Embed Size (px)
Citation preview
ORIGEN Y ANÁLISIS DE OSCILACIONES
ELECTROMECÁNICAS EN SISTEMAS
ELÉCTRICOS DE POTENCIA
Félix Fernando Gamarra Estrella
ORIGEN Y ANÁLISIS DE
OSCILACIONES ELECTROMECÁNICAS
EN SISTEMAS ELÉCTRICOS DE POTENCIA
Primera edición digital
Julio, 2011
Lima - Perú
© Félix Fernando Gamarra Estrella
PROYECTO LIBRO DIGITAL
PLD 0140
Editor: Víctor López Guzmán
http://www.guzlop-editoras.com/[email protected] [email protected] facebook.com/guzlop twitter.com/guzlopster428 4071 - 999 921 348Lima - Perú
PROYECTO LIBRO DIGITAL (PLD)
El proyecto libro digital propone que los apuntes de clases, las tesis y los avances en investigación (papers) de las profesoras y profesores de las universidades peruanas sean convertidos en libro digital y difundidos por internet en forma gratuita a través de nuestra página web. Los recursos económicos disponibles para este proyecto provienen de las utilidades nuestras por los trabajos de edición y publicación a terceros, por lo tanto, son limitados.
Un libro digital, también conocido como e-book, eBook, ecolibro o libro electrónico, es una versión electrónica de la digitalización y diagramación de un libro que originariamente es editado para ser impreso en papel y que puede encontrarse en internet o en CD-ROM. Por, lo tanto, no reemplaza al libro impreso.
Entre las ventajas del libro digital se tienen:• su accesibilidad (se puede leer en cualquier parte que tenga electricidad),• su difusión globalizada (mediante internet nos da una gran independencia geográfica),• su incorporación a la carrera tecnológica y la posibilidad de disminuir la brecha digital (inseparable de la competición por la influencia cultural),• su aprovechamiento a los cambios de hábitos de los estudiantes asociados al internet y a las redes sociales (siendo la oportunidad de difundir, de una forma diferente, el conocimiento),• su realización permitirá disminuir o anular la percepción de nuestras élites políticas frente a la supuesta incompetencia de nuestras profesoras y profesores de producir libros, ponencias y trabajos de investiga-ción de alta calidad en los contenidos, y, que su existencia no está circunscrita solo a las letras.
Algunos objetivos que esperamos alcanzar:• Que el estudiante, como usuario final, tenga el curso que está llevando desarrollado como un libro (con todas las características de un libro impreso) en formato digital.• Que las profesoras y profesores actualicen la información dada a los estudiantes, mejorando sus contenidos, aplicaciones y ejemplos; pudiendo evaluar sus aportes y coherencia en los cursos que dicta.• Que las profesoras y profesores, y estudiantes logren una familiaridad con el uso de estas nuevas tecnologías.• El libro digital bien elaborado, permitirá dar un buen nivel de conocimientos a las alumnas y alumnos de las universidades nacionales y, especialmente, a los del interior del país donde la calidad de la educación actualmente es muy deficiente tanto por la infraestructura física como por el personal docente.• El pe r sona l docente jugará un r o l de tu to r, f ac i l i t ador y conductor de p r oyec tos
de investigación de las alumnas y alumnos tomando como base el libro digital y las direcciones electró-nicas recomendadas.• Que este proyecto ayude a las universidades nacionales en las acreditaciones internacionales y mejorar la sustentación de sus presupuestos anuales en el Congreso.
En el aspecto legal:• Las autoras o autores ceden sus derechos para esta edición digital, sin perder su autoría, permitiendo que su obra sea puesta en internet como descarga gratuita.• Las autoras o autores pueden hacer nuevas ediciones basadas o no en esta versión digital.
Lima - Perú, enero del 2011
“El conocimiento es útil solo si se difunde y aplica” Víctor López Guzmán Editor
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
164
1. Introducción
Hace más de cincuenta años los sistemasde gran potencia viene enfrentando el problema deoscilaciones electromecánicas pocoamortiguadas. El problema se dio a conocercuando subsistemas fueron interconectadosmediante extensas líneas de transmisión ysumándose a este hecho el comportamiento dereguladores automáticos de tensión de acciónrápida y continua. Estos reguladores, proyectadospara mejorar el control de tensión y la estabilidadtransitoria de los sistemas de potencia [1], teníanuna acción negativa en el amortiguamiento de lasoscilaciones electromecánicas.
El ajuste de los reguladores automáticos detensión para tener un buen comportamiento debecumplir con tres requisitos fundamentales:
• Proporcionar una buena regulación detensión en operación permanente.
• Tener un buen comportamiento transitoriodurante grandes disturbios. Esto significa,debe poseer una velocidad de respuestaadecuada para disminuir las caídas detensión durante fallas ocurridas en líneasconectadas directamente a las centralesde generación.
• Presentar un buen comportamientodurante pequeñas perturbaciones.
Para cumplir el primer requisito es necesarioque el regulador posea una elevada ganancia, conla finalidad de reducir el error de régimenpermanente. En el caso del segundo requisito esconveniente que el regulador de tensión posee una
elevada ganancia transitoria, siendo esta carac-terística esencial para la primera oscilación postdisturbio. Por otro lado una elevada gananciatransitoria del regulador de tensión compromete laestabilidad permanente degradando el amorti-guamiento de las oscilaciones electromecánicas.
Los reguladores automáticos de tensión deacción rápida y de elevados límites puedenperjudicar el buen comportamiento del sistemaeléctrico con ciertas configuraciones topológicasy situaciones operativas, dando origen a lasoscilaciones electromecánicas. El artículo deDeMello y Concordia [2] explica las condicionesen que un regulador automático de tensión puedecontribuir negativamente en el amortiguamiento delas oscilaciones electromecánicas.
La necesidad de amortiguar las oscilacioneselectromecánicas motivó a los investigadores ensistemas eléctricos a buscar una solucióneconómicamente viable al problema. Utilizando lateoría de control lineal por la década de los 60,muchos investigadores encontraron resultadosinteresantes, llegándose a la conclusión de que lamanera mas económica de resolver este problemafue a través de la inyección de señalesestabilizantes o «Power System Stabilizer (PSS)»adecuadamente ajustados en algunas centraleseléctricas claves del sistema donde su instalaciónresulta en un amortiguamiento eficaz de estasoscilaciones [3]-[10].
El objetivo de este trabajo consiste en anali-zar, explicar e identificar los orígenes y las causaspor las cuales se presenta el fenómeno de lasoscilaciones electromecánicas poco amortiguadasen los sistemas eléctricos de gran potencia.
Origen y análisis de oscilaciones electromecánicas en sistemaseléctricos de potencia
M.Sc. Ing. Félix Fernando Gamarra [email protected]
Universidad Nacional de Ingeniería, Facultad de Ingeniería Eléctrica y Electrónica, Escuela de Post-GradoAv. Tupac Amaru 210 Lima 25 Perú, Telf. 381-3344.
Resumen: El objetivo de este trabajo consiste en analizar e identificarmatemáticamente los orígenes y las causas por las cuales se presenta el fenómenode las oscilaciones electromecánicas poco amortiguadas en los sistemas eléctricosde gran potencia. Asimismo se define las técnicas util izadas para suamortiguamiento.
Palabras Claves: Estabilidad Frente a Pequeñas Perturbaciones, EstabilidadPermanente, Amortiguamiento de Oscilaciones Electromecánica, Sistemas deExcitación y Power System Stabilizer (PSS).
