Embed Size (px)
Citation preview
Ingeniería en Automática Industrial Universidad del Cauca
DISEÑO DE UN CONTROLADOR DE VELOCIDAD PARA UN MOTOR DE
INDUCCIÓN UTILIZANDO CONTROL VECTORIAL
Diana Fernanda Morales RincónJorge Olmedo Vanegas Serna
ESTRUCTURA DE LA SUSTENTACIÓN
Por qué controlar un motor eléctrico? Motor de inducción versus motor DC. Técnicas de control utilizadas en los motores
de inducción. Esquema de control vectorial directo con PPU
controlada por voltaje. Resultados de la simulación. Conclusiones y recomendaciones. Preguntas.
POR QUÉ CONTROLAR UN MOTOR ELÉCTRICO?
Porque los equipos utilizados en la industria moderna funcionan a velocidades variables.
Porque conlleva al ahorro de energía, a la reducción de ruido, al incremento de la vida del motor y a la posibilidad de diagnostico de fallas.
POR QUÉ CONTROLAR UN MOTOR ELÉCTRICO?
Para lograr una adecuada productividad.
Para lograr una buena terminación del producto elaborado.
Para garantizar la seguridad de personas y bienes.
ESTRUCTURA DE LA SUSTENTACIÓN
Por qué controlar un motor eléctrico? Motor de inducción versus motor DC. Técnicas de control utilizadas en los motores
de inducción. Esquema de control vectorial directo con PPU
controlada por voltaje. Resultados de la simulación. Conclusiones y recomendaciones. Preguntas.
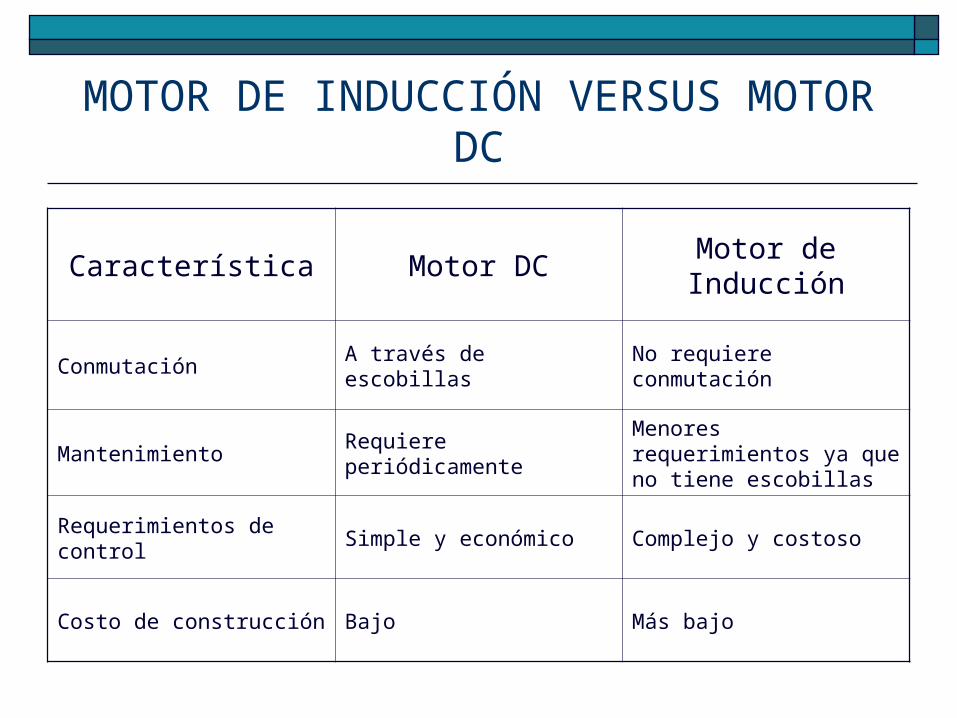
MOTOR DE INDUCCIÓN VERSUS MOTOR DC
Característica Motor DCMotor de Inducción
Conmutación A través de escobillasNo requiere conmutación
MantenimientoRequiere periódicamente
Menores requerimientos ya que no tiene escobillas
Requerimientos de control
Simple y económico Complejo y costoso
Costo de construcción Bajo Más bajo
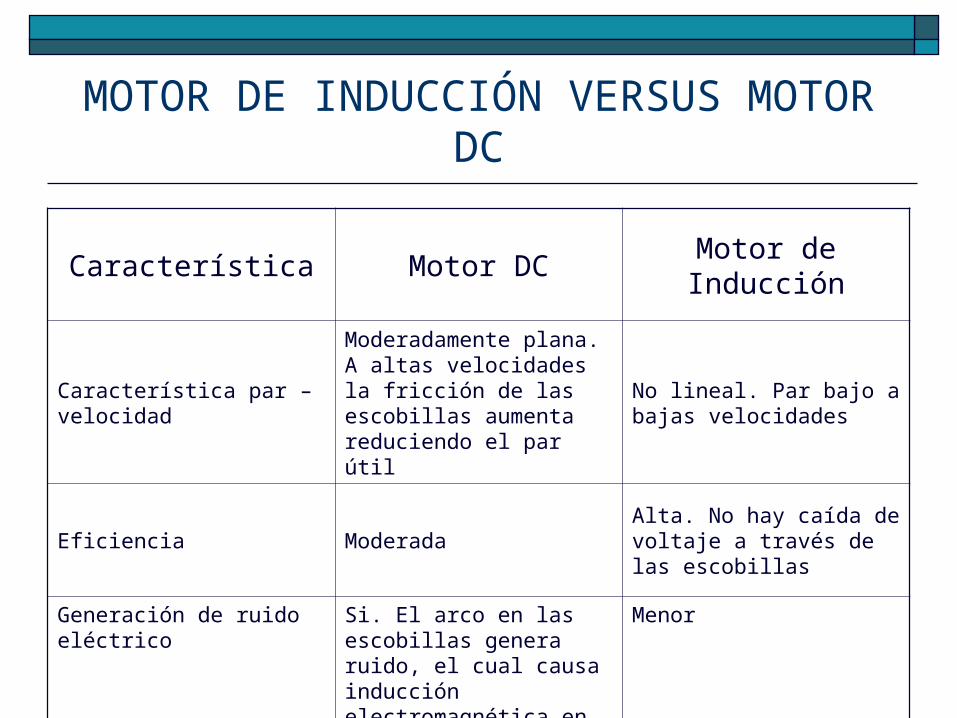
MOTOR DE INDUCCIÓN VERSUS MOTOR DC
Característica Motor DCMotor de Inducción
Característica par – velocidad
Moderadamente plana. A altas velocidades la fricción de las escobillas aumenta reduciendo el par útil
No lineal. Par bajo a bajas velocidades
Eficiencia ModeradaAlta. No hay caída de voltaje a través de las escobillas
Generación de ruido eléctrico
Si. El arco en las escobillas genera ruido, el cual causa inducción electromagnética en los equipos cercanos
Menor
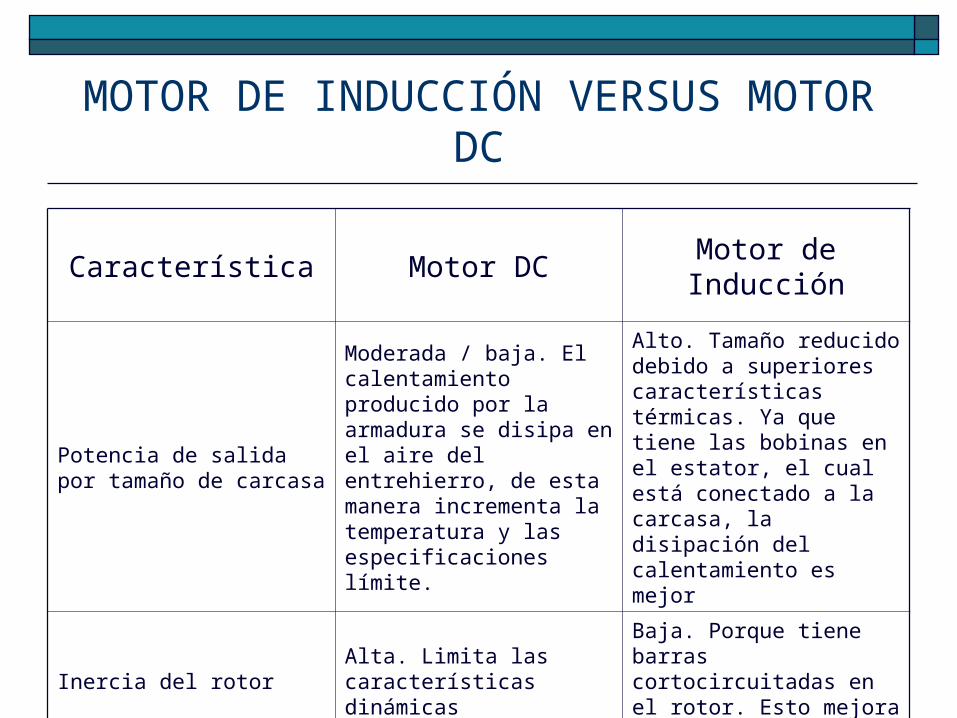
MOTOR DE INDUCCIÓN VERSUS MOTOR DC
Característica Motor DCMotor de Inducción
Potencia de salida por tamaño de carcasa
Moderada / baja. El calentamiento producido por la armadura se disipa en el aire del entrehierro, de esta manera incrementa la temperatura y las especificaciones límite.
Alto. Tamaño reducido debido a superiores características térmicas. Ya que tiene las bobinas en el estator, el cual está conectado a la carcasa, la disipación del calentamiento es mejor
Inercia del rotorAlta. Limita las características dinámicas
Baja. Porque tiene barras cortocircuitadas en el rotor. Esto mejora la respuesta dinámica
MOTOR DE INDUCCIÓN VERSUS MOTOR DC
El motor de inducción está desplazando a el motor DC en gran cantidad de aplicaciones gracias a:
Su construcción más simple, menor costo, inercia del rotor, tamaño y peso para la misma potencia en el eje y la menos frecuente necesidad de mantenimiento
El aprovechamiento del desempeño en los dispositivos de conmutación electrónicos de potencia y su bajo costo.
La posibilidad de llevar a cabo algoritmos complejos en los nuevos microprocesadores.
MOTOR DE INDUCCIÓN VERSUS MOTOR DC
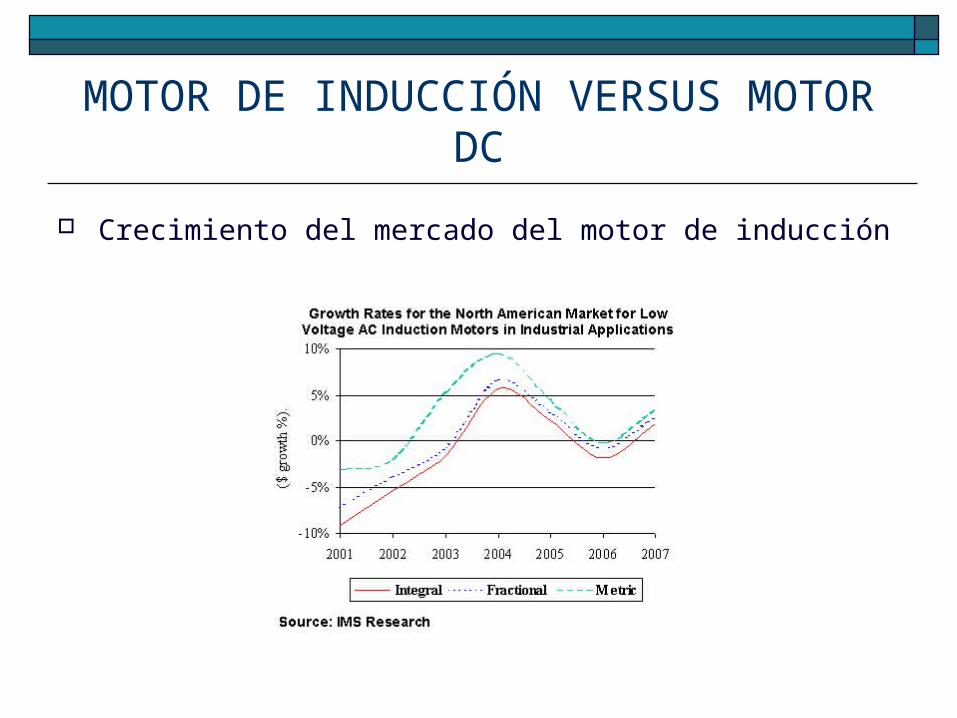
Crecimiento del mercado del motor de inducción
MOTOR DE INDUCCIÓN VERSUS MOTOR DC
Entre los dispositivos o equipos que utilizan un motor de inducción están:
Transportadoras Bombas Ventiladores Elevadores Compresores Trituradoras Molinos
Trapiches Extrusoras Prensas Electrodomésticos Vehículos Eléctricos Maquinas
Herramientas Etcétera
ESTRUCTURA DE LA SUSTENTACIÓN
Por qué controlar un motor eléctrico? Motor de inducción versus motor DC. Técnicas de control utilizadas en los motores
de inducción. Esquema de control vectorial directo con PPU
controlada por voltaje. Resultados de la simulación. Conclusiones y recomendaciones. Preguntas.
