Embed Size (px)
DESCRIPTION
Plc
Citation preview

ÍNDICE
INTRODUCCIÓN ----------------------------------------------------------------------------------- 2
4.1 FUNCIONES LÓGICAS BÁSICAS. ------------------------------------------------------ 2
4.2 CARACTERÍSTICAS DE LOS PLC`S. -------------------------------------------------- 6
4.3 ENTRADAS Y SALIDAS DE LOS PLC´S. --------------------------------------------- 7
4.4 PROGRAMACIÓN DE LOS PLC´S. ---------------------------------------------------- 11
4.5 APLICACIÓN EN LOS CIRCUITOS NEUMÁTICOS E HIDRÁULICOS. ------ 16
4.6 APLICACIÓN CON CONTADORES. --------------------------------------------------- 17
CONCLUSIÓN ------------------------------------------------------------------------------------- 19
FUENTES DE INFORMACIÓN ---------------------------------------------------------------- 20
1
Introducción
Hasta no hace mucho tiempo el control de procesos industriales se hacía de forma
cableada por medio de contactores y relees. Al operario que se encontraba a cargo de
este tipo de instalaciones, se le exigía tener altos conocimientos técnicos para poder
realizarlas y posteriormente mantenerlas. En la actualidad no se puede entender un
proceso complejo de alto nivel desarrollado por técnicas cableadas. El ordenador y los
Controladores Lógicos Programables han intervenido de forma considerable para que
este tipo de instalaciones se hayan visto sustituidas por otras controladas de forma
programada.
El Controlador Lógico Programable (PLC) nació como solución al control de circuitos
complejos de automatización. Por lo tanto se puede decir que un PLC no es más que un
aparato electrónico que sustituye los circuitos auxiliares o de mando de los sistemas
automáticos.
4.1 FUNCIONES LÓGICAS BÁSICAS.
Las operaciones lógicas básicas son las operaciones sobre las que se fundamenta la
lógica Booleana. Cualquier operación lógica compleja puede ser expresada utilizando
combinaciones de las operaciones básicas.
4.1.1FUNCIÓN LÓGICA AND (Y)
La función lógica AND tendrá la salida activada (energizada) solo si ambos contactos
(normalmente abiertos) tienen el nivel lógico de 1, en todos los otros casos la salida
estará desactivada (desenergizada). Ver Figura 4.1, 4.2, 4.3 y 4.4.
Figura 4. 1 Función Lógica AND (Y) con las entradas A y B en "0".
Figura 4. 2 Función Lógica AND (Y) con entrada A en "0" y B en "1".
2

Figura 4. 3 Función Lógica AND (Y) con entrada A en "1" y B en "0".
Figura 4. 4 Función Lógica AND (Y) con las entradas A y B en "1".
Los símbolos iluminados se encuentran activos.
Las Figuras 4.1, 4.2, 4.3 y 4.4 generan la siguiente tabla de verdad:
Tabla 4.1 Función lógica AND (Y)
4.1.2 FUNCIÓN LÓGICA OR (O)
Con una función lógica OR la salida se presenta activada (energizada) si uno o todos sus
contactos (normalmente abiertos) se encuentran en el estado de "1" lógico. En
contraparte la salida se presentara desactivada (desenergizada) cuando todos los
interruptores tienen un estado lógico "0". Ver Figura 4.5, 4.6, 4.7 y 4.8.
3
A B SALIDA FIGURA
0 0 0 5.5
0 1 0 5.6
1 0 0 5.7
1 1 1 5.8
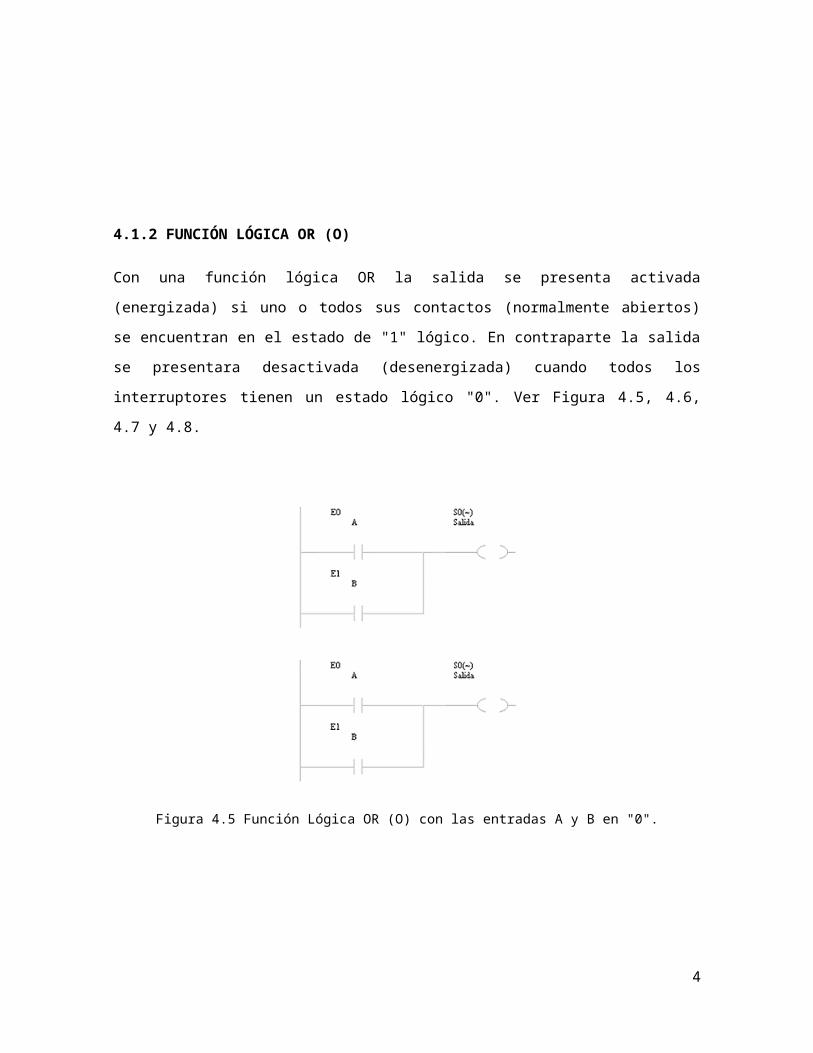
Figura 4.5 Función Lógica OR (O) con las entradas A y B en "0".
Figura 4.6 Función Lógica AND (Y) con entrada A en "0" y B en "1".
Figura 4.7 Función Lógica AND (Y) con entrada A en "1" y B en "0".
