Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
1
J. Londoño, J. Ospina a
aFacultad de Ingeniería Eléctrica y Electrónica. Universidad Pontificia Bolivariana de Medellín.
Colombia
RESUMEN— Este artículo presenta los fundamentos para la
realización del módulo de entrenamiento para el control de
movimiento con Simotion. Principalmente se describe el proceso
para la parametrización y configuración del sistema para poder
llevar a cabo el control de los servomotores desde el software.
Abstract— This paper presents the rationale for the making of the
training module for motion control Simotion. Mainly describes the
process for the configuration and system settings to perform the
servo control from the software
Index Terms— Motion Control, Control System, Simotion,
Servomotor.
I. INTRODUCCIÓN
Las primeras máquinas industriales fueron implementadas
con sistemas mecánicos, los cuales ocupan un gran espacio
físico que limita la producción en una planta, su reparación
es costosa y lleva un tiempo considerable, tienen un alto
margen de error, entre otros aspectos. La automatización ha
sido una solución amigable para todo esto, pues ahora se
puede multiplicar la producción en una empresa gracias a
que los sistemas automáticos son versátiles, flexibles, más
precisos, ahorran tiempo y dinero a la hora de su reparación,
etc.
Hoy en día, los ―componentes inteligentes‖ juegan un papel
importante en las máquinas modernas y en el diseño de
producción en la plata. Estos componentes mecatrónicos se
construyen a partir de piezas mecánicas, sensores,
actuadores, dispositivos electrónicos y software. Las
soluciones mecatrónicas se han vuelto indispensables en
J. Ospina hace parte de la facultad de Ingeniería Electrónica de la
Universidad Pontificia Bolivariana, Medellín, Colombia (e-mail:
la industria, pues su enfoque global en los sistemas y éste ha
sido su principal éxito.
El sistema Simotion de Siemens abarca aplicaciones con
control de movimiento complejo que integra el control de
movimiento y funcionalidad de control simple en una sola
unidad. Lleva varios años de evolución, desde su nombre
hasta sus alcances con el fin de suplir las necesidades en la
industria. Actualmente, las máquinas para los procesos
industriales que están llegando al país desde Europa, vienen
ya con este sistema implementado.
A la empresa Productos Familia SA han llegado máquinas
traídas desde Italia con Simotion incluido, lo cual indica ya
una tendencia en la planta y esto genera la necesidad del
conocimiento al respecto. Por esta razón se requiere que el
departamento electrónico tenga la posibilidad de entrenarse
y realizar pruebas en un lugar seguro, donde al haber un
accidente con los equipos, no implique daños en la
producción de la planta.
El módulo de entrenamiento que se implementó es apto para
la realización de pruebas y cuenta con una guía completa de
manejo del equipo y su correcta configuración.
Para llevar a cabo este proceso, se tuvo colaboración de
personal de Siemens especializado en el tema a nivel de
información complementaria para dicho propósito.
A. Objetivos
Objetivo General
Implementar un módulo de entrenamiento para el control de
posición y velocidad de servomotores usando el sistema
Simotion, desarrollando documentación con el fin facilitar el
entrenamiento del personal electrónico de la empresa
Productos Familia SA.
Módulo de entrenamiento para el control de
posición y velocidad de servomotores usando el
sistema Simotion (Diciembre 2011)
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
2
Objetivos Específicos
• Implementar en hardware y software el sistema
Simotion.
• Desarrollar las aplicaciones básicas de control de
posición y movimiento de servomotores en el módulo
de entrenamiento para realizar guías de procedimiento.
• Validar las guías realizadas con las aplicaciones usadas
en la planta de la compañía.
B. Estado del arte
El 23 de Junio de 1991, James C. Shultz patentó el
control de movimiento, planteando un problema de
precisión y error en las máquinas que en el momento
funcionaban en la industria, pues para lograr la mayor
precisión se requería pasar por varios sistemas de control
y corrección de error. Su trabajo se fundamentó en el uso
de sensores, los cuales son los encargados de monitorear
las variables del sistema en cualquier punto del proceso;
una CPU, la cual es la unidad de procesamiento que
realiza todos los cálculos a partir de la señal de los
sensores.
La ecuación que Shultz planteó fue la siguiente:
( )
(1)
Donde:
Cn es el valor de la señal de comando en un tiempo n
Pd Posición deseada a partir de la referencia X
Px posición actual a partir de la referencia X
D es el factor de inercia del dispositivo controlado
Cn-1 el penúltimo valor de la señal de comando
En los años 80, Siemens lanza el sistema de control de
ejes Masterdrive Vector Control, posteriormente, el
producto evoluciona y toma el nombre de Simodrive, el
cual finalmente se convierte en Simotion, un sistema que
integra el control (en las versiones Simotion C, Simotion
P, Simotion D) y los drives con los servomotores
(Sinamics S120) (Siemens, 2011).
Simotion, se ha implementado en empresas como Kampf
Schneid-und Wickeltechnik GmbH& Co KG, de
Alemania, líder en la fabricación de máquinas de corte y
bobinado para la industria de la manufactura del plástico,
papel y aluminio. Este sistema se implementó ya que en
líneas de alta velocidad la sincronización de los ejes y
los actuadores ofrecen ventajas en el proceso. Entre los
beneficios de ese cambio, en la serie Roll-O-Fix, se
destaca la reducción de los tiempos de parada ya que
luego del cambio de rollo o de una interrupción de
producción, la velocidad preestablecida se alcanza más
rápido que en los modelos anteriores. Asimismo, se
utilizan las funciones de seguridad basadas en
accionamientos del inversor Sinamics S120 para detener
la máquina en un corto lapso (Siemens, 2011)
En Colombia, Simotion es reciente, es un mercado poco
explorado aún, a pesar de esto, las plantas de Familia a
nivel nacional (Familia Sancela, Planta de Cajicá) han
adquirido máquinas con este sistema.
A nivel mundial, Simotion es usado en la industria
farmacéutica, textil, automotriz, entre otras (Siemens,
2005)
II. DESARROLLO
A. Plataforma SIMOTION D (D435)
El sistema de control de movimiento tiene como
―cerebro‖ el módulo Simotion D, el cual se conecta con
el PC para procesar las órdenes enviadas desde el
software Simotion Scout y así lograr la correcta
parmetrización y configuración del sistema según los
elementos que éste contenga.
Simotion D (Drive-based) combina la funcionalidad de
Simotion con la funcionalidad del drive de un sistema
de múltiples ejes en una unidad de hardware. Esto
proporciona un sistema el cual es compacto y
particularmente rápido en su respuesta. El Simotion D
se usa cuando se requiere un diseño de maquina
compacto. Dentro del Simotion D se encuentran los
módulos D425, D435 y D445 (Sitrain, 2011).
El Simotion D435 es la unidad de control (CU) del
sistema de control de movimiento, pues tiene un
Sinamics S120 integrado. Este dispositivo se comunica
con el PC por Profibus o Ethernet para poder
parametrizar el sistema, programarlo, etc. Para llevar a
cabo dicho objetivo, el Simotion D435 se comunica
por Drive-CLiQ con el módulo motor. La alimentación
del Simotion D435 es de 24VDC.
