Embed Size (px)
Citation preview
e v e r y t h i n g n e w e m e r g e s n o w
TRIOL AK06ACCIONAMIENTOS DE VELOCIDAD VARIABLE
PARA APLICACIONES DE BES
V e r s i o n d e s o f t w a r ed e c o n t r o l a d o r U M K A - 0 3 e s 3 1 . 9 6
A T . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
2А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
Estimado cliente!
Gracias por elegir los equipos de Corporación Triol. Estamos seguros de que nuestro accionamiento de velocidad variable (AVV) para bombas eléctricas sumergibles (BES) usadas en la producción de petróleo crudo equipado con motores serie MES y MIP y un convertidor de frecuencia serie Triol AK06 (adelante se denomina el Accionamiento de velocidad variable) será efectivo y les concederá beneficios.
Además, quisiéramos recordar que el AVV es un complejo eléctrico, y la operación inexperta y no calificada puede causar ruptura dela unidad y el equipo sumergible. Le recomendamos que estudie detenidamente el Manual de operación antes de iniciar el AVV y preste atención alas precauciones de seguridad (Sección 2.1.1).
El conjunto de documentos suministrados con el AVV incluye:- Manual de operación;- Ficha de datos.El presente Manual de operación describe los datos técnicos, el diseño, servicio, normas de funciona-
miento y reglas de mantenimiento del AVV producido por Corporación Triol.Las abreviaturas usadas en el texto:RA – Reenganche automático;SCA – Sistema de control automatizado;DBC – Disparo por baja carga;PCS – Protección contra sobrecargas;CAVV – Controlador de accionamiento de velocidad variable;PCS – Protección contra sobrecorriente;ST – Sarta de tubería;MES – Motor eléctrico sumergible; MIP – Motor de imán permanente;AVV – Accionamiento de Velocidad Variable;ST (EM) – Sistema de telemedida (Equipo de medida);TATA – Transformador de aceite de tensión alterna;UBES – Unidad de bomba eléctrica sumergible;BES – Bomba eléctrica sumergible;QF1, QF2 – Disyuntor de circuitos de potencia;QF3 – Disyuntor de circuitos de control;QF4 – Disyuntor de la fuente de alimentación en espera; QF5 – Disyuntor para ventiladores;QF6 – Disyuntor del sistema de telemedida;PFA – Poder Filtro Activo.
3T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de OperacionesContenido
Contenido
1 Descripción y funcionamiento ........................................................................................................................................41.1. Funciones del Accionamiento de velocidad variable .......................................................................................4
1.1.1. Abreviaturas del Accionamiento de Velocidad Variable .....................................................................51.2. Especificaciones del AVV ........................................................................................................................................61.3. Configuraciones del AVV ........................................................................................................................................7
1.3.1. Estructura del AVV ........................................................................................................................................71.3.2. Componentes del AVV .............................................................................................................................. 101.3.3. Construcción del módulo FAD .................................................................................................................11
1.4. Diseño y operación del AVV ................................................................................................................................ 131.4.1. Capacidades del AVV ................................................................................................................................ 131.4.2. Modos de operación del AVV ................................................................................................................. 15
2. El uso a destino ............................................................................................................................................................... 182.1. Preparación para el uso......................................................................................................................................... 18
2.1.1. Precauciones de seguridad ...................................................................................................................... 182.1.2. Preparación de la UBES ............................................................................................................................ 192.1.3. Inicio del AVV ............................................................................................................................................. 242.1.4. Configuración de AVV para el modo manual .................................................................................... 242.1.5. Configuración de AVV para el modo automático ............................................................................. 262.1.6. Configuración del AVV para el algoritmo “VU MIP” ........................................................................ 27
2.2. Operación del Accionamiento de Velocidad Variable ................................................................................. 292.2.1. Ajuste de protección ................................................................................................................................ 292.2.2. Ajuste de características al modo y eliminación de complicaciones ............................................31
2.2.2.1. Inicio y conclusión al modo, a condición de un conjunto completo de telemetría sumergible ............................................................................................................................................... 312.2.2.2. Eliminación de complicaciones ............................................................................................ 32
2.2.3. Apago del AVV .......................................................................................................................................... 332.2.4. Solución de problemas para AVV Triol AK06 .................................................................................... 33
2.2.4.1. Comprobación de operatividad en vacío .......................................................................... 332.2.4.2. Solución de problemas durante el arranque y algoritmos de solución de problemas con MEI .................................................................................................................................................... 332.3.3. Comprobación del AVV con circuito de salida en corto; comprobación de módulos de IGBT .......................................................................................................................................................... 422.2.3.4. Fallos y condiciones de alarma ............................................................................................ 42
2.3. Interfaz de operador. Descripción de UMKA-03 y procedimientos de operación ............................... 432.3.1. Información general ................................................................................................................................. 432.3.2. Descripción de la interfaz de operador .............................................................................................. 45
2.3.2.1. Acceso al menú ........................................................................................................................ 462.3.2.2. Modo de visualización de estado ....................................................................................... 47
3. Transportación .............................................................................................................................................................. 48
4. Almacenamiento ........................................................................................................................................................... 49
4А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
1 Descripción y funcionamiento
1.1. Funciones del Accionamiento de velocidad variable
Accionamiento de velocidad variable (AVV) está diseñado para el control y la protección de bombas sum-ergibles eléctricas parala producción de petroleo equipadas con MES según TC 3381-002-4014834-2010, MIP o su equivalente con potencia nominal de 50 hasta 900 kW.
Valores nominales de los factores climáticos:• temperatura ambiente de -20 a +60 °C (desde -40 hasta +60 °C bajo pedido);• medio ambiente no explosivo, libre de gases corrosivoso vapores en concentraciones que pueden cau-
sar destrucción de metalesy aislamiento; no está saturado conpolvo conductor de corrienteo vapores de agua.
Grado de protección del armariode AVV es NEMA4 según NEMA 2.502.008.El Accionamiento de Velocidades Vertical; desviación permitida en cualquier direcciónes 5°.Valores de factores externos:
• frecuenciade vibración sinusoidal de 0,5 a 35 Hz;• amplitud máximade aceleración de vibración sinusoidal 5 m*s2 (0,5 g);• aceleración máxima de choqueen caso de múltiple schoques 30 m*s2 (3 g);• duración dela aceleraciónde choqueen caso de múltiple schoques de 2 a 20 ms.
El diseñode AVV permite sustituir todos los módulos básicos,unidades funcionalesy circuitosen el campo.Todos los acoplamientosy conexiones entrelas unidades y placas de circuitosson desmontables; no hay necesi-dad de soldar para sustituir cualquier unidad defectuosa dentro del AVV.
El AVV debe ser operadopor unpersonal especialmente instruido y autorizado que tengala calificaciónde seguridad eléctricade al menos 3° nivel.
5T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
1.1.1. Abreviaturas del Accionamiento de Velocidad Variable
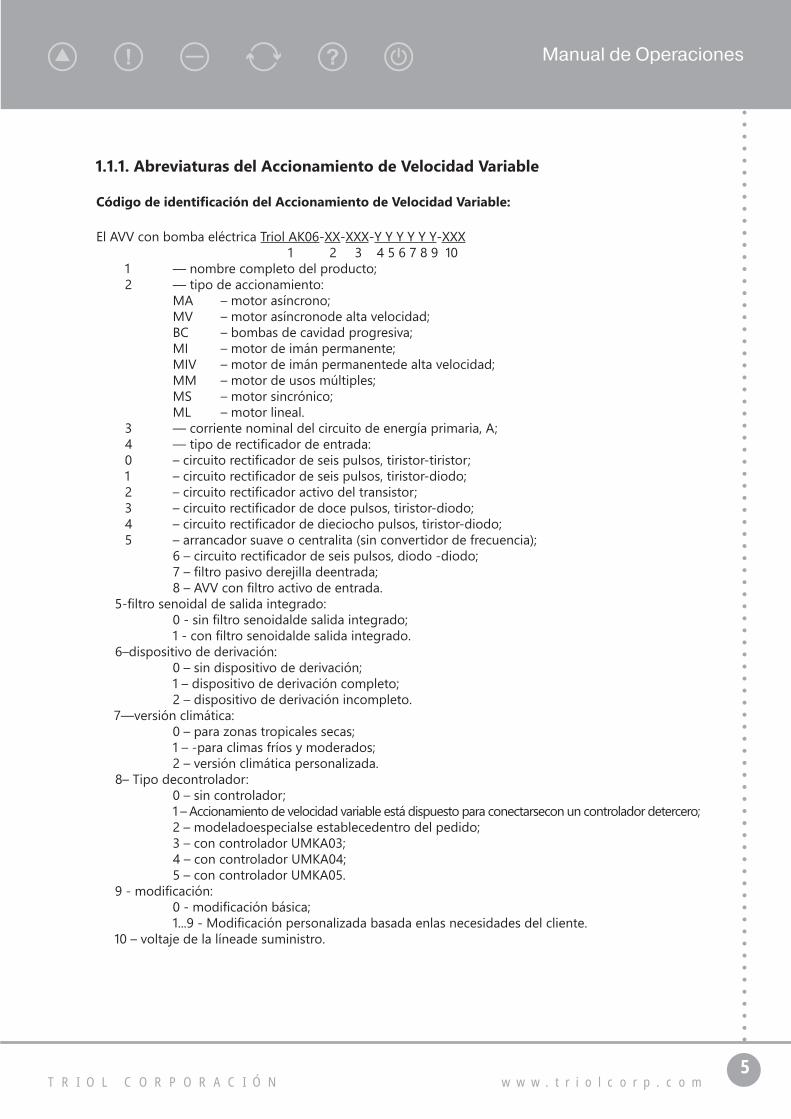
Código de identificación del Accionamiento de Velocidad Variable:
El AVV con bomba eléctrica Triol АК06-XX-ХXX-Y Y Y Y Y Y-ХХХ1 2 3 4 5 6 7 8 9 10
1 — nombre completo del producto; 2 — tipo de accionamiento:
MA – motor asíncrono; MV – motor asíncronode alta velocidad; BC – bombas de cavidad progresiva; MI – motor de imán permanente; MIV – motor de imán permanentede alta velocidad; MM – motor de usos múltiples; MS – motor sincrónico; ML – motor lineal.
3 — corriente nominal del circuito de energía primaria, A; 4 — tipo de rectificador de entrada: 0 – circuito rectificador de seis pulsos, tiristor-tiristor; 1 – circuito rectificador de seis pulsos, tiristor-diodo; 2 – circuito rectificador activo del transistor; 3 – circuito rectificador de doce pulsos, tiristor-diodo; 4 – circuito rectificador de dieciocho pulsos, tiristor-diodo; 5 – arrancador suave o centralita (sin convertidor de frecuencia); 6 – circuito rectificador de seis pulsos, diodo -diodo; 7 – filtro pasivo derejilla deentrada; 8 – AVV con filtro activo de entrada. 5-filtro senoidal de salida integrado: 0 - sin filtro senoidalde salida integrado; 1 - con filtro senoidalde salida integrado.6–dispositivo de derivación: 0 – sin dispositivo de derivación; 1 – dispositivo de derivación completo; 2 – dispositivo de derivación incompleto.7—versión climática: 0 – para zonas tropicales secas; 1 – -para climas fríos y moderados; 2 – versión climática personalizada.8– Tipo decontrolador: 0 – sin controlador;
1 – Accionamiento de velocidad variable está dispuesto para conectarsecon un controlador detercero; 2 – modeladoespecialse establecedentro del pedido; 3 – con controlador UMKA03; 4 – con controlador UMKA04; 5 – con controlador UMKA05.9 - modificación: 0 - modificación básica; 1...9 - Modificación personalizada basada enlas necesidades del cliente.10 – voltaje de la líneade suministro.
6А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
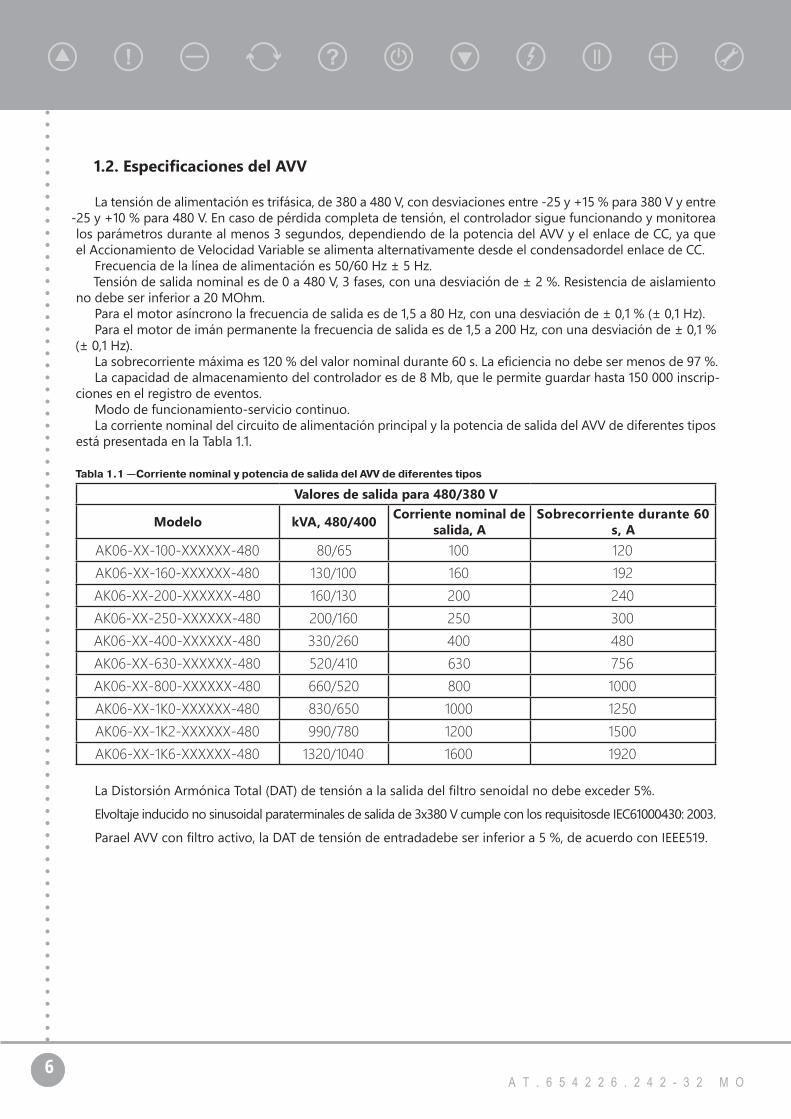
1.2. Especificaciones del AVV
La tensión de alimentación es trifásica, de 380 a 480 V, con desviaciones entre -25 y +15 % para 380 V y entre -25 y +10 % para 480 V. En caso de pérdida completa de tensión, el controlador sigue funcionando y monitorea los parámetros durante al menos 3 segundos, dependiendo de la potencia del AVV y el enlace de CC, ya que el Accionamiento de Velocidad Variable se alimenta alternativamente desde el condensadordel enlace de CC.
Frecuencia de la línea de alimentación es 50/60 Hz ± 5 Hz.Tensión de salida nominal es de 0 a 480 V, 3 fases, con una desviación de ± 2 %. Resistencia de aislamiento
no debe ser inferior a 20 MOhm.Para el motor asíncrono la frecuencia de salida es de 1,5 a 80 Hz, con una desviación de ± 0,1 % (± 0,1 Hz).Para el motor de imán permanente la frecuencia de salida es de 1,5 a 200 Hz, con una desviación de ± 0,1 %
(± 0,1 Hz).La sobrecorriente máxima es 120 % del valor nominal durante 60 s. La eficiencia no debe ser menos de 97 %.La capacidad de almacenamiento del controlador es de 8 Mb, que le permite guardar hasta 150 000 inscrip-
ciones en el registro de eventos.Modo de funcionamiento-servicio continuo.La corriente nominal del circuito de alimentación principal y la potencia de salida del AVV de diferentes tipos
está presentada en la Tabla 1.1.
Tabla 1.1 —Corriente nominal y potencia de salida del AVV de diferentes tipos
Valores de salida para 480/380 V
Modelo kVA, 480/400 Corriente nominal de salida, А
Sobrecorriente durante 60 s, А
AK06-ХХ-100-ХХХХХХ-480 80/65 100 120AK06-ХХ-160-ХХХХХХ-480 130/100 160 192AK06-ХХ-200-ХХХХХХ-480 160/130 200 240AK06-ХХ-250-ХХХХХХ-480 200/160 250 300AK06-ХХ-400-ХХХХХХ-480 330/260 400 480AK06-ХХ-630-ХХХХХХ-480 520/410 630 756AK06-ХХ-800-ХХХХХХ-480 660/520 800 1000AK06-ХХ-1K0-ХХХХХХ-480 830/650 1000 1250AK06-ХХ-1K2-ХХХХХХ-480 990/780 1200 1500AK06-ХХ-1K6-ХХХХХХ-480 1320/1040 1600 1920
La Distorsión Armónica Total (DAT) de tensión a la salida del filtro senoidal no debe exceder 5%.
Elvoltaje inducido no sinusoidal paraterminales de salida de 3x380 V cumple con los requisitosde IEC61000430: 2003.
Parael AVV con filtro activo, la DAT de tensión de entradadebe ser inferior a 5 %, de acuerdo con IEEE519.
7T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
1.3. Configuraciones del AVV
1.3.1. Estructura del AVV
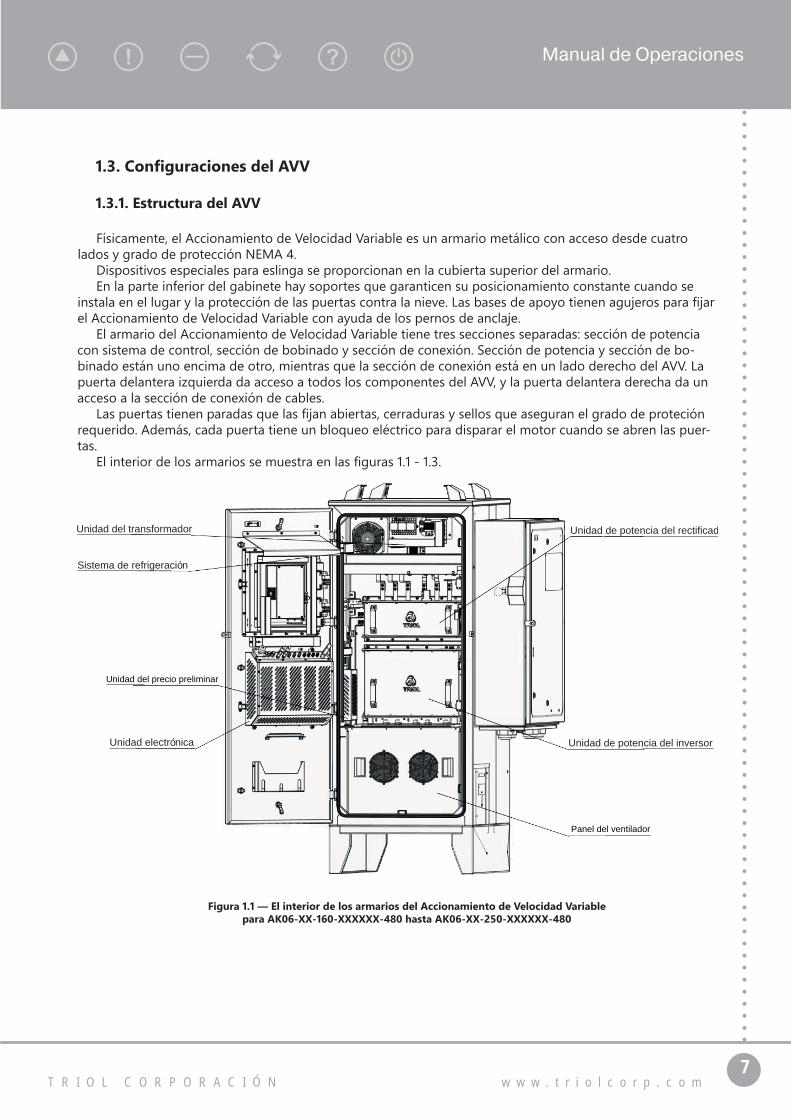
Físicamente, el Accionamiento de Velocidad Variable es un armario metálico con acceso desde cuatro lados y grado de protección NEMA 4.
Dispositivos especiales para eslinga se proporcionan en la cubierta superior del armario.En la parte inferior del gabinete hay soportes que garanticen su posicionamiento constante cuando se
instala en el lugar y la protección de las puertas contra la nieve. Las bases de apoyo tienen agujeros para fijar el Accionamiento de Velocidad Variable con ayuda de los pernos de anclaje.
El armario del Accionamiento de Velocidad Variable tiene tres secciones separadas: sección de potencia con sistema de control, sección de bobinado y sección de conexión. Sección de potencia y sección de bo-binado están uno encima de otro, mientras que la sección de conexión está en un lado derecho del AVV. La puerta delantera izquierda da acceso a todos los componentes del AVV, y la puerta delantera derecha da un acceso a la sección de conexión de cables.
Las puertas tienen paradas que las fijan abiertas, cerraduras y sellos que aseguran el grado de proteción requerido. Además, cada puerta tiene un bloqueo eléctrico para disparar el motor cuando se abren las puer-tas.
El interior de los armarios se muestra en las figuras 1.1 - 1.3.
