Upload
paolo
View
217
Download
0
Embed Size (px)
Citation preview
7/26/2019 Interfaces Neuronales
1/9
Interfaces neuronales y sistemas mquina-cerebro:fundamentos y aplicaciones. Revisin
Felipe Garca Quiroz1,, Adriana Villa Moreno1,Paula Castao Jaramillo1,1Lnea de Bioinstrumentacin, Seales e Imgenes Mdicas.
Recibido 02 de octubre de 2006. Aceptado 08 de diciembre de 2006.
ResumenDebido a la alta incidencia de personas en situacin de discapacidad motora y sensorial, la investigacin en el
desarrollo de interfaces neuronales y sistemas de comunicacin mquina-cerebro ha tenido gran auge a travs de los ltimos diezaos. La construccin de estas interfaces requiere un trabajo coordinado de disciplinas como: siologa, ciencia de los materiales,instrumentacin y procesamiento de seales, inteligencia computacional, mecnica, electrnica, robtica e informtica, entre otras.Todas ellas para lograr una correcta interconexin entre el funcionamiento del sistema nervioso, la construccin de electrodos
biocompatibles, la obtencin de seales aptas para el procesamiento, la clasicacin e identicacin de patrones codicadosy el diseo de los elementos efectores que den sentido a la interfaz. En esta revisin se hace un recorrido por las tres etapasfundamentales de las interfaces neuronales: la deteccin de las seales, el procesamiento de estas y la amplia gama de posibilidades
para los mecanismos efectores.
Palabras clave Microelectrodos, Neuroingeniera, Telemetra, Corteza cerebral, Redes neuronales, Microfabricacin,Biocompatibilidad, Estimulacin elctrica, Discapacidad.
AbstractDuring the past ten years the Neural Interfaces and brain-computer communication systems area has becomean important eld for research, in part due to the increasing statistics of motor and sensorial disabilities. The development of
these systems and interfaces requires the coordinated work of different areas such as physiology, materials science, instrumentationand signal processing, computational intelligence, mechanics, electronics, robotics, and informatics, among others. They allowedthe right integration between the nervous system physiology, the construction of biocompatible electrodes, the acquiring of propersignals for processing, the classication and identication of coded patterns and the design of the actuators elements to nallyachieve the goal of the interface. In this review the three basic stages of neural interfaces are shown. This includes: signal acquiring,signal processing and the wide variety of applications with the effectors systems.
KeywordsMicroelectrode, Neural engineering, Telemetry, Cerebral cortex, Neural networks, Microfabrication,Biocompatibility, Electrical stimulation, Disability.
Revista Ingeniera BiomdicaISSN 19099762, nmer 1, may 2007, pgs. 14-22Escuela e Ingeniera e AniquiaUniersia CES, Meelln, Clmbia
I. INTRODUCCIN
La bsqueda de soluciones de ingeniera para las perso-nas en situacin de discapacidad motora, bloqueo de
las vas de comunicacin y expresin de las experienciascognoscitivas ha llevado al desarrollo de interfaces neuro-nales articiales. En el caso particular de las lesiones me-dulares, slo en los Estados Unidos de Amrica se tienen250000 casos, con 11000 pacientes nuevos cada ao [1].Estas estadsticas justican las intensas investigaciones
desarrolladas en este campo, sobre todo si se considera que
las condiciones de vida de estos pacientes aumenta la ten-dencia a aceptar nuevos estudios que implican el implantecrnico de electrodos en la corteza cerebral [2, 3, 4].
Los sistemas para el registro de la actividad bioelctricade neuronas individuales en primates y humanos se desa-rrollaron hace aproximadamente cuarenta aos, pero sloen la ltima dcada se potenci el implante de arreglos deelectrodos directamente en el cerebro [5]. Este hecho se
Direccin para correspondencia: [email protected]
7/26/2019 Interfaces Neuronales
2/9
15Felipe Garca et al. Interfaces neuronales y sistemas mquina-cerebro: fundamentos y aplicaciones. Revisin.
debe a la elevada carga computacional que se requiere paraprocesar y decodicar las complejas seales derivadas de laactividad de mltiples neuronas individuales [6]. La digita-lizacin de la actividad elctrica, por ejemplo, se debe rea-lizar a altas velocidades (>20KHz) en varios canales, juntocon las demandas para separar los potenciales de accin del
ruido y traducir la actividad neuronal en un comando deaccin apropiado. Todo en una referencia temporal til deunos 200ms [7].
Si bien los recientes progresos en el desarrollo de unainterfaz mquina-cerebro completa han sido importan-tes, an se tienen limitantes en cuanto a la bioestabilidady biofuncionalidad de los electrodos y hacen falta avancesen telemetra para los generadores de pulso implantables.Adems ha sido imposible obtener imgenes de alta resolu-cin de los implantes debido a los materiales utilizados enla fabricacin de los electrodos [8].
Las aplicaciones derivadas del desarrollo de las interfa-ces neuronales y los sistemas mquina-cerebro constituyenla base no slo para el desarrollo de sistemas articiales decontrol motor y de propiocepcin, sino tambin para la re-generacin neuronal y la reparacin del sistema nervioso alcombinar estas tecnologas con los avances en otros camposcomo la ingeniera de tejidos y la terapia gnica [8]. En esteartculo se realiza una revisin tanto de los principios apli-cados en el desarrollo de los sistemas computadora-cerebroy las interfaces neuronales, como una aproximacin a las
principales aplicaciones y desarrollos futuros en el rea.
