Embed Size (px)
Citation preview

S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
1
Workshop SACCSAProblemática en las regiones CAR/SAM
PROYECTO REGIONAL DE COOPERACIÓN TÉCNICARLA/03/902 - RCC08
SACCSA(Solución de Aumentación para Caribe, Centro y Sur América)
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
2
- Breve historia de la navegación satelital
- Navegación por satélite: Idea intuitiva
- Problemática de la región
- Prestaciones obtenidas en la actualidad
Indice
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
3
BREVE HISTORIA DE LA NAVEGACIÓN

S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Page 4
Breve Historia de la Navegación por Satélite
– En 1519, Elcano y Magallanes completaron la primera vuelta a la Tierra solamente utilizando cartas de navegación, un globo terrestre, brújulas, cuadrantes, sextantes, etc.
– Mediante estos instrumentos y con una cierta habilidad podían estimar la velocidad del barco, dirección y latitud, pero no la longitud.
– Se tardaron al menos otros 250 años hasta que los navegantes fueron capaces de estimar la longitud en el mar. 200 años después es posible calcular , posición velocidad y tiempo con una gran precisión, sin esfuerzo y con un coste menor gracias a GPS.
– GPS representa una mezcla de tecnologías que maduraron simultáneamente a mitad del siglo XX. Estas tecnologías cumplen con el objetivo de determinar la posición por medio de la trilateración, o determinación de la posición a base de medir distancias a puntos conocidos.
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Page 5
– A lo largo de la historia tres áreas científicas
aparentemente no relacionadas han constituido la
clave para determinar la posición, tanto en los
antiguos sistemas de navegación como en los
modernos:
• Geodesia
• Medición del tiempo
• Astronomía (en el pasado), astronáutica (en el presente)
Breve Historia de la Navegación por Satélite
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Page 6
Breve Historia de la Navegación por Satélite
– Los avances del siglo XX• A principios del siglo XX dos inventos marcarán el
mundo de la navegación:
– El cruce en 1901 del Atlántico por una señal de radio
– En 1903 los hermanos Wright volaron con el primer aeroplano
• Desde entonces los aviones surcan los vuelos usando sistemas inerciales de navegación y radio ayudas
– Navegación Inercial:» Un giroscopio es una masa giratoria que
permite mantener una dirección fija en el espacio. Los sistemas inerciales de navegación montan tres giroscopios en tres direcciones espaciales y permiten determinar el movimiento de un vehiculo.
– Radionavegación:
» Las señales de radio viajan en el espacio libre en dirección recta y a la velocidad de la luz, el tiempo de propagación permite obtener información sobre la posición.
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Page 7
– Métodos de Radionavegación:• Triangularización:
– Las ondas de radio viajan a la velocidad de la luz, luego midiendo el tiempo de viaje de una señal desde el transmisor al receptor se puede tener información sobre la distancia entre estos. Dada la distancia a tres emisores, en posiciones conocidas, el usuario puede determinar su posición. Estos métodos se denominan TOA (Time Of Arrival) y GPS es un sistema TOA.
• Posicionamiento Hiperbólico:
– Estos sistemas se basan en la medida de la diferencia de los tiempos de llegada de las señales provenientes de dos estaciones transmisoras. Los transmisores estan sincronizados pero no el usuario (receptor), el reloj del usuario mide las deferencias de tiempos, normalmente ms. Se necesitan al menos dos parejas de estaciones emisoras y el usuario se encontrara en la intersección de las dos hipérbolas. Estos sistemas se denominan TDOA (Time Difference Of Arrival) y ejemplos de estos sistemas son Loran y Omega.
• Posicionamiento Doppler:
– Se basan en el efecto doppler, un cambio en la frecuencia aparente de la señal recibida por un observador debido al movimiento relativo entre el emisor y el receptor. Transit es un ejemplo de estos sistemas
Breve Historia de la Navegación por Satélite
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Page 8
Breve Historia de la Navegación por Satélite
– GPS:
• El éxito del Sistema Transit llevo a plantearse el desarrollo de un
nuevo Sistema de elevadas prestaciones, las principales decisiones de
diseño fueron:
– Sistema Activo o Pasivo: Pasivo
– Sistema de posicionamiento, doppler, hiperbólico o
triangularizacion: triangularizacion
– Señales de pulso o de onda continua: CDMA
– Frecuencia portadora: banda L
– Constelación de satélites y orbitas: 24-36 satélites en orbitas medias (MEO)
• El primer satélite GPS se lanzo en 1978
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Page 9
Breve Historia de la Navegación por Satélite
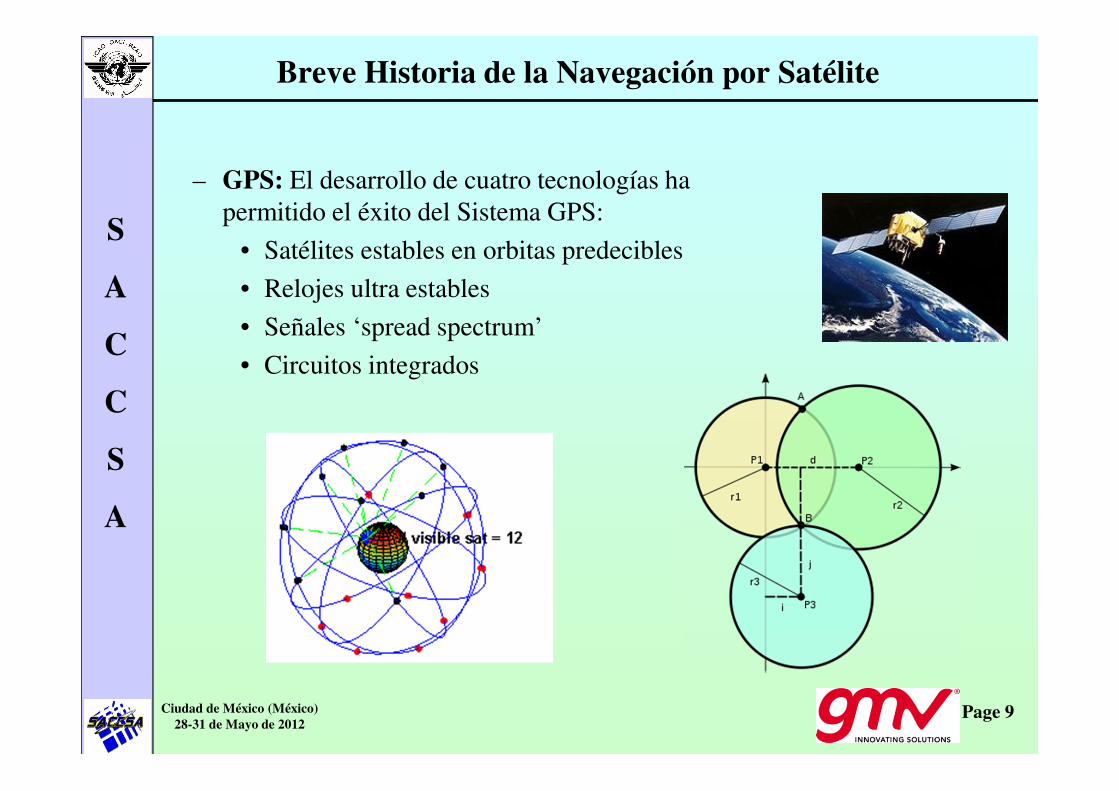
– GPS: El desarrollo de cuatro tecnologías ha
permitido el éxito del Sistema GPS:
• Satélites estables en orbitas predecibles
• Relojes ultra estables
• Señales ‘spread spectrum’
• Circuitos integrados
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Page 10
Breve Historia de la Navegación por Satélite
– GNSS:• GPS no es el único Sistema existente. Mientras
GPS se encontraba en desarrollo, la Unión Soviética emprendió el desarrollo de GLONASS, la constelación de 24 satélites transmitió señales en 1996 y desde entonces d¡fue decayendo para empezar a resurgir en los últimos años.
