Embed Size (px)
Citation preview

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
1
Fundamentos de Robótica. Guía 1
Tema: Morfología de Robots. Tiempo de ejecución: 2 hrs.
Revisar la morfología de los robots industriales presentes en el laboratorio iCIM Lab (3.11).
• Identificar las partes constitutivas de un robot industrial. • Describir las partes de los elementos de transmisión de movimiento. • Determinar los grados de libertad que poseen los robots del iCIM Lab.
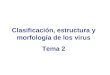
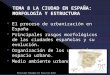
Un robot está formado por los siguientes elementos: estructura mecánica, transmisiones, sistema de accionamiento, sistema sensorial, sistema de control y elementos terminales. Estructura mecánica de un robot Mecánicamente, un robot está formado por una serie de elementos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. La constitución física de la mayor parte de robots industriales guarda cierta similitud con la anatomía del brazo humano, por lo que en ocasiones, para hacer referencia a los distintos elementos que componen el robot, se usan términos como cuerpo, brazo, codo y muñeca. El movimiento de cada articulación puede ser de desplazamiento, de giro, o de una combinación de ambos. De este modo son posibles los seis tipos diferentes de articulaciones que se muestran en la Figura 1, aunque, en la práctica, en los robots sólo se emplean la de rotación y la prismática.
Objetivo General
Introducción Teórica
Objetivos específicos
Facultad: Ingeniería.
Escuela: Electrónica
Asignatura: Fundamentos de Robótica
Lugar de ejecución: iCIM Lab.
Edificio 3. Primera planta.

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
2
Fundamentos de Robótica. Guía 1
Figura 1. Distintos tipos de articulaciones para robots
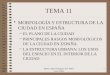
Cada uno de los movimientos independientes que puede realizar cada articulación con respecto a la anterior, se llama grado de libertad (GDL). En la figura 1 se indica el número de GDL de cada tipo de articulación. El número de grados de libertad del robot viene dado por la suma de los grados de libertad de las articulaciones que lo componen. Puesto que, como se ha indicado, las articulaciones empleadas son únicamente las de rotación y prismática con un solo GDL cada una, el número de GDL del robot suele coincidir con el número articulaciones de que se compone. El empleo de diferentes combinaciones de articulaciones, da lugar a diferentes configuraciones, con características a tener en cuenta tanto en el diseño y construcción del robot como en su aplicación. La figura 2 muestra las más comunes.
Figura 2. Configuraciones más frecuentes en robots industriales.
Transmisiones y Reductores Las transmisiones son los elementos encargados de transmitir el movimiento desde los actuadores hasta las articulaciones. Se incluirán junto con las transmisiones a los reductores, encargados de adaptar el par y la velocidad de la salida del actuador a los valores adecuados para el movimiento de los elementos del robot. Transmisiones:

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
3
Fundamentos de Robótica. Guía 1
Dado que un robot mueve su extremo con aceleraciones elevadas, es de gran importancia reducir al máximo su momento de inercia. Del mismo modo, los pares estáticos que deben vencer los actuadores dependen directamente de las masas al actuador. Por estos motivos se procura que los actuadores, por lo general, más pesados, estén lo más cerca posible de la base del robot. Esta circunstancia obliga a utilizar sistemas de transmisión que trasladen el movimiento hasta las articulaciones, especialmente a las situadas en el extremo del robot. Asimismo, las transmisiones pueden ser utilizadas para convertir el movimiento circular en lineal o viceversa, lo que en ocasiones puede ser necesario. Tabla 1. Sistemas de transmisión para robots
Entrada- Salida Denominación Ventajas Inconvenientes
Circular-Circular Engranaje Pares altos Holguras
Correa dentada Distancia grande -
Cadena Distancia grande Ruido
Paralelogramo - Giro limitado
Cable - Deformabilidad
Circular-Lineal Tornillo sin fin Poca holgura Rozamiento
Cremallera Holgura media Rozamiento
Linear-Circular Paral. Articulado - Control difícil
Cremallera Holgura media Rozamiento
Reductores En cuanto a los reductores, al contrario que con las transmisiones, sí que existen determinados sistemas usados de manera preferente en los robots industriales. Esto se debe a que a los reductores utilizados en robótica se les exige unas condiciones de funcionamiento muy restrictivas. La exigencia de estas características viene motivada por las altas prestaciones que se le piden al robot en cuanto a precisión y velocidad de posicionamiento. Actuadores Los actuadores tienen por misión generar el movimiento de los elementos del robot según las órdenes dadas por la unidad de control. Los actuadores utilizados en robótica pueden emplear energía neumática, hidráulica y eléctrica.