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
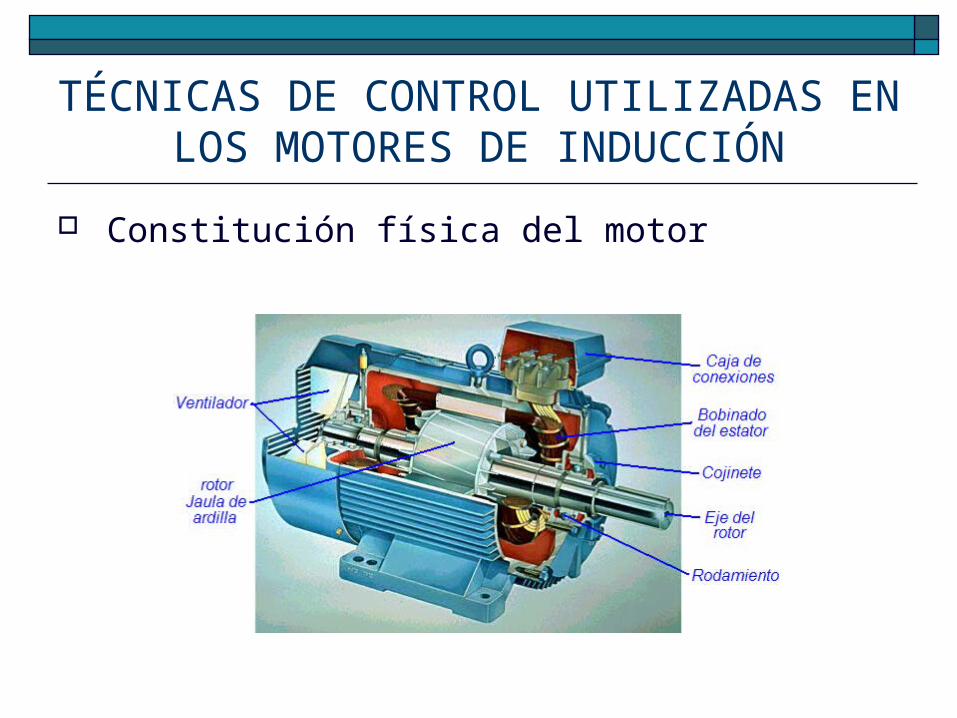
Constitución física del motor
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Para controlar el motor de inducción, éste debe alimentarse con tres voltajes o corrientes de fase de frecuencia y amplitud variable.
Para obtener las condiciones de alimentación anteriores, las técnicas de control pueden clasificarse en tres grandes categorías:
Control escalar Control vectorial Control directo del par
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control escalar
Está basado en el modelo estático del motor de inducción
Consiste en mantener la relación V/F constante
También es llamado control V/F (voltaje/frecuencia)
Su desempeño es bajo debido a que regula pobremente el flujo del campo magnético a velocidades bajas y además no permite controlar el par electromagnético del motor
Es simple de implementar y económico
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
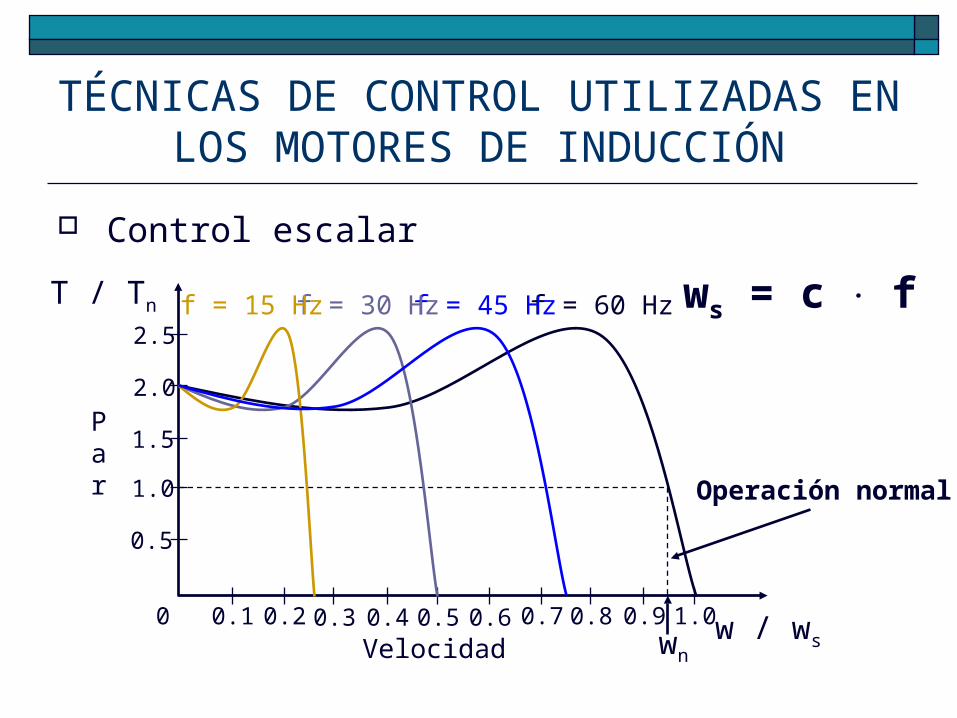
Control escalar
T / Tn
w / wsVelocidad
Par
0.5
1.0
1.5
2.0
2.5
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.00
ws = c . f
wn
f = 60 Hzf = 45 Hzf = 30 Hzf = 15 Hz
Operación normal
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
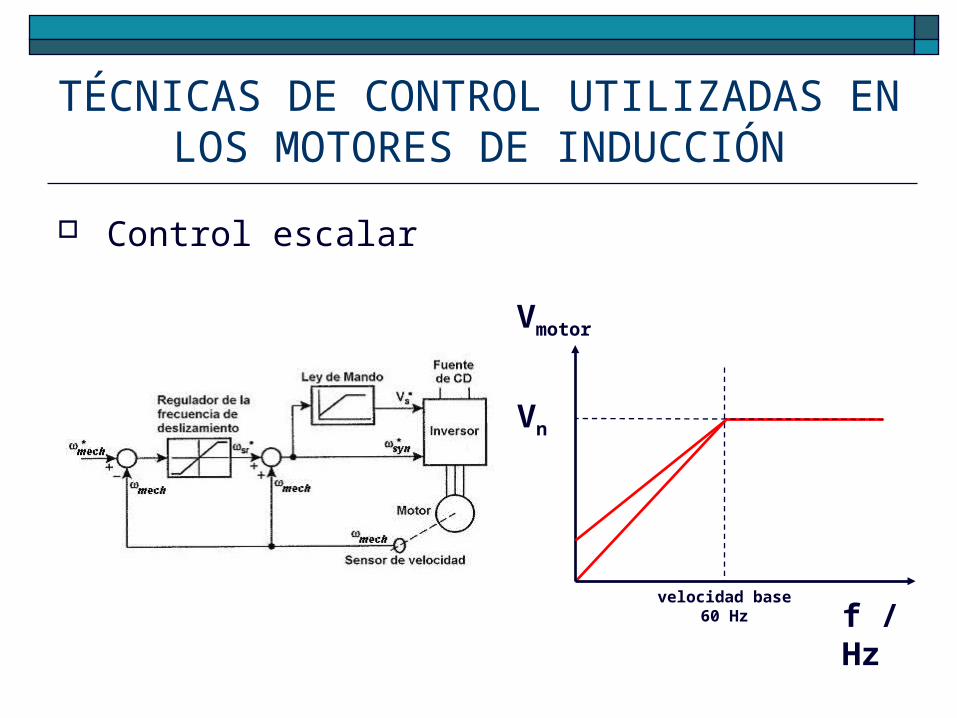
Control escalar
velocidad base60 Hz
Vmotor
f / Hz
Vn
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control vectorial
Utiliza el modelo dinámico del motor de inducción
Permite tratar el motor de inducción de la misma manera que el motor de corriente continua de excitación independiente
Referencia el sistema trifásico alterno del estator y el equivalente del rotor a un sistema de coordenadas ortogonales no estacionario, el cual gira
Transformaciones de Clarke y Park
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
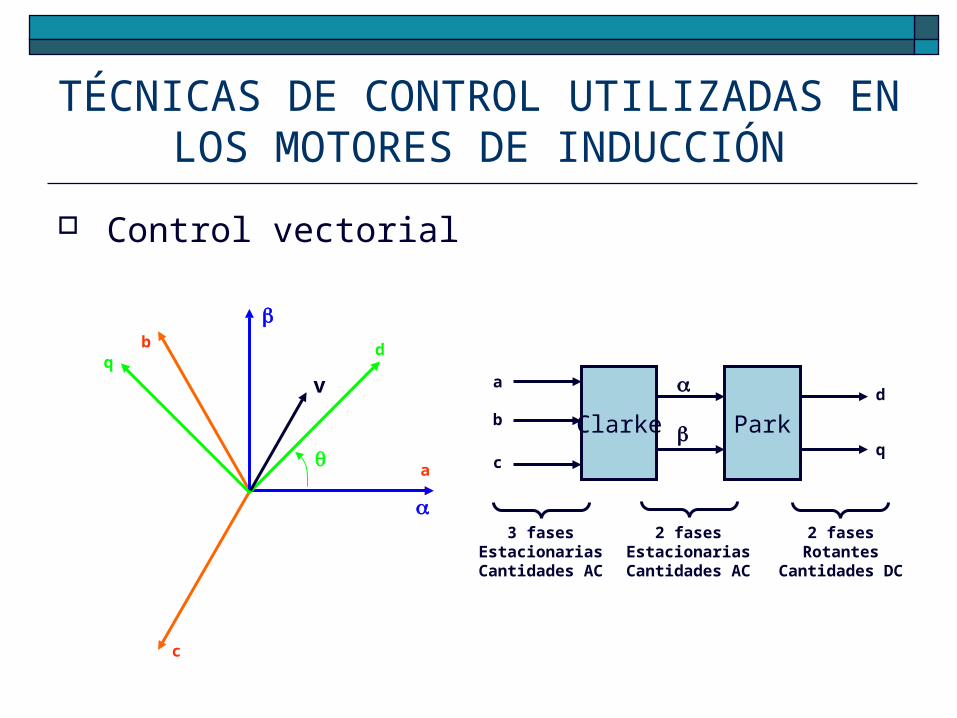
Control vectorial
b
c
a
d
q
Clarke Park
a
b
c
d
q
3 fasesEstacionarias
Cantidades AC
2 fasesEstacionarias
Cantidades AC
2 fasesRotantes
Cantidades DC
v
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
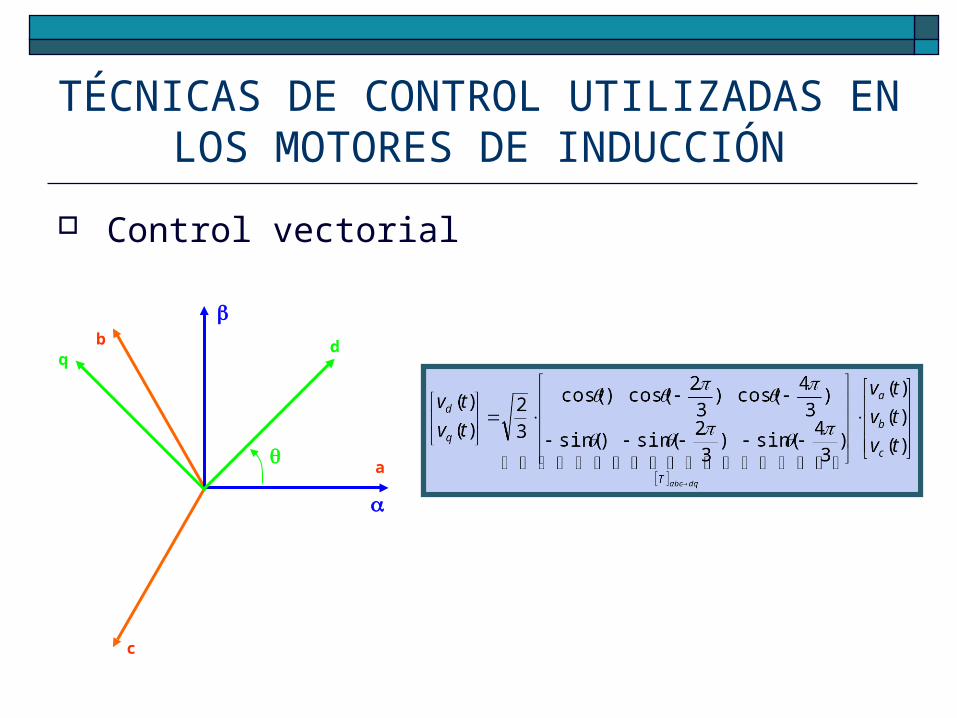
Control vectorial
b
c
a
d
q
