Embed Size (px)
Citation preview
I
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
“ANÁLISIS Y DESARROLLO DE UN ROBOT ARAÑA HEXÁPODO,
CONTROLADO VÍA WIFI CON CÁMARA WEB
INTEGRADA UTILIZANDO EL
MICROCOMPUTADOR
RASPBERRY PI”
TESIS DE GRADO
Previa a la obtención del Título de:
INGENIERO EN SISTEMAS COMPUTACIONALES
AUTOR:
RIKY DANNY RAMOS ZAMBRANO
GUAYAQUIL – ECUADOR
2015
II
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
ANÁLISIS Y DESARROLLO DE UN ROBOT ARAÑA HEXÁPODO,
CONTROLADO VÍA WIFI CON CÁMARA WEB
INTEGRADA UTILIZANDO EL
MICROCOMPUTADOR
RASPBERRY PI
TESIS DE GRADO
Previa a la obtención del Título de:
INGENIERO EN SISTEMAS COMPUTACIONALES
RIKY DANNY RAMOS ZAMBRANO
TUTOR: ING. JOHNNY MARCELO TORRES AMON
GUAYAQUIL – ECUADOR
2015

III
REPOSITORIO NACIONAL EN CIENCIAS Y TECNOLOGÍA
FICHA DE REGISTRO DE TESIS
“ANÁLISIS Y DESARROLLO DE UN ROBOT ARAÑA HEXÁPODO, CONTROLADO VÍA WIFI CON
CÁMARA WEB INTEGRADA UTILIZANDO EL MICROCOMPUTADOR RASPBERRY PI ”
REVISORES: no poner nada
INSTITUCIÓN: Universidad de Guayaquil FACULTAD: Ciencias Matemáticas y Físicas
CARRERA: Ingeniería en sistemas computacionales
FECHA DE PUBLICACIÓN: FECHA ACTUAL N° DE PÁGS.:
ÁREA TEMÁTICA: Robótica
PALABRAS CLAVES: Robot móvil controlado vía WIFI utilizando una página WEB, con cámara WEB integrada.
RESUMEN: Se desarrolló un robot araña hexápodo capaz de desplazarse en todas las direcciones sobre una superficie
plana con una cámara web integrada controlado vía WIFI mediante una página WEB, con un radio de movilidad de la
cámara 180° de izquierda a derecha y de arriba hacia debajo. N° DE REGISTRO(en base de datos): N° DE CLASIFICACIÓN:
Nº
DIRECCIÓN URL (tesis en la web):
ADJUNTO PDF X SI NO
CONTACTO CON AUTOR: Riky Danny Ramos Zambrano Teléfono:0981120947-
2673684
E-mail:
CONTACTO DE LA INSTITUCIÓN
Universidad de Guayaquil Carrera de Ingeniería en Sistemas
Computacionales
Dirección: Víctor Manuel Rendón 429 y Baquerizo Moreno, Guayaquil.
Nombre:
Teléfono:
II
APROBACION DEL TUTOR
En mi calidad de Tutor del trabajo de investigación, “ANÁLISIS Y DESARROLLO
DE UN ROBOT ARAÑA HEXÁPODO, CONTROLADO VÍA WIFI CON
CÁMARA WEB INTEGRADA UTILIZANDO EL MICROCOMPUTADOR
RASPBERRY PI “elaborado por el Sr.
RIKY DANNY RAMOS ZAMBRANO, egresado de la Carrera de Ingeniería en
Sistemas Computacionales, Facultad de Ciencias Matemáticas y Físicas de la
Universidad de Guayaquil, previo a la obtención del Título de Ingeniero en Sistemas,
me permito declarar que luego de haber orientado, estudiado y revisado, la Apruebo en
todas sus partes.
Atentamente
Ing. Johnny Marcelo Torres Amón.
TUTOR
III
CERTIFICACIÓN DE GRAMATÓLOGA
Quien suscribe el presente certificado, se permite informar que después de haber leído y
revisado gramaticalmente el contenido de la tesis de grado de: Riky Danny Ramos
Zambrano. Cuyo tema es:
Certifico que es un trabajo de acuerdo a las normas morfológicas, sintácticas y
simétricas vigentes.
ATENTAMENTE,
Lcda. Janet Elizabeth Pazmiño Ramírez, MSc.
GRAMATOLOGO
C.I. 0907981096
# LICENCIA 1006-14-86051272
IV
DEDICATORIA
Mi tesis se la dedico a Dios por
haberme brindado la oportunidad de
nacer dentro de una familia
maravillosa.
A mis padres por haberme
inculcado, guiado, educado de
manera adecuada ayudándome y
apoyándome siempre de manera
incondicional en cada uno de mis
proyectos y metas que me he
planteado, a ellos millón gracias por
enseñarme con valiosos ejemplos
dignos de superación y entrega.
Esta tesis también se la dedico a mis
hermanos que han sido siempre una
fuente de aliento, alegría y ganas de
superación por el esfuerzo que todos
hemos realizado por sacar adelante a
la familia siempre trabajando y
luchando de manera en conjunta por
el bienestar de todos.
Además se la dedico a mi futura hija
para que le sirva como ejemplo
demostrándole que con esfuerzo,
perseverancia, constancia, ganas de
superación y entrega se pueden
cumplir cada uno de los objetivos
que nos planteemos.
V
AGRADECIMIENTO
Primeramente agradezco a Dios el
creador y dueño de mi vida.
Segundo agradezco a mis padres,
hermanos y mi abuela que en unión
de cada uno de ustedes hemos
conformado una gran familia porque
siempre permanecieron brindándome
su apoyo siempre han estado a mi
lado ayudándome en cada una de los
problemas que se me han presentado
sirviéndome de guía y ejemplo de
superación.
Este trabajo de tesis se lo dedico y
agradezco de manera muy especial a
mi querido padre Hitler Ramos Rizzo,
que gracias a su esfuerzo y valentía ha
sabido sacar adelante a toda nuestra
familia siendo mi ejemplo a seguir
como ser humano.
Todo esto es por y gracias a
ustedes muchas gracias amada
familia.
VI
TRIBUNAL DE GRADO
Ing. Eduardo Santos Baquerizo, M.Sc.
DECANO DE LA FACULTAD
CIENCIAS MATEMATICAS Y
FISICAS
Ing. Harry Luna Aveiga, M.Sc.
DIRECTOR (E)
CISC, CIN
Ing. Johnny Marcelo Torres Amón
DIRECTOR DE TESIS
Ing. Vicente Arturo Vizueta Logroño
PROFESOR DEL ÁREA -
TRIBUNAL
Ing. Tania Guadalupe Yaguano Herrera Ab. Juan Chávez A.
PROFESOR DEL ÁREA – SECRETARIO
TRIBUNAL

1
DECLARACIÓN EXPRESA
“La responsabilidad del contenido de esta Tesis
de Grado, me corresponden exclusivamente; y
el patrimonio intelectual de la misma a la
UNIVERSIDAD DE GUAYAQUIL”
RIKY DANNY RAMOS ZAMBRANO
2
.
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMÁTICAS Y FÍSICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
ANÁLISIS Y DESARROLLO DE UN ROBOT ARAÑA HEXÁPODO,
CONTROLADO VÍA WIFI CON CÁMARA WEB
INTEGRADA UTILIZANDO EL
MICROCOMPUTADOR
RASPBERRY PI
Tesis de Grado que se presenta como requisito para optar por el título de
INGENIERO en Sistemas Computacionales
Autor/a: Riky Danny Ramos Zambrano
C.I. 0924194970
Tutor: Ing. Johnny Marcelo Torres Amón.
Guayaquil, Julio de 2015

3
CERTIFICADO DE ACEPTACIÓN DEL TUTOR
En mi calidad de Tutor de Tesis de Grado, nombrado por el Consejo Directivo de
la Facultad de Ciencias Matemáticas y Físicas de la Universidad de Guayaquil.
CERTIFICO:
Que he analizado el Proyecto de Grado presentado por el/la
estudiante Riky Danny Ramos Zambrano, como requisito previo para optar por el
título de Ingeniero en Sistemas Computacionales cuyo problema es:
ANÁLISIS Y DESARROLLO DE UN ROBOT ARAÑA HEXÁPODO,
CONTROLADO VÍA WIFI CON CÁMARA WEB INTEGRADA
UTILIZANDO EL MICROCOMPUTADOR RASPBERRY PI
Considero aprobado el trabajo en su totalidad.
Presentado por:
Ramos Zambrano Riky Danny C.I. N° 0924194970
Ing. Johnny Marcelo Torres Amón.
Tutor: ____________________________
Guayaquil, Julio de 2015

4
INDICE GENERAL
CONTENIDO
APROBACION DEL TUTOR ......................................................................... II
CERTIFICACIÓN DE GRAMATÓLOGA .................................................. III
DEDICATORIA .............................................................................................. IV
AGRADECIMIENTO ...................................................................................... V
TRIBUNAL DE GRADO ................................................................................ VI
DECLARACIÓN EXPRESA ............................................................................ 1
CERTIFICADO DE ACEPTACIÓN DEL TUTOR ........................................ 3
INDICE GENERAL .......................................................................................... 4
RESUMEN ....................................................................................................... 11
ABSTRACT ..................................................................................................... 12
INTRODUCCIÓN ........................................................................................... 12
CAPITULO I ................................................................................................... 15
EL PROBLEMA .............................................................................................. 15
PLANTEAMIENTO DEL PROBLEMA ........................................................ 15
SITUACIÓN CONFLICTO NUDOS CRÍTICOS ........................................... 18
CAUSAS Y CONSECUENCIAS DEL PROBLEMA ..................................... 18
CONSECUENCIAS....................................................................................... 19
DELIMITACIÓN DEL PROBLEMA ............................................................ 21
FORMULACIÓN DEL PROBLEMA ............................................................ 22
EVALUACIÓN DEL PROBLEMA ............................................................... 22
OBJETIVOS .................................................................................................. 24
OBJETIVOS GENERALES ........................................................................... 24
OBJETIVOS ESPECÍFICOS ......................................................................... 24
ALCANCES DEL PROBLEMA .................................................................... 25
CAPÍTULO II .................................................................................................. 29
ANTECEDENTES DEL ESTUDIO ............................................................... 29
FUNDAMENTACION TEORICA ................................................................. 29
FUNDAMENTACIÓN LEGAL ..................................................................... 51
PREGUNTAS CIENTÍFICAS A CONTESTARSE ........................................ 56
DEFINICIONES CONCEPTUALES ............................................................. 58
CAPÍTULO III ................................................................................................ 61
DISEÑO DE LA INVESTIGACIÓN .............................................................. 61

5
METODOLOGÍA DE DESARROLLO DE SOFTWARE............................... 61
TIPO DE INVESTIGACIÓN ......................................................................... 63
POBLACIÓN ................................................................................................ 64
EL TAMAÑO DE LA MUESTRA ................................................................. 65
OPERACIONALIZACIÓN DE VARIABLES ............................................... 69
INSTRUMENTOS DE RECOLECCIÓN DE DATOS .................................... 69
INSTRUMENTOS DE LA INVESTIGACIÓN .............................................. 70
VALIDACIÓN .............................................................................................. 72
PROCEDIMIENTOS DE LA INVESTIGACIÓN .......................................... 72
RECOLECCIÓN DE LA INFORMACIÓN .................................................... 73
PROCESAMIENTO Y ANÁLISIS ................................................................ 74
CAPÍTULO IV ................................................................................................. 75
CRONOGRAMA ........................................................................................... 75
PRESUPUESTO ............................................................................................ 78
CAPÍTULO V .................................................................................................. 81
CONCLUSIONES ......................................................................................... 81
RECOMENDACIONES ................................................................................ 82
BIBLIOGRAFÍA ............................................................................................. 84
ANEXOS .......................................................................................................... 87
6
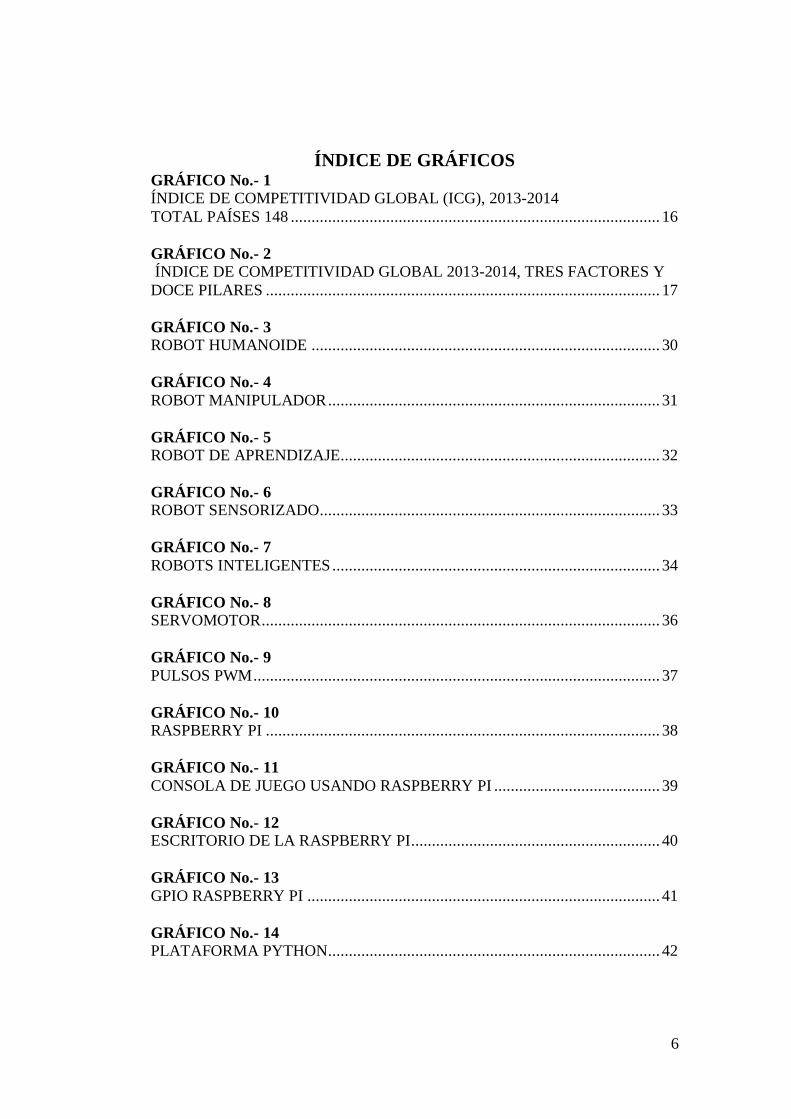
ÍNDICE DE GRÁFICOS GRÁFICO No.- 1
ÍNDICE DE COMPETITIVIDAD GLOBAL (ICG), 2013-2014
TOTAL PAÍSES 148 ......................................................................................... 16
GRÁFICO No.- 2
ÍNDICE DE COMPETITIVIDAD GLOBAL 2013-2014, TRES FACTORES Y
DOCE PILARES ............................................................................................... 17
GRÁFICO No.- 3
ROBOT HUMANOIDE .................................................................................... 30
GRÁFICO No.- 4
ROBOT MANIPULADOR ................................................................................ 31
GRÁFICO No.- 5
ROBOT DE APRENDIZAJE............................................................................. 32
GRÁFICO No.- 6
ROBOT SENSORIZADO.................................................................................. 33
GRÁFICO No.- 7
ROBOTS INTELIGENTES ............................................................................... 34
GRÁFICO No.- 8
SERVOMOTOR ................................................................................................ 36
GRÁFICO No.- 9
PULSOS PWM .................................................................................................. 37
GRÁFICO No.- 10
RASPBERRY PI ............................................................................................... 38
GRÁFICO No.- 11
CONSOLA DE JUEGO USANDO RASPBERRY PI ........................................ 39
GRÁFICO No.- 12
ESCRITORIO DE LA RASPBERRY PI ............................................................ 40
GRÁFICO No.- 13
GPIO RASPBERRY PI ..................................................................................... 41
GRÁFICO No.- 14
PLATAFORMA PYTHON ................................................................................ 42
7
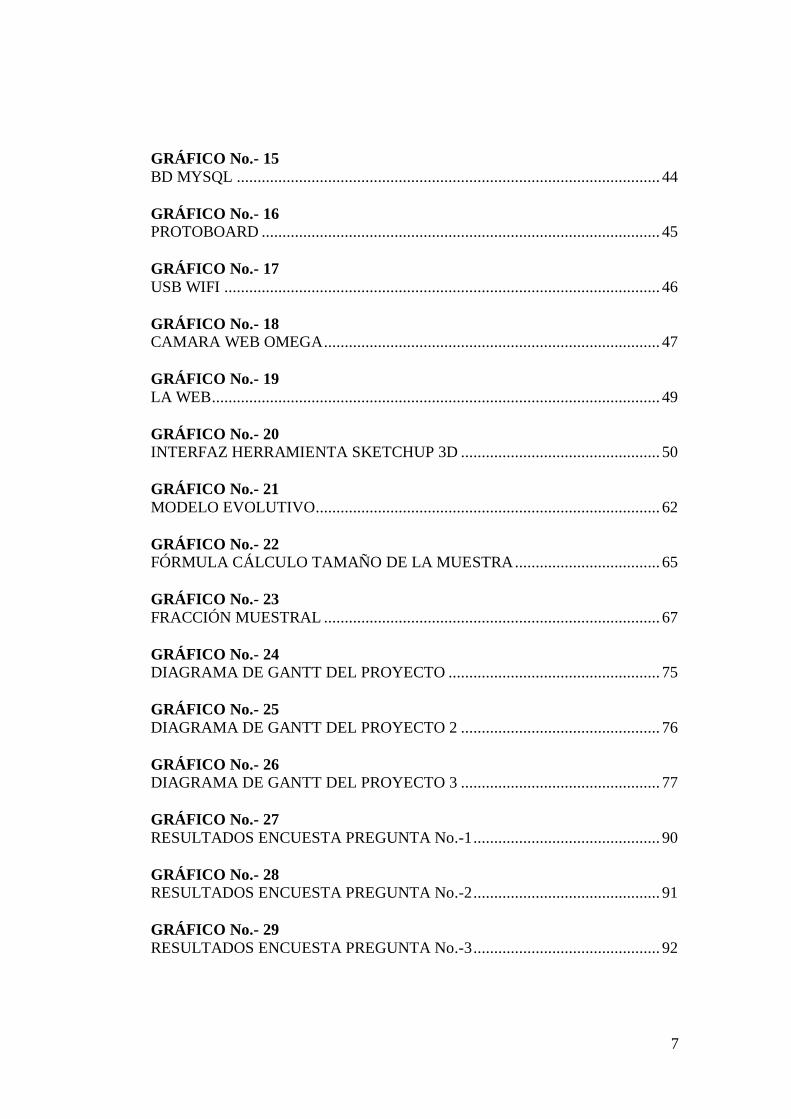
GRÁFICO No.- 15
BD MYSQL ...................................................................................................... 44
GRÁFICO No.- 16
PROTOBOARD ................................................................................................ 45
GRÁFICO No.- 17
USB WIFI ......................................................................................................... 46
GRÁFICO No.- 18
CAMARA WEB OMEGA ................................................................................. 47
GRÁFICO No.- 19
LA WEB ............................................................................................................ 49
GRÁFICO No.- 20
INTERFAZ HERRAMIENTA SKETCHUP 3D ................................................ 50
GRÁFICO No.- 21
MODELO EVOLUTIVO ................................................................................... 62
GRÁFICO No.- 22
FÓRMULA CÁLCULO TAMAÑO DE LA MUESTRA ................................... 65
GRÁFICO No.- 23
FRACCIÓN MUESTRAL ................................................................................. 67
GRÁFICO No.- 24
DIAGRAMA DE GANTT DEL PROYECTO ................................................... 75
GRÁFICO No.- 25
DIAGRAMA DE GANTT DEL PROYECTO 2 ................................................ 76
GRÁFICO No.- 26
DIAGRAMA DE GANTT DEL PROYECTO 3 ................................................ 77
GRÁFICO No.- 27
RESULTADOS ENCUESTA PREGUNTA No.-1 ............................................. 90
GRÁFICO No.- 28
RESULTADOS ENCUESTA PREGUNTA No.-2 ............................................. 91
GRÁFICO No.- 29
RESULTADOS ENCUESTA PREGUNTA No.-3 ............................................. 92
8
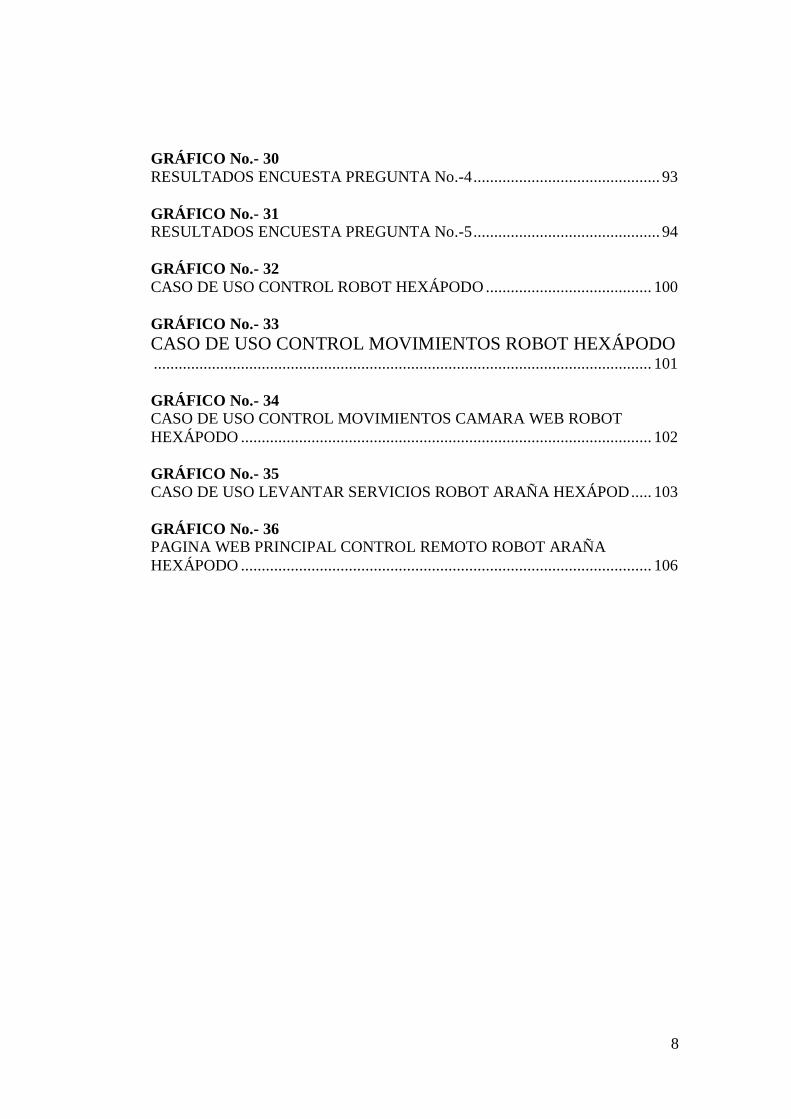
GRÁFICO No.- 30
RESULTADOS ENCUESTA PREGUNTA No.-4 ............................................. 93
GRÁFICO No.- 31
RESULTADOS ENCUESTA PREGUNTA No.-5 ............................................. 94
GRÁFICO No.- 32
CASO DE USO CONTROL ROBOT HEXÁPODO ........................................ 100
GRÁFICO No.- 33
CASO DE USO CONTROL MOVIMIENTOS ROBOT HEXÁPODO ........................................................................................................................ 101
GRÁFICO No.- 34
CASO DE USO CONTROL MOVIMIENTOS CAMARA WEB ROBOT
HEXÁPODO ................................................................................................... 102
GRÁFICO No.- 35
CASO DE USO LEVANTAR SERVICIOS ROBOT ARAÑA HEXÁPOD ..... 103
GRÁFICO No.- 36
PAGINA WEB PRINCIPAL CONTROL REMOTO ROBOT ARAÑA
HEXÁPODO ................................................................................................... 106

9
ÍNDICE DE CUADROS
CUADRO No. 1
CAUSAS Y CONSECUENCIAS 1 .................................................................... 20
CUADRO No. 2
CAUSAS Y CONSECUENCIAS 2 .................................................................... 21
CUADRO No. 3
CLASIFICACIÓN DE LOS ROBOTS SEGÚN T. M. KNASEL ....................... 35
CUADRO No. 4
VARIABLES DE LA INVESTIGACIÓN .......................................................... 57
CUADRO No. 5
MUESTRA ESTRATIFICADA PROPORCIONAL DE LOS ESTUDIANTES . 68
CUADRO No. 6
MATRIZ DE OPERACIONALIZACIÓN DE VARIABLES ............................. 69
CUADRO No. 7
INGRESOS ....................................................................................................... 78
CUADRO No. 8
COSTO HARDWARE Y PIEZAS DEL ROBOT .............................................. 79
CUADRO No. 9
COSTO LICENCIAS SOFTWARE ................................................................... 79
CUADRO No. 10
EGRESOS ......................................................................................................... 80
10
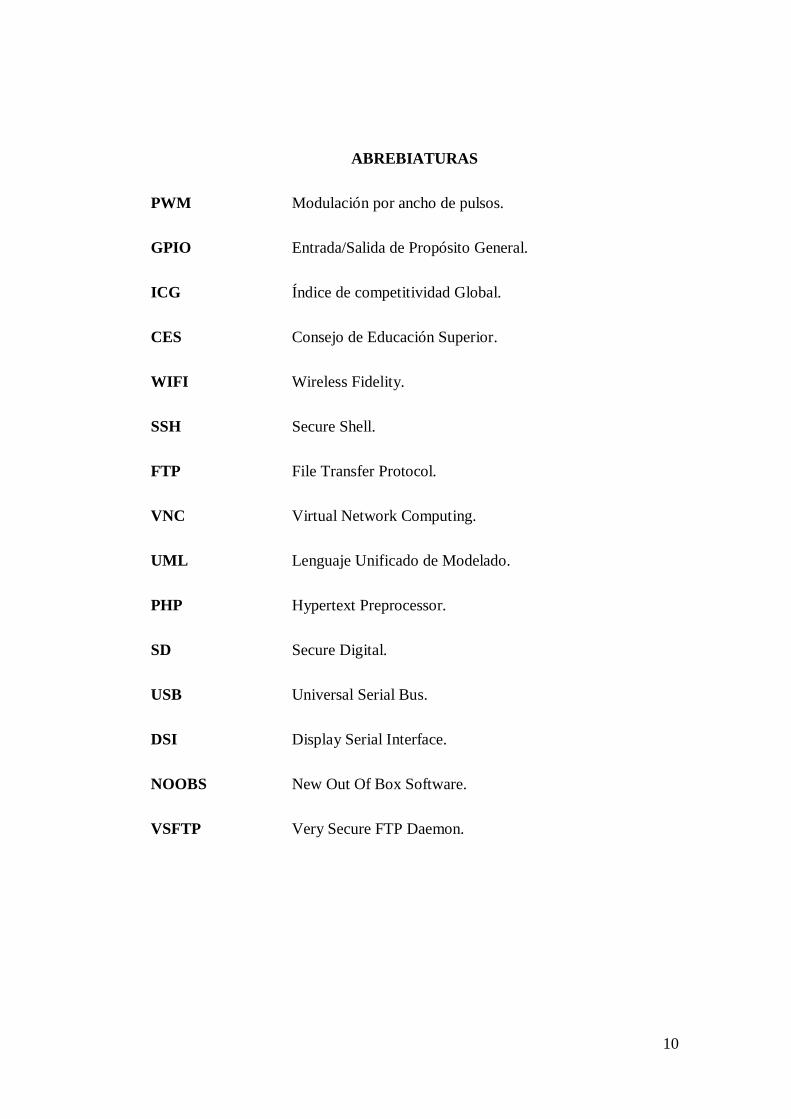
ABREBIATURAS
PWM Modulación por ancho de pulsos.
GPIO Entrada/Salida de Propósito General.
ICG Índice de competitividad Global.
CES Consejo de Educación Superior.
WIFI Wireless Fidelity.
SSH Secure Shell.
FTP File Transfer Protocol.
VNC Virtual Network Computing.
UML Lenguaje Unificado de Modelado.
PHP Hypertext Preprocessor.
SD Secure Digital.
USB Universal Serial Bus.
DSI Display Serial Interface.
NOOBS New Out Of Box Software.
VSFTP Very Secure FTP Daemon.
11
Autor: RIKY RAMOS ZAMBRANO.
Tutor: Ing. Johnny Torres Amón.
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS COMPUTACIONALES
ANÁLISIS Y DESARROLLO DE UN ROBOT ARAÑA HEXÁPODO,
CONTROLADO VÍA WIFI CON CÁMARA WEB
INTEGRADA UTILIZANDO EL
MICROCOMPUTADOR
RASPBERRY PI
RESUMEN
Dentro del área de la Informática y la Robótica, el país muestra un estancamiento
en el desarrollo y experimentación de nuevas tecnologías a nivel mundial, así lo
indica el Índice de competitividad Global (ICG) del foro mundial económico. Este
estancamiento se debe a múltiples factores entre los cuales podemos mencionar la
falta de recursos económicos, falta de áreas o laboratorios de investigación,
experimentación y desarrollo de tecnología en las universidades, falta de
conocimiento o de una guía que impulse o motive a los estudiantes de la carrera
Ingeniería En Sistemas Computacionales de la Universidad de Guayaquil, por esta
razón se realizará el diseño e implementación de un robot araña hexápodo que
sirva como motivación e impulse a los estudiantes de la carrera en el desarrollo y
experimentación de nuevas tecnologías que combinen la informática y robótica.
12
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS COMPUTACIONALES
ANÁLISIS Y DESARROLLO DE UN ROBOT ARAÑA HEXÁPODO,
CONTROLADO VÍA WIFI CON CÁMARA WEB INTEGRADA
UTILIZANDO EL MICROCOMPUTADOR RASPBERRY PI.
ABSTRACT
Within the area of Computer Science and Robotics, the country shows stagnation
in the development and testing of new technologies worldwide and indicates the
Global Competitiveness Index (GCI) of the World Economic Forum. This
stagnation is due to many factors among which we can mention the lack of
economic resources, lack of areas or research laboratories, experimentation and
development of technology in universities, lack of knowledge or guidance that
encourages motivate students Engineering career in Computer Systems from the
University of Guayaquil, therefore the design and implementation of a hexapod
robot spider serve as motivation and drive to students studying in the development
and testing of new technologies that combine will be held computers and robotics.

13
INTRODUCCIÓN
Actualmente el país se encuentra en un ascenso a paso lento dentro del ranking
mundial a nivel de desarrollo, innovación y experimentación de tecnología
informática y robótica, así lo indica el Índice de Competitividad Global (ICG).
Según el estudio realizado Sara Wong, por PhD en Economía, profesora e
investigadora de la Escuela de Postgrado en Administración de Empresas
(ESPAE), entidad encargada de la administración de las encuestas, menciona:
“Los pilares en los que Ecuador tiene el puntaje más bajo son Innovación (puntaje
3.4 que lo ubican en la posición 58 del ranking mundial), Disponibilidad en
aceptación y uso de nuevas tecnologías (3.5, posición 82 antes mencionada) e
Instituciones (3.6, posición 92). Es decir, se observan puntajes aún bajos en
pilares que reflejan los problemas más acuciantes en competitividad en Ecuador:
instituciones débiles y la falta de concreción en iniciativas que expandan sus
mercados en el mundo.”(Wong, 2014).
Por esta razón, la presente tesis está enfocada en el estudio, análisis y desarrollo
de un robot araña hexápodo, ya que se hace uso de nuevas tecnologías
informáticas, conocimientos profesionales, nuevas técnicas de desarrollo,
recursos económicos mínimos y de la experimentación. Todo esto con el objetivo
de motivar, incentivar, y aportar como una guía de estudio para los estudiantes de
la Carrera Ingeniería En Sistemas Computacionales de la Universidad De
Guayaquil.

14
De esta forma se aportaría para mejorar el Índice de Competitividad Global (ICG),
basado en un mejor desarrollo tecnológico y económico en el país, que permita
disminuir las importaciones de tecnología. El desarrollo a nivel nacional sería
mediante la inversión en nuevos departamentos o áreas de investigación científica
e informática, que promuevan el desarrollo y creación de nuevas tecnologías en el
país, de tal forma que satisfaga las necesidades internas y en un futuro exportar
dicha tecnología.
En el capítulo I: Se describe el planteamiento del problema, las causas,
consecuencias del problema, objetivos principales, objetivos específicos y
alcances del problema.
En el capítulo II: Se describe el marco teórico, planteamiento de la hipótesis y
definición de las variables dependiente e independiente.
En el capítulo III: Se describe el diseño de la investigación, tipo de investigación,
descripción de la población y la muestra, además se describen los instrumentos de
recolección de datos, concluyendo con las técnicas para el procesamiento y
análisis de los datos.
En el capítulo IV: Se describe el marco administrativo y el presupuesto necesario
para cumplir con el objetivo del proceso de la investigación.
En el capítulo V: Se describe los principales resultados alcanzados en la tesis
además se realizan unas conclusiones y recomendaciones.