Memorias - XVII CONIMERA
165
2. Conceptos Básicos de Control enSistemas de Potencia
Los sistemas eléctricos de potencia sondefinidos como los sistemas más complejoscreados por el hombre. Transforman energíamecánica a energía eléctrica. Un sistema eléctricode potencia es una fábrica de energía donde paramantenerse en estado estable la energía producidadebe ser igual a la energía consumida y cuando laenergía producida es diferente a la consumida elsistema ingresa a un estado dinámico. Lossistemas de potencia no tienen la capacidad dealmacenar su energía producida, estacaracterística ocasiona la mayor cantidad deproblemas de estabilidad angular, tensión yestabilidad de la frecuencia.
Los sistemas eléctricos de potencia debenestar en condiciones de enfrentar con éxito losestados dinámicos originados por las variacionesaleatorias normales de pequeñas cargas y aquellosoriginados por variaciones bruscas de grandesmagnitudes de carga debido a fallas. Loscontroladores de los sistemas de potencia debenser proyectados para estabilizar las variables deestado y conducir al sistema hacia la operaciónóptima en estado estacionario.
La operación correcta de los controladoresde los sistemas debe ser evaluado según elcomportamiento del sistema en el estadotransitorio. El estado transitorio debe finalizar enun estado estacionario garantizando y exigiendoconfiabilidad, calidad de servicio, robustez yoperación económica del sistema, estas cuatrocaracterísticas se resumen a continuación:
• Confiabilidad: El suministro de la energíadebe ser confiable y estar garantizadaindefinidamente sin disminuir la calidad delsuministro de energía. Técnicamente laconfiabilidad del sistema debe garantizarla operación del sistema con un mínimonúmero de fallas.
• Calidad: El suministro de la energía debeefectuarse con variaciones de frecuenciay tensión dentro límites exigidos por lanormas. Existen otros índices de calidadtales como la simetría de las tensionesde fase y la cantidad de armónicos.
• Robustez: El sistema debe ser losuficientemente robusto para resistircualquier perturbación sin permitir eldesarrollo de otras fallas u oscilacionesde las variables de estado. Por ejemplo,la eliminación de una falla mediante ladesconexión de una terna no debe
terminar en oscilaciones electrome-cánicas no amortiguadas.
• Operación Económica: Considerando laconfiabilidad, la calidad de energía y larobustez del sistema, el costo de laproducción de la energía debe sermínima.
Las consecuencias indeseables de un estadodinámico mal evaluado o mal controlado son lasperdidas de estabilidad de los generadores ysubsistemas que operan en paralelo o lainhabilitación de sus componentes. Para evitarconsecuencias graves en la operación delsistema, el comportamiento del sistema en elestado dinámico debe tener las siguientescaracterísticas:
• El tiempo de duración de un estadotransitorio debe ser mínimo para evitaroscilaciones prolongadas de las variablesde estado. La naturaleza del estadotransitorio está caracterizado por la formade la trayectoria en que evoluciona lasvariables de estado en la escala deltiempo. Por ejemplo, para el caso delanálisis de la estabilidad transitoria, laexistencia de la derivada del ángulo internodel generador igual a cero en la escaladel tiempo garantiza la estabilidad delsistema, pero no es suficiente. Latrayectoria de la evolución de las variablesde estado puede tener diferentes formas,las mas comunes son: oscilanteamortiguada, oscilante no amortiguada ymonotónica. El colapso de tensión es unfenómeno dinámico no oscilatorio.
• El estado transitorio del sistema no debecomprometer la seguridad de suscomponentes. Por ejemplo las corrientesasimétricas en los generadores síncronosproducen campos giratorios con velocidadcontraria a la síncrona originandocalentamiento, esfuerzos mecánicos yvibraciones. Para evitar estos problemas,la coordinación de los dispositivos deprotección son extremadamenteimportante.
Las pérdidas de carga deben ser controladasde preferencia sin desconexión de unidadesgeneración para evitar grandes oscilaciones defrecuencia y tensión. La desconexión de lasunidades generadoras pueden resultar en unapérdida de tiempo injustificado si la reducción degeneración fuese realizada controlando el ingresode la potencia mecánica entre todas las unidadesde generación
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
166
3. Origen de las Oscilaciones Electro-mecánicas.
3.1 Historia de las OscilacionesElectromecánicas
El análisis del fenómeno de las oscilacioneselectromecánicas ha seguido un orden históricocon la evolución tecnológica de la ingenieríaeléctrica. L. Dreyfus [13], en el año de 1911 enAlemania, sugirió la construcción de devanadosamortiguantes en las caras polares del rotor delos generadores síncronos para controlar elfenómeno de oscilaciones electromecánicas,denominado como penduleo. Este término seorigina del la palabra en inglés «hunting». Muchosinvestigadores tales como Doherty, C. F. Wagner,C. A. Nicle y C. A. Pierce analizaron esteinteresante fenómeno. Pero recién en 1941, luegode la publicación de Crary y Duncan [14], laconstrucción de estos devanados amortiguantesse hizo general. Posteriormente el fenómeno delas oscilaciones electromecánicas fue estudiadodurante muchos años y por muchos investigadoreshasta que en 1969 P. DeMello y C. Concordia [2]publicaron uno de los artículos más importantesen esta línea de investigación explicando cómo sepodría resolver hasta entonces el problema deoscilaciones electromecánicas.
3.2. Explicación del Fenómeno deOscilaciones Electromecánicas
Para analizar el fenómeno de las oscilacioneselectromecánicas, puede asumirse por simplicidadel caso de la operación de un solo generadorsíncrono operando en paralelo con una barra infinitaunidos mediante una línea de transmisión.
