Embed Size (px)
Citation preview

UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
FACULTAD DE CIENCIAS DE LA INGENIERÍA
CARRERA DE INGENIERÍA AUTOMOTRIZ
ANÁLISIS, DISEÑO E IMPLEMENTACIÓN DE UN
SCANNER AUTOMOTRIZ PARA VEHÍCULOS
VOLKSWAGEN GOL, PROGRAMADO CON
ARDUINO PARA VISUALIZAR EN ANDROID.
TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO
DE INGENIERO AUTOMOTRIZ
FÉLIX ANDRÉS ANDRADE SÁNCHEZ
DIRECTOR: ING. ALEXANDER PERALVO, MSc.
Quito, febrero de 2015

Derechos de autor
© Universidad Tecnológica Equinoccial. 2015
Reservados todos los derechos de reproducción

DECLARACIÓN
Yo FÉLIX ANDRÉS ANDRADE SÁNCHEZ, declaro que el trabajo aquí descrito
es de mi autoría; que no ha sido previamente presentado para ningún grado o
calificación profesional; y, que he consultado las referencias bibliográficas que
se incluyen en este documento.
La Universidad Tecnológica Equinoccial puede hacer uso de los derechos
correspondientes a este trabajo, según lo establecido por la Ley de Propiedad
Intelectual, por su reglamento y por la normativa institucional vigente.
_________________________
Félix Andrade
C.I. 040130849-9

CERTIFICACIÓN
Certifico que el presente trabajo que lleva por título “ANÁLISIS, DISEÑO E
IMPLEMENTACIÓN DE UN SCANNER AUTOMOTRIZ PARA VEHÍCULOS
VOLKSWAGEN GOL, PROGRAMADO CON ARDUINO PARA VISUALIZAR
EN ANDROID”.
Que, para aspirar al título de Ingeniero Automotriz fue desarrollado por Félix
Andrade, bajo mi dirección y supervisión, en la Facultad de Ciencias de la
Ingeniería; y cumple con las condiciones requeridas por el reglamento de
Trabajos de Titulación artículos 18 y 25.
___________________
Ing. Alexander Peralvo, MSc.
DIRECTOR DEL TRABAJO
C.I. 1718133448

AGRADECIMIENTO
A mi padre, ejemplo de vida superación y Fortaleza, porque siempre brindarme su apoyo y brindarme la determinación para alcanzar cada meta
trazada. Por darme ejemplo de cómo ser un hombre a carta cabal, brindarme su
vocación e incondicionalidad. Por nunca dudar de mí, y jamás permitirme dudar de él.
A mi madre mi mejor amiga mi confidente, quien con su dedicación y su amor incondicionales, me ha forjado como persona, profesional, amigo y ser
humano. Quien con sus palabras ha logrado levantar mi ánimo en innumerables
ocasiones y jamás me ha permitido dar un paso hacia atrás.
A mi hermana Karla quien jamás ha dudado de mi ni de mis decisiones y me ha apoyado incondicionalmente, en cada paso que he dado con quien he
celebrado triunfos y me ha consolado en la derrota.
A mi hermana Domenica quien ilumina mi mundo y mi día a día con su sonrisa y su personalidad libre y descomplicada, quien ha quitado peso de mis hombros con tan solo un abrazo. Y a su corta edad me ha ensenado a
brindarle una sonrisa a la vida.
A mis amigo y hermano Patricio, quien me demostró que los amigos son parte de la familia. Que me ha apoyado incansablemente en este proyecto,
me ha ayudado y empujado para llegar hasta aquí.
A mi amigo Christian quien me ha apoyado, a lo largo del camino con su determinación y conocimientos.
A ustedes les dedico mi esfuerzo y mis logros, porque sin ustedes nada de esto fuese remotamente posible.
FÉLIX ANDRÉS ANDRADE SANCHEZ
“Lo importante es no dejar de hacerse preguntas.”
Albert Einstein

V
INDICE DE CONTENIDOS
DECLARACIÓN III
CERTIFICACIÓN IV
RESUMEN XIV
ABSTRACT XVI
1. INTRODUCCIÓN 1
2. MARCO TEÓRICO 4
2.1. OBD II 5
2.1.1. DEFINICIÓN 5
2.1.2. PROTOCOLO 5
2.1.2.1. TIPOS DE CÓDIGOS 8
2.2. ARDUINO 8
2.2.1. DEFINICIÓN 8
2.2.2. PROTOCOLO DE COMUNICACIÓN 9 2.2.2.1. Serial 9
2.2.3. APLICACIONES 9
2.3. CABLE DE INTERFAZ USB A OBD II 10
2.3.1. PROTOCOLO DE COMUNICACIÓN 10
2.3.2. CLASIFICACIÓN DE PROTOCOLOS DE COMUNICACIÓN 11
2.3.3. VAG-COM Y SU USO 11
2.4. COMUNICACIÓN BLUETOOTH 12
2.4.1. BLUETOOTH 12
2.4.2. OBJETIVOS 12
2.4.3. CLASIFICACIÓN 12
2.5. VISUALIZACIÓN DE DATOS 13
2.5.1. VISUALIZACIÓN EN ENTORNO DE WINDOWS 13

VI
2.5.1.1. Monitor Serial Arduino 13 2.5.1.2. Protocolo Rs232 14
2.6. VISUALIZACIÓN EN ANDROID 14
2.6.1. ANDROID 14
2.6.2. CARACTERÍSTICAS. 15
2.7. SENSORES 16
2.7.1. DEFINICIÓN 16
2.7.2. TIPOS DE SENSORES EN EL VEHÍCULO 16 2.7.2.1. Sensores De Temperatura 16 2.7.2.2. Sensores De Presión 17 2.7.2.3. Sensores De Velocidad 17 2.7.2.4. Sensores De Golpeteo, Sonido O Ruido 17
2.7.3. SENSORES A ESTUDIAR EN EL VEHÍCULO 18
2.7.3.1. Sonda Lambda 18 2.7.3.2. Sensor De Temperatura De Refrigerante 20 2.7.3.3. Sensor De Golpeteo (Ks) 22 2.7.3.4. Sensor De Temperatura De Admisión (Iat) 24 2.7.3.5. Sensor De Aceleración (Tps) 26
3. METODOLOGÍA 29
3.1. ADQUISICIÓN DE DATOS 30
3.1.1. ELM 327 30
3.1.2. DEFINICION 30
3.1.3. APLICACIONES 30
3.1.4. CARACTERISTICAS 31
3.1.5. DIAGRAMA DE CONEXIÓN 31
3.1.6. CARACTERÍSTICAS ELÉCTRICAS. 32
3.1.7. COMUNICACIÓN CON EL ELM327 32
3.1.8. COMANDOS 33 3.1.8.1. Comandos At 33 3.1.8.2. Comandos Obd 34 3.1.8.3. Comandos Específicos Para Iso, J1850 Y Can. 37
3.1.9. COMUNICÁNDOSE CON EL VEHÍCULO 39
3.1.10. INICIACIÓN DEL BUS 44

VII
3.1.11. INTERPRETANDO LOS CÓDIGOS DE FALLA DEL VEHÍCULO 46
3.1.12. BORRANDO CÓDIGOS DE FALLA. 49
3.2. OBDII 51
3.2.1. FUNCIONES DEL OBDII 51
3.2.2. FUNCIONES DE DIAGNÓSTICO DEL OBDII EN VEHÍCULOS A
GASOLINA 52
3.2.3. FUNCIONES DE DIAGNÓSTICO DEL OBDII EN VEHÍCULOS A
DIESEL 52
3.2.4. FUNCIONAMIENTO DE EMERGENCIA 53
3.2.4.1. Sensor Del Pedal Del Acelerador 54 3.2.4.2. Catalizador 54 3.2.4.3. Tensión En La Batería 54 3.2.4.4. Sensor De Temperatura Del Motor. 54
3.2.5. FORMATO DEL MENSAJE DEL OBDII 54
3.2.6. DETECCIÓN DE ERRORES. 57
3.2.7. REDES DE COMUNICACIÓN EL VEHÍCULO. 59
3.2.8. ACCESOS DEL SISTEMA OBDII 63 3.2.8.1. Acceso A Datos En Vivo Del Sistema A Bordo 63
3.2.9. ACCESO A DATOS CONGELADOS 65
3.2.10. ACCESO A CÓDIGOS DE FALLA 65
4. DISEÑO E IMPLEMENTACIÓN DEL PROTOTIPO 67
4.1. DISEÑO DEL PROTOTIPO 68
4.1.1. ARDUINO DUE 68
4.1.2. SPARK FUN OBDII- UART 68
4.1.2.1. Elm327 69
4.1.2.2. Mcp2551 71
4.1.3. CABLE OBDII- RS232 73
4.1.4. LCD 20 X 4 CON I2C 73
4.1.5. DIAGRAMA EXPLICATIVO DE CONEXIÓN 74
4.1.6. DIAGRAMA DE CONEXIÓN DE HARDWARE Y COMUNICACIÓN
BLUETOOTH 75

VIII
4.1.7. APP INVENTOR 75
4.2. IMPLEMENTACIÓN DEL PROTOTIPO 76
4.3. MANUAL DE PROCEDIMIENTOS 79
4.3.1. INSTALACIÓN DE LA APLICACIÓN EN ANDROID 79
4.3.2. USO DE LA APLICACIÓN Y EL PROTOTIPO. 84
5. ANÁLISIS DE RESULTADOS ¡ERROR! MARCADOR NO DEFINIDO.
5.1. CHEVROLET AVEO 2009 88
5.2. KIA SPORTAGE 2011 90
5.3. FORD ECOSPORT 2007 94
6. CONCLUSIONES Y RECOMENDACIONES 98
6.1. CONCLUSIONES 99
6.2. RECOMENDACIONES 100
GLOSARIO DE TÉRMINOS 101
ANEXOS 102
ANEXO 1 103
ANEXO 2 109
ANEXO 3 113
ANEXO 4 116
ANEXO 5 121
ANEXO 6 127
BIBLIOGRAFÍA 129

IX
ÍNDICE DE FIGURAS
Figura.1 Distribución De Pines En OBDII 6
Figura.2 Clasificación De Bluetooth 13
Figura.3 Tipos De Sensores 18
igura.4 Conexión Sonda Landa 19
Figura.5 Onda Sonda Landa 20
Figura.6 Conexión ECT 21
Figura.7 Onda ECT 22
Figura.8 Ubicación Del KS 23
Figura.9 Conexión Del KS 23
Figura.10 Onda Del KS 24
Figura.11 Conexión Del IAT 25
Figura.12 Onda Del IAT 25
Figura.13 Conexión Del TPS 26
Figura.14 Onda Del TPS 27
Figura.15 Diagrama De Conexión 31
Figura.16 Guía Para Detección Y Borrado De Códigos De Error 50

X
Figura.17 Estructura Tradicional De Mensajes Del OBDII Para Normas
Saej1850, Iso9141-2 E Iso14230-4 55
Figura.18 Estructura Tradicional De Mensajes Del OBDII Para Norma
Iso15765-4 56
Figura.19 Ubicación De La Luz Indicadora (Check Engine) 57
Figura.20 Ubicación Del Puerto OBDII 58
Figura.21 Diagrama Explicativo De La Red De Comunicación Para Diagnosis
E Información De Un Vehículo 59
Figura.22 Diagrama Explicativo De Función De Buses En La Red De
Comunicaciones De Un Vehículo 61
Figura.23 Clasificación De Buses De Comunicación Interna En El Vehículo
63
Figura.24 Solicitud Y Respuesta Para Accesos De Datos A Bordo 64
Figura.25 Solicitud Y Respuesta Para Accesos A Códigos De Falla 66
Figura.26 Arduino Due 68
Figura.27 SparkFun OBDII – UART 69
Figura.28 Esquema De Aplicación Tradicional Del Elm327 70
Figura.29 Mcp2551 71
Figura.30 Distribución De Pines Mcp2551 72
Figura.31 Cable OBDII – Rs232 73
Figura.32 Lcd 20 X 4 Con I2c 74
XI
Figura.33 Diagrama Explicativo De Conexión 74
Figura.34 Diagrama De Conexión De Hardware Y Comunicación Bluetooth
` 75
Figura.35 App Inventor 76
Figura.36 Caja De Proyectos Tipo H Modificada 77
Figura.37 Postes De Anclaje Para Placas Electrónicas 77
Figura.38 Placas Montadas Y Conexiones En Las Mismas 78
Figura.39 Prototipo Final 78
Figura.40 Aplicación Provista En El Cd 79
Figura.41 Ajustes Android 80
Figura.42 Aplicación En Gestor De Archivos Android 81
Figura.43 Instalación De La Aplicación 82
Figura.44 Pantalla Inicial De La Aplicación 83
Figura.45 Pantalla Principal De Aplicación 84
Figura.46 Dispositivos Bluetooth 85
Figura.47 Prueba Datos A Bordo, Chevrolet Aveo 88
Figura.48 Solicitud De Vector Y Número De Códigos De Falla En Chevrolet
Aveo 89
Figura.49 Prueba Datos A Bordo, Kia Sportage 90

XII
Figura.50 Forzado De Error Kia Sportage 91
Figura.51 Solicitud Vector Y Número De Errores Kia Sportage 92
Figura.52 Solicitud Scanner A, Kia Sportage 92
Figura.53 Borrar DTC Kia Sportage 93
Figura.54 Prueba Datos A Bordo, Ford Ecosport 94
Figura.55 Forzado De Error Ford Ecosport 95
Figura.56 Solicitud Vector Y Número De Errores Ford Ecosport 96
Figura.57 Solicitud Scanner A, Ford Ecosport 96
Figura.58 Borrar DTC Ford Ecosport 97

XIII
ÍNDICE DE TABLAS
Tabla.1 Distribución De Pines En OBDII 7
Tabla.2 Voltaje Vs Porcentaje De Apertura (TPS) 27
Tabla.3 Resistencia Vs Porcentaje De Apertura (TPS) 28
Tabla.4 Características Eléctricas Elm327 32
Tabla.5 Comandos Generales At Elm327 34
Tabla.6 Comandos OBDII Elm327 36
Tabla.7 Tabla De Conversión 37
Tabla.8 Comandos Específicos Para J1850 37
Tabla.9 Comandos Específicos Para ISO 38
Tabla.10 Comandos Específicos Para CAN 38
Tabla.11 Comandos Específicos Para J1939 39
Tabla.12 Tabla De Interpretación De DTC 48
Tabla.13 Estándares Más Utilizados En Comunicación Interna Del Vehículo
62
Tabla.14 Distribución De Pines Mcp255174 72

XIV
RESUMEN
Se diseñó y construyó un scanner automotriz con la capacidad de obtener
códigos de diagnóstico en vehículos indistintamente del modelo o el fabricante
de los mismos. Abarcando todos las variedades dentro de los vehículos
incluyendo camionetas, autos, sedan hatchback, o SUV sin importar la
cilindrada de los mismos o disposición del motor.
El presente trabajo cumplió con requisitos ergonómicos, técnicos y de
seguridad con el fin de que las pruebas que se realicen con el presente
proyecto sean cómodas y brinden resultados fiables, con este trabajo los
alumnos de Ingeniería Automotriz de la Universidad Tecnológica Equinoccial
lograran diagnosticar con mayor facilidad y sin necesitad de un libro de códigos
los vehículos y después de reparar los mismos incluso se podrá realizar el
reset de los códigos de falla desde su teléfono Android.
Facilitando la obtención de conocimientos en lo que a diagnostico automotriz,
y el uso del scanner automotriz se refiere; fortaleciendo ampliamente el
conocimiento teórico obtenido en las aulas con conocimiento práctico, de
modo que este scanner aparte de ser útil en el diagnostico será úti l en la
formación profesional de los alumnos de la carrera de Ingeniería Automotriz
dado que la práctica brinda beneficios y conocimientos que prácticamente son
imposibles de obtener dentro de una aula de clases.
Este scanner automotriz se realizó mediante la programación de una tarjeta
con microcontrolador, lo que permitió obtener directamente la falla en lugar de
código de diagnóstico correspondiente facilitando ampliamente la detección
de la falla y obviamente el proceso de reparación, es decir este scanner
automotriz aparte de que cumplió con la función de herramienta cumplió la
función de información, dos pilares que son valiosos y útiles en la carrera de
Ingeniería Automotriz.
XV
En el proceso del desarrollo, diseño y construcción del presente scanner se
realizaron diversas pruebas con diversos fallos generados intencionalmente
en varios vehículos, logrando resultados fiables en todas y cada una de las
pruebas por lo que se puede aseverar que scanner automotriz funciona en
cada variedad de los vehículos.
Con respecto al mantenimiento del presente se debe considerar el
mantenimiento de la batería del vehículo, y de la toma de 12v del interior del
vehículo. Aunque por otro lado cabe recalcar que es posible el uso de fuentes
externas tanto para el puerto USB como para el Jack de alimentación es decir
que podemos alimentar al mismo desde un tomacorriente, desde un puerto
USB o desde el vehículo.
XVI
ABSTRACT
I designed an automotive scanner that was built with the ability to obtain
diagnostic codes in vehicles. Encompassing all varieties of vehicles including
sedan, hatchback, even SUV vehicles. And you don’t have to consider the
engine or any other factor, the only one factor to consider is that the vehicle
has to have an OBDII port.
This work meets ergonomic requirements , technical and security in order that
the tests made with this project are comfortable and provide reliable results ,
with this prototype Automotive Engineering Technology University Equinoccial
students are able to diagnosing more easily and without needing a codebook
vehicles even you can do the reset of the trouble codes.
Facilitating the apprehension of knowledge when it comes to automotive
diagnostics, automotive and scanner usage refers broadly strengthen the
theoretical knowledge gained in the classroom with the knowledge obtained in
the practice, so this scanner apart from being useful in the diagnosis will be
useful in training student 's career since automotive engineering practice and
knowledge provides benefits that are virtually impossible to get inside a
classroom.
This automotive scanner will be made by programming a card with
microcontroller, providing directly the fault rather than diagnosis code
corresponding widely facilitating the detection of the fault and obviously the
repair process, if the automotive scanner apart from fulfilling the role of tool
serves to information, two pillars that are valuable and useful in the automotive
engineering career .
In the process of development, design and construction of this scanner several
tests were performed with various faults generated intentionally shot several

XVII
vehicles achieving reliable results each and every test so it can be stated that
automotive scanner works in every variety of vehicles.
With respect to the maintenance of this you should consider keeping the
vehicle's battery , and the 12v socket inside the .but you can use external
alimentation for the Arduino device.

1. INTRODUCCIÓN

2
En la actualidad, los vehículos poseen un sin número de aplicaciones tales
como: actividades de exploración terrestre, manipulación y transporte de
material peligroso, transporte, o en la industria petrolera, minera, agricultura,
construcción e incluso en medicina.
La electrónica automotriz, es una de las áreas más complejas y completas de
la ingeniería, en razón de que involucra distintas disciplinas entre ellas: la
mecánica, la electrónica, teoría de control, programación y procesamiento de
señales, lo cual la convierte en uno de los ejemplos más claros de aplicación
de la Ingeniería Automotriz.
En virtud de los avances tecnológicos, que se han desarrollado en las últimas
décadas, se pueden diferenciar avances en diagnóstico automotriz: los
scanner y los osciloscopios.
Ambos tipos de sistemas poseen cosas en común, cuando de su estudio se
trata, debido a que requieren algoritmos de control necesarios para poder
realizar una tarea dada, complementando a esto los distintos dispositivos que
requiere el mismo para que se le pueda dotar de cierta inteligencia para
cumplir dichas tareas.
De modo que con el presente trabajo se busca incursionar en la investigación
y desarrollo en este campo dentro de la industria automotriz en el país y en la
universidad.
La industria automotriz se ha visto envuelta en un avance tecnológico sin
precedentes, por lo cual el diagnóstico empírico es obsoleto y hasta cierto
modo poco útil, de modo que se plantea la realización, estudio y desarrollo de
un scanner automotriz el mismo que será programado y visualizado vía
Android dada la facilidad de uso que posee este sistema operativo.
3
Logrando así una incursión tecnológica en nuestro ámbito a bajo costo, los
principales beneficiarios vendrían a ser tanto clientes como ingenieros y
artesanos en el campo automotriz.
Cabe recalcar que a lo largo del presente trabajo previo a la obtención del
título, se han encontrado varias limitaciones, como también la posibilidad de
la ampliación del tema, es decir la extensión del presente trabajo, las
limitaciones que se han encontrado están fundamentadas en los protocolos
soportados, cualquier protocolo que no se encuentre especificado en el
presente trabajo no es compatible con el microcontrolador ELM 327, de modo
que si un vehículo posee dicho protocolo en su ECU, no es viable el monitoreo
de datos en dicho vehículo.
Pero por el otro lado se ha logrado expandir el tema, logrando abarcar una,
mayor cantidad de marcas y modelos, de modo que en lugar de limitar a la
marca Volkswagen y al modelo GOL, se ha conseguido el desarrollo y diseño
de un escáner multimarca, compatible con muchos vehículos en el parque
automotor ecuatoriano.
Logrando tener acceso a datos a bordo, lectura de DTC, y posterior a la
reparación mecánica o electrónica del vehículo, es posible en borrado del
código de falla, cabe recalcar que el escáner automotriz posee una base de
datos de la mayoría de códigos de falla estándar.

