Embed Size (px)
Citation preview
Revista Mecatrónica
2013
Universidad Ricardo PalmaFACULTAD DE INGENIERÍA
ESCUELA DE INGENIERÍA MECATRÓNICA

Artículos
Automatización de un Sistema de Riego Agrícola por Técnica de Goteo y Aspersión
Diseño e Implementación de un robot explorador teleoperado por computadora con adquisición de imágenes
Sistema optimizado de adquisición de energía solar por el método de seguidores solares
Diseño e implementación de un robot humanoide asistencial controlado por computador para aplicaciones en pacientes parapléjicos
Implementación de un sistema de control de calidad de color para aji paprika mediante procesamiento digital de imágenes
Diseño y control de una nave aerea no tripulada (quadcopter)
Monitor cardiaco portatil con interfaz de comunicación serial para futuras aplicaciones en telefonia.
Control De Un Brazo Robotico Antropomorfico Con 5 Grados DeLibertad Teleoperado
Proyectos presentados en el concurso de proyecto de ingeniería mecatrónica ciclo 2013-I
9
17
25
33
41
47
53
57
65
INDICE

Art
ícul
os

REVISTA
9
Automatización de un Sistema de Riego Agrícola por Técnica de Goteo y Aspersión
Daniel Gutiérrez, Paul Muñoz, Arturo Suarez
Asesor: Dr. Ing. Elmer Córdova Zapata, Ing. Ricardo J. Palomares Orihuela
Escuela de Ingeniería Mecatrónica, Universidad Ricardo Palma – Perú
[email protected], [email protected], [email protected], [email protected]
ResumenEl sistema consiste en la instalación de un sistema de riego doméstico subterráneo, que va a ser controlado por un circuito lógico mediante la gestión del flujo de agua, siendo la salida del circuito de control aplicado a un elemento actuador electro-mecánico. Para ello, una válvula reguladora accionada mecánicamente permanecerá abierta en el nivel requerido. El circuito mide las horas necesarias para la activación, y el riego se realiza en horas de la noche. Por esa razón, se diseña un temporizador digital con el fin de controlar las horas de apertura. Se incluye también un sistema sensorial que mide la intensidad de la luz y la humedad de la tierra para regular el cierre de la llave secundaria que realiza el avance del flujo de agua a través del sistema de tuberías con aberturas suficientemente pequeñas para mantener el riego por goteo. Con el sistema desarrollado se logra obtener un ahorro en el consumo de agua de regadío entre otros beneficios.
Palabras Clave: Riego por aspersión, riego por goteo, flujo en tuberías, PLC.
1. INTRODUCCIÓN
AbstractThe system consists of installing an underground domestic watering system, which is to be controlled by a logic circuit by managing the flow of water, being the output of control circuit applied to an electro-mechanical actuator element. For this, a mecha-nically actuated valve will remain open at the required level. The circuit measures the hours required for activation, and irrigation is carried out in at night. For this reason a digital timer is designed to control the opening hours. Also includes a sensor system that measures the intensity of light and moisture from the ground to regulate the clo-sure of the secondary key that performs the advance of the flow of water through the pipe system with openings small enough to maintain irrigation drip. With the develo-ped system achieves a saving in water consumption for irrigation and other benefits.
Keywords: Sprinkler irrigation, drip irrigation, pipe flow, PLC.
El sistema de riego por goteo surge como alternativa a la escasez de agua a nivel mundial. Al tratarse del problema ambiental más serio de los últimos tiempos, se optó por una investigación detallada de las cantidades y gastos de agua dulce a nivel mundial. El agua, que cubre el 71 por ciento de la superficie terrestre, le otorga a nuestro planeta ese distintivo tono azul perceptible desde el espacio. Sin embargo, a pesar de toda esa agua, la cantidad disponible para el uso humano es sorprendentemente poca. Si imagináramos toda el agua de la tierra en un balde de 1000 litros lleno hasta
el borde, la fracción correspondiente al agua dulce, sin contar el agua de los campos de hielo y los glaciares, sería apenas 25 mL [1]. A nivel global, el 70% del agua se utiliza en agricultura, 20% en industria, y 10% para abastecer a la población [2]. Es por esta preocupación que surgió la idea de recurrir a alguna alternativa que permita el uso eficiente del agua para el riego agrícola.
Como alternativa eficaz se recurrió al sistema de riego por goteo, ya utilizado en el medio oriente, el cual consiste en mantener en constante humedad el
REVI
STA
REVISTA
10 11
espacio agrícola a tratar. Ello permite que en el lugar, las plantas permanezcan constantemente obteniendo los nutrientes de los suelos y generando su óptimo desarrollo. Además, proporciona ventajas como evitar el reflejo de los rayos del sol en el agua de riego depositada en la superficie de jardines que queman el mismo y lo amarillentan.
Para la instalación del sistema de riego por goteo es fundamental la obtención de cálculos previos de pérdida de energía y transporte del fluido para tomar decisiones sobre la forma topológica del sistema a instalar y los materiales a utilizar. Además de la decisión del flujo del agua a regular en la válvula principal y la llave secundaria.
En una segunda instancia se diseñará un circuito electrónico de control del
sistema de riego. El funcionamiento partirá por el desarrollo de circuitos integrados con lógica booleana. Se utilizarán entradas de sensores de humedad HS1100 con los que se determinará un rango de humedad constante durante la noche. La activación y desactivación del circuito será controlada por un contador que permita determinar las horas de operación del sistema. Existirá una única salida que permita el cerrado de la llave reguladora activada por electrovalvula y por un circuito electrónico de potencia.
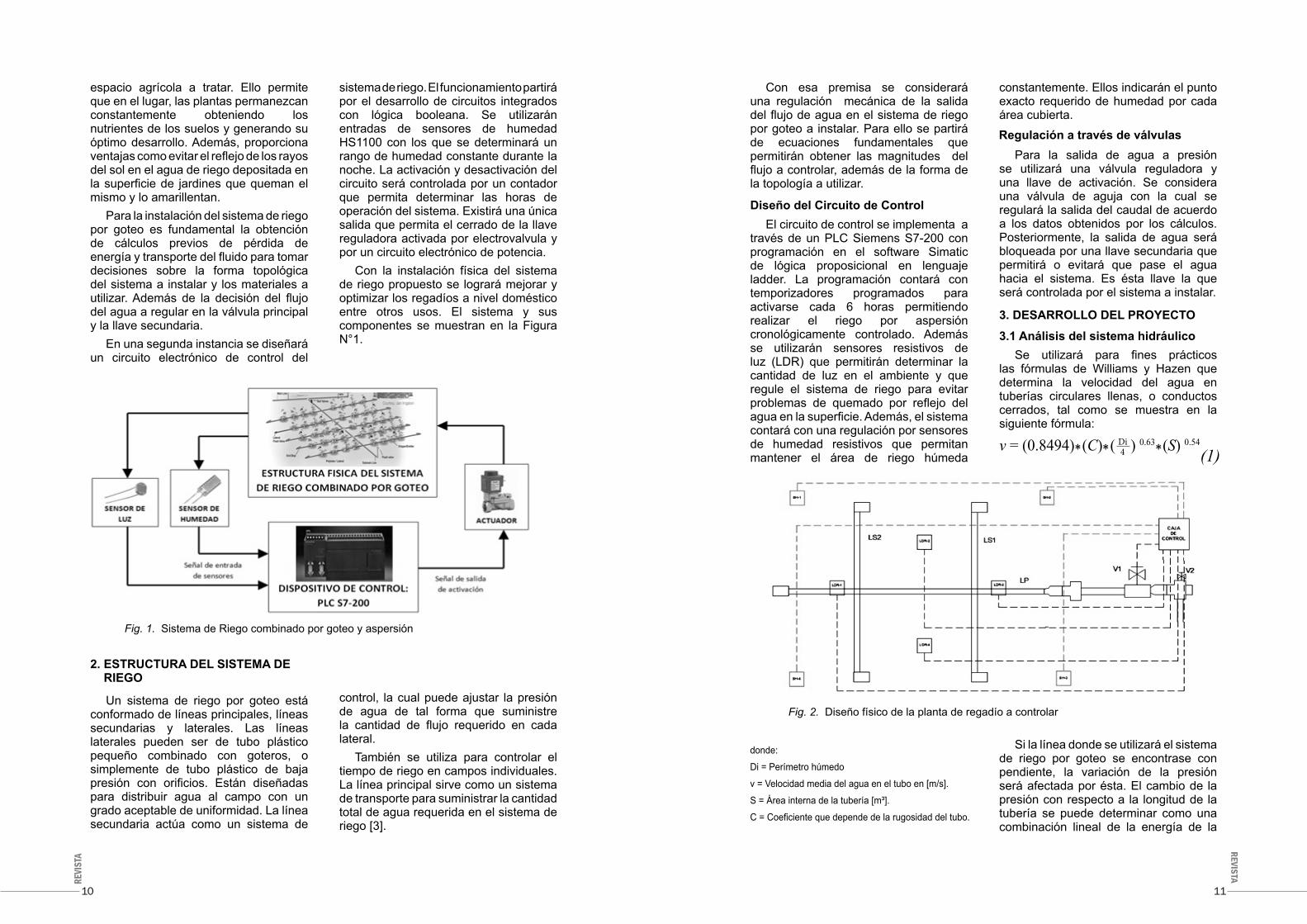
Con la instalación física del sistema de riego propuesto se logrará mejorar y optimizar los regadíos a nivel doméstico entre otros usos. El sistema y sus componentes se muestran en la Figura N°1.
Un sistema de riego por goteo está conformado de líneas principales, líneas secundarias y laterales. Las líneas laterales pueden ser de tubo plástico pequeño combinado con goteros, o simplemente de tubo plástico de baja presión con orificios. Están diseñadas para distribuir agua al campo con un grado aceptable de uniformidad. La línea secundaria actúa como un sistema de
Fig. 1. Sistema de Riego combinado por goteo y aspersión
Fig. 2. Diseño físico de la planta de regadío a controlar
2. ESTRUCTURA DEL SISTEMA DE RIEGO
3. DESARROLLO DEL PROYECTO3.1 Análisis del sistema hidráulico
Diseño del Circuito de Control
Regulación a través de válvulas
control, la cual puede ajustar la presión de agua de tal forma que suministre la cantidad de flujo requerido en cada lateral.
También se utiliza para controlar el tiempo de riego en campos individuales. La línea principal sirve como un sistema de transporte para suministrar la cantidad total de agua requerida en el sistema de riego [3].
Con esa premisa se considerará una regulación mecánica de la salida del flujo de agua en el sistema de riego por goteo a instalar. Para ello se partirá de ecuaciones fundamentales que permitirán obtener las magnitudes del flujo a controlar, además de la forma de la topología a utilizar.
El circuito de control se implementa a través de un PLC Siemens S7-200 con programación en el software Simatic de lógica proposicional en lenguaje ladder. La programación contará con temporizadores programados para activarse cada 6 horas permitiendo realizar el riego por aspersión cronológicamente controlado. Además se utilizarán sensores resistivos de luz (LDR) que permitirán determinar la cantidad de luz en el ambiente y que regule el sistema de riego para evitar problemas de quemado por reflejo del agua en la superficie. Además, el sistema contará con una regulación por sensores de humedad resistivos que permitan mantener el área de riego húmeda
Para la salida de agua a presión se utilizará una válvula reguladora y una llave de activación. Se considera una válvula de aguja con la cual se regulará la salida del caudal de acuerdo a los datos obtenidos por los cálculos. Posteriormente, la salida de agua será bloqueada por una llave secundaria que permitirá o evitará que pase el agua hacia el sistema. Es ésta llave la que será controlada por el sistema a instalar.
Se utilizará para fines prácticos las fórmulas de Williams y Hazen que determina la velocidad del agua en tuberías circulares llenas, o conductos cerrados, tal como se muestra en la siguiente fórmula:
Si la línea donde se utilizará el sistema de riego por goteo se encontrase con pendiente, la variación de la presión será afectada por ésta. El cambio de la presión con respecto a la longitud de la tubería se puede determinar como una combinación lineal de la energía de la
donde:
Di = Perímetro húmedo
v = Velocidad media del agua en el tubo en [m/s].
S = Área interna de la tubería [m³].
C = Coeficiente que depende de la rugosidad del tubo.
v = (0.8494) (C) ( ) 0.63 (S) 0.54Di4 ***
constantemente. Ellos indicarán el punto exacto requerido de humedad por cada área cubierta.
(1)
REVI
STA
REVISTA
12 13
pendiente y la pendiente de la línea, tal como se muestra en la formula:
La variación en presión a lo largo de la línea secundaria causa una variación en el flujo del gotero a lo largo de la lateral la cual se expresa por medio de la siguiente ecuación:
Es necesario para la determinación de los materiales a utilizar, la potencia de los motores de activación de la válvula y la optimización del proceso de transporte de agua, y salida de la misma en el lugar de riego.
El proyecto está basado en una propuesta de topología óptima para el riego por goteo. Se utilizarán tubos de acero inoxidable que se instalarán debajo de la superficie. Al ejercerse presión sobre los tubos podrían perder sus propiedades, por lo que se requerirán tubos de acero con una alta resistencia al esfuerzo cortante.
Se ha considerado una superficie de 10m x 10m para la aplicación de las pruebas iniciales, ubicando estratégicamente los dispositivos de goteo a una distancia proporcional de 2.5 metros de radio hidrostático (Rh), tal como se muestra en la Figura N°2,
= Sf + So
q=C √h
F=W W= (0.6) (9.8) (10 -3)
6x10-3 = 0.09 √h
Sf =
A =
S =
A = 0.459 mm2
S = 1.905 cm2
v = (0.8494) (0.09) (100.63) (0.00019050.54)
d = 0.76 mm
= 0.459
=1.542x10-11
h = 2.7x10 -10
v = 0.462
Q=vS
2.7x10 -10
2.7x10-10
π.D2
m
π.d2
4
17.5
4.59x10-3
4
s
W= 5.88 x 10 -3
(3)
(4)
(2)dhdl
donde:
Sf = Energía de la pendiente o la línea del gradiente de energía.
So = Pendientes de la línea, con signo positivo cuando la línea está hacia abajo de la pendiente, y con signo negativo cuando la línea está hacia arriba de la pendiente.
donde:
q = Flujo de gotero (o flujo hacia la lateral).
h = Cabecera de presión.
*
*
*
* * *
*
donde LP representa la línea principal, LS1 y LS2 son las líneas secundarias de presión. SH representa a los sensores de humedad y LDR representa a los sensores de luz. V1 representa a la válvula reguladora y V2 la llave principal.
De los datos recolectados de experiencias previas se solicita tener un caudal de cabecera de 1.5x10-6 m3/s. Siendo además, la fuerza de salida el propio peso del agua por la disposición de las tuberías. Al tener un riego por goteo, la fuerza de salida será del mismo peso de la gota de agua:
Se obtiene así el primer dato necesario para el diseño del sistema de regado por goteo. Cada cabecera deberá tener un diámetro de 0.76mm aproximadamente.
Para la obtención de la cantidad de cabeceras a diseñar a lo largo de las tuberías se resolverán las ecuaciones de Williams y Hazen. El perímetro húmedo será Di=40m. Como se usarán para fines prácticos tuberías de ¾’’ el área de la sección transversal se obtiene mediante la siguiente fórmula:
Reemplazando los datos en la ecuación (1), se obtiene el valor de la velocidad.
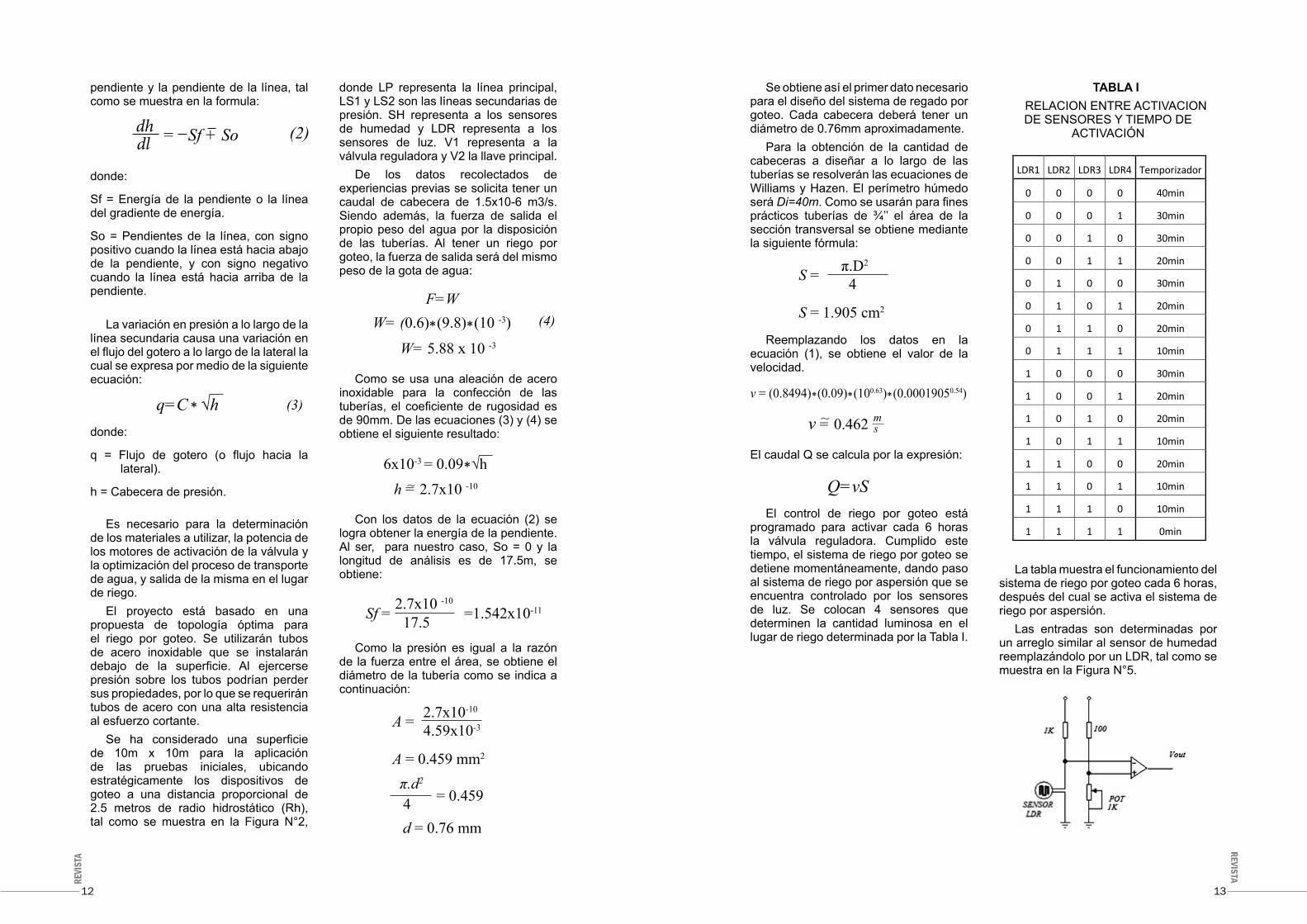
TABLA IRELACION ENTRE ACTIVACION DE SENSORES Y TIEMPO DE
ACTIVACIÓN
El control de riego por goteo está programado para activar cada 6 horas la válvula reguladora. Cumplido este tiempo, el sistema de riego por goteo se detiene momentáneamente, dando paso al sistema de riego por aspersión que se encuentra controlado por los sensores de luz. Se colocan 4 sensores que determinen la cantidad luminosa en el lugar de riego determinada por la Tabla I.
La tabla muestra el funcionamiento del sistema de riego por goteo cada 6 horas, después del cual se activa el sistema de riego por aspersión.
Las entradas son determinadas por un arreglo similar al sensor de humedad reemplazándolo por un LDR, tal como se muestra en la Figura N°5.
El caudal Q se calcula por la expresión:
Como se usa una aleación de acero inoxidable para la confección de las tuberías, el coeficiente de rugosidad es de 90mm. De las ecuaciones (3) y (4) se obtiene el siguiente resultado:
Con los datos de la ecuación (2) se logra obtener la energía de la pendiente. Al ser, para nuestro caso, So = 0 y la longitud de análisis es de 17.5m, se obtiene:
Como la presión es igual a la razón de la fuerza entre el área, se obtiene el diámetro de la tubería como se indica a continuación:
El control de riego por goteo está programado para activar cada 6 horas la válvula reguladora. Cumplido este tiempo, el sistema de riego por goteo se detiene momentáneamente, dando paso al sistema de riego por aspersión que se encuentra controlado por los sensores de luz. Se colocan 4 sensores que determinen la cantidad luminosa en el lugar de riego determinada por la Tabla I.
TABLA I
RELACION ENTRE ACTIVACION DE SENSORES Y TIEMPO DE ACTIVACIÓN
LDR1 LDR2 LDR3 LDR4 Temporizador
0 0 0 0 40min
0 0 0 1 30min
0 0 1 0 30min
0 0 1 1 20min
0 1 0 0 30min
0 1 0 1 20min
0 1 1 0 20min
0 1 1 1 10min
1 0 0 0 30min
1 0 0 1 20min
1 0 1 0 20min
1 0 1 1 10min
1 1 0 0 20min
1 1 0 1 10min
1 1 1 0 10min
1 1 1 1 0min
La tabla muestra el funcionamiento del sistema de riego por goteo cada 6 horas, después del cual se activa el sistema de riego por aspersión.
Las entradas son determinadas por un arreglo similar al sensor de humedad reemplazándolo por un LDR, tal como se muestra en la Figura N°5.
Fig. 5. Estructura del sensor LDR con el OPAMP
Estos sensores envían señales y proporcionan la señal de control de una electroválvula por el tiempo determinado en la Tabla I. Todas las señales de entrada y salida son manipuladas por la lógica ladder tal como se muestra en las Figuras N° 6 y 7:
Fig. 6. Programación ladder para manipulación de los sensores
de humedad
Fig. 7. Programación ladder para controlar tiempos de trabajo
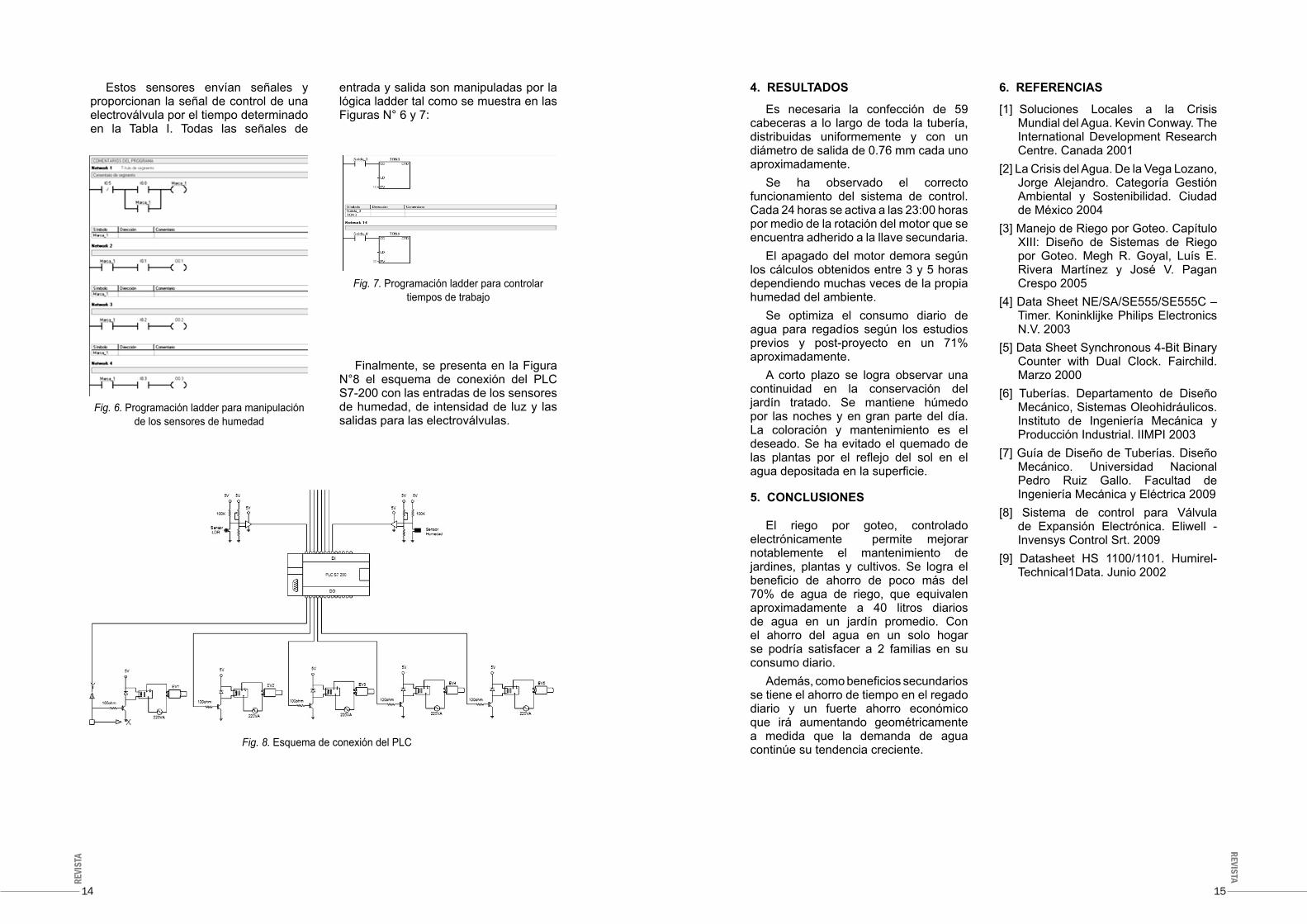
Finalmente, se presenta en la Figura N°8 el esquema de conexión del PLC S7-200 con las entradas de los sensores de humedad, de intensidad de luz y las salidas para las electroválvulas.