4
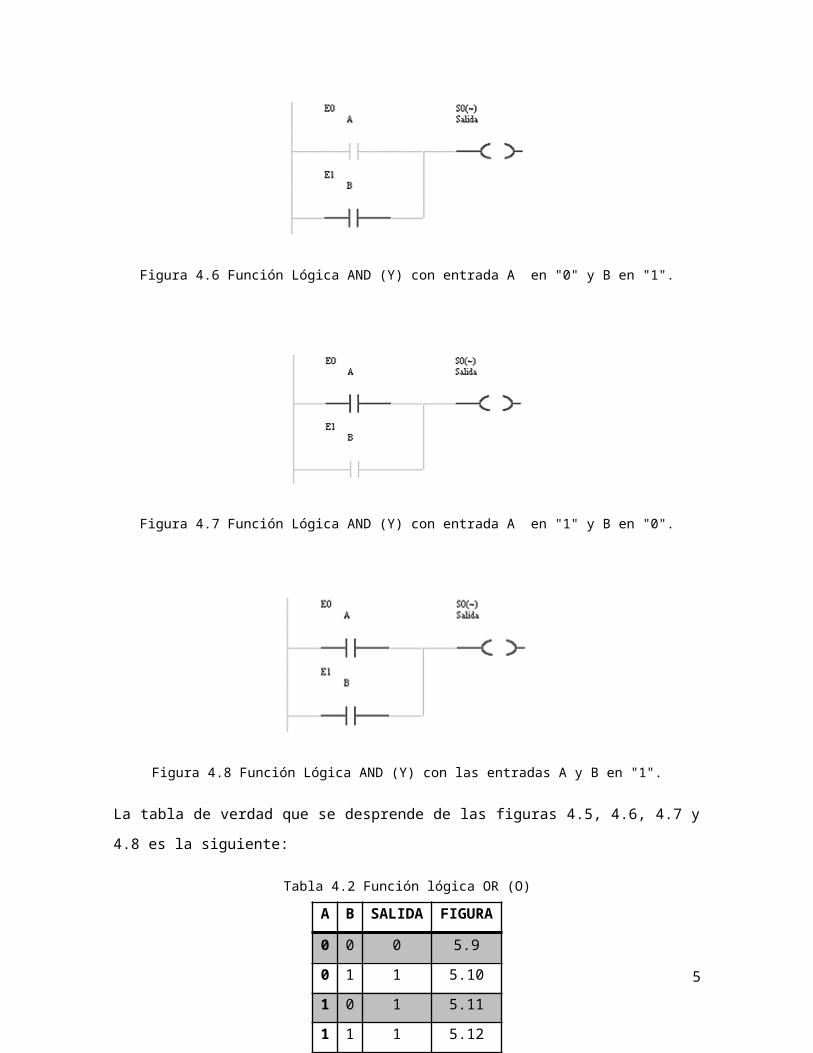
Figura 4.8 Función Lógica AND (Y) con las entradas A y B en "1".
La tabla de verdad que se desprende de las figuras 4.5, 4.6, 4.7 y 4.8 es la siguiente:
Tabla 4.2 Función lógica OR (O)
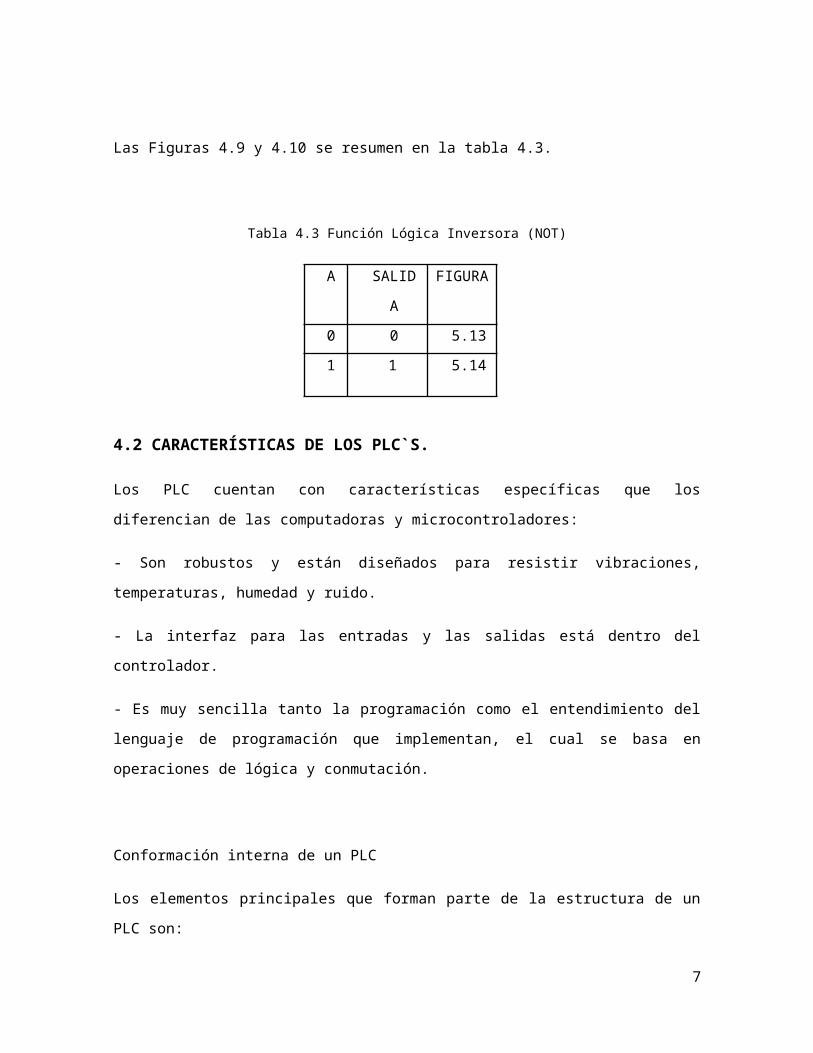
4.1.3 FUNCIÓN LÓGICA INVERSORA (NOT)
La función lógica INVERSORA (NOT), a diferencia de las funciones AND y OR, solo
requiere un contacto en la entrada, el cual debe ser normalmente cerrado. La salida se
presenta activada (energizada) si el contacto se encuentra en el estado de 0 lógico, ver
Figura 4.9. En contraparte la salida se presentara desactivada (desenergizada) cuando el
interruptor tiene un estado lógico "1", ver Figura 4.10.
De acuerdo a lo explicado en el párrafo anterior se observa que la finalidad de esta
función lógica es presentar en la salida el estado lógico del contacto de manera invertida.
Figura 4.9 Función Lógica Inversora (NOT) con las entrada A en "0".
