Embed Size (px)
Citation preview
UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
FACULTAD DE SISTEMAS MERCANTILES
CARRERA INGENIERÍA EN SISTEMAS
TESIS DE GRADO
PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERA EN SISTEMAS E
INFORMÁTICA
TEMA
SISTEMA AUTOMATIZADO DE RIEGO POR ASPERSIÓN PARA EL JARDÍN
UBICADO EN LA PARTE LATERAL DEL BLOQUE DE AULAS #2 DE
UNIANDES QUEVEDO
AUTORA
JEANNETTE ALEXANDRA LAVERDE MENA
TUTOR
ING. DIONISIO VITALIO PONCE RUIZ, PHD
QUEVEDO – LOS RIOS – ECUADOR
2016
II
MISIÓN DE LA CARRERA DE SISTEMAS
Somos una carrera de las Ciencias tecnológicas, que tiene como propósito
formar profesionales competitivos y emprendedores, con sólidos conocimientos
en el área de las ciencias de computación, para resolver problemas
relacionados con el tratamiento de la información, con estricta responsabilidad
social bajo una visión ética y humanística para contribuir con el desarrollo
integral del país.
VISIÓN DE LA CARRERA DE SISTEMAS
Ser una carrera reconocida a nivel nacional e internacional, por la calidad y
competitividad de sus docentes y graduados, con alto desempeño profesional
enfocado al área de computación e informática que transcienda por su
relevancia en la investigación y desarrollo de proyectos técnicos mediante el
uso eficiente de las Ciencias de la computación en beneficio de la sociedad.
III
UNIVERSIDAD REGIONAL AUTONÓMA DE LOS ANDES
CERTIFICACIÓN DEL TUTOR
Ing. Dionisio Vitalio Ponce Ruiz, PHD
TUTOR DE TESIS
CERTIFICA:
Que la tesis previa a la obtención del título de Ingeniera en Sistemas titulada:
SISTEMA AUTOMATIZADO DE RIEGO POR ASPERSIÓN PARA EL JARDÍN
UBICADO EN LA PARTE LATERAL DEL BLOQUE DE AULAS #2 DE
UNIANDES QUEVEDO, es de autoría de la investigadora.
Jeannette Alexandra Laverde Mena
Ha sido revisada en todos sus componentes, por lo que autorizo su
presentación, sustentación y defensa.
Ing. Dionisio Vitalio Ponce Ruiz, PHD
TUTOR DE TESIS
IV
UNIVERSIDAD REGIONAL AUTONÓMA DE LOS ANDES
FACULTAD DE SISTEMAS MERCANTILES
DECLARACIÓN DE AUTORÍA DE TESIS
Yo, Jeannette Alexandra Laverde Mena, portadora de la cédula de ciudadanía
No. 050388473-6 Egresada de la Facultad de Sistemas Mercantiles,
especialización Sistemas.
Declaro que soy la autora del presente trabajo de investigación, el mismo que
es original, auténtico y personal.
Todos los aspectos académicos y legales que se desprendan del presente
trabajo son responsabilidad exclusiva de la autora.
Jeannette Alexandra Laverde Mena
AUTORA DE TESIS
V
DEDICATORIA
Esta tesis la dedico:
A DIOS, por haberme dado la vida y permitirme llegar a este momento tan
crucial e importante de mí formación como profesional.
A mis PADRES: Guillermo Laverde e Inés Medina, quienes me han dado el
amor, cariño y ejemplo para hacer de mí una persona con valores e ideales de
superación.
Jeannette
VI
AGRADECIMIENTOS
La autora deja constancia de su agradecimiento a la Facultad de Sistemas
Mercantiles de la Universidad Regional Autónoma de los Andes, de la
extensión Quevedo.
A los maestros que sin egoísmo impartieron sus conocimientos.
A mi mamá Thalia Mena, y mi papá Iván Laverde que me han dado su apoyo y
consejos de perseverar a lo largo de mi preparación universitaria.
Al Ing. Luis Albarracín Msc. más que un docente ha sido un amigo, que me ha
brindado toda la colaboración durante la elaboración de este proyecto.
A mi tutor Ing. Dionisio Ponce PHD, por haberme guiado sabiamente y en
general a todas aquellas personas que en menor o mayor grado han
contribuido a la culminación del presente trabajo.
Jeannette
VII
INDICE DE CONTENIDO
PORTADA ......................................................................................................... I
MISIÓN DE LA CARRERA DE SISTEMAS ...................................................... II
VISIÓN DE LA CARRERA DE SISTEMAS ...................................................... II
CERTIFICACIÓN DEL TUTOR ........................................................................ III
DECLARACIÓN DE AUTORÍA DE TESIS ...................................................... IV
DEDICATORIA ................................................................................................. V
AGRADECIMIENTOS ...................................................................................... VI
RESUMEN EJECUTIVO .................................................................................. XI
EXECUTIVE SUMMARY ................................................................................. XI
INTRODUCCIÓN ............................................................................................ 12
Antecedentes .................................................................................................. 12
Planteamiento del problema ............................................................................ 13
Formulación del problema ............................................................................... 14
Delimitación del problema ............................................................................... 14
Delimitación geográfica ................................................................................... 14
Objeto de investigación y campo de acción .................................................... 14
Identificación de la línea de investigación ....................................................... 14
Objetivos ......................................................................................................... 14
Objetivo general .............................................................................................. 14
Objetivos específicos ...................................................................................... 14
Hipótesis ......................................................................................................... 15
Variables de la investigación ........................................................................... 15
Justificación .................................................................................................... 15
Breve explicación de la metodología a emplear .............................................. 16
Resumen de la estructura de la tesis: breve explicación de los capítulos de la
tesis ............................................................................................................... 16
Elementos de la novedad, aporte teórico y significación práctica, en
dependencia del alcance de la tesis ................................................................ 17
CAPITULO I. MARCO TEÓRICO ................................................................... 18
1.1. Procesos de automatización ................................................................... 18
1.1.1. Origen y evolución de la automatización............................................... 19
1.1.2. Caracterización de los procesos de automatización ............................. 26
1.1.3. Tipos de automatización ....................................................................... 27
VIII
1.1.4. Técnicas de automatización ................................................................. 29
1.1.5. Sistemas de control .............................................................................. 30
1.1.6. La retroalimentación ............................................................................. 35
1.1.7. Electrónica aplicada a los procesos de automatización ........................ 38
1.2. Sistemas de riego ................................................................................... 39
1.2.1. Origen y evolución de los sistemas de riego ......................................... 40
1.2.2. Tipologías de sistemas de riego para jardines ...................................... 41
1.2.3. Factores a considerar para escoger un adecuado sistema de riego ..... 42
1.3. Sistemas de riego automatizados ........................................................... 43
1.3.1. Algunos modelos desarrollados en la actualidad sobre sistemas de
control y riego. ................................................................................................ 45
1.4. Valoración crítica de los conceptos principales de las distintas posiciones
teóricas ........................................................................................................... 45
1.5. Conclusiones parciales del capítulo ........................................................ 46
CAPITULO II. MARCO METODOLÓGICO Y PLANTEAMIENTO DE LA
PROPUESTA .................................................................................................. 47
2.1. Caracterización del sector, rama, empresa, contexto institucional o
problema seleccionado para la investigación .................................................. 47
2.2. Descripción del procedimiento metodológico para el desarrollo de la
investigación ................................................................................................... 48
2.3. Presentación de los resultados del diagnostico ...................................... 50
2.4. Conclusiones parciales del capítulo ........................................................ 56
CAPITULO III. DESARROLLO DE LA PROPUESTA CON SU VALIDACIÓN
Y/O EVALUACIÓN DE LA APLICACIÓN ....................................................... 57
3.1. Propuesta transformadora ...................................................................... 57
3.1.1. Código del sistema ............................................................................... 70
3.2. Implementación de la propuesta ............................................................. 72
3.3. Validación de la inserción parcial en la práctica de la propuesta .......... 73
3.4. Conclusiones parciales del capítulo ........................................................ 74
CONCLUSIONES GENERALES .................................................................... 78
RECOMENDACIONES ................................................................................... 79
BIBLIOGRAFÍA .............................................................................................. 80
ANEXOS ......................................................................................................... 87
IX
INDICE DE ILUSTRACIONES
Ilustración 1. Automatización Fuente Economy Weblog ................................. 18
Ilustración 2. Inventos de la Segunda revolución industrial. ............................ 21
Ilustración 3. Bioingeniería .............................................................................. 24
Ilustración 4. Procesos de automatización ...................................................... 27
Ilustración 5. Sistema de control de velocidad................................................. 31
Ilustración 6. Sistema de control de temperatura de un horno eléctrico .......... 32
Ilustración 7. Elementos de un sistema de control. ......................................... 32
Ilustración 8. Diagrama de un sistema de control básico del sistema de riego
aspersión ........................................................................................................ 34
Ilustración 9. Sistema de lazo abierto basado en el sistema de riego manual . 36
Ilustración 10. Sistema de lazo cerrado basado en el sistema de riego
automatizado .................................................................................................. 37
Ilustración 11. Tipos de sistemas de riego para jardines ................................. 41
Ilustración 12. Exterior de UNIANDES Quevedo ............................................. 47
Ilustración 13. Áreas verdes de UNIANDES Quevedo .................................... 48
Ilustración 14. Modelo Incremental .................................................................. 57
Ilustración 15. Tabla de Arduino ...................................................................... 58
Ilustración 16. Protoboard y sus partes ........................................................... 59
Ilustración 17. Potenciómetro .......................................................................... 59
Ilustración 18. Resistencia .............................................................................. 60
Ilustración 19. Código de colores de resistencias ............................................ 60
Ilustración 20. Jumpers, cables conectores ..................................................... 61
Ilustración 21. Led's rojo, azul, verde .............................................................. 61
Ilustración 22. Pantalla LCD 16x02 ................................................................ 61
Ilustración 23. Sensor de temeperatura DHT11 .............................................. 62
Ilustración 24. Sensor de humedad de suelos YL38 - YL69 ............................ 62
Ilustración 25. Módulo relé Fuente la autora ................................................... 63
Ilustración 26. Sensor DHT11 conectado a Arduino ........................................ 63
Ilustración 27. Sensor YL-38 y YL-69 conectados a Arduino ........................... 64
Ilustración 28. Pantalla LCD conectada a Arduino .......................................... 64
Ilustración 29. Conexión final de todos los componentes ................................ 65
Ilustración 30. Diseño de circuito electrónico sensor DHT11 con Arduino ....... 67
X
Ilustración 31. Diseño de circuito electrónico sensor YL38 - YL69 con Arduino ........ 67
Ilustración 32. Diseño de circuito electrónico pantalla LCD con Arduino ......... 68
Ilustración 33. Diseño del circuito electrónico de todos los componentes del
sistema ........................................................................................................... 69
INDICE DE TABLAS
Tabla 1. Símbolos electrónicos usados dentro del sistema ............................. 66
XI
RESUMEN EJECUTIVO
La investigación que se presenta aborda la actualidad relativa a los empleos de
la tecnología y la automatización para ahorrar agua, se fundamenta en el
problema científico ¿Cómo contribuir a la automatización de los sistemas de
riego de jardines en la universidad UNIANDES-Quevedo? Donde a partir de
una investigación de tipo experimental y empleando diversos métodos de
carácter teórico, empíricos y estadísticos matemáticos se ha podido determinar
la veracidad del problema y plantear una solución, la cual consiste en el diseño
de un prototipo de sistema automatizado para el riego de jardines, un paso
intermedio para la escalabilidad a nivel de institución de esta experiencia. La
investigación arroja resultados positivos contando con el sistema diseñado a
nivel de realización práctica, que ha sido implementado con sus respectivas
pruebas en el área del jardín de la Universidad.
EXECUTIVE SUMMARY
The research presented today addresses on jobs and automation technology to
save water, is based on the scientific problem How to contribute to the
automation of irrigation systems gardens in the UNIANDES-Quevedo college?
Where from an experimental investigation and employing various methods of
theoretical, empirical and mathematical statistical character has been able to
determine the veracity of the problem and propose a solution, which is the
design of a prototype automated system for watering gardens, an intermediate
step for scalability level institution of this experience. Research shows positive
results counting system designed to level the practical embodiment, which has
been implemented in their respective events in the garden area of the
University.
12
INTRODUCCIÓN
Antecedentes
Los riegos agrícolas, desde la antigüedad se los ha realizado manualmente,
pero el hombre debido al avance de la tecnología siempre quiere llevar todo a
otro nivel, por este motivo se ha intentado integrar la automatización dentro de
la agricultura creando gran variedad de sistemas de riego, pero ¿qué
conocimiento tenemos de automatizar o sistemas de riego?, por eso es
necesaria las investigaciones de los siguientes autores:
El riego por aspersión, a pesar de su amplia tradición a nivel nacional, necesita
mejorar el proceso de aplicación del agua y su manejo por lo que supone de
ahorro tanto de agua como de energía. (Tarjuelo, 1992, pág. 61)
El riego es una práctica cultural que requiere optimizar en lo posible la
eficiencia en la aplicación de agua, entendiendo como tal la fracción del agua
aplicada que es utilizada para satisfacer las necesidades del cultivo y las de
lavado para ello es necesario minimizar las perdidas por evaporación,
escorrentía, precolación profunda y otras perdidas menores, para lo cual se
requiere que el sistema esté bien diseñado, manejado y conservado. (Montero,
2000, Tesis doctoral pág. 10)
El riego es una de las labores agronómicas de gran importancia que permite
conseguir potencialmente el desarrollo agrícola de los cultivos incrementando
sus rendimientos. El recurso hídrico es cada día más escaso, sin embargo se
malgasta, por lo que es necesario implementar sistemas de riego que optimicen
el uso de agua para el riego para obtener una mayor productividad. (Macías,
Vergara, Macías, & Bazurto, 2011, Tesis pág. 4)
La automatización es un sistema donde se transfieren tareas de producción,
realizadas habitualmente por operadores humanos a un conjunto de elementos
tecnológicos que tratan de aplicar sistemas mecánicos, electrónicos y de bases
computacionales para operar y controlar la producción. (Maldonado Silvestre,
2014, pág. 28)
13
La automatización del servicio es la capacidad para automatizar los procesos,
tareas o actividades con la selección, configuración y operación de la
automatización que queda totalmente bajo el control del personal de IT.
(Rasmussen, 2009)
Desde el punto de vista de los autores mencionados el riego es una de las
labores más importantes para el cuidado de las plantas pero no se tiene el
debido control del uso del agua haciendo un gasto excesivo del mismo, en
cambio la automatización con el avance de la tecnología se han ido
desarrollando gran cantidad de sistemas que han ido favoreciendo al hombre
en sus labores del día a día.
Planteamiento del problema
A medida que el tiempo avanza todas las empresas tratan de automatizarse
con la mejor tecnología para tener un mejor desempeño en sus diferentes
áreas, UNIANDES Quevedo no debe ser la excepción, por ejemplo para regar
sus jardines todavía lo realiza de manera manual con el uso de mangueras
ocasionando un uso innecesario de agua debido a que la aplicación de este
recurso es excesiva.
Pero, ¿dónde radica el conflicto? ¿Por qué suele volverse complicado controlar
el uso adecuado del agua?, esta situación desencadena otros factores que se
dieron para conocer mediante un estudio previo:
La aplicación de agua para los jardines puede ser excesiva o escasa.
No hay un riego uniforme para cada área.
El personal no lleva un control o no tiene conocimiento de cuando se
necesita regar los jardines.
La apariencia del jardín se ha ido deteriorando.
Pérdida de tiempo por parte del personal encargado.
Sobre este último, lo más destacable es que, con el pasar del tiempo y la
tecnología avanzando, la institución no cuenta con un sistema de riego para
14
que facilite una de las primordiales actividades del cuidado de sus jardines.
Quizás no hay respuesta satisfactoria para esta situación, lo que si puede decir
es que es necesario automatizar este proceso que es el riego de los jardines.
Formulación del problema
¿Cómo favorecer a un eficiente sistema de riego para los jardines de la
Universidad Regional Autónoma de los Andes, UNIANDES Quevedo?
Delimitación del problema
Delimitación geográfica
Esta investigación se delimitará a dar un mejor cuidado en el riego del jardín
ubicado en el bloque #2 de aulas de la Universidad Regional Autónoma de los
Andes, UNIANDES Quevedo.
Objeto de investigación y campo de acción
Objeto: Automatización electrónica.
Campo: Procesos del sistema de riego para uno de los jardines de UNIANDES
Quevedo.
Identificación de la línea de investigación
Automatización y control
Objetivos
Objetivo general
Implementar un sistema automatizado de riego por aspersión para el jardín
ubicado en la parte lateral del bloque de aulas #2 de la Universidad Regional
Autónoma de los Andes, UNIANDES Quevedo.
Objetivos específicos
Argumentar bibliográficamente las bases conceptuales sobre
automatización electrónica y sistemas de riego por aspersión.
15
Diagnosticar la situación actual del manejo de mantenimiento y riego del
jardín ubicado en la parte lateral del bloque de aulas #2 de UNIANDES
Quevedo.
Diseñar un sistema electrónico de automatización de riego automatizado
por aspersión.
Desarrollar un sistema de riego automatizado por aspersión para el
jardín ubicado en la parte lateral del bloque de aulas #2 de UNIANDES
Quevedo.
Validar las pruebas del sistema electrónico para descartar errores en el
mismo.
Hipótesis
Con la automatización del sistema de riego se mejorará el manejo y cuidado
del jardín ubicado en la parte lateral del bloque de aulas #2 de UNIANDES
Quevedo.
Variables de la investigación
Variable independiente: Automatización del sistema de riego.
Variable dependiente: Manejo y cuidado de los jardines.
Justificación
En la actualidad hemos visto publicidades, eventos o anuncios sobre ahorrar
agua, sin embargo hacemos despilfarro de este recurso en diferentes
actividades, por ejemplo al regar un jardín no consideramos si el agua que
usamos es la necesaria, esto se debe a que lo realizamos manualmente o
contamos con sistemas de fácil adquisición por su bajo costo ocasionando que
no se calcule el uso adecuado del agua.
Para lograr un mejor uso del agua es necesario controlar la aplicación de la
misma, por tal motivo para dar solución a este problema, se debe contar con la
16
implementación de una aplicación automatizada que controle el riego del agua
hacia las plantas y lo realice solo cuando sea necesario.
Debido a que en la actualidad todavía existen sistemas de riego que no son
aptos para ahorrar agua, se desarrolló e implementó este sistema inteligente
con el objetivo de mejorar el uso de este recurso.
Breve explicación de la metodología a emplear
En el presente proyecto dentro del campo de investigación se aplicará el
método de la observación, se utilizaran las técnicas de entrevista y encuestas
dirigidas al director de carrera así como también al personal que labora dentro
de la misma en el área determinada a trabajar. De esta manera se obtendrá
información útil la cual será utilizada para llegar a la solución del problema
planteado.
Resumen de la estructura de la tesis: breve explicación de los capítulos
de la tesis
Esta investigación plantea que es un sistema automatizado y cuáles son los
beneficios que se obtiene al usarlo.
Para la realización de este proyecto se ha propuesto desarrollar la introducción
en la que se hablan de conceptos desde varios puntos de vista de diferentes
autores y tres capítulos los cuales se detalla a continuación.
En el primer capítulo, se evidencian la recopilación de contenidos científicos lo
cuales me ayudarán a entender la problemática existente y las medidas que
son necesarias para dar solución a la situación actual.
En el segundo capítulo, se detalla la metodología, es decir la modalidad el tipo
de investigación, muestra y las técnicas de recolección de la información.
En el tercer capítulo, se hace referencia al análisis de los resultados que se han
obtenido durante la investigación con la que valida la implementación de este
proyecto.
17
En el cuarto capítulo se encuentran las conclusiones, recomendaciones que se
llevan a cabo después de la finalización de esta investigación. La bibliografía
que respalda el contenido científico utilizado y anexo que muestra el estado
actual de la problemática.
Elementos de la novedad, aporte teórico y significación práctica, en
dependencia del alcance de la tesis
Aporte teórico: Estudio sobre sistemas de riegos automatizados por
aspersión.
Significación práctico: Aplicación automatizada para el sistema de
riego para el jardín ubicado en la parte lateral del bloque de aulas #2 de
UNIANDES Quevedo.
Novedad: La implementación de un sistema de riego automatizado,
permite una mejora en el mantenimiento de jardines.
18
CAPITULO I. MARCO TEÓRICO
En el presente capitulo se pretende situar fundamentos teóricos sobre
automatización y sus respectivos contenidos, así como su aplicación dentro de
los sistemas de riego.
1.1. Procesos de automatización
En este primer punto se hace una consideración histórica de la evolución de la
automatización, iniciando por sus antecedentes con la opinión de distintos
autores:
“La automatización hace muchos años dejó de ser una moda y se convirtió en
una necesidad indispensable para el buen desempeño de los procesos y
servicios” Arriola Navarrete & Butrón Yáñez, 2008.
A través de los años el hombre ha realizado descubrimientos con la finalidad de
crear maquinas que imiten o reproduzcan movimientos del cuerpo humano, y
las tareas que se realizan manualmente se transfieran a un conjunto de
elementos mecanizados, para que operen o trabajen sin la necesidad de que
alguien intervenga, esto se conoce como automatización.
Según el Diccionario Merriam Webster la automatización: Es la técnica de
hacer que un sistema opere automáticamente. Es el estado de ser operado
automáticamente. Es la operación automáticamente controlada de un sistema
mediante dispositivos mecánicos o electrónicos para observación esfuerzo y
decisión.
Ilustración 1. Automatización Fuente Economy Weblog
19
De acuerdo con la opinión del autor Ruiz Vadillo la automatización, es la
aplicación de un conjunto de métodos y procedimientos que permiten la
sustitución del operario en aquellas frases tareas físicas y mentales que han
sido previamente programadas.
Se puede decir que la automatización es la combinación de tecnologías
mecánica, eléctrica y electrónica que nos permite o ayuda controlar los
sistemas de producción.
En la actualidad la automatización es de gran ayuda en las pequeñas o
grandes industrias ocasionado grandes avances en el campo de la industria
dándole las facilidades a empresas u organizaciones en el cumplimento de
diversas tareas permitiendo que sus producciones sean más eficientes y
competitivas dentro del mercado.
1.1.1. Origen y evolución de la automatización
Desde la antigüedad, en el Antiguo Egipto, el automatizar procesos mediante
máquinas ha sido una fascinación del hombre, comenzando por estatuas de
dioses como la estatua de Osiris la cual arrojaba fuego por los ojos, y otras las
cuales poseían brazos mecánicos los cuales eran operados por humanos.
En las antiguas Civilizaciones Egipcias una de las valiosas reliquias fue la
“Eolípila” que era una máquina de vapor, diseñada por Herón de Alejandría, la
cual se elaboró tras recopilar información de máquinas autómatas ya existentes
en aquel entonces, este aparato fue construido con una cámara de aire junto a
un calderín metálico, el cual estaba lleno de agua que al momento de colocarlo
sobre el fuego producía la rotación de la máquina. Este mismo tipo de
mecanismo fue utilizado en las llamadas “Puertas de Alejandría” las cuales
mediante la temperatura que producía el fuego ocasionaba que el agua
encontrada en un depósito fluya hacia un cubo, causando el gire de los ejes
para que así las puertas se abrieran.
En Etiopía dos grandes estatuas conocidas como “Los Colosos De Memnón”
simbolizaban al faraón de ese entonces, estas figuras de piedra emitían
20
sonidos al hacer contacto con los rayos del sol lo que causaba temor y respeto
de aquellos que los contemplaban.
En el siglo XVIII con los avances en relación a relojería considerando esta
época donde nacieron los mejores autómatas, Jacques de Vaucanson un
relojero con extensos conocimientos manifestó la realización de los principios
biológicos mediante un pato mecánico que hacía digestión, este autómata
comía de manera realista moviendo su cuello para deslizar de mejor manera la
comida y por ultimo su capacidad de poder descompensar. Pero el secreto de
este fue que en uno de sus compartimientos poseía una sustancia verde que
simulaba el alimento que el pato digería, y la comida de ese momento se
acumulaba en otro depósito.
La automatización y la revolución industrial
A mediados del siglo XVIII hasta mediados del siglo XIX (1760-1860), se
originó la Primera Revolución Industrial ocasionando un cambio en el aspecto
socioeconómico, tecnológico y cultural de la historia, donde se buscaba la
mecanización e implementación de máquinas que sustituyeran las tareas que
en ese entonces el hombre realizaba manualmente. Durante este momento
aparecen diferentes mecanismos que eran controlados por máquinas a vapor
que ayudaban con la transportación, y es aquí donde en la industria textil se
automatizaron todos los procesos con el uso de equipos. Es aquí donde existió
el molino, ferrocarriles, el telar de Jacquard que estaba basado en tarjetas
perforadas permitiendo a personas sin experiencia tejer diferentes diseños
complejos.