REVI
STA
REVISTA
14 15
Estos sensores envían señales y proporcionan la señal de control de una electroválvula por el tiempo determinado en la Tabla I. Todas las señales de
Finalmente, se presenta en la Figura N°8 el esquema de conexión del PLC S7-200 con las entradas de los sensores de humedad, de intensidad de luz y las salidas para las electroválvulas.
Es necesaria la confección de 59 cabeceras a lo largo de toda la tubería, distribuidas uniformemente y con un diámetro de salida de 0.76 mm cada uno aproximadamente.
Se ha observado el correcto funcionamiento del sistema de control. Cada 24 horas se activa a las 23:00 horas por medio de la rotación del motor que se encuentra adherido a la llave secundaria.
El apagado del motor demora según los cálculos obtenidos entre 3 y 5 horas dependiendo muchas veces de la propia humedad del ambiente.
Se optimiza el consumo diario de agua para regadíos según los estudios previos y post-proyecto en un 71% aproximadamente.
A corto plazo se logra observar una continuidad en la conservación del jardín tratado. Se mantiene húmedo por las noches y en gran parte del día. La coloración y mantenimiento es el deseado. Se ha evitado el quemado de las plantas por el reflejo del sol en el agua depositada en la superficie.
[1] Soluciones Locales a la Crisis Mundial del Agua. Kevin Conway. The International Development Research Centre. Canada 2001
[2] La Crisis del Agua. De la Vega Lozano, Jorge Alejandro. Categoría Gestión Ambiental y Sostenibilidad. Ciudad de México 2004
[3] Manejo de Riego por Goteo. Capítulo XIII: Diseño de Sistemas de Riego por Goteo. Megh R. Goyal, Luís E. Rivera Martínez y José V. Pagan Crespo 2005
[4] Data Sheet NE/SA/SE555/SE555C – Timer. Koninklijke Philips Electronics N.V. 2003
[5] Data Sheet Synchronous 4-Bit Binary Counter with Dual Clock. Fairchild. Marzo 2000
[6] Tuberías. Departamento de Diseño Mecánico, Sistemas Oleohidráulicos. Instituto de Ingeniería Mecánica y Producción Industrial. IIMPI 2003
[7] Guía de Diseño de Tuberías. Diseño Mecánico. Universidad Nacional Pedro Ruiz Gallo. Facultad de Ingeniería Mecánica y Eléctrica 2009
[8] Sistema de control para Válvula de Expansión Electrónica. Eliwell - Invensys Control Srt. 2009
[9] Datasheet HS 1100/1101. Humirel-Technical1Data. Junio 2002
El riego por goteo, controlado electrónicamente permite mejorar notablemente el mantenimiento de jardines, plantas y cultivos. Se logra el beneficio de ahorro de poco más del 70% de agua de riego, que equivalen aproximadamente a 40 litros diarios de agua en un jardín promedio. Con el ahorro del agua en un solo hogar se podría satisfacer a 2 familias en su consumo diario.
Además, como beneficios secundarios se tiene el ahorro de tiempo en el regado diario y un fuerte ahorro económico que irá aumentando geométricamente a medida que la demanda de agua continúe su tendencia creciente.
Fig. 6. Programación ladder para manipulación de los sensores de humedad
Fig. 8. Esquema de conexión del PLC
Fig. 7. Programación ladder para controlar tiempos de trabajo
entrada y salida son manipuladas por la lógica ladder tal como se muestra en las Figuras N° 6 y 7:
4. RESULTADOS 6. REFERENCIAS
5. CONCLUSIONES

REVI
STA
REVISTA
16 17
Diseño e Implementación de un robot explorador teleoperado por computadora con adquisición de
imágenes
Rony Martin Cabrera Donayre, Paul Jeampier Chávez Montes
Asesor: Ing. Ricardo J. Palomares Orihuela
Escuela Profesional de Ingeniería Mecatrónica, Universidad Ricardo Palma, Perú
[email protected], [email protected], [email protected]
ResumenEl proyecto tiene como propósito el diseño e implementación de un robot móvil explorador con la capacidad de desplazarse en superficies accidentadas y de adquirir imágenes por medio de una cámara web, todo controlado por el usuario desde una computadora (PC).Lo más importante en la elaboración de este proyecto fue el diseño de la estructura del robot, ya que esta debía ser adecuada para que pueda desplazarse correctamente por pequeños lugares como ductos o cuevas. Para esto se opto por realizar una estructura que no supere los 15cm.Paralelamente se diseño y elaboro la parte electrónica de la unidad central y del robot. La electrónica de la unidad central cuenta con la interfaz serial USB que recibe los datos de la PC y es enviada por radio frecuencia hacia el robot que cuenta con un modulo receptor RF y una etapa de potencia para los dos motores 12VDC.Por último, se diseño la interfaz del usuario en la PC por medio de la plataforma VISUAL BASIC 6.0, en la cual incorporamos aplicaciones para la cámara web y el control del robot por medio del teclado.
Palabras Clave: Robot, comunicación serial USB, comunicación inalámbrica, adquisición de imágenes.
1. INTRODUCCIÓN
AbstractThe project consists in design and implementation of a mobile robot explorer with the ability to navigate on rough surfaces and acquire images through a webcam, all controlled by the user from a computer (PC).Most important in the development of this project was to design the structure of the robot, since this should be adequate to correctly navigate to places such as ducts or small caves. For this it was decided to create a structure not exceeding 15cm.In parallel, the design and elaborate electronic central unit and the robot. The electronic central unit with serial USB interface that receives data from the PC and sent by radio frequency to the robot which has an RF receiver module and a power amplifier for the two motors 12VDC.Finally, we designed the user interface on the PC using the Visual Basic 6.0 platform, which incorporates applications for the webcam and robot control through the keyboard.
Keywords: Robot, serial USB communication, wireless communication, image acquisition
La robótica es una ciencia o rama de la tecnología, que estudia el diseño y construcción de maquinas capaces de desempeñar tareas realizadas por el ser humano o que requieren del uso de inteligencia artificial. Es un área interdisciplinaria formada por la ingeniería mecánica, electrónica e informática.
Dentro del análisis mecánico del robot se debe considerar tres aspectos: el diseño mecánico de la estructura, el análisis estático y el análisis dinámico.
La electrónica le permite al robot trasmi-tir la información que se le entrega, coordi-nando impulsos eléctricos que hacen que el robot realice los movimientos requeridos.
REVI
STA
REVISTA
18 19
La informática provee de los programas necesarios para lograr la coordinación mecánica requerida en los movimientos del robot, dar un cierto grado de inteligencia a la máquina, es decir adaptabilidad, autonomía y capacidad interpretativa y correctiva.
En la actualidad, el aporte de la robótica ha hecho posible que los robots lleguen a lugares inaccesibles para el hombre y cumplan con mayor precisión las tareas encomendadas.
Utilizando estos conceptos se pretende resolver el problema de inaccesibilidad del hombre en ciertos lugares, como por ejemplo, las tuberías,
cuevas, etc. Para esto se desarrollará un robot móvil con la capacidad de adquirir imágenes en tiempo real para que el usuario, en una unidad central de control y supervisión, pueda teledirigirlo y hacer uso de la información.
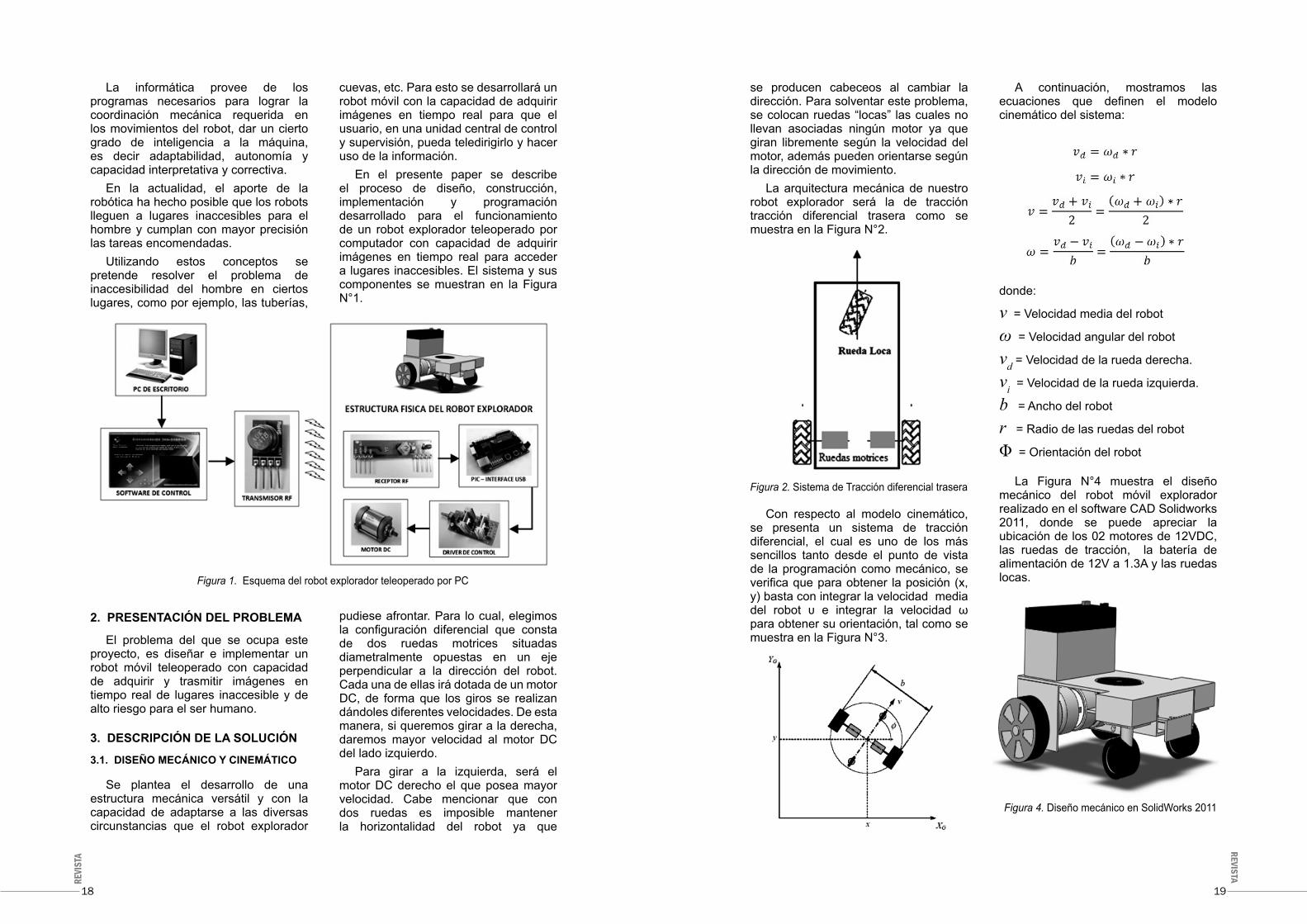
En el presente paper se describe el proceso de diseño, construcción, implementación y programación desarrollado para el funcionamiento de un robot explorador teleoperado por computador con capacidad de adquirir imágenes en tiempo real para acceder a lugares inaccesibles. El sistema y sus componentes se muestran en la Figura N°1.
El problema del que se ocupa este proyecto, es diseñar e implementar un robot móvil teleoperado con capacidad de adquirir y trasmitir imágenes en tiempo real de lugares inaccesible y de alto riesgo para el ser humano.
Se plantea el desarrollo de una estructura mecánica versátil y con la capacidad de adaptarse a las diversas circunstancias que el robot explorador
Figura 1. Esquema del robot explorador teleoperado por PC
Figura 2. Sistema de Tracción diferencial trasera
Figura 4. Diseño mecánico en SolidWorks 2011
2. PRESENTACIÓN DEL PROBLEMA
3. DESCRIPCIÓN DE LA SOLUCIÓN
3.1. DISEÑO MECÁNICO Y CINEMÁTICO
pudiese afrontar. Para lo cual, elegimos la configuración diferencial que consta de dos ruedas motrices situadas diametralmente opuestas en un eje perpendicular a la dirección del robot. Cada una de ellas irá dotada de un motor DC, de forma que los giros se realizan dándoles diferentes velocidades. De esta manera, si queremos girar a la derecha, daremos mayor velocidad al motor DC del lado izquierdo.
Para girar a la izquierda, será el motor DC derecho el que posea mayor velocidad. Cabe mencionar que con dos ruedas es imposible mantener la horizontalidad del robot ya que
se producen cabeceos al cambiar la dirección. Para solventar este problema, se colocan ruedas “locas” las cuales no llevan asociadas ningún motor ya que giran libremente según la velocidad del motor, además pueden orientarse según la dirección de movimiento.
La arquitectura mecánica de nuestro robot explorador será la de tracción tracción diferencial trasera como se muestra en la Figura N°2.
A continuación, mostramos las ecuaciones que definen el modelo cinemático del sistema:
Con respecto al modelo cinemático, se presenta un sistema de tracción diferencial, el cual es uno de los más sencillos tanto desde el punto de vista de la programación como mecánico, se verifica que para obtener la posición (x, y) basta con integrar la velocidad media del robot υ e integrar la velocidad ω para obtener su orientación, tal como se muestra en la Figura N°3.
La Figura N°4 muestra el diseño mecánico del robot móvil explorador realizado en el software CAD Solidworks 2011, donde se puede apreciar la ubicación de los 02 motores de 12VDC, las ruedas de tracción, la batería de alimentación de 12V a 1.3A y las ruedas locas.
donde:
v = Velocidad media del robot
ω = Velocidad angular del robot
vd = Velocidad de la rueda derecha.
vi = Velocidad de la rueda izquierda.
b = Ancho del robot
r = Radio de las ruedas del robot
Φ = Orientación del robot
REVI
STA
REVISTA
20 21
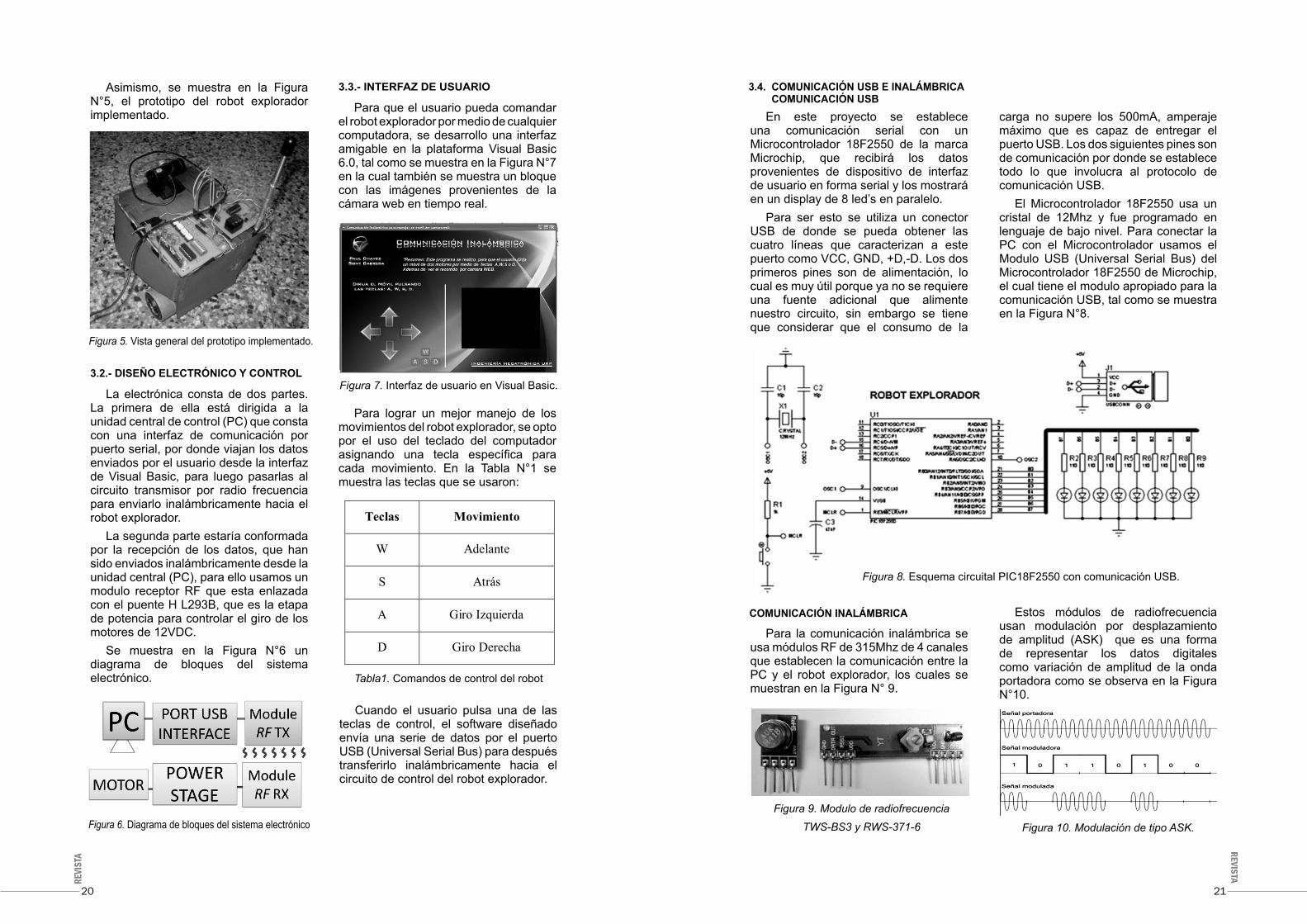
Asimismo, se muestra en la Figura N°5, el prototipo del robot explorador implementado.
La electrónica consta de dos partes. La primera de ella está dirigida a la unidad central de control (PC) que consta con una interfaz de comunicación por puerto serial, por donde viajan los datos enviados por el usuario desde la interfaz de Visual Basic, para luego pasarlas al circuito transmisor por radio frecuencia para enviarlo inalámbricamente hacia el robot explorador.
La segunda parte estaría conformada por la recepción de los datos, que han sido enviados inalámbricamente desde la unidad central (PC), para ello usamos un modulo receptor RF que esta enlazada con el puente H L293B, que es la etapa de potencia para controlar el giro de los motores de 12VDC.
Se muestra en la Figura N°6 un diagrama de bloques del sistema electrónico.
Para que el usuario pueda comandar el robot explorador por medio de cualquier computadora, se desarrollo una interfaz amigable en la plataforma Visual Basic 6.0, tal como se muestra en la Figura N°7 en la cual también se muestra un bloque con las imágenes provenientes de la cámara web en tiempo real.
En este proyecto se establece una comunicación serial con un Microcontrolador 18F2550 de la marca Microchip, que recibirá los datos provenientes de dispositivo de interfaz de usuario en forma serial y los mostrará en un display de 8 led’s en paralelo.
Para ser esto se utiliza un conector USB de donde se pueda obtener las cuatro líneas que caracterizan a este puerto como VCC, GND, +D,-D. Los dos primeros pines son de alimentación, lo cual es muy útil porque ya no se requiere una fuente adicional que alimente nuestro circuito, sin embargo se tiene que considerar que el consumo de la
Para lograr un mejor manejo de los movimientos del robot explorador, se opto por el uso del teclado del computador asignando una tecla específica para cada movimiento. En la Tabla N°1 se muestra las teclas que se usaron:
Cuando el usuario pulsa una de las teclas de control, el software diseñado envía una serie de datos por el puerto USB (Universal Serial Bus) para después transferirlo inalámbricamente hacia el circuito de control del robot explorador.
Figura 5. Vista general del prototipo implementado.
Figura 7. Interfaz de usuario en Visual Basic.
Tabla1. Comandos de control del robot
3.2.- DISEÑO ELECTRÓNICO Y CONTROL
3.3.- INTERFAZ DE USUARIO 3.4. COMUNICACIÓN USB E INALÁMBRICA COMUNICACIÓN USB
COMUNICACIÓN INALÁMBRICA
Figura 6. Diagrama de bloques del sistema electrónico
10
3.2.- DISEÑO ELECTRÓNICO Y CONTROL
La electrónica consta de dos partes. La primera de ella está dirigida a la unidad central de control (PC) que consta con una interfaz de comunicación por puerto serial, por donde viajan los datos enviados por el usuario desde la interfaz de Visual Basic, para luego pasarlas al circuito transmisor por radio frecuencia para enviarlo inalámbricamente hacia el robot explorador.
La segunda parte estaría conformada por la recepción de los datos, que han sido enviados inalámbricamente desde la unidad central (PC), para ello usamos un modulo receptor RF que esta enlazada con el puente H L293B, que es la etapa de potencia para controlar el giro de los motores de 12VDC.
Se muestra en la Figura N°6 un diagrama de bloques del sistema electrónico.
Figura 6. Diagrama de bloques del sistema electrónico
3.3.- INTERFAZ DE USUARIO
Para que el usuario pueda comandar el robot explorador por medio de cualquier computadora, se desarrollo una interfaz amigable en la plataforma Visual Basic 6.0, tal como se muestra en la Figura N°7 en la cual también se muestra un bloque con las imágenes provenientes de la cámara web en tiempo real.
Figura 7. Interfaz de usuario en Visual Basic.
Para lograr un mejor manejo de los movimientos del robot explorador, se opto por el uso del teclado del computador asignando una tecla específica para cada
movimiento. En la Tabla N°1 se muestra las teclas que se usaron:
Tabla1. Comandos de control del robot
Cuando el usuario pulsa una de las teclas de control, el software diseñado envía una serie de datos por el puerto USB (Universal Serial Bus) para después transferirlo inalámbricamente hacia el circuito de control del robot explorador.
3.4.- COMUNICACIÓN USB E INALÁMBRICA
COMUNICACIÓN USB
En este proyecto se establece una comunicación serial con un Microcontrolador 18F2550 de la marca Microchip, que recibirá los datos provenientes de dispositivo de interfaz de usuario en forma serial y los mostrará en un display de 8 led’s en paralelo.
Para ser esto se utiliza un conector USB de donde se pueda obtener las cuatro líneas que caracterizan a este puerto como VCC, GND, +D,-D. Los dos primeros pines son de alimentación, lo cual es muy útil porque ya no se requiere una fuente adicional que alimente nuestro circuito, sin embargo se tiene que considerar que el consumo de la carga no supere los 500mA, amperaje máximo que es capaz de entregar el puerto USB. Los dos siguientes pines son de comunicación por donde se establece todo lo que involucra al protocolo de comunicación USB.
El Microcontrolador 18F2550 usa un cristal de 12Mhz y fue programado en lenguaje de bajo nivel. Para conectar la PC con el Microcontrolador usamos el Modulo USB (Universal Serial Bus) del Microcontrolador 18F2550 de Microchip, el cual tiene el modulo apropiado para la comunicación USB, tal como se muestra en la Figura N°8.
Teclas Movimiento
W Adelante
S Atrás
A Giro Izquierda
D Giro Derecha
carga no supere los 500mA, amperaje máximo que es capaz de entregar el puerto USB. Los dos siguientes pines son de comunicación por donde se establece todo lo que involucra al protocolo de comunicación USB.
El Microcontrolador 18F2550 usa un cristal de 12Mhz y fue programado en lenguaje de bajo nivel. Para conectar la PC con el Microcontrolador usamos el Modulo USB (Universal Serial Bus) del Microcontrolador 18F2550 de Microchip, el cual tiene el modulo apropiado para la comunicación USB, tal como se muestra en la Figura N°8.
Para la comunicación inalámbrica se usa módulos RF de 315Mhz de 4 canales que establecen la comunicación entre la PC y el robot explorador, los cuales se muestran en la Figura N° 9.
Estos módulos de radiofrecuencia usan modulación por desplazamiento de amplitud (ASK) que es una forma de representar los datos digitales como variación de amplitud de la onda portadora como se observa en la Figura N°10.
Figura 8. Esquema circuital PIC18F2550 con comunicación USB.
Figura 9. Modulo de radiofrecuencia
TWS-BS3 y RWS-371-6 Figura 10. Modulación de tipo ASK.