15
CAPITULO I
EL PROBLEMA
PLANTEAMIENTO DEL PROBLEMA
UBICACIÓN DEL PROBLEMA EN UN CONTEXTO
Actualmente existe un nivel de crecimiento mínimo en investigación y desarrollo
de proyectos científicos; debido la falta de acceso a la tecnología, conocimientos o
recursos económicos para poder llevar a cabo dichos proyectos.
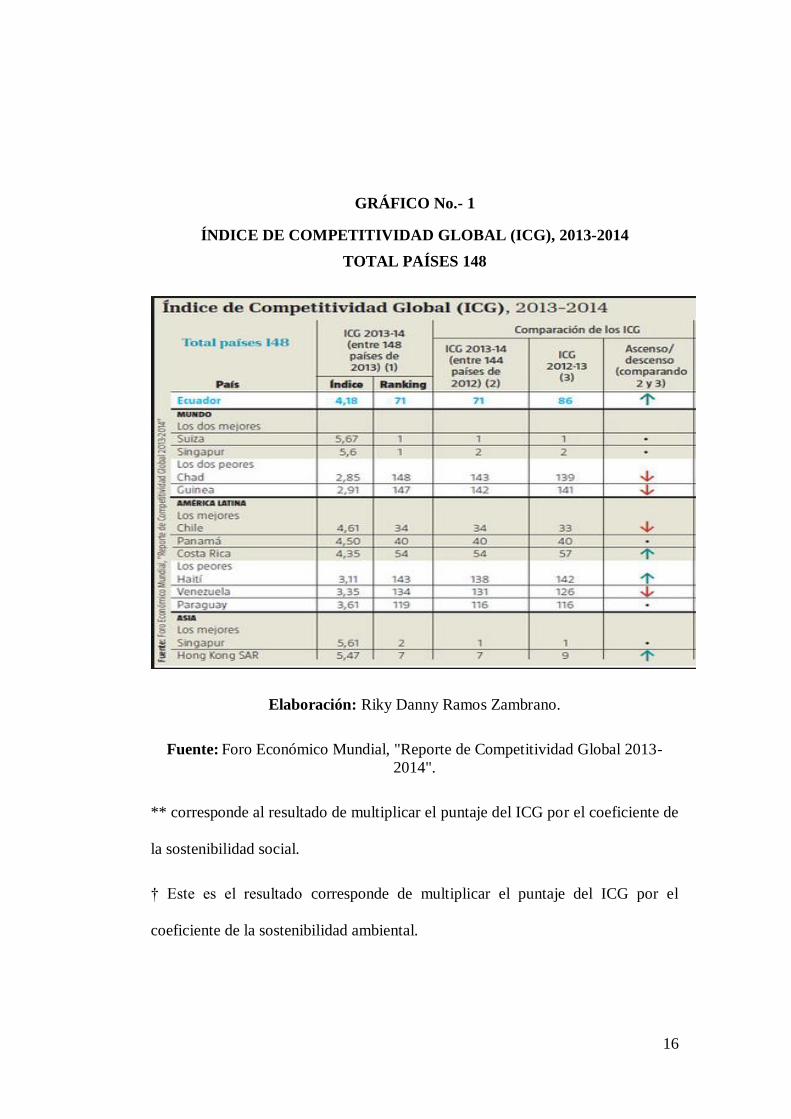
En el último reporte del Índice de Competitividad Global (ICG) 2013-2014 del
foro mundial económico, indica que en crecimiento de tecnología el país tuvo un
incremento de 15 posiciones, ya que paso del puesto 86 al 71, dentro de un grupo
de 148 países con un índice de 4.18 puntos.
En el siguiente grafico podemos observar en qué posición se encuentra nuestro
país con respecto al (ICG), además a eso nos muestra los países que se encuentran
encabezando el ranking mundial y nos muestra el incremento de posiciones con
respecto a otros años:
16
GRÁFICO No.- 1
ÍNDICE DE COMPETITIVIDAD GLOBAL (ICG), 2013-2014
TOTAL PAÍSES 148
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Foro Económico Mundial, "Reporte de Competitividad Global 2013-
2014".
** corresponde al resultado de multiplicar el puntaje del ICG por el coeficiente de
la sostenibilidad social.
† Este es el resultado corresponde de multiplicar el puntaje del ICG por el
coeficiente de la sostenibilidad ambiental.
17
† † Este es el promedio de las puntuaciones del ICG ajustado por sostenibilidad
social y sostenibilidad ambiental.
La puntuación del ICG cambia por > +15% a +20%
La puntuación del ICG
cambia por +5% a +15% La puntuación del ICG
se mantiene estable entre
+5% y –5%
La puntuación del ICG
cambia por –5% a –15%
La puntuación del ICG
cambia por < –15% a –
20%
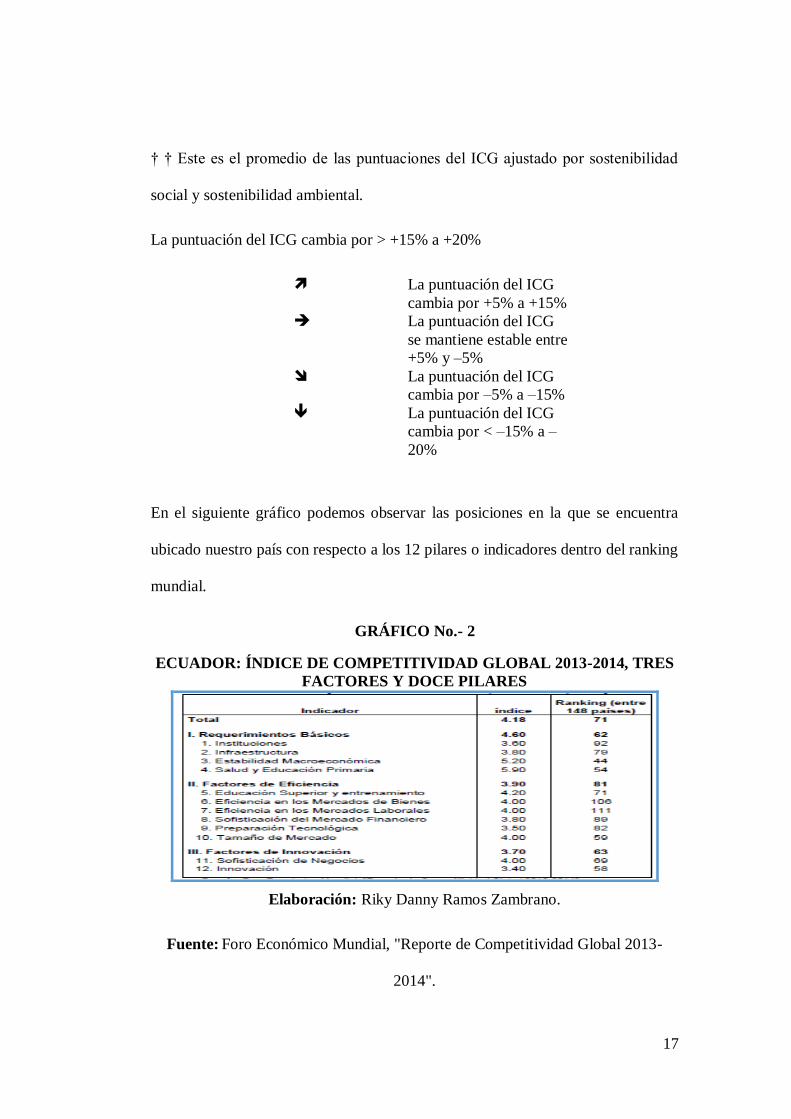
En el siguiente gráfico podemos observar las posiciones en la que se encuentra
ubicado nuestro país con respecto a los 12 pilares o indicadores dentro del ranking
mundial.
GRÁFICO No.- 2
ECUADOR: ÍNDICE DE COMPETITIVIDAD GLOBAL 2013-2014, TRES
FACTORES Y DOCE PILARES
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Foro Económico Mundial, "Reporte de Competitividad Global 2013-
2014".

18
SITUACIÓN CONFLICTO NUDOS CRÍTICOS
El problema surge por la falta de motivación, recursos económicos, y de una base
de conocimiento que sirva de guía para poder impulsar el crecimiento en
investigación y desarrollo de nuevos proyectos en el área de robótica de la carrera
Ingeniería en Sistemas Computacionales de la Universidad de Guayaquil,
Actualmente en la carrera existen alrededor de 14 proyectos de tesis en el área de
robótica una cantidad muy pequeña para los 19 años que tiene la carrera ya que la
misma fue concebida en el año 1996.
CAUSAS Y CONSECUENCIAS DEL PROBLEMA
Las causas del problema se dan por la falta de un laboratorio o área que promueva
la investigación, desarrollo y experimentación de tecnologías informáticas y
robóticas, además a esto se suma la falta de inversión del gobierno o empresas
privadas que aporten con recursos económicos para la compra de hardware o
software que permita a los estudiantes poder estudiar, experimentar y crear nuevos
proyectos robóticos que promuevan el desarrollo de tecnología en la universidad.
Otra de las causas por la cual tenemos un bajo crecimiento en el desarrollo de
proyectos robóticos se debe a la falta de conocimiento, motivación, guía,
impulso, y de explotación de nuevas tecnologías. La falta de conocimiento está
dada por la carencia de profesores especializados en dicha área, que permitan la
realización de nuevos proyectos robóticos de calidad.
19
CONSECUENCIAS
Las consecuencias que podrían acarrear si se sigue manteniendo el problema,
serían estancamiento o crecimiento muy lento en el desarrollo de proyectos de
robótica por parte de la Universidad de Guayaquil y en el país, a la vez
seguiríamos excluidos en los diferentes eventos, competiciones o concursos que
llevan a cabo a nivel nacional como el CER (Concurso Ecuatoriano de
Robótica), ya que se carece del desarrollo de robots que permitan demostrar las
habilidades o conocimientos en el desarrollo de este tipo de proyectos dentro de
esta área impidiendo a los estudiantes de la carrera demostrar el nivel de
competitividad a nivel nacional y porque no a nivel internacional en el área de la
robótica.
Otra de las consecuencias que incluye la baja producción nacional, ya que no se
impulsa o se invierte de manera adecuada en las instituciones educativas de tercer
nivel en especial en las carreras de desarrollo tecnológico como lo es la carrera
Ingeniería En Sistemas Computacionales de la Universidad de Guayaquil, para el
desarrollo de nuestra propia tecnología que permita obtener un mejor ranking
mundial en el Índice de Competitividad Global (ICG).
20
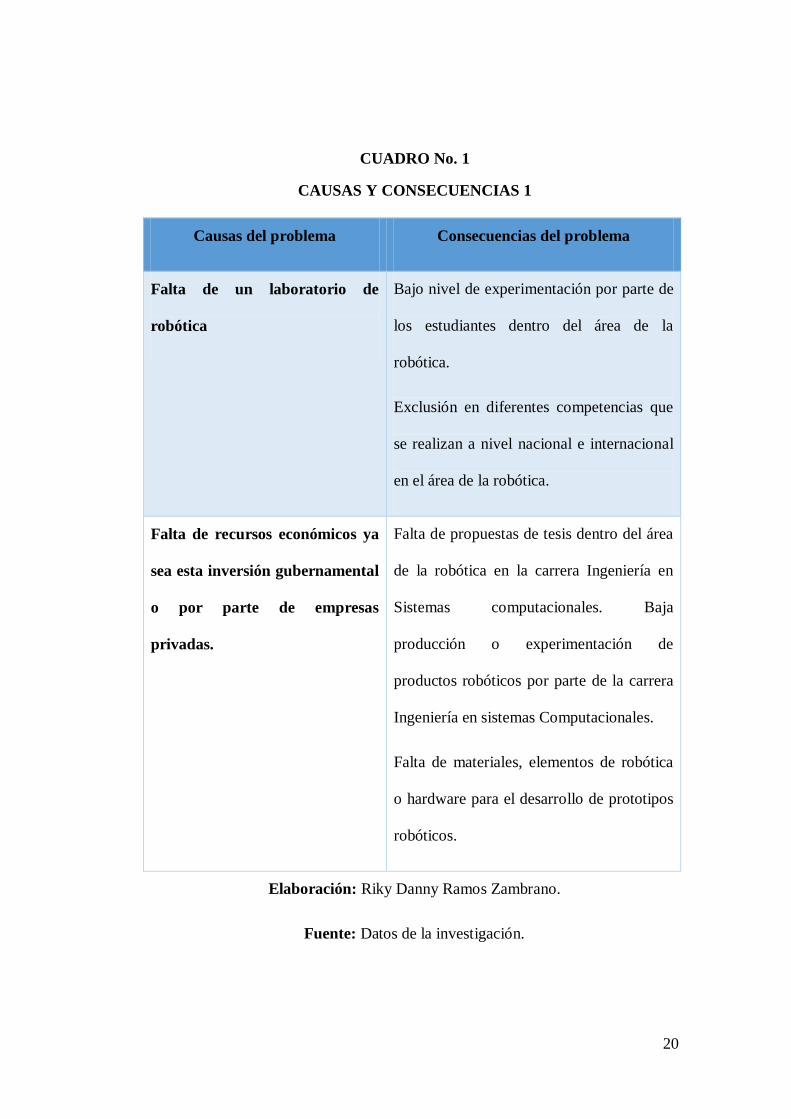
CUADRO No. 1
CAUSAS Y CONSECUENCIAS 1
Causas del problema Consecuencias del problema
Falta de un laboratorio de
robótica
Bajo nivel de experimentación por parte de
los estudiantes dentro del área de la
robótica.
Exclusión en diferentes competencias que
se realizan a nivel nacional e internacional
en el área de la robótica.
Falta de recursos económicos ya
sea esta inversión gubernamental
o por parte de empresas
privadas.
Falta de propuestas de tesis dentro del área
de la robótica en la carrera Ingeniería en
Sistemas computacionales. Baja
producción o experimentación de
productos robóticos por parte de la carrera
Ingeniería en sistemas Computacionales.
Falta de materiales, elementos de robótica
o hardware para el desarrollo de prototipos
robóticos.
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la investigación.
21
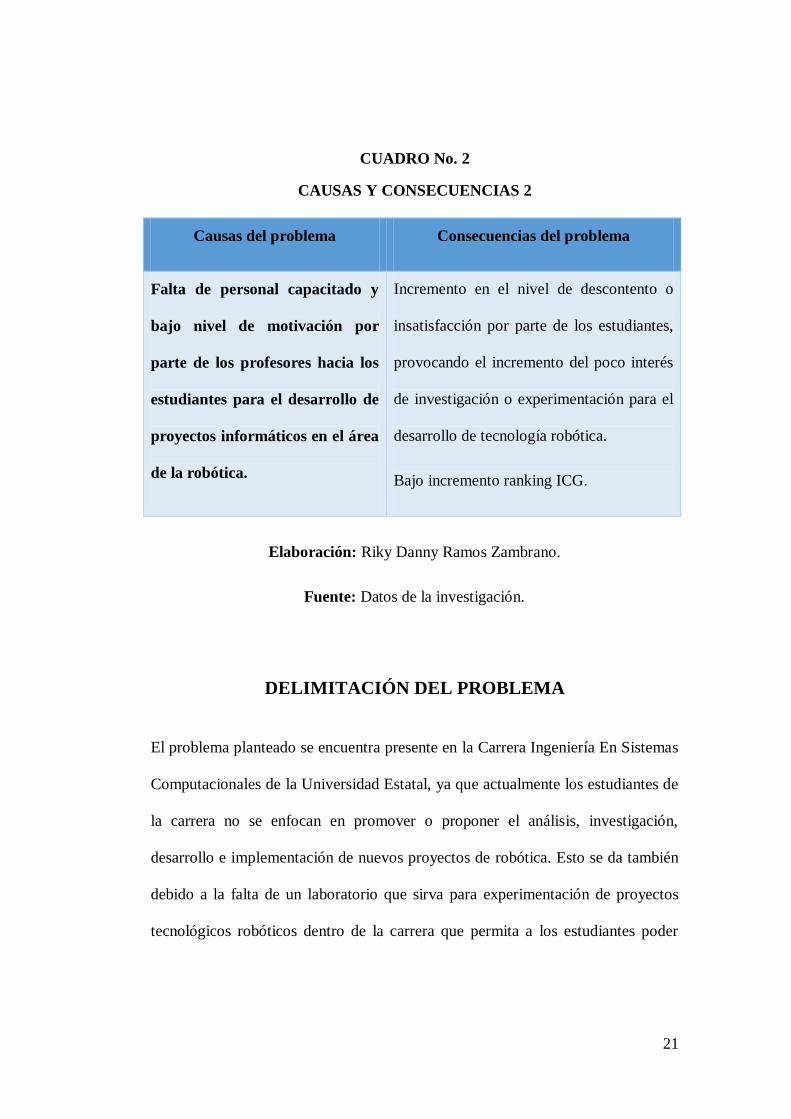
CUADRO No. 2
CAUSAS Y CONSECUENCIAS 2
Causas del problema Consecuencias del problema
Falta de personal capacitado y
bajo nivel de motivación por
parte de los profesores hacia los
estudiantes para el desarrollo de
proyectos informáticos en el área
de la robótica.
Incremento en el nivel de descontento o
insatisfacción por parte de los estudiantes,
provocando el incremento del poco interés
de investigación o experimentación para el
desarrollo de tecnología robótica.
Bajo incremento ranking ICG.
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la investigación.
DELIMITACIÓN DEL PROBLEMA
El problema planteado se encuentra presente en la Carrera Ingeniería En Sistemas
Computacionales de la Universidad Estatal, ya que actualmente los estudiantes de
la carrera no se enfocan en promover o proponer el análisis, investigación,
desarrollo e implementación de nuevos proyectos de robótica. Esto se da también
debido a la falta de un laboratorio que sirva para experimentación de proyectos
tecnológicos robóticos dentro de la carrera que permita a los estudiantes poder
22
investigar y desarrollar robots que tengan un alto nivel y aporte científico a nivel
nacional como internacional.
FORMULACIÓN DEL PROBLEMA
El problema se presenta en el poco y limitado impulso que existe por parte de los
estudiantes de la Universidad Estatal de Guayaquil en la Carrera Ingeniería En
Sistemas Computacionales para la investigación, análisis, diseño, desarrollo e
implementación de nuevos proyectos tecnológicos de alto nivel científico ya que
actualmente en la carrera existen un total de 15 proyectos de tesis dentro del área
de la robótica, los factores que influyen en este tipo de problema son el miedo al
fracaso por parte de los estudiantes, por la falta de investigación, falta de recursos
económicos y de una guía que sirva como ejemplo que con conocimientos
profesionales, utilizando nuevas tecnologías y una pequeña inversión económica
se puede realizar, experimentar o crear nuevos proyectos innovadores de alto
impacto científico informático.
EVALUACIÓN DEL PROBLEMA
Los aspectos generales de evaluación son:
Delimitado: Este problema se encuentra claramente delimitado por que se da en
la Universidad Estatal De Guayaquil en la carrera Ingeniería En Sistemas
Computacionales, ya que actualmente los estudiantes no impulsan o promueven el
desarrollo tecnológico de proyectos informáticos científicos.
23
Claro: Claramente se puede identificar un bajo nivel de crecimiento en cuanto al
análisis, diseño, desarrollo, implementación y experimentar el uso de nuevas
tecnologías para de esta forma poder crear proyectos que tengan un alto impacto
científico informático.
Evidente: El problema en la innovación e impulso de desarrollo tecnológico en la
carrera es evidente ya que se ve el poco crecimiento y creación de nuevas
tecnologías por parte de los estudiantes de la carrera para fomentar el aporte
científico de nuevos proyectos tecnológicos informáticos.
Original: El análisis y desarrollo de este Robot Araña Hexápodo haciendo uso de
la tecnología RaspBerry PI, para promover el impulso del desarrollo de nueva
tecnología informática es novedoso ya que además de ser una idea innovadora,
ofrece o servirá de base como guía que haciendo uso de nuevas tecnologías,
conocimientos profesionales y pocos recursos económicos se pueden realizar o
experimentar proyectos informáticos novedosos.
Factible: El análisis y desarrollo de este Robot Araña Hexápodo es factible ya
que se cuenta con las herramientas, conocimientos y dispositivos necesarios para
poder cumplir con el objetivo del proyecto.
Identifica los productos esperados: Este proyecto tiene mucha aceptación
gracias a la utilización e integración de tecnologías innovadoras que les permitirá
a los estudiantes servir como guía ya que este proyecto aporta el uso de hardware,
software y electrónica de una forma que se integra cada una de estas ramas
24
logrando como resultado final la implementación de un robot Araña hexápodo
controlado de vía WIFI de esta manera lograr impulsar la creación de nuevas
tecnologías informáticas en la carrera Ingeniería En Sistemas Computacionales.
OBJETIVOS
OBJETIVOS GENERALES
Analizar y desarrollar un robot araña hexápodo con cámara, controlado
remotamente vía WIFI mediante una aplicación Web para promover la
investigación y desarrollo de proyectos tecnológicos en el área de la robótica de la
Universidad de Guayaquil en la Carrera Ingeniería En Sistemas Computacionales.
OBJETIVOS ESPECÍFICOS
A. Desarrollar y diseñar la página web en lenguaje PHP, que se encarga de
interactuar con el usuario para controlar los movimientos del Robot Araña
Hexápodo y la cámara Web vía WIFI.
B. Diseñar el prototipo del Robot Araña Hexápodo en 3D utilizando la
herramienta SketchUp, para definir la forma física del robot y optimizar el
tiempo de desarrollo.
C. Utilizar el sistema operativo RaspBian (Linux) para controlar de forma
óptima los movimientos del Robot.
25
D. Integrar el modulo Web (PHP) y el modulo desarrollado en Python, para
lograr una correcta ejecución de los comandos que le darán una correcta
movilidad al Robot.
ALCANCES DEL PROBLEMA
A:
Análisis y Diseño de diagramas de casos de uso.
Selección del modelo de desarrollo del sistema.
Diseño de procesos y funciones que se deberán de crear para
cumplir con el objetivo del proyecto.
Diseño de clases, métodos y pagina PHP que será la encargada de
mostrar la interfaz gráfica con la cual el usuario podrá controlar
cada uno de los movimientos del robot.
Desarrollo y programación de los pines de salida de la RaspBerry
PI que se encargara de enviar los pulsos eléctricos para controlar
los servomotores haciendo uso del estándar PWM.
B:
Instalar y configurar el sistema para diseño en 3D SketchUp.
Diseñar la forma física y ubicación de cada una de las piezas que
formaran parte del robot.
Diseñar la forma y posiciones que van a tener las patas en formato
3D utilizando la herramienta SketchUp.

26
Remodelar el diseño del robot para obtener como resultado una
mejor estética y movimientos del robot.
C:
Instalar y configurar el sistema operativo RaspBian (Linux).
Configurar la red Wifi LAN.
Configurar el sistema de conexión a la red WIFI para el
microcomputador RaspBerry PI utilizando el modem USB.
Instalar y configurar el servidor web Apache Tomcat en el
microcomputador RaspBerry PI.
Instalar y configurar el sistema de gestor de base de datos MYSQL.
Instalar y configurar el sistema de cámara web.
Crear la base de datos y las tablas que se encargaran de registrar los
comandos que se deben de ejecutar en el microcomputador para
darle la movilidad a cada una de las patas.
D:
Programar los movimientos del robot que tendrán las siguientes
direcciones: Adelante, izquierda, derecha, atrás y saludo.
Programar movimientos y control de mando de la cámara web del
robot para controlar los giros de la cámara dentro de un radio de
180 grados de izquierda a derecha, arriba y bajo.
El control de la dirección de la cámara Web y de los movimientos
del robot se los realizará de forma separada, es decir se deberá de
detener el robot para controlar la cámara y viceversa.
27
No se podrá controlar la dirección de la cámara cuando el robot
este en movimiento, es decir cuando el robot se esté moviendo la
cámara permanecerá de manera fija.
La cámara Web está configurada en el robot de tal manera que
realiza la captura de imágenes a una velocidad de 1 fotograma por
segundo, las imágenes capturada por la cámara Web serán
mostradas o podrán ser visualizadas en otra página Web.
La resolución de las imágenes capturadas por la cámara tienen una
resolución de 5 megapíxeles.
Al momento de detener el servicio Motion en el sistema Raspberry
PI se creará un video con cada uno de los fotogramas capturados
por la cámara de manera secuencial con extensión mpg, este
archivo de video y cada una de las imágenes capturadas se
almacenará en el microcomputador Raspberry PI, el usuario podrá
descargar este archivo utilizando una conexión SFTP para
transferir el archivo a nuestro PC de manera remota.
Desarrollar el servicio en la herramienta Python que se encargará
de procesar cada uno de los comandos o requerimientos que
realizara el usuario.
Integrar el modulo web con la base de datos y el servicio demonio
desarrollado en Python.
Elaborar las respectivas pruebas de cada uno de los escenarios de
movilidad que tendrá el robot.
28
Realizar las respectivas pruebas de movilidad del robot en todas las
direcciones mencionadas.
Cada uno de los movimientos que realizará el robot será controlado
por parte del usuario, mediante la interacción con el control de
mando que está desarrollada en una página Web en la plataforma
PHP, esta página web le permitirá al usuario poder interactuar con
los movimientos del robot como la ubicación de la cámara Web.
Se creara una nueva página Web que le permitirá al usuario poder
visualizar en tiempo real a una velocidad de 1 fotograma por
segundo lo que visualiza la cámara Web instalada en el robot.
29
CAPÍTULO II
MARCO TEÓRICO
ANTECEDENTES DEL ESTUDIO
Para el avance del país andino hacia la "economía social del conocimiento" se
necesita dar un impulso decisivo al desarrollo de la ciencia y la tecnología como
piezas "fundamentales para el desarrollo”, así lo menciona el presidente de la
república "hacer del conocimiento y la innovación los pilares del nuevo Ecuador"
(Eco. Correa, 2014).
FUNDAMENTACION TEORICA
Este proyecto de tesis está enfocado en el análisis y desarrollo de un robot araña
hexápodo haciendo uso del microcomputador Raspberry Pi, realizando este
proyecto de experimentación e investigación de carácter científico tecnológico
logrando así un incremento en el desarrollo tecnológico de forma interna en el
país, la tecnología que se utiliza para la elaboración este proyecto tiene muchas
ventajas entre las cuales podemos destacar el bajo costo del hardware, la facilidad
de acceso para adquisición y la alta disponibilidad de herramientas de software
que te permiten poder controlar, configurar o programar el equipo como lo son :
Tomcat, SSH, SFTP, PHP, MYSQL, PYTHON, VNC.

30
ROBÓTICA
Para definirlo en términos generales, un robot es una maquina automática o
autónoma que posee cierto grado de inteligencia, capaz de percibir su entorno y de
imitar determinados comportamientos del ser humano. Los robots se utilizan para
desempeñar labores riesgosas o que requieren de una fuerza, velocidad o precisión
que esta fuera de nuestro alcance. (Riccillo, 2012)
GRÁFICO No.- 3
ROBOT HUMANOIDE
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Riccillo, 2012).
31
CLASIFICACIÓN DE LOS ROBOTS
SEGÚN SU CRONOLOGÍA
1.ª Generación.
2.ª Generación.
3.ª Generación.
4.ª Generación.
5.ta Generación.
PRIMERA GENERACIÓN
Manipuladores, se trata de sistemas mecánicos multifuncionales con sencillos
sistemas de control ya sea esta manual con secuencia fija o de secuencia variable.
GRÁFICO No.- 4
ROBOT MANIPULADOR
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Knasel, 2011).
32
SEGUNDA GENERACIÓN
Los robots de esta generación son conocidos como los robots de aprendizaje, en
esta segunda etapa de los robots se desarrollo hasta los años 80, las características
que tenían estos robots es que eran mas concientes con su entorno, es decir
contaban con un sistema de retroalimentación que les permitía poder obtener
mayores datos de su entorno y de esa forma almacenarlos de forma física, la
información junto con las instrucciones. También contaban con habilidades de
aprender, memorizar y almacenar diferentes movimientos deseados mediante un
seguimiento de los movimientos del operador que en este caso sería el ser
humano.
GRÁFICO No.- 5
ROBOT DE APRENDIZAJE
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Ruiz, 2014).

33
TERCERA GENERACIÓN
Robots con control sensorizado, en esta generación tuvo su desarrollo entre los
años 80 y 90 estos robots están basado en el uso de sensores que le permiten al
robot poder entender o interpretar su entorno para de esta manera poder adaptarse
al mismo obteniendo resultados más óptimos en cuanto a movilidad, cabe recalcar
que en esta generación fue cuando los robots se volvieron programables y a
parecieron los lenguajes de programación que le permiten procesar la información
que es captada mediante los sensores.
GRÁFICO No.- 6
ROBOT SENSORIZADO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Quick, 2011).

34
CUARTA GENERACIÓN
Los robots de cuarta generación o también conocidos como robots inteligentes,
son robots que tienen características iguales a las anteriores, pero adicionalmente
poseen sensores que se encargan de enviar información a la computadora que hace
el papel de control sobre el estado del proceso, esto le ayuda al robot tomar
decisiones inteligentes y control de los procesos en tiempo real. (June, 2015)
QUINTA GENERACIÓN
En la actualidad se están desarrollando una nueva generación de robots basados en
la arquitectura de subsunción, cuyo máximo promotor es Rodney Brooks, se
quiere conseguir que el control parta de la correcta organización y distribución de
los módulos conductuales basados totalmente en la inteligencia artificial. (Ruiz,
2014)
GRÁFICO No.- 7
ROBOTS INTELIGENTES
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la investigación.

35
El robot que se esta desarrollando en este proyecto de tesis corresponde a un robot
de cuarta generación, ya que hace uso de sus patas para poder tener movilidad
utilizando un lenguaje de programacion Python, en el siguiente cuadro podremos
observar de forma resumida la clasificacion de los robots según T. M. Knasel.
CUADRO No. 3
Clasificación de los robots según T. M. Knasel
Generación Nombre Tipo de Control Grado de
movilidad
Usos mas
frecuentes
1(1982) Pick &
Place
Fines de carrera,
aprendizaje.
Ninguno Manipulación,
servicio
demaquinas
2(1984) Servo Servo control
trayectoria
continua, progr.
Condicional.
Desplazamie-
nto por vía.
Soldadura,
pintura.
3(1989) Ensamblado Servos de
precisión, vision y
tacto.
Guiado por
vía.
Ensamblado,
desbardado.
4(2000) Móvil Sensores
inteligentes.
Patas, ruedas. Construcción,
mantenimiento
.
5(2010) Especiales Controlados con
tecnicas de IA
Andante,
saltarín.
Militar,
espacial.
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (June, 2015).

36
DESCRIPCIÓN DE ELEMENTOS PARA EL DESARROLLO
DE ESTE PROYECTO DE TESIS
SERVOMOTORES
Un servomotor o también muchas veces llamados servo son dispositivos muy
parecidos a los motores de corriente continua, estos servos tienen la capacidad de
poder ubicarse en cualquier posición dentro de su rango de operación, otra de las
bondades que poseen es que se mantienen en la ubicación en la cual fueron
configuradas o ejecutada. Un servo es un motor eléctrico que puede ser controlada
tanto su velocidad como en su posición.
GRÁFICO No.- 8
SERVOMOTOR
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la investigación.

37
Para llevar a cabo el control de estos servomotores se hace uso de la modulación
por ancho de pulsos (PWM) para controlar la posición de los motores de corriente
continua. La electrónica interna que contiene el servomotor responde a un ancho
de señal modulada. Dependiendo de la señal que recibe el servomotor en
milisegundos girara en sentido horario o sentido contrario, si el servomotor recibe
una señal entre 0,5 a 1,4 milisegundos el servo se moverá en sentido horario; entre
1,6 a 2 milisegundos este se moverá en sentido anti horario; si se recibe 1,5
milisegundos esto representara un estado neutral para los servomotores
estándares. (Castilla, 2015) (RWB, 2009)
GRÁFICO No.- 9
PULSOS PWM
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (RWB, 2009).

38
RASPBERRY PI
Es un computador de placa reducida o placa única de bajo costo, este es un
producto que fue desarrollado o creado en Reino Unido por la fundación
Raspberry PI, el desarrollo de este equipo fue desarrollado con el objetivo de
estimular, motivar e incentivar la enseñanza de la ciencias de la computación en
las entidades educativas.
GRÁFICO No.- 10
RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (FOUNDATION, 2015).

39
La placa Raspberry PI, tiene muchos beneficios o usos que se les puede dar todo
es cuestión de hacer uso de nuestro ingenio para crear proyectos innovadores que
no demanden de muchos recursos económicos entre los proyectos que se pueden
realizar podemos mencionar los siguientes: Consola de video juegos portable,
sistema de vigilancia, domótica, robótica, PC portátil, etc.
GRÁFICO No.- 11
CONSOLA DE JUEGO USANDO RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la investigación.
40
El microcomputador Raspberry pi hace uso de una distribución de sistema
operativo Linux (Raspbian) y nos permite poder instalar un gestor de base de
datos como por ejemplo MYSQL, como lenguaje de programación para el
desarrollo y configuración de los pines GPIO (Pines de entrada y salida de
propósito general) se hace uso del entorno de desarrollo Python, además a eso nos
permite poder instalar un servidor Web LAMP para poder desarrollar nuestras
aplicaciones Web o servicios Web.
GRÁFICO No.- 12
ESCRITORIO DE LA RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la investigación.
41
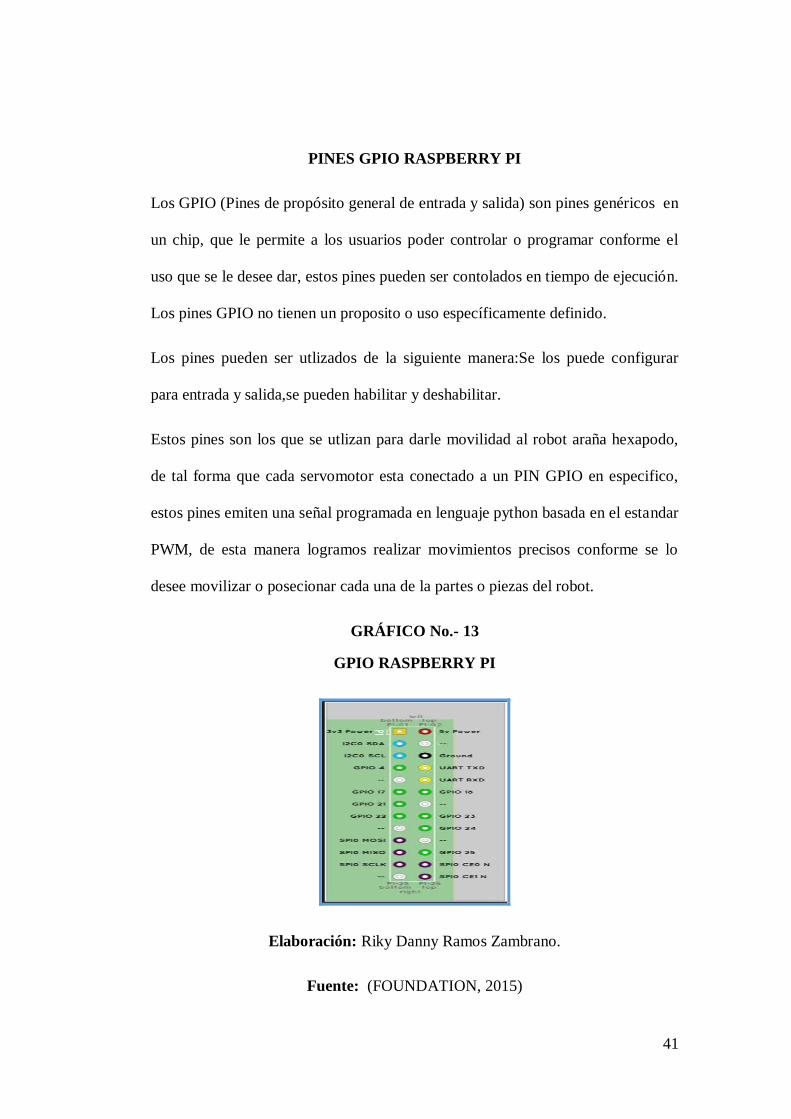
PINES GPIO RASPBERRY PI
Los GPIO (Pines de propósito general de entrada y salida) son pines genéricos en
un chip, que le permite a los usuarios poder controlar o programar conforme el
uso que se le desee dar, estos pines pueden ser contolados en tiempo de ejecución.
Los pines GPIO no tienen un proposito o uso específicamente definido.
Los pines pueden ser utlizados de la siguiente manera:Se los puede configurar
para entrada y salida,se pueden habilitar y deshabilitar.
Estos pines son los que se utlizan para darle movilidad al robot araña hexapodo,
de tal forma que cada servomotor esta conectado a un PIN GPIO en especifico,
estos pines emiten una señal programada en lenguaje python basada en el estandar
PWM, de esta manera logramos realizar movimientos precisos conforme se lo
desee movilizar o posecionar cada una de la partes o piezas del robot.
GRÁFICO No.- 13
GPIO RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (FOUNDATION, 2015)
42
HERRAMIENTA O PLATAFORMA DE DESARROLLO
Para enviar los pulsos eléctricos o la latencia a través de los pines GPIO se hace
uso de el lenguaje de programación python , esta plataforma de desarrollo hace
uso de algunas librerias que le permite poder interactuar y controlar servomotores
para poder posecionarlos o dirigirlos en la dirección que el usuario o
programador desee, ademas a esto esta plataforma nos permite conectarnos a
nuestra base de datos Mysql para poder identificar cual es el comando que se desa
ejecutar.
GRÁFICO No.- 14
PLATAFORMA PYTHON
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la investigación.

