Embed Size (px)
DESCRIPTION
Este documento trata sobre un breve resumen de la aplicacion de los metodos numericos en matlab, con algunos ejemplos de aplicacion en cada tema.
Citation preview
UNIVERSIDAD NACIONAL DE SAN AGUSTIN
ESCUELA PROFESIONAL DE INGENIERIA CIVIL
METODOS NUMERICOS Y PROGRAMACION
RAICES DE ECUACIONES SISTEMAS DE ECUACIONES LINEALES Y NO
LINEALES INTERPOLACION, INTEGRACION Y
DIFERENCIACION NUMERICA
PROFESOR:
ALUMNO: LUCIO FUTURI MOSCOSO
HORARIO:
GRUPO: B
AREQUIPA – PERU
2014RAICES DE ECUACIONES

PROBLEMA 1
Resolver la siguiente ecuación: 0=1/X.^0.5+2*log10(E/(3.7*D)+2.51/(RE*X.^0.5)), donde E es la rugosidad, D el diámetro, RE el numero de Reynolds, RO es la densidad del fluido, V es la velocidad, y MU la viscosidad dinámica.
METODO DEL PUNTO FIJO:
function Y = G1(X)E=0.0000015;D=0.005;RO=1.23;V=40;MU=1.79*10.^-5;RE=RO*V*D/MU;Y =0.25/(log10(E/(3.7*D)+2.51/(RE*X.^0.5))).^2;return;
PROGRAMA
function [Xp, ITER, FLAG] = puntofijo(G, X0, EPS1, MAXIT)% Sintaxis% [Xp, ITER, FLAG] = PUNTOFIJO(G, X0, EPS1, MAXIT)% Entrada% - G es la función, almacenada como un archivo G.m% - X0 es el valor inicial% - EPS1 es el criterio de convergencia% - MAXIT es el número máximo de iteraciones% Salida% - Xp es el valor de la raíz aproximada% - ITER es el número de iteraciones realizadasfor K = 1 : MAXIT X = feval(G, X0); if (abs(X - X0)) < EPS1 Xp = X; ITER = K; return; end X0 = X;end disp('Se ha excedido el máximo número de iteraciones...'); ITER = MAXIT; end
SOLUCION :
>> [Xp, ITER, FLAG] = puntofijo('G1', 3, 1e-6, 25)Xp = 0.0290ITER = 7
METODO DE NEWTON
function Y = f(X)

E=0.0000015;D=0.005;RO=1.23;V=40;MU=1.79*10.^-5;RE=RO*V*D/MU;Y =1/X.^0.5+2*log10(E/(3.7*D)+2.51/(RE*X.^0.5));return;
function y =df(x)h=0.0000001;y=(f(x+h)-f(x))/h;end
PROGRAMA
function [x,k]=newton(x,t1,t2)% Sintaxis% [x,k] = newton(x,t1,t2)% Entrada% - f es la función, almacenada como un archivo f.m% - df es la derivada de de la función, almacenada como un archivo df.m% - X es el valor inicial% - t1 es el criterio de tolerancia% - t2 es el criterio de tolerancia% - x es el valor de la raíz aproximada
k=0; y=x+1;while abs(f(x))>=t1 && abs(y-x)>=t2 y=x; x=x-f(x)/df(x); k=k+1;end
Notese que al usar newton se debe graficar la ecuación previamente para visualizar un punto adecuado a partir del cual se comenzara la iteración:
>> [ x k]= newton(1,10^-6,10^-7)x = Inf - Infik = 7
>> [ x k]= newton(0.03,10^-6,10^-7)x = 0.0290k = 3
>> [ x k]= newton(0.001,10^-6,10^-7)x = 0.0290k = 8
>> fplot('f',[-10 20])Warning: Imaginary parts of complex X and/or Y arguments ignored

-10 -5 0 5 10 15 20-10
-8
-6
-4
-2
0
2
PROBLEMA 2La velocidad de un paracaidista que cae esta dada por: v =(g*x/c)*(1-exp(-(c/x)*t),donde g=9.81m/s2 .Para un paracaidista con coeficiente de arrastre de c=15kg/s, calcule la masa de modo que la velocidad sea v=35m/s en t=9seg.
METODO DE LA BISECCION
function y = f(x)g=9.81;c=15;v=35;t=9;y=(g*x/c)*(1-exp(-(c/x)*t))-v;
return;
Antes de aplicar la iteración es recomendable graficar la ecuación para tener puntos de inicialización y no caer en intervalos inútiles.