5
A B SALIDA FIGURA
0 0 0 5.9
0 1 1 5.10
1 0 1 5.11
1 1 1 5.12
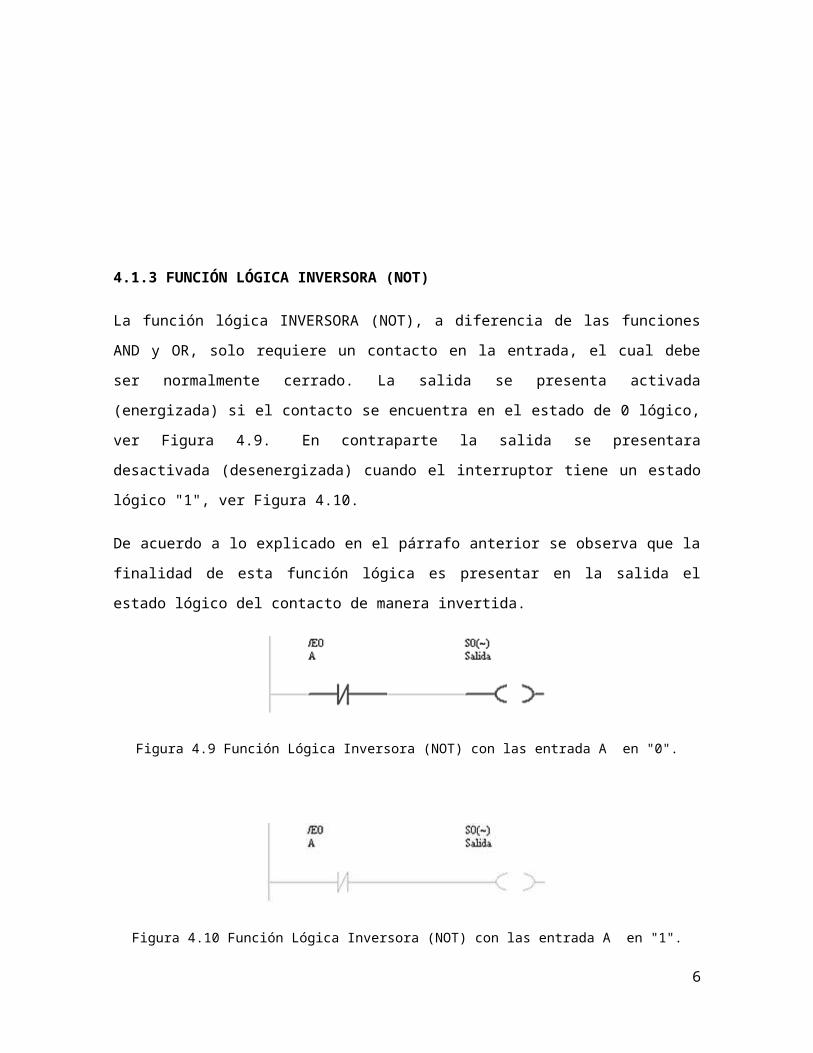
Figura 4.10 Función Lógica Inversora (NOT) con las entrada A en "1".
Las Figuras 4.9 y 4.10 se resumen en la tabla 4.3.
Tabla 4.3 Función Lógica Inversora (NOT)
A SALIDA FIGURA
0 0 5.13
1 1 5.14
4.2 CARACTERÍSTICAS DE LOS PLC`S.
Los PLC cuentan con características específicas que los diferencian de las computadoras
y microcontroladores:
- Son robustos y están diseñados para resistir vibraciones, temperaturas, humedad y
ruido.
- La interfaz para las entradas y las salidas está dentro del controlador.
- Es muy sencilla tanto la programación como el entendimiento del lenguaje de
programación que implementan, el cual se basa en operaciones de lógica y conmutación.
Conformación interna de un PLC
Los elementos principales que forman parte de la estructura de un PLC son:
- CPU (Unidad central de procesamiento): Controla y procesa todas las operaciones
realizadas dentro del PLC.
6
- Reloj: Es la fuente de temporización y sincronización de todos los elementos del
sistema. Su frecuencia típica ronda entre 1 y 8MHZ.
- Sistema de bus: Lleva información y datos desde y hacia el CPU, la memoria y las
unidades de entrada/salida.
- Memoria:
- ROM: Almacena de forma permanente la información del sistema operativo y
datos corregidos.
- RAM: Almacena el programa del usuario.
- Batería: Se encarga de mantener el contenido de la RAM por un determinado tiempo, en
caso de que se corte el suministro de energía eléctrica.
- Unidad de entrada/salida: Es la interfaz entre el sistema y el mundo externo. Para
introducir programas en esta unidad se usa un tablero, el cual puede variar de una
sencilla configuración de teclado con pantalla de cristal líquido, o bien llegar a tener
incluso unidades de presentación visual con teclado y pantalla.
- Canales de entrada/salida: Proporcionan funciones para el acondicionamiento y
aislamiento de señales, lo que permite conectarlos directamente a sensores y actuadores,
sin depender del uso de otros circuitos.