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control vectorial
Es posible asumir cualquier valor arbitrario para la velocidad de giro del sistema de coordenadas ortogonales dq
Sin embargo, se elige que el sistema de coordenadas ortogonales gire sincrónicamente con el flujo enlazado del rotor
También llamado control por campo orientado (FOC por sus iniciales en inglés)
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
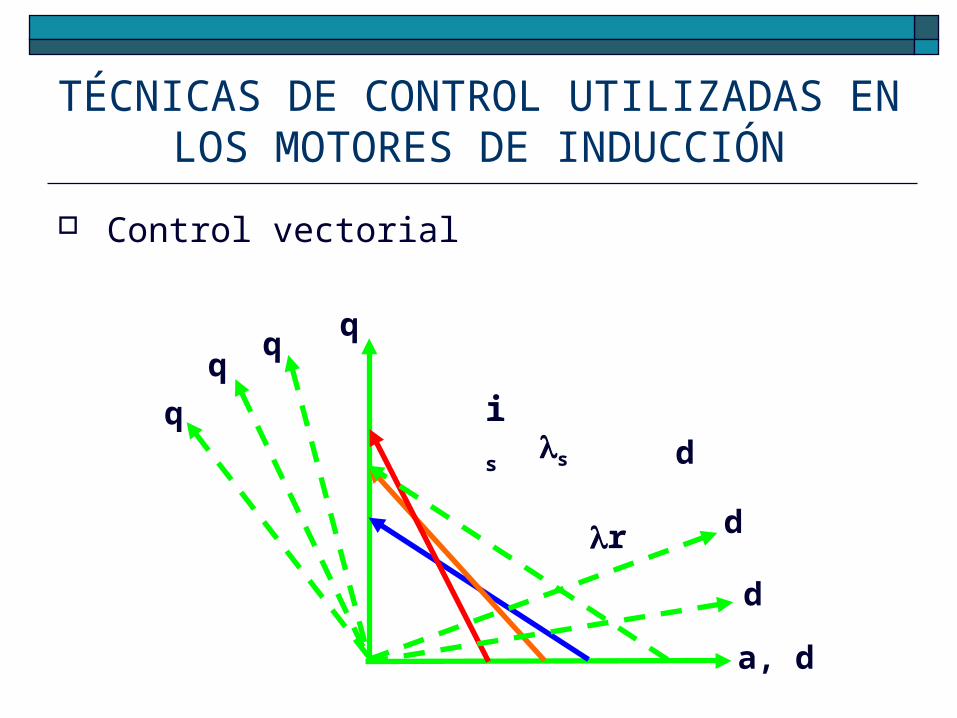
Control vectorial
a, d
q
r
is
s
qd
q
d
q
d
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control vectorial
Existen dos métodos para la adquisición del flujo enlazado del rotor
Control vectorial directo
Control vectorial indirecto
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
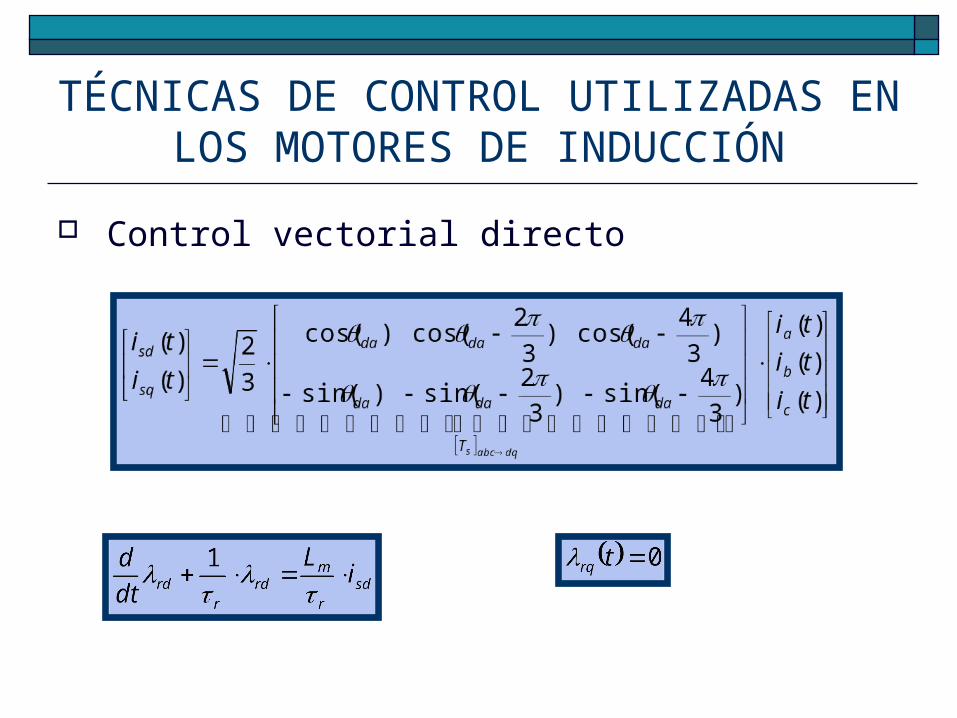
Control vectorial directo
El flujo enlazado del rotor se adquiere a través de
Sensores de efecto Hall
Bobinas en el estator
Se estima a partir del modelo del motor y las corrientes medidas en el estator
También llamado control feedback del flujo
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
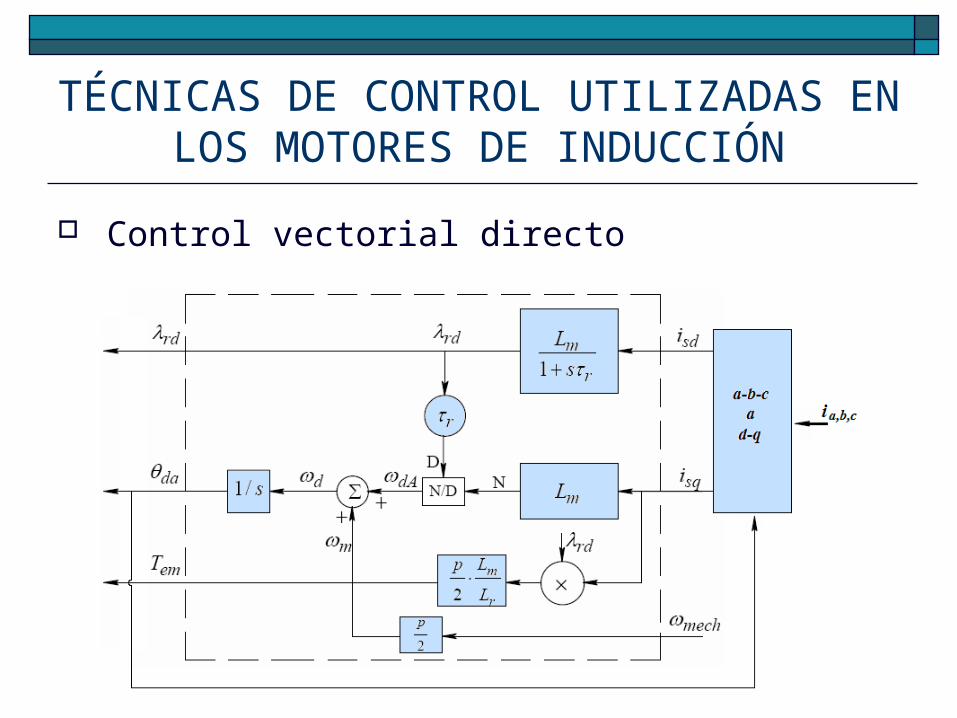
Control vectorial directo
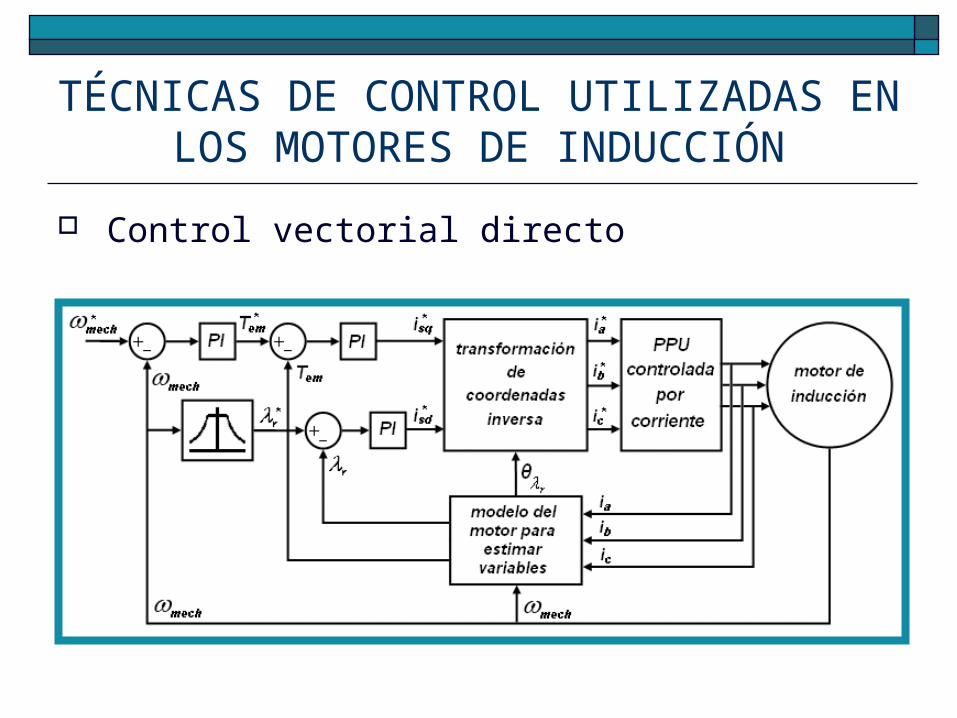
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control vectorial directo
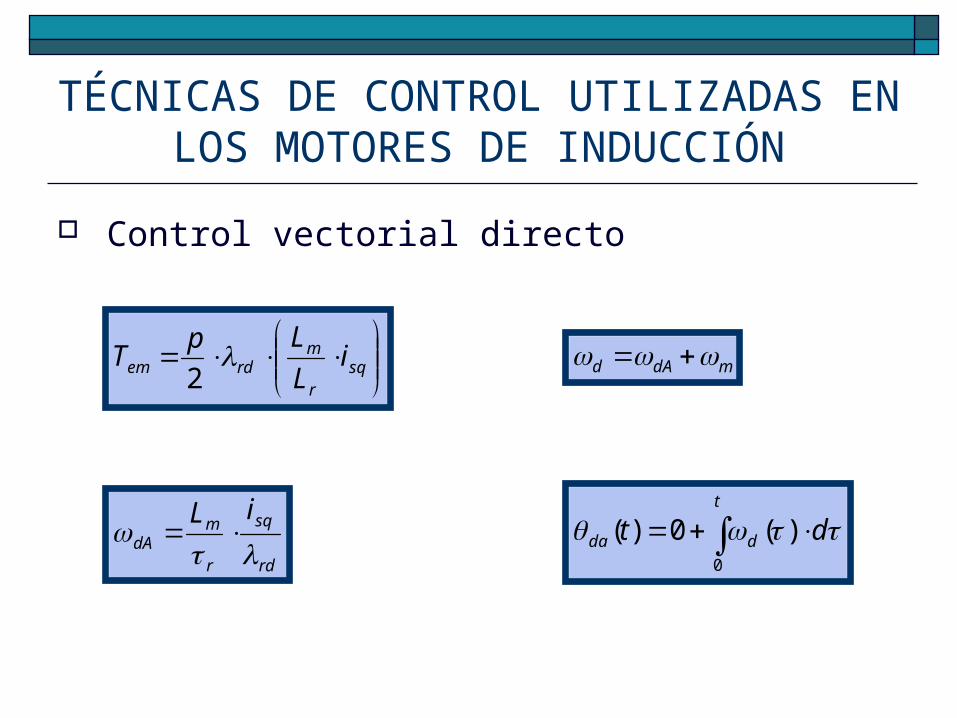
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control vectorial directo
rd
sq
r
mdA
iL
sq
r
mrdem i
L
LpT
2
dtt
dda 0
)(0)(
mdAd
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control vectorial directo
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control vectorial indirecto
Se impone desde el control el valor de flujo enlazado del rotor y el valor del par electromagnético
El cálculo del vector espacial de flujo enlazado del rotor no depende de las condiciones en los terminales de la máquina
También llamado control feedforward del flujo
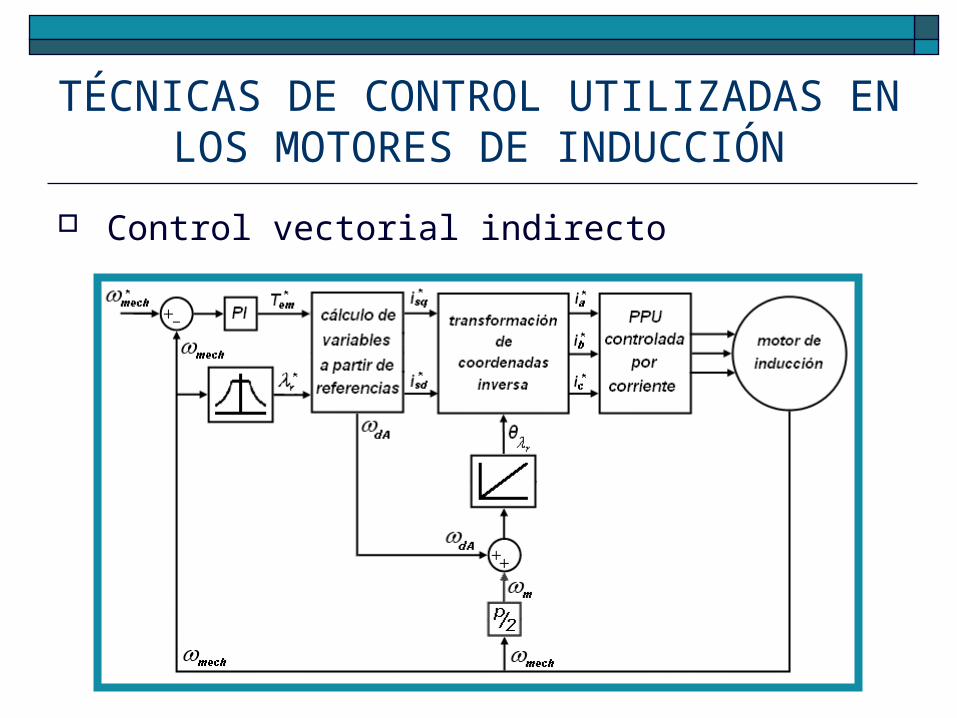
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control vectorial indirecto
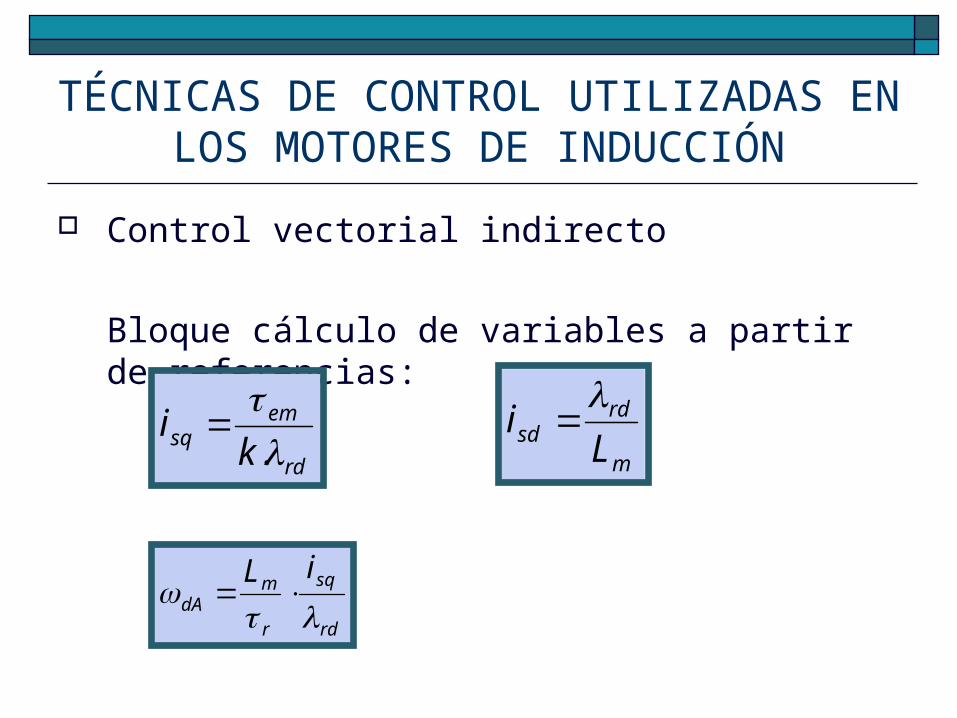
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control vectorial indirecto
Bloque cálculo de variables a partir de referencias:
rd
emsq ki
.