0 10 20 30 40 50 60 70 80 90 100-35
-30
-25
-20
-15
-10
-5
0
5
10
15
PROGRAMA
function [c,k]=biseccion(a,b,e)% Sintaxis% [c,k] = biseccion(a, b, e )% Entrada% - f es la función, almacenada como un archivo f.m% - a, b son los extremos del intervalo inicial% e es el criterio de exactitud o tolerancia% Salida% - c es el valor de la raíz aproximadak=0;while b-a>=e c=(a+b)/2; if f(a)*f(c)<0 b=c; else a=c; end k=k+1;end
SOLUCIONLa_masa_del_individuo_es= biseccion(50,70,10^-3)La_masa_del_individuo_es = 59.7577
METODO DE LA SECANTE
PROGRAMA
function [Xp, ITER, FLAG] = SECANTE(f, X0, X1, EPS1, EPS2, MAXIT)% Sintaxis% [Xp, ITER, FLAG] = SECANTE(f, X0, X1, EPS1, EPS2, MAXIT)% Entrada% - f es la función, almacenada como un archivo f.m

% - X0, X1 son los valores iniciales% - EPS1 es el criterio de convergencia% - EPS2 es el criterio de exactitud% - MAXIT es el número máximo de iteraciones% Salida% - Xp es el valor de la raíz aproximada% - ITER es el número de iteraciones realizadasfor K = 1 : MAXIT Xp = X0 - (X1 - X0) * feval(f, X0) / (feval(f, X1) - feval(f, X0)); if (abs(Xp - X1) <= EPS1) || (abs(feval(f, Xp)) <= EPS2) ITER = K; return; end X0 = X1; X1 = Xp;enddisp('Se ha excedido el máximo número de iteraciones..');ITER = MAXIT;
SOLUCION
>> [Xp, ITER, FLAG] = SECANTE('f', 65, 75, 1e-6, 1e-6, 10)Xp = 59.7582ITER = 4
SISTEMA DE ECUACIONES LINEALES
PROBLEMA3
Resolver el sistema lineal:
>> A=[3 -.1 -.2;0.1 7 -0.3;0.3 -0.2 10]
A =
3.0000 -0.1000 -0.2000 0.1000 7.0000 -0.3000
0.3000 -0.2000 10.0000>> b=[7.85;-19.3;71.4]
b =
7.8500 -19.3000 71.4000
METODO GAUSS
PROGRAMA
function X =gauss(A,b)% ENTRADAS% A : Matriz nxn% B : Vector nx1% SALIDAS% X : Vector solución[~,n]=size(A);X=zeros(n,1);
for k=1:1:n-1 for i=k+1:1:n m=A(i,k)/A(k,k); A(i,k)=0; for j=k+1:1:n A(i,j)=A(i,j)-m*A(k,j); end b(i)=b(i)-m*b(k); endendX(n)=b(n)/A(n,n);for k=n-1:-1:1 S=0; for j=k+1:1:n S=S+A(k,j)*X(j); end X(k)=(b(k)-S)/A(k,k);endend
SOLUCION
>> EL_VECTOR_SOLUCION_ES = gauss(A,b)EL_VECTOR_SOLUCION_ES X = 3.0000 -2.5000 7.0000
METODO FACTORIZACION LU
PROGRAMAfunction descompa=input('ingrese la matriz A=');b=input('ingrese el vector b=');n=length(b);l=zeros(n);u=zeros(n);for k=1:n for j=k:n s=0; p=1; while p<=k-1 s=s+l(k,p)*u(p,j); p=p+1; end u(k,j)=a(k,j)-s; end l(k,k)=1; for i=k+1:n sum=0; q=1; while q<=k-1

