Embed Size (px)
Citation preview
1SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
TEMA 3
Métodos de posicionamiento con GNSS en Geodesia, Topografía y Geomática
Notas y gráficos de apoyo para a la asignatura Aplicación del GNSS en la geomáticaCurso 2013-2014
Autores: Juan F. Prieto Morín y Jesús Velasco Gómez
Se puede hacer uso del material de esta obra siempre que se haga mención expresa de los autores, No se permite un uso comercial de esta obra ni de las posibles obras derivadas ni de partes de ella. Versión T3-14/04
2
Esta obra se acoge a licencia Creative CommonsNo se permite un uso comercial de la obra original ni de las
posibles obras derivadas, la distribución de las cuales se debe hacer con una licencia igual a la que regula la obra original y citando esta obra.
Para citar esta obra:Prieto, J., Velasco, J. (2014) “Métodos de posicionamiento con GNSS en Geodesia, Topografía y
Geomática”. Notas y gráficos de apoyo para a la asignatura Aplicación del GNSS en la geomática. Curso 2013-2014. ETSI Topografía, Geodesia y Cartografía, UPM, Madrid. 119 pp.
3SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
OBSERVABLES GPS
Observables en las observaciones GPS:
• PSEUDODISTANCIASPSEUDODISTANCIAS (Códigos C/A y P)• DIFERENCIAS DE FASEDIFERENCIAS DE FASE DE LAS
LONGITUDES DE ONDA PORTADORAS L1 y L2
• {DIFERENCIAS DOPPLER D1 y D2}
4SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
OBSERVABLES GPS• Las medidas GPS se pueden considerar siempre como
algún tipos de DISTANCIAS• Se describen dos tipos principales de ECUACIONES DE
OBSERVACIÓN:• Modelo de ECUACIÓN DE PSEUDODISTANCIASECUACIÓN DE PSEUDODISTANCIAS en CÓDIGO• Modelo de ECUACIÓN DE MEDIDAS DE FASEECUACIÓN DE MEDIDAS DE FASE de la postadora
• Ambos tipos de ecuación tienen términos lineales sistemáticos:
• Errores del RELOJ DEL SATÉLITERELOJ DEL SATÉLITE• Errores del RELOJ DEL OBSERVADOR-RECEPTORRELOJ DEL OBSERVADOR-RECEPTOR• Retrasos IONOSFÉRICOS Y TROPOSFÉRICOSIONOSFÉRICOS Y TROPOSFÉRICOS• MULTIPATH, CENTROS DE FASE, CALIDAD DE COMPONENTES
RECEPTOR - SATÉLITE, EFECTOS RELATIVISTAS ...
5SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
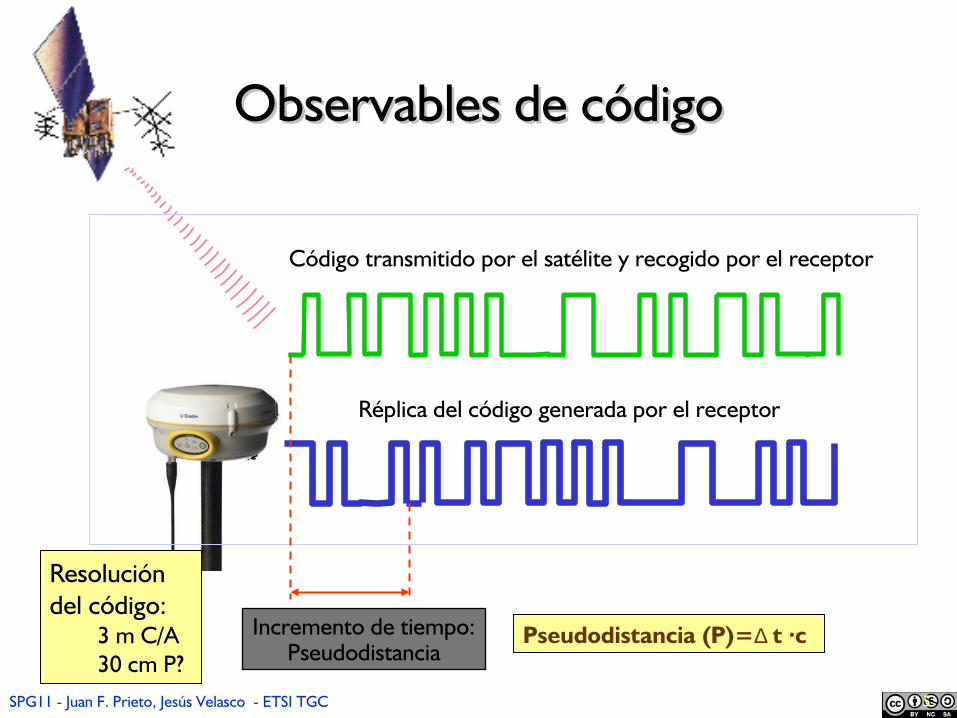
Observables de códigoObservables de código
Código transmitido por el satélite y recogido por el receptor
Réplica del código generada por el receptor
Resolucióndel código:
3 m C/A30 cm P?
Pseudodistancia (P)=∆ t ·cIncremento de tiempo:Pseudodistancia
6SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
PSEUDODISTANCIASPSEUDODISTANCIAS
• Es una ‘medida de la distancia’ entre el satélite y el receptor
• Se comparan los códigoscomparan los códigos de la señal recibida y el código que genera el receptor
• El desfase de tiempo necesario para alinear ambos códigos, correlacióncorrelación, corresponde al tiempo de propagación de la señal entre satélite y receptor
• Este retraso se transforma en distancia usando la velocidad de la luz
• Se puede correlar únicamente códigos C/A y Púnicamente códigos C/A y P
7SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
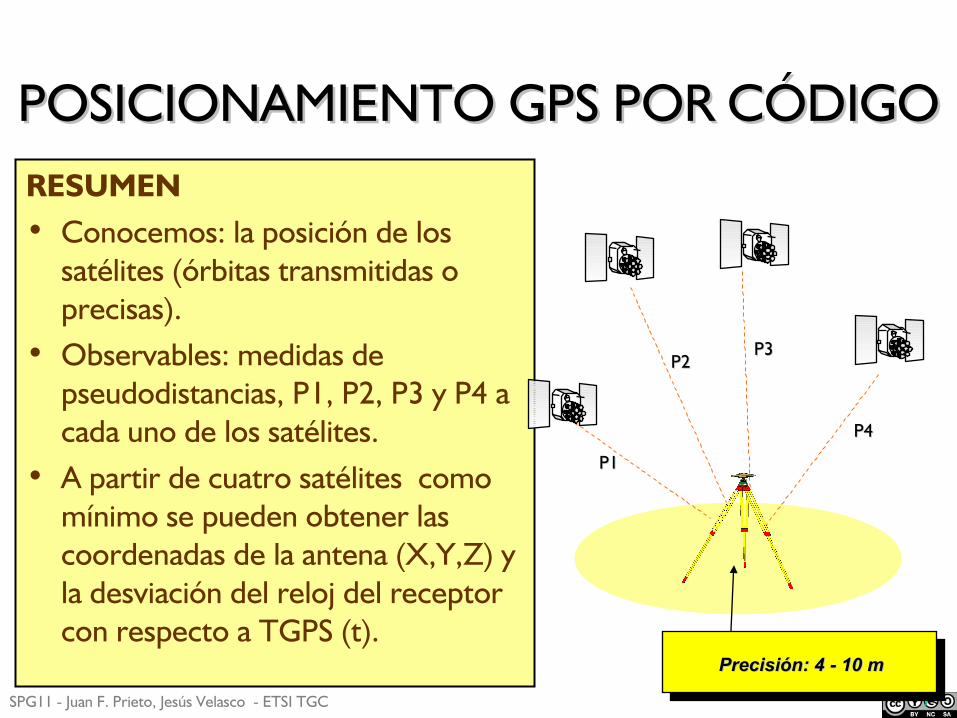
RESUMEN• Conocemos: la posición de los
satélites (órbitas transmitidas o precisas).
• Observables: medidas de pseudodistancias, P1, P2, P3 y P4 a cada uno de los satélites.
• A partir de cuatro satélites como mínimo se pueden obtener las coordenadas de la antena (X,Y,Z) y la desviación del reloj del receptor con respecto a TGPS (t).
POSICIONAMIENTO GPS POR CÓDIGOPOSICIONAMIENTO GPS POR CÓDIGO
P1P1
P2P2P3P3
P4P4
Precisión: 4 - 10 mPrecisión: 4 - 10 m
8SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
POSICIONAMIENTO GPS POR CÓDIGOPOSICIONAMIENTO GPS POR CÓDIGO
Pseudodistancia: ¿Por qué no es la distancia real?
– Pseudodistancia (P) medida observable de código– Distancia Real (ρ) desconocida– La pseudodistancia (P) incluye la distancia real(ρ) entre el
satélite y el usuario más la desviación del reloj del satélite, distorsiones atmosféricas, efectos relativistas, ruido del receptor y desviaciones del reloj del receptor
– La desviación del reloj del satélite, las distorsiones atmosféricas, los efectos relativistas se compensan mediante la incorporación de ajustes determinísticos
9SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
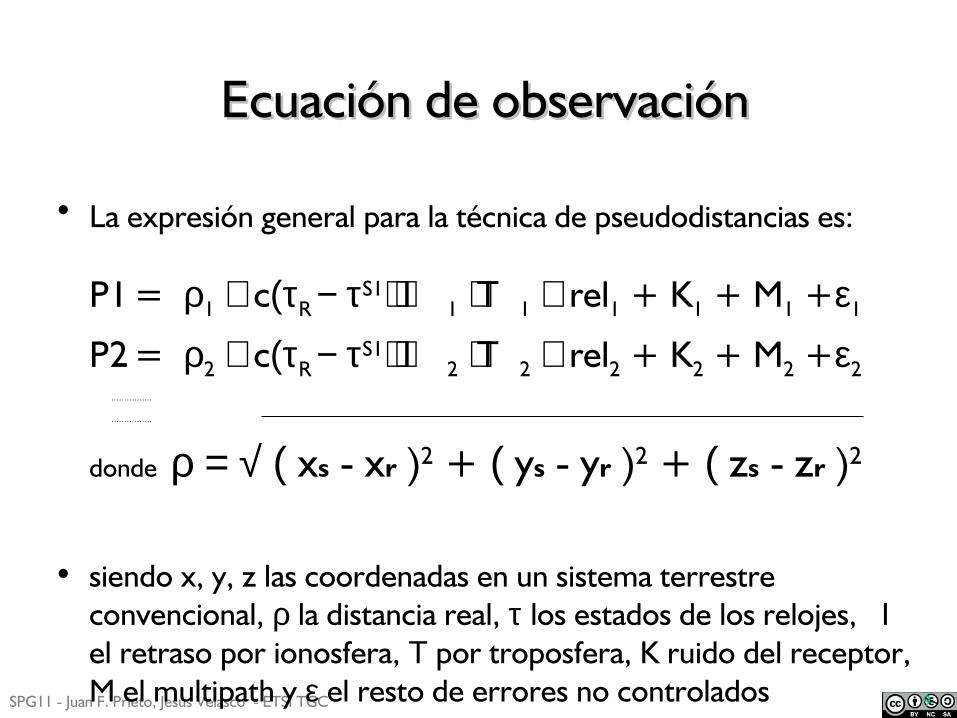
Ecuación de observaciónEcuación de observación
• La expresión general para la técnica de pseudodistancias es:
P1 = ρ1 + c(τR − τS1) + Ι1 + Τ1 + rel1 + K1 + M1 +ε1
P2 = ρ2 + c(τR − τS1) + Ι2 + Τ2 + rel2 + K2 + M2 +ε2 …………….
…………….
donde ρ = √ ( xs - xr )2 + ( ys - yr )2 + ( zs - zr )2
• siendo x, y, z las coordenadas en un sistema terrestre convencional, ρ la distancia real, τ los estados de los relojes, Ι el retraso por ionosfera, Τ por troposfera, K ruido del receptor, M el multipath y ε el resto de errores no controlados
10SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
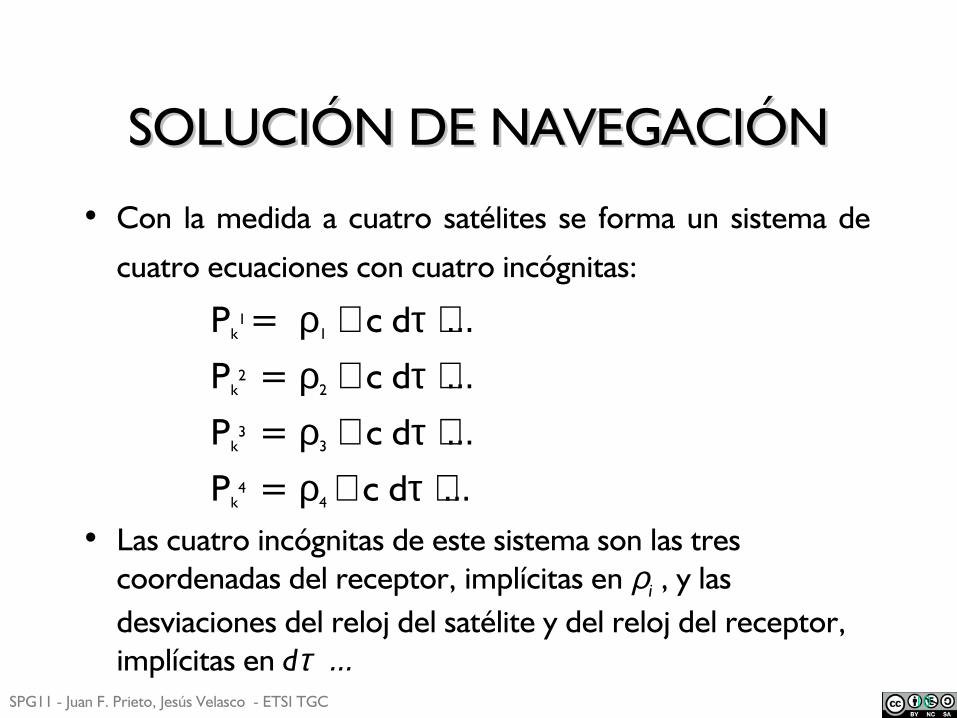
SOLUCIÓN DE NAVEGACIÓNSOLUCIÓN DE NAVEGACIÓN
• Con la medida a cuatro satélites se forma un sistema de
cuatro ecuaciones con cuatro incógnitas: Pk
1 = ρ1 + c dτ + ...
Pk2 = ρ2 + c dτ + ...
Pk3 = ρ3 + c dτ + ...
Pk4 = ρ4 + c dτ + ...
• Las cuatro incógnitas de este sistema son las tres coordenadas del receptor, implícitas en ρi , y las desviaciones del reloj del satélite y del reloj del receptor, implícitas en dτ ...
11SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
OBSERVABLES GPSOBSERVABLES GPS
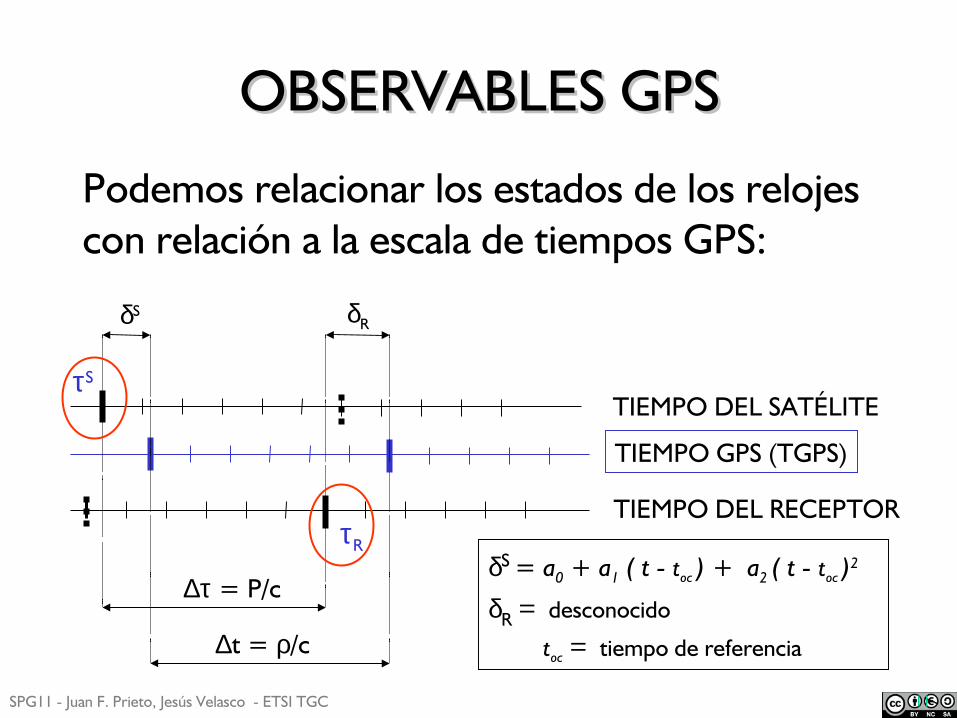
Podemos relacionar los estados de los relojes con relación a la escala de tiempos GPS:
TIEMPO DEL SATÉLITE
TIEMPO GPS (TGPS)
TIEMPO DEL RECEPTOR
δS δR
∆τ = P/c
∆t = ρ/c
δS = a0 + a1 ( t - toc ) + a2 ( t - toc )2
δR = desconocido
toc = tiempo de referencia
τS
τR
12SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
ECUACIÓN DE OBSERVACIÓN ECUACIÓN DE OBSERVACIÓN EN PSEUDODISTANCIASEN PSEUDODISTANCIAS
• La relación de las escalas de tiempo del satélite y del receptor se han de referir a la escala de tiempos de referencia común del sistema: el tiempo TGPS
tS = τS + δS
tR = τR + δR
• La diferencia entre tiempos es equivalente al desplazamiento de la señal de referencia durante el proceso de correlación de código en el receptor:
∆τSR = τR− τS = (tR − δR) − (tS − δS) = ∆tS
R + ∆δSR
Lecturas referidas a escalaTGPSLecturas referidas a escalaTGPS‘‘Colorado Springs’Colorado Springs’
13SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
OBSERVABLES GPS DE CÓDIGOOBSERVABLES GPS DE CÓDIGO
• Multiplicando la diferencia de lecturas ∆τ por la velocidad de la luz en el vacío (c=299.792.458 m/s) obtenemos la ecuación de la pseudodistancia:
P = c ∆τ = C ∆tSR + C ∆δS
R = ρ + C ∆δSR
• Donde ρ es la distancia verdadera al satélite• Si tenemos en cuenta también los retardos provocados por
la IONOSFERA, la TROPOSFERA, …, en la llegada de la señal GPS, la ecuación de la pseudodistancia quedaría:
P = ρ + C ∆δSR + dion + dtrp + ...
14SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
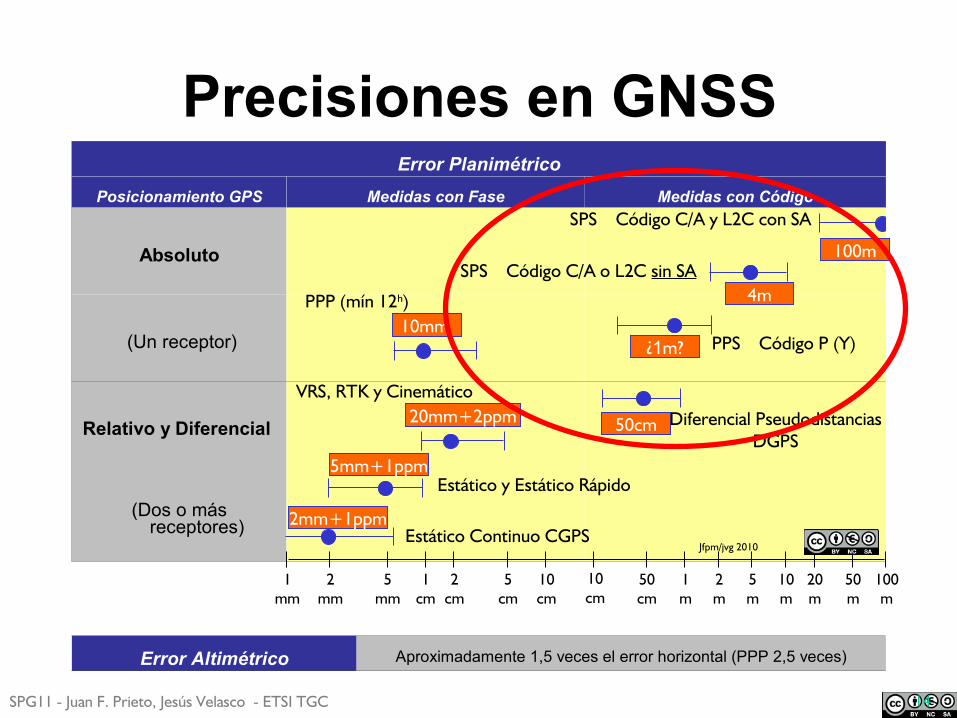
Precisiones en GNSSError Planimétrico
Posicionamiento GPS Medidas con Fase Medidas con Código
Absoluto
(Un receptor)
Relativo y Diferencial
(Dos o más receptores)
Error Altimétrico Aproximadamente 1,5 veces el error horizontal (PPP 2,5 veces)
1mm
2mm
5mm
1cm
2cm
5cm
10cm
10cm
50cm
1m
2m
5m
10m
20m
50m
100m
20mm+2ppm
5mm+1ppm
2mm+1ppm
50cm
¿1m?
4m
100m
VRS, RTK y Cinemático
Estático Continuo CGPS
Estático y Estático Rápido
Diferencial PseudodistanciasDGPS
SPS Código C/A y L2C con SA
SPS Código C/A o L2C sin SA
PPS Código P (Y)
Jfpm/jvg 2010
10mm PPP (mín 12h)
15SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
• Ecuación básica
- El observable de fase es la diferencia entre la fase de la portadora recibida del satélite y la fase generada en el receptor internamente a través de su oscilador
- Estas medidas de fase se registran en intervalos iguales de tiempos del receptor, y no tienen en cuenta el número de ondas que hay entre el receptor y el satélite
- La distancia satélite-receptor está relacionada con el número entero de longitudes de onda y su fase: D = c ∆ ϕ + λN
- Las variaciones del observable de fase con el tiempo están corelacionados con los cambios en la distancia topocéntrica. Por eso se usa algunas veces también el término de interferometría.
Observación de la Fase de la portadora L1-L2
16SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
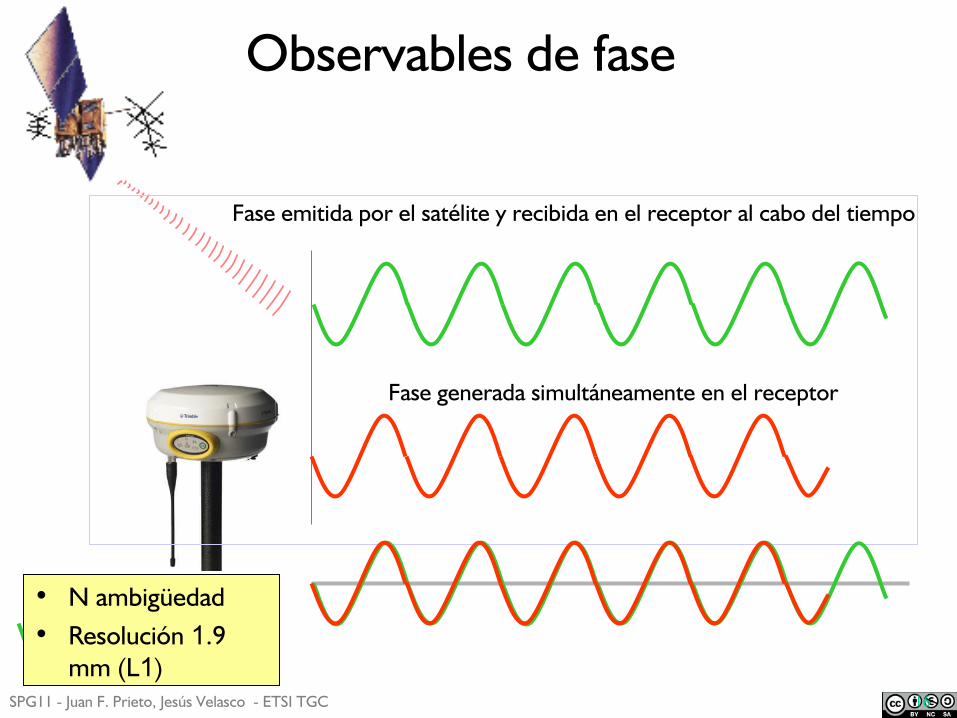
Observables de fase
Fase generada simultáneamente en el receptor
Fase emitida por el satélite y recibida en el receptor al cabo del tiempo
• N ambigüedad• Resolución 1.9
mm (L1)
17SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
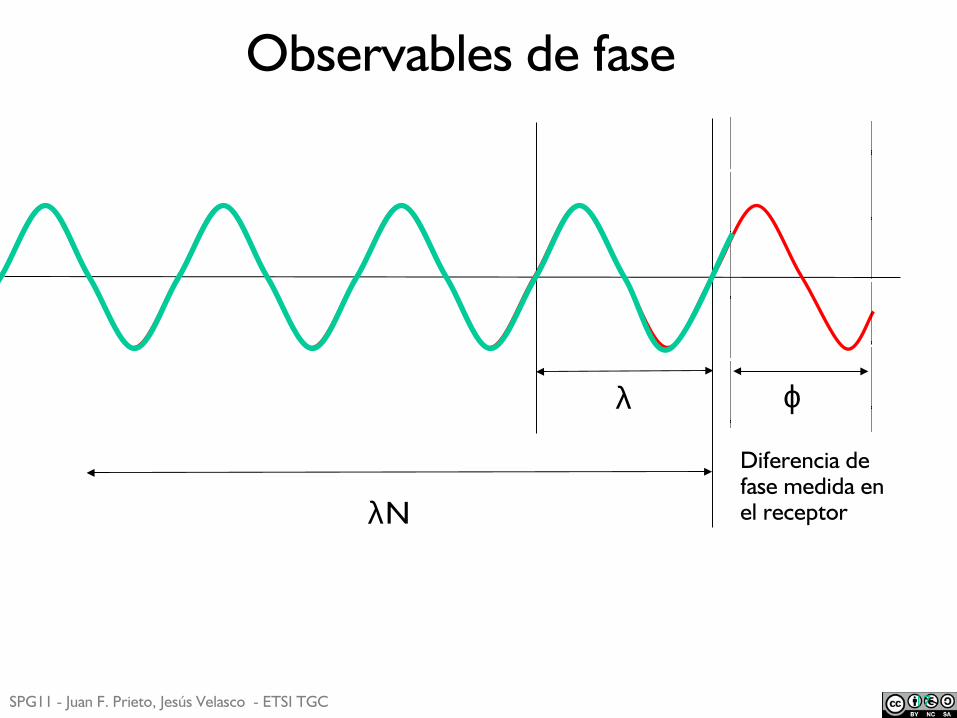
ϕλ
Observables de fase
λN
Diferencia de fase medida en el receptor
18SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
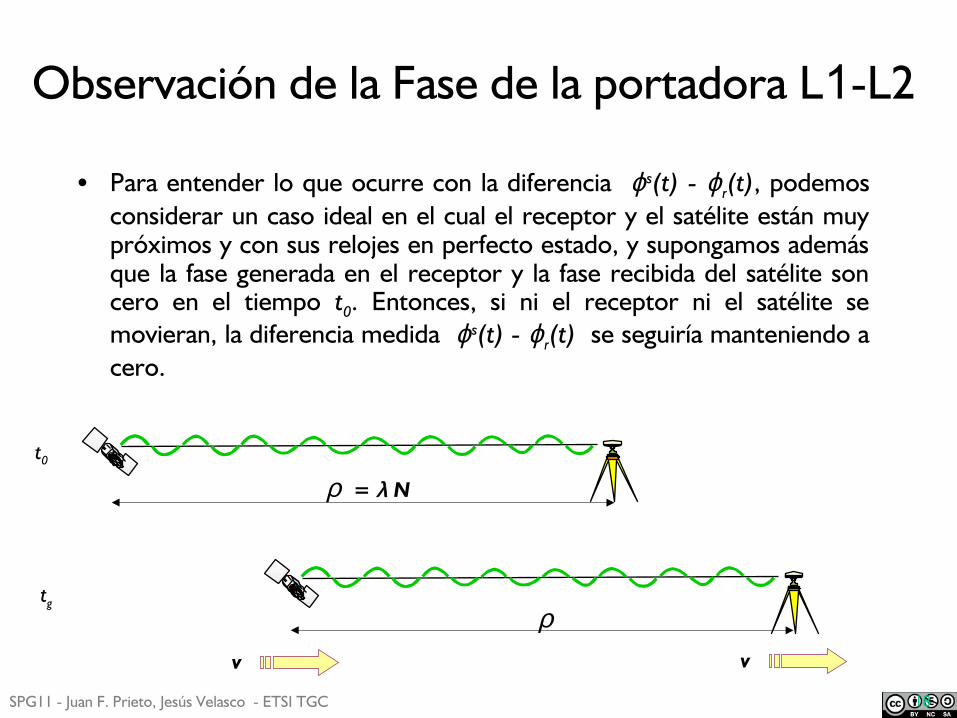
Observación de la Fase de la portadora L1-L2
• Para entender lo que ocurre con la diferencia ϕs(t) - ϕr(t), podemos considerar un caso ideal en el cual el receptor y el satélite están muy próximos y con sus relojes en perfecto estado, y supongamos además que la fase generada en el receptor y la fase recibida del satélite son cero en el tiempo t0. Entonces, si ni el receptor ni el satélite se movieran, la diferencia medida ϕs(t) - ϕr(t) se seguiría manteniendo a cero.
