-
7/28/2019 Tutorial- ECU Automotriz
1/71/7 www.ni.c
Diseo y Prueba de ECU usando Productos de National
Instruments.
1.2.3.4.5.
Visin General
National Instruments tiene varios productos que pueden usarse en
varias aplicaciones en la Industria Automotriz. Al usar los
Productos de National Instruments puede disear y probarcomponentes
electrnicos automotrices. Este documento habla sobre ECU's y los
diferentes protocolos que comnmente se usan en la Industria
Automotriz. Tambin describe las diferentes
opciones que ofrece National Instruments para disear y probar
ECU.br>
Contenido
IntroduccinDiferentes Tipos de ECU'sEntradas/Salidas Tpicas de
un ECUDiferentes tipos de Protocolos usadosDiseo y Pruebas
Introduccin
En la industria automotriz una unidad de control electrnico
(ECU) es un dispositivo electrnico embebido, bsicamente una PC
digital, que lee seales provenientes de sensores ubicados envarias
partes y en diferentes componentes del automvil y dependiendo de
esta informacin controla varias unidades importantes por ejemplo el
motor y operaciones automatizadas en el auto ytambin verifica el
rendimiento de algunos componentes clave usados en el automvil.
Un ECU est hecho bsicamente de hardware y software (firmware).
El hardware est hecho de varios componentes electrnicos en un PCB.
El componente ms importante es un chipmicrocontrolador junto con un
EPROM o un chip de memoria Flash. El software (firmware) es un
juego de cdigos de menor nivel que se ejecuta en el
microcontrolador.
El ECU se caracteriza por: varias lneas de E/S analgica y
digital (alta y baja potencia) dispositivo de interfaz/control de
potencia diferentes protocolos de comunicacin (CAN, KWP-2000,
etc.). grandes matrices de conmutacin para seales de alta y baja
potencia pruebas de alto voltaje adaptadores inteligentes de
interfaz de comunicacin (estndares o personalizados) reconocimiento
automtico de equipo y habilitar secuencia de software simulacin de
dispositivo de potencia
Diferentes Tipos de ECU's
Los ECU's son nombrados y diferenciados dependiendo de lo que se
usa:
ECM Mdulo de Control de Motores. (Con frecuencia en la
industria, los ECM son llamados ECU - Unidad de Control de
Motores).
El ECM tambin conocido como EMS (sistema de administracin de
motores) es un ECU en un motor de combustin interna que controla
varias funciones de motor como inyeccin decombustible, sistema de
control de tiempo de inyeccin y de distribucin de vlvulas. Todo
este control se realiza basado en datos (como temperatura del
anticongelante del motor, flujo de aire,posicin de palanca)
recibidos desde varios sensores.El ECM tambin aprende sobre el
motor conforme manejamos nuestro automvil. El "aprendizaje" es un
proceso que el ECU utiliza para rastrear los cambios de tolerancia
de los sensores yactuadores en el motor. Por ejemplo, la vlvula
bypass idle-air (carburador automtico) con el A/C en el Automvil en
encendido y apagado. El ECM almacena estas vlvulas "aprendidas" en
RA
respaldada en batera as no tiene que iniciar desde cero la
prxima vez que el motor es encendido. Se realiza una discusin en
detalle sobre ECM en la parte final de este documento.Con la
aplicacin de las Regulaciones de Emisin Federal el 1981, los ECUs
se han usado en la mayora de los vehculos. En las aplicaciones
aeronuticas estos sistemas comnmente se llamFADECs (Control de
Motor Digital de Autoridad Completa).
EBCM Mdulo de Control de Frenos Electrnicos.
Este en un ECU que es usado en el mdulo ABS (sistema de freno
antibloqueo) de un automvil. Se introdujeron a principios de 1970
para mejorar el frenado del vehculo sin importar lascondiciones del
camino o clima. Aunque es muy reciente, ya ha obtenido
popularidad.El EBCM regula los sistemas de frenado en las cinco
entradas que recibe.