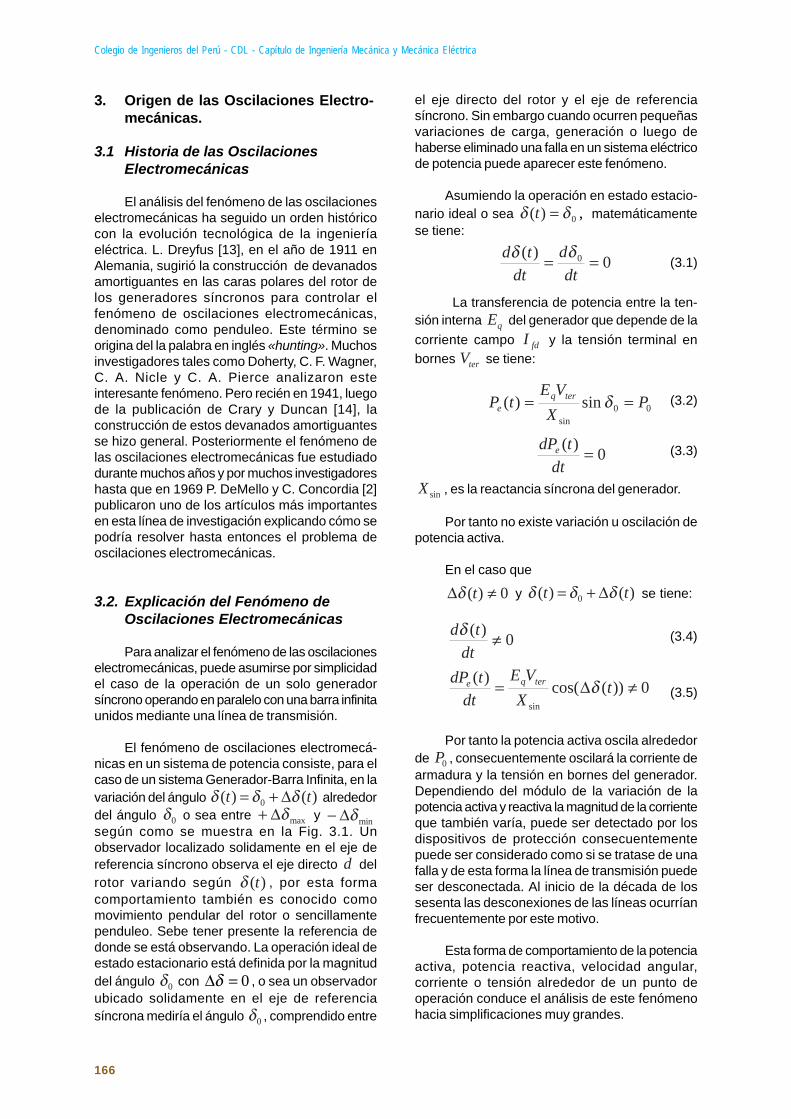
El fenómeno de oscilaciones electromecá-nicas en un sistema de potencia consiste, para elcaso de un sistema Generador-Barra Infinita, en lavariación del ángulo )()( 0 tt δδδ ∆+= alrededordel ángulo 0δ o sea entre maxδ∆+ y minδ∆−según como se muestra en la Fig. 3.1. Unobservador localizado solidamente en el eje dereferencia síncrono observa el eje directo d delrotor variando según )(tδ , por esta formacomportamiento también es conocido comomovimiento pendular del rotor o sencillamentependuleo. Sebe tener presente la referencia dedonde se está observando. La operación ideal deestado estacionario está definida por la magnituddel ángulo 0δ con 0=∆δ , o sea un observadorubicado solidamente en el eje de referenciasíncrona mediría el ángulo 0δ , comprendido entre
el eje directo del rotor y el eje de referenciasíncrono. Sin embargo cuando ocurren pequeñasvariaciones de carga, generación o luego dehaberse eliminado una falla en un sistema eléctricode potencia puede aparecer este fenómeno.
Asumiendo la operación en estado estacio-nario ideal o sea 0)( δδ =t , matemáticamentese tiene:
0)( 0 ==
dt
d
dt
td δδ (3.1)
La transferencia de potencia entre la ten-sión interna qE del generador que depende de la
corriente campo fdI y la tensión terminal enbornes terV se tiene:
00sin
sin)( PX
VEtP terq
e == δ (3.2)
0)( =
dt
tdPe (3.3)
sinX , es la reactancia síncrona del generador.
Por tanto no existe variación u oscilación depotencia activa.
En el caso que
0)( ≠∆ tδ y )()( 0 tt δδδ ∆+= se tiene:
0)( ≠
dt
tdδ (3.4)
0))(cos()(
sin
≠∆= tX
VE
dt
tdP terqe δ (3.5)
Por tanto la potencia activa oscila alrededorde 0P , consecuentemente oscilará la corriente dearmadura y la tensión en bornes del generador.Dependiendo del módulo de la variación de lapotencia activa y reactiva la magnitud de la corrienteque también varía, puede ser detectado por losdispositivos de protección consecuentementepuede ser considerado como si se tratase de unafalla y de esta forma la línea de transmisión puedeser desconectada. Al inicio de la década de lossesenta las desconexiones de las líneas ocurríanfrecuentemente por este motivo.
Esta forma de comportamiento de la potenciaactiva, potencia reactiva, velocidad angular,corriente o tensión alrededor de un punto deoperación conduce el análisis de este fenómenohacia simplificaciones muy grandes.
Memorias - XVII CONIMERA
167
Fig. 3.1 Posición del Rotor respecto a la ReferenciaSíncrona y Referencia del Estator.
Las ecuaciones que modelan un sistemaeléctrico (ver Apéndice) son normalmente nolineales, sin embargo como el fenómeno de lasoscilaciones electromecánicas se caracteriza porlas variaciones de las variables de estado, en estecaso particular del rotor, alrededor del punto deoperación no existiendo grandes desplazamientosde magnitudes. Esta característica muy particularconduce hacia el modelamiento de loscomponentes de los sistemas de potenciautilizando solo la componente lineal de laexpansión de la serie de Taylor desarrollado en unpunto particular de operación. De esta forma sepuede aplicar la teoría de control lineal a un sistemaque es matemáticamente de comportamiento nolineal. Esta particularidad conduce en la prácticaa confusiones muy grandes y puede hacer llevar aconclusiones erradas, cualquier solución que seaplique en un punto de operación en particular pararesolver este problema mediante la técnica decontrol lineal no será válida para aquellos puntosde operaciones muy distantes o muy diferentes.
3.3 Origen de las OscilacionesElectromecánicas
Las oscilaciones electromecánicas seoriginan por las siguientes razones:
• Elevadas Ganancia Transitoria de losReguladores de Tensión.
• Líneas de Interconexiones Débiles.• Configuraciones Topológicas con
Tendencia Radial.• Sistemas Sobrecargados.
4. Análisis de las Oscilaciones Electro-mecánicas
La mayoría de los componentes de lossistemas eléctricos de potencia tales como
generadores, sistemas de excitación, goberna-dores y cargas tienen comportamiento no linealmuy acentuado. Estos componentes y suscontroladores poseen características de saturacióny límites de salida o respuesta.
La teoría de sistemas no lineales pueden serutilizadas para analizar estos sistemas decomportamiento no lineal, sin embargo, suaplicación es muy restringida. Se ha aplicado elconcepto de Función Energía para evaluar porejemplo límites de estabilidad y seguridad, perose complica grandemente la formulación de estatécnica cuando se incluye modelos muy complejoscomo son sistemas de excitación, gobernadoresy modelo de cargas dinámicas.
Actualmente, la teoría de control lineal es lamas utilizada para analizar y controlar lasoscilaciones electromecánicas, por que permitecomprender e investigarlo con técnicasmatemáticas y de control lineal muy fáciles.Afortunadamente, la baja frecuencia de oscilaciónde este fenómeno (0.1-2.0 Hz.), causados porpequeñas perturbaciones alrededor de un puntode operación condiciona la utilización de la teoríade control lineal. Sin embargo es necesarioentender que el proyecto de estabilizaciónmediante la aplicación de esta técnica no puededar los resultados esperados para puntos deoperación muy distantes del que fue aplicado.
Adicionalmente, existen los denominadosSistemas Inteligentes identificados comoalgoritmos genéticos, lógica difusa y redesneuronales que son paradigmas utilizados paracontrol inteligente, pero para controlar losfenómenos dependientes en el tiempo y ladimensión de variables de estado que posee unsistema de potencia, actualmente es casiimposible de controlar mediante estas técnicas.Probablemente en el futuro estos paradigmas setendrán que juntar con otras técnicas de computoavanzadas, entonces talvez un sistemas depotencia puede ser controlada. Sin embargo,actualmente estas técnicas son utilizadas en lossistemas de potencia pero es muy limitado y ensituaciones muy específicas, si se compara conel tamaño de un sistema de potencia.
4.1 Análisis Lineal
El sistema (4.1) representa el resultado delproceso de linealización del sistema de potencia.
