Embed Size (px)
Citation preview
5/16/2018 Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/practica-1-55ab508d7bddb 1/8
Instituto Politécnico Nacional
Unidad Profesional Interdisciplinaria en Ingeniería
y
Tecnologías Avanzadas
UPIITA
Práctica 1
Tutorial de enlace entre SolidWorks y Matlab mediante SimMechanics
Integrante
Alejandro González Carlos Antonio
9MV2
5/16/2018 Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/practica-1-55ab508d7bddb 2/8
Práctica 1
Tutorial de enlace entre SolidWorks y Matlab mediante SimMechanics
Debido a que en la materia de Robótica II se utilizan modelos para simular los ejercicios y ejemplos
vistos en clase es importante saber utilizar alguna aplicación que nos permita realizarlo.
Muchos de los modelos de robots se diseñan en programas de CAD, en nuestro caso será
SolidWorks, que a pesar de que se pueden implementar la dinámica de los diseños no se puede
implementar los controladores. Para este propósito se utilizará Simulink de Matlab, mediante la
aplicación de SimMechanics.
Pasos
1. Primero es importante instalar tanto SolidWorks como Matlab.
2. Una vez instalados ambos programas es necesario descargar la aplicación especial que
realizará el enlace entre SolidWorks y Matlab, se llama SimMechanics Link.
Este se puede descargar gratuitamente del sitio web de MathWorks.
http://www.mathworks.com/
Products and services Simulink Products SimMechanics Exporting CAD
Assemblies from a CAD System into SimMechanics Download SimMechanics Link
Será necesario registrarse para poder descargar la aplicación, pero es sencillo y rápido.
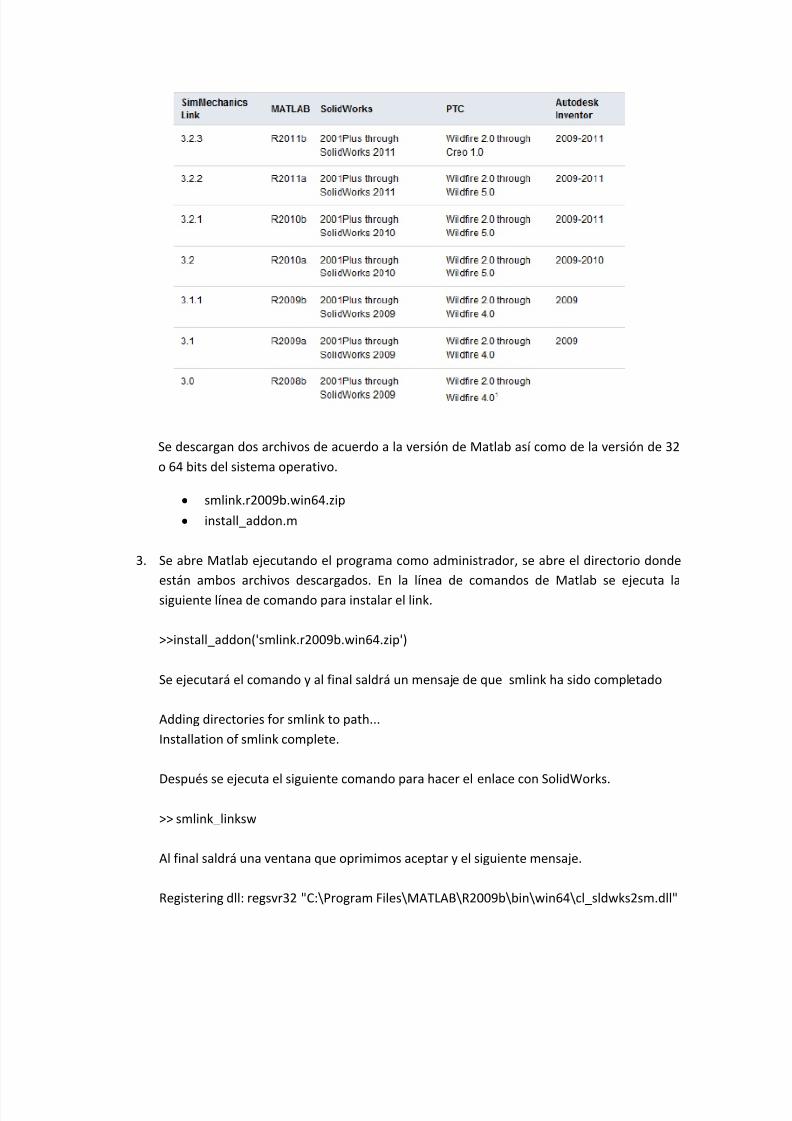
Una vez registrado es importante descargar la versión de SimMechanics Link acorde con
la versión de Matlab ya instalada, tiene que ser la misma o de lo contrario puede haber
problemas en la compatibilidad.