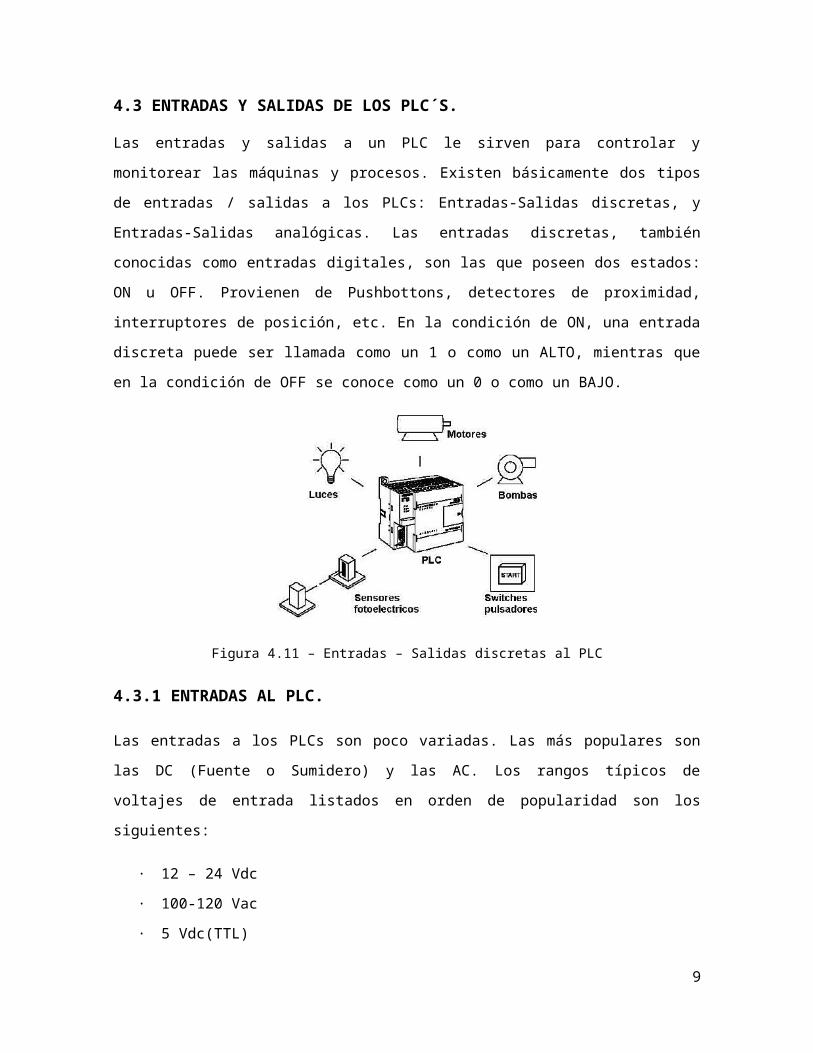
4.3 ENTRADAS Y SALIDAS DE LOS PLC´S.
Las entradas y salidas a un PLC le sirven para controlar y monitorear las máquinas y
procesos. Existen básicamente dos tipos de entradas / salidas a los PLCs: Entradas-
Salidas discretas, y Entradas-Salidas analógicas. Las entradas discretas, también
conocidas como entradas digitales, son las que poseen dos estados: ON u OFF.
Provienen de Pushbottons, detectores de proximidad, interruptores de posición, etc. En la
condición de ON, una entrada discreta puede ser llamada como un 1 o como un ALTO,
mientras que en la condición de OFF se conoce como un 0 o como un BAJO.
7
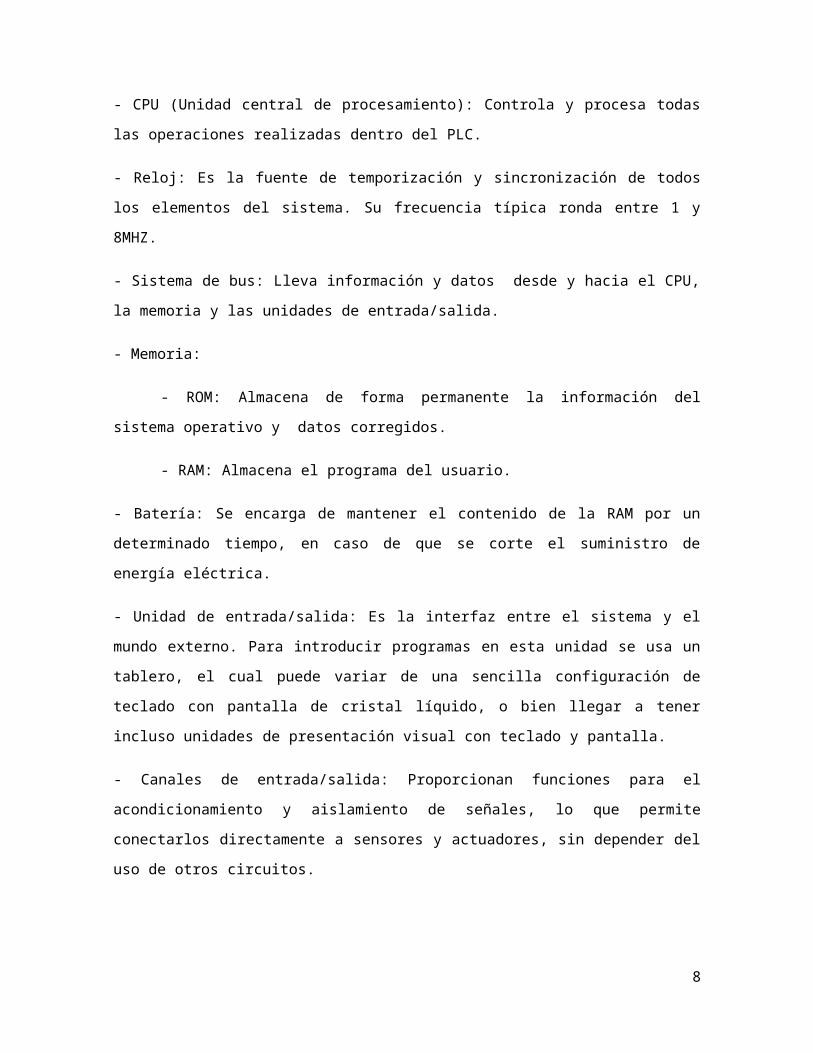
Figura 4.11 – Entradas – Salidas discretas al PLC
4.3.1 ENTRADAS AL PLC.
Las entradas a los PLCs son poco variadas. Las más populares son las DC (Fuente o
Sumidero) y las AC. Los rangos típicos de voltajes de entrada listados en orden de
popularidad son los siguientes:
· 12 – 24 Vdc
· 100-120 Vac
· 5 Vdc(TTL)
· 200-240 Vac
· 48 Vdc
· 24 Vac
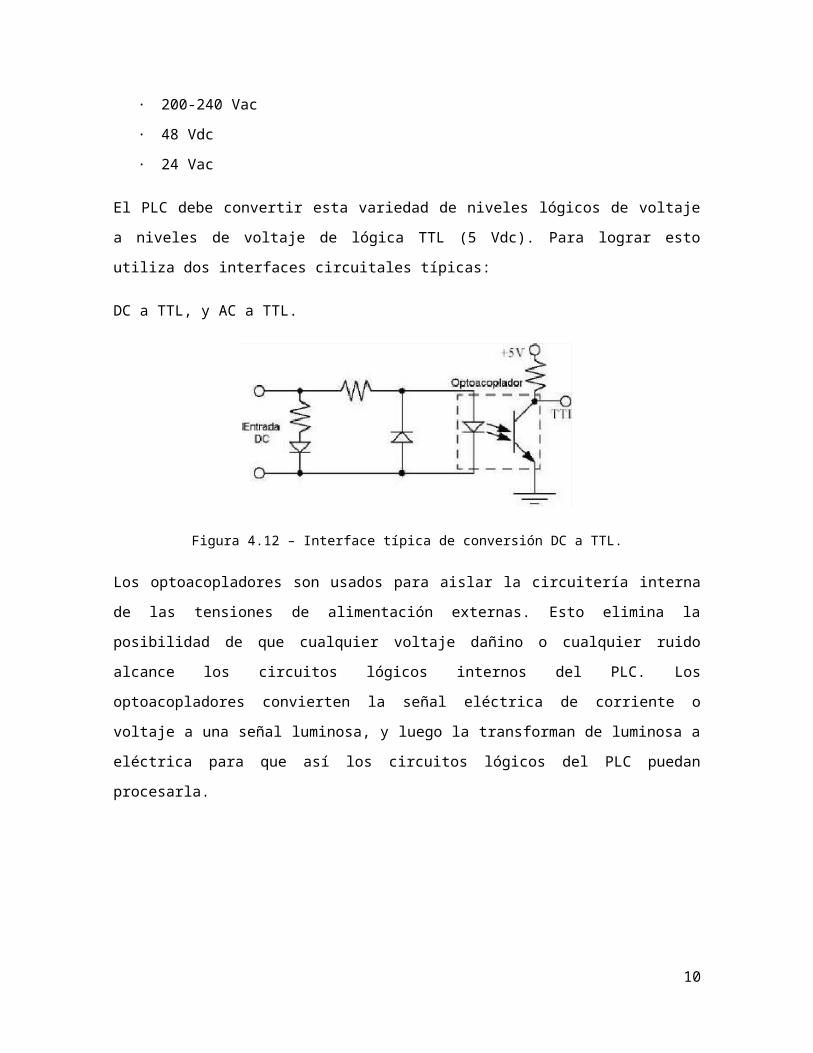
El PLC debe convertir esta variedad de niveles lógicos de voltaje a niveles de voltaje de
lógica TTL (5 Vdc). Para lograr esto utiliza dos interfaces circuitales típicas:
DC a TTL, y AC a TTL.
