Embed Size (px)
DESCRIPTION
Momento y Torque Angular
Citation preview

Capıtulo 19
Torque. Momento angular
M = RF � FR
Torques.La matriz momento de una fuerza M es igual a la matriz del
producto simetrico de la matriz distancia por la matriz fuerzaRF − FR.
19.1. Torque
Sobre un cuerpo se pueden aplicar fuerzas cuya resultante vectorial sea nulapero, a pesar de que entonces su centro de masas no se desplace, el cuerpo puedeno encontrarse en equilibrio, llevando a cabo algun tipo de rotacion. Para elequilibrio completo de un cuerpo se necesita no solo que la resultante de lasfuerzas sea nula sino que, ademas, el momento de las fuerzas total, el torqueresultante, respecto de cualquier punto, tambien sea nulo.
Orientacion de los ejes coordenados. El sistema de coordenadas xyzse toma orientado de tal forma que, con el eje x sentido positivo en horizon-tal derecha, el eje y sentido positivo vertical arriba, se tenga el eje z sentidopositivo hacia fuera del papel. Con esta orientacion, se tiene que el productovectorial de los ejes unitarios es ~ux × ~uy = ~uz,
~ux × ~uy =
∣∣∣∣∣∣∣i j kux 0 00 uy 0
∣∣∣∣∣∣∣ = kuxuy = ~uz .
147

148 Capıtulo 19. Torque. Momento angular
El sentido de un brazo, de una fuerza o de un momento lineal, se tomadesde el origen del sistema de coordenadas hasta el punto de aplicacion de lafuerza. Para una partıcula puntual de masa m, que se desplaza con velocidad~v = (vx, vy, vz) en cierto sistema de referencia S, se define el vector momento
angular ~L = Lxi+Lyj+Lzk, respecto de un punto O como el producto vectorial
~L = ~r ×m~v = m
∣∣∣∣∣∣∣i j krx ry rzvx vy vz
∣∣∣∣∣∣∣ ;
~M = ~r × ~F =
∣∣∣∣∣∣∣i j krx ry rzFx Fy Fz
∣∣∣∣∣∣∣ ,donde ~r = (rx, ry, rz) es el vector distancia desde el punto O hasta el punto
donde se encuentra la partıcula o el punto de aplicacion de la fuerza ~F =(Fx, Fy, Fz). El punto O debe cumplir ciertas condiciones (ser un punto fi-jo, el centro-de-masas del sistema, etc.), y suele ser el origen del sistema decoordenadas S en el que se miden distancias y velocidades. Para una fuerza~F = (Fx, Fy, Fz), que se aplica en el punto con vector distancia ~r = (rx, ry, rz),
el momento de dicha fuerza, ~M , previamente definido.
x
y
z
F
~!
~R ⇥ ~F
~R
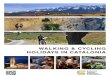
Figura 19.1: Signos del producto vectorial. El producto vectorial ~R× ~F apun-ta en la direccion positiva del eje z. Los ejes coordenados y los signos de loscomponentes en las matrices fuerza y brazo se eligen de manera que la defini-cion del torque mediante matrices asociadas a vectores coincida con la formahabitual de definir el producto vectorial de los mismos dos vectores.