43
BASE DE DATOS
Una base de datos o tambien llamado banco de datos, son un conjunto de datos
pertenecientes en un mismo contexto y almacenados sistemáticamente.Una base
de datos esta compuesta por un cojunto de datos enlazados o relacionados entre si,
estos datos son almacenados de manera digital. (Sierra, 2006)
Existen muchos modelos de bases de datos entre los cuales podemos mencionar:
Bases de datos jerárquicas.
Base de datos de red.
Base de datos relacionales.
Base de datos multidimensionales.
Base de datos orientada a objetos.
Base de datos documentales.
MySQL
Para el desarrollo de este proyecto se hace uso del gestor de base de datos MySQL
que es un sistema administrativo relacional de bases de datos.
Este tipo de bases de datos puede realizar o ejecutar transacciones tan básicas,
como insertar, actualizar y borrar registros o hacer consultas simples, hasta
realizar transacciones tan complejas como la aplicación lo requiera.
MySQL es un servidor multi-usuarios muy rápido y robusto de ejecución de
instrucciones de manera paralela esto quiere decir, que múltiples usuarios

44
distribuidos a lo largo de una red local o Internet podrán ejecutar o realizar
distintas tareas sobre las bases de datos localizadas en un mismo servidor.
MySQL Utiliza el lenguaje SQL (Structured Query Language) que es el estándar
de consulta de bases de datos a nivel mundial. (Sinemed, 2015).
Esta base de datos se la utiliza para poder almacenar los comandos que tiene el
robot, de esa manera el sistema se encargara de consultar que tipo de instrucción o
movimiento debe de realizar el robot.
GRÁFICO No.- 15
BD MYSQL
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Taringa, 2014).
45
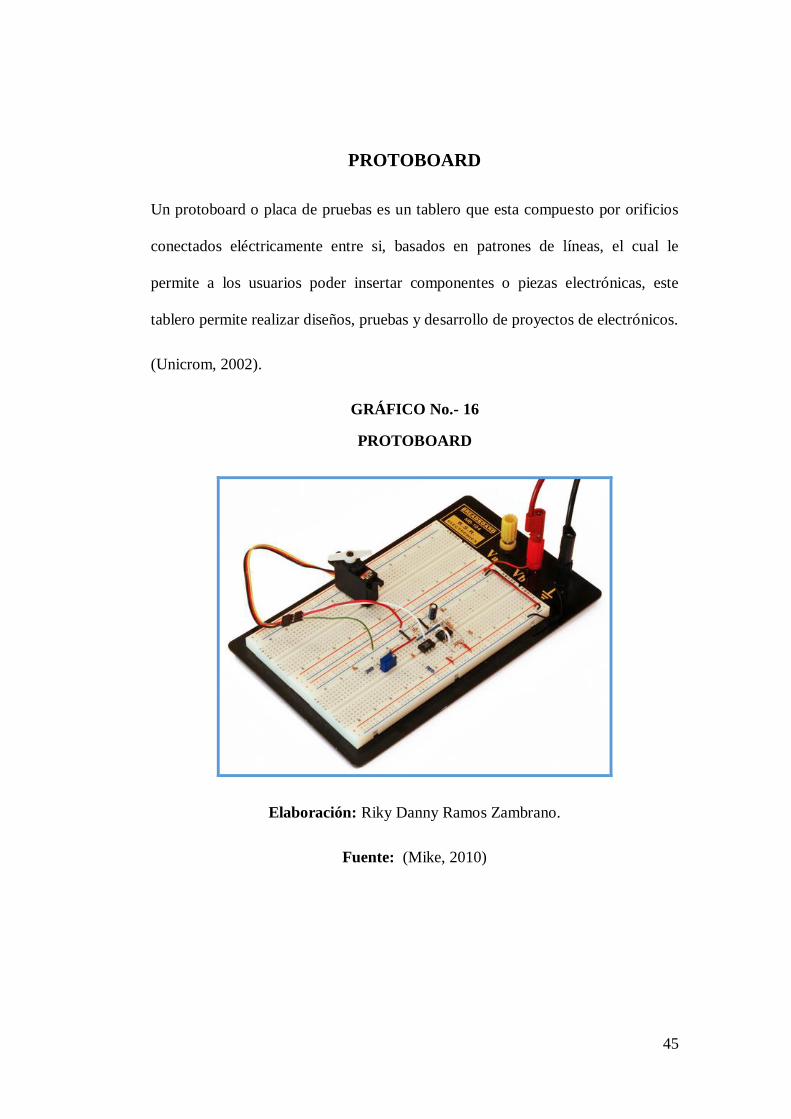
PROTOBOARD
Un protoboard o placa de pruebas es un tablero que esta compuesto por orificios
conectados eléctricamente entre si, basados en patrones de líneas, el cual le
permite a los usuarios poder insertar componentes o piezas electrónicas, este
tablero permite realizar diseños, pruebas y desarrollo de proyectos de electrónicos.
(Unicrom, 2002).
GRÁFICO No.- 16
PROTOBOARD
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Mike, 2010)
46
USB WIFI
Es un dispositivo que te permite poder realizar una conexión de manera
inalámbrica a un dispositivo de red o concentrador, es capaz de enviar 480 MBits
en distancias de hasta 3 metros y 110 MBits de hasta 10 metros, este tipo de
dispositivos es utilizado por muchos equipos entre los cuales están: las
impresoras, pc, escanner, etc.
GRÁFICO No.- 17
USB WIFI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la investigación.

47
CAMARA WEB USB
Es una cámara capaz de conectarse a un pc haciendo uso de los puertos USB,
parta transmitir o capturar las imágenes que son obtenidas por el lente de la
misma, estas cámaras son un dispositivo de entrada y son utilizadas con fines de
vigilancia de manera remota, etc. Esta cámara es utilizada para poder monitorear
de forma remota el lugar donde se encuentra el robot, se realizó una conexión
haciendo uso del puerto USB de la Raspberry PI, el robot hexápodo por medio de
esta cámara capturara fotogramas a una velocidad de un fotograma por segundo
mostrándolas de manera inmediata en una página web la imagen capturada.
GRÁFICO No.- 18
CAMARA WEB OMEGA
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
48
WEB
Una Página Web es un documento electrónico que forma parte de la WWW
(World Wide Web) normalmente construido en el lenguaje HTML (Hyper Text
Markup Language o Lenguaje de Marcado de Hipertexto) ó en XHTML
(eXtensible Hyper Text Markup Language o Lenguaje de Marcado de Hipertexto
Extensible). Este tipo de documento puede contener enlaces (característica del
hypertext) que nos dirigen a otra Página Web cuando se efectúa el click sobre él
enlace. Para poder cargar o visualizar una Página Web es necesario el uso de un
Browser o navegador.
Una Página Web puede estar alojada o almacenada en un computador de forma
local o en un computador remoto. El servidor donde esté alojada la Página Web se
lo denomina Servidor Web. El Servidor Web atiende las peticiones o
requerimientos de Páginas Web utilizando el protocolo HTTP (HyperText
Transfer Protocol); del lado del cliente es el Browser o navegador el que recibe y
muestra las Páginas Web haciendo uso del mismo protocolo. Otra de las
características importantes que tiene una Página Web es que puede ser estática es
decir que (su contenido siempre va a ser el mismo) o dinámica (su contenido se
construye a partir de la información introducida por parte del usuario).
Una Web es un conjunto de Páginas Web interrelacionadas que conforman lo que
se conoce como un Sitio Web. La WWW o la Web es todo el conjunto de
información interrelacionada que se haya disponible en Internet, ésta se conforma
por una serie de servidores a nivel mundial organizados por dominios (nombres
49
lógicos asociados a instituciones o empresas, otorgados por empresas
registradoras oficiales).
Para poder controlar cada uno de los movimientos del robot araña hexápodo de
manera remota se desarrollo una pagina web haciendo uso del lenguaje de
programación PHP que se encargara de interactuar con el usuario y podrá
indicarle los movimiento que desea que realice el robot o la cámara Web.
GRÁFICO No.- 19
LA WEB
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Watts, 2014).
DISEÑO 3D
Para el desarrollo del diseño en 3D del robot araña hexápodo se utilizó la
herramienta SketchUp 3D que sirve para poder definir o diseñar la forma física que va a
tener el robot.

50
SKETCHUP 3D
La interfaz de diseño que ofrece la herramienta SketchUp 3D, es sencilla y nos
brinda todas las herramientas de dibujo, modelado 3D, efectos y texturas
necesarios. Destaca también su cámara que te permite mover con total libertad en
el ángulo o dirección que se lo requiera para de esta forma poder visualizar el
diseño desde diferentes perspectivas sobre lo que se está realizando.
El usuario puede crear diferentes tipos de modelos 3D, partiendo de figuras
básicas, para después llegar a modelos más complejos, como pueden ser:
transportes aéreos, transportes terrestres, edificios, iglesias, infraestructura
informática, robots y otros. Podrás adicionar textura y detalles cuando hayas
terminado con tu creación. (Sketchup, 2013).
GRÁFICO No.- 20
INTERFAZ HERRAMIENTA SKETCHUP 3D
Elaborado: Riky Ramos Zambrano.
Fuente: Datos de la Investigación.
51
FUNDAMENTACIÓN LEGAL
La fundamentación legal para el análisis, desarrollo, investigación e
implementación de nuevas tecnologías está basado según las leyes
constitucionales de la República del Ecuador que se rigen actualmente y se basan
en las siguientes:
Art. 262.- Los gobiernos regionales autónomos tendrán las siguientes
competencias exclusivas, sin perjuicio de las otras que determine la ley
que regule el sistema nacional de competencias:
1. Determinar las políticas de investigación e innovación del
conocimiento, desarrollo y transferencia de tecnologías,
necesarias para el desarrollo regional, en el marco de la
planificación nacional.
2. Fomentar las actividades productivas regionales.
Art. 277.-Para la consecución del buen vivir, serán deberes generales
del Estado:
Impulsar el desarrollo de las actividades económicas mediante un orden
jurídico e instituciones políticas que las promuevan, fomenten y
defiendan mediante el cumplimiento de la Constitución y la ley.
Art. 298.-Se establecen pre-asignaciones presupuestarias destinadas a
los gobiernos autónomos descentralizados, al sector salud, al sector
52
educación, a la educación superior; y a la investigación, ciencia,
tecnología e innovación en los términos previstos en la ley. Las
transferencias correspondientes a pre-asignaciones serán predecibles y
automáticas. Se prohíbe crear otras pre-asignaciones presupuestarias.
Art. 322.-Se reconoce la propiedad intelectual de acuerdo con las
condiciones que señale la ley. Se prohíbe toda forma de apropiación de
conocimientos colectivos, en el ámbito de las ciencias, tecnologías y
saberes ancestrales. Se prohíbe también la apropiación sobre los
recursos genéticos que contienen la diversidad biológica y la agro-
biodiversidad.
Art. 347.- Será responsabilidad del Estado:
Incorporar las tecnologías de la información y comunicación en el
proceso educativo y propiciar el enlace de la enseñanza con las
actividades productivas o sociales.
Art. 355.- El Estado reconocerá a las universidades y escuelas
politécnicas autonomía académica, administrativa, financiera y
orgánica, acorde con los objetivos del régimen de desarrollo y los
principios establecidos en la Constitución.
Se reconoce a las universidades y escuelas politécnicas el derecho a la
autonomía, ejercida y comprendida de manera solidaria y responsable.
Dicha autonomía garantiza el ejercicio de la libertad académica y el
53
derecho a la búsqueda de la verdad, sin restricciones; el gobierno y
gestión de sí mismas, en consonancia con los principios de alternancia,
transparencia y los derechos políticos; y la producción de ciencia,
tecnología, cultura y arte.
SECCIÓN OCTAVA
CIENCIA, TECNOLOGÍA, INNOVACIÓN Y SABERES ANCESTRALES
Art. 385.-- El sistema nacional de ciencia, tecnología, innovación y
saberes ancestrales, en el marco del respeto al ambiente, la naturaleza,
la vida, las culturas y la soberanía, tendrá como finalidad:
1. Generar, adaptar y difundir conocimientos científicos y tecnológicos.
2. Recuperar, fortalecer y potenciar los saberes ancestrales.
3. Desarrollar tecnologías e innovaciones que impulsen la producción
nacional,
Eleven la eficiencia y productividad, mejoren la calidad de vida y
contribuyan a la realización del buen vivir.
Art. 386.- El sistema comprenderá programas, políticas, recursos,
acciones, e incorporará a instituciones del Estado, universidades y
escuelas politécnicas, institutos de investigación públicos y particulares,
empresas públicas y privadas, organismos no gubernamentales y
54
personas naturales o jurídicas, en tanto realizan actividades de
investigación, desarrollo tecnológico, innovación y aquellas ligadas a
los saberes ancestrales.
El Estado, a través del organismo competente, coordinará el sistema,
establecerá los objetivos y políticas, de conformidad con el Plan
Nacional de Desarrollo, con la participación de los actores que lo
conforman.
Art. 387.- Será responsabilidad del Estado:
1. Facilitar e impulsar la incorporación a la sociedad del conocimiento
para alcanzar los objetivos del régimen de desarrollo.
2. Promover la generación y producción de conocimiento, fomentar la
investigación científica y tecnológica, y potenciar los saberes
ancestrales, para así contribuir a la realización del buen vivir, al sumak
kausay.
3. Asegurar la difusión y el acceso a los conocimientos científicos y
tecnológicos, el usufructo de sus descubrimientos y hallazgos en el
marco de lo establecido en la Constitución y la Ley.
4. Garantizar la libertad de creación e investigación en el marco del
respeto a la ética, la naturaleza, el ambiente, y el rescate de los
conocimientos ancestrales.
5. Reconocer la condición de investigador de acuerdo con la Ley.
55
Art. 388.- El Estado destinará los recursos necesarios para la
investigación científica, el desarrollo tecnológico, la innovación, la
formación científica, la recuperación y desarrollo de saberes ancestrales
y la difusión del conocimiento. Un porcentaje de estos recursos se
destinará a financiar proyectos mediante fondos concursables. Las
organizaciones que reciban fondos públicos estarán sujetas a la
rendición de cuentas y al control estatal respectivo. (Ecuador, 2012).
56
PREGUNTAS CIENTÍFICAS A CONTESTARSE
1. ¿Es factible usar RaspBerry Pi para controlar varios servomotores?
2. ¿Es posible simular el movimiento de una araña haciendo uso de
componentes electrónicos para darle movilidad?
3. ¿Es factible controlarlo inalámbricamente mediante una red WIFI?
4. ¿Es posible crear una página Web para poder controlar los movimientos de
los servomotores de manera remota?
5. ¿Es posible configurar una cámara web en el sistema operativo RaspBian?

57
VARIABLES DE LA INVESTIGACIÓN
CUADRO No. 4
VARIABLES DE LA INVESTIGACIÓN
TIPO DE VARIABLE VARIABLE INDICADORES
I
N
D
E
P
E
N
D
I
E
N
T
E
Uso de nuevos componentes
tecnológicos hardware y
software, para experimentar,
explorar y crear nuevos
proyectos robóticos innovadores
utilizando redes de
comunicación WIFI.
Conocimientos y
explotación de nuevas
tecnologías hardware y
software
D
E
P
E
N
D
I
E
N
T
E
Análisis, desarrollo e
implementación de un robot
araña hexápodo controlado vía
WIFI, para impulsar o motivar el
desarrollo de proyectos
tecnológicos Robóticos haciendo
uso de pocos recursos
económicos.
Investigar
Analizar
Diseñar
Desarrollar
Experimentar
Implementar
Elaborado: Riky Ramos Zambrano.
Fuente: Datos de la Investigación.

58
DEFINICIONES CONCEPTUALES
WIFI: Medio de comunicación o conexión entre dispositivos de forma
inalámbrica. (AulaClic, 2005).
Robótica: Ciencia o rama tecnológica que está encargada del estudio, diseño y
desarrollo de máquinas capaces de simular el comportamiento de los seres vivos.
(UNSAAC, 2006).
Microcomputador: Computadora pequeña que tiene capacidades de
procesamiento de información con una unidad central de procesamiento (CPU),
compuesta por circuitos de almacenamiento y puertos para conexión de
periféricos de entrada y salida. (ecured, 2015).
Servomotor: Es un dispositivo parecido a los motores de corriente continua que
tiene características de ubicarse en la posición que se desee dependiendo del pulso
eléctrico que se le envié, trabajan en un radio de 0 a 180 grados. Se lo controla
mediante la conexión de sus tres cables (Poder, GND y Pulsos Eléctricos o
latencia).Los servomotores utilizan la modulación por ancho de pulsos (PWM)
para controlar los movimientos en cada una de las direcciones. (Castilla, 2015).
59
Redes: Conjunto de equipos o medio de interconexión, comunicación,
transferencia de información y control de servicios de forma remota entre
diferentes máquinas o dispositivos, están se pueden dar de forma alámbrica e
inalámbrica. (larevistainformatica, 2006).
Algoritmo: Conjunto de pasos, procesos o eventos secuenciales que se deben de
realizar de una forma ordenada para solucionar un determinado problema. Los
algoritmos son programas o conjuntos de instrucciones que son ejecutadas y
procesados en un computador. (Galeon, 2015).
Frecuencia: Es una medida que se utiliza para indicar el número de repeticiones
de cualquier fenómeno o suceso periódico en cada unidad de tiempo.
Según el sistema internacional, la frecuencia se mide en hertzios (Hz).
Un hertzio es aquel suceso o fenómeno repetido una vez por segundo. Así, dos
hercios son dos sucesos (períodos) por segundo, etc. (Básica, 2015).
RaspBerry PI: Es un microcomputador o computador de placa reducida que
contiene una unidad central de procesamiento(CPU) de bajo costo, este producto
es desarrollado en Reino Unido por la fundación RaspBerry PI, con el objetivo de
impulsar y estimular el aprendizaje y estudio de las ciencias de la computación en
las instituciones educativas. (FOUNDATION, 2015).

60
Diseño Informático: Es el arte de definir la arquitectura del hardware y el
software, la comunicación entre los componentes, módulos y datos en un sistema
informático.
61
CAPÍTULO III
METODOLOGÍA
DISEÑO DE LA INVESTIGACIÓN
El análisis y desarrollo de este proyecto de tesis para la obtención del título como
Ingeniero En Sistemas Computacionales tiene una modalidad de tipo factible, ya
que busca solucionar una problemática existente en la elaboración y
experimentación de nuevas tecnologías robóticas e informáticas para promover el
desarrollo informático en la Universidad De Guayaquil.
METODOLOGÍA DE DESARROLLO DE SOFTWARE
La idea principal de utilizar un modelo para el desarrollo de un sistema es el orden
en el cual las actividades son llevadas a cabo, y las guías para hacer la transición
entre las etapas o actividades del modelo. Un modelo de ciclo de vida define el
estado de las fases a través de las cuales se mueve un proyecto de desarrollo de
software. La metodología que se aplicó al tema de proyecto planteado en esta
tesis, está basado en el modelo evolutivo o también denominado ciclo de vida en
espiral, ya que es el modelo que mejor se adapta y aplica a este tipo de proyecto,
ya que nos permite el desarrollo rápido de versiones incrementales. El modelo
espiral para la ingeniería de software ha sido desarrollado para cubrir las mejores
características tanto del ciclo de vida clásico, como de la creación de prototipos,
62
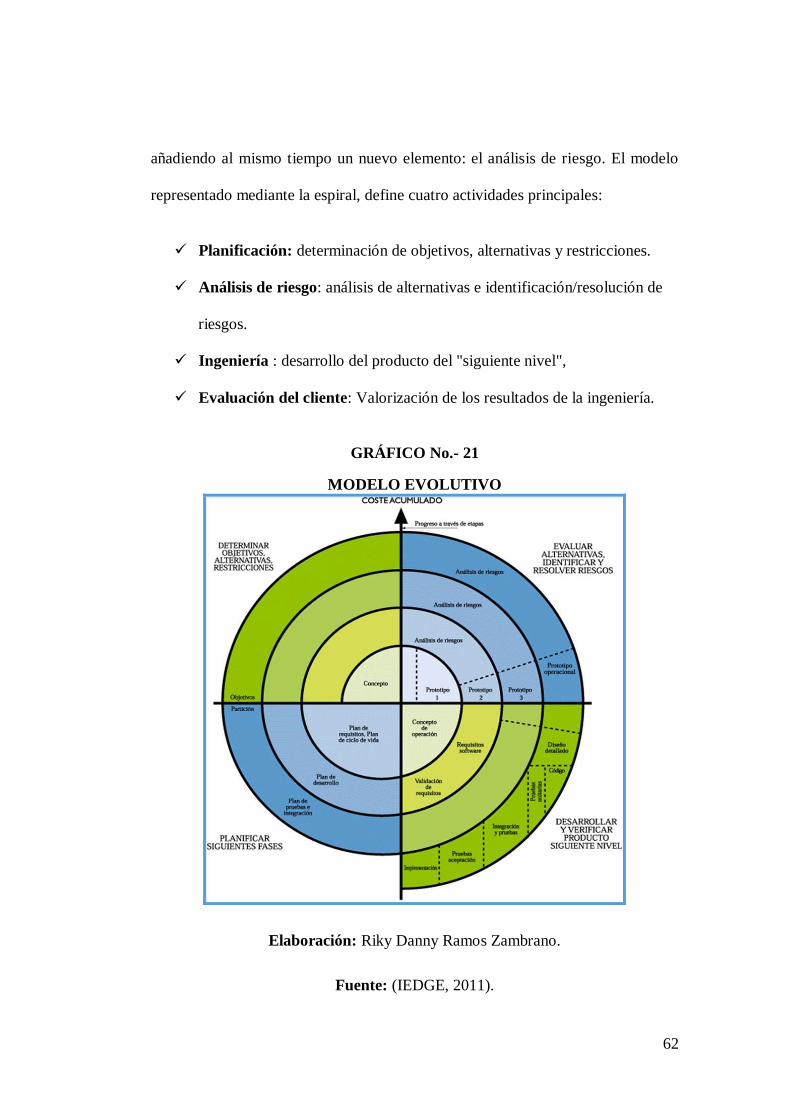
añadiendo al mismo tiempo un nuevo elemento: el análisis de riesgo. El modelo
representado mediante la espiral, define cuatro actividades principales:
Planificación: determinación de objetivos, alternativas y restricciones.
Análisis de riesgo: análisis de alternativas e identificación/resolución de
riesgos.
Ingeniería : desarrollo del producto del "siguiente nivel",
Evaluación del cliente: Valorización de los resultados de la ingeniería.
GRÁFICO No.- 21
MODELO EVOLUTIVO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (IEDGE, 2011).
63
TIPO DE INVESTIGACIÓN
El desarrollo de este proyecto de tesis está compuesto por el siguiente tipo de
investigación:
INVESTIGACIÓN EXPERIMENTAL
Porque a través de esta investigación se puede relacionar la causa - efecto sobre
los factores que influyen en la problemática investigada para promover la
experimentación y el desarrollo de nuevas tecnologías.
INVESTIGACION DESCRIPTIVA
Mediante este método se puede indicar y delimitar el problema para poder tratarlo
de tal forma que nos permitirá poder obtener resultados óptimos para el manejo
del problema brindando una solución viable. (Morales, 2015).

64
POBLACIÓN
La población a nivel de términos geografía y sociología es un grupo de personas
que viven en una área o espacio geográfico, la población se entiende como un
conjunto de personas o individuos que forman parte de una determinada área o
espacio ligado por vínculos de reproducción e identificados por características
territoriales, políticas, jurídicas, étnicas o religiosas. (Bacci, 2015).
La población que forma parte del estudio, análisis y desarrollo de este proyecto
son los estudiantes de sexto semestre en adelante que pertenecen a la Facultad de
Matemáticas y Física de la Carrera Ingeniería En Sistemas Computacionales.
MUESTRA
El subconjunto de la población se lo determino mediante el tamaño de la muestra
y el tipo de muestreo que se utilizará para seleccionar a la cantidad de estudiantes
de la carrera Ingeniería En Sistemas Computacionales De La Universidad De
Guayaquil, que formaran parte de este estudio ya que en este nivel los estudiantes
tienen los conocimientos de programación e inteligencia artificial.

65
EL TAMAÑO DE LA MUESTRA
El tamaño de la muestra se la determinó mediante la fórmula diseñada por la
Universidad Católica de Chile, que toma en cuenta además del tamaño de la
población, la probabilidad de éxito, fracaso y el error de estimación.
GRÁFICO No.- 22
FÓRMULA CÁLCULO TAMAÑO DE LA MUESTRA
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

66
Remplazando los valores de la formula se obtienen los siguientes resultados:
193
8251.0
160
25.05751.0
160
25.0)009.0)(639(
160
25.04/)0036.0)(639(
160
50.050.02/06.0)1640(
64050.050.022
n
n
n
n
n
x
xxn
El tamaño de la muestra es de 193 estudiantes.
67
TIPO DE MUESTREO
El tipo de muestreo utilizado es el probabilístico estratificado proporcionalmente,
ya que se consideran como estratos a la forma como la población de estudiantes
que está dividida según el sexo masculino y femenino y proporcional porque del
tamaño de cada estrato se ha tomado en cuenta la población de estudiantes de la
Universidad de Guayaquil en la Carrera Ingeniería En Sistemas Computacionales
en cada género (femenino o masculino).
GRÁFICO No.- 23
FRACCIÓN MUESTRAL
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
En el cuadro se puede observar, como la población de estudio que corresponde al
total de estudiantes de la carrera Ingeniería En Sistemas Computacionales de la
Cálculo de la fracción muestral:
3015.0640
193
N
nf

68
Universidad De Guayaquil desde el sexto a octavo semestre, se lo ha dividido por
estratos según el género masculino (450) y femenino (190), para determinar según
el tamaño de la población de cada estrato, el número de estratos de la muestra.
CUADRO No. 5
MUESTRA ESTRATIFICADA PROPORCIONAL DE LOS
ESTUDIANTES
ESTRATOS DE
LA
POBLACIÓN
DE
ESTUDIANTES
TAMAÑO DE
LA
POBLACIÓN
DE CADA
ESTRATO
DETERMINACIÓN
DE LOS ESTRATOS
DE LA MUESTRA
ESTRATOS
DE LA
MUESTRA
Hombres
450
450*0.3015
136
Mujeres
190
190*0.3015
57
TOTAL
640
----
193
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
69
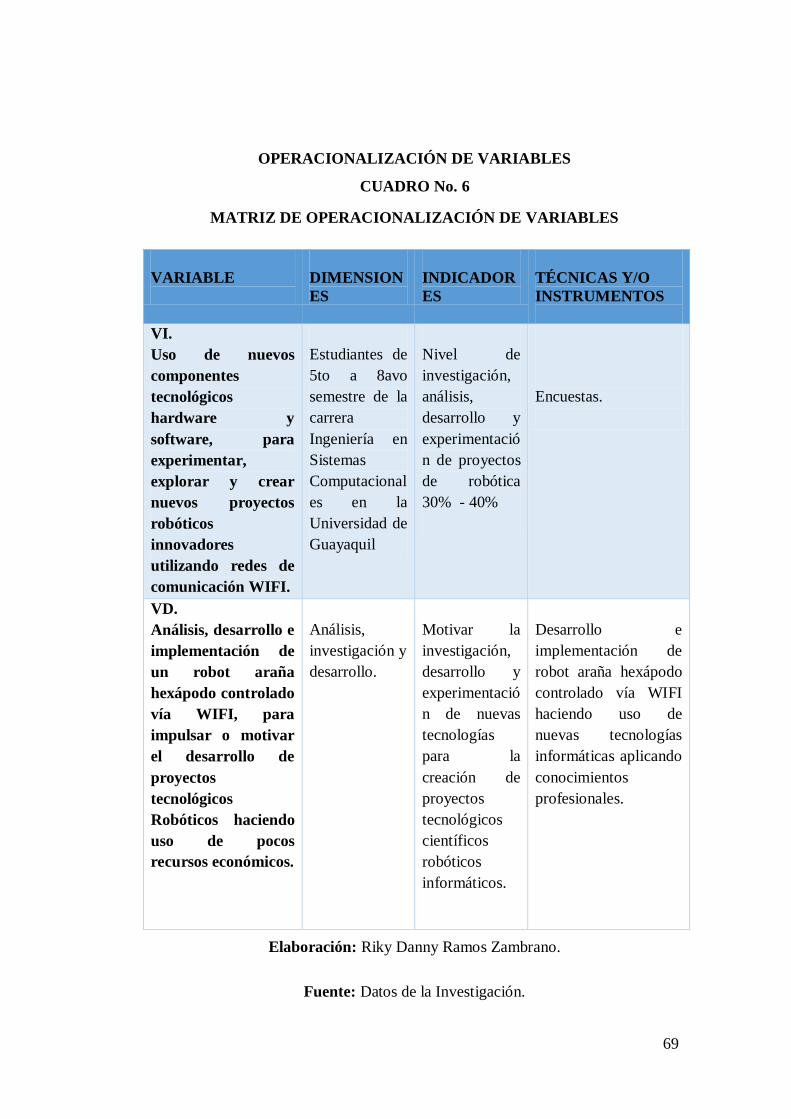
OPERACIONALIZACIÓN DE VARIABLES
CUADRO No. 6
MATRIZ DE OPERACIONALIZACIÓN DE VARIABLES
VARIABLE
DIMENSION
ES
INDICADOR
ES
TÉCNICAS Y/O
INSTRUMENTOS
VI.
Uso de nuevos
componentes
tecnológicos
hardware y
software, para
experimentar,
explorar y crear
nuevos proyectos
robóticos
innovadores
utilizando redes de
comunicación WIFI.
Estudiantes de
5to a 8avo
semestre de la
carrera
Ingeniería en
Sistemas
Computacional
es en la
Universidad de
Guayaquil
Nivel de
investigación,
análisis,
desarrollo y
experimentació
n de proyectos
de robótica
30% - 40%
Encuestas.
VD.
Análisis, desarrollo e
implementación de
un robot araña
hexápodo controlado
vía WIFI, para
impulsar o motivar
el desarrollo de
proyectos
tecnológicos
Robóticos haciendo
uso de pocos
recursos económicos.
Análisis,
investigación y
desarrollo.
Motivar la
investigación,
desarrollo y
experimentació
n de nuevas
tecnologías
para la
creación de
proyectos
tecnológicos
científicos
robóticos
informáticos.
Desarrollo e
implementación de
robot araña hexápodo
controlado vía WIFI
haciendo uso de
nuevas tecnologías
informáticas aplicando
conocimientos
profesionales.
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
70
INSTRUMENTOS DE RECOLECCIÓN DE DATOS
TÉCNICA
Para el proceso de recolección de datos o información para poder entender de una
manera más clara el problema que se está analizando o estudiando se hizo uso de
la técnica de la encuesta que nos permite obtener datos provenientes de las
personas que están involucradas en el mismo, para ello se elaboró una encuesta
conformada por cinco preguntas cerradas manteniendo el anonimato del
encuestado.
La aplicación de esta técnica es de mucha ayuda ya que mediante la formulación
de dichas preguntas nos permite obtener datos o conocer la opinión de los
estudiantes o las personas encuestadas.
Además a eso se hizo uso de la técnica de entrevista de expertos que nos permitió
entender de una manera más precisa, clara y relevante sobre el problema que se
está estudiando para brindarle una solución más óptima.
INSTRUMENTOS DE LA INVESTIGACIÓN
El instrumento de estudio utilizado para conseguir la información y datos
necesarios en el desarrollo de este proyecto fueron:
El cuestionario, porque permitió determinar y registrar mediante la
formulación de preguntas cerradas con respuestas a escala tipo Likert, que
71
piensan los estudiantes de la Carrera Ingeniería En Sistemas
Computacionales de la Universidad De Guayaquil sobre la manera actual
como se analizan, investigan y desarrollan proyectos tecnológicos
robóticos informáticos.
Fuentes como internet, libros, proyectos de tesis de diferentes
universidades, etc. A fin de recolectar datos e información que ayuden a
cumplir con los objetivos y desarrollo del proyecto.
EL CUESTIONARIO
Un cuestionario, es un sistema de preguntas racionales, ordenadas en forma
coherente, tanto desde el punto de vista lógico como psicológico, expresadas en
un lenguaje sencillo y comprensible, que generalmente responde por escrito la
persona interrogada, sin que sea necesaria la intervención de un encuestador.
El cuestionario de preguntas utilizado para realizar la investigación de mercado a
los estudiantes de la carrera Ingeniería en Sistemas Computacionales, con su
respectiva tabulación de resultados se lo puede revisar en el ANEXO # 1.
72
VALIDACIÓN
Para validar el contenido de las preguntas de los cuestionarios utilizados en este
proyecto, se aplicó la técnica de juicio de expertos, la misma que fue consultada a
los siguientes Profesionales:
Ing. Freddy Pincay.
Ing. Roberto Correa.
Ing. David Izurieta.
Cada uno de ellos revisó y validó los instrumentos utilizados, considerando entre
algunos aspectos la formulación y sintaxis de cada una de las preguntas y
alternativas desarrolladas en el cuestionario, a fin de contar con un instrumento de
estudio que permita obtener los datos deseados para el desarrollo del proyecto de
grado.
PROCEDIMIENTOS DE LA INVESTIGACIÓN
Los pasos que se siguieron para elaborar la investigación y desarrollo del proyecto
son los siguientes:
El problema
Planteamiento del problema.
Objetivos de la Investigación.
Alcances y Limitaciones.
Justificación o importancia de la investigación.
73
Marco teórico
Antecedentes del Estudio
Fundamentación teórica
Fundamentación legal
Hipótesis
Variables
Definición de términos
Metodología
Diseño de Investigación (Tipo de Investigación)
Población y Muestra
Instrumentos de recolección de datos
Operacionalización de variables, dimensiones e indicadores
Procedimiento de la Investigación
Criterios para la elaboración de la propuesta
RECOLECCIÓN DE LA INFORMACIÓN
La recolección de la información de las encuestas dirigidas a los estudiantes de la
carrera Ingeniería En Sistemas Computacionales de la Universidad De Guayaquil,
consistió en realizar encuesta haciendo uso de encuestas desarrolladas en páginas
Web la misma que fue enviada de manera masiva al correo personal de los
74
estudiantes, donde mediante el cuestionario utilizado se logró obtener de forma
sistemática los datos necesarios para el proyecto planteado.
PROCESAMIENTO Y ANÁLISIS
La información que analizaremos es la obtenida mediante las encuestas realizadas
a los estudiantes de la carrera Ingeniería En Sistemas Computacionales de la
Universidad De Guayaquil, representando mediante gráficos estadísticos los datos
obtenidos.
Esta información servirá para diseñar un producto que permita cumplir con los
objetivos del proyecto.
Los resultados obtenidos de la encuesta realizada a los estudiantes de la carrera se
encuentran detallados en el ANEXO #1.
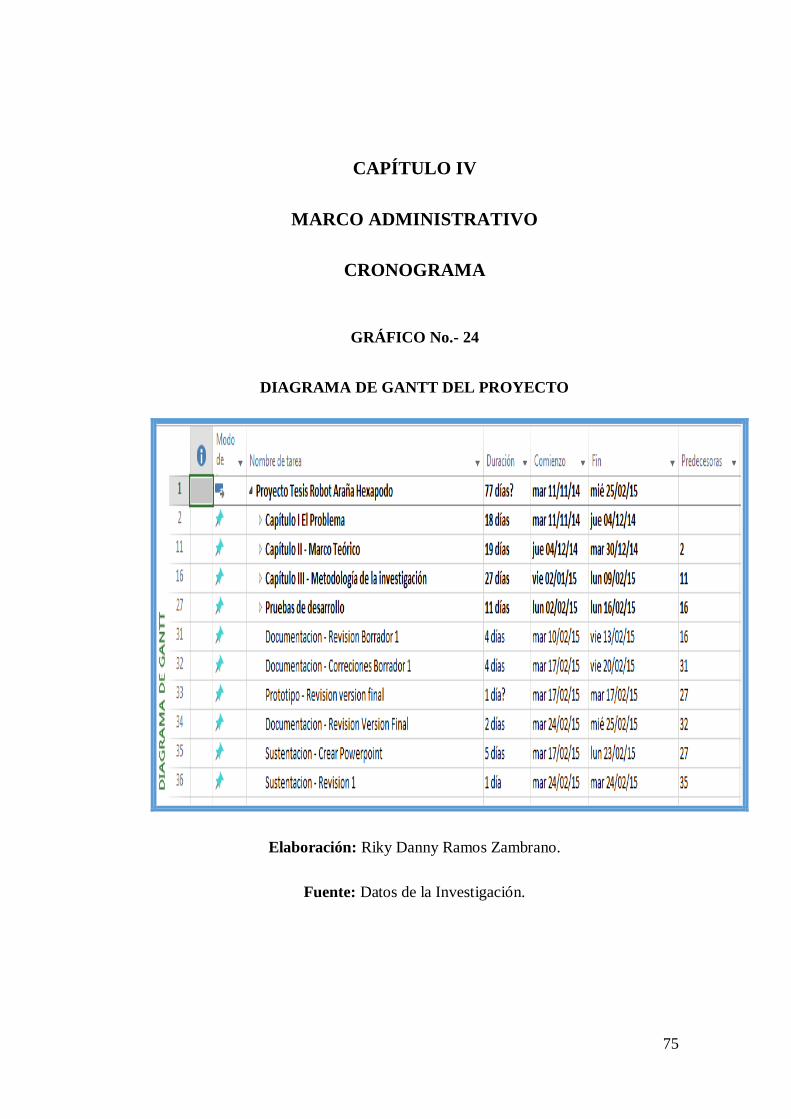
75
CAPÍTULO IV
MARCO ADMINISTRATIVO
CRONOGRAMA
GRÁFICO No.- 24
DIAGRAMA DE GANTT DEL PROYECTO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
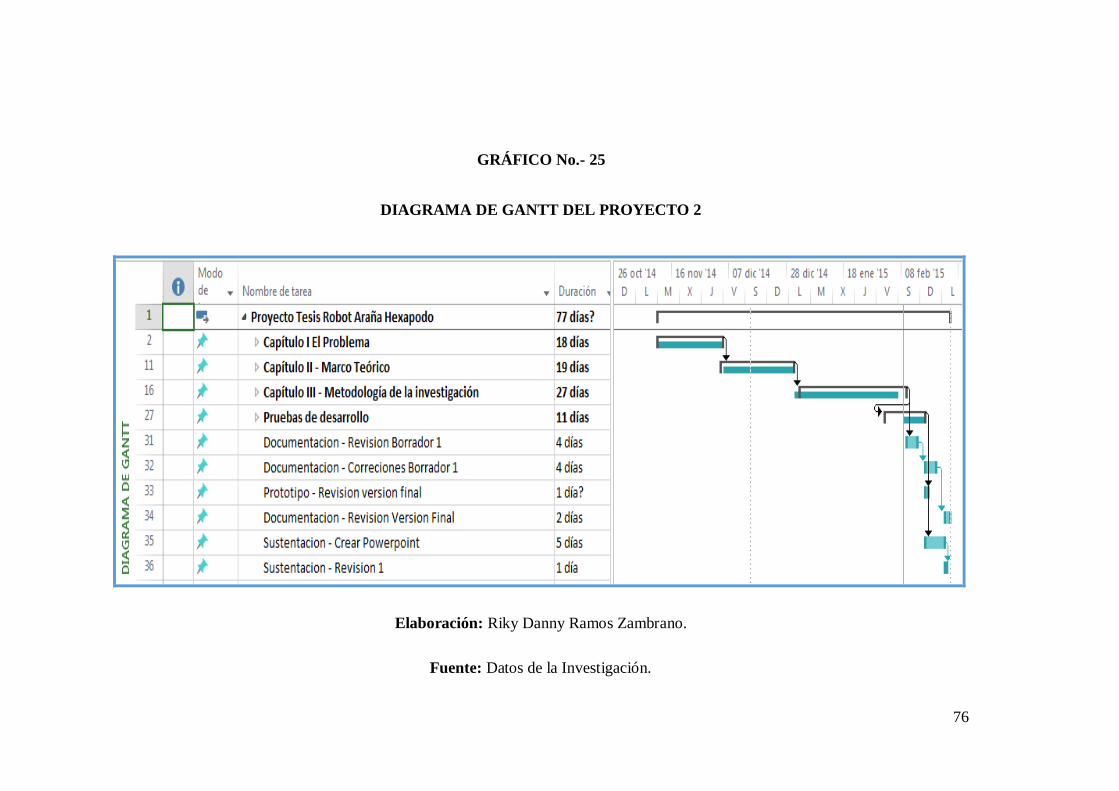
76
GRÁFICO No.- 25
DIAGRAMA DE GANTT DEL PROYECTO 2
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