Unidad del precio preliminar
Panel del ventilador
Unidad de potencia del rectificador
Unidad de potencia del inversorUnidad electrónica
Sistema de refrigeración
Unidad del transformador
Figura 1.1 — El interior de los armarios del Accionamiento de Velocidad Variablepara AK06-ХХ-160-ХХХХХХ-480 hasta AK06-ХХ-250-ХХХХХХ-480
8А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
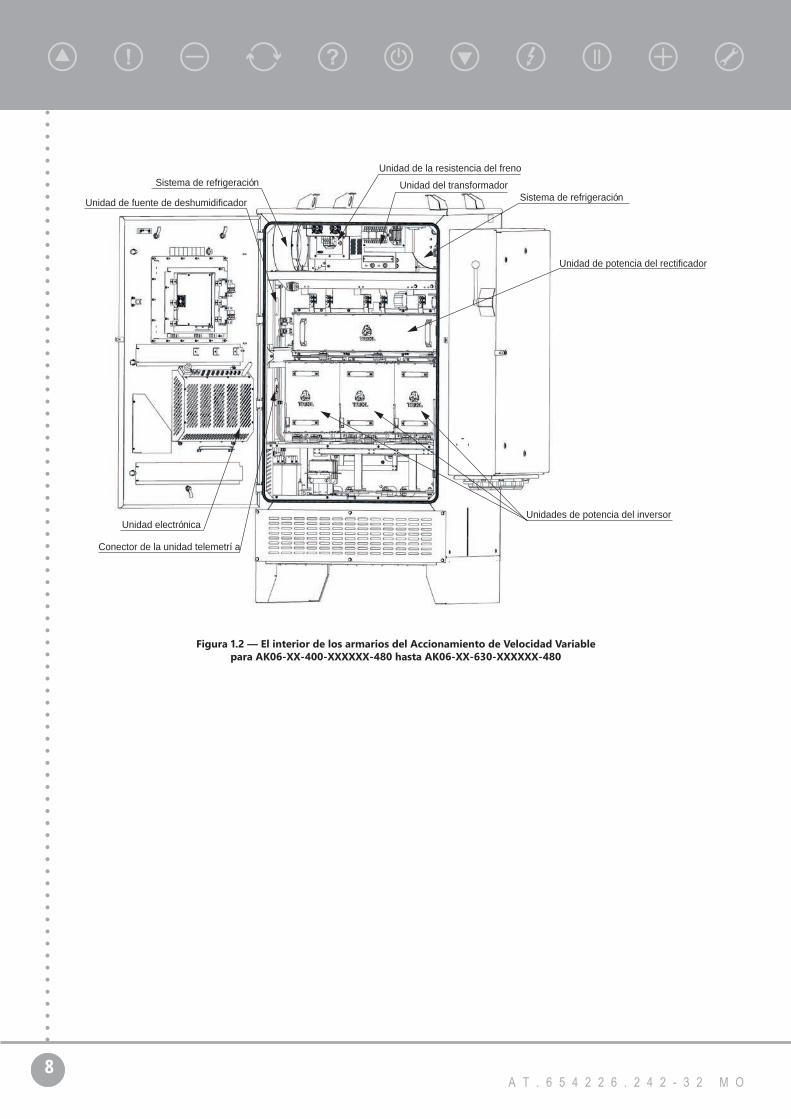
Sistema de refrigeración
Unidad de la resistencia del freno
Unidad de fuente de deshumidificador
Unidad de potencia del rectificador
Unidades de potencia del inversorUnidad electrónica
Conector de la unidad telemetrí a
Unidad del transformador
Sistema de refrigeración
Figura 1.2 — El interior de los armarios del Accionamiento de Velocidad Variablepara AK06-ХХ-400-ХХХХХХ-480 hasta AK06-ХХ-630-ХХХХХХ-480
9T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
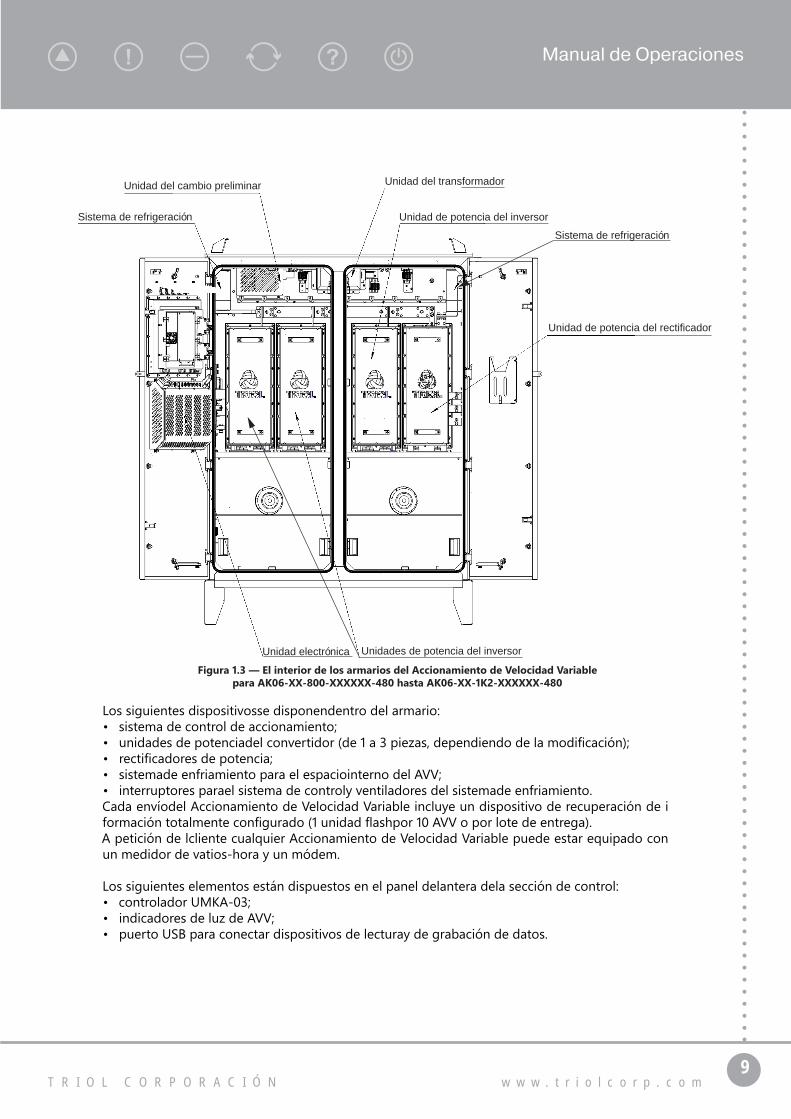
Sistema de refrigeración
Unidad del cambio preliminar Unidad del transformador
Unidad de potencia del inversor
Unidad de potencia del rectificador
Unidades de potencia del inversorUnidad electrónica
Sistema de refrigeración
Figura 1.3 — El interior de los armarios del Accionamiento de Velocidad Variablepara AK06-ХХ-800-ХХХХХХ-480 hasta AK06-ХХ-1K2-ХХХХХХ-480
Los siguientes dispositivosse disponendentro del armario:• sistema de control de accionamiento;• unidades de potenciadel convertidor (de 1 a 3 piezas, dependiendo de la modificación);• rectificadores de potencia;• sistemade enfriamiento para el espaciointerno del AVV;• interruptores parael sistema de controly ventiladores del sistemade enfriamiento.Cada envíodel Accionamiento de Velocidad Variable incluye un dispositivo de recuperación de i formación totalmente configurado (1 unidad flashpor 10 AVV o por lote de entrega).A petición de lcliente cualquier Accionamiento de Velocidad Variable puede estar equipado con un medidor de vatios-hora y un módem.
Los siguientes elementos están dispuestos en el panel delantera dela sección de control:• controlador UMKA-03;• indicadores de luz de AVV;• puerto USB para conectar dispositivos de lecturay de grabación de datos.
10А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
1.3.2. Componentes del AVV
Controlador UMKA-03 controla el accionamiento eléctrico, lee los parámetros de la bombay programa los valores de consigna.
El accionamiento eléctrico arregla la velocidad del motor, su puesta en marchay parada, y protege en modos de emergencia. El accionamiento eléctrico consta de los siguientes componentes: módulo de sistema de control NX con sub-módulo controlador integrado IND, módulos de diodos/SCR (tiristor), controlador de módulos de diodo/SCR y módulos de potencia del inversor.
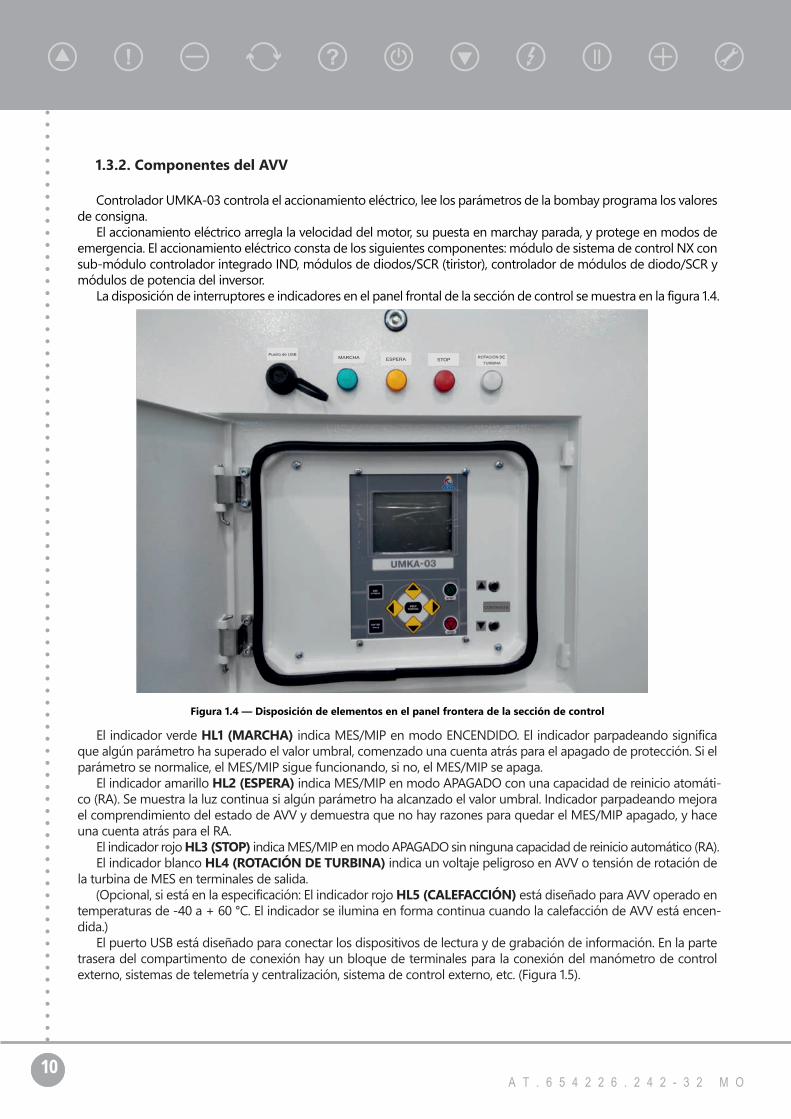
La disposición de interruptores e indicadores en el panel frontal de la sección de control se muestra en la figura 1.4.
Figura 1.4 — Disposición de elementos en el panel frontera de la sección de control
El indicador verde HL1 (MARCHA) indica MES/MIP en modo ENCENDIDO. El indicador parpadeando significa que algún parámetro ha superado el valor umbral, comenzado una cuenta atrás para el apagado de protección. Si el parámetro se normalice, el MES/MIP sigue funcionando, si no, el MES/MIP se apaga.
El indicador amarillo HL2 (ESPERA) indica MES/MIP en modo APAGADO con una capacidad de reinicio atomáti-co (RA). Se muestra la luz continua si algún parámetro ha alcanzado el valor umbral. Indicador parpadeando mejora el comprendimiento del estado de AVV y demuestra que no hay razones para quedar el MES/MIP apagado, y hace una cuenta atrás para el RA.
El indicador rojo HL3 (STOP) indica MES/MIP en modo APAGADO sin ninguna capacidad de reinicio automático (RA). El indicador blanco HL4 (ROTACIÓN DE TURBINA) indica un voltaje peligroso en AVV o tensión de rotación de
la turbina de MES en terminales de salida. (Opcional, si está en la especificación: El indicador rojo HL5 (CALEFACCIÓN) está diseñado para AVV operado en
temperaturas de -40 a + 60 °C. El indicador se ilumina en forma continua cuando la calefacción de AVV está encen-dida.)
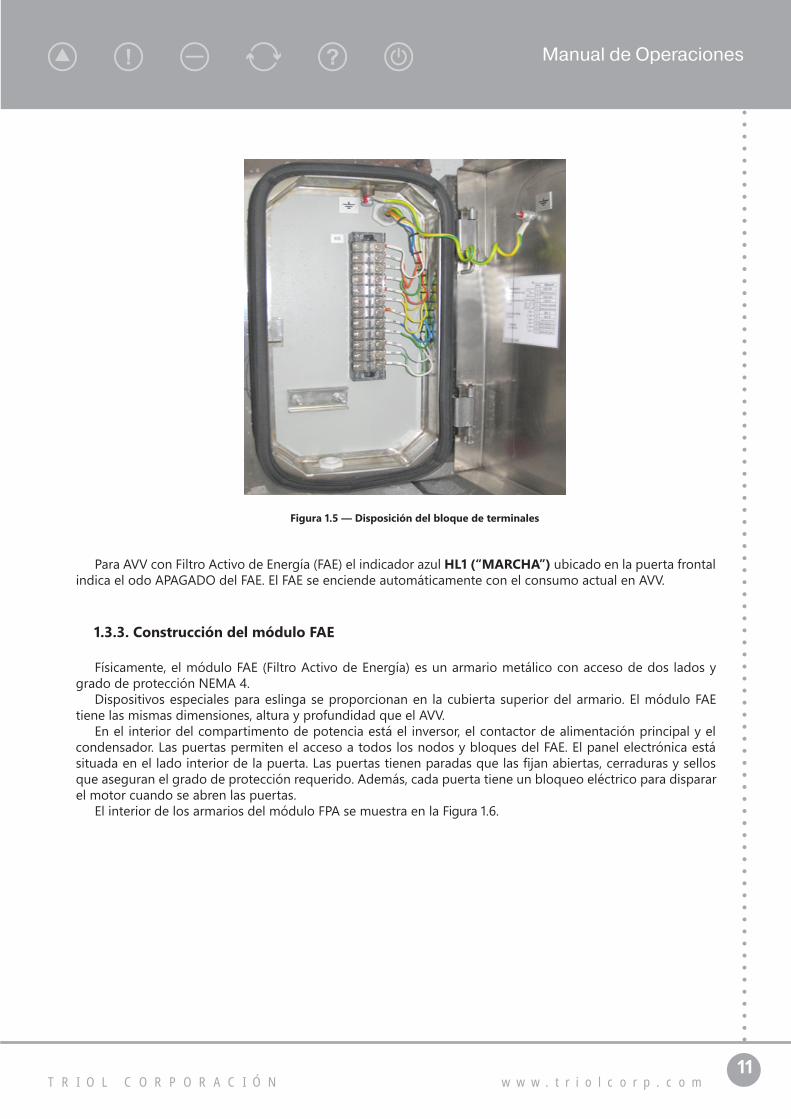
El puerto USB está diseñado para conectar los dispositivos de lectura y de grabación de información. En la parte trasera del compartimento de conexión hay un bloque de terminales para la conexión del manómetro de control externo, sistemas de telemetría y centralización, sistema de control externo, etc. (Figura 1.5).
Puerto de USBMARCHA ESPERA STOP
ROTACIÓN DE
TURBINA
CONTRASTE
11T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
Figura 1.5 — Disposición del bloque de terminales
Para AVV con Filtro Activo de Energía (FAE) el indicador azul HL1 (“MARCHA”) ubicado en la puerta frontal indica el odo APAGADO del FAE. El FAE se enciende automáticamente con el consumo actual en AVV.
1.3.3. Construcción del módulo FAE
Físicamente, el módulo FAE (Filtro Activo de Energía) es un armario metálico con acceso de dos lados y grado de protección NEMA 4.
Dispositivos especiales para eslinga se proporcionan en la cubierta superior del armario. El módulo FAE tiene las mismas dimensiones, altura y profundidad que el AVV.
En el interior del compartimento de potencia está el inversor, el contactor de alimentación principal y el condensador. Las puertas permiten el acceso a todos los nodos y bloques del FAE. El panel electrónica está situada en el lado interior de la puerta. Las puertas tienen paradas que las fijan abiertas, cerraduras y sellos que aseguran el grado de protección requerido. Además, cada puerta tiene un bloqueo eléctrico para disparar el motor cuando se abren las puertas.
El interior de los armarios del módulo FPA se muestra en la Figura 1.6.
12А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
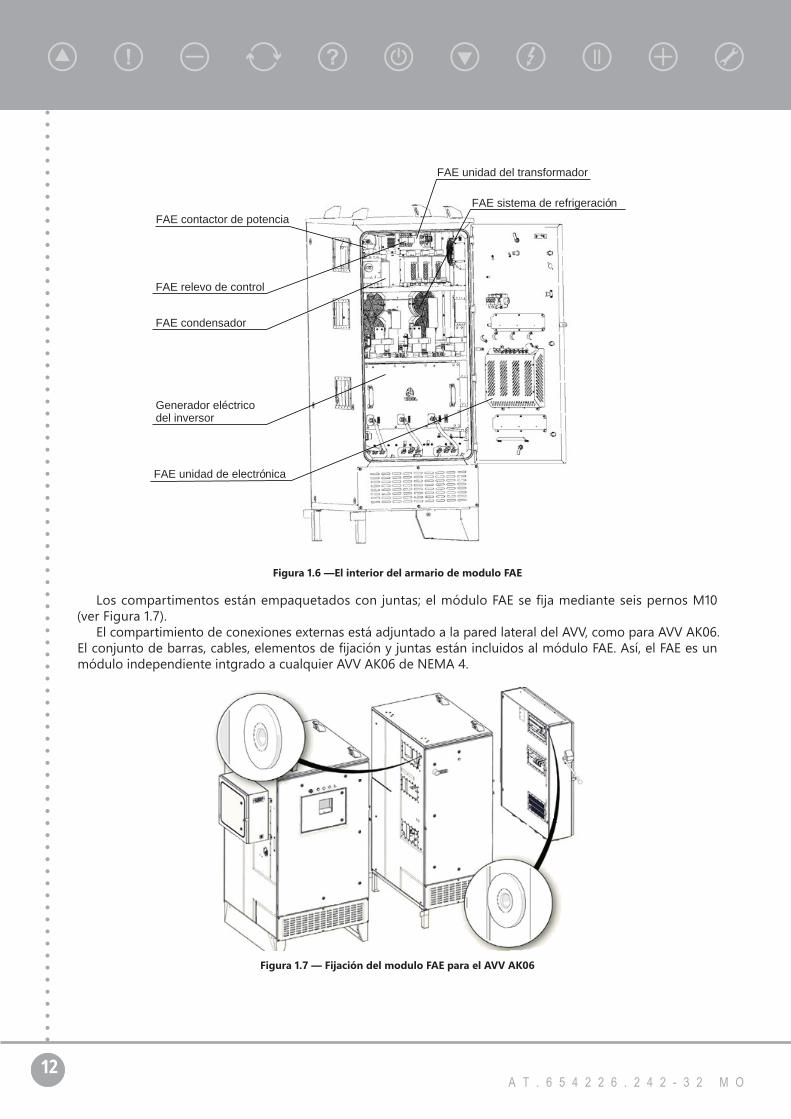
FАЕ contactor de potencia
FАЕ relevo de control
FАЕ condensador
Generador eléctricodel inversor
FАЕ unidad del transformador
FАЕ sistema de refrigeración
FАЕ unidad de electrónica
Figura 1.6 —El interior del armario de modulo FAE
Los compartimentos están empaquetados con juntas; el módulo FAE se fija mediante seis pernos M10 (ver Figura 1.7).
El compartimiento de conexiones externas está adjuntado a la pared lateral del AVV, como para AVV AK06. El conjunto de barras, cables, elementos de fijación y juntas están incluidos al módulo FAE. Así, el FAE es un módulo independiente intgrado a cualquier AVV AK06 de NEMA 4.
Figura 1.7 — Fijación del modulo FAE para el AVV АК06
13T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
1.4. Diseño y operación del AVV
1.4.1. Capacidades del AVV
El Accionamiento de Velocidad Variable asegura lo siguiente:
• Inicio/paro del motor; • Operación del motor eléctrico en los siguientes modos: manual (sin capacidad del reinicio automático
de MES/MIP); automático con capacidad de reinicio automático de MES/MIP; y automático con un pro-grama de tiempo predeterminado;
• Paro del motor en caso de rotación de turbina, y el reinicio automático (para MES/MIP); • Modo de optimización actual cuando se alcanza el régimen pre establecido de rpm; • Operación con un programa de tiempo pre establecido. Los períodos de inicio/paro del MES/PIM se
programan separadamente; • Control manual sobre la velocidad del motor con ayuda de controlador UMKA-03 y control remoto a
través de una consola de supervisión; • Cambio automático de frecuencia de salida a través del programa de tiempo predeterminado; • Aceleración y frenado suave del MES/MIP según valores asignados; • Reversión del motor; • Funcionamiento del motor en campo debilitado con velocidad de rotación mayor de la nominal (MES/MIP); • Conexión del motor con un retardo controlado cuando se aplica la tensión de alimentación automática; • Mantenimiento automático de ajustes para algunos parámetros (presión, corriente);• Modos de inicio del motor eléctrico: oscilante, inicio de impacto (se utilizan para desatascar la unidad
sumergible), inicio suave con la sincronización. El esatascamiento cuenta con el par máximo del motor a baja velocidad;
• Monitoreo de la resistencia de aislamiento entre cables y MES/MIP y paro del sistema si la resistencia se reduce bajo el nivel admisible;
• Operación cuando se reduce la resistencia de aislamiento entre cables y MES/MIP, y apagado rápido en caso de sobrecarga;
• Medición de los parámetros actuales de la unidad de bomba sumergible y la BES y su representación en la pantalla LCD integrada;
• Control remoto del motor, monitoreo de los parámetros del motor, lectura y cambio de ajustes de pro-tección a través del sistema de telemetría utilizando la interfaz RS485;
• Grabación de las causas de inicio/paro del MES/MIP y registro de los parámetros actuales en la memo-ria no volátil integrada durante la operación;
• Grabación de ajustes modificados en el registro de eventos con fecha y hora del cambio; • Sistema de alarma de luz que indica el estado de la unidad de bomba (marcha, espera, stop); • Control del motor desde el dispositivo sumergible (transductor); • Protección contra sobrecarga/cargas bajas, protección contra el desequilibrio de corriente, protección
contra la tensión de alimentación inaceptable, contra el funcionamiento continuo de baja frecuencia del AVV, contra el sobre calentamiento del enfriador, y contra los parámetros de telemetría mayores de los límites preestablecidos. Todo eso puede ser ajustado en lugar de instalación;
• La información sobre las puertas abiertas del AVV puede ser transferida a la estación de expedición a través del sistema de telemedida;
• Medición de energía eléctrica; • Monitoreo de disponibilidad de las tres fases de alimentación. El MES/MIP se dispara o se desactiva si
una fase no está disponible.
14А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
AVV proporciona los siguientes tipos de protección y dispositivos de bloqueo:
• Disparo del MES / MIP en caso de cambio de tensión que resulta en sobrecargas, con la posibilidad de RA después de recuperar la tensión;
• Disparo del MES / MIP en caso de baja carga (disparo por baja carga); • Disparo del MES / MIP en caso de sobrecargas de acuerdo a las características programables; • Disparo del MES / MIP debido a la protección contra sobrecorriente (PCS); • Disparo del MES / MIP si la resistencia de aislamiento entre cables y MES se reduce bajo el nivel admisible; • Disparo del MES / MIP debido a baja frecuencia de salida del AVV; • Disparo del MES / MIP como una respuesta del interruptor de AVV; • Disparo del MES / MIP si se sobrecalientan los módulos de potencia; • Disparo del MES / MIP si los parámetros del sistema de telemedida exceden los puntos preestablecidos;• Disparo del MES / MIP en caso de presión inadmisible en la tubería (según señales del medidor de presión); • Disparo del MES / MIP si se abre la puerta de la sección de potencia.
A petición del Cliente, el accionamiento de velocidad variable AK06 puede ser completo con módulo de conmutador Ethernet que permite recibir y procesar comandos a través del canal de sistema de control au-tomatizado del nivel superior (SCA) en todos los modos de operación. Para conectar el cable Ethernet, se utiliza el enchufe 8P8C ubicado en el mismo compartimiento con el bloque de terminales para conexiones externas.
Precaución! El canal de comunicación por Ethernet debe estar apagado para los AVV con versión de software 31.96 que funcionan con SCADA a través de RS485 (véase los “Ajustes de Ethernet” del menú “IPType”).
15T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
1.4.2. Modos de operación del AVV
El Accionamiento de Velocidad Variable funciona tanto en modo manual como en modo automático para garantizar la máxima adaptación del motor eléctrico a las condiciones específicas de operación. Prácticamente todas las funciones del AVV están disponibles en el modo manual, a excepción de lás relacionadas con el reinicio automático, el disparador y el temporizador.
El modo automático ofrece un temporizador con el tiempo pre establecido del inicio/paro del AVV. Además, se puede iniciar el AVV automaticamente cuando se aplica la tensión de alimentación (si está encendido el disparador) y después las protecciones que permiten el reinicio automático.
En todos los modos de operación, el AVV presta los siguientes métodos de control de frecuencia de salida:• control de frecuencia manual; • control de frecuencia programado; • mantenimiento de presión en pozos de petróleo por las señales de telemetría; • mantenimiento del valor preestablecido actual (regulador de corriente).
Dependiente de las peculiaridades tecnológicas del pozo de petróleo y con el fin de resolver situaciones extremas durante el inicio, el AVV prevé los siguientes modos de inicio: inicio suave, inicio con sincronización, arranque, inicio oscilante, desatascamiento.