19.1. Torque 149
Para describir un determinado proceso, se elige un cierto sistema de re-ferencia inercial S. Siempre que en el proceso intervenga un cuerpo de masacuasi-infinita (el suelo, una pared, etc.) es conveniente elegir como referencialS∞ aquel referencial en el que dicho sistema de masa cuasi-infinita permaneceen reposo. Como ya se ha indicado, las expresiones que se van a adoptar paralas diversas matrices (F, R, etc.) implican que los ejes se encuentran orientadoscon +x a la derecha, +y apuntando hacia arriba y +z apuntando hacia adelan-te, con el producto vectorial de los vectores unitarios ~ux × ~uy = ~uz (Fig. 19.1).Definido el sistema, se elige un punto O sobre el que tomar los momentos queintervienen en la descripcion de la rotacion El punto O elegido debe cumplirciertas condiciones, no demasiado restrictivas (Fig. 19.2). En general, el pun-to O sera un punto que permanezca fijo a lo largo del proceso, pudiendo sertambien el centro de masas del sistema, aunque dicho sistema se desplace.
Una fuerza ~F = (Fx, Fy, Fz) viene caracterizada por una matriz simetricaF dada por
F =
0 0 0 Fx
0 0 0 Fy
0 0 0 Fz
Fx Fy Fz 0
; R =
0 −Rz Ry 0Rz 0 −Rx 0−Ry Rx 0 0
0 0 0 0
. (19.1)
El brazo de una fuerza vendra caracterizado por una matriz antisimetrica 4 ×4, siendo el producto doble de ambas matrices el equivalente matricial delproducto vectorial entre vectores. Si el vector que va desde el punto O hastael punto en el que se aplica la fuerza ~F viene dado por ~R = (Rx, Ry, Rz),entonces sera R la matriz antisimetrica, dada en la Ec. (19.6), la que lo va acaracterizar. Estas definiciones son deudoras de las definiciones de los tensorescampo electrico y campo magnetico, respectivamente, en relatividad.
La 4 × 4-matriz simetrica M del momento de la fuerza ~F , con brazo ~R,asociado a esa fuerza y su brazo se define como.
M = RF − FR . (19.2)
Esta definicion, basada en el tratamiento de la rotacion en la teorıa especial dela relatividad, obedece a la simetrıa espacial que hace que el producto vectorialse pueda elegir de dos maneras equivalentes (en ausencia de un absoluto arribao abajo).
Una barra, sin masa, tiene fijadas una masa m1 a una distancia r1 y unamasa m2 a una distancia r2 del punto O, respectivamente (Fig. 19.2). Sobrela barra se aplican la fuerza F1, que forma un angulo φ1 con la barra y quese aplica a una distancia R1 del origen y la fuerza F2, con angulo φ2 y a unadistancia R2, de O, respectivamente. En un instante dado la barra forma un

150 Capıtulo 19. Torque. Momento angular
FF
m
mv
vy
x
R
R
r
r
1
11
1
2
2
22
1
2
✓
�1
�2!
O
Figura 19.2: Barra con masas que gira sometida a varios torques. Una barra,sin masa, tiene fijadas una masa m1 a una distancia r1 y una masa m2 a unadistancia r2 del punto O, respectivamente. En un instante dado la barra formaun angulo θ con la horizontal y gira con velocidad angular ω respecto de uneje perpendicular que pasa por O.
angulo θ con la horizontal y gira con velocidad angular ω respecto de un ejeperpendicular que pasa por O.
Se tiene, para la fuerza ~F1 = (F1 cos (θ+ Φ1), F1 sen (θ+ Φ1), 0), con brazo~R1 = (R1 sen θ, R1 sen θ, 0), con M1 dado por M1 = R1F1 − F1R1 . Una
matriz M2 semejante se obtiene para la fuerza ~F2 = (F2 cos (θ+Φ2), F2 sen (θ+
Φ2), 0), con brazo ~R2 = (R2 sen θ, R2 sen θ, 0). La matriz asociada al torquetotal aplicado sobre la barra de la Fig. 19.2 sera
M =∑k
Mk = M1 + M2 =
0 0 0 00 0 0 00 0 0 Γ0 0 Γ 0
,
con el torque total resultante Γ = F1R1 sen Φ1 +F2R2 sen Φ2 apuntando en ladireccion del eje z, sentido positivo (hacia fuera del papel).
Si aplicada sobre la barra hubiera una fuerza de rozamiento, f , con brazoigual a d, por ejemplo aplicada sobre el eje sobre el que gira la barra, setendrıa una matriz Mf adicional, y una contribucion adicional al torque totalde Γf = −fd.