2. MARCO TEÓRICO

5
2.1. OBD II
2.1.1. DEFINICIÓN
OBD II (On Board Diagnostics Second Generation) Diagnostico a Bordo,
segunda generación. Por facilidad y comprensión en el presente trabajo se
utilizaran las siglas OBD II.
OBD II es una mejora basado en Sistema OBD. Este sistema nos brinda
diagnóstico electrónico del vehículo y viene integrado en el mismo. Tiene la
capacidad de supervisar y evaluar las funciones del motor con el fin de evitar
exceso de emisiones generando códigos de fallas, a través de los sensores la
lógica del sistema OBDII tiene la capacidad de responder de diversas formas
dependiendo del estado de conducción, clima, temperatura, etc. La
información es recogida por los sensores que son varios y distribuidos por todo
el vehículo cada uno con una función diferente y específica y en base a esta
información generar una respuesta y lograr controlar las emisiones hacia el
medio ambiente, también posee un modo de conducción segura o modo de
emergencia en el cual el consumo de gasolina se reduce y el vehículo alcanza
velocidades de máximo treinta kilómetros por hora este modo se genera
cuando la PCM con tecnología OBDII detecta algún fallo grave en el vehículo,
y este modo provee seguridad a los ocupantes del vehículo y reduce las
emisiones durante la falla hasta llegar a un taller o centro de servicio del
vehículo.
2.1.2. PROTOCOLO
El socket o conector tipo OBDII tiene 16 pines, pero es bueno recalcar que no
se usa la totalidad de los mismos, de hecho en rigor estricto solo se usa uno
o dos de los diez y seis pines con el fin de transferir datos es decir establecer
comunicación con el scanner.
6
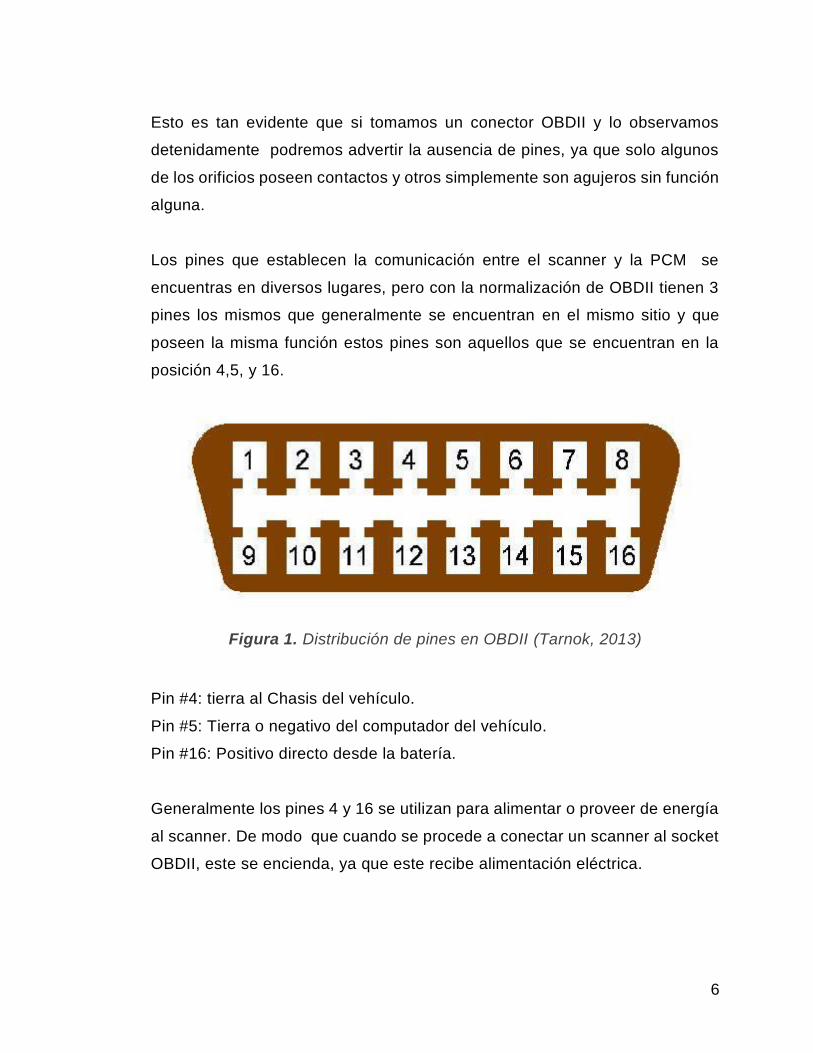
Esto es tan evidente que si tomamos un conector OBDII y lo observamos
detenidamente podremos advertir la ausencia de pines, ya que solo algunos
de los orificios poseen contactos y otros simplemente son agujeros sin función
alguna.
Los pines que establecen la comunicación entre el scanner y la PCM se
encuentras en diversos lugares, pero con la normalización de OBDII tienen 3
pines los mismos que generalmente se encuentran en el mismo sitio y que
poseen la misma función estos pines son aquellos que se encuentran en la
posición 4,5, y 16.
Figura 1. Distribución de pines en OBDII (Tarnok, 2013)
Pin #4: tierra al Chasis del vehículo.
Pin #5: Tierra o negativo del computador del vehículo.
Pin #16: Positivo directo desde la batería.
Generalmente los pines 4 y 16 se utilizan para alimentar o proveer de energía
al scanner. De modo que cuando se procede a conectar un scanner al socket
OBDII, este se encienda, ya que este recibe alimentación eléctrica.
7
En la actualidad los scanner automotrices poseen una fuente de alimentación
propia, pero del mismo modo esta alimentación se ve apoyada por la energía
que proporciona el conector de diagnóstico, en el uso de funciones especiales
tales como iluminación de pantalla.
Se considera que los demás pines, aparte de los pines 4, 5 y 16, corresponden
a pines de comunicación con el scanner, o pines para activar funciones
especiales, por ejemplo la inducción de un “Auto Diagnóstico”.
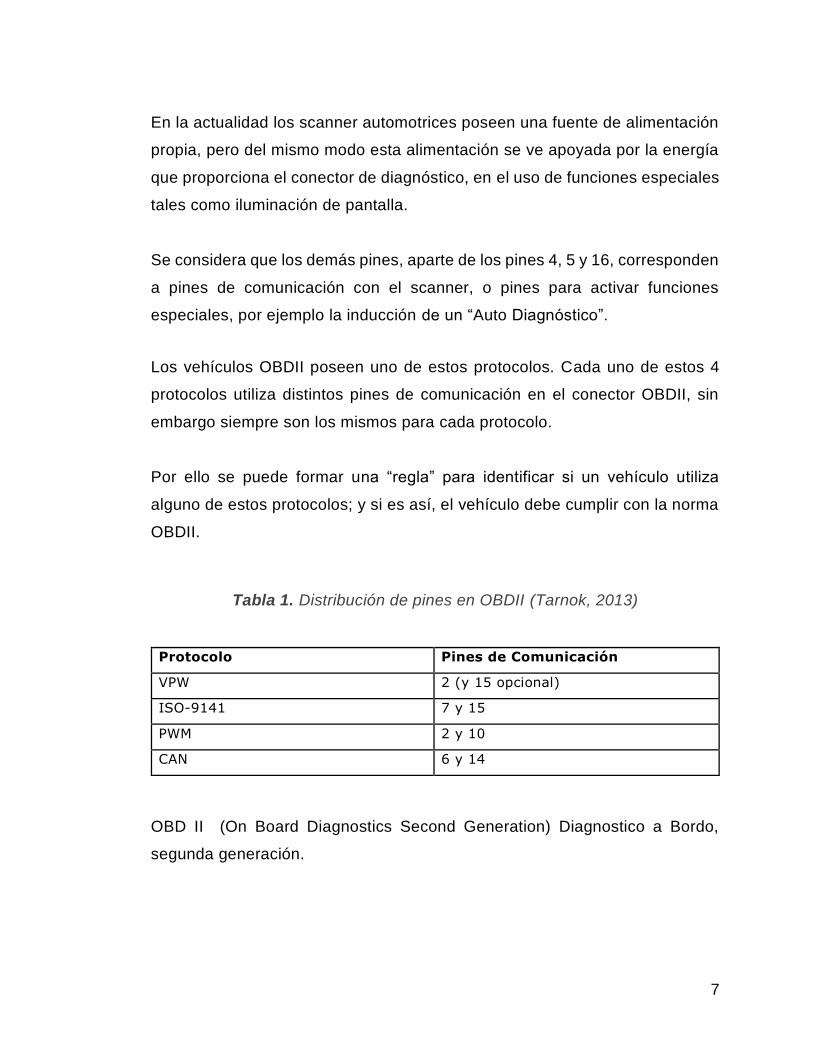
Los vehículos OBDII poseen uno de estos protocolos. Cada uno de estos 4
protocolos utiliza distintos pines de comunicación en el conector OBDII, sin
embargo siempre son los mismos para cada protocolo.
Por ello se puede formar una “regla” para identificar si un vehículo utiliza
alguno de estos protocolos; y si es así, el vehículo debe cumplir con la norma
OBDII.
Tabla 1. Distribución de pines en OBDII (Tarnok, 2013)
Protocolo Pines de Comunicación
VPW 2 (y 15 opcional)
ISO-9141 7 y 15
PWM 2 y 10
CAN 6 y 14
OBD II (On Board Diagnostics Second Generation) Diagnostico a Bordo,
segunda generación.

8
2.1.2.1. Tipos de códigos
Código B Sistemas de la carrocería.
Código C Sistemas del chasis.
Código U Comunicaciones de la red.
Código P Sistemas del tren de potencia [Motor y Transmisión].
2.2. ARDUINO
2.2.1. DEFINICIÓN
Arduino es una plataforma de electrónica abierta para la creación de prototipos
basada en software y hardware flexibles y fáciles de usar. Se creó para
artistas, diseñadores, aficionados y cualquiera interesado en crear entornos u
objetos interactivos. (2013).
Arduino toma información del entorno a través de sus pines de entrada de una
gran variedad de sensores y envía señales hacia actuadores como luces,
motores, etc.
El microcontrolador de las diversas placas Arduino se programa mediante un
lenguaje basado en Wiring el mismo que es conocido como lenguaje Arduino
y fue desarrollado por los mismos fabricantes de dicha placa.
El uso de Arduino en proyectos no obliga el uso de ordenador para la ejecución
del mismo aunque el posible el monitoreo de Arduino con distintos software
como Flash, MATLAB, LabView,etc.
9
2.2.2. PROTOCOLO DE COMUNICACIÓN
2.2.2.1. Serial
Este tipo de protocolo se usa con el fin de establecer comunicación entre
Arduino y un computador u otro dispositivo. Las placas Arduino en todas sus
variedades cuentan con por lo menos un puerto serial el mismo que también
es denominado UART o USART: Serial.
Se comunica a través de los pines digitales 0 (RX) y 1 (TX), así como con el
ordenador mediante USB. Por lo tanto, si se utiliza estas funcione, no pueden
ser usados los pines 0 y 1 como entrada o salida digital. (Arduino, 2013).
Se puede monitorear el puerto serial mediante el programa oficial de Arduino
llamado Arduino y así generar comunicación con la placa.
La placa Arduino Mega tiene tres puertos adicionales de serie: Serial1 en los
pines 19 (RX) y 18 (TX), Serial2 en los pines 17 (RX) y 16 (TX), Serial3 en los
pines 15 (RX) y 14 (TX). Para utilizar estos pines para comunicarse con el
ordenador personal, necesitarás un adaptador USB adicional a serie, ya que
no están conectados al adaptador USB-Serie de la placa Arduino Mega. Para
usarlos para comunicarse con un dispositivo serie externo TTL, conecta el pin
TX al pin RX del dispositivo, el RX al pin TX del dispositivo, y el GND de tu
Arduino Mega a masa del dispositivo. (No conectes estos pines directamente
a un puerto serie RS232, que operan a +/- 12V y esto puede dañar la placa
Arduino. (Arduino, 2013).
2.2.3. APLICACIONES
La placa Arduino se ha usado como base en millones de aplicaciones en el
mundo dado que es tecnología abierta y versátil:
Xoscillo: Es un osciloscopio el mismo que es de tecnología abierta y
podría ser de gran utilidad en el ámbito automotriz.
10
Equipo científico para diversas aplicaciones de carácter investigativo:
Arduinome: Es un controlador de gran utilidad en el ámbito musical
uniendo instrumentos, sintetizadores etc.
Humane Reader: Este es un proyecto cuyo costo es bajo el mismo que
provee señal de televisión logrando tener a disponibilidad contenidos
de hasta 5000 archivos de video.
The Humane PC: Es un simulador de computadora u ordenador el
mismo que funciona usando como núcleo una placa Arduino y usa un
monitor de tv y un teclado de computadora de escritorio.
Ardupilot: Es un proyecto basado en Arduino el mismo que brinda
hardware y software para aeronaves no tripuladas.
ArduinoPhone: Es un teléfono celular basado en Arduino siendo este el
corazón del mismo.
2.3. CABLE DE INTERFAZ USB A OBD II
2.3.1. PROTOCOLO DE COMUNICACIÓN
Existen varios protocolos de comunicación del sistema OBDII para
comunicarse con los distintos scanner en el mundo y del mismo modo
con el scanner que se fabricará.
Los fabricantes es decir cada uno de ellos tiene su propio protocolo de
comunicación, cada marca ha escogido uno de ellos y todos los
vehículos de esa marca poseen el mismo protocolo de modo que es
difícil o complicado saber con qué protocolo se comunica nuestro auto.
11
2.3.2. CLASIFICACIÓN DE PROTOCOLOS DE COMUNICACIÓN
ISO 9141-2 este tipo de protocolo es usado en vehículos Europeos,
Asiáticos y Chrysler con variantes (Key Word Protocol es la Palabra
Clave).
SAE J1850 VPW que significa Ancho de Pulso Variable (Variable
Pulse Width) este protocolo es utilizado por General Motors USA
(General Motors).
SAE J1850 PWM que indica Modulación Ancho de Pulso (Pulse
Width Modulatión) este protocolo lo usa Ford USA.
KWP 1281 y KWP 2000 utilizado por el grupo VAG.
ISO 14230 que lo utiliza Renault.
2.3.3. VAG-COM Y SU USO
El OBD-II estas siglas corresponden a un protocolo tanto de
diagnóstico en el que incluyen varios protocolos de comunicación
este protocolo fue exigido por el Gobierno de EEUU cuya función
primordial es diagnosticar con respecto a las emisiones. El programa
basado en OBD-II funciona con variedad de marcas de automóviles,
mientras el VAG-COM usa un protocolo el mismo que es propiedad
de Volkswagen; funciona con VW, Audi, SEAT y Skoda. A pesar de
que se puede usar un programa de diagnóstico de OBD-II en todos
los automóviles fabricados a partir de 1996 es decir que sean
compatibles con OBD-II, el programa de OBD-II sólo va a generar
comunicación con el motor y en parte con la transmisión automática,
mas no con los demás sistemas electrónicos que posee el vehículo.
Es decir se necesitan más protocolos de comunicación incluidos en
el scanner o la programación del mismo con el fin de obtener los
códigos en Volkswagen se usa el protocolo VAG-COM.

12
2.4. COMUNICACIÓN BLUETOOTH
2.4.1. BLUETOOTH
Es conocido como Bluetooth el protocolo de comunicaciones el cual
fue diseñado especialmente para dispositivos que posean un bajo
consumo, que no requieran un gran alcance de emisión y basados
en emisión y recepción de bajo costo.
La tecnología Bluetooth es una tecnología basada en las redes e
inalámbricas (WPAN) las misma que nos brinda la posibilidad de
transmitir datos de manera inalámbrica mediante un enlace de
radiofrecuencia entre varios dispositivos en una banda ISM de dos
punto cuatro GHz (2,4 GHz).
2.4.2. OBJETIVOS
o Hacer más sencilla la comunicación entre equipos fijos y móviles.
o Eliminar cables y conexiones para generar comodidad y armonía
visual.
o Brindar la oportunidad de generar pequeñas redes sin la
presencia de cables con el fin de sincronizar datos entre equipos
personales.
2.4.3. CLASIFICACIÓN
Siempre que los dispositivos estén próximos es decir dentro de
alcance los dispositivos que poseen este protocolo de comunicación
pueden comunicarse entre ellos. Las comunicaciones son
realizadas por medio de radiofrecuencia lo que posibilita que los

13
elementos a conectarse no se ven obligados a estar alineados
incluso pueden estar separados por muros siempre y cuando la
potencia de transmisión sea suficiente. Estos dispositivos se
clasifican en base a su potencia de transmisión como "Clase 1",
"Clase 2" o "Clase 3" y cabe recalcar que son compatibles entre sí.
Figura 2. Clasificación de Bluetooth (hetpro, 2014)
2.5. VISUALIZACIÓN DE DATOS
2.5.1. VISUALIZACIÓN EN ENTORNO DE WINDOWS
2.5.1.1. Monitor serial Arduino
La comunicación del computador con los diversos microcontroladores es de
suma importancia, debido a esto se ha incorporado un módulo el mismo que
posee propiedades necesarias para el intercambio de la información.
Este módulo es identificado como USART (Universal Synchronous
Asynchronous Receiver Transmitter) y es de suma importancia para el
presente proyecto. El módulo USART posee compatibilidad con el protocolo
de comunicación RS232 el mismo que es muy utilizado en laptops.

14
Los modos de operación disponibles son los siguientes:
Asincrónico (full-dúplex).
Sincrónico-Maestro (half-dúplex).
Sincrónico-Esclavo (half-dúplex).
2.5.1.2. Protocolo RS232
Este protocolo es ampliamente conocido en los ordenadores personales es un
protocolo de comunicación, este protocolo es usado por los puertos COM del
computador. Los puertos físicos tienen acceso atreves de conectores DB-25 o
DB9, machos y hembras y con el avance de la tecnología a través de los
puertos usb disponibles en cualquier computador. La norma RS232 se
estableció para comunicar un computador con un modem.
2.6. VISUALIZACIÓN EN ANDROID
2.6.1. ANDROID
Android es un sistema operativo para dispositivos móviles basado en el núcleo
Linux. Inicialmente fue desarrollado por Google y luego por la Open Handset
Alliance (liderada por la propia Google). La presentación de la plataforma
Android se realizó el 5 de noviembre de 2007 junto con la fundación Open
Handset Alliance, un consorcio de 48 compañías de hardware, software y
telecomunicaciones comprometidas a la promoción de estándares abiertos
para dispositivos móviles.
Esta plataforma permite el desarrollo de aplicaciones por terceros (personas
ajenas a Google). Los desarrolladores deben escribir código gestionado en el
lenguaje de programación Java a través de la SDK que proporciona Google.
Una alternativa es el uso de la NDK (Native Development Kit) de Google para
hacer el desarrollo en el C en código nativo.
15
2.6.2. CARACTERÍSTICAS.
Framework de aplicaciones: permite reusar y reemplazar
componentes.
Máquina virtual Dalvik: Optimizada para dispositivos móviles.
Navegador integrado: Basado en el motor de código abierto
WebKit.
Gráficos optimizados, con una biblioteca de gráficos 2D; gráficos
3D basado en la especificación OpenGL ES 1.0 (aceleración por
hardware opcional).
SQLite para almacenamiento de datos estructurados.
Soporte para medios con formatos comunes de audio, vídeo e
imágenes planas (MPEG4, H.264, MP3, OGG, AAC, AMR, JPG,
PNG, GIF).
Telefonía GSM (dependiente del hardware).
Bluetooth, EDGE, 3G, y WiFi (dependiente del hardware).
Cámara, GPS, brújula, y acelerómetro (dependiente del
hardware).
Ambiente rico de desarrollo incluyendo un emulador de
dispositivo, herramientas para depurar, perfiles de memoria y
rendimiento, y un complemento para el IDE Eclipse.
Pantalla táctil.
Android Market permite que los desarrolladores pongan sus
aplicaciones, gratuitas o de pago, en el mercado a través de esta
aplicación accesible desde todos los teléfonos con Android.
(Castellanos, 2014)
La finalidad de uso de este sistema operativo es la realización de una
visualización completa la misma que se puede realizar tanto en Tablet como
16
Smarthphones, dado que los mismos poseen o cuentan con conexión
inalámbrica Bluetooth, logrando así la eliminación de cables en lo que a
visualización respecta.
2.7. SENSORES
2.7.1. DEFINICIÓN
Un sensor es un dispositivo el mismo que posee la capacidad de detectar
magnitudes que pueden ser físicas o químicas, y que son transformadas y
transmitidas como variables eléctricas, estas magnitudes físicas o químicas
son conocidas como variables de instrumentación.
Las variables de instrumentación pueden ser magnitudes como: temperatura,
intensidad, presión, movimiento, vibración, etc.
Esta información es enviada a la ECU en magnitudes eléctricas, como voltaje,
o resistencia, lo que permite que la ECU monitoree constantemente el
funcionamiento del vehículo variando así el comportamiento de los actuadores
de acuerdo a los datos recibidos de los sensores, estos datos son comparados
con patrones que la ECU tiene almacenado en su software.
2.7.2. TIPOS DE SENSORES EN EL VEHÍCULO
2.7.2.1. Sensores de Temperatura
DEFINICIÓN
Los sensores de temperatura en el vehículo por lo general son del tipo
termistor, es decir son sensores resistivos los mismos que varían la resistencia
con respecto a la temperatura, a menor temperatura mayor es la resistencia

