Embed Size (px)
Citation preview
PRÁCTICA CONTROL
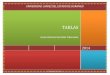
1. Estabilizar el sistema usando Sisotool d Matlab para la planta indicada a continuación. Mostrar la respuesta en el tiempo y el controlador C resultante.
En la figura anterior puede verse como el sistema ha sido estabilizado por medio del controlador mostrado en la figura. Este sistema converge a aproximadamente -190 y se estabiliza en más de 60 segundos.
2. Introducir en Sisotool la planta mostrada a continuación y completar la tabla:
TIPODE COMPENSADOR
UBICACIÓN EFECTO OBSERVADO
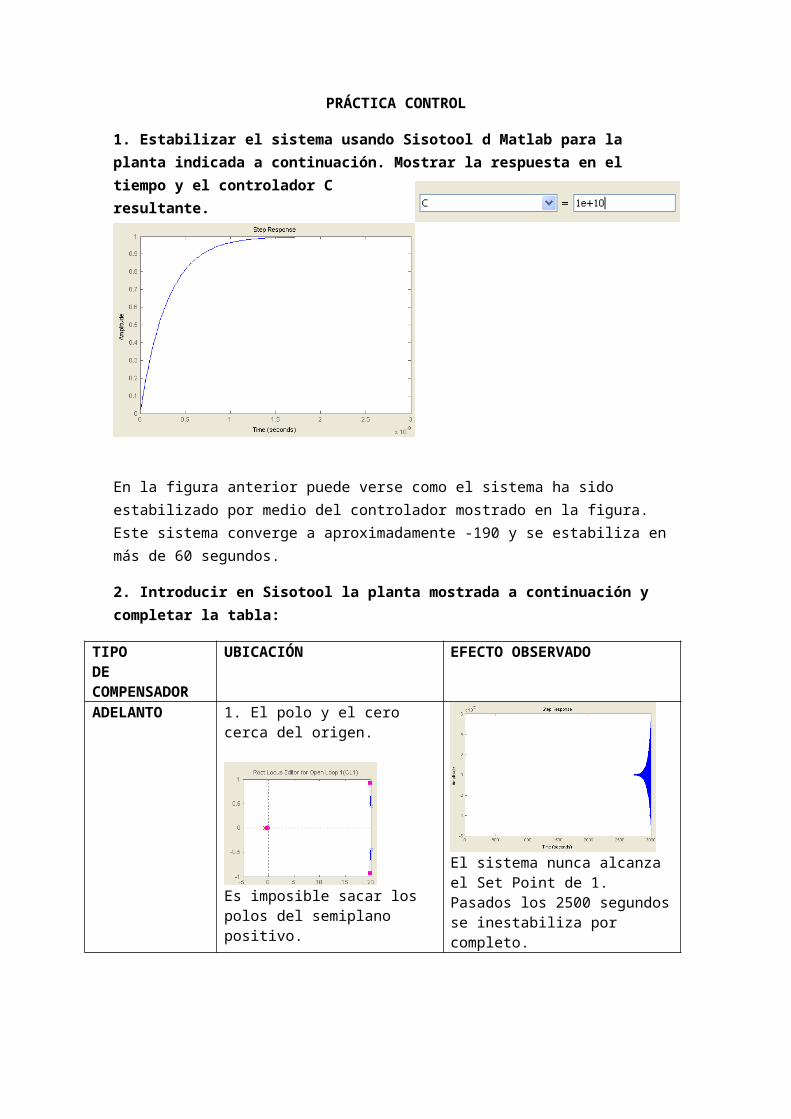
ADELANTO 1. El polo y el cero cerca del origen.
Es imposible sacar los polos del semiplano positivo.
El sistema nunca alcanza el Set Point de 1. Pasados los 2500 segundos se inestabiliza por completo.
2. El polo y el cero lejos del origen.
El sistema nunca alcanza el Set Point
Es imposible sacar los polos del semiplano positivo.
de 1. Pasados los 4000 segundos se inestabiliza por completo.
3. El polo lejos y el cero cerca del origen.
Es posible estabilizar el sistema.
El sistema se estabiliza y converge a 0.7 en 5 segundos.
4. El polo cerca y el cero lejos del origen.
No es posible estabilizar el sistema.El sistema se inestabiliza en 140 segundos.
RETARDO 1. El polo y el cero cerca del origen.
No es posible estabilizar el sistema. El sistema se inestabiliza por completo pasados los 2500 s.
2. El polo y el cero lejos del origen.
No es posible estabilizar el sistema. El sistema se inestabiliza por completo pasados los 2500 s.
3. El polo lejos y el cero cerca del origen.
Después de una gran sobre

Es posible estabilizar el sistema. elongación el sistema converge a 0 pasados los 45 segundos.
4. El polo cerca y el cero lejos del origen.
No es posible estabilizar el sistema.
Pasados los 600 segundos el sistema se inestabiliza por completo.