Figura 4.12 – Interface típica de conversión DC a TTL.
8
Los optoacopladores son usados para aislar la circuitería interna de las tensiones de
alimentación externas. Esto elimina la posibilidad de que cualquier voltaje dañino o
cualquier ruido alcance los circuitos lógicos internos del PLC. Los optoacopladores
convierten la señal eléctrica de corriente o voltaje a una señal luminosa, y luego la
transforman de luminosa a eléctrica para que así los circuitos lógicos del PLC puedan
procesarla.
Figura 4.13– Interface típica de conversión AC a TTL.
Una primera vista comparativa del uso de entradas DC o AC se da a continuación:
· Los voltajes DC usualmente son más bajos (12 – 24 V) y por lo tanto es menos
riesgoso operar con ellos.
· Las entradas DC son muy rápidas. Las entradas AC requieren de un tiempo mayor
para ser reconocida.
· Los voltajes DC pueden ser conectados a una gran variedad de equipos y
sistemas eléctricos.
· Las señales AC son más inmunes al ruido que las señales DC, por eso pueden
cubrir mayor distancia y ambientes ruidosos.
· El suministro AC es más fácil y menos costoso al momento de alimentar equipos
eléctricos.
· Las señales AC son muy comunes en muchos equipos de automatización.
4.3.2 SALIDAS DEL PLC.
Los módulos de salida raras veces o nunca suplen potencia a las cargas, más bien ellos
actúan como switches. Fuentes externas son conectadas a las tarjetas de salida de los
PLCs y entonces ellas se encargan de conmutar la potencia (ON u OFF) hacia cada
9
salida. Los rangos típicos de voltajes típicos que son conmutados en los módulos de
salida son lo que se listan a continuación:
· 120 VAC
· 24 VDC
· 220 VAC
· 12 – 48 VAC
· 12 – 48 VDC
· 5 VDC (TTL)
Los módulos de salida normalmente tienen de 8 a 16 salidas de un mismo tipo: a relés, a
transistores, o a TRIACs. Los PLCs deben convertir los niveles lógicos TTL (5 VDC)
presente en el bus de datos a niveles de voltaje externos. Esto se logra con el uso de
circuitos de interfase como los mostrados a continuación, los cuales además de usar
básicamente un optoacoplador para conmutar la circuitería externa, también utilizan
algunos componentes para proteger la circuitería de voltajes excesivos y de polaridad
inversa.
Figura 4.14 – Interface típica para salida a relé.
Las salidas a relé son las más flexibles con respectos al uso. Ellas son capaces de
conmutar tanto cargas AC como cargas DC. Sin embargo este tipo de salida es bastante
lenta (Tiempo de conmutación típico: 10 ms), de mayor tamaño, de mayor costo, y de
tiempo de vida más corto. Cuando se dedica un relé separado por cada salida, a menudo
se le conoce como contactos secos. Esto permite mezclar voltajes (AC o DC a distintos
niveles de tensión), así como también permite aislar las salidas, protegiendo las mismas y
al PLC mismo. Este método es menos sensitivo a las variaciones y a los picos de voltaje.
10

Figura 4.15 – Interface típica para salida a transistor.
Figura 4.16 – Interface típica para salida a TRIAC.
Las salidas a transistores usan del tipo NPN o PNP y están limitadas a servir cargas DC
hasta 1 Amp, mientras que las salidas a TRIACs sirven a cargas AC típicamente hasta 1
Amp. Las salidas a transistores o a TRIACs son conocidas como salidas conmutadas o
salidas estáticas, y su tiempo de conmutación esta normalmente por debajo de 1 ms.
4.4 PROGRAMACIÓN DE LOS PLC´S.
Lógica en escalera
Este lenguaje de programación está basado en la descripción de lógicas utilizada por
electricistas. Consiste en la representación del circuito lógico utilizando contactos y
bobinas, en forma similar a cuando se utilizan relés. Los elementos básicos de programa-
ción son contactos (NA o NC, es decir, Normal Abiertos o Normal Cerrados, entendiéndo-
se por normal la posición del contacto sin energizar) y bobinas. Las operaciones
booleanas básicas suma y producto se arman conectando apropiadamente estos
contactos.