• El 1999 la Unión Europea decidió el desarrollo del Sistema Galileo, el primero civil, y que comenzará a operar entre el 2012 y el 2018
• China lanzo dos satélites en el año 2000 como parte de sus sistema de navegación experimental Beidou
• Los sistemas de navegación por satélite no solo se circunscriben al ámbito terrestre sino que existen estudios para ser desplegados en otros planetas como por ejemplo Marte.

S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Page 11
Breve Historia de la Navegación por Satélite
Sistemas actuales o en desarrollo:
– GPS
– GLONASS
– Galileo
– QZSS
– WAAS
– EGNOS
– GAGAN e IRNSS
– Beidou y COMPASS
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
12
NAVEGACIÓN PORSATÉLITE: IDEA
INTUITIVA
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Navegación por satélite: Idea Intuitiva
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
• Simplemente: relojes precisos orbitando alrededor de la tierra
– Estos relojes son capaces de transmitir
“marcas de tiempo” a través de señales
electromagnéticas
¿Qué es GNSS?
¿Qué es un receptor GNSS?
• Simplemente: ¡otro reloj!
– Este reloj es capaz de recibir las
“marcas de tiempo” transmitidas y
compararlas con su propio tiempo
– Esto permite medir el tiempo necesario
para la señal para cubrir la distancia
entre el satélite y el receptor.
Idea Intuitiva
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
• El tiempo es distancia: las ondas electromagnéticas
viajan a la velocidad de la luz
• Si sabemos dónde estaba el satélite cuando la señal
fue transmitida:
– PROBLEMA SIMPLE DE TRIANGULACIÓN