17
que brindan de este modo se envía variaciones de voltaje a la ECU o PCM, lo
que representa acciones en los actuadores.
2.7.2.2. Sensores de presión
DEFINICIÓN
Estos sensores miden presión directamente, a través de la deformación de
una membrana o por un sensor de fuerza, lo que quiere decir que mientras
mayor sea la presión en la membrana mayor será el voltaje, y en el vehículo
esto se refleja en que mientras mayor número de RPM tenemos Mayor es el
voltaje.
2.7.2.3. Sensores de velocidad
DEFINICIÓN
Son captadores magnéticos es decir funcionan por medio de la generación de
voltaje cuando el mismo gira, es decir genera corriente alterna la misma que
es interpretada como una señal por la PCM mientras más rápido gire mayor
es el voltaje y la frecuencia.
2.7.2.4. Sensores de golpeteo, sonido o ruido
DEFINICIÓN
Estos sensores son del tipo piezoeléctrico, es decir que generan voltaje a
través de golpes o deformaciones que sufran estos sensores, son hechos de
cuarzo que es un material que posee las propiedades antes mencionadas, del
mismo modo las variaciones de voltaje que presenten o generen son enviadas
a la PCM y esta las interpreta y da respuesta a través de los actuadores.
18
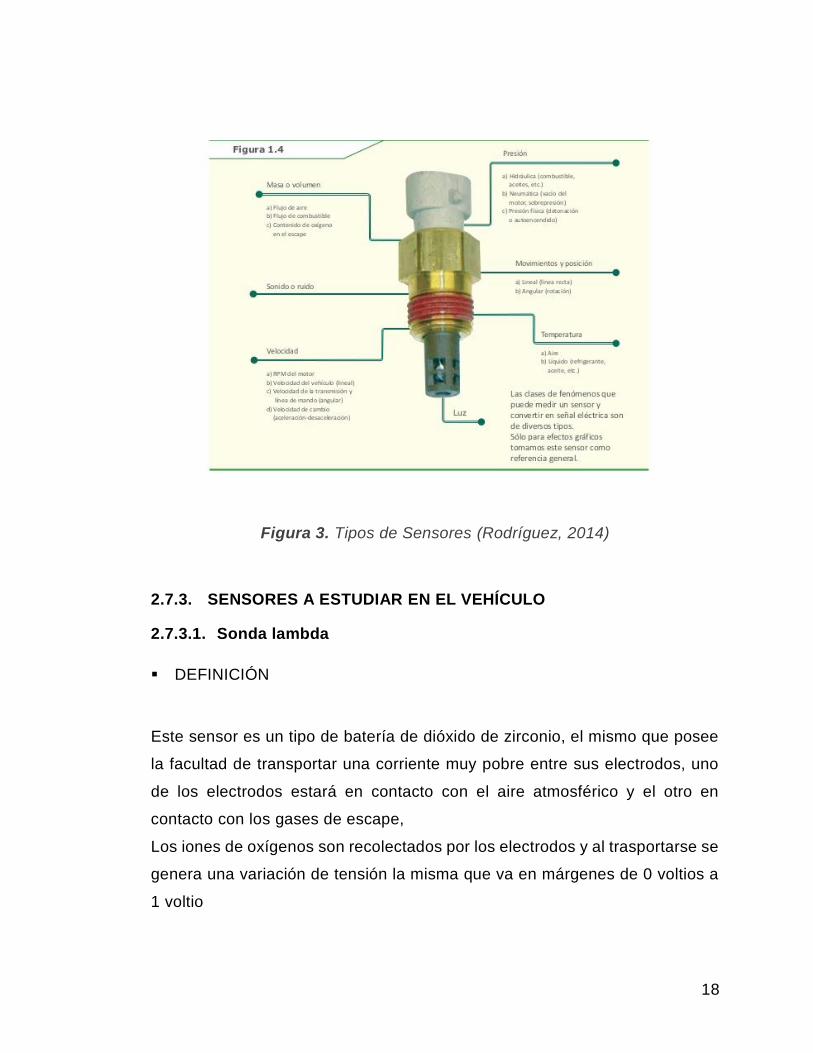
Figura 3. Tipos de Sensores (Rodríguez, 2014)
2.7.3. SENSORES A ESTUDIAR EN EL VEHÍCULO
2.7.3.1. Sonda lambda
DEFINICIÓN
Este sensor es un tipo de batería de dióxido de zirconio, el mismo que posee
la facultad de transportar una corriente muy pobre entre sus electrodos, uno
de los electrodos estará en contacto con el aire atmosférico y el otro en
contacto con los gases de escape,
Los iones de oxígenos son recolectados por los electrodos y al trasportarse se
genera una variación de tensión la misma que va en márgenes de 0 voltios a
1 voltio
19
FUNCIONAMIENTO
Este sensor es el encargado de verificar la cantidad de oxígeno en los gases
del escape, censa por medio de una reacción química.
El contenido de O2 en los gases de escape en relación con el aire de
referencia producen una tensión eléctrica entre ambas superficies.
Esta tensión puede ser, con una mezcla rica (lambda <1) de 800 a 1000 mV
(0.8 a 1.0 voltios) con una mezcla pobre (Lambda >1), la tensión estaría en
valores de 100 mV (0.01 Voltios), el margen cuando se da una variación entre
mezcla rica y pobre, esta entre 450 y 500 mV (0.45 a 0.50 Voltios).
UBICACIÓN
El sensor se encuentra ubicado en el tubo de escape inmediatamente después
del múltiple.
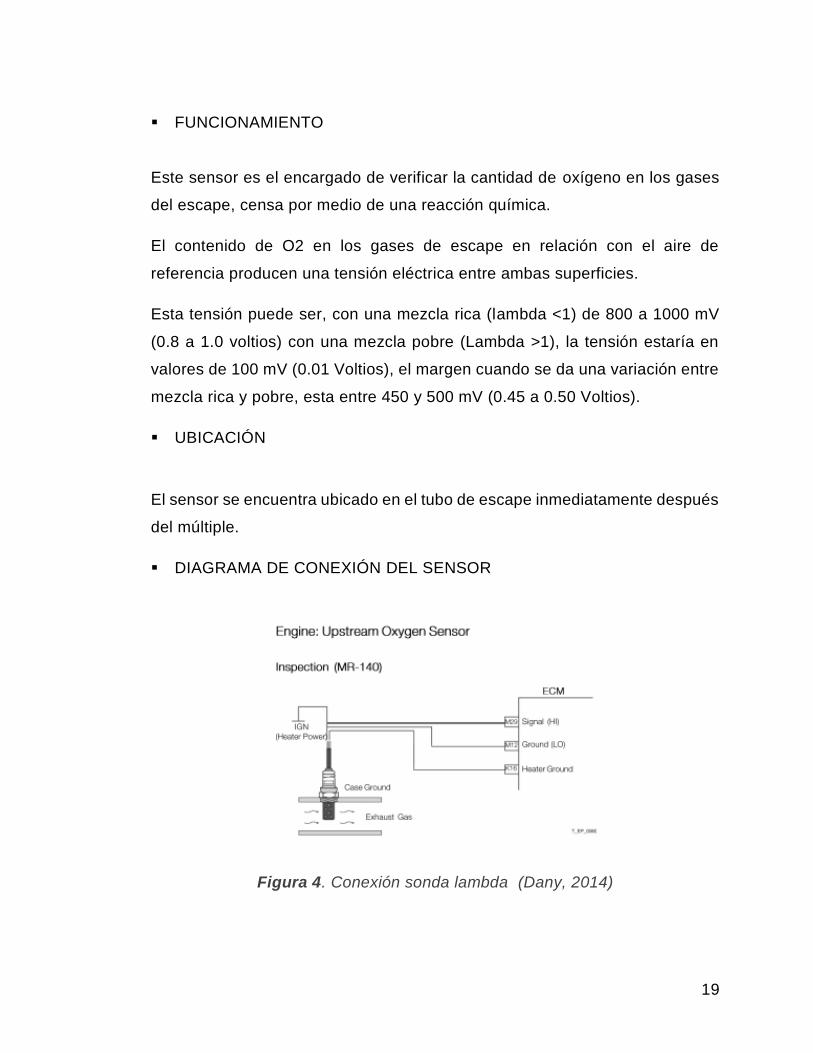
DIAGRAMA DE CONEXIÓN DEL SENSOR
Figura 4. Conexión sonda lambda (Dany, 2014)

20
ONDA EN EL OSCILOSCOPIO
Figura 5. Onda sonda lambda (Andrade F. , 2011)
2.7.3.2. Sensor de temperatura de refrigerante
DEFINICIÓN
Este sensor es un termistor, el mismo que mide los cambios de temperatura
que se generan en el motor basándose en la temperatura del refrigerante, este
sensor es vital para acciones que toman los actuadores como los inyectores,
o para la distribución variable, el tiempo de inyección, etc.
FUNCIONAMIENTO
Es un sensor de tipo termistor es decir varían su voltaje y resistencia en
función de su temperatura. A medida que la temperatura va aumentando, la
resistencia y el voltaje en el sensor disminuyen.

21
La computadora (ECM) toma como referencia los valores del voltaje para
activar o desactivar al bulbo o directamente el electro-ventilador.
Un mal funcionamiento en este sensor, puede ser la causa de rechazo en
Coorpaire.
UBICACIÓN
El sensor se encuentra ubicado en las cañerías del refrigerante es decir se lo
puede encontrar en el sistema de refrigeración entre el retorno del motor y el
radiador, en contacto pleno con el líquido refrigerante.
DIAGRAMA DE CONEXIÓN DEL SENSOR
Figura 6. Onda sonda lambda (Celis, 2013)

22
ONDA EN EL OSCILOSCOPIO
Figura 7. Onda ECT (Andrade F. , 2011)
2.7.3.3. Sensor de golpeteo (KS)
DEFINICIÓN
El sensor de golpeteo es un sensor que se encuentra ubicado en el bloque del
motor, este es un generador de voltaje el mismo que se encarga de controlar
las vibraciones anormales que puedan generarse en el motor, es el encargado
de regular el encendido generando así menos vibración mejor potencia y
menor consumo, un combustible con un bajo grado de octanaje generaría
detonación.
FUNCIONAMIENTO
Este sensor está conformado por un elemento de piezoeléctrico, que chequea
la vibración del bloque de cilindros enviando esta señal a la PCM.
La ECM identifica así la frecuencia recibida y gracias a esto le es posible
controlar el tiempo de la ignición como así también la cantidad de inyección
requerida reducir el golpeteo.

23
UBICACIÓN
Este sensor se encuentra ubicado en la parte central del block, en un motor
en v tendría un sensor a cada lado.
Figura 8. Ubicación del KS (e-auto.com.mx, 2014)
DIAGRAMA CONEXIÓN DEL SENSOR
Figura 9. Conexión del KS (e-auto.com.mx, 2014)
24
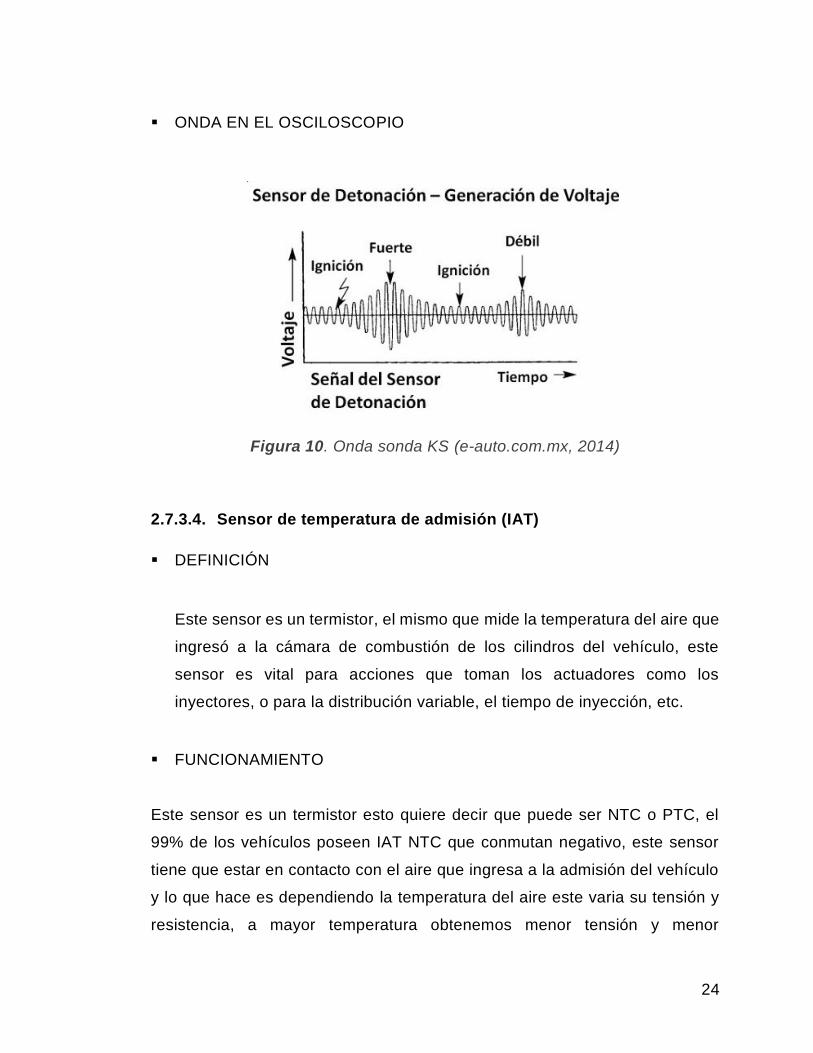
ONDA EN EL OSCILOSCOPIO
Figura 10. Onda sonda KS (e-auto.com.mx, 2014)
2.7.3.4. Sensor de temperatura de admisión (IAT)
DEFINICIÓN
Este sensor es un termistor, el mismo que mide la temperatura del aire que
ingresó a la cámara de combustión de los cilindros del vehículo, este
sensor es vital para acciones que toman los actuadores como los
inyectores, o para la distribución variable, el tiempo de inyección, etc.
FUNCIONAMIENTO
Este sensor es un termistor esto quiere decir que puede ser NTC o PTC, el
99% de los vehículos poseen IAT NTC que conmutan negativo, este sensor
tiene que estar en contacto con el aire que ingresa a la admisión del vehículo
y lo que hace es dependiendo la temperatura del aire este varia su tensión y
resistencia, a mayor temperatura obtenemos menor tensión y menor
25
resistencia, así también a menor temperatura mayor tensión y resistencia. Y
lo que hace es enviar la información a la PCM para que ajuste la mezcla de
combustible con mayor precisión.
UBICACIÓN
El sensor se encuentra ubicado antes de la aleta de aceleración y después
del filtro de aire, cerca del depurador.
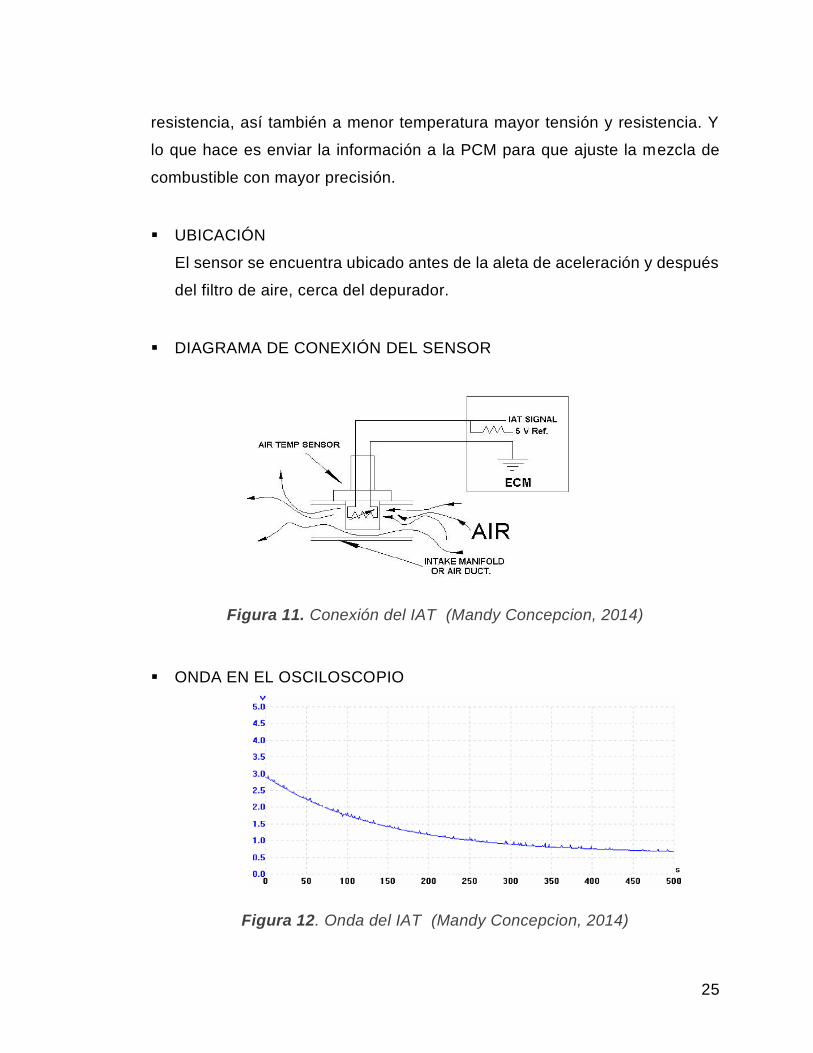
DIAGRAMA DE CONEXIÓN DEL SENSOR
Figura 11. Conexión del IAT (Mandy Concepcion, 2014)
ONDA EN EL OSCILOSCOPIO
Figura 12. Onda del IAT (Mandy Concepcion, 2014)

26
2.7.3.5. Sensor de aceleración (TPS)
DEFINICIÓN
Este sensor es de tipo potenciómetro es decir que varía su resistencia de
acuerdo a su posición, se encuentra ubicado sobre la mariposa, tienen 3
cables, el cursor recorre la pista pudiéndose conocer según la tensión
dicha la posición del cursor, su función es determinar la posición de la
mariposa enviando la información hacia la unidad de control.
FUNCIONAMIENTO
Este sensor es de tipo potenciómetro es decir que es una resistencia
variable de modo que mientras mayor sea el porcentaje de apertura de la
aleta de la mariposa mayor será tanto la resistencia como el voltaje la
función de este sensor es informar a la ECU la carga que se le está
solicitando al motor .
UBICACIÓN DEL SENSOR
El sensor se encuentra ubicado en la aleta de la aceleración de modo que
ira alojado en el lado opuesto de donde se aloja el cable del acelerador.
DIAGRAMA DE CONEXIÓN DEL SENSOR
Figura 13. Conexión del TPS (e-auto.com.mx, 2014)

27
ONDA EN EL OSCILOSCOPIO
Figura 14. Onda del TPS (Andrade F. , 2011)
TABLA VOLTAJE VS PORCENTAJE DE APERTURA
Tabla 2. Voltaje vs porcentaje de apertura (TPS) (Andrade F.
, 2011)
Voltaje % de apertura
4.38 100
4,10 90
3,73 80
3,39 70
3,18 60
2,75 50
2,30 40
1,96 30
1,38 20
1,24 10
0,78 0
28
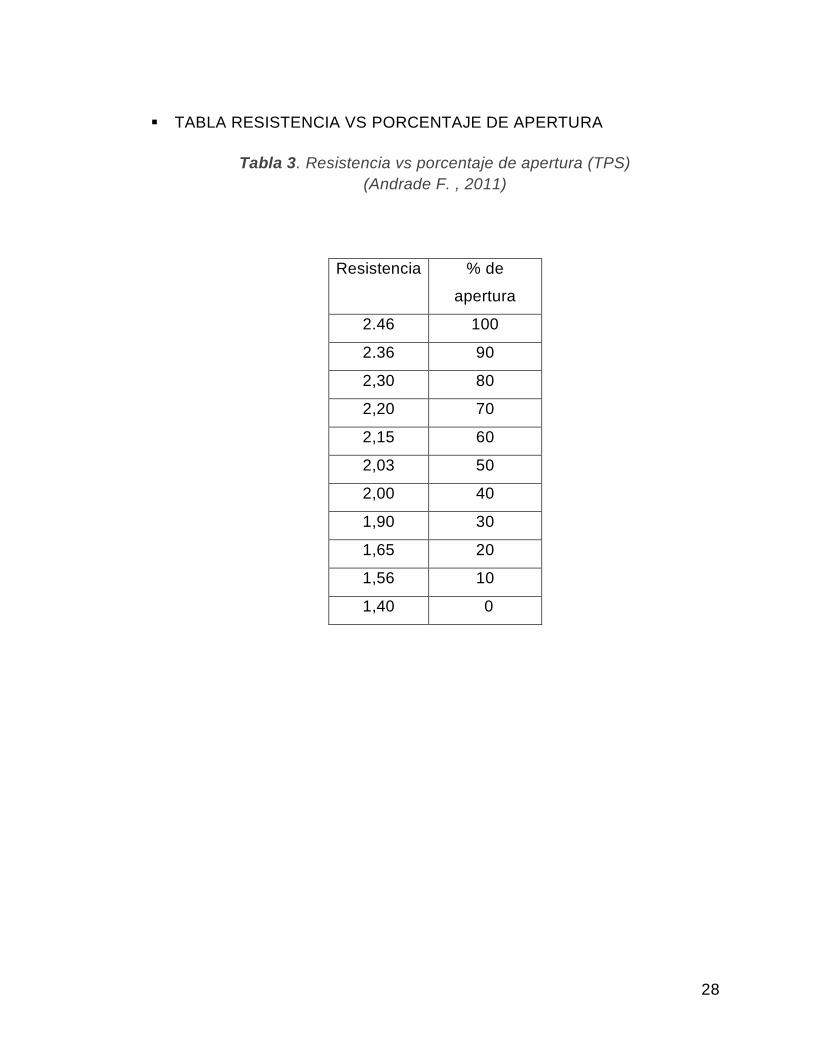
TABLA RESISTENCIA VS PORCENTAJE DE APERTURA
Tabla 3. Resistencia vs porcentaje de apertura (TPS)
(Andrade F. , 2011)
Resistencia % de
apertura
2.46 100
2.36 90
2,30 80
2,20 70
2,15 60
2,03 50
2,00 40
1,90 30
1,65 20
1,56 10
1,40 0
3. METODOLOGÍA

