−Υn)(CN
δcqδtq
+ CNαδcqδ
tqα)δcq
] (G.102)
hm12,21 = 1 (G.103)
G11

G.7. ELEMENTOS DE LA MATRIZ DEL GUIADO-AUTOPILOTO
G.7. Elementos de la Matriz del Guiado-Autopiloto
Ak =
aK11 aK12 aK13
aK21 aK22 aK23
aK31 aK32 aK33
aK11 = −
(q2
0 + q21−q2
2 − q23
)cαcβ (G.104)
aK12 = −2(q1q3−q0q2)VM sincαcβ (G.105)
aK13 = −2(q1q2 + q0q3)VM sinc β (G.106)
aK21 = − (q1q2 − q0q3) cαcβ (G.107)
aK22 = −2(q2q3 + q0q1)VM sincαcβ (G.108)
aK23 = −(q2
0 − q21 + q2
2 − q23
)VM sinc β (G.109)
aK31 = −2 (q1q3 + q0q2) cαcβ (G.110)
aK32 = −(q2
0 − q21 − q2
2 + q23
)VM sincαcβ (G.111)
aK33 = −2 (q2q3 − q0q1)VM sinc β (G.112)
AW =
aW11 aW12 aW13 0 aW15 aW16
0 aW22 aW23 aW24 aW25 aW26
0 aW32 aW33 aW34 aW35 aW36
0 aW42 aW43 aW44 0 0
0 aW52 aW53 aW54 aW55 aW56
0 aW62 aW63 aW64 aW65 aW66
aW11 = −cαcβ ρSrefVM2m
(CA0 + CAα|α|+ CAβ |β|+ CAα2α
2
+CAα3 |α|3 + ∆CAb − CT
)(G.113)
G12
G.7. MATRIZ DEL GUIADO-AUTOPILOTO
aW12 = − sincαcβq∞Srefm
(CNαα + CNα|α|α|α|+ CNα3α
3 + CNβ2αβ2α
)(G.114)
aW13 = − sinc βq∞Srefm
(CSββ + CSβ|β|β|β|+ CSβ3β
3 + CSα2βα2β
)(G.115)
aW15 = −sαcβ q∞Srefm
d
2VMCNq (G.116)
aW16 = −sβ q∞Srefm
d
2VMCSr (G.117)
y el resto de los terminos son iguales que los de Aa
aW22 = aa11 (G.118a)
. . .
aW66 = aa55 (G.118b)
BW =
bW11 bW12 bW13 bW14 bW15
bW21 bW22 bW23 bW24 bW25
bW31 bW32 bW33 bW34 bW35
bW41 bW42 bW43 0 0
bW51 0 0 bW54 0
0 bW62 0 0 bW65
bW11 = −cαcβ q∞Srefm
(CAδcq sgn δcq + CAαδcqα + CAβδcqβ
)− sαcβ q∞Sref
m
(CNδcq + CNαδcqα + CNβ2δcq
β2) (G.119)
bW12 = −cαcβ q∞Srefm
(CAδcr sgn δcr + CAαδcrα + CAβδcrβ
)− sβ q∞Sref
m(CSδcr + CSβδcrβ + CSα2δcr
α2)
(G.120)
bW13 = −cαcβ q∞Srefm
(CAδp sgn δp
)(G.121)
G13

G.7. MATRIZ DEL GUIADO-AUTOPILOTO
bW14 = −cαcβ q∞Srefm
(CA
δtqsgn δtq + CA
αδtqα + CA
α2δtqα2 + CA
βδtqβ)
− sαcβ q∞Srefm
(CN
δtq+ CN
αδtqα + CN
β2δtqβ2) (G.122)
bW15 = −cαcβ q∞Srefm
(CA
δtrsgn δtr + CA
αδtrα + CA
α2δtrα2 + CA
βδtrβ)
− sβ q∞Srefm
(CS
δtr+ CS
βδtrβ + CS
α2δtrα2) (G.123)
y el resto de los terminos son iguales a los de Ba
bW21 = ba11 (G.124a)
. . .