¿Qué conseguimos entonces?
Idea Intuitiva
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
��������
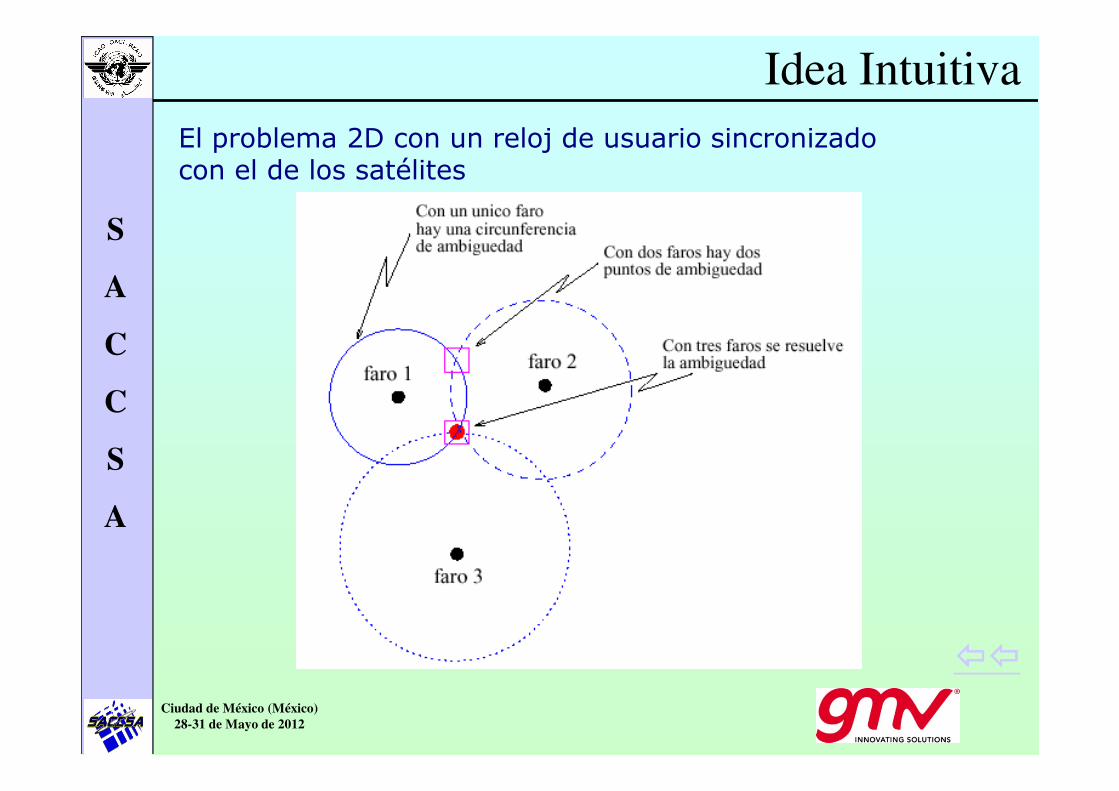
El problema 2D con un reloj de usuario sincronizadocon el de los satélites
Idea Intuitiva
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
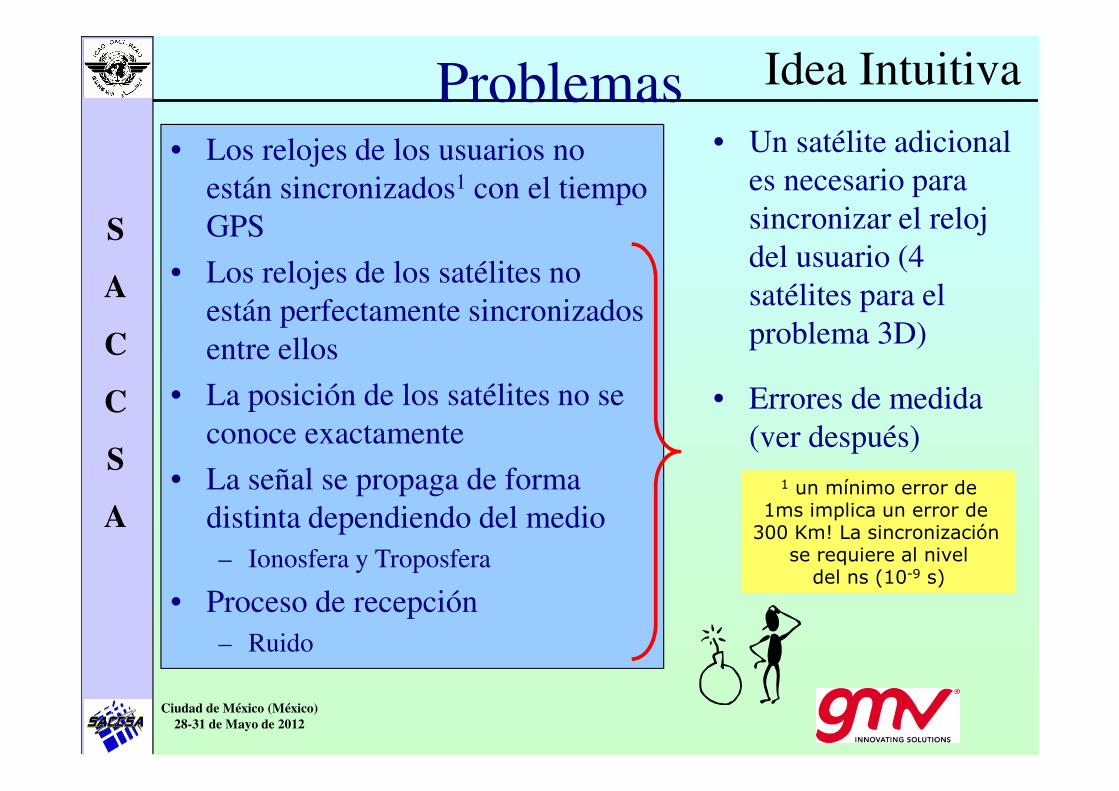
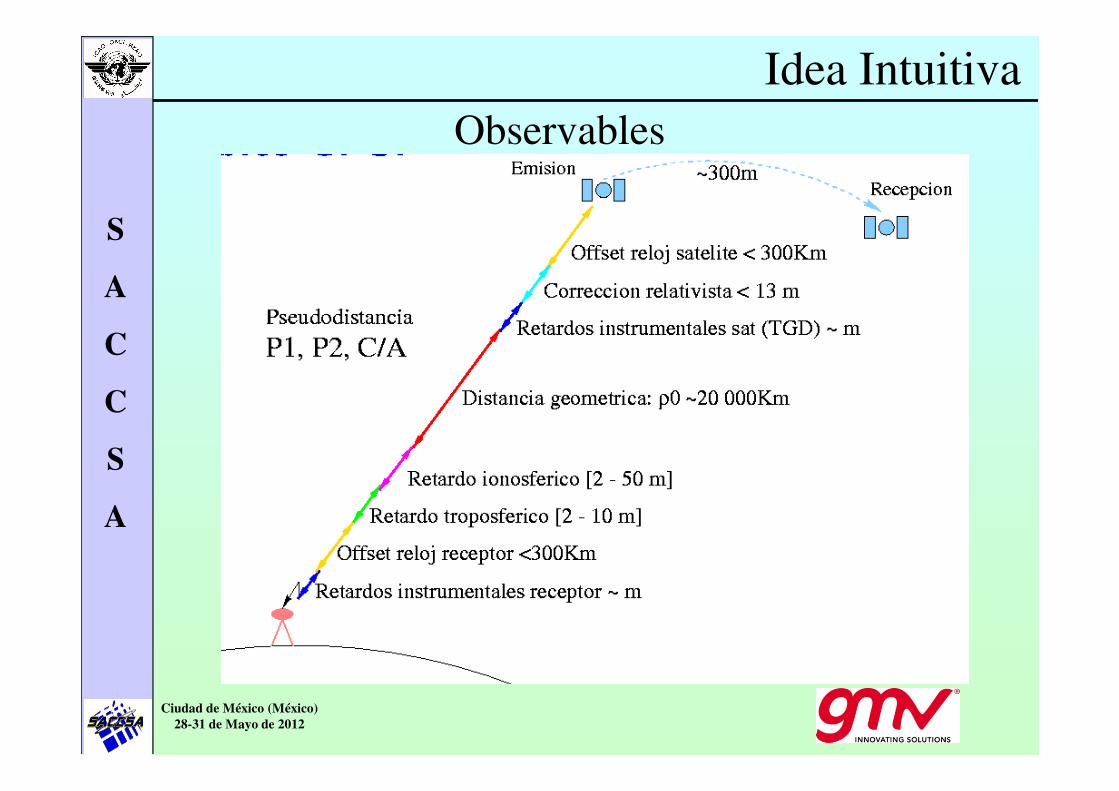
Problemas• Los relojes de los usuarios no
están sincronizados1 con el tiempo
GPS
• Los relojes de los satélites no
están perfectamente sincronizados
entre ellos
• La posición de los satélites no se
conoce exactamente
• La señal se propaga de forma
distinta dependiendo del medio
– Ionosfera y Troposfera
• Proceso de recepción
– Ruido
• Un satélite adicional
es necesario para
sincronizar el reloj
del usuario (4
satélites para el
problema 3D)
• Errores de medida
(ver después)
1 un mínimo error de1ms implica un error de 300 Km! La sincronización
se requiere al niveldel ns (10-9 s)
Idea Intuitiva
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
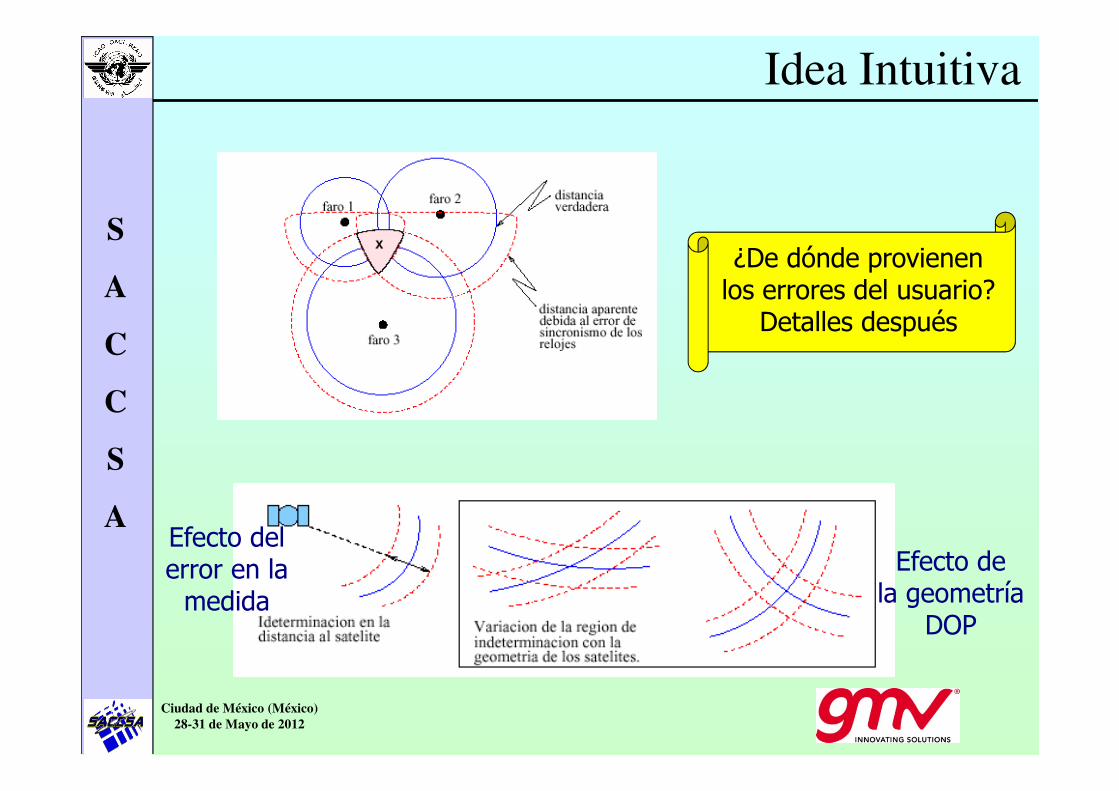
Efecto dela geometríaDOP
Efecto delerror en lamedida
¿De dónde provienenlos errores del usuario?Detalles después
Idea Intuitiva
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Observables
Idea Intuitiva
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Errores y Señales
• ¿Qué son errores y qué señales?– Lo que es un error para unas aplicaciones puede ser una señal para otras
• Los usuarios (clásicos) que quieren conocer la posición precisa del receptor deben compensar errores derivados de sincronización de relojes, atmósfera, ruido, etc.
