Embed Size (px)
Citation preview

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
Unidad Nº I – Geometría analítica en el espacio
1) Coordenadas cartesianas en el espacio
Los planos de referencia XY (z = 0); XZ (y = 0); e YZ (x = 0) dividen el espacio en 8 octantes, los signos de las componentes cambian de positivo a negativo. La posición del punto:
Las coordenadas del punto A serán:
La distancia entre los puntos A y B será:
El segmento AB será:
Si P` tiene cota o Z = 0 se halla sobre el plano (x, y)
2) Distancia entre dos puntosCalcular la distancia entre dos puntos en el plano es muy sencillo. Si haces un dibujo como el de la figura en seguida te das cuenta que la distancia horizontal entre los dos puntos es c - a y la distancia vertical es d - b, por lo tanto, como la distancia entre los puntos es la hipotenusa, la
distancia será
Los planos coordenados dividen el espacio en 8 sectores octantes triedros trirrectángulos c/u determinados por los signos de coordenadas.
3) Ecuaciones de la rectaPARAMÉTRICASDos puntos determinan una recta. Si esos puntos son extremos de vectores (linealmente independientes), podríamos generalizar diciendo que dos vectores determinan una recta. La
Prof. : Ing. Roldan 1-1

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
diferencia entre ambos vectores nos daría un vector colineal con esa recta, vector dirección o pendiente de la recta.
Sean dos vectores w = (2, 3) y v = (5, 2) determinan una recta cuya pendiente es m, de manera que m = w v = ( 3, 1). De esa manera podemos escribir la ecuación de la recta vectorial como: L = t( 3, 1) + (5, 2). El vector que suma al vector pendiente puede ser cualquier vector perteneciente a la recta. Designamos como "t" a un escalar de manera que cualquier vector perteneciente a esta recta se obtiene al dar distintos valores a t.
(x , y) = t ( 3, 1) + (5, 2) Llamada ecuación paramétrica de la recta.
-Curva C lugar geométrico de las posiciones de un punto móvil, las coordenadas del punto son funciones del tiempo:
x = f (t)y = g (t)z = h (t)
Estas reciben el nombre de EC. PARAMÉTRICAS y el parámetro en este caso es el tiempo. (t) no es necesariamente tiempo. Puede tener otros significados geométricos o no. Por ej. Ec. Paramétrica de una circunferencia con centro en el origen de coordenadas y situada en el plano (x, y) serán:
x = r . cos ty = r . cos tz = 0
siendo t = ángulo
t entre 0 y 2 π, recorremos toda la circunferencia
Una recta r queda definida por: un punto P1 (x, y, z) y 3 ángulos α, β, γ que forman con cada eje de coordenadas. Se llaman ÁNGULOS DIRECTORES. Se hallan trazando paralelas a r por el origen. Una semirrecta.
Prof. : Ing. Roldan 2-1

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
A) cualquier punto P de la recta se determina por la distancia t a P 1, proyectando t sobre cada eje de coordenadas:
x – x1 = t . cos α1) y – y1 = t . cos β
z – z1 = t . cos γcos = COSENOS DIRECTORESdonde resulta las ecuaciones paramétricas de la recta:
x = x1 + t . cos α2) y = y1 + t . cos β
z = z1 + t . cos γ
Elevando al cuadrado las 1) y sumando:
(x –x1)2 + (y – y1)2 + (z – z1)2 = t2 (cos2 α + cos2 β + cos2 γ)
= t2 = 1
Ecuaciones paramétricas de una recta
de donde realizando las correspondientes operaciones se tiene que
Las ecuaciones anteriores reciben el nombre de ecuaciones paramétricas de la recta que pasa
por y cuyo vector director es .
NO PARAMÉTRICASDe las Ec. Paramétricas de la recta se obtienen formas NO PARAMÉTRICAS, eliminando el parámetro t.De 1) despejamos t obtenemos:
x –x1 y –y1 z –z1
cos α cos β cos γ
ECUACIONES SIMÉTRICAS de la recta que pasa por P1 y forma ángulos α, β, γ con los ejes.
NOTA: Podemos hallar los cos directores sabiendo que son proporcionales a 3 números a, b, c (≠ 0). Llamamos h al valor común de los 3 Nº :
cos α cos β cos γ a b c
Tenemos: cos α = a . h
3) cos β = b . hcos γ = c . h
Elevando al cuadrado y sumando se tiene:
1 = h2 (a2 + b2 + c2)En donde :
1√ a2 + b2 + c2
Prof. : Ing. Roldan 3-1
= = =
= =
h
h =

