Embed Size (px)
Citation preview

i
UNIVERSIDAD DE CHILE
FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS
DEPARTAMENTO DE INGENIERÍA DE MINAS
SIMULACIÓN GEOESTADÍSTICA INCORPORANDO UN CAMPO DE DIRECCIONES
VARIABLES
ALEJANDRO DAVID LEIVA RODRÍGUEZ
SANTIAGO – CHILE
ENERO 2007
ii
UNIVERSIDAD DE CHILE
FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS
DEPARTAMENTO DE INGENIERÍA DE MINAS
SIMULACIÓN GEOESTADÍSTICA INCORPORANDO UN CAMPO DE DIRECCIONES
VARIABLES
ALEJANDRO DAVID LEIVA RODRÍGUEZ
COMISIÓN EXAMINADORA: CALIFICACIONES
NOTA
(Nº) (Letras) FIRMA
PROFESOR GUÍA
SR. JULIÁN ORTIZ : ……… …………….…….. ………………
PROFESOR CO-GUÍA
SR. EDUARDO MAGRI : ……… …………………… ………………
PROFESOR INTEGRANTE
SR. CAMILO SALINAS : ……… …………………… ………………
MEMORIA PARA OPTAR AL TÍTULO DE
INGENIERO CIVIL DE MINAS
SANTIAGO – CHILE
ENERO 2006

iii
RESUMEN
La correcta evaluación de los recursos en un proyecto minero es de suma importancia para la aprobación de fondos que permiten la realización del proyecto. Debido a que las inversiones son cuantiosas, la necesidad de contar con información confiable es primordial. Para el caso de yacimientos de vetas, la evaluación de recursos se hace más problemática debido a la continuidad variable que presenta este tipo de yacimientos. El objetivo general del presente trabajo de título es definir e implementar una metodología para la estimación de un campo de direcciones de continuidad variable e incorporarlo a la simulación geoestadística de un atributo; se define una metodología para estimar campos de direcciones de anisotropías, se evalúan parámetros necesarios para representar direcciones de anisotropías locales y se modifica el algoritmo de simulación secuencial gaussiana para adecuarlo al uso de anisotropías locales en la simulación. La primera parte de este trabajo consiste en una descripción del formalismo geoestadístico, técnicas de estimación y simulación geoestadística. Además, se hace una revisión bibliográfica de lo realizado en cuanto a incorporar la geología en la evaluación de recursos mineros. Se continúa presentando en detalle la metodología desarrollada para incorporar un campo de direcciones de continuidad variables a la simulación geoestadística de un atributo, junto con la justificación de la misma. Finalmente, se desarrolla un caso de estudio para ilustrar el uso de la metodología propuesta. Se utilizan datos reales de una porción de un yacimiento de oro en vetas del cual es posible deducir direcciones de anisotropía locales condicionantes para la estimación de un campo de direcciones. Utilizar direcciones de anisotropías variables se presenta como una flexibilización de las hipótesis de estacionaridad, las que indican el uso de un variograma único en la simulación de un atributo. El uso de direcciones de continuidad variable no resulta un hecho antojadizo, sino que se basa en la recopilación de información que respalda la presencia de anisotropías locales.
El beneficio del uso de anisotropías locales frente al uso de un variograma único en la simulación de una unidad geológica resulta evidente. Gracias a su uso, en el caso de estudio, se logra representar de mejor manera el cambio de la dirección de continuidad o la continuidad dentro de estructuras geológicas con carácter curvilíneo. Se aprecia que la continuidad y orientación de las vetas simuladas resulta mucho mejor lograda al ser comparadas tanto las realizaciones, como el promedio de éstas con la interpretación geológica de la veta. No obstante a lo anterior, las estadísticas globales entre la simulación propuesta y la tradicional son sumamente parecidas. Por otro lado, el algoritmo de simulación considerando direcciones de continuidad variable, es notoriamente más lento que el algoritmo tradicional debido a que un algoritmo de búsqueda eficiente es difícil de practicar porque la configuración de valores de variograma para los nodos en la vecindad de kriging es variable junto con la anisotropía local.

iv
ABSTRACT
The right resources evaluation in mining projects is very relevant to approve funds that allow carrying out the projects. Due to the investment is substantial to have reliable information is essential. In the case of vein sort of deposits, resources evaluation is more problematic due to the variable continuity that show these deposits. The main objective of this engineering final project is to define and to implement a methodology for the estimation of a field of continuity directions and to incorporate it to the geostatistical simulation of an attribute; it is defined a methodology to estimate the anisotropy direction field, parameters needed to represent local anisotropy direction are evaluated, and it is modified the algorithm of Gaussian Secuential Simulation adapting it to the use of local anisotropies.
The first part of this project consists on a brief description of the geostatistic theory, and estimation and simulation geostatistics tools. In addition, a bibliographic revision of material related to incorporate the geology to mining resources evaluation is done. Then it is showed on detail the developed methodology to incorporate variable continuity direction in geostatistical simulation. Finally, it is developed a study case to show the methodology proposed. For this study case was used real data from a portion of a vein deposit of gold from which it is possible to deduce local anisotropies direction which are used to estimate a direction field. To use variable local anisotropies is proposed as a variant of the strict stationary hypothesis, which indicates the use of a sole variogram for an attribute simulation. Using local anisotropies is not whimsical, rather it is based on the information recompiled that support the presence of local anisotropies. It is evident the benefit of using local anisotropies against to use a sole variogram in the simulation of a geological unit. Thanks to use local anisotropies, in the study case, it is better achieved the representation of either continuity direction changes or the continuity within geological structures with curvilinear character. It is possible to appreciate that the continuity and orientation in simulated veins at every realization as well as in the average is better achieved. Even though, the global statistics are very similar. Moreover, the simulation algorithm that account for variable continuities is notoriously slower than the traditional algorithm due to that an efficient search is difficult to practice because the variograma value configuration for the nodes in the kriging neighborhood is variable along with the local anisotropy.
v
Agradecimiento
Gracias a mis padres y hermanos por quererme y apoyarme tanto en cada una de las etapas de mi vida. Muchas gracias a toda mi familia, en especial a mi abuelita Guillermina que lamentablemente ya no está más conmigo. Sin dudas creo que ella estaría muy feliz de verme un ingeniero. Gracias a los profesores Julián Ortiz y Xavier Emery por su cordialidad y excelente disposición en cada momento, en especial durante mi último semestre dedicado al desarrollo de mi memoria. Gracias a Julián por su dedicación en la corrección de éste trabajo. Gracias a la profesora Gianna Vallebuona por su preocupación y amabilidad demostrada en cada momento. Gracias a todos los amigos que te he tenido gracias a que estudio ingeniería y con los cuales he compartido importantes momentos en mi vida. Mis amigos de plan común: Bernardo Rojas, Leonardo Pérez, Carlos Castillo, Miguel Neira, Leonardo Moreno, Álvaro Parra, Gabriel Letelier, Carlos Urriola, Rodrigo Torreblanca, Boris Aliaga, Nelson Aliaga y Pablo Jofre. Mis amigos de Ingeniera de Minas: Juan Luis Yarmuch, Daniel Silva, Gonzalo Gacitúa, Rodrigo Gacitúa, Eduardo Villalobos, Francisco Peña, Reynaldo Billyard, Andrés Music y Carlos Hernández. A todos los mencionados y a los que he olvidado mencionar les deseo lo mejor en cada aspecto de su vida. Gracias a la Universidad de Chile por darme una formación excepcional. Gracias a la Cátedra Codelco de Evaluación de Yacimientos por financiar los últimos 7 semestres de mi carrera. Gracias a FONDECYT, la cual a través del proyecto N° 1061260, “Evaluación de Yacimientos Mediante Simulación Estocástica Integrando Estadísticas de Múltiples Puntos”, hizo posible la realización de está memoria.

vi

i
Índice General
1 INTRODUCCIÓN ........................................................................................................................................1
1.1 PROBLEMÁTICA Y MOTIVACIÓN ...........................................................................................................................3 1.2 OBJETIVOS............................................................................................................................................................4
1.2.1 Objetivo General..........................................................................................................................................4 1.2.2 Objetivos Específicos ...................................................................................................................................4
1.3 ALCANCES ............................................................................................................................................................5 1.4 DESCRIPCIÓN POR CAPÍTULOS ..............................................................................................................................6
2 ANTECEDENTES .......................................................................................................................................8
2.1 MODELAMIENTO GEOLÓGICO...............................................................................................................................8 2.2 EVALUACIÓN DE RECURSOS .................................................................................................................................9
2.2.1 Variable Regionalizada...............................................................................................................................9 2.2.2 Caracterización de una Función Aleatoria................................................................................................10 2.2.3 Estimación de Leyes...................................................................................................................................13 2.2.4 Simulación Secuencial Gaussiana .............................................................................................................15
2.3 GEOMETRÍAS NO CAPTURADAS POR TÉCNICAS CONVENCIONALES ....................................................................16 2.4 METODOLOGÍAS EXISTENTES PARA INCORPORAR GEOLOGÍA EN LA EVALUACIÓN ............................................18
3 METODOLOGÍA .......................................................................................................................................23
3.1 ESTIMACIÓN DE CAMPO DE DIRECCIONES DE ANISOTROPÍA...............................................................................24 3.2 VARIOGRAMA CONSIDERANDO ANISOTROPÍAS LOCALES...................................................................................26 3.3 SIMULACIÓN SECUENCIAL GAUSSIANA CONSIDERANDO ANISOTROPÍAS LOCALES ............................................28 3.4 JUSTIFICACIÓN DE LA METODOLOGÍA.................................................................................................................30
3.4.1 Parámetros para Definir Direcciones de Anisotropías Locales ................................................................30 3.4.2 Alcance en el Kriging para Estimación de Campo de Direcciones ...........................................................33 3.4.3 Simulación Considerando Anisotropías Locales. ......................................................................................34
3.5 METODOLOGÍA PARA CASO DE ESTUDIO ............................................................................................................37
4. CASO DE ESTUDIO ................................................................................................................................38
4.1 INFORMACIÓN DISPONIBLE.................................................................................................................................38 4.2 GEOLOGÍA DEL YACIMIENTO ..............................................................................................................................40 4.3 ESTUDIO EXPLORATORIO....................................................................................................................................41
4.3.1 Estadísticas Datos Condicionantes............................................................................................................41 4.3.2 Desagrupamiento.......................................................................................................................................44
4.4 TRANSFORMACIÓN GAUSSIANA ........................................................................................................................45 4.5 TEST DE LA DISTRIBUCIÓN BIGAUSSIANA...........................................................................................................47 4.6 ANÁLISIS VARIOGRÁFÍCO ...................................................................................................................................49
4.6.1 Variograma Datos no Gaussianos .............................................................................................................50 4.6.2 Variograma Datos Gaussianos. .................................................................................................................51
4.7 MODELOS VARIOGRÁFICOS ................................................................................................................................52 4.7.1 Modelos Datos no Gaussianos...................................................................................................................52 4.7.2 Modelos Datos Gaussianos........................................................................................................................52 4.7.3 Modelos “Ideales”.....................................................................................................................................53
4.8 CAMPO DE DIRECCIONES DE CONTINUIDAD VARIABLE ......................................................................................54 4.8.1 Secciones....................................................................................................................................................55 4.8.2 Plantas .......................................................................................................................................................57
4.9 SIMULACIÓN SECUENCIAL ..................................................................................................................................58 4.9.1 Caso “Real” ..............................................................................................................................................59 4.9.2 Caso “Ideal” 1...........................................................................................................................................60 4.9.3 Caso “Ideal” 2...........................................................................................................................................62
4.10 VALIDACIÓN DE LA SIMULACIÓN CONSIDERANDO ANISOTROPÍAS LOCALES ...................................................63 4.10.1 Histogramas Datos Gaussianos..............................................................................................................63 4.10.2 Histogramas Datos No Gaussianos .........................................................................................................65 4.10.3 Variogramas ............................................................................................................................................66
ii
4.11 SIMULACIÓN V/S KRIGING ................................................................................................................................67 4.12 COMPARACIÓN PROMEDIO SIMULACIONES CON KRIGING ................................................................................69
5 CONCLUSIONES Y RECOMENDACIONES ...........................................................................................71
5.1 CONCLUSIONES...................................................................................................................................................71 5.2 RECOMENDACIONES ...........................................................................................................................................72
6 BIBLIOGRAFÍA.........................................................................................................................................74
ANEXOS ......................................................................................................................................................75
ANEXO A: DATOS INICIALES DE DIRECCIONES CASO DE ESTUDIO. ..........................................................................76 ANEXO B: HISTOGRAMAS PROMEDIOS Y DESV. STD. SIMULACIONES. .....................................................................80 ANEXO C: MODELOS VARIOGRÁFICOS “IDEALES” PARA KRIGING. ..........................................................................83 ANEXO D: ARCHIVOS DE PARÁMETROS GSLIB. ........................................................................................................84 ANEXO E: COMPARACIÓN ALGORITMOS DE SIMULACIÓN. .......................................................................................85 ANEXO F: COMPARACIÓN KRIGING SIMPLE – KRIGING SIMPLE. ..............................................................................87 ANEXO G: ALGORITMO DE SIMULACIÓN IMPLEMENTADO EN MATLAB....................................................................90
iii
Índice de Figuras Figura 1: Problemas en la Estimación al Utilizar Anisotropías Globales. .........................4 Figura 2: Veta de oro (color rojo)....................................................................................17 Figura 3: Yacimiento de petróleo....................................................................................18 Figura 4: Representación Gráfica de los Vectores h y h' . ............................................20 Figura 5: Patrones de múltiples puntos. .........................................................................22 Figura 6: Ejemplo de Estimación de Campo de Anisotropía ..........................................25 Figura 7: Rotación de Ejes. ............................................................................................28 Figura 8: Anamorfosis Gaussiana [Emery X., 2001].......................................................29 Figura 9: Formas para Definir Direcciones de Continuidad............................................31 Figura 10: Estimación de Direcciones de Continuidad. Caso Plegamiento....................32 Figura 11: Estimación de Direcciones de Continuidad. Caso Veta. ...............................32 Figura 12: Estimaciones con Componentes Normalizados. ...........................................33 Figura 13: Alcances de K.O. en Estimación de direcciones de Anisotropía. ..................34 Figura 14: Datos Recreación Muestreo Veta 1...............................................................35 Figura 15: Simulación Veta 1. ........................................................................................35 Figura 16: Datos Recreación Muestreo Veta 2...............................................................36 Figura 17 Simulación Veta 2. .........................................................................................36 Figura 18: Disposición de Datos Iniciales y Muestras Para Análisis Variográfico. ........39 Figura 19: Datos Condicionantes Espacio a Estimar. ....................................................42 Figura 20: Secciones Utilizadas en el Condicionamiento de Datos................................43 Figura 21: Vista de Plantas Utilizadas en el Condicionamiento de Datos. .....................43 Figura 22: Planta de Datos Luego de la Anamorfosis. ...................................................47 Figura 23: Nubes de Correlación Diferida. .....................................................................48 Figura 24: Rotación de Ejes para Cálculo de Variograma..............................................50 Figura 25: Búsqueda de Direcciones de Continuidad. ...................................................54 Figura 26: Campo Anisotropía Local. Sección 1. ...........................................................55 Figura 27: Campo Anisotropía Local. Planta 1. ..............................................................57 Figura 28: Plantas y Secciones Simulación Caso “Real”. ..............................................60 Figura 29: Plantas y Secciones Simulación Caso “Ideal” 1. ...........................................61 Figura 30: Plantas y Secciones Simulación Caso “Ideal” 2. ...........................................62 Figura 31: Simulaciones v/s Kriging. ..............................................................................68 Figura 32: Promedio Simulaciones con Kriging..............................................................69 Figura 33: Secciones con Datos Iniciales y Campo Estimado de Direcciones. ..............76 Figura 34: Plantas con Datos Iniciales y Campo Estimado de Direcciones. ..................77 Figura 35: Archivo de Parámetros NSCORE..................................................................84 Figura 36: Archivo de Parámetros BACKTR. .................................................................84 Figura 37: Comparación Algoritmos de Simulación Modelo “Ideal” 1.............................85 Figura 38: Comparación Algoritmos de Simulación Modelo “Ideal” 2.............................86 Figura 39: Comparación KS – KO Modelo “Real”...........................................................87 Figura 40: Comparación KS – KO Modelo “Ideal” 1. ......................................................88 Figura 41: Comparación KS – KO Modelo “Ideal” 2. ......................................................89 Figura 42: Figura Esquemática Programación Algoritmos de Simulación......................90
iv
Índice de Gráficos Gráfico 1: Aspecto típico de la función variograma. .......................................................12 Gráfico 2: Histograma de los Ángulos Simulados. .........................................................26 Gráfico 3: Histograma de los Datos Condicionantes Sin Desagrupar. ...........................42 Gráfico 4: Media Desagrupada v/s Tamaño de Celda....................................................44 Gráfico 5: Histograma de Datos Desagrupados. ............................................................45 Gráfico 6: Función de Anamorfosis. ...............................................................................46 Gráfico 7: Histograma Datos Gaussianos Desagrupados. .............................................48 Gráfico 8: Variograma y Correlograma Datos no Gaussianos........................................51 Gráfico 9: Variograma de Datos Gaussianos .................................................................51 Gráfico 10: Variograma y Modelo Variográfico Datos no Gaussianos............................52 Gráfico 11: Variograma y Modelo Variográfico Datos Gaussianos.................................52 Gráfico 12: Modelo Variográfico “Ideal” 1.......................................................................53 Gráfico 13: Modelo Variográfico “Ideal” 2.......................................................................53 Gráfico 14: Histograma de Ángulos de Rotación φ en el plano ZX’...............................56 Gráfico 15: Histograma de Ángulos de Rotaciónα en el Plano XY. ...............................58 Gráfico 16: Histograma Datos Gaussianos Simulaciones. .............................................64 Gráfico 17: Histograma Simulaciones. ...........................................................................65 Gráfico 18: Variogramas Direccionales Simulaciones Anisotropía Local. ......................67 Gráfico 19: Histogramas de Promedios y Dev. Std. Simulaciones Modelo “Real”.........80 Gráfico 20: Histogramas de Promedios y Dev. Std. Simulaciones Modelo “Ideal” 1. ....81 Gráfico 21: Histogramas de Promedios y Dev. Std. Simulaciones Modelo “Ideal” 2. ....82 Gráfico 22: Modelo “Ideales” para Utilizados en Kriging. ...............................................83
Índice de Tablas Tabla 1: Estadísticas Básicas.........................................................................................39 Tabla 2: Estadísticas Subespacio Variograma. ..............................................................40 Tabla 3: Estadísticas Datos Condicionantes Previo Desagrupamiento..........................41 Tabla 4: Estadísticas Datos Condicionantes Desagrupados. .........................................45 Tabla 5: Datos Direcciones Condicionantes Sección 1. .................................................56 Tabla 6: Datos Direcciones Condicionantes Planta 1.....................................................57 Tabla 7: Estadísticas Promedio Simulaciones Caso “Real”. ..........................................59 Tabla 8: Estadísticas Promedio Simulaciones Caso “Ideal” 1. .......................................61 Tabla 9: Estadísticas Promedio Simulaciones Caso “Ideal” 2. .......................................62 Tabla 10: Datos Sección 1. ............................................................................................78 Tabla 11: Datos Planta 1. ...............................................................................................78 Tabla 12: Datos Planta 2. ...............................................................................................78 Tabla 13: Datos Sección 2. ............................................................................................78 Tabla 14: Datos Planta 3. ...............................................................................................78 Tabla 15: Datos Sección 3. ............................................................................................78 Tabla 16: Datos Sección 4. ............................................................................................79 Tabla 17: Datos Planta 4. ...............................................................................................79 Tabla 18: Datos Planta 5. ...............................................................................................79
Capítulo 1 Introducción
1
1 Introducción
La envolvente mineralizada en yacimientos vetiformes a menudo presenta cambios de
rumbo y manteo, los cuales son difíciles de capturar durante la estimación y simulación de
leyes. Esto motiva considerar un campo de direcciones variables inferido a partir del modelo
geológico interpretado.
El conjunto de las correlaciones o dependencias que existen en la distribución espacial
de los valores constituye la “estructura” del fenómeno regionalizado. Existe la necesidad de
adecuar los modelos numéricos lo mejor posible para representar de la manera más fiel las
características que los yacimientos presentan en la realidad. Los yacimientos de vetas,
yacimientos que presentan continuidades con características curvilíneas, resulta ser un caso
característico de la problemática generada al utilizar modelos poco flexibles en la estimación y
simulación geoestadística.
En geoestadística lineal, la descripción de la ley espacial está limitada a sus dos
primeros momentos. El momento de orden 1 (esperanza) hace intervenir en su definición
solamente un punto, y no entrega realmente la información estructural. En cambio, los
momentos de orden 2 (en particular la covarianza y el variograma) están definidos considerando
dos puntos, es decir, tomando el conjunto más pequeño que se puede considerar para describir
la “interacción” entre los valores. Los dos primeros momentos entregan una descripción
elemental y operatoria de la estructura espacial del fenómeno regionalizado estudiado, y son
por esta razón también llamados herramientas estructurales [Journel A. G., Huijbregts C. J.,
1978]. Herramientas más avanzadas en geoestadística, como las estadísticas de múltiples
puntos, se utilizan para intentar reproducir de mejor forma las características estructurales de
una variable regionalizada.
El valor del variograma es función del espaciamiento (h) entre pares de datos de una
variable regionalizada. El variograma puede de ser calculado utilizando distintos espaciamientos
y direcciones. Se considera un variograma isótropo, si éste es idéntico en todas las
direcciones, es decir, si éste no depende de la orientación del vector h, sino sólo de su módulo
|h|. En caso contrario, se habla de la existencia de anisotropías. La existencia de anisotropías
nos indica la presencia de direcciones preferenciales en la continuidad espacial de una variable
regionalizada. Tanto las técnicas de estimación como de simulación consideran la presencia de

Capítulo 1 Introducción
2
anisotropías con el objetivo de reproducir de mejor manera la posible distribución de la variable
regionalizada en estudio en el espacio.
Un modelamiento adecuado de la anisotropía presente nos asegura conseguir un
correcto desarrollo de los trabajos geoestadísticos. El resultado del kriging o simulación será
correcto en la medida que nuestro modelo variográfico se ajuste y reproduzca las estructuras
presentes en los datos condicionantes.
Todo refinamiento matemático utilizado en la evaluación de un proyecto minero pierde
validez cuando no se respeta o reproduce la geología del prospecto. Entender la geología
involucra ser lo suficientemente flexible como para modificar nuestra perspectiva si el modelo no
se ajusta a los datos. Utilizar direcciones de anisotropías variables se presenta como una
flexibilización de las hipótesis de estacionaridad, las que indican el uso de un variograma único
en la simulación de un atributo. El uso de direcciones de continuidad variable no resulta un
hecho antojadizo, sino que se basa en la recopilación de información que respalda la presencia
de anisotropías locales.
Se evalúa y propone una metodología para el uso de direcciones de continuidad variable
en simulación geoestadística. Se desarrolla con esta metodología un caso de estudio detallado
de simulación secuencial gaussiana incorporando direcciones de continuidad variable de un
yacimiento de oro.
El desarrollo de este trabajo de título está enmarcado en el proyecto de investigación NO
1061260, “Evaluación de Yacimientos Mediante Simulación Estocástica Integrando Estadísticas
de Múltiples Puntos”. Éste proyecto es financiado por FONDECYT y buscar capturar ciertos
rasgos estructurales de la variable regionalizada, tales como el cambio de la dirección de
continuidad o la continuidad dentro de estructuras geológicas con carácter curvilíneo, que
herramientas estructurales que consideran dos puntos (covarianza) no capturan.
Capítulo 1 Introducción
3
1.1 Problemática y Motivación
Tanto para la estimación de una variable regionalizada por kriging como para la
simulación geoestadística se utilizan herramientas de modelamiento de la estructura espacial
(covarianza, variograma), y en función de estas herramientas se definen las direcciones de
continuidad presentes en el espacio que se desea estimar.
Las direcciones de anisotropía a menudo se definen constantes dentro de cada unidad
geológica por lo que muchas veces las estimaciones presentan algún grado de sesgo con
respecto a los valores reales de la variable regionalizada.
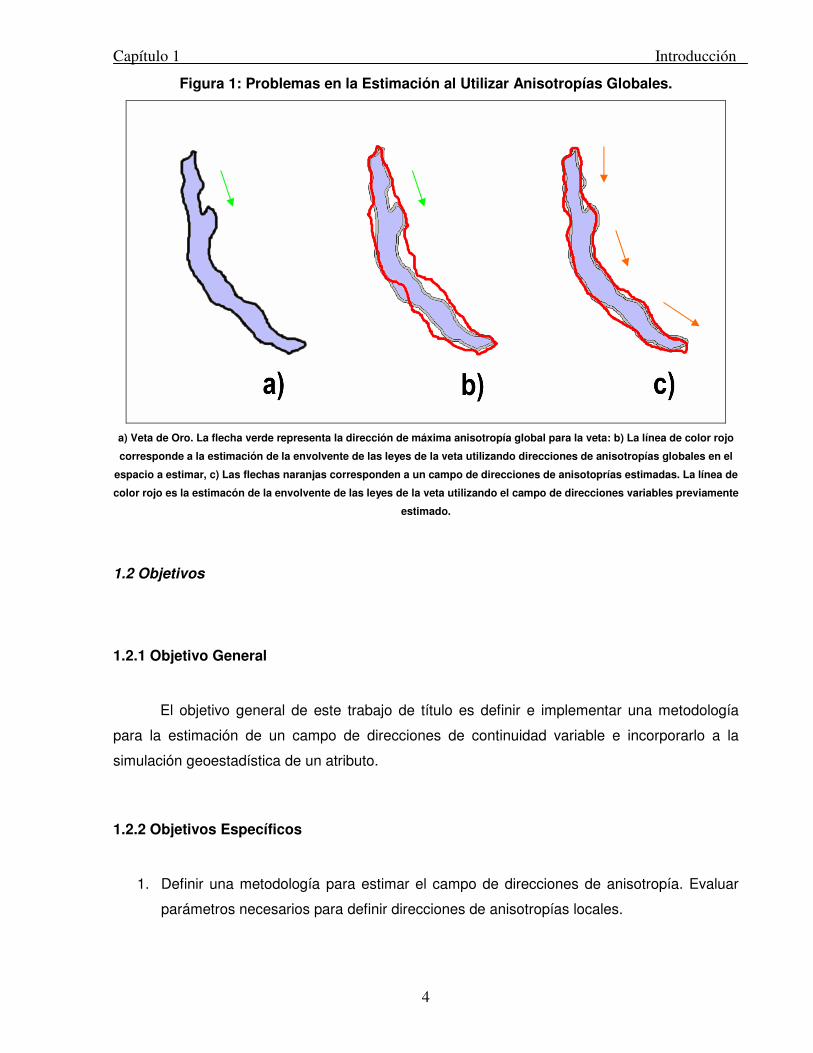
La Figura 1 ejemplifica la problemática al utilizar direcciones de anisotropías globales en
la estimación de la envolvente de leyes para una veta de oro y las mejoras a esta estimación al
utilizar direcciones de continuidad variable.
El error provocado al utilizar direcciones de anisotropías globales en la estimación de
cuerpos mineralizados que presentan con claridad más de una única dirección en la anisotropía
debe ser corregido a fin de representar de mejor manera la distribución de las leyes. Esto es
particularmente relevante en el caso de yacimientos de tipo veta, en los que definir
correctamente su potencia y ubicación resulta trascendental para el negocio minero. Resulta
claro el beneficio que se le incorporaría a la técnica de simulación considerar momentos de
orden 2 (covarianza y variograma) con características variables en el espacio para la evaluación
de un recurso.
Capítulo 1 Introducción
4
Figura 1: Problemas en la Estimación al Utilizar Anisotropías Globales.
a) Veta de Oro. La flecha verde representa la dirección de máxima anisotropía global para la veta: b) La línea de color rojo
corresponde a la estimación de la envolvente de las leyes de la veta utilizando direcciones de anisotropías globales en el
espacio a estimar, c) Las flechas naranjas corresponden a un campo de direcciones de anisotoprías estimadas. La línea de
color rojo es la estimacón de la envolvente de las leyes de la veta utilizando el campo de direcciones variables previamente
estimado.
1.2 Objetivos
1.2.1 Objetivo General
El objetivo general de este trabajo de título es definir e implementar una metodología
para la estimación de un campo de direcciones de continuidad variable e incorporarlo a la
simulación geoestadística de un atributo.
1.2.2 Objetivos Específicos
1. Definir una metodología para estimar el campo de direcciones de anisotropía. Evaluar
parámetros necesarios para definir direcciones de anisotropías locales.
Capítulo 1 Introducción
5
2. Programar algoritmo que permita encontrar el campo de direcciones de continuidad para
el espacio que se pretende estimar utilizando datos de anisotropías locales.
3. Modificar un algoritmo de simulación adecuando el sistema de kriging a la anisotropía
local.
4. Trabajar la metodología desarrollada en la simulación de un yacimiento chileno de Au
del cual es posible estimar un campo de direcciones de continuidad variable.
1.3 Alcances
Se evalúa tanto las ventajas como desventajas de utilizar direcciones de continuidad
variables definidas únicamente por sus direcciones como también direcciones de continuidad
definidas mediante vectores unitarios, es decir, que presentan dirección y sentido. Se concluye
cual de estas maneras representa la forma óptima para el desarrollo de la simulación de un
yacimiento chileno de Au que presente un campo estimable de direcciones de continuidad
variable.
Se estima el campo de direcciones variables utilizando los parámetros más adecuados a
través de un kriging ordinario. No se cubre aspectos tales como:
• Inferencia y medida de direcciones de continuidad que condicionen el campo vectorial
ni la incertidumbre y/o precisión de éstas.
• Modelamientos geológicos en los cuales las direcciones de continuidad presenten
características demasiado complejas, como por ejemplo las presentes en canales fluviales
de depósitos de petróleo.
• Inferencia acerca de la continuidad de las direcciones variables. Se utiliza en la
estimación del campo vectorial un variograma arbitrario y suave, que permita representar
de la mejor forma posible la interpretación geológica de las direcciones de continuidad en
un modelo numérico. No se utiliza un variograma de direcciones ni un variograma
vectorial.
Capítulo 1 Introducción
6
Se modifica el algoritmo de simulación secuencial gaussiana para incorporar las
direcciones de continuidad variable.
Finalmente se trabaja con la metodología desarrollada en la simulación geoestadística
de un yacimiento chileno de vetas de oro el cual presenta un campo de direcciones de
continuidad variable, con el fin de demostrar su uso. Se cuenta con la interpretación geológica
que distingue entre los valores muestreados que son parte de las vetas y los que no lo son. Con
todos los datos correspondientes a vetas se extraen direcciones de anisotropía locales, las
cuales son utilizadas como datos condicionantes en la estimación del campo de continuidad
variable. Además con estos mismos datos se realiza el estudio variográfico destinado a la
búsqueda de direcciones de anisotropías globales para el posterior modelamiento y uso de
estos modelos variográficos en la simulación incorporando direcciones de anisotropías locales.
En cada punto que sea pertinente del caso de estudio se compara los resultados
obtenidos al utilizar el programa de simulación secuencial desarrollado en MATLAB con
realizaciones de simulaciones generadas con el software GSLIB utilizando parámetros tan
similares como las opciones de cada programa lo permiten. Se realiza este ejercicio con el
objetivo de comprobar el correcto funcionamiento del programa escrito para el desarrollo de
este trabajo de título. Se elige GSLIB por ser software ampliamente utilizado en trabajos
geoestadísticos.
1.4 Descripción por Capítulos
Esta sección pretende describir de forma breve lo que se desarrollará en cada capítulo
presente en este trabajo de título para que el lector pueda comprender y situarse de forma más
fácil dentro del mismo.
El capítulo 2 corresponde al capítulo de Antecedentes. Éste capítulo muestra la revisión
bibliográfica relacionada con el desarrollo de los objetivos de este trabajo de título. Se muestra
el “estado del arte” en cuanto a incorporar la geología en la evaluación de recursos mineros.
Además se presenta un resumen del formalismo geoestadístico, la descripción de técnicas de
estimación (kriging ordinario y kriging simple) y de simulación condicional (simulación
secuencial gaussiana).
Capítulo 1 Introducción
7
El capítulo 3 muestra en detalle la metodología desarrollada para incorporar un campo
de direcciones variables a la simulación geoestadística de un atributo. En este capítulo se
muestra además de la metodología desarrollada, algunos ejemplos de pruebas realizas con el
objetivo de justificar las decisiones impuestas en la metodología.
Como forma de validación final de la metodología el capítulo 4 muestra un caso de
estudio desarrollado utilizando la metodología propuesta. Se utiliza datos reales de una porción
de un yacimiento de Au del cual es posible deducir direcciones de anisotropía locales
condicionantes para la estimación de un campo de direcciones. Se compara los resultados
obtenidos utilizando la metodología propuesta con los resultados de una simulación secuencial
gaussiana tradicional.
El capítulo 5 corresponde a las conclusiones y discusiones del trabajo realizado. Se
hace hincapié en destacar las bondades y defectos que posee la metodología desarrollada en
contraste a una simulación que no tome en cuenta direcciones de anisotropías locales. Se
propone posibles mejoras y formas de acercamiento a situaciones no consideradas en los
alcances de este trabajo.
Finalmente los últimos dos capítulos son complementos para que el lector pueda
profundizar más en el tema desarrollado. El capítulo 6 muestra la bibliografía consultada por el
autor de esta memoria, mientras que el capítulo 7 corresponde a los anexos de este trabajo,
entre los cuales se contemplan datos utilizados en ejemplos, código de algoritmo de simulación
para MATLAB, histograma de realizaciones, plantas y perfiles de estimación utilizando kriging,
variogramas “ideales” utilizados, comparación de plantas y perfiles entre una realización
generada con un algoritmo de simulación ya implementando y otra generada con el programado
en MATLAB. También se encuentran los archivos de parámetros de programas de GSLIB
mencionados en la metodología.
Capítulo 2 Antecedentes
8
2 Antecedentes
Este capítulo tiene por objetivo describir los antecedentes con los que se cuenta para el
desarrollo de esta memoria. Se comienza por una breve descripción del modelamiento
geológico. Luego se continúa con técnicas de evaluación de recursos (estimación y simulación
geoestadística) utilizadas en la metodología propuesta. Se intenta estandarizar las definiciones
presentadas por los distintos autores [Emery X., 2000; Goovaerts P., 1997] para que el lector
pueda desarrollar una lectura más sencilla.
Debido a que la geoestadística considera la variable regionalizada como una realización
de una función aleatoria, resulta interesante ver las herramientas matemáticas que permiten
caracterizar una variable aleatoria y que permiten tomar en cuenta los aspectos erráticos y
estructurales de una regionalización. Con este fin se presentan definiciones de: estacionaridad,
momentos y función aleatoria.
Finalmente se mencionan y explican trabajos relacionados con utilización de
anisotropías locales. Se recurre a varios autores con el objetivo de interiorizarse en lo que ya se
ha realizado en cuanto a técnicas existentes para incorporar la geología a la evaluación de
recursos.
2.1 Modelamiento Geológico
Los datos con que se utilizan en este trabajo de título corresponden a leyes y ángulos de
direcciones de continuidad. Se entiende por ley a la concentración de oro, plata, cobre, estaño,
etc., presente en las rocas mineralizadas, elementos de interés de un yacimiento. En el caso de
estudio en particular se trabaja con concentraciones de oro, datos que se encuentran medidos
en partes por millón [ppm].
Los datos leyes obtenidos a través de sondajes son utilizados por los geólogos para
ayudar en la inferencia del modelo geológico del yacimiento.
En la actualidad los yacimientos que afloran a superficie prácticamente no existen, por lo
que la interpretación geológica resulta mucho más compleja. Existen dos tipos de veta: vetas
Capítulo 2 Antecedentes
9
epitermales y vetas mesotermales. Las diferencias entre estos dos tipos consisten en la
profundidad en que se formaron y los componentes que cada una presenta.
Los sondajes son perforaciones de pequeño diámetro y gran longitud que se efectúan
para alcanzar zonas inaccesibles desde la superficie o laboreos mineros. Los sondajes permiten
obtener muestras de dichas zonas a profundidades de hasta 1.200 m para ser estudiadas y
analizadas por los geólogos.
Las técnicas más utilizadas actualmente son la perforación con recuperación de testigos
o diamantina y la recuperación de detritos o aire reverso. En la primera se utiliza una tubería
engastada en diamantes en la punta (corona), obteniéndose un cilindro de roca de un diámetro
entre 2 y 5 pulgadas, en tanto que la segunda se realiza con herramientas que van moliendo la
roca, permitiendo obtener sólo trozos de roca de hasta 1 cm.
Para el caso de estudio presentado en este trabajo de título, la base de datos utilizada
cuenta con una variable de interpretación de la pertenencia o no pertenencia de las muestras a
una veta del yacimiento. De esta interpretación se extraerá los datos condicionantes para
generar el campo de direcciones variables.
2.2 Evaluación de Recursos
2.2.1 Variable Regionalizada
Una variable regionalizada es una función numérica que describe de forma cuantitativa
un cierto atributo presente en una ubicación precisa del espacio. La ley se considera una
variable regionalizada.
Desde un punto de vista matemático, una variable regionalizada es una función
determinista, denotada tradicionalmente como z . En general, esta función representa dos
aspectos complementarios: por una parte, tiene una “estructura” espacial, pero por otro lado,
varía irregularmente y escapa a toda representación simple, es decir, se hace compleja la
estimación de su valor en lugares que no se encuentran muestreados. Si bien un punto del
espacio está relacionado con sus vecinos, resulta altamente complejo reconocer, relacionar y
utilizar de forma correcta esta relación. Caracterizar correctamente estas relaciones con el
objetivo de reproducir de la forma más certera el valor de la variable regionaliza en los

