Embed Size (px)
Citation preview
1
MECANICA CLÁSICA
(Material didáctico para los estudiantes)
Prof. Ilia D. Mikhailov
Capitulo I DESCRIPCION DEL MOVIMIENTO
1.1 Descripción del Movimiento de Una Partícula.
1.1.1 Marcos de Referencia y Sistemas de Coordenadas.
1.1.2 Descripción del Movimiento en Coordenadas relacionadas con la Trayectoria.
1.1.3 Movimiento Circular
1.1.4 Velocidad y aceleración en Coordenadas polares
1.1.5 Descripción del Movimiento en Coordenadas Curvilíneas
1.1.6 Velocidad y aceleración en Coordenadas cilíndricas y esféricas.
1.1.1 Marcos de Referencia y Sistemas de Coordenadas.
-Cinemática estudia el movimiento como tal. Problema principal de cinemática consiste en analizar el movimiento y en elaborar
los métodos de descripción de un movimiento de una partícula o un sistema de partículas en el espacio y en el tiempo.
-En mecánica clásica se considera que cualquier movimiento sucede en el espacio tridimensional, isotrópico, homogéneo y
euclediano
- En mecánica clásica se considera que el tiempo es absoluto, es decir es un parámetro que crece continuamente desde el pasado
hacia el futuro, es homogéneo (igual en todos puntos del espacio) y no depende del movimiento de la materia.
- Las partículas (o cuerpos rígidos) se mueven una respecto a otras si las distancias entre éstas varían. Si una partícula (o un
cuerpo) se toma como un Marco de Referencia y condicionalmente se considera como inmóvil, entonces el movimiento de todas
otras partículas respecto a este se considera como un movimiento absoluto. Sistema de coordenadas relacionada (tres ejes) con la
partícula (cuerpo) inmóvil se llama inmóvil (absoluta), en caso contrario cuando este sistema esta relacionada con una partícula
(cuerpo) en el movimiento se llama sistema de coordenadas móvil.
- Un conjunto de los puntos de las sucesivas posiciones de una partícula en el movimiento se llama trayectoria. Problema
fundamental de cinemática es hallar la forma explicita descripción de la trayectoria, velocidades, aceleraciones y otras
características cinemáticas del movimiento de una partícula o un sistema de partículas. Hay dos diferentes maneras de descripción
de un movimiento: vectorial y en coordenadas.
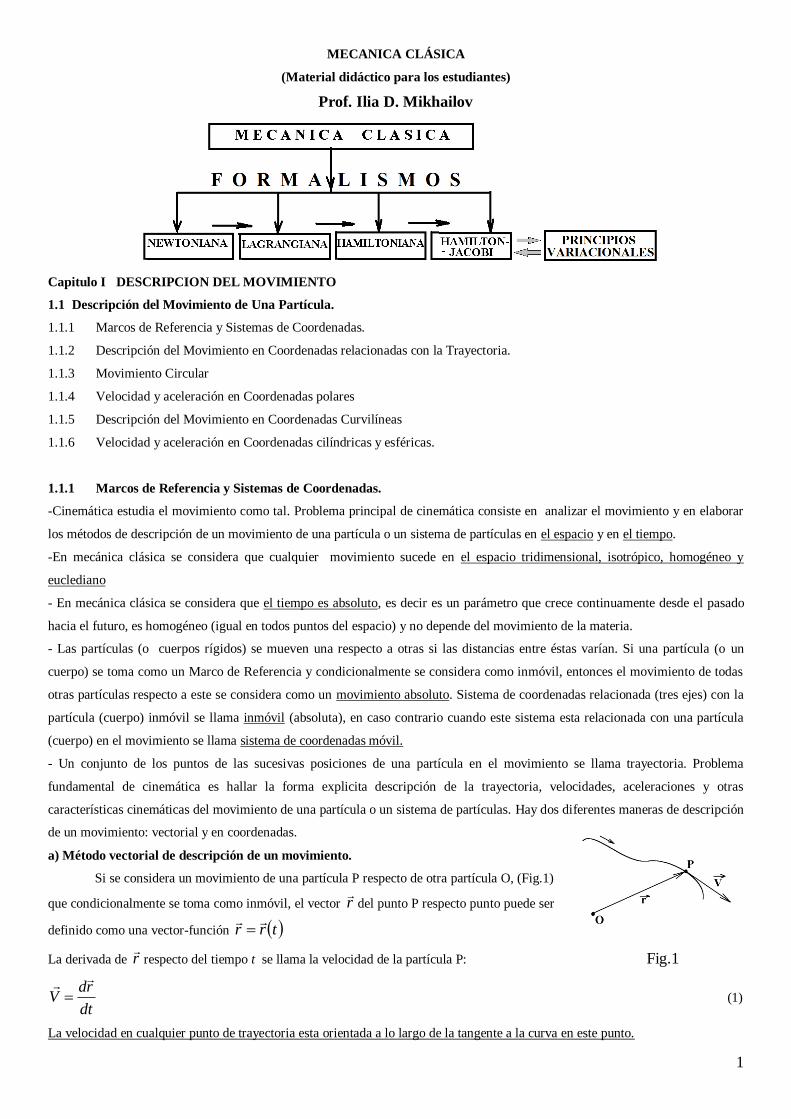
a) Método vectorial de descripción de un movimiento.
Si se considera un movimiento de una partícula P respecto de otra partícula O, (Fig.1)
que condicionalmente se toma como inmóvil, el vector r
del punto P respecto punto puede ser
definido como una vector-función trr
La derivada de r
respecto del tiempo t se llama la velocidad de la partícula P: Fig.1
dt
rdV
(1)
La velocidad en cualquier punto de trayectoria esta orientada a lo largo de la tangente a la curva en este punto.

2
La derivada de V
2
2
dt
rd
dt
Vda
(2)
se llama aceleración de la partícula P
b) Método de descripción de un movimiento en coordenadas.