• Usuarios interesados en la estimación de la ionosfera deben hacer desaparecer los términos geométricos!
• ¿Cómo eliminar los errores para conseguir las señales?– Los errores pueden ser quitados, suavizados, modelados, estimados, o
cualquier combinación de ellos.
• Eliminar errores: a través de diferenciación de datos algunos errores pueden ser cancelados: (e.g. datos iono-free usando medidas en dos frecuencias)
• Suavizado de errores: Procesado y Filtrado de datos (carrier-smoothedpseudoranges)
• Modelizado de errores: Información a priori de algunas contribuciones (e.g. retraso troposférico)
• Estimación de errores: La contribución del error puede ser estimada dentro del propio proceso de estimación de la posición (e.g. estimación del retrasodel reloj en paralelo a la estimación de la posición)
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
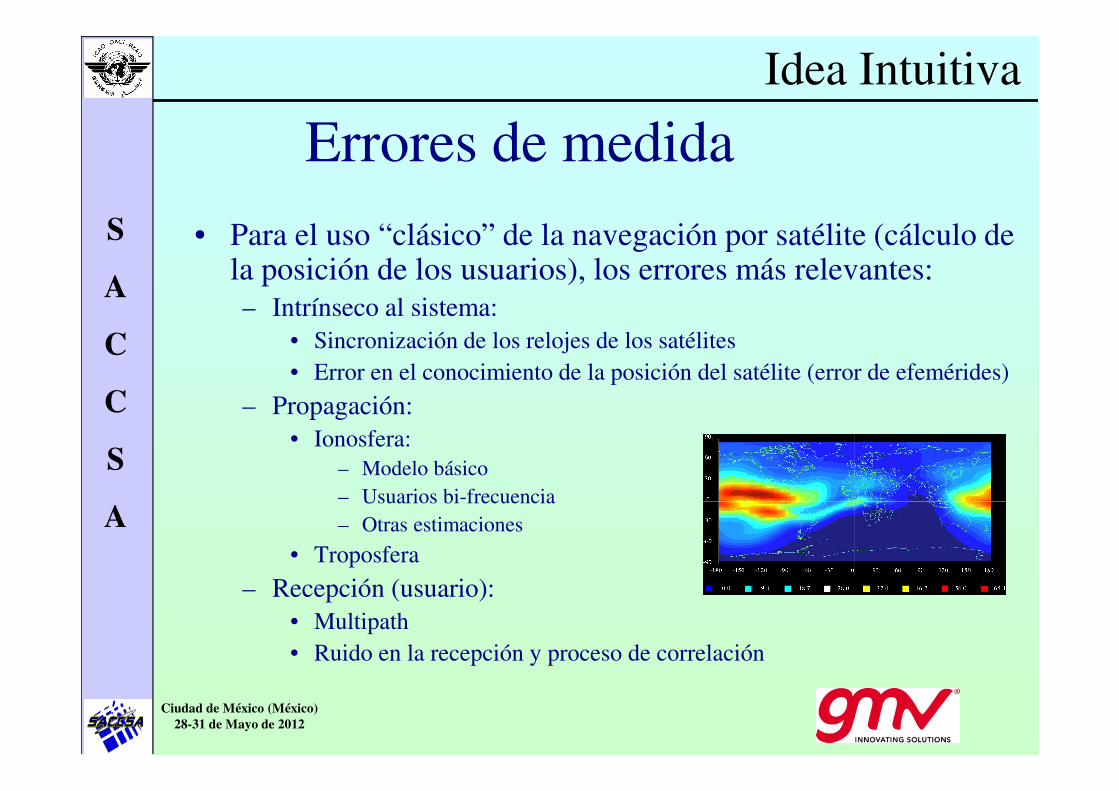
Errores de medida
• Para el uso “clásico” de la navegación por satélite (cálculo de la posición de los usuarios), los errores más relevantes:
– Intrínseco al sistema:
• Sincronización de los relojes de los satélites
• Error en el conocimiento de la posición del satélite (error de efemérides)
– Propagación:
• Ionosfera:
– Modelo básico
– Usuarios bi-frecuencia
– Otras estimaciones
• Troposfera
– Recepción (usuario):
• Multipath
• Ruido en la recepción y proceso de correlación
Idea Intuitiva
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
Prestaciones¿Cuáles son los factores clave de la precisión del GNSS ?
