Embed Size (px)
Citation preview

SONAR DOPPLER
CI-68MODELO
MANUAL OPERADORINDICADOR DE CORRIENTE

C
C / F r a n c i s c o R e m i r o 2 - B2 8 0 2 8 M a d r i d
T e l é f o n o : + 3 4 9 1 7 2 5 9 0 8 8T e l e f a x : + 3 4 9 1 7 2 5 9 8 9 7
S u A g e n t e / V e n d e d o r L o c a l
T o d o s l o s d e r e c h o s r e s e r v a d o s .
P U B . N o . O M S p - 7 2 5 2 0C I - 6 8 ( J M )
P R I M E R A E D I C I O N : O C T U B R E . 2 0 0 3 A 1 : N O V I E M B R E 2 7 , 2 0 0 3 Imrimido en Japón
FURUNO ESPAÑA S.A.

!
i
MEDIDAS DE SEGURIDAD
ADVERTENCIAADVERTENCIA
Si entra agua en el equipo o éste emite
humo o fuego, desconectar la alimenta-
ción inmediatamente.
Riesgo de incendio o descarga eléctrica.
Contactar con agente de Furuno para el
servico.
No desarmar o modificar el equipo.
Riesgo de fuego o descarga eléctrica.
No situar recipientes con líquidos
encima del equipo.
Riesgo de incendio o descarga eléctrica
si el líquido cae dentro del equipo.
Apagar inmediatamente el equipo si
éste emite humo o fuego.
Riesgo de incendio o descarga eléctrica.
Contactar con agente de Furuno para el
servico.
Asegurarse de que el equipo está a
salvo de la lluvia y de salpicaduras de
agua.
Riesgo de incendio o descarga eléctrica si
el agua entra en el equipo.
RIESGO DE ELECTROCUCIONNo abrir el equipo.
En el interior del equipo
existe tensión de valor
peligroso. Sólo personal
especializado.
ATENCIONATENCIONMantener las fuentes de calor alejadas
del equipo.
El calor puede alterar el aislante de los
conductores eléctricos lo que puede
ocasionar incendios o descargas eléctricas.
Usar el fusible correcto.
El uso de fusibles inadecuados puede
causar daños al equipo u ocasionar
un incendio.
No manejar el equipo con las manos
mojadas.
Riesgo de descarga eléctrica.

ii
ATENCIONComprobar regularmente el estado de
las placas de cinc anticorrosión;
sustituirlas si es necesario.
La corrosión de la unidad de casco puede
originar la entrada de agua en el barco.
No usar el equipo para otro proposito.
El equipo puede dañarse si es mal utilizado.
No transmitir con el transductor fuera
del agua, etc.
Riesgo de avería del transductor.
Apague el equipo inmediatamente
cuando vea que se comporta
anormalmente.
Apague el equipo si se calienta o se
producen estraños ruidos.
Contacte con su vendedor lo más pronto
posible.
No arrancar las etiquetas de advertencia
pegadas en las unidades del equipo.
Si se deterioran solicitar otras de un
agente de Furuno.
WARNINGTo avoid electrical shock, do not remove cover. No user-serviceable parts inside.
Transceiver UnitName: Warning Label (1)Type: 86-003-1011-1Code No.: 100-236-231
Monitor Unit Name: Warning Label (2) Type: 03-129-1001-1 Code No.: 100-236-741
ETIQUETA DE AVISO
LCD TFT La pantalla LCD TFT presenta el 99,99%
de sus elementos de imagen. El 0,01%
restante puede oscilar. Esto es inherente a
este tipo de tecnología y no implica mal
funcionamiento.

INDICE
INTRODUCCION ......................................................................................................................... vCONFIGURACION DEL SISTEMA .......................................................................................... viEJEMPLO DE PRESENTACION ............................................................................................. vii
1. PANORAMICA DE OPERACION ...................................................................................... 1-11.1 Controles ....................................................................................................................... 1-11.2 Encendido y Apagado ................................................................................................. 1-21.3 Ajuste del Brillo de la Presentación ........................................................................... 1-31.4 Selección de la Presentación .................................................................................... 1-4
1.4.1 Vector Corriente ............................................................................................... 1-41.4.2 Velocidad del Barco ......................................................................................... 1-51.4.3 Presentación Gráfica ....................................................................................... 1-51.4.4 Ploteo de la Derrota ........................................................................................ 1-61.4.5 Presentación Texto ........................................................................................... 1-61.4.6 Nivel de los Ecos .............................................................................................. 1-7
1.5 Profundidades de Medida .......................................................................................... 1-81.6 Elegir el Modo Seguimiento de la Velocidad............................................................. 1-91.7 Selección de la Escala .............................................................................................. 1-10
2. INTERPRETACION DE LAS PRESENTACIONES ....................................................... 2-12.1 Vector Corriente ........................................................................................................... 2-12.2 Velocidad del Barco .................................................................................................... 2-52.3 Presentación Gráfica .................................................................................................. 2-72.4 Ploteo de la Derrota ................................................................................................... 2-92.5 Nivel de los Ecos ....................................................................................................... 2-102.6 Presentación de Errores ........................................................................................... 2-11
3. PERSONALIZACION DEL SISTEMA ............................................................................... 3-13.1 Operación con Menús ................................................................................................. 3-13.2 Teclas de Función ........................................................................................................ 3-3
3.2.1 Programación de las teclas de función ......................................................... 3-33.2.2 Uso de las teclas de función ........................................................................... 3-3
3.3 Menú MENU 1 .............................................................................................................. 3-43.4 Menú MENU 2 .............................................................................................................. 3-7
3.4.1 Submenú MODE .............................................................................................. 3-73.4.2 Submenú DISP1 ............................................................................................... 3-83.4.3 Submenú DISP2 ............................................................................................ 3-10
3.5 Menú ALARM ............................................................................................................. 3-123.5.1 Tipos de Alarma ............................................................................................. 3-123.5.2 Alarmas de velocidad del barco, velocidad de la corriente,
dirección de la corriente y diferencial de corriente .................................... 3-133.5.3 Alarma de distancia ...................................................................................... 3-153.5.4 Habilitación/inhabilitación de la alarma sonora ......................................... 3-173.5.5 Inhabilitación de una alarma ......................................................................... 3-17
iii

4. MANTENIMIENTO E INCIDENCIAS ................................................................................ 4-14.1 Mantenimiento de Rutina ............................................................................................ 4-14.2 Sustitución de los Fusibles ......................................................................................... 4-24.3 Incidencias .................................................................................................................... 4-34.4 Diagnosis ..................................................................................................................... 4-4
4.4.1 Prueba general ................................................................................................. 4-44.4.2 Prueba del panel .............................................................................................. 4-64.4.3 Patrón de prueba ............................................................................................. 4-7
4.5 Mensajes de Error y Alertas ........................................................................................ 4-8
APENDICE .............................................................................................................................. AP-1ARBOL DE MENUS ........................................................................................................... AP-1MEDIDA DE LA CORRIENTE EN EL MODO NAV ........................................................ AP-3PRINCIPIO DE OPERACION ............................................................................................ AP-6
ESPECIFICACIONES ........................................................................................................... SP-1
iv

INTRODUCCION
A los Usuarios del CI-68FURUNO Electric Company agradece su elección del CI-68, en la seguridad de que prontodescubrirá porque el nombre de FURUNO se ha convertido en sinónimo de calidad y fiabili-dad.
Durante más de 50 años, FURUNO Electric Company ha gozado, en todo el mundo, de unaenvidiable reputación por la calidad de sus productos destinados al sector marino, mantenidapor su eficiente red mundial de agentes y distribuidores.
El equipo está diseñado, y fabricado, para satisfacer las rigurosas exigencias del ambientemarino. Sin embargo, ningún aparato funciona de forma satisfactoria si no es adecuadamentemanejado y conservado. Rogamos, por tanto, leer y seguir cuidadosamente los procedimien-tos de manejo y mantenimiento recomendados.
Asimismo, FURUNO apreciaría cualquier sugerencia o comentario en relación con el equipo.
Características• Con información de rumbo de una giroscó-
pica, un compás satelitario, etc., los movi-mientos absolutos de las capas de medidade la corriente son presentadas en colores.
• Cuando no se tiene referencia acústica delfondo, esto es, el barco está en aguas pro-fundas, el equipo puede proporcionar losmovimientos absolutos de las capas demedida recibiendo información de posición(o de velocidad) de un navegador GPS einformación de rumbo de una giroscópicao de un compás satelitario.
• Monitor con pantalla LCD TFT de 10,4’’.Color de fondo seleccionable.
• Posible utilización de monitores comercia-les en lugar del monitor LCD.
• Seis modos de presentación para obser-var el movimiento de la corriente desde va-rios ángulos.
• Sistema de triple haz para compensaciónautomática del cabeceo y del balanceo.
• Presentación continua del nivel de ecos,monitorizando de las condiciones de señalde los tres haces.
• El eco del fondo puede ser encontradousando datos de profundidad externos;también puede ser adquirido manualmen-te mediante la presentación de nivel deecos. Esto resulta útil en aguas profundascuando la recepción del eco del fondo esbloqueada por burbujas de aire o una capade placton o un banco de pescado es confundido con este eco.
• Alarmas visuales y sonoras.
• Presentación gráfica muestra los datos dela corriente durante las últimas horas.
• Teclado ergonómico y estructura de menúsde fácil interpretación. Teclas de función.
v
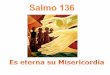
CONFIGURACION DEL SISTEMA
vi
MONITOR
MU-100C
UNIDAD CONTROL
CI-6888
UNIDAD TRANSCEPTOR
CI-6810
TRANSDUCTOR
CI-620
CAJA CONEXION
CI-630
100/110/115/200/
220/230/240 VCA,
φ1, 50-60Hz
INVERSOR CC-CA
TR-2451
24 VCC : Suministro Estándar
: Suministro Opcional
: Suministro Local
UNIDAD CONTROL
CI-6888
Monitor VGA O
Salida NMEA1
Entrada NMEA1
Salida NMEA2/CIF
Entrada NMEA2/CIF
Datos Indicador de Corriente
AUX (NMEA/CIF/Datos Indicador de Corriente/ Datos para la Presentación)
Sensor de Rumbo
Alerta/Alarma
Corredera (2 líneas)
Salida KP
Entrada KP (Dos líneas)
Estado Encendido/Apagado (Señal de Contacto)

EJEMPLO DE PRESENTACION
vii
Elemento y color
• Corriente de la capa 1: Amarillo
• Corriente de la capa 2: Púrpura
• Corriente de la capa 3: Azul claro• Vector de velocidad del barco propio: Verde
• Línea de proa: Blanco (de trazos)
Presentación Vector Corriente

viii
Página en blanco

1. PANORAMICA DE OPERACION
1.1 Controles
Panel de Control
lortnoC lortnoC lortnoC lortnoC lortnoC nóicnuF nóicnuF nóicnuF nóicnuF nóicnuFREWOP .opiuqeleagapayedneicnE
3F-1F .nóicnufedsalceT3RYL-1RYL .apacadacarapetneirrocaledadidemeddadidnuforpalecelbatsE
etsujAedodnaM .alacsealyadidemeddadidnuforpalecelbatsEEGNAR .alacsealecelbatsE
EDOMKCART .oertsaredodomleanoicceleSEDOMPSID .nóicatneserpedodomleanoicceleS
LLIRB .allatnapaledollirbleatsujAUNEM .súnemsolarreicyerbA
rosruCledalceT.súnemsoledsenoicpoysotnemeleanoicceleS-
.etsujaedsanatnevysúnemnesocirémunserolavsolairaV-.aronosamralaalaicneliS-
1-1
POWER F1
F2
F3
LYR1
LYR2
LYR3 RANGE
TRACK MODE
DISP MODE BRILL MENU
- +
FURUNO
CURRENT INDICATOR
Tecla del CursorMando de Ajuste

1.2 Encendido y Apagado
1. PANORAMICA DE OPERACION
1. Para encender el equipo pulsar [POWER]; suena un pitido y se enciende el testigo situadosobre esta tecla. El equipo verifica el funcionamiento de los dispositivos internos y la comu-nicación entre unidades, presentando los resultados como se ilustra en la figura siguiente.Después aparece la presentación utilizada la última vez.
Resultados de la prueba inicial
Nota: Las presentaciones que a título de ejemplo ilustran este manual pueden no coincidirexactamente con las de un equipo concreto, puesto que dependen de la configura-ción del sistema y de los ajustes del equipo.
2. Para apagar el equipo pulsar [POWER].
1-2
XX: Programa Versión No.
CI-68
CI-6888VOL. 6651000-XX.XXMEM. 1 2 3 OK
CI-6810VOL. 6651001-XX.XXTBL. MEM. 1 2 3 4 5 6 7 8 OKANA. 12V;12.03V BV; 110.0VTRM. +25.02°CDSW. 00 00 00 00
DSW. - - 00 00 00
Nota: El mod NAV mide las corrientes donde el seguimiento respecto al fondo no está dispo-nible. Para usar esta función, son necesarios datos de rumbo precisos (de una giroscó-pica o de un compás satelitario). Para más detalles, ver la página AP-3.