sum=sum+l(i,q)*u(q,k); q=q+1; end l(i,k)=(a(i,k)-sum)/u(k,k); endendluy(1)=b(1);for i=2:n s=0; for k=1:i-1 s=s+l(i,k)*y(k); end y(i)=b(i)-s;endyx(n)=y(n)/u(n,n);for i=n-1:-1:1 s=0; for k=i+1:n s=s+u(i,k)*x(k); end x(i)=(y(i)-s)/u(i,i);endx
SOLUCION
>> descompingrese la matriz A=[3 -.1 -.2;0.1 7 -0.3;0.3 -0.2 10]ingrese el vector b=[7.85;-19.3;71.4]
l =
1.0000 0 0 0.0333 1.0000 0 0.1000 -0.0271 1.0000
u =
3.0000 -0.1000 -0.2000 0 7.0033 -0.2933 0 0 10.0120
y = 7.8500 -19.5617 70.0843
x = 3.0000 -2.5000 7.0000
PARA UN SISTEMA TRIDIAGONALPROBLEMA 4

Resolver el siguiente sistema de ecuaciones: M =
2.0147 -0.0209 0 0 -0.0209 2.0147 -0.0209 0 0 -0.0209 2.0147 -0.0209 0 0 -0.0209 2.0147
B =
4.1750 0.0000 0.0000 2.0875
PROGRAMA
function X = tridiagonalsistemaA=input('ingrese EL VECTOR A=');D=input('ingrese EL VECTOR D=');C=input('ingrese EL VECTOR C=');B=input('ingrese EL VECTOR B=');%Este programa resuelve un sistema lineal MX=B donde M es una matriz%triagonal, en este caso consideraremos la matriz M compuesto por los%vectores D,C y A % ENTRADAS% A vector (n-1)*1 diagonal inferior% D vector n*1 diagonal principal% C vector (n-1)*1 diagonal superior% B vector independiente nx1% SALIDA% X vector soluciónn = length(B);for k = 2:n, mult = A(k-1)/D(k-1); D(k) = D(k) - mult*C(k-1); B(k) = B(k) - mult*B(k-1);endX(n) = B(n)/D(n);for k = (n-1):-1:1, X(k) = (B(k) - C(k)*X(k+1))/D(k);end
SOLUCION
>> tridiagonalsistemaingrese EL VECTOR A=[-0.020875 -0.020875 -0.020875 0]ingrese EL VECTOR D=[2.01475 2.01475 2.01475 2.01475]ingrese EL VECTOR C=[-0.020875 -0.020875 -0.020875 0]ingrese EL VECTOR B=[4.175; 0,;0;2.0875]
ans =

2.0724 0.0216 0.0110 1.0362
SISTEMAS DE ECUACIONES NO LINEALES
PROBLEMA 5RESOLVER EL SISTEMA:
function G = FG_2EC(X)G(1) = (4 - sqrt(X(2)))^3 / 8;G(2) = sqrt(17 - X(1)^2);return;
METODO DEL PUNTO FIJO
PROGRAMA
function [Xp, ITER, FLAG] = PUNTOFIJO_MV(G, X0, EPS, MAXIT)% Sintaxis% PUNTOFIJO_MV(G, X0, EPS, MAXIT)% Entrada% - G es el sistema de ecuaciones no lineales, almacenado como G.m% - X0 es el vector de valores iniciales% - EPS es el criterio de convergencia% - MAXIT es el número máximo de iteraciones% Salida% - Xp es el vector solución% - ITER es el número de iteraciones realizadasfor K = 1 : MAXIT X = feval(G, X0); if norm(X - X0) <= EPS Xp = real(X); ITER = K; return; end X0 = X;enddisp('Se ha excedido el máximo número de iteraciones...');ITER = MAXIT;
SOLUCION
>> [Xp, ITER, FLAG] =PUNTOFIJO_MV('FG_2EC', [0.5, 0.5], 1e-6, 25)
Xp = 1.0000 4.0000