REVI
STA
REVISTA
22 23
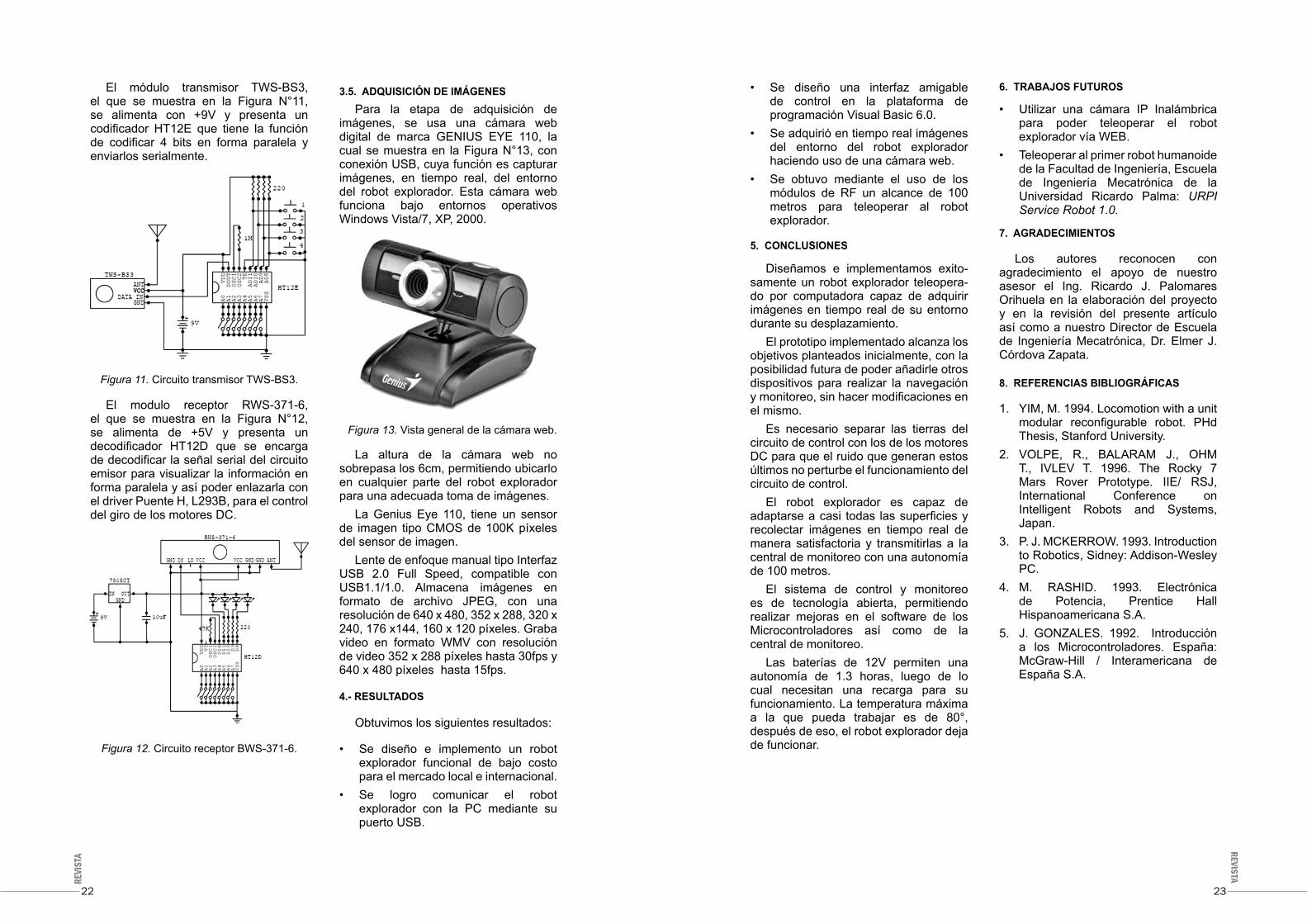
El módulo transmisor TWS-BS3, el que se muestra en la Figura N°11, se alimenta con +9V y presenta un codificador HT12E que tiene la función de codificar 4 bits en forma paralela y enviarlos serialmente.
Para la etapa de adquisición de imágenes, se usa una cámara web digital de marca GENIUS EYE 110, la cual se muestra en la Figura N°13, con conexión USB, cuya función es capturar imágenes, en tiempo real, del entorno del robot explorador. Esta cámara web funciona bajo entornos operativos Windows Vista/7, XP, 2000.
Diseñamos e implementamos exito-samente un robot explorador teleopera-do por computadora capaz de adquirir imágenes en tiempo real de su entorno durante su desplazamiento.
El prototipo implementado alcanza los objetivos planteados inicialmente, con la posibilidad futura de poder añadirle otros dispositivos para realizar la navegación y monitoreo, sin hacer modificaciones en el mismo.
Es necesario separar las tierras del circuito de control con los de los motores DC para que el ruido que generan estos últimos no perturbe el funcionamiento del circuito de control.
El robot explorador es capaz de adaptarse a casi todas las superficies y recolectar imágenes en tiempo real de manera satisfactoria y transmitirlas a la central de monitoreo con una autonomía de 100 metros.
El sistema de control y monitoreo es de tecnología abierta, permitiendo realizar mejoras en el software de los Microcontroladores así como de la central de monitoreo.
Las baterías de 12V permiten una autonomía de 1.3 horas, luego de lo cual necesitan una recarga para su funcionamiento. La temperatura máxima a la que pueda trabajar es de 80°, después de eso, el robot explorador deja de funcionar.
Los autores reconocen con agradecimiento el apoyo de nuestro asesor el Ing. Ricardo J. Palomares Orihuela en la elaboración del proyecto y en la revisión del presente artículo así como a nuestro Director de Escuela de Ingeniería Mecatrónica, Dr. Elmer J. Córdova Zapata.
1. YIM, M. 1994. Locomotion with a unit modular reconfigurable robot. PHd Thesis, Stanford University.
2. VOLPE, R., BALARAM J., OHM T., IVLEV T. 1996. The Rocky 7 Mars Rover Prototype. IIE/ RSJ, International Conference on Intelligent Robots and Systems, Japan.
3. P. J. MCKERROW. 1993. Introduction to Robotics, Sidney: Addison-Wesley PC.
4. M. RASHID. 1993. Electrónica de Potencia, Prentice Hall Hispanoamericana S.A.
5. J. GONZALES. 1992. Introducción a los Microcontroladores. España: McGraw-Hill / Interamericana de España S.A.
El modulo receptor RWS-371-6, el que se muestra en la Figura N°12, se alimenta de +5V y presenta un decodificador HT12D que se encarga de decodificar la señal serial del circuito emisor para visualizar la información en forma paralela y así poder enlazarla con el driver Puente H, L293B, para el control del giro de los motores DC.
Obtuvimos los siguientes resultados:
La altura de la cámara web no sobrepasa los 6cm, permitiendo ubicarlo en cualquier parte del robot explorador para una adecuada toma de imágenes.
La Genius Eye 110, tiene un sensor de imagen tipo CMOS de 100K píxeles del sensor de imagen.
Lente de enfoque manual tipo Interfaz USB 2.0 Full Speed, compatible con USB1.1/1.0. Almacena imágenes en formato de archivo JPEG, con una resolución de 640 x 480, 352 x 288, 320 x 240, 176 x144, 160 x 120 píxeles. Graba video en formato WMV con resolución de video 352 x 288 píxeles hasta 30fps y 640 x 480 píxeles hasta 15fps.
• Se diseño e implemento un robot explorador funcional de bajo costo para el mercado local e internacional.
• Se logro comunicar el robot explorador con la PC mediante su puerto USB.
Figura 11. Circuito transmisor TWS-BS3.
Figura 13. Vista general de la cámara web.
Figura 12. Circuito receptor BWS-371-6.
3.5. ADQUISICIÓN DE IMÁGENES
5. CONCLUSIONES
6. TRABAJOS FUTUROS
7. AGRADECIMIENTOS
8. REFERENCIAS BIBLIOGRÁFICAS
4.- RESULTADOS
• Se diseño una interfaz amigable de control en la plataforma de programación Visual Basic 6.0.
• Se adquirió en tiempo real imágenes del entorno del robot explorador haciendo uso de una cámara web.
• Se obtuvo mediante el uso de los módulos de RF un alcance de 100 metros para teleoperar al robot explorador.
• Utilizar una cámara IP Inalámbrica para poder teleoperar el robot explorador vía WEB.
• Teleoperar al primer robot humanoide de la Facultad de Ingeniería, Escuela de Ingeniería Mecatrónica de la Universidad Ricardo Palma: URPI Service Robot 1.0.
REVI
STA
REVISTA
24 25
Sistema optimizado de adquisición de energía solar por el método de seguidores solares
Andrea Apac Castillo, Juan Casanova Gonzales
Asesor: Ing. Javier Cieza
Escuela de Ingeniería Mecatrónica, Universidad Ricardo Palma – Perú
[email protected], [email protected]
ResumenEl proyecto consiste en el diseño de un control de posición para optimizar la adquisición de la energía solar con un panel solar por el método de seguidor solar. El seguidor solar consistirá de dos motores de corriente continua DC para posicionar el panel solar en función a la mayor cantidad de luz, irradiación, de tal modo que el panel solar obtenga un mejor desempeño en la captación de energía solar.Para ello, se utiliza un sistema de sensores para determinar la dirección de la mayor cantidad de luz emitida por el sol y un sistema de salida para controlar la dirección de rotación y el ángulo de giro de un motor DC.
Palabras Clave: Irradiación, Seguidor solar, Panel Solar, Motores DC.
INTRODUCCIÓN
AbstractThe project consists of a design of a position control to optimize the acquisition of solar energy with a solar panel for solar tracker method. The solar tracker consists of two DC motors DC to position the solar panel according to the most light, irradiation, so that the solar panel get better performance in capturing solar energy.For this purpose, a sensor system used to determine the direction of the greater amount of light emitted by the sun and a system for controlling the output direction of rotation and angle of rotation of a DC motor.
Keywords: Irradiation, Solar Tracker, Solar Panel, DC Motors.
La energía solar es la energía obtenida a partir del aprovechamiento de la radiación electromagnética procedente del Sol.
La radiación solar que alcanza la Tierra puede aprovecharse por medio de captadores que mediante diferentes tecnologías (células fotovoltaicas, helióstatos, colectores térmicos) pueden transformarla en energía eléctrica o térmica.
La potencia de la radiación varía según el momento del día; las condiciones atmosféricas que la amortiguan y la latitud. Se puede asumir que en buenas condiciones de radiación el valor es de aproximadamente 1000 W/m² en la
superficie terrestre. A esta potencia se la conoce como irradiancia.
La radiación es aprovechable en sus componentes directa y difusa, o en la suma de ambas. La radiación directa es la que llega directamente del foco solar, sin reflexiones o refracciones intermedias. La difusa es la emitida por la bóveda celeste diurna gracias a los múltiples fenómenos de reflexión y refracción solar en la atmósfera, en las nubes y el resto de elementos atmosféricos y terrestres. La radiación directa puede reflejarse y concentrarse para su utilización, mientras que no es posible concentrar la luz difusa que proviene de todas las direcciones.
REVI
STA
REVISTA
26 27
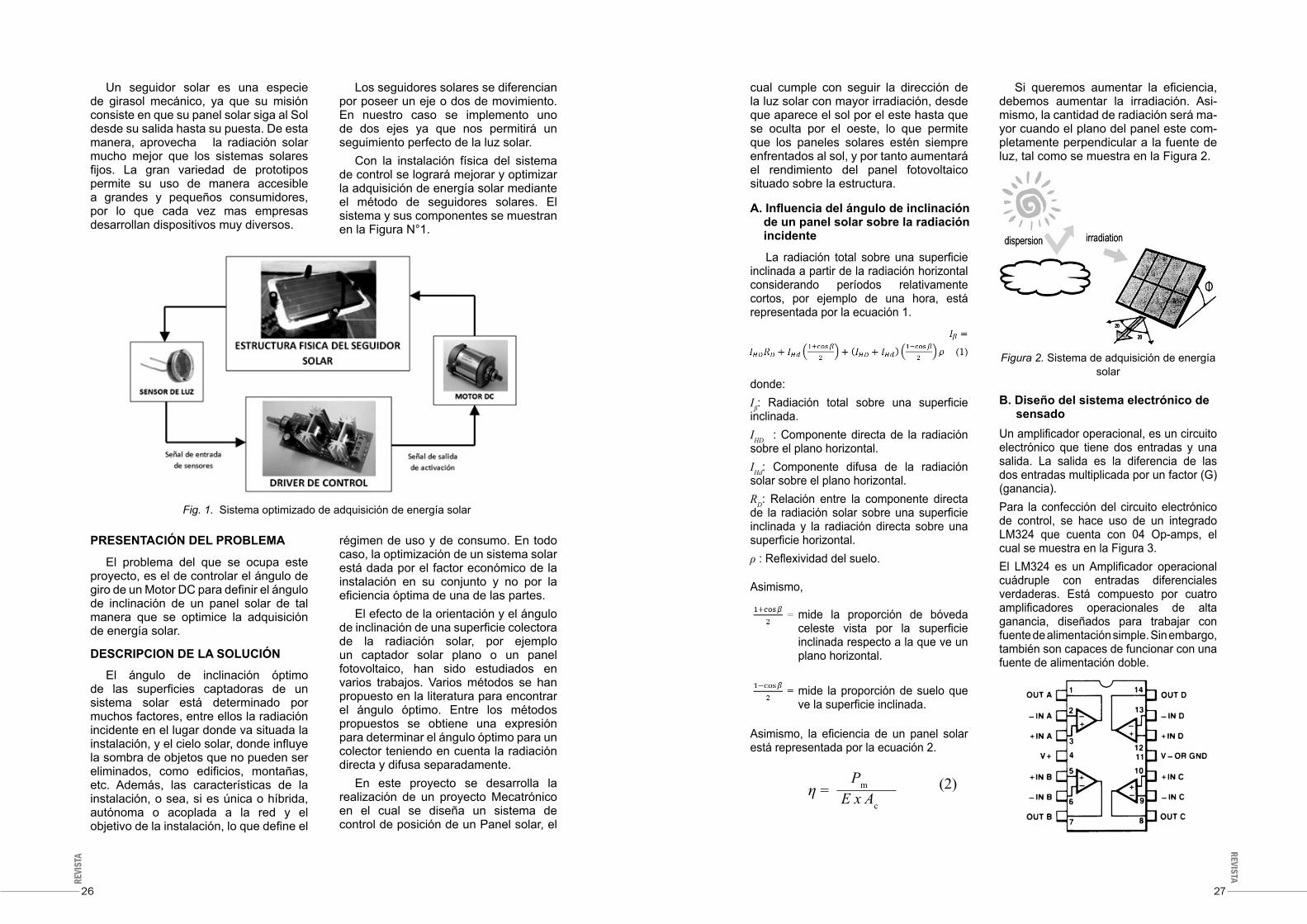
Un seguidor solar es una especie de girasol mecánico, ya que su misión consiste en que su panel solar siga al Sol desde su salida hasta su puesta. De esta manera, aprovecha la radiación solar mucho mejor que los sistemas solares fijos. La gran variedad de prototipos permite su uso de manera accesible a grandes y pequeños consumidores, por lo que cada vez mas empresas desarrollan dispositivos muy diversos.
Los seguidores solares se diferencian por poseer un eje o dos de movimiento. En nuestro caso se implemento uno de dos ejes ya que nos permitirá un seguimiento perfecto de la luz solar.
Con la instalación física del sistema de control se logrará mejorar y optimizar la adquisición de energía solar mediante el método de seguidores solares. El sistema y sus componentes se muestran en la Figura N°1.
El problema del que se ocupa este proyecto, es el de controlar el ángulo de giro de un Motor DC para definir el ángulo de inclinación de un panel solar de tal manera que se optimice la adquisición de energía solar.
El ángulo de inclinación óptimo de las superficies captadoras de un sistema solar está determinado por muchos factores, entre ellos la radiación incidente en el lugar donde va situada la instalación, y el cielo solar, donde influye la sombra de objetos que no pueden ser eliminados, como edificios, montañas, etc. Además, las características de la instalación, o sea, si es única o híbrida, autónoma o acoplada a la red y el objetivo de la instalación, lo que define el
Fig. 1. Sistema optimizado de adquisición de energía solar
Figura 2. Sistema de adquisición de energía solar
PRESENTACIÓN DEL PROBLEMA
DESCRIPCION DE LA SOLUCIÓN
A. Influencia del ángulo de inclinación de un panel solar sobre la radiación incidente
B. Diseño del sistema electrónico de sensado
régimen de uso y de consumo. En todo caso, la optimización de un sistema solar está dada por el factor económico de la instalación en su conjunto y no por la eficiencia óptima de una de las partes.
El efecto de la orientación y el ángulo de inclinación de una superficie colectora de la radiación solar, por ejemplo un captador solar plano o un panel fotovoltaico, han sido estudiados en varios trabajos. Varios métodos se han propuesto en la literatura para encontrar el ángulo óptimo. Entre los métodos propuestos se obtiene una expresión para determinar el ángulo óptimo para un colector teniendo en cuenta la radiación directa y difusa separadamente.
En este proyecto se desarrolla la realización de un proyecto Mecatrónico en el cual se diseña un sistema de control de posición de un Panel solar, el
cual cumple con seguir la dirección de la luz solar con mayor irradiación, desde que aparece el sol por el este hasta que se oculta por el oeste, lo que permite que los paneles solares estén siempre enfrentados al sol, y por tanto aumentará el rendimiento del panel fotovoltaico situado sobre la estructura.
Si queremos aumentar la eficiencia, debemos aumentar la irradiación. Asi-mismo, la cantidad de radiación será ma-yor cuando el plano del panel este com-pletamente perpendicular a la fuente de luz, tal como se muestra en la Figura 2.
La radiación total sobre una superficie inclinada a partir de la radiación horizontal considerando períodos relativamente cortos, por ejemplo de una hora, está representada por la ecuación 1.
donde:Iβ: Radiación total sobre una superficie inclinada.IHD : Componente directa de la radiación sobre el plano horizontal.IHd: Componente difusa de la radiación solar sobre el plano horizontal.RD: Relación entre la componente directa de la radiación solar sobre una superficie inclinada y la radiación directa sobre una superficie horizontal.ρ : Reflexividad del suelo.
Un amplificador operacional, es un circuito electrónico que tiene dos entradas y una salida. La salida es la diferencia de las dos entradas multiplicada por un factor (G) (ganancia).Para la confección del circuito electrónico de control, se hace uso de un integrado LM324 que cuenta con 04 Op-amps, el cual se muestra en la Figura 3.El LM324 es un Amplificador operacional cuádruple con entradas diferenciales verdaderas. Está compuesto por cuatro amplificadores operacionales de alta ganancia, diseñados para trabajar con fuente de alimentación simple. Sin embargo, también son capaces de funcionar con una fuente de alimentación doble.
mide la proporción de bóveda celeste vista por la superficie inclinada respecto a la que ve un plano horizontal.
Asimismo, la eficiencia de un panel solar está representada por la ecuación 2.
mide la proporción de suelo que ve la superficie inclinada.
Asimismo,
η =Pm
E x Ac
(2)
REVI
STA
REVISTA
28 29
Figura 3. Configuración del OPAMP LM324
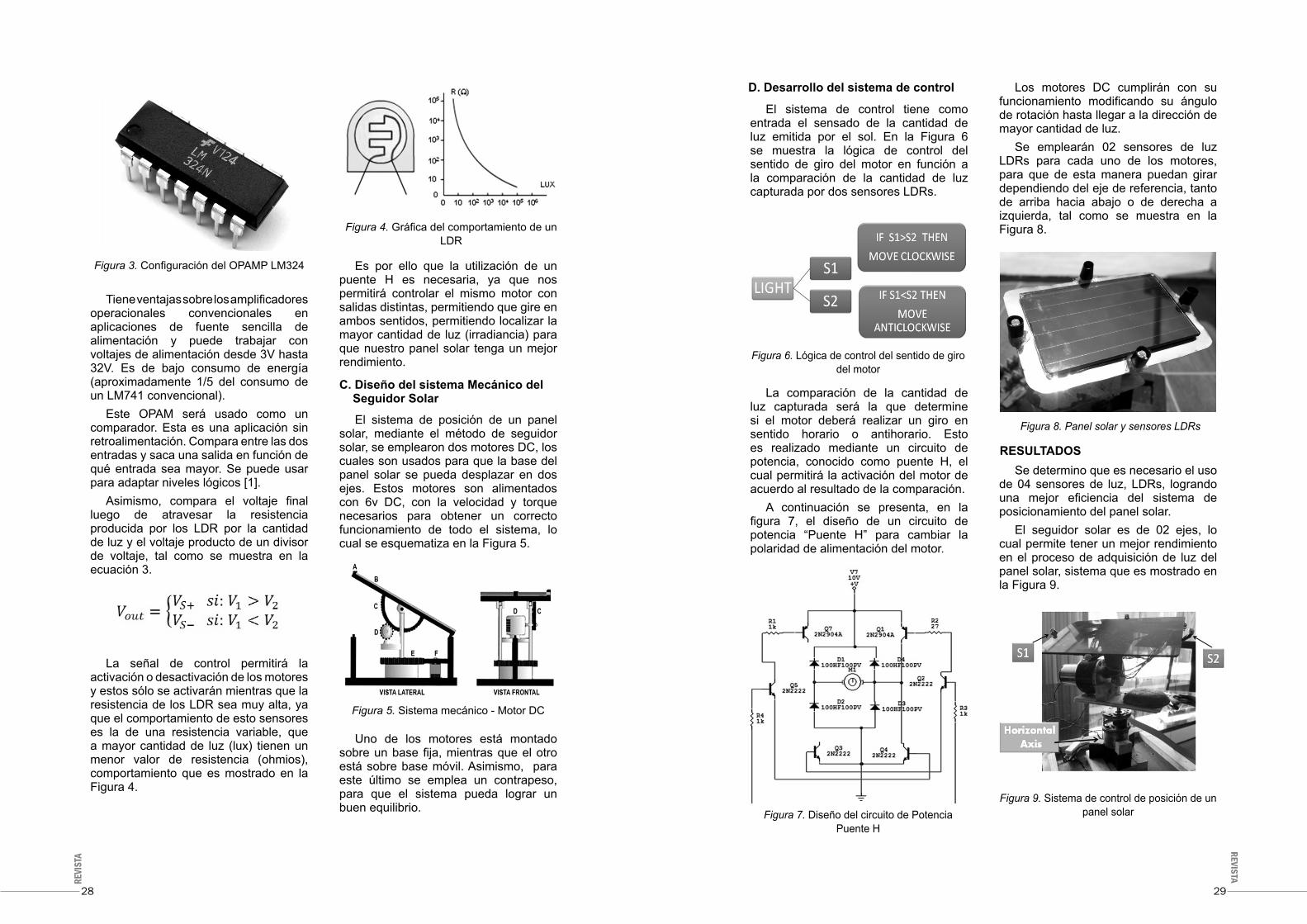
Figura 4. Gráfica del comportamiento de un LDR
Figura 6. Lógica de control del sentido de giro del motor
Figura 8. Panel solar y sensores LDRs
Figura 5. Sistema mecánico - Motor DC
Tiene ventajas sobre los amplificadores operacionales convencionales en aplicaciones de fuente sencilla de alimentación y puede trabajar con voltajes de alimentación desde 3V hasta 32V. Es de bajo consumo de energía (aproximadamente 1/5 del consumo de un LM741 convencional).
Este OPAM será usado como un comparador. Esta es una aplicación sin retroalimentación. Compara entre las dos entradas y saca una salida en función de qué entrada sea mayor. Se puede usar para adaptar niveles lógicos [1].
Asimismo, compara el voltaje final luego de atravesar la resistencia producida por los LDR por la cantidad de luz y el voltaje producto de un divisor de voltaje, tal como se muestra en la ecuación 3.
Es por ello que la utilización de un puente H es necesaria, ya que nos permitirá controlar el mismo motor con salidas distintas, permitiendo que gire en ambos sentidos, permitiendo localizar la mayor cantidad de luz (irradiancia) para que nuestro panel solar tenga un mejor rendimiento.
El sistema de control tiene como entrada el sensado de la cantidad de luz emitida por el sol. En la Figura 6 se muestra la lógica de control del sentido de giro del motor en función a la comparación de la cantidad de luz capturada por dos sensores LDRs.
La comparación de la cantidad de luz capturada será la que determine si el motor deberá realizar un giro en sentido horario o antihorario. Esto es realizado mediante un circuito de potencia, conocido como puente H, el cual permitirá la activación del motor de acuerdo al resultado de la comparación.
A continuación se presenta, en la figura 7, el diseño de un circuito de potencia “Puente H” para cambiar la polaridad de alimentación del motor.
Los motores DC cumplirán con su funcionamiento modificando su ángulo de rotación hasta llegar a la dirección de mayor cantidad de luz.
Se emplearán 02 sensores de luz LDRs para cada uno de los motores, para que de esta manera puedan girar dependiendo del eje de referencia, tanto de arriba hacia abajo o de derecha a izquierda, tal como se muestra en la Figura 8.
Se determino que es necesario el uso de 04 sensores de luz, LDRs, logrando una mejor eficiencia del sistema de posicionamiento del panel solar.
El seguidor solar es de 02 ejes, lo cual permite tener un mejor rendimiento en el proceso de adquisición de luz del panel solar, sistema que es mostrado en la Figura 9.
El sistema de posición de un panel solar, mediante el método de seguidor solar, se emplearon dos motores DC, los cuales son usados para que la base del panel solar se pueda desplazar en dos ejes. Estos motores son alimentados con 6v DC, con la velocidad y torque necesarios para obtener un correcto funcionamiento de todo el sistema, lo cual se esquematiza en la Figura 5.