• Recordar:
– errores del usuario = errores de medida del pseudo-rango * DOP
• Una buena precisión requiere por tanto:
– Buena geometría de los satélites respecto al usuario (DOP pequeño)
– Errores de medida pequeños:
• Eliminar errores de propagación; en particular ionosfera: señales bi-frecuencia; modelos precisos
• Relojes de los satélites bien sincronizados
• Posición de los satélites conocida con precisión:
• “Tracking” preciso / minimizar efecto del multipath: Definición de la señal; receptores
Idea Intuitiva
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
23
DESCRIPCION DE LA PROBLEMÁTICA
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
24
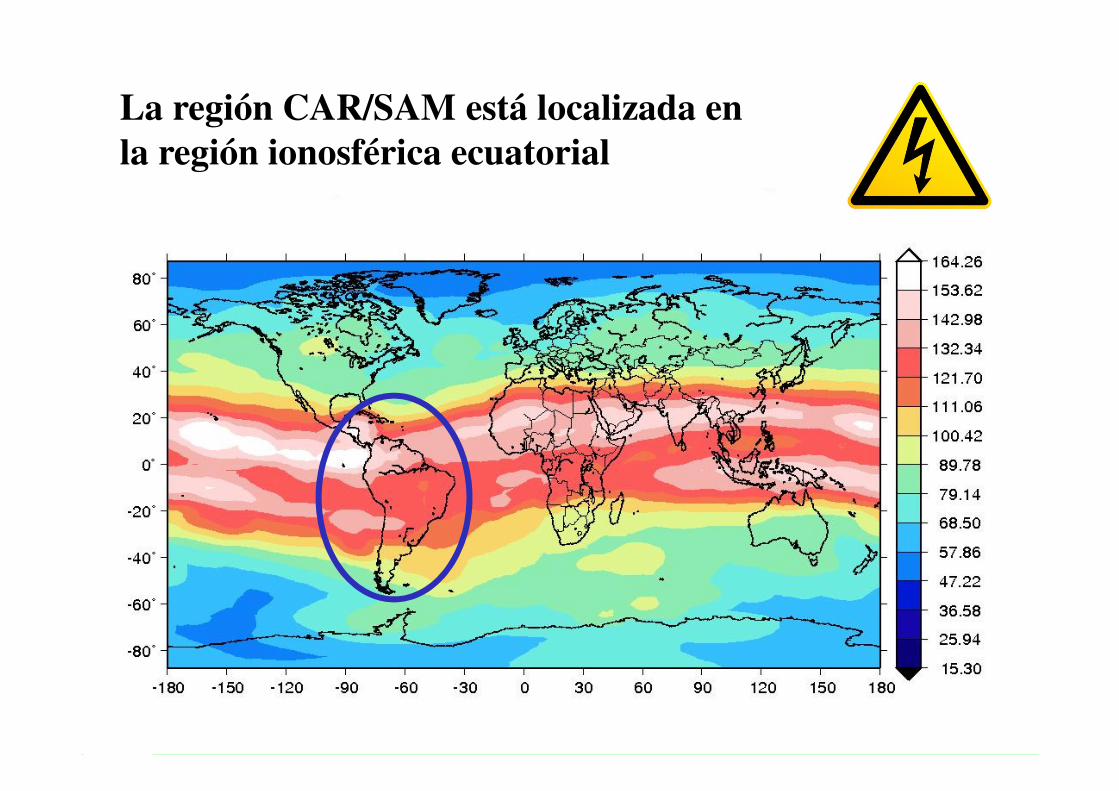
La región CAR/SAM está localizada en la región ionosférica ecuatorial
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
25
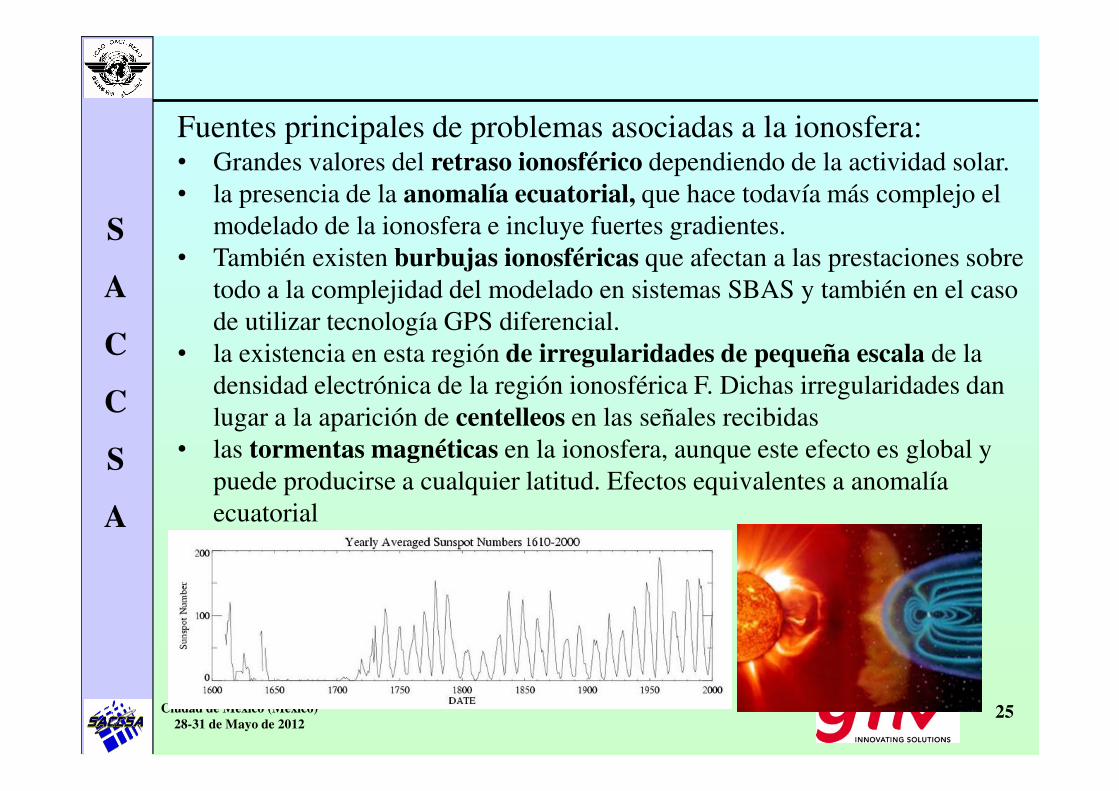
Fuentes principales de problemas asociadas a la ionosfera:• Grandes valores del retraso ionosférico dependiendo de la actividad solar.
• la presencia de la anomalía ecuatorial, que hace todavía más complejo el
modelado de la ionosfera e incluye fuertes gradientes.
• También existen burbujas ionosféricas que afectan a las prestaciones sobre
todo a la complejidad del modelado en sistemas SBAS y también en el caso
de utilizar tecnología GPS diferencial.