30
3.1. ADQUISICIÓN DE DATOS
3.1.1. ELM 327
En la actualidad prácticamente el cien por ciento de los vehículos, por
regulación y normativa, brindan la posibilidad de conectar un dispositivo de
diagnóstico sea un scanner automotriz o prototipos de diagnóstico del vehículo
desarrollados basándose en open source o hardware libre.
Los datos transferidos se basan en distintos protocolos y cabe recalcar que
ninguno de ellos nos brindara acceso a la información si lo que hacemos es
realizar una conexión directa entre el computador y el vehículo o el vehículo y
otro dispositivo inteligente.
3.1.2. DEFINICION
El ELM327 es un interpretador el mismo que está diseñado para ser utilizado
como un interpretador en la comunicación serial entre el OBDII (On – Board
Diagnostics) que posee el vehículo y el receptor en este caso el Arduino.
El ELM327 es capaz de detectar automáticamente 9 de los protocolos OBD
que hay en el mercado automotriz, provee soporte para comunicación de alta
velocidad, aparte de ser completamente modificable según las necesidades
requeridas por el programador.
3.1.3. APLICACIONES
Visualización de datos en tiempo real (pruebas de ruta).
Escaneo de DTC.
Borrado de DTC.
31
3.1.4. CARACTERISTICAS
Modo de inactividad.
Interfaz con comunicación serial RS232 (universal).
Totalmente configurable con comandos AT.
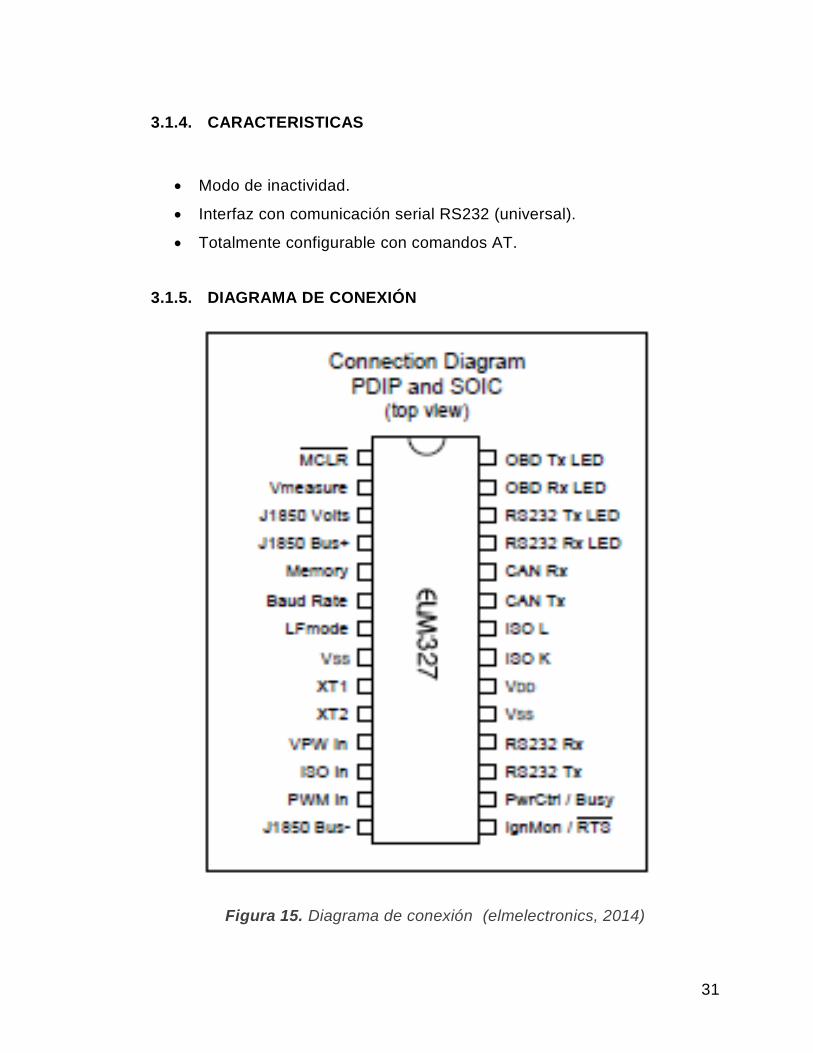
3.1.5. DIAGRAMA DE CONEXIÓN
Figura 15. Diagrama de conexión (elmelectronics, 2014)
32
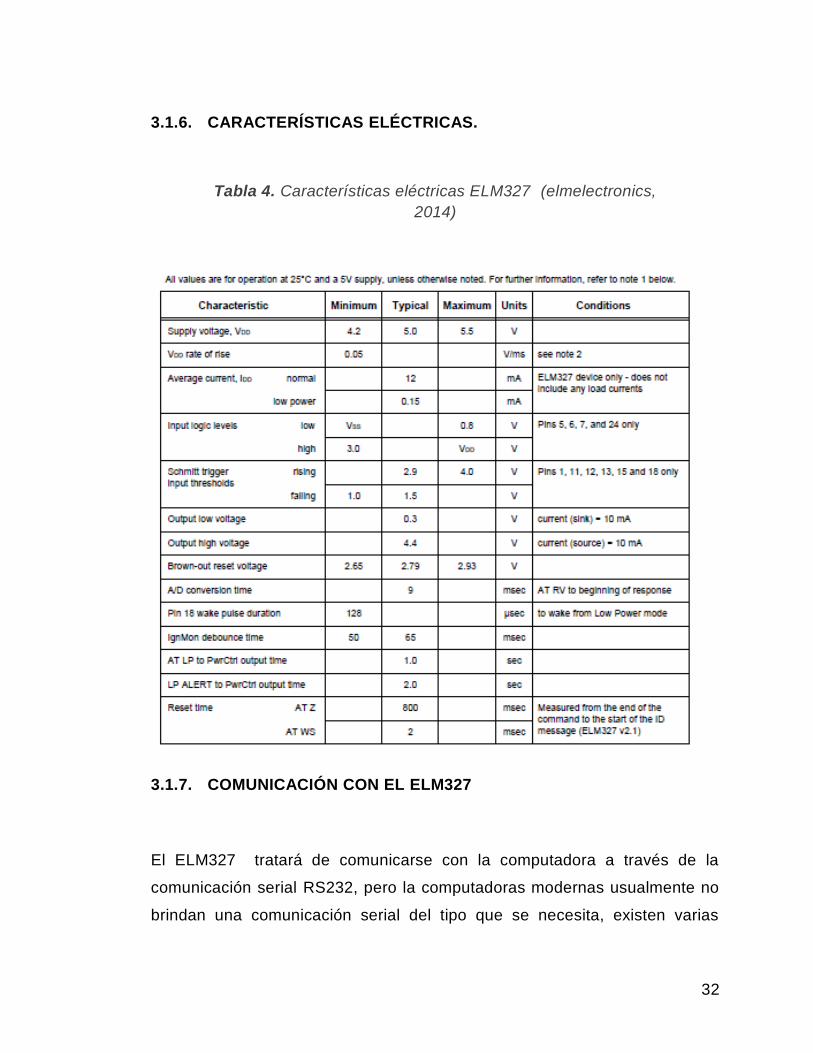
3.1.6. CARACTERÍSTICAS ELÉCTRICAS.
Tabla 4. Características eléctricas ELM327 (elmelectronics,
2014)
3.1.7. COMUNICACIÓN CON EL ELM327
El ELM327 tratará de comunicarse con la computadora a través de la
comunicación serial RS232, pero la computadoras modernas usualmente no
brindan una comunicación serial del tipo que se necesita, existen varias

33
maneras de generar una “comunicación serial del tipo virtual“ los dispositivos
más comunes son USB a DB9, pero en este caso dado que queremos realizar
la visualización es un dispositivo móvil la conexión física la realizará a través
de un Arduino DUE.
Independientemente de la manera física de realizar la conexión el ELM327
necesitará una manera para enviar y recibir datos, el método simple para
realizar esto es el uso de un programa que permita el monitoreo serial, tanto
de datos enviados como recibidos, el mismo que nos brinda la posibilidad de
enviar datos a la ECU.
Pero en este proyecto él envió de datos se realizará automáticamente a través
del Arduino y la orden del envió de datos se la dará desde el dispositivo móvil.
Cabe recalcar que si la conexión se la realiza de manera correcta los 4 leds
de la placa se energizaran indicando el envío y recepción de datos tanto con
el emisor (teléfono móvil) y el receptor (OBDII) y viceversa.
3.1.8. COMANDOS
3.1.8.1. Comandos AT
Muchos parámetros dentro del ELM327, pueden ser ajustados con el fin de
modificar su manera de responder, aunque estos parámetros no tienen la
necesidad de ser modificados si se ha logrado la comunicación con el
vehículo.
Estos comandos generalmente empiezan con las letras “A“ o “T“.
En la siguiente tabla se muestra un resumen de los códigos AT siendo estos
los más importantes.
Para ver la lista completa de comandos refiérase al anexo 4
34
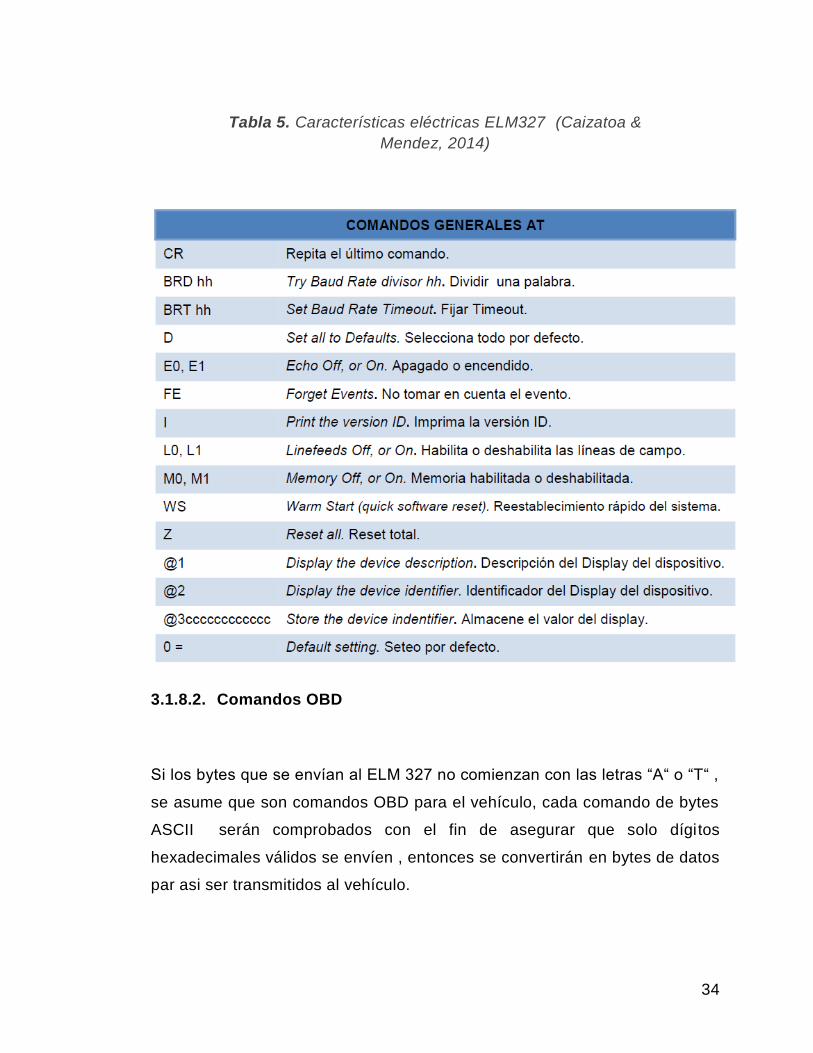
Tabla 5. Características eléctricas ELM327 (Caizatoa &
Mendez, 2014)
3.1.8.2. Comandos OBD
Si los bytes que se envían al ELM 327 no comienzan con las letras “A“ o “T“ ,
se asume que son comandos OBD para el vehículo, cada comando de bytes
ASCII serán comprobados con el fin de asegurar que solo dígitos
hexadecimales válidos se envíen , entonces se convertirán en bytes de datos
par asi ser transmitidos al vehículo.

35
Los Comandos OBD se envían en realidad al vehículo, incrustados en un
paquete de datos. La mayoría de las normas requieren de tres bytes de
cabecera y un byte de suma de comprobación de error, con cada mensaje del
OBD, y el ELM327 agrega estos bytes adicionales a su mandato de bytes.
Los valores iniciales (por defecto) para estos bytes adicionales son por lo
general apropiados para la mayoría de las solicitudes, la mayoría de los
comandos de OBD están compuestos por uno o dos bytes de longitud, pero
algunos pueden ser más largos.
El ELM327 limitará el número de bytes que se pueden enviar al máximo
número permitido por las normas (generalmente siete bytes o 14 dígitos
hexadecimales). Los intentos de enviar más bytes resultarán en un error - el
comando completo es entonces ignorado y como respuesta se tendrá un solo
signo de interrogación impreso. Los dígitos hexadecimales se utilizan para
todos los datos con el fin de generar un intercambio con el ELM327 porque es
el formato de datos utilizado usualmente en los estándares OBDII. La mayoría
de las solicitudes utilizan notación hexadecimal, y es el formato utilizado
usualmente para los resultados a mostrar.
Dado que los resultados o las respuestas del ELM327 vienen en hexadecimal,
finalmente se debe manipular los resultados de alguna manera (la
combinación de bytes y dividiendo por 4 para obtener rpm, dividiendo por 2
para obtener grados de avance, la conversión de temperaturas, etc.). Existe
una tabla de PID que son los que se envían a la ECU, y cada uno de ellos
cuenta con su respectiva formula.

36
Tabla 6. Tabla de comandos OBDII (Caizatoa & Mendez,
2014)

37
Tabla 7. Tabla de conversión (elmelectronics, 2014)
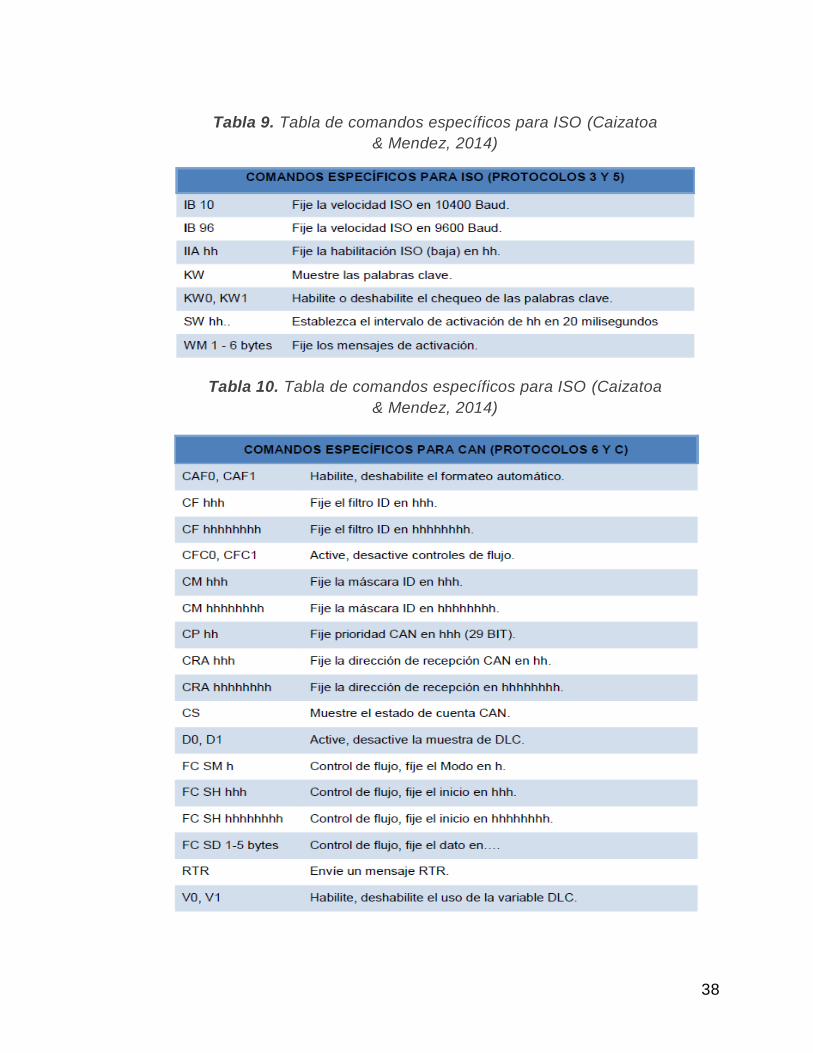
3.1.8.3. Comandos específicos para ISO, J1850 y CAN.
Son aquellos comandos que son exclusivos para configurar los protocolos
para ISO, J1850 Y CAN, estos códigos son exclusivos dadas las
características de dichos protocolos.
Tabla 8. Tabla de comandos específicos para J1850
(Caizatoa & Mendez, 2014)
.
38
Tabla 9. Tabla de comandos específicos para ISO (Caizatoa
& Mendez, 2014)
Tabla 10. Tabla de comandos específicos para ISO (Caizatoa
& Mendez, 2014)

39
Tabla 11. Tabla de comandos específicos para J1939
(Caizatoa & Mendez, 2014)
3.1.9. COMUNICÁNDOSE CON EL VEHÍCULO
Las normas requieren que cada comando OBD o solicitud que se envía al
vehículo debe cumplir con un formato. El primer byte enviado (conocido como
el 'modo') describe el tipo de datos que se solicita, mientras que el segundo
byte (y, posiblemente, un tercero o más) especifica la información real que se
requiere.
Los bytes que siguen después del byte "modo" se conoce como el
"identificación de parámetros "o bytes de número de PID "parameter
identification". Los modos y PIDs se describen en detalle en los documentos
tales como el SAE J1979, o las normas ISO 15031-5, y también puede ser
definido por los fabricantes de vehículos. La norma SAE J1979 define
actualmente diez posibles modos de prueba de diagnóstico, que son:
1. Mostrar datos actuales.
2. Mostrar datos congelados.
3. Mostrar los códigos error.
4. Borrar códigos de error.

40
5. Resultados a la prueba de sensores de oxígeno.
6. Resultados de prueba, no continuamente monitoreados.
7. Mostrar códigos de problemas 'pendientes'.
8. Modo de control especial.
9. Petición de Información del vehículo.
10. (0A) Solicitar los códigos de problemas permanentes.
Los vehículos no necesariamente deben soportar todos los modos, y dentro
de los modos, no están obligados a soportar todos los PID posibles (algunos
vehículos del primer OBD sólo admiten un número muy pequeño de ellos).
Dentro de cada modo, PID 00 está reservada para mostrar cuales PID son
compatibles con dicho modo. Modo 01, PID 00 debe ser compatible con todos
los vehículos y se puede acceder a ella de la siguiente manera.
Asegúrese de que su interfaz ELM327 en este caso la placa “SparkFun” está
correctamente conectada al vehículo, y energizada. La mayoría de los
vehículos no responderá sin la llave de encendido en la posición de “contacto”,
así que se debe girar el encendido del vehículo a la posición contacto, pero no
es necesario arrancar el motor. Si la placa no ha sido reconocida lo que se
debe hacer es resetear el ELM mediante el comando.
: > AT Z
Pero este reseteo se lo realizara automáticamente en este proyecto.
Verá el flash LED de la interfaz, y luego la placa responderá con el fin de
demostrar que la conexión se realizó correctamente. Ahora, se puede elegir
un protocolo con el que el ELM327 debe trabajar, pero por lo general es más
fácil sólo se tiene que seleccionar el protocolo '0', que hará que se detecte uno
automáticamente.
> AT SP 0

41
Eso es todo lo que se necesita hacer para preparar el ELM327 para la
comunicación con el vehículo.
Emitir el modo 01 PID 00 con el comando:
> 01 00
El ELM327 debería responder "searching" (buscando un protocolo), entonces
debería imprimir una serie de números, similares a estos:
41 00 BE 1F B8 10
El 41 significa una respuesta para la petición del modo 01 (01 + 40 = 41),
mientras que el segundo número (00) repite el número PID solicitado.
En el modo 02, la petición es contestada con un 42, el modo 03 con un 43, etc.
Los siguientes cuatro bytes (BE, 1F, B8, y 10) representan los datos
solicitados, en este caso muestra los PID que son compatibles con este modo
(1 = compatible, 0 = no). Aunque esta información no es muy útil, prueba que
la conexión funciona. Otro ejemplo es la solicitud al motor de la actual
temperatura del refrigerante (ECT). La temperatura del refrigerante es PID 05
de modo de 01, y se puede solicitar de la siguiente manera:
> 01 05 La respuesta será de la forma:
41 05 7B
El 41 05 muestra que se trata de una respuesta a una solicitud de Modo 1 para
el PID 05, mientras que la 7B son los datos deseados.
Convertir el 7B hexadecimal a decimal, uno obtiene 7 x 16 + 11 = 123. Esto
representa la corriente la temperatura en grados centígrados, pero con el cero
compensado para permitir temperaturas bajo cero, para convertir a la
temperatura real del refrigerante, es necesario restar 40 a partir del valor que
nos responde el ELM327.

42
En este caso, entonces, el la temperatura del refrigerante es 123-40 o 83 ° C.
Un último ejemplo muestra una petición para el motor rpm.
Esta es PID 0C en modo 01, se lo solicitaría así:
> 01 0C
Si el motor está en marcha, la respuesta podría ser:
41 0C 1A F8:
El valor devuelto (1A F8) es en realidad un número hexadecimal de dos bytes
que se debe convertir a un valor decimal para ser útil, al convertirlo, obtenemos
un valor de 6904, que parece ser un valor muy alto para las revoluciones del
motor.
Eso es porque se envía rpm en incrementos de 1/4 rpm! Para convertir a la
velocidad real del motor, tenemos que dividir el 6,904 para 4.
Un valor de 1726 rpm es mucho más razonable, cabe recalcar que se debe
tener en cuenta que estos ejemplos se solicitaron al vehículo sin tener en
cuenta el tipo de protocolo de OBD que el vehículo utiliza.
Esto es posible ya que el ELM327 se encarga del formato de datos y la
traducción, a menos se vayan a realizar funciones más avanzadas, en realidad
no hay necesidad de saber con qué protocolo cuente el vehículo siempre y
cuando este se encuentre dentro de los 9 protocolos que soporta el ELM327.
Los ejemplos anteriores muestran sólo una sola línea de respuesta para cada
solicitud, pero las respuestas a menudo constar de varios mensajes
separados, ya sea desde múltiples ECUs respondiendo o de una ECU cuyos
mensajes necesitan ser combinados para formar una respuesta. De todos
modos para poder adaptarse a este número variable de respuestas, el ELM327
normalmente espera a ver si alguno más está llegando.