1. PANORAMICA DE OPERACION
1.3 Ajuste del Brillo de la Presentación1. Pulsar la tecla [BRILL] para abrir la ventana de ajuste del brillo.
Ventana de ajuste del brillo
Nota: El ajuste debe iniciarse en el plazo de 5 segundos, sino la ventana se cierra.
2. Pulsando o se aumenta el brillo; pulsando o se disminuye. También se puedeefectuar el ajuste pulsando la tecla [BRILL]; en este caso el ajuste es cíclico, así:0 1 ... 7 6 ... 0.
Nota: La iluminación del panel de contrrol se ajusta con PANEL DIMMER, en el menú MENU 1.
1-3
H
H
BRILLIANCE
� � � � � � �
CURSOR PAD, [BRILL] KEY: CHANGE SETTING
6L
L

1. PANORAMICA DE OPERACION
1.4 Selección de la PresentaciónSe dispone de seis modos de presentación: Vector Corriente, Velocidad del Barco, Presenta-ción Gráfica, Ploteo de la Derrota, Presentación Texto y Nivel de los Ecos. Se seleccionanpulsando la tecla [DISP MODE].
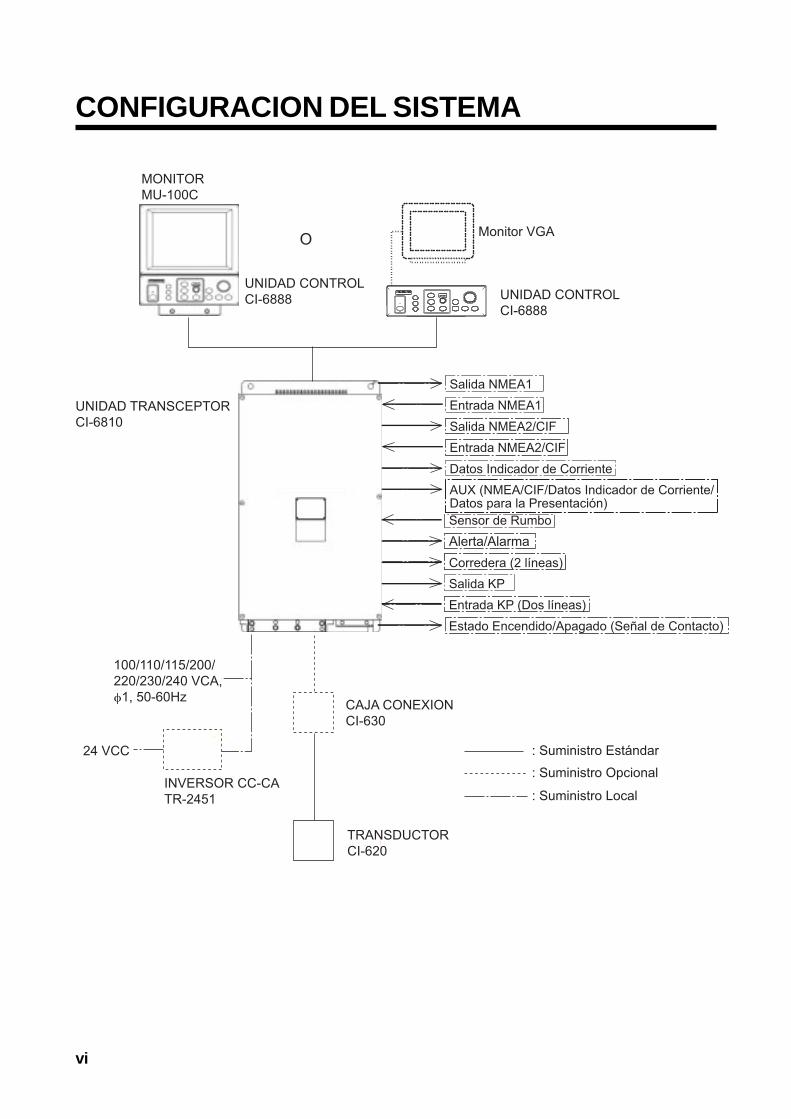
1.4.1 Vector CorrienteEsta presentación muestra, mediante vectores, la velocidad y dirección de la corriente en trescapas.
Presentación Vector Corriente
1-4
Modo de Seguimiento Escala Veloc. de la Corriente
Nivel del EcoRumbo deproa *
Temperaturadel Agua*
Gráfica de laTemperatura del Agua*
*: Se necesita sensor.
Corriente de la Capa 1 (Amarillo)
Corriente de la Capa 2 (Púrpura)
Corriente de la Capa 3 (Azul claro)
Vector del Propio Barco (Verde)
Diferencial de Corriente
Veloc. de la Corriente
y Dirección (3 capas)
Velocidad, Curso*
Marcador del Modo
Escala de laPresentación del Eco
Fondo Seleccionado
Ajuste Promedio de la Corriente
Línea de Proa

1. PANORAMICA DE OPERACION
1.4.2 Velocidad del BarcoEsta presentación muestra las velocidades del barco proa-popa y babor-estribor, en formaanalógica y numérica.
Presentación Gráfica
1.4.3 Presentación GráficaEsta presentación muestra gráficamente la temperatura del agua y la profundidad.
Presentación Velocidad del barco
1-5
Distancia recorridaen el Viaje
Velocidad del Barco(Veloc. Sintentizada)
Gráfica Histórica de la Velocidad Babor-Estribor
Veloc. Proa-Popa
VelocidadBabor-Estribor
Angulo de la Deriva
Vector del Barco Propio
Vector Velocidad Sintetizada (Verde)Gráfica HistóricaVeloc. Proa-Popa
*: Se necesita sensor Ventana de Texto
Gráfica del Fondo
Marcador del Modo
Gráfica Temp. del Agua*
Gráfica de la Corriente
(o Diferencial de Corriente
o Veloc. del Barco)
Marcador de laDistancia recorridaen el Viaje

Modo de Seguimiento
Rumbo
Veloc. y Dirección
de la Corriente
(3 capas)
Veloc. y Curso
Marcador de Modo
Diferencial de Corriente
Temperature delAgua*
*: Se necesita sensor.
Distancia recorridaen el viaje
Veloc. Proa-Popa
VelocidadBabor-Estribor
Angulo de laDeriva
1. PANORAMICA DE OPERACION
1.4.4 Ploteo de la DerrotaEsta presentación muestra la derrota del barco junto a los vectores corriente.
Presentación Ploteo de la Derrota
1.4.5 Presentación TextoEsta presentación muestra información de navegación en formato numérico.
Presentación Texto1-6
Ventana de Texto Escala DIV
Intervalo de Presentación de la Corriente
Posición
Marca Norte
Vector de Corriente
Derrota del Barco
Posición del Barco

1. PANORAMICA DE OPERACION
1.4.6 Nivel de los EcosEsta presentación muestra la intensidad de los ecos correspondientes a los tres haces. Nóte-se que debe haber sido establecido ON para ECHO LEVEL en el menú MODE.
Presentación Nivel de los Ecos
1-7
Nivel del Eco
Vector de Corriente
Haz 2Haz 1Haz 3Escala Presentación del Eco

1. PANORAMICA DE OPERACION
1.5 Profundidades de MedidaSe establecen las profundidades a las que se quiere medir la velocidad y dirección de la co-rriente. Nótese que la profundidad de la capa 3 no puede ser ajustada si se ha establecido ONpara BTM TIDE TRACK en MENU 1.
1. Pulsar la tecla [LYR1] (capa 1), la [LYR2] (capa 2) o la [LYR3] (capa 3).
Ventana de ajuste
2. En el plazo de 5 segundos, establecer la profundidad de medida (de 2 a 400 m) con elmando de ajuste o con la tecla del cursor.
Mando de ajuste: En sentido horario para aumentar; en sentido contra reloj para disminuir.Tecla del cursor: Pulsando o se aumenta; pulsando o se disminuye.
1-8
SETTING DEPTH (LAYER1)
20 m (2-250)
KNOB OR CURSOR PAD: CHANGE SETTING

1. PANORAMICA DE OPERACION
1.6 Elegir el Modo Seguimiento de la VelocidadEl modo de seguimiento está disponible en el seguimiento respecto al fondo, seguimientorespecto al agua, NAV y automático.
Seguimiento Movimientos absolutos del barco y de las corrientes (con relación al fon-de fondo: do). Se requiere la presencia del eco del fondo.
Seguimiento Movimientos del barco y de las corrientes con relación a la capa de aguade agua: cercana a la supeficie. (La longitud de impulso debe ser NORMAL y la
profundidad mayor de 40 m, o longitud de impulso LONG (largo) y profun-didad mayor de 70 m.)
Nav: Movimientos del barco medidos por un navegador y movimientos de lacorriente basados en estos datos de velocidad.
Auto/externo*: Se usa el modo seguimiento de fondo cuando se detecta el fondo y sepasa a seguimiento de agua (o al modo Nav) cuando se pierde el eco delfondo; si se recupera el eco del fondo se restaura el seguimiento de fondo. En la ventana del modo de seguimiento (esquina superior izquierda)aparece la indicación EXT cuando se selecciona EXTERNAL paraDEPTH MODE en el menú OTHER (submenú del menú de instalación).
Se selecciona el modo de seguimiento con la tecla [TRACK MODE]; cada pulsación cambia elmodo dependiendo de la establecido (OFF u ON) para NAV MODE en MENU 1:
OFF: El modo de seguimiento cambia cíclicamente según la secuencia: seguimiento de fon-do, seguimiento de agua, auto.
ON: El modo de seguimiento cambia cíclicamente según la secuencia: seguimiento de fon-do, nav, auto.
Modos de Seguimiento
1-9
Fondo
Movto. del barcorespecto al fondo
Dir N
Capa 1
Medida delfondo
Movto. de lacorriente enla capa 1 Velocidad
Capa 2
Capa 3
Movto. de lacorriente enla capa 2
Movto. de lacorriente enla capa 3
Capa 1
Movto. de la corriente en la capa 1 relativaa la superf. agua
Capa 2
Capa 3
Movto. de la corriente en la capa 2 relativaa la superf. agua
Movto. de la corriente en la capa 3 relativa a la superf.del agua
Movto. del barcorespecto a lasuperficie del agua
Capa Superficie(Capa referencia)
Modo Seguimiento respecto al Fondo Modo Seguimiento respecto al Agua Modo Nav
Capa 1
Movto de la corrienteen la capa 1
Capa 2
Capa 3
Movto. de la corrienteen la capa 2Movto. de la corrienteen la capa 3
Satelites GPSMovto. de la corrientemedida por eluso de satelites(Basado en el fondo)

1. PANORAMICA DE OPERACION
1.7 Selección de la EscalaSe selecciona la escala de velocidad como sigue:
1. Pulsar la tecla [RANGE] para abrir la ventana de selección.
Ventana de selección de escala para el vector corriente
2. En el plazo de 5 segundos, establecer la escala con el mandode ajuste o con la tecla delcursor.
Mando de ajuste: En sentido horario para aumentar; en sentido contra reloj para disminuir.Tecla del cursor: Pulsando o se aumenta; pulsando o se disminuye.
Presentación y escala
nóicatneserP nóicatneserP nóicatneserP nóicatneserP nóicatneserP alacsE alacsE alacsE alacsE alacsE
etneirroCrotceV eddadicolevaledalacsealednóiccelesedanatnevalecerapA.etneirrocedlaicnerefid/etneirrocal
ocraBleddadicoleV
leddadicolevaledalacsealednóiccelesedanatnevalecerapAELACSarap)FFOuNO(odicelbatseoledodneidneped,ocrab
.2PSIDúnembusleneCNYS:NO :NO :NO :NO :NO .robirtse-robabyapop-aorpsedadicolevsalsadazinorcisnoS
acifárG
,dadicolevaledalacsealednóiccelesedanatnevalecerapAúnembusleneEDOMarapodicelbatseoledodneidneped
.1PSID:FIDEDIToEDIT :FIDEDIToEDIT :FIDEDIToEDIT :FIDEDIToEDIT :FIDEDIToEDIT alacsealednóiccelesedanatnevalecerapA
.etneirrocaleddadicolevaled:DEEPS :DEEPS :DEEPS :DEEPS :DEEPS aledalacsealednóiccelesedanatnevalecerapA
ocrableddadicolevatorreDaledoetolP .nóicatneserpaledalacsealednóiccelesedanatnevalecerapA
socEedleviN eddadicolevaledalacsealednóiccelesedanatnevalecerapA.etneirrocal
1-10
TIDE SPEED RANGE
KNOB OR CURSOR PAD: CHANGE SETTING
1.0 kt (0.5-10.0)
2. INTERPRETACION DE LAS PRESENTACIONES
2.1 Vector Corriente
Presentación Vector Corriente
2-1
Diferencial de corriente entre
la capa referenciay la menos profunda
de las otras dos capas
Diferencial de corriente entre
la capa referenciay la más profunda
de las otras dos capas
Escala de Demora Electrónica*
Nota: Los datos perdidos o erróneos son indicados con " --".
Ajuste Promedio de la Corriente
Modo de Seguimiento Escala Veloc. de Corriente
Nivel del EcoProa de proa*
Temperaturadel Agua*
Gráfica de la Temp. del Agua*
*: Se necesita sensor.
Corriente de la Capa 1 (Amarillo)
Corriente de la capa 2 (Púrpura)
Vector del Propio Barco (Verde)
Veloc., Curso*
Marcador de Modo
Escala Presentacióndel Eco
Línea de Proa
Capa 1: Amarillo
Capa 2: Púrpura
Capa 3: Azul-claro
Veloc. y dirección
de la corriente y
del diferencial de
corriente
Corriente de la capa 3 (Azul)Ventana de Texto