Después de todos estos acontecimientos surge la segunda revolución industrial
a finales del XIX y principios del siglo XX (1870-1914), durante este periodo
aparece el petróleo y la electricidad generada en base a energía hidráulica
siendo estos considerados como las fuentes más importantes de energía en
ese tiempo, dejando de lado a las máquinas de vapor que eran utilizadas en
base al carbón.
Se sigue realizando inventos buscando la automatización, con la finalidad de
mejorar la producción (Ver ilustración 2).
21
Dinamo
Generador eléctrico,que se encargaba detransformar laenergía mecánica eneléctrica
El motor de explosión
Utilizando laexplosión decombustible medianteuna chispa, extraía laenergía del petroléo
El cinematógrafo y el teléfono
La primera era unamáquina capaz deproyectar imágenes,y la segunda undispositivo decomunicación
Ilustración 2. Inventos de la Segunda revolución industrial. Fuente : Universidad Michoacana de San Nicolás de Hidalgo Elaborado por autora.
La automatización y la tercera revolución industrial hasta la actualidad
La tercera revolución industrial también conocida como la revolución de la
inteligencia, mediados del siglo XX hasta la actualidad, en esta época se sigue
buscando la automatización a más de esta inicia la robotización o inteligencia
artificial. Aquí entra el estudio de la energía nuclear, telecomunicaciones, la
informática, robótica y la biotecnología.
Las máquinas de esta generación son más precisas y requieren el uso de
mayor tecnología en comparación a las anteriores. Aquí se inicia la revolución
del conocimiento con el desarrollo de la informática convirtiéndose en el factor
más importante, donde se inventó:
Fibra óptica
Cada vez que navegamos por internet o hablamos por teléfono, lo que se dice
o digita viaja a su destino través de fibras delgadas hechas de vidrio, conocidas
como las fibras ópticas. Son pequeñas y livianas capaces de transportar
información a gran velocidad de manera simultánea y no están sujetos a la
interferencia electromagnética siendo esto posible gracias a la luz que viaja a
través del vidrio que contiene este fibra.
22
Según los autores Fernández García & Barbado Santana en su libro
Instalaciones de telefonía prácticas, nos explican que la fibra óptica sustituye
muy ventajosamente a los cables de pares, coaxiales, etc. Se basa en enviar
luz, la fibra está hecha por materiales conductores de la misma (vidrio), ahí se
consigue que la velocidad que alcance sea la de la luz.
Fibra de vidrio
Para Jackson & Day autores de Manual de modelismo, se llama así a un grupo
de materiales formado por fibras de vidrio embebidas en una resina plástica.
Normalmente se lo usa en la industrial textil o en construcciones, este tipo de
fibra es obtenido mediante el estiramiento del vidrio fundido que al solidificarse
tiene la flexibilidad necesaria para ser usado como un material aislante.
Internet
Según Rodríguez Avila nos dice que internet no es una simple red de
ordenadores, sino una red de redes, es decir un conjunto de redes
interconectadas a escala mundial con la particularidad de que cada una de
ellas es independiente y autónoma.
Al revisar el sitio web aulaClic S.L., en el que se encontó que una de las
principales características de internet es la enorme cantidad de información que
contiene y que en la mayoría de los casos es accesible de forma libre y
gratuita.
Por lo tanto internet es una gran red de comunicaciones que permite que la
información de todo el mundo llegue a nuestras computadoras o dispositivos
móviles intercambiando información entre ellos sin importar el lugar en el que
se encuentren, la principal característica de esta red de redes es el intercambio
de información entre usuarios, la gran cantidad de información que tiene a la
que se puede acceder de manera fácil y libre.
De acuerdo con Silva Salinas es la red de redes. Se conoce popularmente “la
superautopista de la información”, porque un usuario, desde su PC, tiene
acceso a la mayor fuente de información que existe.
23
Para Romero Laguillo quien define que internet es una enorme red de
comunicaciones que permite la interconexión de sistemas informáticos,
independientemente de su tipo y situación. Sobre estos ordenadores, y
aprovechando los servicios de comunicaciones de la red, se ejecutan diversos
tipos de aplicaciones, que permiten realizar intercambios muy sofisticados de
información.
Nanotecnología
Esta ciencia se encarga del estudio, diseño, creación, manipulación y
aplicación de materiales, aparatos y sistemas funcionales a nivel de átomos o
moléculas, para la construcción de estructuras, herramientas o máquinas en
dimensiones incapaces de ser vistas al ojo humano.
Según Takeuchi, es el área de investigación que estudia, diseña y fabrica
materiales o sistemas a escalas nanoscópicas. Sin embargo, en muchas
ocasiones se denomina nanotecnología a la habilidad de controlar la materia
átomo por átomo.
Bioingeniería
Esta ciencia se encarga de estudiar los aspectos tecnológicos relacionados con
la medicina y la biología, también se ocupa de analizar a todos los organismos
vivos a nivel molecular, celular y de los sistemas del cuerpo humano o de
cualquier ser vivo.
Para los autores Ruiz Vanoye & Díaz Parra, la bioingeniería se enfoca en la
aplicación de los principios de la ingeniería para el diseño, análisis,
construcción y manipulación de sistemas biológicos, y en descubrir y aplicar
nuevos principios de la ingeniería inspirados en las propiedades de los
sistemas biológicos.
24
Telecomunicaciones
Según se establece en el anexo de la ley 32/2003 (Ley General de
Telecomunicaciones): “una red de telecomunicaciones está formada por los
sistemas de transmisión y, cuando proceda, los equipos de conmutación y
demás recursos que permitan la transmisión de señales entre puntos de
terminación definidos mediante cable, medios ópticos o de otra índole”.
Para Huidobro Moya, las redes de telecomunicaciones, como es obvio se
construyen con el objetivo de prestar servicios de comunicaciones, de muy
diversa naturaleza, a los usuarios que se conectan a ellas y, así, muchas de las
redes que hoy existen pueden ofrecer voz, datos e imágenes con la calidad de
servicio deseada, en base a incorporar en la misma una combinación de
tecnologías que hacen posible disponer de un gran ancho de banda y una alta
capacidad de conmutación.
De acuerdo con las definiciones anteriores, al referirse a telecomunicaciones se
habla de comunicaciones a distancia a través de televisión, radio, internet,
teléfono, que consiste en transmitir un mensaje o intercambiar información
entre personas desde un punto a otro.
Ingeniería
Ciencia
Nuevas
Tecnologías
Bioingeniería
Ilustración 3. Bioingeniería Fuente la autora
Elaborado por la autora
25
Robótica
Según diccionario Merriam-Webster define a un robot como un dispositivo
automático que efectúa funciones ordinariamente asignadas a los seres
humanos.
Otra definición utilizada por Robot Institute of America sobre robots industriales,
“un robot es un manipulador reprogramable multifuncional diseñado para mover
materiales, piezas o dispositivos especializados, a través de movimientos
programados variables para la realización de una diversidad de tareas”.
La robótica para John J. Craig se relaciona en sí con el deseo de sintetizar
algunos aspectos de la función humana mediante el uso de mecanismos,
sensores, actuadores y computadoras.
De acuerdo con el autor antes mencionado la robótica consiste en la creación
de robots estáticos que cumplen una acción determinada de la cual han sido
programadas o robots autómatas que sean capaces de analizar, percibir su
entorno para actuar de forma apropiada para realizar tareas sin la intervención
del hombre.
Con el surgimiento de estas nuevas tecnologías mencionadas, la
automatización ha favorecido a gran escala la eficiencia en la productividad,
aceleración de procesos y tareas que son difíciles de realizar manualmente,
como él envió de datos e información a largas distancias, estudios avanzados
en diferentes campos de la ciencia y tecnología. No hay que dejar de lado a la
robótica, que gracias a los autómatas está llegando a un nivel alto de rapidez y
flexibilidad para realizar diversas actividades que en algunos casos es
imposible o peligroso para los humanos.
La opinión de Bell Daniel nos dice que la unión de ciencia, tecnología y
técnicas económicas en los últimos años se simboliza en la fase «investigación
y desarrollo» (I. & D.). A partir de aquí han surgido las industrias basadas en la
ciencia (computadores, electrónica, óptica, polímeros) que dominan cada vez
más el sector industrial de la sociedad y proporcionan la primacía, según ciclos
de productos, a las sociedades industriales avanzadas.
26
Todo esto no sería posible sin el empleo de los medios productivos y de trabajo
que ofrece esta era que es la revolución tecnológica conocida como la tercera
revolución industrial, la cual nos lleva a una nueva etapa de la evolución
humana, que es la Era del Conocimiento.
1.1.2. Caracterización de los procesos de automatización
Procesos de automatización
Los autores Ponsa Asensio & Vilanova explican en su libro Automatización de
procesos mediante la guía GEMMA que por proceso se entiende aquella parte
del sistema en que, a partir de la entrada de material, energía e información, se
genera una transformación sujeta a perturbaciones del entorno, que da lugar a
la salida de material en forma de producto.
Según el sitio web IPCOMM que habla sobre servicios técnicos especializados
en Diseño, Construcción y Fiscalización de Obras Civiles, Eléctricas,
Automatización & Procesos industriales, nos dice que la automatización, es un
sistema de fabricación diseñado con el fin de usar la capacidad de las
máquinas para llevar a cabo determinadas tareas anteriormente efectuadas por
seres humanos, y para controlar la secuencia de las operaciones sin
intervención humana.
Para Santiago Iñiguez (2011) la automatización de los procesos es la
sustitución de tareas tradicionalmente manuales por las mismas realizadas de
manera automática por máquinas, robots o cualquier otro tipo de automatismo.
Es decir que mediante los procesos de automatización cualquier trabajo o
actividad es posible realizarse en menos tiempo, y ya no es necesaria en su
totalidad la intervención de algún operario, dando las facilidades a pequeñas o
grandes empresas de un aumento en su producción debido a que en la
actualidad se encuentran automatizadas mediante sistemas computarizados
los cuales permiten gobernar cualquier proceso.
Los procesos automatizados constan de:
27
Parte operativa
Son los elementos (motores eléctricos, hidráulicos, neumáticos, válvulas,
sensores, entre otros) que actúan de manera directa sobre la máquina
haciendo que se mueva o realice una acción determinada.
Parte de mando
Es un autómata programable que ordena o controla las tareas de la parte
operativa, siendo capaz de comunicarse con todos los elementos de los que
está formado el sistema automatizado.
1.1.3. Tipos de automatización
Automatización fija
Para Ruiz Vadillo (2012) la automatizacion fija está asociada a la utilización de
sistemas lógicos, como son las compuertas lógicas. Se trata de un sistema de
operación con secuencias fijas en torno a una configuración de los equipos que
lo forman.
Es adecuada para los procesos que son en línea y continuos, cuando los
volúmenes de demanda son altos los diseños del producto son estables y los
ciclos de vida del producto son largos. “Las máquinas que en su mayor parte
están limitadas a una clase de tarea se considera como automatización fija”
(Craig, 2006).
Parte de Mando
Parte Operativa
Procesos automatizados
Ilustración 4. Procesos de automatización Fuente la autora
Elaborado por la autora
28
Este tipo de automatización, se trata en el que la secuencia de las operaciones
que realiza se encuentra fijada, limitada o determinada por los equipos de los
cuales se encuentra conformada, las maquinas con una configuración fija, solo
pueden cumplir una determinada acción, es decir fabrica un tipo de producto en
secuencia.
Automatización programable
Para Ruiz Vadillo, 2012 es un sistema de fabricación que dispone de una serie
de equipos diseñados para poder modificar la secuencia en las operaciones
con el objetivo de adecuarse a la fabricación de distintos productos.
Mikell P. Groover (Fundamentos de Manufactura Moderna: Materiales,
Procesos Y Sistemas) piensa de la misma manera que la automatización
programable es una forma alternativa, en la cual el equipo diseñado tiene la
capacidad de cambiarlos pasos de procesamiento y su secuencia con el fin de
producir diferentes estilos de productos.
Así mismo opina que dentro de la automatización programable, un programa
controla el proceso mediante un conjunto de instrucciones codificadas que el
equipo puede leer e interpretar.
Entonces la automatización programable es adaptada para procesos de
producción en pequeñas cantidades y volúmenes de manufactura. Los equipos
que tienen esta característica son diseñados para poder cambiar la secuencia
de operaciones y poder ajustarse a las diferentes exigencias de los procesos a
la fabricación de productos.
El factor más importante dentro de la automatización programable son los
sistemas de control numérico (computador que controla el proceso) y robots
industriales, los cuales tienen características de flexibilidad y adaptabilidad para
realizar tareas.
Automatización flexible
Según Ruiz Vadillo, 2012 una automatizacion flexible suele constituirse por
estaciones de trabajo interconectadas por sistemas de manipulación y
29
almacenamiento de materiales, que son controladas por una computadora.
Permite que los sistemas de fabricación puedan modificar tanto los programas
como la relación entre los elementos.
Según Rodríguez Díaz & Berenguel Soria (2004), un sistema de
automatización flexible es aquel capaz de producir una variedad de productos
(o partes) sin perder el tiempo de producción entre un producto y otro a la hora
de reprogramar el sistema y alterar la disposición de las maquinas.
Este tipo de automatización es adaptable, posee características de la
automatización fija y programable, permite una adaptación fuerte como para
cambiar los programas y relación de los elementos que la constituyen. Su
escala de producción es intermedia y puede modificarse fácilmente para
manejar diversos productos.
1.1.4. Técnicas de automatización
Automatización neumática
Según (Guillén Salvador, 1993) es la que se realiza usando las propiedades del
aire comprimido.
La automatización neumática realiza sus procesos mediante máquinas que
usan aire comprimido, es decir usan esta como su materia prima. Este tipo de
automatismo es aplicado para trabajos como: desarmadores, taladros
neumáticos, así como también en equipos utilizados para pintar.
Automatización hidráulica
A diferencia de la automatización neumática, esta usa como su materia prima
fluidos para trabajar, haciendo que su tiempo de respuesta sea lento en
comparación a la anterior, pero puede desarrollar más trabajo. Este tipo de
procesos de frenos y suspensión de un automóvil, equipos de perforación y
minería.
30
Automatización mecánica
Es usada en máquinas industriales para sustituir acciones mecánicas que
requieren un trabajo iterativo como corte, molde o labores que ponen en peligro
la seguridad del trabajador, estas máquinas son complicadas en su manejo
debido a su insuficiente flexibilidad.
Automatización electrónica
Sin importar lo grande o pequeña que sea una máquina tiene un sistema
electrónico. Las industrias han dado grandes avances con la automatización
electrónica debido a los autómatas programables que realizan diversas tareas,
como en sistemas de seguridad y en equipos electrodomésticos. Este tipo de
automatización junto con la electrónica es la más empleada en comparación a
las mencionadas.
Pero el empleo de la automatización electrónica no se define solamente en las
producciones industriales, sino que se la usa en cualquier sistema que su
funcionamiento sea independiente o semiindependiente de algún dispositivo,
por ejemplo sistemas de seguridad, en los sistemas de medios de transporte,
en muchos de los casos en equipos electrodomésticos.
1.1.5. Sistemas de control
Para entender en que consiste un sistema de control debemos saber que es
sistema y control, el primero se refiere a elementos que trabajan en conjunto de
manera sistemática, funcionando entre sí para alcanzar un objetivo. Mientras
que el segundo es el dispositivo o mecanismo que nos garantiza alcanzar el
cumplimiento del objetivo.
Para Angulo Bahón & Raya Giner, 2004 un sistema de control es aquel sistema
constituido por un conjunto de elementos conectados de forma que permiten
regular o gobernar otro sistema, denominado planta o proceso.
Estos sistemas ayudan a dirigir el funcionamiento de cualquier sistema o
máquina con la mejor eficiencia y eficacia posible mediante dispositivos o
elementos físicos, siendo también capaces de controlar sus movimientos por si

31
mismos sin la necesidad de la intervención de factores externos, se conoce
como sistema de control. El profesor de ingeniería eléctrica e informática Kuo
Benjamin de la Universidad de Illinois y autor del libro Sistemas de control
automatico nos dice que un sistema de control insensible a la variación de
parámetros pero sensible a los comandos de entrada.
Este tipo de sistemas se los puede encontrar en diferentes zonas desde las
industrias hasta en la civilización moderna.
Sistema de control de velocidad
El autor Ogata Katsuhiko dice que el principio básico del regulador de
velocidad para una máquina se ilustra en el diagrama esquemático de la figura.
La cantidad de combustible que se admite en la maquina se ajusta de acuerdo
con la diferencia entre la velocidad de la máquina que se pretende y la
velocidad real.
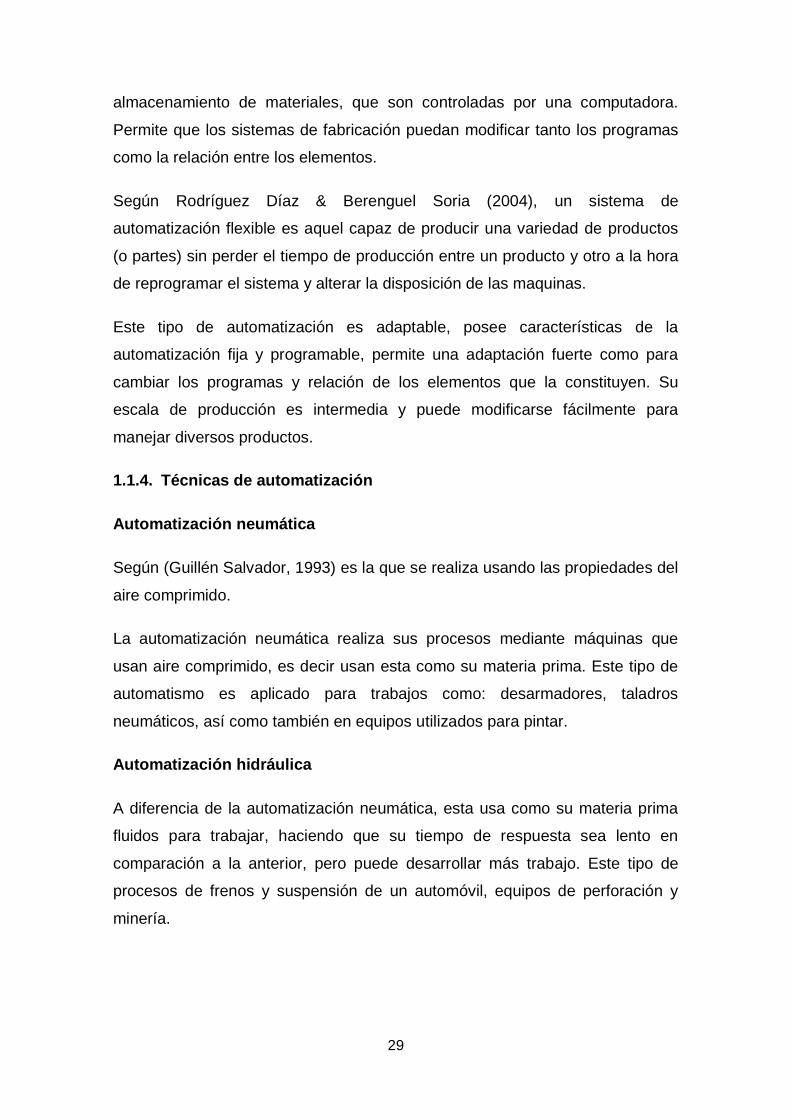
Sistema de control de temperatura
De la misma manera Ogata Katsuhiko dice que los controladores de
temperatura, se usan en una variedad de industrias, son el inicio y
herramientas importantes para el control de temperatura para obtener los
resultados deseados en las industrias. Los controladores de temperatura
Ilustración 5. Sistema de control de velocidad Fuente: Ingeniería de control moderna
32
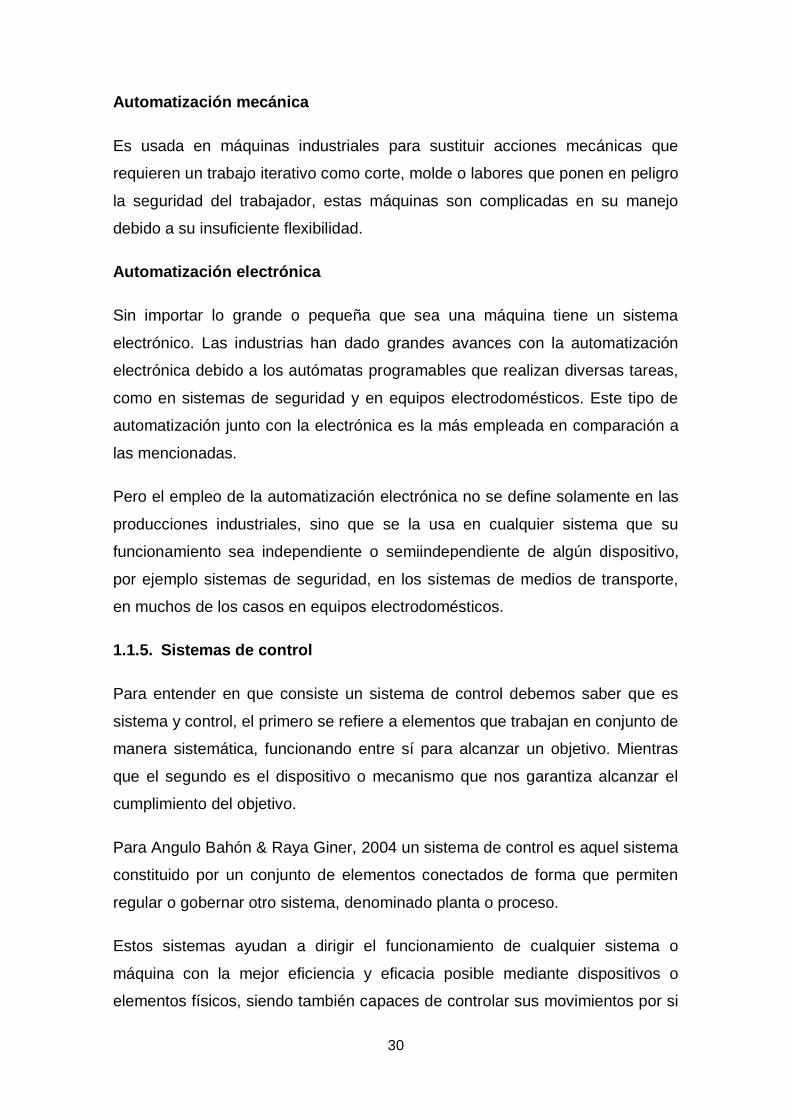
Ilustración 7. Elementos de un sistema de control.
Fuente: Apuntes de sistemas de control.
Elaborado por autora
Elementos de un sistema de control
•Variable del sistema
•Entrada
•Perturbación
•Planta
•Sistema
•Entrada de mando
•Señal de referencia
•Señal de error
•Señal activa
•Señal de control
•Unidad de retroalimentación
•Transductor
Analógico/Digital, ofrecen un rápido ajuste y proporcionan una gestión de
temperatura precisa.
Elementos de un sistema de control
Variable a controlar o salida
Es la señal de salida o el proceso que debe deseamos que se realice mediante
valores que son determinados por los datos de entrada. En la ilustración 7 se
describe que la salida o variable a controlar sería el agua para realizar el riego
de plantas.
Ilustración 6. Sistema de control de temperatura de un horno eléctrico Fuente: Ingeniería de control moderna
33
Entrada
Se refiere a la condición que se ingresa mediante un controlador, para generar
una respuesta de salida.
Perturbación
Son las señales no deseadas que tienden a afectar de manera negativa el
funcionamiento del sistema o valor del mismo, estas perturbaciones pueden ser
internas (si se genera dentro del sistema) o externas (fuera del sistema, puede
ser una entrada).
Planta
Es todo componente que se encuentra dentro del sistema de control, cuyo
objetivo es efectuar una operación en particular.
Sistema
Conjunto de dispositivos o componentes que en combinación actúan y realizan
un objetivo determinado. Los sistemas de control reciben la información
facilitada por los sensores y, tras ser procesada, se utiliza para controlar sus
actuadores
Entrada de mando
Señal externa al sistema que condiciona su funcionamiento
Señal de referencia
Señal de entrada que utilizamos para calibrar el sistema
Señal de error
Señal obtenida en la salida del comparador entre la señal de referencia y la
señal realimentada
34
Señal activa
Cuando la señal de error resultante del comparador está muy atenuada,
necesario amplificarla para convertirla en una señal capaz de activar los
distintos componentes del sistema.