43
Si no hay respuesta dentro de un cierto tiempo, se supone que la ECU ha
terminado su respuesta. Este mismo temporizador también se utiliza cuando
la espera de la primera respuesta, y si nunca llega, será impreso el mensaje
"NO DATA".
Hay una manera de acelerar la recuperación de información, si se conoce
cuántas respuestas serán enviadas.
Al decirle al ELM327 cuántas líneas de datos debe recibir, él sabe cuándo la
respuesta termina, por lo que no hay que pasar por el tiempo de espera final,
a la espera de datos que no van a venir.
Sólo se debe añadir un dígito hexadecimal después de la solicitud OBD de
bytes, este valor del dígito es el que proporciona el número máximo de
respuestas a obtener. Por ejemplo, si se sabe que sólo hay una respuesta que
viene solicitud de la temperatura del motor, se puede enviar:
> 01 05 1
El ELM327 responderá inmediatamente después de la obtención de sólo una
respuesta.
Esto puede ahorrar una considerable cantidad de tiempo, ya que el tiempo
predeterminado para el temporizador AT ST es 200 ms. (El ELM327 todavía
establece el temporizador después el envío de la solicitud, pero eso es sólo
en caso de que la única respuesta solicitada no llegue.). (elmelectronics, 2014)
Algunos protocolos (como J1850 PWM) requiere el reconocimiento del
ELM327 para cada mensaje enviado. Si se proporciona un número para las
respuestas que es demasiado pequeño, el ELM327 responderá demasiado
pronto, esto puede causar congestión en el bus, mientras que la ECU intenta
el envío varias veces para volver a enviar los mensajes que no fueron
reconocidos.

44
Por esto razón, se debe saber cuántas respuestas esperar antes de utilizar
esta función.
Como ejemplo, la solicitud para el número de identificación del vehículo (VIN)
este número es de 17 dígitos de largo, y por lo general toma 5 líneas de datos
para ser representado. Se obtiene con el modo 09, PID 02, y debe ser
solicitada con:
> 09 02
O con:
> 09 02 5
Se sabe que hay cinco líneas de datos que vienen si por error se envía 09 02
1, esto podría causar problemas.
Esta capacidad de especificar el número de respuestas se sumó con el
programador en mente, una rutina de interfaz puede determinar cuántas
respuestas esperar para una solicitud específica, y luego almacenar ese
información para su uso con las solicitudes posteriores. Ya que sabiendo el
número que se puede añadir a las peticiones, el tiempo de respuesta puede
ser optimizado. Para la obtención de códigos de problemas, los ahorros
realmente no resultan útiles, y es más fácil simplemente hacer una solicitud,
sin tener en cuenta cuántas líneas de respuesta se espera.
3.1.10. INICIACIÓN DEL BUS
Las normas tanto la ISO 9141-2 e ISO 14230-4 (KWP2000) requieren que el
bus OBD del vehículo sea 'inicializado' antes de que cualquier comunicación
puede tener lugar. La norma ISO 9141 permite sólo un lento proceso de
iniciación (de 2 a 3 segundos), mientras que ISO 14230 permite tanto un
método lento y una alternativa más rápida.
45
El ELM327 realizará esta iniciación del bus de manera automática, pero
generalmente no, hasta la necesidad del envió de una solicitud. Si la iniciación
del bus se produce durante una búsqueda automática, no se mostrara ningún
informe de estado, pero si se tiene la Opción de apagado automático (y está
configurado para los protocolos 3, 4, o 5), entonces se mostrara un mensaje
similar a este:
BUS INIT: ...
Los tres puntos sólo aparecen cuando un lento inicio proceso se lleva a cabo
una iniciación rápida no muestra los puntos.
Esto será seguido por la expresión 'OK' lo que indica que la inicialización fue
exitosa, o bien un mensaje de error para indicar que hay un problema. (El error
más común encontrado es el no girar la llave del vehículo a la posición
"Contacto" antes de intentar comunicarse con el vehículo).
Una vez que el bus se ha iniciado, las comunicaciones deben llevarse a cabo
con regularidad (por lo general al menos una vez cada cinco segundos), o el
bus volverá a un bajo consumo de energía y entrará Modo "inactivo" o "sleep".
Si no está enviando las solicitudes de datos con la suficiente frecuencia, el
ELM327 generará solicitudes para asegurarse de que el bus se mantiene
"despierto".
Nunca se verán las respuestas a dichas solicitudes, pero se verá el encendido
del LED de transmisión el mismo que titila periódicamente a medida que estas
solicitudes están siendo enviadas.
Por defecto, el ELM327 se asegura que estos "despertar" o mensajes
"ociosos" se envíen cada 3 segundos, pero esto se puede ajustar con el
comando AT SW.

46
El contenido del mensaje de activación también es programable por el usuario
con el comando AT WM, si se quisiera cambiarlo o modificarlo. Pero
generalmente esto no se realiza ya que el mensaje que viene por defecto
trabaja perfectamente con la mayoría de sistemas.
3.1.11. INTERPRETANDO LOS CÓDIGOS DE FALLA DEL VEHÍCULO
Probablemente el uso más común para ELM327 es la obtención de los
actuales códigos de diagnóstico o conocidos como (DTC). Mínimamente, esto
requiere que se realice la petición o solicitud de un modo 03, pero primero se
debe determinar cuántos códigos de problemas están actualmente
almacenados.
Esto se realiza con una petición de modo 01 PID 01 de la siguiente manera:
> 01 01
Una respuesta típica podría ser: 41 01 81 07 65 04 .El 41 01 significa una
respuesta a la solicitud, y el byte siguiente de datos (81) es el número de
problemas actual códigos. Como es lógico no existirán 81 (hexadecimal) o 129
(decimal) códigos de problemas actuales, si el vehículo está en absoluto
estado operacional.
Por lo que cabe recalcar que, este byte cumple una doble función, con el bit
más significativo siendo utilizado para indicar que la luz indicadora de mal
funcionamiento (MIL, o "Check Engine Luz ') se ha encendido por uno de los
códigos de este módulo (si hay más de uno), mientras que el otro 7 bits de
este byte proporcionan el número real los códigos de problemas almacenados
pero no exactamente los actuales sino también los congelados. Con el fin de
47
calcular el número de códigos almacenados cuando el MIL está encendida,
sólo hay que restar 128 (o 80 hex) a partir del número.
Es decir 81-80= 1 lo que indicaría que el vehículo posee un código de falla o
de error y este fue el que estableció el encendido del Check Engine.
Los bytes restantes en la respuesta proporcionan información sobre los tipos
de pruebas compatibles con ese módulo en particular. En este caso, sólo
habrá una línea a la respuesta, pero si existen códigos almacenados en otros
módulos, cada uno de ellos podría haber proporcionado una línea de
respuesta.
Aunque por lo general la respuesta siempre contara de un solo vector, es decir
una sola línea de respuesta.
El siguiente paso es solicitar los códigos de problemas reales con una petición
de modo 03 (no hay PID necesario):
> 03
La respuesta a obtener sería similar a esta:
43 01 33 00 00 00 00
El '43' en la respuesta anterior simplemente indica que esta es una respuesta
a una petición de modo 03.
Los otro 6 bytes en la respuesta tienen que ser leídos en pares para mostrar
los códigos de problemas (lo anterior debe ser interpretado de la siguiente
manera 0133, 0000, y 0000).
Se debe tener en cuenta que la respuesta ha sido rellenado con de 00 como
es requerido por la norma SAE para este modo, los 0000 no representan
actuales códigos de falla.

48
Como cuando se solicita el número de códigos almacenados, los bits más
significativos de cada código de error del vehículo, también contiene
información adicional.
Por comodidad y viabilidad es más lógico utilizar la tabla siguiente para
interpretar los bits adicionales en el primer dígito de la siguiente manera:
Tabla 12.- Tabla de Interpretación de DTC (elmelectronics,
2014)
Tomando el ejemplo de código de error (0201), el primer dígito (0) entonces
sería reemplazado por P0 y el 0201 se convertiría en P0201 (que es el código
para un 'falla en el circuito del inyector cilindro 1 ").

49
Se debe considerar que el protocolo de la norma ISO 15765-4 (CAN) es muy
similar, pero añade un byte de datos extra (en la segunda posición), que
muestran cuantos códigos de falla (DTC) existen. Para ofrecer algunos
ejemplos más, si se recibió el código D023, debería reemplazar la D con U1,
y el código de falla resultante sería U1023. Del mismo modo, si se recibe 1.152
en realidad el código de falla o error vendría a ser el P1152.
3.1.12. BORRANDO CÓDIGOS DE FALLA.
El ELM327 es capaz de borrar los códigos de falla en el diagnóstico del
vehículo, ya que esto sólo requiere la emisión de un comando de acceso al
modo 04. Las consecuencias deberían siempre ser tomadas en cuenta antes
de enviarlo, sin embargo, aparte de que el indicador del "Check Engine" será
restablecerá o será reseteado, la emisión de una solicitud de modo 04 hará lo
siguiente:
Reseteo del número de códigos de error.
Borrar los códigos de problemas de diagnóstico.
Borrar todos los datos almacenados que hayan sido congelados.
Borrar el DTC que inició el problema.
Borrar todos los datos de la prueba del sensor de oxígeno.
Borrar información del modo 06 y 07.
No borra códigos de problemas permanentes (modo 0A) (éstos se
restablecen por la ECU solamente).
Las consecuencias del borrado de todos estos datos no es aplicable sólo al
ELM327 esto se produce cada vez que se utiliza cualquier herramienta de
análisis para restablecer los códigos. El mayor problema con la pérdida de
estos datos es que su vehículo puede funcionar mal por un corto tiempo,
mientras se lleva a cabo una re calibración.

50
Figura 16. Guía para detección y borrado de códigos de error
(Andrade F. , 2014)
Poner el vehiculo en "CONTACTO"
>AT SP 0
OK
>0101
PARA OBSERVAR EL NÚMERO DE CÓDIGOS
(SEGUNDO DIGITO DEL TERCER BITE)
>03 PARA OBSERVAR LOS CODIGOS DE ERROR( SE IGNORA EL 43 Y LOS DEMAS
BYTES SE LEEN EN PARES)
SE ARREGLA EL VEHÍCULO
>04
PARA RESETEAR LOS CÓDIGOS
51
3.2. OBDII
3.2.1. FUNCIONES DEL OBDII
Los cuantificadores principales que dictan como debe estar funcionando y
su correcto funcionamiento son:
1. Velocidad.
2. Carga.
3. Temperatura del motor.
4. Consumo de combustible.
5. Temperatura ambiente.
6. Caudal de aire.
7. Emisiones. (González Melis, 2014)
Cabe recalcar que con el fin de identificar y tener en constante monitoreo a
dichos cuantificadores, lo fabricantes optaron por la inserción de sensores en
los vehículos mismos sensores que fueron detallados brevemente en capítulos
anteriores.
Estos sensores envían y reciben constantemente información de la ECU o de
las ECUS con las que cuenta el vehículo con el fin de garantizar un correcto
funcionamiento del vehículo y detectar fallas en el mismo.
Cuando se genera un error o un parámetro salga de los límites de
funcionamiento correcto o normal, la ECU es la encargada de almacenar dicha
falla, si la misma se repitiese el sistema OBDII informa al conductor a través
del check engine.

52
3.2.2. FUNCIONES DE DIAGNÓSTICO DEL OBDII EN VEHÍCULOS A
GASOLINA
Estas dependen de disponibilidad en el vehículo del número de ECUS y de
que parámetros quiere controlar y monitorear remotamente el fabricante.
Monitoreo del catalizador.
Pruebas de sonda lambda o sensor de oxígeno, basadas en la tensión
de la onda.
Si el vehículo incorpora se realiza monitoreo del aire secundario del
mismo.
Sistema de recuperación en los vapores de la combustión.
Pruebas de fugas.
Sistemas de comunicación entre las ECUS del vehículo
Control del sistema electrónico del vehículo.
Monitoreo contaste de sensores y actuadores del sistema electrónico
del vehículo, los mismos que controlan fluyo de inyección y otros
parámetros del vehículo incluyendo las emisiones generadas por el
mismo.
3.2.3. FUNCIONES DE DIAGNÓSTICO DEL OBDII EN VEHÍCULOS A
DIESEL
Estas dependen de disponibilidad en el vehículo del número de ecus y de que
parámetros quiere controlar y monitorear remotamente el fabricante.
Fallos en la combustión de los cilindros.
Calibración del comienzo de inyección.
Presión de la sobrealimentación.

53
Circulación de gases de escape.
Sistemas de comunicación entre las ECUS del vehículo
Control del sistema electrónico del vehículo.
La verificación de fallos en los sensores,
Los cortocircuitos positivos e interrupciones de línea, se puede detectar
supervisando lo siguiente señales:
En las señales de entrada se revisa:
Verificación de la tensión de alimentación del sensor.
Verificación del rango admisible.
Comprobaciones de integridad con otros componentes.
Los sensores más importantes son redundantes (pedal acelerador),
comparándose directamente entre sí.
En las señales de salida:
Supervisión del circuito de corriente en las etapas finales.
Comprobación de los efectos del actuador sobre el sistema en los
momentos en que se activa.
3.2.4. FUNCIONAMIENTO DE EMERGENCIA
Existe un modo de “funcionamiento en caso de emergencia” este se activa en
caso de avería, estos son los más importantes:

54
3.2.4.1. Sensor del pedal del acelerador
Si existiera una falla, este entraría en modo de funcionamiento de emergencia,
este modo consiste en bloquear el acelerador con el fin de que el motor no
sobrepase las 1500rpm en la mayoría de los casos.
3.2.4.2. Catalizador
En caso de existir dos bloques lo que se procede a realizar es una
comparación de los dos sensores de oxígeno, garantizando su correcto
funcionamiento.
3.2.4.3. Tensión en la batería
En caso de que un fallo exista en la el valor de la tensión de la batería, el modo
de emergencia procede a sustituir este valor por un valor preestablecido hasta
que la línea quede perfecta.
3.2.4.4. Sensor de temperatura del motor.
Si existiera un falló en el sensor de temperatura, el valor que recibe la ECU se
sustituye por un valor de 40 grados centígrados. Y si existe interrupción en la
línea de comunicación entre el sensor y la ECU se activan los
electroventiladores tratando de contrarrestar un posible sobrecalentamiento.
3.2.5. FORMATO DEL MENSAJE DEL OBDII
Todas las ECUS de las que se compone un sistema OBDII, son las
encargadas de monitorear y de diagnosticar los distintos sensores y
actuadores que compones los sistemas del vehículo debido a la disposición
de las mismas en el vehículo, resulta prácticamente imposible y absurdo el
55
hecho de escanear cada una de ellas individualmente por lo cual se realiza el
escaneo de las mismas en conjunto a través del puerto OBDII.
El sistema OBDII proporción bastante flexibilidad con el fin de que las ECUS
se conecten entre si y el sistema OBDII tenga la posibilidad de conocer que
dispositivo envía el mensaje que dispositivo envía la solicitud y que dispositivo
responde, gracias a esto se tiene la capacidad de detectar fallas individuales
y específicas.
Cabe recalcar que el sistema OBDII no es el encargado de detectar las fallas
en los vehículos, el sistema OBDII se encarga exclusivamente de informar que
existe uno.
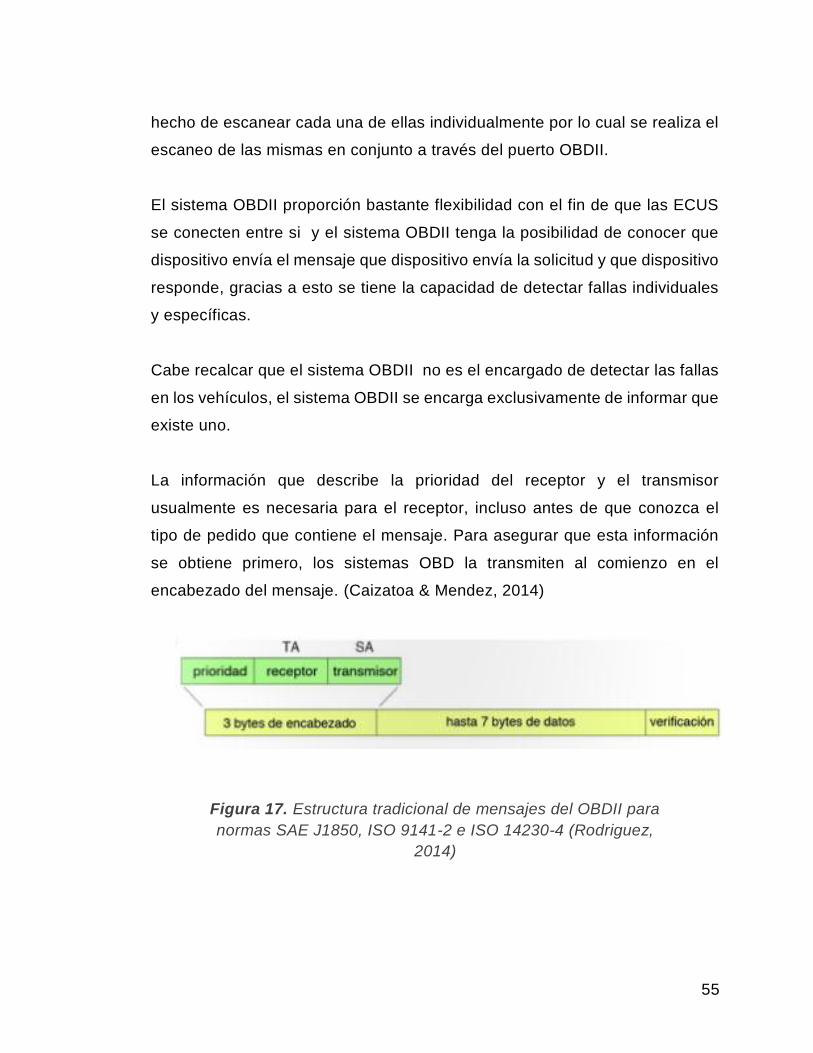
La información que describe la prioridad del receptor y el transmisor
usualmente es necesaria para el receptor, incluso antes de que conozca el
tipo de pedido que contiene el mensaje. Para asegurar que esta información
se obtiene primero, los sistemas OBD la transmiten al comienzo en el
encabezado del mensaje. (Caizatoa & Mendez, 2014)
Figura 17. Estructura tradicional de mensajes del OBDII para
normas SAE J1850, ISO 9141-2 e ISO 14230-4 (Rodriguez,
2014)
56
Encabezado: Como se muestra en la Figura 16 el encabezado utiliza 3 bytes
para proporcionar detalles acerca de la prioridad, del receptor y transmisor
llamados también dirección blanco y dirección fuente respectivamente.
(Caizatoa & Mendez, 2014)
.
Datos: Son hasta 7 los bytes que se utilizaran en este campo con la finalidad
de envían información.
Byte de comprobación: Da lugar a comprobar la integridad de los datos que
se ha recibido.
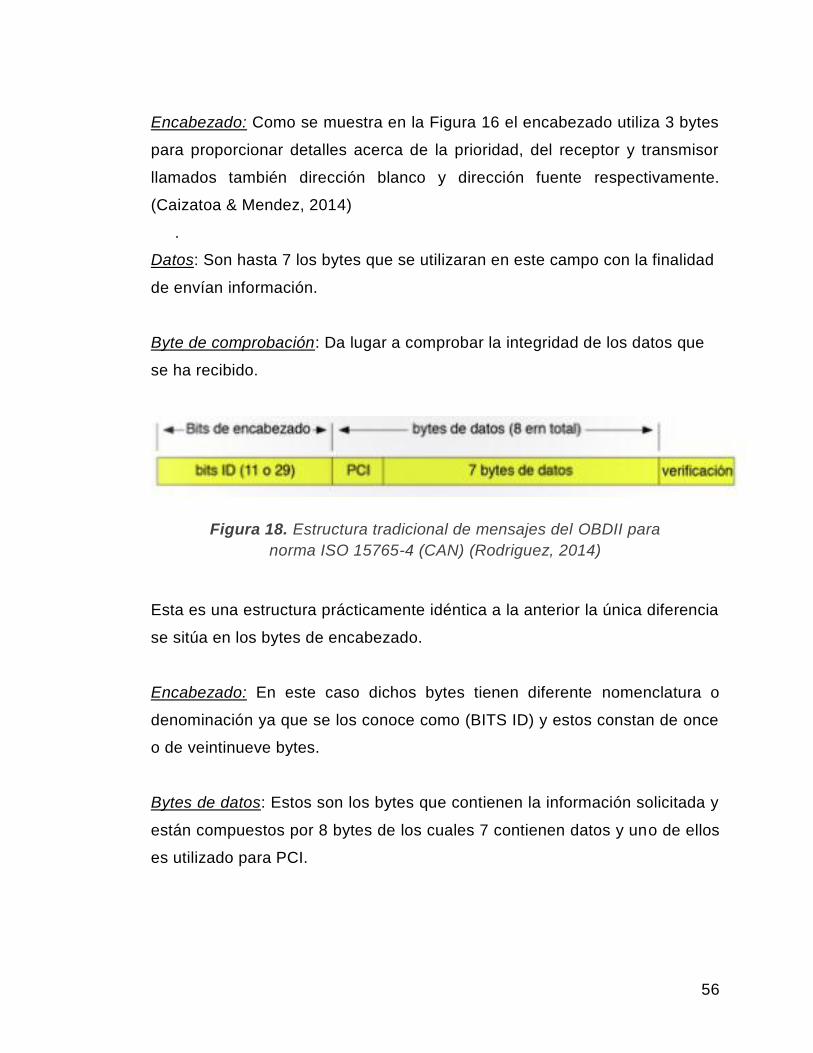
Figura 18. Estructura tradicional de mensajes del OBDII para
norma ISO 15765-4 (CAN) (Rodriguez, 2014)
Esta es una estructura prácticamente idéntica a la anterior la única diferencia
se sitúa en los bytes de encabezado.
Encabezado: En este caso dichos bytes tienen diferente nomenclatura o
denominación ya que se los conoce como (BITS ID) y estos constan de once
o de veintinueve bytes.
Bytes de datos: Estos son los bytes que contienen la información solicitada y
están compuestos por 8 bytes de los cuales 7 contienen datos y uno de ellos
es utilizado para PCI.