BuAxx ∆+∆=∆ � (4.1)
DuCxy ∆+∆=∆
+
+
-
ψ ψq , k q
ψ ψd , k d
q
d
E fd
Ifd
m axδ∆+
m inδ∆−0δ
Eje de Referencia Síncrono
Eje de Referencia del Estator
s in cω
tm 0ω
)(m tδ
mθ
)(tδ∆
fdψ
-
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
168
Donde x∆ representa el vector de variablesde estado, y∆ representa las variables de salida,
u∆ representa las variables de control, Arepresenta la matriz de estado, B representa lamatriz de coeficientes de entrada y B representala matriz de coeficientes de salida.
Este sistema normalmente se escribe como:
BuAxx +=� (4.2)
DuCxy +=
4.1.1 Mode Shape
En el sistema (4.2) se aplica el principio delinealidad y superposición, por tanto, cada autovalores responsable por un modo de oscilación.Conceptualmente el Mode Shape es lavisualización de la amplitud y fase de undeterminado modo de oscilación que correspondea una variable de salida, por ejemplo la velocidadmecánica o tensión.
4.1.2 Factor de Participación
El factor de participación proporciona unamedida de la actividad de una variable cuandosolamente un determinado modo es excitado.
4.1.3 Residuos
Los residuos de una determinada función detransferencia permiten definir una determinadaestructura de realimentación para obtener unpequeño movimiento de los autovalores hacia ellado izquierdo en el plano complejo.
4.1.4. Respuesta en Frecuencia
El criterio de Nyquist es uno de los métodosde respuesta en frecuencia utilizados en la teoríade control clásico para el estudio de estabilidadde sistemas de control.
5. Aplicación
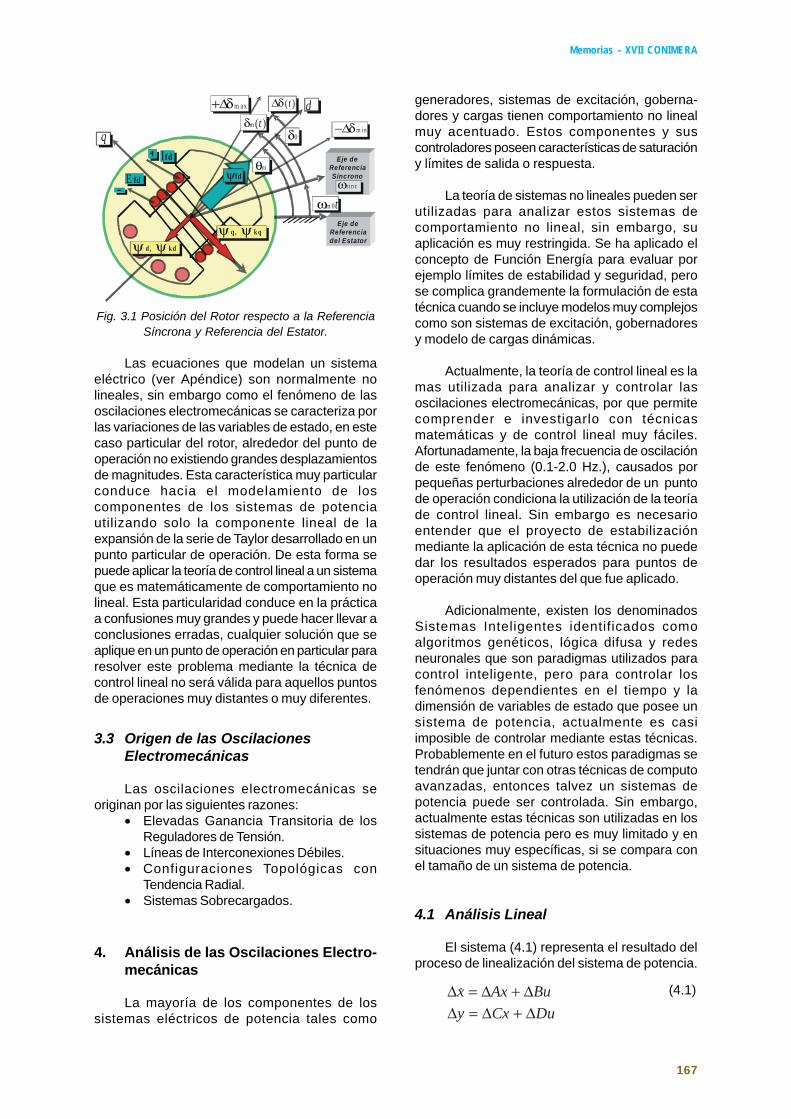
El sistema a ser estudiado se muestra en laFig. 5.1 y consiste de un generador síncronoconectado a una barra caracterizado por tener latensión y la frecuencia constante y se encuentranunidos mediante un transformador y una línea conuna reactancia equivalente a ex .
El modelo matemático que representa estesistema eléctrico de potencia Generador Síncrono-Barra Infinita, los parámetros del generador y losparámetros de la excitatriz se encuentran en el
Apéndice. En este sistema el generador contieneun modo de oscilación electromecánico pocoamor-tiguado contra la barra infinita. En la condiciónde operación nominal la carga en la barra infinita(Bus 4) es 0.9 pu de potencia activa )(P y 0.2 pude potencia reactiva )(Q .
El lazo de estabilización es formado por larealimentación de )( r
mω a través del filtro pasabajo )(sKtor (5.1), un fi ltro «washout»
)(sKwsh (5.2) y el PSS )(sK d (5.3). Este lazodetermina la tensión pssV (5.4). La combinaciónde ambos filtros forma el filtro pasa banda en lafrecuencia del modo electromecánico. Esnecesario remarcar que la constante a y b en (5.1)y la constante de tiempo wT en (5.2) sonconsiderados conocidos.
211
asbsKtor ++
= (5.1)
S
S
w
wwsh T
TK
+=
1 (5.2)
Fig. 5.1 Sistema Generador Barra Infinita
La figura 2 describe el diagrama de bloquesdel sistema. La planta a ser controlada esrepresentada por )(sPa el cual es constituida porla excitatriz, el generador y la red eléctrica.Obsérvese que el lazo de control de tensión seencuentra cerrado en )(sPa . Cuatro señales sonmedidas: La tensión terminal )( tV , la potencia
activa )(P , la potencia reactiva )(Q y la velocidad
mecánica del rotor )( rmω .
Fig. 5.2 Diagrama de Control del Sistema
Memorias - XVII CONIMERA
169
2
11
)(
++=
S
Sd T
TKK S
α(5.3)
mmtorwshdpss wsPSSwsKsKsKV )()()()( == (5.4)
22
2
)( 11
)1()1(
)1(
)(
asbsTs
Ts
T
TKPSS
S
S
w
ws +++
++
= α
(5.5)
wT
π2= (5.6)
La ganancia K del PSS y los parámetrosα y ω son calculados tal que el modoelectromecánico es libremente asignado.
Las ecuaciones dinámicas que modelan lamáquina síncrona y la excitatriz junto con lasecuaciones algebraicas que modelan el compor-tamiento del sistema de potencia, es linealizadoal rededor del punto de operación nominal.