2. INTERPRETACION DE LAS PRESENTACIONES
Descripción de las indicaciones en la presentación Vector Corriente
nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicpircseD nóicpircseD nóicpircseD nóicpircseD nóicpircseDGDH .obmuredrosnesledetnedecorpocrabledobmuR
EDOM .]EDOMKCART[alcetalnocodanoicceles,osuneotneimiugesedodoM
rodacraModomed
sertsoletnarudsoceeddadilibinopsidalyotneimiugesedodomleacidnIatneserperroloclE.adreiuqziaahcerededesodnázalpsed,sotunimsomitlú
gesedodomle
osruC/dadicoleV
.)º953aº0ed(ovitcefeobmury)sodun0,04a0,0ed(avitcefedadicoleV
edlaicnerefiDetneirroc
ed)º953aº0ed(nóicceridy)sodun9,9a0,0ed(dadicolevaledlaicnerefiDedapacaL.sodsartosalyaicnereferedapacalertneetneirrocal
.1UNEMne,FFIDEDITFERneadanoiccelesresedeupaicnereferledarutarepmeT
augaarutarepmetedrosnesyahisaugaledarutarepmetalednóicacidnI
).Cº99a5-ednegraM(.odatcenocedocifárG
ledarutarepmetauga
arutarepmetalodnatneserpadreiuqziaahcerededazalpsedesocifárglEeddutilpmaaL.luzaaenílanuetnaidemsotunim51somitlúsoledaugaled
.º5edsealacseal
2-2
Modo Corriente3 min
Verde: Modo seguimiento respecto al fondo
Azul: Modo seguimiento respecto al agua, modo nav
Con Fondo: Error de Velocidad
N
Rumbo de proa
(dada por
un sensor
de rumbo)
Rumbo verdadero
Speed made good
(Veloc. con seguimiento
respecto al fondo, veloc.
con seguimiento respecto
al agua o velocidad nav)

2. INTERPRETACION DE LAS PRESENTACIONES
nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicpircseD nóicpircseD nóicpircseD nóicpircseD nóicpircseD
ydadicoleValednóiccerid
etneirroc
neetneirrocaled)º953aº0ed(nóicceridy)sodun9,9a0,0ed(dadicoleVlednárednepedserolavsoL.)adidemedsedadidnuforp(sapacsertsal
:eugisomoc,odom:odnofedotneimiugeS :odnofedotneimiugeS :odnofedotneimiugeS :odnofedotneimiugeS :odnofedotneimiugeS natneserpernóicceridydadicolevedserolavsoL
.odnoflanóicalernocsapacsaledotneimivomle:augaedotneimiugeS :augaedotneimiugeS :augaedotneimiugeS :augaedotneimiugeS :augaedotneimiugeS lenatneserpernóicceridydadicolevedserolavsoL
.eicifrepusalaanacrecaugalanóicalernocsapacsaledotneimivom:vaNodoM :vaNodoM :vaNodoM :vaNodoM :vaNodoM otneimivomlenatneserpernóicceridydadicolevedserolavsoL
.oicitcifodnofnuanóicalernocsapacsaled
aorPedaeníL nóicatneserpuS.ocrabledaorpedobmurleacidnieuqsozartedaeníL.1PSIDúnem,ENILGNIDAEHneadavitcasedoadavitcaresedeup
dadicolevrotceVocraBled
,RTCVDPSPIHSneadavitcasedoadavitcaresedeupnóicatneserpuS.1PSIDúnem
edalacsEsaromeD
acinórtcelE
lenocodreucaedarigalacseatse,obmuredrosnesanóixenocyahiS.ocrabledotneimivom
2-3
Fondo
Movto. del barcorespecto al fondo
Dir N
Capa 1
Medidadel fondo
Movto. corrientede la capa 1 Velocidad
Capa 2
Capa 3
Movto. corrientede la capa 2
Movto. corrientede la capa 3
Capa 1
Movto. de la corriente de la capa 1 relativa ala superficie del agua.
Capa 2
Capa 3
Movto. de la corriente de la capa 2 relativa a la surperficie del agua.
Movto. de la corriente de la capa 3 relativa a la surperficie del agua.
Movto. del barcorelativa a la superficiedel agua.
Capa de la Superficie(Capa Referencia)
Modo con Seguimiento respecto al fondo Modo con Seguimiento respecto al Agua
Modo Nav
Capa 1
Movto. de la corrientede la capa 1
Capa 2
Capa 3
Movto. de la corrientede la capa 2Movto. de la corrientede la capa 3
Satelites GPS Movto. del barcomedidad por eluso de satelites(Basado en el fondo)

2. INTERPRETACION DE LAS PRESENTACIONES
nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicpircseD nóicpircseD nóicpircseD nóicpircseD nóicpircseD
serotceVserotceV/etneirroC
edlaicnerefiDetneirroC
adavitcasedoadavitcaresedeupetneirrocserotcevsolednóicatneserpaLserotcevsoL.1PSIDúnemlene,3REYAL,2REYAL,1REYALnoc
.1PSIDúnem,FIDEDITnenavitcasedonavitcaesetneirrocedlaicnerefid.atlasámapacaledleatneserpes,napalosesserotcevsoliseuqesetóN
dadicolevalacsEetneirroced
únem,EGNAREDITneadanoicceles,etneirrocaleddadicolevaledalacsE.1PSID
edoidemorPetneirroc .1UNEM,EGAREVAEDITneodicelbatserolaV
socEedleviN
ocifárgoserolocne,secahsertsoledsocesoledlevinleatneserpeSatsE.2PSIDúnemledEDOMPSIDneodicelbatseoledodneidneped
únem,LEVELOHCEneadavitcasedoadavitcaresedeupnóicatneserp.2PSID
edalacsEednóicatneserp
soce.1UNEM,EGNAROHCEneodicelbatserolaV
2-4
(4)
Línea de Proa
N
W E
S
NW NE
SW SE
(1)
(2)
(3)
Vectores de la Corriente
(5)
VectoresDiferencialde Corriente
Capa 1Amarillo Amarillo
. . . .
Capa 2Morado Morado
. . . .
Capa 3Azul-claro Azul-claro
. . . .
2→1
2→3
Morado Azul-claro Morado Azul-claro Morado Azul-claro
Morado
Amarillo
Capa de
Referencia
(mitad izda.)
Capa medida
(mitad dcha.)
. . . .
. . . .
Morado Amarillo Morado Amarillo
(1)(2)(3)
(4)(5)
2. INTERPRETACION DE LAS PRESENTACIONES
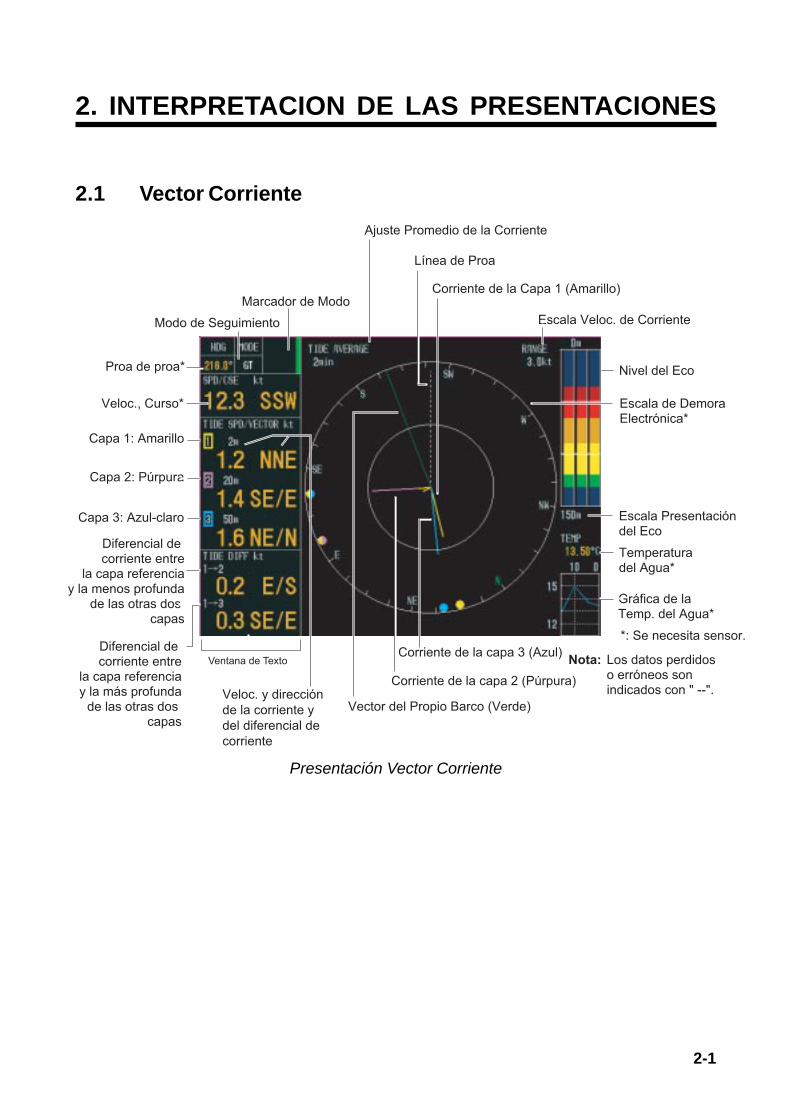
2.2 Velocidad del Barco
Presentación Velocidad del Barco
Descripción de las indicaciones en la presentación Velocidad del Barco
nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicpircseD nóicpircseD nóicpircseD nóicpircseD nóicpircseDleddadicoleV
)TW,TGnE(*ocrabrop.coleVo
ledotneimiugesodomne(auga
)vaN
)etnemlairotcev(namuseS.)sodun0,03a0,0(ocrabledavitcefedadicoleVarapNOodicelbatseahesis,robirtse-robabyapop-aorpsedadicolevsal
.2PSIDúnemleneCNYSELACSleneEDOMDPSPIHSneetsujaledednepeddadicolevaledadidemaL:*
1PSIDúnem
augaotneimiugesodoModnofotneimiugesodoMocrableddadicoleVocrableddadicoleVadanoicceles.ferapaC
augaotneimiugesdadicoleVodnofotneimiugesdadicoleVedotneimiugesapaCadanoicceles
-aorPdadicoleV*apoP
acidniesaorpaicahecnavalE.)sodun0,04a0,0ed(apop-aorpdadicoleV''nuetnaidem apopaicah;acirémunnóicacidnialedamicneollirama''
.nóicacidnialedojabedollirama''''nunoc
-robaBdadicleV*robirtsE
robabaotneimazalpsedlE.)sodun0,04a0,0ed(robirtse-robabdadicoleVrobirtsea;acirémunnóicacidnialedadreiuqzialaojor''''nunocacidnies
.nóicacidnialedahceredalaedrev''''nunoc
avireDedolugnA
usyocrabledaorpedobmurleropodamrofleetsésE.avirededolugnAnunocacidniesrobabaseaviredalodnauC.ovitcefeobmur alaojor''''
alaedrev''''nunocrobirtsea;acirémunnóicacidnialedadreiuqzinóicacidnialedahcered
leneaicnatsiDejaiV
,apop-aorpaoaorpaadireferseaicnatsidatsE.adirroceraicnatsiD.O/Iúnem,TUOESLUPGOLneodicelbatsealedodneidneped
ledserotceVocraB
ejeleerbosyrobirtse-robabdadicolevrotcevleXejeleerbosatneserpeS,edrev,)avitcefedadicolev(amusrotcevlE.apop-aorpdadicolevrotcevleY
únemleneCNYSELACSarapNOodicelbatseahesodnaucatneserpes.2PSID
2-5
Distancia recorridaen el Viaje
Veloc. del Barco(Veloc. Sintetizada)
Gráfico Histórico de la Veloc. Babor-Estribor
Veloc. Proa-Popa
VelocidadBabor-Estribor
Angulo de Deriva
Vector del Barco Propio
Vector Velocidad Sintetizada (Verde)Gráfico Histórico deVeloc. Proa-Popa

2. INTERPRETACION DE LAS PRESENTACIONES
nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicpircseD nóicpircseD nóicpircseD nóicpircseD nóicpircseDocirótsihocifárG
dadicolevaledapop-aorp
soletnarudapop-aorpdadicolevaledserolavsoletnemacifárgnartseumeSúnem,YROTSIHneecelbatseesocifárgledalacseaL.sodnuges06somitlú
.2PSIDúnem,TFIHSYROTSIHnocodazalpsedresedeup;2PSIDocirótsihocifárG
dadicolevaledrobirtse-robab
etnarudrobirtse-robabdadicolevaledserolavsoletnemacifárgnartseumeSTFIRDneecelbatseesocifárgledalacseaL.sodnuges06somitlúsol
.2PSIDúnem,YROTSIH
La velocidad de cálculo depende de lo establecido en SHIP SPD MODE, menú DISP1:
GT/WT: La velocidad es calculada de acuerdo con el modo de seguimiento; velocidad conrelación al fondo para el modo de seguimiento de fondo (GT); velocidad con relaciónal agua para el modo de seguimiento de agua (WT).
WT: La velocidad es calculada con relación al agua independientemente del modo deseguimiento en uso.
2-6

2. INTERPRETACION DE LAS PRESENTACIONES
2.3 Presentación Gráfica
Presentación Gráfica
Descripción de las indicaciones en la presentación Gráfica
nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicpircseD nóicpircseD nóicpircseD nóicpircseD nóicpircseD
otxeTedanatneV TXETneadavitcasedoadavitcaresedeupanatnevatseednóicatneserpaL.saroh21acrabaocifárgle,adavitcaseD.1PSIDúnem,WODNIW
aleddadicoleVoetneirroc
edlaicnerefidoetneirroc
leddadicolevocrab
.1PSIDúnem,EDOMnocratneserpaocifárgleanoicceleseS.1PSIDúnem,EGNAREDITnocanoiccelesesdadicolevedalacseaL
únem,HPARGEDITneegilees)obmuro(etneirrocalednóicceridaL.1PSID
nenatneserpesocifárgledsaenílsal,etneirrocedocifárgedosaclenE.oralcluza:3apac;aruprúp:2apac;ollirama:1apac;seroloc
salertnelaicnerefidle,etneirrocedlaicnerefidedocifárgedosaclenE.oralcluzane3y1ertneyaruprúpneecerapa2y1sapac
edocifárGarutarepmet
augaled
oadavitcaresedeupaugaledarutarepmetedocifárglednóicatneserpaL.1PSIDúnem,HPARGPMETneadavitcased
2-7
0-60 minutos de
los últimos datos
0-6 horas de los
últimos datos
Nota: Cuando la superposición sucede,
la capa que tiene el número más
alto tiene prioridad.
*: Se necesita sensor.Ventana de Texto
Fondo de
cada capa
Gráfica del Fondo
Marcador del Modo
Gráfica Temp. del Agua*
Gráfica de Corriente
(o Dif. de Corriente
o Veloc. del Barco)
Marcador Distanciarecorrida en el Viaje
Escala Max. de
la Veloc. Corriente
(o Curso)