• la existencia en esta región de irregularidades de pequeña escala de la
densidad electrónica de la región ionosférica F. Dichas irregularidades dan
lugar a la aparición de centelleos en las señales recibidas
• las tormentas magnéticas en la ionosfera, aunque este efecto es global y
puede producirse a cualquier latitud. Efectos equivalentes a anomalía
ecuatorial
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
26
Efectos en GNSS global (GPS):- Degradación de prestaciones de precisión (solución fase y código):
- Monofrecuencia:- Aumento significativo del error en posición respecto a latitudes medias.
- No se corrige la ionofera. Errores de navegación muy grandes. Hasta 30m
en máximo solar.
- modelos de GPS muy básicos para regiones ecuatoriales. Dejan
aproximadamente el 50% del error.
- Aumento de ruido y pérdida de señal debido a centelleo
- Bifrecuencia (L1/L2): - Aumento de ruido y Pérdida de señal debido a centelleo => Degradación
de prestaciones
- Aumento del DOP
- Aumento del error
- Indisponibilidad
- L2 mucho más vulnerable que L1
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
27
PRESTACIONES
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
28
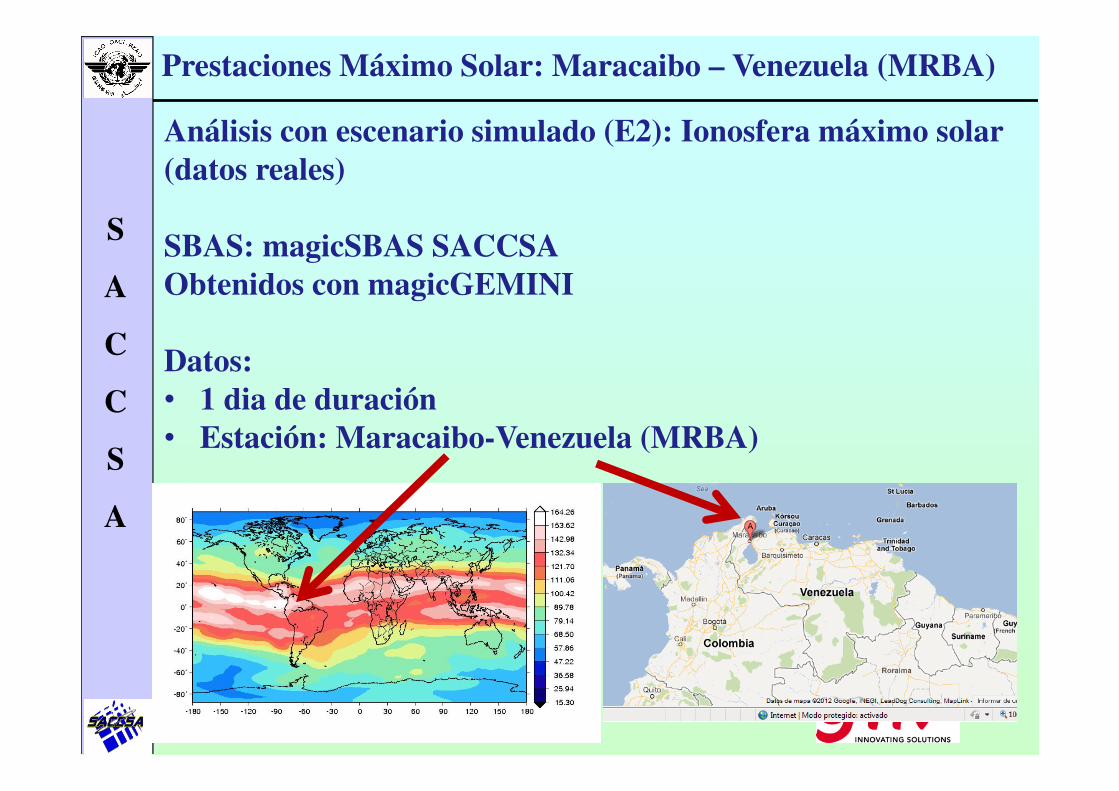
Prestaciones Máximo Solar: Maracaibo – Venezuela (MRBA)
Análisis con escenario simulado (E2): Ionosfera máximo solar (datos reales)
SBAS: magicSBAS SACCSAObtenidos con magicGEMINI
Datos:• 1 dia de duración• Estación: Maracaibo-Venezuela (MRBA)
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
29
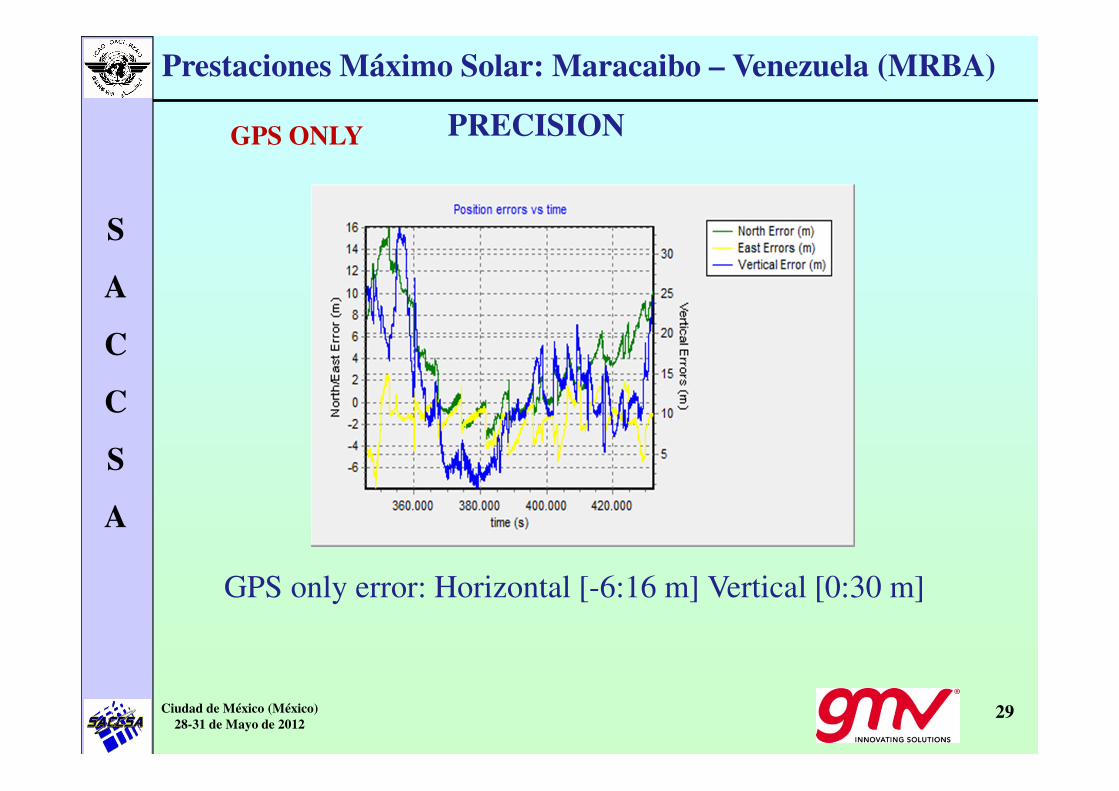
Prestaciones Máximo Solar: Maracaibo – Venezuela (MRBA)
PRECISIONGPS ONLY
GPS only error: Horizontal [-6:16 m] Vertical [0:30 m]
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
30
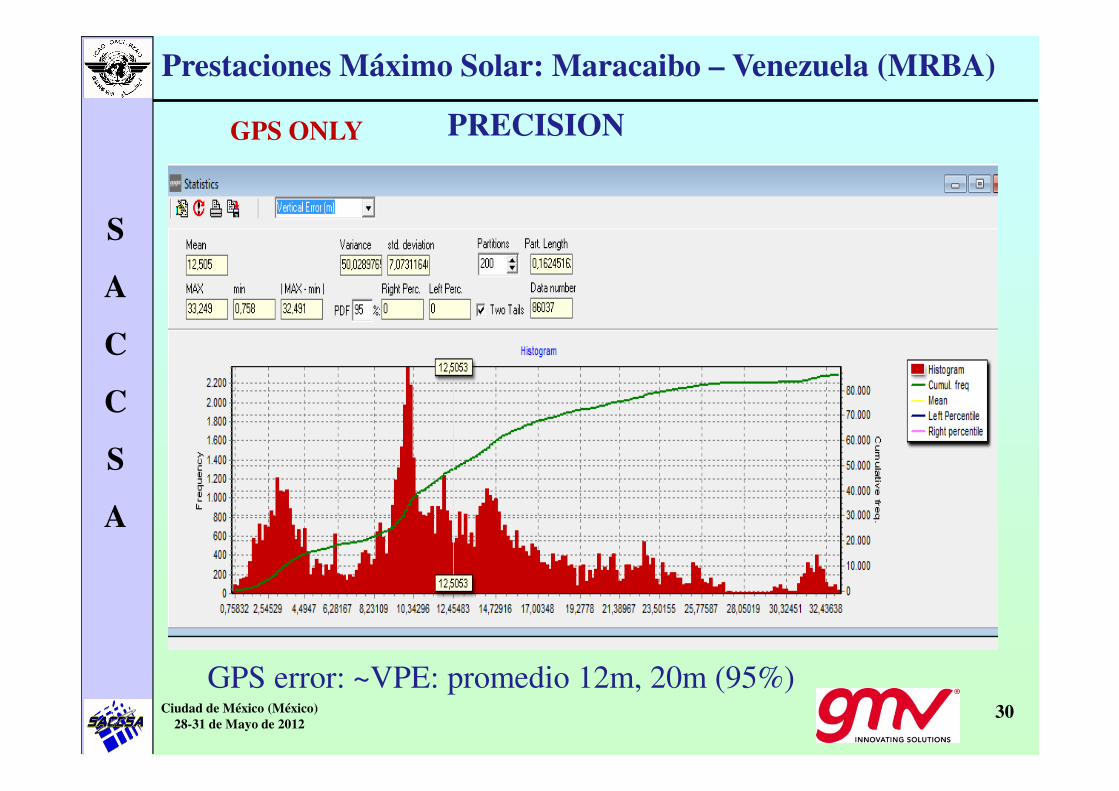
Prestaciones Máximo Solar: Maracaibo – Venezuela (MRBA)
PRECISIONGPS ONLY
GPS error: ~VPE: promedio 12m, 20m (95%)
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
31
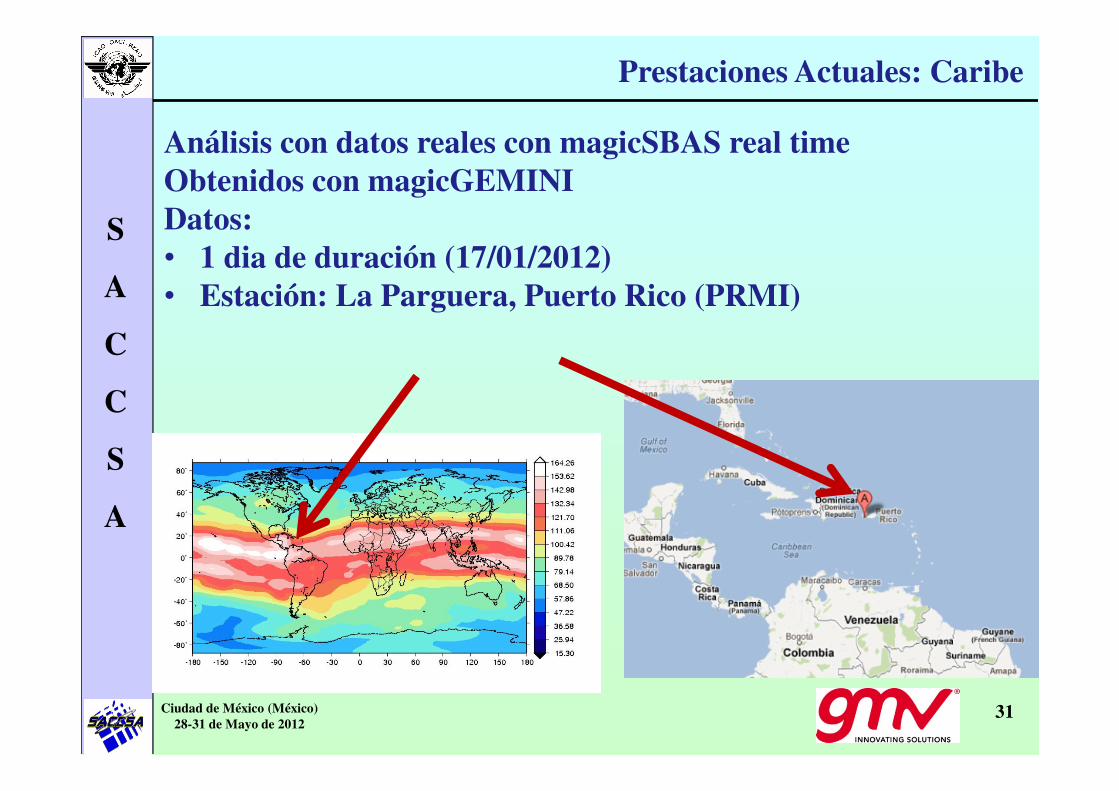
Prestaciones Actuales: Caribe
Análisis con datos reales con magicSBAS real timeObtenidos con magicGEMINIDatos:• 1 dia de duración (17/01/2012)• Estación: La Parguera, Puerto Rico (PRMI)
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