bW65 = ba55 (G.124b)
MW =
mW11 mW
12 0 mW14 mW
15
mW21 mW
22 0 mW24 mW
25
mW31 mW
32 0 mW34 mW
35
0 0 0 0 0
mW51 0 0 mW
54 0
0 mW62 0 0 mW
65
mW
11 = −cαcβ q∞Srefm
CAδcq
2δtqδcqδ
tq (G.125)
mW12 = −cαcβ q∞Sref
mCA
δcr2δtrδcrδ
tr (G.126)
mW14 = −cαcβ q∞Sref
mδcq
(CA
δcqδtq
+ CAαδcqδ
tqα + CA
δcqδtq2δtq
)− sαcβ q∞Sref
mδcq
(CN
δcqδtq
+ CNαδcqδ
tqα) (G.127)
mW15 = −cαcβ q∞Sref
mδcr
(CA
δcrδtr
+ CAβδcrδ
trβ + CA
δcrδtr2δtr
)− sβ q∞Sref
mδcr
(CS
δcrδtr
+ CSβδcrδ
trβ) (G.128)
G14
G.7. MATRIZ DEL GUIADO-AUTOPILOTO
y el resto de los terminos son iguales a los de Ma
mW21 = ma
11 (G.129a)
. . .
mW65 = ma
55 (G.129b)
G15

Apendice H
Tratamiento Analıtico del Error de
Radomo y Ruidos Radar.
H.1. Buscador radar
Se asume en esta tesis el radar esta montado en una cabeza buscadora giro esta-
bilizada. Otras configuraciones mediante antena fija y orientacion electronica de las
son mas atıpicas misiles tacticos y en cualquier caso el proceso de orientacion de las
electronico serıa similar al movimiento de la cabeza giro estabilizada en lo que respec-
ta al funcionamiento del radar para las operaciones de guiado y control. El coste y
los requerimientos de fiabilidad hacen que a dıa de hoy sea mas competitivo el siste-
ma giro estabilizado. Consiste en una plataforma estabilizada, giroscopos y la antena.
La plataforma esta montada sobre dos o tres cardan cada uno de los cuales tiene un
servomecanismo de actuacion para ajustar su orientacion angular hacia el blanco en
respuesta al error angular medido por el receptor radar.
Para una aplicacion aire aire contra blancos pequenos como UCAV u otros misiles,
donde el RCS es pequeno, se emplea el radar de pulsos Pulse Doppler radar (PD) Con
integracion coherente. Existen dos lazos de seguimiento, el lazo de seguimiento angular,
realizado por la cabeza buscadora, y el lazo de seguimiento en distancia. El blanco esta
enganchado por el radar cuando estos dos lazos estan cerrados. El seguimiento angular
del radar se describira en la primera seccion, mientras que el seguimiento en distancia
se lleva a cabo por la tecnica de puertas (gating) que se describe en la referencia (Curry,
2005). La estructura de la senal mono pulso es la preferida para determinar el error de
orientacion angular del blanco en elevacion y azimut, (Barton and Ward, 1984).
Cuando existe un filtro de navegacion entre el buscador y el bloque de guiado,
es mas conveniente que la salida del buscador sean los angulos de la lınea de mira,
definidos como:
H1

H.1. BUSCADOR RADAR
σe = t−1
zBr√xBr
2 + yBr2
(H.1)
σz = t−1
(yBrxBr
2
)(H.2)
La figura 4.11 define los angulos que estan involucrados en el proceso de recons-
truccion de la lınea de mira entre el misil y el blanco. El origen de el angulo esta en el
centro de la antena radar y se mide en contra una referencia inercial, fija en el espacio,
que en nuestro caso sera la posicion de la lınea de mira inicial. La posicion del eje de
la antena radar con respecto al eje MXB se define por el angulo de cardan θh. El error
angular es ε y el error considerando los efectos de rado modo que es εr. De aquı se
obtiene que el angulo de la lınea de mira es:
ε = σ − θ − θh (H.3)
Es importante senalar que el error angular no es unicamente una funcion de la
posicion de la lınea de mira pero tambien de la actitud del misil y de la posicion de la
antena con respecto al eje del misil. Para eliminar el angulo θ de la medida, el buscador
radar necesita una entrada desde la IMU del misil, ver figura H.1. Uno de los requisitos
del buscador es mantener la antena apuntada hacia el blanco, de modo que el error ε
se mantenga pequeno con respecto al ancho de las electronico. Tambien en la regiones
donde ε es pequeno la respuesta puede ser considerada lineal. Si ε no es pequeno, la
respuesta no puede ser considerada lineal y si es mayor que la mitad del ancho de la,
el misil puede perder la senal del blanco.