11
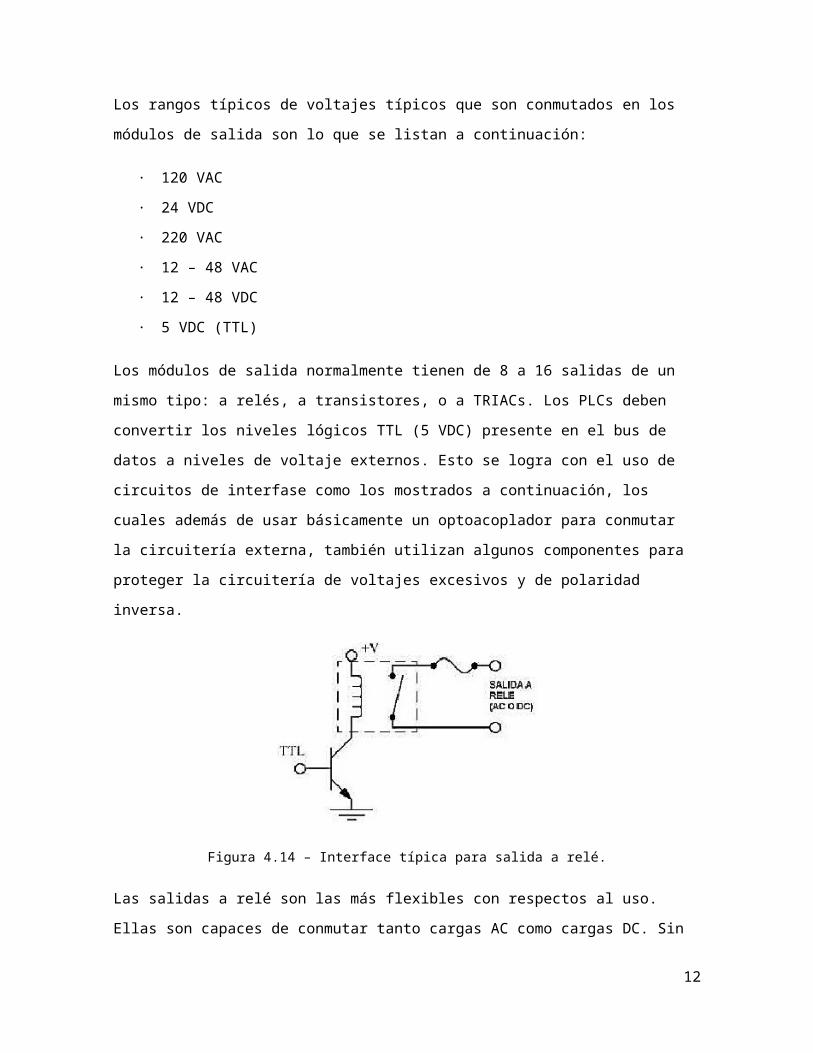
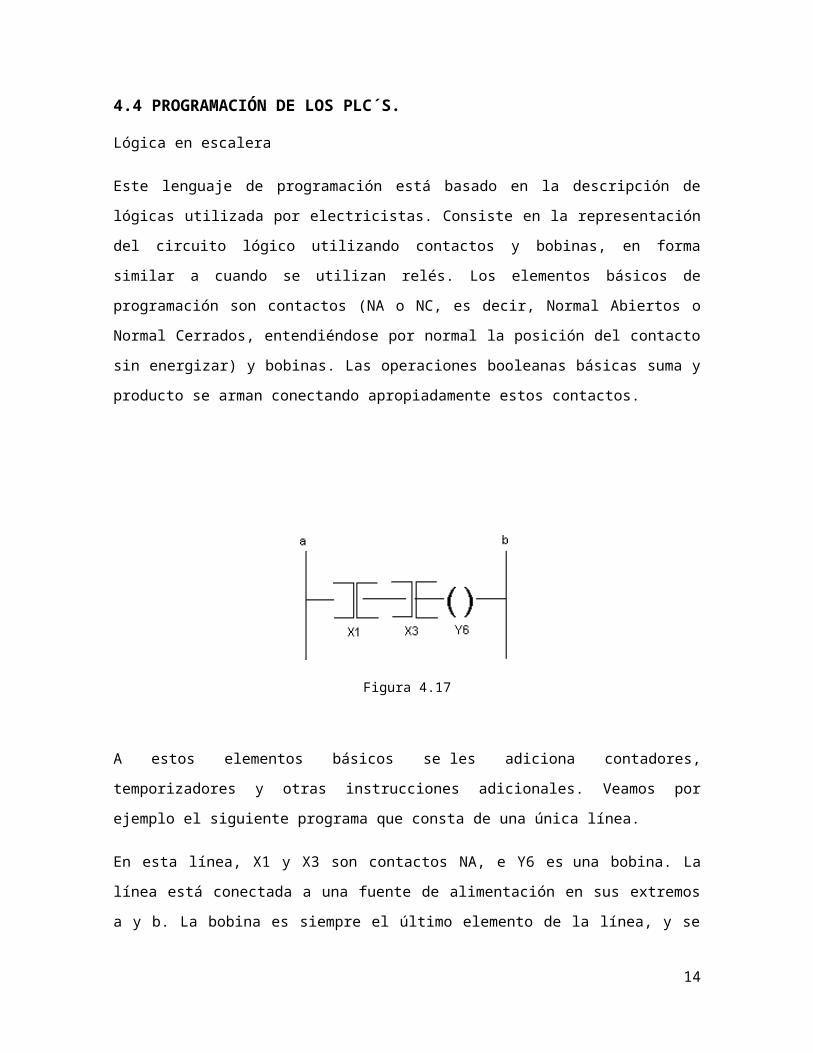
Figura 4.17
A estos elementos básicos se les adiciona contadores, temporizadores y otras
instrucciones adicionales. Veamos por ejemplo el siguiente programa que consta de una
única línea.
En esta línea, X1 y X3 son contactos NA, e Y6 es una bobina. La línea está conectada a
una fuente de alimentación en sus extremos a y b. La bobina es siempre el último
elemento de la línea, y se conecta a uno de los polos de esa fuente. Su activación se
produce cuando se cierra el circuito entre a y b.
En el ejemplo, la bobina Y6 se energizará causando la activación de la salida Y6 real
cuando se cierren los contactos X1 y X3, es decir cuando las entradas X1 y X3 lean un
contacto cerrado en campo. Evidentemente, la conexión en serie de dos contactos
equivale a la operación booleana suma (AND). En forma similar, la conexión en paralelo
de dos contactos equivale a la operación booleana producto (OR).
Con esta misma base se construyen programas para aplicaciones realmente complejas.
Lenguajes de alto nivel
Además de utilizarse en módulos inteligentes, se emplean para escribir subrutinas en
PLCs que utilizan otros lenguajes como la lógica en escalera. En muchos equipos se
insertan caía lógica en escalera instrucciones denominadas “box” que, al activarse,
ejecutan subrutinas escritas en lenguajes similares al C, Pascal o BASIC.