II. INTERFACESNEURONALES, CONECTANDOLOSSISTEMASCOMPUTADOR-CEREBRO
Las interfaces neuronales se consideran como sistemasde transduccin bidireccionales que permiten establecer uncontacto directo entre el dispositivo tcnico y la estructuraneurolgica, cuyo objetivo es registrar las seales bioelc-tricas del cuerpo y la excitacin articial de los msculos ynervios. La interfaz neuronal comprende: los electrodos osensores, las conexiones internas (cables), las conexionesal procesador externo, los circuitos para la adquisicin delos datos y la unidad controladora del sistema efector [9].Uno de los elementos clave en la interfaz es el electrodo,encargado de capturar la actividad bioelctrica o de aplicarlas corrientes elctricas a los tejidos vivos. En adelante, sedescriben las principales caractersticas y requerimientos delos electrodos utilizados en los sistemas mquina-cerebro yla ingeniera neuronal.
2.1 Biocompatibilidad y reacciones del tejido
La interaccin electrodo-tejido neuronal exige tan-to biocompatibilidad de la supercie del electrodo como
biocompatibilidad estructural [9]. Esta ltima se reere al
diseo, tamao y supercie total del electrodo, la cual serelaciona con el dao ocasionado por la accin mecnicade introducir el elemento en el tejido y las fuerzas o distri-
bucin de presiones generadas en las regiones adyacentes.Por otro lado, se considera la biocompatibilidad de los ma-teriales en contacto con el tejido, cuya disolucin incluso en
cantidades mnimas podra generar respuestas del sistemavivo como inamacin, alergia, rechazo, entre otras. Losimplantes elctricamente activos en una prtesis neuronaldeben cumplir con las mayores exigencias en cuanto a la
bioestabilidad y biofuncionalidad, de modo que se puedaasegurar la estabilidad temporal de las propiedades de lainterfaz electrodo-electrolito durante la vida del implante.Adems, la eleccin de un diseo estructuralmente compa-tible de los electrodos se debe equilibrar con los cambiosgenerados en otras caractersticas esenciales del desempeodel electrodo, tales como impedancia, relacin seal-ruidoy selectividad. La ltima se reere a la capacidad de regis -
trar o estimular elctricamente grupos particulares de neu-ronas o bras nerviosas.
El tejido neuronal responde de diversas maneras a la in-troduccin de los electrodos, aunque en todos los casos se
produce un dao del tejido. En efecto, durante la insercin decualquier objeto en el cerebro se genera un dao del parn-quima, se rompen vasos sanguneos (microhemorragias), seactiva la microglia (derivados de los monocitos) y aumenta la
proliferacin de los astrocitos, lo que lleva al encapsulamien-to del electrodo, pudiendo producir cambios importantes ensu impedancia [5]. Schmidt et al. (1993)demostraron la rela-cin existente entre la disminucin de la relacin seal-ruido
y el encapsulamiento, al recuperar la actividad del electrodohaciendo circular corriente elctrica a travs de l [5]. La co-rriente remueve el tejido o crea oricios en la cpsula dismi -nuyendo la impedancia y reactivando los puntos de registro(sensores propiamente) en el electrodo.
Actualmente, algunos investigadores estn trabajandoen la modicacin de la supercie de los electrodos usandohidrogeles, polmeros tipo seda y nanotubos, los cuales se
puedan unir a materiales bioactivos, como las neurotro-nas (factores neurotrcos), que potencien el acercamientode neuritas en crecimiento [10]. De igual manera se buscadisminuir la respuesta inamatoria usando microtubos que
liberen molculas inhibitorias de los factores transcripcio-nales de algunos genes reguladores de la liberacin de cito-quinas proinamatorias.
2.2 Materiales
La estabilidad de los materiales en el electrodo es fun-damental, especialmente si se busca mantener los implantesdentro del cuerpo del paciente por varios aos. Por esto,el electrodo debe ser resistente a la corrosin durante laestimulacin elctrica o al ataque de los uidos biolgicos,
7/26/2019 Interfaces Neuronales
3/9
16 REvIStA INGENIERA BIoMdICA
enzimas y macrfagos producidos durante las primerasetapas de reaccin del tejido vivo.
En cuanto a la seleccin de materiales hay diferentesopciones tanto para la conduccin de seales bioelctricascomo para el aislamiento de los electrodos, los cables y en
algunos casos, de los circuitos electrnicos [9]. Los mate-riales conductores ms utilizados son: platino, iridio, tungs-teno y acero inoxidable. El aislamiento se realiza general-mente con elastmero de silicona, politetrauoroetileno y
poliimida [11].
El elastmero de silicona es el ms utilizado no slopara el aislamiento de los cables, sino tambin en recubri-mientos adicionales para circuitos electrnicos hermtica-mente cerrados.
Otras caractersticas importantes que deben tener estosmateriales incluyen la estabilidad electroqumica, consumo
bajo de energa durante la estimulacin, impedancia y fre-
cuencia de respuesta estable y estabilidad contra el ruidoy otros artefactos. Adems, se requiere un comportamientoadecuado en la fase anterior durante la polarizacin y en lafase posterior al potencial [12].
2.3 Electrodos
Los primeros electrodos utilizados en las interfacesneuronales fueron los microcables, los cuales consisten encables muy nos con dimetros entre 20 y 50m. Comn -mente se fabrican de acero inoxidable o tungsteno y ma-teriales aislantes como ten o poliimida. Estos cables se
organizan en arreglos al soldarlos a un pequeo conectorcon espaciamientos en un rango de (100-300)m, utilizan-do polimetilmetacrilato o glicol polietileno como separa-dores [5]. Un hecho curioso sobre el desempeo de losmicrocables se reere al encapsulamiento que se produ-ce durante la insercin del electrodo, el cual ha permiti-
do su uso para el registro de seales bioelctricas en lacorteza cerebral. El encapsulamiento produce un aumentode la impedancia al reducir el dimetro del cable en elrea expuesta, cuyo tamao inicial sera muy grande para
permitir el registro de unidades neuronales aisladas.