77
GRÁFICO No.- 26
DIAGRAMA DE GANTT DEL PROYECTO 3
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
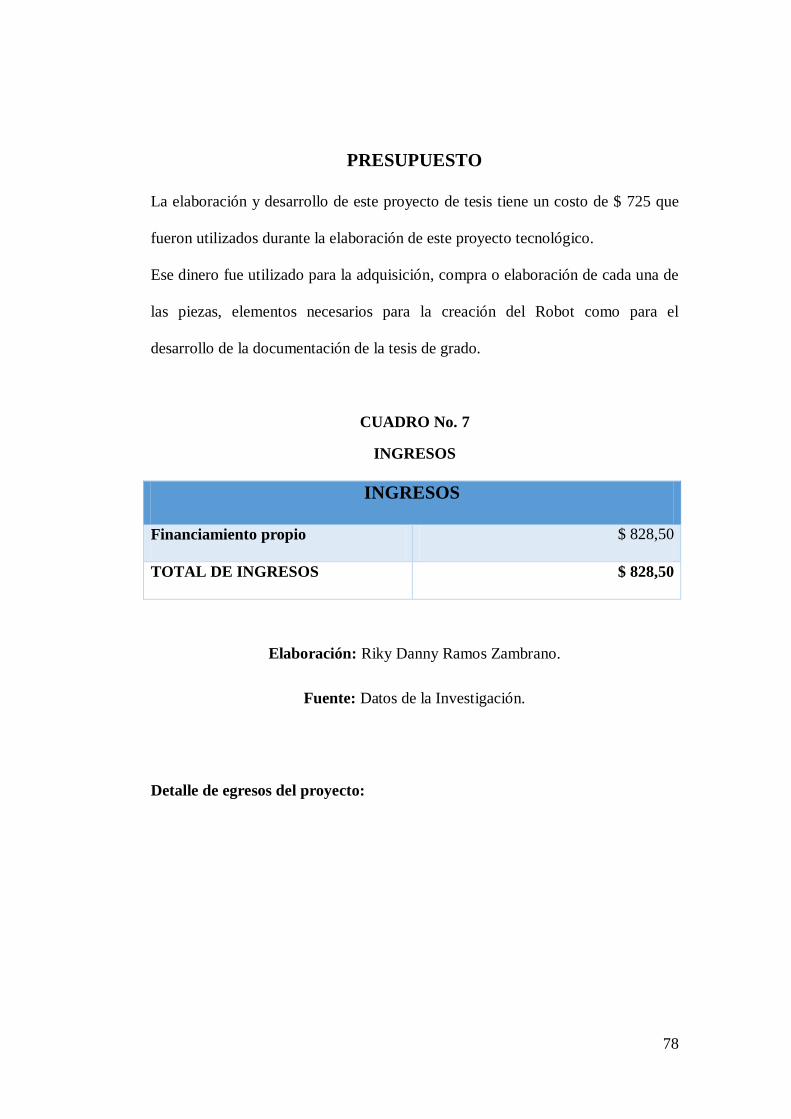
78
PRESUPUESTO
La elaboración y desarrollo de este proyecto de tesis tiene un costo de $ 725 que
fueron utilizados durante la elaboración de este proyecto tecnológico.
Ese dinero fue utilizado para la adquisición, compra o elaboración de cada una de
las piezas, elementos necesarios para la creación del Robot como para el
desarrollo de la documentación de la tesis de grado.
CUADRO No. 7
INGRESOS
INGRESOS
Financiamiento propio $ 828,50
TOTAL DE INGRESOS $ 828,50
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
Detalle de egresos del proyecto:
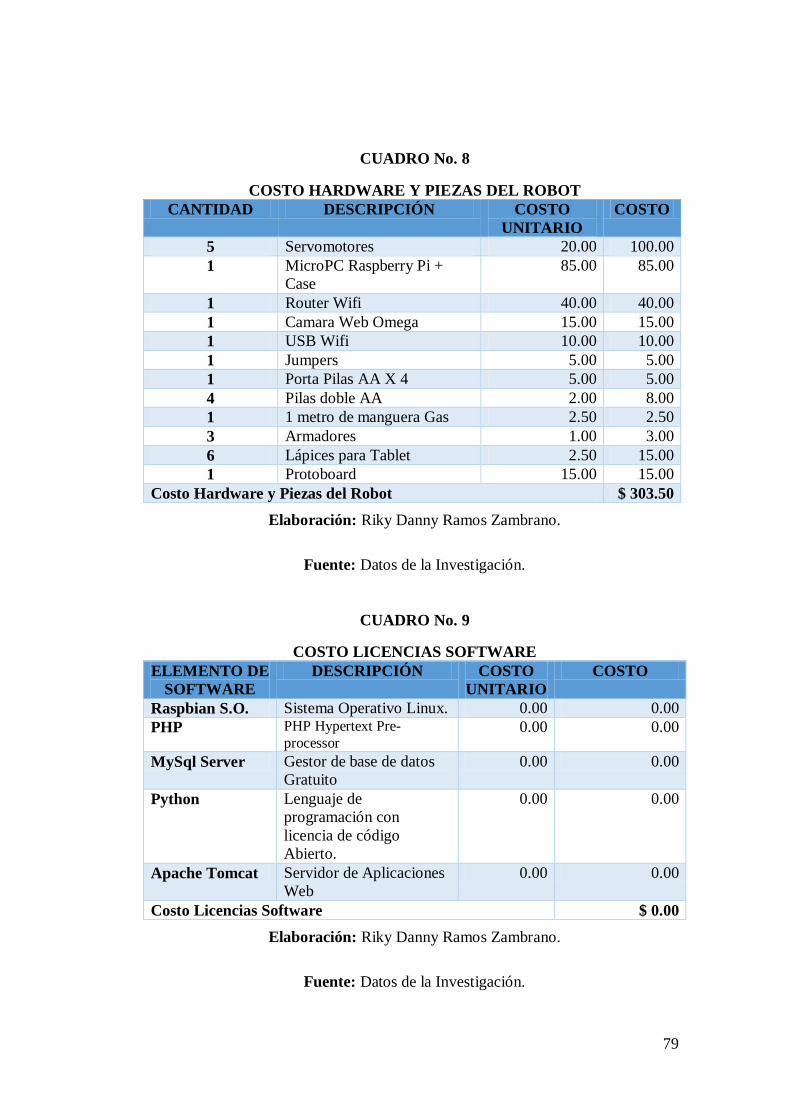
79
CUADRO No. 8
COSTO HARDWARE Y PIEZAS DEL ROBOT
CANTIDAD DESCRIPCIÓN COSTO
UNITARIO
COSTO
5 Servomotores 20.00 100.00
1 MicroPC Raspberry Pi +
Case
85.00 85.00
1 Router Wifi 40.00 40.00
1 Camara Web Omega 15.00 15.00
1 USB Wifi 10.00 10.00
1 Jumpers 5.00 5.00
1 Porta Pilas AA X 4 5.00 5.00
4 Pilas doble AA 2.00 8.00
1 1 metro de manguera Gas 2.50 2.50
3 Armadores 1.00 3.00
6 Lápices para Tablet 2.50 15.00
1 Protoboard 15.00 15.00
Costo Hardware y Piezas del Robot $ 303.50
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
CUADRO No. 9
COSTO LICENCIAS SOFTWARE
ELEMENTO DE
SOFTWARE
DESCRIPCIÓN COSTO
UNITARIO
COSTO
Raspbian S.O. Sistema Operativo Linux. 0.00 0.00
PHP PHP Hypertext Pre-
processor 0.00 0.00
MySql Server Gestor de base de datos
Gratuito
0.00 0.00
Python Lenguaje de
programación con
licencia de código
Abierto.
0.00 0.00
Apache Tomcat Servidor de Aplicaciones
Web
0.00 0.00
Costo Licencias Software $ 0.00
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
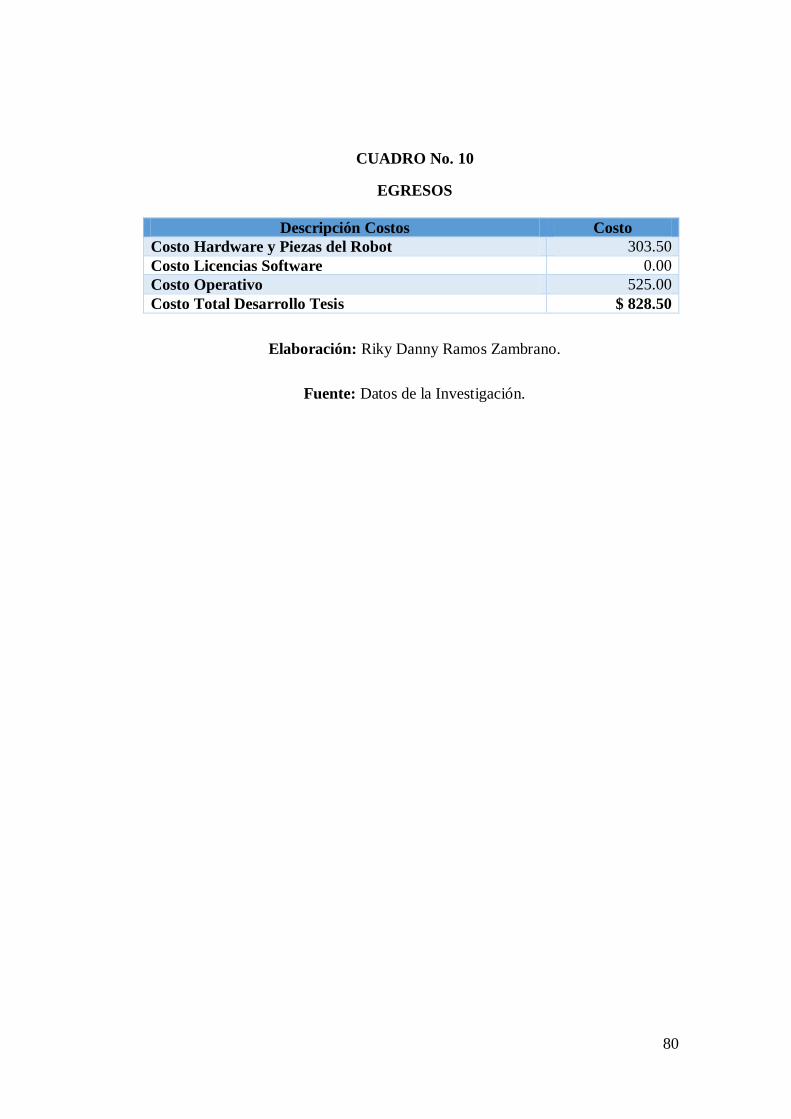
80
CUADRO No. 10
EGRESOS
Descripción Costos Costo
Costo Hardware y Piezas del Robot 303.50
Costo Licencias Software 0.00
Costo Operativo 525.00
Costo Total Desarrollo Tesis $ 828.50
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

81
CAPÍTULO V
CONCLUSIONES Y RECOMENDACIONES
CONCLUSIONES
De la información obtenida mediante la aplicación de la encuesta se puede
conocer que existe un gran porcentaje de estudiantes de la carrera
Ingeniería en Sistemas Computacionales de la Universidad de Guayaquil,
que desean adquirir más conocimientos o experimentar más sobre
proyectos de desarrollo tecnológico en el área de la robótica para poder
enfocarse en las necesidades o problemas que demandan la creación de
tecnología actualmente el país de esta manera poder brindar soluciones
mediante el desarrollo de robots que aporten al crecimiento del país, por
esta razón se llega a la conclusión que con mayor énfasis, motivación,
estudio y experimentación en el área de la robótica se lograría crear
nuestra propia tecnología innovadora que podrá ser aplicable en el país o
porque no a nivel internacional.
El desarrollo de este proyecto de tesis Robot Araña Hexápodo cumple con
cada uno de los objetivos planteados en la misma demostrando que la
aplicación o uso del microcomputador RaspBerry Pi, se pueden crear o
desarrollar Robots innovadores con habilidades de control de manera
WIFI desarrollando una página Web que le permite al usuario interactuar o
controlar cada uno de los movimientos del mismo, tanto de las patas como
el ángulo en el que se encuentra ubicada la cámara. El robot tiene
movilidad en todas las direcciones dependiendo de la dirección o

82
movimiento que le asigne el usuario el robot ejecutara dicha orden y
empezara a desplazarse conforme a lo solicitado por el mismo. El robot
cuenta con una cámara web configurada de tal manera que se encarga de
grabar imágenes en una velocidad de un fotograma por segundo y a la vez
le permitirá al usuario poder visualizar de manera inmediata las imágenes
capturadas haciendo uso de una página Web.
RECOMENDACIONES
Se recomienda que para expandir el conocimiento en el área de la robótica
y desarrollo de la misma en la universidad se debería de crear un
departamento de investigación científica robótica que le permitirá a los
estudiantes poder enfocarse de una manera más profunda permitiéndoles a
los mimos poder experimentar y adquirir más experiencia profesional en el
desarrollo de este tipo de tecnología.
Se recomienda que en el módulo o electiva que se dicta actualmente en la
carrera en el área de la robótica demande que los estudiantes realicen un
pequeño proyecto que les permita poder adquirir mayor conocimiento
sobre el área de la robótica y de esa forma adquieran mayor experiencia
dentro de la misma.
83
Se recomienda que se realicen cursos o capacitaciones de manera
profesional a los maestros dentro del área de la robótica para que de esta
manera ellos puedan impartir de una mejor forma la enseñanza sobre el
desarrollo de proyectos Robóticos logrando de esta manera.
Se recomienda la creación de concursos internos sobre desarrollo de
tecnología informática en el área de la robótica para de esta forma motivar
a los estudiantes a participar y puedan demostrar y hacer uso de su ingenio
y conocimientos adquiridos dentro de la carrera ganando experiencia
profesional e incrementando el interés de los mismos para la
experimentación y desarrollo de proyectos robóticos.
84
BIBLIOGRAFÍA
DIRECCIONES WEB
Asimov. (2015). http://www.ladelec.com. Obtenido de
http://www.ladelec.com/teoria/informacion-tecnica/290-las-3-leyes-de-la-
robotica
AulaClic. (06 de 2005). http://www.aulaclic.es. Obtenido de
http://www.aulaclic.es/articulos/wifi.html
Bacci, M. L. (07 de 01 de 2015). wikipedia.org. Obtenido de
http://es.wikipedia.org/wiki/Poblaci%C3%B3n
Básica, E. (2015). http://www.electricidadbasica.net. Obtenido de
http://www.electricidadbasica.net/amp-vol-fre-fa.htm
Castilla, U. d. (2015). http://www.info-ab.uclm.es. Obtenido de http://www.info-
ab.uclm.es/labelec/solar/electronica/elementos/servomotor.htm
conmasfuturo. (02 de 2014). http://www.conmasfuturo.es. Obtenido de
http://www.conmasfuturo.es/wp-content/uploads/2014/02/RaspberryPi-
1.jpeg
Correa., E. (s.f.). www.eltiempo.com.ec. Obtenido de
http://www.eltiempo.com.ec/noticias-cuenca/140775-ecuador-impulsa-
ciencia-y-tecnologa-a-como-fundamentos-desarrollo-dice-correa/
Eco. Correa, R. (10 de 04 de 2014). www.eltiempo.com.ec. Obtenido de
http://www.eltiempo.com.ec/noticias-cuenca/140775-ecuador-impulsa-
ciencia-y-tecnologa-a-como-fundamentos-desarrollo-dice-correa/
Ecuador, C. (08 de 2012). http://educacion.gob.ec. Obtenido de
http://educacion.gob.ec/wp-
content/uploads/downloads/2012/08/Constitucion.pdf
ecured. (2015). http://www.ecured.cu. Obtenido de
http://www.ecured.cu/index.php/Microcomputadora
FOUNDATION, R. P. (2015). http://www.raspberrypi.org/. Obtenido de
http://www.raspberrypi.org/
Galeon. (2015). http://candyluna.galeon.com. Obtenido de
http://candyluna.galeon.com/aficiones813476.html
85
IEDGE. (23 de 09 de 2011). http://blog.iedge.eu. Obtenido de
http://blog.iedge.eu/tecnologia-sistemas-informacion/desarrollo/pablo-
almunia-ciclo-de-vida-en-el-desarrollo-de-software-segunda-parte/
June, V. (2015). http://www.academia.edu. Obtenido de
http://www.academia.edu/8104337/Fundamentos_de_Robotica
Knasel, T. M. (19 de 06 de 2011). http://blocs.xtec.cat. Obtenido de
http://blocs.xtec.cat/quantumrobotics/category/robotica-industrial/
larevistainformatica. (2006). http://www.larevistainformatica.com. Obtenido de
http://www.larevistainformatica.com/red-informatica.htm
Linuxito. (02 de 02 de 2013). http://www.linuxito.com. Obtenido de
http://www.linuxito.com/gnu-linux/nivel-medio/241-como-instalar-
raspbian-en-raspberry-pi
M, M. G. (01 de 08 de 2013). http://www.frambuesapi.co. Obtenido de
http://www.frambuesapi.co/2013/08/01/tutorial-2-descarga-de-noobs-y-
copia-en-la-tarjeta-sd/
Manuti. (25 de 04 de 2013). http://raspberryparatorpes.net. Obtenido de
http://raspberryparatorpes.net/instalacion/conectar-una-webcam-con-
motion-en-raspberry-pi/
MdeMoUcH. (09 de 02 de 2014). http://www.ubuntufacil.com. Obtenido de
http://www.ubuntufacil.com/2014/02/primeros-pasos-con-raspberry-pi-
instalacion-y-configuracion-de-raspbian/raspbian-logo/
memorykings. (2015). http://www.memorykings.com.pe. Obtenido de
http://www.memorykings.com.pe/producto/91878/bateria-portatil-genius-
eco-u261-smartphone-white
Mike. (1 de 11 de 2010). http://www.nlvocables.com. Obtenido de
http://www.nlvocables.com/blog/?p=368
Morales, F. (28 de 01 de 2015). http://www.creadess.org/index.php. Obtenido de
http://www.creadess.org/index.php/informate/de-interes/temas-de-
interes/17300-conozca-3-tipos-de-investigacion-descriptiva-exploratoria-
y-explicativa
PhD Sara Wong. (2014). http://www.espae.espol.edu.ec/icg2013_2014. Obtenido de http://www.espae.espol.edu.ec/icg2013_2014
Quick, D. (29 de 06 de 2011). http://www.gizmag.com. Obtenido de
http://www.gizmag.com/hexagonal-plate-robotic-skin/19072/
86
raspberrypi.org. (s.f.). http://www.raspberrypi.org/downloads/. Obtenido de
http://www.raspberrypi.org: http://www.raspberrypi.org/downloads/
Riccillo, M. (2012). http://bibliotecadigital.educ.ar. Obtenido de
http://bibliotecadigital.educ.ar/uploads/contents/ROBOTICA1.pdf
Ruiz, A. J. (14 de 09 de 2014). http://www.elotrolado.net. Obtenido de
http://www.elotrolado.net/hilo_reportaje-robots-parte-iii-la-clasificacion-
de-las-maquinas_2036749
RWB. (17 de 02 de 2009). http://www.ermicro.com. Obtenido de
http://www.ermicro.com/blog/?p=771
Sara Wong, P. (2014). www.explored.com.ec. Obtenido de
http://www.explored.com.ec/noticias-ecuador/el-acceso-a-la-tecnologia-
es-el-talon-de-aquiles-de-ecuador-590353.html
Sierra, M. (2006). http://www.aprenderaprogramar.com. Obtenido de
http://www.aprenderaprogramar.com/index.php?option=com_attachments
&task=download&id=500
Sinemed. (2015). http://www.sinemed.com. Obtenido de
http://www.sinemed.com/recursos/docs/MySQL.pdf
Sketchup. (2013). http://www.sketchup.com. Obtenido de
http://www.sketchup.com/es
Taringa. (25 de 06 de 2014). http://www.taringa.net. Obtenido de
http://www.taringa.net/posts/ciencia-educacion/17923381/Curso-Online-
Aprende-MySQL-sin-dolor.html
THEORY, G. (22 de 05 de 2013). http://geekytheory.com. Obtenido de
http://geekytheory.com/tutorial-raspberry-pi-9-servidor-ftp/
Unicrom. (12 de 2002). http://www.unicrom.com. Obtenido de
http://www.unicrom.com/tut_protoboard.asp
UNSAAC. (11 de 2006). https://robotica.wordpress.com. Obtenido de
https://robotica.wordpress.com/about/
Watts, J. (07 de 08 de 2014). http://dinguk.org. Obtenido de
http://dinguk.org/the-new-web-site-is-now-fully-functional/
www.ucontrol.com.ar. (2015). www.ucontrol.com.ar. Obtenido de
www.ucontrol.com.ar/raspberry-pi/
87
ANEXOS
ANEXO # 1: INVESTIGACIÓN DE MERCADO
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMÁTICAS Y FÍSICAS
CARRERA DE INGENIERÍA EN SISTEMAS COMPUTACIONALES
La siguiente encuesta tiene la finalidad obtener información con respecto a la
opinión o percepción que tienen los estudiantes sobre el análisis y desarrollo de un
robot araña hexápodo controlado vía WIFI que servirá como aporte motivacional,
guía o impulso para el desarrollo e experimentación de proyectos científicos
tecnológicos informáticos dentro de la carrera.
Marque la respuesta que usted crea más adecuada, solo seleccione una opción y
no deje preguntas sin responder.
1. ¿El análisis, estudio y desarrollo de un robot araña hexápodo
controlado vía WIFI servirá como impulso para que los estudiantes se
involucren más en la robótica?
a) Totalmente de acuerdo.
b) De acuerdo.
c) Me es indiferente.
d) En desacuerdo.
e) Totalmente en desacuerdo.

88
2. ¿Está usted de acuerdo con que se promueva en la carrera el
desarrollo de experimentos robóticos para que los estudiantes puedan
optimizar sus conocimientos y adquirir experiencia?
a) Totalmente de acuerdo.
b) De acuerdo.
c) Me es indiferente.
d) En desacuerdo.
e) Totalmente en desacuerdo.
3. ¿Está usted de acuerdo que con el desarrollo de un robot controlado
vía WIFI servirá como una guía a los estudiantes para el estudio,
análisis y desarrollo de nuevos proyectos robóticos tecnológicos
informáticos?
a) Totalmente de acuerdo.
b) De acuerdo.
c) Me es indiferente.
d) En desacuerdo.
e) Totalmente en desacuerdo.
4. ¿Debería de existir un departamento o laboratorio de investigación y
desarrollo de experimentos robóticos e informáticos en la carrera?
a) Totalmente de acuerdo.
b) De acuerdo.
c) Me es indiferente.
d) En desacuerdo.
e) Totalmente en desacuerdo.

89
5. ¿Si se tuviera el aporte económico de instituciones públicas y privadas
se lograría poder incrementar el índice de desarrollo y producción de
nuevas tecnologías informáticas y robóticas en la carrera?
a) Totalmente de acuerdo.
b) De acuerdo.
c) Me es indiferente.
d) En desacuerdo.
e) Totalmente en desacuerdo.
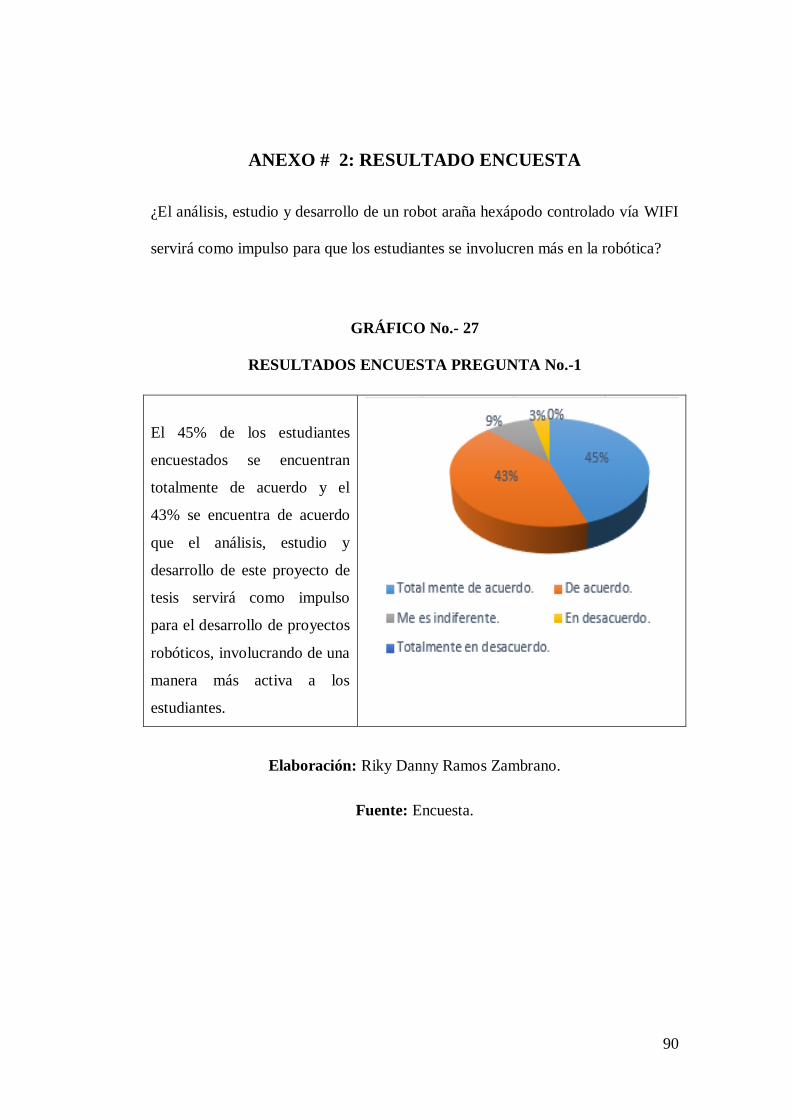
90
ANEXO # 2: RESULTADO ENCUESTA
¿El análisis, estudio y desarrollo de un robot araña hexápodo controlado vía WIFI
servirá como impulso para que los estudiantes se involucren más en la robótica?
GRÁFICO No.- 27
RESULTADOS ENCUESTA PREGUNTA No.-1
El 45% de los estudiantes
encuestados se encuentran
totalmente de acuerdo y el
43% se encuentra de acuerdo
que el análisis, estudio y
desarrollo de este proyecto de
tesis servirá como impulso
para el desarrollo de proyectos
robóticos, involucrando de una
manera más activa a los
estudiantes.
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Encuesta.

91
¿Está usted de acuerdo con que se promueva en la carrera el desarrollo de
experimentos robóticos para que los estudiantes puedan optimizar sus
conocimientos y adquirir experiencia?
GRÁFICO No.- 28
RESULTADOS ENCUESTA PREGUNTA No.-2
El 70% de los estudiantes
encuestados se encuentran
totalmente de acuerdo y el
29% se encuentra de acuerdo
en que se promueva el
desarrollo de experimentos
robóticos para que los
estudiantes puedan optimizar
sus conocimientos y adquirir
experiencia en la carrera.
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Encuesta.
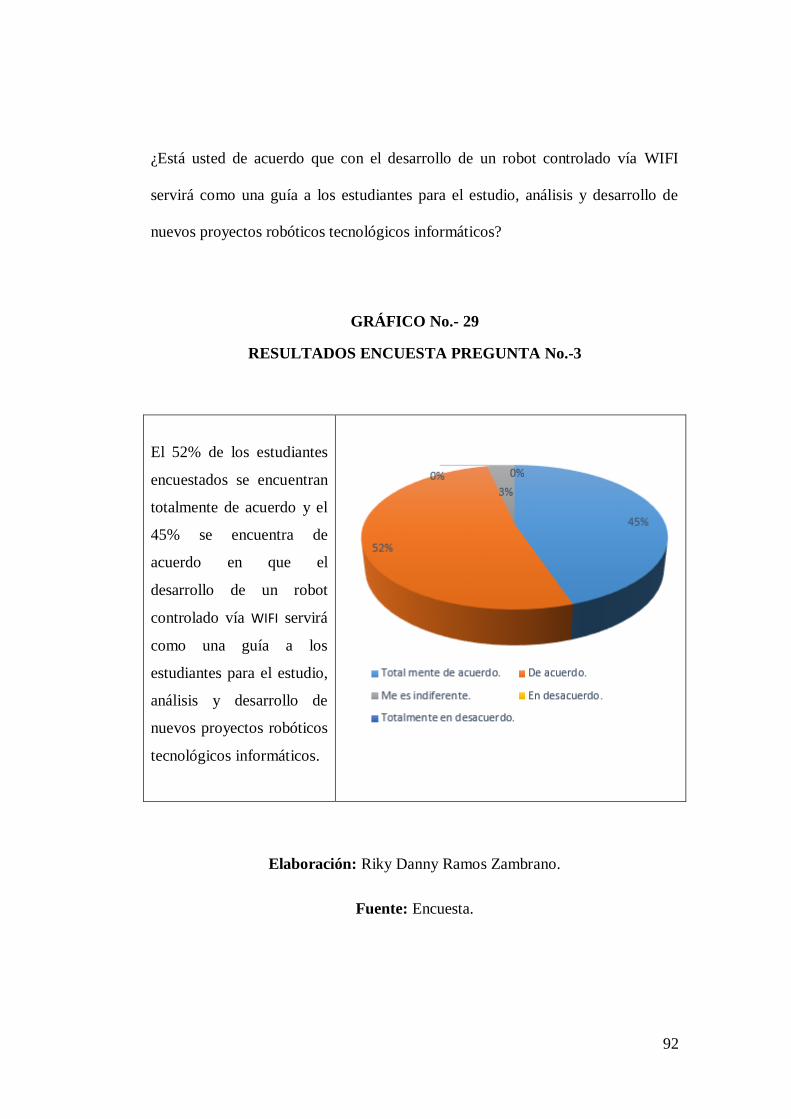
92
¿Está usted de acuerdo que con el desarrollo de un robot controlado vía WIFI
servirá como una guía a los estudiantes para el estudio, análisis y desarrollo de
nuevos proyectos robóticos tecnológicos informáticos?
GRÁFICO No.- 29
RESULTADOS ENCUESTA PREGUNTA No.-3
El 52% de los estudiantes
encuestados se encuentran
totalmente de acuerdo y el
45% se encuentra de
acuerdo en que el
desarrollo de un robot
controlado vía WIFI servirá
como una guía a los
estudiantes para el estudio,
análisis y desarrollo de
nuevos proyectos robóticos
tecnológicos informáticos.
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Encuesta.
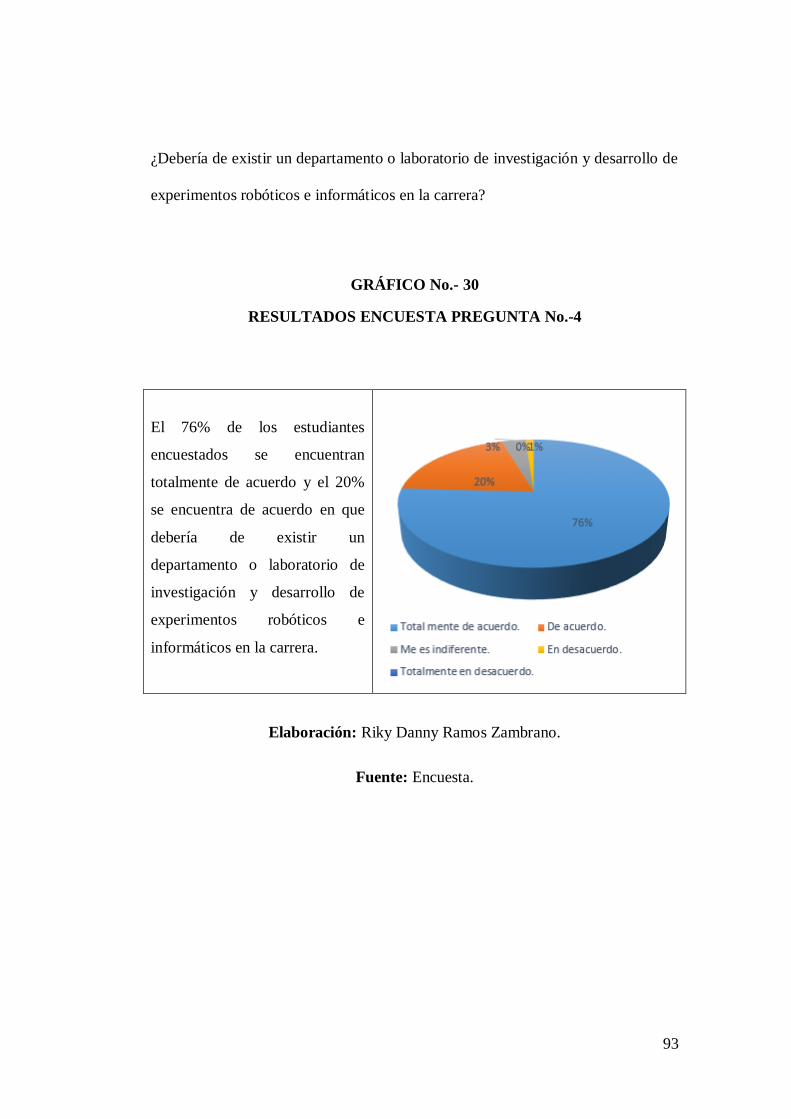
93
¿Debería de existir un departamento o laboratorio de investigación y desarrollo de
experimentos robóticos e informáticos en la carrera?
GRÁFICO No.- 30
RESULTADOS ENCUESTA PREGUNTA No.-4
El 76% de los estudiantes
encuestados se encuentran
totalmente de acuerdo y el 20%
se encuentra de acuerdo en que
debería de existir un
departamento o laboratorio de
investigación y desarrollo de
experimentos robóticos e
informáticos en la carrera.
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Encuesta.
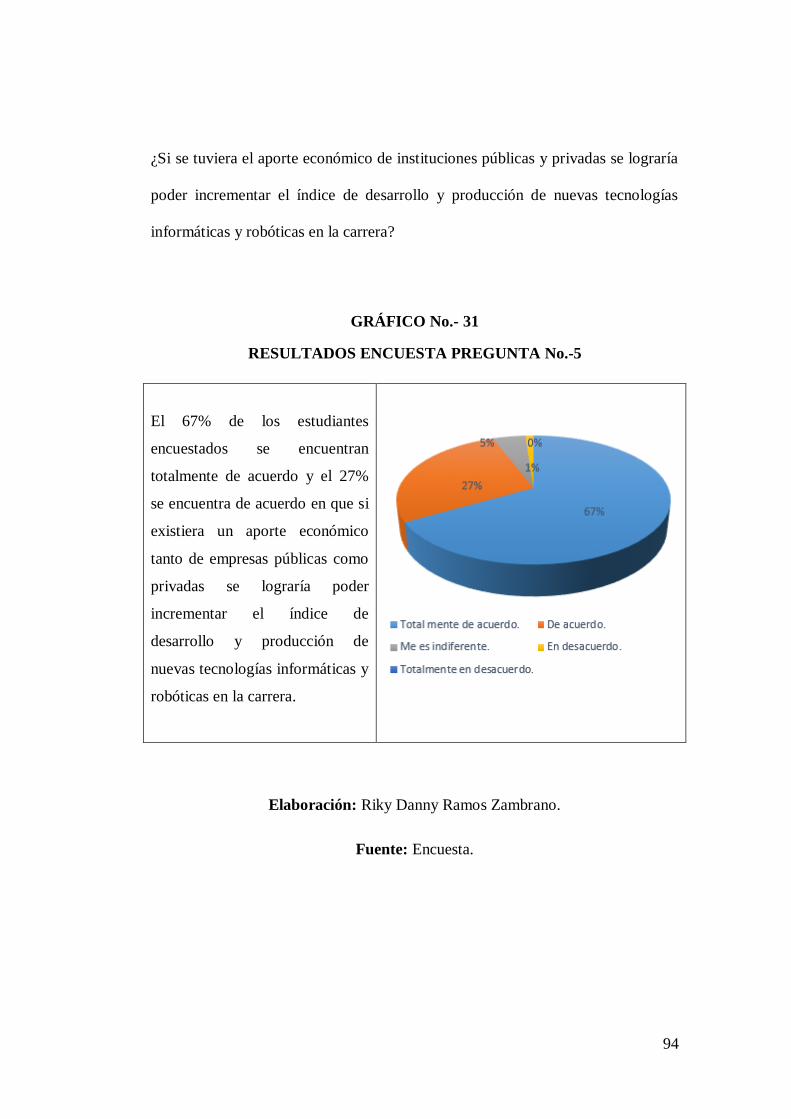
94
¿Si se tuviera el aporte económico de instituciones públicas y privadas se lograría
poder incrementar el índice de desarrollo y producción de nuevas tecnologías
informáticas y robóticas en la carrera?
GRÁFICO No.- 31
RESULTADOS ENCUESTA PREGUNTA No.-5
El 67% de los estudiantes
encuestados se encuentran
totalmente de acuerdo y el 27%
se encuentra de acuerdo en que si
existiera un aporte económico
tanto de empresas públicas como
privadas se lograría poder
incrementar el índice de
desarrollo y producción de
nuevas tecnologías informáticas y
robóticas en la carrera.
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Encuesta.