2. INTERPRETACION DE LAS PRESENTACIONES
nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicpircseD nóicpircseD nóicpircseD nóicpircseD nóicpircseD
rodacraModomed
:osuneotneimiugesedodomleacidnIodnofedotneimiugeS:edreV
vaNodom,augaedotneimiugeS:luzAocrableddadicolevedrorrE:odnofedroloC
edocifárGdadidnuforp
edodomlene,iS.acifárgamrofnedadidnuforpedsotadsolnatneserpeS,dadidnuforpedalacsealeuqroyamsedadidnuforpal,augaedotneimiuges
dadidnuforpednóicamrofnialratneserparaP.atneserpesonatséHTPEDarapLANRETXEranoicceles,anretxeetneufanuedetnedecorp
.)nóicalatsniedúnemledúnembus(REHTOúnemleneECRUOS
edrodacraMadirroceraicnatsid
odnofedrolocyedrevne,allimanuedsosapneadirroceraicnatsidalacidnI.etnemavitanretla
2-8
VerdeColor del
fondo
1 milla

2. INTERPRETACION DE LAS PRESENTACIONES
2.4 Ploteo de la Derrota
Presentación Ploteo de la Derrota
Descripción de las indicaciones en la presentación Ploteo de la Derrota
nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicpircseD nóicpircseD nóicpircseD nóicpircseD nóicpircseD
otxetedanatneVneadavitcasedoadavitcaresedeupotxetedanatnevalednóicatneserpaL
atorrededdutignolalotxetedanatnevalniS.2PSIDúnem,WODNIWTXET.royamseadatneserp
ocrabledatorreD
azneimoC.aunitnocaenílanuetnaidematneserperesocrabledatorredaLynóicatneserpaledortnecleneocrablednóicisopalnocodazartus
ravitcaedeupeS.ortneclaenoperesamsimalededrobnuaznaclaodnauc.2PSIDúnem,KCARTPIHSneatorredalednóicatneserpalravitcasedo
etneirrocrotceVROTCEVneadanoiccelesresedeupetneirrocserotcevsoleddutignolaLednóicatneserpalravitcasedoravitcaedeupeS.2PSIDúnem,HTGNEL
.1PSIDúnem,3REYAL-1REYALneserotcevsoletronledacraM .oredadrevetroNlealañeS
alacsE .2PSIDúnem,ELACSnealacsealanoicceleseSVID .alacsealedsenoisividsaledrolavleacidnI
edolavretnIednóicatneserp
etneirrocal
,LAVRETNIneetneirrocalednóicatneserpedolavretnileanoicceleseS.''2''seolavretnietseroiretnanóicartsulialnE.2PSIDúnem
nóicisoP .dutignolydutitalnenóicisopalatneserpeS
2-9
*: Se necesita sensor.
Marca Norte
Ventana de Texto EscalaDIV
Intervalo Presentación de la Corriente
Posición*
Vector de Corriente
Derrota del Barco
Posición del Propio Barco

2. INTERPRETACION DE LAS PRESENTACIONES
2.5 Nivel de los Ecos
Presentación Nivel de los Ecos
Descripción de las indicaciones en la presentación Nivel de los Ecos
nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicacidnI nóicpircseD nóicpircseD nóicpircseD nóicpircseD nóicpircseD
soceedleviN )robirtse(2,)aorp(1secahsoledsoceedlevinleseroloc8neatneserpeS.)robab(3y
aledalacsEnóicatneserp
soceed
OHCEneadicelbatseresedeupsoceednóicatneserpedalacseaL.1UNEM,EGNAR
2-10
Nivel del Eco
Vector de Corriente
Haz 2Haz 1Haz 3 Escala Presentación
del Eco

2. INTERPRETACION DE LAS PRESENTACIONES
2.6 Presentación de ErroresSe genera una presentación de error si los datos presentados o medidos son anormales.
Velocidad y Rumbo (proa-popa, babor-estribor, ángulo de deriva)
Presentaciones de error de velocidad y rumbo
(1) No entran datos del transceptor en la unidad de presentación. Solicitar asistencia técni-ca.
(2) Esta presentación aparece cuando son anormales el eco de seguimiento de fondo, lacapa de referencia para el rastreo de agua o los datos GPS. En este caso los datos noson fiables.
2-11
12.3 333 °SPD/CSE kt
(1) No hay entrada de datos
de la unidad transceptor
(2) Error de la veloc. del barco
12.3 333 °SPD/CSE
(1) No hay entrada de datos
de la unidad transceptor
(2) Error de la veloc. del barco
kt
Vector corriente, veloc., gráfica y
presentaciones ploter del curso Texto y presentaciones del nivel del eco
(2) Error de la veloc. del barco
2.7
12.0
SPEED FORE-AFT
DRIFT ANGLE
SPEED PORT-STBD
13°
GT SPEED kt
12.02.7
DRIFT kt
DIR °
13
(2) Error de la veloc. del barco
Presentación veloc. del barco Presentación de Texto

2. INTERPRETACION DE LAS PRESENTACIONES
Corriente de las tres capas/diferencial de corriente
Presentaciones de error de corriente y diferencial de corriente
(3) Esta presentación aparece cuando el eco para la capa de medida no está presente. Lalectura para esta capa no es fiable.
(4) Esta presentación aparece cuando la profundidad para una capa de medida no es laadecuada. La lectura para esta capa no es fiable.
Condiciones de profundidad inadecuadas
• La profundidad en el modo de seguimiento de fondo es menor de 10 m.
• La profundidad establecida en mayor que el 75% de la profundidad real.
• No se detectan ecos debido a burbujas de aire, etc.• No se detectan ecos en la profundidad establecida debido a que ésta es mayor que la
real.
2-12
(4) Error en el ajuste del fondo
1 2m
2.3 140°
TIDE SPD/VECTOR kt
(3) El eco de la capa de medida
es anormal
2.3 140°
TIDE DIFF kt
3) El eco de la capa de medida
es anormal
1→2
Vector corriente, veloc., gráfica y
presentaciones ploter derrota Texto y presentaciones de nivel del eco
(4) Error en el ajuste del fondo
1 2m
2.3 140°
TIDE SPD/VECTOR
(3) El eco de la capa de medida
es anormal
kt
2.3 140°
TIDE DIFF
3) El eco de la capa de medida
es anormal
1→2
Vector corriente, veloc., gráfica y
presentaciones ploter derrota Texto y presentaciones de nivel del eco
kt

3. PERSONALIZACION DEL SISTEMA
3.1 Operación con Menús
Las funciones menos usadas están incluidas en los menús. Hay cuatro menús principales:MENU 1, MENU 2, ALARM e INSTALLATION. MENU 2 e INSTALLATION constan de tres submenús cada uno.
1. Pulsar la tecla [MENU]; se presenta el menú utilizado la última vez.
Sub menú MODE
2. Pulsar para situar el cursor en la línea de los menús principales.
3-1
TIDE VECTOR : OFF ON
SHIP SPEED : OFF ON
GRAPH : OFF ON
COURSE PLOT : OFF ON
TEXT : OFF ON
ECHO LEVEL : OFF ON
BACKGROUND CLR : BLACK WHITE BLUE
MENU ON DISPLAY SETTINGS.
[�/�]:SELECT, [�/�]: CHANGE, [MENU]: EXIT
Título menú
MAIN
Título SUB
menú
Ayuda
MENU 1 MENU 2 ALARM INSTALLATION
MODE DISP1 DISP2

2. Seleccionar el menú principal requerido pulsando o : MENU 1, MENU 2, ALARM oINSTALLATION. Si se selecciona MENU 2 o INSTALLATION aparece la línea de títulos desubmenús; pulsar para situar el cursor en esta línea y seleccionar el submenú pulsando o .
3. PERSONALIZACION DEL SISTEMA
Nota: El acceso al menú INSTALLATION está restringido para prevenir modificacionesaccidentales. Cuando se mueve el cursor de ALARM a INSTALLATION aparece elmensaje siguiente:
PRESS ANY FUNC KEY TO OPEN INSTALLATION MENU.PRESS [MENU] KEY TO OPEN ALARM MENU.
Para abrir el menú INSTALLATION pulsar cualquier tecla de función.
3. Seleccionar el elemento pulsando o ; el elemento seleccionado aparece en vídeoinverso.
4. Seleccionar la opción o cambiar el valor numérico pulsando o .
5. Pulsar la tecla [MENU] para cerrar el menú.
3-2

3. PERSONALIZACION DEL SISTEMA
3.2 Teclas de Función
3.2.1 Programación de las teclas de función1. Pulsar la tecla [MENU].
2. Seleccionar el menú requerido (excepto ALARM o INSTALLATION).
3. Seleccionar el elemento del menú (excepto RESET TRIP LOG, TEST o BOTTOM SEARCHde MENU 1).
4. Pulsar la tecla de función a programar hasta oir tres pitidos; se presenta el mensaje‘’PROGRAMMED SELECTED ITEM TO [F*] KEY’’ (elemento seleccionado programadoen la tecla [F*]); (*: número, 1, 2 ó 3, de la tecla de función pulsada).
5. Pulsar la tecla [MENU] para cerrar el menú.
3.2.2 Uso de las teclas de funciónLas teclas de función facilitan el acceso rápido a las funciones de menú programadas en lasmismas. Si una tecla de función no está programada (estado por defecto), al pulsarla apareceel mensaje ‘’NO FUNCTION ASSIGNED TO [F*] KEY’’ (no hay función asignada a la tecla [F*]);(*: número de la tecla de función pulsada).
1. Pulsar la tecla de función requerida. Se abre la ventana de selección o ajuste apropiada.2. En el plazo de cinco segundos, seleccionar o ajustar con la tecla del cursor.
Selección: Se desplaza el cursor a la derecha pulsando o ; a la izquierda pulsando o .
Valor numérico: Se aumenta pulsando o ; se disminuye pulsando o .
3-3

3.3 Menú MENU 1
Menú MENU 1
SHIP SPEED AVGSe selecciona el tiempo promedio de presentación de la velocidad del barco: 15, 30, 60 ó 90segundos.
TIDE AVERAGESe selecciona el tiempo promedio de presentación de la corriente: 15 s, 1, 2, 3, 5, 10 ó 20minutos.
REF TIDE DIFFSe selecciona la capa de referencia para la medida del diferencial de corriente, entre la capa1, capa 2 y capa 3.
BEARING MODESe selecciona el formato de presentación de rumbos: por cuartas (32 CMPS) o en grados(360 TRUE).
3-4
3. PERSONALIZACION DEL SISTEMA
SHIP SPEED AVG : 15 sec 30 sec 60 sec 90 sec
TIDE AVERAGE : 2 min
REF TIDE DIFF : LAYER 1 LAYER 2 LAYER 3
BEARING MODE : 32 CMPS 360 TRUE
NAV MODE : OFF ON
BOTTOM SEARCH : NO YES
BTM TIDE TRACK : OFF ON
ALM/KEY BEEP : OFF ON
WT SPD DEPTH : 2 m (2-400m)
RESET TRIP LOG : NO YES
TEST : NO GENERAL PANEL PATTERN
ECHO RANGE : 150 m
TVG : OFF ON
GAIN : 5 (1-40)
PANEL DIMMER : 5 (0-7)
MENU ON INITIAL SETTINGS.
[�/�]:SELECT, [�/�]: CHANGE, [MENU]: EXIT
MENU 1 MENU 2 ALARM INSTALLATION

3. PERSONALIZACION DEL SISTEMA
NAV MODESe habilita (ON) o inhabilita (OFF) el modo Nav. Seleccionar ON para usar el modo Nav enlugar del seguimiento respecto al agua. Ver 1.6.
BOTTOM SEARCHSe habilita la readquisición del eco del fondo perdido temporalmente, en el modo de segui-miento de agua. Cuando se pierde el eco del fondo debido a burbujas de aire o el equipotiende a seguir un fondo falso, adquirir manualmente el eco del fondo; como sigue.
1. Seleccionar YES para BOTTOM SEARCH y cerrar el menú. Aparece en la presentación elcursor rectangular.
2. Pulsar cualquier tecla de función. Aparece la presentación vector corriente junto con la nivelde ecos.
3. Usar o para situar el cursor en el eco del fondo.
Adquisición del eco del fondo
4. Pulsar la tecla [MENU] para terminar y cerrar el menú.
BTM TIDE TRACKSe selecciona como hacer el seguimiento de fondo de la corriente, en el modo de seguimientode fondo.
ON: La profundidad de medida de la capa 3 cambia automáticamente con la profundidadpara hacer el seguimiento de la corriente cercana al fondo. En este caso las indicacio-nes de la capa 3 muestran ‘’BTTM’’ en lugar de la profundidad de medida.
OFF: Selección normal de la profundidad de medida para la capa 3.
ALM/KEY BEEPSe activa o desactiva el sonido de las teclas. Esto no afecta al sonido de la alarma.
WT SPD DEPTHSe establece la profundidad de referencia a la cual medir la velocidad del barco en el modo deseguimiento de agua. Establecer la profundidad para la cual se quiere conocer la velocidad deseguimiento de agua con referencia a una profundidad específica.
RESET TRIP LOGSe repone a cero la cuenta de la distancia recorrida. Seleccionar YES y después pulsar cual-quier tecla de función.
3-5
Eco del Fondo
CursorFondo