El efecto del radomo es distorsionar la direccion de la lınea de mira tal y como
es percibida por el radar, efecto causado por la refraccion de la radiacion al atravesar
la pared exterior. Debido a que la curvatura de la pared no es uniforme, la radiacion
tiene diferentes angulos de incidencia, que causan que la radiacion Y que a la antena del
radar con fases distintas. Esto resulta en cierta distorsion angular que es una funcion no
lineal del angulo θh, esto es de la orientacion de la antena dentro de la ojiva. Este efecto
por tanto depende de la actitud del misil en el espacio y representa un acoplamiento
fuerte entre la actitud del vuelo y las medidas del radar. Como consecuencia este efecto
de radomo y la ley de control, integrada o en doble lazo, estan acoplados. De acuerdo
a la referencia (Zarchan, 2012) este fenomeno es uno de los principales contribuyentes
a la distancia final en misiles radar.
En teorıa, para cierta forma geometrica de la ojiva serıa posible obtener la funcion
f (R, θh) . Sin embargo f (R) es muy difıcil de calcular en la practica (Yueh and Lin,
1985). Durante el vuelo del misil debido al calentamiento aerodinamico de la ojiva y
debido a la erosion que ocurre en vuelo debido a la velocidad de supersonica as, el
H2

H.2. MODELOS RUIDO RADAR
espesor se modifica ası como la constante dielectrica del material. El factor tambien
es una funcion de la polarizacion y la frecuencia de la senal radar. Un modelo de pre-
cision depende de la aplicacion particular y se requerirıa un tratamiento matematico
especıfico, de tipo estadıstico, dependiente del tiempo y no lineal. De otro lado existen
modelos aproximados de la literatura, con relaciones empıricas para este factor (Flee-
man, 2012). Para escenarios de intercepcion frontales, la literatura asume tıpicamente
que R es un factor constante para pequenas variaciones en θh. Sin embargo esta hipote-
sis no es valida para grandes variaciones en el angulo de cardan que estan asociadas a
altas maniobras del blanco. En su lugar en esta tesis recurriremos a la ecuacion 4.44.
El angulo θr puede ser incluido dentro del bucle de guiado y control con la ecuacion:
εr = σ + θr − θd (H.4)
y de aquı
εr = σ − σ − σh (1−R) (H.5)
Para considerar el efecto de la estimacion del angulo de la lınea de mira en las
actuaciones del sistema, se empleara el modelo dinamico descrito en la figura H.1 ,
adaptado de la referencia (Nesline and Zarchan, 1985), y que a su vez incluye todos los
efectos anteriormente mencionados.
La aceleracion del misil y sus velocidades angulares introducen perturbaciones en el
funcionamiento del buscador radar (Shneydor, 1998), como errores de escalado KGY R
y errores debidos a la deriva de los giroscopos KG causados por la aceleracion del misil
n.
σr = εr +
∫θd (H.6)
H.2. Modelos Ruido Radar
H.2.1. Destello (Glint)
Se considera aquı que sera una mezcla de dos distribuciones normales atravesando
un filtro pasa bajos en la forma(Zhurbal and Idan, 2011b; Kim et al., 2010; Zarchan,
2012):
pg = Υglintpg1 + (1−Υglint) pg2 (H.7)
con pg1 ∼ N(0,Σ2
g1
)y pg2 ∼ N
(0,Σ2
g2
)con Σg1 < Σg2.