Funcionalidad del simotion D435
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
3
El Simotion D435, es un dispositivo que integra un
Sinamics S120 y una CU 320 para así tener un módulo
compacto y práctico.
Este dispositivo se basa en el sistema de control de
movimiento de la familia de drives Sinamics S120. Con
el Simotion D, las funcionalidades del control de
movimiento de Simotion y el software de Sinamics se
puede correr un sistema de lazo cerrado con los
dispositivos del hardware.
Tal y como lo es el Sinamics S120, el Simotion D sigue
el concepto de la automatización totalmente integral
(TIA, Totally Integrated Automation) (Simotion, 2010).
Siemens recomienda el uso de este tipo de dispositivo
en:
• Máquinas compactas
• Conceptos de automatización distribuida como en
máquinas con un gran número de ejes.
• Máquinas modulares, también como extensión de
Simotion P o Simotion C.
• Para requerimientos de tiempo crítico en ejes
acoplados.
Existen tres versiones diferentes de Simotion D en
―booksize‖ que son: D425, D435 y D445. Estas
versiones difieren en su rendimiento y por ende, en la
frecuencia de reloj, rendimiento del PLC y el volumen
de datos de los ejes (Simotion, 2010). La Tabla 1
muestra las diferentes versiones de Simotion D con sus
características:
Tabla 1. Características de SIMOTION D435
Propiedades D425 D435 D445
Puertos DRIVE-
CLiQ
4 4 6
Ejes >16 >32 >64
Ventilador/
módulo de batería
Opcional Opcional Requerido
Ciclo mínimo de
reloj IPO
2ms 1ms 0.5ms
B. Módulo Infeed
El módulo infeed funciona como un variador
internamente, pues básicamente se requiere convertir a
DC la señal de AC de alimentación, la cual sale por el
bus DC.
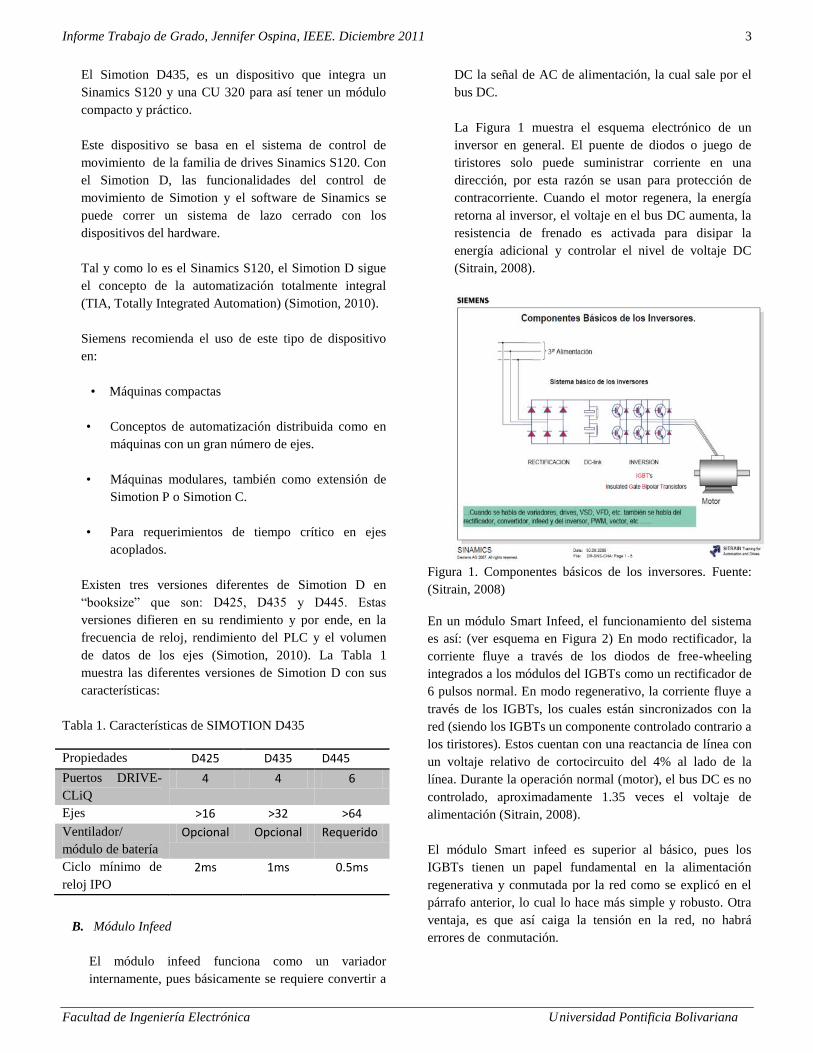
La Figura 1 muestra el esquema electrónico de un
inversor en general. El puente de diodos o juego de
tiristores solo puede suministrar corriente en una
dirección, por esta razón se usan para protección de
contracorriente. Cuando el motor regenera, la energía
retorna al inversor, el voltaje en el bus DC aumenta, la
resistencia de frenado es activada para disipar la
energía adicional y controlar el nivel de voltaje DC
(Sitrain, 2008).
Figura 1. Componentes básicos de los inversores. Fuente:
(Sitrain, 2008)
En un módulo Smart Infeed, el funcionamiento del sistema
es así: (ver esquema en Figura 2) En modo rectificador, la
corriente fluye a través de los diodos de free-wheeling
integrados a los módulos del IGBTs como un rectificador de
6 pulsos normal. En modo regenerativo, la corriente fluye a
través de los IGBTs, los cuales están sincronizados con la
red (siendo los IGBTs un componente controlado contrario a
los tiristores). Estos cuentan con una reactancia de línea con
un voltaje relativo de cortocircuito del 4% al lado de la
línea. Durante la operación normal (motor), el bus DC es no
controlado, aproximadamente 1.35 veces el voltaje de
alimentación (Sitrain, 2008).
El módulo Smart infeed es superior al básico, pues los
IGBTs tienen un papel fundamental en la alimentación
regenerativa y conmutada por la red como se explicó en el
párrafo anterior, lo cual lo hace más simple y robusto. Otra
ventaja, es que así caiga la tensión en la red, no habrá
errores de conmutación.
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
4
Pero así como trae ventajas, también tiene sus desventajas.
Se presentan fluctuaciones, pues el DC link no se regula; es
muy probable la existencia de altas componentes armónicas
y es necesario un circuito de precarga con una resistencia y
un contactor.