m
rdsd Li
rd
sq
r
mdA
iL
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control directo del par
Se fundamenta en el control del par electromagnético de la máquina y del flujo enlazado en el estator
La posición de los interruptores del convertidor de potencia se determina directamente por el estado electromagnético del motor
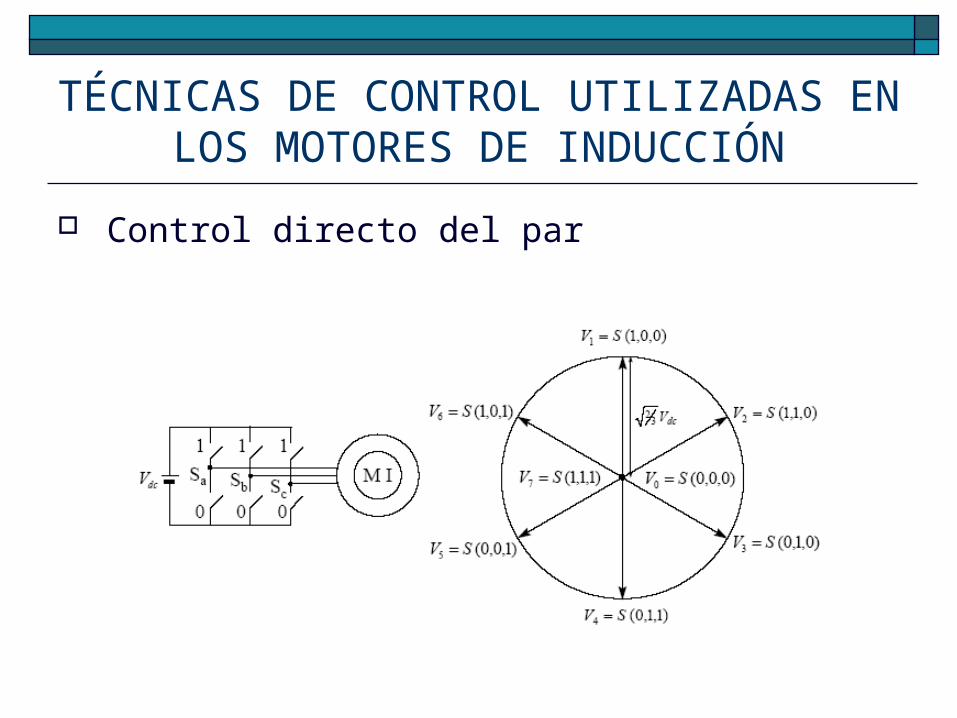
Selecciona el vector espacial de voltaje más apropiado para un puente inversor
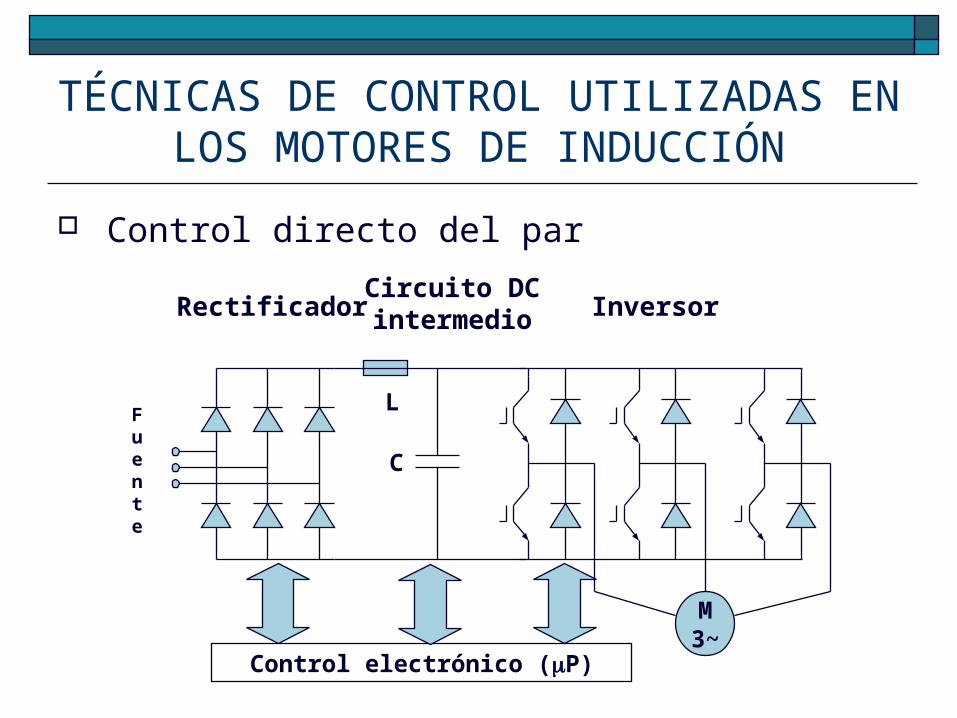
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control directo del par
Fu ente
RectificadorCircuito DCintermedio Inversor
Control electrónico (P)
L
C
M3~
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
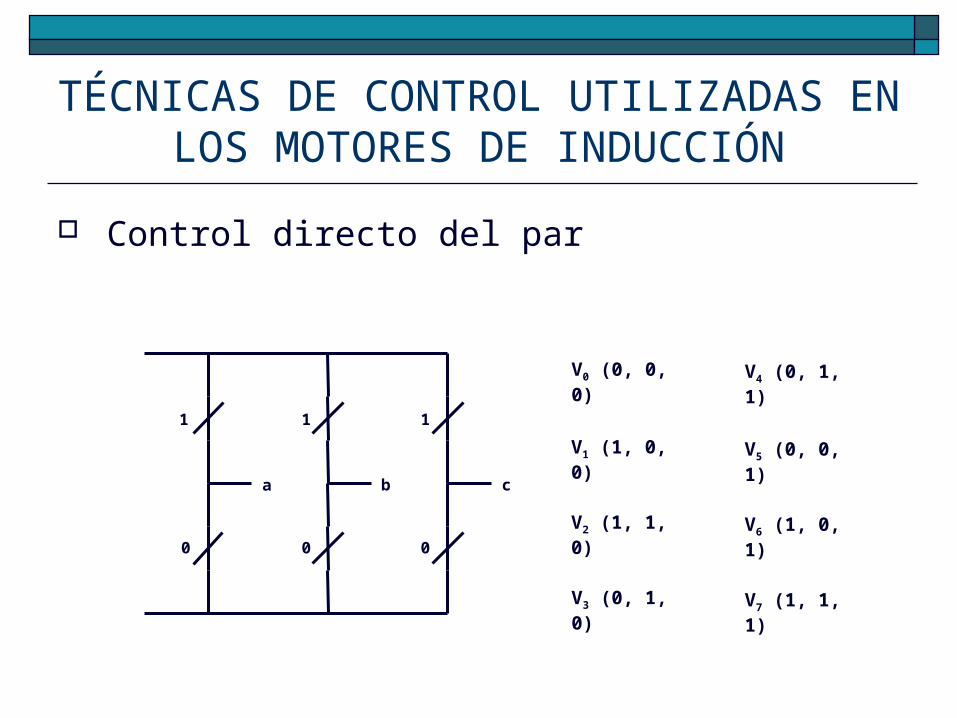
Control directo del par
a b c
1 1 1
0 0 0
V0 (0, 0, 0)
V1 (1, 0, 0)
V2 (1, 1, 0)
V3 (0, 1, 0)
V4 (0, 1, 1)
V5 (0, 0, 1)
V6 (1, 0, 1)
V7 (1, 1, 1)
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control directo del par
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control directo del par
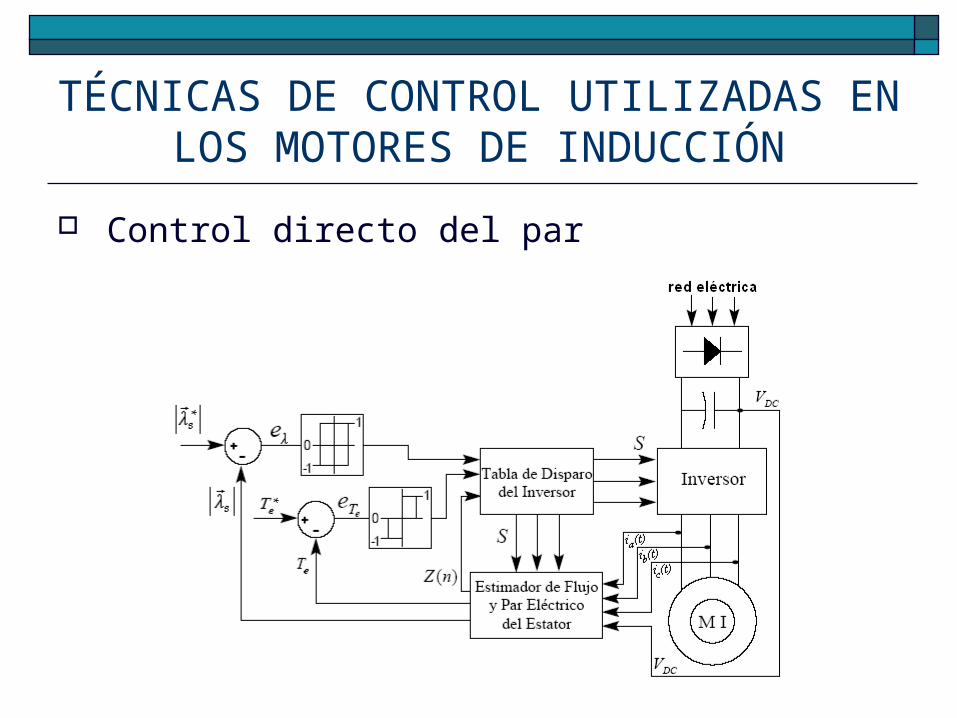
El algoritmo de control selecciona el vector espacial de la tensión del estator que maximiza el cambio necesario
Las variables de par electromagnético y flujo enlazado del estator se estiman a partir de:
Los valores instantáneos de las corrientes del estator
Del vector de interrupciones del inversor
Del voltaje DC del inversor
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Control directo del par

TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Característica
Control Escalar
Vectorial Indirecto
Vectorial Directo
Directodel Par
Desempeño dinámico
Bajo Medio Alto Muy alto
Rango de velocidad
Desde el 5% de la velocidad nominal
Desde velocidad cero
Desde velocidad cero
Desde velocidad cero
Rango de par 80% del par nominal
Par nominal a velocidad cero
Par nominal a velocidad cero
Par nominal a velocidad cero
Construcción Básica Simple Compleja Muy compleja
Precio Económico Moderado Costoso Muy Costoso
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Selección de la técnica de control a utilizar
La necesidad de asimilar una tecnología de punta en el campo de control de motores de inducción
El interés de aportar al enriquecimiento académico del diseño de controladores avanzados para el motor de inducción
El objetivo de conseguir mejoras en las características dinámicas y en el consumo energético del motor de inducción
TÉCNICAS DE CONTROL UTILIZADAS EN LOS MOTORES DE INDUCCIÓN
Selección de la técnica de control a utilizar
El compromiso de una buena relación esfuerzo/beneficio
Las anteriores condiciones conllevan a seleccionar el método de control vectorial directo como la técnica de control a utilizar en este trabajo
ESTRUCTURA DE LA SUSTENTACIÓN
Por qué controlar un motor eléctrico? Motor de inducción versus motor DC. Técnicas de control utilizadas en los motores
de inducción. Esquema de control vectorial directo con PPU
controlada por voltaje. Resultados de la simulación. Conclusiones y recomendaciones. Preguntas.
