Embed Size (px)
Citation preview

PRESENTACIÓN
El trabajo presentado a continuación va dirigido tanto a estudiantes de la carrera
profesional de Ingeniería Electrónica, como también a aficionados y carreras afines; el
cual constituye un tema de mucha importancia para nosotros mismos y en especial para
toda empresa, el cual lleva el nombre de Automatización y Control .
El tema de automatización nos dará una visión muchísimo más amplia de lo que puede
ayudar esto a las empresas, ; todas las empresas buscan producir y sacar al mercado sus
productos en el tiempo más reducido posible, así como también buscan la perfección en
la elaboración de sus productos, reducir la mano de obra y simplificar el trabajo y todo
esto se obtiene gracias a la automatización que da propiedad a las maquinas de realizar
las operaciones de manera automática, volviéndose un proceso más rápido y eficiente.
Así mismo el Proyecto que presentamos es un ejemplo de la automatización,
mostraremos cada etapa del proyecto donde se refleja todo lo mencionado anteriormente.
Esperamos que con todo esto y más podamos cumplir con todas las expectativas
propuestas antes de investigar este tema y logremos alcanzar el objetivo que es aprender
acerca de la automatización.

INTRODUCCIÓN
El presente trabajo está basado en el manejo y control de electromecanismos tales como
motores de inducción de corriente continua, alterna y electrobobinas.
La instrumentación es una rama de la electrónica la cual cobra su máximo protagonismo
en el entorno industrial y adquiere una relevancia especial en lo que hace referencia al
control de procesos. La realidad es que estas dos disciplinas instrumentación y control
están fuertemente imbricadas hasta el punto de que comparten algunos puntos de diseño,
afectando la decisiones de una directamente a la otra.
El objetivo de un sistema de control es obtener una salida, es decir; una respuesta que
coincida con la que pretende el operador pero sin que intervenga directamente sobre el
sistema.
En las 2 últimas décadas automatizar los procesos en la industria a traído como frutos
una mejor producción en masa, menor consumo de recursos tanto humano como
energético, lo que ha llevado a que el mundo globalice esta disciplina en sus fabricas e
industrias.
Finalmente este proyecto surgió a partir de la necesidad de hacer ingeniería en nuestra
ciudad, satisfacer la necesidad de la población en un sector dado, en nuestro caso el de la
etiquetadora automática que se da en procesos de envasado de alimentos.
RESUMEN

En el presente trabajo se muestra el diseño de un prototipo de rebobinador de
transformadores automático utilizando programación en C para el manejo de
microcontroladores.
- En el capítulo I se desarrollaran todas los aspectos generales tales como los objetivos
del proyecto, formulación del problema, justificación del problema alcances y limitaciones
del mismo.
- En el capítulo II se desarrolla todo el marco teórico referido a los componentes usados,
saberes y conocimientos previos para el entendimiento del funcionamiento del prototipo.
- En el capítulo III se desarrolla el diagrama de bloques y selección de los componentes
usados.
- En el capítulo IV se desarrolla el diseño y simulación del prototipo construido en base a
lo desarrollado en el marco teórico.
- En el capítulo V se ha de hacer un listado de todos materiales usados y también una
relación con los costos que implico el desarrollo de este proyecto en el transcurso de
tiempo que tuvo su elaboración.
Al final de este informe se anotara las conclusiones obtenidas así como también se ha de
poner las recomendaciones del caso para futuros proyectos en base al tema expuesto a lo
largo del escrito.

INDICE
PRESENTACION II
INTRODUCCIÓN IV
RESUMEN V
CAPITULO I
1. - GENERALIDADES 1
1.1.-EL PROBLEMA 1
1.1.1.- FORMULACION DEL PROBLEMA 1
1.1.2.- OBJETIVOS 1
1.1.3- JUSTIFICACION DEL PROBLEMA 1
1.1.4- ALCANCES Y LIMITACIONES 2
1.2.- METODOLOGIA 2
1.2.1.- POBLACION Y MUESTRA 2
1.2.2.-TECNICAS DE RECOLECCION DE DATOS 2
1.2.3.- PROCESAMIENTO DE DATOS 2
1.2.4.- TECNICAS DE ANALISIS DE DATOS 2
CAPITULO II
2. - MARCO TEORICO 4
2.1.- MOTOR ELECTRICO 4
2.1.1.- PRINCIPIO DE FUNCIONAMIENTO 4
2.1.2.- MOTORES DE CORRIENTE CONTINUA 6
2.2.- MICROCONTROLADOR 11
2.2.1.- CARACTERISTICAS 11
2.2.2.-ESQUEMA DE UN MICROCONTROLADOR 12
2.2.3.- ESTRUCTURA BASICA 12
2.2.4.- NUCLEO DE UN MICROCONTROLADOR. 13
2.2.5.- ARQUITECTURAS DE COMPUTADORA 13
2.2.6.- PROCESADOR EN DETALLE 14
2.2.7.- FAMILIA DE MICROCONTROLADORES 15
2.3.- SENSOR 16
2.3.1.- CARACTERISTICAS DE UN SENSOR 16
2.3.2.- RESOLUCION Y PRESICION 17
2.3.3.- TIPOS DE SENSORES 17
2.3.4.- OPTOACOPLADORES 18

2.3.5.- BUMPER(SENSOR FIN DE CARRERA) 19
2.3.6.- DISPARADOR SCHMITT 20
2.4.- TECLADO MATRICIAL 23
2.4.1.- CLASIFICACION 23
CAPITULO III
3.- REQUERIMIENTOS Y ESPECIFICACIONES TECNICAS 32
3.1- REQUERIMIENTOS 32
3.2- SELECCION DE COMPONENTES 33
3.3.-DIAGRAMA DE BLOQUES 34
CAPITULO IV
4.- DISEÑO 35
4.1.- CIRCUITERÍA 35
CAPITULO V
5.- COSTOS 37
5.1.- COSTOS DEL PROYECTO 37
CONCLUSIONES 38
RECOMENDACIONES 38
BIBLIOGRAFIA 38
ANEXOS 39

CAPÍTULO I
GENERALIDADES
1.1.-EL PROBLEMA
1.1.1.- FORMULACION DEL PROBLEMA
Hoy en día las industrias son automatizadas debido al crecimiento de la demanda
de sus productos, reducción de costos de operación y mantenimiento, hacer los
procesos más eficientes y confiables, aumentar la capacidad de producción y lo más
importante ser mas competitivos en el mercado.
Se conocen diseños de etiquetados semiautomáticos muy eficientes, siendo el único
problema que aun tienen que intervenir la mano del hombre.
Existen empresas dedicadas a producción de alimentos enlatados, las cuales una
parte importante del proceso es etiquetar los productos tales como latas, botellas,
etc. Estas empresas carecen de un sistema automático de etiquetado, un control y
supervisión desde un ordenador o visualizador de datos, perjudicando la velocidad
de fabricación de los productos.
1.1.2.- OBJETIVOS
OBJETIVOS GENERALES
Diseño y construcción de un sistema automático prototipo para etiquetar latas pequeñas de leche.
OBJETIVOS ESPECIFICOS
Automatizar el traslado de las latas.

Automatizar el etiquetado de las mismas. Aplicar los conceptos adquiridos en toda nuestra preparación universitaria. Implementar un prototipo como muestra del funcionamiento de una
solución para maximizar la producción.
1.1.3- JUSTIFICACION DEL PROBLEMA
Decidimos realizar este proyecto porque las industrias tienen como necesidad la
rapidez de producción de sus productos, en nuestro caso la automatización de la
etiquetadora de latas fue diseñada para reducir el tiempo de dicho proceso.
Por tal motivo se ha de diseñar y construir un sistema automático prototipo para etiquetar latas pequeñas de leche, uno de muy bajo costo, debido a que en el
mercado este tipo de maquinas tienen un precio elevado y no son accesibles a pequeños talleres que realizan este tipo de trabajo.
1.1.4- ALCANCES y LIMITACIONES
Este alcance será el planteo de una de tantas soluciones que se le pueden
agregar a las industrias de alimentos como es la que está ubicada en el Parque
Industrial – Wanchaq.
Este proyecto fue realizado en otras universidades con el mismo fin, el de
aumentar la velocidad de etiquetado y reducir mano de obra, los alumnos de la
carrera de ingeniería electrónica de estas universidades obtuvieron la oportunidad
de diseñar etiquetadoras automáticas con fines específicos en las industrias tanto
nacionales como internacionales.
1.2.- METODOLOGÍA
1.2.1- POBLACIÓN Y MUESTRA