Capítulo 2 Antecedentes
10
diferentes puntos del espacio en estudio a través del uso de herramientas que permiten resumir
las principales características de la regionalización, es una tarea que desarrolla la
geoestadística.
Para el estudio de una variable regionaliza se define un dominio limitado D llamado
campo de la variable. Este campo por ejemplo puede representar el espacio de interés para el
estudio de la variable, ser un lugar donde el atributo presenta una presencia significativa o
representar un lugar delimitado por fronteras naturales que definen el interés o no de la zona a
estudiar.
El valor que adquiere una variable regionalizada puede estar asociado a un punto, una
superficie o un volumen. El punto, la superficie o el volumen sobre el cual se considera la
variable regionalizada se denomina soporte. Para el caso de las muestras el soporte se
considera puntual, mientras que la estimación por ejemplo de una ley mineralógica se considera
que el valor de la variable regionalizada representa el promedio de su valor en el volumen
considerado, volumen que por lo general corresponde a unidades selectivas de explotación en
evaluación minera.
Los modelos geoestadísticos consideran el valor de ( )z x de la variable regionalizada en
un punto x del campo D como una realización de la variable aleatoria ( )Z x , es decir, como
una realización de una variable que asume diferentes valores a consecuencia de los resultados
de un experimento aleatorio. Cuando x recorre D , se obtiene una familia de variables
aleatorias { }( ),Z D∈x x , que constituyen una función aleatoria o proceso estocástico. El
conjunto { }( ),Z D∈x x , que no es otra cosa que la variable regionalizada estudiada, es una
realización particular de la función aleatoria. Resulta interesante ver las herramientas
matemáticas utilizadas para caracterizar una variable aleatoria y que permiten tomar en cuenta
los aspectos erráticos y estructurales de una regionalización.
2.2.2 Caracterización de una Función Aleatoria
En geoestadística lineal se utilizan los dos primeros momentos para caracterizar la
distribución espacial de una variable regionalizada. El momento de primer orden corresponde a
la esperanza matemática, mientras que por momentos de segundo orden se reconocen la
varianza, variograma y covarianza.

Capítulo 2 Antecedentes
11
2.2.2.1 Momentos de Primer Orden
El momento de primer orden corresponde al valor esperado o esperanza matemática (o
simplemente esperanza) de una variable aleatoria. Se puede definir como la suma de la
probabilidad de cada suceso multiplicado por su valor.
[ ]( ) ( ) ( ) ( ( ))Z
D
E Z x m x z x f z x dz= = ⋅ ⋅∫ (1)
2.2.2.2 Momentos de Segundo Orden
• Varianza
La varianza es un estimador de la divergencia de una variable aleatoria de su valor
esperado. También se utilizan la desviación estándar, que corresponde a la raíz cuadrada de la
varianza.
[ ] [ ]{ }2 2 2var ( ) ( ) ( ) ( ) ( )Z E Z m E Z m = − = − x x x x x (2)
• Variograma
La función variograma dependiente únicamente del vector separación h de las muestras
requiere de una función aleatoria intrínseca sin deriva. Una función aleatoria ( )Z x se dice
intrínseca cuando sus crecimientos son estacionarios de orden dos, es decir:
1) [ ]( ) ( ) ( )E Z Z m+ − =x h x h Independiente de la posición x .
2) [ ]2 2 2 2 2cov ( ) ( ), ( ) ( ) ( ; ; )Z Z Z Z C+ − + − = −1 1 1 1 1x h x x h x x x h h
Dependiente solo de 2 ,−1 1x x h y 2h .
El variograma se considera para describir la interacción entre los valores separados por
el vector h . Siendo ( )Z x una función aleatoria intrínseca sin deriva, es decir cuando ( ) 0m =h ,
la definición del variograma es la siguiente:
Capítulo 2 Antecedentes
12
[ ]1
( ) var ( ) ( )2
Z Zγ = −h x + h x (3)
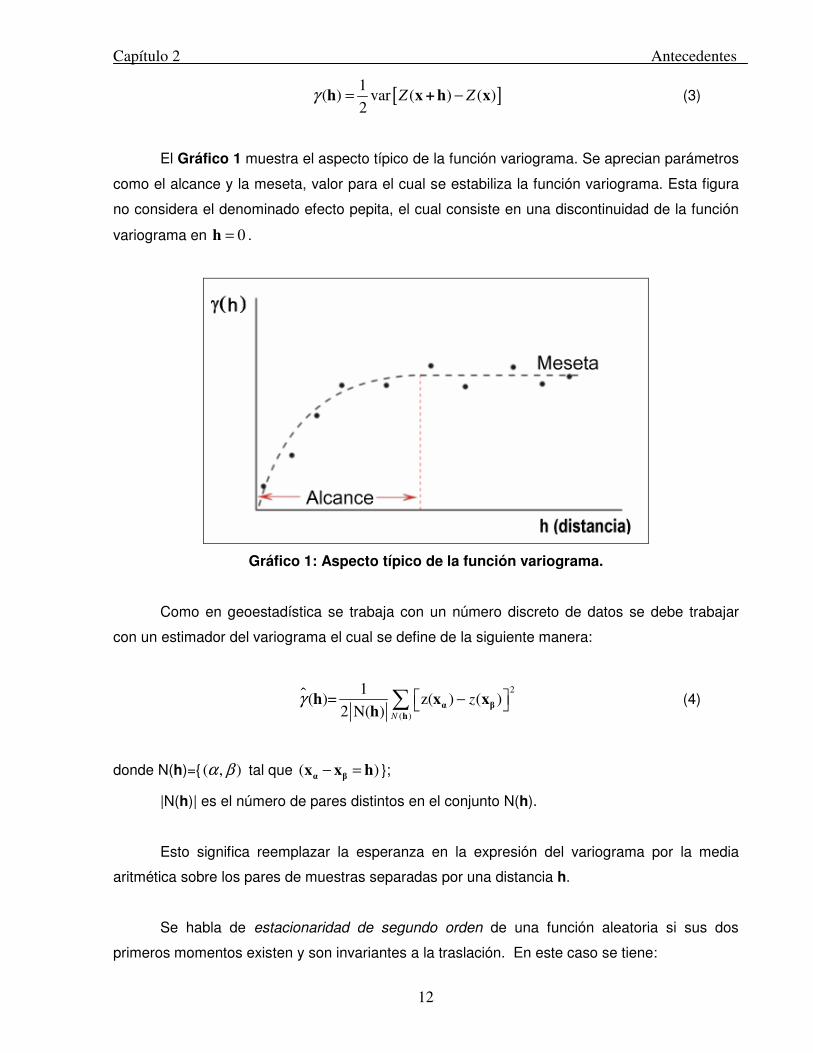
El Gráfico 1 muestra el aspecto típico de la función variograma. Se aprecian parámetros
como el alcance y la meseta, valor para el cual se estabiliza la función variograma. Esta figura
no considera el denominado efecto pepita, el cual consiste en una discontinuidad de la función
variograma en 0=h .
Gráfico 1: Aspecto típico de la función variograma.
Como en geoestadística se trabaja con un número discreto de datos se debe trabajar
con un estimador del variograma el cual se define de la siguiente manera:
�2
( )
1( )= z( ) ( )
2 N( ) N
zγ − ∑ α β
h
h x xh
(4)
donde N(h)={ ( , )α β tal que ( )− =α β
x x h };
|N(h)| es el número de pares distintos en el conjunto N(h).
Esto significa reemplazar la esperanza en la expresión del variograma por la media
aritmética sobre los pares de muestras separadas por una distancia h.
Se habla de estacionaridad de segundo orden de una función aleatoria si sus dos
primeros momentos existen y son invariantes a la traslación. En este caso se tiene:
Capítulo 2 Antecedentes
13
[ ], ( ) .E Z m cte∀ = =x x (5)
[ ] { } 2, var ( ) cov ( ), ( ) ( ) .Z Z Z C cteσ∀ = = = =x x x x 0 (6)
{ }, , cov ( ), ( ) ( )Z Z C∀ =x x + h x x + h h (7)
{ }1, , ( , ) var ( ) ( ) ( ) ( ) ( )2 Z Z C Cγ γ∀ = − = − =x x + h x x + h x x + h 0 h h (8)
Considerando las hipótesis anteriores de estacionaridad de segundo orden, se llega a la
siguiente relación entre el variograma y la covarianza:
( , ) ( ) ( ) ( )C Cγ γ= = −x x + h h 0 h (9)
2.2.3 Estimación de Leyes
La ley mineralógica se considera una variable regionalizada. En la estimación de leyes
se utiliza el kriging, el cual posee la propiedad de ser el mejor estimador lineal de datos en
términos de mínimos cuadrados. La técnica de interpolación por kriging toma en cuenta las
características estructurales de los datos al considerar el variograma. Además realiza una
interpolación exacta en los lugares en que se cuenta con datos, considera la redundancia de los
mismos y nos entrega una expresión para la varianza en la estimación.
El dato estimado *( )Z 0x en la posición 0x por kriging simple se escribe de la siguiente
forma:
*
1 1
( ) ( ) (1 )n n
Z Z mα αα α
λ λ= =
= + −∑ ∑0 αx x (10)
Donde los ponderadores 1,..., nλ λ se obtienen imponiendo las condiciones de un
estimador insesgado y que minimice la varianza. El sistema de ecuaciones que permite
encontrar los ponderadores 1,..., nλ λ escrito en forma matricial, es el siguiente:
1
[ ] ( ) [ ( )].C Cβλ−
= − − α β α 0x x x x (11)
Capítulo 2 Antecedentes
14
Debemos notar que para encontrar el dato estimado *( )Z 0x mediante kriging simple se
utiliza la media m de los valores muestreados. Finalmente la varianza en la estimación de
*( )Z 0x con kriging simple en cada punto 0x queda dada por la siguiente expresión:
2 2
1
( ) ( )n
KS Cαα
σ σ λ=
= −∑0 α 0x x - x (12)
Como se mencionó con anterioridad el kriging simple utiliza una media m única de los
datos para la estimación lo cual resulta poco aconsejable, pues conocer con certeza el valor de
la media, es poco frecuente. Además cuando la media varía demasiado de un lugar a otro
dentro del espacio a estimar se desea que nuestro estimador pueda reproducir esta situación.
Es así como se plantea el kriging ordinario o kriging de media desconocida. El kriging ordinario
al no tomar en cuenta el valor de la media de los valores muestreados requiere de una
condición extra sobre los ponderadores para así satisfacer su propiedad de estimador
insesgado. Esta condición se muestra en la siguiente ecuación:
1
1.n
ααλ
==∑ (13)
Asumiendo la condición que se muestra en la ecuación 13 y considerando a µ como un
multiplicador de Lagrange de esta condición en el sistema que permite encontrar los
ponderadores 1,..., nλ λ , los valores de los ponderadores que permiten estimar *( )Z 0x en la
posición 0x por kriging ordinario se obtienen con el siguiente sistema de ecuaciones:
1( ) 1 ( )
1 0 1
C Cβλ
µ
−− −
=
α β α βx x x x (14)
Es importante recalcar que la condición impuesta sobre los ponderadores 1,..., nλ λ de la
ecuación 13 al ser reemplazada en la ecuación 10 hace que el término de la derecha sea cero,
consiguiendo de esta forma que el valor estimado no considere la media. La varianza en la
estimación de *( )Z 0x con kriging ordinario queda dada por la siguiente expresión:
Capítulo 2 Antecedentes
15
2 2
1
( ) ( )n
KO Cα
σ σ µ=
= − − −∑0 α βx x x (15)
2.2.4 Simulación Secuencial Gaussiana
La simulación consiste en hacer realizaciones de la variable aleatoria que se requiere
estudiar. Estas realizaciones deben reproducir el histograma y los valores exactos de los datos
muestreados y el variograma.
Pese a que la simulación puede ser utilizada para la estimación como un sustituto del
kriging si es que se promedian los distintos escenarios generados, el fuerte de la simulación
geoestadística se da en el análisis de riesgo (escenario más optimista/pesimista) y en la medida
de la incertidumbre (ver qué tan distintos son los diversos escenarios). Como sabemos el
kriging por construcción minimiza la varianza en la estimación lo que provoca que éste produzca
mapas más suavizados que como realmente se presenta la variable regionalizada en el
espacio. La simulación geoestadística trata de corregir el suavizamiento en los mapas de leyes
producido por el kriging agregándole a los valores estimados una variabilidad aleatoria de
manera de reproducir de mejor forma la estructura espacial de la variable. Debido a lo anterior,
resulta imposible distinguir entre el mapa real de la variable regionalizada y un escenario
generado mediante simulación geoestadística, ya que cada escenario generado por la
simulación reproduce la variabilidad que el atributo de interés presenta en la realidad.
En este trabajo de título se utiliza el algoritmo de Simulación Secuencial Gaussiana para
la simulación condicional de la variable de interés. Como en la práctica la función aleatoria
( )Z x que se desea simular presenta raramente una distribución gaussiana es necesario
realizar una transformación de los datos a valores que sigan una distribución de este tipo, es
decir, no se trabaja directamente sobre ( )Z x , sino sobre su transformada gaussiana ( )Y x . En
la transformación gaussiana a cada valor original se le asigna el valor de la distribución normal,
con media 0 y varianza 1, que posee la misma frecuencia acumulada. Luego del proceso de
transformación se requiere comprobar que los datos sigan las hipótesis multigaussianas.
Finalizada la simulación a los valores generados se le aplica una transformación inversa.
El algoritmo de simulación para ( )S
Y ix , valor gaussiano correspondiente al valor ( )S
Z ix
en el espacio original está dado por:
Capítulo 2 Antecedentes
16
*( ) ( )S i i i i
Y x Y x Rσ= + (16)
con: *( )i
Y x : Kriging simple de ( )i
Y x a partir de los valores 0 1{ ( ),..., ( )}S S i
Y x Y x − , considerados
como una realización de 0 1{ ( ),..., ( )}i
Y x Y x − .
i
σ : Desviación estándar del kriging asociada.
i
R : Variable aleatoria de esperanza nula y varianza unitaria, independiente de
0 1{ ( ),..., ( )}S S i
Y x Y x − y de 0 1{ ,..., }i
R R − ; i iRσ es una simulación del error de kriging en
1ix − .
Este tipo de simulación se hace en etapas sucesivas, partiendo de un nodo y luego
condicionando el nodo siguiente a los datos muestreados más los datos ya simulados.
Siguiendo esta estrategia nos aseguramos que la simulación reproduce los dos primeros
momentos de la variable aleatoria de interés.
2.3 Geometrías no Capturadas por Técnicas Convencionales
Distribución de leyes con continuidad asociada a geometrías curvilíneas resultan
sumamente complejas de estimar y simular con las técnicas convencionales. Al utilizar un
variograma global se pierde mucha de la información geológica con la que se cuenta. Esta
información sin lugar a dudas debería ser tomada en consideración en las metodologías
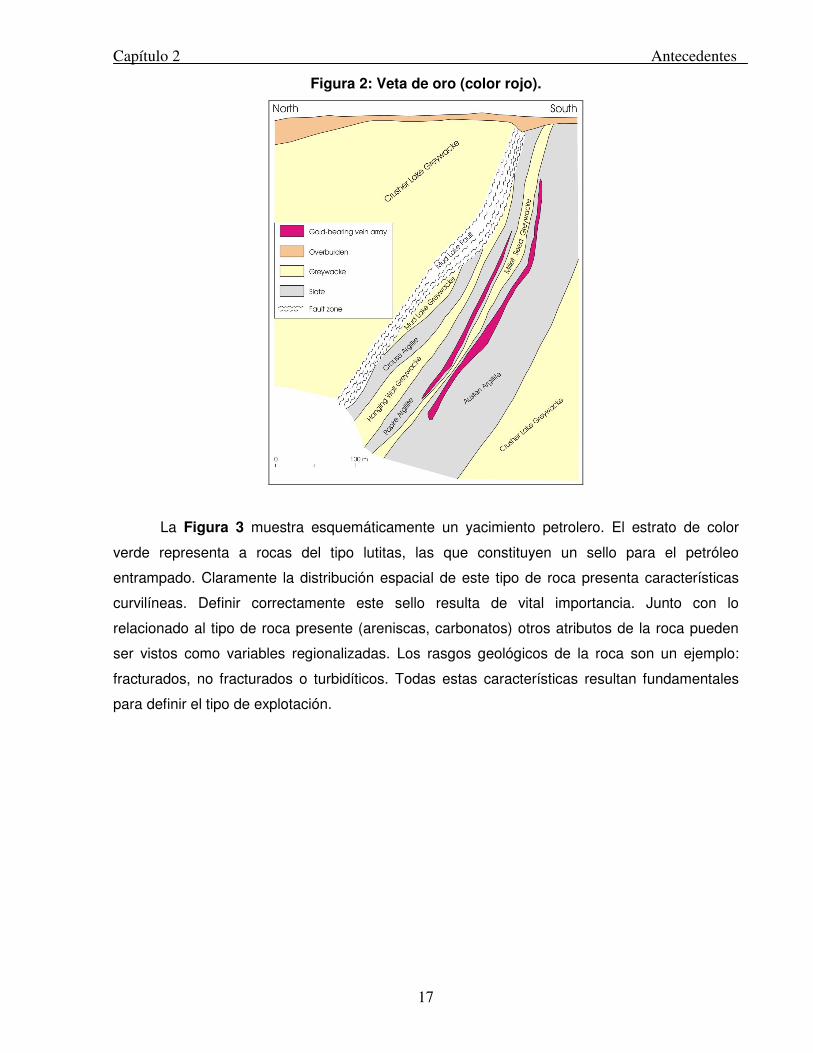
geoestadísticas. Como se aprecia en la Figura 2 la veta de oro (de color rojo) difícilmente
puede ser representada por una dirección única de anisotropía y resulta predecible que la
utilización de un variograma único conlleve a una reproducción deficiente de su geometría.
Definir de forma correcta la potencia y la ubicación de las vetas resulta trascendental en
el negocio minero pues se debe estar bastante seguro de que la operación resultará rentable
antes de comenzar el desarrollo del proyecto
Capítulo 2 Antecedentes
17
Figura 2: Veta de oro (color rojo).
La Figura 3 muestra esquemáticamente un yacimiento petrolero. El estrato de color
verde representa a rocas del tipo lutitas, las que constituyen un sello para el petróleo
entrampado. Claramente la distribución espacial de este tipo de roca presenta características
curvilíneas. Definir correctamente este sello resulta de vital importancia. Junto con lo
relacionado al tipo de roca presente (areniscas, carbonatos) otros atributos de la roca pueden
ser vistos como variables regionalizadas. Los rasgos geológicos de la roca son un ejemplo:
fracturados, no fracturados o turbidíticos. Todas estas características resultan fundamentales
para definir el tipo de explotación.

Capítulo 2 Antecedentes
18
Figura 3: Yacimiento de petróleo.
Las Figuras 2 y 3 son ejemplos de geometrías no capturadas por técnicas
convencionales. A los dos ejemplos anteriores se le pueden agregar los depósitos en canales
fluviales, depósitos tipo cross bedding, etc.
2.4 Metodologías Existentes para Incorporar Geología en la Evaluación
Si el variograma utilizado presenta una dirección de continuidad única en todo el espacio
que se pretende estimar o simular, la estimación o simulación encuentra dificultades para
reproducir algunas características de ciertos tipos de yacimientos debido a la variabilidad de las
direcciones de continuidad que éstos podrían tener. Se ha propuesto la utilización de
direcciones de anisotropías que varían en el espacio a fin de estimar la morfología de
yacimientos de vetas [Soares A., 1990]. Si consideramos D un conjunto formado por dos
conjuntos disjuntos, X y su complemento CX , y un conjunto de N muestras { }, 1,...,i N=ix
espacialmente ubicadas en CD X X= ∪ , se define la variable indicador ( )I ix en cada posición
ix de la siguiente manera:
1
( )0 C
si XI
si X
∈=
∈
ii
i
xx
x (17)

Capítulo 2 Antecedentes
19
Si denotamos i
θ al ángulo que define la orientación (en 2D) del estrato que contiene la
posición ix , el modelo de covarianza global de la variable indicador puede ser escrito como una
función del ángulo principal θ de la elipse de anisotropía global ( )Cθ h . Para cada posición 0x ,
el estimador de kriging de la variable indicador es:
*
1
( ) ( )N
i
i
I Iδ=
=∑0 ix x (18)
donde los pesos i
δ son determinados resolviendo el sistema de kriging. El estimador *0( )I x
puede ser considerado como la probabilidad estimada de que la posición 0x pertenezca al
conjunto X . En la ecuación 19, en forma dual, *0( )I x es la combinación lineal de las
covarianzas indicadoras entre muestras y posiciones no muestreadas, ix y 0x ,
respectivamente.
*
1
( ) ( , )n
i
i
I Cθα=
=∑0 i 0x x x (19)
Por definición, el modelo de covarianza de los datos indicadores, ( )Cθ h , es una medida
de la estructura geométrica de X . El estimador en la ecuación 19 puede ser visto como la
suma de las contribuciones geométricas estructurales de cada uno de los ix al valor estimado
en 0x . Como ( )Cθ h es el promedio de las características geométricas del conjunto X en su
totalidad, ésta puede ser descompuesta en las partes que la componen (características
geométricas locales de X ).
El kriging morfológico se basa en el condicionamiento, en el proceso del kriging, al
ángulo local i
θ (orientación espacial del estrato que contiene la posición ix ), por la rotación de
la elipse de anisotropía global en forma coincidente con el ángulo i
θ para cada ix . Esto
corresponde a la rotación inversa del vector ix , x de i
θ :
* *( ) ( )i
C Cθ θ=h h' (20)
Capítulo 2 Antecedentes
20
donde h' es igual al vector h después de una rotación de i
θ [ ( )]i
rθ=h' h ; y * ( )Cθ h es el modelo
de covarianza global estimada con todos los valores de las muestras ( )i
I x en el espacio a
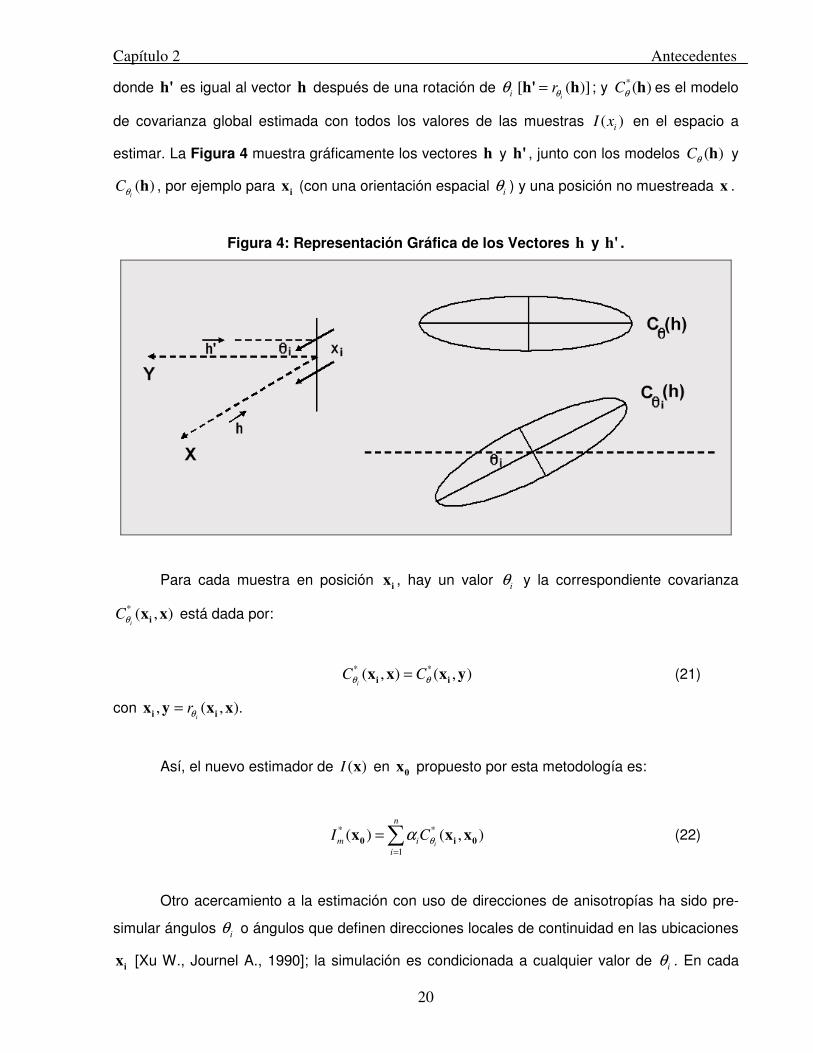
estimar. La Figura 4 muestra gráficamente los vectores h y h' , junto con los modelos ( )Cθ h y
( )i
Cθ h , por ejemplo para ix (con una orientación espacial i
θ ) y una posición no muestreada x .
Figura 4: Representación Gráfica de los Vectores h y h' .
Para cada muestra en posición ix , hay un valor i
θ y la correspondiente covarianza
* ( , )i
Cθ ix x está dada por:
* *( , ) ( , )i
C Cθ θ=i ix x x y (21)
con , ( , ).i
rθ=i ix y x x
Así, el nuevo estimador de ( )I x en 0x propuesto por esta metodología es:
* *
1
( ) ( , )i
n
m i
i
I Cθα=
=∑0 i 0x x x (22)
Otro acercamiento a la estimación con uso de direcciones de anisotropías ha sido pre-
simular ángulos i
θ o ángulos que definen direcciones locales de continuidad en las ubicaciones
ix [Xu W., Journel A., 1990]; la simulación es condicionada a cualquier valor de i
θ . En cada