La señal de control permitirá la activación o desactivación de los motores y estos sólo se activarán mientras que la resistencia de los LDR sea muy alta, ya que el comportamiento de esto sensores es la de una resistencia variable, que a mayor cantidad de luz (lux) tienen un menor valor de resistencia (ohmios), comportamiento que es mostrado en la Figura 4.
Uno de los motores está montado sobre un base fija, mientras que el otro está sobre base móvil. Asimismo, para este último se emplea un contrapeso, para que el sistema pueda lograr un buen equilibrio.
C. Diseño del sistema Mecánico del Seguidor Solar
RESULTADOS
D. Desarrollo del sistema de control
Figura 7. Diseño del circuito de Potencia Puente H
Figura 9. Sistema de control de posición de un panel solar
REVI
STA
REVISTA
30 31
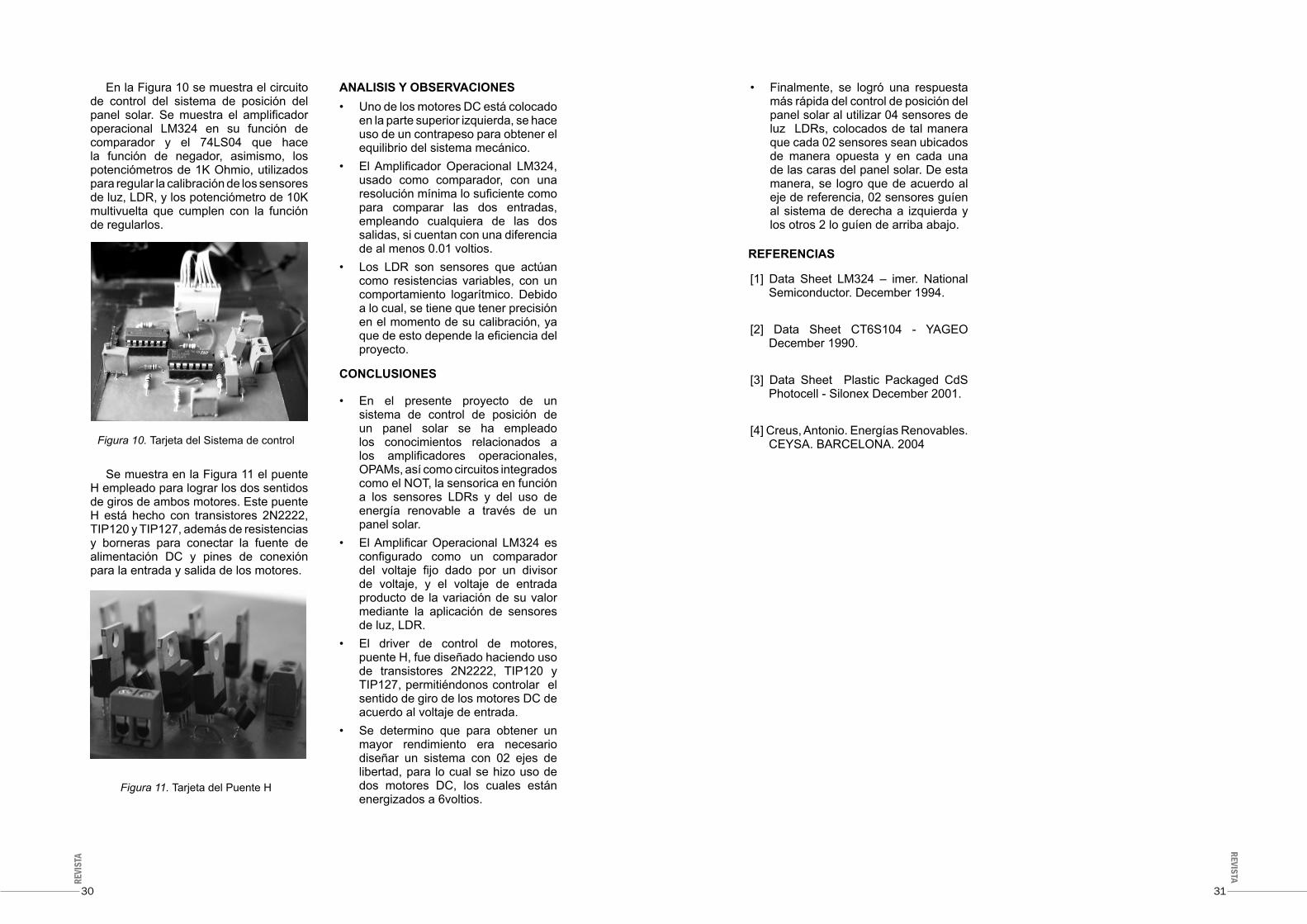
En la Figura 10 se muestra el circuito de control del sistema de posición del panel solar. Se muestra el amplificador operacional LM324 en su función de comparador y el 74LS04 que hace la función de negador, asimismo, los potenciómetros de 1K Ohmio, utilizados para regular la calibración de los sensores de luz, LDR, y los potenciómetro de 10K multivuelta que cumplen con la función de regularlos.
Se muestra en la Figura 11 el puente H empleado para lograr los dos sentidos de giros de ambos motores. Este puente H está hecho con transistores 2N2222, TIP120 y TIP127, además de resistencias y borneras para conectar la fuente de alimentación DC y pines de conexión para la entrada y salida de los motores.
Figura 10. Tarjeta del Sistema de control
Figura 11. Tarjeta del Puente H
ANALISIS Y OBSERVACIONES
CONCLUSIONES
REFERENCIAS
• Uno de los motores DC está colocado en la parte superior izquierda, se hace uso de un contrapeso para obtener el equilibrio del sistema mecánico.
• El Amplificador Operacional LM324, usado como comparador, con una resolución mínima lo suficiente como para comparar las dos entradas, empleando cualquiera de las dos salidas, si cuentan con una diferencia de al menos 0.01 voltios.
• Los LDR son sensores que actúan como resistencias variables, con un comportamiento logarítmico. Debido a lo cual, se tiene que tener precisión en el momento de su calibración, ya que de esto depende la eficiencia del proyecto.
• En el presente proyecto de un sistema de control de posición de un panel solar se ha empleado los conocimientos relacionados a los amplificadores operacionales, OPAMs, así como circuitos integrados como el NOT, la sensorica en función a los sensores LDRs y del uso de energía renovable a través de un panel solar.
• El Amplificar Operacional LM324 es configurado como un comparador del voltaje fijo dado por un divisor de voltaje, y el voltaje de entrada producto de la variación de su valor mediante la aplicación de sensores de luz, LDR.
• El driver de control de motores, puente H, fue diseñado haciendo uso de transistores 2N2222, TIP120 y TIP127, permitiéndonos controlar el sentido de giro de los motores DC de acuerdo al voltaje de entrada.
• Se determino que para obtener un mayor rendimiento era necesario diseñar un sistema con 02 ejes de libertad, para lo cual se hizo uso de dos motores DC, los cuales están energizados a 6voltios.
• Finalmente, se logró una respuesta más rápida del control de posición del panel solar al utilizar 04 sensores de luz LDRs, colocados de tal manera que cada 02 sensores sean ubicados de manera opuesta y en cada una de las caras del panel solar. De esta manera, se logro que de acuerdo al eje de referencia, 02 sensores guíen al sistema de derecha a izquierda y los otros 2 lo guíen de arriba abajo.
[1] Data Sheet LM324 – imer. National Semiconductor. December 1994.
[2] Data Sheet CT6S104 - YAGEO December 1990.
[3] Data Sheet Plastic Packaged CdS Photocell - Silonex December 2001.
[4] Creus, Antonio. Energías Renovables. CEYSA. BARCELONA. 2004

REVI
STA
REVISTA
32 33
Diseño e implementación de un robot humanoide asistencial controlado por computador para
aplicaciones en pacientes parapléjicos
Rony Martín Cabrera Donayre, Paul Jeampier Chávez Montes
Ing. Ricardo J. Palomares Orihuela
Escuela Profesional de Ingeniería Mecatrónica, Universidad Ricardo Palma, Perú
[email protected], [email protected], [email protected]
ResumenEl presente proyecto fue presentado, sustentado y aprobado para optar el Título Profesional de Ingeniero Mecatrónico de la URP bajo la modalidad de Tesis. Tiene como finalidad diseñar e implementar un robot humanoide asistencial con ruedas, el cual podrá ser controlado mediante un computador por una persona discapacitada con paraplejia para facilitarle la realización de actividades cotidianas y poder mejorar su calidad de vida. El robot contará con una base móvil que le permitirá trasladarse, así mismo, con dos brazos de 2GDL que le permitirán manipular objetos de forma regular. Posee la capacidad de transmitir imágenes y video en tiempo real mediante una cámara web-USB.
Palabras Clave: Robot, paraplejia, arduino, bluetooth, webcam.
1. INTRODUCCIÓN
AbstractThis project was presented, supported and approved to elect the Mechatronic Engineering Professional Title of the URP in the form of theses. Its purpose is to design and implement a care humanoid robot with wheels, which can be controlled by a computer by a disabled person with paraplegia to facilitate the daily activities and thus improve their quality of life. The robot will have a mobile base that you can travel, also, with two 2GDL arms to manipulate objects you regularly. It has the ability to transmit in real time images and video using a webcam-USB.
Keywords: Robot, paraplegia, arduino, bluetooth, webcam.
Hoy en día, las sociedades se sirven de los avances de la tecnología para suplir al hombre en la realización de tareas tediosas o pesadas, lo que ha dado lugar al desarrollo de la robótica y la automatización. La robótica ha venido evolucionando con la creación de máquinas cada vez más complejas, que puedan sustituirnos en la realización de las rutinarias actividades de la casa, de forma cada vez más eficiente. En la figura 1 se muestra la tendencia, de las últimas tres décadas, de la migración de la robótica del campo industrial a los robots de servicio y personales. Figura 1: Evolución de la robótica.
REVI
STA
REVISTA
34 35
Tal es así, que se está haciendo cada vez más frecuente la aparición de robots de servicio con aplicaciones militares, seguridad, jardinería, limpieza, educación, cirugía y sobre todo en las aplicaciones donde los robots asistan a personas de la tercera edad o con algún tipo de discapacidad. Se cree que los robots de servicio y de uso personal van a cambiar en gran medida nuestras vidas en el futuro.
La Federación Internacional de Robótica (IFR) en su estudio anual WorldRobotics 2011 proporciona las siguientes cifras de ventas y expectativas a nivel mundial:
• Los robots de servicio profesionales vendidos en el 2010 aumento en un 4% en comparación al 2009 en 13.741 unidades. Se vendió 6.125 unidades para aplicaciones militares y 932 robots médicos aplicados en cirugía y terapia.
• Los robots de servicios personales vendidos en el 2010 aumento en un 35% en comparación al 2009 en 2.2 millones de unidades, en estos se encuentran robots de limpieza por aspiración, corte de césped, entretenimiento, ocio y sobre todo la asistencia a personas con alguna discapacidad física.
• Se pronostica un aumento de 14.4 millones para el año 2014, 9.8 millones para los robots domésticos y 4.6 millones para los de entretenimiento con un valor económico estimado de $4.3 y $1.1 mil millones respectivamente.
2. PRESENTACIÓN DEL PROBLEMA 3.1. Diseño Mecánico
B. Diseño de los brazos del robot
A. Diseño Mecánico en Solid Works
3. DESCRIPCIÓN DE LA SOLUCIÓNEste trabajo de Tesis nace como
solución a la problemática de mejorar la calidad de vida e independencia de las personas con paraplejia, a través del diseño e implementación de un robot humanoide asistencial, el cual podrá ser controlado mediante una PC desde cualquier ubicación de su hogar para facilitarle la realización de sus actividades cotidianas y así poder mejorar su calidad de vida. Llamaremos al robot humanoide de servicio como URPI, cuyo esquema se muestra en la figura 2:
En las últimas décadas, la población mundial de personas de la tercera edad y con algún tipo de discapacidad física, viene incrementándose cada año. Su principal característica es la discriminación e inferioridad, en cuanto a oportunidades sociales, que estas personas sufren respecto al resto de individuos de su entorno.
En este grupo se encuentra las personas con una lesión medular traumática, conocida como paraplejia, la cual es una enfermedad que ocasiona que la parte inferior del cuerpo quede paralizada, careciendo de funcionalidad. El problema de estas personas es que su calidad de vida es crítica dependiendo de la severidad de la lesión, recursos disponibles, aceptación de la lesión y sobre todo del nivel de independencia. La mayoría de estas personas depende de una silla de ruedas para movilizarse, lo cual causa un gran impacto mental y físico que ocasiona muchos problemas secundarios. Además, las condiciones psicosociales incluyen depresión y a largo plazo problemas de pérdida del empleo, pareja y el bienestar en general.
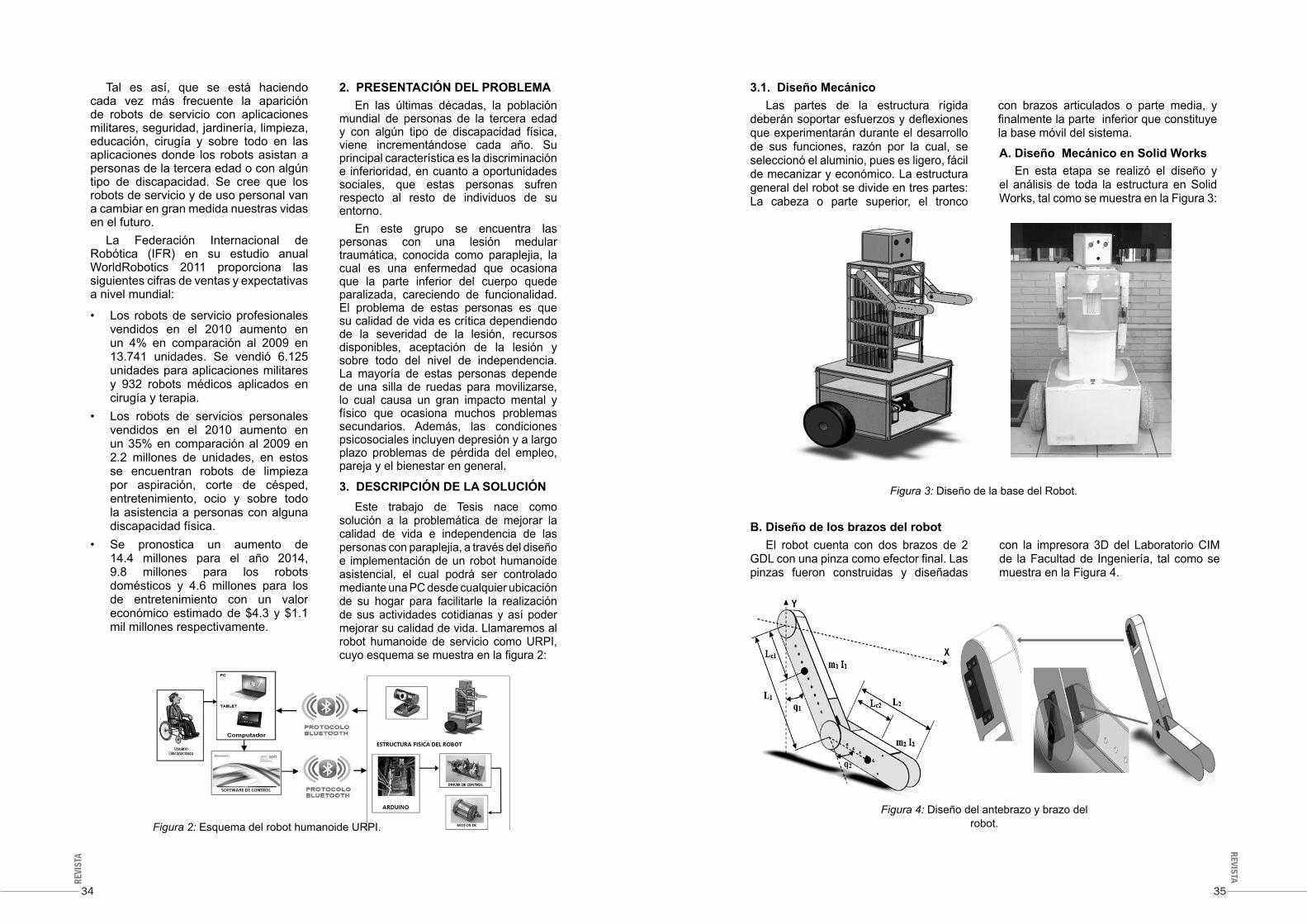
Las partes de la estructura rígida deberán soportar esfuerzos y deflexiones que experimentarán durante el desarrollo de sus funciones, razón por la cual, se seleccionó el aluminio, pues es ligero, fácil de mecanizar y económico. La estructura general del robot se divide en tres partes: La cabeza o parte superior, el tronco
El robot cuenta con dos brazos de 2 GDL con una pinza como efector final. Las pinzas fueron construidas y diseñadas
En esta etapa se realizó el diseño y el análisis de toda la estructura en Solid Works, tal como se muestra en la Figura 3:
Figura 2: Esquema del robot humanoide URPI.
Figura 3: Diseño de la base del Robot.
Figura 4: Diseño del antebrazo y brazo del robot.
con brazos articulados o parte media, y finalmente la parte inferior que constituye la base móvil del sistema.
con la impresora 3D del Laboratorio CIM de la Facultad de Ingeniería, tal como se muestra en la Figura 4.
REVI
STA
REVISTA
36 37
(1)
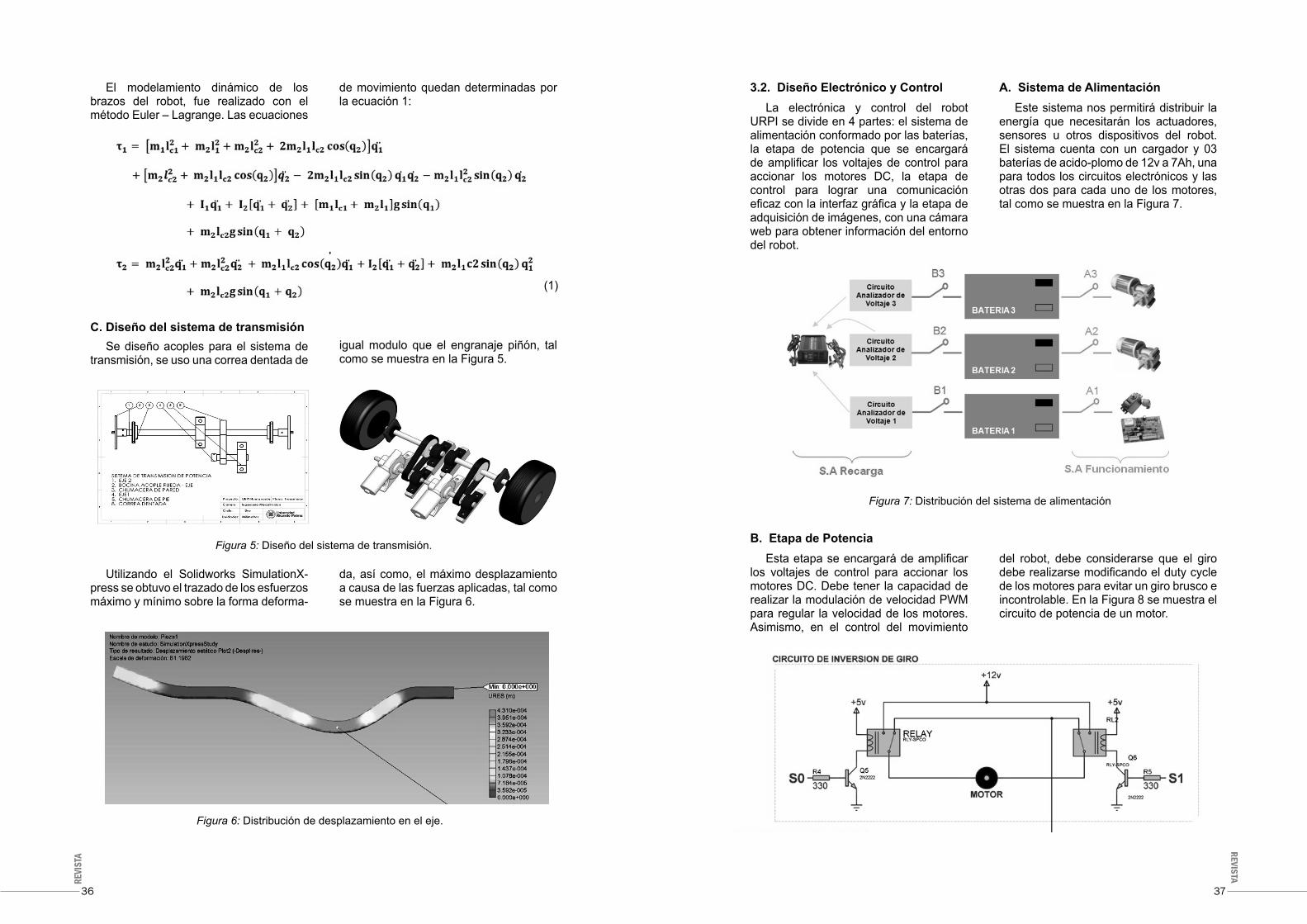
C. Diseño del sistema de transmisión
3.2. Diseño Electrónico y Control A. Sistema de Alimentación
B. Etapa de Potencia
Se diseño acoples para el sistema de transmisión, se uso una correa dentada de
Utilizando el Solidworks SimulationX-press se obtuvo el trazado de los esfuerzos máximo y mínimo sobre la forma deforma-
Figura 5: Diseño del sistema de transmisión.
Figura 7: Distribución del sistema de alimentación
Figura 6: Distribución de desplazamiento en el eje.
igual modulo que el engranaje piñón, tal como se muestra en la Figura 5.
La electrónica y control del robot URPI se divide en 4 partes: el sistema de alimentación conformado por las baterías, la etapa de potencia que se encargará de amplificar los voltajes de control para accionar los motores DC, la etapa de control para lograr una comunicación eficaz con la interfaz gráfica y la etapa de adquisición de imágenes, con una cámara web para obtener información del entorno del robot.
Este sistema nos permitirá distribuir la energía que necesitarán los actuadores, sensores u otros dispositivos del robot. El sistema cuenta con un cargador y 03 baterías de acido-plomo de 12v a 7Ah, una para todos los circuitos electrónicos y las otras dos para cada uno de los motores, tal como se muestra en la Figura 7.
Esta etapa se encargará de amplificar los voltajes de control para accionar los motores DC. Debe tener la capacidad de realizar la modulación de velocidad PWM para regular la velocidad de los motores. Asimismo, en el control del movimiento
da, así como, el máximo desplazamiento a causa de las fuerzas aplicadas, tal como se muestra en la Figura 6.
El modelamiento dinámico de los brazos del robot, fue realizado con el método Euler – Lagrange. Las ecuaciones
de movimiento quedan determinadas por la ecuación 1:
del robot, debe considerarse que el giro debe realizarse modificando el duty cycle de los motores para evitar un giro brusco e incontrolable. En la Figura 8 se muestra el circuito de potencia de un motor.
REVI
STA
REVISTA
38 39
Figura 8: Circuito de potencia de un motor.
Figura 10: Interfaz de configuración de parámetros iníciales.
Figura 11: Diagrama de bloques de la comunicación del robot.
Figura 12: Prueba #1 – Control del robot a distancia.