ρ = λ N
v v
ρ
t0
tg
19SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
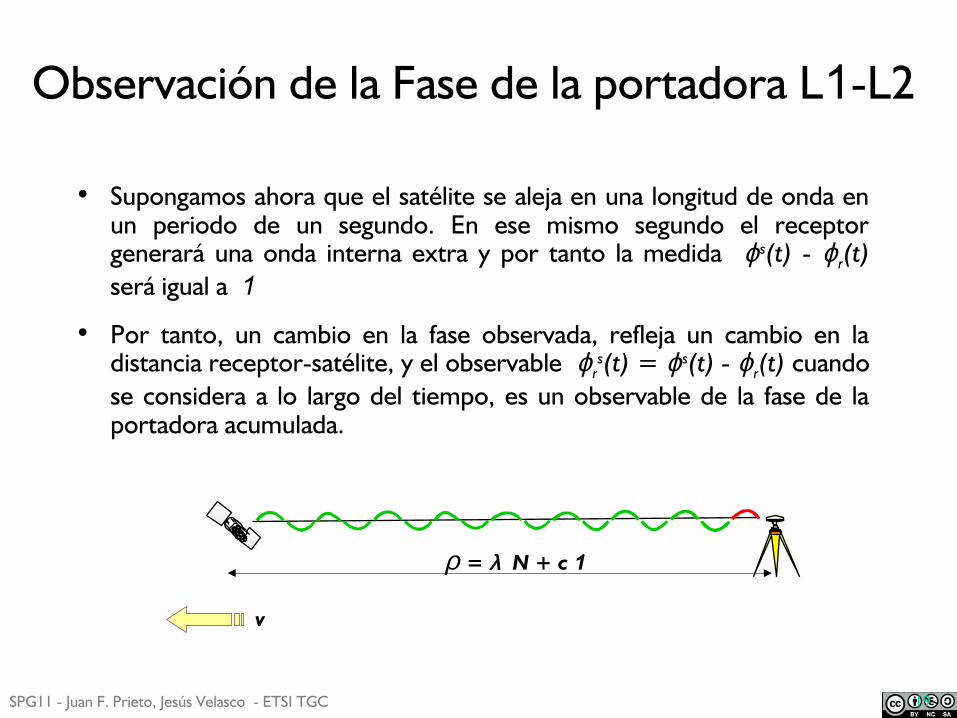
• Supongamos ahora que el satélite se aleja en una longitud de onda en un periodo de un segundo. En ese mismo segundo el receptor generará una onda interna extra y por tanto la medida ϕs(t) - ϕr(t) será igual a 1
• Por tanto, un cambio en la fase observada, refleja un cambio en la distancia receptor-satélite, y el observable ϕr
s(t) = ϕs(t) - ϕr(t) cuando se considera a lo largo del tiempo, es un observable de la fase de la portadora acumulada.
v
ρ = λ N + c 1
Observación de la Fase de la portadora L1-L2
20SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
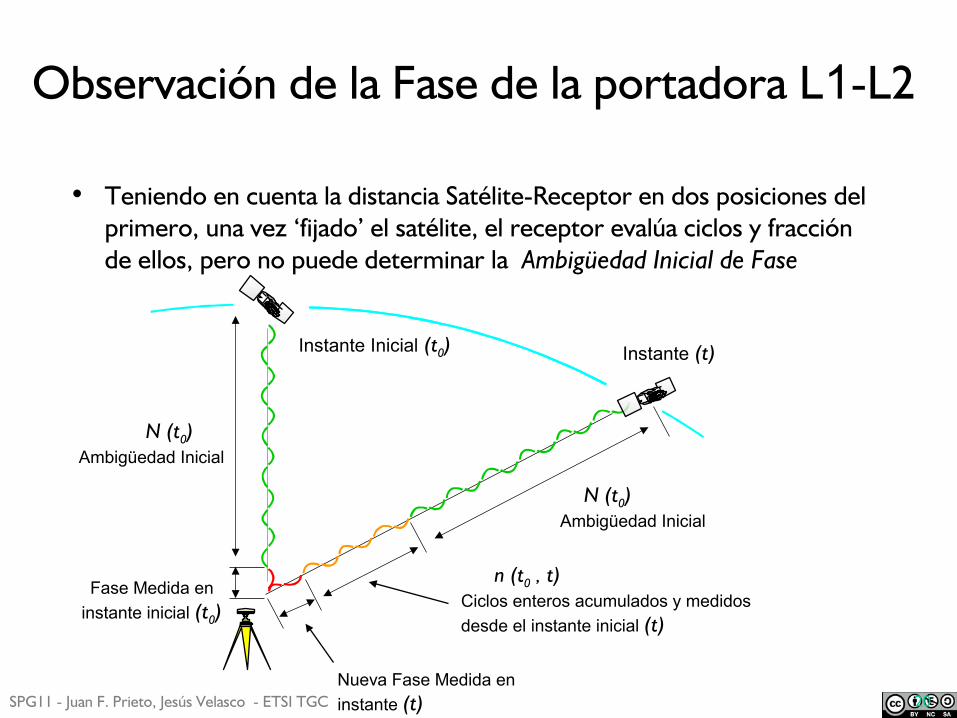
• Teniendo en cuenta la distancia Satélite-Receptor en dos posiciones del primero, una vez ‘fijado’ el satélite, el receptor evalúa ciclos y fracción de ellos, pero no puede determinar la Ambigüedad Inicial de Fase
Instante Inicial (t0)
N (t0) Ambigüedad Inicial
Fase Medida eninstante inicial (t0)
Instante (t)
n (t0 , t) Ciclos enteros acumulados y medidos desde el instante inicial (t)
N (t0) Ambigüedad Inicial
Nueva Fase Medida eninstante (t)
Observación de la Fase de la portadora L1-L2
21SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
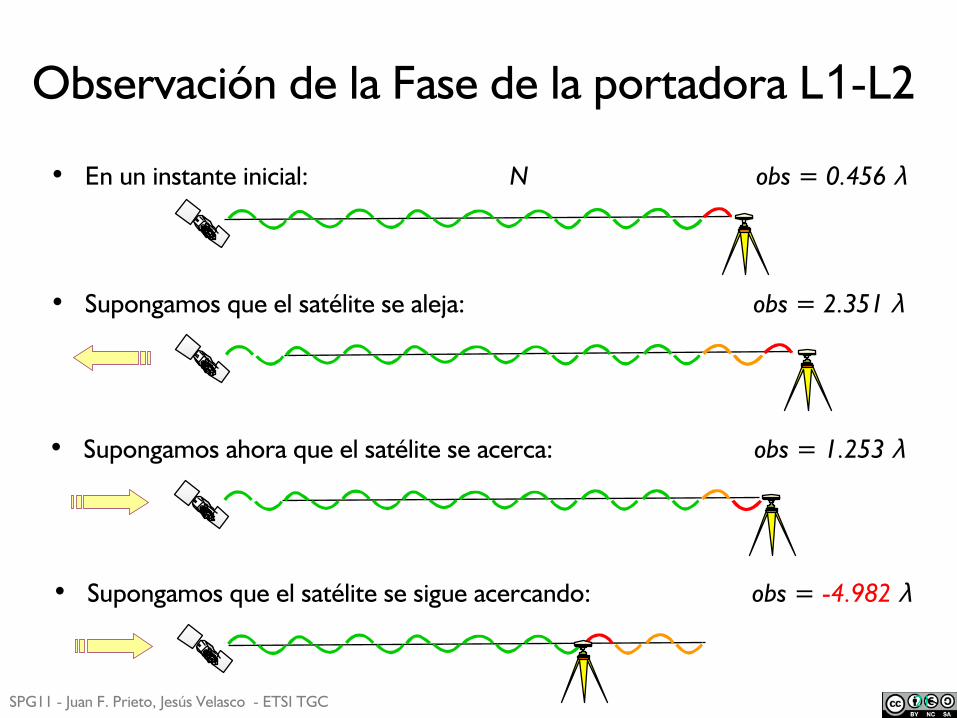
• En un instante inicial: N obs = 0.456 λ
• Supongamos que el satélite se aleja: obs = 2.351 λ
• Supongamos ahora que el satélite se acerca: obs = 1.253 λ
• Supongamos que el satélite se sigue acercando: obs = -4.982 λ
Observación de la Fase de la portadora L1-L2
22SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
• Esta diferencia, ϕs(t) - ϕr(t) es en el vacío y no se han tenido en cuenta los efectos de propagación de la onda, sistematismos y retardos.
• Si el receptor ‘sigue’ la fase desde una época inicial t0, la fase total acumulada consistirá en:
- Una medida fraccional de la fase Fr (n)- Una cuenta entera de ciclos Ent (n, t0, t)
- Un número entero de ciclos desconocido N(t0)
N(t0) se conoce como ambigüedad inicial de fase o de ciclo inicial
• Así, estableciendo una relación matemática de la fase acumulada: ϕr
s(t) = Fr (n) + Ent (n, t0, t) + N(t0)
Observación de la Fase de la portadora L1-L2
23SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
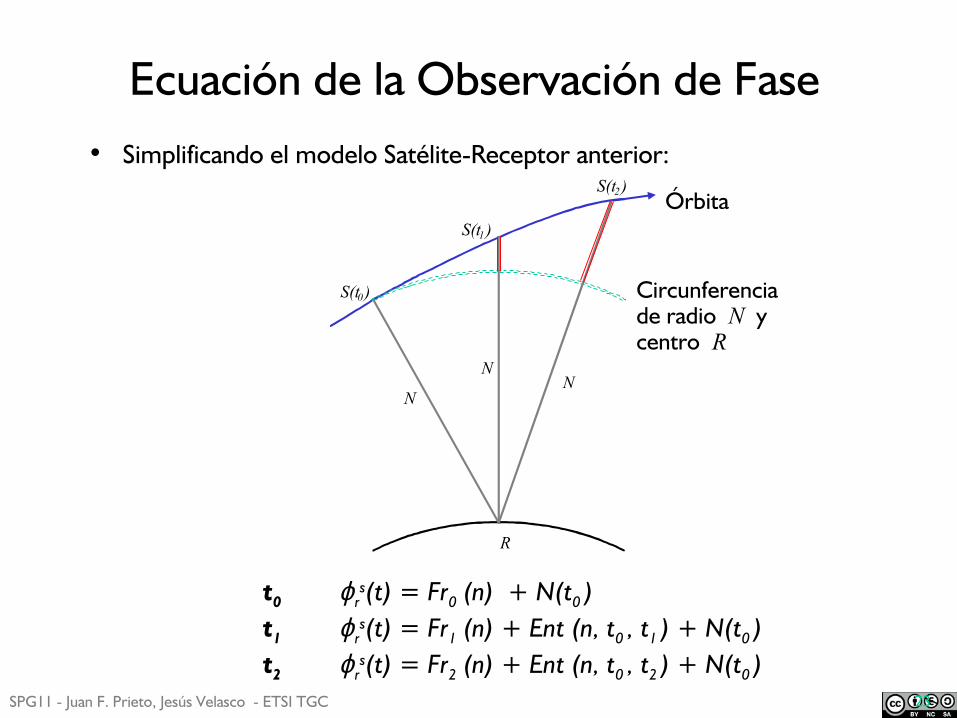
t0 ϕrs(t) = Fr0 (n) + N(t0 )
t1 ϕrs(t) = Fr1 (n) + Ent (n, t0 , t1 ) + N(t0 )
t2 ϕrs(t) = Fr2 (n) + Ent (n, t0 , t2 ) + N(t0 )
Ecuación de la Observación de Fase• Simplificando el modelo Satélite-Receptor anterior:
R
S(t0)
N
NN
S(t1 )
S(t2)Órbita
Circunferencia de radio N y centro R
24SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Observación de la Fase de la portadora L1-L2
• Esta diferencia de fase, ϕ sr(t) = ϕ s(t) - ϕ r(t) , diferencia de las fases
registradas ‘en el satélite’ y en el receptor depende tanto del estado del reloj del satélite como del estado del del reloj del receptor.
• La fase generada en el receptor, ϕ r(t) , estará referida a la ‘base de tiempos’ del reloj del receptor
• La fase de la señal generada y transmitida por el satélite y recibida en el receptor, ϕ s(t) , estará referida a la ‘base de tiempos’ del reloj del satélite
• Para un instante genérico tg posterior, si queremos que ambos relojes del satélite y receptor estén sincronizados al tiempo GPS común (Colorado Springs), habrá que introducir los correspondientes términos correctivos por estados de ambos relojes:
δ s y δ r
ambos diferencias entre tiempo GPS y, reloj del satélite y reloj del receptor respectivamente
25SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Observación de la Fase de la portadora L1-L2
• Para un instante genérico tg posterior, si queremos obtener las diferencias de fase con ambos relojes estén sincronizados al tiempo GPS, y utilizando la ecuación de ondas electromagnéticas ϕ = f t , para referir todos los parámetros a ciclos de onda:
ϕ s(tg) = ϕ s (t) - f δ s y ϕ r(tg) = ϕ r(t) - f δ r
sustituyendo convenientemente, la diferencia de fase para el instante tg :
ϕ sr(tg ) = (ϕ s (t) - f δ s ) - (ϕ r(t) - f δ r ) = ϕ s
r(t) - ( f δ s - f δ r )
• La distancia real ρ entre un satélite s y un receptor r en ese instante podemos escribirla de la forma:
ρ sr (1/λ ) = ϕ s
r - (δ s c/λ - δ r c/λ ) + n sr + N s
r
expresada en ‘ciclosciclos’ teniendo en cuenta que λ = c / f
26SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Observación de la Fase de la portadora L1-L2
• Pero como hemos visto, para un instante genérico tg , la ‘lectura’ de fase en el receptor nos dará la fase ϕ (parte fraccionaria) mas el número entero de longitudes de onda o ciclos n que ha crecido (o decrecido) esta fase desde el instante inicial en que se mantiene el seguimiento al satélite.
• Continuando con la terminología adoptada, la ‘lectura’ u observable de fase se puede escribir como:
Φ sr(tg ) = ϕ s
r(tg ) + n sr
• Sustituyendo este observable en la ecuación anterior de la distancia real:
ρ sr (1/λ ) = Φ s
r - (δ s c/λ - δ r c/λ ) + N sr
27SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Observación de la Fase de la portadora L1-L2
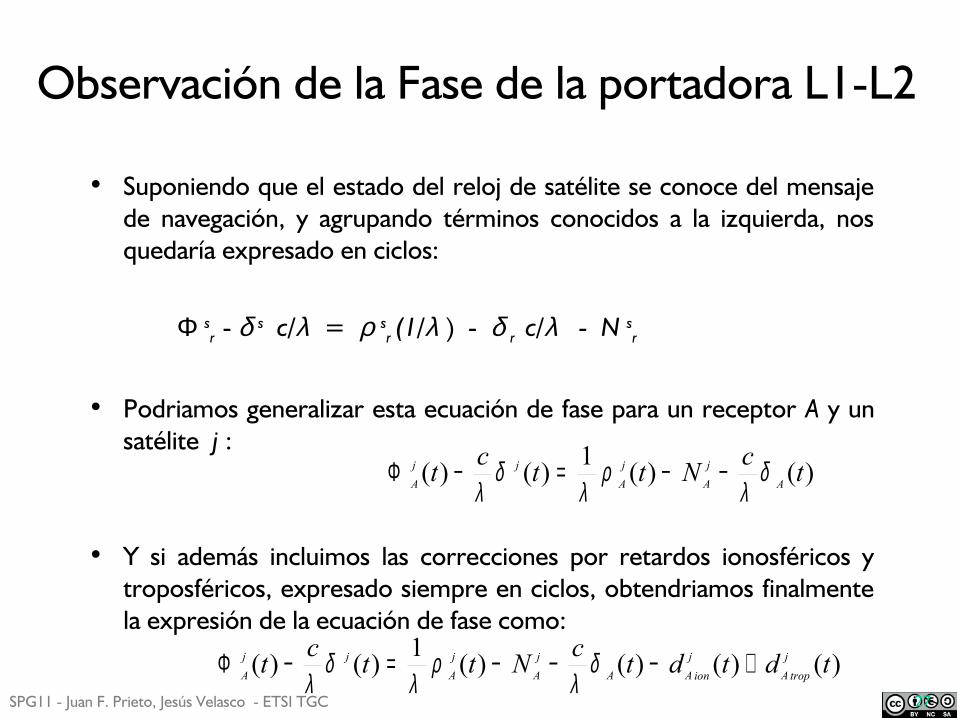
• Suponiendo que el estado del reloj de satélite se conoce del mensaje de navegación, y agrupando términos conocidos a la izquierda, nos quedaría expresado en ciclos:
Φ sr - δ s c/λ = ρ s
r (1/λ ) - δ r c/λ - N sr
• Podriamos generalizar esta ecuación de fase para un receptor A y un satélite j :
• Y si además incluimos las correcciones por retardos ionosféricos y troposféricos, expresado siempre en ciclos, obtendriamos finalmente la expresión de la ecuación de fase como:
)()()()(1)()( tdtdtcNttct tropj
Aionj
AAj
Aj
Ajj
A +−−−=−Φ δλ
ρλ
δλ
)()(1)()( tcNttct Aj
Aj
Ajj
A δλ
ρλ
δλ
−−=−Φ
28SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Observación de la Fase de la portadora L1-L2
• Instantáneamente NO se puede determinar la Ambigüedad Inicial de Fase
• A través de distintos algoritmos que se han ido desarrollando:– simples diferenciassimples diferencias– dobles diferenciasdobles diferencias– triples diferenciastriples diferencias– FARAFARA– QIFQIF– Melburne-BuwenaMelburne-Buwena– Otros ...Otros ...
se consigue determinar la ambigüedad de fase inicial N(t0)
29SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Observación de la Fase de la portadora L1-L2
• Estos algoritmos necesitan datos, pseudodistancia y diferencias de fase, de al menos DOS RECEPTORESDOS RECEPTORES y VARIOS SATÉLITESVARIOS SATÉLITES observando a la vez durante un cierto intervalo de tiempo en el que la geometría de la constelación cambie
• Se necesita almacenar una cierta cantidad de datos mínima para determinar la ambigüedad de fase inicial N(tN(t00))
• En todos estos algoritmos no se obtienen las distancias de los satélites a los receptores, como en el código, sino la distancia entre los dos receptoresdistancia entre los dos receptores: Se trata entonces de un POSICIONAMIENTO RELATIVO
30SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento relativo con fase
• Podríamos establecer ‘n’ ecuaciones del tipo anterior entre un receptor y ‘n’ satélites para resolver las incógnitas del sistema que se forma. Es el Posicionamiento Absoluto de Fase
• Realmente sólo se utiliza la fase en un posicionamiento relativo. El objetivo del posicionamiento relativo es determinar la coordenadas de un punto B B con respecto a otro AA de coordenadas conocidas.
• El posicionamiento relativo necesita del vector entre esos dos puntos. A este vector se le viene denominando “baselinea”.
• Conocida la posición de un receptor Areceptor A, introduciendo los correspondientes vectores, tenemos la siguiente ecuación vectorial:
ABAB bXX
+=
31SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento relativo con fase
• Las componentes del vector baselinea son:
• En el posicionamiento relativo es necesario hacer observaciones simultáneas en ambos puntos.
• Esto significa que las observaciones tienen las mismas marcas de tiempos.
∆∆∆
=
−−−
=
AB
AB
AB
AB
AB
AB
AB
ZYX
ZZYYXX
b
32SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Simples Diferencias de Fase
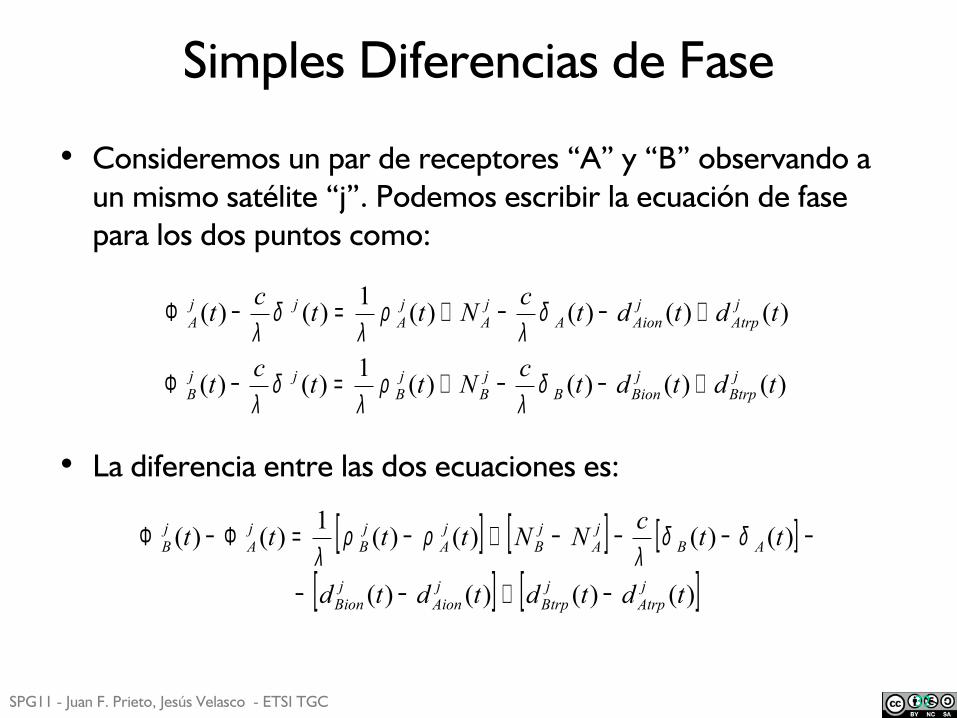
• Consideremos un par de receptores “A” y “B” observando a un mismo satélite “j”. Podemos escribir la ecuación de fase para los dos puntos como:
• La diferencia entre las dos ecuaciones es:
)()()()(1)()( tdtdtcNttct jAtrp
jAionA
jA
jA
jjA +−−+=−Φ δ
λρ
λδ
λ
)()()()(1)()( tdtdtcNttct jBtrp
jBionB
jB
jB
jjB +−−+=−Φ δ
λρ
λδ
λ
[ ] [ ] [ ][ ] [ ])()()()(
)()()()(1)()(
tdtdtdtd
ttcNNtttt
jAtrp
jBtrp
jAion
jBion
ABj
Aj
BjA
jB
jA
jB
−+−−
−−−−+−=Φ−Φ δδλ
ρρλ
33SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Simples Diferencias de Fase
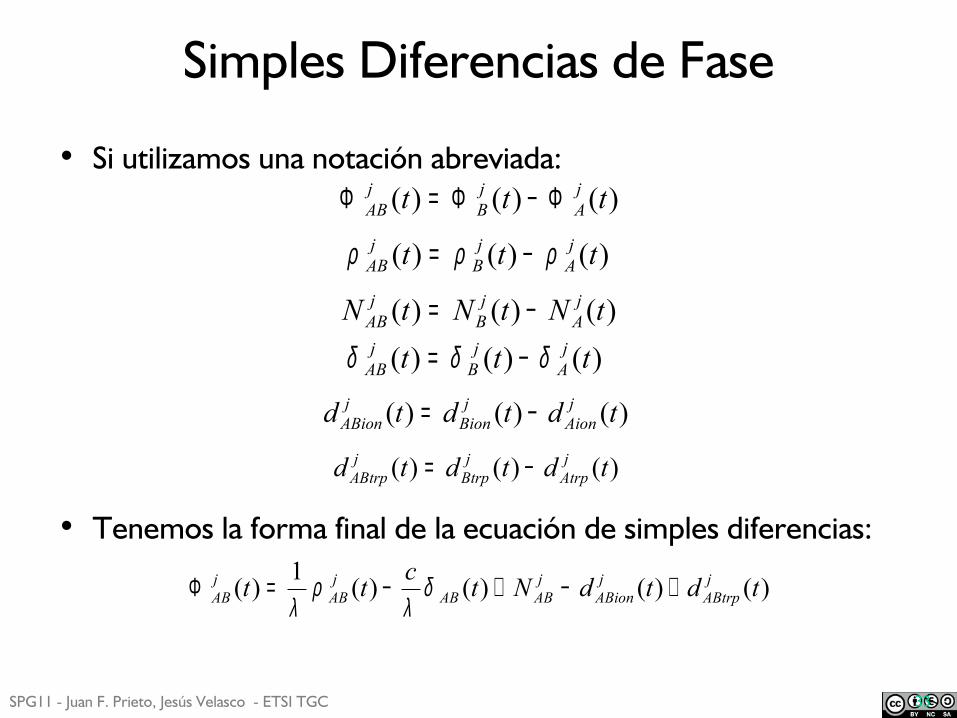
• Si utilizamos una notación abreviada:
• Tenemos la forma final de la ecuación de simples diferencias:
)()()( ttt jA
jB
jAB Φ−Φ=Φ
)()()( ttt jA
jB
jAB ρρρ −=
)()()( tNtNtN jA
jB
jAB −=
)()()( ttt jA
jB
jAB δδδ −=
)()()( tdtdtd jAion
jBion
jABion −=
)()()( tdtdtd jAtrp
jBtrp
jABtrp −=
)()()()(1)( tdtdNtctt jABtrp
jABion
jABAB
jAB
jAB +−+−=Φ δ
λρ
λ
34SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Simples Diferencias de Fase
35SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Simples Diferencias de Fase
• Las simples diferencias entre receptores eliminan o reducen los efectos asociados con los satélites:
• Errores de los relojes de los satélites.