Capítulo 2 Antecedentes
21
nodo ix donde el tipo de facie o la propiedad petro-física es estimada o simulada el modelo
variográfico es rotado para utilizar la dirección de anisotropía local i
θ previamente simulada.
Considerando anisotropías en 2D, se consideran modelos variográficos
( ) ( , )γ γ= 1 2h h h (23)
donde 1 2( , )Th h=h son las coordenadas de separación del vector h en el sistema original de
ejes, es decir, 1
h con respecto al este y 2
h con respecto al norte, ' '1 2( , )T
h h=h' son las
coordenadas después de la rotación del azimut de θ definidas en sentido de los punteros del
reloj con respecto al norte:
1
2
cos sin( )
sin cos1
2
h' hA
h' h
θ θθ
θ θ
= = = ⋅
− h' h (24)
es decir, el variograma queda descrito como ( ; ).i
γ θh
Finalmente podríamos resumir ambos acercamientos al uso de anisotropías locales a
dar cuenta de la anisotropía que varía localmente, en cada nodo 1x por la rotación de la elipse
de anisotropía global en forma coincidente con el ángulo i
θ para cada ix y modificando el
sistema de Kriging Simple de la siguiente forma:
1
(( ); ) (( ); ), 1,...,n
i iC C nβ
β
λ θ θ α=
− = − ∀ =∑ α β α 0x x x x (25)
donde ( ; )i
C θh es la covarianza de Z corregida por el ángulo .i
θ
Otro acercamiento a incorporar las continuidades geológicas aun más allá de la mera
utilización de los dos primeros momentos en la evaluación de recursos y la representación de
estructuras curvilíneas es la realizada al utilizar estadísticas de múltiples puntos. Se ha utilizado
estadísticas de múltiples puntos en imágenes de entrenamiento [Guardiano B., Srivastava. R.,

Capítulo 2 Antecedentes
22
1993] para reproducir las características curvilíneas con forma de duna con buenos resultados.
Estos métodos han tenido una limitada aplicación en la minería.
Se ha trabajado con datos de pozos de tronadura para inferir estadísticas de múltiples
puntos [Ortiz J. M., Deutsch C. V., 2004], obteniéndose buenos resultados. Los pozos de
tronadura dispersos son asociados a los puntos más cercanos de una malla regular de 10 por
10 metros. Si más de un pozo de tronadura está en la celda, solo el más cercano es asignado al
nodo y los demás son desechados, lo cual implica una pequeña pérdida de información
(considerando que las mallas de perforación son similares a la malla de 10 por 10 metros
escogida para la inferencia de las estadísticas). Se debe realizar la simulación en la misma
resolución de las estadísticas de múltiples puntos. Se definen varios patrones con nodos
adjuntos en la grilla como lo muestra la Figura 5, el nodo en gris corresponde al nodo que se
quiere estimar o simular. La inferencia de las estadísticas es hecha al contar la frecuencia con
el nodo central de la configuración de múltiples puntos está bajo un cierto umbral.
Figura 5: Patrones de múltiples puntos.
Capítulo 3 Metodología
23
3 Metodología
La metodología que se propone para la simulación geoestadística incorporando un
campo de direcciones variables comienza con el estudio exploratorio de la base de datos que
se utiliza como datos condicionantes para la simulación. Se deben construir histogramas e
histogramas acumulados de los datos junto con mapas de ubicación de todas las muestras en
planta además de proyecciones verticales. Se descarta todo posible dato aberrante o duplicado
de la base de datos, es decir, los datos que poseen un valor no acorde con las características
del yacimiento y la mineralización, mal definido o datos que están más de una vez considerados
en la base de datos. Se realiza el desagrupamiento de los datos utilizando un tamaño de celda
consistente con el muestreo realizado para obtener los datos.
Luego del análisis exploratorio de los datos, se debe ubicar plantas y perfiles de la zona
a estimar de donde sea posible inferir direcciones de anisotropía locales a través de la
interpretación geológica. Los valores de estas direcciones deben ser impuestas como datos
condicionantes para la realización de un kriging ordinario de direcciones de continuidad. La
estimación de las direcciones de continuidad se realiza de forma independiente para cada una
de las componentes del vector dirección de mayor continuidad, el cual se considera ubicado en
el punto central del nodo de la grilla que se quiere estimar, por lo que para el caso de una grilla
tridimensional, se obtienen tres ángulos de rotación estimados y condicionados a los datos de
cada una de las componentes de las direcciones de continuidad en el espacio. Se debe utilizar
un variograma muy continuo y un alcance lo suficientemente grande para asegurar un campo
de direcciones de continuidad suave en todo el espacio. Se debe verificar el correcto resultado
de la estimación del campo de direcciones graficando y comparando tanto las plantas como los
perfiles de las zonas de las cuales se extrajeron los datos condicionantes.
Se deben preparar los datos para realizar la simulación condicional. A estos se les
practica una transformación gaussiana utilizando el programa NSCORE de GSLIB [Deutsch
C.V., Journel A. G., 1998]. Se grafica el histograma de los datos gaussianos como la función de
anamorfosis para detectar posibles errores en este proceso. Se llevan a cabo tests (nubes de
correlación diferidas, madogramas, etc.) para verificar que los datos luego de la anamorfosis
cumplen con las hipótesis de las distribuciones bigaussianas. El archivo que contiene la tabla de
transformación de los datos es posteriormente utilizado en la transformación inversa de los
Capítulo 3 Metodología
24
datos simulados. A los datos gaussianos se le realiza el estudio variográfico correspondiente,
obteniéndose el variograma utilizado en la simulación secuencial.
La Simulación Secuencial Gaussiana considerando direcciones de continuidad variable
se lleva a cabo utilizando un programa desarrollado en MATLAB. Se consideran como datos
para este proceso tanto los valores gaussianos de las muestras que se encuentran en el
espacio a estimar junto con el campo de direcciones de continuidad variable generado con
anterioridad. Se debe verificar que cada una de las realizaciones posea una distribución
gaussiana de media y varianza aproximadamente 0 y 1, respectivamente.
A los datos gaussianos generados en la simulación se les aplica una transformación
gaussiana inversa utilizando el programa BACKTR de GSLIB [Deutsch C.V., Journel A. G.,
1998], considerando la tabla de transformación construida en el proceso de transformación.
Estos datos luego de la anamorfosis inversa son los datos finales correspondientes a la
simulación con las características requeridas.
Finalmente se comprueba que los valores Y simulados reproduzcan un histograma de
media 0 y varianza 1, junto con que luego de la transformación inversa de valores Y simulados
a Z simulados, los valores Z simulados reproduzcan el histograma de los datos desagrupados
además del variograma de los datos condicionantes. Este ejercicio se puede llevar a cabo tanto
para cada una de las realizaciones de forma independiente como para el conjunto de datos
correspondientes a todas las realizaciones consideradas como un todo.
3.1 Estimación de Campo de Direcciones de Anisotropía
La estimación del campo de direcciones se realiza condicionada a la información que se
posee de direcciones de anisotropías locales. Esta información puede ser obtenida de varias
fuentes:
• Inferencia de estructuras relacionas con la mineralización.
• Direcciones de depósito local obtenidas de interpretación geológica.
• Interpretación de antiguas direcciones de flujos y sedimentación.

Capítulo 3 Metodología
25
La estimación del campo de direcciones de anisotropías se realiza utilizando kriging
ordinario. El alcance en el kriging debe ser lo suficientemente grande y no se debe considerar
efecto pepa para asegurar que el campo generado resulte suave.
La Figura 6a muestra la ubicación de 6 direcciones de continuidad medidas con
respecto al norte correspondientes a muestras ficticias.
Figura 6: Ejemplo de Estimación de Campo de Anisotropía
Se realiza la estimación del campo de direcciones de continuidad condicionado a los
datos de la Figura 6a en la Figura 6b. Se utiliza una grilla de 10x10 nodos. EL Gráfico 2
muestra el histograma de los ángulos estimados. Se puede apreciar en el histograma y en la
Figura 6b que las direcciones de continuidad poseen un dirección dentro del intervalo [-54,54],
medido con respecto al norte. Más aun, la dirección de continuidad promedio es N8W.

Capítulo 3 Metodología
26
Gráfico 2: Histograma de los Ángulos Simulados.
3.2 Variograma Considerando Anisotropías Locales
Para considerar las anisotropías locales se debe realizar la rotación en el sistema de
referencia y evaluar bajo este sistema rotado la función variograma. Si consideramos un
variograma exponencial (variograma global), el valor de éste para el vector h es:
1 2 3
1 2 3
( ) 1 exph h h
a a aγ
= − − + +
h (26)
donde 1 2 3( , , )Th h h=h son las coordenadas de separación en el sistema original. Se definen los
ángulos ,α φ y σ , como ángulos de rotación en torno a los ejes cartesianos y los ejes ya
rotados:
• α ] ]90,90∈ − en el plano XY con respecto al norte.
• φ ] ]90,90∈ − en el plano ZX‘ con respecto a la horizontal.
• σ ] ]90,90∈ − en el plano Y’Z’ con respecto a la horizontal.

Capítulo 3 Metodología
27
entonces, el vector 1 2 3( , , )h h h=h indica las coordenadas después de aplicar las matrices de
rotación ( , ), ( , )T x T yα β y ( , )T z σ . Estas matrices de rotación son las siguientes:
• Matriz básica de rotación sobre eje OZ:
1 0 0
( , ) 0 cos( ) ( )
0 ( ) cos( )
T x sen
sen
α α α
α α
= −
(27)
• Matriz básica de rotación sobre eje OY:
cos( ) 0 ( )
( , ) 0 1 0
( ) 0 cos( )
sen
T y
sen
φ φ
φ
φ φ
= −
(28)
• Matriz básica de rotación sobre eje OX:
cos( ) ( ) 0
( , ) ( ) cos( ) 0
0 0 1
sen
T z sen
σ σ
σ σ σ
− =
(29)
Por ejemplo, una matriz que represente un giro de un ángulo α sobre OZ, seguido de
un giro φ sobre OY’ y de un giro σ sobre OX’, puede obtenerse por la composición de las
matrices básicas de rotación:
( , ) ( , ) ( , )T T z T y T xσ φ α=
0 0 1 0 0
0 0 1 0 0
0 0 1 0 0
C S C S
S C C S
S C S C
σ σ φ φ
σ σ α α
φ φ α α
− = − −
(30)
C C C S S C S S S S C C
C S C C S S S S C S S C
S C S C C
φ σ α σ φ σ α α σ φ σ α
φ σ α σ φ σ α α σ φ σ α
φ φ α α φ
− + + = + + −

Capítulo 3 Metodología
28
Finalmente el vector 1 2 3( , , )h h h=h se puede representar como:
1
2
3
( , ) ( , ) ( , )
h
h T x T y Y z
h
α φ σ
= = ⋅
h h (31)
y el variograma queda como ( ; ; ; )γ γ α φ σ= h .
Se debe notar que en la ecuación 26 1 2,a a y 3a son los alcances del variograma en el
sistema global de anisotropía.
Se debe considerar que las matrices de rotación presentadas tienen su función en rotar
las coordenadas de un punto con respecto a un sistema fijo. Como nuestra metodología
consiste en rotar el sistema, se deben considerar los ángulos de rotación del sistema
antecedidos por un signo menos para así conseguir el efecto de rotación del sistema y no el
punto con respecto a un sistema fijo.
Figura 7: Rotación de Ejes.
3.3 Simulación Secuencial Gaussiana Considerando Anisotropías Locales
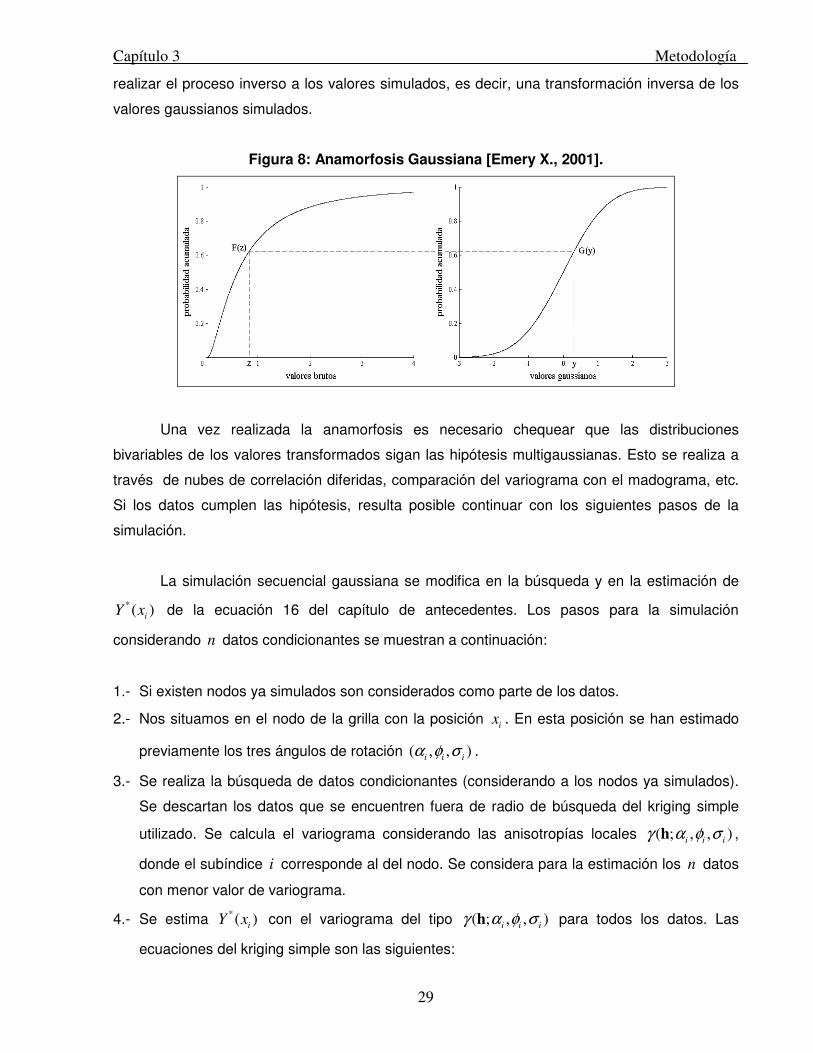
Como primer paso para la simulación se debe realizar una transformación gaussiana a
los datos condicionantes. La anamorfosis consiste en la transformación de los datos originales a
otros que sigan una distribución normal con media 0 y varianza 1. El proceso de transformación
se ve representado en la Figura 8. A cada valor original se le asigna el valor de la distribución
normal que posee la misma frecuencia acumulada. Luego de finalizada la simulación se debe
Capítulo 3 Metodología
29
realizar el proceso inverso a los valores simulados, es decir, una transformación inversa de los
valores gaussianos simulados.
Figura 8: Anamorfosis Gaussiana [Emery X., 2001].
Una vez realizada la anamorfosis es necesario chequear que las distribuciones
bivariables de los valores transformados sigan las hipótesis multigaussianas. Esto se realiza a
través de nubes de correlación diferidas, comparación del variograma con el madograma, etc.
Si los datos cumplen las hipótesis, resulta posible continuar con los siguientes pasos de la
simulación.
La simulación secuencial gaussiana se modifica en la búsqueda y en la estimación de
*( )i
Y x de la ecuación 16 del capítulo de antecedentes. Los pasos para la simulación
considerando n datos condicionantes se muestran a continuación:
1.- Si existen nodos ya simulados son considerados como parte de los datos.
2.- Nos situamos en el nodo de la grilla con la posición i
x . En esta posición se han estimado
previamente los tres ángulos de rotación ( , , )i i i
α φ σ .
3.- Se realiza la búsqueda de datos condicionantes (considerando a los nodos ya simulados).
Se descartan los datos que se encuentren fuera de radio de búsqueda del kriging simple
utilizado. Se calcula el variograma considerando las anisotropías locales ( ; , , )i i i
γ α φ σh ,
donde el subíndice i corresponde al del nodo. Se considera para la estimación los n datos
con menor valor de variograma.
4.- Se estima *( )i
Y x con el variograma del tipo ( ; , , )i i i
γ α φ σh para todos los datos. Las
ecuaciones del kriging simple son las siguientes:
Capítulo 3 Metodología
30
1
. . . (( ); ; ; ) (( ); ; ; ), 1,...,N
i i i i i i ieq K S C x x C x x nβ α β αβ
λ α φ σ α φ σ α=
− = − ∀ =
∑ (32)
5.- El valor simulado ( )S
Y ix corresponde a:
*( ) ( )S i i i i
Y x Y x Rσ= + (33)
con: i
σ : Desviación estándar del kriging asociada.
i
R : Variable aleatoria de esperanza nula y varianza unitaria.
6.- Se vuelve al paso número 1 hasta haber visitado todos los nodos de la grilla que se desea
simular.
La simulación se hace en etapas sucesivas, partiendo de un nodo y luego condicionando
el nodo siguiente a los datos muestreados más los datos ya simulados. Cada nodo de la grilla
solo se visita una vez. El orden para visitar un nodo es aleatorio e independiente en cada
realización.
3.4 Justificación de la Metodología
En la metodología de estimación de ángulos de anisotropías se tomaron algunas
decisiones que pueden parecer arbitrarias en primera instancia. A continuación se presenta
algunos ejemplos para justificar estas decisiones. En cuanto a la simulación se desarrollan
ejemplos para mostrar las diferencias en los resultados de la misma considerando y no
considerando anisotropías locales.
3.4.1 Parámetros para Definir Direcciones de Anisotropías Locales
Como objetivo de esta memoria se incluyen el evaluar parámetros necesarios para
definir direcciones de anisotropías locales. Se definen dos posibles formas de definir las
direcciones de anisotropías:
• Utilizar sólo la dirección de continuidad (utilizar un ángulo [ [/ 2, / 2β π π∈ − ).

Capítulo 3 Metodología
31
• Utilizar dirección y sentido de la continuidad. Estimar senos y cosenos de la dirección en
forma independiente y utilizar estas estimaciones para obtener un ángulo [ [0, 2β π∈ ).
La Figura 9a muestra la forma de un vector de un campo vectorial definido mediante
solo la dirección del vector en cada posición del espacio a estimar. La Figura 9b muestra la
misma posición definiendo dirección y sentido. Cabe destacar que los orígenes que se utilizan
para medir cada ángulo en la Figura 9 son absolutamente arbitrarios y cambiarlos en nada
modificaría el posterior desarrollo del estudio. En este caso, fueron medidos con respecto al
norte.
Figura 9: Formas para Definir Direcciones de Continuidad.
En la Figura 10 los puntos A y B corresponden a los datos iniciales de las estimaciones
C y D respectivamente. En C se aprecia que utilizar dirección y sentido hace que la estimación
sea bastante buena para representar plegamientos. En caso D de la misma Figura 10, utilizar
solo la dirección sin el sentido en la estimación no representa correctamente el plegamiento. En
la Figura 11 los puntos en A y B son datos iniciales. Los puntos en C y D nos muestran
ejemplos de estimación de anisotropías locales para datos más bien suaves. Se puede apreciar
que ambas formas de definir las direcciones de anisotropías locales resultan efectivas para este
tipo de datos.
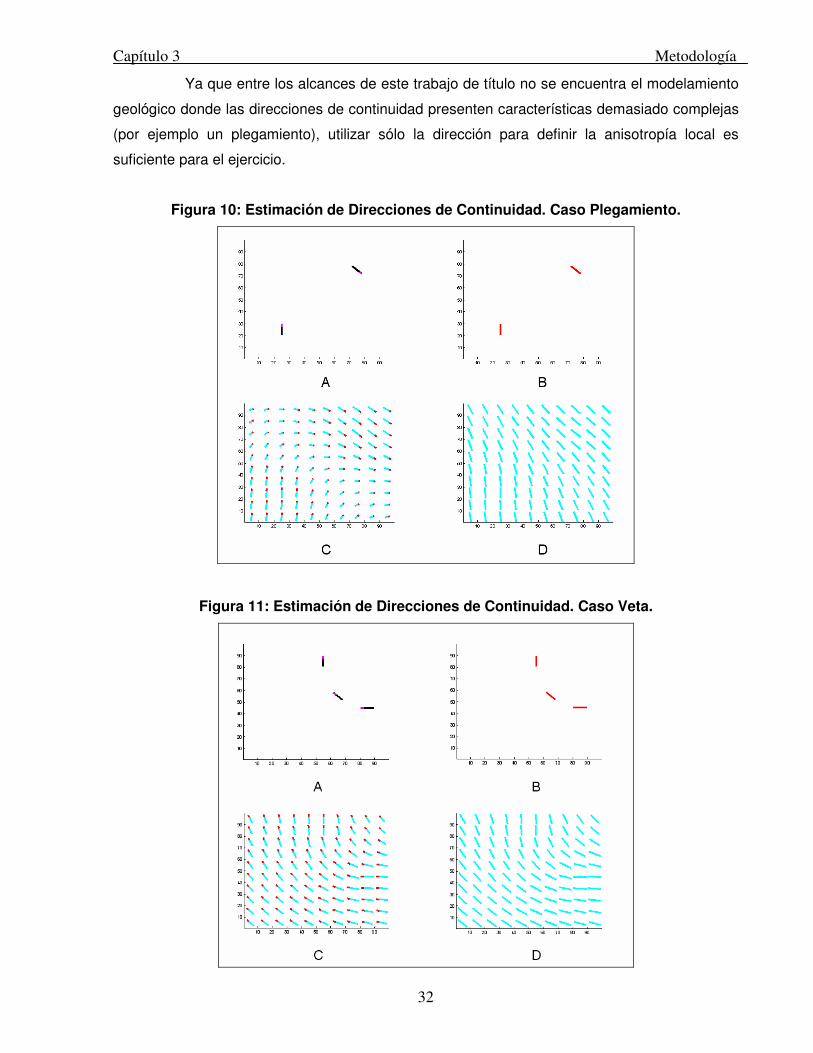
Capítulo 3 Metodología
32
Ya que entre los alcances de este trabajo de título no se encuentra el modelamiento
geológico donde las direcciones de continuidad presenten características demasiado complejas
(por ejemplo un plegamiento), utilizar sólo la dirección para definir la anisotropía local es
suficiente para el ejercicio.
Figura 10: Estimación de Direcciones de Continuidad. Caso Plegamiento.
Figura 11: Estimación de Direcciones de Continuidad. Caso Veta.

Capítulo 3 Metodología
33
Como se puede ver en los ejemplos C de las Figuras 10 y 11 al utilizar estimación de
senos y cosenos por kriging ordinario considerando ambas componentes de forma
independiente, las estimaciones no cumplen las identidades trigonométricas básicas del seno y
coseno ( 2 2, ( ) cos ( ) 1senα α α∀ + = ), por lo que si se quiere utilizar esta forma de definir
direcciones de anisotropía se debe realizar una normalización de las componente estimadas en
cada punto del espacio. La siguiente figura muestra la estimación con las componentes
normalizadas de los ejemplos anteriormente presentados:
Figura 12: Estimaciones con Componentes Normalizados.
El módulo resultante del vector dirección, utilizando estimación independiente de senos y
cosenos previo a la normalización, está asociado con la confianza en la estimación de la
dirección de continuidad local, es decir, para casos en el que la confianza en la estimación del
vector es alta en relación a los datos condicionantes, su módulo se acerca a la unidad (“largo”
de un vector normalizado), mientras que en posiciones de mucha incertidumbre, la dirección de
continuidad estimada puede ser incluso el vector nulo.
3.4.2 Alcance en el Kriging para Estimación de Campo de Direcciones
Generar campos vectoriales suaves como se ha mencionado con anterioridad es lo que
se requiere para la metodología propuesta en este trabajo. En la metodología de estimación de
campo se plantea utilizar un alcance lo suficientemente grande para alcanzar cambios de
direcciones suaves en el espacio. Utilizar un corto alcance ocasionaría que las características
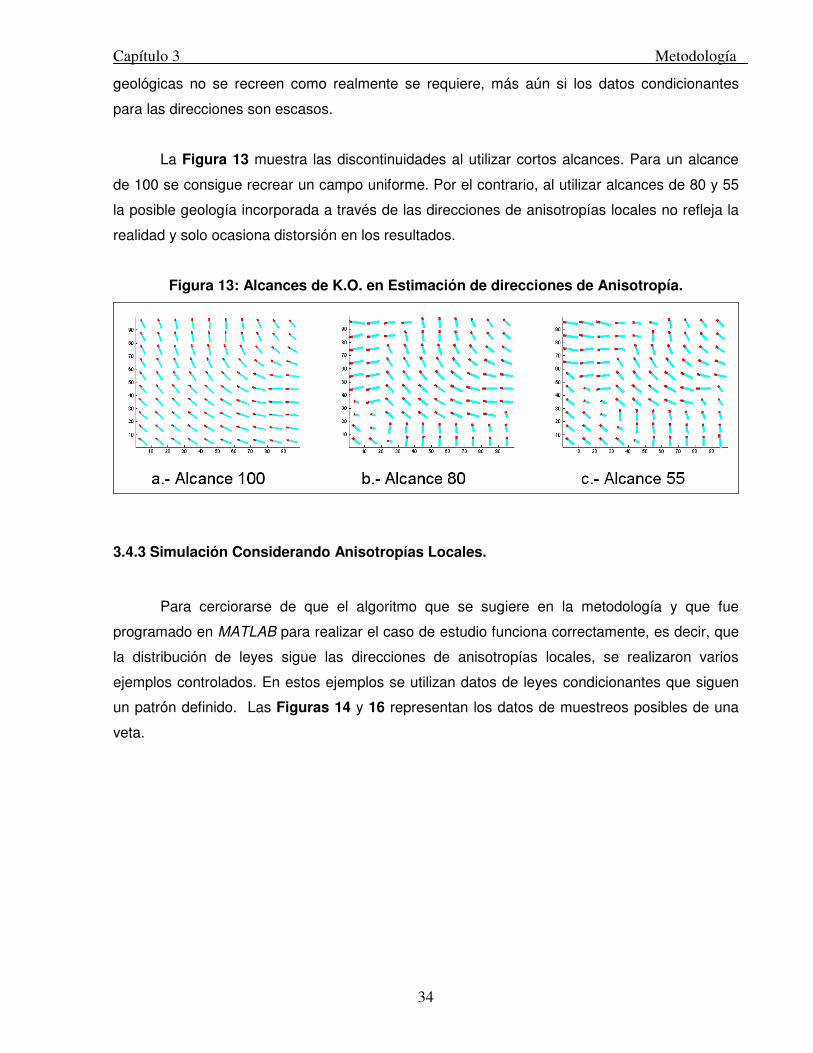
Capítulo 3 Metodología
34
geológicas no se recreen como realmente se requiere, más aún si los datos condicionantes
para las direcciones son escasos.
La Figura 13 muestra las discontinuidades al utilizar cortos alcances. Para un alcance
de 100 se consigue recrear un campo uniforme. Por el contrario, al utilizar alcances de 80 y 55
la posible geología incorporada a través de las direcciones de anisotropías locales no refleja la
realidad y solo ocasiona distorsión en los resultados.
Figura 13: Alcances de K.O. en Estimación de direcciones de Anisotropía.
3.4.3 Simulación Considerando Anisotropías Locales.
Para cerciorarse de que el algoritmo que se sugiere en la metodología y que fue
programado en MATLAB para realizar el caso de estudio funciona correctamente, es decir, que
la distribución de leyes sigue las direcciones de anisotropías locales, se realizaron varios
ejemplos controlados. En estos ejemplos se utilizan datos de leyes condicionantes que siguen
un patrón definido. Las Figuras 14 y 16 representan los datos de muestreos posibles de una
veta.

Capítulo 3 Metodología
35
Figura 14: Datos Recreación Muestreo Veta 1.
Con los datos de las Figuras 14 y 16 se hacen dos realizaciones considerando
anisotropías locales y dos considerando una anisotropía global de dirección N45E y dirección N,
respectivamente. Los resultados se muestran en las Figuras 15 y 17. Es posible apreciar que la
simulación considerando direcciones de anisotropía variable reproduce de mejor manera las
distribuciones de leyes a lo largo de la veta.
Figura 15: Simulación Veta 1.
En la Figura 15 las simulaciones de la derecha reproducen de mejor manera la forma en
los extremos de la veta de los datos condicionantes, resultando favorable utilizar direcciones de
anisotropía variable para la simulación.
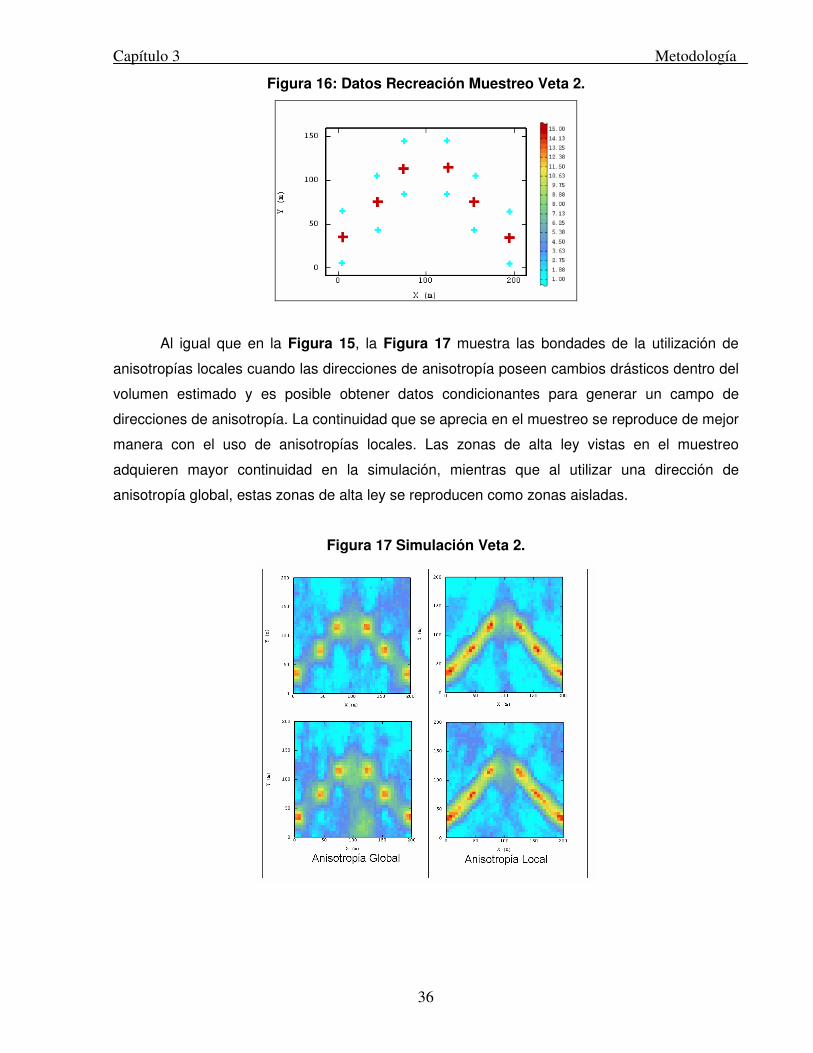
Capítulo 3 Metodología
36
Figura 16: Datos Recreación Muestreo Veta 2.
Al igual que en la Figura 15, la Figura 17 muestra las bondades de la utilización de
anisotropías locales cuando las direcciones de anisotropía poseen cambios drásticos dentro del
volumen estimado y es posible obtener datos condicionantes para generar un campo de
direcciones de anisotropía. La continuidad que se aprecia en el muestreo se reproduce de mejor
manera con el uso de anisotropías locales. Las zonas de alta ley vistas en el muestreo
adquieren mayor continuidad en la simulación, mientras que al utilizar una dirección de
anisotropía global, estas zonas de alta ley se reproducen como zonas aisladas.
Figura 17 Simulación Veta 2.

