Embed Size (px)
DESCRIPTION
Semana3.pdf
Citation preview

SEMANA 3
CAPÍTULO 3: ANÁLISIS DE SISTEMAS EN EL
DOMINIO DEL TIEMPO Y EN EL PLANO DE LA
VARIABLE COMPLEJA �s�
Gabriela Carrión Vivar, gcarrió[email protected]
Universidad Politécnica Salesiana Sede Cuenca
January 16, 2015

1
3.6 Análisis de estabilidad de sistemas
El análisis de estabilidad, consiste en determinar si existen polos en la parte derecha del sistema.
De�nición de estabilidad:
Un sistema es estable si para cualquier entrada acotada se tiene una salida acotada, independiente-mente de su estado inicial. La estabilidad o inestabilidad de un sistema es intrínseca, independientede la entrada.
Estabilidad Absoluta:
Se re�ere a la condición de si el sistema es estable o no. Si el sistema es estable, se puede determinarque tan estable es.
Estabilidad Relativa:
El grado de estabilidad absoluta es una medida de la estabilidad relativa, es decir, establece bajoque condiciones en sus variables el sistema es estable.
3.6.1 Criterio de estabilidad de Nyquist
Establece: Si la función de transferencia en lazo abierto G(s)H(s) tiene k polos en el semiplano
derecho del plano s yLı́ms→∞ G(s)H(s) = constante, para la estabilidad, el lugar geométrico
G(jω)H(jω) conforme ω varía de −∞ a ∞, debe rodear k veces el punto −1 + j0 en sentidocontrario al de las agujas del reloj.
• Se basa en el análisis de una curva (dominio de la frecuencia).
• Utiliza criterios de BODE.
• Analiza la magnitud y fase.
3.6.2 Criterio de estabilidad de Routh-Hurwitz
El criterio de estabilidad de Routh-Hurtwitz es un método que permite determinar si las raíces deun polinomio de coe�cientes constantes está en el semiplano izquiero del dominio en s, sin calcularlas raíces.
Consiste en realizar una tabulación y el análisis de signos de los elementos. Si los elementos dela primera columna no cambia de signo, las raíces están en el semiplano negativo.
Construcción del arreglo de Routh
Sea D(s) la ecuación característica del sistema:
D(s) = ansn + an−1s
n−1 + ...+ +a2s2 + a1s+ +a0 (1)
Tomando como ejemplo un polinomio de quinto orden:
D(s) = a5s5 + a4s
4 + a3s3 + a2s
2 + a1s+ a0 (2)
Se construye una tabla, ordenando los coe�cientes de la siguiente manera:
s5 a5 a3 a1s4 a4 a2 a0s3 A1 A2 A3
s2 B1 B2 B3
s1 C1 C2
s0 D1
Se consideran los siguientes aspectos para el diseño:

2
• El valor que se ubica primero será el de mayor orden.
• Cada línea se construye con la información de las dos líneas inmediatamente anteriores.
• El número de �las del arreglo disminuye progresivamente: cada dos �las se disminuye unacolumna.
A partir de la �la s3 se obtienen los coe�cientes A, B y C como se indica a continuación.
Valores de la �la correspondiente a s3
A1 =a4 � a3 − a5 � a2
a4
A2 =a4 � a1 − a5 � a0
a4
A3 =a4 � 0− a5 � 0
a4= 0
El coe�ciente A3no es necesario calcular en este caso, puesto que no hay más columnas en lasdos primeras líneas y por lo tanto su valor será A3 = 0
Valores de la �la correspondiente a s2
B1 =A1 � a2 − a4 �A2
A1
B2 =A1 � a0 − a4 �A3
A1=A1 � a0A1
B3 =a4 � 0− a5 � 0
A1= 0
De igual manera, el coe�ciente B3 tendrá como valor B3 = 0
Valores de la �la correspondiente a s1
C1 =B1 �A2 −A1 �B2
B1
C2 =B1 �A3 −A1 �B3
B1= 0
Valores de la �la correspondiente a s0
D1 =C1 �B2 −B1 � C2
C1=C1 �B2
C1
El término que se ubica en la última columna es siempre el mismo.El criterio de Routh.Hurwitz puede expresarse como:El número de raíces de la ecuación (1) en el semiplano derecho es igual al número de cambios
de signos que suceden en la pruimera columna del arreglo de Routh de dicho polinomio.Si no existen cambios de signo, el sistema es estable, el número de cambios de signo representa
el número de polos inestables.Para explicar mejor el criterio, se presentan los siguientes ejemplos:

3
EJEMPLO 3.6.2.1:
s4 + 2s3 + s2 − 2s+ 4 = 0
Como se observa, la ecuación tiene cuatro raíces, se procede a realizar el arreglo de Routh.
s4 1 1 4s3 2 −2 0s2 A1 A2
s1 B1 B2
s0 C1
Se determinan los coe�cientes para A, B y C:
A1 =(2)(1)− (1)(−2)
2= 2
A2 =(2)(4)− (1)(0)
2= 4
B1 =(2)(−2)− (2)(4)
2= −6
B2 =(2)(0)− (2)(0)
2= 0
C1 =(−6)(4)− (2)(0)
−6= 4
Reubicando los términos en el arreglo, se obtiene:
s4 1 1 4s3 2 −2 0s2 2 4s1 −6 0s0 4
Se observa que en los coe�cientes de la primera columna, los signos cambian dos veces, lo queindica que para este sistema, existen dos raíces en el semieje derecho, por lo tanto, el sistema esinestable.
EJEMPLO 3.6.2.2: Para que el sistema sea estable, se presenta la siguiente solución.
s4 + 2s3 + k1s2 + s+ 2 = 0
k1es un valor variable, permite estabilizar el sistema (estabilidad relativa). Dependiedo de estevalor, se considera al sistema estable o inestable, luego:
s4 1 k1 2s3 2 1 0s2 A1 A2
s1 B1 B2
s0 C1
Se obtienen los coe�cientes como:
A1 =(2)(k1)− (1)(1)
2=
2k1 − 1
2
A2 =(2)(2)− (1)(0)
2= 2

4
B1 =
(2k1−1
2
)(1)− (2)(2)
2k1−12
=2k1 − 9
2k1 − 1
B2 =
(2k1−1
2
)(0)− (2)(0)
2k1−12
= 0
C1 =
(2k1−92k1−1
)(2)−
(2k1−1
2
)(0)(
2k1−92k1−1
) = 2
Luego:
s4 1 k1 2s3 2 1 0
s2 2k1−12 2
s1 2k1−92k1−1 0
s0 2
De la expresión A1 = 2k1−12 se tiene que si el valor de k1 es negativo, el sistema nunca será
estable. Luego, para que el sistema sea estable, se debe cumplir:
2k1−12 > 0 (3)
2k1−92k1−1 > 0 (4)
Si con (3) el denominador es negativo, el denominador también deberá ser negativo para quese cumpla la condición.
Luego:
2k1 − 1 > 0
k1 >12
2k1 − 9 > 0
k1 >92
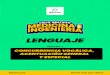
Mediante el diagrama de regiones presentado en la �gura 1, se determina para cual de los dosvalores de k1, el sistema será estable.
Figura 3.6.2.1
Mediante la �gura, se puede determinar que sistema será estable para k1 >92 .

5
EJEMPLO 3.6.2.3:
s3 + k1s2 − k2s+ 3 = 0
En este caso, se deben obtener los valores de k1y k2 para los cuales el sistema será estable. Entonces:
s3 1 −k2s2 k1 3s1 A1 A2
s0 B1
Se obtienen los coe�cientes como:
A1 =(k1)(−k2)− (1)(3)
k1=−k1k2 − 3
k1
A2 =(k1)(0)− (1)(0)
k1= 0
B1 =
(−k1k2−3
k1
)(3)− (1)(0)
−k1k2−3k1
= 3
El arreglo queda de la forma:
s3 1 −k2s2 k1 3
s1 −k1k2−3k1
0
s0 3
Estableciendo las condiciones
k1 > 0
−k1k2−3k1
> 0
se tiene:
−k1k2 − 3 > 0
−k1k2 > 3
k1k2 < −3
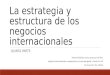
Mediante el diagrama de regiones presentado en la �gura 2, se determina las regiones de k1 yk2 para los cuales el sistema será estable.

6
Figura 3.6.2.2 Ejemplo 3.6.2.3
Se han ubicado puntos de prueba en el plano para determinar las regiones en las cuales elsistema es estable, se obtiene:
P(1,1)=⇒ (1)(1) < −3P(3,-2)=⇒ (3)(−2) < −3En P(1,1), y P(3,-2) se cumple la condición de k1 > 0, sin embargo, en P(1,1) no se cumple la
segunda condición, mientras que en P(3,-2), si se cumple.En el segundo cuadrante del plano, se cumple la condición 2, en el tercer cuadrante, no se
cumple ninguna de las condiciones.Dado que sólo se cumplen ambas condiciones en la región ubicada en el cuarto cuadrante, esta
es la región para la cual el sistema es estable.
3.6.2.1 CASOS ESPECIALES DEL CRITERIO DE Routh- Hurwitz
CASO 1: Existe un cero en la primera columna
Debido a que los términos para el arreglo de Routh se calculan como se indica en la tabulación,surge un problema cuando en la primera columna se presenta un cero, implicando que para obtenerlos coe�cientes, se debe multiplicar para cero, como se indica a continuación.
s3 d1 d3s2 d2 d4s1 0 as0 ?
Este problema se puede solucionar reemplazando el cero por ε, y luego analizar el límite cuandoε tiende a cero por la derecha.
CASO 2: Todos los términos de una �la son cero
Tal como se muestra en el arrglo a continuación, este caso se conoce como la �terminación prematuradel arreglo� y se relaciona con polinomios cuyas raíces están ubicadas en forma simétrica conrespecto al origen.

7
s3 d1 d3s2 d2 d4s1 0 0s0 ?
En este caso, se soluciona el problema escribiendo un polinomio auxiliar, con los coe�cientes dela �la anterior, en este caso será:
p̂(s) = s2 + d2s1 + d4s
0
Entonces, se reemplaza la �la de ceros con con los coe�cientes de la derivada de p̂(s)