• Gran parte de los errores orbitales, si el vector es corto en comparación
con los 20.000 Km de altura de los satélites.
• Otro tipo de simples diferencias que se pueden formar, son diferencias de observaciones simultaneas desde una misma estación a dos satélites.
36SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Simples Diferencias de Fase
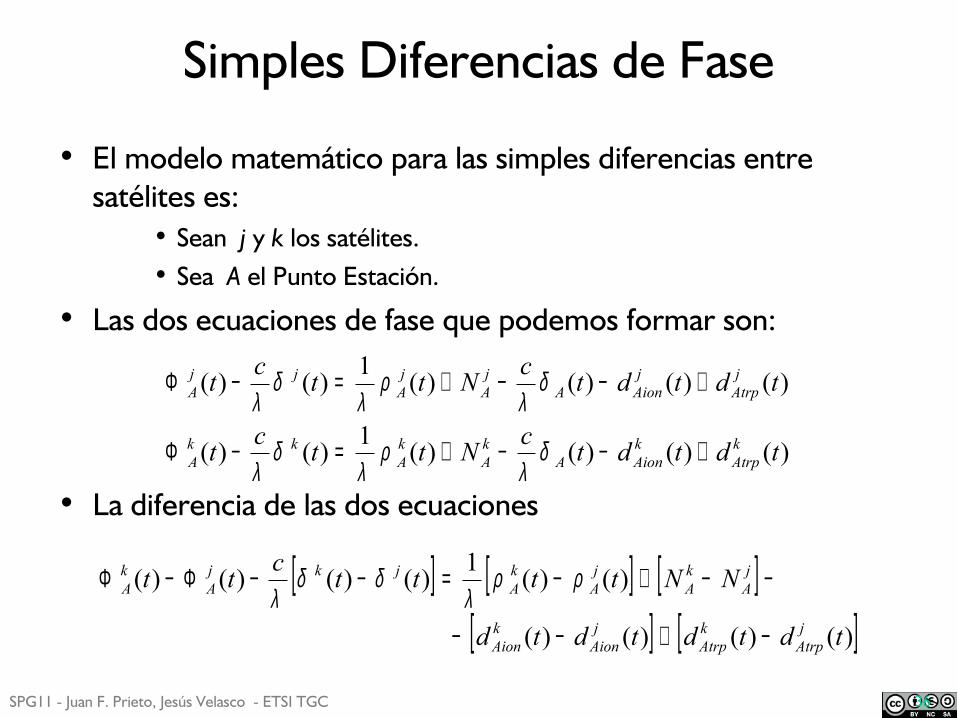
• El modelo matemático para las simples diferencias entre satélites es:
• Sean j y k los satélites.• Sea A el Punto Estación.
• Las dos ecuaciones de fase que podemos formar son:
• La diferencia de las dos ecuaciones
)()()()(1)()( tdtdtcNttct jAtrp
jAionA
jA
jA
jjA +−−+=−Φ δ
λρ
λδ
λ
)()()()(1)()( tdtdtcNttct kAtrp
kAionA
kA
kA
kkA +−−+=−Φ δ
λρ
λδ
λ
[ ] [ ] [ ][ ] [ ])()()()(
)()(1)()()()(
tdtdtdtd
NNttttctt
jAtrp
kAtrp
jAion
kAion
jA
kA
jA
kA
jkjA
kA
−+−−
−−+−=−−Φ−Φ ρρλ
δδλ

37SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Simples Diferencias de Fase
• Como ante, si usamos una notación abreviada:
• Las simples diferencias entre satélites están libres de los errores del reloj del receptor
)()()(1)()( tdtdNttct jkAtrp
jkAion
jkA
jkA
jkjkA +−+=−Φ ρ
λδ
λ
38SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Dobles Diferencias de Fase
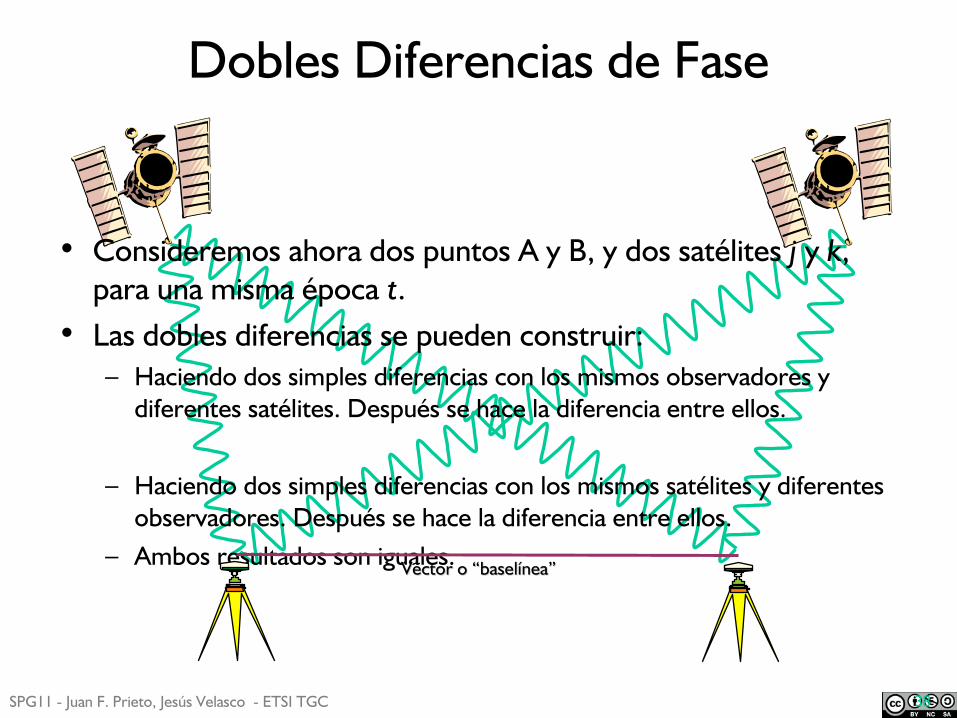
• Consideremos ahora dos puntos A y B, y dos satélites j y k, para una misma época t.
• Las dobles diferencias se pueden construir:– Haciendo dos simples diferencias con los mismos observadores y
diferentes satélites. Después se hace la diferencia entre ellos.
– Haciendo dos simples diferencias con los mismos satélites y diferentes observadores. Después se hace la diferencia entre ellos.
– Ambos resultados son iguales.Vector o “baselínea”Vector o “baselínea”
39SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Dobles Diferencias de Fase
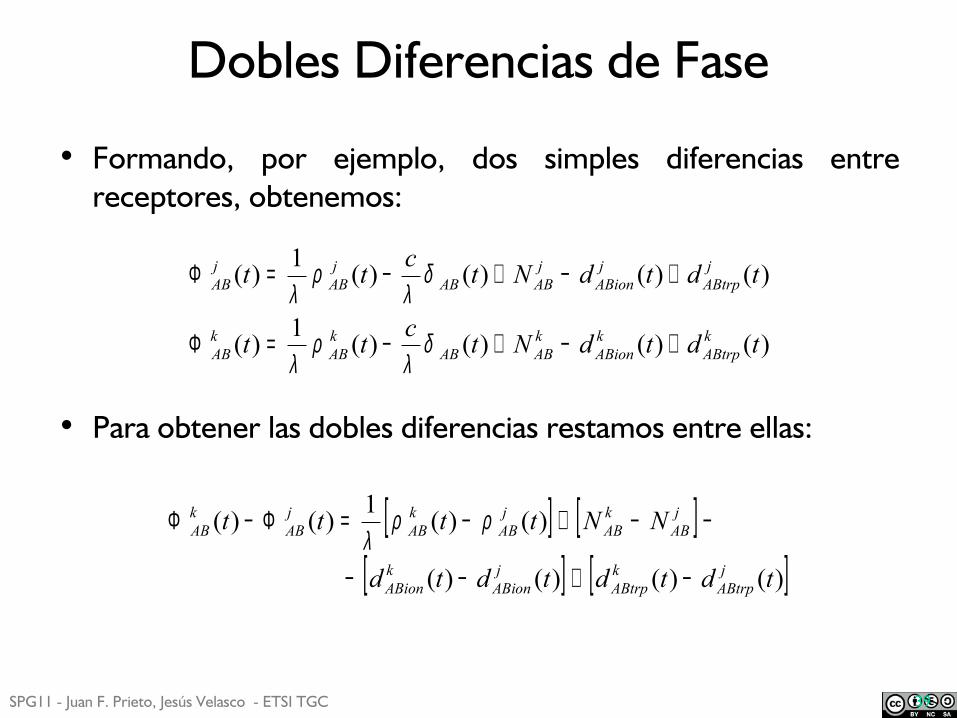
• Formando, por ejemplo, dos simples diferencias entre receptores, obtenemos:
• Para obtener las dobles diferencias restamos entre ellas:
)()()()(1)( tdtdNtctt jABtrp
jABion
jABAB
jAB
jAB +−+−=Φ δ
λρ
λ
)()()()(1)( tdtdNtctt kABtrp
kABion
kABAB
kAB
kAB +−+−=Φ δ
λρ
λ
[ ] [ ][ ] [ ])()()()(
)()(1)()(
tdtdtdtd
NNtttt
jABtrp
kABtrp
jABion
kABion
jAB
kAB
jAB
kAB
jAB
kAB
−+−−
−−+−=Φ−Φ ρρλ
40SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Dobles Diferencias de Fase
• Usando la notación abreviada:
• Las dobles diferencias eliminan o reducen en gran medida los efectos debidos a:– Los errores de los relojes del receptor– Los errores de los relojes de los satélites.
)()()(1)( tdtdNtt jkABtrp
jkABion
jkAB
jkAB
jkAB +−+=Φ ρ
λ
41SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Vector o “baselínea”Vector o “baselínea”
Época 1Época 1
Época 2Época 2Época 1Época 1 Época 2Época 2
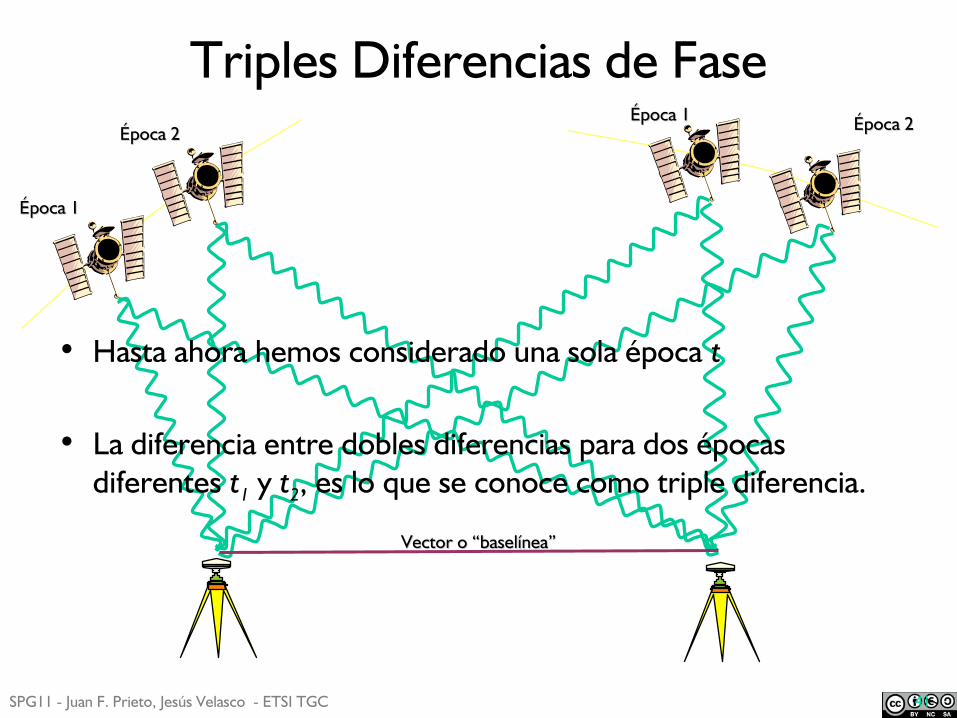
Triples Diferencias de Fase
• Hasta ahora hemos considerado una sola época t
• La diferencia entre dobles diferencias para dos épocas diferentes t1 y t2, es lo que se conoce como triple diferencia.
42SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Triples Diferencias de Fase
• Si escribimos las dobles diferencias para cada época t1 y t2:
• Para obtener las triples diferencias retamos entre ellas:
• Usando la notación abreviada:
)()()(1)( 1111 tdtdNtt jkABtrp
jkABion
jkAB
jkAB
jkAB +−+=Φ ρ
λ
)()()(1)( 2222 tdtdNtt jkABtrp
jkABion
jkAB
jkAB
jkAB +−+=Φ ρ
λ
[ ] [ ] [ ])()()()()()(1)()( 12121212 tdtdtdtdtttt jkABtrp
jkABtrp
jkABion
jkABion
jkAB
jkAB
jkAB
jkAB −+−−−=Φ−Φ ρρ
λ
)()()(1)( 12121212 tdtdtt jkABtrp
jkABion
jkAB
jkAB +−=Φ ρ
λ
43SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Triples Diferencias de Fase
• Hay varias características importantes en las triples diferencias:
• Se eliminan las ambigüedades iniciales de ciclo.
• Se han eliminado los estados de los relojes tanto de los satélites como de los receptores.
• No modelan los posibles retardos por ionosfera (combinación de datos de las dos frecuencias)
44SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Proceso de Datos
Detección y Reparación de Pérdidas de CicloDetección y Reparación de Pérdidas de Ciclo• Como sabemos, la ambigüedad de fase inicial permanece
constante mientras no exista una pérdida en el seguimiento de la señal.
• Ahora bien, si esto ocurre, el contador de enteros de la fase acumulada se reinicializa, lo que ocasiona un salto en la fase instantánea acumulada.
• A este salto es lo que se denomina pérdida de ciclo
• Para detectar si ha ocurrido una pérdida de ciclo se analizan los datos de fase de épocas consecutivas.
45SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Combinaciones de Datos
• Los Observables GPS se obtienen de la información del código o de la onda portadora en la señal trasmitida por el satélite. Entonces para una determinada época los observables que podemos encontrar son:
• ΦL1 fase de la portadora L1
• ΦL2 fase de la portadora L2
• [ DL1 desplazamiento Doppler en L1 ]
• [ DL2 desplazamiento Doppler en L2 ]• C/A código C/A sobre L1• PL1 código P sobre L1
• PL2 código P sobre L2
• Aunque no todas las observaciones pueden estar disponibles.
46SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Combinaciones de Datos
Combinación Lineal de FaseCombinación Lineal de Fase• La combinación lineal de fase viene expresado como:
donde n1 y n2 son dos números arbitrarios
• Sustituyendo φi = fit tenemos:
• La frecuencia de la combinación lineal es:
• Y la longitud de onda de la combinación:
2211 ϕϕϕ nn +=
fttfntfn =+= 2211ϕ
2211 fnfnf +=
fc=λ
47SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Combinaciones de Datos
Combinación Lineal de FaseCombinación Lineal de Fase• Existen algunas combinaciones lineales especiales para las
portadoras L1 y L2.
– Suma de frecuencias
– Combinación ionosférica
– Eliminación de ionosfera
1;1 21 == nn L2L1L2L1 Φ+Φ=Φ +
L2L1L2L1 Φ−Φ=Φ −
L1
L221 ;1
ffnn −== L2
L1
L2L1L2L1, Φ−Φ=Φ
ff
1;1 21 −== nn
48SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Combinaciones de Datos
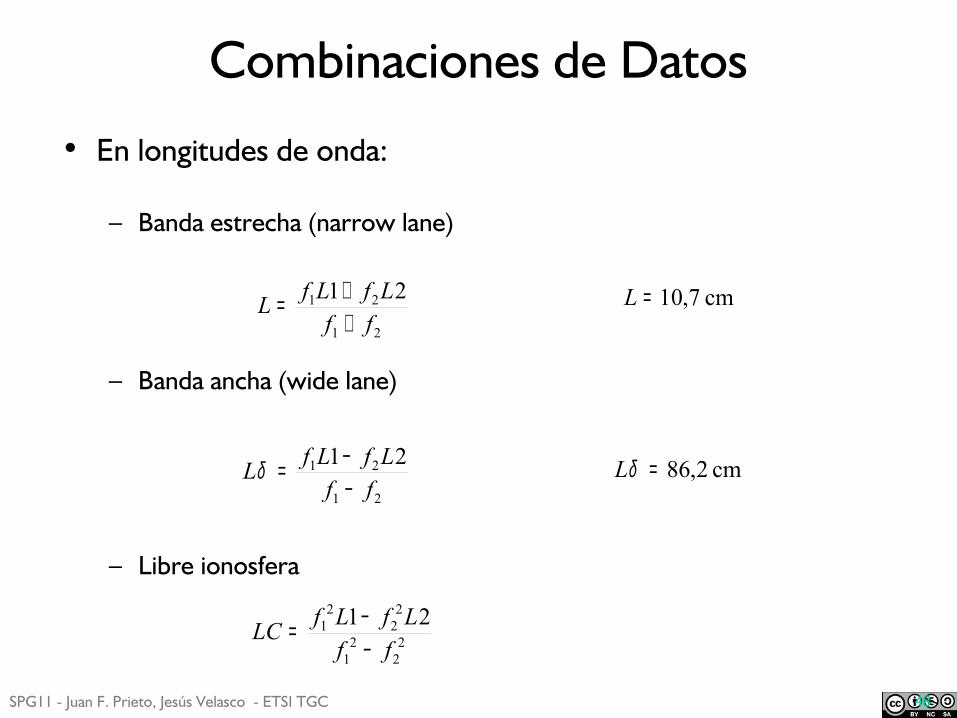
• En longitudes de onda:
– Banda estrecha (narrow lane)
– Banda ancha (wide lane)
– Libre ionosfera
cm 2,86=δL21
21 21ff
LfLfL−−=δ
22
21
22
21 21
ffLfLfLC
−−=
cm 7,10=L21
21 21ff
LfLfL++=
49SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Correlación entre Observaciones
• En general hay dos tipos de correlación:
• La correlación física y• La correlación matemática.
• La correlación física se debe a que la señal que emite un satélite se recibe en varias estaciones al mismo tiempo. No se tiene en cuenta si se calcula en modo de baselíneas aisladas. Si se tiene en cuenta si se calcula en modo multibaselínea o multiestación.
• Sin embargo, se obtienen excelentes resultados aún obviando esta correlación.
50SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Proceso de Datos
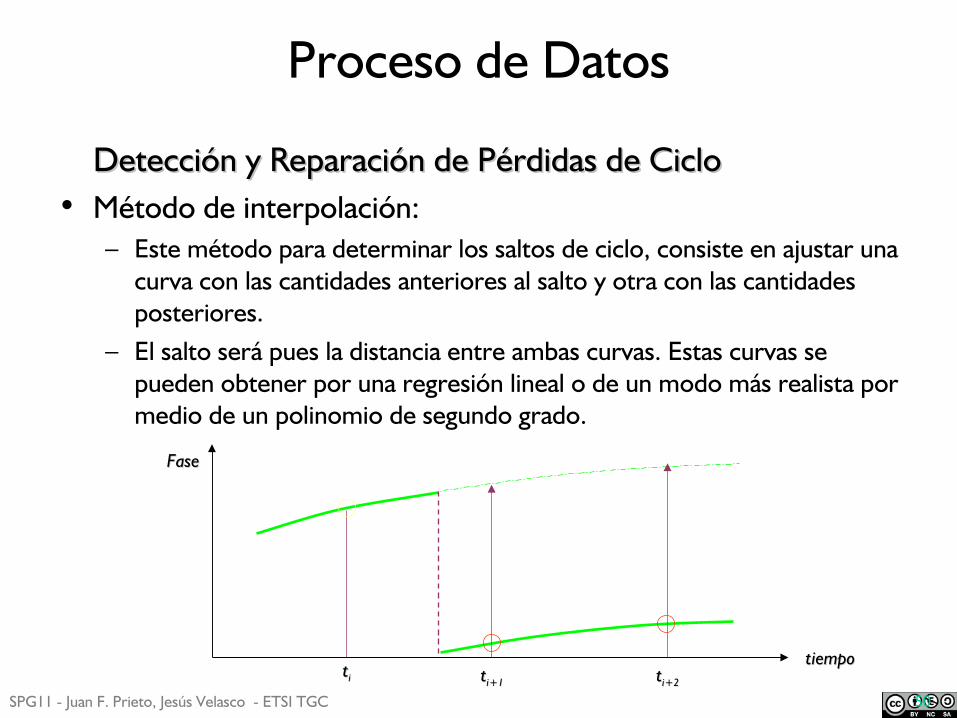
Detección y Reparación de Pérdidas de CicloDetección y Reparación de Pérdidas de Ciclo• Método de interpolación:
– Este método para determinar los saltos de ciclo, consiste en ajustar una curva con las cantidades anteriores al salto y otra con las cantidades posteriores.
– El salto será pues la distancia entre ambas curvas. Estas curvas se pueden obtener por una regresión lineal o de un modo más realista por medio de un polinomio de segundo grado.
ttii tti+1i+1 tti+2i+2
tiempotiempo
FaseFase
51SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Proceso de Datos
Detección y Reparación de Pérdidas de CicloDetección y Reparación de Pérdidas de Ciclo• Filtros KALMAN:
– Se predice el valor para la siguiente época, con la información de las épocas precedentes y se compara con el valor observado. Esta diferencia es la que tiene que pasar el filtro.
• Sea cual sea la técnica utilizada, la cantidad detectada en el salto, se debe añadir a las siguientes cantidades, salvo en el caso en que la combinación lineal sea la de libre ionosfera en la que el número de ciclos no es un entero.
52SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Proceso de Datos
Resolución de la AmbigüedadResolución de la Ambigüedad• La ambigüedad N en la fase depende del satélite y del receptor
y no varía en el tiempo mientras se mantenga sin interrupción el seguimiento
• La ambigüedad inicial es un número enteronúmero entero. La búsqueda del ‘mejor’ número entero es muy importante para mejorar la precisión del vector (“baselínea”) que deseamos determinar
• Si no fuera posible determinar N como número entero, las ambigüedades nos quedarían como números reales obteniendo lo que se conoce como solución “float” o flotante
53SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
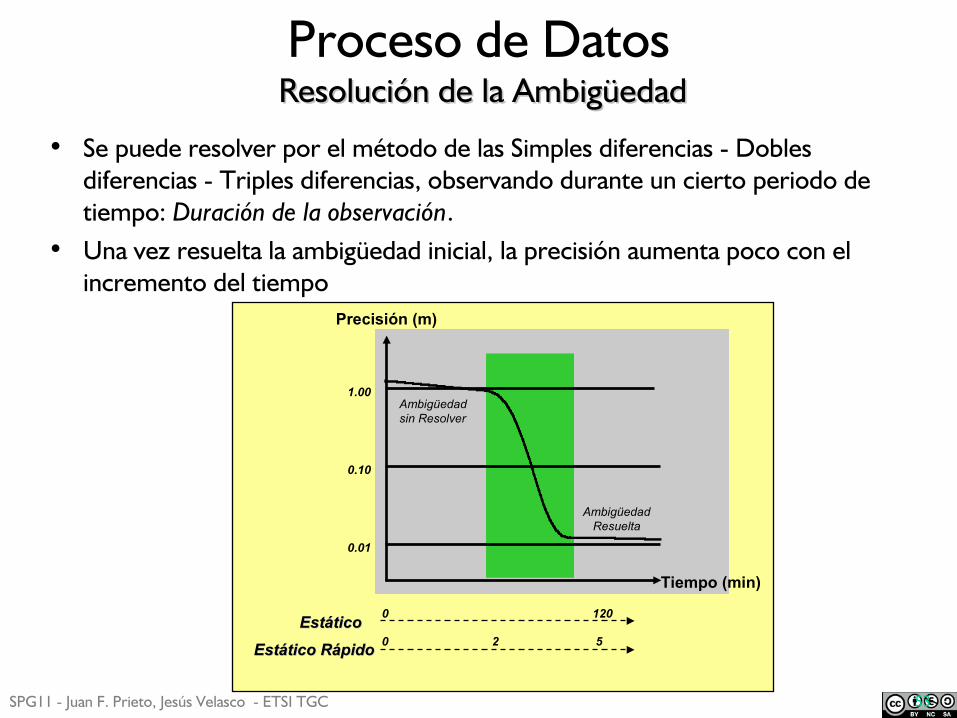
• Se puede resolver por el método de las Simples diferencias - Dobles diferencias - Triples diferencias, observando durante un cierto periodo de tiempo: Duración de la observación.
• Una vez resuelta la ambigüedad inicial, la precisión aumenta poco con el incremento del tiempo
Precisión (m)
1.00
0.10
0.01
EstáticoEstático 0 120
Estático RápidoEstático Rápido 0 2 5
Tiempo (min)
Ambigüedadsin Resolver
Ambigüedad Resuelta
Proceso de Datos Resolución de la AmbigüedadResolución de la Ambigüedad
54SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
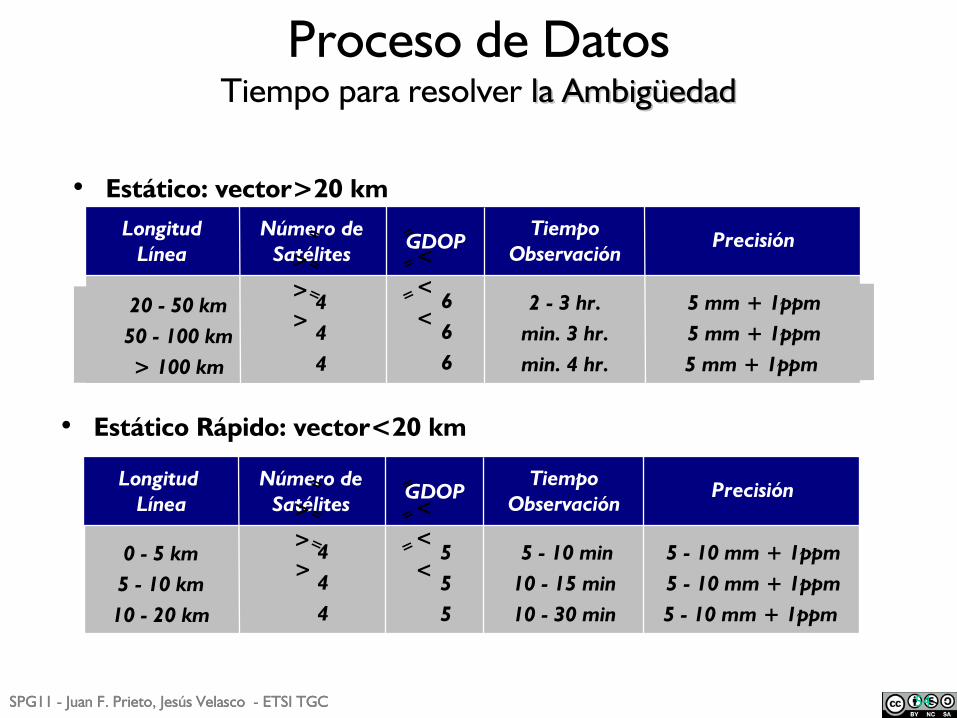
Proceso de DatosTiempo para resolver la Ambigüedadla Ambigüedad
SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
LongitudLínea
Número deSatélites GDOP
TiempoObservación
Precisión
20 - 50 km50 - 100 km> 100 km
2 - 3 hr.min. 3 hr.min. 4 hr.