ITER = 17
PROBLEMA 6RESOLVER EL SIGUIENTE SISTEMA:
function Y = F1_2EC(X)Y(1) = 4 - (8 * X(1))^(1/3) - X(2)^(1/2);Y(2) = 17 - X(1)^2 - X(2)^2;return;
function dY = JF1_2EC(X) dY(1) = -(8/3) * (8 * X(1))^(-2/3);dY(2) = -2 * X(2);return;
PROGRAMA
function [Xp, ITER, FLAG] = NEWTON_MODIF(F, D, X, EPS1, MAXIT)% Sintaxis% [Xp, ITER, FLAG] = NEWTON_MODIF(F, D, X, EPS1, MAXIT)% Entrada% - F es el sistema de ecuaciones no lineales, almacenado como F.m% - D son las derivadas, almacenadas como D.m% - X es el vector de valores iniciales% - EPS1 es el criterio de convergencia% - MAXIT es el número máximo de iteraciones% Salida% - Xp es el vector solución% - ITER es el número de iteraciones realizadas% - FLAG es una variable lógica, es 1 si hubo convergencia, caso% contrario es 0for K = 1 : MAXIT XAUX = X; for I = 1 : 2 FX = feval(F, X); DX = feval(D, X); X(I) = X(I) - FX(I) / DX(I); end if norm(XAUX - X) < EPS1 ITER = K; FLAG = 1; Xp = X; return;
endenddisp('Se ha excedido el máximo número de iteraciones...');ITER = MAXIT;FLAG = 0;
SOLUCION
>> [Xp, ITER, FLAG] = NEWTON_MODIF('F1_2EC', 'JF1_2EC', [4, 3], 1e-6, 25)Xp =
1.0 4.0000 2.0000
ITER = 9FLAG = 1
INTERPOLACION NUMERICA
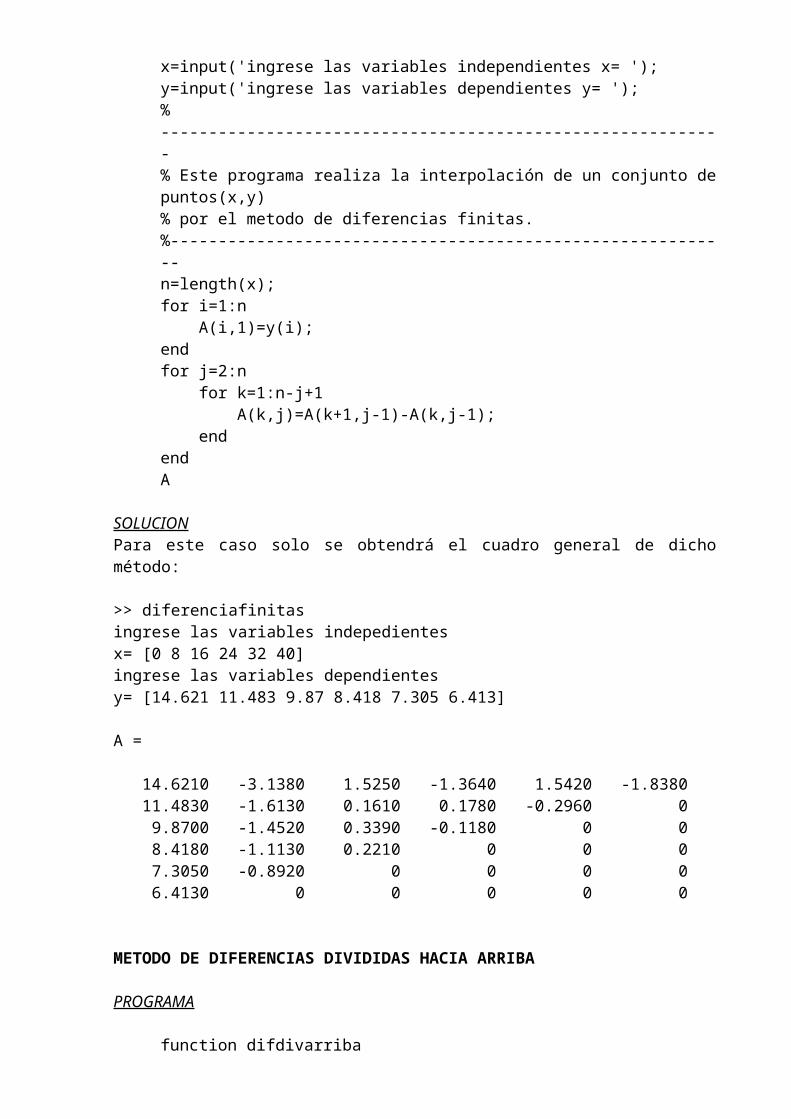
PROBLEMA 7OBTENER LOS COEFICIENTES DE INTERPOLACION DE NEWTON DEl SIGUIENTE CONJUNTO DE PARES ORDENADOS MOSTRADOS EN LA SIGUIENTE FORMA:
X= [0 8 16 24 32 40]Y= [14.621 11.483 9.87 8.418 7.305 6.413]
METODO DE DIFERENCIAS FINITAS
PROGRAMA
function diferenciafinitasx=input('ingrese las variables independientes x= ');y=input('ingrese las variables dependientes y= ');% -----------------------------------------------------------% Este programa realiza la interpolación de un conjunto de puntos(x,y) % por el metodo de diferencias finitas.%-----------------------------------------------------------n=length(x);for i=1:n A(i,1)=y(i);endfor j=2:n for k=1:n-j+1 A(k,j)=A(k+1,j-1)-A(k,j-1); endendA
SOLUCIONPara este caso solo se obtendrá el cuadro general de dicho método:
>> diferenciafinitasingrese las variables indepedientes x= [0 8 16 24 32 40]ingrese las variables dependientes y= [14.621 11.483 9.87 8.418 7.305 6.413]
A =