95
RESULTADOS DE LAS ENCUESTAS
Los resultados obtenidos en las encuestas nos demuestran que el análisis y
desarrollo de un robot araña hexápodo controlado vía WIFI haciendo uso de
nuevas tecnologías como lo es el Raspberry PI B, lograra promover, motivar e
incentivar el análisis, experimentación y desarrollo de nuevos proyectos
tecnológicos científicos robóticos informáticos dentro de la carrera Ingeniería En
Sistemas Computacionales de la Universidad De Guayaquil, ya que en base a los
resultados obtenidos de la encuesta se tiene un nivel del 85 % de aceptación que
los estudiantes se encuentran total mente de acuerdo o de acuerdo en el aporte
tecnológico que involucra la investigación y desarrollo de este proyecto robótico.
Cabe notar que la investigación, análisis y desarrollo de tecnología por parte de la
carrera servirá como aporte a nivel nacional ya que estaríamos creando y
desarrollando nuestra propia tecnología y esto nos lleva hacia un camino de una
país de desarrollo tecnológico, de esta forma los recursos económicos que se
utilizan para la importación de tecnología serían usados de manera interna como
inversión para la investigación y desarrollo de la misma.

96
ANEXO # 3: ANÁLISIS DE LAS FUNCIONALIDADES DEL
SISTEMA
El propósito principal del análisis es obtener una descripción lógica del sistema a
desarrollar, es decir, describir formalmente mediante modelos las características
de la aplicación. Estos modelos servirán posteriormente de guía para obtener el
producto deseado. Para ello utilizaremos el lenguaje de modelado UML (Lenguaje
Unificado de Modelado). Se trata de un lenguaje gráfico para visualizar,
especificar, construir y documentar un sistema de software. Éste tiene varios
diagramas que nos facilitara obtener una solución.
La notación UML se deriva y unifica las tres metodologías de análisis y diseño
Orientado Objetos más extendidas:
Metodología de Grady Booch para la descripción de conjuntos de objetos y sus
relaciones.
Técnica de modelado orientada a objetos de James Rumbaugh (OMT: Object-
ModelingTechnique). Aproximación de Ivar Jacobson (OOSE: Object- Oriented
Software Engineering) mediante la metodología de casos de uso (use case).
El desarrollo de UML comenzó a finales de 1994 cuando Grady Booch y Jim
Rumbaugh de Rational Software Corporation empezaron a unificar sus métodos.
A finales de 1995, Ivar Jacobson y su compañía Objectory se incorporaron a
Rational en su unificación, aportando el método OOSE .De las tres metodologías
de partida, las de Booch y Rumbaugh pueden ser descritas como centradas en
objetos, ya que sus aproximaciones se enfocan hacia el modelado de los objetos
que componen el sistema, su relación y colaboración. Por otro lado, la

97
metodología de Jacobson es más centrada a usuario, ya que todo en su método se
deriva de los escenarios de uso. UML se ha ido fomentando y aceptando como
estándar desde el OMG, que es también el origen de CORBA, el estándar líder en
la industria para la programación de objetos distribuidos. En 1997 UML 1.1 fue
aprobada por la OMG convirtiéndose en la notación estándar de facto para el
análisis y el diseño orientado a objetos. UML es el primer método en publicar un
meta-modelo en su propia notación, incluyendo la notación para la mayoría de la
información de requisitos, análisis y diseño. Se trata pues de un meta-modelo
auto-referencial (cualquier lenguaje de modelado de propósito general debería ser
capaz de modelarse a sí mismo).

98
ANEXO # 4: DIAGRAMA DE CASOS DE USO
En el Lenguaje de Modelado Unificado, un diagrama de casos de uso es una
especie de diagrama de comportamiento. UML mejorado El Lenguaje de
Modelado Unificado define una notación gráfica para representar casos de uso
llamada modelo de casos de uso. UML no define estándares para que el formato
escrito describa los casos de uso, y así mucha gente no entiende que esta notación
gráfica define la naturaleza de un caso de uso; sin embargo una notación gráfica
puede solo dar una vista general simple de un caso de uso o un conjunto de casos
de uso. Los diagramas de casos de uso son a menudo confundidos con los casos
de uso. Mientras los dos conceptos están relacionados, los casos de uso son
mucho más detallados que los diagramas de casos de uso.
La descripción escrita del comportamiento del sistema al afrontar una tarea
de negocio o un requisito de negocio. Esta descripción se enfoca en el
valor suministrado por el sistema a entidades externas tales como usuarios
humanos u otros sistemas.
La posición o contexto del caso de uso entre otros casos de uso. Dado que
es un mecanismo de organización, un conjunto de casos de uso coherente
y consistente promueven una imagen fácil de comprender del
comportamiento del sistema, un entendimiento común entre el
cliente/propietario/usuario y el equipo de desarrollo.
99
DESCRIPCIÓN DE ACTORES:
Usuario.- Es la persona que se encargara de interactuar con el sistema de darle
movilidad al robot en las direcciones que desee haciendo uso de una página web
que podrá ser cargada o visualizada en cualquier dispositivo.
Administrador del sistema.- Es la persona que se encargara de realizar el
control, levantar los servicios o demonios que les permitirán a los usuarios poder
interactuar con el sistema de control del robot araña hexápodo.
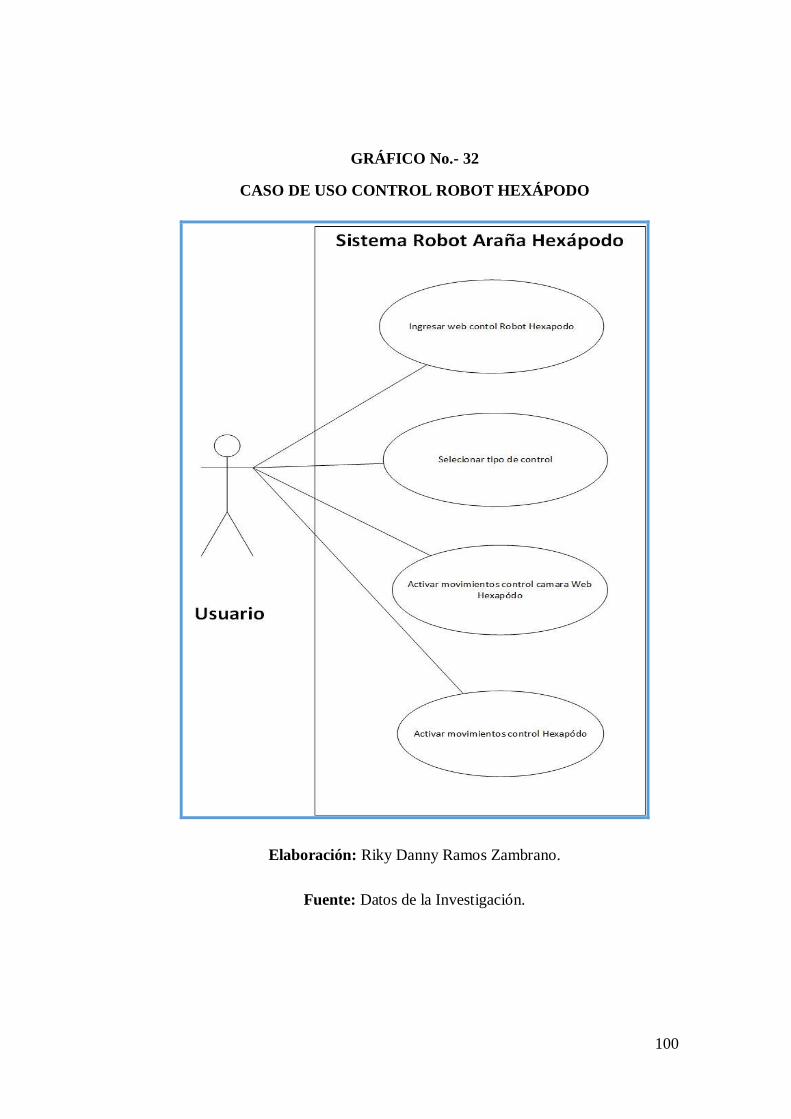
100
GRÁFICO No.- 32
CASO DE USO CONTROL ROBOT HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
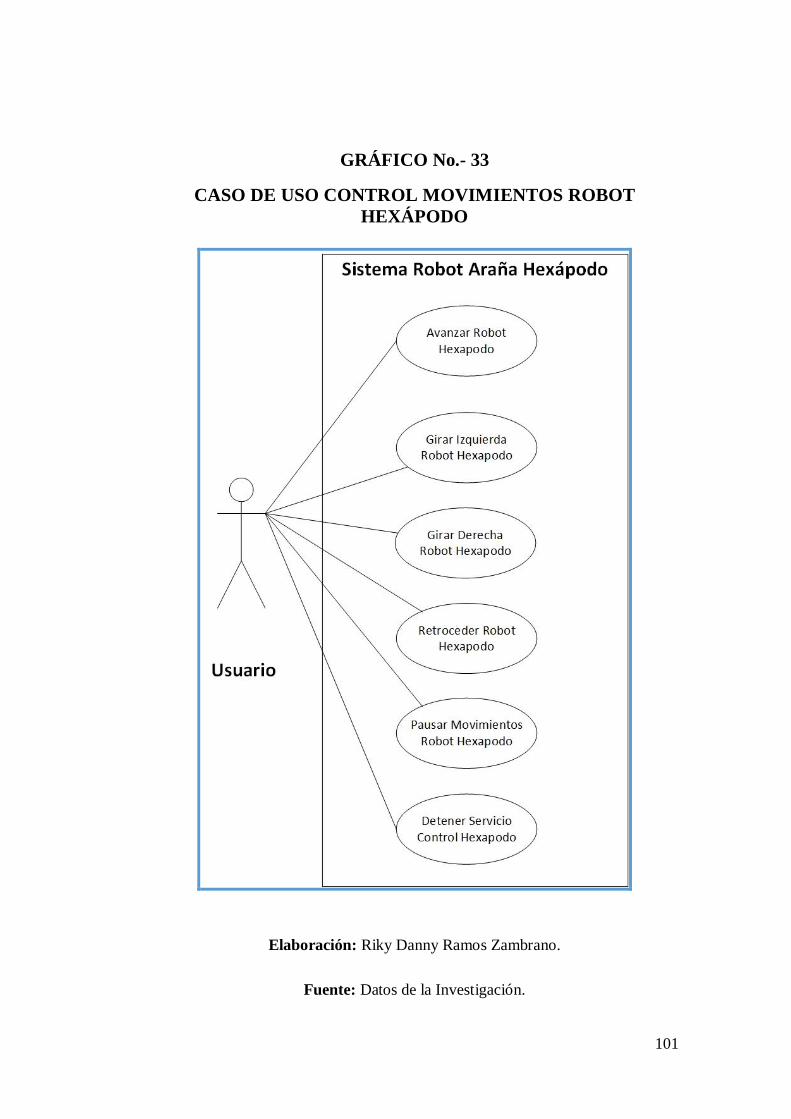
101
GRÁFICO No.- 33
CASO DE USO CONTROL MOVIMIENTOS ROBOT
HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
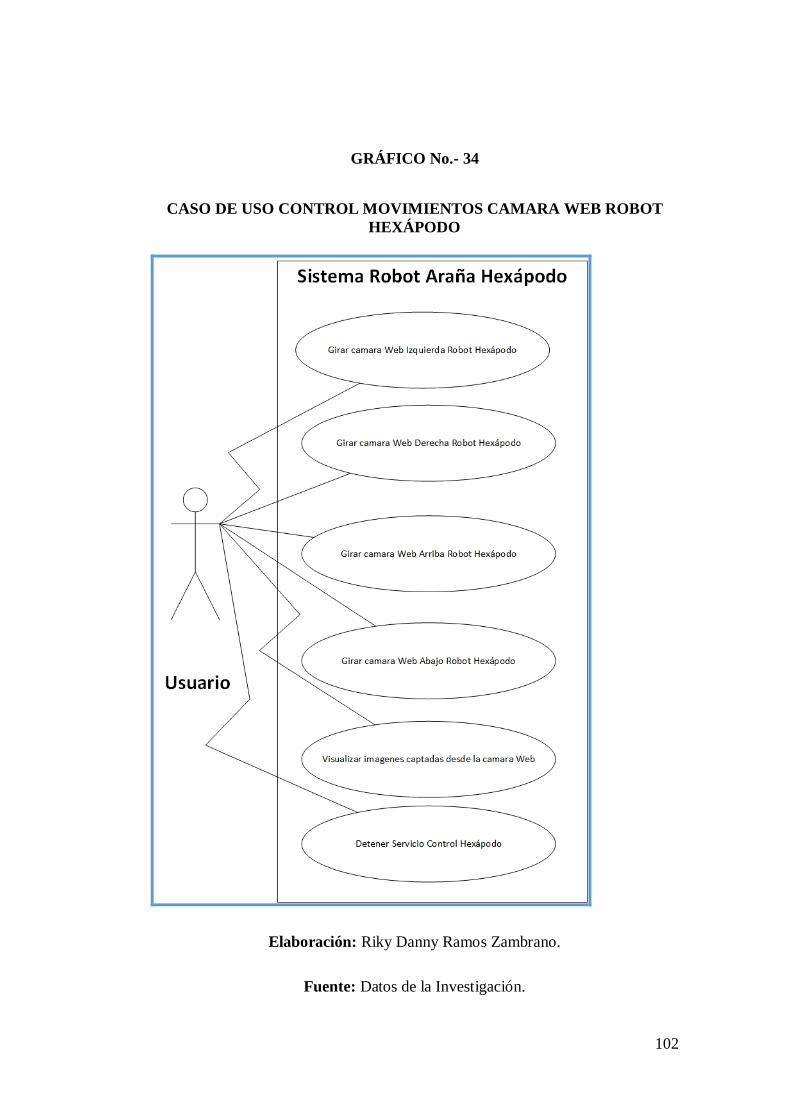
102
GRÁFICO No.- 34
CASO DE USO CONTROL MOVIMIENTOS CAMARA WEB ROBOT
HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

103
GRÁFICO No.- 35
CASO DE USO LEVANTAR SERVICIOS ROBOT ARAÑA HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

104
ESCENARIOS DE CASOS DE USO
ACTOR: USUARIO.
CASO DE USO: CONTROL ROBOT HEXÁPODO.
1. CONTROL ROBOT HEXÁPODO.
1.1. Cargar Pagina Web Control Robot Araña Hexápodo.
1.2. Seleccionar tipo de control.
1. Activar movimientos control cámara Web robot araña hexápodo.
2. Activar movimientos extremidades control robot araña hexápodo.
ACTOR: USUARIO.
CASO DE USO: CONTROL MOVIMIENTOS ROBOT HEXÁPODO.
2. CONTROL MOVIMIENTOS ROBOT HEXÁPODO.
2.1. Avanzar Robot araña hexápodo.
2.2. Girar Robot araña hexápodo izquierda.
2.3. Girar Robot araña hexápodo derecha.
2.4. Retroceder Robot araña hexápodo.
2.5. Pausar movimientos robot araña hexápodo.
2.6. Detener Servicio control robot araña hexápodo.
105
ACTOR: USUARIO.
CASO DE USO: CONTROL MOVIMIENTOS CAMARA WEB ROBOT
HEXÁPODO.
3. CONTROL MOVIMIENTOS CAMARA WEB ROBOT HEXÁPODO.
3.1. Girar izquierda cámara web Robot araña hexápodo.
3.2. Girar derecha cámara web Robot araña hexápodo.
3.3. Girar hacia abajo cámara web robot araña hexápodo.
3.4. Girar hacia arriba cámara web robot araña hexápodo.
3.5. Pausar movimientos robot araña hexápodo.
3.6. Visualizar imágenes captadas por la cámara web.
3.7. Detener Servicio control robot araña hexápodo.
ACTOR: ADMINISTRADOR.
CASO DE USO: LEVANTAR SERVICIOS ROBOT ARAÑA HEXÁPODO.
4. LEVANTAR SERVICIOS ROBOT ARAÑA HEXÁPODO.
4.1. Levantar Servicio Web.
4.2. Levantar servicio de base de datos.
4.3. Levantar servicio o demonio de control remoto hexápodo.
4.4. Levantar servicio de grabación de cámara web araña hexápodo.
4.5. Detener servicio de control remoto robot araña hexápodo.
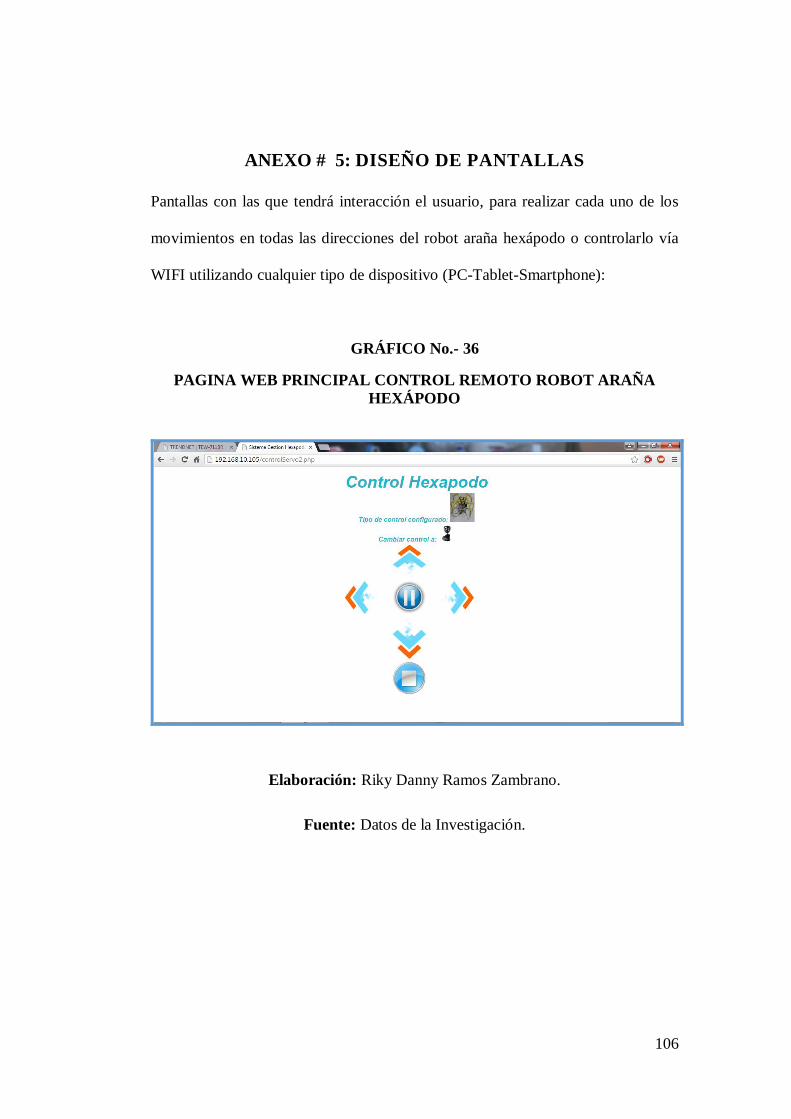
106
ANEXO # 5: DISEÑO DE PANTALLAS
Pantallas con las que tendrá interacción el usuario, para realizar cada uno de los
movimientos en todas las direcciones del robot araña hexápodo o controlarlo vía
WIFI utilizando cualquier tipo de dispositivo (PC-Tablet-Smartphone):
GRÁFICO No.- 36
PAGINA WEB PRINCIPAL CONTROL REMOTO ROBOT ARAÑA
HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
I
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
“ANÁLISIS Y DESARROLLO DE UN ROBOT ARAÑA HEXÁPODO,
CONTROLADO VÍA WIFI CON CÁMARA WEB
INTEGRADA UTILIZANDO EL
MICROCOMPUTADOR
RASPBERRY PI”
MANUAL TÉCNICO Y DE USUARIO
TESIS DE GRADO
Previa a la obtención del Título de:
INGENIERO EN SISTEMAS COMPUTACIONALES
AUTOR:
RIKY DANNY RAMOS ZAMBRANO
GUAYAQUIL – ECUADOR
2015

II
Contenido
INTRODUCCION ............................................................................................ X
ANEXO # 6 : INSTALACION SISTEMA OPERATIVO RASPBIAN EN
RASPBERRY PI ................................................................................................ 1
ANEXO # 7: INSTALACIÓN APACHE, MYSQL Y PHP EN RASPBIAN .. 8
ANEXO # 8: CONFIGURACIÓN CONEXIÓN WIFI RASPBERRY PI .... 13
ANEXO # 9: CONFIGURACIÓN FTP RASPBERRY PI ............................ 16
ANEXO # 10: CONFIGURACIÓN SSH RASPBERRY PI .......................... 18
ANEXO # 11: INSTALACIÓN PYTHON RASPBERRY PI........................ 20
ANEXO # 12: CONFIGURACIÓN VNC ...................................................... 22
ANEXO # 13: CONFIGURACION SERVICIO MOTION RASPBERRY PI
.......................................................................................................................... 23
ANEXO # 14: DESCRIPCIÓN DE PIEZAS O ELEMENTOS ROBOT
HEXÁPODO .................................................................................................... 27
ANEXO # 15: ROBOT ARAÑA HEXÁPODO ENSAMBLADO ................. 39
ANEXO # 16: CÓDIGO FUENTE DE APLICACIONES CONTROL
ROBOT HEXÁPODO. .................................................................................... 47
ANEXO # 17: CÓDIGO FUENTE DEL SERVICIO O DEMONIO
PYTHON QUE SE ENCARGA DE ENVIAR LA SEÑAL A LOS
SERVOMOTORES ......................................................................................... 60
ANEXO # 18 .................................................................................................... 66
MANUAL DE USUARIO ................................................................................ 66
III
ÍNDICE DE GRÁFICOS
GRÁFICO No.- 1
RASPBIAN ......................................................................................................... 1
GRÁFICO No.- 2
INSTALADOR RASPBIAN EN SD-CARD ........................................................ 2
GRÁFICO No.- 3
PANTALLA INICIAL INSTALACIÓN RASPBIAN .......................................... 3
GRÁFICO No.- 4
MENÚ CONFIGURACIONES RASBIAN .......................................................... 4
GRÁFICO No.- 5
CONFIGURACIÓN USUARIO Y PASSWORD ................................................. 4
GRÁFICO No.- 6
CONFIRMACIÓN MODIFICACIÓN USUARIO Y PASSWORD..................... 5
GRÁFICO No.- 7
CONFIGURACIÓN REGIONAL ........................................................................ 5
GRÁFICO NO.- 8
REINICIO RASBIAN.......................................................................................... 6
GRÁFICO NO.- 9
CONFIRMACIÓN REINICIO RASPBIAN ......................................................... 6
GRÁFICO No.- 10
ESCRITORIO RASPBIAN RASPBERRY PI ...................................................... 7
GRÁFICO No.- 11
LX TERMINAL RASSPBERRY PI .................................................................... 8
GRÁFICO No.- 12
PHP CONFIG .................................................................................................... 11

IV
GRÁFICO No.- 13
PHPMYADMIN RASPBERRY PI LOGIN ....................................................... 12
GRÁFICO No.- 14
PHPMYADMIN RASPBERRY PI LOGONEADO ........................................... 12
GRÁFICO No.- 15
CONFIGURACIÓN WIFI ................................................................................. 13
GRÁFICO No.- 16
IFCONFIG WIFI RASPBERRY PI ................................................................... 14
GRÁFICO NO.- 17
DISPOSITIVO WIFI ......................................................................................... 15
GRÁFICO No.- 18
CONEXIÓN FTP RASPBERRY PI ................................................................... 17
GRÁFICO No.- 19
CONEXIÓN FTP RASPBERRY PI 2 ................................................................ 17
GRÁFICO No.- 20
PUTTY .............................................................................................................. 18
GRÁFICO No.- 21
PUTTY CONFIGURACIÓN ............................................................................. 19
GRÁFICO No.- 22
PUTTY CONEXIÓN ESTABLECIDA.............................................................. 19
GRÁFICO No.- 23
LIBRERÍAS PYTHON ...................................................................................... 21
GRÁFICO No.- 24
PYTHON CÓDIGO ........................................................................................... 21
GRÁFICO No.- 25
VNC .................................................................................................................. 22