Figura 9: Placa Arduino Mega 2560
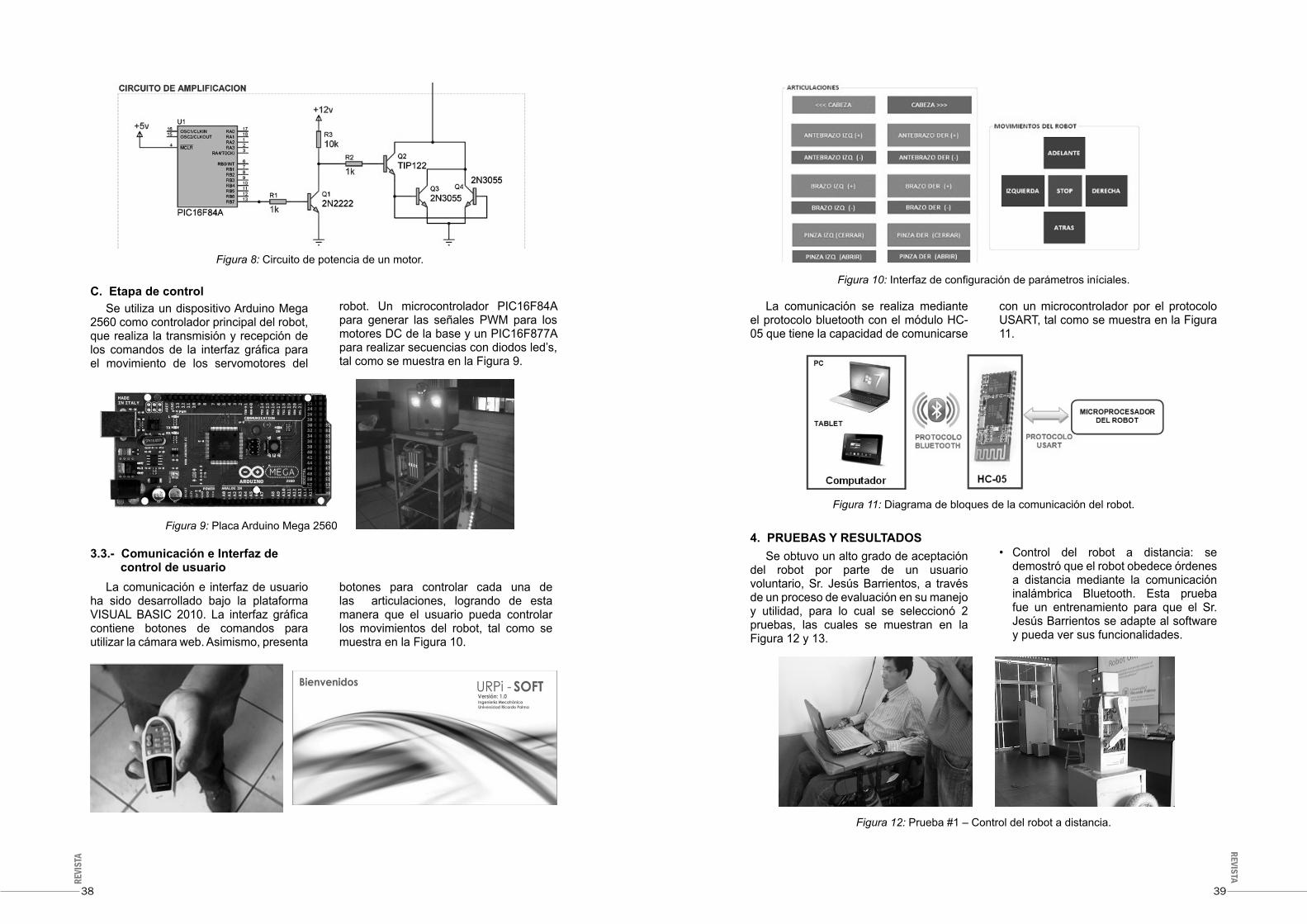
C. Etapa de control
3.3.- Comunicación e Interfaz de control de usuario
4. PRUEBAS Y RESULTADOS
Se utiliza un dispositivo Arduino Mega 2560 como controlador principal del robot, que realiza la transmisión y recepción de los comandos de la interfaz gráfica para el movimiento de los servomotores del
La comunicación e interfaz de usuario ha sido desarrollado bajo la plataforma VISUAL BASIC 2010. La interfaz gráfica contiene botones de comandos para utilizar la cámara web. Asimismo, presenta
robot. Un microcontrolador PIC16F84A para generar las señales PWM para los motores DC de la base y un PIC16F877A para realizar secuencias con diodos led’s, tal como se muestra en la Figura 9.
La comunicación se realiza mediante el protocolo bluetooth con el módulo HC-05 que tiene la capacidad de comunicarse
Se obtuvo un alto grado de aceptación del robot por parte de un usuario voluntario, Sr. Jesús Barrientos, a través de un proceso de evaluación en su manejo y utilidad, para lo cual se seleccionó 2 pruebas, las cuales se muestran en la Figura 12 y 13.
• Control del robot a distancia: se demostró que el robot obedece órdenes a distancia mediante la comunicación inalámbrica Bluetooth. Esta prueba fue un entrenamiento para que el Sr. Jesús Barrientos se adapte al software y pueda ver sus funcionalidades.
botones para controlar cada una de las articulaciones, logrando de esta manera que el usuario pueda controlar los movimientos del robot, tal como se muestra en la Figura 10.
con un microcontrolador por el protocolo USART, tal como se muestra en la Figura 11.
REVI
STA
REVISTA
40 41
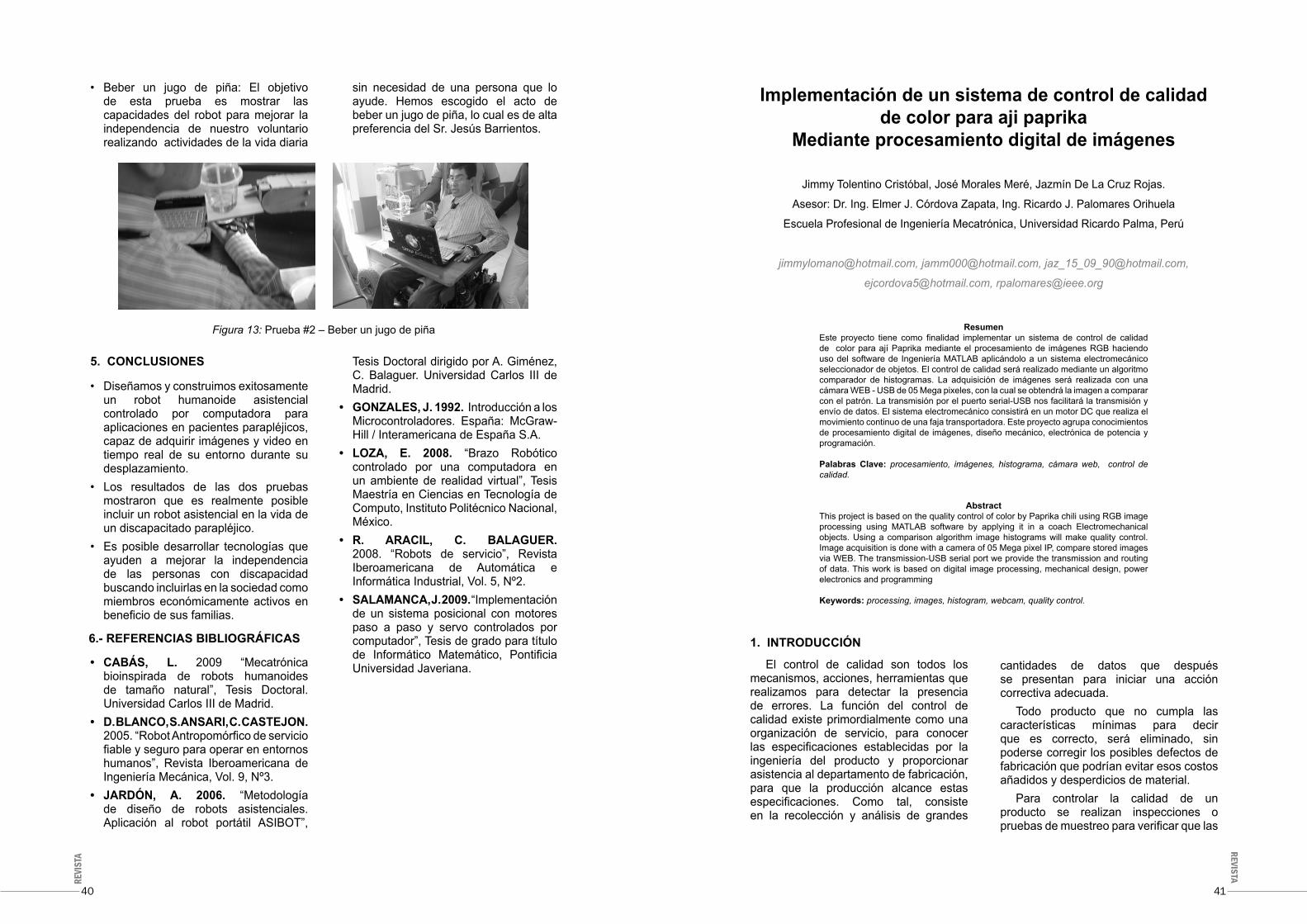
• Beber un jugo de piña: El objetivo de esta prueba es mostrar las capacidades del robot para mejorar la independencia de nuestro voluntario realizando actividades de la vida diaria
• Diseñamos y construimos exitosamente un robot humanoide asistencial controlado por computadora para aplicaciones en pacientes parapléjicos, capaz de adquirir imágenes y video en tiempo real de su entorno durante su desplazamiento.
• Los resultados de las dos pruebas mostraron que es realmente posible incluir un robot asistencial en la vida de un discapacitado parapléjico.
• Es posible desarrollar tecnologías que ayuden a mejorar la independencia de las personas con discapacidad buscando incluirlas en la sociedad como miembros económicamente activos en beneficio de sus familias.
sin necesidad de una persona que lo ayude. Hemos escogido el acto de beber un jugo de piña, lo cual es de alta preferencia del Sr. Jesús Barrientos.
Figura 13: Prueba #2 – Beber un jugo de piña
5. CONCLUSIONES
6.- REFERENCIAS BIBLIOGRÁFICAS
• CABÁS, L. 2009 “Mecatrónica bioinspirada de robots humanoides de tamaño natural”, Tesis Doctoral. Universidad Carlos III de Madrid.
• D. BLANCO, S. ANSARI, C. CASTEJON. 2005. “Robot Antropomórfico de servicio fiable y seguro para operar en entornos humanos”, Revista Iberoamericana de Ingeniería Mecánica, Vol. 9, Nº3.
• JARDÓN, A. 2006. “Metodología de diseño de robots asistenciales. Aplicación al robot portátil ASIBOT”,
Tesis Doctoral dirigido por A. Giménez, C. Balaguer. Universidad Carlos III de Madrid.
• GONZALES, J. 1992. Introducción a los Microcontroladores. España: McGraw-Hill / Interamericana de España S.A.
• LOZA, E. 2008. “Brazo Robótico controlado por una computadora en un ambiente de realidad virtual”, Tesis Maestría en Ciencias en Tecnología de Computo, Instituto Politécnico Nacional, México.
• R. ARACIL, C. BALAGUER. 2008. “Robots de servicio”, Revista Iberoamericana de Automática e Informática Industrial, Vol. 5, Nº2.
• SALAMANCA, J. 2009. “Implementación de un sistema posicional con motores paso a paso y servo controlados por computador”, Tesis de grado para título de Informático Matemático, Pontificia Universidad Javeriana.
Implementación de un sistema de control de calidad de color para aji paprika
Mediante procesamiento digital de imágenes
Jimmy Tolentino Cristóbal, José Morales Meré, Jazmín De La Cruz Rojas.
Asesor: Dr. Ing. Elmer J. Córdova Zapata, Ing. Ricardo J. Palomares Orihuela
Escuela Profesional de Ingeniería Mecatrónica, Universidad Ricardo Palma, Perú
[email protected], [email protected], [email protected],
[email protected], [email protected]
ResumenEste proyecto tiene como finalidad implementar un sistema de control de calidad de color para ají Paprika mediante el procesamiento de imágenes RGB haciendo uso del software de Ingeniería MATLAB aplicándolo a un sistema electromecánico seleccionador de objetos. El control de calidad será realizado mediante un algoritmo comparador de histogramas. La adquisición de imágenes será realizada con una cámara WEB - USB de 05 Mega pixeles, con la cual se obtendrá la imagen a comparar con el patrón. La transmisión por el puerto serial-USB nos facilitará la transmisión y envío de datos. El sistema electromecánico consistirá en un motor DC que realiza el movimiento continuo de una faja transportadora. Este proyecto agrupa conocimientos de procesamiento digital de imágenes, diseño mecánico, electrónica de potencia y programación.
Palabras Clave: procesamiento, imágenes, histograma, cámara web, control de calidad.
1. INTRODUCCIÓN
AbstractThis project is based on the quality control of color by Paprika chili using RGB image processing using MATLAB software by applying it in a coach Electromechanical objects. Using a comparison algorithm image histograms will make quality control. Image acquisition is done with a camera of 05 Mega pixel IP, compare stored images via WEB. The transmission-USB serial port we provide the transmission and routing of data. This work is based on digital image processing, mechanical design, power electronics and programming
Keywords: processing, images, histogram, webcam, quality control.
El control de calidad son todos los mecanismos, acciones, herramientas que realizamos para detectar la presencia de errores. La función del control de calidad existe primordialmente como una organización de servicio, para conocer las especificaciones establecidas por la ingeniería del producto y proporcionar asistencia al departamento de fabricación, para que la producción alcance estas especificaciones. Como tal, consiste en la recolección y análisis de grandes
cantidades de datos que después se presentan para iniciar una acción correctiva adecuada.
Todo producto que no cumpla las características mínimas para decir que es correcto, será eliminado, sin poderse corregir los posibles defectos de fabricación que podrían evitar esos costos añadidos y desperdicios de material.
Para controlar la calidad de un producto se realizan inspecciones o pruebas de muestreo para verificar que las
REVI
STA
REVISTA
42 43
características del mismo sean óptimas. El único inconveniente de estas pruebas es el gasto que conlleva el control de cada producto fabricado, ya que se eliminan los defectuosos, sin posibilidad de reutilizarlo.
A través de los sistemas de visión artificial se verifica el cumplimiento de los requisitos y especificaciones técnicas de un objeto a partir de un patrón dado. La visión artificial, también conocida como visión por computador es un subcampo de la inteligencia artificial. El propósito de la visión artificial es programar un computador para que “entienda” una escena o las características de una imagen.
El problema del que se ocupa este proyecto, es diseñar e implementar un Sistema de Control de calidad de color mediante procesamiento digital de imágenes. Los colores serán el rojo, verde y azul.
La aplicación de la Visión Artificial industrial integra sistemas de captura de imágenes digitales, dispositivos de entrada/salida y redes de ordenador para el control de equipos destinados a la fabricación, tales como brazos robóticos.
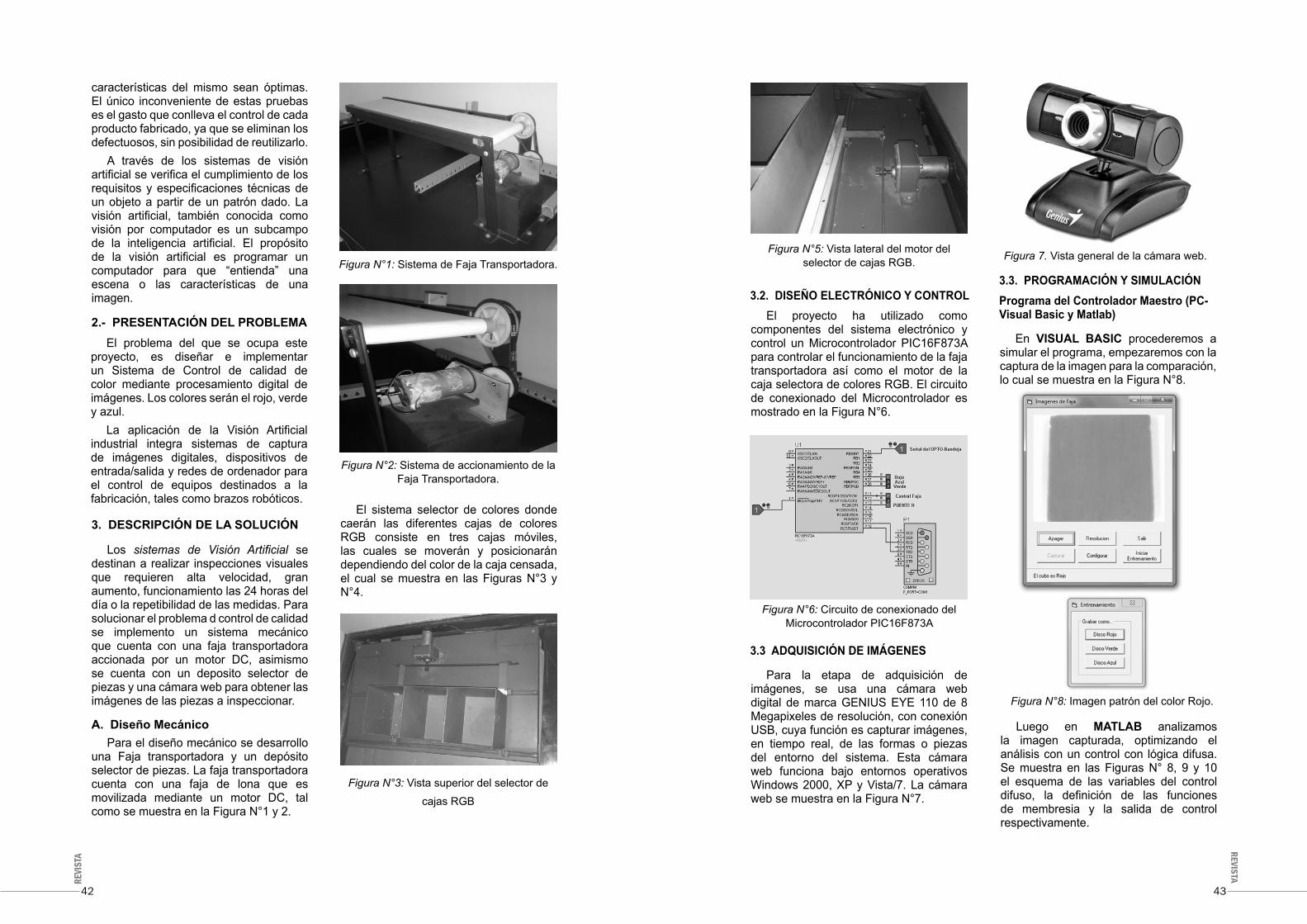
El sistema selector de colores donde caerán las diferentes cajas de colores RGB consiste en tres cajas móviles, las cuales se moverán y posicionarán dependiendo del color de la caja censada, el cual se muestra en las Figuras N°3 y N°4.
El proyecto ha utilizado como componentes del sistema electrónico y control un Microcontrolador PIC16F873A para controlar el funcionamiento de la faja transportadora así como el motor de la caja selectora de colores RGB. El circuito de conexionado del Microcontrolador es mostrado en la Figura N°6.
En VISUAL BASIC procederemos a simular el programa, empezaremos con la captura de la imagen para la comparación, lo cual se muestra en la Figura N°8.
Para la etapa de adquisición de imágenes, se usa una cámara web digital de marca GENIUS EYE 110 de 8 Megapixeles de resolución, con conexión USB, cuya función es capturar imágenes, en tiempo real, de las formas o piezas del entorno del sistema. Esta cámara web funciona bajo entornos operativos Windows 2000, XP y Vista/7. La cámara web se muestra en la Figura N°7.
Luego en MATLAB analizamos la imagen capturada, optimizando el análisis con un control con lógica difusa. Se muestra en las Figuras N° 8, 9 y 10 el esquema de las variables del control difuso, la definición de las funciones de membresia y la salida de control respectivamente.
Los sistemas de Visión Artificial se destinan a realizar inspecciones visuales que requieren alta velocidad, gran aumento, funcionamiento las 24 horas del día o la repetibilidad de las medidas. Para solucionar el problema d control de calidad se implemento un sistema mecánico que cuenta con una faja transportadora accionada por un motor DC, asimismo se cuenta con un deposito selector de piezas y una cámara web para obtener las imágenes de las piezas a inspeccionar.
Para el diseño mecánico se desarrollo una Faja transportadora y un depósito selector de piezas. La faja transportadora cuenta con una faja de lona que es movilizada mediante un motor DC, tal como se muestra en la Figura N°1 y 2.
2.- PRESENTACIÓN DEL PROBLEMA
3.2. DISEÑO ELECTRÓNICO Y CONTROL3.3. PROGRAMACIÓN Y SIMULACIÓNPrograma del Controlador Maestro (PC- Visual Basic y Matlab)
3.3 ADQUISICIÓN DE IMÁGENES
3. DESCRIPCIÓN DE LA SOLUCIÓN
A. Diseño Mecánico
Figura N°1: Sistema de Faja Transportadora.
Figura N°2: Sistema de accionamiento de la Faja Transportadora.
Figura N°3: Vista superior del selector de
cajas RGB
Figura N°5: Vista lateral del motor del selector de cajas RGB. Figura 7. Vista general de la cámara web.
Figura N°6: Circuito de conexionado del Microcontrolador PIC16F873A
Figura N°8: Imagen patrón del color Rojo.
REVI
STA
REVISTA
44 45
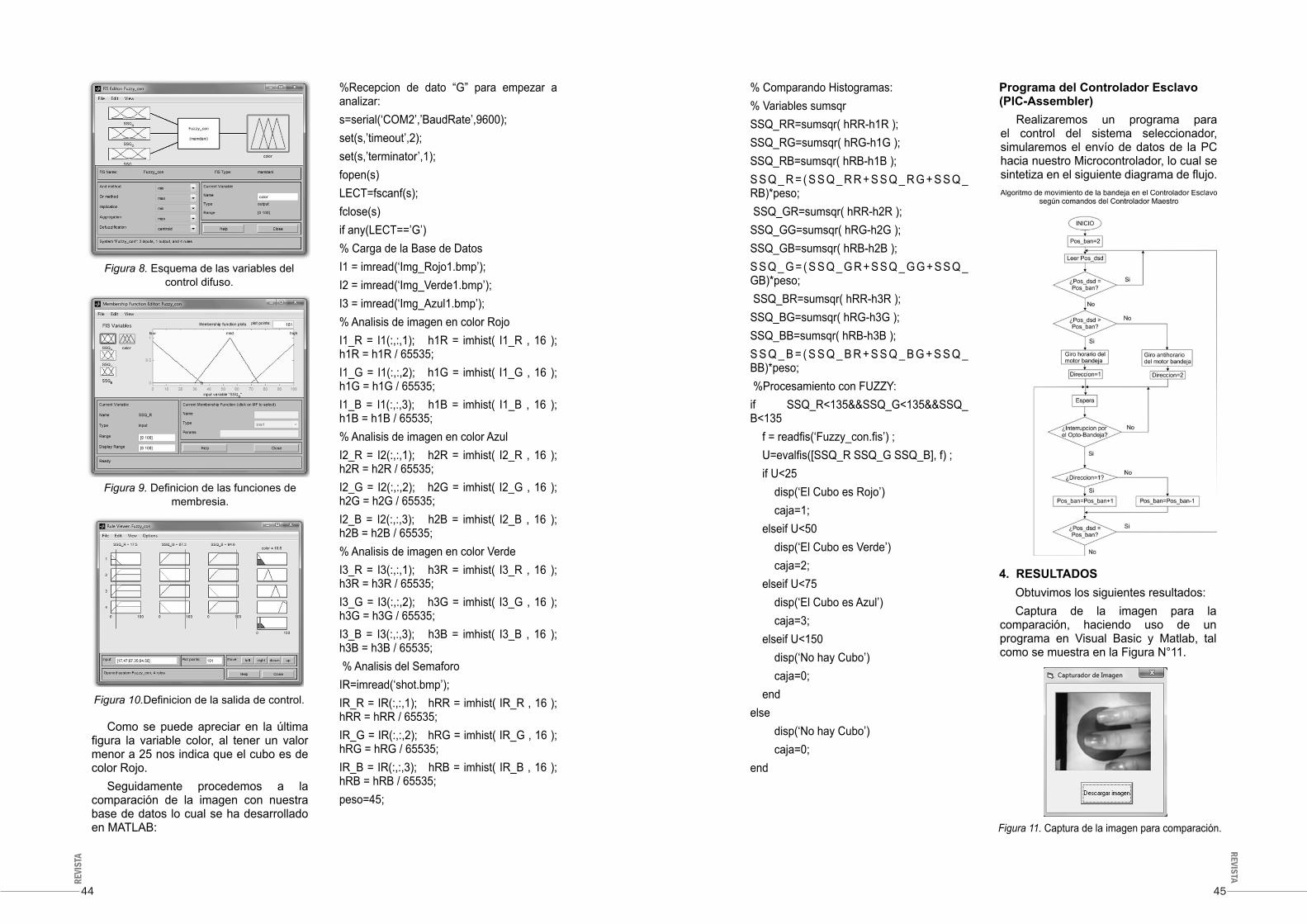
Figura 8. Esquema de las variables del control difuso.
Figura 9. Definicion de las funciones de membresia.
Figura 10.Definicion de la salida de control.
Figura 11. Captura de la imagen para comparación.
Como se puede apreciar en la última figura la variable color, al tener un valor menor a 25 nos indica que el cubo es de color Rojo.
Seguidamente procedemos a la comparación de la imagen con nuestra base de datos lo cual se ha desarrollado en MATLAB:
Realizaremos un programa para el control del sistema seleccionador, simularemos el envío de datos de la PC hacia nuestro Microcontrolador, lo cual se sintetiza en el siguiente diagrama de flujo.
Obtuvimos los siguientes resultados:Captura de la imagen para la
comparación, haciendo uso de un programa en Visual Basic y Matlab, tal como se muestra en la Figura N°11.