5/16/2018 Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/practica-1-55ab508d7bddb 3/8
Se descargan dos archivos de acuerdo a la versión de Matlab así como de la versión de 32
o 64 bits del sistema operativo.
smlink.r2009b.win64.zip
install_addon.m
3. Se abre Matlab ejecutando el programa como administrador, se abre el directorio donde
están ambos archivos descargados. En la línea de comandos de Matlab se ejecuta la
siguiente línea de comando para instalar el link.
>>install_addon('smlink.r2009b.win64.zip')
Se ejecutará el comando y al final saldrá un mensaje de que smlink ha sido completado
Adding directories for smlink to path...
Installation of smlink complete.
Después se ejecuta el siguiente comando para hacer el enlace con SolidWorks.
>> smlink_linksw
Al final saldrá una ventana que oprimimos aceptar y el siguiente mensaje.
Registering dll: regsvr32 "C:\Program Files\MATLAB\R2009b\bin\win64\cl_sldwks2sm.dll"
5/16/2018 Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/practica-1-55ab508d7bddb 4/8
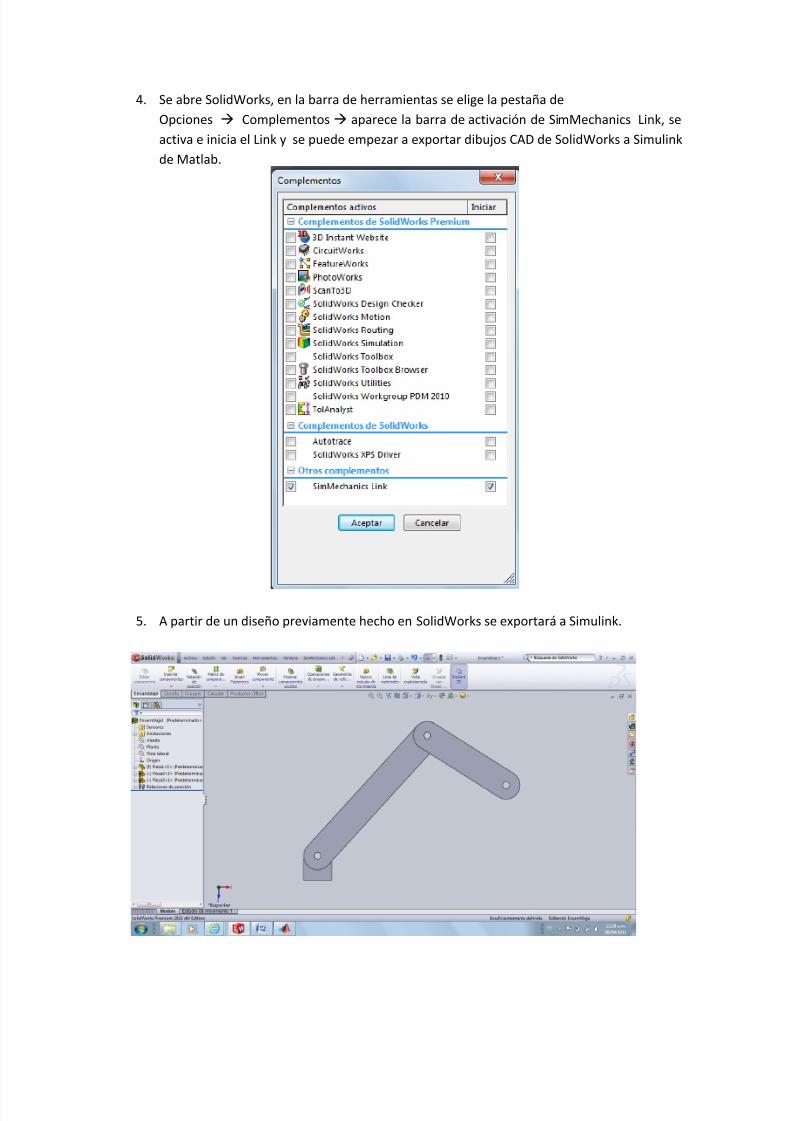
4. Se abre SolidWorks, en la barra de herramientas se elige la pestaña de
Opciones Complementos aparece la barra de activación de SimMechanics Link, se
activa e inicia el Link y se puede empezar a exportar dibujos CAD de SolidWorks a Simulink
de Matlab.