:Tipo de Documento Tutorial
: SSoportado por NI
: may 12, 2010Fecha de Publicacin
http://search.ni.com/nisearch/app/main/p/lang/es/pg/1/ap/tech/sn/catnav:tu,ssnav:dznhttp://search.ni.com/nisearch/app/main/p/lang/es/pg/1/ap/tech/sn/catnav:tu,ssnav:dzn
-
7/28/2019 Tutorial- ECU Automotriz
2/72/7 www.ni.c
1. El Freno: Esta entrada le proporciona el estado del pedal del
freno, por ejemplo flexin o adhesin. Esta informacin se adquiere en
un formato digital o analgico.
2. El 4 W.D: Esta entrada proporciona el estado en formato
digital si el vehculo est en modo de manejo en 4 ruedas.
3. El encendido: Esta entrada registra si la llave de encendido
est en su lugar y si el motor est andando o no.
4. Velocidad del Vehculo: Esta entrada proporciona la informacin
sobre la velocidad del vehculo.
5. Velocidad de las llantas: En una aplicacin tpica esto
representa un juego de 4 seales de entrada que transmiten la
informacin referente a la velocidad de cada llanta. Esta informacin
seusa para obtener toda la informacin necesaria para los algoritmos
de control.
PCM Mdulo de control del tren de potencia.
PCM es un ECU que monitorea y controla velocidad, A/C y
Transmisin Automtica. Las entradas que son alimentadas al PCM son
de: sensor de posicin del acelerador,
sensor de velocidad de flecha de transmisin, sensor de velocidad
del vehculo sensor de velocidad del motor (CKP) interruptor de
freno interruptores de control de velocidad encendido interruptor
on/off de overdrive sensor del gobernador de presin.
Usando estas entradas realiza control de transmisin, control de
vlvula a travs de salidas PWM, control del embrague convertidor de
torsin y del rel de proteccin de transmisin y proporcioinformacin
al controlador a travs de la lmpara del tablero de overdrive.
VCM Mdulo de control del vehculo
VCM es un ECU que cuida los sistemas como:
sistemas de Direccin Elctrica Asistida (EPS) sistemas de control
de velocidad inteligente (ACC)
sistemas de control de bolsa de aire (ACS). sistemas de Control
Electrnico de Estabilidad (ESC).
El VCM generalmente es instalado a la mitad del automvil entre
el pasajero y el compartimiento del motor. Estn conectados a varios
tipos de sensores para controlar varios sistemas en elautomvil.
Toman entradas de sensores de impacto (acelermetros de micro
mquina) y sensores que detectan el peso del ocupante, posicin de
asientos, cinturn de seguridad y posicin deasiento para determinar
la fuerza con la cual las bolsas de aire frontales deben desplegar.
As mismo, toman entradas de los sensores de ngulo de direccin,
sensores de velocidad de lasllantas, sensores del rango de viraje,
sensores de aceleracin lateral para proporcionar una salida al ESC
para seguridad de manejo.
BCM Mdulo de control de la unidad.
BCM es un ECU que cuida la unidad de control del asiento,
control del limpiador, ventanas y toldos en automviles convertibles
(ej. Benz SL Roadster).
Entradas/Salidas Tpicas de un ECU
Un ECU consiste en un nmero de bloques funcionales:
1. Fuente de Alimentacin - digital y analgica (potencia para
sensores analgicos)
2. MPU microprocesador y memoria (generalmente Flash y RAM)3.
Enlace de Comunicacin (ej. bus CAN)4. Entradas Discretas entradas
tipo interruptor On/Off5. Entradas de Frecuencia seales tipo
codificador (ej. palanca o velocidad de vehculo)6. Entradas
Analgicas - seales de retroalimentacin desde sensores7. Salidas de
Conmutador - salidas tipo interruptor On/Off8. Salidas PWM -
frecuencia variable y periodo (ej. inyector o encendido)9. Salidas
de Frecuencia - periodo constante (ej. motor de pasos - control de
tiempo de inyeccin)
Y generalmente en una Unidad de Control de Motores existen
varios tipos de sensores y actuadores conectados y es importante
saber el tipo de E/S que requieren.
