Embed Size (px)
DESCRIPTION
Tesis Fisica
Citation preview

REPÚBLICA BOLIVARIANA DE VENEZUELA
MINISTERIO DEL PODER POPULAR PARA LA EDUCACION
UNIDAD EDUCATIVA COLEGIO “LAS COLINAS”
BARQUISIMETO, ESTADO LARA
ANÁLISIS BIOMECÁNICO DE LA MANO Y SUS APLICACIONES EN EL
DISEÑO DE PROTESIS ROBÓTICAS
Barquisimeto, Junio 2015

REPÚBLICA BOLIVARIANA DE VENEZUELA
MINISTERIO DEL PODER POPULAR PARA LA EDUCACION
UNIDAD EDUCATIVA COLEGIO “LAS COLINAS”
BARQUISIMETO, ESTADO LARA
ANÁLISIS BIOMECÁNICO DE LA MANO Y SUS APLICACIONES EN EL
DISEÑO DE PROTESIS ROBÓTICAS
Autores:
Fernández Faverola, Luisana
Gómez Montes de Oca, José David
Gómez Oropeza, Paola Haydee
Hernández Pereira, Carlos Eduardo
Tutores: Prof. Noel Flores
Prof. Silenny Meléndez
ANÁLISIS BIOMECÁNICO DE LA MANO Y SUS APLICACIONES EN EL
DISEÑO DE PROTESIS ROBÓTICAS
Por
Fernández Faverola, Luisana
Gómez Montes de Oca, José David
Gómez Oropeza, Paola Haydee
Hernández Pereira, Carlos Eduardo
Proyecto aprobado por:
Barquisimeto, Junio 2015
Jurado Jurado
Prof. Sileny Meléndez

DEDICATORIA
Este trabajo fue hecho con mucha dedicación y cariño: A nuestros padres, quienes
nos concedieron el regalo de la vida, nos enseñaron la importancia de la educación y
nos ha permitido desarrollarnos libremente como personas para que en el día de
mañana seamos aquellos héroes ejemplares, y ejemplo para los demás. Por todo el
apoyo y ayuda que nos dieron para poder terminar esta etapa de nuestra vida
permitiéndonos tener cada vez mas fortaleza, mas fe en nosotros mismo y con eso
seguir adelante sin importar los contratiempos que se nos presenten.
AGRADECIMIENTOS
Primeramente a Dios, quien nos ha dado el gran regalo de la vida; y con ella la
oportunidad de las miles experiencias que hemos vivido.
A nuestro Colegio Las Colinas que siempre nos abrió sus puertas para que nos
desarrolláramos al máximo permitiéndonos recorrer un largo pero a la vez corto
camino de nuestra vida, ayudándonos al cumplimiento de cada una de nuestras metas.
A todos nuestros maestros y profesores por compartir con nosotros todos sus
conocimientos y darnos consejos oportunos que nos han servido para llegar a la recta
final.
A los profesores Sileny Meléndez y Noel Flores quienes nos ayudo en la elaboración
del proyecto.
A las distintas personas que nos colaboraron en la elaboración de la investigación.
Y a todos los que de una u otra manera han contribuido directa o indirectamente en la
culminación de esta etapa de nuestras vidas como el personal no docente y obrero que
labora en nuestra casa de estudio.

ÍNDICE
PÁGINA
DEDICATORIA
IV
AGRADECIMIENTOS
V
RESUMEN
IX
INTRODUCCIÓN
10
CAPITULO
I EL PROBLEMA
12
Planteamiento del Problema
12
Objetivos
General 14
Específicos
15
Justificación e Importancia
15
Delimitación
16
II MARCO TEORICO
17
Antecedentes Históricos
17
Antecedentes de la Investigación
18
Bases Teóricas
21
Definición de Términos
40
III MARCO METODOLOGICO
43
Naturaleza de la Investigación
43
Tipo de Investigación
43
Técnicas de Recolección de Datos
44
Recursos 45

IV ANALISIS BIOMECANICO DE LA MANO
46
V CONCLUSIONES Y RECOMENDACIONES
VI LA PROPUESTA
51
53
REFERENCIAS Y BIBLIOGRAFÍA
54
ANEXOS
57

REPÚBLICA BOLIVARIANA DE VENEZUELA
MINISTERIO DEL PODER POPULAR PARA LA EDUCACION
UNIDAD EDUCATIVA COLEGIO “LAS COLINAS”
BARQUISIMETO, ESTADO LARA
ANÁLISIS BIOMECÁNICO DE LA MANO Y SUS APLICACIONES EN EL
DISEÑO DE PROTESIS ROBÓTICAS
Autores:
Fernández Faverola, Luisana
Gómez Montes de Oca, José David
Gómez Oropeza, Paola Haydee
Hernández Pereira, Carlos Eduardo
Tutores: Prof. Noel Flores
Prof. Silenny Meléndez
RESUMEN
Las manos son aquellas que forman parte de las extremidades del cuerpo
humano, siendo el cuarto segmento del miembro superior del ser humano, son la
principal fuente de información táctil sobre el entorno, por eso el sentido del tacto se
asocia con las manos, posee cinco dedos, estructura ósea, flujo sanguíneo y red
nerviosa, debido a que todas las actividades que se realizan son prácticamente con las
manos, estas se vuelven vulnerables a cualquier accidente que ocasiona daños
psicológicos en la persona. Se crearon prótesis ortopédicas las cuales en muchos
casos no se asemejaban a la mano convencional ocasionando dificultades. Al pasar
los años la tecnología avanza exponencialmente por lo que las personas que sufren
amputaciones bien sea por accidentes laborales o sociales y por enfermedades
congénitas, debido a que su mano están en una condición médica irreparable, es decir,
que la única opción del cirujano es remover ese miembro y proceder a un arreglo
mecánico de no hacerlo se puede impedir que las personas se desarrollen y realicen
las actividades diarias necesarias para poder llevar una vida normal, estas personas
buscan mantenerse tal y como estaban antes de la amputación, por lo tanto, la
mayoría de estas personas busca implementarse prótesis en la extremidad. Se realizó
este trabajo de investigación cuantitativa en el último año de bachiller en ciencias con
el fin de realizar un análisis biomecánico y buscar que esta sea aplicada en el diseño
de prótesis robóticas, bien sea en un chip o en otro implemento tecnológico.
Descriptores: Mano, biomecánica, estudio, prótesis, robótica y amputaciones.
10
INTRODUCCIÓN
Desde los orígenes del hombre, desde que paso a ser bípedo, las manos han
cumplido un papel fundamental en la vida diaria del ser humano en todos los
aspectos, con las cuales realizaban las actividades diarias necesarias para subsistir,
desde cazar, conseguir alimento y pelear a realizar procesos mecánicos y actividades
del día a día con ellas con el fin de obtener un resultado, debido a su uso a lo largo de
la vida de una persona, estas se pueden ser vulnerables en todos los aspectos.
Su disposición de cinco (5) dedos y 27 (veintisiete) huesos, la mayoría de
ellos metacarpianos es decir que son frágiles y cualquier torcedura o doblez puede
ocasionar que esta persona necesite una corrección mecánica, o en un escenario
mucho más grave donde el cirujano decide remover quirúrgicamente a la mano
debido a que la condición es muy grave a consecuencia de un accidente, en la
mayoría de los casos se procede a realizar la amputación y posteriormente a la
colocación de una prótesis.
A lo largo de los años, las amputaciones y las prótesis han avanzado, desde
prótesis de madera, donde se utilizaban para crear una función de completitud antes
que por la función en sí, mientras que las prótesis actuales son mucho más liviano, se
elaboran con plástico y aluminio para proporcionar al amputado dispositivos más
funcionales y hechos a la medida del paciente.
Además, las prótesis son más reales, con fundas de silicona y pueden imitar la
función de una extremidad natural, al explorar la historia de la protésica se puede
apreciar todo lo que implico la elaboración de un dispositivo y las perseverantes
generaciones que hicieron falta para garantizar que el hombre pueda tener no solo
cuatro extremidades si no también la función.
11
A pesar que el ser humano ha dado grandes saltos en el área de la salud todos
son propensos a accidentes y víctimas de enfermedades. Así que para contrarrestar
estos males físicos la tecnología alzo la mano y se encuentra desarrollando
dispositivos electrónicos, robóticos y biónicos para auxiliar a las personas del siglo
XXI y años venideros. Los avances más prometedores son en relación a la autonomía
de parte de las prótesis robóticas.
Vale destacar, que actualmente se esta utilizando la biomecánica, siendo esta
la subdivisión de la física mecánica que estudia el movimiento de los cuerpos sin
importar la causa de este, su objetivo es la búsqueda de la eficacia sin dejar al lado la
expresividad de un movimiento, debe tenerse presente ya que tras la búsqueda de la
eficacia se suele caer en el mecanismo como tal, para ello debe tenerse en cuenta que
la optimización debe ser alcanzado de manera global y no de manera analítica.
El presente trabajo consta de cinco (5) capítulos, el primer capítulo. El
Problema donde se realizó el planteamiento del problema, objetivos, justificación y
delimitación, un segundo capítulo que comprende el Marco Teórico, donde se
encuentran los antecedentes históricos, antecedentes de la investigación, las bases
teóricas del problema y las definiciones de términos básicos, el tercer capítulo, el
Marco Metodológico donde se especificó la naturaleza y tipo de la investigación, los
recursos utilizados y la técnicas de recolección de datos, el cuarto capítulo con el
análisis biomecánico de la mano como tal, en el quinto capítulo las recomendaciones
y conclusiones del proyecto en la cual va incluida una propuesta en el capitulo seis.
Por último, se presentan las referencias bibliográficas consultadas y los
anexos conseguidos
12
CAPÍTULO 1
EL PROBLEMA
Planteamiento Del Problema
Según “Morfología Anatómica de la Mano” de Rocha (2011) define a
las manos como aquellas que forman parte de las extremidades del cuerpo humano,
siendo el cuarto segmento del miembro superior o torácico. Están localizadas en los
extremos de los antebrazos, son prensiles y tienen cinco dedos cada una. Abarcan
desde la muñeca hasta la yema de los dedos en los seres humanos. Son el
principal órgano para la manipulación física del medio. La punta de los dedos
contiene algunas de las zonas con más terminaciones nerviosas del cuerpo humano;
son la principal fuente de información táctil sobre el entorno, por eso el sentido
del tacto se asocia inmediatamente con las manos.
Como en los otros órganos pares (ojos, oídos, piernas), cada mano, está
controlada por el hemisferio del lado contrario del cuerpo. Siempre hay una
dominante sobre la otra, la cual se encargará de actividades como la escritura manual,
de esta forma, el individuo podrá ser zurdo, si la predominancia es de la mano
izquierda (siniestra) o diestro si es de la derecha (diestra).
La disposición anatómica de la mano permite entender su gran versatilidad en
la manipulación de objetos y ajustes posicionales de acuerdo a las necesidades en la
ejecución de patrones funcionales.
En relación a esto, Repetto (2005) estudió la correlación entre las unidades
arquitectónicas con el complejo biomecánico de cada una de ellas, permite entender
que la función prensil de la mano depende de la integridad de la cadena cinética de
huesos y articulaciones extendida desde la muñeca hasta las falanges distales, y que el
compromiso de sus arcos longitudinales o transversales altera la morfología de la
13
mano e implica la ruptura de un ensamblaje coordinado necesario para la realización
de agarres de fuerza y de precisión.
La integridad de la macroestructura y la microestructura de la mano
combinada con un abundante tejido cerebral, le han conferido al hombre el desarrollo
de habilidades y ventajas especiales frente a otras especies. No cabe duda, que la
disposición anatómica de la mano es lo que le ha otorgado gran variedad de
adaptaciones funcionales en un momento determinado de acuerdo a la necesidad de
su ejecutante.
Constantemente la mano debe adoptar formas diversas que permiten al ser
humano interactuar con su medio externo; posiciones como la concavidad palmar que
permite tomar y soltar objetos, movimientos de oposición que proporcionan la pinza
y facilitan la manipulación de instrumentos de precisión, y actividades de destreza
manual fina. La comunicación mediante el lenguaje corporal también involucra la
mano e inclusive, puede ser determinante a la hora de tomar decisiones definitivas en
la elección de candidatos en tareas específicas.
Lo anteriormente descrito destaca el hecho de que la mano es una extremidad
muy utilizada por lo que puede estar propensa a lesiones que ocasionen amputaciones
a la misma, bien sea por accidentes laborales o por accidentes fortuitos que afecten la
recuperación de ésta llegando a la conclusión que debe ser operada y removida
quirúrgicamente. Esta remoción quirúrgica es conocida como amputación, al respecto
Osorio (2009) la define como una condición adquirida cuyo resultado es la pérdida de
una extremidad y cuya causa suele ser una lesión, una enfermedad o una operación
quirúrgica. Al mismo tiempo, los pacientes que sufren esta condición quedan
imposibilitados para realizar las actividades diarias.
Por otra parte, tecnológicamente se han creado distintas prótesis las cuales
ayudan a la persona a realizar las acciones previamente imposibilitadas, de igual
manera se crearon prótesis ortopédicas, las cuales en muchos casos no se asemejaban
a la mano convencional ocasionando dificultades. Actualmente se está desarrollando
la implementación de la robótica en las prótesis, aunque para que esto ocurra se debe
realizar un análisis biomecánico de la mano del paciente. Así mismo, este análisis

