Embed Size (px)
Citation preview
Cali - Colombia
2011
Sistema de seguimiento de un biofeedback para
extremidades inferiores (SIMEXO)
Análisis del sistema Bernardo Steven López Lozada
Johnny Francisco Bonilla Alvaran
Universidad de San Buenaventura
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 2
PROYECTO DE GRADO
“SISTEMA DE SEGUIMIENTO DE UN BIOFEEDBACK PARA EXTREMIDADES INFERIORES”
PRESENTADO POR:
JOHNNY FRANCISCO BONILLA ALVARAN CODIGO: 1065162
BERNARDO STEVEN LÓPEZ LOZADA
CODIGO: 1065574
UNIVERSIDAD DE SAN BUENAVENTURA – CALI FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIRÍA DE SISTEMAS SANTIAGO DE CALI
2011

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 3
1 REVISIONES
Versión Fecha Autor(es) Descripción
0.5 Bernardo Steven López Lozada y Johnny Francisco Bonilla Alvarán
Definición del problema, objetivos y fronteras del sistema.
Especificación de requerimientos funcionales y no funcionales.
Casos de uso del sistema. Especificación de los casos de uso
del sistema. Diagramas de casos de uso del
sistema.
1.0 Bernardo Steven López Lozada y Johnny Francisco Bonilla Alvarán
Especificación de requerimientos funcionales y no funcionales. (Corrección)
Casos de uso del sistema. (Corrección)
Especificación de los casos de uso del sistema. (Trasladados al documento del ciclo de desarrollo)
Priorización de casos de uso. Definición de los ciclos de
desarrollo. Anexados ejemplos de los formatos
de informes fiscales y balances generales.

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 4
Contenido
1 REVISIONES .................................................................................................................................. 3 2 INTRODUCCIÓN ............................................................................................................................ 7 3 DESCRIPCIÓN DEL PROBLEMA Y JUSTIFICACIÓN ......................................................................... 9 4 OBJETIVOS .................................................................................................................................. 11
4.1 Objetivo general ................................................................................................................ 11 4.2 Objetivos específicos ......................................................................................................... 11
5 MARCO DE REFERENCIA ............................................................................................................. 12 5.1 Marco teórico .................................................................................................................... 12 5.2 Exoesqueleto ..................................................................................................................... 28 5.3 Biofeedback ....................................................................................................................... 28 5.4 Segmentos ......................................................................................................................... 28
6 METODOLOGÍA .......................................................................................................................... 29 6.1 Investigación ...................................................................................................................... 29 6.2 Elicitación de requisitos ..................................................................................................... 29 6.3 Análisis de requisitos ......................................................................................................... 29 6.4 Diseño ................................................................................................................................ 29 6.5 Arquitectura ....................................................................................................................... 29 6.6 Implementación, pruebas y despliegue ............................................................................. 30
7 CRONOGRAMA DE ACTIVIDADES ............................................................................................... 31 8 FRONTERAS DEL SISTEMA .......................................................................................................... 33 9 ACTORES DEL SISTEMA. ............................................................................................................. 34
9.1 Administrador .................................................................................................................... 34 9.2 Terapeuta ........................................................................................................................... 34 9.3 Paciente ............................................................................................................................. 34 9.4 Acudiente ........................................................................................................................... 34
10 REQUERIMIENTOS FUNCIONALES...................................................................................... 35 10.1 Lista de Requerimientos .................................................................................................... 35
10.1.1 Funcionales .............................................................................................................. 35 10.1.2 No Funcionales ........................................................................................................ 36
10.2 Matriz de Requerimientos ................................................................................................. 36 11 CASOS DE USO DEL SISTEMA. ............................................................................................ 40
11.1 Listado de casos de uso. .................................................................................................... 40 11.2 Diagrama de Casos de Uso del Sistema. ............................................................................ 41
12 DEFINICIÓN DE CICLOS DE DESARROLLO. .......................................................................... 45 13 CICLO 001 DE DESARROLLO ............................................................................................... 47
Análisis ........................................................................................................................................... 47 13.1.1 Casos de usos a incluir ............................................................................................. 47 13.1.2 Casos de uso expandidos ......................................................................................... 48 13.1.3 Modelo del dominio ................................................................................................ 79
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 5
13.1.4 Diagramas de secuencia del sistema ....................................................................... 80 DISEÑO ........................................................................................................................................... 82
13.1.5 Modelo de clases ..................................................................................................... 82 13.1.6 Diagramas de secuencia detallados ........................................................................ 83 13.1.7 Modelo entidad relación ......................................................................................... 87
14 INTRODUCCIÓN A LA DOCUMENTACIÓN DE ARQUITECTURA BASE. ................................ 89 14.1 EVALUACIÓN DE TECNOLOGÍAS A APLICAR EN EL PROYECTO. ......................................... 89 14.2 DIAGRAMAS DE PAQUETES................................................................................................ 90 14.3 ARQUITECTURA DEL SOFTWARE........................................................................................ 91 14.4 PATRONES .......................................................................................................................... 91
14.4.1 Estilo arquitectónico. ............................................................................................... 91 14.4.2 Patrones arquitectónicos......................................................................................... 92 14.4.3 Patrones de diseño. ................................................................................................. 92
14.5 Diagramas de despliegue. .................................................................................................. 93 14.6 MODELO DE DATOS ........................................................................................................... 94 14.6.1 Modelo entidad relación normalizado. ........................................................................ 94 14.7 Diccionario de datos. ......................................................................................................... 95 14.7.1 Pantallas ........................................................................................................................ 95 14.7.2 Terapias ........................................................................................................................ 95 14.7.3 Personas........................................................................................................................ 95 14.7.4 Tipo_identificacion ....................................................................................................... 96 14.7.5 Simulaciones ................................................................................................................. 96 14.7.6 Tipo_persona ................................................................................................................ 96 14.7.7 Personas_permisos ....................................................................................................... 96 14.7.8 Segmentos .................................................................................................................... 97 14.7.9 Simulacion_segmentos ................................................................................................. 97 14.7.10 Usuario .......................................................................................................................... 97 14.7.11 Terapia_real .................................................................................................................. 97 14.7.12 Tipo_terapia .................................................................................................................. 98 15 BIBLIOGRAFÍA..................................................................................................................... 99
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 6
INVESTIGACIÓN
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 7
2 RESUMÉN El sistema de seguimiento de un biofeedback para extremidades inferiores contiene tres módulos generales: Modulo de configuración básica: En este modulo el administrador ingresara la información la cual es necesaria para poder utilizar el sistema, dentro de esta información básica, está contenida los segmentos, el registro de nuevas personas en el sistema como terapeutas, pacientes y acudientes, los permisos dependiendo del tipo de usuario, tipo de identificación que pueden tener la personas. Modulo de Terapia: En este modulo el terapeuta podrá registrar datos de un paciente ya registrado en el sistema, como su estatura y peso, se selecciona un tipo de terapia, se asocia a un terapeuta y se realiza una breve descripción de lo que es la terapia, luego esta información se almacena en la base de datos, ya con los datos almacenado el terapeuta ingresará los datos de la simulación tales como el tiempo de duración de la terapia y los ángulos máximo, mínimo e inicial de cada segmento (Tibia, fémur y tronco), ya con estos datos almacenados el sistema procede automáticamente a consultar los ángulos, el tiempo, el peso y la altura del paciente al cual se le está realizando la terapia para poder aplicar el modelo matemático y obtener los torques de cada segmento y almacenarlos a su respectiva simulación. Terminada la simulación el terapeuta debe ingresar los ángulos máximo y mínimo de cada segmento de la terapia real. Modulo de reportes: En este modulo se podrán consultar los datos obtenidos en las terapias a través de dos reportes, uno que nos muestra la trayectoria angular de uno de los segmentos que seleccione el usuario y un reporte de comparación de torques entre los segmentos fémur y tronco.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 8
3 INTRODUCCIÓN
En la actualidad los diferentes grupos humanos, debido a fenómenos asociados con el estrés, los malos hábitos alimenticios y los efectos económicos, son propensos en un alto porcentaje a desarrollar enfermedades neurológicas de tipo cerebro vasculares (ACV), lesiones medulares (LM) o daños cerebrales traumáticos. Las enfermedades neuromusculares causan, dependiendo del grado de afectación, una discapacidad motora, la cual puede acarrear graves problemas en la marcha incluso haciendo imposible el caminar o mantenerse en posición de equilibrio vertical. La aplicación de un programa de rehabilitación es crucial para recobrar parte de la movilidad perdida en aquellos pacientes que tienen una discapacidad parcial de médula. Hoy en día, la rehabilitación de la marcha y las extremidades inferiores se basan en fisioterapia manual y ejercicios musculares específicos. El uso de terapia mediante robots ha mejorado los procedimientos de rehabilitación actuales, permitiendo así una rehabilitación de mayor calidad y aumentando también la motivación del paciente, quien se sentirá más independiente de la disponibilidad de fisioterapeutas, mejorando repetitividad y motivación. “En los últimos años se han abierto varias líneas de investigación de plataformas robóticas para la rehabilitación de la marcha, algunas de ellas han tenido éxito, y se caracterizan por ser portables, entregando la posibilidad de aplicación real en casos de rehabilitación funcional” (BUREAU, y otros, 2007). El diseño de un exoesqueleto (estructura de cierta rigidez que es montada sobre el cuerpo para restaurar, rehabilitar o potenciar la función motora humana), como solución que incite a un usuario en proceso de rehabilitación a interactuar con un mecanismo instalado en su cuerpo, evitando un mero movimiento pasivo e inducido de su extremidad, se constituye en el recurso que permitirá desarrollar programas de rehabilitación en escenarios distintos al centro médico especializado. Este proyecto “Sistema de Seguimiento de un Biofeedback para Extremidades Inferiores” inicialmente obtendrá un modelo dinámico, teniendo en cuenta la interacción humano-máquina, a partir de las leyes físicas que describan al sistema, se parametrizará y se validará el modelo a través de un software utilizando Matlab y Java. Este módulo presentara la administración y simulación del sistema de recuperación de extremidades inferiores basado en biofeedback y generara reportes sobre el comportamiento de los torques ubicados en los segmentos de la persona en su tratamiento.En este documento se presenta la descripción del problema, su justificación, los objetivos general y específicos de la investigación; un marco teórico que pretende presentar los conceptos básicos sobre la teoría de la biomecánica humana, incluyendo los movimientos que incluyan esfuerzos sobre la cadera y rodilla en un adulto que se encuentre estático y su modelado matemático; una metodología y cronograma para el desarrollo del proyecto. Finalmente, se espera con este proyecto, contribuir a la investigación y al desarrollo tecnológico del análisis del movimiento humano, el desarrollo del control para los sistemas biomecatrónicos en Colombia y el análisis biomecánico de los individuos con discapacidad motora total o parcial.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 9
4 DESCRIPCIÓN DEL PROBLEMA Y JUSTIFICACIÓN La caminata bípeda, actividad básica de locomoción desarrollada por los humanos y que hace parte de su cotidianidad, requiere de una excelente integración sensorial y motriz para coordinar movimientos de las diferentes articulaciones; logrando así un sistema eficiente de desplazamiento en un ambiente que cambia permanentemente. El interés por obtener sistemas robóticos bípedos, o mecanismos de simulación que representen la marcha de los individuos, se ha centrado particularmente en obtener estudios cuantitativos con el propósito de mejorar el tratamiento de pacientes con lesiones o enfermedades asociadas al sistema músculo-esquelético o simplemente para mejorar la calidad de vida de los individuos habilitándolos para ejercer labores asociadas al desplazamiento. Según cifras del DANE, en Colombia, de cada 100 individuos con limitaciones, el 29.3% de esa población tiene limitaciones para caminar, esto equivale a aproximadamente 770.128 habitantes que podrían ser asistidos por un exoesqueleto para mejorar su calidad de vida y ser más productivos para la sociedad. El problema general ha sido abordado por investigadores del Grupo de Investigación en Control Industrial (GICI) y en este momento cuentan con dos proyectos en curso, uno para rehabilitación de rodilla “Diseño y construcción de un exoesqueleto para rehabilitación asistida de pacientes con lesiones de rodilla” (aprobado por la Universidad del Valle) y otro para miembros inferiores “Exoesqueleto para rehabilitación asistida de pacientes con pérdida parcial o completa del movimiento de los miembros inferiores. Fase 1: equilibrio” (aprobado por Colciencias). El exoesqueleto se considera como un proceso multivariable, altamente no lineal y susceptible de ser controlado, cuyo modelado se hace a partir de dinámica inversa, donde se expresan las fuerzas y pares que intervienen en función de las evolución de las coordenadas articulares y sus derivadas. Para modelar el comportamiento del mecanismo en la interacción humano máquina orientado al desempeño de equilibrio y desplazamiento es necesario utilizar información de las variables que harán parte de las expresiones matemáticas. Esta información está relacionada con: datos antropométricos, como longitud de extremidades, ubicación del centro de gravedad y momentos de inercia respecto al centro de gravedad; datos cinemáticos, los cuales se obtienen a partir a análisis cinematográfico (pasillo de marcha) donde se determinan ángulos de cada articulación de los cuales se puede extraer información (con una herramienta de cálculo adecuada) de velocidad y aceleración angular, lo que permite finalmente obtener datos de velocidad y aceleración lineal en cualquier punto de las extremidades inferiores; y datos que involucren la fuerza de reacción del piso, que son obtenidos con el pasillo de marcha donde son necesarias dos componentes: vertical y antero posterior de la fuerza de reacción. Adicionalmente, se incluyen fuerzas externas como las de coriolis, centrípetas y gravitacionales que afectan el posicionamiento normal del exoesqueleto y se calculan a partir de las posiciones angulares de las articulaciones.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 10
El principal inconveniente se concentra en modelar un sistema bípedo que presenta un cambio continuo en sus características de estabilidad producido por el balanceo de sus extremidades inferiores especialmente porque el contacto entre las puntas y el piso no es controlado por actuadores. Así mismo, la estabilidad, sea estática ó dinámica, denota aproximaciones diferentes para lograr la marcha del mecanismo. Pensando en la caminata dinámica, el centro de gravedad puede estar fuera de la región de soporte por un tiempo finito, buscando alcanzar una caminata muy parecida a la humana permitiendo velocidades de marcha altas y con mayor eficiencia en el movimiento. Desde el punto de vista del control el principal reto es poder diseñar un controlador, a partir del estudio del modelo dinámico de la caminata bípeda, que desarrolle la tarea de equilibrio y marcha con retroalimentación de sensores adecuados. Las principales condiciones que debe cumplir el sistema exosqueletal son: lograr estabilidad de altura, estabilidad de giro, estabilidad de velocidad y balancear la pierna de forma que las posiciones consecutivas de los pies permitan las estabilizaciones mencionadas. Adicionalmente se pretende, de manera particular, realizar el control de un exoesqueleto para la articulación de la rodilla aprovechando los modelos matemáticos que se implementen para la extremidad completa, constituyéndose en un aporte al proyecto aprobado por Univalle al grupo GICI. Que tan útil puede llegar a ser una aplicación donde se implemente un modelo matemático no lineal que describa el comportamiento dinámico del movimiento de segmentos y equilibrio del cuerpo humano en interacción con un sistema electromecánico externo, permita representar movimientos y diseñar estrategias de control clásicas de exoesqueletos de miembros inferiores para pacientes con discapacidad motora parcial o total.

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 11
5 OBJETIVOS
4.1 Objetivo general
Implementar el modelo matemático de tres segmentos utilizando un software creado a la medida, para visualizar el comportamiento dinámico de las estrategias de control para un biofeedback de miembros inferiores incluyendo los segmentos que interactúen con la cadera y rodilla, y poder administrar la información obtenida sirviendo de utilidad para la toma de decisiones del terapeuta.
4.2 Objetivos específicos
Diseñar un software que provea el modelo dinámico para un biofeedback de miembros
inferiores un entorno gráfico.
Implementar los patrones de diseño y la arquitectura necesaria para satisfacer las
necesidades del software.
Realizar pruebas para verificar la coherencia con resultados obtenidos en papel.
Diseñar una interfaz de fácil comprensión para los distintos usuarios del sistema.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 12
6 MARCO DE REFERENCIA
5.1 Marco teórico
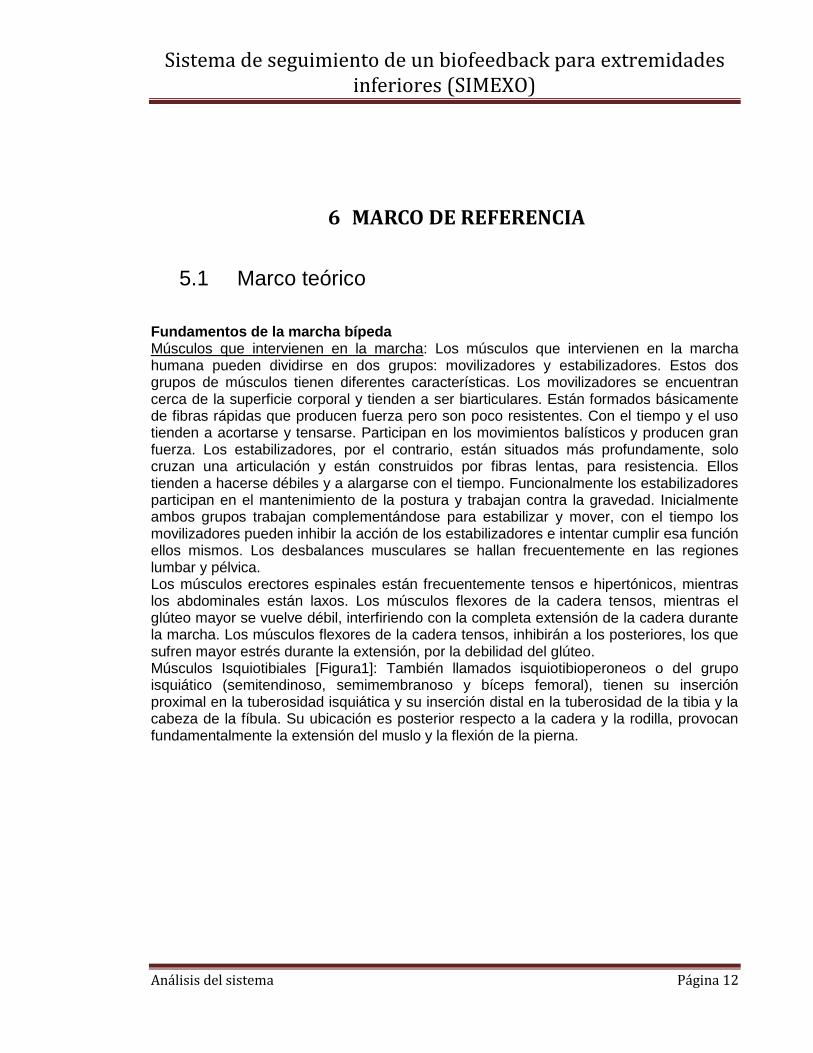
Fundamentos de la marcha bípeda Músculos que intervienen en la marcha: Los músculos que intervienen en la marcha humana pueden dividirse en dos grupos: movilizadores y estabilizadores. Estos dos grupos de músculos tienen diferentes características. Los movilizadores se encuentran cerca de la superficie corporal y tienden a ser biarticulares. Están formados básicamente de fibras rápidas que producen fuerza pero son poco resistentes. Con el tiempo y el uso tienden a acortarse y tensarse. Participan en los movimientos balísticos y producen gran fuerza. Los estabilizadores, por el contrario, están situados más profundamente, solo cruzan una articulación y están construidos por fibras lentas, para resistencia. Ellos tienden a hacerse débiles y a alargarse con el tiempo. Funcionalmente los estabilizadores participan en el mantenimiento de la postura y trabajan contra la gravedad. Inicialmente ambos grupos trabajan complementándose para estabilizar y mover, con el tiempo los movilizadores pueden inhibir la acción de los estabilizadores e intentar cumplir esa función ellos mismos. Los desbalances musculares se hallan frecuentemente en las regiones lumbar y pélvica. Los músculos erectores espinales están frecuentemente tensos e hipertónicos, mientras los abdominales están laxos. Los músculos flexores de la cadera tensos, mientras el glúteo mayor se vuelve débil, interfiriendo con la completa extensión de la cadera durante la marcha. Los músculos flexores de la cadera tensos, inhibirán a los posteriores, los que sufren mayor estrés durante la extensión, por la debilidad del glúteo. Músculos Isquiotibiales [Figura1]: También llamados isquiotibioperoneos o del grupo isquiático (semitendinoso, semimembranoso y bíceps femoral), tienen su inserción proximal en la tuberosidad isquiática y su inserción distal en la tuberosidad de la tibia y la cabeza de la fíbula. Su ubicación es posterior respecto a la cadera y la rodilla, provocan fundamentalmente la extensión del muslo y la flexión de la pierna.

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 13
Músculos Isquiotibiales Músculo flexores de la cadera Figura 1. Músculos isquiotibiales Figura 2. Músculos flexores de la cadera Músculo cuadrado lumbar: Situado posterior y lateralmente respecto a la columna vertebral, este músculo ayuda a soportar el peso de la pelvis cuando se está apoyado sobre uno de los miembros inferiores. El papel de este músculo en la extensión, hiperextensión y en la flexión lateral del tronco, es afectado por la posición, o mejor, por los cambios en la posición del tronco. Músculos flexores de la cadera [Figura2]: Los músculos flexores de la cadera (tensor de la fascialata, sartorio, pectíneo, recto femoral, aductores largo y breve) se hallan ubicados por delante de la articulación de la cadera. Entre ellos, excepto el pectíneo y los aductores, son músculos biarticulares, pues sobrepasan la articulación de la rodilla, por lo tanto son movilizadores y tienden a acortarse. El recto femoral, además de participar en la flexión de la cadera actúa, con el resto de las cabezas del cuadriceps femoral, en la extensión de la rodilla, es decir, en dos movimientos que se realizan en dirección contraria. (MANZUR RODÉS, 2008). Descripción de las fases del caminado humano: El caminado del ser humano es un proceso de locomoción bastante complicado, debido a que cada individuo tiene su manera particular de hacerlo. El movimiento ocurre en tres planos como se muestra en la figura 3.

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 14
Figura 3. Planos de movimiento. Tomado de (VAUGHAN, DAVIS, & O.CONNOR, 1999) Plano Medio Sagital: Es el plano que divide imaginariamente al cuerpo en sentido antero posterior a lo largo de la línea media y lo divide en dos partes iguales, derecha e izquierda. Plano frontal: Es un plano vertical que pasa a través del cuerpo formando un ángulo recto (de 90°) con el plano medio y divide imaginariamente al cuerpo en dos partes, la anterior o facial y la posterior o dorsal. Plano Horizontal: Es el plano que divide al cuerpo o cualquier parte de l en dos mitades, superior o cefálica e inferior o caudal. Durante este desplazamiento cada parte del cuerpo tiene un movimiento específico que colabora a mantener el equilibrio y a que sea posible desplazarse erguidos. Sin embargo, por más particular e individual que sea el caminado de una persona, existen ciertas fases que son reconocibles y que se pueden generalizar. Lo primero que hay que comprender es que el caminar es un proceso cíclico, por lo tanto repetitivo, razón por la cual es posible dividirla en fases. La manera como se determinan las fases que componen el proceso, depende de la forma como se esté analizando el proceso de caminar: a) Se puede analizar haciendo referencia a todo el cuerpo y cómo es soportado por cada pierna, o b) se puede analizar el movimiento que realiza cada pierna por separado. En el proceso de locomoción bípeda el cuerpo se mueve de forma erguida hacia adelante, siendo su peso soportado alternativamente por ambas piernas. Mientras el cuerpo se desplaza sobre la extremidad soporte, la otra pierna se balancea como preparación para el siguiente apoyo. Siempre un pie se encuentra sobre el piso, y en el periodo de transferencia del peso del cuerpo de la pierna de soporte a la otra, existe un breve lapso de tiempo en el cual ambos

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 15
pies descansan simultáneamente sobre el suelo. Al aumentar la velocidad de la marcha, los periodos bipodales o de doble soporte se tornan más cortos, hasta que el sujeto eventualmente comienza a correr, siendo así reemplazados por lapsos breves de tiempo en los que ambos pies se encuentran en el aire. El plano sagital se identifica con el plano de progresión de movimiento; los movimientos más importantes de las articulaciones que permiten la caminata ocurren en este plano, aunque se requieren movimientos adicionales en el plano frontal para lograr un adecuado balance, y en el plano transversal para mejorar la eficiencia energética de la caminata. Durante un ciclo de marcha completo cada pierna pasa por una fase de apoyo, durante la cual el pie se encuentra en contacto con el suelo y por una fase de oscilación, en la cual el pie se halla en el aire mientras se desplaza hacia adelante como preparación para el siguiente apoyo. La fase de apoyo (stance phase) comienza con el contacto inicial y finaliza con el despegue del antepié. Se destacan cinco momentos a saber: contacto inicial, inicial de apoyo o de respuesta de carga, media del apoyo, final del apoyo y previa a la oscilación. La fase de oscilación (swing phase) transcurre desde el instante de despegue del antepié hasta el contacto con el suelo y la constituyen tres momentos: inicial de oscilación, media de la oscilación y final de la oscilación. (VAUGHAN, DAVIS, & O.CONNOR, 1999). Centro de Masa y Centro de Presión: El control postural implica el dominio de la posición del cuerpo en el espacio con los objetivos de estabilidad y orientación. La estabilidad postural, también llamada equilibrio, se define como la capacidad para mantener el centro de masa (COM) corporal dentro de la base de sustentación. Por otra parte, la orientación postural se refiere a la capacidad de mantener una correcta relación entre los propios segmentos del cuerpo y entre éstos y el entorno a la hora de realizar una tarea. (FORT V., ROMERO R., COSTA T., BAGUR C., LLORET R., & MOTAÑOLA V., 2009) El COM de un cuerpo es la localización neta del centro de masa en tres dimensiones y constituye el peso ponderado del centro de masa de cada segmento. Se debe tener presente que cada segmento en movimiento causa que el COM total del cuerpo varíe constantemente con el tiempo. Esto significa que cada intervalo de tiempo es necesario recalcularlo, obligando a que se conozca las trayectorias del COM de cada segmento del cuerpo. Si se considera un elemento de tres segmentos como se muestra en la figura 4, el COM total del sistema está localizado en (Xo,Yo) y cada una de esas coordenadas puede ser calculada separadamente tal como se muestra en las siguientes ecuaciones:
m1 (X1,Y1)
m2 (X2,Y2)
m3 (X3,Y3)
m0 (X0,Y0)
x
y
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 16
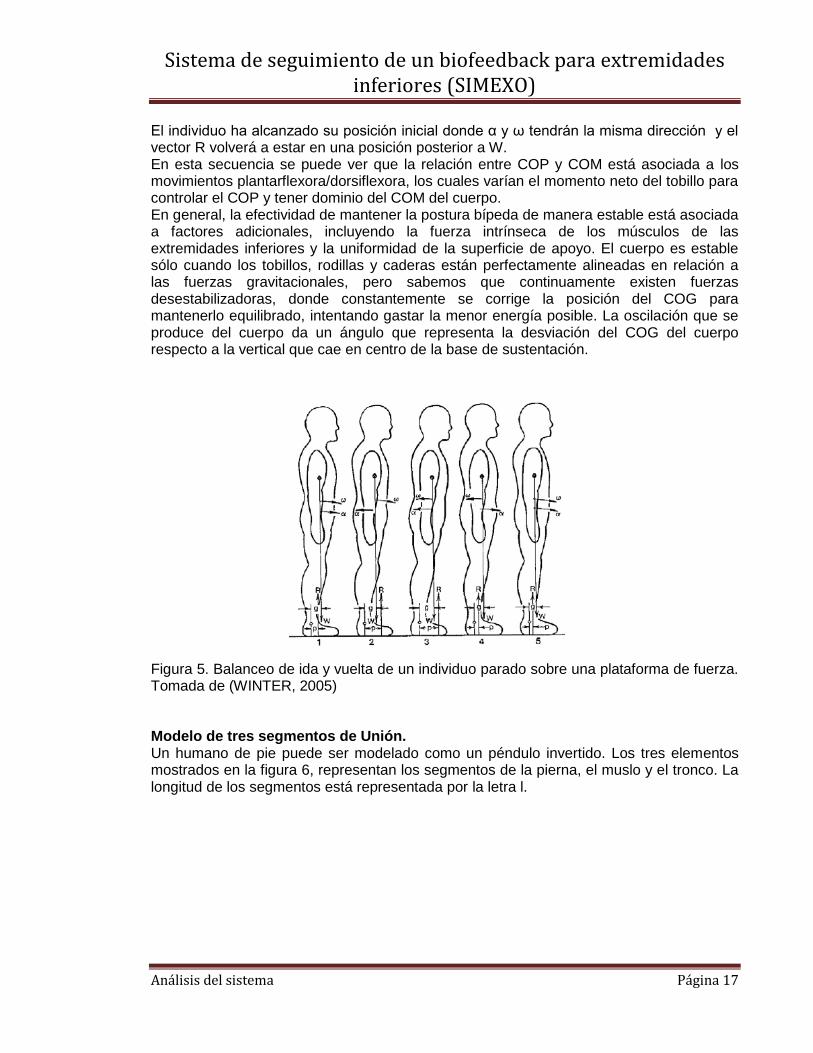
Figura 4. Representación de los COM de un elemento de tres segmentos. X_o=(m_1 x_1+m_2 x_2+m_3 x_3)/(m_1+m_2+m_3 ) Y_o=(m_1 y_1+m_2 y_2+m_3 y_3)/(m_1+m_2+m_3 ) La localización del COM en la dirección vertical es llamada algunas veces centro de gravedad (COG). La trayectoria de esta línea vertical del COM dirigida a tierra, nos permite comparar las trayectorias del COM y el centro de presión (COP). La trayectoria del COP es totalmente independiente del COM y corresponde a una línea perpendicular al piso que representa el vector fuerza de reacción de una simple plataforma de fuerza, asumiendo que todos los puntos de contacto del cuerpo están sobre la plataforma. Dicha fuerza se obtiene del promedio ponderado de todas las fuerzas actuando sobre el plato de fuerza. Estas fuerzas dependen de la posición de los pies y del control motor de los músculos del tobillo. Entonces, el COP es la respuesta neuromuscular ante desequilibrios del COM del cuerpo. (WINTER, 2005). En la anterior figura se demuestra la diferencia entre COM y COP. Hace referencia a un sujeto balanceándose adelante y atrás mientras permanece de pie sobre una plataforma de fuerza. Se muestran cinco cambios de situación correspondientes a tiempos distintos: El individuo tiene el COM del cuerpo, representado por un vector vertical W, delante del COP, representado por el vector vertical de reacción R. Los dos actúan a una distancia g y p del tobillo respectivamente. La Magnitud de W y R son iguales y constantes mientras exista la posición de equilibrio. Se asumirá que el cuerpo será pivotado alrededor de los tobillos y se despreciará las masas de los pies. Actuarán dos momentos, uno Rp en el sentido contrario horario y Wg en sentido horario. Tiempo 1 En este tiempo, Wg > Rp y el cuerpo experimentará una aceleración angular α en sentido horario, lo cual repercutirá en la aparición de una velocidad angular ω en el mismo sentido. Para corregir este desequilibrio hacia adelante, el sujeto incrementará su actividad plantarflexora la cual incrementará el COP. Tiempo 2 El COP está en la posición anterior del COM. Ahora se tiene que Rp > Wg. Entonces, α cambiará de dirección y causará un decremento de ω. Tiempo 3 Ahora α y ω están en sentido contrahorario y el cuerpo experimentará un balanceo hacia atrás. Tiempo 4 El individuo responde al balanceo hacia atrás decrementando su COP por reducción de su actividad flexoplantar. Ahora Wg > Rp causando que α cambie de sentido y después de un periodo de tiempo haga que ω disminuya y cambie de sentido y el cuerpo retorne a su posición inicial. Tiempo 5
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 17
El individuo ha alcanzado su posición inicial donde α y ω tendrán la misma dirección y el vector R volverá a estar en una posición posterior a W. En esta secuencia se puede ver que la relación entre COP y COM está asociada a los movimientos plantarflexora/dorsiflexora, los cuales varían el momento neto del tobillo para controlar el COP y tener dominio del COM del cuerpo. En general, la efectividad de mantener la postura bípeda de manera estable está asociada a factores adicionales, incluyendo la fuerza intrínseca de los músculos de las extremidades inferiores y la uniformidad de la superficie de apoyo. El cuerpo es estable sólo cuando los tobillos, rodillas y caderas están perfectamente alineadas en relación a las fuerzas gravitacionales, pero sabemos que continuamente existen fuerzas desestabilizadoras, donde constantemente se corrige la posición del COG para mantenerlo equilibrado, intentando gastar la menor energía posible. La oscilación que se produce del cuerpo da un ángulo que representa la desviación del COG del cuerpo respecto a la vertical que cae en centro de la base de sustentación. Figura 5. Balanceo de ida y vuelta de un individuo parado sobre una plataforma de fuerza. Tomada de (WINTER, 2005) Modelo de tres segmentos de Unión. Un humano de pie puede ser modelado como un péndulo invertido. Los tres elementos mostrados en la figura 6, representan los segmentos de la pierna, el muslo y el tronco. La longitud de los segmentos está representada por la letra l.