5 mm + 1ppm5 mm + 1ppm5 mm + 1ppm
• Estático: vector>20 km
Longitud Línea
Número deSatélites GDOP
TiempoObservación
Precisión
0 - 5 km5 - 10 km
10 - 20 km
5 - 10 min10 - 15 min10 - 30 min
5 - 10 mm + 1ppm5 - 10 mm + 1ppm5 - 10 mm + 1ppm
>=444
>=>=
555
<=
<=
<=
>=444
>=>=
666
<=
<=
<=
• Estático Rápido: vector<20 km
55SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
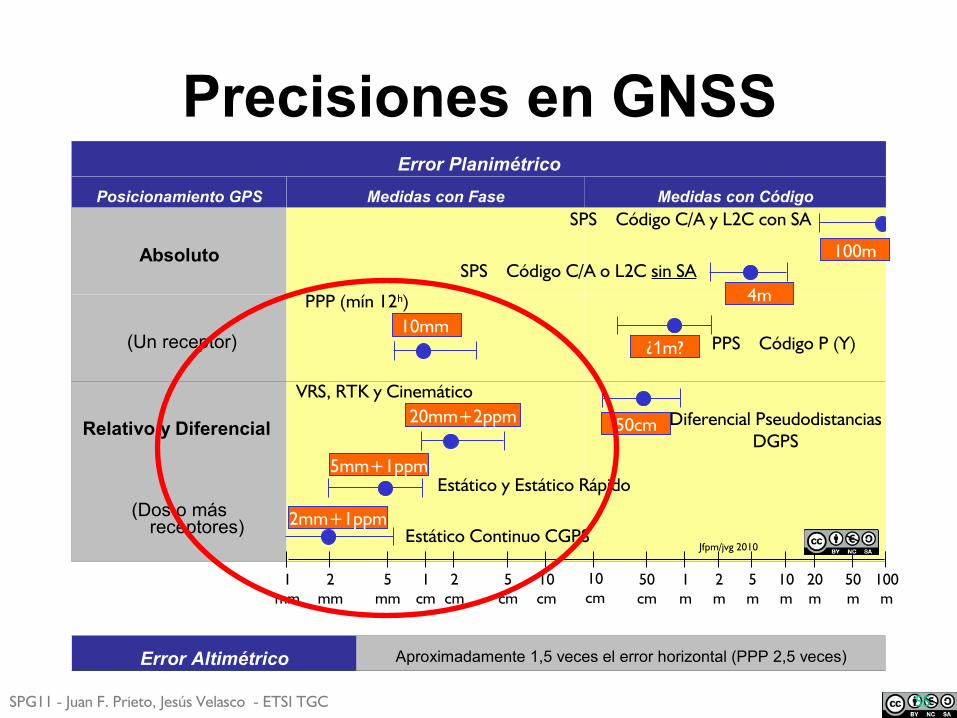
Precisiones en GNSSError Planimétrico
Posicionamiento GPS Medidas con Fase Medidas con Código
Absoluto
(Un receptor)
Relativo y Diferencial
(Dos o más receptores)
Error Altimétrico Aproximadamente 1,5 veces el error horizontal (PPP 2,5 veces)
1mm
2mm
5mm
1cm
2cm
5cm
10cm
10cm
50cm
1m
2m
5m
10m
20m
50m
100m
20mm+2ppm
5mm+1ppm
2mm+1ppm
50cm
¿1m?
4m
100m
VRS, RTK y Cinemático
Estático Continuo CGPS
Estático y Estático Rápido
Diferencial PseudodistanciasDGPS
SPS Código C/A y L2C con SA
SPS Código C/A o L2C sin SA
PPS Código P (Y)
Jfpm/jvg 2010
10mm PPP (mín 12h)
56SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Proceso de Datos Resumen de posibilidades de posicionamientoResumen de posibilidades de posicionamiento
• Usando el método de medición de CODIGOCODIGO con un sólo receptor obtenemos una precisión de 4 a 10 m
– Dependiendo de la SA (100, 300 m …)– La solución es instantánea; Posición Absoluta
• Con los métodos relativos y diferenciales, usando dos receptores simultáneamente siguiendo un mínimo de 4 satélites, ofrece una precisión en el vector o ‘baselínea’ de 0,005 cm hasta 1 m.
• En función del observable:– Usando método Diferencial con CODIGOCODIGO obtendremos precisión
metros o varios decímetros.metros o varios decímetros.– Usando método Relativo con FASEFASE obtendremos precisión de
centímetros o de varios milímitros.centímetros o de varios milímitros.
57SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Formato de datos GNSS-PP• Cada receptor almacena los datos de Observables, Navegación,
…, en un formato propietario de cada marca fabricante• Están en codificación binaria y normalmente sólo pueden ser
procesados con programas del mismo fabricante • Nominación de archivos con diferente tipología RRRRRRRR dddddd ss .EXT.EXT
donde:– RRRRRRRR es el código de la estación (4 caracteres) – dddddd es el día del año en 3 dígitos (1-365)– ss es el número de sesión dentro del día:
• 00 indica que el archivo tiene datos de todo un día• a, b, c, … xa, b, c, … x para los archivos de hora en hora, sesiones, … (1, 2, 3, 4, 5,…)
– EXT EXT es el tipo de extensión que caracteriza a cada fabricante:• .DAT , .SSF TRIMBLE• .TPS Topcon• .JPS Javad• .M00 Leica 500 y 1200
58SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Formato de datos RINEX• Archivos de datos RINEX de Observaciones, Navegación, …,
para poder calcular datos recogidos con distintas marcas de receptores y procesados con distintos programas
• Nominación de archivos tipificada eeeeeeee dddddd ss .. aaaa tt donde:– eeeeeeee es el código de la estación (4 caracteres) – dddddd es el día del año en 3 dígitos (001-365)– ss es el número de sesión dentro del día:
• 00 indica que el archivo tiene datos de todo un día• a, b, c, … xa, b, c, … x para los archivos de hora en hora, sesiones, … (1, 2, 3, 4, 5,…)
– aaaa es el año en dos dígitos– tt es el tipo de archivo RINEX
• oo archivo de observaciones (L1, L2, L5, C1, C2, P1, P2, D1, D2 ......)• dd archivo de observaciones compact RINEX• nn archivo de navegación GPS (efemérides transmitidas)• mm archivo de datos meteorológicos• g, h, c, ...g, h, c, ...
59SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
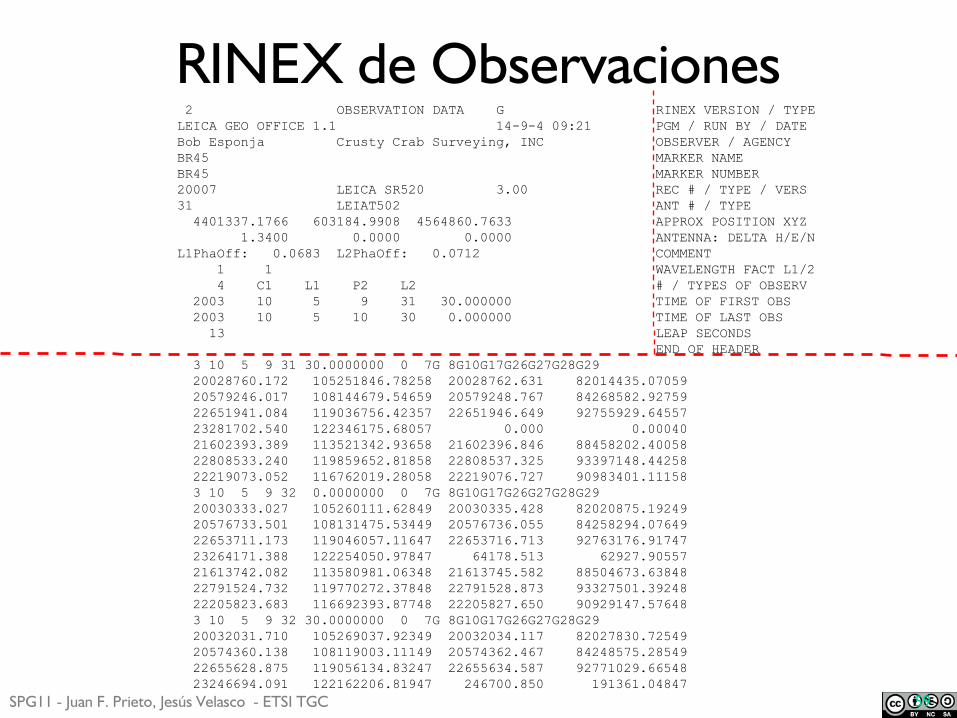
RINEX de Observaciones 2 OBSERVATION DATA G RINEX VERSION / TYPELEICA GEO OFFICE 1.1 14-9-4 09:21 PGM / RUN BY / DATEBob Esponja Crusty Crab Surveying, INC OBSERVER / AGENCYBR45 MARKER NAMEBR45 MARKER NUMBER20007 LEICA SR520 3.00 REC # / TYPE / VERS31 LEIAT502 ANT # / TYPE 4401337.1766 603184.9908 4564860.7633 APPROX POSITION XYZ 1.3400 0.0000 0.0000 ANTENNA: DELTA H/E/NL1PhaOff: 0.0683 L2PhaOff: 0.0712 COMMENT 1 1 WAVELENGTH FACT L1/2 4 C1 L1 P2 L2 # / TYPES OF OBSERV 2003 10 5 9 31 30.000000 TIME OF FIRST OBS 2003 10 5 10 30 0.000000 TIME OF LAST OBS 13 LEAP SECONDS END OF HEADER 3 10 5 9 31 30.0000000 0 7G 8G10G17G26G27G28G29 20028760.172 105251846.78258 20028762.631 82014435.07059 20579246.017 108144679.54659 20579248.767 84268582.92759 22651941.084 119036756.42357 22651946.649 92755929.64557 23281702.540 122346175.68057 0.000 0.00040 21602393.389 113521342.93658 21602396.846 88458202.40058 22808533.240 119859652.81858 22808537.325 93397148.44258 22219073.052 116762019.28058 22219076.727 90983401.11158 3 10 5 9 32 0.0000000 0 7G 8G10G17G26G27G28G29 20030333.027 105260111.62849 20030335.428 82020875.19249 20576733.501 108131475.53449 20576736.055 84258294.07649 22653711.173 119046057.11647 22653716.713 92763176.91747 23264171.388 122254050.97847 64178.513 62927.90557 21613742.082 113580981.06348 21613745.582 88504673.63848 22791524.732 119770272.37848 22791528.873 93327501.39248 22205823.683 116692393.87748 22205827.650 90929147.57648 3 10 5 9 32 30.0000000 0 7G 8G10G17G26G27G28G29 20032031.710 105269037.92349 20032034.117 82027830.72549 20574360.138 108119003.11149 20574362.467 84248575.28549 22655628.875 119056134.83247 22655634.587 92771029.66548 23246694.091 122162206.81947 246700.850 191361.04847
60SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
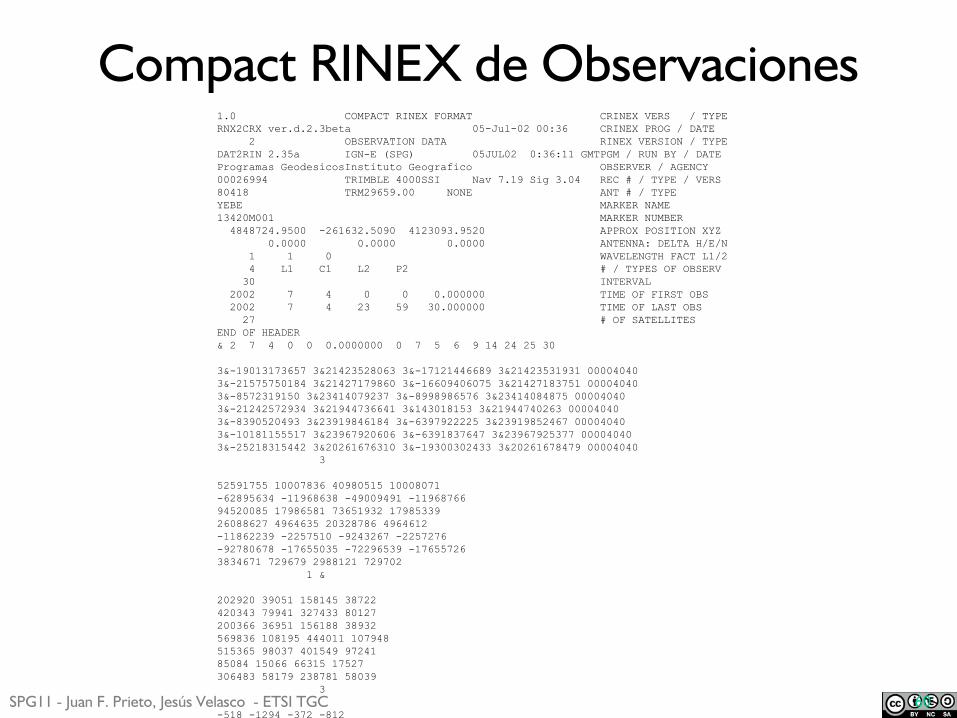
Compact RINEX de Observaciones1.0 COMPACT RINEX FORMAT CRINEX VERS / TYPERNX2CRX ver.d.2.3beta 05-Jul-02 00:36 CRINEX PROG / DATE 2 OBSERVATION DATA RINEX VERSION / TYPEDAT2RIN 2.35a IGN-E (SPG) 05JUL02 0:36:11 GMTPGM / RUN BY / DATEProgramas GeodesicosInstituto Geografico OBSERVER / AGENCY00026994 TRIMBLE 4000SSI Nav 7.19 Sig 3.04 REC # / TYPE / VERS80418 TRM29659.00 NONE ANT # / TYPEYEBE MARKER NAME13420M001 MARKER NUMBER 4848724.9500 -261632.5090 4123093.9520 APPROX POSITION XYZ 0.0000 0.0000 0.0000 ANTENNA: DELTA H/E/N 1 1 0 WAVELENGTH FACT L1/2 4 L1 C1 L2 P2 # / TYPES OF OBSERV 30 INTERVAL 2002 7 4 0 0 0.000000 TIME OF FIRST OBS 2002 7 4 23 59 30.000000 TIME OF LAST OBS 27 # OF SATELLITESEND OF HEADER& 2 7 4 0 0 0.0000000 0 7 5 6 9 14 24 25 30
3&-19013173657 3&21423528063 3&-17121446689 3&21423531931 000040403&-21575750184 3&21427179860 3&-16609406075 3&21427183751 000040403&-8572319150 3&23414079237 3&-8998986576 3&23414084875 000040403&-21242572934 3&21944736641 3&143018153 3&21944740263 000040403&-8390520493 3&23919846184 3&-6397922225 3&23919852467 000040403&-10181155517 3&23967920606 3&-6391837647 3&23967925377 000040403&-25218315442 3&20261676310 3&-19300302433 3&20261678479 00004040 3
52591755 10007836 40980515 10008071-62895634 -11968638 -49009491 -1196876694520085 17986581 73651932 1798533926088627 4964635 20328786 4964612-11862239 -2257510 -9243267 -2257276-92780678 -17655035 -72296539 -176557263834671 729679 2988121 729702 1 &
202920 39051 158145 38722420343 79941 327433 80127200366 36951 156188 38932569836 108195 444011 107948515365 98037 401549 9724185084 15066 66315 17527306483 58179 238781 58039 3
-518 -1294 -372 -8121471 612 1257 368-1160 2853 -992 625-1163 -6 -913 6991867 876 1488 21281921 2396 1468 -2597-234 540 -134 832 2 &
-852 1142 -760 7421237 -520 956 -638-1101 -2946 -845 -3836-1276 -39 -979 -557529 -150 440 -13671938 -871 1528 1250-545 -890 -418 -1148 3
-662 -795 -470 -2551004 876 779 1217-1121 1040 -829 3185-1321 -311 -1000 -566840 -252 625 13641303 824 988 2841-174 241 -164 513 3 & 8 4 5 6 &9 1 4 25 30
3&8843748 3&25348516269 0000-645 -297 -526 -5071303 -24 1032 56-1539 -1062 -1256 -2574-1213 -474 -960 631074 -454 830 -9682187 -995 1716 -2822-509 162 -381 -112 3
53351124 10152903 -752 333 -543 271210 401 958 -136-1223 -676 -890 -628-1398 -166 -1141 -423940 1460 769 9531694 2141 1324 1587-495 -221 -411 -111 4 &
469734 88501 -767 -88 -634 -531136 -205 919 133-1114 2581 -954 4536-1208 -15 -847 2431057 -536 693 -4031780 588 1450 2641-336 -381 -246 -419 3
3&19957785 3038 -771 -769 -654 -171876 1156 617 981-1077 -3524 -720 -6874-1468 -1084 -1164 -16711043 524 989 4852087 -1992 1564 -4524-401 204 -339 240 5 &
54755654 -4668 -518 865 -322 3281375 -1111 1095 -630-1540 1366 -1306 5350-1519 1134 -1222 1757645 815 478 15671892 3072 1478 5580-359 210 -256 222 3
464776 1262 -739 -1038 -578 -8901059 1134 785 326-1254 -815 -913 -3558-1425 -1809 -1088 -2315504 -1179 278 -24331376 -812 1059 -2605-376 -373 -287 -244 6 &
-1619 244 3&36181368 3&25410772574 4040-686 58 -543 -126959 134 742 635-1200 695 -908 -992-1515 1094 -1230 1317
61SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
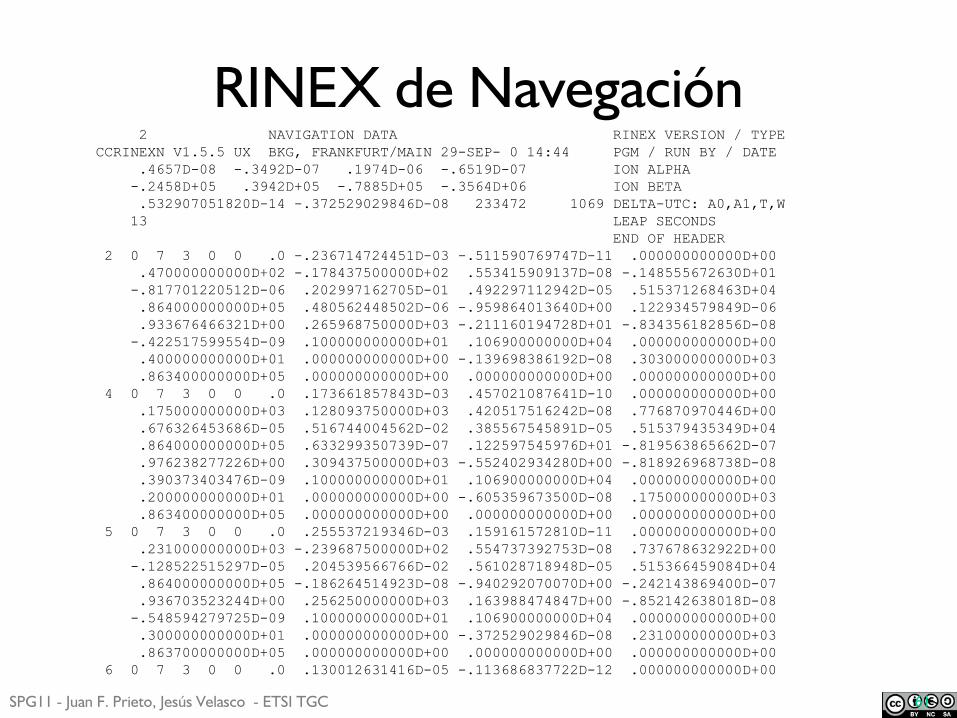
RINEX de Navegación 2 NAVIGATION DATA RINEX VERSION / TYPECCRINEXN V1.5.5 UX BKG, FRANKFURT/MAIN 29-SEP- 0 14:44 PGM / RUN BY / DATE .4657D-08 -.3492D-07 .1974D-06 -.6519D-07 ION ALPHA -.2458D+05 .3942D+05 -.7885D+05 -.3564D+06 ION BETA .532907051820D-14 -.372529029846D-08 233472 1069 DELTA-UTC: A0,A1,T,W 13 LEAP SECONDS END OF HEADER 2 0 7 3 0 0 .0 -.236714724451D-03 -.511590769747D-11 .000000000000D+00 .470000000000D+02 -.178437500000D+02 .553415909137D-08 -.148555672630D+01 -.817701220512D-06 .202997162705D-01 .492297112942D-05 .515371268463D+04 .864000000000D+05 .480562448502D-06 -.959864013640D+00 .122934579849D-06 .933676466321D+00 .265968750000D+03 -.211160194728D+01 -.834356182856D-08 -.422517599554D-09 .100000000000D+01 .106900000000D+04 .000000000000D+00 .400000000000D+01 .000000000000D+00 -.139698386192D-08 .303000000000D+03 .863400000000D+05 .000000000000D+00 .000000000000D+00 .000000000000D+00 4 0 7 3 0 0 .0 .173661857843D-03 .457021087641D-10 .000000000000D+00 .175000000000D+03 .128093750000D+03 .420517516242D-08 .776870970446D+00 .676326453686D-05 .516744004562D-02 .385567545891D-05 .515379435349D+04 .864000000000D+05 .633299350739D-07 .122597545976D+01 -.819563865662D-07 .976238277226D+00 .309437500000D+03 -.552402934280D+00 -.818926968738D-08 .390373403476D-09 .100000000000D+01 .106900000000D+04 .000000000000D+00 .200000000000D+01 .000000000000D+00 -.605359673500D-08 .175000000000D+03 .863400000000D+05 .000000000000D+00 .000000000000D+00 .000000000000D+00 5 0 7 3 0 0 .0 .255537219346D-03 .159161572810D-11 .000000000000D+00 .231000000000D+03 -.239687500000D+02 .554737392753D-08 .737678632922D+00 -.128522515297D-05 .204539566766D-02 .561028718948D-05 .515366459084D+04 .864000000000D+05 -.186264514923D-08 -.940292070070D+00 -.242143869400D-07 .936703523244D+00 .256250000000D+03 .163988474847D+00 -.852142638018D-08 -.548594279725D-09 .100000000000D+01 .106900000000D+04 .000000000000D+00 .300000000000D+01 .000000000000D+00 -.372529029846D-08 .231000000000D+03 .863700000000D+05 .000000000000D+00 .000000000000D+00 .000000000000D+00 6 0 7 3 0 0 .0 .130012631416D-05 -.113686837722D-12 .000000000000D+00
62SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
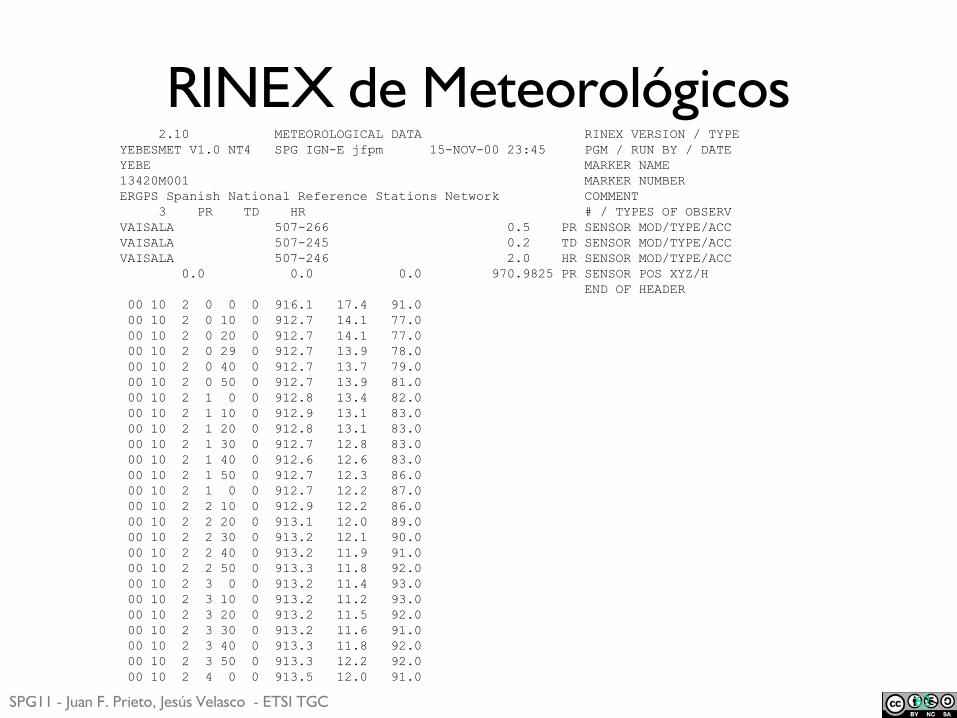
RINEX de Meteorológicos 2.10 METEOROLOGICAL DATA RINEX VERSION / TYPEYEBESMET V1.0 NT4 SPG IGN-E jfpm 15-NOV-00 23:45 PGM / RUN BY / DATE YEBE MARKER NAME 13420M001 MARKER NUMBER ERGPS Spanish National Reference Stations Network COMMENT 3 PR TD HR # / TYPES OF OBSERV VAISALA 507-266 0.5 PR SENSOR MOD/TYPE/ACC VAISALA 507-245 0.2 TD SENSOR MOD/TYPE/ACC VAISALA 507-246 2.0 HR SENSOR MOD/TYPE/ACC 0.0 0.0 0.0 970.9825 PR SENSOR POS XYZ/H END OF HEADER 00 10 2 0 0 0 916.1 17.4 91.0 00 10 2 0 10 0 912.7 14.1 77.0 00 10 2 0 20 0 912.7 14.1 77.0 00 10 2 0 29 0 912.7 13.9 78.0 00 10 2 0 40 0 912.7 13.7 79.0 00 10 2 0 50 0 912.7 13.9 81.0 00 10 2 1 0 0 912.8 13.4 82.0 00 10 2 1 10 0 912.9 13.1 83.0 00 10 2 1 20 0 912.8 13.1 83.0 00 10 2 1 30 0 912.7 12.8 83.0 00 10 2 1 40 0 912.6 12.6 83.0 00 10 2 1 50 0 912.7 12.3 86.0 00 10 2 1 0 0 912.7 12.2 87.0 00 10 2 2 10 0 912.9 12.2 86.0 00 10 2 2 20 0 913.1 12.0 89.0 00 10 2 2 30 0 913.2 12.1 90.0 00 10 2 2 40 0 913.2 11.9 91.0 00 10 2 2 50 0 913.3 11.8 92.0 00 10 2 3 0 0 913.2 11.4 93.0 00 10 2 3 10 0 913.2 11.2 93.0 00 10 2 3 20 0 913.2 11.5 92.0 00 10 2 3 30 0 913.2 11.6 91.0 00 10 2 3 40 0 913.3 11.8 92.0 00 10 2 3 50 0 913.3 12.2 92.0 00 10 2 4 0 0 913.5 12.0 91.0
63SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Otras nomenclaturas datos RINEXversiones futuras
• Nominación no tipificada (V3?) eeeeeeee aaaaaaaa mmmm dddd hhhh .. tttttt donde:– eeeeeeee es el código de la estación (4 caracteres)– aaaaaaaa es el año en el que se han recogido los datos (4 caracteres)– mmmm mes en el que se han recogido los datos (2 caracteres)– dddd día en el que se han recogido los datos (2 caracteres)– hhhh hora inicio en la que se han recogido los datos (2 caracteres)– tttttt es el tipo de archivo RINEX
• obsobs archivo de observaciones (L1, L2, L5, C1, C2, P1, P2, D1, D2 ....)• navnav archivo de navegación GPS (efemérides transmitidas)• metmet archivo de datos meteorológicos
– Utilizado en datos de estaciones permanentes. No es un formato normalizado y muchos programas de proceso de datos GPS no lo reconocen. SOLUCIÓNSOLUCIÓN: renombrar el archivo al formato estándar
64SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
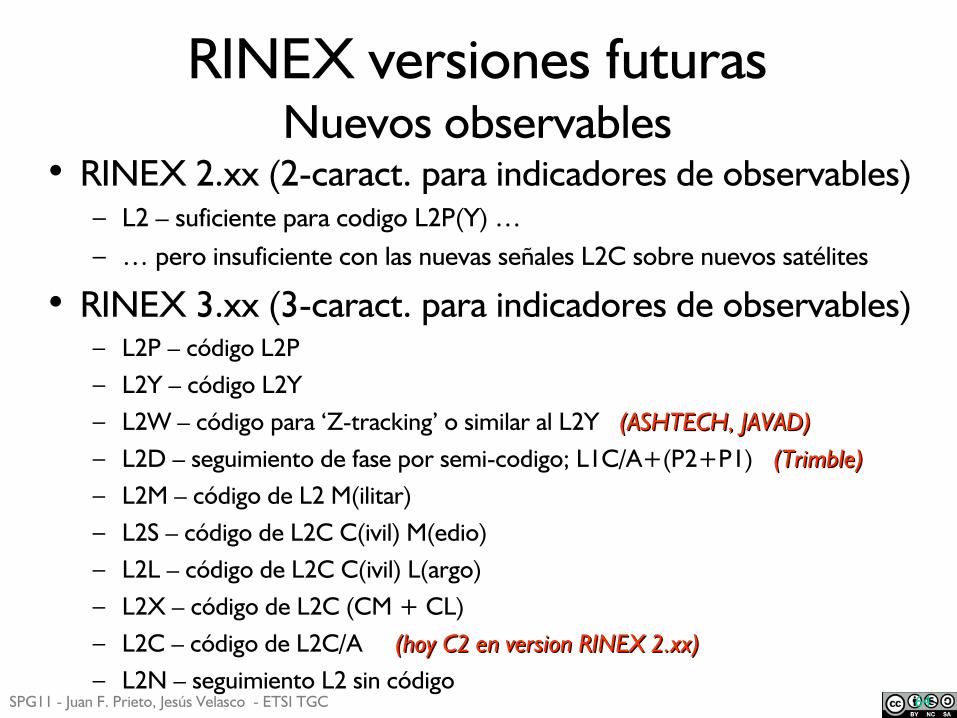
RINEX versiones futurasNuevos observables
• RINEX 2.xx (2-caract. para indicadores de observables)– L2 – suficiente para codigo L2P(Y) …– … pero insuficiente con las nuevas señales L2C sobre nuevos satélites
• RINEX 3.xx (3-caract. para indicadores de observables)– L2P – código L2P– L2Y – código L2Y– L2W – código para ‘Z-tracking’ o similar al L2Y (ASHTECH, JAVAD)(ASHTECH, JAVAD)– L2D – seguimiento de fase por semi-codigo; L1C/A+(P2+P1) (Trimble)(Trimble)– L2M – código de L2 M(ilitar)– L2S – código de L2C C(ivil) M(edio)– L2L – código de L2C C(ivil) L(argo)– L2X – código de L2C (CM + CL)– L2C – código de L2C/A (hoy C2 en version RINEX 2.xx)(hoy C2 en version RINEX 2.xx)– L2N – seguimiento L2 sin código
65SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Tipos de Posicionamiento GPS• La elección del método dependerá fundamentalmente de:
– Precisión que se requiere alcanzar
– Relación de costes
– Equipo disponible
– Tiempo de ejecución del proyecto
Se puede hacer una amplia clasificación en función de muchas variables. Una clasificación tradicional sería:
• En función del observable utilizado– Código (metros)
– Código y Fase (centímetros, milímetros)
• En función del movimiento del receptor– Estático, no se mueve durante la observación (mayor precisión y tiempo)
– Cinemático, el receptor se desplaza durante la observación (menor precisión)
– Hibridos, combina los dos anteriores
66SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Tipos de Posicionamiento GPS
• En función del tipo de solución– Posicionamiento absoluto: coordenadas de un punto aislado, X, Y, Z
sobre el Sistema Geodésico de Refª
– Posicionamiento relativo: coordenadas de un punto con respecto a otro, ∆X, ∆Y, ∆Z (metros, kilómetros)
– Posicionamiento diferencial: variación de coordenadas de un punto obtenidas con respecto a otro, dx, dy, dz (variaciones diferenciales)
• En función de la disponibilidad de la solución– Post-proceso, cálculo y solución en oficina PP– Tiempo Real, cálculo y solución en campo RT
67SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
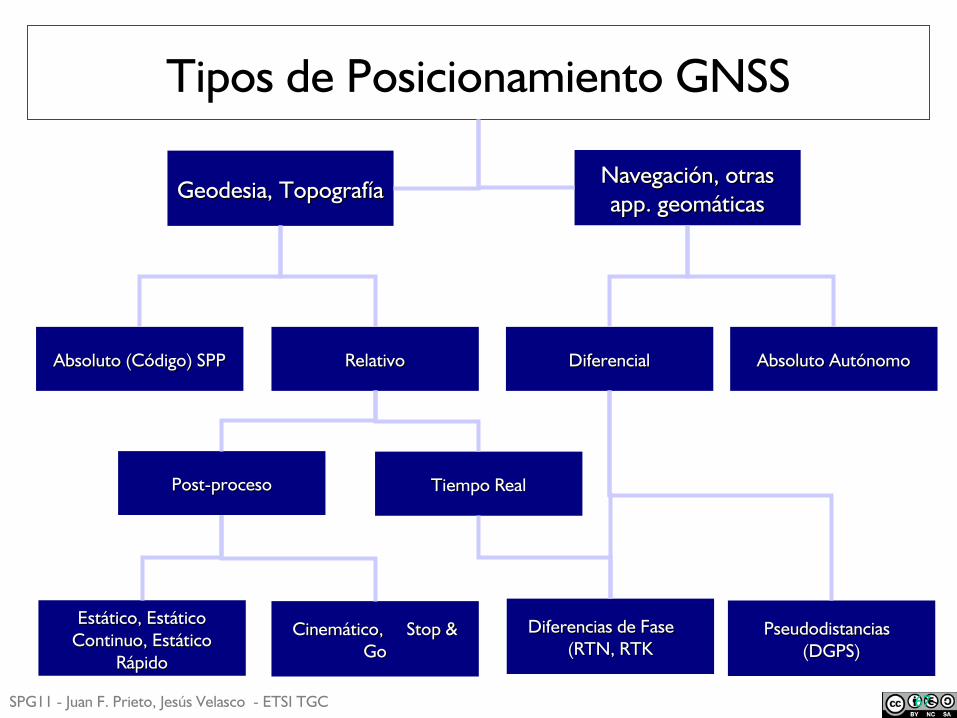
Tipos de Posicionamiento GNSS
RelativoRelativo DiferencialDiferencial Absoluto AutónomoAbsoluto AutónomoAbsoluto (Código) SPPAbsoluto (Código) SPP
Geodesia, TopografíaGeodesia, Topografía Navegación, otras Navegación, otras app. geomáticasapp. geomáticas
Estático, Estático Estático, Estático Continuo, Estático Continuo, Estático
RápidoRápido
Cinemático, Stop & Cinemático, Stop & GoGo
Pseudodistancias Pseudodistancias (DGPS)(DGPS)
Diferencias de Fase Diferencias de Fase (RTN, RTK(RTN, RTK
Post-procesoPost-proceso Tiempo RealTiempo Real
68SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Tipos de Posicionamiento GPS
El método a utilizar depende de la precisión requerida por el usuario y el tipo de receptor disponible. En un amplio sentido de la palabra, estas técnicas se pueden clasificar básicamente en tres clases:
• 1.- Navegación autónoma = Posicionamiento Absoluto por código1.- Navegación autónoma = Posicionamiento Absoluto por código,, empleando sólo un receptor simple. Excursionistas, barcos en alta mar, fuerzas armadas. 4-10 metros de precisión sin SA. 100 - 300 m con SA
69SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Tipos de Posicionamiento GPS
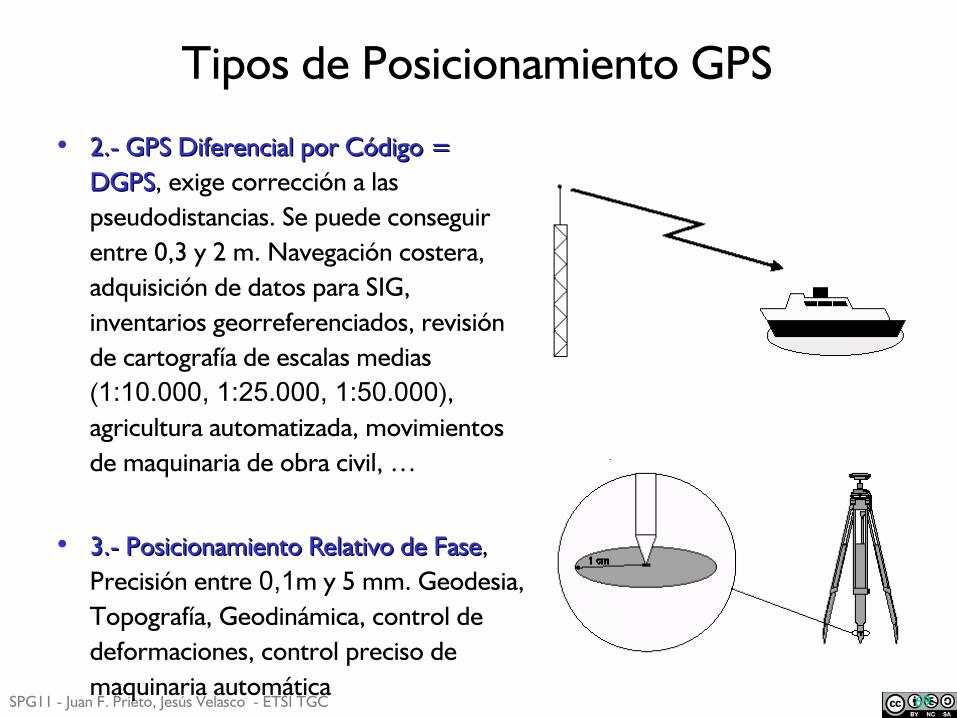
• 2.- GPS Diferencial por Código = 2.- GPS Diferencial por Código = DGPSDGPS, exige corrección a las pseudodistancias. Se puede conseguir entre 0,3 y 2 m. Navegación costera, adquisición de datos para SIG, inventarios georreferenciados, revisión de cartografía de escalas medias (1:10.000, 1:25.000, 1:50.000), agricultura automatizada, movimientos de maquinaria de obra civil, …
• 3.- Posicionamiento Relativo de Fase3.- Posicionamiento Relativo de Fase, Precisión entre 0,1m y 5 mm. Geodesia, Topografía, Geodinámica, control de deformaciones, control preciso de maquinaria automática
70SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Absoluto por Código• Es la técnica más sencilla empleada por los receptores GPS para proporcionar
instantáneamente al usuario la posición y altura y/o tiempo
• 4-10 metros de precisión sin SA. 100 - 300 m con SA
• Se obtiene la posición a través de las pseudodistancias de los satélites al receptor en el SGR de la constelación: un solo receptor y se obtiene posición absoluta
• Los receptores utilizados son unidades pequeñas, portátiles y de bajo coste que normalmente sólo ofrecen código C/A (no fase)
• Conocido también como “Solución de Código”, “Solución de Navegación”, “Posicionamiento de Punto Simple” (SPP), “Posicionamiento de punto aislado”,”POSAC”
71SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamientos Relativos y Diferenciales• Dos receptores (al menos) están simultáneamente observando satélites comunes,
para establecer las ecuaciones de simples y dobles diferencias, o combinaciones similares.
• De los dos, uno de ellos ha de estar en un punto de coordenadas conocidas o bien se le asignan unas a priori con otro método, pero éstas se consideradas fijas.
• Se determinan los incrementos de coordenadas o variaciones diferenciales.
• Ventaja: eliminación de errores, especialmente el retardo ionosférico y troposférico, si consideramos de la misma magnitud en el mismo instante de observación en puntos no muy alejados.
• Dentro de estos métodos hay múltiples variaciones en función del observable, movimiento o no de los receptores, post-proceso tiempo-real,etc.
72SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
GPS DiferencialDGPS
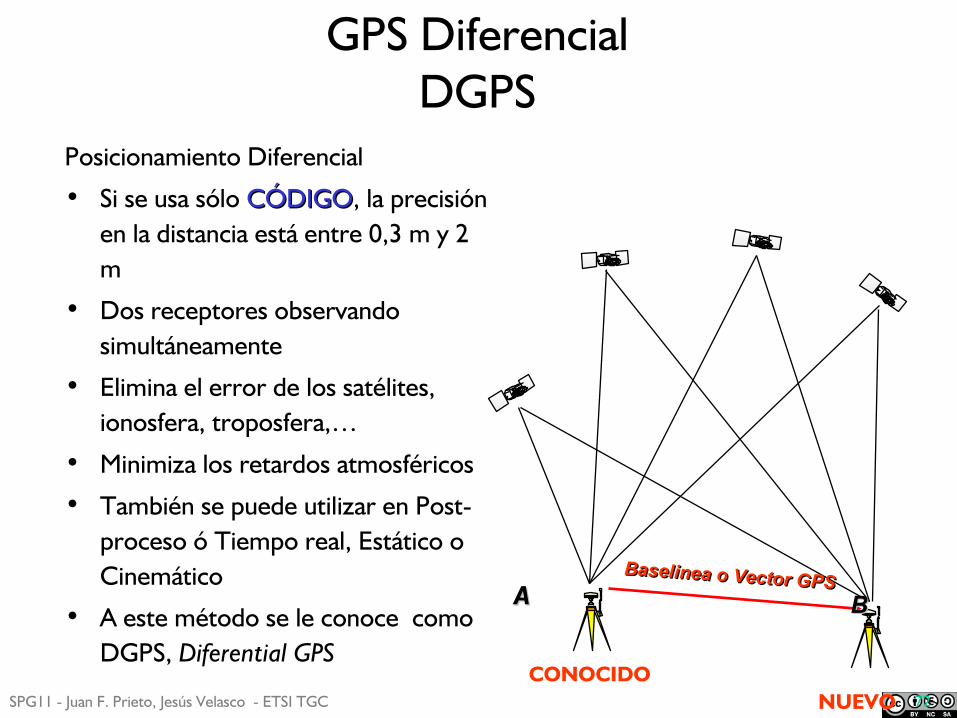
Posicionamiento Diferencial
• Si se usa sólo CÓDIGOCÓDIGO, la precisión en la distancia está entre 0,3 m y 2 m
• Dos receptores observando simultáneamente
• Elimina el error de los satélites, ionosfera, troposfera,…
• Minimiza los retardos atmosféricos
• También se puede utilizar en Post-proceso ó Tiempo real, Estático o Cinemático
• A este método se le conoce como DGPS, Diferential GPS
Baselinea o Vector GPSBaselinea o Vector GPS
BBAA
CONOCIDONUEVO
73SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
GPS Diferencial (DGPS)
Posición GPS (errores)
Posición GPS
(errónea)
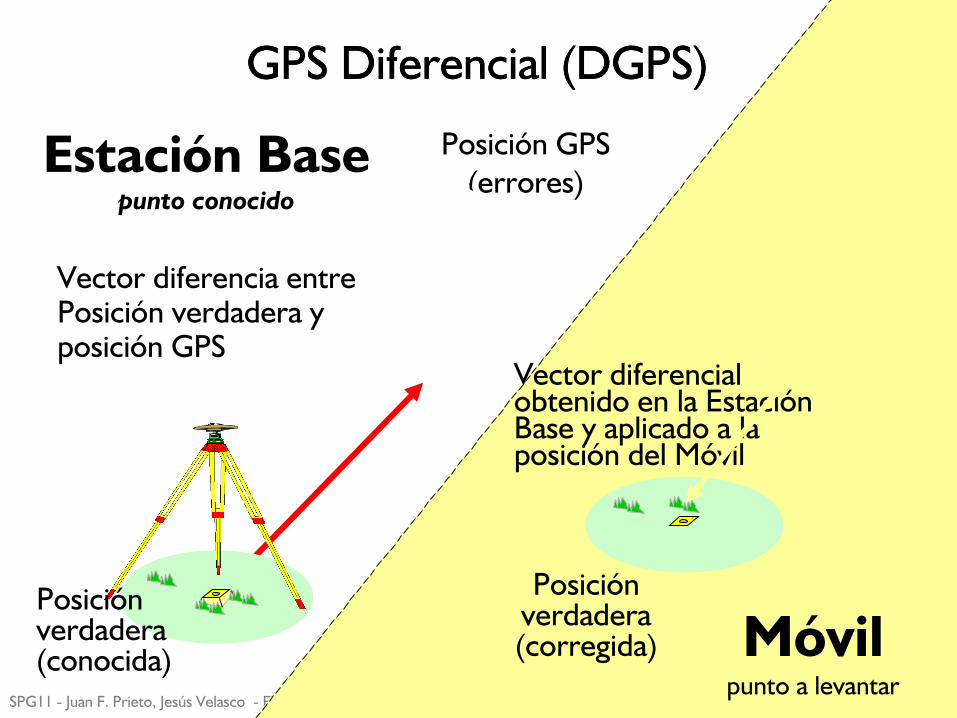
GPS Diferencial (DGPS)
Estación Base punto conocido
Vector diferencia entre Posición verdadera y posición GPS
Posición verdadera (conocida) Móvil
punto a levantar
Posición verdadera (corregida)
Vector diferencial obtenido en la Estación Base y aplicado a la posición del Móvil
74SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
GPS Diferencial (DGPS)GPS Diferencial (DGPS)
• El equipo ‘móvil’ o ‘Rover’ en el punto desconocido que se quiere determinar y el equipo ‘Base’ en el punto de coordenadas conocidas.
• Ambos deben observar los mismos satélites, sino las pseudodistancias son distintas en cada estación y la solución cambia.
• El equipo Base calcula el error en las pseudodisrtancias: • Llamadas ‘correcciones diferenciales’ obtenidas restando las
pseudodistancias calculadas por código (C/A, P) y las distancias reales a los satélites (ρ)en función de la posición conocida
• Las ‘correcciones diferenciales’ del receptor Base se aplican a las pseudodistancias registradas por el receptor Móvil.
• El método es tanto más preciso cuanto mas similares sean las condiciones de error de ambos equipos. Entonces los errores se anulan en un método diferencial
75SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
GPS Diferencial (DGPS)GPS Diferencial (DGPS)
• Se elimina:• Errores de reloj SV• Error orbital• SA
• Se disminuye:• Efecto de la ionosfera 10 veces• Efecto de la troposfera 2 veces
• Se mantiene:• Multipath• ruido del receptor
76SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
GPS Diferencial (DGPS)GPS Diferencial (DGPS)
• Según tipo de corrección aplicada:• - Pseudodistancias• - Coordenadas (cuando no exista la misma constelación en las estaciones)
• Según el proceso:• - Directa• - Inversa
• Según disponibilidad o no instantánea:• - Post-proceso• - Tiempo real
• Según observable:• - Código (tradicionalmente DGPS)• - Código y Fase (RTK-RTN)• - Transmisión de diferencia de fase (RTK)
• (En general, combinación de varias)
77SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Tipos de Corrección Diferencial
• Corrección de pseudodistancia – La "estación base" genera una corrección para cada una de las
pseudodistancias observadas (PRC - Pseudo Range Correction) y su variación con el tiempo (RRC Range Rate Correction), época a época, para los satélites observados.
– El equipo móvil aplica estas correcciones sobre los satélites que esté utilizando para calcular su posición. Este es el método más correcto.
• Corrección por posición– Se utiliza cuando la estación móvil y base no observan la misma constelación. – Se calcula la diferencia de latitud, longitud y altura elipsoidal en la "estación
base" para aplicársela al móvil. – Es el método más sencillo pero tiene el incoveniente de que sólo si en la
base y el el móvil se usan los mismos satélites (constelación idéntica) puede considerarse correcta.
78SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Tipos de Corrección Diferencial
• Corrección diferencial directa– Proceso normal. La estación móvil recoge las correcciones
diferenciales y las aplica sobre sus observaciones obteniendo su posición corregida
• Corrección diferencial inversa– Se suele aplicar en control de flotas. – Los datos recogidos por los distintos móviles se envían a un
centro de control que dispone de correcciones diferenciales (o las obtiene mediante una "estación base") y las aplica a todos ellos obteniendo su posición corregida.
– En este tipo de tecnología el móvil suele desconocer su posición corregida.
79SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Fuentes de Corrección Diferencial
• Receptor proporcionado por el usuario (RT/PP) LOCAL
• Universidades y centros de investigación (PP) L,R,M
• Centros oficiales– Redes de estaciones de referencia (PP) REGIONAL
– Radiofaros (RT) LOCAL
– Sistemas de área amplia (SBAS, WADGPS ) MUNDIAL
• Organizaciones privadas– Fabricantes GPS (RT/PP) LOCAL
– Satelitarias (geo) o terrestres (ej. FM) (RT) MUNDIAL
80SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
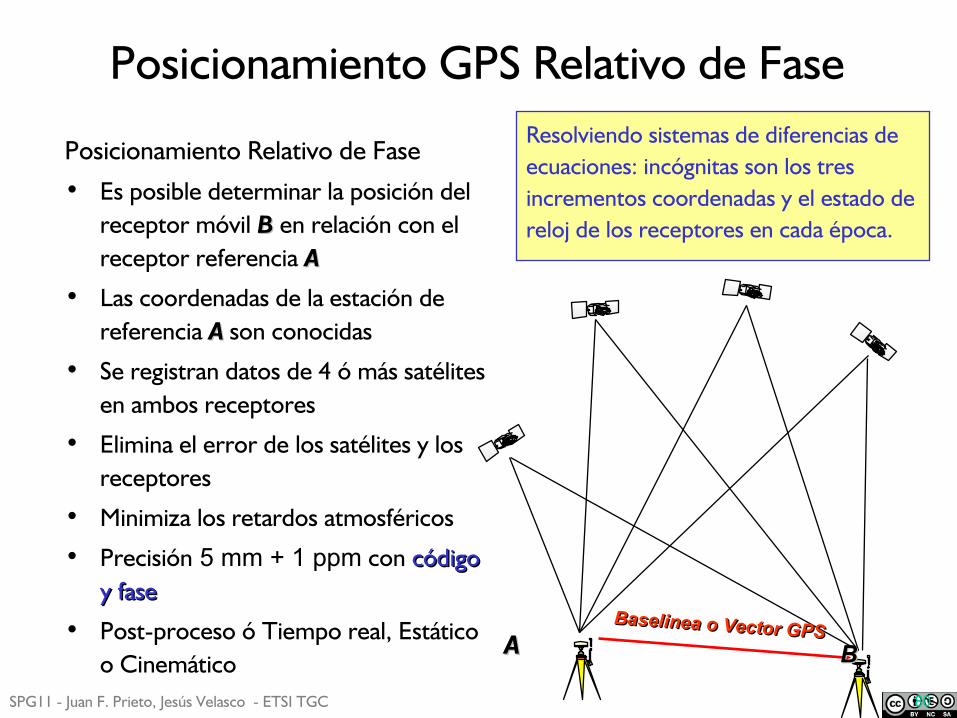
Posicionamiento GPS Relativo de Fase
Posicionamiento Relativo de Fase• Es posible determinar la posición del
receptor móvil BB en relación con el receptor referencia AA
• Las coordenadas de la estación de referencia AA son conocidas
• Se registran datos de 4 ó más satélites en ambos receptores
• Elimina el error de los satélites y los receptores
• Minimiza los retardos atmosféricos
• Precisión 5 mm + 1 ppm con código código y fasey fase
• Post-proceso ó Tiempo real, Estático o Cinemático
Baselinea o Vector GPSBaselinea o Vector GPS
BBAA
Resolviendo sistemas de diferencias de ecuaciones: incógnitas son los tres incrementos coordenadas y el estado de reloj de los receptores en cada época.
81SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
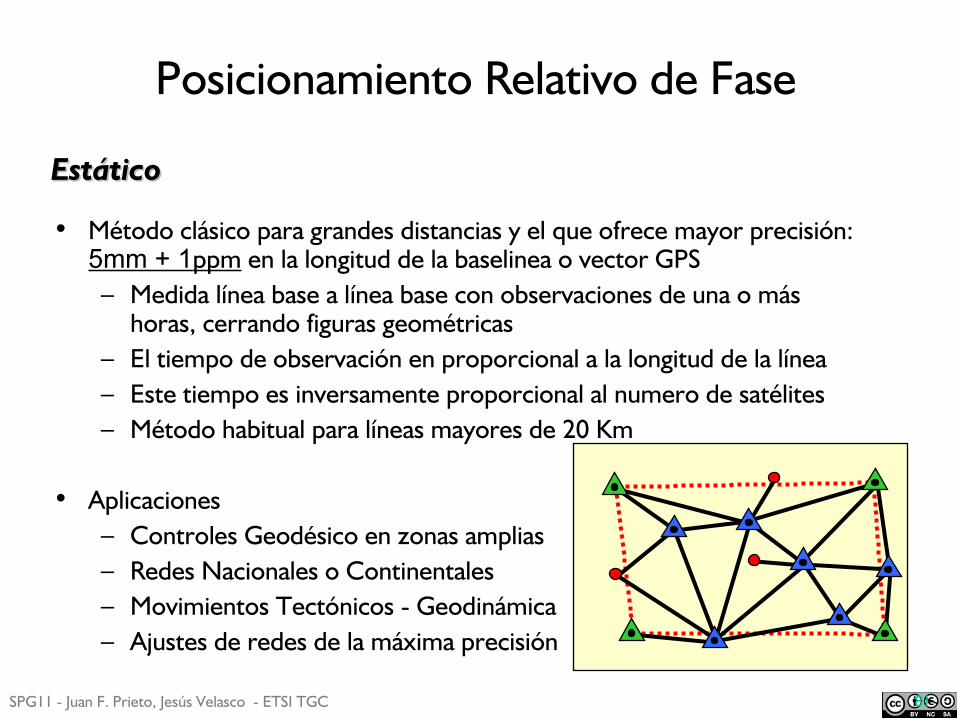
• Método clásico para grandes distancias y el que ofrece mayor precisión: 5mm + 1ppm en la longitud de la baselinea o vector GPS– Medida línea base a línea base con observaciones de una o más
horas, cerrando figuras geométricas– El tiempo de observación en proporcional a la longitud de la línea– Este tiempo es inversamente proporcional al numero de satélites– Método habitual para líneas mayores de 20 Km
• Aplicaciones– Controles Geodésico en zonas amplias– Redes Nacionales o Continentales– Movimientos Tectónicos - Geodinámica– Ajustes de redes de la máxima precisión
EstáticoEstático
Posicionamiento Relativo de Fase
82SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
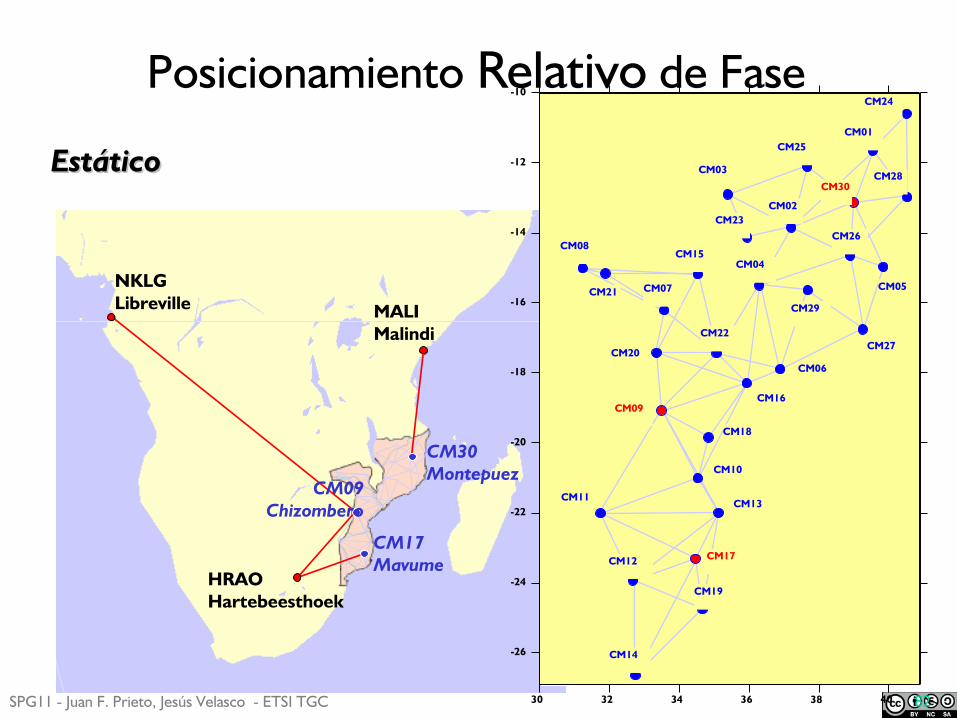
EstáticoEstático
Posicionamiento Relativo de Fase
MALIMalindi
NKLGLibreville
HRAOHartebeesthoek
CM30Montepuez
CM17Mavume
CM09Chizombero
30 32 34 36 38 40
-26
-24
-22
-20
-18
-16
-14
-12
-10
CM01
CM02
CM03
CM04
CM05
CM06
CM07
CM08
CM09
CM10
CM11
CM12
CM13
CM14
CM15
CM16
CM17
CM18
CM19
CM20
CM21
CM22
CM23
CM24
CM25
CM26
CM27
CM28
CM29
CM30
83SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
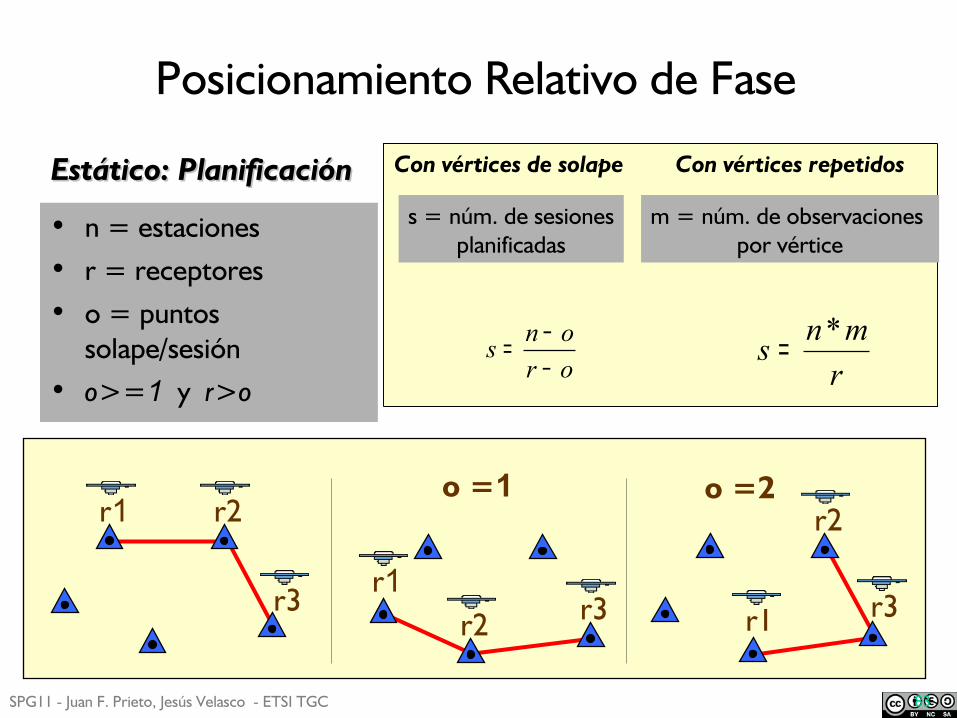
Estático: PlanificaciónEstático: Planificación
Posicionamiento Relativo de Fase
n osr o
−=−
• n = estaciones• r = receptores• o = puntos
solape/sesión• o>=1 y r>o
r1 r2
r3 r1r2 r3 r1
r2
r3
rmns *=
o =1 o =2
s = núm. de sesionesplanificadas
m = núm. de observaciones por vértice
Con vértices de solape Con vértices repetidos
SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de Fase
SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
• Líneas independientes v.s. cálculo automático l.i.=(r-1)*s• Distancias de las líneas homogéneas.• Algoritmos de lazo:
– Tan importante son las estaciones como las líneas observadas– Observación homogénea, sin ponderar unas partes sobre otras de
la red: todos los vértices observados el mismo número de sesiones– Dos vértices no pueden estar contenidos en más de una sesión
común.– En caso de que existan lineas repetidas, debería de haber también
homogeneidad dentro de la red• Una vez proyectada la red, se debe de revisar la geometría resultante
de la red y ponderar ésta en función de la morfología del terreno y la logística de la fase de observación.
Estático: PlanificaciónEstático: Planificación
SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGCSPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
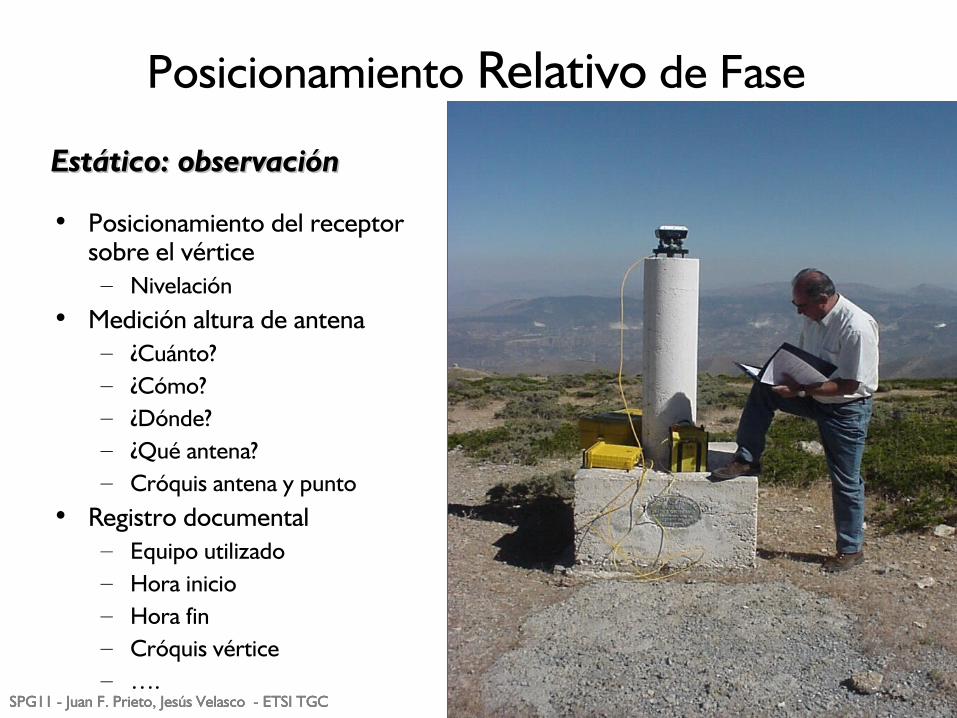
• Posicionamiento del receptor sobre el vértice
– Nivelación• Medición altura de antena
– ¿Cuánto?– ¿Cómo?– ¿Dónde?– ¿Qué antena?– Cróquis antena y punto
• Registro documental– Equipo utilizado– Hora inicio– Hora fin– Cróquis vértice– ….
85SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Estático: observaciónEstático: observación
Posicionamiento Relativo de Fase
86SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de FaseEstático Continuo CGPSEstático Continuo CGPS
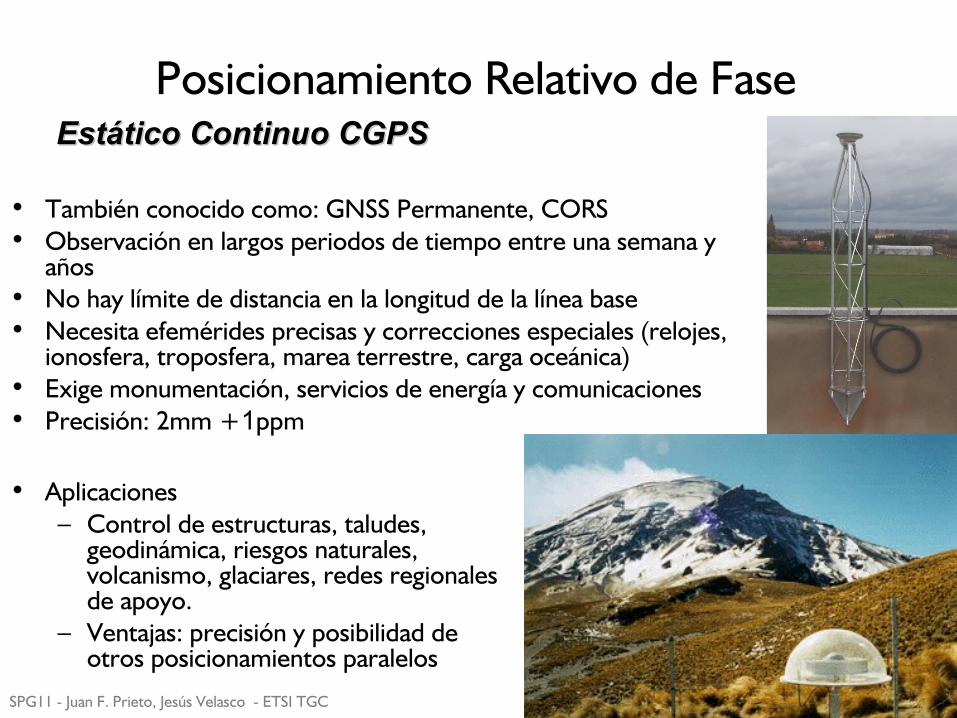
• También conocido como: GNSS Permanente, CORS• Observación en largos periodos de tiempo entre una semana y
años• No hay límite de distancia en la longitud de la línea base• Necesita efemérides precisas y correcciones especiales (relojes,
ionosfera, troposfera, marea terrestre, carga oceánica)• Exige monumentación, servicios de energía y comunicaciones• Precisión: 2mm +1ppm
• Aplicaciones– Control de estructuras, taludes,
geodinámica, riesgos naturales, volcanismo, glaciares, redes regionales de apoyo.
– Ventajas: precisión y posibilidad de otros posicionamientos paralelos
87SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de FaseEstático RápidoEstático Rápido
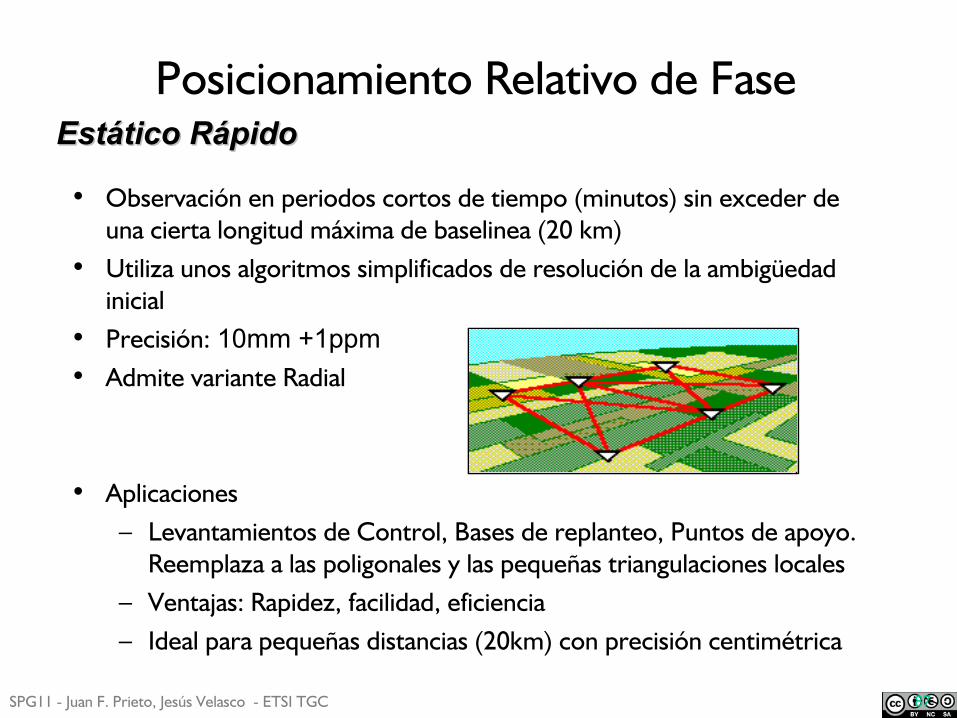
• Observación en periodos cortos de tiempo (minutos) sin exceder de una cierta longitud máxima de baselinea (20 km)
• Utiliza unos algoritmos simplificados de resolución de la ambigüedad inicial
• Precisión: 10mm +1ppm• Admite variante Radial
• Aplicaciones– Levantamientos de Control, Bases de replanteo, Puntos de apoyo.
Reemplaza a las poligonales y las pequeñas triangulaciones locales– Ventajas: Rapidez, facilidad, eficiencia– Ideal para pequeñas distancias (20km) con precisión centimétrica
88SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
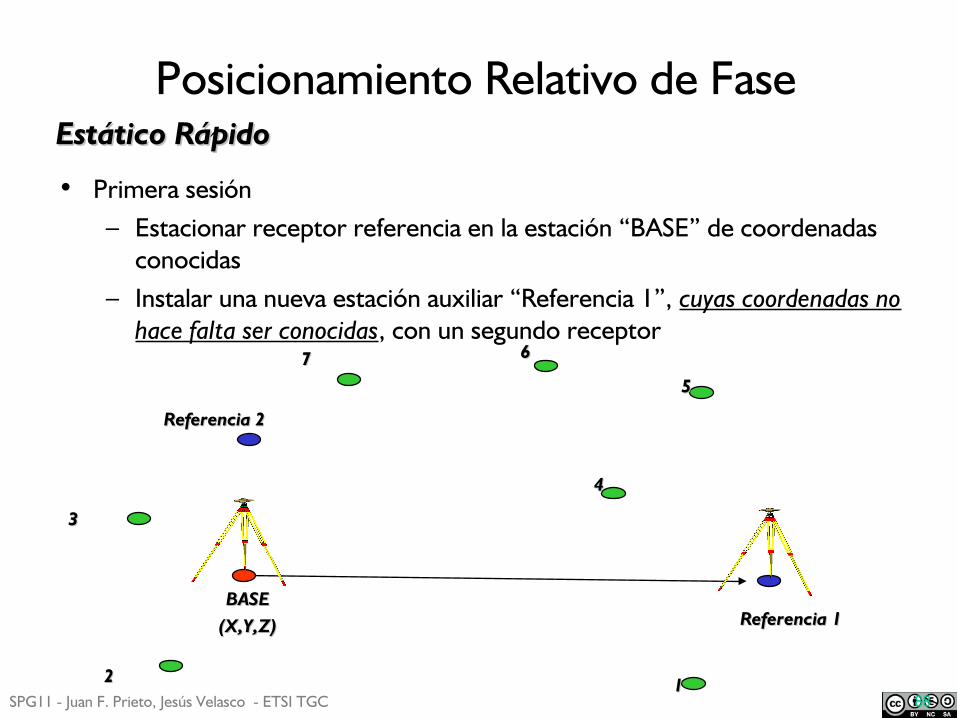
Posicionamiento Relativo de FaseEstático RápidoEstático Rápido
• Primera sesión– Estacionar receptor referencia en la estación “BASE” de coordenadas
conocidas– Instalar una nueva estación auxiliar “Referencia 1”, cuyas coordenadas no
hace falta ser conocidas, con un segundo receptor
BASEBASE
(X,Y,Z)(X,Y,Z) Referencia 1Referencia 1
Referencia 2Referencia 2
44
33
22 11
77 66
55
89SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
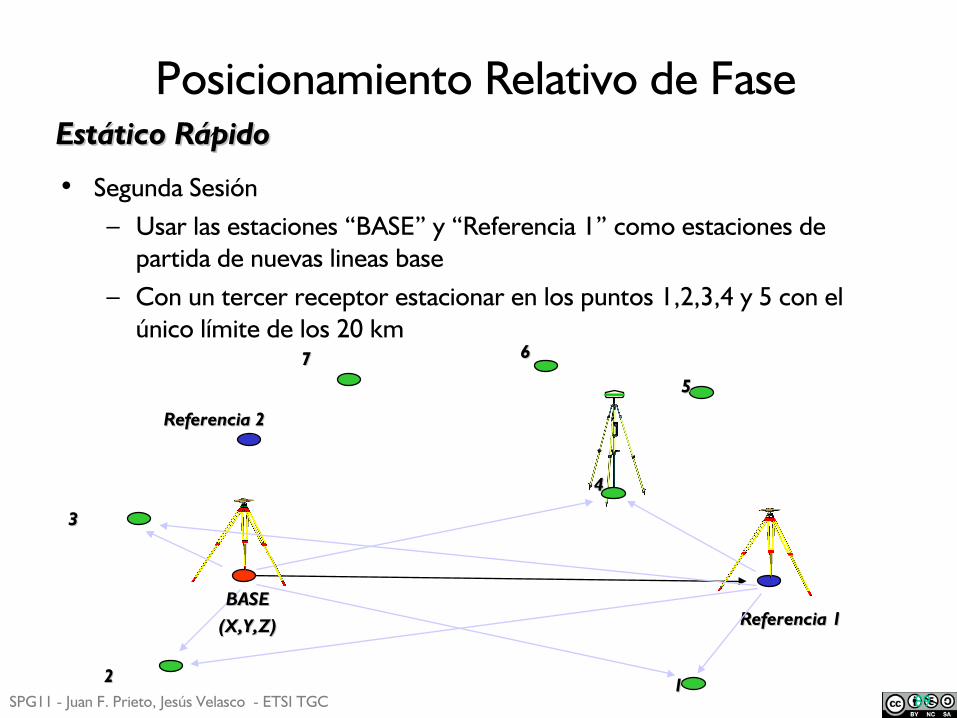
Posicionamiento Relativo de FaseEstático RápidoEstático Rápido
• Segunda Sesión– Usar las estaciones “BASE” y “Referencia 1” como estaciones de
partida de nuevas lineas base – Con un tercer receptor estacionar en los puntos 1,2,3,4 y 5 con el
único límite de los 20 km
Referencia 1Referencia 1
Referencia 2Referencia 2
44
33
22 11
77 66
55
BASEBASE
(X,Y,Z)(X,Y,Z)
90SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de FaseEstático RápidoEstático Rápido
Referencia 1Referencia 1
Referencia 2Referencia 2 44
33
22 11
77 66
55
BASEBASE
(X,Y,Z)(X,Y,Z)
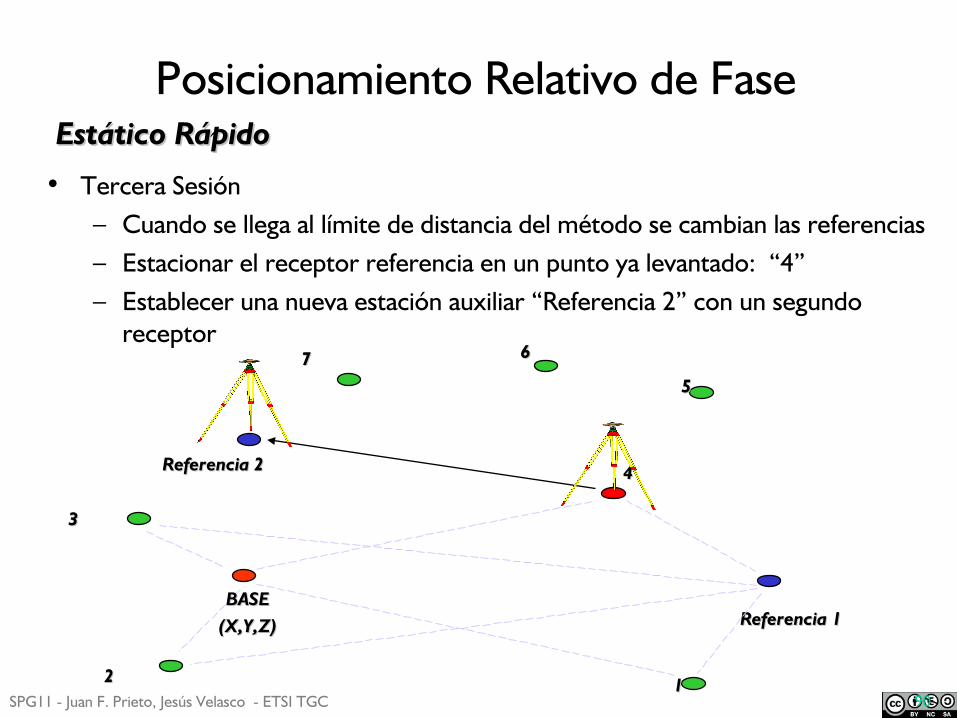
• Tercera Sesión– Cuando se llega al límite de distancia del método se cambian las referencias– Estacionar el receptor referencia en un punto ya levantado: “4”– Establecer una nueva estación auxiliar “Referencia 2” con un segundo
receptor
91SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de FaseEstático RápidoEstático Rápido
Referencia 1Referencia 1
Referencia 2Referencia 2 44
3 Revisitación3 Revisitación
22 11
77 66
55
BASEBASE
(X,Y,Z)(X,Y,Z)
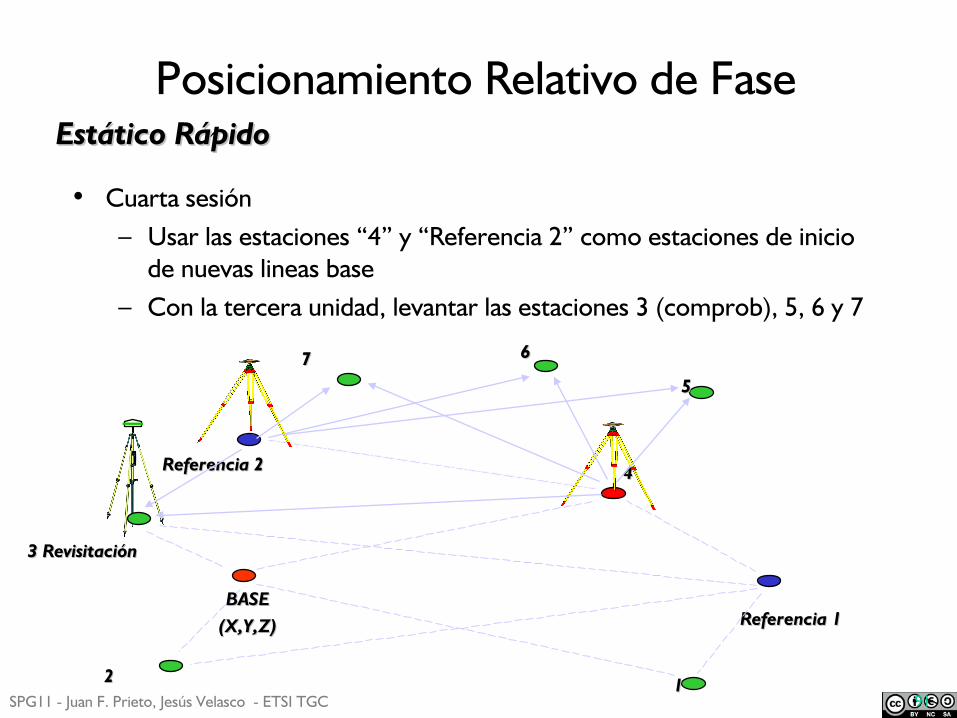
• Cuarta sesión– Usar las estaciones “4” y “Referencia 2” como estaciones de inicio
de nuevas lineas base– Con la tercera unidad, levantar las estaciones 3 (comprob), 5, 6 y 7
92SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
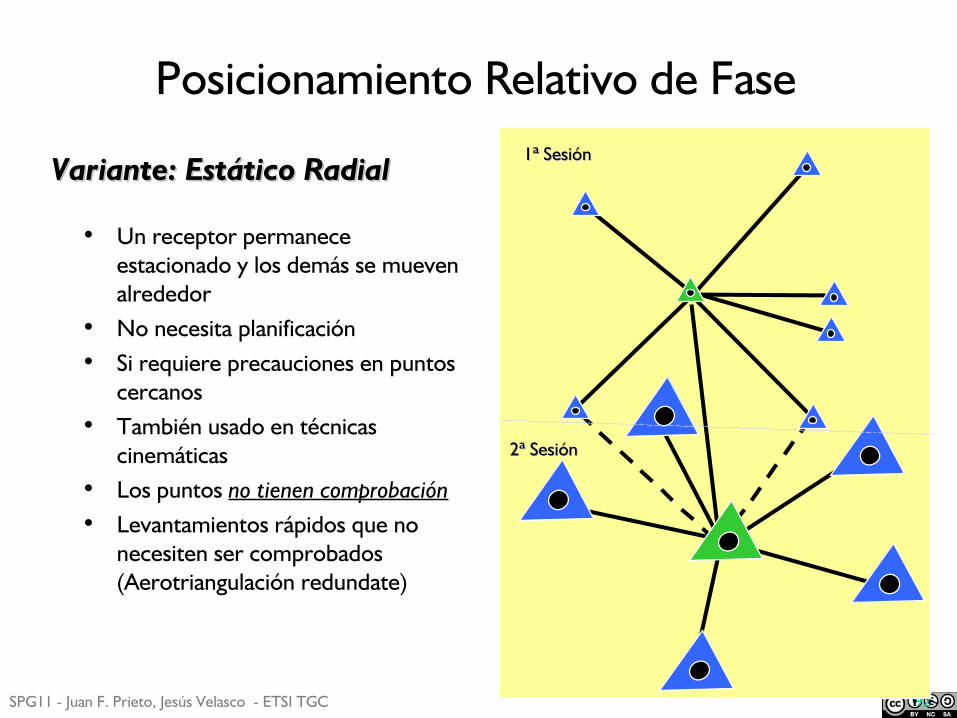
Variante: Estático RadialVariante: Estático Radial
Posicionamiento Relativo de Fase
• Un receptor permanece estacionado y los demás se mueven alrededor
• No necesita planificación• Si requiere precauciones en puntos
cercanos• También usado en técnicas
cinemáticas• Los puntos no tienen comprobación• Levantamientos rápidos que no
necesiten ser comprobados (Aerotriangulación redundate)
1ª Sesión1ª Sesión
2ª Sesión2ª Sesión
93SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Estático: principales errores de usuario y equivocacionesEstático: principales errores de usuario y equivocaciones
Posicionamiento Relativo de Fase
• Error de estacionamiento• (Error de orientación de antenas)• Multipath, paredes, alambradas• Descentrado de la estación durante el tiempo de
observación• Error en la lectura o en la forma de medir la altura de
antena• Identificación incorrecta de la estación• Procesado de líneas base triviales o dependientes• Equivocación del tipo de antena utilizado en cualquiera o
los dos equipos utilizados
94SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
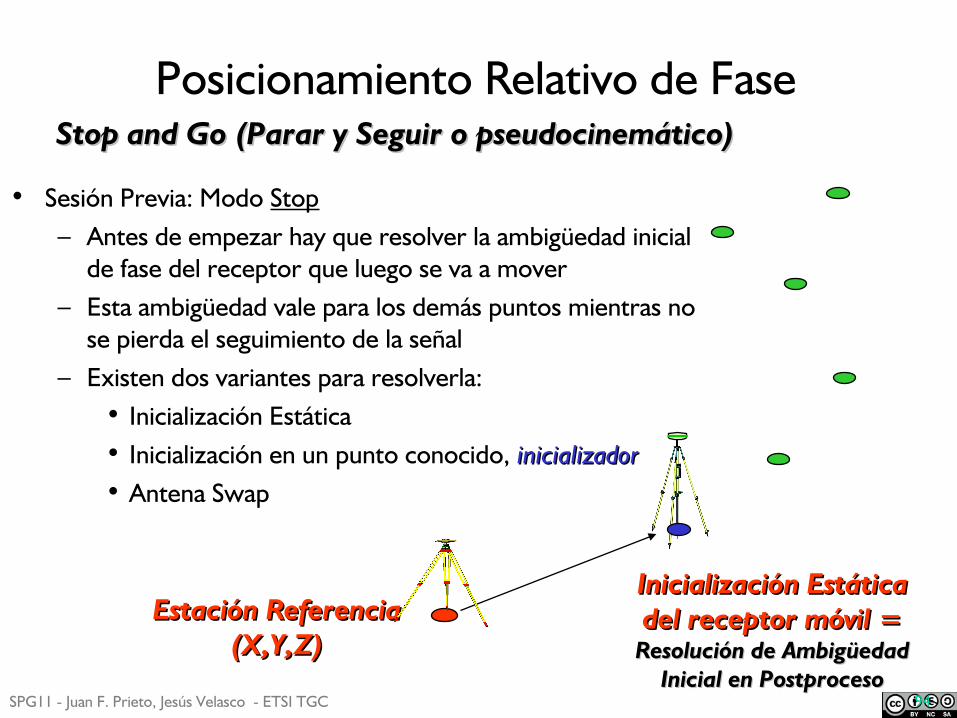