H3
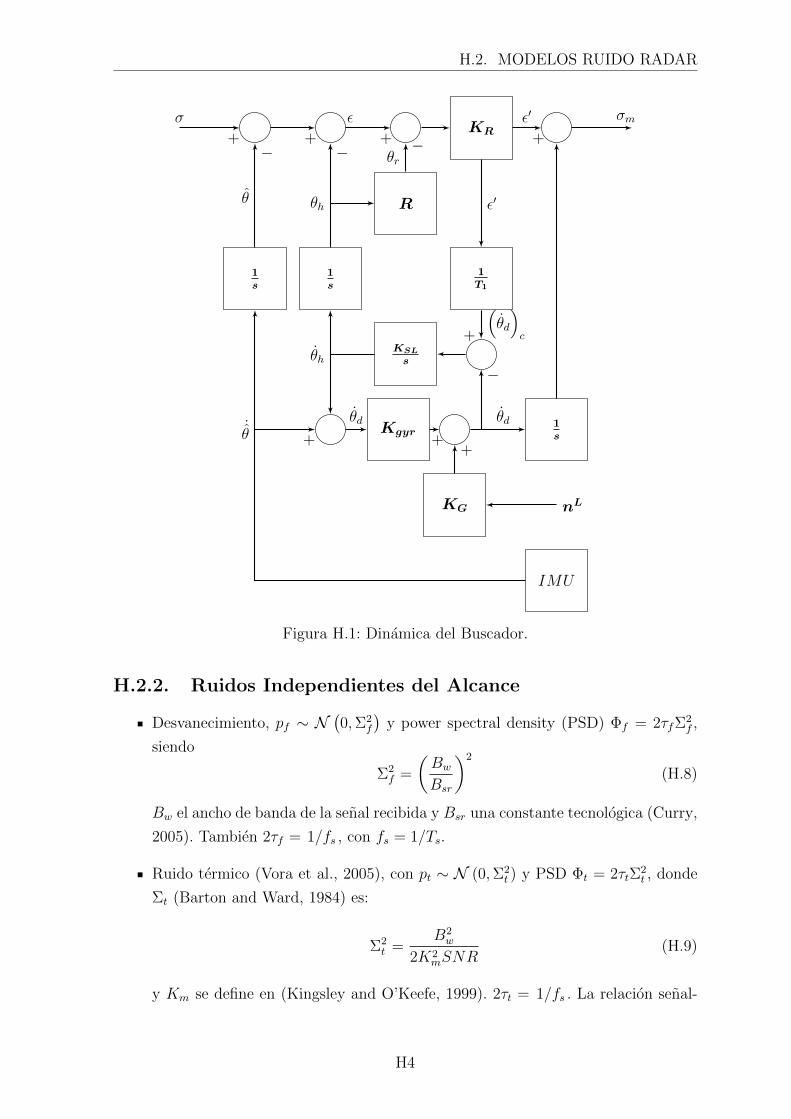
H.2. MODELOS RUIDO RADAR
KR
R
1s
1s
1T1
KSL
s
Kgyr1s
KG
IMU
σ
+ +
ε
+
ε′
+
θ
− −
θh
θr−
ε′
(θd
)c+
θh
θd
+
−
θd
+
nL
˙θ +
σm
Figura H.1: Dinamica del Buscador.
H.2.2. Ruidos Independientes del Alcance
Desvanecimiento, pf ∼ N(0,Σ2
f
)y power spectral density (PSD) Φf = 2τfΣ
2f ,
siendo
Σ2f =
(Bw
Bsr
)2
(H.8)
Bw el ancho de banda de la senal recibida y Bsr una constante tecnologica (Curry,
2005). Tambien 2τf = 1/fs , con fs = 1/Ts.
Ruido termico (Vora et al., 2005), con pt ∼ N (0,Σ2t ) y PSD Φt = 2τtΣ
2t , donde
Σt (Barton and Ward, 1984) es:
Σ2t =
B2w
2K2mSNR
(H.9)
y Km se define en (Kingsley and O’Keefe, 1999). 2τt = 1/fs . La relacion senal-
H4

H.2. MODELOS RUIDO RADAR
ruido SNR se obtiene de la ecuacion del radar(Siouris, 2004),
SNR =PtG
2λ2 ·RCS · L(4π)3 ‖rTM‖4 (kTnBw) · F
τ 2R
PRI · τG(H.10)
donde
Pt Radar peak transmission power
G Antenna gain
Pc Pulse compression ratio, τTBw
k Boltzmann constant
Tn Noise temperature in the radar system
F Loss factor due to signal processing in the receptor
L Loss factor due to beam forming
τR Pulse duration at the receiver gate
PRI Pulse Repetition Interval
τG Received gate duration
siendo τR ∼ τG.
Ruido atmosferico, (Barton and Ward, 1984), con pan ∼ N (0,Σ2an) PSD Φan =
Φanref ‖rTM‖, donde ‖rTM‖ es el segmento de distancia entre misil y blanco por
debajo de 5Km en altura, y
Φanref = 4τanΣ2anref
Fc√d
(H.11)
con
d Radar antenna aperture diameter, in m
Σ2anref
Standard deviation, 0,44 · 10−6
τan Atmospheric correlation time, 0,6s
k Boltzmann constant
Fc Noise correlation factor, 0,4 , from (Alpert, 2003)
H.2.3. Ruidos en Distancia y Velocidad de Colision
El ruido en la medida de distancia puede tener varios componentes, aquı solo con-
sideraremos el que depende de la SNR (Curry, 2005), que tıpicamente domina y puede
considerarse Gausiano con:
Σρ =clight
2Bx
√2 · SNR
(H.12)
donde clight es la velocidad de la luz.