5. A partir de un diseño previamente hecho en SolidWorks se exportará a Simulink.
5/16/2018 Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/practica-1-55ab508d7bddb 5/8
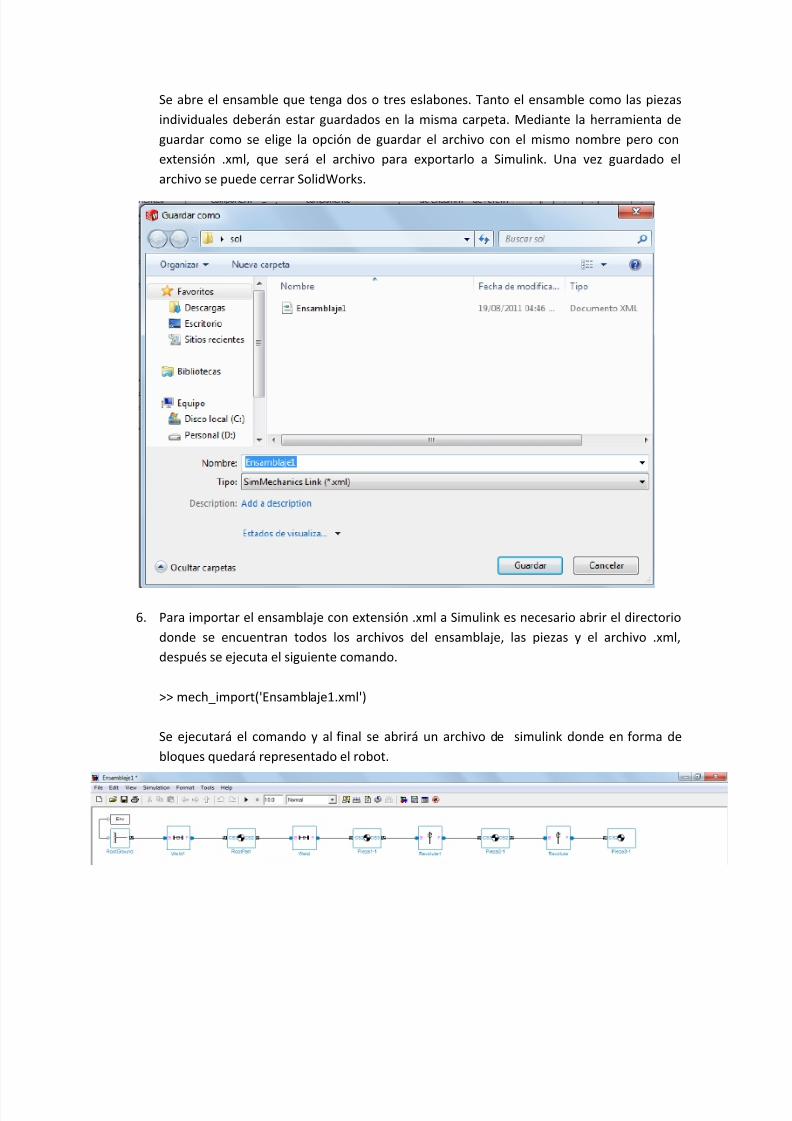
Se abre el ensamble que tenga dos o tres eslabones. Tanto el ensamble como las piezas
individuales deberán estar guardados en la misma carpeta. Mediante la herramienta de
guardar como se elige la opción de guardar el archivo con el mismo nombre pero con
extensión .xml, que será el archivo para exportarlo a Simulink. Una vez guardado el
archivo se puede cerrar SolidWorks.