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 18
Figura 6. Tres Segmento
En la figura 6se representa el modelo de tres segmentos que modela un exoesqueleto de pie como un péndulo invertido. Los tres elementos que se muestran representan la tibia(2), el fémur(4) y HAT (cabeza, tronco y cadera) (6). Las longitudes de los segmentos
se identifica con las letras ; la localización de los centros de masa de cada segmento por a, medidos respecto a su extremo distal. Los torques en las uniones , , y representan torques en las articulaciones de tobillo, rodilla y cadera respectivamente [5]. Una articulación motorizada se ubica en la rodilla (posición 3) y otra en la cadera (posición 5) y tienen masas y respectivamente. En términos generales, el modelo tiene cuatro parámetros que se pueden hallar a partir del planteamiento de las ecuaciones: ángulo que forma el segmento 1 (tibia) con la
horizontal; , ángulo que forma el segmento 2 (fémur) con la horizontal y; , ángulo que forma el segmento 3 (HAT: cabeza, brazo y tronco) con la horizontal. Donde los términos
de entrada serían los torques , , y que aparecen en las articulaciones (Cinemática directa). Si al contrario, se quiere conocer el valor de los torques que deben ser aplicados al sistema para lograr ciertas orientaciones del exoesqueleto, los términos de entrada son
, y (Cinemática inversa). Las dos situaciones se presentan en este documento. Para el desarrollo del modelo se tienen en cuenta los siguientes supuestos: Cada segmento tiene un valor de masa determinado localizado como una masa puntual en lo que se conoce como centro de masa1 (CM). La ubicación de cada CM permanece fija durante el movimiento del segmento. Las articulaciones en la rodilla y cadera son motorizadas. Los momentos de inercia de la masa de cada segmento y el motor permanecen constantes durante el movimiento.
1Los términos centro de masa (CM) y centro de gravedad (CG) son a menudo empleados indistintamente, el más general es CM, mientras que el CG se refiere al CM en un solo eje definido por la dirección de la gravedad. Cuando se utilizan los ejes coordenados (x-y) es necesario el uso de CM.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 19
La longitud de cada segmento permanece constante durante el movimiento. Los segmentos permanecen rígidos y no se deforman con el movimiento. En el modelo, debido a que la masa del actuador en un caso dado puede ser comparable con la masa del eslabón que une las articulaciones, es necesario analizar el efecto del motor ubicado en los puntos 3 y 5 sobre el desplazamiento y la velocidad en los demás segmentos.
El centro de giro del segmento está situado a una distancia de la articulación motorizada y a una distancia del centro de masa (CM) del segmento, se debe tener presente que la ubicación final del CM de cada segmento estará dada por la expresión:
Donde representa la distancia de la masa tomando como referencia el punto de giro
y la distancia del CM del segmento. Lo anterior implica que: Si la masa del segmento es equiparable con la masa de la articulación motorizada, se presenta un aumento de la distancia del CM con respecto a su extremo de giro del segmento. Si la masa del segmento es significativamente menor que la masa del actuador, el CM se ubica directamente en el mismo punto donde está la articulación motorizada. En las situaciones señaladas, se percibe que el CM total de los tres segmentos se verá afectado por el peso de las articulaciones motorizadas, siendo esto un parámetro importante en la selección del actuador del exoesqueleto. El movimiento de cada uno de los segmentos hace que la posición del CM sea variable
con el tiempo, pero asumiendo que el exoesqueleto está quieto en un instante , las coordenadas rectangulares del CM estarán dadas por:
Ec. 1.1
Donde, l1cos( )+ l2cos( )+ rcm3 cos(

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 20
Ec. 1.2
Donde
De acuerdo al esquema de la figura 5, se encuentran los desplazamientos de cada uno de los puntos señalados, denotados por los siguientes vectores de desplazamiento(Winter, 2005): desp(1)=[0 , 0]
desp(2)=[rcm1cos( ) , rcm1sin( )] desp(3)=[ l1cos( ) , l1sin( )] desp(4)=[l1cos( )+rcm1cos( ),l1sin( )+rcm2sin( )]
desp(5)=[l1cos( )+ l2cos( ) , l1sin( )+ l2sin( )] desp(6)=[l1cos( )+l2cos( )+rcm3cos( ),l1sin( )+ l2sin( )+ rcm3sin )] Las velocidades de los puntos señalados en la figura 5 quedan de la forma: - - - En este modelo la localización del CM de cada segmento es importante para relacionarla con un análisis de movimiento traslacional en el espacio. Debido a que hay aceleraciones presentes en los segmentos, es necesario conocer la resistencia inercial debido a los movimientos circulares existentes. En el sentido de rotación se tiene la expresión , donde es el momento de la fuerza causada por la aceleración angular . Cuando un cuerpo rígido está libre de moverse en las tres direcciones, tiene varios ejes de rotación. Es así como aparece el concepto de tensor de inercia como una generalización del momento de inercia. Teóricamente representa una distribución de masa de un cuerpo rígido. En general está dado por la expresión:
Seleccionando un sistema de referencia local (LRS) apropiado es posible simplificar la matriz a una matriz diagonal. Autores como (2) emplean representaciones geométricas para determinar el tensor de Inercia de cada uno de los segmentos y así realizar los cálculos correspondientes. Por otra parte, hay que señalar que la mayoría de los segmentos del cuerpo no giran alrededor de su centro de masa, sino en la articulación

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 21
del extremo proximal (Winter, 2005), Esto es un elemento importante porque en la medida que la ubicación del CM se aproxime al centro de giro, su efecto inercial será mínimo sobre el sistema del exoesqueleto. Con ayuda del teorema de ejes paralelos es posible encontrar una relación entre el momento de inercia dado en el CM ( ) y el que se presenta en la articulación ( ) a través de la ecuación:
Ec. 1.3 Donde , es la masa del segmento; , la longitud y es la distancia entre el centro de masa y el extremo distal. Luego, se determina la energía cinética de cada punto como una contribución de una
energía traslacional dada por
, siendo la masa del elemento en cuestión y la
velocidad; y una energía rotacional calculada como
, donde corresponde al
momento de inercia y la velocidad angular del elemento respectivo. Igualmente se determina la energía potencial, dada por la expresión , donde corresponde a la masa del elemento, la constante gravitacional y la altura. De esta manera se construye el lagrangiano del sistema como Ec. 1.4
Las ecuaciones de movimiento se obtienen a partir de las correspondientes relaciones de Euler-Lagrange (Winter, 2005)
Ec.1.5
Donde es un vector de fuerzas generalizadas2 y torques aplicados. La primera ecuación es:
Ec.1.6
La segunda ecuación estará dada por:
Ec.1.7
La tercera ecuación resulta de:
Ec. 1.8
2Las fuerzas generalizadas son aquellas que hacen trabajo cuando su coordenada asociada varía mientras las otras coordenadas del sistema permanecen constantes.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 22
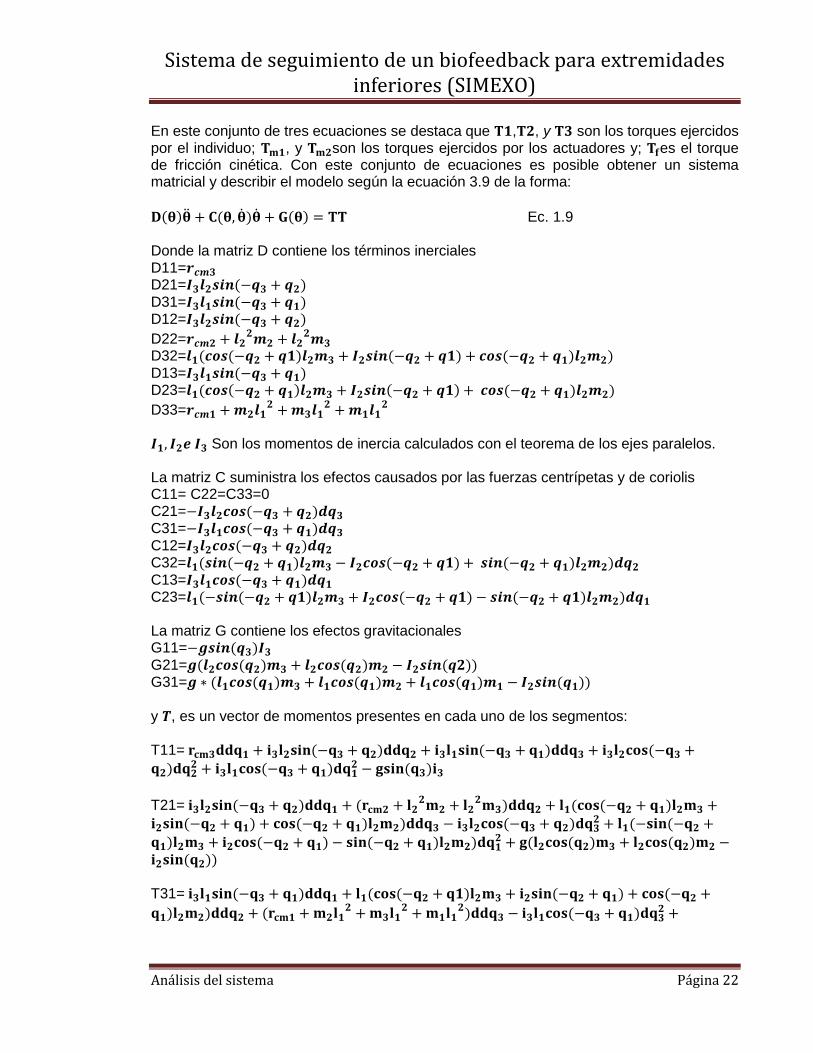
En este conjunto de tres ecuaciones se destaca que , , y son los torques ejercidos por el individuo; , y son los torques ejercidos por los actuadores y; es el torque de fricción cinética. Con este conjunto de ecuaciones es posible obtener un sistema matricial y describir el modelo según la ecuación 3.9 de la forma:
Ec. 1.9 Donde la matriz D contiene los términos inerciales D11= D21= D31= D12=
D22=
D32= D13= D23=
D33=
Son los momentos de inercia calculados con el teorema de los ejes paralelos. La matriz C suministra los efectos causados por las fuerzas centrípetas y de coriolis C11= C22=C33=0 C21= C31= C12= C32=
C13= C23= La matriz G contiene los efectos gravitacionales G11=
G21= G31=
y , es un vector de momentos presentes en cada uno de los segmentos: T11=
T21=
T31=

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 23
Se considera como:
Ec. 1.10
Siendo los torques que actúan sobre una juntura como resultado de la acción voluntaria
de los músculos y , los torques generados por actuadores artificiales del exoesqueleto(DARIUSH, 2005). Simulación y Resultados. El cálculo de cada una de las matrices obtenidas demanda la utilización de una herramienta de cálculo. Es así como se acude al uso de Simulink de Matlab como herramienta de cálculo y simulación de cada una de las situaciones que se generan a partir de la ecuación 3.9. En el siguientemodelo [figura 7] se muestra el cálculo de torques tal como se expresa en la ecuación 3.9. Aquí la entrada está dada por la posición angular en radianes de cada segmento, la estatura en metros y la masa en kilogramos del individuo. Los torques obtenidos se pueden asociar a algún tipo de actividad, especialmente de flexión y/o extensión, dependiendo del individuo que porte el exoesqueleto (análisis cinemático inverso).
Figura 7. Modelo de torques Por otra parte se puede obtener resultados de posición, velocidad y aceleración a partir de los torque aplicados a los segmentos, tal como se muestra en el siguiente modelo.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 24
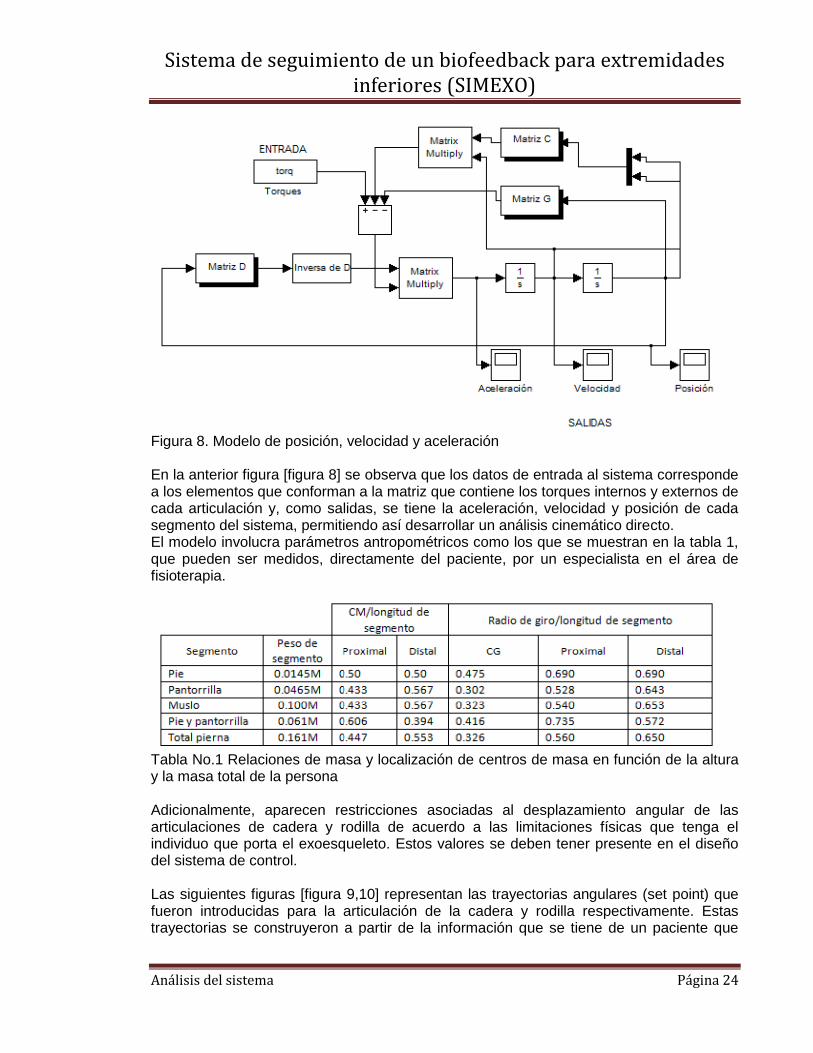
Figura 8. Modelo de posición, velocidad y aceleración En la anterior figura [figura 8] se observa que los datos de entrada al sistema corresponde a los elementos que conforman a la matriz que contiene los torques internos y externos de cada articulación y, como salidas, se tiene la aceleración, velocidad y posición de cada segmento del sistema, permitiendo así desarrollar un análisis cinemático directo. El modelo involucra parámetros antropométricos como los que se muestran en la tabla 1, que pueden ser medidos, directamente del paciente, por un especialista en el área de fisioterapia.
Tabla No.1 Relaciones de masa y localización de centros de masa en función de la altura y la masa total de la persona Adicionalmente, aparecen restricciones asociadas al desplazamiento angular de las articulaciones de cadera y rodilla de acuerdo a las limitaciones físicas que tenga el individuo que porta el exoesqueleto. Estos valores se deben tener presente en el diseño del sistema de control. Las siguientes figuras [figura 9,10] representan las trayectorias angulares (set point) que fueron introducidas para la articulación de la cadera y rodilla respectivamente. Estas trayectorias se construyeron a partir de la información que se tiene de un paciente que

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 25
camina en un pasillo de marcha adulto. Con los datos se aplicó interpolación con ayuda de Matlab, obteniéndose las siguientes ecuaciones:
Figura 9. Trayectoria angular aplicada a la articulación de cadera
Figura 10. Trayectoria angular aplicada a la articulación de rodilla.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 26
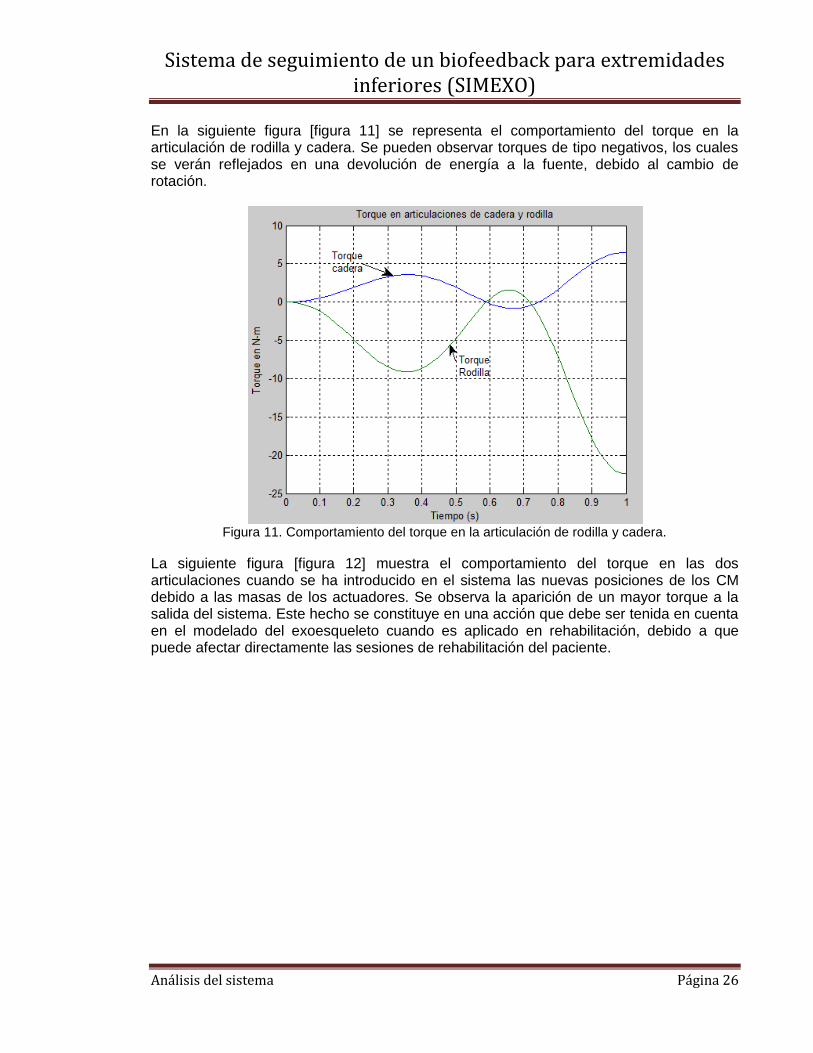
En la siguiente figura [figura 11] se representa el comportamiento del torque en la articulación de rodilla y cadera. Se pueden observar torques de tipo negativos, los cuales se verán reflejados en una devolución de energía a la fuente, debido al cambio de rotación.
Figura 11. Comportamiento del torque en la articulación de rodilla y cadera.
La siguiente figura [figura 12] muestra el comportamiento del torque en las dos articulaciones cuando se ha introducido en el sistema las nuevas posiciones de los CM debido a las masas de los actuadores. Se observa la aparición de un mayor torque a la salida del sistema. Este hecho se constituye en una acción que debe ser tenida en cuenta en el modelado del exoesqueleto cuando es aplicado en rehabilitación, debido a que puede afectar directamente las sesiones de rehabilitación del paciente.

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 27
Figura 12. Comportamiento del torque en las articulaciones con nuevas posiciones de los
CM debido a las masas de los actuadores.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 28
5.2 Exoesqueleto
El exoesqueleto es una estructura externa electromecánica de cierta rigidez que es montada sobre el cuerpo para restaurar, rehabilitar o potenciar la función motora humana. Transmite pares de fuerza a través de actuadores situados en las articulaciones del individuo. El mismo dispositivo con diferentes algoritmos de control puede utilizarse en cuatro modos de funcionamiento:
Fisioterapia: El paciente realiza actividad física de manera activa ayudado por el
exoesqueleto y de acuerdo a parámetros definidos por el fisioterapista.
Dispositivo de asistencia: (Amplificador humano) Cuando el individuo requiere
mover cargas muy pesadas, el exoesqueleto cumple la función de soportar el peso
de dichas cargas.
Dispositivo háptico: El sujeto físicamente interactúa con un objeto virtual mientras
que las fuerzas generadas a través de la interacción realimentan al sujeto por
medio del exoesqueleto. Es posible determinar forma, rigidez y textura de los
objetos virtuales.
Dispositivo maestro: El operador utiliza el exoesqueleto para controlar un sistema
robótico en modo de tele operación (maestro/esclavo). El exoesqueleto le refleja al
operario las fuerzas empleadas por el robot en la medida que interactúa con el
ambiente.
5.3 Biofeedback
Es la técnica de hacer los movimientos corporales perceptibles a dispositivos electrónicos, con el fin de mejorar el resultado de la recuperación de los sistemas esquelético muscular, cardiovascular linfático, nerviosos y hormonal de una persona que se encuentre con algún problema en estos sistemas, utilizando mecanismos electrónicos y matemáticos para calcular el resultado esperado por un terapeuta en la terapia de su paciente.
5.4 Segmentos
En este proyecto, presentaremos tres tipos de segmentos, el segmento uno es la parte del cuerpo que compone toda la masa muscular que se encuentra desde la cadera hasta la cabeza llamado también tronco, el segmento dos es la masa muscular que se encuentra entre la cadera y la rodilla llamado también fémur o muslo y el segmento tres que es la masa muscular que se encuentra entre la rodilla y el final del pie pero sin contar algún movimiento del tobillo, llamado también tipia o pierna.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 29
7 METODOLOGÍA La metodología del proyecto más la investigación consta de 6 fases:
6.1 Investigación
Esta fase se dedicara exclusivamente a la recolección de información que nos permita entender el problema planteado y poder desarrollar los objetivos propuestos bajo la orientación del profesor Juan Carlos Cruz.
6.2 Elicitación de requisitos
Documentar la especificación de requisitos de software (SRS), identificar cuáles son las fuentes de los requisitos de software.
6.3 Análisis de requisitos
Validar y refinar los requerimientos funcionales y no funcionales del sistema. Analizar los escenarios de casos de uso. Refinar el diagrama de casos de uso basado en análisis.
6.4 Diseño
Crear un modelo de diseño para un caso de uso utilizando “Análisis robusto”. Refinar el modelo de dominio para satisfacer el modelo de solución. Aplicar patrones de diseño a los modelos de dominio solución.
6.5 Arquitectura
Seleccionar un tipo de arquitectura para el sistema. Rediseñar el modelo de arquitectura para satisfacer los requerimientos no funcionales del sistema. Crear la línea base de la arquitectura a usar.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 30
6.6 Implementación, pruebas y despliegue
Implementar la solución de software utilizando el modelo de solución. Probar la solución de software contra los escenarios de casos de uso. Desplegar la solución de software utilizando el diagrama de despliegue.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 31
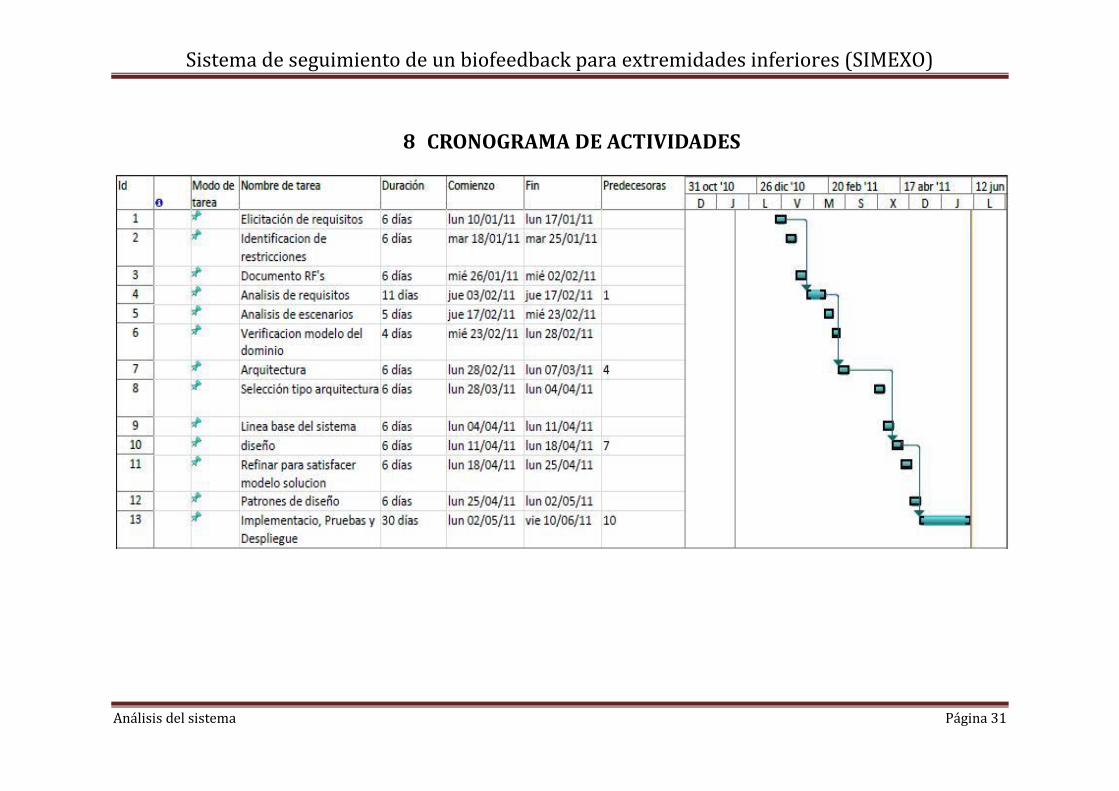
8 CRONOGRAMA DE ACTIVIDADES
ANALISIS
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 33
9 FRONTERAS DEL SISTEMA El sistema se encargará de brindar de forma oportuna y clara la información
contenida en él, para que pueda ser analizada por el usuario. El sistema generará gráficos como un medio de apoyo para el análisis de la
información acerca de la simulación de los segmentos, tomando como base la información ingresada por el usuario al sistema.
El sistema se encargará del almacenamiento de información, de tal manera que los datos estén disponibles en cualquier momento en el que sean requeridos.
El sistema solo simulara el movimiento del modelo tres segmentos, aludiendo que el paciente será un adulto hombre que no está utilizando dos segmentos.
El sistema validará los datos ingresados, solo en las reglas que se indiquen para poderlos regístralos en la base de datos, como el tipo de dato y el tamaño que tienen las estructuras en el sistema.
El sistema no se encargará de la educación de los usuarios en el área de estadística, el usuario debe poseer la habilidad de interpretar la información presentada por el sistema.
El sistema solo podrá analizar información almacenada en el sistema, es decir, que para generar el análisis (gráficas y conclusiones), la información ya debe hacer parte del sistema.
El sistema no almacenará las gráficas en el repositorio. Esto como parte del ahorro de espacio por parte del sistema, por el lado contrario, las generara en tiempo real y esto puede generar una leve sensación de retardo.
El sistema no se encargara de confirmar la validez de los datos como ángulos y medidas tomadas por el terapeuta, que se introducirán en él, esto estará a cargo de las personas que lo administren.
El sistema no se encargara de actualizar la información de las simulaciones. El sistema no relacionara los datos registrados en la simulación para representar
estos mismos en un medio visual.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 34
10 ACTORES DEL SISTEMA. Son actores del sistema:
9.1 Administrador
Se encargará de gestionar las cuentas de los usuarios del sistema, al igual que de administrar la información de los sobre los diferentes segmentos, los tipos de identificación existentes, todo lo que tenga que ver con la configuración general del sistema.
9.2 Terapeuta
Se encargará de la gestión de las terapias, las simulaciones y la información pertinente a estas en el sistema.
9.3 Paciente
Se encargará de realizar consultas de las simulaciones y generar reportes a los que este relacionados.
9.4 Acudiente
Se encargará de realizar consultas de las simulaciones y generar reportes a los que este relacionados.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 35
11 REQUERIMIENTOS FUNCIONALES.
Un requisito funcional define el comportamiento interno del software: cálculos, detalles técnicos, manipulación de datos y otras funcionalidades específicas que muestran cómo los casos de uso serán llevados a la práctica.
10.1 Lista de Requerimientos
10.1.1 Funcionales
Req-001 El sistema deberá permitir gestionar la información de los
usuarios del sistema. Req-002 El sistema deberá permitir gestionar la información de las
JSPX del sistema, para controlar el acceso por parte de los usuarios.
Req-003 El sistema deberá permitir gestionar la información de los tipos de usuarios del sistema.
Req-004 El sistema deberá permitir gestionar la información de las terapias en el sistema.
Req-005 El sistema deberá permitir gestionar la información de las simulaciones en el sistema.
Req-006 El sistema deberá permitir gestionar la información de los tipos de identificaciones en el sistema.
Req-007 El sistema deberá permitir el ingreso al sistema con los permisos correspondientes.
Req-008 El sistema deberá permitir realizar elcálculo de los torques con el modelo matemático.
Req-009 El sistema deberá permitir mostrar reportes sobre el progreso del paciente durante su recuperación.
Req-010 El sistema deberá permitir gestionar la información de los segmentos en el sistema.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 36
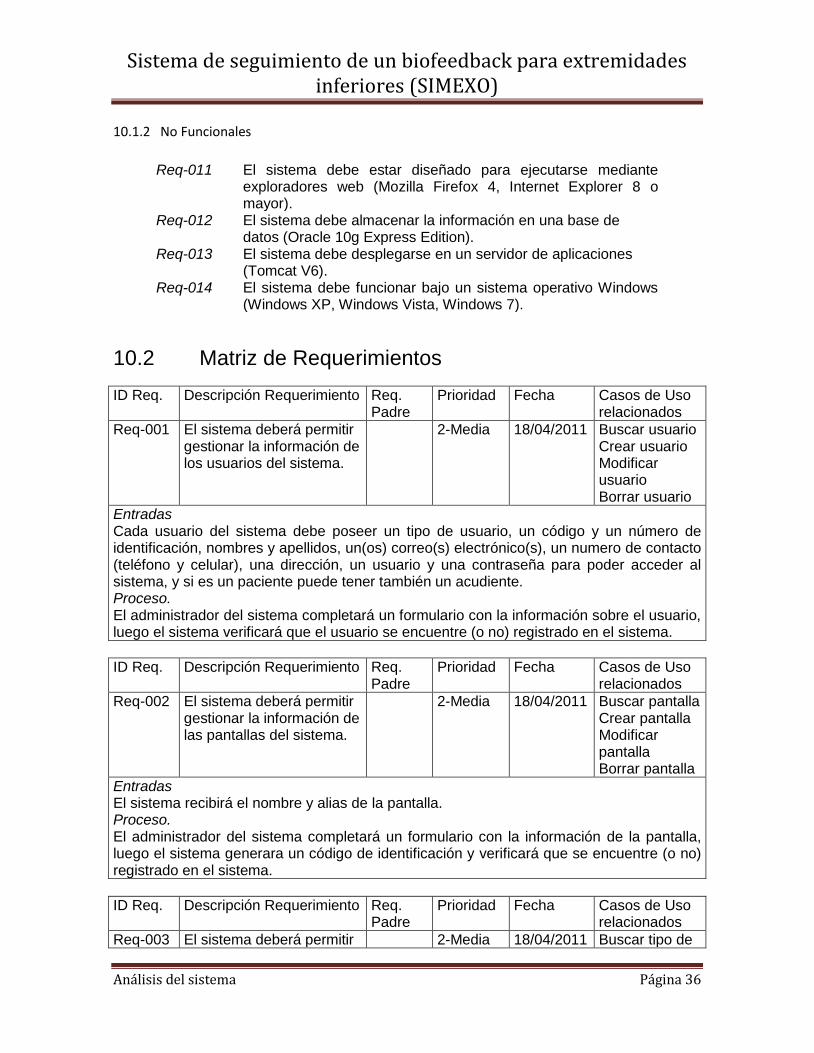
10.1.2 No Funcionales
Req-011 El sistema debe estar diseñado para ejecutarse mediante
exploradores web (Mozilla Firefox 4, Internet Explorer 8 o mayor).
Req-012 El sistema debe almacenar la información en una base de datos (Oracle 10g Express Edition).
Req-013 El sistema debe desplegarse en un servidor de aplicaciones (Tomcat V6).
Req-014 El sistema debe funcionar bajo un sistema operativo Windows (Windows XP, Windows Vista, Windows 7).
10.2 Matriz de Requerimientos
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-001 El sistema deberá permitir gestionar la información de los usuarios del sistema.
2-Media 18/04/2011 Buscar usuario Crear usuario Modificar usuario Borrar usuario
Entradas Cada usuario del sistema debe poseer un tipo de usuario, un código y un número de identificación, nombres y apellidos, un(os) correo(s) electrónico(s), un numero de contacto (teléfono y celular), una dirección, un usuario y una contraseña para poder acceder al sistema, y si es un paciente puede tener también un acudiente. Proceso. El administrador del sistema completará un formulario con la información sobre el usuario, luego el sistema verificará que el usuario se encuentre (o no) registrado en el sistema.
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-002 El sistema deberá permitir gestionar la información de las pantallas del sistema.
2-Media 18/04/2011 Buscar pantalla Crear pantalla Modificar pantalla Borrar pantalla
Entradas El sistema recibirá el nombre y alias de la pantalla. Proceso. El administrador del sistema completará un formulario con la información de la pantalla, luego el sistema generara un código de identificación y verificará que se encuentre (o no) registrado en el sistema.
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-003 El sistema deberá permitir 2-Media 18/04/2011 Buscar tipo de