POLO REAL 1. Cerca del origen
No es posible estabilizar el sistema.Pasados los 25 segundos el sistema se inestabiliza.
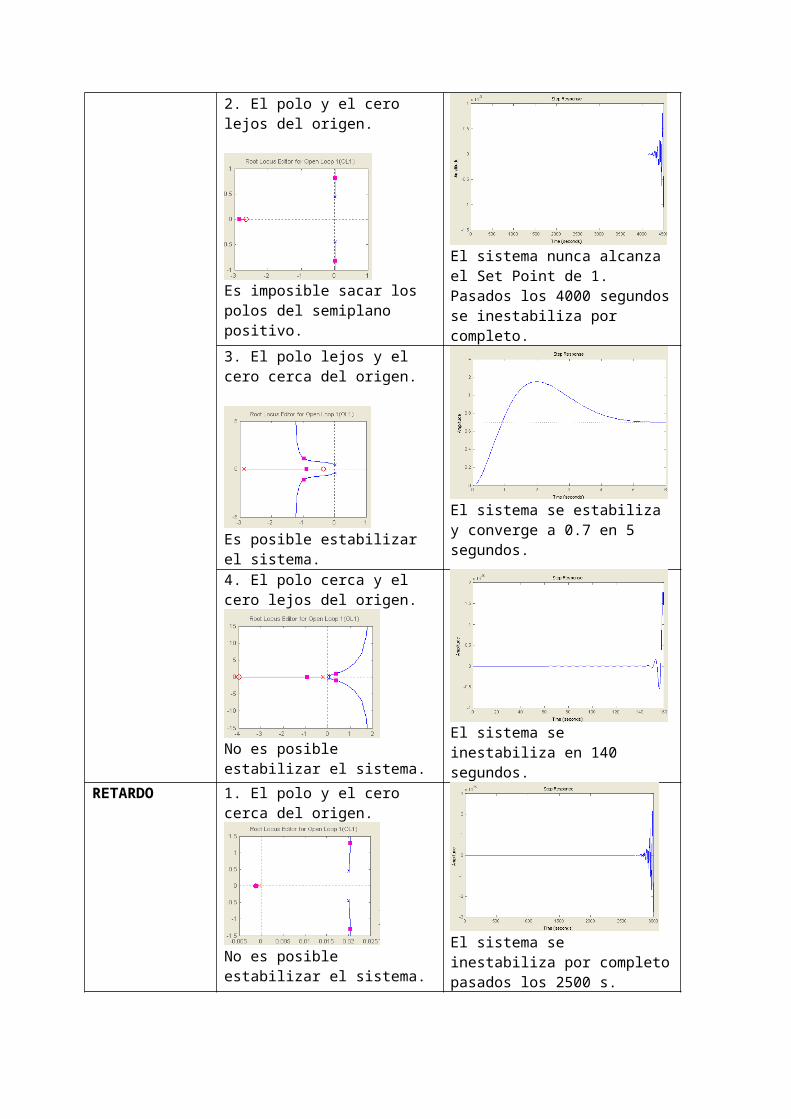
2. Lejos del origen
No es posible estabilizar el sistema.
Pasados los 10 segundos el sistema se inestabiliza.
POLO COMPLEJO 1. Cerca del origen
No es posible estabilizar el sistema.Pasados los 100 segundos el sistema se inestabiliza.
2. Lejos del origen
No es posible estabilizar el sistema.
Pasados los 5 segundos el sistema se inestabiliza.