3. PERSONALIZACION DEL SISTEMA
TESTSe selecciona la prueba de funcionamiento a ejecutar. Ver 4.4.
ECHO RANGESe establece la profundidad máxima para la que presentar ecos: 50, 100, 150, 200, 250, 300,350, 400, 450, 500 metros.
TVGSe activa o desactiva la función TVG.
GAINSe ajusta el color de presentación de nivel de ecos, no la ganancia de recepción. Dígito másalto, color más fuerte (marrón rojizo). «GAIN» no ajusta la ganancia de la señal recibida; losvalores de la velocidad y la corriente no son afectados por este ajuste. El margen del ajuste es1-40.
PANEL DIMMERSe ajusta la iluminación del panel de control, de 0 a 7.
3-6

3. PERSONALIZACION DEL SISTEMA
3.4 Menú MENU 2
3.4.1 Submenú MODEFundamentalmente, en este submenú se activa o desactiva las distintas presentaciones. Laspresentaciones aquí desactivadas son eliminadas del campo de selección de la tecla [DISPMODE].
Submenú MODE
TIDE VECTORSe activa o desactiva la presentación vector corriente.
SHIP SPEEDSe activa o desactiva la presentación velocidad del barco.
GRAPHSe activa o desactiva la presentación gráfica.
COURSE PLOTSe activa o desactiva la presentación ploteo de la derrota.
3-7
TIDE VECTOR : OFF ON
SHIP SPEED : OFF ON
GRAPH : OFF ON
COURSE PLOT : OFF ON
TEXT : OFF ON
ECHO LEVEL : OFF ON
BACKGROUND CLR : BLACK WHITE BLUE
MENU ON DISPLAY SETTINGS.
[�/�]:SELECT, [�/�]: CHANGE, [MENU]: EXIT
MENU 1 MENU 2 ALARM INSTALLATION
MODE DISP1 DISP2

3. PERSONALIZACION DEL SISTEMA
TEXTSe activa o desactiva la presentación texto.
ECHO LEVELSe activa o desactiva la presentación nivel de ecos.
BACKGROUND CLRSe selecciona el color de fondo de la pantalla: negro, blanco o azul.
3.4.2 Submenú DISP1
Submenú DISP1
TIDE RANGESe selecciona la escala para la presentaciones vector corriente, gráfica y nivel de ecos: 0,5;1,0; 2,0; 3,0; 5,0; 10,0 nudos.
SHIP SPD VCTRSe activa o desactiva la presentación del vector de velocidad del barco en las presentacionesvector corriente y nivel de ecos.
3-8
COMMON SETTINGS
TIDE RANGE : 3.0kt
SHIP SPD VCTR : OFF ON
HEADING LINE : OFF ON
TIDE VECTOR
LAYER 1 : OFF ON
LAYER 2 : OFF ON
LAYER 3 : OFF ON
TIDE DIFF : OFF ON
DISPLAY MODE : HEAD UP NORTH UP
SHIP SPD MODE : GT/WT WT
GRAPH
MODE : TIDE TIDE DIF SHIP SPD
TIDE GRAPH : NORTH SOUTH
TEMP GRAPH : OFF ON
TEXT WINDOW : OFF ON
MENU ON DISPLAY SETTINGS.
[�/�]:SELECT, [�/�]: CHANGE, [MENU]: EXIT
MENU 1 MENU 2 ALARM INSTALLATION
MODE DISP1 DISP2
Ajustes de la
presentación gráfica

3. PERSONALIZACION DEL SISTEMA
HEADING LINESe activa o desactiva la presentación de la línea de proa en las presentaciones vector corrien-te y nivel de ecos.
LAYER 1, LAYER 2, LAYER 3, TIDE DIFFSe activa o desactiva la presentación del vector corriente, para el elemento correspondiente,en las presentaciones vector corriente y nivel de ecos.
DISPLAY MODESe elige la orientación de la presentación. Para Norte arriba es necesario entrada de rumbo.
Modos de presentación Proa arriba y Norte arribaSHIP SPD MODESe selecciona el modo de seguimiento para la presentación del ángulo de deriva, la velocidadproa-popa y la velocidad babor-estribor, en las presentaciones velocidad del barco y texto.
MODESe selecciona el elemento a mostrar en la presentación gráfica: corriente, diferencial de co-rriente y velocidad del barco.
TIDE GRAPHSe selecciona como presentar la corriente en la presentación gráfica: NORTH (N, E, S, W) oSOUTH (S, W, N, E).
TEMP GRAPHSe activa o desactiva la presentación del gráfico de temperatura en la presentación gráfica.
TEXT WINDOWSe activa o desactiva la presentación de la ventana de texto en la presentación gráfica.
3-9
Proa-arriba Norte-arriba
La proa del barco está
en la parte superior de
la pantalla.
El norte está en la
parte superior de
la pantalla.
W
S N
E
SW NW
SE NE
LINEA DE PROA
N
W E
S
NW NE
SW SE

3. PERSONALIZACION DEL SISTEMA
3.4.3 Submenú DISP2
Submenú DISP2
ECHO LEVELSe activa o desactiva la presentación de nivel de ecos en la presentación vector corriente.
DISP MODESe elige el modo de la presentación nivel de ecos: SOUNDER (intensidad de ecos en 8 colo-res), GRAPH (intensidad de ecos mostrados en la gráfica).
Presentaciones nivel de ecos
3-10
TIDE VECTOR
ECHO LEVEL : OFF ON
DISP MODE : SOUNDER GRAPH
SHIP SPEED
SCALE SYNC : OFF ON
DRIFT SCALE : 1.0 kt
SCALE : 10.0 kt
DRIFT HISTORY : 0.5 kt 1 kt 2 kt
HISTORY : 4 kt 8 kt 16 kt 32 kt
HISTORY SHIFT : 0 kt
COURSE PLOT
SCALE : 1:10000 1:20000 1:50000 1:100000
INTERVAL : 2.0
SHIP TRACK : OFF ON
VECTOR LENGTH : LONG SHORT
TEXT WINDOW : OFF ON
MENU ON DISPLAY SETTINGS.
[�/�]:SELECT, [�/�]: CHANGE, [MENU]: QUIT
MENU 1 MENU 2 ALARM INSTALLATION
MODE DISP1 DISP2
Ajustes presentación
del vector corriente
Ajustes presentación
de la veloc. del barco
Ajustes presentación
del diferencial corriente
SONDA
Haz 3 (babor)
Haz 1 (proa)
Haz 2 (estribor)
Eco del fondo
200m Escala presentación del eco
Marca fondo de la capa 1: Amarillo
Marca fondo de la capa 2: Morado
Marca fondo de la capa 3: Azul claro
GRAFICA
Intensidad del eco
Fondo
200m
Eco del fondo
Pulso de transmisión
Intensidad del eco:
Capa 1: Amarillo
Capa 2: Púrpura
Capa 3: Azul-claro
0 m
3. PERSONALIZACION DEL SISTEMA
SCALE SYNCSe establece si se desea sincronizar (ON) la presentación de la velocidad proa-popa con la develocidad babor-estribor o no (OFF).
DRIFT SCALESe establece la escala de la velocidad babor-estribor en la presentación velocidad del barco:0,5; 1,0; 2,0; 3,0; 5,0; 10,0 nudos.
Nota: Se puede ajustar DRIFT SCALE en cualquier momento, sin embargo, es necesariodesactivar (OFF) SCALE SYNC para hacer efectivo el cambio.
SCALESe establece la escala de la velocidad proa-popa en la presentación velocidad del barco: 0,5;1,0; 2,0; 3,0; 5,0; 10,0; 20,0; 30,0 nudos.
Nota: Se puede ajustar SCALE en cualquier momento, sin embargo, es necesario desactivar(OFF) SCALE SYNC para hacer efectivo el cambio.
DRIFT HISTORYSe elige la escala de velocidad babor-estribor en la presentación gráfica: 0,5; 1; 2 nudos.
HISTORYSe elige la escala de velocidad proa-popa en la presentación gráfica: 4, 8, 16, 32 nudos.
HISTORY SHIFTSe elige el desplazamiento del gráfico de la velocidad proa-popa: -2, -1, 0, 1, 2, 4, 8 nudos.
SCALESe establece la escala de la presentación ploteo de la derrota: 1:10000, 1:20000, 1:50000,1:100000.
INTERVALSe establece el intervalo de presentación del vector corriente en la presentación ploteo de laderrota: 0,5; 1,0; 1,5; 2,0; 2,5; 3,0; 3,5; 4,0.
SHIP TRACKSe activa o desactiva la presentación de la derrota del barco.
VECTOR LENGTHSe selecciona la longitud del vector: LONG (largo) o SHORT (corto). En el caso de LONG, 1mm equivale a 0,1 nudos.
TEXT WINDOWSe activa o desactiva la presentación de la ventana de texto en la presentación de ploteo de laderrota.
3-11

3. PERSONALIZACION DEL SISTEMA
3.5 Menú ALARMEn este menú se establecen los valores de alarma para la velocidad y dirección de la corriente,para la velocidad del barco y para la distancia recorrida. Rebasado uno de estos valores sue-na la alarma y aparece intermitente el mensaje correspondiente. La alarma sonora se silenciapulsando la tecla del cursor pero el mensaje de alarma permanece en la pantalla hasta quecesa la causa de la alarma o ésta es inhabilitada.
La alarma sonora y el mensaje de alarma pueden ser habilitados o inhabilitados independien-temente. En 4.5 se describen los mensajes de alarma.Nota: La prioridad de las alarmas sigue el mismo orden en que aparecen en el menú ALARM;
así, la capa 1 tiene la prioridad más alta y la distancia recorrida la más baja. Activadasvarias alarmas, las señales visual y sonora se refieren a la de prioridad más alta.
3.5.1 Tipos de AlarmaLAYER 1, LAYER 2, LAYER 3Alarmas de velocidad y dirección de la corriente para las capas respectivas.
SHALLOW T/D, DEEP T/D
SHALLOW T/D: Se establece el valor de la diferencia entre la corriente de la capa base y lamenos profunda de las otras dos.
DEEP T/D: Se establece el valor de la diferencia entre la corriente de la capa base y lamás profunda de las otras dos.
aicnerefeRedapaC D/TwollahS D/TpeeD
1 21 31
2 12 32
3 13 23
SHIP SPEED
Se establecen los valores de alarma de la velocidad y su rumbo.
TRIP
Se establecen los valores de alarma de la distancia recorrida y tiempo.
3-12

3. PERSONALIZACION DEL SISTEMA
3.5.2 Alarmas de velocidad del barco, velocidad de la corriente,dirección de la corriente y diferencial de corriente
Se describe a continuación como configurar las alarmas anteriores, utilizando el ejemplo deestablecer la alarma de velocidad de la corriente entre 1 y 2 nudos y la de dirección de lamisma entre 350º y 10º para la capa 1.
1. Pulsar la tecla [MENU].2. Pulsar para situar el cursor en la línea de títulos de menú.
3. Pulsar o para seleccionar el menú ALARM.
Menú ALARM
El estado de la alarma se indica mediante los siguientes símbolos de altavoz:
:Mensaje de alarma y alarma sonora habilitados.
:Mensaje de alarma habilitado y alarma sonora inhabilitada.
4. Seleccionar LAYER 1-SPD pulsando o .5. Pulsar para abrir la ventana de configuración.
3-13
LAYER 1 : SPD
: DIR
LAYER 2 : SPD
: DIR
LAYER 3 : SPD
: DIR
SHALLOW T/D : SPD
: DIR
DEEP T/D : SPD
: DIR
SHIP SPEED : SPD
: CSE
TRIP : DIST
: TIME
MENU ON ALARM SETTINGS.
[�/�]:SELECT, [�/�]: CHANGE, [MENU]: EXIT
MENU 1 MENU 2 ALARM INSTALLATION
DISP2

3. PERSONALIZACION DEL SISTEMA
Ventana de configuración de alarma (corriente, veloc. del barco)
6. Pulsar o para establecer la velocidad mínima del margen de alarma; pulsar o para establecer la máxima. Realizado el ajuste, la presentación es la siguiente.
Margen de la velocidad de alarma de la corriente
7. Pulsar cualquier tecla de función para volver al menú ALARM. A la derecha de SPD apare-ce el símbolo .
3-14
N
S
E
NE
SESW
W
NW
3.0kt SPD LAYER1 �
�KEY MAX
� �KEY MIN
STATUS
0.0kt
0°
TIDE
MIN 0.0kt
MAX 0.0kt
QUIT
ANY FUNC KEY
DIRECTION
MIN 0°
MAX 0°
Valor de la escala veloc. corriente seleccionada para alarma
Ajsutes
alarmas
Tecla cursorr
Datos de la corriente
presente en la capa1
S
E
NE
SESW
W
NW
3.0kt DIR LAYER1 �
�KEY MAX
� �KEY MIN
STATUS
0.0kt
0°
TIDE
MIN 1.0kt
MAX 2.0kt
QUIT
ANY FUNC KEY
DIRECTION
MIN 0°
MAX 0°
NN
Ajuste de
la alarma
veloc. de
la corriente