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 37
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
gestionar la información de los tipos de usuarios del sistema.
usuario Crear tipo de usuario Modificar tipo de usuario Borrar tipo de usuario
Entradas El sistema recibirá una descripción del tipo de usuario que se desea almacenar (tipo persona) Proceso. El administradoringresara la descripción en un formulario, luego el sistema generara un código de identificación, y procederá a verificar que se encuentre (o no) registrado en el sistema.
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-004 El sistema deberá permitir gestionar la información de las terapias en el sistema.
2-Media 18/04/2011 Buscar terapia Crear terapia Modificar terapia
Entradas El sistema recibirá un nombre para la terapia, una descripción de la misma, una hora de inicio y una hora final cuando concluya la terapia, así mismo tendrá un terapeuta y un paciente asociado a esta terapia. Proceso El terapeuta completará un formulario con la información sobre la terapia, luego el sistemaadicionara a esta información un código de terapia y una fecha que será la fecha interna del sistema en ese momento, y luego verificará que se encuentre (o no) registrado en el sistema.
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-005 El sistema deberá permitir gestionar la información de las simulaciones en el sistema.
2-Media 18/04/2011 Crear simulación
Entradas El sistema recibirá el peso del paciente, la estatura, y se le asociara una terapia. Proceso El sistema generara un código de identificación para la simulación, y luego verificará que se encuentre (o no) registrado en el sistema.
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-006 El sistema deberá permitir gestionar la información de
2-Media 18/04/2011 Buscar tipo de identificación
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 38
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
los tipos de identificaciones en el sistema.
Crear tipo de identificación Modificar tipo de identificación Borrar tipo de identificación
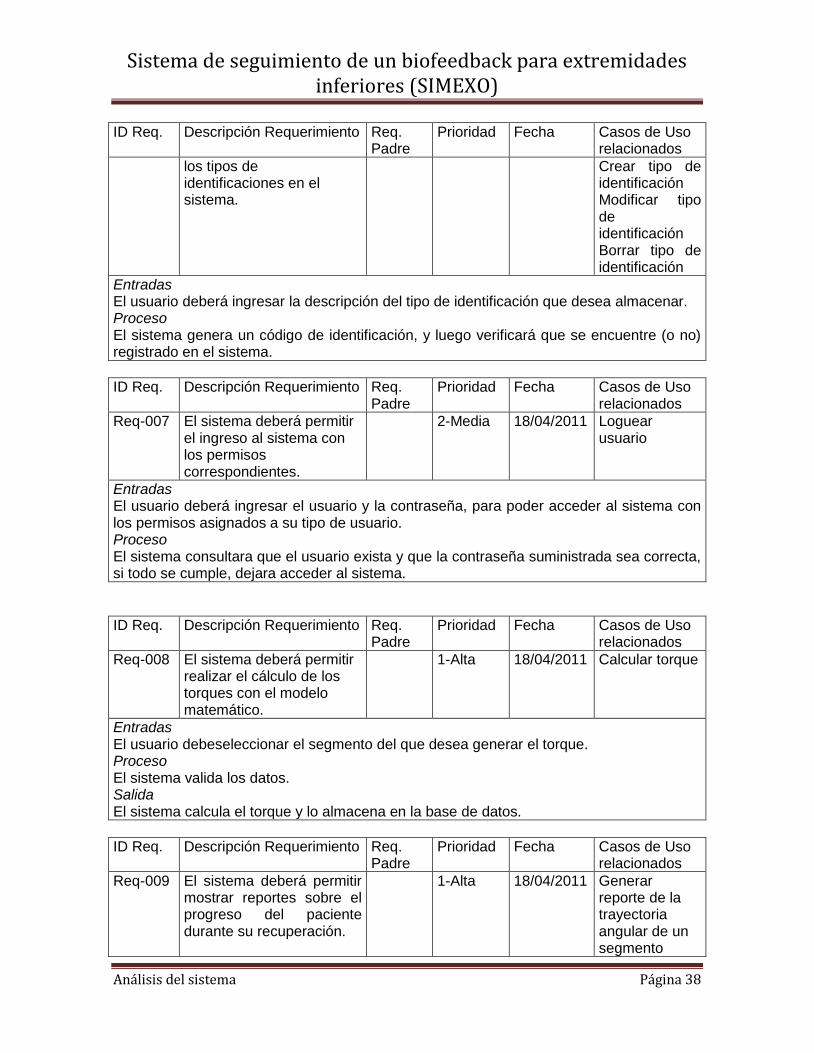
Entradas El usuario deberá ingresar la descripción del tipo de identificación que desea almacenar. Proceso El sistema genera un código de identificación, y luego verificará que se encuentre (o no) registrado en el sistema.
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-007 El sistema deberá permitir el ingreso al sistema con los permisos correspondientes.
2-Media 18/04/2011 Loguear usuario
Entradas El usuario deberá ingresar el usuario y la contraseña, para poder acceder al sistema con los permisos asignados a su tipo de usuario. Proceso El sistema consultara que el usuario exista y que la contraseña suministrada sea correcta, si todo se cumple, dejara acceder al sistema.
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-008 El sistema deberá permitir realizar el cálculo de los torques con el modelo matemático.
1-Alta 18/04/2011 Calcular torque
Entradas El usuario debeseleccionar el segmento del que desea generar el torque. Proceso El sistema valida los datos. Salida El sistema calcula el torque y lo almacena en la base de datos.
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-009 El sistema deberá permitir mostrar reportes sobre el progreso del paciente durante su recuperación.
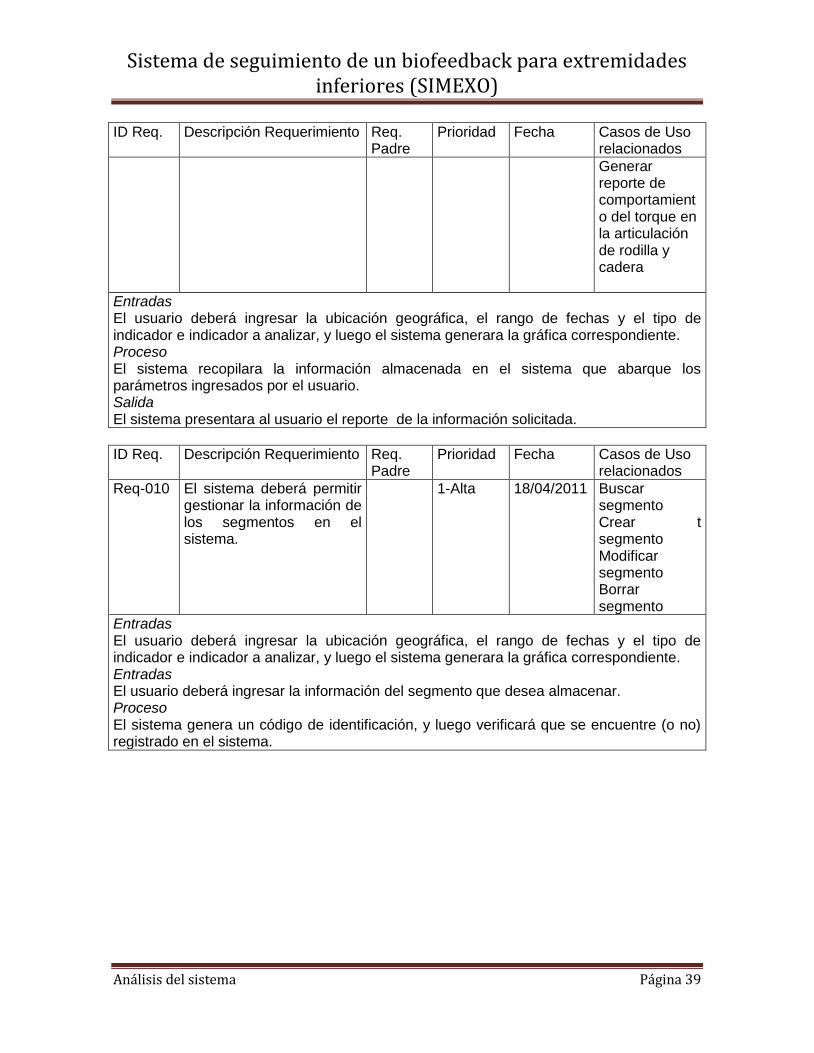
1-Alta 18/04/2011 Generar reporte de la trayectoria angular de un segmento
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 39
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Generar reporte de comportamiento del torque en la articulación de rodilla y cadera
Entradas El usuario deberá ingresar la ubicación geográfica, el rango de fechas y el tipo de indicador e indicador a analizar, y luego el sistema generara la gráfica correspondiente. Proceso El sistema recopilara la información almacenada en el sistema que abarque los parámetros ingresados por el usuario. Salida El sistema presentara al usuario el reporte de la información solicitada.
ID Req. Descripción Requerimiento Req. Padre
Prioridad Fecha
Casos de Uso relacionados
Req-010 El sistema deberá permitir gestionar la información de los segmentos en el sistema.
1-Alta 18/04/2011 Buscar segmento Crear t segmento Modificar segmento Borrar segmento
Entradas El usuario deberá ingresar la ubicación geográfica, el rango de fechas y el tipo de indicador e indicador a analizar, y luego el sistema generara la gráfica correspondiente. Entradas El usuario deberá ingresar la información del segmento que desea almacenar. Proceso El sistema genera un código de identificación, y luego verificará que se encuentre (o no) registrado en el sistema.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 40
12 CASOS DE USO DEL SISTEMA.
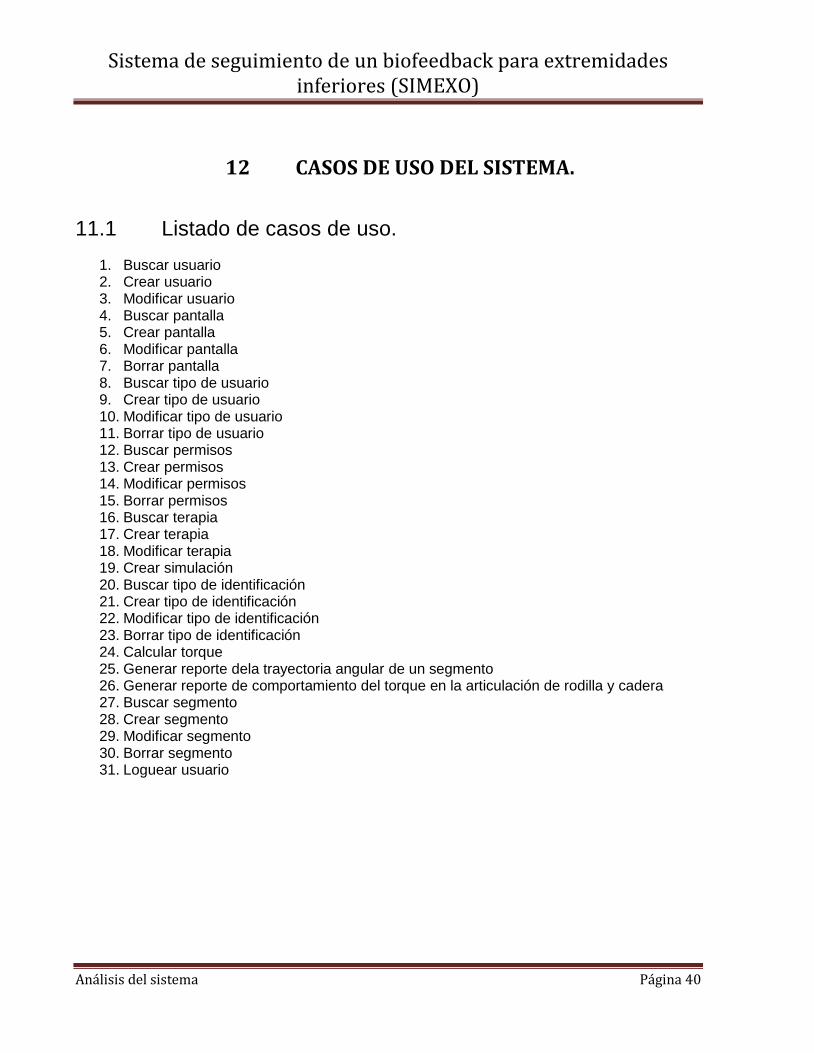
11.1 Listado de casos de uso.
1. Buscar usuario 2. Crear usuario 3. Modificar usuario 4. Buscar pantalla 5. Crear pantalla 6. Modificar pantalla 7. Borrar pantalla 8. Buscar tipo de usuario 9. Crear tipo de usuario 10. Modificar tipo de usuario 11. Borrar tipo de usuario 12. Buscar permisos 13. Crear permisos 14. Modificar permisos 15. Borrar permisos 16. Buscar terapia 17. Crear terapia 18. Modificar terapia 19. Crear simulación 20. Buscar tipo de identificación 21. Crear tipo de identificación 22. Modificar tipo de identificación 23. Borrar tipo de identificación 24. Calcular torque 25. Generar reporte dela trayectoria angular de un segmento 26. Generar reporte de comportamiento del torque en la articulación de rodilla y cadera 27. Buscar segmento 28. Crear segmento 29. Modificar segmento 30. Borrar segmento 31. Loguear usuario
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 41
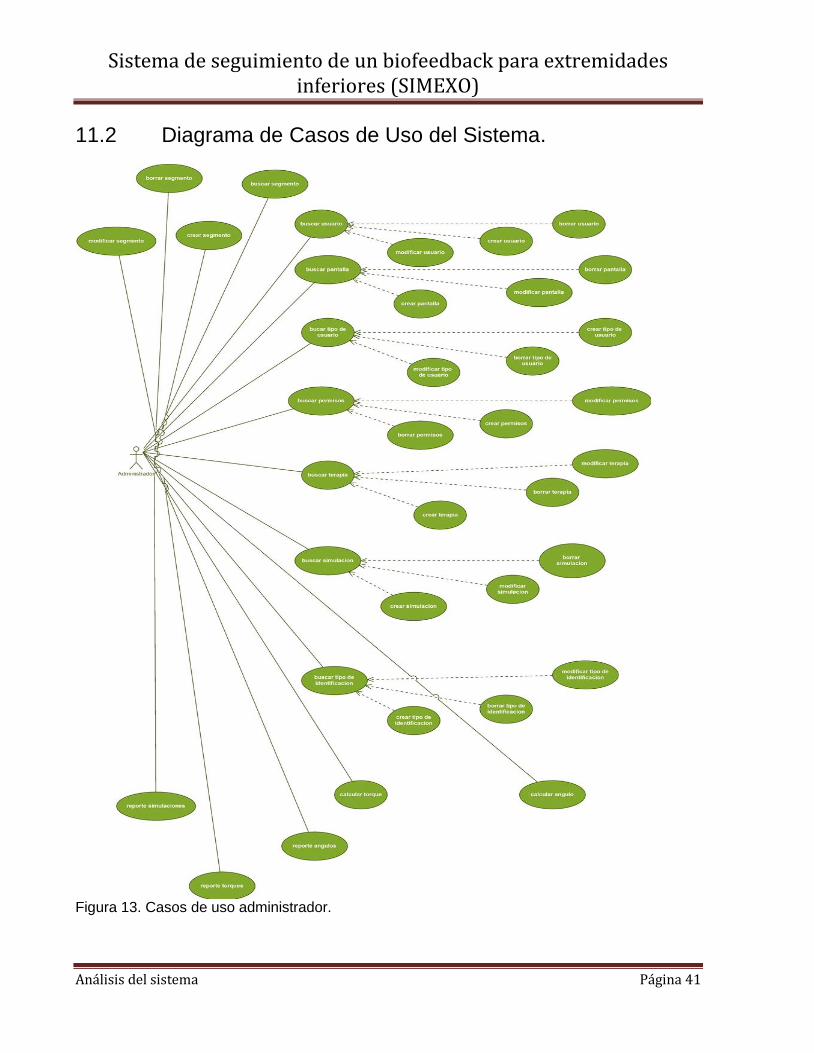
11.2 Diagrama de Casos de Uso del Sistema.
Figura 13. Casos de uso administrador.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 42
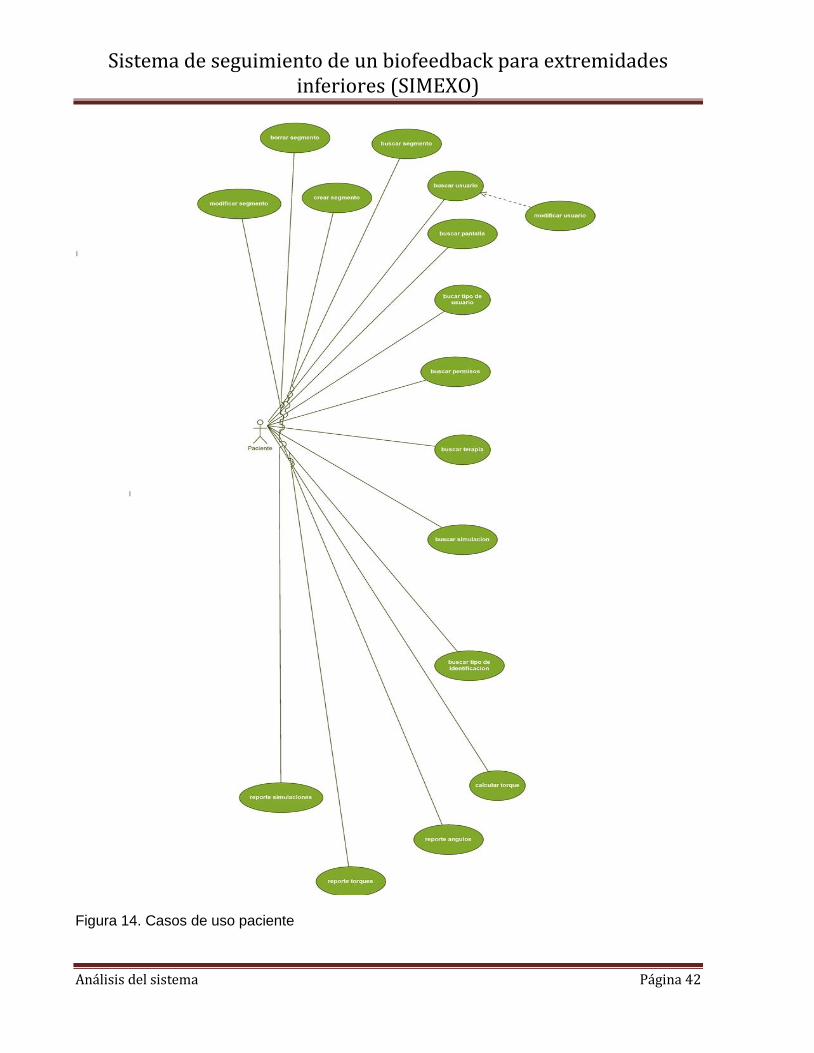
Figura 14. Casos de uso paciente
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 43
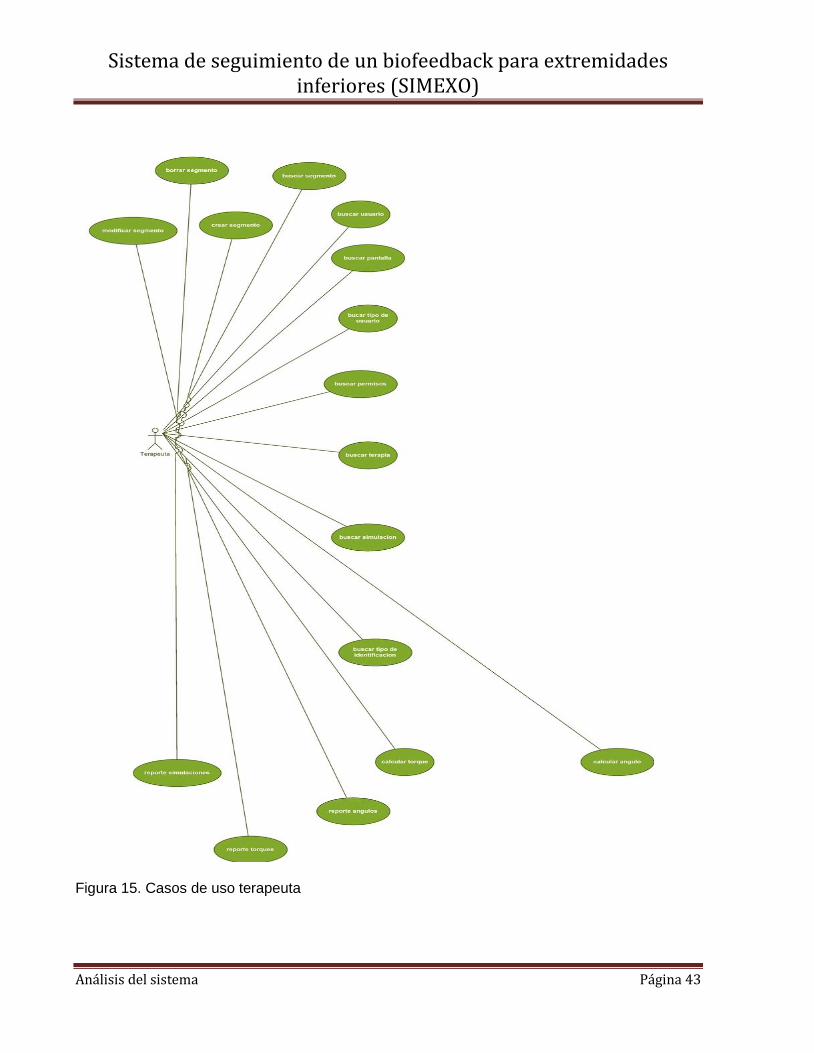
Figura 15. Casos de uso terapeuta
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 44
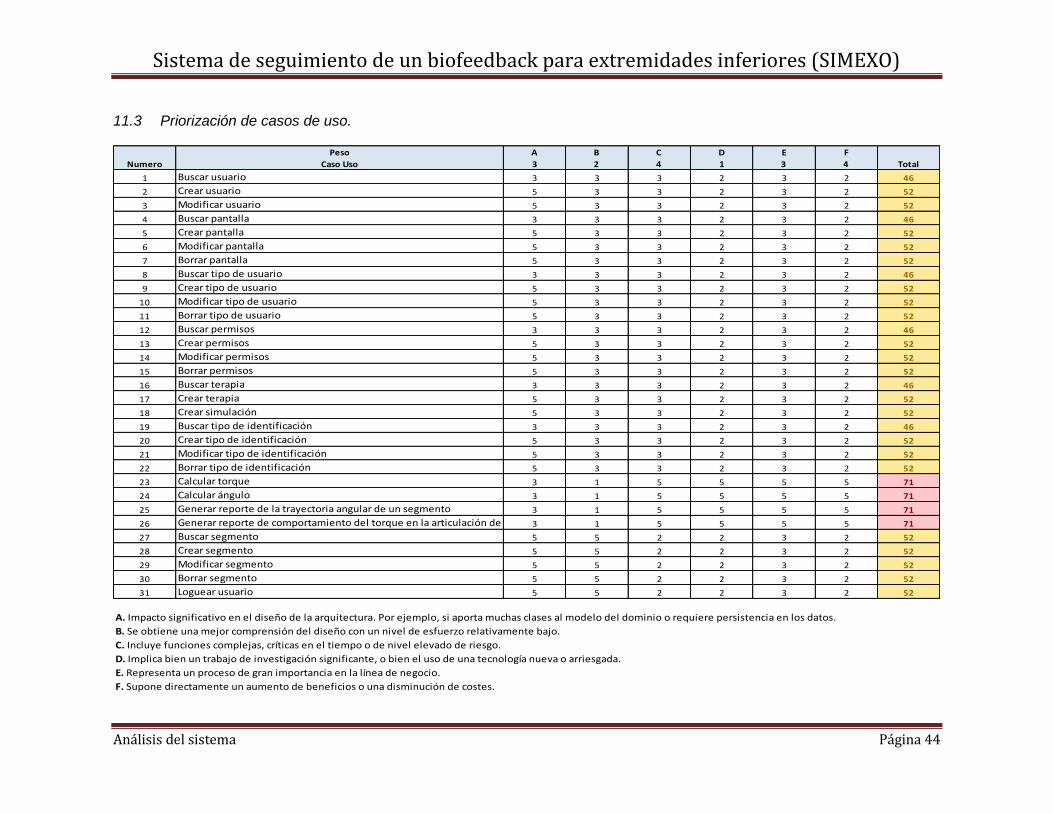
11.3 Priorización de casos de uso.
Numero
Peso
Caso Uso
A
3
B
2
C
4
D
1
E
3
F
4 Total
1 Buscar usuario 3 3 3 2 3 2 46
2 Crear usuario 5 3 3 2 3 2 52
3 Modificar usuario 5 3 3 2 3 2 52
4 Buscar pantalla 3 3 3 2 3 2 46
5 Crear pantalla 5 3 3 2 3 2 52
6 Modificar pantalla 5 3 3 2 3 2 52
7 Borrar pantalla 5 3 3 2 3 2 52
8 Buscar tipo de usuario 3 3 3 2 3 2 46
9 Crear tipo de usuario 5 3 3 2 3 2 52
10 Modificar tipo de usuario 5 3 3 2 3 2 52
11 Borrar tipo de usuario 5 3 3 2 3 2 52
12 Buscar permisos 3 3 3 2 3 2 46
13 Crear permisos 5 3 3 2 3 2 52
14 Modificar permisos 5 3 3 2 3 2 52
15 Borrar permisos 5 3 3 2 3 2 52
16 Buscar terapia 3 3 3 2 3 2 46
17 Crear terapia 5 3 3 2 3 2 52
18 Crear simulación 5 3 3 2 3 2 52
19 Buscar tipo de identificación 3 3 3 2 3 2 46
20 Crear tipo de identificación 5 3 3 2 3 2 52
21 Modificar tipo de identificación 5 3 3 2 3 2 52
22 Borrar tipo de identificación 5 3 3 2 3 2 52
23 Calcular torque 3 1 5 5 5 5 71
24 Calcular ángulo 3 1 5 5 5 5 71
25 Generar reporte de la trayectoria angular de un segmento 3 1 5 5 5 5 71
26 Generar reporte de comportamiento del torque en la articulación de rodilla y cadera3 1 5 5 5 5 71
27 Buscar segmento 5 5 2 2 3 2 52
28 Crear segmento 5 5 2 2 3 2 52
29 Modificar segmento 5 5 2 2 3 2 52
30 Borrar segmento 5 5 2 2 3 2 52
31 Loguear usuario 5 5 2 2 3 2 52
A. Impacto significativo en el diseño de la arquitectura. Por ejemplo, si aporta muchas clases al modelo del dominio o requiere persistencia en los datos.
B. Se obtiene una mejor comprensión del diseño con un nivel de esfuerzo relativamente bajo.
C. Incluye funciones complejas, críticas en el tiempo o de nivel elevado de riesgo.
D. Implica bien un trabajo de investigación significante, o bien el uso de una tecnología nueva o arriesgada.
E. Representa un proceso de gran importancia en la línea de negocio.
F. Supone directamente un aumento de beneficios o una disminución de costes.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 45
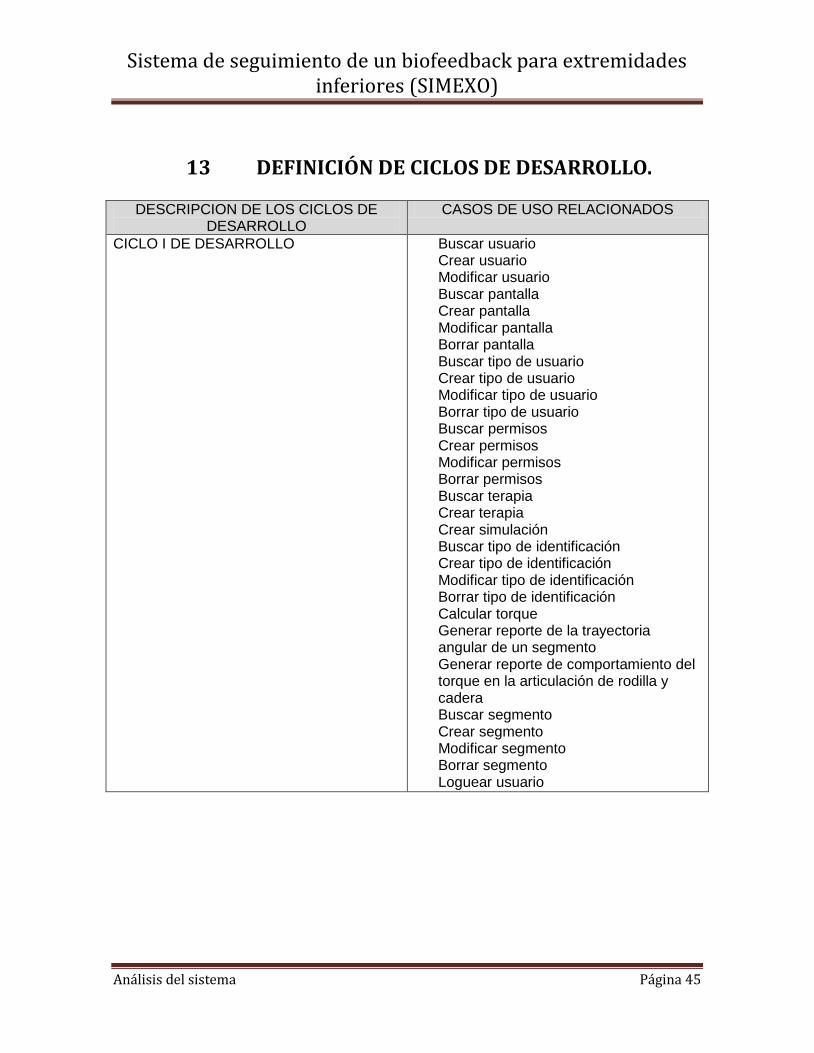
13 DEFINICIÓN DE CICLOS DE DESARROLLO.
DESCRIPCION DE LOS CICLOS DE DESARROLLO
CASOS DE USO RELACIONADOS
CICLO I DE DESARROLLO Buscar usuario Crear usuario Modificar usuario Buscar pantalla Crear pantalla Modificar pantalla Borrar pantalla Buscar tipo de usuario Crear tipo de usuario Modificar tipo de usuario Borrar tipo de usuario Buscar permisos Crear permisos Modificar permisos Borrar permisos Buscar terapia Crear terapia Crear simulación Buscar tipo de identificación Crear tipo de identificación Modificar tipo de identificación Borrar tipo de identificación Calcular torque Generar reporte de la trayectoria angular de un segmento Generar reporte de comportamiento del torque en la articulación de rodilla y cadera Buscar segmento Crear segmento Modificar segmento Borrar segmento Loguear usuario
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 46
DISEÑO
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 47
14 CICLO 001 DE DESARROLLO
Análisis
13.1.1 Casos de usos a incluir
1. Buscar usuario 2. Crear usuario 3. Modificar usuario 4. Buscar pantalla 5. Crear pantalla 6. Modificar pantalla 7. Borrar pantalla 8. Buscar tipo de usuario 9. Crear tipo de usuario 10. Modificar tipo de usuario 11. Borrar tipo de usuario 12. Buscar permisos 13. Crear permisos 14. Modificar permisos 15. Borrar permisos 16. Buscar terapia 17. Crear terapia 18. Crear simulación 19. Buscar tipo de identificación 20. Crear tipo de identificación 21. Modificar tipo de identificación 22. Borrar tipo de identificación 23. Calcular torque 24. Generar reporte dela trayectoria angular de un segmento 25. Generar reporte de comportamiento del torque en la articulación de rodilla y
cadera 26. Buscar segmento 27. Crear segmento 28. Modificar segmento 29. Borrar segmento
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 48
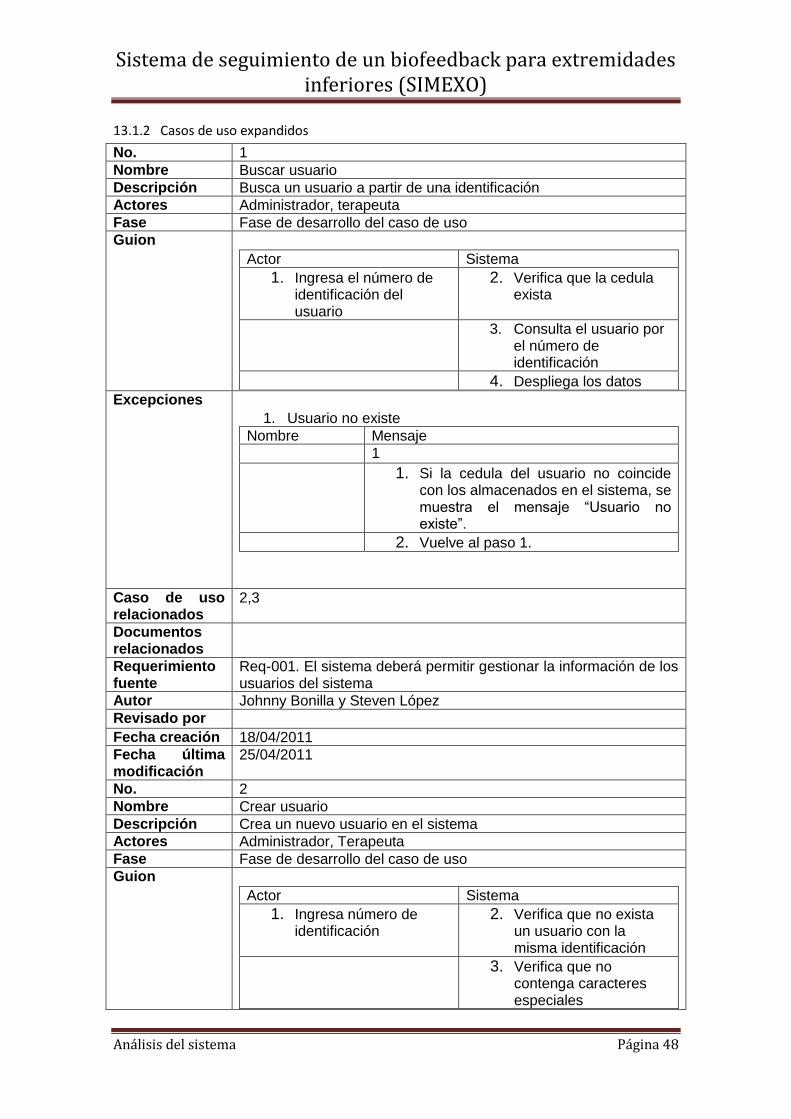
13.1.2 Casos de uso expandidos
No. 1 Nombre Buscar usuario Descripción Busca un usuario a partir de una identificación Actores Administrador, terapeuta Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa el número de identificación del usuario
2. Verifica que la cedula exista
3. Consulta el usuario por el número de identificación
4. Despliega los datos
Excepciones 1. Usuario no existe
Nombre Mensaje 1
1. Si la cedula del usuario no coincide con los almacenados en el sistema, se muestra el mensaje “Usuario no existe”.
2. Vuelve al paso 1.
Caso de uso relacionados
2,3
Documentos relacionados
Requerimiento fuente
Req-001. El sistema deberá permitir gestionar la información de los usuarios del sistema
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 2 Nombre Crear usuario Descripción Crea un nuevo usuario en el sistema Actores Administrador, Terapeuta Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa número de identificación
2. Verifica que no exista un usuario con la misma identificación
3. Verifica que no contenga caracteres especiales
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 49
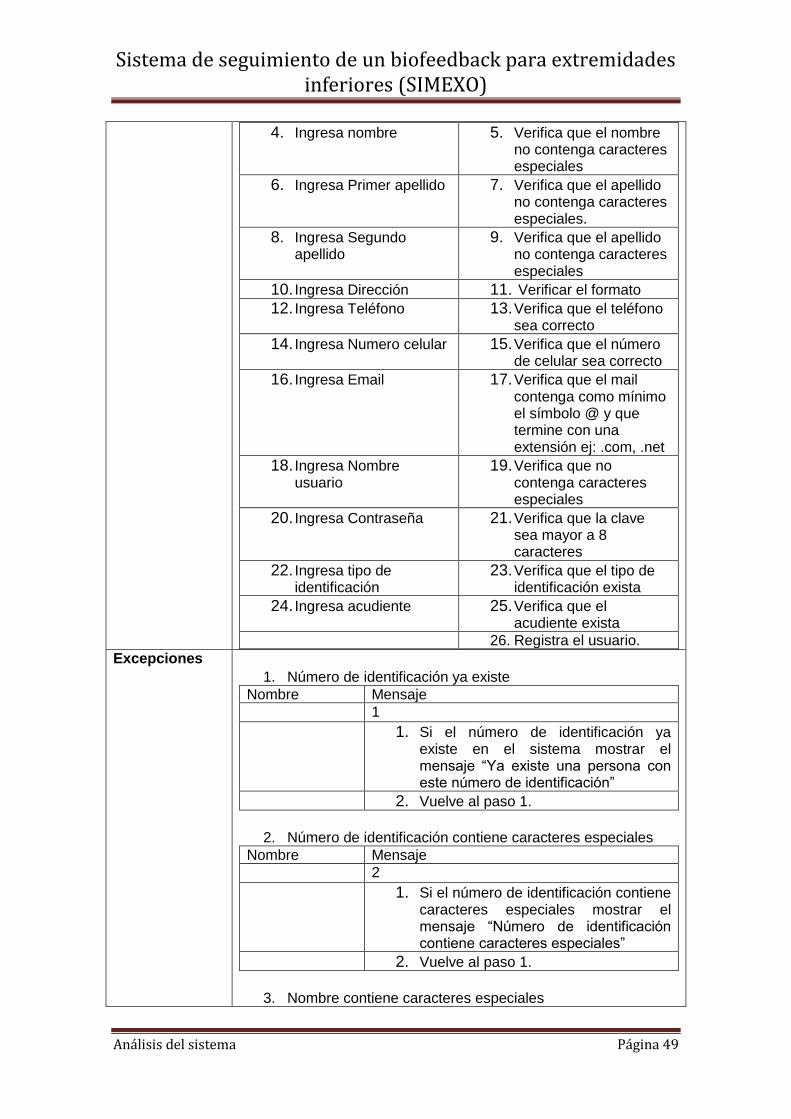
4. Ingresa nombre 5. Verifica que el nombre no contenga caracteres especiales
6. Ingresa Primer apellido 7. Verifica que el apellido no contenga caracteres especiales.
8. Ingresa Segundo apellido
9. Verifica que el apellido no contenga caracteres especiales
10. Ingresa Dirección 11. Verificar el formato
12. Ingresa Teléfono 13. Verifica que el teléfono sea correcto
14. Ingresa Numero celular 15. Verifica que el número de celular sea correcto
16. Ingresa Email 17. Verifica que el mail contenga como mínimo el símbolo @ y que termine con una extensión ej: .com, .net
18. Ingresa Nombre usuario
19. Verifica que no contenga caracteres especiales
20. Ingresa Contraseña 21. Verifica que la clave sea mayor a 8 caracteres
22. Ingresa tipo de identificación
23. Verifica que el tipo de identificación exista
24. Ingresa acudiente 25. Verifica que el acudiente exista
26. Registra el usuario.
Excepciones 1. Número de identificación ya existe
Nombre Mensaje 1
1. Si el número de identificación ya existe en el sistema mostrar el mensaje “Ya existe una persona con este número de identificación”
2. Vuelve al paso 1.
2. Número de identificación contiene caracteres especiales
Nombre Mensaje 2
1. Si el número de identificación contiene caracteres especiales mostrar el mensaje “Número de identificación contiene caracteres especiales”
2. Vuelve al paso 1.
3. Nombre contiene caracteres especiales

