En Este Trabajo Se Presenta El Análisis de Un Robot Móvil Todo Terreno Diseñado Para La...
1
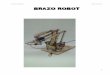
En este trabajo se presenta el análisis de un robot móvil todo terreno diseñado para la exploración de nuevos terrenos. El diseño que se propone consiste en la implementación de un sistema de tracción oruga para un robot móvil, dicho sistema en base en las investigaciones realizadas tendrá que ser adaptable por lo cual se recomienda una tracción modificable la cual consta de un determinado números de motores los cuales se dividirán en dos motores para el movimiento de la oruga y los demás motores se incluirán en los brazos giratorios, los cuales permitirán que el robot se abra paso por sí mismo colocando la inclinación y la altura necesaria para cada camino. El robot contara con navegación autónoma la cual consiste en que el robot mismo será capaz de resolver los problemas con los que se encuentre, lograr evadir los obstáculos o simplemente atravesarlos de ser necesario, para que sea autónomo es necesario la instalación de sensores así como de una cámara para obtener una mejor sensación del ambiente que lo rodea. El objetivo general de este proyecto es que tenga una implementación en el campo espacial, militar o de exploración, ya que es para lo que se está adaptando el prototipo.
En Este Trabajo Se Presenta El Análisis de Un Robot Móvil Todo Terreno Diseñado Para La Exploración de Nuevos Terrenos
En Este Trabajo Se Presenta El Análisis de Un Robot Móvil Todo Terreno Diseñado Para La Exploración de Nuevos Terrenos
Citation preview
En este trabajo se presenta el anlisis de un robot mvil todo
terreno diseado para la exploracin de nuevos terrenos. El diseo que
se propone consiste en la implementacin de un sistema de traccin
oruga para un robot mvil, dicho sistema en base en las
investigaciones realizadas tendr que ser adaptable por lo cual se
recomienda una traccin modificable la cual consta de un determinado
nmeros de motores los cuales se dividirn en dos motores para el
movimiento de la oruga y los dems motores se incluirn en los brazos
giratorios, los cuales permitirn que el robot se abra paso por s
mismo colocando la inclinacin y la altura necesaria para cada
camino.El robot contara con navegacin autnoma la cual consiste en
que el robot mismo ser capaz de resolver los problemas con los que
se encuentre, lograr evadir los obstculos o simplemente
atravesarlos de ser necesario, para que sea autnomo es necesario la
instalacin de sensores as como de una cmara para obtener una mejor
sensacin del ambiente que lo rodea.
El objetivo general de este proyecto es que tenga una
implementacin en el campo espacial, militar o de exploracin, ya que
es para lo que se est adaptando el prototipo.