Capítulo 3 Metodología
37
3.5 Metodología para Caso de Estudio
Junto con aplicar la metodología expuesta en este capítulo para la Simulación
Secuencial Incorporando un Campo de Direcciones Variables, se realiza el ejercicio paralelo de
simulación secuencial gaussiana, kriging simple y kriging ordinario sobre el mismo espacio
utilizando el software GSLIB [Deutsch C.V., Journel A. G.,1998]. Esta simulación paralela se
realiza para comprobar el correcto funcionamiento del algoritmo utilizado para incorporar
direcciones de continuidad variable. El kriging se desarrolla para mostrar las bondades que
presenta la simulación frente a la estimación con kriging.
Capítulo 4 Caso de Estudio
38
4. Caso de Estudio
El caso de estudio se realiza utilizando la metodología propuesta en el capítulo anterior.
El caso de estudio de este capítulo corresponde a un esfuerzo para mostrar la metodología
propuesta utilizando datos reales. Se desarrolla la simulación en una zona de 125x125x130 [m].
Los datos utilizados corresponden una porción de un yacimiento de oro en vetas del cual es
posible deducir direcciones de anisotropías locales condicionantes para la generación de un
campo de anisotropías locales. Debido a las características variográficas del yacimiento
utilizado y de los depósitos de oro en general, se desarrolla el ejercicio de simulación con dos
modelos variográficos que consideran un menor efecto pepita pero el mismo tipo de anisotropía
(geométrica) junto a las simulaciones con el modelo variográfico del variograma experimental de
los datos. Para la simulación con el variograma experimental de los datos se generan 30
realizaciones al igual que para las simulaciones con variogramas “ideales”.
En cada etapa del estudio se hace la comparación de los resultados obtenidos,
utilizando la metodología propuesta con los resultados de una simulación secuencial gaussiana
tradicional (utilizando una orientación de variograma única) realizada con el programa diseñado
en MATLAB.
A modo de corroborar el correcto funcionamiento del programa diseñado en MATLAB se
realiza en forma conjunta la simulación con el software GSLIB. Los resultados de estas
simulaciones se van citando a lo largo de este capítulo.
4.1 Información Disponible
Se posee una base de 40621 datos, cuya ley de oro promedio es de 0.32 ppm. Estos
datos provienen de varias campañas de sondajes realizadas al depósito. La Tabla 1 muestra
las estadísticas básicas del yacimiento.
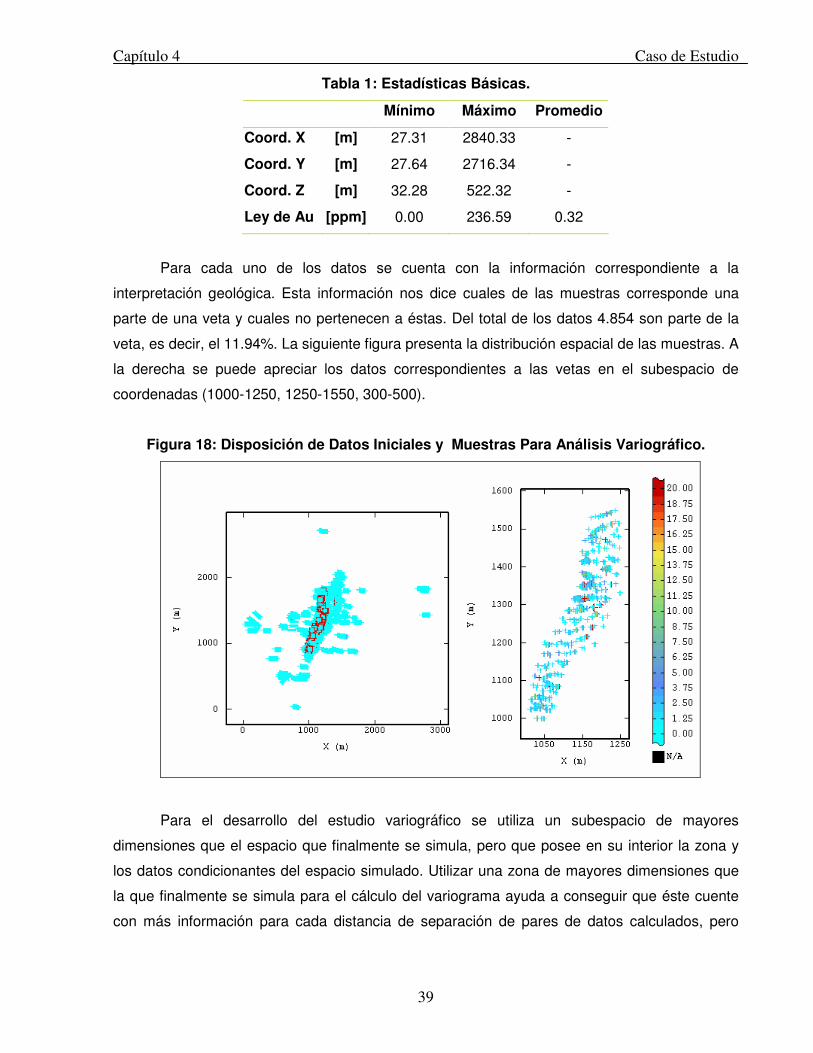
Capítulo 4 Caso de Estudio
39
Tabla 1: Estadísticas Básicas.
Mínimo Máximo Promedio
Coord. X [m] 27.31 2840.33 -
Coord. Y [m] 27.64 2716.34 -
Coord. Z [m] 32.28 522.32 -
Ley de Au [ppm] 0.00 236.59 0.32
Para cada uno de los datos se cuenta con la información correspondiente a la
interpretación geológica. Esta información nos dice cuales de las muestras corresponde una
parte de una veta y cuales no pertenecen a éstas. Del total de los datos 4.854 son parte de la
veta, es decir, el 11.94%. La siguiente figura presenta la distribución espacial de las muestras. A
la derecha se puede apreciar los datos correspondientes a las vetas en el subespacio de
coordenadas (1000-1250, 1250-1550, 300-500).
Figura 18: Disposición de Datos Iniciales y Muestras Para Análisis Variográfico.
Para el desarrollo del estudio variográfico se utiliza un subespacio de mayores
dimensiones que el espacio que finalmente se simula, pero que posee en su interior la zona y
los datos condicionantes del espacio simulado. Utilizar una zona de mayores dimensiones que
la que finalmente se simula para el cálculo del variograma ayuda a conseguir que éste cuente
con más información para cada distancia de separación de pares de datos calculados, pero
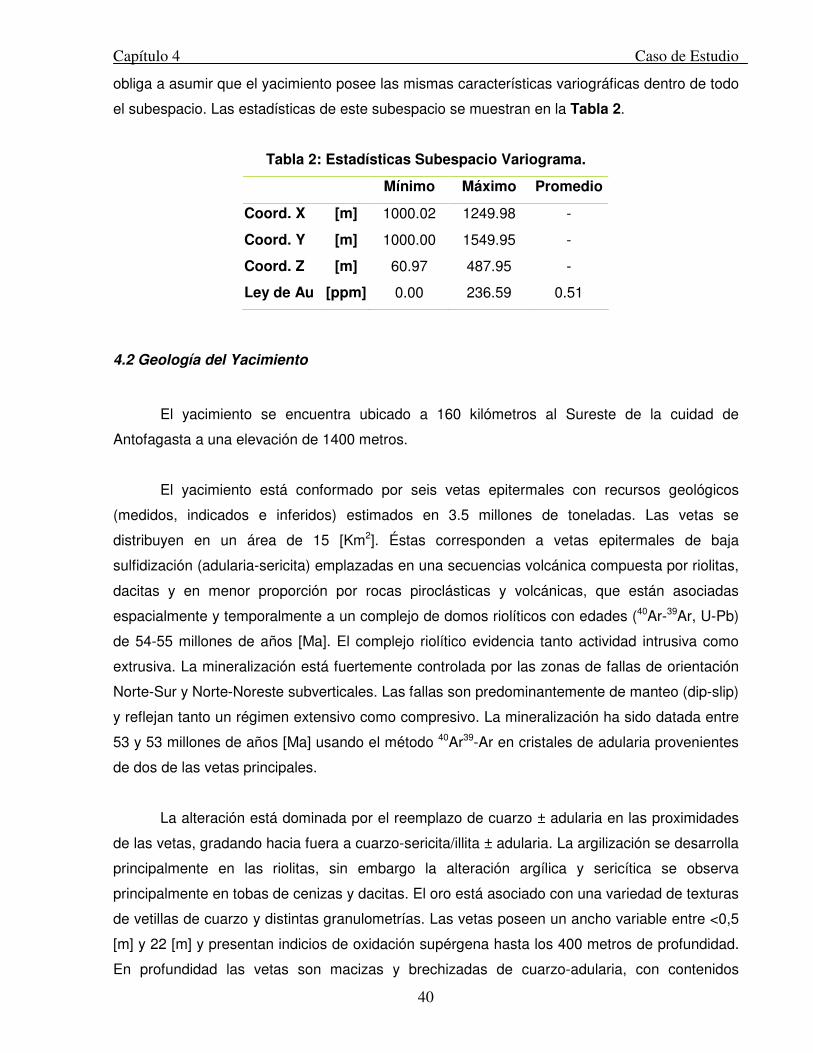
Capítulo 4 Caso de Estudio
40
obliga a asumir que el yacimiento posee las mismas características variográficas dentro de todo
el subespacio. Las estadísticas de este subespacio se muestran en la Tabla 2.
Tabla 2: Estadísticas Subespacio Variograma.
Mínimo Máximo Promedio
Coord. X [m] 1000.02 1249.98 -
Coord. Y [m] 1000.00 1549.95 -
Coord. Z [m] 60.97 487.95 -
Ley de Au [ppm] 0.00 236.59 0.51
4.2 Geología del Yacimiento
El yacimiento se encuentra ubicado a 160 kilómetros al Sureste de la cuidad de
Antofagasta a una elevación de 1400 metros.
El yacimiento está conformado por seis vetas epitermales con recursos geológicos
(medidos, indicados e inferidos) estimados en 3.5 millones de toneladas. Las vetas se
distribuyen en un área de 15 [Km2]. Éstas corresponden a vetas epitermales de baja
sulfidización (adularia-sericita) emplazadas en una secuencias volcánica compuesta por riolitas,
dacitas y en menor proporción por rocas piroclásticas y volcánicas, que están asociadas
espacialmente y temporalmente a un complejo de domos riolíticos con edades (40Ar-39Ar, U-Pb)
de 54-55 millones de años [Ma]. El complejo riolítico evidencia tanto actividad intrusiva como
extrusiva. La mineralización está fuertemente controlada por las zonas de fallas de orientación
Norte-Sur y Norte-Noreste subverticales. Las fallas son predominantemente de manteo (dip-slip)
y reflejan tanto un régimen extensivo como compresivo. La mineralización ha sido datada entre
53 y 53 millones de años [Ma] usando el método 40Ar39-Ar en cristales de adularia provenientes
de dos de las vetas principales.
La alteración está dominada por el reemplazo de cuarzo ± adularia en las proximidades
de las vetas, gradando hacia fuera a cuarzo-sericita/illita ± adularia. La argilización se desarrolla
principalmente en las riolitas, sin embargo la alteración argílica y sericítica se observa
principalmente en tobas de cenizas y dacitas. El oro está asociado con una variedad de texturas
de vetillas de cuarzo y distintas granulometrías. Las vetas poseen un ancho variable entre <0,5
[m] y 22 [m] y presentan indicios de oxidación supérgena hasta los 400 metros de profundidad.
En profundidad las vetas son macizas y brechizadas de cuarzo-adularia, con contenidos

Capítulo 4 Caso de Estudio
41
menores de pirita, calcopirita, esfalerita y galena. Las vetas desarrollan bandeamiento con
variadas texturas crustificadas. Las texturas de recristalización en el cuarzo sugieren eventos
precursores de sílice amorfa y calcedonia.
La mineralogía de las vetas en la zona de oxidación consiste en electrum (40-60% Au).
En general, los clavos mineralizados están asociados a bandas macizas de cuarzo y adularia de
grano fino y a brechas hidrotermales compuestas por fragmentos de vetas y matriz fina con
cristales de cuarzo y adularia. Localmente los procesos supérgenos removilizaron el Au y lo
liberaron hasta un nivel casi puro (98% de Au) en zonas oxidadas canalizadas a través de las
fracturas.
4.3 Estudio Exploratorio
4.3.1 Estadísticas Datos Condicionantes
Los datos condicionantes son la porción de los datos que se encuentran dentro de la
zona que con posterioridad se simula. La zona que se simula fue seleccionada por contar con
abanicos de sondajes que muestran con claridad las orientaciones de la vetas, por lo que se
pueden inferir con claridad direcciones de continuidad. Las simulación se realizan en un espacio
de 125x125x130 [m]. Esta zona se encuentra entre las cotas 1275-1400 [m] en la coordenada
Y, 1075-1200 [m] en la coordenada X, y 200-350 [m] en la coordenada Z. Las estadísticas de
los 1.417 datos condicionantes previo al desagrupamiento de los mismos se muestran en la
Tabla 3. Se debe verificar que no existen datos duplicados ni aberrantes con anterioridad.
Tabla 3: Estadísticas Datos Condicionantes Previo Desagrupamiento.
Mínimo Máximo Promedio Desv. Std.
[ppm] [ppm] [ppm] [ppm]
Ley de Au 0.00 142.60 1.29 5.34
El histograma de los datos iniciales sin desagrupar se muestra en el Gráfico 3. Se
aprecia que una gran parte de los datos posee un valor menor que 4 ppm de Au y que la
mayoría de los datos se pueden clasificar como estéril dentro de esta zona.
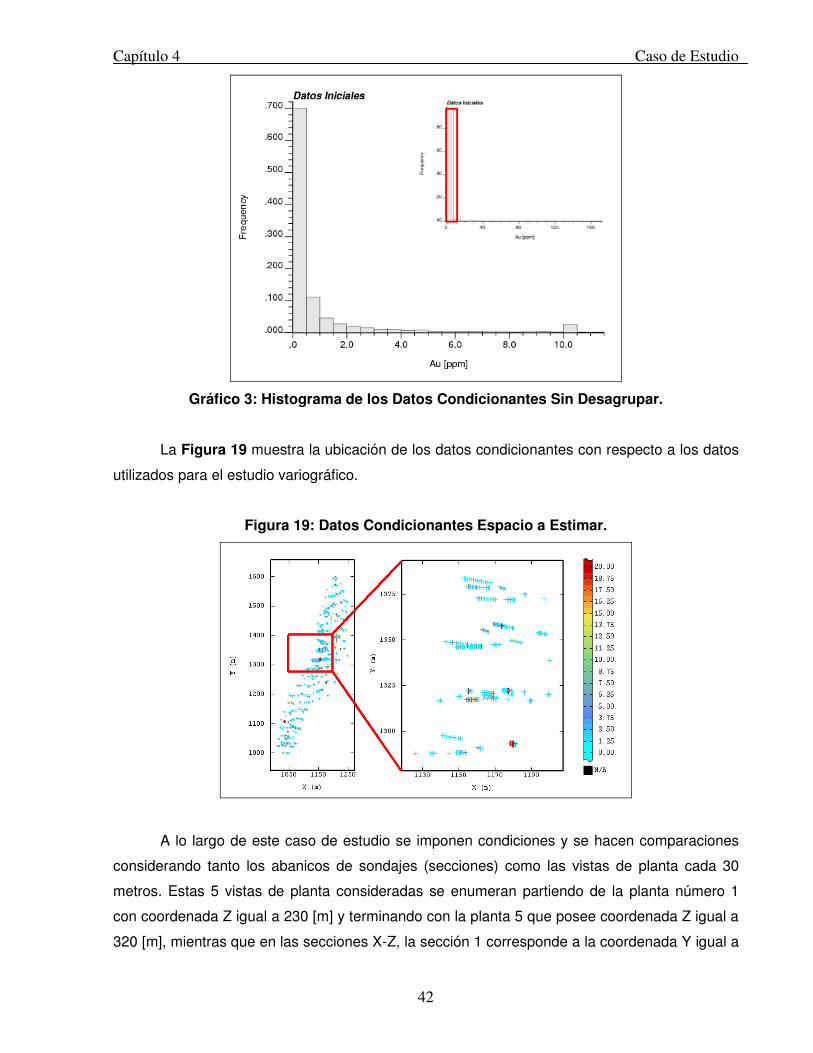
Capítulo 4 Caso de Estudio
42
Gráfico 3: Histograma de los Datos Condicionantes Sin Desagrupar.
La Figura 19 muestra la ubicación de los datos condicionantes con respecto a los datos
utilizados para el estudio variográfico.
Figura 19: Datos Condicionantes Espacio a Estimar.
A lo largo de este caso de estudio se imponen condiciones y se hacen comparaciones
considerando tanto los abanicos de sondajes (secciones) como las vistas de planta cada 30
metros. Estas 5 vistas de planta consideradas se enumeran partiendo de la planta número 1
con coordenada Z igual a 230 [m] y terminando con la planta 5 que posee coordenada Z igual a
320 [m], mientras que en las secciones X-Z, la sección 1 corresponde a la coordenada Y igual a
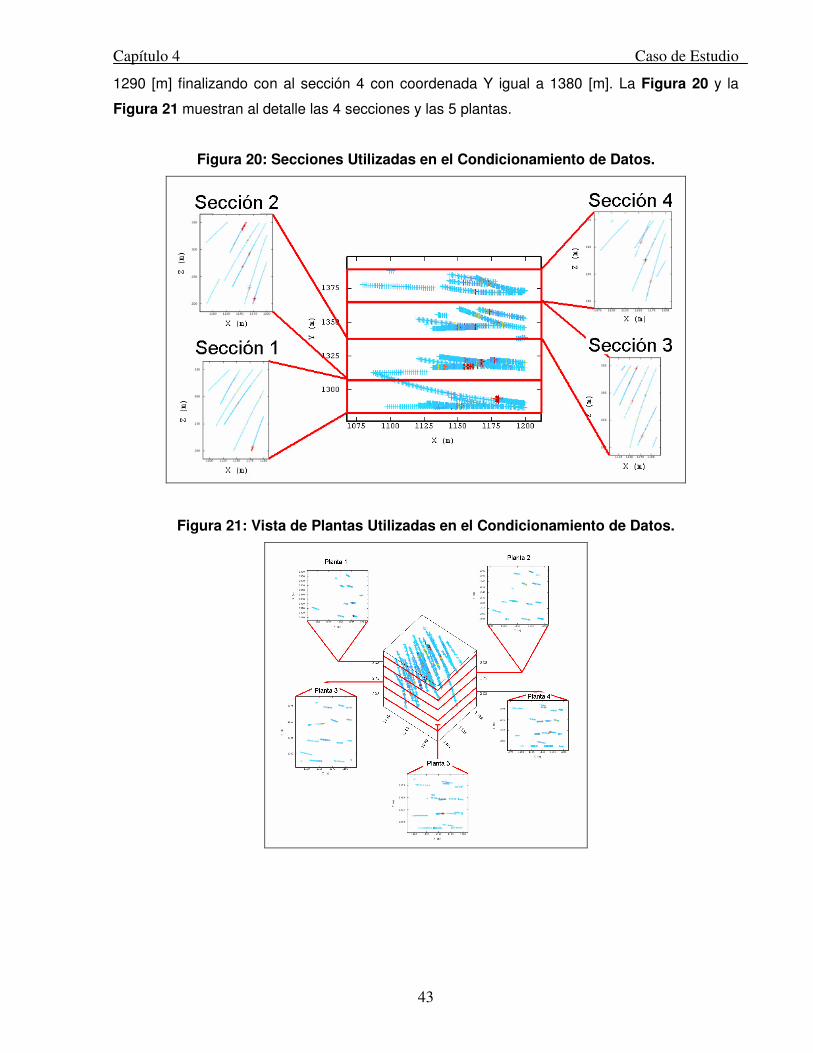
Capítulo 4 Caso de Estudio
43
1290 [m] finalizando con al sección 4 con coordenada Y igual a 1380 [m]. La Figura 20 y la
Figura 21 muestran al detalle las 4 secciones y las 5 plantas.
Figura 20: Secciones Utilizadas en el Condicionamiento de Datos.
Figura 21: Vista de Plantas Utilizadas en el Condicionamiento de Datos.
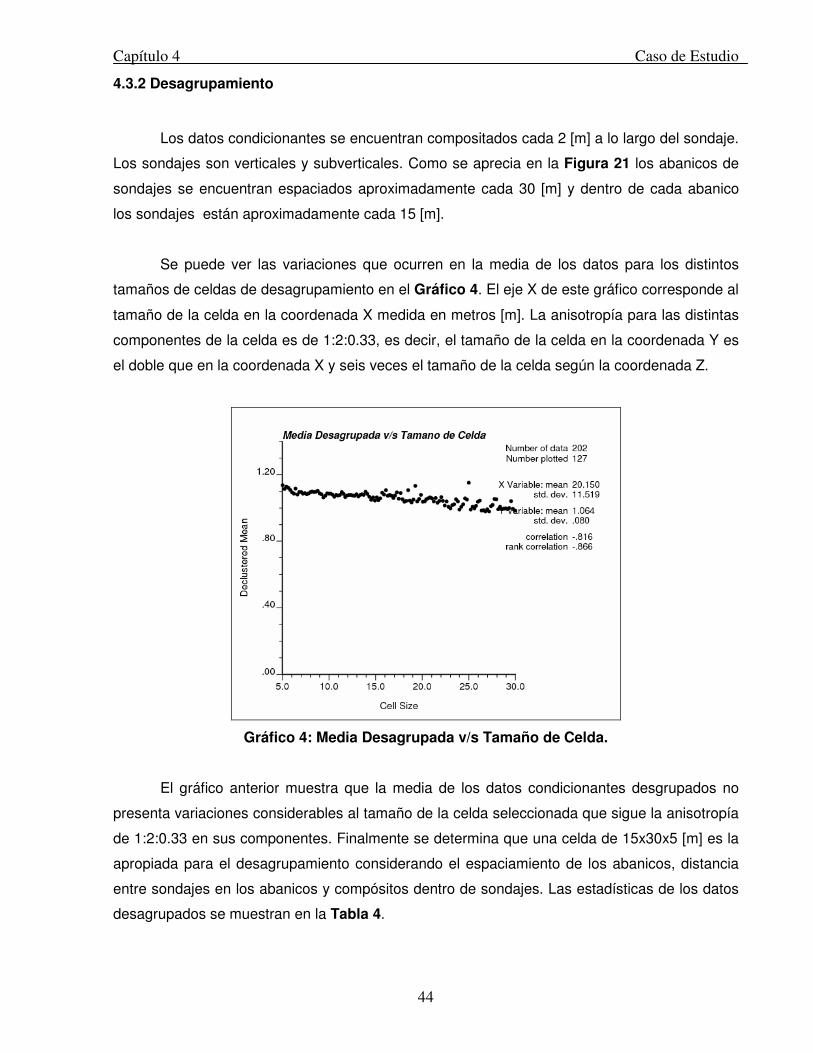
Capítulo 4 Caso de Estudio
44
4.3.2 Desagrupamiento
Los datos condicionantes se encuentran compositados cada 2 [m] a lo largo del sondaje.
Los sondajes son verticales y subverticales. Como se aprecia en la Figura 21 los abanicos de
sondajes se encuentran espaciados aproximadamente cada 30 [m] y dentro de cada abanico
los sondajes están aproximadamente cada 15 [m].
Se puede ver las variaciones que ocurren en la media de los datos para los distintos
tamaños de celdas de desagrupamiento en el Gráfico 4. El eje X de este gráfico corresponde al
tamaño de la celda en la coordenada X medida en metros [m]. La anisotropía para las distintas
componentes de la celda es de 1:2:0.33, es decir, el tamaño de la celda en la coordenada Y es
el doble que en la coordenada X y seis veces el tamaño de la celda según la coordenada Z.
Gráfico 4: Media Desagrupada v/s Tamaño de Celda.
El gráfico anterior muestra que la media de los datos condicionantes desgrupados no
presenta variaciones considerables al tamaño de la celda seleccionada que sigue la anisotropía
de 1:2:0.33 en sus componentes. Finalmente se determina que una celda de 15x30x5 [m] es la
apropiada para el desagrupamiento considerando el espaciamiento de los abanicos, distancia
entre sondajes en los abanicos y compósitos dentro de sondajes. Las estadísticas de los datos
desagrupados se muestran en la Tabla 4.