-
7/28/2019 Tutorial- ECU Automotriz
3/73/7 www.ni.c
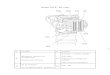
Veamos algunos de los tipos de sensores y actuadores que
generalmente son conectados a un mdulo de control de motores y el
tipo de E/S que requieren.
Sensor Manifold de Temperatura del Aire (MAT)
El sensor es un termistor. Es montado normalmente en el ducto de
aire alojado en el manifold. La resistencia elctrica del termistor
disminuye como respuesta al aumento de temperatura y esto
se puede medir usando canal analgico con algn acondicionamiento
de seal. (excitacin, amplificacin, etc.)
Sensor de Temperatura del Anticongelante (CTS)
El CTS tambin usa un termistor para detectar la temperatura del
anticongelante en el motor y alimenta la seal de voltaje a un canal
de entrada analgica del ECM.
Sensor de Posicin Camshaft/Crankshaft (CPS)
El CPS es muy importante al monitorear la velocidad del motor y
la posicin del pistn en el motor. Tradicionalmente, los sensores de
renuencia variable eran usados para medir esto pero hoy eda varios
sensores IR y los ltimos codificadores rotativos son usados para
hacer lo mismo. Estas seales de codificador son proporcionados como
entradas de frecuencia a los ECU's.
Sensor de Golpe (KS)
El KS es un sensor piezoelctrico tpico, detecta la vibracin de
golpe desde el bloque de cilindro donde est sujeto y esta seal
analgica compleja/dinmica se manda al ECU.
Sensor de Oxgeno (HO2S)
El HO2S es un sensor de medida de calidad del aire. El sensor
est hecho bsicamente de cermica zirconia la cual es colocada en el
manifold de combustin en un tubo cerrado. La zirconiagenera voltaje
desde aproximadamente 1 V mximo en excelentes condiciones hasta 0 V
en condiciones difciles. Esta seal analgica es enviada al ECM.
Sensor de Posicin del Acelerador (TPS)
El TPS es un potencimetro que transforma la posicin del
acelerador en voltaje de salida el cual se enva la ECM.
Sensor de Velocidad del Vehculo (VSS)
El VSS est ubicada en el eje de transmisin. Es un generador de
pulso y proporciona una seal digital al ECM.
Presin Absoluta del Manifold (PAM)
El sensor de Presin Absoluta del Manifold mide los cambios en la
presin de admisin desde la carga del motor y los cambios de
velocidad. El ECM enva una seal de referencia de 5 volts al
sensor MAP. Conforme los cambios de presin en la presin de
admisin ocurren, la resistencia elctrica del sensor MAP tambin
cambia. Al monitorear el voltaje de salida del sensor, la PCpuede
determinar la presin absoluta del manifold. Mientras mayor la
salida de voltaje MAP, menor el vaco del motor, lo cual requiere ms
gasolina. Mientras menor la salida de voltaje MAP,
mayor el vaco del motor, lo cual requiere menos gasolina. Bajo
ciertas condiciones, el sensor MAP tambin es usado par medir presin
baromtrica. Esto permite a la PC ajustarseautomticamente para
diferentes altitudes. La PC utiliza el sensor MAP para controlar la
inyeccin de combustible y tiempo de inyeccin.Estos son algunas de
las seales ms importantes que el ECM toma para controlar el sistema
de inyeccin de combustible de manera eficiente para una
administracin adecuada del combustib
El hardware de NI que se puede usar con estos sensores se puede
escoger en la lista a continuacin:
Diferentes tipos de Protocolos usados
Los protocolos automotrices se pueden dividir en las siguientes
categoras principales.
