Embed Size (px)
Citation preview
147ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLOAnales Acad. Nac. de Ing. Buenos Aires, Tomo VII (2011): pp. 147-198
ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
17 de octubre de 2011
I. Palabras de apertura a cargo del señor Presidente de la Academia Na-cional de Ingeniería, Ing. Oscar A. Vardé.
II. Presentación del premiado por el señor Académico de número de la Academia Nacional de Ingeniería, Ing. Alberto H. Puppo.
III. Conferencia del Dr. Ing. Miguel Eduardo Tornello sobre el tema: “Ar-gentina y sus Primeras Experiencias en la Protección Sísmica mediante Dis-positivos de Aislamiento Sísmico”.
148 PREMIOS
149ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
17 de octubre de 2011
Palabras de apertura a cargo del señor Presidente de la Academia Nacional de Ingeniería, Ing. Oscar A. Vardé
Buenas tardes a todos. Agradecemos a los presentes su asistencia a este acto de la Academia Nacional de Ingeniería en el que realizaremos la entrega del Premio “Enrique Butty” Edición 2011 al Dr. Ing. Miguel Eduardo Tornello.
Hoy tenemos el privilegio de contar con la presencia de familiares di-rectos del Ing. Enrique Butty, nombre de este premio, y como siempre para esta Academia este tipo de actos, donde otorgamos un premio, es un episodio muy grato, porque uno de nuestros objetivos es distinguir la excelencia en Ingeniería.
En este caso, el premio Butty justamente lleva el nombre de uno de los ingenieros más prestigiosos en nuestro medio, uno de los fundadores de la Academia Nacional de Ingeniería en el año 1971, siempre hemos querido hon-rar su memoria nominando con su nombre este premio.
Este premio se otorga a un ingeniero destacado en la profesión, por sus contribuciones, por sus trabajos, y en este caso particular creo que está absolu-tamente justificado el haber otorgado el premio al Dr. Tornello, quien presen-ta un intenso récord de trabajos de investigación, de docencia y profesionales en esta actividad.
El jurado, en su dictamen, ha confirmado por unanimidad el nombre del Dr. Tornello como merecedor de este premio y por ello creemos que ha sido muy justa esta nominación. El Ing. Puppo, coordinador del jurado del premio, realizará su presentación y luego le entregaremos el diploma y la medalla que
150 PREMIOS
lo hacen acreedor de este premio. A continuación daremos lugar a su exposi-ción sobre un tema muy interesante que es uno de los motivos que ha ocupado gran parte de su vida profesional en investigación.
Cedo la palabra, entonces, al Ing. Puppo.Muchas gracias.
151ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
Presentación del premiado Dr. Ing. Miguel Eduardo Tornellopor el señor Académico de número de la Academia Nacionalde Ingeniería, Ing. Alberto H. Puppo
Señor Presidente de la AcademiaSeñores AcadémicosDr. Ing. Miguel Eduardo TornelloSeñoras y señores
Durante las últimas tres décadas nos hemos reunido cada dos años para hacer entrega del Premio Butty. Este premio tiene un doble propósito: por un lado, recordar y honrar al Ingeniero Enrique Butty, Académico Fundador de esta Academia y uno de los más destacados ingenieros argentinos del siglo pa-sado; por otro lado, premiar a un ingeniero de mediana edad que se destaque por su actuación en algún campo de la Ingeniería Civil.
Nuestro premiado de hoy es el Dr. Ing. Miguel Eduardo Tornello, de quien paso a destacar algunos de los aspectos de su actividad, extraídos de su fron-doso Curriculum Vitae y dejando otros muchos sin mencionar por razones de tiempo.
El Dr. Ing. Tornello nació en la Ciudad de Mendoza, donde cursó sus es-tudios secundarios y obtuvo sus títulos universitarios en la Regional Mendoza de la Universidad Tecnológica Nacional (RM-UTN), institución en la que ha desarrollado y continúa desarrollando el grueso de sus actividades docentes y de investigación.
La docencia universitaria, en todos sus niveles, es una actividad perma-nente del Dr. Ing. Tornello, que recorrió en la RM-UTN, desde Ayudante a Profesor Titular Ordinario, todas las categorías, desempeñándose en materias ligadas a la Ingeniería Estructural, particularmente en estructuras sismorre-sistentes, en forma brillante, como lo reconocen sus alumnos de ayer y sus colegas y colaboradores de hoy. Las publicaciones de apoyo para sus cursos muestran la dedicación e importancia que le da a su actividad de profesor.
152 PREMIOS
La investigación es otra actividad muy importante del Dr. Ing. Tornello. Desde su graduación hasta el presente, participa en importantes programas de investigación que abarcan diversos aspectos de la planificación y el desa-rrollo de la ingeniería sismorresistente. En particular, integra el SIS, Servicio de Información Sísmica de la RM-UTN, dependiente del Centro Regional de Desarrollos Tecnológicos para la Construcción, Sismología e Ingeniería Sísmi-ca (CEREDETEC).
Dirige el Proyecto “Estructuras edilicias con dispositivos de protección sísmica emplazadas en regiones cercanas a fallas activas” en la RM-UTN y brinda servicios especiales y asistencia técnica a industrias consistentes en “Análisis y zonificación del peligro sísmico, identificación de fuentes”.
Es de mencionar en forma especial la tarea del Dr. Ing. Tornello en el de-sarrollo de sistemas de protección sísmica de edificios utilizando como técnica no tradicional la aislación de base, avanzando hasta la aplicación concreta en un edificio de la ciudad de Mendoza.
El Dr. Ing. Tornello participa activamente en programas de cooperación científica con diversas instituciones del país y se ocupa de la formación de re-cursos humanos mediante cursos, participación en congresos y publicaciones. Al respecto, son más de 50 sus publicaciones en revistas especializadas sobre los temas de su especialidad.
“Last but not least”, cabe resaltar algunas características personales del Dr. Ing. Tornello. Dedicado a su familia y trabajo, su modestia y calidad en el trato lo convierten en el conductor ideal para llevar adelante proyectos con intervención de numerosas personas. Es un profesor nato, que expone sus am-plios conocimientos con claridad y en forma amena, que le genera el aprecio de sus numerosos discípulos.
El Premio Butty 2011 está en muy buenas manos. En nombre de los miembros de esta Academia y en el mío propio, felicito cordialmente al Dr. Ing. Tornello y le deseo una continuidad exitosa de su brillante carrera.
153ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
ARGENTINA Y SUS PRIMERAS EXPERIENCIASEN LA PROTECCIÓN SÍSMICA MEDIANTE DISPOSITIVOS
DE AISLAMIENTO SÍSMICO
Dr. Ing. Miguel Eduardo Tornello
Resumen
En la República Argentina, más de las dos terceras partes de su territorio se encuentran en riesgo sísmico. Estudios realizados sobre sismicidades locales y regionales han demostrado el elevado peli-gro sísmico de importantes provincias del oeste argentino, un ejemplo son Mendoza y San Juan. La región conocida como el Gran Mendoza con más de un millón de habitantes, presenta una importan-te historia sísmica. En los últimos 200 años han ocurrido no menos de 15 terremotos que ocasiona-ron distintos niveles de daños en las construcciones y en algunos casos se ha tenido que lamentar la pérdida de vidas humanas. El antecedente histórico más conocido lo constituye el terremoto de 1861, que provocó la destrucción total de la ciudad y ocasionó la muerte del 60% de las personas que habitaban la ciudad. El avance tecnológico de los últimos años ha permitido contar con nuevos desarrollos tecnológicos que tiendan a reducir y controlar el efecto de los terremotos destructivos sobre las construcciones emplazadas en regiones de riesgo sísmico. El trabajo realiza una revisión de los dispositivos de aislamiento más comúnmente utilizados a nivel mundial y particularmente se presenta un desarrollo y una aplicación concreta de aislamiento sísmico de base para un edificio de construcción típica, de tres niveles, para las zonas sísmicas del país, con dispositivos de aislamiento distintos de los habitualmente utilizados en otras zonas sísmicas del continente. Para todos los casos se desarrolla el marco teórico que permite predecir la respuesta sísmica de la construcción aislada. El trabajo se completa con i) información sobre la respuesta del edificio diseñado localmente frente a sismos sensibles ocurridos en la región registrados por el instrumental sísmico instalados en el edificio aislado y en otro edificio de idénticas características pero de base tradicional, ii) carac-terísticas más relevantes de la construcción del edificio y de los dispositivos de aislamiento.
Palabras clave: Protección sísmica, aislamiento sísmico, terremotos falla cercana.
1. Introducción
Hoy, muchos proyectos de Ingeniería utilizan técnicas modernas para controlar los efectos de los terremotos, entre ellas, los sistemas pasivos de con-
154 PREMIOS
trol de vibraciones (disipadores de energía) y la técnica del aislamiento sísmico (Martelli, 2005) han sido las más utilizadas. Ambas constituyen herramientas eficientes para garantizar la seguridad de las construcciones frente a la ocu-rrencia de los terremotos. La protección no sólo se limita a los elementos es-tructurales, sino también a los no estructurales y fundamentalmente a los con-tenidos, en muchos casos de mayor valor económico que la construcción misma.
La implementación de dispositivos de aislamiento sísmico permite reducir la demanda sísmica sobre las estructuras y asegurar su capacidad de resisten-cia frente a terremotos destructivos; por lo tanto, dichas estructuras muestran un comportamiento elástico ante la ocurrencia de importantes terremotos.
El objetivo del aislamiento sísmico es desacoplar la estructura de los mo-vimientos de suelo ante la ocurrencia de terremotos. En consecuencia, se evita que la superestructura sea la responsable de disipar la energía entregada por el terremoto. La estructura debe ser soportada en puntos discretos por dispo-sitivos especiales llamados aisladores, los cuales poseen características diná-micas especiales para desacoplar la estructura de los movimientos del terreno. Los desplazamientos máximos y la no linealidad se concentran a nivel del sistema de aislamiento, mientras que la superestructura se comporta como un bloque rígido y presenta un comportamiento elástico. Los aisladores pueden ser diseñados y construidos con un control de calidad que supera ampliamente los estándares habituales de la construcción civil, con la ventaja de que pue-den ser inspeccionados y eventualmente reemplazados como un dispositivo de repuesto. Por el contrario, la reparación de los elementos dañados de una estructura no resulta ser una tarea simple y económica.
La técnica del aislamiento sísmico permite desacoplar la estructura de la componente horizontal del terremoto gracias a su baja rigidez en esa direc-ción. Este efecto le proporciona a la estructura una frecuencia natural que es mucho menor que aquella que tendría si el edificio fuese de base fija o tuviese la frecuencia predominante del terremoto. En general, los sistemas de aisla-miento más utilizados a nivel mundial (aisladores elastoméricos o friccionales) poseen una importante rigidez vertical, aspecto que no permite desacoplar el edificio de la componente vertical, situación que, en ciertas ocasiones, resulta necesaria para proteger los contenidos del edificio.
La primera obra que utilizó aisladores elastoméricos para proteger una estructura fue en 1969, en una escuela de enseñanza básica en Skopje, Mace-donia (ex Yugoslavia). El edificio tiene tres niveles y fue construido y diseñado por la empresa Swiss Engineers (Naeim et al., 1999). Los proyectos más re-cientes actualmente utilizan casi exclusivamente aisladores conformados por planchas de goma vulcanizadas a láminas de acero y en muchos países tales

155ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
como Estados Unidos y Nueva Zelanda, lo hacen con núcleo de plomo, con el objeto de aumentar el amortiguamiento del sistema de aislamiento. Las plan-chas de acero le proveen una importante rigidez vertical, pero mantienen su flexibilidad horizontal.
Muchos proyectos de aislamiento sísmico, particularmente en Nueva Ze-landa y Japón, combinan aisladores de goma natural de alto amortiguamiento con amortiguadores viscosos o visco-elásticos, con el objeto de controlar las respuestas de terremotos de tipo impulsivos y próximos a fallas geológicas locales. Los dispositivos que se adicionan a los aisladores introducen una no linealidad de la respuesta que, en parte, requieren de análisis teóricos más complejos y, por otro lado, reducen el grado de aislamiento para los modos superiores de la excitación sísmica (Naeim et al., 1999). Sin embargo, la pre-sencia de los amortiguadores viscosos o visco-elásticos trabajando en paralelo con los aisladores de goma conduce a respuestas eficientes del sistema de ais-lamiento cuando se está en presencia de terremotos asociados a falla cercana (Jangid y Kelly, 2001).
La técnica del aislamiento sísmico no sólo se utiliza para obras nuevas, también se han utilizado en proyectos de edificios existentes. El problema que enfrentan las regiones sísmicas de países desarrollados y también de países en vías de desarrollo no es sólo la amenaza permanente de un terremoto des-tructivo sino, además, que muchas de sus construcciones (civiles, comerciales, industriales y de infraestructura) fueron construidas con reglamentos hoy ob-soletos y en muchos otros casos con pocas prescripciones sísmicas. En alguna ocasión el edificio podrá ser demolido y reconstruido, en otros no, ya sea por razones económicas, sociales o históricas. Por lo tanto, hoy, los sistemas de ais-lamiento sísmico y de disipación de energía representan técnicas innovativas para recuperar las construcciones vulnerables a los terremotos, con un grado de seguridad aceptable.
Entre los proyectos de recuperación más relevantes pueden citarse: el edi-ficio municipal de la ciudad de Oakland, construido en 1914; el de la ciudad de San Francisco (diseñado en 1912 para reemplazar el destruido por el terremo-to de 1906) y el edificio municipal de la ciudad de Los Ángeles, construido en 1928. Previo a implementar los sistemas de aislamiento, los edificios presenta-ron daños en ocasión del terremoto de Loma Prieta de 1989 y en especial el de Los Ángeles con el terremoto de Northridge de 1994. En el edificio municipal de la ciudad de Los Ángeles se combinaron aisladores elastoméricos fabricados con goma de alto amortiguamiento y los mismos fueron colocados en combina-ción con amortiguadores viscosos (Naeim et al., 1999).
En Sudamérica, Chile, es el país que más utiliza dispositivos de aislamien-to sísmico. Las aplicaciones más relevantes son: un edificio de cuatro niveles
156 PREMIOS
para viviendas económicas conformado por dos departamentos de 50 m2 cada uno, aislado con dispositivos elastoméricos a base de láminas de caucho refor-zado con acero (Sarrazin, M. et al., 1989 y Moroni, M. O. et al., 1995); un puente de 383 metros de longitud (Marga-Marga), con un único tablero continuo apo-yado en 36 aisladores elastoméricos reforzados con láminas de acero (Boros-check, R., et al., 1997); un tramo elevado de 5 a 8 metros de la línea 5 del metro de Santiago (Sarrazin, M. et al., 1995), un edificio destinado al Hospital Militar que consta de una superficie de 50.000 m2, posee cuatro niveles por encima del sistema de aislamiento, se utilizaron 164 aisladores elastoméricos reforzados con placas de aceros con diámetros de 70 y 90 cm. y el mismo representa, ac-tualmente, la estructura aislada de mayores dimensiones en América Latina (Stagno, P. et al., 2001). Entre las obras de infraestructura puede citarse el puente Amolanas, de 268 metros de longitud. En los estribos y pilas existen dos apoyos de neopreno en una caja fija de acero con lámina de teflón a excepción de la pila más alta donde sólo hay apoyo de neopreno. En ambos estribos hay dos amortiguadores visco elásticos de Taylor Devices Inc. de 300 toneladas, (Sarrazin M., et al., 2001; Benavides, et al., 2004; Beltrán C., et al., 2004).
En Argentina, y especialmente en la región oeste, zona de mayor peligro sísmico del país, no existen aplicaciones, salvo el edificio de la Residencia de Estudiantes de la Facultad Regional Mendoza de la UTN (Tornello, et al., 2003; 2004a, 2004b, 2004c, 2004d, 2005a, 2005b). El estado actual del arte en las aplicaciones de los sistemas de aislamiento sísmico a nivel mundial indica que existen numerosas aplicaciones en distintos países del mundo y también en Sudamérica. Argentina y sus zonas sísmicas evidencian un importante re-traso en la implementación de técnicas no tradicionales para el control de los efectos de los terremotos y entre ellos los sistemas de aislamiento sísmico. Los reglamentos de aplicación no contemplan el uso de dispositivos para el control y disipación de energía, situación que acentúa aún más el retraso citado, si se compara, no sólo con países tecnológicamente avanzados, sino con otros de la región, como es Chile.
2. Marco teórico del aislamiento sísmico
2.1. Teoría lineal. Funciones de transmisibilidadEl sistema de aislamiento sísmico más simple es el representado por la
masa m soportada por un dispositivo de baja rigidez a los desplazamientos horizontales x, que cumple la función de aislar la estructura de la excitación
157ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
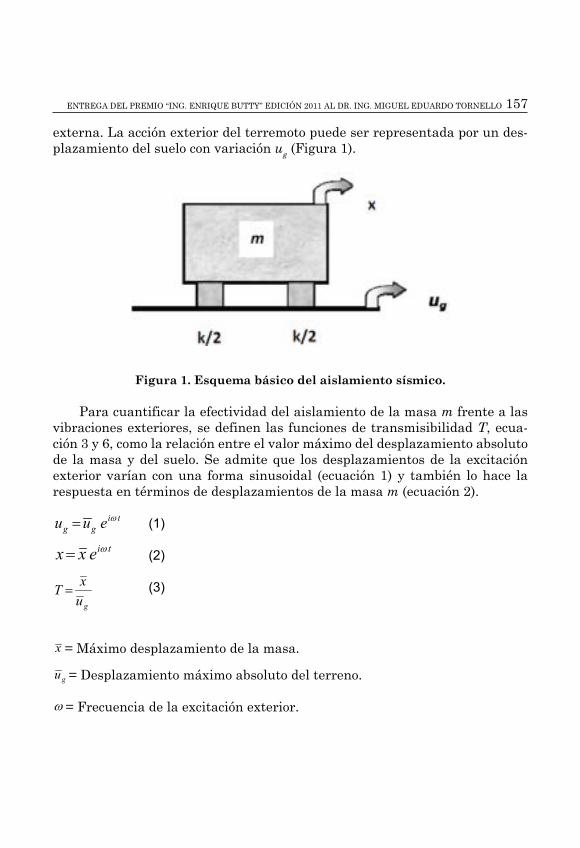
externa. La acción exterior del terremoto puede ser representada por un des-plazamiento del suelo con variación ug (Figura 1).
Figura 1. Esquema básico del aislamiento sísmico.
Para cuantificar la efectividad del aislamiento de la masa m frente a las vibraciones exteriores, se definen las funciones de transmisibilidad T, ecua-ción 3 y 6, como la relación entre el valor máximo del desplazamiento absoluto de la masa y del suelo. Se admite que los desplazamientos de la excitación exterior varían con una forma sinusoidal (ecuación 1) y también lo hace la respuesta en términos de desplazamientos de la masa m (ecuación 2).
tigg euu ω= (1)
tiexx ω= (2)
guxT = (3)
x = Máximo desplazamiento de la masa.
gu = Desplazamiento máximo absoluto del terreno.
ω = Frecuencia de la excitación exterior.

158 PREMIOS
La transmisibilidad puede igualmente expresarse en términos de una re-lación entre aceleraciones absolutas:
tigg eau ω= (4)
tieax ω= (5)
gaaT = (6)
a = Máximo aceleración de la masa.
ga = Aceleración máxima absoluta del terreno.
La ecuación de movimiento de la masa, sujeta a la acción del movimien-to del suelo, puede expresarse mediante la ecuación 7. Luego, si se define la razón de amortiguamiento crítico por la 8 y la frecuencia natural mediante la expresión 9, finalmente la ecuación de movimiento queda expresada con la ecuación 10.
)()( gg uxkuxcxm −−−−= (7)
mkc
mc
o 22==
ωβ (8)
mk
o =2ω (9)
)()(2 2gogo uxuxx −−−−= ωβω (10)
Los valores de ug y x se encuentran definidos por las ecuaciones 1 y 2 res-pectivamente, por lo tanto la expresión de amplitud de transmisibilidad puede expresarse como:
22121
Ω−Ω+Ω+
=β
βi
iux
g
(11)
Donde: oωω
=Ω w = frecuencia de la excitación exterior.
ωo = frecuencia propia del sistema.

159ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
El cociente de la suma de complejos tiene solución en el campo real, en-tonces la expresión de la amplitud de transmisibilidad queda expresada por la ecuación 12.
2/1
2222
22
4)1(41
Ω+Ω−
Ω+=
ββT (12)
El análisis de la ecuación 12, indica que cuando 0=Ω el valor de T = 1.
Cuando 1=Ω , ββ 2/)41( 2/12+=T , si β es pequeño, β2/1≈T . Por otro lado
cuando T = 1, 22 =Ω , independientemente del valor de β , por lo tanto T es siempre menor que uno cuando 2>Ω (Tabla 1)
Tabla 1: Valores límites función de transmisibilidad “T”para amortiguamiento viscoso.
Relación de frecuencias cuando tiende a...
Función de transmisibilidad (T) para amortiguamiento viscoso
0→Ω 1→T
1→Ω
2→Ω 1→T
∞→Ω
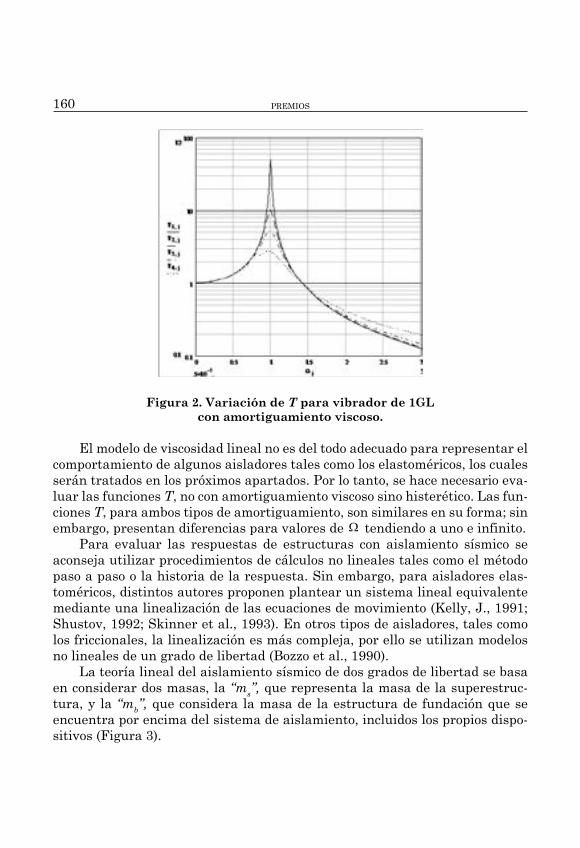
La variación de la transmisibilidad (T) para un vibrador de un grado de li-bertad, en función de la relación de frecuencias y para distintos valores de β , se observa en la figura 2. La unidad de T es decibeles (decibeles = 20 log10 T), por lo tanto la representación se realiza en escala logarítmica para el eje de las abscisas (Kelly, J., 1993, 1996). Del gráfico se deduce que el valor de T decrece para valores altos de Ω . Por lo tanto, para valores elevados de W, T disminuye con la relación: Ω≈ /2βT , es decir que, valores altos de amortiguamiento tien-den a reducir la efectividad del sistema de aislamiento para altas frecuencias; sin embargo, el amortiguamiento es esencial para evitar la resonancia ( 1=Ω ).
βββ
21
241 2
≈+
→T
Ω→
β2T
160 PREMIOS
Figura 2. Variación de T para vibrador de 1GLcon amortiguamiento viscoso.
El modelo de viscosidad lineal no es del todo adecuado para representar el comportamiento de algunos aisladores tales como los elastoméricos, los cuales serán tratados en los próximos apartados. Por lo tanto, se hace necesario eva-luar las funciones T, no con amortiguamiento viscoso sino histerético. Las fun-ciones T, para ambos tipos de amortiguamiento, son similares en su forma; sin embargo, presentan diferencias para valores de Ω tendiendo a uno e infinito.
Para evaluar las respuestas de estructuras con aislamiento sísmico se aconseja utilizar procedimientos de cálculos no lineales tales como el método paso a paso o la historia de la respuesta. Sin embargo, para aisladores elas-toméricos, distintos autores proponen plantear un sistema lineal equivalente mediante una linealización de las ecuaciones de movimiento (Kelly, J., 1991; Shustov, 1992; Skinner et al., 1993). En otros tipos de aisladores, tales como los friccionales, la linealización es más compleja, por ello se utilizan modelos no lineales de un grado de libertad (Bozzo et al., 1990).
La teoría lineal del aislamiento sísmico de dos grados de libertad se basa en considerar dos masas, la “ms”, que representa la masa de la superestruc-tura, y la “mb”, que considera la masa de la estructura de fundación que se encuentra por encima del sistema de aislamiento, incluidos los propios dispo-sitivos (Figura 3).

161ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
En la figura 3 se representa con Kb y Ks, las rigideces del sistema de aisla-miento y de la superestructura respectivamente, con cb y cs los coeficientes de amortiguamiento viscoso de los dos niveles considerados, ug, el desplazamiento absoluto del terreno, ub, el desplazamiento relativo del sistema de aislamiento con respecto al suelo y us, el desplazamiento relativo de la superestructura con respecto a la fundación.
ms
mb
Ks - cs
Kb – cb
us
ub
ug
Figura 3. Modelo de 2 GDL para representar la estructura aislada.
Se define: sbt mmM += (13)
La ecuación del movimiento del modelo para dos grados de libertad es:
gbsbbbbssbbs ummukucumumm )()( +−=++++ (14)
gsssssssbs umukucumum −=+++ (15)
Utilizando la notación matricial resulta:
gu01
mmmM
uu
k00k
uu
c00c
uu
mmmM
ss
st
s
b
s
b
s
b
s
b
s
b
ss
st
=
+
+
(16)
gtt ujMuKuCuM −=++ (17)
Donde “j” es el vector que vincula el grado de libertad correspondiente al movimiento del suelo. La solución de la ecuación 17 está asociada a un proble-ma de valores y vectores propios del tipo indicado en la ecuación 18.
0)MK( t2 =− ϕω (18)

162 PREMIOS
En la ecuación 18, el valor de w representa la frecuencia del sistema y j su correspondiente forma modal. La ecuación característica para la frecuencia puede explicitarse mediante la ecuación 19.
0)(
)1( 24 =+
+
+
+−−
sb
b
s
s
s
s
bs
b
mmK
mK
mK
mmK
ωgω (19)
El factor “g” define la relación de masas (ecuación 20).
t
s
bs
s
Mm
)mm(m
=+
=g (20)
La solución de la ecuación 19 proporciona dos frecuencias naturales, aso-ciadas a los dos grados de libertad del sistema. Se define la frecuencia de la estructura y la del sistema de aislamiento con la ecuación 21 y 22, respectiva-mente.
s
ss m
K=ω (21)
sb
bb mm
K+
=ω (22)
La solución de la ecuación 19 resulta:
+−
−±++
=− )1()1(411
)1(2
222
21 eg
gωω
ω sb (23)
El coeficiente “e” de la ecuación 23 representa la relación entre las fre-cuencias naturales.
2
2
s
b
ωω
e = (24)
163ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
Si se explicita las raíces de la ecuación 23, los valores de las frecuencias naturales pueden expresarse como:
(25)
La rigidez de la estructura Ks, es alta comparada con la rigidez del sistema de aislamiento Kb, por lo tanto el factor e tiene un valor pequeño. En general, desde un punto de vista práctico, es habitual tomar el valor (e = 0.01) (Kelly J., 1993, 1996). En consecuencia, el cuadrado de dicho valor es muy próximo a cero, el término (1+e)2 ≅1 y la ecuación 25 queda reducida a las expresiones siguientes.
221 bωω ≅
)1(
2
2 gω
ω−
≅ s (26)
El valor de ω1 representa la frecuencia modificada del sistema de aislamiento y la ω2 la frecuencia modificada de la estructura. De la observación de las ante-riores ecuaciones se concluye que el período de una estructura con aislamiento sísmico es similar al período del sistema de aislamiento. Conocidos los valores propios de las frecuencias ω1, ω2, es posible expresar los vectores propios que permiten resolver el sistema lineal dado por la ecuación 18.
−=geϕ1
1
−=g
ϕ 11
2 (27)
El vector propio correspondiente al primer modo de vibración indica que la totalidad del movimiento lateral de la estructura se concentra en la base y el desplazamiento relativo entre los restantes pisos es una variable de segun-do orden, por lo tanto, es posible considerar que el comportamiento estructural de edificios con aislamiento sísmico es similar al de un sólido rígido con des-plazamiento lateral concentrado en la base (Bozzo et al., 1990). Si se utilizan los procedimientos clásicos de la dinámica estructural, los vectores propios (ecuaciones 27), permiten desacoplar las ecuaciones del movimiento definidas por las expresiones 16 y 17. Dicho procedimiento conduce a los factores de amortiguamiento modal b y a los de participación modal L.

164 PREMIOS
bb1 )5.11( βegββ ≅−=
(28)
111 ≅−= egL eg=2L (29)
Los factores de amortiguamiento de la estructura y del sistema de aisla-miento incluidos en las ecuaciones 28 pueden expresarse con la forma siguiente.
)(22
bsb
bb
bs
bbb mm
cmm
c+
==>+
=ω
ββω
ss
ss
s
sss m
cmc
ωββω
22 ==>= (30)
El valor de g es siempre menor que la unidad y el e, tal cual se citó prece-dentemente, es aproximadamente 0,01, por lo tanto el factor de participación del segundo modo es mucho menor que el del primer modo. Esta situación permite controlar los desplazamientos relativos de piso para estructuras que eventualmente se encuentren vibrando en el segundo modo. Por otro lado, es posible que la excitación sísmica tenga un contenido de frecuencias con un periodo predominante similar al primer modo de la estructura, es decir que la respuesta puede no ser favorable debido a que su valor máximo está condi-cionado por el coeficiente de amortiguamiento del sistema de aislamiento βb (ecuaciones 30). Por lo tanto, para diseñar una estructura aislada debe tenerse presente el contenido de frecuencias de los terremotos en el lugar de emplaza-miento de la estructura.
3. Dispositivos de aislamiento sísmico más frecuentes
Debido a la constante evolución de los sistemas de aislamiento sísmico a nivel mundial, es posible encontrar una amplia gama de dispositivos uti-lizados para tal fin. Sería extenso, y por otro lado excedería los objetivos del presente trabajo realizar una amplia recorrida por todos ellos; sin embargo, es posible sintetizar, en sus aspectos más importantes, aquellos más frecuen-temente utilizados desde el punto de vista práctico, ello sin desconocer otros
165ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
sistemas disponibles que han demostrado un comportamiento adecuado a los fines del aislamiento sísmico.
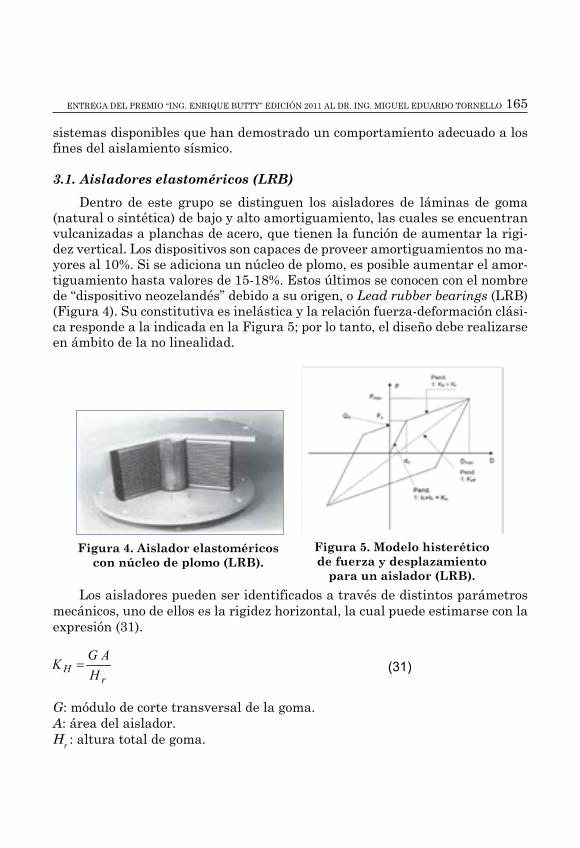
3.1. Aisladores elastoméricos (LRB)Dentro de este grupo se distinguen los aisladores de láminas de goma
(natural o sintética) de bajo y alto amortiguamiento, las cuales se encuentran vulcanizadas a planchas de acero, que tienen la función de aumentar la rigi-dez vertical. Los dispositivos son capaces de proveer amortiguamientos no ma-yores al 10%. Si se adiciona un núcleo de plomo, es posible aumentar el amor-tiguamiento hasta valores de 15-18%. Estos últimos se conocen con el nombre de “dispositivo neozelandés” debido a su origen, o Lead rubber bearings (LRB) (Figura 4). Su constitutiva es inelástica y la relación fuerza-deformación clási-ca responde a la indicada en la Figura 5; por lo tanto, el diseño debe realizarse en ámbito de la no linealidad.
Los aisladores pueden ser identificados a través de distintos parámetros mecánicos, uno de ellos es la rigidez horizontal, la cual puede estimarse con la expresión (31).
rH H
AGK = (31)
G: módulo de corte transversal de la goma.A: área del aislador.Hr : altura total de goma.
Figura 4. Aislador elastoméricoscon núcleo de plomo (LRB).
Figura 5. Modelo histeréticode fuerza y desplazamiento
para un aislador (LRB).
166 PREMIOS
El periodo del sistema aislado está en función de la rigidez lateral total del conjunto y puede estimarse con la expresión 32. La rigidez vertical del ais-lador puede determinarse con la ecuación 33.
gKWTHt
i π2= (32)
W: peso de la estructura.KHt : Rigidez horizontal total del sistema de aislamiento.
rv t
AEcK = (33)
Ec: módulo de elasticidad de la goma, modificado por un factor de forma del aislador (Kelly, 1993, 1996).tr : espesor de una capa de goma.
Con el valor de la rigidez vertical del aislador puede estimarse las tensio-nes normales (σc) y deformaciones (εc) del mismo las cuales deben ser inferio-res a los límites fijados por los reglamentos de aplicación. Las tensiones en las placas de acero se verifican con la expresión siguiente:
cs
rs t
tσσ 2= (34)
ts : espesor de la placa de acero.
Se controla que la deformación debida a compresión, corte y flexión no supere los siguientes valores admisibles:
uobosoc f eggg ≤++ )()()( (35)
(gc)o: Distorsión angular máxima asociada a la compresión.(gs)o: Distorsión angular máxima asociada al corte.(gb)o: Distorsión angular máxima asociada a la flexión.
f = 1/3 Para estado de servicio. f = ½ Para el terremoto de diseño. f = 9/10 Para el terremoto máximo esperado.

167ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
Para las deformaciones ultimas se aceptan valores comprendidos entre 500 - 600%). Para controlar la esbeltez del aislador se realizan dos compro-baciones. La primera es la verificación al vuelco del aislador que se realiza a través de un desplazamiento lateral (∆ro):
PHKDP
Hro +=∆
)2(*
(36)
P: Carga normal sobre el aislador.D: Diámetro del aislador.H: Altura del aislador.
Los valores de (∆ro) deben ser inferiores a los límites fijados por los regla-mentos de aplicación. La segunda verificación está relacionada con el pandeo del aislador que se realiza a través de una carga normal crítica (Pcr).
−
+= 141
2 RPRP E
cr (37)
R: Rigidez lateral unitaria del aislador.PE: Carga euleriana del aislador
La ecuación 37 no contempla la reducción de la capacidad debido a las grandes deformaciones del aislador en compresión. Este efecto se considera mediante la reducción de la carga crítica y para ello se la multiplica por un factor que tiene en cuenta el área efectiva (Aeff) en compresión y el área total de la sección del aislador (A), ecuación 38.
AA
PP effcreffcr =)( (38)
La verificación queda satisfecha cuando la relación entre el (Pcr (eff)) y la carga normal N que actúa sobre el aislador es mayor que un determinado coeficiente de seguridad definido por el reglamento de aplicación.
168 PREMIOS
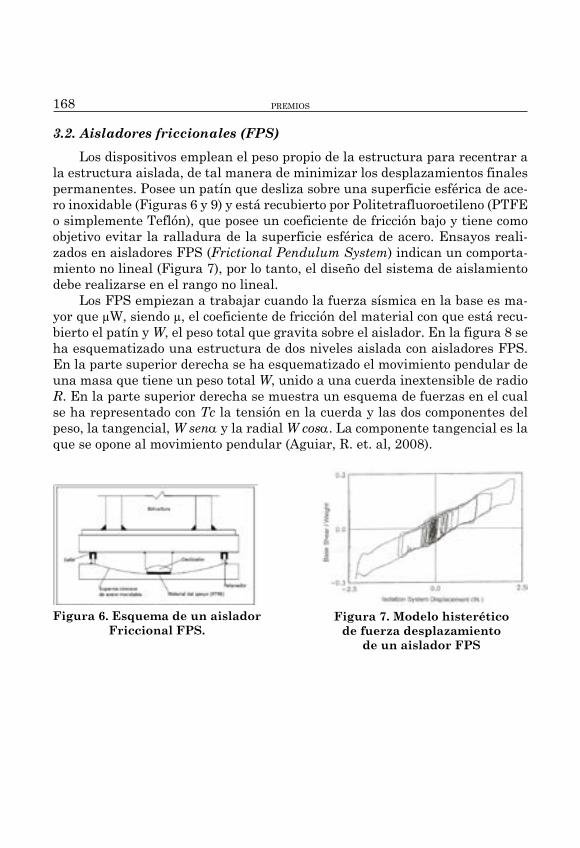
3.2. Aisladores friccionales (FPS)Los dispositivos emplean el peso propio de la estructura para recentrar a
la estructura aislada, de tal manera de minimizar los desplazamientos finales permanentes. Posee un patín que desliza sobre una superficie esférica de ace-ro inoxidable (Figuras 6 y 9) y está recubierto por Politetrafluoroetileno (PTFE o simplemente Teflón), que posee un coeficiente de fricción bajo y tiene como objetivo evitar la ralladura de la superficie esférica de acero. Ensayos reali-zados en aisladores FPS (Frictional Pendulum System) indican un comporta-miento no lineal (Figura 7), por lo tanto, el diseño del sistema de aislamiento debe realizarse en el rango no lineal.
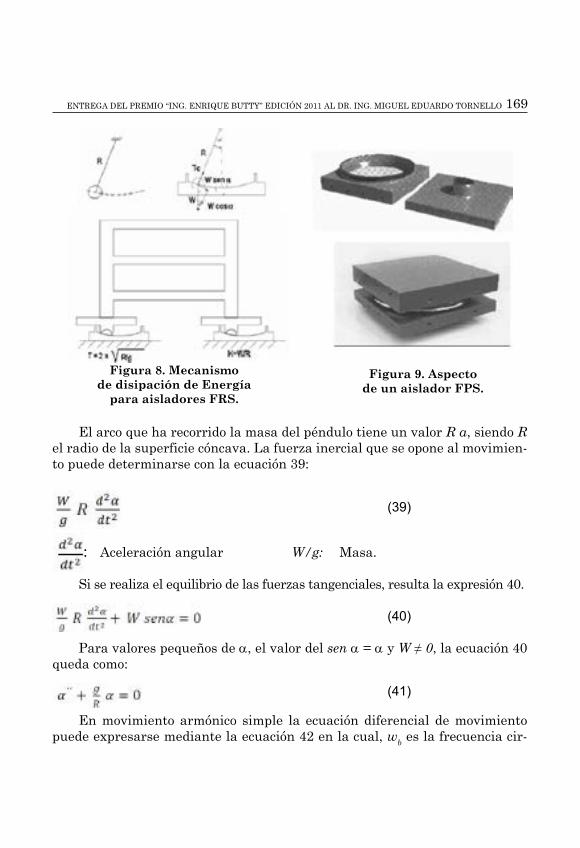
Los FPS empiezan a trabajar cuando la fuerza sísmica en la base es ma-yor que µW, siendo µ, el coeficiente de fricción del material con que está recu-bierto el patín y W, el peso total que gravita sobre el aislador. En la figura 8 se ha esquematizado una estructura de dos niveles aislada con aisladores FPS. En la parte superior derecha se ha esquematizado el movimiento pendular de una masa que tiene un peso total W, unido a una cuerda inextensible de radio R. En la parte superior derecha se muestra un esquema de fuerzas en el cual se ha representado con Tc la tensión en la cuerda y las dos componentes del peso, la tangencial, W senα y la radial W cosα. La componente tangencial es la que se opone al movimiento pendular (Aguiar, R. et. al, 2008).
Figura 6. Esquema de un aislador
Friccional FPS.Figura 7. Modelo histerético
de fuerza desplazamientode un aislador FPS
169ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
El arco que ha recorrido la masa del péndulo tiene un valor R α, siendo R el radio de la superficie cóncava. La fuerza inercial que se opone al movimien-to puede determinarse con la ecuación 39:
(39)
: Aceleración angular W/g: Masa.
Si se realiza el equilibrio de las fuerzas tangenciales, resulta la expresión 40.
(40)
Para valores pequeños de α, el valor del sen α = α y W ≠ 0, la ecuación 40 queda como:
(41)
En movimiento armónico simple la ecuación diferencial de movimiento puede expresarse mediante la ecuación 42 en la cual, wb es la frecuencia cir-
Figura 8. Mecanismode disipación de Energía
para aisladores FRS.
Figura 9. Aspectode un aislador FPS.

170 PREMIOS
cular nominal del aislador que por comparación con la expresión 41 es posible deducir su valor expresado en la ecuación 43. Utilizando conceptos básico de la dinámica, es posible encontrar una expresión del periodo de los dispositivos de aislamiento FPS, ecuación 45.
(42)
(43)
(44)
(45)
Obsérvese que asignando un valor al radio de la superficie esférica R es posible determinar, de manera sencilla, el periodo objetivo que se desea tenga el sistema de aislamiento. Las ecuaciones propuestas son suficientes a los fi-nes prácticos para el diseño de los aisladores (Aguiar R., et al., 2008).
En la Figura 10 se ha idealizado la respuesta de los aisladores FPS repre-sentada en la Figura 9. La ley constitutiva indica que el aislador inicialmente trabaja en rango elástico ke hasta que la fuerza actuante supera el valor de µW, en ese instante el aislador ingresa en rango no lineal y su respuesta la hace con una rigidez kp. Se había mencionado que cuando la fuerza es mayor que µW la estructura manifiesta un movimiento pendular, por lo tanto la rigi-dez Kp = Kb cuyos valores pueden estimarse con las expresiones 46.
Donde qY es el desplazamiento de fluencia (ver Figura 10).
(46)
En el lazo histerético de la Figura 10 se ha identificado con la variable F a la fuerza asociada al desplazamiento del aislador, q, más qY. Por lo tanto la fuerza F puede estimarse con el grupo de expresiones 47.

171ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
Figura 10. Comportamiento histerético del aislador FPS.
(47)
En la misma Figura 10 se ha representado, además, la rigidez secante del aislador, kef, la cual se designará como rigidez efectiva del aislador y es igual a la fuerza F, dividida por el desplazamiento q, (ecuación 48).
(48)
Se define el amortiguamiento efectivo (xef) como la relación entre la ener-gía disipada por un ciclo de histéresis (WD), área encerrada por la curva de his-téresis, con relación al valor 4πWE, siendo WE la energía elástica. Los valores de cada una de las energías citadas pueden evaluarse con las expresiones 49 y 50, respectivamente.
(49)
(50)
Se aplica la definición de amortiguamiento efectivo como la relación indi-cada en el párrafo anterior y en la expresión de la energía elástica se reempla-

172 PREMIOS
za la rigidez efectiva del aislador dada por la ecuación 48. El proceso descripto conduce a la ecuación 51.
(51)
Se nota que la rigidez efectiva del aislador (ecuación 48) y el amortigua-miento efectivo (ecuación 51) dependen del desplazamiento lateral q. Por lo tanto para evaluar la respuesta ante un input sísmico debe realizarse a través de un proceso iterativo que converja al valor de q. En el primer paso iterativo se debe asumir un valor arbitrario de q luego, mediante pasos sucesivos de ite-ración y determinado el valor del desplazamiento es necesario compararlo con el supuesto. Los distintos pasos iterativos supone además revalorar kef yxef.
3.2.1. Evaluación de la respuesta para un grado de libertas (1GDL)El planteo matemático que presenta este apartado, corresponde al caso
más simple. El modelo unidireccional de masa me, amortiguamiento ce y rigi-dez equivalente ke está sujeto a una aceleración (Figura 11).
Para sistemas con múltiples grados de libertad (nGDL) es posible plan-tear un modelo simplificado de 1GDL (Figura 12). Se disponen de varios mo-delos para encontrar la matriz de masas, M(S), y la matriz de rigidez K(S) de un sistema de 1GDL equivalente a sistemas de nGDL (Rodríguez, 1994; Fajfar y Gasperdic, 1996, Esteva, 1999; Aguiar, 2001).
Los métodos consideran que la frecuencia natural de vibración del primer modo de la estructura con nGDL, wn, es igual a la frecuencia natural de vibra-ción de un sistema de 1GDL, w. Partiendo de esa hipótesis es posible escribir el grupo de ecuaciones 52.
Figura 12. Sistemas de nGDLy su Modelo equivalente de 1GDL.
Figura 11. Modelo unidireccional de 1GDL del aislador FPS.
173ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
(52)
Donde ∅(1), es el primero modo de vibrar que se obtiene de la solución del problema de valores y vectores propios con las matrices M(S), K(S); k es la ma-triz equivalente de la superestructura del modelo de 1GDL; r(s) es el vector que relaciona los grados de libertad de la estructura de nGDL con la dirección del movimiento del suelo.
En el modelo de Bozzo y Mahín (1989), descripto en Zayas et al., (1989) se suponen las siguientes hipótesis:
i. Se desprecia la masa del sistema de aislamiento debido a que la misma es pequeña comparada con la masa de la superestructura.
ii. Si bien al amortiguamiento de la superestructura es del tipo viscoso y la de los dispositivos FPS friccional (Coulomb), se admite que el sistema de 1GDL tiene amortiguamiento viscoso porque la masa me y la rigidez k de la superestructura son mayores que la masa y la rigidez de los dispositivos FPS. Por lo tanto, se cumple la relación que indica la ecuación 53.
(53)
Se define a x* como el amortiguamiento ficticio de la estructura con ais-ladores FPS y puede evaluarse de manera aproximada con la expresión 54 (Aguiar et al., 2007).
(54)
Donde x es el factor de amortiguamiento de la superestructura; T(b) es el periodo del sistema de aislamiento normalmente impuesto por el proyectista en función del periodo buscado para la estructura aislada; T(s), periodo funda-mental de la superestructura.
iii. Se admite que la fuerza de corte entre el sistema FPS y la super-estructura son iguales, de manera que en la flexibilidad del modelo pueden combinarse para utilizar una flexibilidad equivalente según lo indicado por la expresión 55.
(55)

174 PREMIOS
Donde fe es la flexibilidad equivalente del sistema aislado, f(s) es la flexibi-lidad de la superestructura y f(b) la del sistema de aislamiento. Si se trabaja la expresión (55) en términos de rigidez, se obtiene la relación (56).
(56)
Donde k es la rigidez del sistema equivalente de 1GDL que se obtiene a partir de la rigidez de la superestructura; kp es la rigidez del aislador FPS (Kp = W/R), con W, peso total y R radio del FPS.
iv. Cuando el sistema no desliza la rigidez es igual a k, rigidez del sistema de 1GDL. Cuando el sistema desliza, la rigidez es ke, valor que puede ser de-terminado mediante la expresión 56.
La ecuación de movimiento para realizar un análisis no lineal de una es-tructura sobre aisladores FPS de 1GDL viene dada por la expresión 57.
(57)
Donde es, respectivamente, el desplazamiento, velocidad y aceleración del sistema de 1GDL; q es el desplazamiento horizontal del sistema de aisla-miento más el desplazamiento relativo de la superestructura; me es la masa equivalente del sistema de 1GDL que se determina con la expresión 52, w es la frecuencia del sistema, x* es el factor de amortiguamiento determinado con la expresión 54; f(t) es la fuerza de resistencia equivalente definida por la ley constitutiva (Figura 10); es la aceleración del suelo en la dirección de análisis. Finalmente el periodo equivalente Te, cuando el dispositivo FPS desliza, puede determinarse con la expresión 58.
(58)
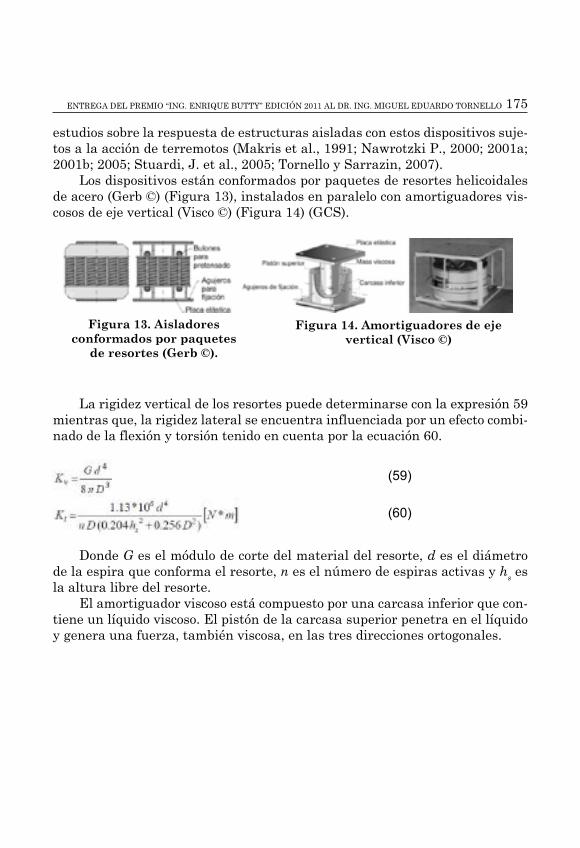
3.3. Aisladores conformados por resortes helicoidales de aceroy amortiguadores viscosos (GCS)
Inicialmente, los dispositivos se utilizaban para máquinas de pequeño porte y luego se extendieron a fundaciones de máquinas pesadas e instalaciones industriales de importancia. Sin embargo, en los últimos años se han realizado
175ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
estudios sobre la respuesta de estructuras aisladas con estos dispositivos suje-tos a la acción de terremotos (Makris et al., 1991; Nawrotzki P., 2000; 2001a; 2001b; 2005; Stuardi, J. et al., 2005; Tornello y Sarrazin, 2007).
Los dispositivos están conformados por paquetes de resortes helicoidales de acero (Gerb ©) (Figura 13), instalados en paralelo con amortiguadores vis-cosos de eje vertical (Visco ©) (Figura 14) (GCS).
La rigidez vertical de los resortes puede determinarse con la expresión 59 mientras que, la rigidez lateral se encuentra influenciada por un efecto combi-nado de la flexión y torsión tenido en cuenta por la ecuación 60.
(59)
(60)
Donde G es el módulo de corte del material del resorte, d es el diámetro de la espira que conforma el resorte, n es el número de espiras activas y hs es la altura libre del resorte.
El amortiguador viscoso está compuesto por una carcasa inferior que con-tiene un líquido viscoso. El pistón de la carcasa superior penetra en el líquido y genera una fuerza, también viscosa, en las tres direcciones ortogonales.
Figura 13. Aisladores conformados por paquetes
de resortes (Gerb ©).
Figura 14. Amortiguadores de eje vertical (Visco ©)
176 PREMIOS
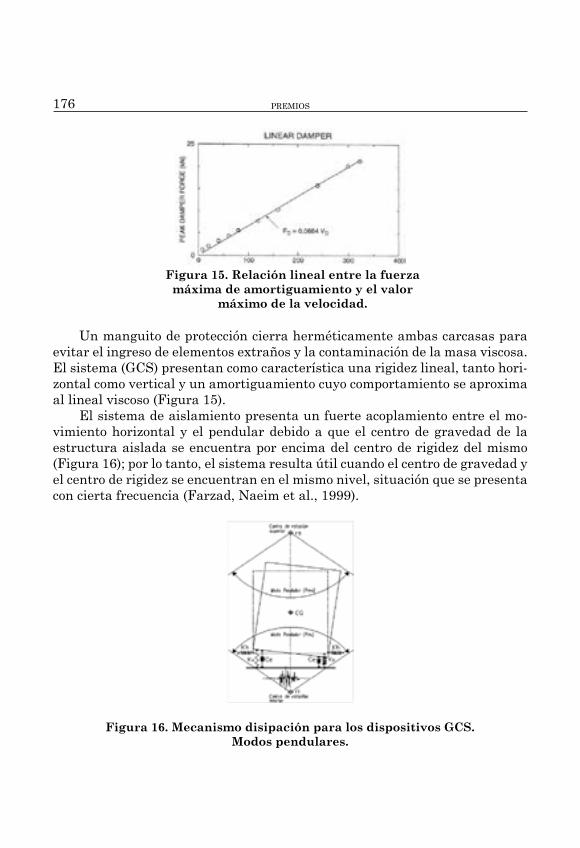
Un manguito de protección cierra herméticamente ambas carcasas para evitar el ingreso de elementos extraños y la contaminación de la masa viscosa. El sistema (GCS) presentan como característica una rigidez lineal, tanto hori-zontal como vertical y un amortiguamiento cuyo comportamiento se aproxima al lineal viscoso (Figura 15).
El sistema de aislamiento presenta un fuerte acoplamiento entre el mo-vimiento horizontal y el pendular debido a que el centro de gravedad de la estructura aislada se encuentra por encima del centro de rigidez del mismo (Figura 16); por lo tanto, el sistema resulta útil cuando el centro de gravedad y el centro de rigidez se encuentran en el mismo nivel, situación que se presenta con cierta frecuencia (Farzad, Naeim et al., 1999).
Figura 16. Mecanismo disipación para los dispositivos GCS.Modos pendulares.
Figura 15. Relación lineal entre la fuerza máxima de amortiguamiento y el valor
máximo de la velocidad.
177ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
3.3.1. Marco teórico para evaluar las respuestas de estructuras aisladascon dispositivos GCS
Inicialmente, y con el objeto de evaluar respuestas de estructuras ais-ladas con dispositivos GCS, se propone un modelo simplificado que permite determinar las respuestas en el tiempo cuando actúan las tres componentes sísmicas del terremoto (Aguiar y Tornello, 2009). El modelo considera que la superestructura se desplaza como cuerpo rígido ante la acción de un sismo; sin embargo, debido a la presencia de los resortes, los desplazamientos verticales en los extremos del edificio serán de signos contrarios, debido al efecto pendu-lar de la respuesta (Tornello y Sarrazin, 2007). Es decir, mientras un extremo de la estructura aislada asciende, el otro desciende, la diferencia de desplaza-mientos verticales pone de manifiesto el mecanismo de disipación de energía.
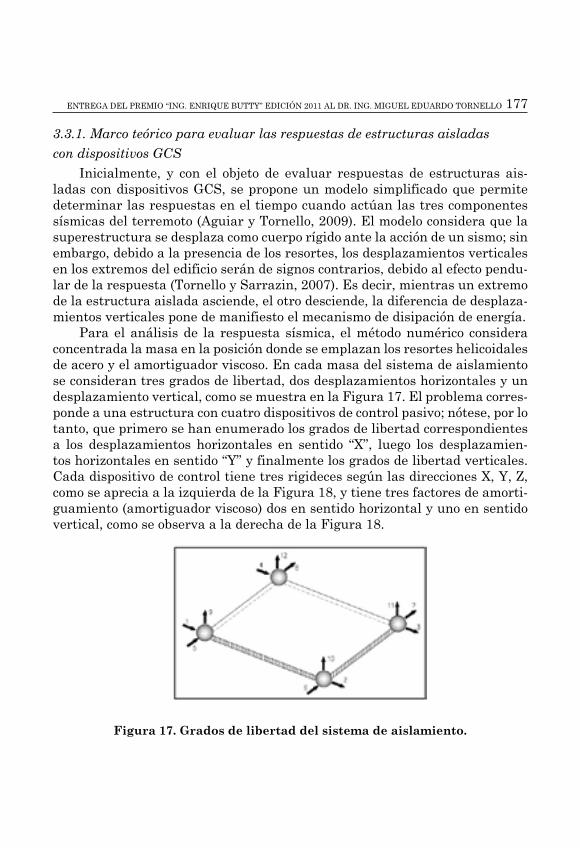
Para el análisis de la respuesta sísmica, el método numérico considera concentrada la masa en la posición donde se emplazan los resortes helicoidales de acero y el amortiguador viscoso. En cada masa del sistema de aislamiento se consideran tres grados de libertad, dos desplazamientos horizontales y un desplazamiento vertical, como se muestra en la Figura 17. El problema corres-ponde a una estructura con cuatro dispositivos de control pasivo; nótese, por lo tanto, que primero se han enumerado los grados de libertad correspondientes a los desplazamientos horizontales en sentido “X”, luego los desplazamien-tos horizontales en sentido “Y” y finalmente los grados de libertad verticales. Cada dispositivo de control tiene tres rigideces según las direcciones X, Y, Z, como se aprecia a la izquierda de la Figura 18, y tiene tres factores de amorti-guamiento (amortiguador viscoso) dos en sentido horizontal y uno en sentido vertical, como se observa a la derecha de la Figura 18.
Figura 17. Grados de libertad del sistema de aislamiento.
178 PREMIOS
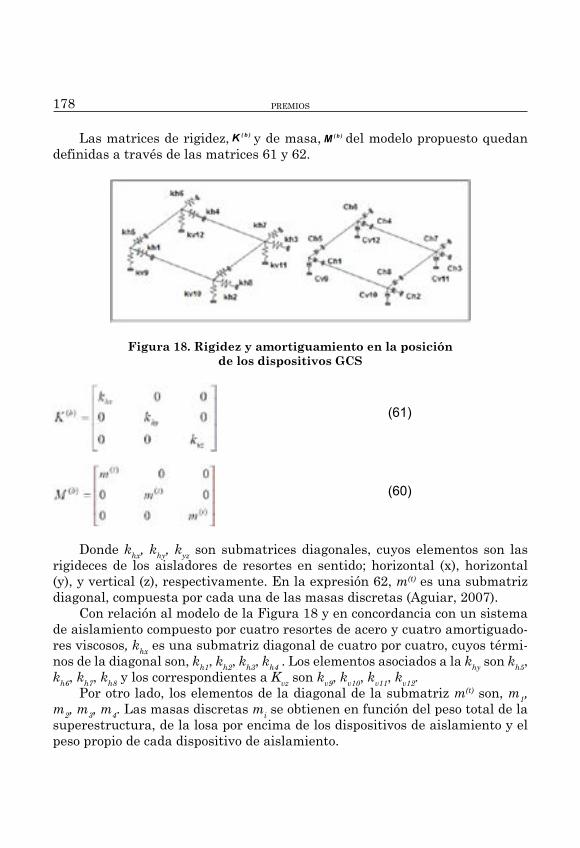
Las matrices de rigidez, )b(K y de masa, )b(M del modelo propuesto quedan definidas a través de las matrices 61 y 62.
Figura 18. Rigidez y amortiguamiento en la posiciónde los dispositivos GCS
(61)
(60)
Donde khx, khy, kyz son submatrices diagonales, cuyos elementos son las rigideces de los aisladores de resortes en sentido; horizontal (x), horizontal (y), y vertical (z), respectivamente. En la expresión 62, m(t) es una submatriz diagonal, compuesta por cada una de las masas discretas (Aguiar, 2007).
Con relación al modelo de la Figura 18 y en concordancia con un sistema de aislamiento compuesto por cuatro resortes de acero y cuatro amortiguado-res viscosos, khx es una submatriz diagonal de cuatro por cuatro, cuyos térmi-nos de la diagonal son, kh1, kh2, kh3, kh4 . Los elementos asociados a la khy son kh5, kh6, kh7, kh8 y los correspondientes a Kvz son kv9, kv10, kv11, kv12.
Por otro lado, los elementos de la diagonal de la submatriz m(t) son, m1, m2, m3, m4. Las masas discretas mi se obtienen en función del peso total de la superestructura, de la losa por encima de los dispositivos de aislamiento y el peso propio de cada dispositivo de aislamiento.

179ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
La matriz de amortiguamiento C(b) se obtiene en función de la matriz de masas M(b) de los modos de vibración, de la matriz modal F y del amortigua-miento del dispositivo viscoso (Expresión 63).
)()()()( ˆ btbbb MCMC ΦΦ= (63)
Donde )b(C es una matriz diagonal compuesta por las submatrices que defi-nen el amortiguamiento del dispositivo viscoso (Expresión 64).
(64)
Para el modelo de la Figura 18, los elementos de la diagonal de hxChx son Ch1,
Ch2, Ch3, Ch4. En función del factor de amortiguamiento en sentido horizontal xh, se definen los elementos de la diagonal de hxC hx con para “ i ” de 1 a 4. Siendo xhi el factor de amortiguamiento en sentido (x) asociado al primer modo de vibración; mt es la masa discreta i; ωi es la frecuencia de vibración para el modo i; los valores de las submatrices resultan en todos sus términos similares a los precedentes, es decir, el subíndice i, es el modo de vibración para el caso de la frecuencia natural w y para el factor de amortigua-miento x. El subíndice i, también indica la masa discreta.
Para la dirección (y) se trabaja con el factor de amortiguamiento en senti-do (y). Para la dirección Z, con el correspondiente factor de amortiguamiento vertical. Cada amortiguador viscoso tiene tres factores de amortiguamiento, dos en sentido horizontal y uno en sentido vertical. El modelo presentado con-sidera que la superestructura se mueve como cuerpo rígido y la respuesta de la misma se determina resolviendo la ecuación 65.
gbbbbbbb UJMqKqCqM )()()()()()()( −=++ (65)
Donde )()()( ,, bbb qqq son los vectores de desplazamiento, velocidad y acele-ración del sistema de aislamiento. Se hace notar que, primero se enumeran todas las coordenadas en sentido (x), luego en sentido (y), y finalmente en (z) (Figura 18). En estas condiciones y cuando solo actúa sismo en sentido (x), el vector [ ]001=tJ ; para sismo en sentido (y) el vector [ ]010=tJ y para

180 PREMIOS
sismo en sentido (z), [ ]100=tJ . Donde 1 es el vector unitario y 0, un vector compuesto por ceros. El orden de estos vectores 1 y 0 es igual al número de masas discretas. Con esta consideración la aceleración del suelo gU puede ser
gxU para sismo en sentido (x); gyU para sismo en sentido (y); gzU para sismo en sentido (z).
3.3.2. Respuestas en la superestructura aislada con dispositivos GCSA título de ejemplo, se plantea un modelo matemático para un edificio de
planta rectangular y de tres niveles. El modelo matemático de análisis admite que las losas de la superestructura son rígidas en el plano horizontal, razón por la cual se considera un grado de libertad vertical en cada uno de los nudos de la superestructura. Por otra parte, en función de la hipótesis asumida, se puede admitir que el piso experimenta el mismo desplazamiento horizontal (Aguiar y Tornello, 2009). En la Figura 19 se indican los grados de libertad considerados; nótese que primero se enumeran los desplazamientos horizonta-les de piso y posteriormente los desplazamientos verticales.
La estructura que se plante como ejemplo tiene 27 grados de libertad (des-plazamientos), 3 en sentido horizontal (x) y 24 en sentido vertical. Los despla-zamientos se agrupan en un vector u. El algoritmo permite el análisis sísmico de la estructura ante la acción de dos componentes horizontales y una vertical. Se define al vector transpuesto ][ zx
t uuu = donde ux es el vector que contiene a los desplazamientos de piso en sentido horizontal; uz el vector que contiene a los desplazamientos de cada nudo en sentido vertical.
Figura 19. Grados de libertad considerados para la superestructura.
181ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
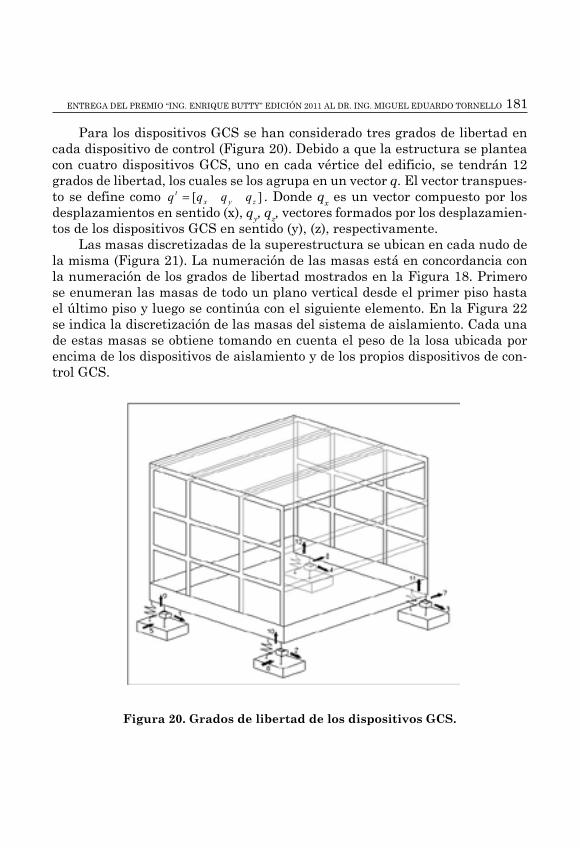
Para los dispositivos GCS se han considerado tres grados de libertad en cada dispositivo de control (Figura 20). Debido a que la estructura se plantea con cuatro dispositivos GCS, uno en cada vértice del edificio, se tendrán 12 grados de libertad, los cuales se los agrupa en un vector q. El vector transpues-to se define como ][ zyx
t qqqq = . Donde qx es un vector compuesto por los desplazamientos en sentido (x), qy, qz, vectores formados por los desplazamien-tos de los dispositivos GCS en sentido (y), (z), respectivamente.
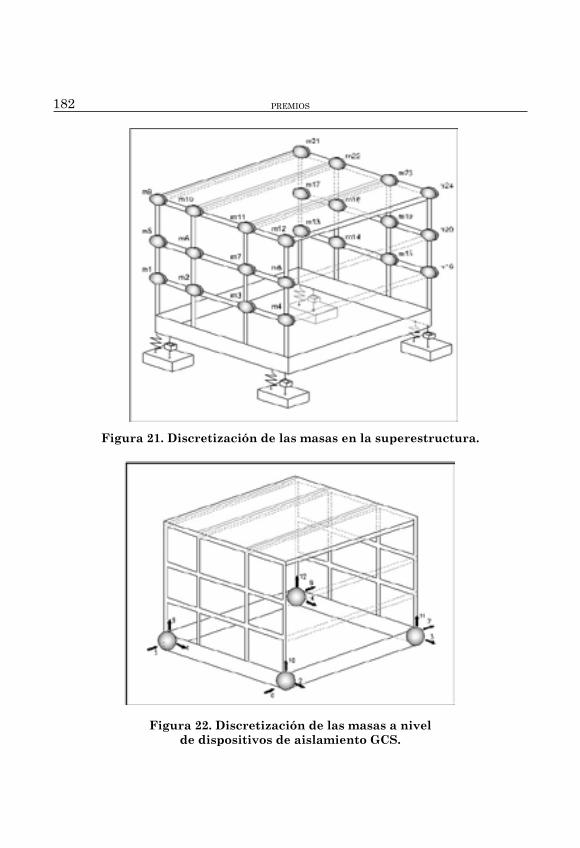
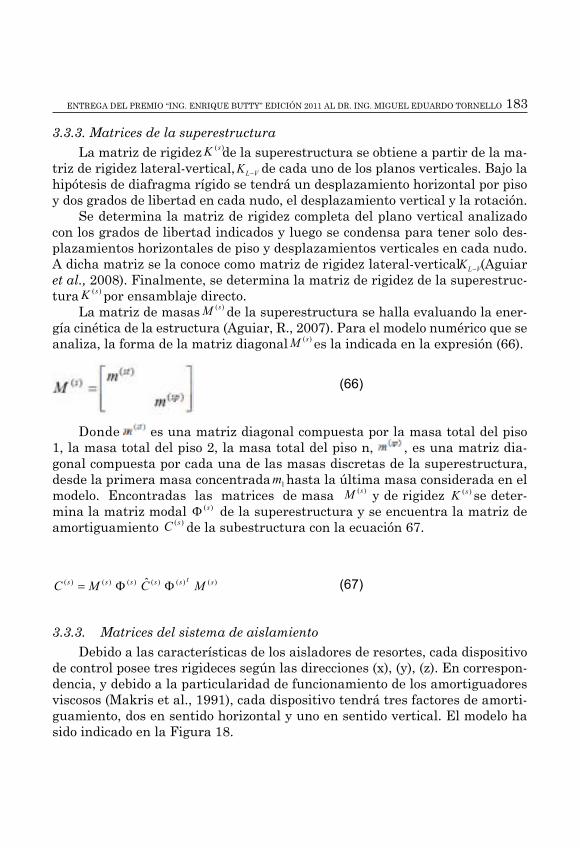
Las masas discretizadas de la superestructura se ubican en cada nudo de la misma (Figura 21). La numeración de las masas está en concordancia con la numeración de los grados de libertad mostrados en la Figura 18. Primero se enumeran las masas de todo un plano vertical desde el primer piso hasta el último piso y luego se continúa con el siguiente elemento. En la Figura 22 se indica la discretización de las masas del sistema de aislamiento. Cada una de estas masas se obtiene tomando en cuenta el peso de la losa ubicada por encima de los dispositivos de aislamiento y de los propios dispositivos de con-trol GCS.
Figura 20. Grados de libertad de los dispositivos GCS.
182 PREMIOS
Figura 21. Discretización de las masas en la superestructura.
Figura 22. Discretización de las masas a nivelde dispositivos de aislamiento GCS.
183ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
3.3.3. Matrices de la superestructuraLa matriz de rigidez )(sK de la superestructura se obtiene a partir de la ma-
triz de rigidez lateral-vertical, VLK − de cada uno de los planos verticales. Bajo la hipótesis de diafragma rígido se tendrá un desplazamiento horizontal por piso y dos grados de libertad en cada nudo, el desplazamiento vertical y la rotación.
Se determina la matriz de rigidez completa del plano vertical analizado con los grados de libertad indicados y luego se condensa para tener solo des-plazamientos horizontales de piso y desplazamientos verticales en cada nudo. A dicha matriz se la conoce como matriz de rigidez lateral-vertical VLK − (Aguiar et al., 2008). Finalmente, se determina la matriz de rigidez de la superestruc-tura )(sK por ensamblaje directo.
La matriz de masas )(sM de la superestructura se halla evaluando la ener-gía cinética de la estructura (Aguiar, R., 2007). Para el modelo numérico que se analiza, la forma de la matriz diagonal )(sM es la indicada en la expresión (66).
(66)
Donde es una matriz diagonal compuesta por la masa total del piso 1, la masa total del piso 2, la masa total del piso n, , es una matriz dia-gonal compuesta por cada una de las masas discretas de la superestructura, desde la primera masa concentrada 1m hasta la última masa considerada en el modelo. Encontradas las matrices de masa )(sM y de rigidez )(sK se deter-mina la matriz modal )(sΦ de la superestructura y se encuentra la matriz de amortiguamiento )(sC de la subestructura con la ecuación 67.
)()()()()()( ˆ stsssss MCMC ΦΦ= (67)
3.3.3. Matrices del sistema de aislamiento Debido a las características de los aisladores de resortes, cada dispositivo
de control posee tres rigideces según las direcciones (x), (y), (z). En correspon-dencia, y debido a la particularidad de funcionamiento de los amortiguadores viscosos (Makris et al., 1991), cada dispositivo tendrá tres factores de amorti-guamiento, dos en sentido horizontal y uno en sentido vertical. El modelo ha sido indicado en la Figura 18.

184 PREMIOS
La matriz de rigidez, )(bK y de masa, )(bM se determinan con las expresio-nes 61 y 62. La matriz de amortiguamiento )(bC se evalúa con la expresión 63 y la matriz diagonal )(ˆ bC que definen el amortiguamiento del amortiguador viscoso con la expresión 64.
3.3.4. Sistemas de ecuaciones diferenciales El sistema de ecuaciones diferenciales, tanto para los dispositivos de ais-
lamiento como para la superestructura, se expresan mediante las expresiones 68 y 69.( Aguiar R. et al 2008).
uMrurMqKqCqM stsg
bbbbb )()()()()()()( −−=++ (68)
[ ]gbsssss urqrMuKuCuM )()()()()()( +−=++ (69)
Donde qqq ,, son los vectores de desplazamiento, velocidad y aceleración del sistema de aislamiento; )(br es un vector que relaciona los grados de libertad del sistema de aislamiento con la componente sísmica de movimiento del suelo;
uuu ,, son los vectores de desplazamiento velocidad y aceleración de los grados de libertad de la superestructura; )(sr es similar a )(br pero en la superestructu-ra. Tanto el vector )(br como )(sr están compuestos únicamente por 0 y 1. El 1 se ubica en las coordenadas que están relacionadas con el movimiento del suelo. Finalmente, gu es la componente sísmica del movimiento del suelo. Si se está analizando para sismo horizontal, será gxu , si es para sismo vertical, será gzu .
Se aclara que los grados de libertad de la superestructura son desplaza-mientos relativos con respecto al movimiento del sistema de aislamiento. Por este motivo es que la matriz de masas es diagonal. Para los dispositivos de aislamiento, la solución del sistema de ecuaciones diferenciales considera que
0=u . Es decir que aceleración proveniente de la superestructura no influye en el movimiento de los dispositivos de aislamiento (Kulkarni, J. et al., 2002). Para encontrar la respuesta en el tiempo de los dispositivos GCS, se resuelve el sistema de ecuaciones diferenciales indicado en (70).
gbbbbb urMqKqCqM )()()()()( −=++ (70)
Para encontrar la respuesta de la superestructura se trabaja con la ecua-ción diferencial completa (68) y (69).
185ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
4. Edificio aislado sísmicamente con dispositivos GCS
4.1. Características principales del edificio El edificio aislado forma parte del complejo de la residencia universitaria
de la Facultad Regional Mendoza de la UTN (Tornello y Sarrazin, 2006). El complejo está compuesto por tres edificios de idénticas características arqui-tectónicas y estructurales, destinados a dormitorios, de los cuales uno de ellos posee los dispositivos de protección. Dentro del mismo complejo fueron cons-truidos locales destinados a comedores, recepción y sala de lectura.
Una característica importante del proyecto es que los edificios de dormi-torios se encuentran relativamente próximos entre sí (5 a 6 metros), situación que ha permitido comparar las respuestas frente a sismos del edificio aislado con otro de idénticas características, pero de base fija.
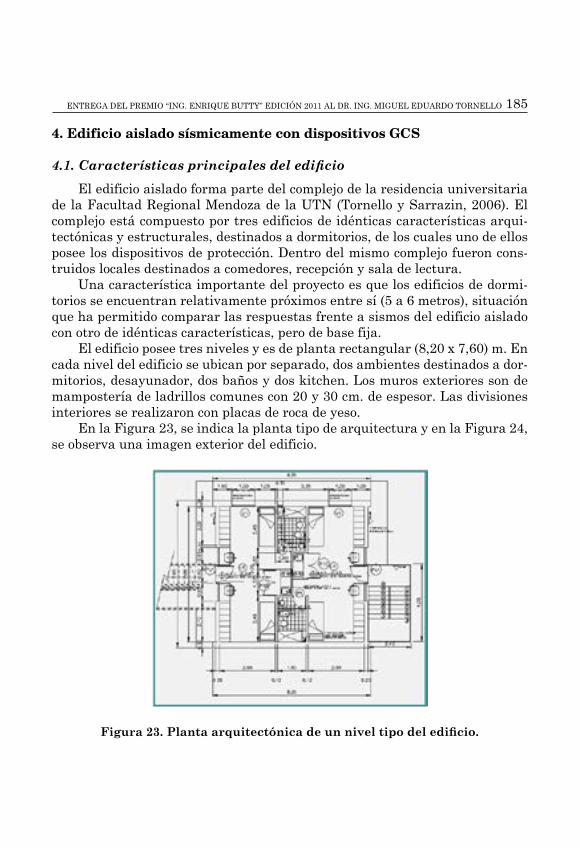
El edificio posee tres niveles y es de planta rectangular (8,20 x 7,60) m. En cada nivel del edificio se ubican por separado, dos ambientes destinados a dor-mitorios, desayunador, dos baños y dos kitchen. Los muros exteriores son de mampostería de ladrillos comunes con 20 y 30 cm. de espesor. Las divisiones interiores se realizaron con placas de roca de yeso.
En la Figura 23, se indica la planta tipo de arquitectura y en la Figura 24, se observa una imagen exterior del edificio.
Figura 23. Planta arquitectónica de un nivel tipo del edificio.
186 PREMIOS
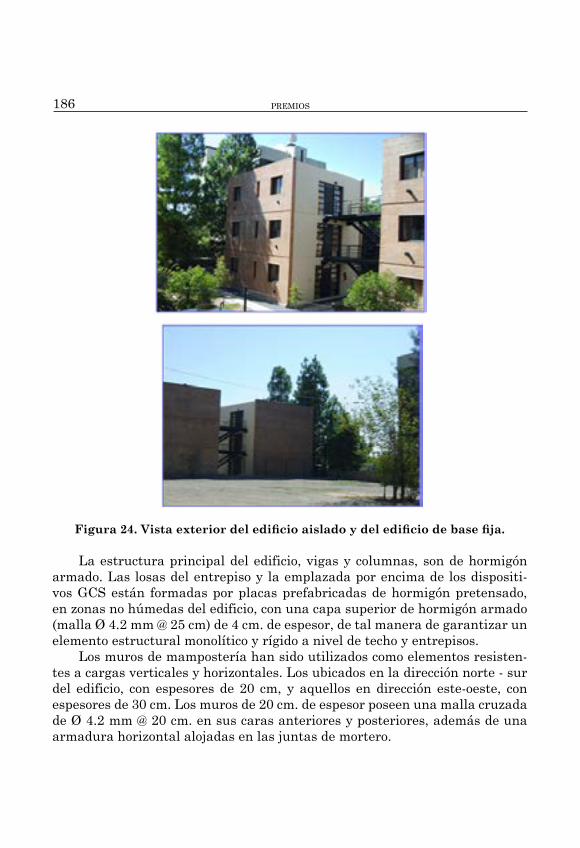
Figura 24. Vista exterior del edificio aislado y del edificio de base fija.
La estructura principal del edificio, vigas y columnas, son de hormigón armado. Las losas del entrepiso y la emplazada por encima de los dispositi-vos GCS están formadas por placas prefabricadas de hormigón pretensado, en zonas no húmedas del edificio, con una capa superior de hormigón armado (malla Ø 4.2 mm @ 25 cm) de 4 cm. de espesor, de tal manera de garantizar un elemento estructural monolítico y rígido a nivel de techo y entrepisos.
Los muros de mampostería han sido utilizados como elementos resisten-tes a cargas verticales y horizontales. Los ubicados en la dirección norte - sur del edificio, con espesores de 20 cm, y aquellos en dirección este-oeste, con espesores de 30 cm. Los muros de 20 cm. de espesor poseen una malla cruzada de Ø 4.2 mm @ 20 cm. en sus caras anteriores y posteriores, además de una armadura horizontal alojadas en las juntas de mortero.
187ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
4.2. Estructura de fundación por debajo de los dispositivos GCS Las fundaciones fueron resueltas con bases corridas y vigas rígidas de
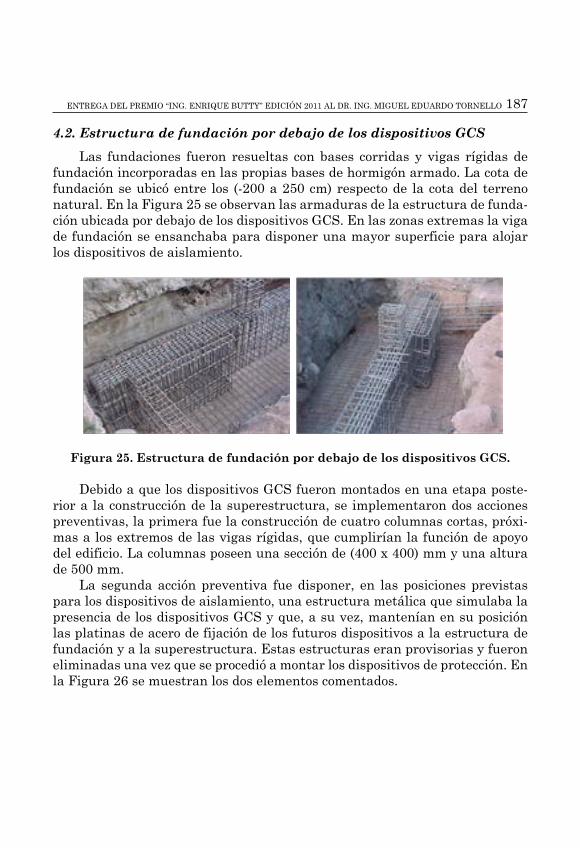
fundación incorporadas en las propias bases de hormigón armado. La cota de fundación se ubicó entre los (-200 a 250 cm) respecto de la cota del terreno natural. En la Figura 25 se observan las armaduras de la estructura de funda-ción ubicada por debajo de los dispositivos GCS. En las zonas extremas la viga de fundación se ensanchaba para disponer una mayor superficie para alojar los dispositivos de aislamiento.
Figura 25. Estructura de fundación por debajo de los dispositivos GCS.
Debido a que los dispositivos GCS fueron montados en una etapa poste-rior a la construcción de la superestructura, se implementaron dos acciones preventivas, la primera fue la construcción de cuatro columnas cortas, próxi-mas a los extremos de las vigas rígidas, que cumplirían la función de apoyo del edificio. La columnas poseen una sección de (400 x 400) mm y una altura de 500 mm.
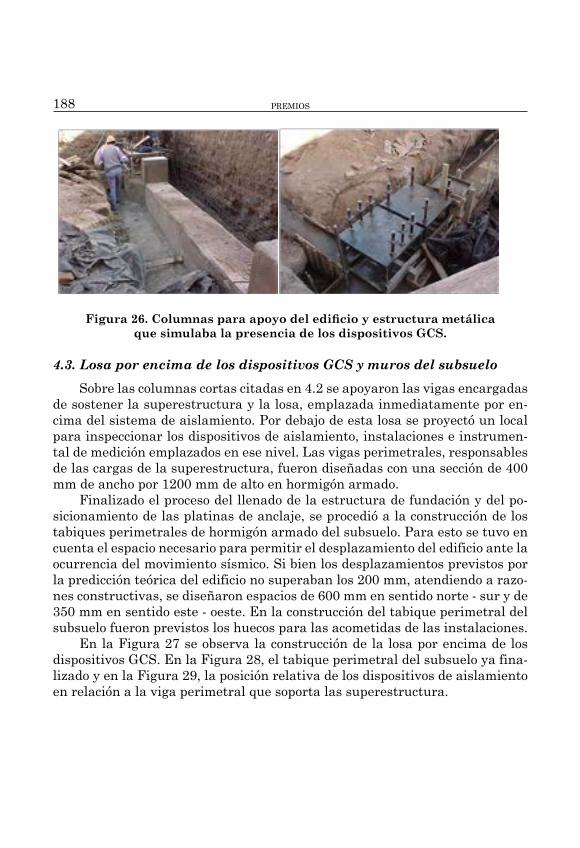
La segunda acción preventiva fue disponer, en las posiciones previstas para los dispositivos de aislamiento, una estructura metálica que simulaba la presencia de los dispositivos GCS y que, a su vez, mantenían en su posición las platinas de acero de fijación de los futuros dispositivos a la estructura de fundación y a la superestructura. Estas estructuras eran provisorias y fueron eliminadas una vez que se procedió a montar los dispositivos de protección. En la Figura 26 se muestran los dos elementos comentados.
188 PREMIOS
Figura 26. Columnas para apoyo del edificio y estructura metálicaque simulaba la presencia de los dispositivos GCS.
4.3. Losa por encima de los dispositivos GCS y muros del subsueloSobre las columnas cortas citadas en 4.2 se apoyaron las vigas encargadas
de sostener la superestructura y la losa, emplazada inmediatamente por en-cima del sistema de aislamiento. Por debajo de esta losa se proyectó un local para inspeccionar los dispositivos de aislamiento, instalaciones e instrumen-tal de medición emplazados en ese nivel. Las vigas perimetrales, responsables de las cargas de la superestructura, fueron diseñadas con una sección de 400 mm de ancho por 1200 mm de alto en hormigón armado.
Finalizado el proceso del llenado de la estructura de fundación y del po-sicionamiento de las platinas de anclaje, se procedió a la construcción de los tabiques perimetrales de hormigón armado del subsuelo. Para esto se tuvo en cuenta el espacio necesario para permitir el desplazamiento del edificio ante la ocurrencia del movimiento sísmico. Si bien los desplazamientos previstos por la predicción teórica del edificio no superaban los 200 mm, atendiendo a razo-nes constructivas, se diseñaron espacios de 600 mm en sentido norte - sur y de 350 mm en sentido este - oeste. En la construcción del tabique perimetral del subsuelo fueron previstos los huecos para las acometidas de las instalaciones.
En la Figura 27 se observa la construcción de la losa por encima de los dispositivos GCS. En la Figura 28, el tabique perimetral del subsuelo ya fina-lizado y en la Figura 29, la posición relativa de los dispositivos de aislamiento en relación a la viga perimetral que soporta las superestructura.

189ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
4.4. Instalaciones y circulaciones verticalesCon el objeto de controlar cualquier interacción de las instalaciones con
el desplazamiento del edificio durante el movimiento sísmico, fue necesario diseñar adecuadamente las acometidas de las instalaciones, con el objeto de no reducir la eficiencia de los dispositivos de aislamiento.
Figura 27. Losa por encima Figura 28. Tabique perimetralde los Dispositivos GCS. del subsuelo.
Figura 29. Posición relativa de los dispositivos GCS en relacióna la superestructura.
El edificio aislado tiene la posibilidad de desplazarse horizontalmente y, debido a las características particulares del sistema GCS, también lo hace en sentido vertical; por lo tanto, cada una de las conexiones debe acompañar el movimiento del edificio. En general, todas las acometidas fueron resueltas con conexiones flexibles; sin embargo, y a diferencia de otros dispositivos de ais-lamiento más ampliamente utilizados (elastoméricos o friccionales.), para los

190 PREMIOS
dispositivos GCS debe pensarse que el edificio no sólo evidenciará movimien-tos transversales, sino también verticales.
Las conexiones de agua, desagües primarios y secundarios fueron senci-llas de resolver, a diferencia de la conexión del gas. Para tal efecto, se diseñó y procedió a fabricar especialmente un dispositivo que asegurara su estanquei-dad ante la ocurrencia de un terremoto y que, además, acompañase de manera eficiente los movimientos del edificio. El dispositivo está conformado por un tubo recto con dos fuelles metálicos extremos. Los fuelles extremos cumplen la doble función de permitir los desplazamientos verticales y materializar articu-laciones en los extremos del tubo para liberar la rotación y el desplazamiento horizontal. La distancia entre los dos fuelles metálicos está asociada al despla-zamiento horizontal permitido del edificio y, por lo tanto, al de las conexiones de las instalaciones.
En la Figura 30 se observan las conexiones de agua y desagües primarios y en la Figura 31 la conexión de gas.
Figura 30. Conexiones de agua y del desagüe primario del edificio.
Figura 31. Conexiones de gas del edificio aislado.

191ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
El edificio aislado posee escaleras metálicas exteriores que cumplen la doble función de vincular los tres niveles del edificio y además comunicar los edificios contiguos. El edificio aislado tiene adosados dos circulaciones vertica-les, la primera ubicada sobre el costado oeste y la segunda en el frente opuesto.
Para controlar la interacción de las escaleras con el edificio aislado se diseñaron ménsulas fijadas al edificio para permitir el libre movimiento del edificio aislado. El apoyo de las escaleras metálicas sobre la ménsula se rea-lizó sobre una plancha de plomo, con el objeto de reducir la fricción y oponer el mínimo de resistencia al desplazamiento horizontal. Las escaleras (en toda su altura) deben acompañar no solamente los movimientos horizontales del edificio frente a la ocurrencia de un sismo, sino también al desplazamiento vertical, situación que fue tenida en cuenta mediante un diseño adecuado de los apoyos. En la Figura 32 se observa el apoyo de las escaleras en las ménsu-las metálicas fijadas al edificio.
Topes para control de desplazamientos Placas de plomo
Figura 32. Detalle de los apoyos de las escaleras metálicas exteriores.
4.5. Instrumental y registros sísmicosLos edificios cuentan con instrumental sísmico para monitorear la res-
puesta frente a la ocurrencia de sismos. Los datos permiten comparar la res-puesta del edificio de base fija con el edificio aislado, ambos se encuentran a escasos metros de distancia. La instrumentación instalada permitiría contar con información, en puntos estratégicos, del edificio aislado y simultáneamen-te del edificio con fundación tradicional.
192 PREMIOS
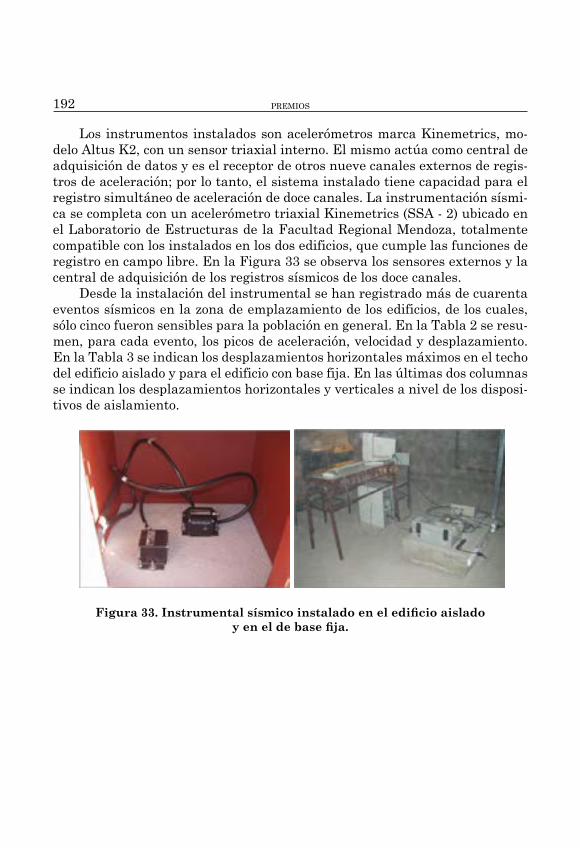
Los instrumentos instalados son acelerómetros marca Kinemetrics, mo-delo Altus K2, con un sensor triaxial interno. El mismo actúa como central de adquisición de datos y es el receptor de otros nueve canales externos de regis-tros de aceleración; por lo tanto, el sistema instalado tiene capacidad para el registro simultáneo de aceleración de doce canales. La instrumentación sísmi-ca se completa con un acelerómetro triaxial Kinemetrics (SSA - 2) ubicado en el Laboratorio de Estructuras de la Facultad Regional Mendoza, totalmente compatible con los instalados en los dos edificios, que cumple las funciones de registro en campo libre. En la Figura 33 se observa los sensores externos y la central de adquisición de los registros sísmicos de los doce canales.
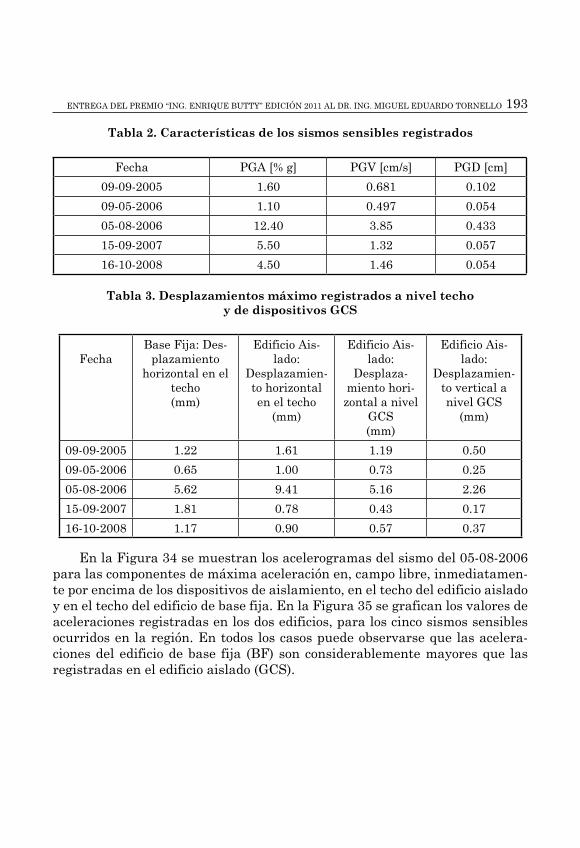
Desde la instalación del instrumental se han registrado más de cuarenta eventos sísmicos en la zona de emplazamiento de los edificios, de los cuales, sólo cinco fueron sensibles para la población en general. En la Tabla 2 se resu-men, para cada evento, los picos de aceleración, velocidad y desplazamiento. En la Tabla 3 se indican los desplazamientos horizontales máximos en el techo del edificio aislado y para el edificio con base fija. En las últimas dos columnas se indican los desplazamientos horizontales y verticales a nivel de los disposi-tivos de aislamiento.
Figura 33. Instrumental sísmico instalado en el edificio aisladoy en el de base fija.
193ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
Tabla 2. Características de los sismos sensibles registrados
Fecha PGA [% g] PGV [cm/s] PGD [cm]
09-09-2005 1.60 0.681 0.102
09-05-2006 1.10 0.497 0.054
05-08-2006 12.40 3.85 0.433
15-09-2007 5.50 1.32 0.057
16-10-2008 4.50 1.46 0.054
Tabla 3. Desplazamientos máximo registrados a nivel techoy de dispositivos GCS
FechaBase Fija: Des-
plazamiento horizontal en el
techo(mm)
Edificio Ais-lado:
Desplazamien-to horizontalen el techo
(mm)
Edificio Ais-lado:
Desplaza-miento hori-
zontal a nivel GCS(mm)
Edificio Ais-lado:
Desplazamien-to vertical a nivel GCS
(mm)
09-09-2005 1.22 1.61 1.19 0.50
09-05-2006 0.65 1.00 0.73 0.25
05-08-2006 5.62 9.41 5.16 2.26
15-09-2007 1.81 0.78 0.43 0.17
16-10-2008 1.17 0.90 0.57 0.37
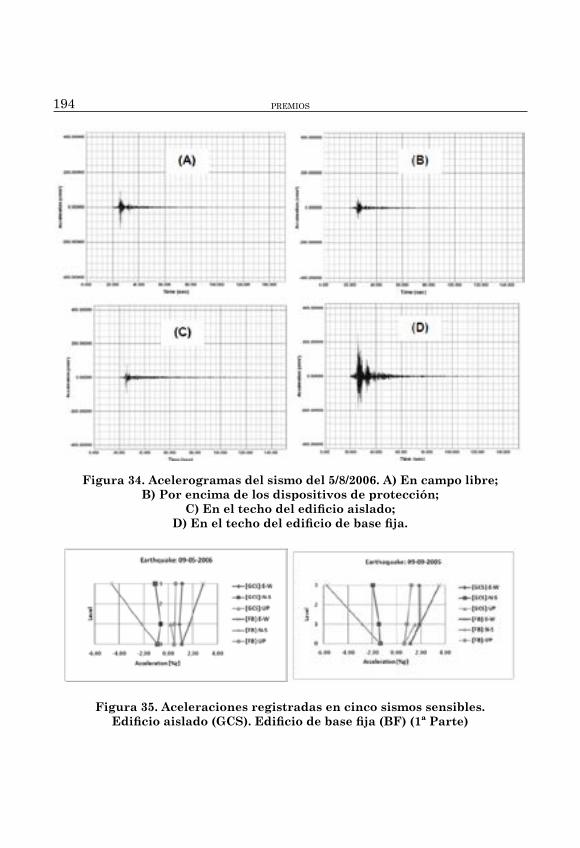
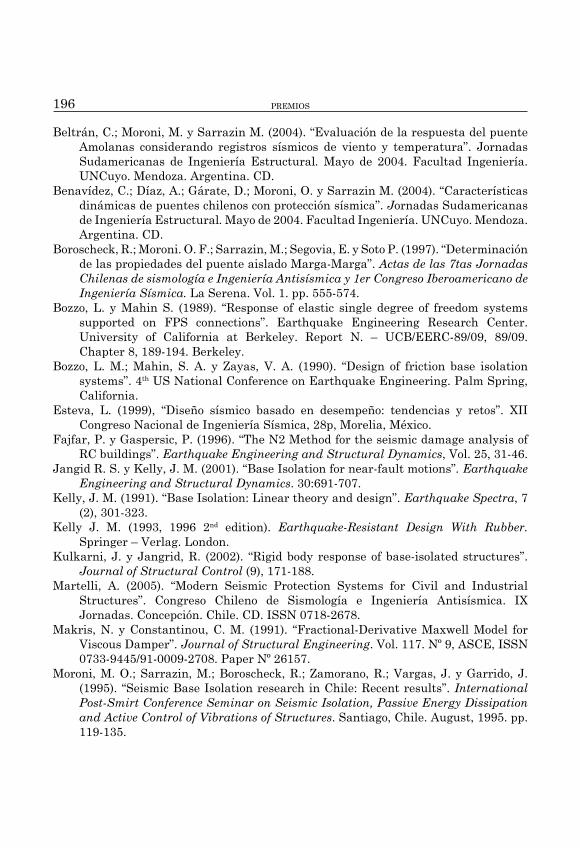
En la Figura 34 se muestran los acelerogramas del sismo del 05-08-2006 para las componentes de máxima aceleración en, campo libre, inmediatamen-te por encima de los dispositivos de aislamiento, en el techo del edificio aislado y en el techo del edificio de base fija. En la Figura 35 se grafican los valores de aceleraciones registradas en los dos edificios, para los cinco sismos sensibles ocurridos en la región. En todos los casos puede observarse que las acelera-ciones del edificio de base fija (BF) son considerablemente mayores que las registradas en el edificio aislado (GCS).
194 PREMIOS
Figura 34. Acelerogramas del sismo del 5/8/2006. A) En campo libre;B) Por encima de los dispositivos de protección;
C) En el techo del edificio aislado;D) En el techo del edificio de base fija.
Figura 35. Aceleraciones registradas en cinco sismos sensibles.Edificio aislado (GCS). Edificio de base fija (BF) (1ª Parte)

195ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
Figura 35. Aceleraciones registradas en cinco sismos sensibles.Edificio aislado (GCS). Edificio de base fija (BF) (2ª Parte)
Referencias
Aguiar R. (2001). “Evaluación del daño en edificios y desempeño sísmico. Programa de ordenador CEINCI3”. Centro Internacional de Métodos Numéricos en Ingeniería, CIMNE. IS-45, 107 p, Barcelona, España.
Aguiar R. (2007). Dinámica de estructuras con MATLAB, Centro de Investigaciones Científicas. Escuela Politécnica del Ejército, 292 p., Quito, Ecuador.
Aguiar, R.; Almazán, J. L.; Dechent, P. y Suárez, V. (2008). Aisladores de base Elastoméricos y FPS. Centro de Investigaciones Científicas. Escuela Politécnica del Ejército, 292 p., Quito, Ecuador.
Aguiar, R. y Tornello, M. (2009). “Modelo propuesto para el análisis sísmico de estructuras con aisladores se base tipo resortes. ENIEF 2009. ID-20”. Publicado en Actas del Congreso. Tandil. Buenos Aires. Argentina.
Aguiar, R.; Tornello M. y Gioacchini G. (2009). “Estimación de la respuesta sísmica de un edificio aislado mediante un modelo matemático sintético”. Encuentro de Investigadores y docentes de la Ingeniería. ENIDI 2009. FRM UTN. Publicado en las Actas del Congreso. San Rafael. Mendoza. Argentina.
196 PREMIOS
Beltrán, C.; Moroni, M. y Sarrazin M. (2004). “Evaluación de la respuesta del puente Amolanas considerando registros sísmicos de viento y temperatura”. Jornadas Sudamericanas de Ingeniería Estructural. Mayo de 2004. Facultad Ingeniería. UNCuyo. Mendoza. Argentina. CD.
Benavídez, C.; Díaz, A.; Gárate, D.; Moroni, O. y Sarrazin M. (2004). “Características dinámicas de puentes chilenos con protección sísmica”. Jornadas Sudamericanas de Ingeniería Estructural. Mayo de 2004. Facultad Ingeniería. UNCuyo. Mendoza. Argentina. CD.
Boroscheck, R.; Moroni. O. F.; Sarrazin, M.; Segovia, E. y Soto P. (1997). “Determinación de las propiedades del puente aislado Marga-Marga”. Actas de las 7tas Jornadas Chilenas de sismología e Ingeniería Antisísmica y 1er Congreso Iberoamericano de Ingeniería Sísmica. La Serena. Vol. 1. pp. 555-574.
Bozzo, L. y Mahin S. (1989). “Response of elastic single degree of freedom systems supported on FPS connections”. Earthquake Engineering Research Center. University of California at Berkeley. Report N. – UCB/EERC-89/09, 89/09. Chapter 8, 189-194. Berkeley.
Bozzo, L. M.; Mahin, S. A. y Zayas, V. A. (1990). “Design of friction base isolation systems”. 4th US National Conference on Earthquake Engineering. Palm Spring, California.
Esteva, L. (1999), “Diseño sísmico basado en desempeño: tendencias y retos”. XII Congreso Nacional de Ingeniería Sísmica, 28p, Morelia, México.
Fajfar, P. y Gaspersic, P. (1996). “The N2 Method for the seismic damage analysis of RC buildings”. Earthquake Engineering and Structural Dynamics, Vol. 25, 31-46.
Jangid R. S. y Kelly, J. M. (2001). “Base Isolation for near-fault motions”. Earthquake Engineering and Structural Dynamics. 30:691-707.
Kelly, J. M. (1991). “Base Isolation: Linear theory and design”. Earthquake Spectra, 7 (2), 301-323.
Kelly J. M. (1993, 1996 2nd edition). Earthquake-Resistant Design With Rubber. Springer – Verlag. London.
Kulkarni, J. y Jangrid, R. (2002). “Rigid body response of base-isolated structures”. Journal of Structural Control (9), 171-188.
Martelli, A. (2005). “Modern Seismic Protection Systems for Civil and Industrial Structures”. Congreso Chileno de Sismología e Ingeniería Antisísmica. IX Jornadas. Concepción. Chile. CD. ISSN 0718-2678.
Makris, N. y Constantinou, C. M. (1991). “Fractional-Derivative Maxwell Model for Viscous Damper”. Journal of Structural Engineering. Vol. 117. Nº 9, ASCE, ISSN 0733-9445/91-0009-2708. Paper Nº 26157.
Moroni, M. O.; Sarrazin, M.; Boroscheck, R.; Zamorano, R.; Vargas, J. y Garrido, J. (1995). “Seismic Base Isolation research in Chile: Recent results”. International Post-Smirt Conference Seminar on Seismic Isolation, Passive Energy Dissipation and Active Control of Vibrations of Structures. Santiago, Chile. August, 1995. pp. 119-135.
197ENTREGA DEL PREMIO “ING. ENRIQUE BUTTY” EDICIÓN 2011 AL DR. ING. MIGUEL EDUARDO TORNELLO
Naeim, F. y Kelly, J. M. (1999). Design of Seismic Isolated Structures. Edit. John Wiley & Sons, Inc. Printed in the United States of America.
Nawrotzki, P. (2000). “Some Strategies for the reduction of seismic structural responses. The First International Conference on Structural Stability and Dynamics. December 7-9, 2000. Taipei. Taiwan.
Nawrotzki, P. (2001a). “Seismic Protection of structures by viscoelastic elements”. The Eighth Asia-Pacific Conference on Structural Engineering and Construction. December 2001. Nanyang Technological University. Singapore.
Nawrotzki, P. (2001b). “Passive Control Systems for Building in Seismically Active Regions”. ECCM-2001. European Conference on Computational Mechanics. June 2001. Cracow. Poland.
Nawrotzki, P. (2005). “Visco-elastic device for the seismic control of machinery, equipment and buildings”. 9th World Seminar on Seismic Isolation, Energy Dissipation and Active Vibration Control of Structure. Kobe. Japan. Session 13. Paper Nº 34. pp. 587-594.
Rodriguez, M. (1994). “A Measure of the capacity of earthquake ground motions to damage structures”. Earthquake Engineering and Structural Dynamics, Vol. 23, 627-643.
Sarrazin, M.; Osorio, F.; Herbach, E.; Moroni, O. F. y Figueroa, A. (1989). “Diseño sísmico de edificios de viviendas con aislación de base”. Actas de las 5tas Jornadas Chilenas de sismología e Ingeniería Antisísmica. Agosto 1989. Santiago de Chile. Vol. 2. pp. 1107-1117.
Sarrazin, M.; Moroni, M.; Boroschek, R. y Tomaselli, F. (2001). “Applications on seismic isolation and energy dissipation in bridges in Chile and Venezuela”. Proc. 7th International Seminar for Seismic Isolation, Passive Energy Dissipation and Active Control of Vibrations of Structures, Assisi, Italy.
Stagno, P.; Frerk, J.; Stagno, D.; Rendic, P.; Iturriaga, W.; De la Llera, J. C.; Luder, C.; Sady, H.; Guendelman, T.; Guendelman, M.; Lindenberg, J.; Astudillo, M. y Boroschek, R. (2001). “Análisis y diseño del Hospital Militar”. VIII Jornadas de Sismología e Ingeniería Antisísmica. Universidad Técnica Federico Santa María, Departamento de Obras civiles y Asociación Chilena de Sismología e Ingeniería Antisísmica. Valparaíso, Abril del 2002. Chile. CD. Sesión: Control Activo y Pasivo de la Respuesta sísmica.
Shustov V. (1992). “Base Isolation: Fresh insight”. Proceeding of the Tenth World Conference on Earthquake Engineering. Madrid, España, 4, 1983-1986.
Skinner, R. I.; Robinson, W. H. y Mc Verry G. H. (1993). An Introduction to Seismic Isolation. John Wiley & Sons. Chichester.
Stuardi, J.; Massa, J. y Brewer, A. (2005). “Eficiencia de Sistemas de Aislamiento Sísmico basados en resortes helicoidales y amortiguadores viscosos comparada con aisladores tradicionales goma - metal”. VIII Congreso Argentino de Mecánica Computacional. CD. Noviembre 2005. Buenos Aires, Argentina. Facultad Ingeniería y Ciencias Exactas. Centro Estudios Avanzados Universidad Argentina de la Empresa.
198 PREMIOS
Tornello, M. y Sarrazin, A. M. (2003). “Desarrollo e implementación de un sistema de aislación sísmica para un edificio civil”. XI Congreso Iberoamericano de Ingeniería Sísmica. Agosto de 2003. Mendoza. Argentina. CD. Paper 28. pp. 18.
Tornello, M. y Sarrazin M. (2003). “Protección de estructuras mediante aislamiento sísmico ubicadas en zonas de falla cercana”. XIX Jornadas Argentinas de Ingeniería Estructural. Octubre 2006. Mar del Plata. Argentina.
Tornello, M.; Michelini, R. y Pizarro, N., (2004a). “Solución habitacional para estudiantes universitarios. Descripción del proceso constructivo de un edificio con aislación sísmica de base. Modelo de referencia. Proyecto VIS”. II Simposio de la Vivienda en la sociedad de hoy. Octubre-2004. Facultad Regional Mendoza. Argentina. Paper en CD.
Tornello, M. y Sarazzin A. M., (2004b). “Desarrollo e implementación de un sistema de aislación sísmica de base para el edificio de la residencia universitaria de la Facultad Regional Mendoza de la UTN”. Revista Internacional de Estructuras. Editores: Barbat A., Aguiar R., Revista semestral de la Escuela Politécnica del Ejercito. Ecuador. Vol. 9, Nº 1, 2004. pp. 71-91. SIN 1390-0315. © 2004 ESPE, Quito. Ecuador.
Tornello, M. y Sarrazin, A. M. (2004c). “Respuesta dinámica en término de desplazamientos de un edificio con aislación sísmica de base para sismos de falla cercana”. XVIII Jornadas Argentinas de Ingeniería Estructural. Septiembre de 2004. Buenos Aires. Argentina. Paper en CD.
Tornello, M. y Sarrazin, A. M., (2004d). “Implementación de un sistema de aislación sísmica para el edificio de la residencia universitaria de la Facultad Regional Mendoza”. Revista de Ciencia y Tecnología “Proyecto Leonardo”. Editor: Facultad Regional Mendoza. Año 0. Vol. 1. Julio-2004. CD. SIN 1668-5784.
Tornello, M. y Sarrazin, A. M., (2005a). “Respuesta estructural de dos sistemas de aislamiento sísmico frente a terremotos de fuente cercana”. Congreso Chileno de Sismología e Ingeniería Antisísmica. IX Jornadas. Noviembre de 2005. Paper Nº A13-04. CD. SIN 07118-2678.
Tornello, M. y Sarrazin, A. M. (2005b). “Control de desplazamiento de sistemas de aislamiento sísmico de base, para terremotos de falla cercana”. Primer Encuentro de Investigadores y Docentes en Ingeniería. EnIDI. Octubre de 2005. FRM. UTN, Facultad de Ingeniería. UNC. Mendoza. Argentina. ISBN 987-43-9997-X.
Tornello, M. y Sarrazin M. (2007). “Dynamic response of a Building with base isolation for near-fault motions”. 9th Canadian Conference on Earthaquake Engineering. Paper Nº 1057. Ottawa. CAEE, ACEP. Junio 2007. Ottawa. Canadá.
Zayas, V.; Low, S.; Bozzo, L. y Mahin, S. (1989). “Feasibility and performance studies on improving the earthquake resistence of new and existing buildings using the frictional pendulum sustems”. Earthquake Engineering Research Center. University of California at Berkeley. Report N. – UCB/EERC-89/09, 308 p., Berkeley California.