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
Entonces de 3)cos α = a cos γ = c √ a2 + b2 + c2 √ a2 + b2 + c2
4) cos β = b √ a2 + b2 + c2
a, b, y c fijan la dirección, se llaman NÚMEROS DIRECTORES de la recta.Si no se conocen los cosenos y sí los Nº directores.
5) x –x1 y –y1 z –z1
l m n
Si dividimos cada denominador por un Nº R = √ l2 + n2 + m2 pasamos a las
4) cos α = l cos β = m cos γ = nR R R
Ejemplo:
Determine las ecuaciones paramétricas y simétricas de la recta que pasa por el punto y
tiene como vector director a . Solución 1) Ecuaciones paramétricas
2) Ecuaciones simétricas
Cosenos directores: Son los cosenos de los ángulos que forma el vector con los vectores de la base canónica
Prof. : Ing. Roldan 4-1
= =

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
B) Ecuación de la recta que pasa por 2 puntos
P1 (x1, y1, z1)P2 (x2, y2, z2)
x2 –x1 y2 –y1 z2 –z1
l m ndividiendo 5) por esta se obtiene:
x –x1 y –y1 z –z1
x2 –x1 y2 –y1 z2 –z1
Por ejemplo: hallar la Ec. de la recta que pasa por
P1 (1, 3, 2) y P2 (5, 0, 2)
Reemplazar:
x –1 y –3 z –2 4 -3 0
O sea:
x –1 y –3 z –2 4 -3
Como √ l2 + n2 + m2 = √ 42 + 32 + 02 = 5
Los cos directores son:
cos α = 4 cos β = - 3 cos γ = 0 5 5
4) Ecuación del planoPlano afín: Subespacio afín de dimensión 2.
Prof. : Ing. Roldan 5-1
= =
= =
= =
= = = 0

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
Un Plano queda determinado por:a) Su distancia al eje de coordenadas δ = 0Nb) Cosenos directores de la normal 0N (los directores del plano)
Sea P (x, y, z) un punto cualquiera del plano y 0PHP’, la poligonal de sus coordenadas 0P’ = x , P’H = y , HP = ZResultante = 0P
La proyección de la resultante OP sobre un eje es igual a la suma de las proyecciones de los lados de la poligonal:
1) proy OP = proy OP’ + proy P’H + proy HP2) Tomando como eje de proyección a la normal ON tenemos:
proy OP = ON = δproy OP’ = x cos αproy P’H = y cos βproy HP = z cos γ
Reemplazando 2) en 1):
3) x cos α + y cos β + z cos γ = δ EC. DE 1er GRADO
Toda ecuación de 1er grado en las coordenadas cartesianas x, y, z :
4) a x + b y + c z + d = 0 EC. GRAL DEL PLANO Representa un plano. a, b y c : son Nº reales
Si en 4) pasamos al 2º miembro y dividimos todo por √a2 + b2 + c2 obtenemos la ecuación 3)
cos α = a cos β = b cos γ = c
√a2 + b2 + c2 √a2 + b2 + c2 √a2 + b2 + c2
cos α = a . h cos β = b .h cos γ = c .h
y δ = c
√a2 + b2 + c2
Casos especiales
a) Si uno de los Nº a, b, o c es cero el plano es paralelo al eje correspondiente a la coordenada cuyo coeficiente es nulo.Ej.
a x + b y = d // a eje z
Prof. : Ing. Roldan 6-1