En la nueva era de electrodos penetrantes desarro-llados principalmente para estimulacin y registro de laactividad elctrica del sistema nervioso central, aun-que utilizados en estudios preliminares con el sistemanervioso perifrico (SNP), se encuentran los electrodoscuyo diseo y construccin se explica a continuacin.
Se han desarrollado multielectrodos con nmerosvariables de electrodos ubicados en agujas o bloques
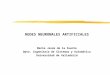
portadores fabricados de vidrio, silicona o poliimida.Los electrodos se disponen en arreglos 1D, 2D, o 3D(ver Fig. 1). Adems, se ha desarrollado una gran varie-dad de diseos y mtodos de fabricacin para la construc-cin en masa de estos dispositivos, incluyendo tcnicas demecnica de precisin y microfabricacin [9, 10]. Dosde los diseos ms reconocidos en la actualidad sedesarrollaron en la Universidad de Utah y la Universidadde Michigan, e incluso han sido comercializados.
Fig. 1. Electrodos penetrantes desarrollados por la Universidad de Michigan (izquierda) y la Universidad de Utah (derecha). Imgenes originales deAoyagi et al., 2003; Branner et al., 2001. Imgenes tomadas de [9].
7/26/2019 Interfaces Neuronales
4/9
17Felipe Garca et al. Interfaces neuronales y sistemas mquina-cerebro: fundamentos y aplicaciones. Revisin.
El arreglo de electrodos de Michigan puede fabricarsecon varias conguraciones y formas debido al protoco-lo de fabricacin desarrollado. La principal caractersticaes la disposicin de varios puntos de registro (sensores)a lo largo de cada columna (electrodo). Este diseo per-mite asegurar que al menos algunos de los puntos de re-
gistro se ubicarn en profundidades corticales apropiadaspara medir la actividad bioelctrica. El arreglo estndarpara implantes crnicos consta de cuatro columnas pa-ralelas tipo daga conectadas a una cinta de microsilicona(ver Fig. 1. A, B). Las columnas tienen 15m de grosor y(50-100)m de ancho [5].
Los investigadores de la Universidad de Utah utiliza-ron un enfoque totalmente diferente, con un nico punto deregistro ubicado en la punta de cada electrodo. Los cablesatraviesan la longitud del electrodo hasta la parte posteriordel bloque, donde se encuentran canales de oro para la uninde los cables que se proyectan al crneo (ver Fig. 1. C, D).Las puntas de registro son de platino, con una longitud de(35-75)m y una impedancia de (100-500)KOhms. Por lascaractersticas del mtodo de fabricacin desarrollado, elrango para la longitud de las columnas es de 1-1,5mm. Es-tos electrodos, al tener un nico punto de registro, presentanel problema de ubicacin de los microcables, sin embargo,
permite ubicar una gran cantidad de puntos de registro enun volumen compacto de corteza. Adems, se considera queel extremo del electrodo es el mejor punto para muestrear elcampo producido por un potencial de accin [4].
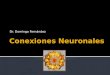
Fig. 2. Esquema de un electrodo regenerativo. Se observa como lasbras nerviosas de un nervio seccionado crecen a travs de los oricios
del electrodo encerrado en un tubo gua [9].
En el caso particular del SNP, se han utilizado electro-dos regenerativos, los cuales fueron diseados con el obje-tivo de permitir la regeneracin de las bras nerviosas enzonas medulares segmentadas o en extremidades amputa-das [9]. El diseo se basa en una serie de oricios rodeados
por electrodos que permiten el crecimiento de los axoneso de las bras nerviosas hacia su interior, posibilitando elregistro de potenciales de accin y estimulacin directa so-
bre axones individuales o pequeos fascculos (ver Fig. 2).
Idealmente, un diseo 1:1 permitira el acceso a cada axnregenerado en un oricio del dispositivo (2-10m), pero seha demostrado que no se da regeneracin con tamaos tan
pequeos. Entonces, los diseos buscan el equilibrio entreel nmero de perforaciones y el dimetro en un rango de40-65m. Otros electrodos utilizados en SNP son los de tipo
brazalete (cuff electrodes), los electrodos intrafasciculares(LIFE), los interfasciculares y los electrodos epineurales.
La ubicacin inadecuada de los electrodos durante elprocedimiento de insercin o la prdida de calidad de laseal debida al movimiento del electrodo en la corteza (pro-ducido por la respiracin, los cambios en la presin sangu-nea o el encogimiento del cerebro) han llevado al desarrollode electrodos ajustables [7]. stos permitiran aumentar lacalidad de la seal registrada, aislar o buscar grupos celula-res particulares e incrementar la estabilidad y la vida til delos implantes crnicos.
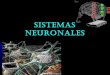
El objetivo es desarrollar sistemas microelectrome-cnicos (MEMS) que permitan el movimiento y la ajus-tabilidad del arreglo de electrodos implantados. Unode los mtodos con mayor potencial utiliza las tcnicasde electrlisis para mover y jar la posicin de los elec -trodos [13]. En resumen, el movimiento se da al pa-sar corriente elctrica a travs de unas cmaras plegadas(tipo acorden) llenas de uido. La electrlisis de ste pro-duce una fase gaseosa que aumenta la presin en las cma-ras y desplaza el electrodo (ver Fig. 3). Algunas ventajas deeste mtodo incluyen: poca disipacin de calor, bajo consu-mo de voltaje, y la posibilidad de generar grandes fuerzas y
desplazamientos controlados de cientos de micras.