Sea OXYZ (Fig.2) un sistema de Coordenadas Cartesianas inmóvil (relacionada
con el cuerpo O) y kji
,, tres vectores unitarios a lo largo de los ejes X, Y y Z entonces
vector-función trr
puede ser representada por medio de tres funciones escalares
tztytx ,, - coordenadas del punto P: Fig.2
ktzjtyitxtr
(3)
El valor absoluto de la velocidad y la dirección el respecto de los ejes son:
tztVtytVtxtVktVjtVitVtV zyxzyx
;;; (4)
El valor absoluto de la velocidad y sus ángulos con las ejes de coordenadas se definen por medio de las relaciones:
;,cos;,cos;,cos
;222
tV
tzkV
tV
tyjV
tV
txiV
tztytxtVtV
(5)
De manera similar se encuentran los componentes del vector de aceleración
tztatytatxtaktajtaitata zyxzyx
;;; (6)
su valor absoluto y las direcciones:
;,cos;,cos;,cos
;222
ta
tzka
ta
tyja
ta
txia
tztytxtata
(7)
Ejemplo: Coordenadas de una partícula P varían con el tiempo de acuerdo con las formulas: cos , ,x A bt y Asenbt
z ct donde A, b y c son constantes. Hállese la trayectoria, la velocidad y aceleración de la partícula en función del tiempo.
Solución: De las dos primeras relaciones se ve que las coordenadas cartesianas en cualquier momento del tiempo cumplen la
relación: 222 Ayx . Esto significa que la partícula se mueve sobre el superficie de un cilindro del radio a, el eje del cual
coincide con el eje Z. Sea el ángulo entre la proyección OA del vector OP sobre el plano XOY y el eje OX (Fig. 3), entonces
bczbtsenAyAx ,,;cos . Por consiguiente, la recta OA
se rota uniformemente, mientras el punto P se desplaza uniformemente hacia arriba a lo
largo de la recta AP y la trayectoria es una espiral del radio A.Definimos la velocidad
de la partícula P. Según las formulas (4) y (5) tenemos:
; cos ; ;x t Ab senbt y t Ab bt z c 2 2 2 2 2 2V x y z A b c
El valor absoluto de la velocidad es una constante, mientras que la dirección de la
velocidad varía con el tiempo:
;,cos;cos,cos;,cos222222222 cbA
ckVbt
cbA
AbjVsenbt
cbA
AbiV
Fig. 3
Definimos la aceleración de la partícula P. Según las formulas (6) y (7) tenemos:
3
2 2 2 2 2 2cos ; ; 0;x t Ab bt y t Ab senbt z a x y z Ab
El valor absoluto de la aceleración es una constante y siempre esta orientada a lo largo de la normal interior PB (Fig.3) desde el
punto B hacia el punto B paralelo a recta AO. Los angulos con los ejes correspondientes se definen a través de las formulas:
;0,cos;,cos;cos,cos kVsenbtjVbtiV
Problemas.
1) En un movimiento unidimensional la coordenada de una partícula varía con el tiempo según la formula:
teV
tx
10. Hállese las formulas para la velocidad y aceleración. Hágase los gráficos de la velocidad y aceleración
en función del tiempo para diferentes valores de . ¿ Que tipo de movimiento describen estas formulas? Analícese el caso limite
cuando .
2) En un movimiento unidimensional la coordenada de una partícula varía con el tiempo según la formula:
2
12
0 gte
Vtx t
. Hállese las formulas para la velocidad y aceleración. Hágase los gráficos de la velocidad y
aceleración en función del tiempo para diferentes valores de . ¿ Que tipo de movimiento describen estas formulas? Analícese
el caso limite cuando .
3) El movimiento de un proyectil en Coordenadas Cartesianas se describe a través de formulas:
2
1;1cos
)(2
0000 gte
senVtye
Vtx tt
. Hállese las formulas para los componentes de la
velocidad y la aceleración, valores absolutos de la velocidad y aceleración y el ángulo que forma la velocidad con eje OX.
Analícese el caso límite cuando .
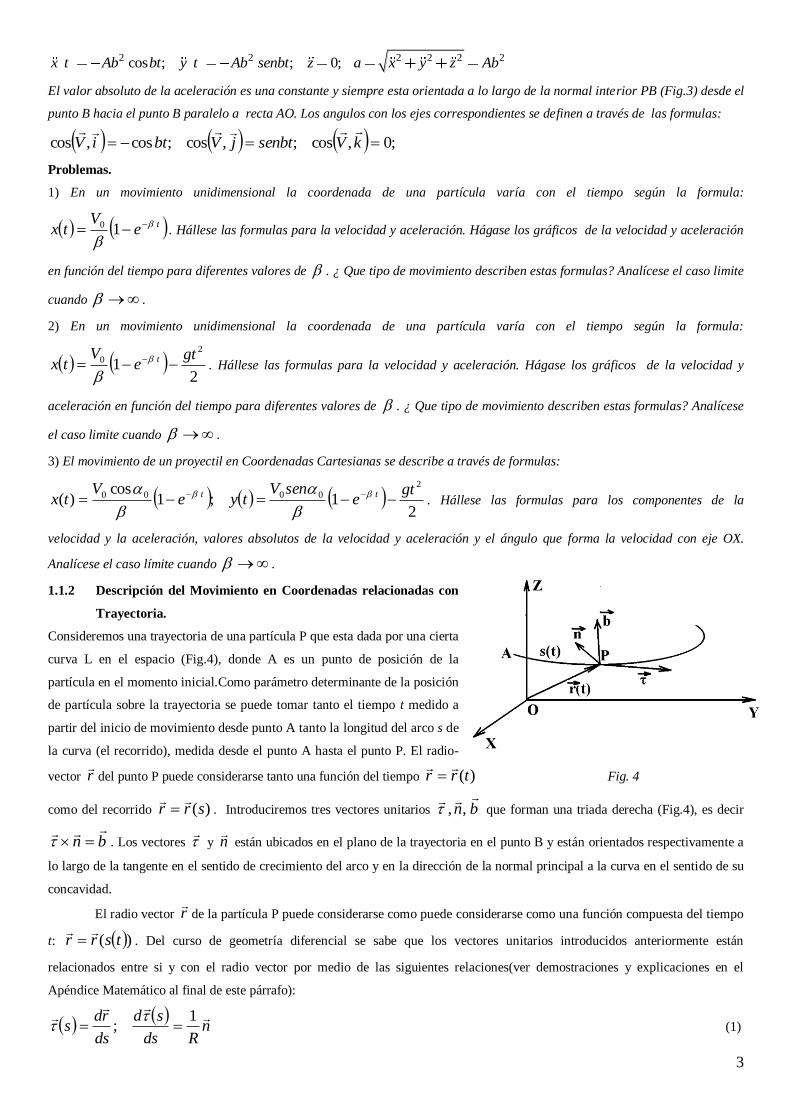
1.1.2 Descripción del Movimiento en Coordenadas relacionadas con
Trayectoria.