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
b y + c z = d // a eje xa x + c z = d // a eje y
b) Si 2 coeficientes son nulos el plano es paralelo al plano que forman los 2 ejes para los cuales los coeficientes de sus coordenadas son nulos.Ej.
c z = d // al plano x y
c) Si d = 0 el plano pasa por el origen de coordenadas ya que 4) se verifica para x = 0y = 0z = 0
d) Si c = 0 la ecuación queda:a x + b y + d = 0
En el plano (x, y) representa una recta r. En el espacio esta ecuación representa el plano que pasa por r y es paralela al eje z. Todo punto P del plano tiene las mismas x e y que un punto H de la recta r.
Prof. : Ing. Roldan 7-1

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
De otro modo si c = 0 cos γ = 0 γ = π / 2 h.El plano es perpendicular al eje z El plano es paralelo a zEl plano (horizontal) , donde ;
El plano (vertical) , donde ;
El plano (vertical) , donde .
Prof. : Ing. Roldan 8-1

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
5) Ecuaciones de Superficies y de Curvas
Una ecuación o relación entre las coordenadas x, y, z de un punto f (x, y, z) = 0 representa en gral. una superficie S.Esa superficie puede ser un plano, la superficie más sencilla, y su ecuación es de primer grado.Las más sencillas después de los planos son las superficies cilíndricas, engendradas por una recta (generatriz) que se mueve manteniéndose paralela a si misma, apoyada en una curva. Por ejemplo: la curva puede ser f (x, y) = 0; en el plano x, y ; y la generatriz una recta constantemente paralela al eje z. Así si P0 (x, y, 0) se halla en la curva, cualquier P (x, y, z) con igual x e y, y cualquier valor de z se hallará en la superficie. O sea si sus coordenadas x, y satisfacen f (x, y) = 0 P está en la superficie independientemente de z.
Recíprocamente, si el punto P (x, y, z) se halla sobre la superficie cilíndrica, el punto P 0(x, y, z) pertenece a la curva del plano x, y; y por lo tanto sus coordenadas x e y satisfacen a la ecuación f (x, y) = 0.Así si interpolamos f (x, y) = 0 como la ecuación de un lugar geométrico en el espacio (en lugar de la ecuación de una curva plana), el lugar es una superficie cilíndrica de generatrices paralelos al eje z (coordenadas que falta en la ecuación cuya sección recta por el plano z = 0 es la curva)Ej. Nº 1: la superficie cilíndrica y = x2 tiene generatrices paralelos a z y su sección plana por el plano z = 0 es una parábola.
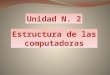
Superficies cilíndricas
Las superficies se generan a partir de una curva que se mueve en el espacio (llamada generatriz), siguiendo una trayectoria determinada (llamada directriz) . Trazar la gráfica de una superficie de este tipo es muy simple, la idea es arrastrar la generatriz en la dirección de la directriz, el movimiento de la generatriz forma la superficie por la traza que va dejando. En la figura 7, la curva generatriz es una parábola y como directriz se usa el vector u = ( 0, 5, 0).
Prof. : Ing. Roldan 9-1

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
Figura 7.
La parábola
Figura 9.Ej. Nº 2: y2 + 4 z2 = 4 es un cilindro Elíptico de generatrices paralelos a x que se extiende indefinidamente.
Definición (cilindro)Sea una curva sobre un plano llamada directriz y sea una recta no paralela al plano , llamada generatriz. Entonces el conjunto de todos los puntos en las rectas paralelas a que intersecan a es un cilindro
Observación : esta definición es una generalización del conocido cilindro circular recto donde,
por ejemplo, la directriz es que esta sobre el plano y la generatriz es paralela al eje . Este tipo de cilindros se conoce como cilindros rectos. Cuando la generatriz es una recta que no es paralela a alguno de los ejes coordenados el cilindro generado se conoce como oblicuo. Un cilindro circular recto tiene como directriz un círculo y como recta generatriz una recta paralela a uno de los ejes coordenados. En la figura 7 se muestra un cilindro con directriz;
y con recta generatriz paralela al eje .
Figura 8.
En la fig. 8 se muestra un cilindro parabólico con generatriz paralela al eje
La Elipse
Prof. : Ing. Roldan 10-1