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 50
Nombre Mensaje 3
1. Si el nombre contiene caracteres especiales mostrar el mensaje “Nombre contiene caracteres especiales”
2. Vuelve al paso 4.
4. Primer apellido contiene caracteres especiales
Nombre Mensaje 4
1. Si el primer apellido contiene caracteres especiales mostrar el mensaje “Primer apellido contiene caracteres especiales”
2. Vuelve al paso 6.
5. Segundo apellido contiene caracteres especiales
Nombre Mensaje 5
1. Si el segundo apellido contiene caracteres especiales mostrar el mensaje “Primer apellido contiene caracteres especiales”
2. Vuelve al paso 8.
6. Dirección
Nombre Mensaje 6
1.
2. Vuelve al paso 10.
7. Teléfono erróneo
Nombre Mensaje 7
1. Si el teléfono no cumple mínimo con los 7 dígitos mostrar mensaje “Número de teléfono no cumple”
2. Vuelve al paso 12.
8. Celular erróneo
Nombre Mensaje
8
1. Si el número de celular no cumple mínimo con los 10 dígitos, mostrar mensaje “Número de celular no cumple”
2. Vuelve al paso 14.
9. Email incorrecto
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 51
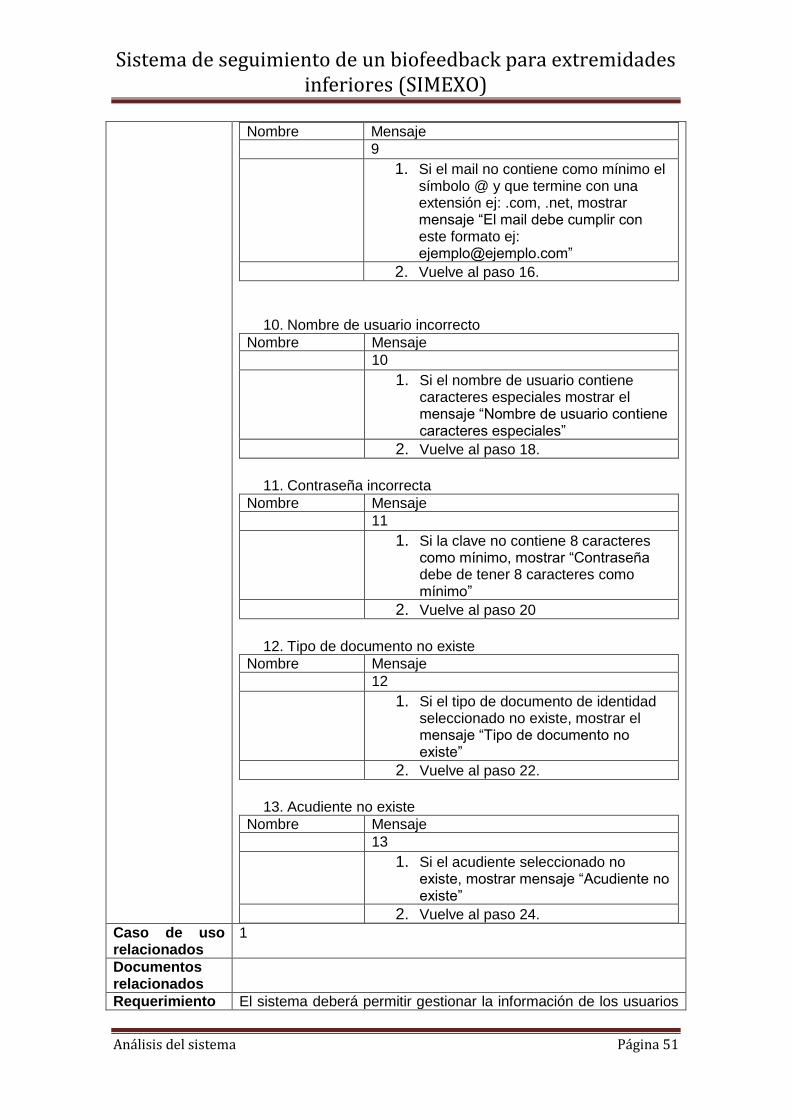
Nombre Mensaje 9
1. Si el mail no contiene como mínimo el símbolo @ y que termine con una extensión ej: .com, .net, mostrar mensaje “El mail debe cumplir con este formato ej: [email protected]”
2. Vuelve al paso 16.
10. Nombre de usuario incorrecto
Nombre Mensaje 10
1. Si el nombre de usuario contiene caracteres especiales mostrar el mensaje “Nombre de usuario contiene caracteres especiales”
2. Vuelve al paso 18.
11. Contraseña incorrecta
Nombre Mensaje 11
1. Si la clave no contiene 8 caracteres como mínimo, mostrar “Contraseña debe de tener 8 caracteres como mínimo”
2. Vuelve al paso 20
12. Tipo de documento no existe
Nombre Mensaje 12
1. Si el tipo de documento de identidad seleccionado no existe, mostrar el mensaje “Tipo de documento no existe”
2. Vuelve al paso 22.
13. Acudiente no existe
Nombre Mensaje 13
1. Si el acudiente seleccionado no existe, mostrar mensaje “Acudiente no existe”
2. Vuelve al paso 24.
Caso de uso relacionados
1
Documentos relacionados
Requerimiento El sistema deberá permitir gestionar la información de los usuarios
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 52
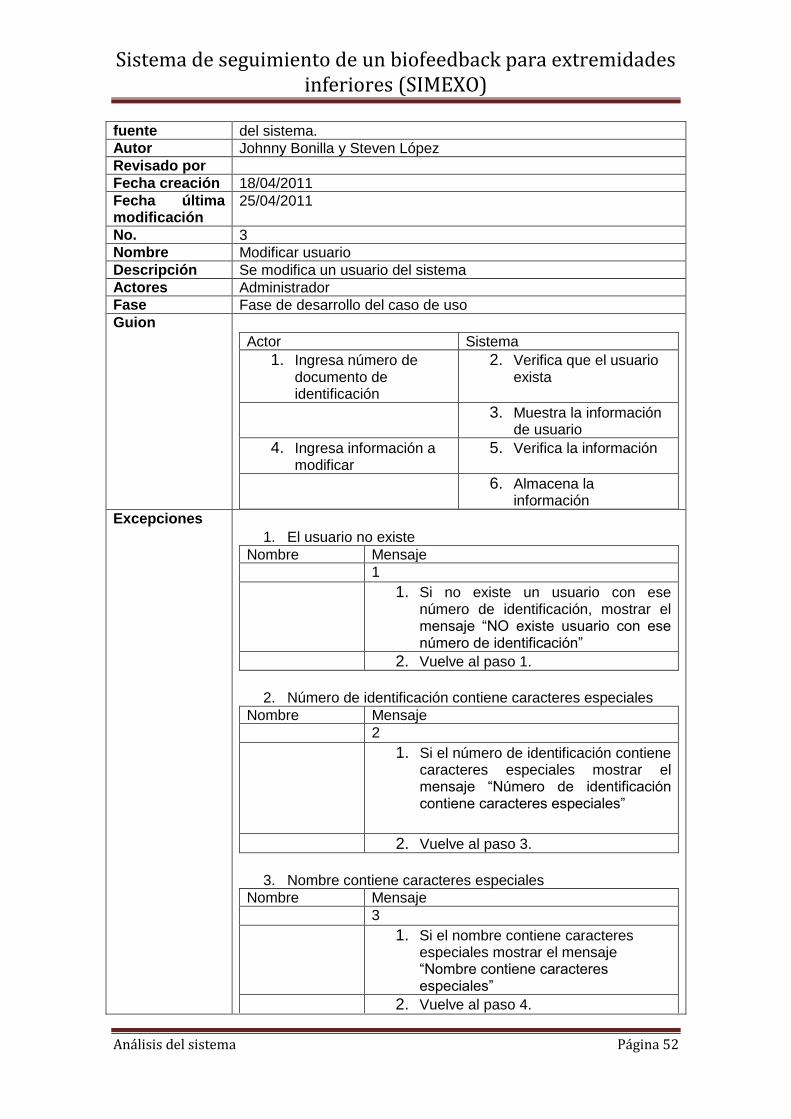
fuente del sistema. Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 3 Nombre Modificar usuario Descripción Se modifica un usuario del sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema 1. Ingresa número de
documento de identificación
2. Verifica que el usuario exista
3. Muestra la información de usuario
4. Ingresa información a modificar
5. Verifica la información
6. Almacena la información
Excepciones 1. El usuario no existe
Nombre Mensaje 1
1. Si no existe un usuario con ese número de identificación, mostrar el mensaje “NO existe usuario con ese número de identificación”
2. Vuelve al paso 1.
2. Número de identificación contiene caracteres especiales
Nombre Mensaje 2
1. Si el número de identificación contiene caracteres especiales mostrar el mensaje “Número de identificación contiene caracteres especiales”
2. Vuelve al paso 3.
3. Nombre contiene caracteres especiales
Nombre Mensaje 3
1. Si el nombre contiene caracteres especiales mostrar el mensaje “Nombre contiene caracteres especiales”
2. Vuelve al paso 4.