Consideremos una trayectoria de una partícula P que esta dada por una cierta
curva L en el espacio (Fig.4), donde A es un punto de posición de la
partícula en el momento inicial.Como parámetro determinante de la posición
de partícula sobre la trayectoria se puede tomar tanto el tiempo t medido a
partir del inicio de movimiento desde punto A tanto la longitud del arco s de
la curva (el recorrido), medida desde el punto A hasta el punto P. El radio-
vector r
del punto P puede considerarse tanto una función del tiempo )(trr
Fig. 4
como del recorrido )(srr
. Introduciremos tres vectores unitarios bn
,, que forman una triada derecha (Fig.4), es decir
bn
. Los vectores
y n
están ubicados en el plano de la trayectoria en el punto B y están orientados respectivamente a
lo largo de la tangente en el sentido de crecimiento del arco y en la dirección de la normal principal a la curva en el sentido de su
concavidad.
El radio vector r
de la partícula P puede considerarse como puede considerarse como una función compuesta del tiempo
t: )( tsrr
. Del curso de geometría diferencial se sabe que los vectores unitarios introducidos anteriormente están
relacionados entre si y con el radio vector por medio de las siguientes relaciones(ver demostraciones y explicaciones en el
Apéndice Matemático al final de este párrafo):
nRds
sd
ds
rds
1;
(1)

4
donde R es el radio de curvatura de la trayectoria en el punto P. Utilizando estas relaciones se puede encontrar los vectores de
velocidad y aceleración:
dt
ds
dt
dzdydx
dt
dz
dt
dy
dt
dxVVV
dt
ds
ds
rd
dt
rdV
222222
;
(2)
n
R
V
dt
sd
dt
ds
ds
dV
dt
sd
dt
dV
dt
dV
dt
Vd
dt
Vda
2
2
2
2
2
(3)
La formula (2) muestra que el vector de velocidad siempre esta orientado a lo largo de la tangente de la trayectoria y el
valor absoluto de la velocidad puede calcularse como la derivada del recorrido respecto del tiempo.
Del formula (3) se ve que el vector de aceleración siempre esta ubicado en el plano de dos vectores
y n
y puede
representarse en la forma siguiente:
nR
Va
dt
sd
dt
dVaaaa nn
2
2
2
;; (4)
De esta manera el vector de aceleración en coordenadas relacionadas con la trayectoria puede considerarse como una suma de la
aceleración tangencial a
y aceleración normal na
. La formula (4) expresa el teorema de Huygens sobre descomposición de la
aceleración en dos componentes tangencial y normal. La aceleración tangencial caracteriza la rapidez de variación del modulo de
la velocidad, mientras que aceleración normal caracteriza la rapidez de variación de la dirección de la velocidad.
El valor absoluto de la aceleración se define a través de estas dos componentes como:
22
naaa (5)
Ejemplo. La trayectoria de una partícula esta dada por formulas: BsentytAx ;cos . Hallase la forma de esta
trayectoria y el radio de curvatura en función del tiempo.
Solución.
Coordenadas x y y satisfacen la relación 12
2
2
2
B
y
A
x, por eso la trayectoria es una
elipse (Fig.5). Para hallar el radio de curvatura utilizaremos la relación:
2
2
2
2
42
222 ;
dt
dVa
VR
R
V
dt
dVaaa n . (6)
Por otro lado Fig.5
tBtsenAVtBtsenAyxV 22222222222 cos;cos ; (7)
tsenBtAa 22222 cos ; (8)
tBtsenA
ttsenBA
dt
dVa
2222
22222
2
cos
cos
(9)
Al sustituir (7)-(9) en (6) se obtiene una expresión final para el radio de curvatura:
AB
tBtsenAR
23
2222 cos
Particularmente, en los puntos extremos de la elipse, situados sobre eje OX (donde t=0,), R=B2/A y situados sobre eje OY(t=
/2, 3/2) R=A2/B
Apéndice Matemático. Demostración de relaciones (1) de geometría diferencial.
Teorema1. Al derivar el radio vector r
respecto al escalar s, el recorrido a lo largo de trayectoria, se obtiene un vector
unitario dr ds dirigido según la tangente a la trayectoria, en el sentido de crecimiento s.

5
Demostración.
El nuevo vector se puede definir como 0
lims
r
s, donde en la Fig.6
BAr
es longitud de cuerda, mientras que BAs
es longitud del arco. Es
sabido que la relación entre la cuerda que subtiende al arco y la longitud del arco
tiende a 1, cuando la longitud de este último se aproxima a cero. Por consiguiente
1
, es decir el vector
es un vector unitario. Además se puede ver desde Fig. 6
que la dirección del vector r
junto con la dirección de la cuerda se aproxima a Fig.6
la dirección de tangente cuando 0s .
Teorema 2. La derivada de un vector unitario al respecto del tiempo es un vector perpendicular a el e igual en modulo a su
velocidad angular de rotación.
Demostración. Sea un vector
un vector unitario entonces su derivada se define como.
0 0lim limt t
t t td
dt t t
Como el vector unitario en el proceso de su variación conserva su longitud entonces el solo
cambia su dirección y como se ve de la Fig.7 los vectores )(t
y )( tt
forman un
triangulo OAB isósceles. Por eso la longitud del vector
Fig. 7
es igual 222
2
sen
OA sen 1puesto que OA . El modulo de la derivada del vector )(t
se encuentra
como un límite: dt
d
t
sen
tdt
d
tt
2
2limlim
Cuando t el vector
se hace perpendicular al
vector )(t
y por eso la derivada del vector )(t
es perpendicular al este.
Teorema 3. Si el vector )(s
es el vector unitario tangente a la trayectoria y s es el recorrido a lo largo de este trayectoria
entonces la derivada de este vector satisface la igualdad
nRds
sd
1
, donde R es el radio de curvatura y n
es un vector
unitario orientado a lo largo de la normal principal.