Capítulo 4 Caso de Estudio
45
Tabla 4: Estadísticas Datos Condicionantes Desagrupados.
Mínimo Máximo Promedio Desv. Std.
[ppm] [ppm] [ppm] [ppm]
Ley de Au 0.00 142.60 1.07 4.46
El histograma de los datos desagrupados no sufre mayores diferencias con respecto al
histograma de los datos sin desagrupar, aunque los datos desagrupados poseen un promedio
menor en 0.22 [ppm] en el contenido de Au que los datos sin desagrupar. Esto se debe al
desarrollo de campañas de sondajes centradas en búsqueda de zonas de altas leyes. El
Gráfico 5 muestra el histograma de los datos desagrupados.
Gráfico 5: Histograma de Datos Desagrupados.
4.4 Transformación Gaussiana
Como se describe en la metodología propuesta para el desarrollo de la simulación
secuencial gaussiana considerando un campo de direcciones variables, se realiza la
anamorfosis tanto de los datos condicionantes como de los datos para el análisis variográfico,
utilizando el software NCORE de GSLIB [Deutsch C.V., Journel A. G.,1998].
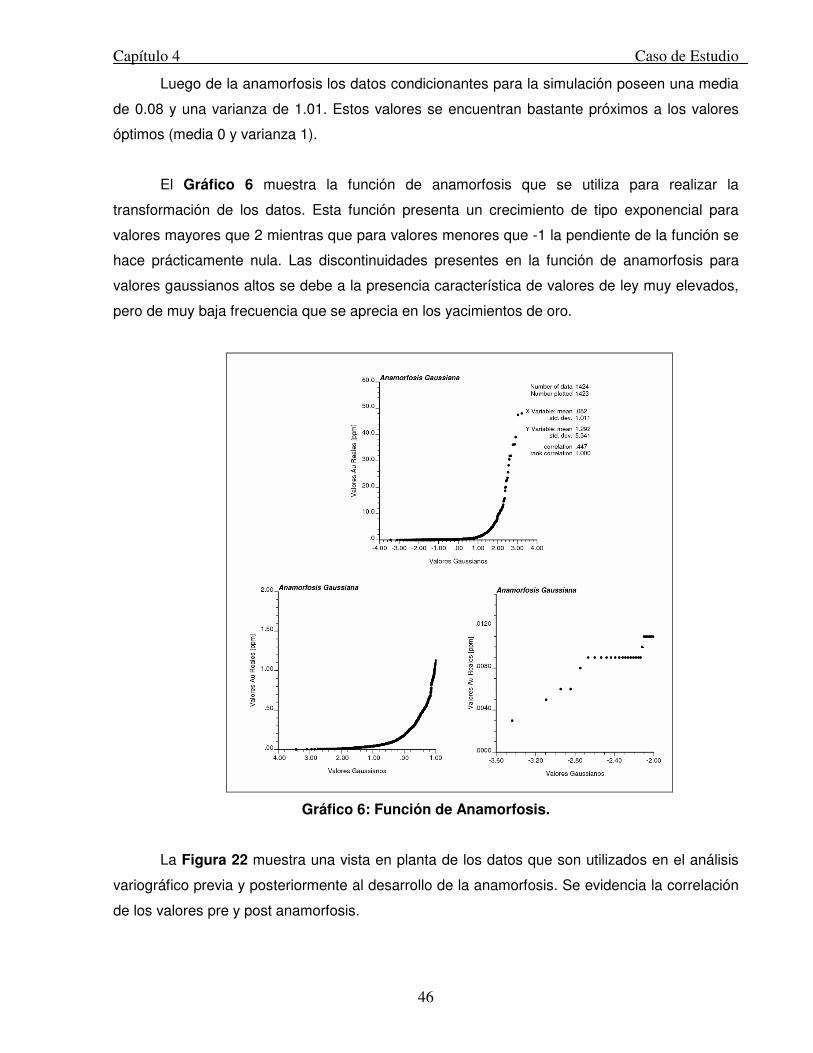
Capítulo 4 Caso de Estudio
46
Luego de la anamorfosis los datos condicionantes para la simulación poseen una media
de 0.08 y una varianza de 1.01. Estos valores se encuentran bastante próximos a los valores
óptimos (media 0 y varianza 1).
El Gráfico 6 muestra la función de anamorfosis que se utiliza para realizar la
transformación de los datos. Esta función presenta un crecimiento de tipo exponencial para
valores mayores que 2 mientras que para valores menores que -1 la pendiente de la función se
hace prácticamente nula. Las discontinuidades presentes en la función de anamorfosis para
valores gaussianos altos se debe a la presencia característica de valores de ley muy elevados,
pero de muy baja frecuencia que se aprecia en los yacimientos de oro.
Gráfico 6: Función de Anamorfosis.
La Figura 22 muestra una vista en planta de los datos que son utilizados en el análisis
variográfico previa y posteriormente al desarrollo de la anamorfosis. Se evidencia la correlación
de los valores pre y post anamorfosis.
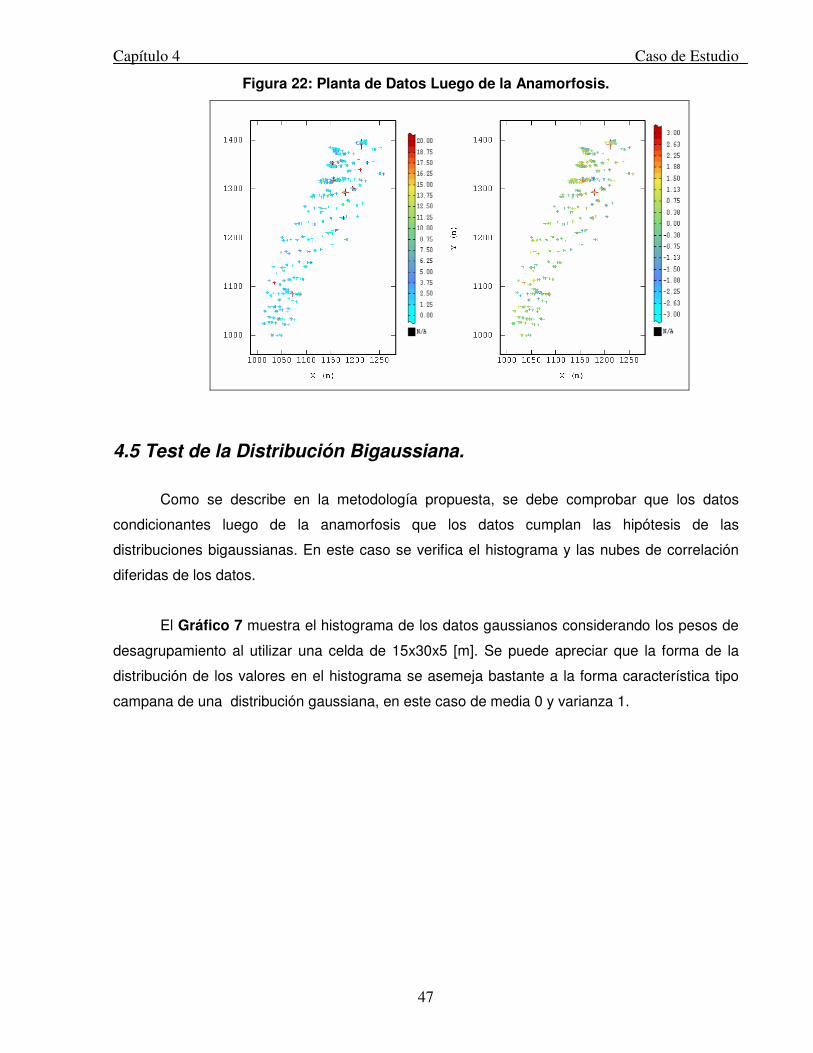
Capítulo 4 Caso de Estudio
47
Figura 22: Planta de Datos Luego de la Anamorfosis.
4.5 Test de la Distribución Bigaussiana.
Como se describe en la metodología propuesta, se debe comprobar que los datos
condicionantes luego de la anamorfosis que los datos cumplan las hipótesis de las
distribuciones bigaussianas. En este caso se verifica el histograma y las nubes de correlación
diferidas de los datos.
El Gráfico 7 muestra el histograma de los datos gaussianos considerando los pesos de
desagrupamiento al utilizar una celda de 15x30x5 [m]. Se puede apreciar que la forma de la
distribución de los valores en el histograma se asemeja bastante a la forma característica tipo
campana de una distribución gaussiana, en este caso de media 0 y varianza 1.
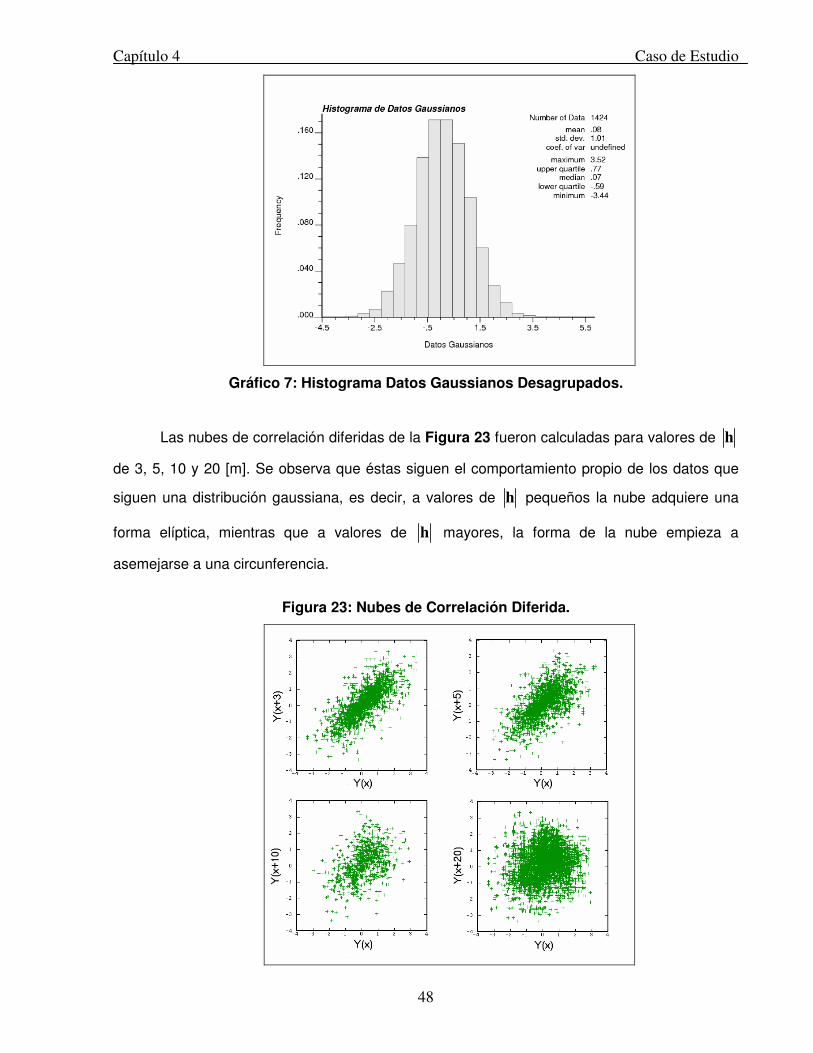
Capítulo 4 Caso de Estudio
48
Gráfico 7: Histograma Datos Gaussianos Desagrupados.
Las nubes de correlación diferidas de la Figura 23 fueron calculadas para valores de h
de 3, 5, 10 y 20 [m]. Se observa que éstas siguen el comportamiento propio de los datos que
siguen una distribución gaussiana, es decir, a valores de h pequeños la nube adquiere una
forma elíptica, mientras que a valores de h mayores, la forma de la nube empieza a
asemejarse a una circunferencia.
Figura 23: Nubes de Correlación Diferida.
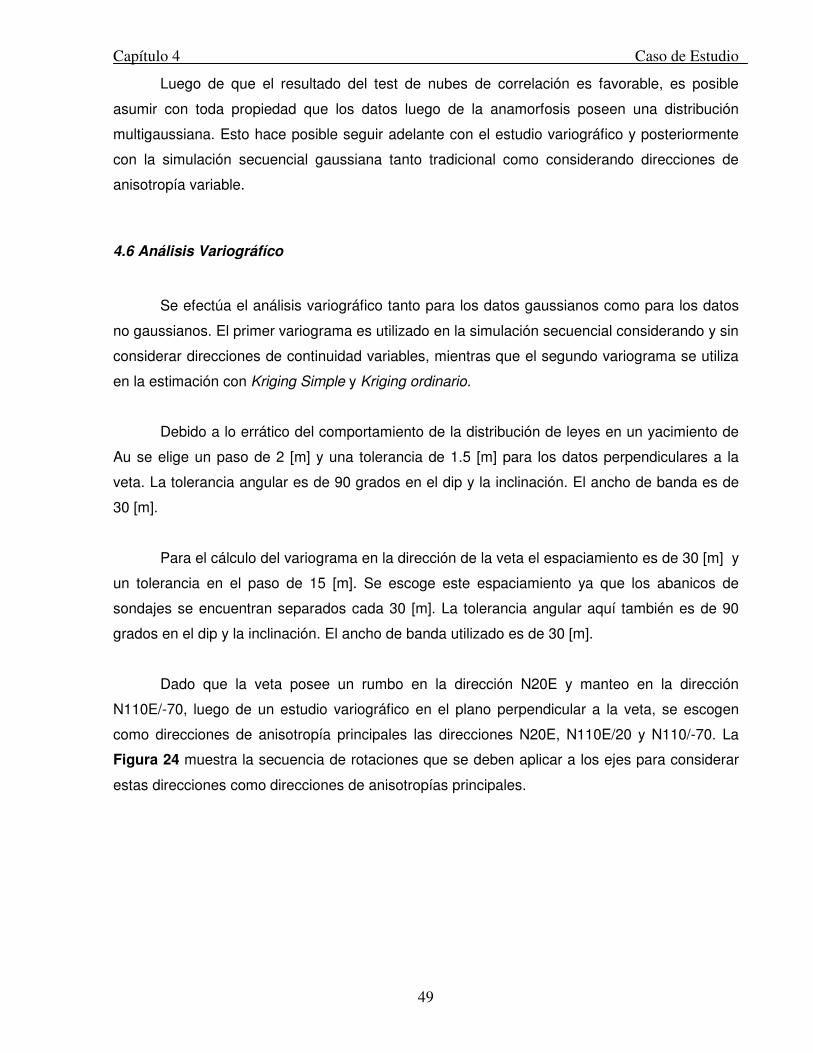
Capítulo 4 Caso de Estudio
49
Luego de que el resultado del test de nubes de correlación es favorable, es posible
asumir con toda propiedad que los datos luego de la anamorfosis poseen una distribución
multigaussiana. Esto hace posible seguir adelante con el estudio variográfico y posteriormente
con la simulación secuencial gaussiana tanto tradicional como considerando direcciones de
anisotropía variable.
4.6 Análisis Variográfíco
Se efectúa el análisis variográfico tanto para los datos gaussianos como para los datos
no gaussianos. El primer variograma es utilizado en la simulación secuencial considerando y sin
considerar direcciones de continuidad variables, mientras que el segundo variograma se utiliza
en la estimación con Kriging Simple y Kriging ordinario.
Debido a lo errático del comportamiento de la distribución de leyes en un yacimiento de
Au se elige un paso de 2 [m] y una tolerancia de 1.5 [m] para los datos perpendiculares a la
veta. La tolerancia angular es de 90 grados en el dip y la inclinación. El ancho de banda es de
30 [m].
Para el cálculo del variograma en la dirección de la veta el espaciamiento es de 30 [m] y
un tolerancia en el paso de 15 [m]. Se escoge este espaciamiento ya que los abanicos de
sondajes se encuentran separados cada 30 [m]. La tolerancia angular aquí también es de 90
grados en el dip y la inclinación. El ancho de banda utilizado es de 30 [m].
Dado que la veta posee un rumbo en la dirección N20E y manteo en la dirección
N110E/-70, luego de un estudio variográfico en el plano perpendicular a la veta, se escogen
como direcciones de anisotropía principales las direcciones N20E, N110E/20 y N110/-70. La
Figura 24 muestra la secuencia de rotaciones que se deben aplicar a los ejes para considerar
estas direcciones como direcciones de anisotropías principales.

Capítulo 4 Caso de Estudio
50
Figura 24: Rotación de Ejes para Cálculo de Variograma.
Para el cálculo del variograma se realizan dos rotaciones de 20º. La primera se lleva a
cabo dejando el eje Z fijo, mientras que para la segunda se deja el eje Y’ (coordenadas
previamente rotadas) fijo.
4.6.1 Variograma Datos no Gaussianos
Se calcula el variograma de los datos con los parámetros mencionados anteriormente. El
Gráfico 8a muestra un variograma sumamente errático en las direcciones N110E/-70 y N110E,
por lo que resulta conveniente calcular el correlograma de los datos para estas direcciones. Se
utilizan las mismas tolerancias que para el cálculo del variograma. El Gráfico 8b muestra el
variograma y los correlogramas para las direcciones antes mencionadas.
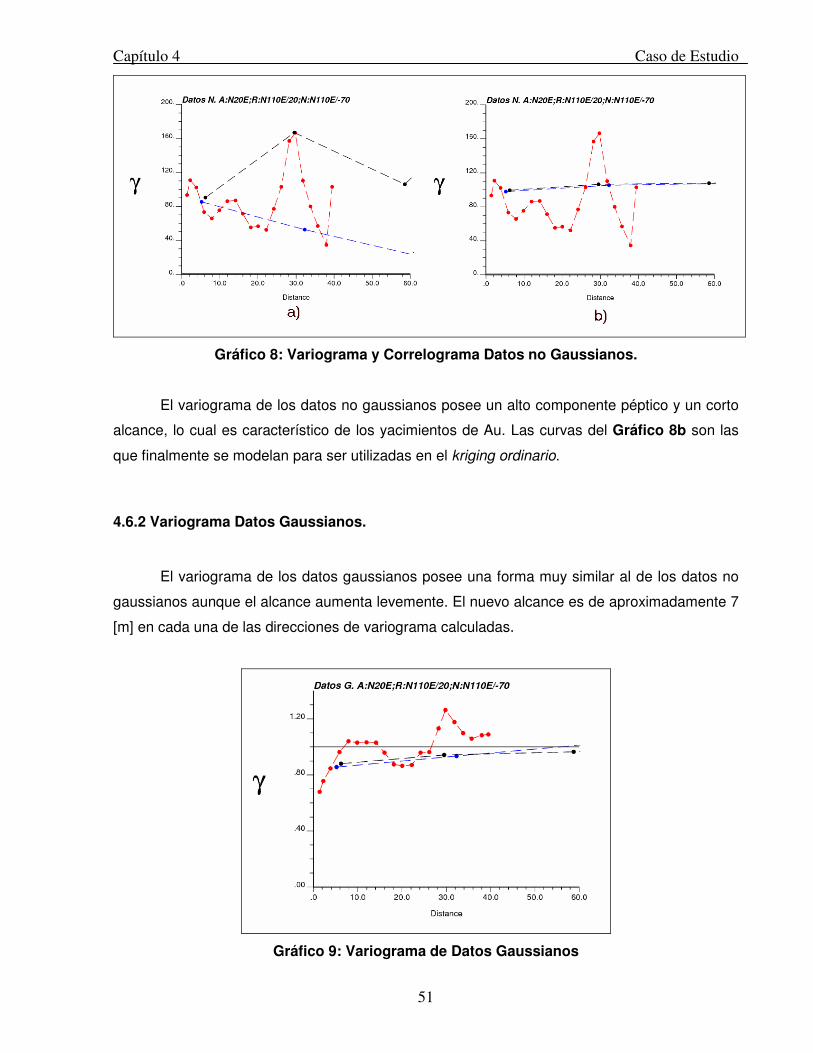
Capítulo 4 Caso de Estudio
51
Gráfico 8: Variograma y Correlograma Datos no Gaussianos.
El variograma de los datos no gaussianos posee un alto componente péptico y un corto
alcance, lo cual es característico de los yacimientos de Au. Las curvas del Gráfico 8b son las
que finalmente se modelan para ser utilizadas en el kriging ordinario.
4.6.2 Variograma Datos Gaussianos.
El variograma de los datos gaussianos posee una forma muy similar al de los datos no
gaussianos aunque el alcance aumenta levemente. El nuevo alcance es de aproximadamente 7
[m] en cada una de las direcciones de variograma calculadas.
Gráfico 9: Variograma de Datos Gaussianos
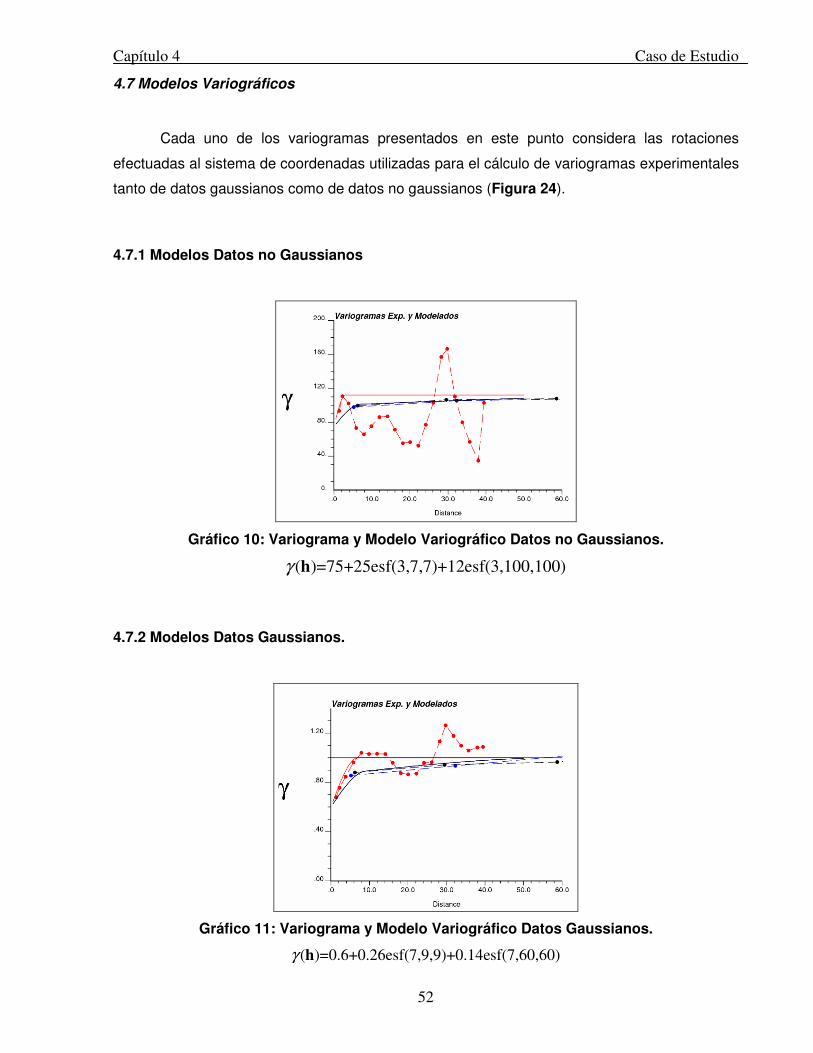
Capítulo 4 Caso de Estudio
52
4.7 Modelos Variográficos
Cada uno de los variogramas presentados en este punto considera las rotaciones
efectuadas al sistema de coordenadas utilizadas para el cálculo de variogramas experimentales
tanto de datos gaussianos como de datos no gaussianos (Figura 24).
4.7.1 Modelos Datos no Gaussianos
Gráfico 10: Variograma y Modelo Variográfico Datos no Gaussianos.
( )=75+25esf(3,7,7)+12esf(3,100,100)γ h
4.7.2 Modelos Datos Gaussianos.
Gráfico 11: Variograma y Modelo Variográfico Datos Gaussianos.
( )=0.6+0.26esf(7,9,9)+0.14esf(7,60,60)γ h
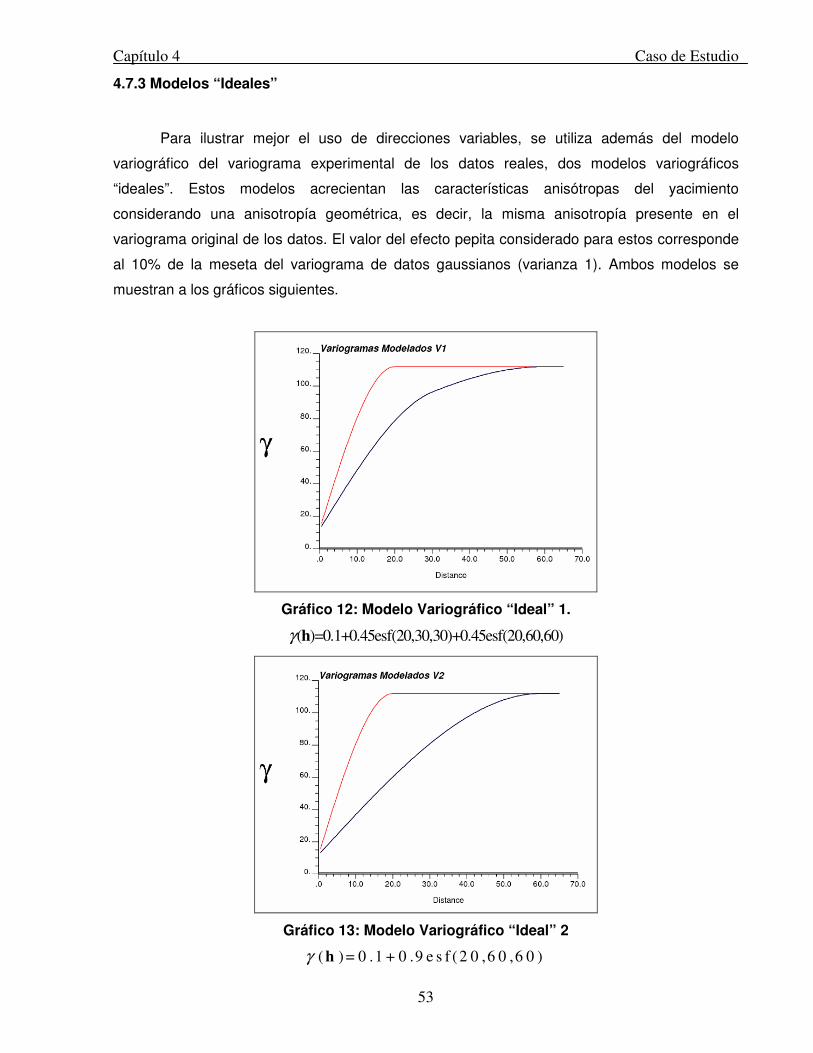
Capítulo 4 Caso de Estudio
53
4.7.3 Modelos “Ideales”
Para ilustrar mejor el uso de direcciones variables, se utiliza además del modelo
variográfico del variograma experimental de los datos reales, dos modelos variográficos
“ideales”. Estos modelos acrecientan las características anisótropas del yacimiento
considerando una anisotropía geométrica, es decir, la misma anisotropía presente en el
variograma original de los datos. El valor del efecto pepita considerado para estos corresponde
al 10% de la meseta del variograma de datos gaussianos (varianza 1). Ambos modelos se
muestran a los gráficos siguientes.
Gráfico 12: Modelo Variográfico “Ideal” 1.
( )=0.1+0.45esf(20,30,30)+0.45esf(20,60,60)γ h
Gráfico 13: Modelo Variográfico “Ideal” 2
( ) = 0 .1 + 0 .9 e s f (2 0 ,6 0 ,6 0 )γ h
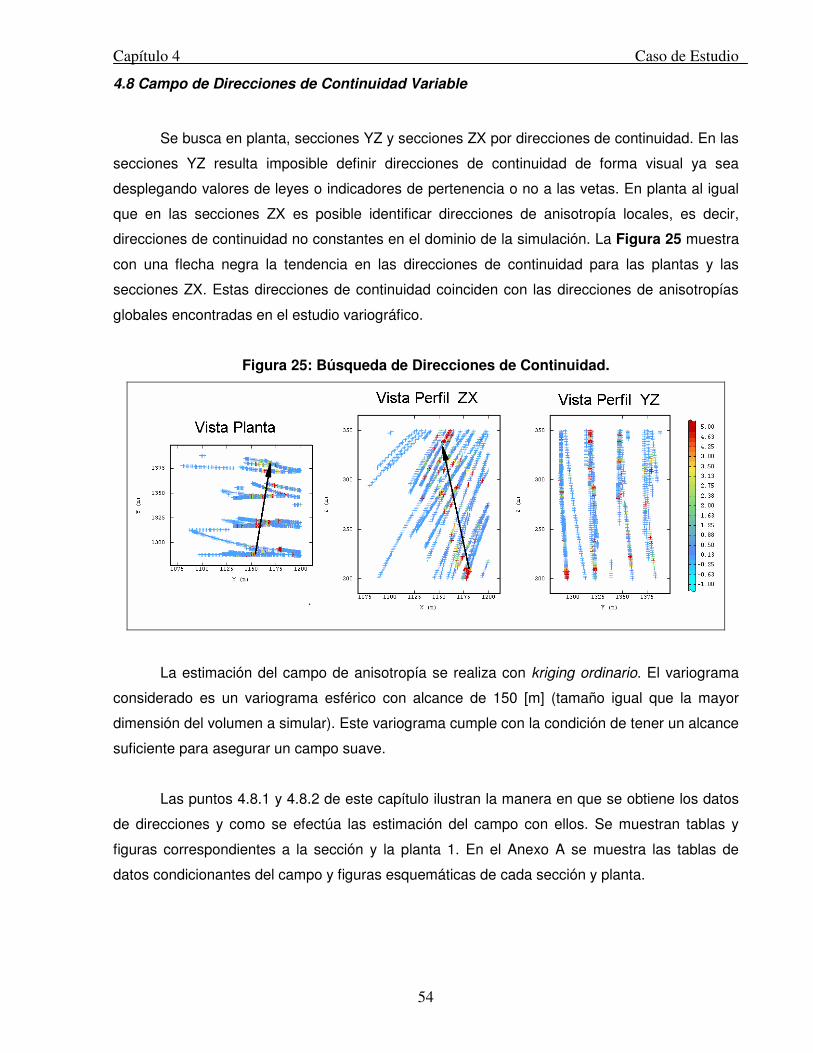
Capítulo 4 Caso de Estudio
54
4.8 Campo de Direcciones de Continuidad Variable
Se busca en planta, secciones YZ y secciones ZX por direcciones de continuidad. En las
secciones YZ resulta imposible definir direcciones de continuidad de forma visual ya sea
desplegando valores de leyes o indicadores de pertenencia o no a las vetas. En planta al igual
que en las secciones ZX es posible identificar direcciones de anisotropía locales, es decir,
direcciones de continuidad no constantes en el dominio de la simulación. La Figura 25 muestra
con una flecha negra la tendencia en las direcciones de continuidad para las plantas y las
secciones ZX. Estas direcciones de continuidad coinciden con las direcciones de anisotropías
globales encontradas en el estudio variográfico.
Figura 25: Búsqueda de Direcciones de Continuidad.
La estimación del campo de anisotropía se realiza con kriging ordinario. El variograma
considerado es un variograma esférico con alcance de 150 [m] (tamaño igual que la mayor
dimensión del volumen a simular). Este variograma cumple con la condición de tener un alcance
suficiente para asegurar un campo suave.
Las puntos 4.8.1 y 4.8.2 de este capítulo ilustran la manera en que se obtiene los datos
de direcciones y como se efectúa las estimación del campo con ellos. Se muestran tablas y
figuras correspondientes a la sección y la planta 1. En el Anexo A se muestra las tablas de
datos condicionantes del campo y figuras esquemáticas de cada sección y planta.

Capítulo 4 Caso de Estudio
55
4.8.1 Secciones
Se trabaja con 4 secciones ZX espaciadas 30 [m] cada una. De estas secciones se
obtienen datos condicionantes para generar el campo de anisotropía local. Se utiliza la
información de cuales datos pertenecen a la veta. Estos datos se muestran en rojo en la Figura
26a. Al unir los datos que pertenecen a las vetas se recrea una posible interpretación de la
forma de la veta de oro en esta sección. Ésta se muestra en la Figura 26b. Luego de inferir la
forma de la veta es posible extraer los datos de direcciones condicionantes. Estos datos deben
representar de la forma más correcta posible la continuidad de la veta. Los datos
condicionantes para la sección 1 se muestran gráficamente en la Figura 26c, mientras que la
Tabla 5 muestras sus valores. Con los valores de direcciones condicionantes se realiza el
kriging ordinario para generar el campo de direcciones de continuidad para las secciones. La
Figura 26d muestra el resultado para la sección 1. En esta representación utiliza una grilla de
13X15 nodos para una mejor visualización de las direcciones en la sección, aunque se debe
considerar que la grilla en la sección utilizada para la simulación es de 25X30 nodos. Resulta
evidente la correlación entre datos condicionantes y el campo generado.
Figura 26: Campo Anisotropía Local. Sección 1.
Los valores medios de las direcciones de continuidad condicionantes para cada una de
las 4 secciones son -28.7, -21.58, -19.92 y -19.36 [grados], mientras que los valores medios
para las mismas secciones obtenidas con el kriging ordinario son de -24.92, -22.22, -19,23, -
17,17 [grados].

Capítulo 4 Caso de Estudio
56
Tabla 5: Datos Direcciones Condicionantes Sección 1.
Sección 1
Coord. X Coord. Z Ángulo
[m] [m] [grados]
1125 337 -26.0
1131 318 -26.0
1143 303 -26.0
1152 281 -14.0
1156 263 -14.0
1160 245 -12.0
1162 228 -25.0
1177 205 -37.0
1123 343 -57.0
1145 337 -50.0
Dirección Promedio [grados] -28.7
Ya que se trabaja con una grilla de 18750 nodos en la simulación, se obtienen 18750
ángulos de rotación φ para el sistema de anisotropías. El valor promedio para la direcciones del
campo generado es de -20.18, con una varianza de 56.25.
Gráfico 14: Histograma de Ángulos de Rotación φ en el plano ZX’.
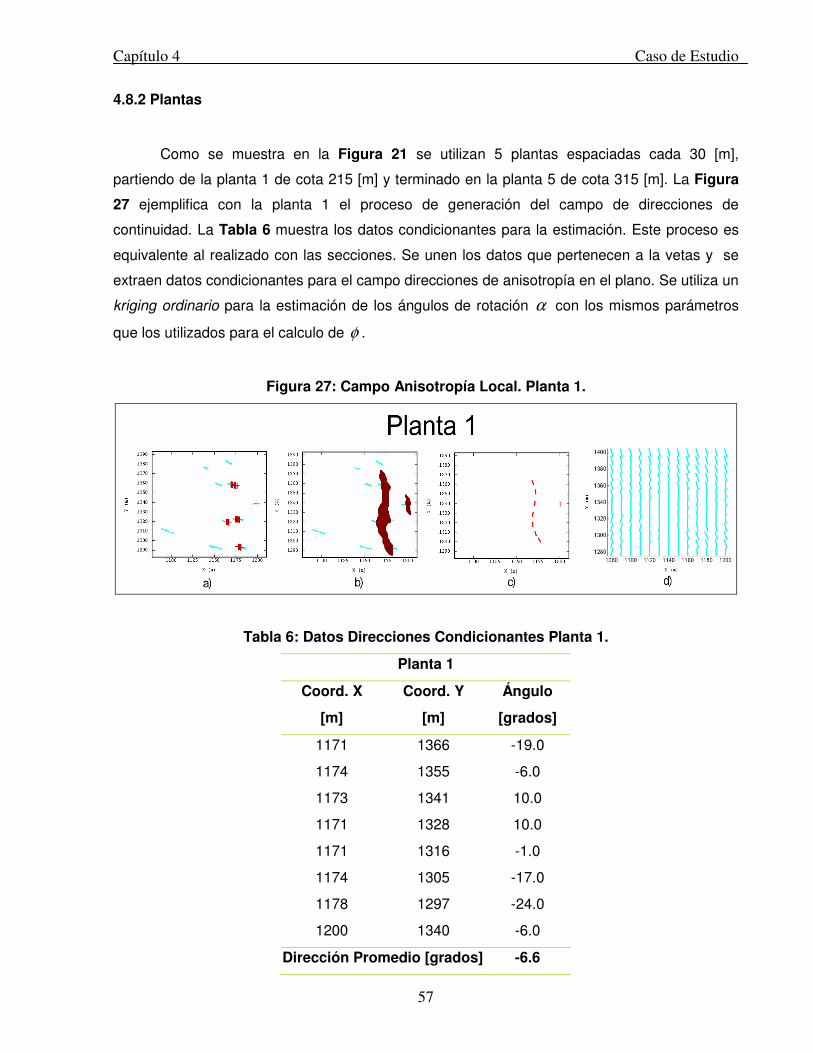
Capítulo 4 Caso de Estudio
57
4.8.2 Plantas
Como se muestra en la Figura 21 se utilizan 5 plantas espaciadas cada 30 [m],
partiendo de la planta 1 de cota 215 [m] y terminado en la planta 5 de cota 315 [m]. La Figura
27 ejemplifica con la planta 1 el proceso de generación del campo de direcciones de
continuidad. La Tabla 6 muestra los datos condicionantes para la estimación. Este proceso es
equivalente al realizado con las secciones. Se unen los datos que pertenecen a la vetas y se
extraen datos condicionantes para el campo direcciones de anisotropía en el plano. Se utiliza un
kriging ordinario para la estimación de los ángulos de rotación α con los mismos parámetros
que los utilizados para el calculo de φ .
Figura 27: Campo Anisotropía Local. Planta 1.
Tabla 6: Datos Direcciones Condicionantes Planta 1.
Planta 1
Coord. X Coord. Y Ángulo
[m] [m] [grados]
1171 1366 -19.0
1174 1355 -6.0
1173 1341 10.0
1171 1328 10.0
1171 1316 -1.0
1174 1305 -17.0
1178 1297 -24.0
1200 1340 -6.0
Dirección Promedio [grados] -6.6

Capítulo 4 Caso de Estudio
58
La dirección promedio para las 5 plantas utilizadas fue de -6.6, -4.4, 0.95, 1.53 y 5.54
[grados], mientras que la dirección promedio del kriging ordinario para las mismas es de -4.67,
1.48, 5.13, 3.69 y 5.22 [grados]. El valor promedio sobre los 18750 nodos estimados para el
ángulo α es de 2.87 [grados]. El Gráfico 15 muestra la distribución 18750 valores estimados.
Gráfico 15: Histograma de Ángulos de Rotaciónα en el Plano XY.
4.9 Simulación Secuencial
Como se ha mencionado con anterioridad se realiza la simulación secuencial gaussiana
tanto considerando direcciones de anisotropías locales, como considerando solamente una
dirección de anisotropía global. Para realizar la comparación entre el resultado de la
metodología propuesta y la metodología tradicional de una simulación secuencial se utilizan 3
casos de simulación diferenciados cada uno en el modelo variográfico utilizado para los datos
gaussianos. El primer caso es el caso denominado “real”. En este caso se utiliza el modelo del
variograma experimental de los datos. En los siguientes dos casos denominados “Ideales”, se
utiliza un modelo con un menor componente pepítico (10%). El radio de búsqueda utilizado en
las simulaciones es de 30 [m] en cada componente de las direcciones de anisotropía global
como locales según corresponde. Utilizar un radio de búsqueda mayor sería un error, ya que
datos muy distantes serían evaluados en el sistema de kriging simple con direcciones de
continuidad máxima sin relación alguna con la estructura presente entre los datos.