Para este caso sería el nivel de producción obtenida antes y después de la
automatización del sistema, para lo cual se necesitarían los datos que la empresa
tiene de su producción pasada, la empresa de la que pensamos obtener datos es
la ubicada en Pq. Parque Industrial Nro. A-6 Z.i. Parque Industrial.
1.2.2- TÉCNICAS DE RECOLECCION DE DATOS
Entre la variedad de métodos que existen para recolectar datos escogimos el de
la entrevista a las personas de las empresas que se dedican a esta actividad
y también el de la observación cuando se efectuaban los etiquetados.
La encuesta fue realizado a personal de empresas ubicadas en Cusco y Lima que
no cuentan con un sistema automatizado para etiquetar, en Lima se hizo posible
gracias a la ayuda de amigos que radican en dicha ciudad.
Las preguntas fueron simples y concisas:
¿cuánto tiempo se tarda en etiquetar una lata o botella?
¿cuántas latas son mal etiquetadas?
¿cuántas latas puede etiquetar sin parar y en cuanto tiempo?
Las respuestas a estas preguntas las hemos resumido, el promedio de tiempo en
etiquetar una lata es de 1 minuto, de cada 20 latas, 3 son mal etiquetadas y en
promedio un trabajador puede etiquetar 70 latas en una hora sin parar.
Al observar al trabajador vimos que tenía que estar muy concentrado y atento al
etiquetar las latas, siendo el problema el desgaste físico y mental de los
trabajadores.
1.2.3- PROCESAMIENTO DE DATOS
Con estos datos obtenidos por observación y entrevista llegamos a concluir que éste
proceso depende mucho de la habilidad del trabajador que tiene que usar ambas
manos para tener el producto final esperado.

1.2.4- TÉCNICAS DE ANALISIS DE DATOS
Para entender bien cómo funciona el proceso que realiza el trabajador, veremos los
pasos que hemos de implementar en nuestro prototipo etiquetador:
Detección de latas al inicio de la faja transportadora. Movimiento de la faja transportadora. Aplicación de goma a la lata. Detección de lata y accionamiento de electro mecanismos. Presión de brazos electromecanicos y tambor a la lata. Entrega de etiqueta al tambor. Giro del tambor para etiquetar la lata retenida por los brazos.
Después de haber hecho el análisis de los pasos para etiquetar una lata nos damos
cuenta cómo ha de funcionar nuestro prototipo y también en qué puntos se ha de
optimizar el proceso para tener éxito en nuestro proyecto.
CAPÍTULO II
MARCO TEÓRICO
2.1.- FAJA TRANSPORTADORA

2.1.1.- GENERALIDADES DE LAS CINTAS TRASNPORTADORAS.
2.1.1.1.- Materiales a Transportar, Tamaños y Temperaturas.
Los primeros materiales que se transportan por cinta y de los que se tiene noticia histórica, fueron los cereales y las harinas y salvados derivados de los mismos. Con posterioridad, el otro producto más transportado fue el carbón.Las capacidades a transportar y las distancias eran pequeñas desde el punto de vista actual.Las cintas transportadoras Transportan materiales diversos por ejemplo:
Materiales empleados en la construcción.Arcilla (fina, seca), arena (seca, húmeda), asfalto (para pavimentos), caliza (molida, triturada, agrícola, hidratada),Cemento, cenizas, granito, hormigón, grava, tierras, etc.
Combustibles.Antracita, coke (de petróleo calcinado y metalúrgico salido del horno), carbón, hulla, lignito, etc.
Fertilizantes.Fosfato (granulado, pulverizado), guanos, nitratos, sulfatos, sales, urea, etc.
Minerales.Aluminio, alumbre, azufre, cobre, hierro, grafito, magnesio, plomo, yeso, etc.
Alimentos y Productos de Origen Vegetal.Azúcar, aceitunas, algodón, café, cacao, guisantes, harinas, papas, maíz, nueces, remolachas, etc.
2.1.1.2.- Empleos de las Cintas Transportadoras.El empleo de las Cintas Transportadoras es muy diverso entre las cuales podemos destacar los siguientes:
Las industrias extractivas (minas subterráneas y a cielo abierto, canteras).
Las Industrias Siderúrgicas (parques de carbón y minerales). Instalaciones portuarias de almacenamiento, carga y descarga de
barcos. Centrales Térmicas ( parques de almacenamiento y transporte a
quemadores de carbón, así como la evacuación de las cenizas producidas)
Agroindustrias azucareras (Transporte de bagazo, cachaza). Industria Automotriz.

Industria Químico - Farmacéutica.
2.1.1.3.- Capacidades a transportar y longitudes.
Teniendo en cuenta el progreso realizado en la fabricación de bandas, tanto en anchuras (hasta 2m.), como en calidades, es corriente en la actualidad el transporte de hasta 10000 T/Hora, existiendo cintas que trasportan hasta 50000 T/Hora; en lo que respecta a la longitud, existen cintas de hasta 30 Km.
2.1.1.4.- Ventajas ambientales y de seguridad.Efectuando la cubrición de las cintas, es posible evitar la dispersión del polvo producido durante el transporte, contribuyendo a mantener una atmósfera limpia.En la actualidad es posible reducir por completo la emisión de polvo al exterior mediante la instalación de cintas tubulares, esto es importante si la cinta está próxima a núcleos urbanos.
2.1.1.5.- Facilidad de carga y descarga.Aunque en general las cintas transportadoras se cargan en un extremo de las mismas, es posible efectuar la carga en un punto cualquiera de las mismas, mediante dispositivos diversos (Tolvas, descarga directa desde otra cinta, etc.).La descarga de las cintas transportadoras se efectúa generalmente en cabeza, pero es posible hacerla también en cualquier punto fijo de las mismas, o de una forma continua, empleando disposiciones constructivas adecuadas, (Carros descargadores, llamados comúnmente Trippers).
2.1.2.- COMPONENTES DE UNA CINTA TRANSPORTADORA.
2.1.2.1. PARTES PRINCIPALES DE UNA CINTA TRANSPORTADORA.
A. Bandas Transportadoras.

La función principal de la banda es soportar directamente el material a transportar y desplazarlo desde el punto de carga hasta el de descarga, razón por la cual se la puede considerar el componente principal de las cintas transportadoras; también en el aspecto económico es, en general, el componente de mayor precio.
Se sabe que conforme aumenta la longitud, también crece el costo de la banda respecto del total.
Pueden llevarse a cabo las siguientes clasificaciones de las bandas:
- Según el tipo de tejido:
De algodón. De tejidos sintéticos.
De cables de acero.
- Según la disposición del tejido:
De varias telas o capas.
De tejido sólido.
- Según el aspecto de la superficie portante de la carga:
Lisas (aspecto más corriente). Rugosas.
Con nervios, tacos o bordes laterales vulcanizados.
La Banda al cumplir la función de transportar, está sometida a la acción de las siguientes influencias.
De las fuerzas longitudinales, que producen alargamientos Del peso del material entre las ternas de rodillos portantes, que
producen flexiones locales, tanto en el sentido longitudinal como en el transversal, y ello a consecuencia de la adaptación de la banda a la terna de rodillos.
De los impactos del material sobre la cara superior de la banda, que producen erosiones sobre la misma.
Para soportar adecuadamente las influencias anteriores, la banda está formada por dos componentes básicos:
1. El tejido o Carcasa, que transmite los esfuerzos.

2. Los recubrimientos, que soportan los impactos y erosiones.
El tejido, como es bien sabido, consta de la urdimbre o hilos longitudinales, y de la trama o hilos transversales; las posiciones relativas de urdimbre y trama.
La urdimbre, que soporta los esfuerzos de tracción longitudinales, es en general bastante más resistente que la trama, la cual solo soporta esfuerzos transversales secundarios, derivados de la adaptación a la forma de artesa y de los producidos por los impactos. La rigidez transversal de la trama, no debe ser excesiva, con el fin de que la banda pueda adaptarse bien a la artesa formada por la terna de rodillos
Los recubrimientos o partes externas están formados por elastómeros (caucho natural), plastómeros (pvc), u otros materiales.
B. Rodillos y Soportes.
Los rodillos son uno de los componentes principales de una cinta transportadora, y de su calidad depende en gran medida el buen funcionamiento de la misma. Si el giro de los mismos no es bueno, además de aumentar la fricción y por tanto el consumo de energía, también se producen desgastes de recubrimientos de la banda, con la consiguiente reducción de la vida de la misma.
La separación entre rodillos se establece en función de la anchura de la banda y de la densidad del material transportado.
Las funciones a cumplir son principalmente tres:
1. Soportar la banda y el material a transportar por la misma en el ramal superior, y soportar la banda en el ramal inferior; los rodillos del ramal superior situados en la zona de carga, deben soportar además el impacto producido por la caída del material.
2. Contribuir al centrado de la banda, por razones diversas la banda esta sometida a diferentes fuerzas que tienden a decentarla de su posición recta ideal. El centrado de la misma se logra en parte mediante la adecuada disposición de los rodillos, tanto portantes como de retorno.
3. Ayudar a la limpieza de la banda ,aunque la banda es limpiada por los rascadores, cuando el material es pegajoso pueden quedar adheridos restos del mismo, que al entrar en contacto con los rodillos inferiores pueden originar desvíos