V
GRÁFICO No.- 26
ARCHIVO DE CONFIGURACIÓN MOTION RASPBERRY PI ...................... 24
GRÁFICO No.- 27
INICIAR Y DETENER SERVICIO MOTION ................................................. 24
GRÁFICO No.- 28
CAMARA WEB USB ....................................................................................... 25
GRÁFICO No.- 29
IMÁGENES CÁMARA WEB RASPBERRY PI ............................................... 26
GRÁFICO No.- 30
CASE RASPBERY PI ....................................................................................... 27
GRÁFICO No.- 31
RASPBERRY PI B ............................................................................................ 28
GRÁFICO No.- 32
RASPBERRY PI B CON CASE ........................................................................ 29
GRÁFICO No.- 33
PROTOBOARD ................................................................................................ 29
GRÁFICO No.- 34
JUMPER ........................................................................................................... 30
GRÁFICO No.- 35
SERVOMOTOR MG995 ................................................................................... 30
GRÁFICO NO.- 36
PORTA PILAS AA ........................................................................................... 31
GRÁFICO NO.- 37
PILAS AA ......................................................................................................... 31
GRÁFICO NO.- 38
BATERÍA RECARGABLE USB....................................................................... 32
VI
GRÁFICO No.- 39
DISEÑO PATAS CENTRALES 3D ROBOT HEXÁPODO .............................. 33
GRÁFICO No.- 40
PATAS CENTRALES ROBOT HEXÁPODO 3D ............................................. 34
GRÁFICO No.- 41
PATAS LATERALES DISEÑADAS 3D ROBOT HEXÁPODO....................... 35
GRÁFICO No.- 42
PATAS LATERALES 2 DISEÑADAS 3D ROBOT HEXÁPODO .................... 35
GRÁFICO No.- 43
DISEÑO 3D DE PATAS ROBOT ARAÑA ...................................................... 36
GRÁFICO No.- 44
DISEÑO 3D PATAS ROBOT ARAÑA 2 .......................................................... 37
GRÁFICO No.- 45
DISEÑO 3D PATAS ROBOT ARAÑA 3 .......................................................... 38
GRÁFICO No.- 46
ROBOT ARAÑA HEXÁPODO RAXAPODO .................................................. 39
GRÁFICO No.- 47
ROBOT ARAÑA HEXÁPODO RAXAPODO 2 ............................................... 40
GRÁFICO No.- 48
ROBOT ARAÑA HEXÁPODO RAXAPODO 3 ............................................... 41
GRÁFICO No.- 49
ROBOT ARAÑA HEXÁPODO RAXAPODO 4 ............................................... 42
GRÁFICO No.- 50
ROBOT ARAÑA HEXÁPODO RAXAPODO 5 ............................................... 43
GRÁFICO No.- 51
ARQUITECTURA DE COMUNICACIÓN ENTRE APLICACIONES ............. 44
VII
GRÁFICO No.- 52
ARQUITECTURA CLIENTE SERVIDOR ROBOT ......................................... 45
GRÁFICO No.- 53
ESQUEMA DE CONEXIÓN SERVOMOTORES CON LOS PINES GPIO
RASPBERRY PI ............................................................................................... 46
GRÁFICO No.- 54
WEB CONTROL REMOTO ROBOT ARAÑA HEXÁPODO ........................... 47
GRÁFICO No.- 55
WEB CONTROL REMOTO ROBOT ARAÑA HEXÁPODO 2 ........................ 48
GRÁFICO No.- 56
BD MYSQL HEXÁPODO ................................................................................ 50
GRÁFICO No.- 57
BD MYSQL HEXÁPODO TABLA COMANDOS_HEXAPODO..................... 50
GRÁFICO No.- 58
CÓDIGO FUENTE PAGINA WEB PHP........................................................... 51
GRÁFICO No.- 59
CÓDIGO FUENTE PAGINA WEB PHP 2 ........................................................ 52
GRÁFICO No.- 60
CÓDIGO FUENTE PAGINA WEB PHP 3 ........................................................ 53
GRÁFICO No.- 61
CÓDIGO FUENTE PAGINA WEB PHP 4 ........................................................ 54
GRÁFICO No.- 62
CÓDIGO FUENTE PAGINA WEB PHP 5 ........................................................ 54
GRÁFICO No.- 63
CÓDIGO FUENTE PAGINA WEB PHP 6 ........................................................ 55
GRÁFICO No.- 64
CÓDIGO FUENTE PAGINA WEB PHP 7 ........................................................ 55
VIII
GRÁFICO No.- 65
CÓDIGO FUENTE PAGINA WEB PHP 8 ........................................................ 56
GRÁFICO No.- 66
CÓDIGO FUENTE PAGINA WEB PHP 9 ........................................................ 56
GRÁFICO No.- 67
CÓDIGO FUENTE PAGINA WEB PHP 10 ...................................................... 57
GRÁFICO No.- 68
CÓDIGO FUENTE PAGINA WEB PHP 11 ...................................................... 57
GRÁFICO No.- 69
CÓDIGO FUENTE PAGINA WEB PHP 12 ...................................................... 58
GRÁFICO No.- 70
CÓDIGO FUENTE PAGINA WEB PHP 13 ...................................................... 58
GRÁFICO No.- 71
CÓDIGO FUENTE PAGINA WEB PHP 14 ...................................................... 59
GRÁFICO No.- 72
CÓDIGO FUENTE DEMONIO PYTHON ........................................................ 60
GRÁFICO No.- 73
CÓDIGO FUENTE DEMONIO PYTHON 2 ..................................................... 61
GRÁFICO No.- 74
CÓDIGO FUENTE DEMONIO PYTHON 3 ..................................................... 61
GRÁFICO No.- 75
CÓDIGO FUENTE DEMONIO PYTHON 4 ..................................................... 62
GRÁFICO No.- 76
CÓDIGO FUENTE DEMONIO PYTHON 5 ..................................................... 62
GRÁFICO No.- 77
CÓDIGO FUENTE DEMONIO PYTHON 6 ..................................................... 63
IX
GRÁFICO No.- 78
CÓDIGO FUENTE DEMONIO PYTHON 7 ..................................................... 63
GRÁFICO No.- 79
ROUTER WIFI.................................................................................................. 66
GRÁFICO No.- 80
DHCP ROUTER RASPBERRY PI .................................................................... 67
GRÁFICO No.- 81
INSTALACIÓN PILAS AA ROBOT ............................................................... 68
GRÁFICO No.- 82
INSTALACIÓN BATERIA ROBOT ................................................................ 69
GRÁFICO No.- 83
INSTALACIÓN BATERIA ROBOT 2 ............................................................. 70
GRÁFICO NO.- 84
CONEXIÓN SSH ROBOT ................................................................................ 71
GRÁFICO NO.- 85
PÁGINA WEB STREAMING VIDEO ROBOT ................................................ 73
GRÁFICO NO.- 86
CONEXIÓN SFTP ROBOT .............................................................................. 74
GRÁFICO NO.- 87
PÁGINA WEB CONTROL ROBOT ................................................................. 75
GRÁFICO No.- 88
PÁGINA WEB CONTROL ROBOT 2 .............................................................. 76
X
INTRODUCCION
El presente documento constituye una herramienta de ayuda para los lectores de
manera general que requieran saber cuáles son los procesos o pasos lógicos que se
utilizaron para el desarrollo de este proyecto robótico.
El objetivo de este documento es describir cada uno de los procesos realizados
para el desarrollo del robot araña hexápodo, detallando cada uno de los elementos
utilizados y los sistemas que se deben de instalar y configurar para poder levantar
el sistema de manera correcta.
En este documento se explica el esquema o la arquitectura de comunicación que
se utilizó para lograr darle movilidad al robot y de igual forma se muestra el
diseño del robot realizado en 3D haciendo uso de la herramienta SketchUp.
1
ANEXO # 1 : INSTALACION SISTEMA OPERATIVO
RASPBIAN EN RASPBERRY PI
A continuación se detallaran los pasos que se deben de seguir para realizar la
instalación del sistema operativo Raspbian, este S.O. es una distribución de Linux
y es soportada por nuestro hardware RaspBerry PI.
GRÁFICO No.- 1
RASPBIAN
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (MdeMoUcH, 2014).
DESCARGA Y COPIA INSTALADOR RASBIAN EN SD CARD
Se deberá de descargar el sistema NOOBS (New Out Of Box Software) que se lo
puede realizar desde el siguiente enlace (raspberrypi.org, s.f.), este sistema
contiene un conjunto de paquetes o sistemas operativos que el usuario podrá
escoger de ellos dependiendo del tipo de proyecto que se vaya a realizar, en
nuestro caso instalaremos Raspbian.
Una vez que se descargue el instalador se deberá de descomprimir el contenido y
copiarlo en la tarjeta SD-Card, de manera previa la tarjeta SD deberá de estar
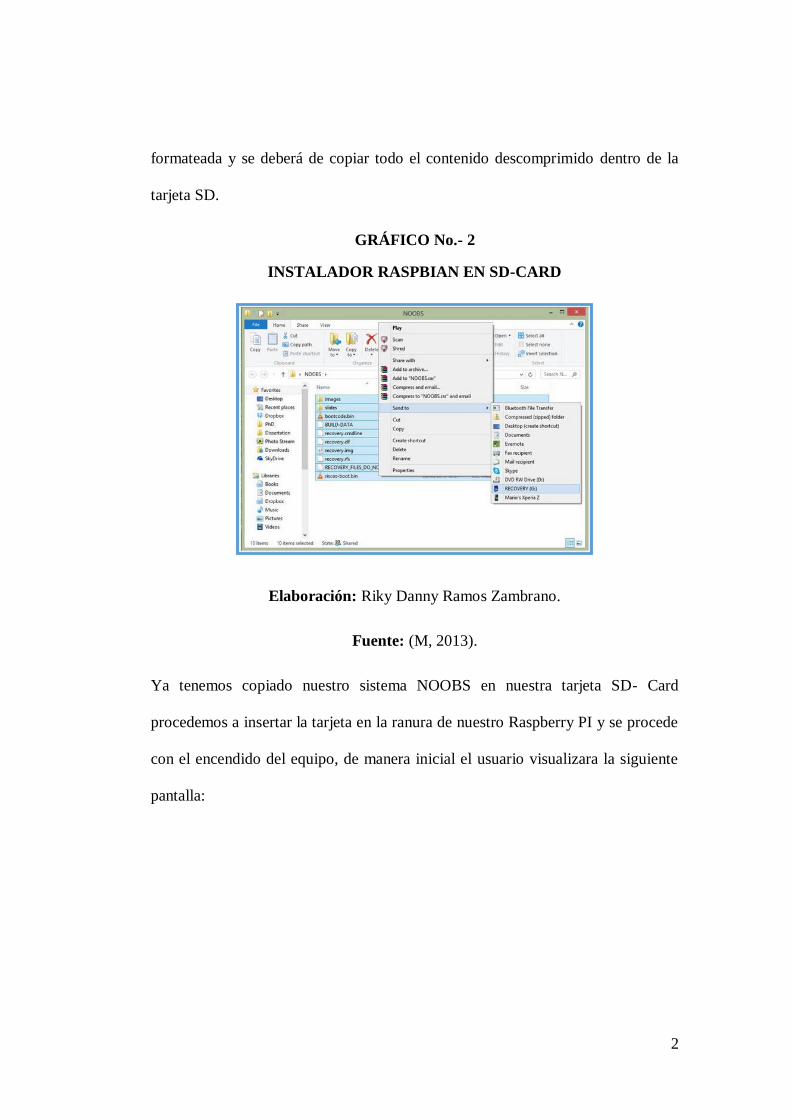
2
formateada y se deberá de copiar todo el contenido descomprimido dentro de la
tarjeta SD.
GRÁFICO No.- 2
INSTALADOR RASPBIAN EN SD-CARD
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (M, 2013).
Ya tenemos copiado nuestro sistema NOOBS en nuestra tarjeta SD- Card
procedemos a insertar la tarjeta en la ranura de nuestro Raspberry PI y se procede
con el encendido del equipo, de manera inicial el usuario visualizara la siguiente
pantalla:
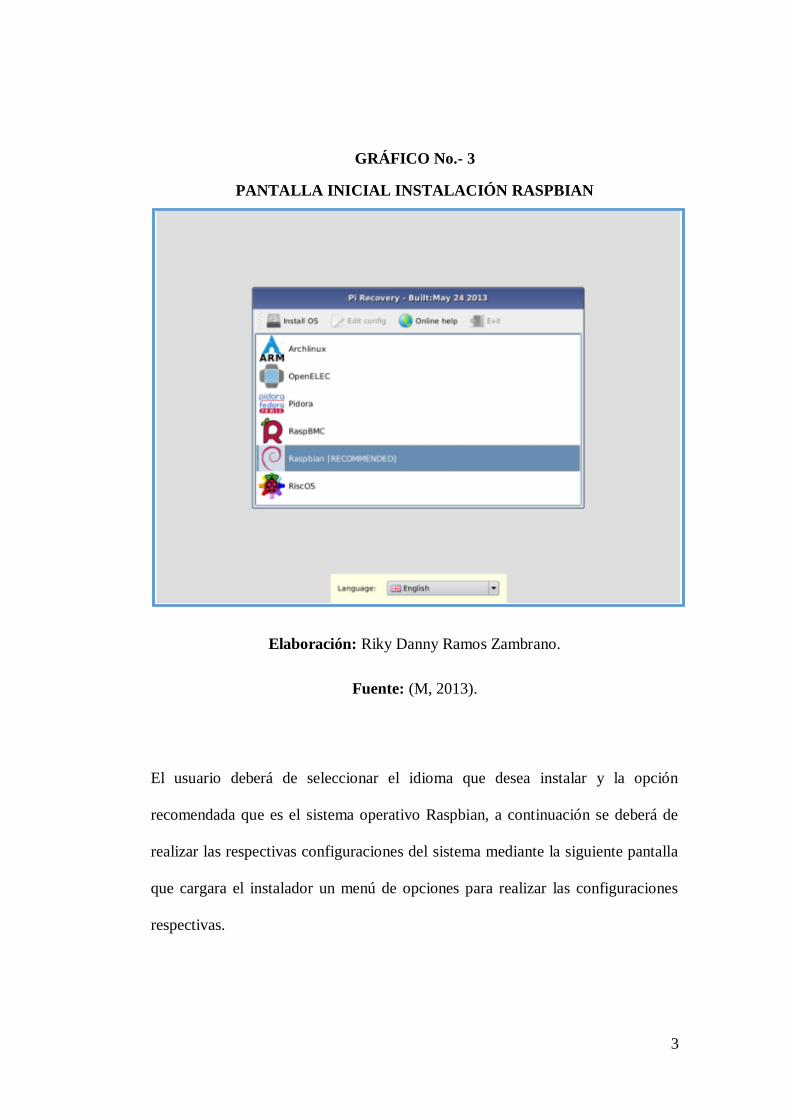
3
GRÁFICO No.- 3
PANTALLA INICIAL INSTALACIÓN RASPBIAN
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (M, 2013).
El usuario deberá de seleccionar el idioma que desea instalar y la opción
recomendada que es el sistema operativo Raspbian, a continuación se deberá de
realizar las respectivas configuraciones del sistema mediante la siguiente pantalla
que cargara el instalador un menú de opciones para realizar las configuraciones
respectivas.
4
GRÁFICO No.- 4
MENÚ CONFIGURACIONES RASBIAN
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Linuxito, 2013).
Para el cambio de usuario y password se deberá de seleccionar la opción "Change
User Password" para asignar la nueva contraseña del usuario pi (Usuario por defecto
del sistema).
GRÁFICO No.- 5
CONFIGURACIÓN USUARIO Y PASSWORD
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Linuxito, 2013).
5
GRÁFICO No.- 6
CONFIRMACIÓN MODIFICACIÓN USUARIO Y PASSWORD
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Linuxito, 2013).
GRÁFICO No.- 7
CONFIGURACIÓN REGIONAL
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Linuxito, 2013).

6
Una vez que se haiga configurado cada una de las opciones se deberá de finalizar
los cambios realizados para que se reinicie el equipo esto lo lograremos
presionando la tecla enter o seleccionando el botón Finish.
GRÁFICO NO.- 8
REINICIO RASBIAN
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Linuxito, 2013).
GRÁFICO NO.- 9
CONFIRMACIÓN REINICIO RASPBIAN
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Linuxito, 2013).
7
Una vez reiniciado nuestro micro computador Raspberrry PI podremos visualizar
el escritorio de nuestro sistema operativo Raspbian finalmente instalado.
GRÁFICO No.- 10
ESCRITORIO RASPBIAN RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Linuxito, 2013).

8
ANEXO # 2: INSTALACIÓN APACHE, MYSQL Y PHP EN
RASPBIAN
Para instalar los nuevos servicios de manera correcta o instalara cualquier nuevo
sistema se recomienda de manera previa realizar una actualización del sistema
operativo Raspbian, esto se lo realiza ejecutando el siguiente comando en la
pantalla de cmd conocida como LX Terminal.
GRÁFICO No.- 11
LX TERMINAL RASSPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
9
Comandos de actualización sistema operativo Raspbian:
sudo apt-get update
sudo apt-get upgrade
INSTALACIÓN DE APACHE Y PHP
Lo primero que se debe de realizar es darle permisos al grupo que usa apache por
defecto esto se lo realiza ejecutando los siguientes comandos:
sudo addgroup www-data
sudo usermod -a -G www-data www-data
Hacemos un update de los repositorios y procedemos a instalar Apache y PHP:
sudo apt-get update
sudo apt-get install apache2 php5 libapache2-mod-php5
Reiniciamos el servicio de Apache mediante el siguiente comando:
sudo ifup lo
INSTALACIÓN MYSQL Y PHPMYADMIN
Para instalar MySQL y PHPMyAdmin se deberá de ejecutar el siguiente comando
en el terminal:
sudo apt-get install mysql-server mysql-client php5-mysql phpmyadmin
10
Al terminar la ejecución de este comando el sistema nos solicitara registrar una
contraseña para efectos de conexión de nuestra base de datos, posteriormente se
deberá de ejecutar el siguiente comando:
sudo nano /etc/php5/apache2/php.ini
Después ejecutamos los siguientes comandos:
sudo ln -s /etc/phpmyadmin/apache.conf
/etc/apache2/conf.d/phpmyadmin.conf
sudo /etc/init.d/apache2 reload
Una vez que se haiga instalado todo de manera correcta probamos que todo esté
funcionando de manera adecuada para ello creamos un archivo con extensión php
dentro de la ruta /var/www llamado pruebasphp.php incluyendo la siguiente
función:
<?php phpinfo(); ?>
Para verificar que se instala de manera correcta se deberá de cargar la nueva
página creada ingresando la IP del equipo Raspberry pi en el navegador seguido
del nombre del archivo web php creado ejemplo: 192.168.xx.xx/ pruebasphp.php.
El navegador mostrara una la siguiente página:
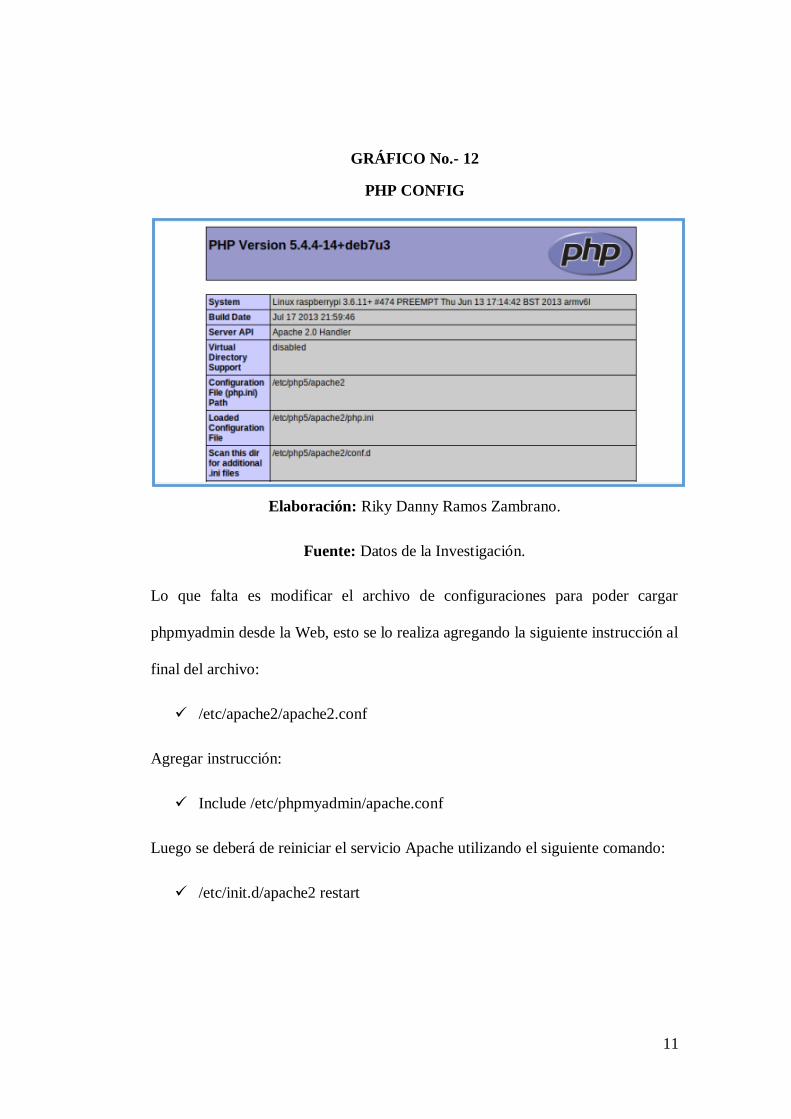
11
GRÁFICO No.- 12
PHP CONFIG
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
Lo que falta es modificar el archivo de configuraciones para poder cargar
phpmyadmin desde la Web, esto se lo realiza agregando la siguiente instrucción al
final del archivo:
/etc/apache2/apache2.conf
Agregar instrucción:
Include /etc/phpmyadmin/apache.conf
Luego se deberá de reiniciar el servicio Apache utilizando el siguiente comando:
/etc/init.d/apache2 restart
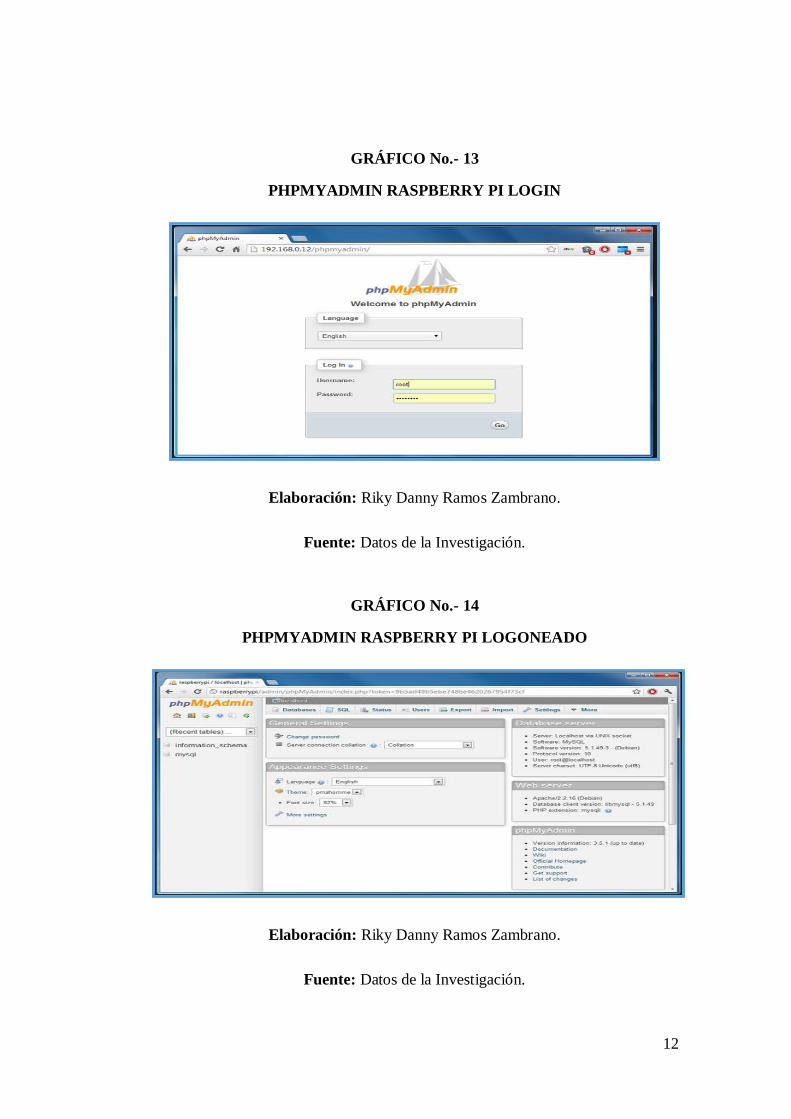
12
GRÁFICO No.- 13
PHPMYADMIN RASPBERRY PI LOGIN
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 14
PHPMYADMIN RASPBERRY PI LOGONEADO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

13
ANEXO # 3: CONFIGURACIÓN CONEXIÓN WIFI
RASPBERRY PI
Para configurar una conexión vía WIFI en el micro computador Raspberry PI se
deberá de realizar las siguientes configuraciones:
Ejecutar el siguiente comando en el terminal:
sudo nano /etc/network/interfaces
Este comando nos mostrara un archivo de configuración para conexión a una red
vía WIFI:
GRÁFICO No.- 15
CONFIGURACIÓN WIFI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
El usuario deberá de ingresar la información correspondiente a la red que se desea
conectarse dentro de las comillas como muestra la imagen, una vez culminado el
ingreso de la información se deberá de guardar la información del archivo.
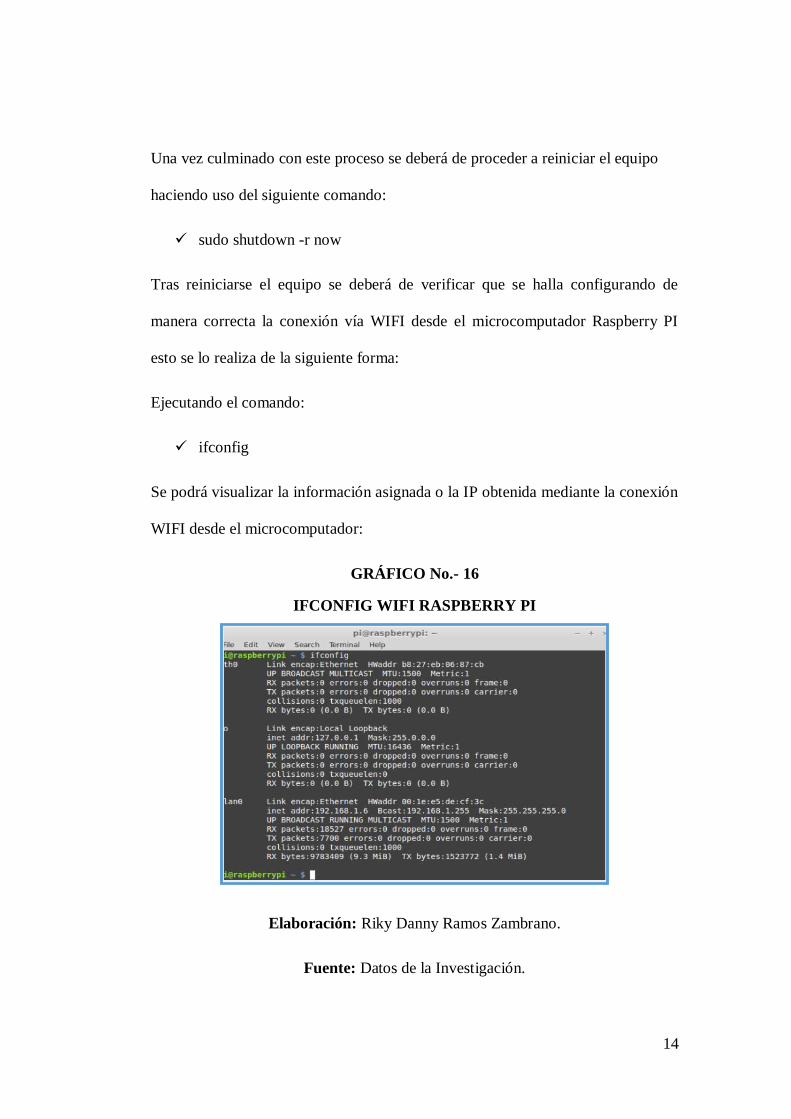
14
Una vez culminado con este proceso se deberá de proceder a reiniciar el equipo
haciendo uso del siguiente comando:
sudo shutdown -r now
Tras reiniciarse el equipo se deberá de verificar que se halla configurando de
manera correcta la conexión vía WIFI desde el microcomputador Raspberry PI
esto se lo realiza de la siguiente forma:
Ejecutando el comando:
ifconfig
Se podrá visualizar la información asignada o la IP obtenida mediante la conexión
WIFI desde el microcomputador:
GRÁFICO No.- 16
IFCONFIG WIFI RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
15
GRÁFICO NO.- 17
DISPOSITIVO WIFI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

16
ANEXO # 4: CONFIGURACIÓN FTP RASPBERRY PI
Para esto debemos realizar la instalación y Configuración de vsftpd haciendo uso
del siguiente comando:
sudo apt-get install vsftpd
Una vez instalado el sistema VSFTP se procede a modificar el archivo de
configuracion:
sudo nano /etc/vsftpd.conf
Se deberá de descomentar las siguientes líneas para permitir la escritura de
archivos a los usuarios raspberry pi:
local_enable=YES
write_enable=YES
Por último se debe de reiniciar el servicio ejecutando el siguiente comando:
sudo service vsftpd restart
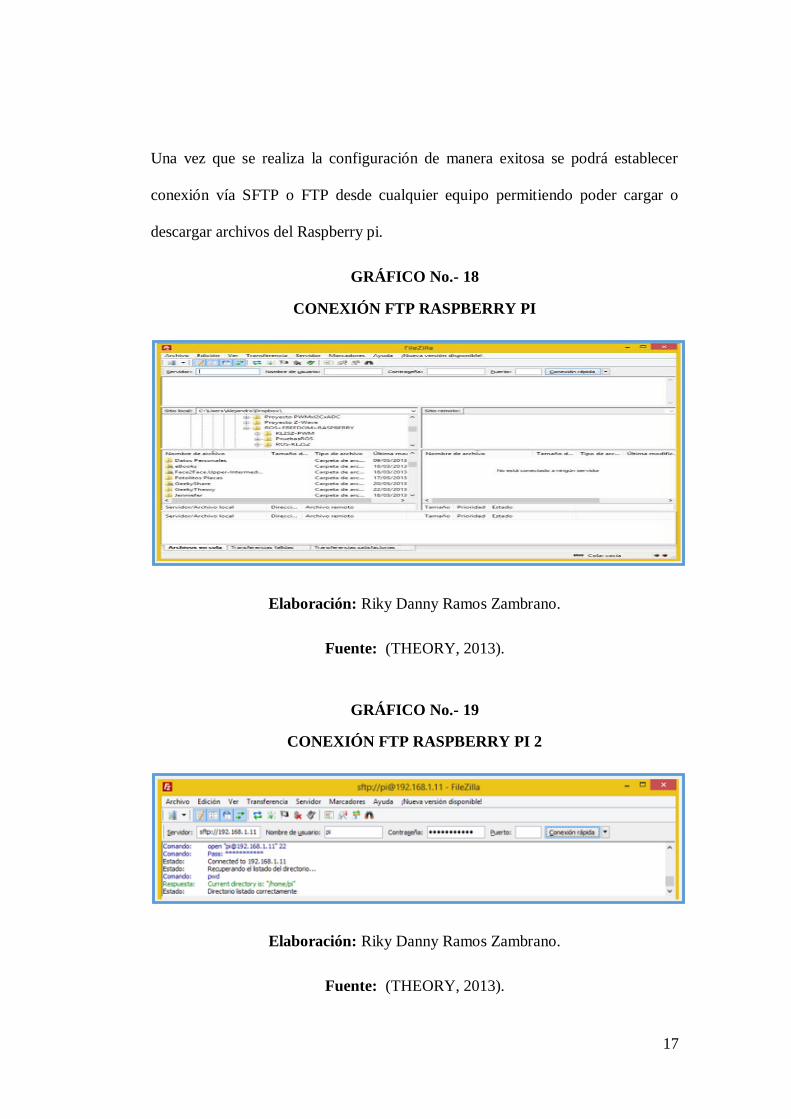
17
Una vez que se realiza la configuración de manera exitosa se podrá establecer
conexión vía SFTP o FTP desde cualquier equipo permitiendo poder cargar o
descargar archivos del Raspberry pi.
GRÁFICO No.- 18
CONEXIÓN FTP RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (THEORY, 2013).
GRÁFICO No.- 19
CONEXIÓN FTP RASPBERRY PI 2
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (THEORY, 2013).
18
ANEXO # 5: CONFIGURACIÓN SSH RASPBERRY PI
Se deberá de proceder a instalar el servicio SSH en el microcomputador haciendo
uso del siguiente comando:
sudo apt-get install ssh
Luego se deberá de iniciar el servicio ejecutando el siguiente comando:
sudo /etc/init.d/ssh start
Para lograr que se levante dicho servicio de manera automática al momento de
iniciar, encender o arrancar el microcomputador se deberá de ejecutar el siguiente
comando:
sudo update-rc.d ssh defaults
De esta forma ya podemos conectarnos a nuestro equipo y controlarlo de forma
remota haciendo uso del software putty estableciendo una conexión SSH.
GRÁFICO No.- 20
PUTTY
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
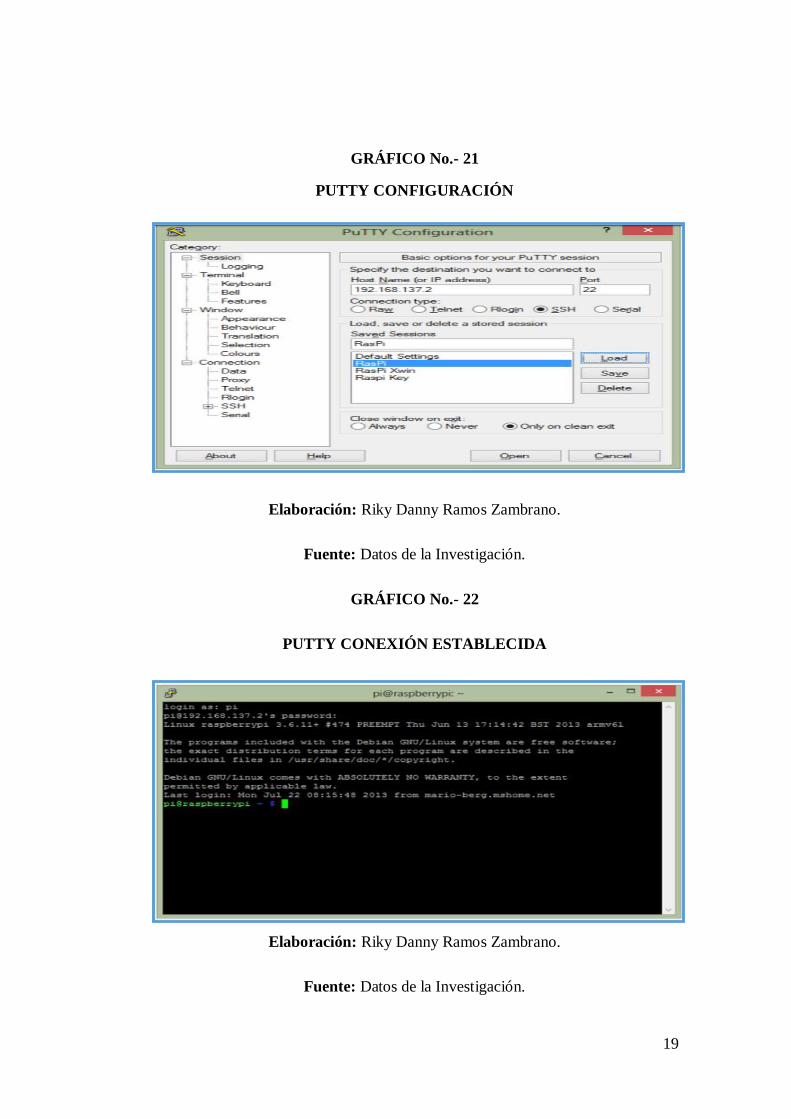
19
GRÁFICO No.- 21
PUTTY CONFIGURACIÓN
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 22
PUTTY CONEXIÓN ESTABLECIDA
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

20
ANEXO # 6: INSTALACIÓN PYTHON RASPBERRY PI
El sistema operativo Raspbian por defecto contiene instalado el lenguaje de
programación o plataforma de desarrollo Python, pero para poder controlar los
pines GPIO del Raspberry PI es necesario instalar unas librerías.
Para poder instalar dichas librerías se deberá de ejecutar los siguientes comandos:
wget 'http://downloads.sourceforge.net/project/raspberry-gpio-
python/RPi.GPIO-0.5.4.tar.gz'
tar zxvf RPi.GPIO-0.5.4.tar.gz
sudo apt-get install python-dev
sudo python setup.py install
Para poder crear un archivo o programa Python bastara con ejecutar el siguiente
comando:
sudo python nombre_archivo.py
Para poder controlar los pines GPIO del microcomputador es necesario que se
agreguen las siguientes líneas de código en el programa o aplicación que se vaya a
desarrollar:

21
GRÁFICO No.- 23
LIBRERÍAS PYTHON
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 24
PYTHON CÓDIGO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
22
ANEXO # 7: CONFIGURACIÓN VNC
Para realizar una conexión de manera remota para poder controlar o visualizar la
interfaz gráfica del microcomputador Raspberry PI se debe de realizar la
instalación del servicio o sistema VNC Virtual Network Computing
(Computación Virtual en Red) en el microcomputador.
Para instalar este servicio se debe de ejecutar el siguiente comando:
sudo apt-get install tightvncserver
Una vez que se realizó el proceso de instalación de manera correcta es necesario
iniciar el servicio para eso se hace uso del siguiente comando:
vncserver :1 -geometry 1280x800 -depth 16 -pixelformat rgb565
Una vez culminada la configuración se puede tener acceso o control de manera
remota hacienda uso de la opción de Windows (Conexión a escritorio remoto).
GRÁFICO No.- 25
VNC
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
23
ANEXO # 8: CONFIGURACION SERVICIO MOTION
RASPBERRY PI
Para realizar la instalación de este servicio hay que ejecutar el siguiente comando:
sudo apt-get install motion
Una vez instalado el servicio se debe de realizar la respectiva configuración del
sistema motion ejecutando el siguiente comando nos cargara un archivo de
configuración:
sudo nano /etc/motion/motion.conf
Dentro de este archivo de configuración se debe de modificar las siguientes líneas:
En el apartado #Daemon# se cambia Daemon OFF por Daemon ON.
En el apartado #Snapshots# podemos cambiar el tiempo entre cada captura
de vídeo, poniendo un valor de 4 segundos entre capturas,
snapshot_interval 4.
En el apartado #Live Webcam Center# ponemos webcam_port 8001 y
webcam_localhost OFF.
En el apartado #HTTP Based Control# cambiamos a control_port 888 y
control_localhost OFF.

