Embed Size (px)
Citation preview
MMGELECATMMLDPWT401 Referencias del Participante Página 1
ENTRENAMIENTO OPERACIONES Y MEJORA DEL DESEMPEÑO
Referencias del Participante
Para
Electrónica de Maquina
MMGELECAT
MMLDPWT401
Proyecto Corp. Newmont - MYSRL Cajamarca, Perú
2006
MMGELECATMMLDPWT401 Referencias del Participante Página 2
AApprroobbaacciióónn
AApprroobbaaddoo ppoorr::
GGeerreennttee:: ____________________________________________________________________________________ EEnnttrreennaammiieennttoo yy MMeejjoorraa ddee DDeesseemmppeeññoo
FFeecchhaa:: AAbbrriill 22000066
PPeerrssoonnaa ddee ccoonnttaaccttoo:: CCaassee DDeebbrruuiijjnn GGeerreennttee –– EEnnttrreennaammiieennttoo yy MMeejjoorraa ddee DDeesseemmppeeññoo CCoorrppoorraacciióónn NNeewwmmoonntt –– MMYYSSRRLL CCaajjaammaarrccaa,, PPeerrúú TTeellff..:: ++8888 44000000 ((2222111122)) FFaaxx:: ++8888 44003366 CCoorrrreeoo EElleeccttrróónniiccoo:: ccaassee..ddeebbrruuiijjnn@@nneewwmmoonntt..ccoomm © Este material es de propiedad intelectual de la Corp. Newmont - MYSRL. Bajo convenios internacionales, ninguna parte puede ser reproducida sin previo permiso de MYSRL o de la Corp. Newmont - MYSRL.
MMGELECATMMLDPWT401 Referencias del Participante Página 3
CONTENIDO
Modulo 1 Componentes Electrónicos de Estado Solidó
Lección 1.1: Semiconductores Lección 1.1.1: Funcionamiento Lección 1.1.2: Flujo de Corriente por un Semiconductor Lección 1.1.3: Región de Interrupción Lección 1.1.4: Voltaje de Barrera Lección 1.2: Diodos Lección 1.2.1: Diodo Zener Lección 1.2.2: LED’s (Light Emitting Diode) Lección 1.2.3: Diodos Rectificadores Lección 1.2.4: Diodos en la protección de circuitos Lección 1.2.5: Evaluación de Diodos Lección 1.3: Transistores Lección 1.3.1: Tipos de Transistores Lección 1.3.2: Construcción de un Transistor Lección 1.3.3: Partes de un Transistor Lección 1.3.5: Funcionamiento Lección 1.4: Reles de Estado Solidó Lección 1.5: Resistencias en Circuitos de Transistores Lección 1.6: Terminología de Transistores
Modulo 2 Esquema Eléctrico
Lección 2.1: Símbolos Lección 2.2: Información Contenida en el Esquema Lección 2.3: Información de los Cables Lección 2.4: Conectores Lección 2.5: Componentes Lección 2.6: Conexiones o Empalmes Lección 2.7: Lectura del Esquema Eléctrico
Módulo 3 Señales Electrónicas
Lección 3.1: Señales Análogas Lección 3.1.1: Señales Análogas continuas Lección 3.1.2: Señales Análogas alternas Lección 3.2: Señales digitales Lección 3.2.1: Señales digitales de frecuencia Lección 3.2.2: Señales digitales de pulso ancho modulado
Modulo 4 Componentes de Entrada
Lección 4.1: Switches (Interruptores) Lección 4.1.1: Interruptor de Presión Lección 4.1.2: Interruptor de Verificación / Luces Lección 4.1.3: Voltaje Pull-Up (Rerencia) Lección 4.2: Sender (Sensadores) Lección 4.2.1: Sender de 0 a 240 ohms Lección 4.2.2: Sender de 70 a 800 ohms Lección 4.3: Sensores Lección 4.3.1: Sensor de Frecuencia Lección 4.3.2: Sensor de frecuencia – Detector Magnético (Magnetic Pick-Up) Lección 4.3.3: Sensor de Frecuencia – Efecto Hall Lección 4.3.4: Sensor de Velocidad de Salida de la Transmisión (TOS) Lección 4.3.5: Sensor de Velocidad y Sincronización Lección 4.3.6: Sensor Digital de PWM Lección 4.3.7: Sensores Analógicos Lección 4.3.8: Sensores Análogos – Digitales Lección 4.3.9: Sensor Ultrasónico
Modulo 5 Controles Electrónicos
Lección 5.1: Tipos de ECM Lección 5.1.1: EPTC II Lección 5.1.2: MAC 14
MMGELECATMMLDPWT401 Referencias del Participante Página 4
Lección 5.1.3: ADEM II Lección 5.1.4: ADEM III Lección 5.1.5: VIMS 3.0 Lección 5.1.6: VIMS 4.0
Modulo 6 Componentes de Salida
Lección 6.1: Modulo de Pantalla Principal Lección 6.1.1:Data Link de la Pantalla Lección 6.1.2: Indicador de Alerta Lección 6.1.3: Lampara / Alarma de Acción Lección 6.1.4: Otros Componentes de Salida Lección 6.2: Solenoides Lección 6.3: Relés
Anexos
Ejercicios
MMGELECATMMLDPWT401 Referencias del Participante Página 5
MODULO 1
COMPONENTES ELECTRONICOS

MMGELECATMMLDPWT401 Referencias del Participante Página 6
MMGELECATMMLDPWT401 Referencias del Participante Página 7
MODULO 1: COMPONENTES ELÉCTRICOS DE ESTADO SÓLIDO Esta lección cubre los componentes eléctricos de estado sólido utilizados en las maquinas Caterpillar. OBJETIVOS Al término de este módulo, el estudiante estará en capacidad de: Explicar la función de los componentes eléctricos de estado sólido respondiendo correctamente las preguntas de las evaluaciones. Dado un apoyo en el entrenamiento y un multímetro digital, evaluar un circuito eléctrico que contenga un diodo y resolver los laboratorios referentes a la operación de los diodos. Dado un apoyo en el entrenamiento y un multímetro digital, evaluar un circuito eléctrico que contenga un transistor y resolver los laboratorios referentes a la operación de los transistores.
MMGELECATMMLDPWT401 Referencias del Participante Página 8
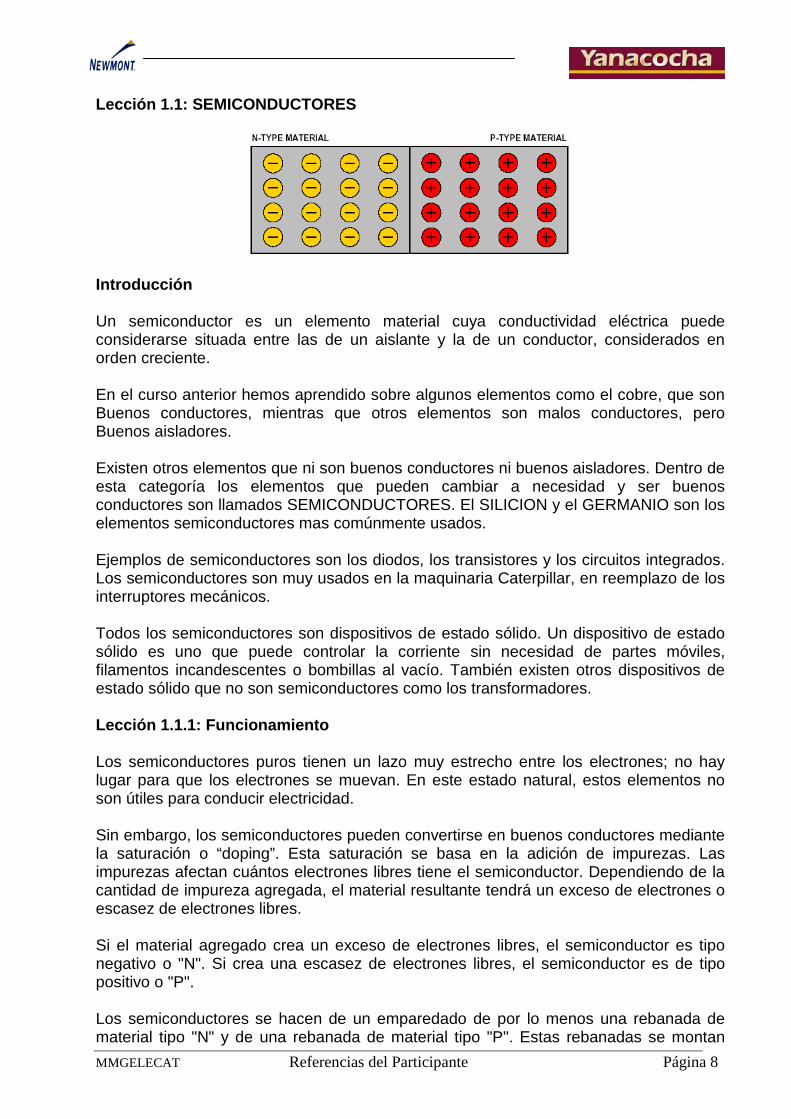
Lección 1.1: SEMICONDUCTORES
Introducción Un semiconductor es un elemento material cuya conductividad eléctrica puede considerarse situada entre las de un aislante y la de un conductor, considerados en orden creciente. En el curso anterior hemos aprendido sobre algunos elementos como el cobre, que son Buenos conductores, mientras que otros elementos son malos conductores, pero Buenos aisladores. Existen otros elementos que ni son buenos conductores ni buenos aisladores. Dentro de esta categoría los elementos que pueden cambiar a necesidad y ser buenos conductores son llamados SEMICONDUCTORES. El SILICION y el GERMANIO son los elementos semiconductores mas comúnmente usados. Ejemplos de semiconductores son los diodos, los transistores y los circuitos integrados. Los semiconductores son muy usados en la maquinaria Caterpillar, en reemplazo de los interruptores mecánicos. Todos los semiconductores son dispositivos de estado sólido. Un dispositivo de estado sólido es uno que puede controlar la corriente sin necesidad de partes móviles, filamentos incandescentes o bombillas al vacío. También existen otros dispositivos de estado sólido que no son semiconductores como los transformadores. Lección 1.1.1: Funcionamiento Los semiconductores puros tienen un lazo muy estrecho entre los electrones; no hay lugar para que los electrones se muevan. En este estado natural, estos elementos no son útiles para conducir electricidad. Sin embargo, los semiconductores pueden convertirse en buenos conductores mediante la saturación o “doping”. Esta saturación se basa en la adición de impurezas. Las impurezas afectan cuántos electrones libres tiene el semiconductor. Dependiendo de la cantidad de impureza agregada, el material resultante tendrá un exceso de electrones o escasez de electrones libres. Si el material agregado crea un exceso de electrones libres, el semiconductor es tipo negativo o "N". Si crea una escasez de electrones libres, el semiconductor es de tipo positivo o "P". Los semiconductores se hacen de un emparedado de por lo menos una rebanada de material tipo "N" y de una rebanada de material tipo "P". Estas rebanadas se montan
MMGELECATMMLDPWT401 Referencias del Participante Página 9
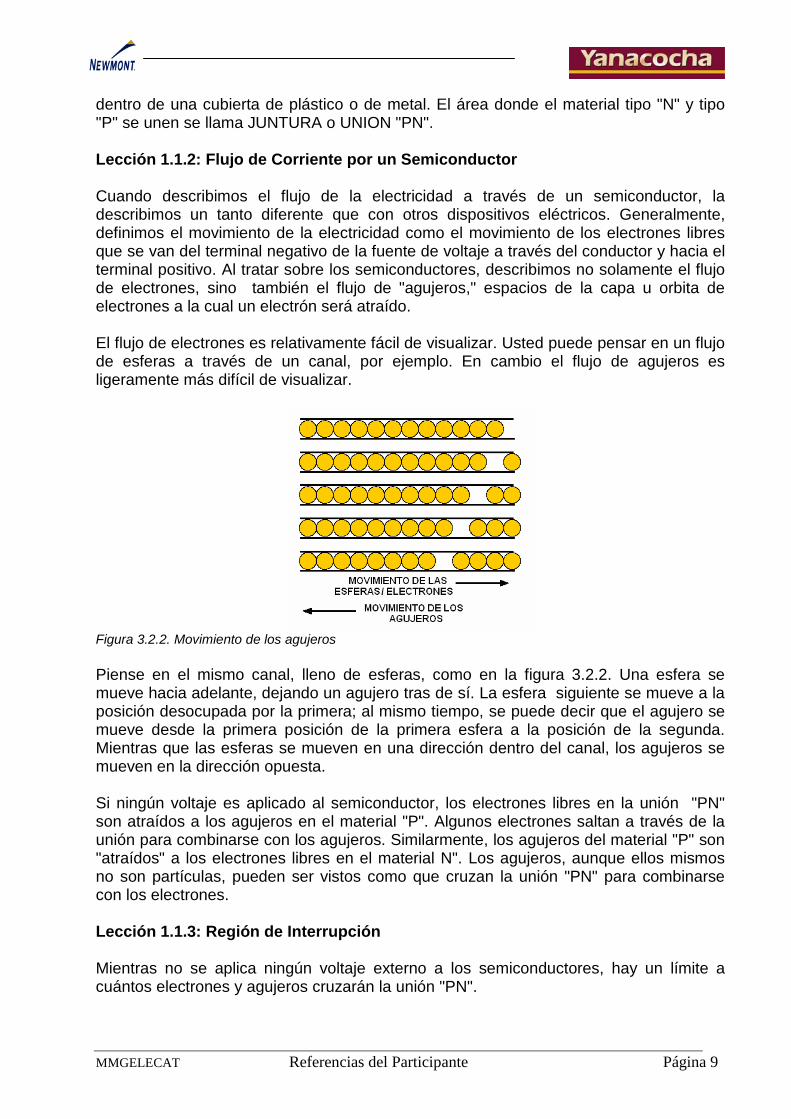
dentro de una cubierta de plástico o de metal. El área donde el material tipo "N" y tipo "P" se unen se llama JUNTURA o UNION "PN". Lección 1.1.2: Flujo de Corriente por un Semiconductor Cuando describimos el flujo de la electricidad a través de un semiconductor, la describimos un tanto diferente que con otros dispositivos eléctricos. Generalmente, definimos el movimiento de la electricidad como el movimiento de los electrones libres que se van del terminal negativo de la fuente de voltaje a través del conductor y hacia el terminal positivo. Al tratar sobre los semiconductores, describimos no solamente el flujo de electrones, sino también el flujo de "agujeros," espacios de la capa u orbita de electrones a la cual un electrón será atraído. El flujo de electrones es relativamente fácil de visualizar. Usted puede pensar en un flujo de esferas a través de un canal, por ejemplo. En cambio el flujo de agujeros es ligeramente más difícil de visualizar.
Figura 3.2.2. Movimiento de los agujeros Piense en el mismo canal, lleno de esferas, como en la figura 3.2.2. Una esfera se mueve hacia adelante, dejando un agujero tras de sí. La esfera siguiente se mueve a la posición desocupada por la primera; al mismo tiempo, se puede decir que el agujero se mueve desde la primera posición de la primera esfera a la posición de la segunda. Mientras que las esferas se mueven en una dirección dentro del canal, los agujeros se mueven en la dirección opuesta. Si ningún voltaje es aplicado al semiconductor, los electrones libres en la unión "PN" son atraídos a los agujeros en el material "P". Algunos electrones saltan a través de la unión para combinarse con los agujeros. Similarmente, los agujeros del material "P" son "atraídos" a los electrones libres en el material N". Los agujeros, aunque ellos mismos no son partículas, pueden ser vistos como que cruzan la unión "PN" para combinarse con los electrones. Lección 1.1.3: Región de Interrupción Mientras no se aplica ningún voltaje externo a los semiconductores, hay un límite a cuántos electrones y agujeros cruzarán la unión "PN".
MMGELECATMMLDPWT401 Referencias del Participante Página 10
Cada electrón que cruza la unión deja tras de sí un átomo que pierde una carga negativa, entonces el átomo es llamado un ion positivo.
De la misma manera, cada agujero que cruza la unión deja tras de sí un ion negativo. Mientras que los iones positivos se acumulan en el material "N", estos ejercen una fuerza (un potencial) que evita que más electrones se vayan. Mientras que los iones negativos se acumulan en el material "P", estos ejercen un potencial que mantiene que más agujeros se vayan. Eventualmente, esto da lugar a una condicione estable que permite una deficiencia de agujeros y de electrones en la unión "PN". Esta zona se llama región de interrupción.
Silicio tipo P y silicio tipo N separados Cuando se efectúa esta unión, los electrones y los huecos inmediatos a la unión se atraen, cruzan la unión y se neutralizan. Lección 1.1.4: Voltaje de Barrera
Silicio tipo P y silicio tipo N unidos.- UNIÓN P-N Cuando un voltaje es aplicado a un semiconductor "PN" (y asumiendo que el semiconductor está configurado en el circuito para permitir que fluya la electricidad; vea polarización directa e inversa, en esta lección) los electrones fluyen del lado "N", a través de la unión, y a través del lado "P". Los agujeros fluyen en dirección opuesta. El
MMGELECATMMLDPWT401 Referencias del Participante Página 11
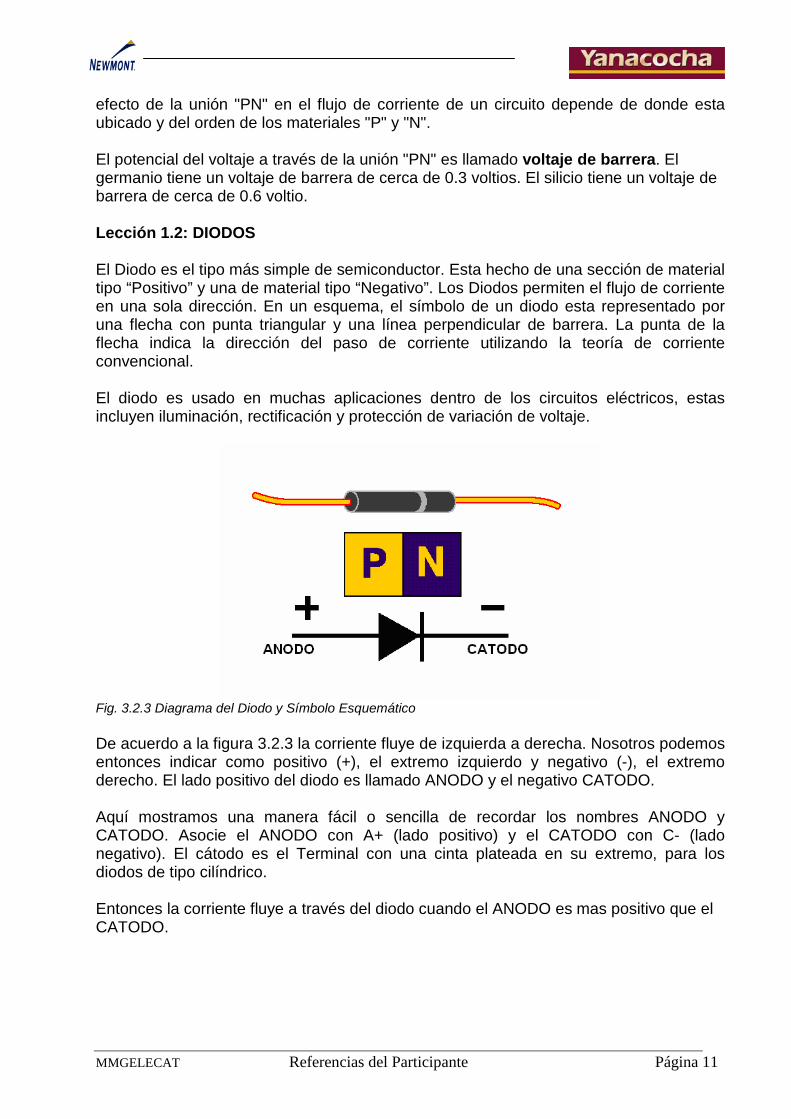
efecto de la unión "PN" en el flujo de corriente de un circuito depende de donde esta ubicado y del orden de los materiales "P" y "N". El potencial del voltaje a través de la unión "PN" es llamado voltaje de barrera. El germanio tiene un voltaje de barrera de cerca de 0.3 voltios. El silicio tiene un voltaje de barrera de cerca de 0.6 voltio. Lección 1.2: DIODOS El Diodo es el tipo más simple de semiconductor. Esta hecho de una sección de material tipo “Positivo” y una de material tipo “Negativo”. Los Diodos permiten el flujo de corriente en una sola dirección. En un esquema, el símbolo de un diodo esta representado por una flecha con punta triangular y una línea perpendicular de barrera. La punta de la flecha indica la dirección del paso de corriente utilizando la teoría de corriente convencional. El diodo es usado en muchas aplicaciones dentro de los circuitos eléctricos, estas incluyen iluminación, rectificación y protección de variación de voltaje.
Fig. 3.2.3 Diagrama del Diodo y Símbolo Esquemático De acuerdo a la figura 3.2.3 la corriente fluye de izquierda a derecha. Nosotros podemos entonces indicar como positivo (+), el extremo izquierdo y negativo (-), el extremo derecho. El lado positivo del diodo es llamado ANODO y el negativo CATODO. Aquí mostramos una manera fácil o sencilla de recordar los nombres ANODO y CATODO. Asocie el ANODO con A+ (lado positivo) y el CATODO con C- (lado negativo). El cátodo es el Terminal con una cinta plateada en su extremo, para los diodos de tipo cilíndrico. Entonces la corriente fluye a través del diodo cuando el ANODO es mas positivo que el CATODO.
MMGELECATMMLDPWT401 Referencias del Participante Página 12
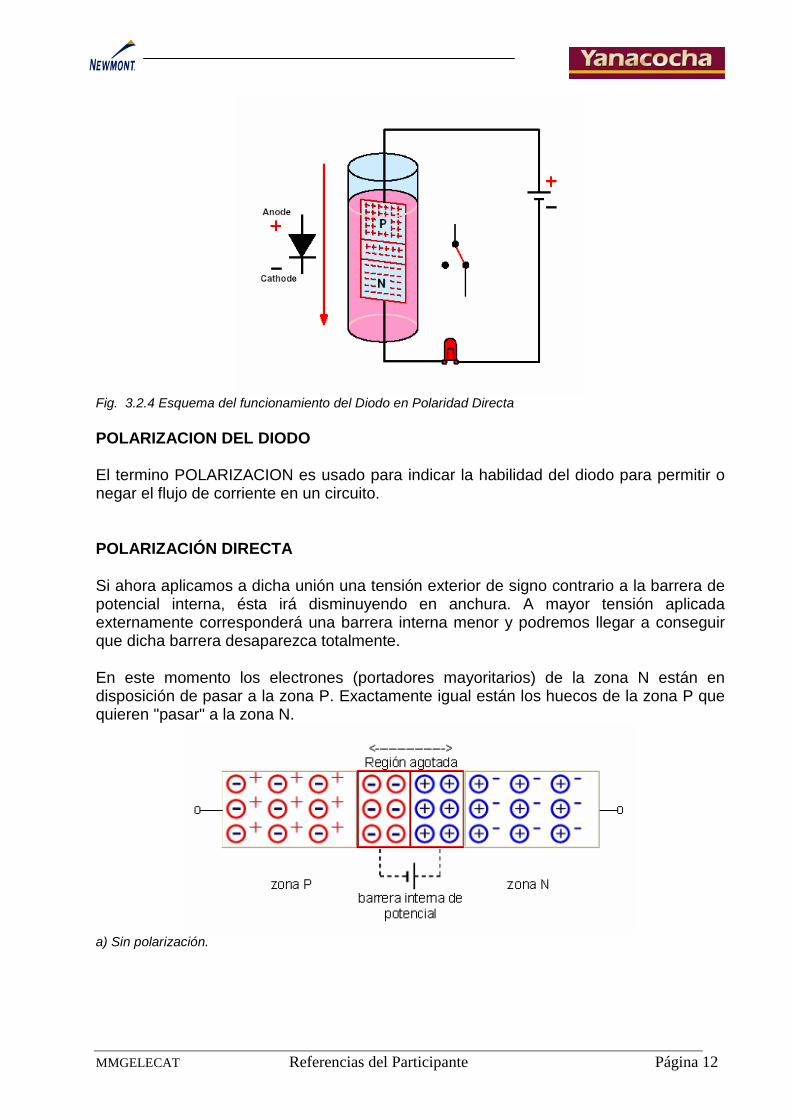
Fig. 3.2.4 Esquema del funcionamiento del Diodo en Polaridad Directa
POLARIZACION DEL DIODO El termino POLARIZACION es usado para indicar la habilidad del diodo para permitir o negar el flujo de corriente en un circuito.
POLARIZACIÓN DIRECTA
Si ahora aplicamos a dicha unión una tensión exterior de signo contrario a la barrera de potencial interna, ésta irá disminuyendo en anchura. A mayor tensión aplicada externamente corresponderá una barrera interna menor y podremos llegar a conseguir que dicha barrera desaparezca totalmente.
En este momento los electrones (portadores mayoritarios) de la zona N están en disposición de pasar a la zona P. Exactamente igual están los huecos de la zona P que quieren "pasar" a la zona N.
a) Sin polarización.
MMGELECATMMLDPWT401 Referencias del Participante Página 13
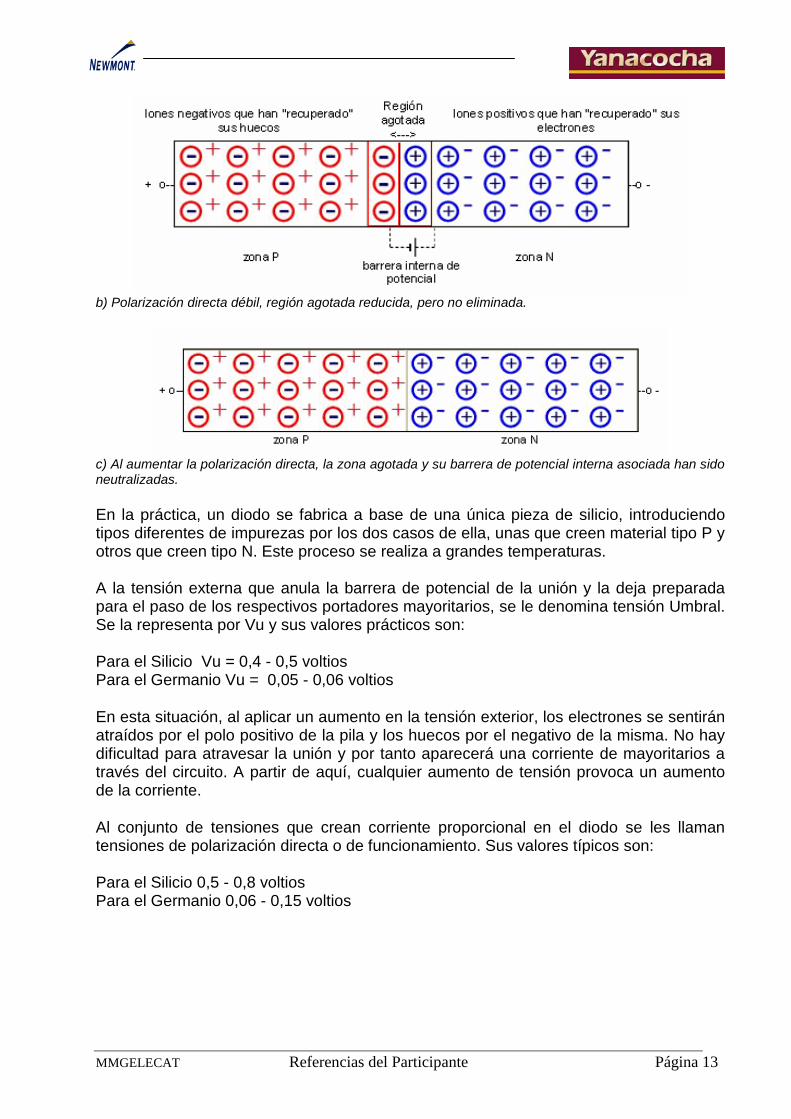
b) Polarización directa débil, región agotada reducida, pero no eliminada.
c) Al aumentar la polarización directa, la zona agotada y su barrera de potencial interna asociada han sido neutralizadas. En la práctica, un diodo se fabrica a base de una única pieza de silicio, introduciendo tipos diferentes de impurezas por los dos casos de ella, unas que creen material tipo P y otros que creen tipo N. Este proceso se realiza a grandes temperaturas. A la tensión externa que anula la barrera de potencial de la unión y la deja preparada para el paso de los respectivos portadores mayoritarios, se le denomina tensión Umbral. Se la representa por Vu y sus valores prácticos son: Para el Silicio Vu = 0,4 - 0,5 voltios Para el Germanio Vu = 0,05 - 0,06 voltios
En esta situación, al aplicar un aumento en la tensión exterior, los electrones se sentirán atraídos por el polo positivo de la pila y los huecos por el negativo de la misma. No hay dificultad para atravesar la unión y por tanto aparecerá una corriente de mayoritarios a través del circuito. A partir de aquí, cualquier aumento de tensión provoca un aumento de la corriente.
Al conjunto de tensiones que crean corriente proporcional en el diodo se les llaman tensiones de polarización directa o de funcionamiento. Sus valores típicos son: Para el Silicio 0,5 - 0,8 voltios Para el Germanio 0,06 - 0,15 voltios
MMGELECATMMLDPWT401 Referencias del Participante Página 14
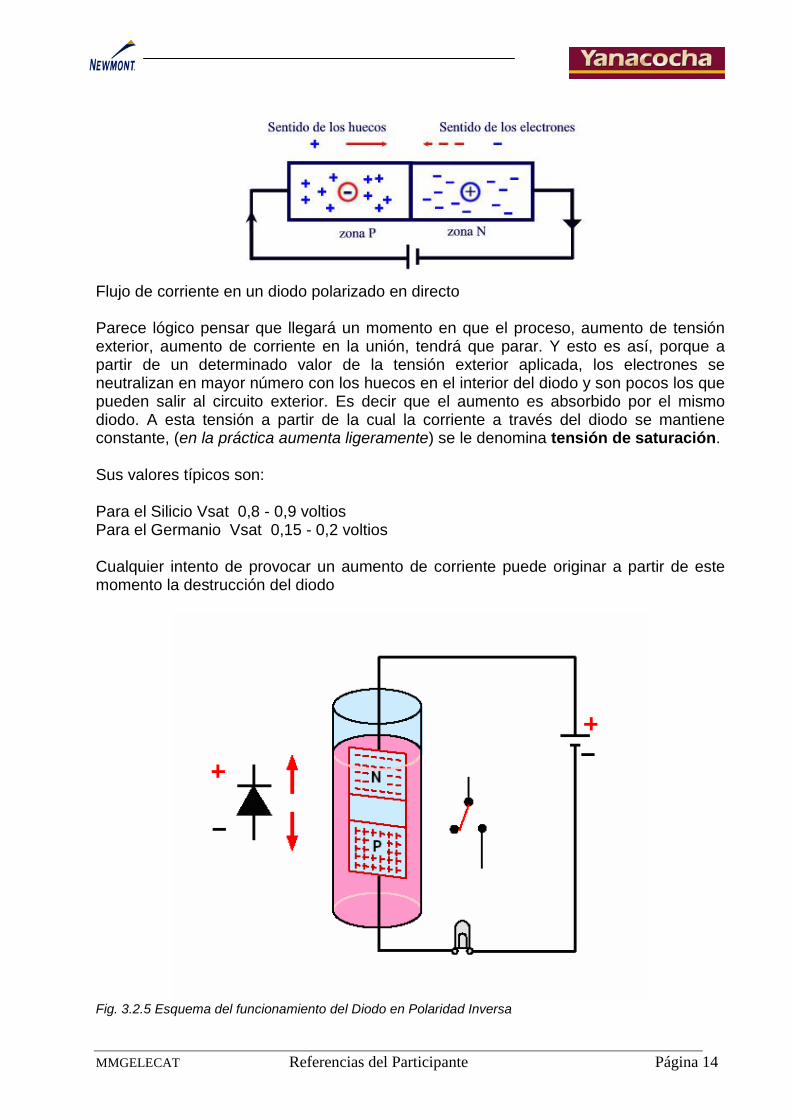
Flujo de corriente en un diodo polarizado en directo Parece lógico pensar que llegará un momento en que el proceso, aumento de tensión exterior, aumento de corriente en la unión, tendrá que parar. Y esto es así, porque a partir de un determinado valor de la tensión exterior aplicada, los electrones se neutralizan en mayor número con los huecos en el interior del diodo y son pocos los que pueden salir al circuito exterior. Es decir que el aumento es absorbido por el mismo diodo. A esta tensión a partir de la cual la corriente a través del diodo se mantiene constante, (en la práctica aumenta ligeramente) se le denomina tensión de saturación. Sus valores típicos son: Para el Silicio Vsat 0,8 - 0,9 voltios Para el Germanio Vsat 0,15 - 0,2 voltios Cualquier intento de provocar un aumento de corriente puede originar a partir de este momento la destrucción del diodo
Fig. 3.2.5 Esquema del funcionamiento del Diodo en Polaridad Inversa
MMGELECATMMLDPWT401 Referencias del Participante Página 15
POLARIZACIÓN INVERSA
Si la tensión aplicada externamente al diodo es del mismo signo que la barrera de potencial interna se dice que el diodo está polarizado inversamente. El terminal positivo de la pila atrae a los electrones del material N apartándolos de la unión, mientras que el negativo a trae a las cargas positivas del material P, apartándolos también de la unión. Se crea, por tanto, en la unión, una ausencia de carga, formándose una corriente que recibe el nombre de "corriente inversa de saturación" o "corriente de fuga". Su valor es prácticamente despreciable, pues es del orden de nA (nanoamperios).
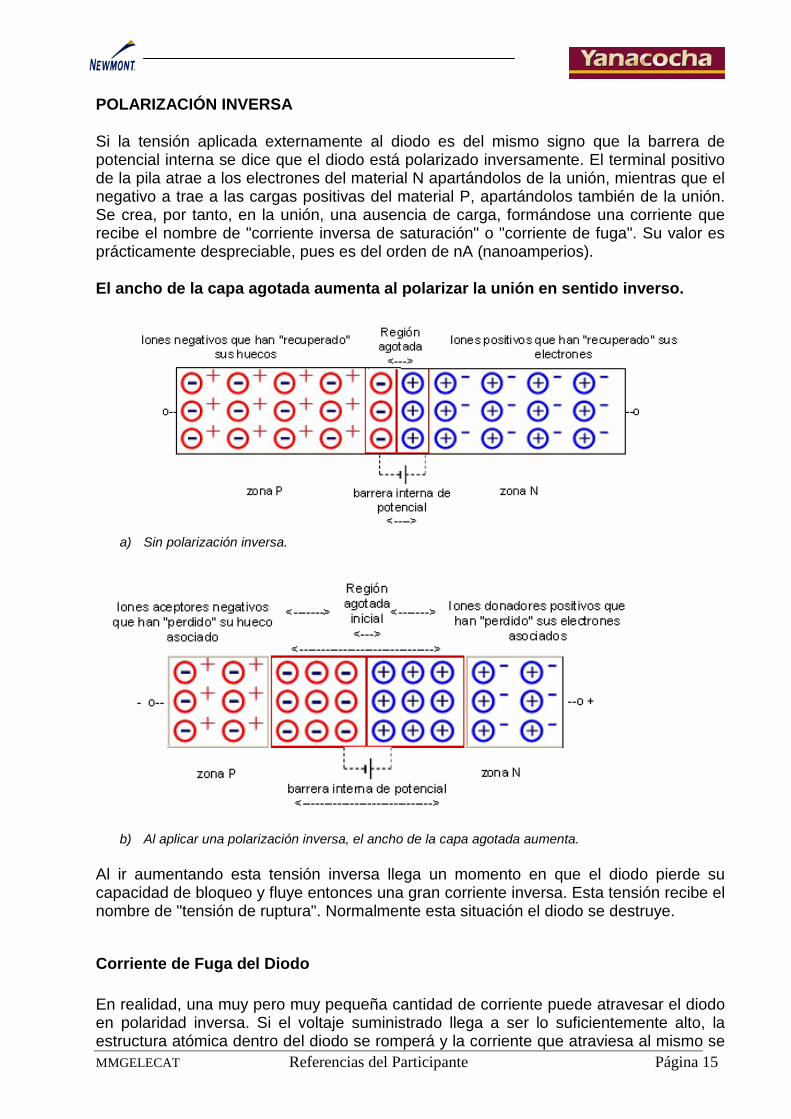
El ancho de la capa agotada aumenta al polarizar la unión en sentido inverso.
a) Sin polarización inversa.
b) Al aplicar una polarización inversa, el ancho de la capa agotada aumenta.
Al ir aumentando esta tensión inversa llega un momento en que el diodo pierde su capacidad de bloqueo y fluye entonces una gran corriente inversa. Esta tensión recibe el nombre de "tensión de ruptura". Normalmente esta situación el diodo se destruye.
Corriente de Fuga del Diodo En realidad, una muy pero muy pequeña cantidad de corriente puede atravesar el diodo en polaridad inversa. Si el voltaje suministrado llega a ser lo suficientemente alto, la estructura atómica dentro del diodo se romperá y la corriente que atraviesa al mismo se
MMGELECATMMLDPWT401 Referencias del Participante Página 16
incrementara rápidamente. Si la corriente es mayor a la soportada por el diodo, este podría dañarse por el calor generado. En resumen, si un diodo es polarizado directamente, este actuara como una pequeña resistencia, o como un corto circuito. En cambio si es polarizado inversamente este actuara como una alta resistencia o como un circuito abierto.
CURVA CARACTERÍSTICA DEL DIODO
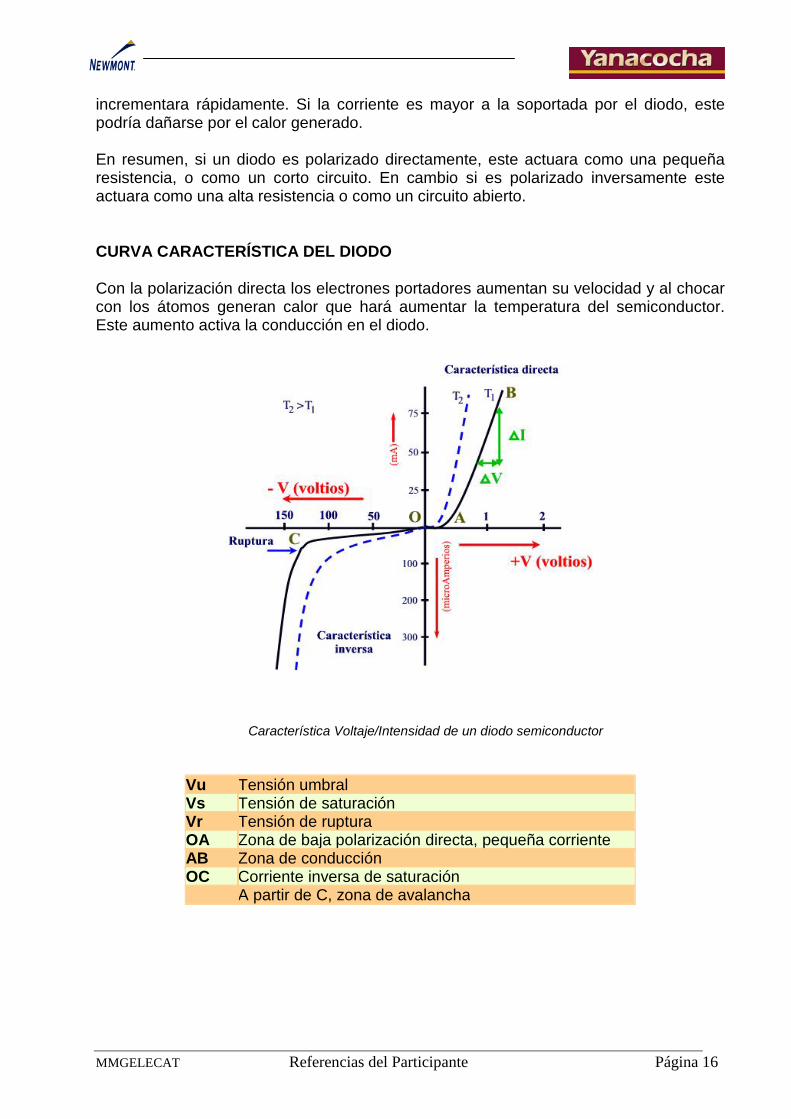
Con la polarización directa los electrones portadores aumentan su velocidad y al chocar con los átomos generan calor que hará aumentar la temperatura del semiconductor. Este aumento activa la conducción en el diodo.
Característica Voltaje/Intensidad de un diodo semiconductor
Vu Tensión umbral Vs Tensión de saturación Vr Tensión de ruptura OA Zona de baja polarización directa, pequeña corriente AB Zona de conducción OC Corriente inversa de saturación A partir de C, zona de avalancha
MMGELECATMMLDPWT401 Referencias del Participante Página 17
OBSERVACIONES
Cada diodo tiene su nomenclatura y características. La nomenclatura esta directamente relacionada con el uso que se va a hacer del diodo. Las características nos dirán las tensiones y corrientes que cada uno puede soportar. Lección 1.2.1: Diodo Zener
Fig. 3.2.6 Diodo Zener o Regulador de Voltaje
Hemos visto que un diodo semiconductor normal puede estar polarizado tanto en directa como inversamente.
• En directa se comporta como una pequeña resistencia. • En inversa se comporta como una gran resistencia.
Veremos ahora un diodo de especiales características que recibe el nombre de diodo tener, el diodo zener trabaja exclusivamente en la zona de característica inversa y, en particular, en la zona del punto de ruptura de su característica inversa. Esta tensión de ruptura depende de las características de construcción del diodo, se fabrican desde 2 a 200 voltios. Polarizado en directa actúa como un diodo normal y por tanto no se utiliza en dicho estado.
EFECTO ZENER
El efecto zener se basa en la aplicación de tensiones inversas que originan, debido a la característica constitución de los mismos, fuertes campos eléctricos que causan la rotura de los enlaces entre los átomos dejando así electrones libres capaces de establecer la conducción. Su característica es tal que una vez alcanzado el valor de su tensión inversa nominal y superando la corriente a través de un determinado valor mínimo, la tensión en bornes del diodo se mantiene constante e independiente de la corriente que circula por él.
MMGELECATMMLDPWT401 Referencias del Participante Página 18
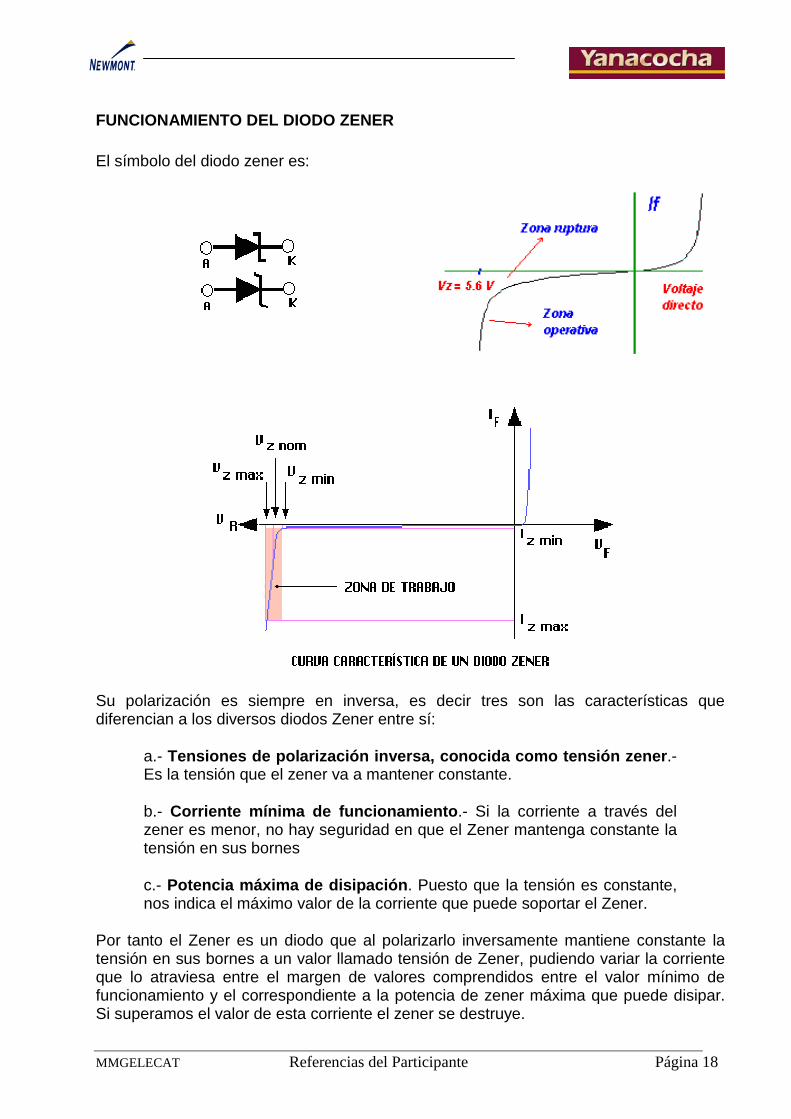
FUNCIONAMIENTO DEL DIODO ZENER El símbolo del diodo zener es:
Su polarización es siempre en inversa, es decir tres son las características que diferencian a los diversos diodos Zener entre sí:
a.- Tensiones de polarización inversa, conocida como tensión zener.- Es la tensión que el zener va a mantener constante.
b.- Corriente mínima de funcionamiento.- Si la corriente a través del zener es menor, no hay seguridad en que el Zener mantenga constante la tensión en sus bornes
c.- Potencia máxima de disipación. Puesto que la tensión es constante, nos indica el máximo valor de la corriente que puede soportar el Zener.
Por tanto el Zener es un diodo que al polarizarlo inversamente mantiene constante la tensión en sus bornes a un valor llamado tensión de Zener, pudiendo variar la corriente que lo atraviesa entre el margen de valores comprendidos entre el valor mínimo de funcionamiento y el correspondiente a la potencia de zener máxima que puede disipar. Si superamos el valor de esta corriente el zener se destruye.
MMGELECATMMLDPWT401 Referencias del Participante Página 19
Aplicaciones Los usos comunes de los diodos en los circuitos eléctricos incluyen:
Regulación de Voltaje (usando Diodos Zener) Indicadores (Usando LED´s) Rectificación (cambiando la corriente AC a DC) Control de las variaciones y picos de voltaje que puedan dañar los circuitos de
estado sólido (actuando como un protector de circuito)
Los Diodos Zener y la Regulación de Voltaje Un diodo Zener es una clase especial de diodo que se ha saturado en extremo durante su fabricación. Esto da lugar a un gran número de electrones y agujeros libres. Estos portadores adicionales de corriente permiten un flujo de corriente inversa cuando se alcanza cierto voltaje de polarización inversa (voltaje Zener o voltaje de ruptura del diodo Zener) En polaridad directa, el Diodo Zener Actúa como un diodo común. Un diodo Zener común no conducirá la corriente en la polaridad inversa si el voltaje de polarización está por debajo de los seis voltios. Pero, si el voltaje de polarización inversa alcanza o excede los seis voltios, el diodo permitirá una corriente inversa. Este diodo se utiliza a menudo en los circuitos de control de voltaje. Un ejemplo del uso de los diodos Zener se encuentra en el sistema de carga. Estos se montan dentro del alternador y actúan como mecanismos de seguridad limitando la salida del estator. Los diodos Zener en los alternadores están regulados para proporcionar aproximadamente 28 voltios. Lección 1.2.2: LED’s (Light Emitting Diode)
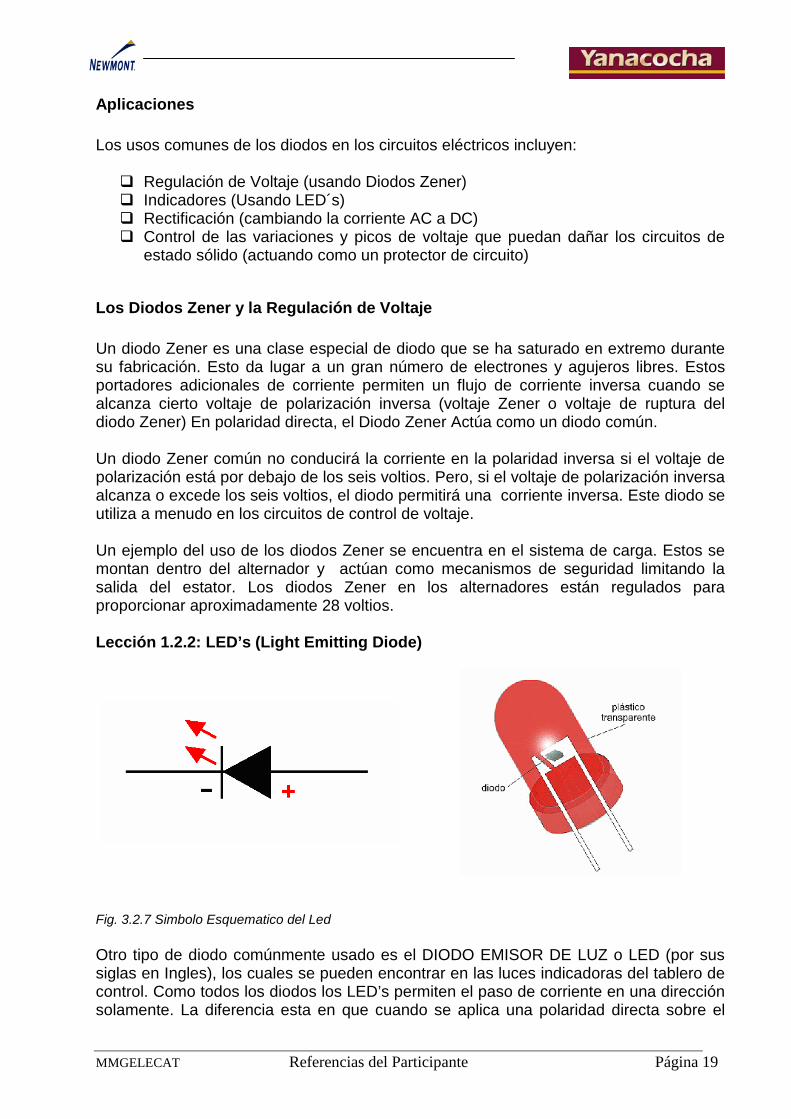
Fig. 3.2.7 Simbolo Esquematico del Led Otro tipo de diodo comúnmente usado es el DIODO EMISOR DE LUZ o LED (por sus siglas en Ingles), los cuales se pueden encontrar en las luces indicadoras del tablero de control. Como todos los diodos los LED’s permiten el paso de corriente en una dirección solamente. La diferencia esta en que cuando se aplica una polaridad directa sobre el
MMGELECATMMLDPWT401 Referencias del Participante Página 20
LED este emite luz. Muchos LED’s conectados en series pueden formar letras o números en un panel. Mientras que la mayoría de los diodos de silicio necesitan alrededor de 0.5 o 0.7 voltios para conducir corriente a través de ellos, los LED’s necesitan aproximadamente de 1.5 a 2.2 voltios. Este voltaje resulta en una mayor corriente lo suficientemente alta como para dañar un LED. Muchos LED’s pueden manejar entre 20 a 30 mA de corriente. Para prevenir esta condición la corriente del LED se debe limitar colocando una resistencia en serie con el LED.
LEDs versus Lámparas Incandescentes En los circuitos eléctricos complejos, los LED’s son una excelente alternativa como reemplazo de las lámparas incandescentes. Estos producen mucho menos calor y necesitan menos corriente para funcionar. Estos también se encienden y apagan mas rápidamente. Lección 1.2.3: Diodos Rectificadores
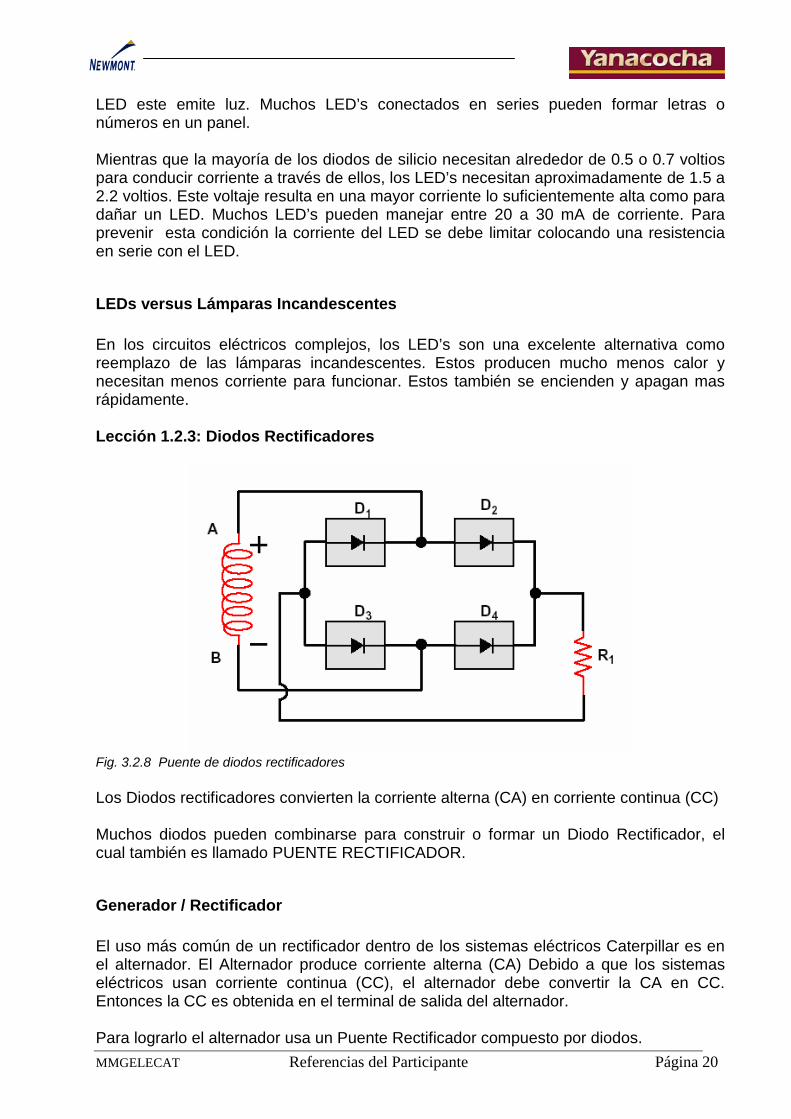
Fig. 3.2.8 Puente de diodos rectificadores Los Diodos rectificadores convierten la corriente alterna (CA) en corriente continua (CC) Muchos diodos pueden combinarse para construir o formar un Diodo Rectificador, el cual también es llamado PUENTE RECTIFICADOR.
Generador / Rectificador El uso más común de un rectificador dentro de los sistemas eléctricos Caterpillar es en el alternador. El Alternador produce corriente alterna (CA) Debido a que los sistemas eléctricos usan corriente continua (CC), el alternador debe convertir la CA en CC. Entonces la CC es obtenida en el terminal de salida del alternador. Para lograrlo el alternador usa un Puente Rectificador compuesto por diodos.
MMGELECATMMLDPWT401 Referencias del Participante Página 21
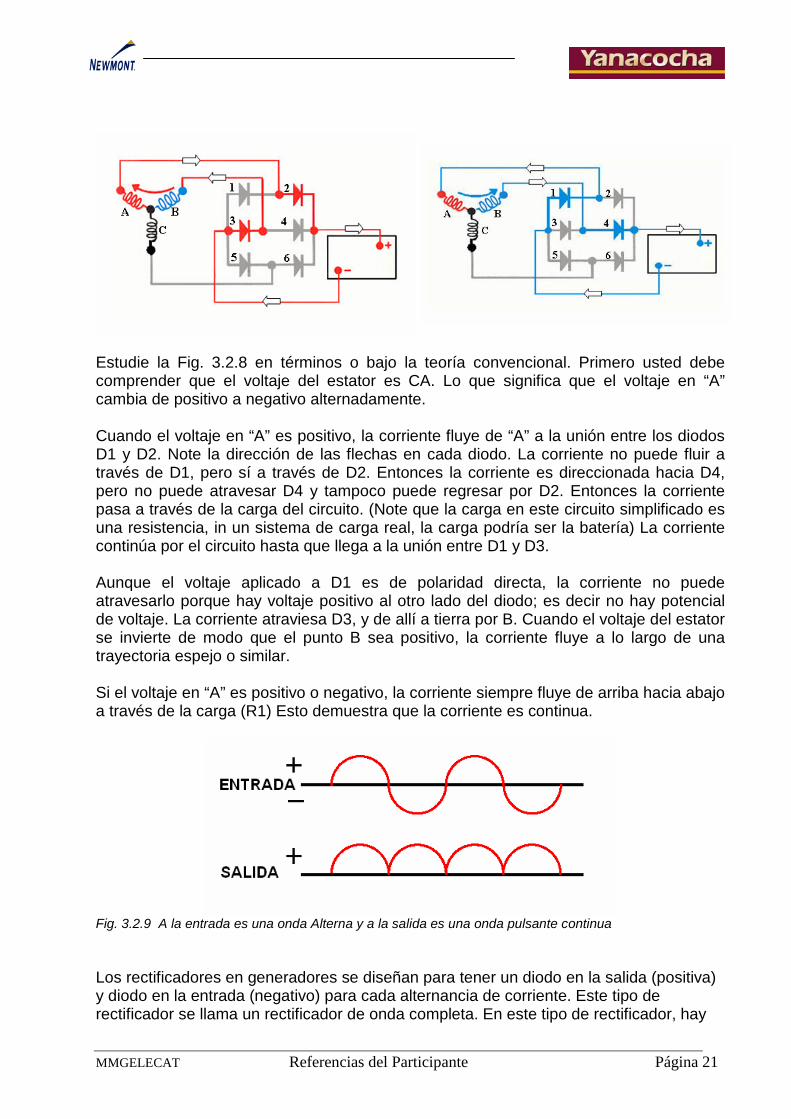
Estudie la Fig. 3.2.8 en términos o bajo la teoría convencional. Primero usted debe comprender que el voltaje del estator es CA. Lo que significa que el voltaje en “A” cambia de positivo a negativo alternadamente. Cuando el voltaje en “A” es positivo, la corriente fluye de “A” a la unión entre los diodos D1 y D2. Note la dirección de las flechas en cada diodo. La corriente no puede fluir a través de D1, pero sí a través de D2. Entonces la corriente es direccionada hacia D4, pero no puede atravesar D4 y tampoco puede regresar por D2. Entonces la corriente pasa a través de la carga del circuito. (Note que la carga en este circuito simplificado es una resistencia, in un sistema de carga real, la carga podría ser la batería) La corriente continúa por el circuito hasta que llega a la unión entre D1 y D3. Aunque el voltaje aplicado a D1 es de polaridad directa, la corriente no puede atravesarlo porque hay voltaje positivo al otro lado del diodo; es decir no hay potencial de voltaje. La corriente atraviesa D3, y de allí a tierra por B. Cuando el voltaje del estator se invierte de modo que el punto B sea positivo, la corriente fluye a lo largo de una trayectoria espejo o similar. Si el voltaje en “A” es positivo o negativo, la corriente siempre fluye de arriba hacia abajo a través de la carga (R1) Esto demuestra que la corriente es continua.
Fig. 3.2.9 A la entrada es una onda Alterna y a la salida es una onda pulsante continua Los rectificadores en generadores se diseñan para tener un diodo en la salida (positiva) y diodo en la entrada (negativo) para cada alternancia de corriente. Este tipo de rectificador se llama un rectificador de onda completa. En este tipo de rectificador, hay
MMGELECATMMLDPWT401 Referencias del Participante Página 22
un pulso de C.C. para cada pulso de CA. La C.C. generada es llamada C.C. de onda completa según lo mostrado en la fig. 3.2.9. Lección 1.2.4: Diodos en la protección de circuitos
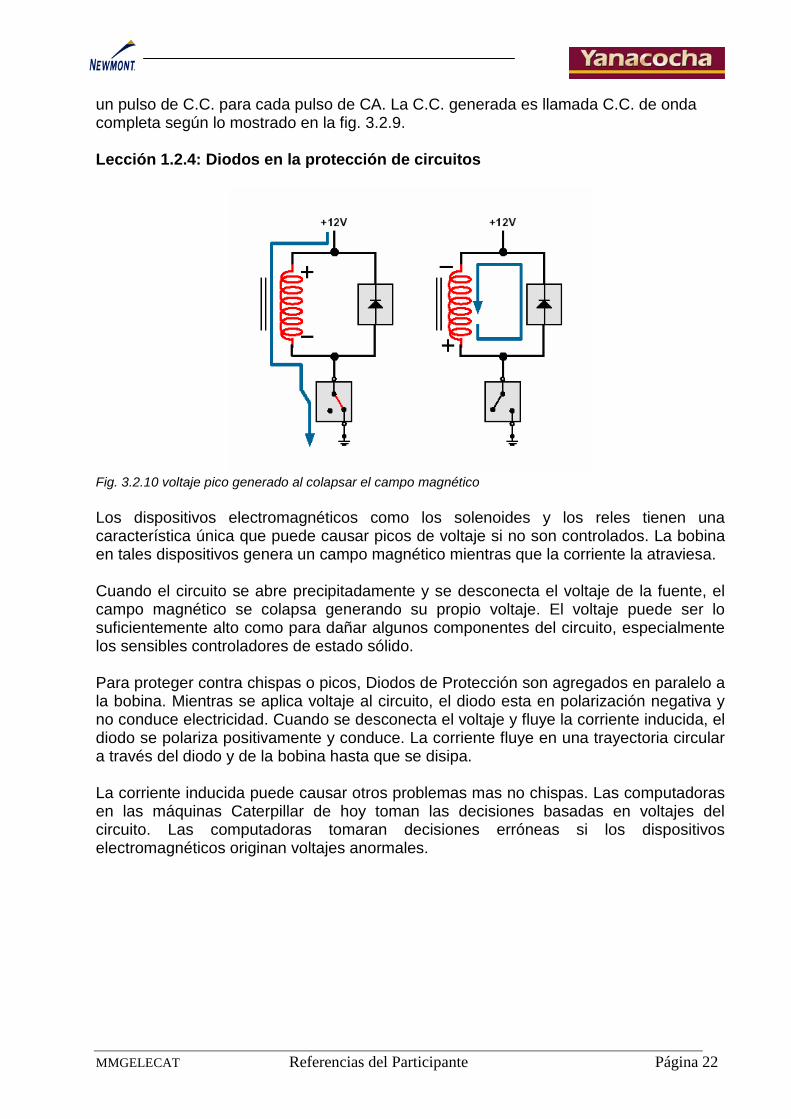
Fig. 3.2.10 voltaje pico generado al colapsar el campo magnético Los dispositivos electromagnéticos como los solenoides y los reles tienen una característica única que puede causar picos de voltaje si no son controlados. La bobina en tales dispositivos genera un campo magnético mientras que la corriente la atraviesa. Cuando el circuito se abre precipitadamente y se desconecta el voltaje de la fuente, el campo magnético se colapsa generando su propio voltaje. El voltaje puede ser lo suficientemente alto como para dañar algunos componentes del circuito, especialmente los sensibles controladores de estado sólido. Para proteger contra chispas o picos, Diodos de Protección son agregados en paralelo a la bobina. Mientras se aplica voltaje al circuito, el diodo esta en polarización negativa y no conduce electricidad. Cuando se desconecta el voltaje y fluye la corriente inducida, el diodo se polariza positivamente y conduce. La corriente fluye en una trayectoria circular a través del diodo y de la bobina hasta que se disipa. La corriente inducida puede causar otros problemas mas no chispas. Las computadoras en las máquinas Caterpillar de hoy toman las decisiones basadas en voltajes del circuito. Las computadoras tomaran decisiones erróneas si los dispositivos electromagnéticos originan voltajes anormales.
MMGELECATMMLDPWT401 Referencias del Participante Página 23
Lección 1.2.5: Evaluación de Diodos Cuando un diodo funciona apropiadamente en un circuito, este actúa como una gran caída de voltaje en una dirección y como una muy baja caída de voltaje en otra. Desafortunadamente, evaluar diodos no es tan simple. De hecho, existen cuatro posibles formas por las cuales se puede evaluar un diodo:
Tomar al diodo fuera del circuito (que en algunos casos no es posible) Si el diodo esta en un circuito en serie, este puede ser evaluado con el circuito
des-energizado. Para el mismo caso, también se puede evaluar con el circuito energizado. En
este caso para un diodo de silicio la caída de voltaje en polaridad directa será de 0.6 voltios.
Si el diodo esta en un circuito paralelo, este debe ser evaluado con un multímetro analógico, no con un multimetro digital. Lección 1.3: TRANSISTORES
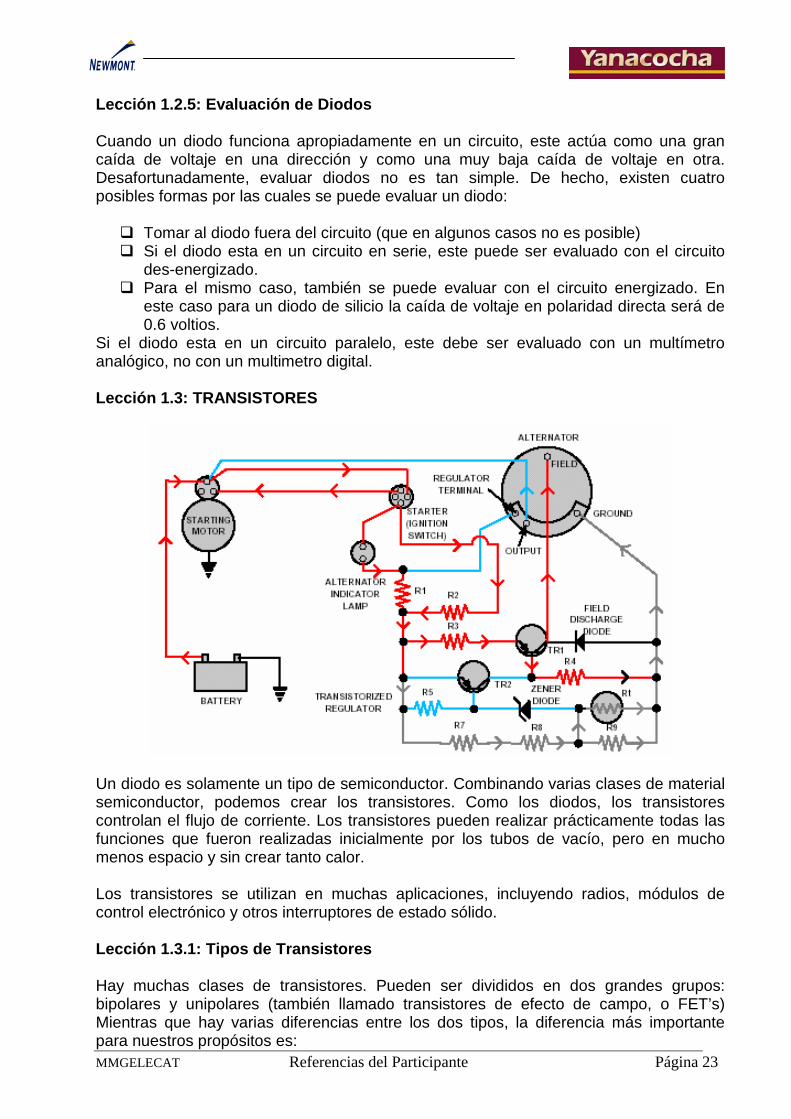
Un diodo es solamente un tipo de semiconductor. Combinando varias clases de material semiconductor, podemos crear los transistores. Como los diodos, los transistores controlan el flujo de corriente. Los transistores pueden realizar prácticamente todas las funciones que fueron realizadas inicialmente por los tubos de vacío, pero en mucho menos espacio y sin crear tanto calor. Los transistores se utilizan en muchas aplicaciones, incluyendo radios, módulos de control electrónico y otros interruptores de estado sólido. Lección 1.3.1: Tipos de Transistores Hay muchas clases de transistores. Pueden ser divididos en dos grandes grupos: bipolares y unipolares (también llamado transistores de efecto de campo, o FET’s) Mientras que hay varias diferencias entre los dos tipos, la diferencia más importante para nuestros propósitos es:
MMGELECATMMLDPWT401 Referencias del Participante Página 24
Los transistores bipolares varían la corriente para controlar el voltaje Los transistores FET varían voltaje para controlar la corriente
Los transistores Bipolares son los más comunes en los circuitos eléctricos Caterpilla, así que nos centraremos en ellos. Lección 1.3.2: Construcción de un Transistor
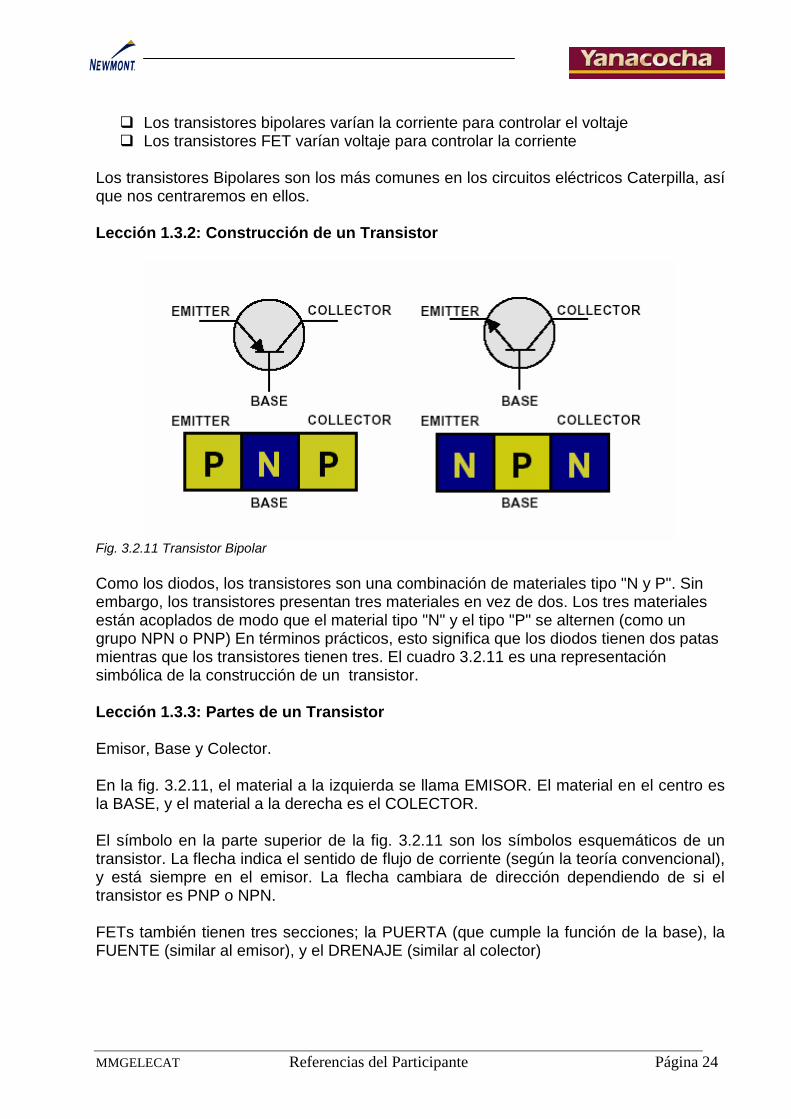
Fig. 3.2.11 Transistor Bipolar Como los diodos, los transistores son una combinación de materiales tipo "N y P". Sin embargo, los transistores presentan tres materiales en vez de dos. Los tres materiales están acoplados de modo que el material tipo "N" y el tipo "P" se alternen (como un grupo NPN o PNP) En términos prácticos, esto significa que los diodos tienen dos patas mientras que los transistores tienen tres. El cuadro 3.2.11 es una representación simbólica de la construcción de un transistor. Lección 1.3.3: Partes de un Transistor Emisor, Base y Colector. En la fig. 3.2.11, el material a la izquierda se llama EMISOR. El material en el centro es la BASE, y el material a la derecha es el COLECTOR. El símbolo en la parte superior de la fig. 3.2.11 son los símbolos esquemáticos de un transistor. La flecha indica el sentido de flujo de corriente (según la teoría convencional), y está siempre en el emisor. La flecha cambiara de dirección dependiendo de si el transistor es PNP o NPN. FETs también tienen tres secciones; la PUERTA (que cumple la función de la base), la FUENTE (similar al emisor), y el DRENAJE (similar al colector)
MMGELECATMMLDPWT401 Referencias del Participante Página 25
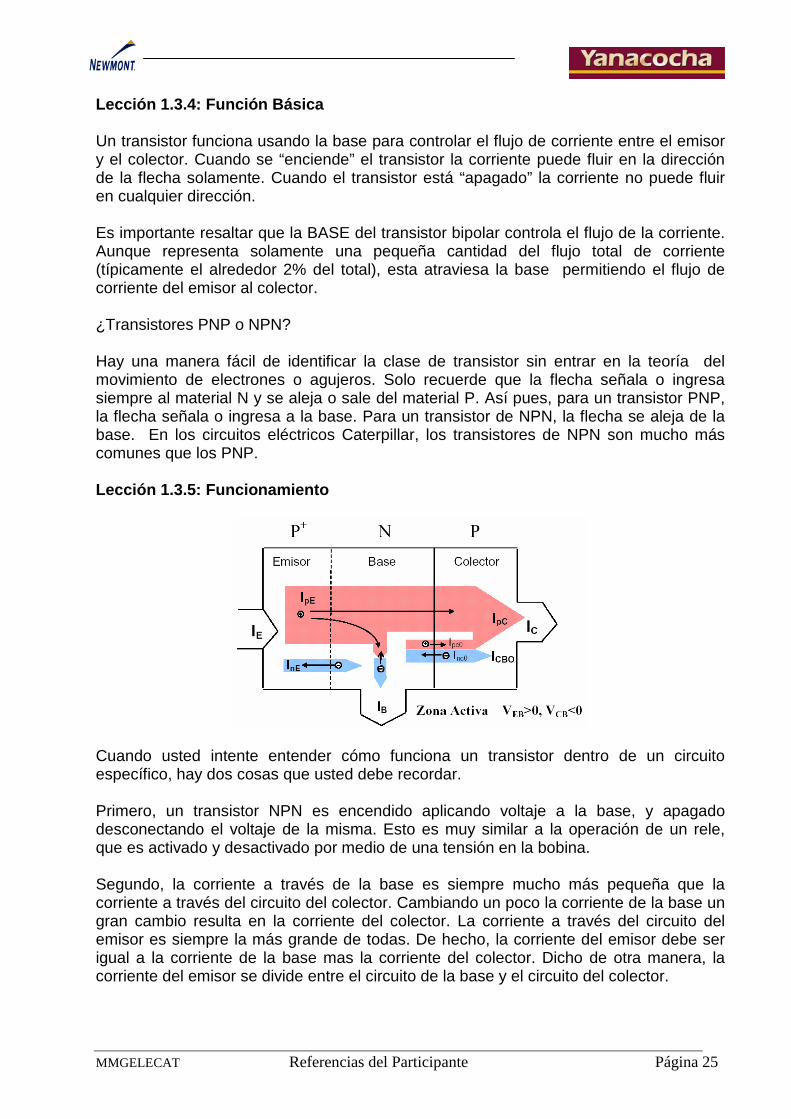
Lección 1.3.4: Función Básica Un transistor funciona usando la base para controlar el flujo de corriente entre el emisor y el colector. Cuando se “enciende” el transistor la corriente puede fluir en la dirección de la flecha solamente. Cuando el transistor está “apagado” la corriente no puede fluir en cualquier dirección. Es importante resaltar que la BASE del transistor bipolar controla el flujo de la corriente. Aunque representa solamente una pequeña cantidad del flujo total de corriente (típicamente el alrededor 2% del total), esta atraviesa la base permitiendo el flujo de corriente del emisor al colector. ¿Transistores PNP o NPN? Hay una manera fácil de identificar la clase de transistor sin entrar en la teoría del movimiento de electrones o agujeros. Solo recuerde que la flecha señala o ingresa siempre al material N y se aleja o sale del material P. Así pues, para un transistor PNP, la flecha señala o ingresa a la base. Para un transistor de NPN, la flecha se aleja de la base. En los circuitos eléctricos Caterpillar, los transistores de NPN son mucho más comunes que los PNP. Lección 1.3.5: Funcionamiento
Cuando usted intente entender cómo funciona un transistor dentro de un circuito específico, hay dos cosas que usted debe recordar. Primero, un transistor NPN es encendido aplicando voltaje a la base, y apagado desconectando el voltaje de la misma. Esto es muy similar a la operación de un rele, que es activado y desactivado por medio de una tensión en la bobina. Segundo, la corriente a través de la base es siempre mucho más pequeña que la corriente a través del circuito del colector. Cambiando un poco la corriente de la base un gran cambio resulta en la corriente del colector. La corriente a través del circuito del emisor es siempre la más grande de todas. De hecho, la corriente del emisor debe ser igual a la corriente de la base mas la corriente del colector. Dicho de otra manera, la corriente del emisor se divide entre el circuito de la base y el circuito del colector.
MMGELECATMMLDPWT401 Referencias del Participante Página 26
Lección 1.4: RELES DE ESTADO SÓLIDO
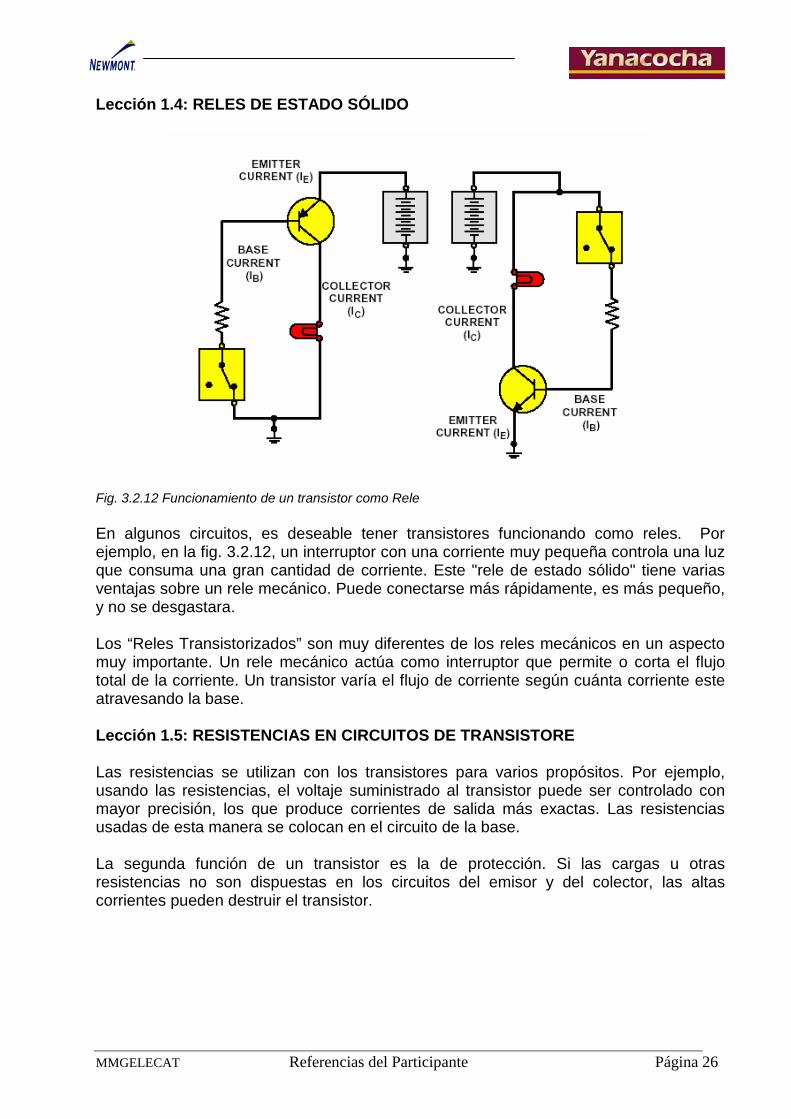
Fig. 3.2.12 Funcionamiento de un transistor como Rele
En algunos circuitos, es deseable tener transistores funcionando como reles. Por ejemplo, en la fig. 3.2.12, un interruptor con una corriente muy pequeña controla una luz que consuma una gran cantidad de corriente. Este "rele de estado sólido" tiene varias ventajas sobre un rele mecánico. Puede conectarse más rápidamente, es más pequeño, y no se desgastara. Los “Reles Transistorizados” son muy diferentes de los reles mecánicos en un aspecto muy importante. Un rele mecánico actúa como interruptor que permite o corta el flujo total de la corriente. Un transistor varía el flujo de corriente según cuánta corriente este atravesando la base. Lección 1.5: RESISTENCIAS EN CIRCUITOS DE TRANSISTORE Las resistencias se utilizan con los transistores para varios propósitos. Por ejemplo, usando las resistencias, el voltaje suministrado al transistor puede ser controlado con mayor precisión, los que produce corrientes de salida más exactas. Las resistencias usadas de esta manera se colocan en el circuito de la base. La segunda función de un transistor es la de protección. Si las cargas u otras resistencias no son dispuestas en los circuitos del emisor y del colector, las altas corrientes pueden destruir el transistor.
MMGELECATMMLDPWT401 Referencias del Participante Página 27
Lección 1.6: TERMINOLOGÍA DE TRANSISTORES
Existen muchos términos que hacen fácil hablar de las características de un transistor específico. Por ejemplo, la ganancia de corriente del transistor describe cuan grande es la corriente del colector con respecto a la corriente de la base. Si un transistor presenta una ganancia de 100 y la corriente de la base es de 10mA, entonces la corriente en el colector es de 100 multiplicada por 10, que es igual a 1000mA o 1A. Los transistores tienen muchos otros rangos similares a los diodos. Existen rangos o referencias que indican cuan rápidamente el transistor puede “encenderse” o “apagarse”, cuanto calor puede manejar, y cuanta corriente fuga atraviesa este cuando se apaga. Otras Aplicaciones Los transistores son muy utilizados como dispositivos de conexión. Si usted ve un transistor en un circuito eléctrico, este funciona comúnmente como un interruptor. Así mismo, debe saber que un transistor también puede ser usado para amplificar o regular corriente, como los dimmers.

MMGELECATMMLDPWT401 Referencias del Participante Página 28
MMGELECATMMLDPWT401 Referencias del Participante Página 29
MODULO 2
ESQUEMA ELECTRICO

MMGELECATMMLDPWT401 Referencias del Participante Página 30
MMGELECATMMLDPWT401 Referencias del Participante Página 31
MODULO 2: ESQUEMA ELÉCTRICO
Esta lección describe y explica la información que esta disponible para ayudar al técnico en la evaluación y diagnostico de los sistemas eléctricos.
OBJETIVOS
Al término de este módulo, el estudiante estará en capacidad de:
1. Reconocer los diferentes componentes de un circuito eléctrico mediante los símbolos gráficos que los representan en los diferentes diagramas o planos eléctricos.
2. Demostrar su habilidad en la lectura e interpretación de un esquema eléctrico.
3. Dado un circuito y las herramientas apropiadas, probar los componentes de
estado sólido según el laboratorio respectivo.
MMGELECATMMLDPWT401 Referencias del Participante Página 32
Lección 2.1: SIMBOLOS
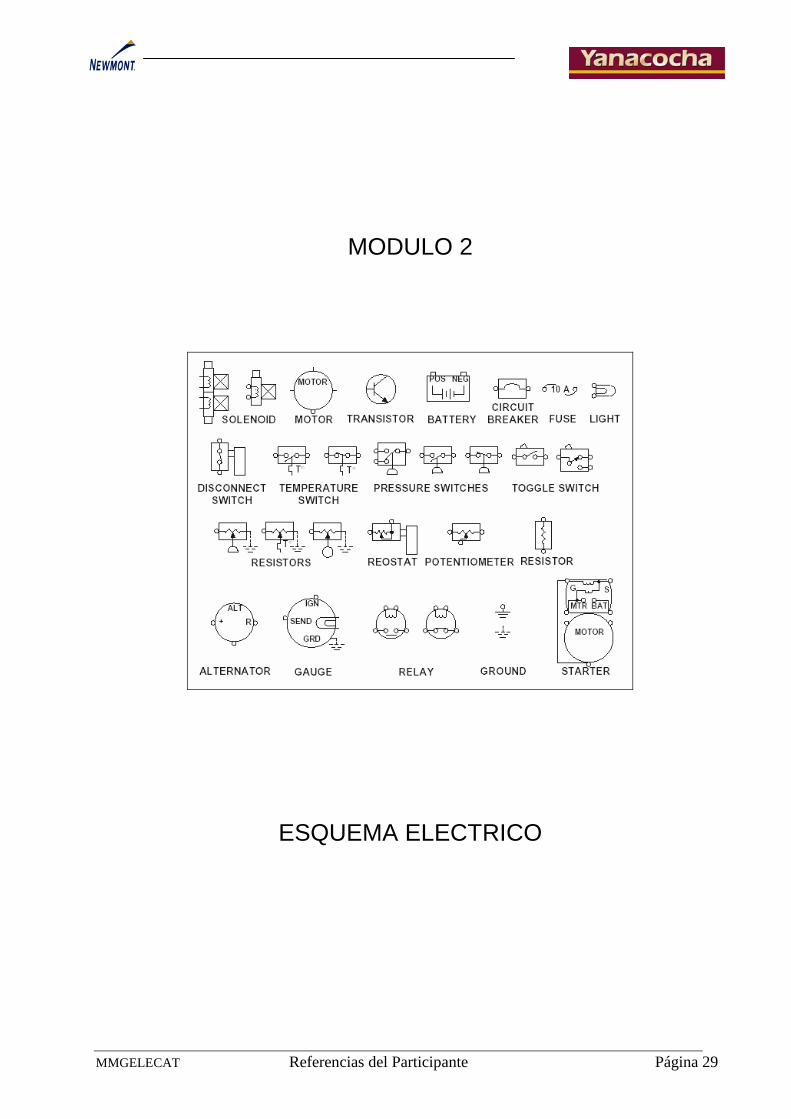
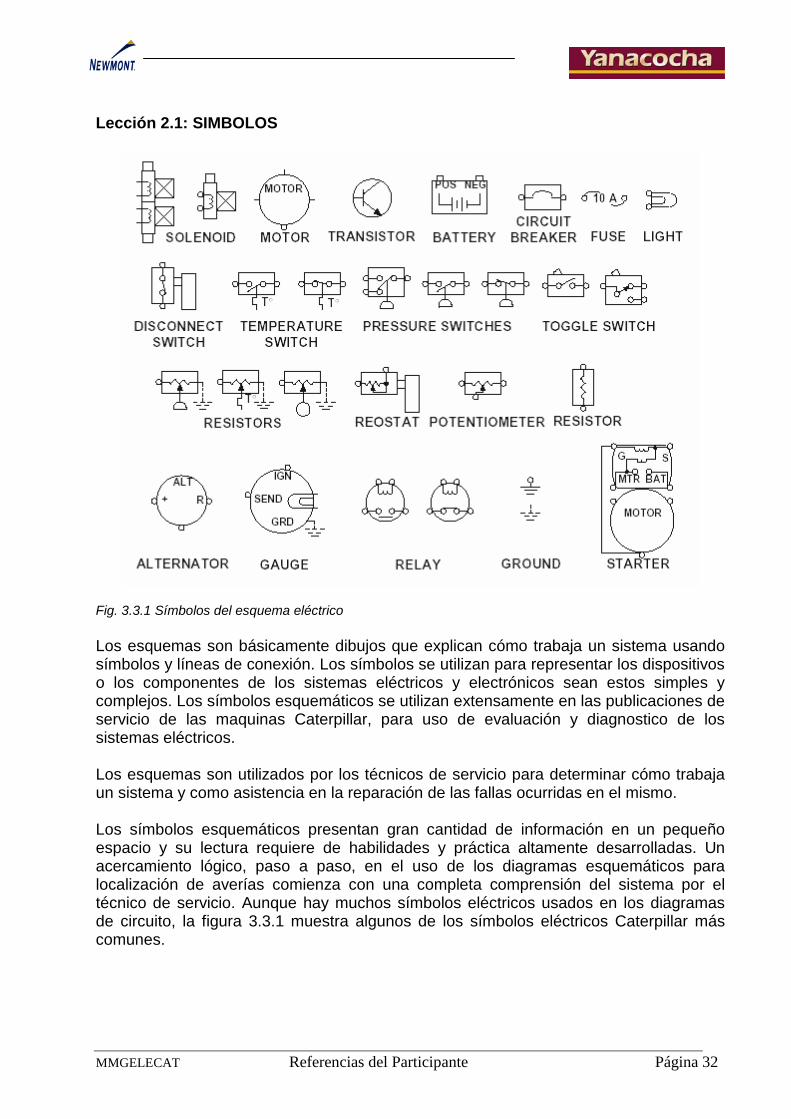
Fig. 3.3.1 Símbolos del esquema eléctrico Los esquemas son básicamente dibujos que explican cómo trabaja un sistema usando símbolos y líneas de conexión. Los símbolos se utilizan para representar los dispositivos o los componentes de los sistemas eléctricos y electrónicos sean estos simples y complejos. Los símbolos esquemáticos se utilizan extensamente en las publicaciones de servicio de las maquinas Caterpillar, para uso de evaluación y diagnostico de los sistemas eléctricos. Los esquemas son utilizados por los técnicos de servicio para determinar cómo trabaja un sistema y como asistencia en la reparación de las fallas ocurridas en el mismo. Los símbolos esquemáticos presentan gran cantidad de información en un pequeño espacio y su lectura requiere de habilidades y práctica altamente desarrolladas. Un acercamiento lógico, paso a paso, en el uso de los diagramas esquemáticos para localización de averías comienza con una completa comprensión del sistema por el técnico de servicio. Aunque hay muchos símbolos eléctricos usados en los diagramas de circuito, la figura 3.3.1 muestra algunos de los símbolos eléctricos Caterpillar más comunes.
MMGELECATMMLDPWT401 Referencias del Participante Página 33
Lección 2.2: INFORMACIÓN CONTENIDA EN EL ESQUEMA
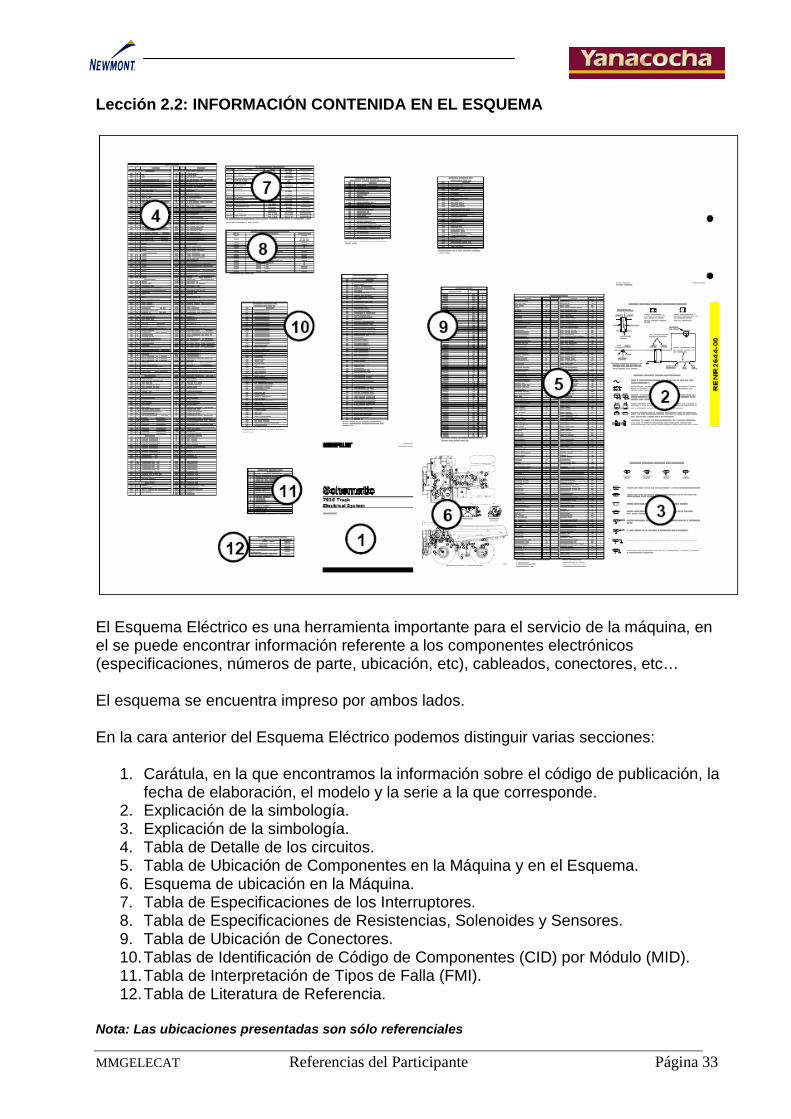
El Esquema Eléctrico es una herramienta importante para el servicio de la máquina, en el se puede encontrar información referente a los componentes electrónicos (especificaciones, números de parte, ubicación, etc), cableados, conectores, etc… El esquema se encuentra impreso por ambos lados. En la cara anterior del Esquema Eléctrico podemos distinguir varias secciones:
1. Carátula, en la que encontramos la información sobre el código de publicación, la fecha de elaboración, el modelo y la serie a la que corresponde.
2. Explicación de la simbología. 3. Explicación de la simbología. 4. Tabla de Detalle de los circuitos. 5. Tabla de Ubicación de Componentes en la Máquina y en el Esquema. 6. Esquema de ubicación en la Máquina. 7. Tabla de Especificaciones de los Interruptores. 8. Tabla de Especificaciones de Resistencias, Solenoides y Sensores. 9. Tabla de Ubicación de Conectores. 10. Tablas de Identificación de Código de Componentes (CID) por Módulo (MID). 11. Tabla de Interpretación de Tipos de Falla (FMI). 12. Tabla de Literatura de Referencia.
Nota: Las ubicaciones presentadas son sólo referenciales
MMGELECATMMLDPWT401 Referencias del Participante Página 34
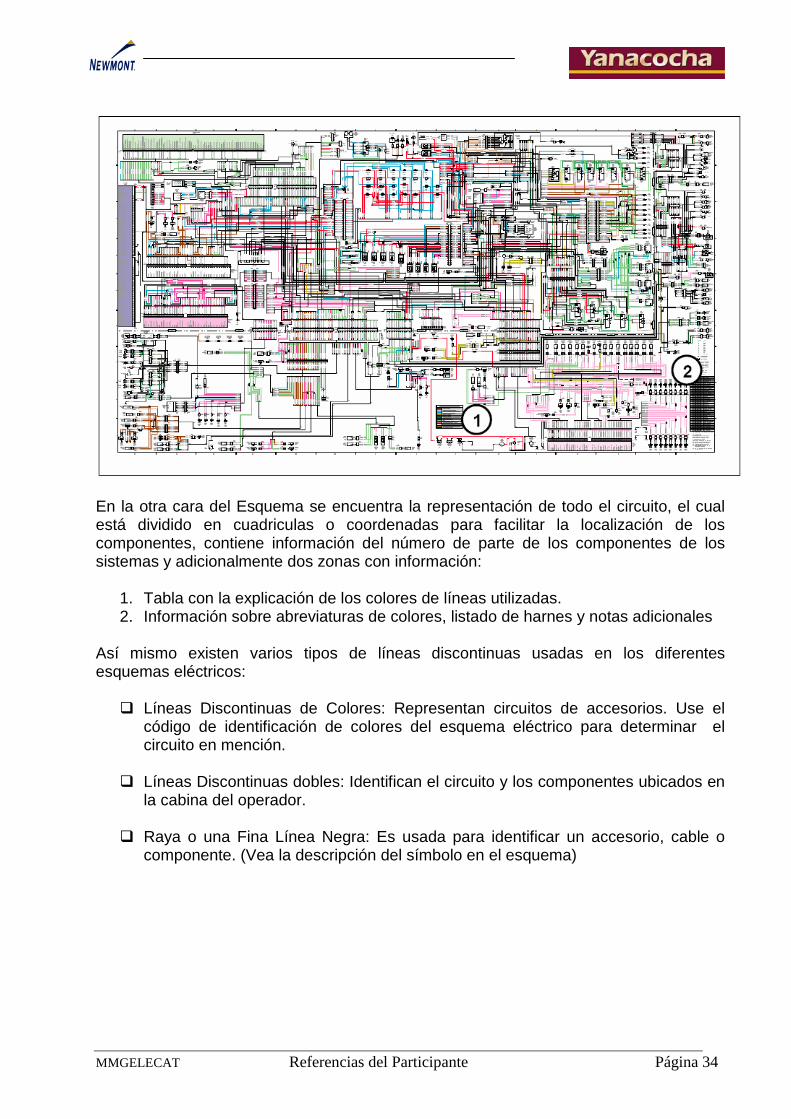
En la otra cara del Esquema se encuentra la representación de todo el circuito, el cual está dividido en cuadriculas o coordenadas para facilitar la localización de los componentes, contiene información del número de parte de los componentes de los sistemas y adicionalmente dos zonas con información:
1. Tabla con la explicación de los colores de líneas utilizadas. 2. Información sobre abreviaturas de colores, listado de harnes y notas adicionales
Así mismo existen varios tipos de líneas discontinuas usadas en los diferentes esquemas eléctricos:
Líneas Discontinuas de Colores: Representan circuitos de accesorios. Use el código de identificación de colores del esquema eléctrico para determinar el circuito en mención.
Líneas Discontinuas dobles: Identifican el circuito y los componentes ubicados en
la cabina del operador.
Raya o una Fina Línea Negra: Es usada para identificar un accesorio, cable o componente. (Vea la descripción del símbolo en el esquema)
MMGELECATMMLDPWT401 Referencias del Participante Página 35
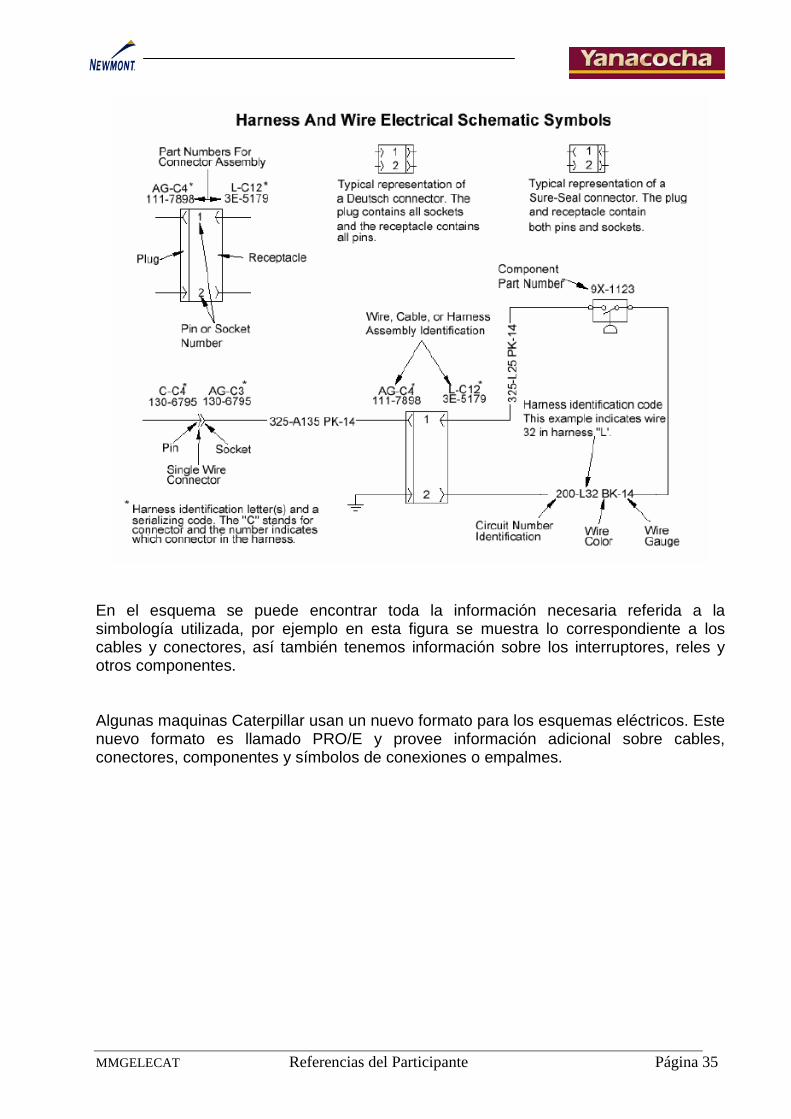
En el esquema se puede encontrar toda la información necesaria referida a la simbología utilizada, por ejemplo en esta figura se muestra lo correspondiente a los cables y conectores, así también tenemos información sobre los interruptores, reles y otros componentes. Algunas maquinas Caterpillar usan un nuevo formato para los esquemas eléctricos. Este nuevo formato es llamado PRO/E y provee información adicional sobre cables, conectores, componentes y símbolos de conexiones o empalmes.
MMGELECATMMLDPWT401 Referencias del Participante Página 36
Lección 2.3: INFORMACIÓN DE LOS CABLES
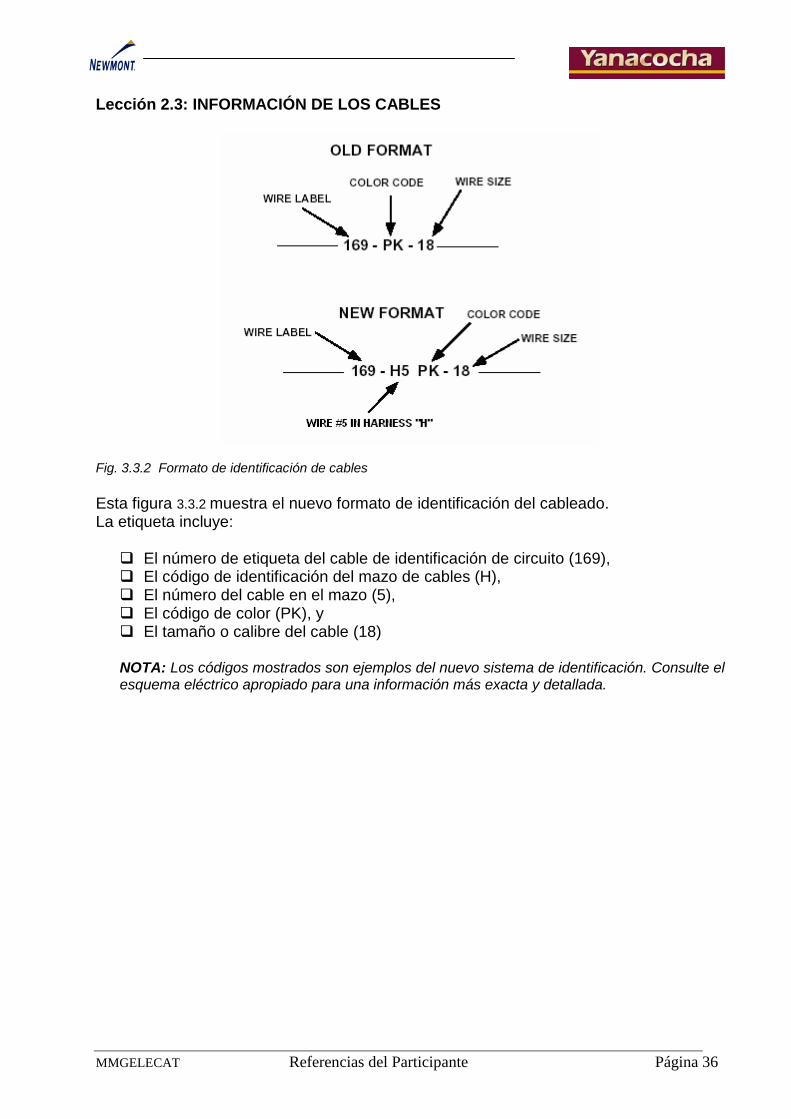
Fig. 3.3.2 Formato de identificación de cables Esta figura 3.3.2 muestra el nuevo formato de identificación del cableado. La etiqueta incluye:
El número de etiqueta del cable de identificación de circuito (169), El código de identificación del mazo de cables (H), El número del cable en el mazo (5), El código de color (PK), y El tamaño o calibre del cable (18)
NOTA: Los códigos mostrados son ejemplos del nuevo sistema de identificación. Consulte el esquema eléctrico apropiado para una información más exacta y detallada.
MMGELECATMMLDPWT401 Referencias del Participante Página 37
Lección 2.4: CONECTORES
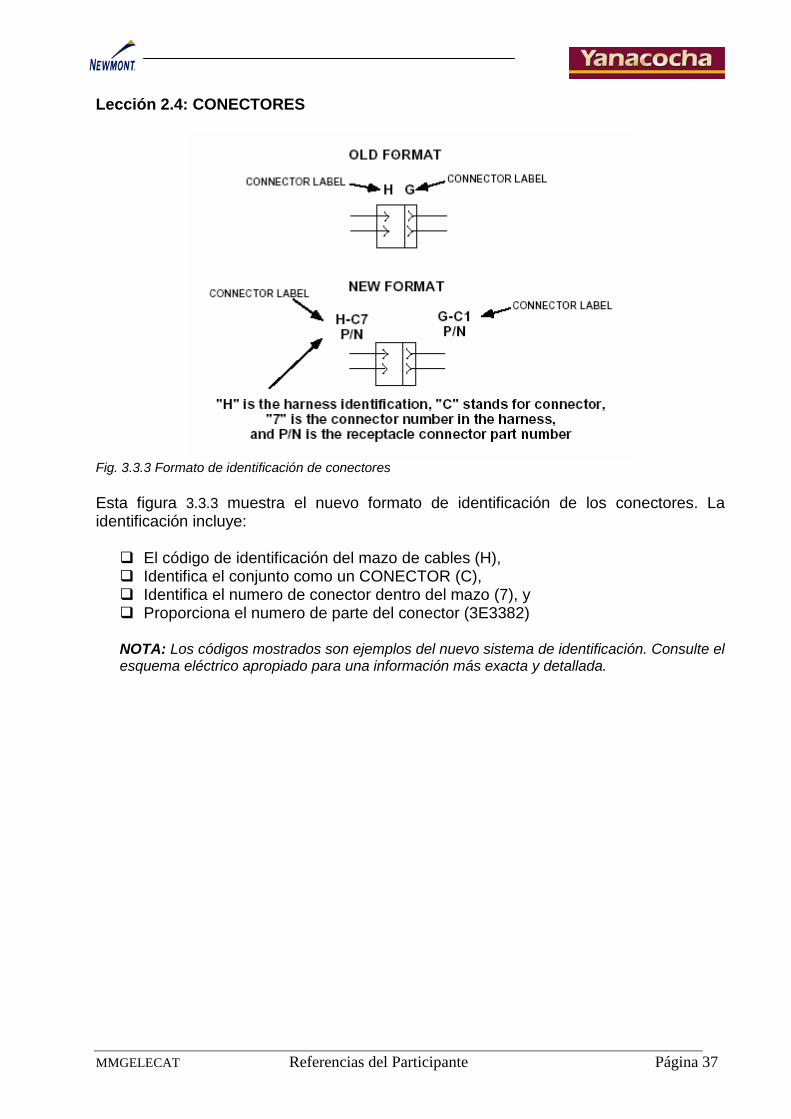
Fig. 3.3.3 Formato de identificación de conectores Esta figura 3.3.3 muestra el nuevo formato de identificación de los conectores. La identificación incluye:
El código de identificación del mazo de cables (H), Identifica el conjunto como un CONECTOR (C), Identifica el numero de conector dentro del mazo (7), y Proporciona el numero de parte del conector (3E3382)
NOTA: Los códigos mostrados son ejemplos del nuevo sistema de identificación. Consulte el esquema eléctrico apropiado para una información más exacta y detallada.
MMGELECATMMLDPWT401 Referencias del Participante Página 38
Lección 2.5: COMPONENTES
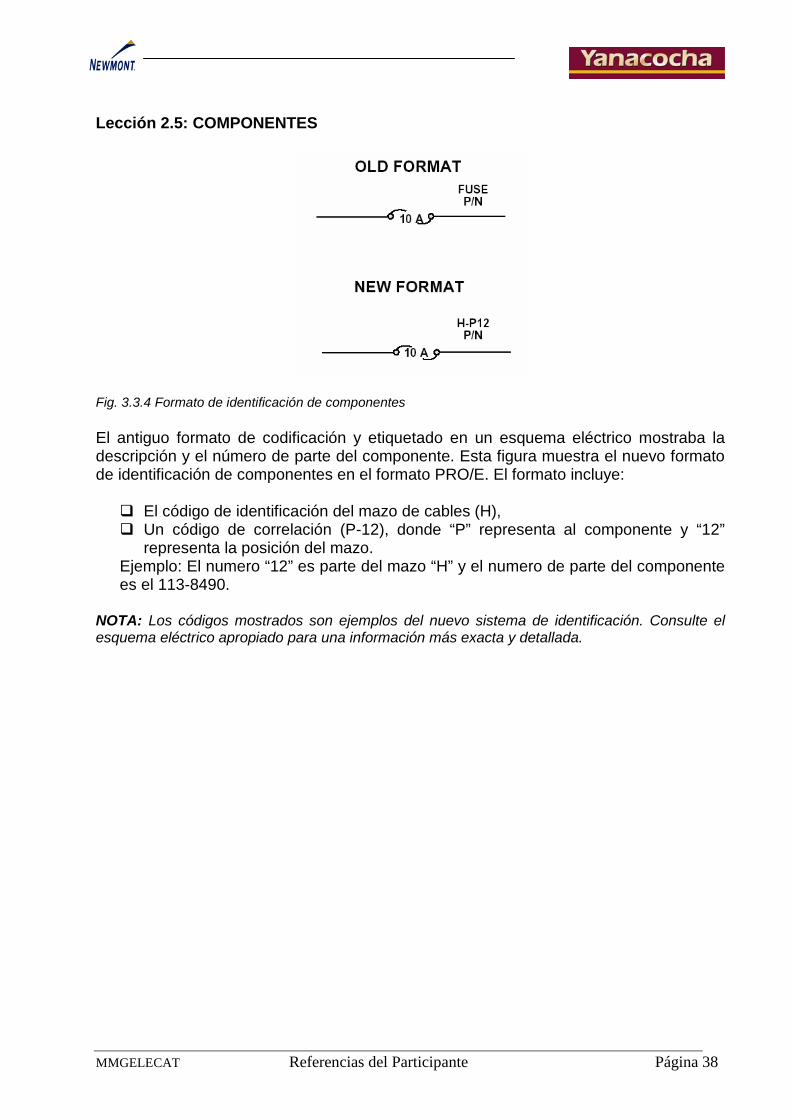
Fig. 3.3.4 Formato de identificación de componentes El antiguo formato de codificación y etiquetado en un esquema eléctrico mostraba la descripción y el número de parte del componente. Esta figura muestra el nuevo formato de identificación de componentes en el formato PRO/E. El formato incluye:
El código de identificación del mazo de cables (H), Un código de correlación (P-12), donde “P” representa al componente y “12”
representa la posición del mazo. Ejemplo: El numero “12” es parte del mazo “H” y el numero de parte del componente es el 113-8490.
NOTA: Los códigos mostrados son ejemplos del nuevo sistema de identificación. Consulte el esquema eléctrico apropiado para una información más exacta y detallada.
MMGELECATMMLDPWT401 Referencias del Participante Página 39
Lección 2.6: CONEXIONES O EMPALMES
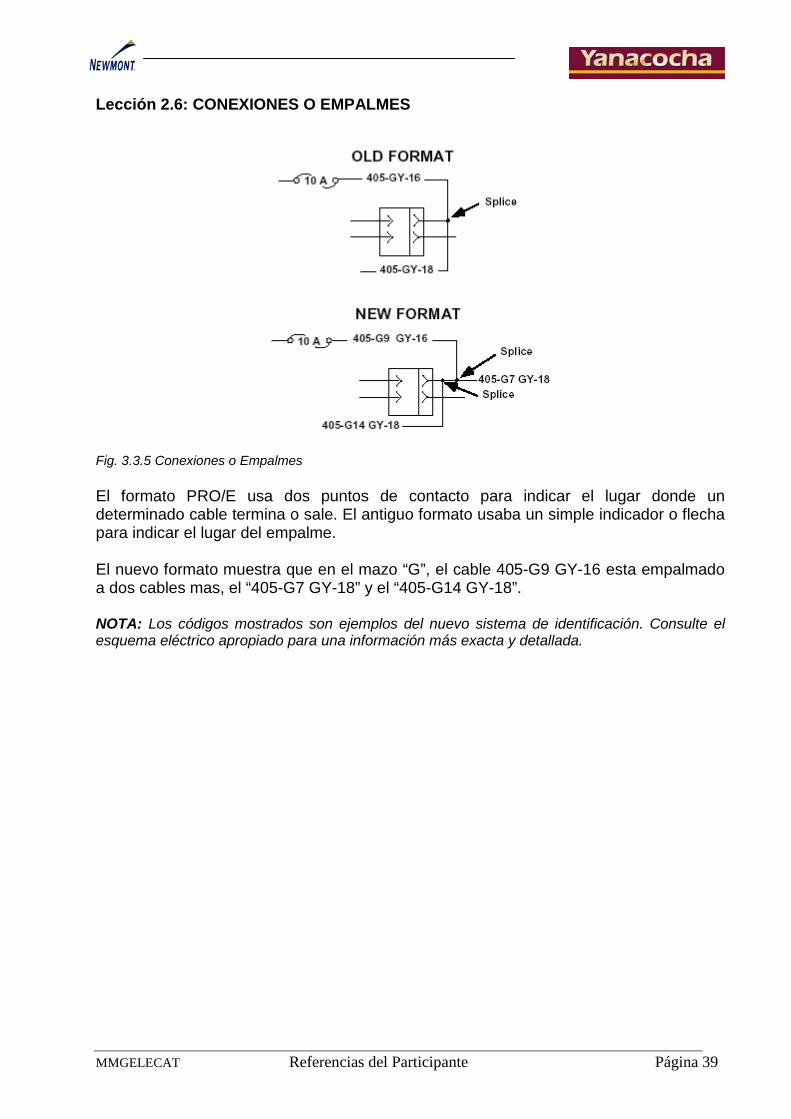
Fig. 3.3.5 Conexiones o Empalmes El formato PRO/E usa dos puntos de contacto para indicar el lugar donde un determinado cable termina o sale. El antiguo formato usaba un simple indicador o flecha para indicar el lugar del empalme. El nuevo formato muestra que en el mazo “G”, el cable 405-G9 GY-16 esta empalmado a dos cables mas, el “405-G7 GY-18” y el “405-G14 GY-18”.
NOTA: Los códigos mostrados son ejemplos del nuevo sistema de identificación. Consulte el esquema eléctrico apropiado para una información más exacta y detallada.
MMGELECATMMLDPWT401 Referencias del Participante Página 40
Lección 2.7: LECTURA DEL ESQUEMA ELECTRICO
Instrucciones: Utilizando el esquema eléctrico para el camión 785B, complete el cuestionario Siguiente. Complete los espacios o marque la respuesta correcta. 1. Ubique el sensor de temperatura de refrigerante del motor e indique las coordenadas en el plano y en la silueta de la máquina.
Coordenadas__________ Silueta ____________
2. ¿Cuál es el número de parte del sensor de temperatura del refrigerante del motor? ________________ 3. El conector del sensor de temperatura del refrigerante del motor. ¿Es macho o hembra? 4. El conector de la pregunta anterior tiene:
A. Pines solamente C. Sockets solamente B. Combinación de ambos D. Ninguna de las anteriores.
5. Cuál es el calibre del cable del sensor de la pregunta 1 A. 14 AWG B. 16 AWG
C. 18 AWG D. 20 AWG. 6. ¿Cuál es el número de parte del mazo de cables donde conecta el sensor de la pregunta 1? 7. En el sensor de la pregunta 1 el retorno análogo está conectado a:
A. Tierra del motor C. Tierra de la máquina B. Control del motor D. Ninguna de las anteriores.
8. Ubique el interruptor de flujo de refrigerante del motor
Coordenadas__________ Silueta ____________ 9. ¿Cuántos cables están unidos al interruptor de la pregunta anterior?
A. 2 C. 3 B. 4 D. 5
10. ¿Qué tipo de conexión es el usado en el interruptor de la pregunta N ° 8?
A. Sure Seal C. Deutsch B. Interno al interruptor D. Otro (explique)
MMGELECATMMLDPWT401 Referencias del Participante Página 41
11. Explique brevemente que significa una línea roja sólida en el plano 12. Explique que significa una línea segmentada coloreada sobre el plano 13. Explique brevemente qué significa una línea segmentada no coloreada sobre el plano. 14. Localice el sensor de velocidad del motor
Coordenadas__________ Silueta ____________
15. ¿Cuál es el número de parte del conector del sensor localizado? 16. ¿Cuál es el número de parte del mazo de cables de la máquina donde se conecta dicho sensor? 17. ¿El conector del sensor de velocidad de velocidad tiene?
a. Pines solamente c. Combinación de ambos b. Sockets solamente d. Ninguna de las anteriores
18. ¿Cuál es el número de parte del mazo principal al módulo de control del motor? 19. ¿Cuál es el calibre del cable usado en el mazo principal de la pregunta anterior?
20. El control automático del retardador muestra en la pantalla el código CID 627, el mal funcionamiento probable será:
A. Sensor de posición del acelerador B. Sensor de velocidad del motor C. Interruptor de presión del retardador D. Interruptor de presión de freno secundario.
MMGELECATMMLDPWT401 Referencias del Participante Página 42
21. El ECM del motor muestra el modo de falla 4. Explique la descripción de la falla. 22. ¿A que presión actúa el interruptor de frenos secundarios? 25. ¿Qué representa la letra “G” en la silueta de la máquina? 27. ¿Cuál es la resistencia de la bobina del solenoide del arranque de aire? 28. ¿Cuál es el número de forma del manual de servicio del control automático del retardador? 29. ¿Qué notación se le asigna a los cables de los circuitos de accesorios para
identificarlos? 30. En una inspección visual a una máquina, en un cableado se descubre un cable cortado en dos. El número sobre el cable es 999 blanco. ¿Qué circuito de la maquina es controlado por este cable?
MMGELECATMMLDPWT401 Referencias del Participante Página 43
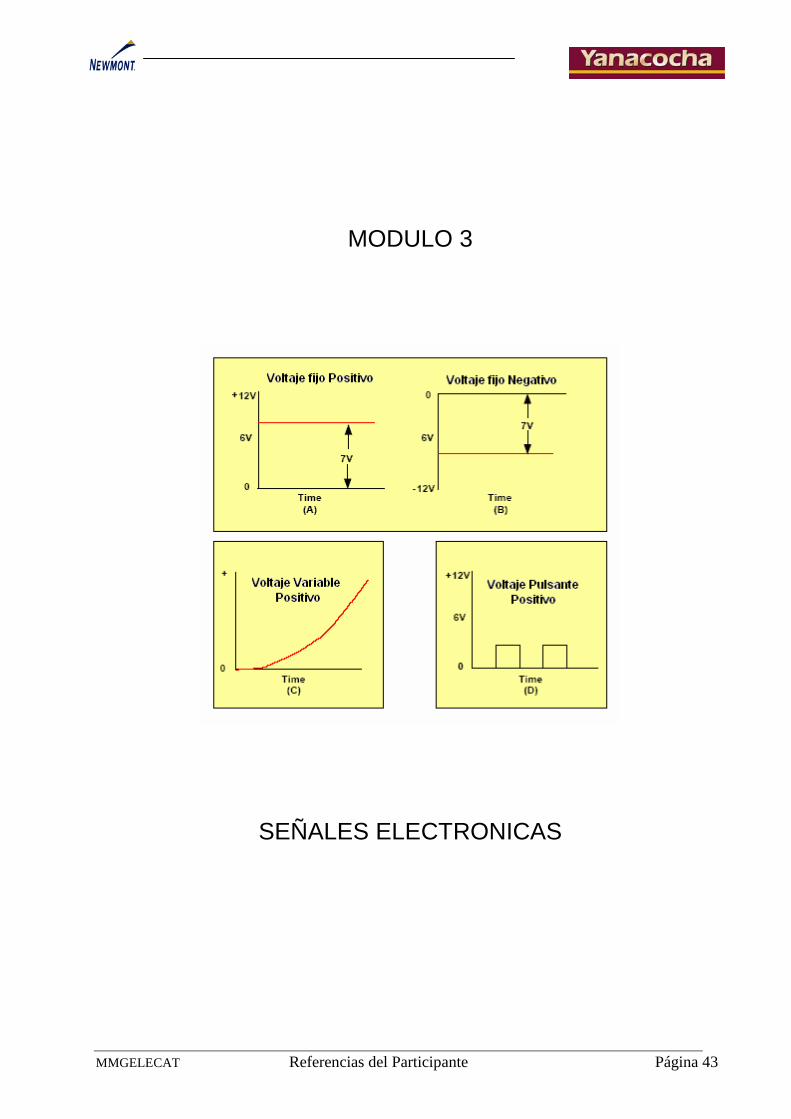
MODULO 3
SEÑALES ELECTRONICAS

MMGELECATMMLDPWT401 Referencias del Participante Página 44
MMGELECATMMLDPWT401 Referencias del Participante Página 45
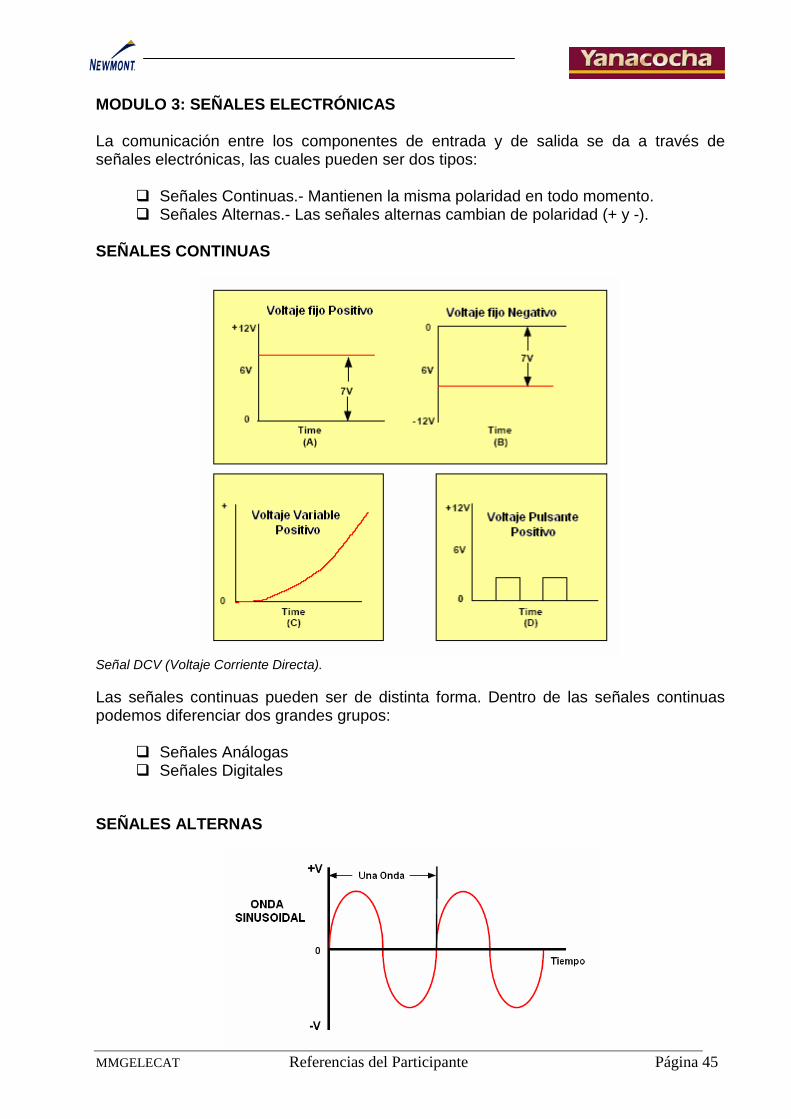
MODULO 3: SEÑALES ELECTRÓNICAS La comunicación entre los componentes de entrada y de salida se da a través de señales electrónicas, las cuales pueden ser dos tipos:
Señales Continuas.- Mantienen la misma polaridad en todo momento. Señales Alternas.- Las señales alternas cambian de polaridad (+ y -).
SEÑALES CONTINUAS
Señal DCV (Voltaje Corriente Directa). Las señales continuas pueden ser de distinta forma. Dentro de las señales continuas podemos diferenciar dos grandes grupos:
Señales Análogas Señales Digitales
SEÑALES ALTERNAS
MMGELECATMMLDPWT401 Referencias del Participante Página 46
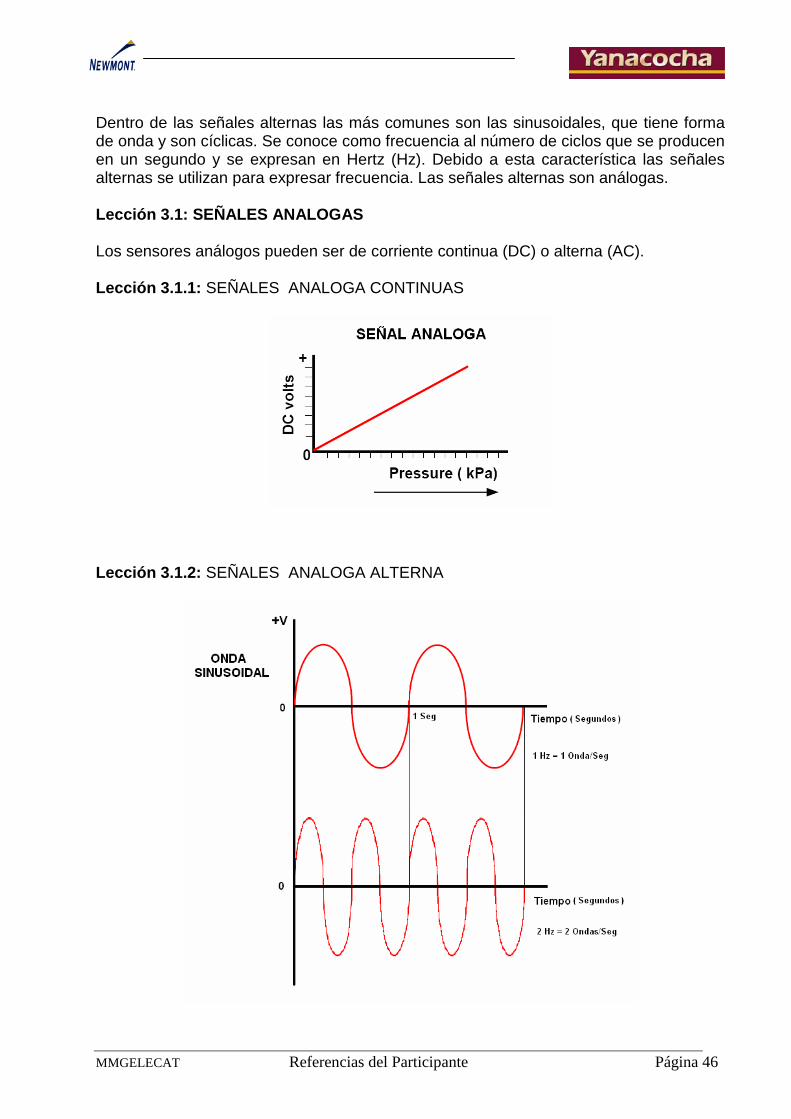
Dentro de las señales alternas las más comunes son las sinusoidales, que tiene forma de onda y son cíclicas. Se conoce como frecuencia al número de ciclos que se producen en un segundo y se expresan en Hertz (Hz). Debido a esta característica las señales alternas se utilizan para expresar frecuencia. Las señales alternas son análogas. Lección 3.1: SEÑALES ANALOGAS Los sensores análogos pueden ser de corriente continua (DC) o alterna (AC). Lección 3.1.1: SEÑALES ANALOGA CONTINUAS
Lección 3.1.2: SEÑALES ANALOGA ALTERNA
MMGELECATMMLDPWT401 Referencias del Participante Página 47
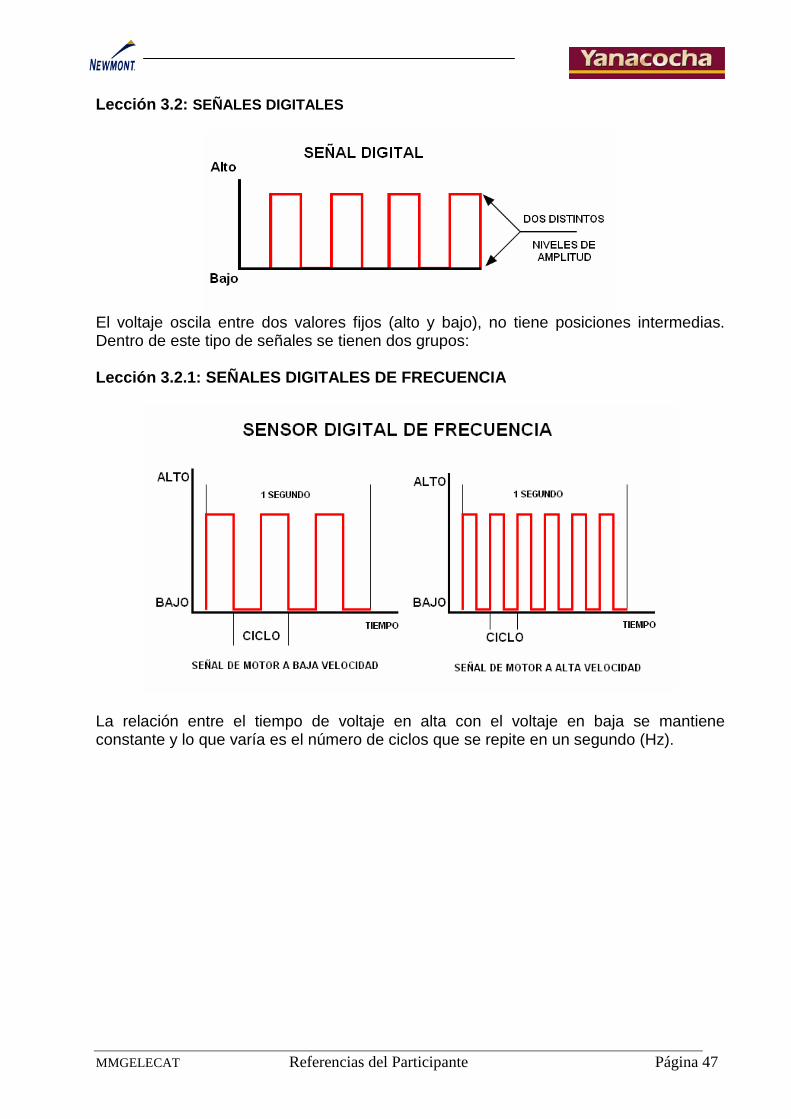
Lección 3.2: SEÑALES DIGITALES
El voltaje oscila entre dos valores fijos (alto y bajo), no tiene posiciones intermedias. Dentro de este tipo de señales se tienen dos grupos: Lección 3.2.1: SEÑALES DIGITALES DE FRECUENCIA
La relación entre el tiempo de voltaje en alta con el voltaje en baja se mantiene constante y lo que varía es el número de ciclos que se repite en un segundo (Hz).
MMGELECATMMLDPWT401 Referencias del Participante Página 48
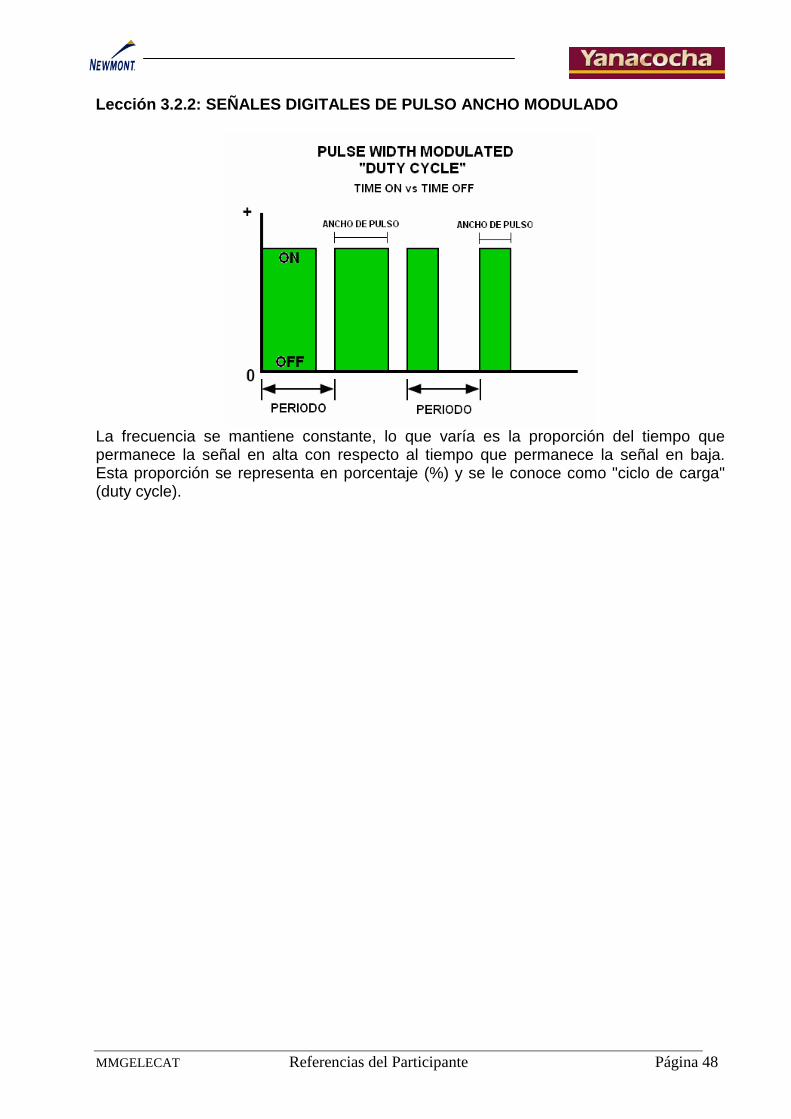
Lección 3.2.2: SEÑALES DIGITALES DE PULSO ANCHO MODULADO
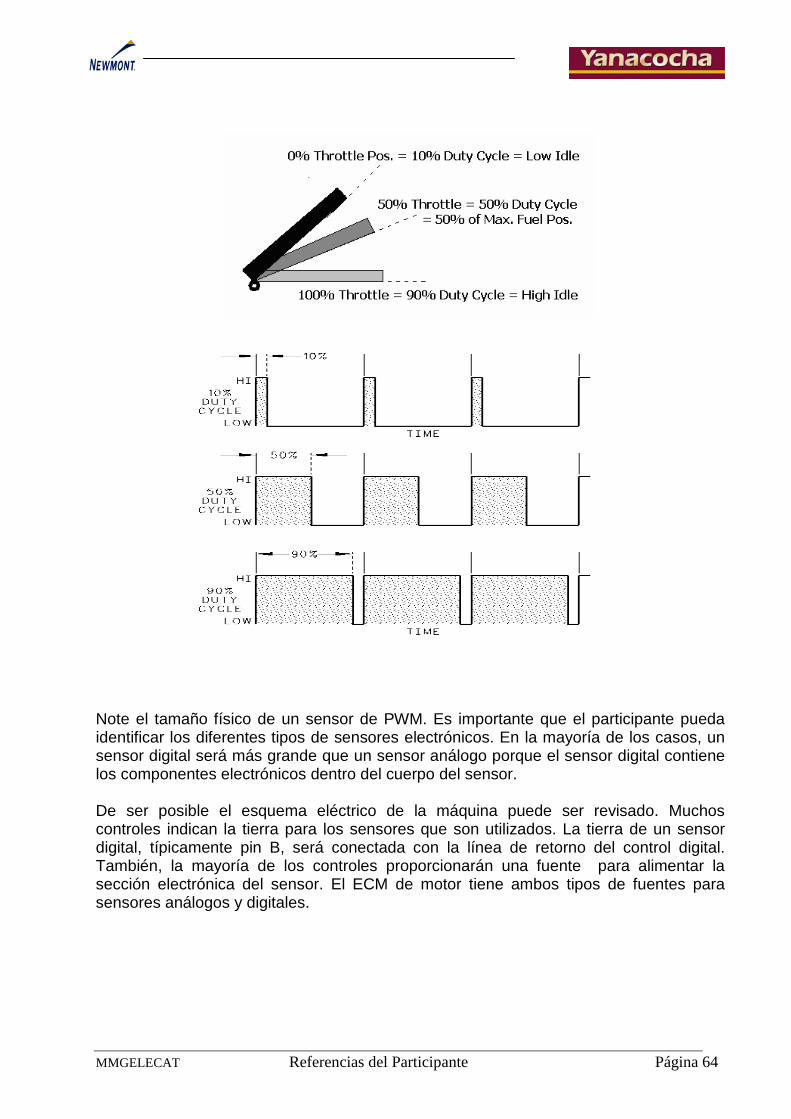
La frecuencia se mantiene constante, lo que varía es la proporción del tiempo que permanece la señal en alta con respecto al tiempo que permanece la señal en baja. Esta proporción se representa en porcentaje (%) y se le conoce como "ciclo de carga" (duty cycle).

MMGELECATMMLDPWT401 Referencias del Participante Página 49
MODULO 4
COMPONENTES DE ENTRADA

MMGELECATMMLDPWT401 Referencias del Participante Página 50
MMGELECATMMLDPWT401 Referencias del Participante Página 51
Lección 4: COMPONENTES DE ENTRADA La mayoría de dispositivos de entrada usados en los sistemas electrónicos caterpillar se pueden clasificar como:
Switches (Interruptores) Senders (Senders) Sensores
El técnico de servicio debe poder identificar cada uno de estos dispositivos, entender su operación y saber como utilizar las herramientas de diagnóstico para determinar su correcta operación. Se trataran ejemplos de cada uno de estos componentes en esta lección. Lección 4.1: Switches (Interruptores)
El sistema de Monitoreo Caterpillar usa una gran cantidad de diferentes tipos de interruptores para monitorear las condiciones de la maquina. Todos estos tienen funciones similares y pueden asociarse como dispositivos de “dos estados” (ON – OFF). Esto quiere decir que proporcionan una señal de entrada “abierta” (open) o una señal de entrada a “tierra” (grounded) al control electrónico. Este tipo de dispositivo o componente es usado en el antiguo Sistema de Monitoreo Electrónico (EMS) Caterpillar. Los nuevos sistemas de monitoreo aun siguen usando muchos de estos componentes con algunos nuevos dispositivos de entrada los mismos que serán detallados mas adelante. Ahora detallaremos algunos tipos de interruptores. Lección 4.1.1: INTERRUPTOR DE PRESION
MMGELECATMMLDPWT401 Referencias del Participante Página 52
La figura superior muestra un interruptor (switch) de presión de aceite de motor localizado (para este caso) en el lado derecho del motor. Los contactos del switch de presión están normalmente abiertos (con el motor apagado). Cuando se enciende el motor y la presión de aceite aumenta al nivel especificado, los contactos se cierran y completan el circuito a tierra. Si la presión de aceite de motor cae por debajo de un nivel especificado los contactos se abrirán, alertando al operador de una condición de peligro. Los interruptores (switches) utilizados por el Sistema de Monitoreo Caterpillar están en posición “cerrados” cuando operan normalmente. En caso de una rotura del cable la señal recibida por el sistema seria de “circuito abierto” resultando en un mensaje de advertencia para el operador. Las categorías y niveles de “Advertencia” se detallaran mas adelante. Lección 4.1.2: INTERRUPTOR DE VERIFICACIÓN / LUCES
Otro tipo de switch es el de tablero mostrado en la figura superior montado en un panel en la cabina. Este interruptor es utilizado por el operador para seleccionar ciertos modos de operación de la pantalla del modulo principal del sistema de monitoreo. El switch esta momentáneamente ENCENDIDO, y los contactos están normalmente abiertos. Cuando el switch es activado (presionado) el cable de señal provee una conexión a tierra al modulo de control permitiendo al operador acceder al modo seleccionado. Lección 4.1.3: VOLTAJE PULL-UP (REFERENCIA)
MMGELECATMMLDPWT401 Referencias del Participante Página 53
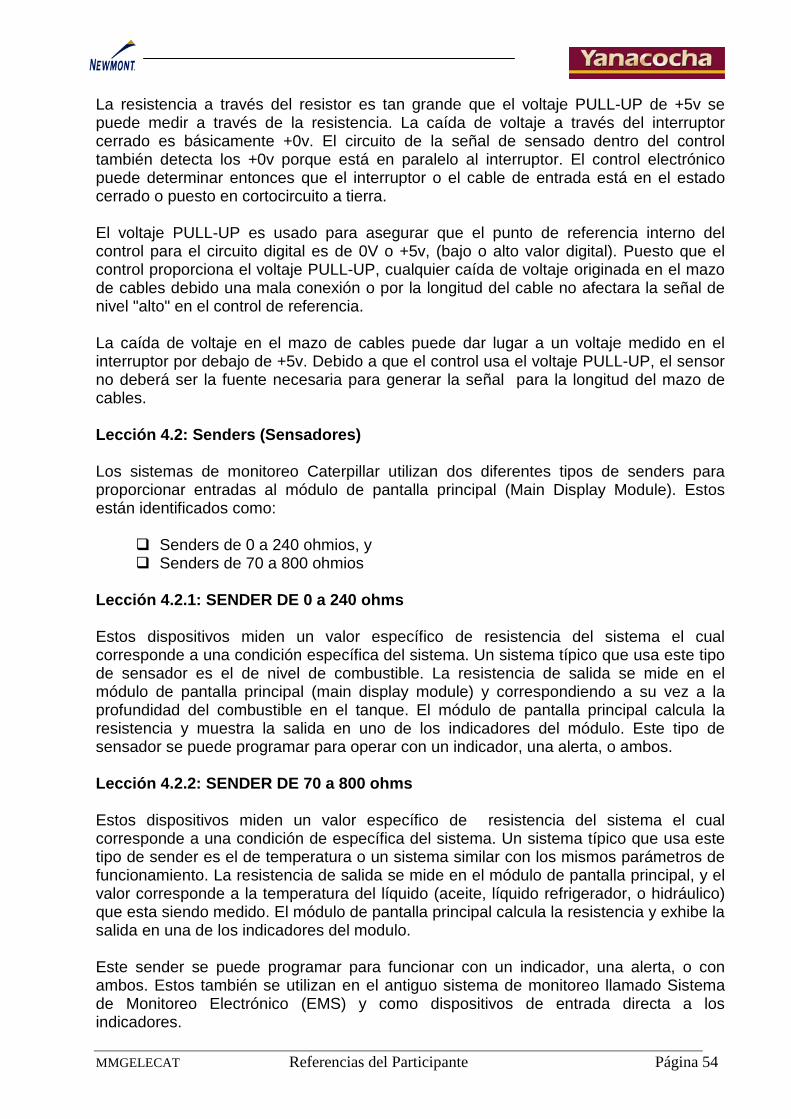
El control electrónico utiliza un voltaje de referencia interno llamado voltaje PULL-UP. El valor del voltaje varía y puede ser de +5V, +8V o +12V inclusive. Aunque el valor es diferente en algunos controles, el concepto es el mismo. Este voltaje está conectado al cable de señal a través de una resistencia (típicamente de 2K ohmios). El circuito de la señal de sensado en el control está conectado típicamente eléctricamente en paralelo con la resistencia del dispositivo de entrada. El análisis eléctrico básico del circuito revela que la caída de voltaje a través del dispositivo de entrada será considerada por el circuito de la señal de sensado dentro del control.
La figura superior muestra un diagrama de bloque de un interruptor conectado a la pata del dispositivo de entrada. Cuando el interruptor está en la posición abierta la resistencia del mismo es infinita. El circuito básico aparece como un divisor de voltaje. La resistencia a través del interruptor es tan grande que los +5v del voltaje PULL-UP se pueden medir a través del interruptor. El circuito de la señal de sensado dentro del control electrónico detecta los +5v también porque está en paralelo al interruptor. El control electrónico puede determinar entonces que el interruptor o el cable de entrada está en estado abierto.
La figura 3.1.10 muestra el mismo circuito con el interruptor en la posición cerrada. Cuando el interruptor está en la posición cerrada la resistencia del cable de señal es muy baja (los ohmios casi en cero). Ahora el circuito básico divisor de voltaje ha cambiado de valor. La resistencia del resistor en el control es perceptiblemente mayor que la resistencia del interruptor cerrado.
MMGELECATMMLDPWT401 Referencias del Participante Página 54
La resistencia a través del resistor es tan grande que el voltaje PULL-UP de +5v se puede medir a través de la resistencia. La caída de voltaje a través del interruptor cerrado es básicamente +0v. El circuito de la señal de sensado dentro del control también detecta los +0v porque está en paralelo al interruptor. El control electrónico puede determinar entonces que el interruptor o el cable de entrada está en el estado cerrado o puesto en cortocircuito a tierra. El voltaje PULL-UP es usado para asegurar que el punto de referencia interno del control para el circuito digital es de 0V o +5v, (bajo o alto valor digital). Puesto que el control proporciona el voltaje PULL-UP, cualquier caída de voltaje originada en el mazo de cables debido una mala conexión o por la longitud del cable no afectara la señal de nivel "alto" en el control de referencia. La caída de voltaje en el mazo de cables puede dar lugar a un voltaje medido en el interruptor por debajo de +5v. Debido a que el control usa el voltaje PULL-UP, el sensor no deberá ser la fuente necesaria para generar la señal para la longitud del mazo de cables. Lección 4.2: Senders (Sensadores) Los sistemas de monitoreo Caterpillar utilizan dos diferentes tipos de senders para proporcionar entradas al módulo de pantalla principal (Main Display Module). Estos están identificados como:
Senders de 0 a 240 ohmios, y Senders de 70 a 800 ohmios
Lección 4.2.1: SENDER DE 0 a 240 ohms Estos dispositivos miden un valor específico de resistencia del sistema el cual corresponde a una condición específica del sistema. Un sistema típico que usa este tipo de sensador es el de nivel de combustible. La resistencia de salida se mide en el módulo de pantalla principal (main display module) y correspondiendo a su vez a la profundidad del combustible en el tanque. El módulo de pantalla principal calcula la resistencia y muestra la salida en uno de los indicadores del módulo. Este tipo de sensador se puede programar para operar con un indicador, una alerta, o ambos. Lección 4.2.2: SENDER DE 70 a 800 ohms Estos dispositivos miden un valor específico de resistencia del sistema el cual corresponde a una condición de específica del sistema. Un sistema típico que usa este tipo de sender es el de temperatura o un sistema similar con los mismos parámetros de funcionamiento. La resistencia de salida se mide en el módulo de pantalla principal, y el valor corresponde a la temperatura del líquido (aceite, líquido refrigerador, o hidráulico) que esta siendo medido. El módulo de pantalla principal calcula la resistencia y exhibe la salida en una de los indicadores del modulo. Este sender se puede programar para funcionar con un indicador, una alerta, o con ambos. Estos también se utilizan en el antiguo sistema de monitoreo llamado Sistema de Monitoreo Electrónico (EMS) y como dispositivos de entrada directa a los indicadores.
MMGELECATMMLDPWT401 Referencias del Participante Página 55
SENDER DE NIVEL DE COMBUSTIBLE La figura muestra un sender de 0 a 240 ohmios usado para medir el nivel de combustible. El sender (flecha) está situado en la tapa del depósito de combustible y mide la profundidad del combustible en el tanque. Dos tipos de senders nivel están disponibles para el uso en el sistema de monitoreo Caterpillar. Uno tiene una gama interna de resistencia entre 0 y 90 ohmios, y el otro tipo tiene una gama de resistencia entre 33 y 240 ohmios. La profundidad del combustible en el tanque determina la posición que el flotador viajará para arriba o para abajo en la barra espiral, rotando la barra mientras se mueve. El sender esta unido al ensamble superior de la tapa y se acopla magnéticamente a la barra espiral. La resistencia de salida del sender cambia mientras que la barra gira y es medida por el módulo de pantalla principal o exhibida por el indicador de combustible. Si una falla ocurre en el circuito del sender de nivel de combustible, las causas probables son:
- Sender - Tierra abierta - Señal puesta en cortocircuito a +Batería - Cable de señal roto
NOTA: El sender resistivo puede ser reparado por separado del conjunto de nivel de combustible. SENDER RESISTIVO
La figura muestra un sender del tipo resistivo el cuál se utiliza para detectar temperaturas en fluidos. La resistencia del sender está típicamente en el radio de los 70 a 800 ohmios. La salida de la resistencia varía con la temperatura del líquido y la señal se envía al módulo de pantalla principal para mostrarlo en el módulo de indicadores. La resistencia disminuye típicamente mientras que la temperatura aumenta. Los terminales del sender dependen del uso de una base de montaje para conectarse a tierra de la máquina para completar el circuito de la señal. Debido a esto es importante tener buen contacto eléctrico entre la base del sender y el metal en el que están montados. El uso cintas de teflón para los propósitos de sellado puede interferir con la conductividad eléctrica del empalme. La mayoría de los senders utilizan una arandela
MMGELECATMMLDPWT401 Referencias del Participante Página 56
aislante que mantiene el cable con el terminal central de ponerse en cortocircuito a la cubierta del remitente. Si ocurre una falla en el sender, el módulo de pantalla principal alertará al operador con una advertencia de categoría 2 y registrará una avería en el módulo. El indicador se mostrará en la gama de alta temperatura. La siguiente información de diagnóstico será almacenada en la memoria del modulo. La información disponible para el sistema de temperatura del convertidor de torque es: MID 30, CID 177, FMI 04. La causa probable es: El circuito de la señal esta en cortocircuito a tierra Lección 4.3: SENSORES Esta sección discutirá los siguientes tipos de sensores:
Sensores de frecuencia Sensores analógicos Sensores digitales Combinación de sensores analogo-digital
Lección 4.3.1: SENSORES DE FRECUENCIA
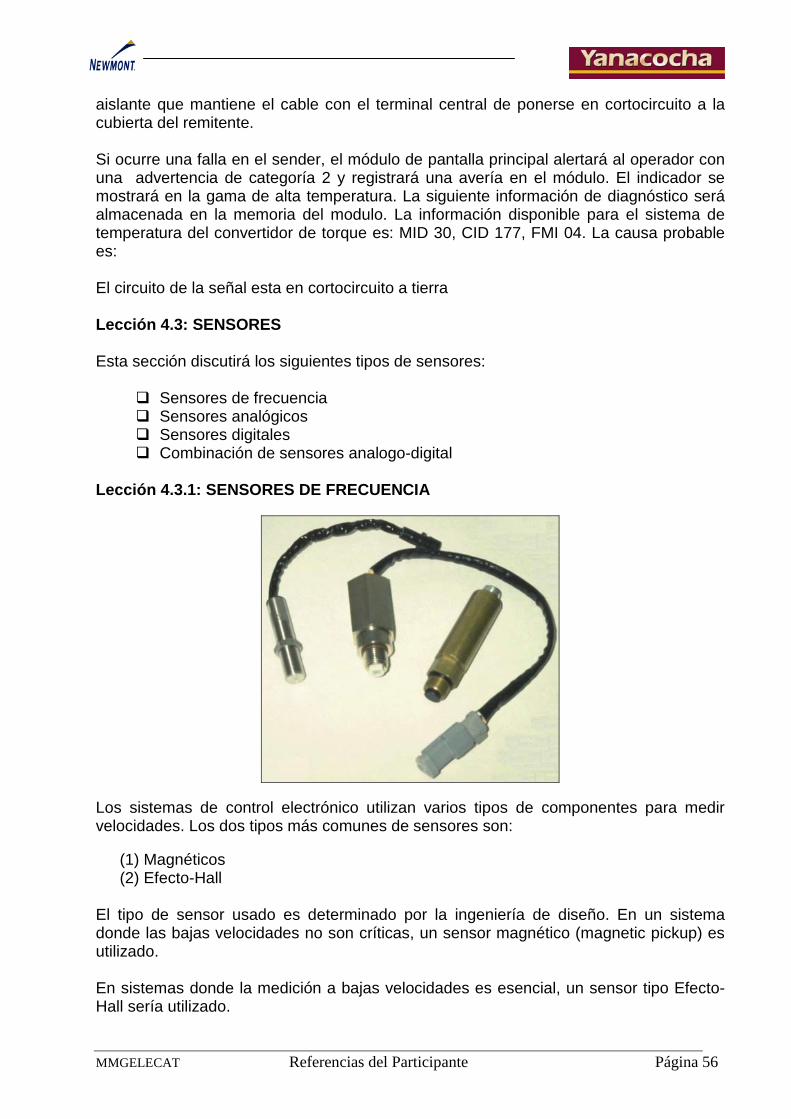
Los sistemas de control electrónico utilizan varios tipos de componentes para medir velocidades. Los dos tipos más comunes de sensores son:
(1) Magnéticos (2) Efecto-Hall
El tipo de sensor usado es determinado por la ingeniería de diseño. En un sistema donde las bajas velocidades no son críticas, un sensor magnético (magnetic pickup) es utilizado. En sistemas donde la medición a bajas velocidades es esencial, un sensor tipo Efecto-Hall sería utilizado.
MMGELECATMMLDPWT401 Referencias del Participante Página 57
Un ejemplo de un sistema que usa un sensor de velocidad magnético del tipo pickup seria el de velocidad del motor el mismo que se presentaría en un tacómetro. Velocidades por debajo de 600 RPM no son críticas, entonces, medir las RPM con el fin de sincronizar un motor electrónico requiere mediciones de velocidad cercanas a las 0 RPM. En este caso particular, un sensor tipo Efecto-Hall sería utilizado. Lección 4.3.2: SENSOR DE FRECUENCIA - DETECTOR MAGNETICO (MAGNETIC PICK-UP)
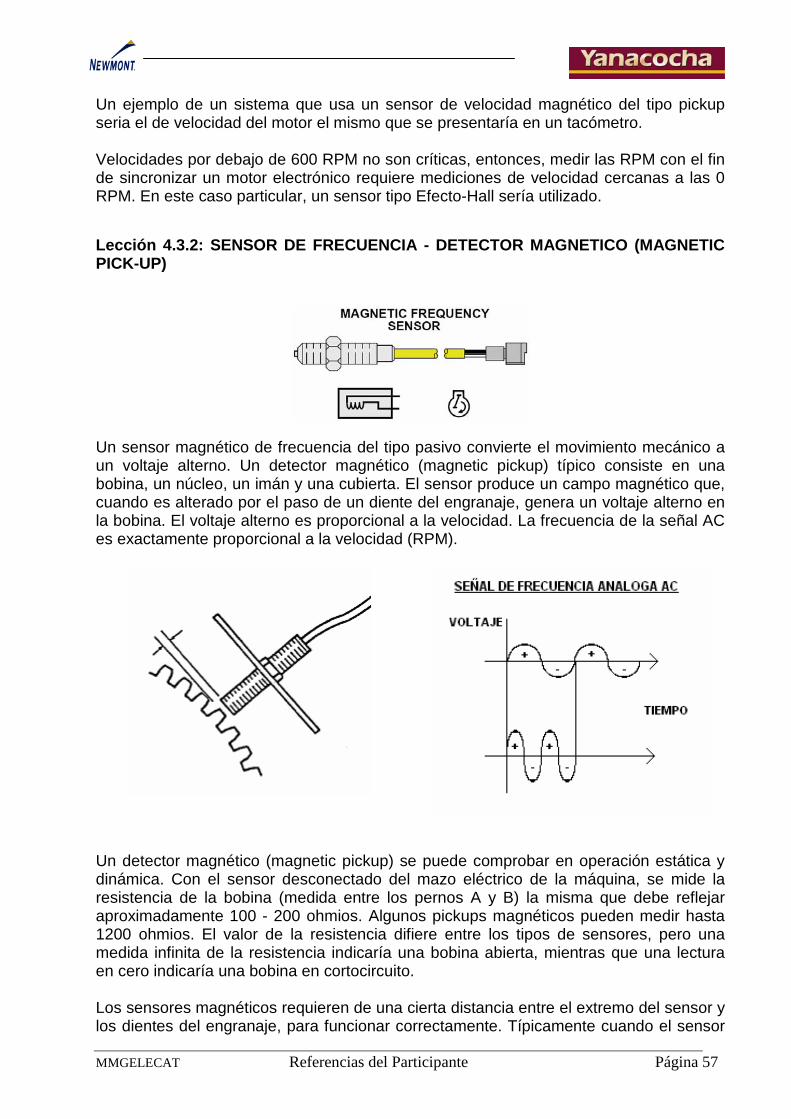
Un sensor magnético de frecuencia del tipo pasivo convierte el movimiento mecánico a un voltaje alterno. Un detector magnético (magnetic pickup) típico consiste en una bobina, un núcleo, un imán y una cubierta. El sensor produce un campo magnético que, cuando es alterado por el paso de un diente del engranaje, genera un voltaje alterno en la bobina. El voltaje alterno es proporcional a la velocidad. La frecuencia de la señal AC es exactamente proporcional a la velocidad (RPM).
Un detector magnético (magnetic pickup) se puede comprobar en operación estática y dinámica. Con el sensor desconectado del mazo eléctrico de la máquina, se mide la resistencia de la bobina (medida entre los pernos A y B) la misma que debe reflejar aproximadamente 100 - 200 ohmios. Algunos pickups magnéticos pueden medir hasta 1200 ohmios. El valor de la resistencia difiere entre los tipos de sensores, pero una medida infinita de la resistencia indicaría una bobina abierta, mientras que una lectura en cero indicaría una bobina en cortocircuito. Los sensores magnéticos requieren de una cierta distancia entre el extremo del sensor y los dientes del engranaje, para funcionar correctamente. Típicamente cuando el sensor
MMGELECATMMLDPWT401 Referencias del Participante Página 58
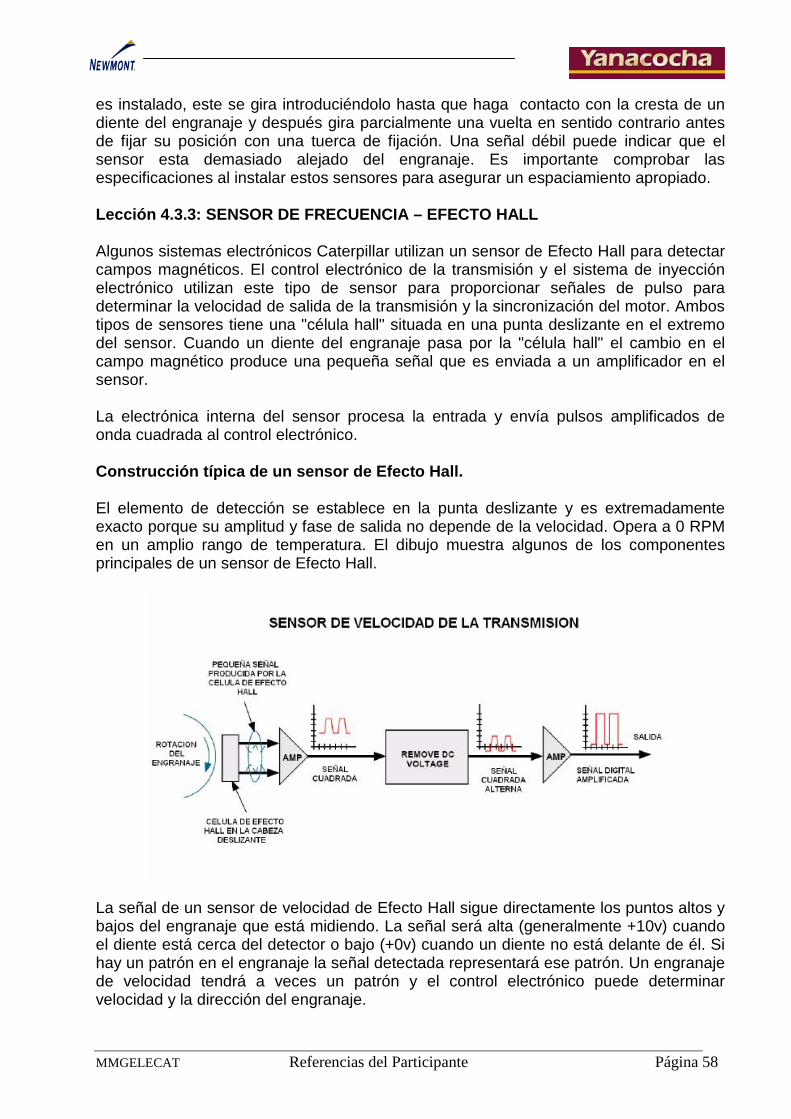
es instalado, este se gira introduciéndolo hasta que haga contacto con la cresta de un diente del engranaje y después gira parcialmente una vuelta en sentido contrario antes de fijar su posición con una tuerca de fijación. Una señal débil puede indicar que el sensor esta demasiado alejado del engranaje. Es importante comprobar las especificaciones al instalar estos sensores para asegurar un espaciamiento apropiado. Lección 4.3.3: SENSOR DE FRECUENCIA – EFECTO HALL Algunos sistemas electrónicos Caterpillar utilizan un sensor de Efecto Hall para detectar campos magnéticos. El control electrónico de la transmisión y el sistema de inyección electrónico utilizan este tipo de sensor para proporcionar señales de pulso para determinar la velocidad de salida de la transmisión y la sincronización del motor. Ambos tipos de sensores tiene una "célula hall" situada en una punta deslizante en el extremo del sensor. Cuando un diente del engranaje pasa por la "célula hall" el cambio en el campo magnético produce una pequeña señal que es enviada a un amplificador en el sensor. La electrónica interna del sensor procesa la entrada y envía pulsos amplificados de onda cuadrada al control electrónico. Construcción típica de un sensor de Efecto Hall. El elemento de detección se establece en la punta deslizante y es extremadamente exacto porque su amplitud y fase de salida no depende de la velocidad. Opera a 0 RPM en un amplio rango de temperatura. El dibujo muestra algunos de los componentes principales de un sensor de Efecto Hall.
La señal de un sensor de velocidad de Efecto Hall sigue directamente los puntos altos y bajos del engranaje que está midiendo. La señal será alta (generalmente +10v) cuando el diente está cerca del detector o bajo (+0v) cuando un diente no está delante de él. Si hay un patrón en el engranaje la señal detectada representará ese patrón. Un engranaje de velocidad tendrá a veces un patrón y el control electrónico puede determinar velocidad y la dirección del engranaje.
MMGELECATMMLDPWT401 Referencias del Participante Página 59
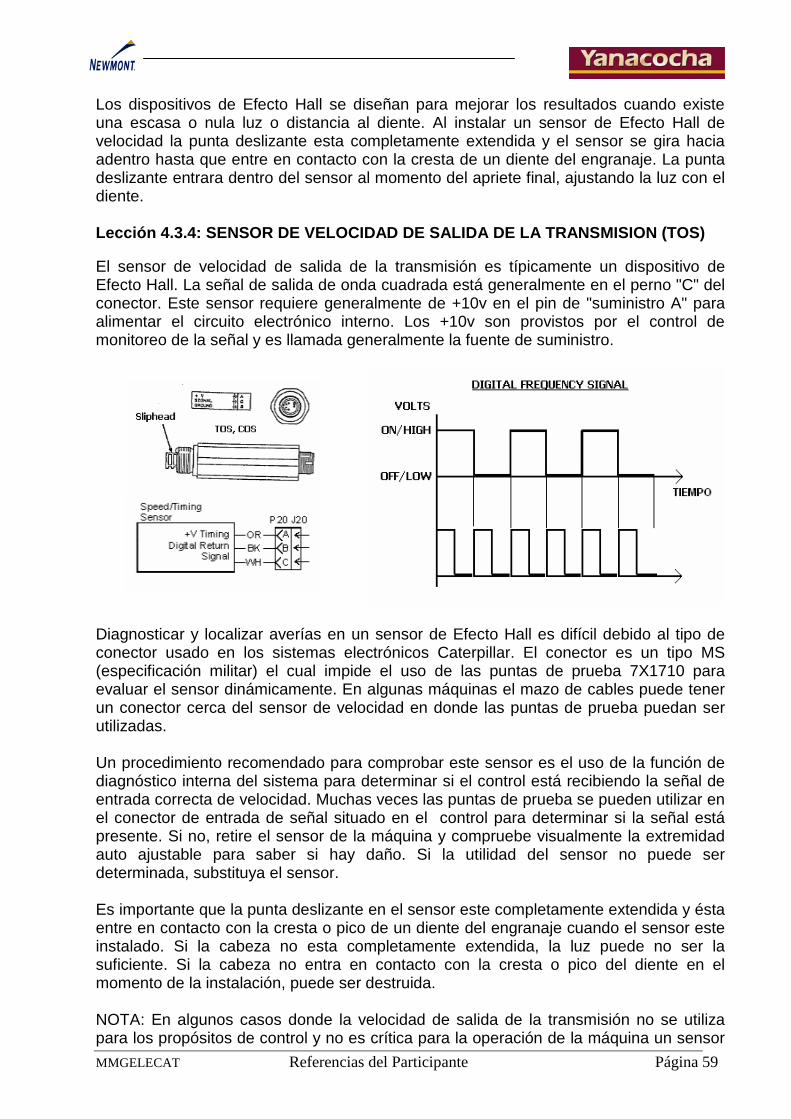
Los dispositivos de Efecto Hall se diseñan para mejorar los resultados cuando existe una escasa o nula luz o distancia al diente. Al instalar un sensor de Efecto Hall de velocidad la punta deslizante esta completamente extendida y el sensor se gira hacia adentro hasta que entre en contacto con la cresta de un diente del engranaje. La punta deslizante entrara dentro del sensor al momento del apriete final, ajustando la luz con el diente. Lección 4.3.4: SENSOR DE VELOCIDAD DE SALIDA DE LA TRANSMISION (TOS) El sensor de velocidad de salida de la transmisión es típicamente un dispositivo de Efecto Hall. La señal de salida de onda cuadrada está generalmente en el perno "C" del conector. Este sensor requiere generalmente de +10v en el pin de "suministro A" para alimentar el circuito electrónico interno. Los +10v son provistos por el control de monitoreo de la señal y es llamada generalmente la fuente de suministro.
Diagnosticar y localizar averías en un sensor de Efecto Hall es difícil debido al tipo de conector usado en los sistemas electrónicos Caterpillar. El conector es un tipo MS (especificación militar) el cual impide el uso de las puntas de prueba 7X1710 para evaluar el sensor dinámicamente. En algunas máquinas el mazo de cables puede tener un conector cerca del sensor de velocidad en donde las puntas de prueba puedan ser utilizadas. Un procedimiento recomendado para comprobar este sensor es el uso de la función de diagnóstico interna del sistema para determinar si el control está recibiendo la señal de entrada correcta de velocidad. Muchas veces las puntas de prueba se pueden utilizar en el conector de entrada de señal situado en el control para determinar si la señal está presente. Si no, retire el sensor de la máquina y compruebe visualmente la extremidad auto ajustable para saber si hay daño. Si la utilidad del sensor no puede ser determinada, substituya el sensor. Es importante que la punta deslizante en el sensor este completamente extendida y ésta entre en contacto con la cresta o pico de un diente del engranaje cuando el sensor este instalado. Si la cabeza no esta completamente extendida, la luz puede no ser la suficiente. Si la cabeza no entra en contacto con la cresta o pico del diente en el momento de la instalación, puede ser destruida. NOTA: En algunos casos donde la velocidad de salida de la transmisión no se utiliza para los propósitos de control y no es crítica para la operación de la máquina un sensor
MMGELECATMMLDPWT401 Referencias del Participante Página 60
de velocidad del tipo PICKUP puede ser utilizado. Esto sería determinado por el diseño del sistema de control. Lección 4.3.5: SENSOR DE VELOCIDAD Y SINCRONIZACION
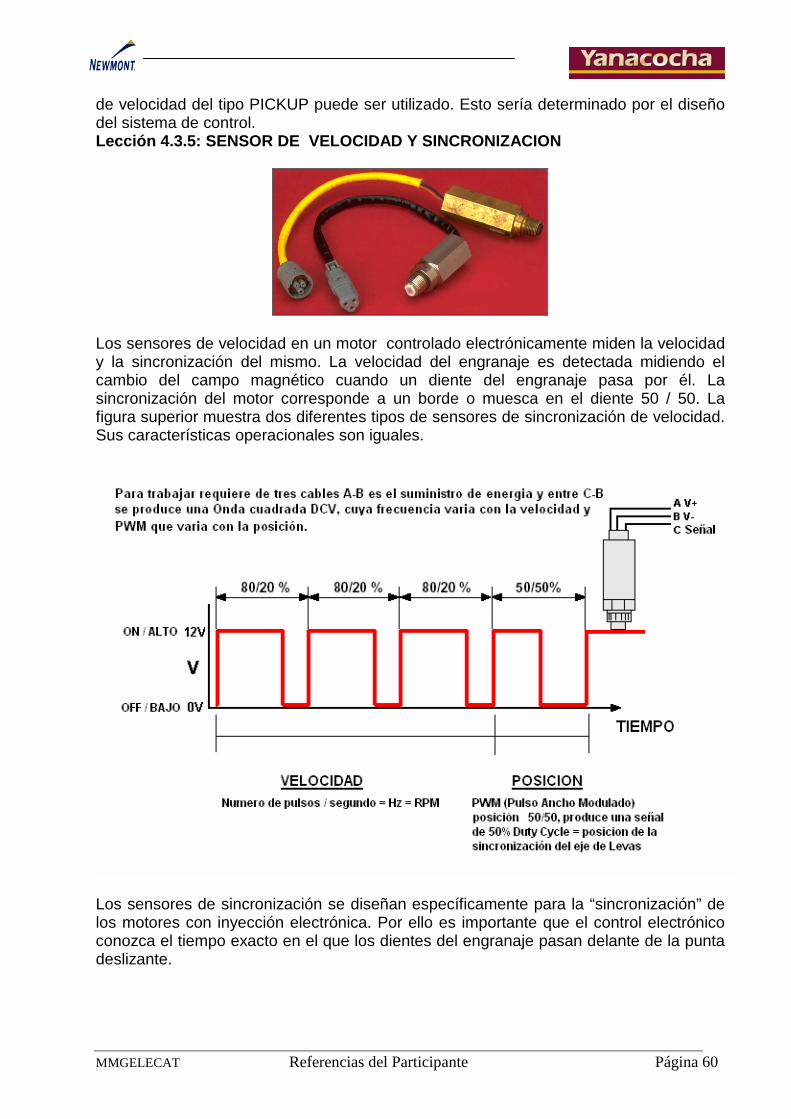
Los sensores de velocidad en un motor controlado electrónicamente miden la velocidad y la sincronización del mismo. La velocidad del engranaje es detectada midiendo el cambio del campo magnético cuando un diente del engranaje pasa por él. La sincronización del motor corresponde a un borde o muesca en el diente 50 / 50. La figura superior muestra dos diferentes tipos de sensores de sincronización de velocidad. Sus características operacionales son iguales.
Los sensores de sincronización se diseñan específicamente para la “sincronización” de los motores con inyección electrónica. Por ello es importante que el control electrónico conozca el tiempo exacto en el que los dientes del engranaje pasan delante de la punta deslizante.
MMGELECATMMLDPWT401 Referencias del Participante Página 61
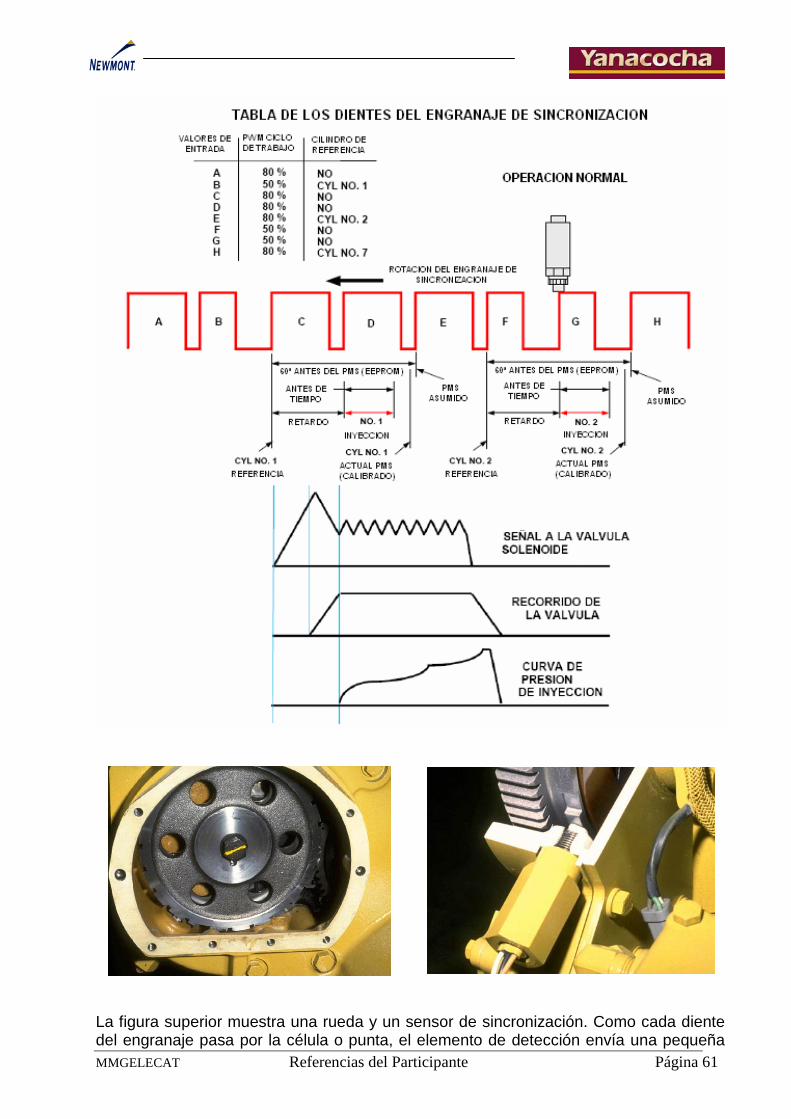
La figura superior muestra una rueda y un sensor de sincronización. Como cada diente del engranaje pasa por la célula o punta, el elemento de detección envía una pequeña
MMGELECATMMLDPWT401 Referencias del Participante Página 62
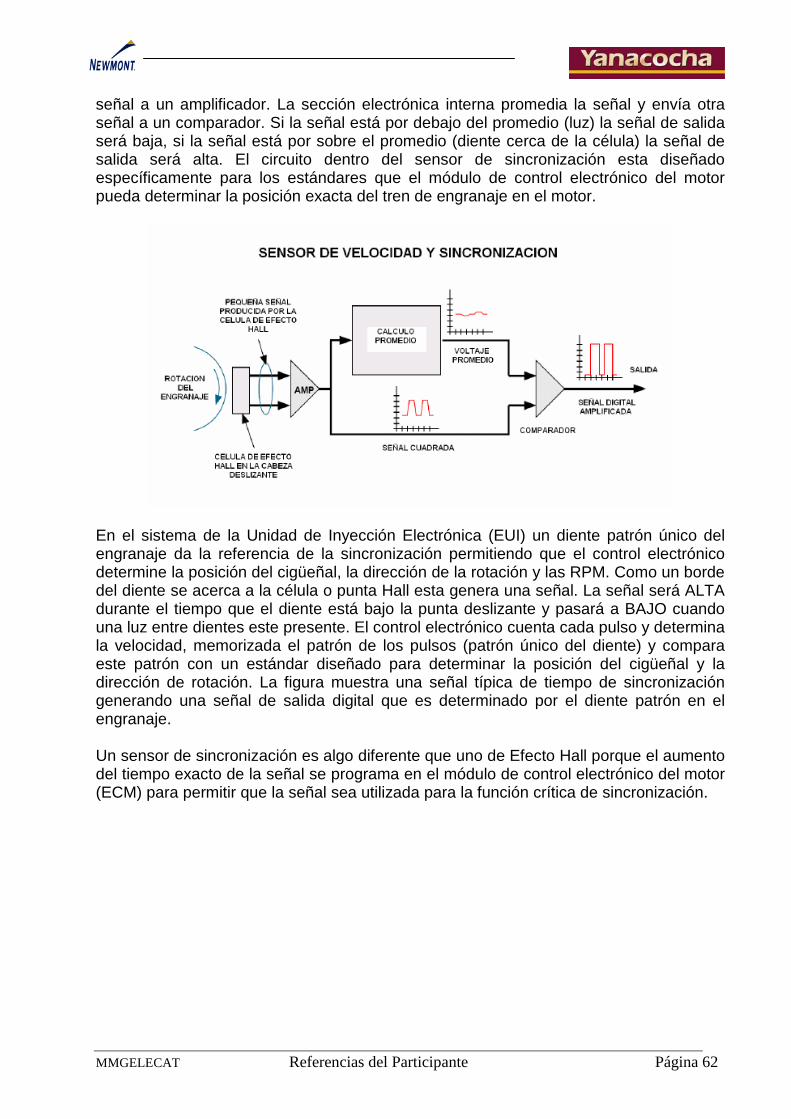
señal a un amplificador. La sección electrónica interna promedia la señal y envía otra señal a un comparador. Si la señal está por debajo del promedio (luz) la señal de salida será baja, si la señal está por sobre el promedio (diente cerca de la célula) la señal de salida será alta. El circuito dentro del sensor de sincronización esta diseñado específicamente para los estándares que el módulo de control electrónico del motor pueda determinar la posición exacta del tren de engranaje en el motor.
En el sistema de la Unidad de Inyección Electrónica (EUI) un diente patrón único del engranaje da la referencia de la sincronización permitiendo que el control electrónico determine la posición del cigüeñal, la dirección de la rotación y las RPM. Como un borde del diente se acerca a la célula o punta Hall esta genera una señal. La señal será ALTA durante el tiempo que el diente está bajo la punta deslizante y pasará a BAJO cuando una luz entre dientes este presente. El control electrónico cuenta cada pulso y determina la velocidad, memorizada el patrón de los pulsos (patrón único del diente) y compara este patrón con un estándar diseñado para determinar la posición del cigüeñal y la dirección de rotación. La figura muestra una señal típica de tiempo de sincronización generando una señal de salida digital que es determinado por el diente patrón en el engranaje. Un sensor de sincronización es algo diferente que uno de Efecto Hall porque el aumento del tiempo exacto de la señal se programa en el módulo de control electrónico del motor (ECM) para permitir que la señal sea utilizada para la función crítica de sincronización.

MMGELECATMMLDPWT401 Referencias del Participante Página 63
Lección 4.3.6: SENSOR DIGITAL DE PWM
Los Sensores Digitales en sistemas electrónicos Caterpillar utilizan un método llamado Modulación de Ancho de Pulso (PWM) para proporcionar la entrada electrónica variable necesaria en algunos controles. Los requisitos de uso determinarán la selección de cada dispositivo. Los Sensores Digitales se utilizan para medir una variedad de aplicaciones, tales como posición, velocidad, fuerza, presión, etc. Para exponer sobre los sensores digitales PWM, un sensor de posición del pedal del acelerador será utilizado. Todos los sensores PWM realizan la misma función básica.
MMGELECATMMLDPWT401 Referencias del Participante Página 64
Note el tamaño físico de un sensor de PWM. Es importante que el participante pueda identificar los diferentes tipos de sensores electrónicos. En la mayoría de los casos, un sensor digital será más grande que un sensor análogo porque el sensor digital contiene los componentes electrónicos dentro del cuerpo del sensor. De ser posible el esquema eléctrico de la máquina puede ser revisado. Muchos controles indican la tierra para los sensores que son utilizados. La tierra de un sensor digital, típicamente pin B, será conectada con la línea de retorno del control digital. También, la mayoría de los controles proporcionarán una fuente para alimentar la sección electrónica del sensor. El ECM de motor tiene ambos tipos de fuentes para sensores análogos y digitales.
MMGELECATMMLDPWT401 Referencias del Participante Página 65
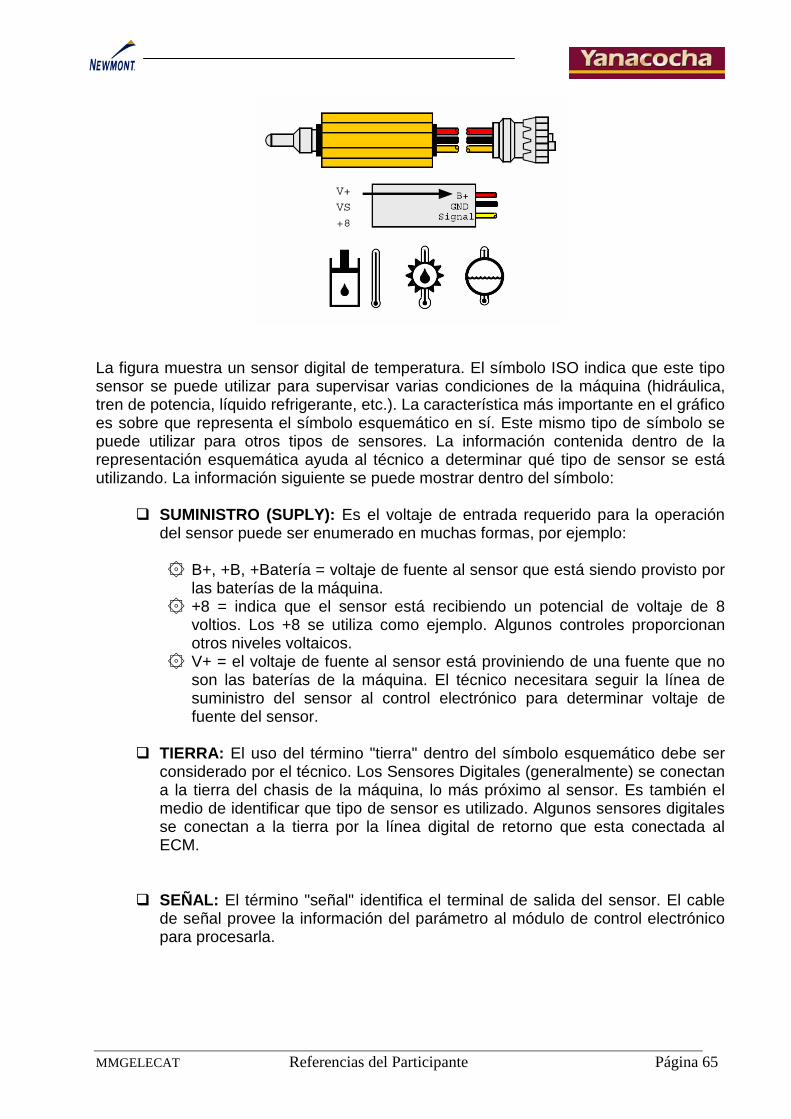
La figura muestra un sensor digital de temperatura. El símbolo ISO indica que este tipo sensor se puede utilizar para supervisar varias condiciones de la máquina (hidráulica, tren de potencia, líquido refrigerante, etc.). La característica más importante en el gráfico es sobre que representa el símbolo esquemático en sí. Este mismo tipo de símbolo se puede utilizar para otros tipos de sensores. La información contenida dentro de la representación esquemática ayuda al técnico a determinar qué tipo de sensor se está utilizando. La información siguiente se puede mostrar dentro del símbolo:
SUMINISTRO (SUPLY): Es el voltaje de entrada requerido para la operación del sensor puede ser enumerado en muchas formas, por ejemplo:
۞ B+, +B, +Batería = voltaje de fuente al sensor que está siendo provisto por
las baterías de la máquina. ۞ +8 = indica que el sensor está recibiendo un potencial de voltaje de 8
voltios. Los +8 se utiliza como ejemplo. Algunos controles proporcionan otros niveles voltaicos.
۞ V+ = el voltaje de fuente al sensor está proviniendo de una fuente que no son las baterías de la máquina. El técnico necesitara seguir la línea de suministro del sensor al control electrónico para determinar voltaje de fuente del sensor.
TIERRA: El uso del término "tierra" dentro del símbolo esquemático debe ser
considerado por el técnico. Los Sensores Digitales (generalmente) se conectan a la tierra del chasis de la máquina, lo más próximo al sensor. Es también el medio de identificar que tipo de sensor es utilizado. Algunos sensores digitales se conectan a la tierra por la línea digital de retorno que esta conectada al ECM.
SEÑAL: El término "señal" identifica el terminal de salida del sensor. El cable de señal provee la información del parámetro al módulo de control electrónico para procesarla.
MMGELECATMMLDPWT401 Referencias del Participante Página 66
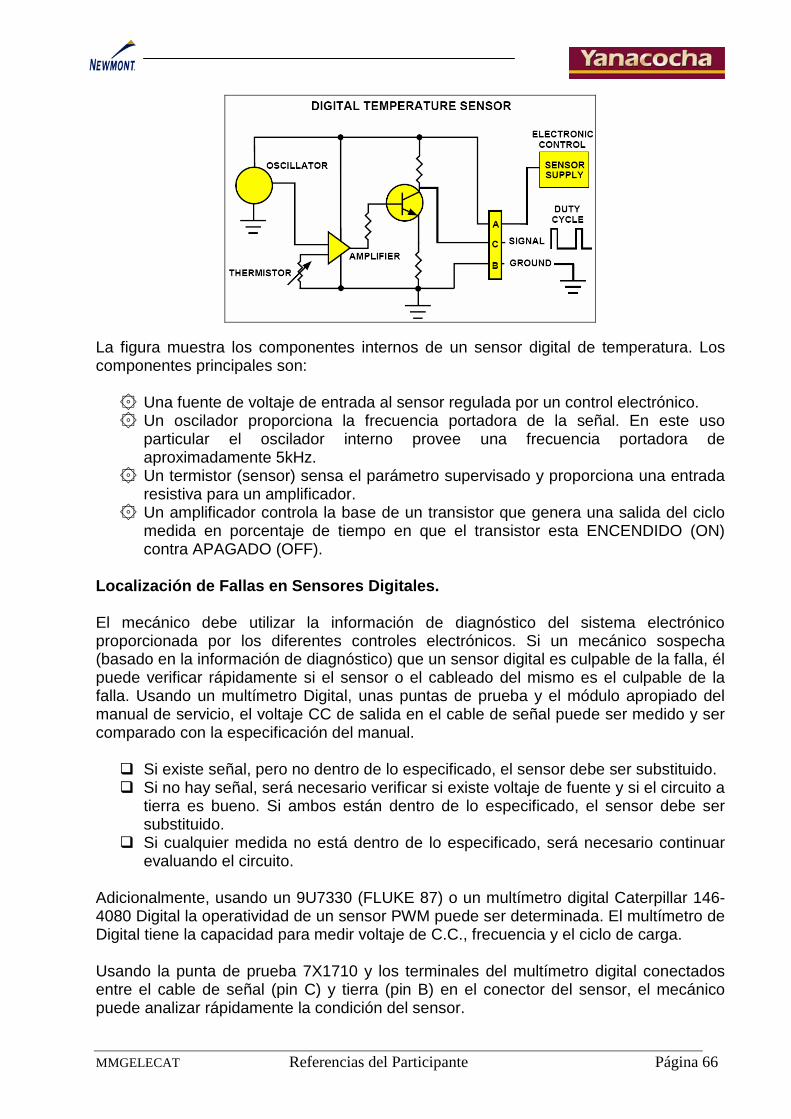
La figura muestra los componentes internos de un sensor digital de temperatura. Los componentes principales son:
۞ Una fuente de voltaje de entrada al sensor regulada por un control electrónico. ۞ Un oscilador proporciona la frecuencia portadora de la señal. En este uso
particular el oscilador interno provee una frecuencia portadora de aproximadamente 5kHz.
۞ Un termistor (sensor) sensa el parámetro supervisado y proporciona una entrada resistiva para un amplificador.
۞ Un amplificador controla la base de un transistor que genera una salida del ciclo medida en porcentaje de tiempo en que el transistor esta ENCENDIDO (ON) contra APAGADO (OFF).
Localización de Fallas en Sensores Digitales. El mecánico debe utilizar la información de diagnóstico del sistema electrónico proporcionada por los diferentes controles electrónicos. Si un mecánico sospecha (basado en la información de diagnóstico) que un sensor digital es culpable de la falla, él puede verificar rápidamente si el sensor o el cableado del mismo es el culpable de la falla. Usando un multímetro Digital, unas puntas de prueba y el módulo apropiado del manual de servicio, el voltaje CC de salida en el cable de señal puede ser medido y ser comparado con la especificación del manual.
Si existe señal, pero no dentro de lo especificado, el sensor debe ser substituido. Si no hay señal, será necesario verificar si existe voltaje de fuente y si el circuito a
tierra es bueno. Si ambos están dentro de lo especificado, el sensor debe ser substituido.
Si cualquier medida no está dentro de lo especificado, será necesario continuar evaluando el circuito.
Adicionalmente, usando un 9U7330 (FLUKE 87) o un multímetro digital Caterpillar 146-4080 Digital la operatividad de un sensor PWM puede ser determinada. El multímetro de Digital tiene la capacidad para medir voltaje de C.C., frecuencia y el ciclo de carga. Usando la punta de prueba 7X1710 y los terminales del multímetro digital conectados entre el cable de señal (pin C) y tierra (pin B) en el conector del sensor, el mecánico puede analizar rápidamente la condición del sensor.
MMGELECATMMLDPWT401 Referencias del Participante Página 67
Las siguientes mediciones serían típicas para un sensor de temperatura PWM con el sensor conectado al control y el interruptor principal encendido:
Pin A al Pin B = Voltaje de fuente o Voltaje de alimentación Pin C al Pin B = De 0.7 - 6.9 DCV, en la escala de voltaje CC Pin C al Pin B = 4.5 - 5.5 kHz, en la escala de frecuencia Pin C al Pin B = 5% - 95%, en la escala % ciclo de carga
El voltaje CC puede variar entre los diferentes tipos de sensores PWM, pero la frecuencia debe siempre estar dentro de lo especificado en el sensor, y el ciclo de carga debe siempre ser mayor a 0% (generalmente entre 5% - 10 %) en baja y hasta 95% en el alta (pero nunca en 100%). Lección 4.3.7: SENSORES ANALOGICOS
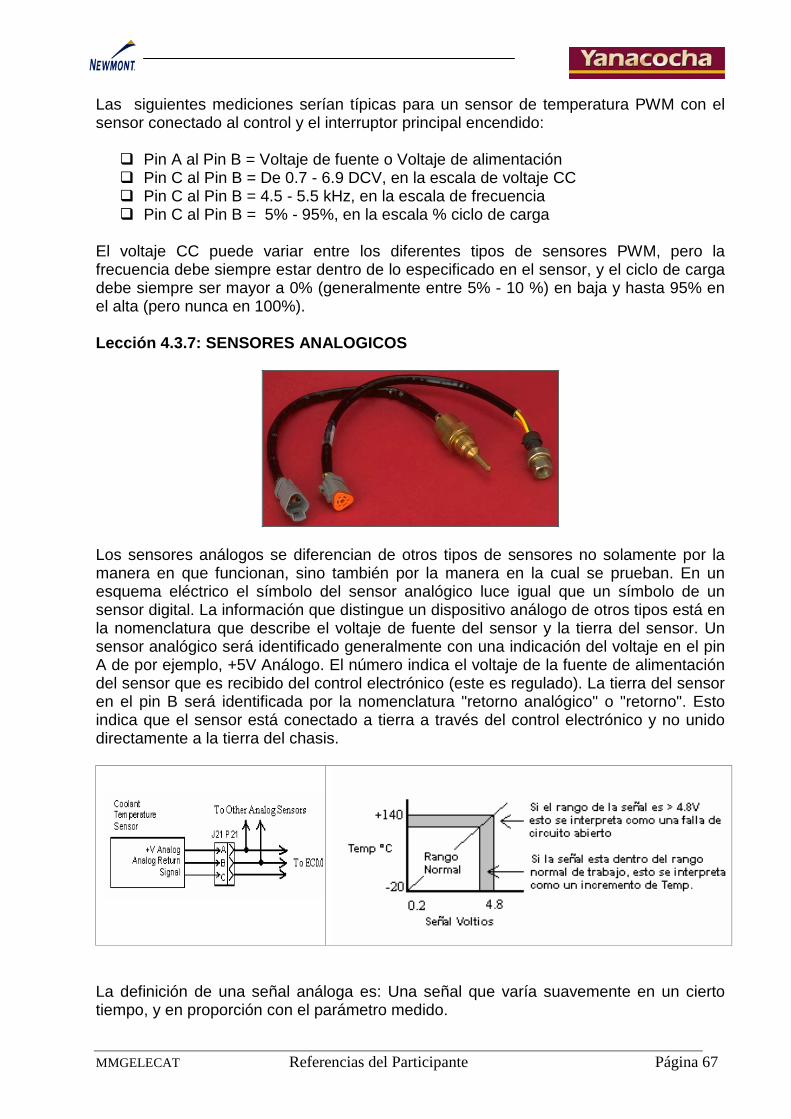
Los sensores análogos se diferencian de otros tipos de sensores no solamente por la manera en que funcionan, sino también por la manera en la cual se prueban. En un esquema eléctrico el símbolo del sensor analógico luce igual que un símbolo de un sensor digital. La información que distingue un dispositivo análogo de otros tipos está en la nomenclatura que describe el voltaje de fuente del sensor y la tierra del sensor. Un sensor analógico será identificado generalmente con una indicación del voltaje en el pin A de por ejemplo, +5V Análogo. El número indica el voltaje de la fuente de alimentación del sensor que es recibido del control electrónico (este es regulado). La tierra del sensor en el pin B será identificada por la nomenclatura "retorno analógico" o "retorno". Esto indica que el sensor está conectado a tierra a través del control electrónico y no unido directamente a la tierra del chasis.
La definición de una señal análoga es: Una señal que varía suavemente en un cierto tiempo, y en proporción con el parámetro medido.
MMGELECATMMLDPWT401 Referencias del Participante Página 68
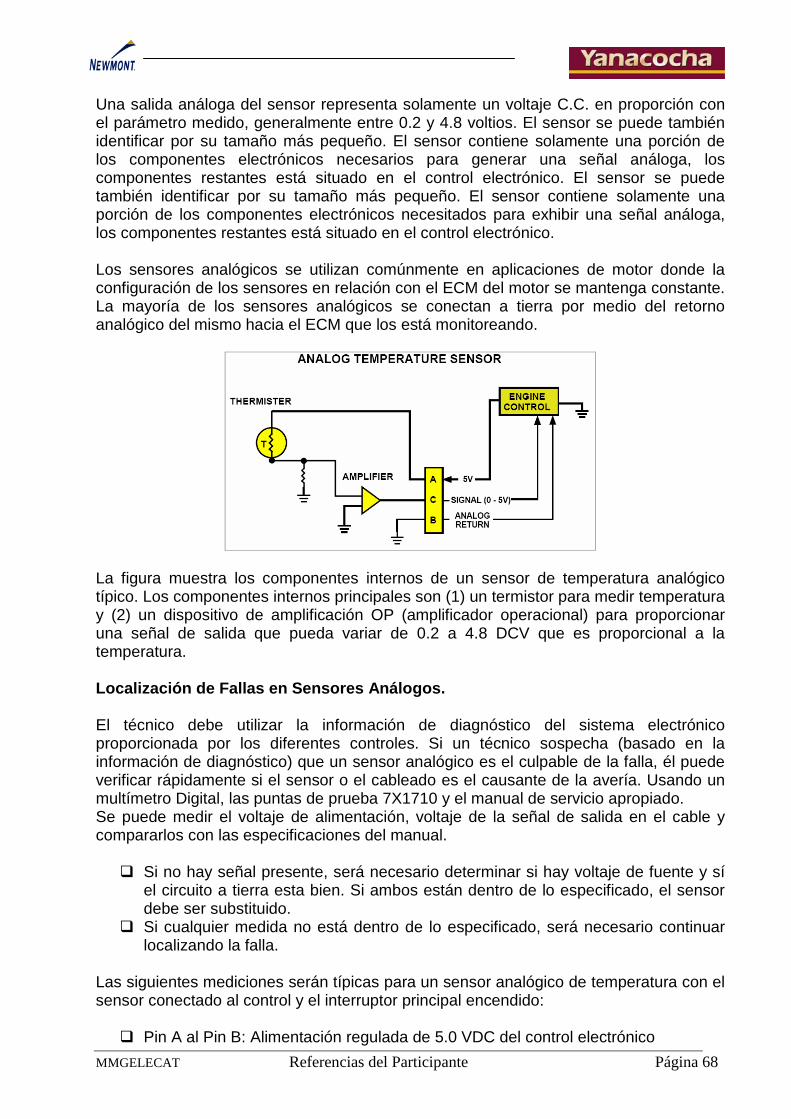
Una salida análoga del sensor representa solamente un voltaje C.C. en proporción con el parámetro medido, generalmente entre 0.2 y 4.8 voltios. El sensor se puede también identificar por su tamaño más pequeño. El sensor contiene solamente una porción de los componentes electrónicos necesarios para generar una señal análoga, los componentes restantes está situado en el control electrónico. El sensor se puede también identificar por su tamaño más pequeño. El sensor contiene solamente una porción de los componentes electrónicos necesitados para exhibir una señal análoga, los componentes restantes está situado en el control electrónico. Los sensores analógicos se utilizan comúnmente en aplicaciones de motor donde la configuración de los sensores en relación con el ECM del motor se mantenga constante. La mayoría de los sensores analógicos se conectan a tierra por medio del retorno analógico del mismo hacia el ECM que los está monitoreando.
La figura muestra los componentes internos de un sensor de temperatura analógico típico. Los componentes internos principales son (1) un termistor para medir temperatura y (2) un dispositivo de amplificación OP (amplificador operacional) para proporcionar una señal de salida que pueda variar de 0.2 a 4.8 DCV que es proporcional a la temperatura. Localización de Fallas en Sensores Análogos. El técnico debe utilizar la información de diagnóstico del sistema electrónico proporcionada por los diferentes controles. Si un técnico sospecha (basado en la información de diagnóstico) que un sensor analógico es el culpable de la falla, él puede verificar rápidamente si el sensor o el cableado es el causante de la avería. Usando un multímetro Digital, las puntas de prueba 7X1710 y el manual de servicio apropiado. Se puede medir el voltaje de alimentación, voltaje de la señal de salida en el cable y compararlos con las especificaciones del manual.
Si no hay señal presente, será necesario determinar si hay voltaje de fuente y sí el circuito a tierra esta bien. Si ambos están dentro de lo especificado, el sensor debe ser substituido.
Si cualquier medida no está dentro de lo especificado, será necesario continuar localizando la falla.
Las siguientes mediciones serán típicas para un sensor analógico de temperatura con el sensor conectado al control y el interruptor principal encendido:
Pin A al Pin B: Alimentación regulada de 5.0 VDC del control electrónico
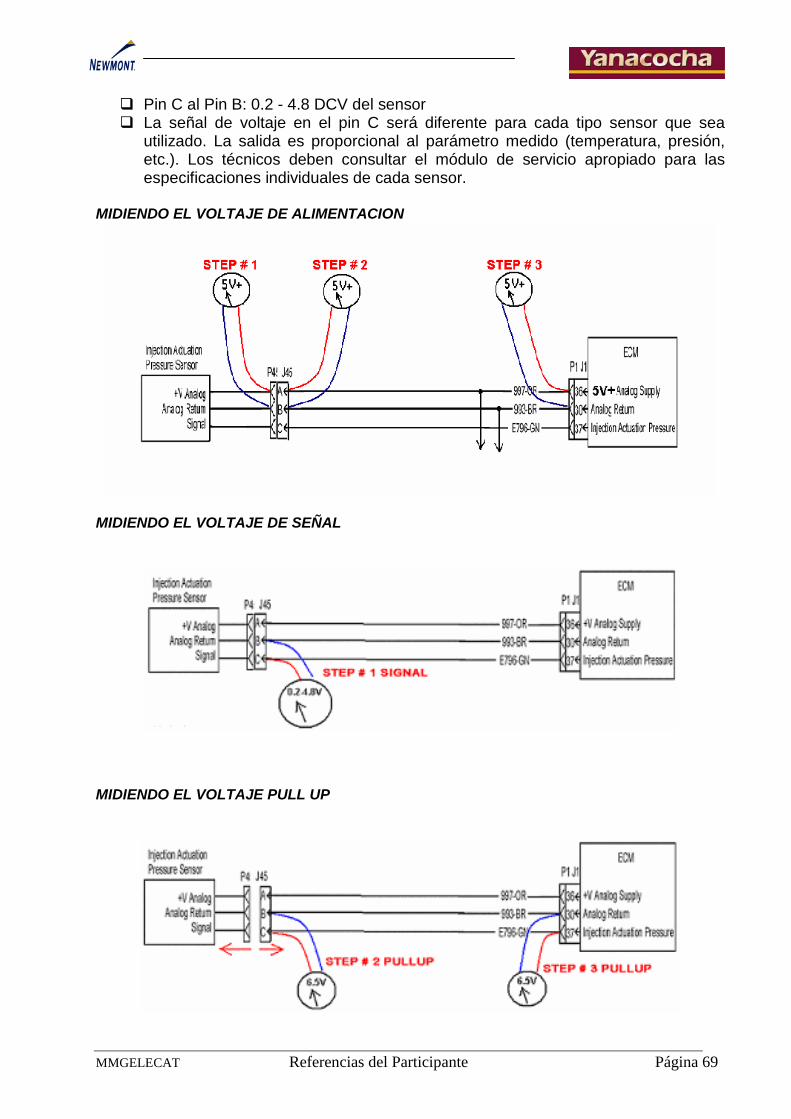
MMGELECATMMLDPWT401 Referencias del Participante Página 69
Pin C al Pin B: 0.2 - 4.8 DCV del sensor La señal de voltaje en el pin C será diferente para cada tipo sensor que sea
utilizado. La salida es proporcional al parámetro medido (temperatura, presión, etc.). Los técnicos deben consultar el módulo de servicio apropiado para las especificaciones individuales de cada sensor.
MIDIENDO EL VOLTAJE DE ALIMENTACION
MIDIENDO EL VOLTAJE DE SEÑAL
MIDIENDO EL VOLTAJE PULL UP
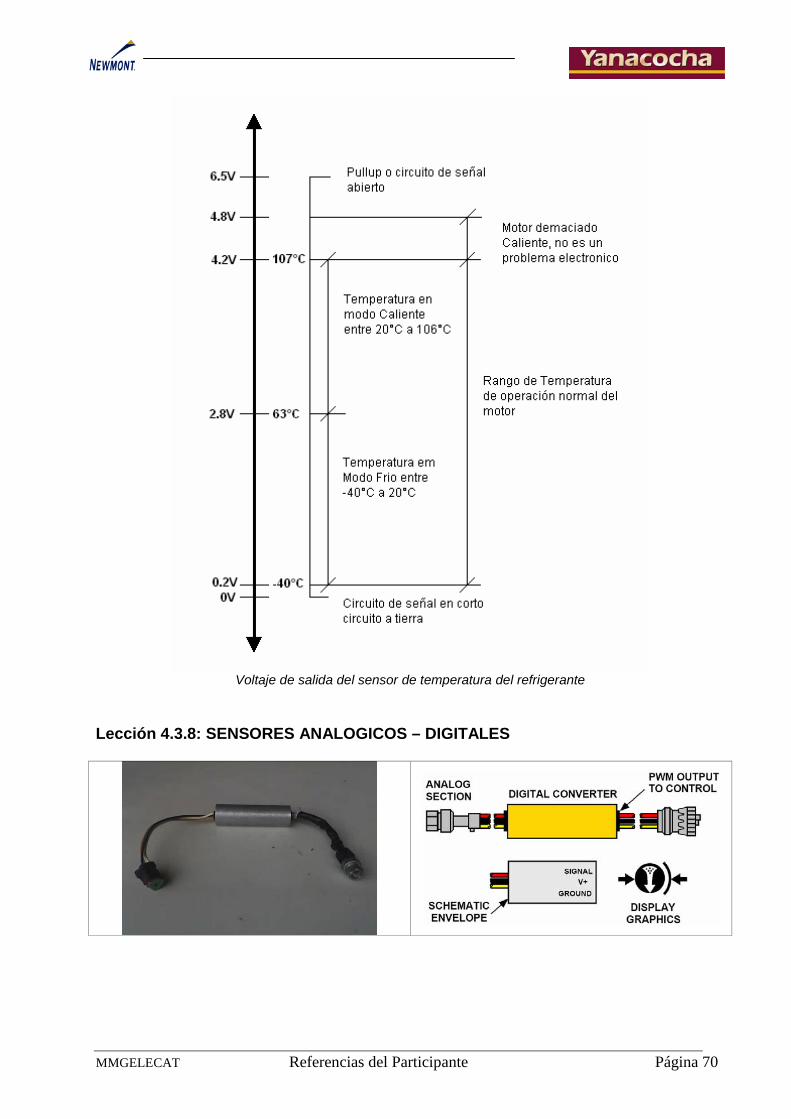
MMGELECATMMLDPWT401 Referencias del Participante Página 70
Voltaje de salida del sensor de temperatura del refrigerante
Lección 4.3.8: SENSORES ANALOGICOS – DIGITALES

MMGELECATMMLDPWT401 Referencias del Participante Página 71
El sensor tipo Analógico - Digital es un dispositivo que incorpora electrónica análoga y digital. El uso de este sensor es determinado por el control electrónico específico que está procesando la información. La figura muestra un sensor A-D de presión y temperatura de gases de escape. Se mide la presión y temperatura usando la sección análoga y la señal se envía a un convertidor donde se procesa y se convierte en una señal digital de PWM que se envía al control electrónico. La figura muestra dos secciones de un sensor A-D. La sección analógica mide el parámetro presión o temperatura y envía una señal al convertidor análogo-digital. La salida de la sección digital es una señal PWM tal cual es procesado por el control electrónico y después enviado a un dispositivo de salida, que puede ser una lámpara o un indicador, etc. El símbolo esquemático no identifica el sensor como A-D. La información contenida dentro del símbolo se refiere a la salida del sensor. En este ejemplo, la salida es una señal PWM digital. El símbolo de la representación gráfica se utiliza para identificar el sistema que es monitoreado. En este ejemplo, el sistema es "presión de aire del freno”. Localizando averías en sensores Análogo-Digital. El técnico debe localizar averías para este tipo dispositivo, usando el mismo procedimiento que para un sensor digital (PWM) antes mencionado. Es la salida del sensor lo que determina la utilidad del componente.
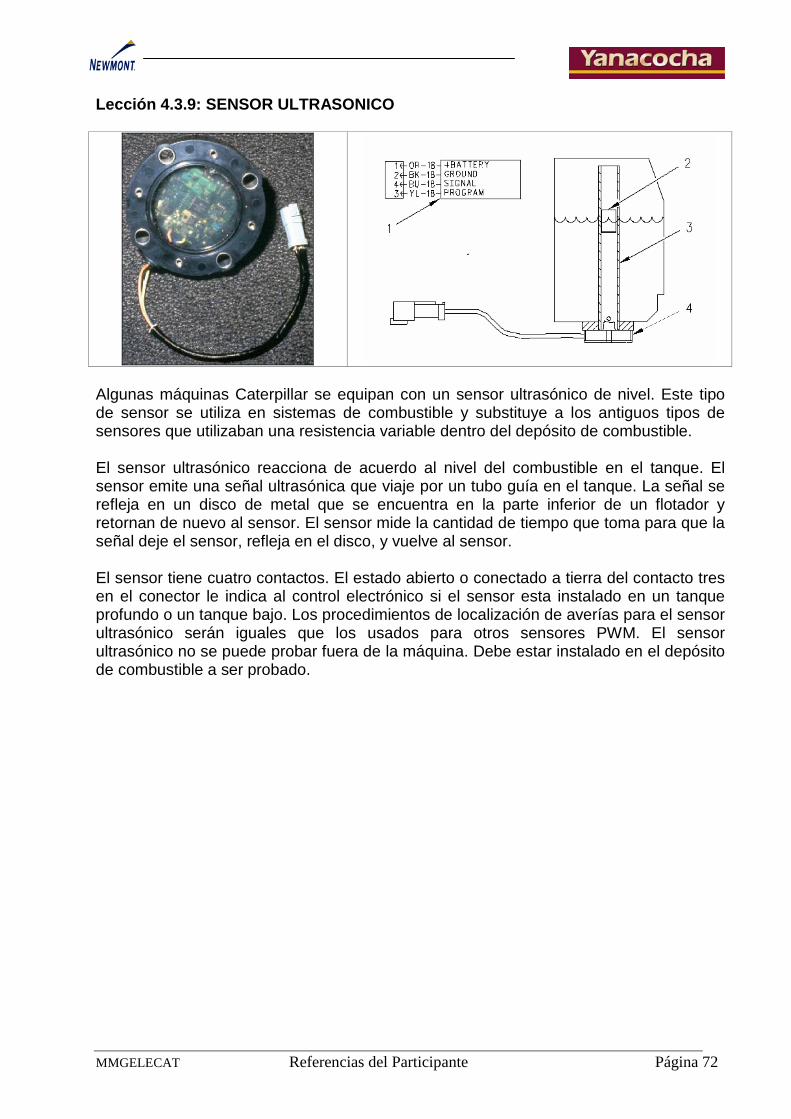
MMGELECATMMLDPWT401 Referencias del Participante Página 72
Lección 4.3.9: SENSOR ULTRASONICO
Algunas máquinas Caterpillar se equipan con un sensor ultrasónico de nivel. Este tipo de sensor se utiliza en sistemas de combustible y substituye a los antiguos tipos de sensores que utilizaban una resistencia variable dentro del depósito de combustible. El sensor ultrasónico reacciona de acuerdo al nivel del combustible en el tanque. El sensor emite una señal ultrasónica que viaje por un tubo guía en el tanque. La señal se refleja en un disco de metal que se encuentra en la parte inferior de un flotador y retornan de nuevo al sensor. El sensor mide la cantidad de tiempo que toma para que la señal deje el sensor, refleja en el disco, y vuelve al sensor. El sensor tiene cuatro contactos. El estado abierto o conectado a tierra del contacto tres en el conector le indica al control electrónico si el sensor esta instalado en un tanque profundo o un tanque bajo. Los procedimientos de localización de averías para el sensor ultrasónico serán iguales que los usados para otros sensores PWM. El sensor ultrasónico no se puede probar fuera de la máquina. Debe estar instalado en el depósito de combustible a ser probado.
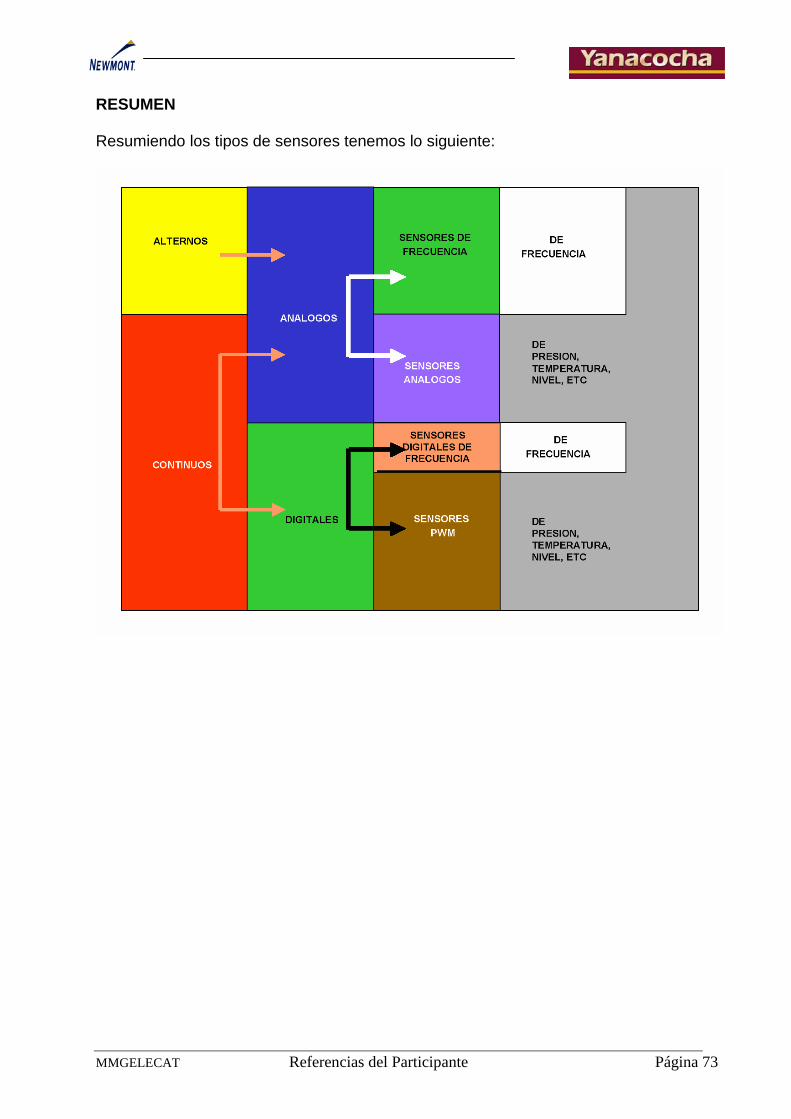
MMGELECATMMLDPWT401 Referencias del Participante Página 73
RESUMEN Resumiendo los tipos de sensores tenemos lo siguiente:

MMGELECATMMLDPWT401 Referencias del Participante Página 74

MMGELECATMMLDPWT401 Referencias del Participante Página 75
MODULO 5
CONTROLES ELECTRONICOS

MMGELECATMMLDPWT401 Referencias del Participante Página 76
MMGELECATMMLDPWT401 Referencias del Participante Página 77
MODULO 5: controles electrónicos Esta lección describe los módulos de control electrónicos más empleados en máquinas Caterpillar. Los Módulos de Control Electrónicos (ECM) son sofisticadas computadoras, contienen fuentes de poder, unidad de procesamiento central, memoria, entradas y se comunican con otros controles de forma bi-direcciónal OBJETIVOS Al término de este módulo, el estudiante estará en capacidad de:
1. Describir los diferentes módulos.
2. Establecer diferencias y similitudes entre los módulos.
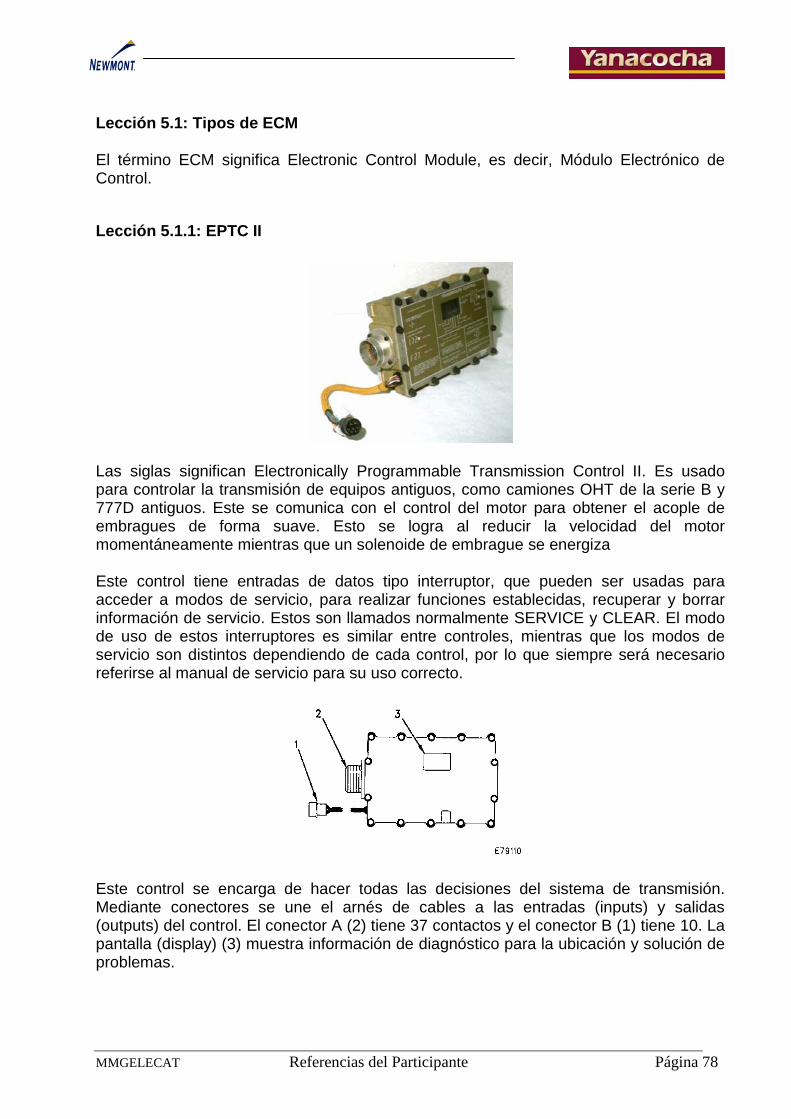
MMGELECATMMLDPWT401 Referencias del Participante Página 78
Lección 5.1: Tipos de ECM
El término ECM significa Electronic Control Module, es decir, Módulo Electrónico de Control.
Lección 5.1.1: EPTC II
Las siglas significan Electronically Programmable Transmission Control II. Es usado para controlar la transmisión de equipos antiguos, como camiones OHT de la serie B y 777D antiguos. Este se comunica con el control del motor para obtener el acople de embragues de forma suave. Esto se logra al reducir la velocidad del motor momentáneamente mientras que un solenoide de embrague se energiza Este control tiene entradas de datos tipo interruptor, que pueden ser usadas para acceder a modos de servicio, para realizar funciones establecidas, recuperar y borrar información de servicio. Estos son llamados normalmente SERVICE y CLEAR. El modo de uso de estos interruptores es similar entre controles, mientras que los modos de servicio son distintos dependiendo de cada control, por lo que siempre será necesario referirse al manual de servicio para su uso correcto.
Este control se encarga de hacer todas las decisiones del sistema de transmisión. Mediante conectores se une el arnés de cables a las entradas (inputs) y salidas (outputs) del control. El conector A (2) tiene 37 contactos y el conector B (1) tiene 10. La pantalla (display) (3) muestra información de diagnóstico para la ubicación y solución de problemas.
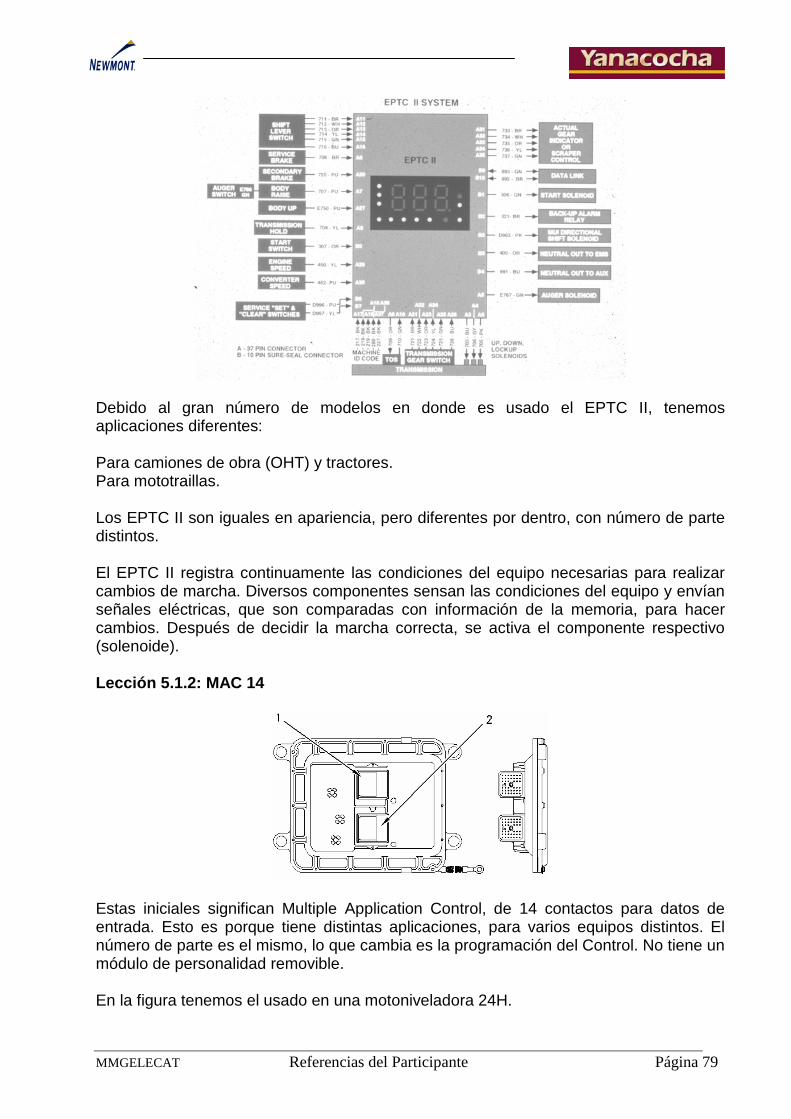
MMGELECATMMLDPWT401 Referencias del Participante Página 79
Debido al gran número de modelos en donde es usado el EPTC II, tenemos aplicaciones diferentes: Para camiones de obra (OHT) y tractores. Para mototraillas. Los EPTC II son iguales en apariencia, pero diferentes por dentro, con número de parte distintos. El EPTC II registra continuamente las condiciones del equipo necesarias para realizar cambios de marcha. Diversos componentes sensan las condiciones del equipo y envían señales eléctricas, que son comparadas con información de la memoria, para hacer cambios. Después de decidir la marcha correcta, se activa el componente respectivo (solenoide). Lección 5.1.2: MAC 14
Estas iniciales significan Multiple Application Control, de 14 contactos para datos de entrada. Esto es porque tiene distintas aplicaciones, para varios equipos distintos. El número de parte es el mismo, lo que cambia es la programación del Control. No tiene un módulo de personalidad removible. En la figura tenemos el usado en una motoniveladora 24H.
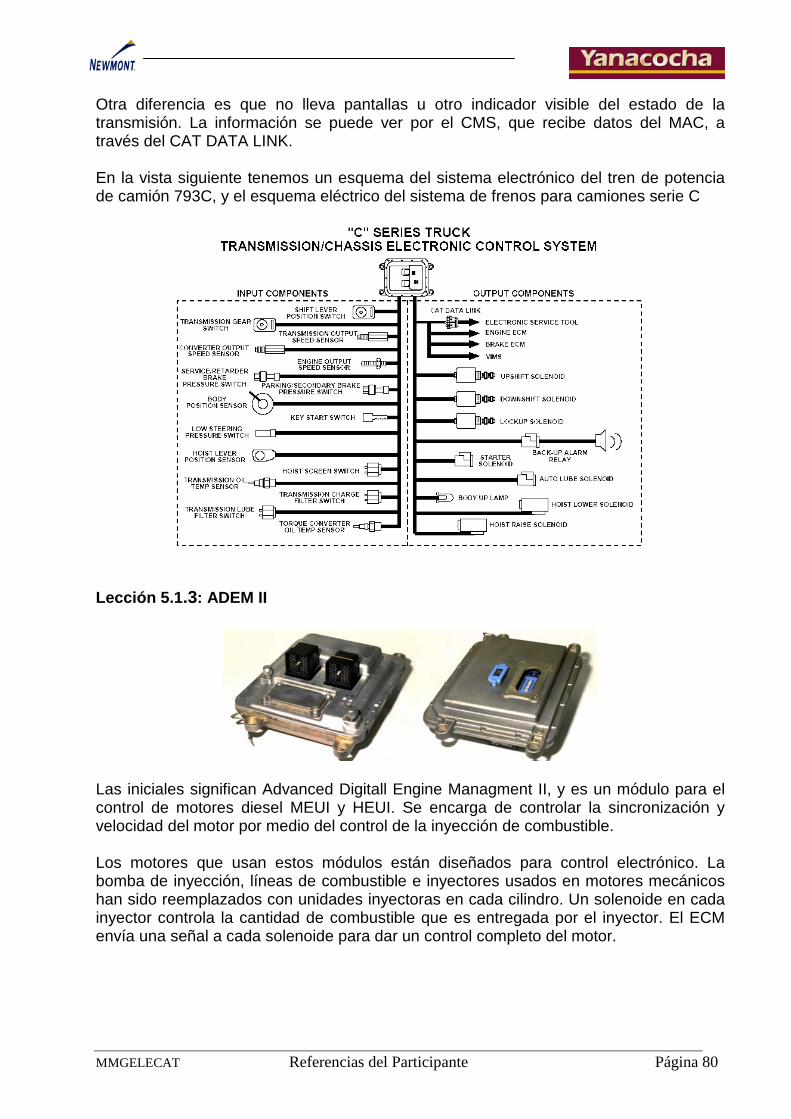
MMGELECATMMLDPWT401 Referencias del Participante Página 80
Otra diferencia es que no lleva pantallas u otro indicador visible del estado de la transmisión. La información se puede ver por el CMS, que recibe datos del MAC, a través del CAT DATA LINK. En la vista siguiente tenemos un esquema del sistema electrónico del tren de potencia de camión 793C, y el esquema eléctrico del sistema de frenos para camiones serie C
Lección 5.1.3: ADEM II
Las iniciales significan Advanced Digitall Engine Managment II, y es un módulo para el control de motores diesel MEUI y HEUI. Se encarga de controlar la sincronización y velocidad del motor por medio del control de la inyección de combustible. Los motores que usan estos módulos están diseñados para control electrónico. La bomba de inyección, líneas de combustible e inyectores usados en motores mecánicos han sido reemplazados con unidades inyectoras en cada cilindro. Un solenoide en cada inyector controla la cantidad de combustible que es entregada por el inyector. El ECM envía una señal a cada solenoide para dar un control completo del motor.
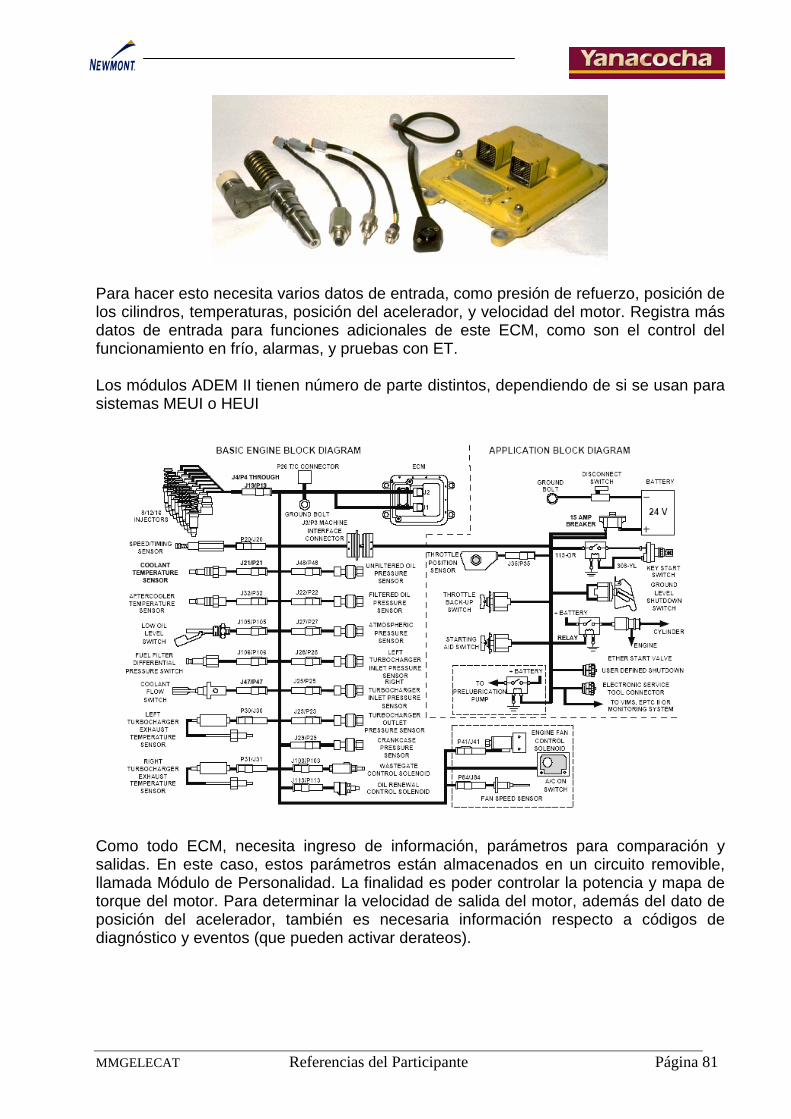
MMGELECATMMLDPWT401 Referencias del Participante Página 81
Para hacer esto necesita varios datos de entrada, como presión de refuerzo, posición de los cilindros, temperaturas, posición del acelerador, y velocidad del motor. Registra más datos de entrada para funciones adicionales de este ECM, como son el control del funcionamiento en frío, alarmas, y pruebas con ET. Los módulos ADEM II tienen número de parte distintos, dependiendo de si se usan para sistemas MEUI o HEUI
Como todo ECM, necesita ingreso de información, parámetros para comparación y salidas. En este caso, estos parámetros están almacenados en un circuito removible, llamada Módulo de Personalidad. La finalidad es poder controlar la potencia y mapa de torque del motor. Para determinar la velocidad de salida del motor, además del dato de posición del acelerador, también es necesaria información respecto a códigos de diagnóstico y eventos (que pueden activar derateos).
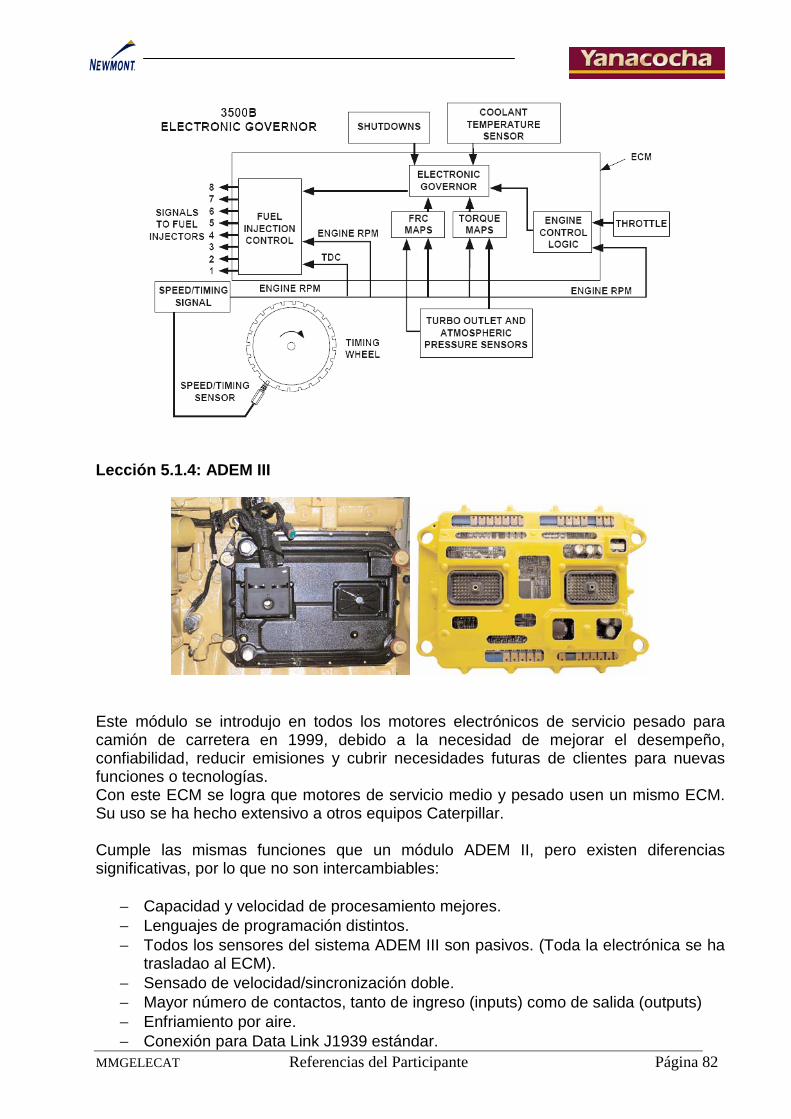
MMGELECATMMLDPWT401 Referencias del Participante Página 82
Lección 5.1.4: ADEM III
Este módulo se introdujo en todos los motores electrónicos de servicio pesado para camión de carretera en 1999, debido a la necesidad de mejorar el desempeño, confiabilidad, reducir emisiones y cubrir necesidades futuras de clientes para nuevas funciones o tecnologías. Con este ECM se logra que motores de servicio medio y pesado usen un mismo ECM. Su uso se ha hecho extensivo a otros equipos Caterpillar. Cumple las mismas funciones que un módulo ADEM II, pero existen diferencias significativas, por lo que no son intercambiables:
− Capacidad y velocidad de procesamiento mejores. − Lenguajes de programación distintos. − Todos los sensores del sistema ADEM III son pasivos. (Toda la electrónica se ha
trasladao al ECM). − Sensado de velocidad/sincronización doble. − Mayor número de contactos, tanto de ingreso (inputs) como de salida (outputs) − Enfriamiento por aire. − Conexión para Data Link J1939 estándar.

MMGELECATMMLDPWT401 Referencias del Participante Página 83
Ambos controles son diferentes en apariencia.
Sensores distintos
Sistemas del vehículo
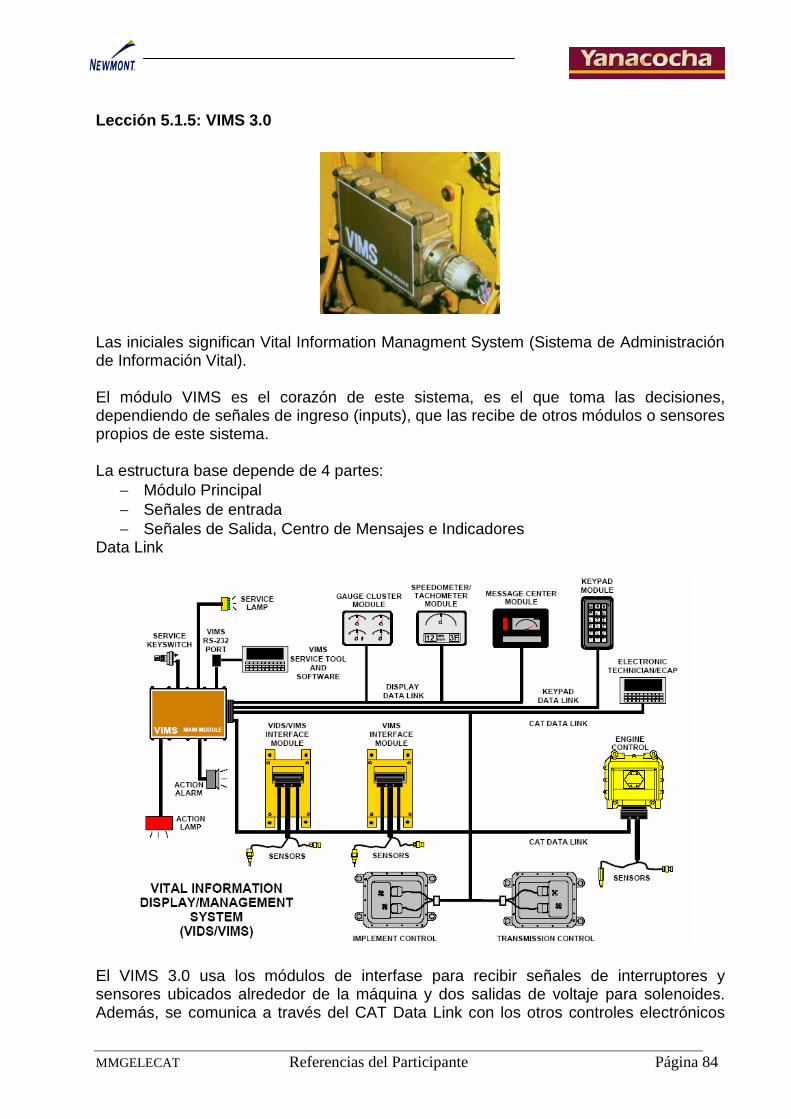
MMGELECATMMLDPWT401 Referencias del Participante Página 84
Lección 5.1.5: VIMS 3.0
Las iniciales significan Vital Information Managment System (Sistema de Administración de Información Vital). El módulo VIMS es el corazón de este sistema, es el que toma las decisiones, dependiendo de señales de ingreso (inputs), que las recibe de otros módulos o sensores propios de este sistema. La estructura base depende de 4 partes:
− Módulo Principal − Señales de entrada − Señales de Salida, Centro de Mensajes e Indicadores
Data Link
El VIMS 3.0 usa los módulos de interfase para recibir señales de interruptores y sensores ubicados alrededor de la máquina y dos salidas de voltaje para solenoides. Además, se comunica a través del CAT Data Link con los otros controles electrónicos

MMGELECATMMLDPWT401 Referencias del Participante Página 85
del equipo, dando al personal de operación y servicio información sobre los sistemas del equipo. Algunos de los controles que se pueden instalar son:
− ECM del control del motor − Control de Implementos electro-hidráulicos − EPTC II − ARC
Módulos de Interfase
El módulo principal puede recibir hasta 8 módulos de interfase. Este número dependerá del software de configuración. Cada interfase trabaja del mismo modo, pero tendrá su propio código MID. Las interfases reciben señales de entrada de sensores y switches, y envían una señal de salida al módulo principal, usando el Cat Data Link. El módulo principal procesa la información y la envía a los indicadores correspondientes. Esto reduce la cantidad de cableado necesario. Las interfases también tienen 2 salidas para solenoides y 2 salidas de voltaje regulado usadas para energizar sensores. Lección 5.1.6: VIMS 4.0 Este controlador es una versión de hardware más moderna que la usada con VIMS 3.0. Este cumple las mismas funciones que la versión anterior, pero no usa los módulos de interfase: los sensores van directo al conector principal, lo mismo que las salidas para los solenoides. Tanto VIMS 3.0 como 4.0 llevan una batería de litio de 3 voltios, que permite retener información cuando se corta la energía del módulo principal. La única información que se queda son los grupos de software: source code y configuration file.
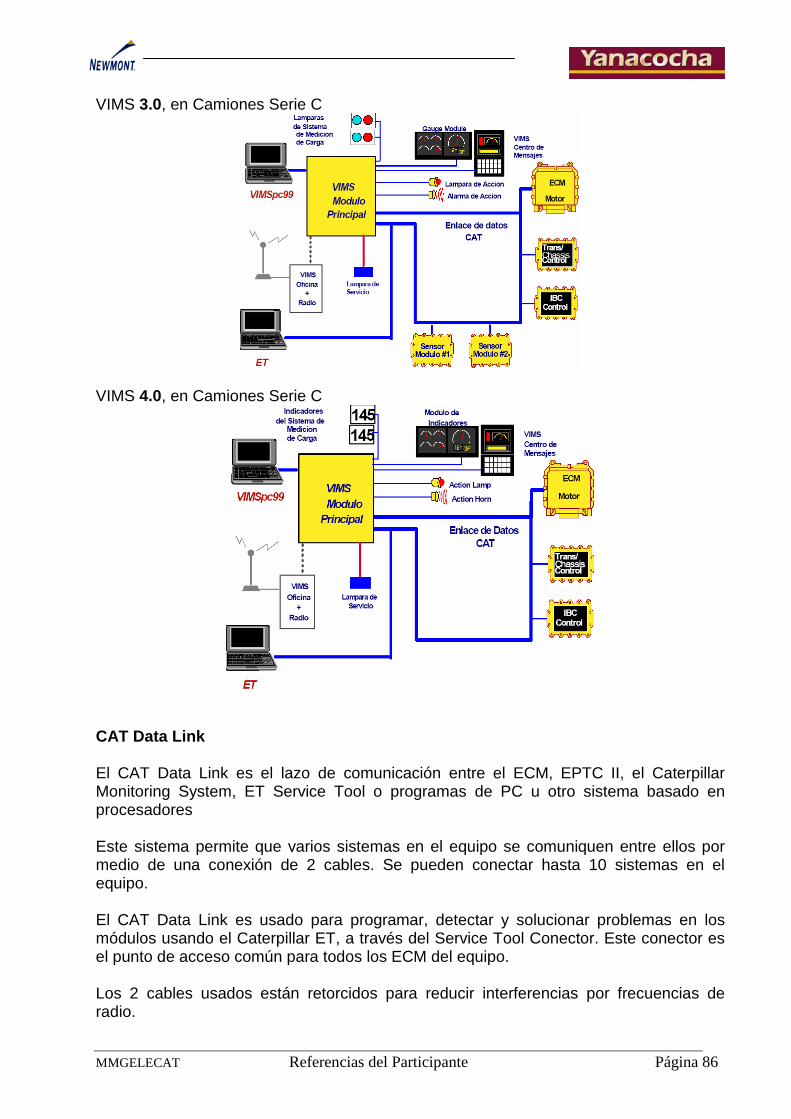
MMGELECATMMLDPWT401 Referencias del Participante Página 86
VIMS 3.0, en Camiones Serie C
VIMS 4.0, en Camiones Serie C
CAT Data Link El CAT Data Link es el lazo de comunicación entre el ECM, EPTC II, el Caterpillar Monitoring System, ET Service Tool o programas de PC u otro sistema basado en procesadores Este sistema permite que varios sistemas en el equipo se comuniquen entre ellos por medio de una conexión de 2 cables. Se pueden conectar hasta 10 sistemas en el equipo. El CAT Data Link es usado para programar, detectar y solucionar problemas en los módulos usando el Caterpillar ET, a través del Service Tool Conector. Este conector es el punto de acceso común para todos los ECM del equipo. Los 2 cables usados están retorcidos para reducir interferencias por frecuencias de radio.
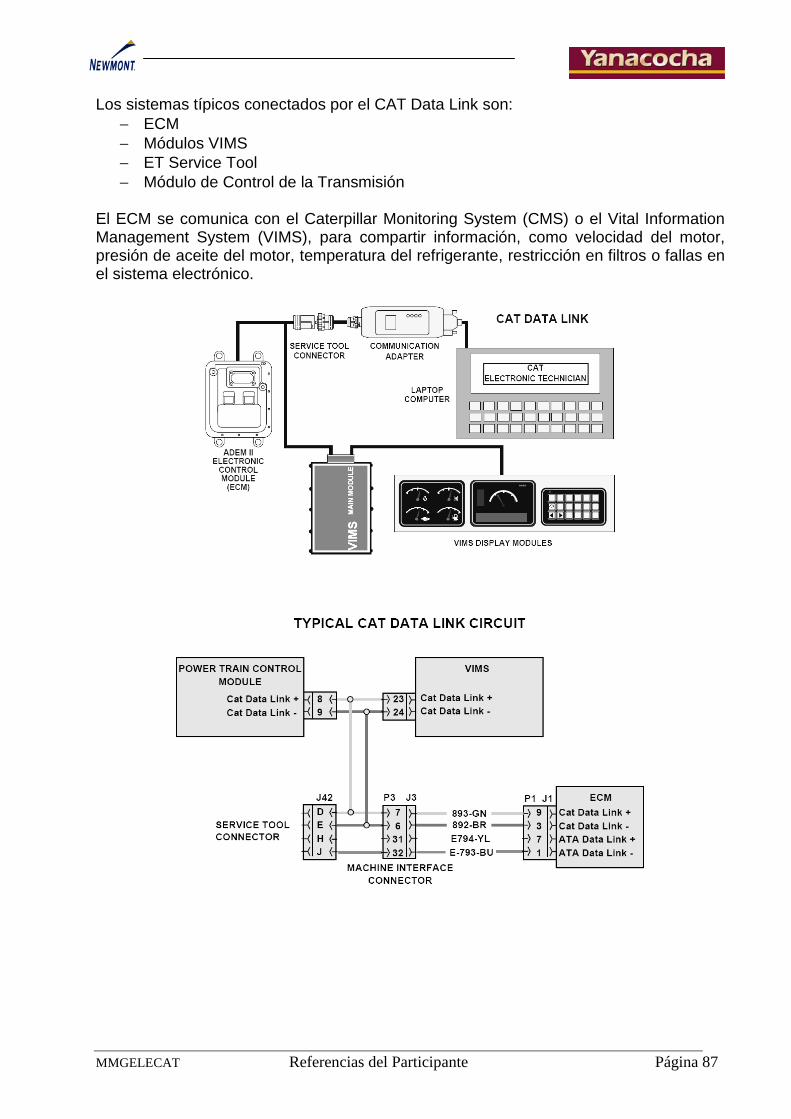
MMGELECATMMLDPWT401 Referencias del Participante Página 87
Los sistemas típicos conectados por el CAT Data Link son: − ECM − Módulos VIMS − ET Service Tool − Módulo de Control de la Transmisión
El ECM se comunica con el Caterpillar Monitoring System (CMS) o el Vital Information Management System (VIMS), para compartir información, como velocidad del motor, presión de aceite del motor, temperatura del refrigerante, restricción en filtros o fallas en el sistema electrónico.

MMGELECATMMLDPWT401 Referencias del Participante Página 88
MMGELECATMMLDPWT401 Referencias del Participante Página 89
MODULO 6
COMPONENTES DE SALIDA

MMGELECATMMLDPWT401 Referencias del Participante Página 90
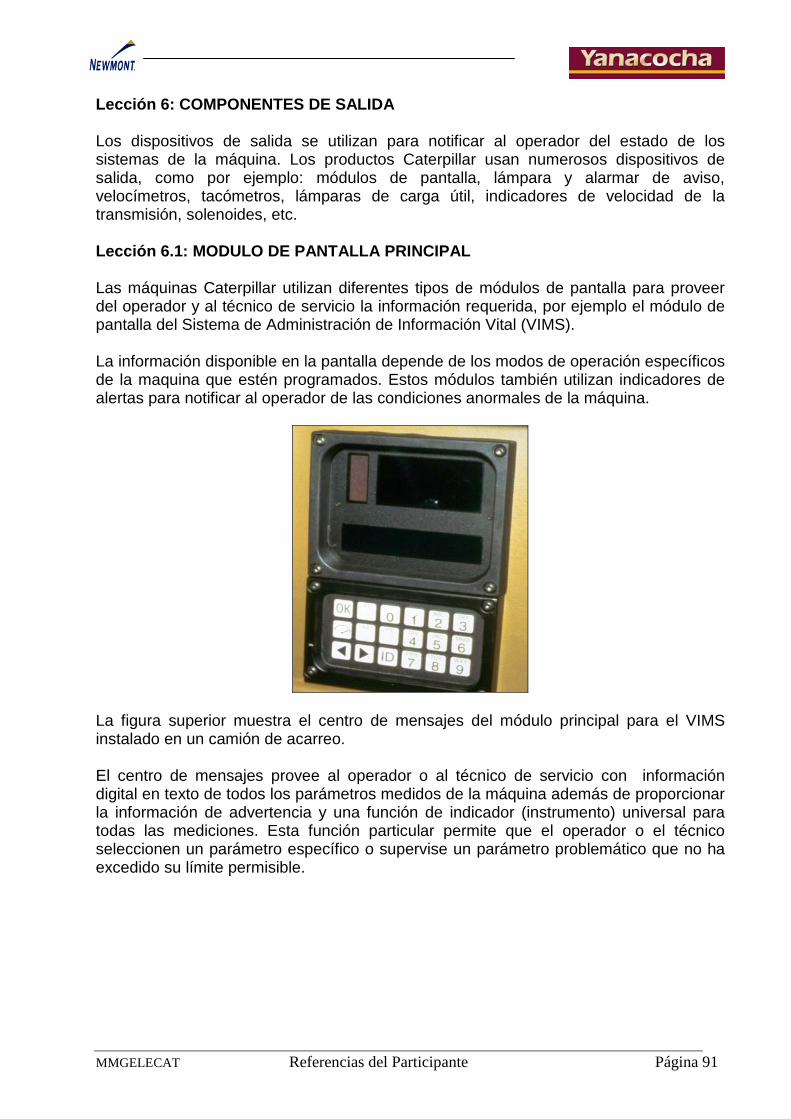
MMGELECATMMLDPWT401 Referencias del Participante Página 91
Lección 6: COMPONENTES DE SALIDA Los dispositivos de salida se utilizan para notificar al operador del estado de los sistemas de la máquina. Los productos Caterpillar usan numerosos dispositivos de salida, como por ejemplo: módulos de pantalla, lámpara y alarmar de aviso, velocímetros, tacómetros, lámparas de carga útil, indicadores de velocidad de la transmisión, solenoides, etc. Lección 6.1: MODULO DE PANTALLA PRINCIPAL Las máquinas Caterpillar utilizan diferentes tipos de módulos de pantalla para proveer del operador y al técnico de servicio la información requerida, por ejemplo el módulo de pantalla del Sistema de Administración de Información Vital (VIMS). La información disponible en la pantalla depende de los modos de operación específicos de la maquina que estén programados. Estos módulos también utilizan indicadores de alertas para notificar al operador de las condiciones anormales de la máquina.
La figura superior muestra el centro de mensajes del módulo principal para el VIMS instalado en un camión de acarreo. El centro de mensajes provee al operador o al técnico de servicio con información digital en texto de todos los parámetros medidos de la máquina además de proporcionar la información de advertencia y una función de indicador (instrumento) universal para todas las mediciones. Esta función particular permite que el operador o el técnico seleccionen un parámetro específico o supervise un parámetro problemático que no ha excedido su límite permisible.
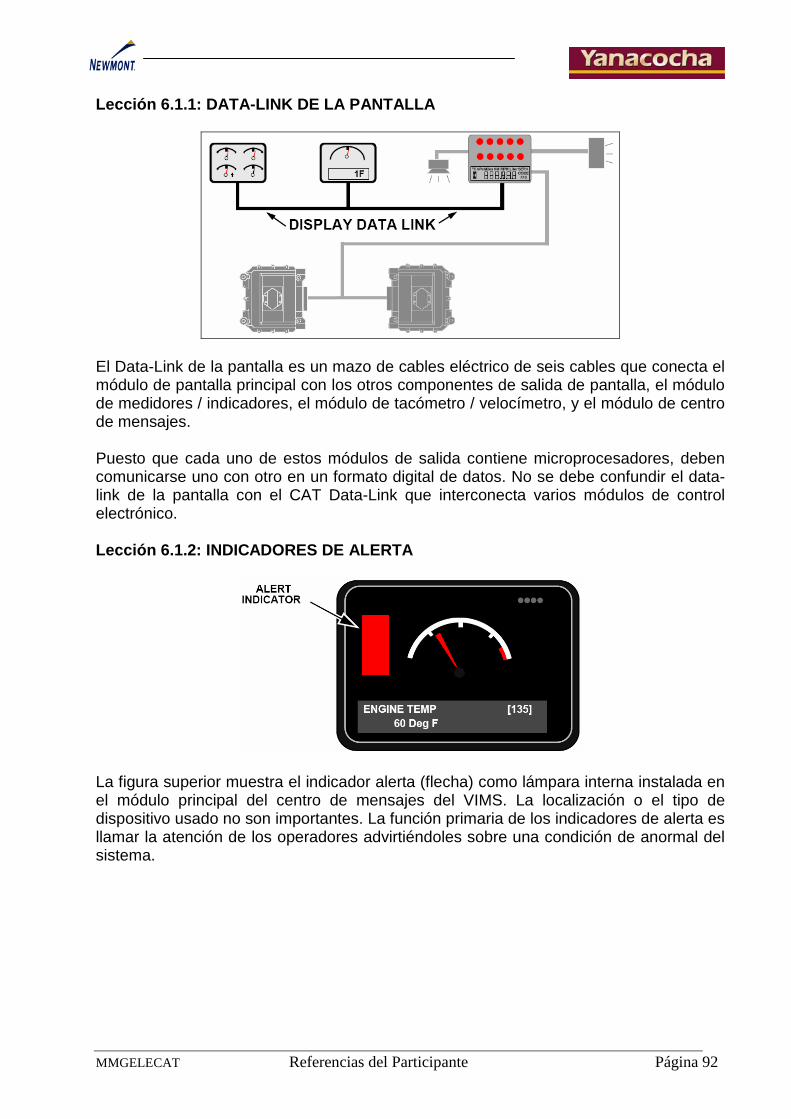
MMGELECATMMLDPWT401 Referencias del Participante Página 92
Lección 6.1.1: DATA-LINK DE LA PANTALLA
El Data-Link de la pantalla es un mazo de cables eléctrico de seis cables que conecta el módulo de pantalla principal con los otros componentes de salida de pantalla, el módulo de medidores / indicadores, el módulo de tacómetro / velocímetro, y el módulo de centro de mensajes. Puesto que cada uno de estos módulos de salida contiene microprocesadores, deben comunicarse uno con otro en un formato digital de datos. No se debe confundir el data-link de la pantalla con el CAT Data-Link que interconecta varios módulos de control electrónico. Lección 6.1.2: INDICADORES DE ALERTA
La figura superior muestra el indicador alerta (flecha) como lámpara interna instalada en el módulo principal del centro de mensajes del VIMS. La localización o el tipo de dispositivo usado no son importantes. La función primaria de los indicadores de alerta es llamar la atención de los operadores advirtiéndoles sobre una condición de anormal del sistema.
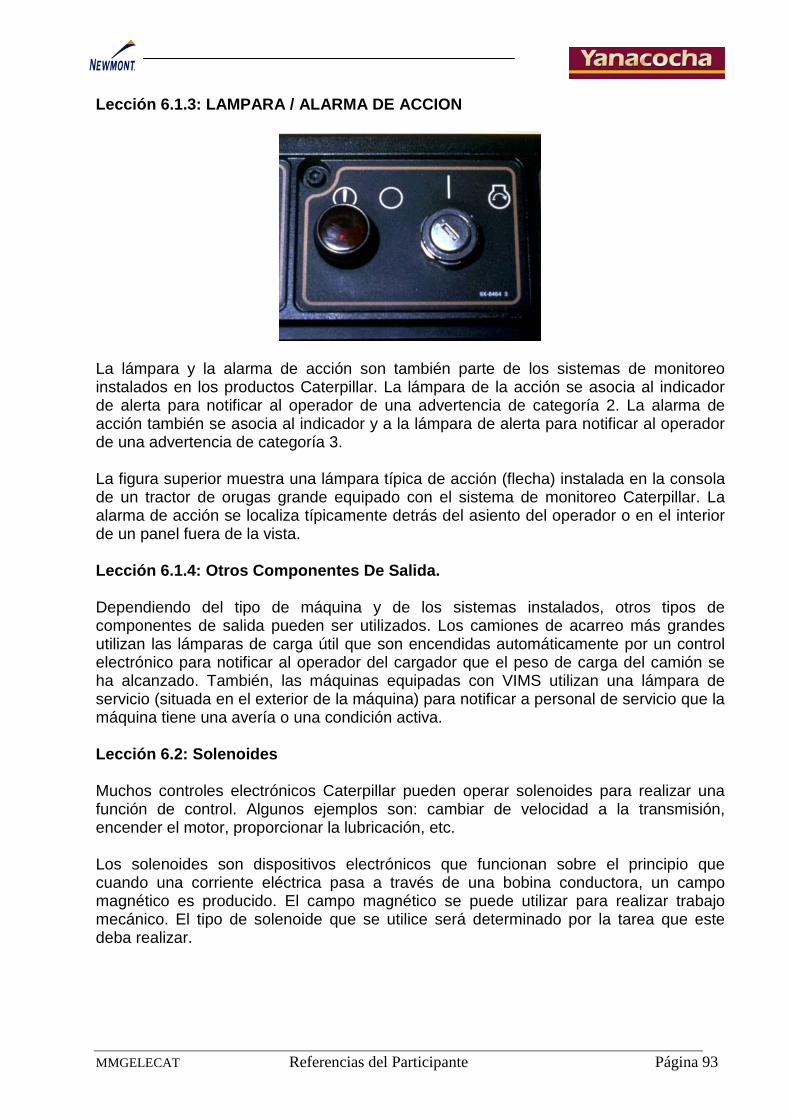
MMGELECATMMLDPWT401 Referencias del Participante Página 93
Lección 6.1.3: LAMPARA / ALARMA DE ACCION
La lámpara y la alarma de acción son también parte de los sistemas de monitoreo instalados en los productos Caterpillar. La lámpara de la acción se asocia al indicador de alerta para notificar al operador de una advertencia de categoría 2. La alarma de acción también se asocia al indicador y a la lámpara de alerta para notificar al operador de una advertencia de categoría 3. La figura superior muestra una lámpara típica de acción (flecha) instalada en la consola de un tractor de orugas grande equipado con el sistema de monitoreo Caterpillar. La alarma de acción se localiza típicamente detrás del asiento del operador o en el interior de un panel fuera de la vista. Lección 6.1.4: Otros Componentes De Salida. Dependiendo del tipo de máquina y de los sistemas instalados, otros tipos de componentes de salida pueden ser utilizados. Los camiones de acarreo más grandes utilizan las lámparas de carga útil que son encendidas automáticamente por un control electrónico para notificar al operador del cargador que el peso de carga del camión se ha alcanzado. También, las máquinas equipadas con VIMS utilizan una lámpara de servicio (situada en el exterior de la máquina) para notificar a personal de servicio que la máquina tiene una avería o una condición activa. Lección 6.2: Solenoides Muchos controles electrónicos Caterpillar pueden operar solenoides para realizar una función de control. Algunos ejemplos son: cambiar de velocidad a la transmisión, encender el motor, proporcionar la lubricación, etc. Los solenoides son dispositivos electrónicos que funcionan sobre el principio que cuando una corriente eléctrica pasa a través de una bobina conductora, un campo magnético es producido. El campo magnético se puede utilizar para realizar trabajo mecánico. El tipo de solenoide que se utilice será determinado por la tarea que este deba realizar.
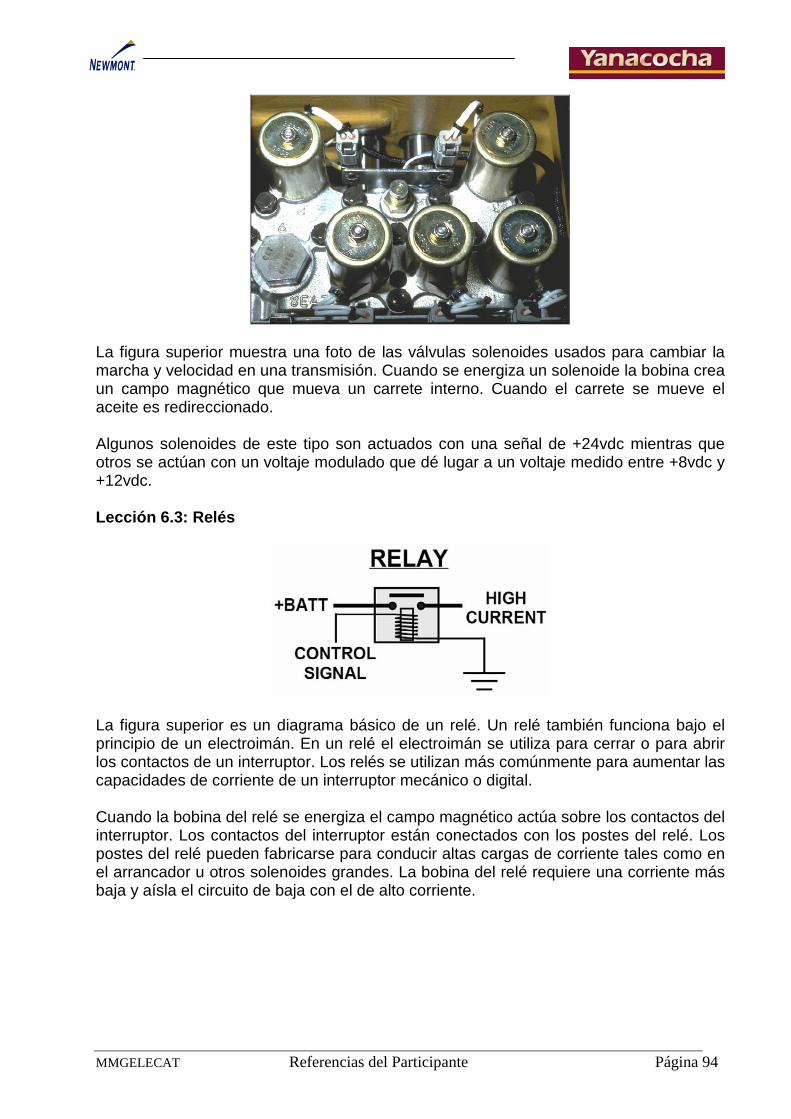
MMGELECATMMLDPWT401 Referencias del Participante Página 94
La figura superior muestra una foto de las válvulas solenoides usados para cambiar la marcha y velocidad en una transmisión. Cuando se energiza un solenoide la bobina crea un campo magnético que mueva un carrete interno. Cuando el carrete se mueve el aceite es redireccionado. Algunos solenoides de este tipo son actuados con una señal de +24vdc mientras que otros se actúan con un voltaje modulado que dé lugar a un voltaje medido entre +8vdc y +12vdc. Lección 6.3: Relés
La figura superior es un diagrama básico de un relé. Un relé también funciona bajo el principio de un electroimán. En un relé el electroimán se utiliza para cerrar o para abrir los contactos de un interruptor. Los relés se utilizan más comúnmente para aumentar las capacidades de corriente de un interruptor mecánico o digital. Cuando la bobina del relé se energiza el campo magnético actúa sobre los contactos del interruptor. Los contactos del interruptor están conectados con los postes del relé. Los postes del relé pueden fabricarse para conducir altas cargas de corriente tales como en el arrancador u otros solenoides grandes. La bobina del relé requiere una corriente más baja y aísla el circuito de baja con el de alto corriente.
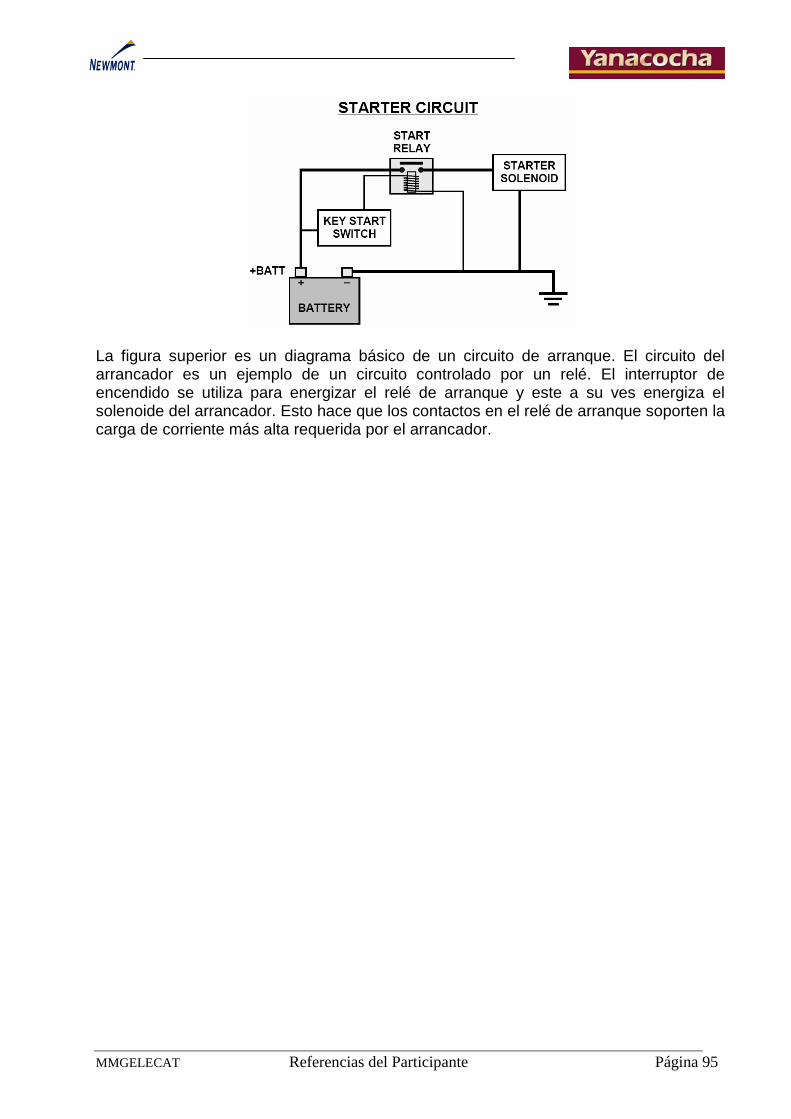
MMGELECATMMLDPWT401 Referencias del Participante Página 95
La figura superior es un diagrama básico de un circuito de arranque. El circuito del arrancador es un ejemplo de un circuito controlado por un relé. El interruptor de encendido se utiliza para energizar el relé de arranque y este a su ves energiza el solenoide del arrancador. Esto hace que los contactos en el relé de arranque soporten la carga de corriente más alta requerida por el arrancador.

MMGELECATMMLDPWT401 Referencias del Participante Página 96
MMGELECATMMLDPWT401 Referencias del Participante Página 97
ANEXO

MMGELECATMMLDPWT401 Referencias del Participante Página 98
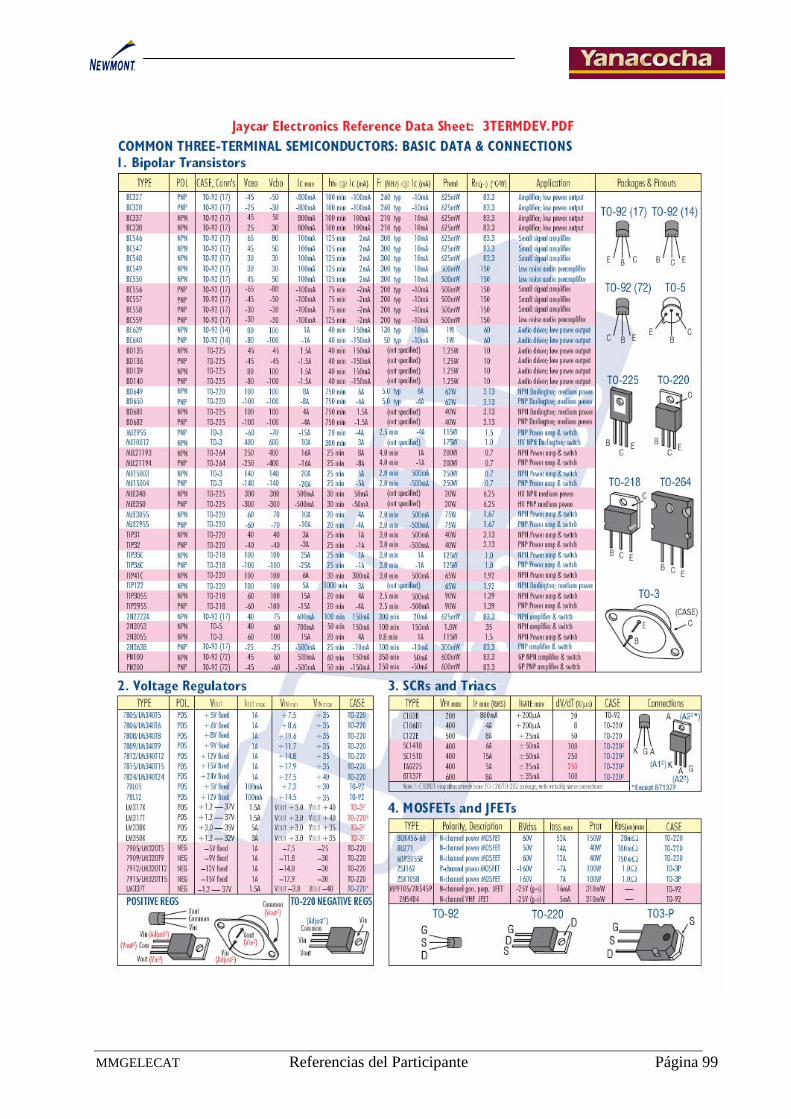
MMGELECATMMLDPWT401 Referencias del Participante Página 99

MMGELECATMMLDPWT401 Referencias del Participante Página 100
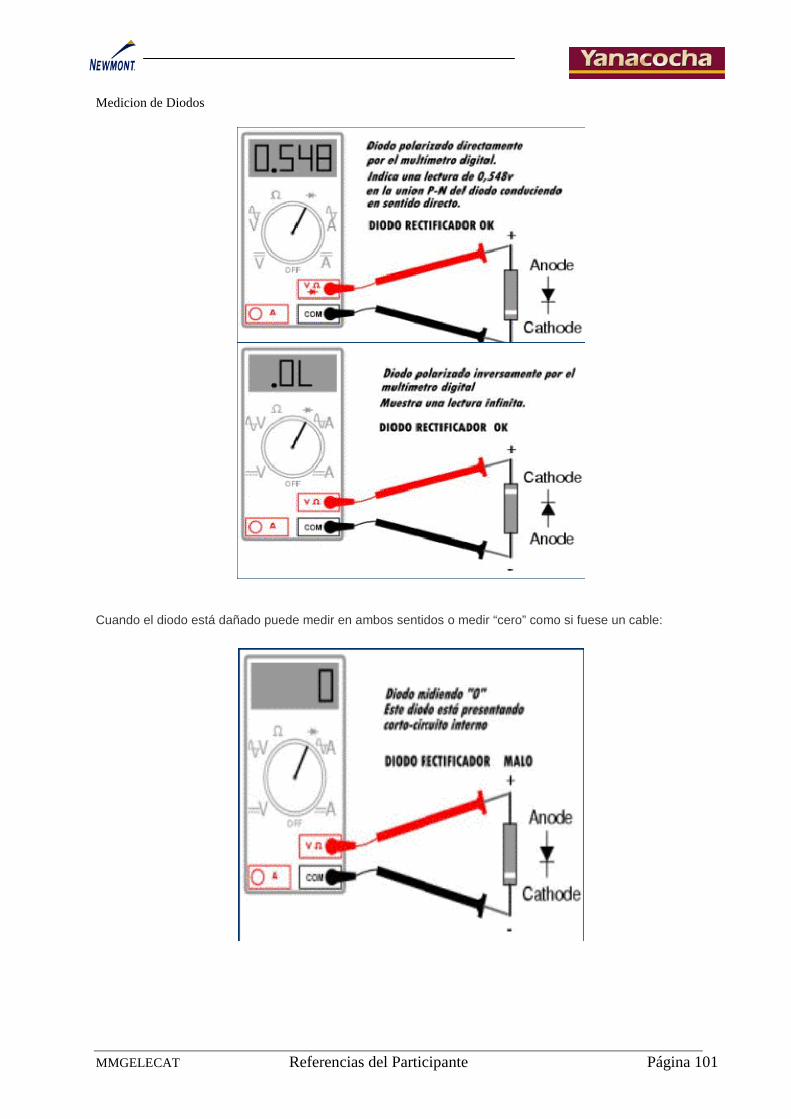
MMGELECATMMLDPWT401 Referencias del Participante Página 101
Medicion de Diodos
Cuando el diodo está dañado puede medir en ambos sentidos o medir “cero” como si fuese un cable:
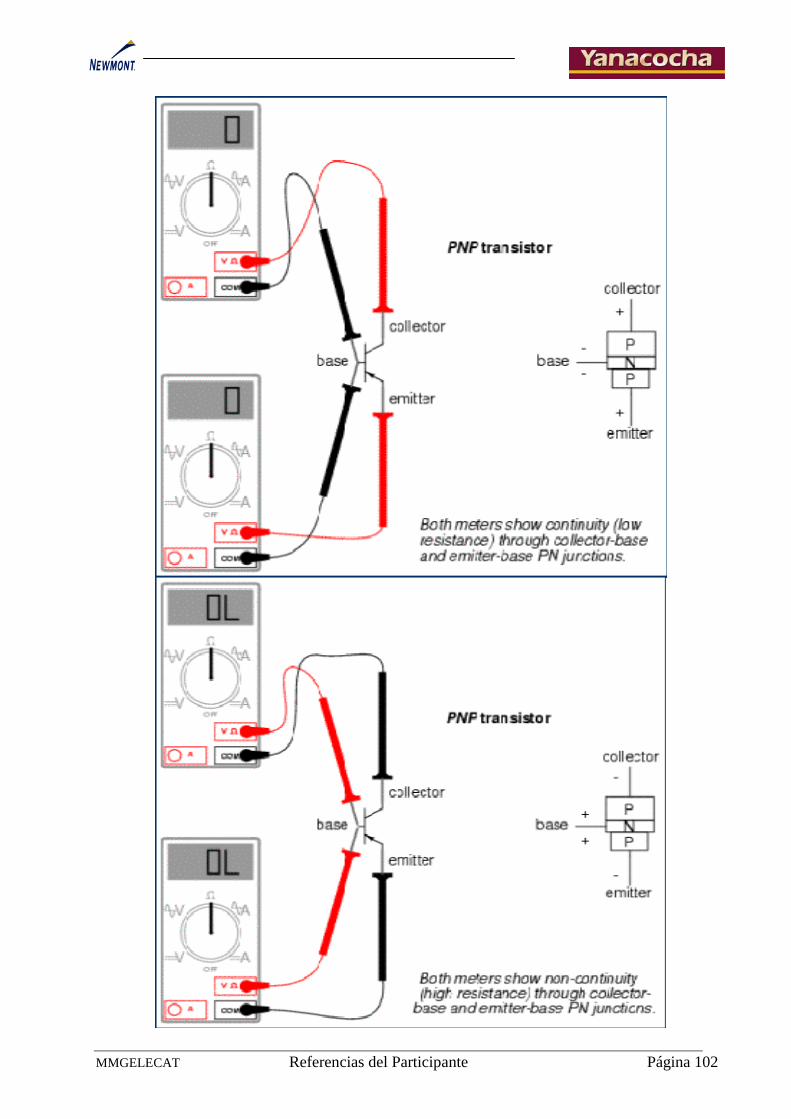
MMGELECATMMLDPWT401 Referencias del Participante Página 102
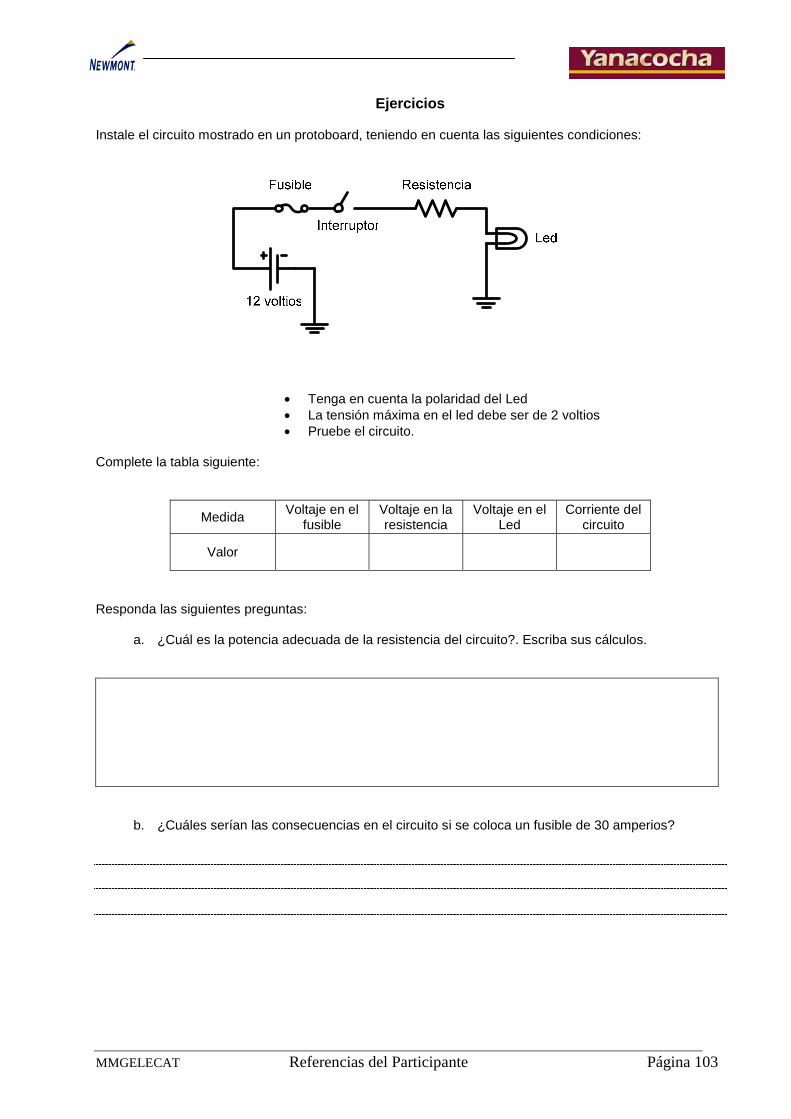
MMGELECATMMLDPWT401 Referencias del Participante Página 103
Ejercicios Instale el circuito mostrado en un protoboard, teniendo en cuenta las siguientes condiciones:
• Tenga en cuenta la polaridad del Led • La tensión máxima en el led debe ser de 2 voltios • Pruebe el circuito.
Complete la tabla siguiente:
Medida Voltaje en el
fusible Voltaje en la resistencia
Voltaje en el Led
Corriente del circuito
Valor
Responda las siguientes preguntas:
a. ¿Cuál es la potencia adecuada de la resistencia del circuito?. Escriba sus cálculos.
b. ¿Cuáles serían las consecuencias en el circuito si se coloca un fusible de 30 amperios?
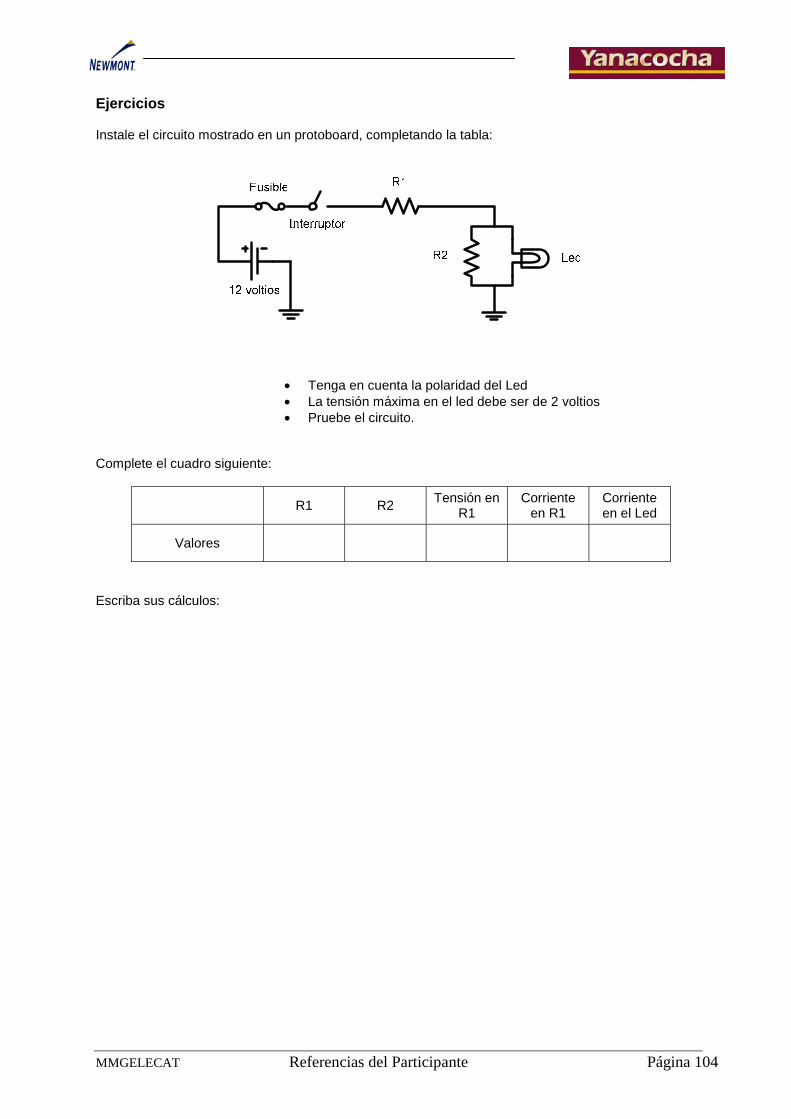
MMGELECATMMLDPWT401 Referencias del Participante Página 104
Ejercicios Instale el circuito mostrado en un protoboard, completando la tabla:
• Tenga en cuenta la polaridad del Led • La tensión máxima en el led debe ser de 2 voltios • Pruebe el circuito.
Complete el cuadro siguiente:
R1 R2 Tensión en
R1 Corriente
en R1 Corriente en el Led
Valores
Escriba sus cálculos:
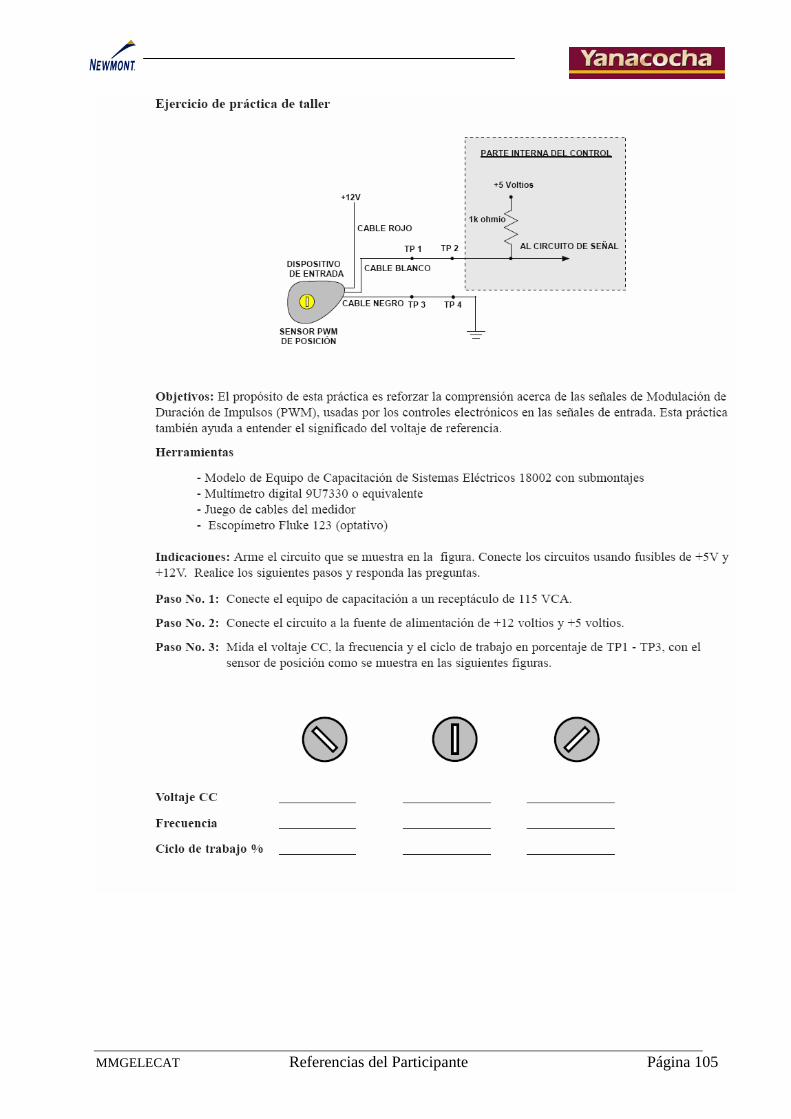
MMGELECATMMLDPWT401 Referencias del Participante Página 105
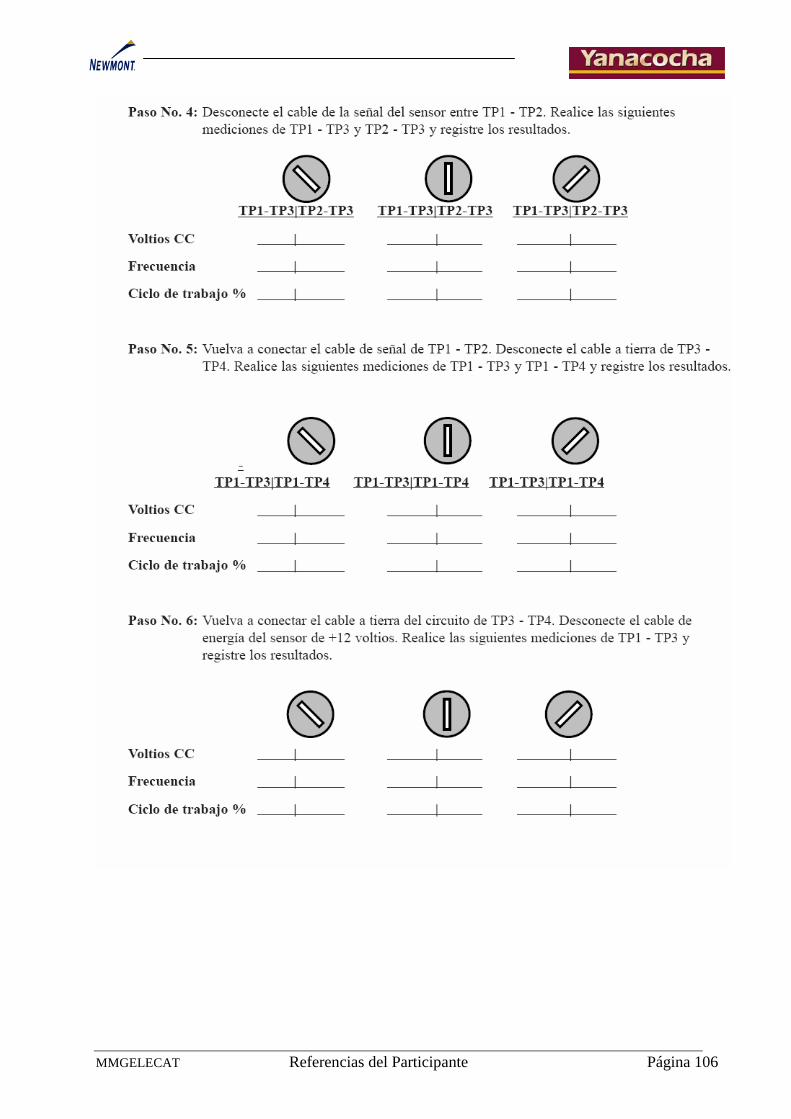
MMGELECATMMLDPWT401 Referencias del Participante Página 106
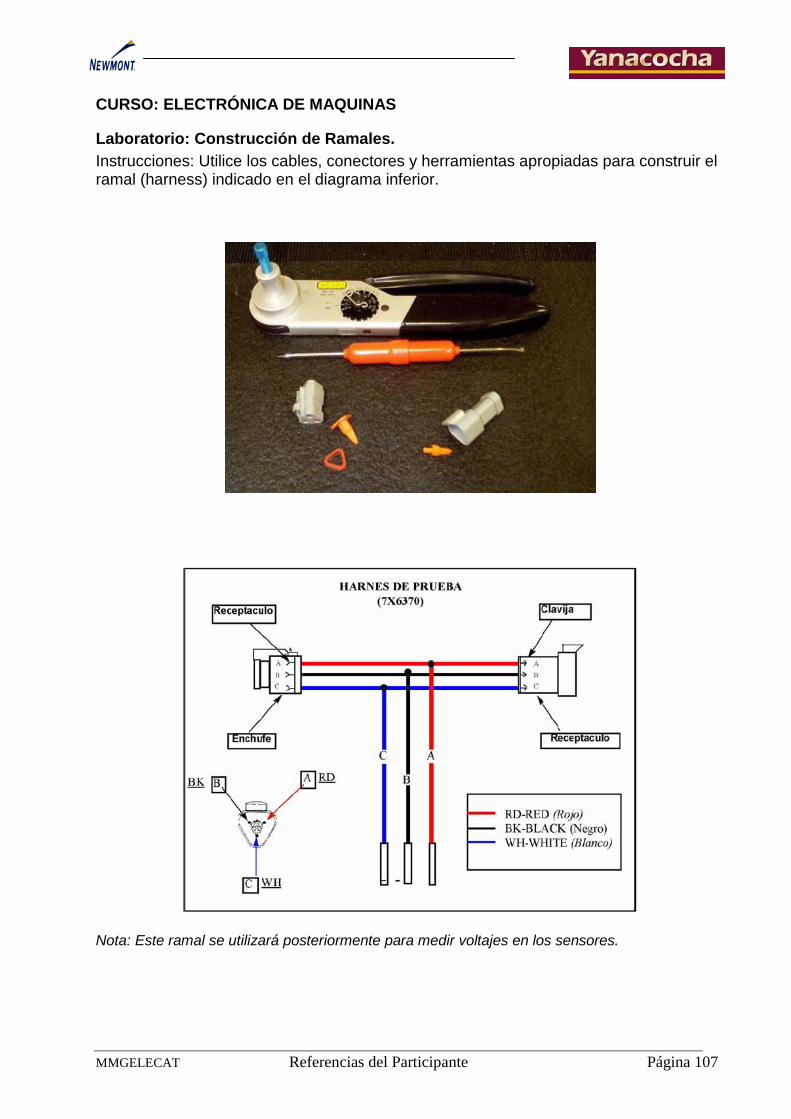
MMGELECATMMLDPWT401 Referencias del Participante Página 107
CURSO: ELECTRÓNICA DE MAQUINAS
Laboratorio: Construcción de Ramales. Instrucciones: Utilice los cables, conectores y herramientas apropiadas para construir el ramal (harness) indicado en el diagrama inferior.
Nota: Este ramal se utilizará posteriormente para medir voltajes en los sensores.
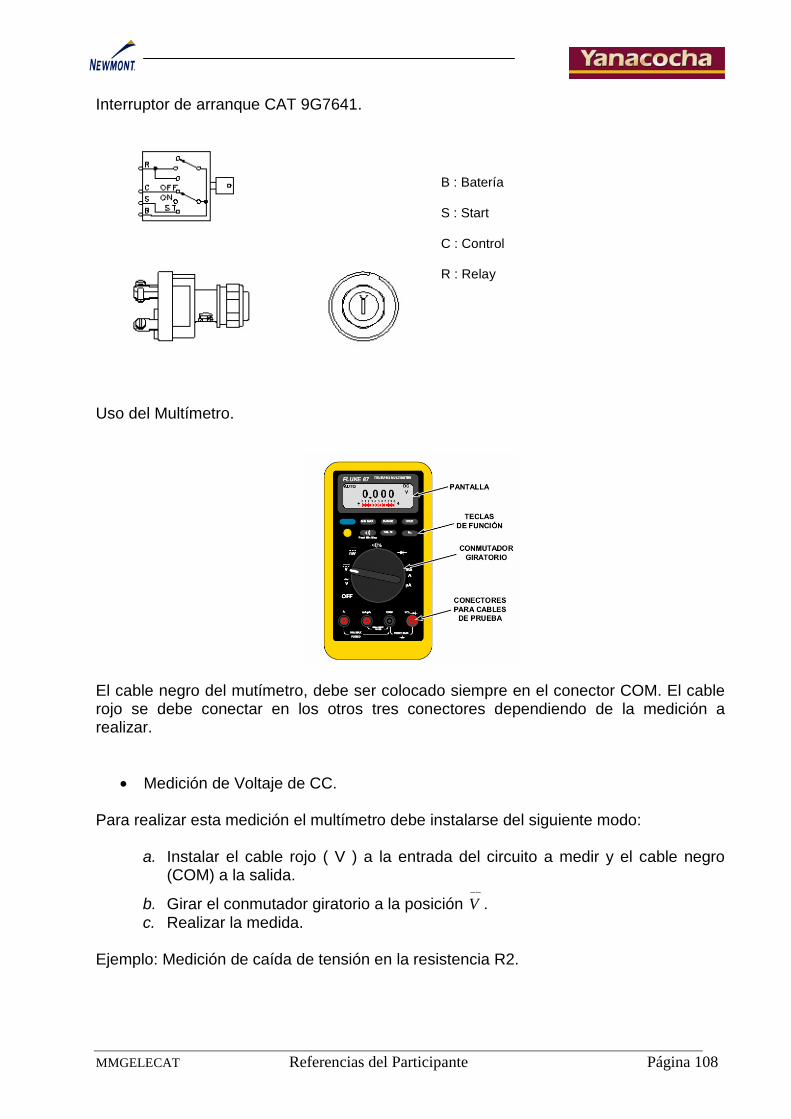
MMGELECATMMLDPWT401 Referencias del Participante Página 108
Interruptor de arranque CAT 9G7641. B : Batería S : Start C : Control R : Relay
Uso del Multímetro.
El cable negro del mutímetro, debe ser colocado siempre en el conector COM. El cable rojo se debe conectar en los otros tres conectores dependiendo de la medición a realizar.
• Medición de Voltaje de CC. Para realizar esta medición el multímetro debe instalarse del siguiente modo:
a. Instalar el cable rojo ( V ) a la entrada del circuito a medir y el cable negro (COM) a la salida.
b. Girar el conmutador giratorio a la posición −−
V . c. Realizar la medida.
Ejemplo: Medición de caída de tensión en la resistencia R2.
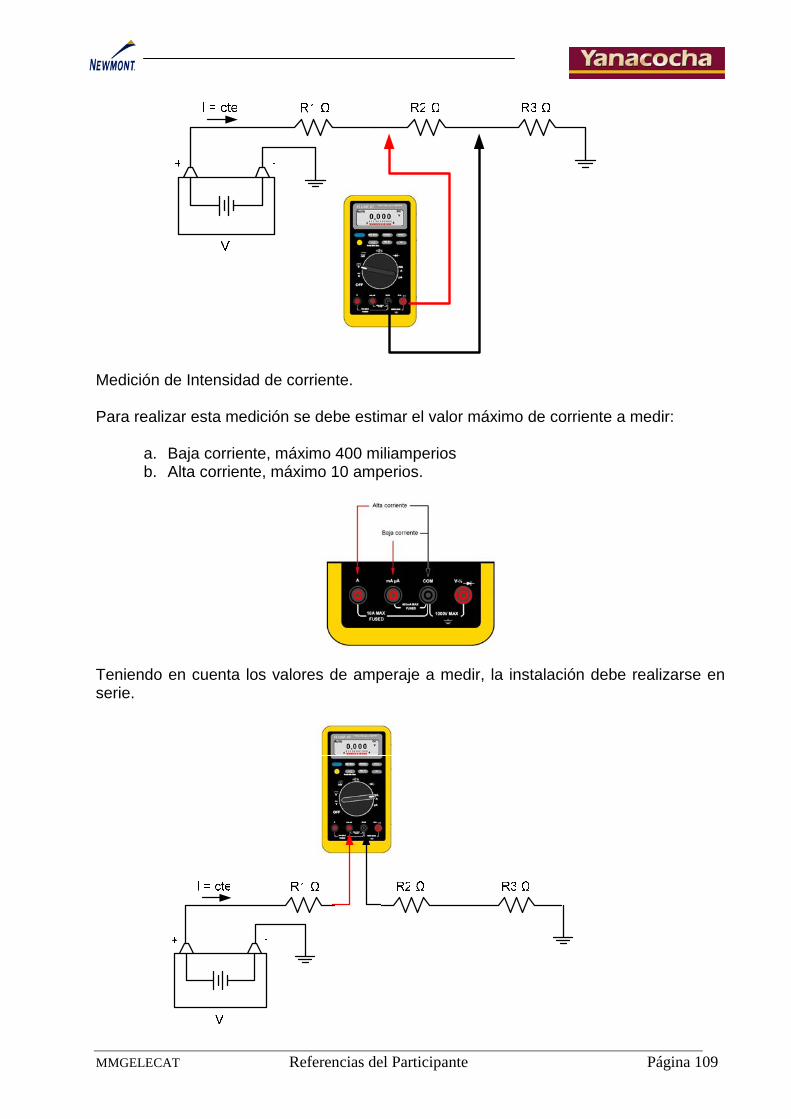
MMGELECATMMLDPWT401 Referencias del Participante Página 109
Medición de Intensidad de corriente. Para realizar esta medición se debe estimar el valor máximo de corriente a medir:
a. Baja corriente, máximo 400 miliamperios b. Alta corriente, máximo 10 amperios.
Teniendo en cuenta los valores de amperaje a medir, la instalación debe realizarse en serie.
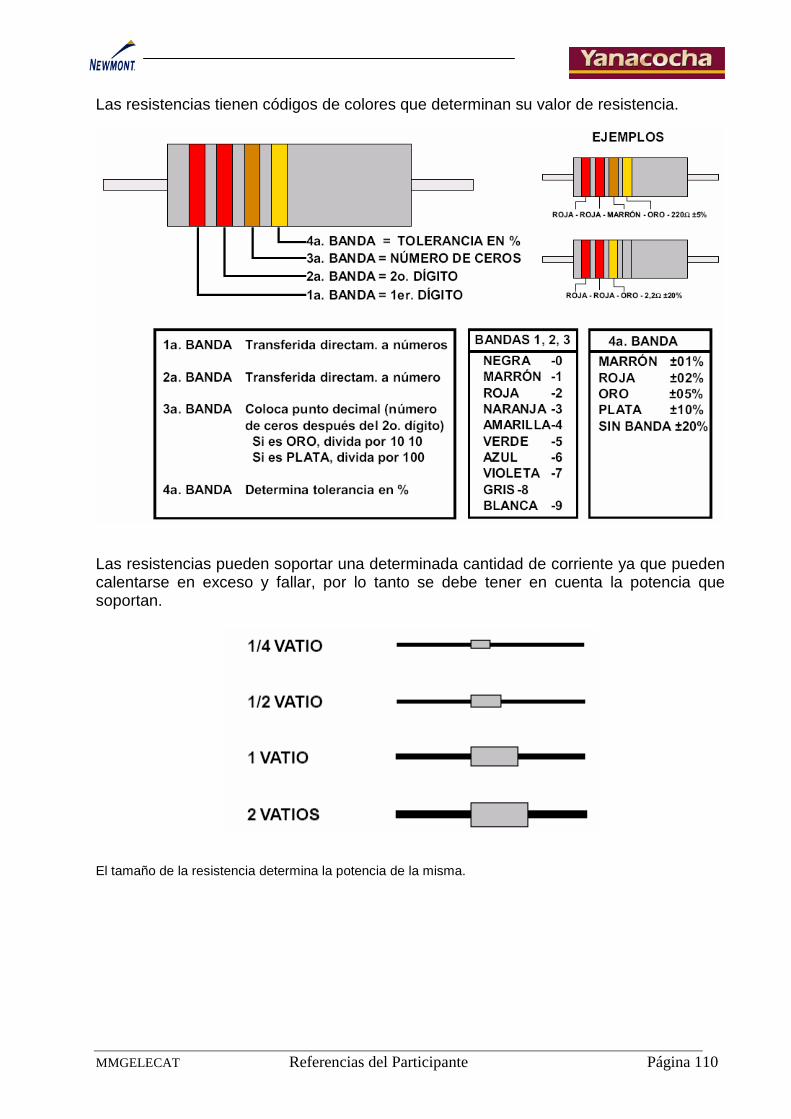
MMGELECATMMLDPWT401 Referencias del Participante Página 110
Las resistencias tienen códigos de colores que determinan su valor de resistencia.
Las resistencias pueden soportar una determinada cantidad de corriente ya que pueden calentarse en exceso y fallar, por lo tanto se debe tener en cuenta la potencia que soportan.
El tamaño de la resistencia determina la potencia de la misma.

MMGELECATMMLDPWT401 Referencias del Participante Página 111
Laboratorio: Tipos de sensores. Instrucciones: Utilizando el material de referencia y el esquema eléctrico, el participante identificará las diferentes características de los siguiente sensores electrónicos. - Análogo - Digital - Frecuencia
-Componente de Entrada -Componente de Salida
Alimentación (Voltios) Graficar la Señal
Sensor de presión Atmosférica
Sensor de temperatura del refrigerante
Sensor de posición del pedal del acelerador
Sensor de Velocidad
Sensor de Velocidad y Sincronización
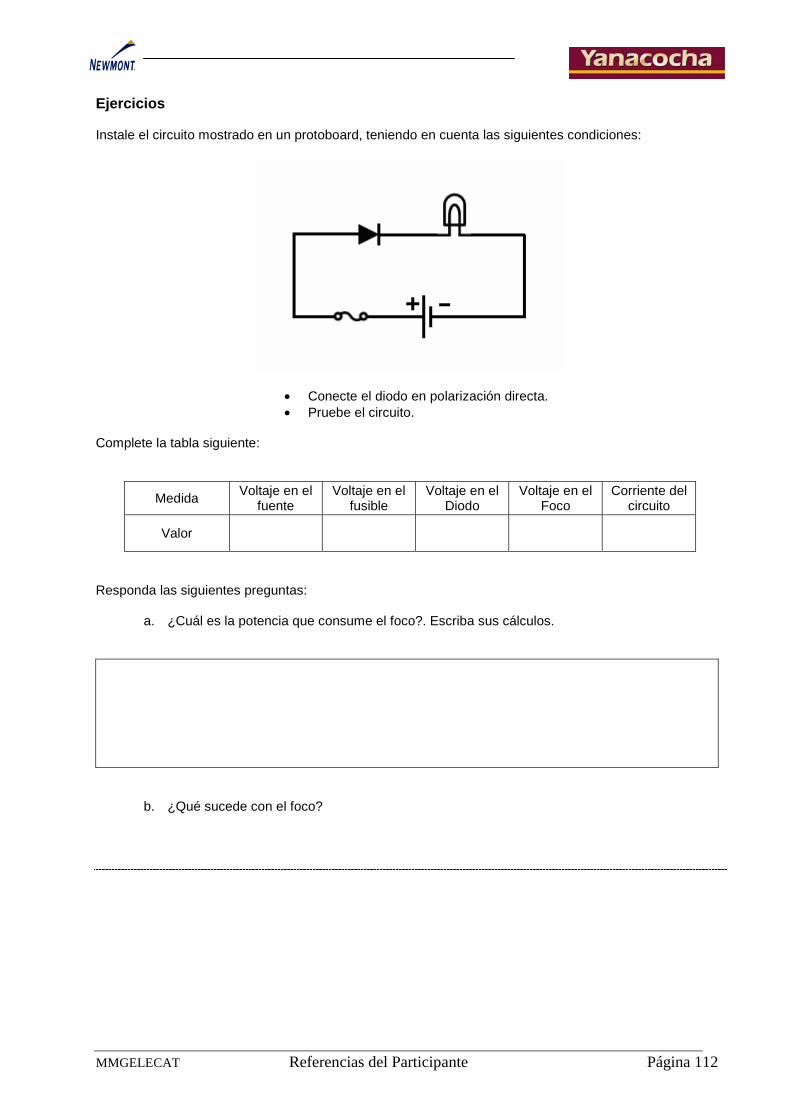
MMGELECATMMLDPWT401 Referencias del Participante Página 112
Ejercicios Instale el circuito mostrado en un protoboard, teniendo en cuenta las siguientes condiciones:
• Conecte el diodo en polarización directa. • Pruebe el circuito.
Complete la tabla siguiente:
Medida Voltaje en el
fuente Voltaje en el
fusible Voltaje en el
Diodo Voltaje en el
Foco Corriente del
circuito
Valor
Responda las siguientes preguntas:
a. ¿Cuál es la potencia que consume el foco?. Escriba sus cálculos.
b. ¿Qué sucede con el foco?
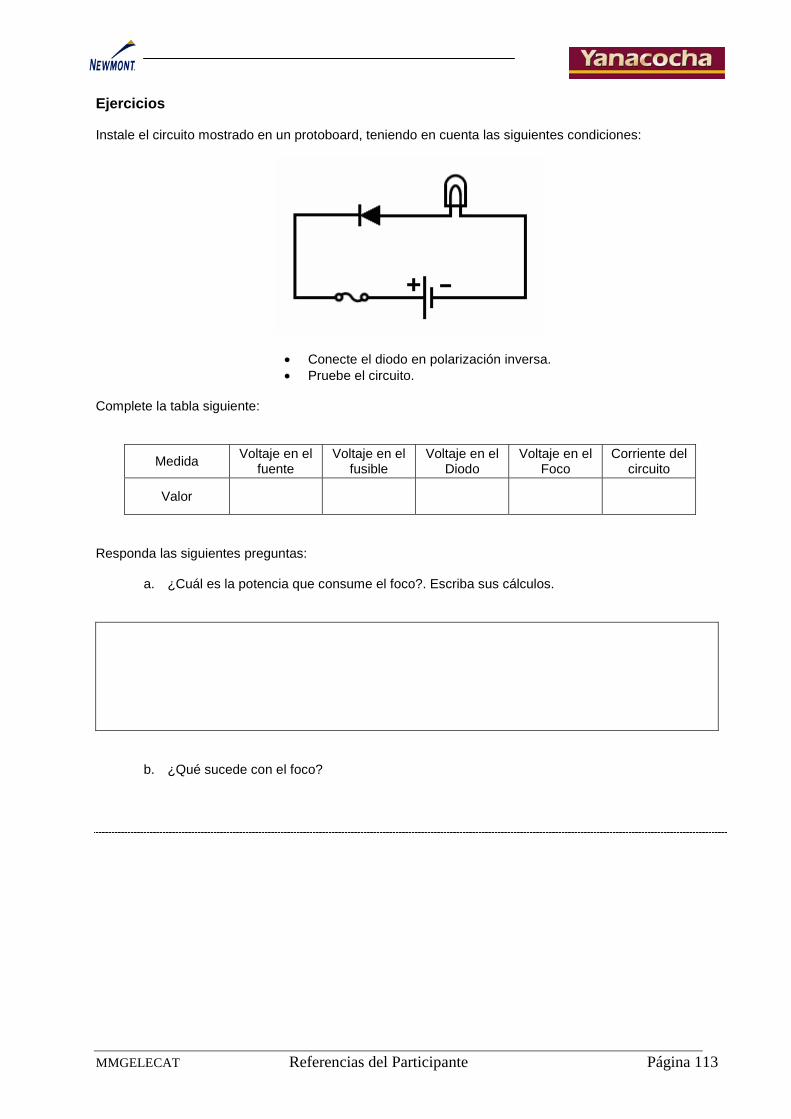
MMGELECATMMLDPWT401 Referencias del Participante Página 113
Ejercicios Instale el circuito mostrado en un protoboard, teniendo en cuenta las siguientes condiciones:
• Conecte el diodo en polarización inversa. • Pruebe el circuito.
Complete la tabla siguiente:
Medida Voltaje en el
fuente Voltaje en el
fusible Voltaje en el
Diodo Voltaje en el
Foco Corriente del
circuito
Valor
Responda las siguientes preguntas:
a. ¿Cuál es la potencia que consume el foco?. Escriba sus cálculos.
b. ¿Qué sucede con el foco?
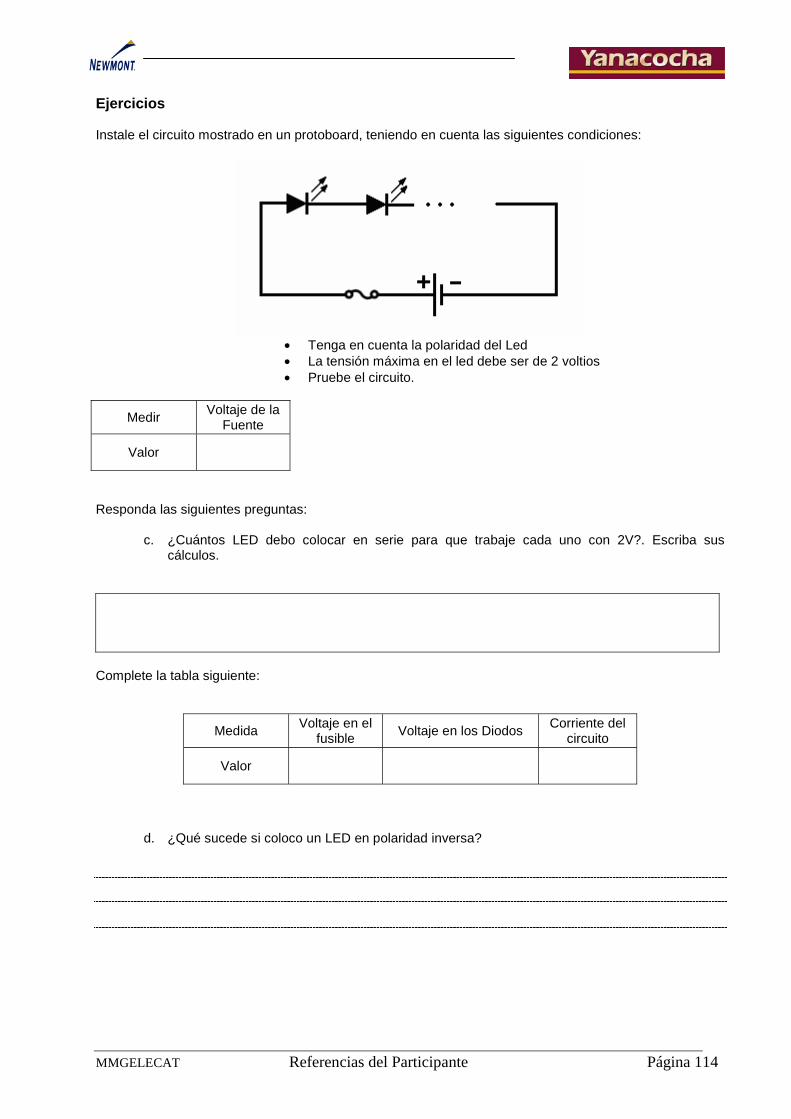
MMGELECATMMLDPWT401 Referencias del Participante Página 114
Ejercicios Instale el circuito mostrado en un protoboard, teniendo en cuenta las siguientes condiciones:
• Tenga en cuenta la polaridad del Led • La tensión máxima en el led debe ser de 2 voltios • Pruebe el circuito.
Medir Voltaje de la
Fuente
Valor
Responda las siguientes preguntas:
c. ¿Cuántos LED debo colocar en serie para que trabaje cada uno con 2V?. Escriba sus cálculos.
Complete la tabla siguiente:
Medida Voltaje en el
fusible Voltaje en los Diodos
Corriente del circuito
Valor
d. ¿Qué sucede si coloco un LED en polaridad inversa?
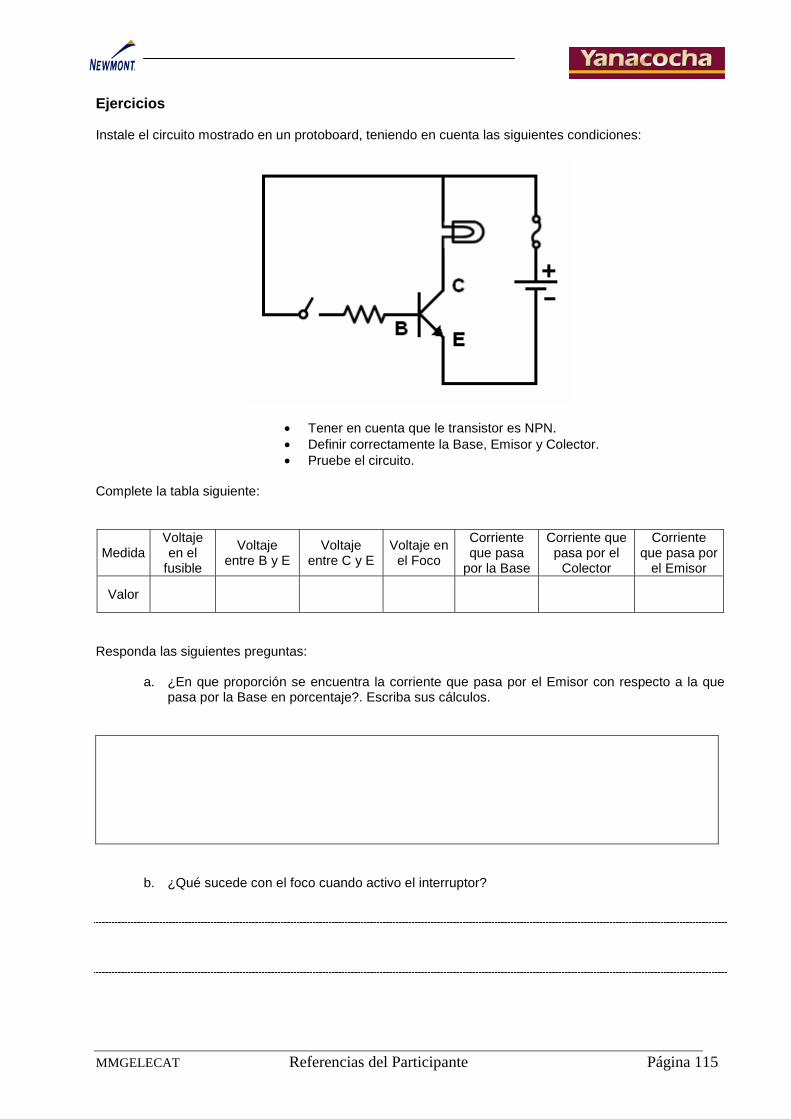
MMGELECATMMLDPWT401 Referencias del Participante Página 115
Ejercicios Instale el circuito mostrado en un protoboard, teniendo en cuenta las siguientes condiciones:
• Tener en cuenta que le transistor es NPN. • Definir correctamente la Base, Emisor y Colector. • Pruebe el circuito.
Complete la tabla siguiente:
Medida Voltaje en el
fusible
Voltaje entre B y E
Voltaje entre C y E
Voltaje en el Foco
Corriente que pasa
por la Base
Corriente que pasa por el
Colector
Corriente que pasa por
el Emisor
Valor
Responda las siguientes preguntas:
a. ¿En que proporción se encuentra la corriente que pasa por el Emisor con respecto a la que pasa por la Base en porcentaje?. Escriba sus cálculos.
b. ¿Qué sucede con el foco cuando activo el interruptor?

MMGELECATMMLDPWT401 Referencias del Participante Página 116
Cambie el interruptor por un potenciómetro de 5k ohmios y llene la tabla para tres posiciones del potenciómetro.
Para la posición del potenciómetro cuya resistencia es cero ohm.
Medida Voltaje
entre B y E Voltaje
entre C y E Voltaje en
el Foco
Corriente que pasa
por la Base
Corriente que pasa por el
Colector
Corriente que pasa por
el Emisor
Valor
Para la posición del potenciómetro cuya resistencia es 2.5k ohm.
Medida Voltaje
entre B y E Voltaje
entre C y E Voltaje en
el Foco
Corriente que pasa
por la Base
Corriente que pasa por el
Colector
Corriente que pasa por
el Emisor
Valor
Para la posición del potenciómetro cuya resistencia es 5k ohm.
Medida Voltaje
entre B y E Voltaje
entre C y E Voltaje en
el Foco
Corriente que pasa
por la Base
Corriente que pasa por el
Colector
Corriente que pasa por
el Emisor
Valor
¿Qué sucede con el foco cuando se gira el potenciómetro?





