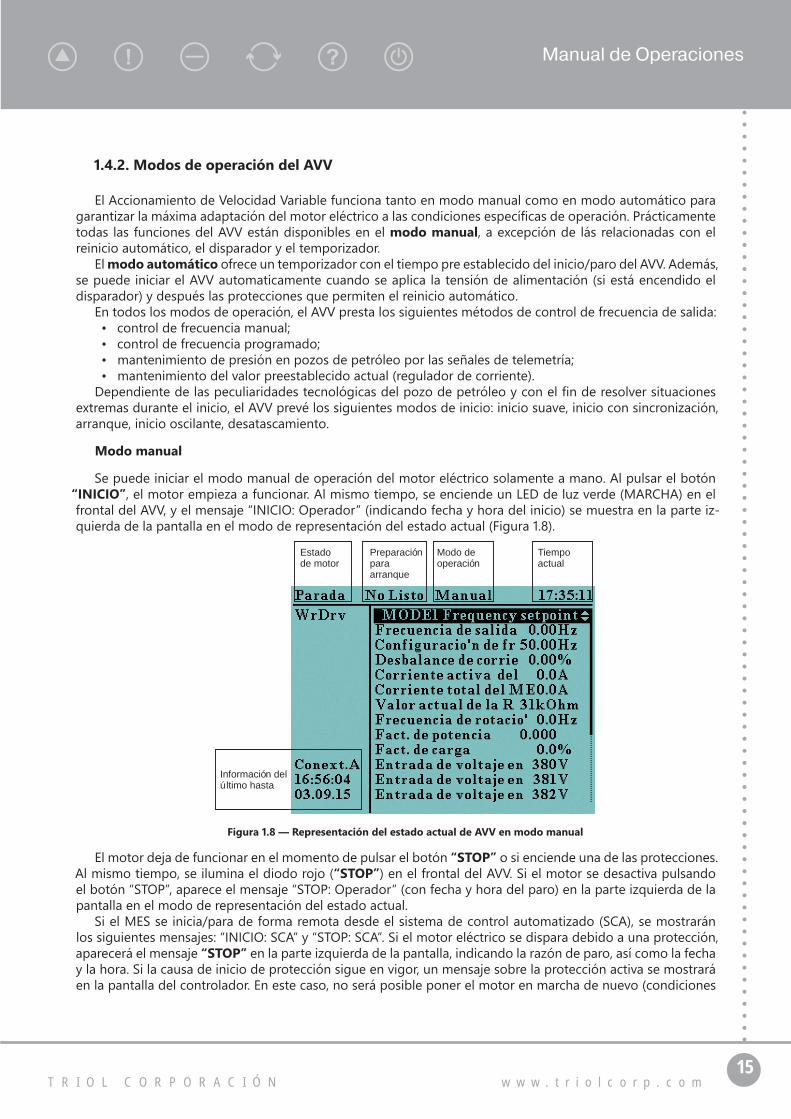
Modo manual
Se puede iniciar el modo manual de operación del motor eléctrico solamente a mano. Al pulsar el botón “INICIO”, el motor empieza a funcionar. Al mismo tiempo, se enciende un LED de luz verde (MARCHA) en el frontal del AVV, y el mensaje “INICIO: Operador” (indicando fecha y hora del inicio) se muestra en la parte iz-quierda de la pantalla en el modo de representación del estado actual (Figura 1.8).
Información delúltimo hasta
Estadode motor
Preparaciónparaarranque
Modo deoperación
Tiempoactual
Figura 1.8 — Representación del estado actual de AVV en modo manual
El motor deja de funcionar en el momento de pulsar el botón “STOP” o si enciende una de las protecciones. Al mismo tiempo, se ilumina el diodo rojo (“STOP”) en el frontal del AVV. Si el motor se desactiva pulsando el botón “STOP”, aparece el mensaje “STOP: Operador” (con fecha y hora del paro) en la parte izquierda de la pantalla en el modo de representación del estado actual.
Si el MES se inicia/para de forma remota desde el sistema de control automatizado (SCA), se mostrarán los siguientes mensajes: “INICIO: SCA” y “STOP: SCA”. Si el motor eléctrico se dispara debido a una protección, aparecerá el mensaje “STOP” en la parte izquierda de la pantalla, indicando la razón de paro, así como la fecha y la hora. Si la causa de inicio de protección sigue en vigor, un mensaje sobre la protección activa se mostrará en la pantalla del controlador. En este caso, no será posible poner el motor en marcha de nuevo (condiciones
16А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
de re-inicio no están disponibles). Después de restaurar el parámetro que provocó la actuación de protección, el dicho mensaje desaparecerá.
Modo automático
Es el modo básico del AVV. En modo automático, la operación de AVV empieza pulsando el botón “INICIO” cuando se aplica la tensión de alimentación (si está encendido el disparador).
Son posibles los reinicios automáticos después de actuar protecciones que los permiten. Si el motor apaga debido a una protección que permite RA, comienza la cuenta atrás de la demora de AR. El diodo de luz amarillo (“ESPERA”) se enciende en el frontal del AVV; aparece el mensaje “STOP” indicando la causa de parada y el tiempo hasta el reinicio automático. El motor se iniciará en cuando termine este tiempo. Se puede iniciar el mo-tor durante el retardo de reinicio automático con el botón “INICIO”. Si el motor se apaga debido una protec-ción que no permite reinicios automáticos, o después de un número predeterminado de reinicios automáticos, aparece el mensaje “STOP” indicando el motivo de parada, y se enciende un LED rojo en el frontal del AVV.
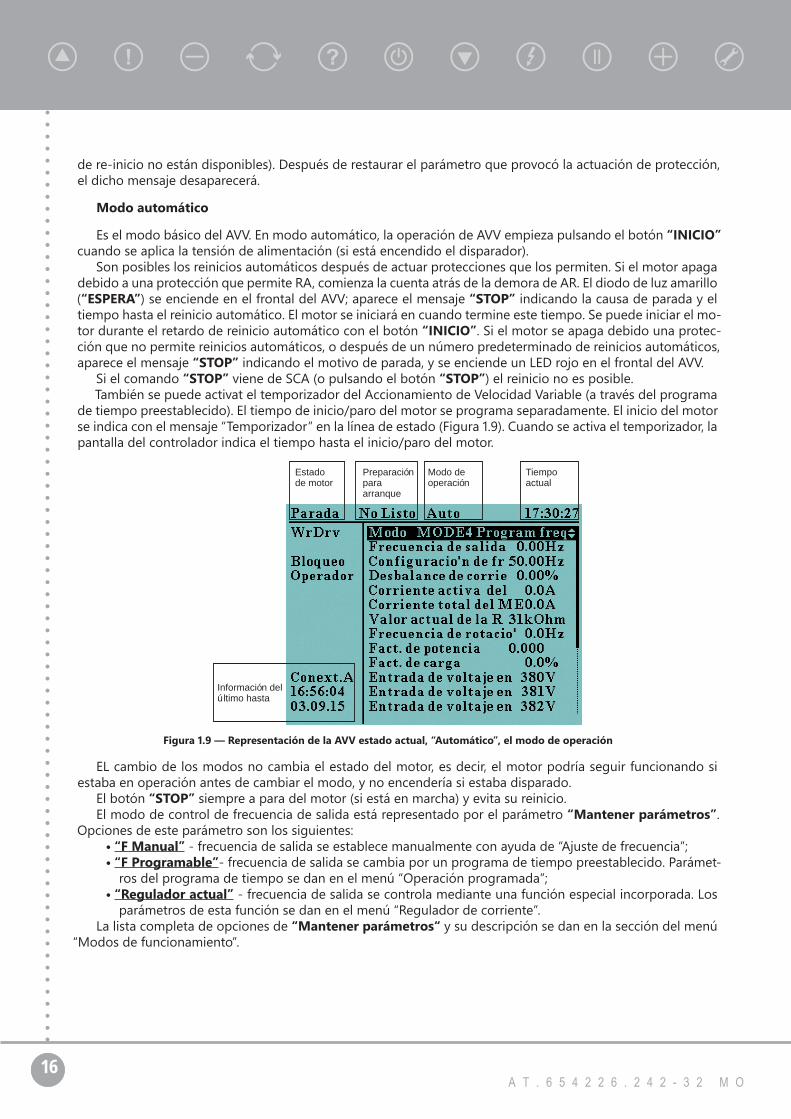
Si el comando “STOP” viene de SCA (o pulsando el botón “STOP”) el reinicio no es posible. También se puede activat el temporizador del Accionamiento de Velocidad Variable (a través del programa
de tiempo preestablecido). El tiempo de inicio/paro del motor se programa separadamente. El inicio del motor se indica con el mensaje “Temporizador” en la línea de estado (Figura 1.9). Cuando se activa el temporizador, la pantalla del controlador indica el tiempo hasta el inicio/paro del motor.
Información delúltimo hasta
Estadode motor
Preparaciónparaarranque
Modo deoperación
Tiempoactual
Figura 1.9 — Representación de la AVV estado actual, “Automático”, el modo de operación
EL cambio de los modos no cambia el estado del motor, es decir, el motor podría seguir funcionando si estaba en operación antes de cambiar el modo, y no encendería si estaba disparado.
El botón “STOP” siempre a para del motor (si está en marcha) y evita su reinicio. El modo de control de frecuencia de salida está representado por el parámetro “Mantener parámetros”.
Opciones de este parámetro son los siguientes: • “F Manual” - frecuencia de salida se establece manualmente con ayuda de “Ajuste de frecuencia”; • “F Programable”- frecuencia de salida se cambia por un programa de tiempo preestablecido. Parámet-
ros del programa de tiempo se dan en el menú “Operación programada”; • “Regulador actual” - frecuencia de salida se controla mediante una función especial incorporada. Los
parámetros de esta función se dan en el menú “Regulador de corriente”. La lista completa de opciones de “Mantener parámetros“ y su descripción se dan en la sección del menú
“Modos de funcionamiento”.
17T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
Control de frecuencia manual
En modo de control de frecuencia manual el operador asigna un valor necesario para la frecuencia de salida, y el AVV funciona en esta frecuencia preestablecida.
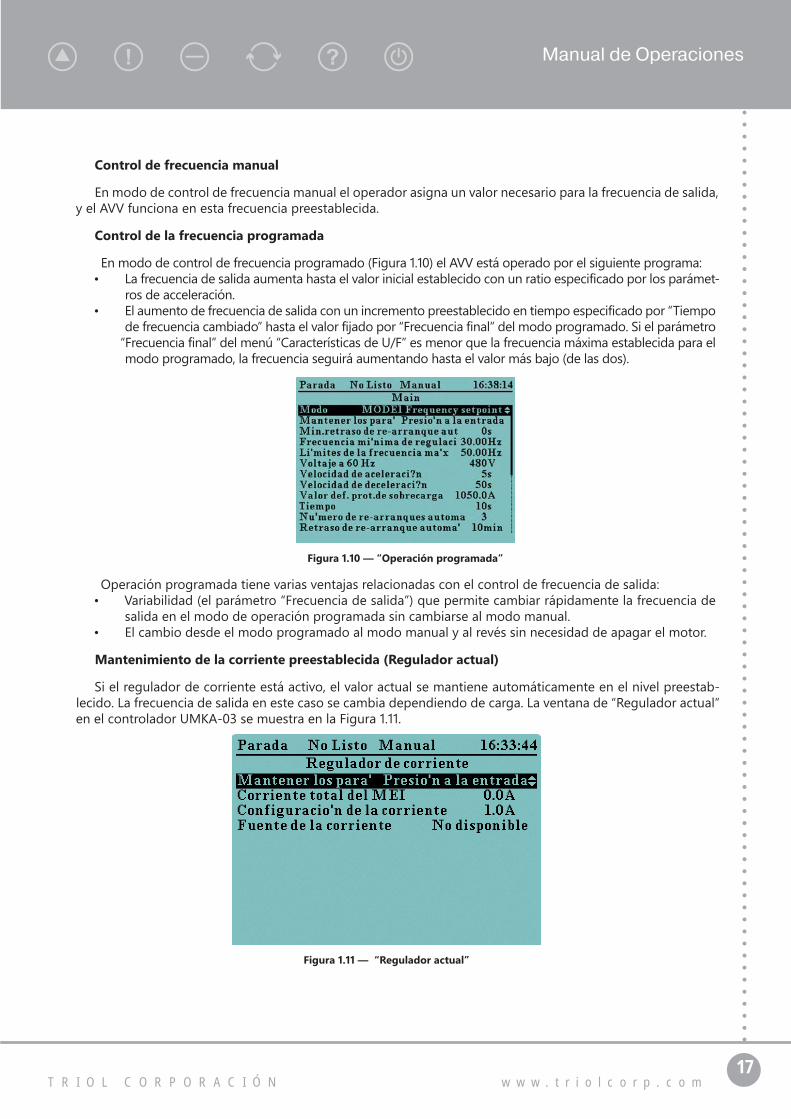
Control de la frecuencia programada
En modo de control de frecuencia programado (Figura 1.10) el AVV está operado por el siguiente programa:• La frecuencia de salida aumenta hasta el valor inicial establecido con un ratio especificado por los parámet-
ros de acceleración. • El aumento de frecuencia de salida con un incremento preestablecido en tiempo especificado por “Tiempo
de frecuencia cambiado” hasta el valor fijado por “Frecuencia final” del modo programado. Si el parámetro “Frecuencia final” del menú “Características de U/F” es menor que la frecuencia máxima establecida para el modo programado, la frecuencia seguirá aumentando hasta el valor más bajo (de las dos).
Figura 1.10 — “Operación programada”
Operación programada tiene varias ventajas relacionadas con el control de frecuencia de salida:• Variabilidad (el parámetro “Frecuencia de salida”) que permite cambiar rápidamente la frecuencia de
salida en el modo de operación programada sin cambiarse al modo manual. • El cambio desde el modo programado al modo manual y al revés sin necesidad de apagar el motor.
Mantenimiento de la corriente preestablecida (Regulador actual)
Si el regulador de corriente está activo, el valor actual se mantiene automáticamente en el nivel preestab-lecido. La frecuencia de salida en este caso se cambia dependiendo de carga. La ventana de “Regulador actual” en el controlador UMKA-03 se muestra en la Figura 1.11.
Figura 1.11 — “Regulador actual”
18А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
2. El uso a destino
2.1. Preparación para el uso
2.1.1. Precauciones de seguridad
El Accionamiento de Velocidad Variable cumple con los requisitos de seguridad BS EN 6180051: 2007 y NF EN 618004:2003, así como las Reglas de Operación de Instalaciones Eléctricas, Normas de Seguridad para la Operación de Instalaciones Eléctricas, Normas de Seguridad para Industria del Petróleo y Gas (API BULL E 4) y Reglas Interindustriales de Seguridad Laboral para la Operación de Instalaciones Eléctricas.
El montaje, ajuste y puesta en marcha de unidades de velocidad variable se llevarán a cabo de acuerdo con los requisitos de seguridad para la conexión con tierra, la resistencia y la fuerza de aislamiento eléctrico impuestos por CEI, ROIE, SRARP 0.001.2198, SNiP 3.05.06.85 y RSOGI 0.862.403.
La instalación, montaje, desmontaje, operación y mantenimiento del Accionamiento de Velocidad Variable se llevarán a cabo de conformidad con el Código de Instalaciones Eléctricas (CEI), Reglas de Operación de Instala-ciones Eléctricas (ROIE), Reglas de seguridad para la operación de Instalaciones eléctricas de los clientes (RSOIEC), Normas de Seguridad para la Industria del Petróleo y Gas (NSIPG), Reglas Interindustriales de Seguridad Laboral para la Operación de Instalaciones Eléctricas (RISLOIE), instrucciones de la empresa (organización) que opera el accionamento y el presente Manual.
Antes de empezar la operación de AVV, el personal deberá:• pasar el entrenamiento y el examen especial en cuestiones de protección del trabajo;• pasar el examen médico preliminar (cuando se contrata para el trabajo) y los exámenes periódicos de
salud (durante toda la actividad laboral);• tener calificación de seguridad eléctrica de al menos 3º nivel (para los asistentes de operación que con-
trolan el mantenimiento de las instalaciones eléctricas y para capataces);• ser instruido en protección laboral.
Es necesario asegurar la puesta a tierra fiable de la caja del AVV antes de conectarlo a la línea de aliment-ación. La puesta a tierra deberá cumplir con los requisitos del Código de Instalaciones Eléctricas (CIE).
Ejecutando cualquier trabajo dentro del Accionamiento de Velocidad Variable, es necesario ejecutar las siguientes medidas de seguridad:
• El disyuntor QF1 debe estar en el modo “APAGADO”;• El cable de entrada debe estar desactivado;• Poner las marcas de advertencia donde sea necesario;• Asegurarse de que los cables de entrada están desactivados y conectados a la tierra.
Condensadores del filtro conservan una carga peligrosa a la vida dentro de los 5 minutos después de la desenergización! Asegúrese de que los condensadores se desactivan antes de operar en el interior del armario.
Se prohíbe desconectar y conectar juntas desmontables si la tensión de alimentación está disponible. Las unidades de control electrónico del accionamiento contienen componentes hechos según la tecnología de metaloxidesemiconductor (MOS), excluyendo la electricidad estática. Si tiene que tocar algún componente de MOS, conecta su cuerpo y todos los dis-positivos que quieren unilizar a tierra. Coloque estas eunidades en las almojadillas conducto-ras de corriente mientras trabajar.
19T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
2.1.2. Preparación de la UBES
Al finalizar la instalación de UBES, es necesario preparar el equipo eléctrico para ponerlo en marcha. Si un ST sumergible está incluido en el comlejo de UBES, es necesario probar la instalación y el funcionamiento de la unidad de ST antes de iniciar la UBES.
Accionamiento de velocidad variable proporciona una diversidad de funciones para configurar el MES/MIP y ajustar los modos de operación del AVV. Se suministra a los clientes con varios parámetros guardados en la memoria no volátil. El Cliente puede cambiarlos si sea necesario.
El pre-inicio del AVV se realiza por los representantes autorizados del Cliente o por empleados de Corporación Triol.La preparación al inicio del AVV incluye los siguientes pasos:• Comprobar de parámetros eléctricos del TATA, AVV y MES/MIP incluidos en el complejo de la UBES; mon-
tar el equipo eléctrico de la UBES en conformidad con los requisitos si sea necesario;• Comprobar la funcionalidad del AVV, TATA y bloque de terminales de acuerdo con el procedimiento de
preparación de AVV/TATA; eliminar las fallas identificadas;• Asegurar el suministro de tensión en el cable del AVV
El accionamiento de velocidad variable se activa con la tensión en la línea de suministro.EL AVV se considera dispuesto a funcionar cuando la pantalla muestra la bienvenida en forma de una imagen.
Después se aparecerá la información sobre la funcionalidad del AVV.Antes de comenzar, es necesario ajustar el AVV para asegurar su funcionamiento propio. Para eso hay que
cumplir los siguientes pasos:1. Ajustar la tensión nominal en “Protección”/”Red de Alta Tensión”. Es necesario para proporcionar la tensión
nominal del sistema de control.2. Ajustar la frecuencia nominal de la red eléctrica en la sección “Configuración” de “Frecuencia nominal”.3. Introducir los siguientes parámetros en la memoria del AVV:• “Modo de operación” - “Manual”/“Automático”;• “Arranq. por alimentacio’n” - “Habilitar”/“Deshabilitar”;• “Tiempo del arran.autom”;• “Direccio’n de rotacio’n” - “Directo”/“Inverso”;• “Velocidad de aceleracio’n”, Hz/s;• “Configuracio’n de frecuencia”;
“Tipo del SC” - de acuerdo con el tipo de AVV (sólo para el AVV universal). Los parámetros “149 Frecuencia de arranque”, “150 Voltaje de arranque”, “151 Frecuencia de flexión”, “152 Tensión de flexión”, “153 Frecuencia nominal”,
“154 Tensión nominal”, “693 Max. limitación de frec.” Y “516 Min. frec contr.” definen la forma de la curva U/F identifi-cando la posición de los puntos. Para ciertas cargas de la unidad se puede seleccionar una curva de forma especial, por ejemplo, una combada para unidades de torsión alta.
• “Nu’mero del yacimiento”;• “Nu’mero del grupo”;• “Nu’mero del rozo”;• “U de la toma del transformador”, V;• “Frec.nomin.motor”;• “Capacidad nominal del MEI”, kW;• “Capacidad del transformador el”, VA;• “RendNomBombEl-Centr.”, m3/s;• “PresBombEl-Centr.”, m;• “Profundidad de descenso”, m;• “Corriente nominal del motor”, A.
4. Introducir los parámetros de aceleración del accionamiento (valores recomendados son de 1 a 8 Hz/s).
20А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
5. Seleccionar un grifo transformador requerido de la tabla y establecer su número. Iniciar el acciona-miento a la frecuencia de 50 Hz sin carga, medir la tensión de salida del transformador utilizando el filtro de alta tensión y el osciloscopio de Fluke. Asegurarse de que la tensión de salida es suficientemente alta para la alimentación de MES/MIP. Cambiar el grifo si es necesario. Desconectar el accionamiento de velocidad variable. Conectar el cable sumergible de MES/MIP a los terminales de TATA. La armadura del cable se sujeta bajo el perno de puesta a tierra. Reemplazar la cubierta del transformador.