de la misma; para facilitar el desprendimiento de este material se emplean rodillos con discos de goma (rodillos autolimpiadores).
Los más utilizados son:
Rodillos de Alineación , sirven para alinear la banda dentro de la propia instalación.
Rodillos de Impacto ; recubiertos de discos de goma para absorber los golpes provocados por la caída de bloques en las tolvas de recepción.
Rodillos de Retorno ; los cuales están formados con discos de goma.
Rodillo cilíndrico ; con la superficie exterior lisa, tal como la obtenida mediante el empleo de tubos de acero; es el más empleado.
Rodillo cilíndrico con aros de goma ; son adecuados para soportar los fuertes impactos del material en las zonas de carga, mientras que si se montan en los rodillos de retorno, deben ser adecuados para facilitar la limpieza de la banda.
C. Tambores.
Los tambores están constituidos por un eje de acero, siendo el material del envolvente acero suave y los discos, ya sea de acero suave o acero moldeado.
La determinación de los diámetros del tambor depende del tipo de banda empleado, el espesor de las bandas o el diámetro del cable de acero, según sea el caso; a su vez estos espesores o diámetros dependen de la tensión máxima en la banda. Por lo tanto el diámetro exterior depende de la tensión en la banda.
D. Tensores De Banda.
Los Dispositivos de tensado cumplen las siguientes funciones:
Lograr el adecuado contacto entre la banda y el tambor motriz.
Evitar derrames de material en las proximidades de los puntos de carga, motivados por falta de tensión en la banda.

Compensar las variaciones de longitud producidas en la banda, estas variaciones son debidas a cambios de tensión en la banda.
Mantener la tensión adecuada en el ramal de retorno durante el arranque..
E. Bastidores.
Los bastidores son estructuras metálicas que constituyen el soporte de la banda transportadora y demás elementos de la instalación entre el punto de alimentación y el de descarga del material.
Se compone de los rodillos, ramales superiores e inferior y de la propia estructura soporte.
Los bastidores son el componente más sencillo de las cintas, y su función es soportar las cargas del material, banda, rodillos y las posibles cubiertas de protección contra el viento.
F. Tolvas De Carga y Descarga.
La carga y descarga de las cintas son dos operaciones a las cuales no se les concede la debida importancia, pese a que de ellas depende el que el material a transportar inicie adecuadamente su recorrido a través de la instalación.
G. Frenos y Mecanismos Antiretorno.
Los frenos mas utilizados son los de disco, situados en el eje del reductor. En algunos casos generalmente en cintas descendentes, se montan en el eje del tambor.
En las cintas de pendiente, además del freno se dispone de un sistema de antiretorno su función consiste en retener la carga en las cintas inclinadas ascendentes, estos sistemas antiretorno actúa como un elemento de seguridad.
En las grandes cintas horizontales el frenado en cabeza puede ser insuficiente, por lo que una solución adoptada consiste en colocar un freno de disco sobre el tambor de retorno.
H. Reductores.
Se emplean dos tipos de reductores en las cintas de gran potencia:

Reductores Suspendidos: Son de montaje flotante.
Esta disposición presenta la ventaja de precisar un espacio reducido, suprimiendo la alineación entre el tambor y reductor, el inconveniente es el de tener que desmontar el conjunto cuando se tiene que sustituir el tambor.
. Reductores Clásicos:
Estos reductores son utilizados en las grandes instalaciones. La variante en reducción planetaria presenta la ventaja de un espacio mas reducido.
Esta disposición con acoplamiento de dientes mecanizados permite, mediante el desacoplamiento, la intervención rápida sobre un grupo y la marcha a bajo régimen del otro grupo , en el caso de un tambor motriz con grupos dobles de accionamiento.
2.2.- MOTOR ELECTRICO
Campo magnético que rota como suma de vectores magnéticos a partir de 3 bobinas de
la fase
Un motor eléctrico es una máquina eléctrica que transforma energía eléctrica en energía mecánica por medio de interacciones electromagnéticas. Algunos de los motores eléctricos son reversibles, es decir, pueden transformar energía mecánica en energía eléctrica funcionando como generadores. Los motores eléctricos de tracción usados en locomotoras realizan a menudo ambas tareas, si se los equipa con frenos regenerativos.
Son ampliamente utilizados en instalaciones industriales, comerciales y de particulares. Pueden funcionar conectados a una red de suministro eléctrico o a baterías. Una batería de varios kilogramos equivale a la energía que contienen 80

g de gasolina. Así, en automóviles se están empezando a utilizar en vehículos híbridos para aprovechar las ventajas de ambos.
2.2.1- PRINCIPIO DE FUNCIONAMIENTO
Los motores de corriente alterna y los motores de corriente continua se basan en el mismo principio de funcionamiento, el cual establece que si un conductor por el cual circula una corriente eléctrica se encuentra dentro de la acción de un campo magnético, éste tiende a desplazarse perpendicularmente a las líneas de acción del campo magnético.
El conductor tiende a funcionar como un electroimán debido a la corriente eléctrica que circula por el mismo adquiriendo de esta manera propiedades magnéticas, que provocan, debido a la interacción con los polos ubicados en el estator, el movimiento circular que se observa en el rotor del motor.
Partiendo del hecho de que cuando pasa corriente eléctrica por un conductor se produce un campo magnético, además si lo ponemos dentro de la acción de un campo magnético potente, el producto de la interacción de ambos campos magnéticos hace que el conductor tienda a desplazarse produciendo así la energía mecánica. Dicha energía es comunicada al exterior mediante un dispositivo llamado flecha.
Según La Ley de Lorentz, cuando un conductor por el que pasa una corriente eléctrica se sumerge en un campo magnético, el conductor sufre una fuerza perpendicular al plano formado por el campo magnético y la corriente, siguiendo la regla de la mano derecha.
F: Fuerza en Newtons I: Intensidad que recorre el conductor en amperios l: Longitud del conductor en metros lineales B: Inducción en teslas
Si el conductor está colocado fuera del eje de giro del rotor, la fuerza producirá un momento que hará que el rotor gire.

El rotor no solo tiene un conductor, sino varios repartidos por la periferia. A medida que gira, la corriente se activa en el conductor apropiado.
Normalmente se aplica una corriente con sentido contrario en el extremo opuesto del rotor, para compensar la fuerza neta y aumentar el momento.
Fuerza Contraelectromotriz inducida en un motor
Es la tensión que se crea en los conductores de un motor como consecuencia del corte de las líneas de fuerza, es el efecto generador de pines.
La polaridad de la tensión en los generadores es inversa a la aplicada en bornes del motor.
Las fuertes puntas de corriente de un motor en el arranque son debidas a que con máquina parada no hay fuerza contraelectromotriz y el bobinado se comporta como una resistencia pura del circuito.
Número de escobillas
Las escobillas deben poner en cortocircuito todas las bobinas situadas en la zona neutra. Si la máquina tiene dos polos, tenemos también dos zonas neutras. En consecuencia, el número total de escobillas ha de ser igual al número de polos de la máquina.
En cuanto a su posición, será coincidente con las líneas neutras de los polos.
Sentido de giro
El sentido de giro de un motor de corriente continua depende del sentido relativo de las corrientes circulantes por los devanados inductor e inducido.
La inversión del sentido de giro del motor de corriente continua se consigue invirtiendo el sentido del campo magnético o de la corriente del inducido.
Si se permuta la polaridad en ambos bobinados, el eje del motor gira en el mismo sentido.