Figura 2. Rectificación Smart Infeed.Fuente: Adaptado de
(Sitrain, 2008)
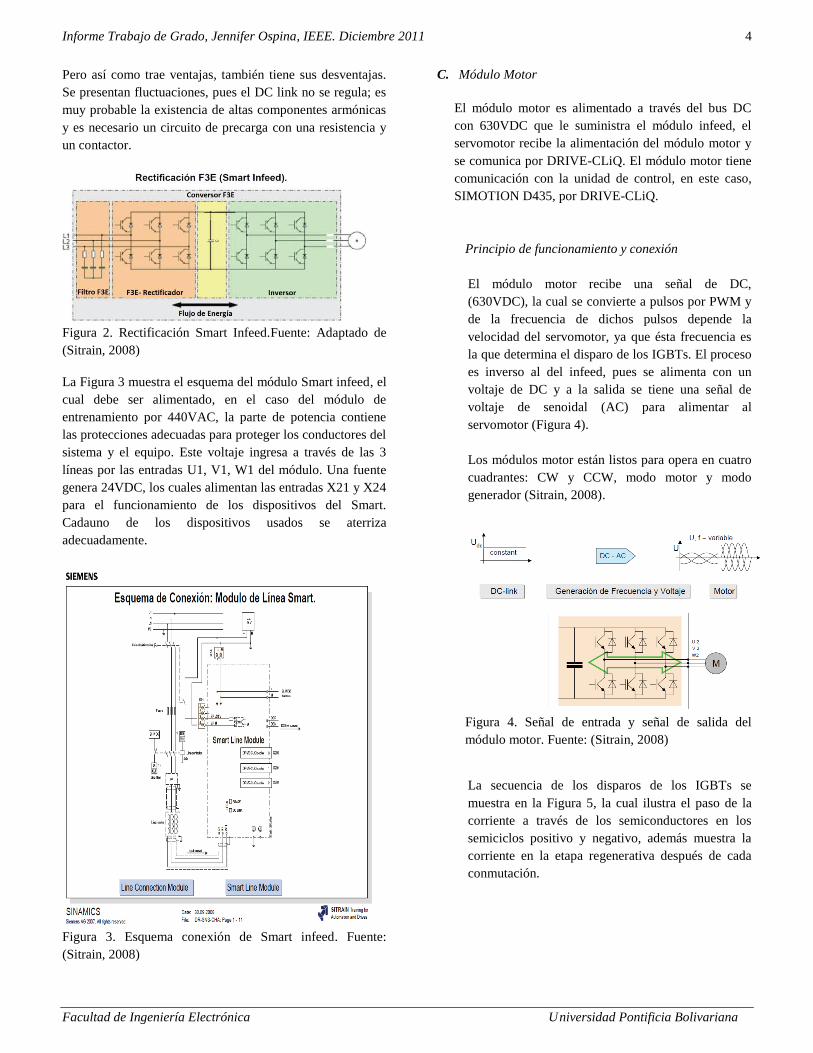
La Figura 3 muestra el esquema del módulo Smart infeed, el
cual debe ser alimentado, en el caso del módulo de
entrenamiento por 440VAC, la parte de potencia contiene
las protecciones adecuadas para proteger los conductores del
sistema y el equipo. Este voltaje ingresa a través de las 3
líneas por las entradas U1, V1, W1 del módulo. Una fuente
genera 24VDC, los cuales alimentan las entradas X21 y X24
para el funcionamiento de los dispositivos del Smart.
Cadauno de los dispositivos usados se aterriza
adecuadamente.
Figura 3. Esquema conexión de Smart infeed. Fuente:
(Sitrain, 2008)
C. Módulo Motor
El módulo motor es alimentado a través del bus DC
con 630VDC que le suministra el módulo infeed, el
servomotor recibe la alimentación del módulo motor y
se comunica por DRIVE-CLiQ. El módulo motor tiene
comunicación con la unidad de control, en este caso,
SIMOTION D435, por DRIVE-CLiQ.
Principio de funcionamiento y conexión
El módulo motor recibe una señal de DC,
(630VDC), la cual se convierte a pulsos por PWM y
de la frecuencia de dichos pulsos depende la
velocidad del servomotor, ya que ésta frecuencia es
la que determina el disparo de los IGBTs. El proceso
es inverso al del infeed, pues se alimenta con un
voltaje de DC y a la salida se tiene una señal de
voltaje de senoidal (AC) para alimentar al
servomotor (Figura 4).
Los módulos motor están listos para opera en cuatro
cuadrantes: CW y CCW, modo motor y modo
generador (Sitrain, 2008).
Figura 4. Señal de entrada y señal de salida del
módulo motor. Fuente: (Sitrain, 2008)
La secuencia de los disparos de los IGBTs se
muestra en la Figura 5, la cual ilustra el paso de la
corriente a través de los semiconductores en los
semiciclos positivo y negativo, además muestra la
corriente en la etapa regenerativa después de cada
conmutación.
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
5
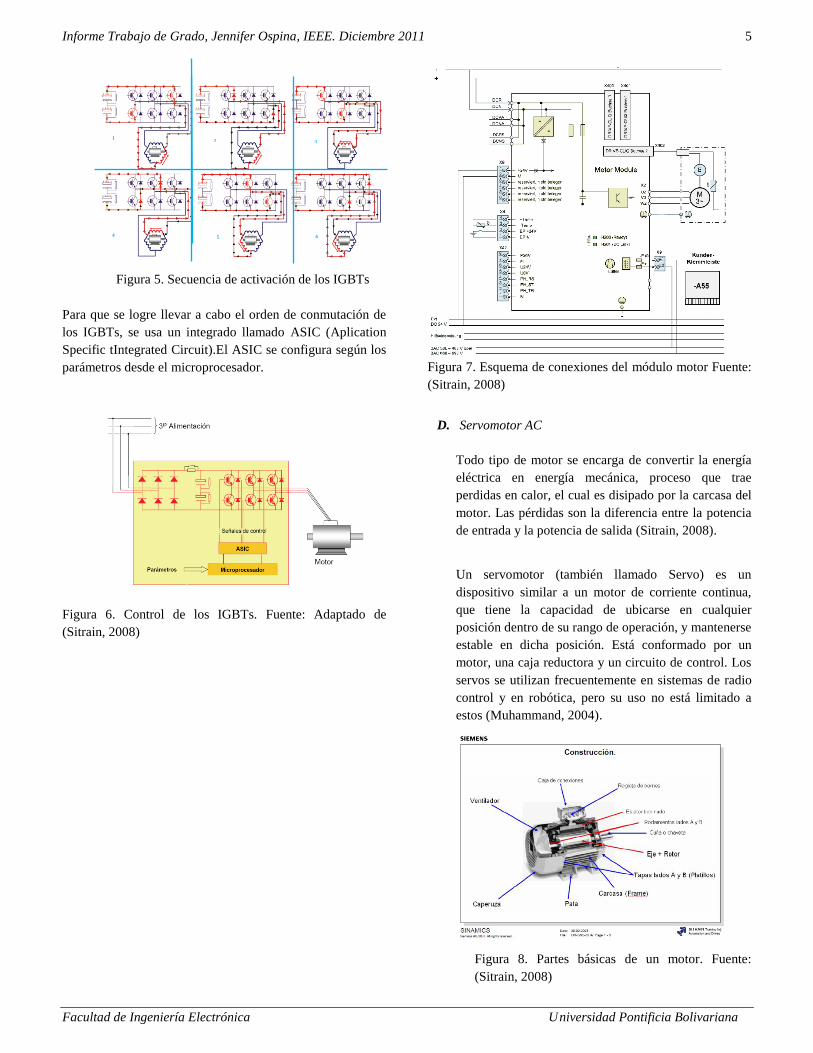
Figura 5. Secuencia de activación de los IGBTs
Para que se logre llevar a cabo el orden de conmutación de
los IGBTs, se usa un integrado llamado ASIC (Aplication
Specific tIntegrated Circuit).El ASIC se configura según los
parámetros desde el microprocesador.