%Recepcion de dato “G” para empezar a analizar:s=serial(‘COM2’,’BaudRate’,9600);set(s,’timeout’,2);set(s,’terminator’,1);fopen(s)LECT=fscanf(s);fclose(s)if any(LECT==’G’)% Carga de la Base de DatosI1 = imread(‘Img_Rojo1.bmp’);I2 = imread(‘Img_Verde1.bmp’);I3 = imread(‘Img_Azul1.bmp’);% Analisis de imagen en color RojoI1_R = I1(:,:,1); h1R = imhist( I1_R , 16 ); h1R = h1R / 65535;I1_G = I1(:,:,2); h1G = imhist( I1_G , 16 ); h1G = h1G / 65535;I1_B = I1(:,:,3); h1B = imhist( I1_B , 16 ); h1B = h1B / 65535;% Analisis de imagen en color AzulI2_R = I2(:,:,1); h2R = imhist( I2_R , 16 ); h2R = h2R / 65535;I2_G = I2(:,:,2); h2G = imhist( I2_G , 16 ); h2G = h2G / 65535;I2_B = I2(:,:,3); h2B = imhist( I2_B , 16 ); h2B = h2B / 65535;% Analisis de imagen en color VerdeI3_R = I3(:,:,1); h3R = imhist( I3_R , 16 ); h3R = h3R / 65535;I3_G = I3(:,:,2); h3G = imhist( I3_G , 16 ); h3G = h3G / 65535;I3_B = I3(:,:,3); h3B = imhist( I3_B , 16 ); h3B = h3B / 65535; % Analisis del SemaforoIR=imread(‘shot.bmp’);IR_R = IR(:,:,1); hRR = imhist( IR_R , 16 ); hRR = hRR / 65535;IR_G = IR(:,:,2); hRG = imhist( IR_G , 16 ); hRG = hRG / 65535;IR_B = IR(:,:,3); hRB = imhist( IR_B , 16 ); hRB = hRB / 65535;peso=45;
% Comparando Histogramas:% Variables sumsqrSSQ_RR=sumsqr( hRR-h1R );SSQ_RG=sumsqr( hRG-h1G );SSQ_RB=sumsqr( hRB-h1B );S S Q _ R = ( S S Q _ R R + S S Q _ R G + S S Q _RB)*peso; SSQ_GR=sumsqr( hRR-h2R );SSQ_GG=sumsqr( hRG-h2G );SSQ_GB=sumsqr( hRB-h2B );S S Q _ G = ( S S Q _ G R + S S Q _ G G + S S Q _GB)*peso; SSQ_BR=sumsqr( hRR-h3R );SSQ_BG=sumsqr( hRG-h3G );SSQ_BB=sumsqr( hRB-h3B );S S Q _ B = ( S S Q _ B R + S S Q _ B G + S S Q _BB)*peso; %Procesamiento con FUZZY:if SSQ_R<135&&SSQ_G<135&&SSQ_B<135 f = readfis(‘Fuzzy_con.fis’) ; U=evalfis([SSQ_R SSQ_G SSQ_B], f) ; if U<25 disp(‘El Cubo es Rojo’) caja=1; elseif U<50 disp(‘El Cubo es Verde’) caja=2; elseif U<75 disp(‘El Cubo es Azul’) caja=3; elseif U<150 disp(‘No hay Cubo’) caja=0; endelse disp(‘No hay Cubo’) caja=0; end
Programa del Controlador Esclavo (PIC-Assembler)
4. RESULTADOS

REVI
STA
REVISTA
46 47
Se logro obtener un sistema de seleccionador de colores del ají paprika haciendo uso del procesamiento digital de imágenes y la lógica difusa, tal como se muestra en la Figura N°12.
Figura 12. Sistema de procesamiento digital de imágenes
5. CONCLUSIONES
6.- REFERENCIAS BIBLIOGRÁFICAS
• Diseñamos e implementamos exitosamente un sistema de control de calidad de color para el ají paprika mediante procesamiento digital de imágenes haciendo uso de la lógica difusa.
• Es un sistema muy eficaz para el reconocimiento de objetos RGB. La Luminosidad del ambiente genera un “Ruido de imagen” en nuestro control.
• La transmisión Serial-USB simplifica la comunicación entre interfaces.
• Se pudo aplicar la gran mayoría de conocimientos adquiridos durante la carrera, poniendo a prueba nuestra máxima capacidad.
• BLANCHET, G & CHARBIT, M. 2001 “Digital Signal and Image Processing Using MATLAB”. ISTD.
• GONZALEZ, W. 2001 “Digital image processing using matlab”. Sringer.
• GOPI, S. 2007. “Algorithm Collections for Digital Signal Processing Applications using Matlab”. Springer
• SIVANANDAM, S. 2007. “Introduc-tion to Fuzzy Logic using MatLab”. Springer
Diseño y control de una nave aerea no tripulada (Quadcopter)
Macavilca, Marco., Delgado, Aurelio.
Escuela Académico profesional de Ingeniería Mecatrónica, Universidad Ricardo Palma
{marcomc.91, ernesto_2dr}@hotmail.com
ResumenEste trabajo se realizó para comprender el modelado y la estabilización de un Quadcopter de código abierto, El QuadSimo. Hemos determinado los ángulos de Euler φ, θ & ψ que describen la rotación del QuadSimo alrededor de los ejes x, y, z respectivamente.
Este vehículo aéreo no tripulado (UAV) se puede usar para la exploración y el reconocimiento de un área de desastre y compilar los datos en tiempo real obtenidos con varios sensores.
Índice de Términos: Modelado, PID, Arduino, Quadcopter.
1. INTRODUCCIÓN
AbstractThis paper was made to understand the modeling and stabilization of an open-source quadcopter, The QuadSimo. We determinate the Euler angles φ, θ & ψ that describe the rotation of the QuadSimo around the x, y, z axes respectively.This unmanned aerial vehicle (UAV) may be used to exploration and recognition of a disaster area and compile the data on real time obtained with several sensors.
Index Terms: Modeling, PID, Arduino, Quadcopter.
Un quadricóptero o quadcopter se clasifica como un helicóptero en contraposición a las aeronaves de ala fija, poseen cuatro rotores para su sostén y su propulsión. Los cuatro rotores generalmente tienen un configuración de cruz o X. A fin de evitar que el aparato se desequilibre respecto a su eje de orientación, es necesario que dos hélices giren en un sentido y las otras dos en el otro. El control del movimiento del vehículo se consigue variando la velocidad relativa de cada rotor para cambiar el empuje y el par motor producido por cada uno de ellos.
Un quadcopter consta de una estructura mecánica capaz de soportar en vuelo los elementos mecánico, eléctricos, y electrónicos.Sus bloques principales son:
Sensores: aquí se encuentran los giroscopios. Acelerómetros, magnetómetros y barómetro que darán la información de la posición y orientación del quadcopter.
Controladores: en este bloque se encuentra el microcontrolador que recibirá la información de los sensores y operarlos para así enviar las señales
REVI
STA
REVISTA
48 49
a los reguladores de velocidad de los motores
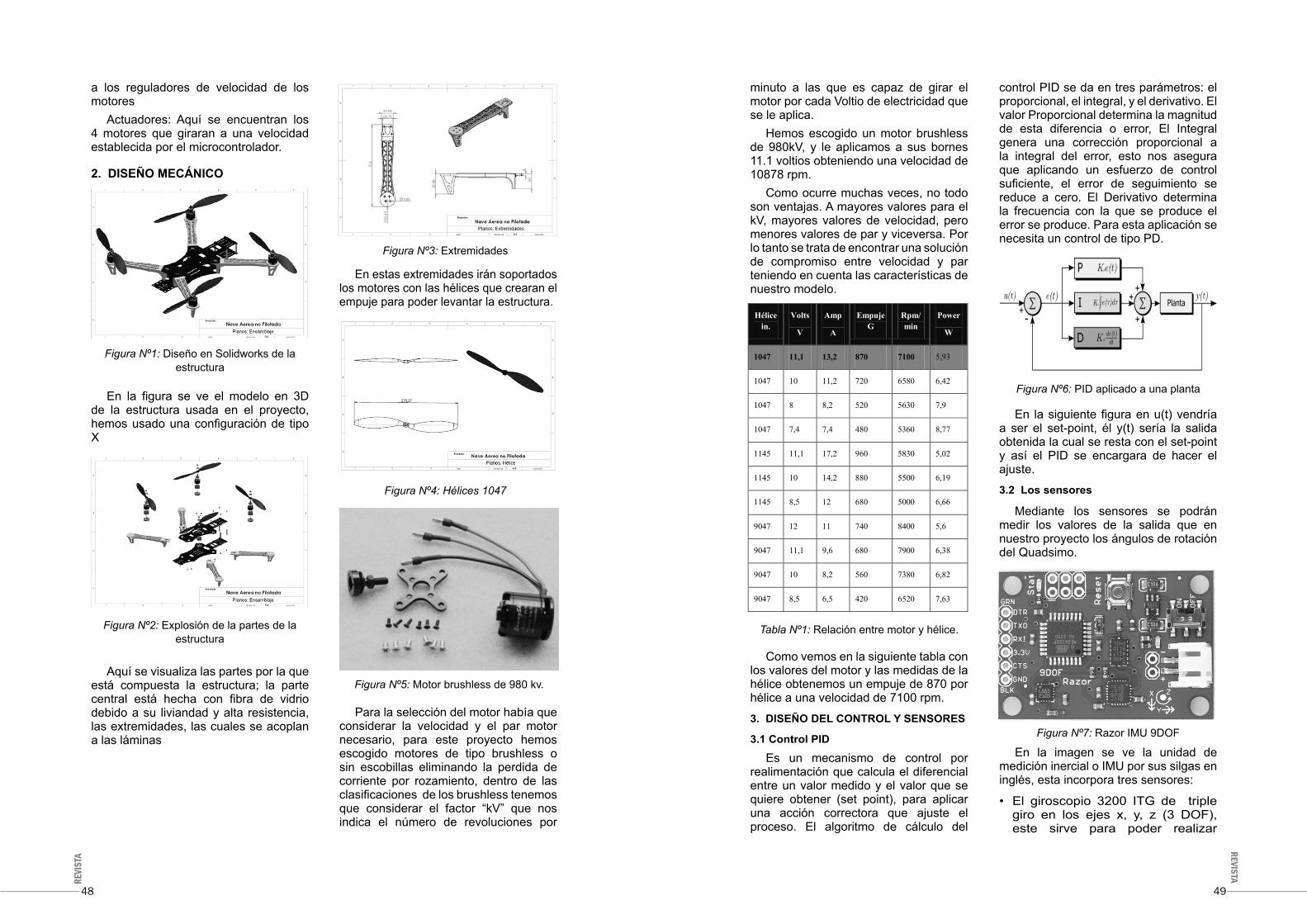
Actuadores: Aquí se encuentran los 4 motores que giraran a una velocidad establecida por el microcontrolador.
En la figura se ve el modelo en 3D de la estructura usada en el proyecto, hemos usado una configuración de tipo X
En estas extremidades irán soportados los motores con las hélices que crearan el empuje para poder levantar la estructura.
Aquí se visualiza las partes por la que está compuesta la estructura; la parte central está hecha con fibra de vidrio debido a su liviandad y alta resistencia, las extremidades, las cuales se acoplan a las láminas
Para la selección del motor había que considerar la velocidad y el par motor necesario, para este proyecto hemos escogido motores de tipo brushless o sin escobillas eliminando la perdida de corriente por rozamiento, dentro de las clasificaciones de los brushless tenemos que considerar el factor “kV” que nos indica el número de revoluciones por
Como vemos en la siguiente tabla con los valores del motor y las medidas de la hélice obtenemos un empuje de 870 por hélice a una velocidad de 7100 rpm.
Es un mecanismo de control por realimentación que calcula el diferencial entre un valor medido y el valor que se quiere obtener (set point), para aplicar una acción correctora que ajuste el proceso. El algoritmo de cálculo del
En la imagen se ve la unidad de medición inercial o IMU por sus silgas en inglés, esta incorpora tres sensores:
2. DISEÑO MECÁNICO
3. DISEÑO DEL CONTROL Y SENSORES
3.1 Control PID
3.2 Los sensores
Figura Nº1: Diseño en Solidworks de la estructura
Figura Nº3: Extremidades
Tabla Nº1: Relación entre motor y hélice.
Figura Nº7: Razor IMU 9DOF
Figura Nº6: PID aplicado a una planta
Figura Nº4: Hélices 1047
Figura Nº2: Explosión de la partes de la estructura
Figura Nº5: Motor brushless de 980 kv.
minuto a las que es capaz de girar el motor por cada Voltio de electricidad que se le aplica.
Hemos escogido un motor brushless de 980kV, y le aplicamos a sus bornes 11.1 voltios obteniendo una velocidad de 10878 rpm.
Como ocurre muchas veces, no todo son ventajas. A mayores valores para el kV, mayores valores de velocidad, pero menores valores de par y viceversa. Por lo tanto se trata de encontrar una solución de compromiso entre velocidad y par teniendo en cuenta las características de nuestro modelo.
36
Aquí se visualiza las partes por la que está compuesta la estructura; la parte central está hecha con fibra de vidrio debido a su liviandad y alta resistencia, las extremidades, las cuales se acoplan a las láminas principales, están hechas de polímeros en moldes.
Figura Nº3: Extremidades En estas extremidades irán soportados los motores con las hélices que crearan el empuje para poder levantar la estructura.
Figura Nº4: Hélices 1047
Figura Nº5: motor brushless de 980 kv.
Para la selección del motor había que considerar la velocidad y el par motor necesario, para este proyecto hemos escogido motores de tipo brushless o sin escobillas eliminando la perdida de corriente por rozamiento, dentro de las clasificaciones de los
brushless tenemos que considerar el factor "kV" que nos indica el número de revoluciones por minuto a las que es capaz de girar el motor por cada Voltio de electricidad que se le aplica.
Hemos escogido un motor brushless de 980kV, y le aplicamos a sus bornes 11.1 voltios obteniendo una velocidad de 10878 rpm. Como ocurre muchas veces, no todo son ventajas. A mayores valores para el kV, mayores valores de velocidad, pero menores valores de par y viceversa. Por lo tanto se trata de encontrar una solución de compromiso entre velocidad y par teniendo en cuenta las características de nuestro modelo.
Hélice in.
Volts
V
Amp
A
Empuje G
Rpm/min
Power
W
1047 11,1 13,2 870 7100 5,93
1047 10 11,2 720 6580 6,42
1047 8 8,2 520 5630 7,9
1047 7,4 7,4 480 5360 8,77
1145 11,1 17,2 960 5830 5,02
1145 10 14,2 880 5500 6,19
1145 8,5 12 680 5000 6,66
9047 12 11 740 8400 5,6
9047 11,1 9,6 680 7900 6,38
9047 10 8,2 560 7380 6,82
9047 8,5 6,5 420 6520 7,63
Tabla Nº1: relación entre motor y hélice. Como vemos en la siguiente tabla con los valores del motor y las medidas de la hélice obtenemos un empuje de 870 por hélice a una velocidad de 7100 rpm.
3.- DISEÑO DEL CONTROL Y SENSORES
3.1 Control PID
Es un mecanismo de control por realimentación que calcula el diferencial entre un valor medido y el valor que se quiere obtener (set point), para aplicar una acción correctora que ajuste el proceso. El algoritmo de cálculo del control PID se da en tres parámetros: el proporcional, el integral, y el derivativo. El valor
control PID se da en tres parámetros: el proporcional, el integral, y el derivativo. El valor Proporcional determina la magnitud de esta diferencia o error, El Integral genera una corrección proporcional a la integral del error, esto nos asegura que aplicando un esfuerzo de control suficiente, el error de seguimiento se reduce a cero. El Derivativo determina la frecuencia con la que se produce el error se produce. Para esta aplicación se necesita un control de tipo PD.
En la siguiente figura en u(t) vendría a ser el set-point, él y(t) sería la salida obtenida la cual se resta con el set-point y así el PID se encargara de hacer el ajuste.
Mediante los sensores se podrán medir los valores de la salida que en nuestro proyecto los ángulos de rotación del Quadsimo.
• El giroscopio 3200 ITG de triple giro en los ejes x, y, z (3 DOF), este sirve para poder realizar
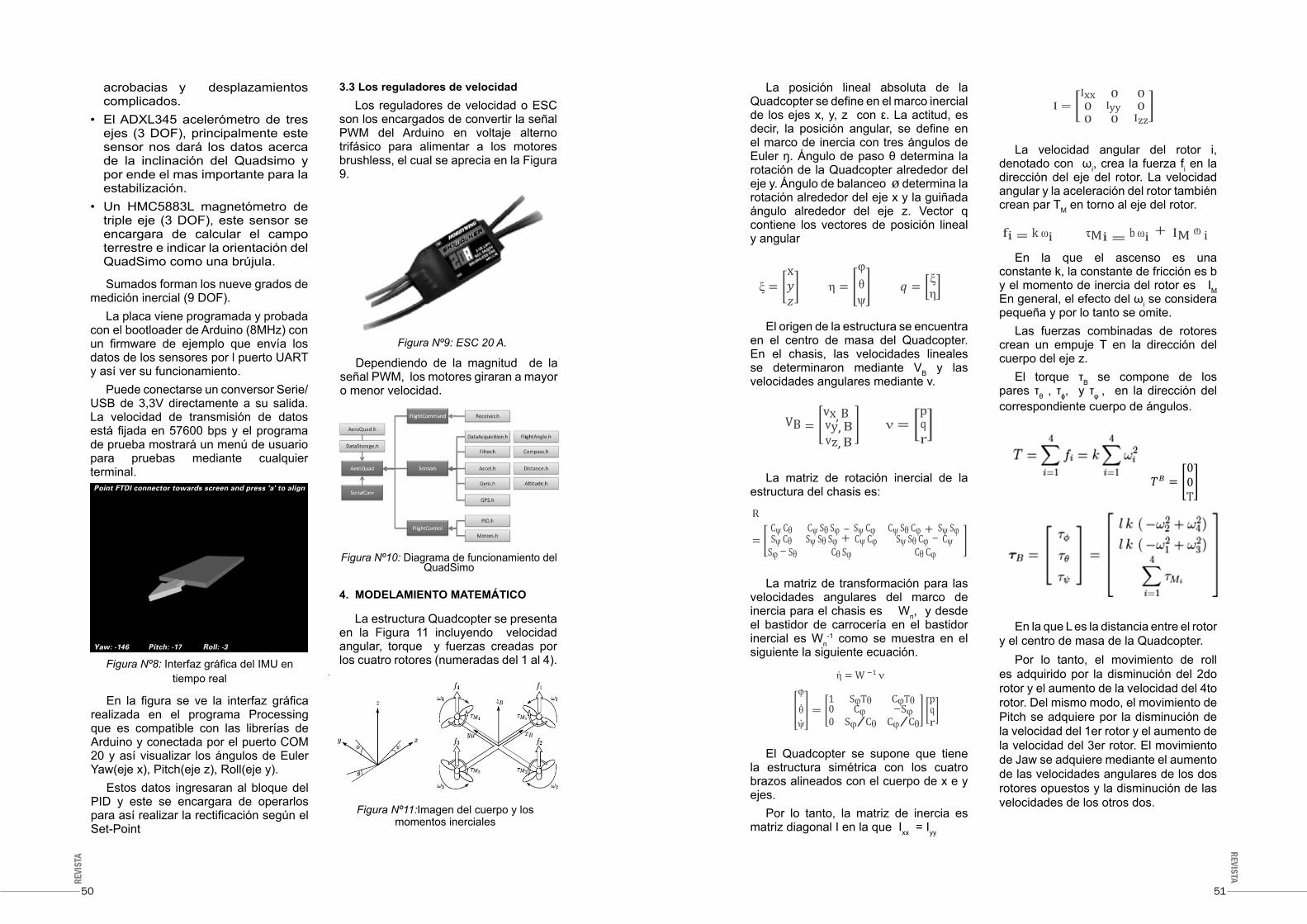
REVI
STA
REVISTA
50 51
acrobacias y desplazamientos complicados.
• El ADXL345 acelerómetro de tres ejes (3 DOF), principalmente este sensor nos dará los datos acerca de la inclinación del Quadsimo y por ende el mas importante para la estabilización.
• Un HMC5883L magnetómetro de triple eje (3 DOF), este sensor se encargara de calcular el campo terrestre e indicar la orientación del QuadSimo como una brújula.
Sumados forman los nueve grados de medición inercial (9 DOF).
La placa viene programada y probada con el bootloader de Arduino (8MHz) con un firmware de ejemplo que envía los datos de los sensores por l puerto UART y así ver su funcionamiento.
Puede conectarse un conversor Serie/USB de 3,3V directamente a su salida. La velocidad de transmisión de datos está fijada en 57600 bps y el programa de prueba mostrará un menú de usuario para pruebas mediante cualquier terminal.
Dependiendo de la magnitud de la señal PWM, los motores giraran a mayor o menor velocidad.
Los reguladores de velocidad o ESC son los encargados de convertir la señal PWM del Arduino en voltaje alterno trifásico para alimentar a los motores brushless, el cual se aprecia en la Figura 9.
La posición lineal absoluta de la Quadcopter se define en el marco inercial de los ejes x, y, z con ε. La actitud, es decir, la posición angular, se define en el marco de inercia con tres ángulos de Euler ŋ. Ángulo de paso θ determina la rotación de la Quadcopter alrededor del eje y. Ángulo de balanceo ø determina la rotación alrededor del eje x y la guiñada ángulo alrededor del eje z. Vector q contiene los vectores de posición lineal y angular
La velocidad angular del rotor i, denotado con ωi, crea la fuerza fi en la dirección del eje del rotor. La velocidad angular y la aceleración del rotor también crean par TM en torno al eje del rotor.
En la que el ascenso es una constante k, la constante de fricción es b y el momento de inercia del rotor es IM En general, el efecto del ωi se considera pequeña y por lo tanto se omite.
Las fuerzas combinadas de rotores crean un empuje T en la dirección del cuerpo del eje z.
El torque τB se compone de los pares τθ , τϕ, y τφ , en la dirección del correspondiente cuerpo de ángulos.
En la que L es la distancia entre el rotor y el centro de masa de la Quadcopter.
Por lo tanto, el movimiento de roll es adquirido por la disminución del 2do rotor y el aumento de la velocidad del 4to rotor. Del mismo modo, el movimiento de Pitch se adquiere por la disminución de la velocidad del 1er rotor y el aumento de la velocidad del 3er rotor. El movimiento de Jaw se adquiere mediante el aumento de las velocidades angulares de los dos rotores opuestos y la disminución de las velocidades de los otros dos.
El origen de la estructura se encuentra en el centro de masa del Quadcopter. En el chasis, las velocidades lineales se determinaron mediante VB y las velocidades angulares mediante v.
La matriz de rotación inercial de la estructura del chasis es:
La matriz de transformación para las velocidades angulares del marco de inercia para el chasis es Wn, y desde el bastidor de carrocería en el bastidor inercial es Wn
-1 como se muestra en el siguiente la siguiente ecuación.
El Quadcopter se supone que tiene la estructura simétrica con los cuatro brazos alineados con el cuerpo de x e y ejes.
Por lo tanto, la matriz de inercia es matriz diagonal I en la que Ixx = Iyy
En la figura se ve la interfaz gráfica realizada en el programa Processing que es compatible con las librerías de Arduino y conectada por el puerto COM 20 y así visualizar los ángulos de Euler Yaw(eje x), Pitch(eje z), Roll(eje y).
Estos datos ingresaran al bloque del PID y este se encargara de operarlos para así realizar la rectificación según el Set-Point
La estructura Quadcopter se presenta en la Figura 11 incluyendo velocidad angular, torque y fuerzas creadas por los cuatro rotores (numeradas del 1 al 4).Figura Nº8: Interfaz gráfica del IMU en
tiempo real
Figura Nº11:Imagen del cuerpo y los momentos inerciales
Figura Nº9: ESC 20 A.
Figura Nº10: Diagrama de funcionamiento del QuadSimo
3.3 Los reguladores de velocidad
4. MODELAMIENTO MATEMÁTICO
38
Figura Nº9: ESC 20 A.
Dependiendo de la magnitud de la señal PWM, los motores giraran a mayor o menor velocidad.
Figura Nº10: diagrama de funcionamiento del QuadSimo
4.- MODELAMIENTO MATEMÁTICO
La estructura Quadcopter se presenta en la Figura 11 incluyendo velocidad angular, torque y fuerzas creadas por los cuatro rotores (numeradas del 1 al 4).
Figura Nº11: imagen del cuerpo y los momentos inerciales
La posición lineal absoluta de la Quadcopter se define en el marco inercial de los ejes x, y, z con ε. La actitud, es decir, la posición angular, se define en el marco de inercia con tres ángulos de Euler ŋ. Ángulo de paso θ determina la rotación de la Quadcopter alrededor del eje y. Ángulo de balanceo ∅ determina la rotación alrededor del eje x y la
guiñada ángulo alrededor del eje z. Vector q contiene los vectores de posición lineal y angular
ξ = [x𝑦𝑦𝑧𝑧
] η = [φθψ
] 𝑞𝑞 = [ξη]
El origen de la estructura se encuentra en el centro de masa del Quadcopter. En el chasis, las velocidades lineales se determinaron mediante 𝑉𝑉𝐵𝐵 y las velocidades angulares mediante v.
VB = [vx, B vy, Bvz, B
] ν = [pqr]
La matriz de rotación inercial de la estructura del chasis es:
R
= [Cψ Cθ Cψ Sθ Sφ − Sψ Cφ Cψ Sθ Cφ + Sψ Sφ Sψ Cθ Sψ Sθ Sφ + Cψ Cφ Sψ Sθ Cφ − Cψ
Sφ − Sθ Cθ Sφ Cθ Cφ]
La matriz de transformación para las velocidades angulares del marco de inercia para el chasis es 𝑊𝑊𝑛𝑛, y desde el bastidor de carrocería en el bastidor inercial es 𝑊𝑊𝑛𝑛
−1, como se muestra en el siguiente la siguiente ecuación.