57
Protocolo de control de información (PCI): Este byte es el encargado de dar a
notar o informar si la trama de datos es simple o se extiende y al mismo tiempo
puede informar la longitud de los datos.
3.2.6. DETECCIÓN DE ERRORES.
El sistema OBDII como se mencionó antes no es el encargado de realizar la
comprobación de sensores y actuadores pero si de informar si existe algún
error en el sistema electrónico o mecánico del vehículo, y a la vez es el
encargado de almacenar los códigos de falla generados por el escaneo
periódico de las ECUS, el mismo que viene en forma de código, este código
indica donde se ha producido el error y a que se puede deber haciendo
sumamente más fácil la detección del fallo y la reparación del mismo.
El vehículo informa al conductor el aparecimiento de un error o la detección
de un código de falla, a través de una luz indicadora en el tablero del vehículo
la misma que es conocida en la industria automotriz como “check engine”,
cabe recalcar que a pesar del fallo en la mayoría de los casos el vehículo
seguirá funcionando.
Figura 19. Ubicación de la luz indicadora (Check engine)
(Juliancho, 2014)

58
No existe un botón, pulsador, o manera alguna de restablecer o apagar la luz
del Check Engine, de modo que la única manera posible y técnicamente
adecuada es realizar el escaneo del vehículo, solicitando los DTC del vehículo,
por medio de un escanear automotriz conectando el mismo al puerto OBDII,
reparar el vehículo y proceder al borrado de los mismo igualmente a través de
un escáner automotriz conectado al puerto OBDII.
Existen 3 tipos de señales emitidas por el Check Engine.
Encendida constantemente: esto indica que la falla es grave y no
se apagara hasta que el problema sea resuelto.
Parpadeo constante: esto indica que el problema es sumamente
grave y puede causar un serio daño al motor si no se lo apaga
inmediatamente.
Encendido intermitente de la luz. Esto indica que hay problemas de
las funcionamiento, temporal ya que si el vehículo completa 3 ciclo
de manejo sin presentar el mismo problema o sin que el mismo sea
detectado por la ECU, el Check Engine se apagara y la lectura será
borrada.
Figura 20. Ubicación del puerto OBDII (Alejandro, 2014)

59
3.2.7. REDES DE COMUNICACIÓN EL VEHÍCULO.
Con el avance de la tecnología dentro de la industria automotriz, se ha logrado
mejorar de varias maneras, el confort, la seguridad, la autonomía, las
emisiones y las fallas dentro de un vehículo, todo esto es gracias a la
presencia de las ECUS y de los sensores en el vehículo, pero dada la
presencia de dos o más ECUS se ha debido establecer una red de
comunicación entre los distintos sistemas electrónicos y de control que posee
el vehículo.
Figura 21. diagrama explicativo de la red de comunicación,
para diagnosis e información de un vehículo (Caizatoa &
Mendez, 2014)
Con el fin de asegurar el diagnostico a bordo del vehículo es necesario y muy
importante la comunicación entre todos los sistemas electrónicos del vehículo,
es decir que las ECUS se comuniquen entre si y a la vez, respondan a un
60
procesador central el mismo que tendrá como función el análisis de los datos
con el fin de detectar si existe un código o no comparando estos datos con
patrones preestablecidos, y a la vez tiene la función de facilitar el acceso a los
mismo a través de un dispositivo externo.
La comunicación tanto externa como interna que establece el vehículo sea
entre las distintas ECUS o con un dispositivo de diagnóstico externo se ve
garantizada gracias a los siguientes elementos, los mismos que intervienen en
la misma.
Buses
Son elementos que permiten la comunicación tanto entre una ECU con
otra, como la comunicación entre la ECU principal y el Scanner
automotriz.
Dichas conexiones se rigen a ciertas normas establecidas según el
fabricante del vehículo y modelo del mismo.
Los buses comúnmente más utilizados en la industria automotriz son
los siguientes:
MOST
Byteflight
J1850
MI
Bus D2B
SMARTwireX
DSI
IEBus
LIN

61
CAN
Intellibus
OBD-II Bus
SAEJ1708
BST
MML
Flex-ray
IDB-1394
Figura 22. Diagrama explicativo de función de buses en la
red de comunicaciones un vehículo (megatecpower, 2014)

62
Protocolos de comunicación
Son las reglas o las normativas que caracterizan el intercambio de información
entre dos o más ECUS, entre ECUS esclavas y el procesador central, o entre
el puerto OBDII y el exterior los protocolos principales son: ISO y SAE.
Redes de comunicación interna del vehículo.
La red de comunicaciones se ha visto afectada debido, al gran avance
tecnológico, ya que esto conlleva que las ECUS, sus buses y sus protocolos
están sometidos a exigencias mayores, relacionadas con velocidad, fiabilidad,
estabilidad y prioridades que estas den.
Tabla 13. Estándares más utilizados en comunicación interna
del vehículo, (Andrade F. , 2014)
ORGANIZACIÓN >125 kbps <125 kbps
ISO (Europa) CAN
ISO11898
CAN
ISO 11519
ISO 11992
SAE (EEUU)
Vehículos livianos
CAN
SAE J2284
J1850
SAE (EEUU)
Camiones y buses
CAN
SAE J1939
J1587/1708, J1922
ASIA CAN *********

63
Clasificación
Los fabricantes han realizado una clasificación, basados en la velocidad como
parámetro, y se han dividido los buses internos en tres grandes grupos, los
mismos que se refieren a velocidad alta, media y baja.
Figura 23. Clasificación de buses de comunicación interna
en el vehículo, (MAzo, Espinoza, Baset, & Gardel, 2014)
3.2.8. ACCESOS DEL SISTEMA OBDII
3.2.8.1. Acceso a datos en vivo del sistema a bordo
Brinda la posibilidad de conocer valores relativos al funcionamiento del
vehículo en el momento que se realiza la solicitud del mismo, tenemos gran
variedad de valores para escoger como por ejemplo:
Las revoluciones por minuto del motor
La velocidad del vehículo
Temperatura del refrigerante

64
Porcentaje de apertura de la mariposa
Posición de la mariposa
Temperatura del aire de ingreso
Presión de combustible
Tiempo de avance
Estos entre infinidad de valores más que se pueden monitorear en tiempo
real, para conocer estos valores es necesario enviar una solicitud a la ECU
en esta solicitud debe constar un PID el mismo que permite especificar qué
valor es el que se desea monitorear.
Las ECU son las encargadas de responder a esta solicitud con el último valor
que se haya sensado.
Figura 24. Solicitud y respuesta para acceso de datos a
bordo (Huertas & Véliz, 2006)

65
3.2.9. ACCESO A DATOS CONGELADOS
Esta función nos brinda la posibilidad de acceder, a los códigos de falla que la
ECU a almacenado en el momento de ocurrir la falla incluso si la falla luego
pareciera desapareces, es decir se tratase de una falla intermitente, la utilidad
de esta función es que se puede determinar bajo qué circunstancias ocurrió
dicha falla.
Tanto el mensaje que contiene la solicitud como el mensaje que posee la
respuesta es exactamente idéntico al anterior.
3.2.10. ACCESO A CÓDIGOS DE FALLA
Esta función permite acceder a los códigos de falla arrojados por las distintas
ECUS, el procedimiento para la obtención de los códigos de falla del vehículo
se resume en dos pasos, el primer paso es:
Enviar una solicitud con un PID
Esta solicitud lo que permite es conocer el número exactos de códigos de falla
que posee el vehículo en ese momento.
Entrar al modo 03 (realizar petición de códigos de falla)
El sistema OBDII nos proveerá los códigos de falla que posee el vehículo con
un máximo de 4 códigos, dado que en caso de la existencia de más códigos
el funcionamiento del vehículo sería prácticamente imposible o paupérrimo.

66
Figura. 25 Solicitud y respuesta para acceso a Códigos de
falla (Huertas & Véliz, 2006)

4. DISEÑO E IMPLEMENTACIÓN DEL PROTOTIPO

68
4.1. DISEÑO DEL PROTOTIPO
4.1.1. ARDUINO DUE
El Arduino Due es una placa electrónica basada en el Atmel SAM3X8E ARM
Cortex-M3 de la CPU. Es la primera placa Arduino basado en un
microcontrolador núcleo ARM de 32 bits. Cuenta con 54 pines digitales de
entrada / salida (de los cuales 12 pueden utilizarse para salidas PWM), 12
entradas analógicas, 4 UARTs (puertas seriales), un reloj de 84 MHz, una
conexión USB OTG capaz, 2 DAC (de digital a analógico), 2 TWI, un conector
de alimentación, una cabecera de SPI, un encabezado JTAG, un botón de
reinicio y un botón de borrado. Véase anexo 1 (Arduino, 2013).
Figura 26. Arduino DUE (Arduino, 2013)
4.1.2. SPARK FUN OBDII- UART
Esta tarjeta electrónica es la que nos brinda la posibilidad de interactuar con
el sistema OBDII del vehículo, nos brinda una interfaz en serial y permite el
acceso a la ECU mediante comandos, el ELM327, soporta los principales

69
protocolo OBDII, esta placa será conectada en uno de los extremos al conector
OBDII y en el otro al Arduino, accesando y procesando la información.
Figura. 27 SparkFun OBDII - UART (sparkfun, 2014)
4.1.2.1. ELM327
El ELM 327 es un microcontrolador de tipo PIC, cuya programación tiene la
función de interpretar los códigos mas no la evaluación de mensajes, su
principal función es la capacidad de crear una comunicación directa con la
ECU, mediante el puesto OBDII.
Cabe recalcar que para establecer comunicación con la computadora a bordo
se utiliza lenguaje ASCII.

70
Figura 28. Esquema de aplicación tradicional del ELM327
(elmelectronics, 2014)

71
4.1.2.2. MCP2551
La tarjeta Sparkfun contiene un integrado conocido como MCP2551 el mismo
que posee la capacidad de transmitir y receptar a alta velocidad en protocolo
CAN, su función principal es interpretar y convertir las señales lógicas en el
nivel de tensión o voltaje adecuado (TTL/CMOS), lo que significa que 0=0V y
1=1,5V, estas señales provienes desde el controlador CAN y por el BUS
Figura 29. MCP2551 (elmelectronics, 2014)
CARACTERÍSTICAS PRINCIPALES
a) Opera a un megabit por segundo.
b) Provee resistencia a daños por cortocircuito (negativo o positivo).
c) Alta exención al ruido.
d) Funcionalidad en temperaturas entre (-40 y 125) grados centígrados.
e) Función automática de apagado térmico.

72
DISTRIBUCIÓN DE LOS PINES DEL MCP2551
Figura 30. Distribución de pines MCP2551
(datasheetcatalog, 2014)
Tabla 14. Distribución de pines MCP2551 (Caizatoa &
Mendez, 2014)
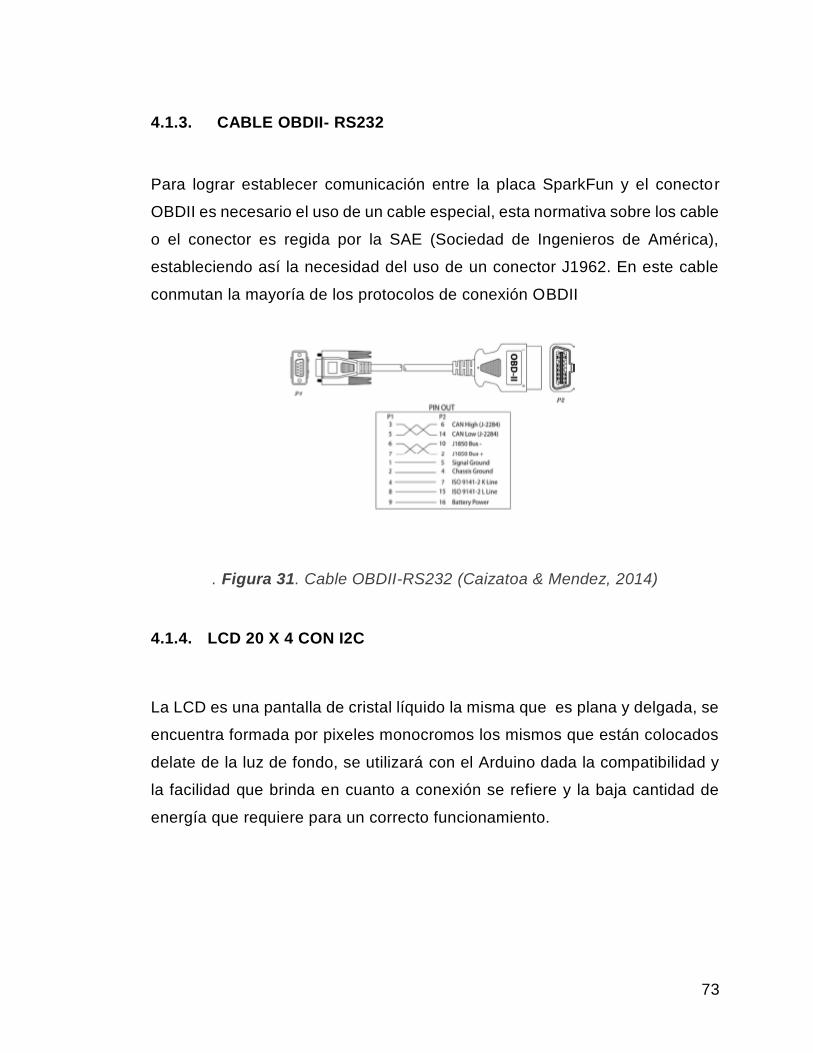
73
4.1.3. CABLE OBDII- RS232
Para lograr establecer comunicación entre la placa SparkFun y el conector
OBDII es necesario el uso de un cable especial, esta normativa sobre los cable
o el conector es regida por la SAE (Sociedad de Ingenieros de América),
estableciendo así la necesidad del uso de un conector J1962. En este cable
conmutan la mayoría de los protocolos de conexión OBDII
. Figura 31. Cable OBDII-RS232 (Caizatoa & Mendez, 2014)
4.1.4. LCD 20 X 4 CON I2C
La LCD es una pantalla de cristal líquido la misma que es plana y delgada, se
encuentra formada por pixeles monocromos los mismos que están colocados
delate de la luz de fondo, se utilizará con el Arduino dada la compatibilidad y
la facilidad que brinda en cuanto a conexión se refiere y la baja cantidad de
energía que requiere para un correcto funcionamiento.

74
. Figura 32. LCD 20x4 con I2C (Andrade F. , 2014)
4.1.5. DIAGRAMA EXPLICATIVO DE CONEXIÓN
Figura 33. Diagrama explicativo de conexión (Andrade F. ,
2014)
OBDII
(Vehículo) •Envía y recive información
SparkFun
•Premite visualización de datos
Arduino •Comunicación serial
SeedBTslave y Bluetooth
Dispositivo
Android

75
4.1.6. DIAGRAMA DE CONEXIÓN DE HARDWARE Y COMUNICACIÓN
BLUETOOTH
Figura 34. Diagrama de conexión de hardware y
comunicación Bluetooth (Andrade F. , 2014)
4.1.7. APP INVENTOR
App inventor es una plataforma virtual la misma que es propiedad de Google
y trabajan en conjunto con el MIT (instituto de tecnología de Massachusetts).
Esta plataforma permite la creación y desarrollo de aplicaciones en formato
.apk, es decir aplicaciones ejecutables en sistema operativo Android, la misma
que se realizar a través del enlace de bloques.
Es decir las aplicaciones se las realizan mediante programación didáctica e
intuitiva, aunque las aplicaciones desarrolladas en esta plataforma son
simples, satisfacen las necesidades del usurario con respecto a su dispositivo
móvil.

76
Figura 35. App inventor (puravidaapps, 2015)
4.2. IMPLEMENTACIÓN DEL PROTOTIPO
Para realizar la implementación del prototipo, se tomó en cuenta dos factores
muy importantes la optimización de espacio y la funcionalidad del mismo de
modo que se realizó el montaje del mismo es una caja de proyectos
electrónicos tipo H, la misma que se modificó, retirando la cubierta superior de
color negro, y colocando un vidrio color bronce en lugar de la cubierta original,
todo esto se lo realizó con el fin de obtener visibilidad del interior de la misma,
dando acceso así a los leds de la placa SparkFun los que indican el envío y
recepción de datos, como la apertura y cierre del módulo Bluetooth, mismo
con el que se pareara el dispositivo móvil Android, mediante una aplicación
móvil (.apk) diseñada mediante app inventor.

77
Figura 36. Caja de proyectos tipo H modificada (Andrade F. ,
2014)
Posteriormente se procedió al anclaje de las placas que se usó para obtención
y petición de datos, tanto la placa Arduino DUE como la placa SparkFun fueron
ancladas a la cubierta inferior de la caja de proyectos mediante el uso de
postes para placas electrónicas.
Figura 37. Postes de anclaje para placas electrónicas
(mercadolibre, 2014)
A continuación se montó el Shield Bluetooth en el Arduino y se realizó las
conexiones necesarias mediante el uso de cable Arduino.
Del mismo modo se conectó el cable serial y el cable USB que hará la función
de fuente.

78
Figura 38. Placas montadas y conexiones en las mismas
(Andrade F. , 2014)
Una vez conectados todos los dispositivos necesarios para alimentación,
solicitud y recepción de datos se procedió a conectar la LCD la misma que
proporcionará información visual, como por ejemplo de los datos a bordo o nos
informará en que momento debemos revisar el dispositivo móvil.
Figura 39. Prototipo final (Andrade F. , 2014)
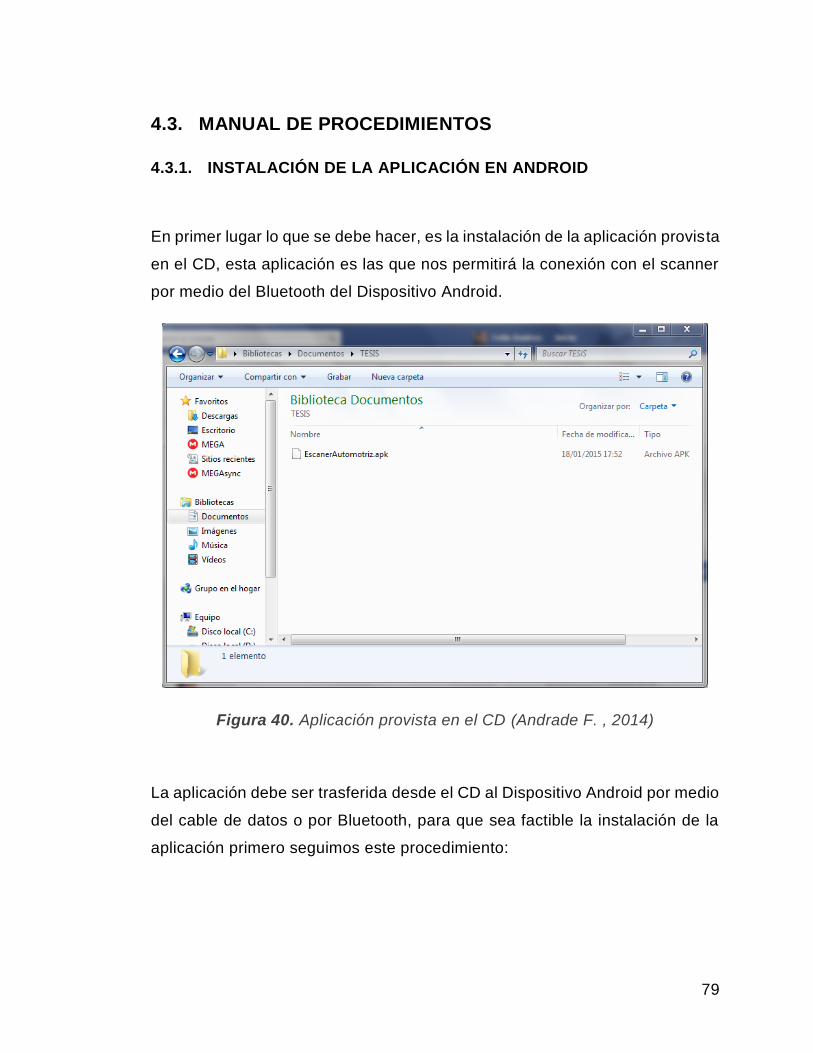
79
4.3. MANUAL DE PROCEDIMIENTOS
4.3.1. INSTALACIÓN DE LA APLICACIÓN EN ANDROID
En primer lugar lo que se debe hacer, es la instalación de la aplicación provista
en el CD, esta aplicación es las que nos permitirá la conexión con el scanner
por medio del Bluetooth del Dispositivo Android.
Figura 40. Aplicación provista en el CD (Andrade F. , 2014)
La aplicación debe ser trasferida desde el CD al Dispositivo Android por medio
del cable de datos o por Bluetooth, para que sea factible la instalación de la
aplicación primero seguimos este procedimiento:
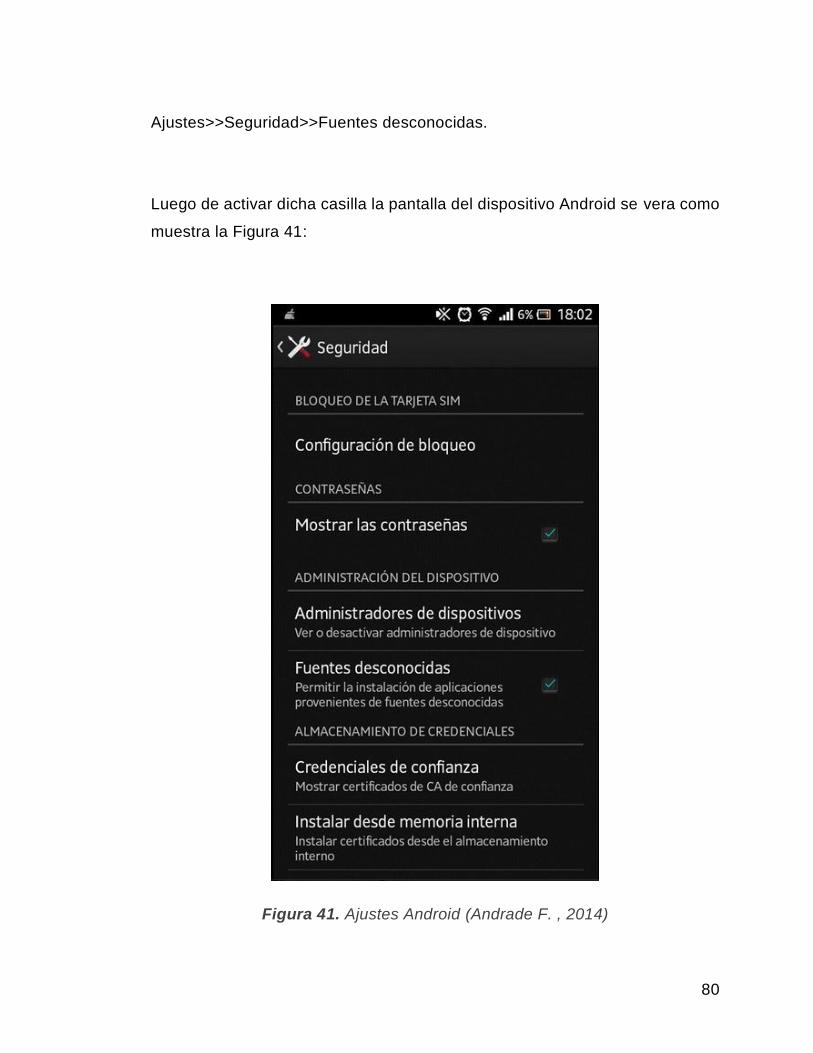
80
Ajustes>>Seguridad>>Fuentes desconocidas.
Luego de activar dicha casilla la pantalla del dispositivo Android se vera como
muestra la Figura 41:
Figura 41. Ajustes Android (Andrade F. , 2014)