Diagnsticos
Los diagnsticos internos existen desde principios de 1980. Pero
en los ltimos aos se han vuelto altamente sofisticados. Por lo
tanto, son protocolos altamente confiables usados para
-
7/28/2019 Tutorial- ECU Automotriz
4/74/7 www.ni.c
diagnsticos internos.Algunos de los usados con mayor frecuencia
son:
Protocolo ODBII- Este es un estndar de los ms populares que se
introdujo a mediados de los aos 90's y cuida el control del motor
completo y monitoreo del chasis y los accesorios. Es usadopor casi
todos losfabricantes
CAN ISO 11898 - Otro protocolo muy popular usado por la mayora
de los fabricantes para diagnsticos internos. Los detalles del pin
se muestran a continuacin.
Pin 2 - J1850 Bus+Pin 4 - Tierra del ChasisPin 5 - Seal a
TierraPin 6 - CAN Alto (J-2284)Pin 7 - ISO 9141-2 Lnea KPin 10 -
J1850 BusPin 14 - CAN Bajo (J-2284)Pin 15 - ISO 9141-2 Lnea LPin 16
- Batera
Keyword 2000 y J1850 - Estos protocolos son usados bsicamente
por GM, Chrysler para diagnsticos internos. J1850 es un protocolo
muy viejo y est obsoleto.
Carrocera y Tren de Potencia
Las redes de Carrocera y Tren de Potencia pueden consistir en
protocolos CAN, LIN o J1850. CAN es un protocolo verstil y es usado
principalmente en varias categoras de redes porttiles.CAN de alta
velocidad es usado comnmente para aplicaciones de Tren de potencia
como temporizacin del motor para asegurar que el automvil funciona
de manera eficiente.
LIN -- La Red Local de Interconexin (LIN) es una red basada en
UART que fue desarrollada estrictamente para aplicaciones de
carrocera. Por ejemplo, una red LIN conecta todos losdispositivos
elctricos en la puerta de un automvil. LIN y CAN deben coexistir.
Es usado principalmente por Chrysler, BMW y Volkswagen.
Multimedia y Controlador por cable
MOST -- Es una red de fibra ptica que ha sido optimizada para
uso en el automvil. Est diseado para usarse con dispositivos
simples como micrfonos y bocinas junto con dispositivos mscomplejos
como dispositivos de seguridad como aquellos usados para ubicar
automviles robados. La tecnologa MOST ha sido desarrollada y
promovida por una Cooperacin, la cual incluyeBMW, Daimler-Chrysler
y Audi.
IDB 1394 -- Es la ltima adicin a la familia IDB de las redes
porttiles, diseado para aplicaciones de multimedia de alta
velocidad que requieren mover rpidamente grandes cantidades
deinformacin en un vehculo. Anteriormente conocido como IDB-M, el
IDB-1394 est integrado en la tecnologa IEEE 1394 que ha ganado
amplia aceptacin en la comunidad de electrnicos deconsumo.La
especificacin IDB-1394 define las capas de grado fsico del automvil
(ej. cables, conectores), modos de potencia y los protocolos del ms
alto nivel necesarios para asegurar la interoperatividad de todos
los dispositivos IDB-1394.
Controlador por cable hasta el momento los protocolos no han
sido desarrollados completamente. Tambin hay algunos desacuerdos
sobre cul protocolo se volver el estndar industrial.Mientras
Flexray ofrece alta velocidad, es costoso y lejos de la
estandarizacin.
FlexRay -- Es un sistema de comunicacin escalable, flexible y de
alta velocidad, el cual cumple con las crecientes demandas tcnicas
en la industria automotriz. Con su razn de datos de hast10 MBits/s,
es ideal para aplicaciones de cable por X.
Diseo y Pruebas
La manera tradicional para desarrollar sistemas embebidos
automotrices ha sido construir tarjetas de hardware que representan
todo o parte de cada ECU y parte de sus componentes,generalmente
llamados modelos de plantas y usadas para pruebas de laboratorio.
Desafortunadamente, el enfoque de laboratorio tiene varias
limitaciones.Primero, es costoso crear todas las tarjetas de
hardware necesarias.Segundo, los requerimientos del rendimiento de
los ECU's ms potentes (aquellos usados para control del tren de
potencia) son tan demandantes que ya no es posible construir
tarjetas quepermitan adecuar las medidas que sern
tomadas.Finalmente, y ms importante, este enfoque de pruebas de
laboratorio est basado en un proceso secuencial de diseo donde el
hardware es desarrollado, los prototipos del modelo de planta
sconstruidos y el desarrollo de software comienza.