14.6210 -3.1380 1.5250 -1.3640 1.5420 -1.8380 11.4830 -1.6130 0.1610 0.1780 -0.2960 0 9.8700 -1.4520 0.3390 -0.1180 0 0 8.4180 -1.1130 0.2210 0 0 0 7.3050 -0.8920 0 0 0 0 6.4130 0 0 0 0 0
METODO DE DIFERENCIAS DIVIDIDAS HACIA ARRIBA
PROGRAMA
function difdivarribaX=input('ingrese el vector X=');Y=input('ingrese el vector Y=');% -----------------------------------------------------------% Este programa realiza la interpolación de un conjunto de puntos (x,y) % por el metodo de diferencias divididas hacia arriba.%-----------------------------------------------------------% ENTRADAS% X : Conjunto de abcisas% Y : Conjunto de ordenadas% SALIDAS: % C : Coeficientes del polinómio interpolante de Newton% D :Coeficientes de la tabla por el metodo de diferencias % divididas hacia abajo%-----------------------------------------------------------n=length(X);D=zeros(n,n);D(:,1)=Y';%Formula de la tabla de diferencia divididas hacia abajo. for j=2:n for k=j:n D(k,j)=(D(k,j-1)-D(k-1,j-1))/(X(k)-X(k-j+1)); endendD
SOLUCION
>> difdivarribaingrese el vector X=[0 8 16 24 32 40]ingrese el vector Y=[14.621 11.483 9.87 8.418 7.305 6.413]
D =
14.6210 0 0 0 0 0
11.4830 -0.3922 0 0 0 0 9.8700 -0.2016 0.0119 0 0 0 8.4180 -0.1815 0.0013 -0.0004 0 0 7.3050 -0.1391 0.0026 0.0001 0.0000 0 6.4130 -0.1115 0.0017 -0.0000 -0.0000 -0.0000
A partir del cuadro obtenido se extrae los coeficientes y se compone la siguiente función:
function y = f(x) y=14.6210-0.3922*(x-0)+0.0119*(x-8)*(x-0)-0.0004*(x-0)*(x-8)*(x-16);>> f(27)ans = 7.8791
METODO DE DIFERENCIAS DIVIDIDAS HACIA ABAJO
PROGRAMA
function diferenciasdivididasx=input('ingrese el vector x=');y=input('ingrese el vector y=');n=length(x);a=zeros(n);for i=1:n a(i,1)=y(i);endfor j=2:n for k=1:n-j+1 a(k,j)=(a(k+1,j-1)-a(k,j-1))/(x(k+j-1)-x(k)); endend%a representa que contiene los coeficientes del polinómio interpolante de Newton a%C representa los coeficientes del polinómio interpolante de Newton
C=a(n,n);for k=(n-1):-1:1 C=conv(C,poly(x(k))); m=length(C); C(m)=C(m)+a(k,k);endC
SOLUCION
>> diferenciasdivididasingrese el vector x=[0 8 16 24 32 40]ingrese el vector y=[14.621 11.483 9.87 8.418 7.305 6.413]
a =