Demostración. Teniendo en cuenta que el radio de curvatura se define como Rdds y utilizando el resultado del Teorema 2
se obtiene
R
nRd
dn
ds
dn
ds
dt
dt
dn
ds
dt
dt
d
ds
sd 1
Problemas.
1) El movimiento de un proyectil en Coordenadas Cartesianas se describe a través de formulas:
2
1;1cos
)(2
0000 gte
senVtye
Vtx tt
. Hállese las formulas para las aceleraciones tangencial,
normal y total y el radio de curvatura de la trayectoria en función del tiempo. Analícese el caso limite cuando .

6
2) Trayectoria de una partícula es un elipse 1// 2222 ByAx . El vector de aceleración en todos puntos de la trayectoria
es paralelo al eje OY. Hállese aceleración total, tangencial y radial.
3) Hállese las expresiones analíticas para tres vectores unitarios de un sistema de coordenadas natural (relacionados con la
trayectoria bn
,, ) en términos de los vectores de velocidad y aceleración, ayV
, si se cumplen las condiciones
00 VyVa
4) Hállese el radio de curvatura de la trayectoria R si están dados los vectores de velocidad y aceleración, ayV
.
5) Una partícula a lo largo de su trayectoria tiene aceleración rrr
a
3
, donde r
es el radio vector, const y
0 rr . La velocidad inicial de la partícula fue igual a 0V
. a)Hállese la formula para el radio de curvatura. b) Demuéstrese
que la trayectoria de la partícula esta ubicada sobre un cono circular.
6) Una partícula tiene una trayectoria en el plano XOY. En cada momento del tiempo se conocen la velocidad de la partícula V(t)
y el radio de curvatura R(t). Demuéstrese que la trayectoria x=x(t), y=y(t) satisface la siguiente sistema de ecuaciones
diferenciales:
)(/)()();(cos)()();(cos)()( tRtVtttVtyttVtx
Utilizando este resultado encuéntrese la trayectoria x=x(t), y=y(t) si esta dada dependencia del tiempo de la velocidad V(t)=At y
del radio de curvatura R=Bt, si en el momento inicial t=0 partícula arrancó el movimiento desde el punto (x0, y0) cuando su
velocidad formaba el ángulo con el eje OX.
1.1.3 Movimiento Circular
Sea una partícula participa en un movimiento circular a lo largo de una
circunferencia del radio R, entonces el recorrido s esta relacionado con el ángulo
(Fig.8) a través de relación s=R. En esta relación el ángulo se considera
como función del tiempo t, al radio como una constante. Utilizando las relaciones
(2)-(4) del párrafo anterior se obtiene:
nRnR
VaRaRV n
2
2
;; (1) Fig. 8
Las características y se llaman velocidad angular y aceleración angular respectivamente. La aceleración total se
expresa a través de estas dos características como
42 Ra (2)
El .ángulo entre aceleraciones total y normal se encuentra a través de la relación:
2
na
atg (3)
Problemas.
1) Demuéstrese que para un movimiento circular con una velocidad constante se cumple la siguiente relación entre los vectores
de velocidad y aceleración: Va
. ¿ Como es la dirección del vector
y su valor?
2)La trayectoria de una partícula es una circunferencia del radio R. La aceleración en toda la trayectoria forma con la velocidad
un ángulo constante e igual a (/2), ¿ En cuanto tiempo la velocidad de la partícula se incrementa en n veces si su velocidad
inicial es V0 ?

7
1.1.4 Velocidad y aceleración en Coordenadas polares
Si el movimiento de una partícula se realiza en el plano XOY la trayectoria
puede describirse tanto en las coordenadas cartesianas x(t), y(t) como en polares
r=r(t), = (t). Sea en el punto P de la trayectoria re
un vector unitario orientado a lo
largo del radio vector r
en sentido de su crecimiento y e
el vector que se obtiene a
través de rotación del vector re
al ángulo /2 en el sentido contrario de las manecillas
del reloj (Fig.9) estos dos vectores definen las direcciones de dos ejes perpendiculares Fig. 9
entre si, que se llaman la eje radial y la eje transversal. En sistema de coordenadas XOY los vectores re
y e
pueden
presentarse como:
cos,sin;sin,cos eer
(1)
Como coordenadas cartesianas están relacionadas con las coordenadas polares a través de formulas x=rcos y y=sin entonces
componentes de la velocidad en las coordenadas XOY son:
,cossin,sincos,
rrrryxV (2)
Similarmente se encuentran los componentes de la aceleración:
cos2sin,sin2cos, 22
rrrrrrrryxa (3)
Las proyecciones de la velocidad (2) sobre ejes re
y e
se llaman respectivamente las velocidades radial y transversal, las cuales
peden calcularse como los productos escalares de los vectores (1) y (2):
reVVreVV rr ,;, (4)
Para las proyecciones de la aceleración se obtienen las formulas de manera similar:
rreaarreaa rr 2,;, 2 (5)
Ejemplo. La trayectoria de una partícula esta dada en coordenadas polares a través de las formulas: BtAtr ; , donde
A y B son constantes. Hallase la forma de esta trayectoria, la velocidad y aceleración de la partícula en función del tiempo.
Solución.
Excluyendo de las formulas el tiempo t se obtiene la formula para la trayectoria en
forma explícita en coordenadas polares r=A/B que describe una curva que se
llama la espiral de Arquímedes (Fig 10). Las derivadas de la coordenada y del
ángulo son: ; ; 0; 0r A B r
Según las formulas(4) las velocidades radial, transversal y total son iguales:
2222 1;; tBAVVVABtVAV rr Fig.10
De manera similar se obtienen las aceleraciones correspondientes:
22222 4;2; tBABaaaABatABa rr
Problemas.
1) En la trayectoria de una partícula que se mueve en el plano XOY, el ángulo entre los vectores de la velocidad y del radio en
todos momentos del tiempo es el mismo, igual a . Hállese la trayectoria de la partícula en las coordenadas polares, si en el
momento inicial 00 )0(,)0( rr .
8
2) La trayectoria de una partícula esta dada en las coordenadas polares . )(),( ttrr . Demuéstrese que en el caso
cuando la velocidad sectorial es una constante constr 2( ), el vector de aceleración y el radio vector son paralelos.