El modelo linealizado del sistema en estudioes representado por las siguientes ecuaciones deestado:
BuAxx +=� (5.7)DuCxy +=
Donde x representa las variables de estado,
u representa la variable de control, pssV e yrepresenta la magnitud de medida. En el dominiode la variable “ s ” la ecuación (5.7) está dado por:
[ ] )()()( 1 sUDBAsICsY +−= − (5.8)
Sustituyendo (5.4) en (5.8) se obtiene:
[ ]{ } 0)()()( 1 =−+− − sYIsPSSDBAsIC (5.9)
Para ems λ= donde emλ es la posicióndeseada para el valor propio de lazo cerrado querepresenta el modo electromecánico, luego se tiene:
[ ]{ }0
)()(det 1
=−+− − IPSSDBAIC emem λλ
(5.10)
Las únicas magnitudes desconocidas en(5.10) son las ganancias K , α y ω , por otrolado se tiene dos ecuaciones obtenidas al separarla parte real y la parte imaginaria concluyéndoseque es imposible la solución de estas ganancias.Sin embargo el parámetro ω es seleccionado porel proyectista.
Los elementos de la matriz A dependen delos parámetros del sistema, esto es, mudan solo
cuando varían las cargas P y Q . Cuando la matriz
A es sustituida en (5.10) se consigue obtener laganancia K y α tal que el valor propio de lazocerrado que representa el modo electromecánicosea localizado en 7.83.1 jem ±−=λ . La variablelibre ω es escogida de manera que sea lafrecuencia electromecánica en el punto nominalde operación .)/44.8( segrad=ω .
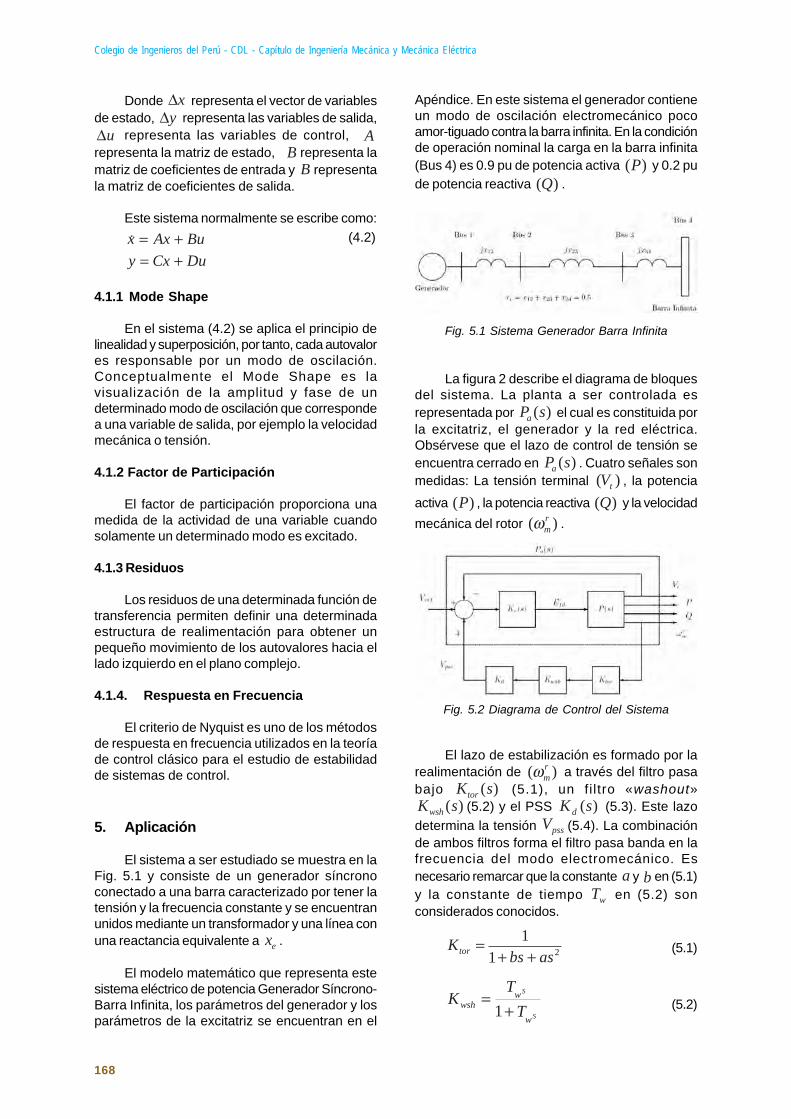
A continuación se muestra el comportamientode un sistema eléctrico de potencia conformadopor un generador síncrono, transformador y líneade transmisión conectada a una barra infinita. Eneste ejemplo de aplicación se demuestra lainfluencia que tienen los reguladores de tensiónde acción rápida y continua sobre elcomportamiento de los generadores síncronos,estos tipos de reguladores actúan negativamentepor si solos sin depender de los parámetrosexternos como son el nivel de carga o lascaracterísticas del sistema.
Fig. 5.3 Sistema Generador Barra Infinita Linealizado para Condición de Operación Nominal.
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
170
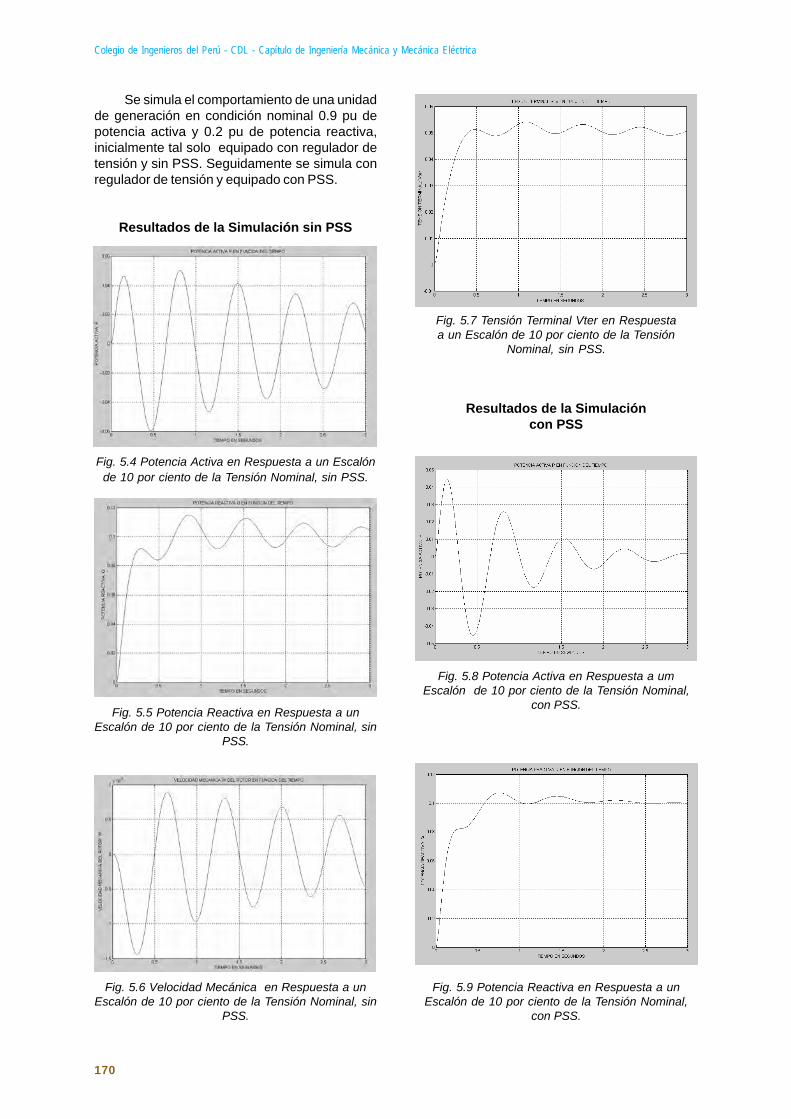
Se simula el comportamiento de una unidadde generación en condición nominal 0.9 pu depotencia activa y 0.2 pu de potencia reactiva,inicialmente tal solo equipado con regulador detensión y sin PSS. Seguidamente se simula conregulador de tensión y equipado con PSS.