Figura 6. Control de los IGBTs. Fuente: Adaptado de
(Sitrain, 2008)
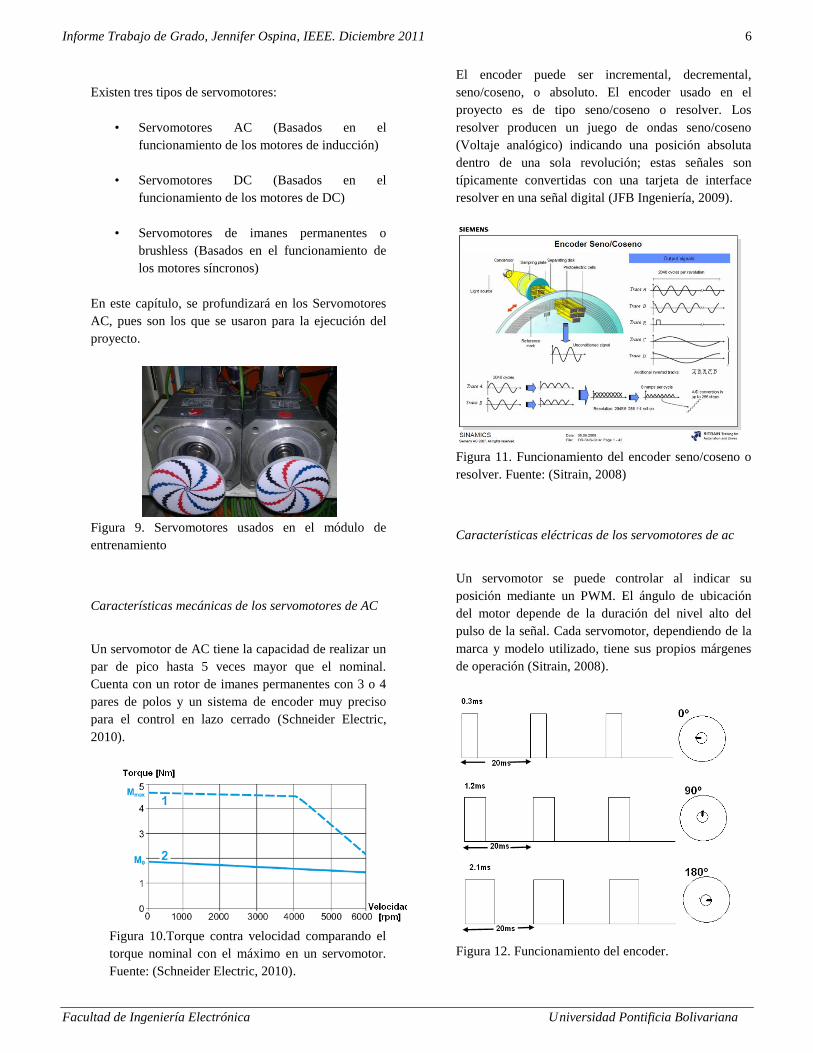
Figura 7. Esquema de conexiones del módulo motor Fuente:
(Sitrain, 2008)
D. Servomotor AC
Todo tipo de motor se encarga de convertir la energía
eléctrica en energía mecánica, proceso que trae
perdidas en calor, el cual es disipado por la carcasa del
motor. Las pérdidas son la diferencia entre la potencia
de entrada y la potencia de salida (Sitrain, 2008).
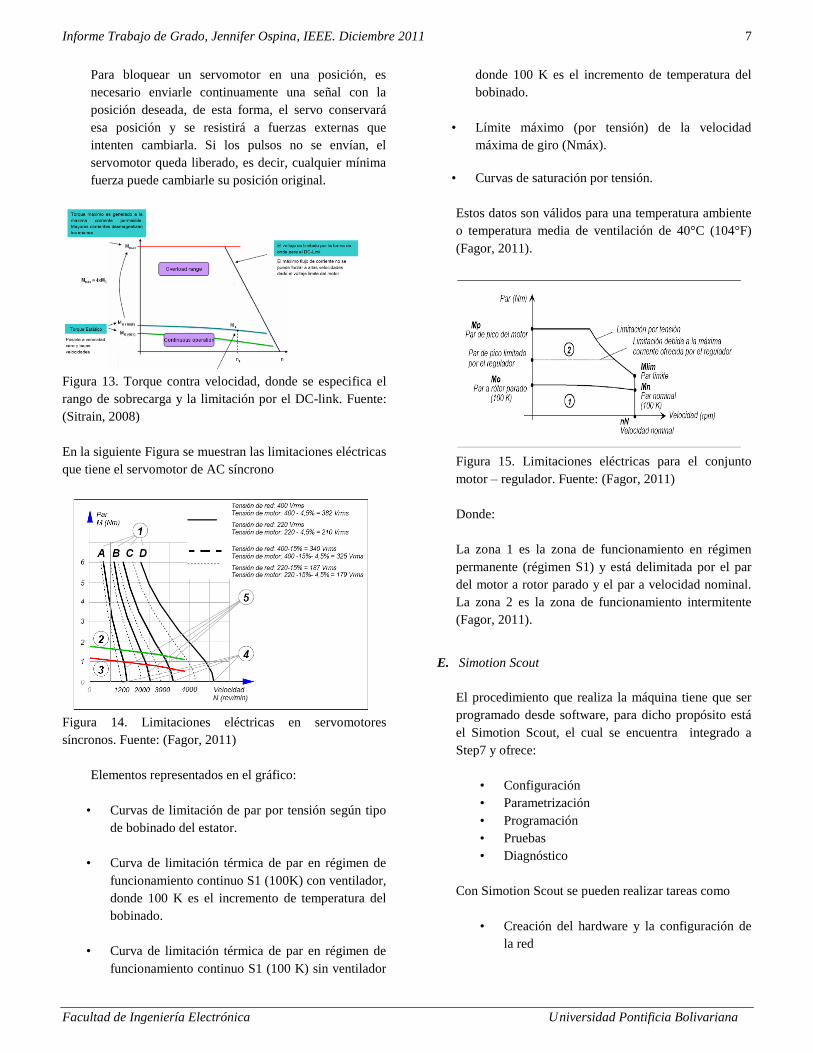
Un servomotor (también llamado Servo) es un
dispositivo similar a un motor de corriente continua,
que tiene la capacidad de ubicarse en cualquier
posición dentro de su rango de operación, y mantenerse
estable en dicha posición. Está conformado por un
motor, una caja reductora y un circuito de control. Los
servos se utilizan frecuentemente en sistemas de radio
control y en robótica, pero su uso no está limitado a
estos (Muhammand, 2004).