3) Una planeta tiene una orbita en forma de un elipse que se describe en las coordenadas polares a través de la ecuación
cos1/ pr , donde p y son parámetros. Hállese las aceleraciones radial y transversal en función de r, utilizando la
ley de conservación de las áreas )( 2 constcr .
4) Una partícula en las coordenadas polares tiene los componentes de la velocidad radial 2/1 rVr y transversal
ArV /1 , donde A es una constante. La posición inicial de la partícula esta dada en los coordenadas polares r(0)=r0 y (0)
= 0 . Hállese a)la trayectoria de la partícula r=r(), b) los componentes radial y transversal de la aceleración, c) los
componentes tangencial y normal de la aceleración.
5) Una partícula se mueve en un plano con una velocidad radial constante, 0 CVr y con la aceleración radial
32 / rAar . La posición inicial de la partícula esta dada en los coordenadas polares r(0)=r0 y (0) = 0 . . Hállese la
trayectoria de la partícula r=r()
1.1.5 Descripción del Movimiento en Coordenadas Curvilíneas
El análisis realizado en el párrafo anterior muestra que el movimiento de una partícula puede ser definida no solo a través
de las coordenadas cartesianas, sino también en coordenadas polares. En el caso general cualquier conjunto de tres números
321 ,, qqq que definen la posición de la partícula en el espacio pueden considerarse como las coordenadas de esta partícula.
Estos números en la diferencia con las coordenadas cartesianas rectangulares se llaman coordenadas curvilíneas. Cualquiera
trayectoria en estas coordenadas se define a través de tres funciones 3,2,1),( itqq ii
La relación entre coordenadas cartesianas y curvilíneas se define a través de las igualdades:
kqqqzjqqqyiqqqxqqqrr
),,(),,(),,(),,( 321321321321 (1)
donde las funciones ),,(),,,(),,,( 321321321 qqqzqqqyqqqx se consideran como conocidos y doblemente diferenciables. En
este caso el vector radio se considera como una función compuesta del tiempo ))(),(),(()( 321 tqtqtqrtr
.
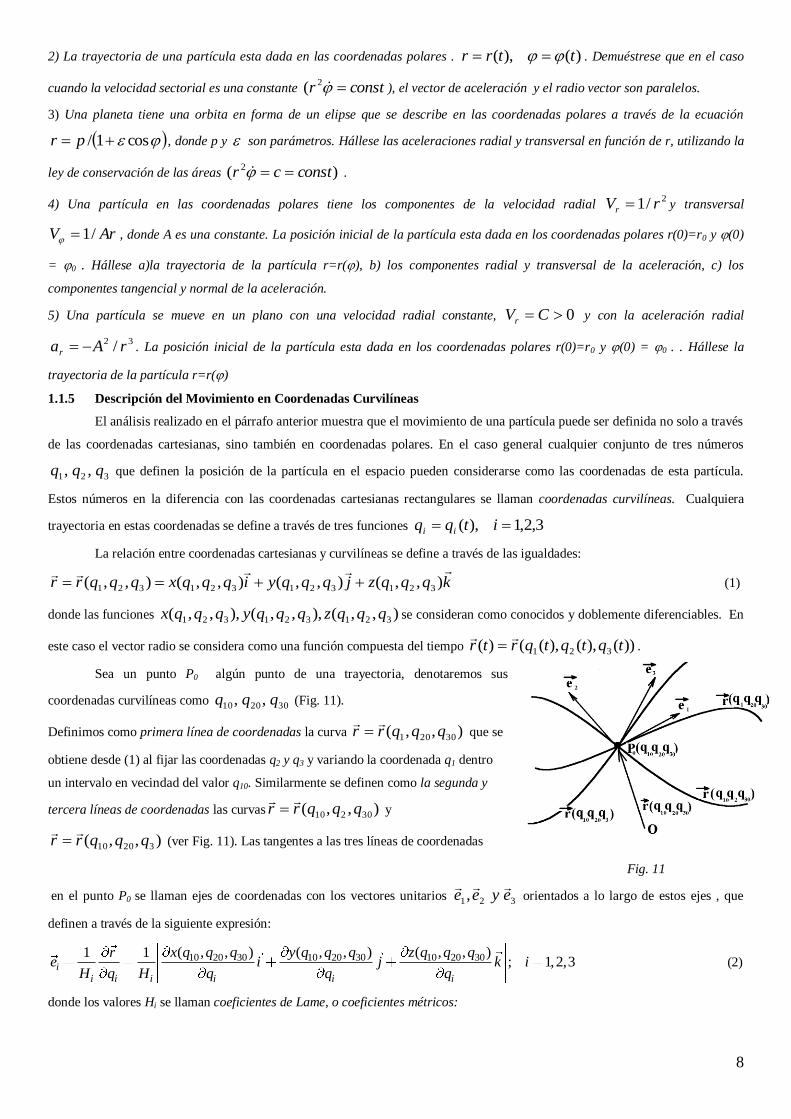
Sea un punto P0 algún punto de una trayectoria, denotaremos sus
coordenadas curvilíneas como 302010 ,, qqq (Fig. 11).
Definimos como primera línea de coordenadas la curva ),,( 30201 qqqrr
que se
obtiene desde (1) al fijar las coordenadas q2 y q3 y variando la coordenada q1 dentro
un intervalo en vecindad del valor q10. Similarmente se definen como la segunda y
tercera líneas de coordenadas las curvas ),,( 30210 qqqrr
y
),,( 32010 qqqrr
(ver Fig. 11). Las tangentes a las tres líneas de coordenadas
Fig. 11
en el punto P0 se llaman ejes de coordenadas con los vectores unitarios 321, eyee
orientados a lo largo de estos ejes , que
definen a través de la siguiente expresión:
10 20 30 10 20 30 10 20 30( , , ) ( , , ) ( , , )1 1; 1,2,3i
i i i i i i
x q q q y q q q z q q qre i j k i
H q H q q q (2)
donde los valores Hi se llaman coeficientes de Lame, o coeficientes métricos:

9
2 2 2
10 20 30 10 20 30 10 20 30( , , ) ( , , ) ( , , ); 1,2,3i
i i i i
x q q q y q q q z q q qrH i
q q q q (3)
Un sistema de coordenadas definida a través tres vectores de la base (2) se llama sistema de coordenadas curvilíneas. En el caso
cuando tres vectores 321, eyee
son ortogonales el sistema de coordenadas curvilíneas además se llama un sistema ortogonal. En
el curso de mecánica teórica se consideran solo coordenadas curvilíneas ortogonales.