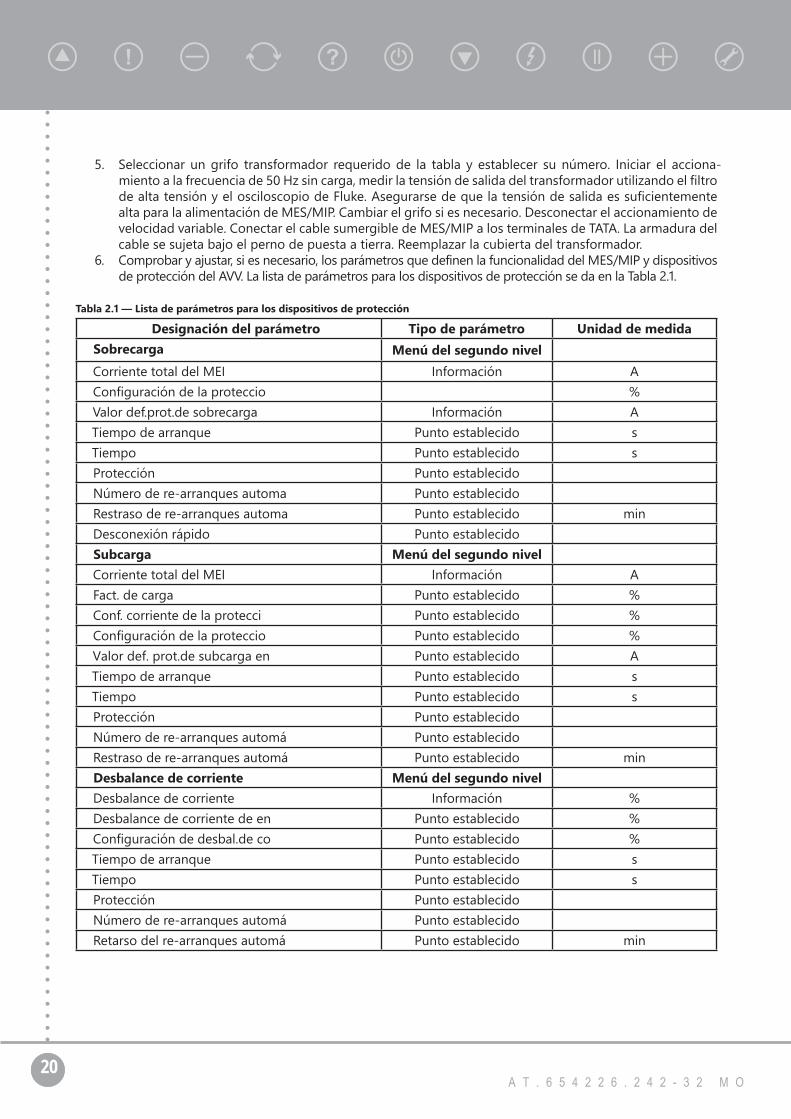
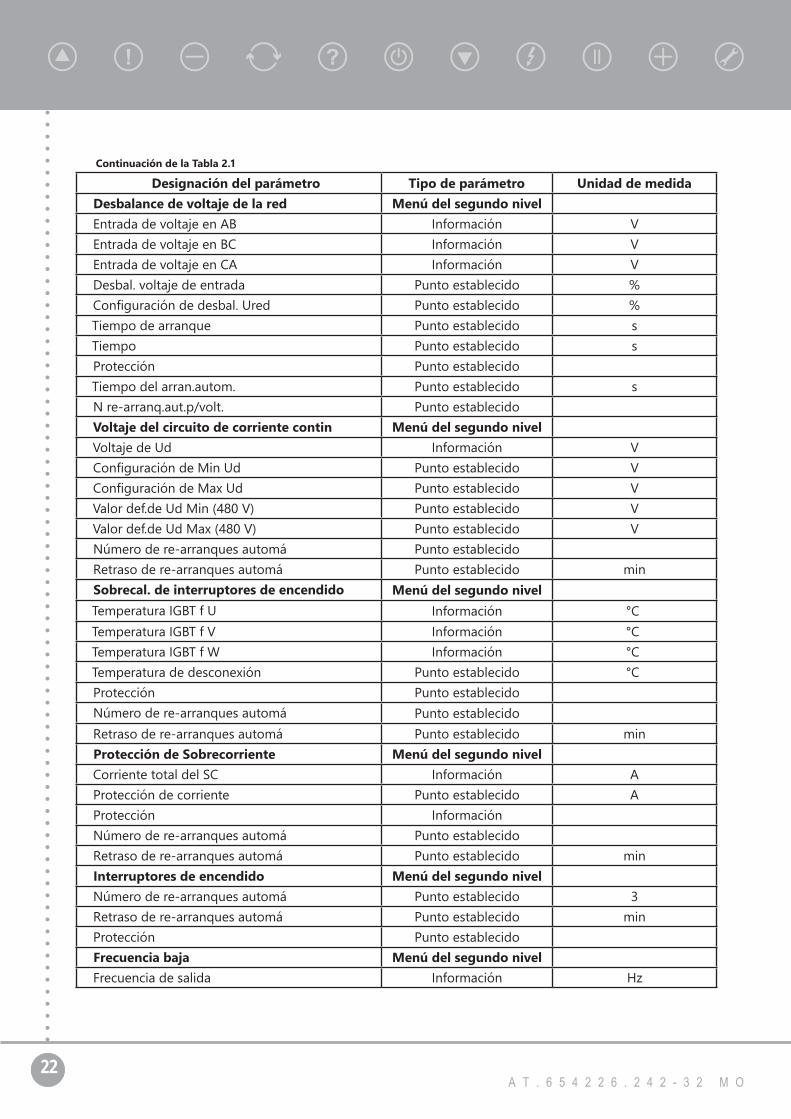
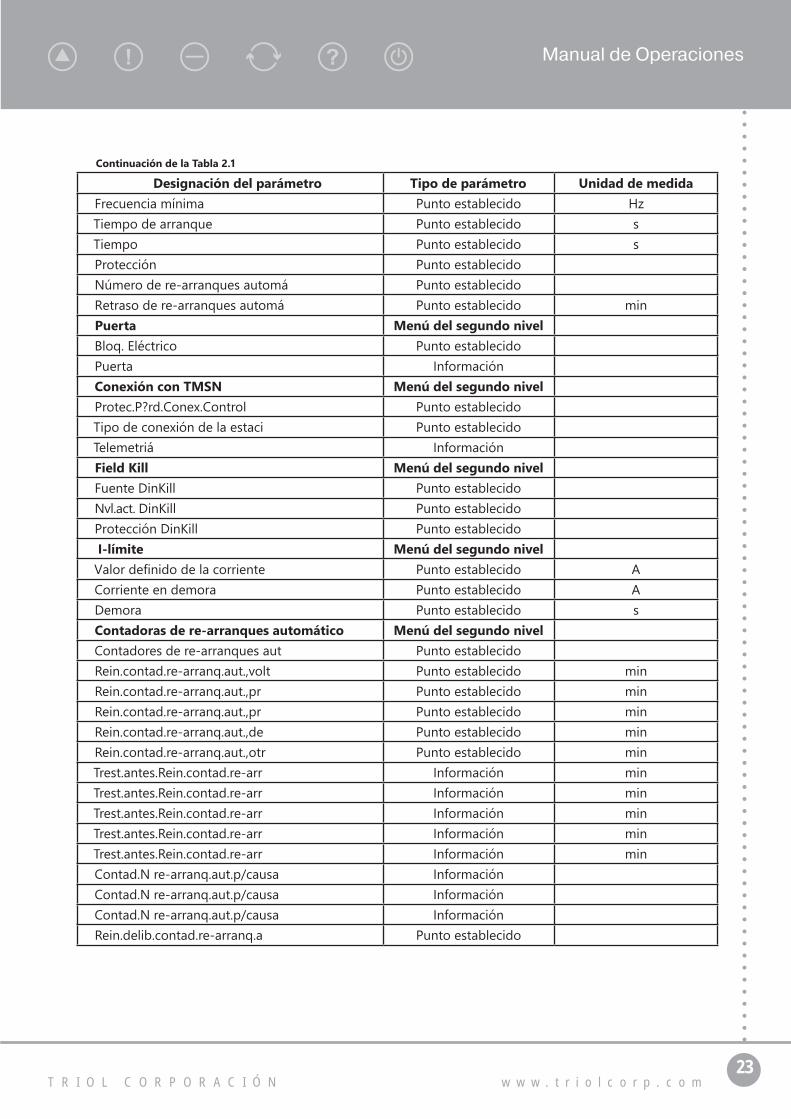
6. Comprobar y ajustar, si es necesario, los parámetros que definen la funcionalidad del MES/MIP y dispositivos de protección del AVV. La lista de parámetros para los dispositivos de protección se da en la Tabla 2.1.
Tabla 2.1 — Lista de parámetros para los dispositivos de protección
Designación del parámetro Tipo de parámetro Unidad de medidaSobrecarga Menú del segundo nivelCorriente total del MEI Información АConfiguración de la proteccio %Valor def.prot.de sobrecarga Información ATiempo de arranque Punto establecido sTiempo Punto establecido sProtección Punto establecidoNúmero de re-arranques automa Punto establecidoRestraso de re-arranques automa Punto establecido minDesconexión rápido Punto establecidoSubcarga Menú del segundo nivelCorriente total del MEI Información AFact. de carga Punto establecido %Conf. corriente de la protecci Punto establecido %Configuración de la proteccio Punto establecido %Valor def. prot.de subcarga en Punto establecido ATiempo de arranque Punto establecido sTiempo Punto establecido sProtección Punto establecidoNúmero de re-arranques automá Punto establecidoRestraso de re-arranques automá Punto establecido minDesbalance de corriente Menú del segundo nivelDesbalance de corriente Información %Desbalance de corriente de en Punto establecido %Configuración de desbal.de co Punto establecido %Tiempo de arranque Punto establecido sTiempo Punto establecido sProtección Punto establecidoNúmero de re-arranques automá Punto establecidoRetarso del re-arranques automá Punto establecido min
21T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
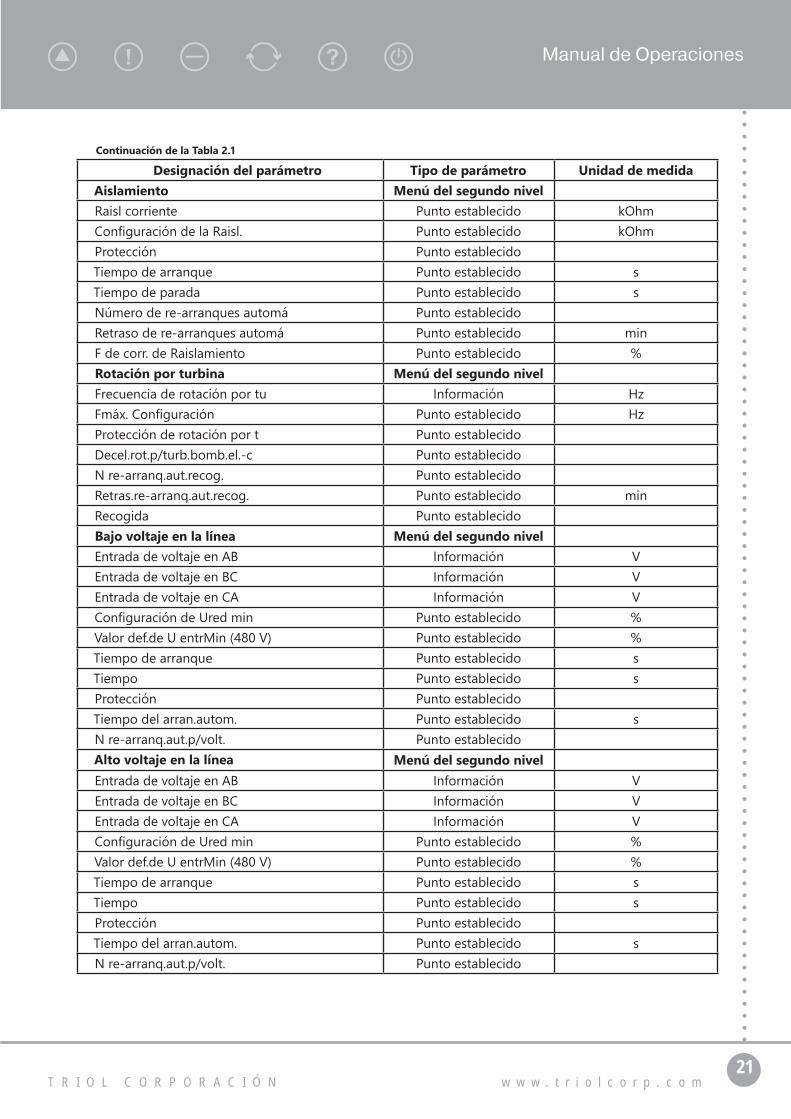
Designación del parámetro Tipo de parámetro Unidad de medidaAislamiento Menú del segundo nivelRaisl corriente Punto establecido kOhmConfiguración de la Raisl. Punto establecido kOhmProtección Punto establecidoTiempo de arranque Punto establecido sTiempo de parada Punto establecido sNúmero de re-arranques automá Punto establecidoRetraso de re-arranques automá Punto establecido minF de corr. de Raislamiento Punto establecido %Rotación por turbina Menú del segundo nivelFrecuencia de rotación por tu Información HzFmáx. Configuración Punto establecido HzProtección de rotación por t Punto establecidoDecel.rot.p/turb.bomb.el.-c Punto establecidoN re-arranq.aut.recog. Punto establecidoRetras.re-arranq.aut.recog. Punto establecido minRecogida Punto establecidoBajo voltaje en la línea Menú del segundo nivelEntrada de voltaje en AB Información VEntrada de voltaje en BC Información VEntrada de voltaje en CA Información VConfiguración de Ured min Punto establecido %Valor def.de U entrMin (480 V) Punto establecido %Tiempo de arranque Punto establecido sTiempo Punto establecido sProtección Punto establecidoTiempo del arran.autom. Punto establecido sN re-arranq.aut.p/volt. Punto establecidoAlto voltaje en la línea Menú del segundo nivelEntrada de voltaje en AB Información VEntrada de voltaje en BC Información VEntrada de voltaje en CA Información VConfiguración de Ured min Punto establecido %Valor def.de U entrMin (480 V) Punto establecido %Tiempo de arranque Punto establecido sTiempo Punto establecido sProtección Punto establecidoTiempo del arran.autom. Punto establecido sN re-arranq.aut.p/volt. Punto establecido
Continuación de la Tabla 2.1
22А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
Designación del parámetro Tipo de parámetro Unidad de medidaDesbalance de voltaje de la red Menú del segundo nivelEntrada de voltaje en AB Información VEntrada de voltaje en BC Información VEntrada de voltaje en CA Información VDesbal. voltaje de entrada Punto establecido %Configuración de desbal. Ured Punto establecido %Tiempo de arranque Punto establecido sTiempo Punto establecido sProtección Punto establecidoTiempo del arran.autom. Punto establecido sN re-arranq.aut.p/volt. Punto establecidoVoltaje del circuito de corriente contin Menú del segundo nivelVoltaje de Ud Información VConfiguración de Min Ud Punto establecido VConfiguración de Max Ud Punto establecido VValor def.de Ud Min (480 V) Punto establecido VValor def.de Ud Max (480 V) Punto establecido VNúmero de re-arranques automá Punto establecidoRetraso de re-arranques automá Punto establecido minSobrecal. de interruptores de encendido Menú del segundo nivelTemperatura IGBT f U Información °СTemperatura IGBT f V Información °СTemperatura IGBT f W Información °СTemperatura de desconexión Punto establecido °СProtección Punto establecidoNúmero de re-arranques automá Punto establecidoRetraso de re-arranques automá Punto establecido minProtección de Sobrecorriente Menú del segundo nivelCorriente total del SC Información АProtección de corriente Punto establecido АProtección InformaciónNúmero de re-arranques automá Punto establecidoRetraso de re-arranques automá Punto establecido minInterruptores de encendido Menú del segundo nivelNúmero de re-arranques automá Punto establecido 3Retraso de re-arranques automá Punto establecido minProtección Punto establecidoFrecuencia baja Menú del segundo nivelFrecuencia de salida Información Hz
Continuación de la Tabla 2.1
23T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
Designación del parámetro Tipo de parámetro Unidad de medidaFrecuencia mínima Punto establecido HzTiempo de arranque Punto establecido sTiempo Punto establecido sProtección Punto establecidoNúmero de re-arranques automá Punto establecidoRetraso de re-arranques automá Punto establecido minPuerta Menú del segundo nivelBloq. Eléctrico Punto establecidoPuerta InformaciónConexión con TMSN Menú del segundo nivelProtec.P?rd.Conex.Control Punto establecidoTipo de conexión de la estaci Punto establecidoTelemetriá InformaciónField Kill Menú del segundo nivelFuente DinKill Punto establecidoNvl.act. DinKill Punto establecidoProtección DinKill Punto establecido I-límite Menú del segundo nivelValor definido de la corriente Punto establecido ACorriente en demora Punto establecido ADemora Punto establecido sContadoras de re-arranques automático Menú del segundo nivelContadores de re-arranques aut Punto establecidoRein.contad.re-arranq.aut.,volt Punto establecido minRein.contad.re-arranq.aut.,pr Punto establecido minRein.contad.re-arranq.aut.,pr Punto establecido minRein.contad.re-arranq.aut.,de Punto establecido minRein.contad.re-arranq.aut.,otr Punto establecido minTrest.antes.Rein.contad.re-arr Información minTrest.antes.Rein.contad.re-arr Información minTrest.antes.Rein.contad.re-arr Información minTrest.antes.Rein.contad.re-arr Información minTrest.antes.Rein.contad.re-arr Información minContad.N re-arranq.aut.p/causa InformaciónContad.N re-arranq.aut.p/causa InformaciónContad.N re-arranq.aut.p/causa InformaciónRein.delib.contad.re-arranq.a Punto establecido
Continuación de la Tabla 2.1
24А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
Estos parámetros se utilizan durante cada inicio de la unidad de bomba eléctrica sumergible. Durante la puesta en marcha del AVV todos los parámetros deben ser verificados (es posible cambiar los valores preajustados). Se pu-ede introducir los valores, navegar por los menús y visualizar los datos desde el teclado de interfaz usando botones
“CANCELAR” y “ENTRAR” “ ”, “ ”.Si el pozo opera en modo periódico, es necesario cambiar el accionamiento de velocidad variable para el modo
automático con temporizador activado, fijando un período requerido de operación y el tiempo de pausa.Si se utiliza el modo de frecuencia aumentando, es necesario configurar el parámetro “Programar el modo” del
menú “Modos de funcionamiento” - valores necesarios de máxima y mínima frecuencia, paso de incremento de frecuencia y el intervalo de tiempo para cada paso.
2.1.3. Inicio del AVV
1. Compruebe la precisión y fiabilidad de las conexiones externas.2. Inspeccione visualmente el armario para verificar la ausencia de objetos extraños y asegúrese de que los
módulos de potencia y las barras colectoras no contienen agua.3. Aplique la tensión de alimentación. El protector de pantalla aparecerá en la interfaz del controlador UMKA-03.
Para entrar en el menú del estado corriente, pulse el botón “Cancelar”. Si no, el protector de pantalla desapa-recerá en 15-20 segundos y el menú de estado corriente se mostrará en la pantalla de UMKA.
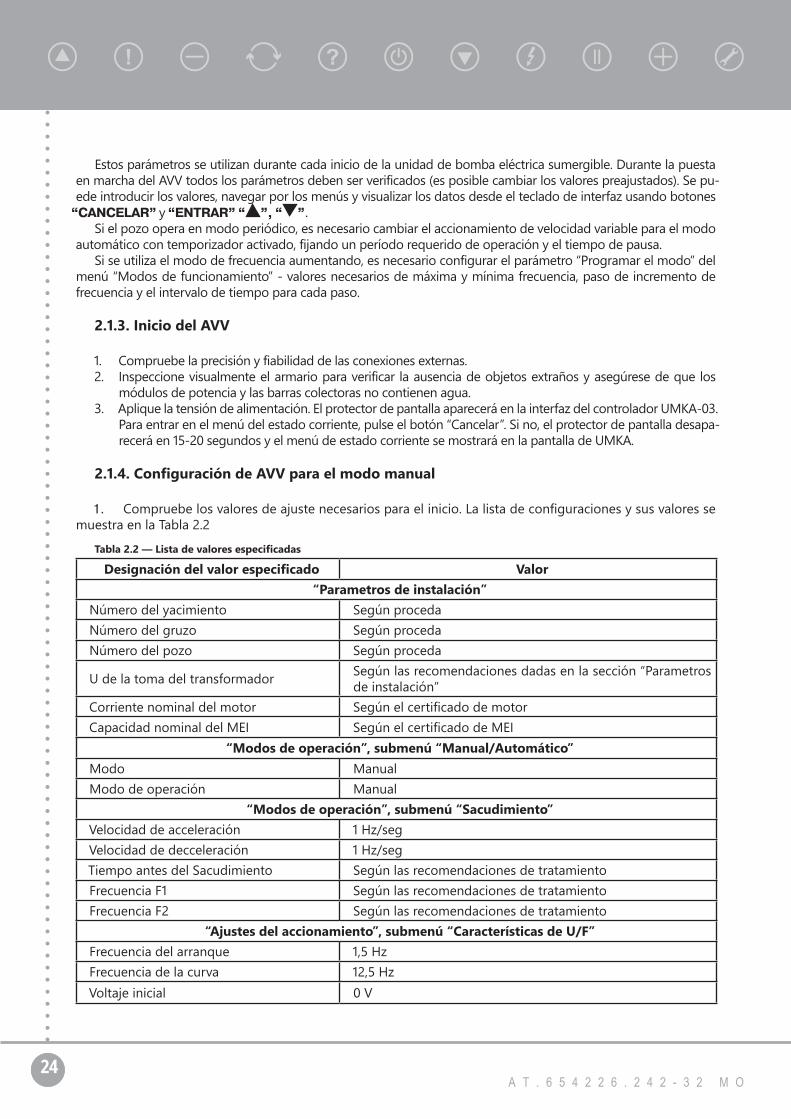
2.1.4. Configuración de AVV para el modo manual
1. Compruebe los valores de ajuste necesarios para el inicio. La lista de configuraciones y sus valores se muestra en la Tabla 2.2
Tabla 2.2 — Lista de valores especificadas
Designación del valor especificado Valor“Parametros de instalación”
Número del yacimiento Según procedaNúmero del gruzo Según procedaNúmero del pozo Según proceda
U de la toma del transformador Según las recomendaciones dadas en la sección “Parametros de instalación”
Corriente nominal del motor Según el certificado de motorCapacidad nominal del MEI Según el certificado de MEI
“Modos de operación”, submenú “Manual/Automático”Modo ManualModo de operación Manual
“Modos de operación”, submenú “Sacudimiento”Velocidad de acceleración 1 Hz/segVelocidad de decceleración 1 Hz/segTiempo antes del Sacudimiento Según las recomendaciones de tratamientoFrecuencia F1 Según las recomendaciones de tratamientoFrecuencia F2 Según las recomendaciones de tratamiento
“Ajustes del accionamiento”, submenú “Características de U/F”Frecuencia del arranque 1,5 HzFrecuencia de la curva 12,5 HzVoltaje inicial 0 V
25T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
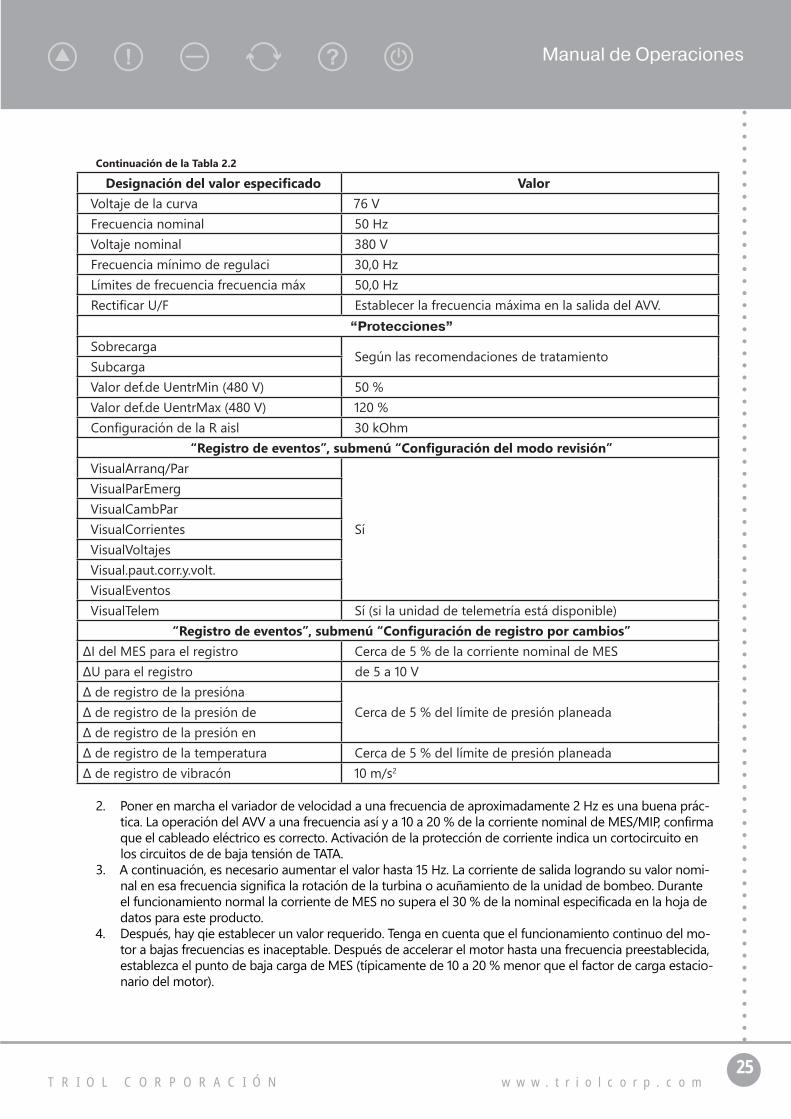
Manual de Operaciones
Designación del valor especificado ValorVoltaje de la curva 76 VFrecuencia nominal 50 HzVoltaje nominal 380 VFrecuencia mínimo de regulaci 30,0 HzLímites de frecuencia frecuencia máx 50,0 HzRectificar U/F Establecer la frecuencia máxima en la salida del AVV.
“Protecciones”
SobrecargaSegún las recomendaciones de tratamiento
SubcargaValor def.de UentrMin (480 V) 50 %Valor def.de UentrMax (480 V) 120 %Configuración de la R aisl 30 kOhm
“Registro de eventos”, submenú “Configuración del modo revisión”VisualArranq/Par
Sí
VisualParEmergVisualCambParVisualCorrientesVisualVoltajesVisual.paut.corr.y.volt.VisualEventosVisualTelem Sí (si la unidad de telemetría está disponible)
“Registro de eventos”, submenú “Configuración de registro por cambios”ΔI del MES para el registro Cerca de 5 % de la corriente nominal de MESΔU para el registro de 5 a 10 VΔ de registro de la presióna
Cerca de 5 % del límite de presión planeadaΔ de registro de la presión deΔ de registro de la presión enΔ de registro de la temperatura Cerca de 5 % del límite de presión planeadaΔ de registro de vibracón 10 m/s2
2. Poner en marcha el variador de velocidad a una frecuencia de aproximadamente 2 Hz es una buena prác-tica. La operación del AVV a una frecuencia así y a 10 a 20 % de la corriente nominal de MES/MIP, confirma que el cableado eléctrico es correcto. Activación de la protección de corriente indica un cortocircuito en los circuitos de de baja tensión de TATA.