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
Figura 10.Ej. Nº 3: x2 + y2 + x2 = 5 representa una esfera de radio π =√5 con centro en el origen de coordenadas, la condición necesaria y suficiente para que un punto esté en una esfera es que su distancia al origen sea √5.
6) Superficies de Revolución
Las superficies de revolución son las formadas por una curva g (generatriz), al girar alrededor de un eje e.La superficie se caracteriza por la propiedad de que todas son secciones con planos paralelos a e son circunferencias con centro en e (paralelos).Todas las secciones con planos que pasan por e (meridianos) son congruentes entre sí y cualquiera puede tomarse como generatriz.
Ej. Nº 1: el meridiano se encuentra en el plano x, z; y el eje e de rotación es uno de los ejes coordenadas, por ej. Z.Sea f (x, y) = 0; y = 0 – las ecuaciones del meridiano m.Un punto genérico P de la superficie de revolución S está en un paralelo P engendrado por un punto M del meridiano. El radio del paralelo es P = √x2 + y2.
Prof. : Ing. Roldan 11-1
z

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
7) Cuádricas
Una superficie cuya ecuación es de 2º grado en las variables x, y, z se denomina superficie cuadrática o cuádrica.Al girar una cónica (elipse, hipérbola, parábola) alrededor de uno de sus ejes resulta una cuádrica que llamaremos de revolución.
a) Elipsoide – La elipsex2 z2
a2 c2 engendra al girar alrededor de z la superficie llamada elipsoide de revolución.
Elipsoide en gral. x2 y2 z2
a2 b2 c2
b) Hiperboloide – La hipérbolax2 z2
a2 c2
engendra al girar alrededor de z el hiperboloide de revolución de una hoja.
x2 y2 z2
a 2 b2 c2
Si gira alrededor del eje x engendra el hiperboloide de revolución de 2 hojas.
x2 y2 z2
a2 b2 c2
Prof. : Ing. Roldan 12-1
=+ 1 y = 0
=+ 1+
= 1- y = 0
=+ 1-
=- 1-

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
La hipérbola
Figura 8.
c) Paraboloide – La parábola x2 = z ; y = 0Engendra al girar alrededor de z el paraboloide de revolución.Paraboloide elíptico.
x2 y2 a2 b2
d) Nunca es de revolución el llamado paraboloide hiperbólicoTambién llamado Silla de MontarEs simétrico respecto a los planos x = 0 (plano y z)
e y = 0 (plano x z)Las secciones en esos planos son parábolas.
Definición:Una cuádrica es el lugar geométrico de los puntos del espacio (x,y,z) que verifican una ecuación de segundo grado del tipo
Clasificación:1. elipsoide real 2. elipsoide imaginario (no existen puntos reales que verifican la ecuación) 3. cono imaginario
Prof. : Ing. Roldan 13-1
= Z+

Universidad Nacional de ChilecitoIngeniería en Sistemas-Licenciatura en Sistemas
Análisis Matemático II
4. hiperboloide hiperbólico (de una hoja) 5. hiperboloide elíptico (de dos hojas) 6. cono real 7. paraboloide elíptico 8. paraboloide hiperbólico
1. cilindro elíptico imaginario 2. cilindro elíptico real 3. par de planos imaginarios secantes
1. cilindro hiperbólico 2. par de planos reales secantes
1. cilindro parabólico 2. par de planos imaginarios paralelos distintos 3. par de planos reales paralelos distintos 4. par de planos coincidentes
Así se tiene:
1 Cuádricas con centro: elipsoides, hiperboloides y conos. 2 Cuádricas con eje de centros: cilindros elípticos e hiperbólicos y pares de planos secantes.
3 Cuádricas con plano de centros: pares de planos paralelos o coincidentes.
4 El resto de las cuádricas no posee centro (lo tiene en el infinito): paraboloides y cilindros parabólicos.
El centro es un punto de simetría de la cuádrica, el eje y el plano de centros son a su vez eje y plano de simetría.
Prof. : Ing. Roldan 14-1