24
GRÁFICO No.- 26
ARCHIVO DE CONFIGURACIÓN MOTION RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (Manuti, 2013).
GRÁFICO No.- 27
INICIAR Y DETENER SERVICIO MOTION
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

25
Para la grabación de imágenes mediante el robot se hace uso de una cámara Web
que se la conecta en el puerto USB del microcomputador Raspberry PI en la cual
se encarga de capturar imágenes o fotogramas a una velocidad de uno por
segundo, esto se lo puede configurar en el archivo anteriormente mencionado.
GRÁFICO No.- 28
CAMARA WEB USB
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

26
Una vez que se haya cumplido con el proceso de levantar el servicio Motion para
que el usuario pueda visualizar las imágenes o el video captado por la cámara web
del Raspberry PI el usuario deberá de ingresar en su navegador la siguiente ruta:
http://[IP_de_la_Raspberry]:8001
En mi caso sería:
http://192.168.10.105:8001
GRÁFICO No.- 29
IMÁGENES CÁMARA WEB RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

27
ANEXO # 9: DESCRIPCIÓN DE PIEZAS O ELEMENTOS
ROBOT HEXÁPODO
Para el desarrollo de este proyecto Robótico se utilizaron los siguientes
elementos:
Case Raspberry PI, se hace uso de este elemento para proteger de forma física el
hardware del microcomputador y a su vez sirva como soporte para poder montar
los servomotores, existen un sinnúmero de modelos en el mercado pero el más
idóneo que se usó para este proyecto es uno con la superficie plana ya que eso
facilita poder posesionar los sevomotores de una manera más fija.
GRÁFICO No.- 30
CASE RASPBERY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
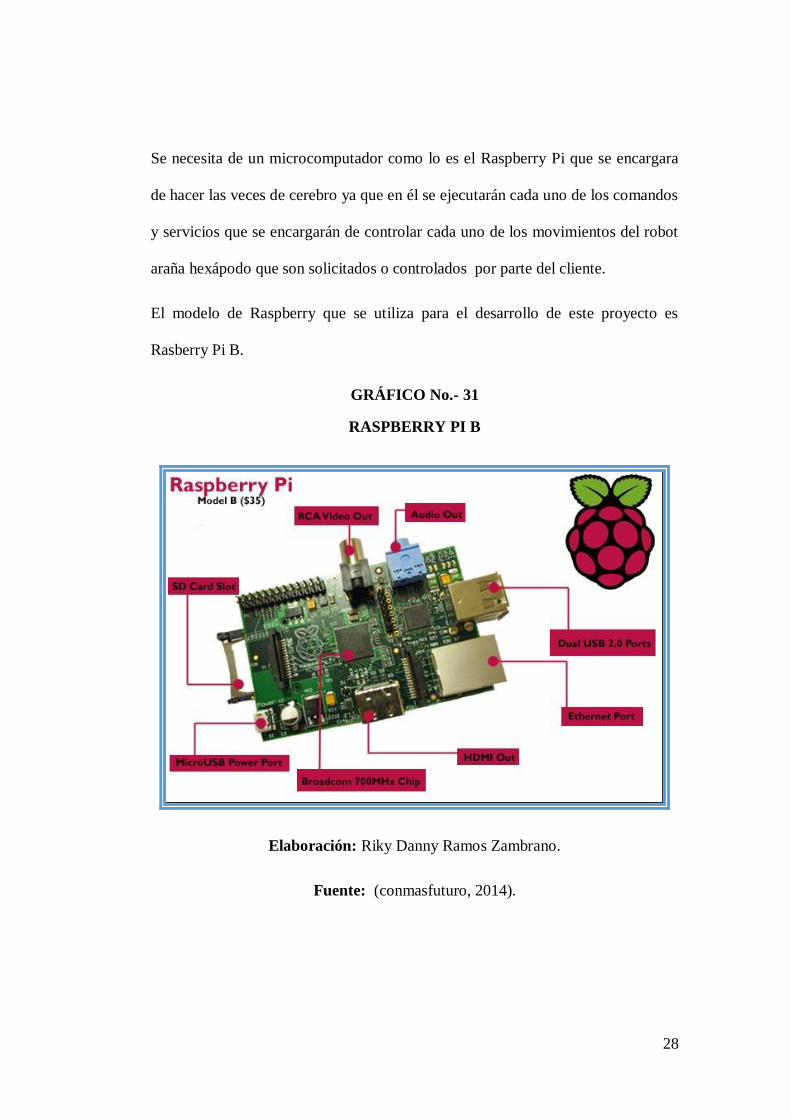
28
Se necesita de un microcomputador como lo es el Raspberry Pi que se encargara
de hacer las veces de cerebro ya que en él se ejecutarán cada uno de los comandos
y servicios que se encargarán de controlar cada uno de los movimientos del robot
araña hexápodo que son solicitados o controlados por parte del cliente.
El modelo de Raspberry que se utiliza para el desarrollo de este proyecto es
Rasberry Pi B.
GRÁFICO No.- 31
RASPBERRY PI B
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (conmasfuturo, 2014).
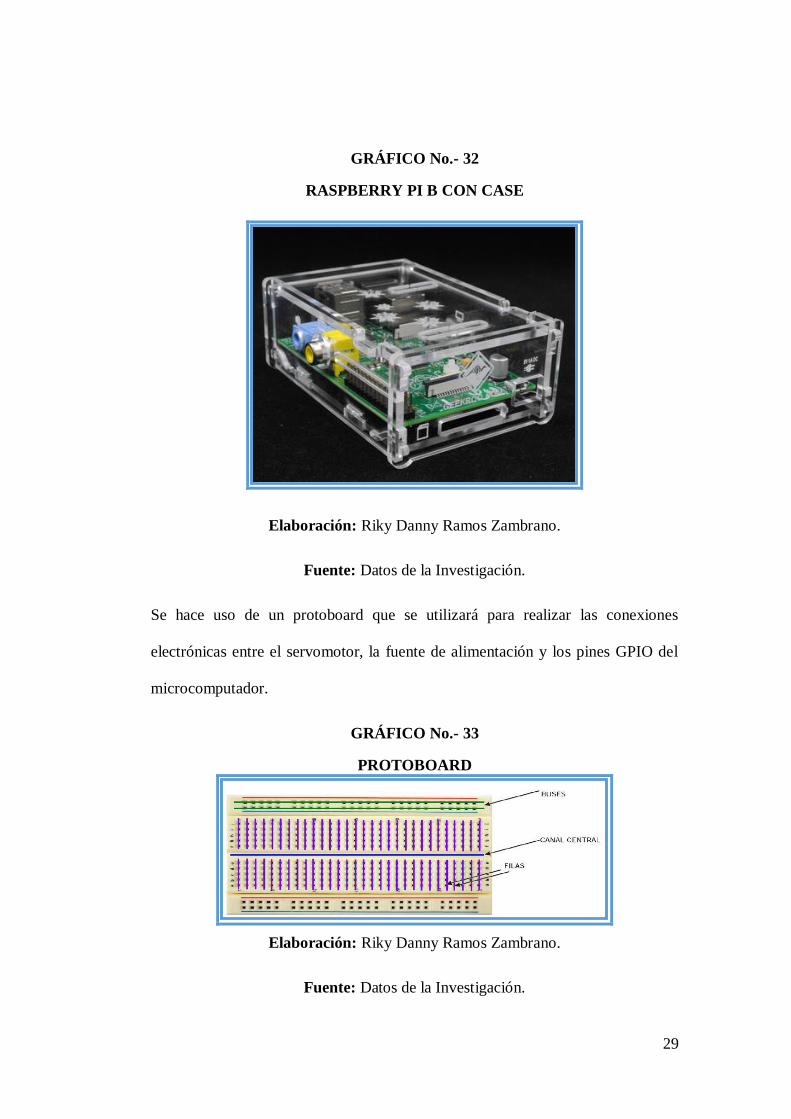
29
GRÁFICO No.- 32
RASPBERRY PI B CON CASE
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
Se hace uso de un protoboard que se utilizará para realizar las conexiones
electrónicas entre el servomotor, la fuente de alimentación y los pines GPIO del
microcomputador.
GRÁFICO No.- 33
PROTOBOARD
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
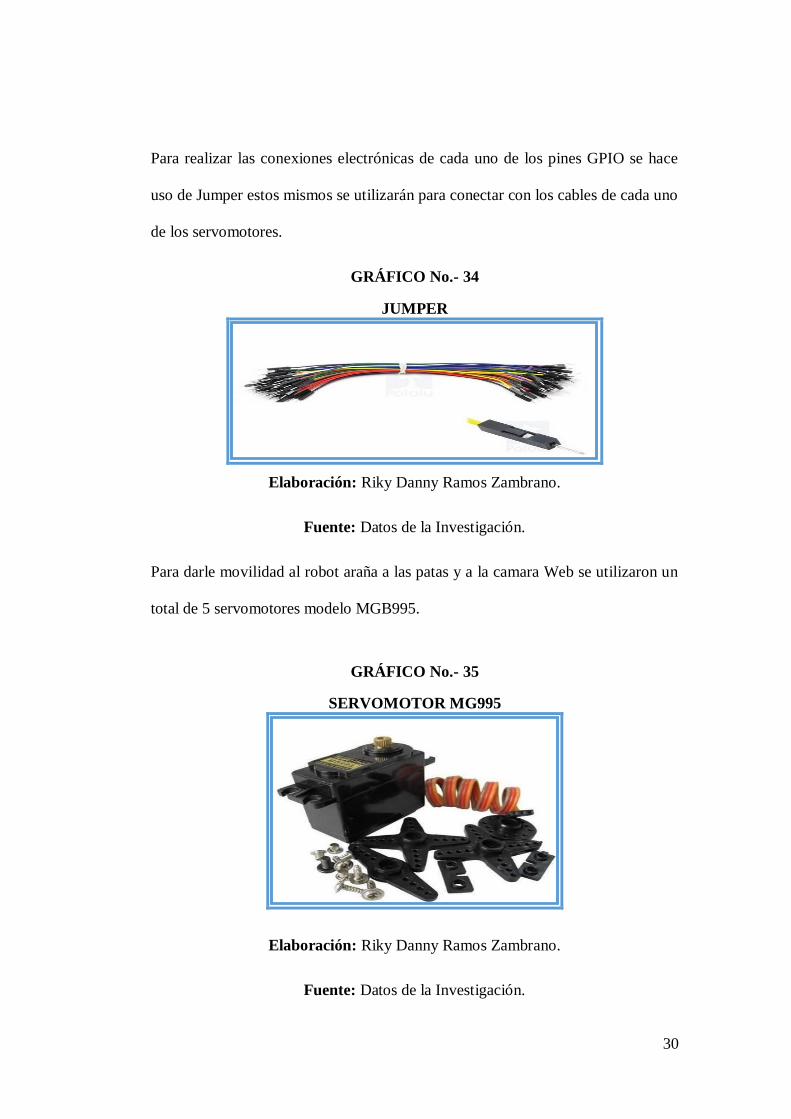
30
Para realizar las conexiones electrónicas de cada uno de los pines GPIO se hace
uso de Jumper estos mismos se utilizarán para conectar con los cables de cada uno
de los servomotores.
GRÁFICO No.- 34
JUMPER
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
Para darle movilidad al robot araña a las patas y a la camara Web se utilizaron un
total de 5 servomotores modelo MGB995.
GRÁFICO No.- 35
SERVOMOTOR MG995
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

31
Para alimentar con poder a los servomotores se hace uso de un porta pilas de 4
doble AA.
GRÁFICO NO.- 36
PORTA PILAS AA
Elaborado: Riky Ramos Zambranno.
Fuente: Riky Ramos Zambrano.
Se utilizan cuatro pilas doble AA para alimentar eléctricamente a los
servomotores.
GRÁFICO NO.- 37
PILAS AA
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

32
Para la alimentación de energía al microcomputador se hace uso de una batería
portable recargable vía USB marca Genius.
GRÁFICO NO.- 38
BATERÍA RECARGABLE USB
Elaboración: Riky Danny Ramos Zambrano.
Fuente: (memorykings, 2015).
Las patas que forman parte del robot araña hexápodo fueron realizadas de manera
artesanal haciendo uso de alambre de armadores se le dio la forma adecuada para
obtener una buena estética y lograr darle movilidad al mismo, en los extremos se
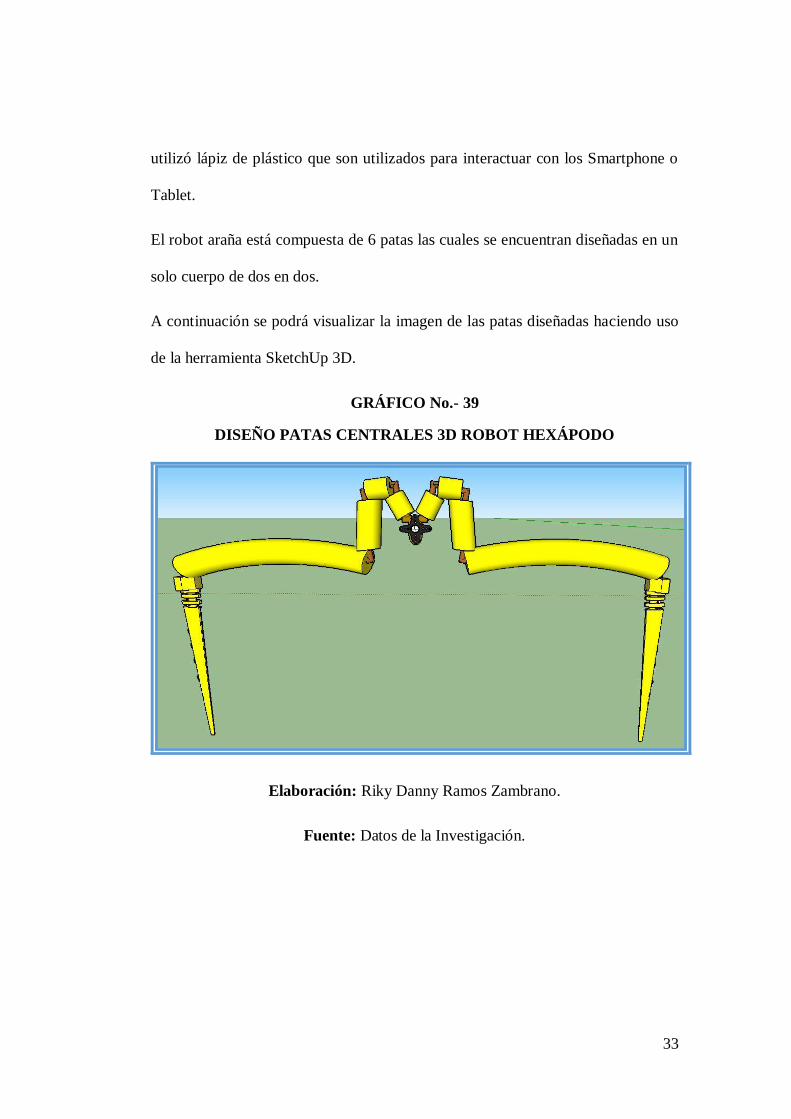
33
utilizó lápiz de plástico que son utilizados para interactuar con los Smartphone o
Tablet.
El robot araña está compuesta de 6 patas las cuales se encuentran diseñadas en un
solo cuerpo de dos en dos.
A continuación se podrá visualizar la imagen de las patas diseñadas haciendo uso
de la herramienta SketchUp 3D.
GRÁFICO No.- 39
DISEÑO PATAS CENTRALES 3D ROBOT HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
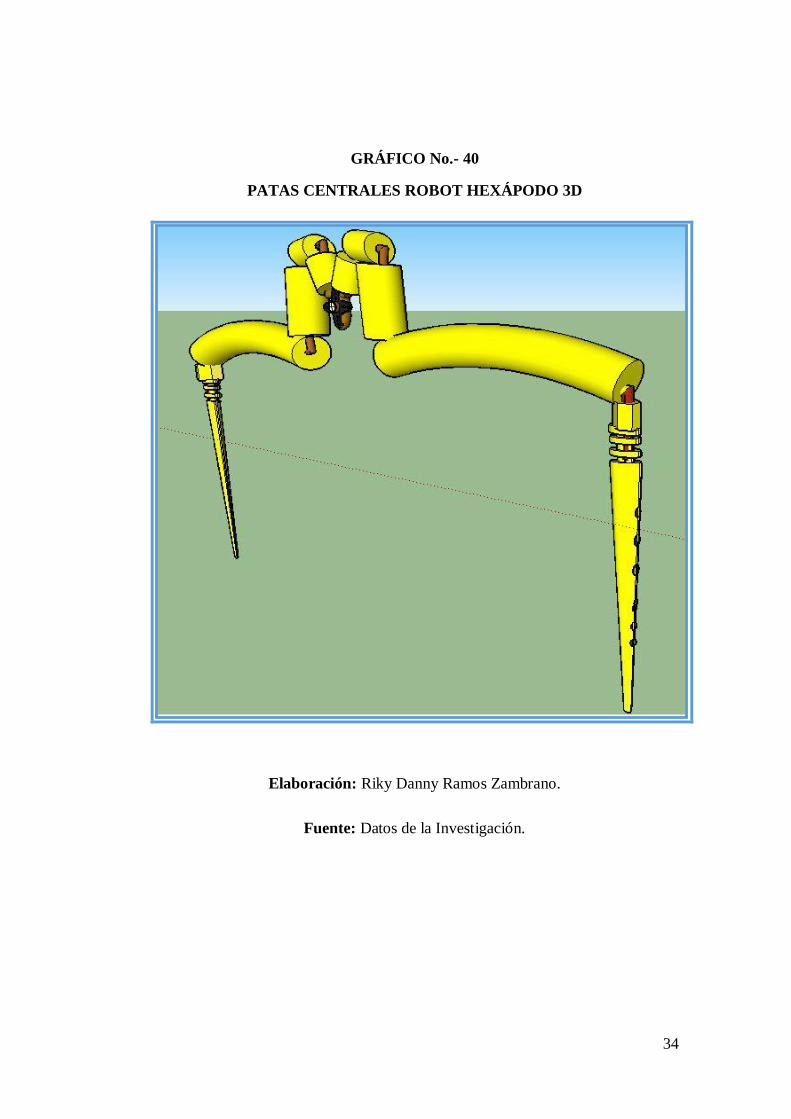
34
GRÁFICO No.- 40
PATAS CENTRALES ROBOT HEXÁPODO 3D
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

35
GRÁFICO No.- 41
PATAS LATERALES DISEÑADAS 3D ROBOT HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 42
PATAS LATERALES 2 DISEÑADAS 3D ROBOT HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
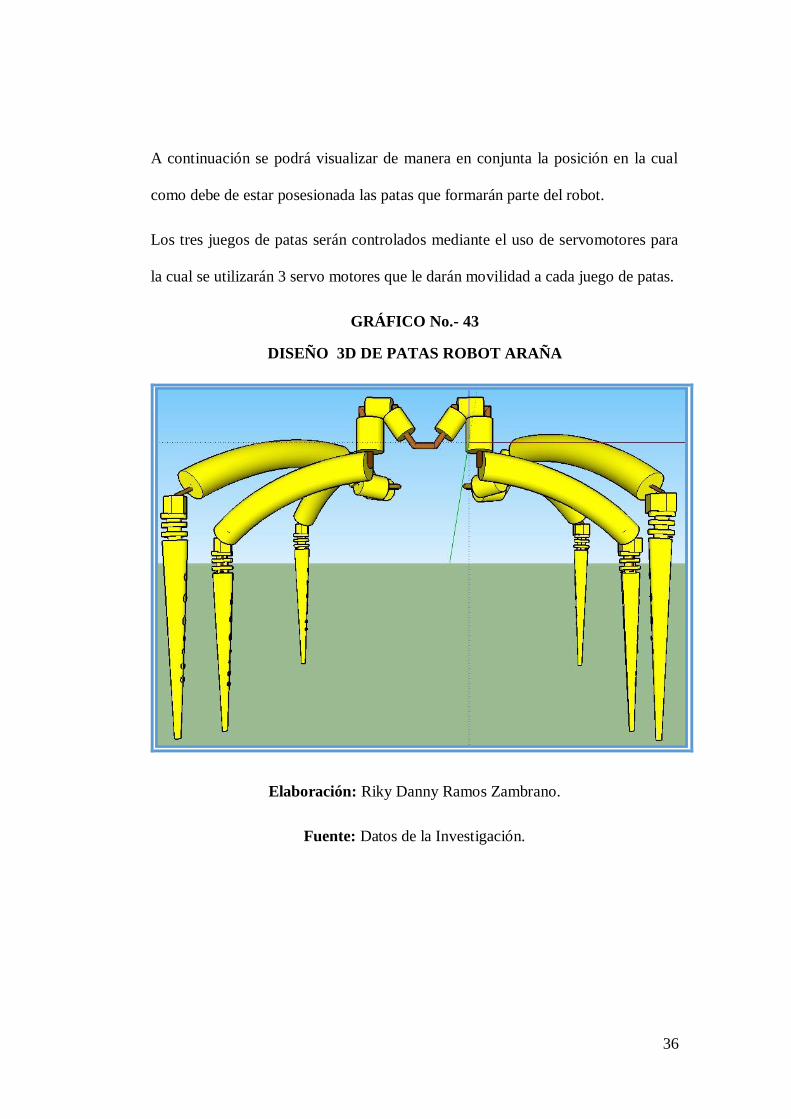
36
A continuación se podrá visualizar de manera en conjunta la posición en la cual
como debe de estar posesionada las patas que formarán parte del robot.
Los tres juegos de patas serán controlados mediante el uso de servomotores para
la cual se utilizarán 3 servo motores que le darán movilidad a cada juego de patas.
GRÁFICO No.- 43
DISEÑO 3D DE PATAS ROBOT ARAÑA
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

37
GRÁFICO No.- 44
DISEÑO 3D PATAS ROBOT ARAÑA 2
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

38
Diseño de las patas visualizadas desde el lado izquierdo:
GRÁFICO No.- 45
DISEÑO 3D PATAS ROBOT ARAÑA 3
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
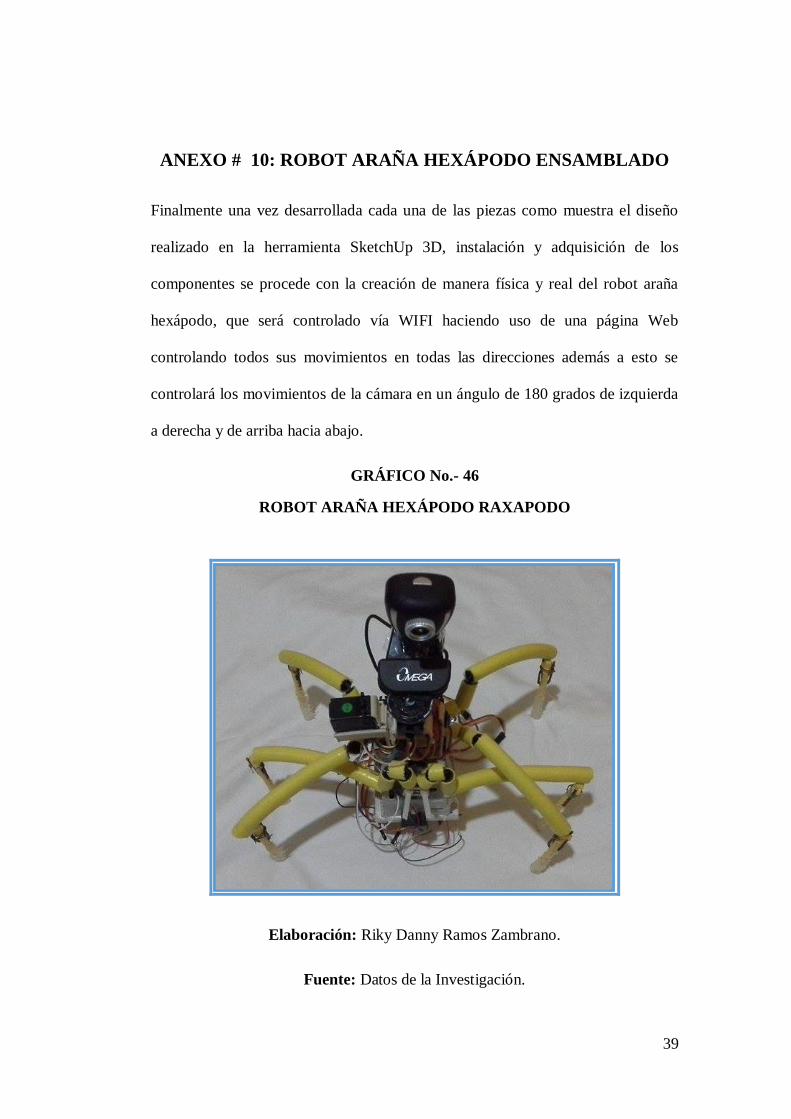
39
ANEXO # 10: ROBOT ARAÑA HEXÁPODO ENSAMBLADO
Finalmente una vez desarrollada cada una de las piezas como muestra el diseño
realizado en la herramienta SketchUp 3D, instalación y adquisición de los
componentes se procede con la creación de manera física y real del robot araña
hexápodo, que será controlado vía WIFI haciendo uso de una página Web
controlando todos sus movimientos en todas las direcciones además a esto se
controlará los movimientos de la cámara en un ángulo de 180 grados de izquierda
a derecha y de arriba hacia abajo.
GRÁFICO No.- 46
ROBOT ARAÑA HEXÁPODO RAXAPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
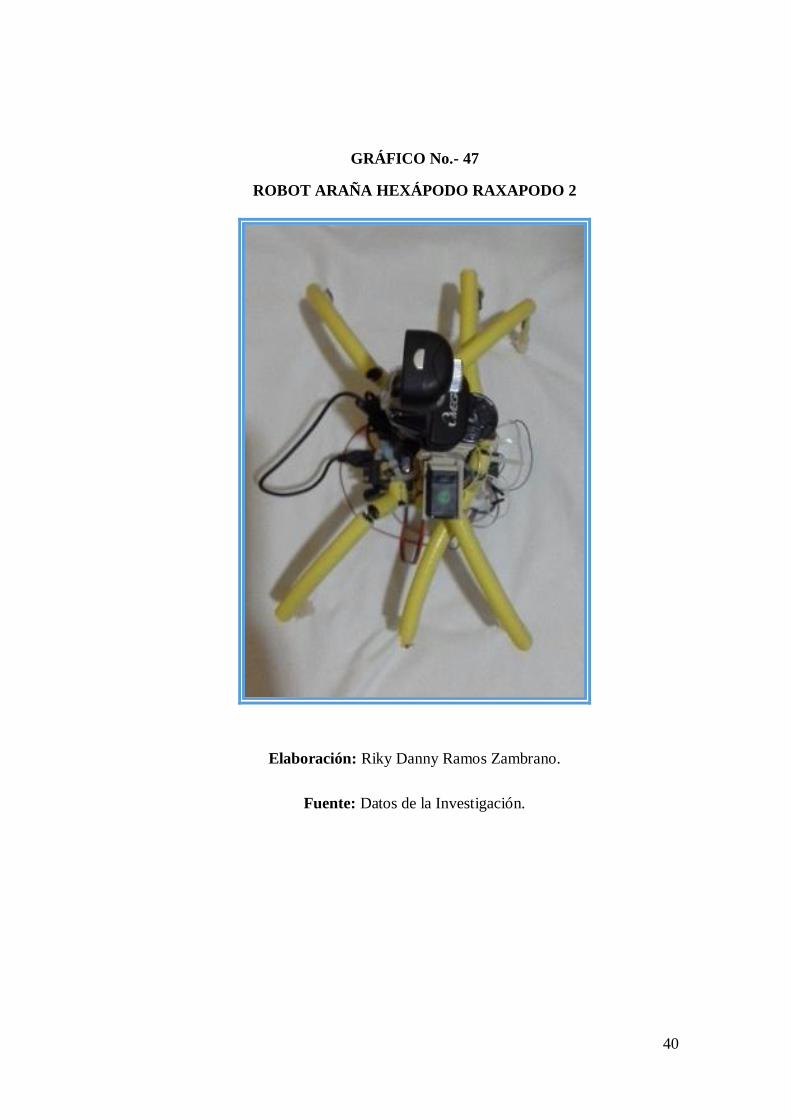
40
GRÁFICO No.- 47
ROBOT ARAÑA HEXÁPODO RAXAPODO 2
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
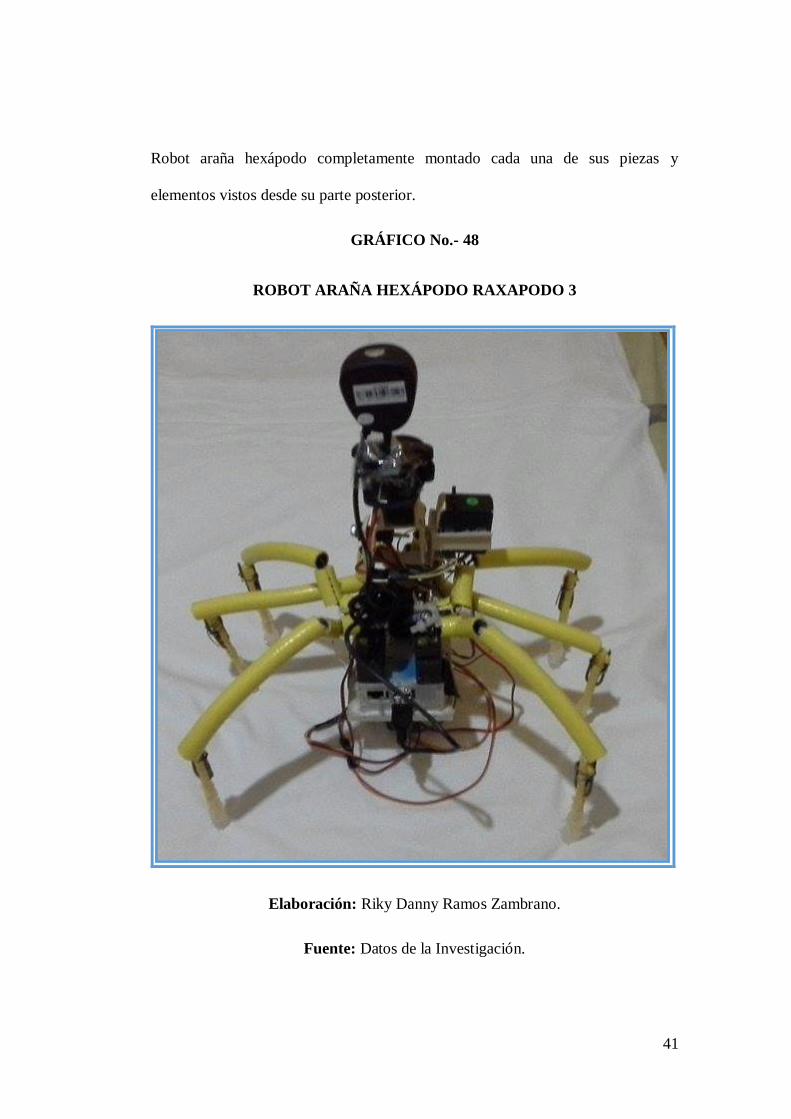
41
Robot araña hexápodo completamente montado cada una de sus piezas y
elementos vistos desde su parte posterior.
GRÁFICO No.- 48
ROBOT ARAÑA HEXÁPODO RAXAPODO 3
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

42
Robot araña hexápodo completamente montado cada una de sus piezas y
elementos vistos desde su parte delantera.
GRÁFICO No.- 49
ROBOT ARAÑA HEXÁPODO RAXAPODO 4
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
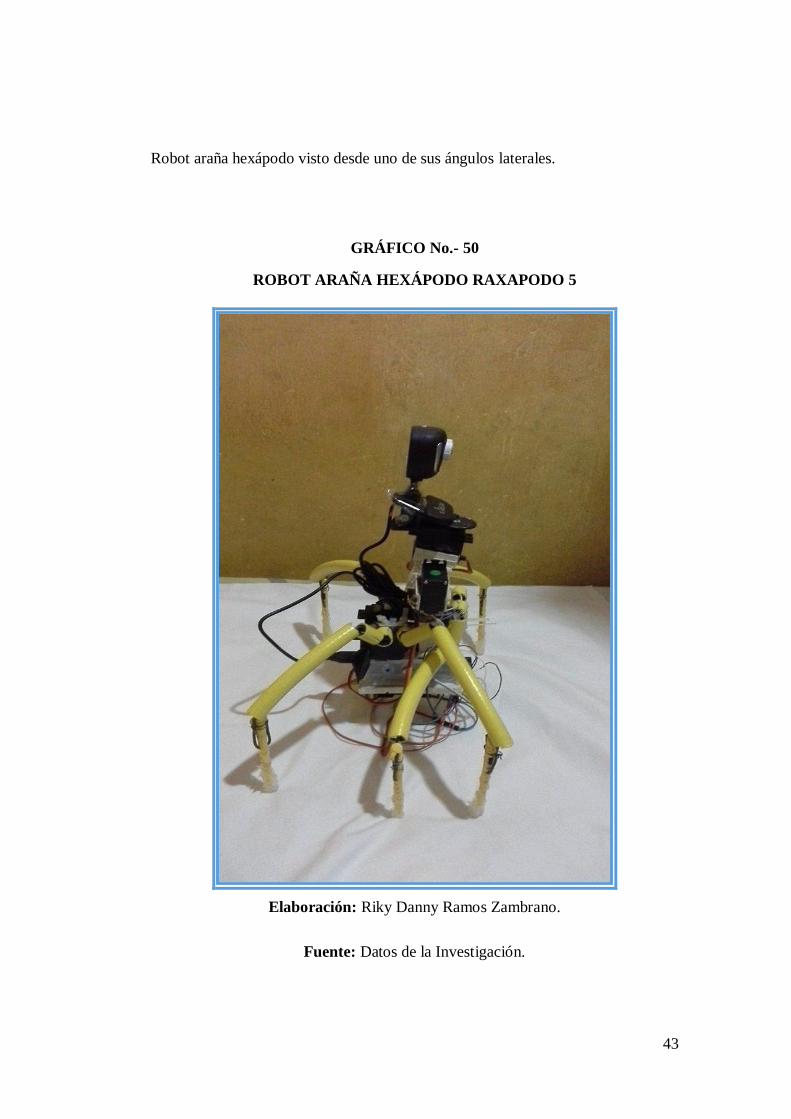
43
Robot araña hexápodo visto desde uno de sus ángulos laterales.
GRÁFICO No.- 50
ROBOT ARAÑA HEXÁPODO RAXAPODO 5
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

44
EL desarrollo de este robot utiliza la Arquitectura Cliente servidor de la siguiente
forma se comunican las aplicaciones para obtener como resultado la movilidad del
Robot:
GRÁFICO No.- 51
ARQUITECTURA DE COMUNICACIÓN ENTRE APLICACIONES
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
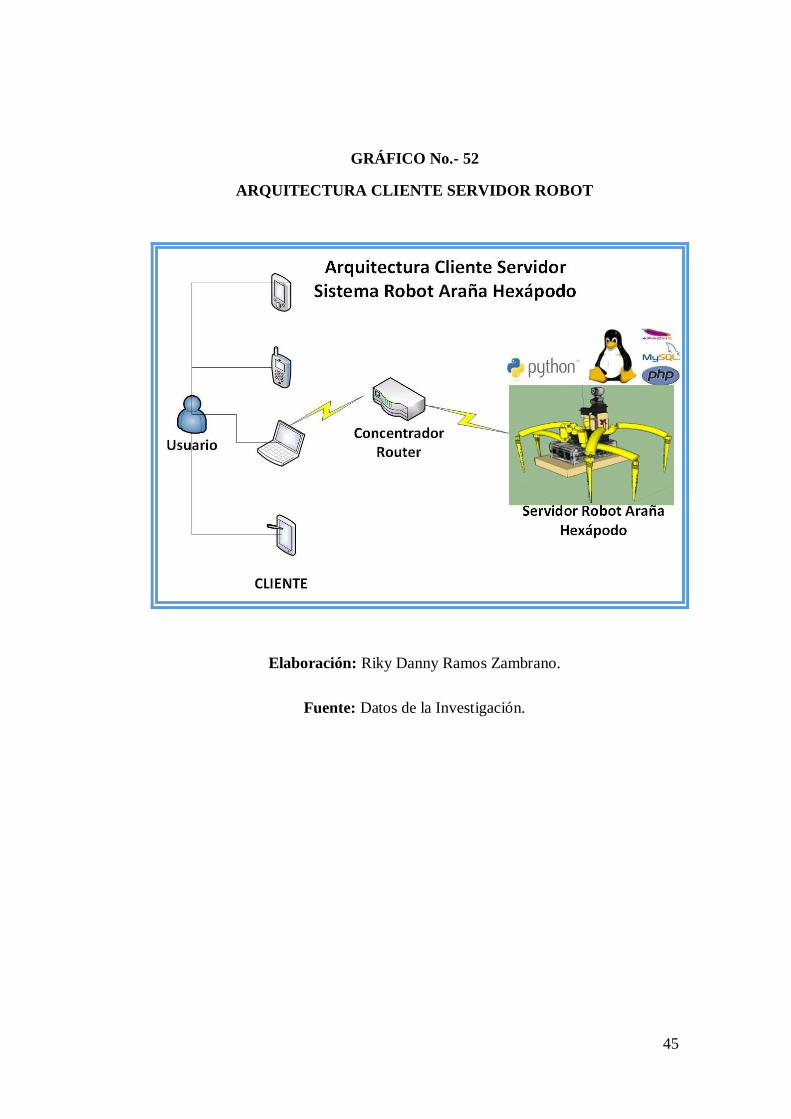
45
GRÁFICO No.- 52
ARQUITECTURA CLIENTE SERVIDOR ROBOT
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