Unidad de control
Controla la salida en función de una señal activa
Unidad de realimentación
Conjunto de dispositivos que, en presencia de alguna perturbación captan la
variable controlada, la acondicionan y la llevan al comparador, para reducir la
diferencia entre la salida de un sistema y una entrada de referencia, y lo realiza
tomando en cuenta la diferencia.
Transductor
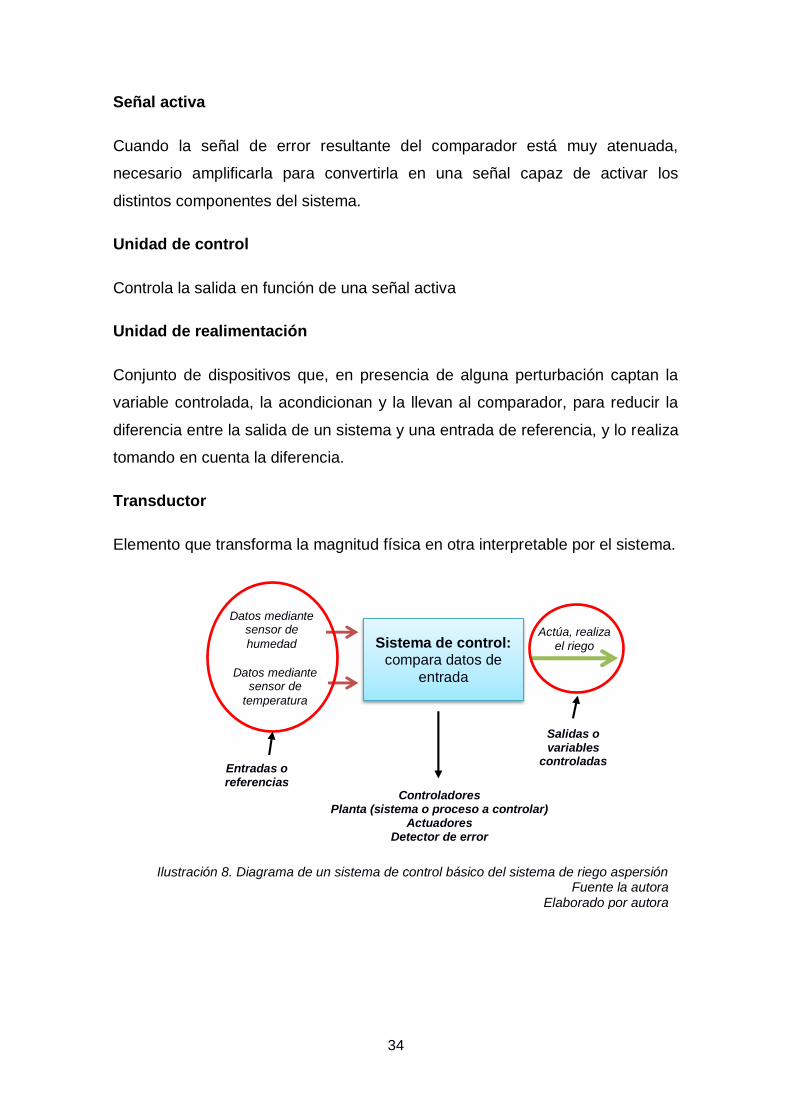
Elemento que transforma la magnitud física en otra interpretable por el sistema.
Actúa, realiza
el riego Sistema de control: compara datos de
entrada
Ilustración 8. Diagrama de un sistema de control básico del sistema de riego aspersión Fuente la autora
Elaborado por autora
Datos mediante sensor de
humedad
Datos mediante sensor de
temperatura
Entradas o referencias
Salidas o variables
controladas
Controladores Planta (sistema o proceso a controlar)
Actuadores Detector de error
35
1.1.6. La retroalimentación
Una retroalimentación existe cuando dentro de un sistema cualquiera hay una
continuidad cerrada de información procesándose, mediante el principio de
acción y reacción con las variables que capta dicho sistema.
Para los autores Gonzáles López & Jesús la realimentación es el mecanismo
mediante el cual el sistema da información útil al usuario para determinar la
siguiente acción a realizar. La información de realimentación que el sistema
genera en cada momento depende lógicamente del estado del sistema y de la
información previamente entrada por el usuario.
Gonzales López nos explica que, un dispositivo que alcanza su objetivo de
forma automática, mediante las variables de entrada (“input”) y salida (“output”),
sin importar las variaciones o perturbaciones en las que se presente, realiza un
proceso de retroalimentación.
Por lo tanto la realimentación es un proceso donde una parte de información,
datos o señales se mueven a la salida de un sistema, para después volver al
principio de este, realizando un bucle infinito de procesos.
Algunos ejemplos:
Un celular: necesita de una batería que necesita ser recargada para su
funcionamiento, su energía va al sistema y vuelve a llegar al inicio cuando se
recarga.
Televisor: necesita de una fuente de energía para funcionar y cuando esta se
encuentra ausente deja de trabajar, entonces la retroalimentación se produce
cada vez que es conectado a la fuente.
Tipos de realimentación.
Realimentación Positiva
Las señales o actividades tienden a acumularse en la entrada del sistema, una
vez que salen del mismo es decir se puede amplificar los cambios introducidos
en el sistema para que pueda escalar a un estado de proporción diferente al
36
anterior. Ejemplo: en una carrera de atletismo de 1 kilómetro se nos pide llegar
en 5 minutos, pero somos capaces de llegar a la meta en 4 minutos. Entonces
para la siguiente carrera nos pedirán reducir la cantidad de tiempo para llegar a
la meta. La retroalimentación ha sido positiva debido a que se está buscando
un equilibrio basado en la eficiencia.
Realimentación Negativa
Es la encargada de controlar y regular al sistema manteniendo el equilibrio
dentro del mismo, devolviendo al emisor toda la información que necesita para
corregir la pauta de entrada. Ejemplo: en la misma carrera de atletismo de 1
kilómetro se nos pide llegar en 5 minutos, pero llegamos en 4 minutos. A
continuación nos exigen que para la próxima carrera recorramos 2 kilómetros
en 5 minutos, entonces ocurrió un proceso de realimentación negativa para que
el sistema regrese a su equilibrio original, basado en la calidad de la ejecución
de las tareas.
Tipos de sistemas de control realimentados
Sistemas de control en lazo abierto
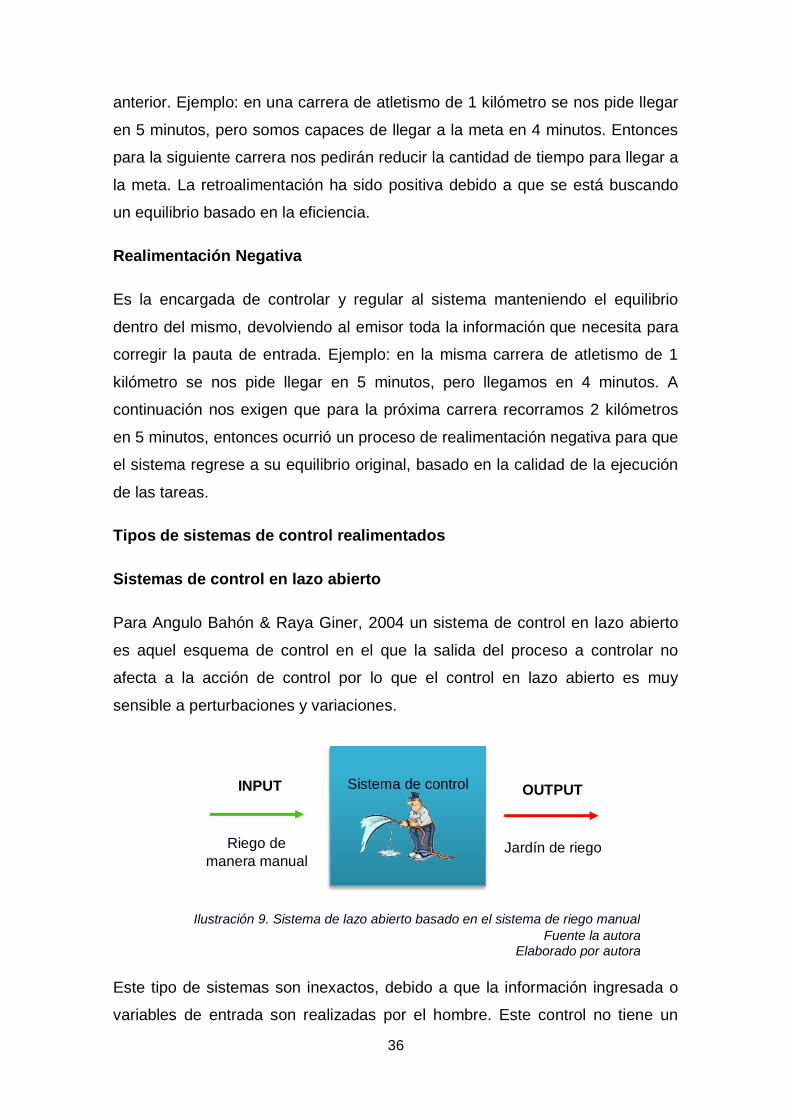
Para Angulo Bahón & Raya Giner, 2004 un sistema de control en lazo abierto
es aquel esquema de control en el que la salida del proceso a controlar no
afecta a la acción de control por lo que el control en lazo abierto es muy
sensible a perturbaciones y variaciones.
Este tipo de sistemas son inexactos, debido a que la información ingresada o
variables de entrada son realizadas por el hombre. Este control no tiene un
Sistema de control
INPUT OUTPUT
Riego de
manera manual Jardín de riego
Ilustración 9. Sistema de lazo abierto basado en el sistema de riego manual
Fuente la autora Elaborado por autora
37
proceso de retroalimentación, es decir los datos de entrada van de manera
directa a la salida sin comparar datos con la anterior ejecución. Por ejemplo: Un
riego realizado de manera manual (manguera o regadera), el hombre sin saber
si la cantidad de agua irrigada en un cultivo o jardín fue la necesaria o
excesiva.
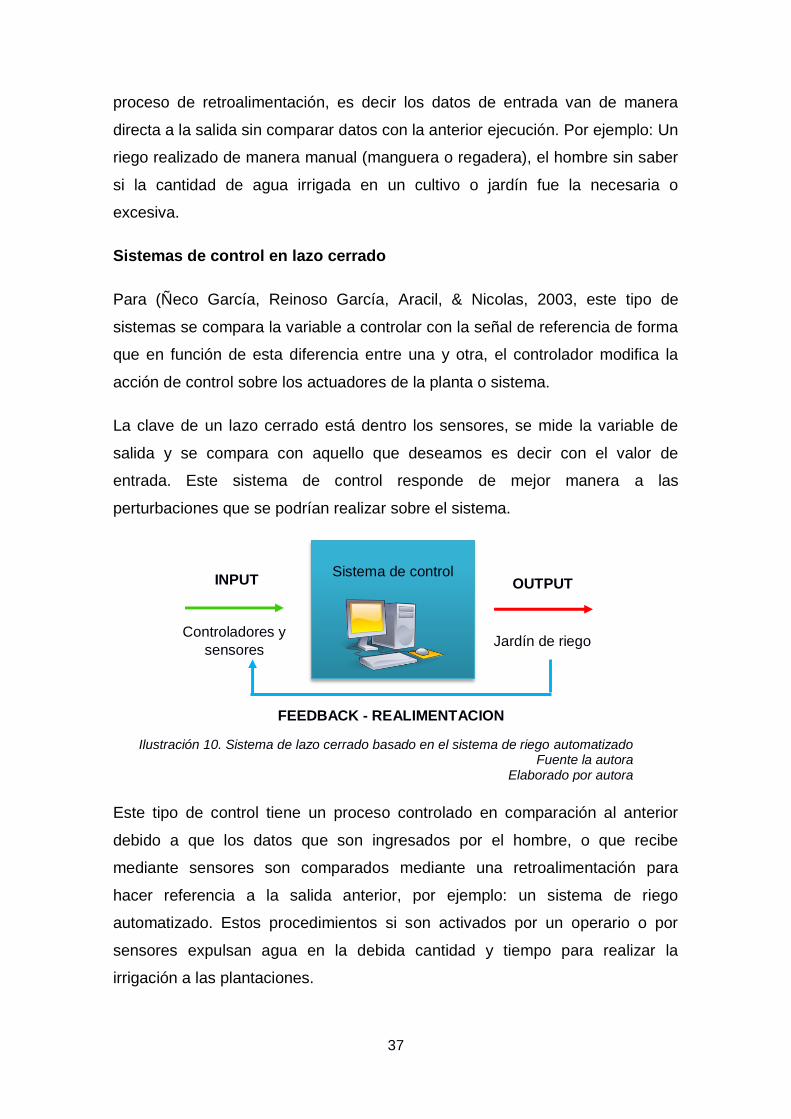
Sistemas de control en lazo cerrado
Para (Ñeco García, Reinoso García, Aracil, & Nicolas, 2003, este tipo de
sistemas se compara la variable a controlar con la señal de referencia de forma
que en función de esta diferencia entre una y otra, el controlador modifica la
acción de control sobre los actuadores de la planta o sistema.
La clave de un lazo cerrado está dentro los sensores, se mide la variable de
salida y se compara con aquello que deseamos es decir con el valor de
entrada. Este sistema de control responde de mejor manera a las
perturbaciones que se podrían realizar sobre el sistema.
Este tipo de control tiene un proceso controlado en comparación al anterior
debido a que los datos que son ingresados por el hombre, o que recibe
mediante sensores son comparados mediante una retroalimentación para
hacer referencia a la salida anterior, por ejemplo: un sistema de riego
automatizado. Estos procedimientos si son activados por un operario o por
sensores expulsan agua en la debida cantidad y tiempo para realizar la
irrigación a las plantaciones.
Sistema de control
INPUT OUTPUT
Controladores y
sensores Jardín de riego
FEEDBACK - REALIMENTACION
Ilustración 10. Sistema de lazo cerrado basado en el sistema de riego automatizado Fuente la autora
Elaborado por autora
38
Sistemas de control lineal y no lineal
Un sistema es lineal cuando el comportamiento de su salida depende de la
magnitud de la señal de entrada.
Según Ogata Katsuhiko (2003) nos dice que un sistema es no lineal sino se
aplica el principio de superposición. Por tanto, para un sistema no lineal la
respuesta a dos entradas no puede calcularse tratando dos entradas a la vez y
sumando los resultados.
Sistemas de control continuo y discreto
Los sistemas de control continuo se caracterizan porque la materia prima fluye
de manera continua a través de los procesos continuos, son procesos de tipo
químico, farmacéuticos metales básicos, petróleo, comida bebidas, generación
de energía eléctrica. Todos estos fluyen de manera continua a través de los
sistemas, las magnitudes a controlar son temperatura, flujo, presiones, alturas
de nivel, es decir medidas que se pueden definir de manera analógica.
Según Valdivia Miranda, 2012, un sistema de control de tiempo continuo todas
las partes del sistema son variables en función del tiempo continuo y, por tanto
son conocidas en todo momento. Sin embargo, en un sistema de control de
tiempo discreto, una o más variables son conocidas solo en instantes
concretos; es decir, los datos son recibidos de forma intermitente.
Dentro de los sistemas discretos se destacan: automóviles, aviones,
computadores, maquinaria y otros componentes con los cuales estos productos
son ensamblados. Se llaman discretos porque el proceso de fabricación se lo
realiza de forma gradual, hasta que se obtiene desde la materia prima el
producto terminado (se construye por partes). Las magnitudes que se manejan
dentro de este sistema son digitales es decir binarias.
1.1.7. Electrónica aplicada a los procesos de automatización
La nueva era de la tecnología se basa en la electrónica, como se mencionó en
el punto 1.1.4. en automatización electrónica todo dispositivo que nos ayuda en
tareas cuenta con componentes electrónicos que permiten su funcionamiento,
39
esto hace que la automatización sea precisa y eficiente. Por ello la electrónica
se puede considerar una parte imprescindible dentro de cualquier equipo que
sea electrónico.
Tipos de señal electrónicas
Son datos que pueden usarse para transmitir información, los emisores y
receptores debe encontrar lenguajes en común para poder entenderse.
Señal Analógica
Para Pablo Alcalde (2009), una señal analógica es aquella que varía de forma
continua, toman un valor instantáneo diferente por cada fracción de tiempo.
Asimismo el autor Antonio Hermosa Donate (1995) nos dice que son señales
que, dentro de un margen, pueden tomar cualquier valor; entre dos valores
cualesquiera siempre pueden tomar otro intermedio.
Señal digital
Para Antonio Hermosa Donate (1995) las señales digitales son cuantificadas;
varían a intervalos entre los cuales no toman valores intermedios. Las señales
digitales con que operan los sistemas electrónicos digitales son binarias, es
decir, solo toman dos estados diferenciados nivel alto lógico alto y nivel lógico
bajo, son representados por 1 y 0 respectivamente.
De la misma manera los autores Kenneth & Jane Laudon (2004) opinan que
una señal digital es una forma de onda discreta, más que continua. Transmite
datos codificados en dos estados discretos: bits 1 y bits 0, los cuales se
representan como el encendido y apagado de los pulsos eléctricos.
1.2. Sistemas de riego
El riego es una práctica desde la antigüedad, que tiene como finalidad
suministrar la cantidad necesaria de agua para un correcto desarrollo de las
plantas o cultivos.
40
Según Durango (2001) es una de las labores agronómicas de gran importancia
que permite conseguir potencialmente el desarrollo agrícola de los cultivos
incrementando sus rendimientos. El riego se puede definir como la aplicación
artificial de agua al terreno con el fin de suministrar a las especies vegetales la
humedad necesaria para su desarrollo.
Un sistema de riego se denomina al conjunto de elementos físicos que hace
posible que un área determinada pueda ser cultivada con la aplicación de agua
necesaria para las plantas.
En la actualidad existen diferentes métodos para el riego de cultivos, las cuales
pueden variar en costo, eficiencia o facilidades en uso, pero todos tienen la
misma finalidad.
1.2.1. Origen y evolución de los sistemas de riego
Dentro de las civilizaciones mesoamericanas esta la cultura Maya, cuando
inicio la agricultura a pesar de estar ubicados en un ambiente montañoso
debían tener un sistema de riego para mantener sus cultivos, para realizar esto
construyeron canales de riego que mediante la lluvia el agua corría a través
estos para llegar a los cultivos que se encontraban en la parte baja de la
montaña.
De la misma manera los Incas, construyeron terrazas a lo largo de las
montañas para regar sus cosechas, conquistaron los problemas ambientales
que tenían desviando las rutas de los ríos para mediante canales proveer agua
a sus cultivos.
Gracias a estos desarrollos en la actualidad existen diferentes sistemas de
riego modernos, los cuales mediante bombas se usa para sacar agua de ríos y
es utilizada para la irrigación de los cultivos. Teniendo en cuenta que estos
nuevos sistemas de riego ayudan a ahorrar el agua ya que este es un recurso
importante, asimismo reducen el tiempo de riego y el exceso de nutrientes para
las plantas.
41
1.2.2. Tipologías de sistemas de riego para jardines
Riego con manguera o manual
Este tipo riego es uno de los antiguos y baratos hasta la actualidad, aunque
este sistema genera un gasto descontrolado e innecesario de tiempo y agua
porque no existe una igualdad debido a que en algunos sitios puede caer más
agua que en otros, pero se lo sigue utilizando en diferentes lugares donde se
encuentre cualquier tipo de plantaciones.
Riego por aspersión
Mediante el uso de un sistema de riego por aspersión el agua llega a las
plantas o cultivos en forma de lluvia cubriendo más cantidad de área en
comparación al de goteo, este sistema lo realiza a través del funcionamiento de
una bomba. Sin importar el tipo de terreno en el que se encuentre instalado el
aspersor realizará su trabajo con un 80% de eficiencia, siendo el único
problema que el viento sería su némesis obstaculizando su uniformidad y área
de riego.
Tipos de sistemas de
riego
Riego con manguera o
manual
Riego por aspersión
Riego a gran cañon
Riego por goteo
Ilustración 11. Tipos de sistemas de riego para jardines Fuente la autora
Elaborado por autora
42
Los sistemas de riego por aspersión se caracterizan por la aplicación de una
lluvia sobre la parcela para que el agua se infiltre donde cae. El riego por
aspersión utiliza dispositivos de emisión en los que la presión disponible en las
tuberías portaemisoras induce un caudal de salida. (Ruiz Canales & Molina
Martinez, 2010, pág. 89)
Riego a gran cañón
Se puede decir que este es una versión mejorada del riego por aspersión, es
un aspersor en grandes dimensiones, la aplicación del agua llega de la misma
manera en forma de lluvia, pero este es usado en cultivos de áreas grandes y
con mayor producción, por ejemplo una plantación de banano.
Riego por goteo
Con este sistema de riego el agua es aplicada mediante gotas de manera
uniforme y constante, ocasionando que el suelo se humedezca para que el
cultivo lo absorba y obtenga los nutrientes necesarios para su desarrollo. Pero
este tipo de método necesita riegos continuos en intervalos de tiempo
1.2.3. Factores a considerar para escoger un adecuado sistema de riego
Comparación entre los sistemas de riego más comunes, en relación a las
variables de tipo carácter técnico-agronómico, social y económico.
Adaptación al terreno (llano, arenoso, arcilloso, accidentado) y al tipo de
cultivo que se encuentre en el área.
Menos consumo de agua.
Disponibilidad del agua, garantizar el suministro necesario para el cultivo.
Eficiencia de riego, con relación al uso del agua utilizada en los cultivos.
Utilización de mano de obra, instalación y mantenimiento del sistema.
Conocimiento y sencillez para la instalación y operación del sistema, fácil y
comprensible para que el operador entienda su funcionamiento.
43
1.3. Sistemas de riego automatizados
Un sistema de riego automatizado está constituido por sensores y equipos
programables que ayudan al regadío de plantas ornamentales o de cualquier
otro cultivo, mediante órdenes que son asignadas por un computador, como a
la hora y el tiempo que debe realizar el riego o la cantidad de agua necesaria
para las mismas.
El sistema de riego automatizado permite optimizar el uso del agua en cultivos
a través de sensores que miden la humedad y la temperatura en la zona
radicular de las plantas. La ventaja de regar cuando se ha excedido una
temperatura determinada o bien por la detección o falta de humedad, permite
que el cultivo no entre en estrés, con lo que se garantiza el mejor producto
agrícola posible. (Gutierrez Jaguey, Porta, Romero, & Villa, 2012, pág. 3)
Dentro de la agricultura en cualquier tipo de cultivo, se consume una cantidad
excesiva de agua, por este motivo es necesario optimizar su uso aumentando
eficiencia en los riegos agrícolas, de manera que se reduzca la cantidad de uso
de este recurso.
Existe una gran cantidad de sistemas de riego automatizados los cuales se
basan en horarios de riego, interruptores los cuales se activan dependiendo de
las condiciones atmosféricas, y otros con sensores que pueden detectar estado
de humedad del suelo y la temperatura ambiente. Con la implementación de
este tipo de sistemas mencionados la aplicación de agua será óptima para el
suelo y aún más para el cultivo.
Sensores dentro de un sistema de riego
Los sensores ayudan a automatizar cualquier sistema de riego mejorando su
funcionamiento para evitar el despilfarro de agua, dependiendo del tipo de
sensor (humedad, temperatura, viento) mide magnitudes físicas o químicas
llamadas variables del entorno y las transformarlas en variables eléctricas para
enviar la información obtenida al sistema de control para que este tome la
decisión de realizar el riego.
44
Tipos de sensores para el uso en sistemas de riego
Sensor de humedad
Son sensores que pueden detectar el nivel de líquido dentro del área de riego
de un cultivo, para determinar cuándo se debe o no aplicar agua las plantas.
Sensor de lluvia
Este tipo de sensores al momento de detectar un ambiente de lluvia se encarga
de detener el interruptor del sistema de riego para que este se apague en caso
de que esté en funcionamiento.
Sensores de temperatura
A pesar de que este tipo de sensores son usados para la detección de
incendios o la regulación de sistemas de calefacción, su aplicación también
sirve para riego de cultivos mediante la obtención de la temperatura del
ambiente, dependiendo de la intensidad de este y de cómo haya sido
programado el sistema empieza con el riego de agua.
Estos 3 tipos de sensores son los encargados de proporcionar los datos de
entrada para el sistema, para procesarlos y tomar las decisiones de acuerdo a
la información obtenida.