6. Para importar el ensamblaje con extensión .xml a Simulink es necesario abrir el directorio
donde se encuentran todos los archivos del ensamblaje, las piezas y el archivo .xml,
después se ejecuta el siguiente comando.
>> mech_import('Ensamblaje1.xml')
Se ejecutará el comando y al final se abrirá un archivo de simulink donde en forma de
bloques quedará representado el robot.
5/16/2018 Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/practica-1-55ab508d7bddb 6/8
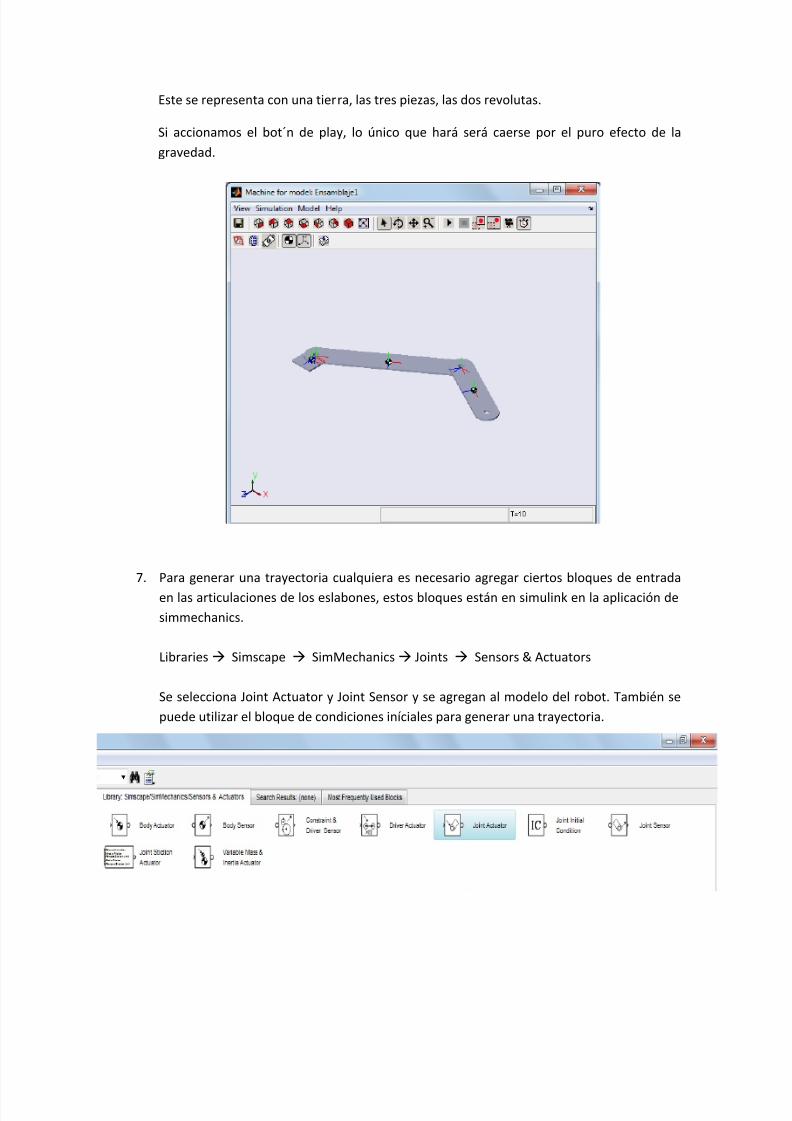
Este se representa con una tierra, las tres piezas, las dos revolutas.