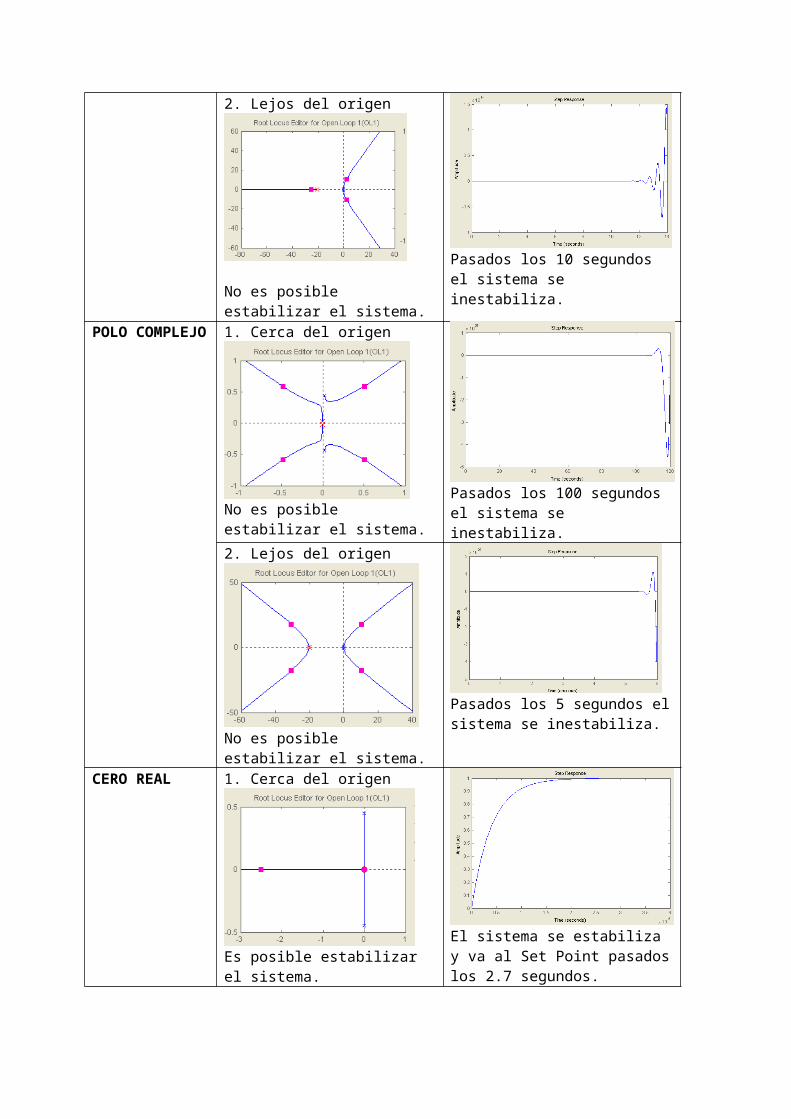
CERO REAL 1. Cerca del origen
Es posible estabilizar el sistema.El sistema se estabiliza y va al Set Point pasados los 2.7 segundos.
2. Lejos del origen
Es posible estabilizar el sistema.El sistema se estabiliza y va al Set Point antes de llegar a los 0.9 segundos.
CERO COMPLEJO 1. Cerca del origen
Es posible estabilizar el sistema.
El sistema llega al Set Point y después se aleja lentamente (16K s)
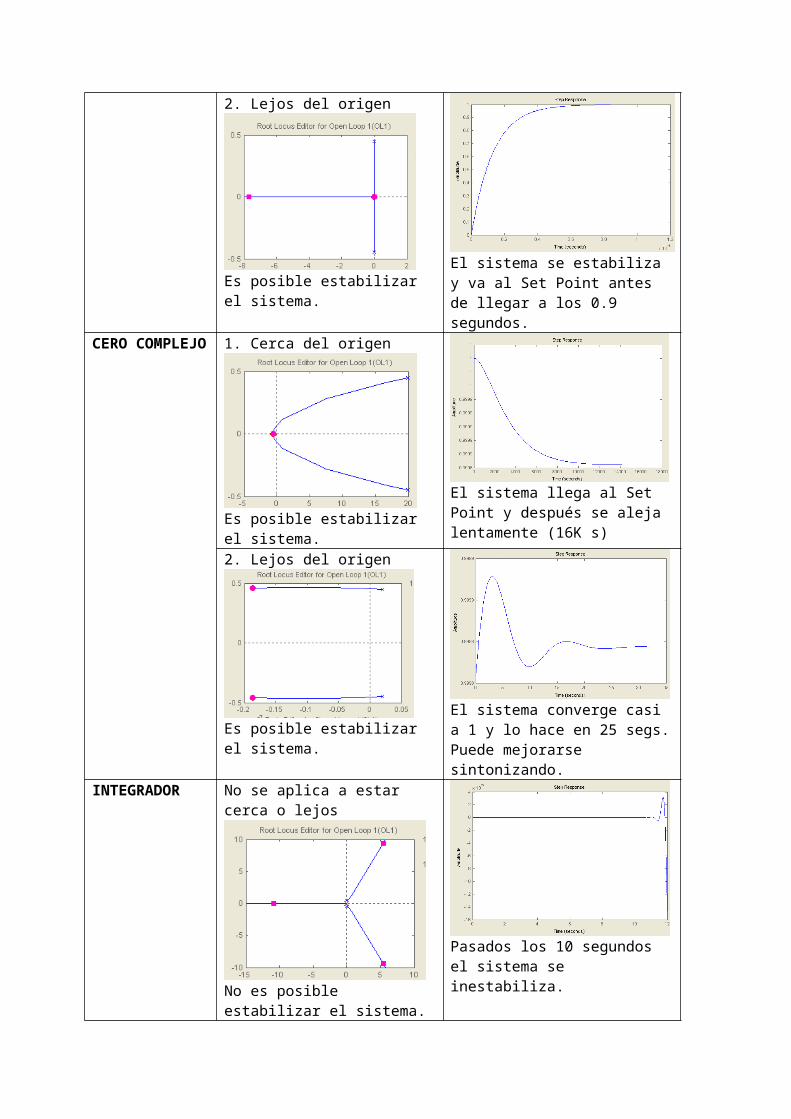
2. Lejos del origen
Es posible estabilizar el sistema.El sistema converge casi a 1 y lo hace en 25 segs. Puede mejorarse sintonizando.