81
Una vez que tengamos la aplicación en el teléfono procedemos a buscarla con
el gestor de archivos propio del teléfono u cualquier otro gestor de archivos
descargado desde la Play Store, y nos encontraremos con un icono igual al
que se muestra en la Figura 42:
Figura 42. Aplicación en gestor de archivos Android
(Andrade F. , 2014)

82
Se procede a darle “click” al archivo “EscanerAutomotriz”.
El teléfono automáticamente desplegara una pantalla como la que se muestra
en la Figura 43:
Las opciones con respecto a los instaladores de aplicaciones varían según el
fabricante y las aplicaciones instaladas por el usuario.
Figura 43. Instalación de la aplicación (Andrade F. , 2014)

83
Se procede a escoger cualquier opción y se realizará automáticamente la
instalación de la aplicación, y la ejecutamos normalmente como cualquier
aplicación, al abrir la aplicación obtendremos una pantalla idéntica a la que
muestra la Figura 44; de preferencia se debe tener activado el bluetooth del
dispositivo movil.
Figura 44. Pantalla inicial de la aplicación (Andrade F. ,
2014)

84
Procedemos a darle “click “a ingresar y se nos desplegará la pantalla principal
de la aplicación con la que se puede realizar las funciones del prototipo antes
descritas. Véase Figura 45.
Figura 45. Pantalla principal de la aplicación (Andrade F. ,
2014)
4.3.2. USO DE LA APLICACIÓN Y EL PROTOTIPO.
Se procede a alimentar el prototipo mediante un cable USB y a conectar el
mismo con el puerto OBDII del vehículo y poner el vehículo en “contacto” es
decir con la llave del vehículo en posición ON.
Activamos el Bluetooth del dispositivo Android y se lo vincula con el prototipo,
el mismo que se llamará SeeedBTSlave.
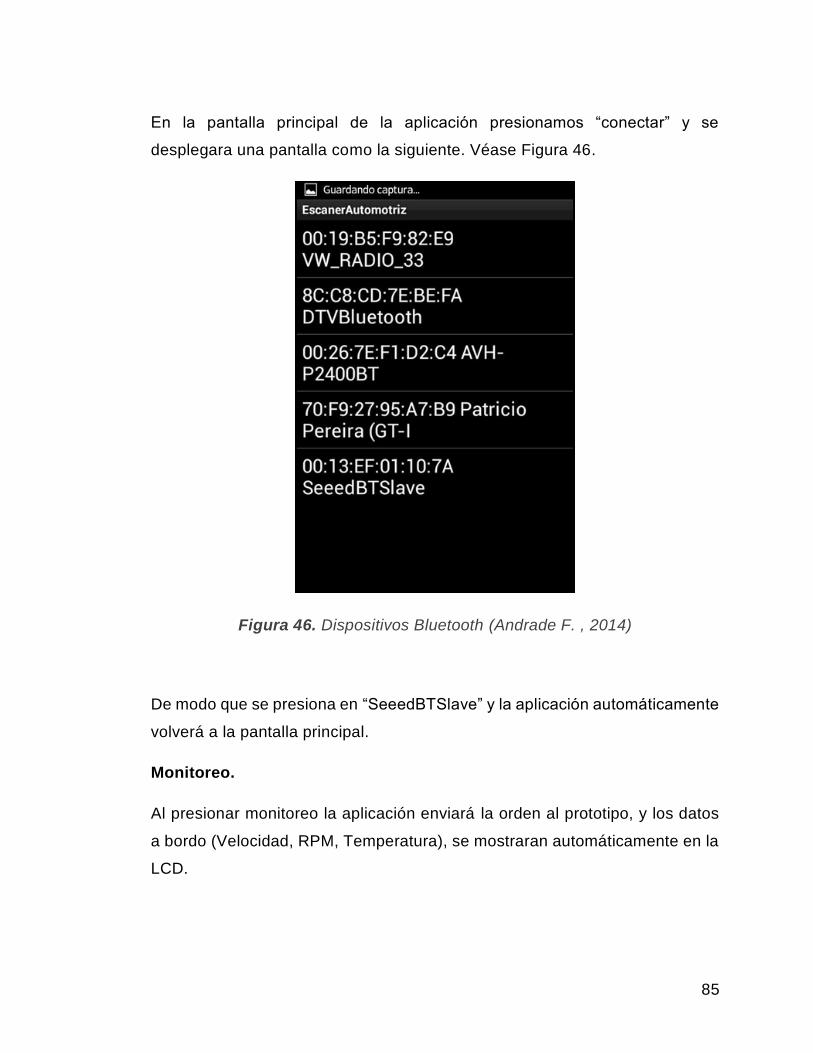
85
En la pantalla principal de la aplicación presionamos “conectar” y se
desplegara una pantalla como la siguiente. Véase Figura 46.
Figura 46. Dispositivos Bluetooth (Andrade F. , 2014)
De modo que se presiona en “SeeedBTSlave” y la aplicación automáticamente
volverá a la pantalla principal.
Monitoreo.
Al presionar monitoreo la aplicación enviará la orden al prototipo, y los datos
a bordo (Velocidad, RPM, Temperatura), se mostraran automáticamente en la
LCD.

86
Lectura de errores.
Cabe recalcar que debido al extenso número de protocolos de comunicación
utilizados, este prototipo posee dos opciones (Scanner A y Scanner B),
logrando así abarcar más protocolos y por lo tanto más vehículos.
De modo que el botón “vector” que se encuentra en la pantalla principal sirve
para tener conocimiento si debemos ejecutar Scanner A o Scanner B.
Al presionar “vector” tenemos dos opciones si nos responde una serie de
caracteres similar a esta:
43 02 02 02 02 04
En la que en el cuarto carácter nos muestra el número de errores y luego
obviamente el error “0202” y “0204”.
Presionamos Scanner A.
Si al presionar “vector”, nos responde una serie de caracteres similar a esta:
43 01 07 01 22 00 00
En la que nos muestra 2 errores “0107” y”0122”, más en la 4ta posición no nos
muestra el número de errores.
Presionamos Scanner B.
Se procede a reparar el vehículo.
Borrado de códigos de Falla.
Una vez reparado el vehículo, en la pantalla principal de la aplicación se
encuentra el botón “Borrar DTC”.
Al presionar este botón borraremos los códigos de falla que posea el vehículo.

5. ANALISIS DE RESULTADOS

88
5.1. CHEVROLET AVEO 2009
Figura 47. Prueba datos a bordo, Chevrolet Aveo (Andrade
F. , 2014)
Como se puede observar en la imagen se ha realizado pruebas en un
Chevrolet Aveo del año 2009, en la misma que se logró acceder a los datos
de la PCM del vehículo.
En este caso a través de la aplicación del dispositivo móvil se logró acceder a
los datos a bordo del vehículo, y esta información es desplegada en la pantalla
de cristal líquido.
Lo que indica que el prototipo, es completamente compatible con este
vehículo, y se puede llevar a cabo todas las pruebas descritas anteriormente,
en este vehículo, desde nuestro dispositivo móvil

89
Figura 48. Solicitud de vector y numero de códigos de falla
en Chevrolet Aveo (Andrade F. , 2014)
Se solicitó a la PCM los códigos de falla del vehículo y como se puede ver en
la imagen el vehículo no presentaba códigos de diagnóstico.

90
5.2. KIA SPORTAGE 2011
Figura 49. Prueba datos a bordo, Kia Sportage (Andrade F. ,
2014)
Como se puede observar en la imagen se ha realizado pruebas en un Kia
Sportage del año 2011, en la misma que se logró acceder a los datos de la
PCM del vehículo.
91
Figura 50. Forzado de error, Kia Sportage
(Andrade F. , 2014)
Dado que después de realizar una solicitud, a la PCM del vehículo, esta nos
informó que el vehículo se encontraba en perfecto estado, forzar un error en
el vehículo seria lo óptimo.
Para realizar pruebas del prototipo en lo que a detección de códigos de falla y
borrado de códigos de diagnóstico concernía, se desconectó un sensor en el
vehículo, se lo apago y encendió tres ocasiones con un minuto de separación
entre cada una de ellas, con el fin de que se cumpla el ciclo de manejo y la
PCM del vehículo compruebe cada actuador y sensor de vehículo.
Se volvió a enviar una solicitud a la PCM y en esta ocasión nos respondió la
presencia de un código de falla.
En la siguiente figura se puede apreciar, la respuesta de la solicitud antes y
después de forzar el error en el vehículo.
Cabe recalcar que como se menciona en el manual de procedimientos se debe
tener en cuenta el vector respuesta, antes de seleccionar Scanner A o Scanner
B.
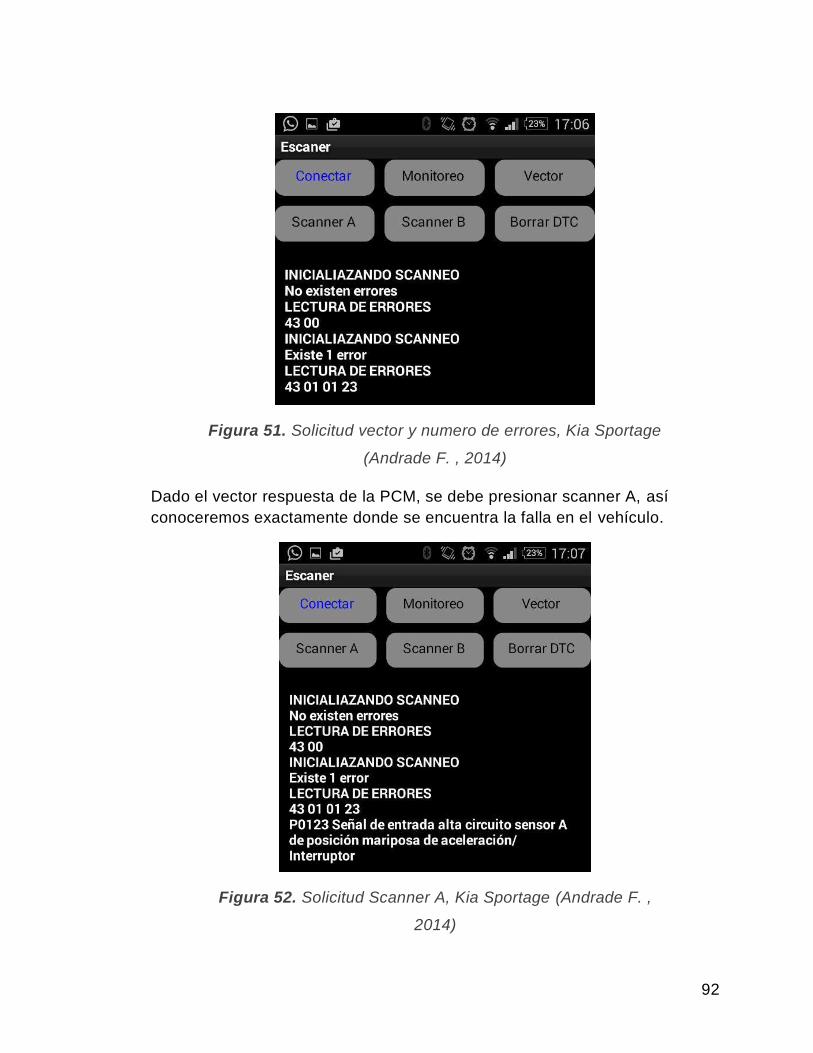
92
Figura 51. Solicitud vector y numero de errores, Kia Sportage
(Andrade F. , 2014)
Dado el vector respuesta de la PCM, se debe presionar scanner A, así
conoceremos exactamente donde se encuentra la falla en el vehículo.
Figura 52. Solicitud Scanner A, Kia Sportage (Andrade F. ,
2014)

93
Se procede a la reparación del fallo generado en el vehículo, (en este caso
desconexión de sensor de aceleración TPS).
Se enciende y apaga 3 veces el vehículo con una separación de un minuto, y
presionamos borrar DTC.
Se realiza un nuevo escaneo y el código habrá sido borrado.
Como se muestra en la siguiente figura.
Figura 53. Borrar DTC, Kia Sportage (Andrade F. , 2014)

94
5.3. FORD ECOSPORT 2007
Figura 54. Prueba datos a bordo, Ford Ecosport (Andrade F.
, 2014)
Como se puede observar en la imagen se ha realizado pruebas en un Ford
Ecosport del año 2007, en el mismo que se logró acceder a los datos de la
PCM del vehículo.

95
Figura 55. Forzado de error, Ford Ecosport
(Andrade F. , 2014)
Dado que después de realizar una solicitud, a la PCM del vehículo, esta nos
informó que el vehículo se encontraba en perfecto estado, forzar un error en
el vehículo seria lo óptimo.
Para realizar pruebas del prototipo en lo que a detección de códigos de falla y
borrado de códigos de diagnóstico concernía, se desconectó un sensor en el
vehículo, se lo apago y encendió tres ocasiones con un minuto de separación
entre cada una de ellas, con el fin de que se cumpla el ciclo de manejo y la
PCM del vehículo compruebe cada actuador y sensor de vehículo.
Se volvió a enviar una solicitud a la PCM y en esta ocasión nos respondió la
presencia de un código de falla.
En la siguiente figura se puede apreciar, la respuesta de la solicitud antes y
después de forzar el error en el vehículo.
Cabe recalcar que como se menciona en el manual de procedimientos se debe
tener en cuenta el vector respuesta, antes de seleccionar Scanner A o Scanner
B.
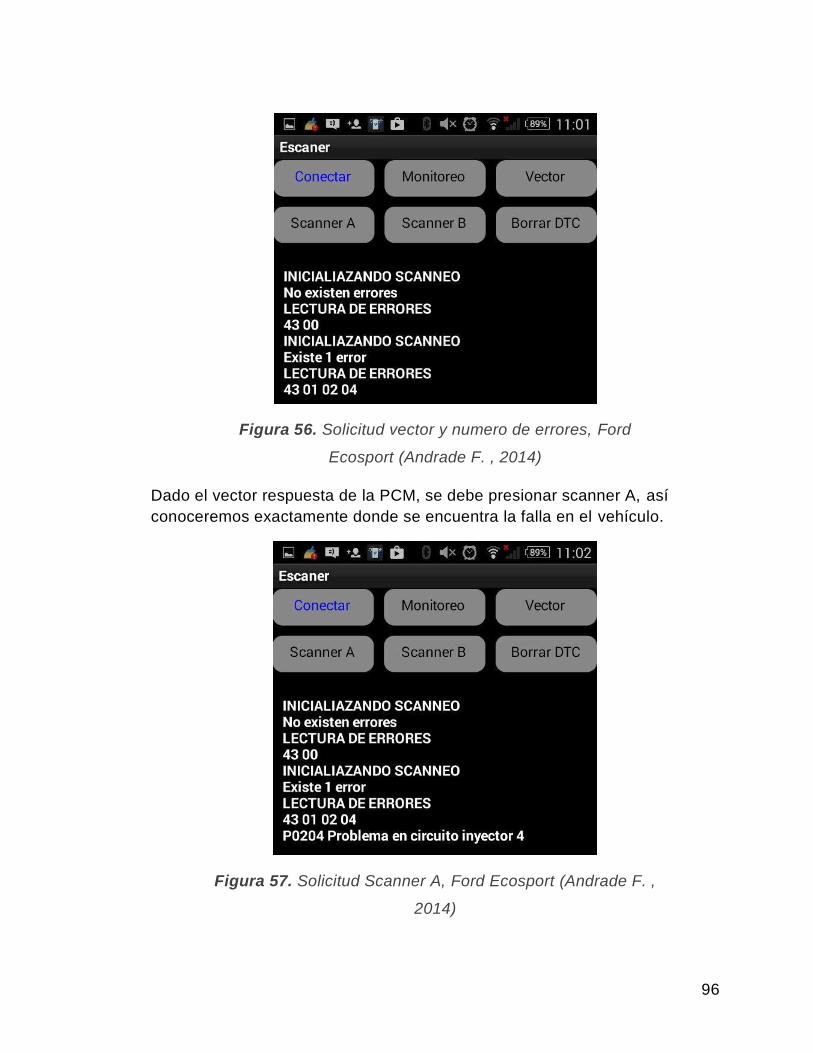
96
Figura 56. Solicitud vector y numero de errores, Ford
Ecosport (Andrade F. , 2014)
Dado el vector respuesta de la PCM, se debe presionar scanner A, así
conoceremos exactamente donde se encuentra la falla en el vehículo.
Figura 57. Solicitud Scanner A, Ford Ecosport (Andrade F. ,
2014)

97
Se procede a la reparación del fallo generado en el vehículo, (en este caso
desconexión de inyector del cilindro numero 4).
Se enciende y apaga 3 veces el vehículo con una separación de un minuto, y
presionamos borrar DTC.
Se realiza un nuevo escaneo y el código habrá sido borrado.
Como se muestra en la siguiente figura.
Figura 58. Borrar DTC, Ford Ecosport (Andrade F. , 2014)

6. CONCLUSIONES Y RECOMENDACIONES

99
6.1. CONCLUSIONES
Es viable la creación de tecnología automotriz, y tecnología afín,
mediante la utilización de dispositivos existentes en el mercado, y un
plan de investigación definido, logrando así demostrar que el desarrollo
automotriz dentro del país y de la Universidad Tecnológica Equinoccial
es factible.
Se construyó el prototipo de un scanner automotriz, bajo parámetros
técnicos y ergonómicos, teniendo en cuenta la optimización del volumen
que ocuparía, la visibilidad, la comodidad en pruebas de ruta y la
facilidad de lectura de códigos.
Cada generación de ECU posee su propio protocolo de comunicación
lo que hace sumamente difícil la compatibilidad de cualquier scanner
automotriz con absolutamente todo el parque automotor existente, pero
no obstante se ha logrado compatibilidad con aproximadamente el 90%
del parque automotor, refiriéndonos a vehículos a gasolina fabricados a
partir del 2005, y un 50% con vehículos fabricados anteriormente o que
posean protocolos obsoletos, mismos que no son capaces de brindar
todas las facilidades y todos los datos que los protocolos actuales
proveen.
Dada la alta tasa de renovación vehicular que existe actualmente en el
país, se concluye que es un proyecto viable y utilitario en la misión de
diagnosticar fallas de manera técnica en los vehículos.
La tecnología inalámbrica está en auge en nuestro tiempo dada la
comodidad que provee, por lo cual la lectura de los códigos de falla y el
borrado de los mismos se los podrá realizar inalámbricamente mediante
el uso de la aplicación provista con el presente proyecto mismo que es
ejecutable o compatible con sistema operativo Android.
100
6.2. RECOMENDACIONES
El voltaje para la alimentación externa de esta placa debe estar
comprendido entre los 6V como mínimo y los 12V como máximo,
viniendo a ser este el voltaje de alimentación recomendado pero de
ninguna manera el límite, dado que el límite inferior está establecido en
5V y el límite superior en 16V
El uso del scanner automotriz a pesar de ser completamente intuitivo,
es recomendable se lo realice, después de haber leído y comprendido
el manual de operación que se provee en el presente trabajo de
titulación.
En caso de apertura de la caja de proyectos y de tener acceso a la placa
Arduino, se recomienda que bajo ninguna circunstancia se presione el
pulsador “erase”, esto podría generar pérdidas en la base de datos del
Arduino, o fallas en la programación.
Para un correcto funcionamiento se recomienda, conectarse via
Bluetooth con el prototipo antes de empezar a trabajar.
Se recomienda el incentivo en prácticas y desarrollo de proyectos de
este tipo, con el fin de promover el uso y desarrollo de tecnología para
el diagnóstico automotriz.
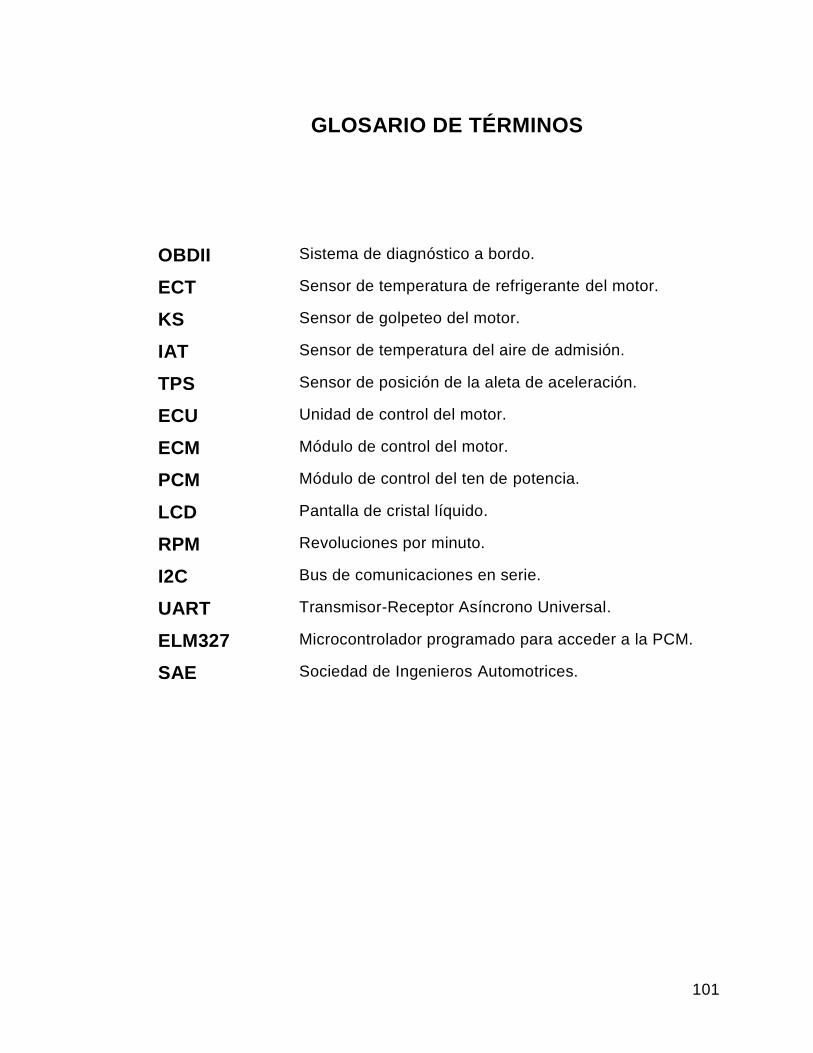
101
GLOSARIO DE TÉRMINOS
OBDII Sistema de diagnóstico a bordo.
ECT Sensor de temperatura de refrigerante del motor.
KS Sensor de golpeteo del motor.
IAT Sensor de temperatura del aire de admisión.
TPS Sensor de posición de la aleta de aceleración.
ECU Unidad de control del motor.
ECM Módulo de control del motor.
PCM Módulo de control del ten de potencia.
LCD Pantalla de cristal líquido.
RPM Revoluciones por minuto.
I2C Bus de comunicaciones en serie.
UART Transmisor-Receptor Asíncrono Universal.
ELM327 Microcontrolador programado para acceder a la PCM.
SAE Sociedad de Ingenieros Automotrices.