3. A continuación, es necesario aumentar el valor hasta 15 Hz. La corriente de salida logrando su valor nomi-nal en esa frecuencia significa la rotación de la turbina o acuñamiento de la unidad de bombeo. Durante el funcionamiento normal la corriente de MES no supera el 30 % de la nominal especificada en la hoja de datos para este producto.
4. Después, hay qie establecer un valor requerido. Tenga en cuenta que el funcionamiento continuo del mo-tor a bajas frecuencias es inaceptable. Después de accelerar el motor hasta una frecuencia preestablecida, establezca el punto de baja carga de MES (típicamente de 10 a 20 % menor que el factor de carga estacio-nario del motor).
Continuación de la Tabla 2.2
26А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
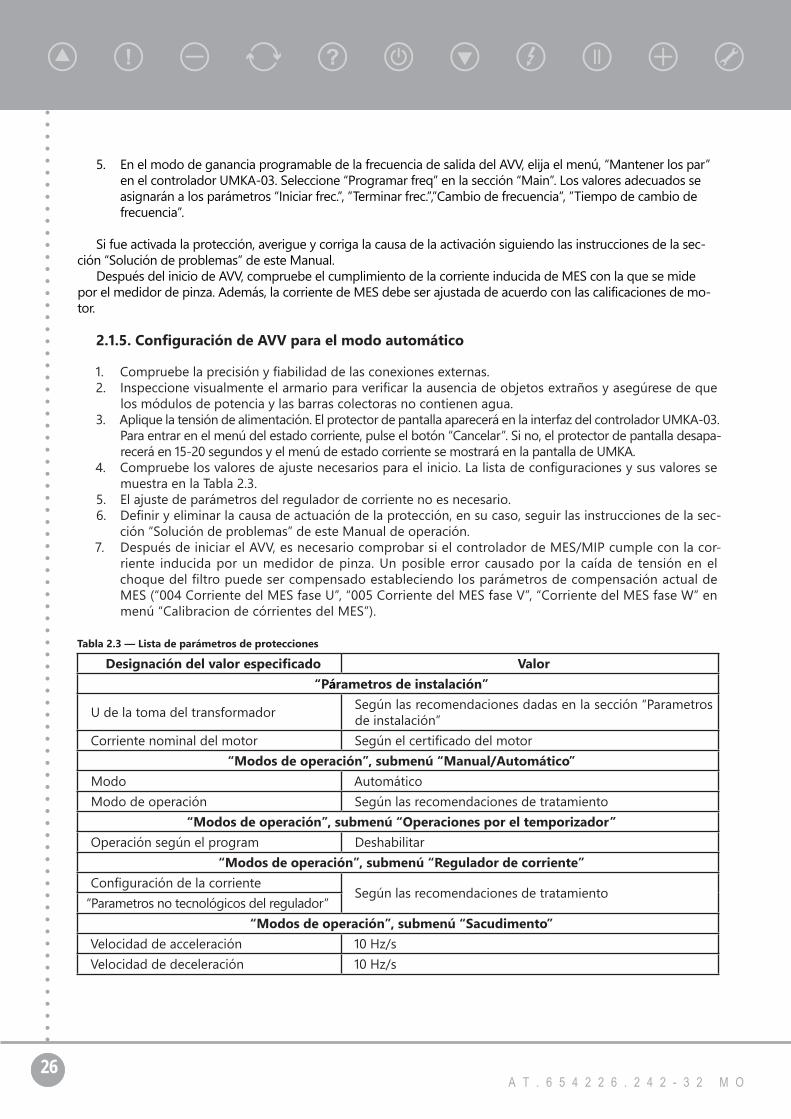
5. En el modo de ganancia programable de la frecuencia de salida del AVV, elija el menú, “Mantener los par” en el controlador UMKA-03. Seleccione “Programar freq” en la sección “Main”. Los valores adecuados se asignarán a los parámetros “Iniciar frec.”, ”Terminar frec.”,”Cambio de frecuencia”, ”Tiempo de cambio de frecuencia”.
Si fue activada la protección, averigue y corriga la causa de la activación siguiendo las instrucciones de la sec-ción “Solución de problemas” de este Manual.
Después del inicio de AVV, compruebe el cumplimiento de la corriente inducida de MES con la que se mide por el medidor de pinza. Además, la corriente de MES debe ser ajustada de acuerdo con las calificaciones de mo-tor.
2.1.5. Configuración de AVV para el modo automático
1. Compruebe la precisión y fiabilidad de las conexiones externas.2. Inspeccione visualmente el armario para verificar la ausencia de objetos extraños y asegúrese de que
los módulos de potencia y las barras colectoras no contienen agua.3. Aplique la tensión de alimentación. El protector de pantalla aparecerá en la interfaz del controlador UMKA-03.
Para entrar en el menú del estado corriente, pulse el botón “Cancelar”. Si no, el protector de pantalla desapa-recerá en 15-20 segundos y el menú de estado corriente se mostrará en la pantalla de UMKA.
4. Compruebe los valores de ajuste necesarios para el inicio. La lista de configuraciones y sus valores se muestra en la Tabla 2.3.
5. El ajuste de parámetros del regulador de corriente no es necesario.6. Definir y eliminar la causa de actuación de la protección, en su caso, seguir las instrucciones de la sec-
ción “Solución de problemas” de este Manual de operación.7. Después de iniciar el AVV, es necesario comprobar si el controlador de MES/MIP cumple con la cor-
riente inducida por un medidor de pinza. Un posible error causado por la caída de tensión en el choque del filtro puede ser compensado estableciendo los parámetros de compensación actual de MES (“004 Corriente del MES fase U”, “005 Corriente del MES fase V”, “Corriente del MES fase W” en menú “Calibracion de córrientes del MES”).
Tabla 2.3 — Lista de parámetros de protecciones
Designación del valor especificado Valor“Párametros de instalación”
U de la toma del transformador Según las recomendaciones dadas en la sección “Parametros de instalación”
Corriente nominal del motor Según el certificado del motor“Modos de operación”, submenú “Manual/Automático”
Modo AutomáticoModo de operación Según las recomendaciones de tratamiento
“Modos de operación”, submenú “Operaciones por el temporizador”Operación según el program Deshabilitar
“Modos de operación”, submenú “Regulador de corriente”Configuración de la corriente
Según las recomendaciones de tratamiento“Parametros no tecnológicos del regulador”
“Modos de operación”, submenú “Sacudimento”Velocidad de acceleración 10 Hz/sVelocidad de deceleración 10 Hz/s
27T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
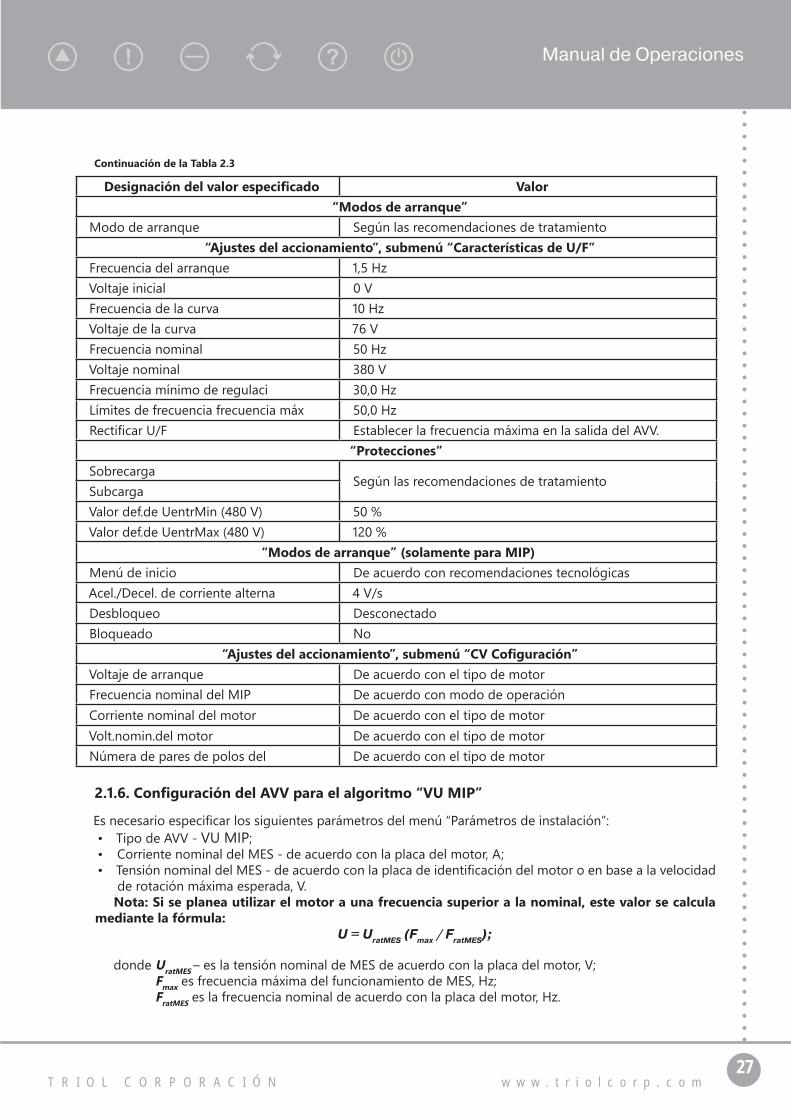
Designación del valor especificado Valor“Modos de arranque”
Modo de arranque Según las recomendaciones de tratamiento“Ajustes del accionamiento”, submenú “Características de U/F”
Frecuencia del arranque 1,5 HzVoltaje inicial 0 VFrecuencia de la curva 10 HzVoltaje de la curva 76 VFrecuencia nominal 50 HzVoltaje nominal 380 VFrecuencia mínimo de regulaci 30,0 HzLímites de frecuencia frecuencia máx 50,0 HzRectificar U/F Establecer la frecuencia máxima en la salida del AVV.
“Protecciones”Sobrecarga
Según las recomendaciones de tratamientoSubcargaValor def.de UentrMin (480 V) 50 %Valor def.de UentrMax (480 V) 120 %
“Modos de arranque” (solamente para MIP)Menú de inicio De acuerdo con recomendaciones tecnológicasAcel./Decel. de corriente alterna 4 V/sDesbloqueo DesconectadoBloqueado No
“Ajustes del accionamiento”, submenú “CV Cofiguración”Voltaje de arranque De acuerdo con el tipo de motorFrecuencia nominal del MIP De acuerdo con modo de operaciónCorriente nominal del motor De acuerdo con el tipo de motorVolt.nomin.del motor De acuerdo con el tipo de motorNúmera de pares de polos del De acuerdo con el tipo de motor
2.1.6. Configuración del AVV para el algoritmo “VU MIP”
Es necesario especificar los siguientes parámetros del menú “Parámetros de instalación”:• Tipo de AVV - VU MIP;• Corriente nominal del MES - de acuerdo con la placa del motor, A;• Tensión nominal del MES - de acuerdo con la placa de identificación del motor o en base a la velocidad
de rotación máxima esperada, V.Nota: Si se planea utilizar el motor a una frecuencia superior a la nominal, este valor se calcula
mediante la fórmula:U = U
ratMES (F
max / F
ratMES);
donde UratMES – es la tensión nominal de MES de acuerdo con la placa del motor, V;Fmax es frecuencia máxima del funcionamiento de MES, Hz;FratMES es la frecuencia nominal de acuerdo con la placa del motor, Hz.
Continuación de la Tabla 2.3
28А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
La tensión calculada será más alta que la tensión nominal mencionada en la placa del motor.Frecuencia nominal del motor - frecuencia del MES nominal, de acuerdo con la placa del motor, Hz.
Nota: Si se planea utilizar el motor a una frecuencia superior a la nominal, dada frecuencia se establece en parámetros de Fmax - frecuencia máxima de funcionamiento de MES.
2. Establecer los parámetros siguientes en la sección “Configuración de la unidad/Parámetros de motor elec-trónico de corrente alterna”:Tipo de motor (tipo de MIP) - de acuerdo con los datos de la placa (bajo el certificado de registro) se puede elegir entre una serie de valores:
• 3000 rpm;• 6000 rpm;• 10,000 rpm;• “Factor de eficiencia” – 0,85.
3. Entrar: profundidad, sección de cable, temperatura del yacimiento - en el menú de primer nivel ”Calc. de transf stepup. menú de tensión del grifo”.
4. Ver el valor recomendado de toma de tensión (valor sellando) en “Recomendado STEPUP trans.” Parámetro. Ajustar el “Parámetro U de stepup” (pero no la coloque en realidad en el transformador stepup!) el valor de la tensión del grifo más cercano superior que pueden configurar en el transformador stepup.
5. Comprobar la característica de U/F (“Configuración de la unidad/característica U/F”). Tensión cuarto de punto debe estar bajo 310 - 340 V (para línea de 380 V) o 400-440 V (para línea de 480 V). Si este valor es mayor, hay que entrar el valor más alto de tensión del transformador en el parámetro”Valor U de stepup” y cambiar la característica U/F una vez más. Llevar a cabo las operaciones anteriores, mientras que la tensión carto de punto de entrada está en rango de 310 a 340 V (para línea de 380 V) o 400-440 V (para línea de 480 V).
6. Establecer (por interruptores correspondientes) el mismo voltaje del transformador stepup que en “Valor U del transf.stepup”.
7. La unidad se activa cuando los dispositivos de producción de petróleo y equipos eléctricos están dispuestos.8. Si antes de inicio y después de la carga del enlace de CC aparecen las emergencias de sobrecorriente o
sobrecarga, es necesario:Fijar el valor de la tensión de salida del AVV en el “Registro de eventos/Ver el registro de eventos” inme-
diatamente antes de que aparece la emergencia de sobrecorriente o sobrecarga. Si este valor es inferior al 50 % de la característica de U/ F, es necesario reducir la tensión del punto más cercano de la característica U/F: la tensión debe corresponder a la tensión de salida del AVV antes de la emergencia (“Configuración de la unidad /Característica U/F”). Al revés, si este valor es superior al 50 %, es necesario aumentar de tensión de punto más cercano de característica U/F: la tensión debe corresponder a la tensión de salida del AVV antes de la emergencia. Iniciar el AVV. Si el problema persiste, repetir las acciones que comienzan desde el punto anterior.
9. Si antes de aceleración o después de la captura de frecuencia aparece la emergencia de sobrecorriente o sobrecarga y acciones del punto 8 no ayudan, es necesario reducir el “Factor de eficiencia” (“Configura-ciónes del Accionamiento/Parámetros de motor electrónico de corriente alterna”) hasta 0,8 (0,9 por defecto). Si después de inicios repetidos el problema no esta resuelta, es necesario seguir reduciendo cos φ hasta 0.7.
29T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
2.2. Operación del Accionamiento de Velocidad Variable
2.2.1. Ajuste de protección
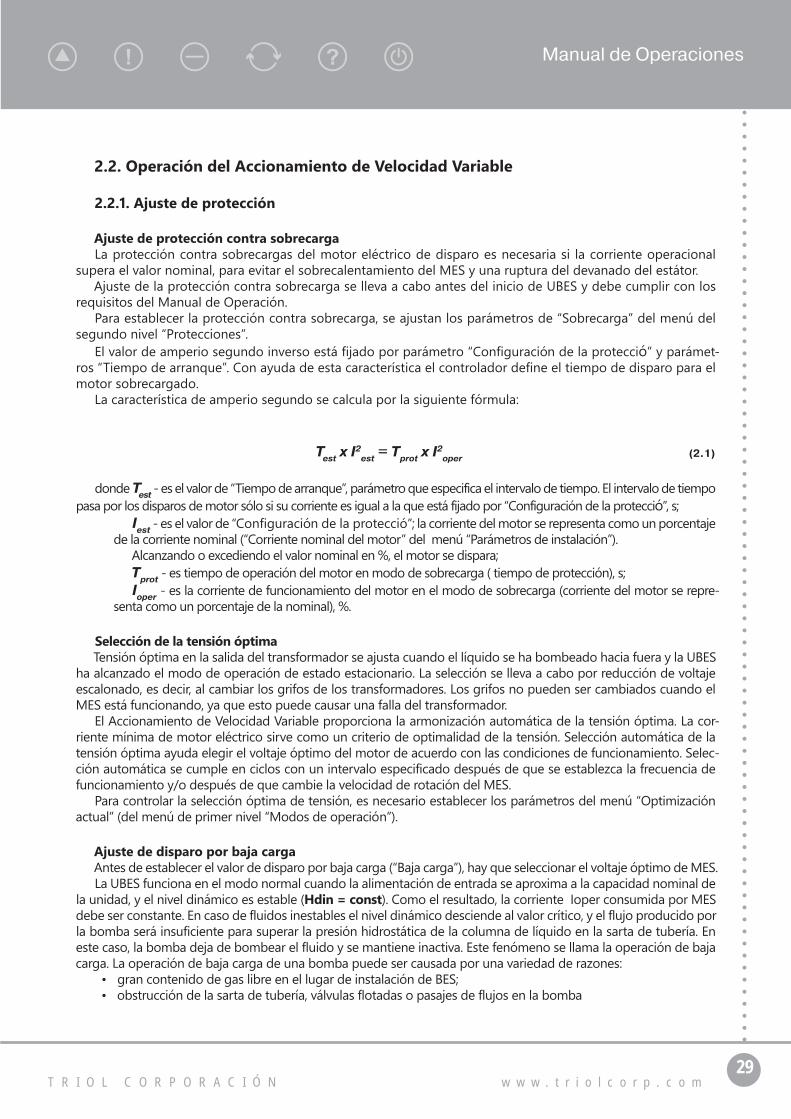
Ajuste de protección contra sobrecargaLa protección contra sobrecargas del motor eléctrico de disparo es necesaria si la corriente operacional
supera el valor nominal, para evitar el sobrecalentamiento del MES y una ruptura del devanado del estátor.Ajuste de la protección contra sobrecarga se lleva a cabo antes del inicio de UBES y debe cumplir con los
requisitos del Manual de Operación.Para establecer la protección contra sobrecarga, se ajustan los parámetros de “Sobrecarga” del menú del
segundo nivel “Protecciones”.El valor de amperio segundo inverso está fijado por parámetro “Configuración de la protecció” y parámet-
ros “Tiempo de arranque”. Con ayuda de esta característica el controlador define el tiempo de disparo para el motor sobrecargado.
La característica de amperio segundo se calcula por la siguiente fórmula:
Test
x I2est
= Tprot
x I2oper (2.1)
donde Test
- es el valor de “Tiempo de arranque”, parámetro que especifica el intervalo de tiempo. El intervalo de tiempo pasa por los disparos de motor sólo si su corriente es igual a la que está fijado por “Configuración de la protecció”, s;
Iest
- es el valor de “Configuración de la protecció”; la corriente del motor se representa como un porcentaje de la corriente nominal (“Corriente nominal del motor” del menú “Parámetros de instalación”).
Alcanzando o excediendo el valor nominal en %, el motor se dispara;T
prot - es tiempo de operación del motor en modo de sobrecarga ( tiempo de protección), s;
Ioper
- es la corriente de funcionamiento del motor en el modo de sobrecarga (corriente del motor se repre-senta como un porcentaje de la nominal), %.
Selección de la tensión óptimaTensión óptima en la salida del transformador se ajusta cuando el líquido se ha bombeado hacia fuera y la UBES
ha alcanzado el modo de operación de estado estacionario. La selección se lleva a cabo por reducción de voltaje escalonado, es decir, al cambiar los grifos de los transformadores. Los grifos no pueden ser cambiados cuando el MES está funcionando, ya que esto puede causar una falla del transformador.
El Accionamiento de Velocidad Variable proporciona la armonización automática de la tensión óptima. La cor-riente mínima de motor eléctrico sirve como un criterio de optimalidad de la tensión. Selección automática de la tensión óptima ayuda elegir el voltaje óptimo del motor de acuerdo con las condiciones de funcionamiento. Selec-ción automática se cumple en ciclos con un intervalo especificado después de que se establezca la frecuencia de funcionamiento y/o después de que cambie la velocidad de rotación del MES.
Para controlar la selección óptima de tensión, es necesario establecer los parámetros del menú “Optimización actual” (del menú de primer nivel “Modos de operación”).
Ajuste de disparo por baja cargaAntes de establecer el valor de disparo por baja carga (“Baja carga”), hay que seleccionar el voltaje óptimo de MES.La UBES funciona en el modo normal cuando la alimentación de entrada se aproxima a la capacidad nominal de
la unidad, y el nivel dinámico es estable (Нdin = const). Como el resultado, la corriente Ioper consumida por MES debe ser constante. En caso de fluidos inestables el nivel dinámico desciende al valor crítico, y el flujo producido por la bomba será insuficiente para superar la presión hidrostática de la columna de líquido en la sarta de tubería. En este caso, la bomba deja de bombear el fluido y se mantiene inactiva. Este fenómeno se llama la operación de baja carga. La operación de baja carga de una bomba puede ser causada por una variedad de razones:
• gran contenido de gas libre en el lugar de instalación de BES;• obstrucción de la sarta de tubería, válvulas flotadas o pasajes de flujos en la bomba
30А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
• mal funcionamiento de la boca de pozo o cañería principal (sin paso)Operación de baja carga provoca varios fenómenos que empeoran el servicio de la UBES:
• la falta de flujo de fluido en el MES provoca su calentamiento excesivo;la eficiencia de la bomba es 0 %, y la potencia consumida por la bomba no es menor que 50 % del valor esta-
blecido. Si el líquido bombeado es cero, toda la energía consumida por la bomba se desperdicia para calentar la bomba y el fluido circundante. Calefacción de líquido en la bomba puede resultar en generación de vapor localizada, que a su vez provoca fricción en seco en las partes de la bomba y su desgaste acelerado.
Normalmente, inanición de la bomba conlleva consecuencias como fusión de cable, pérdida de la sección de sellado, ruptura del aislamiento o devanado del estátor.
Para evitar los dichos fenómenos, el accionamiento está protegido contra baja carga (“Baja carga”). Dado que durante la inanición el consumo de energía es considerablemente menor que en el modo normal, la operación de protección se basa en la monitorización del consumo actual. Si el valor actual se pone al nivel críticamente bajo, el accionamiento de velocidad variable dispara la UBES, protegiendo la bomba de inanición.
Control de funcionamiento en baja cargaEl funcionamiento de disparo por baja carga se comprobará de la siguiente manera:• Establecer el retardo de tiempo a 300 s;• Disminuir el valor establecido de baja carga (parámetro “Configuración de la protecció”) para que corre-
sponda a la carga real. El indicador “OPERACIÓN” en el panel frontal se encenderá parpadeando y comen-zará la cuenta atrás hasta el disparo (la operación en baja carga);
• Restaurar el valor establecido anteriormente según el procedimiento de ajuste de protección.
El ajuste de disparo por baja carga contra la carga del motor sumergibleAntes de iniciar el disparo por baja carga deberá estar deshabilitado.El disparo por baja carga (DBC) se fijará después de un lapso de 1 hora de operación, después de la rotación
adecuada – después de que ha sido confirmada la entrega a EMGA (estación de medición del grupo automa-tizado). Para eso:
• hay que sostener la carga real del motor fijo;• el punto de ajuste para la protección contra carga baja debe ser fijada a 90 % de la carga real;• hay que reajustar la protección con respecto a los valores reales de la carga (corriente) en el proceso de
la puesta en marcha, so sea necesario (sustitución de fluido por fluido de formación, flujo de entrada desde el depósito o presencia de gas).
La carga del MES/STM deberá ser definida por un parámetro correspondiente en el controlador del AVV o utilizando la función de control de los disponibles del componente real de MES/STM. Si esa capacidad no se proporciona en el AVV, la carga del MES/STM se define como una relación entre la carga actual del MES/STM y corriente nominal multiplicado por 100 %.
Ajuste de protección contra la caída de tensión Ajuste de protección contra caídas de tensión se realiza con el fin de estabilizar el funcionamiento de la UBES.Tensión máxima: Umax = 150 V. El retardo de operación se establece en 5 s.Tensión mínima: Umin = 80 V. El retardo de operación se establece en 5 s.
Ajuste de protección contra el desequilibrio de corriente de faseLa protección contra el desequilibrio de corriente es necesaria para asegurar la estabilidad de la operación
de MES, lo que garantiza su máximo TMEF (Tiempo Medio Entre Fallos). El desequilibrio actual no no debe ser superior al 10 %:
med
(2.2)
donde ΔI - es el desequilibrio actual, %;ΔImax - desviación máxima de la corriente del valor medio, A;Imed - valor medio aritmético de las corrientes de fase, A.