Capítulo 4 Caso de Estudio
59
Para cada estimación se considera como mínimo 1 y como máximo 20 datos
condicionantes en la estimación. Ya que el algoritmo secuencial incorpora los valores ya
simulados a los valores condicionantes, entre éstos últimos, puede haber datos previamente
simulados.
4.9.1 Caso “Real”
Las treinta realizaciones generadas utilizando direcciones de anisotropías locales
entregaron un promedio de 1.45 [ppm] y una desviación estándar de 6.46 [ppm], mientras que
las simulaciones sin considerar anisotropías locales poseen una media de 1.46 y una
desviación estándar de 6.34 entre simulaciones. La Tabla 7 muestra las estadísticas del
promedio de las simulaciones para ambos casos.
Tabla 7: Estadísticas Promedio Simulaciones Caso “Real”.
Promedio Simulaciones Mínimo Máximo Media Desv. Estándar [ppm] [ppm] [ppm] [ppm]
Var. Real Anisotropía Local 0.00 142.60 1.45 6.46 Var. Real Anisotropía Global 0.00 142.60 1.46 6.34
La Figura 28 muestra el resultado para la planta 3 y la sección 4 de la simulación
número 15 de las 30 simulaciones realizadas. No se aprecia diferencias entre las secciones y
plantas desarrolladas con las diferentes metodologías debido al alto componente pepítico del
modelo variográfico utilizado. Más aun, las estadísticas de ambas metodologías son
sumamente parecidas e inducen a pensar que el uso de anisotropías locales para ese tipo de
modelos variográficos pierde sentido. El estudio de la metodología con variogramas ideales
resulta aconsejable para poder evaluar efectivamente los cambios esperados al utilizar la
metodología propuesta.
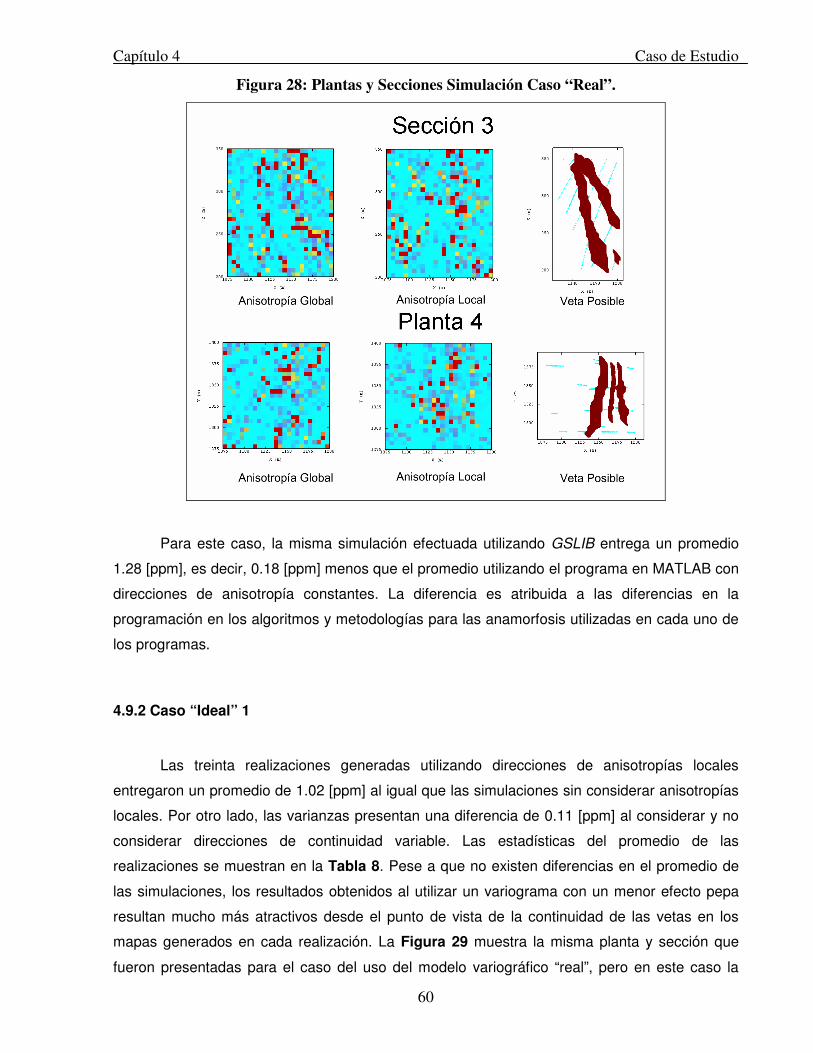
Capítulo 4 Caso de Estudio
60
Figura 28: Plantas y Secciones Simulación Caso “Real”.
Para este caso, la misma simulación efectuada utilizando GSLIB entrega un promedio
1.28 [ppm], es decir, 0.18 [ppm] menos que el promedio utilizando el programa en MATLAB con
direcciones de anisotropía constantes. La diferencia es atribuida a las diferencias en la
programación en los algoritmos y metodologías para las anamorfosis utilizadas en cada uno de
los programas.
4.9.2 Caso “Ideal” 1
Las treinta realizaciones generadas utilizando direcciones de anisotropías locales
entregaron un promedio de 1.02 [ppm] al igual que las simulaciones sin considerar anisotropías
locales. Por otro lado, las varianzas presentan una diferencia de 0.11 [ppm] al considerar y no
considerar direcciones de continuidad variable. Las estadísticas del promedio de las
realizaciones se muestran en la Tabla 8. Pese a que no existen diferencias en el promedio de
las simulaciones, los resultados obtenidos al utilizar un variograma con un menor efecto pepa
resultan mucho más atractivos desde el punto de vista de la continuidad de las vetas en los
mapas generados en cada realización. La Figura 29 muestra la misma planta y sección que
fueron presentadas para el caso del uso del modelo variográfico “real”, pero en este caso la
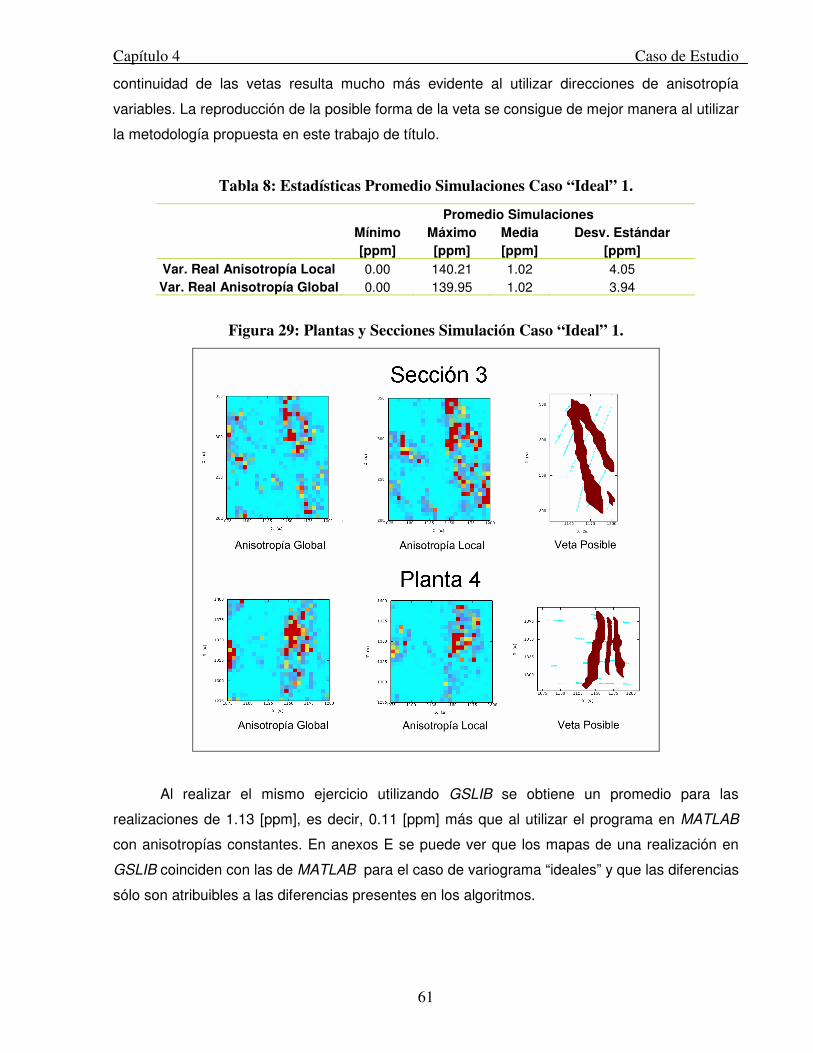
Capítulo 4 Caso de Estudio
61
continuidad de las vetas resulta mucho más evidente al utilizar direcciones de anisotropía
variables. La reproducción de la posible forma de la veta se consigue de mejor manera al utilizar
la metodología propuesta en este trabajo de título.
Tabla 8: Estadísticas Promedio Simulaciones Caso “Ideal” 1.
Promedio Simulaciones Mínimo Máximo Media Desv. Estándar [ppm] [ppm] [ppm] [ppm]
Var. Real Anisotropía Local 0.00 140.21 1.02 4.05 Var. Real Anisotropía Global 0.00 139.95 1.02 3.94
Figura 29: Plantas y Secciones Simulación Caso “Ideal” 1.
Al realizar el mismo ejercicio utilizando GSLIB se obtiene un promedio para las
realizaciones de 1.13 [ppm], es decir, 0.11 [ppm] más que al utilizar el programa en MATLAB
con anisotropías constantes. En anexos E se puede ver que los mapas de una realización en
GSLIB coinciden con las de MATLAB para el caso de variograma “ideales” y que las diferencias
sólo son atribuibles a las diferencias presentes en los algoritmos.

Capítulo 4 Caso de Estudio
62
4.9.3 Caso “Ideal” 2.
Al igual que para el caso “Ideal” 1, el caso “Ideal” muestra las virtudes de utilizar
direcciones de continuidad variable. Las simulaciones utilizando direcciones de anisotropías
variable entregaron un promedio de 0.92 [ppm] y una desviación estándar de 3.54 [ppm],
mientras que las simulaciones sin considerar anisotropías locales poseen una media de 0.89 y
una desviación estándar de 3.45 entre simulaciones.
Tabla 9: Estadísticas Promedio Simulaciones Caso “Ideal” 2.
Promedio Simulaciones Mínimo Máximo Media Desv. Estándar [ppm] [ppm] [ppm] [ppm]
Var. Real Anisotropía Local 0.00 131.49 0.92 3.54 Var. Real Anisotropía Global 0.00 126.50 0.89 3.45
Figura 30: Plantas y Secciones Simulación Caso “Ideal” 2.
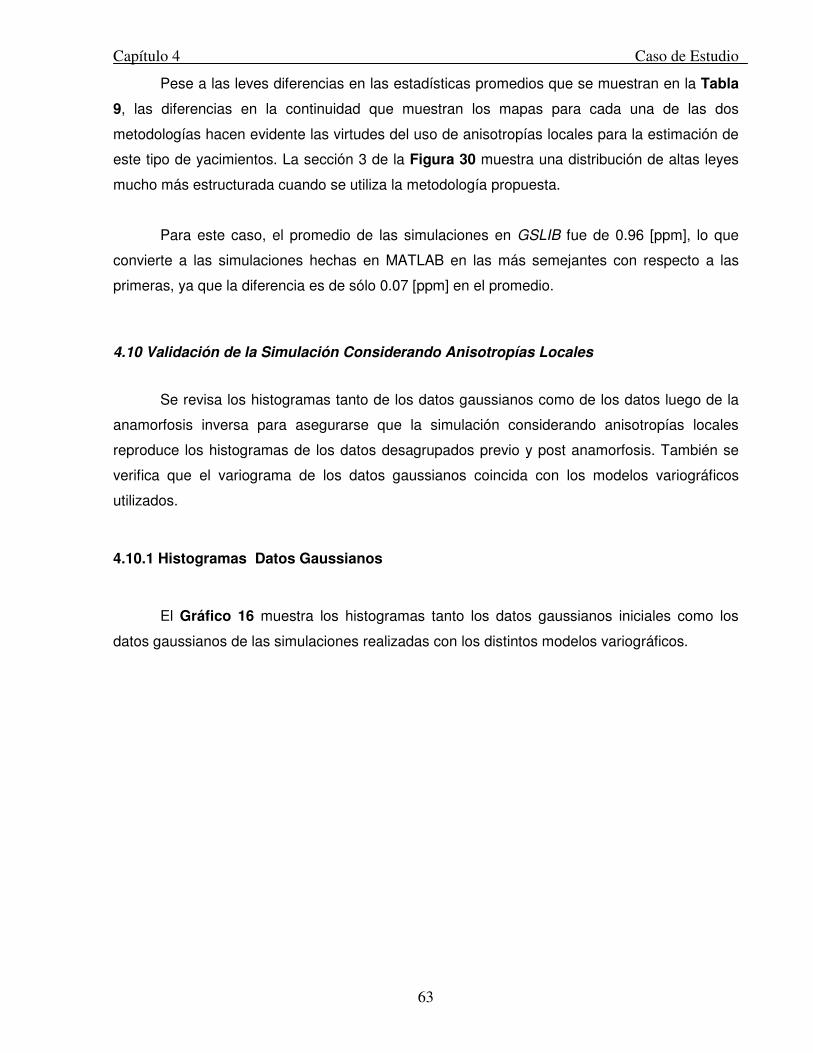
Capítulo 4 Caso de Estudio
63
Pese a las leves diferencias en las estadísticas promedios que se muestran en la Tabla
9, las diferencias en la continuidad que muestran los mapas para cada una de las dos
metodologías hacen evidente las virtudes del uso de anisotropías locales para la estimación de
este tipo de yacimientos. La sección 3 de la Figura 30 muestra una distribución de altas leyes
mucho más estructurada cuando se utiliza la metodología propuesta.
Para este caso, el promedio de las simulaciones en GSLIB fue de 0.96 [ppm], lo que
convierte a las simulaciones hechas en MATLAB en las más semejantes con respecto a las
primeras, ya que la diferencia es de sólo 0.07 [ppm] en el promedio.
4.10 Validación de la Simulación Considerando Anisotropías Locales
Se revisa los histogramas tanto de los datos gaussianos como de los datos luego de la
anamorfosis inversa para asegurarse que la simulación considerando anisotropías locales
reproduce los histogramas de los datos desagrupados previo y post anamorfosis. También se
verifica que el variograma de los datos gaussianos coincida con los modelos variográficos
utilizados.
4.10.1 Histogramas Datos Gaussianos
El Gráfico 16 muestra los histogramas tanto los datos gaussianos iniciales como los
datos gaussianos de las simulaciones realizadas con los distintos modelos variográficos.
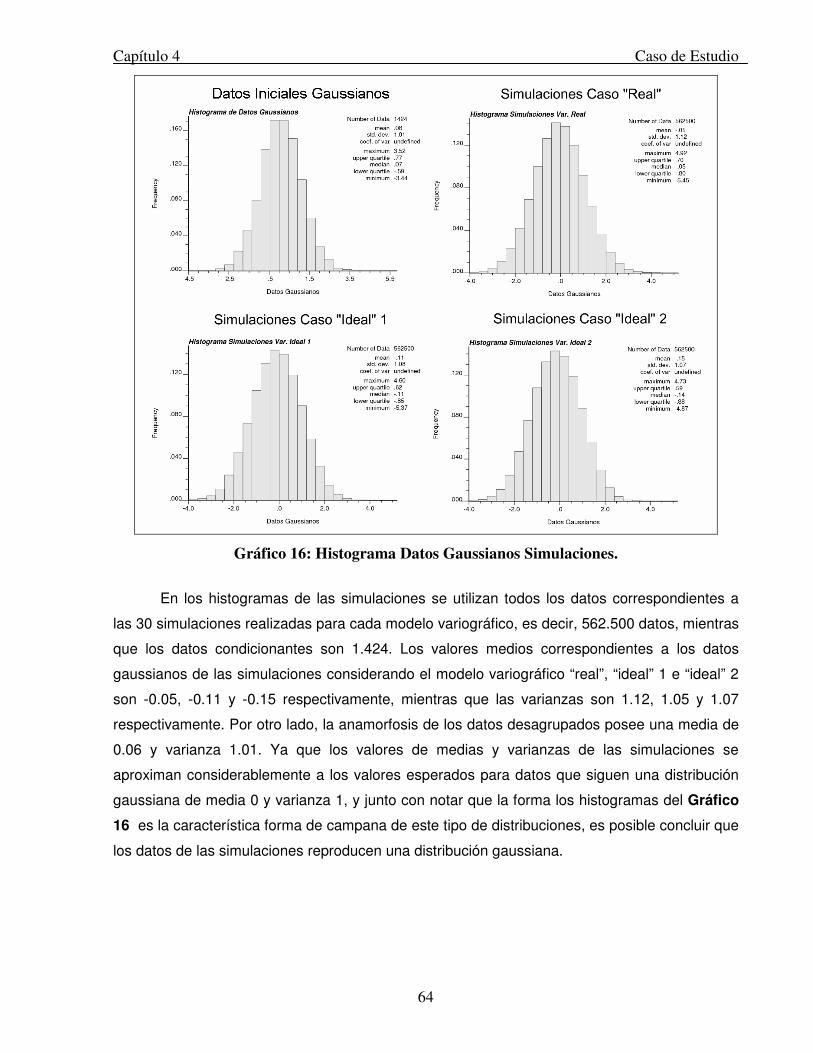
Capítulo 4 Caso de Estudio
64
Gráfico 16: Histograma Datos Gaussianos Simulaciones.
En los histogramas de las simulaciones se utilizan todos los datos correspondientes a
las 30 simulaciones realizadas para cada modelo variográfico, es decir, 562.500 datos, mientras
que los datos condicionantes son 1.424. Los valores medios correspondientes a los datos
gaussianos de las simulaciones considerando el modelo variográfico “real”, “ideal” 1 e “ideal” 2
son -0.05, -0.11 y -0.15 respectivamente, mientras que las varianzas son 1.12, 1.05 y 1.07
respectivamente. Por otro lado, la anamorfosis de los datos desagrupados posee una media de
0.06 y varianza 1.01. Ya que los valores de medias y varianzas de las simulaciones se
aproximan considerablemente a los valores esperados para datos que siguen una distribución
gaussiana de media 0 y varianza 1, y junto con notar que la forma los histogramas del Gráfico
16 es la característica forma de campana de este tipo de distribuciones, es posible concluir que
los datos de las simulaciones reproducen una distribución gaussiana.
Capítulo 4 Caso de Estudio
65
4.10.2 Histogramas Datos No Gaussianos
Como es posible ver en el Gráfico 17 la reproducción del histograma por las
simulaciones resulta un hecho. En estos histogramas se consideraron todos los datos de las 30
simulaciones realizadas para cada modelo variográfico propuesto, es decir, 562.500 datos por
histograma.
Gráfico 17: Histograma Simulaciones.
El promedio de las simulaciones varia según el modelo variográfico utilizado. El
promedio para la simulación considerando el modelo variográfico “real” es de 1.45, mientras que
con el modelo variográfico “Ideal” 1 e “Ideal” 2 es 1.02 y 0.92, respectivamente. Las
desviaciones estándar resultan proporcionales a los promedios de las leyes, lo cual evidencia la
presencia de efecto proporcional en las simulaciones, a diferencia de lo que ocurre en la
estimación con kriging, donde la desviación estándar es independiente del valor de las leyes y
sólo considera la posición relativa de los lugares a estimar con respecto a los datos. Las
desviaciones estándar son 4.92, 1.08 y 1.07 para las simulaciones con variograma “real”, “ideal”
1 e “ideal” 2 respectivamente.
Capítulo 4 Caso de Estudio
66
4.10.3 Variogramas
Se utilizan 4 direcciones para el cálculo de variogramas experimentales sobre los datos
simulados. Las direcciones son Norte-Sur, Este-Oeste, N45 y vertical. El Gráfico 18 muestra
tanto variogramas experimentales como variogramas modelados para las direcciones recién
mencionadas.
En el origen los variogramas y los modelos resultan bastante parecidos. Las direcciones
de mayor continuidad en los variogramas y los modelos son la vertical (negro) y la Norte-Sur
(amarillo), las cuales representan aproximadamente las direcciones en que se encuentra
contenida la veta. Las diferencias lejos del origen se atribuyen a utilizar un dominio acotado
para la simulación y a asumir la estacionalidad en todo el dominio pese a que la existencia de
derivas y artefactos en los datos condicionantes no es algo con menor ocurrencia.
Ya que el comportamiento de los variogramas experimentales es bastante parecido a los
modelos variográficos hasta el radio de búsqueda utilizado en la simulación (30 [m]), la
reproducción del variograma en la simulación secuencial gaussiana considerando direcciones
de anisotropía locales es alcanzada.
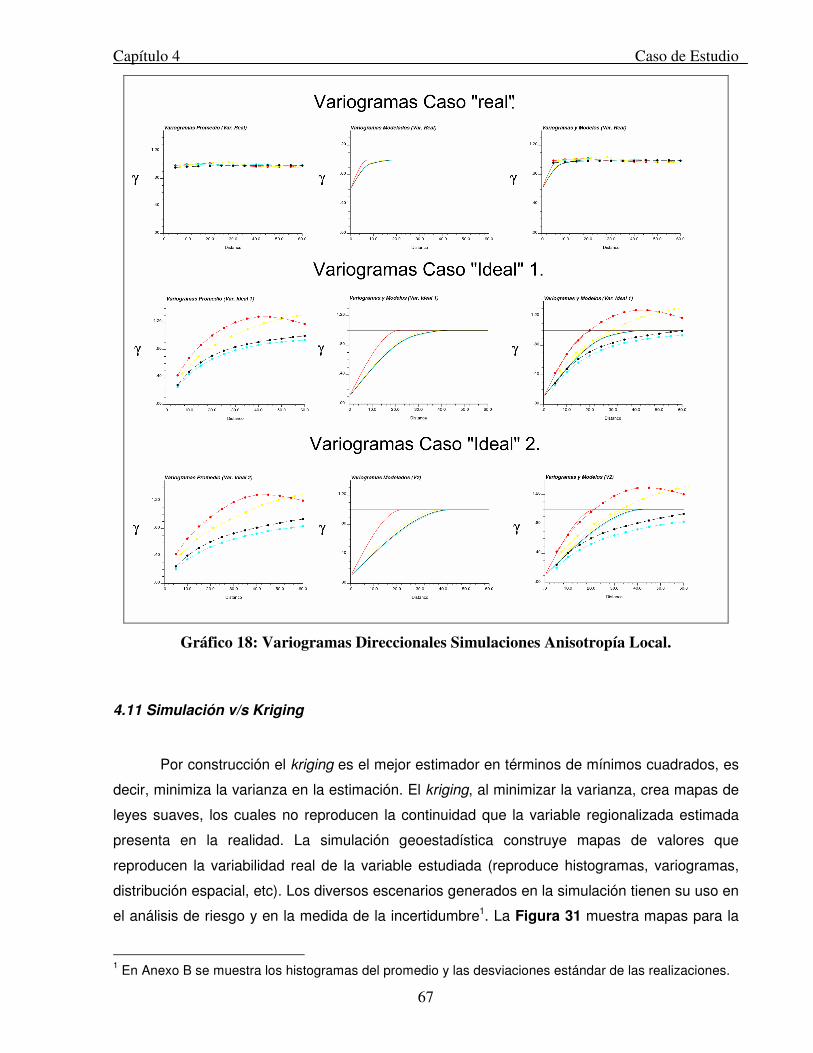
Capítulo 4 Caso de Estudio
67
Gráfico 18: Variogramas Direccionales Simulaciones Anisotropía Local.
4.11 Simulación v/s Kriging
Por construcción el kriging es el mejor estimador en términos de mínimos cuadrados, es
decir, minimiza la varianza en la estimación. El kriging, al minimizar la varianza, crea mapas de
leyes suaves, los cuales no reproducen la continuidad que la variable regionalizada estimada
presenta en la realidad. La simulación geoestadística construye mapas de valores que
reproducen la variabilidad real de la variable estudiada (reproduce histogramas, variogramas,
distribución espacial, etc). Los diversos escenarios generados en la simulación tienen su uso en
el análisis de riesgo y en la medida de la incertidumbre1. La Figura 31 muestra mapas para la
1 En Anexo B se muestra los histogramas del promedio y las desviaciones estándar de las realizaciones.

Capítulo 4 Caso de Estudio
68
planta y sección 3 generados utilizando simulación, kriging simple y kriging ordinario2. Se puede
apreciar como el kriging suaviza, particularmente el kriging simple, el cual considera la media de
los datos condicionantes en la estimación, mientras que el kriging ordinario aplica condiciones
sobre los ponderadores λ y no considera la media global de los datos condicionantes en la
estimación.
Figura 31: Simulaciones v/s Kriging.
Ya que la simulación secuencial incorpora los valores ya simulados a los datos
condicionantes, la cantidad de nodos sin simular por no contar datos condicionantes es
marginal en comparación a la estimación por kriging ordinario. Para el caso del kriging simple,
todo el espacio es estimado y en sectores donde no existe datos condicionantes la variabilidad
espacial de las leyes no existe, ya que sólo se les asigna el valor promedio de los datos
condicionantes.
Debido a las diferentes características en su construcción, el kriging y la simulación no
compiten, ya que son herramientas diseñadas para diferentes propósitos. El kriging entrega la
mejor estimación en términos de mínimos cuadradas, mientras que la simulación nos sirve para
evaluar estrategias para los distintos escenarios posibles y aunque el promedio de las
2 Para realizar el kriging se utilizan modelos “ideales” con forma similar a los modelos ideales propuestos para los datos gaussianos. Esto modelos se pueden ver en el Anexo C.
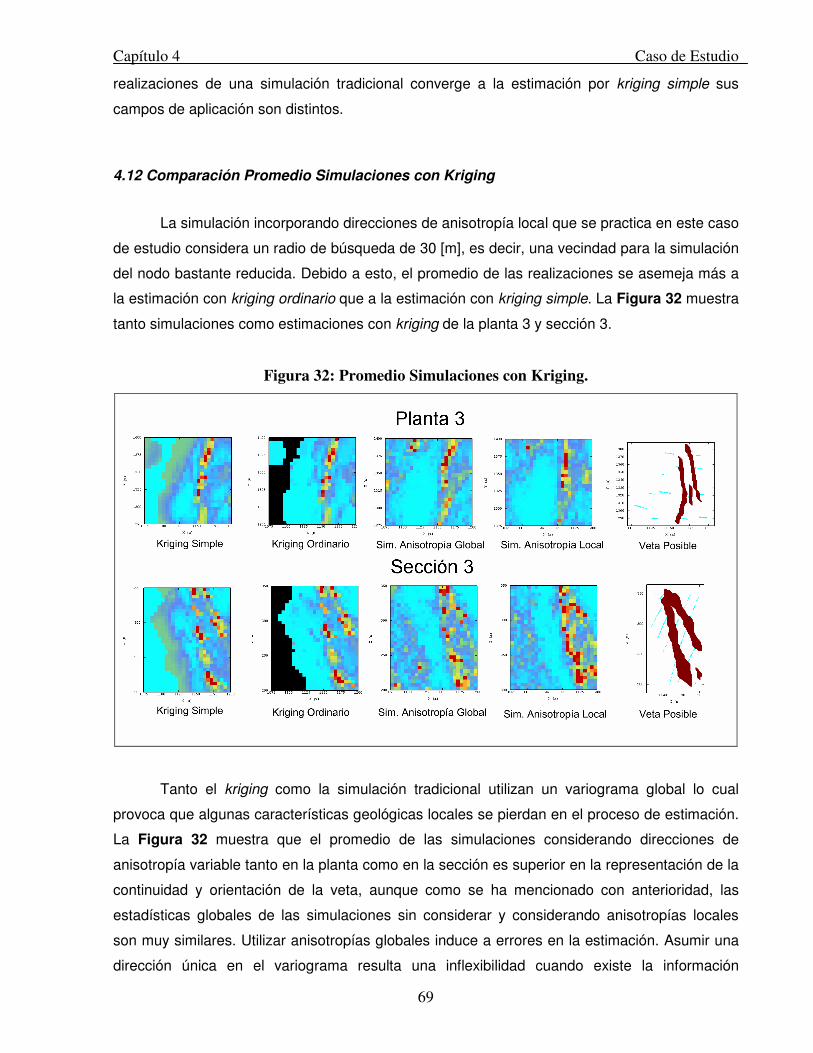
Capítulo 4 Caso de Estudio
69
realizaciones de una simulación tradicional converge a la estimación por kriging simple sus
campos de aplicación son distintos.
4.12 Comparación Promedio Simulaciones con Kriging
La simulación incorporando direcciones de anisotropía local que se practica en este caso
de estudio considera un radio de búsqueda de 30 [m], es decir, una vecindad para la simulación
del nodo bastante reducida. Debido a esto, el promedio de las realizaciones se asemeja más a
la estimación con kriging ordinario que a la estimación con kriging simple. La Figura 32 muestra
tanto simulaciones como estimaciones con kriging de la planta 3 y sección 3.
Figura 32: Promedio Simulaciones con Kriging.
Tanto el kriging como la simulación tradicional utilizan un variograma global lo cual
provoca que algunas características geológicas locales se pierdan en el proceso de estimación.
La Figura 32 muestra que el promedio de las simulaciones considerando direcciones de
anisotropía variable tanto en la planta como en la sección es superior en la representación de la
continuidad y orientación de la veta, aunque como se ha mencionado con anterioridad, las
estadísticas globales de las simulaciones sin considerar y considerando anisotropías locales
son muy similares. Utilizar anisotropías globales induce a errores en la estimación. Asumir una
dirección única en el variograma resulta una inflexibilidad cuando existe la información