Fig. 3. Arreglos de electrodos autoajustables con actuadores que uti-lizan electrlisis para el desplazamiento de los electrodos. Adems
permiten la liberacin de citoquinas antiinamatorias con bombasperistlt icas de electrlisis. Imagen modicada [13].
2.4 Interfaces neuronales hbridas
Este tipo de interfaces combinan los conocimientos delcultivo de clulas, los trasplantes celulares, la ingenierade tejidos y la microfabricacin; y constituyen el punto deconvergencia entre la regeneracin neuronal y las prtesisneuronales [14]. Las interfaces hbridas son dispositivossintticos implantables que tienen un elemento adicionalde tipo biolgico que facilita su integracin al sistema
7/26/2019 Interfaces Neuronales
5/9
18 REvIStA INGENIERA BIoMdICA
nervioso del paciente. La primera aproximacin consiste encultivar clulas sobre el elemento sinttico y promover sucrecimiento para que establezcan conexiones sinpticas conlas neuronas en el tejido husped. Un segundo enfoque con-siste en agregar al implante algunas sustancias neuroflicasque obliguen al tejido a extender prolongaciones o procesos
que permitan realizar la conexin del electrodo [15].
Por ejemplo, se han cultivado exitosamente neuronas sep-tales en electrodos de silicona, y una vez implantados se dala migracin de las clulas hacia el tejido del paciente debidoa la mayor disponibilidad de nutrientes. Sin embargo, la mi-gracin de las clulas es tal que se pierden las conexiones conel electrodo. Entonces, se debe trabajar en la modicacin delos electrodos de modo que las clulas cultivadas mantenganla conexin una vez implantadas. Se est explorando la po-sibilidad de incluir modicaciones fenotpicas que obliguena las neuronas a extender sus procesos, en lugar de migrarhacia el tejido del paciente [14, 15].
III. PROCESAMIENTODELASEAL
La informacin contenida en los electrodos puede serextrada por diferentes mtodos y procesos de decodica-cin. stos se clasican en dos grandes grupos: los mtodosdeductivos y los clasicadores.
Los mtodos deductivos son modelos basados en lacomprensin de los mecanismos implicados en la genera-cin de las seales bioelctricas. Por ejemplo, la actividadde una poblacin neuronal se puede representar con unvector, donde cada dimensin corresponde a una neuronay la magnitud de cada dimensin se supone proporcionala la tasa de descarga de esa clula. El algoritmo de ex-traccin realiza un ajuste direccional de las funciones paratransformar el vector en uno de movimiento en el espacio.Este fue uno de los primeros acercamientos que permitidecodicar la tasa de descarga elctrica de las neuronas
para predecir la trayectoria del movimiento de las extremi-dades superiores, usando modelos lineales (ajuste aproxi-mado con funciones coseno) que relacionan la rata de des-carga con la posicin, la velocidad y la aceleracin de laextremidad [5, 8].
En contraposicin, los algoritmos clasicadores norequieren un conocimiento previo de cmo la actividadneuronal est relacionada con el movimiento, sino que se
basan en el reconocimiento de patrones en las seales bio-elctricas registradas. Este mtodo utiliza los principiosde la inteligencia articial y redes neuronales para los pro-cesos de clasicacin y, por tanto, depende de una rela-cin entre las tasas de descarga elctrica y el movimiento.Por ejemplo, un algoritmo de clasicacin conocido comoSOFM (del ingls self-organizing feature map) consisteen una red de nodos (neuronas articiales), cada uno de
los cuales esta conectado a un vector de entrada con unsistema de pesos. Los vectores de entrada son los registrosde las tasas de descarga neuronal y se utilizan inicialmente
para el entrenamiento de la red y el ajuste de los pesos(inicializados aleatoriamente). El elemento con el vectorde pesos ms cercano al vector de entrada es el ganador
y es modicado para acercarse al valor de entrada. Esteproceso se repite durante el entrenamiento de la red y cadagrupo se asocia a una direccin. Se ingresan los nuevosvectores de entrada y la direccin prevista del movimientose elige como la direccin ms cercana que se encuen-tre dentro de las categoras de la red creada. Otro tipode redes neuronales que han sido usadas de manera exi-tosa para convertir poblaciones de actividad neuronal enmovimiento, usan los principios de back propagation yestimaciones no lineales de la mxima probabilidad [5].
En ambas categoras los algoritmos para decodicarla informacin neuronal se dividen en dos pasos. Estos seresumen a continuacin.
3.1. Deteccin y clasifcacin de la seal
La seal digitalizada puede pasar por diferentes proce-sos de extraccin de las caractersticas relevantes como:ltrado espacial, medida de la amplitud de voltaje, anli-sis espectral o separacin de una sola neurona. Medianteestos procesos se espera obtener las caractersticas quecodican la orden del paciente. Estas caractersticas pue-den estar en el dominio del tiempo (p. ej. amplitudes de
potenciales evocados o tasa de descargas neuronales) o enel dominio de la frecuencia (p. ej. amplitudes de los ritmos o ). Una interfaz neuronal que use ambos podra sermucho ms exacta.