Temporizadores de riego
Un temporizador es un dispositivo electrónico programable que funciona en
base al tiempo para el cual este determinado para realizar una actividad o
proceso que se necesite controlar, muy aparte de los sensores anteriormente
mencionados, también se puede usar un temporizador los cuales dependiendo
de la hora o lapsos de tiempo que hayan sido programados van a realizar el
respectivo riego de agua en cultivos o jardines.
45
1.3.1. Algunos modelos desarrollados en la actualidad sobre sistemas de
control y riego.
En el Recinto la Colonia ubicado en el Cantón La Maná se encuentra la
Hacienda “La Fortaleza” en donde existen dos sistemas de control:
El primero consiste que en determinada hora de la noche automáticamente se
enciende el alumbrado dentro de la hacienda, el segundo es mediante el cual
toman los datos del clima para tomar la decisión de si se debe proceder a
realizar el riego a la plantación de banano. (Ver en Anexos “Sistema de control
y riego en Hacienda La Fortaleza”).
1.4. Valoración crítica de los conceptos principales de las distintas
posiciones teóricas
En el estudio teórico preliminar desarrollado, se han evidenciado los elementos
conceptuales relativos a como se estructuran, los sistemas de control, su
fiabilidad, sus procesos de retroalimentación. Se valoran además los sistemas
de riego con sus diferentes tipologías lo cual condiciona todo un conocimiento
alrededor de la dinámica de control automatizado de riego por aspersión en
jardines.
En la valoración teórica realizada emergieron categorías rectoras del proceso
de investigación, las cuales van a condicionar, el estudio empírico y la
propuesta transformadora que se presenta. Dentro de las categorías más
recurrentes destacan: Procesos de automatización, técnicas de automatización
(automatización electrónica), los sistemas de control, la retroalimentación,
sistemas de riego y por último el conjunto de todo esto los sistemas de riego
automatizados.
La identificación de estas categorías por diversos autores, le dan sustento
teórico a la investigación realizada orientando el trabajo de la investigadora a la
gestión electrónica computacional, para el logro de un sistema automatizado de
gestión de riego por aspersión en jardines.
46
1.5. Conclusiones parciales del capítulo
Este capítulo sobre las bases conceptuales de automatización y sistemas de
riego automatizados, ha permitido entender el papel que cumple un sistema
automatizado dentro de los diferentes campos en la industria, poniendo énfasis
en la aplicación del mismo a los sistemas de riego.
Se cuenta con un estudio profuso de este tema y con las contrastaciones
teóricas necesarias que permiten aseguran que el tema y el problema
investigado son de debate en la comunidad científica internacional y nacional.
Se destaca en esta conclusión el hecho de la diversidad de sistemas
automatizados y la trascendencia de la aplicación del mismo a actividades en la
vida cotidiana.
47
CAPITULO II. MARCO METODOLÓGICO Y PLANTEAMIENTO DE LA
PROPUESTA
2.1. Caracterización del sector, rama, empresa, contexto institucional o
problema seleccionado para la investigación
La Universidad Regional Autónoma de los Andes, UNIANDES Quevedo se
encuentra ubicada en el Km 4 ½ Vía a Valencia, es un centro de educación
superior, que ofrece una formación integral a sus estudiantes sin distinción de
sexo, raza, religión o política. Esta prestigiosa institución cuenta con un
ambiente agradable para el estudio dedicándose a formar profesionales
competitivos y emprendedores en Jurisprudencia, Gastronomía, Administración
de empresas y Sistemas.
La mayor parte de la institución tiene áreas verdes las cuales son agradables
para los estudiantes porque realizan diferentes actividades que les permiten
socializarse y compartir tiempo entre ellos, estas áreas se caracterizan por un
buen cuidado por parte del personal, quienes día a día se dan el tiempo de
regarlas y mantenerlas en buen estado.
Ilustración 12. Exterior de UNIANDES Quevedo
Fuente: Google Maps
48
2.2. Descripción del procedimiento metodológico para el desarrollo de
la investigación
Métodos
La investigación que se desarrolla es de tipo cuantitativa, en la modalidad
experimental, con un carácter de Investigación aplicada.
Métodos empleados
En la misma se emplean diversos métodos de las ciencias, situados en el nivel
teórico, empírico y estadísticos-matemáticos. Destacando:
Método inductivo: Permitirá realizar las respectivas encuestas,
entrevistas a los personales encargados y directiva de UNIANDES
Quevedo, permitiendo un análisis de el estado actual de este proyecto.
Método sistemático: Ayudará de manera ordenada llegar a la solución
de la problemática con respecto a los jardines de UNIANDES Quevedo,
con un análisis respectivo desarrollar el sistema de riego automatizado.
Método analítico: Permitió estudiar y examinar de manera profunda los
diferentes temas y problemáticas que intervienen en esta investigación.
Método sintético: Se llevó a cabo la reconstrucción a partir de la
recopilación de información obtenida mediante las investigaciones
realizadas.
Ilustración 13. Áreas verdes de UNIANDES Quevedo Fuente: Google Maps
49
Método deductivo: Este proceso me permitió presentar conceptos,
principios, reglas, definiciones a partir de los cuales se analizó, se
sintetizo, comparó, generalizo y demostró los conflictos que hay al
momento de realizar un riego de forma manual.
Método de Observación: Nos ayudó a explorar situaciones poco
conocidas la misma que nos permitió recolectar información para
detectar los apectos de la problemática, y así encontrar la solución
adecuada de los problemas en la investigación.
Técnicas de investigación
Encuesta: Es la técnica que a través de un cuestionario permitió
recopilar datos de toda la población o de una parte representativa de
ella, mediante esta técnica se logró obtener opiniones de los diferentes
puntos de vista de quienes serían los “operadores”, debido a que es
necesario recopilar cuales eran sus perspectivas sobre el sistema y la
calidad del servicio.
Entrevista: Otro elemento importante debido al dialogo mantenido con
el Rector de la institución y Director de Carrera de Sistemas, de lo que
se obtuvo información como los requerimientos principales y necesidad
que se deseaban que el sistema de control cumpliera.
Métodos estadísticos y matemáticos
Estadística y matemática: Con los datos cualitativos y cuantitativos
recopilados de la investigación, se pretende la comprobación de la
información mediante una compilación con gráficos representativos.
El estudio de campo se desarrolló a partir del empleo de la triangulación de
métodos y de fuentes, trabajándose las entrevistas en profundidad con
especialistas, las encuestas a estudiantes y las mediciones de temperatura y
humedad en el área de jardín a ser modificada.
50
2.3. Presentación de los resultados del diagnostico
Para realizar los estudios, se realizó una entrevista semiestructurada a tres
actores importantes dentro de esta investigación:
Entrevista realizada a experto en riego
Para realizar esta entrevista se precisó contactar con el Ing. Oswaldo
Andrade, el cual se lo solicito debido a su experiencia y conocimiento sobre en
riego a plantaciones de gran magnitud. La entrevista conto con los siguientes
aspectos.
1. ¿Qué es para usted un sistema de riego?
Es una manera de tratar de hidratar la tierra, regar plantas. Es darle lo único
que la planta necesita o le falta ni más ni menos. Si le damos más de lo
necesario no estamos regando sino echándole agua.
2. ¿Qué tipos de sistemas de riego que conoce?
Goteo, aspersión y drenaje
3. ¿Qué factores cree usted que intervienen para realizar un riego?
Evapotranspiración, dependiendo de la planta, el suelo, el tipo de aspersor y la
presión de la bomba. En base a eso se aplica la cantidad debida de riego
4. ¿Qué sistemas de riego usted recomienda?
Ningún riego es perfecto, el único que se puede decir que es perfecto es el
riego por goteo, pero generalmente en este país y en las grandes plantaciones,
se recomienda el riego por aspersión y por ende es el más usado
5. ¿Para usted es lo mismo regar en invierno y verano?
No, debido a que en invierno tenemos el riego natural que es la lluvia y la
planta no necesita de mucha agua. Porque un riego es para rehidratar y
complementar la falta de agua de la planta. Los riegos son 100% necesarios en
verano.
51
6. ¿Todas las plantas necesitan la misma cantidad de agua?
No, todas las plantas no son iguales por ejemplo el banano es una planta de
agua y necesita estar en zonas húmedas para mantenerse en buen estado
7. ¿Cuantas veces al día es necesario regar una planta?
Todo depende de cuanta humedad se le haya asignado a la planta,
dependiendo la textura del suelo, dependiendo el clima donde se encuentre,
por ese motivo es necesario regar en un clima no muy caluroso debido a que
no es adecuado para la plantación y el agua evapotranspira mas rápido.
8. ¿Qué cuidados aparte del agua necesita la planta?
Cualquier plantación que sea, Necesita de un control fitosanitario para evitar
cualquier tipo de plagas
9. ¿Variables que son consideradas para realizar un riego?
La humedad del suelo y la temperatura del clima, porque la cantidad de
humedad que se evapora o pierde con el sol es necesario que la planta
recupere.
Todo depende de cómo se quiere recuperar la lámina de riego, si se la quiere
recuperar toda la semana, cada día, cada mes, en nuestro caso la
recuperamos a diario. Por ejemplo si hoy perdimos 3 milímetros de agua
mañana se le proporciona esos 3 milímetros de agua es decir lo que consumo
hoy lo recupero mañana.
Cuando se controla por día hay que tener en cuenta el factor climático en el
que se encuentra y del sistema de riego que se tiene.
Recuperamos de acuerdo a la necesidad de la planta.
El riego usted lo aplica no es a la planta sino al suelo, y debe darse cuenta de
la cantidad de agua que va perdiendo por consumo de su planta.
Medimos la cantidad de agua que le hace falta al suelo para que la planta tome
el agua sin la necesidad de estresarse. Y quien mide esto es el tensiómetro
52
como su nombre lo indica mide la tensión de agua en el suelo, el cual cuenta
con una capsula porosa que a medida que se va regando agua esa capsula
comienza a absorber, entonces eso se conecta con un tubo al vacío y un
manómetro arriba que indica que si la pluma se acerca al cero quiere decir que
no se hace ningún esfuerzo por tomar agua entonces la planta no se estresa.
Aunque el agua en exceso es mala, puede matar a la planta pero esto se debe
a la falta de oxígeno que le hace falta a la planta.
10. ¿Cree que es necesario automatizar procesos de riego?
Sí, porque ayudaría a ahorrar el agua, y también da facilidades a quien se
encarga de regar.
11. Ustedes cuentan con una estación meteorológica, ¿los datos que
obtienen de ella realizan un riego automático?
No, todavía no tenemos sistemas de riego automatizados contamos es con el
apoyo de las estaciones meteorológicas que ayudan a tomar decisiones pero
todavía las tomamos en base a criterios analizando la información que nos da.
Las estaciones nos dan los valores de evapotranspiración y este es el factor
que nos indica la perdida de agua.
12. Formula lámina de riego a recuperar o aportar.
𝐿𝑅 =𝐸𝑇𝑂 − 𝐴𝑃𝑂𝑅𝑇𝐴𝐶𝐼𝑂𝑁
𝐸𝐹𝐼𝐶𝐼𝐸𝑁𝐶𝐼𝐴 𝐷𝐸 𝑅𝐼𝐸𝐺𝑂
LR = lamina de riego
ETO = evapotranspiración
EFICIENCIA DE RIEGO = eficiencia del sistema
APORTACION = caída de lluvias
53
Entrevista realizada a Director de la Carrera de Sistemas
Para realizar esta entrevista se precisó contactar con el Ing. Juan Carlos
Albarracín Matute Msc., el cual se lo solicito debido a los conocimientos de las
aportaciones que tendrá esta investigación para la carrera. La entrevista conto
con los siguientes aspectos.
1. ¿Qué conocimientos tiene sobre automatización y sistemas de
automatización?
Bueno depende, lo que es automatización y sistemas automatizados es un
tema bastante amplio pero si tengo conocimientos sobre automatización
considerando que la mayoría de la informática son sistemas de automatización.
Por ejemplo en base a la información que me proporcionan se toman
decisiones, al momento que un ser humano interviene en un proceso este deja
de ser automatizado.
2. ¿Conoce usted algún sistema automatizado implementado en la
institución?
Todos. La matriculación, el sistema de calificaciones, el portal web de docentes
son sistemas automatizados debido a que se ingresan datos y entregan
reportes y en base a esos se toman las decisiones o se continúa con procesos
y la parte académica es la que maneja más este tipo de sistemas.
3. Como docente de UNIANDES, ¿de qué forma cree usted que aportaría
este proyecto de tesis a la carrera y a la institución?
Su sistema tiene dos aportes importantes a la Universidad el uno en la parte de
servicios porque los servicios sobre todo en el campo de su tesis no existe
ningún sistema, salvo en los manuales en donde sale una de las personas
encargadas de los jardines a estar regándolo, a ver si puede regar o no esto no
deja de ser un sistema pero humano ese cambio, ese salto de todo lo manual a
algo automatizado es algo muy grande dentro de la Universidad. Ahora dentro
de la carrera como un objeto de estudio aporta mucho como en asignaturas
como automatización, robótica, entre otras, en las que su sistema estando
implementado dentro aunque es mayormente mecánico digo esto porque la
54
electrónica actúa solamente en una plaqueta y todo lo que mueve es mecánico
porque la placa programada es la parte informática, y esto puede servir
muchísimo para ejemplificar y aprender.
4. ¿Qué visión tiene usted hacia este proyecto?
Su proyecto es un punto de inicio en la automatización de todos los procesos
que todavía continúan siendo manuales aquí, apartando un poco la parte
académica que es lo fuerte de la Universidad porque es una institución que
brinda estudios, conocimientos más su proyecto más bien no aporta en esta
área directamente, es un detonante para que el resto de tesis considerando
además que es la primera tesis que se inclina por esta línea y el resto de
investigaciones puedan abrir su cosmovisión para buscar nuevas alternativas.
Dentro de la institución consideremos que usted va a regar apenas un pequeño
espacio de la gran inmensidad que son los terrenos de áreas verdes, entonces
si su proyecto aporta de la forma que estamos considerando al momento
imagínese en algún tiempo toda la Universidad automatizada con su sistema
de riego, que las canchas de futbol siendo un área muy extensa en lugar de
que salga una de las personas a cargo a estar regando con la manguera que
solo se encienda y riegue todo el campus. Imagínese todos los jardines
regados de esa manera obviamente es el detonante para abrir mucho más la
visión del trabajo en campo.
5. ¿Cree usted que este sistema le quite trabajo al personal que trabaja
en la institución?
No, porque el personal realiza varias actividades y una de ellas es regar los
jardines, no es que existe una persona encargada únicamente para regar los
jardines lo que estaría haciendo es facilitando el trabajo porque ellos ya no
regarían los jardines pero, si deberían ver si el sistema está funcionando y sino
está trabajando alertar al técnico responsable del mismo. No van a hacer el
trabajo manual pero van a seguir estando a cargo de ese jardín. Por lo tanto no
le quita el trabajo se lo facilita y el objetivo principal de la informática es ese.
55
Entrevista realizada ha Encargado de los Jardines de UNIANDES Quevedo
Para realizar esta entrevista se precisó contactar con el Sr. Vicente, el cual se
lo solicito debido a los conocimientos sobre el manejo que tiene en los jardines
de la institución. La entrevista conto con los siguientes aspectos.
1. ¿De qué manera o que materiales usa para realizar el riego de
jardines?
Aquí por lo general hemos usado mangueras para regar los jardines.
2. ¿Cada qué periodo de tiempo realizan el riego?
Todos los días, debido a que los jardines son áreas grandes un día
comenzamos una parte y al día siguiente vamos a otra para regar y cuando
terminamos toda el área regresamos al principio.
3. ¿Cuántas veces al día riega?
Como ahora estamos en invierno las lluvias mismo se encargar de mantener
húmeda la tierra, pero si estuviéramos en verano se riega todo el día porque se
necesita que la planta reciba agua.
4. ¿Qué cuidados a parte del riego usted le proporciona al jardín?
Nos encargamos de podar y fumigamos tratando de cuidar que no haya ningún
tipo de plaga que afecte a la planta.
5. ¿Cómo sabe usted que es el momento adecuado para regar las
plantas?
Cuando es verano, la tierra se empieza a secar o las plantas se empiezan a
marchitar es el momento propicio para regar
6. ¿Cómo sabe usted si la planta ha recibido la cantidad correcta de
agua?
Porque se percibe o se nota que ya la tierra está húmeda, tratando de no
sobrepasarse en darle agua.
56
2.4. Conclusiones parciales del capítulo
Los estudios empíricos realizados, Mediante los métodos, técnicas aplicadas
en las entrevistas consumadas a tres de los actores importantes, en la
dinámica estudiada dentro de la investigación, ayudó a tomar las decisiones
para tomar en cuenta factores intervienen al momento de realizar un riego, de
la misma manera a identificar los parámetros dentro de la programación del
sistema para proceder a realizar el riego.
Se constató el problema y la necesidad de trasformación del mismo a través de
un sistema automatizado, dadas las características del suelo y las plantas
situadas en el área del jardín.
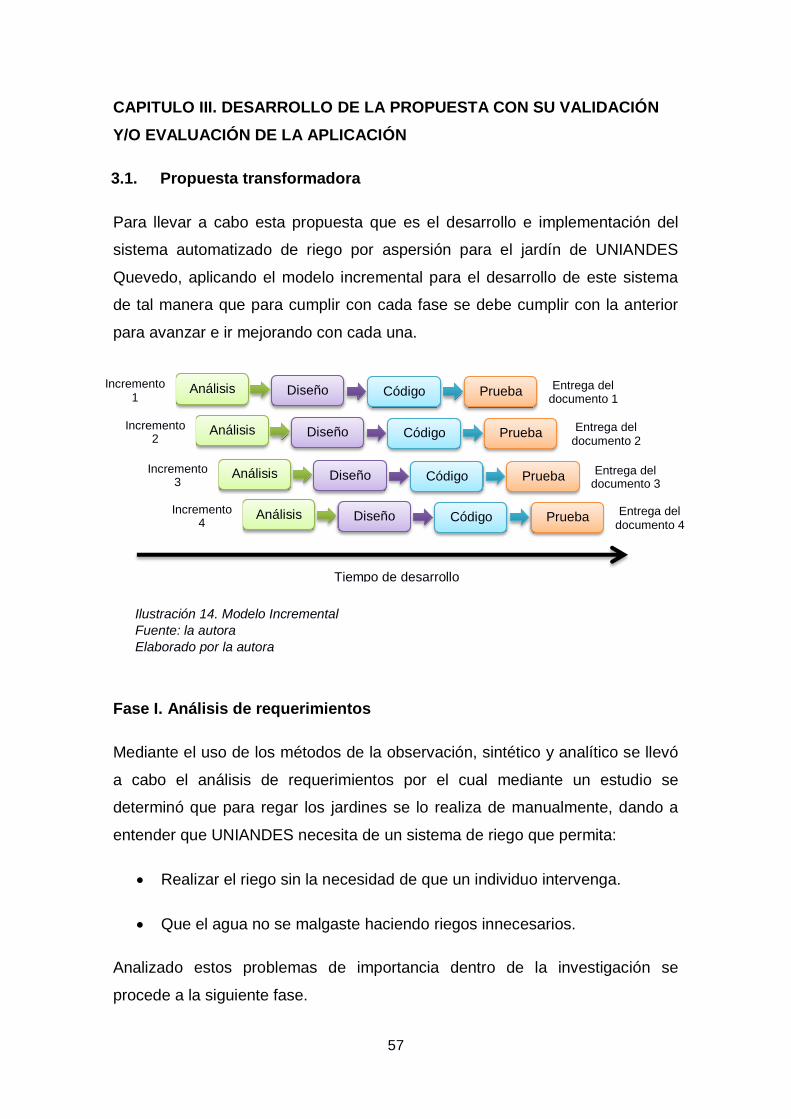
57
CAPITULO III. DESARROLLO DE LA PROPUESTA CON SU VALIDACIÓN
Y/O EVALUACIÓN DE LA APLICACIÓN
3.1. Propuesta transformadora
Para llevar a cabo esta propuesta que es el desarrollo e implementación del
sistema automatizado de riego por aspersión para el jardín de UNIANDES
Quevedo, aplicando el modelo incremental para el desarrollo de este sistema
de tal manera que para cumplir con cada fase se debe cumplir con la anterior
para avanzar e ir mejorando con cada una.
Fase I. Análisis de requerimientos
Mediante el uso de los métodos de la observación, sintético y analítico se llevó
a cabo el análisis de requerimientos por el cual mediante un estudio se
determinó que para regar los jardines se lo realiza de manualmente, dando a
entender que UNIANDES necesita de un sistema de riego que permita:
Realizar el riego sin la necesidad de que un individuo intervenga.
Que el agua no se malgaste haciendo riegos innecesarios.
Analizado estos problemas de importancia dentro de la investigación se
procede a la siguiente fase.
Análisis Diseño Código Prueba Incremento
1 Entrega del
documento 1
Análisis Diseño Código Prueba Incremento
2 Entrega del
documento 2
Análisis Diseño Código Prueba Incremento
3 Entrega del
documento 3
Análisis Diseño Código Prueba Incremento
4 Entrega del
documento 4
Tiempo de desarrollo
Ilustración 14. Modelo Incremental
Fuente: la autora
Elaborado por la autora
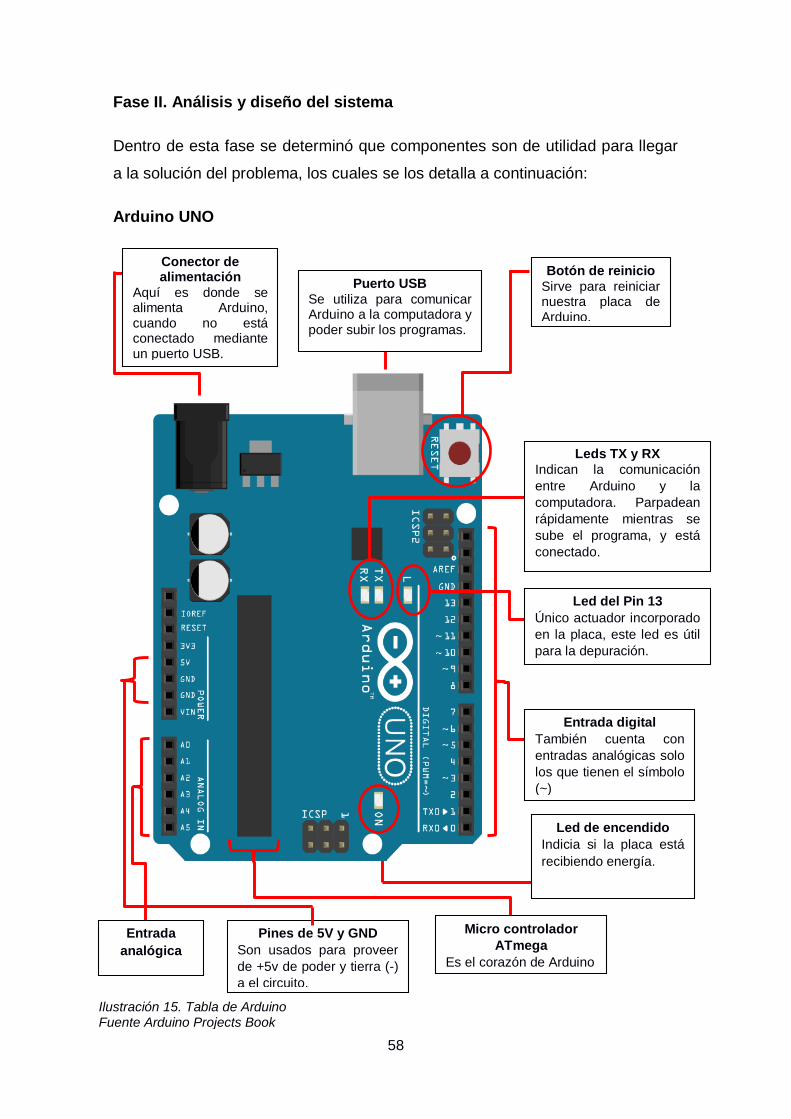
58
Fase II. Análisis y diseño del sistema
Dentro de esta fase se determinó que componentes son de utilidad para llegar
a la solución del problema, los cuales se los detalla a continuación:
Arduino UNO
Entrada
analógica
Pines de 5V y GND
Son usados para proveer
de +5v de poder y tierra (-)
a el circuito.
Micro controlador
ATmega
Es el corazón de Arduino
Led de encendido
Indicia si la placa está
recibiendo energía.
Conector de alimentación
Aquí es donde se alimenta Arduino, cuando no está conectado mediante un puerto USB.
Puerto USB
Se utiliza para comunicar Arduino a la computadora y poder subir los programas.
Botón de reinicio
Sirve para reiniciar nuestra placa de Arduino.