Capítulo 4 Caso de Estudio
70
suficiente para considerar direcciones de anisotropías locales, lo que generalmente ocurre en
yacimientos de vetas como el considerado en este caso de estudio.
Es posible visualizar el promedio de las simulaciones considerando anisotropías locales
como un kriging ordinario con características de kriging morfológico, pues también se considera
las direcciones de anisotropía locales, pero que a diferencia de entregar un mapa de
probabilidad de pertenencia a una determinada estructura geológica nos entrega leyes
mineralógicas estimadas.
Capítulo 5 Conclusiones y Recomendaciones
71
5 Conclusiones y Recomendaciones
5.1 Conclusiones
De los resultados de este trabajao de título se desprenden las siguientes conclusiones:
Utilizar únicamente la dirección para definir campos de direcciones de anisotropía
variable correspondientes a estructuras geológicas sin características demasiado complejas
(por ejemplo plegamientos), resulta ser suficiente. Para casos más complejos, es necesario
hacer inferencias y utilizar el sentido de la dirección de anisotropía en la estimación del campo
para que éste represente correctamente la estructura requerida.
Se utiliza Kriging Ordinario en la estimación del campo de direcciones de continuidad
variable. El variograma utilizado debe ser muy continuo, con un alcance lo suficientemente
grande para asegurar la estimación de un campo suave en todo el espacio.
Una función variograma única para describir las correlaciones presentes en una unidad
geológica representa el promedio de las contribuciones geométricas estructurales de cada una
de las muestras presentes en dicha unidad geológica. El conjunto de características
geométricas puede ser descompuesto en las partes que la componen. El uso de anisotropías
locales se propone con este propósito y representa una forma de incorporar la geología más
allá del uso de los dos primeros momentos en la evaluación de recursos.
Para que el algoritmo de simulación secuencial considere la presencia de anisotropías
locales se realiza una rotación en la elipse de anisotropía global en forma coincidente a los
ángulos locales ( , , )i i i
α φ σ , previamente generados en la estimación del campo de direcciones
de anisotropía, en cada nodo ix . Debido a esto se modifica la búsqueda y el sistema de Kriging
Simple de la simulación. El algoritmo de simulación considerando direcciones de continuidad
variable es notoriamente más lento que el algoritmo tradicional debido a que un algoritmo de
búsqueda eficiente no se puede practicar porque la configuración de valores de variograma
para los nodos en la vecindad de kriging es variable con la anisotropía local.
Capítulo 5 Conclusiones y Recomendaciones
72
El beneficio del uso de anisotropías locales frente al uso de un variograma único en la
simulación de una unidad geológica resulta evidente. Gracias a su uso en el caso de estudio, se
logra representar de mejor manera el cambio de la dirección de continuidad o la continuidad
dentro de estructuras geológicas con carácter curvilíneo. Se aprecia que la continuidad y
orientación de las vetas, tanto de las realizaciones como del promedio de éstas, al ser
comparadas con la interpretación geológica de las mismas, resulta ser mucho mejor alcanzada
al utilizar direcciones de anisotropía locales. No obstante a lo anterior, las estadísticas globales
entre la simulaciones desarrolladas y la tradicional son sumamente parecidas.
El promedio de las simulaciones considerando anisotropías locales puede ser
considerado como un kriging ordinario con características de kriging morfológico, pero que a
diferencia de entregar un mapa de probabilidad de pertenencia a una determinada estructura
geológica nos entrega leyes mineralógicas estimadas. Tanto las realizaciones como el promedio
de las mismas pueden resultar útiles para la extrapolación del modelo geológico inferido. Esta
extrapolación satisface las características estructurales presentes en el yacimiento, ya que la
simulación utilizada considera las herramientas estructurales en la generación de las
realizaciones.
El uso de variogramas “ideales” en el caso de estudio resulta beneficioso para la
ilustración del uso de anisotropías locales en la simulación geoestadística.
5.2 Recomendaciones
Luego de realizado este estudio surgen las siguientes ideas y recomendaciones para ser
consideradas en posibles mejoras a este trabajo:
Si bien el uso de Kriging Ordinario reproduce satisfactoriamente la forma que podría
tener el campo de direcciones de continuidad, los campos generados resultan demasiado
suaves y claramente no reproducen la variabilidad que estas direcciones poseen en la realidad.
La simulación de direcciones de continuidad constituye una alternativa para evaluar la
trascendencia de considerar campos que reproduzcan la realidad de mejor manera.
Resulta interesante evaluar la influencia que el radio de búsqueda ejerce en la
simulación geoestadística incorporando direcciones de continuidad variable. Es aconsejable
definir un radio de búsqueda máximo, en una posible relación con la varianza de las direcciones

Capítulo 5 Conclusiones y Recomendaciones
73
de anisotropías locales, para que el uso de anisotropías locales no pierda consistencia al
evaluar pares de datos bajo un variograma que no los representa.
Extender el uso de parámetros locales en la simulación y estimación es otro tema de
interés. Por ejemplo, alcances de variogramas locales, los cuales consideren el grado de
confianza que se posee en que un determinado punto pertenezca a una cierta unidad geológica.
Utilizar el campo de probabilidades entregado por el Kriging Morfológico como un indicador de
la confianza que uno posee sobre los vecinos considerados en la simulación puede ser
considerado.
Capítulo 6 Bibliografía
74
6 Bibliografía
[1] Dae S. Young. Random Vectors and Spatial Analysis by Geostatistics for Geotechnical
Applications. Mathematical Geology, Vol. 19, No. 6, pp. 469-470.
[2] Deutsch C.V., Journel A. G. (1998). GSLIB: Geostatistical Software Library and User’s
Guide. Segunda Edición, Oxford University Press, New York, pp.223-226.
[3] Emery X. (2000). Apunte Geoestadística Lineal. Departamento de Ingeniería de Minas,
Facultad de Ciencias Físicas y Matemáticas, Universidad de Chile. pp. 81-87.
[4] Emery X. (2001). Apunte Simulación Estocástica y Geoestadística No Lineal.
Departamento de Ingeniería de Minas, Facultad de Ciencias Físicas y Matemáticas,
Universidad de Chile, pp. 260-263.
[8] Goovaerts P. (1997). Geostatistics for Natural Resources Evaluation, University of Oxford
Press, New York, pp. 476-485.
[5] Guardiano B., Srivastava M., (1993). Multivariate Geostatistics: Beyond Bivariate
Moments. In A. Soares, editor, Geostatistics Troia ’92, volume 1, pp. 133-135.
[6] Journel A. G., Huijbregts C. J., (1978). Mining Geostatistics, Academic Press, London,
1978, 600 p.
[7] Ortiz J. M., Deutsch C. V., (2004). Indicador Simulation Acounting for Multiple-Point
Statistics. Mathematical Geology, Vol. 36, No. 5, pp. 545-558.
[9] Soares A. (1990). Geostatistical Estimation of Orebody Geometry: Morphological Kriging.
Mathematical Geology, Vol. 22, No. 7, pp. 487-492.
[10] Xu W., Journel A. G.. (1990). Conditional Curvilinear Stochastic Simulation Using Pixel-
based Algorithms. Mathematical Geology, Vol. 28, No. 7, pp. 937-949.
Anexos
75
Anexos
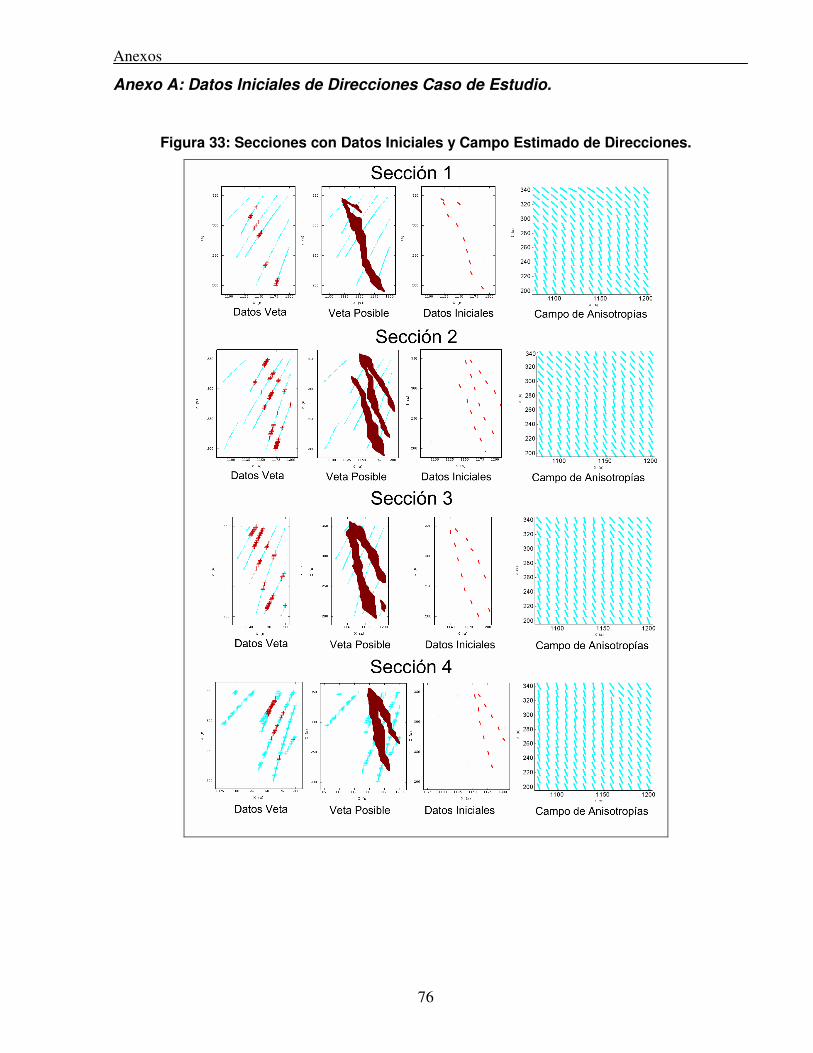
Anexos
76
Anexo A: Datos Iniciales de Direcciones Caso de Estudio.
Figura 33: Secciones con Datos Iniciales y Campo Estimado de Direcciones.
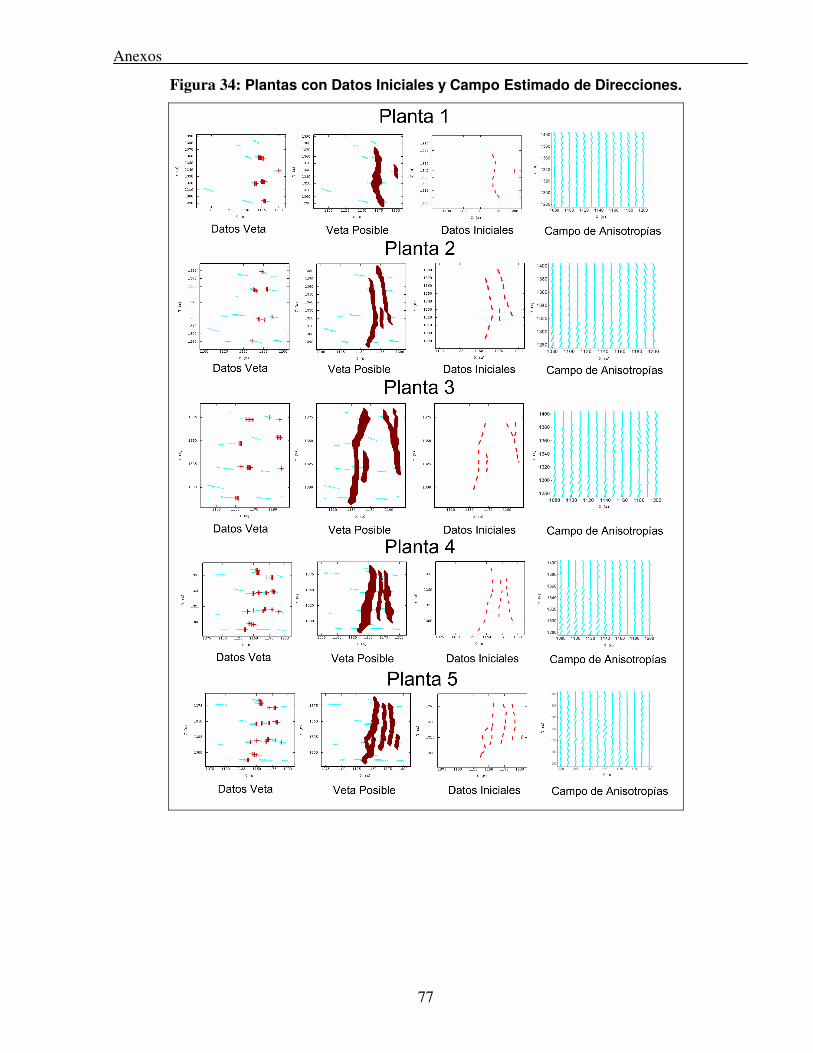
Anexos
77
Figura 34: Plantas con Datos Iniciales y Campo Estimado de Direcciones.
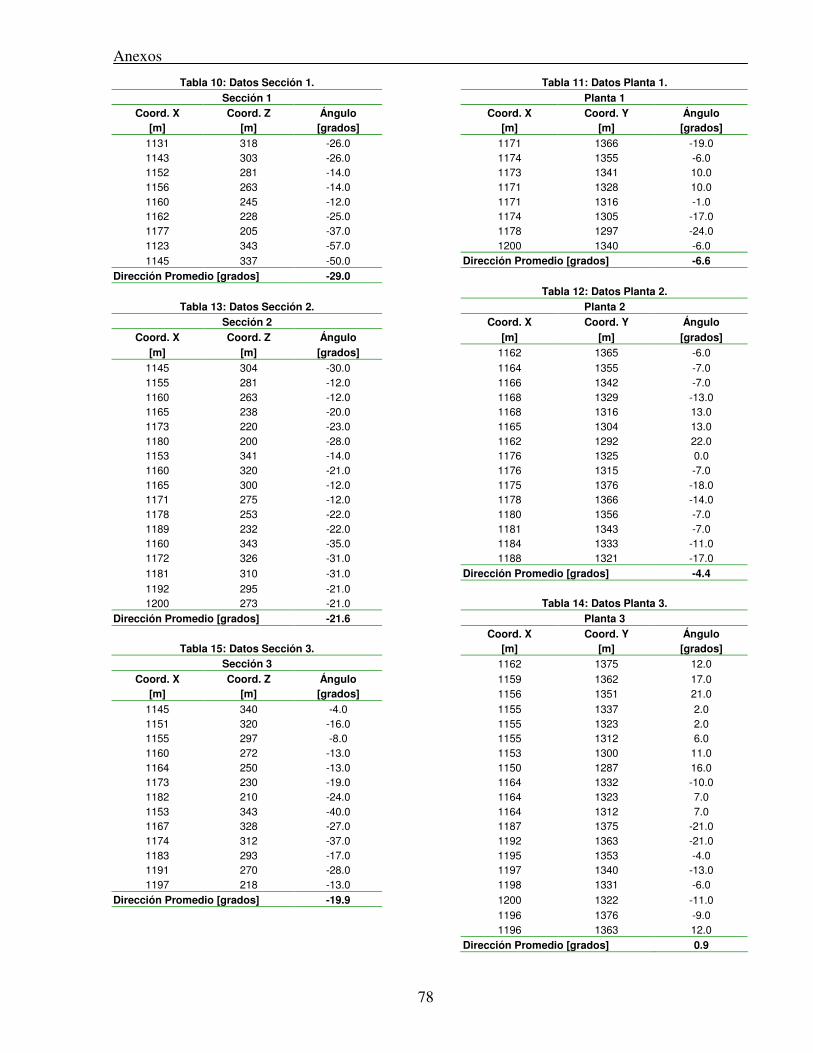
Anexos
78
Tabla 10: Datos Sección 1. Tabla 11: Datos Planta 1.
Sección 1 Planta 1 Coord. X Coord. Z Ángulo Coord. X Coord. Y Ángulo
[m] [m] [grados] [m] [m] [grados]
1131 318 -26.0 1171 1366 -19.0 1143 303 -26.0 1174 1355 -6.0 1152 281 -14.0 1173 1341 10.0 1156 263 -14.0 1171 1328 10.0 1160 245 -12.0 1171 1316 -1.0 1162 228 -25.0 1174 1305 -17.0 1177 205 -37.0 1178 1297 -24.0 1123 343 -57.0 1200 1340 -6.0 1145 337 -50.0 Dirección Promedio [grados] -6.6
Dirección Promedio [grados] -29.0 Tabla 12: Datos Planta 2.
Tabla 13: Datos Sección 2. Planta 2 Sección 2 Coord. X Coord. Y Ángulo
Coord. X Coord. Z Ángulo [m] [m] [grados] [m] [m] [grados] 1162 1365 -6.0
1145 304 -30.0 1164 1355 -7.0 1155 281 -12.0 1166 1342 -7.0 1160 263 -12.0 1168 1329 -13.0 1165 238 -20.0 1168 1316 13.0 1173 220 -23.0 1165 1304 13.0 1180 200 -28.0 1162 1292 22.0 1153 341 -14.0 1176 1325 0.0 1160 320 -21.0 1176 1315 -7.0 1165 300 -12.0 1175 1376 -18.0 1171 275 -12.0 1178 1366 -14.0 1178 253 -22.0 1180 1356 -7.0 1189 232 -22.0 1181 1343 -7.0 1160 343 -35.0 1184 1333 -11.0 1172 326 -31.0 1188 1321 -17.0 1181 310 -31.0 Dirección Promedio [grados] -4.4
1192 295 -21.0 1200 273 -21.0 Tabla 14: Datos Planta 3.
Dirección Promedio [grados] -21.6 Planta 3
Coord. X Coord. Y Ángulo Tabla 15: Datos Sección 3. [m] [m] [grados]
Sección 3 1162 1375 12.0 Coord. X Coord. Z Ángulo 1159 1362 17.0
[m] [m] [grados] 1156 1351 21.0 1145 340 -4.0 1155 1337 2.0 1151 320 -16.0 1155 1323 2.0 1155 297 -8.0 1155 1312 6.0 1160 272 -13.0 1153 1300 11.0 1164 250 -13.0 1150 1287 16.0 1173 230 -19.0 1164 1332 -10.0 1182 210 -24.0 1164 1323 7.0 1153 343 -40.0 1164 1312 7.0 1167 328 -27.0 1187 1375 -21.0 1174 312 -37.0 1192 1363 -21.0 1183 293 -17.0 1195 1353 -4.0 1191 270 -28.0 1197 1340 -13.0 1197 218 -13.0 1198 1331 -6.0
Dirección Promedio [grados] -19.9 1200 1322 -11.0 1196 1376 -9.0 1196 1363 12.0 Dirección Promedio [grados] 0.9
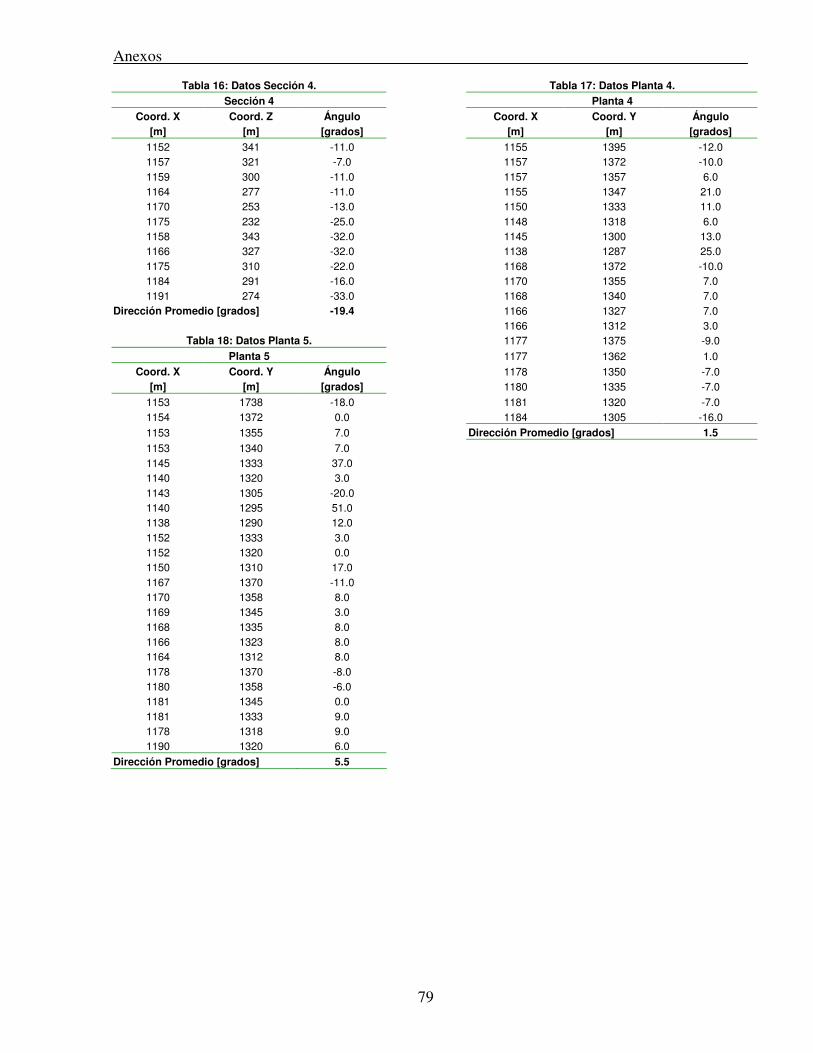
Anexos
79
Tabla 16: Datos Sección 4. Tabla 17: Datos Planta 4.
Sección 4 Planta 4
Coord. X Coord. Z Ángulo Coord. X Coord. Y Ángulo [m] [m] [grados] [m] [m] [grados]
1152 341 -11.0 1155 1395 -12.0 1157 321 -7.0 1157 1372 -10.0 1159 300 -11.0 1157 1357 6.0 1164 277 -11.0 1155 1347 21.0 1170 253 -13.0 1150 1333 11.0 1175 232 -25.0 1148 1318 6.0 1158 343 -32.0 1145 1300 13.0 1166 327 -32.0 1138 1287 25.0 1175 310 -22.0 1168 1372 -10.0 1184 291 -16.0 1170 1355 7.0 1191 274 -33.0 1168 1340 7.0
Dirección Promedio [grados] -19.4 1166 1327 7.0 1166 1312 3.0
Tabla 18: Datos Planta 5. 1177 1375 -9.0
Planta 5 1177 1362 1.0 Coord. X Coord. Y Ángulo 1178 1350 -7.0
[m] [m] [grados] 1180 1335 -7.0
1153 1738 -18.0 1181 1320 -7.0 1154 1372 0.0 1184 1305 -16.0
1153 1355 7.0 Dirección Promedio [grados] 1.5
1153 1340 7.0 1145 1333 37.0 1140 1320 3.0 1143 1305 -20.0 1140 1295 51.0 1138 1290 12.0 1152 1333 3.0 1152 1320 0.0 1150 1310 17.0 1167 1370 -11.0 1170 1358 8.0 1169 1345 3.0 1168 1335 8.0 1166 1323 8.0 1164 1312 8.0 1178 1370 -8.0 1180 1358 -6.0 1181 1345 0.0 1181 1333 9.0 1178 1318 9.0 1190 1320 6.0
Dirección Promedio [grados] 5.5
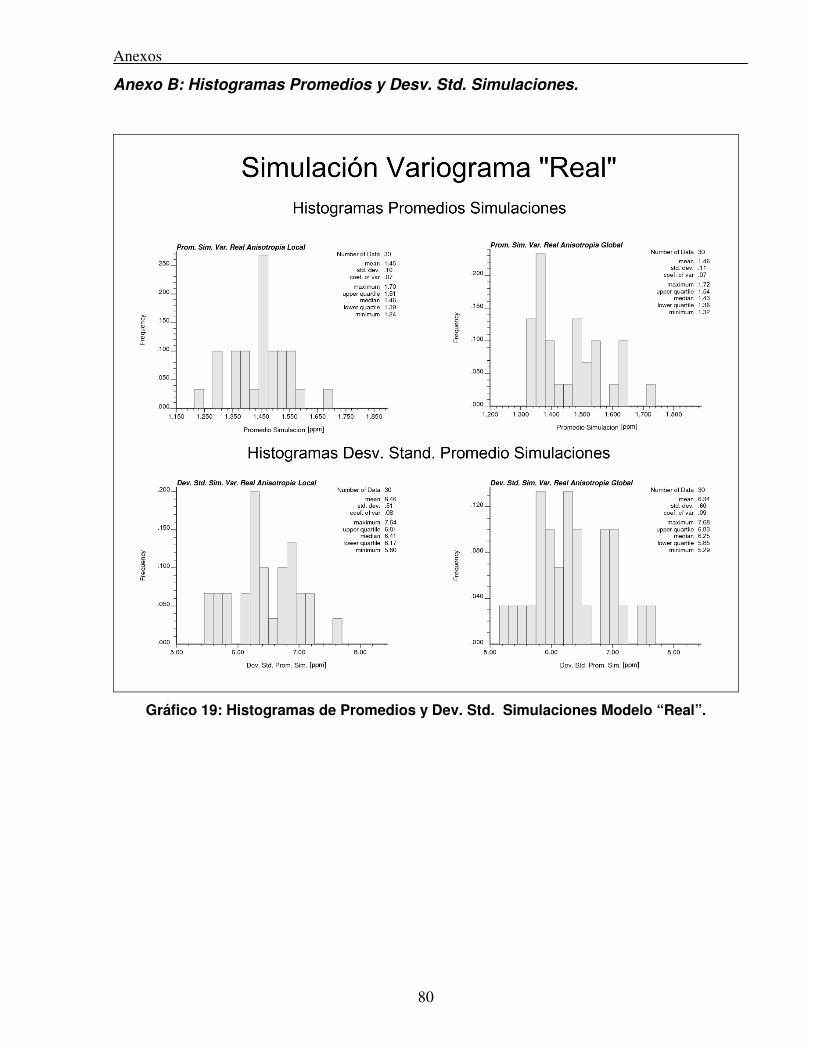
Anexos
80
Anexo B: Histogramas Promedios y Desv. Std. Simulaciones.
Gráfico 19: Histogramas de Promedios y Dev. Std. Simulaciones Modelo “Real”.
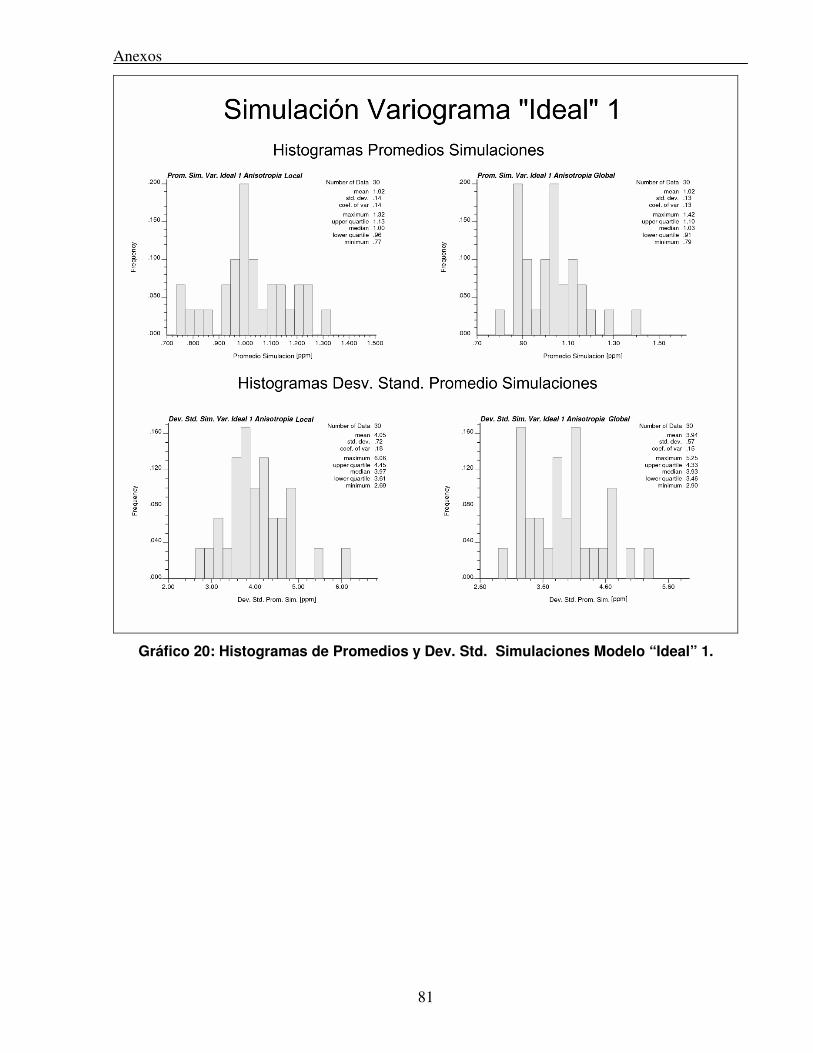
Anexos
81
Gráfico 20: Histogramas de Promedios y Dev. Std. Simulaciones Modelo “Ideal” 1.
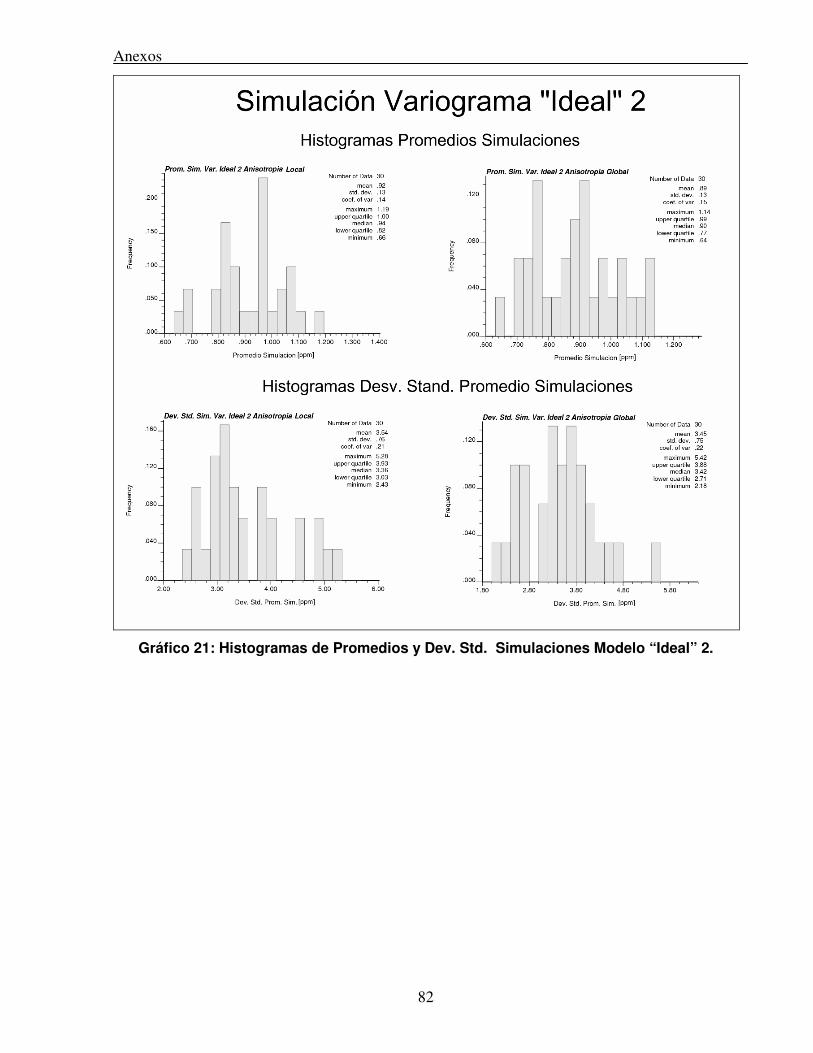
Anexos
82
Gráfico 21: Histogramas de Promedios y Dev. Std. Simulaciones Modelo “Ideal” 2.
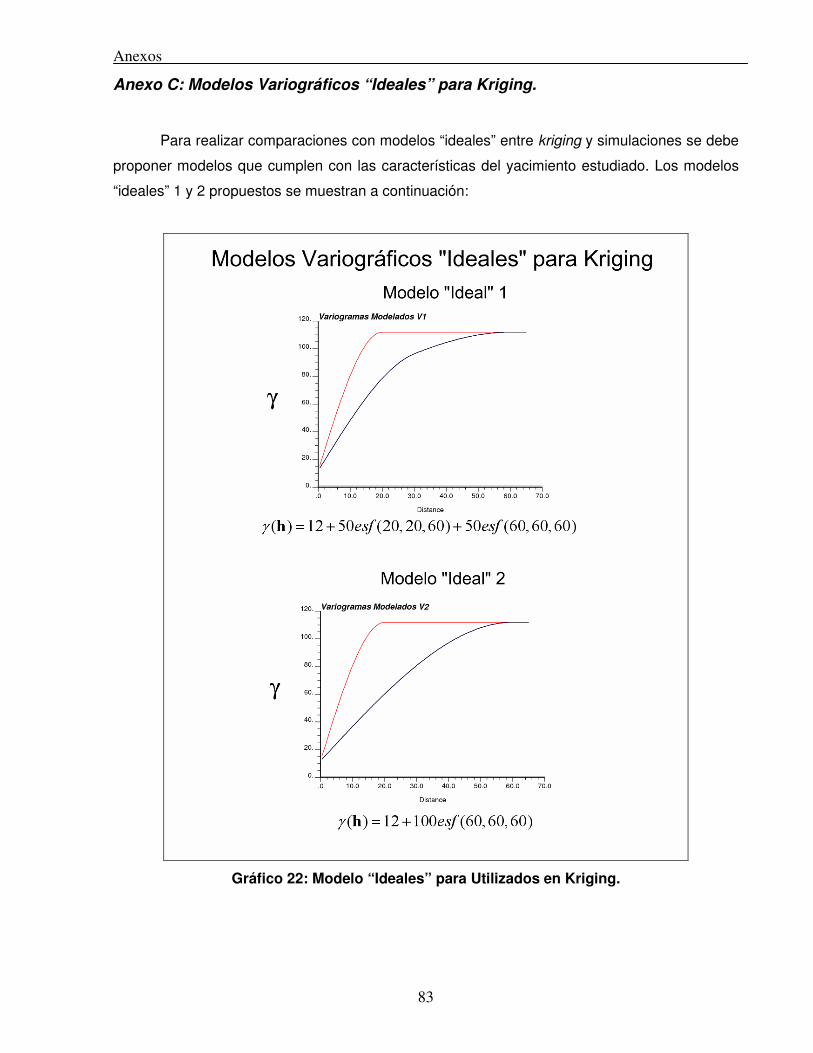
Anexos
83
Anexo C: Modelos Variográficos “Ideales” para Kriging.
Para realizar comparaciones con modelos “ideales” entre kriging y simulaciones se debe
proponer modelos que cumplen con las características del yacimiento estudiado. Los modelos
“ideales” 1 y 2 propuestos se muestran a continuación:
Gráfico 22: Modelo “Ideales” para Utilizados en Kriging.
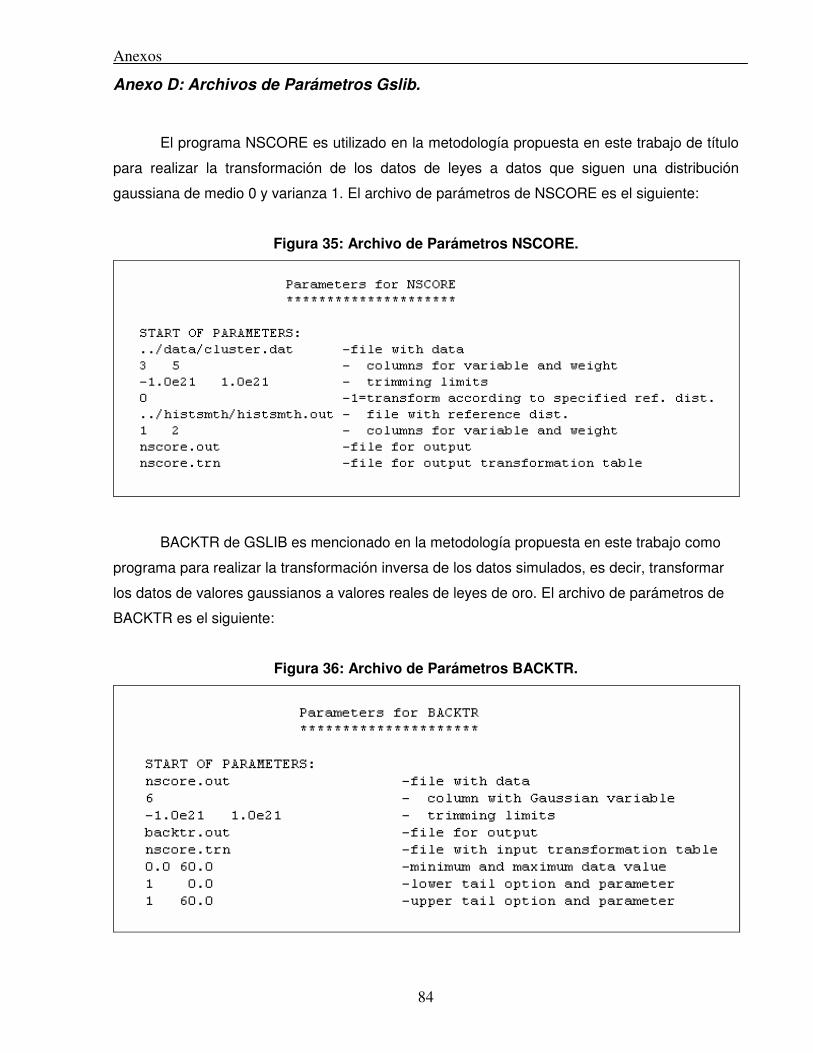
Anexos
84
Anexo D: Archivos de Parámetros Gslib.
El programa NSCORE es utilizado en la metodología propuesta en este trabajo de título
para realizar la transformación de los datos de leyes a datos que siguen una distribución
gaussiana de medio 0 y varianza 1. El archivo de parámetros de NSCORE es el siguiente:
Figura 35: Archivo de Parámetros NSCORE.
BACKTR de GSLIB es mencionado en la metodología propuesta en este trabajo como
programa para realizar la transformación inversa de los datos simulados, es decir, transformar
los datos de valores gaussianos a valores reales de leyes de oro. El archivo de parámetros de
BACKTR es el siguiente:
Figura 36: Archivo de Parámetros BACKTR.
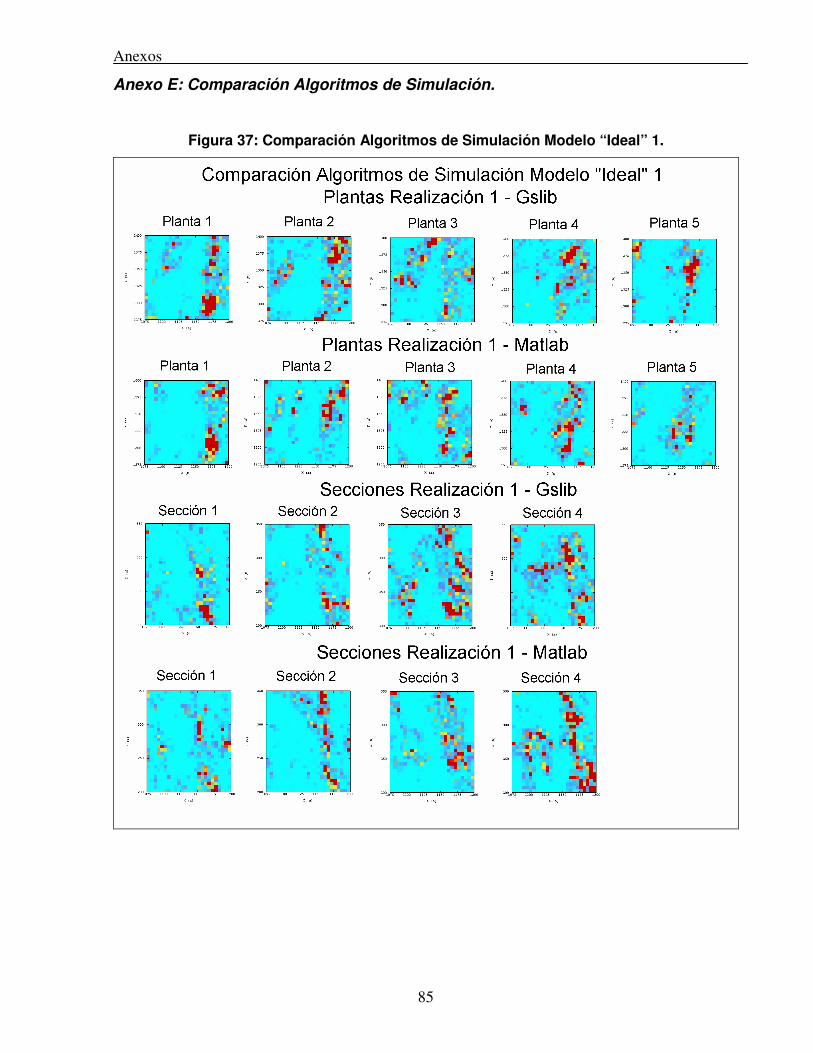
Anexos
85
Anexo E: Comparación Algoritmos de Simulación.
Figura 37: Comparación Algoritmos de Simulación Modelo “Ideal” 1.