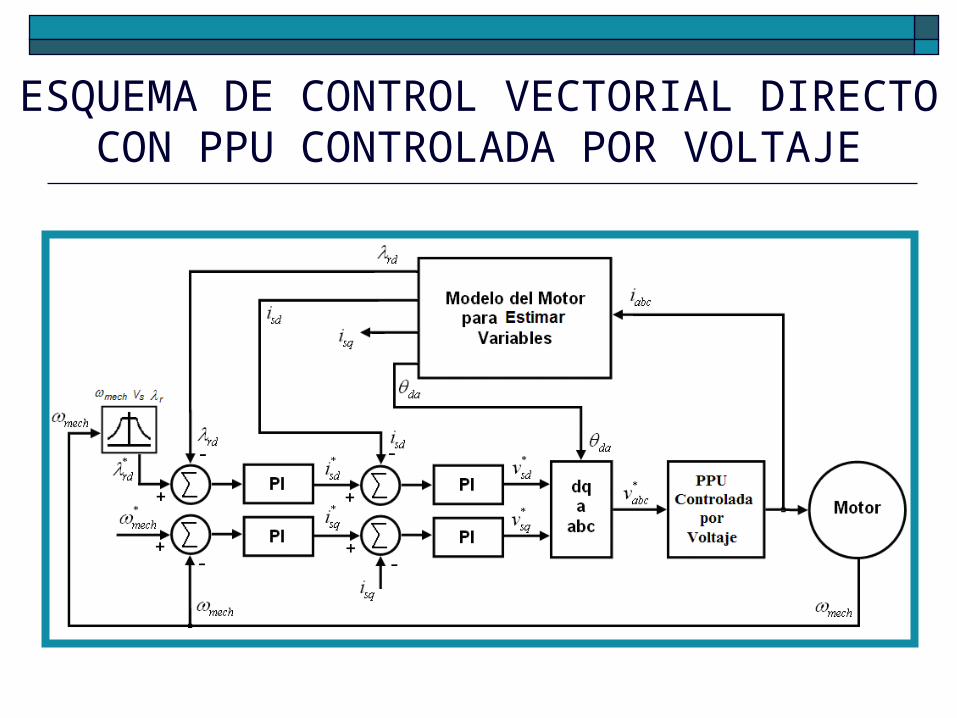
ESQUEMA DE CONTROL VECTORIAL DIRECTO CON PPU CONTROLADA POR
VOLTAJE
ESQUEMA DE CONTROL VECTORIAL DIRECTO CON PPU CONTROLADA POR
VOLTAJE
CONTROLADORES PI
DEBILITAMIENTO DE CAMPO
CONTROLADORES PI
El diseño de los controladores PI se realizó de acuerdo a los términos de control
Frecuencia de corte c
Margen de fase (PM)
Estos términos de control permiten calcular fácilmente las constantes de los controladores PI utilizando los parámetros del motor y la frecuencia de conmutación de la PPU
CONTROLADORES PI
Las ecuaciones utilizadas son:
cc j
OLOL sG
)(
1)( cjOL sG
º180c
OLPM
CONTROLADORES PI
El esquema de control vectorial utilizado es un esquema de control en cascada
Para diseñar los cuatro controladores PI se utilizó el modelo del motor en variables de estado, donde el eje-d está alineado con el vector espacial de flujo enlazado del rotor
CONTROLADORES PI
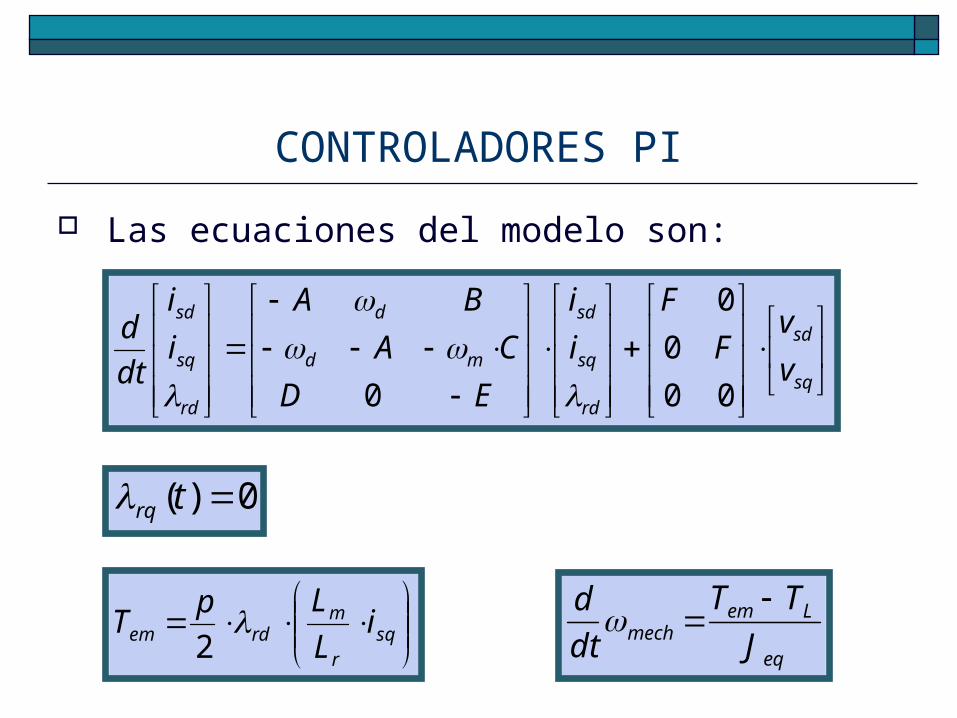
Las ecuaciones del modelo son:
sq
sd
rd
sq
sd
md
d
rd
sq
sd
v
vF
F
i
i
ED
CA
BA
i
i
dt
d
0
0
0
0
0
0)( trq
eq
Lemmech J
TT
dt
d
sq
r
mrdem i
L
LpT
2
CONTROLADORES PI
Los cuatro controladores PI diseñados son:
Flujo enlazado del rotor
Corriente del eje-d
Velocidad
Corriente del eje-q
CONTROLADORES PI
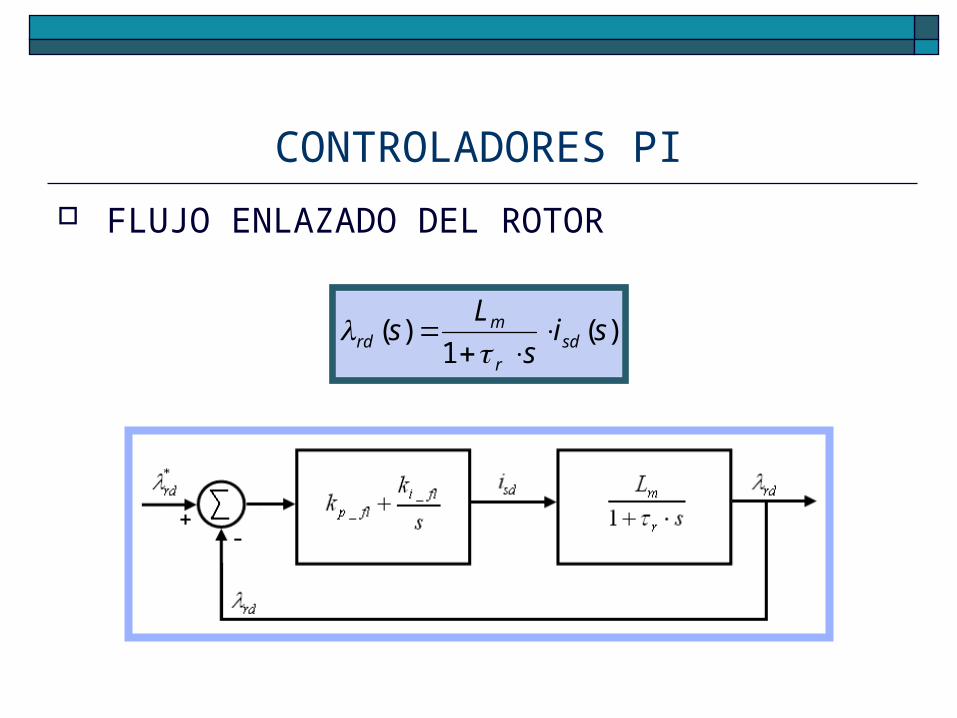
FLUJO ENLAZADO DEL ROTOR
)(1
)( sis
Ls sd
r
mrd
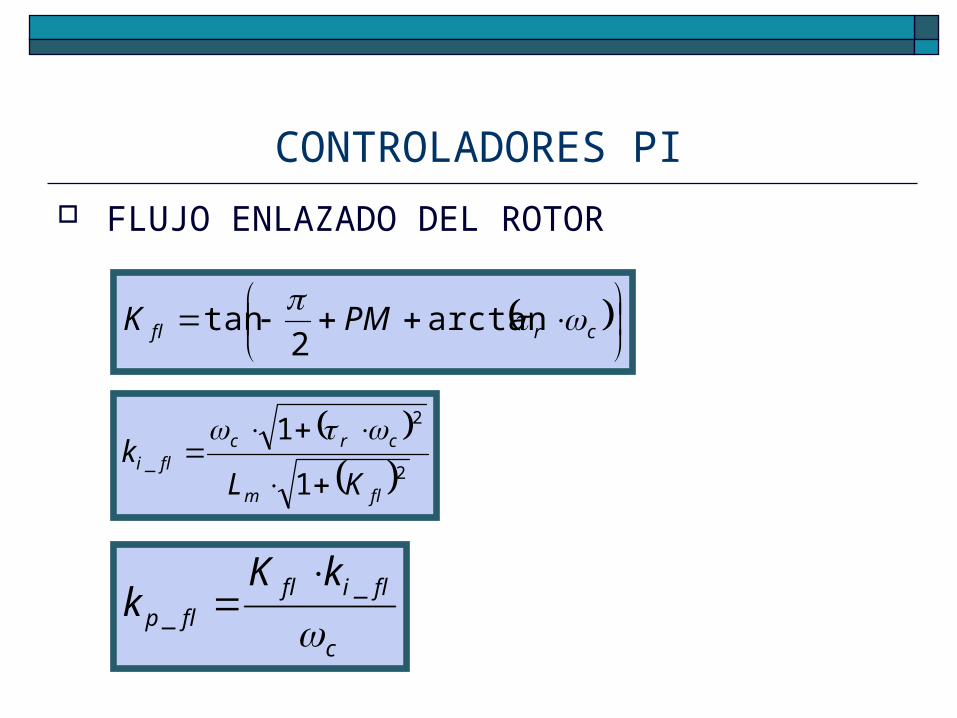
CONTROLADORES PI FLUJO ENLAZADO DEL ROTOR
crfl PMK
arctan2
tan
2
2
_
1
1
flm
crcfli
KLk
c
fliflflp
kKk
_
_
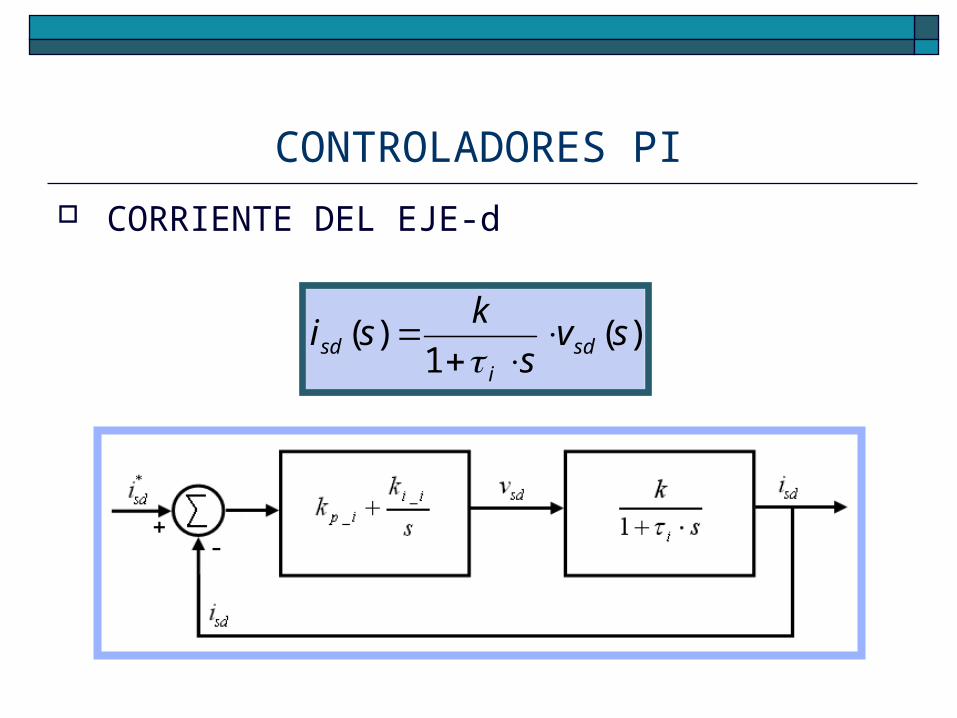
CONTROLADORES PI CORRIENTE DEL EJE-d
)(1
)( svs
ksi sd
isd
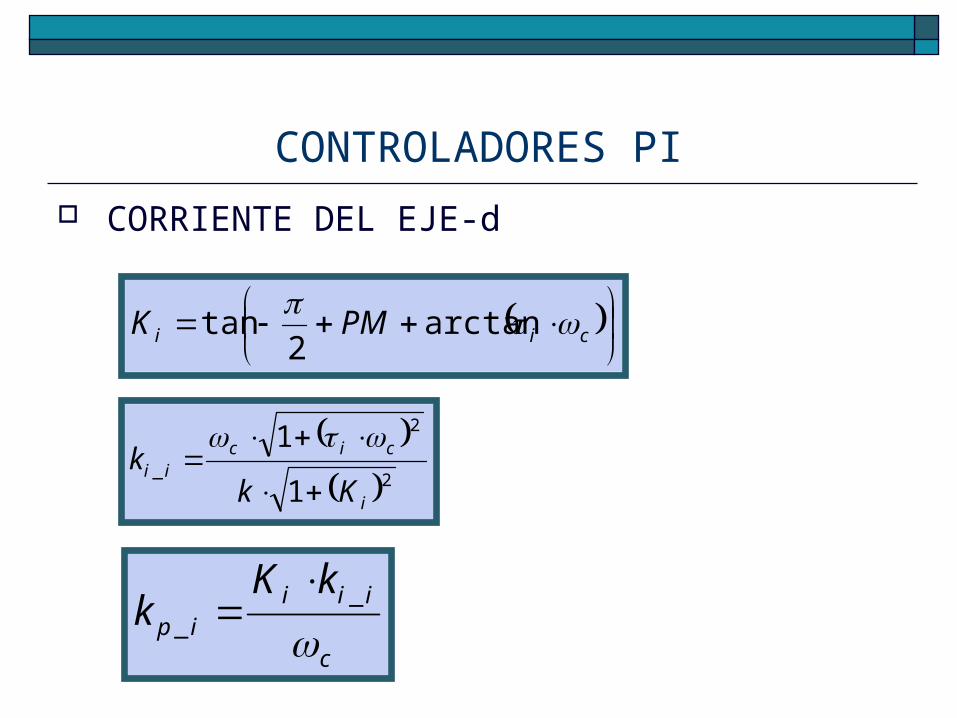
CONTROLADORES PI CORRIENTE DEL EJE-d
cii PMK
arctan2
tan
2
2
_
1
1
i
cicii
Kkk
c
iiiip
kKk
_
_
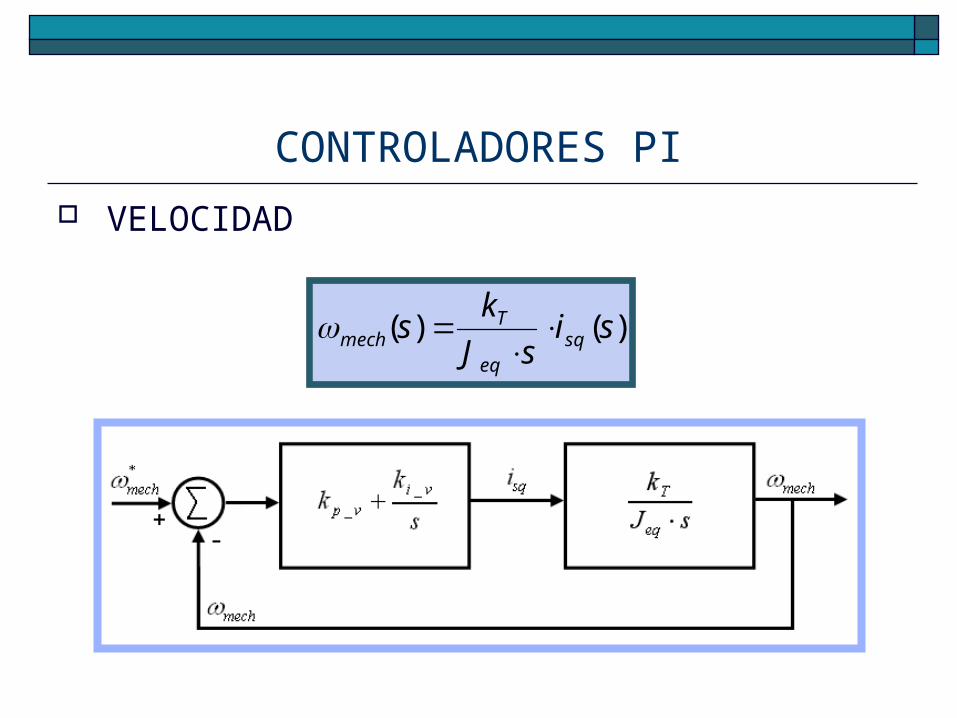
CONTROLADORES PI VELOCIDAD
)()( sisJ
ks sq
eq
Tmech
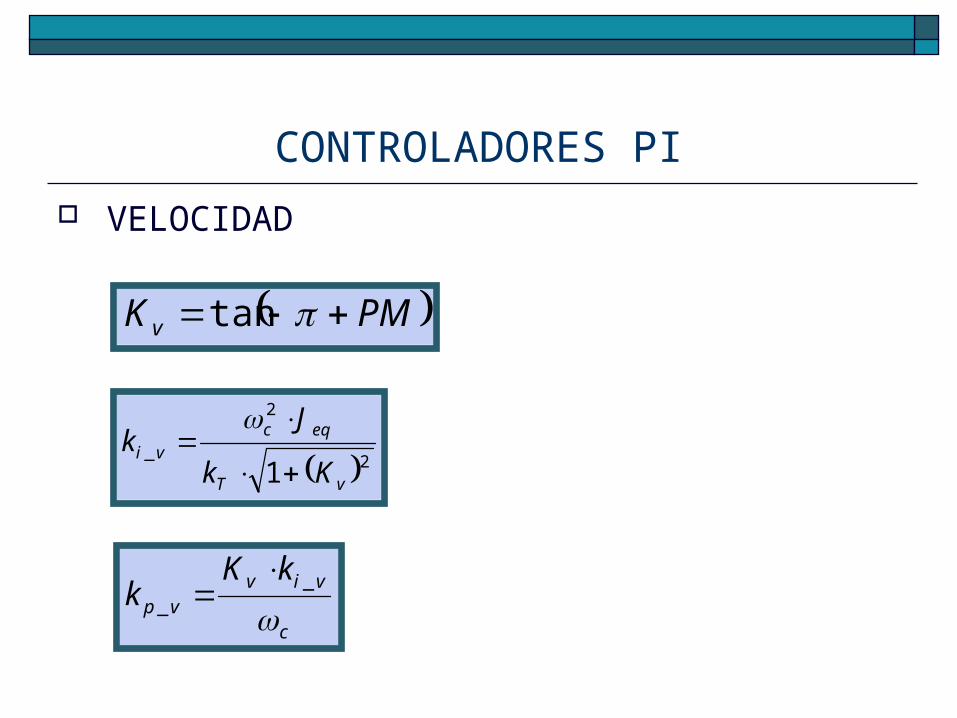
CONTROLADORES PI VELOCIDAD
PMK v tan
2
2
_
1 vT
eqcvi
Kk
Jk
c
vivvp
kKk
_
_
CONTROLADORES PI CORRIENTE DEL EJE-q
Constantes del controlador iguales a las de la corriente del eje-d
)(1
)( svs
ksi sq
isq
CONTROLADORES PI SELECCIÓN DE LA FRECUENCIA DE CORTE Y
DEL MARGEN DE FASE