Leds TX y RX
Indican la comunicación
entre Arduino y la
computadora. Parpadean
rápidamente mientras se
sube el programa, y está
conectado.
Entrada digital
También cuenta con
entradas analógicas solo
los que tienen el símbolo
(~)
Led del Pin 13
Único actuador incorporado
en la placa, este led es útil
para la depuración.
Ilustración 15. Tabla de Arduino Fuente Arduino Projects Book
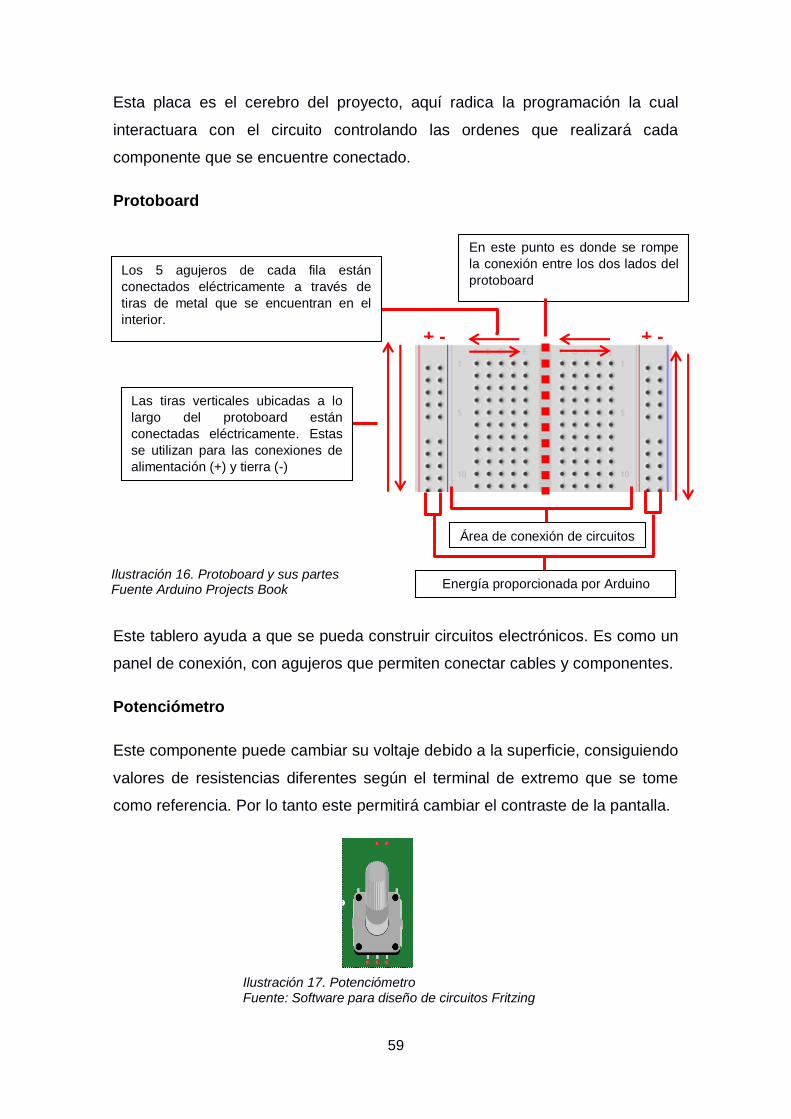
59
Esta placa es el cerebro del proyecto, aquí radica la programación la cual
interactuara con el circuito controlando las ordenes que realizará cada
componente que se encuentre conectado.
Protoboard
Este tablero ayuda a que se pueda construir circuitos electrónicos. Es como un
panel de conexión, con agujeros que permiten conectar cables y componentes.
Potenciómetro
Este componente puede cambiar su voltaje debido a la superficie, consiguiendo
valores de resistencias diferentes según el terminal de extremo que se tome
como referencia. Por lo tanto este permitirá cambiar el contraste de la pantalla.
+ - + -
En este punto es donde se rompe
la conexión entre los dos lados del
protoboard
Área de conexión de circuitos
Energía proporcionada por Arduino
Las tiras verticales ubicadas a lo
largo del protoboard están
conectadas eléctricamente. Estas
se utilizan para las conexiones de
alimentación (+) y tierra (-)
Los 5 agujeros de cada fila están
conectados eléctricamente a través de
tiras de metal que se encuentran en el
interior.
Ilustración 16. Protoboard y sus partes Fuente Arduino Projects Book
Ilustración 17. Potenciómetro Fuente: Software para diseño de circuitos Fritzing
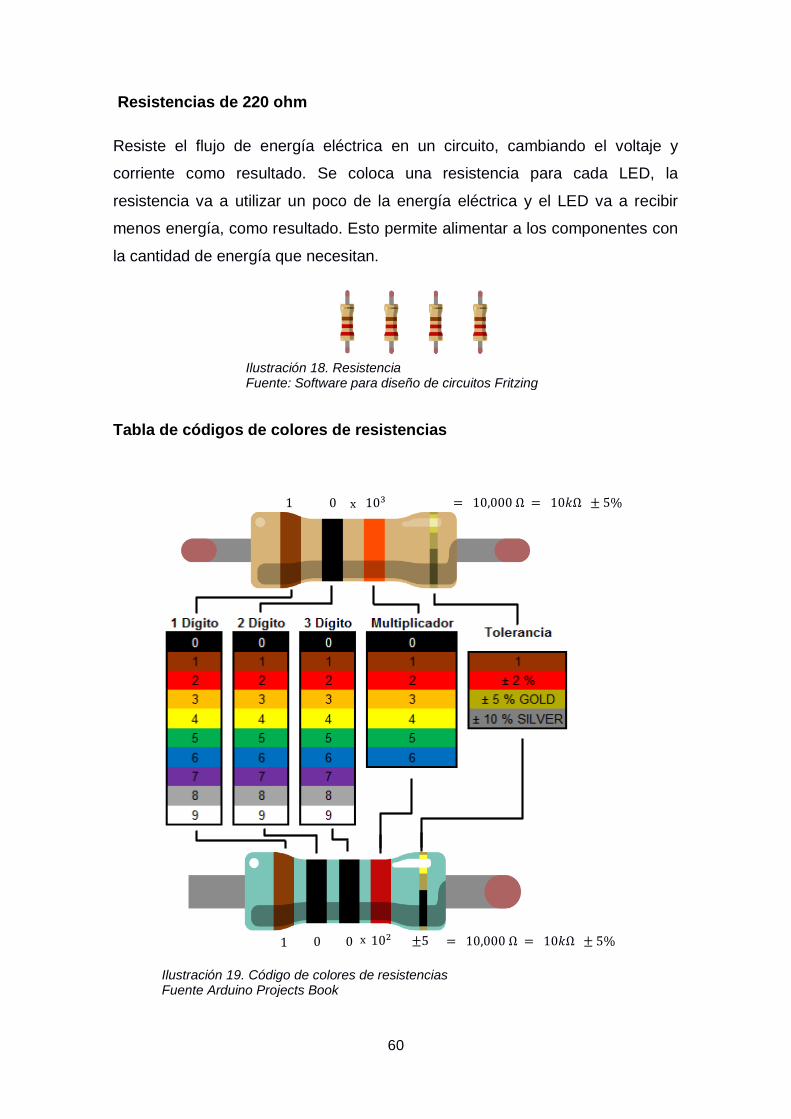
60
Resistencias de 220 ohm
Resiste el flujo de energía eléctrica en un circuito, cambiando el voltaje y
corriente como resultado. Se coloca una resistencia para cada LED, la
resistencia va a utilizar un poco de la energía eléctrica y el LED va a recibir
menos energía, como resultado. Esto permite alimentar a los componentes con
la cantidad de energía que necesitan.
Tabla de códigos de colores de resistencias
0 103
±5
= 10,000 Ω = 10𝑘Ω ± 5% x 1
1 0 0 102 = 10,000 Ω = 10𝑘Ω ± 5% x
Ilustración 19. Código de colores de resistencias Fuente Arduino Projects Book
Ilustración 18. Resistencia Fuente: Software para diseño de circuitos Fritzing
61
Jumpers
También conocido como puente, es usado para conectar componentes entre sí
en el protoboard y Arduino, esta unión de terminales cierra el circuito eléctrico
del que forma parte.
Led (Light Emitting Diodes)
Un tipo de diodo se ilumina cuando la electricidad pasa a través de él. Cada
color representa diferentes situaciones del circuito: Rojo indica que la
temperatura es demasiado alta, azul indica que el sistema se encuentra
encendido y verde que el sistema está regando.
Pantalla LCD
Pantalla alfanumérica, en la cual se muestra datos que receptan los sensores.
Sensor de temperatura DHT11
Este sensor se encarga de medir la temperatura ambiente, su señal de salida
es digital tiene 3 pines de los cuales:
Ilustración 20. Jumpers, cables conectores Fuente: Arduino Projects Book
Ilustración 21. Led's rojo, azul, verde Fuente: Arduino Projects Book
Ilustración 22. Pantalla LCD 16x02 Fuente: Arduino Projects Book
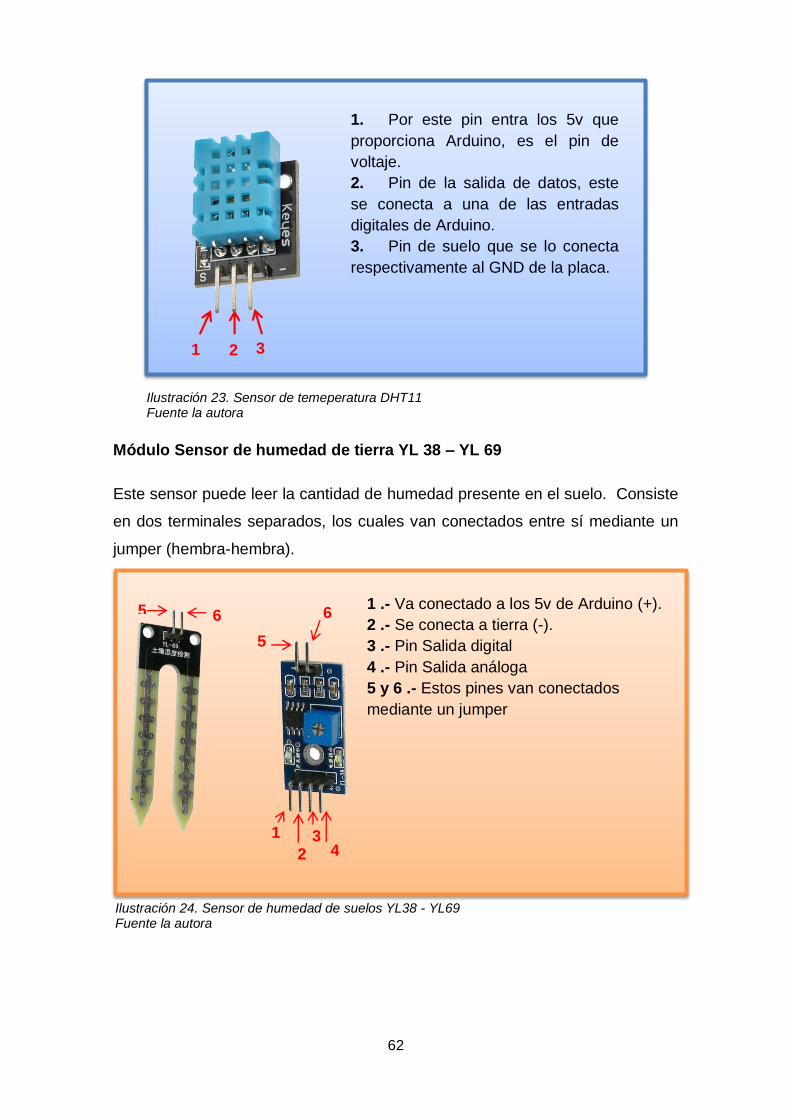
62
Módulo Sensor de humedad de tierra YL 38 – YL 69
Este sensor puede leer la cantidad de humedad presente en el suelo. Consiste
en dos terminales separados, los cuales van conectados entre sí mediante un
jumper (hembra-hembra).
1 2 3
1. Por este pin entra los 5v que
proporciona Arduino, es el pin de
voltaje.
2. Pin de la salida de datos, este
se conecta a una de las entradas
digitales de Arduino.
3. Pin de suelo que se lo conecta
respectivamente al GND de la placa.
Ilustración 23. Sensor de temeperatura DHT11 Fuente la autora
1
2 3
4
5
6 5 6
Ilustración 24. Sensor de humedad de suelos YL38 - YL69 Fuente la autora
1 .- Va conectado a los 5v de Arduino (+).
2 .- Se conecta a tierra (-).
3 .- Pin Salida digital
4 .- Pin Salida análoga
5 y 6 .- Estos pines van conectados
mediante un jumper

63
Módulo relé 5v para ARDUINO
Esta tarjeta es un canal con el que se puede controlar aparatos de alto voltaje a
través de los 5v que trabaja Arduino.
Fase III. Construcción del sistema y código
Para la construcción del sistema y que cumpla con la finalidad de la
investigación se lo realizó por partes, para que cuando se vayan
implementando más componentes el circuito vaya funcionando de una mejor
manera, a continuación se detalla cómo se fue construyendo el circuito hasta
llegar a la parte final.
Sensor de temperatura del ambiente conectado a ARDUINO
Dentro de esta primera conexión, se realizó la medición de la temperatura del
ambiente en la que se encontraba el dispositivo, utilizando el sensor de
temperatura TMP 36 y la placa de Arduino, dando como resultado la conexión
de la ilustración a continuación:
Ilustración 25. Módulo relé Fuente la autora
Ilustración 26. Sensor DHT11 conectado a Arduino Fuente la autora Elaborado en Software de diseño de circuitos Fritzing
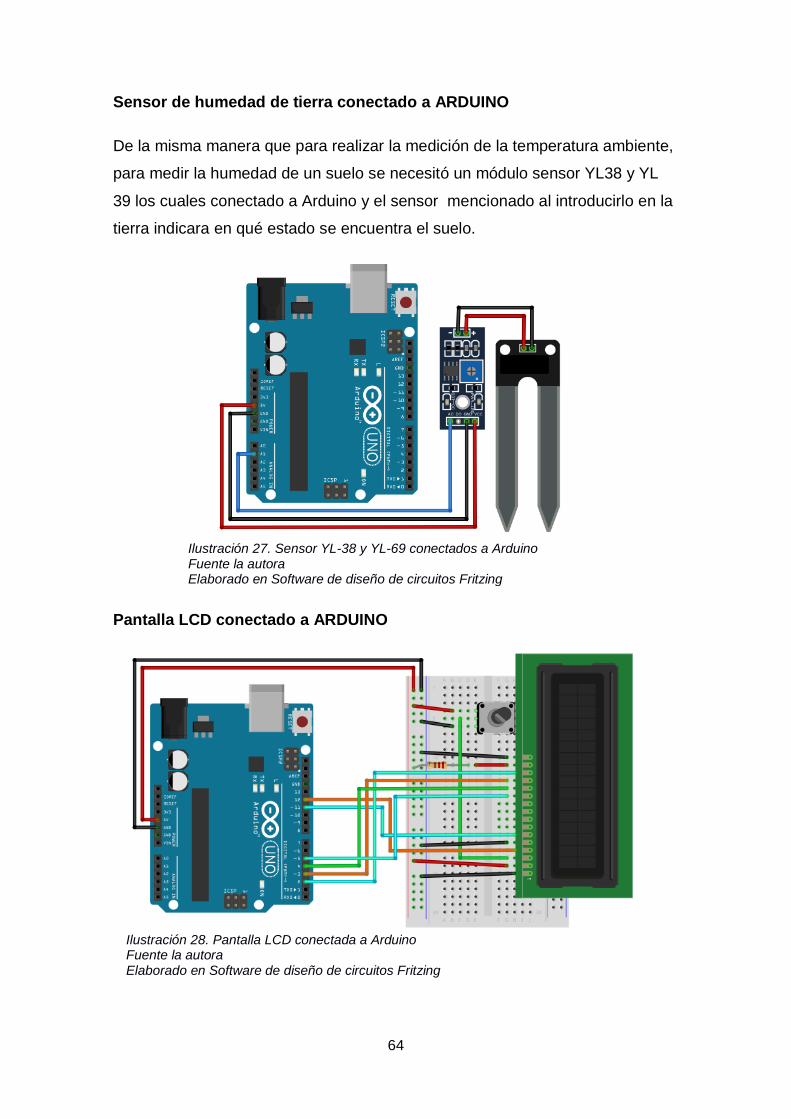
64
Ilustración 28. Pantalla LCD conectada a Arduino Fuente la autora Elaborado en Software de diseño de circuitos Fritzing
Sensor de humedad de tierra conectado a ARDUINO
De la misma manera que para realizar la medición de la temperatura ambiente,
para medir la humedad de un suelo se necesitó un módulo sensor YL38 y YL
39 los cuales conectado a Arduino y el sensor mencionado al introducirlo en la
tierra indicara en qué estado se encuentra el suelo.
Pantalla LCD conectado a ARDUINO
Ilustración 27. Sensor YL-38 y YL-69 conectados a Arduino Fuente la autora Elaborado en Software de diseño de circuitos Fritzing
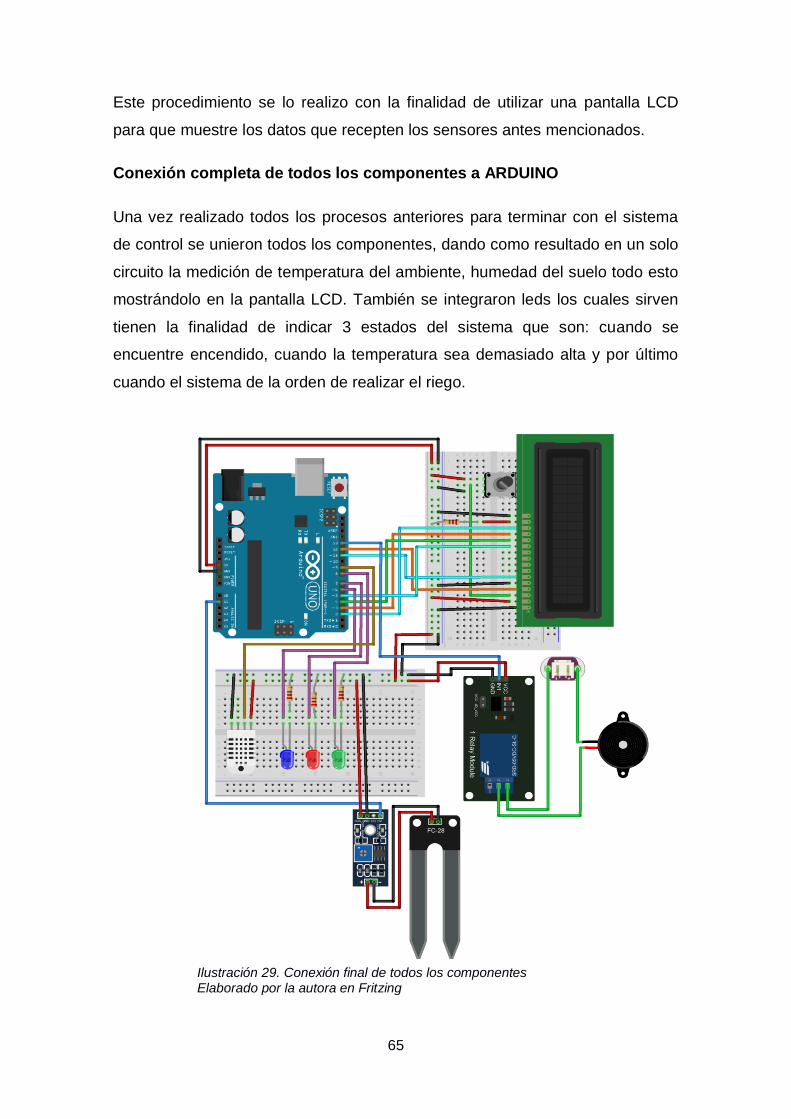
65
Este procedimiento se lo realizo con la finalidad de utilizar una pantalla LCD
para que muestre los datos que recepten los sensores antes mencionados.
Conexión completa de todos los componentes a ARDUINO
Una vez realizado todos los procesos anteriores para terminar con el sistema
de control se unieron todos los componentes, dando como resultado en un solo
circuito la medición de temperatura del ambiente, humedad del suelo todo esto
mostrándolo en la pantalla LCD. También se integraron leds los cuales sirven
tienen la finalidad de indicar 3 estados del sistema que son: cuando se
encuentre encendido, cuando la temperatura sea demasiado alta y por último
cuando el sistema de la orden de realizar el riego.