Cualquier vector en esta sistema de coordenadas puede ser definido a través de sus tres proyecciones sobre los ejes 321, eyee
:
3,2,1);,(;321 321 ieAAeAeAeAA iqqqq i
(4)
Encontraremos las proyecciones de los vectores de velocidad y aceleración sobre los ejes de las coordenadas curvilíneas
321, eyee
. La velocidad puede considerarse como una función compuesta del tiempo
1 2 3( ( ), ( ), ( ))( ) dr q t q t q tdr tV
dt dt (5)
Por eso utilizando la definición de los vectores 321, eyee
(2) y coeficientes de Lame (3) tenemos:
3 3
1 1i i i i
i ii
dr rV q H q e
dt q (6)
Por otro lado según la definición (4)
3
1i
iq eVVi
(7)
Ahora comparando (6) y (7) se encuentran las formulas para las proyecciones del vector de velocidad sobre los ejes de las
coordenadas curvilíneas 321, eyee
3,2,1; iqHV iiqi (8)
Para encontrar las formulas para las proyecciones del vector de la aceleración sobre los ejes de las coordenadas curvilíneas
321, eyee
anotemos que según la definición (4) las proyecciones de la aceleración iqa son iguales al producto escalar
, ,i i
dVa e e
dty pueden representarse en la forma siguiente:
1 1, , ,
iq i
i i i i i
dV dV r d r d ra e V V
dt H dt q H dt q dt q (9)
El segundo término de esta expresión la derivada del respecto al tiempo puede transformarse de manera siguiente:
23
1j
ji i j i
d r r Vq
dt q q q q (10)
La última igualdad aquí se obtiene a través de la derivación de ambas partes de la formula (6) respecto de la variable iq . Por otro
lado, derivando las ambas partes de la igualdad (6) respecto iq se obtiene:
ii q
V
q
r
(11)
Ahora sustituyendo (11) y (10) in se encuentra la formula final para las proyecciones del vector de la aceleración sobre los ejes de
las coordenadas curvilíneas 321, eyee

10
iiiiii
V
q
V
dt
d
Hq
VV
q
VV
dt
d
Ha
i
221,
122
(12)
Esta formula puede representarse en una forma más compacta:
2;1 2VT
q
T
q
T
dt
d
Ha
iii
qi
(13)
1.1.6 Velocidad y aceleración en Coordenadas cilíndricas y esféricas.
En coordenadas cilíndricas tres números que definen la posición de la partícula en el
espacio son 1q , la distancia desde el origen de la proyección sobre el plano XOY
(Fig.12), el ángulo polar 2q y coordenada z, zq 3 .
La relación entre coordenadas cartesianas y coordenadas cilíndricas esta dada por las
formulas: Fig.12
zzyx ;sin;cos (1)
El vector radio en las coordenadas cilíndricas esta dado por las relaciones:
kzjir
sincos (1a)
Entonces los coeficientes métricos son:
;cossin
;1sincos
22
222
22
222
zyxH
zyxH
(2)
1
222
z
z
z
y
z
xH z
Los vectores unitarios de la base a lo largo de los tres ejes de coordenadas cilíndricas según las formulas (1a) y (2) son iguales:
kz
r
Heji
r
Heji
r
He
z
1;cossin
1;sincos
1
(3)
Es fácil de verificar de que los vectores zeyee
, son ortogonales es decir sus productos escalares entre si son iguales a cero y
a si mismo son iguales a uno. Ahora utilizando las expresiones (2) para los coeficientes métricos y la formula (8) del párrafo
anterior para las proyecciones del vector de velocidad sobre los ejes de las coordenadas curvilíneas zeyee
,
zVVV z ;; (4)
Para deducir las formulas para las proyecciones del vector de la aceleración sobre los ejes de las coordenadas curvilíneas
zeyee
, lo primero hay que encontrar la función T, definida a través de la formula (13) del párrafo anterior, utilizando la
propiedad de la ortogonalidad de los vectores zeyee
, :
22222222
2
1
2
1
2
1zVVVVT z
(5)
Sustituyendo la expresión (5) para la función T en la formula (13) del párrafo anterior se encuentran enseguida las formulas para
las proyecciones del vector de la aceleración sobre los ejes de las coordenadas curvilíneas zeyee
, :
zaaa z ;2;2 (6)
11
Ejemplo.
Una partícula se mueve en el espacio de tal manera que sus tres coordenadas cilíndricas varían linealmente:
CtzBtAt ;; . Hallase la velocidad total y aceleración total de la partícula.
Solución.