INTEGRADOR No se aplica a estar cerca o lejos
No es posible estabilizar el sistema.
Pasados los 10 segundos el sistema se inestabiliza.
DIFERENCIADOR No se aplica a estar cerca o lejos
No es posible estabilizar el sistema.
Pasados los 10 segundos el sistema se inestabiliza.
3. Controlar en la planta del problema 1 logrando que se cumplan las siguientes características de diseño:
Tiempo de asentamiento < 1s Porcentaje de sobre elongación < 5%
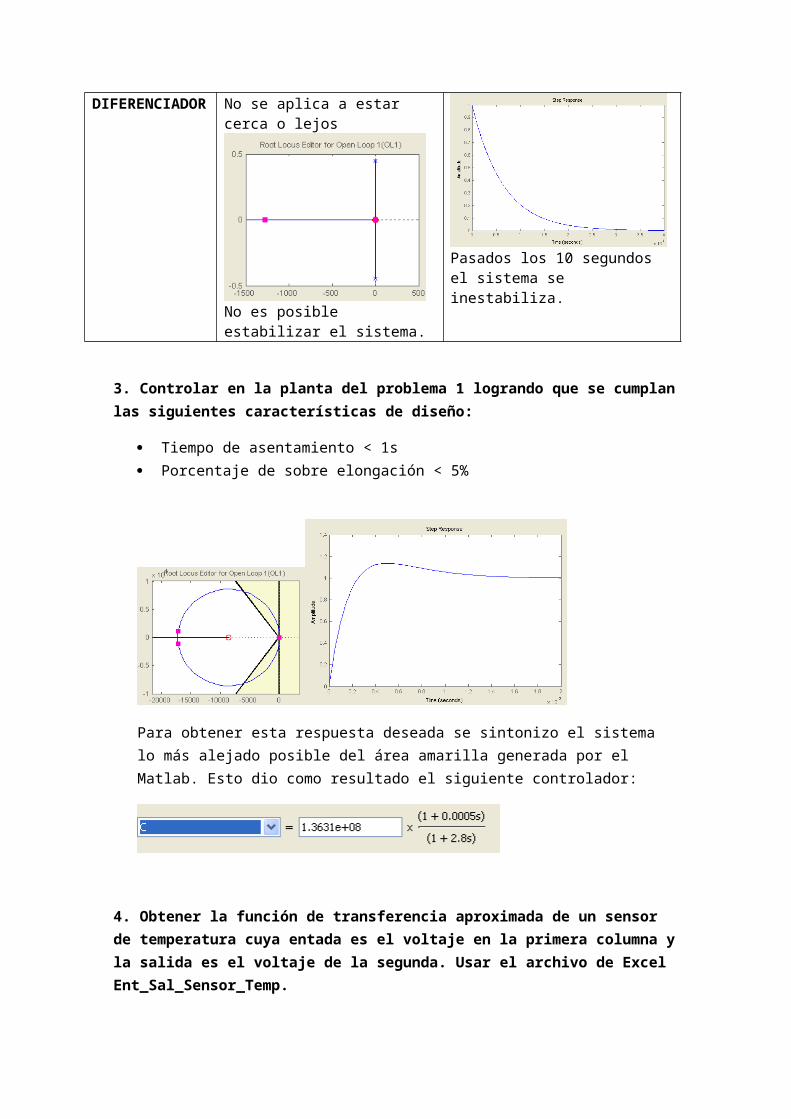
Para obtener esta respuesta deseada se sintonizo el sistema lo más alejado posible del área amarilla generada por el Matlab. Esto dio como resultado el siguiente controlador:
4. Obtener la función de transferencia aproximada de un sensor de temperatura cuya entada es el voltaje en la primera columna y la salida es el voltaje de la segunda. Usar el archivo de Excel Ent_Sal_Sensor_Temp.