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 53
4. Primer apellido contiene caracteres especiales
Nombre Mensaje 4
1. Si el primer apellido contiene caracteres especiales mostrar el mensaje “Primer apellido contiene caracteres especiales”
2. Vuelve al paso 6.
5. Segundo apellido contiene caracteres especiales
Nombre Mensaje 5
3. Si el segundo apellido contiene caracteres especiales mostrar el mensaje “Primer apellido contiene caracteres especiales”
4. Vuelve al paso 8.
6. Dirección
Nombre Mensaje 6
3.
4. Vuelve al paso 10.
7. Teléfono erróneo
Nombre Mensaje 7
3. Si el teléfono no cumple mínimo con los 7 dígitos mostrar mensaje “Número de teléfono no cumple”
4. Vuelve al paso 12.
8. Celular erróneo
Nombre Mensaje 8
3. Si el número de celular no cumple mínimo con los 10 dígitos, mostrar mensaje “Número de celular no cumple”
4. Vuelve al paso 14.
9. Email incorrecto
Nombre Mensaje 9
1. Si el mail no contiene como mínimo el símbolo @ y que termine con una extensión ej: .com, .net, mostrar mensaje “El mail debe cumplir con este formato ej:
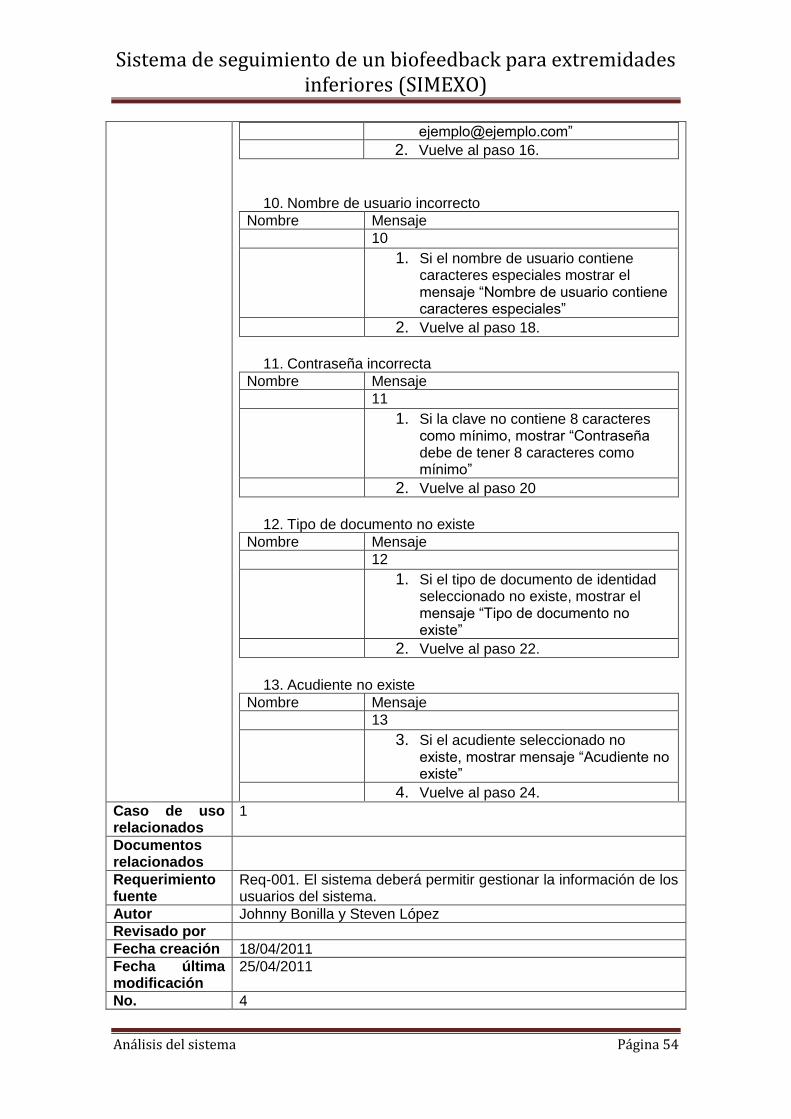
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 54
[email protected]” 2. Vuelve al paso 16.
10. Nombre de usuario incorrecto
Nombre Mensaje 10
1. Si el nombre de usuario contiene caracteres especiales mostrar el mensaje “Nombre de usuario contiene caracteres especiales”
2. Vuelve al paso 18.
11. Contraseña incorrecta
Nombre Mensaje 11
1. Si la clave no contiene 8 caracteres como mínimo, mostrar “Contraseña debe de tener 8 caracteres como mínimo”
2. Vuelve al paso 20
12. Tipo de documento no existe
Nombre Mensaje 12
1. Si el tipo de documento de identidad seleccionado no existe, mostrar el mensaje “Tipo de documento no existe”
2. Vuelve al paso 22.
13. Acudiente no existe
Nombre Mensaje 13
3. Si el acudiente seleccionado no existe, mostrar mensaje “Acudiente no existe”
4. Vuelve al paso 24.
Caso de uso relacionados
1
Documentos relacionados
Requerimiento fuente
Req-001. El sistema deberá permitir gestionar la información de los usuarios del sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 4
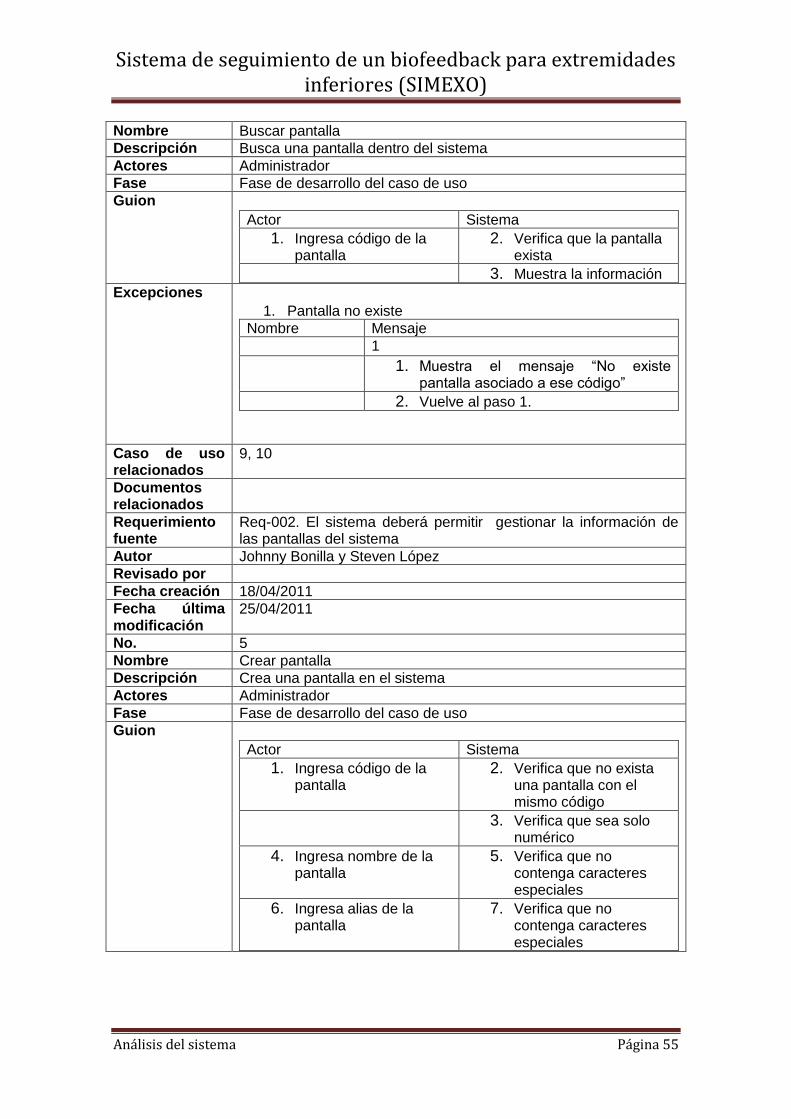
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 55
Nombre Buscar pantalla Descripción Busca una pantalla dentro del sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código de la pantalla
2. Verifica que la pantalla exista
3. Muestra la información
Excepciones 1. Pantalla no existe
Nombre Mensaje 1
1. Muestra el mensaje “No existe pantalla asociado a ese código”
2. Vuelve al paso 1.
Caso de uso relacionados
9, 10
Documentos relacionados
Requerimiento fuente
Req-002. El sistema deberá permitir gestionar la información de las pantallas del sistema
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 5 Nombre Crear pantalla Descripción Crea una pantalla en el sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código de la pantalla
2. Verifica que no exista una pantalla con el mismo código
3. Verifica que sea solo numérico
4. Ingresa nombre de la pantalla
5. Verifica que no contenga caracteres especiales
6. Ingresa alias de la pantalla
7. Verifica que no contenga caracteres especiales

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 56
Excepciones 1. Pantalla no existe
Nombre Mensaje 1
1. Muestra el mensaje “No existe pantalla asociado a ese código”
2. Vuelve al paso 1.
2. Nombre contiene caracteres especiales
Nombre Mensaje 2
1. Muestra el mensaje “El nombre de la pantalla no puede contener caracteres especiales”
2. Vuelve al paso 4.
3. Alias contiene caracteres especiales
Nombre Mensaje 3
1. Muestra el mensaje “El alias de la pantalla no puede contener caracteres especiales”
2. Vuelve al paso 6.
Caso de uso relacionados
4
Documentos relacionados
Requerimiento fuente
Req-002. El sistema deberá permitir gestionar la información de las pantallas del sistema
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 6 Nombre Modificar pantalla Descripción Modifica una pantalla del sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código de la pantalla
2. Verifica que la pantalla exista
3. Muestra información
4. Ingresa información 5. Verifica la información 6. Almacena la
información
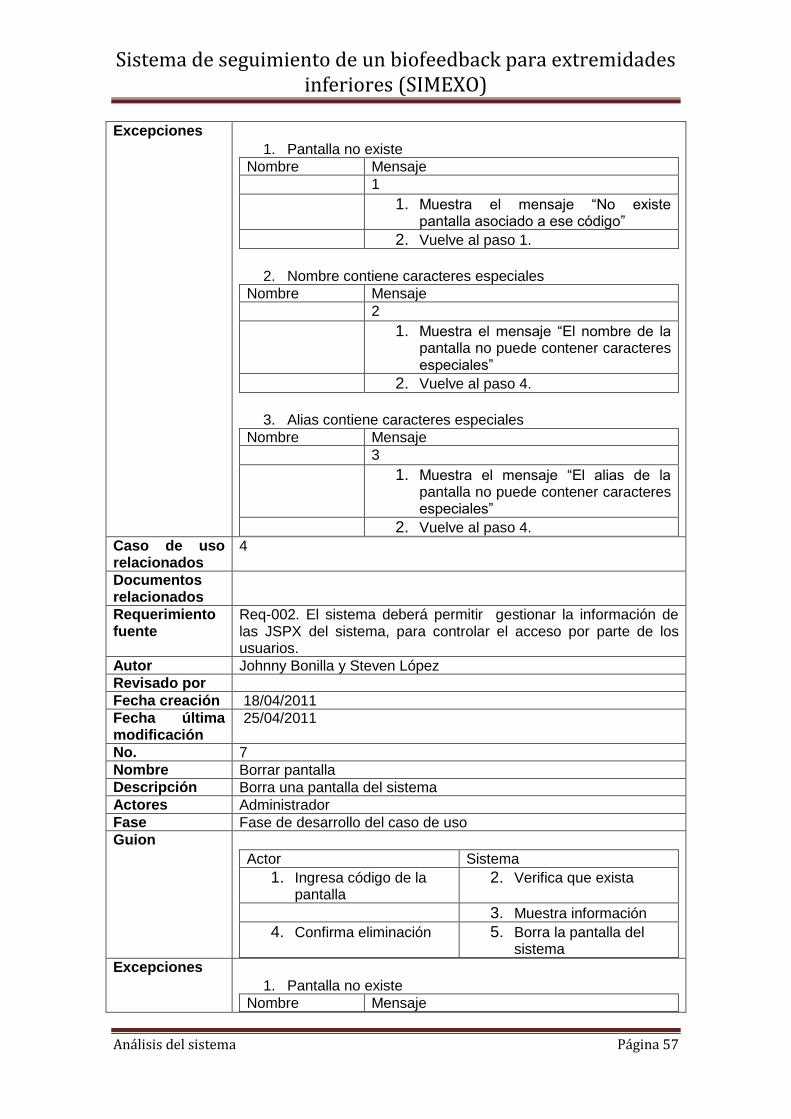
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 57
Excepciones 1. Pantalla no existe
Nombre Mensaje 1
1. Muestra el mensaje “No existe pantalla asociado a ese código”
2. Vuelve al paso 1.
2. Nombre contiene caracteres especiales
Nombre Mensaje 2
1. Muestra el mensaje “El nombre de la pantalla no puede contener caracteres especiales”
2. Vuelve al paso 4.
3. Alias contiene caracteres especiales
Nombre Mensaje 3
1. Muestra el mensaje “El alias de la pantalla no puede contener caracteres especiales”
2. Vuelve al paso 4.
Caso de uso relacionados
4
Documentos relacionados
Requerimiento fuente
Req-002. El sistema deberá permitir gestionar la información de las JSPX del sistema, para controlar el acceso por parte de los usuarios.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 7 Nombre Borrar pantalla Descripción Borra una pantalla del sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código de la pantalla
2. Verifica que exista
3. Muestra información
4. Confirma eliminación 5. Borra la pantalla del sistema
Excepciones 1. Pantalla no existe
Nombre Mensaje

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 58
1
1. Muestra el mensaje “No existe pantalla asociado a ese código”
2. Vuelve al paso 1.
2. Pantalla tiene permisos asignados a un usuario
Nombre Mensaje 2
1. Muestra el mensaje “Esta pantalla tiene permisos que han sido asignados a una persona”
2. Vuelve al paso 1.
Caso de uso relacionados
4
Documentos relacionados
Requerimiento fuente
Req-002. El sistema deberá permitir gestionar la información de las pantallas del sistema
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 8 Nombre Buscar tipo de usuario Descripción Busca un tipo de usuario Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código del tipo de usuario
2. Verifica que exista el tipo de usuario
3. Muestra información
Excepciones 1. Tipo de usuario no existe
Nombre Mensaje 1
1. Si el código del tipo de usuario no existe mostrar el mensaje “tipo de usuario con este código no existe”
2. Vuelve al paso 1.
Caso de uso relacionados
Documentos relacionados
Requerimiento fuente
Req-003. El sistema deberá permitir gestionar la información de los tipos de usuarios del sistema.
Autor Johnny Bonilla y Steven López
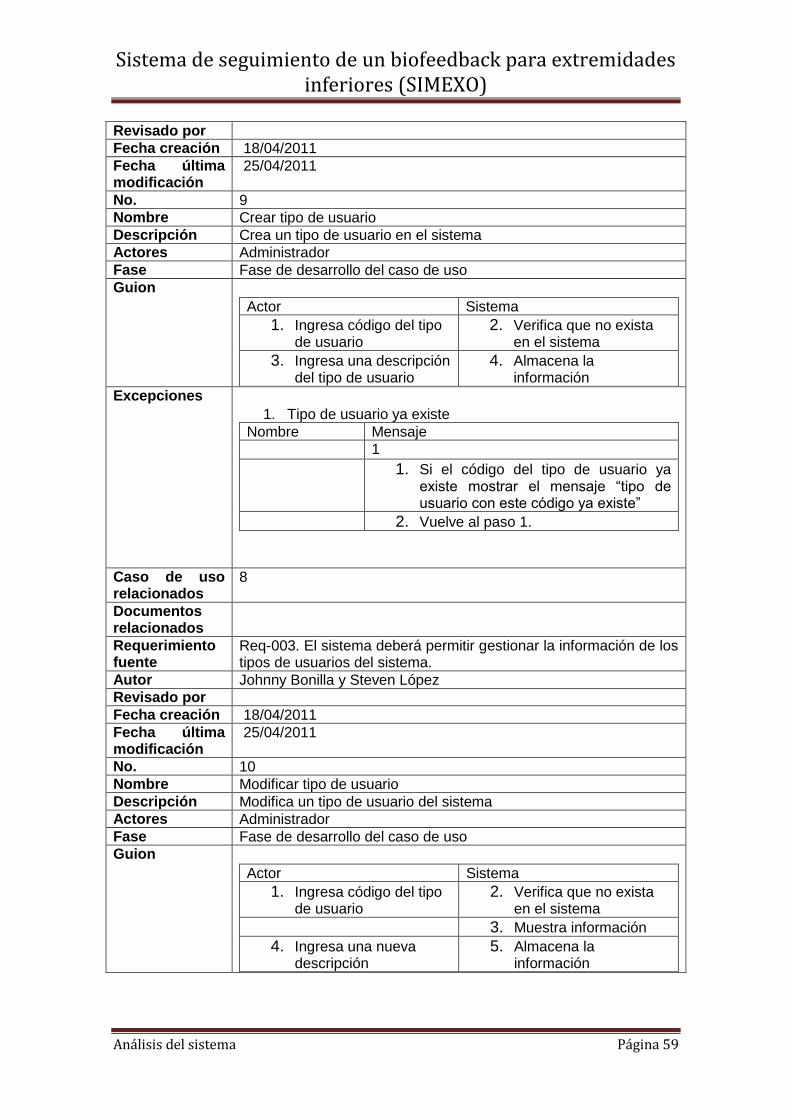
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 59
Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 9 Nombre Crear tipo de usuario Descripción Crea un tipo de usuario en el sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema 1. Ingresa código del tipo
de usuario 2. Verifica que no exista
en el sistema
3. Ingresa una descripción del tipo de usuario
4. Almacena la información
Excepciones 1. Tipo de usuario ya existe
Nombre Mensaje 1
1. Si el código del tipo de usuario ya existe mostrar el mensaje “tipo de usuario con este código ya existe”
2. Vuelve al paso 1.
Caso de uso relacionados
8
Documentos relacionados
Requerimiento fuente
Req-003. El sistema deberá permitir gestionar la información de los tipos de usuarios del sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 10 Nombre Modificar tipo de usuario Descripción Modifica un tipo de usuario del sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema 1. Ingresa código del tipo
de usuario 2. Verifica que no exista
en el sistema 3. Muestra información
4. Ingresa una nueva descripción
5. Almacena la información
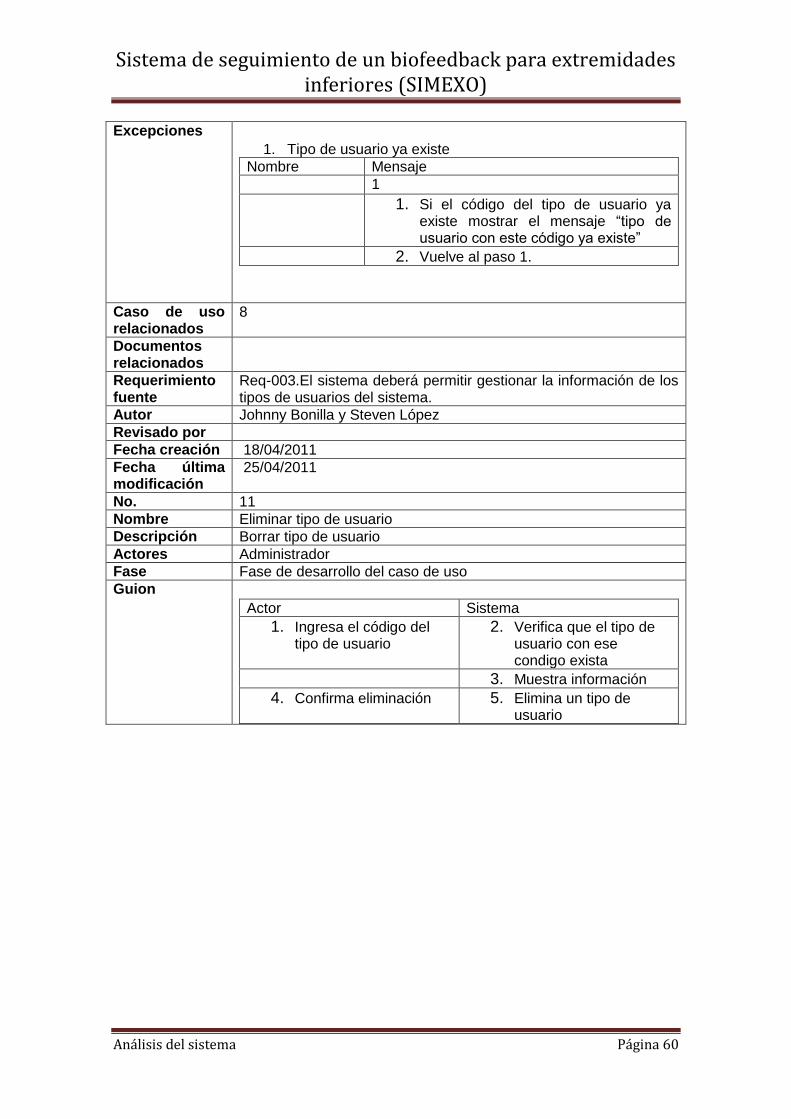
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 60
Excepciones 1. Tipo de usuario ya existe
Nombre Mensaje 1
1. Si el código del tipo de usuario ya existe mostrar el mensaje “tipo de usuario con este código ya existe”
2. Vuelve al paso 1.
Caso de uso relacionados
8
Documentos relacionados
Requerimiento fuente
Req-003.El sistema deberá permitir gestionar la información de los tipos de usuarios del sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 11 Nombre Eliminar tipo de usuario Descripción Borrar tipo de usuario Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa el código del tipo de usuario
2. Verifica que el tipo de usuario con ese condigo exista
3. Muestra información
4. Confirma eliminación 5. Elimina un tipo de usuario

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 61
Excepciones 1. Tipo de usuario no existe
Nombre Mensaje 1
1. Si el código del tipo de usuario no existe, mostrar el mensaje “Tipo de usuario con ese código no existe”.
2. Vuelve al paso 1.
2. Tipo de usuario está asignado a un usuario
Nombre Mensaje 2
1. Muestra el mensaje “Este tipo de usuario está asignado a una persona”
2. Vuelve al paso 4.
Caso de uso relacionados
8
Documentos relacionados
Requerimiento fuente
Req-003. El sistema deberá permitir gestionar la información de los tipos de usuarios del sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 12 Nombre Buscar permisos Descripción Busca los permisos almacenados en el sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema 1. Ingresa código del
permiso 2. Verifica que exista el
permiso 3. Muestra información
Excepciones 1. Permiso no existe
Nombre Mensaje 1
1. Si el permiso no existe, mostrar el mensaje “No existe ningún permiso asociado a ese código”
2. Vuelve al paso 1.
Caso de uso relacionados
9, 10
Documentos
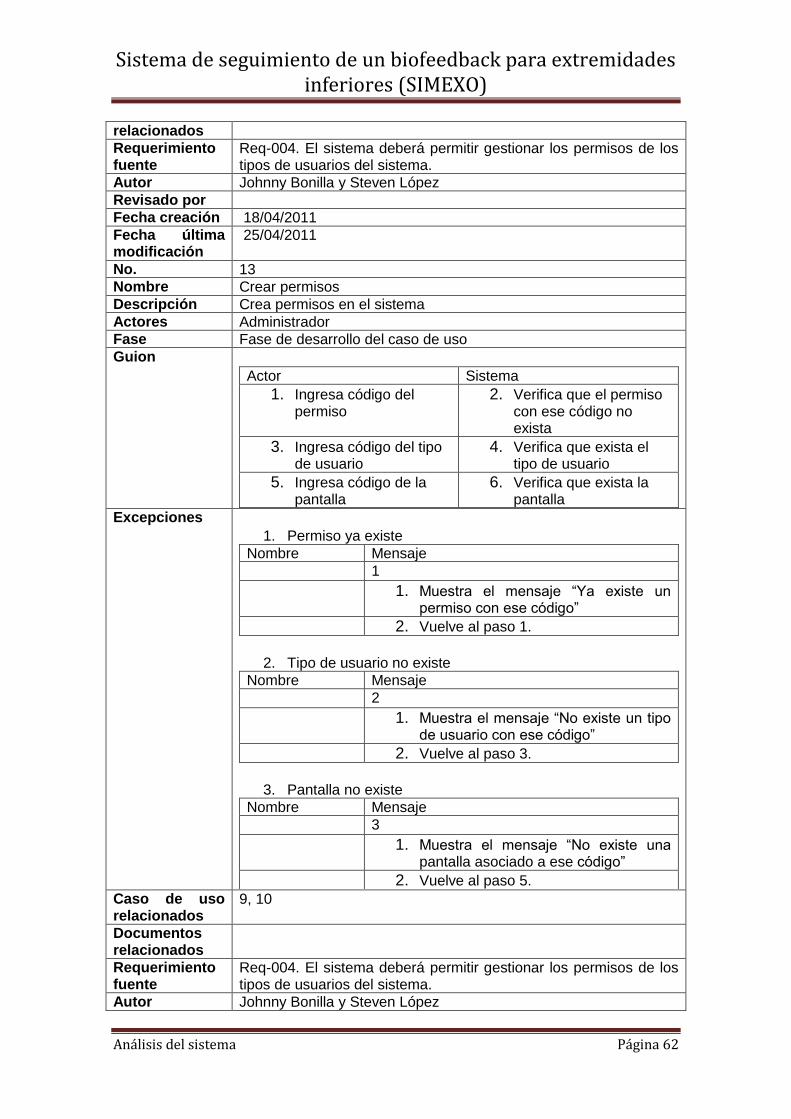
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 62
relacionados Requerimiento fuente
Req-004. El sistema deberá permitir gestionar los permisos de los tipos de usuarios del sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 13 Nombre Crear permisos Descripción Crea permisos en el sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema 1. Ingresa código del
permiso 2. Verifica que el permiso
con ese código no exista
3. Ingresa código del tipo de usuario
4. Verifica que exista el tipo de usuario
5. Ingresa código de la pantalla
6. Verifica que exista la pantalla
Excepciones 1. Permiso ya existe
Nombre Mensaje 1
1. Muestra el mensaje “Ya existe un permiso con ese código”
2. Vuelve al paso 1.
2. Tipo de usuario no existe
Nombre Mensaje 2
1. Muestra el mensaje “No existe un tipo de usuario con ese código”
2. Vuelve al paso 3.
3. Pantalla no existe
Nombre Mensaje 3
1. Muestra el mensaje “No existe una pantalla asociado a ese código”
2. Vuelve al paso 5.
Caso de uso relacionados
9, 10
Documentos relacionados
Requerimiento fuente
Req-004. El sistema deberá permitir gestionar los permisos de los tipos de usuarios del sistema.
Autor Johnny Bonilla y Steven López
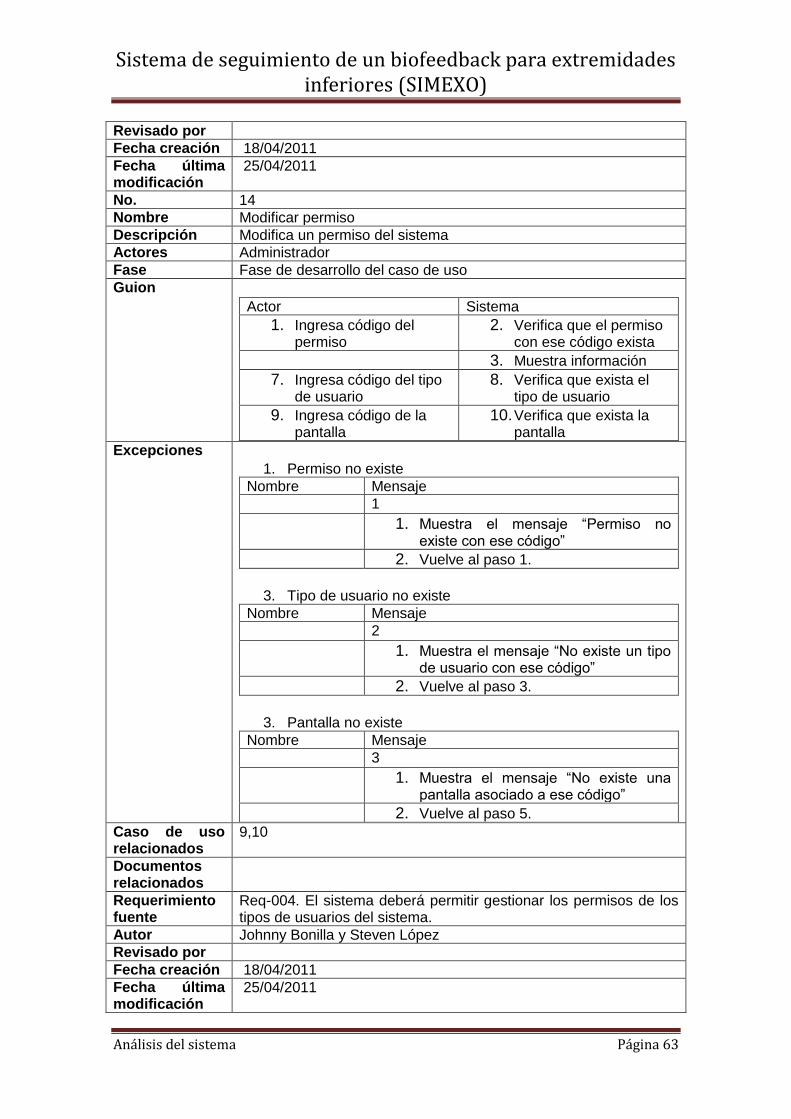
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 63
Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 14 Nombre Modificar permiso Descripción Modifica un permiso del sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema 1. Ingresa código del
permiso 2. Verifica que el permiso
con ese código exista 3. Muestra información
7. Ingresa código del tipo de usuario
8. Verifica que exista el tipo de usuario
9. Ingresa código de la pantalla
10. Verifica que exista la pantalla
Excepciones 1. Permiso no existe
Nombre Mensaje 1
1. Muestra el mensaje “Permiso no existe con ese código”
2. Vuelve al paso 1.
3. Tipo de usuario no existe
Nombre Mensaje 2
1. Muestra el mensaje “No existe un tipo de usuario con ese código”
2. Vuelve al paso 3.
3. Pantalla no existe
Nombre Mensaje 3
1. Muestra el mensaje “No existe una pantalla asociado a ese código”
2. Vuelve al paso 5.
Caso de uso relacionados
9,10
Documentos relacionados
Requerimiento fuente
Req-004. El sistema deberá permitir gestionar los permisos de los tipos de usuarios del sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
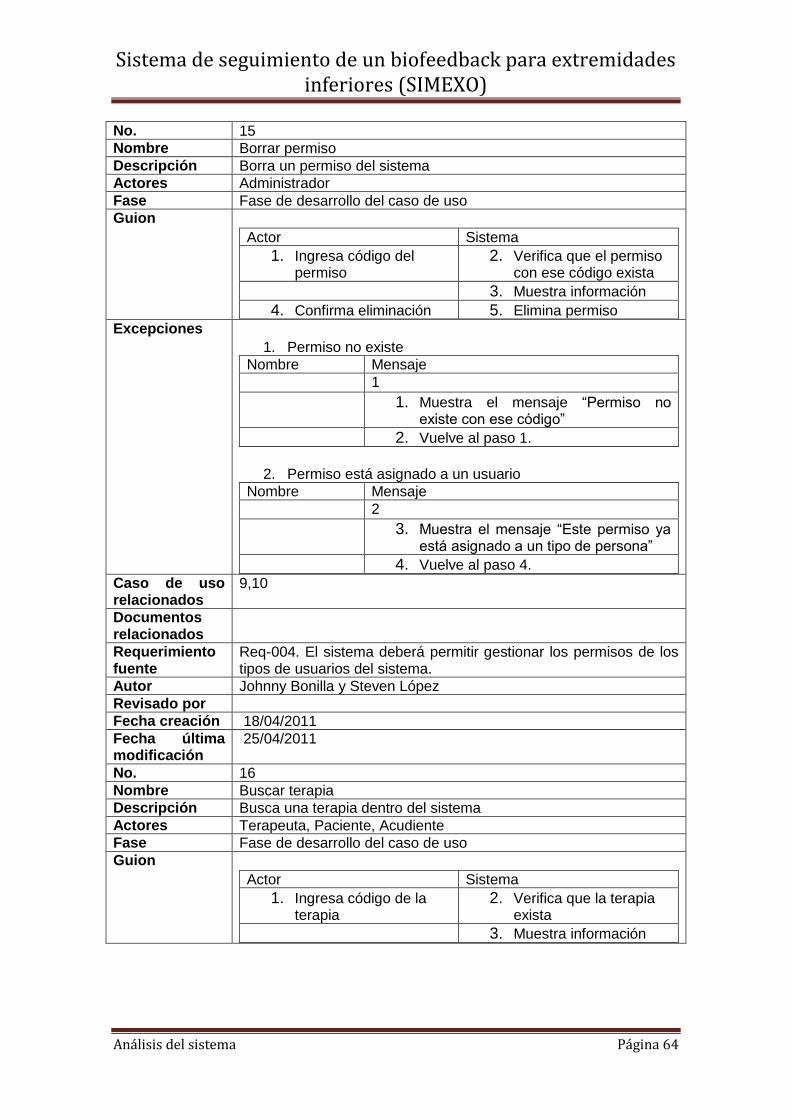
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 64
No. 15 Nombre Borrar permiso Descripción Borra un permiso del sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema 1. Ingresa código del
permiso 2. Verifica que el permiso
con ese código exista 3. Muestra información
4. Confirma eliminación 5. Elimina permiso
Excepciones 1. Permiso no existe
Nombre Mensaje
1
1. Muestra el mensaje “Permiso no existe con ese código”
2. Vuelve al paso 1.
2. Permiso está asignado a un usuario
Nombre Mensaje 2
3. Muestra el mensaje “Este permiso ya está asignado a un tipo de persona”
4. Vuelve al paso 4.
Caso de uso relacionados
9,10
Documentos relacionados
Requerimiento fuente
Req-004. El sistema deberá permitir gestionar los permisos de los tipos de usuarios del sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 16 Nombre Buscar terapia Descripción Busca una terapia dentro del sistema Actores Terapeuta, Paciente, Acudiente Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código de la terapia
2. Verifica que la terapia exista
3. Muestra información
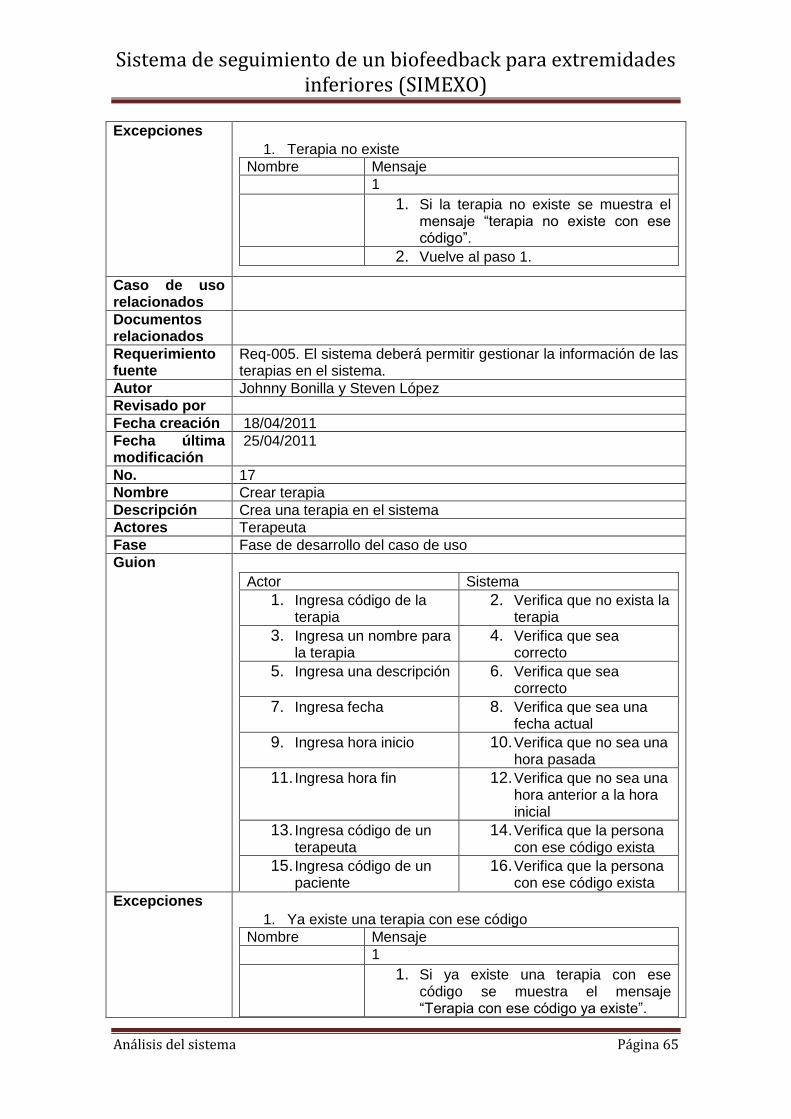
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 65
Excepciones 1. Terapia no existe
Nombre Mensaje 1
1. Si la terapia no existe se muestra el mensaje “terapia no existe con ese código”.
2. Vuelve al paso 1.
Caso de uso relacionados
Documentos relacionados
Requerimiento fuente
Req-005. El sistema deberá permitir gestionar la información de las terapias en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 17 Nombre Crear terapia Descripción Crea una terapia en el sistema Actores Terapeuta Fase Fase de desarrollo del caso de uso Guion
Actor Sistema 1. Ingresa código de la
terapia 2. Verifica que no exista la
terapia
3. Ingresa un nombre para la terapia
4. Verifica que sea correcto
5. Ingresa una descripción 6. Verifica que sea correcto
7. Ingresa fecha 8. Verifica que sea una fecha actual
9. Ingresa hora inicio 10. Verifica que no sea una hora pasada
11. Ingresa hora fin 12. Verifica que no sea una hora anterior a la hora inicial
13. Ingresa código de un terapeuta
14. Verifica que la persona con ese código exista
15. Ingresa código de un paciente
16. Verifica que la persona con ese código exista
Excepciones 1. Ya existe una terapia con ese código
Nombre Mensaje 1
1. Si ya existe una terapia con ese código se muestra el mensaje “Terapia con ese código ya existe”.
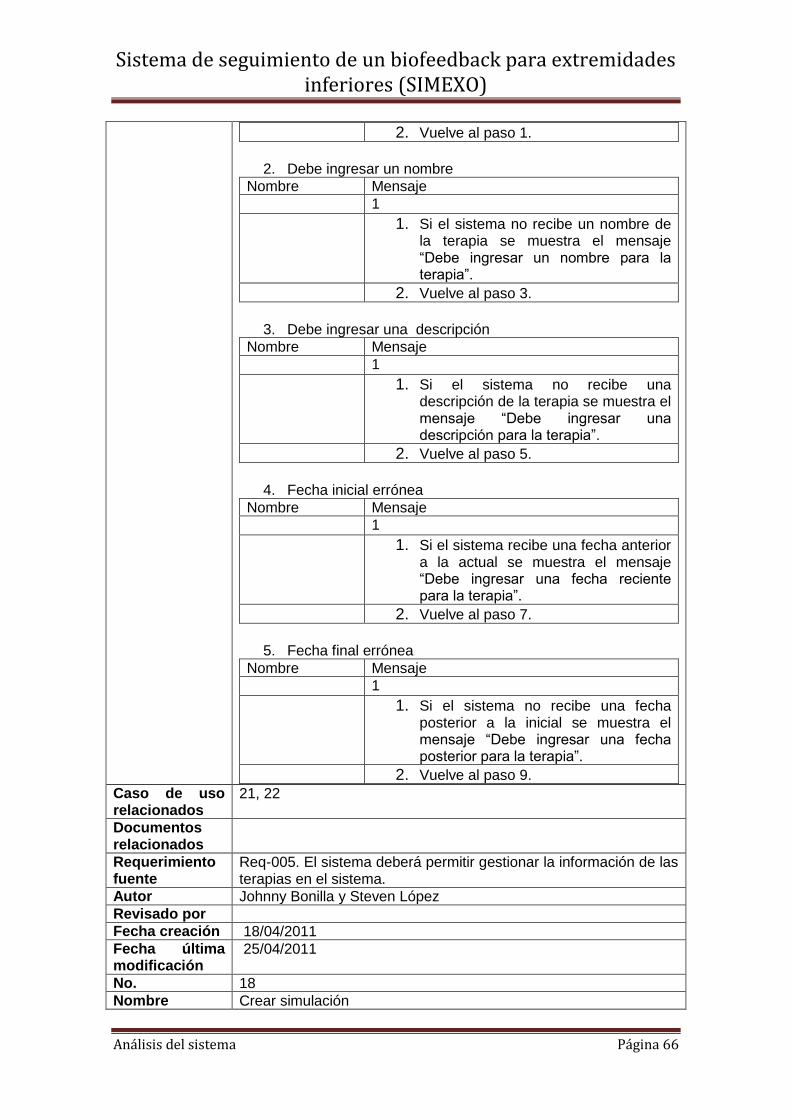
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 66
2. Vuelve al paso 1.
2. Debe ingresar un nombre
Nombre Mensaje 1
1. Si el sistema no recibe un nombre de la terapia se muestra el mensaje “Debe ingresar un nombre para la terapia”.
2. Vuelve al paso 3.
3. Debe ingresar una descripción
Nombre Mensaje 1
1. Si el sistema no recibe una descripción de la terapia se muestra el mensaje “Debe ingresar una descripción para la terapia”.
2. Vuelve al paso 5.
4. Fecha inicial errónea
Nombre Mensaje 1
1. Si el sistema recibe una fecha anterior a la actual se muestra el mensaje “Debe ingresar una fecha reciente para la terapia”.
2. Vuelve al paso 7.
5. Fecha final errónea
Nombre Mensaje 1
1. Si el sistema no recibe una fecha posterior a la inicial se muestra el mensaje “Debe ingresar una fecha posterior para la terapia”.
2. Vuelve al paso 9.
Caso de uso relacionados
21, 22
Documentos relacionados
Requerimiento fuente
Req-005. El sistema deberá permitir gestionar la información de las terapias en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 18
Nombre Crear simulación
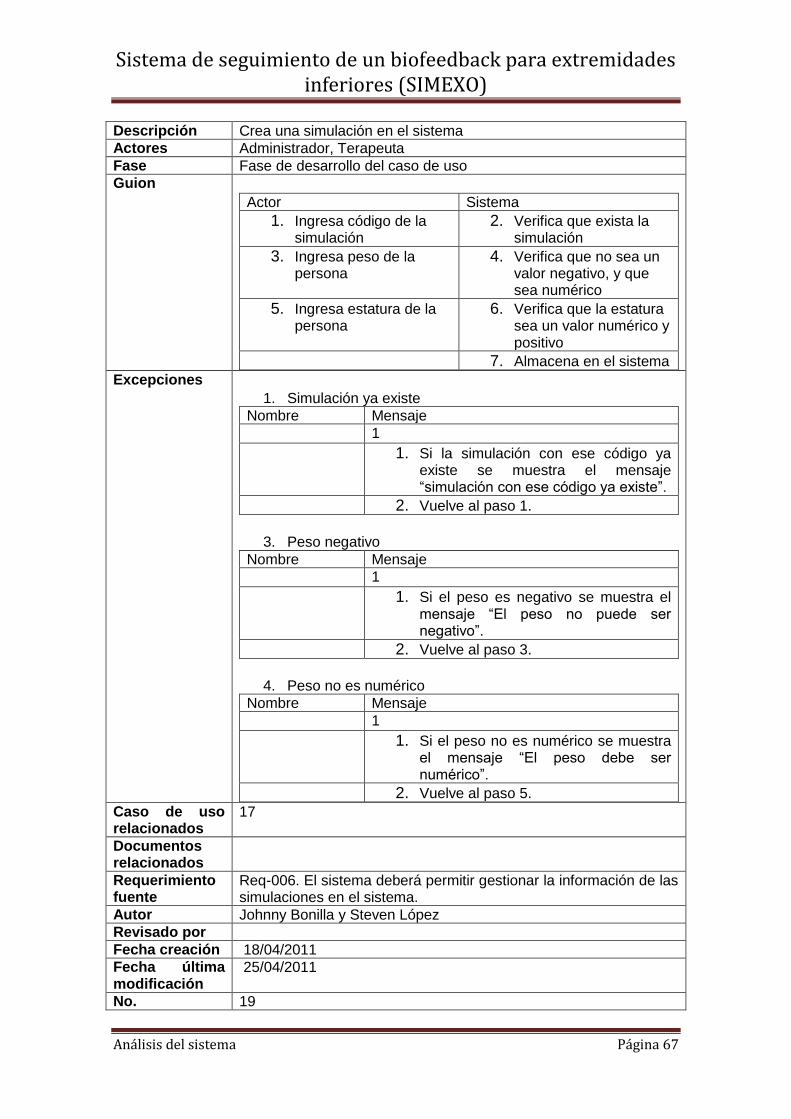
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 67
Descripción Crea una simulación en el sistema Actores Administrador, Terapeuta Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código de la simulación
2. Verifica que exista la simulación
3. Ingresa peso de la persona
4. Verifica que no sea un valor negativo, y que sea numérico
5. Ingresa estatura de la persona
6. Verifica que la estatura sea un valor numérico y positivo
7. Almacena en el sistema
Excepciones 1. Simulación ya existe
Nombre Mensaje 1
1. Si la simulación con ese código ya existe se muestra el mensaje “simulación con ese código ya existe”.
2. Vuelve al paso 1.
3. Peso negativo
Nombre Mensaje 1
1. Si el peso es negativo se muestra el mensaje “El peso no puede ser negativo”.
2. Vuelve al paso 3.
4. Peso no es numérico
Nombre Mensaje 1
1. Si el peso no es numérico se muestra el mensaje “El peso debe ser numérico”.
2. Vuelve al paso 5.
Caso de uso relacionados
17
Documentos relacionados
Requerimiento fuente
Req-006. El sistema deberá permitir gestionar la información de las simulaciones en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 19

