-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
Introduccin.
Mtodos analticos
Resolucin de las ecuaciones analticas por el mtodo de
Newton-Raphson.
Anlisis de la posicin, velocidad y aceleracin en mecanismos
planos.
Anlisis de la posicin, velocidad y aceleracin de cualquier punto
en mecanismos planos
Anlisis de mecanismos complejos
-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
Introduccin.
Mtodos Analticos
( )3 1 2 3 4 2, , , ,....,q q= f r r r r
( )3 1 2 3 4 2 2, , , ,...., ,r r r rw j q w=
( )3 1 2 3 4 2 2 2, , , ,...., , ,a x q w a= r r r r
PosicinVelocidad
Aceleracin
Mtodos analticos.
Mtodo trigonomtrico Mtodo vectorial Mtodo por nmeros complejos o
Raven
-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
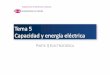
Mtodo de Raven:
2
3
4
O2 O4
A
B
r1
r2
r3
r4
2 1 3 4r r r r= + +ur ur ur ur
2 3 4 1r r r r+ + =ur ur ur ur
Ecuacin de cierre Ecuacin de cierre
-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
Mtodo de Raven: Ecuacin de cierre
r1
r2
r3
r4
2 3 4 1r r r r+ + =ur ur ur ur
32 4 12 3 4 1
ii i ir e r e r e reqq q q+ + =
cos ir( + i sen )= re qq qcos cos cos cossen sen sen sen
1 2 3 41 2 3 4
1 2 3 41 2 3 4
= + +r r r r= + +r r r r
q q q qq q q q
Mtodos numricos
Resolucin:problema posicin
Mtodos iterativos
Ecuacin de Freudenstein
-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
Anlisis posicin, velocidad y aceleracin en mecanismos planos
r1
r2
r3
r432 4 1
2 3 4 1ii i ir e r e r e reqq q q+ + =
Ecuacin de cierre
0=dt
d i er+dtd i er+dt
d i er 4i43i32i2 432qqq qqq
qw+qw+qw
qwqwqw0=cosrcosrcosr :I0=senr-senr-senr- :R
444333222
444333222w
qqqq
w 243
42
3
23 )-sen(
)-sen( rr-=
wqqqq
w 243
32
4
24 )-sen(
)-sen( rr=
Velocidad:
-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
Anlisis posicin, velocidad y aceleracin en mecanismos planos
r1
r2
r3
r432 4 1
2 3 4 1ii i ir e r e r e reqq q q+ + =
Ecuacin de cierre
Aceleracin:
0=dt
der i+dt
d e r-dt
der i
dtd e r-
dtder i+
dtd e r-
24
2i
44
2i
423
2i
3
32
i32
22
i2
22
i2
443
322
qqq
qqq
qqq
qqq
+
+
( ) ( ) ( )( ) ( ) ( )
=------
=+-+-+-
senrsenrsenr :Isenrsenrsenr :R
0coscoscos
0coscoscos
444244333
233222
222
444244333
233222
222
qaqwqaqwqaqw
qaqwqaqwqaqw
-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
Anlisis posicin, velocidad y aceleracin en mecanismos planos
q2
q3
r1
r2r3
r4y(-)
3241 rrrrrrrr
+=+
Ecuacin de cierre:
er+er=er+er 3241 i3i2i4i1 qqqq
1 2 2 3 3
4 2 2 3 3
: s: cos cos
I r r en r senR r r r
q qq q
- = +
= +
Posicin:
dtd
eri+dtd
eri=edtdr 3i
32i
2i 324 qq qqq4
qwqw 333222 senr-senr-=V :R 4
qwqw 333222 r+r=0 :I coscos
Velocidad:2
44 2
3 3
222 2i i i
2 2
223 3i i
3 2
d da = i (i ( + ))e e er dt dtd di (i ( + ))e er dt dt
qq q
q q
q q
q q
+
+
Aceleracin:
qaqwqaqw 33332332222222 r+senr-r+senr-=0 :I coscos
qaqwqaqw 33332332222222 senr-r-senr-r-=a :R coscos4
-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
Anlisis posicin, velocidad y aceleracin en mecanismos planos
Ecuacin de cierre: Posicin:
Velocidad:
Aceleracin:
1 2 4= +r r rr r r 1 2 4i i i1 2 4= +e e er r rq q q
cos cos1 2 42 4R : = +r r rq q2 42 4I : 0 = sen + senr rq q
2 4 42 4
i i i2 42 4 P P0 = i +i +e e V er rq q qw w
cos2 42 42 2 4 4 4P PR : - sen - sen + = 0Vr rw q w q q
cos cos2 42 42 2 4 4 4P PI : + + sen = 0Vr rw q w q q
2 4
42 4 2 4
2 i 2 i2 42 2 4 4
i4P P P P
(- +i ) +(- +i )e er r( + 2 i ) = 0a V e
q q
q
w a w a
w
+
+
4cos coscos
2 4 2 4
2 22 2 4 42 2 2 2 4 4 4
4 4 4P P P P
R : - - sen - - senr r r r- 2 sen = 0a V
qw q a q w a qq w q
-
-
4cos coscos
2 4 2 4
2 22 2 4 42 2 2 2 4 4 4
4 4 4P P P P
I : - sen + - sen +r r r r+ sen +2 = 0a V
qw q a q w a qq w q
+
-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
Anlisis posicin, velocidad y aceleracin de cualquier punto en
mecanismos planos
r1
r2r3 r4
O2 O4
h1
h2 h3 h4g2
g3
g4
AB
f2
f3
f4
P2P3
P4
=
qg2
q2
q4
q4
X
YPosicin punto P2
eg=h )+i(22 22fqr
eg+er=g+r=h )+i(3i
2323332 fqq
rrrPosicin punto P3
eg+r=eg+er=g+r=h )+i(41)+i(
4i
141444441 fqfqq
rrrPosicin punto P4
( )( )22i222 egdtd
dthd
V f+q==
Velocidad punto P2
egi=dt)+d(
egi=V )+i(2222)+i(
222222 fqfq w
fq
Aceleracin punto P2
2 2i( + )2 22
d= (i )ga edt
fqwuur
2 22 22 i( + )
2 22a -(g - i )g efqw a=
uur
-
TEMA 5.TEMA 5.-- ANALISIS CINEMATICO DE MECANISMOS ANALISIS
CINEMATICO DE MECANISMOS PLANOS. METODOS ANALITICOSPLANOS. METODOS
ANALITICOS
Anlisis de mecanismos complejos
( )n-2Nmero de ecuaciones de cierre 2
=
1
q'1
q5
q6
q1
r'1
r'4
r1
r2
r3
r4
r5
r6
q2
q3
q'4q4=
1
2
3
6
4
5
1 1
A
BC
D
O2
O5 O6
r = r + r + rr = r +r + r + r
1546
15432rrrr
rrrrr