En la actualidad las caractersticas reejan cmo ladescarga de una neurona cortical o la activacin sinp-tica sincronizada de la corteza motora produce un ritmo. La ubicacin, el tamao y la funcin del rea corticalque genera un ritmo o un potencial evocado indican cmodebe ser registrado. Pueden usarse tambin los sistemasde parmetros autoregresivos que se correlacionan con laintencin del paciente, pero no reejan necesariamenteacontecimientos especcos del cerebro [16].
En todos los casos es muy importante asegurarse deque las caractersticas elegidas no estn contaminadas porseales bioelctricas no neuronales como electromiografa(EMG), electrooculografa (EOG), entre otros.
3.2 Transduccin de la seal
Una vez se ha realizado la extraccin de las caracters-ticas especiales de las seales bioelctricas registradas, serequiere de una etapa adicional que permita traducir estascaractersticas a los comandos del dispositivo encargado de
7/26/2019 Interfaces Neuronales
6/9
19Felipe Garca et al. Interfaces neuronales y sistemas mquina-cerebro: fundamentos y aplicaciones. Revisin.
realizar la orden del paciente. Estos algoritmos pueden usartanto mtodos lineales (anlisis estadsticos clsicos) comono lineales (redes neuronales). Un algoritmo ecaz debeadaptarse al usuario en tres niveles [10]:
1) El algoritmo se adapta a las caractersticas de un pa-
ciente nuevo. Entonces, si la caracterstica es la amplituddel ritmo , el algoritmo se adapta al rango de amplitudes del paciente. Una interfaz con slo este nivel ser efec-tiva si la actividad elctrica del paciente es muy estable yaque solo se ajusta al paciente en la fase inicial.
2) Ajustes peridicos para reducir el impacto de las varia-ciones espontneas debidas a niveles hormonales, medioambiente, fatiga, enfermedades, entre otras.
3) El tercer nivel acomoda las capacidades adaptativas delcerebro ante los resultados obtenidos con cada accin dela interfaz. Este nivel implica la interaccin de dos con-troladores adaptativos: el cerebro y el sistema de interfaz
neuronal. Esto explica la importancia de crear algorit-mos de extraccin cuya salida pueda ser entendida por el
paciente, de modo que ste pueda alterar la actividadneuronal de manera consistente. Este ciclo cerrado decontrol permite producir cambios predecibles en la formacomo se mueve la prtesis o el sistema efector.
IV. APLICACIONES
Una vez realizado el procesamiento de la seal, los po-tenciales bioelctricos decodicados, provenientes de lasfunciones neuronales, son utilizados como seales de con-
trol para una amplia gama de aplicaciones [16]. Muchas delas investigaciones que se han realizado en el campo de lasinterfaces neuronales se han enfocado al control y a la eje-cucin de funciones de mecanismos efectores. Algunos delos ms estudiados son: neuroprtesis, exoesqueletos, ro-
bots telemtricos y, de manera especial, sistemas de comu-nicacin directa con computadores [1, 14, 16]. Estos permi-tiran la sustitucin de partes corporales, la restitucin defunciones para las que se ha perdido capacidad, la realiza-cin de tareas en ambientes inaccesibles para los humanos,entre otras funciones.
Las interfaces neuronales tambin incluyen las aplica-ciones relacionadas con los dispositivos de estimulacinneuromuscular (FES systems) y cerebral (DBS systems)
para la recuperacin funcional, as como los dispositivosde obtencin de la informacin sensorial que es llevada alcerebro para su interpretacin cuando hay deciencias enlos rganos de los sentidos [7, 17].
4.1. Interfaces neuronales para funciones motoras
Las interfaces neuronales han demostrado su ca-pacidad para dar buenos resultados en el control de
dispositivos externos mediante las seales corticales o peri-fricas. Se han enfocado de manera especial en el desarrollode comandos de fcil ejecucin como controles ambienta-les de temperatura, luz, televisin, respuesta a preguntastipo s/no, procesamiento de palabras a bajas velocidades(mxima velocidad alcanzada 2 letras/min.) [10]. Otros ms
complejos incluyen la operacin de dispositivos o meca-nismos como sillas de ruedas, control de prtesis, ortesis,exoesqueletos, robots y cursores de computador [5, 10]. Sinembargo, muchos pacientes, principalmente los que conser-van el control muscular de algunos miembros, tienen mejo-res opciones en comparacin con las interfaces neuronales.Para estos pacientes generalmente es ms sencillo y menostraumtico utilizar las contracciones musculares medianteEMG como seales de control para estas aplicaciones o in-cluso seales del movimiento ocular con EOG. Aunque elcontrol con estos ltimos es ms rpido y preciso que conlas interfaces neuronales actuales, las seales de electroen-
cefalografa (EEG) pueden permitir el control de un mayornmero de grados de libertad en comparacin con las pr-tesis mioelctricas (cuatro grados de libertad) [9]. Ademsexisten muchos pacientes que han perdido totalmente elcontrol muscular, se fatigan con facilidad o presentan des-rdenes en el movimiento [16].
La informacin neuronal puede resultar excelente parael control si se le hace el procesamiento correcto, pues seha demostrado que las neuronas motoras pueden proveerestimaciones ables de las intenciones motoras, incluyendofuerza y direccin [7]. De esta manera sera posible sustituirde forma casi natural los movimientos de la mano para tareas
cotidianas como el alcance de alimentos que se encuentranen diferentes posiciones, su agarre y posterior transporte a laboca, entre muchos otros ejemplos [5]. En estudios realiza-dos con interfaces con computadores, se ha mostrado que lossujetos pueden controlar un cursor en una pantalla, indicandoque se puede alcanzar ms que un simple control on-off. As,las seales neuronales pueden resolver algunos de los pro-
blemas que se presentan con las seales electromiogrcaspara el control de prtesis, robots y dems aplicaciones quelo requieren. Incluso algunos estudios han llegado ms allde permitir movimientos de cursores en 2D logrando exten-der el control de los movimientos de manera continua a tresdimensiones [1]. taylr et al.(2002) lograron con primates
el movimiento de un cursor en 3D mediante realidad virtual,tanto con un control manual como con uno neuronal [18].A su vez estos experimentos se han modicado cambiandoel movimiento de cursores por el movimiento de robotsvirtuales.