Los cambios de polaridad de los bobinados, tanto en el inductor como en el inducido se realizarán en la caja de bornes de la máquina, y además el ciclo combinado producido por el rotor produce la fmm (fuerza magnetomotriz).
Ventajas
En diversas circunstancias presenta muchas ventajas respecto a los motores de combustión:
A igual potencia, su tamaño y peso son más reducidos. Se pueden construir de cualquier tamaño. Tiene un par de giro elevado y, según el tipo de motor, prácticamente constante. Su rendimiento es muy elevado (típicamente en torno al 75%, aumentando el
mismo a medida que se incrementa la potencia de la máquina). Este tipo de motores no emite contaminantes, aunque en la generación de energía
eléctrica de la mayoría de las redes de suministro se emiten contaminantes.
2.2.2- MOTORES DE CORRIENTE CONTINUA
Los motores de corriente continua se clasifican según la forma como estén conectados, en:
Motor serie Motor compound Motor stunt Motor eléctrico sin escobillas
Además de los anteriores, existen otros tipos que son utilizados en electrónica:
Motor paso a paso Servomotor Motor sin núcleo
El motor de corriente continua es una máquina que convierte la energía eléctrica en mecánica, principalmente mediante el movimiento rotatorio. En la

actualidad existen nuevas aplicaciones con motores eléctricos que no producen movimiento rotatorio, sino que con algunas modificaciones, ejercen tracción sobre un riel. Estos motores se conocen como motores lineales.
Esta máquina de corriente continua es una de las más versátiles en la industria. Su fácil control de posición, par y velocidad la han convertido en una de las mejores opciones en aplicaciones de control y automatización de procesos. Pero con la llegada de la electrónica su uso ha disminuido en gran medida, pues los motores de corriente alterna, del tipo asíncrono, pueden ser controlados de igual forma a precios más accesibles para el consumidor medio de la industria. A pesar de esto los motores de corriente continua se siguen utilizando en muchas aplicaciones de potencia (trenes y tranvías) o de precisión (máquinas, micro motores, etc.)
La principal característica del motor de corriente continua es la posibilidad de regular la velocidad desde vacío a plena carga.
Una máquina de corriente continua (generador o motor) se compone principalmente de dos partes, un estator que da soporte mecánico al aparato y tiene un hueco en el centro generalmente de forma cilíndrica. En el estator además se encuentran los polos, que pueden ser de imanes permanentes o devanados con hilo de cobre sobre núcleo de hierro. El rotor es generalmente de forma cilíndrica, también devanado y con núcleo, al que llega la corriente mediante dos escobillas.
También se construyen motores de CC con el rotor de imanes permanentes para aplicaciones especiales.
2.3.- ELECTROBOBINA O ELECTROIMÁN
En la electrobobina se aplica la ley del magnetismo de Biot-savart: Esta ley indica el campo magnético creado por la corriente que circula en circuitos cerrados. El aporte de un elemento infinitamente pequeño o próximo a 0 de longitud (dl) del circuito y una corriente I que circule por el, crean una contribución de campo magnético (dB) en el punto para el cual apunta el vector (Ur) a una distancia R de la longitud del elemento infinitesimal, el cual apunta al sentido hacia dónde va la corriente.
(Ur): vector unitario.(dL): longitud del elemento infinitesimal(R): distancia desde el vector hasta la longitud (dL)

I: corriente que circula por el circuitoµo: Permeabilidad magnética del vacio Permeabilidad magnética del vacío: es la capacidad que tiene una sustancia o un medio para dejar pasar atreves de si un campo magnético La permeabilidad del vacío, conocida también como constante magnética
expresión para hallar una ecuación para el campo magnético final
N es el número de vueltas del cable en torno al electroimán; I es la corriente en amperios; L es la longitud del circuito magnético.
Sustituyendo, se obtiene:
Electroimán:Este es un tipo de imán que consta de (2) tipos de elementos, un núcleo de
hierro y un alambre de cobre enrollado sobre él.
El electroimán es hecha con un solenoide, que es enrollado en forma de bobina con un
número de vueltas predeterminado
Al conectar los (2) terminales que salen del electroimán a una fuente de alimentación de
(24V) (DC) esta tención al pasar por el embobinado produce una corriente de más o
menos (1.2A) Amperios la cual al circular por este cableado producirá un campo
magnético dentro del solenoide y este campo magnético desaparecerá cuando dicha
corriente también desaparezca.
El solenoide con un núcleo apropiado se convierte en un imán (en realidad Electroimán).
Se utiliza en gran medida para generar un campo magnético uniforme.
Campo Magnético
Es una región del espacio en la que una carga eléctrica denominada (q) que se desplaza a una velocidad (V) sufre los efectos de una fuerza que es perpendicular y proporcional tanto a la velocidad como al campo, esta fuerza es llamada densidad de campo magnético lo que significa la cantidad de este por la unidad del volumen.Al ser esta fuerza perpendicular la ecuación toma la operación producto cruz

Ecuación:
(q,v,B) son magnitudes vectorialesCuando no hay cargas magnéticas es un campo solenoide lo que lleva a que este puede ser derivado de un vector potencial , es decir:
2.4.- MICROCONTROLADOR
Un microcontrolador es un circuito integrado o chip que incluye en su interior las tres unidades funcionales de una computadora: unidad central de procesamiento, memoria y unidades de E/S (entrada/salida).
2.4.1.- CARACTERISTICAS
Son diseñados para disminuir el costo económico y el consumo de energía de un sistema en particular. Por eso el tamaño de la unidad central de procesamiento, la cantidad de memoria y los periféricos incluidos dependerán de la aplicación. El control de un electrodoméstico sencillo como una batidora, utilizará un procesador muy pequeño (4 u 8 bit) por que sustituirá a un autómata finito. En cambio un reproductor de música y/o vídeo digital (mp3 o mp4) requerirá de un procesador de 32 bit o de 64 bit y de uno o más Códec de señal digital (audio y/o vídeo). El control de un sistema de frenos ABS (Antilock Brake System) se basa normalmente en un microcontrolador de 16 bit, al igual que el sistema de control electrónico del motor en un automóvil.
2.4.2.- ESQUEMA DE UN MICROCONTROLADOR

Los microcontroladores representan la inmensa mayoría de los chips de computadoras vendidos, sobre un 50% son controladores "simples" y el restante corresponde a DSPs más especializados. Mientras se pueden tener uno o dos microprocesadores de propósito general en casa (vd. está usando uno para esto), usted tiene distribuidos seguramente entre los electrodomésticos de su hogar una o dos docenas de microcontroladores. Pueden encontrarse en casi cualquier dispositivo electrónico como automóviles, lavadoras, hornos microondas, teléfonos, etc.
Un microcontrolador difiere de una CPU normal, debido a que es más fácil convertirla en una computadora en funcionamiento, con un mínimo de chips externos de apoyo. La idea es que el chip se coloque en el dispositivo, enganchado a la fuente de energía y de información que necesite, y eso es todo. Un microprocesador tradicional no le permitirá hacer esto, ya que espera que todas estas tareas sean manejadas por otros chips. Hay que agregarle los módulos de entrada/salida (puertos) y la memoria para almacenamiento de información.
Por ejemplo, un microcontrolador típico tendrá un generador de reloj integrado y una pequeña cantidad de memoria RAM y ROM/EPROM/EEPROM/FLASH, significando que para hacerlo funcionar, todo lo que se necesita son unos pocos programas de control y un cristal de sincronización. Los microcontroladores disponen generalmente también de una gran variedad de dispositivos de entrada/salida, como convertidores de analógico a digital, temporizadores, UARTs y buses de interfaz serie especializados, como I2C y CAN. Frecuentemente, estos dispositivos integrados pueden ser controlados por instrucciones de procesadores especializados. Los modernos microcontroladores frecuentemente incluyen un lenguaje de programación integrado, como el BASIC que se utiliza bastante con este propósito.
Los microcontroladores negocian la velocidad y la flexibilidad para facilitar su uso. Debido a que se utiliza bastante sitio en el chip para incluir funcionalidad, como los dispositivos de entrada/salida o la memoria que incluye el microcontrolador, se ha de prescindir de cualquier otra circuitería.
2.4.3.- ESTRUCTURA BASICA DE UN MICROCONTROLADOR
En esta figura, vemos al microcontrolador metido dentro de un encapsulado de circuito integrado, con su procesador (CPU), buses, memoria, periféricos y puertos de entrada salida. Fuera del encapsulado se ubican otros circuitos para completar periféricos internos y dispositivos que pueden conectarse a los pines de entrada/salida. También se conectarán a los pines del encapsulado la alimentación, masa, circuito de completamiento del oscilador y otros circuitos necesarios para que el microcontrolador pueda trabajar.