H5

H.2. MODELOS RUIDO RADAR
La velocidad de colision puede medirse a traves de
1. Desviacion Doppler en la senal recibida
2. A traves de diferentes medidas de distancia al blanco
Siendo superior el primero, que se obtiene de:
Vc =λ
f D2 (H.13)
donde fD es la desviacion en frecuencia debido al efecto Doppler y λ es la longitud
de onda del radar.Su desviacion estandar es:
ΣV =λ
2τ√
2 · SNR=
∆Vc√2 · SNR
(H.14)
donde ∆Vc es la resolucion de la medida de velocidad radial y τ es la extension temporal
de la senal radar que se procesa de modo coherente.
H6

Bibliografıa
Akgul, A., Akargun, H. Y., Atak, B., Cetiner, A. E., and Goker, O. (2012). Numerical
investigation of nasa tandem control missile and experimental comparison. Scientific
Technical Review, 62(1):3–9.
Al-Garni, A. Z., Kassem, H. A., and Abdallah, A. M. (2008). Aerodynamic shape opti-
mization of supersonic missiles using monte-carlo. International Review of Aerospace
Engineering (IREASE), 1(1).
Alpert, J. (2003). Normalized analysis of interceptor missiles using the four-state op-
timal guidance system. Journal of guidance, control, and dynamics, 26(6):838–845.
Anderson, B. D. O. and Moore, J. B. (2007). Optimal Control: Linear Quadratic
Methods. Dover, Mineola, NY.
Auman, L. M., Doyle, J., Rosema, C., Underwood, M., and Blake, W. B. (2011). Missile
datcom user manual 2011 revision. Technical Report AFRL-RB-WP-TR-2011-3071,
Air Force Research Laboratory, Air Vehicles Directorate.
Balakrishnan, S. N., Tsourdos, A., and White, B. A. (2013). Advances in Missile
Guidance, Control and Estimation, volume 1. CRC Press, NY, US.
Barton, D. and Ward, H. (1984). Handbook of radar measurement. Artech House.
Prentice-Hall.
Ben-Asher, J. Z. and Yaesh, I. (1998). Advances in Missile Guidance Theory, volume
180. American Institute of Aeronautics and Astronautics, Reston, VA. Joseph Z.
Ben-Asher and Isaac Yaesh.
Beresh, S. J., Smith, J. A., Henfling, J. F., Grasser, T. W., and Spillers, R. W. (2009).
Interaction of a fin trailing vortex with a downstream control surface. Journal of
Spacecraft and Rockets, 46:318–328.
Berglund, E., Fleeman, E. L., and Licata, W. (2001). Technologies for future precision
strike missile systems, guidance and control technology. Technical Report RTO-EN-
018 / SCI-087 bis, NATO Reseach and Technology Organization.
Blair, A. (1978). Wind-tunnel investigation at supersonic speeds of a canard-controller
missile with fixed and free-rolling tail fins. Technical Report Technical Paper 1316,
NASA.
Brewer, J. (1978). Kronecker products and matrix calculus in system theory. IEEE
Transactions on Circuits and Systems, 25(9):772–781.
Caliari, M., Kandolf, P., Ostermann, A., and Rainer, S. (2014). Comparison of software
for computing the action of the matrix exponential. BIT Numerical Mathematics,
54(1):113–128.
Carleone, J. (1993). Tactical missile warheads, volume 155. American Institute of
Aeronautics and Astronautics, Washington. edited by Joseph Carleone; 19970415.
Chin, S. S. (1961). Missile configuration design. McGraw-Hill, New York. Includes
bibliographical references and index.
Cross, P., Carter, J., and Schultz, R. (2010). Navair missile configuration test cases. In
ADAPCO Aerospace, Defense and Marine 2010 Presentations September 1-2, 2009.
ADAPCO.
Curry, G. (2005). Radar Systems Performance Modeling. Artech House, 2nd edition.
Dancer, M. W., Balakrishnan, S. N., and Ohlmeyer, E. J. (2008). Discussion and
analysis of missile igc design. In AIAA Guidance, Navigation and Control Conferen-
ce, 18-21 August 2008.
Fleeman, E. L. (2006). Tactical missile design. American Institute of Aeronautics and
Astronautics, Reston, VA, 2 edition. Eugene L. Fleeman.
Fleeman, E. L. (2012). Missile design and system engineering. American Institute of
Aeronautics and Astronautics, Reston, VA, 1 edition. Eugene L. Fleeman ; Joseph
A. Schetz , editor-in-chief.; 1111; p. cm.
Gajic, Z. and Qureshi, M. (2008). Lyapunov Matrix Equation in System Stability and
Control. Dover, Mineola, NY, 2 edition.