14.6210 -0.3922 0.0119 -0.0004 0.0000 -0.0000 11.4830 -0.2016 0.0013 0.0001 -0.0000 0 9.8700 -0.1815 0.0026 -0.0000 0 0 8.4180 -0.1391 0.0017 0 0 0 7.3050 -0.1115 0 0 0 0 6.4130 0 0 0 0 0
A partir de la tabla obtenida anteriormente se obtiene los coeficientes para el polinomio interpolador:
function y = f(x) y=14.6210-0.3922*(x-0)+0.0119*(x-8)*(x-0)-0.0004*(x-0)*(x-8)*(x-16);>> f(27)ans = 7.8791
METODO DE LAGRANGE
El problema planteado es el mismo que el anterior, pero esta vez por otro método.
>> X= [0 8 16 24 32 40]X = 0 8 16 24 32 40
>> Y= [14.621 11.483 9.87 8.418 7.305 6.413]Y = 14.6210 11.4830 9.8700 8.4180 7.3050
6.4130
PROGRAMA
function LAGRANGE1X=input('ingrese el vector X=');Y=input('ingrese el vector Y=');XINT=input('ingrese el vector XINT=');% Sintaxis% YINT = LAGRANGE1(X, Y, XINT)% Entrada% - X es un vector que contiene la lista de abscisas% - Y es un vector que contiene la lista de ordenadas% - XINT es el valor para el que se desea la interpolación% Salida% - YINT es el valor de la función en XINTN = length(X) - 1;YINT = 0;for I = 1 : N + 1 L = 1; for J = 1 : N + 1 if I ~= J L = L * (XINT - X(J)) / (X(I) - X(J)); end endYINT = YINT + L * Y(I);endYINT

SOLUCION
>> LAGRANGE1ingrese el vector X= [0 8 16 24 32 40]ingrese el vector Y= [14.621 11.483 9.87 8.418 7.305 6.413]ingrese el vector XINT= 27
YINT = 7.9417
METODOS DE INTEGRACION NUMERICA
PROBLEMA 8Integrar la función dada en forma tabular:>> X= [0, 1, 2, 3, 4, 5, 6]; Y = [-5, 1, 9, 25, 55, 105, 181];
METODO DEL TRAPECIO
PROGRAMA
function S = TRAPECIO(X, FX)% Sintaxis% I = TRAPECIO(X, FX)% Entrada% - X es un vector que contiene la lista de variables independientes% - FX es un vector que contiene la lista de variables dependientes o% integrando% - a y b son los extremos inferior y superior del intervalo de% integración% Salida% - S es la aproximación a la integral con la regla compuesta del% trapecioN = length(X);a = X(1);b = X(N);H = (b - a) / (N - 1);S = 0;for K = 2 : (N - 1) S = S + FX(K);endS = (H / 2) * (FX(1) + 2 * S + FX(N));
>> TRAPECIO(X,Y)ans = 283
METODO DE SIMPSON 1/3
PROGRAMA

function S = SIMPSON13(X, FX)% Sintaxis% I = SIMPSON13(X, FX)% Entrada% - X es un vector que contiene la lista de variables independientes% - FX es un vector que contiene la lista de variables dependientes o integrando% - a y b son los extremos inferior y superior del intervalo de integración% Salida% - S es la aproximación a la integral con la regla compuesta del Simpson 1/3N = length(X);a = X(1);b = X(N);H = (b - a) / (N - 1);S1 = 0;S2 = 0;for K = 2 : 2 : (N - 1)S1 = S1 + FX(K);endfor K = 3 : 2 : (N - 2)S2 = S2 + FX(K);endS = (H / 3) * (FX(1) + 4 * S1 + 2 * S2 + FX(N));
SOLUCION
>> X=[0, 1, 2, 3, 4, 5, 6]; Y = [-5, 1, 9, 25, 55, 105, 181];>> SIMPSON13(X, Y)
ans = 276
METODO DE SIMPSON 3/8
PROGRAMA
function S = SIMPSON38(X, FX)% Sintaxis% I = SIMPSON38(X, FX)% Entrada% - X es un vector que contiene la lista de variables independientes% - FX es un vector que contiene la lista de variables dependientes o integrando% - a y b son los extremos inferior y superior del intervalo de integración% Salida% - S es la aproximación a la integral con la regla compuesta del Simpson 3/8N = length(X);a = X(1);b = X(N);H = (b - a) / (N - 1);