14
tiene como fin el obtener datos de los movimientos de las manos con el fin de
aplicarlo en prótesis robóticas logrando así una mayor adaptabilidad a la persona y a
las acciones que realiza.
La Unidad Biomecánica (UBM) se define como aquella que constituye la
unidad anatómico-funcional. La UBM representa al conjunto de estructuras que
posibilitan la producción de un movimiento; y está conformado por el conjunto de
estructuras articulares y periarticulares. (ob.cit). Sobre todo, es importante la
implementación de las ramas de la biomecánica con el fin de estudiar la UBM, dichas
ramas son la osteocinemática, el cual es el estudio del movimiento de los huesos, la
artocinemática, el movimiento que se genera entre las superficie de las articulaciones,
y por último la miocinetica la cual es el estudio del movimiento de los músculos.
Es por eso que el problema radica en que las personas son amputadas cuando
sus extremidades están irremediablemente dañadas, bien sea por accidente laboral o
social, luego de que la mano es removida, las personas dejan de realizar las
actividades que venían realizando, trabajo, en el hogar y en los lugares donde la
persona pasaba la mayor parte de su tiempo, esto causa depresión en el paciente, tal y
como lo expresa Morris (2008).
Sin embargo, el estudio biomecánico de dicha mano cumple un papel
fundamental debido a que le da la oportunidad al experto de almacenar toda esa
información en una prótesis robótica para que el paciente pueda volver a realizar las
actividades previo a la amputación.
Entendida la situación problemática cabe preguntarse: ¿Se puede analizar la
estructura de una mano biomecanicamente?, ¿Cuál será el funcionamiento estructural
y anatómico de las manos y su utilidad biomecánica?, ¿Es posible integrar la
información obtenida en una prótesis robótica?
Objetivo General
Analizar biomecanicamente la mano y sus aplicaciones en el diseño de
prótesis robóticas.
15
Objetivos Específicos
a) Analizar biomecanicamente la estructura de la mano.
b) Caracterizar el funcionamiento estructural y anatómico de las manos y su
utilidad biomecánica.
c) Estudiar la posible integración de la información obtenida en una prótesis
robótica
Justificación e Importancia
A lo largo de los años se ha demostrado que la incorporación de prótesis ha
ayudado a personas a seguir realizando sus actividades diarias, por lo tanto la
implementación de prótesis robóticas las cuales se asemejan a los movimientos de la
mano ayudará mucho más a estos, los movimientos de la extremidad son muy
complejos debido a que hay infinidades de acciones que se pueden realizar con ella,
aunado a esto, está el movimiento de los dedos y de la muñeca las cuales se
relacionan con la mano. Ahora bien, este proyecto también se realiza debido a la
necesidad de algunas personas con bajos recursos los cuales no tienen acceso a esta
medida de recuperación de manos amputadas, por lo tanto este análisis biomecánico
se basa en la reducción de costos los cuales ayudará a la población.
Se puede analizar, de distintas maneras las razones por las cuales se realiza
este trabajo, del punto de vista estético debido a que el análisis visual es diferente
cuando una persona tiene una mano amputada y otra que tiene una prótesis, desde el
punto de vista tecnológico ya que el estudio previo a la creación de las prótesis ayuda
robóticamente al entendimiento de la misma, desde el punto de vista de la salud
psicológica del paciente es la posibilidad de realizar las actividades que realizaba
antes de la amputación y desde el punto de vista social es la posibilidad que estas
personas no sufran discriminación y tengan las mimas oportunidades de trabajos que
los demás.
Analizando de forma específica, que el mismo ayudaría en el entendimiento
de la importancia del estudio biomecánico con el fin de aplicarlo en prótesis robóticas
a futuro, de lo contrario su aplicación en la misma sería más complicado debido a los
numerosos movimientos que puede realizar la mano y sus componentes.
16
Delimitación
El presente proyecto de investigación, se realiza mediante análisis de la
información de la temática biomecánica, aplicada en un diseño de prótesis robóticas
que se pueda desarrollar en Venezuela a futuro.
17
CAPITULO II
MARCO TEORICO
Antecedentes Históricos
Los antecedentes históricos más relevantes en este estudio son los
relacionados con las prótesis y sus avances, los egipcios fueron los primeros pioneros.
Elaboraban sus extremidades protésicas, y se cree que las utilizaban por la sensación de
“completitud” antes que por la función en sí. El erudito romano Plinio el Viejo, escribió sobre
un general romano de la Segunda Guerra Púnica, a quien le amputaron el brazo derecho. Se
le colocó una mano de hierro para que sostuviera el escudo y pudo volver al campo de
batalla.
A partir de esta, en la Alta Edad Media hubo pocos avances en el campo de la
protésica, además del gancho de mano y la pata de palo, a un caballero se le colocaba una
prótesis diseñada solamente para sostener un escudo, fuera del campo de batalla, solamente
los ricos tenían la suerte de contar un gancho de mano para las funciones diarias. En el
Renacimiento, se produjo un renacer en la historia de la protésica. Durante este período, las
prótesis generalmente se elaboraban con hierro, acero, cobre y madera.
Vale destacar que muchos consideran al barbero y cirujano del Ejército Francés
Ambroise Paré el padre de la cirugía de amputación y del diseño protésico moderno debido a
que introdujo modernos procedimientos de amputación (1529) en la comunidad médica, y
que Elaboró prótesis (1536) para amputados de extremidades superior e inferior, utilizó
cuero, papel y pegamento en lugar de hierro pesado para elaborar una prótesis.
A medida, que se desarrollaba la Guerra Civil Estadounidense, la cantidad de
amputados incrementaba en forma astronómica, lo que obligó a los estadounidenses a
ingresar en el campo de la protésica, aunque La Primera Guerra Mundial no fomentó mucho
el avance en este campo. Debido a quejas y debates se creó la Asociación Estadounidense de
Ortoprótesis (AOPA, por sus siglas en inglés).
Al finalizar la Segunda Guerra Mundial, Los Estados Unidos cerraron un trato con

18
compañías militares para que mejoraran la función protésica en lugar de la de las armas. Este
acuerdo allanó el camino para el desarrollo y la producción de las prótesis modernas. Los
dispositivos actuales son mucho más livianos, se elaboran con plástico, aluminio y materiales
compuestos para proporcionar a los amputados dispositivos más funcionales y están hechos a
la medida del paciente, el advenimiento de los microprocesadores, los chips informáticos y la
robótica en los dispositivos actuales.
Todo lo mencionado, permite que los amputados recuperen el estilo de vida al que
estaban acostumbrados, en lugar de simplemente proporcionarles una funcionalidad básica o
un aspecto más agradable. Las prótesis son más reales con fundas de silicona y pueden imitar
la función de una extremidad natural hoy más que nunca. Al explorar la historia de la
protésica, se puede apreciar todo lo que implicó la elaboración de un dispositivo y las
perseverantes generaciones que hicieron falta para garantizar que el hombre pueda tener no
solo las cuatro extremidades sino también la función
Antecedentes De La Investigación
A lo largo de los años, se ha estudiado y avanzado en el campo de las prótesis
robóticas para que estas tengan mayor similitud con la extremidad previa a la
amputación, además se han realizado avances en la biomecánica en sí, entre los
cuales se destacan:
Investigadores del Centro Científico E. Piaggio de la Universidad de Pisa y del
Instituto Italiano de Tecnología de Génova (2010) han diseñado una mano robótica
que podría revolucionar el campo de las prótesis, pues tiene la capacidad de sostener
todo tipo de objetos mediante un único motor; además, su costo es menor que el de
otros sistemas. Esta resultó capaz de reproducir casi todos los movimientos naturales
de la mano.
Otro estudio de carácter internacional sobre tejidos y estructuras es el
relacionado con células madre, donde a partir de estas científicos de la Universidad
de Granada (2012) han creado un sistema llamado “Células Madres y sus capacidades
regenerativas” para regenerar los huesos a partir de células madre del cordón
19
umbilical. Se trata de una especie de tela de carbón activado que sirve de soporte para
las células madre, es la clave de este nuevo desarrollo. Gracias a este nuevo
biomaterial las células pluripotentes acaban diferenciándose como tejido óseo y se
consigue regenerar el tejido formando „huesos artificiales.
En el caso de An Do y algunos colegas del Long Beach Veterans Affairs
Medical Center de California (2012) afirmaron haber construido y probado una
prótesis de miembro inferior que se puede controlar en tiempo real por medio de
señales de EEG (electroencefalograma) introducidas en un ordenador.
En relación a esto, un grupo de ingenieros del Instituto Tecnológico de
Massachusetts (MIT) en el (2013), en Estados Unidos, las personas en condición de
discapacidad o de edad avanzada tendrían acceso a una nueva forma de usar sus
brazos. Se trata de una prótesis robótica que tras adaptarse a la muñeca, agrega dos
nuevos dedos a la mano. El objetivo del invento, llamado “SR Fingers” (Dedos
robóticos supernumerarios) es incrementar la funcionalidad de una sola mano, de
forma que sea capaz de realizar labores que exigen el uso de ambas. Para ello, los
responsables del proyecto se las ingeniaron para hacer que los dedos robóticos se
muevan en sincronía con los biológicos de del usuario.
En Venezuela también se han realizado avances en este tema, estos han sido
menores en comparación a otros países pero de todas maneras, es significante, entre
los cuales se destacan:
El desarrollo de prótesis para amputados de miembros inferiores forma
parte de los grandes proyectos del grupo de Biomecánica de la Universidad Simón
Bolívar (USB) (2012). Los recientes avances en el conocimiento del comportamiento
del cuerpo humano aumentan cada día la esperanza de una vida más larga y más sana.
Esto se debe al avance tecnológico y a las técnicas computacionales de simulación, lo
que han permitido un estudio más integral de la ingeniería y las soluciones que
pueden aportar a las patologías biológicas, permitiendo la aplicación de una medicina
menos invasiva y más eficiente en los pacientes que así lo requieran.
20
Esta iniciativa data desde el año 2004 con la creación del grupo de
Biomecánica G-50, ente adscrito al Decanato de Investigación y Desarrollo de la
USB, bajo la dirección de la profesora Carmen Müller-Karger, quien agrupó a
estudiantes y profesores que trabajaban en el área de biomecánica de manera
independiente, para que pudieran seguir desarrollando los productos, pero con
identidad nacional.
Actualmente, la USB lleva a cabo 4 proyectos de Biomecánica.
a) El primero es el diseño y construcción de dispositivos médicos, que
consiste en la creación de prótesis para miembros inferiores a la
disposición de pacientes amputados. La idea es que los pacientes den su
opinión luego de usado el producto.
b) El segundo proyecto es la simulación y análisis numérico de dispositivos
médicos, donde se prueban los prototipos de prótesis, así como fijadores
externos, clavos y placas, entre otros, bajo cargas fisiológicas. Esto se
realiza para optimizar la función de dispositivos sobre el miembro
afectado de los pacientes, ya que se convertirán en su soporte.
c) En el área de la simulación ósea ejecutan el tercer proyecto. Consiste en
la creación de una plataforma virtual donde se simulan a los huesos en
condiciones fisiológicas reales, de manera de poder analizar la
adaptación de la prótesis en pacientes que los usen.
d) El último proyecto es dedicado al análisis experimental, por medio de la
captura del movimiento y el estudio de la marcha. Prueban los
dispositivos médicos colados en los pacientes para determinar su
comportamiento y efectividad en la sanación de problemas ortopédicos.
No todos los antecedentes son de universidades e institutos debido a que
Angel Sanguino (2014) sufrió un accidente automovilístico ocasionando la pérdida de
su brazo izquierdo, con sus conocimientos en electrónica, física y biología logro
construir una prótesis biomecánica con 8 movimientos básicos.