31T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
Ajuste de protección contra el desequilibrio de tensión de faseLa protección contra el desequilibrio de tensión de fase, igual como la protección contra el desequilibrio de
corriente, es necesaria para asegurar la estabilidad de la operación de MES. Valor del desequilibrio de tensión de fase no debe ser superior al 10%.
Ajuste de la protección contra la resistencia baja del sistema “TATA-ESM–Cable”La protección contra baja resistencia del sistema “TATA-Cable-ESM” está diseñado para evitar averías de las partes
de alimentación del sistema. El valor establecido de baja resistencia para este sistema no podrá exceder 30 kOhm.
Ajuste de la protección contra rotación de turbinaLa protección contra rotación de la turbina está destinada a prevenir el inicio de la UBES cuando el líquido
se drena de la sarta de tubería. El valor establecido es 5 Hz. Si dicha protección se proporciona en el acciona-miento de velocidad variable, el tiempo de disparo es igual a 1-5 min.
2.2.2. Ajuste de características al modo y eliminación de complicaciones
2.2.2.1. Inicio y conclusión al modo, a condición de un conjunto completo de telemetría sumergible
Inicio y puesta en marcha de la UBES equipada con sistema de telemedida sumergiblePoniendo un pozo en marcha después de reacondicionamiento en la presión anular de 0 atm, es difícil definir el
nivel estático Нstat. y cambios del nivel dinámico (Нdyn) después de que la UBES se ha puesto en funcionamiento. Si los datos sobre la presión en el lado de succión contienen el valor de Нstat. y Нdyn se puede definir con más exactitud. La presión en el lado de succión de la bomba puede ser convertida en metros de columna de líquido usando la siguiente fórmula:
H = L - Hdyn(stat) prof liq(2.3)
donde Lprof - es profundidad establecida de la bomba, m;Нliq - es la columna de líquido por encima del lugar de succión (profundidad de ajuste) de la bomba.
Нliq - puede ser calculado mediante la fórmula:
Hliq =( - )·10P Ptrans annular
Ppetr
(2.4)
donde Рtrans - es la presión en el lado de succión de la bomba de acuerdo a las lecturas del transductor, atm;Рannular - presión del anillo, atm;Рpetr - petroleo es la Densidad básica de petroleo, en kg/m3.
Después de que la BES se ha puesto en funcionamiento y mientras identificando la correcta dirección de los ejes de rotación de la BES - después de la conversión del valor de la presión en el lado de succión en los metros de columna de líquido (cambio de Нdyn) y el Рentr (Нdyn), el valor de declinación debe ser comparado con los valores de Нdyn dados en las Tablas. El cumplimiento de la disminución Рentr (Нdyn) con los valores de la tabla va implícitamente a demostrar la exactitud de la dirección de rotación.
Los datos del sensor sumergible sobre la temperatura de MES y la temperatura en el lado de succión de la bomba se utilizarán para el monitoreo de las condiciones de temperatura. El aumento de temperatura de MES por encima de 105 °C indica una refrigeración insuficiente del motor sumergible. Es necesario identificar el motivo del aumento de la temperatura de MES. Entre las posibles causas del aumento tan podemos denotar el flujo insuficiente desde el depósito, rotación incorrecta de los ejes de UBES, sellado defectuoso del tubo ascensor y la cabeza de la bomba insuficiente a la velocidad de rotación instantánea.
Al poner el pozo en marcha, los datos del transductor sumergible (Рentrada, Тmotor, Тentrada, vibración), así como otros parámetros de funcionamiento del pozo (Нd, Q, Рannulus, etc.) permiten evaluar las condicio-nes de funcionamiento del sistema UBES - pozo más precisamente, para reducir el riesgo de puesta en marcha imperfecta y el fracaso de la unidad.
32А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
2.2.2.2. Eliminación de complicaciones
Si algunas dificultades aparecen durante la puesta en marcha, es necesario ponerse en contacto con el Servicio de Proceso OPE y el supervisor de la UBES. Operaciones subsiguientes se realizarán en presencia del personal de ingeniería del Taller de Producción.
En el caso del disparo de AVV debido a la sobrecarga, el segundo reinicio se realizará dentro de 30 minu-tos (si la válvula de flotador en la sarta de tubería tiene fugas, el líquido drenado puede causar rotación de la turbina).
Para reducir el tiempo de espera, se utilizará el modo de comprobación instantánea bajo condiciones de rotación de la turbina.
En caso de paro, el usuario deberá desconectar el convertidor de frecuencia, desconectar el cable sumerg-ible del transformador y medir la resistencia de aislamiento del sistema “Cable-MES” desde el convertidor de frecuencia a la unidad apropiada. Si la resistencia de aislamiento no supera 5 MOhm, hay realizar una prueba sin carga (inactivo) del convertidor de frecuencia (control de funcionamiento).
AtranqueEn caso de bloqueo de la unidad (sin período previo), es necesario limpiarla. El método de limpieza será
elegido según la disponibilidad/ausencia de válvula de flotador en la sarta de tubería, así como de la disponibi-lidad/ausencia de la circulación.
Al reiniciar la unidad, intente operarla con rotación inversa. Si la unidad se inicia, siga funcionando dentro de 5 -10 minutos después de cambiar el sentido de giro. Si la unidad no puede alcanzar el valor de la frecuencia preestablecida, intente a desatascarla de nuevo.
Es posible desatascar el accionamiento de velocidad variable por uno de los siguientes métodos:• Arranque - inicio del AVV en el que una secuencia de pulsos de tensión alta se aplica al motor mientras
accelerarlo con baja frecuencia.• Puesta en marcha con rotación reversa – el AVV se pone en marcha de forma intermitente con el
cambio de sentidos de giro.• Inicio con desatascamiento duro - inicio del AVV durante el cual se alcanza el par máximo del mo-
tor a la frecuencia baja. Con la frecuencia definida por el parámetro “712 Frecuencia de deslizamiento” (refiérase a la hoja de datos de MES) se aplica una tensión de baja frecuencia durante dos segundos, de tal manera que la corriente de MES es dos veces más grande que la corriente de MES clasificada para esta frecuencia.
En caso de rotación inversa, mantenga la UBES en marcha de 5 a 10 min, y después cambie la dirección de rotación y mantenga la unidad apagada, observando la carga actual. La corriente de UBES no debe superar el valor nominal.
En caso de bloqueo de la unidad (sin período previo), es necesario limpiarla. El método de limpieza será elegido según la disponibilidad/ausencia de válvula de flotador en la sarta de tubería, así como de la disponibi-lidad/ausencia de la circulación.
Sellado defectuoso de la sarta de tuberíaLa UBES puede funcionar en modo normal si la tubería tiene fugas.Ioper. - se observa dentro del siguiente dominio:
Iх.х.
* 1.2 < Ioper.
< Inomin.
Las protecciones pueden ser ajustadasEs imposible detectar las fugas en tubos controlando la corriente de funcionamiento. Se puede detectarlas
utilizando dos manómetros y un dispositivo de medición (DM). Si la presión en el búfer (Рbuf.) es igual o un poco mayor que la de Рdepósito, y el dispositivo de medición indica baja capacidad de bombeo, la estanqueidad
33T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
se comprobará cerrando la válvula de compuerta. Después de que la unidad está apagada, se puede observar el valor del medidor de presión (por ejemplo 40 kg/cm2) que permanecerá constante dentro de un tiempo determinado. Si la presión aumenta al encender la unidad o comienza a caer rápidamente después de que la unidad se ha apagado, podemos concluir de que la sarta de tubería tiene fugas.
Interrupción del acoplamiento conectando el motor con la bombaSi se interrumpen las estrías de acoplamiento que conecta el motor a la bomba, la corriente actual de oper-
ación estará cerca de o inferior a 120 % de la corriente flotante de MES. Esta corriente puede aparecer también en caso del nivel bajo dinámico (Нdyn), cuando la unidad está funcionando con baja carga. En este caso la UBES debe estar apagada durante 2-3 horas para revisar el problema. Inicie la unidad después de que el Нdyn en el pozo se incremente. Si el valor de la corriente de MES no aumenta, podemos concluir que las estrías están interrumpidas.
2.2.3. Apago del AVV
Apagando el AVV, es necesario cumplir los siguientes pasos:• pare el motor si está em marcha;• si el motor no está en marcha, asegúrese de que no está en modo de espera y no va a encenderse por el
reinicio automático o mediante el temporizador. Si no (el indicador amarillo ESPERA está encendido, se muestra un mensaje correspondiente en la pantalla del controlador UMKA-03), pulse el botón “STOP”.
Para realizar cualquier obra que impliquen apertura de puertas, es necesario desconectar el interruptor automático QF1.
2.2.4. Solución de problemas para AVV Triol AK06
Todas las obras se llevan a cabo sólo por el personal cualificado que satisface los requisitos de las Reglas de Operación de Instalaciones Eléctricas, Normas de seguridad para la operación de Instalaciones Eléctricas e instrucciones de seguridad de la empresa.
El supervisor de las obras deberá tener al menos categoría cuarta en ingeniería de seguridad.Las operaciones de montaje del AVV se ejecutan solamente en el modo desactivado y el enlace Ud descargado.
2.2.4.1. Comprobación de operatividad en vacío
1. Conecte el suministro.2. Seleccione el modo manual, ajuste la frecuencia de salida a 50 Hz.3. Pulse el botón “INICIO” en el menú “Inicio en vacio” de controlador UMKA-03. Compruebe la carga
de los condensadores del circuito intermedio, el indicador “OPERACIÓN” encendido y aumento de la frecuencia de salida.
4. Pulse el botón “STOP”.5. Ponga el AVV en el modo automático. Encienda el temporizador y ponga el tiempo de ejecución de 1
minuto. Pulse el botón “INICIO”. En cuanto se termina la cuenta atrás, asegúrese de que el indicador “ESPERA” está activado.
6. Pulse el botón “STOP”. Ponga el AVV en el modo de arranque manual.
2.2.4.2. Solución de problemas durante el arranque y algoritmos de solución de problemas con MEI
Soluciones de problemas durante el arranque del AVV y esquemas de fallos se dan en la Tabla 2.4. Solucio-nes de problemas con el Poder Filtro Activo (para accionamientos de velocidad variable con Poder Filtro Activo (adelante el PFA) y esquemas de fallos se dan en la Tabla 2.5.
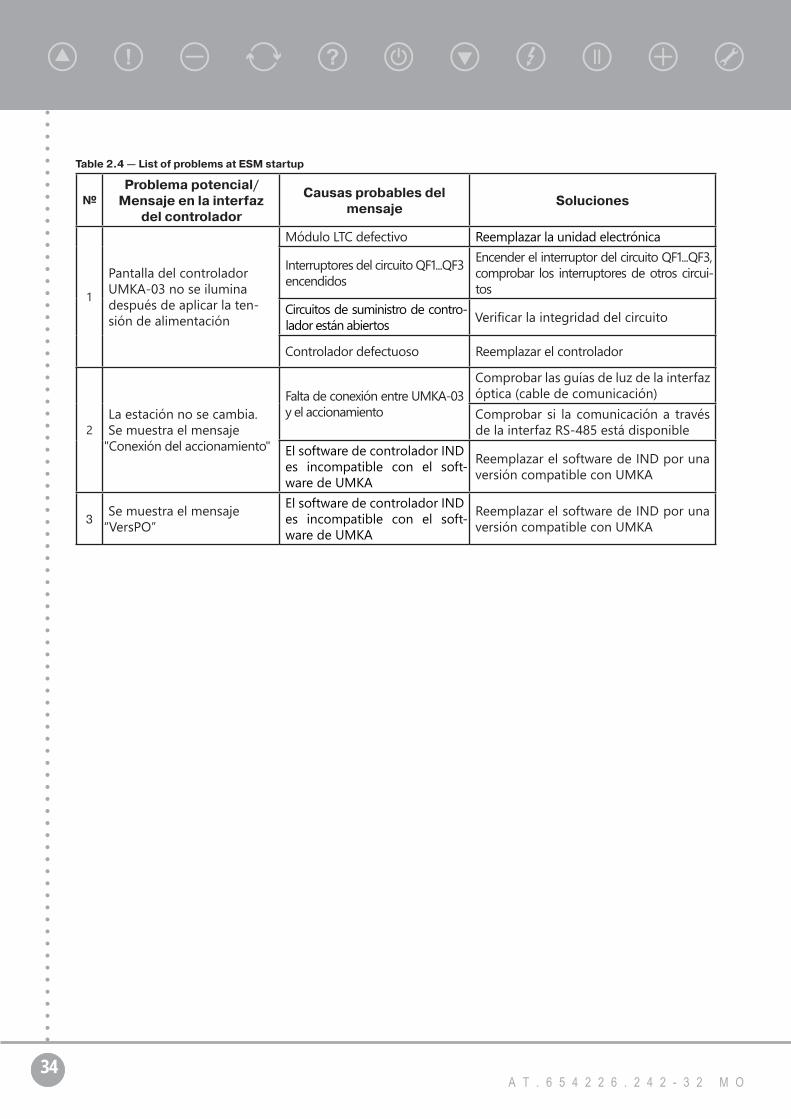
34А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
Table 2.4 — List of problems at ESM startup
№Problema potencial/
Mensaje en la interfaz del controlador
Causas probables del mensaje
Soluciones
1
Pantalla del controlador UMKA-03 no se ilumina después de aplicar la ten-sión de alimentación
Módulo LTC defectivo Reemplazar la unidad electrónica
Interruptores del circuito QF1...QF3 encendidos
Encender el interruptor del circuito QF1...QF3, comprobar los interruptores de otros circui-tos
Circuitos de suministro de contro-lador están abiertos Verificar la integridad del circuito
Controlador defectuoso Reemplazar el controlador
2La estación no se cambia. Se muestra el mensaje
"Conexión del accionamiento"
Falta de conexión entre UMKA-03 y el accionamiento
Comprobar las guías de luz de la interfaz óptica (cable de comunicación)Comprobar si la comunicación a través de la interfaz RS-485 está disponible
El software de controlador IND es incompatible con el soft-ware de UMKA
Reemplazar el software de IND por una versión compatible con UMKA
3Se muestra el mensaje
“VersPO”
El software de controlador IND es incompatible con el soft-ware de UMKA
Reemplazar el software de IND por una versión compatible con UMKA
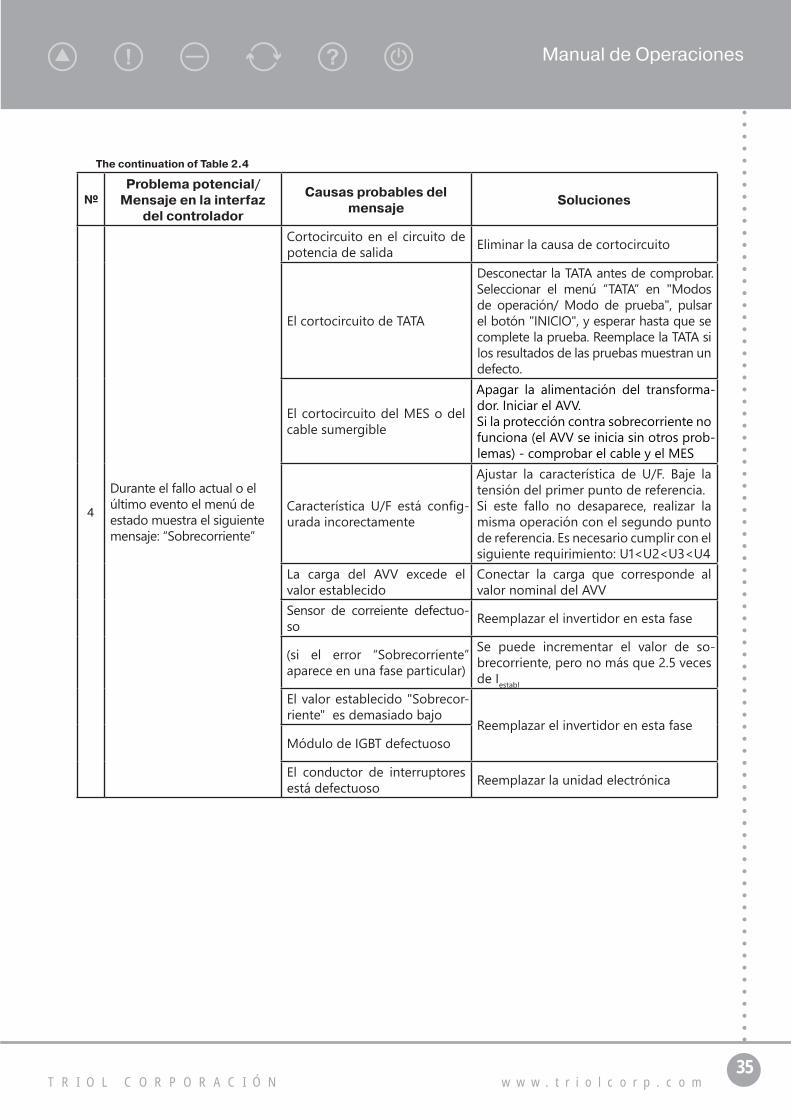
35T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
№Problema potencial/
Mensaje en la interfaz del controlador
Causas probables del mensaje
Soluciones
4
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: “Sobrecorriente”
Cortocircuito en el circuito de potencia de salida Eliminar la causa de cortocircuito
El cortocircuito de TATA
Desconectar la TATA antes de comprobar. Seleccionar el menú “TATA” en "Modos de operación/ Modo de prueba", pulsar el botón "INICIO", y esperar hasta que se complete la prueba. Reemplace la TATA si los resultados de las pruebas muestran un defecto.
El cortocircuito del MES o del cable sumergible
Apagar la alimentación del transforma-dor. Iniciar el AVV. Si la protección contra sobrecorriente no funciona (el AVV se inicia sin otros prob-lemas) - comprobar el cable y el MES
Característica U/F está config-urada incorectamente
Ajustar la característica de U/F. Baje la tensión del primer punto de referencia.Si este fallo no desaparece, realizar la misma operación con el segundo punto de referencia. Es necesario cumplir con el siguiente requirimiento: U1<U2<U3<U4
La carga del AVV excede el valor establecido
Conectar la carga que corresponde al valor nominal del AVV
Sensor de correiente defectuo-so Reemplazar el invertidor en esta fase
(si el error “Sobrecorriente” aparece en una fase particular)
Se puede incrementar el valor de so-brecorriente, pero no más que 2.5 veces de Iestabl
El valor establecido "Sobrecor-riente" es demasiado bajo
Reemplazar el invertidor en esta faseMódulo de IGBT defectuoso
El conductor de interruptores está defectuoso Reemplazar la unidad electrónica
The continuation of Table 2.4
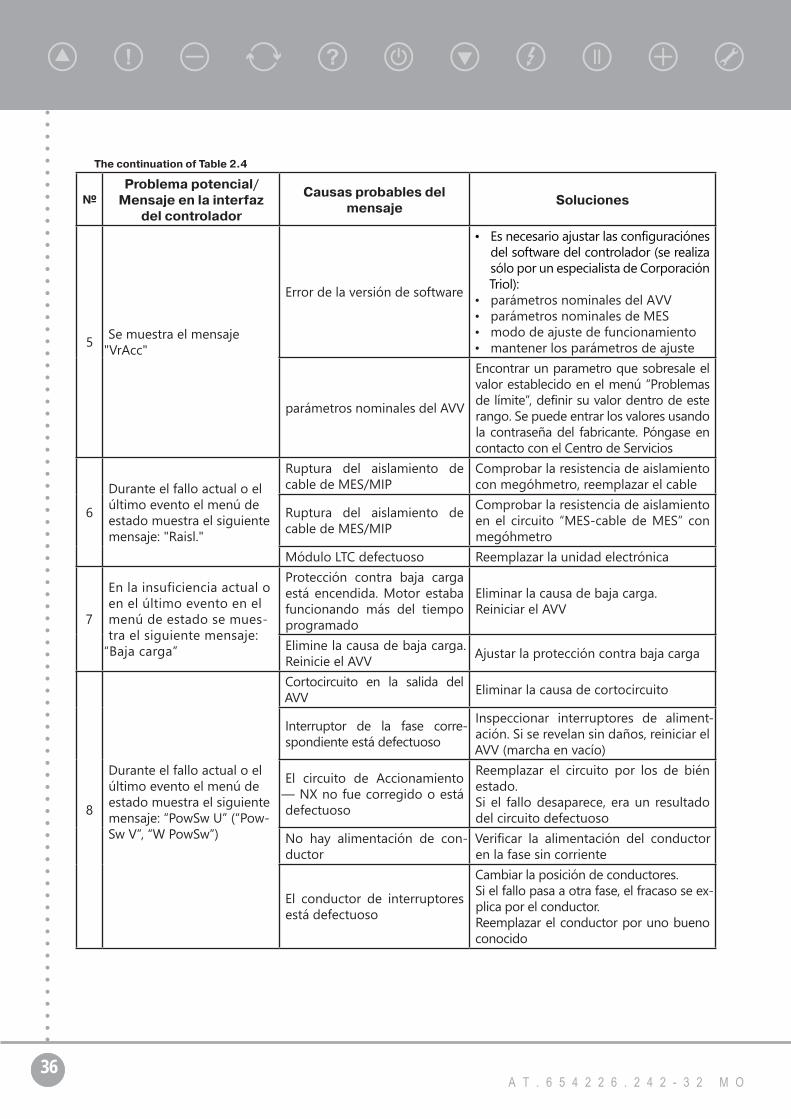
36А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
№Problema potencial/
Mensaje en la interfaz del controlador
Causas probables del mensaje
Soluciones
5 Se muestra el mensaje "VrAcc"
Error de la versión de software
• Es necesario ajustar las configuraciónes del software del controlador (se realiza sólo por un especialista de Corporación Triol):
• parámetros nominales del AVV• parámetros nominales de MES• modo de ajuste de funcionamiento• mantener los parámetros de ajuste
parámetros nominales del AVV
Encontrar un parametro que sobresale el valor establecido en el menú “Problemas de límite”, definir su valor dentro de este rango. Se puede entrar los valores usando la contraseña del fabricante. Póngase en contacto con el Centro de Servicios
6
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: "Raisl."