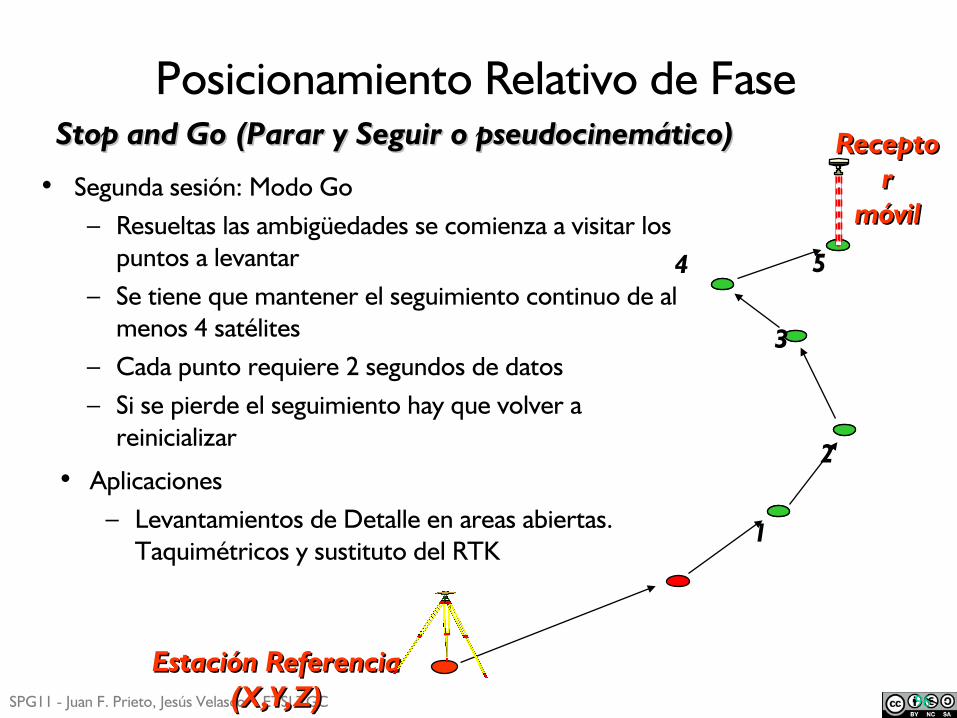
Posicionamiento Relativo de FaseStop and Go (Parar y Seguir o pseudocinemático)Stop and Go (Parar y Seguir o pseudocinemático)
• Sesión Previa: Modo Stop– Antes de empezar hay que resolver la ambigüedad inicial
de fase del receptor que luego se va a mover– Esta ambigüedad vale para los demás puntos mientras no
se pierda el seguimiento de la señal– Existen dos variantes para resolverla:
• Inicialización Estática• Inicialización en un punto conocido, inicializadorinicializador• Antena Swap
Inicialización EstáticaInicialización Estáticadel receptor móvil = del receptor móvil =
Resolución de Ambigüedad Resolución de Ambigüedad Inicial en PostprocesoInicial en Postproceso
Estación ReferenciaEstación Referencia(X,Y,Z)(X,Y,Z)
95SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
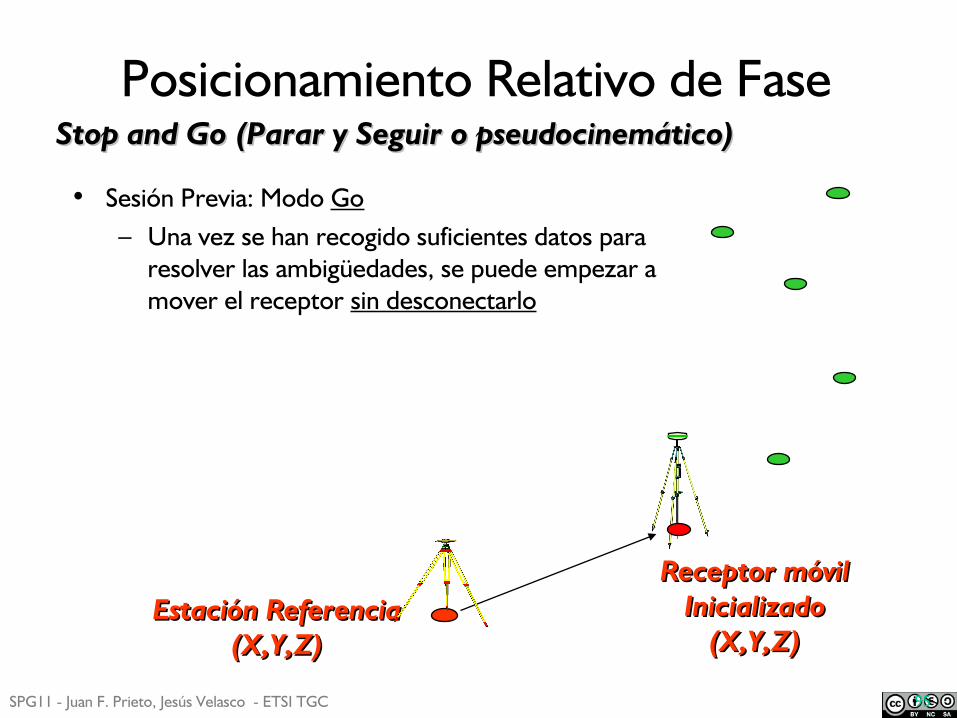
Posicionamiento Relativo de FaseStop and Go (Parar y Seguir o pseudocinemático)Stop and Go (Parar y Seguir o pseudocinemático)
Estación ReferenciaEstación Referencia(X,Y,Z)(X,Y,Z)
• Sesión Previa: Modo Go– Una vez se han recogido suficientes datos para
resolver las ambigüedades, se puede empezar a mover el receptor sin desconectarlo
Receptor móvilReceptor móvilInicializadoInicializado
(X,Y,Z)(X,Y,Z)
96SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de FaseStop and Go (Parar y Seguir o pseudocinemático)Stop and Go (Parar y Seguir o pseudocinemático)
• Segunda sesión: Modo Go– Resueltas las ambigüedades se comienza a visitar los
puntos a levantar– Se tiene que mantener el seguimiento continuo de al
menos 4 satélites– Cada punto requiere 2 segundos de datos– Si se pierde el seguimiento hay que volver a
reinicializar
• Aplicaciones– Levantamientos de Detalle en areas abiertas.
Taquimétricos y sustituto del RTK
Estación ReferenciaEstación Referencia(X,Y,Z)(X,Y,Z)
1
2
3
4 5
ReceptoReceptorr
móvilmóvil
97SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
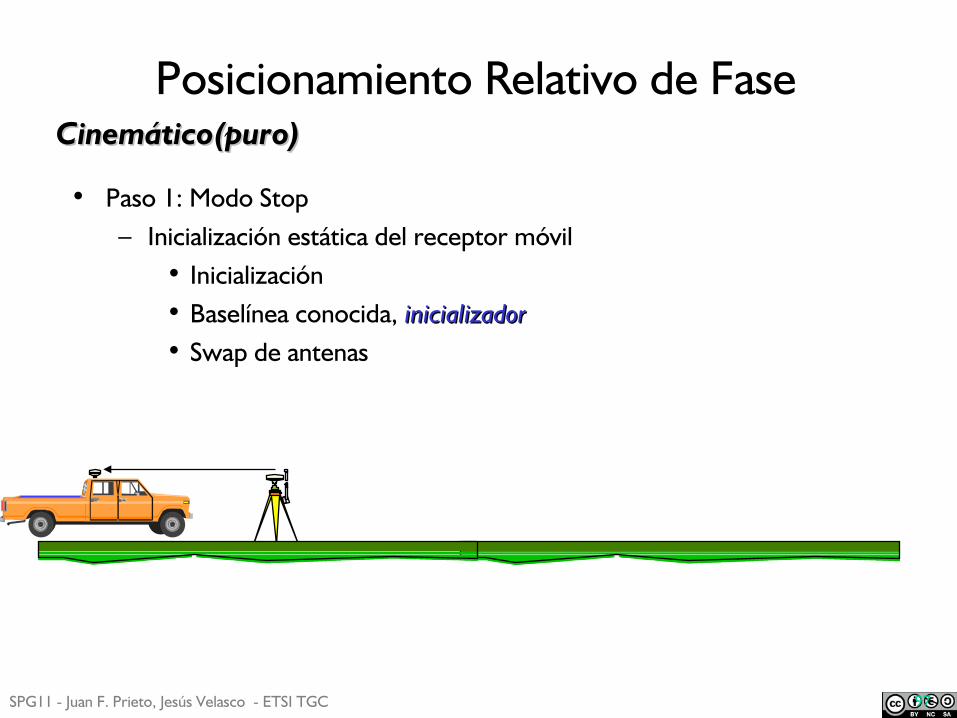
Posicionamiento Relativo de FaseCinemático(puro)Cinemático(puro)
• Paso 1: Modo Stop– Inicialización estática del receptor móvil
• Inicialización• Baselínea conocida, inicializadorinicializador • Swap de antenas
98SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de Fase
23 : 10 :22
23 : 10 :24
23 : 10 :26
23 : 10 :27
23 : 10 : 28
23 : 10 :30
23 : 10 :12
23 : 10 :14
23 : 10 :16
23 : 10 :18
23 : 10 : 20
23 : 10 :14
23 : 10 :16
23 : 10 :18
23 : 10 : 20
23 : 10 :22
23 : 10 :24
23 : 10 :26
23 : 10 :27
23 : 10 : 28
23 : 10 :30
23 : 10 :12
23 : 10 :14
23 : 10 :16
23 : 10 :18
23 : 10 : 20
23 : 10 :12
23 : 10 :14
23 : 10 :16
23 : 10 :18
23 : 10 : 20
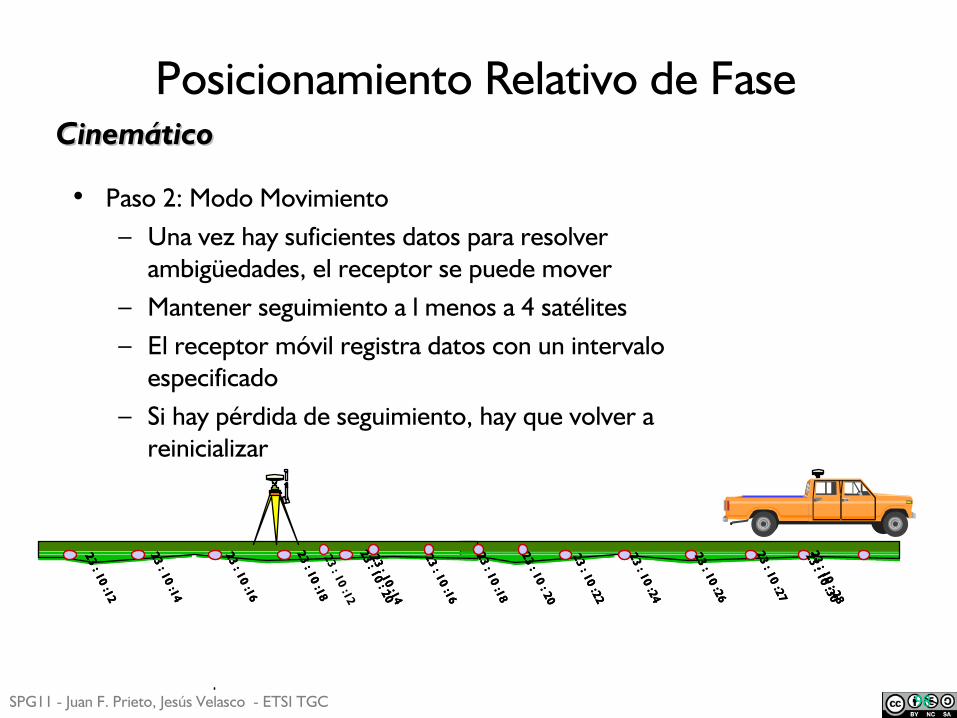
• Paso 2: Modo Movimiento– Una vez hay suficientes datos para resolver
ambigüedades, el receptor se puede mover– Mantener seguimiento a l menos a 4 satélites– El receptor móvil registra datos con un intervalo
especificado – Si hay pérdida de seguimiento, hay que volver a
reinicializar
CinemáticoCinemático
99SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de Fase
• Levantamiento continuo• Requiere planeamiento minucioso para evitar obstáculos a
los satélites• Hay que mantener seguimiento continuo a 4 satélites• Apto para
– areas abiertas y despejadas de vegetación– trabajos no críticos
• Necesita inicialización del equipo móvil– 5-10 minutos parado para resolver posteriormente
ambigüedades en postproceso
CinemáticoCinemático
100SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
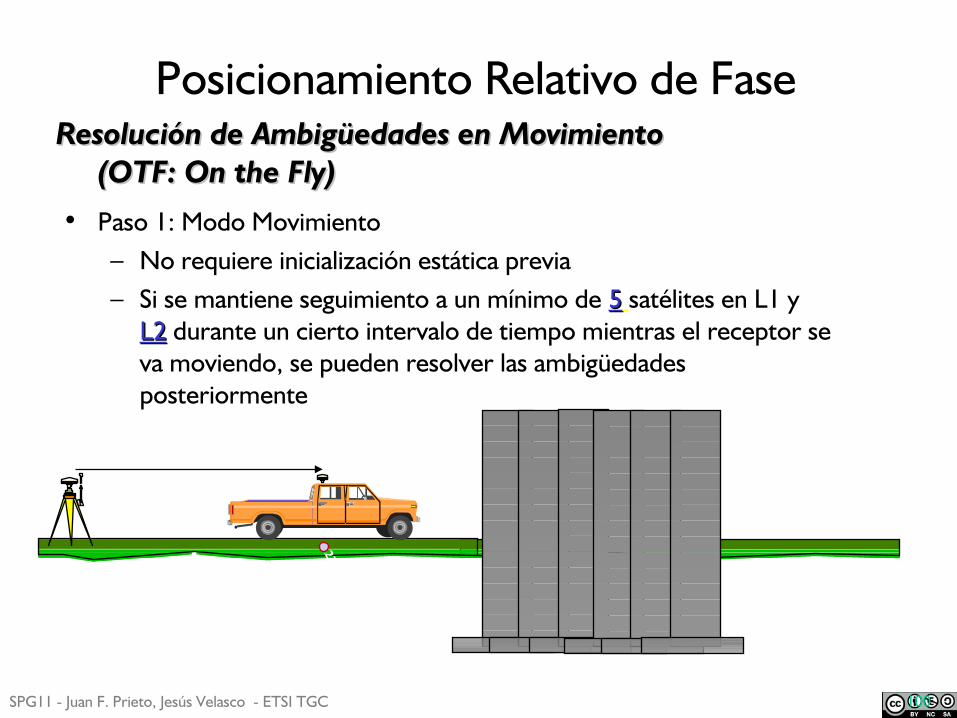
Posicionamiento Relativo de FaseResolución de Ambigüedades en Movimiento Resolución de Ambigüedades en Movimiento
(OTF: On the Fly)(OTF: On the Fly)• Paso 1: Modo Movimiento
– No requiere inicialización estática previa– Si se mantiene seguimiento a un mínimo de 55 satélites en L1 y
L2L2 durante un cierto intervalo de tiempo mientras el receptor se va moviendo, se pueden resolver las ambigüedades posteriormente
23 : 10 :12
101SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de Fase
23 : 10 :12
23 : 10 :14
23 : 10 :16
23 : 10 :18
23 : 10 :22
23 : 10 :24
23 : 10 :26
23 : 10 :27
23 : 10 : 28
23 : 10 :30
23 : 10 :12
23 : 10 :14
23 : 10 :16
23 : 10 :18
23 : 10 :22
23 : 10 :24
23 : 10 :26
23 : 10 :27
23 : 10 : 28
23 : 10 :30
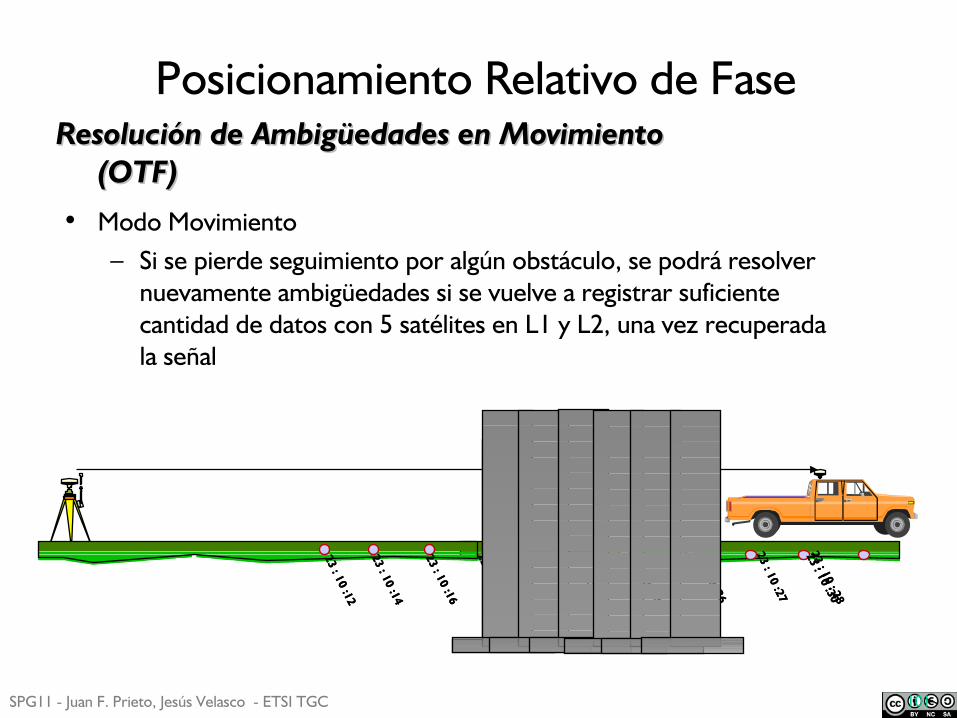
• Modo Movimiento– Si se pierde seguimiento por algún obstáculo, se podrá resolver
nuevamente ambigüedades si se vuelve a registrar suficiente cantidad de datos con 5 satélites en L1 y L2, una vez recuperada la señal
Resolución de Ambigüedades en Movimiento Resolución de Ambigüedades en Movimiento (OTF)(OTF)
102SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de Fase
• Trayectorias en áreas abiertas con pocas obstrucciones o de difícil inicialización.
• No requiere inicialización estática• Puede capturar los mismos elementos que el cinemático• Si perdiéramos 4 SVs se reinicializaría al volver a
recuperar 4• Precisión del orden del cm• Aplicaciones:
– Vuelos fotogramétricos– Levantamientos de carreteras– Levantamientos hidrográficos
Resolución de Ambigüedades en Movimiento Resolución de Ambigüedades en Movimiento (OTF)(OTF)
103SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de Fase
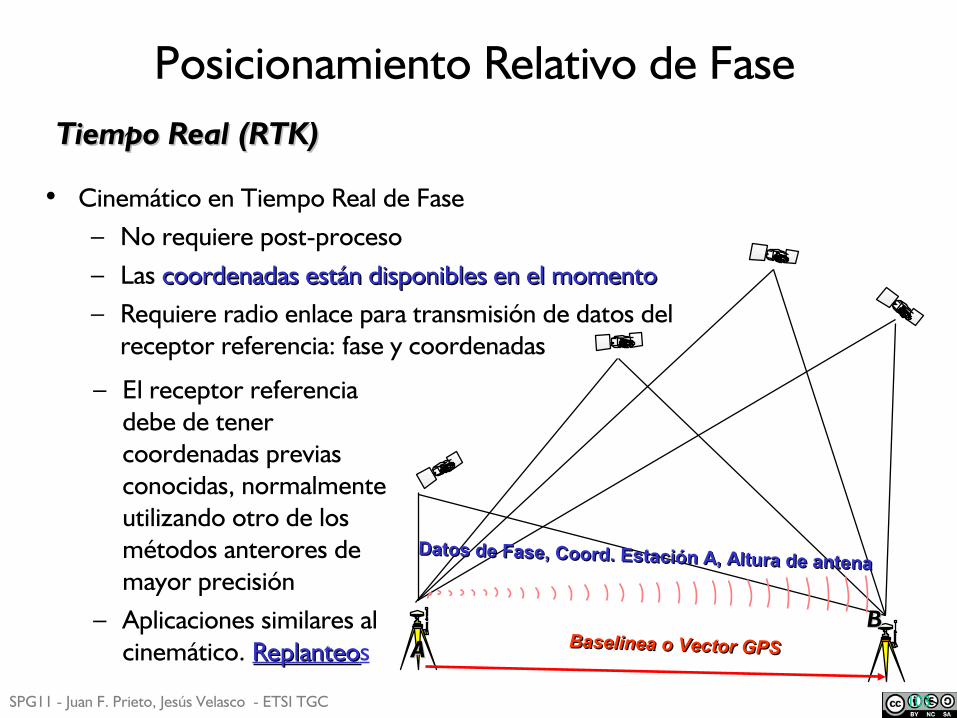
• Cinemático en Tiempo Real de Fase – No requiere post-proceso– Las coordenadas están disponibles en el momentocoordenadas están disponibles en el momento– Requiere radio enlace para transmisión de datos del
receptor referencia: fase y coordenadas
Tiempo Real (RTK)Tiempo Real (RTK)
BBAA
– El receptor referencia debe de tener coordenadas previas conocidas, normalmente utilizando otro de los métodos anterores de mayor precisión
– Aplicaciones similares al cinemático. ReplanteoReplanteos Baselinea o Vector GPSBaselinea o Vector GPS
Datos de Fase, Coord. Estación A, Altura de antenaDatos de Fase, Coord. Estación A, Altura de antena
104SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de Fase
• Se incorporan los algoritmos de cálculo de los software post-proceso, o parte de ellos, a los controladores del propio receptor.
• Permite edición de datos de un levantamiento en campo, replanteo, y todo tipo de labores en los cuales sea necesario el conocimiento de las coordenadas de los puntos en tiempo real.
Tiempo Real (RTK)Tiempo Real (RTK)
105SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de FaseTiempo Real (RTK): Descripción del sistemaTiempo Real (RTK): Descripción del sistema
• El receptor de referencia recoge los datos de código y fase de todos los satélites en su horizonte
• El receptor de referencia envía, a través de su Radio-módem, los datos observados junto con sus coordenadas y su altura de antena a los equipos móviles
• El Radio-módem debe cumplir ciertas especificaciones:• Suficiente potencia de emisión, • Tipo de antena calibrada adecuadamente en la frecuencia de trabajo y homologación de la Radio por la DGT
• Horizonte completamente despejado
• Elevación de la antena del Radio-módem RTK
• Posibilidad de trabajar con GSM (IBEREF-GPSIBEREF-GPS) y/o Radio-módem, o incluso Internet (EUREF-IPEUREF-IP)

106SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de Fase
107SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de FaseRTK. Descripción del sistema, RTK. Descripción del sistema, Equipo GPS Móvil
• El Radio-Módem recibirá los datos enviados por el equipo de referencia.