Figura 8. Partes básicas de un motor. Fuente:
(Sitrain, 2008)
1
. 2
.
4
. 5
. 6
.
3
.
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
6
Existen tres tipos de servomotores:
• Servomotores AC (Basados en el
funcionamiento de los motores de inducción)
• Servomotores DC (Basados en el
funcionamiento de los motores de DC)
• Servomotores de imanes permanentes o
brushless (Basados en el funcionamiento de
los motores síncronos)
En este capítulo, se profundizará en los Servomotores
AC, pues son los que se usaron para la ejecución del
proyecto.
Figura 9. Servomotores usados en el módulo de
entrenamiento
Características mecánicas de los servomotores de AC
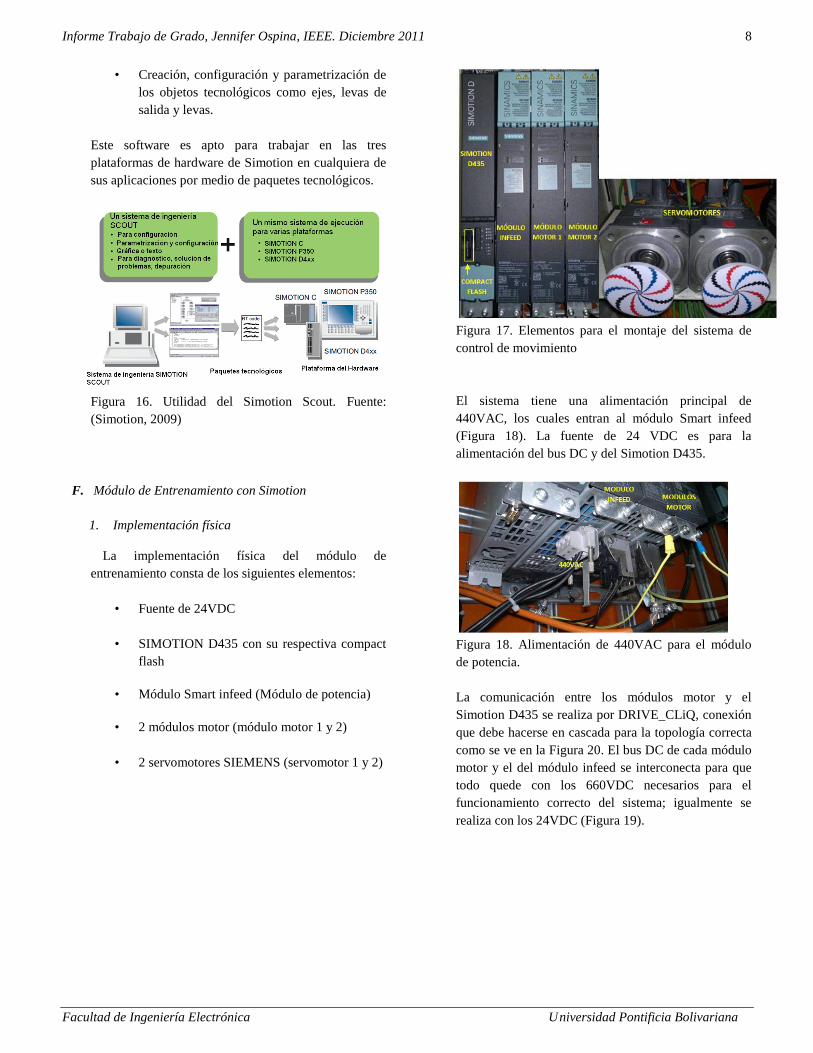
Un servomotor de AC tiene la capacidad de realizar un
par de pico hasta 5 veces mayor que el nominal.
Cuenta con un rotor de imanes permanentes con 3 o 4
pares de polos y un sistema de encoder muy preciso
para el control en lazo cerrado (Schneider Electric,
2010).
Figura 10.Torque contra velocidad comparando el
torque nominal con el máximo en un servomotor.
Fuente: (Schneider Electric, 2010).
El encoder puede ser incremental, decremental,
seno/coseno, o absoluto. El encoder usado en el
proyecto es de tipo seno/coseno o resolver. Los
resolver producen un juego de ondas seno/coseno
(Voltaje analógico) indicando una posición absoluta
dentro de una sola revolución; estas señales son
típicamente convertidas con una tarjeta de interface
resolver en una señal digital (JFB Ingeniería, 2009).
Figura 11. Funcionamiento del encoder seno/coseno o
resolver. Fuente: (Sitrain, 2008)
Características eléctricas de los servomotores de ac
Un servomotor se puede controlar al indicar su
posición mediante un PWM. El ángulo de ubicación
del motor depende de la duración del nivel alto del
pulso de la señal. Cada servomotor, dependiendo de la
marca y modelo utilizado, tiene sus propios márgenes
de operación (Sitrain, 2008).
Figura 12. Funcionamiento del encoder.
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
7
Para bloquear un servomotor en una posición, es
necesario enviarle continuamente una señal con la
posición deseada, de esta forma, el servo conservará
esa posición y se resistirá a fuerzas externas que
intenten cambiarla. Si los pulsos no se envían, el
servomotor queda liberado, es decir, cualquier mínima
fuerza puede cambiarle su posición original.
Figura 13. Torque contra velocidad, donde se especifica el
rango de sobrecarga y la limitación por el DC-link. Fuente:
(Sitrain, 2008)
En la siguiente Figura se muestran las limitaciones eléctricas
que tiene el servomotor de AC síncrono
Figura 14. Limitaciones eléctricas en servomotores
síncronos. Fuente: (Fagor, 2011)
Elementos representados en el gráfico:
• Curvas de limitación de par por tensión según tipo
de bobinado del estator.
• Curva de limitación térmica de par en régimen de
funcionamiento continuo S1 (100K) con ventilador,
donde 100 K es el incremento de temperatura del
bobinado.
• Curva de limitación térmica de par en régimen de
funcionamiento continuo S1 (100 K) sin ventilador
donde 100 K es el incremento de temperatura del
bobinado.
• Límite máximo (por tensión) de la velocidad
máxima de giro (Nmáx).
• Curvas de saturación por tensión.
Estos datos son válidos para una temperatura ambiente
o temperatura media de ventilación de 40°C (104°F)
(Fagor, 2011).
Figura 15. Limitaciones eléctricas para el conjunto
motor – regulador. Fuente: (Fagor, 2011)
Donde:
La zona 1 es la zona de funcionamiento en régimen
permanente (régimen S1) y está delimitada por el par
del motor a rotor parado y el par a velocidad nominal.
La zona 2 es la zona de funcionamiento intermitente
(Fagor, 2011).