3. PERSONALIZACION DEL SISTEMA
8. Pulsar para pasar a DIR en LAYER 1.9. Pulsar para abrir la ventana de configuración.10. Pulsar o para establecer la dirección inicial del margen de alarma (en este ejemplo
350º); pulsar o para establecer la dirección final (en este caso 10º). Realizado el ajus-te, la presentación es la siguiente.
Margen de la dirección de alarma de la corriente
11. Pulsar cualquier tecla de función para volver al menú ALARM. A la derecha de DIR apare-ce el símbolo .
12. Pulsar la tecla [MENU] para cerrar el menú.
3.5.3 Alarma de distanciaDistancia recorrida
Se activa la alarma cuando el barco ha recorrido una distancia superior a la establecida comovalor de alarma.
1. Pulsar la tecla [MENU].2. Pulsar para situar el cursor en la línea de títulos de menú.
3. Pulsar o para seleccionar el menú ALARM.
4. Seleccionar TRIP-DIST pulsando o .5. Pulsar para abrir la ventana de ajuste.
3-15
S
E
NE
SESW
W
NW
3.0kt DIR LAYER1 �
�KEY MAX
� �KEY MIN
STATUS
0.0kt
0°
TIDE
MIN 1.0kt
MAX 2.0kt
QUIT
ANY FUNC KEY
DIRECTION
MIN 350°
MAX 10°
Ajuste de la alarma
de la dirección de
corriente
NN
Ajuste de la alarma
de la veloc. de
corriente
Punto inicio
Punto final

3. PERSONALIZACION DEL SISTEMA
Ajuste de la distancia de alarma
6. Establecer el valor de la distancia de alarma pulsando o .
7. Pulsar cualquier tecla de función para volver al menú ALARM. A la derecha de TRIP-DISTaparece el símbolo .
8. Pulsar la tecla [MENU] para cerrar el menú.
Tiempo de recorrido
Se activa la alarma transcurrido el tiempo establecido como valor de alarma.
1. Pulsar la tecla [MENU].
2. Pulsar para situar el cursor en la línea de títulos de menú.3. Pulsar o para seleccionar el menú ALARM.
4. Seleccionar TRIP-TIME pulsando o .5. Pulsar para abrir la ventana de ajuste.
Ajuste del tiempo de alarma
6. Seleccionar el elemento a ajustar (hr, min, sec) pulsando o .
7. Establecer el valor pulsando o .
8. Pulsar cualquier tecla de función para volver al menú ALARM. A la derecha de TRIP-TIMEaparece el símbolo .
9. Pulsar la tecla [MENU] para cerrar el menú.
3-16
**TRIP ALARM**
TRIP TIME : 0 hr : 0 min : 0 sec ANY FUNC KEY: QUIT
�
�KEY: SELECT � � KEY: SET
**TRIP ALARM** � � KEY: SET
TRIP DIST : 0.0 nm ANY FUNC KEY: QUIT

3. PERSONALIZACION DEL SISTEMA
3.5.4 Habilitación/inhabilitación de la alarma sonora1. Pulsar la tecla [MENU].
2. Pulsar para situar el cursor en la línea de títulos de menú.
3. Pulsar o para seleccionar el menú ALARM.4. Pulsando o , seleccionar la alarma para la que se quiere cambiar el estado de la señal
sonora (estará señalada con o ).
5. Cambiar el símbolo de altavoz o pulsando o .6. Pulsar la tecla [MENU] para cerrar el menú.
3.5.5 Inhabilitación de una alarma1. Pulsar la tecla [MENU].2. Pulsar para situar el cursor en la línea de títulos de menú.
3. Pulsar o para seleccionar el menú ALARM.
4. Pulsando o , seleccionar la alarma que se quiere inhabilitar.
5. Pulsar cualquier tecla de función. Se abre la ventana de confirmación siguiente.
6. Seleccionar YES pulsando .
7. Pulsar cualquier tecla de función para volver al menú ALARM. Desaparece el símbolo delaltavoz o .
8. Pulsar la tecla [MENU] para cerrar el menú.
3-17
AREA IS ALREADY SET SET: � �
ARE YOU SURE TO RESET? : : NO YES
PRESS ANY FUNCTION KEY AFTER SETTING.

3. PERSONALIZACION DEL SISTEMA
Página en blanco
3-18

4. MANTENIMIENTO E INCIDENCIAS
El mantenimiento periódico mantendrá al equipo en óptimas condiciones de funcionamientodurante mucho tiempo.
!
4.1 Mantenimiento de RutinaComprobaciones generales
Mensualmente, comprobar lo siguiente:
• Cables; sustituir si hubiera deterioro físico.• Conectores de cada unidad; apretar y limpiar si fuera necesario.
• Conexiones de tierra; apretar y limpiar si fuera necesario.
• Tensión de alimentación; corregir si no fuera la correcta.
Limpieza
La limpieza de las superficies exteriores debe efectuarse con un paño suave y seco; no utilizaragentes químicos que pueden afectar a la pintura y al rotulado. Limpiar la pantalla LCD cuida-dosamente para evitar arañazos, usar un pañuelo de papel y un limpiador de LCD para disol-ver la suciedad. Cambiar de papel frecuentemente para evitar arañazos en la pantlla.
Transductor
• Comprobar regularmente el estado de las placas de cinc anticorrosión; sustituirlas si es ne-cesario. La corrosión de la unidad de casco puede originar la entrada de agua en el barco.
• Con el barco en seco, limpiar el transductor mediante una pieza de madera o un papel delija fino.
• No pintar la cara activa del transductor.
4-1
ADVERTENCIARIESGO DE ELECTROCUCIONNo abrir el equipo.
En el interior del equipo existe
tensión de valor peligroso.
Sólo personal especializado.

4. MANTENIMIENTO E INCIDENCIAS
4.2 Sustitución de los FusiblesEl monitor, la unidad de control y el transceptor están equipados con fusibles protectores. To-dos están situados dentro de las respectivas unidades; por tanto, tienen que ser sustituidospor personal técnico.
dadinU dadinU dadinU dadinU dadinU elbisufedopiT elbisufedopiT elbisufedopiT elbisufedopiT elbisufedopiT ogidóC ogidóC ogidóC ogidóC ogidóC
rotinoM V521A3BMGF 909-401-000
lortnoC V521A2BMGF 561-301-000
rotpecsnarT)ACV001(
V052CAA3OBGF 120-945-000
V052CAA5OBGF 220-945-000rotpecsnarT)ACV002( V052CAA3OBGF 120-945-000
4-2
ADVERTENCIAUsar un fusible adecuado.
El uso de un fusible erróneo puede dañar
o producir fuego en el equipo.

4. MANTENIMIENTO E INCIDENCIAS
4.3 IncidenciasEn la tabla siguiente se relacionan los problemas más comunes y la solución a los mismos. Sino es posible restaurar el funcionamiento normal, solicitar asistencia técnica.
...iS ...iS ...iS ...iS ...iS ...secnotnE ...secnotnE ...secnotnE ...secnotnE ...secnotnEREWOPaslupesodnauc
ecerapaonrednecnearapallatnapalneadan
nóicatnemilaalraborpmoc-selbisufraborpmoc-
ollirbleratsuja-ledatorredalatneserpeson
ocrab 2PSIDúnemleneKCARTPIHSravitcA-
odnofledoceleecerapaonedlevinnóicatneserpalne
soce
se1UNEMne,EGNAROHCEedetsujaleisraborpmoc-ojabodaisamed
edalacsealeuqroyamresedeupdadidnuforpal-adidem
1UNEMneNIAGedetsujaleraborpmoc-nóicatneserpalepmurretnies
soceedodnalbyumodnof-
oicusyumrotcudsnart-nosetneirrocedsotadsol
selbatseni 1UNEMneoidemorpleratsuja-
saicnerefretniyaharreitednóixenocalraborpmoc-
ledacrecsopiuqesortoedselbacyahisraborpmoc-rotcudsnartledelbac
4-3

4. MANTENIMIENTO E INCIDENCIAS
4.4 DiagnosisEl equipo dispone de varios programas de prueba para verificar el funcionamiento del mismo.
4.4.1 Prueba generalSe verifica la ROM, la RAM y las tensiones.
1. Pulsar la tecla [MENU].
2. Pulsar para situar el cursor en la línea de títulos de menú.3. Pulsar para seleccionar MENU 1.
Menú MENU 1
4. Pulsar o para seleccionar TEST.
5. Pulsar para seleccionar GENERAL.
6. Pulsar cualquier tecla de función para arrancar la prueba. Se presentan los resultados comose ilustra en la figura siguiente.
4-4
SHIP SPEED AVG : 15 sec 30 sec 60 sec 90 sec
TIDE AVERAGE : 2 min
REF TIDE DIFF : LAYER 1 LAYER 2 LAYER 3
BEARING MODE : 32 CMPS 360 TRUE
NAV MODE : OFF ON
BOTTOM SEARCH : NO YES
BTM TIDE TRACK : OFF ON
ALM/KEY BEEP : OFF ON
WT SPD DEPTH : 2 m (2-400m)
RESET TRIP LOG : NO YES
TEST : NO GENERAL PANEL PATTERN
ECHO RANGE : 150 m
TVG : OFF ON
GAIN : 5 (1-40)
PANEL DIMMER : 5 (0-7)
MENU ON INITIAL SETTINGS.
[�/�]:SELECT, [�/�]: CHANGE, [MENU]: EXIT
MENU 1 MENU 2 ALARM INSTALLATION

4. MANTENIMIENTO E INCIDENCIAS
Resultados de prueba
Resultados de la prueba de la unidad de control
VOL: Nº de versión del programa de la tarjeta OCK (66P3927)MEM: Comprobación de , 1: ROM, 2: SRAM, 3: EEPROMSIO: OK: normal; NG: anormal
Resultados de la prueba del transceptor
VOL: Nº de versión del programa de la tarjeta PCP (66P3920)MEM: Comprobación de las memorias de la tarjeta PCP. Si todas funcionan correcta-
mente se presenta OK; si alguna falla se presenta NG y la memoria anormal esseñalada con un asterisco.
ANA: Valor de la tensión de 12 V en las líneas +B.TRM: Temperatura en el interior del transductorDSW: Estado de los interruptores DIP en PCPDSW: Estado de los interruptores DIP en PCN
7. Para salir de la prueba, pulsar la tecla [MENU] para volver a MENU 1.8. Pulsar la tecla [MENU] otra vez para cerrar el menú.
4-5
XX: Programa Version No.Presentación del eco para los tres haces
CI-68
CI-6888
VOL. 6651000-XX.XX
MEM. 1 2 3 OK
SIO. OK
CI-6810
VOL. 6651001-XX.XX
TBL.
MEM. 1 2 3 4 5 6 7 8 OK
ANA. 12V;12.03V BV;110.0V
TRM. +25.02°C
DSW. 00 00 00 00
DSW. -- 00 00 00
Modelo
Pureba
de la
Unidad
de Control
Prueba de la
Unidad
Transceptor
Nivel de ruido
del Haz 1,
Haz 2 y Haz 3
TVG ON/OFF
(Usar � o � para aplicar o retirar el TVG de
la presentación del eco, respectivamente.)
PRESS [MENU] KEY TO QUIT.
NL -8, -2, -5
TVG ON OFF
Beam 3 Beam 1 Beam 2
(Port) (Fore) (Starboard)

4. MANTENIMIENTO E INCIDENCIAS
4.4.2 Prueba del panelSe verifica el funcionamiento de los controles.
1. Abrir MENU 1 y seleccionar y en TEST seleccionar PANEL.
2. Pulsar cualquier tecla de función para arrancar la prueba. Se abre la presentación de prue-ba ilustrada a continuación.
Prueba del panel
3. Pulsar las teclas, una a una (excepto [MENU] y [POWER]). Al pulsar una tecla su represen-tación en la pantalla cambia a ‘’1’’ mientras la tecla está pulsada.
4. Al actuar sobre el mando de ajuste cambia el valor mostrado.
5. Para salir de la prueba, pulsar la tecla [MENU] para volver a MENU 1.
6. Pulsar la tecla [MENU] otra vez para cerrar el menú.
4-6
0
0
0 0
0
0
0
0
00
0
0
0
0
0
PRESS [MENU] KEY TO QUIT.
0
4. MANTENIMIENTO E INCIDENCIAS
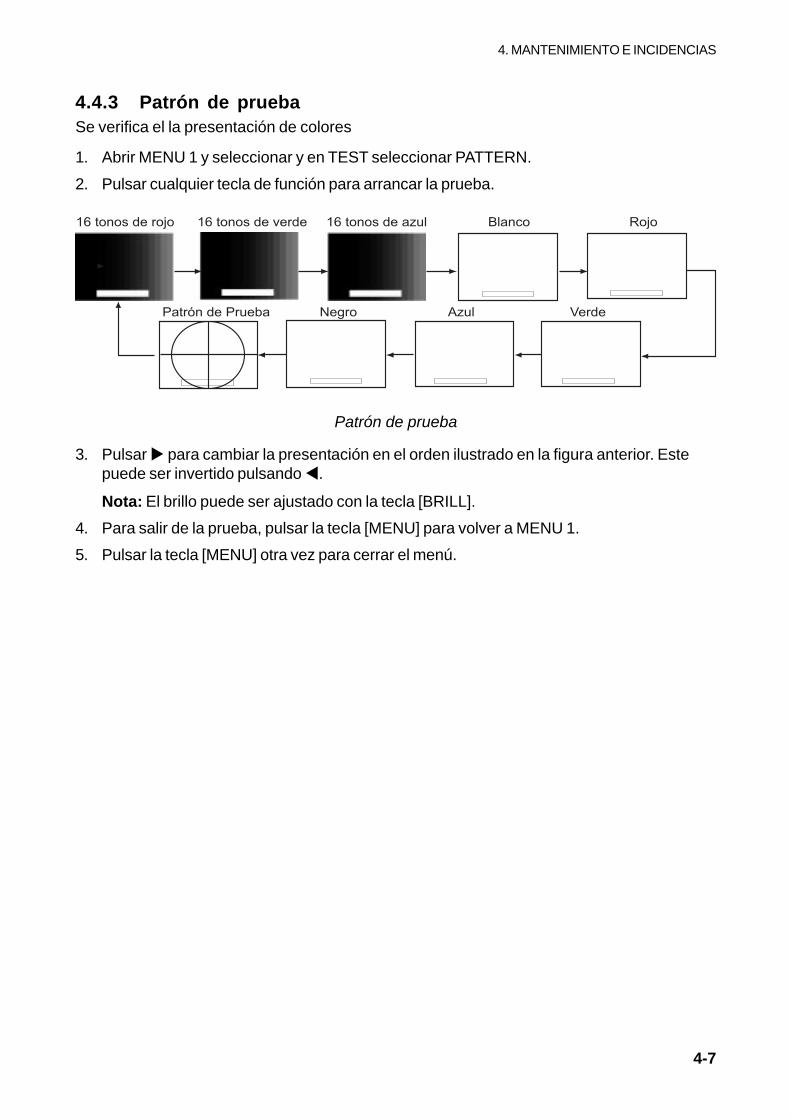
4.4.3 Patrón de pruebaSe verifica el la presentación de colores
1. Abrir MENU 1 y seleccionar y en TEST seleccionar PATTERN.
2. Pulsar cualquier tecla de función para arrancar la prueba.
Patrón de prueba
3. Pulsar para cambiar la presentación en el orden ilustrado en la figura anterior. Estepuede ser invertido pulsando .
Nota: El brillo puede ser ajustado con la tecla [BRILL].
4. Para salir de la prueba, pulsar la tecla [MENU] para volver a MENU 1.
5. Pulsar la tecla [MENU] otra vez para cerrar el menú.
4-7
Patrón de Prueba Negro Azul Verde
16 tonos de rojo 16 tonos de verde 16 tonos de azul Blanco Rojo