Ilustración 29. Conexión final de todos los componentes Elaborado por la autora en Fritzing
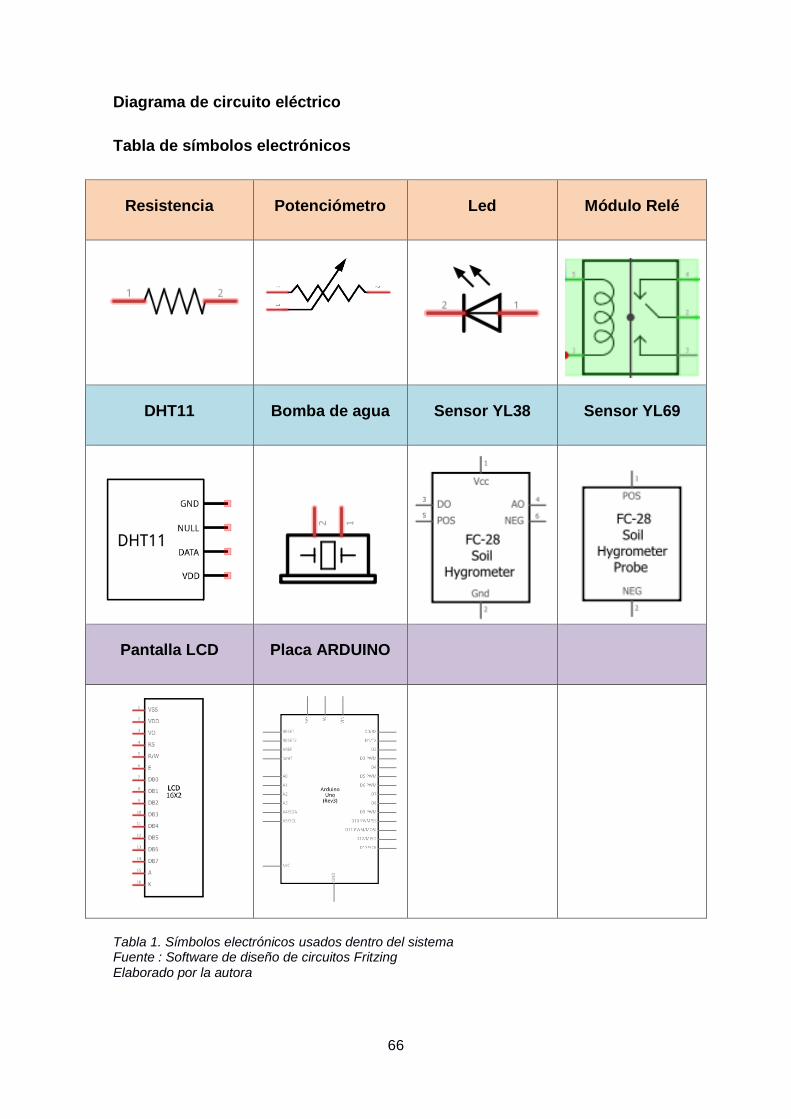
66
Diagrama de circuito eléctrico
Tabla de símbolos electrónicos
Resistencia Potenciómetro Led Módulo Relé
DHT11 Bomba de agua Sensor YL38 Sensor YL69
Pantalla LCD Placa ARDUINO
Tabla 1. Símbolos electrónicos usados dentro del sistema Fuente : Software de diseño de circuitos Fritzing Elaborado por la autora
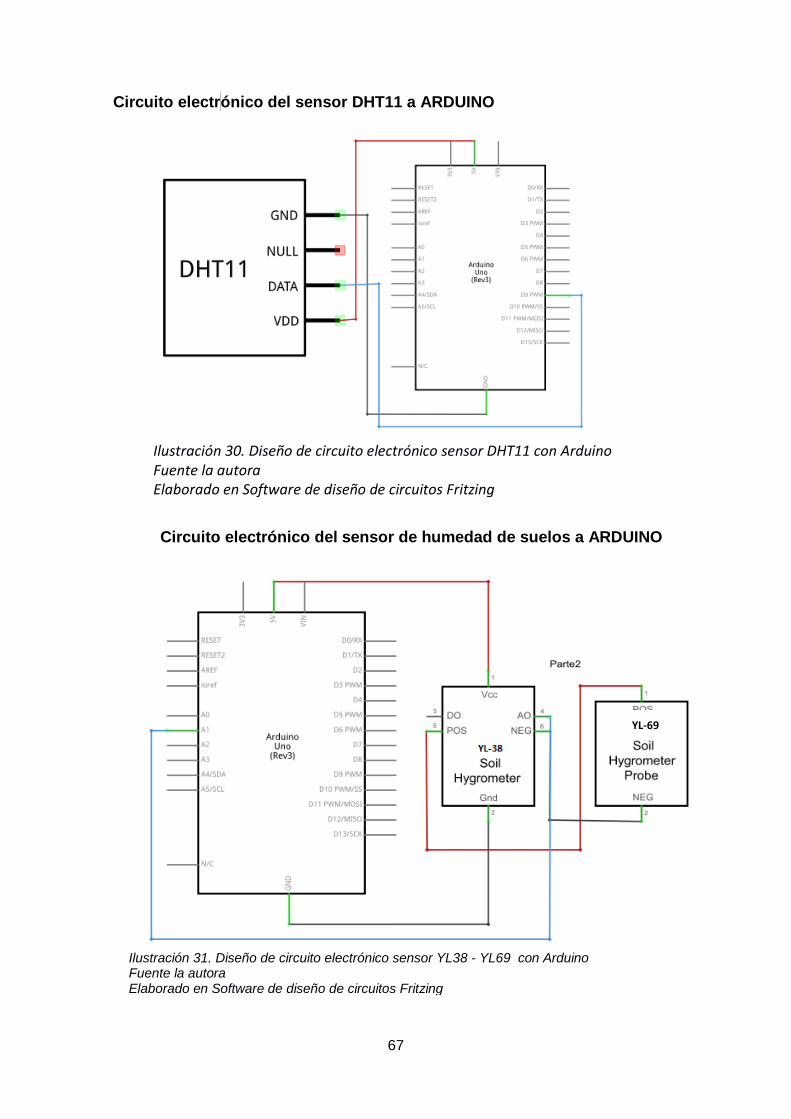
67
Circuito electr ónico del sensor DHT11 a ARDUINO
Circuito electrónico del sensor de humedad de suelos a ARDUINO
Ilustración 30. Diseño de circuito electrónico sensor DHT11 con Arduino Fuente la autora Elaborado en Software de diseño de circuitos Fritzing
YL-69
Ilustración 31. Diseño de circuito electrónico sensor YL38 - YL69 con Arduino Fuente la autora Elaborado en Software de diseño de circuitos Fritzing
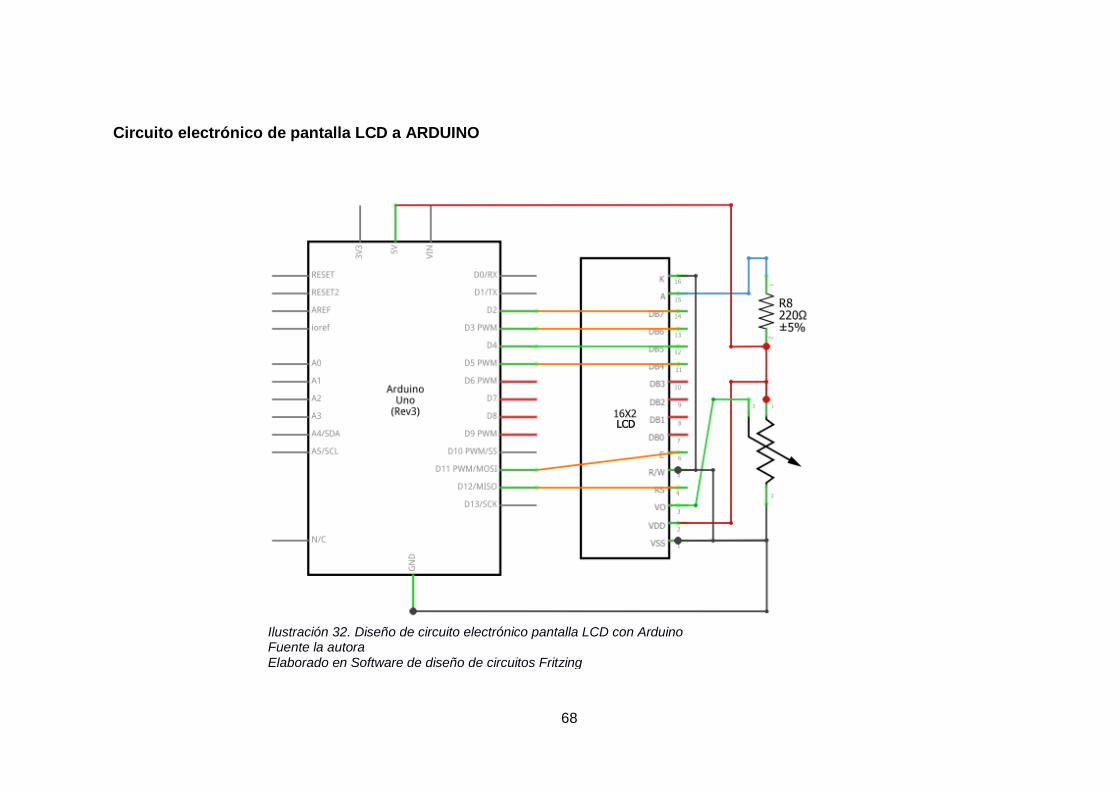
68
Circuito electrónico de pantalla LCD a ARDUINO
Ilustración 32. Diseño de circuito electrónico pantalla LCD con Arduino Fuente la autora Elaborado en Software de diseño de circuitos Fritzing
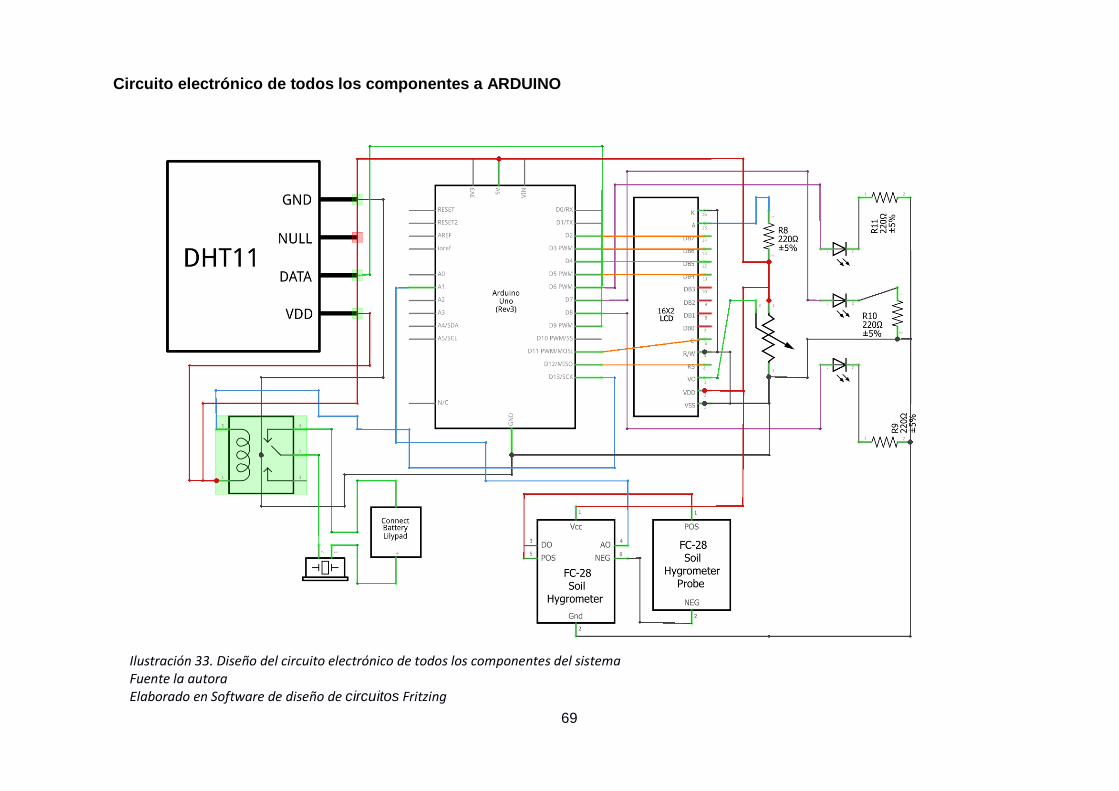
69
Circuito electrónico de todos los componentes a ARDUINO
Ilustración 33. Diseño del circuito electrónico de todos los componentes del sistema Fuente la autora Elaborado en Software de diseño de circuitos Fritzing
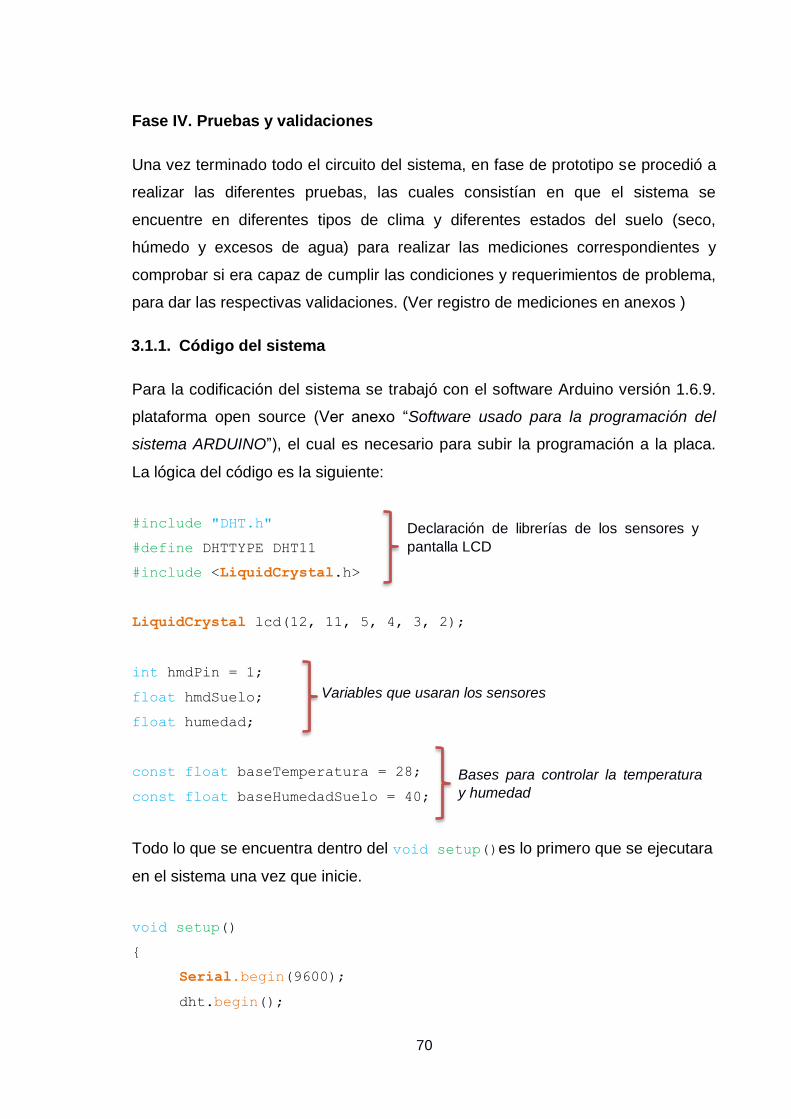
70
Fase IV. Pruebas y validaciones
Una vez terminado todo el circuito del sistema, en fase de prototipo se procedió a
realizar las diferentes pruebas, las cuales consistían en que el sistema se
encuentre en diferentes tipos de clima y diferentes estados del suelo (seco,
húmedo y excesos de agua) para realizar las mediciones correspondientes y
comprobar si era capaz de cumplir las condiciones y requerimientos de problema,
para dar las respectivas validaciones. (Ver registro de mediciones en anexos )
3.1.1. Código del sistema
Para la codificación del sistema se trabajó con el software Arduino versión 1.6.9.
plataforma open source (Ver anexo “Software usado para la programación del
sistema ARDUINO”), el cual es necesario para subir la programación a la placa.
La lógica del código es la siguiente:
#include "DHT.h"
#define DHTTYPE DHT11
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
int hmdPin = 1;
float hmdSuelo;
float humedad;
const float baseTemperatura = 28;
const float baseHumedadSuelo = 40;
Todo lo que se encuentra dentro del void setup()es lo primero que se ejecutara
en el sistema una vez que inicie.
void setup()
Serial.begin(9600);
dht.begin();
Declaración de librerías de los sensores y
pantalla LCD
Variables que usaran los sensores
Bases para controlar la temperatura
y humedad
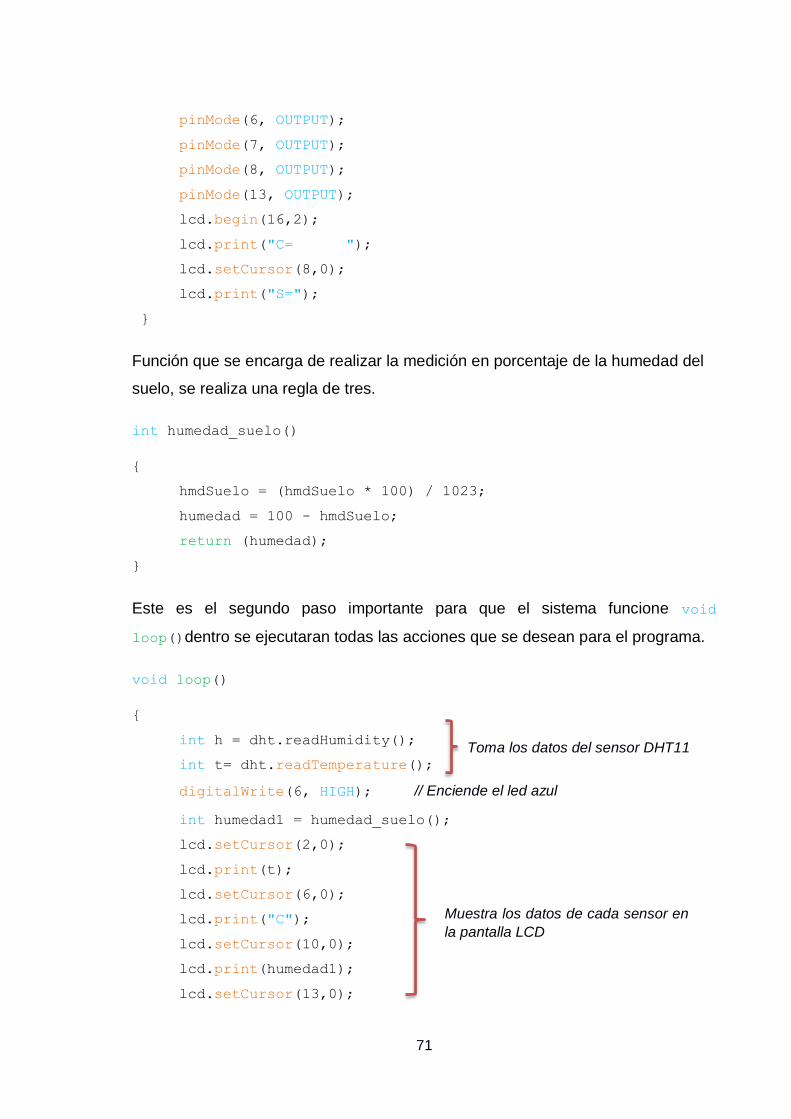
71
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(13, OUTPUT);
lcd.begin(16,2);
lcd.print("C= ");
lcd.setCursor(8,0);
lcd.print("S=");
Función que se encarga de realizar la medición en porcentaje de la humedad del
suelo, se realiza una regla de tres.
int humedad_suelo()
hmdSuelo = (hmdSuelo * 100) / 1023;
humedad = 100 - hmdSuelo;
return (humedad);
Este es el segundo paso importante para que el sistema funcione void
loop()dentro se ejecutaran todas las acciones que se desean para el programa.
void loop()
int h = dht.readHumidity();
int t= dht.readTemperature();
digitalWrite(6, HIGH); // Enciende el led azul
int humedad1 = humedad_suelo();
lcd.setCursor(2,0);
lcd.print(t);
lcd.setCursor(6,0);
lcd.print("C");
lcd.setCursor(10,0);
lcd.print(humedad1);
lcd.setCursor(13,0);
Toma los datos del sensor DHT11
Muestra los datos de cada sensor en
la pantalla LCD
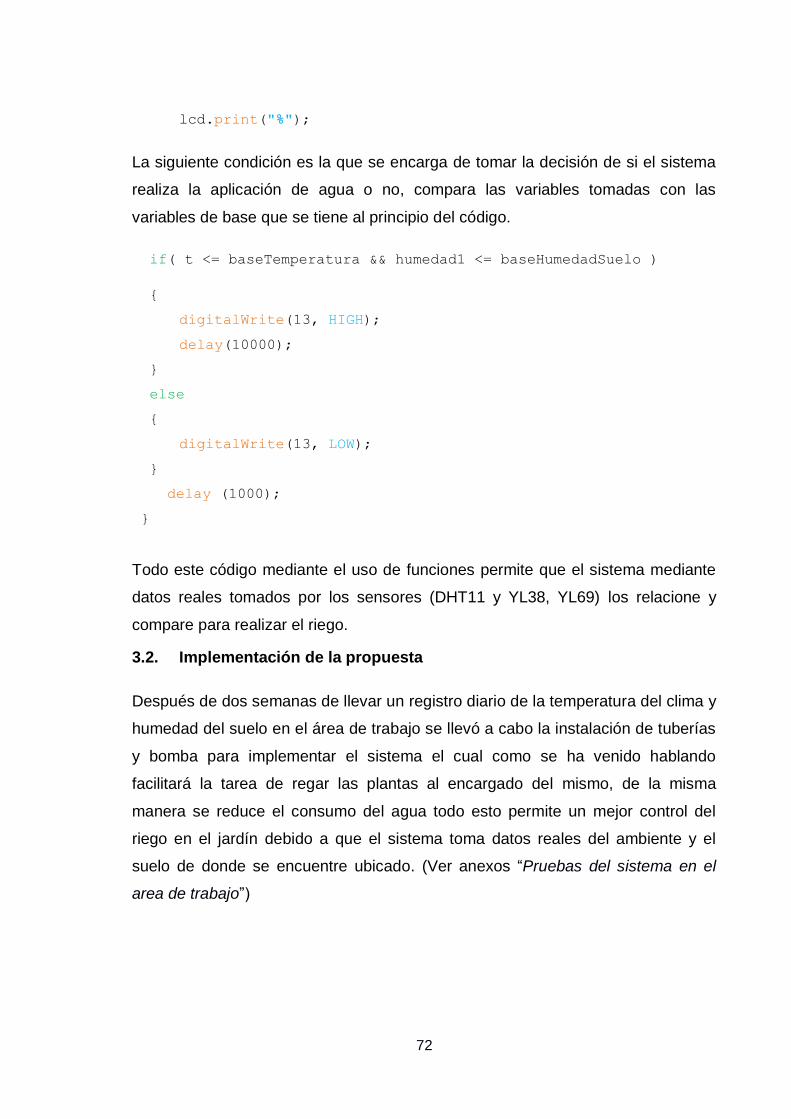
72
lcd.print("%");
La siguiente condición es la que se encarga de tomar la decisión de si el sistema
realiza la aplicación de agua o no, compara las variables tomadas con las
variables de base que se tiene al principio del código.
if( t <= baseTemperatura && humedad1 <= baseHumedadSuelo )
digitalWrite(13, HIGH);
delay(10000);
else
digitalWrite(13, LOW);
delay (1000);
Todo este código mediante el uso de funciones permite que el sistema mediante
datos reales tomados por los sensores (DHT11 y YL38, YL69) los relacione y
compare para realizar el riego.
3.2. Implementación de la propuesta
Después de dos semanas de llevar un registro diario de la temperatura del clima y
humedad del suelo en el área de trabajo se llevó a cabo la instalación de tuberías
y bomba para implementar el sistema el cual como se ha venido hablando
facilitará la tarea de regar las plantas al encargado del mismo, de la misma
manera se reduce el consumo del agua todo esto permite un mejor control del
riego en el jardín debido a que el sistema toma datos reales del ambiente y el
suelo de donde se encuentre ubicado. (Ver anexos “Pruebas del sistema en el
area de trabajo”)
73
3.3. Validación de la inserción parcial en la práctica de la propuesta
Al desarrollar la puesta en marcha del sistema se tomaron en cuenta las
condiciones que rigen en el jardín ubicado en la parte lateral del bloque de aulas
#2 de la Universidad UNIANDES Quevedo. La evaluación parcial de la propuesta
tecnológica desarrollada se realizó de dos modos:
Modo 1: A partir de la realización de una serie de puestas en marcha que constan
de documentos visuales, los cuales testifican que el sistema funciona y se
implementó. (Ver anexos “Pruebas del sistema en el area de trabajo”)
Modo 2: Mediante la consulta a diversos especialistas sobre el proyecto y sus
opiniones de especialistas, usuarios y docentes de la institución que aseveran la
validez del sistema donde se adjunta los siguientes certificados:
UNIVERSIDAD REGIONAL AUTONÓMA DE LOS ANDES
CERTIFICADO DE VALIDACIÓN
Ing. Edmundo Jalón Msc.
DOCENTE DE UNIANDES QUEVEDO
CERTIFICA:
Que la tesis previa a la obtención del título de Ingeniera en Sistemas titulada:
SISTEMA AUTOMATIZADO DE RIEGO POR ASPERSIÓN PARA EL JARDÍN
UBICADO EN LA PARTE LATERAL DEL BLOQUE DE AULAS #2 DE UNIANDES
QUEVEDO, ha sido validada con las respectivas pruebas e implementada en la
institución, encontrándose en optimó estado para su funcionamiento.
Ing. Edmundo Jalón Msc.
DOCENTE DE UNIANDES QUEVEDO
UNIVERSIDAD REGIONAL AUTONÓMA DE LOS ANDES
CERTIFICADO DE VALIDACIÓN
Ing. Luis Albarracín Msc.
DOCENTE DE UNIANDES QUEVEDO
CERTIFICA:
Que la tesis previa a la obtención del título de Ingeniera en Sistemas titulada:
SISTEMA AUTOMATIZADO DE RIEGO POR ASPERSIÓN PARA EL JARDÍN
UBICADO EN LA PARTE LATERAL DEL BLOQUE DE AULAS #2 DE UNIANDES
QUEVEDO, ha sido validada con las respectivas pruebas e implementada en la
institución, encontrándose en optimó estado para su funcionamiento.
Ing. Luis Albarracín Msc.
DOCENTE DE UNIANDES QUEVEDO
UNIVERSIDAD REGIONAL AUTONÓMA DE LOS ANDES
CERTIFICADO DE VALIDACIÓN
Ing. Juan Carlos Albarracín Msc.
DIRECTOR DE CARRERA DE SISTEMAS
CERTIFICA:
Que la tesis previa a la obtención del título de Ingeniera en Sistemas titulada:
SISTEMA AUTOMATIZADO DE RIEGO POR ASPERSIÓN PARA EL JARDÍN
UBICADO EN LA PARTE LATERAL DEL BLOQUE DE AULAS #2 DE UNIANDES
QUEVEDO, ha sido validada con las respectivas pruebas e implementada en la
institución, encontrándose en optimó estado para su funcionamiento.
Ing. Juan Carlos Albarracín Msc.
DIRECTOR DE CARRERA DE SISTEMAS
77
3.4. Conclusiones parciales del capítulo
Se cuenta con un sistema automatizado de riego por aspersión, dándole
cumplimiento a la tarea investigativa desarrollada.
El sistema se fundamenta en el empleo del Arduino como elemento electrónico
computacional para desarrollar la lógica de control.
El sistema se implementó en uno de los jardines de la Universidad Regional
Autónoma de los Andes - UNIANDES Quevedo, y se realizaron pruebas de
funcionamiento que resultaron positivas dando fe de la validez de la tecnología
aplicada.
78
CONCLUSIONES GENERALES
La investigación ha permitido obtener las siguientes conclusiones:
1. Se cuenta con un estudio teórico sobre los procesos de automatización del
riego en jardines.
2. Se desarrolló un estudio de campo sobre la problemática asociada al riego
de jardines en la universidad UNIANDES-Quevedo, que permite aseverar
la pertinencia, vialidad y significación práctica de la investigación.
3. Se cuenta con un sistema automatizado de riego de jardines susceptible a ser
escalado a otras áreas de UNIANDES-Quevedo, para satisfacer sus necesidades
de irrigación.