Resultados de la Simulación sin PSS
Resultados de la Simulacióncon PSS
Fig. 5.4 Potencia Activa en Respuesta a un Escalónde 10 por ciento de la Tensión Nominal, sin PSS.
Fig. 5.5 Potencia Reactiva en Respuesta a unEscalón de 10 por ciento de la Tensión Nominal, sin
PSS.
Fig. 5.6 Velocidad Mecánica en Respuesta a unEscalón de 10 por ciento de la Tensión Nominal, sin
PSS.
Fig. 5.7 Tensión Terminal Vter en Respuestaa un Escalón de 10 por ciento de la Tensión
Nominal, sin PSS.
Fig. 5.8 Potencia Activa en Respuesta a umEscalón de 10 por ciento de la Tensión Nominal,
con PSS.
Fig. 5.9 Potencia Reactiva en Respuesta a unEscalón de 10 por ciento de la Tensión Nominal,
con PSS.
Memorias - XVII CONIMERA
171
6. Conclusiones
1. Debido a su característica no lineal, elcomportamiento dinámico del un sistemaeléctrico de potencia es diferente cuandoenfrenta grandes y pequeñas perturbaciones.
2. El análisis de oscilaciones electromecánicasutilizando la teoría de control lineal es bastantesencillo y fácil de entender.
3. El inconveniente de este método se encuentraen el hecho de haber realizados todos losprocesos de cálculo para un punto deoperación que corresponde normalmente alnominal. En el caso que el sistema por algunarazón se aleja de este punto de operaciónpodría estar comprometido su estabilización.
4. El comportamiento electrodinámico de lossistemas eléctricos de potencia deben serevaluados en varios puntos de operación, paraevaluar el margen confiabilidad, esto es hastadonde un determinado proyecto de estabi-lización de oscilaciones electromecánicastiene posibilidades de funcionar con éxito.
5. En el caso que la topología de un sistema depotencia ha sido alterado por la construcciónde una línea o por la inclusión de una nuevacentral, el sistema debe pasar por una eva-luación para determinar su comportamientodinámico.
7. Bibliografía
1. HEFFRON, W. G., PHILLIPS, R. A., «Effect of aModern Amplidyne Voltage Regulator of Under-excited Operation of Large Turbine Generators»,AIEE Transactions on Power Apparatus andSystems, Vol. 71, pp. 692-697, 1952.
2. DEMELLO F. P., CONCORDIA\ C., «Concepts ofSynchronous Machine Stability as Affected byExcitation Control», IEEE Transactions on PowerApparatus and Systems, Vol. 88, pp. 316-329,1969.
3. MARTINS, N., «Analise e Controle deOscilações Eletromecânica Pouco Amortecidasem Sistemas Elétricos», Anais do I EncontroArgentino-Brasileiro sobre Estabilidade deSistemas de Potencia, Foz do Iguaçu 1985.
4. MARTINS, N., «Efficient Eigenvalue andFrequency Response Methods Applied to PowerSystem Small-Signal Stability Studies», IEEETransactions on Power Systems, Vol. PWRS-1,pp. 217-226, February 1986.
5. MARTINS N., LIMA L.T.G., «Eigenvalue andFrequency Domain of Small-SignalElectromechanical Stability Problems»,IEEE Publication 90TH0292-3-PWR, pp 17-33,1989.
6. MARTINS N., LIMA L.T.G., «Determination ofSuitable Location for Power System Stabilizersand Static VAR Compensator for DampingElectromechanical Oscillation in Large ScalePower Systems», IEEE Transactions on PowerSystems, PWRS-5, Vol. 4, pp. 1455-33, 1990.
7. LARSEN, E. V., SWANN, D. A., «Applying PowerSystem Stabilizers, Parts I-II-III», IEEETransactions on Power Apparatus and Systems,Vol. PAS-100, No. 6, pp. 3017-3046, June 1981.
8. BOLLINGER, K.E., HURLEY J.,LARSEN, E. V.,LEE D., «IEEE Tutorial Course Power SystemStabilization Via Excitation Control», IEEEPublication 81 EHO 175-0 PWR, 1981.
9. KUNDUR, P., KLEIN M., ROGERS, G. J., ZywnoM. S., «Application of Power System Stabilizersfor Enhancement of Overall System Stability»,IEEE Transactions on Power Systems, Vol. 4,pp. 614-625, 1989.
10. KUNDUR, P., «Power System Stability andControl», ed, New York, McGraw-Hill, 1994.
11. SCHULZ, R. P., «Synchronous MachineModeling», IEEE Publication, Adequacy and
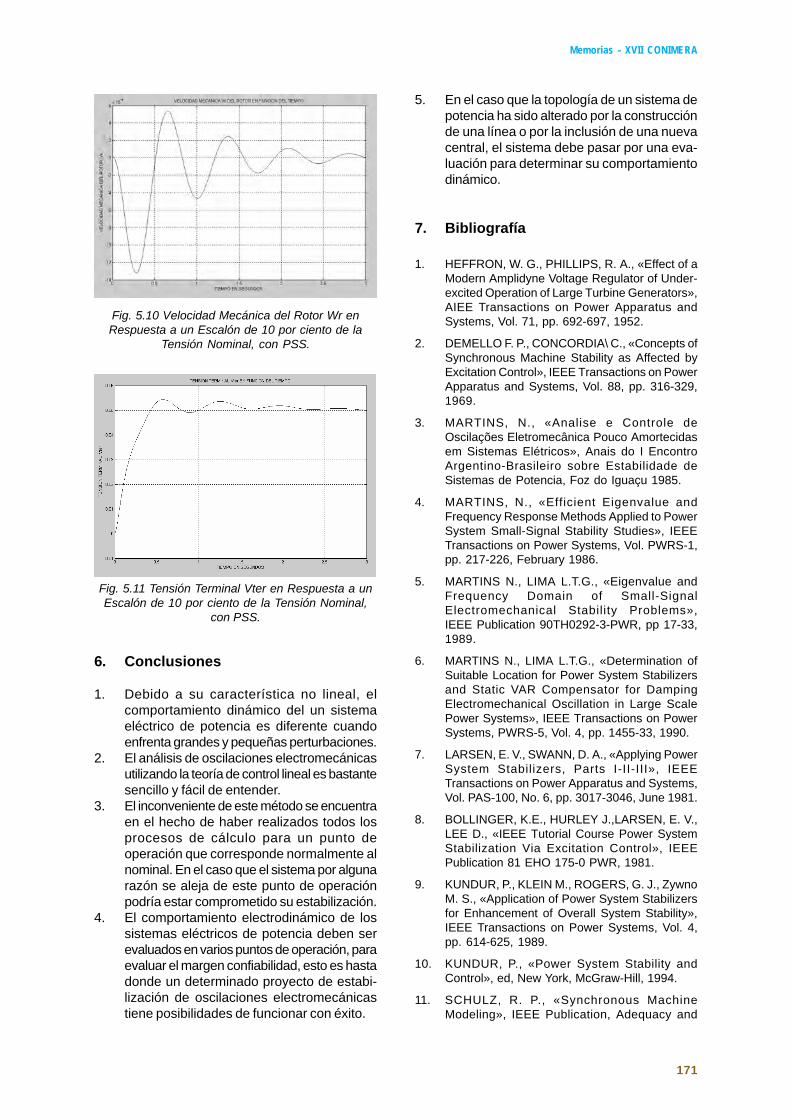
Fig. 5.10 Velocidad Mecánica del Rotor Wr enRespuesta a un Escalón de 10 por ciento de la
Tensión Nominal, con PSS.