Gustafsson, F., Gunnarsson, F., Bergman, N., Forssell, U., Jansson, J., Karlsson, R.,
and Nordlund, P.-J. (2002). Particle filters for positioning, navigation, and tracking.
Signal Processing, IEEE Transactions on, 50(2):425–437.
Gutman, S. (2003). Superiority of canards in homing missiles. IEEE Transactions on
Aerospace and Electronic Systems,, 39(3):740–746.

Harl, N., Balakrishnan, S. N., and Phillips, C. (2010). Sliding modes integrated missile
guidance and control. In Proceedings of the AIAA Guidance, Navigation, and Control
Conference, Toronto, 2-5 August, volume 7741.
Innocenti, M. and Thukral, A. (1993). Simultaneous reaction jet and aerodynamic
control of missile systems. In AIAA Guidance, Navigation and Control Conference,
Monterey, CA, pages 347–354.
Kelley, C. T. (2003). Solving nonlinear equations with Newton’s method, volume 1.
Siam.
Khalid, M., Dujardin, A., Henning, P., Leavitt, L. D., Leopold, F., Mendenhall, M. R.,
and Prince, S. A. (2005a). Turbulence model studies to investigate the aerodynamic
performance of a nasa dual control missile at supersonic mach numbers. Canadian
Aeronautics and Space Journal, 51(4):153–166.
Khalid, M., Henning, P., Mendenhall, M. R., and Leavitt, L. D. (2005b). Assesment of
turbulence modeling for high-speed vehicles. Technical Report TR-AVT-082, NATO
Research and Technology Organization.
Kim, J., Tandale, M., Menon, P., and Ohlmeyer, E. (2010). Particle filter for ballis-
tic target tracking with glint noise. Journal of guidance, control, and dynamics,
33(6):1918–1921.
Kim, J., Vaddi, S., Menon, P., and Ohlmeyer, E. (2012). Comparison between nonlinear
filtering techniques for spiraling ballistic missile state estimation. Aerospace and
Electronic Systems, IEEE Transactions on, 48(1):313–328.
Kim, Y., Kim, B. S., and Park, J. (2013). Aerodynamic pitch control design for reversal
of missile’s flight direction. Proceedings of the Institution of Mechanical Engineers,
Part G: Journal of Aerospace Engineering, page 0954410013496741.
Kingsley, S. and O’Keefe, S. G. (1999). Beam steering and monopulse processing of
probe-fed dielectric resonator antennas. IEE Proceedings-Radar, Sonar and Naviga-
tion, 146(3):121–125.
Klein, V. and Morelli, E. (2010). Aircraft System Identification Theory and Practice.
AIAA, Reston, VA. AIAA Educational Series.
Laub, A. J. (2004). Matrix Analysis For Scientists And Engineers. Society for Industrial
and Applied Mathematics, Philadelphia, PA, USA.
Lesieutre, D. J., Love, J. F., and Dillenius, M. D. (2002a). Prediction of the nonli-
near aerodynamic characteristics of tandem-control and rolling-tail missiles. AIAA
Atmospheric Flight Mechanics Conference, 5-8 August 2002, Monterey, CA, 4511.

Lesieutre, D. J., Love, J. F., Dillenius, M. D., and Jr, A. B. B. (2002b). Recent appli-
cations and improvements to the engineering-level aerodynamic prediction software
misl3. In Proceedings of the 40th AIAA Aerospace Sciences Meeting and Exhibit,
pages 2002–0275.
Levy, M., Shima, T., and Gutman, S. (2013). Linear quadratic integrated versus se-
parated autopilot-guidance design. Journal of Guidance, Control and Dynamics,
36(6):1722–1730.
Levy, M., Shima, T., and Gutman, S. (2015). Single versus two-loop full-state multi-
input missile guidance. Journal of Guidance, Control and Dynamics, 38(5):843–853.
AIAA Early Edition, doi: 10.2514/1.G000171.
Lin, C. F. (1991). Modern navigation, guidance, and control processing, volume 2.
Prentice Hall.
M. Idan, T. S. and Golan, O. M. (2007). Integrated sliding mode autopilot-guidance for
dual-control missiles. Journal of Guidance Control and Dynamics, 30(4):1081–1089.
Manabe, S. (2001). Diophantine equations in coefficient diagram method. In 1st IFAC
Symposium on System Structure and Control, August 29-31, volume A-130, pages
29–31, Prague, Czech. IFAC.