E. Simotion Scout
El procedimiento que realiza la máquina tiene que ser
programado desde software, para dicho propósito está
el Simotion Scout, el cual se encuentra integrado a
Step7 y ofrece:
• Configuración
• Parametrización
• Programación
• Pruebas
• Diagnóstico
Con Simotion Scout se pueden realizar tareas como
• Creación del hardware y la configuración de
la red
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
8
• Creación, configuración y parametrización de
los objetos tecnológicos como ejes, levas de
salida y levas.
Este software es apto para trabajar en las tres
plataformas de hardware de Simotion en cualquiera de
sus aplicaciones por medio de paquetes tecnológicos.
Figura 16. Utilidad del Simotion Scout. Fuente:
(Simotion, 2009)
F. Módulo de Entrenamiento con Simotion
1. Implementación física
La implementación física del módulo de
entrenamiento consta de los siguientes elementos:
• Fuente de 24VDC
• SIMOTION D435 con su respectiva compact
flash
• Módulo Smart infeed (Módulo de potencia)
• 2 módulos motor (módulo motor 1 y 2)
• 2 servomotores SIEMENS (servomotor 1 y 2)
Figura 17. Elementos para el montaje del sistema de
control de movimiento
El sistema tiene una alimentación principal de
440VAC, los cuales entran al módulo Smart infeed
(Figura 18). La fuente de 24 VDC es para la
alimentación del bus DC y del Simotion D435.
Figura 18. Alimentación de 440VAC para el módulo
de potencia.
La comunicación entre los módulos motor y el
Simotion D435 se realiza por DRIVE_CLiQ, conexión
que debe hacerse en cascada para la topología correcta
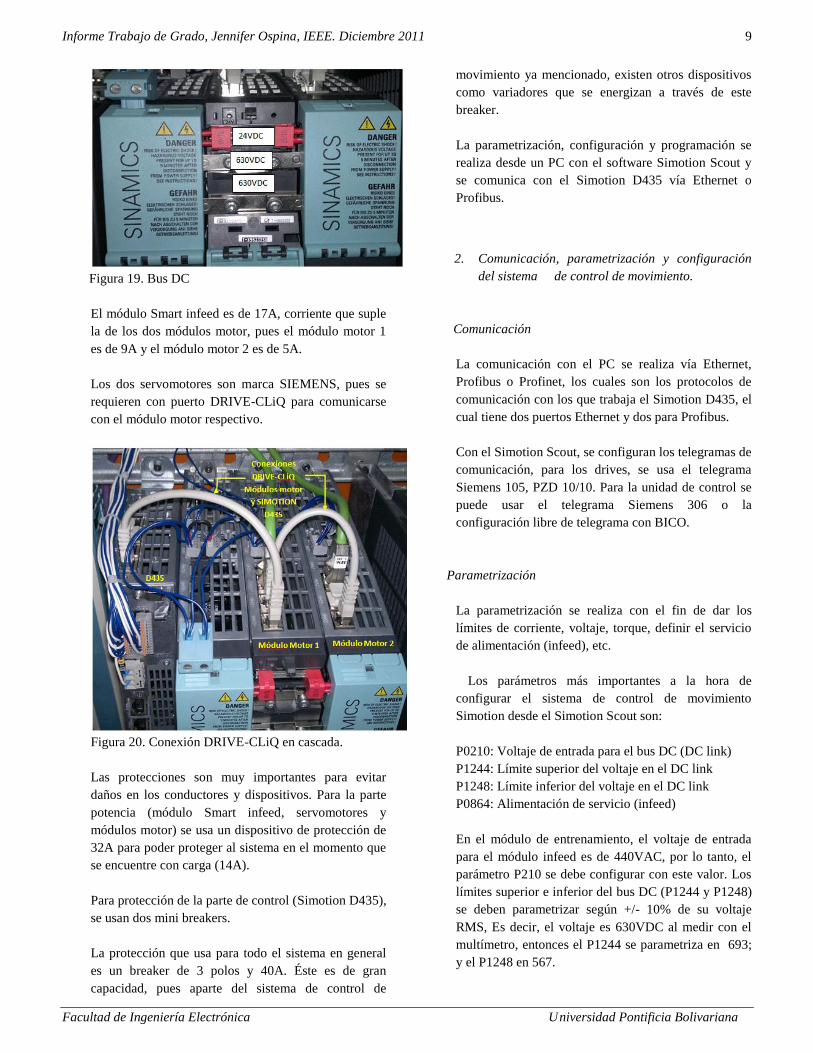
como se ve en la Figura 20. El bus DC de cada módulo
motor y el del módulo infeed se interconecta para que
todo quede con los 660VDC necesarios para el
funcionamiento correcto del sistema; igualmente se
realiza con los 24VDC (Figura 19).
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
9
Figura 19. Bus DC
El módulo Smart infeed es de 17A, corriente que suple
la de los dos módulos motor, pues el módulo motor 1
es de 9A y el módulo motor 2 es de 5A.
Los dos servomotores son marca SIEMENS, pues se
requieren con puerto DRIVE-CLiQ para comunicarse
con el módulo motor respectivo.
Figura 20. Conexión DRIVE-CLiQ en cascada.
Las protecciones son muy importantes para evitar
daños en los conductores y dispositivos. Para la parte
potencia (módulo Smart infeed, servomotores y
módulos motor) se usa un dispositivo de protección de
32A para poder proteger al sistema en el momento que
se encuentre con carga (14A).
Para protección de la parte de control (Simotion D435),
se usan dos mini breakers.
La protección que usa para todo el sistema en general
es un breaker de 3 polos y 40A. Éste es de gran
capacidad, pues aparte del sistema de control de
movimiento ya mencionado, existen otros dispositivos
como variadores que se energizan a través de este
breaker.
La parametrización, configuración y programación se
realiza desde un PC con el software Simotion Scout y
se comunica con el Simotion D435 vía Ethernet o
Profibus.
2. Comunicación, parametrización y configuración
del sistema de control de movimiento.
Comunicación
La comunicación con el PC se realiza vía Ethernet,
Profibus o Profinet, los cuales son los protocolos de
comunicación con los que trabaja el Simotion D435, el
cual tiene dos puertos Ethernet y dos para Profibus.
Con el Simotion Scout, se configuran los telegramas de
comunicación, para los drives, se usa el telegrama
Siemens 105, PZD 10/10. Para la unidad de control se
puede usar el telegrama Siemens 306 o la
configuración libre de telegrama con BICO.
Parametrización
La parametrización se realiza con el fin de dar los
límites de corriente, voltaje, torque, definir el servicio
de alimentación (infeed), etc.
Los parámetros más importantes a la hora de
configurar el sistema de control de movimiento
Simotion desde el Simotion Scout son:
P0210: Voltaje de entrada para el bus DC (DC link)
P1244: Límite superior del voltaje en el DC link
P1248: Límite inferior del voltaje en el DC link
P0864: Alimentación de servicio (infeed)
En el módulo de entrenamiento, el voltaje de entrada
para el módulo infeed es de 440VAC, por lo tanto, el
parámetro P210 se debe configurar con este valor. Los
límites superior e inferior del bus DC (P1244 y P1248)
se deben parametrizar según +/- 10% de su voltaje
RMS, Es decir, el voltaje es 630VDC al medir con el
multímetro, entonces el P1244 se parametriza en 693;
y el P1248 en 567.