En ensayos de lazo abierto se ha logrado el controlde manos robticas que reproducen su trayectoria segnuna reconstruccin 2D. Sin embargo las prtesis neuro-nales requieren controles de lazo cerrado donde haya unarealimentacin, que casi siempre es visual, por parte del
7/26/2019 Interfaces Neuronales
7/9
20 REvIStA INGENIERA BIoMdICA
sujeto. Estos controles cerrados mejoran de manera signi-cativa la habilidad para realizar determinada tarea conmayor rapidez y precisin. De hecho, los pacientes al verlos resultados de los procesos de control en tiempo real,aprenden a modicar su actividad neuronal para mejorarsu desempeo en la tarea [5]. Experimentos con animales
han mostrado que es posible mover el cursor con un controlde ciclo cerrado para seleccionar objetos que aparecen demanera aleatoria en el monitor, alcanzando desempeosmuy cercanos a los controles manuales [1]. Los diseosde estas interfaces an estn en una etapa temprana dedesarrollo y se requiere el control de funciones adicionalespara llegar a una aplicacin clnicamente relevante, comolograr hacer clic.
Para mejorar los alcances de estas interfaces se estn in-troduciendo y estudiando muchas mejoras, entre ellas nue-vas modalidades para la comunicacin como la telemetra,y se estn explorando otras reas del cerebro que podran
permitir controles neuronales de ms alto nivel [1]. Inclusose est estudiando el reconocimiento de movimientos mscomplejos, como gestos, ya que stos podran codicarse
para convertirse en palabras, comandos o acciones [1].
4.2. Interfaces neuronales para funciones sensitivas
Como ya se mencion, hay muchas aplicaciones de lasinterfaces neuronales con nes motores que permiten a losindividuos con parlisis, desrdenes motores u otras pato-logas, integrarse al ambiente al tener un mejor control ycomunicacin con l. Sin embargo, la informacin sensitivaque los individuos reciben del ambiente es un aspecto fun-damental en el desempeo de las tareas motoras y permi-te una comunicacin bidireccional con el medio, tal comoocurre con las personas sin afecciones en las vas motorasy sensitivas.
Por esta razn, una interfaz de comunicacin idealpara estos pacientes debe ser capaz de llevar a la corte-za seales que de manera natural son indistinguibles, locual se puede lograr con microestimulacin local [7]. Los
principales desarrollos e investigaciones que se han rea-lizado en este campo buscan recuperar las funciones devisin y audicin mediante prtesis que estimulan elctri-
camente reas especcas de la corteza correspondientesa la percepcin de estos sentidos. De acuerdo con esto sehan logrado varios avances en implantes cocleares, queya llevan varias generaciones, algunos de ellos con lautilizacin de arreglos basados en polmeros de cris-tal lquido como material dielctrico [14]. De manerasimilar se han desarrollado prtesis de retina intraocu-lar que cuentan con dispositivos de electrodos de plati-no para permitir a los pacientes discriminar la forma y elmovimiento de objetos visibles con una precisin mayoral 80% [14].
Tambin se han realizado estudios para otras interfaces,como aquellas para el sentido tctil. En estos casos se haceuso de la microestimulacin en la corteza sensorial somtica
para sustituir vibraciones en la piel de manera que se logreun reconocimiento de su frecuencia [7]. Esto ha sugerido la
posibilidad de desarrollar patrones de estimulacin que se
puedan utilizar para percibir informacin signicativa y degran importancia como seales de alerta.
Adems, la funcin sensorial tambin presenta gran utili-dad como sistema de realimentacin para mecanismos efec-tores de movimiento. En las acciones motoras naturales elcuerpo humano utiliza los sensores de propiocepcin pararegular la posicin de sus miembros y controlar el movimien-to. Las seales de estos receptores podran utilizarse en laregulacin de los movimientos de miembros externos cuandolos comandos provienen de otra interfaz neuronal, teniendocomo ventaja que las seales sensitivas pueden detectarsedirectamente del sistema nervioso sin causar alteraciones enel comportamiento de la persona [9].
La obtencin de la informacin sensorial tambin se haestudiado para mejorar el desempeo de los sistemas de es-timulacin elctrica funcional, es decir, cuando lo que estsiendo controlado elctricamente es un miembro propiodel individuo. Las caractersticas variables del sistemaneuromuscular hacen necesario tener un ciclo cerradode control con una unidad de sensado que provea infor-macin acerca de la tarea motora que se est ejecutando.Si bien el sensado puede ser articial, es un nuevo retoutilizar la informacin de los sensores naturales mediante
el procesamiento de sus seales nerviosas [9].
4.3. Interfaces neuronales para estimulacin
Existe otro tipo de estimulacin elctrica que esla estimulacin funcional, la cual intenta dirigir elcomportamiento o modicar la funcin cerebral o nervio-sa, sin la intervencin de receptores cognitivos. Diere dela estimulacin para nes sensitivos que tiene la funcinde remplazar los rganos sensoriales por otros construidosde manera articial.