79
RECOMENDACIONES
1. Para la utilización de la placa en donde se encuentra programado el
sistema, se debe tener los principales conocimientos de electrónica y
programación.
2. Tener conocimientos básicos de electrónica y electricidad para las
conexiones.
3. Para trabajar con componentes electrónicos se debe usar un multímetro,
para saber si los dispositivos con los que cuenta el sistema están
trabajando bien.
4. El sistema debe encontrarse en un lugar en donde no pueda calentarse,
debido a que sus componentes en debido momento llegaran a calentarse
por ese motivo se utilizó un aislante de calor en la construcción de la
caseta.
80
BIBLIOGRAFÍA
Alcalde San Miguel, P. (2009). Electrónica: electricidad, electrónica, instalaciones
eléctricas y autómatas. Madrid, España: Ediciones Paraninfo.
Amaya, J. (2009). Sistemas de información gerenciales: Hardware, software,
redes, Internet, diseño (Segunda ed.). Bogotá, Colombia: ECOE Ediciones.
Angulo Bahón, C., & Raya Giner, C. (2004). Tecnología de sistemas de control
(Primera ed.). Barcelona, España: Ediciones UPC.
Arduino. (2013). Arduino Projects Book (Segunda ed.). Turín, Italia.
Armero, S. (2011). Mantenimiento de computadoras. En J. Moreno, & U.
Hernández (Edits.). Popayán, Colombia: Universidad del Cauca.
Arriola Navarrete, O., & Butrón Yáñez, K. (Diciembre de 2008). Recuperado el
Enero de 2016, de Sistemas integrales para la automatización de
bibliotecas basados en software libre:
http://scielo.sld.cu/scielo.php?pid=S1024-
94352008001200009&script=sci_arttext
aulaClic S L. (s.f.). Curso de Internet por aulaClic.
Aumaille, B. (2002). J2EE: Desarrollo de aplicaciones Web (Primera ed.).
Barcelona, España: Ediciones ENI.
Barranco, J. (2001). Metodología del análisis estructurado de sistemas. España.
Batiz, J. d. (1 de Diciembre de 2011). Desarrollo Orientado a Objetos con UML. 4.
Bell, D. (2008). The Coming Of Post-industrial Society (Primera ed.). New York,
Estados Unidos: Basic Books.
Benjamin, E. (2007). Auditoría administrativa: gestión estratégica del cambio
(Segunda ed.). México.
Bennigton, J., Louvau, G., & Westlake, G. (1982). Técnicas de dirección y control
de costes para los laboratorios clínicos (Primera ed.). Barcelona, España:
Editorial Reverte.
81
Bernabé, M., & Lopéz, C. (2012). Fundamentos de las Infraestructuras de Datos
Espaciales (IDE). Madrid, España.
Campderrich, B. (2003). Ingeniería del software. Barcelona, España: Editorial
UOC.
Cobo, A. (2010). Diseño y programación de bases de datos (Primera ed.). Madrid
, España: Editorial Visión Libros.
Cobo, A., Gómez, P., Pérez, D., & Rocha, R. (2005). PHP y MySQL: Tecnología
para el desarrollo de aplicaciones web. (Primera ed.). España: Ediciones
Díaz de Santos.
Craig, J. J. (2006). Robótica (Tercera ed.). México: Pearson Educación.
Date, C. (2001). Introducción a los sistemas de bases de datos (Séptima ed.).
Pearson.
Debrauwer, L. (2005). UML 2: iniciación, ejemplos y ejercicios corregidos (Primera
ed.). Barcelona, España: Ediciones ENI.
Egea, C. (2003). Diseño web para tod@s I. Barcelona, España: Icaria editorial.
Fernández García, C., & Barbado Santana, J. A. (2008). Instalaciones de telefonía
prácticas (Primera ed.). Madrid, España: Paraninfo.
Fleitman, J. (2000). Negocios exitosos. McGraw-Hill.
Fowler, M., & Kendall, S. (1999). UML gota a gota (Primera ed.). México.
Gomáriz Castro, S., Biel Solé, D., Matas Alcalá, J., & Reyes Moreno, M. (1998).
Teoría de control, diseño electronico (Segunda ed.). Barcelona, España:
Edicions UPC (Universidad Politécnica de Cataluña).
Gonzáles López, P., & Jesús, C. B. (1998). Informática gráfica (Primera ed.).
Cuenca, España.
Gonzáles, J. (2002). Control y gestión del área comercial y de producción de la
PYME (Primera ed.). España.
Groover, M. P. (1997). Fundamentos de Manufactura Moderna: Materiales,
Procesos y Sistemas (Primra ed.). México: Pearson Educación.
82
Guía breve de CSS. (s.f.). Obtenido de
http://www.w3c.es/Divulgacion/GuiasBreves/HojasEstilo
Guillén Salvador, A. (1993). Introducción a la neumática (Primera ed.). Barcelona ,
España.
Gutierrez Jaguey, J., Porta, M., Romero, E., & Villa, J. (2012). Innovación
tecnologica de sistemas de producción y comercialización de especies
aromáticas y cultivos de élite en agricultura orgánica protegida con
energías alternativas de bajo costo. Proyecto, Centro de Investigaciones
del Noroeste, México.
Hassan, H., Molero, J., Ors, R., & Rodríguez, F. (1997). Introducción a los
computadores. España.
Hermosa Donate, A. (1995). Electrónica digital práctica: tecnología y sistemas
(Primera ed.). Barcelona , España.
Heurtel, O. (2011). PHP 5.3: Desarrollar un sitio Web dinámico e interactivo
(Primera ed.). Barcelona, España: Ediciones ENI.
Huidobro Moya, J. M. (2006). Redes y servicios de telecomunicaciones (Primera
ed.). Madrid , España: Paraninfo.
Hurtado Carmona, D. (2011). Teoria General de Sistemas: Un Enfoque Hacia La
Ingenieria de Sistemas (Segunda ed.). México.
Iñiguez, S. (4 de Octubre de 2011). Overblog. Recuperado el 5 de Septiembre de
2015, de https://es.over-
blog.com/Que_es_la_automatizacion_de_procesos-1228321767-
art127041.html
ipcomm. (s.f.). IPCOMM eléctrica, automatización & civil. Recuperado el
Septiembre de 2015, de http://ipcomm.com.ec/automatizacion.htm
Jackson, A., & Day, D. (1990). Manual de modelismo (Cuarta ed.). Madrid,
España: Ediciones AKAL.
Kuo, B. C. (1996). Sistemas de control automático (Séptima ed.). México:
Pearson.
83
Lafrance, J. (1988). Intranet ilustrada: usos e impactos organizacionales de
intranet en las empresas (Primera ed.). Montevideo, Uruguay: Ediciones
Trilce.
Laudon, K., & Laudon, J. (2004). Sistemas de información gerencial:
administración de la empresa digital (Octava ed.). México: Pearson.
León, C. y. (2006). Técnicos de Soporte Informático (Primera ed.). España:
Editorial MAD.
Lugo Espinosa, O., Quevedo Nolasco, A., Bauer Mengelberg, J. R., Hebert del
Valle Paniagua, D., Palacios Vélez, E., & Aguila Marín, M. (31 de Octubre
de 2011). Red de Revistas Científicas de América Latina y el Caribe,
España y Portugal. Revista Mexicana de Ciencias Agrícolas, II(5).
Luján, S. (2002). Programación de aplicaciones web: historia, principios básicos y
clientes web (Primera ed.). España.
Macías Macías, M. J., Vergara Sabando, M. M., Macías Solórzano, V. R., &
Bazurto Zambrano, M. A. (2011). Adaptación e instalación de un sistema
de riego por aspersión, para cultivos comerciales establecidos en la
comunidad El Milagro del cantón Portoviejo. Tesis de grado, Universidad
Técnica de Manabí , Departamento Agrícola, Manabí.
Madariaga, J. (2004). Manual práctico de auditoría. Barcelona, España: Ediciones
Deusto.
Maldonado Silvestre, E. (2014). Control de temperatura en instalaciones de
distribución intermedia (IDF) de edificios inteligentes. Universidad Nacional
Autónoma de México. México: Prentice Hall.
Mano, M. M. (1994). Arquitectura de computadoras (Tercera ed.). México.
Martín, P., Oliva, J., & Manjavacas, C. (2010). Montaje y mantenimientos de
equipos. Madrid, España: Paraninfo.
Menéndez, R., & Barzanallana, A. (2001). Lenguaje de programación HTML y
CSS. Editorail UMU.
84
Mitchel, S., & Atkinson, J. (2001). Aprendiendo Active Server Pages 3.0 en 21
días (Primera ed.). México: Pearson Educación.
Montero Martinez, J. (2000). Análisis de la distribución de agua en sistemas de
riego por aspersión estacionario. Desarrollo del modelo de simulación del
riego por aspersion. Tesis doctoral, Universidad de Castilla - La Mancha,
Departamento de producciçon vegetal y Tecnología Agraria, Ciudad Real,
España.
Muller, M. (2005). Fundamentos de administración de inventarios. Bogotá,
Colombia: Norma S.A.
Muñoz, C. (2002). Auditoría en sistemas computacionales. México: Pearson
Educación.
Nevado, V. (2010). Introducción a las bases de datos relacionales. Madrid,
España: Editorial Visión Libros.
Ñeco García, P., Reinoso García, O., Aracil, G., & Nicolas, A. S. (2003). Apuntes
de sistemas de control. Alicante, España.
Ogata, K. (2003). Ingeniería de control moderna (Cuarta ed.). Madrid, España:
Pearson Educacion S.A.
Osorio, L., Rodríguez, A., & Hernandez, J. (s.f.). Mantenimiento del equipo de
computo. Reporte de prácticas, Oaxaca, Mexico.
Pampillón, R. (29 de Agosto de 2012). Economy Weblog. Recuperado el 2016, de
http://economy.blogs.ie.edu/archives/2012/08/la-tercera-revolucion-
industrial.php
Peña, C. (2012). Técnico Windows diagnóstico, reparación y mantenimiento.
Buenos Aires, Argentina: Manuales USERS.
Pérez, M., & Bastos, A. (2006). Introducción a la gestión de stocks (Segunda ed.).
España: ideaspropias Editorial.
Plata, U. N. (s.f.). Teoría del inventario.
85