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
10
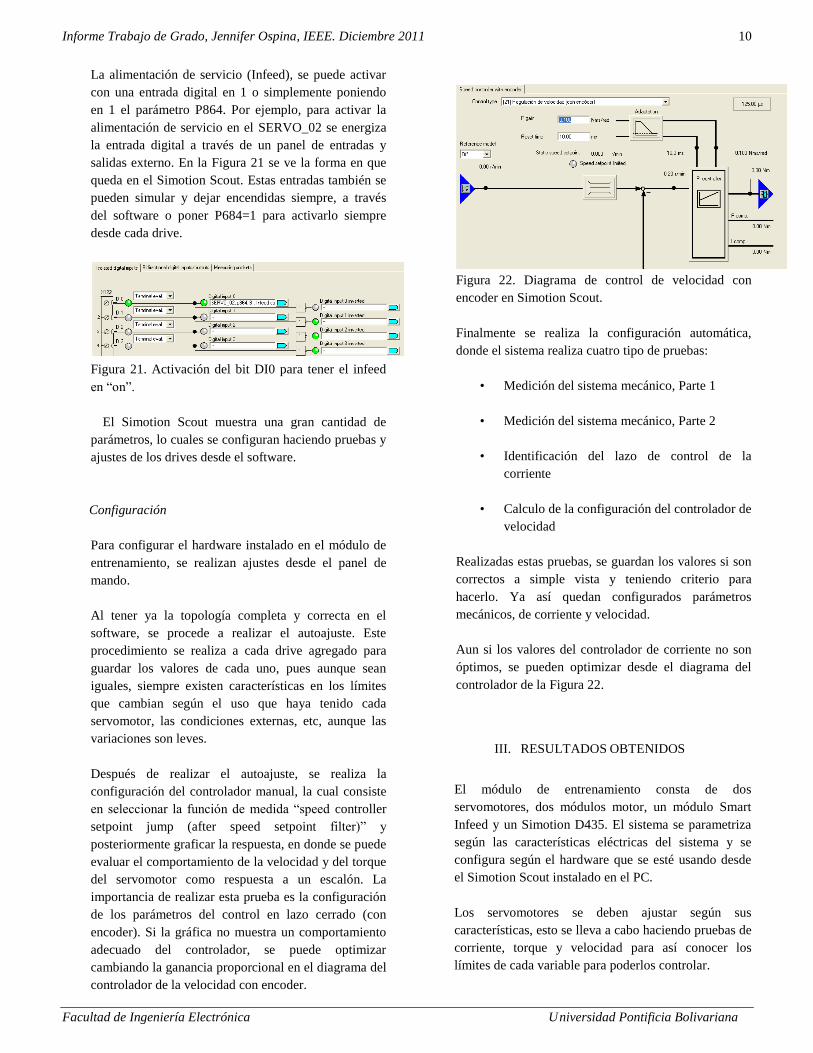
La alimentación de servicio (Infeed), se puede activar
con una entrada digital en 1 o simplemente poniendo
en 1 el parámetro P864. Por ejemplo, para activar la
alimentación de servicio en el SERVO_02 se energiza
la entrada digital a través de un panel de entradas y
salidas externo. En la Figura 21 se ve la forma en que
queda en el Simotion Scout. Estas entradas también se
pueden simular y dejar encendidas siempre, a través
del software o poner P684=1 para activarlo siempre
desde cada drive.
Figura 21. Activación del bit DI0 para tener el infeed
en ―on‖.
El Simotion Scout muestra una gran cantidad de
parámetros, lo cuales se configuran haciendo pruebas y
ajustes de los drives desde el software.
Configuración
Para configurar el hardware instalado en el módulo de
entrenamiento, se realizan ajustes desde el panel de
mando.
Al tener ya la topología completa y correcta en el
software, se procede a realizar el autoajuste. Este
procedimiento se realiza a cada drive agregado para
guardar los valores de cada uno, pues aunque sean
iguales, siempre existen características en los límites
que cambian según el uso que haya tenido cada
servomotor, las condiciones externas, etc, aunque las
variaciones son leves.
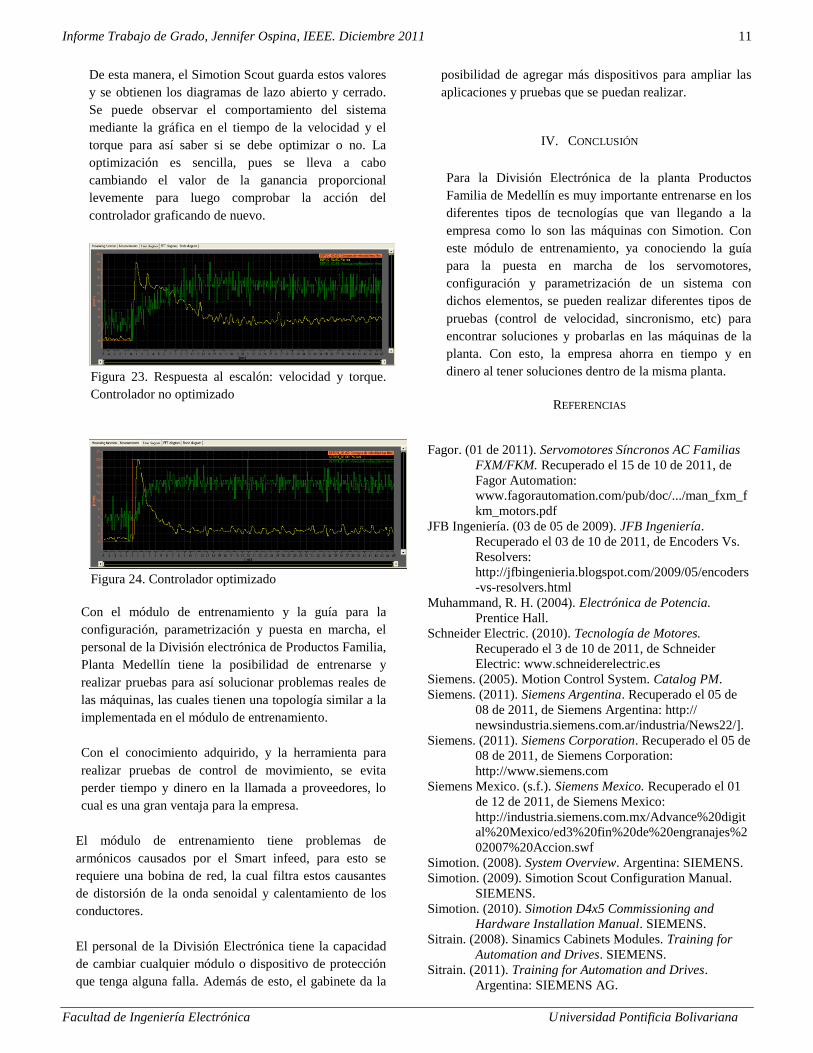
Después de realizar el autoajuste, se realiza la
configuración del controlador manual, la cual consiste
en seleccionar la función de medida ―speed controller
setpoint jump (after speed setpoint filter)‖ y
posteriormente graficar la respuesta, en donde se puede
evaluar el comportamiento de la velocidad y del torque
del servomotor como respuesta a un escalón. La
importancia de realizar esta prueba es la configuración
de los parámetros del control en lazo cerrado (con
encoder). Si la gráfica no muestra un comportamiento
adecuado del controlador, se puede optimizar
cambiando la ganancia proporcional en el diagrama del
controlador de la velocidad con encoder.