McFarland, M. B. and Calise, A. J. (2000). Adaptive nonlinear control of agile anti-air
missiles using neural networks. IEEE Transactions on Control Systems Technology,,
8(5):749–756.
Menon, P., Lam, T., Crawford, L., and Cheng, V. (2002a). Real-time computational
methods for sdre nonlinear control of missiles. In American Control Conference,
2002. Proceedings of the 2002, volume 1, pages 232–237. IEEE.
Menon, P. and Ohlmeyer, E. (2001). Integrated design of agile missile guidance and
autopilot systems. Control Engineering Practice, 9(10):1095 – 1106. Special Section
on Control in Defence Systems.
Menon, P. K., Sweriduk, G. D., Ohlmeyer, E. J., and Malyevac, D. S. (2002b). Inte-
grated guidance and control of moving mass actuated kinetic warheads. Journal of
Guidance, Control and Dynamics, 27(1):118–126.
Mikhail, A. G. (1995). Roll damping for finned projectiles including: Wraparound, offset
and arbitrary number of fins. Technical Report ARL-TR-846, US Army Research
Laboratory.
Moore, F. G. (2000). Approximate methods for weapon aerodynamics, volume 186.
American Institute of Aeronautics and Astronautics, Reston, VA.

Mracek, C. P. (2007). Sdre autopilot for dual controlled missiles. In 17th IFAC Sympo-
sium on Automatic Control in Aerospace, Universitas Studii Tolosana, France, June
25-27 2007, volume 17, pages 750–755. IFAC.
Mracek, C. P. and Ridgely, D. B. (2006). Optimal control solution for dual (tail and
canard) controlled missiles. AIAA Guidance, Navigation and Control Conferece and
Exhibit, 21-24 August, Keytosne, Colorado.
Nesline, F. and Zarchan, P. (1985). Line of sight reconstruction for faster homing
guidance. AIAA Journal of Guidance, 8(1).
Ochi, Y. (2003). Design of a normal acceleration and angle of attack control system for
a missile having front and rear control surfaces. Transactions of the Japan Society
of Aeronautical and Space Sciences, 51:621–627.
Ochi, Y. and Kanai, K. (1997). Normal acceleration control for an innovative missile
via angle-of-attack control. In AIAA Guidance, Navigation, and Control Conference,
Aug 8-13.
Ochi, Y., Kanai, K., Saka, N., Imado, F., and Kuroda, T. (1994). Design method of
normal acceleration control system for a missile with front and rear control surfaces.
Transactions of the Japan Society of Aeronautical and Space Sciences, 37(117):196–
207.
Palumbo, N. F., Blauwkamp, R. A., and Lloyd, J. M. (2010). Basic principles of homing
guidance. Johns Hopkins APL Technical Digest, 29(1):25.
Park, B. G., Kim, T. H., and Tahk, M. J. (2011). Time-delay control for integrated mis-
sile guidance and control. International Journal of Aeronautical and Space Science,
12(3):260–265.
Pitts, W. C., Nielsen, J. N., and Kaattari, G. E. (1957). Lift and center of pressure of
wing-body-tail combinations at subsonic. Technical Report NACA 1307, National
Advisory Committee for Aeronautics.
Ratliff, R. T., Ramsey, J. A., Wise, K. A., and Lavretsky, E. (2009). Advances in agile
maneuvering for high performance munitions. In Proc. of the Ameri-can Institute of
Aeronautics and Astronautics Guidance, Navi-gation, and Control Conference, pages
412–419.
Rogers, A. W. (1954). Application of two-dimensional vortex theory to the prediction
of flow field behind wing of wing-body combinations at subsonic and supersonic
speeds. Technical Report Technical Note 3227, NACA.

Sanz-Aranguez, P. (2000). Misiles II. Publicaciones de la ETS Ingenieros Aeronauticos,
Madrid. P. Sanz-Aranguez; 2 v. 30 cm; Quinto curso, Intensificacion A (1er semestre);
T.1: Temas 1 a 17, T.2: Temas 18 al 33; 19981120.
Sanz-Aranguez, P. (2011). Optimizacion de Trayectorias y Leyes de Guiado. ETS
Ingenieros Aeronauticos, Universidad Politecnica de Madrid, Madrid. PhD Course
Teaching Notes.
Sanz-Aranguez, P. and Simon, J. (2012). Los Cohetes en el INTA. Instituto Nacional
de Tecnica Aeroespacial Esteban Terradas (INTA), Madrid, Spain, 1 edition.