S1 = 0;S2 = 0;for K = 2 : (N - 1) if mod(K - 1, 3) == 0 S1 = S1 + FX(K); else S2 = S2 + FX(K); endendS = (3 * H / 8) * (FX(1) + 2 * S1 + 3 * S2 + FX(N));
SOLUCION
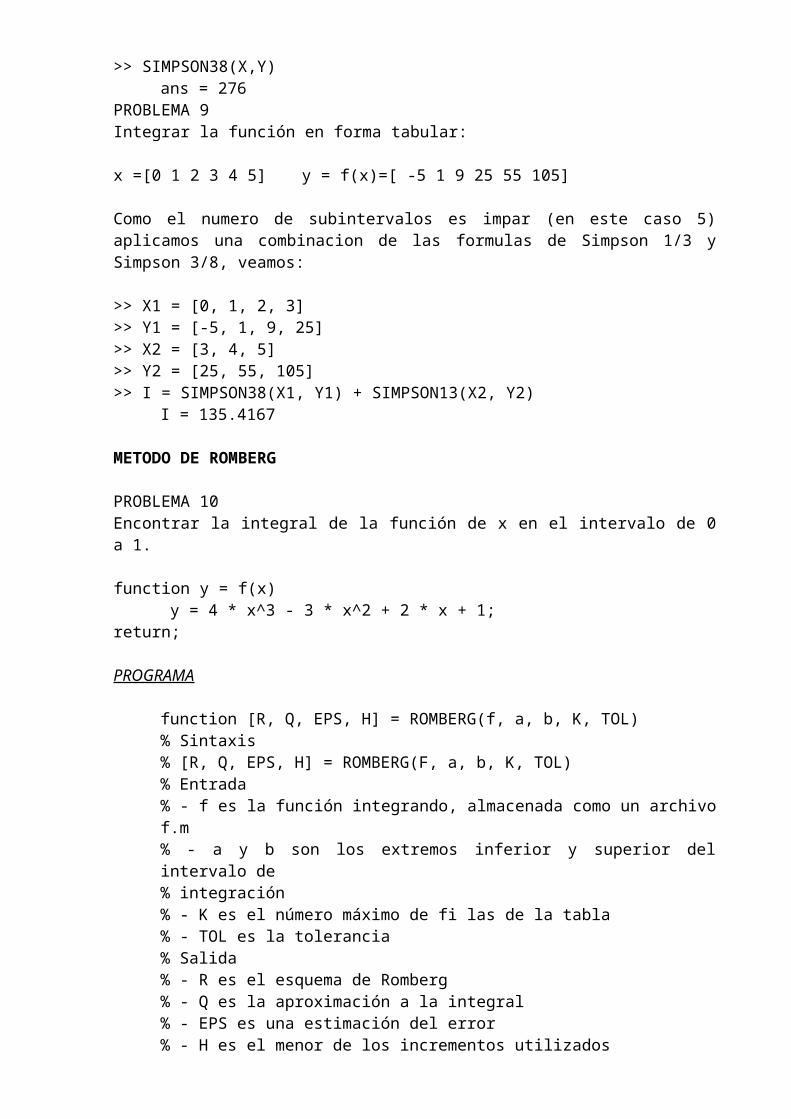
>> X=[0, 1, 2, 3, 4, 5, 6]; Y = [-5, 1, 9, 25, 55, 105, 181];>> SIMPSON38(X,Y)
ans = 276PROBLEMA 9Integrar la función en forma tabular:
x =[0 1 2 3 4 5] y = f(x)=[ -5 1 9 25 55 105]
Como el numero de subintervalos es impar (en este caso 5) aplicamos una combinacion de las formulas de Simpson 1/3 y Simpson 3/8, veamos:
>> X1 = [0, 1, 2, 3]>> Y1 = [-5, 1, 9, 25]>> X2 = [3, 4, 5]>> Y2 = [25, 55, 105]>> I = SIMPSON38(X1, Y1) + SIMPSON13(X2, Y2)
I = 135.4167
METODO DE ROMBERG
PROBLEMA 10Encontrar la integral de la función de x en el intervalo de 0 a 1.
function y = f(x) y = 4 * x^3 - 3 * x^2 + 2 * x + 1;
return;
PROGRAMA
function [R, Q, EPS, H] = ROMBERG(f, a, b, K, TOL)% Sintaxis% [R, Q, EPS, H] = ROMBERG(F, a, b, K, TOL)% Entrada% - f es la función integrando, almacenada como un archivo f.m% - a y b son los extremos inferior y superior del intervalo de% integración% - K es el número máximo de fi las de la tabla