El control en cascada requiere que la frecuencia de corte (velocidad de respuesta) incremente hacia el lazo más interno
Los lazos de corriente son los más rápidos y los lazos de velocidad y flujo enlazado del rotor los más lentos
CONTROLADORES PI SELECCIÓN DE LA FRECUENCIA DE CORTE Y
DEL MARGEN DE FASE
Frecuencia de corte de los lazos de corriente
Frecuencia de corte de los lazos de velocidad y flujo enlazado del rotor
100
2_
sic
f
10_
__ic
flcvc
CONTROLADORES PI SELECCIÓN DE LA FRECUENCIA DE CORTE Y
DEL MARGEN DE FASE
Para una respuesta dinámica satisfactoria sin oscilaciones, se elige que todos los márgenes de fase sean mayores a 45º, preferiblemente cerca de 60º
180
60
flvi PMPMPM
ESQUEMA DE CONTROL VECTORIAL DIRECTO CON PPU CONTROLADA POR
VOLTAJE
CONTROLADORES PI
DEBILITAMIENTO DE CAMPO
DEBILITAMIENTO DE CAMPO
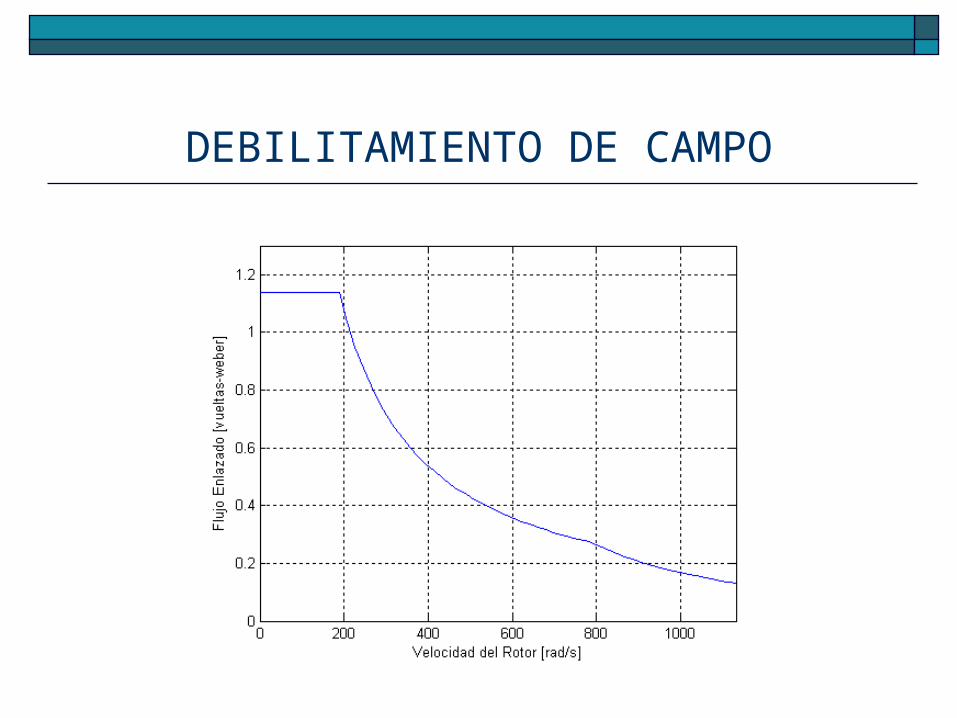
El módulo recibe como entrada la velocidad del rotor y entrega la señal de referencia para el lazo de control del flujo enlazado del rotor
Para valores de velocidad por debajo de la velocidad nominal, el flujo enlazado del rotor se mantiene en su valor nominal
Para valores por encima de la velocidad nominal, el flujo enlazado del rotor se reduce de acuerdo con el modo de debilitamiento de flujo
DEBILITAMIENTO DE CAMPO
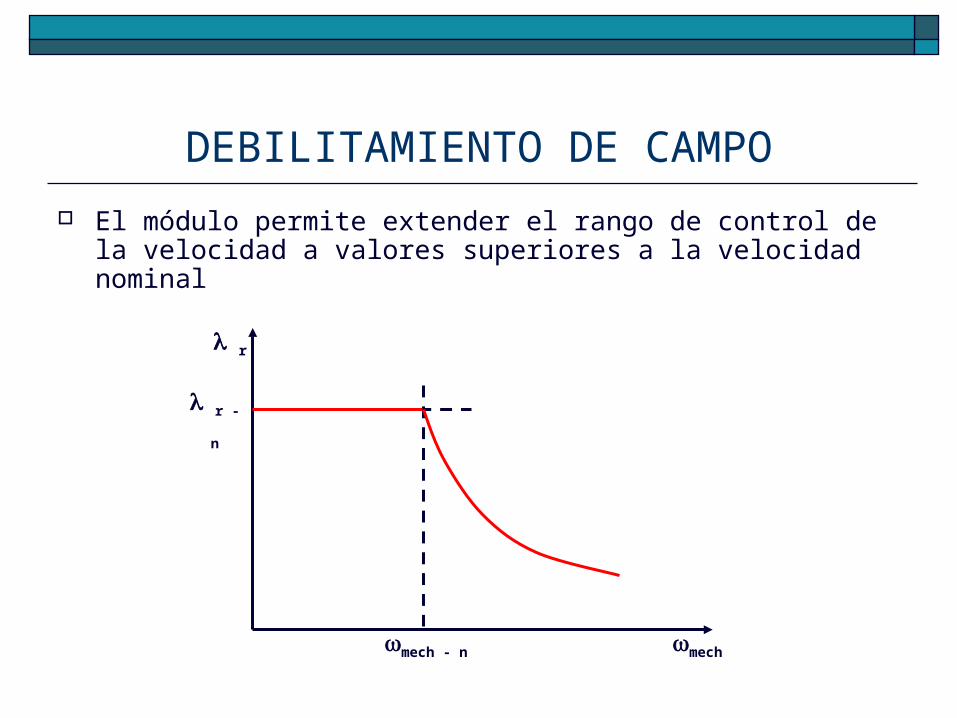
El módulo permite extender el rango de control de la velocidad a valores superiores a la velocidad nominal
r
mechmech - n
r -
n
DEBILITAMIENTO DE CAMPO
Restricciones para extender el rango de velocidad por encima de la velocidad nominal
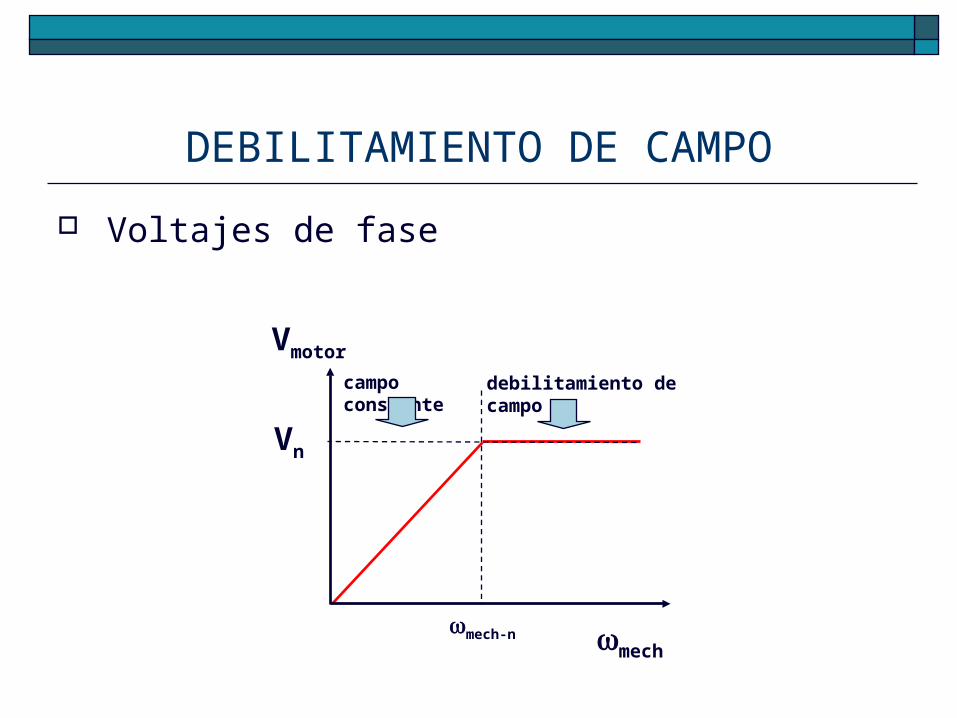
Los voltajes de fase
Incrementan con la velocidad y su valor no puede exceder el valor nominal
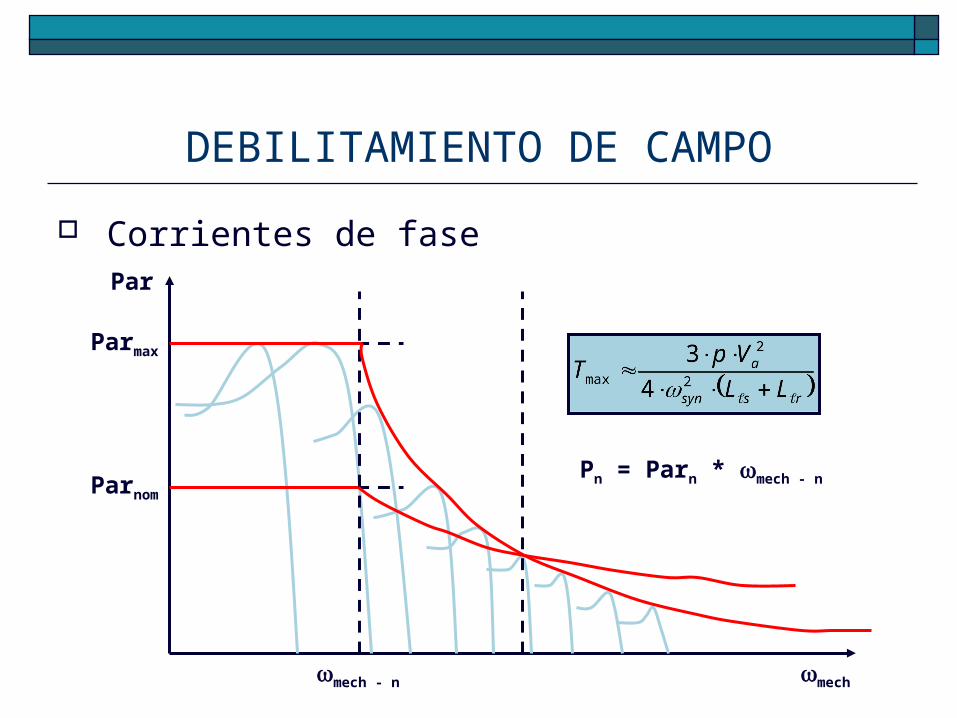
Las corrientes de fase
Incrementan con la carga mecánica, por lo tanto el par nominal en el motor necesita establecerse en un valor tal que mantenga las corrientes de fase en un nivel menor o igual a su valor nominal
DEBILITAMIENTO DE CAMPO
Voltajes de fase
mech-n
campo constante debilitamiento de campo
Vmotor
mech
Vn
DEBILITAMIENTO DE CAMPO
Corrientes de fase
mech
Par
Parmax
Parnom
mech - n
Pn = Parn * mech - n
DEBILITAMIENTO DE CAMPO