La estimulacin elctrica se ha usado desde 1950 para
tratar desrdenes neurolgicos en humanos [7]. Actual-mente una de las aplicaciones ms estudiadas es el aliviode algunas de las manifestaciones del sndrome de Par-kinson, para el cual se han diseado y construido implan-tes para estimulacin profunda del cerebro (DBS por susigla en ingles). Gracias a esto se han estudiado terapiasmediante la manipulacin del ganglio basal que buscanaliviar el temblor, la rigidez y la bradikinesia propias deesta enfermedad [7]. Sin embargo, an es necesario tenerun mayor conocimiento de la siopatologa de los desr-denes de movimiento que se maniestan en las funciones
7/26/2019 Interfaces Neuronales
8/9
21Felipe Garca et al. Interfaces neuronales y sistemas mquina-cerebro: fundamentos y aplicaciones. Revisin.
sensoriales-motoras anormales para obtener mayoresavances en las interfaces de estimulacin cerebral [14].Los experimentos han demostrado que la estimulacindel ncleo subtalmico mejora signicativamente la velo-cidad del movimiento de la articulacin del codo y de larodilla en pacientes con enfermedad de Parkinson, me-
jorando la calidad de vida de estos individuos. Una ex-plicacin probable de este fenmeno es el aumento de laactivacin de los msculos agonistas y antagonistas, locual se ha evidenciado por medio de mediciones electro-miogrcas [14]. Sin embargo, esta estimulacin directatrae algunas contraindicaciones como el impacto negativoen la uencia verbal que hipotticamente es causado porla extensin del estmulo elctrico ms all de las regio-nes patolgicas localizadas [14]. Para responder a esto sehan sugerido mejoras en los electrodos de estimulacin,crendose propuestas como el desarrollo de tecnologas demicroelectrodos con microactuadores que permitan posi-
cionar el dispositivo de manera precisa, logrando un menortiempo de ciruga y posibilitando el ajuste de la profundidaddel electrodo despus de sta.
Otras aplicaciones teraputicas que se han evaluadopara la DBS presentan especial inters en pediatra, aplica-das en desrdenes en los recin nacidos, principalmente enalgunas patologas asociadas a la sordera. En este caso, lossistemas presentan nuevos requerimientos tecnolgicos encomparacin con los desarrollados para personas de edadavanzada, enfocados, por ejemplo, a la enfermedad de Par-kinson [14]. La mayora de veces, se requiere la unin deinterfaces para DBS con prtesis cocleares, por lo que sur-
ge la necesidad de disear interfaces neuronales mltiplespara implantar en un mismo paciente por largos periodos detiempo [14]. En otros casos existe la posibilidad de estimu-lar de manera directa las neuronas de la va auditiva que anconservan algo de funcin.
La estimulacin funcional tambin puede ser efectua-da en zonas diferentes al cerebro. Actualmente los sistemasFES (Functional Electrical Stimulation) brindan la posibi-lidad de aplicar corrientes elctricas en nervios perifricoso en porciones neuromusculares para estimular o suprimiralguna actividad especca del sistema nervioso. Esta esti-mulacin posibilita el control del movimiento de un miem-
bro paralizado; la activacin de funciones viscerales, comoel control de la vejiga o de la respiracin; la creacin de
percepciones, como sensibilidad en la piel; la interrupcinde experiencias indeseadas, como el dolor o el espasmo; yadems, facilita la recuperacin natural [17]. De todas ma-neras, para producir mediante estimulacin el movimientonatural de un miembro paralizado, se requiere un entendi-miento ms profundo de cmo interactan los msculos
para producir movimientos complejos, y en algunos casos,por ejemplo en la marcha, se necesita la integracin deseales vestibulares [7].
Existe una interfaz para controlar movimientos de lamano aprobada por la FDA (del ingls Food and Drug
Administration). En sta, los movimientos de agarre de lamano son controlados por un dispositivo externo que estimu-la los msculos de manera selectiva mediante electrodos.
La estimulacin tambin puede realizarse directa-mente en la mdula espinal, con la ventaja de proveer uncontacto directo con el tejido neuronal. Para esto se handesarrollado sistemas con fotodiodos que convierten lalongitud de onda de la luz incidente del infrarrojo cercanoen estmulos elctricos [14]. Estudios realizados en gatosmuestran la utilidad de la microestimulacin intraespinal
por medio de microcables para permitir movimientos fun-cionales de algunos miembros [14]. La estimulacin espi-nal con relacin a la perifrica, presenta la ventaja de au-mentar el tiempo requerido para producir fatiga muscular;sin embargo, tiene como desventaja la dicultad tcnica conel posicionamiento y la estabilidad de los electrodos, ya quelas diferencias de 10m en la posicin del electrodo puedendeterminar el xito o fracaso de la aplicacin. Dicho efec-to es menos importante en los nervios perifricos. Por otrolado los sistemas de estimulacin con lser pueden generarefectos fototrmicos evidenciados por elevaciones localesde la temperatura [14].
Algunos trabajos de mayor alcance en cuanto a inter-faces neuronales se han centrado en modelos matemticosque describen la dinmica no lineal de las redes de neuro-nas. Un potencial campo de aplicacin consiste en el desa-rrollo de microchips que capturan el comportamiento de las
neuronas de una regin especca del cerebro en 3D. Me-diante el desarrollo de estos modelos matemticos de ml-tiples entradas es posible prever la dinmica de las unionessinpticas. Por ejemplo, para el hipocampo se han integradolas aproximaciones del modelo con arreglos de electrodos,de tal manera que al implementar el chip con el modelomatemtico predictivo ha sido posible replicar algunasfunciones que sustituyen la regin CA3 [14].