4. MANTENIMIENTO E INCIDENCIAS
4.5 Mensajes de Error y AlertasCuando el equipo detecta un error presenta el mensaje correspondiente y hace sonar la alar-ma; ésta se silencia pulsando la tecla del cursor, en el caso de errores relativos al transceptor;para errores relacionados con la unidad de control, desactivar la alarma en el menú ALARM.En el caso de varios errores simultáneos, la alarma se refiere al de más alta prioridad. Serelacionan en la tabla siguiente los mensajes de error y alertas que pueden aparecer en lapantalla, por orden de prioridad.
atrelAororrEedejasneM odacifingiS)rotpecsnartled(rorrEedejasneM )rotpecsnartled(rorrEedejasneM )rotpecsnartled(rorrEedejasneM )rotpecsnartled(rorrEedejasneM )rotpecsnartled(rorrEedejasneM
]100[RECUDSNARTDETAEHREVO!GNINRAW rotcudsnartledotneimatnelacerboS]200[EGATLOVXTLAMRONBA!GNINRAW lamronaxTnóisneT
]300[)B+(RORREGNIGRAHC!GNINRAW lamronaB+nóisneT]900[V21TUPNILAMRONBA!GNINRAW )V21(lamronaadartneednóisneT
]001[ATADNOITISOPON!GNINRAW sonretxenóicisopedsotadsolsodidreP]101[ATADDEEPSON!GNINRAW sonretxedadicolevedsotadsolsodidreP]301[ATADHTPEDON!GNINRAW sonretxedadidnuforpedsotadsolsodidreP
]401[ATADGNIDAEHON!GNINRAW obmuredsotadsolsodidreP]501[ATADESRUOCLAMRONBA!GNINRAW lamronaobmuredrorreedolugnA
]601[ATADERUTAREPMETON!GNINRAW augaledarutarepmetedsotadsolsodidreP]102[TUPNIPMETLAMRONBA!GNINRAW lamronaaugaledarutarepmetedrosneS
)lortnoceddadinualed(atrelA )lortnoceddadinualed(atrelA )lortnoceddadinualed(atrelA )lortnoceddadinualed(atrelA )lortnoceddadinualed(atrelADEEPSEDIT1REYAL!GNINRAW 1apacetneirrocaleddadicolevedamralA
NOITCERIDEDIT1REYAL!GNINRAW 1apacetneirrocalednóicceridedamralADEEPSEDIT2REYAL!GNINRAW 2apacetneirrocaleddadicolevedamralA
NOITCERIDEDIT2REYAL!GNINRAW 2apacetneirrocalednóicceridedamralADEEPSEDIT3REYAL!GNINRAW 3apacetneirrocaleddadicolevedamralA
NOITCERIDEDIT3REYAL!GNINRAW 3apacetneirrocalednóicceridedamralA
DPSFFIDEDITREWOLLAHS!GNINRAW etneirrocedlaicnerefideddadicolevedamralAadnuforpocop
RIDFFIDEDITREWOLLAHS!GNINRAW etneirrocedlaicnerefidednóicceridedamralAadnuforpocop
DPSFFIDEDITREPEED!GNINRAW etneirrocedlaicnerefideddadicolevedamralAadnuforp
RIDFFIDEDITREPEED!GNINRAW etneirrocedlaicnerefidednóicceridedamralAadnuforp
DEEPSPIHS!GNINRAW ocrableddadicolevedamralAESRUOCPIHS!GNINRAW ocrabledobmuredamralA
ECNATSIDPIRT!GNINRAW adirroceraicnatsidedamralAEMITPIRT!GNINRAW odirroceredopmeitedamralA
4-8

AP-1
APENDICE
Arbol de MenúsOpciones por defecto en cursiva negrita.
Tecla MENU
MENU 1 SHIP SPD AVG (15 sec, 30 sec, 60 sec, 90 sec)TIDE AVERAGE (15 sec, 1 min, 2 min, 3 min, 5 min, 10 min, 20 min) REF TIDE DIFF (LAYER 1, LAYER 2, LAYER 3)BEARING MODE (32 CMPS, 360 TRUE)NAV MODE (OFF, ON)BOTTOM SEARCH (NO, YES)BTM TIDE TRACK (OFF, ON)ALM/KEY BEEP (OFF, ON)WT SPD DEPTH (2-400 (m))RESET TRIP LOG (NO, YES)TEST (NO, GENERAL, PANEL, PATTERN)ECHO RANGE (50 m, 100 m, 150 m, 200 m, 250 m, 300 m 350 m,400 m, 450 m, 500 m)TVG (OFF, ON)GAIN (1-40, 5)PANEL DIMMER (0-7, 5)
MENU 2 MODE TIDE VECTOR (OFF, ON)SHIP SPEED (OFF, ON)GRAPH (OFF, ON)COURSE PLOT (OFF, ON)TEXT (OFF, ON)ECHO LEVEL (OFF, ON)BACKGROUND CLR (BLACK, WHITE, BLUE)
COMMON SETTINGS
LAYER 1 (OFF, ON)LAYER 2 (OFF, ON)LAYER 3 (OFF, ON)TIDE DIFF (OFF, ON)
(Continua en la págima siguiente)
MODE (TIDE, TIDE DIF, SHIP SPD)TIDE GRAPH (NORTH, SOUTH)TEMP GRAPH (OFF, ON)TEXT WINDOW (OFF, ON)
TIDE RANGE (0.5 kt, 1.0 kt, 2.0 3.0 kt, 5.0 kt, 10.0 kt)SHIP SPD VCTR (OFF, ON)HEADING LINE (OFF, ON)TIDE VECTOR
DISPLAY MODE (HEAD UP, NORTH UP)SHIP SPD MODE (GT/WT, WT)
GRAPH
DISP1

ARBOL DE MENUS
AP-2
ALARM LAYER 1 SPDDIR
LAYER 2 SPDDIR
LAYER 3 SPDDIR
SHALLOWT/D
SPDDIR
DEEPT/DSHIPSPEEDTRIP
SPDDIR
SPDCSEDIST (0-30 (nm))TIME (0-23:59:59 (h:m:s))
(Continua de la página anterior)
ECHO LEVEL (OFF, ON)DISP MODE (SOUNDER, GRAPH)
TIDEVECTORSHIPSPEED
COURSEPLOT
SCALE SYNC (OFF, ON)DRIFT SCALE* (0.5, 1.0, 2.0, 3.0, 5.0, 10.0 (kt))SCALE (0.5, 1.0, 2.0, 3.0, 5.0, 10.0, 20.0, 30.0 (kt))DRIFT HISTORY (0.5 kt, 1 kt, 2 kt)HISTORY (4 kt, 8 kt, 16 kt, 32 kt)HISTORY SHIFT (-2, -1, 0, 1, 2, 4, 8 (kt))SCALE (1:10000, 1:20000, 1:50000, 1:100000)INTERVAL (0.5, 1.0, 1.5, 2.0, 2.5, 3.0, 3.5, 4.0, 4.5, 5.0)SHIP TRACK (OFF, ON)VECTOR LENGTH (LONG, SHORT)TEXT WINDOW (OFF, ON)
DISP2
SPD (0-ajuste del margen de velocidad)DIR, CSE (0-359 (°))
* Mostrado cuando SCALE SYNC está off.

MEDIDA DE LA CORRIENTE EN MODO NAVLa precisión de la medida de la corriente en modo Nav depende fundamentalmente de laprecisión de la giroscópica.
Medida de la Corriente en Modo Nav
Determinación del rumbo del barcoEl modo Nav se utiliza para medir las corrientes en aguas profundas donde el modo de segui-miento de fondo no es posible. Para esto es necesario proporcionar al indicador de corrienteinformación del rumbo del barco y de su posición (o velocidad y rumbo efectivo).
Procedimiento
1. Confirmar que la giroscópica está orientada y establecidas las compensaciones (latitud,etc.) oportunas.
2. Alinear la lectura del convertidor AD con la de la giroscópica.
Si la indicación de la giroscópica es precisa, lo será también la del indicador de corriente. Si lainformación de la giro es errónea se observará lo siguiente:
• El ángulo de deriva en el modo de seguimiento de fondo no es el mismo que en el modo navo aparece en dirección inversa a la real.
Angulo de deriva en el modo de seguimiento de fondo: Diferencia entre la velocidad conrelación al fondo y rumbo efectivo y el rumbo de la giroscópica.
Angulo de deriva en el modo nav: Diferencia entre el rumbo nav y el rumbo de la giroscópica.
• La dirección y velocidad de la corriente en el modo de seguimiento de fondo no son lasmismas que en el modo nav y la correlación de corriente entre capas es diferente.
Vectores corriente en los modos de seguimiento de fondo y nav
Si se observan estos síntomas, calibrar el indicador de corriente como se indica en el manualde instalación.
AP-3
Modo seguimiento del fondo Modo Nav
Medida de la Corriente en Modo Nav
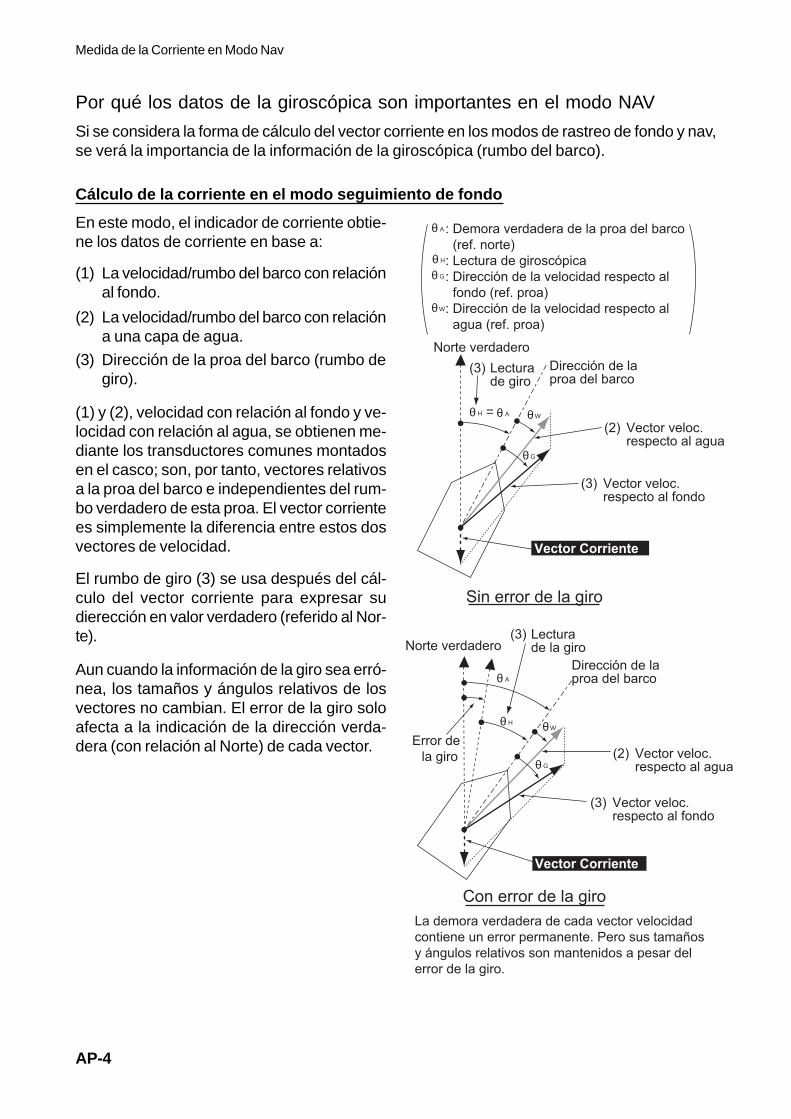
Si se considera la forma de cálculo del vector corriente en los modos de rastreo de fondo y nav,se verá la importancia de la información de la giroscópica (rumbo del barco).
Cálculo de la corriente en el modo seguimiento de fondo
En este modo, el indicador de corriente obtie-ne los datos de corriente en base a:
(1) La velocidad/rumbo del barco con relaciónal fondo.
(2) La velocidad/rumbo del barco con relacióna una capa de agua.
(3) Dirección de la proa del barco (rumbo degiro).
(1) y (2), velocidad con relación al fondo y ve-locidad con relación al agua, se obtienen me-diante los transductores comunes montadosen el casco; son, por tanto, vectores relativosa la proa del barco e independientes del rum-bo verdadero de esta proa. El vector corrientees simplemente la diferencia entre estos dosvectores de velocidad.
El rumbo de giro (3) se usa después del cál-culo del vector corriente para expresar sudierección en valor verdadero (referido al Nor-te).
Aun cuando la información de la giro sea erró-nea, los tamaños y ángulos relativos de losvectores no cambian. El error de la giro soloafecta a la indicación de la dirección verda-dera (con relación al Norte) de cada vector.
AP-4
Por qué los datos de la giroscópica son importantes en el modo NAV
Norte verdadero
(3) Lectura de giro
(2) Vector veloc. respecto al agua
(3) Vector veloc. respecto al fondo
Vector Corriente
=
Sin error de la giro
Norte verdadero
Vector Corriente
(3) Lectura de la giro
Dirección de la proa del barco
(2) Vector veloc. respecto al agua
(3) Vector veloc. respecto al fondo
Con error de la giro
Error de
la giro
La demora verdadera de cada vector velocidad
contiene un error permanente. Pero sus tamaños
y ángulos relativos son mantenidos a pesar del
error de la giro.
: Demora verdadera de la proa del barco
(ref. norte)
: Lectura de giroscópica
: Dirección de la velocidad respecto al
fondo (ref. proa)
: Dirección de la velocidad respecto al
agua (ref. proa)
Aθ
Aθ
Hθ
Hθ
Gθ
Gθ
Wθ
Aθ
Hθ
Gθ
Wθ
Wθ
Dirección de la proa del barco