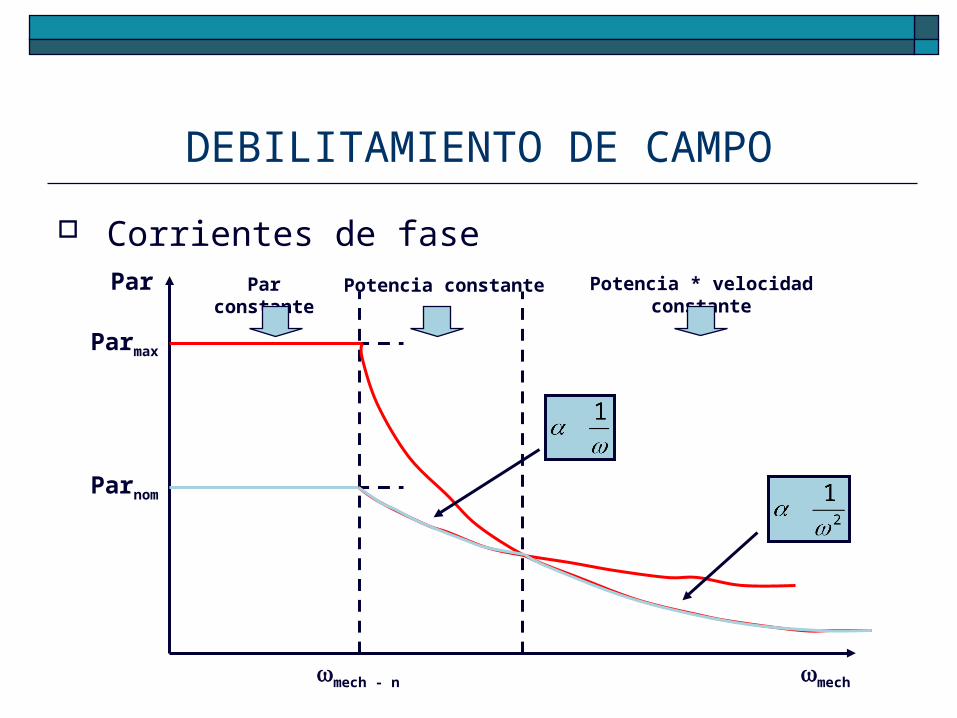
Corrientes de fase
mech
Par
Parmax
Parnom
mech - n
Par constante Potencia constante Potencia * velocidad constante
DEBILITAMIENTO DE CAMPO
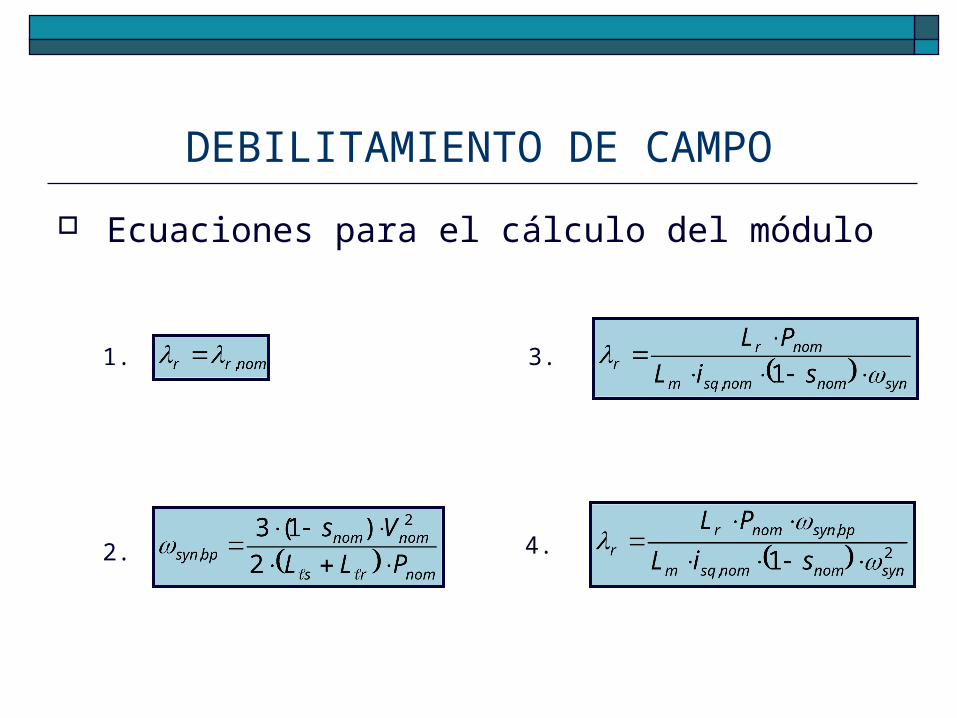
Pasos para el cálculo del módulo
1. Cálculo del flujo de referencia para el rango de velocidad normal
2. Cálculo del punto de cruce entre las curvas de par nominal y par máximo
3. Cálculo del flujo de referencia para la zona de potencia constante
4. Cálculo del flujo de referencia para la zona de potencia*velocidad constante
DEBILITAMIENTO DE CAMPO
Ecuaciones para el cálculo del módulo
1.
2.
3.
4.
DEBILITAMIENTO DE CAMPO
ESTRUCTURA DE LA SUSTENTACIÓN
Por qué controlar un motor eléctrico? Motor de inducción versus motor DC. Técnicas de control utilizadas en los motores
de inducción. Esquema de control vectorial directo con PPU
controlada por voltaje. Resultados de la simulación. Conclusiones y recomendaciones. Preguntas.
RESULTADOS DE LA SIMULACIÓN
Se realizaron cuatro pruebas:
Arranque en línea con el par de carga nominal conectado al eje del motor
Respuesta a la variación del par de carga
Seguimiento de un perfil de velocidad
Variación de Parámetros
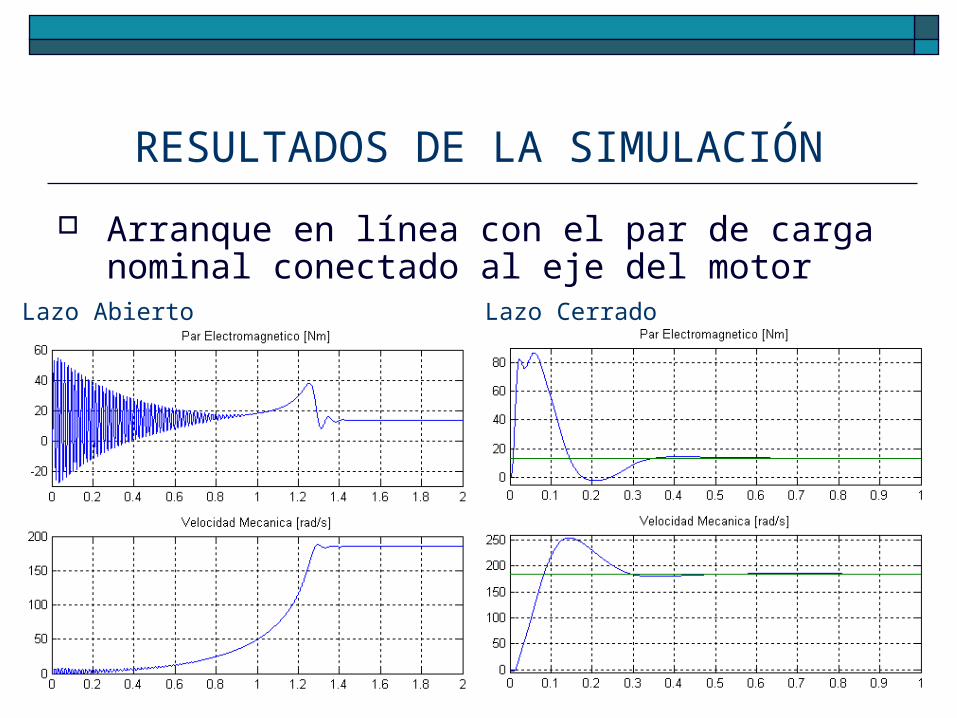
RESULTADOS DE LA SIMULACIÓN
Arranque en línea con el par de carga nominal conectado al eje del motor
Lazo Abierto Lazo Cerrado
RESULTADOS DE LA SIMULACIÓN
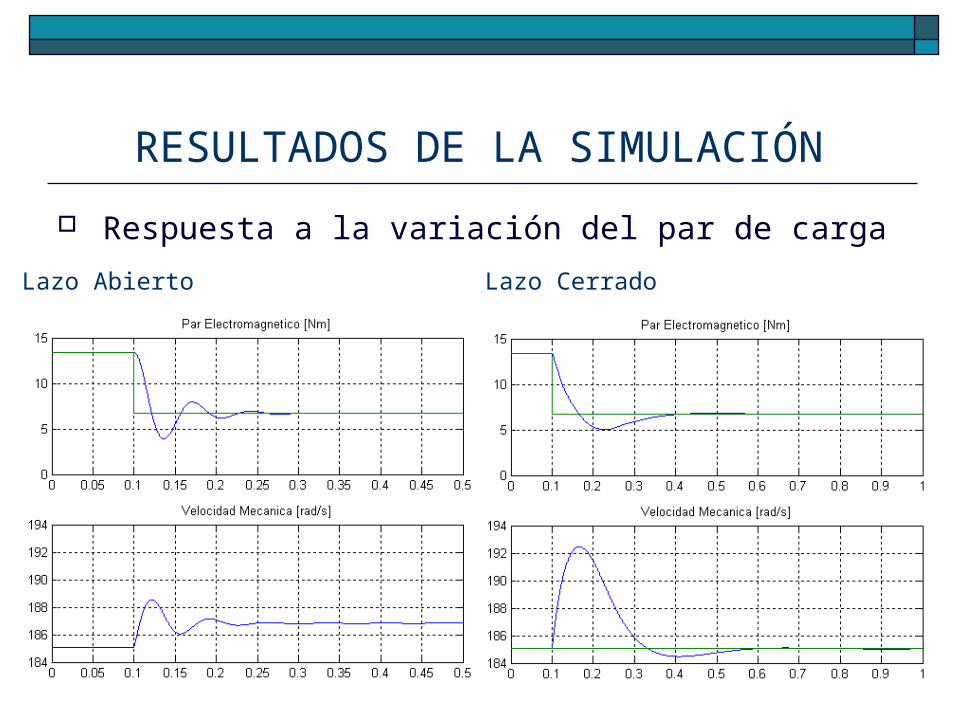
Respuesta a la variación del par de cargaLazo Abierto Lazo Cerrado
RESULTADOS DE LA SIMULACIÓN
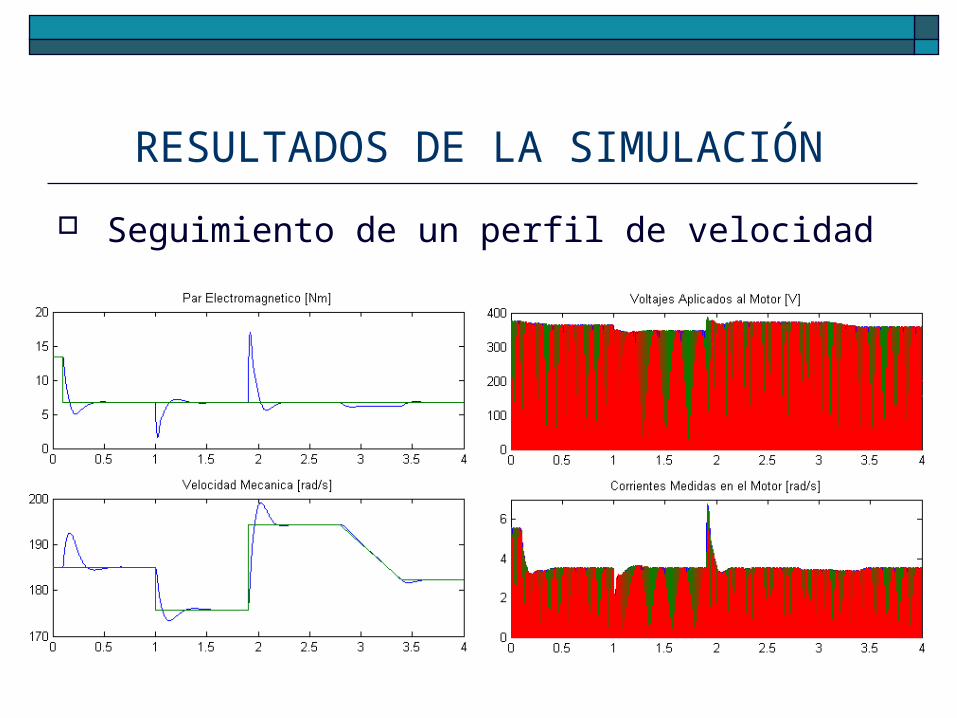
Seguimiento de un perfil de velocidad
RESULTADOS DE LA SIMULACIÓN
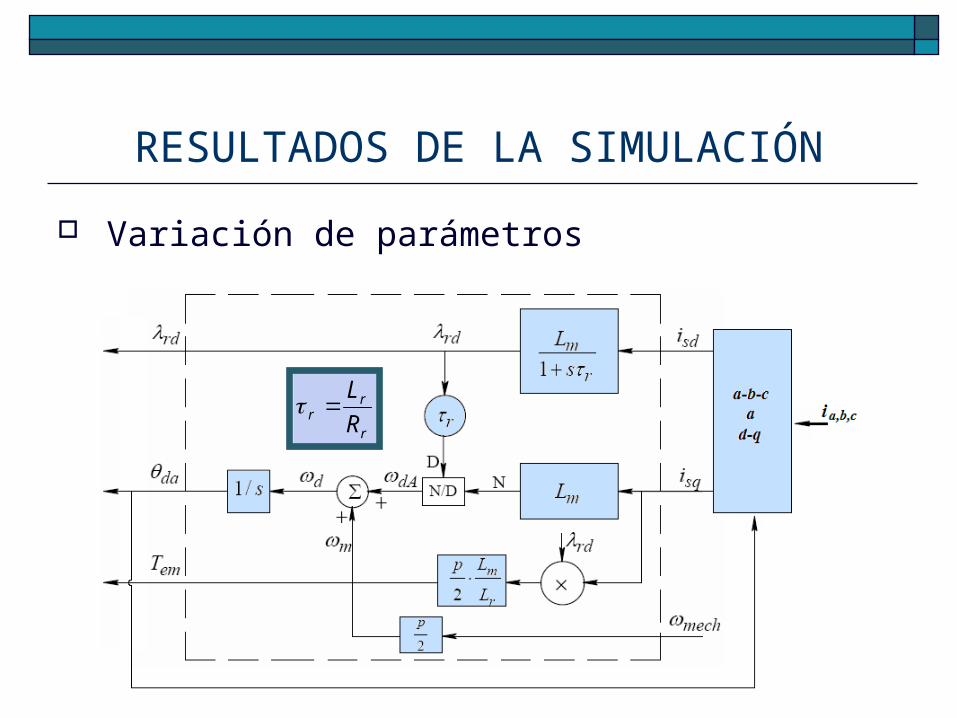
Variación de parámetros
r
rr R
L
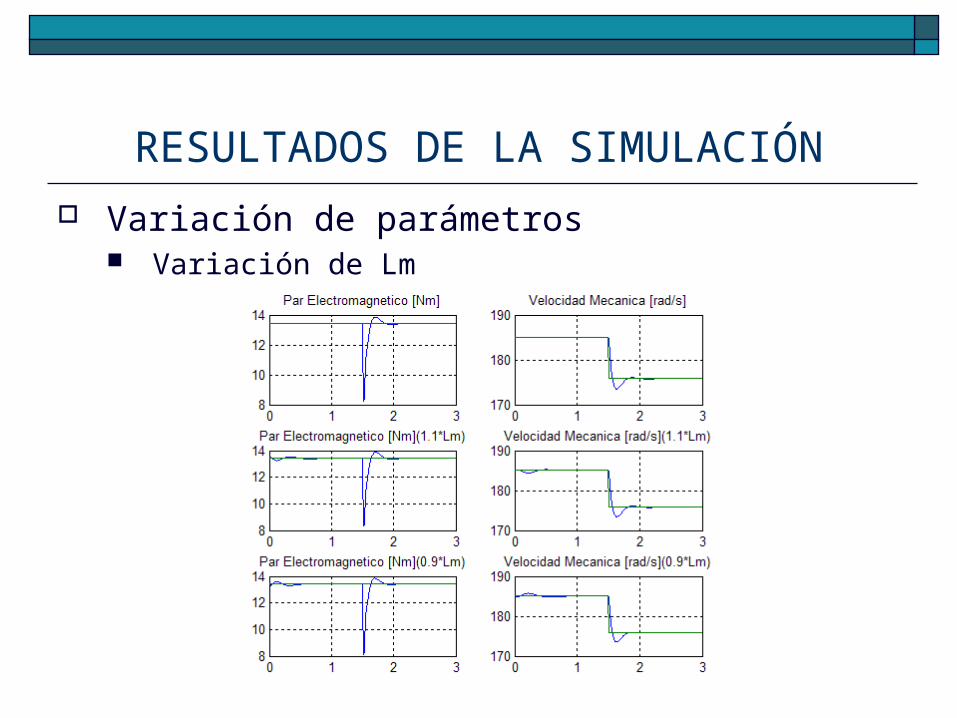
RESULTADOS DE LA SIMULACIÓN Variación de parámetros
Variación de Lm
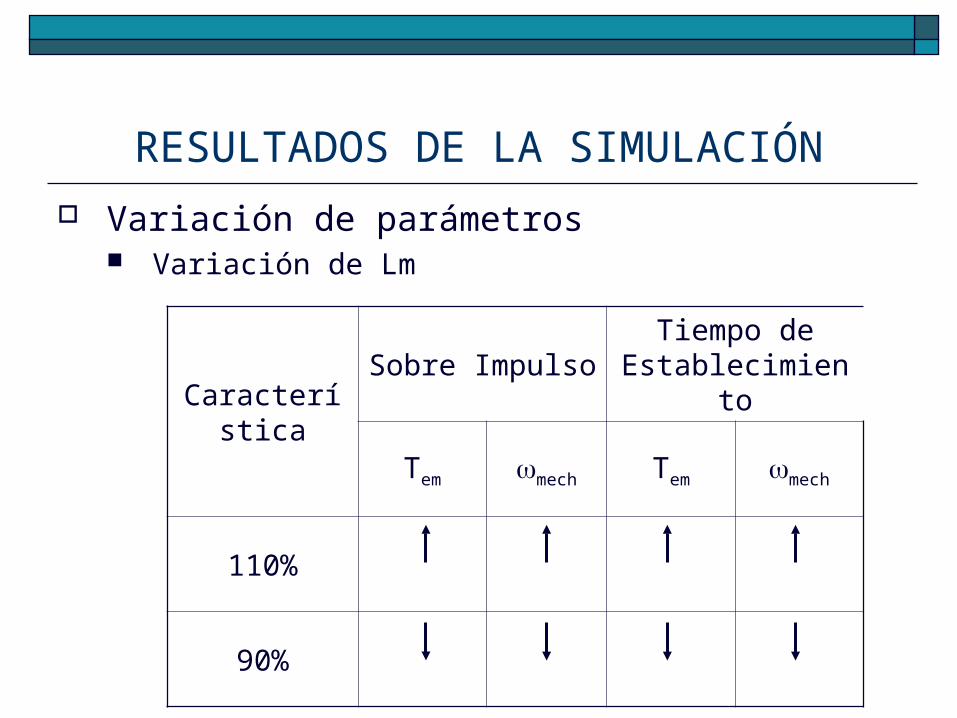
RESULTADOS DE LA SIMULACIÓN Variación de parámetros
Variación de Lm
Característica
Sobre ImpulsoTiempo de
Establecimiento
Tem mech Tem mech
110%
90%
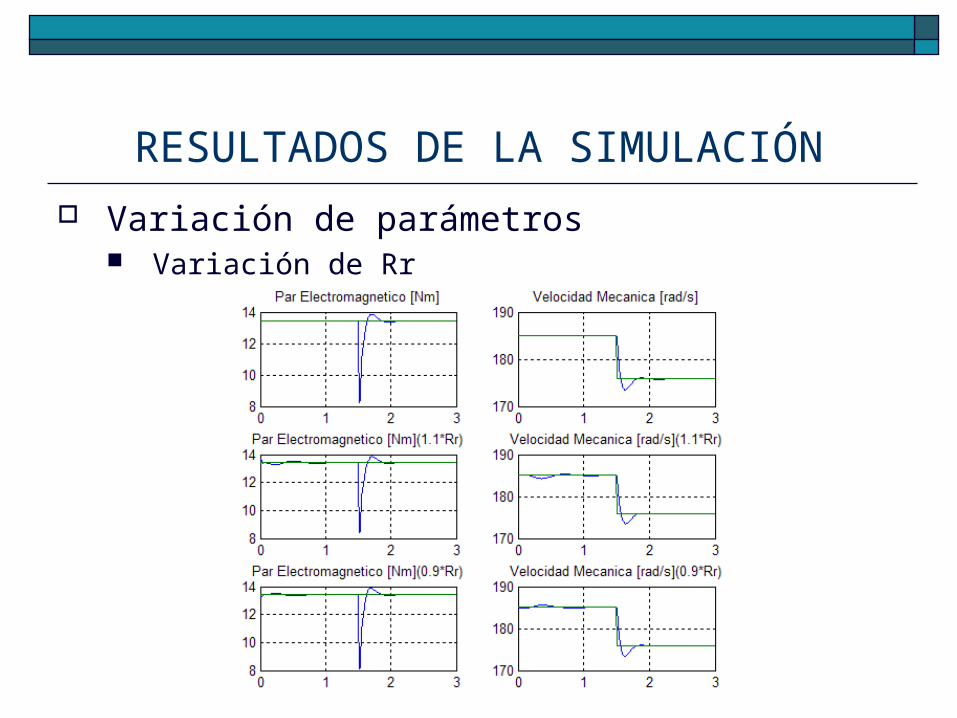
RESULTADOS DE LA SIMULACIÓN Variación de parámetros
Variación de Rr
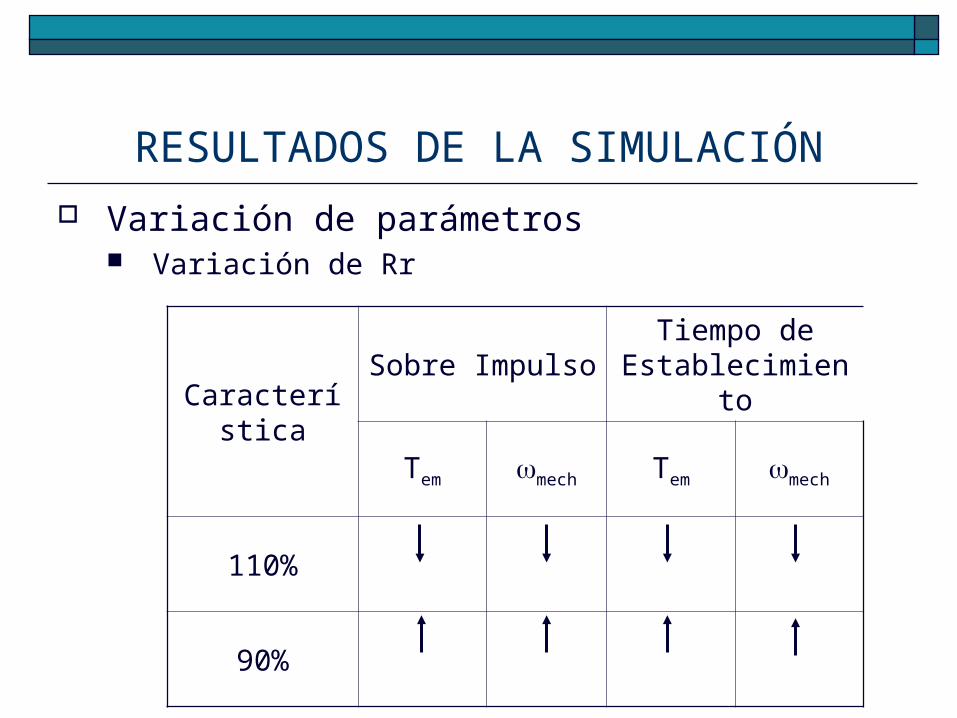