Shima, T. and Golan, O. M. (2005). End-game guidance laws for dual-control missiles.
Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace
Engineering, 219(2):157–170.
Shima, T. and Golan, O. M. (2006). Bounded differential games guidance law for dual-
controlled missiles. IEEE Transactions on Control Systems Technology, 14(4):719–
724.
Shima, T. and Golan, O. M. (2007). Linear quadratic differential games guidance
law for dual controlled missiles. IEEE Transactions on Aerospace and Electronic
Systems, 43(3):834–842.
Shneydor, N. A. (1998). Missile guidance and pursuit: kinematics, dynamics and con-
trol. Horwood Pub., Chichester.
Siouris, G. M. (2004). Missile guidance and control systems. Springer, NY. George M.
Siouris.
Spahr, R. J. and Dickey, R. R. (1953). Wind tunnel investigation of the vortex wake and
downwash field behind triangular wings and wing-body combination at supersonic
speeds. Technical Report RM A53D10, NACA, National Advisory Committee for
Aeronautics.
Stevens, B. L. and Lewis, F. L. (2003). Aircraft control and simulation. John Wiley,
Hoboken, NJ, 2 edition.
Tewari, A. (2007). Atmospheric and space flight dynamics: modeling and simulation
with MATLAB and Simulink. Birkhauser, Boston.
Tsourdos, A., Cho, H., and H., S. (2011). Time-to-go estimation using guidance com-
mand history. In 18th IFAC World Congress, Milano. International Federation of
Automatic Control (IFAC).

Vaddi, S. S., Menon, P. K., and Ohlmeyer, E. J. (2009). Numerical state-dependent ric-
cati equation approach for missile integrated guidance control. Journal of guidance,
control, and dynamics, 32(2):699–703.
Vetter, W. (1970). Derivative operations on matrices. Automatic Control, IEEE
Transactions on, 15(2):241–244.
Vora, P., Tiwari, P., Bhattacharjee, R., Bhattacharyya, A., and Jyothi, M. (2005).
Radio frequency seeker modelling and seeker filter design. Defence Science Journal,
55(3):337–348.
Wise, K. A. and B Roy, D. J. (1998). Agile missile dynamics and control. Journal of
Guidance, Control, and Dynamics, 21(3):441–449.
Wood, R. M., Jr, F. J. W., Bauer, S. X., and Allen, J. M. (2003). Vortex Flows
at Supersonic Speeds, volume 1. National Aeronautics and Space Administration,
Langley Research Center, Virginia.
Xin, M., Balakrishnan, S. N., and Ohlmeyer, E. J. (2006). Integrated guidance and
control of missiles with theta-d method. IEEE Transactions on Control Systems
Technology, 14(6):981–992.
Yamasaki, T., Balakrishnan, S., and Takano, H. (2012). Integrated guidance and au-
topilot for a path-following uav via high-order sliding modes. In American Control
Conference (ACC), 2012, pages 143–148. IEEE.
Yan, H. and Ji, H. (2012). Integrated guidance and control for dual control missi-
les againts ground fixed targets. In International Conference on mechatronics and
Automation, August 5-8, Chengdu, China, pages 1026–1031. IEEE.
Yanushevsky, R. (2008). Modern missile guidance. CRC Press, Boca Raton, FL.
Yueh, W. and Lin, C.-F. (1985). Guidance performance analysis with in-flight radome
error calibration. Journal of Guidance, Control, and Dynamics, 8(5):666–669.
Zarchan, P. (2007). Tactical and strategic missile guidance, volume 219. American
Institute of Aeronautics and Astronautics, Reston, VA, 5th edition.
Zarchan, P. (2012). Tactical and strategic missile guidance, volume 239. American
Institute of Aeronautics and Astronautics, Reston, VA, 6th edition.
Zarchan, P. and Musoff, H. (2000). Fundamentals of Kalman Filtering: A Practical
Approach. Number v. 190 in Fundamentals of Kalman filtering: a practical approach.
American Institute of Aeronautics and Astronautics, Incorporated.
Zhurbal, A. and Idan, M. (2011a). Effect of estimation on the performance of an
integrated missile guidance and control system. IEEE Transactions on Aerospace
and Electronic Systems, 47(4):2690–2708.
Zhurbal, A. and Idan, M. (2011b). Effect of estimation on the performance of an
integrated missile guidance and control system. Aerospace and Electronic Systems,
IEEE Transactions on, 47(4):2690–2708.