Según las formulas (5):
CzVABtVAV z ;;
y la velocidad total es igual:
22222222 CtBAAVVVV z
Utilizando las formulas (6) es fácil encontrar los componentes de la aceleración en
coordenadas cilíndricas:
0;22;22 zaABatABa z
y la aceleración total
2224222222 44 tBABtBABAaaaa z
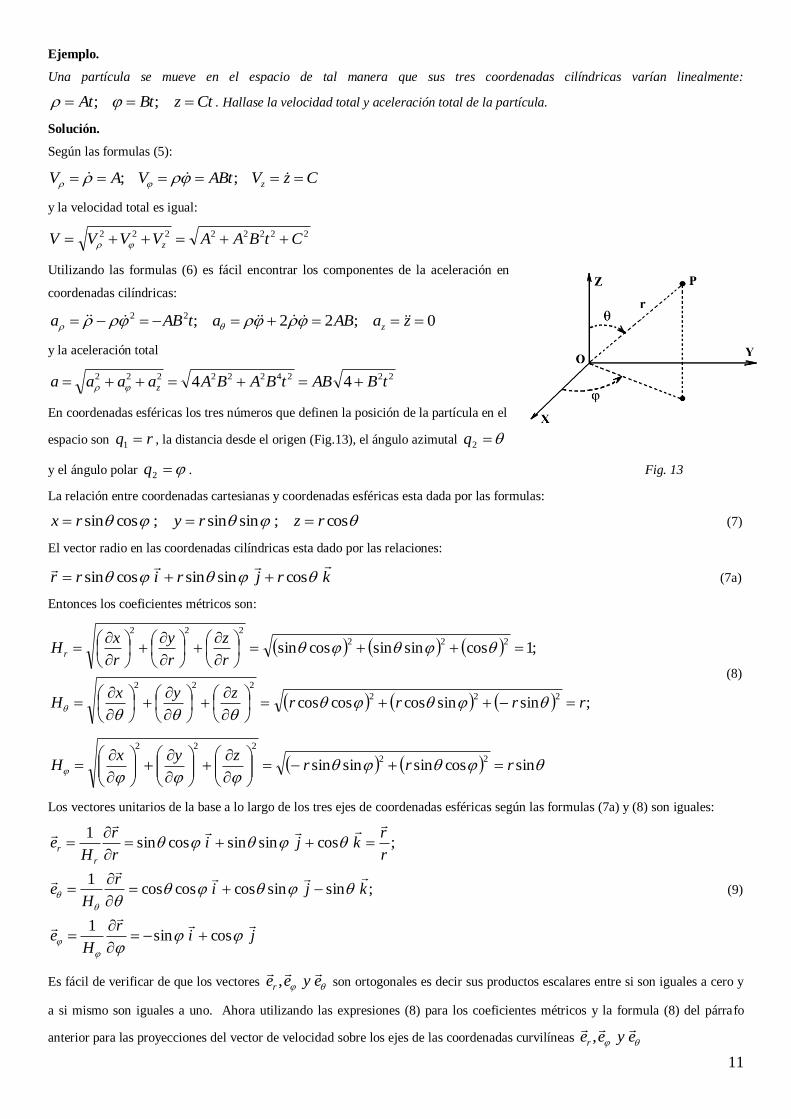
En coordenadas esféricas los tres números que definen la posición de la partícula en el
espacio son rq 1 , la distancia desde el origen (Fig.13), el ángulo azimutal 2q
y el ángulo polar 2q . Fig. 13
La relación entre coordenadas cartesianas y coordenadas esféricas esta dada por las formulas:
cos;sinsin;cossin rzryrx (7)
El vector radio en las coordenadas cilíndricas esta dado por las relaciones:
krjrirr
cossinsincossin (7a)
Entonces los coeficientes métricos son:
;sinsincoscoscos
;1cossinsincossin
222
222
222
222
rrrrzyx
H
r
z
r
y
r
xH r
(8)
sincossinsinsin22
222
rrrzyx
H
Los vectores unitarios de la base a lo largo de los tres ejes de coordenadas esféricas según las formulas (7a) y (8) son iguales:
jir
He
kjir
He
r
rkji
r
r
He
r
r
cossin1
;sinsincoscoscos1
;cossinsincossin1
(9)
Es fácil de verificar de que los vectores eyeer
, son ortogonales es decir sus productos escalares entre si son iguales a cero y
a si mismo son iguales a uno. Ahora utilizando las expresiones (8) para los coeficientes métricos y la formula (8) del párrafo
anterior para las proyecciones del vector de velocidad sobre los ejes de las coordenadas curvilíneas eyeer
,

12
sin;; rVrVrVr (10)
Para deducir las formulas para las proyecciones del vector de la aceleración sobre los ejes de las coordenadas curvilíneas
eyeer
, lo primero hay que encontrar la función T, definida a través de la formula (13) del párrafo anterior, utilizando la
propiedad de la ortogonalidad de los vectores eyeer
, :
2222222222222 sin2
1
2
1
2
1
rrrVVVVT r (11)
Sustituyendo la expresión (11) para la función T en la formula (13) del párrafo anterior se encuentran enseguida las formulas para
las proyecciones del vector de la aceleración sobre los ejes de las coordenadas curvilíneas zeyee
, :
cos2sin2sin
;cossin2;sin 2222
rrra
rrrarrra
(12)
Ejemplo.
Una partícula se mueve en con una velocidad constante sobre una esfera
del radio R. La partícula inicia su movimiento en el ecuador y la dirección
de su velocidad V
siempre forma con los meridianos de la esfera el mismo
ángulo (esta curva se llama loxodroma). Hallase la ecuación del
movimiento de la partícula y el tiempo necesario para que partícula llega
hasta el polo de la esfera.
Solución.
La posición de una partícula sobre esta esfera se define a través de dos
coordenadas angularea y (Fig.14) Según las formulas (10): Fig. 14
sin; RVRV (13)
La trayectoria de la partícula puede definirse paramétricamente tt ; o en una forma explícita .
Como el punto de partida de la partícula esta ubicado sobre el ecuador entonces podemos tomar las siguientes condiciones
iniciales:
20;00 tt (14)
suponiendo que durante el movimiento de la partícula el ángulo decrece desde 2 hasta cero y la derivada 0
(movimiento en el sentido de las manecillas del reloj). Como según la condición del problema la dirección del vector de
velocidad forma con los meridianos (las lineas de coordenadas const ) el ángulo entonces se cumple la relación
VVctg (el signo menos en esta igualdad se debe a que en la Fig.14 la velocidad V tiene la dirección contraria al
crecimiento del ángulo ). Sustituyendo en esta igualdad las formulas (13) y teniendo en cuenta que
d
d
se obtiene la
siguiente ecuación diferencial:
20;sin
ctg
d
d (15)
Solución de esta ecuación se encuentra enseguida separando las variables e integrando ambas partes de igualdad:
ctgtg exp2
(16)

13
Se ve que esta ecuación satisface la condición inicial, cuando 0 según (16) 12
tg y por eso 2 . Por otro lado
según la formula (16) el ángulo se anula (condición para que partícula llega al polo) solo cuando el ángulo se hace igual a
, es decir la loxodroma realiza un número infinito vueltas acercándose al polo. Pero la longitud total de loxodroma es finita y
puede calcularse utilizando la siguiente expresión para la longitud de un elemento infinitesimal de la loxodroma:
2
222222222222
d
dHHddHdHHHdtdtVVVdtds
sustituyendo en esta formula las expresiones (8) para los coeficientes métricos y teniendo en cuenta que según la ecuación
diferencial (15) la derivada
ctgd
d
sin
1 se obtiene:
cos2cos
;cos
1
0
2
2 RdRs
dRtgdRds
Teniendo en cuenta que la velocidad V durante todo el movimiento es constante seencuentra el tiempo del recorrido:
cos2V
R
Problemas.