% - TOL es la tolerancia% Salida% - R es el esquema de Romberg% - Q es la aproximación a la integral% - EPS es una estimación del error% - H es el menor de los incrementos utilizadosN = 1;H = b - a;EPS = 1;J = 0;R = zeros(4, 4);R(1, 1) = H * (feval(F, a) + feval(F, b)) / 2;while ((EPS > TOL) && (J < K)) || (J < 4) J = J + 1; H = H / 2; S = 0; for P = 1 : N X = a + H * (2 * P - 1); S = S + feval(F, X); end R(J + 1, 1) = R(J, 1) / 2 + H * S; N = 2 * N; for M = 1 : J R(J + 1, M + 1) = R(J + 1, M) + (R(J + 1, M) - R(J, M)) / (4^M - 1); end EPS = abs(R(J, J) - R(J + 1, M + 1));endQ = R(J + 1, J + 1);
SOLUCION
>> [R, I, EPS, H]= ROMBERG('f',0, 1, 4, 1e-2)
R =
2.5000 0 0 0 0 2.1250 2.0000 0 0 0 2.0313 2.0000 2.0000 0 0 2.0078 2.0000 2.0000 2.0000 0 2.0020 2.0000 2.0000 2.0000 2.0000
I = 2EPS = 0H = 0.0625
METODOS DE DIFERENCIACION NUMERICA
METODO DE EULER
PROBLEMA 11Resolver el siguiente problema de valor inicial:

function y = f(X, Y) y(0)=1y = (Y + 1) / (X - 1);return;
PROGRAMA
function [t, Y] = EULER(F, a, b, Y0, N)% Sintaxis% [t, Y] = EULER(F, a, b, Y0, N)% Entrada% - F es la función, almacenada como un archivo F.m% - a y b son los extremos del intervalo% - Y0 es la condición inicial YO = Y(a)% - N es ell número de pasos% Salida% - t es el vector de la abscisas o variable independiente% - Y es el vector de las ordenadas o variable dependienteH = (b - a) / N;t = zeros(1, N + 1);Y = zeros(1, N + 1);t = [a: H: b];Y(1) = Y0;for J = 1 : N Y(J + 1) = Y(J) + H * feval(F, t(J), Y(J));endt = t';Y = Y';
SOLUCION
>> [X, Y] = EULER('f', 0, 0.4, 1, 4)
X =
0 0.1000 0.2000 0.3000 0.4000
Y =
1.0000 0.8000 0.6000 0.4000 0.2000
METODO DE RUNGE KUTTA DE CUARTO ORDEN
PROBLEMA 12Resolver el siguiente problema de valor inicial:
function y = f(X, Y) y(0.5)=1
y = X + 2 * X * Y;return;
PROGRAMA
function [t, Y] = RK4(F, a, b, Y0, N)% Sintaxis% [t, Y] = RK4(F, a, b, Y0, N)% Entrada% - F es la función, almacenada como un archivo F.m% - a y b son los extremos del intervalo% - Y0 es la condición inicial YO = Y(a)% - N es ell número de pasos% Salida% - t es el vector de la abscisas o variable independiente% - Y es el vector de las ordenadas o variable dependienteH = (b - a) / N;t = zeros(1, N + 1);Y = zeros(1, N + 1);t = (a: H: b);Y(1) = Y0;for J = 1 : N K1 = H * feval(F, t(J), Y(J)); K2 = H * feval(F, t(J) + H/2, Y(J) + K1/2); K3 = H * feval(F, t(J) + H/2, Y(J) + K2/2); K4 = H * feval(F, t(J) + H, Y(J) + K3); Y(J + 1) = Y(J) + (K1 + 2 * K2 + 2 * K3 + K4)/6;endt = t';Y = Y';
SOLUCION
>> [t, Y] = RK4('f', 0.5, 1, 1, 5)
t =
0.5000 0.6000 0.7000 0.8000 0.9000 1.0000
Y =
1.0000 1.1744 1.4069 1.7155 2.1260 2.6755