21
Bases Teóricas
A continuación se define la estructura y fisiología de la mano, las manos son
componentes esenciales de esa fantástica maquinaria que es el cuerpo humano. Por
ellos es muy importante, para estudiar las posibles consecuencias que puede sufrir
una persona al perder dicho miembro y su posible reintegro en forma de prótesis
robóticas es necesario saber el soporte que las conforma profundizando en la
anatomía, vascularización y la inervación.
Al mismo tiempo, las manos están a la vista de los demás. Los movimientos
que se hacen con ellas dicen mucho de nuestra personalidad y gracias a ellas podemos
realizar infinidad de trabajos. Rocha (2012) explica que las manos son la extremidad
más distal del miembro superior, adaptadas para realizar infinidad de movimientos
gracias a la acción de los numerosos músculos insertados en los huesos, y a los
ligamientos que le sirven de sujeción.
Estructura De La Mano
Según su estructura, posee huesos y músculos (permitiendo el movimiento),
venas y arterias (visualizándose a través de la piel), nervios (permitiendo tacto y
movimiento) y la piel y uñas que se aprecian a simple vista. Desde el punto de vista
óseo la mano posee 27 huesos diferenciados en tres zonas bien características: la
primera llamada falange o dedos compuesta por catorce huesos, tres huesos en cada
uno de los 5 dedos a excepción del pulgar que tiene dos, la segunda zona se denomina
metacarpio-palma conformada por cinco huesos distribuidos en dos hileras, y por
último la tercera zona es llamada carpo o muñeca la cual posee ocho huesos
distribuidos en dos hileras.
Musculatura y Estructura Ósea
Ahora bien, Guerra Toro (2010) explicó que para el estudio de los músculos
de la mano, suele dividirse ésta en región palmar (anterior) y en región dorsal
(posterior), la región palmar, a su vez, está dividida en región tenar (músculos

22
destinados al pulgar), región hipotecar (músculos destinados al meñique), y un grupo
medio donde se encuentran los músculos interóseos y lumbricales.
Los músculos de la región palmar son un total de 15, repartidos en grupos de
cuatro para las diferentes regiones tenar, hipotenar. Se suman a éstos, los asociados al
flexor profundo de los dedos, llamados lumbricales, más tres en los espacios inter
metacarpianos, denominados interóseos palmares, vale destacar, que para la función
muscular de los músculos de la mano se tomara en cuenta como referencia la línea
media o plano medio del cuerpo y no de la mano, Cueto (2010).
Se observa de la misma manera que la región o eminencia tenar es el abductor
corto del pulgar, flexor corto, oponente y aductor. El abductor corto del pulgar
también cumple una parte fundamental en las realizaciones de actividades prensiles
siendo este el musculo plano que va del carpo a la falange proximal del pulgar.
Dentro de este marco sus inserciones proximales se dan en el retináculo
flexor, en el tubérculo del escafoides y en el tubérculo del trapecio. Desde aquí se
dirige a la articulación metacarpo falángica del pulgar en su cara lateral, y termina en
el tubérculo lateral y faceta articular de la base de la falange proximal, dichos
músculos realizar acciones de flexión de la articulación metacarpo falángica y ayuda
en la primera fase de la oposición del pulgar, y su inervación y vascularización se
debe por nervio mediano, irrigado por la rama palmar superficial de la arteria radial.
Continuando con la musculatura de la mano específicamente del pulgar, se
encuentra el flexor corto del mismo el cual es un músculo pequeño; tiene dos capas,
una superficial que se encuentra hacia medial del abductor corto del pulgar, y otra
profunda que se encuentra por debajo del mismo músculo. En ocasiones presenta un
hueso sesamoideo en su tendón, presenta dos inserciones proximales; la capa
superficial se inserta en el retináculo flexor, en el tubérculo del trapecio y en la vaina
del flexor radial del carpo.
La capa profunda se inserta lateralmente en el trapezoide y medialmente en el
grande. Entre las dos inserciones pasa el tendón del flexor largo del pulgar. Las dos
capas se unen para terminar en la falange proximal del pulgar, entre las acciones que
realiza esta la flexión de las articulaciones carpo-metacarpianas y metacarpo-

23
falángicas. A través de esta función participa también en la oposición. La inervación
es compartida, ya que el nervio mediano llega a la capa superficial y el lunar llega a
la capa profunda; la irrigación está a cargo de las ramas superficial y profunda
palmares, ramas de la arteria radial
Por otra parte el oponente del pulgar es un músculo pequeño y cuadrangular;
está en un plano más profundo que el abductor corto del pulgar, que la capa
superficial del flexor corto del pulgar, y lateral a la capa profunda del flexor corto del
pulgar, se inserta en el tubérculo del trapecio y en el borde lateral de la cresta del
mismo hueso, así como en la parte antero lateral del retináculo flexor. Se dirige de
manera oblicua hacia abajo y lateral hasta llegar a la cara lateral, superficie anterior
de la diáfisis del primer metacarpiano. Como su nombre lo indica, es oponente del
pulgar y lo gira medialmente para cumplir esta función, es inervado por el nervio
mediano, irrigado por la rama palmar profunda de la arteria radial. (ob.cit)
Debe señalarse que el aductor corto del pulgar (aproximador del pulgar) es un
músculo más profundo y medial de la región tenar; se divide en dos fascículos que
confluyen conjuntamente en la falange proximal del pulgar, donde frecuentemente se
encuentra un hueso sesamoideo. En la inserción proximal, estos dos fascículos dejan
un espacio por donde pasa la arteria radial. (ob.cit)
Por lo tanto, el fascículo oblicuo se inserta en la cara anterior del hueso
grande, en el trapezoide, y en las bases del segundo y tercer metacarpiano. El
fascículo transverso se inserta en la cara anterior de la diáfisis del tercer
metacarpiano; ambos fascículos se unen e insertan en el tubérculo medial, en la base
de la falange proximal del pulgar. Entre las acciones que realiza esta la de aductor del
pulgar, participando en la oposición del mismo, es inervada por el nervio mediano,
rama de T1. Irrigado por la rama palmar profunda de la arteria radial. (ob.cit)
Cabe considerar, por consiguiente que Naveda (2008) esquematizo a los
músculos de la mano específicamente la zona de la palma comenzando por el palmar
corto o cutáneo el cual es un músculo inconstante, plano, fino y muy superficial; se
encuentra en el tejido celular subcutáneo de la región hipotenar, se inserta en el borde
medial de la aponeurosis palmar y se dirige a la piel del borde medial de la mano,

24
hace que se arrugue la piel de la región hipotenar, ahonda la cavidad de la mano, y
tensa la piel para ayudar a la mano cuando se agarran objetos, inervado por el nervio
cubital, rama de T1. Irrigado por la rama palmar superficial de la arteria ulnar.
Es conveniente acotar que Testut (1990) estudio el aductor del
meñique (aproximador del meñique) el cual es un músculo superficial; se comporta
como un músculo interóseo. Si se toma la línea media de la mano o la relación con el
cuarto dedo, se puede considerar como separador del meñique, su inserción proximal
se da en el pisiforme y la expansión fibrosa del flexor ulnar del carpo; de aquí se
dirige medialmente hacia abajo fijándose en un hueso sesamoideo, en el ligamento
glenoideo de la articulación metacarpo-falángica y en la cara posterior de la base de
la falange proximal del quinto dedo.
Entre las acciones que realiza podemos encontrar que aduce el quinto dedo,
separándolo del cuarto (anular); ayuda en la flexión de la articulación metacarpo-
falángica del quinto dedo. Así como los interóseos, ayuda también a la extensión de
las falanges media y distal a través de la expansión del tendón extensor, inervado por
el nervio cubital, rama de T1. Irrigado por la rama palmar superficial de la arteria
ulnar.
Sin duda alguna es importante explicar sobre el flexor corto del meñique, este
es músculo pequeño, fusiforme e inconstante, las inserciones proximales se dan en el
proceso unciforme o gancho del hueso ganchoso, en el retináculo flexor y en los arcos
tendinosos entre el ganchoso y el pisiforme. La inserción distal se fija en la falange
proximal del quinto dedo, sus acciones se ven destacadas al flexionar el quinto dedo a
través de la flexión de la articulación metacarpo-falángica, inervado por el nervio
cubital, rama de T1. Irrigado por las ramas palmar superficial y profunda de la arteria
ulnar.
El oponente del meñique es el músculo más profundo de los hipotecares; es
plano, triangular y se encuentra por delante del quinto metacarpiano, proximalmente
se inserta en el gancho del ganchoso, en el retináculo flexor y en el ligamento entre el
pisiforme y el ganchoso. Distalmente se fija a la cara medial de la diáfisis del quinto
metacarpiano, como su nombre lo indica es oponente del quinto metacarpiano,
25
haciendo rotación lateral y acercando hacia el pulgar el meñique, inervado por el
nervio cubital rama de T1. Irrigado por la rama palmar profunda de la arteria ulnar.
Si se ubica, en la parte de los lumbricales se explica que son cuatro
fusiformes, con tendón alargado en forma de lombriz (por eso el nombre de
lumbricoides) y su inserción proximal se da en los tendones del flexor profundo de
los dedos, a nivel metacarpiano. Se enumeran de lateral a medial del I al IV, son
flexores de la falange proximal y extensores de las dístales de los cuatro últimos
dedos.
Los primeros dos lumbricales se insertan próximamente en la cara anterior y
borde lateral de los tendones dirigidos a los dedos índice y medio respectivamente
(unipeiniforme); los lumbricales tercero y cuarto se insertan proximalmente a lado y
lado en los tendones flexores, semejando los pelos de una pluma (bipeiniforme).
Todos los tendones se insertan en la cara lateral de la base de la falange proximal del
siguiente dedo así: el primer lumbrical en el índice, el segundo en el medio, el tercero
en el anular, y el cuarto en el meñique, los dos más laterales son inervados por el
mediano, y los dos más mediales por el ulnar; ramas de C8 y T1. Irrigados por el arco
palmar superficial, producto de la anastomosis de las arterias ulnar y radial.
Palastanga, Field, Roger en su libro “Anatomía y Movimiento Humano.
Estructura y Funcionamiento” (2007) explican que los interóseos palmares son los
músculos más profundos de la mano; son tres y se encuentran entre los
metacarpianos, con excepción del primer espacio inter metacarpiano. Son pequeños y
fusiformes; sus fibras son oblicuas de proximal a distal, dirigiéndose hacia las
falanges proximales del segundo, cuarto y quinto dedo, se insertan en la cara lateral
de los metacarpianos segundo, cuarto y quinto, terminando en la cara lateral de la
base de la falange proximal del dedo respectivo así: el segundo con el índice, el
cuarto con el anular y el quinto con el meñique, estos aproximan los metacarpianos al
eje de la mano.
Por su parte, la región posterior de la mano sólo se describe los interóseos
dorsales, los cuales ocupan los espacios interóseos de los metacarpianos; también se
26
insertan a través de dos porciones que dan el aspecto de pelos de pluma
(bipeiniforme). Pérez Sánchez (2013), proximalmente se insertan en los bordes
mediales y laterales de los metacarpianos, según donde se encuentren, así: el primero
entre el primer y segundo metacarpiano, el segundo entre el segundo y tercer
metacarpiano, el tercero entre el tercer y cuarto metacarpiano, y el cuarto entre el
cuarto y el quinto metacarpiano, separan a los metacarpianos del eje de la mano.
Flujo Sanguíneo
No obstante cada uno de los segmentos de la extremidad superior tiene sus
propias arterias. Partiendo de la arteria subclavia, la cual nace a partir del tronco
arterial braquiocefálico, nace la arteria axilar que va a vascularizar a los músculos del
hombro y de la pared anterolateral del tórax y la glándula mamaria. De la arteria
axilar, nace la arteria humeral o también llamada braquial que por medio de sus
diferentes ramas vasculariza los músculos del brazo y finalmente se divide dando
lugar a las arterias cubital o ulnar y radial que irrigan los músculos y huesos del
antebrazo y mano, por último se forma el arco palma que proporciona sangre
oxigenada a la mano.
Rodríguez (2011) define a la arteria axilar, rama y continuación directa de la
arteria subclavia. Se extiende desde la mitad de la cara inferior de la clavícula hasta el
borde inferior del músculo pectoral mayor, donde se convierte en la arteria braquial,
recorriendo así la región axilar de forma oblicua de arriba hacia abajo y de fuera hacia
dentro. Da lugar a 6 ramas que son torácica superior, tronco toracoacromial, torácica
lateral, subscapular, circunflejo humeral anterior y circunflejo humeral posterior
De la Torre (2010) define a la arteria humeral o braquial, que continua a la
arteria axilar, se extiende desde el borde inferior del pectoral mayor hasta poco antes
del codo (0,1 cm antes) vascularizando los diferentes músculos del brazo. Se divide
en sus 2 ramas terminales (la arteria radial y la arteria cubital) y 5 colaterales: rama
deltoidea, arteria nutricia del húmero, arteria humeral profunda, arteria colateral
cubital superior e inferior.
27
Por otra parte la arteria radial, nace en la fosa cubital a nivel del cuello del
radio y está cubierta por el músculo braquiorradial, recorre la cara radial del
antebrazo hacia la muñeca, dónde es fácilmente palpable en el canal del pulso. Una
vez en la muñeca se anastomosa dando lugar a la arteria radiopalmar que
conjuntamente con la cúbitopalmar forma el arco palmar que nutre de sangre la mano.
En relación a esto, es importante acotar que la arteria cubital o ulnar, irriga los
músculos del antebrazo, muñeca y mano, se inicia cerca del codo y pasa en dirección
oblicua hacía la mano. En el tramo cercano a la mano da lugar a la arteria
cúbitopalmar que forma el arco palmar como dijimos anteriormente con la arteria
radiopalmar.
En virtud, el arco palmar superficial y profundo, el arco superficial está
formado por la terminación de la arteria cubital y por la rama palmar de la radial, por
otra parte el arco profundo lo conforman las arterias radial y la rama cubito-
palmar de la cubital, estos nutren la mano de sangre y se anastomosan para dar lugar
a las diferentes arterias digitales de los dedos, mediante el siguiente proceso:
a) Drenaje venoso de la extremidad superior
b) La sangre venosa de las extremidades superiores se drena desde la mano,
antebrazo y brazo hasta la vena subclavia derecha o izquierda que termina
desembocando en la cava superior y ésta en la aurícula derecha, pasará al
ventrículo izquierdo y se oxigenará en los pulmones antes de ser bombeada
otra vez.
c) La sangre desoxigenada es recogida por numerosas venas de pequeño calibre
de la mano que desembocan en el arco venoso profundo y vena dorsal de la
mano.
Las redes venosas de la mano dan origen a varios troncos principales, que se
convierten en los tronco colectores de las venas del antebrazo:
Vena cefálicao radial superficial, asciende por la cara lateral del antebrazo y se
localiza en la fosa del codo en el surco bicipital lateral.