2.4.4.- NUCLEO DE UN MICROCONTROLADOR
Aún cuando el microcontrolador es una computadora embebida dentro de un circuito integrado, se compone de un núcleo y un conjunto de circuitos adicionales. Dentro del núcleo se encuentran el procesador y la memoria, todo ello estructurado de forma tal que conforme una arquitectura de computadora.
2.4.5.- ARQUITECTURAS DE COMPUTADORA
Básicamente existen dos arquitecturas de computadoras, y por supuesto, están presentes en el mundo de los microcontroladores: Von Neumann y Harvard. Ambas se diferencian en la forma de conexión de la memoria al procesador y en los buses que cada una necesita.
La arquitectura Von Neumann es la que se utiliza en las computadoras personales, para ella existe una sola memoria, donde coexisten las instrucciones de programa y los datos, accedidos con un bus de dirección, uno de datos y uno de control.
Debemos comprender que en una PC, cuando se carga un programa en memoria, a éste se le asigna un espacio de direcciones de la memoria que se divide en segmentos, de los cuales típicamente tenderemos los siguientes: código (programa), datos y pila. Es por ello que podemos hablar de la memoria como un todo, aunque existan distintos dispositivos físicos en el sistema (HDD, RAM, CD, FLASH).
En el caso de los microcontroladores, existen dos tipos de memoria bien definidas: memoria de datos (típicamente algún tipo de SRAM) y memoria de programas (ROM, PROM, EEPROM, FLASH u de otro tipo no volátil). En este caso la organización es distinta a las de las PC, porque hay circuitos distintos para cada memoria y normalmente no se utilizan los registros de segmentos, sino que la memoria está segregada y el acceso a cada tipo de memoria depende de las instrucciones del procesador.
A pesar de que en los sistemas embebidos con arquitectura Von Neumann la memoria esté segregada, y existan diferencias con respecto a la definición tradicional de esta arquitectura; los buses para acceder a ambos tipos de memoria son los mismos, del procesador solamente salen el bus de datos, el de direcciones, y el de control. Como conclusión, la arquitectura no ha sido alterada, porque la forma en que se conecta la memoria al procesador sigue el mismo principio definido en la arquitectura básica.
Esta arquitectura es la variante adecuada para las PC, porque permite ahorrar una buena cantidad de líneas de E/S, que son bastante costosas, sobre todo para aquellos sistemas como las PC, donde el procesador se monta en algún tipo de socket alojado en una placa madre (motherboard). También esta organización les

ahorra a los diseñadores de motherboards una buena cantidad de problemas y reduce el costo de este tipo de sistemas.
Algunas familias de microcontroladores como la INTEL-51 y la Z80 implementan este tipo de arquitectura, fundamentalmente porque era la utilizada cuando aparecieron los primeros microcontroladores.
La otra variante es la arquitectura Harvard, y por excelencia la utilizada en supercomputadoras, en los microcontroladores, y sistemas embebidos en general. En este caso, además de la memoria, el procesador tiene los buses segregados, de modo que cada tipo de memoria tiene un bus de datos, uno de direcciones y uno de control.
La ventaja fundamental de esta arquitectura es que permite adecuar el tamaño de los buses a las características de cada tipo de memoria; además, el procesador puede acceder a cada una de ellas de forma simultánea, lo que se traduce en un aumento significativo de la velocidad de procesamiento, típicamente los sistemas con esta arquitectura pueden ser dos veces más rápidos que sistemas similares con arquitectura Von Neumann.
La desventaja está en que consume muchas líneas de E/S del procesador; por lo que en sistemas donde el procesador está ubicado en su propio encapsulado, solo se utiliza en supercomputadoras. Sin embargo, en los microcontroladores y otros sistemas embebidos, donde usualmente la memoria de datos y programas comparten el mismo encapsulado que el procesador, este inconveniente deja de ser un problema serio y es por ello que encontramos la arquitectura Harvard en la mayoría de los microcontroladores.
2.4.6.- PROCESADOR EN DETALLE
En los años 70 del siglo XX, la electrónica digital todavía andaba medio que en pañales, pero dentro de la electrónica ya era una especialidad consagrada. En aquel entonces las computadoras se diseñaban para que realizaran algunas operaciones muy simples, y si se quería que estas máquinas pudiesen hacer cosas diferentes, era necesario realizar cambios bastante significativos al hardware.
A principios de los años 70, una empresa japonesa le encargó a una joven compañía norteamericana que desarrollara un conjunto de circuitos para producir una calculadora de bajo costo. INTEL se dedicó de lleno a la tarea y entre los circuitos encargados desarrolló uno muy especial, algo no creado hasta la fecha: el primer microprocesador integrado.
El 4004 salió al mercado en 1971, es una máquina digital sincrónica compleja, como cualquier otro circuito lógico secuencial sincrónico. Sin embargo, la ventaja de este componente está en que aloja internamente un conjunto de circuitos digitales que pueden hacer operaciones corrientes para el cálculo y procesamiento

de datos, pero desde una óptica diferente: sus entradas son una serie de códigos bien definidos, que permiten hacer operaciones de carácter específico cuyo resultado está determinado por el tipo de operación y los operandos involucrados.
Visto así, no hay nada de especial en un microprocesador; la maravilla está en que la combinación adecuada de los códigos de entrada, su ejecución secuencial, el poder saltar hacia atrás o adelante en la secuencia de códigos en base a decisiones lógicas u órdenes específicas, permite que la máquina realice un montón de operaciones complejas, no contempladas en los simples códigos básicos.
Hoy estamos acostumbrados a los sistemas con microprocesadores, pero en el “lejano” 1971 esta era una forma de pensar un poco diferente y hasta escandalosa, a tal punto que Busicom, la empresa que encargó los chips a INTEL, no se mostró interesada en el invento, así que INTEL puso manos a la obra y lo comercializó para otros que mostraron interés; y bueno, el resto de la historia: una revolución sin precedentes en el avance tecnológico de la humanidad.
Es lógico pensar que el invento del microprocesador integrado no fue una revelación divina para sus creadores, sino que se sustentó en los avances, existentes hasta el momento, en el campo de la electrónica digital y las teorías sobre computación. Pero sin lugar a dudas fue la gota que colmó la copa de la revolución científico-técnica, porque permitió desarrollar aplicaciones impensadas o acelerar algunas ya encaminadas. La conclusión es simple, el mundo era uno antes del microprocesador y otro después de su invención, piense en un mundo sin microprocesadores y se encontrará remontado a los años 70 del siglo XX.
Ahora comenzaremos a ver cómo es que está hecho un procesador, no será una explicación demasiado detallada porque desde su invención éste ha tenido importantes revoluciones propias, pero hay aspectos básicos que no han cambiado y que constituyen la base de cualquier microprocesador. En la Figura 4 podemos ver la estructura típica de un microprocesador, con sus componentes fundamentales, claro está que ningún procesador real se ajusta exactamente a esta estructura, pero aún así nos permite conocer cada uno de sus elementos básicos y sus interrelaciones.
2.4.7.- FAMILIAS DE MICROCONTROLADORES
Los microcontroladores más comunes en uso son:

Empresa 8 bits12
bits
14
bits16 bits 32 bits 64 bits Observaciones
Atmel
AVR
ATmega8,89Sx
xxx familia
similar 8051
ATmega16
Freescale
(antes
Motorola)
68HC05,
68HC08,
68HC11,
HCS08
x x
68HC12,
68HCS12,
68HCSX12,
68HC16
683xx,
PowerPC
Architecture,
ColdFire
x x
Hitachi, Ltd H8 x x x x x x
Holtek HT8
Intel
MCS-48 (familia
8048)
MCS51 (familia
8051)
8xC251
x xMCS96,
MXS296x x x
National
Semicondu
ctor
COP8 x x x x x x
Microchip Familia 10f2xx
Familia 12Cxx
Familia 12Fxx,
PIC24F,
PIC24H y
dsPIC30FXX,ds
PIC32 x x

16Cxx y 16Fxx
18Cxx y 18Fxx
PIC33F con
motor dsp
integrado
Observación: Algunas arquitecturas de microcontrolador están disponibles por tal cantidad de vendedores y en tantas variedades, que podrían tener, con total corrección, su propia categoría. Entre ellos encontramos, principalmente, las variantes de 8051 y Z80.
2.5.- SENSOR
Un sensor es un aparato capaz de transformar magnitudes físicas o químicas, llamadas variables de instrumentación, en magnitudes eléctricas. Las variables de instrumentación dependen del tipo de sensor y pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, pH, etc. Una magnitud eléctrica obtenida puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en un sensor de humedad), una tensión eléctrica (como en un termopar), una corriente eléctrica (como un fototransistor), etc.
Un sensor se diferencia de un transductor en que el sensor está siempre en contacto con la variable a medir o a controlar. Hay sensores que no solo sirven para medir la variable, sino también para convertirla mediante circuitos electrónicos en una señal estándar (4 a 20 mA, o 1 a 5VDC) para tener una relación lineal con los cambios de la variable sensada dentro de un rango (span), para fines de control de dicha variable en un proceso.
Puede decirse también que es un dispositivo que aprovecha una de sus propiedades con el fin de adaptar la señal que mide para que la pueda interpretar otro dispositivo. Como por ejemplo el termómetro de mercurio que aprovecha la propiedad que posee el mercurio de dilatarse o contraerse por la acción de la temperatura. Un sensor también puede decirse que es un dispositivo que convierte una forma de energía en otra. Áreas de aplicación de los sensores: Industria automotriz, Industria aeroespacial, Medicina , Industria de manufactura, Robótica , etc.
Los sensores pueden estar conectados a un computador para obtener ventajas como son el acceso a una base de datos, la toma de valores desde el sensor, etc.
2.5.1.- CARACTERISTICAS DE UN SENSOR
Entre las características técnicas de un sensor destacan las siguientes:

Rango de medida: dominio en la magnitud medida en el que puede aplicarse el sensor.
Precisión: es el error de medida máximo esperado. Offset o desviación de cero: valor de la variable de salida cuando la variable de
entrada es nula. Si el rango de medida no llega a valores nulos de la variable de entrada, habitualmente se establece otro punto de referencia para definir el offset.
Linealidad o correlación lineal. Sensibilidad de un sensor: relación entre la variación de la magnitud de salida y la
variación de la magnitud de entrada. Resolución: mínima variación de la magnitud de entrada que puede apreciarse a la
salida. Rapidez de respuesta: puede ser un tiempo fijo o depender de cuánto varíe la
magnitud a medir. Depende de la capacidad del sistema para seguir las variaciones de la magnitud de entrada.
Derivas: son otras magnitudes, aparte de la medida como magnitud de entrada, que influyen en la variable de salida. Por ejemplo, pueden ser condiciones ambientales, como la humedad, la temperatura u otras como el envejecimiento (oxidación, desgaste, etc.) del sensor.
Repetitividad: error esperado al repetir varias veces la misma medida.
Un sensor es un tipo de transductor que transforma la magnitud que se quiere medir o controlar, en otra, que facilita su medida. Pueden ser de indicación directa (e.g. un termómetro de mercurio) o pueden estar conectados a un indicador (posiblemente a través de un convertidor analógico a digital, un computador y un display) de modo que los valores detectados puedan ser leídos por un humano.
Por lo general, la señal de salida de estos sensores no es apta para su lectura directa y a veces tampoco para su procesado, por lo que se usa un circuito de acondicionamiento, como por ejemplo un puente de Wheatstone, amplificadores y filtros electrónicos que adaptan la señal a los niveles apropiados para el resto de la circuitería.
2.5.2.- RESOLUCION Y PRESICION
La resolución de un sensor es el menor cambio en la magnitud de entrada que se aprecia en la magnitud de salida. Sin embargo, la precisión es el máximo error esperado en la medida.
La resolución puede ser de menor valor que la precisión. Por ejemplo, si al medir una distancia la resolución es de 0,01 mm, pero la precisión es de 1 mm, entonces pueden apreciarse variaciones en la distancia medida de 0,01 mm, pero no puede asegurarse que haya un error de medición menor a 1 mm. En la mayoría de los casos este exceso de resolución conlleva a un exceso innecesario en el coste del sistema. No obstante, en estos sistemas, si el error en la medida sigue una distribución normal o similar, lo cual es frecuente en errores accidentales, es decir, no sistemáticos, la repetitividad podría ser de un valor inferior a la precisión.

Sin embargo, la precisión no puede ser de un valor inferior a la resolución, pues no puede asegurarse que el error en la medida sea menor a la mínima variación en la magnitud de entrada que puede observarse en la magnitud de salida.
2.5.3.- TIPOS DE SENSORES
En la siguiente tabla se indican algunos tipos y ejemplos de sensores electrónicos.
Magnitud Transductor Característica
Posición lineal o angular
Potenciómetro Analógica
Encoder Digital
Velocidad lineal y angular
Dinamo tacométrica Analógica
Encoder Digital
Detector inductivo Digital
Servo-inclinómetros A/D
RVDT Analógica
Giróscopo
Aceleración
Acelerómetro Analógico
Servo-acelerómetros

Fuerza y par (deformación)
Galga extensiométrica Analógico
Triaxiales A/D
Presión
Membranas Analógica
Piezoeléctricos Analógica
Manómetros Digitales Digital
Temperatura
Termopar Analógica
RTD Analógica
Termistor NTC Analógica
Algunas magnitudes pueden calcularse mediante la medición y cálculo de otras, por ejemplo, la aceleración de un móvil puede calcularse a partir de la integración numérica de su velocidad. La masa de un objeto puede conocerse mediante la fuerza gravitatoria que se ejerce sobre él en comparación con la fuerza gravitatoria ejercida sobre un objeto de masa conocida (patrón).
2.5.4.- OPTOACOPLADOR
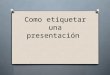
Un optoacoplador, también llamado optoaislador o aislador acoplado ópticamente, es un dispositivo de emisión y recepción de luz que funciona como un interruptor excitado mediante la luz. La mencionada luz es emitida por un diodo LED que satura un componente optoelectrónico, normalmente en forma de fototransistor. De este modo se combinan en un solo dispositivo semiconductor, un fotoemisor y un fotoreceptor cuya conexión entre ambos es óptica. Estos elementos se encuentran dentro de un encapsulado que por lo general es del tipo DIP. Se suelen utilizar como medio de protección para dispositivos muy sensibles.

Funcionamiento
El optoacoplador combina un LED y un fotodiodo.
La figura de la derecha muestra un optoacoplador 4N35 formado por un LED y un fototransistor. La tensión de la fuente de la izquierda y la resistencia en serie establecen una corriente en el LED emisor cuando se cierra el interruptor S1. Si dicha corriente proporciona un nivel de luz adecuado, al incidir sobre el fototransistor lo saturará, generando una corriente en R2. De este modo la tensión de salida será igual a cero con S1 cerrado y a V2 con S1 abierto.
Si la tensión de entrada varía, la cantidad de luz también lo hará, lo que significa que la tensión de salida cambia de acuerdo con la tensión de entrada. De este modo el dispositivo puede acoplar una señal de entrada con el circuito de salida.
La ventaja fundamental de un optoacoplador es el aislamiento eléctrico entre los circuitos de entrada y salida. Mediante el optoacoplador, el único contacto entre ambos circuitos es un haz de luz. Esto se traduce en una resistencia de aislamiento entre los dos circuitos del orden de miles de MΩ. Estos aislamientos son útiles en aplicaciones de alta tensión en las que los potenciales de los dos circuitos pueden diferir en varios miles de voltios.
Tipos
En general, los diferentes tipos de optoacopladores se distinguen por su diferente etapa de salida. Entre los principales caben destacar el fototransistor, ya mencionado, el fototriac y el fototriac de paso por cero. En este último, su etapa de salida es un triac de cruce por cero, que posee un circuito interno que conmuta al triac sólo en los cruce por cero de la fuente.

Etapa de salida a fototransistor Etapa de salida a fototriac
2.5.5.- DISPARADOR SCHMITT
En electrónica un trigger Schmitt o disparador de Schmitt es un tipo especial de circuito comparador. Fue inventado por el estadounidense Otto Herbert Schmitt.
Funcionamiento
Un trigger Schmitt cambia su estado de salida cuando la tensión en su entrada sobrepasa un determinado nivel; la salida no vuelve a cambiar cuando la entrada baja de ese voltaje, sino que el nivel de tensión para el cambio es otro distinto, más bajo que el primero. A este efecto se conoce como ciclo de histéresis. Ésta es la principal diferencia con un comparador normal, que es un simple amplificador operacional sin realimentación, y que su salida depende únicamente de la entrada mayor.
El trigger Schmitt usa la histéresis para prevenir el ruido que podría solaparse a la señal original y que causaría falsos cambios de estado si los niveles de referencia y entrada son parecidos.
Para su implementación se suele utilizar un amplificador operacional realimentado positivamente. Los niveles de referencia pueden ser controlados ajustando las resistencias R1 y R2:
Por ejemplo, si el trigger inicialmente está activado, la salida estará en estado alto a una tensión Vout = +Vs, y las dos resistencias formarán un divisor de tensión entre la salida y la entrada. La tensión entre las dos resistencias (entrada +) será V+, que es comparada con la tensión en la entrada −, que supondremos 0V (en este caso, al no haber realimentación negativa en el operacional, la tensión entre las dos entradas no tiene porque ser igual). Para producir una transición a la salida, V+ debe descender y llegar, al menos, a 0V. En este caso la tensión de
entrada es . Llegado este punto la tensión a la salida cambia a Vout=−Vs. Por un razonamiento equivalente podemos llegar a la condición para
pasar de −Vs a +Vs:

Con esto se hace que el circuito cree una banda centrada en cero, con niveles de disparo ±(R1/R2)VS. La señal de entrada debe salir de esa banda para conseguir cambiar la tensión de salida.
Si R1 es cero o R2 es infinito (un circuito abierto), la banda tendrá una anchura de cero y el circuito funcionará como un comparador normal.
Para indicar que una puerta lógica es del tipo trigger Schmitt se pone en el interior de la misma el símbolo de la histéresis:

CAPÍTULO III
REQUERIMIENTOS Y
ESPECIFICACIONES
TÈCNICAS
3.1- REQUERIMIENTOS
Después de haber hecho todo el desarrollo del marco teórico se vio por conveniente
hacer uso de microcontroladores para el proceso de control de motores así como
también la comunicación con la pc que será esencial para la toma de datos que luego
serán procesados tanto por el microcontrolador y la pc en el interfaz maquina usuario.
3.2- SELECCION DE COMPONENTES
Para la implementación del hardware se utilizo barras de fierro, retazos de aluminio,
remaches, pernos, cojinetes, armazón de fierro (como planta).
Hemos visto por conveniente hacer uso de un motor AC 220v para mover la faja
transportadora, 1 motor DC a 24v controlado por PWM para hacer girar tambor cuya
función es etiquetar la lata, 2 electrobobinas DC 24v para accionar los brazos que
retienen la lata al tambor y 2 compuertas controlados por 2 motores DC 12v, botón de
inicio. Aparte de lo antes mencionado se utilizaron los siguientes componentes:
Pic16f877A: microcontrolador de gama media de la familia microchip, escogido por ser de alta resolución de operación en instrucciones: 200 ns (cada instrucción) con cristal de 20Mhz, 8 conversores A/D, 5 puertos de entrada y salida, arquitectura de 8 bits, voltaje de alimentación de -0.3 a +7.5V, comunicación serial USART. Este micro será usado como maestro
Pic16f628A: microcontrolador usado como esclavoEl uso de un maestro y un esclavo es conveniente porque la frecuencia a la que cada
motor ha de girar es diferente y la lectura de los micros es instrucción por instrucción lo
que hace que haya un desfase al momento de darle el trabajo a uno solo.
También se usó 1 LCD 16x2 en los cuales se muestra en que estado del proceso se
encuentra.
Arreglo de transistores mosfet irf540 para la parte de potencia que requieren los motores
y electrobobinas.

5 sensores ópticos transmisivos para ver el posicionamiento de los motores y conteo de latas.
2 sensores ópticos reflexivos para detectar las latas Un disparador trigger para la señal de conteo de pulsos, este obtendrá la señal
del sensor óptico conectado al rotor del motor para contar el numero de vueltas. 6 optocopladores para aislar las etapas de control y la etapa de potencia.
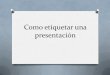
3.3.-DIAGRAMA DE BLOQUES

CAPÍTULO IV
DISEÑO
En el pic maestro se ha usado todos los puertos, el puerto A para recibir señal de
encendido por medio de un pulsador, puerto B comunicación maestro con los esclavos
interfaz rs485, el puerto C comunicación con la PC con interfaz rs232 y D para un lcd.

Se usaron resistencias de 220 ohm para conectar al pic debido a que estos trabajan con
corrientes del orden de 25-30 mA.
También usamos potenciómetros para el contraste de los lcd´s

Los pic esclavos envían la señal a los optoacopladores, que habilitaran a los mosfet
IRF540 que accionan a los motores y electrobobinas.

En la etapa de comunicación serial usamos un MAX232 y condensadores de 1uF
recomendado por el fabricante para convertir los niveles de voltaje enviados por la PC a
niveles de voltaje TTL para el pic.

CAPÍTULO V
COSTOS
Componentes Precio
Módulos de fierro y aluminios s/ 80.00
Cojinetes, remaches, pernos y tuercas s/ 25.00
1 Motor AC 220V con caja reductora s/ 50.00
1 Motor DC 24V y 2 motores DC 12v s/ 45.00
4 Pic 16f628A s/ 36.00
1 Pic 16f877A s/ 20.00
5 Cristales osciladores (4=>20Mhz, 1=>4 Mhz) s/ 7.50
2 Electrobobinas s/ 14.00

Soldaduras s/ 8.00
Sensores(ópticos) y trigger s/ 35.00
Dispositivos varios(cables, resistencias, grasa,
silicona, condensadores, etc.)
s/ 30.00
Faja de gebe y corrospun s/12.00
6 mosfet s/ 24.00
5 Protoboards s/ 100.00
1 LCD s/ 14.00
Taladro y remachador s/ 150.00
1 Max232 y 4 max485 s/ 23.00
Software ( Labview, CCS, ISIS Proteus ) s./100.00
Mano de obra s/ 300.00
TOTAL s/ 1073.50

CONCLUSIONES:
Se implemento con los componentes más adecuados un prototipo con un costo
relativamente elevado debido a que en nuestra ciudad cuesta conseguir dispositivos,
además que por ser único no se compro en masa.
Este prototipo cumplió con los objetivos planteados que fueron etiquetar latas en menor
tiempo y con efectividad.
RECOMENDACIONES:
Este prototipo debe usarse con cuidado porque la parte de potencia del motor AC 220v
conducen corrientes de aproximadamente 2.5A.
Se ha de tener cuidado al momento de polarizar los componentes ya que algunos
funcionan con valores TTL.
BIBLIOGRAFIA:
Libros: Sistemas de control moderno - Dorf Svobda Teoría de control Moderno - Ogata Control Automático - Kuo Bobinado de Transformadores - Efraín Guevara Roger Coaquira, Facundo Palomino “Automatizacion Industrial” Dorf, “Control Moderno” National Instruments, “LabView” Rashid, “Electrónica de Potencia” DataSheet “microchip, semiconductors & Toshiba” Antonio Creus “Instrumentación Industrial” Forouzan Behrouz “Transmisión de Datos y Redes de Comunicación”
Páginas web:
www.etiquetadorasgmr.com.ar/automaticas%20i79d.htm

http://www.youtube.com/watch?v=Yo942MKi2tQ&feature=related http://www.youtube.com/watch?v=N4JlCVDj61U&feature=related http://www.youtube.com/watch?v=WtYANtUG9Ek
ANEXOS:
CODIGO:
#include <16f877a.h>
#device *=16
#fuses HS, NOWDT, NOLVP, NOBROWNOUT, NOPROTECT, PUT
#use delay(clock=20M)
#define MODBUS_TYPE MODBUS_TYPE_MASTER
#define MODBUS_SERIAL_RX_BUFFER_SIZE 64
#define MODBUS_SERIAL_BAUD 9600
#ifndef USE_WITH_PC
#use rs232(baud=9600, xmit=PIN_C6, rcv=PIN_C7, stream=PC, errors)
#define MODBUS_SERIAL_INT_SOURCE MODBUS_INT_EXT
#define MODBUS_SERIAL_TX_PIN PIN_B1
#define MODBUS_SERIAL_RX_PIN PIN_B0
#define MODBUS_SERIAL_ENABLE_PIN PIN_B2 //DE
//#define MODBUS_SERIAL_RX_ENABLE PIN_B3 //RE
#define DEBUG_MSG(msg) fprintf(PC, msg)
#define DEBUG_DATA(msg,data) fprintf(PC, msg, data)
#else
#define MODBUS_SERIAL_INT_SOURCE MODBUS_INT_RDA
#define DEBUG_MSG(msg) if(0)

#define DEBUG_DATA(msg,data) if(0)
#endif
#include "modbus.c"
#define MODBUS_SLAVE_ADDRESS1 0xF9
#define MODBUS_SLAVE_ADDRESS2 0xF1
#define MODBUS_SLAVE_ADDRESS3 0xF2
#define MODBUS_SLAVE_ADDRESS4 0xF3
/////////////////////////////////////////////////////////////////////////////////////////////////////////
//definimos una lista de etiquetas de esclavos aparte de sus direcciones para usarla
dentro de un switch
//y asi mandar ordenes a cada uno de ellos con solo una funcion general
typedef enum _esclavos{MODBUS_SLAVE_ADDRESS11=1,
MODBUS_SLAVE_ADDRESS22=2, MODBUS_SLAVE_ADDRESS33=3,
MODBUS_SLAVE_ADDRESS44=4}esclavos;
typedef enum
_actuador{MOTOR1_ON=1,MOTOR1_OFF=2,MOTOR2_ON=3,MOTOR2_OFF=4,MOTO
R3_ON=5,MOTOR3_OFF=6,
BRAZO1_ON=7,BRAZO1_OFF=8,BRAZO2_ON=9,BRAZO2_OFF=10,TAMBOR_ON=11,
TAMBOR_OFF=12,FAJA_ON=13,FAJA_OFF=14}actuador;
int i,sensores;
/////////////////////////////////////////////////////////////////////////////////////////////////////////
/*esta funcion mantiene el bit mas significativo en el primer sitio*/
int8 swap_bits(int8 c)
{
return ((c&1)?128:0)|((c&2)?64:0)|((c&4)?32:0)|((c&8)?16:0)|((c&16)?8:0)
|((c&32)?4:0)|((c&64)?2:0)|((c&128)?1:0);
}
//////////////////////////////////////////////////////////////////////////////////////////////////////////
int read_all_inputs(int8 esclavo)
{