32
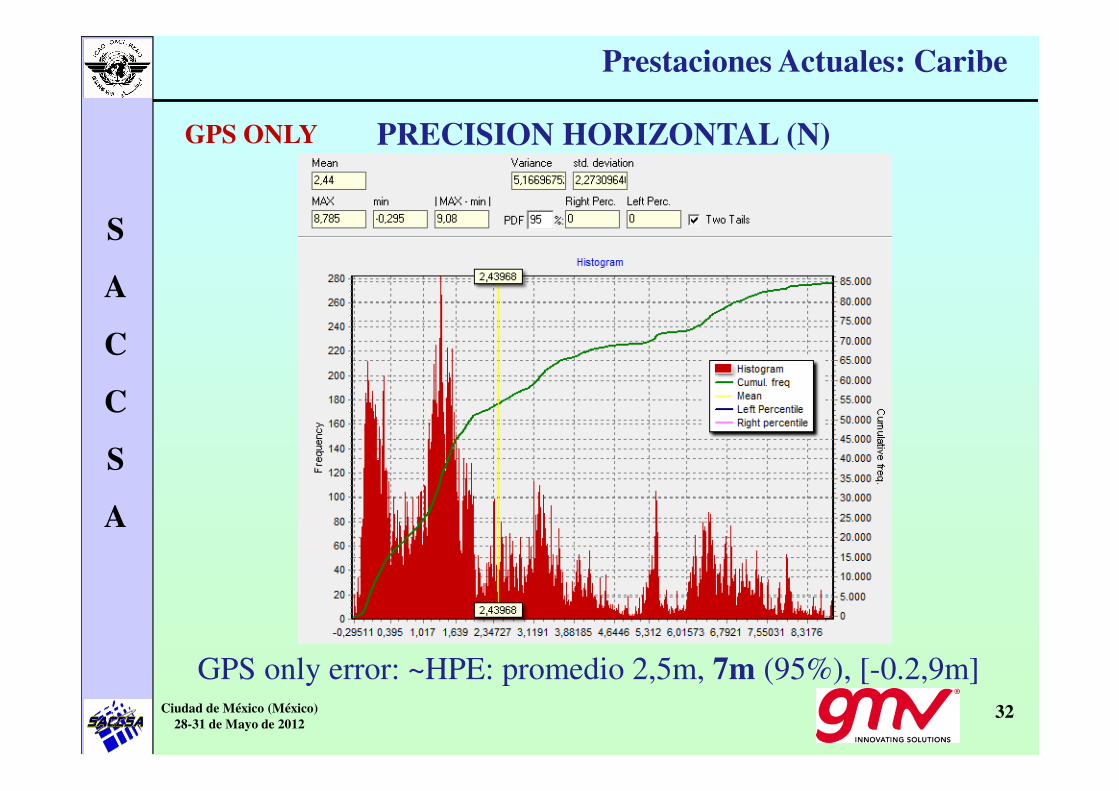
PRECISION HORIZONTAL (N)
Prestaciones Actuales: Caribe
GPS ONLY
GPS only error: ~HPE: promedio 2,5m, 7m (95%), [-0.2,9m]
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
33
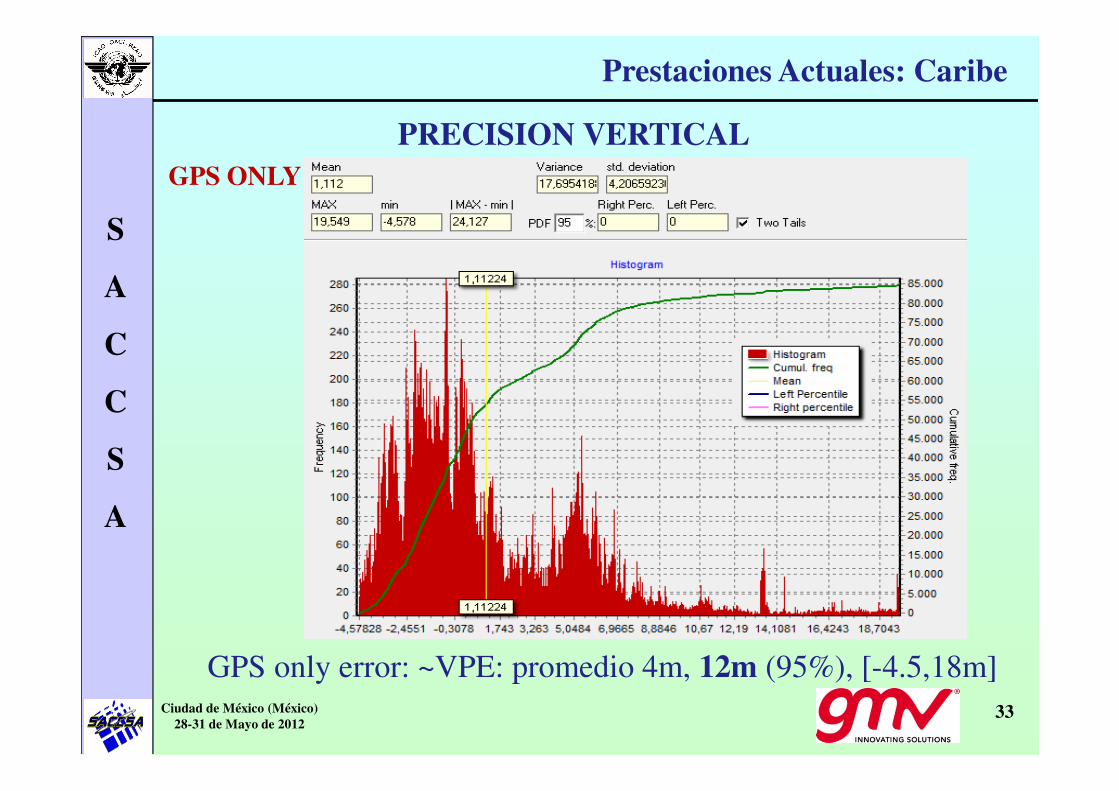
PRECISION VERTICAL
Prestaciones Actuales: Caribe
GPS ONLY
GPS only error: ~VPE: promedio 4m, 12m (95%), [-4.5,18m]
S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
34
Prestaciones Actuales
GNSS es una tecnología de moda gracias a:• La evolución de la tecnología permite introducir en el mercado
terminales atractivos y de bajo coste
• La precisión actual de GPS permite proporcionar muchos servicios
Las aplicaciones GPS crecen:• Serviciós de Navegación
• Servicios de Localización
Pero… otros mercados de usuarios no están satisfechos• Principalmente lo que buscan es:
� Mejoras de precisión (por debajo de un metro, incluso centímetros o
milímetros)
� Fiabilidad
� Garantía de servicio
� Integridad
La solución a esos problemas: en el siguiente capítulo

S
A
C
C
S
A
Ciudad de México (México)28-31 de Mayo de 2012
35
GraciasMarta Cueto Santamaría – GMV