0.0001557 s + 8.672e-06
---------------------------
S^2 + 0.02089 s + 0.0004746
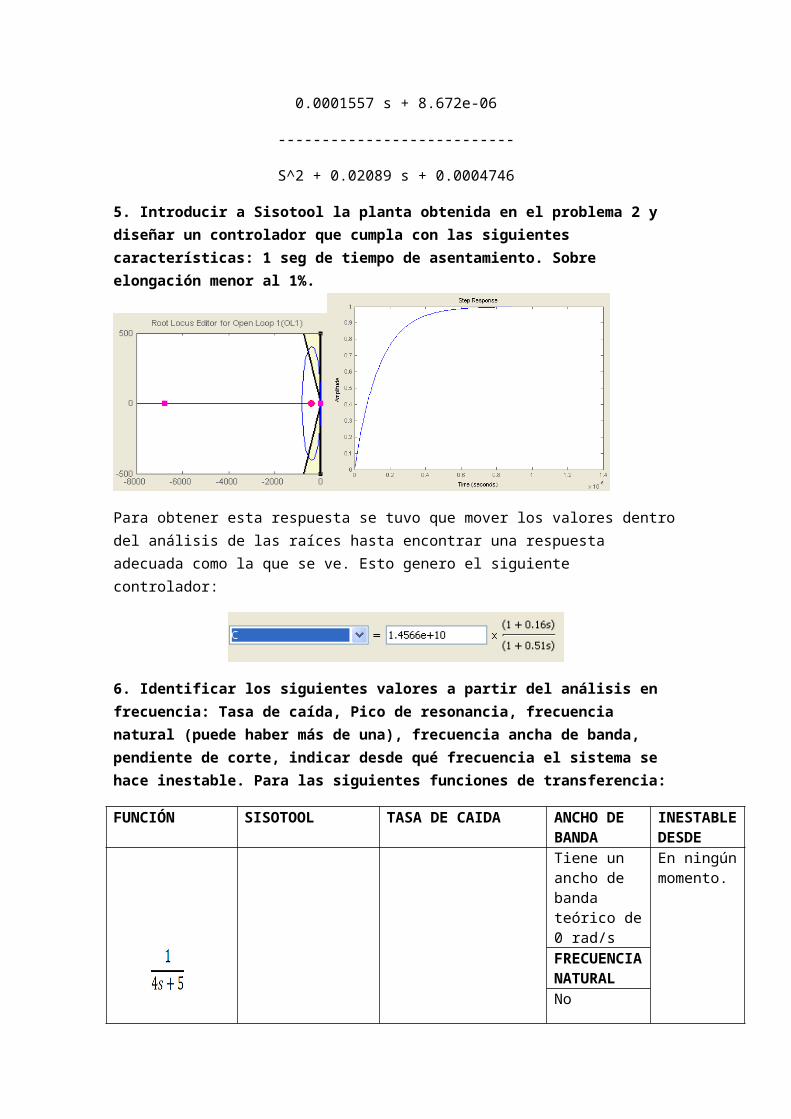
5. Introducir a Sisotool la planta obtenida en el problema 2 y diseñar un controlador que cumpla con las siguientes características: 1 seg de tiempo de asentamiento. Sobre elongación menor al 1%.
Para obtener esta respuesta se tuvo que mover los valores dentro del análisis de las raíces hasta encontrar una respuesta adecuada como la que se ve. Esto genero el siguiente controlador:
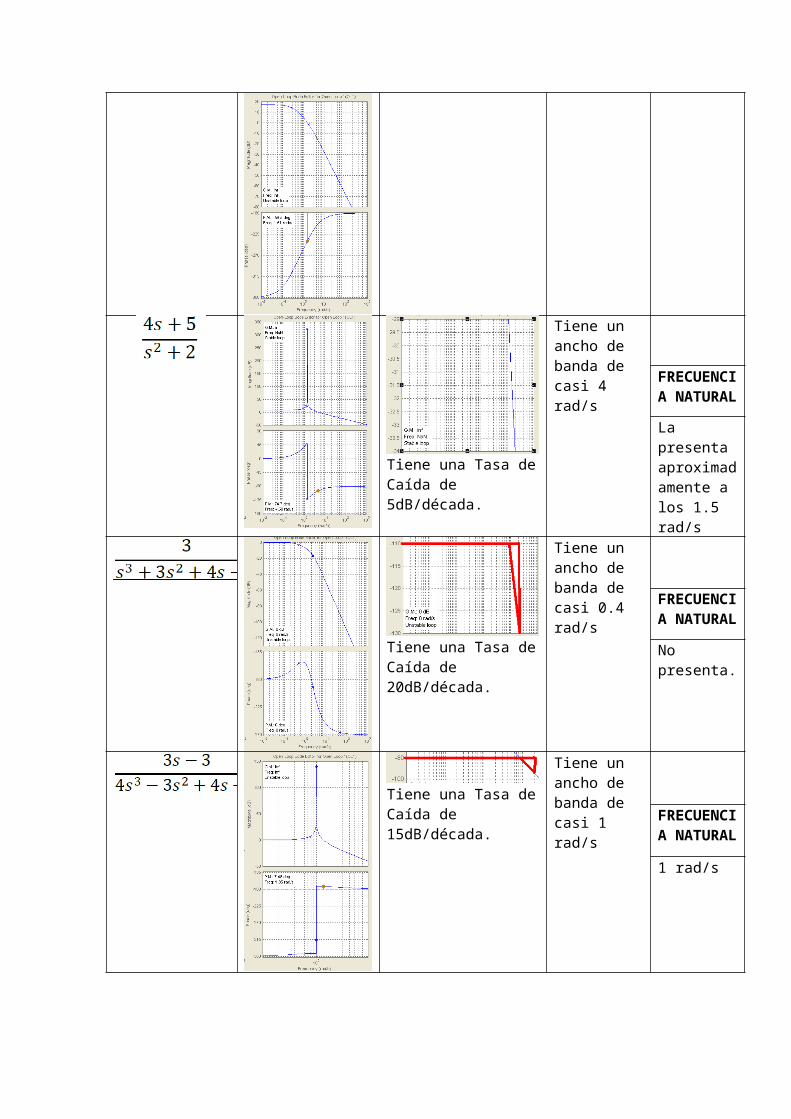
6. Identificar los siguientes valores a partir del análisis en frecuencia: Tasa de caída, Pico de resonancia, frecuencia natural (puede haber más de una), frecuencia ancha de banda, pendiente de corte, indicar desde qué frecuencia el sistema se hace inestable. Para las siguientes funciones de transferencia:
FUNCIÓN SISOTOOL TASA DE CAIDA ANCHO DE BANDA
INESTABLE DESDE
Se tiene una Tasa de Caída de 3dB/década
Tiene un ancho de banda teórico de 0 rad/s
En ningún momento.