Ruptura del aislamiento de cable de MES/MIP
Comprobar la resistencia de aislamiento con megóhmetro, reemplazar el cable
Ruptura del aislamiento de cable de MES/MIP
Comprobar la resistencia de aislamiento en el circuito “MES-cable de MES” con megóhmetro
Módulo LTC defectuoso Reemplazar la unidad electrónica
7
En la insuficiencia actual o en el último evento en el menú de estado se mues-tra el siguiente mensaje:
“Baja carga”
Protección contra baja carga está encendida. Motor estaba funcionando más del tiempo programado
Eliminar la causa de baja carga. Reiniciar el AVV
Elimine la causa de baja carga. Reinicie el AVV Ajustar la protección contra baja carga
8
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: “PowSw U” (“Pow-Sw V”, “W PowSw”)
Cortocircuito en la salida del AVV Eliminar la causa de cortocircuito
Interruptor de la fase corre-spondiente está defectuoso
Inspeccionar interruptores de aliment-ación. Si se revelan sin daños, reiniciar el AVV (marcha en vacío)
El circuito de Accionamiento — NX no fue corregido o está defectuoso
Reemplazar el circuito por los de bién estado. Si el fallo desaparece, era un resultado del circuito defectuoso
No hay alimentación de con-ductor
Verificar la alimentación del conductor en la fase sin corriente
El conductor de interruptores está defectuoso
Cambiar la posición de conductores. Si el fallo pasa a otra fase, el fracaso se ex-plica por el conductor.Reemplazar el conductor por uno bueno conocido
The continuation of Table 2.4
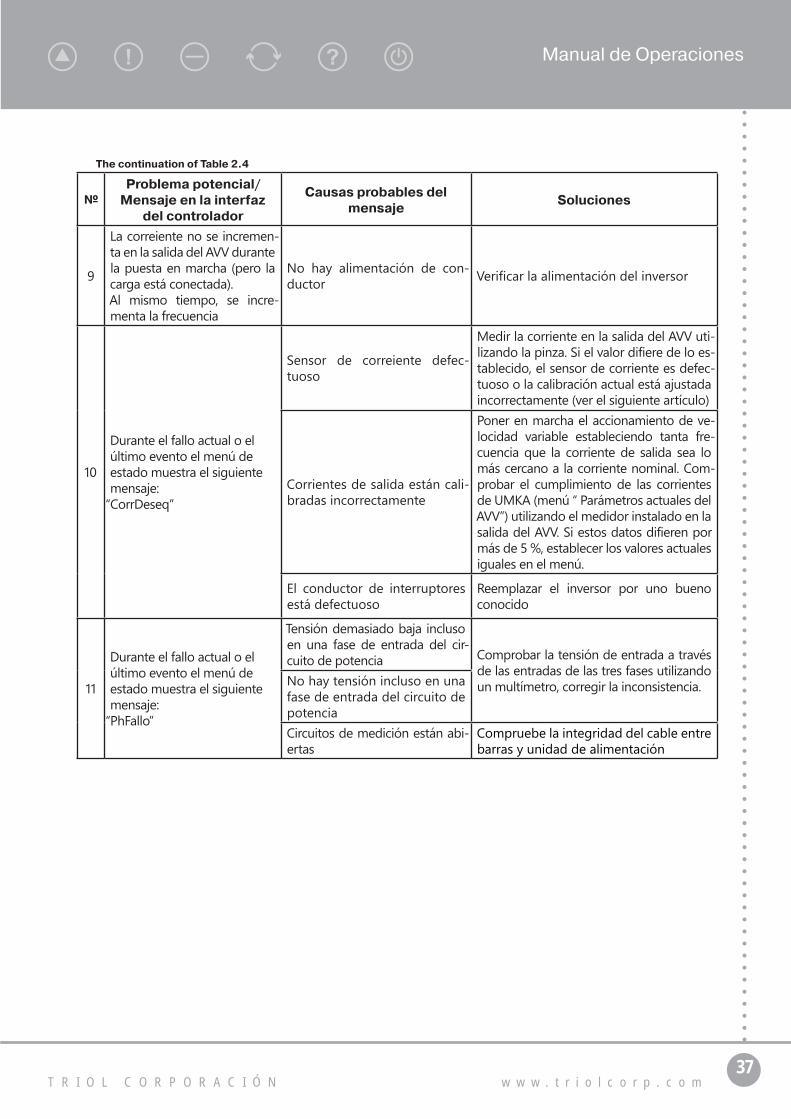
37T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
№Problema potencial/
Mensaje en la interfaz del controlador
Causas probables del mensaje
Soluciones
9
La correiente no se incremen-ta en la salida del AVV durante la puesta en marcha (pero la carga está conectada).Al mismo tiempo, se incre-menta la frecuencia
No hay alimentación de con-ductor Verificar la alimentación del inversor
10
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje:
“CorrDeseq”
Sensor de correiente defec-tuoso
Medir la corriente en la salida del AVV uti-lizando la pinza. Si el valor difiere de lo es-tablecido, el sensor de corriente es defec-tuoso o la calibración actual está ajustada incorrectamente (ver el siguiente artículo)
Corrientes de salida están cali-bradas incorrectamente
Poner en marcha el accionamiento de ve-locidad variable estableciendo tanta fre-cuencia que la corriente de salida sea lo más cercano a la corriente nominal. Com-probar el cumplimiento de las corrientes de UMKA (menú “ Parámetros actuales del AVV”) utilizando el medidor instalado en la salida del AVV. Si estos datos difieren por más de 5 %, establecer los valores actuales iguales en el menú.
El conductor de interruptores está defectuoso
Reemplazar el inversor por uno bueno conocido
11
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje:
“PhFallo”
Tensión demasiado baja incluso en una fase de entrada del cir-cuito de potencia Comprobar la tensión de entrada a través
de las entradas de las tres fases utilizando un multímetro, corregir la inconsistencia.No hay tensión incluso en una
fase de entrada del circuito de potenciaCircuitos de medición están abi-ertas
Compruebe la integridad del cable entre barras y unidad de alimentación
The continuation of Table 2.4
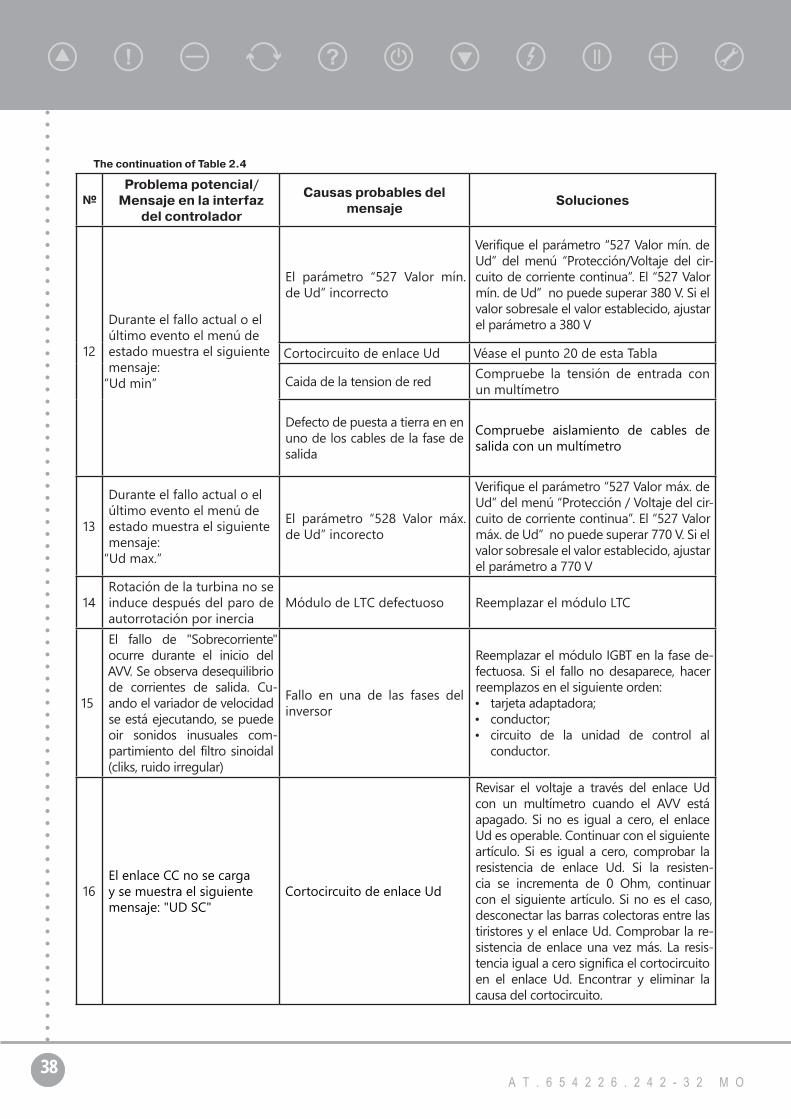
38А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
№Problema potencial/
Mensaje en la interfaz del controlador
Causas probables del mensaje
Soluciones
12
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje:
“Ud min”
El parámetro “527 Valor mín. de Ud” incorrecto
Verifique el parámetro “527 Valor mín. de Ud” del menú “Protección/Voltaje del cir-cuito de corriente continua”. El “527 Valor mín. de Ud” no puede superar 380 V. Si el valor sobresale el valor establecido, ajustar el parámetro a 380 V
Cortocircuito de enlace Ud Véase el punto 20 de esta Tabla
Caida de la tension de red Compruebe la tensión de entrada con un multímetro
Defecto de puesta a tierra en en uno de los cables de la fase de salida
Compruebe aislamiento de cables de salida con un multímetro
13
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje:
“Ud max.”
El parámetro “528 Valor máx. de Ud” incorecto
Verifique el parámetro “527 Valor máx. de Ud” del menú “Protección / Voltaje del cir-cuito de corriente continua”. El “527 Valor máx. de Ud” no puede superar 770 V. Si el valor sobresale el valor establecido, ajustar el parámetro a 770 V
14Rotación de la turbina no se induce después del paro de autorrotación por inercia
Módulo de LTC defectuoso Reemplazar el módulo LTC
15
El fallo de "Sobrecorriente" ocurre durante el inicio del AVV. Se observa desequilibrio de corrientes de salida. Cu-ando el variador de velocidad se está ejecutando, se puede oir sonidos inusuales com-partimiento del filtro sinoidal (cliks, ruido irregular)
Fallo en una de las fases del inversor
Reemplazar el módulo IGBT en la fase de-fectuosa. Si el fallo no desaparece, hacer reemplazos en el siguiente orden:• tarjeta adaptadora;• conductor;• circuito de la unidad de control al
conductor.
16El enlace CC no se carga y se muestra el siguiente mensaje: "UD SC"
Cortocircuito de enlace Ud
Revisar el voltaje a través del enlace Ud con un multímetro cuando el AVV está apagado. Si no es igual a cero, el enlace Ud es operable. Continuar con el siguiente artículo. Si es igual a cero, comprobar la resistencia de enlace Ud. Si la resisten-cia se incrementa de 0 Ohm, continuar con el siguiente artículo. Si no es el caso, desconectar las barras colectoras entre las tiristores y el enlace Ud. Comprobar la re-sistencia de enlace una vez más. La resis-tencia igual a cero significa el cortocircuito en el enlace Ud. Encontrar y eliminar la causa del cortocircuito.
The continuation of Table 2.4
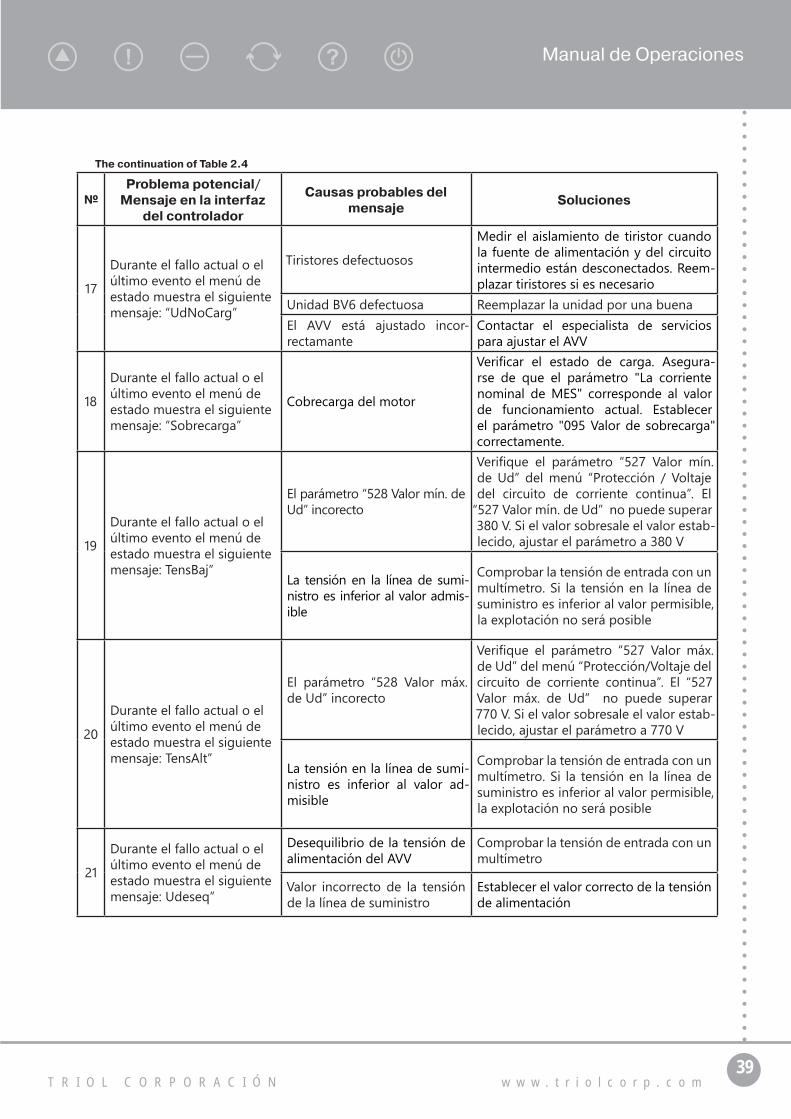
39T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
№Problema potencial/
Mensaje en la interfaz del controlador
Causas probables del mensaje
Soluciones
17
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: “UdNoCarg”
Tiristores defectuosos
Medir el aislamiento de tiristor cuando la fuente de alimentación y del circuito intermedio están desconectados. Reem-plazar tiristores si es necesario
Unidad BV6 defectuosa Reemplazar la unidad por una buenaEl AVV está ajustado incor-rectamante
Contactar el especialista de servicios para ajustar el AVV
18
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: “Sobrecarga”
Cobrecarga del motor
Verificar el estado de carga. Asegura-rse de que el parámetro "La corriente nominal de MES" corresponde al valor de funcionamiento actual. Establecer el parámetro "095 Valor de sobrecarga" correctamente.
19
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: TensBaj”
El parámetro “528 Valor mín. de Ud” incorecto
Verifique el parámetro “527 Valor mín. de Ud” del menú “Protección / Voltaje del circuito de corriente continua”. El
“527 Valor mín. de Ud” no puede superar 380 V. Si el valor sobresale el valor estab-lecido, ajustar el parámetro a 380 V
La tensión en la línea de sumi-nistro es inferior al valor admis-ible
Comprobar la tensión de entrada con un multímetro. Si la tensión en la línea de suministro es inferior al valor permisible, la explotación no será posible
20
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: TensAlt”
El parámetro “528 Valor máx. de Ud” incorecto
Verifique el parámetro “527 Valor máx. de Ud” del menú “Protección/Voltaje del circuito de corriente continua”. El “527 Valor máx. de Ud” no puede superar 770 V. Si el valor sobresale el valor estab-lecido, ajustar el parámetro a 770 V
La tensión en la línea de sumi-nistro es inferior al valor ad-misible
Comprobar la tensión de entrada con un multímetro. Si la tensión en la línea de suministro es inferior al valor permisible, la explotación no será posible
21
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: Udeseq”
Desequilibrio de la tensión de alimentación del AVV
Comprobar la tensión de entrada con un multímetro
Valor incorrecto de la tensión de la línea de suministro
Establecer el valor correcto de la tensión de alimentación
The continuation of Table 2.4
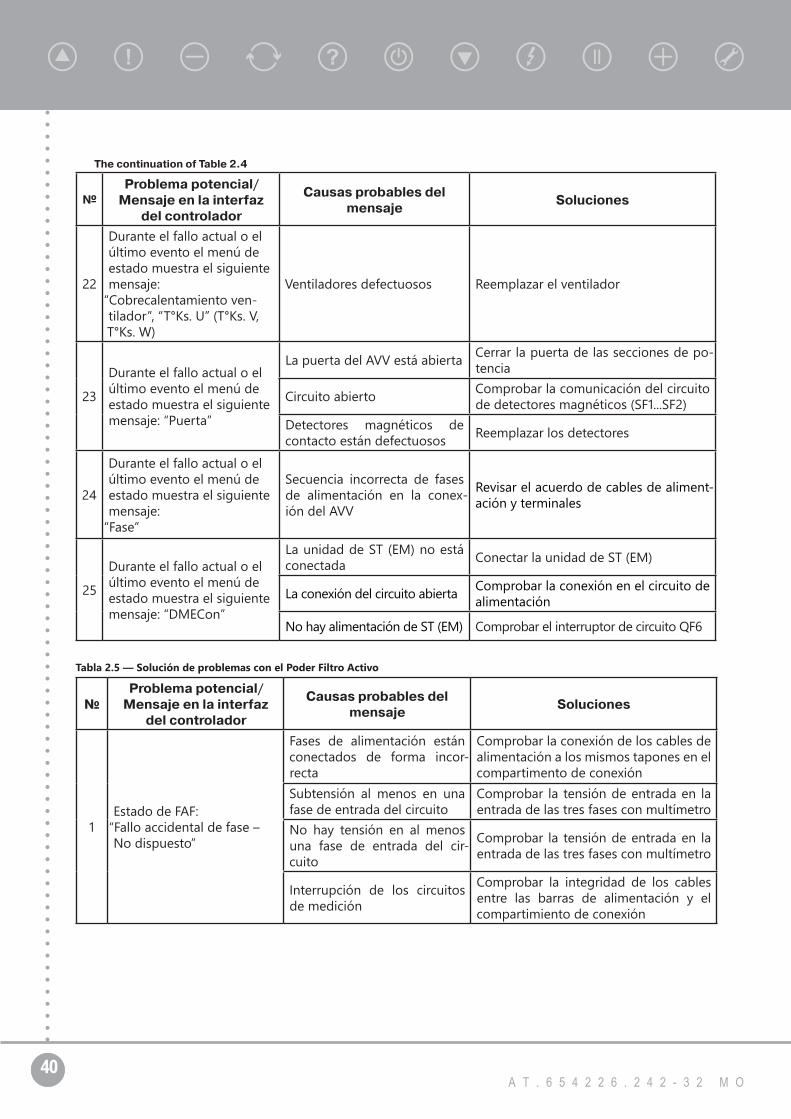
40А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
№Problema potencial/
Mensaje en la interfaz del controlador
Causas probables del mensaje
Soluciones
22
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje:
“Cobrecalentamiento ven-tilador”, “Т°Ks. U” (Т°Ks. V, Т°Ks. W)
Ventiladores defectuosos Reemplazar el ventilador
23
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: “Puerta”
La puerta del AVV está abierta Cerrar la puerta de las secciones de po-tencia
Circuito abierto Comprobar la comunicación del circuito de detectores magnéticos (SF1...SF2)
Detectores magnéticos de contacto están defectuosos Reemplazar los detectores
24
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje:
“Fase”
Secuencia incorrecta de fases de alimentación en la conex-ión del AVV
Revisar el acuerdo de cables de aliment-ación y terminales
25
Durante el fallo actual o el último evento el menú de estado muestra el siguiente mensaje: “DMECon”
La unidad de ST (EM) no está conectada Conectar la unidad de ST (EM)
La conexión del circuito abierta Comprobar la conexión en el circuito de alimentación
No hay alimentación de ST (EM) Comprobar el interruptor de circuito QF6
Tabla 2.5 — Solución de problemas con el Poder Filtro Activo
№Problema potencial/
Mensaje en la interfaz del controlador
Causas probables del mensaje
Soluciones
1Estado de FAF:
“Fallo accidental de fase – No dispuesto”
Fases de alimentación están conectados de forma incor-recta
Comprobar la conexión de los cables de alimentación a los mismos tapones en el compartimento de conexión
Subtensión al menos en una fase de entrada del circuito
Comprobar la tensión de entrada en la entrada de las tres fases con multímetro
No hay tensión en al menos una fase de entrada del cir-cuito
Comprobar la tensión de entrada en la entrada de las tres fases con multímetro
Interrupción de los circuitos de medición
Comprobar la integridad de los cables entre las barras de alimentación y el compartimiento de conexión
The continuation of Table 2.4
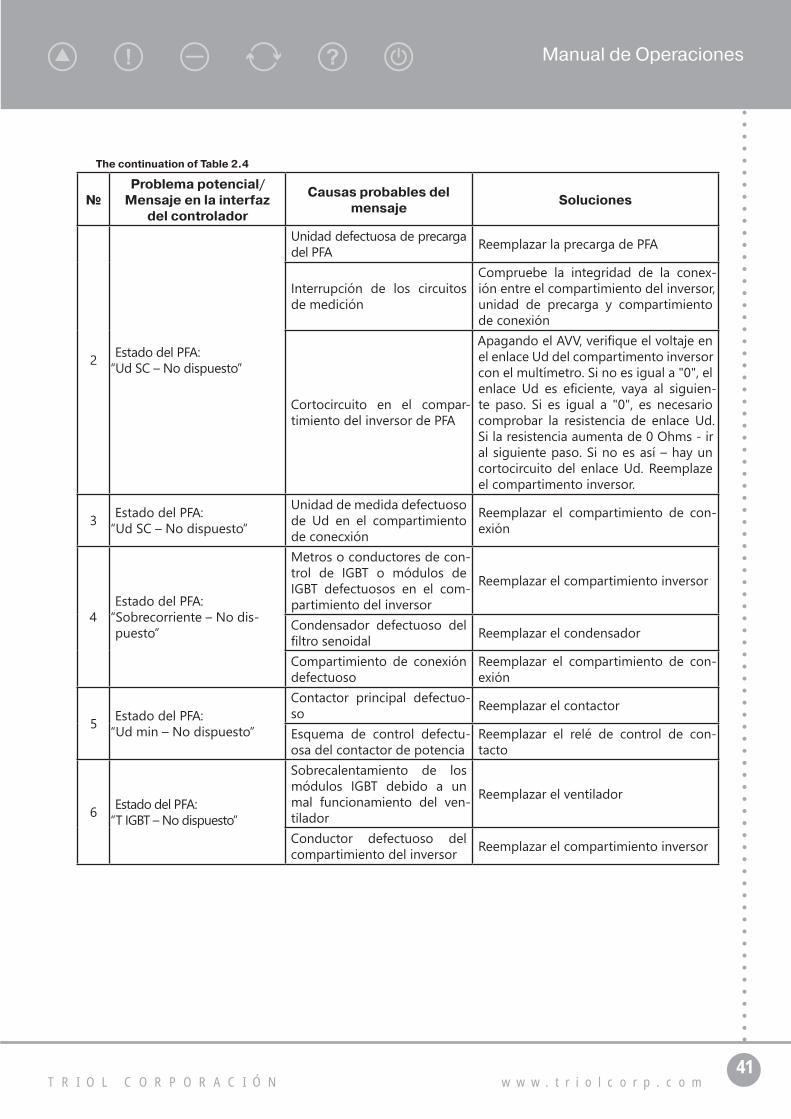
41T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
№Problema potencial/
Mensaje en la interfaz del controlador
Causas probables del mensaje
Soluciones
2 Estado del PFA: “Ud SC – No dispuesto”
Unidad defectuosa de precarga del PFA Reemplazar la precarga de PFA
Interrupción de los circuitos de medición
Compruebe la integridad de la conex-ión entre el compartimiento del inversor, unidad de precarga y compartimiento de conexión
Cortocircuito en el compar-timiento del inversor de PFA
Apagando el AVV, verifique el voltaje en el enlace Ud del compartimento inversor con el multímetro. Si no es igual a "0", el enlace Ud es eficiente, vaya al siguien-te paso. Si es igual a "0", es necesario comprobar la resistencia de enlace Ud. Si la resistencia aumenta de 0 Ohms - ir al siguiente paso. Si no es así – hay un cortocircuito del enlace Ud. Reemplaze el compartimento inversor.
3 Estado del PFA:“Ud SC – No dispuesto”
Unidad de medida defectuoso de Ud en el compartimiento de conecxión
Reemplazar el compartimiento de con-exión
4Estado del PFA:
“Sobrecorriente – No dis-puesto”
Metros o conductores de con-trol de IGBT o módulos de IGBT defectuosos en el com-partimiento del inversor
Reemplazar el compartimiento inversor
Condensador defectuoso del filtro senoidal Reemplazar el condensador
Compartimiento de conexión defectuoso
Reemplazar el compartimiento de con-exión
5 Estado del PFA: “Ud min – No dispuesto”
Contactor principal defectuo-so Reemplazar el contactor
Esquema de control defectu-osa del contactor de potencia
Reemplazar el relé de control de con-tacto
6 Estado del PFA:“T IGBT – No dispuesto”
Sobrecalentamiento de los módulos IGBT debido a un mal funcionamiento del ven-tilador
Reemplazar el ventilador
Conductor defectuoso del compartimiento del inversor Reemplazar el compartimiento inversor
The continuation of Table 2.4
42А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
2.3.3. Comprobación del AVV con circuito de salida en corto; comprobación de módulos de IGBT
CUIDADO! Se comprueban solamente los accionamientos con filtros de onda sinusoidal!
1. Asegúrese de que el accionamiento de velocidad variable está cerrado y apagado, conecte las fases de salida con los conductores si el AVV es asíncrono o universal; o conecte las fases a la salida del filtro senoidal externa si es el AVV de convertido de corriente alterna. La longitud de los conductores de cortocircuito será el mismo. La sección transversal del conductor deberá ser suficiente para garantizar la alimentación del AVV.