Ponsa Asensio, P., & Vilanova, R. (2005). Automatización de procesos mediante
la guía GEMMA (Primera ed.). Cataluñá, España.
Ramos, A., & Ramos, J. (2011). Aplicaciones Web (Primera ed.). Madrid, España:
Paraninfo.
Rasmussen, A. (2009). El signo de los Tiempos: La adopción de la automatización
del servicio. (bmcsoftware, Editor) Recuperado el 7 de Mayo de 2015, de
http://documents.bmc.com/products/documents/75/46/97546/97546.pdf
Render, B., Stair, R., & Hanna, M. (2006). Métodos cuantitativos para los negocios
(Novena ed.). Pearson.
Rivas, G. (1989). Auditoría informática. Madrid, España: Ediciones Díaz de
Santos, S.A.
Rodríguez Avila, A. (2007). Iniciación a la Red de Internet: Concepto,
funcionamiento, servicios y aplicaciones de internet (Primera ed.). España.
Rodríguez Díaz, F., & Berenguel Soria, M. (2004). Control y robótica en
agricultura (Primera ed.). Almería, España: Universidad de Almería,
Servicio de publicaciones.
Roel, D. V. (1998). La tercera revolución industrial y la era del conocimiento
(Tercera ed.). Lima (Universidad Nacional de San Marcos), Perú.
Romero Laguillo, L. F. (1998). Publicar en Internet: guía práctica para la creación
de documentos HTML (Primera ed.). Cantabria, España.
Ruiz Canales, A., & Molina Martinez, J. M. (2010). Automatización y telecontrol de
sistemas de riego (Primera ed.). Barcelona, España.
Ruiz Vadillo, D. M. (2012). Montaje y reparación de sistemas eléctricos y
electrónicos de bienes de equipo y máquinas industriales (Primera ed.).
Málaga, España: INNOVA.
Ruiz Vanoye, J., & Díaz Parra, O. (2013). Bio-innovacion, innovación a través de
observación, análisis y comprensión de la ciencia de la vida (Primera ed.).
Cuernavaca, México: Académica Dragón Azteca.
86
Sánchez, M. (2001). JavaScript (Primera ed.). España.
Silva Salinas, S. (2003). Internet y correo electrónico: información y comunicación.
(Primera ed.). España: IdeasPropias.
Sommerville, I. (2005). Ingeniería del software (Séptima ed.). (P. E. S.A., Ed.)
Madrid, España.
Staff, U. (2013). Técnico profesional de PC claves de mantenimiento y reparación
(Primera ed.). Buenos Aires, Argentina: Manuales USERS.
Suárez, R. (2007). Tecnologías de la Información y la Comunicación (Primera
ed.). España: Ideaspropias Editorial.
Taha, H. (1991). Investigación de operaciones. Mexico: Ediciones Alfaomega.
Takeuchi, N. (2009). Nanociencia y nanotecnología: La construcción de un nuevo
mundo átomo por átomo (Primera ed.). México D.F., México.
Tarjuelo, J. M. (1992). El riego por aspersión: diseño y funcionamiento. España:
Universidad de Castilla - La Mancha.
Universidad Michoacana de San Nicolás de Hidalgo, C. d. (s.f.). Universidad
Michoacana de San Nicolás de Hidalgo. Recuperado el Septiembre de
2015, de Coordinación de innovación educativa:
http://dieumsnh.qfb.umich.mx/gesinfo/revoluciones_industriales.htm
Valdivia Miranda, C. (2012). Sistemas de control continuos y discretos (Primera
ed.).
Vazquez, J. (2012). Arquitectura de computadoras I (Primera ed.). Mexico: Red
Tercer Milenio.
Vilet, G. (1999). La tecnología y los sistemas de información aplicados en los
negocios y la educación. México.
ANEXOS
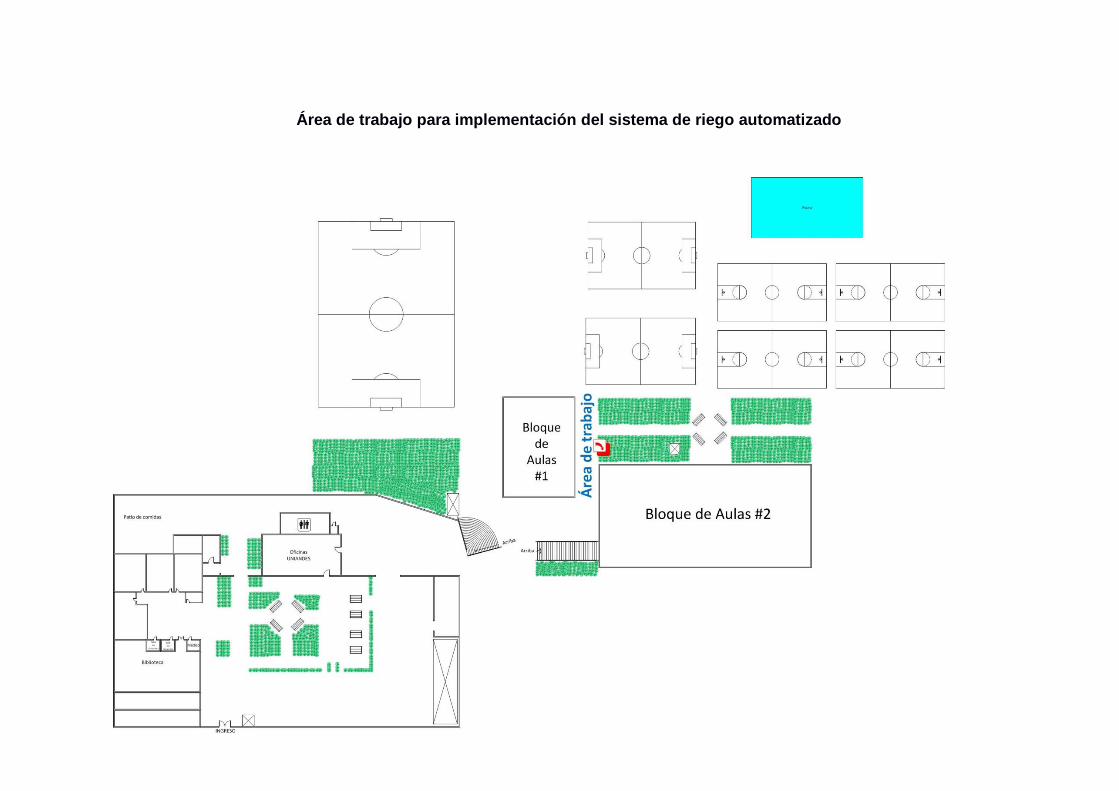
Área de trabajo para implementación del sistema de riego automatizado

Sistema de control y riego en Hacienda “La Fortaleza”
fd sfs
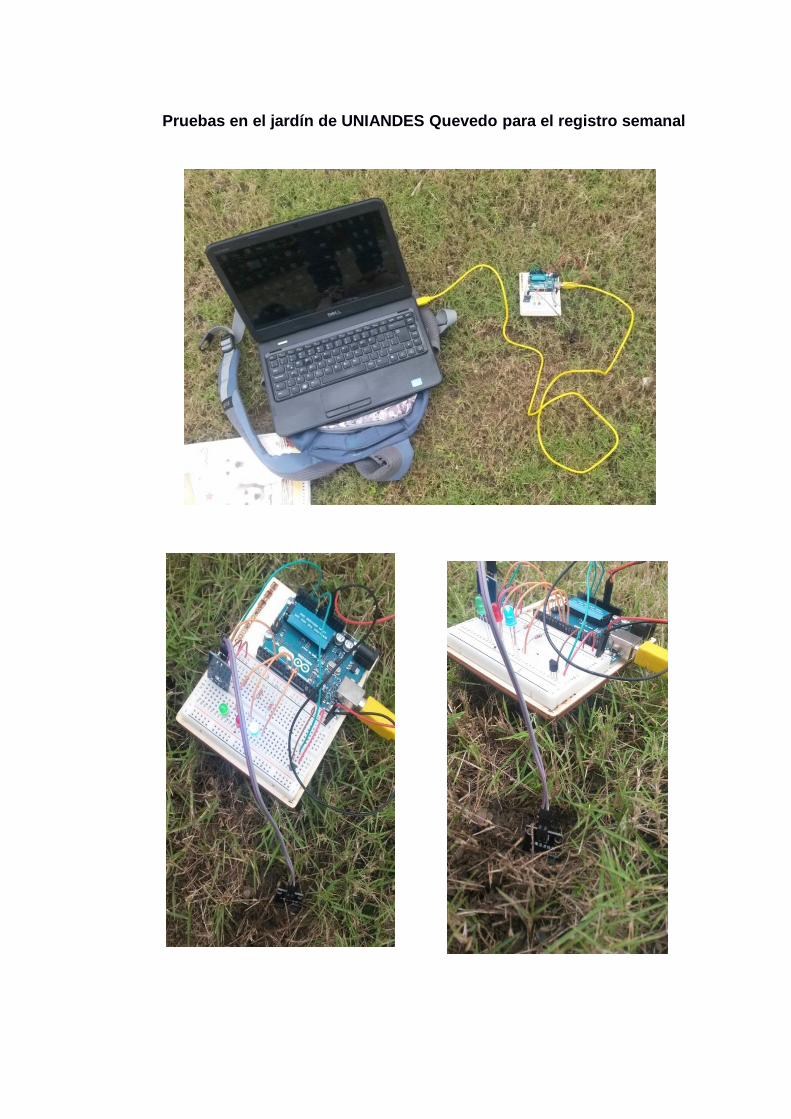
Pruebas en el jardín de UNIANDES Quevedo para el registro semanal

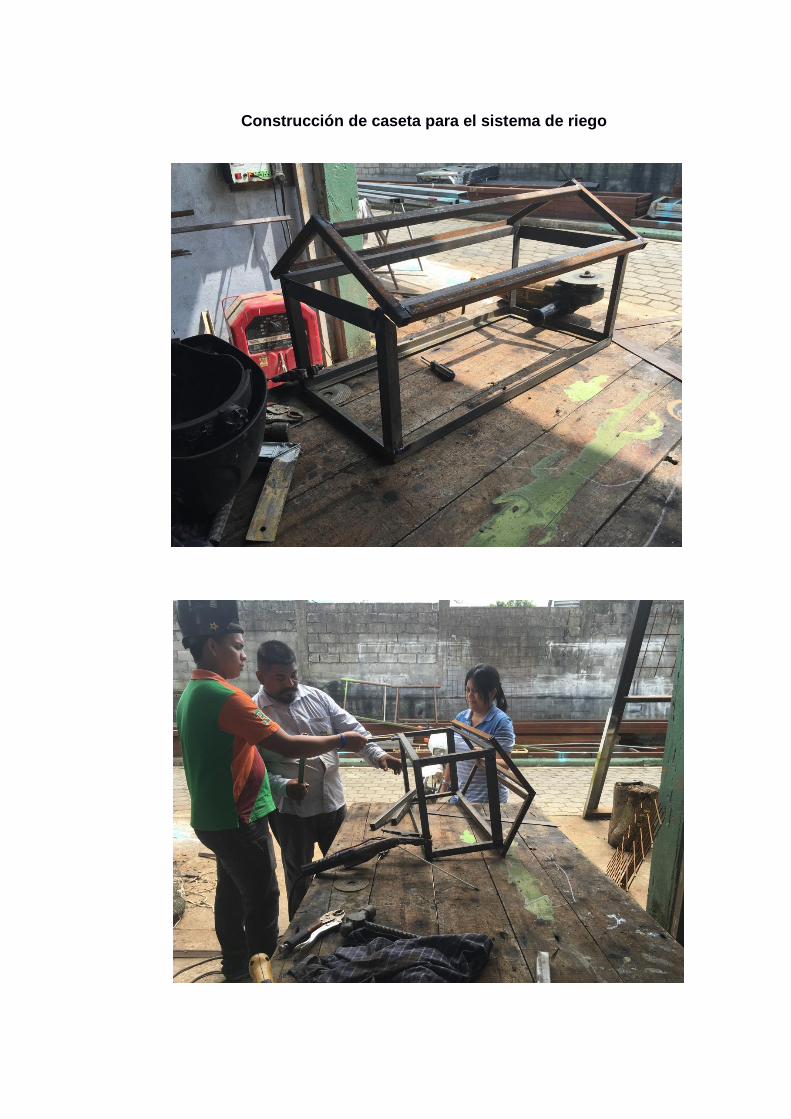
Construcción de caseta para el sistema de riego
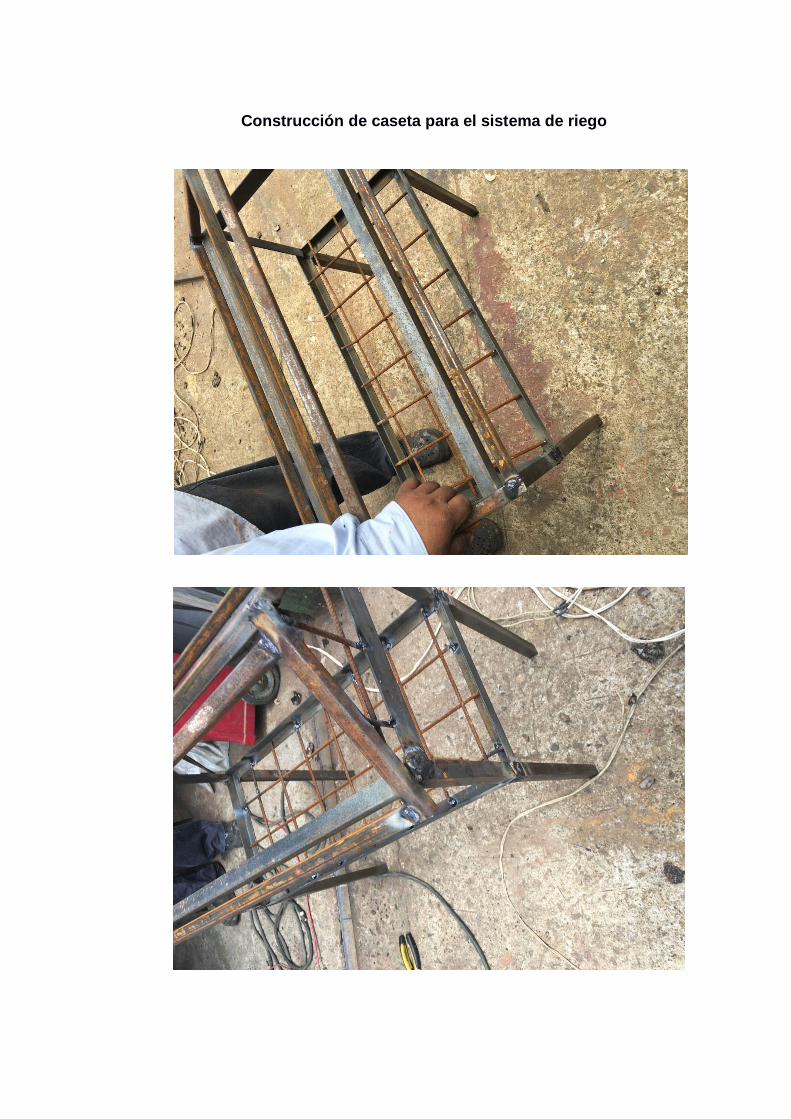
Construcción de caseta para el sistema de riego
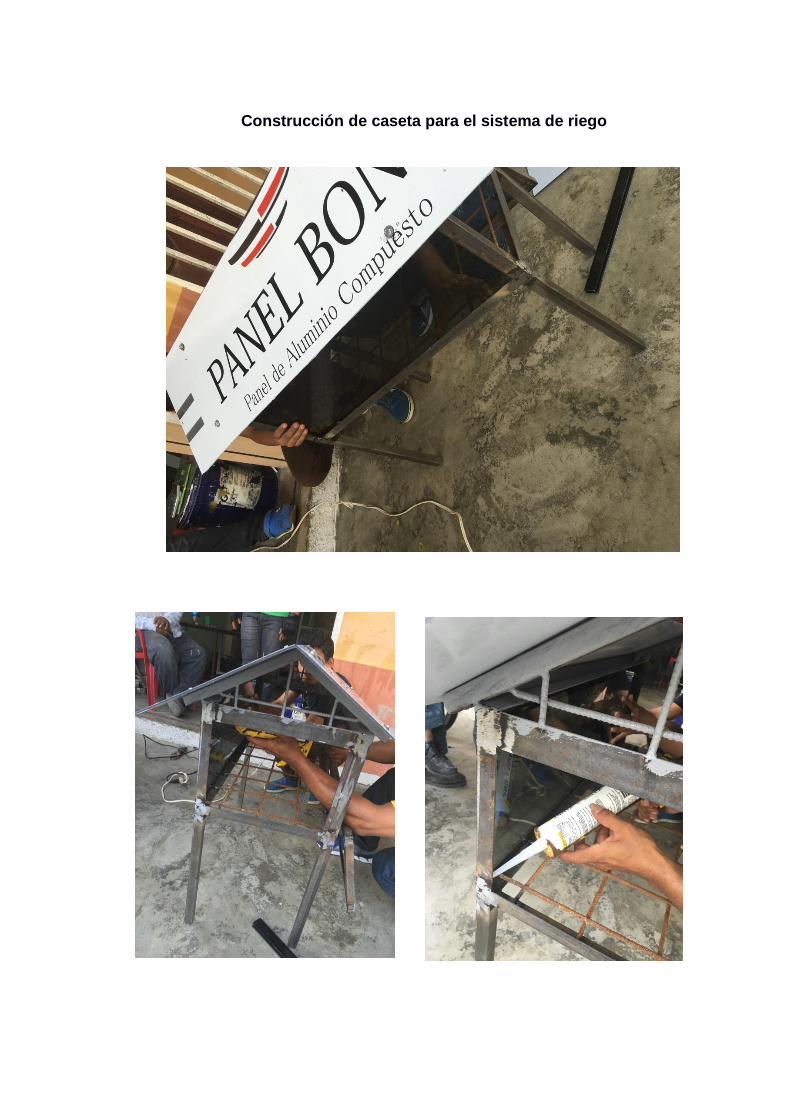
Construcción de caseta para el sistema de riego

Pruebas del sistema en el area de trabajo

Implementación del sistema automatizado de riego por aspersión
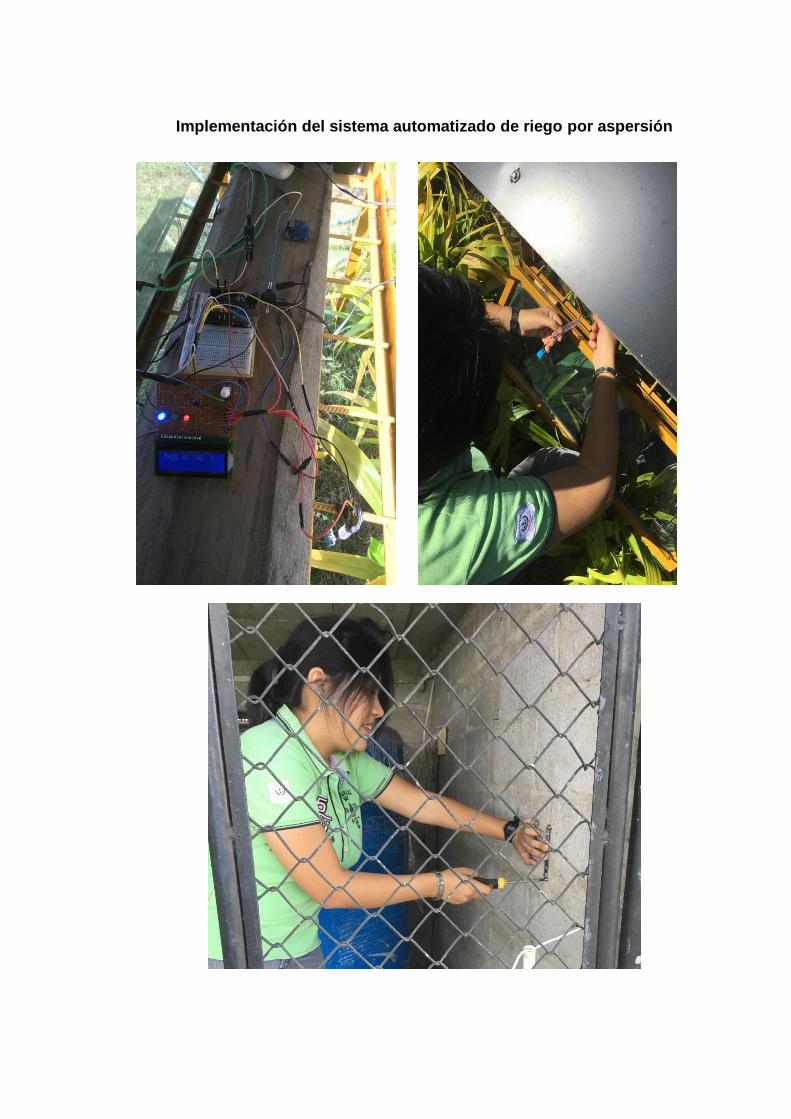
Implementación del sistema automatizado de riego por aspersión
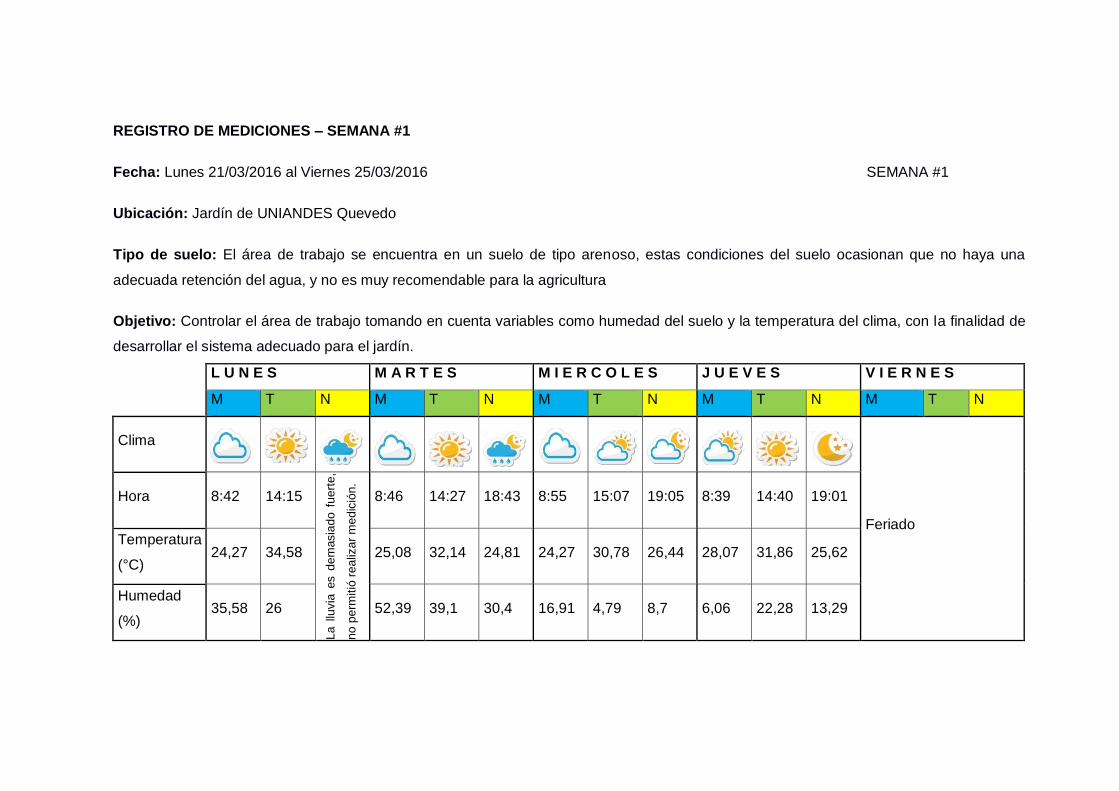
REGISTRO DE MEDICIONES – SEMANA #1
Fecha: Lunes 21/03/2016 al Viernes 25/03/2016 SEMANA #1
Ubicación: Jardín de UNIANDES Quevedo
Tipo de suelo: El área de trabajo se encuentra en un suelo de tipo arenoso, estas condiciones del suelo ocasionan que no haya una
adecuada retención del agua, y no es muy recomendable para la agricultura
Objetivo: Controlar el área de trabajo tomando en cuenta variables como humedad del suelo y la temperatura del clima, con la finalidad de
desarrollar el sistema adecuado para el jardín.
L U N E S M A R T E S M I E R C O L E S J U E V E S V I E R N E S
M T N M T N M T N M T N M T N
Clima
Feriado
Hora 8:42 14:15
La l
luvia
es d
em
asia
do f
uert
e,
no p
erm
itió
realiz
ar
medic
ión.
8:46 14:27 18:43 8:55 15:07 19:05 8:39 14:40 19:01
Temperatura
(°C) 24,27 34,58 25,08 32,14 24,81 24,27 30,78 26,44 28,07 31,86 25,62
Humedad
(%) 35,58 26 52,39 39,1 30,4 16,91 4,79 8,7 6,06 22,28 13,29
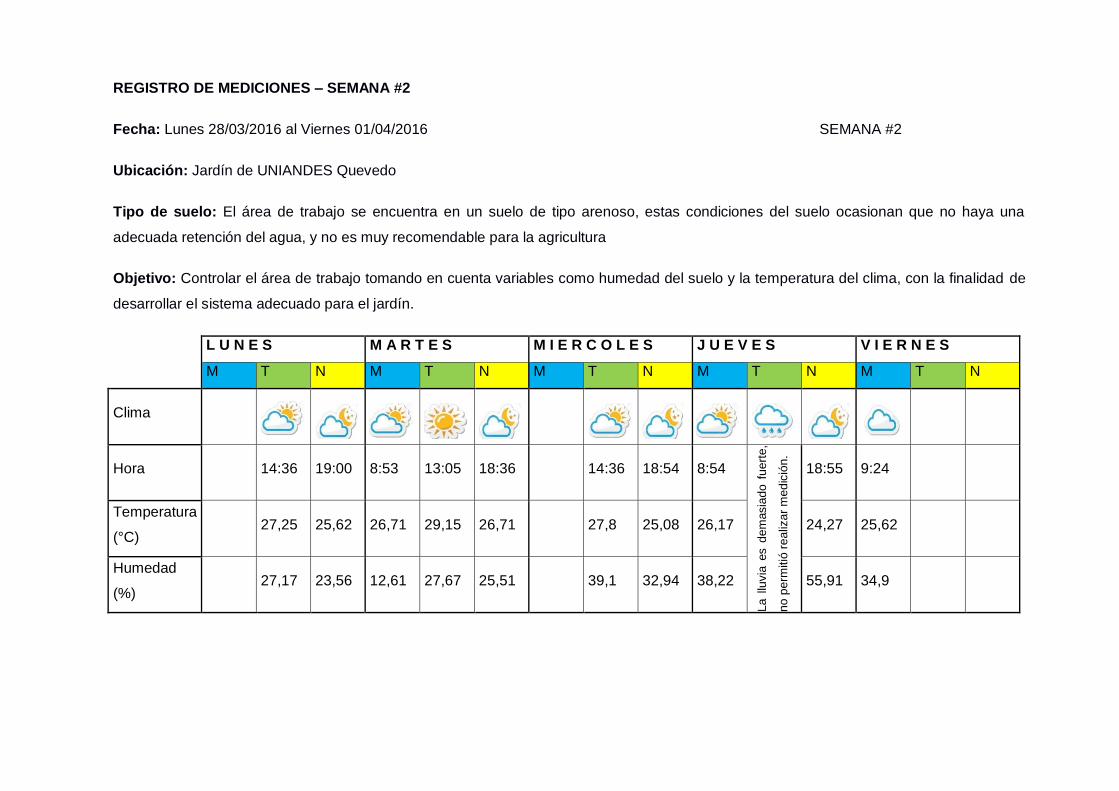
REGISTRO DE MEDICIONES – SEMANA #2
Fecha: Lunes 28/03/2016 al Viernes 01/04/2016 SEMANA #2
Ubicación: Jardín de UNIANDES Quevedo
Tipo de suelo: El área de trabajo se encuentra en un suelo de tipo arenoso, estas condiciones del suelo ocasionan que no haya una
adecuada retención del agua, y no es muy recomendable para la agricultura
Objetivo: Controlar el área de trabajo tomando en cuenta variables como humedad del suelo y la temperatura del clima, con la finalidad de
desarrollar el sistema adecuado para el jardín.
L U N E S M A R T E S M I E R C O L E S J U E V E S V I E R N E S
M T N M T N M T N M T N M T N
Clima
Hora 14:36 19:00 8:53 13:05 18:36 14:36 18:54 8:54
La l
luvia
es d
em
asia
do f
uert
e,
no p
erm
itió
realiz
ar
medic
ión.
18:55 9:24
Temperatura
(°C) 27,25 25,62 26,71 29,15 26,71 27,8 25,08 26,17 24,27 25,62
Humedad
(%) 27,17 23,56 12,61 27,67 25,51 39,1 32,94 38,22 55,91 34,9

ACTORES QUE INTERVIENEN EN LA INVESTIGACION
Ing. Oswaldo Andrade Experto en riego
Sr. Vicente Jardinero de UNIANDES Quevedo
Ing. Juan Carlos Albarracín Matute Msc. Director de la Carrera de Sistemas

Software usado para la programación del sistema ARDUINO

Software usado para el desarrollo del circuito del sistema FRITZING
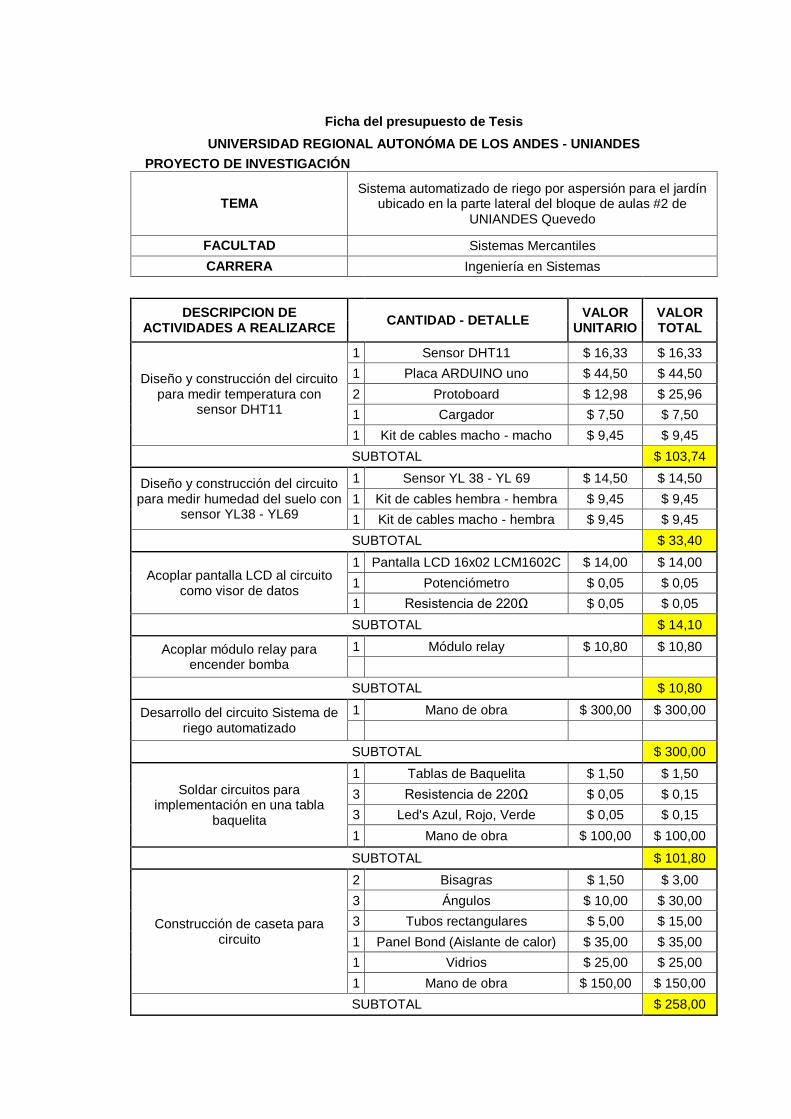
Ficha del presupuesto de Tesis
UNIVERSIDAD REGIONAL AUTONÓMA DE LOS ANDES - UNIANDES
PROYECTO DE INVESTIGACIÓN
TEMA Sistema automatizado de riego por aspersión para el jardín
ubicado en la parte lateral del bloque de aulas #2 de UNIANDES Quevedo
FACULTAD Sistemas Mercantiles
CARRERA Ingeniería en Sistemas
DESCRIPCION DE
ACTIVIDADES A REALIZARCE CANTIDAD - DETALLE
VALOR UNITARIO
VALOR TOTAL
Diseño y construcción del circuito para medir temperatura con
sensor DHT11
1 Sensor DHT11 $ 16,33 $ 16,33
1 Placa ARDUINO uno $ 44,50 $ 44,50
2 Protoboard $ 12,98 $ 25,96
1 Cargador $ 7,50 $ 7,50
1 Kit de cables macho - macho $ 9,45 $ 9,45
SUBTOTAL $ 103,74
Diseño y construcción del circuito para medir humedad del suelo con
sensor YL38 - YL69
1 Sensor YL 38 - YL 69 $ 14,50 $ 14,50
1 Kit de cables hembra - hembra $ 9,45 $ 9,45
1 Kit de cables macho - hembra $ 9,45 $ 9,45
SUBTOTAL $ 33,40
Acoplar pantalla LCD al circuito como visor de datos
1 Pantalla LCD 16x02 LCM1602C $ 14,00 $ 14,00
1 Potenciómetro $ 0,05 $ 0,05
1 Resistencia de 220Ω $ 0,05 $ 0,05
SUBTOTAL $ 14,10
Acoplar módulo relay para encender bomba
1 Módulo relay $ 10,80 $ 10,80
SUBTOTAL $ 10,80
Desarrollo del circuito Sistema de riego automatizado
1 Mano de obra $ 300,00 $ 300,00
SUBTOTAL $ 300,00
Soldar circuitos para implementación en una tabla
baquelita
1 Tablas de Baquelita $ 1,50 $ 1,50
3 Resistencia de 220Ω $ 0,05 $ 0,15
3 Led's Azul, Rojo, Verde $ 0,05 $ 0,15
1 Mano de obra $ 100,00 $ 100,00
SUBTOTAL $ 101,80
Construcción de caseta para circuito
2 Bisagras $ 1,50 $ 3,00
3 Ángulos $ 10,00 $ 30,00
3 Tubos rectangulares $ 5,00 $ 15,00
1 Panel Bond (Aislante de calor) $ 35,00 $ 35,00
1 Vidrios $ 25,00 $ 25,00
1 Mano de obra $ 150,00 $ 150,00
SUBTOTAL $ 258,00
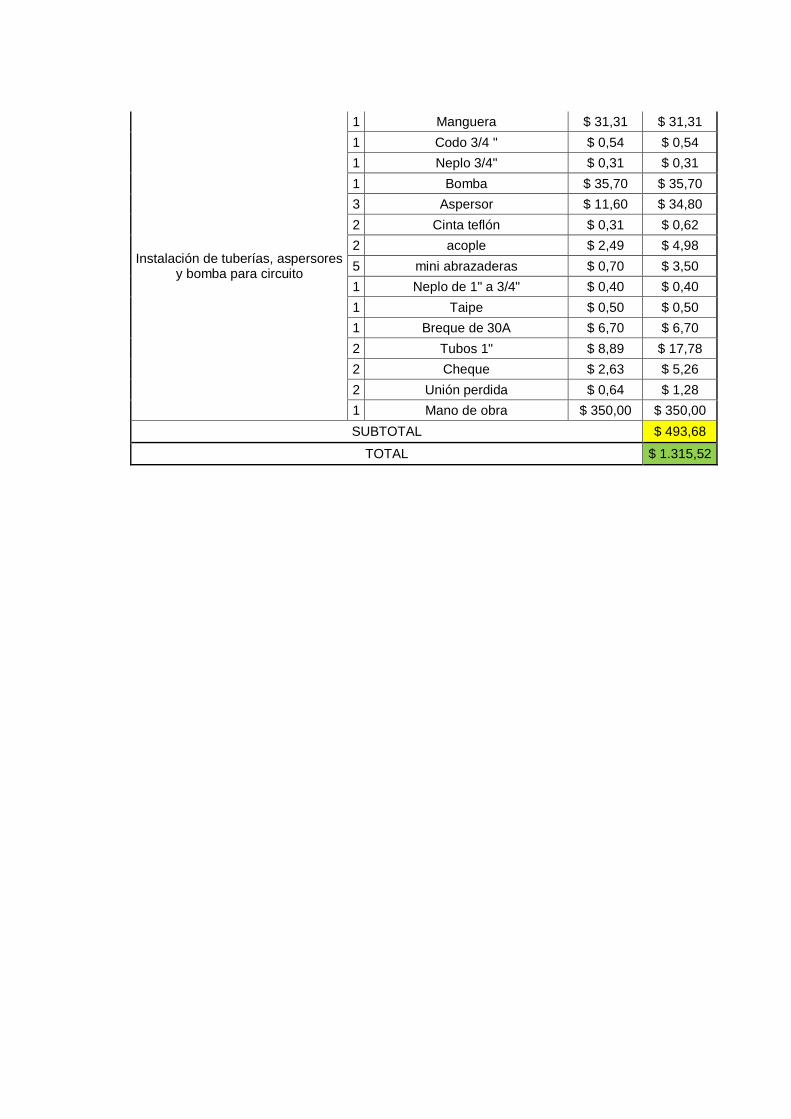
Instalación de tuberías, aspersores y bomba para circuito
1 Manguera $ 31,31 $ 31,31
1 Codo 3/4 " $ 0,54 $ 0,54
1 Neplo 3/4" $ 0,31 $ 0,31
1 Bomba $ 35,70 $ 35,70
3 Aspersor $ 11,60 $ 34,80
2 Cinta teflón $ 0,31 $ 0,62
2 acople $ 2,49 $ 4,98
5 mini abrazaderas $ 0,70 $ 3,50
1 Neplo de 1" a 3/4" $ 0,40 $ 0,40
1 Taipe $ 0,50 $ 0,50
1 Breque de 30A $ 6,70 $ 6,70
2 Tubos 1" $ 8,89 $ 17,78
2 Cheque $ 2,63 $ 5,26
2 Unión perdida $ 0,64 $ 1,28
1 Mano de obra $ 350,00 $ 350,00
SUBTOTAL $ 493,68
TOTAL $ 1.315,52






















![[Rosario] Pensando en automatizar procesos - Nadia Álvarez](https://img.pdfslide.es/doc/110x75/546c2b89af795967298b4f2e/rosario-pensando-en-automatizar-procesos-nadia-alvarez.jpg)