46
Para el control de los movimientos de cada uno de los servomotores se hizo uso
de los pines de GPIO de la Raspberry PI, como se utilizaron un total de 5 servos
se utilizan 5 pines que se encargaran de enviar el pulso aplicando el estándar
PWM de esta manera se le indicara la posición en la cual debe de posesionarse el
servomotor lo que le permitirá lograr darle movilidad al Robot.
A continuación se mostrara los pines utilizados de la Raspberry PI:
GRÁFICO No.- 53
ESQUEMA DE CONEXIÓN SERVOMOTORES CON LOS PINES GPIO
RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
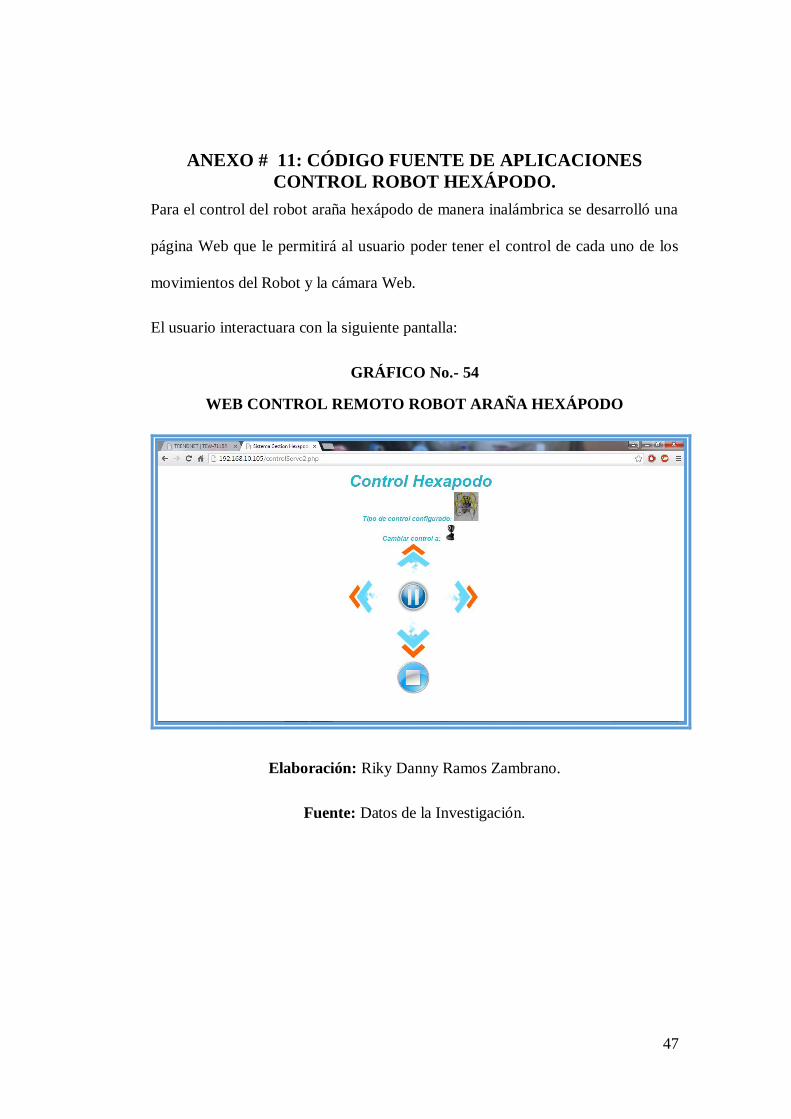
47
ANEXO # 11: CÓDIGO FUENTE DE APLICACIONES
CONTROL ROBOT HEXÁPODO.
Para el control del robot araña hexápodo de manera inalámbrica se desarrolló una
página Web que le permitirá al usuario poder tener el control de cada uno de los
movimientos del Robot y la cámara Web.
El usuario interactuara con la siguiente pantalla:
GRÁFICO No.- 54
WEB CONTROL REMOTO ROBOT ARAÑA HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
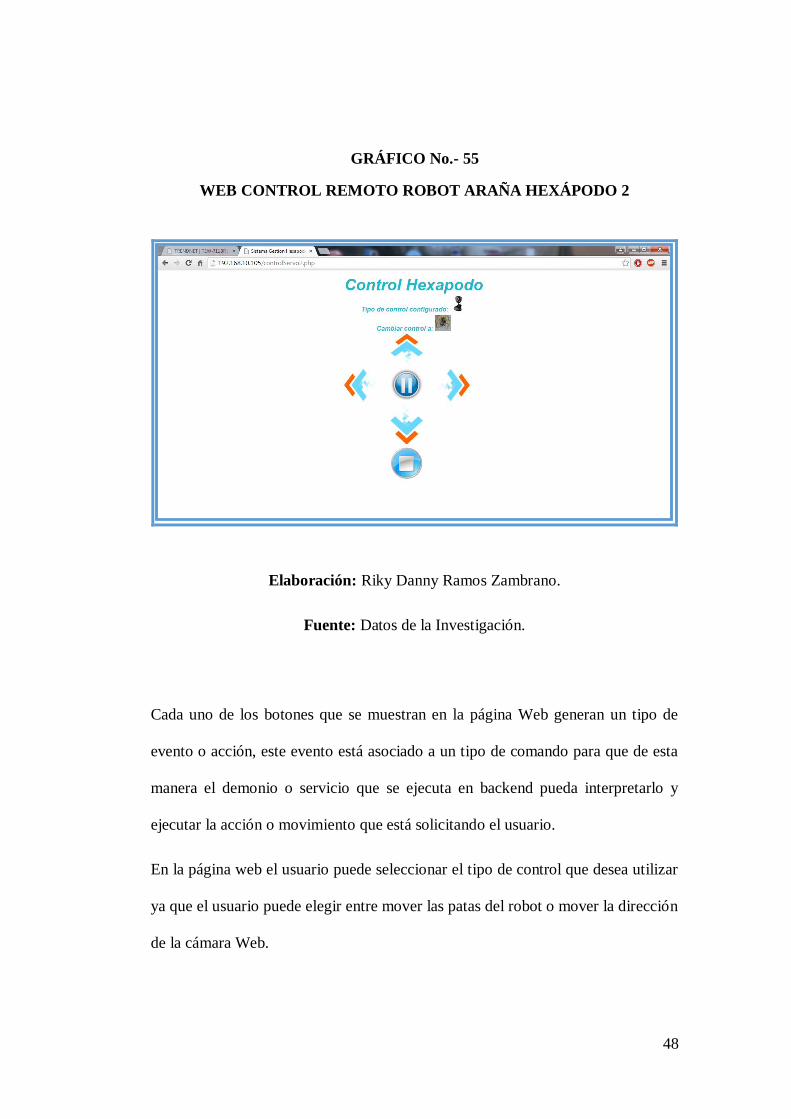
48
GRÁFICO No.- 55
WEB CONTROL REMOTO ROBOT ARAÑA HEXÁPODO 2
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
Cada uno de los botones que se muestran en la página Web generan un tipo de
evento o acción, este evento está asociado a un tipo de comando para que de esta
manera el demonio o servicio que se ejecuta en backend pueda interpretarlo y
ejecutar la acción o movimiento que está solicitando el usuario.
En la página web el usuario puede seleccionar el tipo de control que desea utilizar
ya que el usuario puede elegir entre mover las patas del robot o mover la dirección
de la cámara Web.
49
Para el control he identificación de que comando se debe de ejecutar para poder
manipular el robot se utiliza la siguiente tabla de comandos:
CUADRO No. 1
TABLA DE COMANDOS ROBOT HEXÁPODO
CÓDIGO
COMANDO
TIPO DE ACCIÓN
1 MOVER ROBOT HACIA ADELANTE
2 GIRAR ROBOT HACIA LA IZQUIERDA
3 GIRAR ROBOT HACIA LA DERECHA
4 MOVER ROBOT HACIA ATRÁS
5 PAUSAR MOVIMIENTOS ROBOT
6 GIRAR CÁMARA DE IZQUIERDA A DERECHA
7 GIRARA CÁMARA DE ARRIBA HACIA ABAJO
8 DETENER SERVICIO DE CONTROL REMOTO
ROBOT HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
Cada uno de estos comandos que solicita el usuario al momento de dar clic en los
botones de la página Web se actualiza en la base de datos, de esta forma el
demonio o hilo se encarga de leer o consultar en la base de datos cual es el
comando que se debe de ejecutar dependiendo del valor que está ingresado o
registrado en la tabla.
Para registrar la información de los comandos en la base de datos se creó una base
de datos en MYSQL llamada hexápodo.

50
GRÁFICO No.- 56
BD MYSQL HEXÁPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 57
BD MYSQL HEXÁPODO TABLA COMANDOS_HEXAPODO
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

51
Para el diseño y desarrollo de la página Web que se encargara de controlar los
movimientos del robot se la realizó mediante la programación del siguiente
código fuente:
GRÁFICO No.- 58
CÓDIGO FUENTE PAGINA WEB PHP
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
52
GRÁFICO No.- 59
CÓDIGO FUENTE PAGINA WEB PHP 2
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

53
GRÁFICO No.- 60
CÓDIGO FUENTE PAGINA WEB PHP 3
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

54
GRÁFICO No.- 61
CÓDIGO FUENTE PAGINA WEB PHP 4
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 62
CÓDIGO FUENTE PAGINA WEB PHP 5
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
55
GRÁFICO No.- 63
CÓDIGO FUENTE PAGINA WEB PHP 6
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 64
CÓDIGO FUENTE PAGINA WEB PHP 7
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
56
GRÁFICO No.- 65
CÓDIGO FUENTE PAGINA WEB PHP 8
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 66
CÓDIGO FUENTE PAGINA WEB PHP 9
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
57
GRÁFICO No.- 67
CÓDIGO FUENTE PAGINA WEB PHP 10
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 68
CÓDIGO FUENTE PAGINA WEB PHP 11
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
58
GRÁFICO No.- 69
CÓDIGO FUENTE PAGINA WEB PHP 12
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 70
CÓDIGO FUENTE PAGINA WEB PHP 13
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

59
GRÁFICO No.- 71
CÓDIGO FUENTE PAGINA WEB PHP 14
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
60
ANEXO # 12: CÓDIGO FUENTE DEL SERVICIO O
DEMONIO PYTHON QUE SE ENCARGA DE ENVIAR LA
SEÑAL A LOS SERVOMOTORES
Para el control de cada uno de los movimientos se creó un sistema backend que se
lo levanta o ejecuta haciendo uso de un comando y se encarga de monitorear o
consultar constantemente en la base de datos que comando se debe de ejecutar
dependiendo del comando el sistema realizara la acción o evento solicitado por el
cliente.
Para levantar el sistema o demonio se debe de ejecutar el comando:
sudo python RaxapodoPI.py
Donde RaxapodoPI es el nombre del archivo que contiene el código fuente en el
lenguaje python.
GRÁFICO No.- 72
CÓDIGO FUENTE DEMONIO PYTHON
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

61
GRÁFICO No.- 73
CÓDIGO FUENTE DEMONIO PYTHON 2
Elaborado: Riky Ramos Zambrano.
Fuente: Riky Ramos Zambrano.
GRÁFICO No.- 74
CÓDIGO FUENTE DEMONIO PYTHON 3
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
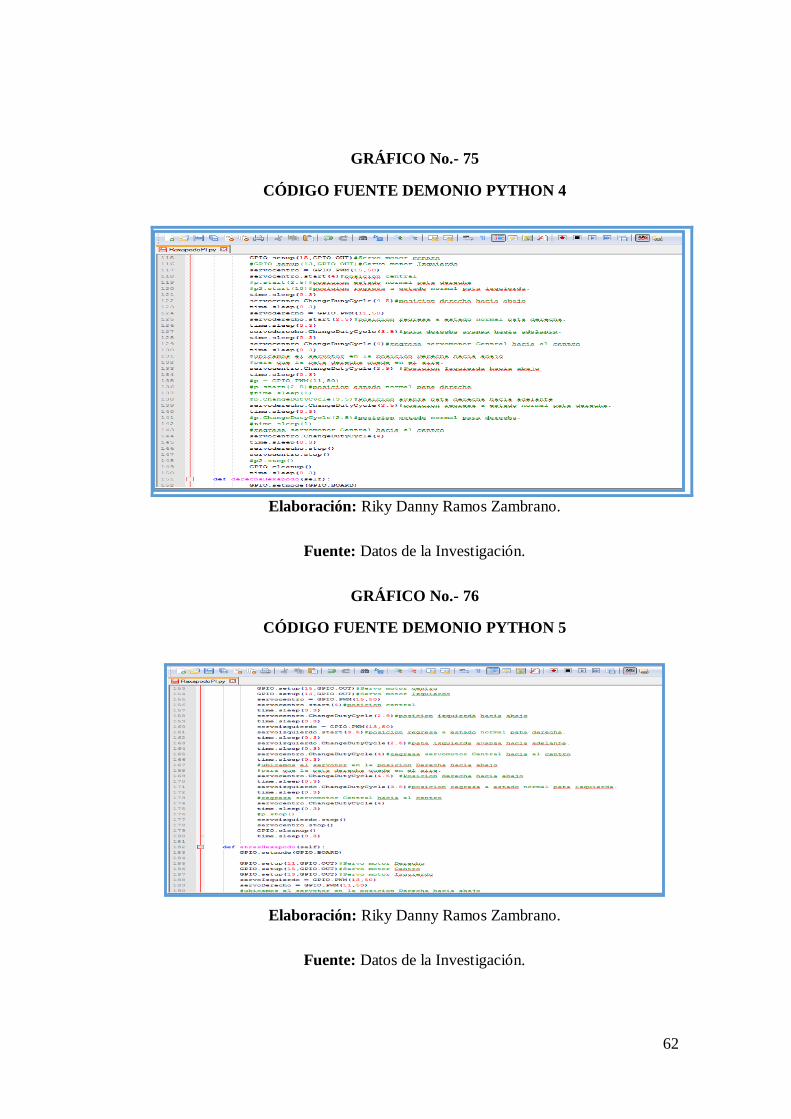
62
GRÁFICO No.- 75
CÓDIGO FUENTE DEMONIO PYTHON 4
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 76
CÓDIGO FUENTE DEMONIO PYTHON 5
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
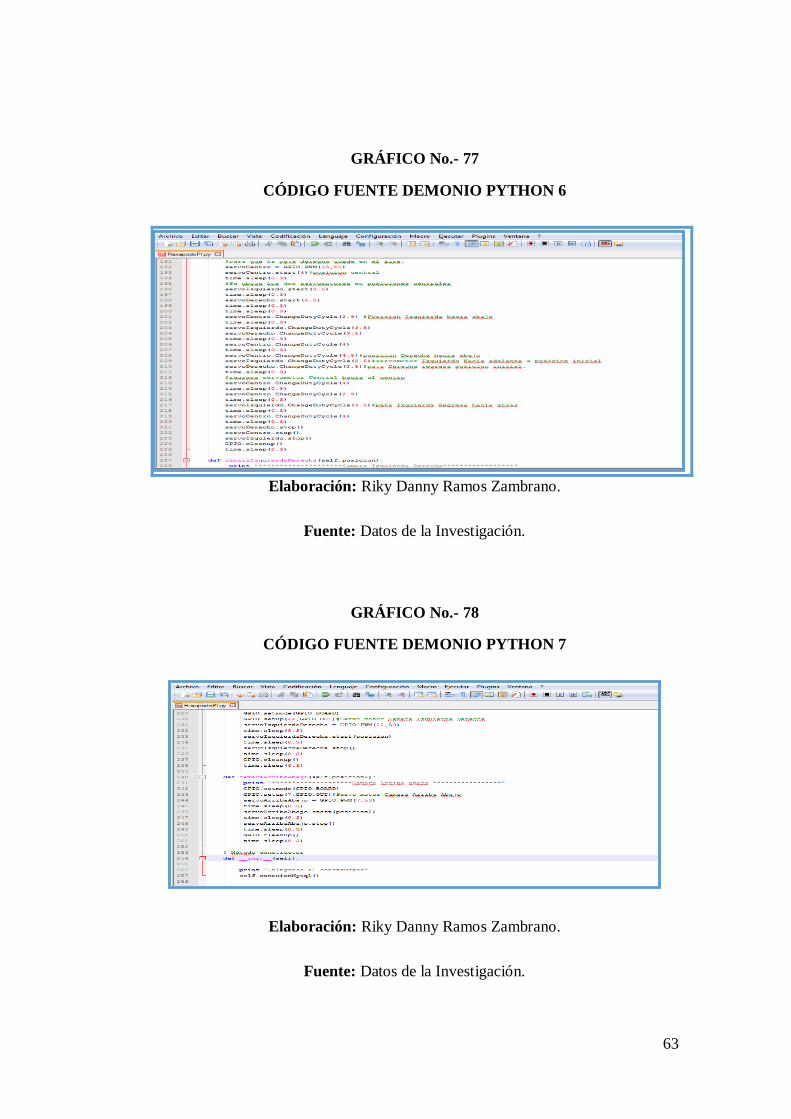
63
GRÁFICO No.- 77
CÓDIGO FUENTE DEMONIO PYTHON 6
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
GRÁFICO No.- 78
CÓDIGO FUENTE DEMONIO PYTHON 7
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
64
UNIVERSIDAD DE GUAYAQUIL
FACULTAD DE CIENCIAS MATEMATICAS Y FISICAS
CARRERA DE INGENIERIA EN SISTEMAS
COMPUTACIONALES
“ANÁLISIS Y DESARROLLO DE UN ROBOT ARAÑA HEXÁPODO,
CONTROLADO VÍA WIFI CON CÁMARA WEB
INTEGRADA UTILIZANDO EL
MICROCOMPUTADOR
RASPBERRY PI”
MANUAL DE USUARIO
TESIS DE GRADO
Previa a la obtención del Título de:
INGENIERO EN SISTEMAS COMPUTACIONALES
AUTOR:
RIKY DANNY RAMOS ZAMBRANO
GUAYAQUIL – ECUADOR
2015
65
INTRODUCCION
El presente documento especifica de manera detallada cada uno de los pasos que
debe de seguir el usuario para poder iniciar el proceso de interacción o control
remoto del robot araña hexápodo.
Cada uno de estos procesos se lo debe de realizar de manera secuencial por parte
del usuario para de esta forma poder conseguir un correcto funcionamiento del
robot, a continuación se detalla cada uno de los pasos que se deben de seguir de
manera secuencial.

66
ANEXO # 13
MANUAL DE USUARIO
CONFIGURACIÓN DE LA RED DE COMUNICACIÓN WIFI.
Primeramente se debe de tener a la mano un concentrador o ROUTER
WIFI que debe de estar configurado con DHCP con los siguientes
parámetros de conexión:
Usuario: ramos
Password: ramosmin123
Nota: El ROUTER debe de estar configurada de esa manera ya que el
robot dentro de su archivo conexión WIFI está configurado con esos
mismos parámetros de esa manera el robot una vez que se encienda se
conectara de manera automática a dicha red.
GRÁFICO No.- 79
ROUTER WIFI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

67
Identificar la IP asignada al Robot.
Dentro de las configuraciones del router el usuario debe de consultar cual
fue la IP que fue asignada al robot, para ello el usuario deberá de buscar el
equipo con el nombre (raspberrypiRamo) y de esa manera se obtendrá la
IP con la cual se podrá realizar el control de manera remota para realizar
cada uno de los proceso o transacciones del robot.
GRÁFICO No.- 80
DHCP ROUTER RASPBERRY PI
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
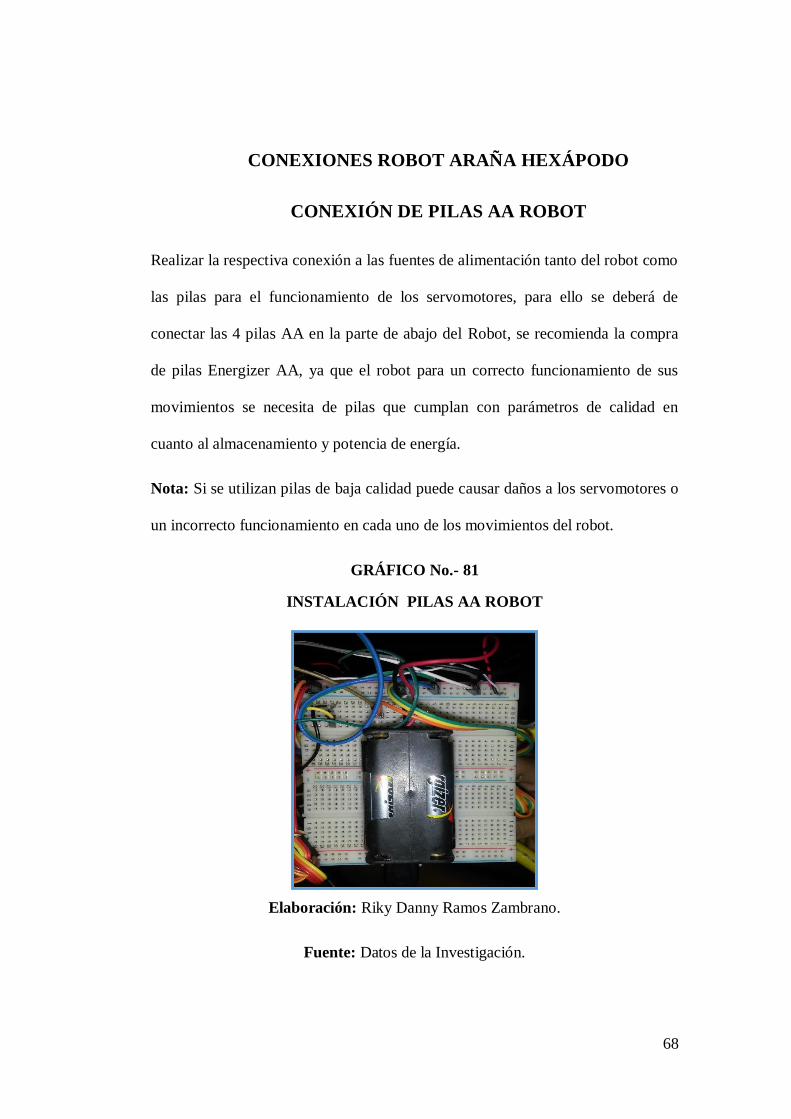
68
CONEXIONES ROBOT ARAÑA HEXÁPODO
CONEXIÓN DE PILAS AA ROBOT
Realizar la respectiva conexión a las fuentes de alimentación tanto del robot como
las pilas para el funcionamiento de los servomotores, para ello se deberá de
conectar las 4 pilas AA en la parte de abajo del Robot, se recomienda la compra
de pilas Energizer AA, ya que el robot para un correcto funcionamiento de sus
movimientos se necesita de pilas que cumplan con parámetros de calidad en
cuanto al almacenamiento y potencia de energía.
Nota: Si se utilizan pilas de baja calidad puede causar daños a los servomotores o
un incorrecto funcionamiento en cada uno de los movimientos del robot.
GRÁFICO No.- 81
INSTALACIÓN PILAS AA ROBOT
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

69
CONEXIÓN BATERÍA PORTABLE PUERTO MINI USB ROBOT
Para poder encender el cerebro del robot (Raspberry pi) se deberá de usar una
batería portable con salida de 5V con puerto USB y micro USB. El mismo que se
deberá de conectar en el puerto micro USB del robot de esta manera se levantara
el sistema operativo Raspbian y cada uno de los servicios de comunicación.
GRÁFICO No.- 82
INSTALACIÓN BATERIA ROBOT
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

70
GRÁFICO No.- 83
INSTALACIÓN BATERIA ROBOT 2
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
CONEXIÓN REMOTA VÍA SSH
El usuario deberá de realizar una conexión de manera remota con el robot
ingresando el número de IP asignada al mismo mediante el servicio DHCP del
router utilizando el puerto 22.
Datos de acceso al robot:
Usuario: pi
Password: raspberry

71
GRÁFICO NO.- 84
CONEXIÓN SSH ROBOT
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
Una vez que el usuario se conecte de manera exitosa deberá de ejecutar los
siguientes comandos para levantar cada uno de los servicios que ofrece el robot
que son los siguientes:
SERVICIO STREAMING DE VIDEO.
El servicio de Streaming de video se encargara de controlar el sistema de
grabación de manera continua el cual nos permitirá poder visualizar en tiempo
real con una velocidad de captura de 1 fotograma por segundo.
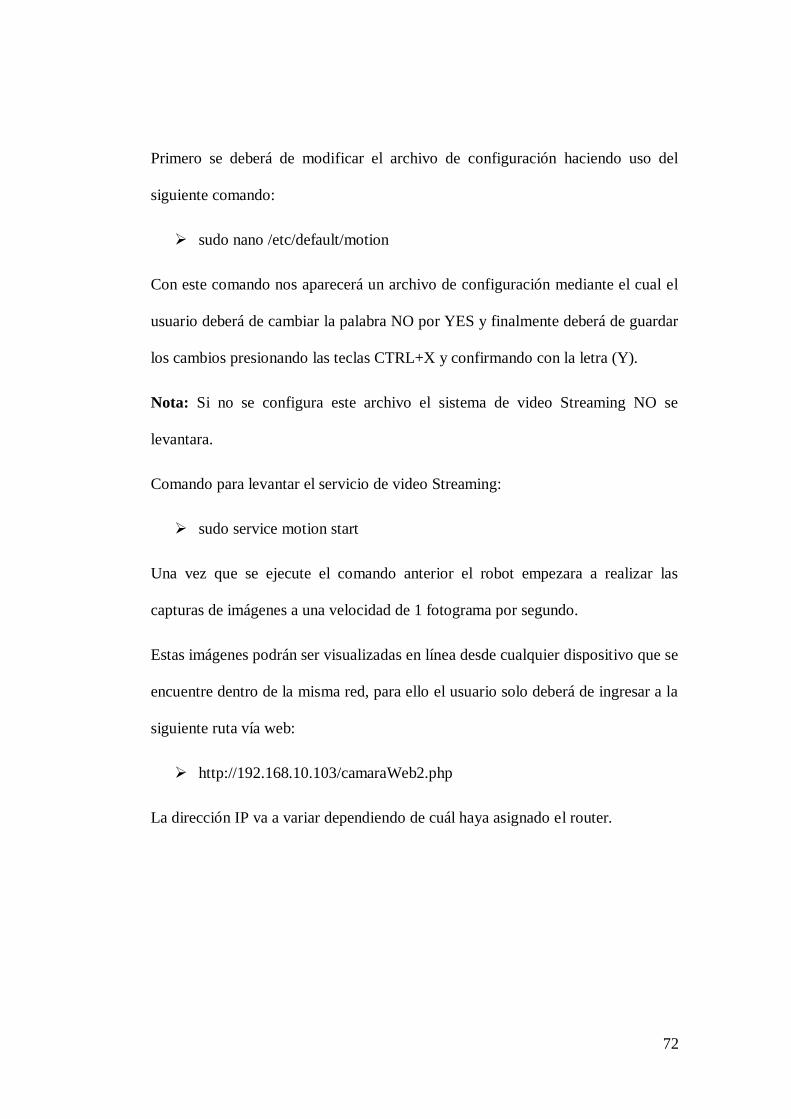
72
Primero se deberá de modificar el archivo de configuración haciendo uso del
siguiente comando:
sudo nano /etc/default/motion
Con este comando nos aparecerá un archivo de configuración mediante el cual el
usuario deberá de cambiar la palabra NO por YES y finalmente deberá de guardar
los cambios presionando las teclas CTRL+X y confirmando con la letra (Y).
Nota: Si no se configura este archivo el sistema de video Streaming NO se
levantara.
Comando para levantar el servicio de video Streaming:
sudo service motion start
Una vez que se ejecute el comando anterior el robot empezara a realizar las
capturas de imágenes a una velocidad de 1 fotograma por segundo.
Estas imágenes podrán ser visualizadas en línea desde cualquier dispositivo que se
encuentre dentro de la misma red, para ello el usuario solo deberá de ingresar a la
siguiente ruta vía web:
http://192.168.10.103/camaraWeb2.php
La dirección IP va a variar dependiendo de cuál haya asignado el router.

73
GRÁFICO NO.- 85
PÁGINA WEB STREAMING VIDEO ROBOT
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
Comando para detener el servicio de video Streaming:
sudo service motion stop
Una vez que el usuario culmine con el proceso de filmación o captura de video el
mismo podrá descargar a su PC el video completo mediante una conexión SFTP
al robot accediendo a la siguiente ruta:
/var/www/cámara/20141204-timelapse.mpg
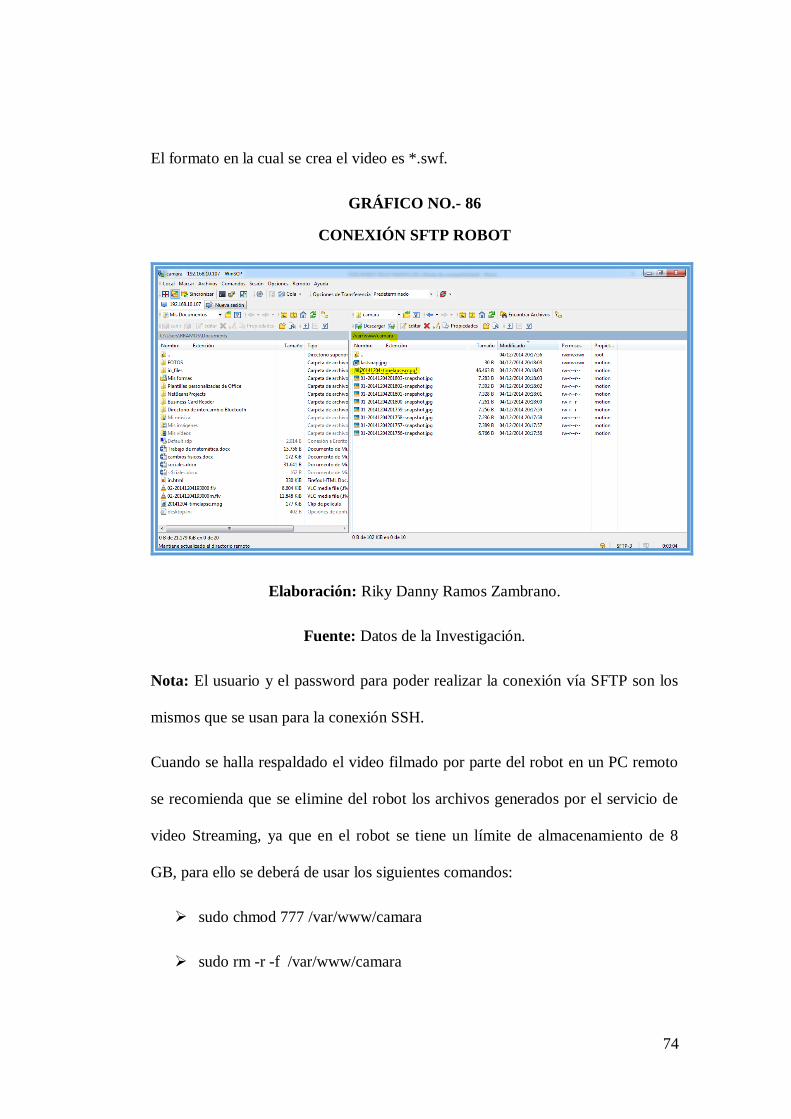
74
El formato en la cual se crea el video es *.swf.
GRÁFICO NO.- 86
CONEXIÓN SFTP ROBOT
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
Nota: El usuario y el password para poder realizar la conexión vía SFTP son los
mismos que se usan para la conexión SSH.
Cuando se halla respaldado el video filmado por parte del robot en un PC remoto
se recomienda que se elimine del robot los archivos generados por el servicio de
video Streaming, ya que en el robot se tiene un límite de almacenamiento de 8
GB, para ello se deberá de usar los siguientes comandos:
sudo chmod 777 /var/www/camara
sudo rm -r -f /var/www/camara
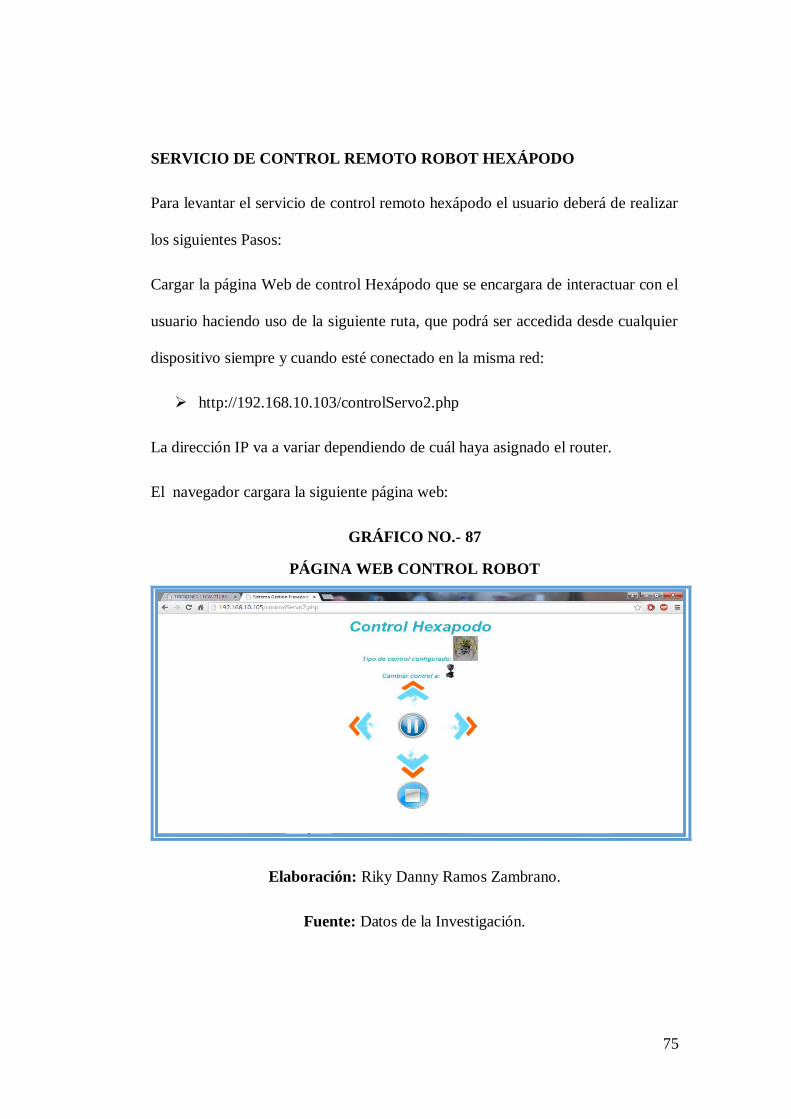
75
SERVICIO DE CONTROL REMOTO ROBOT HEXÁPODO
Para levantar el servicio de control remoto hexápodo el usuario deberá de realizar
los siguientes Pasos:
Cargar la página Web de control Hexápodo que se encargara de interactuar con el
usuario haciendo uso de la siguiente ruta, que podrá ser accedida desde cualquier
dispositivo siempre y cuando esté conectado en la misma red:
http://192.168.10.103/controlServo2.php
La dirección IP va a variar dependiendo de cuál haya asignado el router.
El navegador cargara la siguiente página web:
GRÁFICO NO.- 87
PÁGINA WEB CONTROL ROBOT
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.

76
El usuario deberá de dar clic sobre el botón pausa que se encuentra ubicada
en el centro de la página web, posteriormente deberá de ejecutar el siguiente
comando vía SSH:
sudo python Desktop/VERSION\ FINAL/RaxapodoPI.py
Este comando se encargará de levantar el servicio o demonio que le permitirá al
usuario poder tener el control del robot he interactuar con el mismo dándole
órdenes para que realice cada uno de los movimientos deseados tanto de las patas
con los de la cámara Web.
Si el usuario desea controlar los movimientos de la cámara el mismo deberá de
dar clic sobre el icono de la cámara Web, de esa forma podrá interactuar con la
misma, de igual manera si el usuario desea controlar los movimientos del robot
deberá de dar clic sobre el icono del robot.
Ejemplo de control configurado para manipular la cámara Web:
GRÁFICO No.- 88
PÁGINA WEB CONTROL ROBOT 2
Elaboración: Riky Danny Ramos Zambrano.
Fuente: Datos de la Investigación.
77
Para que el robot avance el usuario deberá de dar clic sobre el icono una
vez que el usario de clic sobre el icono el robot empezará a avanzar de manera
indefinida hasta que el usuario le asigne otra posición de movimiento ya sea esta a
la izquierda , derecha o hacia atrás .
Para que el robot se detenga o pause sus movimientos el usuario deberá de dar clic
sobre el icono pausa y si se desea detener el servicio o demonio de control
remoto del robot el usuario debera de dar clic sobre el icono Stop .
Nota: Una vez que el usuario detenga el servicio de control remoto del robot para
poder controlar el robot debera de volver a realizar cada uno de los pasos
mencionados anteriormente para poder levantar nuevamente el servicio
(SERVICIO DE CONTROL REMOTO ROBOT HEXÁPODO), los movimientos
del robot y de la camara son realizados de manera separada el robot NO puede
moverse y al mismo tiempo mover la camara esa parte esta definida en el alcance.
Una vez que el usuario ha culminado con el proceso de pruebas o de interacción
con el robot se recomienda dejar configurado con NO el archivo de configuración
de video Straming haciendo uso del siguiente comando:
sudo nano /etc/default/motion
Ya que si no se realiza este pasó en la siguiente vez que el usuario encienda el
robot el sistema se encargará de filmar o se levantará de manera automática el
sistema de video Streaming.

78
APAGAR ROBOT ARAÑA HEXAPODO
Para poder apagar el robot araña el usuario deberá de ejecutar el siguiente
comando mediante una conexión SSH:
sudo shutdown -h now
Nota: Se recomienda que el usuario siga cada uno de estos pasos mencionados en
este manual de usuario y que sean leídos detenidamente para poder obtener un
correcto funcionamiento del robot.





