28
Red Nerviosa
Como complemento, la red nerviosa de la mano hace posible funciones como
la sensibilidad al tacto, al dolor, los movimientos, principalmente gracias a el nervio
cubital (que cubre la zona dorsal de la mano hasta la zona palmar), el nervio mediano
(que alcanza los tres primeros dedos y mitad del cuarto) y el radial que es responsable
de la inervación de la parte externa del dorso de la mano. (Rocha 2012).
Es relevante explicar que la tanto el antebrazo y específicamente la mano
posee el acto reflejo debido a que estos son extremidades que entran en contacto en
todo aquello que rodea a las personas, Irausquin Lee (2010) lo define como una
acción inconsciente, automática , donde se responde a un estimulo sin que la
información llegue al cerebro.
Un ejemplo de lo ya mencionado es cuando una persona se pincha, quita
automáticamente la mano, sin siquiera pensarlo, se comienza con la despolarización
de la membrana del receptor, la neurona recibe esa despolarización y la lleva hasta la
medula donde la neurona de asociación hace, a su vez sinapsis con una neurona
motora la cual lleva el impulso nervioso hasta el musculo.
Amputaciones
Según Zieve (2014) una amputación es un procedimiento quirúrgico que
consiste en la remoción, extirpación o resección de parte o la totalidad de una
extremidad a través de una o más estructuras óseas, en forma perpendicular al eje
longitudinal del miembro. Cuando se efectúa a través de una interlínea articular se
denomina desarticulado.
Según Douglas G. Smith (2007) se recurren a las manos de forma rutinaria
para desempeñar una gran cantidad de tareas. Se le pide que lo hagan todo, desde lo
delicado y complejo hasta lo agotador y enérgico. Las manos evidencian los
conceptos arquitectónicos de forma y función. En el tratamiento quirúrgico de las
lesiones de la mano, se suele equilibrar la función y la estética (apariencia). Cuando
29
la mano se daña gravemente o queda afectada por una enfermedad y es necesario
amputar, el objetivo es recuperar toda la funcionalidad posible y pensar qué puede
hacerse para minimizar la impresión de la pérdida. Hasta que se experimenta una
lesión grave en la mano o una amputación parcial de mano, rara vez se piensa en
cuánto contribuyen a la imagen corporal.
En la mayoría de las culturas, lo primero que se presenta al mundo son las
manos y la cara. Una lesión en la mano que requiera de una amputación implica más
que una pérdida física; también es la profunda pérdida de una parte de la persona. Es
una pérdida de la presentación de la persona hacia los demás, las manos sean el
principal lugar donde se producen lesiones de amputación, puesto que las usamos
muy a menudo y de diferente forma. Es difícil determinar el número exacto anual de
las amputaciones de toda o alguna parte de la mano, porque la mayoría de los
investigadores solo registran las amputaciones de extremidad superior (aquellas
realizadas por encima de la muñeca).
Como dijo el doctor Stephen Fink (2011) las personas con amputaciones no
está relacionada directamente la extensión de la pérdida física con las dificultades
psicológicas del paciente. Estas dificultades dependen en su mayor parte de los
atributos personales del individuo que del tipo de amputación. Por tanto, un individuo
con una pérdida física limitada, puede presentar problemas de adaptación mayores
que otro individuo con una pérdida más importante.
Cuando nace un niño con la ausencia congénita de 1 o más miembros, sus
padres se ven enfrentados a la pérdida de un hijo perfecto. Dependiendo de la
gravedad de la pérdida, de la asociación con otras anomalías de nacimiento, además
de la forma en que se esperaba el nacimiento, los padres pueden sufrir un choque
psíquico. Este proceso puede causar en los padres gran culpabilidad, ira y
desesperación. Es necesario establecer y poner en práctica intervenciones de apoyo.
Mientras más se retarde este proceso de apoyo se reduce la posibilidad de que el niño
crezca en un ambiente familiar emocionalmente saludable. El niño sólo absorberá los

30
conceptos y se definirá a sí mismo como persona válida a través de los lazos
emocionales de las interacciones familiares. Promis (2012) habló de que la mayoría
de las amputaciones resultan de las complicaciones de la diabetes mellitus (DM) o
isquemia.
Por otra parte el doctor Oscar Fernández (2011) explicó otro factor por el cual
se debe amputar la mano siendo esta la enfermedad de la vena vascular. La falta de
circulación en un miembro constituye una indicación absoluta para amputación. La
insuficiencia circulatoria secundaria a enfermedad vascular arterioesclerótica,
constituye la causa más frecuente de amputación. Generalmente va asociada a
diabetes mellitus, y puede llegar a la necrosis (gangrena) en las extremidades con o
sin infección agregada. También se debe considerar a la tromboangitis obliterante o
enfermedad de buerger.
La elección de la altura a que ha de realizarse la amputación, depende en
primer lugar de la localización de la obliteración y del estado de la circulación
colateral. El examen del pulso, la auscultación vascular y la arteriografía nos pueden
ofrecer importantes informaciones, aun cuando al final, lo decisivo para la elección
de la altura correcta de amputación, será el estado en que encontremos los tejidos
durante el acto quirúrgico.
Existen en la actualidad exámenes especiales como el Doopler, el cual, por un
sistema similar al ultrasonido o el ecosonda, permite percibir por medio de un sistema
electrónico de emisión y recepción de señales, el pasaje de flujo sanguíneo a través de
los vasos arteriales del más simple nivel. Otros métodos predictivos de la
cicatrización del muñón, son la determinación de la presión sanguínea del Hallux o la
determinación del PO2 y PCO2, así como el aclaramiento cutáneo del Xenón
133Hablo de otro indicador como los son las Traumáticas los cuales son accidentes
de trabajo, tránsito, bélicos, etc., como recurso para salvar la vida, en la que hay
pérdida completa del sistema neuromuscular, con aplastamiento grave, compromiso
vascular y deterioro marcado de la piel.

31
Por último, se nombra las Infecciones que en ciertos casos, una infección
agresiva localizada en una extremidad, además de producir compromiso focal,
compromete seriamente el estado general. Por ejemplo, osteo-mielitis, gangrena
gaseosa, que hoy, con el advenimiento de los antibióticos y la ayuda adicional del
oxígeno hiperbárico, hacen que la amputación raramente sea necesaria. En la lepra, en
cierto número de casos, se presentan secuelas neurológicas de úlceras perforantes del
pie, y en osteomielitis crónica la cirugía local puede llevar a la curación, pero no son
raras las recidivas que pueden hacer necesaria la amputación.
Según el doctor. Ángel González Moreno (2012) también hay otros
indicadores como son los neoplasias. Sobre todo si son tumores malignos y primarios,
requieren un tratamiento radical, antes que den metástasis o si el dolor es intenso, si la
neoplasia se ha ulcerado, o por fractura patológica. Los tumores metastásicos
secundarios son los que con mayor frecuencia afectan a las extremidades, pero sólo
muy rara vez son tratados mediante amputación. Otro indicador son las
deformidades. Sean éstas congénitas o adquiridas. Niños con defectos parciales o
totales de la extremidad pueden requerir intervención quirúrgica para hacer más
funcional la extremidad afectada. En estos casos debemos tener en cuenta dos
factores: el económico, pues la corrección quirúrgica de estas deformidades requieren
varios actos operatorios, y el psíquico, ya que el paciente requiere una estabilidad
emocional para soportar dos, tres o más años de tratamiento. En caso de que no se
reúnan estos dos factores es más aconsejable la amputación.
Además, el Dr. Moreno (2014) hablo de las lesiones nerviosas que son cuando
hay úlceras tróficas en un miembro anestésico e infectado. En los hemipléjicos y
cuadripléjicos raramente está indicada, porque los miembros ayudan al paciente a
mantener el equilibrio en la silla de ruedas y previene las escaras.
Ángel Gonzales (2012) dijo que habían unas complicaciones de la amputación
inmediatas como los son los hematoma los cuales pueden demorar la cicatrización de
la herida y servir de medio de cultivo para la infección bacteriana, o llegar a formar la

32
llamada miositis osificante, la necrosis, siendo de los bordes cutáneos por sutura a
tensión, que puede necesitar una re amputación en cuña, por dehiscencia de la herida
operatoria, otro de las consecuencias que puede conllevar una amputación es una
infección, la más común por vasculopatía periférica. Todo absceso debe drenarse y
deben practicar cultivos y antibiogramas. Puede requerirse una amputación más alta.
Además, psicológicamente se presenta la sensación del "miembro
fantasma", es la percepción del paciente de que la parte amputada está presente. Esta
sensación puede ser perturbadora, rara vez dolorosa. Suele desaparecer si se usa una
prótesis con regularidad. Otras veces requiere excéresis local de un neuroma o
revisión mioplástica del muñón; puede también requerir evaluación psicológica.
Biomecánica
La biomecánica es la ciencia que estudia la relación entre las estructuras
biológicas y el medio ambiente, basándose en los principios y las leyes de la física
mecánica abarcando desde el análisis teórico hasta la aplicación práctica de los
resultados obtenidos. (ob.cit)
La física se ocupa del estudio de las leyes básicas que gobiernan el
funcionamiento del medio en el que nos desenvolvemos y al que pertenecemos.
Motivo por el cual sus leyes nos permiten conocer las causas y consecuencias de
nuestra relación con todo aquello que nos rodea; como nos influye y como nos vemos
influidos en el medio. Sin embargo, a la naturaleza no le reporta ningún beneficio que
nosotros podamos llegar a conocer su funcionamiento; motivo por el cual no se
preocupa por facilitarnos la tarea. (ob.cit)
Debido a que las leyes y principios básicos de la física mecánica pueden ser
expresados en forma de ecuaciones matemáticas, sustituyendo una gran cantidad de
información por caracteres simbólicos que la representen; abordar su estudio implica
la necesidad de relacionarse con el lenguaje matemático. Sn embargo, si bien en un
principio esto puede aparecer como una dificultad; una vez que se dominan los

33
conceptos fundamentales de la física mecánica, su aplicación práctica constituye un
hecho simple que no debería presentar grandes dificultades. (ob.cit)
Como explica Kemp (2012), cada vez que nos encontramos en frente a un
movimiento determinado podemos hacernos varias preguntas al respecto, como lo
son el origen, la estructura que lo regula, el factor de inicio, fuerzas que actúan para
generarlo, fuerzas que actúan para detenerlo, de que modo actúan las fuerzas, quien
las controla, como se puede medir y evaluar, entre otras…
Brindando las herramientas para responder, entre muchas otras, a estas
preguntas; el estudio de la biomecánica otorga al kinesiólogo las bases científicas
para llevar a cabo el análisis de los movimientos con la finalidad de descubrir
posturas y movimientos viciosos producto de las secuelas generadas por las diferentes
patologías, evaluar funcionalmente al paciente con el fin de determinar la técnica
terapéutica adecuada de todas aquellas posibles de utilizar en cada caso en particular,
dar al paciente con secuelas transitorias o permanentes, las pautas para obtener un
rendimiento físico óptimo de acuerdo a sus posibilidades actuales.
Además de esto la biomecánica se encarga de evaluar funcionalmente a la
población en general con objeto de prevenir alteraciones futuras como resultado de
una utilización inadecuada de su estructura corporal, a su vez de evaluar la relación
individuo-esquema laboral con la finalidad de orientar al mismo hacia el máximo
aprovechamiento de su potencial laboral y la prevención de patologías derivadas de
una utilización ergonómicamente inadecuada de su estructura corporal. Se le permite
al paciente reinsertarse en su vida laboral con un rendimiento óptimo de acuerdo a su
capacidad física actúa, además se poseen los elementos de análisis necesarios para
poder evolucionar la progresión de un determinado tratamiento, comparándolo con
etapas anteriores.
El objetivo principal de la biomecánica es evaluar la relación entre el
movimiento ejecutado y el gasto de energía implicado en su realización; con la
finalidad de optimizarlo (máximo rendimiento posible) y para llevar a cabo, centra su