• El receptor móvil también recogerá los datos de todos los satélites en su horizonte.
• El receptor calcula, en tiempo real, con sus datos y los recibidos de referencia.
• Fija las ambigüedades iniciales de fase de los satélites. Con las técnicas actuales, este proceso no supera los 10 segundos.
• El receptor calcula las coordenadas de su posición y las muestra con un control de calidad asociado. Después de fijadas las ambigüedades, el equipo proporciona posición precisa a un intervalo de hasta 0,1 segundos
108SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento Relativo de FaseRTK. No todo son ventajas: INCONVENIENTESRTK. No todo son ventajas: INCONVENIENTES
• Imposibilidad de chequear los ficheros de observación, pues no existen.
• Limitación en las correcciones de tipo atmosférico.
• Limitación en los procesos de transformación de coordenadas. No siempre el receptor incorpora todos los algoritmos de cambio de datum
• Pobre tratamiento e información estadística.
• Escasa manipulación de los parámetros de cálculo.
Aún así, las ventajas compensan y con creces estos ligeros inconvenientes que no lo son tanto en labores de topografía (pequeñas distancias, datum locales, etc), que es donde más arraigo tienen estos equipos.
109SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Formato de datos GNSS-RTK• Cada receptor emite los los datos de Observables, Navegación, …, en un
formato propietario de cada marca fabricante• Normalmente sólo pueden ser procesados con receptrores del mismo
fabricante • Formaos propietarios:
– LEICA – Leica Geosystems– RT-Data – Leica Geosystems– CMR, CMR+, Trimble
• Formatos standard– NMEA – Solo coordenadas– RTCM – coordenadas, datos brutos de codigo y fase o correcciones– NTRIP – coordenadas, datos brutos de código y fase, correcciones
• Multiestación• Se transmite via internet
110SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
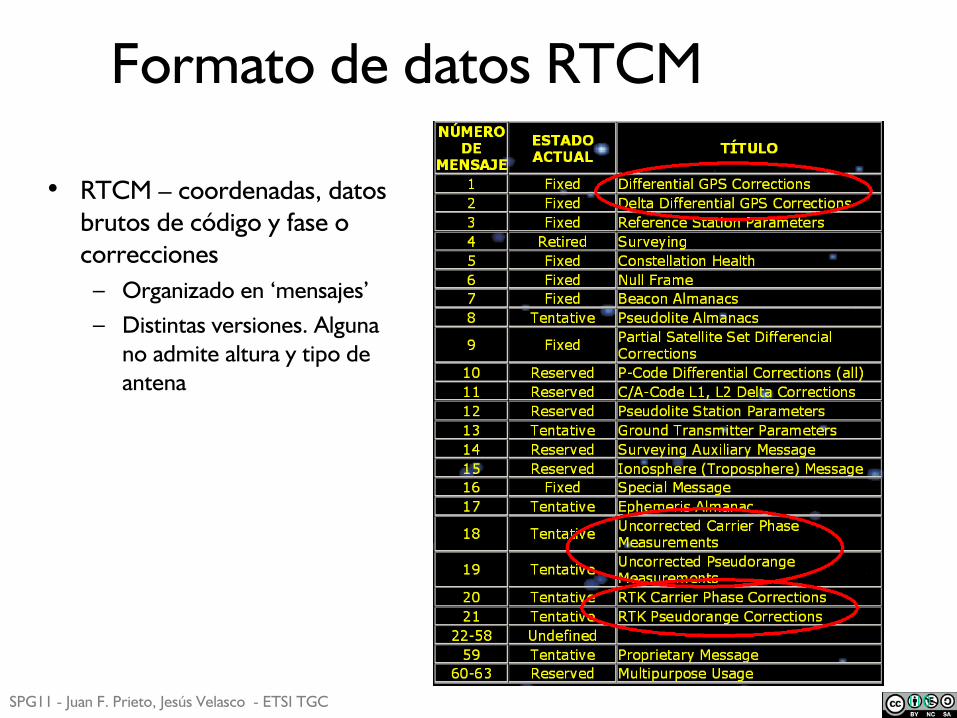
Formato de datos RTCM
• RTCM – coordenadas, datos brutos de código y fase o correcciones
– Organizado en ‘mensajes’– Distintas versiones. Alguna
no admite altura y tipo de antena
111SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Posicionamiento relativo RTK
• Errores en estacionamiento de la referencia o del equipo movil• Errores leyendo la lectura de antena en ambos equipos• Equivocación en la identificacion de las estaciones de referencia
– Canales múltiples
• Equivocación en la denominación del punto a levantar• Comenzar midiendo antes de que se hayan resuelto las ambigüedades• Equivocación al identificar la antena• Medir en periodos de fuerte actividad solar• Configuración incorrecta de los parámetros de comunicación de los
sistemas de comunicaciones• Levantamientos en areas obstaculizadas
RTK: principales errores de usuario y equivocacionesRTK: principales errores de usuario y equivocaciones
112SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
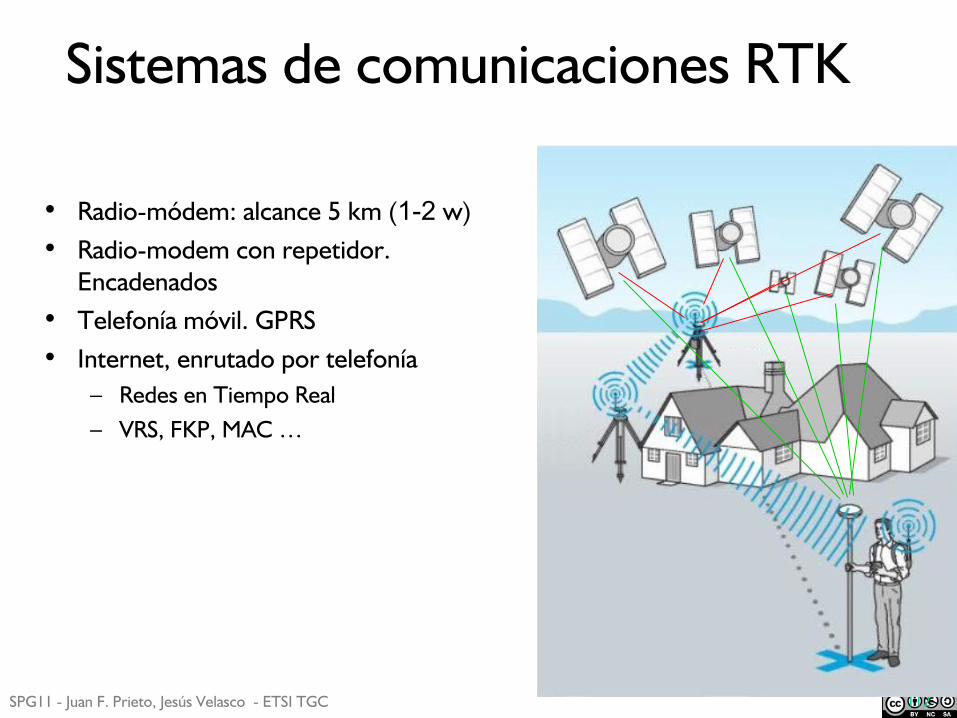
Sistemas de comunicaciones RTK
• Radio-módem: alcance 5 km (1-2 w)• Radio-modem con repetidor.
Encadenados• Telefonía móvil. GPRS• Internet, enrutado por telefonía
– Redes en Tiempo Real– VRS, FKP, MAC …
113SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
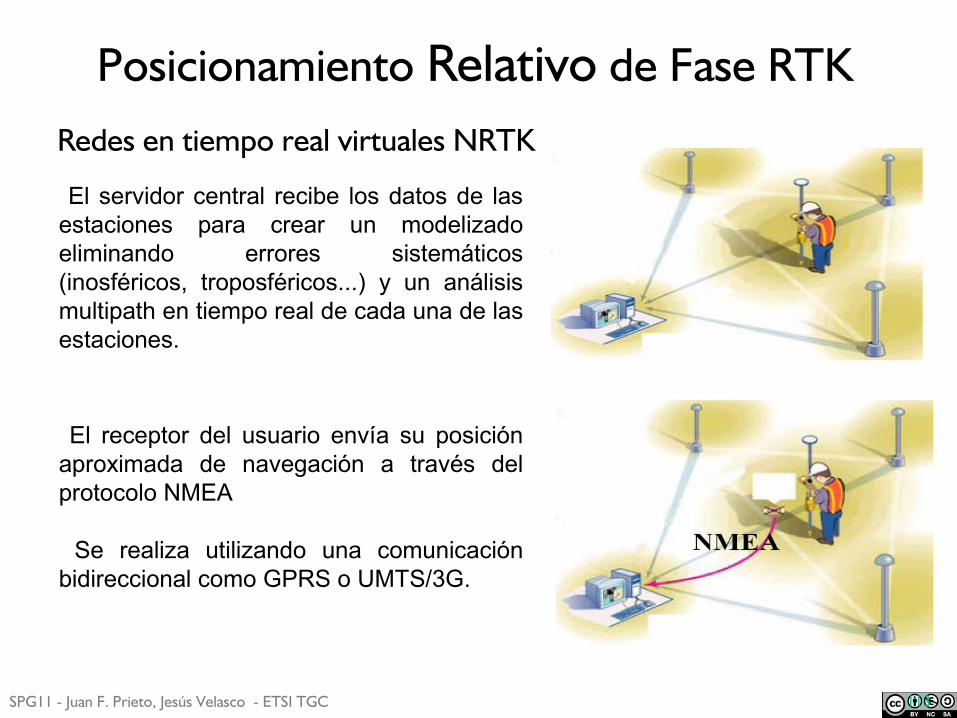
Redes en tiempo real virtuales NRTK
El servidor central recibe los datos de las estaciones para crear un modelizado eliminando errores sistemáticos (inosféricos, troposféricos...) y un análisis multipath en tiempo real de cada una de las estaciones.
El receptor del usuario envía su posición aproximada de navegación a través del protocolo NMEA
Se realiza utilizando una comunicación bidireccional como GPRS o UMTS/3G.
Posicionamiento Relativo de Fase RTK
114SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
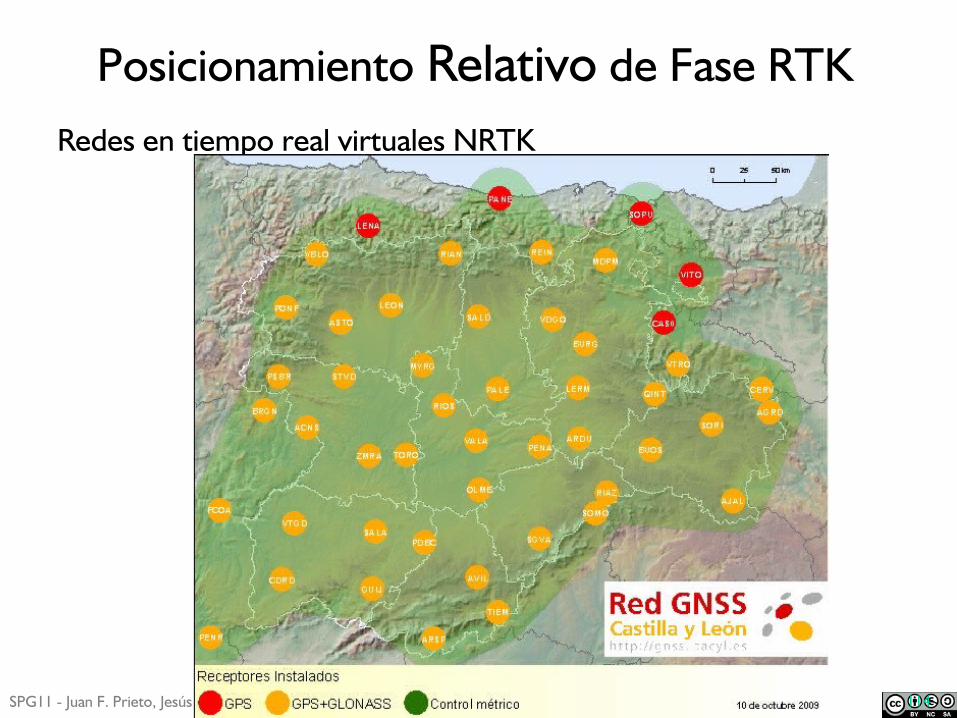
Redes en tiempo real virtuales NRTK
Posicionamiento Relativo de Fase RTK
115SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
Redes en tiempo real virtuales NRTK
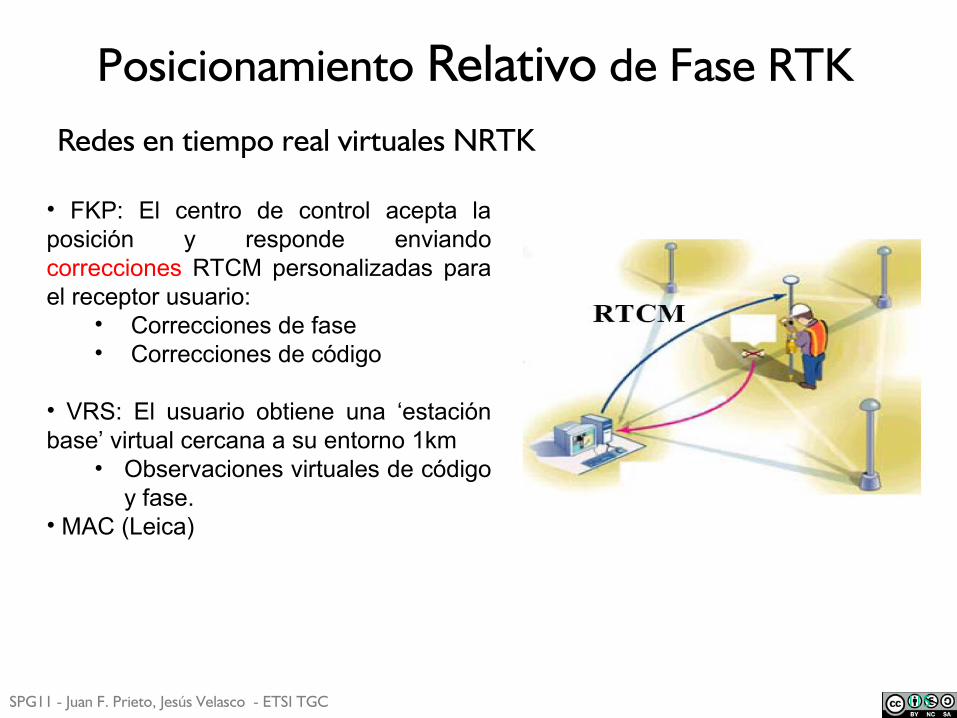
Posicionamiento Relativo de Fase RTK
• FKP: El centro de control acepta la posición y responde enviando correcciones RTCM personalizadas para el receptor usuario:
• Correcciones de fase• Correcciones de código
• VRS: El usuario obtiene una ‘estación base’ virtual cercana a su entorno 1km
• Observaciones virtuales de código y fase.
• MAC (Leica)
116SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
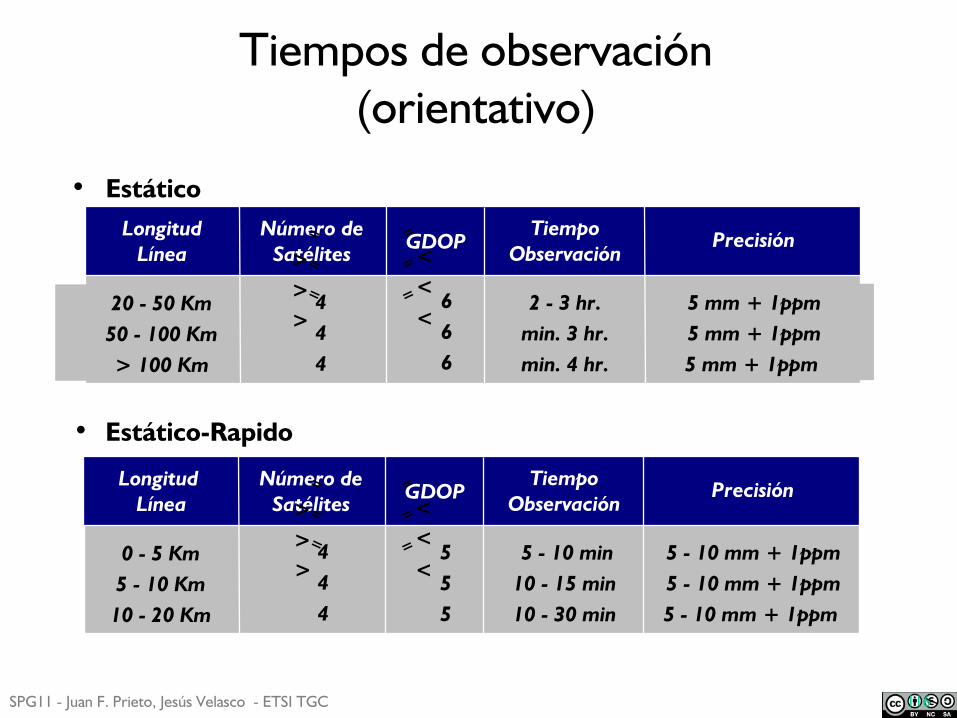
Tiempos de observación(orientativo)
LongitudLínea
Número deSatélites GDOP
TiempoObservación
Precisión
20 - 50 Km50 - 100 Km> 100 Km
2 - 3 hr.min. 3 hr.min. 4 hr.
5 mm + 1ppm5 mm + 1ppm5 mm + 1ppm
• Estático
• Estático-Rapido
Longitud Línea
Número deSatélites GDOP
TiempoObservación
Precisión
0 - 5 Km5 - 10 Km10 - 20 Km
5 - 10 min10 - 15 min10 - 30 min
5 - 10 mm + 1ppm5 - 10 mm + 1ppm5 - 10 mm + 1ppm
>=444
>=>=
555
<=
<=
<=
>=444
>=>=
666
<=
<=
<=
117SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
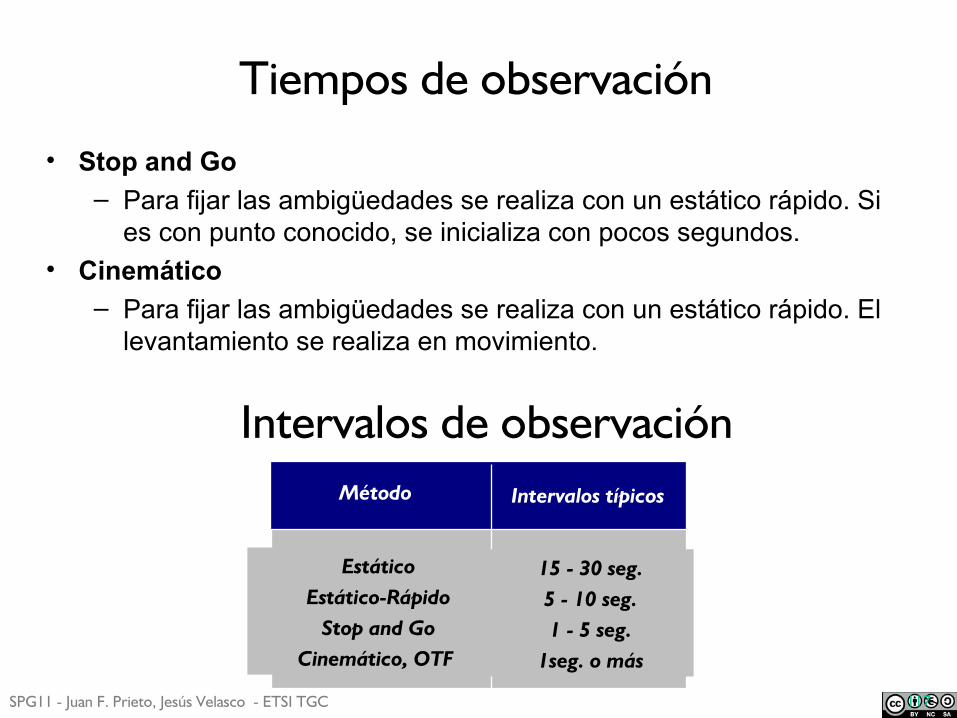
Tiempos de observación
• Stop and Go– Para fijar las ambigüedades se realiza con un estático rápido. Si
es con punto conocido, se inicializa con pocos segundos.• Cinemático
– Para fijar las ambigüedades se realiza con un estático rápido. El levantamiento se realiza en movimiento.
Intervalos de observaciónMétodo
EstáticoEstático-Rápido
Stop and GoCinemático, OTF
15 - 30 seg.5 - 10 seg.1 - 5 seg.
1seg. o más
Intervalos típicos
118SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
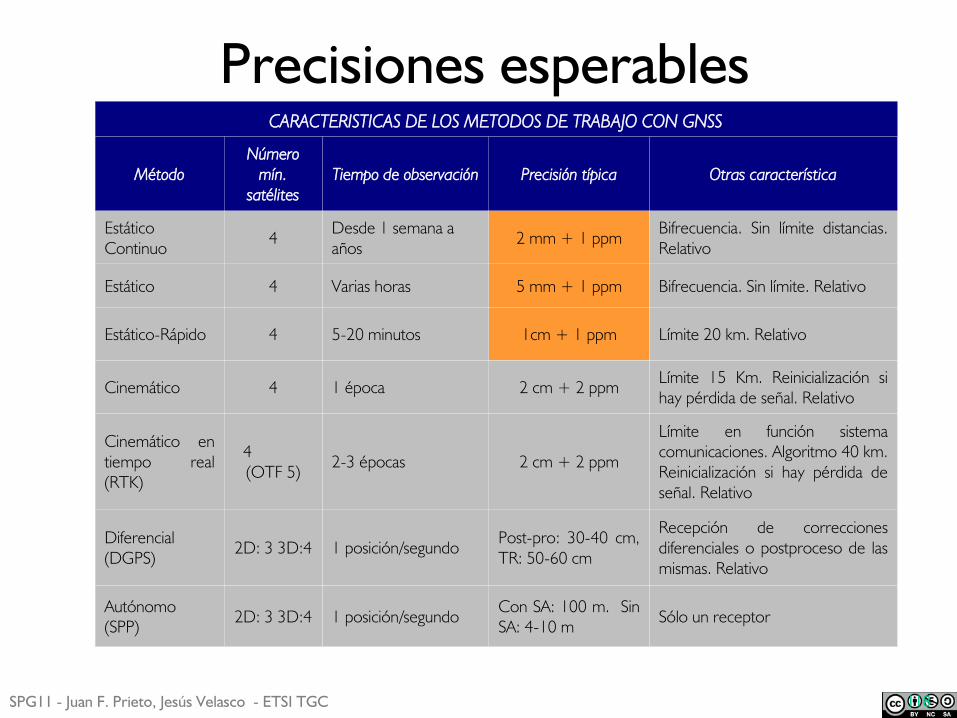
Precisiones esperablesCARACTERISTICAS DE LOS METODOS DE TRABAJO CON GNSS
MétodoNúmero
mín. satélites
Tiempo de observación Precisión típica Otras característica
Estático Continuo 4 Desde 1 semana a
años 2 mm + 1 ppm Bifrecuencia. Sin límite distancias. Relativo
Estático 4 Varias horas 5 mm + 1 ppm Bifrecuencia. Sin límite. Relativo
Estático-Rápido 4 5-20 minutos 1cm + 1 ppm Límite 20 km. Relativo
Cinemático 4 1 época 2 cm + 2 ppm Límite 15 Km. Reinicialización si hay pérdida de señal. Relativo
Cinemático en tiempo real (RTK)
4 (OTF 5) 2-3 épocas 2 cm + 2 ppm
Límite en función sistema comunicaciones. Algoritmo 40 km. Reinicialización si hay pérdida de señal. Relativo
Diferencial (DGPS) 2D: 3 3D:4 1 posición/segundo Post-pro: 30-40 cm,
TR: 50-60 cm
Recepción de correcciones diferenciales o postproceso de las mismas. Relativo
Autónomo (SPP) 2D: 3 3D:4 1 posición/segundo Con SA: 100 m. Sin
SA: 4-10 m Sólo un receptor
119SPG11 - Juan F. Prieto, Jesús Velasco - ETSI TGC
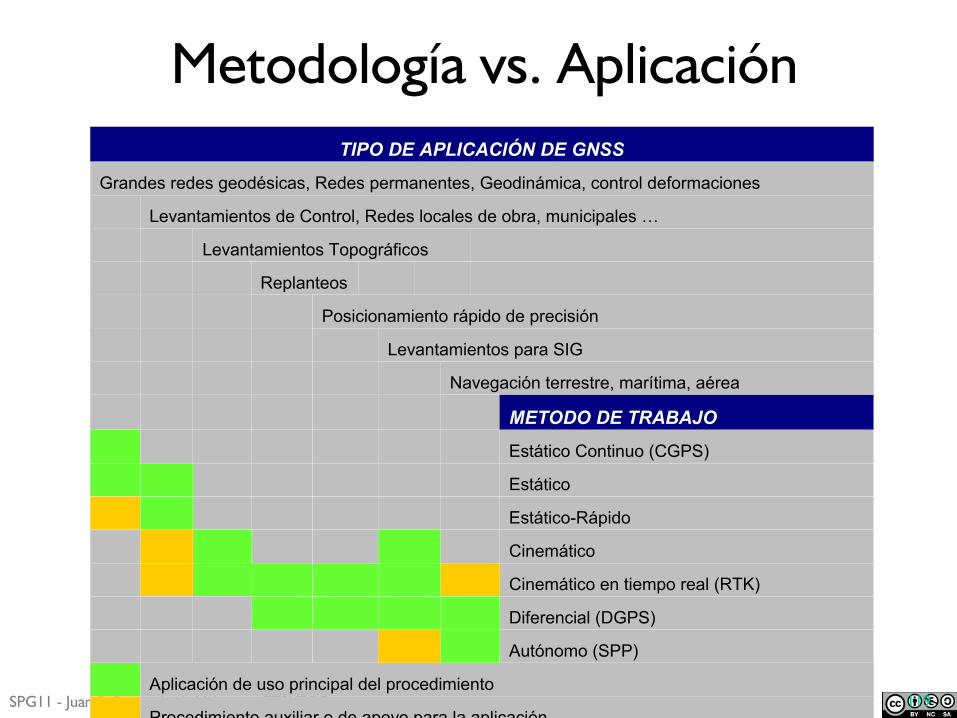
Metodología vs. AplicaciónTIPO DE APLICACIÓN DE GNSS
Grandes redes geodésicas, Redes permanentes, Geodinámica, control deformaciones
Levantamientos de Control, Redes locales de obra, municipales …
Levantamientos Topográficos
Replanteos
Posicionamiento rápido de precisión
Levantamientos para SIG
Navegación terrestre, marítima, aérea
METODO DE TRABAJO
Estático Continuo (CGPS)
Estático
Estático-Rápido
Cinemático
Cinemático en tiempo real (RTK)
Diferencial (DGPS)
Autónomo (SPP)
Aplicación de uso principal del procedimiento
Procedimiento auxiliar o de apoyo para la aplicación