Figura 22. Diagrama de control de velocidad con
encoder en Simotion Scout.
Finalmente se realiza la configuración automática,
donde el sistema realiza cuatro tipo de pruebas:
• Medición del sistema mecánico, Parte 1
• Medición del sistema mecánico, Parte 2
• Identificación del lazo de control de la
corriente
• Calculo de la configuración del controlador de
velocidad
Realizadas estas pruebas, se guardan los valores si son
correctos a simple vista y teniendo criterio para
hacerlo. Ya así quedan configurados parámetros
mecánicos, de corriente y velocidad.
Aun si los valores del controlador de corriente no son
óptimos, se pueden optimizar desde el diagrama del
controlador de la Figura 22.
III. RESULTADOS OBTENIDOS
El módulo de entrenamiento consta de dos
servomotores, dos módulos motor, un módulo Smart
Infeed y un Simotion D435. El sistema se parametriza
según las características eléctricas del sistema y se
configura según el hardware que se esté usando desde
el Simotion Scout instalado en el PC.
Los servomotores se deben ajustar según sus
características, esto se lleva a cabo haciendo pruebas de
corriente, torque y velocidad para así conocer los
límites de cada variable para poderlos controlar.
Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
11
De esta manera, el Simotion Scout guarda estos valores
y se obtienen los diagramas de lazo abierto y cerrado.
Se puede observar el comportamiento del sistema
mediante la gráfica en el tiempo de la velocidad y el
torque para así saber si se debe optimizar o no. La
optimización es sencilla, pues se lleva a cabo
cambiando el valor de la ganancia proporcional
levemente para luego comprobar la acción del
controlador graficando de nuevo.
Figura 23. Respuesta al escalón: velocidad y torque.
Controlador no optimizado
Figura 24. Controlador optimizado
Con el módulo de entrenamiento y la guía para la
configuración, parametrización y puesta en marcha, el
personal de la División electrónica de Productos Familia,
Planta Medellín tiene la posibilidad de entrenarse y
realizar pruebas para así solucionar problemas reales de
las máquinas, las cuales tienen una topología similar a la
implementada en el módulo de entrenamiento.
Con el conocimiento adquirido, y la herramienta para
realizar pruebas de control de movimiento, se evita
perder tiempo y dinero en la llamada a proveedores, lo
cual es una gran ventaja para la empresa.
El módulo de entrenamiento tiene problemas de
armónicos causados por el Smart infeed, para esto se
requiere una bobina de red, la cual filtra estos causantes
de distorsión de la onda senoidal y calentamiento de los
conductores.
El personal de la División Electrónica tiene la capacidad
de cambiar cualquier módulo o dispositivo de protección
que tenga alguna falla. Además de esto, el gabinete da la
posibilidad de agregar más dispositivos para ampliar las
aplicaciones y pruebas que se puedan realizar.
IV. CONCLUSIÓN
Para la División Electrónica de la planta Productos
Familia de Medellín es muy importante entrenarse en los
diferentes tipos de tecnologías que van llegando a la
empresa como lo son las máquinas con Simotion. Con
este módulo de entrenamiento, ya conociendo la guía
para la puesta en marcha de los servomotores,
configuración y parametrización de un sistema con
dichos elementos, se pueden realizar diferentes tipos de
pruebas (control de velocidad, sincronismo, etc) para
encontrar soluciones y probarlas en las máquinas de la
planta. Con esto, la empresa ahorra en tiempo y en
dinero al tener soluciones dentro de la misma planta.
REFERENCIAS
Fagor. (01 de 2011). Servomotores Síncronos AC Familias
FXM/FKM. Recuperado el 15 de 10 de 2011, de
Fagor Automation:
www.fagorautomation.com/pub/doc/.../man_fxm_f
km_motors.pdf
JFB Ingeniería. (03 de 05 de 2009). JFB Ingeniería.
Recuperado el 03 de 10 de 2011, de Encoders Vs.
Resolvers:
http://jfbingenieria.blogspot.com/2009/05/encoders
-vs-resolvers.html
Muhammand, R. H. (2004). Electrónica de Potencia.
Prentice Hall.
Schneider Electric. (2010). Tecnología de Motores.
Recuperado el 3 de 10 de 2011, de Schneider
Electric: www.schneiderelectric.es
Siemens. (2005). Motion Control System. Catalog PM.
Siemens. (2011). Siemens Argentina. Recuperado el 05 de
08 de 2011, de Siemens Argentina: http://
newsindustria.siemens.com.ar/industria/News22/].
Siemens. (2011). Siemens Corporation. Recuperado el 05 de
08 de 2011, de Siemens Corporation:
http://www.siemens.com
Siemens Mexico. (s.f.). Siemens Mexico. Recuperado el 01
de 12 de 2011, de Siemens Mexico:
http://industria.siemens.com.mx/Advance%20digit
al%20Mexico/ed3%20fin%20de%20engranajes%2
02007%20Accion.swf
Simotion. (2008). System Overview. Argentina: SIEMENS.
Simotion. (2009). Simotion Scout Configuration Manual.
SIEMENS.
Simotion. (2010). Simotion D4x5 Commissioning and
Hardware Installation Manual. SIEMENS.
Sitrain. (2008). Sinamics Cabinets Modules. Training for
Automation and Drives. SIEMENS.
Sitrain. (2011). Training for Automation and Drives.
Argentina: SIEMENS AG.

Informe Trabajo de Grado, Jennifer Ospina, IEEE. Diciembre 2011
Facultad de Ingeniería Electrónica Universidad Pontificia Bolivariana
12
AUTOR
Jennifer Ospina Álvarez. Nacida el 4 de Octubre de 1984 en Medellín (Antioquia). Bachiller académico del
colegioMaría Inmaculada. Año 2002.Profesional no
graduada de ingeniería electrónica de la Universidad Pontificia Bolivariana. Tiene gusto por las áreas que
permitan el desarrollo habilidades como la
automatización y la microelectrónica. Tienehabilidad para el desarrollo de montajes y el análisis de sistemas
en control industrial.
Recommended

