34
estudio en las fuerzas aplicadas, el diseño y las posibilidades de movimiento del
cuerpo en cuestión, tal y como lo explica Karanka (2013).
Para su estudio, la mecánica puede ser dividida en tres grandes ramas, la
cinemática que estudia el movimiento de los cuerpos en el espacio con un carácter
meramente descriptivo; sin detenerse a evaluar las causas productoras, ni el gasto
energético demandado, la cinética o dinámica estudia las causas productoras de los
movimientos y la estática que estudia el diseño de las estructuras y las respuestas de
las mismas ante las cargas aplicadas.
Desde el punto de vista biomecánico el cuerpo humano constituye un sistema,
el cual es un conjunto de elementos interrelacionadas con un fin común: generar la
movilidad necesaria para sobrevivir y dejar descendencia. Como todo sistema, puede
ser subdividido para su estudio en subsistemas, que en este caso los constituyen las
llamadas cadenas cinemáticas. Estas constituyen la unidad dinámico-funcional del
sistema; y están conformadas por sucesivas cadenas óseas y las unidades
biomecánicas que las unen.(ob.cit)
Se posee como seres humanos cadenas cinemáticas estructurales conformadas
por los miembros superiores, los miembros inferiores, y la cabeza junto al tronco, así
mismo tienen una gran cantidad de cadenas cinemáticas funcionales conformadas por
la asociación coordinada de las cadenas estructurales en un determinado gesto motor
(un ejemplo de esto es el movimiento realizada por la mano), realizado en
determinado gesto motor, realizando en determinado momento y bajo determinadas
circunstancias.
Dependiendo de sus posibilidades de movimiento se puede dividir a la cadena
cinemáticas en cadenas abiertas y cerradas, donde las abiertas vencen resistencia
mientras que las cerradas no vencen resistencias.
Así como la cadena cinemática constituye la unidad dinámico-funcional del
sistema, la unidad biomecánica (UBM), constituye la unidad anatomo-funcional del
35
mismo, siendo esta que representa al conjunto de estructuras que posibilita la
producción de un movimiento; y esta conformada por el conjunto de las estructuras
articulares y periarticulares.
Vale destacar, que la unidad funcional del movimiento humano la constituye
el gesto motor, siendo este el conjunto de movimientos realzados simultánea y/o
sucesivamente con una finalidad en común. Todo gesto motor está compuesto por dos
actividades totalmente interrelacionadas para llevar a cabo el objetivo final, el cual es
un punto de trabajo constituido por la cadena cinemática principalmente implicada en
la realización del mismo, y un automatismo de fondo constituido por el conjunto de
cadenas que posibilitan la obtención y el mantenimiento de la postura adecuada para
llevar a cabo la realización del gesto en cuestión y prevenir lesiones.
Sin embargo, en muchos casos una misma cadena puede pertenecer tanto al
automatismo de fondo como al punto de trabajo o pasar alternativamente de uno a
otro. El movimiento humano posee una doble finalidad, por un lado tiene un fin
manipulativo (mediante el cual tiende a modificar el medio para saciar una
necesidad), y otro lado posee un fin expresivo (mediante el cual tiende a relacionarse
con los demás). En todo movimiento están presentes ambos objetivos, y son los que
le dan su característica individual propia.
Si bien, el objetivo de la biomecánica es la búsqueda de la eficacia
(optimización del gesto); no debe dejarse de lado la expresividad de un movimiento.
Esto se debe tenerse siempre presente, ya que tras la búsqueda de la eficacia es muy
fácil caer en el mecanismo. Para ello debe tenerse en cuenta que la optimización debe
ser alcanzado de manera global (alcance del objetivo y expresividad) y no de manera
analítica.
Como complemento, la expresividad no debe ser interpretada como un gasto
superfluo de energía; ya que es esta la que le da a los diferentes gestos motores su
carácter individual. El objetivo es centrarse en obtener un individuo eficaz, y no un
robot. Físicamente hablando el movimiento es la variación objetiva de la posición de
36
un cuerpo dentro del espacio en que se desenvuelve en un determinado periodo de
tiempo. Por lo tanto para que el desplazamiento sea objetivo es necesaria la existencia
de un sistema de referencia que permita determinar el cambio de un lugar de un
cuerpo dentro del espacio.
Es decir, estos elementos de orientación pueden ser externos (sistemas de
coordenadas) o internos (medición de ángulos entre segmentos adyacentes de la
cadena). Un cuerpo puede encontrarse en dos situaciones denominadas estados o
sucesos físicos los cuales son reposo y movimiento, donde todo cuerpo siempre se
encontrara en uno de estos dos estados.
En este orden de ideas, la condición fundamental para la producción del
movimiento es la existencia de una fuerza, esta ultima provoca en la estructura donde
actúa dos efectos, el externo que se traduce en el cambio del estado físico en que el
cuerpo se encuentra y un efecto interno que representa la reorganización molecular de
la estructura corporal, creando un estado de tensión que se manifiesta con
deformación y aumento de temperatura.
Es necesario mencionar, que las fuerzas que interactúan en el sistema pueden
ser clasificadas como cargas que son generadas en el medio con el cual interactúan en
el sistema y también es clasificada como tensiones, generadas por la interacción de
las estructuras corporales. La utilización de leyes mecánicas y ecuaciones
matemáticas al analizar la relación entre una estructura y el medio suelen requerir en
la mayoría de los casos cálculos de una complejidad tal, que generalmente es
necesario remplazar la acción física real y las estructuras intervinientes con sustitutos
hipotéticos simplificados que hagan posible su análisis.
Aníbal (2012) realizo un resumen de la mejor manera de realizar un estudio
biomecánico de un gesto motor, donde se divide por niveles:
Un primer nivel de observación que consiste en la observación global del
gesto. Una observación detallada puede revelar una gran cantidad de información. Un

37
error frecuente e importante en este primer paso es centrarse en la observación del
punto motor dejando de lado el automatismo de fondo. Un correcto análisis debe
incluir tanto a las cadenas responsables del movimiento principal como a aquellas
destinadas al mantenimiento del equilibrio.
Además, de toda la secuencia de movimiento es necesario elegir aquel
segmento que interesa al análisis. Por tanto se debe elegir un instante donde ha de
comenzar el análisis y donde ha de terminar. La secuencia de movimiento asi elegida
debe ser dividida en tantos instantes intermedios como sea necesario, teniendo en
cuenta que cuanto más grande sea la cantidad de instantes analizados mayor será la
fiabilidad del análisis; ya que no se va a poder evaluar todo aquello que acontece en
los instantes no analizados.
El paso siguiente es la representación del sistema orgánico como un sistema
grafico (Dempster), constituido por los ejes mecánicos de los eslabones de las
cadenas y los centros de masa ya sean de cada cadena como de la totalidad del
sistema. Esto va a permitir transformar los hechos naturales en variables física y
matemáticamente analizables.
a) Para ello es necesario que la representación grafica sea una fiel
expresión del sistema en estudio por lo que debe respetarse la
relación tanto estructural (escala) como espacial de los segmentos
entre sí y con el medio que se desenvuelve.
b) Una simplificación del sistema grafico lo constituye el diagrama de
cuerpo libre que no es otra cosa que el sector que interesa evaluar,
prescindiendo momentáneamente del resto del sistema, como en el
caso de este proyecto se realiza en la mano.
Como todo lo que sucede en la naturaleza lo posee un marco temporoespacial
determinado, donde se va a necesitar establecer un sistema referencial que lo
represente por lo tanto es necesario incluir en el análisis un sistema de coordenadas
que represente los planos espaciales y de ser necesario otro que represente el
38
transcurso del tiempo. El origen del sistema de coordenadas va a ser aplicado
arbitrariamente según la necesidad del análisis.
a) Debe tenerse en cuenta que las referencias temporoespaciales
determinadas así como la escala a utilizar deben mantenerse
constantes durante todo el transcurso del análisis, de lo contrario
los resultados obtenidos no tendrán relación con el estudio.
Sin embargo se aplican sobre el grafico todas las variables siendo estas las
fuerzas internas y externas que se encuentran actuando simultáneamente en cada uno
de los instantes que se están evaluando, conformándose el llamado sistema
multifactorial. Al igual que cada uno de los pasos anteriores todo lo que ha de
graficarse debe ser fiel a la expresión de todo aquello que se esta aconteciendo; por lo
que deben respetarse las escalas utilizadas, así como los ángulos de acción y los
puntos de aplicación de las fuerzas en cuestión.
Con los elementos surgidos, del análisis llevado a cabo en los pasos anteriores
se lleva a cabo el segundo nivel de observación que dependerá del objetivo planteado,
pudiendo estar orientado:
a) Comprobar la existencia o no de una disfunción, determinar la
magnitud de una disfunción, determinar la fisiología de una
determinada estructura, determinar posibilidades y objetivos
terapéuticos, valorar la capacidad de prevención
b) Para poder iniciar este nivel es necesario el conocimiento previo de
la anatomía funcional y el diseño de las diferentes estructuras
intervinientes.
Por último se sacan las conclusiones que van a determinar la pauta a seguir,
terapéutica, entrenamiento, corrección mecánica o prevención.
Esto evidencia, que un análisis más complejo exige el aporte de elementos
tecnológicos de cuantificación; para así realizar todas las mediciones que fuesen

39
necesarias. Sin embargo, debido a la alta complejidad de los tejidos biológicos
generada principalmente por su heterogeneidad y el continuo cambio que van a
experimentar; toda evaluación biomecánica va a arrojar resultados aproxi9mados
cualquiera que fuese el método de evaluación utilizado. La reducción de ellos al
mínimo posible es lo que va a determinar la utilidad del análisis.
Prótesis
El largo y complejo camino hacia las prótesis robóticas comenzó alrededor del año
1500 perfeccionamientos desde los primeros ganchos de mano, y el resultado ha sido la
fijación y el moldeado altamente personalizados que se encuentran en los dispositivos
actuales.
El significado de la palabra prótesis proviene del griego: pros "por añadidura", lo que
nos describe que se añadirá o complementara el miembro faltante, mientras que según el
diccionario de la real academia nos dice que es el "procedimiento mediante el cual se repara
artificialmente la falta de un órgano o parte de él".
Para definir que es una prótesis robótica, nos basamos en los párrafos mencionados
anteriormente; la prótesis robótica es un dispositivo o elemento que está dotado de
inteligencia y diseñado anatómicamente para cumplir con funciones que le faltan al cuerpo
específicamente a partes locomotoras, la funcionalidad de la prótesis es conseguida por
inclusión de circuitos electrónicos. Siavichay (2014).
Actualmente, las prótesis robóticas están en desarrollo, arrojando
esporádicamente uno que otro avance trascendental, con el tiempo se volverán
herramientas fundamentales para la medicina; inclusive, podrían ser el as bajo la
manga para conseguir el empleo soñado.
A pesar de que el ser humano ha dado grandes saltos en el área de la salud,
todos son propensos a accidentes y víctimas de enfermedades. Así que, para
contrarrestar estos males físicos, la tecnología alzó la mano y se encuentra
desarrollando dispositivos electrónicos, robóticos y biónicos para auxiliar a las
personas del siglo XXI y años venideros. Los avances más prometedores en esta
40
delicada relación entre tecnología y salud se han dado en el área de las prótesis
robóticas.
Explicar además que estas herramientas son un elemento artificial dotado de
cierta autonomía e inteligencia, capaz de realizar una función de una parte faltante del
cuerpo. Dicha autonomía e inteligencia se logra al integrar sensores, procesadores,
actuadores, y complejos algoritmos de control. Hacer una prótesis robótica de calidad
requiere de un enorme esfuerzo, no solo en el campo de la mecatrónica si no también
en neurociencia, ingeniería eléctrica, ciencias cognitivas, procesamiento de señales,
diseño de baterías, nano-tecnología, y ciencias del comportamiento.
Para ejemplificar estos enormes avances de la ciencia existe una gran variedad
de dispositivos, que van desde manos robóticas hasta ojos biónicos, sin dejar de lado
la construcción de órganos internos electrónicos.
Glosario de Términos
Androide: Es el nombre que se le da a un robot antropomorfo, es decir, que
tiene forma o apariencia humana, y además imita algunos aspectos de su conducta de
manera autónoma.
Autómata: Máquina que contiene un mecanismo que le permite realizar
determinados movimientos.
Automatización: Es un sistema donde se trasfieren tareas de producción,
realizadas habitualmente por operadores humanos a un conjunto de elementos
tecnológicos.
Cibernética: Es la ciencia que se ocupa de los sistemas de control y de
comunicación en las personas y en las máquinas, estudiando y aprovechando todos
sus aspectos y mecanismos comunes.
Ciencia: Conjunto de conocimientos obtenidos mediante la observación y el
41
razonamiento, y de los que se deducen principios y leyes generales. En su sentido
más amplio se emplea para referirse al conocimiento en cualquier campo, pero que
suele aplicarse sobre todo a la organización del proceso experimental verificable.
Humanoide: Se refiere a cualquier ser cuya estructura corporal se asemeja a
la de un humano.
Inteligencia: Es la capacidad de entender, asimilar, elaborar información y
utilizarla adecuadamente. Es la capacidad de procesar información y está íntimamente
ligada a otras funciones mentales como la percepción, o capacidad de recibir dicha
información, y la memoria, o capacidad de almacenarla.
Inteligencia Artificial: Es la rama de la ciencia informática dedicada al
desarrollo de agentes racionales no vivos.
Máquina: Es un conjunto de piezas o elementos móviles y fijos, cuyo
funcionamiento posibilita aprovechar, dirigir, regular o transformar energía o realizar
un trabajo.
Robot: Es un agente artificial, mecánico o virtual. Es una máquina usada para
realizar un trabajo automáticamente y que es controlada por una computadora.
Robótica: Es una rama de la tecnología que se ocupa del diseño, manufactura
y aplicaciones de los robots.
Robótica Industrial: Es el campo de la ciencia que se encarga del estudio,
diseño y uso de robots para la ejecución de procesos industriales.
Sensores: Son aquellos que facilitan la información necesaria para que los
robots interpreten el mundo real.
Sistema: Es un conjunto de funciones, virtualmente referenciada sobre ejes,
bien sean estos reales o abstractos.
Tecnología: Conjunto de teorías y técnicas que permiten el aprovechamiento
42
práctico del conocimiento científico.
Telecirugía: Es aquella cirugía que se realiza a kilómetros de distancia, de un
país a otro o de un continente a otro, usando las vías de telecomunicación (satélites,
Internet) actuales. Para esta cirugía se utilizan cámaras de televisión,
telecomunicación permanente y se puede asociar con la robótica.
Telerobótica: Consiste en el manejo de robots a distancia, pero con la
salvedad de que el operador ve lo que el robot esta viendo incluso tiene el tacto de la
máquina.
Osteocinematica: Es la rama de la biomecánica que se encarga de estudiar el
movimiento de los huesos en el espacio, sin detenerse a evaluar las causas que los
provocan ni el gasto energético empleado para su producción.
Artrocinematica: Es la rama de la biomecánica que estudia las características
de los movimientos que se generan entre las superficies articulares como
consecuencia de los movimientos osteocinematicos.
Miocinetica: Es la relación que existe entre el medio ambiente con el ser
humano al realizar los movimientos necesarios para desplazarse y variar su
configuración espacial según los requerimientos impuestos por las diferentes
actividades.