Con estas subrutinas pueden crearse modelos de control que no están pre programados
en el PLC. Como pueden ser linealizaciones escalados. etc. Otra aplicación puede ser la
simulación de fenómenos físicos o químicos antes de la puesta en marcha definitiva de un
12

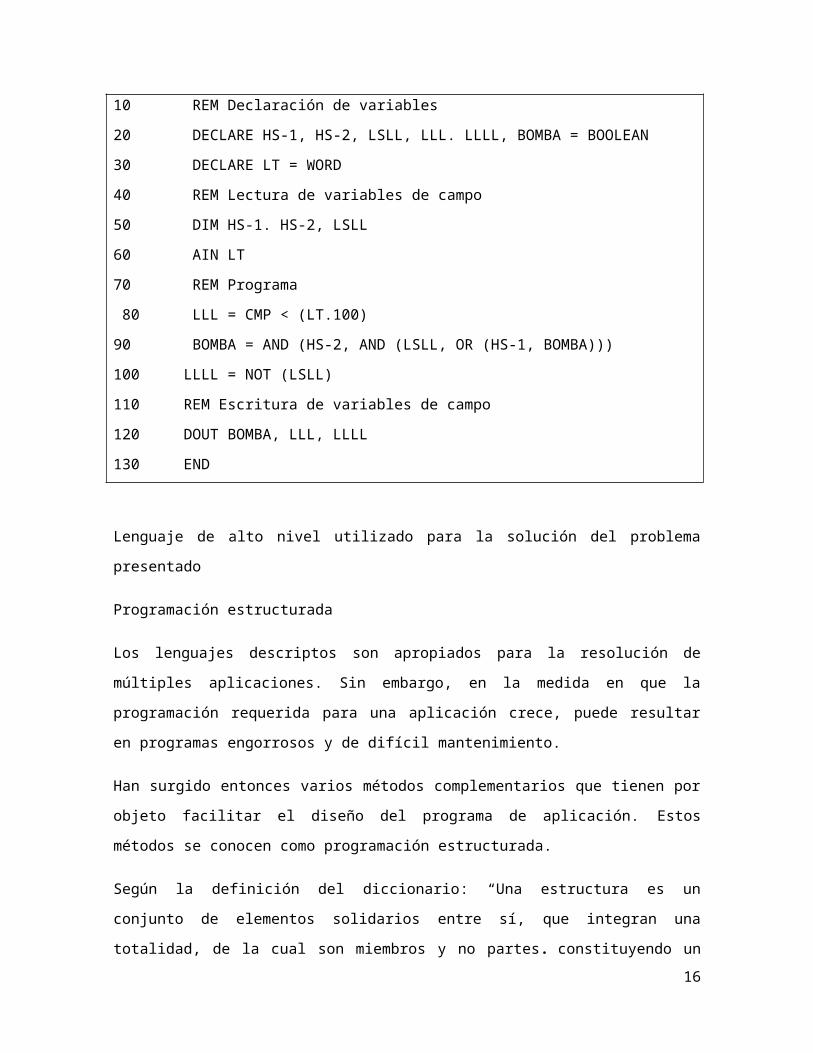
sistema. En general, este tipo de lenguajes se utiliza para aplicaciones que requieren una
capacidad intensiva de cálculo Si bien no es usual implementar problemas como el dado
de ejemplo, se muestra igualmente su solución a continuación:
10 REM Declaración de variables
20 DECLARE HS-1, HS-2, LSLL, LLL. LLLL, BOMBA = BOOLEAN
30 DECLARE LT = WORD
40 REM Lectura de variables de campo
50 DIM HS-1. HS-2, LSLL
60 AIN LT
70 REM Programa
80 LLL = CMP < (LT.100)
90 BOMBA = AND (HS-2, AND (LSLL, OR (HS-1, BOMBA)))
100 LLLL = NOT (LSLL)
110 REM Escritura de variables de campo
120 DOUT BOMBA, LLL, LLLL
130 END
Lenguaje de alto nivel utilizado para la solución del problema presentado
Programación estructurada
Los lenguajes descriptos son apropiados para la resolución de múltiples aplicaciones. Sin
embargo, en la medida en que la programación requerida para una aplicación crece,
puede resultar en programas engorrosos y de difícil mantenimiento.
Han surgido entonces varios métodos complementarios que tienen por objeto facilitar el
diseño del programa de aplicación. Estos métodos se conocen como programación
estructurada.
Según la definición del diccionario: “Una estructura es un conjunto de elementos solidarios
entre sí, que integran una totalidad, de la cual son miembros y no partes. constituyendo
un todo y no una suma. Los miembros se caracterizan por su independencia, su
articulación en la forma total, y su solidaridad’.
13
Entonces, la programación estructurada consiste en la descomposición de un trabajo en
varias tareas independientes, autocontenidas y fáciles de comprender. Cada una de estas
tareas se diseña por separado, en alguno de los lenguajes descriptos. Un programa
maestro define cuando se corre cada tarea, y controla el conjunto.
Prácticamente cada fabricante tiene una versión propia de lenguaje de programación
estructurada.
Equipos de programación
Para la programación de PLCs se utilizan elementos auxiliares denominados Unidades de
Programación o Programadores
Actualmente se encuentran dos tipos de programador:
Programador de mano: Se trata de una unidad portátil, con un pequeño teclado y un
display alfanumérico de una o dos líneas. Se utilizan como único medio de programación
de microPLCs, o como programador de mantenimiento para PLCs de mayor tamaño.
Usualmente sirven para programar utilizando un lenguaje de mnemónicos, Para poder
programar requieren estar conectados al PLC. Esta modalidad se conoce como
“programación en línea” u “on-line”
Software para computadoras PC: La difusión de las PCs ha llevado a todos los
proveedores a utilizarlas como plataforma para el diseño de Unidades de Programación.
Típicamente constan de una computadora personal IBM compatible, con sistema
operativo DOS, y un software de programación propio del proveedor del PLC. La PC se
comunica con el PLC utilizando un protocolo de baja velocidad (9600 baudios),
implementado en un port RS-232-C. Algunas funciones que pueden estar disponibles son:
· Configuración en línea (on-line) El PLC se programa desde la PC, mientras ambos
están en comunicación. Es posible forzar a las variables de la memoria del PLC a
tomar determinados valores, pudiendo probar así un programa de aplicación. Por
ejemplo, se puede forzar una entrada discreta para que ésta aparezca cerrada,
aun cuando el contacto en campo esté abierto.
· Programación fuera de línea (off-line): Se desarrolla el programa de aplicación en
la PC, sin que ésta esté conectada al PLC.
14
· Manejo de diversos lenguajes de programación: El software puede permitir el
desarrollo de un programa de aplicación en un lenguaje (por ejemplo, lógicas en
escalera), y traducirlo a otro lenguaje (como diagramas lógicos), permitiendo
efectuar modificaciones en cualquiera de ambos lenguajes.
· Carga y descarga del programa de aplicación: El programa de aplicación
residente en el PLC puede ser leído por la PC, para luego modificarlo. En forma
inversa, un programa desarrollado off-line puede ser cargado en la CPU, luego de
conectar la PC al PLC.
· Archivo de programas: Los programas de aplicación pueden ser almacenados en
los medios magnéticos de la PC (disco rígido, disquetes, etc.), para facilitar su
archivo.
· Documentación: Se puede imprimir un reporte que indique los módulos que
componen el PLC, revisión de software y hardware, y el programa de aplicación
implementado.
La difusión de computadoras IBM compatibles de pequeño tamaño, como las notebook
(del inglés, cuaderno), permite contar con una unidad de programación tan poderosa
como la descripta en un equipo chico, que puede ser trasladado fácilmente a la ubicación
del PLC para tareas de mantenimiento.