η = W −1 ν
[φ
θψ
] = [1 SφTθ CφTθ0 Cφ −Sφ0 Sφ/Cθ Cφ/Cθ
] [pqr
]
El Quadcopter se supone que tiene la estructura simétrica con los cuatro brazos alineados con el cuerpo de x e y ejes.
Por lo tanto, la matriz de inercia es matriz diagonal I en la que 𝐼𝐼𝑥𝑥𝑥𝑥 = 𝐼𝐼𝑦𝑦𝑦𝑦
I = [Ixx 0 00 Iyy 00 0 Izz
]
La velocidad angular del rotor i, denotado con 𝜔𝜔𝑖𝑖 , crea la fuerza 𝑓𝑓𝑖𝑖 en la dirección del eje del rotor. La velocidad angular y la aceleración del rotor también crean par 𝑇𝑇𝑀𝑀 en torno al eje del rotor.
fi = k ωi Fi τMi = b ωi + IM ω i En la que el ascenso es una constante k, la constante de fricción es b y el momento de inercia del rotor es 𝐼𝐼𝑀𝑀 .En general, el efecto del 𝜔𝜔𝑖𝑖 se considera pequeña y por lo tanto se omite.
38
Figura Nº9: ESC 20 A.
Dependiendo de la magnitud de la señal PWM, los motores giraran a mayor o menor velocidad.
Figura Nº10: diagrama de funcionamiento del QuadSimo
4.- MODELAMIENTO MATEMÁTICO
La estructura Quadcopter se presenta en la Figura 11 incluyendo velocidad angular, torque y fuerzas creadas por los cuatro rotores (numeradas del 1 al 4).
Figura Nº11: imagen del cuerpo y los momentos inerciales
La posición lineal absoluta de la Quadcopter se define en el marco inercial de los ejes x, y, z con ε. La actitud, es decir, la posición angular, se define en el marco de inercia con tres ángulos de Euler ŋ. Ángulo de paso θ determina la rotación de la Quadcopter alrededor del eje y. Ángulo de balanceo ∅ determina la rotación alrededor del eje x y la
guiñada ángulo alrededor del eje z. Vector q contiene los vectores de posición lineal y angular
ξ = [x𝑦𝑦𝑧𝑧
] η = [φθψ
] 𝑞𝑞 = [ξη]
El origen de la estructura se encuentra en el centro de masa del Quadcopter. En el chasis, las velocidades lineales se determinaron mediante 𝑉𝑉𝐵𝐵 y las velocidades angulares mediante v.
VB = [vx, B vy, Bvz, B
] ν = [pqr]
La matriz de rotación inercial de la estructura del chasis es:
R
= [Cψ Cθ Cψ Sθ Sφ − Sψ Cφ Cψ Sθ Cφ + Sψ Sφ Sψ Cθ Sψ Sθ Sφ + Cψ Cφ Sψ Sθ Cφ − Cψ
Sφ − Sθ Cθ Sφ Cθ Cφ]
La matriz de transformación para las velocidades angulares del marco de inercia para el chasis es 𝑊𝑊𝑛𝑛, y desde el bastidor de carrocería en el bastidor inercial es 𝑊𝑊𝑛𝑛
−1, como se muestra en el siguiente la siguiente ecuación.
η = W −1 ν
[φ
θψ
] = [1 SφTθ CφTθ0 Cφ −Sφ0 Sφ/Cθ Cφ/Cθ
] [pqr
]
El Quadcopter se supone que tiene la estructura simétrica con los cuatro brazos alineados con el cuerpo de x e y ejes.
Por lo tanto, la matriz de inercia es matriz diagonal I en la que 𝐼𝐼𝑥𝑥𝑥𝑥 = 𝐼𝐼𝑦𝑦𝑦𝑦
I = [Ixx 0 00 Iyy 00 0 Izz
]
La velocidad angular del rotor i, denotado con 𝜔𝜔𝑖𝑖 , crea la fuerza 𝑓𝑓𝑖𝑖 en la dirección del eje del rotor. La velocidad angular y la aceleración del rotor también crean par 𝑇𝑇𝑀𝑀 en torno al eje del rotor.
fi = k ωi Fi τMi = b ωi + IM ω i En la que el ascenso es una constante k, la constante de fricción es b y el momento de inercia del rotor es 𝐼𝐼𝑀𝑀 .En general, el efecto del 𝜔𝜔𝑖𝑖 se considera pequeña y por lo tanto se omite.
38
Figura Nº9: ESC 20 A.
Dependiendo de la magnitud de la señal PWM, los motores giraran a mayor o menor velocidad.
Figura Nº10: diagrama de funcionamiento del QuadSimo
4.- MODELAMIENTO MATEMÁTICO
La estructura Quadcopter se presenta en la Figura 11 incluyendo velocidad angular, torque y fuerzas creadas por los cuatro rotores (numeradas del 1 al 4).
Figura Nº11: imagen del cuerpo y los momentos inerciales
La posición lineal absoluta de la Quadcopter se define en el marco inercial de los ejes x, y, z con ε. La actitud, es decir, la posición angular, se define en el marco de inercia con tres ángulos de Euler ŋ. Ángulo de paso θ determina la rotación de la Quadcopter alrededor del eje y. Ángulo de balanceo ∅ determina la rotación alrededor del eje x y la
guiñada ángulo alrededor del eje z. Vector q contiene los vectores de posición lineal y angular
ξ = [x𝑦𝑦𝑧𝑧
] η = [φθψ
] 𝑞𝑞 = [ξη]
El origen de la estructura se encuentra en el centro de masa del Quadcopter. En el chasis, las velocidades lineales se determinaron mediante 𝑉𝑉𝐵𝐵 y las velocidades angulares mediante v.
VB = [vx, B vy, Bvz, B
] ν = [pqr]
La matriz de rotación inercial de la estructura del chasis es:
R
= [Cψ Cθ Cψ Sθ Sφ − Sψ Cφ Cψ Sθ Cφ + Sψ Sφ Sψ Cθ Sψ Sθ Sφ + Cψ Cφ Sψ Sθ Cφ − Cψ
Sφ − Sθ Cθ Sφ Cθ Cφ]
La matriz de transformación para las velocidades angulares del marco de inercia para el chasis es 𝑊𝑊𝑛𝑛, y desde el bastidor de carrocería en el bastidor inercial es 𝑊𝑊𝑛𝑛
−1, como se muestra en el siguiente la siguiente ecuación.
η = W −1 ν
[φ
θψ
] = [1 SφTθ CφTθ0 Cφ −Sφ0 Sφ/Cθ Cφ/Cθ
] [pqr
]
El Quadcopter se supone que tiene la estructura simétrica con los cuatro brazos alineados con el cuerpo de x e y ejes.
Por lo tanto, la matriz de inercia es matriz diagonal I en la que 𝐼𝐼𝑥𝑥𝑥𝑥 = 𝐼𝐼𝑦𝑦𝑦𝑦
I = [Ixx 0 00 Iyy 00 0 Izz
]
La velocidad angular del rotor i, denotado con 𝜔𝜔𝑖𝑖 , crea la fuerza 𝑓𝑓𝑖𝑖 en la dirección del eje del rotor. La velocidad angular y la aceleración del rotor también crean par 𝑇𝑇𝑀𝑀 en torno al eje del rotor.
fi = k ωi Fi τMi = b ωi + IM ω i En la que el ascenso es una constante k, la constante de fricción es b y el momento de inercia del rotor es 𝐼𝐼𝑀𝑀 .En general, el efecto del 𝜔𝜔𝑖𝑖 se considera pequeña y por lo tanto se omite.
38
Figura Nº9: ESC 20 A.
Dependiendo de la magnitud de la señal PWM, los motores giraran a mayor o menor velocidad.
Figura Nº10: diagrama de funcionamiento del QuadSimo
4.- MODELAMIENTO MATEMÁTICO
La estructura Quadcopter se presenta en la Figura 11 incluyendo velocidad angular, torque y fuerzas creadas por los cuatro rotores (numeradas del 1 al 4).
Figura Nº11: imagen del cuerpo y los momentos inerciales
La posición lineal absoluta de la Quadcopter se define en el marco inercial de los ejes x, y, z con ε. La actitud, es decir, la posición angular, se define en el marco de inercia con tres ángulos de Euler ŋ. Ángulo de paso θ determina la rotación de la Quadcopter alrededor del eje y. Ángulo de balanceo ∅ determina la rotación alrededor del eje x y la
guiñada ángulo alrededor del eje z. Vector q contiene los vectores de posición lineal y angular
ξ = [x𝑦𝑦𝑧𝑧
] η = [φθψ
] 𝑞𝑞 = [ξη]
El origen de la estructura se encuentra en el centro de masa del Quadcopter. En el chasis, las velocidades lineales se determinaron mediante 𝑉𝑉𝐵𝐵 y las velocidades angulares mediante v.
VB = [vx, B vy, Bvz, B
] ν = [pqr]
La matriz de rotación inercial de la estructura del chasis es:
R
= [Cψ Cθ Cψ Sθ Sφ − Sψ Cφ Cψ Sθ Cφ + Sψ Sφ Sψ Cθ Sψ Sθ Sφ + Cψ Cφ Sψ Sθ Cφ − Cψ
Sφ − Sθ Cθ Sφ Cθ Cφ]
La matriz de transformación para las velocidades angulares del marco de inercia para el chasis es 𝑊𝑊𝑛𝑛, y desde el bastidor de carrocería en el bastidor inercial es 𝑊𝑊𝑛𝑛
−1, como se muestra en el siguiente la siguiente ecuación.
η = W −1 ν
[φ
θψ
] = [1 SφTθ CφTθ0 Cφ −Sφ0 Sφ/Cθ Cφ/Cθ
] [pqr
]
El Quadcopter se supone que tiene la estructura simétrica con los cuatro brazos alineados con el cuerpo de x e y ejes.
Por lo tanto, la matriz de inercia es matriz diagonal I en la que 𝐼𝐼𝑥𝑥𝑥𝑥 = 𝐼𝐼𝑦𝑦𝑦𝑦
I = [Ixx 0 00 Iyy 00 0 Izz
]
La velocidad angular del rotor i, denotado con 𝜔𝜔𝑖𝑖 , crea la fuerza 𝑓𝑓𝑖𝑖 en la dirección del eje del rotor. La velocidad angular y la aceleración del rotor también crean par 𝑇𝑇𝑀𝑀 en torno al eje del rotor.
fi = k ωi Fi τMi = b ωi + IM ω i En la que el ascenso es una constante k, la constante de fricción es b y el momento de inercia del rotor es 𝐼𝐼𝑀𝑀 .En general, el efecto del 𝜔𝜔𝑖𝑖 se considera pequeña y por lo tanto se omite.
38
Figura Nº9: ESC 20 A.
Dependiendo de la magnitud de la señal PWM, los motores giraran a mayor o menor velocidad.
Figura Nº10: diagrama de funcionamiento del QuadSimo
4.- MODELAMIENTO MATEMÁTICO
La estructura Quadcopter se presenta en la Figura 11 incluyendo velocidad angular, torque y fuerzas creadas por los cuatro rotores (numeradas del 1 al 4).
Figura Nº11: imagen del cuerpo y los momentos inerciales
La posición lineal absoluta de la Quadcopter se define en el marco inercial de los ejes x, y, z con ε. La actitud, es decir, la posición angular, se define en el marco de inercia con tres ángulos de Euler ŋ. Ángulo de paso θ determina la rotación de la Quadcopter alrededor del eje y. Ángulo de balanceo ∅ determina la rotación alrededor del eje x y la
guiñada ángulo alrededor del eje z. Vector q contiene los vectores de posición lineal y angular
ξ = [x𝑦𝑦𝑧𝑧
] η = [φθψ
] 𝑞𝑞 = [ξη]
El origen de la estructura se encuentra en el centro de masa del Quadcopter. En el chasis, las velocidades lineales se determinaron mediante 𝑉𝑉𝐵𝐵 y las velocidades angulares mediante v.
VB = [vx, B vy, Bvz, B
] ν = [pqr]
La matriz de rotación inercial de la estructura del chasis es:
R
= [Cψ Cθ Cψ Sθ Sφ − Sψ Cφ Cψ Sθ Cφ + Sψ Sφ Sψ Cθ Sψ Sθ Sφ + Cψ Cφ Sψ Sθ Cφ − Cψ
Sφ − Sθ Cθ Sφ Cθ Cφ]
La matriz de transformación para las velocidades angulares del marco de inercia para el chasis es 𝑊𝑊𝑛𝑛, y desde el bastidor de carrocería en el bastidor inercial es 𝑊𝑊𝑛𝑛
−1, como se muestra en el siguiente la siguiente ecuación.
η = W −1 ν
[φ
θψ
] = [1 SφTθ CφTθ0 Cφ −Sφ0 Sφ/Cθ Cφ/Cθ
] [pqr
]
El Quadcopter se supone que tiene la estructura simétrica con los cuatro brazos alineados con el cuerpo de x e y ejes.
Por lo tanto, la matriz de inercia es matriz diagonal I en la que 𝐼𝐼𝑥𝑥𝑥𝑥 = 𝐼𝐼𝑦𝑦𝑦𝑦
I = [Ixx 0 00 Iyy 00 0 Izz
]
La velocidad angular del rotor i, denotado con 𝜔𝜔𝑖𝑖 , crea la fuerza 𝑓𝑓𝑖𝑖 en la dirección del eje del rotor. La velocidad angular y la aceleración del rotor también crean par 𝑇𝑇𝑀𝑀 en torno al eje del rotor.
fi = k ωi Fi τMi = b ωi + IM ω i En la que el ascenso es una constante k, la constante de fricción es b y el momento de inercia del rotor es 𝐼𝐼𝑀𝑀 .En general, el efecto del 𝜔𝜔𝑖𝑖 se considera pequeña y por lo tanto se omite.
38
Figura Nº9: ESC 20 A.
Dependiendo de la magnitud de la señal PWM, los motores giraran a mayor o menor velocidad.
Figura Nº10: diagrama de funcionamiento del QuadSimo
4.- MODELAMIENTO MATEMÁTICO
La estructura Quadcopter se presenta en la Figura 11 incluyendo velocidad angular, torque y fuerzas creadas por los cuatro rotores (numeradas del 1 al 4).
Figura Nº11: imagen del cuerpo y los momentos inerciales
La posición lineal absoluta de la Quadcopter se define en el marco inercial de los ejes x, y, z con ε. La actitud, es decir, la posición angular, se define en el marco de inercia con tres ángulos de Euler ŋ. Ángulo de paso θ determina la rotación de la Quadcopter alrededor del eje y. Ángulo de balanceo ∅ determina la rotación alrededor del eje x y la
guiñada ángulo alrededor del eje z. Vector q contiene los vectores de posición lineal y angular
ξ = [x𝑦𝑦𝑧𝑧
] η = [φθψ
] 𝑞𝑞 = [ξη]
El origen de la estructura se encuentra en el centro de masa del Quadcopter. En el chasis, las velocidades lineales se determinaron mediante 𝑉𝑉𝐵𝐵 y las velocidades angulares mediante v.
VB = [vx, B vy, Bvz, B
] ν = [pqr]
La matriz de rotación inercial de la estructura del chasis es:
R
= [Cψ Cθ Cψ Sθ Sφ − Sψ Cφ Cψ Sθ Cφ + Sψ Sφ Sψ Cθ Sψ Sθ Sφ + Cψ Cφ Sψ Sθ Cφ − Cψ
Sφ − Sθ Cθ Sφ Cθ Cφ]
La matriz de transformación para las velocidades angulares del marco de inercia para el chasis es 𝑊𝑊𝑛𝑛, y desde el bastidor de carrocería en el bastidor inercial es 𝑊𝑊𝑛𝑛
−1, como se muestra en el siguiente la siguiente ecuación.
η = W −1 ν
[φ
θψ
] = [1 SφTθ CφTθ0 Cφ −Sφ0 Sφ/Cθ Cφ/Cθ
] [pqr
]
El Quadcopter se supone que tiene la estructura simétrica con los cuatro brazos alineados con el cuerpo de x e y ejes.
Por lo tanto, la matriz de inercia es matriz diagonal I en la que 𝐼𝐼𝑥𝑥𝑥𝑥 = 𝐼𝐼𝑦𝑦𝑦𝑦
I = [Ixx 0 00 Iyy 00 0 Izz
]
La velocidad angular del rotor i, denotado con 𝜔𝜔𝑖𝑖 , crea la fuerza 𝑓𝑓𝑖𝑖 en la dirección del eje del rotor. La velocidad angular y la aceleración del rotor también crean par 𝑇𝑇𝑀𝑀 en torno al eje del rotor.
fi = k ωi Fi τMi = b ωi + IM ω i En la que el ascenso es una constante k, la constante de fricción es b y el momento de inercia del rotor es 𝐼𝐼𝑀𝑀 .En general, el efecto del 𝜔𝜔𝑖𝑖 se considera pequeña y por lo tanto se omite.
Las fuerzas combinadas de rotores crean un empuje T en la dirección del cuerpo del eje z.
El torque 𝜏𝜏𝐵𝐵 se compone de los pares 𝜏𝜏𝜃𝜃 , 𝜏𝜏𝜙𝜙, y 𝜏𝜏𝜑𝜑, en la dirección del correspondiente cuerpo de ángulos.
𝑇𝑇𝐵𝐵 = [00T
]
En la que L es la distancia entre el rotor y el centro de masa de la Quadcopter.
Por lo tanto, el movimiento de roll es adquirido por la disminución del 2do rotor y el aumento de la velocidad del 4to rotor. Del mismo modo, el movimiento de Pitch se adquiere por la disminución de la velocidad del 1er rotor y el aumento de la velocidad del 3er rotor. El movimiento de Jaw se adquiere mediante el aumento de las velocidades angulares de los dos rotores opuestos y la disminución de las velocidades de los otros dos.
5.- CONCLUSIONES
En resumen se puede ver que la estabilización del Quadsimo se puede lograr mediante la implementación de un control de tipo PD y así obtener desplazamientos lineales en sus 3 ejes. 6.- REFERENCIAS
[1] G. M. Hoffmann, H. Huang, S. L. Waslander, and C. J. Tomlin, “Quadrotor helicopter flight dynamics and control: Theory and experiment,” Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Aug. 2007.
[2] H. Huang, G. M. Hoffmann, S. L. Waslander, and C. J. Tomlin, “Aerodynamics and control of autonomous quadrotor helicopters in aggressive maneuvering,” IEEE International Conference on Robotics and Automation, pp. 3277–3282, May 2009.
[3] A. Tayebi and S. McGilvray, “Attitude stabilization of a four-rotor aerial robot,” 43rd IEEE Conference on Decision and Control, vol. 2, pp. 1216–1221, 2004.
[4] I. C. Dikmen, A. Arısoy, and H. Temeltas, “ Attitude control of a quadrotor,” 4th
International Conference on Recent Advances in Space Technologies, pp. 722–727, 2009.
[5] Z. Zuo, “Trajectory tracking control design with command-filtered compensa- tion for a quadrotor,” IET Control Theory Appl., vol. 4, no. 11, pp. 2343–2355,2010.
[6] S. Bouabdallah, A. Noth, and R. Siegwart, “PID vs LQ control techniques applied to an indoor micro quadrotor,” IEEE/RSJ International Conference on Intelligent Robots and Systems, vol. 3, pp. 2451–2456, 2004.
[7] T. Madani and A. Benallegue, “Backstepping control for a quadrotor heli- copter,” IEEE/RSJ International Conference on Intelligent Robots and Sys- tems, pp. 3255–3260, 2006.
REVI
STA
REVISTA
52 53
5. CONCLUSIONES
6. REFERENCIAS
En resumen se puede ver que la estabilización del Quadsimo se puede lograr mediante la implementación de un control de tipo PD y así obtener desplazamientos lineales en sus 3 ejes.
[1] G. M. Hoffmann, H. Huang, S. L. Waslander, and C. J. Tomlin, “Quadrotor helicopter flight dynamics and control: Theory and experiment,” Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Aug. 2007.
[2] H. Huang, G. M. Hoffmann, S. L. Waslander, and C. J. Tomlin, “Aerodynamics and control of autonomous quadrotor helicopters in aggressive maneuvering,” IEEE International Conference on Robotics and Automation, pp. 3277–3282, May 2009.
[3] A. Tayebi and S. McGilvray, “Attitude stabilization of a four-rotor aerial robot,” 43rd IEEE Conference on Decision and Control, vol. 2, pp. 1216–1221, 2004.
[4] I˙. C. Dikmen, A. Arısoy, and H. Temelta¸s, “ Attitude control of a quadrotor,” 4th
International Conference on Recent Advances in Space Technologies, pp. 722–727, 2009.
[5] Z. Zuo, “Trajectory tracking control design with command-filtered compensa- tion for a quadrotor,” IET Control Theory Appl., vol. 4, no. 11, pp. 2343–2355,2010.
[6] S. Bouabdallah, A. Noth, and R. Siegwart, “PID vs LQ control techniques applied to an indoor micro quadrotor,” IEEE/RSJ International Conference on Intelligent Robots and Systems, vol. 3, pp. 2451–2456, 2004.
[7] T. Madani and A. Benallegue, “Backstepping control for a quadrotor heli- copter,” IEEE/RSJ International Conference on Intelligent Robots and Sys- tems, pp. 3255–3260, 2006.
MONITOR CARDIACO PORTATIL CON INTERFAZ DE COMUNICACIÓN SERIAL PARA FUTURAS
APLICACIONES EN TELEFONIA.
Rosa Karin Canelo Cervatez, Karina Janet Nicolás León, Miguel Ángel Vera Masías
Asesor: Ing. Ricardo J. Palomares Orihuela
Escuela Profesional de Ingeniería Mecatrónica, Universidad Ricardo Palma, Perú
[email protected], [email protected], [email protected], [email protected]
ResumenLos signos vitales (Pulso cardíaco, frecuencia respiratoria, temperatura, tensión arterial) son una serie de parámetros cuantificables propios de un individuo vivo que nos permiten obtener información acerca del funcionamiento de su organismo. Entre ellos, el pulso cardíaco es a menudo el primero en ser tomado en cuenta por médicos y profesionales de la salud ya que su ausencia implica la muerte casi inmediata del paciente. Por tal motivo es que en este proyecto se plantea desarrollar un contador de pulsos cardiacos de costo relativamente bajo y portable para que la persona que sufra de alguna enfermedad cardiaca de crónica pueda estar en constante evaluación, por sus medico
Palabra Clave: Electrocardiograma, amplificación, comunicación serial, sensor
1. INTRODUCCIÓN
2. PRESENTACION DEL PROBLEMA
AbstractVital signs (heart pulse, respiratory rate, temperature, blood pressure) are a series of quantifiable parameters characteristic of a living individual that allow us to obtain information about the functioning of your body. Among them, the heart rate is often the first to be taken into account by doctors and health professionals as its absence implies the almost immediate death of the patient. For this reason is that in this project is to develop a cardiac pulse counter relatively low cost and portable so that the person suffering from chronic cardiac disease may be under constant evaluation by their physician.
Key Words: Electrocardiogram, amplification, serial communication, sensor
Los métodos utilizados en electrónica para medir los signos vitales, y en este caso el pulso cardíaco, son variados. En ocasiones se usan técnicas invasivas para dicho fin, como colocar electrodos sobre la piel o incluso implantarlos en el organismo, sin embargo estos métodos a menudo pueden resultar engorrosos o poco convenientes, para realizar esta tarea utilizaremos métodos menos invasivos.
Tomaremos lectura del pulso cardiaco a través del dedo meñique, con un diodo led rojo de alta intensidad que será
censado por un LDR que contara con una etapa de amplificación y filtrado adecuado.
Este dispositivo poseerá un micro controlador que actualmente evaluaremos al PIC12F675 como contador y comunicador serial. Lo emplearemos debido al pequeño tamaño y la mínima cantidad de componentes que emplea.
Al poseer una interfaz serial procedemos agregar una forma de comunicación inalámbrica como el modulo bluetooth HC-05
Al poseer esta forma de comunicación tenemos la ventaja de crear una comunicación con un Smartphone en
REVI
STA
REVISTA
54 55
plataforma android, con el fin de mas adelante desarrollar una aplicación que haga una llamada automática cuando se produzcan puntos críticos censados del corazón.
Se empleara el Modulo HC-05 con el fin de mantener una comunicación serial con el micro controlador
Esta es la etapa primordial, ya que es donde se demuestra si es posible detectar los pulsos cardiacos a traves de un fotosensado. Al final de esta etapa pudimos concluir nuestro circuito con el siguiente diagrama. En la Figura 1 se muestra la primera etapa.
Sensor Nellcor DS-100: Sensor óptico, no invasivo con Led Emisor Rojo y foto diodo. Posee una interfaz DB-09 Macho, tal como se muestra en la Figura 2.
Pines a usar: Se emplearan los pines 1 y 2 para conectar al diodo emisor, siendo 1 el cátodo y 2 el anodo.
Para el foto diodo, con conducción a la inversa el pin 5 se pone a tierra y el pin 9 a las etapa de comparación.