Fig. 5.11 Tensión Terminal Vter en Respuesta a unEscalón de 10 por ciento de la Tensión Nominal,
con PSS.
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
172
Philosophy of Modeling System DynamicPerformance, 1972.
12. IEEE Committee Report, «Excitation SystemModels for Power System Stability Studies»,IEEE Transactions on PAS, Vol. 100, pp. 494-509, 1981.
13. DREYFUS, L., Einfurhrung in die theorie derselbsterregten schwmgungen synchronermaschinen. Elektrochnik und Maschinenbau,1911, 29: 323-329.
14. CRARY, S. B., DUNCAN, W. E., AmortisseurWindings for Hidro-generators. Electrical World,115: 2204-2206.
8. Apéndice
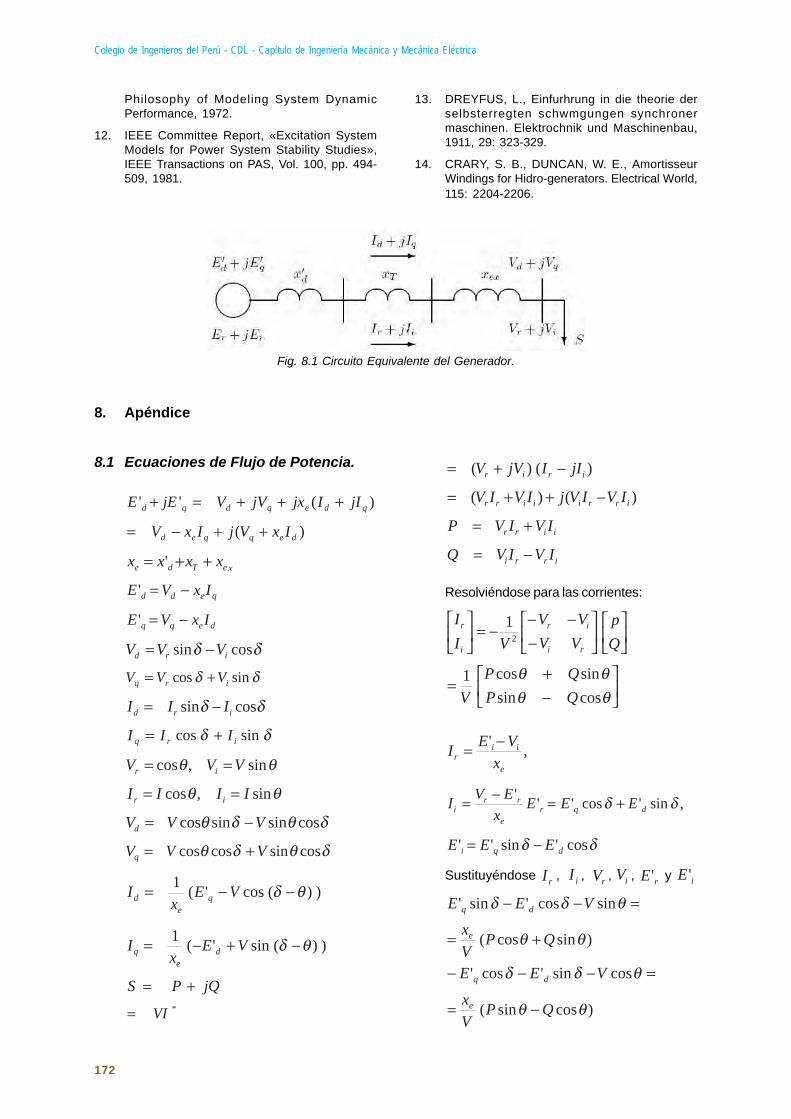
8.1 Ecuaciones de Flujo de Potencia.
)('' qdeqdqd jIIjxjVVjEE +++=+
)( deqqed IxVjIxV ++−=
xeTde xxxx ++= '
qedd IxVE −='
deqq IxVE −='
δδ cossin ird VVV −=
δδ sincos irq VVV +=
δδ cossin ird III −=
δδ sincos irq III +=
θθ sin,cos VVV ir ==
θθ sin,cos IIII ir ==
δθδθ cossinsincos VVVd −=
δθδθ cossincoscos VVVq +=
))(cos'(1 θδ −−= VEx
I qe
d
))(sin'(1 θδ −+−= VEx
I de
q
jQPS +=*VI=
Fig. 8.1 Circuito Equivalente del Generador.
)()( irir jIIjVV −+=
)()( irriiirr IVIVjIVIV −++=
iirr IVIVP +=
irri IVIVQ −=
Resolviéndose para las corrientes:
−
−−−=
ri
ir
i
r
VV
VV
VI
I2
1
Q
p
−+
=θθθθ
cossin
sincos1QP
QP
V
,'
e
iir x
VEI
−=
,sin'cos''' δδ dqr
e
rri EEE
x
EVI +=−=
δδ cos'sin'' dqi EEE −=
Sustituyéndose rI , iI , rV , iV , rE' y iE '
=−− θδδ sincos'sin' VEE dq
)sincos( θθ QPV
xe +=
=−−− θδδ cossin'cos' VEE dq
)cossin( θθ QPV
xe −=
Memorias - XVII CONIMERA
173
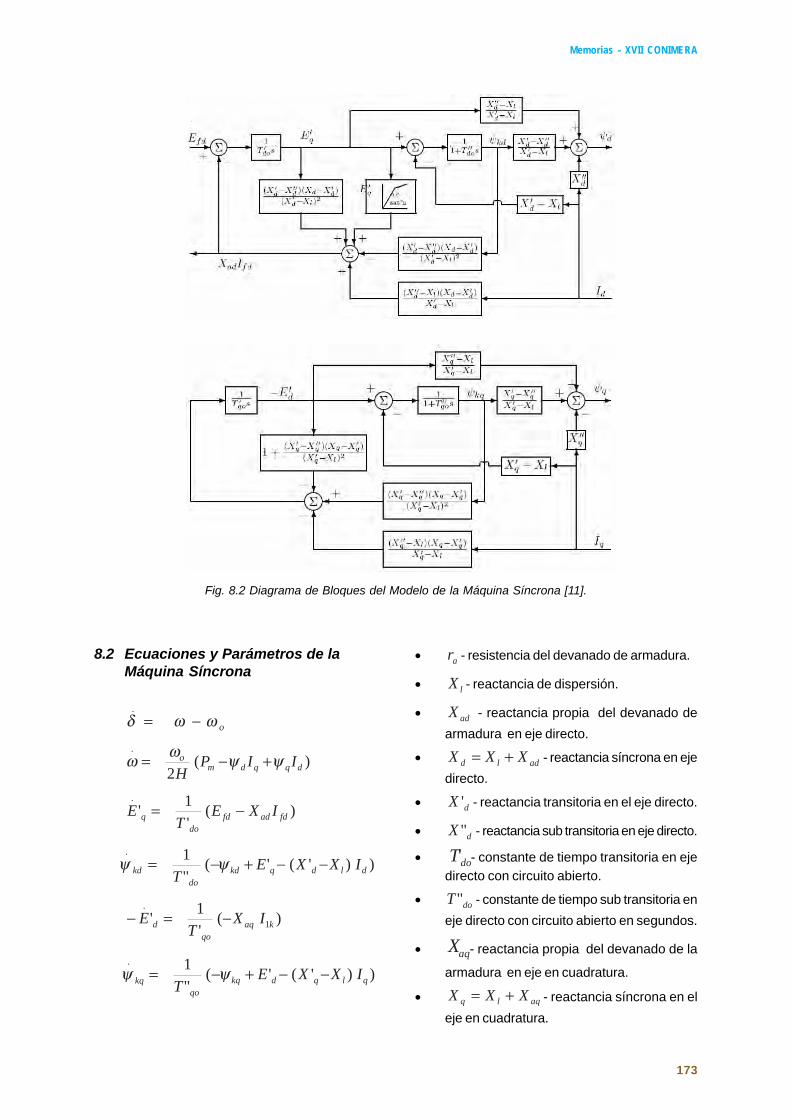
8.2 Ecuaciones y Parámetros de laMáquina Síncrona
οωωδ −=.