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 68
Nombre Buscar tipo de identificación Descripción Busca un tipo de identificación en el sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código tipo de identificación
2. Verifica que el tipo de identificación exista
3. Muestra información
Excepciones 1. Tipo de identificación no existe
Nombre Mensaje 1
1. Muestra el mensaje “Tipo de identificación con este código no existe”
2. Vuelve al paso 1.
Caso de uso relacionados
2, 3
Documentos relacionados
Requerimiento fuente
Req-007.El sistema deberá permitir gestionar la información de los tipos de identificaciones en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 20 Nombre Crear tipo de identificación Descripción Crear un tipo de identificación en el sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código tipo de identificación
2. Verifica que el tipo de identificación no exista
3. Ingresar descripción 4. Verificar que sea correcto
Excepciones 1. Tipo de identificación ya existe
Nombre Mensaje
1
1. Muestra el mensaje “Tipo de identificación con este código ya existe”
2. Vuelve al paso 1.
2. Debe ingresar una descripción
Nombre Mensaje

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 69
2
1. Si el sistema no recibe una descripción de la terapia se muestra el mensaje “Debe ingresar una descripción para la terapia”.
2. Vuelve al paso 3.
Caso de uso relacionados
2, 19
Documentos relacionados
Requerimiento fuente
Req-007.El sistema deberá permitir gestionar la información de los tipos de identificaciones en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 21 Nombre Modificar tipo de identificación Descripción Modifica un tipo de identificación en el sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código tipo de identificación
2. Verifica que el tipo de identificación no exista
3. Muestra información
4. Ingresar descripción 5. Verificar que sea correcto
6. Almacena la información
Excepciones 1. Tipo de identificación no existe
Nombre Mensaje 1
1. Muestra el mensaje “Tipo de identificación con este código no existe”
2. Vuelve al paso 1.
3. Debe ingresar una descripción
Nombre Mensaje 2
1. Si el sistema no recibe una descripción de la terapia se muestra el mensaje “Debe ingresar una descripción para la terapia”.
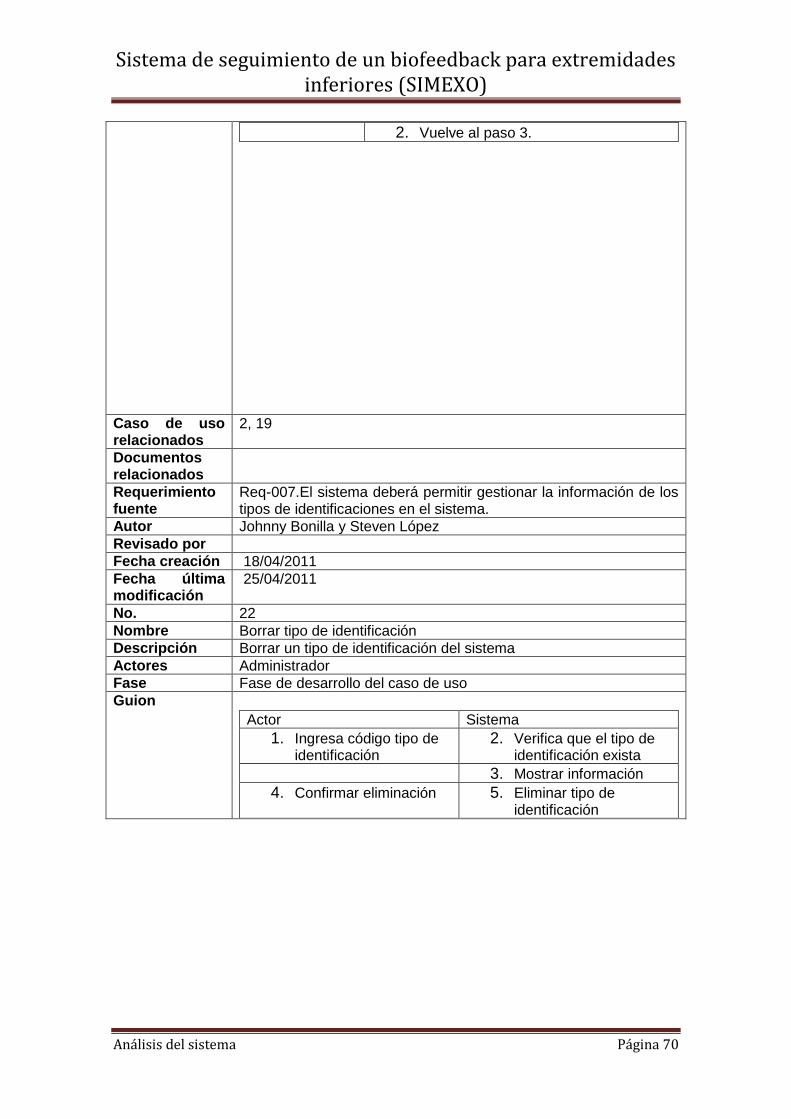
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 70
2. Vuelve al paso 3.
Caso de uso relacionados
2, 19
Documentos relacionados
Requerimiento fuente
Req-007.El sistema deberá permitir gestionar la información de los tipos de identificaciones en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 22 Nombre Borrar tipo de identificación Descripción Borrar un tipo de identificación del sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código tipo de identificación
2. Verifica que el tipo de identificación exista
3. Mostrar información
4. Confirmar eliminación 5. Eliminar tipo de identificación

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 71
Excepciones 1. Tipo de identificación no existe
Nombre Mensaje 1
1. Muestra el mensaje “Tipo de identificación con este código no existe”
2. Vuelve al paso 1.
2. Tipo de identificación ya tiene personas asociadas
Nombre Mensaje 2
1. Si la simulación ya está asociada a los cálculos de algún segmento mostrar el mensaje “La simulación ya tiene cálculos asociados”
2. Vuelve al paso 1.
Caso de uso relacionados
2, 24
Documentos relacionados
Requerimiento fuente
Req-007.El sistema deberá permitir gestionar la información de los tipos de identificaciones en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 23 Nombre Calcular torque Descripción Calcula el torque de un segmento Actores Terapeuta Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código segmento
2. Verifica que el segmento exista
3. Ingresar posición angular
4. Verificar que sea consistente
5. Ingresar código del paciente
6. Verificar que el paciente exista
7. Consulta datos de la simulación del paciente
8. Calcula torque
9. Muestra información
10. Almacena información
Excepciones 1. Segmento no existe
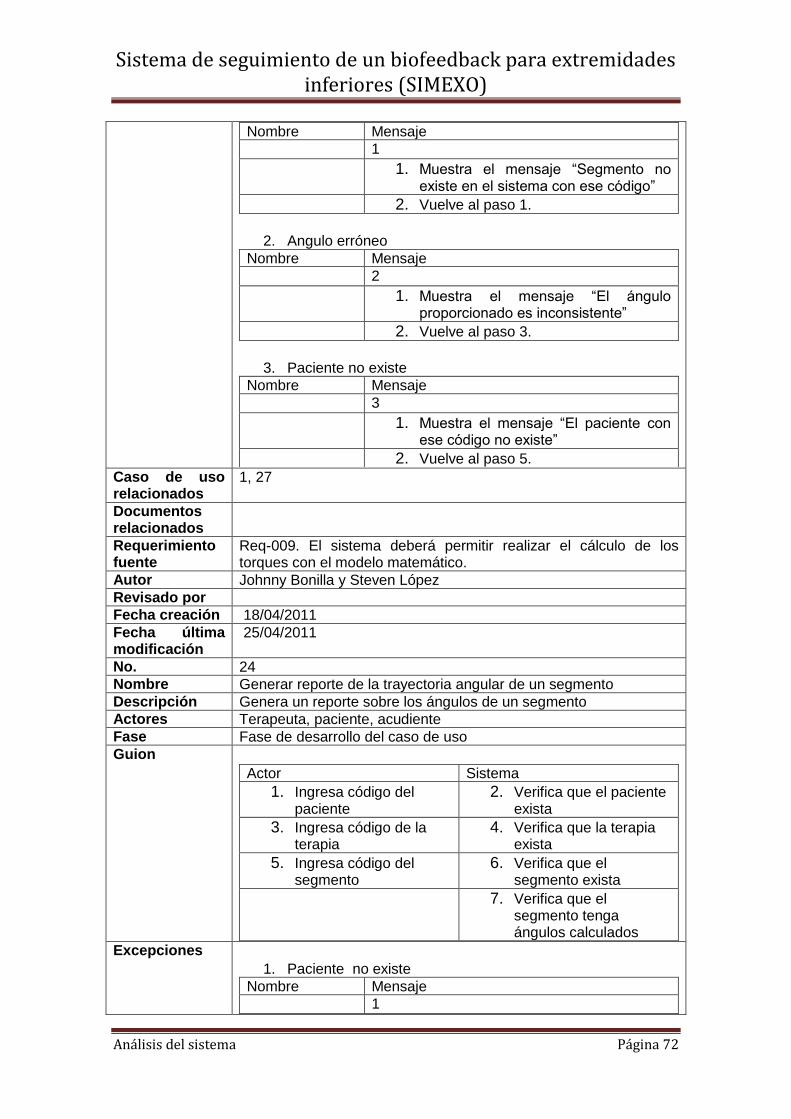
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 72
Nombre Mensaje 1
1. Muestra el mensaje “Segmento no existe en el sistema con ese código”
2. Vuelve al paso 1.
2. Angulo erróneo
Nombre Mensaje 2
1. Muestra el mensaje “El ángulo proporcionado es inconsistente”
2. Vuelve al paso 3.
3. Paciente no existe
Nombre Mensaje 3
1. Muestra el mensaje “El paciente con ese código no existe”
2. Vuelve al paso 5.
Caso de uso relacionados
1, 27
Documentos relacionados
Requerimiento fuente
Req-009. El sistema deberá permitir realizar el cálculo de los torques con el modelo matemático.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 24 Nombre Generar reporte de la trayectoria angular de un segmento
Descripción Genera un reporte sobre los ángulos de un segmento Actores Terapeuta, paciente, acudiente Fase Fase de desarrollo del caso de uso Guion
Actor Sistema 1. Ingresa código del
paciente 2. Verifica que el paciente
exista 3. Ingresa código de la
terapia 4. Verifica que la terapia
exista
5. Ingresa código del segmento
6. Verifica que el segmento exista
7. Verifica que el segmento tenga ángulos calculados
Excepciones 1. Paciente no existe
Nombre Mensaje 1
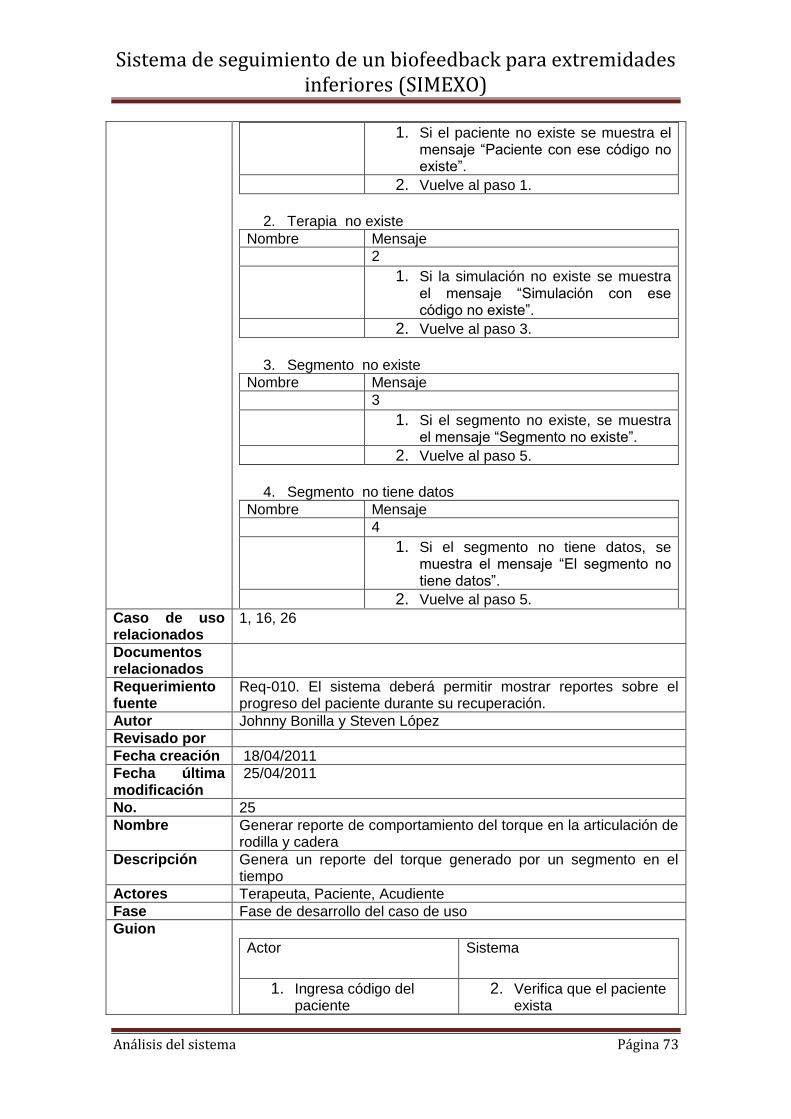
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 73
1. Si el paciente no existe se muestra el mensaje “Paciente con ese código no existe”.
2. Vuelve al paso 1.
2. Terapia no existe
Nombre Mensaje 2
1. Si la simulación no existe se muestra el mensaje “Simulación con ese código no existe”.
2. Vuelve al paso 3.
3. Segmento no existe
Nombre Mensaje 3
1. Si el segmento no existe, se muestra el mensaje “Segmento no existe”.
2. Vuelve al paso 5.
4. Segmento no tiene datos
Nombre Mensaje 4
1. Si el segmento no tiene datos, se muestra el mensaje “El segmento no tiene datos”.
2. Vuelve al paso 5.
Caso de uso relacionados
1, 16, 26
Documentos relacionados
Requerimiento fuente
Req-010. El sistema deberá permitir mostrar reportes sobre el progreso del paciente durante su recuperación.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 25 Nombre Generar reporte de comportamiento del torque en la articulación de
rodilla y cadera
Descripción Genera un reporte del torque generado por un segmento en el tiempo
Actores Terapeuta, Paciente, Acudiente Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código del paciente
2. Verifica que el paciente exista
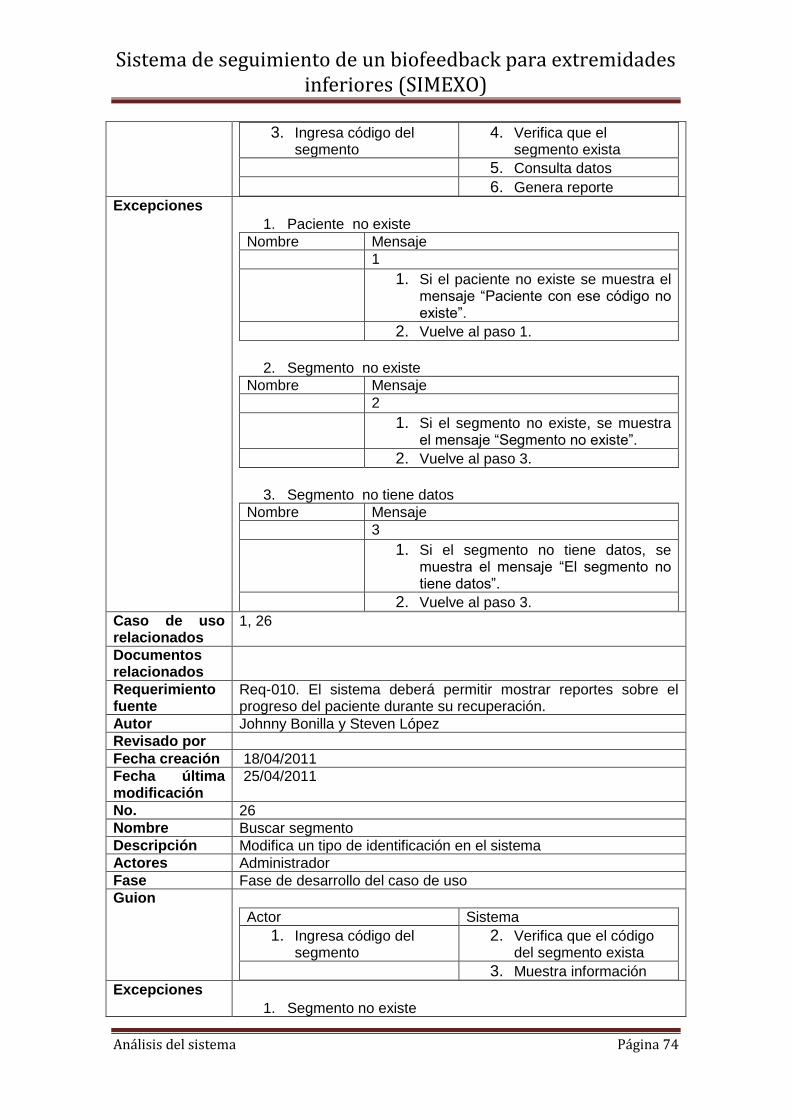
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 74
3. Ingresa código del segmento
4. Verifica que el segmento exista
5. Consulta datos
6. Genera reporte
Excepciones 1. Paciente no existe
Nombre Mensaje 1
1. Si el paciente no existe se muestra el mensaje “Paciente con ese código no existe”.
2. Vuelve al paso 1.
2. Segmento no existe
Nombre Mensaje 2
1. Si el segmento no existe, se muestra el mensaje “Segmento no existe”.
2. Vuelve al paso 3.
3. Segmento no tiene datos
Nombre Mensaje 3
1. Si el segmento no tiene datos, se muestra el mensaje “El segmento no tiene datos”.
2. Vuelve al paso 3.
Caso de uso relacionados
1, 26
Documentos relacionados
Requerimiento fuente
Req-010. El sistema deberá permitir mostrar reportes sobre el progreso del paciente durante su recuperación.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 26 Nombre Buscar segmento Descripción Modifica un tipo de identificación en el sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código del segmento
2. Verifica que el código del segmento exista
3. Muestra información
Excepciones 1. Segmento no existe
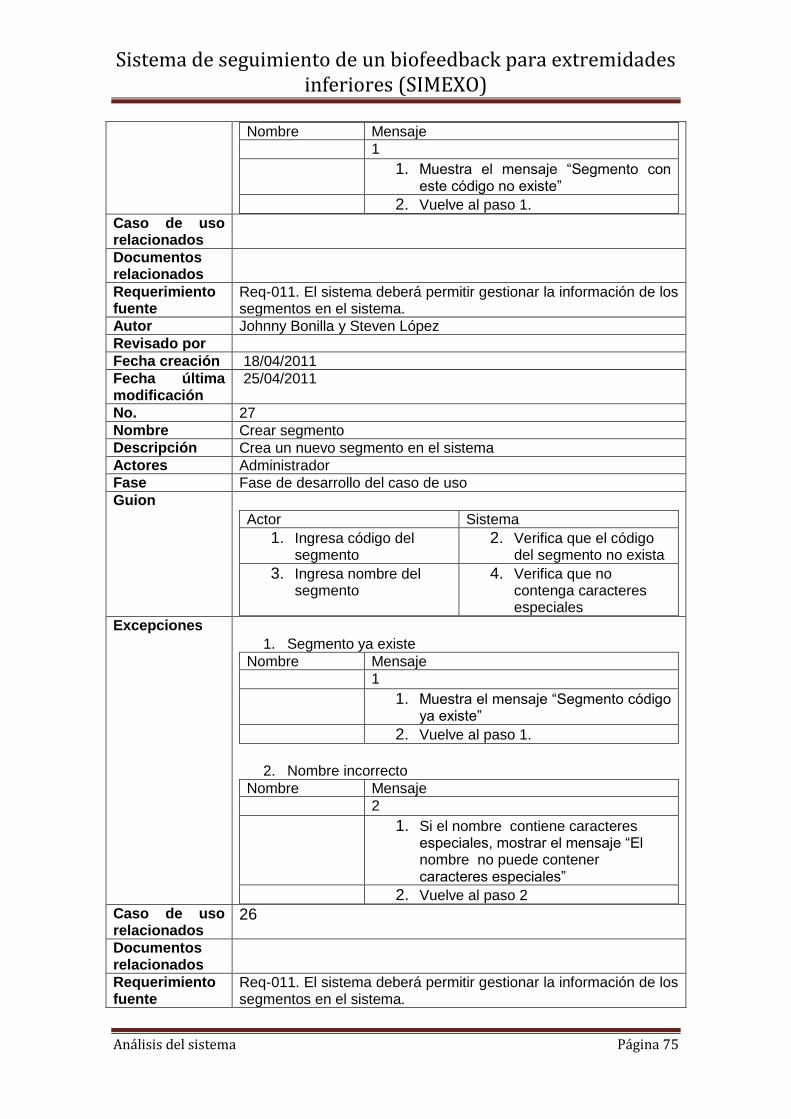
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 75
Nombre Mensaje 1
1. Muestra el mensaje “Segmento con este código no existe”
2. Vuelve al paso 1.
Caso de uso relacionados
Documentos relacionados
Requerimiento fuente
Req-011. El sistema deberá permitir gestionar la información de los segmentos en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 27 Nombre Crear segmento Descripción Crea un nuevo segmento en el sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código del segmento
2. Verifica que el código del segmento no exista
3. Ingresa nombre del segmento
4. Verifica que no contenga caracteres especiales
Excepciones 1. Segmento ya existe
Nombre Mensaje 1
1. Muestra el mensaje “Segmento código ya existe”
2. Vuelve al paso 1.
2. Nombre incorrecto
Nombre Mensaje 2
1. Si el nombre contiene caracteres especiales, mostrar el mensaje “El nombre no puede contener caracteres especiales”
2. Vuelve al paso 2
Caso de uso relacionados
26
Documentos relacionados
Requerimiento fuente
Req-011. El sistema deberá permitir gestionar la información de los segmentos en el sistema.