Si accionamos el bot´n de play, lo único que hará será caerse por el puro efecto de la
gravedad.
7. Para generar una trayectoria cualquiera es necesario agregar ciertos bloques de entrada
en las articulaciones de los eslabones, estos bloques están en simulink en la aplicación de
simmechanics.
Libraries Simscape SimMechanics Joints Sensors & Actuators
Se selecciona Joint Actuator y Joint Sensor y se agregan al modelo del robot. También se
puede utilizar el bloque de condiciones iníciales para generar una trayectoria.
5/16/2018 Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/practica-1-55ab508d7bddb 7/8
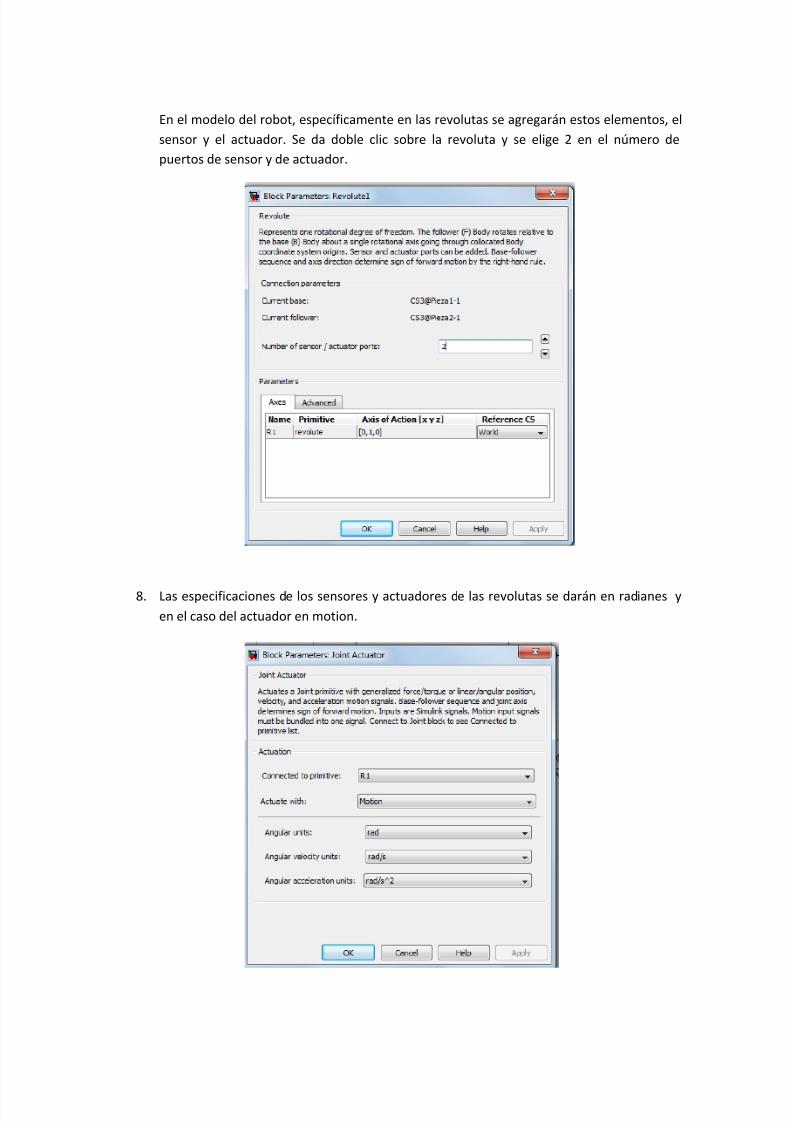
En el modelo del robot, específicamente en las revolutas se agregarán estos elementos, el
sensor y el actuador. Se da doble clic sobre la revoluta y se elige 2 en el número de
puertos de sensor y de actuador.