Anexos
86
Figura 38: Comparación Algoritmos de Simulación Modelo “Ideal” 2.
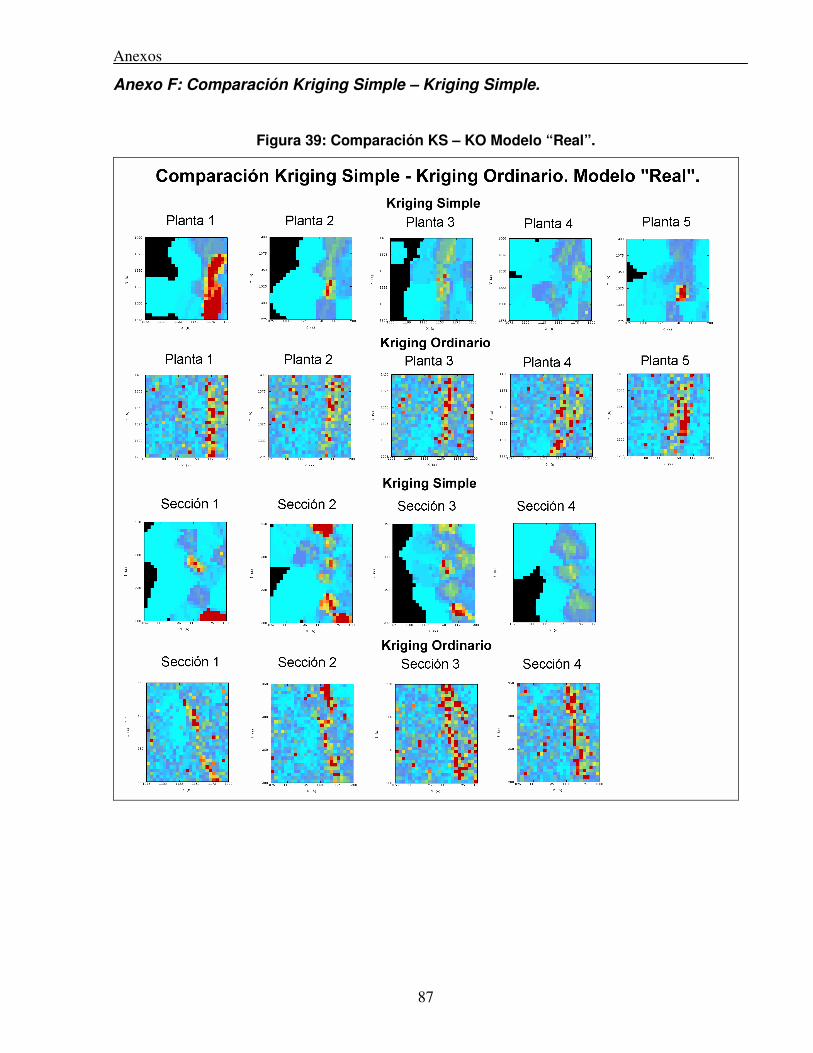
Anexos
87
Anexo F: Comparación Kriging Simple – Kriging Simple.
Figura 39: Comparación KS – KO Modelo “Real”.
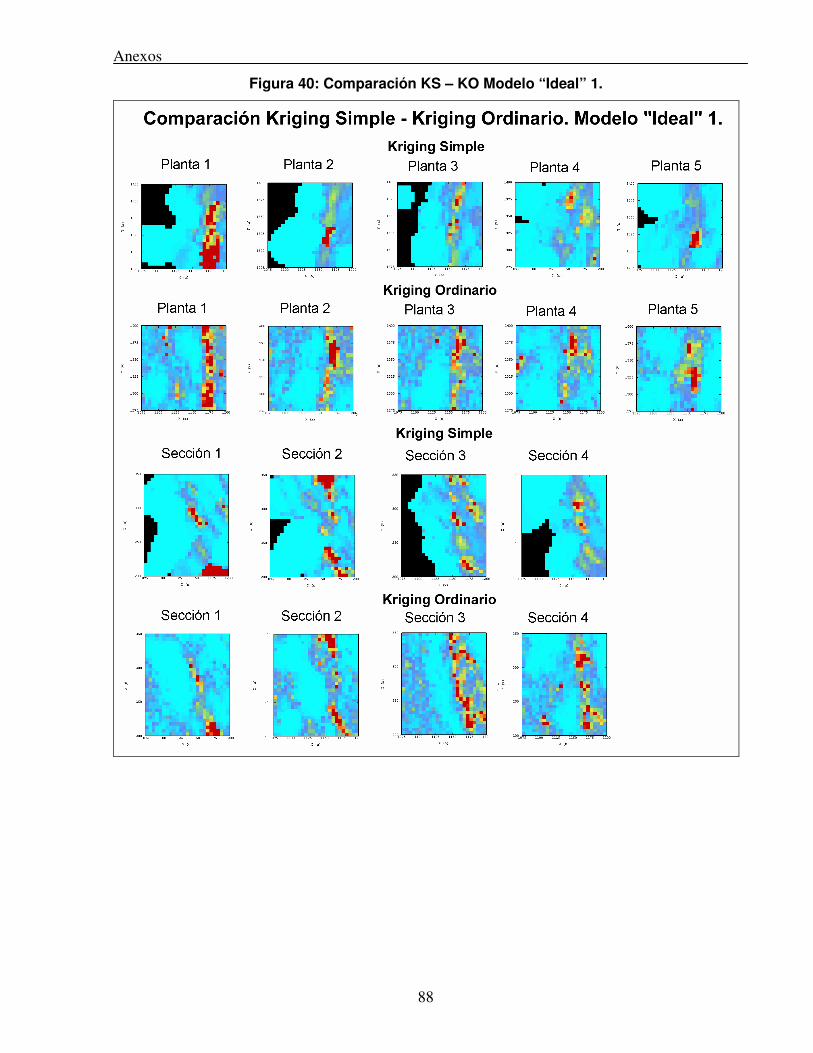
Anexos
88
Figura 40: Comparación KS – KO Modelo “Ideal” 1.
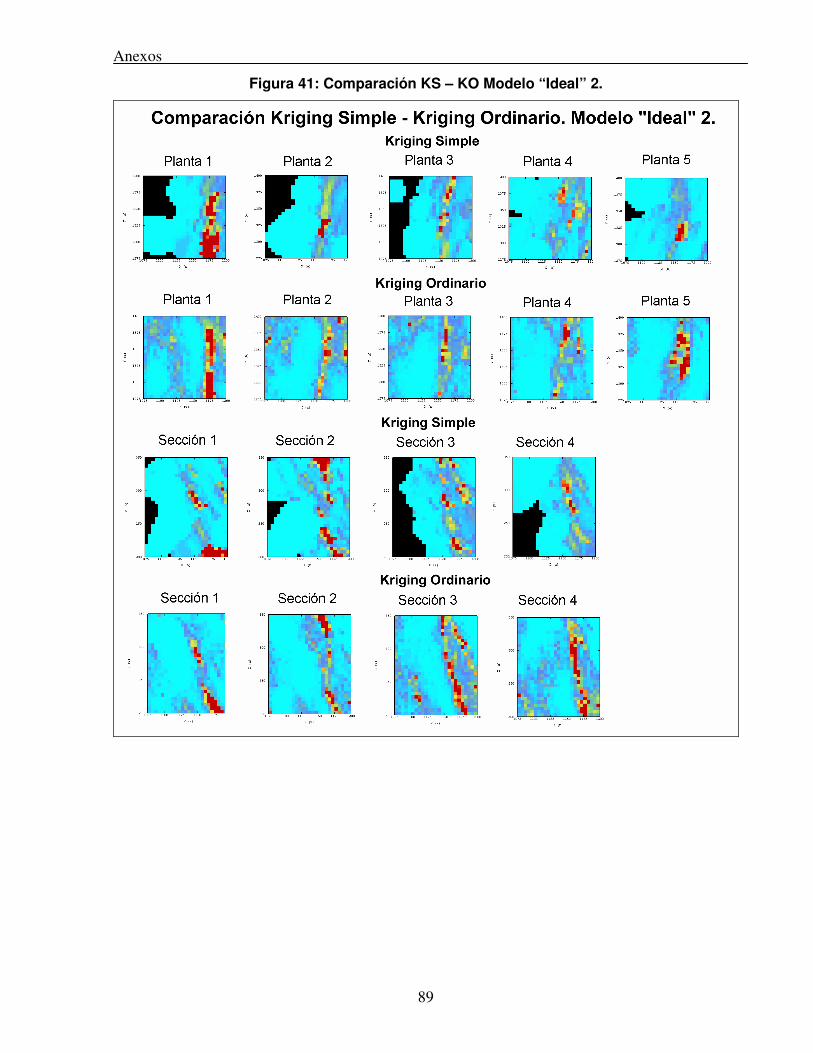
Anexos
89
Figura 41: Comparación KS – KO Modelo “Ideal” 2.
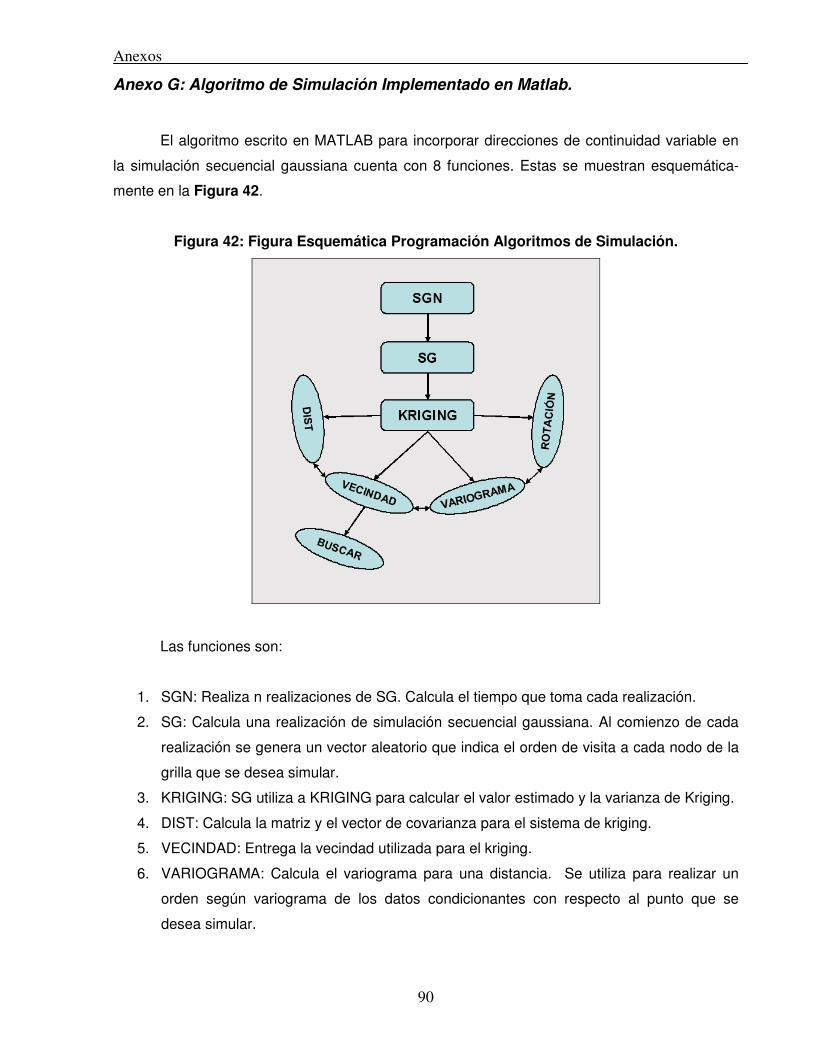
Anexos
90
Anexo G: Algoritmo de Simulación Implementado en Matlab.
El algoritmo escrito en MATLAB para incorporar direcciones de continuidad variable en
la simulación secuencial gaussiana cuenta con 8 funciones. Estas se muestran esquemática-
mente en la Figura 42.
Figura 42: Figura Esquemática Programación Algoritmos de Simulación.
Las funciones son:
1. SGN: Realiza n realizaciones de SG. Calcula el tiempo que toma cada realización.
2. SG: Calcula una realización de simulación secuencial gaussiana. Al comienzo de cada
realización se genera un vector aleatorio que indica el orden de visita a cada nodo de la
grilla que se desea simular.
3. KRIGING: SG utiliza a KRIGING para calcular el valor estimado y la varianza de Kriging.
4. DIST: Calcula la matriz y el vector de covarianza para el sistema de kriging.
5. VECINDAD: Entrega la vecindad utilizada para el kriging.
6. VARIOGRAMA: Calcula el variograma para una distancia. Se utiliza para realizar un
orden según variograma de los datos condicionantes con respecto al punto que se
desea simular.
Anexos
91
7. ROTACIÓN: Rota el sistema de coordenadas para incorporar anisotropías locales en el
algoritmo.
8. BUSCAR: Entrega una vecindad a priori, que consiste en los valores dentro del cubo
centrado en el valor que se desea simular y que posee lados iguales a dos radios de
búsqueda según coordenadas rotadas.
Se debe mencionar que el algoritmo de simulación que incorpora direcciones de
continuidad variable resulta ser bastante más lento que el algoritmo tradicional, esto es debido a
que la búsqueda espiral no se puede practicar, ya que la configuración de valores de
variograma para los nodos en la vecindad dentro del radio de búsqueda empleado en la
simulación es variable con la anisotropía local.
A continuación se muestra el código correspondiente a las 8 funciones que usa el
algoritmo de simulación:
function [result result2]=sgn(datos,grilla,rx,ry,rz,n1,n2,n3,realizaciones) result=zeros(size(grilla,1),3+realizaciones); result(:,1:3)=grilla(:,1:3); for i=1:realizaciones %Se toma el tiempo de ejecución de cada realización. tic; randn('state',sum(100*clock)); rand('state',sum(100*clock)); %Para cada una de las realizaciones se llama a la función sg. a=sg(datos,grilla,rx,ry,rz,n1,n2,n3); result(:,3+i)=a(:,4); result2(i)=toc end end
%Función entrega una realización de valores simulados para la grilla
requerida. function result=sg(datos,grid,rx,ry,rz,n1,n2,n3) n=size(grid,1); %Se genera un vector aleatorio con el orden de visita a los nodos en la %grilla. visita=randperm(n); rd=randn(n,1); simulados=ones(n,5)*-100; %Visita única a cada uno de los n nodos. for i=1:n nodo=grid(visita(i),:); x=find(simulados(:,4)~=-100); aux=simulados(x,:); estimacion=kriging(datos,aux,nodo,rx,ry,rz,n1,n2,n3); if estimacion(4)~=-100 estimacion(4)=estimacion(4)+sqrt(estimacion(5))*rd(i); end simulados(i,:)=estimacion(1:5);
Anexos
92
end result=simulados; result(:,6)=visita; %Se entregan resultados ordenados según grilla original. result=sortrows(result,6); result(:,6)=[]; end
%Sistema ax=b, x vector de pesos de kriging. function result=kriging(datos,simulados,nodo,rx,ry,rz,n1,n2,n3) data=vecindad(nodo,datos,rx,ry,rz,n1,n2); sim=vecindad(nodo,simulados,rx,ry,rz,0,n3); data=[data;sim]; if (size(data,1)==0 | size(data,1)<n1) %los datos son vecinos quedan con valor estimado -100 result=[nodo(1:3) -100 -100]; else if (size(data,1)>n2) data=sortrows(data,8); data=data(1:n2,:); end a=data(:,1:3); a=dist(a,nodo(4),nodo(5),nodo(6)); a=variograma(a); %data(:,8)=valores de variograma b=data(:,8); %Se calcula el vector y la matriz covarianzas. a=1-a; b=1-b; x=a^-1*b; z=dot(x',data(:,4)'); var=1-dot(x',b'); %Función kriging entrega las coordenadas del nodo, el valor de la %estimación (z) y la varianza de kriging (var). result=[nodo(1:3) z var]; end end
%Matriz de distancia entre los datos function result=dist(a,alpha,beta,gamma) [m]=size(a,1); result=zeros(m,m,3); for i=1:m result(i,:,1)=a(i,1)-a(:,1); end
for i=1:m result(i,:,2)=a(i,2)-a(:,2); end
for i=1:m result(i,:,3)=a(i,3)-a(:,3); end %Rotación de coordenadas for i=1:m for j=1:m result(i,j,:)=abs(rotacion([result(i,j,1) result(i,j,2)... result(i,j,3)],alpha,beta,gamma));
Anexos
93
end end end
%Función que entrega datos vecinos condicionantes para el kriging. function result=vecindad(nodo,datos,rx,ry,rz,n1,n2) radio=[rx ry rz]; rmax=max(radio); result=buscar(datos,nodo(1),nodo(2),nodo(3),rmax,rmax,rmax); if (size(result,1)==0 | size(result)<n1) result=[]; else %Se rotan componentes de separación. for i=1:size(result) result(i,5:7)=abs(rotacion([nodo(1)-result(i,1) nodo(2)-... result(i,2) nodo(3)-result(i,3)],nodo(4),nodo(5),nodo(6))); end aux=result; result(:,1:3)=aux(:,5:7); result(:,5:7)=aux(:,1:3); result=buscar(result,0,0,0,radio(1),radio(2),radio(3)); if (size(result,1)==0) result=[]; else aux=result; result(:,5:7)=aux(:,1:3); result(:,1:3)=aux(:,5:7); result(:,8)=variograma(result(:,5:7)); %Se ordena según valor de variograma. result=sortrows(result,8); if size(result,1)>=n2 result=result(1:n2,:); elseif size(result,1)<n1 result=[]; end end end end
%Se considera el sistema de kriging ax=b. %Ejemplo utilizando variograma "ideal" 2. function result=variograma(a) [m n o]=size(a); %Caso en que se debe calcular el variograma a al vector b del sistema de
kriging. if o==1 result=zeros(m,1); for i=1:m result(i)=0.6+0.26*((3/2)*(sqrt((a(i,1)/7)^2+(a(i,2)/9)^2+... (a(i,3)/9)^2))-(1/2)*(sqrt((a(i,1)/7)^2+(a(i,2)/9)^2+...
(a(i,3)/9)^2))^3)+0.14*((3/2)*(sqrt((a(i,1)/7)^2+(a(i,2)/60)^2+... (a(i,3)/60)^2))-(1/2)*(sqrt((a(i,1)/7)^2+(a(i,2)/60)^2+... (a(i,3)/60)^2))^3); if((a(i,1)/7)^2+(a(i,2)/9)^2+(a(i,3)/9)^2>=1)
result(i)=0.86+0.14*((3/2)*(sqrt((a(i,1)/7)^2+(a(i,2)/60)^2+... (a(i,3)/60)^2))-(1/2)*(sqrt((a(i,1)/7)^2+(a(i,2)/60)^2+...

Anexos
94
(a(i,3)/60)^2))^3); end if (((a(i,1)/7)^2+(a(i,2)/60)^2+(a(i,3)/60)^2)>=1) result(i)=1; end end %Caso en que se debe calcular el variograma a la matriz a del sistema de
kriging. else result=zeros(m); for i=1:m for j=1:m
result(i,j)=0.6+0.26*((3/2)*(sqrt((a(i,j,1)/7)^2+(a(i,j,2)/9)^2+... (a(i,j,3)/9)^2))-(1/2)*(sqrt((a(i,j,1)/7)^2+(a(i,j,2)/9)^2+...
(a(i,j,3)/9)^2))^3)+0.14*((3/2)*(sqrt((a(i,j,1)/7)^2+(a(i,j,2)/60)^2+... (a(i,j,3)/60)^2))-
(1/2)*(sqrt((a(i,j,1)/7)^2+(a(i,j,2)/60)^2+... (a(i,j,3)/60)^2))^3); if((a(i,j,1)/7)^2+(a(i,j,2)/9)^2+(a(i,j,3)/9)^2>=1)
result(i,j)=0.86+0.14*((3/2)*(sqrt((a(i,j,1)/7)^2+(a(i,j,2)/60)^2+... (a(i,j,3)/60)^2))-
(1/2)*(sqrt((a(i,j,1)/7)^2+(a(i,j,2)/60)^2+... (a(i,j,3)/60)^2))^3); end if (((a(i,j,1)/7)^2+(a(i,j,2)/60)^2+(a(i,j,3)/60)^2)>=1) result(i,j)=1; end end end end end
%Función de rotación de coordenadas. function result=rotacion(a,alpha,beta,gamma) result=rotz(roty(rotx(a,alpha),beta),gamma); end function result=rotx(a,alpha) result=[1 0 0 0;0 cos(alpha) -sin(alpha) 0;0 sin(alpha) cos(alpha)... 0;0 0 0 1]*[a 1]'; result=result(1:3)'; end function result=roty(a,beta) result=[cos(beta) 0 sin(beta) 0;0 1 0 0;-sin(beta) 0 cos(beta) 0;... 0 0 0 1]*[a 1]'; result=result(1:3)'; end function result=rotz(a,gamma) result=[cos(gamma) -sin(gamma) 0 0;sin(gamma) cos(gamma) 0 0;... 0 0 1 0;0 0 0 1]*[a 1]'; result=result(1:3)'; end
%Entrega datos que se encuentran en la vecindad con forma cúbica con lados %iguales a los radios de buscaqueda según componentes previamente rotadas. function result=buscar(a,x0,y0,z0,dx,dy,dz) %Se llama a lookup, la cual busca por componente.
Anexos
95
result=lookup(a,x0,dx,1); result=lookup(result,y0,dy,2); result=lookup(result,z0,dz,3); end %Se busca por una componente. function result=lookup(a,x0,dx,row) result=a; if (size(a,1)==0) result=[]; else x=find(x0-dx>a(:,row) | a(:,row)>x0+dx); if (size(x,1)==size(a,1)) result=[]; else result(x,:)=[]; end end end





