2. Encienda el AVV.3. Introduzca los “Ajustes del accionamiento/Característica de U/F” del controlador UMKA. Registre los
valores de todos los parámetros de este menú.4. Ajuste la tensión del punto 4 a 35 V. Ponga el parámetro “Rectificar U/F” en “Sí”.5. Asegúrese de que la corriente del motor en el menú “Parámetros de instalación” es igual a la corriente
nominal del AVV.6. Establezca el valor del parámetro “Mantener parámetro” a 5 Hz en el menú principal. Pulse el botón
“INICIO”. Observe el incremento de salida de corriente en la pantalla del controlador UMKA. A continu-ación, levante la frecuencia de salida con un incremento de 2 a 3 Hz hasta que la corriente de salida se incrementa hasta el valor nominal. Seleccione el modo “Regulador de corriente” en el menú “Modos de operación” y establezca el valor de la corriente igual a la corriente nominal del AVV sin pararlo. Entre en el menú principal y compruebe la corriente de salida del AVV.
7. Dentro de 5 minutos de la operación del AVV a la corriente nominal pulse el botón “STOP” .
Si el error “PowSw U” (“PowSw V”, “PowSw W”) aparece en la pantalla mientras la comprobación, consulte la Tabla 2.4.
2.2.3.4. Fallos y condiciones de alarma
1. Comprobación de la funcionalidad de las entradas digitales (discretos).1.1. Compruebe la presencia del indicador “Inactivo” en parámetro “615 Valor actual” del menú “Telemetriá/Manómetro de contacto” del controlador UMKA03; en caso de nivel activo se indicará el valor “Reg.1”.Conecte los contactos 5 y 6 del bloque de terminal X5 usando un puente. Compruebe si aparece el indica-dor “Activo” del parámetro “Valor actual” en el menú “Telemetriá/Manómetro de contacto” del controlador UMKA03.1.2. Apague el AVV.
2. Comprobación de las salidas de relé.2.1. Pulse el botón “INICIO” en el controlador UMKA03. Compruebe si el indicador “OPERACIÓN” está activado. Si usa un multímetro para verificar la continuidad eléctrica, compruebe los contactos de “MES ENCENDIDO” (contactos 1-4 del bloque de terminales X5). Cuando se presiona el botón “INICIO”, los con-tactos 1 y 2 del bloque de terminales X2 serán abiertos, y los contactos 3 y 4 deben ser cerrados.2.2. Pulse el botón “STOP”. Contactos 1 y 2 del bloque de terminales X2 se cerrarán, pero los contactos 3 y 4 se abrirán. Ponga el AVV en el modo automático. Encienda el temporizador y ponga la hora a 1 minuto. Pulse el botón “INICIO”. Cuando se termina la cuenta atrás, verifique si está encendido el indicador “ES-PERA”.2.3. Pulse el botón “STOP”.
Ponga el AVV en el modo manual.
43T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
2.3. Interfaz de operador. Descripción de UMKA-03 y procedimientos de operación
2.3.1. Información general
La información dada en la presente sección se refiere a la versión de software del controlador 31.96. El usu-ario puede encontrar su versión del software a través del parámetro “386 Versión del software del controlador de AVV” en el menú “Parámetros del controlador de AVV”. Se puede obtener las revisiones de este Manual en el departamento de servicio de Corporación Triol o en el sitio web www.triolcorp.com.
Atención! Iniciando el accionamiento de velocidad variable después de su almacenamiento a largo plazo (un mes o más), el usuario debe actualizar la versión del software con el departa-mento de servicio de Corporación Triol o en el sitio web www.triolcorp.com.
Todos los datos se muestran en la gran indicador (pantalla) LCD con resolución de 320 х 240 puntos, que se instala en la parte superior del panel frontal del controlador.
Todos los mensajes sobre el estado, las protecciones, los parámetros de funcionamiento, etc., se muestran en del texto sin ningún códigos numéricos o símbolos que requieren decodificación.
El indicador LCD tiene una iluminación de fondo para mejorar de la visibilidad en condiciones de ilumi-nación insuficiente. El indicador está diseñado para funcionar dentro de una amplia gama de temperaturas.
Si sea necesario, el contraste de la pantalla puede ser controlado manualmente por el parámetro”Contraste” (“Sistema” - menú “Configuración de pantalla”) o usando los botones apropiados en el módulo de control.
El panel frontal del controlador UMKA-03 está demostrada en la Figura 2.1. La capacidad de memoria del registro de eventos es 4.125 Mb. Esta capacidad ayuda realizar 870 000 registros y garantice el guardo de la información durante el período de 10 días.
El menú consta de 14 artículos básicos que a su vez pueden tener algunos subelementos (menú del se-gundo nivel).
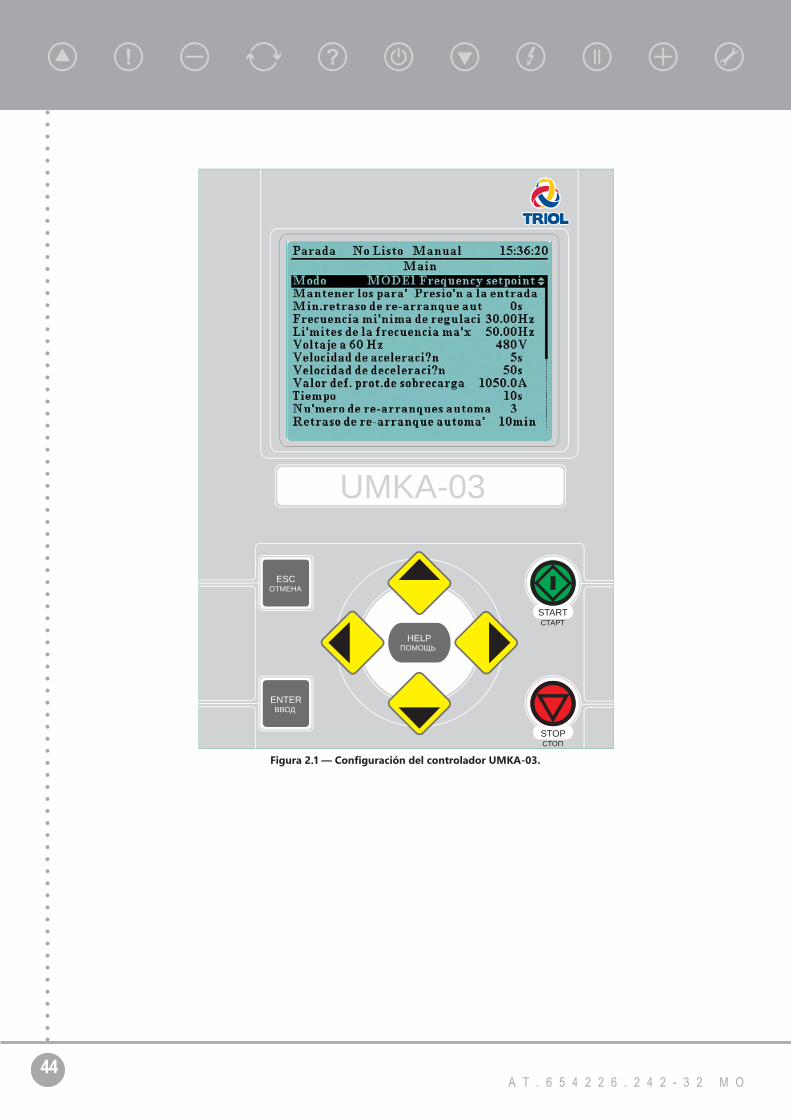
44А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
UMKA-03
ESCОТМЕНА
ENTERВВОД
START
STOPСТОП
СТАРТ
HELPПОМОЩЬ
Figura 2.1 — Configuración del controlador UMKA-03.
45T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
2.3.2. Descripción de la interfaz de operador
Todas las operaciones asociadas con ajustes de datos, incluyendo cambio entre modos de funcionamiento y arranque / parada del motor se cumplen mediante el teclado.
El teclado se compone de nueve teclas:
1. Tecla “ ” está destinada para recorrer el menú de control, aumentar el valor del parámetro en el modo de edición, y para cambiar al siguiente registro en el modo de vista de registro.
2. Tecla “ ” está destinada para recorrer el menú del controlador, disminuir el valor de parametros en el modo de edición, y para cambiar al registro anterior en el modo de vista de registro.
3. Tecla “ ” está destinada para cambiar al menú del nivel más bajo, seleccionar el parámetro la categoría en el modo de edición, y para cambiar a la información adicional en el menú de vista de registro; pasar por modo de estado corriente para ver gráficos de características del AVV.
4. Tecla “ ” está destinada a cambiar al menú del niver mas alto, seleccionar el parámetro5. la categoría en el modo de edición, y para volver a los eventos en el modo de vista de registro6. Tecla “ENTRAR” está destinada a entrar en el modo de edición de parámetros, cambiar el valor del
parámetro, así como para la selección de gráficos de la característica.7. Tecla “CANCELAR” está destinada a salir del modo de edición sin cambiar el los parámetros; salir del
modo de gráficos de características, así como para pasar del modo de parámetros reales al menú y viceversa.
8. Tecla “INICIO” está destinada a poner el MEI en marcha.9. Tecla “STOP” está destinado para el manejo racional de disparo.10. Tecla “AYUDA” está destinado a entrar en el modo de la ayuda en cada opción de menú. Para cual-
quier elemento del menú de control, después de pulsar esta tecla se muestra la siguiente información: nombre, límites de medición, valor por defecto (sólo para valores de ajuste), dirección y descripción del parámetro. Para salir del menú de ayuda, pulse la tecla “ ”.
El controlador tiene los siguientes modos de visualización de datos:
• modo de visualización del estado actual;• menú;• modo de registros;• modo de gráficos con las características de funcionamiento del AVV.
IPara todos los modos, los siguientes datos se muestran en la línea de estado (línea superior de la pantalla del controlador):
• Estado del MEI - encendido (“Operación”) o apagado (“Stop”);• Preparación para el inicio de la estación (sólo cuando la estación está apagada) - “Dispuesto”;• Modo de funcionamiento (manual o automático “Manual/Automático”);• Funcionamiento del temporizador - “Operación por temporizador” (sólo en modo automático);• Tiempo actual.
Si no aparece ningún mensaje de la preparación de estación, el MEI no puede ser iniciado porque la pro-teción está activa eliminando el retardo interno del AVV.
Si un parámetro superó su valor de urgencia establecido, se enciende el indicador verde en el panel de control, y aparece la indicación del temporizador en la parte izquierda de la pantalla. El temporizador muestra la cuenta atrás desde el momento en que el valor de emergencia se ha sido superado hasta el momento de disparo del AVV.
Durante la cuenta atrás, el indicador amarillo (“ESPERA”) empieza a parpadear. Si la protección está activa, este indicador se enciende de manera continua (sin parpadear).
46А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
2.3.2.1. Acceso al menú
Al encender el controlador UMKA-03, aparece un protector de pantalla, y dentro de un minuto se cambia por una ventana del estado. Para ir al menú, pulse cualquier tecla además de “INICIO” y “STOP”.
Es posible seleccionar un elemento del menú deseado utilizando las teclas “ ” y “ ”.El elemento de menú seleccionado se resalta por inversión. El símbolo “ ”, esta a la derecha y significa que
usted ha presionado la tecla “ ” para entrar en el submenú.Para entrar en el menú de nivel más alto, pulse la tecla “ ”.El símbolo “ ” a la derecha del parámetro significa que el valor de este parámetro puede ser cambiado.
Los valores pueden ser cambiados sólo cuando el motor está apagado. Si un parámetro está siendo program-ado durante el arranque, el motor permanecerá desactivado hasta que se haya completado esta operación.
Para seleccionar un parámetro para cambiar use la tecla “ ” y “ ”.Para entrar en el modo de programación de parámetros pulse “ENTRAR”. Ajuste de parámetros comenzará a
parpadear con el mismo.La tecla “ ” incrementa el valor del parámetro en “1”, mientras que la tecla “ ” disminuye el valor en “1”.
Si usted mantiene las teclas presionadas, el valor del parámetro se aumenta o disminuye automáticamente.Los parámetros de varios dígitos numéricos proporcionan la posibilidad de editar dígito por dígito.Los dígitos editados se seleccionan con ayuda de las teclas “ ” y “ ” En tal caso, sólo los dígitos que han
de ser cambiados van a parpadear.El nuevo ajuste de un parámetro se graba en la memoria del controlador pulsando la tecla “ENTRAR”. Para
salir del modo de programación sin guardar el valor nuevo, pulse la tecla “CANCELAR”.Pulsando la tecla “ ”, el último dígito elegido se incrementará en “1”; pulsando la tecla “ ” el último
dígito elegido disminuirá en “1”. Si usted mantiene las teclas presionadas, el último dígito elegido se aumenta o disminuye automáticamente.
Ejemplo: Ajuste del parámetro “093 Valor U del transf. Stepup” debe ser cambiado desde 2100 a 2440 V. Para eso, tiene que hacer lo siguiente:
1. Pulse la tecla “ENTRAR”. Todos los dígitos de configuración de parámetros comenzarán a parpadear con el mismo.
2. Presione la tecla “ ”. Los 3 primeros dígitos del ajuste de parámetros empezarán a parpadear.3. Presione la tecla “ ” cuatro veces. El ajuste de los parámetros se cambiará a 2140.4. Presione la tecla “ ” Los primeros 2 dígitos del ajuste de parámetros empezarán a parpadear.5. Presione la tecla “ ” tres veces. El ajuste de los parámetros se cambiará a 2440. 6. Presione la tecla “ENTER”. El ajuste del parámetro deja de parpadear. El nuevo valor se guardará en la
memoria del controlador.
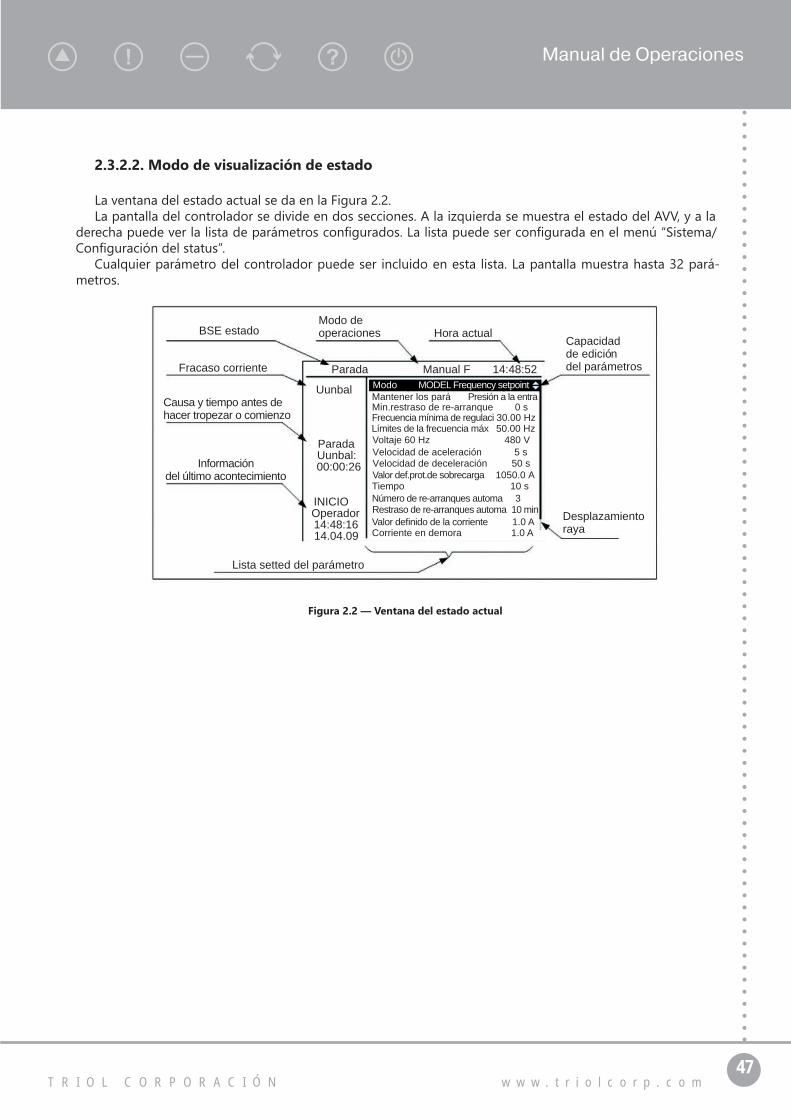
47T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
2.3.2.2. Modo de visualización de estado
La ventana del estado actual se da en la Figura 2.2.La pantalla del controlador se divide en dos secciones. A la izquierda se muestra el estado del AVV, y a la
derecha puede ver la lista de parámetros configurados. La lista puede ser configurada en el menú “Sistema/Configuración del status”.
Cualquier parámetro del controlador puede ser incluido en esta lista. La pantalla muestra hasta 32 pará-metros.
Modo deoperaciones
Manual F 14:48:52
Hora actualCapacidadde edicióndel parámetros
Desplazamientoraya
Lista setted del parámetro
Informacióndel último acontecimiento
Causa y tiempo antes dehacer tropezar o comienzo
Fracaso corriente
BSE e dosta
Parada
Uunbal
ParadaUunbal:00:00:26
INICIOOpera ord14:48:1614.04.09
Modo MODEL Frequency setpoint
Mantener los pará
Fre uenc 0.00 Hzc ia mínima de regulaci 3
Velocidad de aceleración 5 s
Corriente en demora .0 A1Valor definido de la corriente 1.0 A
Número de re-arranques automa 3
T 10iempo s0 .0Valor def.prot.de sobrecarga 1 50 A
Voltaje 60 Hz 480 VLímites de la frecuencia m xá 50.00 Hz
Presión a la entraMin.restraso de re-arranque s0
Velocidad de deceleración 50 s
Restraso de re-arranques automa 10 min
Figura 2.2 — Ventana del estado actual
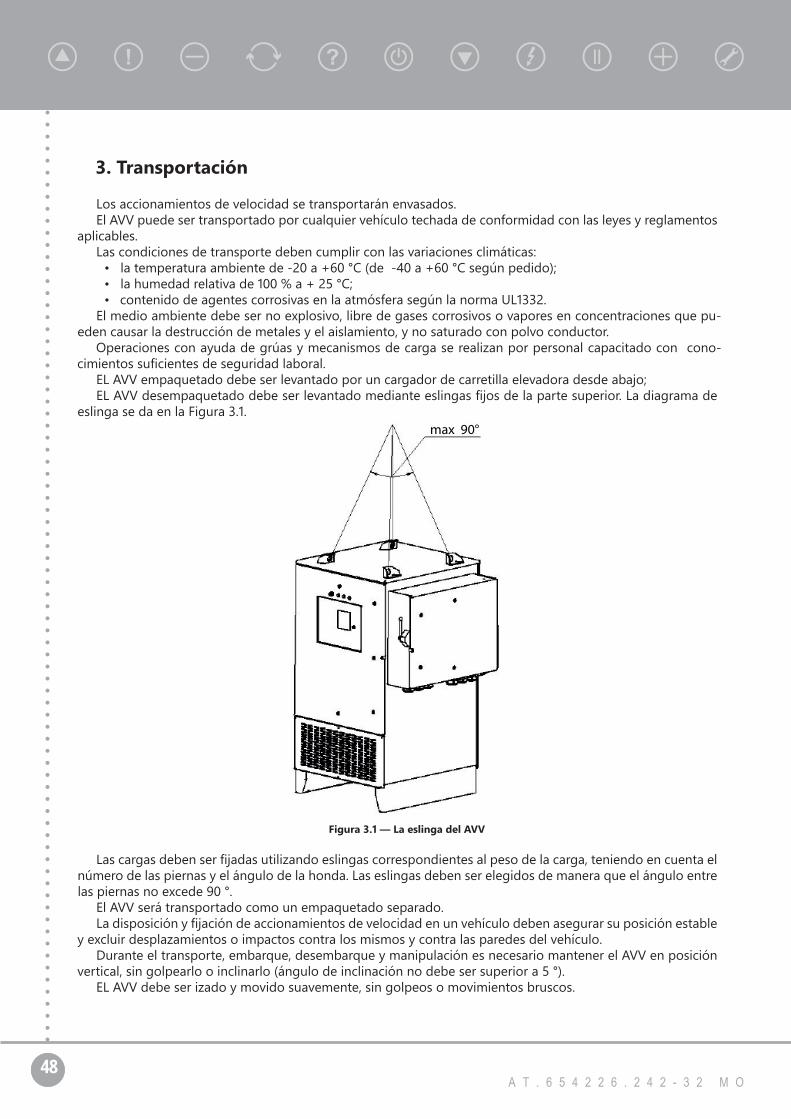
48А Т . 6 5 4 2 2 6 . 2 4 2 - 3 2 M O
3. Transportación
Los accionamientos de velocidad se transportarán envasados.El AVV puede ser transportado por cualquier vehículo techada de conformidad con las leyes y reglamentos
aplicables.Las condiciones de transporte deben cumplir con las variaciones climáticas:
• la temperatura ambiente de -20 a +60 °C (de -40 a +60 °C según pedido);• la humedad relativa de 100 % a + 25 °C;• contenido de agentes corrosivas en la atmósfera según la norma UL1332.
El medio ambiente debe ser no explosivo, libre de gases corrosivos o vapores en concentraciones que pu-eden causar la destrucción de metales y el aislamiento, y no saturado con polvo conductor.
Operaciones con ayuda de grúas y mecanismos de carga se realizan por personal capacitado con cono-cimientos suficientes de seguridad laboral.
EL AVV empaquetado debe ser levantado por un cargador de carretilla elevadora desde abajo;EL AVV desempaquetado debe ser levantado mediante eslingas fijos de la parte superior. La diagrama de
eslinga se da en la Figura 3.1.max 90°
Figura 3.1 — La eslinga del AVV
Las cargas deben ser fijadas utilizando eslingas correspondientes al peso de la carga, teniendo en cuenta el número de las piernas y el ángulo de la honda. Las eslingas deben ser elegidos de manera que el ángulo entre las piernas no excede 90 °.
El AVV será transportado como un empaquetado separado.La disposición y fijación de accionamientos de velocidad en un vehículo deben asegurar su posición estable
y excluir desplazamientos o impactos contra los mismos y contra las paredes del vehículo.Durante el transporte, embarque, desembarque y manipulación es necesario mantener el AVV en posición
vertical, sin golpearlo o inclinarlo (ángulo de inclinación no debe ser superior a 5 °).EL AVV debe ser izado y movido suavemente, sin golpeos o movimientos bruscos.
49T R I O L C O R P O R A C I Ó N w w w . t r i o l c o r p . c o m
Manual de Operaciones
Se prohibe estar bajo el AVV durante el izado, manipulaciones o descenso. Accionamiento de velocidad variable debe ser bajado solamente al lugar previsto. No se puede quitarlo, entregarlo o deslizarlo hacia abajo.
El AVV debe ser izado y manejado en su empaque original, con respeto a la capacidad de a máquina de iza-do y los valores indicados en la tabla de cargas admisibles en horquillas dependiendo del centro de gravidad.
Conduzca la carretilla elevadora a baja velocidad; ponga las horquillas debajo del AVV para que esté bien centrado para los tenedores y está paralelo a su línea axial.
Se prohibe usar una horquilla cargadora para el izado y la manipulación del AVV.El AVV transportado en camiones debe estar dispuesto y fijados para no causar peligros a los peatones y
otros usuarios de la carretera, así como para evitar la caída de la carrocería del camión y la inestabilidad del vehículo.
4. Almacenamiento
Las condiciones de almacenamiento del AVV deben cumplir con las condiciones de funcionamiento de los productos con protección NEMA 4, según los requisitos del estándar NEMA 2.502.008 (en lo que pertenece a las condiciones de entorno).
El medio ambiente debe ser no explosivo, libre de gases corrosivos o vapores en concentraciones que pueden causar la destrucción de metales y el aislamiento, y no saturado con polvo conductor.
El tiempo máximo de almacenamiento antes de la puesta en servicio es 1 año