19.2. Momento angular 151
L = rp � pr
Momento angular.La matriz momento angular L es igual a la matriz del producto
simetrico de las matrices distancia y momento lineal rp − pr.
19.2. Momento angular
x
y
z
~p
~r
~r ⇥ ~p
Figura 19.3: Momento angular. El momento angular de una partıcula que semueve con velocidad ~v, momento lineal ~p, y con vector brazo del momentolineal ~r es ~r× ~p. El producto vectorial ~r× ~p apunta en la direccion positiva deleje z.
En el formalismo matricial para la rotacion, a un cuerpo de momento lineal(instantaneo) ~p = m~v, con ~v = (vx, vy, vz), se le caracteriza por una matrizsimetrica p dada por
p =
0 0 0 mvx0 0 0 mvy0 0 0 mvz
mvx mvy mvz 0
; r =
0 −rz ry 0rz 0 −rx 0−ry rx 0 0
0 0 0 0
. (19.3)

152 Capıtulo 19. Torque. Momento angular
Si el vector desde el punto O hasta la partıcula viene dado por ~r = (rx, ry, rz),entonces su correspondiente matriz antisimetrica es r en la Ec. (19.3). La 4×4matriz antisimetrica momento angular L asociada (instantaneamente) a esecuerpo viene dada por
L = rp − pr . (19.4)
En la Fig. 20.2, que gira con velocidad angular ω, para la masa m1 se tieneque contribuye al momento angular como la matriz L1 = r1p1 − p1r1, con
L1 =
0 0 r1 sen θ 00 0 −r1cos θ 0
−r1 sen θ r1cos θ 0 00 0 0 0
0 0 0 Mx
0 0 0 My
0 0 0 0Mx My 0 0
−
−
0 0 0 Mx
0 0 0 My
0 0 0 0Mx My 0 0
0 0 r1 sen θ 00 0 −r1cos θ 0
−r1 sen θ r1cos θ 0 00 0 0 0
,
donde Mx = −m1ωr1 sen θ y My = m1ωr1 cos θ. Se tiene que la matriz delmomento angular asociado a la masa m1 es
L1 =
0 0 0 00 0 0 00 0 0 m1ωr
21
0 0 m1ωr21 0
; L2 =
0 0 0 00 0 0 00 0 0 m2ωr
22
0 0 m2ωr22 0
.
y del mismo modo, para la masa m2 se tiene que con L2 = r2p2 − p2r2. Elmomento angular total (instantaneo) del sistema L vendra dado por
L =∑j
Lj = L1 + L2 =
0 0 0 00 0 0 00 0 0 L0 0 L 0
, (19.5)
donde L = m1ωr21 + m2ωr
22. El momento angular del sistema apunta en la
direccion del eje z, sentido positivo. En general, para un proceso infinitesimalrealizado por un cuerpo se tendra
dL =
0 0 0 d(Iωx)0 0 0 d(Iωy)0 0 0 d(Iωz)
d(Iωx) d(Iωy) d(Iωz) 0
; dL =
0 0 0 Idωx
0 0 0 Idωy
0 0 0 Idωz
Idωx Idωy Idωz 0
,
y, en concreto, la matriz dL para un proceso finito con momento de inercia Iconstante.

19.3. Fuerza de rozamiento en rotacion 153
FF
m
mv
v
y
x
R
R
r
r
1
11
1
2
2
22
1
2
θ
φ1
φ2ω
df
fO
Figura 19.4: Barra con masas que gira sometida a fuerzas de rozamiento. Labarra de la Fig. 19.2 gira sometida a fuerzas de rozamiento, f , con brazo d/2,que se oponen a su movimiento.
19.3. Fuerza de rozamiento en rotacion
En la Fig. 20.4 se muestra un esquema de un proceso en el que la barradescrita anteriormente gira sobre el eje de tal manera que aparecen ciertasfuerzas de rozamiento que se oponen al giro.
Las fuerzas de rozamiento ~f1 y ~f2 (por simetrıa, estas fuerzas se consideraniguales y de sentido contrario, aplicadas sobre el borde del eje) tiene asociadaslas matrices f1 y f2, ası como las matrices de brazos de fuerza R1 y R2, con
f1 =
0 0 0 00 0 0 f0 0 0 00 f 0 0
; R1 =
0 0 0 00 0 −d/2 00 d/2 0 00 0 0 0
. (19.6)
Expresiones semejantes, cambiando los signos, se tienen para f2 y R2. Se tienepara el torque debido a estas fuerzas de rozamiento
Mf = M1 + M2 =
0 0 0 00 0 0 00 0 0 −fd0 0 −fd 0
.
Este torque es el equivalente en rotacion a la fuerza de rozamiento en traslacion.