int c;
int8 MODBUS_SLAVE_ADDRESS;
switch(esclavo)
{
case MODBUS_SLAVE_ADDRESS11:
MODBUS_SLAVE_ADDRESS=MODBUS_SLAVE_ADDRESS1;
break;
case MODBUS_SLAVE_ADDRESS22:
MODBUS_SLAVE_ADDRESS=MODBUS_SLAVE_ADDRESS2;
break;
case MODBUS_SLAVE_ADDRESS33:
MODBUS_SLAVE_ADDRESS=MODBUS_SLAVE_ADDRESS3;
break;
case MODBUS_SLAVE_ADDRESS44:
MODBUS_SLAVE_ADDRESS=MODBUS_SLAVE_ADDRESS4;
break;
}
DEBUG_MSG("Inputs:\r\n");
if(!(modbus_read_discrete_input(MODBUS_SLAVE_ADDRESS,0,8)))
{
DEBUG_MSG("Data: ");
/*Started at 1 since 0 is quantity of coils*/
for(i=1; i < (modbus_rx.len); ++i)
{DEBUG_DATA("%X ", modbus_rx.data[i]);
c=modbus_rx.data[i];}
DEBUG_MSG("\r\n\r\n");
}
else
{
DEBUG_DATA("<-**Exception %X**->\r\n\r\n", modbus_rx.error);
}
return(c);
}
/////////////////////////////////////////////////////////////////////////////////////////////////////////

void write_coils(int8 esclavo, int8 actuadores)
{
int8 coils;
int8 MODBUS_SLAVE_ADDRESS;
switch(esclavo)
{
case MODBUS_SLAVE_ADDRESS11:
MODBUS_SLAVE_ADDRESS=MODBUS_SLAVE_ADDRESS1;
break;
case MODBUS_SLAVE_ADDRESS22:
MODBUS_SLAVE_ADDRESS=MODBUS_SLAVE_ADDRESS2;
break;
case MODBUS_SLAVE_ADDRESS33:
MODBUS_SLAVE_ADDRESS=MODBUS_SLAVE_ADDRESS3;
break;
case MODBUS_SLAVE_ADDRESS44:
MODBUS_SLAVE_ADDRESS=MODBUS_SLAVE_ADDRESS4;
break;
}
switch(actuadores)
{
case MOTOR1_ON:
coils = 0x01;
break;
case MOTOR1_OFF:
coils= 0x02;
break;
case MOTOR2_ON:
coils =0x03;
break;
case MOTOR2_OFF:
coils =0x04;
break;

case MOTOR3_ON:
coils= 0x05;
break;
case MOTOR3_OFF:
coils = 0x06;
break;
case BRAZO1_ON:
coils = 0x07;
break;
case BRAZO1_OFF:
coils = 0x08;
break;
case BRAZO2_ON:
coils = 0x09;
break;
case BRAZO2_OFF:
coils = 0x10;
break;
case TAMBOR_ON:
coils = 0x11;
break;
case TAMBOR_OFF:
coils = 0x12;
break;
}
DEBUG_MSG("Writing Multiple Coils:\r\n");
if(!(modbus_write_multiple_coils(MODBUS_SLAVE_ADDRESS,0,8,coils)))
{
DEBUG_MSG("Data: ");
for(i=0; i < (modbus_rx.len); ++i)
DEBUG_DATA("%X ", modbus_rx.data[i]);
DEBUG_MSG("\r\n\r\n");
}
else

{
DEBUG_DATA("<-**Exception %X**->\r\n\r\n", modbus_rx.error);
}
}
/////////////////////////////////////////////////////////////////////////////////////////////////////////
void main()
{
char inicio;
int sensores;
sensores=0;
delay_ms(2000);
start:
inicio=getc(PC);
if (inicio!=1)
{ goto start;}
else
{ DEBUG_MSG("\r\nInicializando...");
modbus_init();
DEBUG_MSG("...listo\r\n");}
#ifndef USE_WITH_PC
do{
sensores=read_all_inputs( MODBUS_SLAVE_ADDRESS11);
DEBUG_MSG("evaluando ");
DEBUG_DATA("estado inicial de sensores: %X ",sensores);
DEBUG_MSG("\r\n");
if(!bit_test(sensores,0))
{
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR1_ON);
while (!bit_test(sensores,0))
{
sensores=read_all_inputs( MODBUS_SLAVE_ADDRESS11);
}
DEBUG_DATA("compuerta1 en estado inicial: %X ",sensores);
DEBUG_MSG("\r\n");

if(bit_test(sensores,0))
{
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR1_OFF);
}
}
else
{DEBUG_DATA("compuerta1 en estado inicial: %X ",sensores);
DEBUG_MSG("\r\n");}
if(!bit_test(sensores,1))
{
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR2_ON);
while (!bit_test(sensores,1))
{
sensores=read_all_inputs( MODBUS_SLAVE_ADDRESS11);
}
DEBUG_DATA("compuerta2 en estado inicial: %X ",sensores);
DEBUG_MSG("\r\n");
if(bit_test(sensores,1))
{
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR2_OFF);
}
}
else
{DEBUG_DATA("compuerta2 en estado inicial: %X ",sensores);
DEBUG_MSG("\r\n");}
if(!bit_test(sensores,2))
{
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR3_ON);
while (!bit_test(sensores,2))
{
sensores=read_all_inputs( MODBUS_SLAVE_ADDRESS11);
}

DEBUG_DATA("papel en estado inicial: %X ",sensores);
DEBUG_MSG("\r\n");
if(bit_test(sensores,2))
{
delay_ms(400);
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR3_OFF);
}
}
else
{DEBUG_DATA("papel en estado inicial: %X ",sensores);
DEBUG_MSG("\r\n");}
if(!bit_test(sensores,3))
{
write_coils(MODBUS_SLAVE_ADDRESS44,FAJA_ON);
delay_ms(2500);/////////////////////////////////tener kuidado aka
sensores=read_all_inputs( MODBUS_SLAVE_ADDRESS11);
if(bit_test(sensores,3))
{
DEBUG_DATA("lata presente en compuerta: %X ",sensores);
DEBUG_MSG("\r\n");
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR1_ON);
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR2_ON);
}
else if (!bit_test(sensores,3))
{
bit_set(sensores,7);
DEBUG_DATA("lata ausente en compuerta: %X ",sensores);
DEBUG_MSG("\r\n");
DEBUG_MSG("inserte lata y reinicie proceso");
DEBUG_MSG("\r\n");
bit_clear(sensores,7);
write_coils(MODBUS_SLAVE_ADDRESS44,FAJA_OFF);
goto start;

}
}
else
{
DEBUG_DATA("lata presente en compuerta: %X ",sensores);
DEBUG_MSG("\r\n");
write_coils(MODBUS_SLAVE_ADDRESS44,FAJA_ON);
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR1_ON);
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR2_ON);
}
sensores=read_all_inputs( MODBUS_SLAVE_ADDRESS11);
while (!bit_test(sensores,0) || !bit_test(sensores,1))
{
sensores=read_all_inputs( MODBUS_SLAVE_ADDRESS11);
DEBUG_DATA("compuertas abiertas: %X ",sensores);
DEBUG_MSG("\r\n");
}
if (bit_test(sensores,0) || bit_test(sensores,1))
{
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR1_OFF);
write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR2_OFF);
DEBUG_DATA("compuertas cerradas: %X ",sensores);
DEBUG_MSG("\r\n");
}
while (!bit_test(sensores,4))
{
sensores=read_all_inputs( MODBUS_SLAVE_ADDRESS11);
}
if (bit_test(sensores,4))
{
delay_ms(1200);
write_coils(MODBUS_SLAVE_ADDRESS44,FAJA_OFF);
write_coils(MODBUS_SLAVE_ADDRESS33,BRAZO1_ON);

write_coils(MODBUS_SLAVE_ADDRESS33,BRAZO2_ON);
delay_ms(500);
//write_coils(MODBUS_SLAVE_ADDRESS22,MOTOR3_ON);
//write_coils(MODBUS_SLAVE_ADDRESS33,TAMBOR_ON);
}
}while(TRUE);
}
------------------------------------------------------------------------
MANUAL DE MANEJO:
Presione ON y ponga las latas al inicio de la faja transportadora.
Presione OFF para detener el proceso
DATASHEET: