IMPLEMENTACIN DE UN NODO DE COMUNICACIONES BASADO EN CAN
(CONTROLLER AREA NETWORK) CON FINES DOCENTESPau Mart Colom Dept.
Enginyeria de Sistemes, Automtica i Informtica Industrial,
Universitat Politcnica de Catalunya C/Pau Gargallo, 5. 08028
Barcelona, [email protected] Manel Velasco Garca Dept. Enginyeria de
Sistemes, Automtica i Informtica Industrial, Universitat Politcnica
de Catalunya C/Pau Gargallo, 5. 08028 Barcelona,
[email protected] Ricard Vill Millaruelo Dept. Enginyeria de
Sistemes, Automtica i Informtica Industrial, Universitat Politcnica
de Catalunya C/Pau Gargallo, 5. 08028 Barcelona,
[email protected] Josep M. Fuertes Armengol Dept. Enginyeria de
Sistemes, Automtica i Informtica Industrial, Universitat Politcnica
de Catalunya C/Pau Gargallo, 5. 08028 Barcelona,
[email protected] Diego Compadre Morales Escola Universitria
Politcnica de Vilanova i la Geltr, Universitat Politcnica de
Catalunya Av. Vctor Balaguer, s/n. 08800 Vilanova i la Geltr
ResumenEn este trabajo describimos el diseo e implementacin de
un nodo de comunicaciones basado en el protocolo de comunicaciones
industriales Controller Area Network (CAN). El nodo desarrollado ha
sido concebido con el fin de dar soporte a prcticas de asignaturas
relacionadas con temas de automatizacin, como por ejemplo,
comunicaciones industriales o sistemas informticos de tiempo real.
Palabras Clave: Controller Area Network, Comunicaciones
industriales, Sistemas de tiempo real, Docencia en automatizacin. A
pesar de la limitacin presupuestaria, siempre presente en toda
organizacin docente o industrial, la calidad de la docencia es
siempre una prioridad para todo centro universitario. Por
consiguiente, se debe dotar a las asignaturas de un soporte prctico
suficientemente real y tecnolgicamente actual con el fin de que el
alumnado se sienta familiarizado con lo que encontrar en el tejido
industrial al finalizar los estudios universitarios. Adems, el
hecho de que la tecnologa evolucione tan velozmente implica que los
materiales utilizados en las prcticas pueda quedar rpidamente
obsoleto. Por consiguiente, es de agradecer que el material usado
en las prcticas de laboratorio sea de bajo coste y pueda ser
utilizado por ms de una asignatura. Con el fin de a) dotar de
tecnologa puntera laboratorios con b) material de bajo coste que
sea c) utilizable en varias asignaturas (comunicaciones
industriales, sistemas de tiempo real) impartidas en ciclos de
automtica y electrnica industrial, hemos especificado, diseado e
implementado un nodo de comunicaciones basado en el protocolo de
comunicaciones industriales Controller Area Network (CAN) [1]. Este
nodo est preparado para poder ser usado en laboratorios de
asignaturas de automatizacin con una fuerte componente de
comunicaciones industriales y/o tecnologas de sistemas de tiempo
real.
1
INTRODUCCION
La docencia en temas de automatizacin se ha ido incrementando en
los ltimos aos, sobretodo gracias a la creacin de segundos ciclos
universitarios centrados en las reas de automtica y electrnica
industrial. Dichos estudios incorporan una fuerte componente
tecnolgica que requiere de un material de prcticas que est siempre
actualizado y responda tanto a las exigencias tecnolgicas cercanas
a la investigacin, como las correspondientes a la actualidad
industrial.
En el resto de este trabajo presentamos el nodo. En la Seccin 2
discutimos las decisiones de diseo que determinan la tecnologa
utilizada, la arquitectura y los diferentes componentes que
conforman el nodo de comunicaciones. En la seccin 3 describimos la
implementacin del nodo, centrndonos en los diferentes servicios que
el nodo proporciona. En la seccin 4 explicamos el tipo de prcticas
realizables con dicho nodo (resumiendo la llamadas mas importantes
de la librera utilizada) y finalizamos con las conclusiones en al
seccin 5.
Histricamente, las primeras implementaciones eran las llamadas
stand-alone, en las que el controlador de comunicaciones CAN estaba
separado tanto del transceptor de lnea (bus) como del
microcontrolador. Las ventajas de esta arquitectura son la
modularidad y fcil conectividad entre mdulos. Seguidamente,
aparecieron soluciones integrando controlador y microcontrolador,
hecho que mejora los tiempos de acceso del microcontrolador a los
buzones de transmisin y recepcin del microcontrolador CAN. Teniendo
en cuenta los fines docentes del nodo, se decidi optar por una
arquitectura integrada: microcontrolador y controlador de
comunicaciones en un mismo chip. La decisin se tom con el fin de
minimizar los retardos entre componentes, y ms importante, evitar
posibles fallos en las conexiones entre componentes. Adems, esta
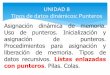
arquitectura ofrece la ventaja que, al disponer el microcontrolador
de mdulo interno CAN, es el propio microcontrolador quien puede
encargarse de gestionar la comunicacin CAN sin necesidad de
utilizar un controlador externo a l, requiriendo nicamente el
soporte de un transceptor de seal TTL-CAN para adaptar la seal del
microcontrolador a la del bus CAN, tal y como se muestra de forma
esquemtica en la Figura 1.
2
DECISIONES DE DISEO
En esta seccin se detallan las decisiones de diseo tomadas y su
repercusin en la arquitectura del nodo de comunicaciones. 2.1
PROTOCOLO DE COMUNICACIONES
La tecnologa que se ha escogido para el nodo de comunicaciones
es Controller Area Network (CAN). CAN es un sistema de
comunicaciones basado en una arquitectura de bus para transferencia
de mensajes en ambientes distribuidos. Fue concebido por Robert
Bosch GmbH para aplicaciones crticas de tiempo real. Aunque
originalmente fue diseado con el fin de ser aplicado en el sector
del automvil, rpidamente despert la atencin en el rea del control y
de la automatizacin industrial. Se justifica la eleccin de CAN como
protocolo de comunicaciones industriales porque este protocolo
considera una arquitectura multimaestra capaz de proporcionar
caractersticas de respuesta de tiempo real y tolerancia a fallos en
la recepcin de mensajes y mal funcionamiento de todos y cada uno de
los nodos. Al mismo tiempo, cabe resaltar que CAN est estructurado
en el modelo OSI en una arquitectura colapsada de dos capas (la
capa fsica y la de enlace de datos). Para la capa de aplicacin
existen distintas opciones. Entre ellas destacan: CiA CAN
Application Layer, CANOpen, SDS (Smart Distributed System),
DeviceNet y CAN Kingdom. Cabe destacar que CAN ha sido una
tecnologa ampliamente utilizada tanto para entornos hardware de
diseo y implementacin de aplicaciones distribuidas (como en [7]),
como para entornos de simulacin software de dichas aplicaciones
(como en [8]), pero sus caractersticas las hacen especialmente
idneas para ser usadas con fines docentes (ver por ejemplo [3] o
[10]), con las propiedades que se detallan en el resto de este
trabajo. 2.2 NIVEL DE INTEGRACIN
Figura 1: Arquitectura general 2.3 COMPONENTES
El microcontrolador que seleccionado para nuestra aplicacin deba
tener un controlador de CAN integrado. Este factor hizo que la
eleccin de este dispositivo presentase importantes restricciones,
ya que debamos buscar nicamente entre microcontroladores de este
tipo. Despus de revisar diversos modelos se lleg a la conclusin de
que los nodos de comunicacin estuvieran basados sobre el
microcontrolador PIC18F258. Dicho dispositivo pertenece a la gama
alta de Microchip y adems de ofrecer todas las prestaciones que se
requieren (interrupciones externas, timers, comunicacin USART,
etc.) lleva consigo integrado un controlador CAN. El transceptor
elegido para este diseo ha sido el MCP2551 de Microchip. Se trata
de un transceptor de alta velocidad de uso muy extendido entre los
productos orientados a la comunicacin CAN. Este dispositivo se
encarga de recibir las instrucciones
Una vez decidida la tecnologa, se estableci el tipo de
integracin que se requera para el nodo.
enviadas por el microcontrolador adaptando posteriormente su
seal a niveles elctricos CAN y viceversa. Por ello, se comporta
como una interfase entre el mdulo microcontrolador y el bus de
datos. Las caractersticas mas relevantes del PIC18F258 son las
siguientes: Vvelocidad mxima de trabajo de 40MHz. Memoria Flash de
32K. Da soporte a cuatro timers de 8 y 16 bits. Trabaja con
entradas y salidas tanto analgicas como digitales, mediante cuatro
puertos. Da soporte a la modulacin por ancho de pulso. Incluye
mdulo de comunicacin USART. Contiene tres entradas de interrupcin
externa. Controlador interno CAN.
totalidad del sistema, jerarquizando a la vez una serie de
tareas a realizar. Por ese motivo este dispositivo es el que
organiza de forma global el funcionamiento del sistema. Cabe
destacar que el oscilador utilizado para el microcontrolador
proporciona una frecuencia de trabajo de 20MHz.CAN H E/S CAN L TX
Transceiver CANTX MCP2551 CANRXMicrocontrolador
PC
RX
PIC18F258 Controlador CAN
TX RX
Transceiver MAX233
LCD
LEDS
Las caractersticas ms relevantes del controlador CAN interno del
microcontrolador son: Bit rate del mensaje de hasta 1Mbps.
Identificacin de mensajes tanto estndar como extendidos. Longitud
del mensaje CAN de 8 bytes. 3 Buffer de transmisin de datos con
posibilidad para establecer prioridades (por programa). 2 Buffer de
recepcin de datos. 3.1
Figura 2: Diagrama de bloques GESTION DE LA COMUNICACION
Anlogamente, las caractersticas ms relevantes del transceiver
MCP2551 son las siguientes: Soporta una velocidad mxima de 1Mbps, a
la vez que una velocidad mnima de 16 kbps. Admite hasta un mximo de
112 nodos. Incorpora un sistema de alta inmunidad al ruido debido a
la tensin diferencial del bus.
La principal funcin que debe gestionar el microcontrolador es la
comunicacin con el bus CAN. ste se conecta al bus mediante un
transceptor de seal, el cual adecua los niveles elctricas del bus a
niveles admisibles por el microcontrolador y viceversa, ya que el
transceptor es el que se encuentra directamente conectado a la capa
fsica CAN. La conexin entre ste y el microcontrolador se establece
mediante las seales CANRX (recepcin de datos de la red) y CANTX
(envo de datos a la red). ste a su vez, se encuentra conectado a la
red mediante las seales CAN_H y CAN_L. En el diseo, entre las
patillas CANH_ y CAN_L se ha conectado una resistencia y un jumper
en paralelo. Su valor se obtiene a partir de la impedancia
caracterstica de la lnea y permite adecuar el funcionamiento del
sistema a diferentes longitudes de cables y nmero de unidades de
control abonadas, ya que absorben fenmenos de reflexin que pueden
perturbar el mensaje. Por lo tanto el bus debe cerrarse en los
extremos con impedancias de carga. Estas resistencias suelen estar
alojadas en el interior de algunas de las unidades de control
(nodos) del sistema por cuestiones de economa y seguridad de
funcionamiento. En nuestro diseo, al requerir nicamente dos
terminadores de red, se incorpora un jumper con el que habilitamos
o inhabilitamos la actuacin del terminador del nodo. Anlogamente,
otra funcin de control que debe gestionar el microcontrolador es la
comunicacin va serie (USART) con un PC para poder depurar y
monitorizar la red de comunicaciones. Para ello se establece
conexin con otro transceptor de seal (MAX233) que se encarga de
adecuar las seales
3
IMPLEMENTACION
La arquitectura del nodo de comunicaciones viene determinada por
los objetivos que dicho nodo debe satisfacer. Los nodos, adems de
facilitar la comunicacin entre ellos debern poder dar soporte a la
visualizacin de datos e informaciones, as como tambin establecer
una interfase para el control de procesos. Para ello, se decidi que
los nodos deberan comunicarse mediante RS232 con un PC para poder
visualizar dichas variables, adems de dar soporte a la posible
incorporacin de un dispositivo LCD. Tambin debe posibilitar la
gestin de entradas y salidas de propsito general con el fin de dar
lugar al control de procesos. La Figura 2 detalla los distintos
bloques que forman el nodo. Cmo se observa en el diagrama, la
arquitectura del nodo est dispuesta alrededor del dispositivo
microcontrolador, el cul es el encargado de regir la
elctricas utilizadas en la comunicacin RS-232 a las del propio
microcontrolador y viceversa. La conexin entre este dispositivo y
el microcontrolador se establece mediante las seales RX (recepcin
de datos del PC) y TX (envo de datos al PC). ste, a su vez se
conecta al PC mediante las seales RX y TX adaptadas ya a las
tensiones soportadas por el protocolo RS-232. 3.2 ENTRADAS Y
SALIDAS
El microcontrolador tambin se encarga de controlar las entradas
y salidas de propsito general. El nodo dispone de unos puertos que
permiten su interaccin con dispositivos o elementos exteriores, los
cuales pueden ser utilizados con diversos fines. Destacamos que las
patillas del microcontrolador destinadas a entradas y salidas de
propsito general se protegen mediante electrnica especfica ante
posibles errores de conexionado que podran provocar la destruccin
del microcontrolador. Cabe destacar que tambin se ha dotado al nodo
de un conjunto de LEDs para facilitar la visualizacin de distintos
eventos y se ha preparado el nodo para la fcil incorporacin de un
LCD, el cual permitir tambin la visualizacin de datos. Asimismo, se
ha incorporado un interruptor conectado a una de las interrupciones
del microcontrolador. 3.3 ALIMENTACIN
Figura 3: Nodo de comunicaciones
4
APLICACIONES
En esta seccin se repasan las funciones ms importantes de la
librera CAN de Microchip para la realizacin de prcticas y para
otras aplicaciones. Esto se concreta en posible entornos de
aplicacin del nodo de comunicaciones. 4.1 LIBRERIA DE COMUNICACIN
CAN
La etapa de alimentacin proporciona servicio al
microcontrolador, al transceptor CAN y al canal RS232. Adems, con
el fin de utilizar el mnimo de fuentes de alimentacin, adems de
compartir la seal propia de bus se comparte tambin una nica seal de
alimentacin, capaz de abastecer a todos los nodos remotos del
sistema. De esta forma se establece que junto con los cables del
propio bus de comunicacin CAN tengan cabida los de alimentacin del
sistema (+12 y 0V respectivamente), proporcionando as un servici
integral a cada uno de los nodos. La finalidad de este criterio de
diseo es pues el ahorro en el nmero de fuentes de alimentacin que
necesita el sistema. No obstante, el diseo dispone de la
posibilidad de alimentar cada nodo mediante la seal compartida de
la que hemos hablado o tambin de la proporcionada por la fuente de
alimentacin. Por ello, es eleccin del usuario del sistema la
disposicin e interconexin de los diferentes nodos, estableciendo de
esta forma un sistema mucho ms flexible. 3.4 PLACA
Con el fin de facilitar el trabajo relacionado con la
programacin del microcontrolador existe una librera especfica en C
que se encarga de gestionar la comunicacin CAN que puede ejercer el
microcontrolador. Dicha librera tiene por nombre CAN18XX8 y se
puede encontrar dentro de la pgina web de Microchip. Las funciones
bsicas son las siguientes: CANInitialize: esta funcin es la
encargada de inicializar el mdulo CAN con una serie de parmetros:
SJW, BRP, PHSEG1, PHSEG2, PROPSEG y config. El parmetro config
sirve para si deseamos recibir mensajes nicamente de tipo estndar,
extendido o ambos. Los parmetros SJW, BRP, PHSEG1, PHSEG2 y PROSPEG
hacen referencia a la configuracin del Tiempo Nominal de Bit, con
el fin de establecer la velocidad de envo y recepcin de mensajes a
travs del bus. CANSendMessage: se encarga de colocar el mensaje a
transmitir en uno de los buffers vaco, marcndolo como disponible a
ser transmitido. Los parmetros de entrada que conforman esta funcin
son Id (valor del identificador del mensaje, el cual corresponder a
un valor de 11 bits para mensaje de tipo estndar y de 29 para
extendido), Data (dato enviado), DataLen (nmero de bytes de datos
enviados), MsgFlags (indica opciones como la eleccin de mensaje
estndar o extendido, la inclusin del bit RTR y el nivel de
prioridad de cada buffer de salida). Al mismo tiempo, esta funcin
tiene un valor de retorno el cual indica si el mensaje ha sido
El resultado final del montaje del nodo de comunicaciones puede
verse en la Figura 3. Para ms detalles de implementacin, referirse
a [2].
colocado satisfactoriamente en uno de los buffers vacos, por lo
que en caso de fallo se vuelve a buscar un buffer que se encuentre
libre. CANReceivedMessage: esta funcin se encarga de copiar el
nuevo mensaje recibido en uno de los buffers libres. Los parmetros
de entrada de esta funcin son Id, Data, DataLen y MsgFlags,
equivalentes a la funcin anterior CANIsRxReady: esta funcin nos
devuelve un 1 si por lo menos uno de los Buffers de recepcin se
encuentra lleno, y un 0 si ambos se encuentran vacos. CANIsTxReady:
esta funcin retorna un 1 si por lo menos unos de los buffers de
transmisin se encuentra vaco, y un 0 si todos se encuentran
ocupados. ENTORNOS DE APLICACION
Referencias [1] CAN (1991). Bosch CAN specification, V 2.0 Part
A. R. Bosch Gmbh, Germany. [2] Compadre, D. (2003) Diseo de un nodo
de comunicaciones CAN basado en PIC. Proyecto Final de Carrera.
Vilanova i la Geltr, Barcelona. [3] Fuertes, J.M., Vzquez, L.,
Rojas, L. (1999) Educational Architecture LAN/CAN for Process
Control Engineering 3rd Int. Workshop on Design of Mixed-Mode
Integrated Circuits and Applications Proc. p.203-206 IEEE ed.
Puerto Vallarta, Mexico, Julio [4] Fuertes, J.M., Rojas, L., Matos,
N., Vzquez, L. (2002) Sistema Integrado de Control con Alcance
Docente 2nd International Conference on Automatic Control AUT'2002
Proceedings Santiago de Cuba 17-19 Julio [5] Gmiz, J., Samitier,
J., Fuertes, J.M., Rubies, O. (2003) Practical evaluation of
messages latencies in CAN. Proc 8th IEEE Int. Conference on
Emerging Technologies and Factory Automation, Lisbon, September [6]
Mart, P., Fuertes, J.M., and Fohler, G. (2001) An Integrated
Approach to Real-Time Distributed Control Systems Over Fieldbuses,
Proc 8th IEEE Conf. Emerging Technologies and Factory Automation.
France. October. [7] Martinez, R., Hassan, H., Benet, G., Crespo,
A. (2001) Arquitectura de control distribuida sobre bus CAN para
robots moviles. XXII Jornadas Automtica, Bellaterra, Barcelona [8]
Portillo, J., Marcos, M. (2001). Contributions to the design of
real time distributed control systems. Proceedings of the European
Control Conference, September, 2001. Porto, Portugal. [9] Tindell,
K. and A. Burns (1994). Guaranteeing Message Latencies on
Controller Area Network (CAN). Proceedings 1st International CAN
Conference, Mainz (Germany), Sept. 1994. [10] Vzquez, L., Fuertes,
J.M., Rojas, L., Uribazo, E. (2001) Educational Industrial Network
Design Based in CANopen Application Layer III Simposium de Control
Automtico, CIMAF2001 Proceedings p.103-112 La Habana, Cuba,
Marzo
4.2
Estas funciones de mensajera facilitan el diseo de aplicaciones
distribuidas sobre CAN. Esto permite pensar en una gran variedad de
aplicaciones. As, tanto en prcticas de comunicaciones industriales,
como de sistemas de tiempo real o de control (como en [4]), la fcil
programacin de la mensajera hace que el nodo puede ser fcilmente
utilizado. Por ejemplo, pensando en sistemas de tiempo real, una
prctica interesante podra basarse en implementar la aplicacin
propuesta en [9] para medir las latencias reales de los mensajes
(conociendo a priori el anlisis de tiempos de respuesta sobre redes
CAN), como se detalla en [5]. Pensando en sistemas de control, y
concretamente en sistemas de control en red, seria interesante
comprobar los resultados presentados en [6], donde los retardos de
comunicacin en un lazo de control son activamente compensados por
el controlador.
5
CONCLUSIONES
En este trabajo se ha presentado un nodo de comunicaciones
basado en la tecnologa CAN con el propsito de ser usado en prcticas
de laboratorio de asignaturas de automatizacin y electrnica
industrial. El nodo permite disponer de material de bajo coste, con
tecnologa puntera y de amplia utilizacin para distintas
asignaturas. Las caractersticas principales del nodo son la
comunicacin CAN, la comunicacin RS-232 para funciones de depuracin
y/o monitorizacin de la red y la utilizacin de E/S de propsito
general para ser utilizadas en distintas aplicaciones.
Agradecimientos Este trabajo ha recibido soporte del proyecto CICYT
ref. DPI2002-01621.


![WORKSHOP AMTC 2013 - aprimin.claprimin.cl/site/wp-content/uploads/2015/06/AMTC-Avances-en-Uso... · -0.4-0.2 0 0.2 0.4 tiempo [s] Pref nodo 1 nodo 2 nodo 3 nodo 4 nodo 5 nodo 6 nodo](https://img.pdfslide.es/doc/110x75/5abccbd67f8b9af27d8e622b/workshop-amtc-2013-0-02-04-tiempo-s-pref-nodo-1-nodo-2-nodo-3-nodo-4-nodo.jpg)