1) La trayectoria de una partícula en un sistema de coordenadas curvilíneas y ortogonales 321 ,, qqq esta dada a través de
función del vector radio 321 ,, qqqrr
y dependencias de coordenadas tqtqtq 321 ,, dadas en función del
tiempo. Hállese la formula para el radio de curvatura de la trayectoria en función del tiempo.
2) Una partícula se mueve sobre una superficie de una esfera del radio R de tal manera que sus coordenados angulares varían
con el tiempo linealmente . BtAt ; . Hállese como varían con el tiempo la velocidad aceleración total y
curvatura de la trayectoria.
3) Para las siguientes sistemas de coordenadas descríbase líneas de coordenadas y hállese las formulas para los coeficientes de
Lame, vectores unitarios de base, componentes de las velocidades y aceleraciones:
a)Coordenadas de cilindro parabólico: zqqq 321 ;; están relacionadas con coordenadas cartesianas a
través de relaciones: zzyx ;2; 22
b) Coordenadas de cilindro elíptico: zqqq 321 ;; están relacionadas con coordenadas cartesianas a
través de relaciones: ;;11; 22 zzcycx . Los limites para las coordenadas de cilindro
elíptico:
c) Coordenadas parabólicas: 321 ;; qqq están relacionadas con coordenadas cartesianas a través de
relaciones: 2/;cos;cos 22 zyx
Ejemplo
Para la sistemas de coordenadas de cilindro elíptico las coordenadas zqqq 321 ;; están relacionadas con
coordenadas cartesianas a través de relaciones: ;;11; 22 zzcycx . Los limites para las coordenadas
de cilindro elíptico: z;1;11 1)Descríbase líneas de coordenadas¸2)Hállese
a)las formulas para los coeficientes de Lame, b)vectores unitarios de base, c)componentes de las velocidades y aceleraciones:

14
1) Sea un punto P con las coordenadas 0 0 0, , z , tres líneas de coordenadas que pasan a través de este punto tienen ecuaciones
zrrzrrzrr ,,;,,;,, 00000
. Consideremos cada de estas curvas por separado. La primera curva
0 0 0 0 0 0, , , , , ,r ix z jy z kz z tiene siguiente forma paramétrica:
0 0 0, , ;x x z c 2 2
0 0 0 0, , 1 1 ;y y z c z z .
Como los parámetros 00 ,, zc , estas ecuaciones se puede representar de manera siguiente:
0
22
0
2222
0
22 ;11/;/ zzcycx .
Excluyendo el parámetro de las primeras dos ecuaciones tenemos la
ecuación explícita para primera línea de coordenadas:
0
2
0
222
0
22 ;11// zzcycx
Esto es la ecuación de una hipérbola en el plano paralelo a XOY
(ver Fig.15)
Fig.15 Líneas de coordenadas y vectores unitarios de base para las
coordenadas de cilindro elíptico
Similarmente se obtiene la ecuación para segunda línea de coordenadas:
2 20 0 0 0 0 0, , ; , , 1 1 ;x x z c y y z c 0z z . Para obtener la forma de la curva en una forma
explícita presentemos estas ecuaciones en forma:
0
22
0
2222
0
22 ;11/;/ zzcycx
Finalmente la forma explícita de la segunda línea de coordenadas es una elipse:
0
2
0
222
0
22 ;11// zzcycx
Tercera línea de coordenadas es una recta vertical (Fig. 15)
2) Para encontrar coeficientes de Lame, primero hay que calcular las derivadas parciales:
;0,1
1;
1
1
;1,0;0;0,;
2
2
2
2
z
yc
yc
y
z
zzz
z
xc
xc
x
a) Encontraremos coeficientes de Lame:
2
22
2
222
222
2
22
2
222
222
11
1
;11
1
ccczyx
H
ccczyx
H
1
222
z
z
z
y
z
xH z

15
b) Los vectores unitarios de la base a lo largo de los tres ejes de coordenadas cilindro elíptico son iguales:
kz
r
He
jiz
ky
jx
iH
r
He
jiz
ky
jx
iH
r
He
z
z
1
;1111
;1111
22
2
22
2
22
2
22
2
Es fácil de verificar de que los vectores zeyee
, son ortogonales es decir sus productos escalares entre si son iguales a cero y
a si mismo son iguales a uno
c) Ahora utilizando las expresiones encontrados para los coeficientes métricos se puede obtener fácilmente formulas para las
proyecciones del vector de velocidad sobre los ejes de las coordenadas curvilíneas zeyee
,
zzHVcHVcHV zz
;
1;
1 2
22
2
22
Para deducir las formulas para las proyecciones del vector de la aceleración sobre los ejes de las coordenadas curvilíneas
zeyee
, lo primero hay que encontrar la función T, utilizando la propiedad de la ortogonalidad de los vectores zeyee
,
2
2
2
2
22222222
112
1
2
1
2
1zcVVVVT z
Sustituyendo esta expresión (5) para la función T en la formula (13) del párrafo (1.1.5) se encuentran las formulas para las
proyecciones del vector de la aceleración sobre los ejes de las coordenadas curvilíneas zeyee
,
za
;dt
dc
TT
dt
d
Ha
)(dt
dc
TT
dt
d
Ha
z
11
1
1
11
11
1
1
11
2
2
2
22
2
22
22
2
2
2
22
22
2
22
22
2


















![Diferències%20entre%20 blackberry%20i%20l[1]](https://img.pdfslide.es/doc/110x75/55c942d4bb61eb6f3e8b477f/diferencies20entre20-blackberry20i20l1.jpg)



![Curso%20 programación%20presupuestaria%20mayo junio%202010%20módulo%20i%20cece%20c[1]](https://img.pdfslide.es/doc/110x75/55b4abd1bb61eb111a8b469b/curso20-programacion20presupuestaria20mayo-junio20201020modulo20i20cece20c1.jpg)





![Unidad%200 %20 genetica%20i%20parte%20-%202010[1]](https://img.pdfslide.es/doc/110x75/55a2830c1a28ab3e1d8b45ba/unidad200-20-genetica20i20parte20-2020101.jpg)