8. Las especificaciones de los sensores y actuadores de las revolutas se darán en radianes y
en el caso del actuador en motion.
5/16/2018 Practica 1 - slidepdf.com
http://slidepdf.com/reader/full/practica-1-55ab508d7bddb 8/8
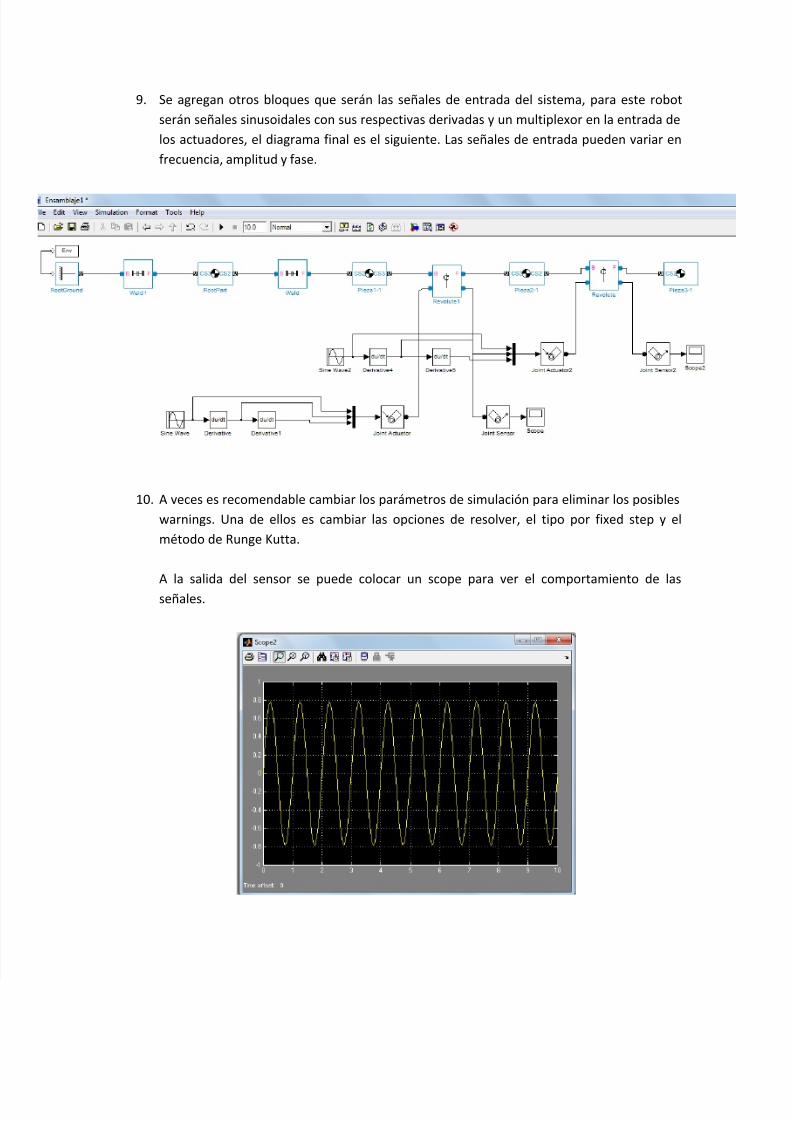
9. Se agregan otros bloques que serán las señales de entrada del sistema, para este robot
serán señales sinusoidales con sus respectivas derivadas y un multiplexor en la entrada de
los actuadores, el diagrama final es el siguiente. Las señales de entrada pueden variar en
frecuencia, amplitud y fase.
10. A veces es recomendable cambiar los parámetros de simulación para eliminar los posibles
warnings. Una de ellos es cambiar las opciones de resolver, el tipo por fixed step y el
método de Runge Kutta.
A la salida del sensor se puede colocar un scope para ver el comportamiento de las
señales.





![Practica 1[1]](https://img.pdfslide.es/doc/110x75/55a25f8b1a28abdc718b46b6/practica-11-55a529235d02c.jpg)