43
CAPITULO III
MARCO METODOLÓGICO
Naturaleza de la Investigación
Se basa en un tipo de pensamiento deductivo, que va desde lo general a lo
particular. Desde un conocimiento extenso de una generalidad, para luego deducir el
comportamiento acotado de una particularidad individual. Se basa en un
modelamiento que define cómo se hace cada cosa, transformándolo en un enfoque
más rígido, enmarcado en una cierta forma de hacer las cosas, según explica Cauas
(2006).
Tipo de Investigación
Para la realización de este trabajo, es necesario el planteamiento de un
esquema de trabajo que ayudará a la consecución de los objetivos específicos
expuestos anteriormente.
La presente investigación se encuentra enmarcada en la modalidad de
proyecto factible; esto significa que está orientado a resolver una situación
problemática basado en una investigación o estudio diagnóstico. El proyecto factible
consiste en la elaboración de una propuesta de un modelo operativo viable o una
solución posible a un problema de tipo práctico para satisfacer necesidades de una
institución. (UPEL,1998). Igualmente este tipo de investigación involucra un
diagnóstico sistemático previo que implique un estudio de factibilidad funcional, y
corresponde, como comenta Orozco y Labrador (2002), a la producción de tecnología
blanda y constituye una alternativa de solución viable para una situación planteada,
esto es; propuestas, procesos y diseños instruccionales fundamentados en la
planificación consultiva.
44
Además, se efectúa para resolver un problema o satisfacer una necesidad en
una organización, empresa o institución determinada previamente. Reúne técnicas
orientadas a la identificación de un problema particular, la planificación, desarrollo e
instrumentación del estudio conducente a la evaluación del fenómeno caso estudio, la
situación y/o realización de servicios o programas de actividades concretas.” Método
de investigación Para conseguir los objetivos establecidos se tiene el siguiente
método o fases metodológicas:
Fase I: Recopilación y organización de los planteamientos metodológicos de
diferentes autores acerca del diseño de manos mecánicas, biomecánica, amputaciones
y prótesis. En esta fase se realizará una revisión de los diversos estudios realizados a
nivel internacional y nacional acerca del desarrollo y uso de manipuladores, así como
de diseños de manos robóticas utilizadas para tal fin.
Fase II: Determinación de las características del agarre de tipo cilíndrico. En
esta etapa se indagó acerca del tipo de agarre cilíndrico realizado por la mano humana
en cuanto a las disposiciones de las falanges de los dedos y las funciones de cada una
de ellas.
Fase III: Realización del Análisis Biomecánico. En esta fase se realizo un
video, el cual explica el movimiento de las falanges a la hora de realizar acciones
mecánicas en la mano.
Técnica de recolección de datos
La técnica utilizada para la recolección de datos en este proyecto se basa en la
investigación bibliográfica que se realizó para obtener un marco teórico que busca
darle solución al problema planteado y a través de la consulta de expertos en el área
se determinaron la amplitud de los movimientos de los dedos a diseñar y las
longitudes de los mismos.
Recursos
Recurso humano: Las personas de quienes se requiere asesorías y aportes para
la elaboración de este trabajo de investigación.

45
Recursos institucionales: La institución en la cual se apoyará esta
investigación a futuro, si se logra aplicar la inclusión del análisis biomecánico en el
diseño de las prótesis robóticas, así como empresas relacionadas.

46
CAPÍTULO IV
ANALÍSIS BIOMECÁNICO DE LA MANO
Siguiendo los pasos previamente explicados en las bases teóricas donde
Aníbal (2012) realizo un resumen de la mejor manera de realizar un estudio
biomecánico de un gesto motor, donde se divide por niveles:
El primer paso sería determinar el objeto o parte del cuerpo que se va a
estudiar, en este caso, se estudió la mano, sus componentes la interacción de estos a la
hora de realizar un movimiento, donde se analizó un primer nivel de observación que
consiste en la observación global del gesto. Una observación detallada puede revelar
una gran cantidad de información. Un error frecuente e importante en este primer
paso es centrarse en la observación del punto motor dejando de lado el automatismo
de fondo. Un correcto análisis debe incluir tanto a las cadenas responsables del
movimiento principal como a aquellas destinadas al mantenimiento del equilibrio.
Con respecto al primer paso, se dividió la mano según sus partes, esta posee 5
dedos, 27 huesos, musculuratura, red nerviosa y flujo sanguíneo, principalmente, las
los dedos con las falanges que vienen siendo los huesos junto con la musculatura son
las estructuras que realizan los movimiento, de toda la secuencia de movimiento es
necesario elegir aquel segmento que interesa al análisis. Por tanto se debe elegir un
instante donde ha de comenzar el análisis y donde ha de terminar. La secuencia de
movimiento así elegida debe ser dividida en tantos instantes intermedios como sea
necesario, teniendo en cuenta que cuanto más grande sea la cantidad de instantes
analizados mayor será la fiabilidad del análisis; ya que no se va a poder evaluar todo
aquello que acontece en los instantes no analizados.
El paso siguiente es la representación de la mano como un sistema grafico
(Dempster), constituido por los ejes mecánicos de los eslabones de las cadenas y los
centros de masa ya sean de cada cadena como de la totalidad del sistema. En la

47
siguiente imagen se ve como gracias al software de simulación biomecánica
KINOVEA, se pudo dividir la mano y sus componentes con respecto a la realización
de un movimiento. Donde el color negro y verde representa las terminaciones
nerviosas del antebrazo y la mano, y los colores amarillos, morado y rojo, representan
las falanges de los dedos.
Esta representación fue una fiel expresión del sistema en estudio por lo que
debe respetarse la relación tanto estructural (escala) como espacial de los segmentos
entre sí y con el medio que se desenvuelve. También se analizó los siguientes
movimientos
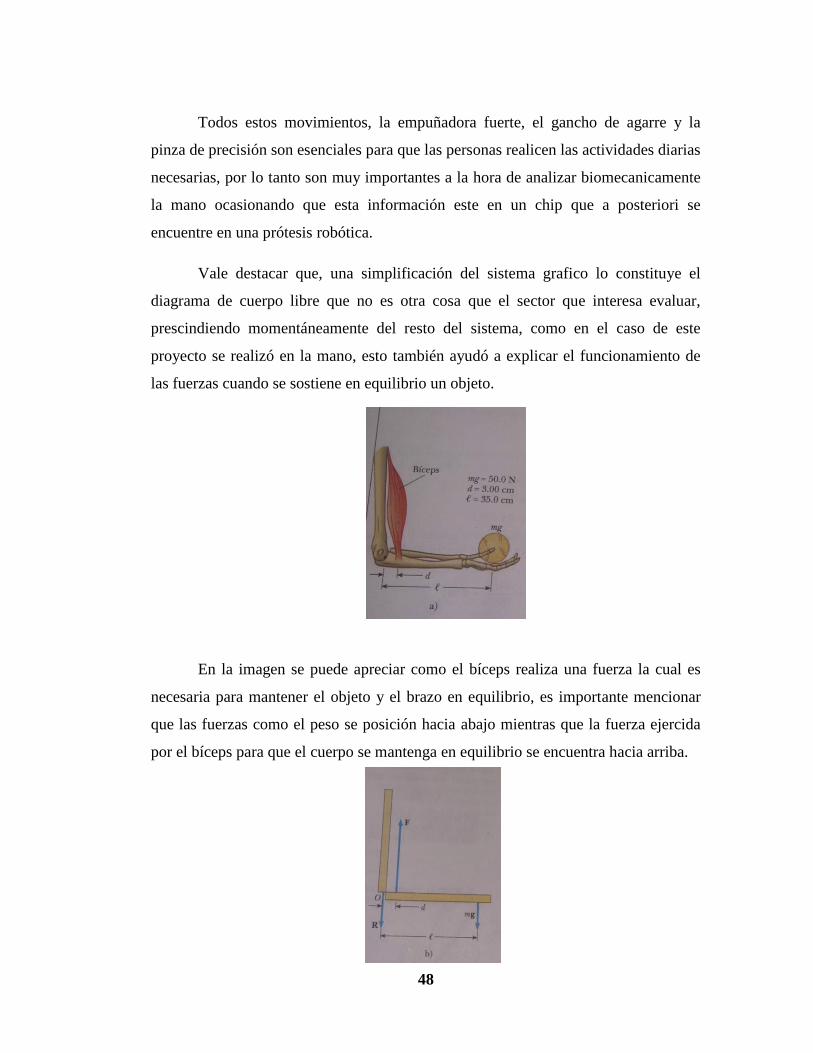
48
Todos estos movimientos, la empuñadora fuerte, el gancho de agarre y la
pinza de precisión son esenciales para que las personas realicen las actividades diarias
necesarias, por lo tanto son muy importantes a la hora de analizar biomecanicamente
la mano ocasionando que esta información este en un chip que a posteriori se
encuentre en una prótesis robótica.
Vale destacar que, una simplificación del sistema grafico lo constituye el
diagrama de cuerpo libre que no es otra cosa que el sector que interesa evaluar,
prescindiendo momentáneamente del resto del sistema, como en el caso de este
proyecto se realizó en la mano, esto también ayudó a explicar el funcionamiento de
las fuerzas cuando se sostiene en equilibrio un objeto.
En la imagen se puede apreciar como el bíceps realiza una fuerza la cual es
necesaria para mantener el objeto y el brazo en equilibrio, es importante mencionar
que las fuerzas como el peso se posición hacia abajo mientras que la fuerza ejercida
por el bíceps para que el cuerpo se mantenga en equilibrio se encuentra hacia arriba.
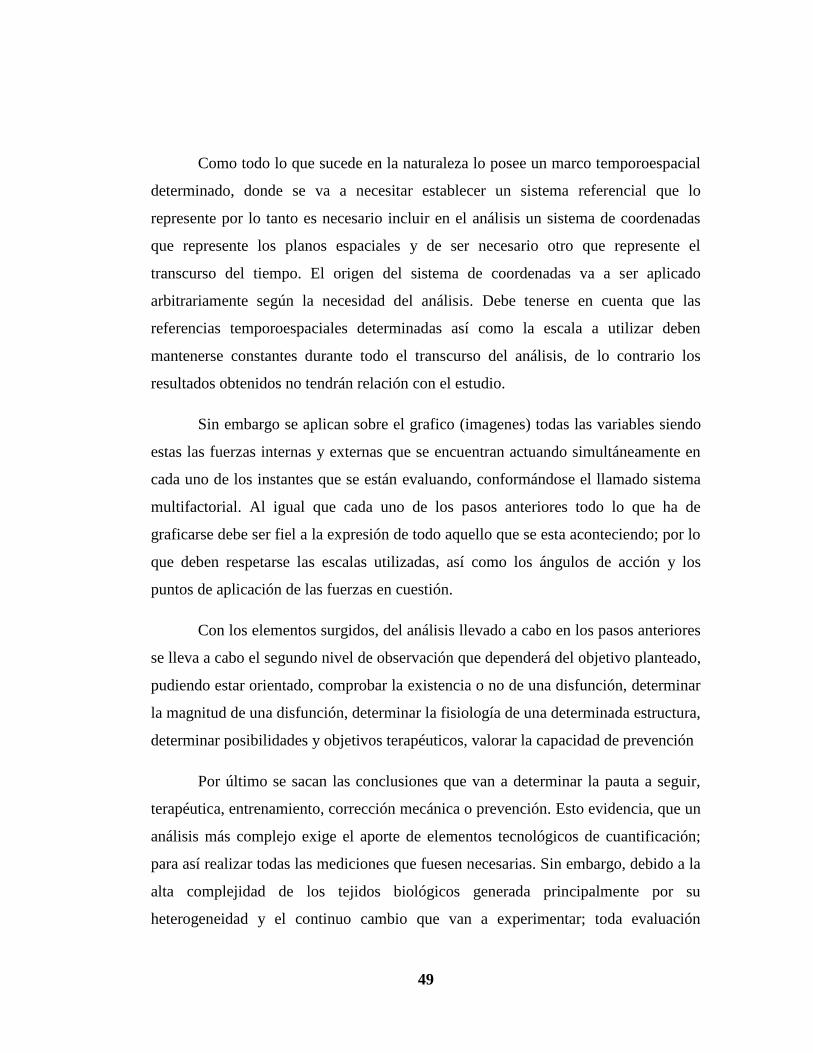
49
Como todo lo que sucede en la naturaleza lo posee un marco temporoespacial
determinado, donde se va a necesitar establecer un sistema referencial que lo
represente por lo tanto es necesario incluir en el análisis un sistema de coordenadas
que represente los planos espaciales y de ser necesario otro que represente el
transcurso del tiempo. El origen del sistema de coordenadas va a ser aplicado
arbitrariamente según la necesidad del análisis. Debe tenerse en cuenta que las
referencias temporoespaciales determinadas así como la escala a utilizar deben
mantenerse constantes durante todo el transcurso del análisis, de lo contrario los
resultados obtenidos no tendrán relación con el estudio.
Sin embargo se aplican sobre el grafico (imagenes) todas las variables siendo
estas las fuerzas internas y externas que se encuentran actuando simultáneamente en
cada uno de los instantes que se están evaluando, conformándose el llamado sistema
multifactorial. Al igual que cada uno de los pasos anteriores todo lo que ha de
graficarse debe ser fiel a la expresión de todo aquello que se esta aconteciendo; por lo
que deben respetarse las escalas utilizadas, así como los ángulos de acción y los
puntos de aplicación de las fuerzas en cuestión.
Con los elementos surgidos, del análisis llevado a cabo en los pasos anteriores
se lleva a cabo el segundo nivel de observación que dependerá del objetivo planteado,
pudiendo estar orientado, comprobar la existencia o no de una disfunción, determinar
la magnitud de una disfunción, determinar la fisiología de una determinada estructura,
determinar posibilidades y objetivos terapéuticos, valorar la capacidad de prevención
Por último se sacan las conclusiones que van a determinar la pauta a seguir,
terapéutica, entrenamiento, corrección mecánica o prevención. Esto evidencia, que un
análisis más complejo exige el aporte de elementos tecnológicos de cuantificación;
para así realizar todas las mediciones que fuesen necesarias. Sin embargo, debido a la
alta complejidad de los tejidos biológicos generada principalmente por su
heterogeneidad y el continuo cambio que van a experimentar; toda evaluación