FRECUENCIA NATURALNo presenta
Tiene una Tasa de Caída bajísima que redondea los 0dB/década
Tiene un ancho de banda de aproximadamente 1 rad/s
Desde la frecuencia de 1 rad/s
FRECUENCIA NATURALNo presenta
Tiene una Tasa de Caída de 10dB/década.
Tiene un ancho de banda teórico de 0 rad/s
FRECUENCIA NATURALNo presenta
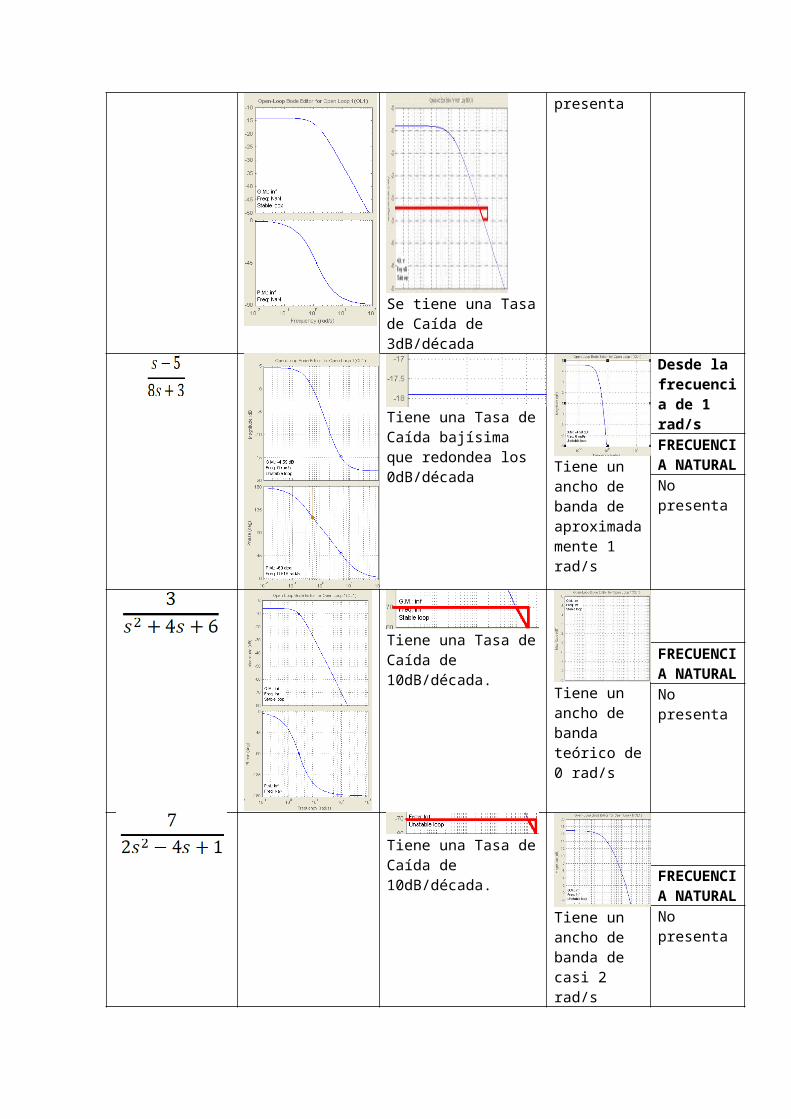
Tiene una Tasa de Caída de 10dB/década.
Tiene un ancho de banda de casi 2 rad/s
FRECUENCIA NATURALNo presenta
Tiene una Tasa de Caída de 5dB/década.
Tiene un ancho de banda de casi 4 rad/s FRECUENCIA
NATURAL
La presenta aproximadamente a los 1.5 rad/s
Tiene una Tasa de Caída de 20dB/década.