ANEXOS

ANEXO 1

104

105

106

107
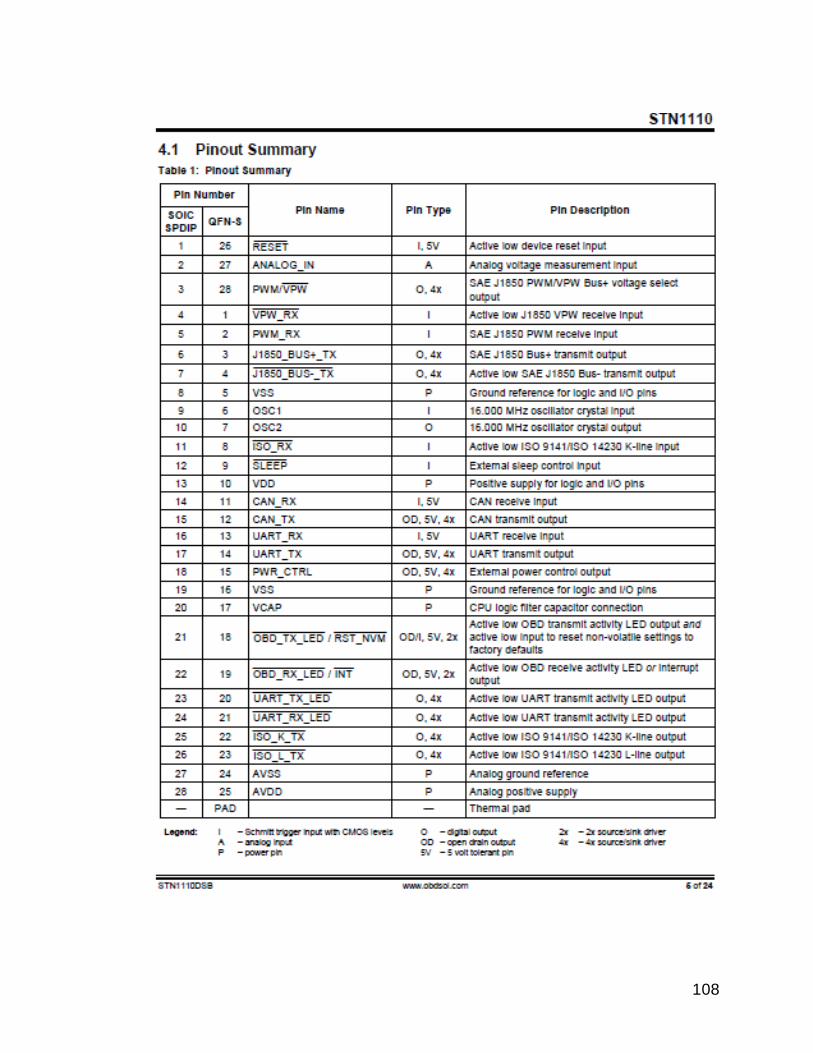
108

ANEXO 2

110

111

112

ANEXO 3
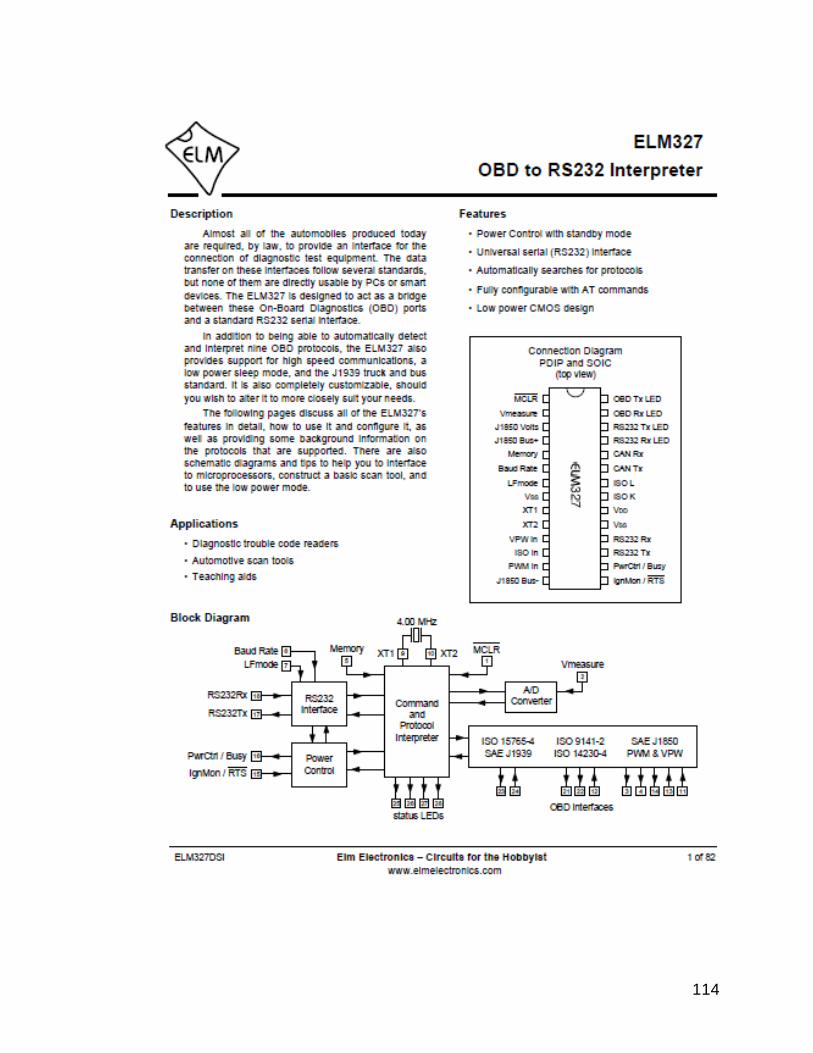
114

115

ANEXO 4
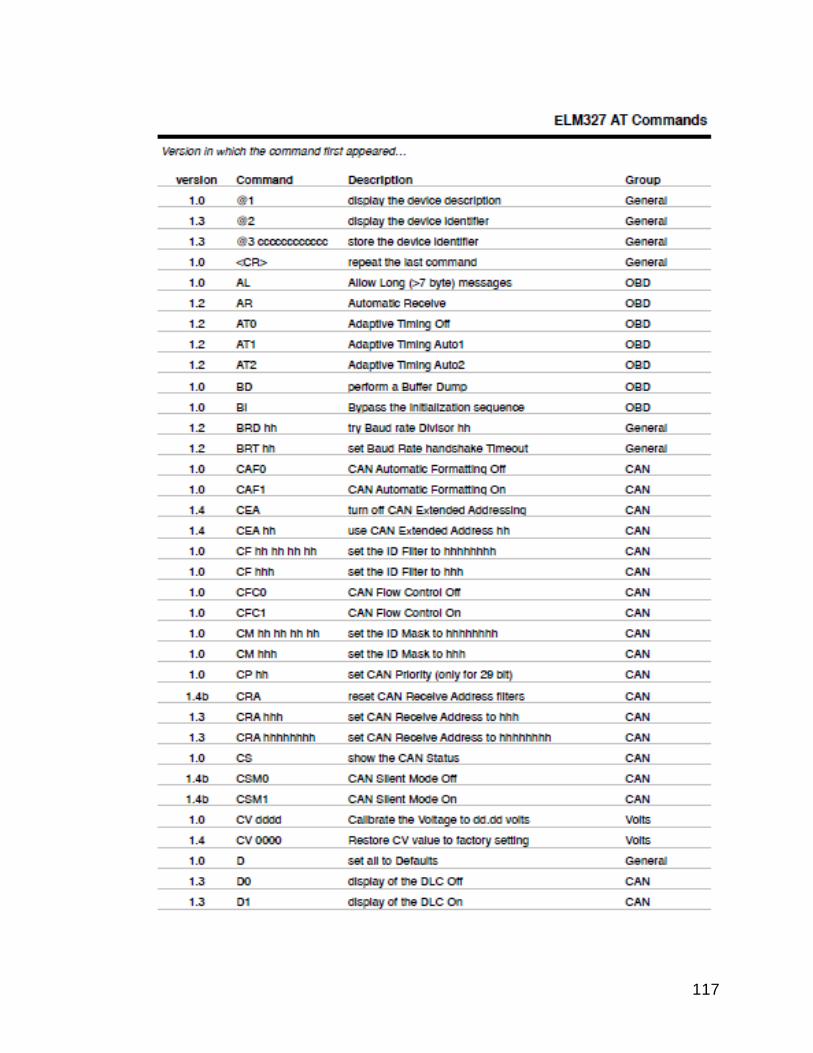
117
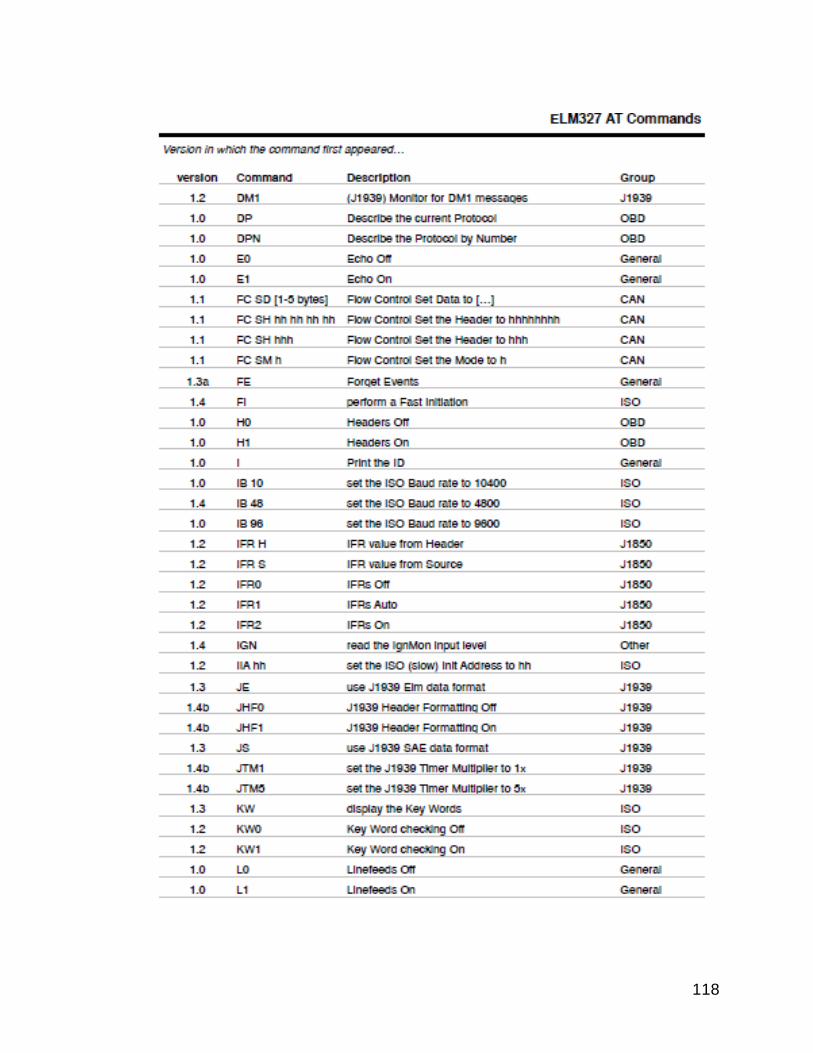
118

119

120
ANEXO 5
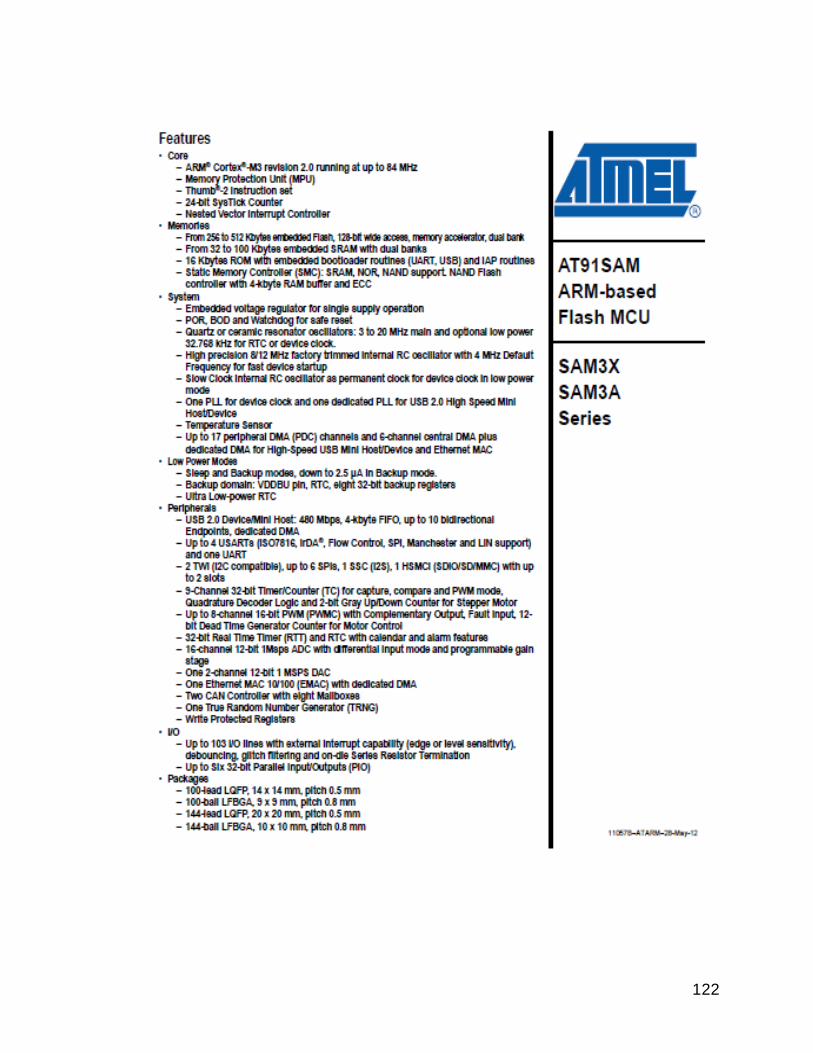
122

123

124

125

126
ANEXO 6

128

BIBLIOGRAFÍA

130
Alejandro. (26 de 10 de 2014). http://www.teseomotor.com/ubicacion-conector-obd/. Obtenido de http://www.teseomotor.com/ubicacion-conector-obd/: http://www.teseomotor.com
Andrade, F. (2011). Sensores. Andrade, F. (17 de Octubre de 2014). Arduino. (28 de 10 de 2014). Recuperado el 22 de Octubre de 2013, de
Arduino: http://www.Arduino.cc/es/ Arduino. (s.f.). Amazon.com. Recuperado el 22 de Octubre de 2013, de
http://www.amazon.com/Arduino-A000062-Due/dp/B00A6C3JN2/ref=sr_1_2?ie=UTF8&qid=1382412054&sr=8-2&keywords=arduino+due
Bosch, R. (2005). Manual de la Tecnica del automovil. Leonberg: Bauer & Partner.
Boxall, J. (2013). Arduino Workshop. San Francisco, USA: Library of congress cataloging.
Caizatoa, M., & Mendez, X. (24 de 10 de 2014). repositorio.espe.edu.ec. Obtenido de repositorio.espe.edu.ec
Castellanos, L. (26 de 02 de 2014). Tecnologia al dia. Recuperado el 22 de Octubre de 2013, de http://tecnologiaaldia.wordpress.com/2009/09/14/que-es-android/
Celis, E. (14 de 9 de 2013). automecanico.com. Recuperado el 21 de Octubre de 2013, de http://automecanico.com/auto2003/obdll.html
Dany. (29 de 07 de 2014). aficionadosalamecanica.com. datasheetcatalog. (29 de 10 de 2014). datasheetcatalog.com. Obtenido de
datasheetcatalog.com: datasheetcatalog.com e-auto.com.mx. (29 de 07 de 2014). http://e-auto.com.mx/. elmelectronics. (21 de 09 de 2014). elmelectronics.com. Obtenido de Elm
Electronics. González Melis, P. (30 de 10 de 2014). http://tec.upc.es/eau/OBDII.pdf. Hernandez, H. H. (s.f.). www.prezi.com. Recuperado el 22 de Octubre de
2013, de http://prezi.com/a4q17ejexk6j/diagnostico-scanner-automotriz/
hetpro. (25 de 02 de 2014). http://hetpro-store.com/index.php?option=com_content&view=article&id=%2023&Itemid=&lang=en. Obtenido de http://hetpro-store.com/index.php?option=com_content&view=article&id=%2023&Itemid=&lang=en: http://hetpro-store.com/index.php?option=com_content&view=article&id=%2023&Itemid=&lang=en
Huertas, E., & Véliz, F. (2006). Sistema Monitor Remoto Interactivo de Vehiculos.

131
Juliancho. (26 de 10 de 2014). http://www.stcolombia.com/portal/proyectos-foristas-street-tuning/37161-jetta-1-8-rojo-tornado-2.html. Obtenido de http://www.stcolombia.com/portal/proyectos-foristas-street-tuning/37161-jetta-1-8-rojo-tornado-2.html: http://www.stcolombia.com
Mandy Concepcion, A. D. (29 de 07 de 2014). diycardoctor.com. Margolis, M. (2011). Arduino Cookbook. Sebastopol: O'reilly. MAzo, M., Espinoza, F., Baset, A., & Gardel, A. (27 de 10 de 2014).
https://espacioseguro.com/fundacionfitsa0/admin/_fitsa/archivos/publicaciones/0000034/Libro%20diagnosis%20electronica.pdf. Obtenido de https://espacioseguro.com/fundacionfitsa0/admin/_fitsa/archivos/publicaciones/0000034/Libro%20diagnosis%20electronica.pdf: https://espacioseguro.com
megatecpower. (27 de 10 de 2014). http://www.tecnomovil.com/Cursos-formacion/Garantia%20mecanica/Mecanica%20avanzada%20II/Mecanica%20avanzada%20II_archivos/image018.jpg. Obtenido de http://www.tecnomovil.com/Cursos-formacion/Garantia%20mecanica/Mecanica%20avanzada%20II/Mecanica%20avanzada%20II_archivos/image018.jpg: http://www.tecnomovil.com
mercadolibre. (26 de 12 de 2014). mercadolibre.com. Obtenido de mercadolibre.com: http://articulo.mercadolibre.com.mx/MLM-476491395-6-postes-o-patitas-para-tarjeta-electronica-pcb-arduino-pic-_JM
Robot. (s.f.). amazon.com. Recuperado el 22 de Octubre de 2013, de http://www.amazon.com/Robot-Non-contact-Liquid-Level-Switch/dp/B00C0Q6Q1E/ref=sr_1_3?ie=UTF8&qid=1382412376&sr=8-3&keywords=obd+ii+arduino
Rodríguez, I. C. (27 de 07 de 2014). slideshare.com. Rodriguez, L. (24 de 10 de 2014).
http://issuu.com/diegoquemero/docs/auto_elec_ok. Obtenido de http://issuu.com/diegoquemero/docs/auto_elec_ok: http://issuu.com
seeed. (s.f.). Amazon.com. Recuperado el 22 de Octubre de 2013, de http://www.amazon.com/Bluetooth-Shield-for-Arduino/dp/B007BYI172/ref=dp_return_2?ie=UTF8&n=541966&s=pc
sparkfun. (28 de 10 de 2014). https://www.sparkfun.com/products/9555. Obtenido de https://www.sparkfun.com/products/9555: https://www.sparkfun.com
Tarnok, F. (s.f.). http://www.multiscanners.cl. Obtenido de http://www.multiscanners.cl/atecnicos/conector2.htm.