V. CONCLUSIN
Los diferentes avances mostrados tanto en el desarrollode los electrodos como en el procesamiento y la clasica-
cin de las seales bioelctricas, adems del gran nmerode aplicaciones de estas tecnologas, hacen pensar en el r-
pido crecimiento e implementacin de estas tcnicas en elcampo clnico en los prximos aos. Sin embargo, se debesealar que uno de los mayores limitantes que presentanestos sistemas se relaciona con la bioestabilidad de los sis-temas implantados. En este sentido, se debe plantear unainquietud tica relacionada con la utilizacin de pacientesen situacin de discapacidad para experimentar con losimplantes crnicos. En la actualidad, estos implantes sonde corta duracin, con tiempos mximos de registro activo
7/26/2019 Interfaces Neuronales
9/9
22 REvIStA INGENIERA BIoMdICA
de la actividad neuronal no superior a un ao. Adems,presentan alta probabilidad de desarrollar reacciones in-fecciosas y no siempre son la opcin con la mejor relacincosto-benecio para el paciente (p. ej. se podran utilizarelectrodos superciales para el control con EEG o EMG).Debido a todo esto, el desarrollo de arreglos de electrodos
con mayor estabilidad y capacidad de registro de maneraactiva por largos perodos es uno de los grandes retos eneste campo. Adems, es necesario implementar tecnolo-gas telemtricas que reduzcan la posibilidad de desarro-llar reacciones infecciosas en la interfaz neuronal. Todoesto permitira realizar estudios clnicos de mayor dura-cin que impulsen nuevos desarrollos en los sistemas deidenticacin y clasicacin de la seales bioelctricas.
AGRADECIMIENTO
Al programa de Ingeniera Biomdica del ConvenioEIA-CES.
REFERENCIAS
[1] Black M. J., Bienenstocky E., Donoghuey J.P, Serruyay M., WuzW., Gaoz Y. Connecting Brains with Machines: The Neural Controlof 2D Cursor Movement. 1st International IEEE/EMBS Conferenceon Neural Engineering, pp. 580-583, Capri, Italy, March, 2003.
[2] Kelly S., Burke D., Chazal D., Reilly R. Parametric models andClassication for Direct Brain Interfaces.Proceedings of the IrishSignal and Systems Conference, Cork, Ireland, June 2002.
[3] Curran E., Stokes M. Learning to control brain activity: A reviewof the production and control of EEG components for drivingbraincomputer interface (BCI) systems.Brain and Cognition,51,326336, 2003.
[4] Engel K., Moll C., Fried I., Ojemann G. Invasive recordings fromthe human brain: clinical insights and beyond. Nature reviews(Neuroscience), 6, 35-47, June 2005.
[5] Schwartz A. B. Cortical Neural Prosthetics. Anual Review ofNeuroscience,27, 487-507, Marzo 2004.
[6] Mussa-Ivaldi F., Miller L. Brainmachine interfaces: computationaldemands and clinical needs meet basic neuroscience. Trends inNeurosciences,26, 329-334, Junio 2003.
[7] Donhoghue P. Connecting cortex to machines: recent advances inbrain interfaces. Nature Neuroscience suplement, 5, 1085-1088,Noviembre 2002
[8] Ball T., Nawrot M.P., Pistohl T., Aertsen A., Schulze-BonhageA., Mehring C. Towards an implantable brain-machine interfacebased on epicortical eld potentials. Biomedizinische Technik, 49,756-759, 2004.
[9] Navarro X., Krueger T. B., Lago N., Misera S., Stieglitz T., Dario P.A critical review of interfaces with the peripheral nervous.Journalof the Peripheral Nervous System,10, 229258, 2005.
[10] Shoham S. Advances towards an implantable motor corticalinterface. August 2005. Disponible en: http://www.bm.technion.ac.il/niel/index_les/pubs/Shoham_dissertation01.pdf.
[11] Heiduschka P., Thanos S. Implantable bioelectronic interfacesfor lost nerve functions. Progress in Neurobiology, 55, 433461,August 1998.
[12] Stieglitz T., Gross M. Flexible BIOMEMS with electrodearrangements on front and back side as key component in neuralprostheses and biohybrid systems. Sensors and Actuators B:chemical,83, 814, Marzo 2002.
[13] Andersen R.A., Burdick J.W., Musallam S., Pesaran B., ChamJ.G. Cognitive neural prosthetics. Trends in Cognitive Sciences,8,486-493, November 2004.
[14] Pancrazio J. J., Chen D., Fertig S. J., Miller R. L., Oliver E.,Peng G.C.Y., Shinowara N. L., Weinrich M., Kleitman N.Toward Neurotechnology Innovation: Report from the 2005Neural Interfaces Workshop. An NIH-Sponsored Event.Neuromodulation, 9, 17, September 2005.
[15] Grill W. M., McDonald J.W., Peckham P. H., Heetderks W.,Kocsis J., Weinrich M. At the interface: Convergence of neuralregeneration and neural prostheses for restoration of function.Journal of Rehabilitation Research and Development,38, 633-639,December 2001.
[16] Wolpaw J. R., Birbaumer N., McFarland D.J., Pfurtscheller G.,Vaughan T.M. Braincomputer interfaces for communication andcontrol. Clinical Neurophysiology,113, 767791, 2002.
[17] Cleveland FES Center. Agosto 2006. Disponible en:http://fescenter.case.edu/Who_We_Are/mission_history.htm.
[18] Taylor D., Tillery S., Schwartz A. Direct cortical control of 3Dneuroprosthetic devices. Science,296, 1829-1832, July 2002.