Para resolver estas limitaciones los ingenieros de diseo de
control han adoptado un proceso de diseo altamente eficiente
generalmente referido como el diagrama "V". Aunque originalmente
fdiseado para encapsular el proceso de diseo de las aplicaciones de
software, se pueden encontrar diferentes versiones de este diagrama
para describir diferentes ciclos de diseo de productEl que se
proporciona a continuacin generalmente es usado en el ciclo de
diseo ECU.
-
7/28/2019 Tutorial- ECU Automotriz
5/75/7 www.ni.c
En este diagrama la progresin del tiempo general en las etapas
de desarrollo se muestra de izquierda a derecha. Sin embargo, este
es siempre un proceso repetitivo y el desarrollo actual noproceder
linealmente a travs de estos pasos. A cambio, usted podr emplear el
tiempo en cada paso y hasta tener que regresar de vez en cuando. La
meta es hacer este ciclo lo ms eficienteposible al minimizar la
cantidad de reproducciones entre los pasos, as como el tiempo
empleado en cada paso.El eje y de este diagrama se le puede conocer
como el nivel al cual los componentes del sistema son considerados.
Los requerimientos del sistema se deben considerar al comienzo
deldesarrollo. Conforme el sistema es dividido en sub sistemas y
componentes, el proceso se vuelve de bajo nivel hasta el punto de
cargar el cdigo en los procesadores individuales.Despus, los
componentes son integrados y probados juntos hasta ese tiempo en el
que el sistema completo puede entrar a las pruebas de produccin
finales. Por lo tanto, la parte superior dediagrama representa la
vista del sistema de alto nivel y la parte inferior del diagrama
representa una vista de muy bajo nivel.
Analicemos estos pasos uno por uno.Definicin del Sistema.
En este paso los ingenieros de diseo inicialmente documentan las
necesidades y requerimientos del proyecto usando aplicaciones de
hojas de clculo o procesamiento de palabras. Ladocumentacin tambin
se encarga de las diferentes especificaciones del motor y las
diferentes normas que necesita para cumplirlas. Tambin marca los
lmites de los parmetros involucrados
en controlar el motor.
Una vez que las especificaciones son documentadas, el proceso
actual de diseo comienza, en el que primero se construyen un modelo
de software del ECU y el motor.
Y una vez que los modelos son construidos, el tercer paso
involucra simulacin de software en el ciclo. En este paso los dos
modelos de software; modelo del ECU y modelo del Motor;
sonconectados juntos en un ciclo cerrado y despus simulados para
analizar las caractersticas dinmicas del sistema completo. Durante
la simulacin el modelo del ECU monitorea la salida desdemodelo del
Motor y ajusta las entradas al modelo del Motor para mejorar el
rendimiento de varias funciones del motor como inyeccin del
combustible, encendido, etc.
National Instruments ofrece tres opciones para construir un
modelo de software.
1ra. Opcin --- LabVIEW.
LabVIEW con el Paquete Diseo de Control y Simulacin ofrece una
muy buena plataforma para disear y modelar el Motor y la unidad de
control del Motor. El Paquete Diseo de Control ySimulacin consiste
principalmente de tres juegos de herramientas para este
propsito.
System Identification Toolkit y Control Design Toolkit:- Este
juego de herramientas contiene varios VI's para Identificacin de
Sistemas que ayuda a construir modelos matemticos de lossistemas
dinmicos de un motor. Estos modelos pueden ser integrados juntos
para generar un modelo completo del motor, el cual al usarlos VIs
para diseo de control se puede analizar y usar para disear el
modelo matemtico del ECU.