)(2
.
dqqdm IIPH
ψψωω ο +−=
)('1
'.
fdadfddo
q IXET
E −=
))'('("1.
dldqkddo
kd IXXET
−−+−= ψψ
)('1
' 1
.
kaqqo
d IXT
E −=−
))'('("1.
qlqdkqqo
kq IXXET
−−+−= ψψ
• ar - resistencia del devanado de armadura.
• lX - reactancia de dispersión.
• adX - reactancia propia del devanado de
armadura en eje directo.
• adld XXX += - reactancia síncrona en eje
directo.
• dX ' - reactancia transitoria en el eje directo.
• dX " - reactancia sub transitoria en eje directo.
• doT' - constante de tiempo transitoria en ejedirecto con circuito abierto.
• doT" - constante de tiempo sub transitoria en
eje directo con circuito abierto en segundos.
• aqX - reactancia propia del devanado de la
armadura en eje en cuadratura.
• aqlq XXX += - reactancia síncrona en el
eje en cuadratura.
Fig. 8.2 Diagrama de Bloques del Modelo de la Máquina Síncrona [11].
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
174
• qX ' - reactancia transitoria en el eje encuadratura.
• qX " - reactancia sub transitoria en eje en
cuadratura.
• qoT ' - constante de tiempo transitoria en el
eje en cuadratura con circuito abierto.
• qoT" - constante de tiempo sub transitoria en
el eje en cuadratura con circuito abierto ensegundos.
• fdE - tensión de campo.
• fdI - corriente de campo.
• dE' - componente da tensión transitoria en
el eje directo.
• qE ' - componente de tensión transitoria eneje en cuadratura.
• dψ - enlace de flujo de armadura en el eje
directo.
• kdψ - enlace de flujo del devanado
amortiguador en el eje directo.
• qψ - enlace de flujo de armadura en el eje en
cuadratura.
• kqψ - enlace de flujo del devanadoamortiguador en cuadratura.
• dI - componente de la corriente de armaduraen eje directo.
• qI - componente de la corriente de armadura
en el eje en cuadratura.
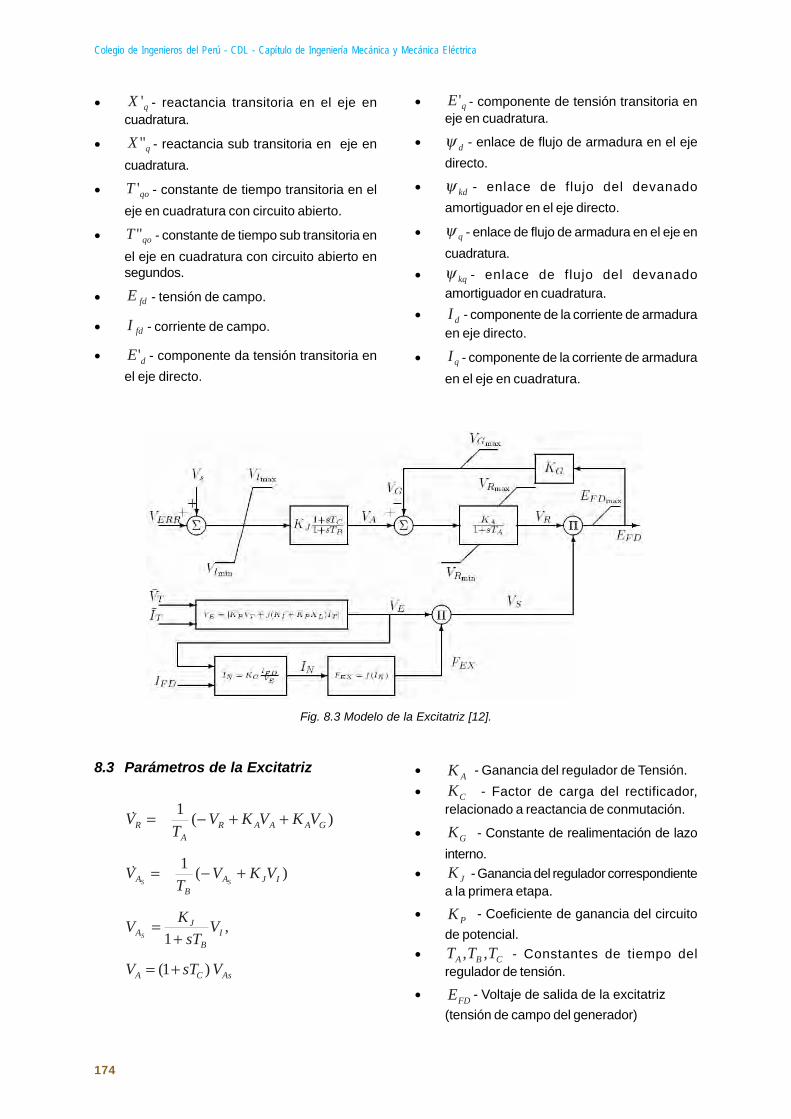
8.3 Parámetros de la Excitatriz
)(1
GAAARA
R VKVKVT
V ++−=�
)(1
IJAB
A VKVT
VSS+−=�
,1 I
B
JA V
sT
KV
S +=
AsCA VsTV )1( +=
Fig. 8.3 Modelo de la Excitatriz [12].
• AK - Ganancia del regulador de Tensión.
• CK - Factor de carga del rectificador,relacionado a reactancia de conmutación.
• GK - Constante de realimentación de lazo
interno.
• JK - Ganancia del regulador correspondientea la primera etapa.
• PK - Coeficiente de ganancia del circuito
de potencial.
• CBA TTT ,, - Constantes de tiempo delregulador de tensión.
• FDE - Voltaje de salida de la excitatriz
(tensión de campo del generador)
Memorias - XVII CONIMERA
175
• EXF - Factor de carga del rectificador.
• FDI - Corriente de campo del generador.
• NI - Corriente de la excitatriz en pu.
• AV - Tensión interna del regulador.
• BV - Voltaje obtenible de la excitatriz.
• EV - Tensión de la excitatriz atrás de la
reactancia de conmutación.
• ERRV - Señal de error de voltaje.
• GV - Voltaje de realimentación en el lazo
interno.
• IV - Señal interna dentro del regulador detensión.
• RV - Voltaje de salida del regulador.
• SV - Tensión de salida del PSS en pu.
• TV_
- Fasor de la tensión terminal del
generador.
• TI_
- Fasor de corriente terminal del generador.
• LX - Reactancia asociada con la fuente de
potencial.