50
biomecánica va a arrojar resultados aproximados cualquiera que fuese el método de
evaluación utilizado. La reducción de ellos al mínimo posible es lo que va a
determinar la utilidad del análisis.
Por lo tanto se concluye así el análisis biomecánico, es redundante mencionar
que al estar amputada la extremidad esta necesitará una corrección mecánica la cual
se propone que tenga un chip incorporado con toda la información de movimientos y
agarres de la persona para que esta sea personalizada y no cause molestias al usarla.

51
CAPÍTULO V
CONCLUSIONES Y RECOMENDACIONES
Conclusiones
En cuanto a las conclusiones, primeramente se cumplieron los objetivos
uno y dos, los cuales hacen referencia al análisis Biomecánico de la mano y a la
compresión del funcionamiento de la estructura y función de la mano, los cuales se
cumplieron en el soporte teórico de esta investigación. Se puede concluir que:
El análisis biomecánico de la mano es importante la para la posible
incorporación a una mano robótica mediante artículos tecnológicos como un chip.
Además, se caracterizo el funcionamiento estructural y anatómico de la mano
desde estructura ósea, flujo sanguíneo, musculatura y red nervios hasta la utilidad
biomecánica, movimientos realizados y relación de estos con la vida diaria de las
personas.
Para finalizar, se realizo el estudio biomecánico con ayuda del video, donde se
ven claramente los movimientos musculares y de las falanges.
Recomendaciones
La animación del proceso de agarre de la mano se puede realizar a futuro a
través del programa Roboworks con el cual se percibe en detalle los movimientos
realizados por cada uno de los dedos para realizar el agarre.
Se sugiere un análisis resistivo para diversas configuraciones de agarre de la
mano mecánica, de esta manera se obtiene una visión más amplia de la capacidad de
la mano para soportar diversas cargas en diferentes posiciones de agarre. Para
posterior investigación se propone el diseño del sistema de control de la mano que
permita posicionarlo en base a señales de entrada establecidas por una persona.
Se recomienda trabajar en base a interfaces haptics o percepción del sentido
del tacto las cuales permitirían a la mano tener una retroalimentación del ambiente

52
cuando se produce el proceso de agarre de cualquier pieza y de esta manera
retroalimentar un sistema de control
Se recomienda la creación de un laboratorio con la plataforma tecnológica
necesaria para el desarrollo de sistemas de control de prótesis robóticas.
53
CAPÍTULO VI
LA PROPUESTA
Dada la importancia de las manos, sus usos día a día en la vida de todo ser
humano, desde que la persona es un infante hasta su crecimiento llegando a la
adultez, donde dicha extremidad cumple un papel más importante debido a que se
entra al campo laboral requiriendo realizar acciones que involucren directa e
indirectamente las manos.
Tomando en cuenta, también a aquellas personas que sufren amputaciones
bien sea por accidentes laborales o sociales donde el miembro se encuentra en un
estado irremediable.
Habiendo estudiado la biomecánica, sus subdivisiones, componentes y fases
de las mismas, además de que se realizó un estudio biomecánico de la mano completa
desde diagramación de los movimientos de las estructuras anatómicas de la mano
hasta representación grafica de fuerzas y movimientos.
Se propone, que esta información obtenida en el análisis biomecánico sus
movimientos típicos como el de agarre tipo pinza preciso y el agarre se involucre en
las construcciones de prótesis robóticas las cuales ayudarían a ser más personalizadas
causando menos molestias en el muñón de las personas luego de colocarle las prótesis
genéricas.
Resaltando también, que se lograría un avance tecnológico mayor al colocar
este chip dentro de la prótesis y a su vez esta sea de bajo costo, esto se lograría si la
prótesis es hecha de un material liviano como lo es el plástico y el polietileno, para la
impresión de las mismas se recomienda utilizar impresoras 3D, debido a que estas
captan el diseño desde un computador logrando así precisión y asertividad.
54
REFERENCIAS Y BIBLIOGRAFÍA
ANA DO LONG BEACH VETERANS AFFAIRS AND MEDICAL CENTER
CALIFORNIA (2012). Prótesis Robóticas [Articulo en línea] Disponible:
http://avances-tecnologicos.euroresidentes.com/2012/09/protesis-controladas-por-la-
mente.html [Consulta 2014, 13 de Noviembre 10:02pm]
ANGEL GONZALEZ (2012). Complicaciones en las Amputaciones [Articulo en
línea] http://vitae.ucv.ve/pdfs/VITAE_5056.pdf [Consulta 2015, 17 de Febrero
10:25pm]
ANGEL GONZALEZ MORENO (2012). Neoplasias [Articulo en
línea]https://scholar.google.co.ve/scholar?rlz=1C1CHXH_esVE522VE522&es_sm=1
22&um=1&ie=UTF-8&lr&cites=8203264424023352084 [Consulta 2015, 15 de
Enero 8:26am]
ANGEL SANGUINATO (2014). Prótesis Robóticas [Articulo en línea] Disponible:
http://www.correodelorinoco.gob.ve/foto-dia/vea-al-venezolano-que-se-construyo-
un-brazo-electronico-fotos/ [Consulta 2014, 10 de Diciembre 10:30am]
ANIBAL REPPETO (2012). Pasos en la Biomecánica [Articulo en línea]
http://weblog.maimonides.edu/deportes/archives/basesbiomecanicas.pdf [Consulta
2015, 25 de Marzo 4:02pm]
CAUAS (2006). Naturaleza de la Investigación [Articulo en línea]
https://www.google.co.ve/search?q=CAUAS+(2006).+Naturaleza+de+la+Investigaci
%C3%B3n&rlz=1C1CHXH_esVE522VE522&oq=CAUAS+(2006).+Naturaleza+de
+la+Investigaci%C3%B3n&aqs=chrome..69i57.191j0j9&sourceid=chrome&es_sm=
122&ie=UTF-8 [Consulta 2015, 29 de Abril 6:07am]
CENTRO CIENTIFICO PIAGGIO DE LA UNIVERISDAD DE PISA DEL
INSTITUTO ITALIANO DE TECNOLOGIA DE GENOVA (2010). Mano
Robótica [Articulo en línea] Disponible: http://www.invdes.com.mx/tecnologia/2229-
crean-protesis-robotica-con-movimientos-identicos-a-la-mano [Consulta 2014, 12 de
Noviembre 3:49pm]
CUETO (2010). Función Muscular de la Mano [Articulo en línea]
http://aprendeenlinea.udea.edu.co/lms/ova/mod/resource/view.php?inpopup=true&id
=618 [Consulta 2014, 10 de Diciembre 10:45am]
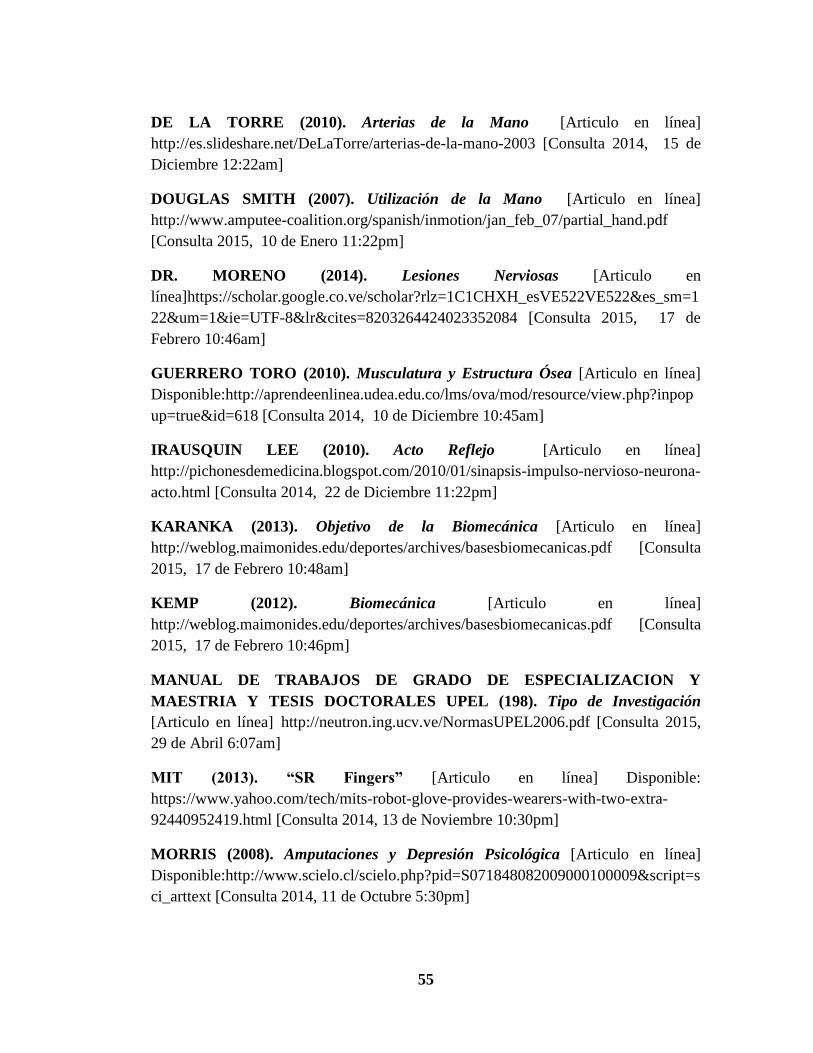
55
DE LA TORRE (2010). Arterias de la Mano [Articulo en línea]
http://es.slideshare.net/DeLaTorre/arterias-de-la-mano-2003 [Consulta 2014, 15 de
Diciembre 12:22am]
DOUGLAS SMITH (2007). Utilización de la Mano [Articulo en línea]
http://www.amputee-coalition.org/spanish/inmotion/jan_feb_07/partial_hand.pdf
[Consulta 2015, 10 de Enero 11:22pm]
DR. MORENO (2014). Lesiones Nerviosas [Articulo en
línea]https://scholar.google.co.ve/scholar?rlz=1C1CHXH_esVE522VE522&es_sm=1
22&um=1&ie=UTF-8&lr&cites=8203264424023352084 [Consulta 2015, 17 de
Febrero 10:46am]
GUERRERO TORO (2010). Musculatura y Estructura Ósea [Articulo en línea]
Disponible:http://aprendeenlinea.udea.edu.co/lms/ova/mod/resource/view.php?inpop
up=true&id=618 [Consulta 2014, 10 de Diciembre 10:45am]
IRAUSQUIN LEE (2010). Acto Reflejo [Articulo en línea]
http://pichonesdemedicina.blogspot.com/2010/01/sinapsis-impulso-nervioso-neurona-
acto.html [Consulta 2014, 22 de Diciembre 11:22pm]
KARANKA (2013). Objetivo de la Biomecánica [Articulo en línea]
http://weblog.maimonides.edu/deportes/archives/basesbiomecanicas.pdf [Consulta
2015, 17 de Febrero 10:48am]
KEMP (2012). Biomecánica [Articulo en línea]
http://weblog.maimonides.edu/deportes/archives/basesbiomecanicas.pdf [Consulta
2015, 17 de Febrero 10:46pm]
MANUAL DE TRABAJOS DE GRADO DE ESPECIALIZACION Y
MAESTRIA Y TESIS DOCTORALES UPEL (198). Tipo de Investigación
[Articulo en línea] http://neutron.ing.ucv.ve/NormasUPEL2006.pdf [Consulta 2015,
29 de Abril 6:07am]
MIT (2013). “SR Fingers” [Articulo en línea] Disponible:
https://www.yahoo.com/tech/mits-robot-glove-provides-wearers-with-two-extra-
92440952419.html [Consulta 2014, 13 de Noviembre 10:30pm]
MORRIS (2008). Amputaciones y Depresión Psicológica [Articulo en línea]
Disponible:http://www.scielo.cl/scielo.php?pid=S071848082009000100009&script=s
ci_arttext [Consulta 2014, 11 de Octubre 5:30pm]