Mdulo de Simulacin:- El mdulo de simulacin ofrece un entorno de
simulacin en LabVIEW. Los clientes tambin pueden construir el motor
y los modelos ECU en forma de diagrama debloques (como modelos
Simulink) usando varios VI's en LabVIEW para funciones lgicas y
aritmticas, procesamiento de seales,filtros, etc. junto con
elementos Dinmico, tablas de consulta, etc. proporcionadas por el
mdulo de simulacin. Despus que el modelo es diseado, se puede
realizar la simulacin del softwareen el ciclo usando el mismo
entorno de simulacin.
La documentacin para el modelo se puede preparar usando
cualquier aplicacin de palabras o hojas de clculo.
2da Opcin --- MATRIXx
-
7/28/2019 Tutorial- ECU Automotriz
6/76/7 www.ni.c
MATRIXx tiene habilidades similares a Matlab/Simulink. Es una
herramienta ideal para clientes que estn planeando construir sus
modelos desde cero y estn buscando herramientas quepuedan lograr
una aplicacin compleja de diseo de control y simularla a alta
velocidad.MATRIXx est hecho bsicamente de cuatro productos:-1)
XMath2) SystemBuild3) AUTOCODE4) DocumentItUsando software XMath y
SystemBuild, los clientes pueden modelar sus ECUs y Motores y
despus usando esos modelos pueden realizar simulacin de software en
el ciclo.
El software XMath es un entorno de software bsico de anlisis y
visualizacin que controla SystemBuild y todo el entorno MATRIXx
relacionado. Tambin ayuda a manejar datos y realizaranlisis numrico
para SystemBuild.SystemBuild es un entorno de programacin grfica
que se puede usar para modelar y simular el Motor y el sistema del
Motor. Tiene una opcin de ms 80 tipos de bloques que se pueden
usarpara construir modelos complejos del Motor y del ECU.Para
documentar el modelo MATRIXx tiene un producto llamado DocumentIt
el cual puede crear documentos automticamente en varios formatos
desde los modelos construidos en SystemBuil
3ra Opcin --- LabVIEW + Simulink
Si ya tiene un modelo de motor listo e integrado en Simulink y
no desea re construir el modelo. Entonces hay dos opciones
disponibles:1) Al usar el Mdulo de Simulacin podemos traducir el
modelo Simulink (.mdl file) existente en cdigo del diagrama de
bloques de LabVIEW, lo cual se puede lograr fcilmente en un proceso
dtres pasos.2) El Simulation Interface Toolkit (SIT) es un
complemento de LabVIEW que proporciona herramientas para crear
interfaz de LabVIEW para comunicarse exitosamente con un modelo
Simulinkexistente.a) Comunicar directamente entre LabVIEW y el
modelo Simulink. El Servidor SIT necesita iniciarse desde MATLAB
para lograr esta comunicacin. El modelo Simulink tambin se
puedeejecutar en la PC principal u otra PC diferente.
La documentacin se puede realizar usando cualquier aplicacin de
hoja de datos o palabras.
b.) Ejecutar el modelo en un sistema en tiempo real al convertir
el modelo Simulink a un DLL. Una vez que el DLL est construido, no
son necesarios el servidor SIT ni el modelo.
Rpida Generacin de Prototipos de Control
Tambin se conoce como simulacin de modelo en el ciclo (EIL). No
se debe confundir con el trmino (RP) la cual se refiere a una clase
de tecnologas querpida generacin de prototipospueden construir
modelos fsicos automticamente desde datos de Diseo Asistido por
Computadora (CAD). Para RCP, el modelo de software ECU que ha sido
diseado es descargado a unobjetivo prototipo de hardware en tiempo
real. El Objetivo puede ser cualquier hardware en tiempo real
(idealmente un sistema PXI o un sistema cRIO). Por lo tanto, el
modelo de software de Eproporciona interfaz de E/S la cual est
conectada a sensores y actuadores sujetos al motor.
El software que se puede requerir es LabVIEW, LV RT y LV FPGA
(si se usa cRIO o 7831R en PXI). Si el mdulo es construido en
MATRIXx entonces un dll se puede crear a partir de l y se
-
7/28/2019 Tutorial- ECU Automotriz
7/7