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 76
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 28 Nombre Modificar segmento Descripción Modifica un segmento del sistema Actores Administrador Fase Fase de desarrollo del caso de uso Guion
Actor Sistema
1. Ingresa código del segmento
2. Verifica que el código del segmento exista
3. Muestra información
4. Ingresa información 5. Verifica que sea consistente
Excepciones 1. Segmento no existe
Nombre Mensaje 1
1. Muestra el mensaje “Segmento código no existe”
2. Vuelve al paso 1.
2. Nombre incorrecto
Nombre Mensaje 2
1. Si el nombre contiene caracteres especiales, mostrar el mensaje “El nombre no puede contener caracteres especiales”
2. Vuelve al paso 4
Caso de uso relacionados
26
Documentos relacionados
Requerimiento fuente
Req-011. El sistema deberá permitir gestionar la información de los segmentos en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 29 Nombre Eliminar segmento Descripción Elimina un segmento del sistema Actores Administrador Fase Fase de desarrollo del caso de uso

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 77
Guion Actor Sistema
1. Ingresa código del segmento
2. Verifica que el código del segmento exista
3. Muestra información
4. Confirma eliminación 5. Elimina un segmento
Excepciones 1. Segmento no existe
Nombre Mensaje 1
1. Muestra el mensaje “Segmento código no existe”
2. Vuelve al paso 1.
2. Segmento tiene simulaciones asociadas
Nombre Mensaje 2
1. Si el segmento tiene asociado alguna simulación, mostrar el mensaje “El segmento ya tiene simulaciones asociadas”
2. Vuelve al paso 1.
Caso de uso relacionados
26
Documentos relacionados
Requerimiento fuente
Req-011. El sistema deberá permitir gestionar la información de los segmentos en el sistema.
Autor Johnny Bonilla y Steven López Revisado por Fecha creación 18/04/2011 Fecha última modificación
25/04/2011
No. 30
Nombre Loguear usuario
Descripción Permite ingresar al sistema a un usuario
Actores Administrador, Terapeuta, Paciente, Acudiente
Fase Fase de desarrollo del caso de uso
Guion
Actor Sistema
1. Ingresa usuario 2. Verifica que no contenga caracteres especiales
3. Ingresa contraseña 4. Verificar que sea correcto
5. Verifica que los datos sean correspondientes
Excepciones 1. Usuario incorrecto
Nombre Mensaje
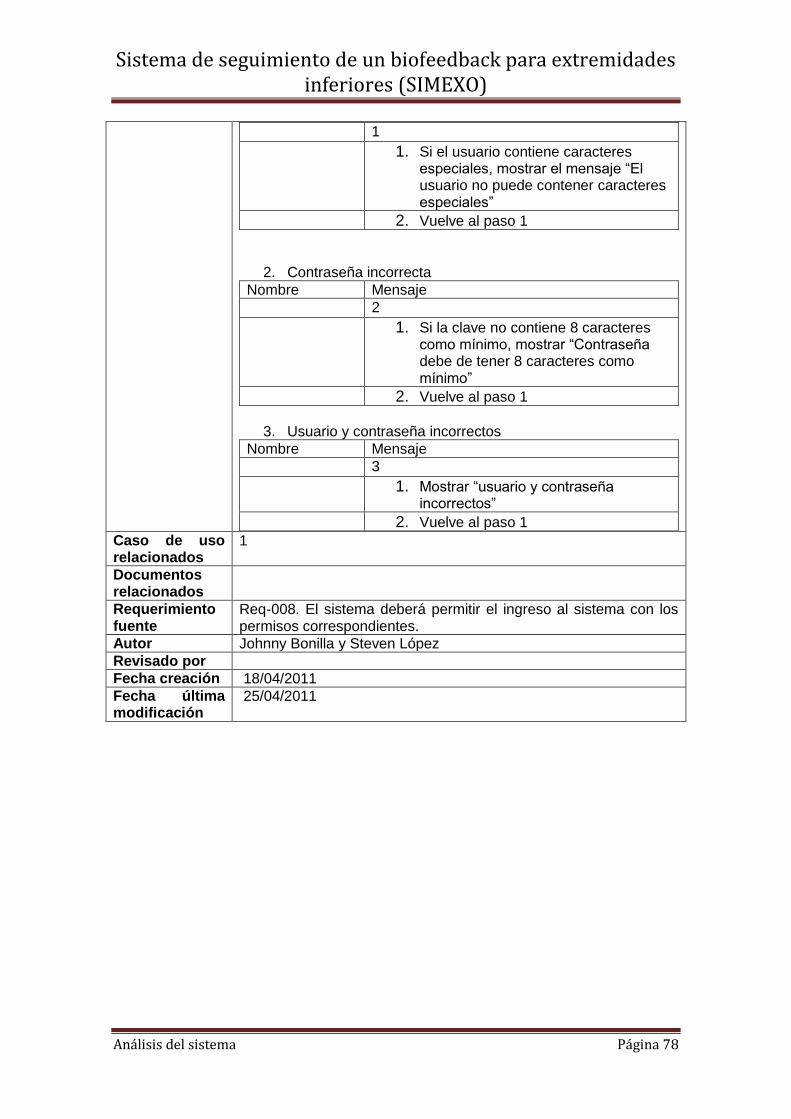
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 78
1
1. Si el usuario contiene caracteres especiales, mostrar el mensaje “El usuario no puede contener caracteres especiales”
2. Vuelve al paso 1
2. Contraseña incorrecta
Nombre Mensaje 2
1. Si la clave no contiene 8 caracteres como mínimo, mostrar “Contraseña debe de tener 8 caracteres como mínimo”
2. Vuelve al paso 1
3. Usuario y contraseña incorrectos
Nombre Mensaje 3
1. Mostrar “usuario y contraseña incorrectos”
2. Vuelve al paso 1
Caso de uso relacionados
1
Documentos relacionados
Requerimiento fuente
Req-008. El sistema deberá permitir el ingreso al sistema con los permisos correspondientes.
Autor Johnny Bonilla y Steven López
Revisado por
Fecha creación 18/04/2011
Fecha última modificación
25/04/2011
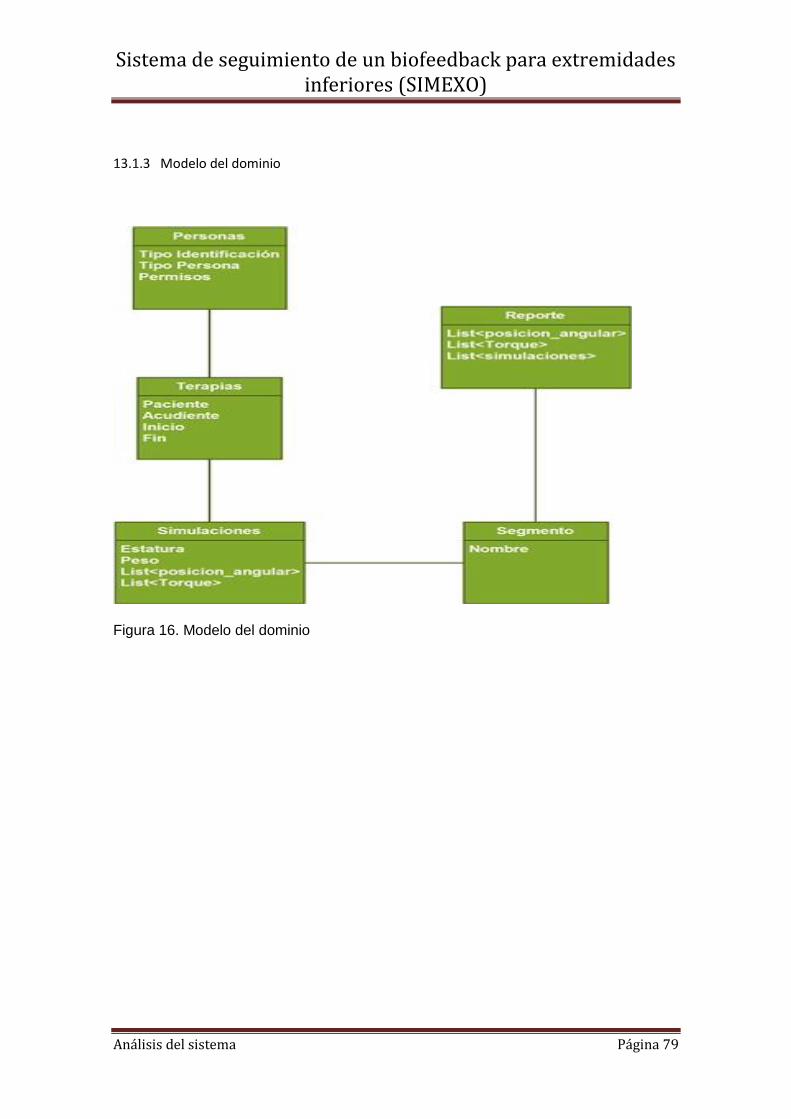
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 79
13.1.3 Modelo del dominio
Figura 16. Modelo del dominio
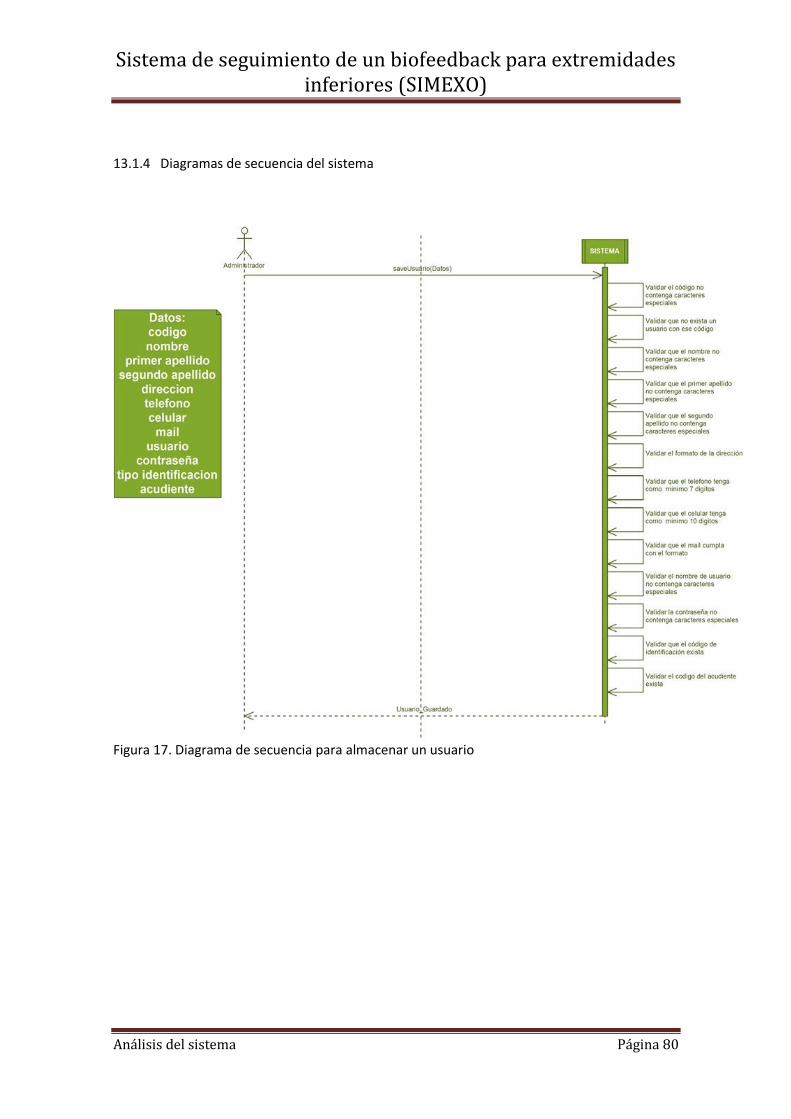
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 80
13.1.4 Diagramas de secuencia del sistema
Figura 17. Diagrama de secuencia para almacenar un usuario
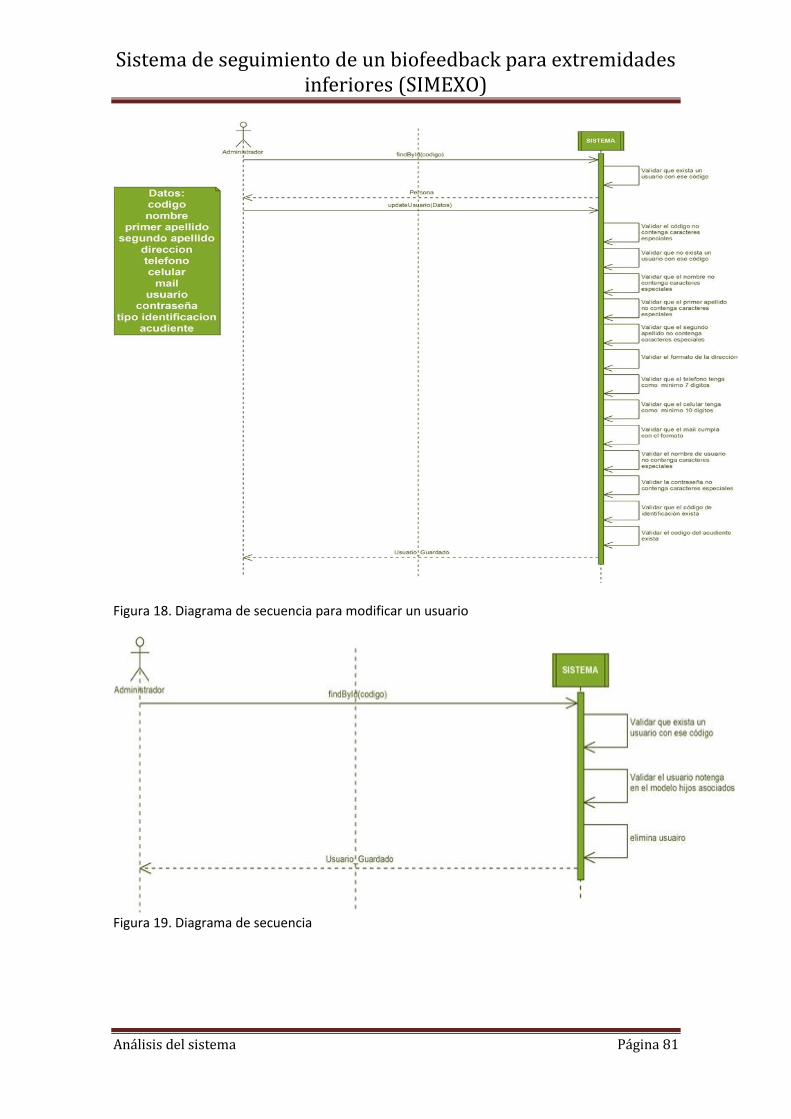
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 81
Figura 18. Diagrama de secuencia para modificar un usuario
Figura 19. Diagrama de secuencia

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 82
DISEÑO
13.1.5 Modelo de clases
Figura 20. Modelo de clases del sistema
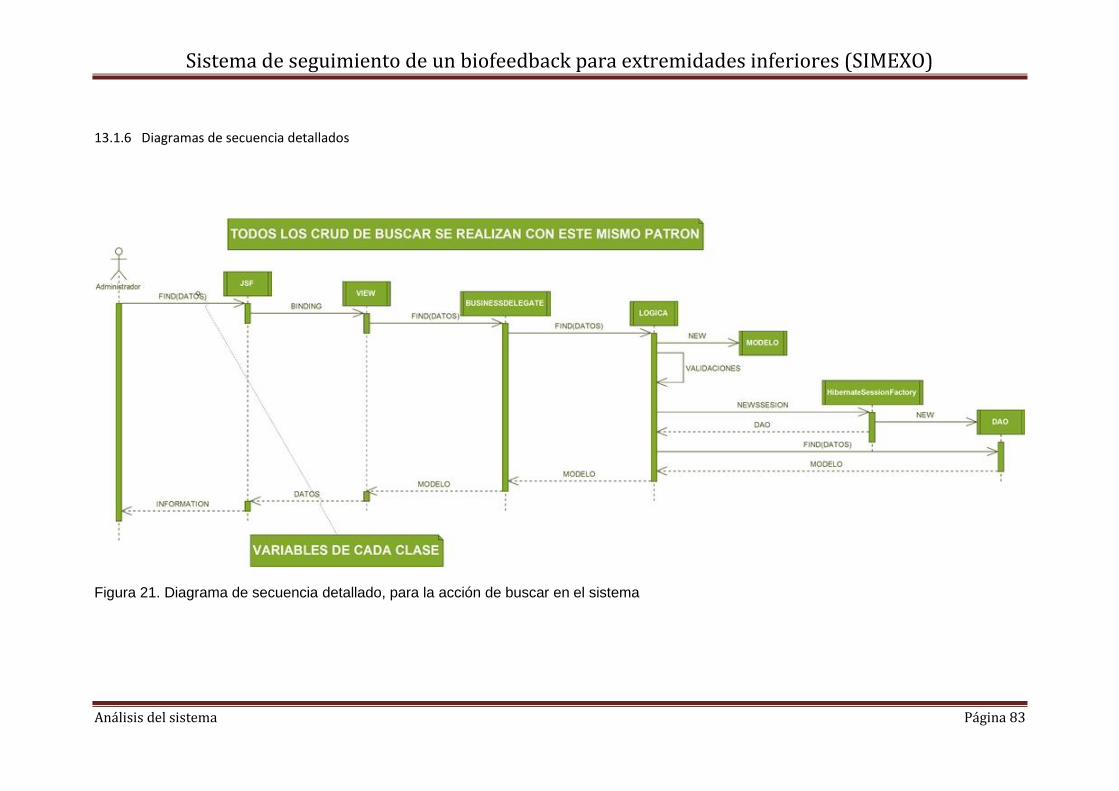
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 83
13.1.6 Diagramas de secuencia detallados
Figura 21. Diagrama de secuencia detallado, para la acción de buscar en el sistema

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 84
Figura 22. Diagrama de secuencia detallado, para la acción de crear en el sistema

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 85
Figura 23. Diagrama de secuencia detallado, para la acción de modificar en el sistema
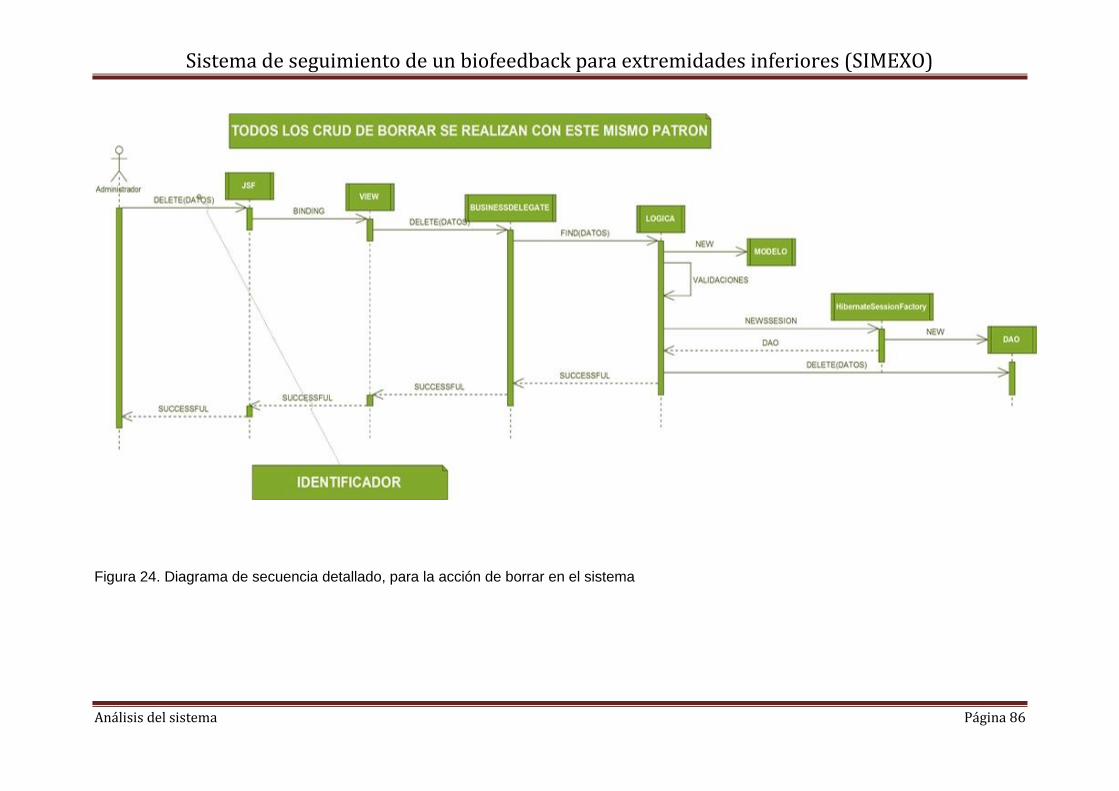
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 86
Figura 24. Diagrama de secuencia detallado, para la acción de borrar en el sistema

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 87
13.1.7 Modelo entidad relación
Figura 25. Modelo entidad relación

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 88
ARQUITECTURA

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 89
15 INTRODUCCIÓN A LA DOCUMENTACIÓN DE
ARQUITECTURA BASE. Este documento especifica la arquitectura de Software para elSistema de seguimiento de un Biofeedback para extremidades inferiores. La arquitectura de software para un sistema es la estructura de las diferentes estructuras de ese sistema. Comprometiendo los elementos de software, las propiedades externamente visibles de esos componentes y las relaciones entre ellos. La arquitectura de software incluye principalmente información sobre como los elementos se relacionan entre sí. Esto significa que la arquitectura omite cierta información acerca de tales elementos que no sea concerniente con esas interacciones. Por ello, una arquitectura de software es una abstracción del sistema que suprime algunos detalles de los elementos que no afectan como se usan, como son usados, se relacionan o interactúan con otros elementos. La definición de la arquitectura establece que no es posible definir una única estructura de componentes. En realidad, la definición de la arquitectura se basa en un conjunto de diferentes perspectivas del sistema que ofrecen información diversa de los componentes. La documentación de la arquitectura de software se basa en la presentación de las vistas relevantes y en documentar la información que aplica a ellas.
14.1 EVALUACIÓN DE TECNOLOGÍAS A APLICAR EN EL PROYECTO.
La aplicación se encuentra desarrollada en la plataforma JEE5, para lo cual se empleó el uso de:
POJOs (Plain Old Java Objects): El esquema basado en objetos planos, permite desarrollar toda la aplicación empleando un esquema basado en objetos de entidad transversales a todas las capas. Los objetos de entidad que se obtienen a partir de la capa de acceso a datos, pueden ser utilizados en las capas de lógica de dominio y de presentación.
Para hacer uso del esquema basado en objetos planos, se usan librerías que soportan este modo de operación:
Java Server Faces (JSF), para la generación de pantallas y el manejo de los eventos de la interfaz de usuarios.
Hibernate, para el manejo de la persistencia de los datos. La capa de presentación se construye basada en el uso de Java Server Faces (JSF). Cada una de las pantallas de la aplicación es construida en un archivo separado empleando una página XML Java Server Pages (JSPX) con los componentes Java Server Faces (JSF) e ICEfaces.
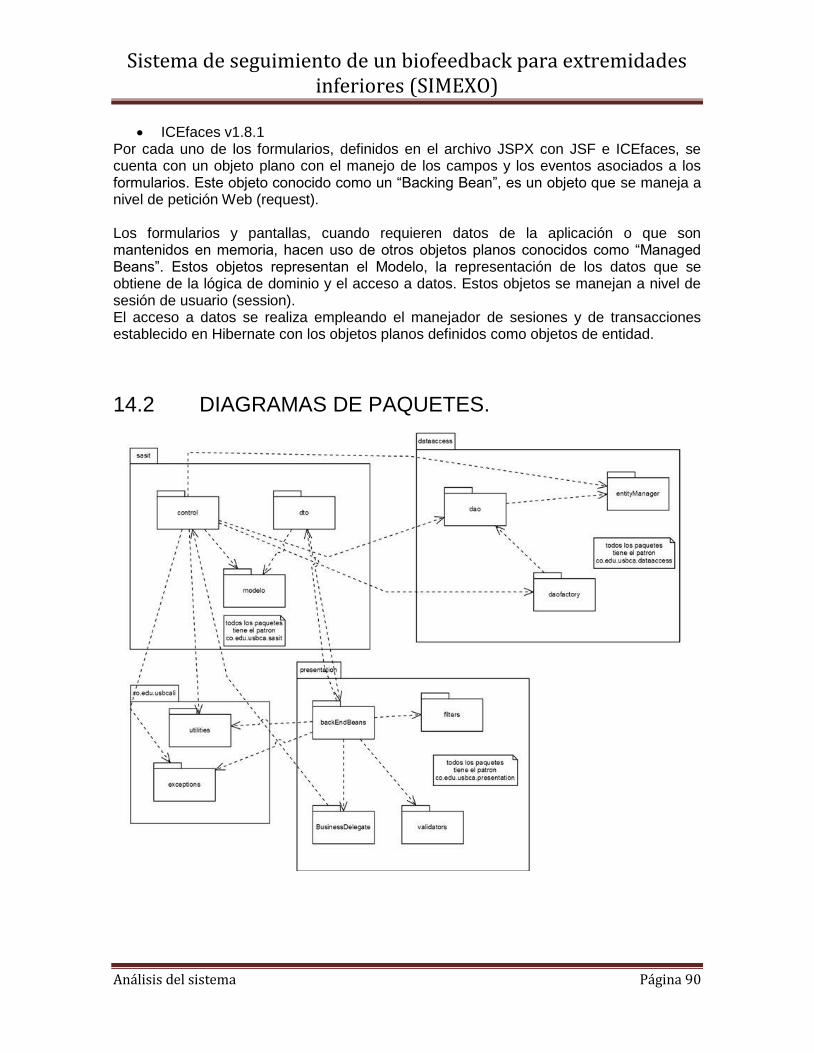
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 90
ICEfaces v1.8.1 Por cada uno de los formularios, definidos en el archivo JSPX con JSF e ICEfaces, se cuenta con un objeto plano con el manejo de los campos y los eventos asociados a los formularios. Este objeto conocido como un “Backing Bean”, es un objeto que se maneja a nivel de petición Web (request). Los formularios y pantallas, cuando requieren datos de la aplicación o que son mantenidos en memoria, hacen uso de otros objetos planos conocidos como “Managed Beans”. Estos objetos representan el Modelo, la representación de los datos que se obtiene de la lógica de dominio y el acceso a datos. Estos objetos se manejan a nivel de sesión de usuario (session). El acceso a datos se realiza empleando el manejador de sesiones y de transacciones establecido en Hibernate con los objetos planos definidos como objetos de entidad.
14.2 DIAGRAMAS DE PAQUETES.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 91
14.3 ARQUITECTURA DEL SOFTWARE.
La Arquitectura del Software es el diseño de más alto nivel de la estructura de un sistema. Una Arquitectura de Software, consiste en un conjunto de patrones y abstracciones coherentes que proporcionan el marco de referencia necesario para guiar la construcción del software para un sistema de información. La Arquitectura de Software establece los fundamentos para que analistas, diseñadores, programadores, etc. trabajen en una línea común que permita alcanzar los objetivos del sistema de información, cubriendo todas las necesidades. Una arquitectura de software se selecciona y diseña con base en objetivos y restricciones. La arquitectura de software define, de manera abstracta, los componentes que llevan a cabo alguna tarea de computación, sus interfaces y la comunicación entre ellos. Toda arquitectura debe ser implementable en una arquitectura física, que consiste simplemente en determinar qué computadora tendrá asignada cada tarea.
14.4 PATRONES
Un patrón de diseño es una solución a un problema de diseño. Para que una solución sea considerada un patrón debe poseer ciertas características. Una de ellas es que debe haber comprobado su efectividad resolviendo problemas similares en ocasiones anteriores. Otra es que debe ser reusable, lo que significa que es aplicable a diferentes problemas de diseño en distintas circunstancias.
14.4.1 Estilo arquitectónico.
El estilo arquitectónico de la aplicación es: Web-Centric N-Tier, y está distribuido de la siguiente forma:

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 92
El web browser es el cliente que se conecta al servidor de aplicaciones.
La lógica de negocio reside en un servidor de aplicaciones
El servidor de aplicaciones administra la integridad de datos y provee la lógica de negocio y de presentación.
14.4.2 Patrones arquitectónicos
Arquitectura de datos y modelado (E-R Data Modeling)
14.4.3 Patrones de diseño.
DAO
Singleton
Factory
Business Delegate

Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 93
14.5 Diagramas de despliegue.
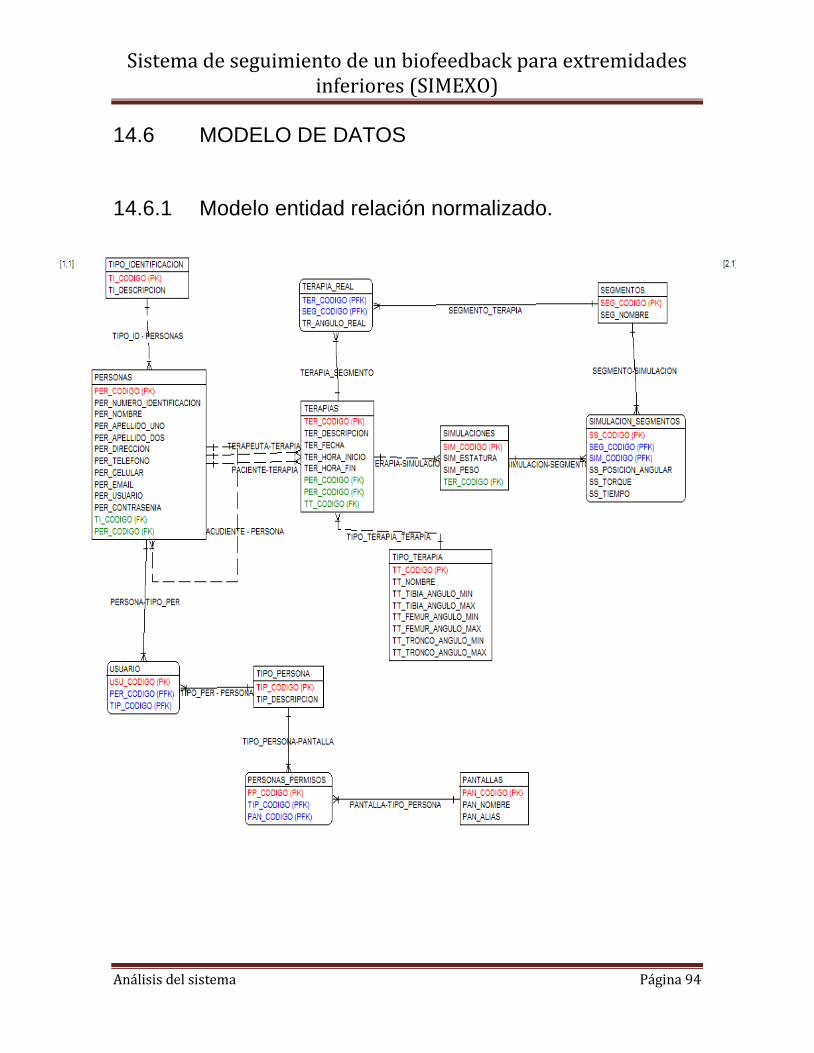
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 94
14.6 MODELO DE DATOS
14.6.1 Modelo entidad relación normalizado.
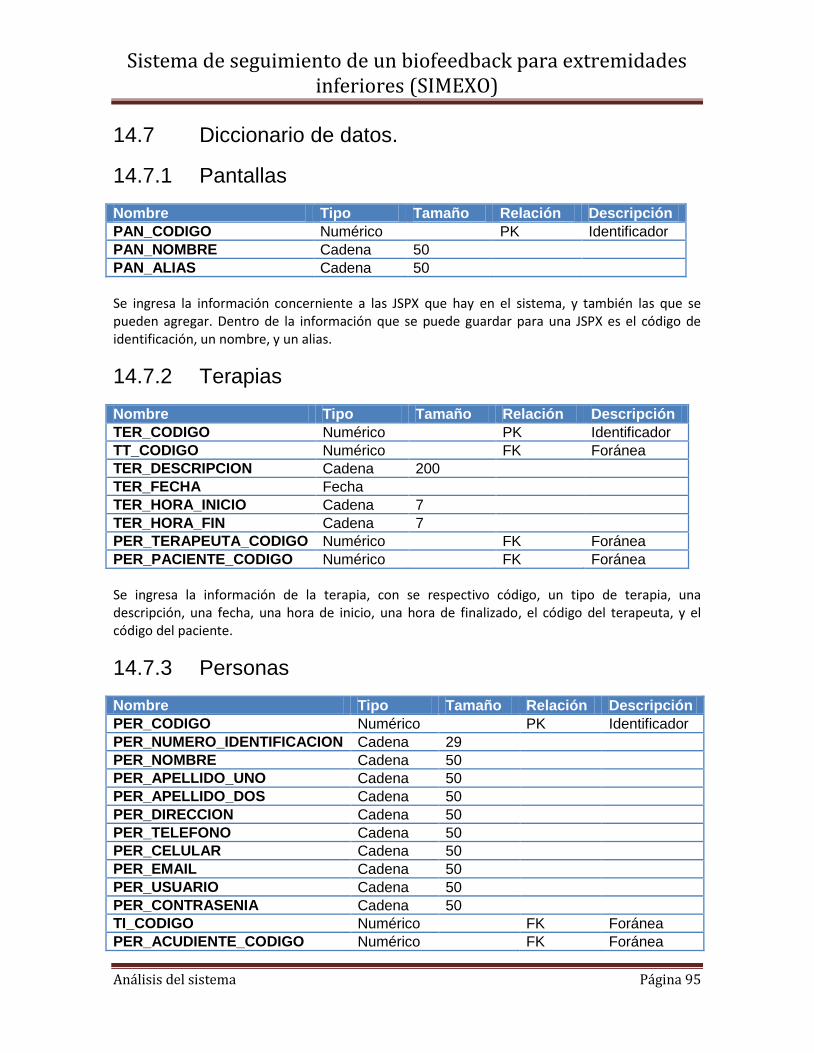
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 95
14.7 Diccionario de datos.
14.7.1 Pantallas
Nombre Tipo Tamaño Relación Descripción
PAN_CODIGO Numérico PK Identificador
PAN_NOMBRE Cadena 50
PAN_ALIAS Cadena 50
Se ingresa la información concerniente a las JSPX que hay en el sistema, y también las que se pueden agregar. Dentro de la información que se puede guardar para una JSPX es el código de identificación, un nombre, y un alias.
14.7.2 Terapias
Nombre Tipo Tamaño Relación Descripción
TER_CODIGO Numérico PK Identificador
TT_CODIGO Numérico FK Foránea
TER_DESCRIPCION Cadena 200
TER_FECHA Fecha
TER_HORA_INICIO Cadena 7
TER_HORA_FIN Cadena 7
PER_TERAPEUTA_CODIGO Numérico FK Foránea
PER_PACIENTE_CODIGO Numérico FK Foránea
Se ingresa la información de la terapia, con se respectivo código, un tipo de terapia, una descripción, una fecha, una hora de inicio, una hora de finalizado, el código del terapeuta, y el código del paciente.
14.7.3 Personas
Nombre Tipo Tamaño Relación Descripción
PER_CODIGO Numérico PK Identificador
PER_NUMERO_IDENTIFICACION Cadena 29
PER_NOMBRE Cadena 50
PER_APELLIDO_UNO Cadena 50
PER_APELLIDO_DOS Cadena 50
PER_DIRECCION Cadena 50
PER_TELEFONO Cadena 50
PER_CELULAR Cadena 50
PER_EMAIL Cadena 50
PER_USUARIO Cadena 50
PER_CONTRASENIA Cadena 50
TI_CODIGO Numérico FK Foránea
PER_ACUDIENTE_CODIGO Numérico FK Foránea
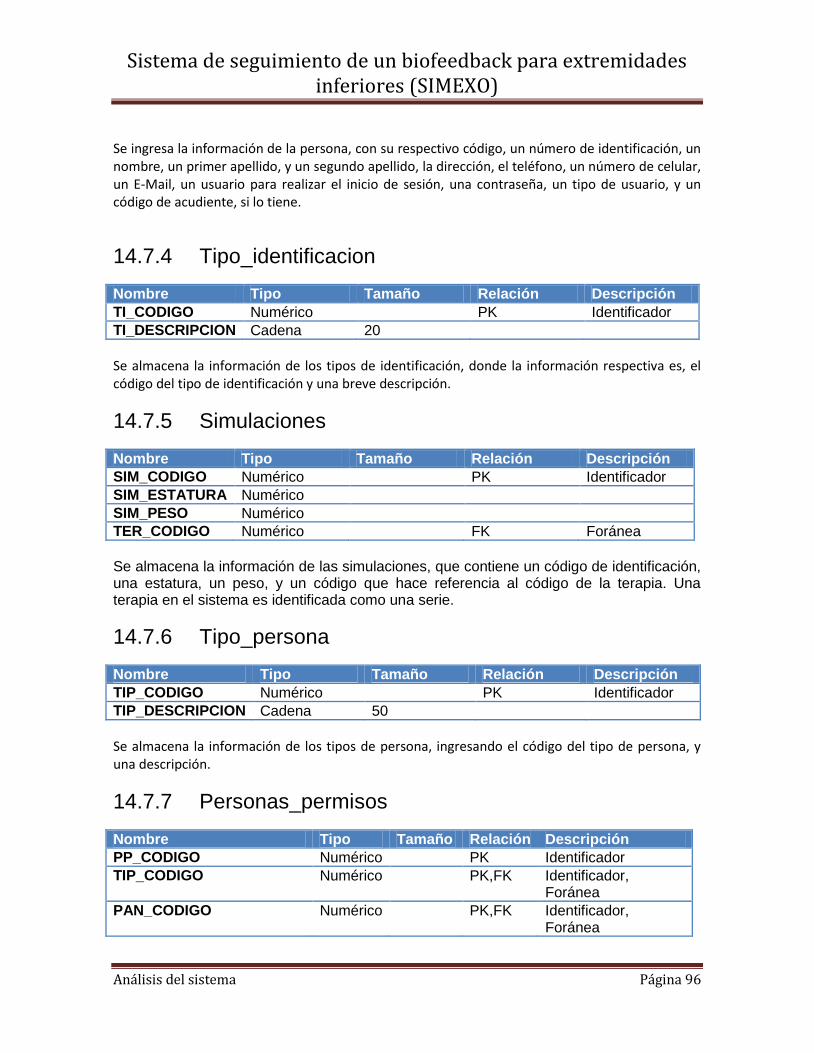
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 96
Se ingresa la información de la persona, con su respectivo código, un número de identificación, un nombre, un primer apellido, y un segundo apellido, la dirección, el teléfono, un número de celular, un E-Mail, un usuario para realizar el inicio de sesión, una contraseña, un tipo de usuario, y un código de acudiente, si lo tiene.
14.7.4 Tipo_identificacion
Nombre Tipo Tamaño Relación Descripción
TI_CODIGO Numérico PK Identificador
TI_DESCRIPCION Cadena 20
Se almacena la información de los tipos de identificación, donde la información respectiva es, el código del tipo de identificación y una breve descripción.
14.7.5 Simulaciones
Nombre Tipo Tamaño Relación Descripción
SIM_CODIGO Numérico PK Identificador
SIM_ESTATURA Numérico
SIM_PESO Numérico
TER_CODIGO Numérico FK Foránea
Se almacena la información de las simulaciones, que contiene un código de identificación, una estatura, un peso, y un código que hace referencia al código de la terapia. Una terapia en el sistema es identificada como una serie.
14.7.6 Tipo_persona
Nombre Tipo Tamaño Relación Descripción
TIP_CODIGO Numérico PK Identificador
TIP_DESCRIPCION Cadena 50
Se almacena la información de los tipos de persona, ingresando el código del tipo de persona, y una descripción.
14.7.7 Personas_permisos
Nombre Tipo Tamaño Relación Descripción
PP_CODIGO Numérico PK Identificador
TIP_CODIGO Numérico PK,FK Identificador, Foránea
PAN_CODIGO Numérico PK,FK Identificador, Foránea
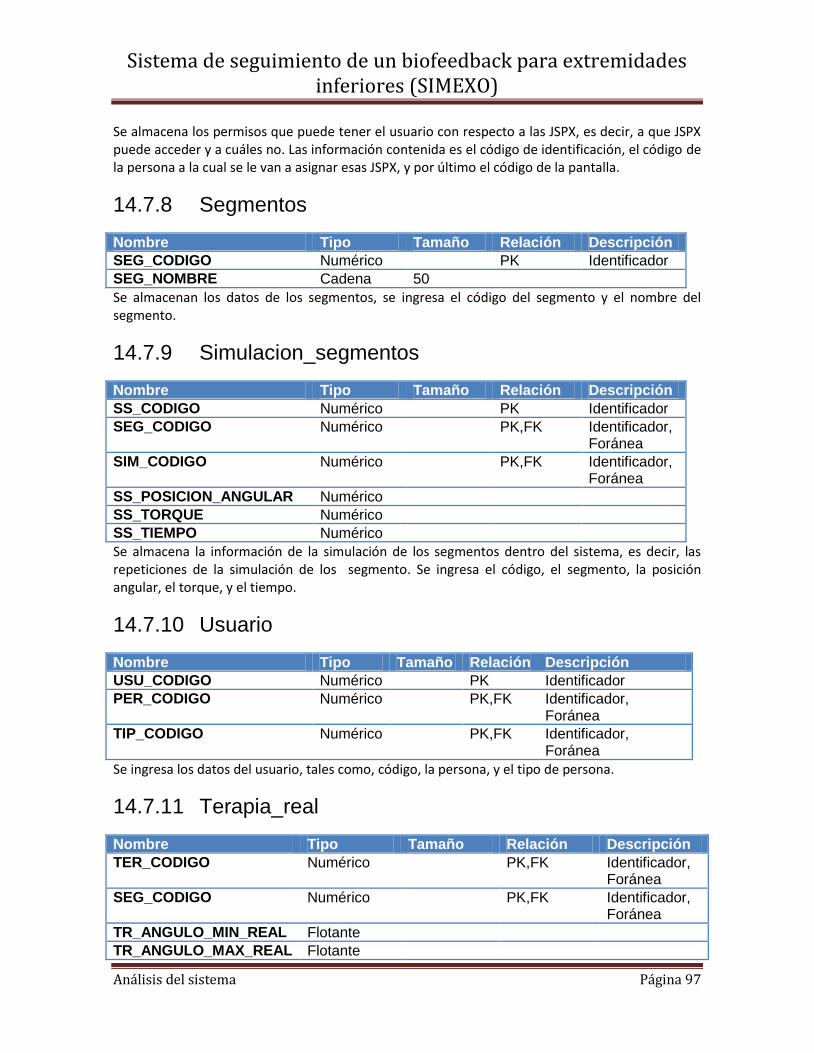
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 97
Se almacena los permisos que puede tener el usuario con respecto a las JSPX, es decir, a que JSPX puede acceder y a cuáles no. Las información contenida es el código de identificación, el código de la persona a la cual se le van a asignar esas JSPX, y por último el código de la pantalla.
14.7.8 Segmentos
Nombre Tipo Tamaño Relación Descripción
SEG_CODIGO Numérico PK Identificador
SEG_NOMBRE Cadena 50
Se almacenan los datos de los segmentos, se ingresa el código del segmento y el nombre del segmento.
14.7.9 Simulacion_segmentos
Nombre Tipo Tamaño Relación Descripción
SS_CODIGO Numérico PK Identificador
SEG_CODIGO Numérico PK,FK Identificador, Foránea
SIM_CODIGO Numérico PK,FK Identificador, Foránea
SS_POSICION_ANGULAR Numérico
SS_TORQUE Numérico
SS_TIEMPO Numérico
Se almacena la información de la simulación de los segmentos dentro del sistema, es decir, las repeticiones de la simulación de los segmento. Se ingresa el código, el segmento, la posición angular, el torque, y el tiempo.
14.7.10 Usuario
Nombre Tipo Tamaño Relación Descripción
USU_CODIGO Numérico PK Identificador
PER_CODIGO Numérico PK,FK Identificador, Foránea
TIP_CODIGO Numérico PK,FK Identificador, Foránea
Se ingresa los datos del usuario, tales como, código, la persona, y el tipo de persona.
14.7.11 Terapia_real
Nombre Tipo Tamaño Relación Descripción
TER_CODIGO Numérico PK,FK Identificador, Foránea
SEG_CODIGO Numérico PK,FK Identificador, Foránea
TR_ANGULO_MIN_REAL Flotante
TR_ANGULO_MAX_REAL Flotante
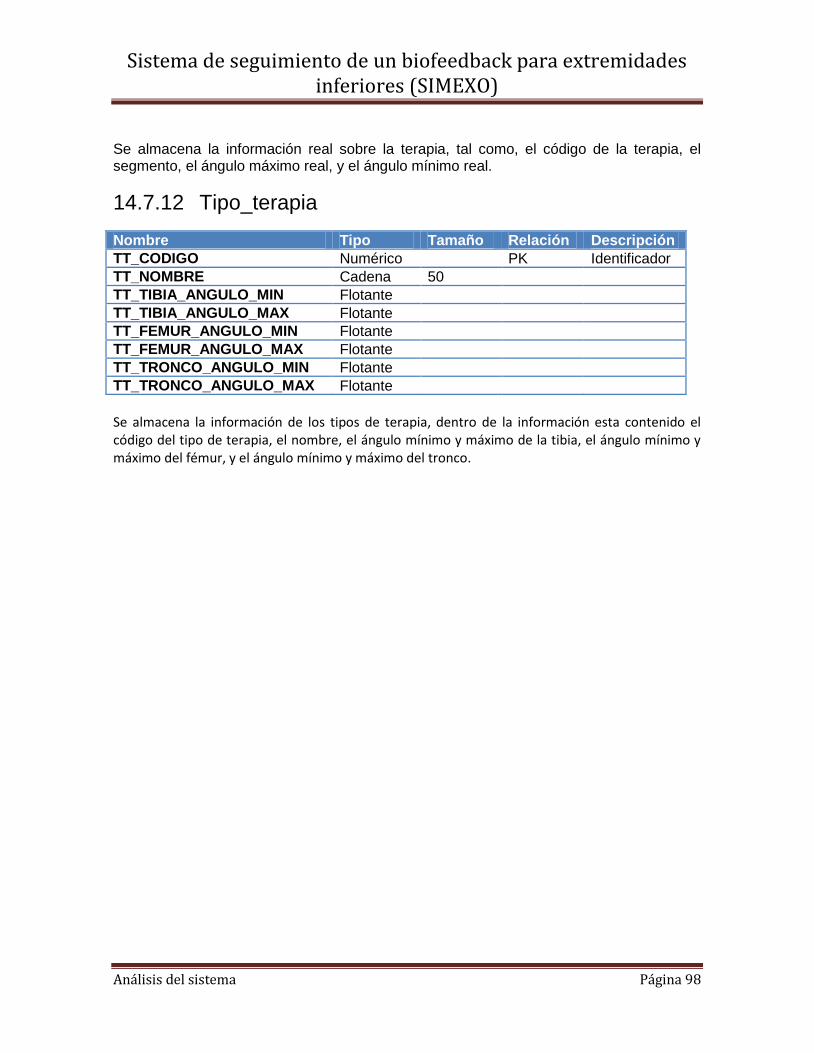
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 98
Se almacena la información real sobre la terapia, tal como, el código de la terapia, el segmento, el ángulo máximo real, y el ángulo mínimo real.
14.7.12 Tipo_terapia
Nombre Tipo Tamaño Relación Descripción
TT_CODIGO Numérico PK Identificador
TT_NOMBRE Cadena 50
TT_TIBIA_ANGULO_MIN Flotante
TT_TIBIA_ANGULO_MAX Flotante
TT_FEMUR_ANGULO_MIN Flotante
TT_FEMUR_ANGULO_MAX Flotante
TT_TRONCO_ANGULO_MIN Flotante
TT_TRONCO_ANGULO_MAX Flotante
Se almacena la información de los tipos de terapia, dentro de la información esta contenido el código del tipo de terapia, el nombre, el ángulo mínimo y máximo de la tibia, el ángulo mínimo y máximo del fémur, y el ángulo mínimo y máximo del tronco.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 99
15 BIBLIOGRAFÍA
AGUIRRE Ollinger G [y otros] Active-impedance control of s lower-limb assistive exoskeleton [Publicación periódica]. - Evaston : Rehabilitation robotics, 2007, icorr 2007, ieee 10th international conference on robotic, 2007. - Vols. Pág. 188-195.
BRAIDOT A [et al.] Diseño de un electrogoniómetro telemétrico y microcontrolado [Conference] // II Congreso latinoamericano de ingeniería biomédica. - Habana : [s.n.], 2001.
BUREAU M [y otros] Diseño de un exoesqueleto para neurorehabilitación basado en detección de intención. [Informe]. - España : Fundación Fatronik, Centro de investigación tecnológica, 2007.
CHEVALLEREAU C and SARDAIN P Design and actuation optimization of a 4-axes biped robot forwalking and running [Conference] // Robotics and Automation, 2000. Proceedings. ICRA apos;00. IEEE International Conference on Digital Object Identifier. - San Francisco, USA. : IEEE, 2000. - Vol. 4. - pp. 3365-3370.
CHOI S-B Compliant motion control of a three-link maipulador with link flexibility and joint constraints [Journal] // PROQUEST SCIENCE JOURNALS. - 2005. - p. 1207.
CONTRERAS B. Leonardo E. y ROA G. Máximo A. Modelado de la marcha humana por medio de gráficos de unión [Publicación periódica] // TECNURA No. 16. - Bogotá : Con-ciencias, 2007. - 16. - págs. 26-42.
DARIUSH Behzad Analisis and simulation of an exoeskeleton controller that accommodates static and reactive loads [Conference] // International Conference on robotics and automation. - Barcelona, España : [s.n.], 2005.
DARIUSH Behzad Analysis and simulation of an exoskeleton controller that accommodates static and reactive loads [Conference] // Proceedings of the 2005 IEEE international conference on robotics and automation. - Barcelona : Honda Research Institute USA, 2005.
DIAZ Christian A. [y otros] Descripción de un dispositivo destinado al análisis de la marcha en dos dimensiones [Publicación periódica] // EIA No.5. - Medellin (Colombia) : Revista EIA, 2006. - 5. - págs. 85-92.
DO NASCIMIENTO Breno G. [et al.] Development of the joint position system for controlling the exoskeleton based on pneumatic musles [Conference] // 18th INTERNATIONAL CONGRESS OF MECHANICAL ENGINEERING. COBEM 2005. - Ouro Preto (Brasil) : Asociación Brasilera de Ingeniería y ciencias mecánicas (ABCM), 2005.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 100
FLEISCHER Christian and GÜNTER Hommel Calibration of an EMG-based body model with six muscles to control a leg exoskeleton [Conference] // Proceedings of the 2007 IEEE international conference on robotics and automation. - Roma : IEEE, 2007. - pp. 2514 - 2519.
FLEISCHER CHRISTIAN and HOMMEL GÜNTER Embedded control system for a powered leg exoskeleton [Report]. - Berlin : Institute for Computer Engineering and Microelectronics Berlin University of Technology, 2006.
FLEISCHER Christian Controlling exoskeleton with EMG signals and a biomechanical body model [Book]. - Berlin : Technical University of Berlin, 2007.
HAAVISTO Olli y HYÖTYNIEMI Heikki Simulation tool of a biped walking robot model [Informe]. - Helsinki : Helsinki University of Technology, 2004.
HOGAN N. Impedance control: An approach to manipulation, parts I, II, III. [Publicación periódica]. - [s.l.] : Transactions of the ASME, journal of dynamic systems,measurement, and control, 1985. - 107, 1-24.
HURMUZLU Yildirim Dynamics of bipedal gait part 1: objective functions and the contact event a planar five link biped [Informe]. - Dallas : Mechanical Engineering Department Southern Methodist University Dallas, 1998.
KAPHLE Manindra Simulations of human movements through temporal discretizacion and optimization [Report]. - Sweden : Royal Institute Of Technology Department Of Mechanics, 2007.
KIGUCHI Kazauo [y otros] Design and control of an exoskeleton system of human upper-limb motion assist [Conferencia] // Advanced Intelligent Mechatronics. - Japan : IEEWASME, 2003. - Vol. 2.
KIGUCHI Kazuo [et al.] Design and control of an exoskeleton system for human upper-limb motion assist [Conference] // Proceedings of the 2003 IEEE ASME international conference on advanced intelligent mechatronics. - [s.l.] : IEEE, 2003.
LOW K H [et al.] Development of a lower extremity exoskeleton, preliminary study for dynamic walking [Conference] // 8th International Conference on Control, Automation, Robotics and Vision. - Kunming, China : [s.n.], 2004.
MANZUR R. Silvia del Carmen Consideraciones anatomofuncionales para la elongación y el fortalecimiento de músculos acortados o debilitados [Publicación periódica]. - Buenos Aires : [s.n.], JULIO de 2008.
PERRY Joel C, ROSEN Jacob and BURNS Stephen Upper-limb powered exoesqueleton design [Journal] // IEEE/ASME TRANSACTIONS ON MECHATRONICS. - [s.l.] : IEEE Asme Transactions on Mechatronics, 2007. - 4 : Vol. 12. - pp. VOL 12, No 4.
Sistema de seguimiento de un biofeedback para extremidades inferiores (SIMEXO)
Análisis del sistema Página 101
ROA M. A, RAMIREZ R. E y GARZON D. A Development od biped robots at the National University of colombia [Informe]. - Bogotá : National University of colombia, 2006.
ROA Maximo Alejandro Modelamiento y simulación de la caminata bípeda [Libro]. - Bogotá : Universidad Nacional, 2004.
ROA Máximo. A., VILLEGAS Camilo y GARZON Diego A. Modelamiento, estabilidad e implicaciones biomédicas de la caminata bípeda pasiva con tres grados de libertad. Revista Ingeniería e investigación , 2007. - 2 : Vol. 27. - pág. VOL. 27 No 2.
RUIZ A F [y otros] Couple control of human-exoskeleton systems: an adaptative process [Publicación periódica]. - [s.l.] : IEEE, 2008. - Vols. 25-27, pag, 242-246.
RUIZ O. Andres Felipe Sistema robotico multinodal para analisis y estudios en biomecánica, movimiento humano y control neuromotor [Informe]. - Leganés : Universidad Carlos III de Madrid, 2008.
SOTO V M y GUTIERREZ M Parámetros inerciales para el modelado biomecánico del cuerpo humano [Publicación periódica] // MOTRICIDAD. - Granada (España) : [s.n.], 1996. - 169-189 : Vol. 2. - págs. 169-189.
STEGER Rian, KIM Sung H. and KAZEROONI H Control Scheme and networked control architecture for the Berkeley lower extremity exoskeleton (BLEEX) [Conference] // Conference on robotics and automation. - Orlando, Florida : [s.n.], 2006. - p. USA.
VALIENTE Andrew Design of a quasi-passive parallel leg exoskeleton to augment load carrying for walking [Report]. - [s.l.] : Le Tourneau University, 2003.
VAUGHAN Christopher L, DAVIS Brian L and O.CONNOR Jeremy C. Dynamics of human gait [Journal] // KIBOHO PUBLISHERS. - 1999.
YANG Zhiyong [y otros] Research of exoskeleton suit based on sensitivity amplification control [Conferencia] // International Conference of Automation and Logistics. - Jinan-China : IEEE, 2007.





