Medida de la Corriente en Modo Nav
Cálculo de la corriente en el modo Nav
En este modo, el indicador de corriente obtiene los datos de corriente en base a:(1) La velocidad/rumbo del barco proporcionados por un navegador (GPS).(2) La velocidad/rumbo del barco con relación a una capa de agua.(3) Dirección de la proa del barco (rumbo de giro).
La velocidad (1) es la determinada por elnavegador y su dirección se expresa con rela-ción al Norte.La velocidad (2) la calcula el indicador de co-rriente en relación con una capa de agua utili-zando el efecto Doppler; así, su dirección seexpresa con relación a la proa del barco.
Como las referencias de dirección de estosdos vectores son distintas (Norte y proa delbarco), no se puede obtener el vector corrien-te como diferencia de los mismos.
Se calcula con relación al Norte la direccióndel vector de velocidad del barco relativa alagua (2) usando la información de la giros-cópica; así se deduce el vector corriente.
Por tanto, la dirección con relación al Norte delvector de velocidad del barco relativa al aguadepende de la indicación de la giro; la direc-ción del vector de velocidad Nav no dependede la indicacción de la giro.En otras palabras, el vector corriente, dadocomo diferencia de los dos vetores de veloci-dad del barco antes descritos, depende entamaño (velocidad) y dirección de la indica-ción de la giroscópica.
Así, para obtener datos fiables de la corrienteel error de la giroscópica debe ser inferior a1º y la profundidad superior a 40 metros.
AP-5
Norte verdadero
(3) Lectura de giro
Proa del barco
(2) Vector veloc. respecto al agua
(1) Vector veloc. Nav
Vector Corriente
=
Sin error de la giro
Norte verdadero
Vector Corriente
(3) Lectura de la giro
Proa del barco
(2) Vector veloc. respecto al agua
(1) Vector veloc. Nav
Con error de la giro
Error dela Giro
El ángulo relativo entre el vector de veloc. respecto al agua y el vector veloc. nav cambia con el error de la giro. Por lo tanto, el tamaño (velocidad) y dirección del vectorde corriente cambian.
: Demora verdadera de la proa del barco (ref. norte): Lectura de giroscópica: Dirección de la velocidad respecto al fondo (ref. norte): Dirección de la velocidad respecto al agua (ref. proa)
Aθ
Hθ Aθ
HθNθ
Nθ
Wθ
Aθ
HθNθ
Wθ
Wθ

Principio de Operación
PRINCIPIO DE OPERACIONCuando, moviéndose el barco, se emite un impulso de energía sónica en el agua, parte de éstaes reflejada por el fondo y objetos microscópicos sumergidos tales como el placton o burbujasde aire. La frecuencia de la señal acústica reflejada recibida en el barco es distinta de lafrecuencia de transmisión; este desplazamiento de frecuencia es proporcional a la velocidadrelativa del barco respecto de los objetos reflectantes. Esto es lo que se denomina efectoDoppler.
El indicador de corriente calcula y presenta los movimientos del barco y de la corriente a pro-fundidades específicas, midiendo los desplazamientos Doppler en tres direcciones distintas.
AP-6
Capa de plancton
Fondo
Frecuencia de la señal reflejada está
desplazada en proporción a la velocidad
relativa entre el barco y los objetos
reflectantes.

Principio de Operación
Velocidad del BarcoVector que indica el valor de la velocidad y su dirección. Dependiendo de la base de medida:
Velocidad con seguimiento de fondo: Velocidad y rumbo del barco con relación al fondo(Velocidad absoluta) (base fija).
Velocidad con seguimiento d agua: Velocidad y rumbo del barco con relación a la capa(Velocidad relativa) de agua justo debajo del barco fondo (base flotan-
te).Velocidad Nav: Velocidad y rumbo del barco proporcionados por(Velocidad absoluta) un navegador (GPS).
CorrienteEs el movimiento de la masa de agua a una profundidad particular.Para conocer la corriente absoluta (con relación al fondo) se requieren los datos siguientes:
1) Velocidad y rumbo del barco con relación al fondo.2) Velocidad y rumbo del barco con relación a una capa de agua (A).
Entonces, la corriente absoluta es la diferencia entre estos dos vectores de velocidad.
AP-7
Fijado
Satélites GPS
Veloc. generada por la Ayuda de Nav
(Veloc. respecto un fondo falso)
Velocidad respecto al agua
Velocidad respecto al fondo
Capa cercana a la superficie
: Base de medida

Principio de Operación
Corriente Absoluta = (1) - (2)
Diferencial de CorrienteEl diferencial de corriente es el movimiento relativo de dos corrientes a diferentes profundida-des, capa (A) y capa (B).
Para calcular el diferencial de corriente es necesario lo siguiente:
1) Velocidad y rumbo del barco con relación a la capa de agua (A).2) Velocidad y rumbo del barco con relación a la capa de agua (B).El diferencial de corriente entre las dos capas es la diferencia entre estos dos vectors develocidad.
Diferencial de corriente = (1) - (2) (movimiento de la capa B con relación a la A) o = (2) - (1) (movimiento de la capa A con relación a la B)
AP-8
Fijado
Capa (A)
: Base de la medida
1
2
Capa (B): Base de la medida
2
Capa (A)
1

Principio de Operación
Corriente, Corriente-Nav y Diferencial de CorrienteCorriente AbsolutaPuede ser medida en el modo seguimiento de fondo:
Suponiendo que el barco y la capa de agua A se mueven en la misma dirección:
Vg (velocidad del barco con relación al fondo) = 10 nudosVwa (velocidad del barco con relación a la capa A) = 7 nudos
C1 (velocidad de la capa A con relación al fondo) = Vg - Vwa = 10 - 7 = 3 nudos
AP-9
: Base de la medidad
1Capa A
Fijado
Inicio delviaje
Fin delviaje
(Moviéndose a 10 kt respecto al fondo)
(Moviéndose a 10 kt respecto al fondo)
10 MN (1 hora de viaje)
2

Diferencial de Corriente
Principio de Operación
El diferencial de corriente es el movimiento relativo de las corrientes a diferentes profundida-des. Puede ser medido en los modos seguimiento de fondo, seguimiento de agua y Nav.
Suponiendo que el barco, la capa de agua A y la capa de agua B se mueven en la mismadirección:
Vwa (velocidad del barco con relación a la capa A) = 8 nudosVwb (velocidad del barco con relación a la capa B) = 5 nudos
Cálculo del diferencial de corriente en el modo seguimiento de fondo
Si la velocidad absoluta (con relación al fondo) del barco es Vg, las velocidades de las capasA (C1) y B (C2) con relación al fondo son:
C1 = Vg - VwaC2 = Vg - Vwb
El diferencial de corriente (Cd) entre las capas:Velocidad de la capa B vista desde la capa A:Cd = C2 - C1 = (Vg - Vwb) - (Vg - Vwa) = Vwa - Vwb = 8 - 5 = 3 nudos,oVelocidad de la capa A vista desde la capa B:
En el modo seguimiento de agua se toma como base de la medida la masa de agua en con-tacto con el transductor (capa cercana a la superficie). Por tanto, en el modo seguimiento deagua las velocidades del barco y de las corrientes no son absolutas sino relativas a esta capacercana a la superificie.
Cd = C1 - C2 = (Vg - Vwa) - (Vg - Vwb) = Vwb - Vwa = 5 - 8 = -3 nudos
AP-10
: Base de la medida
2Capa A
Inicio del viaje
Fin delviaje
(Movto.)
10 MN (1 hora de viaje)
Capa B
(Movto.)
2 kt
5 kt
3

Principio de Operación
Vw (velocidad del barco con relación a la capa cercana a la superificie) = 9 nudosVwa (velocidad del barco con relación a la capa A) = 8 nudosVwb (velocidad del barco con relación a la capa B) = 5 nudos
AP-11
: Base de la medida
2 3
Capa A
Inicio delviaje
Fin delviaje
10 MN (1 hora de viaje)
Capa B
2 kt
5 kt
1
Capa cercade lasuperficie
1 kt
Supone que el barco y todas las capas demedida están moviéndose en la mismadirección, pero con diferentes velocidades.

Principio de Operación
Cálculo del diferencial de corriente en el modo seguimiento de agua
Las velocidades de las capas A (D1) y B (D2) con relación a la capa de agua cercana a lasuperficie son:
D1 = Vw - VwaD2 = Vw - Vwb
El diferencial de corriente (Dd) entre las capas:Velocidad de la capa B vista desde la capa A:Dd = D2 - D1 = (Vw - Vwb) - (Vw - Vwa) = Vwa - Vwb = 8 - 5 = 3 nudos,oVelocidad de la capa A vista desde la capa B:Dd = D1 - D2 = (Vw - Vwa) - (Vw - Vwb) = Vwb - Vwa = 5 - 8 = -3 nudos
Comparando estos resultados con los obtenidos en la página anterior se observa el valor deldiferencial de corriente es independiente del modo de seguimiento.
AP-12

ESPECIFICACIONES DEL INDICADOR DE CORRIENTECI-68
1 CORRIENTE1.1 Velocidad 0,0 - 9,0 nudos1.2 Precisión Dentro de 0,2 nudos1.3 Dirección Todas en pasos de 1º1.4 Nº de capas de medida 31.5 Escala de medida 2 - 150 metros
Hasta el 75% de la profundidad. La profundidad debe ser ma-yor de 22 m en el modo seguimiento de fondo y mayor de 40m en el modo de seguimiento de agua cuando se usa impul-so ‘’normal’’ y mayor de 70 m cuando se usa impulso largo.
2 VELOCIDAD
2.1 Velocidad Proa-popa: - 10,0 a 30 nudosBabor-estribor: - 9,9 a +9,9 nudos
2.2 Precisión Dentro de ±1% ó 0,1 nudos, la mayor2.3 Dirección Todas en pasos de 1º2.4 Profundidad de medida 3 - 3000 metros (dependiendo de la instalación y las condi-
(seguimiento de fondo) ciones marinas)
3 PRESENTACION3.1 Presentación VGA (640 x 480 puntos)
Vector corriente, ploteo de la derrota, velocidad del barco,texto, gráfica, nivel de ecos
4 TRANSMISION4.1 Frcuencia 244 kHz
5 FUNCIONES5.1 Modos de medida Seguimiento de fondo, seguimiento de agua, nav5.2 Funciones Corriente con seguimiento de fondo, salida de alarma,
rechazador de interferencias, modo simulación.5.3 Correcciones Velocidad del barco, corriente, ángulo de instalación (error
de demora, compensación, escora), error del rumbo, acalado,margen del KP externo.
SP-1E7252S01B
031120

6 DATOS ENTRADA/SALIDA6.1 Formato Lazo de corriente, NMEA 0183 Ver. 1.5/2.0/3.0, IEC 61162-1
Ed. 2, IEC 61162-2, indicador de corriente (formato propiode Furuno)
6.2 Entrada NMEA ZDA, RMC, RMA, GGA, GLL, VTG, HDT, HDM, HDG, DBT,DPT, MTW
6.3 Salida NMEA VBW, VDR, VHW, VTG, VLW, CUR
6.4 Entrada CIF Horario, posición de medida, proa, rumbo, profundidad, tem-peratura del agua
6.5 Salida CIF Datos de corriente de la 1ª capa, profundidades de las capas
6.6 Datos indicador Fecha y hora, posición, velocidad, calibración de velocidad,calibración de ángulo, alarma, otros
7 ALIMENTACION7.1 Transceptor, 100/110/115/120/200/220/230/240 V CA, una fase, 3 A (100
Monitor, Control V), 1,5 A (220 V)
8 RESISTENCIA AL AGUA8.1 Monitor IPX08.2 Transceptor IPX08.3 Control (panel) IPX28.4 Control (trasera) IPX08.5 Caja de conexión IPX48.6 Transductor IPX8
9 CONDICIONES AMBIENTALES9.1 Temperatura Transductor: -5º C a 35ºC
Otras unidades: -15ºC a 55ºC9.2 Humedad relativa Menos de 95% (40ºC)
10 COLOR10.1 Monitor Panel: N3.0, Cubierta: 2.5GY5/1.510.2 Control Panel: N3.0, Cubierta: 2.5GY5/1.510.3 Transceptor 2.5GY5/1.5
SP-2E7252S01A