RESULTADOS DE LA SIMULACIÓN Variación de parámetros
Variación de Rr
Característica
Sobre ImpulsoTiempo de
Establecimiento
Tem mech Tem mech
110%
90%
ESTRUCTURA DE LA SUSTENTACIÓN
Por qué controlar un motor eléctrico? Motor de inducción versus motor DC. Técnicas de control utilizadas en los motores
de inducción. Esquema de control vectorial directo con PPU
controlada por voltaje. Resultados de la simulación. Conclusiones y recomendaciones. Preguntas.
CONCLUSIONES Y RECOMENDACIONES
Conclusiones
Se ha presentado el método de control vectorial directo aplicable al control de velocidad de motores de inducción
El control vectorial permite controlar con exactitud el motor de inducción
El grado de exactitud del control vectorial depende de la correcta estimación de los parámetros del motor
CONCLUSIONES Y RECOMENDACIONES
Conclusiones
Las simulaciones verifican el buen comportamiento del método de control vectorial directo tanto para rangos de velocidad normal como para rangos de velocidad extendida
Este trabajo ha contribuido y fortalecido el enriquecimiento académico enfocado al control de motores de inducción con rotor jaula de ardilla
Los convertidores comerciales no se pueden aprovechar como PPU dentro del esquema de control utilizado
CONCLUSIONES Y RECOMENDACIONES
Recomendaciones
Simular el esquema de control vectorial considerando los siguientes efectos:
Saturación del circuito magnético del motor de inducción
Cuantificación de las variables (debido a la conversión analógica – digital en los sensores)
El muestreo, característico de los sistemas discretos
CONCLUSIONES Y RECOMENDACIONES
Recomendaciones
Desarrollo o adquisición de la infraestructura tecnológica necesaria para la implementación de las técnicas de control para motores de inducción
Validación en forma práctica de los resultados teóricos alcanzados hasta este momento
ESTRUCTURA DE LA SUSTENTACIÓN
Por qué controlar un motor eléctrico? Motor de inducción versus motor DC. Técnicas de control utilizadas en los motores
de inducción. Esquema de control vectorial directo con PPU
controlada por voltaje. Resultados de la simulación. Conclusiones y recomendaciones. Preguntas.
PREGUNTAS
GRACIAS