Interfaces con el operador
El objetivo original del PLC fue el reemplazo de paneles de relés, por lo que no se
consideró necesario el desarrollo de una interface al operador. Esta quedó a cargo de un
panel convencional, con indicadores luminosos, pulsadores y llaves.
La facilidad de comunicación de un PLC moderno y la baja de costos de computadoras
hacen posible una combinación que ha despertado gran interés en los usuarios: la suma
de PLCs y computadoras. Esta combinación se complementa con un tercer elemento: el
software para control y adquisición de datos, que corre en la computadora. El interés por
este tipo de software ha crecido en los últimos años en forma vertiginosa y hoy existen
paquetes que permiten desde una simple adquisición de datos hasta complejas tareas de
control, supervisión e integración con otros sistemas automatizados de una empresa. De
esta forma, el PLC pasa de ser un sistema en sí mismo, a ser un componente más de
otros sistemas.
15
Otro mercado de desarrollo complementario al PLC y de gran crecimiento en la última
década es el de las interfaces al operador basadas en displays y paneles dedicados.
Estos equipos permiten ingresos manuales de datos, modificación y monitoreo de lazos
de control, emisión de mensajes al operador, etc. Van desde simples desarrollos basados
en microprocesador hasta potentes computadoras integradas con el PLC, que permiten la
integración de software para control basado en PC dentro del mismo.
La comunicación de estas interfaces con el PLC puede ser a través de módulos
insertados en su chasis (como el módulo inteligente ASCII), por medio de la conexión al
bus de comunicaciones serie de los chasis remotos, o a través de las redes creadas con
los módulos inteligentes de comunicaciones.
4.5 APLICACIÓN EN LOS CIRCUITOS NEUMÁTICOS E HIDRÁULICOS.
Una de las principales características del desarrollo tecnológico, es el buscar un
funcionamiento cada vez más automatizado en los procesos industriales. Estopara incidir
sobre tres aspectos fundamentalmente:
1. Regularidad en la realización de los procesos.
2. Velocidad de fabricación.
3. Contratación de la mano de obra.
Grado de Automatización
La primera fase de automatización se logra con el uso individual y combinado de los
accionamientos mecánicos, eléctricos, hidráulicos, neumáticos. En las fases siguientes,
se optimiza el desempeño agregando características que beneficien el proceso y la
seguridad de los operadores.
Para dar solución a lo anterior, se diseñó un dispositivo electrónico denominado
Controlador Lógico Programable -PLC-. Este permite configurar su funcionamiento, como
se verá más adelante, sin necesidad de introducir reformas a los circuitos internos,
habilitándolo para ser instalado en una gran cantidad de sistemas de automatización
industrial.
16
Figura 4.18
4.6 APLICACIÓN CON CONTADORES.
Un contador es una función de cómputo que permite efectuar la cuenta de
acontecimientos o efe impulsos. La cuenta se puede programar en forma progresiva
(ascendente) o regresiva (descendente). La operación de conteo consiste en incrementar
1 al contenido del contador, mientras que la operación de descuento consiste en
decrementar 1 al contenido del contador, ambos al presentarse un pulso o un
acontecimiento. La función del contador, permite activar salidas o memorias internas, en
el momento que su registro de conteo coincide con el valor presente previamente definido.
Por otro lado si el registro es diferente al valor de presente la salida asociada al contador
no se activara. Es importante señalar, que la cantidad de contadores que se pueden
programar con el PLC, depende del tamaño de éste, pudiendo ser desde 16 hasta miles.
APLICACIÓN DEL CONTADOR
DESCRIPCIÓN TECNOLÓGICA:
Se desea contabilizar eventos cuando se activa una entrada S1Q, así mismo decrementar
con la señal de entrada S2Q. Por otro lado, es preciso resetear a cero el contador cada
vez que aparece la señal S0Q. Contemplar una entrada S3Q para que se pueda cargar al
contador un valor preseteado de 10. Finalmente, una lámpara H1H se encenderá cuando
el contador tenga en su registro contabilizado 10 eventos.
Se pide:
Tabla 4.4
17
1. LISTA DE ORDENAMIENTO
ENTRADAS
Tabla 4.5
2. SALIDAS
Tabla 4.6
3. DIAGRAMA DE CONTACTOS
Figura 4.19
PLANO DE FUNCIONES
18
Figura 4.20
CONCLUSIÓN
Los controladores lógicos programables (PLC) son dispositivos electrónicos digitales que
fueron a reemplazar a los circuitos de relevadores electromecánicos, interruptores y otros
componentes comúnmente utilizados para el control de los sistemas. En los sistemas el
estado de una salida queda determinado por el estado de una cierta combinación de
entradas sin importar la historia de éstas.
Los PLC's resultaron muy atractivos ya que, a diferencia de los antiguos circuitos permiten
reprogramación, ocupan comparativamente muy poco espacio, consumen poca potencia,
poseen auto-diagnóstico y tienen un costo competitivo. Sin embargo, fueron las
innovaciones tecnológicas en microprocesadores y memorias lo que a hecho tan
versátiles y populares a los PLC's. Así, los PLC's pueden realizar operaciones aritméticas,
manipulaciones complejas de datos, tienen mayores capacidades de almacenamiento y
pueden comunicarse más eficientemente con el programador y con otros controladores y
computadoras en redes de área local.
Cuando se comprendió el gran potencial de los PLC's , como poderosas computadoras
que son y se dio la evolución de capacidades que ahora tienen, que no poseían los
antiguos circuitos, aparecieron los lenguajes de alto nivel como el "lenguaje de escalera"
pero, con la adición de funciones especiales complejas, que en el diagrama de escalera
aparecen en el lugar de las salidas". Luego, se desarrollaron los Lenguajes Especiales de
Computadora, también de alto nivel, que son muy similares a los lenguajes de
programación de computadoras como el Basic y el C, para hacer cada vez más amigable
la programación aumentando el aporte de los plc en ámbito industrial.
19
FUENTES DE INFORMACIÓN
M. A. Laughton, D. J. Warne (ed), Electrical Engineer's Reference book, 16th edition,Newnes, 2003 Chapter 16 Programmable Controller
Hugh, Jack: Automated manufacturing systems. PLCs. First Draft. Enero 2000.
Industrial programmable controller. Modicon. Catálogo, Febrero 1998.
Micro autómata TSX 17.Manual de Instalación: Telemecanique. Manual 1989.
Rabiee, Max et al.:Programmable logic controller: Hardware and Programming. Enero 2000.
Terminal TSX T317. Programación PL7-1. Lenguaje Booleano. Telemecanique. Manual 1989.
http://www.instrumentacionycontrol.net/cursos-libres/automatizacion/curso-completo-de-plcs/item/111-capitulo-6-funciones-l%C3%B3gicas-de-un-plc.html#sthash.RgCaigew.dpuf
20