56
NAVEDA (2008). Musculatura de la Mano [Articulo en línea]
http://unefaanatomia.blogspot.com/2008/06/msculos-del-miembro-superior.html
[Consulta 2014, 10 de Diciembre 10:45am]
OSCAR FERNÁNDEZ (2011). Amputaciones y las Enfermedades [Articulo en
línea]https://scholar.google.co.ve/scholar?rlz=1C1CHXH_esVE522VE522&es_sm=1
22&um=1&ie=UTF-8&lr&cites=8203264424023352084 [Consulta 2015, 20 de
Enero 8:26am]
OSORIO (2008). Amputaciones [Articulo en línea] Disponible:
http://bvs.sld.cu/revistas/ang/vol14_2_13/ang04213.htm [Consulta 2014, 11 de
Octubre 4:32pm]
PALASTARAGA, FIELD, ROGER (2007). Movimiento Humano, Estructuras y
Funcionamiento [Articulo en
línea]https://books.google.co.ve/books/about/ANATOM%C3%8DA_Y_MOVIMIEN
TO_HUMANO_ESTRUCTURA.html?id=a5iSQyjVBPkC [Consulta 2014, 10 de
Diciembre 10:45am]
PEREZ SANCHEZ (2013). Estructura Ósea de la Mano [Articulo en línea]
http://carloslcrv.blogspot.com/2011/02/estructura-osea-de-la-mano.html [Consulta
2014, 10 de Diciembre 11:22]
PROMIS (2012). Diabetes en las Amputaciones [Articulo en línea]
https://scholar.google.co.ve/scholar?rlz=1C1CHXH_esVE522VE522&es_sm=122&u
m=1&ie=UTF-8&lr&cites=8203264424023352084 [Consulta 2015, 14 de Enero
8:26am]
REPETTO (2005). Relación unidades Arquitectónicas con el Complejo
Biomecánico [Articulo en línea] Disponible:
http://weblog.maimonides.edu/deportes/archives/basesbiomecanicas.pdf [Consulta
2014, 10 de Octubre 7:10pm]
ROCHA (2012). Manos como Extremidad mas Distal [Articulo en línea]
Disponible: http://www.bdigital.unal.edu.co/32030/1/31373-113677-1-PB.pdf /
[Consulta 2014, 10 de Diciembre 10:30am]
ROCHA (2012). Morfologogia Anatómica de la Mano [Articulo en línea]
Disponible: http://www.bdigital.unal.edu.co/32030/1/31373-113677-1-PB.pdf
[Consulta 2014, 10 de Octubre 9:20pm]

57
ROCHA (2012). Red Nerviosa [Articulo en línea]
http://www.bdigital.unal.edu.co/32030/1/31373-113677-1-PB.pdf [Consulta 2014,
18 de Diciembre 1:30pm]
RODRIGUEZ (2011). Flujo Sanguíneo [Articulo en línea]
http://ocw.unican.es/ciencias-de-la-salud/fisiologia-humana-2011-g367/material-de-
clase/bloque-tematico-1.-fisiologia-del-aparato/tema-5.-hemodinamica-o-fisica-del-
flujo-sanguineo/tema-5.-hemodinamica-o-fisica-del-flujo-sanguineo [Consulta 2014,
10 de Diciembre 11:22]
SIACKCHAY (2014). Prótesis [Articulo en línea]
https://www.google.co.ve/search?q=protesis&rlz=1C1CHXH_esVE522VE522&oq=
protesis&aqs=chrome..69i57j69i61j69i65l3j69i59.1119j0j4&sourceid=chrome&es_s
m=122&ie=UTF-8 [Consulta 2015, 27 de Marzo 6:03pm]
STEPHEN FINK (2011). Psicología y las Amputaciones [Articulo en línea]
http://www.oandp.com/news/jmcorner/library/protesica/LLP-02.pdf [Consulta 2015,
12 de Enero 8:26am]
TESTUT (1990). Aductor del Meñique [Articulo en línea]
https://es.wikipedia.org/wiki/M%C3%BAsculo_abductor_del_me%C3%B1ique
[Consulta 2014, 10 de Diciembre 10:45am]
UNIVERSIDAD DE GRANADA (2012). Células Madres y su Poder Regenerativo
[Articulo en línea] Disponible:
http://tratamientocelular.com/index.php?option=com_content&view=article&id=474:
una-investigacion-con-celulas-madre-pretende-evitar-la-amputacion-de-miembros-
en-pacientes-diabeticos-con-isquemia&catid=9&Itemid=139 [Consulta 2014, 12 de
Noviembre 8:49pm]
UNIVERSIDAD SIMÓN BOLÍVAR (2012). Estudios Biomecanicos y su relación
con las Prótesis Robóticas [Articulo en línea] Disponible:
http://elimpulso.com/articulo/la-biomecanica-aporta-una-mejor-calidad-de-vida-para-
los-amputadosl [Consulta 2014, 10 de Diciembre 10:02am]
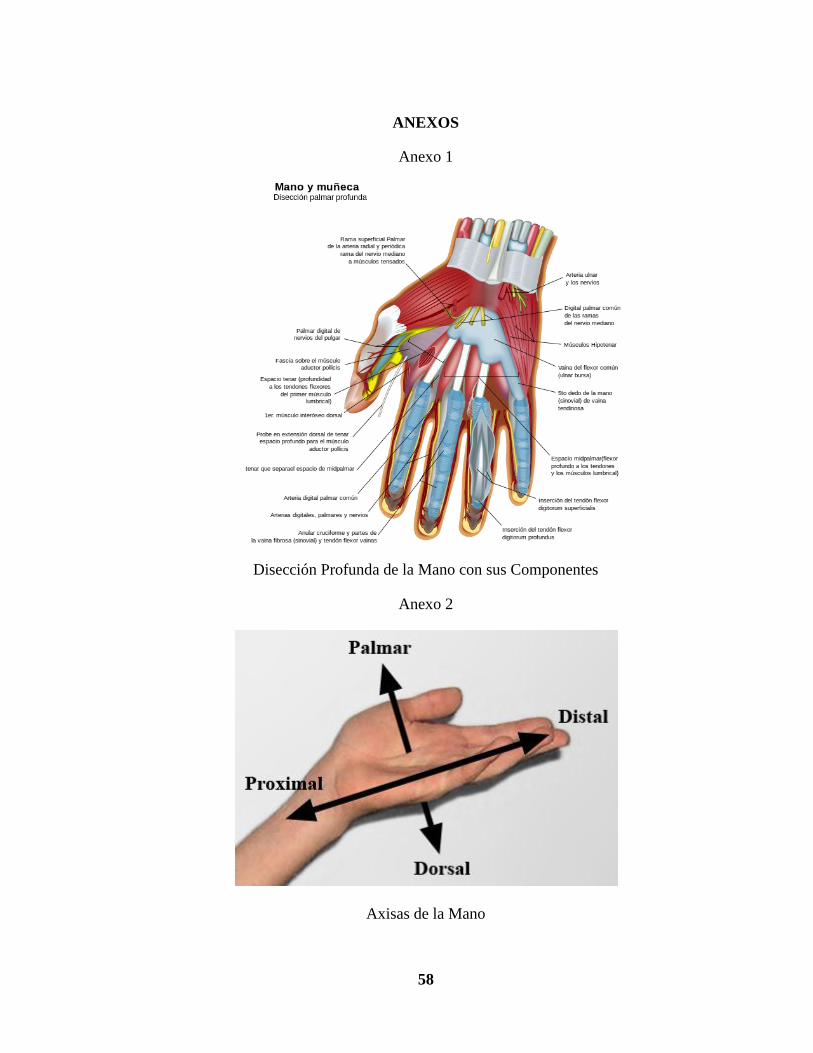
58
ANEXOS
Anexo 1
Disección Profunda de la Mano con sus Componentes
Anexo 2
Axisas de la Mano
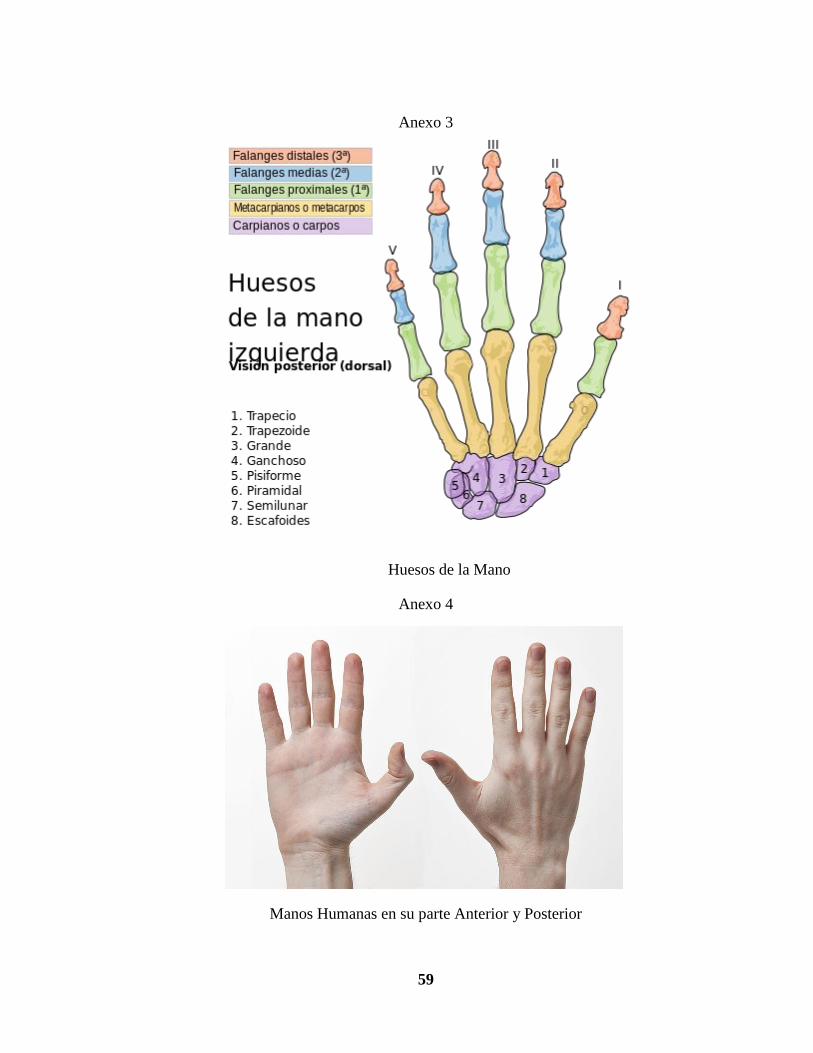
59
Anexo 3
Huesos de la Mano
Anexo 4
Manos Humanas en su parte Anterior y Posterior

60
Anexo 5
Prótesis Robótica realizada por una Impresora 3D
Anexo 6
Prótesis Robótica sosteniendo un objeto manteniendo el Equilibrio