Tiene un ancho de banda de casi 0.4 rad/s FRECUENCIA
NATURAL
No presenta.
Tiene una Tasa de Caída de 15dB/década.
Tiene un ancho de banda de casi 1 rad/s FRECUENCIA
NATURAL
1 rad/s
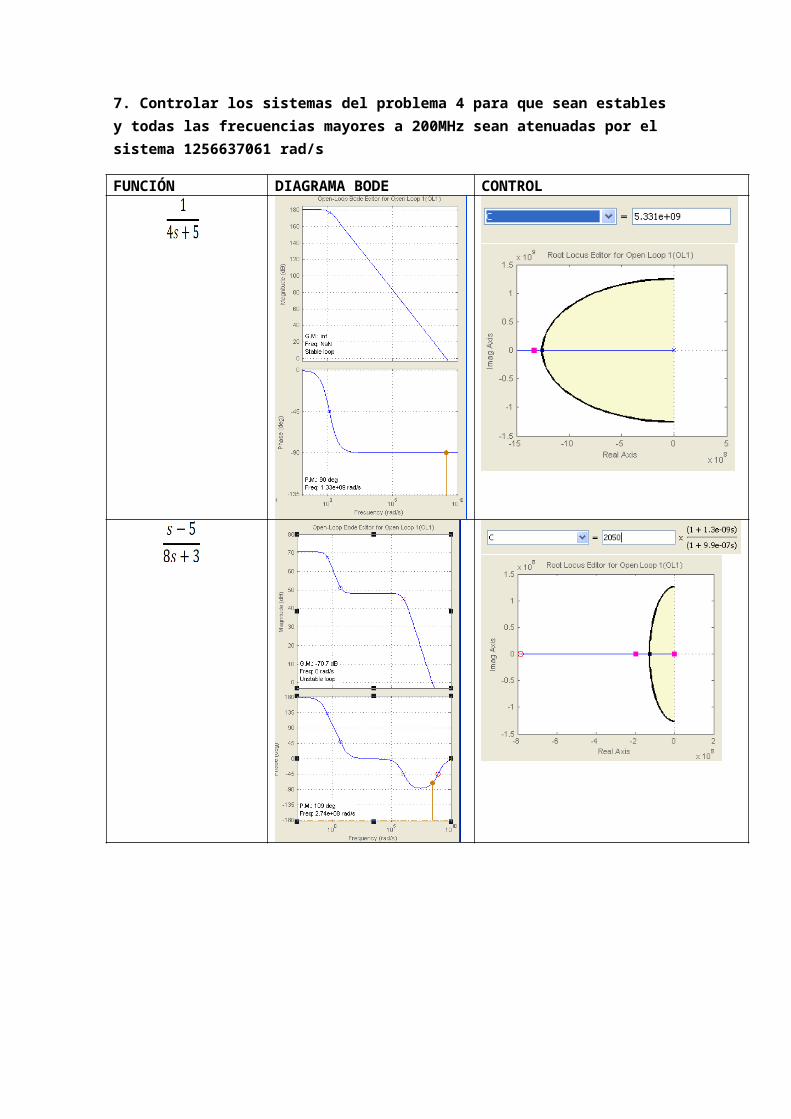
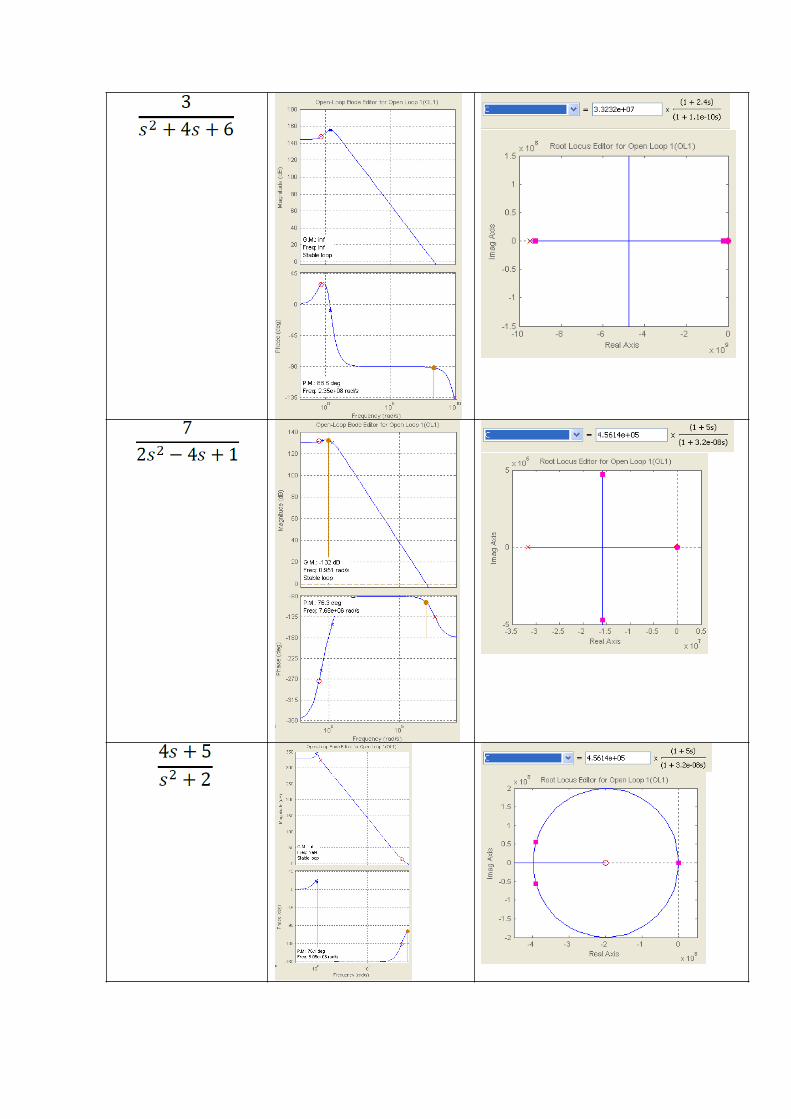
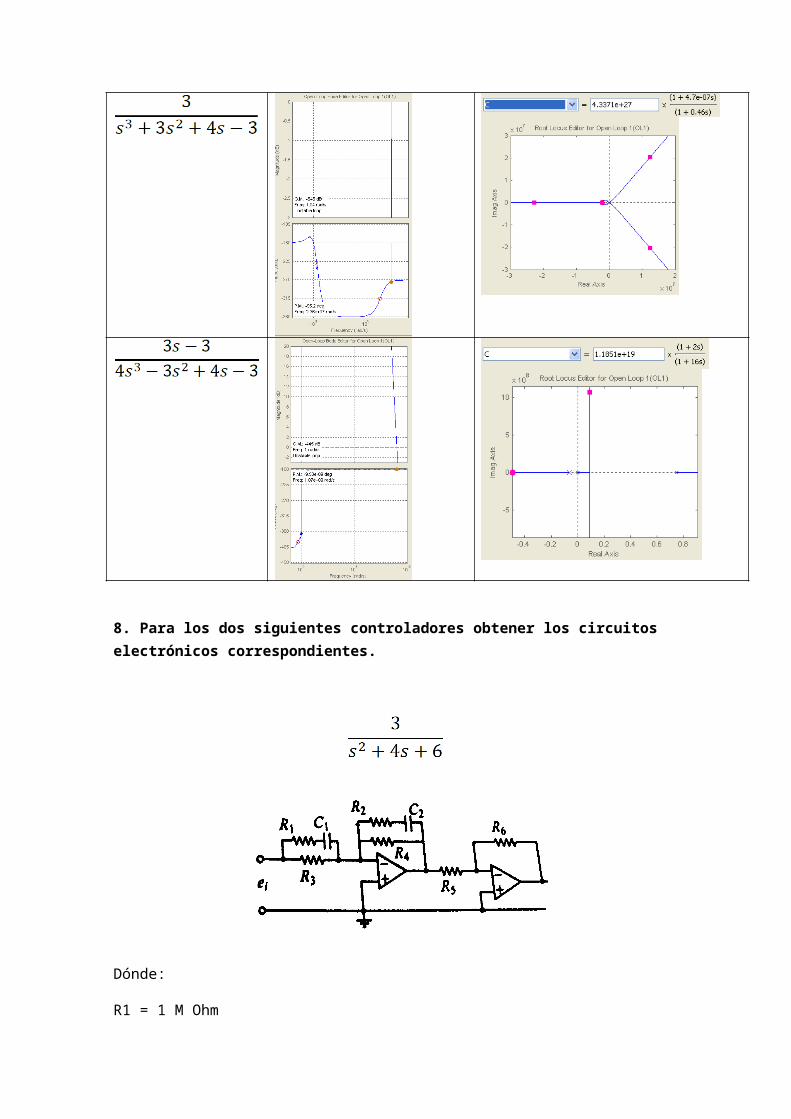
7. Controlar los sistemas del problema 4 para que sean estables y todas las frecuencias mayores a 200MHz sean atenuadas por el sistema 1256637061 rad/s
FUNCIÓN DIAGRAMA BODE CONTROL
8. Para los dos siguientes controladores obtener los circuitos electrónicos correspondientes.
Dónde:
R1 = 1 M Ohm
R2 = 0 Ohm
R3 = 1 Ohm
R4 = 3333.33 Ohm
R5 = 3 Ohm
R6 = 90 micro Ohm
C1 = 1 micro F
C2 = 10 micro F
C1 = 10 micro F
C2 = 10 micro F
R1 = 20 K Ohm
R2 = 12.5 K Ohm
R3 = R4 = 400 micro Ohm