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
4
Fundamentos de Robótica. Guía 1
Tabla 2. Características de distintos tipos de actuadores para robots
Neumático Hidráulico Eléctrico
Energía Aire a presión Aceite mineral Corriente eléctrica
(5 a 10 bar) (50 a 100 bar)
Opciones -Cilindros Cilindros Corriente continua
-Motor de paletas Motor de paletas Corriente alterna
-Motor de pistón Motor de pistones axiales Motor paso a paso
Ventajas -Baratos Rápidos Precisos
-Rápidos Alta relación potencia-peso Fiables
-Sencillos Autolubricantes Fácil control
-Robustos Alta capacidad de carga Sencilla instalación
Estabilidad frente a cargas Silenciosos
estáticas
Desventajas - Dificultad de - Difícil mantenimiento Potencia limitada
Control continuo - Instalación especial
- Instalación especial (filtros, eliminación aire)
(compresor, filtros) - Frecuentes fugas
- Ruidoso - Caros
Sensores internos Para conseguir que un robot realice su tarea con la adecuada precisión, velocidad e inteligencia, será preciso que tenga conocimiento tanto de su propio estado como del estado de su entorno. La información relacionada con su estado (fundamentalmente la posición de sus articulaciones) la consigue con los denominados sensores internos, mientras que la que se refiere al estado de su entorno, se adquiere con los sensores externos

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
5
Fundamentos de Robótica. Guía 1
Tabla3. Tipos de sensores internos de robots
- Inductivo
- Capacitivo
- Efecto hall
Presencia - Célula Reed
- Óptico
- Ultrasónico
- Contacto
- Potenciómetros
- Resolver
Analógicos - Sincro
- Inductosyn
- LVDT
Posición
- Encoders absolutos
Digitales - Encoders incrementales
- Regla óptica
Velocidad - Tacogenerador
Elementos terminales Los elementos terminales, también llamados efectores finales (end effector) son los encargados de interaccionar directamente con el entorno del robot. Pueden ser tanto elementos de aprehensión como herramientas. Los elementos de sujeción se utilizan para agarrar y sostener los objetos y se suelen denominar pinzas. Se distingue entre las que utilizan elementos de agarre mecánico y las que utilizan algún otro tipo de dispositivo (ventosas, pinzas magnéticas, adhesivas, ganchos, etc.).

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
6
Fundamentos de Robótica. Guía 1
Tabla 4. Sistemas de sujeción para robots Tipos de sujeción Accionamiento Uso
Pinza de presión Neumático o eléctrico Transporte y manipulación de piezas sobre
- desp. Angular las que no importe presionar
- desp. lineal
Pinza de enganche Neumático o eléctrico Piezas de grandes dimensiones o sobre las
que no se puede ejercer presión.
Ventosas de vacío Neumático Cuerpos de superficie lisa poco porosa
(cristal, plástico, etc.).
Electroimán Eléctrico Piezas ferromagnéticas
1 Estación de ensamblaje con robot Mitsubishi RV-3SB. 1 Célula de manufactura flexible con robot Mitsubishi RV-2AJ. 1 Estación del sistema automatizado de almacenamiento/recuperación AS-RS Festo.
Parte I. Brazo robot de la célula de manufactura flexible.
1. Se le asignará, para que pueda realizar la práctica, la consola de mando (teaching box o teaching pendant) de manera que pueda verificar los diferentes movimientos y ejes que posee el robot, complete las preguntas que se le hacen a continuación, según sean sus observaciones.
Procedimiento
Materiales y equipos

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
7
Fundamentos de Robótica. Guía 1
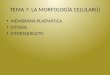
Figura 3. Control de mando (teaching box o teaching pendant).
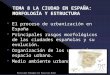
2. Al observar el Brazo Robot, determine:
a) Estructura:
Figura 4. Brazo Robot modelo RV-2AJ.
- Tipo de configuración: _______________________________________________
- Grados de libertad: __________________________________________________ - Número de articulaciones: _____________________________________________
- Tipos de Articulaciones: ______________________________________________ - Número de Eslabones: ________________________________________________ - Tipo de actuadores: __________________________________________________

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
8
Fundamentos de Robótica. Guía 1
b) Transmisiones: (Describir los elementos de transmisión, como piñones, cadenas, correas, reductores, poleas, tensores, cables), haga esquemas de estos elementos, de ser necesario desarmar una parte del brazo, hágalo con cuidado de volverlo a armar correctamente. _____________________________________________
c) Actuadores: _________________________________________________________
d) Sensores: ___________________________________________________________
e) Elemento terminal: ___________________________________________________ Parte II. Brazo robot RV-3SB de la estación de ensamble.
Figura 5. Vista lateral de brazo robot RV-3SB. 3. Al observar el brazo Robot y con la ayuda del control de mando (teaching pendant) determine:

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
9
Fundamentos de Robótica. Guía 1
a) Estructura:
- Tipo de configuración: _______________________________________________
- Grados de libertad: __________________________________________________ - Número de articulaciones: _____________________________________________
- Tipos de Articulaciones: ______________________________________________
- Número de Eslabones: ________________________________________________
- Tipo de actuadores: __________________________________________________
b) Transmisiones: (Describir los elementos de transmisión, como piñones, cadenas, correas,
reductores, poleas, tensores, cables) haga esquemas de estos elementos, de ser necesario desarmar una parte del brazo, hágalo con cuidado de volverlo a armar correctamente.
_____________________________________________________________________
c) Actuadores: _________________________________________________________
d) Sensores: ___________________________________________________________
e) Elemento terminal: _________________________________________________ Parte III. Sistema automatizado de almacenamiento/recuperación. Auxíliese del control de entrenamiento Teaching box para verificar los movimientos de las articulaciones que posee el robot de servicio del sistema automatizado de almacenamiento/ recuperación, verifique y complete las siguientes preguntas relacionadas con esta parte.

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
10
Fundamentos de Robótica. Guía 1
Fig. 6. Sistema automatizado de almacenamiento/ recuperación (AS-RS).
4. Al observar el almacén, y con la ayuda del control de mando Teaching box determine:
a) Estructura:
- Tipo de configuración: _______________________________________________
- Grados de libertad: __________________________________________________ - Número de articulaciones: _____________________________________________
- Tipos de Articulaciones: ______________________________________________
- Número de Eslabones: ________________________________________________
- Tipo de actuadores: __________________________________________________
b) Transmisiones: (Describir los elementos de transmisión, como piñones, cadenas, correas,
reductores, poleas, tensores, cables) haga esquemas de estos elementos, de ser necesario desarmar una parte del brazo, hágalo con cuidado de volverlo a armar correctamente.
_____________________________________________________________________
c) Actuadores: _________________________________________________________
d) Sensores: ___________________________________________________________
e) Elemento terminal: _________________________________________________

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
11
Fundamentos de Robótica. Guía 1
5. Apague el equipo y deje ordenado su puesto de trabajo.
1. Presente la todas las respuestas a las preguntas que se formulan en la guía de laboratorio. 2. Presente la estructura del servosistema de control que posee el sistema automatizado de
almacenamiento/recuperación identificando los componentes (sensores, actuadores, preactuadores, red de comunicación, control, interfaz humano-máquina) y eslabones del mismo.
1. Investigue acerca de los controladores de los robots industriales Mitsubishi, qué tipo de energía
utilizan sus actuadores y qué tipo de configuraciones presentan.
� Barrientos, Antonio; Peñín, Luis Felipe; Balaguer, Carlos; Aracil, Rafael. Fundamentos de Robótica Edit. McGraw-Hill/Interamericana de España S.A.U. 1997.
Investigación Complementaria
Bibliografía
Análisis de resultado

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2016
12
Fundamentos de Robótica. Guía 1
Hoja de cotejo: 1
Guía 1: Morfología de robots.
Alumno: Estación No:
Docente: Héctor Rubén Carías Juárez GL: Fecha:
EVALUACION
% 1-4 5-7 8-10 Nota
CONOCIMIENTO
25% Conocimiento deficiente de los fundamentos teóricos de la morfología de los robots.
Conocimiento y explicación incompleta de los fundamentos teóricos.
Conocimiento completo y explicación clara de la morfología de los robots.
APLICACIÓN DEL CONOCIMIENTO
23% 23% 23%
No realizó la parte I de la guía de laboratorio.
No realizó la parte II de la guía de laboratorio.
No realizó la parte III de la guía de laboratorio.
Necesitó la ayuda del docente de laboratorio Necesitó la ayuda del docente de laboratorio Necesitó la ayuda del docente de laboratorio
Realizó la parte I de la guía de laboratorio.
Realizó la parte II de la guía de laboratorio. Realizó la parte III de la guía de laboratorio.
ACTITUD
3%
No tiene actitud proactiva.
Participa ocasionalmente o lo hace constantemente pero sin coordinarse con su compañero.
Tiene actitud proactiva y sus propuestas son concretas y factibles.
3%
No es ordenado ni responsable en el uso del equipo
Solo es ordenado o solo responsable con el uso del equipo
Es ordenado y responsable en el uso del equipo
TOTAL
100%