El proyecto Monitor Portátil de Pulsos Cardiacos (MPPC), puede ser de gran utilidad en el área médica, de apoyo para diagnostico, además se pueden agregar e implementar mas herramientas para serlo más práctico y más útil. Como la señal eléctrica del corazón nos puede dar información del estado del músculo cardiaco, es muy práctico que además de monitorear al corazón se pueda estimular en dado caso que tenga una arritmia, mediante un pulso de estimulo (marcapasos), o una desfibrilación en caso que se tenga un problema más grave como un infarto.
Al proyecto se puede ir agregando más herramientas en cuestión de mejorarlo y darle un mejor uso y aplicación en la medicina.
Se buscara y evaluara la manera de enviar SMS. A través de un Smartphone o de un modulo GSM.
Programación en CCS
3. DESCRIPCION DEL PROBLEMA
INTERFAZ DE COMUNICACIÓN BLUETOOH
3.1. Primera etapa: Amplificación y filtrado
Simulación en Proteus
Circuito eléctrico
Diseño de la placa
5. CONCLUSIONES
Circuito Implementado
3.2. Segunda etapa: Funcionalidad de comunicación a través de SMS. Microcrontrolador PIC16f628a
4. RESULTADOS
3.3. Materiales
Figura 1: Etapa de amplificación y filtrado
Figura 2: Conectores DB-9

REVI
STA
REVISTA
56 57
Control de un brazo robotico Antropomorfico con 5 grados de libertad teleoperado
RHans C. Rojas Caytuiro, Jerson Herrera Yui, Eduardo Espinoza Marazo
Asesor: Javier Cieza Davila
Escuela Profesional de Ingeniería Mecatrónica, Universidad Ricardo Palma, Perú
[email protected] , [email protected] , [email protected]
1. INTRODUCCIÓN
2. MARCO TEÓRICO
AbstractIn this project we describe the design of a 6 degrees of freedom robotic arm and a human interface using flex sensors and bluetooth transmission. The human interface is a data glove which has 5 flex sensors, an accelerometer and a PIC16F877A with a master bluetooth interface. The data glove transmits via bluetooth all the data of the position of the fingers and the inclination of the wrist to the slave, the robotic arm. The Arduino Uno on the robotic arm then receive the data and move the servomotors accordingly.
Key Words: PIC, Bluetooth, Conversor ADC, Interfaz Humana, Flex Sensor.
El uso de robots para diversas áreas de la investigación ha ido en incremento desde una simple manipulación hasta tareas complejas. En la actualidad se han desarrollado diversos mecanismos para controlar sistemas robóticos por medio de diferentes interfaces como: sistemas remotos o teleoperados (control por internet), tacto y reconocimiento de voz.
Este trabajo describe el diseño de una interfaz humana utilizando sensores de flexión (Flex sensor) para manipular las articulaciones del robot antropomórfico de 6 grados de libertad.
El sistema consta de dos partes principalmente: una es obtener los datos del Flex sensor por el pic16f877a y la segunda es recibir esos datos mediante bluetooth en el arduino uno para controlar los servomotores con el ancho de pulso del arduino (PWM) y de esta manera poder simular el movimiento de una mano humana[1].
Para poder entender el funcionamiento de los dispositivos a usar, detallamos sus caracteristicas.
REVI
STA
REVISTA
58 59
2.1 Servomotor 2.2 Micrcontrolador PIC16F877A
2.3 Tarjeta Arduino UNO
2.4 Bluestooth:
Un servomotor (también llamado servo) es un dispositivo similar a un motor de corriente continua que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición 1.
Un servomotor es un motor eléctrico que consta con la capacidad de ser controlado, tanto en velocidad como en posición. Se muestra un servomotor en la Figura 1.
Los servos se utilizan frecuentemente en sistemas de radio control y en robótica, pero su uso no está limitado a estos. Es posible modificar un servomotor para obtener un motor de corriente continua que, si bien ya no tiene la capacidad de control del servo, conserva la fuerza, velocidad y baja inercia que caracteriza a estos dispositivos.
Características. Está conformado por un motor, una caja reductora y un circuito de control. También potencia proporcional para cargas mecánicas. Un servo, por consiguiente, tiene un consumo de energía reducido.
La corriente que requiere depende del tamaño del servo. Normalmente el fabricante indica cual es la corriente que consume. La corriente depende principalmente del par, y puede exceder un amperio si el servo está enclavado, pero no es muy alto si el servo está libre moviéndose sin carga.
Fig. 1. Servomotor ROB-10189 (Fuente: Sparkfun)
En otras palabras, un servomotor es un motor especial al que se ha añadido un sistema de control (tarjeta electrónica), un potenciómetro y un conjunto de engranajes. Con anterioridad los servomotores no permitían que el motor girara 360 grados, solo aproximadamente 180; sin embargo, hoy en día existen servomotores en los que puede ser controlada su posición y velocidad en los 360 grados. Los servomotores son comúnmente usados en modelismo como aviones, barcos, helicópteros y trenes para controlar de manera eficaz los sistemas motores y los de dirección.
Control. Los servomotores hacen uso de la modulación por ancho de pulsos (PWM) para controlar la dirección o posición de los motores de corriente continua. La mayoría trabaja en la frecuencia de los cincuenta hercios, así las señales PWM tendrán un periodo de veinte milisegundos. La electrónica dentro del servomotor responderá al ancho de la señal modulada. Si los circuitos dentro del servomotor reciben una señal de entre 0,5 a 1,4 milisegundos, este se moverá en sentido horario; entre 1,6 a 2 milisegundos moverá el servomotor en sentido antihorario; 1,5 milisegundos representa un estado neutro para los servomotores estándares. A continuación se muestra eb la Figura 2 ejemplos de cada caso:
Utilizaremos las entradas analógicas del pic16f877a para medir el voltaje de salida de los sensores de flexión, para ello utilizaremos una resolución de 10bits. Además el PIC16F877A contará con una unidad bluetooth maestra, que se encargará de las comunicaciones de PIC a arduino.
Utilizaremos este microprocesador para el control del servomotor utilizando las salidas pwm que controlan el ancho de pulso para los servomotores.
El modulo bluetooth además tiene un LED que indica el estado del modulo, durante los momentos en que esta energizado y no está conectado a otro dispositivo, el LED enciende en forma intermitente hasta que al conectar y establecer vinculo con otro dispositivo, el LED pasa a estar encendido de forma continua, es decir el LED no se apaga en ninguna instancia del funcionamiento del modulo.La transmisión es una transmisión serie RS232 con lógica TTL positiva, como se muestra en la Figura 6.
El modulo bluetooth es un dispositivo que realiza comunicación serial sin necesidad de cableado. El dispositivo es muy pequeño, bajo consumo de corriente, trabaja con lógica TTL positiva y posee un alcance de 10 metros. Estos módulos poseen solo 4 pines: +5V, GND, Tx y Rx como se muestra en la figura5. [4]
La velocidad de comunicación es muy importante para que el PIC18F4550 pueda mandar los pulsos correspondiente de manera rápida. Estos modulos se pueden configurar mediante comandos AT cuando el Bluetooth esta energizado pero no está enlazado a un dispositivo.Se pueden configurar tanto la clave, modo de uso esclavo/maestro asi como la velocidad de conexión.
Fig. 2. Señal y posiciones del servomotor (Fuente: Airtronics)
Fig. 3. Microcontrolador PIC16f877a
Fig. 5. Módulo Bluetooth HC-06 (Fuente: SparkFun)
Fig. 3. Microcontrolador PIC16f877a
Fig. 4. Arduino UNOFig. 6. Transmisión serial continúa
(Fuente: http://perso.wanadoo.es/pictob/comserie.htm)
REVI
STA
REVISTA
60 61
La velocidad de de transmisión datos puede configurarse de 1200 BPS a 1.3 BMPS.Se usará un modulo Bluetooth maestro HC-05 a la interfaz humana, es decir al guante, y un modulo esclavo HC-06 al robot antropomórfico. De esta manera la interfaz humana, y por lo tanto la persona que controla el guante, tendra total control sobre el robot antropomórfico.
El diseño mecanico se desarrolló usando el software “Solidworks”, el cual se logro diseñar y simular, se utilizó una impresora 3D para tener las piezas con las medidas precisas, el diseño se puede ver en la figura 7.[5]
Se puede ver en la figura 9, la vista de sección de un dedo, donde en la zona “A” se aprecia los orificios por donde atraviesa el nylon, y en la zona “B” se observa las roldanas, diseñadas para que el cable pueda pasar por un camino guiado.
Existen 4 ángulos de giro en la mano, los cuales corresponden a los siguientes huesos: Falange distal que corresponde al ángulo A, falange medial que corresponde al ángulo B, falange proximal que corresponde al ángulo C, huesos metacarpianos que corresponden al ángulo D y huesos carpianos (Figura 11); de los cuales solo el dedo meñique, el dedo anular y el dedo pulgar tienen movimiento de los huesos metacarpianos como se ve en la figuras 12, 13 y 14, en los huesos carpianos se conecta la mano con el antebrazo, y con eso se da el giro de izquierda y derecha del brazo.
La parte del antebrazo se une a la mano, en la muñeca. El antebrazo tiene en su interior los 6 servomotores, 5 que permitirá el movimiento del nylon y los dedos, además de 1 servomotor que estará situado al final para darle el movimiento de giro al brazo. Se puede apreciar la distribución de los servomotores con sus respectivos anillos que permitirán que con un solo servomotor, poder mover cada nylon en su respectiva vía (Figura 15.)
Para lo cual los ángulos máximos de giro se ven en la tabla 1
La mano derecha, está formada por 17 articulaciones, unidas por tornillos de 1/8 de pulgada de diámetro, figura 8. Las articulaciones actúan con sistemas de cableado de nylon de 0.8 mm de diámetro, los cuales son capaces de contraer y expandir cada uno de los dedos y de la mano (figura 10), al jalar cada nylon desde su respectiva vía [6].
3. DISEÑO MECÁNICO
Fig. 7. Diseño de la mano (Fuente: Propia)
Fig. 8. Cables de nylon para mover las articulaciones (Fuente: Inmoov)
Fig. 9. Vista de sección de un dedo. (Fuente: Propia)
Fig. 11. Huesos de la mano (Fuente: Georgetown hospital system)
Fig. 14. Ejes en los dedos anular y meñique (Fuente: Propia)
Fig. 12. Ejes en el dedo índice y medio (Fuente: Propia)
Fig. 15. Ensamblaje de los servomotores (Fuente: Propia)
Fig. 13. Ejes en el dedo pulgar (Fuente: Propia)Fig. 10. (A) Dedo contrayéndose, (B) Dedo
en expansión (Fuente: Propia)
50
Para lo cual los ángulos máximos de giro se ven en la tabla 1
Dedo/Eje A B C D
Pulgar 50º - 68º 80º
Índice 53º 72º 90º -
Medio 42º 81º 90º -
Anular 72º 60º 90º 6º
Meñique 42º 75º 90º 16º
Tabla 1.
La parte del antebrazo se une a la mano, en la muñeca. El antebrazo tiene en su interior los 6 servomotores, 5 que permitirá el movimiento del nylon y los dedos, además de 1 servomotor que estará situado al final para darle el movimiento de giro al brazo. Se puede apreciar la distribución de los servomotores con sus respectivos anillos que permitirán que con un solo servomotor, poder mover cada nylon en su respectiva vía (Figura 15.)
Fig. 15. Ensamblaje de los servomotores (Fuente: Propia)
En el diseño se trató de darle una forma lo más humana posible, por lo que se emplearon técnicas de diseño para darle contornos imitando una mano humana, Figura 16.
Fig. 16. Dorso del diseño de la mano (Fuente: Propia)
REVI
STA
REVISTA
62 63
En el diseño se trató de darle una forma lo más humana posible, por lo que se emplearon técnicas de diseño para darle contornos imitando una mano humana, Figura 16.
Se diseñó un guante de datos, que tiene incorporado sensores de flexión y un acelerómetro.Se escogió utilizar 1 Flex sensor por cada dedo, ya que miden flexión. Estos son sensores moduladores resistivos, es decir que cambian su resistencia a medida que este se flexiona. Esto se aprecia en la Figura 17. [7]
Para utilizar los Flex sensor usamos el siguiente circuito de acondicionamiento, ver Figura 19, que consta de un divisor de tensión un opamp seguidor para adaptar impedancias , un restador ya que los sensores de flexión tienen una variación resistiva pero no inicializa desde los 0 ohm, es por ello que en el divisor de tensión cuando queramos 0 volts tendremos que restar ese offset por un voltaje similar y un amplificador no inversor para lograr una ganancia la cual nos proporcione 5 voltios, finalmente un diodo zener de 5v para que no sobrepase este voltaje de lo contrario podría dañar al pic. Este circuito de acondicionamiento se realizó para un dedo por lo tanto tendremos 5 circuitos idénticos.
Este sensor es el que precisamente se necesita para medir flexiones de un dedo, estos sensores estarán en el guante como se muestra en la Figura 18.
En esta parte del acondicionamiento se tuvieron algunos problemas como, surgieron con los sensores de flexión, ya que son muy delicados y no se pueden doblar la parte de esta fuera de la línea negra de lo contrario el flex sensor dejara de funcionar para esto se tiene que usar unos termo contraíbles y asegurar esta parte tan delicada, lo mismo ocurre cuando se quiere tratar se soldar las patitas de los flex sensor, ya que si se tiene mucho tiempo el cautin en el flex sensor, el calor que este genera puede estropear los sensores como nos ocurrió.
Se realizo dos programas, uno para la conversión ADC desde el guante de datos y otra para la generación de PWM para el brazo antropomórfico, tal como se muestra en la Figura 21.
Para sensar el movimiento de la muñeca se usará un acelerómetro de 2 ejes de ±2G para maximizar sensibilidad. El acelerómetro estará ubicado en la muñeca del usuario. El eje X servirá para hallar el ángulo de la muñeca y el eje Y para hallar el ángulo del codo [8].Una vez realizada la etapa del acondicionamiento de los sensores de flexión entablamos la comunicación vía bluetooth entre los microcontroladores PIC16F887A y arduino uno. El PIC16F877A es el maestro el que enviara la señal, por lo que es este el que inicia la comunicación. Primero lee los cinco ADC en sus entradas que los recibe de los circuitos de acondicionamiento y luego manda un mensaje al esclavo. El esclavo entra en modo de espera, Se transmiten los datos de las cinco conversiones. El esclavo manda un ACK, es decir un acuse de recibo indicando que los datos llegaron correctamente. El arduino uno
• El movimiento del brazo robótico es idéntico al movimiento ejercido por el operario en el guante de datos con un tiempo de respuesta de 100ms.
• Para el diseño del sistema mecatrónico se tuvo que utilizar medidas promedios de personas de 1.50m de estatura y además se tuvo que limitar el movimiento de los dedos en la parte posterior con topes para evitar que movimientos excesivos dañen al brazo.
• Además en el diseño se tuvieron que usar articulaciones adicionales en la mano para dar la forma más humana posible. Se decidió usar
Fig. 16. Dorso del diseño de la mano (Fuente: Propia)
Fig. 18. Guante con Flex sensor (Fuente: Benkras)
Fig. 20. Flex Sensor
Fig. 21. Se muestra el prototipo con su software de control
4. DISEÑO ELECTRÓNICO
5. PROGRAMACIÓN:
6. RESULTADOS
7. OBSERVACIONESFig. 17. Cambio de resistencia
con Flexión
Fig. 19. Circuito para el Flex Sensor (Fuente: Propia)
se encarga de convertir estos ADC a anchos de pulso [9].Una vez procesado el ADC, controlamos los servomotores de los dedos de la mano, con el ancho de pulso (PWM) entregados por el arduino uno para poder abrir y cerrar los dedos.Finalmente implementamos los 5 servomotores en el brazo.
REVI
STA
REVISTA
64 65
servomotores de 10Kg-cm con nylon ya que si se usaran microservos para las articulaciones estos no tendrían el torque suficiente para mover la mano.
• La base de los sensores de flexión debe estar protegida ya que si no se pueden dañar. Además hay que tener en cuenta el número máximo de flexiones que soporta el sensor y calibrarlo acorde a su tiempo de utilización.
• Se tiene que tener una protección física contra estrés en las borneras del sensor de flexión ya que estas son delicadas. Esto además alargará la vida útil de los sensores.
• El sistema teleoperado es capaz de responder adecuadamente al guante de datos y el operador es capaz de manipular componentes peligrosos a distancia.
• Se pueden usar más sensores, como sensor de efecto hall para que el robot pueda saber cuándo tiene contacto con un componente.
8. CONCLUSIONES
9. BIBLIOGRAFÍAS
[1] Antonio Barrientos, Luis Felipe Peñín, Carlos Balaguer y Rafael Arecil: “Fundamentos de Robótica Industrial” Ed. McGraw-Hill 1997.
[2] Microchip Data Sheet PIC16F87XA 28/40/44-Pin Enhanced Flash Microcontrollers
[3] Microchip Data Sheet P IC18F2455/2550 /4455 /4550 , 28/40/44-Pin, High-Performance,Enhanced Flash, USB Microcontrollers with nanoWatt Technology
[4] ht tp: / /www.mcu-turkey.com/wp-content/uploads/2013/01/HC-Serial-Bluetooth-Products-201104.pdf (HC Serial Bluetooth Products)
[5] h t t p : / / v e g a r d . h a m m e r s e t h .c o m / 2 0 0 9 / 0 3 / s c h o o l - p r o j e c t -mechanical-hand/395/
[6] http://inmoov.blogspot.com/
[7] Ramón Pallás Areny: Sensores y Acondicionadores de Señal.
[8] Manual Lenguaje C: Forest Electronic Developments PIC C Compiler & WIZ-C Compiler
[9] Eduardo García Breijo “Compilador C CCS y simulador PROTEUS para Microcontroladores PIC”.
PROYECTOS PRESENTADOS EN EL CONCURSO DE PROYECTO DE INGENIERÍA MECATRÓNICA
CICLO 2013-I
UNIVERSIDAD RICARDO PALMAFACULTAD DE INGENIERÍA
ESCUELA DE INGENIERÍA MECATRÓNICA
1.- DISEÑO E IMPLEMENTACIÓN DE UN ROBOT DETECTOR DE MINAS ANTIPERSONALES
2.- IMPLEMENTACIÓN Y CONTROL DE UNA NAVE AEREA NO TRIPULADA - QUADCOPTER
PROYECTISTAS: Díaz, Patricia y Yábar, José
PROYECTISTA: Macavilca, Marco y Mamani Ernesto
RESUMEN: Este proyecto consiste en la implementación de un prototipo de robot detector de minas antipersonales. Está compuesto por un sensor inductivo y una alarma para indicar de manera sonora en cuanto se encuentre una mina. Tiene un Microcontrolador Arduino que por activación del sensor enviara una señal de activación. Este prototipo ha sido diseñado para operar en campamentos mineros.
RESUMEN: Este trabajo se realizó para comprender el modelado y la estabilización de un Quadcopter de código abierto, “El QuadSimo”. Un quadricóptero o quadcopter se clasifica como un helicóptero en contraposición a las aeronaves de ala fija, poseen cuatro rotores para su sostén y su propulsión. Los cuatro rotores generalmente tienen un configuración de cruz o X. A fin de evitar que el aparato se desequilibre respecto a su eje de orientación, es necesario que dos hélices giren en un sentido y las otras dos en el otro. El control del movimiento del vehículo se consigue variando la velocidad relativa de cada rotor para cambiar el empuje y el par motor producido por cada uno de ellos.
REVI
STA
REVISTA
66 67
Un Quadcopter consta de una estructura mecánica capaz de soportar en vuelo los elementos mecánico, eléctricos, y electrónicos. Este vehículo aéreo no tripulado (UAV) se puede usar para la exploración y el reconocimiento de un área de desastre y compilar los datos en tiempo real obtenidos con varios sensores.
3.- DISEÑO, IMPLEMENTACIÓN Y CONTROL DE UN PROTOTIPO DE MANO DE 5 GDL ATRAVEZ DE UN INTERFAZ TIPO GUANTE
4.- IMPLEMENTACION Y CONTROL DEL SISTEMA PENDULO INVERTIDO SOBRE DOS RUEDAS “TWO WHELL”.
5.- DISEÑO E IMPLEMENTACIÓN DE UNA CERRADURA ELECTRÓNICA A TRAVES DE UNA TARJETA DE IDENTIFICACIÓN
PROYECTISTA: Herrera, Rojas, Espinoza
PROYECTISTA: Aragón Callupe, Cristhian
PROYECTISTA: Landeo Gastelú, Alexander
RESUMEN: El presente proyecto tiene como finalidad el diseño, implementación y control de un prototipo de mano de 5 GDL a través de un interfaz tipo guante. El prototipo de mano será controlado por el accionamiento de cinco servomotores a través de las señales capturadas de un dispositivo tipo guante. El proyecto cuenta con un circuito de adquisición y procesamiento de las señales emitidas al mover el dispositivo guante y que serán utilizadas para accionar cada uno de los dedos de la mano artificial. Asimismo, se presenta una interfaz grafica que muestra en tiempo real los movimientos realizados por el prototipo.
RESUMEN: El presente proyecto tiene como finalidad implementar y controlar el sistema péndulo invertido sobre dos ruedas “Two Whell” a través del uso acelerómetros. El sistema consiste de una estructura rígida con dos ruedas que serán controladas por dos motores DC, los cuales serán activados o desactivados de acuerdo a las señales enviadas por un acelerómetro a un microcontrolador PIC. El control del sistema permite la estabilización del mismo en presencia de fuerzas externas.
RESUMEN: El presente proyecto consiste en un sistema de seguridad que utiliza una cerradura electrónica adaptada a una puerta, la cual podrá ser controlada mediante una tarjeta. El sistema puede ser utilizado en compuertas, portones, cajones, ventanas, cajas fuertes, etc.Cuenta con un circuito que se encarga de detectar la presencia de una tarjeta de identificación para activar un laser, el cual será sensado con un sensor LDR que accionará un motor DC para la apertura del seguro de la puerta.
REVI
STA
REVISTA
68 69
6.- DISEÑO E IMPLEMENTACIÓN DE UN ROBOT EXPLORADOR CON 03 BRAZOS DE 6 GDL
7.- DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE ENFRIAMIENTO POR REFRIGERANTE APLICADO A UN CPU
8.- DISEÑO E IMPLEMENTACIÓN DE UN ROBOT APODO APLICADO A LA INSPECCIÓN DE TUBERÍAS DE AGUA POTABLEPROYECTISTA: Rozas, Diego
PROYECTISTA: Villarreal Carhuas, Doly Elizabeth
PROYECTISTA: Juárez, Jhosue; Ramírez, JaimeRESUMEN: El objetivo del presente
proyecto es la implementación de un robot explorador no tripulado, teleoperado, dotado de sensores y actuadores para realizar el reconocimiento de zonas o lugares donde un ser humano no pueda acceder. El Robot está dotado de 03 brazos con 6 grados de libertad cada uno, dos delanteros que le permiten manipular cualquier objeto y otro trasero que actua como un tercer brazo de agarre. Asimismo, cuenta con dos cámaras, una delantera ubicada dentro del armazón y otra trasera ubicada en la cola que permite tener una vista panorámica de su entorno. Las articulaciones de cada llanta permiten una buena estabilidad en diferentes tipos de terrenos.
RESUMEN: El sistema consiste en la instalación de un sistema de refrigeración por refrigerante para CPU, que va ser controlado por un circuito lógico mediante la gestión de flujo de refrigerante, siendo la salida del circuito de control aplicado al conjunto ventilador-radiador-bomba de agua.Un sistema diseñado cuenta con un circuito que muestra la temperatura del CPU y en qué momento se activa o desactiva el sistema de enfriamiento que consiste en un sistema ventilador-radiador-bomba de refrigerante. Con el sistema desarrollado se logra obtener un ahorro en el consumo de energía y el rendimiento de una computadora.
RESUMEN: El presente proyecto tiene como finalidad el diseño y construcción de un robot apodo aplicado en la inspección de tuberías de agua potable. El robot apodo cuenta con módulos enlazados a través de un servomecanismo independiente, que en su conjunto permiten al robot generar movimientos rectilíneos. El control en los robots apodos se vuelve una tarea complicada conforme el número de módulos que lo conforman aumenta debido a que los movimientos de las articulaciones que los unen deben sincronizarse adecuadamente.
Los robots apodos están inspirados en la naturaleza, se basan en los patrones de movimiento de los gusanos y serpientes cuya estructura se compone de múltiples segmentos que permiten el movimiento ondulatorio. De manera análoga, el presente robots apodo se construye a partir de módulos similares entre sí, que en su conjunto forman el cuerpo del robot. Con este trabajo se pretende mejorar los procesos de inspección en tuberías de agua potable.
Docente Coordinador: Ing. Ricardo J. Palomares Orihuela [email protected]

REVI
STA
70
Revista Mecatrónica Se termino de imprimir
en los talleres de BUSINESS SUPPORT ANETH SRL
R.U.C.: 20544671848Av. Marginal 259 - Urb Javier Prado
6ta Etapa - Salamanca - AteTelefono: 01 434-5101 RPM: *205535
Cel.: 995710259 - 992755609Email: [email protected]





























